

Page 1
DigitroniK
Digital Program Controller
DCP32
User’s Manual
No. CP-SP-1042E
Thank you for purchasing the DigitroniK
Digital Program Controller DCP32.
This manual contains information for
ensuring correct use of the DCP32. It
also provides necessary information for
installation, maintenance, and
troubleshooting.
This manual should be read by those
who design and maintain devices that
use the DCP32.
Be sure to keep this manual nearby for
handy reference.
Page 2
When using this product in applications that require particular safety or when using this
product in important facilities, pay attention to the safety of the overall system and
equipment. For example, install fail-safe mechanisms, carry out redundancy checks
and periodic inspections, and adopt other appropriate safety measures as required.
RESTRICTIONS ON USE
DigitroniK®is a registered trademark of Yamatake Corporation.
DCP31, DCP32, SDC20, SDC21, SDC30, SDC31, SDC40, MA500 and MX200
are registered trademarks of Yamatake Corporation.
© 1998 Yamatake Corporation ALL RIGHTS RESERVED
Make sure that this Instruction Manual is handed over to the user before
the product is used.
Copying or duplicating this Instruction Manual in part or in whole is forbidden. The information and specifications in this Instruction Manual are
subject to change without notice.
Considerable effort has been made to ensure that this Instruction
Manual is free from inaccuracies and omissions.
If you should find any inaccuracies or omissions, please contact
Yamatake Corporation.
In no event is Yamatake Corporation liable to anyone for any indirect,
special or consequential damages as a result of using this product.
REQUEST
Page 3
■ About Icons
Safety precautions are for ensuring safe and correct use of this product, and for
preventing injury to the operator and other people or damage to property. You must
observe these safety precautions. The safety precautions described in this manual
are indicated by various icons.
The following describes the icons and their meanings. Be sure to read and
understand the following descriptions before reading this manual.
■ Examples
i
Triangles warn the user of a possible danger that may be caused by
wrongful operation or misuse of this product.
These icons graphically represent the actual danger. (The example on
the left warns the user of the danger of electrical shock.)
White circles with a diagonal bar notify the user that specific actions are
prohibited to prevent possible danger.
These icons graphically represent the actual prohibited action. (The
example on the left notifies the user that disassembly is prohibited.)
Black filled-in circles instruct the user to carry out a specific obligatory
action to prevent possible danger.
These icons graphically represent the actual action to be carried out.
(The example on the left instructs the user to remove the plug from the
outlet.)
SAFETY PRECAUTIONS
WARNING
Warnings are indicated when mishandling this product might
result in death or serious injury to the user.
CAUTION
Cautions are indicated when mishandling this product might
result in minor injury to the user, or only physical damage to
this product.
Page 4
ii
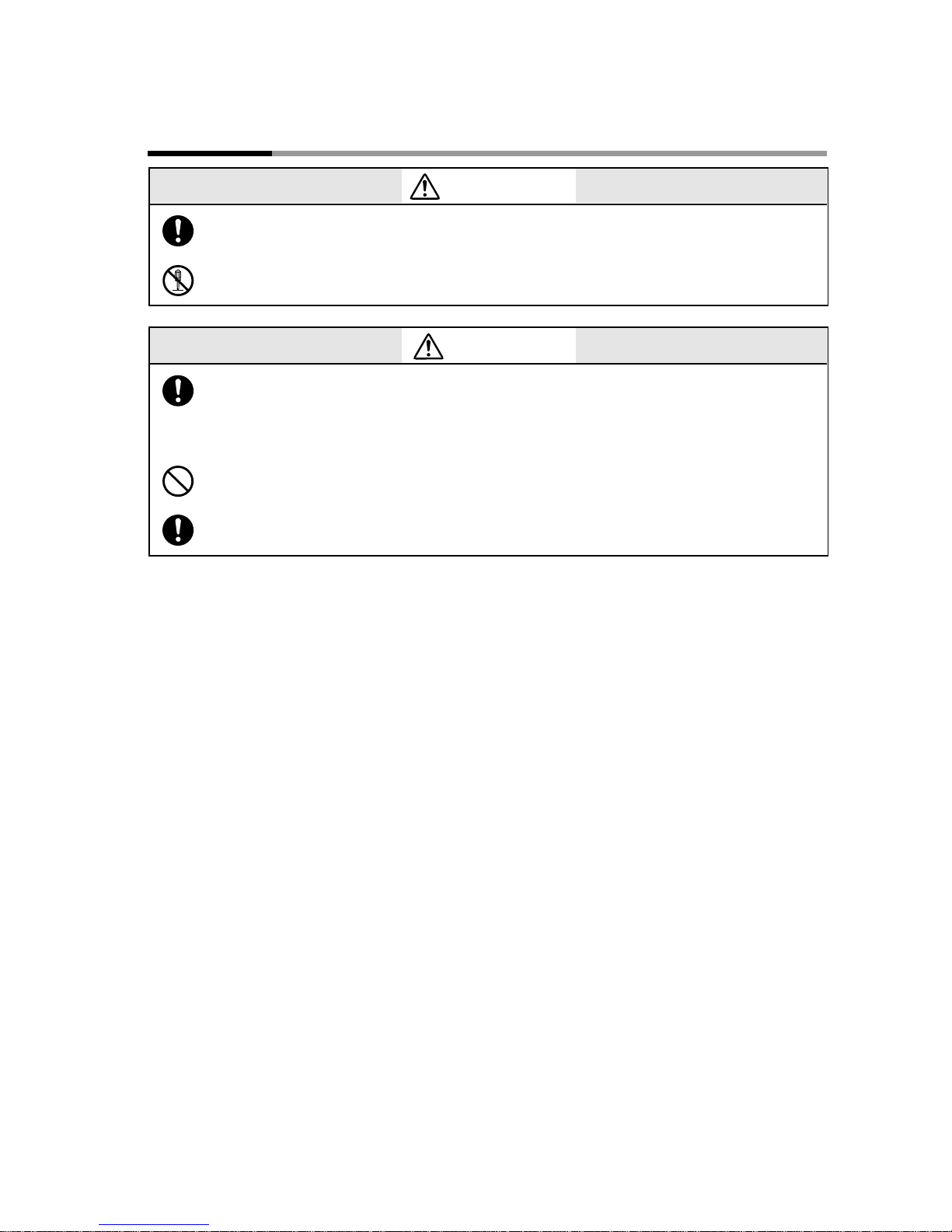
WARNING
CAUTION
Use the DCP32 within the operating ranges recommended in the specifications (temperature, humidity, voltage, vibration, shock, mounting direction,
atmosphere, etc.).
Failure to do so might cause fire or faulty operation.
Do not block ventilation holes.
Doing so might cause fire or faulty operation.
Do not allow lead clippings, chips or water to enter the DCP32 case.
Doing so might cause fire or faulty operation.
Wire the DCP32 properly according to predetermined standards.
Also wire the DCP32 using designed power leads according to recognized
installation methods.
Failure to do so might cause electric shock, fire or faulty operation.
Inputs to the current input terminals and on the DCP32 should be
within the current and voltage ranges listed in the specifications.
Failure to do so might cause fire or faulty operation.
Firmly tighten the terminal screws at the torque listed in the specifications.
Insufficient tightening of terminal screws might cause electric shock or fire.
Do not use unused terminals on the DCP32 as relay terminals.
Doing so might cause electric shock, fire or faulty operation.
We recommend attaching the terminal cover (sold separately) after wiring
the DCP32.
Failure to do so might cause electric shock.
33
31
Before removing or mounting the DCP32, be sure to turn the power OFF.
Failure to do so might cause electric shock.
Do not disassemble the DCP32.
Doing so might cause electric shock or faulty operation.
Before connecting the DCP32 to the measurement target or external control
circuits, make sure that the FG terminal is properly grounded (100
Ω max.).
Failure to do so might cause electric shock or fire.
Turn the DCP32 OFF before starting wiring.
Failure to do so might cause electric shock.
Do not touch electrically charged parts such as the power terminals.
Doing so might cause electric shock.
Page 5

iii
CAUTION
Use Yamatake Corporation's SurgeNon if there is the risk of power surges
caused by lightning.
Failure to do might cause fire or faulty operation.
Before replacing the battery, be sure to turn the power OFF.
Failure to do so might cause electric shock.
Do not touch internal components immediately after turning the power OFF
to replace the battery.
Doing so might cause burns.
・Do not insert the battery with the polarities (+, -) reversed.
・Do not use damaged (broken battery skin, leaking battery fluid) batteries.
・Do not throw batteries into fires, or charge, short-circuit, disassemble or
heat batteries.
・Store batteries in low-temperature, dry locations.
Failure to observe the above cautions may cause batteries to emit heat or
split, or battery fluid to leak.
Store batteries out of the reach of small children.
Batteries are small and are easy to swallow. If a child swallows a battery,
consult a physician immediately.
Do not throw used batteries into fires or dispose at the user site.
Return used batteries to Yamatake Corporation or your dealer.
If you touch components inside the DCP32, touch a grounded metal object
to discharge any static electricity from your body.
Otherwise, static electricity might damage the components.
Handling Precautions
After turning the power ON, do not operate the DCP32 for at least 15
seconds to allow the DCP32 to stabilize.
Page 6
iv
To reduce of electrical shock which could cause personal injury, all safety notices in
this documentation.
This symbol warns the user of a potential shock hazardous live voltages may be
accessible.
・ If the equipment is used in a manner not specified by the manufacturer, the protection
provided by the equipment must be impaired.
・ Do not replace any component (or part) not explicity specified as replaceable by your
supplier.
・ All wiring must be in accordance with local norms and carried out by authorized
experienced personnel.
・ The ground terminal must be connected before any other wiring (and disconnected last).
・ A switch in the main supply is required near the equipment.
・ In the case of AC power supply models, the main power supply wiring requires a (T) 1.0 A,
250 V fuse(s).(IEC127)
EQUIPMENT RATINGS
Supply voltages 100 to 240 Vac (operation power voltages 90 to 264 Vac)
Frequency 50/60 Hz
Power or current ratings 30 VA maximum
EQUIPMENT CONDITIONS
Do not operate the instrument in the presence of flammable liquids or vapors. Operation of any
electrical instrument in such an environment constitutes a safety hazard.
Temperature 0 to 50
℃
Humidity 10 to 90%RH
Vibration Frequency 10 to 60 Hz
Acceleration 1.96 m/s
2
maximum
Installation category Category II (IEC664-1, EN61010-1)
Pollution degree 2
EQUIPMENT INSTALLATION
The controller must be mounted into a panel to limit operator access to the rear terminal.
Specification of common mode voltage; The common mode voltages of all I/O except for main
supply and relay outputs are less than 30 Vrms, 42.4 V peak and 60 Vdc .
APPLICABLE STANDARDS
EN61010-1, EN50081-2, EN50082-2
CAUTION
Danger of explosion if battery is incorrectly replaced.
Replace only with the same or equivalent type recommended by the manufacturer.
Dispose of used batterries according to the manufacturer’s instructions.
SAFETY REQUIREMENTS
Page 7
Request
v
The Role of This Manual
The filter on the front of the DCP32 is covered with a protective film to protect the surface of the DCP32.
When you have finished mounting and wiring the DCP32, fix cellophane adhesive tape on the corners of the filter,
and pull in the direction of the arrow to peel off the protective film.
Pull towards you.
Handling Precautions
Peeling off the protective film with your fingernail might scratch the surface
of the DCP32.
DigitroniK CPL Communications DCP31/32 Version
Manual No. CP-UM-1760E
This manual is required reading for those using the CPL communications
functions of the DCP32.
This manual describes an outline of CPL communications, wiring,
communications procedures and DCP communications data, how to
remedy trouble, and communications specifications.
XXXXX
XXXXXX
ser's anua
XXXXX
No.CP-UM-XXXXE
XXXXXXXXXXXXXX
XXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXX
Product Manual Manual No. CP-SP1042E
This manual
This manual is provided with the DCP32 (single-loop model).
It is required reading for those in charge of designing, producing and
maintaining control systems incorporating the DCP32, and for those using
the DCP32 in other applications.
It describes mounting onto control panels, wiring, parameter setup,
program setup, operation methods, maintenance and inspection,
troubleshooting and specifications.
XXXXX
XXXXXX
ser's anua
XXXXX
No.CP-UM-XXXXE
XXXXXXXXXXXXXX
XXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXX
The following two manuals have been prepared for the DCP32. The following gives a brief outline of the manual.
If you do not have the required manual, contact Yamatake Corporation or your dealer.
Page 8

Organization of This User’s Manual
vi
This user's manual comprises the following ten chapters.
Chapter 1. GENERAL
This chapter describes DCP32 applications, features and basic function blocks.
It also gives a list of model numbers.
Chapter 2. NAMES & FUNCTIONS OF PARTS
This chapter describes the names and functions of DCP32 parts, input types and
range Nos.
Chapter 3. INSTALLATION & MOUNTING
This chapter describes how to mount the DCP32 on control panels. This chapter is
required reading for designers of control systems using the DCP32.
Chapter 4. WIRING
This chapter describes the precautions when wiring the DCP32 to a control system
and how to wire the DCP32. This chapter is required reading for designers of
control systems and supervisors of wiring work.
Chapter 5. FUNCTIONS
This chapter describes the functions of the DCP32. This chapter is required
reading for designers of control systems using the DCP32.
Chapter 6. OPERATION
This chapter describes how to switch the basic display states of the DCP32, and
select and run programs. This chapter is required reading for designers of control
systems using the DCP32 and users of control systems.
Chapter 7. PARAMETER SETUP
This chapter describes how to set up parameters on the DCP32 and the meaning of
settings.
Chapter 8. PROGRAM SETUP
This chapter describes how to set up programs on the DCP32 and the meanings of
settings.
Chapter 9. MAINTENANCE & TROUBLESHOOTING
This chapter describes points to check when the DCP32 is not working properly or
how to remedy trouble that might occur.
Chapter 10. SPECIFICATIONS
This chapter describes the general specifications, performance specifications and
external dimensions of the DCP32.
Page 9

Contents
vii
SAFETY PRECAUTIONS
SAFETY REQUIREMENT
Request
The Role of This Manual
Organization Used in This Manual
Contents
Conventions Used inThis Manual
Chapter 1. GENERAL
1-1 Features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
1-2 Basic Function Blocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1-3 Data Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
1-4 System Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
■ System configuration by CPL communications . . . . . . . . . . . . . . . . . . . 1-4
1-5 Model Numbers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
Chapter 2. NAMES & FUNCTIONS OF PARTS
2-1 Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
2-2 Console . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
■ Basic display state . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
■ Displays. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
■ Keys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
■ Combined key operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
■ Loader jack . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8
2-3 Input Type and Range No. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
■ Inputs 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
■ Inputs 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
Chapter 3. INSTALLATION & MOUNTING
3-1 Installation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
■ Mounting locations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
■ Noise generating sources and countermeasures . . . . . . . . . . . . . . . . . . 3-2
■ Dust-proof cover. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
3-2 Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
■ Panel cutout dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
■ Mounting method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
Chapter 4. WIRING
4-1 Wiring Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4-2 Compensating Lead . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-3
4-3 Terminal Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-4
4-4 Layout of Terminals and Recommended Lead Draw-out Direction. . . . . . . 4-5
4-5 Connecting the Ground and Power Supply . . . . . . . . . . . . . . . . . . . . . . . . . . 4-6
■ Power supply . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-6
■ Ground. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-6
4-6 Wiring of Standard and Add-on Terminal Base . . . . . . . . . . . . . . . . . . . . . . . 4-7
■ Standard terminal layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-7
■ Add-on terminal layout. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-7
Page 10

4-7 Connecting Inputs (analog inputs) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-8
■ Connecting input 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-8
■ Connecting input 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-8
4-8 Connecting Control Outputs (outputs 1, 2, 3) . . . . . . . . . . . . . . . . . . . . . . . 4-10
■ Relay output (0D) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-10
■ Current output (5G) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-10
■ Position-proportional output (2G). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-11
■ Heat/cool output (3D) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-12
■ Heat/cool output (5K) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-13
4-9 Connecting Auxiliary Outputs (output 3) . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-14
■ 0D, 5G auxiliary outputs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-14
4-10 Connecting Event Output (relay output). . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-15
4-11 Connecting Time Event Output (open-collector). . . . . . . . . . . . . . . . . . . . . 4-16
4-12 Connecting External Switch (RSW) Input. . . . . . . . . . . . . . . . . . . . . . . . . . . 4-17
4-13 Connecting for Communications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-19
■ RS-485 interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-19
4-14 Isolating Inputs and Outputs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-22
■ Control outputs 0D, 5G, 3D, 5K . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-22
■ Control output 2G. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-22
Chapter 5. FUNCTIONS
5-1 Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
■ Data types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
5-2 Program Patterns . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
■ Patterns . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
■ Events 1 to 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-3
■ Time events 1 to 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-6
■ PID set selection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-8
■ G.Soak (guarantee soak) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-9
■ PV start . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-10
■ Cycle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-10
■ Pattern link . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-11
■ Tag . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-11
5-3 Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-12
■ Mode type . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-12
■ Mode transition. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-14
■ Mode transition operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-15
■ Mode transition limitations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-16
5-4 Controller and Programmer. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-17
5-5 Input Processing Functions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-18
5-6 Output Processing Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-20
■ Exchanging MV1/MV2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-20
■ Control output CH1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-21
■ SP output. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-29
■ Auxiliary output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-30
viii
Page 11

ix
Chapter 6. OPERATION
6-1 Turning the Power ON . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1
6-2 Switching the Basic Display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
■ Display in program operation mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-3
■ Display in constant-value operation mode . . . . . . . . . . . . . . . . . . . . . . . 6-7
6-3 Program Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-10
■ How to select the program No. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-10
6-4 External Switch (RSW) Operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-11
■ External switch (RSW) input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-11
■ Program selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-12
■ Read timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-13
6-5 Manual Operation and Auto-tuning. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-14
■ Manual operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-14
■ Auto-tuning (AT) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-14
Chapter 7. PARAMETER SETUP
7-1 Parameter Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-1
■ Selecting the setting group in the parameter setup . . . . . . . . . . . . . . . . 7-1
■ Moving individual items in the parameter setup . . . . . . . . . . . . . . . . . . 7-2
■ Changing individual items and how to return from the setup state . . . 7-2
7-2 How to Use PARA Keys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-4
■ How to register functions to PARA keys . . . . . . . . . . . . . . . . . . . . . . . . . 7-4
7-3 Parameter Setup List . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-6
■ Variable parameter settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-7
■ Description of variable parameter settings . . . . . . . . . . . . . . . . . . . . . . . 7-9
■ Variable parameter 2 settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-16
■ Description of variable parameter 2 settings. . . . . . . . . . . . . . . . . . . . . 7-17
■ Event configuration data settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-18
■ Description of event configuration data. . . . . . . . . . . . . . . . . . . . . . . . . 7-24
■ PID parameter 1 settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-25
■ PID parameter 2 settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-28
■ Setup data settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-29
■ Description of setup data settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-38
■ Table data settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-46
■ Description of table data settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-47
■ Constant-value operation data settings . . . . . . . . . . . . . . . . . . . . . . . . . 7-48
Chapter 8. PROGRAM SETUP
8-1 Program Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-1
■ How to enter program setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-1
■ Selecting the program No. to set up. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-1
■ Mode transition. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-2
■ Programming map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-4
■ Display details. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-5
■ Setting up pattern items. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-5
■ Setting up SP 2 items. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-6
■ Setting up events 1 to 3 items. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-6
■ Setting up time events 1 to 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-8
Page 12

x
■ Setting up PID set No. items (CH1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-9
■ Setting up PID set No. items (CH2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-10
■ Setting up G.Soak (guarantee soak) items (CH1) . . . . . . . . . . . . . . . . . 8-11
■ Setting up G.Soak (guarantee soak) items (CH2) . . . . . . . . . . . . . . . . . 8-12
■ Setting up PV start items . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-13
■ Setting up cycle items . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-14
■ Setting up pattern link items . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-15
■ Deleting programs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-16
■ Inserting and deleting segments. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-17
8-2 Copying Programs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-19
■ Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-19
8-3 General Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-20
■ Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-20
Chapter 9. MAINTENANCE & TROUBLESHOOTING
9-1 Maintenance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-1
9-2 Self-diagnostics and Alarm Code Display . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-2
■ Self-diagnostics at power ON . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-2
■ Self-diagnostics at each sampling cycle . . . . . . . . . . . . . . . . . . . . . . . . . 9-2
■ Intermittent self-diagnostics during operation . . . . . . . . . . . . . . . . . . . . 9-3
■ Self-diagnostics only when certain functions are operating . . . . . . . . . 9-3
■ Alarm code display. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-3
■ Alarm categories. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-4
9-3 Trouble during Key Entry. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-5
■ Trouble in the basic display state. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-5
■ Trouble in the parameter setup state . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-8
■ Trouble in the program setup state . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-8
9-4 Motor Adjustment is Impossible . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-11
■ Normal wiring for direct motor rotation . . . . . . . . . . . . . . . . . . . . . . . . . 9-12
■ Normal wiring for reverse motor rotation. . . . . . . . . . . . . . . . . . . . . . . . 9-12
■ Alarm display caused by wrong wiring and causes . . . . . . . . . . . . . . . 9-12
9-5 When BAT LED Blinks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-13
■ BAT LED blinking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-13
■ Replacing the battery . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-13
Chapter 10.
SPECIFICATIONS
10-1
Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-1
■ Accessories/option list . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-8
10-2
External Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-9
■ DCP32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-9
■ Soft dust-proof cover (sold separately) . . . . . . . . . . . . . . . . . . . . . . . . 10-10
■ Hard dust-proof cover (sold separately) . . . . . . . . . . . . . . . . . . . . . . . 10-10
■ Terminal cover set (sold separately) . . . . . . . . . . . . . . . . . . . . . . . . . . 10-10
Index
Page 13
Conventions Used in This Manual
xi
The following conventions are used in this manual.
Handling Precautions
: Handling Precautions indicate items that the user should pay attention
to when handling the DCP32.
Note : Notes indicate useful information that the user might benefit by
knowing.
: Circled numbers indicate steps in a sequence or indicate corresponding
parts in an explanation.
» : Indicates the DCP32 state after an operation.
DISP + ↑ keys : These icons represent keys on the DCP32's console.
FUNC + PROG keys : Key combinations like these indicate keys that must be pressed while
being held down together.
PA01, C21
: These represent indications on the upper and lower 7-segment
displays.
Page 14

1-1
Chapter 1. GENERAL
1 - 1 Features
The DCP32 is:
• a general-purpose double-loop program controller for controlling temperature, pressure, flow rate and other
inputs
• a 2-loop program controller for controlling temperature and relative humidity.
On the DCP32, you can set up to 19 program patterns, and set up to 30 segments to each program pattern.
● High accuracy achieved by multi-range input
Multi-range input allows you to choose between the following input types:
thermocouple, resistance temperature detector (RTD), DC voltage and DC current.
Accuracy of ±0.1%FS±1 digit (±0.2%FS±1 digit for Input 2 only) and a sampling
cycle of 0.1 seconds ensures consistently high-precision control.
● Wide range of control output types
A wide range of models supporting various control output types are available:
relay time-proportional output, position-proportional output, current output,
voltage time-proportional output, and heat/cool output.
On models other than heat-cool control output, you can also choose neural netbased auto-tuning and smart-tuning for inhibiting overshoot, in addition to 2
degrees of freedom PID.
● Enhanced compatibility with PLCs
12 external switch inputs (eight optional), three event outputs and five time event
outputs (optional) ensure compatibility with automating systems designed around
a PLC core.
● Easy operation
Up to eight frequently changed parameter setups can be registered to the PARA
key, facilitating recall of item setups.
Page 15
1-2
Chapter 1. GENERAL
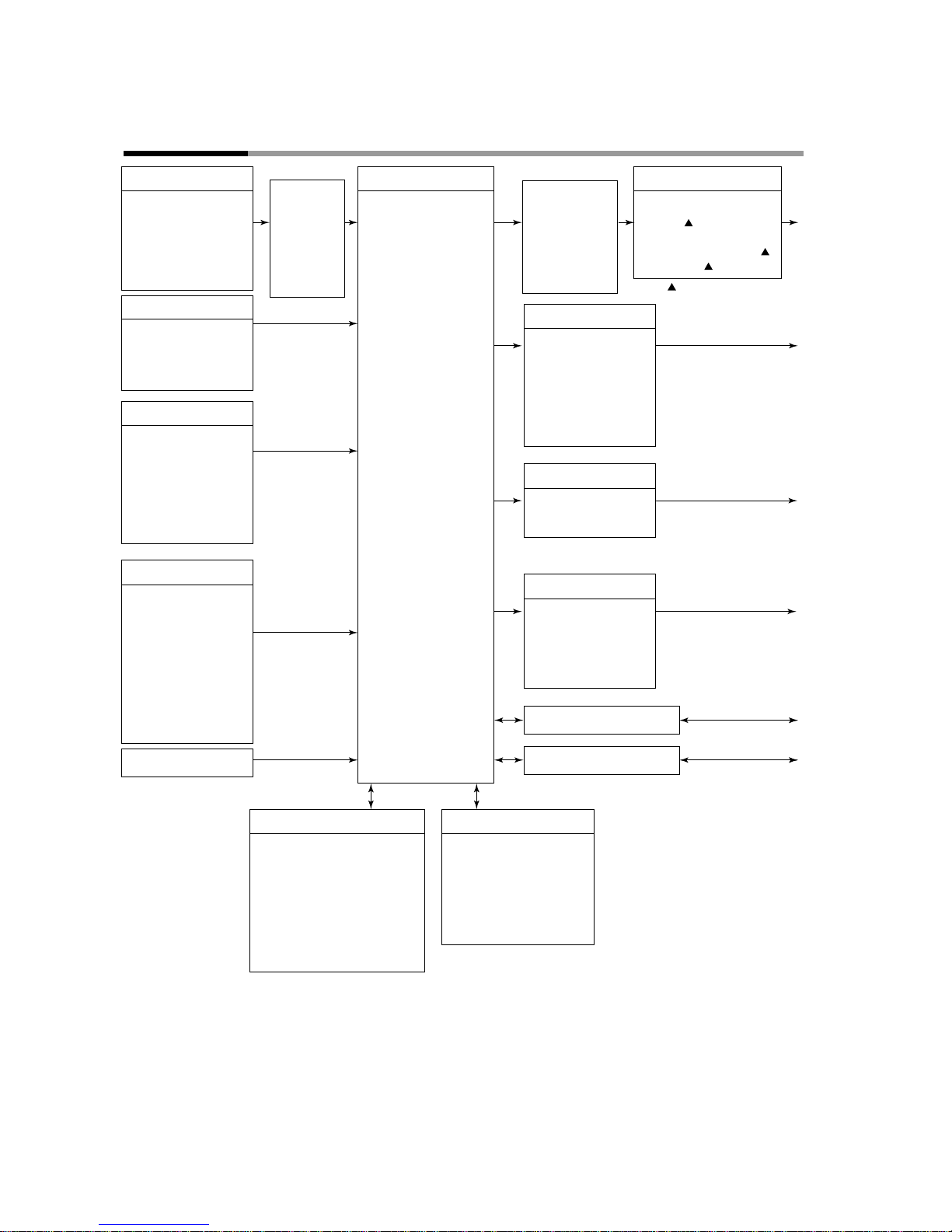
1 - 2 Basic Function Blocks
4 External Switch Inputs
• RUN
• HOLD
• RESET
• ADV
* indicates options.
Inputs 1/2
• Thermocouple
• Resistance
• DC current
• DC voltage
8 External Switch Inputs
• Program No.
• FAST
• PV start
• AUTO/MANUAL
• AT start/stop
• G.Soak cancel
• Direct/reverse action
Key Operation
• Display selection
• Program No.
• RUN/HOLD
• RESET
• ADV
• FAST
• AUTO/MANUAL
• AT start/stop
• Program setup
• Parameter setup
MFB input
• Square root
extraction
•
• Bias
• Filter
Control Operation Block
• Mode transition
• PID control
• Auto-tuning
• Neuro & Fuzzy
• Forward/reverse action
• ON-OFF control
• SP limit
• SP bias
• Output change
limitter
• Upper/lower
limitter
• SP output
• Exchanging
MV1/MV2
Outputs 1/ 2/ 3
• Current
• Relay ( )
• Voltage
• Position-proportional ( )
• Heat-cool ( )
Event Outputs
• PV
• SP
• Deviation
• MV
• MFB
• Modes
• Alarm
Time Event Outputs
• Time event
• Segment code
Auxiliary Outputs
• PV
• SP
• Deviation
• MV
• MFB
CPL communications I/O
Loader communications I/O
*
*
*
Program
• 19 patterns x 30 segments
• Events
• Time events
• PID sets
• G.Soak
• PV start
• Cycle
• Pattern link
Parameters
• Variable parameters
• Event configuration
• PID parameters (8 sets)
• Setup
• Tables
• Constant-value operation
*
temperature detector
(input 1 only)
Linearization table
approximation
( ) indicates output for
one loop only.
Page 16
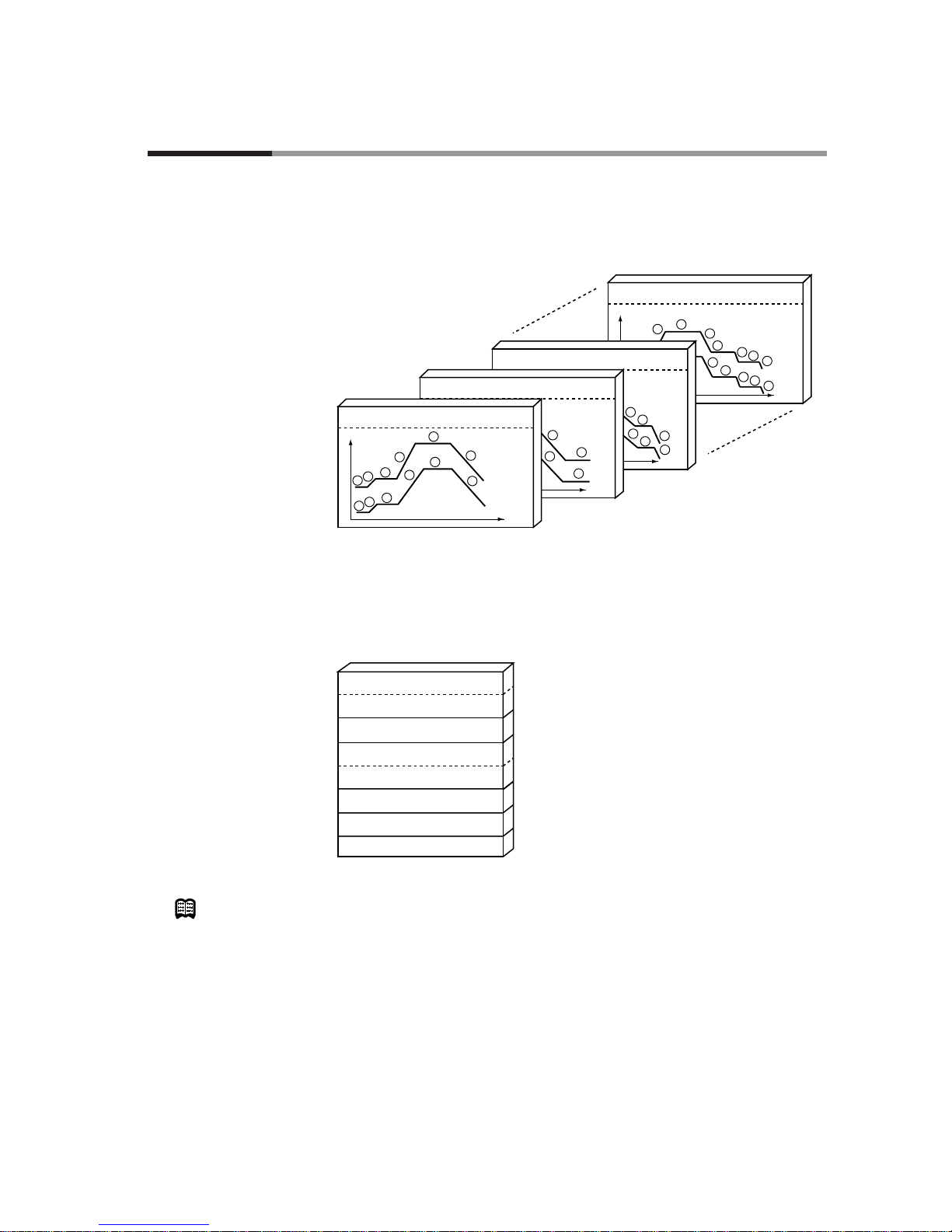
Data is made up of “parameters” that are used mainly for setting controller functions and “programs” that are used
for setting operation during program operation of the DCP32.
● Total of 19 program patterns
Up to 19 program patterns can be set.
1-3
Chapter 1. GENERAL
● Parameters
Parameters are provided for six types of data: variable parameters, event
configuration data, PID parameters, setup data, table data and constant-value
operation data.
Note
Variable parameters contain common parameters regardless of channels CH1 and
CH2.
Program No. = 19 Number of segments = 8
SP
Time
4
5
6
7
8
Program No. = 3 Number of segments = 15
SP
Time
13
15
14
Program No. = 2 Number of segments = 19
SP
Time
18
19
Program No. = 1 Number of segments = 6
SP
Time
1
2
3
4
5
6
4
5
6
7
8
13
15
14
18
19
1
2
3
4
5
6
SP1
SP2
2
3
Variable parameters
Variable parameters 2
Event configuration data
PID parameter 1
PID parameter 2
Setup data
Table data
Constant-value operation data
1 - 3 Data Structure
Page 17
1-4
Chapter 1. GENERAL
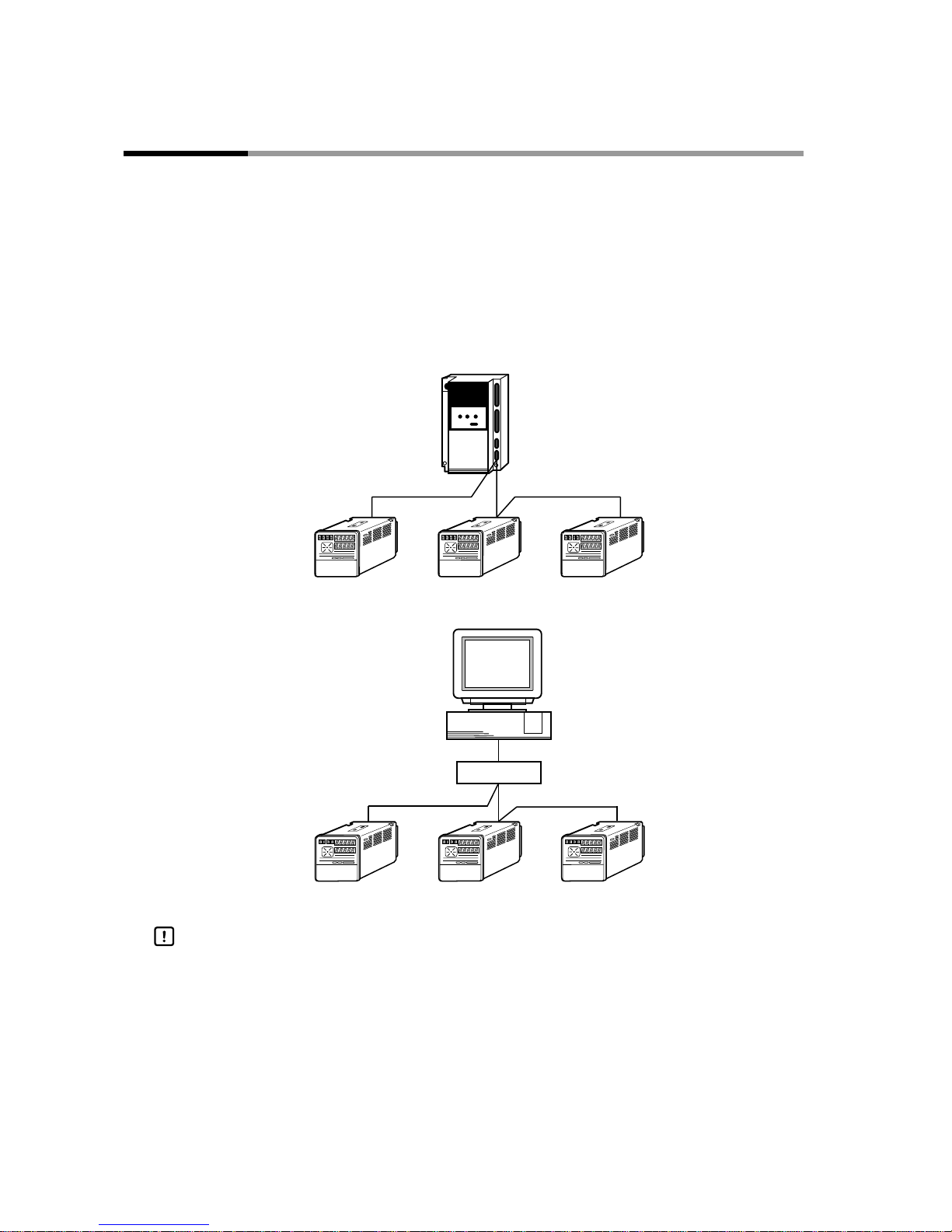
■ System configuration by CPL communications
On DCP32 models supporting RS-485 communications (optional), DigitroniK
series controllers can be connected as slave stations on the CPL communications*
network.
Yamatake Corporation’s MA500 FA controller or MX200 machine controller can
be used as the host station in this case.
* “CPL communications” refers to standard host communications defined in
Yamatake CPD.
Handling Precautions
On a 3-lead wire RS-485 configuration, the Yamatake CMA50A105 cannot
be used as the converter for the master or slave station.
MA500 or MX200
RS-485
DCP32 (slave station)
Personal computer
DCP32 (slave station)
RS-232C
CMA50A105 or CMC410A102 (master station)
RS-485
1 - 4 System Configuration
Page 18
1-5
Chapter 1. GENERAL
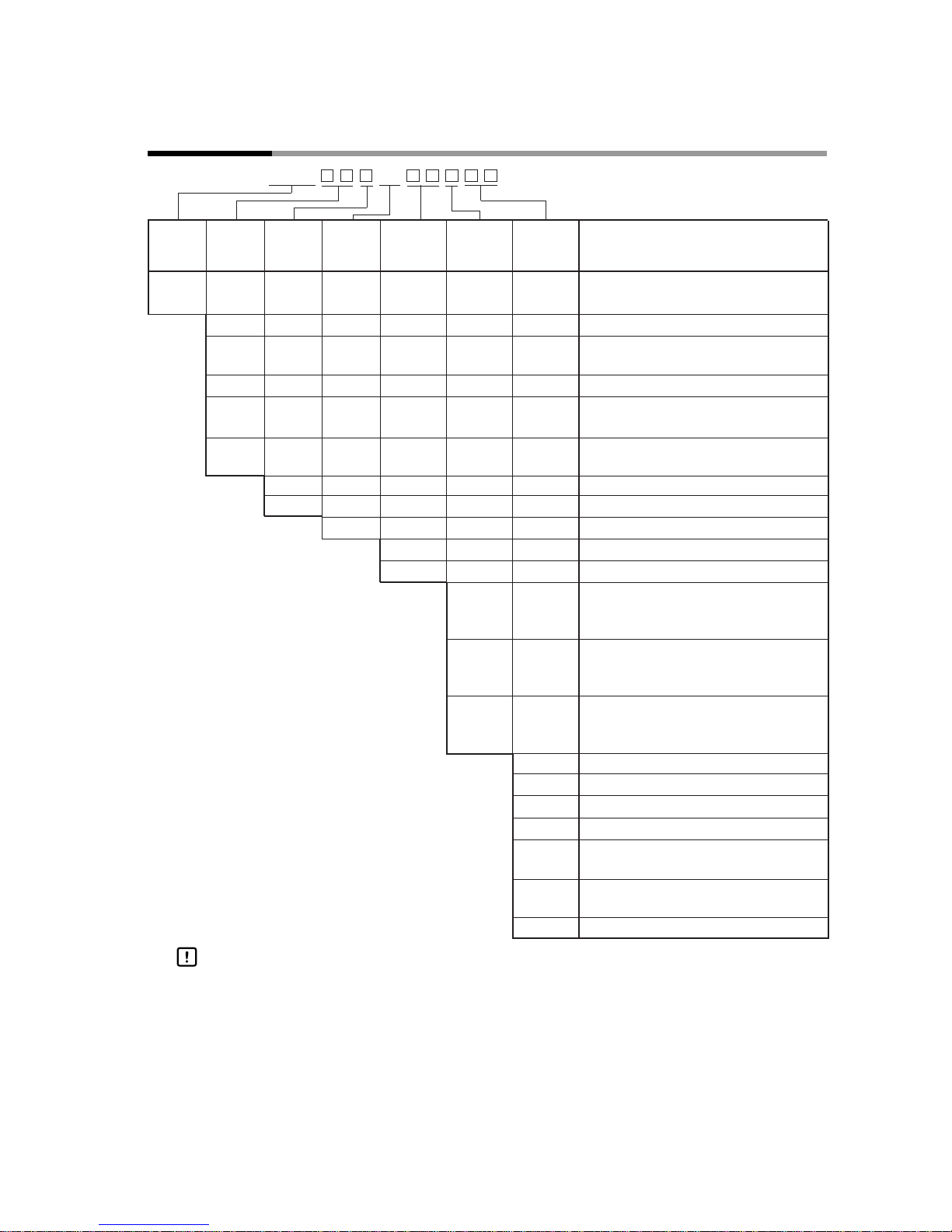
Basic
Model Output Function Power Option 1 Option 2 Additions Description
No.
P32A Digital Program Controller (2-loop
model)
0D Relay outputs + current output
2G Position-proportional output + current
output
5G Current output + current output
3D Heat-cool output (relay output + relay
output) + current output
5K Heat-cool output (current output +
current output) + current output
1 Input 2 channel
2 Temperature/humidity calculation
AS Free power supply (90 to 264 Vac)
00 No auxiliary output
01 1 auxiliary output
0 External switch inputs (4), time events
not supported, communications not
supported
1 External switch inputs (12), 5 time
events supported, communications not
supported
2 External switch inputs (12), 5 time
events supported, RS-485
communications supported
00 Additional treatment not supported
T0 Tropical treatment
K0 Antisulfide treatment
D0 Inspection Certificate provided
B0 Tropical treatment + Inspection
Certificate provided
L0 Antisulfide treatment + Inspection
Certificate provided
Y0 Traceability Certificate
Basic Model No. : P32A AS
Handling Precautions
• On 2G, 3D and 5K output models, only 00 (auxiliary output OFF) can be
designated for option 1.
• On current output models other than heat/cool output, you can choose
between use of the DCP32 as a controller or a programmer.
• Current output can be changed to voltage output (with current value
adjustment function).
• Relay output on 0D output models is time-proportional output.
• Relay output on 3D output models is either time-proportional output or
3-position control output.
• Voltage output is time-proportional output.
1 - 5 Model Numbers
Page 19
2-1
Chapter 2. NAMES & FUNCTIONS OF PARTS
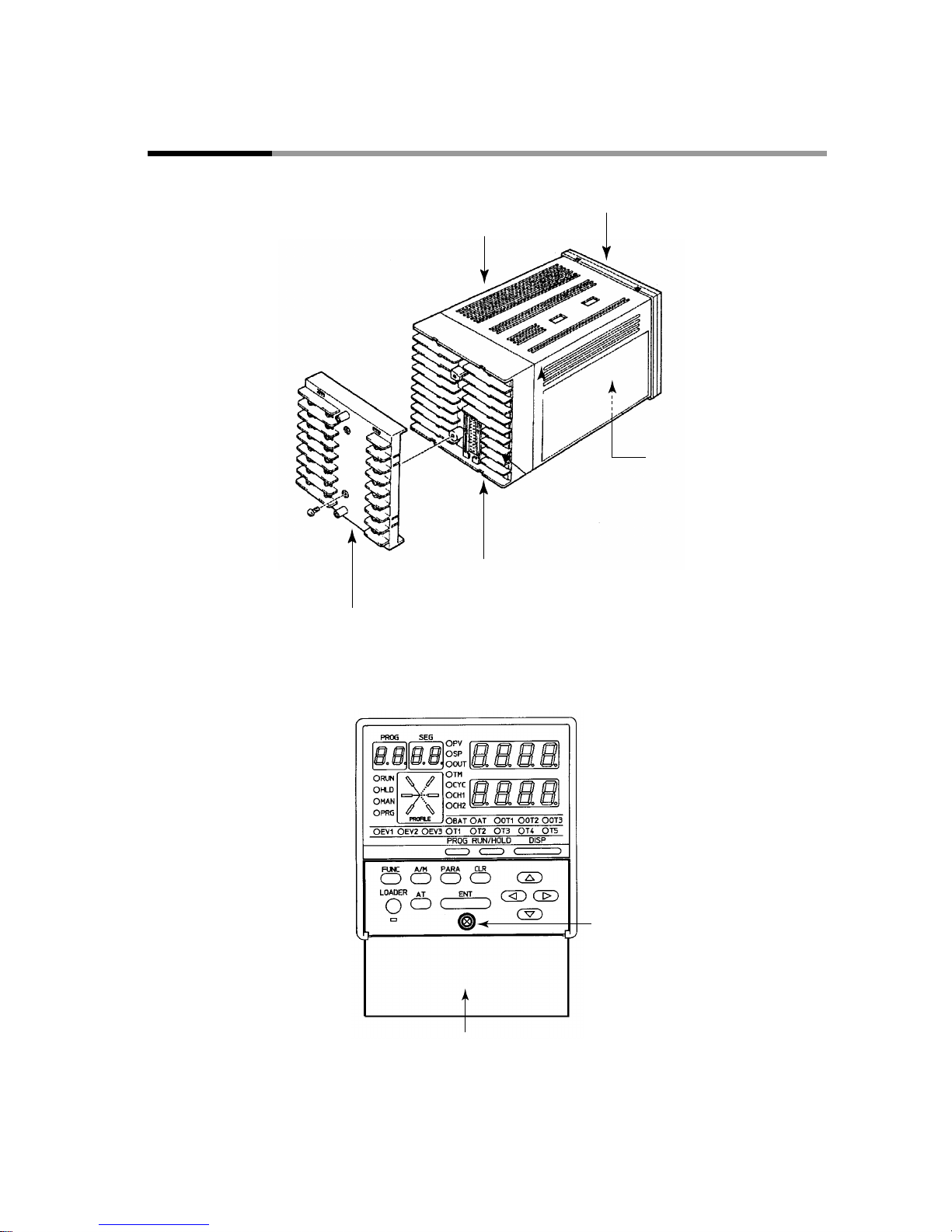
2 - 1 Structure
The DCP32 comprises a body, console, case, standard terminal base and add-on terminal base.
Case
Console
Body
Standard terminal base
Contains 7-segment display, LEDs,
operation keys and loader
connector.
Contains console and electrical
circuits.
Connectors for connecting power, input, output, event outputs, external
switch inputs (4) and auxiliary outputs (options).
Add-on terminal base
Terminal for connecting external switch inputs (8 options), time event outputs (options) and
CPL communications (options).
This base is not provided on models not supporting external switch inputs (8) and time event
outputs.
Key lock screw
Fixes the case to the body.
Key cover
Cover for preventing erroneous operation.
Page 20
2-2
Chapter 2. NAMES & FUNCTIONS OF PARTS
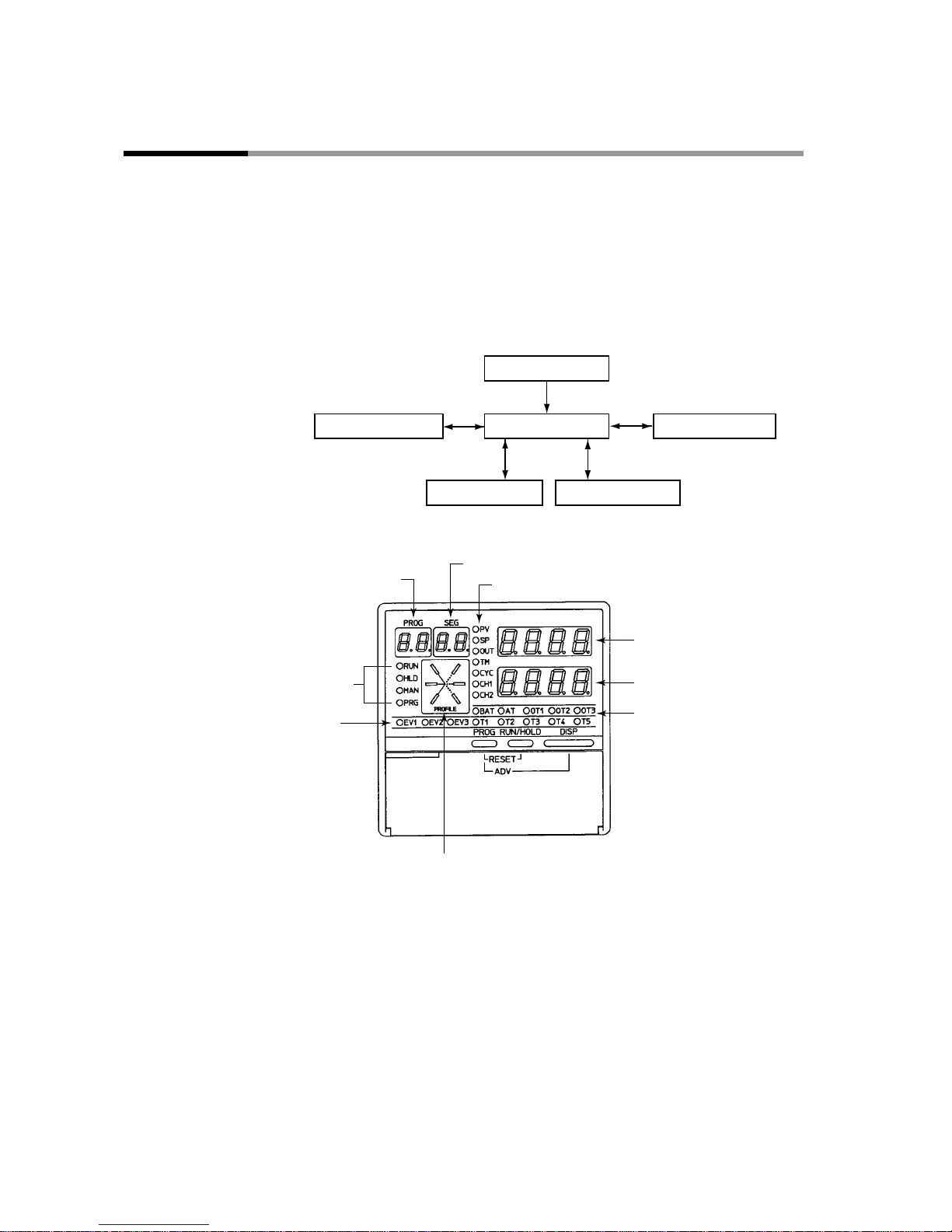
2 - 2 Console
The console comprises keys for operating the DCP32, and displays and LEDs.
■ Basic display state
The “basic display state” is the state in which the DCP32 operating state is
displayed on the console.
When the power is turned ON, the DCP32 is in this state.
Key operation changes the DCP32 from the basic display state to one of the
parameter setup, program setup, program copy or general reset states. Key
operation also returns the DCP32 to the basic display state.
■ Display
● Program No. display
In the basic display state, this display indicates the currently selected program No.
In the program setup state, this display indicates the program No. currently being
set up.
During constant-value operation, this display goes out in the basic display state.
When an alarm occurs in the basic display state, alarm code “AL” is displayed.
● Segment No. display
In the basic display state, this display indicates the currently selected segment No.
In the program setup state, this display indicates the segment No. currently being
set up.
During constant-value operation, this display goes out in the basic display state.
In the parameter setup state, this display indicates the item No.
When an alarm occurs in the basic display state, the alarm code No. is displayed.
Power ON
Parameter setup state
Program setup state Program copy state
General reset state
Basic display state
Program No. display
Mode indicator
LED lamps
Event LEDs
Segment No. display
Basic indicator LED lamps
Upper display
Lower display
Low battery voltage LED (BAT)
Control/output state LED
Profile display
Page 21
Chapter 2. NAMES & FUNCTIONS OF PARTS
● Mode indicator LEDs
RUN, HLD : Display the READY, RUN, HOLD, FAST and END modes. (See
following table.)
MAN : Lights when the displayed channel (CH1 or CH2 whose LED is lit)
is in the MANUAL mode, blinks when the displayed channel is in
the AUTO mode or the undisplayed channel is in the MANUAL
mode, and goes out when both channels are in the AUTO mode.
PRG : Lights in the program setup state. Otherwise, this LED is out.
● Upper display
In the basic display state, displays PV and other values.
In the parameter setup state, displays the item code.
● Lower display
In the basic display state, displays SP, time, output and other values.
In the parameter setup state, displays the item setting value.
● Low battery voltage LED
BAT : Blinks when the battery voltage is low. Otherwise, this LED is out.
● Control/output state LED
AT : The channel currently displayed in the upper or lower displays
(
CH1 or CH2 whose LED is lit) blinks during auto-tuning, and
lights during smart-tuning. Otherwise, this LED is out.
OT1 : When relay or voltage are assigned to output 1, lights when output
is ON and goes out when output is OFF. In the case of 2G output
models, lights when the open-side relay is ON and goes out when
the relay is OFF.
Lights when current output is assigned to output 1.
OT2 : When relay or voltage are assigned to output 2, lights when output
is ON and goes out when output is OFF. In the case of 2G output
models, lights when the closed-side relay is ON and goes out when
the relay is OFF. Lights when current output is assigned to output 2.
OT3 : Lights when voltage output assigned to output 3 is ON, and goes
out when voltage output is OFF. Lights when current output is
assigned to output 3, and goes out when output 3 is auxiliary output.
● Basic indicator LEDs
PV : Lights during PV display. Otherwise, this LED is out.
SP : Lights during SP display. Otherwise, this LED is out.
OUT : Lights during output display. Otherwise, this LED is out.
TM : Lights during time display. Otherwise, this LED is out.
CYC : Lights during cycle display. Otherwise, this LED is out.
CH1 : Lights when CH1 data is displayed, blinks when CH1 data is
displayed with
CH2 data. Otherwise, this LED is out.
CH2 : Lights when CH2 data is displayed, blinks when CH2 data is
displayed with
CH1 data. Otherwise, this LED is out.
Mode
LED
READY RUN HOLD FAST END
RUN Out Lit Out Blinking Out
HLD Out Out Lit Out Blinking
2-3
Page 22

2-4
Chapter 2. NAMES & FUNCTIONS OF PARTS
● Event LEDs
EV1, EV2, : ・ In the basic display state or parameter setup state, these LEDs
EV3 light when each of EV3 events 1 to 3 are ON, and go out when
OFF.
・ In the program setup (programming) state, these LEDs light
when each of the items for events 1 to 3 are displayed.
Otherwise, these LEDs are out.
T1, T2, T3, : ・ These LEDs light when each of time events 1 to 5 are ON, and
T4, T5 go out when OFF.
・ In the program setup (programming) state, these LEDs light
when each of the items for time events 1 to 5 are displayed.
Otherwise, these LEDs are out.
● Profile display
Displays the tendencies (rise, soak, fall) of the program pattern of the displayed
channel (CH1 or CH2 whose LED is lit) in the upper/lower display. Blinks during
G.Soak standby, and light successively after the power is turned ON.
Page 23
2-5
Chapter 2. NAMES & FUNCTIONS OF PARTS
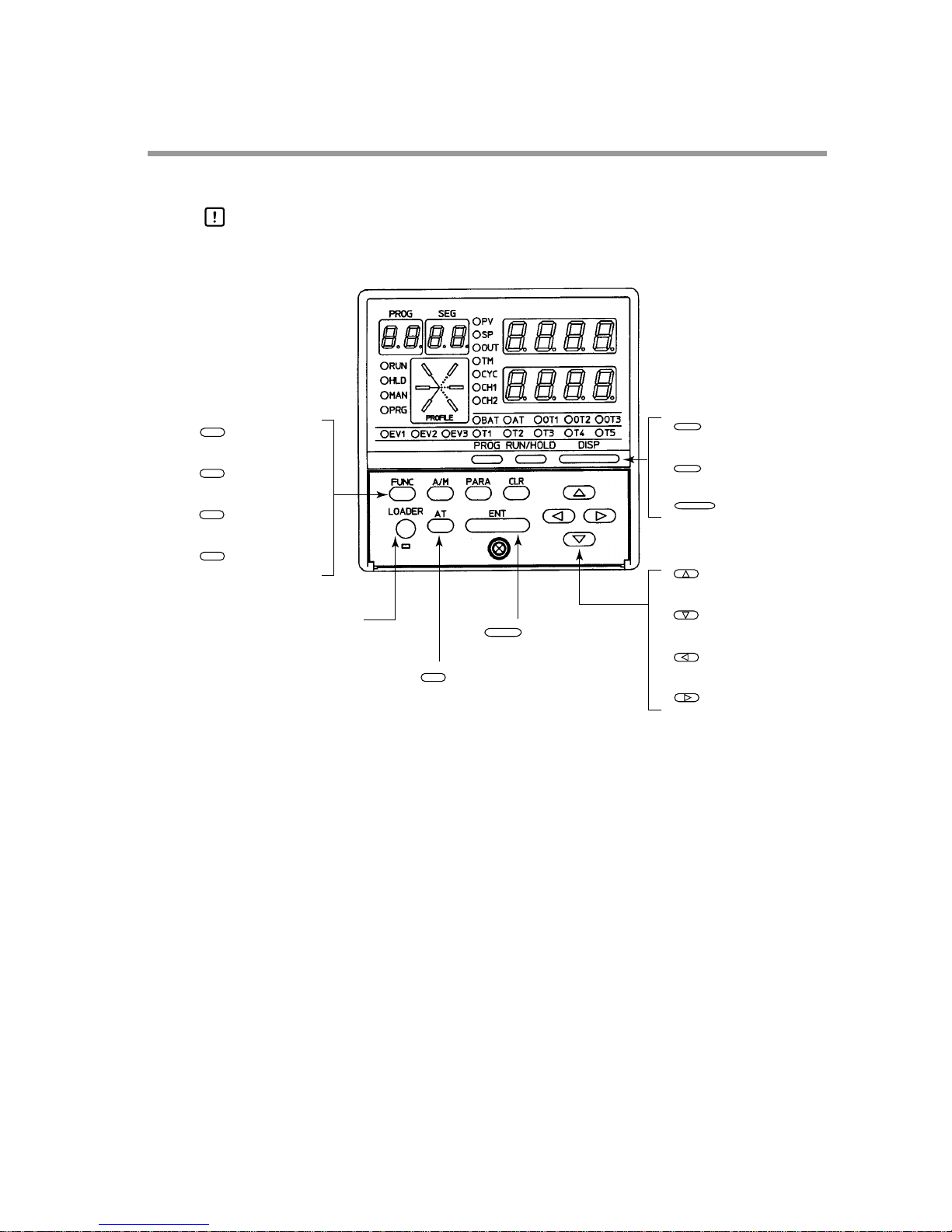
■ Keys
Handling Precautions
Do not operate the console keys using a sharp-pointed object such as a
propelling pencil or needle. Doing so might damage the console.
Function key
(FUNC key)
:
:
:
:
Auto/Manual key
(A/M key)
Parameter key
(PARA key)
Program key
(PROG key)
:
:
:
Run/Hold key
(RUN/HOLD key)
Display key
(DISP key)
Clear key
(CLR key)
Up arrow key
(↑ key)
:
Enter key
(ENT key)
:
Auto-tuning key
(AT key)
:
:
:
:
Down arrow key
(↓ key)
Left arrow key
(← key)
Right arrow key
(→ key)
Loader jack
RUN/HOLD
PROG
PARA
FUNC
ENT
DISP
CLR
AT
A/M
Page 24
2-6
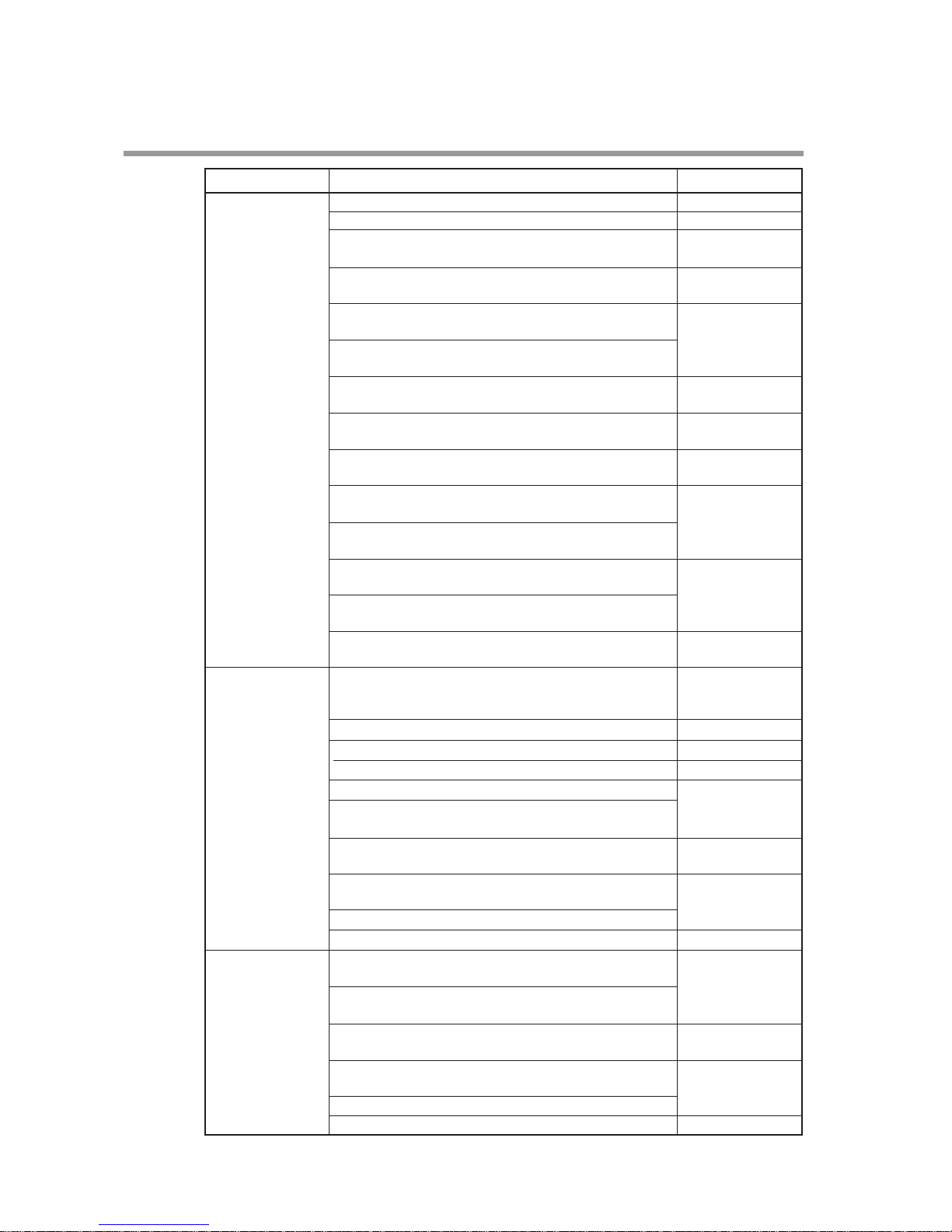
Chapter 2. NAMES & FUNCTIONS OF PARTS
Category
Basic display state
Parameter setup
PARA key
Assignment item
setup
Function
To change the display
To switch the display channel
To change the program No. in ascending order
(in READY mode)
To change the program No. in descending order
(in READY mode)
To run the program
(in READY, HOLD, FAST modes)
To hold the program
(in RUN mode)
To reset the program
(in READY, HOLD, FAST, END modes)
To advance the program
(in RUN, HOLD, FAST modes)
To run the program fast
(in RUN, HOLD modes)
To execute manual operation
(in AUTO mode)
To execute automatic operation
(in MANUAL mode)
To start auto-tuning
(when not executing auto-tuning)
To cancel auto-tuning
(when executing auto-tuning)
To change values during manual operation
(when MV or SP is blinking)
Starts parameter setup. So, the controller enters
selection of setup group (major item).
(in basic display state)
To change the setup group (major item)
To fix the setup group (major item)
To move between individual items (minor items)
To start changing of individual item setting values
To end changing of individual item setting values
(while setting value is blinking)
To change individual item setting values
(while setting value is blinking)
To cancel changing of individual item setting values
(in basic display state)
To select setup group
To end parameter setup
To start changing assignment item setting values
(in basic display state)
To move to next item by assignment item, and start
changing setting values
To change assignment item setting values
(while setting value is blinking)
To end changing of assignment item setting values
(while setting value is blinking)
To start changing assignment item setting values
To end assignment item setup
Key operation
DISP
FUNC + DISP
PROG
↓
RUN/HOLD
PROG +
RUN/HOLD
PROG + DISP
FUNC +
→
A/M
AT
↑ ↓ ← →
FUNC + PARA
PARA ↑ ↓
ENT
↑ ↓ ← →
ENT
↑ ↓ ← →
PARA
DISP
PARA
↑ ↓ ← →
ENT
DISP
Page 25
2-7
Chapter 2. NAMES & FUNCTIONS OF PARTS
Category
Program setup
Program copy
General reset
Function
To start program setup (programming)
(in basic display state)
To move between program items and segment Nos.
To start changing of item setting values
(while setting value is blinking)
To end changing of item setting values
(while setting value is blinking)
To change item setting values
(while setting value is blinking)
To clear item setting
(while setting value is blinking)
To cancel changing item setting values
(while setting value is blinking)
To insert/delete segments
To change the program No. in ascending order
To change the program No. in descending order
To end program setup (programming)
To start program copy
(in basic display state)
To change the copy destination program No.
To execute program copy
(while setting value is blinking)
To end program copy
To check general reset
(in basic display state)
To execute general reset
To cancel general reset
Key operation
FUNC + PROG
↑ ↓ ← →
ENT
↑ ↓ ← →
FUNC + CLR
DISP
FUNC + ENT
FUNC + PROG
FUNC +
↓
DISP
↑ + PROG
↑ ↓
ENT
DISP
FUNC + CLR +
DISP
ENT
DISP
■ Combined key operations
FUNC + DISP : Displayed channel switching keys
Press the DISP
key with the FUNC key held down in the basic
display state to switch the displayed channel.
PROG + RUN/HOLD
: Reset keys
Press the
RUN/HOLD key with the PROG key held down in the
basic display state to reset the DCP32.
The DCP32 enters the READY mode from the RUN, HOLD,
FAST or END modes.
The DCP32 cannot be reset in the READY mode by key operation.
PROG + DISP : Advance keys
Press the DISP key with the PROG key held down in the program
operation mode in the basic display state to advance the program.
In the RUN, HOLD or FAST modes, the program advances to the
next segment.
The DCP32 cannot advance in the READY mode by key operation.
FUNC + → : Fast keys
Press → with the FUNC key held down in the program operation
mode in the basic display state to fast-operate the program.
The DCP32 enters the FAST mode from the RUN or HOLD
modes.
Page 26

2-8
Chapter 2. NAMES & FUNCTIONS OF PARTS
FUNC + PARA : Parameter setup keys
Press the PARA key with the FUNC key held down in
the basic display state to move to selection of the setting
group (major items) in the parameter setup state.
FUNC + PROG : Program setup (programming) keys
Press the PROG key with the FUNC key held down in
the program operation mode in the basic display state to
move to the program setup (programming) state.
Press the PROG key with the FUNC key held down in
the program setup state to change the No. of the
program to be set up in ascending order.
FUNC + ↓ : Program No. change keys
Press ↓ with the FUNC key held down in the program
setup state to change the No. of the program to be set up
in descending order.
FUNC + CLR : Program item delete keys
Press the CLR key with the FUNC key held down
during entry of settings in the program setup state to
clear the setting.
FUNC + ENT : Segment insert/delete keys
Press the ENT key with the FUNC key held down at the
SP or time items in the program setup state to move to
the segment insert/delete screen.
↑ + PROG : Program copy keys
Press the PROG key with ↑ held down in the program
operation READY mode in the basic display state to
move to the program copy screen.
FUNC + CLR + DISP : General reset keys
Press the CLR key and the DISP key with the FUNC
key held down in the READY AUTO mode in the basic
display state to move to the general reset confirmation
screen.
■ Loader jack
This jack is for connecting the loader.
Objects other than the loader plug should not be inserted into this jack.
The loader jack is not isolated from internal digital circuits. Be sure to cap the
loader jack when it is not in use.
Page 27
2-9
Chapter 2 NAMES & FUNCTIONS OF PARTS
2 - 3 Input Type and Range No.
■ Input 1
● Thermocouple
● Resistance temperature detector (RTD)
Input Type Range No. Code Temp. Range (°C) Temp. Range (°F)
K (CA) 0 K09 0 to 1200 0 to 2400
K (CA) 1 K08 0.0 to 800.0 0 to 1600
K (CA) 2 K04 0.0 to 400.0 0 to 750
K (CA) 3 K29 -200 to +1200 -300 to +2400
K (CA) 4 K44 -200.0 to +300.0 -300 to +700
K (CA) 5 K46 -200.0 to +200.0 -300 to +400
E (CRC) 6 E08 0.0 to 800.0 0 to 1800
J (IC) 7 J08 0.0 to 800.0 0 to 1600
T (CC) 8 T44 -200.0 to +300.0 -300 to +700
B (PR30-6) 9 B18 0 to 1800 0 to 3300
R (PR13) 10 R16 0 to 1600 0 to 3100
S (PR10) 11 S16 0 to 1600 0 to 3100
W (WRe5-26) 12 W23 0 to 2300 0 to 4200
W (WRe5-26) 13 W14 0 to 1400 0 to 2552
PR40-20 14 D19 0 to 1900 0 to 3400
Ni-Ni•Mo 15 Z13 0 to 1300 32 to 2372
N 16 U13 0 to 1300 32 to 2372
PL II 17 Y13 0 to 1300 32 to 2372
DIN U 18 Z08 -200.0 to +400.0 -300 to +750
DIN L 19 Z07 -200.0 to +800.0 -300 to +1600
Golden iron 20 Z06 0.0 to +300.0 K —
chromel
Input Type Range No. Code Temp. Range (°C) Temp. Range (°F)
JIS’89 Pt100 32 F50 -200.0 to +500.0 -300 to +900
(IEC Pt100 Ω) 33 F46 -200.0 to +200.0 -300 to +400
34 F32 -100.0 to +150.0 -150.0 to +300.0
35 F36 -50.0 to +200.0 -50.0 to +400.0
36 F38 -60.0 to +40.0 -76.0 to +104.0
37 F33 -40.0 to +60.0 -40.0 to +140.0
38 F05 0.0 to 500.0 0.0 to 900.0
39 F03 0.0 to 300.0 0.0 to 500.0
40 F01 0.00 to 100.00 0.0 to 200.0
JIS’89 JPt100 48 P50 -200.0 to +500.0 -300 to +900
49 P46 -200.0 to +200.0 -300 to +400
50 P32 -100.0 to +150.0 -150.0 to +300.0
51 P36 -50.0 to +200.0 -50.0 to +400.0
52 P38 -60.0 to +40.0 -76.0 to +104.0
53 P33 -40.0 to +60.0 -40.0 to +140.0
54 P05 0.0 to 500.0 0.0 to 900.0
55 P03 0.0 to 300.0 0.0 to 500.0
56 P01 0.00 to 100.00 0.0 to 200.0
Input Type Range No. Code
Range
(programmable)
4 to 20 mA 64 C01
0 to 20 mA 65 C08
0 to 10 mA 66 M01
-10 to+10 mV 67 L02 -1999
0 to 100 mV 68 L01 to
0 to 1 V 69 L04 +9999
-1 to +1 V 70 L08
1 to 5 V 71 V01
0 to 5 V 72 L05
0 to 10 V 73 L07
● DC current, DC voltage
Page 28
2-10
Chapter 2. NAMES & FUNCTIONS OF PARTS
■ Input 2
● Thermocouple
● Resistance temperature detector (RTD)
● DC current, DC voltage
Handling Precautions
• The unit of code Z06 is Kelvin (K)
• The lower limit readout of code B18 is 20°C.
The lower limit readout of codes K44, K46, T44, Z08 and Z07 is
-199.9°C.
• The lower limit readout of codes F50, F46, P50 and P46 is -199.9°C.
• The upper limit readout of codes F01 and P01 is 99.99°C.
• The PV lower limit alarm does not occur with code F50.
However, note that the PV lower limit alarm occurs at a line
disconnection if input has been downscaled when input is disconnected
during setup.
• The number of digits past the decimal point for DC current and DC
voltage is programmable within the range 0 to 3.
Input Type Range No. Code Temp. Range (°C) Temp. Range (°F)
K (CA) 128 K44 -200.0 to +300.0 -300 to +700
K (CA) 129 K29 -200 to +1200 -300 to +2400
Input Type Range No. Code Temp. Range (°C) Temp. Range (°F)
JIS’89Pt100 160 F36 -50.0 to +200.0 -50.0 to +400.0
(IEC Pt100 Ω) 161 F01 0.00 to 100.00 0.0 to 200.0
JIS’89 JPt100 176 P36 -50.0 to +200.0 -50.0 to +400.0
177 P01 0.00 to 100.00 0.0 to 200.0
Input Type Range No. Code Range (programmable)
0 to 10 V 192 L07
-1999 to +9999
1 to 5 V 193 V01
Page 29
3-1
Chapter 3. INSTALLATION & MOUNTING
3 - 1 Installation
■ Mounting locations
Avoid installing the DCP32 in the following locations:
• Locations subject to low and high temperature and humidity
• Locations subject to direct sunlight, wind or rain
• Locations subject to splashing by liquids (e.g. water, oil or chemicals).
• Locations subject to corrosive gases or flammable gases
• Locations subject to dust or oil smoke
• Locations subject to vibration or shock
• Locations where magnetic fields are generated
• Locations near sources of electrical noise (such as high-voltage ignition
equipment, welders)
• Locations near flammable liquid or steam
WARNING
Before removing or mounting the DCP32, be sure to turn the power OFF.
Failure to do so might cause electric shock.
Do not disassemble the DCP32.
Doing so might cause electric shock.
CAUTION
Use the DCP32 within the operating ranges recommended in the
specifications (temperature, humidity, voltage, vibration, shock, mounting
direction, atmosphere, etc.).
Failure to do so might cause fire or faulty operation.
Do not block ventilation holes.
Doing so might cause fire or faulty operation.
Do not allow lead clippings, chips or water to enter the DCP32 case.
Doing so might cause fire or faulty operation.
Page 30
3-2
Chapter 3. INSTALLATION & MOUNTING
■ Noise generating sources and countermeasures
• Generally, the following generate electrical noise:
①Relays and contacts
②Solenoid coils, solenoid valves
③Power lines (in particular, 90 Vac min.)
④Induction loads
⑤Inverters
⑥Motor commutators
⑦Phase angle control SCR
⑧Radio communications equipment
⑨Welding equipment
⑩High-voltage ignition equipment
• If the influence of electrical noise cannot be eliminated, we recommend taking
the following countermeasures:
• Provision of a CR filter for fast-rising noise
Recommended CR filter: Yamatake Model No. 81446365-001
• Provision of a varistor for high wave height noise.
Recommended varistor: Yamatake Model No. 81446366-001 (100 V)
81446367-001 (200 V)
Handling Precautions
The varistor may become short-circuited when trouble occurs. Pay
attention to this when providing a varistor on the DCP32.
■ Dust-proof cover
Use the dust-proof cover when using the DCP32 in a dusty or dirty location, and
to prevent inadvertent operation.
Two dust proof-covers are provided, hard or soft, each with the following
differing functions.
Type Confirmation on Display Operation
Hard
« X
Soft ««
« indicates that a function can be used.
Page 31

3-3
Chapter 3. INSTALLATION & MOUNTING
3 - 2 Mounting
The following describes how to mount the DCP32.
■ Panel Cutout Dimensions
Use a steel panel at least 2 mm thick for mounting the DCP32.
Handling Precautions
When mounting the DCP32, take care to prevent the temperature at the
lower surface of the DCP32’s case from exceeding the operating
temperature range (0 to 50°C), particularly when mounting vertically or
during multiple mounting.
92
+0.8
0
92
+0.8
0
150 min.
(when vertically
installed)
99 min.
(when horizontally installed)
Unit: mm
Page 32

3-4
Chapter 3. INSTALLATION & MOUNTING
• Firmly secure the top and bottom of the DCP32 by the mounting brackets.
• When mounting the DCP32, secure by lower mounting bracket 1 first.
Panel
Mounting bracket 81405411-001
Mounting bracket
①
➁
Panel
Mounting bracket
Panel
■ Mounting method
Handling Precautions
To secure the DCP32, tighten the screw on the mounting bracket
(supplied) until there is no more play and then tighten a further full turn.
Take care not to overtighten the screw. Doing so might deform or
damage the case.
• Keep the mounting angle to within 10° from the horizontal at both the DCP32
rear top and bottom.
Lift up from rear by
10° max.
Pull down from rear by
10° max.
Page 33

4-1
Chapter 4. WIRING
4 - 1 Wiring Precautions
WARNING
Before connecting the DCP32 to the measurement target or external control
circuits, make sure that the FG terminal is properly grounded (100
Ω max.).
Failure to do so might cause electric shock or fire.
Before wiring, be sure to turn the power OFF.
Failure to do so might cause electric shock.
Do not touch electrically charged parts such as the power terminals.
Doing so might cause electric shock.
CAUTION
Wire the DCP32 properly according to predetermined standards. Also wire
the DCP32 using designed power leads according to recognized installation
methods.
Failure to do so might cause electric shock, fire or faulty operation.
Do not allow lead clippings, chips or water to enter the DCP32 case.
Doing so might cause fire or faulty operation.
Inputs to the current input terminals and on the DCP32 should be
within the current and voltage ranges listed in the specifications.
Failure to do so might cause fire or faulty operation.
Firmly tighten the terminal screws at the torque listed in the specifications.
Insufficient tightening of terminal screws might cause electric shock or fire.
Do not use unused terminals on the DCP32 as relay terminals.
Doing so might cause electric shock, fire or faulty operation.
We recommend attaching the terminal cover (sold separately) after wiring the
DCP32.
Failure to do so might cause electric shock.
Use the relays on the DCP32 within the service life listed in the specifications.
Continued use of the relays after the recommended service life might cause
fire or faulty operation.
Use Yamatake Corporation's SurgeNon if there is the risk of power surges
caused by lightning.
Failure to do might cause fire or faulty operation.
33
31
Page 34

4-2
Chapter 4. WIRING
Handling Precautions
• Before wiring the DCP32, check the DCP32 model No. and terminal Nos.
on the label on the rear of the body.
After wiring the DCP32, be sure to check the wiring for any mistakes
before turning the power ON.
• Maintain a distance of at least 50 cm between I/O signal leads or
communications leads and the power lead. Also, do not pass these leads
through the same piping or wiring duct.
• When wiring with crimped terminals, take care to prevent contact with
adjacent terminals.
• When connecting the DCP32's thermocouples in parallel to other
controllers, make sure that the total input impedance of the other
controllers is at least 1 MΩ.
If the input impedance is less than 1 MΩ, the DCP32 may not be able to
detect sensor disconnection.
• Precautions when combining the DCP32 with other data input device
When inputting the DCP32’s I/O (parallel connection in case of input) to
an A/D converter or analog scanner, read data may fluctuate.
To prevent this, adopt one of the following measures.
①Use a low-speed, integrating type A/D converter.
②Insert an isolator without a switching power supply between the
DCP32 and A/D converter.
③Average the data on a personal computer when reading data.
④If possible, set a filter for the input.
• Provide a switch within the operator's reach on the instrumentation
power supply wiring for turning the mains power OFF.
• Provide a delay-type (T) rated current 1A and rated voltage 250 V fuse
on the instrumentation power supply wiring. (IEC 127)
Page 35

4-3
Chapter 4. WIRING
4 - 2 Compensating Lead
When a thermocouple input is input to the DCP32, connect the bare thermocouple lead to the terminal. If the
thermocouple is located a long way from the DCP32 or the thermocouple is connected to a terminal, extend the
connection using a compensating lead and then connect to the terminal. Use shielded compensating leads only.
Note
• For I/O other than thermocouples, use JCS-364 shielded instrument
polyethylene insulated vinyl sheath cable or equivalent product. (This is
generally referred to “shielded twisted cable for instruments.”) The following
cables are recommended.
• Shielded, multi-core microphone cord (MVVS) can be used if there is little
electromagnetic induction.
Fujikura Cable Co. 2-core IPEV-S-0.9 mm2x 1P
3-core ITEV-S-0.9 mm
2
x 1T
Hitachi Cable Co. 2-core KPEV-S-0.9 mm2x 1P
3-core KTEV-S-0.9 mm
2
x 1T
Page 36

4-4
Chapter 4. WIRING
4 - 3 Terminal Connections
Use crimped terminals that fit onto M3.5 screws.
Handling Precautions
• When installing the DCP32 in locations subject to vibration or impact, be
sure to use round crimped terminals to prevent the lead from coming
loose from the terminal.
• When wiring with crimped terminals, take care to prevent contact with
adjacent terminals.
• The recommended tightening torque for the terminal screws is 0.78 to
0.98 N•m.
7.4
ø3.7
Unit: mm
7.3 max.6.6 max.
Page 37

4-5
Chapter 4. WIRING
4 - 4
Layout of Terminals and Recommended Lead Draw-out Direction
Wiring is carried out on the standard terminal base or add-on terminal base. The following diagram shows the
recommended draw-out directions for the leads on the standard terminal base.
The lead draw-out directions are the same when using the add-on terminal base.
Lead draw-out direction Lead draw-out direction
Standard terminal base
Page 38

4-6
Chapter 4. WIRING
4 - 5 Connecting the Ground and Power Supply
■ Power supply
Connect the DCP32 to a single-phase power supply for instrumentation, and take
measures to prevent the influence of electrical noise.
Handling Precautions
・ If the power supply generates a lot of electrical noise, we recommend
inserting an insulating transformer in the power circuit and using a line
filter.
Recommended line filter:
Yamatake Corporation, model No. 81446364-001
・ After providing anti-noise measures, do not bundle primary and
secondary power leads together, or pass them through the same piping
or wiring duct.
■ Ground
When it is difficult to ground shielded cable, prepare a separate ground terminal
(earth bar).
Ground type: 100 Ω max.
Ground cable: 2 mm sq. min. annealed copper wire (AWG14)
Cable length: Max. 20 m
1
3
2
1
2
E
3
4
GND
Instrument
power supply
90 to 264 Vac
50/60 Hz
Other circuits
GND GND
Recommended
line filter
81446364-001
DCP32
200/200 V
100/100 V
Insulated transformer
3
FG
terminal
DCP32
GND terminal plate
GND (100 Ω min.)
Shielded cable
Handling Precautions
Use only the FG terminal 3 on the DCP32 for grounding. Do not ground
across other terminals.
Page 39

4-7
Chapter 4. WIRING
4 - 6
Wiring of Standard and Add-on Terminal Base
■ Standard terminal layout
2G, 3D or 5K models do not support auxiliary output.
On 0D or 5G models, terminal Nos. 'and ( are the auxiliary outputs.
Relay
Relay
Relay
2
3
1
Y
T
G
1
2
3
4
5
6
7
8
9
10
Instrument
power supply
90 to 264 Vac
50/60 Hz
FG (Frame GND)
EV1
EV2
EV3
Event
outputs
11
12
13
14
15
16
17
18
19
20
4 to 20 mA
voltage
4 to 20 mA
4 to 20 mA
voltage
5G output
5K output
Auxiliary output
0D output
3D output
2G output
Output 1
Output 2
Output 3
(Auxiliary output)
26
27
28
29
30
31
32
33
34
21
22
23
24
25
RSW1
RSW2
RSW3
RSW4
COM
V
Thermocouple
input
Resistance
temperature
detector
Resistance
temperature
detector
DC mA
V, mV
Voltage input
Thermocouple input
Input 2
Input 1
✽
Auxiliary output
4 to 20 mA
Recorder, etc.
44
45
46
47
48
43
41
42
55
56
53
54
51
52
49
50
63
64
62
59
60
57
58
61
RSW5
T1
T2
T3
T4
T5
SDA
SDB
RDA
RDB
SG
RSW6
RSW7
RSW8
RSW9
RSW10
RSW11
RSW12
External switch
inputs
To terminals
Time event outputs
Load
Load
Load
Load
Load
External
10 to 29 Vdc power supply
Bias circuit
RS-485
communications
25
Page 40

4-8
Chapter 4. WIRING
4 - 7 Connecting Inputs (analog inputs)
CAUTION
Inputs to the current input terminals and on the DCP32 should be
within the current and voltage ranges listed in the specifications.
Failure to do so might cause fire or faulty operation.
33
31
34
A
B
C
33
32
31
34
33
32
31
34
33
32
31
34
33
32
31
mV • V
mA
■ Connecting input 1
Multiple input 1 supports various sensor inputs. Connect as follows according to
the sensor being used:
• Thermocouple input • RTD input
• DC voltage input • DC current input
30
A
B
C
29
28
31
30
29
28
31
26
27
26
27
■ Connecting input 2
Multiple input 2 supports various sensor inputs. Connect as follows according to
the sensor being used:
• Thermocouple input • RTD input
Page 41

4-9
Chapter 4. WIRING
30
29
28
31
26
27
V
• DC voltage input
Handling Precautions
• Applying voltage across DC current input terminals and may
cause faulty operation.
• Pay attention to polarities (+, -) when wiring inputs.
• Use only shielded cable for wiring inputs.
• When a thermocouple is used as the input, prevent wind from blowing
against the terminals. This may cause an error in readings.
33
31
Page 42

4-10
Chapter 4. WIRING
4 - 8
Connecting Control Outputs (outputs 1, 2, 3)
WARNING
Before wiring, or removing/mounting the DCP32, be sure to turn the power
OFF.
Failure to do so might cause electric shock.
15
14
13
31
11
12
16
Load
Power supply
Load
(SSR)
Output 1 (MV1 or MV2)
Contact rating, resistive load
5 A (30 Vdc/120 Vac)
4 A (240 Vac)
Minimum switching current: 100 mA
Output 2 (MV2 or MV1)
• Current output
4 to 20 mA dc/0 to 20 mA
Resistive load 600 Ω max.
• Voltage output
2 to 22 mA dc
With current adjustment function
(setup data
C79
)
■ Relay output (0D)
Connect as follows:
15
14
13
31
11
12
16
Load
Load
(SSR)
(SSR)
Output 1 (MV1 or MV2)
• Current output
4 to 20 mA dc/0 to 20 mA dc
Resistive load 600 Ω max.
• Voltage output
2 to 22 mA dc
With current adjustment function
(setup data
C78
)
Output 2 (MV2 or MV1)
• Current output
4 to 20 mA dc/0 to 20 mA dc
Resistive load 600 Ω max.
• Voltage output
2 to 22 mA dc
With current adjustment function
(setup data
C79
)
Handling Precautions
• When switching small currents, connect a bleeder resistor to allow
current flow of the minimum relay switching input (100 mA min.).
• Current output and voltage output can be selected by setup data
C 76
.
Voltage output is reliant on an internal fixed-current circuit.
Set the current value in the setup data so that the optimum voltage is
obtained matched to the conditions of the SSR in use and the load.
Factory setting: general-purpose SSR voltage value.
• Internal connection of MV1 (CH1 MV) and MV2 (CH2 MV), and output 1
and output 2 can be selected in setup data
C44
.
• 4 to 20 mA dc and 0 to 20 mA dc can be selected in setup data
C90
.
■ Current output (5G)
Connect as follows.
Page 43

Chapter 4. WIRING
15
14
13
31
11
12
16
Load
Power
supply
Output 1 (MV1 or MV2)
Contact rating, resistive load
4 A (120 Vac cosø = 0.4)
2 A (240 Vac cosø = 0.4)
Feedback resistance
100 to 2500 Ω
18
17
19
Load
(SSR)
Load
2
3
1
Open
side
Closed
side
Closed side
Open side
Output 3 (MV2 or MV 1)
• Current output
4 to 20 mA dc/0 to 20 mA dc
Resistive load 600 Ω max.
• Voltage output
2 to 22 mA dc
With current adjustment function
(setup data
C80
)
Y
T
G
Handling Precautions
• Current output and voltage output can be selected by setup data
C 75
and
C 76
.
Voltage output is reliant on an internal fixed-current circuit.
Set the current value in the setup data so that the optimum voltage is
obtained matched to the conditions of the SSR in use and the load.
Factory setting: general-purpose SSR voltage value.
• Internal connection of MV1 (CH1 MV) and MV2 (CH2 MV), and output 1
and output 2 can be selected in setup data
C44
.
• 4 to 20 mA dc and 0 to 20 mA dc can be selected in setup data
C90
.
■ Position-proportional output (2G)
Connect as follows paying attention to the switching direction:
Handling Precautions
• The life of internal relays is limited.
Avoid setting the PID constant in such a way that results in excessive
repeated ON/OFF switching.
• When using a 100/200 Vac motor, pay attention to rush current and the
contact rating. If necessary, provide an external auxiliary relay.
• Maintain a distance of at least 30 cm between the wiring for motor
terminals !" # and feedback resistor terminals $% &.
(Do not wire the leads in the same duct or use 6-core cable. Doing so
might result in faulty controller operation caused by electrical noise when
the motor is started up.)
• When controlling without motor feedback with variable parameter
m-C
set to “2”, terminals $% &need not be connected.
• Current output and voltage output can be selected by setup data
C77
.
Voltage output is reliant on an internal fixed-current circuit.
Set the current value in the setup data so that the optimum voltage is
obtained matched to the conditions of the SSR in use and the load.
Factory setting: general-purpose SSR voltage value.
• Internal connection of MV1 (CH1 MV) and MV2 (CH2 MV), and output 1
and output 2 can be selected in setup data
C44
.
• 4 to 20 mA dc and 0 to 20 mA dc can be selected in setup data
C90
.
4-11
Page 44

4-12
Chapter 4. WIRING
Handling Precautions
• When switching small currents, connect a bleeder resistor to allow
current flow of the minimum relay switching input (100 mA min.).
• Current output and voltage output can be selected by setup data
C 77
.
Voltage output is reliant on an internal fixed-current circuit.
Set the current value in the setup data so that the optimum voltage is
obtained matched to the conditions of the SSR in use and the load.
Factory setting: general-purpose SSR voltage value.
• Internal connection of MV1 (CH1 MV) and MV2 (CH2 MV), and output 1
and output 2 can be selected in setup data
C44
.
• 4 to 20 mA dc and 0 to 20 mA dc can be selected in setup data
C90
.
15
14
13
31
11
12
16
Load
Power supply
Output 1 (MV1 heat output or MV2 heat output)
Contact rating, resistive load
5 A (30 Vdc/120 Vac)
4 A (240 Vac)
Minimum switching current: 100 mA
Output 2 (MV1 cool output or MV2 cool output)
Contact rating, resistive load
5 A (30 Vdc/120 Vac)
4 A (240 Vac)
Minimum switching current: 100mA
18
17
19
Load
(SSR)
Load
Power supply
Output 3 (MV2 or MV1)
• Current output
4 to 20 mA dc/0 to 20 mA dc
Resistive load 600 Ω max.
• Voltage output
2 to 22 mA dc
With current adjustment function
(setup data
C80
)
■ Heat/cool output (3D)
Connect as follows:
Page 45

4-13
Chapter 4. WIRING
Handling Precautions
• Current output and voltage output can be selected by setup data
C75,
C76
and
C77
.
Voltage output is reliant on an internal fixed-current circuit.
Set the current value in the setup data so that the optimum voltage is
obtained matched to the conditions of the SSR in use and the load.
Factory setting: general-purpose SSR voltage value.
• Internal connection of MV1 (CH1 MV) and MV2 (CH2 MV), and output 1
and output 2 can be selected in setup data
C44
.
• 4 to 20 mA dc and 0 to 20 mA dc can be selected in setup data
C90
.
15
14
13
31
11
12
16
18
17
19
Load
(SSR)
Load
(SSR)
Load
(SSR)
Output 1 (MV1 heat output or MV2 heat output)
• Current output
4 to 20 mA dc/0 to 20 mA dc
Resistive load 600 Ω max.
• Voltage output
2 to 22 mA dc
With current adjustment function
(setup data
C78
)
Output 2 (MV1 cool output or MV2 cool output)
• Current output
4 to 20 mA dc/0 to 20 mA dc
Resistive load 600 Ω max.
• Voltage output
2 to 22 mA dc
With current adjustment function
(setup data
C79
)
Output 3 (MV2 or MV1)
• Current output
4 to 20 mA dc/0 to 20 mA dc
Resistive load 600 Ω max.
• Voltage output
2 to 22 mA dc
With current adjustment function
(setup data
C80
)
■ Heat/cool output (5K)
Connect as follows.
Page 46

4-14
Chapter 4. WIRING
4 - 9 Connecting auxiliary outputs (outputs 3)
■ 0D, 5G auxiliary outputs
Handling Precautions
• Use shielded cable only.
• 2G, 3D or 5K models do not support auxiliary output.
• 4 to 20 mA dc and 0 to 20 mA dc can be selected in setup data
C90
.
WARNING
Before wiring the DCP32, be sure to turn the power OFF.
Failure to do so might cause electric shock.
Receiver
18
17
19
Auxiliary output (output 3)
4 to 20 mA dc/0 to 20 mA dc
Resistive load 600 Ω max.
Page 47

4-15
Chapter 4. WIRING
4 - 10 Connecting Event Output (relay output)
Event outputs EV1 and EV2 are 1a contact, and event output EV3 is 1a1b. Event outputs are connected on the
standard terminal base.
Handling Precautions
When switching small currents, connect a bleeder resistor to allow current
flow of the minimum relay switching input (10 mA min.).
6
31
4
5
Load
Power supply
Contact rating, resistive load
1 A (30 Vdc/250 Vac)
Contact rating, resistive load
1 A (30 Vdc/250 Vac)
Contact rating, resistive load
2 A (30 Vdc/250 Vac)
9
7
8
Load
Power supply
10
Load
Power supply
EV1 1a
EV2 1b
EV3 1a1b
Minimum switching current: 10 mA
Page 48

4-16
Chapter 4. WIRING
4-11
Connecting Time Event Output (open-collector)
Optional time event outputs T1 to T5 (open-collector outputs) can be added on. Time event outputs are connected
on the add-on terminal base.
Handling Precautions
• Be sure to connect terminal to the + terminal of the external power
supply. Otherwise, open-collector output will not function.
• Do not short-circuit the + terminal of the external power supply and
terminals to on the DCP32. Doing so will cause faulty opencollector output.
(The DCP32 does not contain a short-circuit prevention circuit.)
• When connecting to a semiconductor load such as a programmable
controller (sequencer), select a module whose current directions are
matching.
Use a module that does not operate by leakage current when the opencollector output of the DCP32 is OFF.
5349
55
31
Load
Maximum load current: 70 mA/load
OFF leakage current: 0.1 mA max.
Load
Load
Bias circuit
T1
Load
Load
External power supply
10 to 29 Vdc
56
55
53
52
51
50
49
T2
T3
T4
T5
Page 49

4-17
Chapter 4. WIRING
4 - 12 Connecting External Switch (RSW) Input
The DCP32 is provided with four standard and eight optional external switch inputs.
The optional eight inputs are located on the add-on terminal base. In this case, wire the external switch inputs
across the standard and add-on terminal bases.
Handling Precautions
• The external switch inputs on the DCP32 have built-in power supplies
(open voltage 12 Vdc). Be sure to use no-voltage contacts for external
contacts.
• Use no-voltage contacts such as gold contacts whose small current can
be switched ON/OFF. On some relay contacts, the small current cannot
be switched ON/OFF. Use no-voltage contacts having a sufficient
minimum switching capability with respect to the contact current and
open voltage of the DCP32.
• When using a semiconductor (e.g. open-collector) as a no-voltage
contact, use a semiconductor whose contact terminal voltages at contact
ON are 3V max., and whose leakage current at contact OFF is 0.1 mA.
• External switch inputs on the DCP32, DCP31 and SDC40 series can be
connected in parallel.
When connecting in parallel with other controllers, thoroughly check the
conditions of the other controller before configuring the control system.
23
31
21
22
Standard terminal base
24
25
Contact
Contact
Contact
Contact
RSW1
RSW2
RSW3
RSW4
COM
43
31
41
42
Add-on terminal base
44
45
Contact
Contact
Contact
46
47
48
Contact
Contact
Contact
Contact
Contact
RSW5
RSW6
RSW7
RSW8
RSW9
RSW10
RSW11
RSW12
Page 50

4-18
Chapter 4. WIRING
● Internal circuit for controller components for connecting external switch inputs
Handling Precautions
Do not connect to the SDC20/21 or SDC30/31 series in parallel. Doing so
might damage the external switch inputs of the SDC20/21 or SDC30/31.
Internal circuit
41
48
Add-on terminal base
12 Vdc
12 Vdc
12 Vdc
12 Vdc
Internal circuit
21
24
Standard terminal base
25
External switch
input
External switch
input
Page 51

4-19
Chapter 4. WIRING
4 - 13 Connecting for Communications
Some controller models support the RS-485 communications interface. Select the RS-485 communications models
by selecting the required model No.
The DCP32 operates as a slave station in a multidrop configuration. In this case, connect as follows.
■ RS-485 interface
Add-on terminal base
59
60
61
SDA
SDB
RDA
RDB
SG
57
58
Handling Precautions
• Make sure that different addresses are set for each slave station.
• Provide terminators (total of 4 in the case of a 5-lead connection) on both
ends of the communications path.
Use terminators having a resistance of 150 Ω ±5%, 1/2 W min.
• In the case of a 3-lead connection, short-circuit terminals and ,
and and on the DCP32.
• Do not short-circuit and , or and terminals.
Doing so might damage the DCP32.
60
59
58
57
6058
59
57
Page 52

4-20
Chapter 4. WIRING
● 5-lead RS-485 mutual connection
Provide terminators of resistance 150 Ω±5%, 1/2 W min. at both ends of the
communications path.
Grounding of the shielded FG terminal should be carried out at only one end and
not both ends.
In this connection, the Yamatake CMA50A105 can be used as a host station
converter.
SDA
SDB
RDA
RDB
SG
FG
SDA
Shielded
cable
SDB
RDA
RDB
SG
Shielded cable
Shielded cable
Master station
Terminator
Terminator
Terminator
Terminator
Slave station DCP32
SDA
SDB
RDA
RDB
SG
RDA
RDB
SDA
SDB
SG
FG
Slave station DCP32
Slave station DCP32
57
58
59
60
61
57
58
59
60
61
57
58
59
60
61
FG
FG
Page 53

Chapter 4. WIRING
● 3-lead RS-485 mutual connection
Handling Precautions
In this connection, the Yamatake CMA50A105 cannot be used as either a
slave or a host station converter.
Provide terminators of resistance 150 Ω ±5%, 1/2 W min. at both ends of the
communications path.
Grounding of the shielded FG terminal should be carried out at only one end and
not both ends.
When there are only three RS-485 terminals, terminals marked *are wired
internally.
SDA
SDB
RDA
RDB
SG
SDA
Shielded
cable
SDB
RDA
RDB
SG
Shielded cable
Shielded cable
Master station
*
Terminator
Terminator
Slave station DCP32
SDA
SDB
RDA
RDB
SG
RDA
RDB
SDA
SDB
SG
FG
Slave station DCP32
Slave station DCP32
*
57
58
59
60
61
FG
57
58
59
60
61
FG
57
58
59
60
61
FG
4-21
Page 54

4-22
Chapter 4. WIRING
4 - 14 Isolating Inputs and Outputs
Handling Precautions
The loader jack is not isolated from internal digital circuits. Be sure to cap
the loader jack when it is not in use.
31
32
33
34
Input1
(full multiple-input
PV supported)
26
27
28
29
Input2
(full multiple-input
PV supported)
30
Loader communications I/O
21
25
41
48
12 external switch
inputs
57
61
Communications I/O
(RS-485)
Loader jack
Output 1
(relay, current,
voltage output)
11
12
Output 2
(relay, current,
voltage output)
14
15
Output 3
(current,
voltage output,
auxiliary output)
17
18
Event output 1
(relay output 1a)
4
5
Event output 2
(relay output 2a)
6
7
Event output 3
(relay outputs 1a1b)
8
9
10
49
56
Time event outputs
1 to 5 (open-collector
output)
Digital circuit
The following figures show isolation between inputs and outputs. Solid lines show isolated items, and dotted lines
show non-isolated items.
■ Control outputs 0D, 5G, 3D, 5K
Handling Precautions
The loader jack is not isolated from internal digital circuits. Be sure to cap
the loader jack when it is not in use.
■ Control output 2G
31
32
33
34
Input1
(full multiple-input
PV supported)
26
27
28
29
Input2
(full multiple-input
PV supported)
30
Loader communications I/O
21
25
41
48
12 external switch
inputs
57
61
Communications I/O
(RS-485)
Loader jack
Output 1
(control output
1a relay x 2)
11
12
Motor feedback
input
14
15
Output 3
(current,
voltage output)
17
18
Event output 1
(relay output 1a)
4
5
Event output 2
(relay output 2a)
6
7
Event output 3
(relay outputs 1a1b)
8
9
10
49
56
Time event outputs
1 to 5 (open-collector
output)
Digital circuit
Page 55

5-1
Chapter 5. FUNCTIONS
5 - 1 Data
■ Data types
The DCP32 supports the following data types.
For further details, see Chapter 7, Parameter Setup and Chapter 8, Program Setup.
Data Parameters Variable parameters
Table data
Setup data
PID parameters 1
Event configuration data
Program
Pattern
G.Soak (CH2)
PID set No. (CH2)
Time event
Tag
Pattern link
Cycle
PV start
Data that can be changed even in RUN mode
Data (e.g. event type)
Channel 1 control parameters of PID sets 1 to 8
Basic data that can be changed only in READY mode
Linearization table data
SP1, SP2 and time data
Time event 1 to 5 data
PID set No. data for use in channel 2 control
Event
Events 1 to 3 data
Channel 2 G.Soak ON/OFF data
PID set No. (CH1)
PID set No. data for use in channel 1 control
G.Soak (CH1)
Channel 1 G.Soak ON/OFF data
PV START ON/OFF data
Cycle count data
Pattern link destination program No. data
Eight numbers or alphabets (can be set on loader)
PID parameters 2
Channel 2 control parameters of PID sets 2-1 to 2-8
Variable parameters 2
Channel 2 data that can be changed even in RUN mode
Constant-value operation data
Data (e.g. SP, PID) of constant-value operation
Page 56

5-2
Chapter 5. FUNCTIONS
5 - 2 Program Patterns
■ Patterns
SP1 (SP of CH1), SP2 (SP of CH2) and time comprise the settings for a single
segment in a pattern.
Up to 30 segments can be linked to create a broken-line whose vertical axis is SP
and horizontal axis is time.
This system is called the “RAMP-X” system.
SP1 setting: Within range of SP1 limitter upper and lower limits
SP2 setting: Within range of SP2 limitter upper and lower limits
Time setting: 0 to 99 hours, 59 minutes or 0 to 99 minutes, 59 seconds
(Select the time unit in setup data
C64
.)
SP is the point that corresponds to the time elapsed in the current segment on a
straight line made by joining the start point (SP setting value of the previous
segment) to an end point (SP setting value of the current segment).
Accordingly, segments are categorized as follows:
• Rising ramp (rising ramp, rising tendency)
Previous segment SP setting value < current segment SP setting value
• Falling ramp (falling ramp, falling tendency)
Previous segment SP setting value > current segment SP setting value
• Soak (soak)
Previous segment SP setting value = current segment SP setting value
In the case of the No.1 segment, both the start and end points become the soak
segment of the No.1 segment SP setting values.
SP (other than No.1 segment) is calculated by the following formula:
SP = (current segment SP setting value - previous segment SP setting value) x
(current segment elapsed time current segment time setting) + previous
segment SP setting
Time setting is common to both SP1 and SP2.
Time setting of current segment
SP setting value of
current segment
SP setting value of
previous segment
Page 57

5-3
Chapter 5. FUNCTIONS
■ Events 1 to 3
Events 1 to 3 are event configuration data. These are used after the event type,
event standby, hysteresis and ON delay time are set.
A total of three event types are available: PV type events, controller status events
and time events.
● PV type events
• Basic specifications
The following page shows event type PV, deviation, absolute value deviation,
SP, MV and MFB. In the figures, the thick lines show ON-OFF changes in state.
The upper line expresses the ON state, and the lower line the OFF state.
EV and H stand for event setting value and hysteresis, respectively.
Output in the READY state is OFF.
• Event standby
Events function as follows when event standby has been set to ON.
• If the DCP32 is in the state in the figure when changing from the READY
to the RUN mode and after restoring the power, operation is the same as when
event standby is set to OFF. The up-facing arrow in the figure indicates a
change to ON, and a down-facing arrow indicates a change to OFF.
• If the DCP32 is outside the state in the figure when changing from the
READY to the RUN mode and after restoring the power, the state is OFF.
After entering the state, the up-facing arrow in the figure indicates a
change to ON, and a down-facing arrow indicates a change to OFF.
• Event ON delay
The event No. to apply the delay to and the delay time can be set regardless of
event type. “Delay” functions to turn output ON when the event is continuously
ON for the preset delay time after the event OFF → ON condition is satisfied.
When event ON delay is combined with event standby, event standby must first
be canceled before event ON delay functions.
• Segment progression
• Output is OFF until the program progresses to a segment containing the event
setting.
• When the program progresses to a segment containing an event setting, event
ON/OFF operation is carried out according to the event setting value.
• The previous setting is valid until the program progresses to a segment
containing a new event setting. Accordingly, set as follows to disable the
event set to the preceding segment from a certain event onwards:
Direct action events: Upper limit value of event setting
Reverse action events: Lower limit value of event setting
However, note that with some event types the event sometimes turns ON even
if you set as shown above.
• When the program has progressed to the No.1 segment by the cycle or pattern
link functions, the previous setting is disabled. Output is OFF unless the No.1
segment contains an event setting.
Page 58

5-4
Chapter 5. FUNCTIONS
• Other
When CH1 side output is current output other than heat/cool output, setup data
C18
is set to 1, and SP output (programmer functions) is selected, the MV1
direct/reverse event does not function.
When CH2 side output is current output other than heat/cool output, setup data
C41
is set to 1, and SP output (programmer functions) is selected, the MV2
direct/reverse event does not function.
PV direct
ON
OFF
ON
OFF
PV reverse
H
EV
EV
SP+EV
PV
H
PV
Deviation direct
ON
OFF
ON
OFF
Deviation reverse
H
SP+EV
PV
H
PV
EV
SP direct
ON
OFF
ON
OFF
SP reverse
H
EV
EV
EV
EV
EV
SP
H
SP
MV direct
ON
OFF
ON
OFF
MV reverse
H
MV
H
MV
MFB direct
ON
OFF
ON
OFF
MFB reverse
H
MFB
H
MFB
SP
Absolute value deviation direct
ON
OFF
Absolute value deviation reverse
HH
EV EV
PV
SP
ON
OFF
HH
EV EV
PV
Page 59

5-5
Chapter 5. FUNCTIONS
● Controller status events
Controller status events are turned ON and OFF according to the DCP32 mode,
alarm status and other statuses.
Though the event standby function does not function, the ON delay function does.
Event setting values (operating point), hysteresis and event standby are not set.
• Basic operations
The following event types are provided:
RUN+HOLD+FAST+END
READY
RUN
HOLD
FAST
END
G.Soak standby (logical OR of CH1 and CH2, CH1, CH2)
MANUAL (logical OR of CH1 and CH2, CH1, CH2)
Auto-tuning executing (logical OR of CH1 and CH2, CH1, CH2)
Constant-value operation
MFB estimated position control
Logical OR of all alarms
PV range alarm
Controller alarms
Low battery voltage
Console setup in progress
Loader setup in progress
ADV
When the DCP32 reaches the state designated by the event type, the event is
turned ON. Otherwise, the event is OFF.
• Alarms
Alarms are divided into the PV range alarm group (alarm code Nos. 01 to 16)
and the controller alarm group (alarm code Nos. 70 to 99, and low battery
voltage).
When the event type is set to the logical OR of all alarms, the alarm turns ON
even if at least one of the alarms occurs.
When the event type is set to PV range alarm, the alarm turns ON even if at
least one of the alarms in the PV range alarm group occurs.
When the event type is set to controller alarm, the alarm turns ON even if at
least one of the alarms in the DCP32 alarm group occurs.
• ADV
This is ON for one second after executing program advance. The event ON
delay setting is also enabled.
● Time events
When the event 1 to 3 type is set to time event, the event can be used in the same
way as time events 1 to 5. However, note that events 1 to 3 do not have segment
No. event functions.
Though the event standby function does not function, the ON delay function does.
Page 60

Chapter 5. FUNCTIONS
■ Time events 1 to 5
Either of time events or segment No. events can be selected by the time event type
item in the event configuration data setup.
● Time events
The ON and OFF times or only the
ON time can be set for each event No.
and segment. The following describes
ON/OFF of output.
• When the ON time is smaller than
the OFF time, output is ON for the
duration from the ON time to the
OFF time.
(See segments 1, 6 and 7 in the
figure.)
• When only the ON time is set,
output is ON for the duration from
the ON time to the segment end
point.
(See segments 2 and 5 in the
figure.)
• When neither the ON time nor OFF
time are set, output is OFF.
(See segment 3 in the figure.)
• Setting only the OFF time without
an ON time is not possible.
(See segment 3B in the figure.)
• Setting an ON time to be greater to
or equal than the OFF time is not
possible.
(See segment 3C in the figure.)
• Only ON and OFF times set within
the segment time are valid. Times
straddling the next segment are
invalid. The ON and OFF times set
in the next segment are valid.
(See segments 4 and 5 in the
figure.)
Accordingly, the ON and OFF
times settings at the segment end
point are ignored.
However, ON and OFF times set
for segment end points when the
END mode is moved to are valid.
(See segment 9 in the figure, and
compare with segment 10 in the
END mode.)
• When the ON time is set to 0 (no
OFF time setting, or OFF time is
greater than 0), output becomes
OFF at time 0.
If output at the previous segment
end point was ON at this time, the
output status at the segment
switching point does not
momentarily become OFF.
(See segments 5 and 6 in the
figure.)
• The G.Soak standby time is not
included in the ON and OFF times.
(See segment 7 in the figure.)
Segment
1
ON time
OFF time
Output ON
Output OFF
ON<OFF
2 3
Output turns OFF at end of
segment even if OFF time is
not set.
Segment
ON time
OFF time
Output ON
Output OFF
3B 3C
ON=OFF ON>OFF
No ON
Segment
ON time
OFF time
Output ON
Output OFF
4 5
Segment time
Advance to segment 5ON-OFF time is invalid even if
set in excess of segment 4 time.
Segment
ON time
OFF time
Output ON
Output OFF
5 6
ON=0
ON continued
Segment
ON time
OFF time
Output ON
Output OFF
7
G.Soak standby
Segment time start
Segment
ON time
OFF time
Output ON
Output OFF
5-6
Page 61

5-7
Chapter 5. FUNCTIONS
• If the ON time is set to 0 in the case
of G.Soak standby, output becomes
ON from the G.Soak standby state,
and the ON time is started at
completion of the G.Soak standby
time.
The output time = G.Soak standby
time + OFF time
(See segment 8 in the figure.)
• ON and OFF time settings the same
time as the segment end point are
valid in the case of the final
segment END mode.
(See segment 10 in the figure.)
● Segment No. events
The current segment No. is output as binary code.
When all of T1 to T5 are selected as segment No. events in the time event type
setup, all ON-OFF operations are as shown in the following table.
When T1 to T4 are assigned partially to segment No. events, only the assigned
time events operate as shown in the following table, and the remaining events
operate as regular time events.
8
G.Soak standby Segment 8 time start
When ON = 0, output turns ON
when segment 8 is entered.
Segment
ON time
OFF time
Output ON
Output OFF
9
ON = segment time
10
Segment time
END mode
ON = segment time
Segment
ON time
OFF time
Output ON
Output OFF
Segment
ON time
OFF time
Output ON
Output OFF
Segment No.
Event No.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
T1 ON OFF ON OFF ON OFF ON OFF ON OFF ON OFF ON OFF ON
T2 OFF ON ON OFF OFF ON ON OFF OFF ON ON OFF OFF ON ON
T3 OFF OFF OFF ON ON ON ON OFF OFF OFF OFF ON ON ON ON
T4 OFF OFF OFF OFF OFF OFF OFF ON ON ON ON ON ON ON ON
T5 OFF OFF OFF OFF OFF OFF OFF OFF OFF OFF OFF OFF OFF OFF OFF
Segment No.
Event No.
16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
T1 OFF ON OFF ON OFF ON OFF ON OFF ON OFF ON OFF ON OFF
T2 OFF OFF ON ON OFF OFF ON ON OFF OFF ON ON OFF OFF ON
T3 OFF OFF OFF OFF ON ON ON ON OFF OFF OFF OFF ON ON ON
T4 OFF OFF OFF OFF OFF OFF OFF OFF ON ON ON ON ON ON ON
T5 ON ON ON ON ON ON ON ON ON ON ON ON ON ON ON
Page 62

5-8
Chapter 5. FUNCTIONS
■ PID set selection
• Eight sets of PID parameters, PID1 to PID8
for CH1 and PID2-1 to PID 2-8 for CH2, are
used for control operation. When the PID set
No. is set to each segment by designating the
PID set segment, control output is calculated
by each of the PID parameters.
• There are two ways of selecting PID sets: by
designating the PID set segment and by PID
set auto-switching. The method can be
selected by setting setup data
C11
or
C34
.
C11
set to 0: Designation of CH1 PID set
segment
C11
set to 1: CH1 PID set auto-switching
C34
set to 0: Designation of CH2 PID set
segment
C34
set to 1: CH2 PID set auto-switching
These two methods cannot be set simultaneously in PID set selection on the same channel.
Note
When setup data C11 is set to 1, PID set
No. items (CH1) in the program setup are
not displayed.
When setup data C34 is set to 1, PID set
No. items (CH2) in the program setup are
not displayed.
• By designation of PID set segment, the
PID set No. is set for each segment, and
control output is calculated by each of the
PID parameters.
• By PID set auto-switching, the SP fullscale is divided into eight zones according
to the settings of
CP.11
to
CP.17
of CH1
or
CP.21
to
CP.27
of CH2, and the PID
constant to be used according to the SP
value is automatically selected to calculate
the control output.
PID set No. (CH1)
PID set No. (CH2)
1 2 3 4
1 1 2 2
PID set segment designation
SP2
SP1
All SP ranges are
divided into eight zones.
PID set automatic switching (CH1)
Zone 8
Zone 7
Zone 6
Zone 5
Zone 4
Zone 3
Zone 2
Zone 1
CP.17
CP.16
CP.15
CP.14
CP.13
CP.12
CP.11
Page 63

5-9
Chapter 5. FUNCTIONS
■ G.Soak (guarantee soak)
G.Soak ON/OFF and G.Soak width can be set
for each segment. The G.Soak time can also be
set by the variable parameter
gs.t
item. The
G.Soak function ensures a segment execution
time with PV close to SP. G.Soak functions not
only in soak segments but also in ramp
segments.
At the segment start point, PV and SP are
compared, and the absolute value of the
resulting deviation continues for the G.Soak
time or longer. When the absolute value is
smaller than the G.Soak width, operation of that
segment is started.
The DCP32 is in the G.Soak standby state until
this condition is satisfied, and the line lamp on
the left side of the profile display blinks. The
operation state is the same as HOLD at the
segment start point (time is set to 0).
If G.Soak standby is canceled on both channels
when G.Soak is set to ON on channels CH1 and
CH2, operation of that segment starts.
However, note that in the FAST mode, the
DCP32 does not enter the G.Soak standby state
even if G.Soak is set to ON. The G.Soak
standby state can also be canceled by external
switch output. The following cancel conditions
can be used for both CH1 and CH2, and
selected by the setup date
C52 toC54
settings.
1 G.Soak cancel when external switch input
contact is ON or PV satisfies the G.Soak
cancel conditions
2 G.Soak cancel when external switch input
contact is ON and PV satisfies the G.Soak
cancel conditions
Time
SP
G.Soak width
G.Soak width
SP
PV
Segment
set time
Segment
execution time
G.Soak standby time
Time count start
G.Soak time
Page 64

5-10
Chapter 5. FUNCTIONS
■ PV start
If PV start is set in the program setup, PV is
started by regular RUN operation.
The first point where PV matches the SP in the
program pattern (including bias for both PV and
SP) is searched for, and operation is started
from that point.
However, note that if a matching point is not
found, operation is started from the beginning
of segment 1.
You can select in the program setup which
channel, CH1 or CH2, PV and SP is to be used.
When PV has started, event operating points
and the time of time events are automatically
corrected. If the PV start function is selected by
setup data
C52
to
C54
settings relating to
external switch input, PV start can be executed
without setting PV start in the program setup.
PV start is valid on the segment of the currently
selected program, and is invalid on the segment
of the pattern link destination.
■ Cycle
The cycle function is for repeating operation
from the No.1 segment of the program pattern
to the final set segment for a preset number of
cycles. The number of cycles can be set up to
9999.
When a number of cycles “n” is set, the
operation count becomes “n+1”.
When executing cycle operation, operation at
the end point of the final segment is not carried
out, and operation is restarted with the effective
value (setting of previous segment continued)
of the program item (e.g. PV event value, PID
set No.) whose setting is continuous from the
previous segment cleared. At this time, PV is
not started and operation starts from the No.1
segment even if PV start is set.
If the SPs at the pattern start and end points do
not match, the SP changes in a stepped manner
during cycle operation.
Cycle operation functions simultaneously on
both patterns of SP1 and SP2.
C
A
①'
①
①''
①'
PV starts at point B where the PV value first crosses
the SP pattern.
①PV starts at point A where the PV value first crosses
the SP pattern.
①'' Point C of segment 1 is the PV start point since there is
no point where the PV value crosses the SP value.
A'
B
SP pattern
Start point
Start point
Start point
Current PV value
PV start points
②
①
③
Cycle 1
SP
④
⑤
⑥
Time
Page 65

5-11
Chapter 5. FUNCTIONS
■ Pattern link
“Pattern link” is a function for
linking patterns together. The link
destination program No. is set by the
pattern link item.
When the pattern link item is set to 0
(default), patterns are not linked.
When the No. of the current program
itself is set to the pattern link item,
this creates an endless loop.
If the SPs at the link source end point
and the link destination start point do
not match, the SP changes in a
stepped manner during link
operation.
When cycle operation has been set,
the pattern link function works after
cycle operation has ended. After
pattern link operation ends, operation
begins from the No.1 segment of the
link destination pattern, so operation
is restarted with the effective value
(setting of previous segment
continued) of the program item (e.g.
PV event value, PID set No.) whose
setting is continuous from the
previous segment cleared.
If PV start is programmed to the link
destination pattern, the PV start
function operates after the link is
made.
After the link has been made, PID
operation is not initialized, and is
continued.
Pattern link functions simultaneously
on both patterns of SP1 and SP2.
■ Tag
A “tag” is eight alphanumeric data that can be set to each program.
Though this item cannot be displayed nor set on the DCP32, it can be displayed and set on the smart loader
package.
When the pattern items of segment 1 has been set by program setup, a total of eight characters (“PROG” +
program No. (2 characters) + “__” (two spaces)) are automatically set.
Example:
In the case of program No.1: “
PROG01__
”
In the case of program No.19: “
PROG19__
”
SP
Time
SP
Time
Pattern linking of program No.2 to program No.1
Program No.1
Program No.2
Time
Program No.1
SP
Program No.2
Page 66

5-12
Chapter 5. FUNCTIONS
5 - 3 Modes
■ Mode types
The following modes are available on the DCP32.
● Program operation
The DCP32 operates according to SP, times, events, etc. set to program patterns
No.1 to 19.
● Constant-value operation
The DCP32 operates according to SP or events set in the constant-value operation
data. Time events 1 to 5 turn OFF.
● READY
In this mode, the DCP32 is ready for operation.
MV output is fixed, and events to be operated according to event setting values
turn OFF. However, events to be operated according to controller states are active.
Parameters for all of the setup data, some event configuration data and some
constant-value operation data can be set or changed only in the READY mode.
During program operation, program pattern Nos.1 to 19 can be selected.
AUTO
MANUAL
Program operation
Mode
READY
AUTO
MANUAL
AUTO
MANUAL
AUT
MANUAL
AUTO
MANUAL
AUTO
MANUAL
AUTO
MANUAL
RUN
HOLD
FAST
END
READY
RUN
Constant-value operation
Page 67

5-13
Chapter 5. FUNCTIONS
● RUN
In this mode, the program is running.
MV outputs are active in PID control, and events and time events are active.
In the program operation mode, program operation progresses according to the
elapsed time.
However, note that progress of program operation stops in the same way as the
HOLD mode when the DCP32 is in the G.Soak (Guarantee Soak) standby state.
● HOLD
In this mode, program operation is held.
Progress of program operation stops. However, note that MV outputs are active in
PID control, and events and time events are active in the same way as in the RUN
mode.
The HOLD mode is not available during constant-value operation.
● FAST
In this mode, the program is fast-forwarded.
This mode is like the RUN mode except that progress of the program operation
time is speeded up.
The time scale is selected by the variable parameter
FASt
setting.
MV outputs are active in PID control or ON-OFF control, and events and time
events are active.
The DCP32 does not enter the G.Soak standby state even if G.Soak (Guarantee
Soak) is set.
The FAST mode is not available during constant-value operation.
● END
In this mode, operation of the program has ended.
MV outputs are active in PID control or ON-OFF control, and events and time
events are active with program operation stopped at the program end point.
The END mode is not available during constant-value operation.
● AUTO
In this mode, program operation is automatic.
MV output is active according to control by the DCP32.
(However, note that when programmer functions are selected on the current output
channels except heat/cool, SP output is active according to controller control by
the DCP32.)
● MANUAL
In this mode, program operation is manual.
MV output can be changed by ↑, ↓, ←, → on the console or by communications.
(However, note that when programmer functions are selected on the current output
channels except heat/cool, SP output can be changed by ↑, ↓, ←, → on the
console or communications.)
Page 68

5-14
Chapter 5. FUNCTIONS
Handling Precautions
• The program operation and constant-value operation modes are
common to channels CH1 and CH2.
• The READY/RUN/HOLD/FAST/END modes are common to channels
CH1 and CH2.
• The AUTO/MANUAL modes are common to channels CH1 and CH2.
■ Mode transition
● During program operation
The solid lines in the following diagram show mode transition operations. The
broken lines show end of operation.
Note
• When moving between the AUTO and MANUAL modes, the modes in the
square frames can be moved between.
• Selection of the READY or END modes at end of operation is set up in the
setup data.
● During constant-value operation
The solid lines in the following diagram shows mode transition operation.
Note
When moving between the AUTO and MANUAL modes, the modes in the
square frames can be moved between.
● Switching between program operation and constant-value operation
In the READY mode, select operation by the constant-value operation data
“
modE
” operation mode item.
0: Program operation
1: Constant-value operation
END AUTO
END MANUAL
READY AUTO
READY MANUAL
RUN AUTO
RUN MANUAL
HOLD AUTO
HOLD MANUAL
RESET
Mode changes to READY or END at end of operation.
RUN
RESET
HOLD
RUN
FAST AUTO
FAST MANUAL
ADV
RESET
ADV ADV
FAST
FAST
HOLD
RUN
RESET
ADV
READY AUTO
READY MANUAL
RUN AUTO
RUN MANUAL
RUN
RESET
Page 69

Chapter 5. FUNCTIONS
■ Mode transition operations
The following describes mode transition operations.
Though "program end" is not an operation, it is described below as it is a factor in
mode transition.
● RUN
This operation involves moving to the RUN mode from the READY, HOLD or
FAST modes. To move from the READY mode to the RUN mode, the DCP32
must be in the basic display state even in key, external switch input or
communication operations.
● HOLD
This operation involves moving to the HOLD mode from the RUN or FAST
modes.
The HOLD mode is not available in the constant-value operation mode.
● RESET
This operation involves moving to the READY mode from the RUN, HOLD,
FAST or END modes.
In the program operation mode, this mode includes returning to the No.1 segment.
● ADV
This operation involves advancing one segment in the READY, RUN, HOLD or
FAST modes.
The ADV mode is not available in the constant-value operation mode.
● FAST
This operation involves moving to the FAST mode from the RUN or HOLD
modes.
The FAST mode is not available in the constant-value operation mode.
● AUTO
This operation involves moving to the AUTO mode from the MANUAL mode of
the displayed channel.
● MANUAL
This operation involves moving to the MANUAL mode from the AUTO mode for
the displayed channel.
When the DCP32 enters the MANUAL mode, the basic display state changes as
follows.
• When controller functions are selected, PV and output value (%) are displayed.
• When programmer functions are selected, PV and SP are displayed.
When the DCP32 enters the MANUAL mode from the AUTO mode by external
switch inputs or communications, the display changes to the basic display state
even in the parameter setup or program setup states.
However, note that when SPw programmer functions are selected, PVw and SPw
are displayed on the CH2 display on a temperature/humidity operation model if
variable parameter 2
CH.2
setting is 2. If the setting is other than 2, the basic
display does not change.
● Program end
When operation progresses in the RUN or FAST modes in the program operation
mode, or when the segment has been advanced in the ADV mode, the program
ends when all end points in the program setup including cycles and pattern links
have been reached.
You can select in the setup setting in which of the READY or END modes
program operation ends.
The program does not end in the constant-value operation mode.
5-15
Page 70

5-16
Chapter 5. FUNCTIONS
■ Mode transition limitations
Mode transition can be carried out by operating the console keys, external switch
input and communications. The following table shows which operations are
enabled in each of the modes.
READY ◎◎◎————
∆∆
— «« ———
RUN — — —
◎ «« ◎ ««◎ ««◎ ««
HOLD ◎ ««———◎ ««◎ ««◎ ««
FAST ◎ ««— ««◎ ««◎ «« ———
END ——————
◎ ««——————
READY
◎ ««————————————
RUN ——————
◎ ««——————
Operation
Original mode
Program
operation
Constantvalue
operation
RUN
(to RUN mode)
Key Switch Com-
munica
tions
HOLD
(to HOLD mode)
Key Switch Com-
munica
tions
RESET
(to READY mode)
Key Switch Com-
munica
tions
ADV
(to next segment)
Key Switch Com-
munica
tions
FAXT
(to FAST mode)
Key Switch Com-
munica
tions
AUTO ◎ ««———
MANUAL — — —
◎ ««
AUTO ◎ ««———
MANUAL — — —
◎ ««
Operation
Original mode
Program
operation
Constantvalue
operation
MANUAL
(to MANUAL mode)
Key Switch Com-
munications
AUTO
(to AUTO mode)
Key Switch Com-
munications
« : Operation is enabled.
◎ : Operation is enabled if in basic display state.
∆
: No.1 segment is returned to if controller is still in READY mode.
— : Operation is disabled.
Page 71

Chapter 5. FUNCTIONS
5 - 4 Controller and Programmer
● Programmer
When the DCP32 is used as a programmer, PID control operation is not carried
out, and the SP is output in the scaled 4 to 20 mA range.
In the MANUAL mode, the SP can be incremented or decremented in the basic
display state by the console keys.
You can also select use of the DCP32 as a programmer on either just one of
channels CH1 and CH2 or both channels.
DCP32
Channel 1 controller or Channel 2 controller
Controlled system 1
MV1
PV1
PV2
MV2
Controlled system 2
On the current output channels except heat/cool, you can choose between use of the DCP32 as a controller or a
programmer. Set this in setup data
C18 orC41
.
You can also choose between controller or programmer functions even if the DCP32 is used for program operation
or constant-value operation.
Channels on other output models are limited to use as a controller at all times.
● Controller
When the DCP32 is used as a controller, PID control operation is carried out
according to PV, SP and PID setting values, and the resulting manipulated
variable (MV) is output as an analog output.
Heat/cool PID control and 3-position-proportional is also possible instead of PID
control depending on the type of output supported by the DCP32 model.
In the MANUAL mode, the MV can be incremented or decremented in the basic
display state by the console keys.
SDC series
controller
4 to 20 mA
DCP32
Channel 1 programmer or Channel 2 controller
Controlled system
MV
SP output
RSP input
PV PV PV
PV1
PV2
MV2
Controlled system
SDC series
controller
Controlled system
MV
SDC series
controller
Controlled system
MV
Handling Precautions
If setup data
C41
has been set to 2 (SPw programmer) on CH2 on a
temperature/humidity operation model, set variable parameter 2
CH.2
to 2
(PVw + SPw additional display) to increment or decrement SPw in the
MANUAL mode.
5-17
Page 72

5-18
Chapter 5. FUNCTIONS
Input 1 processing is carried out in the order shown below:
5 - 5 Input Processing Functions
Analog input 1
Cold junction compensation
Wiring resistance compensation
A/D conversion
Input range type
Square-root extraction
Linearization approximation
Upper/lower limit alarm
Temperature unit range
Upper/lower limit value scaling
Digital filter
Bias
Setting: Setup data
C03
(resistance temperature detector)
Setting: Setup data
C91
(thermocouple)
Setting: Setup data
C72
(DC current and voltage)
Setting: Setup data
C07
(DC current and voltage)
Setting: Setup data
C04
to
C06
(thermocouple and resistance temperature detector)
Setting: Setup data
C02
Setting: Setup data
C08
Setting: Variable parameter
Pbl
Setting: Variable parameter
FL
PV1
Table data
t-A.1 to t-b.b
Page 73

5-19
Chapter 5. FUNCTIONS
Input 2 processing is carried out in the order shown below:
• Temperature/humidity operation model • Input 2 channels model
Handling Precautions
On a temperature/humidity operation model, the humidity channel (CH2) is
controlled by wet-bulb set value SPw and wet-bulb temperature PVw. SPw
and PVw are automatically converted from SP1 (dry-bulb temperature set
value) and SP2 (relative humidity set value).
Analog input 2
Cold junction
compensation
Wiring resistance
compensation
A/D conversion
Input range type
Square-root extraction
Linearization
approximation
Upper/lower limit alarm
Temperature unit range
Upper/lower limit
value scaling
Digital filter
PV2
Bias
Setting: Setup data
C23
(resistance temperature detector)
Setting: Setup data
C92
(thermocouple)
Setting: Setup data
C72
(DC voltage)
Setting: Setup data
C27
(DC voltage)
Setting: Setup data
C24
to
C26
(thermocouple and resistance
temperature detector)
Setting: Setup data
C22
Setting: Setup data
C28
Setting: Variable parameters 2
Pbl.2
Setting: Variable parameters 2
FL.2
PVw
(wet-bulb temperature)
PV 1 = PVD
(wet-bulb temperature)
Relative humidity
calculation
Setting: Variable parameter 2
Table data
t-C.1 to t-d.b
PrSS, vEL
Analog input 2
Cold junction
compensation
Wiring resistance
compensation
A/D conversion
Input range type
Square-root extraction
Linearization
approximation
Upper/lower limit alarm
Temperature unit range
Upper/lower limit
value scaling
Digital filter
Bias
Setting: Setup data
C23
(resistance temperature detector)
Setting: Setup data
C92
(thermocouple)
Setting: Setup data
C72
(DCvoltage)
Setting: Setup data
C27
(DC voltage)
Setting: Setup data
C24
to
C26
(thermocouple and resistance
temperature detector)
Setting: Setup data
C22
Setting: Setup data
C28
Setting: Variable parameters 2
Pbl.2
Setting: Variable parameters 2
FL.2
PV2
Table data
t-C.1 to t-d.b
Page 74

5-20
Chapter 5. FUNCTIONS
5 - 6 Output Processing Functions
Three outputs are provided as output processing functions: control output, SP output and auxiliary output.
■ MV1/MV2 switching
MV1 and MV2 according to control output or SP output, and outputs 1, 2 and 3
can be switched as shown in the figures below. (Processing in these figures
advances from left to right.)
● 0D, 5G output
● 2G output
● 3D, 5K output
Handling Precautions
• Switching of MV1 and MV2, and outputs 1, 2 and 3 can be selected in
setup data
C44
.
• Switching of control output and SP output can be selected in setup data
C18
and
C41
.
• SP output can be output to current output other than heat output and
cool output.
• The “MV1/MV2 switching” function can be used for SP output even
though SP output originally is not MV. So, SP output is shown to be
connectable to MV1 and MV2 in the above figures for convenience only.
Channel 1 control output
Channel 1 SP output
MV1
Output 1
Channel 2 control output
Channel 2 SP output
MV2
Output 2
Auxiliary output
Output 3
Relay/current/voltage output
Current/voltage output
Current output
Channel 1 control output
Channel 1 SP output
MV1
Output 1 open-side output
Channel 2 control output
Channel 2 SP output
MV2
Output 3
Relay output
Output 1 closed-side output Relay output
Current/voltage output
Channel 1 control output
Channel 1 SP output
MV1
Output 1: Heat output
Channel 2 control output
Channel 2 SP output
MV2
Output 3
Relay/current/voltage output
Output 2: Cool output
Relay/current/voltage output
Current/voltage output
Page 75

5-21
Chapter 5. FUNCTIONS
■ Control output CH1
When the DCP32 is selected for use as a controller, control output is operational.
How outputs are processed varies according to the output type supported on the
model.
● CH1 control output → Current output
Handling Precautions
• You can switch current output and voltage output in setup data
C75, C76
and
C77
.
• You can switch 4 to 20 mA output and 0 to 20 mA output in setup data
C90
.
Initialization of
PID control operation
Output change limitter
PID control operation
Setting: PID parameters
P/l/d/rE
Setting: Variable parameters
loUt/ rPld
Setting: Variable parameters
otL
AT operation Setting: Variable parameters
At
AT execution
MV at over-range
Setting: Setup data
C12/C13
Over-range
MV in READY mode
Setting: Setup data
C16
READY mode
Manual MV
MANUAL mode
Preset manual value
When
C44
= 1
Manipulated variable (MV1)
Output 1
Current output 4 to 20 mA
(0 to 20 mA)
[
C75
= 0] (
C90
)
When
C44
= 0 (5G output)
2G, 3D and 5K
Output 2
Current output 4 to 20 mA
(0 to 20 mA)
[
C76
= 0] (
C90
)
Output 3
Current output 4 to 20 mA
(0 to 20 mA)
[
C77
= 0] (
C90
)
0D and 5G output
Setting: Setup data
C14/C15
Setting: Setup data
C44
Output upper/
lower limit limitter
Setting: PID parameters
oL/oH
PID parameters
dP/dl/dd
PID parameters
br
Page 76

5-22
Chapter 5. FUNCTIONS
● CH2 control output → Current output
Handling Precautions
• You can switch current output and voltage output in setup data
C75, C76
and
C77
.
• You can switch 4 to 20 mA output and 0 to 20 mA output in setup data
C90
.
Initialization of
PID control operation
Output change limitter
PID control operation
Setting: PID parameters 2
P.-2/l.-2/d.-2/rE.2
Setting: Variable parameters 2
lot.2/ rPl.2
Setting: Variable parameters 2
otL.2
AT operation Setting: Variable parameters 2
At.2
AT execution
MV at over-range
Setting: Setup data
C35/C36
Over-range
MV in READY mode
Setting: Setup data
C39
READY mode
Manual MV
MANUAL mode
Preset manual value
When
C44
= 0
Manipulated variable (MV2)
Output 1
Current output 4 to 20 mA
(0 to 20 mA)
[
C75
= 0] (
C90
)
When
C44
= 1 (5G output)
2G, 3D and 5K
Output 2
Current output 4 to 20 mA
(0 to 20 mA)
[
C76
= 0] (
C90
)
Output 3
Current output 4 to 20 mA
(0 to 20 mA)
[
C77
= 0] (
C90
)
0D and 5G output
Setting: Setup data
C37/C38
Setting: Setup data
C44
Output upper/
lower limit limitter
Setting: PID parameters 2
oL.2/oH.2
PID parameters 2
dP.2/dl.2/dd.2
PID parameters 2
br.2
Page 77

5-23
Chapter 5. FUNCTIONS
● CH1 control output → Relay output, voltage output
Handling Precautions
• You can switch current output and voltage output in setup data
C75, C76
and
C77
.
Initialization of
PID control operation
Output change limitter
PID control operation
Setting: PID parameters
P/l/d/rE
Setting: Variable parameters
IoUt / rPId
Setting: Variable parameters
otL
AT operation
Setting: Variable parameters
At
AT execution
MV at over-range
Setting: Setup data
C12/C13
Over-range
MV in READY mode
Setting: Setup data
C16
READY mode
Manual MV
MANUAL mode
Preset manual value
When
C44
= 1
Manipulated variable (MV1)
Output 1
Time-proportional relay output
Time-proportional voltage output
[
C75
= 1]
When
C44
= 0
(0D and 5G output)
Setting:
Variable parameters
CY.1
Setting:
Variable parameters
CY.2
2G, 3D and 5K
Setting:
Variable parameters
CY.3
Output 2
Time-proportional voltage output
[
C76
= 1]
Output 3
Output 1 time-proportional
output cycle
Output 2 time-proportional
output cycle
Output 3 time-proportional
output cycle
(5G output)
Setting:
Setup data
C78
Setting:
Setup data
C79
Setting:
Setup data
C80
Voltage output 1 adjustment Voltage output 2 adjustment Voltage output 3 adjustment
Time-proportional voltage output
[
C77
= 1]
0D and 5G output
Setting: Setup data
C14/C15
Setting: Setup data
C44
Output upper/
lower limit limitter
Setting: PID parameters
oL/oH
PID parameters
dP/dl/dd
PID parameters
br
Page 78

5-24
Chapter 5. FUNCTIONS
● CH2 control output → Relay output, voltage output
Handling Precautions
• You can switch current output and voltage output in setup data
C75, C76
and
C77
.
Initialization of
PID control operation
Output change limitter
PID control operation
Setting: PID parameters
P.-2/l.-2/d.-2/rE.2
Setting: Variable parameters
lot.2/ rPl.2
Setting: Variable parameters
otL.2
AT operation
Setting: Variable parameters 2
At.2
AT execution
MV at over-range
Setting: Setup data
C35/C36
Over-range
MV in READY mode
Setting: Setup data
C39
READY mode
Manual MV
MANUAL mode
Preset manual value
When
C44
= 0
Manipulated variable (MV2)
Output 1
Time-proportional relay output
Time-proportional voltage output
[
C75
= 1]
When
C44
= 1
(0D and 5G output)
Setting:
Variable parameters
CY.1
Setting:
Variable parameters
CY.2
2G, 3D and 5K
Setting:
Variable parameters
CY.3
Output 2
Time-proportional voltage output
[
C76
= 1]
Output 3
Output 1 time-proportional
output cycle
Output 2 time-proportional
output cycle
Output 3 time-proportional
output cycle
(5G output)
Setting:
Setup data
C78
Setting:
Setup data
C79
Setting:
Setup data
C80
Voltage output 1 adjustment Voltage output 2 adjustment Voltage output 3 adjustment
Time-proportional voltage output
[
C77
= 1]
0D and 5G output
Setting: Setup data
C37/C38
Setting: Setup data
C44
Output upper/
lower limit limitter
Setting: PID parameters
oL.2/oH.2
PID parameters
dP.2/dl.2/dd.2
PID parameters
br.2
Page 79

5-25
Chapter 5. FUNCTIONS
● CH1 control output → Position-proportional output
Initialization of
PID control operation
Output change limitter
PID control operation
Setting: PID parameters
P/l/d/rE
Setting: Variable parameters
IoUt / rPId
Setting: Variable parameters
otL
AT operation
Setting: Variable parameters
At
AT execution
MV at over-range
Setting: Setup data
C12/C13
Over-range
MV in READY mode
Setting: Setup data
C16
READY mode
MFB automatic adjustment
Setting: Variable parameters
m-At
MFB automatic
adjustment execution
Manual MV
MANUAL mode
Preset manual value
When
C44
= 1
Manipulated variable (MV1)
When
C44
= 0 (2G output)
Output other than position-proportional (output 3)*
Setting: Setup data
C44
Output upper/
lower limit limitter
Setting: PID parameters
oL/oH
Motor control method selection
Setting: Variable parameters
m-C
MFB operation
Setting: Variable parameters
m-CL/m-oP/m-t
Motor control operation
Output 1
Open-side relay
Output 1
Closed-side relay
Setting: Variable parameters
dlFF
Setting: Setup data
C14/C15
* For details of current output, see page 5-21,
and for details of voltage output, see page 5-23.
PID parameters
dP/dl/dd
PID parameters
br
Page 80

5-26
Chapter 5. FUNCTIONS
● CH2 control output → Position-proportional output
Initialization of
PID control operation
Output change limitter
PID control operation
Setting: PID parameters 2
P.-2/l.-2/d.-2/rE.2
Setting: Variable parameters 2
lot.2/ rPl.2
Setting: Variable parameters 2
otL.2
AT operation
Setting: Variable parameters 2
At.2
AT execution
MV at over-range
Setting: Setup data
C35/C36
Over-range
MV in READY mode
Setting: Setup data
C39
READY mode
MFB automatic adjustment
Setting: Variable parameters
m-At
MFB automatic
adjustment execution
Manual MV
MANUAL mode
Preset manual value
When
C44
= 0
Manipulated variable (MV2)
When
C44
= 1 (2G output)
Setting: Setup data
C44
Output upper/
lower limit limitter
Setting: PID parameters
oL.2/oH.2
Motor control method selection
Setting: Variable parameters
m-C
MFB operation
Setting: Variable parameters
m-CL/m-oP/m-t
Motor control operation
Output 1
Open-side relay
Output 1
Closed-side relay
Setting: Variable parameters
dlFF
Setting: Setup data
C37/C38
PID parameters 2
dP.2/dl.2/dd.2
PID parameters 2
br.2
Output other than position-proportional (output 3)*
* For details of current output, see page 5-21,
and for details of voltage output, see page 5-23.
Page 81

Chapter 5. FUNCTIONS
● CH1 control output → Heat/cool output
Handling Precautions
• You can switch current output and voltage output in setup data
C75, C76
and
C77
.
• You can switch 4 to 20 mA output and 0 to 20 mA output in setup data
C90
.
Initialization of
PID control operation
Output change limitter
PID control operation
Setting: PID parameters
P/l/d/rE
Setting: Variable parameters
IoUt / rPId
Setting: Variable parameters
otL
MV at over-range
Setting: Setup data
C12/C13
Over-range
50 %
READY mode
Manual MV
MANUAL mode
Preset manual value
When
C44
= 1
Manipulated variable (MV1)
Heat-cool MV operation
Output 1
Time-proportional relay output
Current output 4 to 20 mA (0 to 20 mA)
[
C75
= 0] (
C90
)
Time-proportional voltage output
[
C75
= 1]
When
C44
= 0 (3D and 5K outputs)
3-position control
MV (heat)
(relay/voltage output)
Setting: Variable parameter
CY.1
Output 1 time-proportional output cycle
(voltage output)
Setting: Setup data
C78
Voltage output 1 adjustment
Setting: Setup data
C14/C15
Setting: Setup data
C44
Setting: Variable parameters
dlFF
Output lower/upper limit limitter
3-position control operation
Heat-side
Setting: PID parameters
oL/oH
Setting:
Setup data
C45
Variable parameters
dv-L/HY-L
READY/
AUTO modes
MV in READY mode (heat)
Setting: Setup data
C16
Output 2
Time-proportional relay output
Current output 4 to 20 mA (0 to 20 mA)
[
C76
= 0] (
C90
)
Time-proportional voltage output
[
C76
= 1]
3-position control
(3D output) (3D output)
MV (cool)
(relay/voltage output)
Setting: Variable parameter
CY.2
Output 2 time-proportional output cycle
(voltage output)
Setting: Setup data
C79
Voltage output 2 adjustment
3-position control operation
Setting:
Setup data
C45
Variable parameters
dv-H/HY-H
READY/
AUTO modes
MV in READY mode (cool)
Setting: Setup data
C17
Output lower/upper limit limitter
Cool-side
Setting: PID parameters
oL/oH
(odd-numbered PID sets)
(even-numbered PID sets)
Output other than position-proportional (output 3)*
* For details of current output, see page 5-21,
and for details of voltage output, see page 5-23.
5-27
Handling Precautions
The DCP32 cannot be set to the MANUAL mode
during 3-position control.
Page 82

Chapter 5. FUNCTIONS
● CH2 control output → Heat/cool output
Handling Precautions
• You can switch current output and voltage output in setup data
C75,
C76
and
C77
.
• You can switch 4 to 20 mA output and 0 to 20 mA output in setup data
C90
.
Initialization of
PID control operation
Output change limitter
PID control operation
Setting: PID parameters 2
P.-2/l.-2/d.-2/rE.2
Setting: Variable parameters 2
lot.2/ rPl.2
Setting: Variable parameters 2
otL.2
MV at over-range
Setting: Setup data
C35/C36
Over-range
50 %
READY mode
Manual MV
MANUAL mode
Preset manual value
When
C44
= 0
Manipulated variable (MV2)
Heat-cool MV operation
Output 1
Time-proportional relay output
Current output 4 to 20 mA (0 to 20 mA)
[
C75
= 0] (
C90
)
Time-proportional voltage output
[
C75
= 1]
When
C44
= 1 (3D and 5K outputs)
3-position control
MV (heat)
(relay/voltage output)
Setting: Variable parameter
CY.1
Output 1 time-proportional output cycle
(voltage output)
Setting: Setup data
C78
Voltage output 1 adjustment
Setting: Setup data
C37/C38
Setting: Setup data
C44
Setting: Variable parameters
dlFF
Output lower/upper limit limitter
3-position control operation
Heat-side
Setting: PID parameters 2
oL.2/oH.2
Setting:
Setup data
C45
Variable parameters
dv-L/HY-L
READY/
AUTO modes
MV in READY mode (heat)
Setting: Setup data
C39
Output 2
Time-proportional relay output
Current output 4 to 20 mA (0 to 20 mA)
[
C76
= 0] (
C90
)
Time-proportional voltage output
[
C76
= 1]
3-position control
(3D output) (3D output)
MV (cool)
(relay/voltage output)
Setting: Variable parameter
CY.2
Output 2 time-proportional output cycle
(voltage output)
Setting: Setup data
C79
Voltage output 2 adjustment
3-position control operation
Setting:
Setup data
C45
Variable parameters
dv-H/HY-H
READY/
AUTO modes
MV in READY mode (cool)
Setting: Setup data
C40
Output lower/upper limit limitter
Cool-side
Setting: PID parameters 2
oL.2/oH.2
(odd-numbered PID sets)
(even-numbered PID sets)
Output other than position-proportional (output 3)*
* For details of current output, see page 5-21,
and for details of voltage output, see page 5-23.
5-28
Handling Precautions
The DCP32 cannot be set to the MANUAL mode
during 3-position control.
Page 83

5-29
Chapter 5. FUNCTIONS
■ SP output
When the DCP32 is selected for use as a programmer, control output is
operational.
On current output models other than heat/cool, SP output is processed as follows.
● CH1 SP output
Handling Precautions
• You can switch current output and voltage output in setup data
C75, C76
and
C77
.
• You can switch 4 to 20 mA output and 0 to 20 mA output in setup data
C90
.
Main output types
Upper/lower limit scaling
Setting: Setup data
C18
= 1
Setting: Setup data
C19/C20
MV in READY mode
Setting: Setup data
C16
READY mode
Upper/lower limit scaling
MANUAL mode
Manual SP 1
When
C44
= 1
SP 1 output
Output1
Current output 4 to 20 mA
(0 to 20 mA)
[
C75
= 0] (
C90
)
When
C44
= 0 (5G output)
2G, 3D and 5K
Output 2
Current output 4 to 20 mA
(0 to 20 mA)
[
C76
= 0] (
C90
)
Output 3
Current output 4 to 20 mA
(0 to 20 mA)
[
C77
= 0] (
C90
)
0D and 5G outputs
Setting: Setup data
C19/C20
Setting: Setup data
C44
Page 84

Chapter 5. FUNCTIONS
● CH2 SP output
Handling Precautions
• You can switch current output and voltage output in setup data
C75, C76
and
C77
.
• You can switch 4 to 20 mA output and 0 to 20 mA output in setup data
C90
.
■ Auxiliary output
When auxiliary output is supported on 0D or 5G output models, auxiliary output 1
is processed as follows.
2G, 3D and 5K output models do not support auxiliary output.
Handling Precautions
• You can switch 4 to 20 mA output and 0 to 20 mA output in setup data
C90
.
Main output types
Upper/lower limit scaling
Setting: Setup data
C41
= 1
Setting: Setup data
C42/C43
MV in READY mode
Setting: Setup data
C39
(or MANUAL SPw)
READY mode
Upper/lower limit scaling
MANUAL mode
Manual SP 2
When
C44
= 0
SP 2 output
Output1
Current output 4 to 20 mA
(0 to 20 mA)
[
C75
= 0] (
C90
)
When
C44
= 1 (5G output)
2G, 3D and 5K
Output 2
Current output 4 to 20 mA
(0 to 20 mA)
[
C76
= 0] (
C90
)
Output 3
Current output 4 to 20 mA
(0 to 20 mA)
[
C77
= 0] (
C90
)
0D and 5G outputs
Setting: Setup data
C42/C43
Setting: Setup data
C44
Auxiliary output type
Upper/lower limit scaling
Setting: Setup data
C49
Setting: Setup data
C50/C51
4 mA (0 mA)
Current output 4 to 20 mA (0 to 20 mA)
(
C90
)
Output 3
When READY mode is entered at auxiliary output type
SP and deviation
When auxiliary output type is NOP
When auxiliary output type is set to MFB on non-2G
output models
When auxiliary output type is set to MV by programmer
function on non heat/cool models
When auxiliary output type is set to MV by 3-position-
proportional control on 3D output models
5-30
Page 85

Chapter 6. OPERATION
6 - 1 Turning the Power ON
6-1
The DCP32 is not equipped with a power switch or protective fuses. If necessary, prepare these externally. When a
voltage of 90 to 264 Vac is applied across terminals 1 and 2 on the DCP32, the display appears for about ten
seconds after which control and other operations are started. During initialization of the controller until start of
operations, the LEDs on the profile display light successively at uneven intervals clockwise from top right.
The following diagram shows the flow of operations at startup.
● Startup flow
Power ON
RAM backup normal?
NO
YES
Check start of general reset
Parameter = factory shipment setting
Delete entire program.
Program operation mode
READY mode
AUTO mode
Program No. = 1/segment No. = 1
Segment progress time = 0
Continuation of program operation/constant-value operation modes
Continuation of READY/RUN/HOLD/FAST/END modes
Continuation of AUTO/MANUAL modes
(Continuation of manual value if in MANUAL mode)
Continuation of program No./segment No.
Continuation of segment progress time
Continuation of display No. of basic display state in AUTO mode
Cancellation of auto-tuning/smart-tuning
Cancellation of MFB automatic adjustment by 2G output
Initiallization of G.Soak standby time
Initialization of PID operation
Initialization of event output state
Setting display state → Basic display state
Display No. of basic display state in MANUAL mode
Start of operations
Press ENT key.
Handling Precautions
With the following modes and items, the state that was active when the
power was turned OFF continues when the power is turned back ON.
• READY, RUN, HOLD, FAST, END modes
• AUTO, MANUAL modes
• MANUAL values in the MANUAL mode
• Program No., segment No.
• Progress time in segment
• Display No. if in basic display state in the AUTO mode
Page 86

6 - 2 Switching the Basic Display
6-2
Chapter 6. OPERATION
The “basic display state” of the DCP32 collectively refers to the display state of the program No. display, segment
No. display, upper display, lower display, basic indicator LED lamps and event LEDs.
Each press of the DISP key successively switches the basic display state, and each press of the DISP key with the
FUNC key held down switches the channel displays between CH1 and CH2.
Operation of other displays and LEDs is carried out in the same way even when setting up parameters, for
example. However, switching by the DISP key is not possible.
The profile display and AT LED indicates the status of the channel displayed in the basic display.
The following figure shows the conventions used for representing displays in this manual.
Program/segment No. Display
TM
OUT
SP
PV
CYC
CH1
CH2
PV
SP
In the program operation mode, READY indicates the currently selected program/segment No.
Displays other than READY indicate the currently operating program/segment No.
In the constant-value operation mode, nothing is displayed and this display is blank.
Profile Display
Upper display
Basic indicator LED lamps
Displays the LED to light
LED lit
LED blinking
Supplementary explanation
PROFILE
Rising ramp
Soak
Falling ramp
Falling ramp
Soak
Rising ramp
Current segment
Next segment
PROG SEG
PROFILE
Program
No.
Segment
No.
Pattern
tendency
Event LEDs
Output states of events 1 to 3, time events 1 to 5
Lower display
Displays the program status of the displayed channel.
In the program operation mode, the profile is displayed only when the program has been set up.
The profile is not displayed when the program is not set up.
When there is no subsequent segment even if the program is set up, the three LEDs on the right
do not light.
In the constant-value operation mode, nothing is displayed and this display is blank.
Page 87

6-3
Chapter 6. OPERATION
■ Display in program operation mode
● The DISP key functions
Output Format of
Display
Displayed Channel
Relay, current, voltage Display 1 → Display 2 → Display 3 → Display 6 → Display 7 → Display 8
→ *Display 1 (repeated)
Position-proportional Display 1 → Display 2 → Display 3 → Display 4 → Display 6 → Display 7
→ Display 8 → *Display 1 (repeated)
Heat/cool Display 1 → Display 2 → Display 3 → Display 5 → Display 6 → Display 7
→ Display 8 → *Display 1 (repeated)
Handling Precautions
When channel CH2 is displayed on temperature/humidity operation model,
other displays are inserted at the position marked by an asterisk “*”
depending on the setting of variable parameter 2 CH.2 as follows:
• When variable parameter 2
CH.2
is set to 1, display 9 is inserted.
• When variable parameter 2
CH.2
is set to 2, display 10 is inserted.
● FUNC key + DISP key functions
This key combination switches between CH1 display and CH2 display.
As the display number that is selected by the DISP key is independent to each
channel, the display number on the CH1 and CH2 display is not necessarily the
same number even if the displayed channel is switched by the FUNC key + DISP
key combination.
● Display 1
PV
PV1
PV2
PROG SEG
PROFILE
Program
No.
Segment
No.
Pattern
tendency
Output states of events 1 to 3, time events 1 to 5
Displayed
channel
Display 1 indicates the PV of both channels. However, note that the lit LED of
CH1 LED and CH2 LED indicates the displayed channel common to displays 1 to 11.
A blinking LED indicates the channel displayed on display 1 only.
Page 88

6-4
Chapter 6. OPERATION
● Display 2
PV
PV
SP
PROG SEG
PROFILE
Program
No.
Segment
No.
Pattern
tendency
Output states of events 1 to 3, time events 1 to 5
SP
Displayed
channel
PV
PV
Output value (%)
PROG SEG
PROFILE
Program
No.
Segment
No.
Pattern
tendency
Output states of events 1 to 3, time events 1 to 5
OUT
Displayed
channel
Motor valve opening (%)
PROG SEG
PROFILE
Program
No.
Segment
No.
Pattern
tendency
Output states of events 1 to 3, time events 1 to 5
Displayed
channel
On the displayed channel, the digit to which an SP value can be entered blinks in
the MANUAL mode when programmer functions are selected. However, note that
in the MANUAL mode when SPw programmer functions are selected, none of the
digits in SP blink on the CH2 display on temperature/humidity operation models.
● Display 3
On the displayed channel, the digit to which an SP value can be entered blinks in
the MANUAL mode when controller functions are selected.
● Display 4
This display is exclusive to 2G output models (output model No. appended with
2G) when the displayed channel is position-proportional output.
Page 89

6-5
Heat-side output (%)
Cool-side output (%)
PROG SEG
PROFILE
Program
No.
Segment
No.
Pattern
tendency
Output states of events 1 to 3, time events 1 to 5
OUT
Displayed
channel
Chapter 6. OPERATION
PV
PV
Time
PROG SEG
PROFILE
Program
No.
Segment
No.
Pattern
tendency
Output states of events 1 to 3, time events 1 to 5
TM
Displayed
channel
PV
PV
Number of remaining cycles
PROG SEG
PROFILE
Program
No.
Segment
No.
Pattern
tendency
Output states of events 1 to 3, time events 1 to 5
CYC
Displayed
channel
● Display 5
This display is exclusive to heat/cool output models (output model No. appended
with 3D or 5K) when the displayed channel is heat/cool output.
● Display 6
Either of “hours:minutes” or “minutes:seconds” is selected in setup data
C64
as
the time unit in the setup. Select either “remaining segment time” or “total
operating time” in setup data
C65
as the time display format.
● Display 7
When the remaining number of cycles is “0”, subsequent cycle operation is not
carried out.
Page 90

Chapter 6. OPERATION
● Display 8
On the displayed channel, the digit to which an SP value can be entered blinks in
the MANUAL mode when programmer functions are selected. However, note that
in the MANUAL mode when SPw programmer functions are selected none of the
digits in SP blink on the CH2 display on temperature/humidity operation models.
Either of “hours:minutes” or “minutes:seconds” is selected in setup data
C64
as
the time unit in the setup. Select either “remaining segment time” or “total
operating time” in setup data
C65
as the time display format.
● Display 9
This display is exclusive to CH2 display on temperature/humidity operation
models only when variable parameter 2
CH.2
is set to 1. PV2 indicates the relative
humidity, while PVw indicates the wet-bulb temperature.
● Display 10
This display is exclusive to CH2 display on temperature/humidity operation
models only when variable parameter 2
CH.2
is set to 2. PVw is the wet-bulb
temperature, and SPw is the wet-bulb side SP. SPw is calculated from SP1 (drybulb side SP) and SP2 (relative humidity SP).
The digit to which an SP value can be entered blinks in the MANUAL mode when
SPw programmer functions are selected.
SP
PV
Time
PROG SEG
PROFILE
Program
No.
Segment
No.
Pattern
tendency
Output states of events 1 to 3, time events 1 to 5
TM
Displayed
channel
PV
PV2
PVw
PROG SEG
PROFILE
Program
No.
Segment
No.
Pattern
tendency
Output states of events 1 to 3, time events 1 to 5
CH2
PV
PVw
SPw
PROG SEG
PROFILE
Program
No.
Segment
No.
Pattern
tendency
Output states of events 1 to 3, time events 1 to 5
SP
CH2
6-6
Page 91

6-7
Chapter 6. OPERATION
■ Display in constant-value operation mode
● The DISP key functions
Handling Precautions
When channel CH2 is displayed on temperature/humidity operation model,
other displays are inserted at the position marked by an asterisk “*”
depending on the setting of variable parameter 2 CH.2 as follows:
• When variable parameter 2
CH.2
is set to 1, display 6 is inserted.
• When variable parameter 2
CH.2
is set to 2, display 7 is inserted.
● FUNC key + DISP key functions
This key combination switches between CH1 display and CH2 display.
As the display number that is selected by the DISP key is independent to each
channel, the display number on the CH1 and CH2 display is not necessarily the
same number even if the displayed channel is switched by the FUNC key + DISP
key combination.
● Display 1
Display 1 indicates the PV of both channels. However, note that the lit LED of
CH1 LED and CH2 LED indicates the displayed channel common to displays 1 to
7. A blinking LED indicates the channel displayed on display 1 only.
PV
PV1
PV2
PROG SEG
PROFILE
Output states of events 1 to 3, time events 1 to 5
Displayed
channel
Output Format of
Display
Displayed Channel
Relay, current, voltage Display 1 → Display 2 → Display 3 → *Display 1 (repeated)
Position-proportional Display 1 → Display 2 → Display 3 → Display 4 → *Display 1 (repeated)
Heat-cool Display 1 → Display 2 → Display 3 → Display 5 → *Display 1 (repeated)
Page 92

6-8
Chapter 6. OPERATION
● Display 2
On the displayed channel, the digit to which an SP value can be entered blinks in
the MANUAL mode when programmer functions are selected. However, note that
in the MANUAL mode when SPw programmer functions are selected, none of the
digits in SP blink on the CH2 display on temperature/humidity operation models.
● Display 3
On the displayed channel, the digit to which an SP value can be entered blinks in
the MANUAL mode when controller functions are selected.
● Display 4
This display is exclusive to 2G output models (output model No. appended with
2G) when the displayed channel is position-proportional output.
PV
PV
SP
PROG SEG
PROFILE
Output states of events 1 to 3, time events 1 to 5
SP
Displayed
channel
PV
PV
Output value (%)
PROG SEG
PROFILE
Output states of events 1 to 3, time events 1 to 5
OUT
Displayed
channel
Motor valve opening (%)
PROG SEG
PROFILE
Output states of events 1 to 3, time events 1 to 5
Displayed
channel
Page 93

6-9
Chapter 6. OPERATION
Heat-side output (%)
Cool-side output (%)
PROG SEG
PROFILE
Output states of events 1 to 3, time events 1 to 5
OUT
Displayed
channel
PV
PV2
PVw
PROG SEG
PROFILE
Pattern
tendency
Output states of events 1 to 3, time events 1 to 5
CH2
PV
PVw
SPw
PROG SEG
PROFILE
Pattern
tendency
Output states of events 1 to 3, time events 1 to 5
SP
CH2
● Display 5
This display is exclusive to heat/cool output models (output model No. appended
with 3D or 5K) when the displayed channel is heat/cool output.
● Display 6
This display is exclusive to CH2 display on temperature/humidity operation
models only when variable parameter 2
CH.2
is set to 1. PV2 indicates the relative
humidity, while PVw indicates the wet-bulb temperature.
● Display 7
This display is exclusive to CH2 display on temperature/humidity operation
models only when variable parameter 2
CH.2
is set to 2. PVw is the wet-bulb
temperature, and SPw is the wet-bulb side SP. SPw is calculated from SP1 (drybulb side SP) and SP2 (relative humidity SP).
The digit to which an SP value can be entered blinks in the MANUAL mode when
SPw programmer functions are selected.
Page 94

6 - 3 Program Selection
6-10
Chapter 6. OPERATION
The program No. can be selected using the keys on the console within the range 1 to 19.
■ How to select the program No.
When the DCP32 is in the basic display state in the program operation READY
mode:
• Each press of the PROG key increments the program No. The display reverts to
1 after 19.
• Each press of ↓ decrements the program No. The display reverts to 19 after 1.
Handling Precautions
• Program Nos. can be selected whether they are already set or not.
• A program No. currently selected by external switch input cannot be
selected.
• The program No. cannot be selected during constant-value operation.
• Pressing ↓ does not change the program No. when values currently
being entered are displayed in the MANUAL mode.
PROG key
Program No.1
↓ key
PROG key
Program No.2
↓ key
Program No.3
PROG key
Program No.19
↓ key
Page 95

6 - 4 External Switch (RSW) Operations
Chapter 6. OPERATION
■ External switch (RSW) inputs
In all, the DCP32 is provided with 12 external switch inputs. Each of these inputs
are differentiated by RSW1, RSW2 and so forth up to RSW12. On models whose
option 2 model No. is “0”, only inputs RSW1 to RSW4 are mounted.
(RSW: external switch input)
● External switch input types
The functions of RSW1 to 4, and RSW8 to 12 are fixed.
The functions of RSW5 to 7 are selected by setup data
C71
to
C74
.
Note
• With “G.Soak cancel by OR conditions,” G.Soak standby is canceled when the
external switch turns ON, or when the PV is within the G.Soak width setting.
• With “G.Soak cancel by AND conditions,” G.Soak standby is canceled when the
external switch turns ON and the PV is within the G.Soak width setting.
• With “direct/reverse action switching (CH1),” direct/reverse action follows the
setting of setup data
C01
when the external switch turns OFF. When the
external switch turns ON, action is opposite to the setting of setup data
C01
.
• With “direct/reverse action switching (CH2),” direct/reverse action follows the
setting of setup data
C21
when the external switch turns OFF. When the
external switch turns ON, action is opposite to the setting of setup data
C21
.
External
Function Detection Method
Switch No.
RSW1 RUN Rising edge
RSW2 HOLD Rising edge
RSW3 RESET Rising edge
RSW4 ADV Rising edge
RSW5 Selected by setup from the following functions
RSW6 FAST Rising edge
RSW7 PV start (using PV1) Rising edge
PV start (using PV2) Rising edge
AUTO/MANUAL (CH1) Rising/falling edge
AUTO/MANUAL (CH2) Rising/falling edge
AT start/stop (CH1) Rising/falling edge
AT start/stop (CH2) Rising/falling edge
G.Soak cancel by OR conditions Status
G.Soak cancel by AND conditions Status
Direct/reverse action switching (CH1) Status
Direct/reverse action switching (CH2) Status
RSW8 Program No. selection Weighting 1 Status
RSW9 Program No. selection Weighting 2 Status
RSW10 Program No. selection Weighting 4 Status
RSW11 Program No. selection Weighting 8 Status
RSW12 Program No. selection Weighting 10 Status
6-11
Page 96

6-12
Chapter 6. OPERATION
■ Program selection
The program can be selected by external switch input in the program operation
READY mode. The table below shows program selection by external switch
inputs. Two external switch states are provided for selection of programs 10 to 15.
When program selection by external switch inputs is set to “0”, the program can be
selected by the console keys and by communication with a personal computer.
External
Weighting State
Switch No.
RSW8 1 OFF ON OFF ON OFF ON OFF ON OFF ON
RSW9 2 OFF OFF ON ON OFF OFF ON ON OFF OFF
RSW10 4 OFF OFF OFF OFF ON ON ON ON OFF OFF
RSW11 8 OFF OFF OFF OFF OFF OFF OFF OFF ON ON
RSW12 10 OFF OFF OFF OFF OFF OFF OFF OFF OFF OFF
Program No. Selection 0 1 2 3 4 5 6 7 8 9
External
Weighting State
Switch No.
RSW8 1 OFF OFF ON ON OFF OFF ON ON OFF OFF ON ON
RSW9 2 OFF ON OFF ON ON OFF ON OFF OFF ON OFF ON
RSW10 4 OFF OFF OFF OFF OFF ON OFF ON ON ON ON ON
RSW11 8 OFF ON OFF ON OFF ON OFF ON OFF ON OFF ON
RSW12 10 ON OFF ON OFF ON OFF ON OFF ON OFF ON OFF
Program No. Selection 10 11 12 13 14 15
External
Weighting State
Switch No.
RSW8 1 OFF ON OFF ON OFF ON OFF ON OFF ON
RSW9 2 ON ON OFF OFF ON ON OFF OFF ON ON
RSW10 4 ON ON OFF OFF OFF OFF ON ON ON ON
RSW11 8 OFF OFF ON ON ON ON ON ON ON ON
RSW12 10 ON ON ON ON ON ON ON ON ON ON
Program No. Selection 16 17 18 19 0
Page 97

Chapter 6. OPERATION
■ Read timing
● Timing of inputs RSW1 to 7
Inputs RSW1 to RSW7 are read according to the following timing.
1 When input state changes from OFF to ON, the time from the change up to
reading is 0.2 seconds max.
2 When input state changes from ON to OFF, the time from the change up to
reading is 0.2 seconds max.
● Timing of inputs RSW8 to 12, RUN and PV start
The time from the change in input state up to reading when selecting program Nos.
by RSW8 to RSW12 is 0.4 seconds max.
Accordingly, due to the relationship with RUN operation, be sure to observe
timings 1 to 4 in the following diagram.
PV start operation also must conform to RUN operation.
1 The time from fixing of the selected No. up to the rising edge of the RUN
signal is 0.4 seconds min.
2 The time from the rising edge of the RUN signal up to holding of the program
No. is 0.2 seconds min.
3 The time from holding of RUN signal OFF up to the rising edge of the RUN
signal is 0.2 seconds min.
4 The time from the rising edge of the RUN signal up to holding of RUN signal
ON is 0.2 seconds min.
5 The time from fixing of the selected No. up to changing of the program No. is
0.4 seconds max.
6 The time from the rising edge of the RUN signal up to start of RUN is 0.4
seconds max.
Handling Precautions
When operating the DCP32 by external switch inputs, operation can be
carried out more reliably if a margin is added to the minimum time for the
above read timings.
External switch input state
ON read
OFF read
State of No. different
from that selected
1 2
State of selected No.
State of No. different
from that selected
3
4
56
No. different from that selected
Selected No.
Program No.
RUN signal
Program selection
No. (5 inputs)
READY
Mode
RUN
6-13
Page 98

6 - 5 Manual Operation and Auto-tuning
Chapter 6. OPERATION
■ Manual operation
In the MANUAL mode, controller outputs can be manipulated by ↑ or ↓ on the
console.
● Controller functions
When outputs are displayed in the basic display state, only one digit in the output
value blinks. If the output value is incremented or decremented by ↑ or ↓, actual
output also increments or decrements. Output values differ from values being
entered to setting items in that the ENT key need not be pressed.
The blinking digit can be moved by pressing ← or →.
On 2G output models, when only estimated position-proportional control is
selected by variable parameter
m-C
setting 2, “----” not the value is displayed as
the output display in the MANUAL mode.
Pressing ↑ displays “
oPEn
” , and the open-side relay turns ON.
Pressing ↓ displays “
CLoS
”, and the closed-side relay turns ON.
Bump-less and preset output changes when moving from the AUTO to the
MANUAL mode can be selected by setup data
C14
(for MV1) or
C37
(for MV2)
setting. When moving from the MANUAL to the AUTO mode, the change in
output is bumpless.
(However, note that a sudden change in output occurs when the total time for the
PID parameter of the PID set in use is set to “0”.)
● Programmer functions
On the current output channel, when programmer functions are in operation with
setup data
C18
(for CH1) or
C41
(for CH2) set to 1, SP can be manually
manipulated. When SP is displayed in the basic display state, only one digit in the
SP value being entered blinks. When the SP value is incremented or decremented
by ↑ or ↓, the actual SP output also increments or decrements. SP values differ
from values being entered to setting items in that the ENT key need not be
pressed.
The blinking digit can be moved by pressing ← or →.
Output changes when moving from the AUTO to the MANUAL mode are
bumpless regardless of setup data
C14
(for CH1) or
C37
(for CH2) setting. When
moving from the MANUAL to the AUTO mode, the SP becomes the program
pattern SP, which results in a sudden change in output.
■ Auto-tuning (AT)
When operating in the AUTO mode in either of the RUN, HOLD, FAST or END
modes, setting values can be automatically written to the PID set in use by autotuning (AT). The following can be selected by variable parameter At(for CH1) or
At.2
(for CH2) setting.
0:AT is disabled.
1: General AT is executed.
2: Overshoot-inhibited AT is executed.
3: AT by neutral net is executed.
• Auto-tuning does not function when programmer functions are selected on
heat/cool output channel models and current output channel models.
6-14
Page 99

6-15
Chapter 6. OPERATION
• During execution of auto-tuning, progress of program operation time stops.
Accordingly, the DCP32 is in a similar state to the HOLD mode even in the
RUN or FAST modes.
• Auto-tuning in all instances involves calculating the downtime and critical
sensitivity of the control system according to two limit cycles and PID values
according to suitable characteristic equations for each, and automatically writing
these PID values.
• During execution of auto-tuning, PV fluctuates according to fluctuations in MV.
Before executing auto-tuning, make sure that fluctuations in PV will not cause
controller trouble.
• Normally, suitable values are written by setting variable parameter At setting to
1 or 3. However, when executing auto-tuning on a control system that easily
overshoots, either set to 2, or also use smart-tuning for carrying out overshoot
inhibit control. Setting to 3 executes AT by neural net so that suitable values are
calculated for wider range applications.
• The point at which output at auto-tuning is inverted (lower limit to upper limit,
and vice versa) is determined as follows from SP and PV at start of auto-tuning.
• Auto-tuning can be started by the AT key, external switch inputs and
communications. The AT key functions on the currently displayed channel.
During auto-tuning, the AT LED on the currently displayed channel blinks.
• If one or more of the following conditions occurs during auto-tuning, autotuning is canceled without PID constants being written, and the AT LED goes
out.
- Cancellation by the AT key (when the displayed channel indicates auto-tuning
in progress)
- Cancellation by external switch input
- Cancellation by communications
- Change in mode (move to MANUAL mode or READY mode)
- Execution of automatic motor valve opening adjustment on 2G output models
- When variable parameter At(for CH1) setting is changed to “0”
- When variable parameter 2
At.2
(for CH2) setting is changed to “0”
- When PV becomes out-of-range
Handling Precautions
• Auto-tuning will not function properly unless the control target is
connected.
• The time from start to end of auto-tuning varies according to the control
target.
SP
AT start Normal end
Time
PV > SP
PV < SP
SP ≠ PV
2/3
2/3
1/3
1/3
SP
AT start Normal end
Time
SP = PV operation
PV PV
Page 100

6-16
Chapter 6. OPERATION
• When auto-tuning is executed, control is stopped, and ON/OFF output
switching (if the output type is relay output or voltage output) or output
switching between the manipulated variable upper and lower limits of the
currently selected PID set (if the output type is current output or positionproportional output) is repeated several times. If this causes controller
trouble, manually set the PID value.
• Sometimes a suitable PID value cannot be obtained depending on the
control target. If this happens, manually set the PID value.
• Though auto-tuning can be executed simultaneously on both the CH1
and CH2 channels, suitable PID values cannot be obtained if PVs in
each channel interfere with each. If this happens, execute auto-tuning on
each channel individually.
 Loading...
Loading...