

ZLG MiroMouse102 User Manual
/29
广州致远电子有限公司
MicroMouse102
IEEE 国际标准电脑鼠
MiroMouse102
User
mannual
IEEE 国际标准电脑鼠
V1.2
类别 内容
关键词 电脑鼠、IEEE、走迷宫、机器人
摘 要
介绍 IEEE 电脑鼠 MiroMouse102 的硬件电路原理、
软件设计方法等。
Date: 2007/08/13
工程样机用户手册
www.embedtools.cn
广州致远电子有限公司
产品用户手册
Date:2007/08/13
V1.2
©2007 Guangzhou Zhiyuan Electronics CO., LT D
I

/29
广州致远电子有限公司
MicroMouse102
IEEE 国际标准电脑鼠
目 录
1. 硬件结构 .............................................................................................................................................1
1.1 简介 ...............................................................................................................................................1
1.2 硬件原理 .......................................................................................................................................2
2. 反射式红外线传感器 .........................................................................................................................9
2.1 反射式红外线传感器设计方案....................................................................................................9
2.2 一体化红外接收头工作原理......................................................................................................10
2.3 检测障碍物的软件设计 ............................................................................................................. 10
3. 迷宫挡板检测 ...................................................................................................................................12
3.1 原理分析 .....................................................................................................................................12
3.2 调制信号产生 ............................................................................................................................. 12
3.3 抗干扰处理 ................................................................................................................................. 13
3.4 软件设计参考 ............................................................................................................................. 14
4. 电机的调速 .......................................................................................................................................20
4.1 电机的调速 ................................................................................................................................. 20
4.2 程序设计 .....................................................................................................................................21
5. MICROMOUSE 车速检测 ..............................................................................................................24
5.1 车速检测程序设计 ..................................................................................................................... 24
6. 使用 JTAG 引脚作 GPIO................................................................................................................26
6.1 使用方法 .....................................................................................................................................26
产品用户手册
Date:2007/08/13
©2007 Guangzhou Zhiyuan Electronics CO., LT D
II
V1.2

/29
广州致远电子有限公司
MicroMouse102
IEEE 国际标准电脑鼠
1. 硬件结构
1.1 简介
MicroMouse102 电脑老鼠,采用美国 LuminaryMicro 公司生产的 32 位 ARM CortexM3
处理器 LM3S102,控制和检测红外传感器;主 CPU 根据检测到的传感信号,控制电机驱
动电路调整行走路径,直到到达终点。
产品用户手册
Date:2007/08/13
©2007 Guangzhou Zhiyuan Electronics CO., LTD
1
V1.2
/29
DP5V0
INF
广州致远电子有限公司
MicroMouse102
IEEE 国际标准电脑鼠
1.2 硬件原理
MicroMouse102 电脑鼠原理图如图 1.1 所示。
DP5V0
+
C1
3300μF/25V
DP5V0
(5V
输入
1
2
JP1
)
C12
104
DP3V3
C10
104
C11
475
104
105
C13 18P
6M
OSC1
LM3S101/102
C8
LDO
C9
C7 18P
Y1
OSC0
INFRAREDIN
Q3
8050
22u
475
INFRAREDOUT1
INFRAREDOUT2
INFRAREDOUT3
LEFT _P U LSE
14
PA 5/ SSI Tx16PA 4/ SSI Rx
PB0/CCP0
GND18VDD
15
17
RWC2
LWC2
GND
DP3V3
INFRAREDOUT3
C20
R28
200
C17
3
OUT1GND2VCC
U7
DP3V3
GND
OSC0
OSC1
nRST
LDO
PC3/TDO/SWO
PB3/I2CSDA
PB2 /I 2 CSCL
PB1/32KHz
VDD22GND
20
24
21
23
19
RIGHT_PULSE
RWC1
DP3V3
GND
KEY2
KEY3
SEND
R21
10K
D9
RF
R22
47
10K
IR-RX
SEND
INFRARED
PC1/TMS/SWDIO
PC2/TDI
25
26
JTAG_TDI
JTAG_TDO
DP5V0_I NF
R23
JTAG_nTRST
LWC1
U5
PB7/nTRST1PB6 /CCP 1 /C0 +2PB5/C0O3PB4/C0-4nRST5LDO6VDD7GND8OSC09OSC110PA0/U0Rx11PA1/U0Tx12PA 2/ SSI CLk13PA 3/ SSI Fss
PC0/TCK/SWCLK
28
27
JTAG_TMS
JTAG_TCK
JP12
1
INFRAREDOUT3
JP13
1
INFRAREDOUT2
22u
104
INFRAREDIN
Q2
8050
22u
475
2
GND
SP6641A-5V
VOUT
3
C22
C23
D10
LED
D11
PHOTO
LEFT _P U LSE RIGHT_PULSE
D12
LED
D13
PHOTO
SHDN4VBATT
DP5V0_I NF
INFRAREDOUT2
C19
R20
200
C16
3
OUT1GND2VCC
U6
C21
22u
5
22uH
U2
LX
1
D14
1N5819
R24
200
R25
10K
R26
200
R27
10K
SEND
R17
10K
D8
RF
R18
47
10K
IR-RX
L1
DP5V0_I NF
R19
DP3V3
DP3V3
DP3V3
JP4
1
INFRAREDIN
JP5
1
INFRAREDOUT1
+5V
INFRARED
R16
200
INFRAREDIN
+3.3V
INFRAREDIN
Q1
8050
22u
475
JP2
1
DP5V0
JP3
1
DP3V3
C18
C6
U2
SP6201
INFRAREDOUT1
R15
200
3
OUT1GND2VCC
RS1
3
RSN
4
nRST
0
C3
105
470
D3
POWER
SEND
R11
10K
D6
RF
R12
47
R13
10K
IR-RX
R5
10K
KEY1
C2
475
Vin1GND2EN
U1
Vout
5
R6
R7
_
DP5V0
R1
470K
DP3V3
JTAG_nTRST
JTAG_TDI
JTAG_TMS
JTAG_TCK
JTAG_TDO
RP1
10K
RP2
10K
DP3V3
JTAG
9 10
11 12
13 14
15 16
17 18
19 20
CON1
1 2
3 4
5 6
7 8
JP8
1
1
1
1
TA7291S
LWC1
JP9
LWC2
JP10
RWC1
JP11
RWC2
IN1
9
LWC1
C14
0.1u
TA7291S
IN1
9
RWC1
C15
0.1u
OUT2
OUT1
VREF
GND
NC
VS
5
4
7
6
8
DP5V0
MOTO R2
1
2
OUT2
OUT1
VREF
GND
NC
VS
5
4
7
6
8
DP5V0
MOT OR1
1
2
LEFT WHEEL RIGHT WHEEL
U3
VCC
IN2
1
2
3
LWC2
DP5V0
JP6
U4
VCC
IN2
2
3
1
RWC2
DP5V0
JP7
JTAG_TDO
D1
D2
D4
D5
D7
LED
LED
LED
LED
LED
R2
220
R8
220
R9
220
R10
220
R14
220
DP3V3
KEY3
KEY2
R3
10k
DP3V3
R4
C4 104
10k
KEY2
KEY3
C5 104
JTAG_nTRST
JTAG_TDI
JTAG_TMS
JTAG_TCK
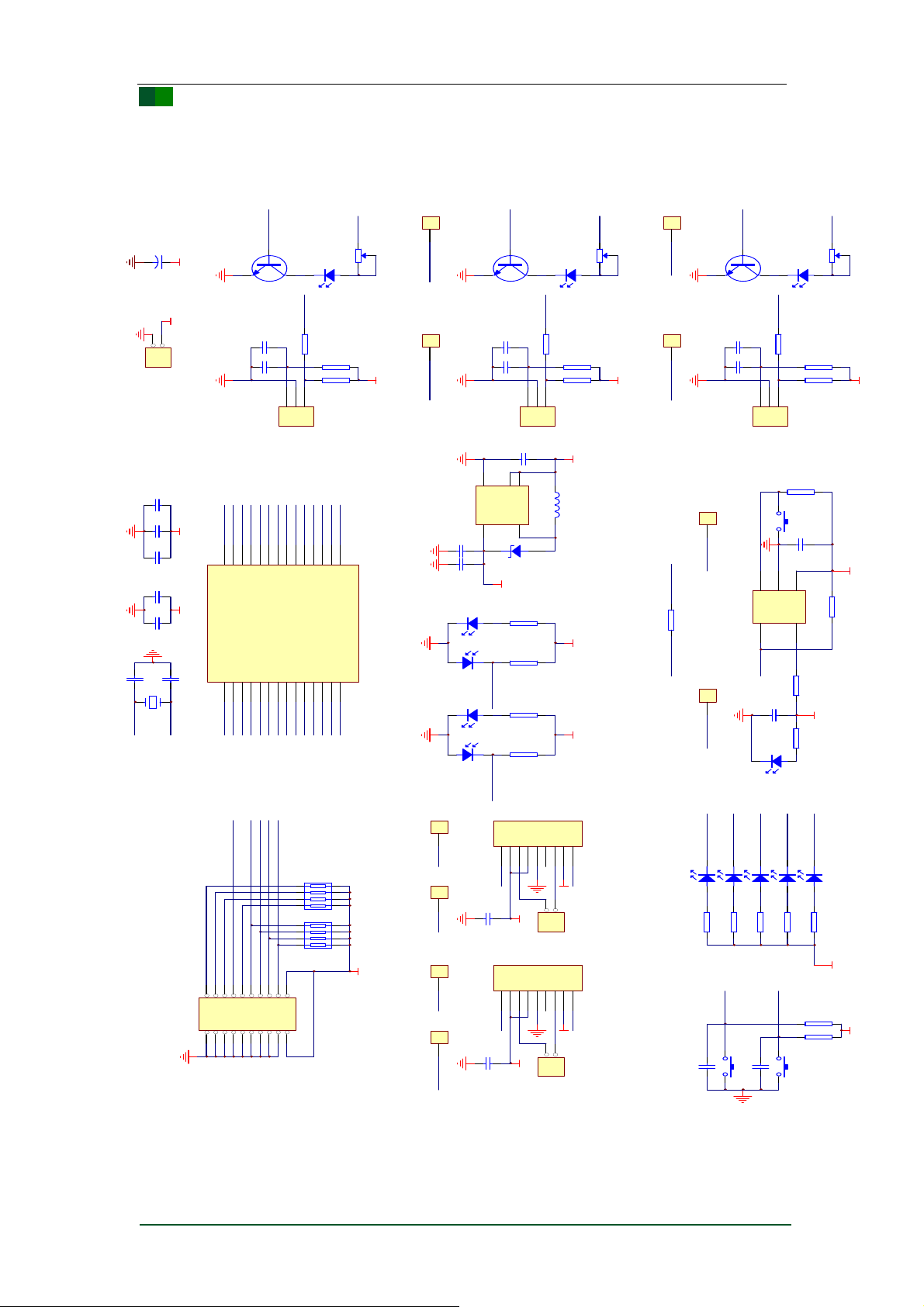
图 1.1 MicroMouse102 电脑鼠原理图
产品用户手册
Date:2007/08/13
©2007 Guangzhou Zhiyuan Electronics CO., LTD
2
V1.2
/29
广州致远电子有限公司
MicroMouse102
IEEE 国际标准电脑鼠
1.2.1 电源电路
电脑鼠的电源采用 4 节 1.5V 的 5 号电池供电,电源插座为 2.54-2T 型插座,如图 1.2
所示。
(5V
输入
)
DP5 V0
+
C1
3300μF/25V
DP5 V0
JP1
2
1
图 1.2 电源接口电路
1.2.2 LDO 和复位电路
LDO 和复位电路如图 1.3 所示。LDO 和复位电路采用 Sipex 公司性价比高的单芯片解
决方案 SP6201EM5-3.3。5V 电源经过 SP6201 可以输出 3.3V 最大 200mA 电流给微处理器
和用户外设供电。SP6201 还有使能输入和 Reset Not 输出引脚,通过这些引脚实现对微处
理器的复位控制。
DP5 V0
R1
R5
10K
KEY 1
RS1
C2
475
470K
U1
1
Vi n
Vo ut
2
GND
3
EN
RSN
SP6201
图 1.3 LDO 和复位电路
5
4
R6
0
nRST
DP3 V3
C3
105
R7
470
D3
POWER
使能(非关断)输入:LDO 通过拉底 EN 管脚关闭,通过拉高 EN 管脚打开。如果不
需要关断 LDO,EN(管脚 3)应连接到 IN(管脚 1),来保持调节器输出在任何时候都有
效。使能阈值为 9V,在整个温度和 VIN 电压范围内的变化不能大于 100mV。使能阈值的
变化总在 100mV 以内。关断电流保证小于 1uA,用户不需要总是将使能管脚拉底(0V)。
标准的 TTL 或 CMOS 电平可使器件从完全运行到完全关闭。
Reset Not(V
管脚 4(RSN)。这是一个开漏、逻辑输出管脚,当由 V
良好)输出:所有固定输出的版本器件都提供一个 V
OUT
提供的电压超过规定调节范围
OUT
良好指示器,
OUT
的 4%时,它可用来使微处理器或微控制器保持复位。Reset Not 功能包含一个 1%的滞后,
使得不会因为 LDO 的输出噪声而发出错误的警告。Reset Not 功能在 10~50us 内起作用。
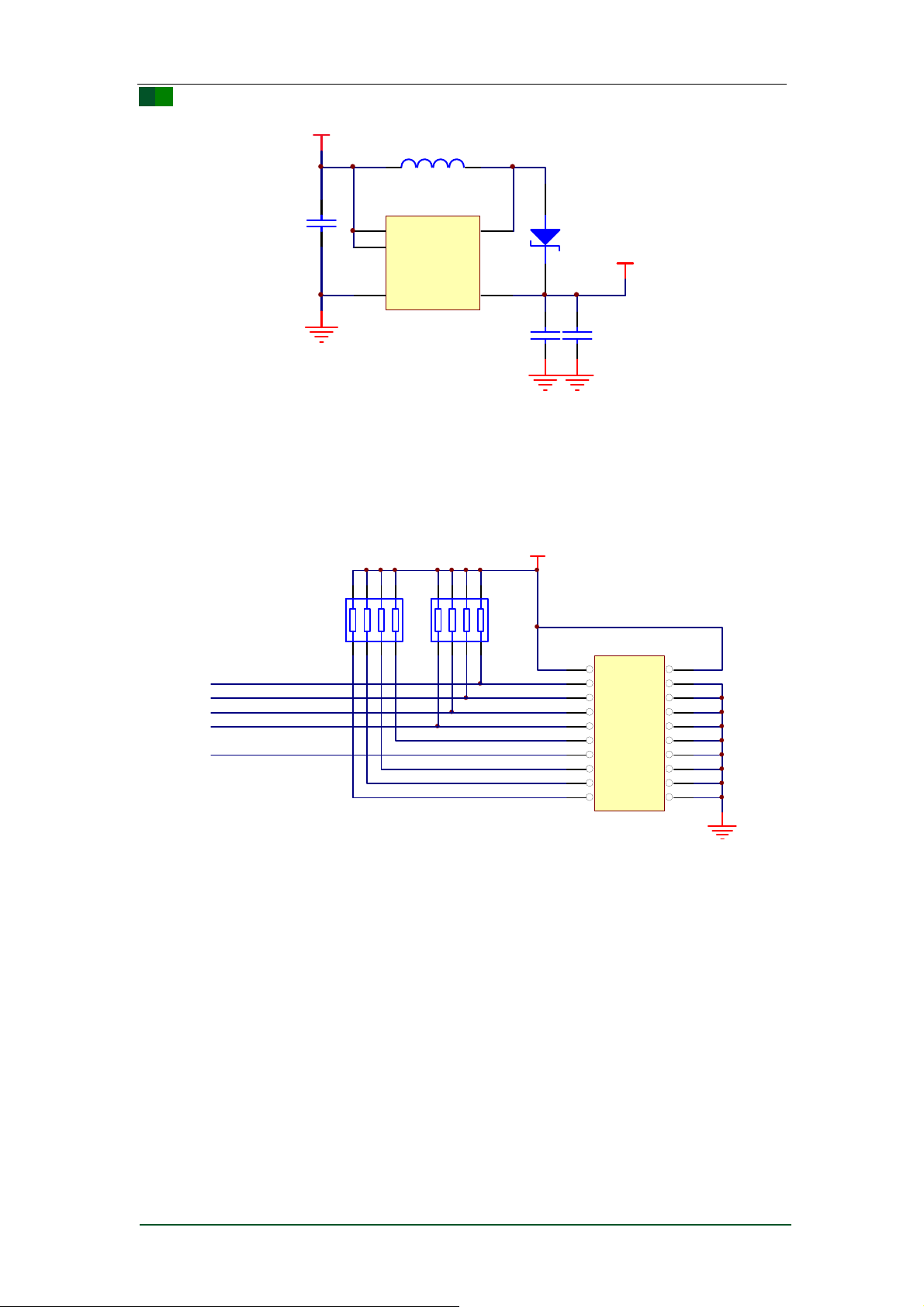
1.2.3 升压电路
升压芯片采用 Sipex 公司的低静态电流、高效率的升压芯片 SP6641A,升压电路如图
1.4 所示。输入电压 3.3V,输出电压 5V。
产品用户手册
Date:2007/08/13
©2007 Guangzhou Zhiyuan Electronics CO., LTD
3
V1.2
/29
3
DP3 V3
广州致远电子有限公司
DP3V
L1
22uH
MicroMouse102
IEEE 国际标准电脑鼠
C21
22u
5
4
U2
VB ATT
SHDN
GND2VOUT
SP6641A-5V
LX
C22
22u
D14
1N5819
DP5V0_INF
C23
104
1
3
图 1.4 升压电路
1.2.4 JTAG 接口电路
电脑鼠(MicroMouse102)的 JTAG 电路采用 ARM 公司提出的标准 20 脚 JTAG 仿真
调试接口,JTAG 信号的定义及与 LM3S 系列单片机的连接图如图 1.5 所示。
RP1
10K
JTAG_nTR ST
JTAG_ TDI
JTAG_ TMS
JTAG_ TCK
JTAG_ TDO
RP2
10K
CON1
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
JTAG
图 1.5 JTAG 接口电路
1.2.5 LED 电路
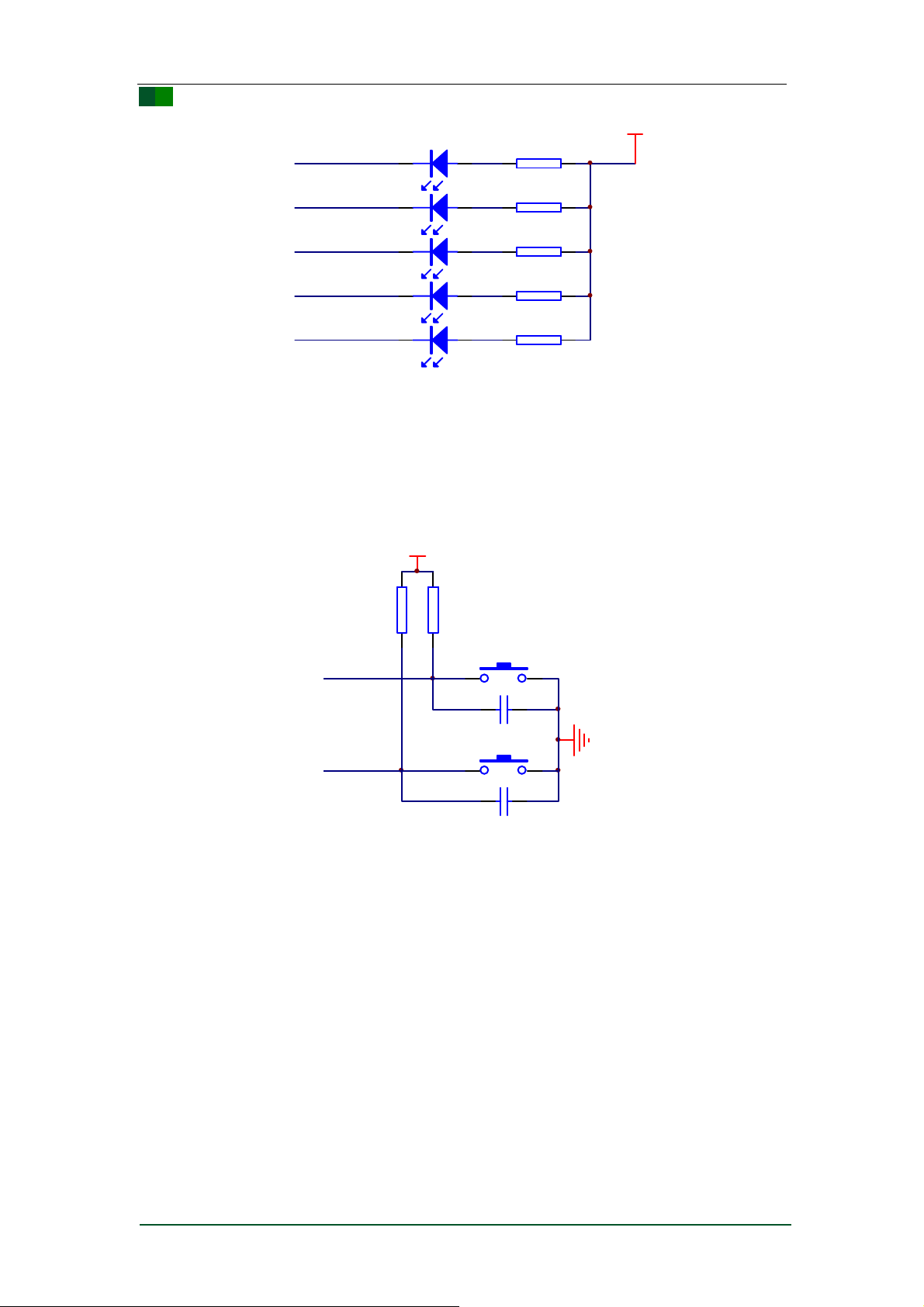
电脑鼠有 5 个独立的 LED,通过 LM3S 系统单片机的 GPIO 口直接控制,如图 1.6 所示。
电路采用了 I/O 口灌电流的驱动方式来驱动 LED,LM3S 系统单片机的灌电流为 2~8mA
(可配置),所以不需要驱动就可以点亮 LED。GPIO 引脚输出高电平时 LED 熄灭,低电
平时 LED 点亮。
产品用户手册
Date:2007/08/13
©2007 Guangzhou Zhiyuan Electronics CO., LTD
4
V1.2
/29
DP3 V3
DP3 V3
广州致远电子有限公司
MicroMouse102
IEEE 国际标准电脑鼠
JTAG_nTRST
JTAG_TDI
JTAG_TMS
JTAG_TCK
JTAG_TDO
D1
D2
D4
D5
D7
图 1.6 LED 电路
LED
LED
LED
LED
LED
R2
220
R8
220
R9
220
R10
220
R14
220
1.2.6 独立按键电路
电脑鼠设计有 2 路独立的输入按键,都直接输入到 CPU 的 GPIO 输入引脚,如图 1.7
所示。当按键未按下时,由于 R3、R4 上拉电阻的作用,CPU 检测到引脚为高电平;当按
键按下时,CPU 检测到引脚为低电平。
R3
10k
KEY2
KEY3
图 1.7 独立按键电路
R4
10k
KEY2
C4 104
KEY3
C5 104
1.2.7 电机驱动电路
电机采用直流减速电机,最高输出转速为 800 转/分钟,工作电压为 DC3V。电机驱动
电路采用专用的单相直流电动机桥式驱动芯片,如图 1.8 所示。
产品用户手册
Date:2007/08/13
V1.2
©2007 Guangzhou Zhiyuan Electronics CO., LTD
5
/29
DP3 V3
DP3 V3
广州致远电子有限公司
MicroMouse102
IEEE 国际标准电脑鼠
LEFT WHEEL RIG HT WHE EL
U3
IN2
VC C
OUT2
NC
GND
VS
OUT1
VR EF
IN1
TA7291S
1
2
3
4
5
6
7
8
9
LWC2
DP5 V0
LWC1
JP6
1
2
MOTOR2
DP5 V0
C14
0.1u
U4
IN2
VC C
OUT2
NC
GND
VS
OUT1
VR EF
IN1
TA7291S
1
2
3
4
5
6
7
8
9
RWC2
DP5 V0
RWC1
JP7
1
2
MOTOR1
DP5 V0
C15
0.1u
图 1.8 电机驱动电路
TA7291S 是 TOSHIBA 公司生产的单相直流电动机桥式驱动芯片,工作电压 4~20 伏,
最大输出电流 400mA。电动机驱动由输入端 IN1 和 IN2 控制,控制方法如表 1.1 所示。
表 1.1 电机控制
IN1 IN2 OUT1 OUT2 电动机工作模式
0 0
1 0 H L
0 1 L H
1 1 L L
∞ ∞ 停止,待机(STOP)
正转(CW)
反转(CCW)
刹车(BREAK)
注:电机的正转和反转与 OUT1 和 OUT2 与直流电机的接线有关,这里主要是相对的。
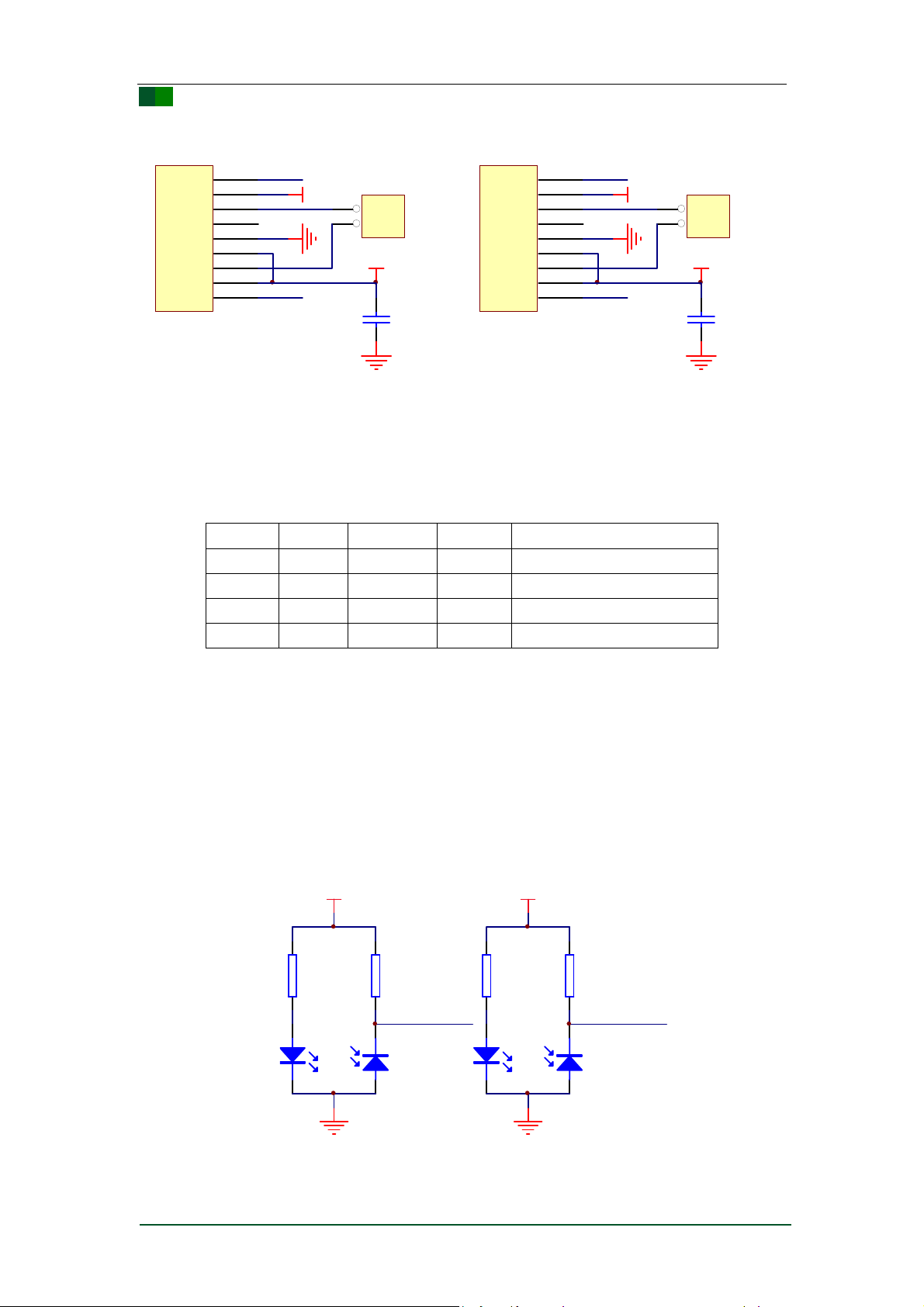
1.2.8 车速检测电路
车速检测用于检测并记录车体运行的路径,通过车速检测记录车体做迷宫的坐标,同
时也起到控制车速和保持左右双轮的速度一致。
检测原理:在左轮和右轮的内则都贴有的光电码盘,码盘由两种颜色组成白色和黑色。
红外发射管安装在车轮光电检测码盘的检测区域,当红外发射与接收管正对着黑色边时,
红外线没有被反射,接收管的电阻很大;当红外发射与接收管正对着白色边时,红外线被
反射,接收管的电阻很小。检测电路如图 1.9 所示。
R24
200
D1 0
LED
R25
10K
LEFT_ PULS E RI GHT_P ULSE
D1 1
PHOTO
R26
200
D1 2
LED
R27
10K
D1 3
PHOTO
产品用户手册
Date:2007/08/13
图 1.9 车速检测电路
V1.2
©2007 Guangzhou Zhiyuan Electronics CO., LTD
6
/29
DP5 V0_INF
广州致远电子有限公司
MicroMouse102
IEEE 国际标准电脑鼠
在图 1.9 的检测电路中,红外发射与接收管正对着黑色边时,PULSE 输出高电平;正
对着白色边时,PULSE 输出低电平;从黑色边到白色边,PULSE 输出一个下降沿信号;
从白色边到黑色边,PULSE 则输出一个上升沿信号。
LM3S102 单片机可以检测输出脉冲的下降沿信号判断车轮转到的角速度,当检测到
13 个下降沿信号时,轮子转动了一圈。
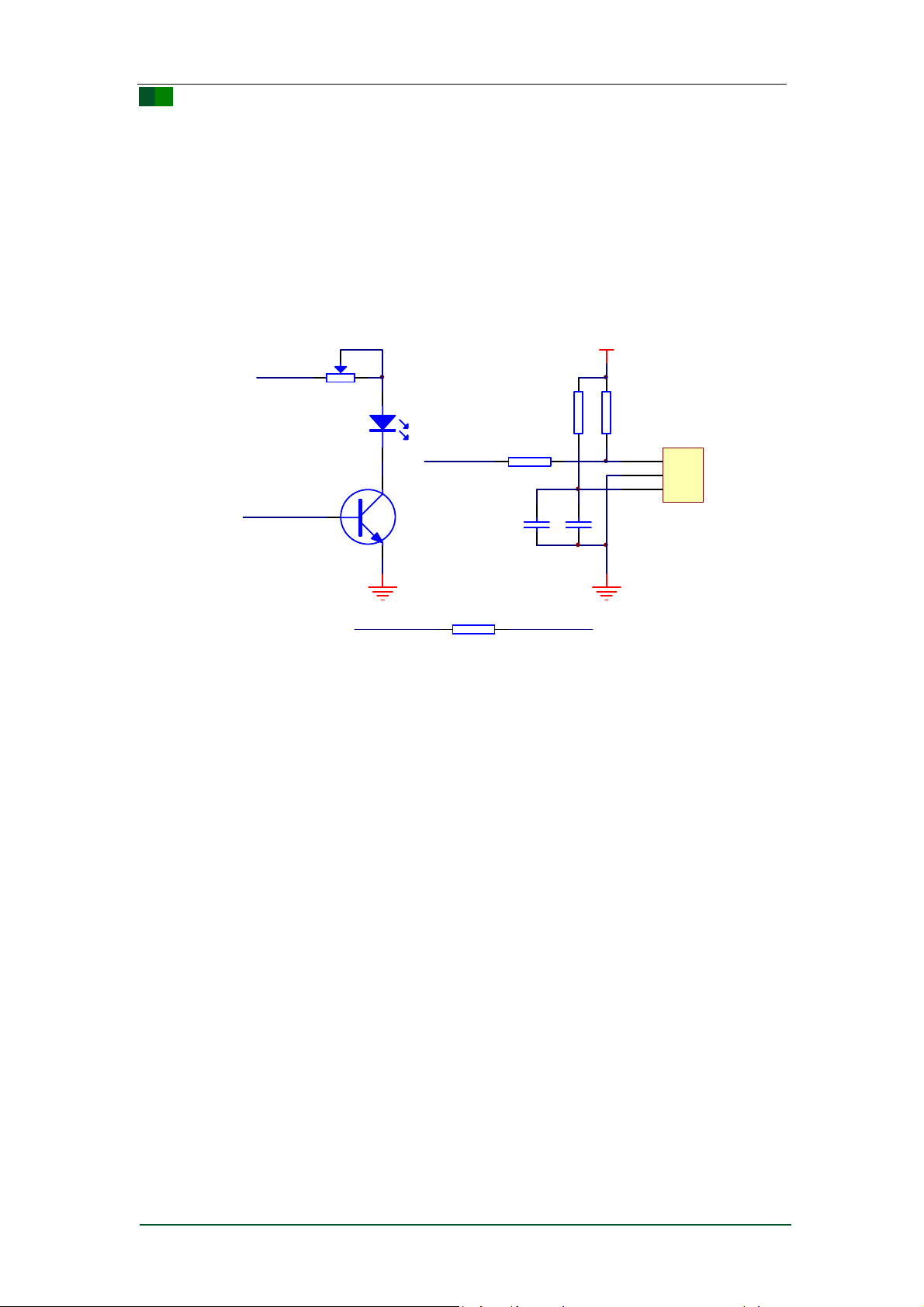
1.2.9 红外检测电路
红外检测电路是用于迷宫挡板的检测,分为左侧、右侧、前方三个方向,三个方向的
检测原理相同,某一个方向的检测电路如图 1.10 所示。
SEND
R21
INFRAREDIN
10K
D9
RF
INF RAR EDOUT3
Q3
8050
C20
22u
R28
200
R22
47
C17
475
R23
10K
1
2
3
IR-RX
OU T
GN D
VC C
U7
INFRARED
图 1.10 红外检测电路
R16
INFRAREDIN
U7(IR-RX)为一体式红外线接收传感器,当连续收到 38KHz(INFRAREDIN)的红
外线信号时,将产生脉宽 10ms 左右的低电平。如果没有收到信号,便立即输出高电平。
Send 为发射控制端,高电平时发射 38KHz 的红外信号。Out(INFRAREDOUT3)为
接收输出端,低电平表示收到信号。
R16 为发射端的限流电阻,起保护 Q3 管作用;R28 为接收端的限流电阻,防止过大
的 I/O 端口电压,起保护 LM3S 系统单片机的 I/O 口作用。
1.2.10 CPU 及晶振电路
电脑鼠的单片机、晶体振荡器和 LDO 输出原理如图 1.11 所示。该单片机选用 LM3S102
微处理器。
产品用户手册
Date:2007/08/13
V1.2
©2007 Guangzhou Zhiyuan Electronics CO., LTD
7
 Loading...
Loading...