

Xeos Rover User Manual

Rover User Manual
Surface Iridium Satellite Beacon with GPS Location
Version 3.0
July 2019
Email
support@xeostech.com
Phone
(902) 444-7650
Fax
(902) 444-7651
Website
www.xeostech.com
Version No.
Date
Description
1.0
Oct 2013
Original Document
2.0
Jan 2015
Rewrite, added information on updating
2.5
Oct 2017
Document overhaul
2.6
Dec 2017
Standardized Commands and Bluetooth info
2.6.1
Jan 2018
Watch Circle information edits
2.6.2
Jan 2018
Fixed error in default timers of Timer 3
2.7
Feb 2018
Added further details to Bluetooth info (New BT update)
2.8
Apr 2018
Rewrote Understanding Position Information section
2.9
Aug 2018
Added changes for version 4170, encryption
3.0
July 2019
Overhaul; messages expanded, alarm mode tips, flash memory
Shipped From
Contact Us
Specifics
This manual version is written with respect to Rover firmware build 4170. If you wish to acquire
the latest firmware for your device, contact support@xeostech.com
Version History
Regular checks for the latest manual are suggested. Be sure to check Xeos Technologies’ manuals
page to compare versions and download the latest version.
Rover User Manual Version 3.0 2

Table of Contents
Shipped From .................................................................................................................................. 2
Contact Us ....................................................................................................................................... 2
Specifics ........................................................................................................................................... 2
Version History ................................................................................................................................ 2
General Description ........................................................................................................................ 6
Theory of Operation........................................................................................................................ 6
Preliminary Setup ............................................................................................................................ 7
Outside Diagram ......................................................................................................................... 7
Setting up an Iridium Account .................................................................................................... 7
Quickstart ........................................................................................................................................ 9
Before using the Rover ............................................................................................................... 9
Power-Up.................................................................................................................................... 9
Battery Installation ................................................................................................................ 9
Magnet ................................................................................................................................... 9
Confirm Transmission ................................................................................................................. 9
Operation ................................................................................................................................... 9
Understanding Position Information ............................................................................................ 10
Iridium Doppler position .......................................................................................................... 10
Global Positioning System ........................................................................................................ 11
Additional Models ......................................................................................................................... 11
ROBY ......................................................................................................................................... 11
On/Off Modes ............................................................................................................................... 12
Using the Magnet ..................................................................................................................... 12
LED Indicators ........................................................................................................................... 12
Messages From the Rover ............................................................................................................ 13
Version ..................................................................................................................................... 13
Position Message ..................................................................................................................... 13
Compressed Binary Position ................................................................................................ 13
ASCII Position (Type P) ......................................................................................................... 14
Status Change Message (Type S) .............................................................................................. 15
Information Message (Type I) .................................................................................................. 16
Rover User Manual Version 3.0 3

Orientation Change Message ................................................................................................... 16
Communicating with the Rover .................................................................................................... 17
Sending Commands via Email .................................................................................................. 17
Command Format ................................................................................................................ 17
Command Structure ............................................................................................................ 17
The Unlock Code .................................................................................................................. 18
Sending the Command ........................................................................................................ 18
Sending Commands Using XeosOnline .................................................................................... 19
Setting up to Send ............................................................................................................... 19
Xeos Beacon Bluetooth App ..................................................................................................... 19
Messages to the Rover .................................................................................................................. 20
Settings ..................................................................................................................................... 20
Lifetime Stats ............................................................................................................................ 21
Stats .......................................................................................................................................... 21
Timers............................................................................................................................................ 22
Rover/ROBY Timer Intervals ..................................................................................................... 23
Timer Command ....................................................................................................................... 23
Changing the Timers ............................................................................................................ 24
Watch Circle .................................................................................................................................. 25
Enabling the Watch Circle ........................................................................................................ 25
Setting the Watch Circle ........................................................................................................... 25
Message Enable ............................................................................................................................ 26
Encryption ..................................................................................................................................... 27
Generating your Key ................................................................................................................. 27
Enabling Encryption.................................................................................................................. 28
Setting Up Encryption on XeosOnline ...................................................................................... 28
Flash Memory ............................................................................................................................... 29
Dumping the Flash Memory ..................................................................................................... 29
Deleting the Flash Memory ...................................................................................................... 30
Other Commands .......................................................................................................................... 31
Testing the Rover .......................................................................................................................... 32
Before testing ........................................................................................................................... 32
Testing ...................................................................................................................................... 32
Rover User Manual Version 3.0 4

Power-up and Batteries ....................................................................................................... 32
Transmission ........................................................................................................................ 32
Response to commands ...................................................................................................... 33
Inverted Messaging ............................................................................................................. 33
Example .................................................................................................................................... 34
Deployment of the Rover .............................................................................................................. 34
Maintenance ................................................................................................................................. 35
Batteries ................................................................................................................................... 35
Choosing Batteries ............................................................................................................... 35
Adding/Replacing Batteries ................................................................................................. 35
O-Rings ..................................................................................................................................... 36
Removing the ROBY float ......................................................................................................... 37
Recovery and Storage .............................................................................................................. 37
Appendix A: Part Sourcing Summary ............................................................................................ 38
Appendix B: Technical Specifications ............................................................................................ 40
Appendix C: Sample Power Consumption Patterns ...................................................................... 41
Appendix D: Engineering Diagram ................................................................................................ 42
Appendix E: GPS Text Long ........................................................................................................... 43
Warranty, Support and Limited Liability ....................................................................................... 44
Rover User Manual Version 3.0 5

General Description
The Rover Surface Iridium satellite mooring location beacon continuously monitors location for
mobile surface assets and/or instrument moorings. Rover makes use of the bi-directional, global,
real time Iridium Satellite Short Burst Data (SBD) network in combination with GPS position
location. Rover’s sleek tubular design and internal dual Iridium/GPS antennas located at each end
cap allow it to be easily retrofitted into a variety of surface mounts. Even surface installations
which capsize may be able to transmit location information.
Inside the Rover is a 9603 Iridium satellite Short Burst Data core radio transceiver, a specialized
low power Xeos digital controller with GPS and Iridium hardware.
Rover is intended for surface deployments and should not be deployed in situations which exceed
100m in depth. Xeos Technologies Inc. (Xeos) manufactures other specific products for either
surface, or subsurface applications to depths of 11,000m.
Theory of Operation
The Rover is intended for providing regular location information on high value assets at the
surface, drifting or moored. After being activated, the Rover is deployed at the surface and begins
sending location messages as per the user settings. The internal battery pack provides over 1500
messages.
Operators can communicate with the surface deployed Rover via Iridium using email commands.
Status information can be obtained, including the health of the GPS system and battery voltage.
Timings are settable, and the default is one message every 3 hours. If you need to make a change
to settings, the Rover will receive the command to change the timing the next time it checks for
messages, as much as 3 hours after the command is sent.
The Rover will continue to send position messages based on the timings, until it is manually
turned off or the battery pack drops below the minimum voltage requirement of 7V.
Due to the location of dual Iridium/GPS antennas at both ends of the enclosure, the Rover will
continue to try and send position messages, even when inverted or capsized.
Rover User Manual Version 3.0 6
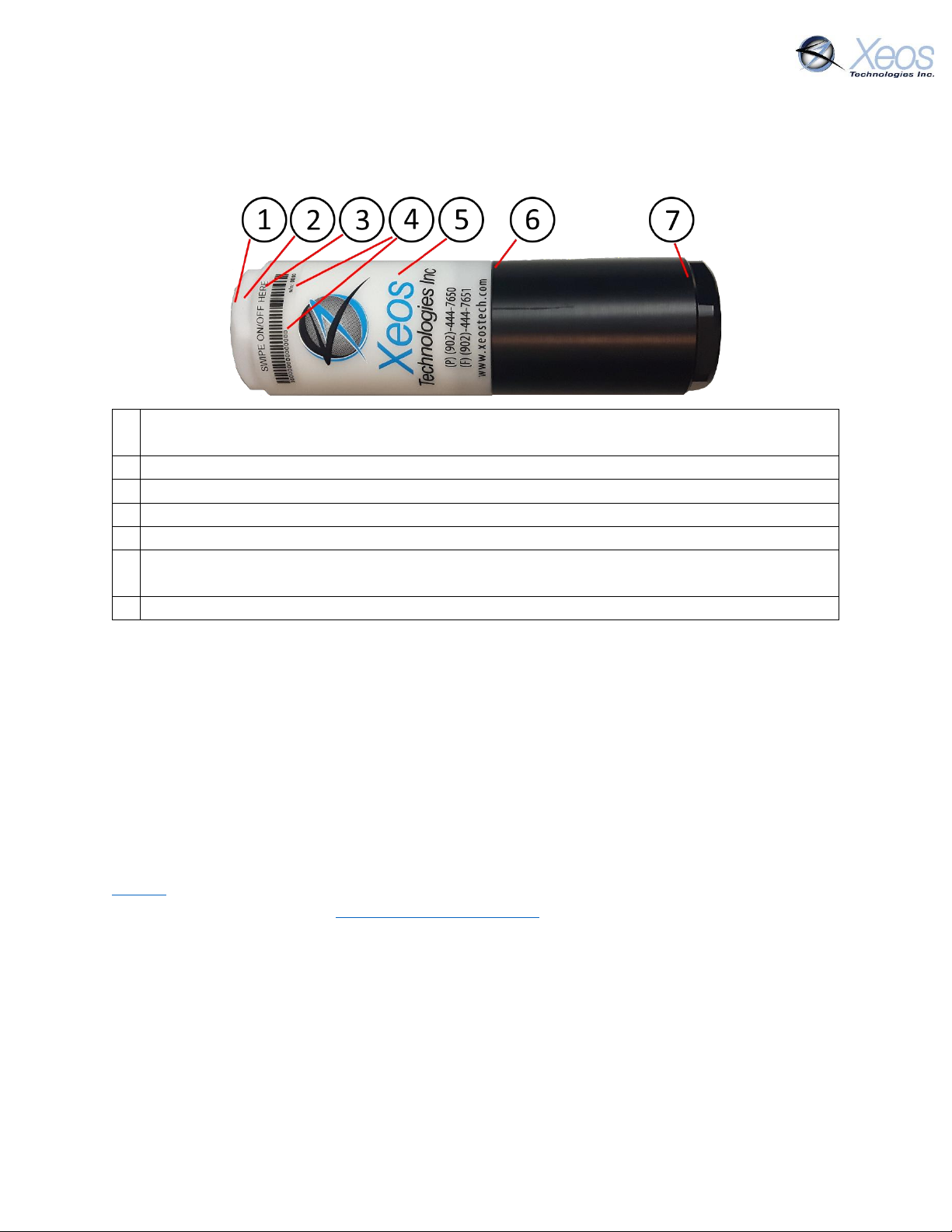
1
The LEDS of the Rover are located here. LEDs illuminate on magnet contact, power-up
and Bluetooth connection
2
The top Iridium and GPS antennae of the Rover are located here
3
The magnet switch for turning the Rover on and off is located behind the label
4
The 15-digit IMEI of the Rover’s Iridium modem and factory serial number is displayed
5
A QR code is available to scan to download the manual on new devices
6
Two sealing O-rings are located in the middle of the Rover. This is where the device is
opened to install batteries
7
The bottom Iridium and GPS antennae of the Rover are located here, used when inverted
Preliminary Setup
Outside Diagram
Setting up an Iridium Account
Rover makes use of the Iridium Satellite Systems’ Short Burst Data (SBD) service for the 9603
transceiver. This service is a global (including the Polar Regions), two-way, real-time and emailbased data delivery service with a maximum outbound (from beacon) message size of 340 bytes
and a maximum inbound (to beacon) message size of 270 bytes.
Rover end users must set up an approved data delivery account with their preferred service
provider. This can only be done once Xeos has provided the user with an International Mobile
Equipment Identity (IMEI) number. Each 9603 modem has a unique IMEI that must be registered
with the preferred service provider. For a list of service providers in your area please contact
Iridium for recommendations. Xeos Technologies is also able to provide Iridium SBD data service
and accounts. Please contact activations@xeostech.com for more information.
Each IMEI number is capable of being associated with up to five (5) unique email addresses (this
may vary between service providers). When registering an IMEI number, please provide the
service provider with a temporary Xeos testing account email address.
This account is: xeosbeaconb@gmail.com
This temporary email testing account can be deleted or replaced at any time after delivery of the
Rover. Once the SBD account has been activated, please contact your Xeos representative and
confirm this.
Rover User Manual Version 3.0 7
Rover makes use of a simple and robust binary email protocol as the default outgoing message
format. Any email application can be used to send and receive messages to or from the Rover,
however, the messages from the Rover in this format are not human-readable. XeosOnline is a
web-based monitoring system which allows users to view and manage information from the
Rover on a mapping system, as well as view the messages in a human-readable format.
XeosOnline also allows for the creation of multiple kinds of message forwarders which can
forward certain (or all) messages to a group of email addresses in a human-readable form.
Sending messages and changing configuration can be completed through XeosOnline. See
www.xeostech.com or your account manager for more information.
Rover User Manual Version 3.0 8

Quickstart
Before using the Rover
Ensure the IMEI of your device is activated through your chosen Iridium
provider and intended message recipients are added to its account ahead
of deployment.
Power-Up
Battery Installation
The Rover automatically turns on once all batteries are installed. The device must
be turned off via magnet or battery removal.
Magnet
Swipe the magnet slowly along the “SWIPE ON/OFF HERE” label
horizontally until the flashing GREEN LED on the top of the device remains
solid. The green LED will flash again while the device completes powerup.
Confirm Transmission
Turn the device on and place it outside in view of as much of the
sky as possible.
The unit will transmit a power-up message, and transmit one GPS
fix every 10 minutes at default settings within 5 minutes of
power-up for one hour.
Confirm that these messages are being received by your email
and/or XeosOnline.
Operation
When deploying the unit, power it up by swiping the magnet.
Once the unit is confirmed to be on, it is ready to be deployed.
Turn the Rover OFF using the same magnet method as turning ON, with the RED LED in
place of the green.
Rover User Manual Version 3.0 9
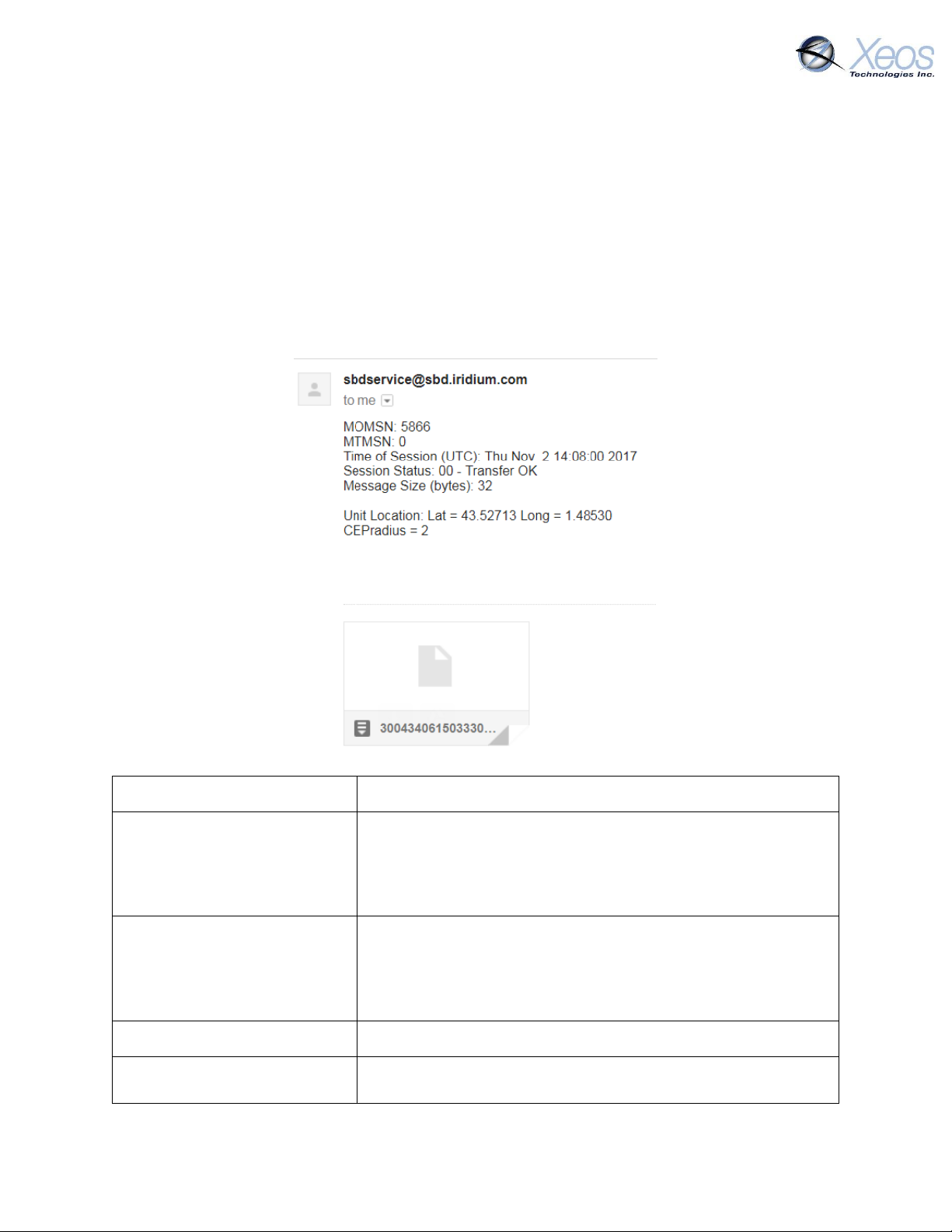
sbdservice@sbd.iridium.com
All messages from Iridium devices come from this address.
MOMSN: 5866
Mobile Originating Message Serial Number; each individual
message has its own incrementing serial number. A mobile
originating message is one that comes from the Iridium
device.
MTMSN: 0
Mobile Terminating Message Serial Number; like the MOMSN,
messages to Iridium devices (like commands) also have an
incrementing serial number. Since the message in the
example is from an Iridium device, the MT number is zero.
Time of Session (UTC)
The time the message arrived at the Iridium Gateway
Session Status
Each message will have a code determined by how well the
message was received; codes 00, 01 and 02 are acceptable
Understanding Position Information
There are two types of position information which will be sent via the Iridium Gateway.
Iridium Doppler position
The Iridium Gateway calculates the Iridium transceivers’ position on earth when it receives a
transmission, using Doppler technology. As a result, it is often very inaccurate. This location is
only visible to users getting emails directly from the Rover, as opposed to emails forwarded by
Xeos Online. An example of a “raw” Iridium message via email is below and will always have the
IMEI of the device in the subject line, regardless of its name on XeosOnline.
Rover User Manual Version 3.0 10
and will always have their code name (ex. Transfer OK) next to
this number.
Message Size (bytes)
The size of the actual message sent by the Iridium device,
which is in the attachment in the email.
*Unit Location
The Doppler position of the device as estimated by Iridium’s
network. It is NOT the GPS position measured by the device.
*CEPradius = 2
The numerical value of how accurate the above position is;
with a value of 2, This means that using the Lat/Long that the
body has supplied, Iridium is 80% confident (always 80%) that
the device sending the message is within a circle, 2 kilometers
in radius, with the Lat/Long given as the centre of that circle.
The higher the CEPradius value, the larger the circle and
therefore the less accurate that position.
*These items can be enabled/disabled by your Iridium provider if desired.
Global Positioning System
Location information generated by the device itself is embedded in the SBD attachment sent via
the Iridium Gateway and can only be seen through the Xeos Online system or situations where
the position information is sent in a plain-text format (XeosOnline message forwarder or using
the $msgenable command). This position information is accurate to within several feet of the
true position.
Additional Models
ROBY
The ROBY model is a modified Rover unit, designed for surface
tracking of oil spills. The ROBY incorporates a highly visible
urethane foam float and user-configured watch circle
functionality to keep track of spill movement.
The ROBY functions identically to the Rover except for the
removal of the inverted alarm mode and different timer intervals.
Therefore, the ROBY will transmit consistently from either end
until it has exited its designated Watch Circle area.
Rover User Manual Version 3.0 11
Unit Status Indicators
Action: Turn On
Swipe Magnet back and forth across topside until LED is solid green
Action: Turn Off
Swipe magnet back and forth across topside until LED is solid red
Check Status
Swipe magnet once across topside (red is off, green is on)
Other Indicators
Flashing 4 Hz on
power-up
Device powering up, performing self-test
Flashing 0.5 Hz
after power-up
Self-test failure
Flashing 4 Hz on
Bluetooth
Connection
Device acknowledging Bluetooth is connected
On/Off Modes
Using the Magnet
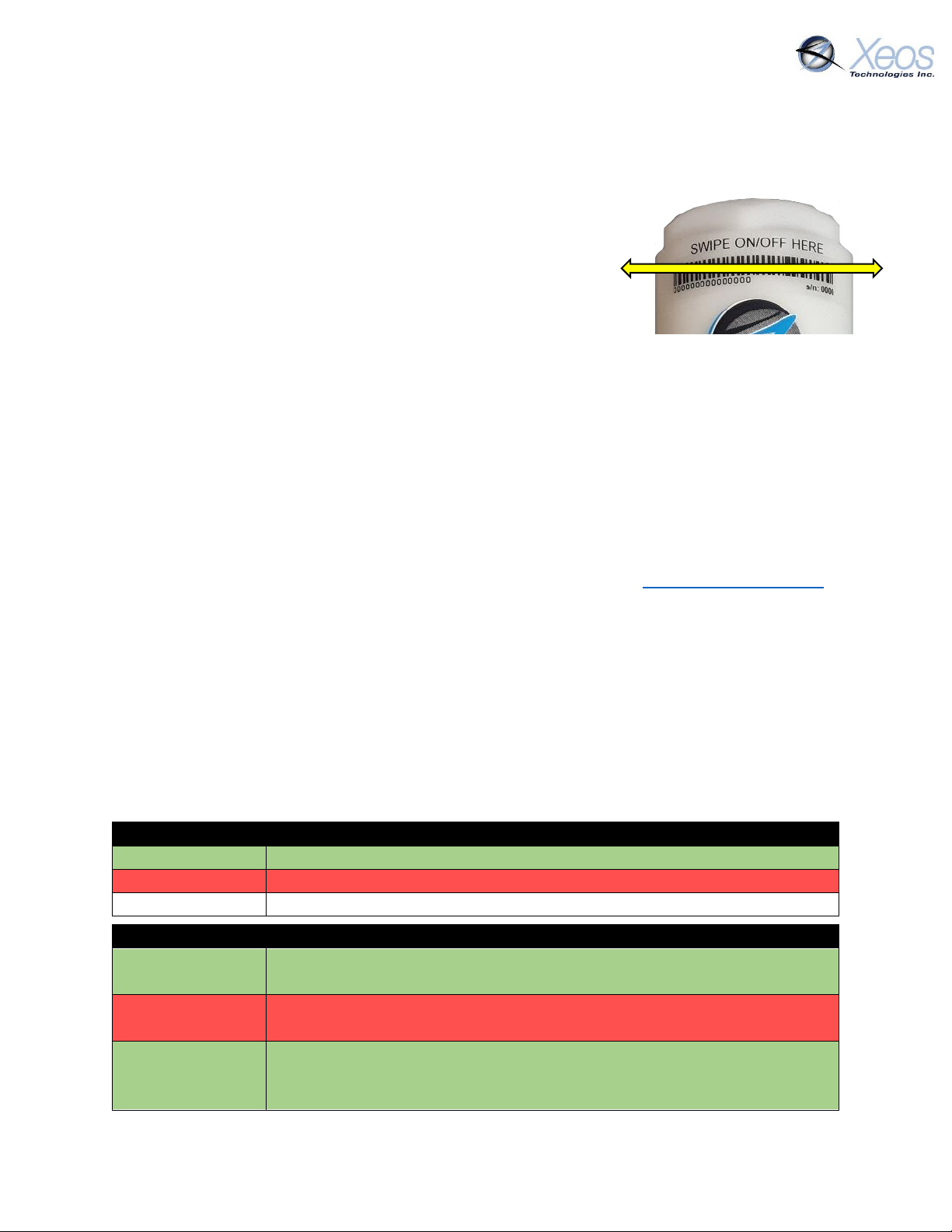
The Rover beacon is turned ON and OFF using an external magnet
near an internal magnetic reed switch, and operation can be
identified by viewing the LED through the top of the Rover.
To turn the Rover ON, begin swiping the magnet slowly up and
down at the location of the reed switch. The reed switch is located
directly behind the Swipe On/Off Here label.
To turn the Rover OFF, repeat the above procedure with the magnet and watch the LED change
from green to red. A red flashing LED indicates the device is powering down; continue to swipe
the magnet until you see a solid red LED. A solid red LED indicates that the device is turned OFF.
At any time, the magnet can be placed against the location of the reed switch once to see which
mode the beacon is currently in. A red LED indicates the device is turned OFF. A green LED
indicates the device is turned ON.
If the batteries are low, or if some of the batteries have been inserted incorrectly, the Rover will
sound a quick intermittent beep and flash the red LED at the top for 5 minutes, or until the
batteries have been corrected or replaced. If this behavior persists even if the batteries are full
and oriented correctly, this indicates a SELF-TEST FAILURE. Contact support@xeostech.com if
this occurs.
It is important to let all LEDs stop illuminating before initiating another action.
Cycling power for any reason, for example by using the switch to turn OFF/ON or by
removing battery power, will initiate the Startup Mode.
LED Indicators
The top of the Rover (and bottom of ROBY) use red and green LEDs to show their on/off status.
It is also to be used as an indicator for when the magnetic switch is used to turn the device on/off.
This same LEDs are also used during self-test failure or Bluetooth connection.
Rover User Manual Version 3.0 12
Version Readout
MMDDHHMM
Timestamp in UTC
V
Type of message (Version)
Firmware Version
Product; Major, minor, build of firmware
Hardware Revision
Hardware revision, set during assembly
Serial
The unit’s serial number
GPS Version
Firmware version of GPS chip
Iridium Version
Firmware version of Iridium chip
Reset Count
The number of resets since firmware was uploaded
Current
Cause of last power off
Previous
Cause of previous power off, not used in Rover
Message Log Readout
Timestamp
Date and time in UTC of the latest position reading
BatteryV: 5.49
Loaded voltage of the power supply; minimum battery voltage
observed during the previous Iridium transmission
44.714406
Latitude of fix, decimal degrees
-63.604947
Longitude of fix, decimal degrees
Vul: 8.16
Unloaded voltage of power supply; battery voltage data from
measurement taken just prior to the turning on of the Iridium modem
Messages From the Rover
Version
The $ver command will return a summary of both firmware and hardware versions:
Position Message
Typical position messages are sent in compressed binary format (Message Type 10) to save on
data usage and are parsed in XeosOnline. If XeosOnline is not used, GPS Text Short (Message
Type 0) can be used to read position messages as P-Type.
Compressed Binary Position
The default format for positions is compressed to save on Iridium data usage. This binary format
is parsed into a readable format by XeosOnline, placing its full contents in the Message and
Location Logs. The binary format is stackable and can transmit more than one position per Iridium
transmission. In this situation, all recorded positions will be displayed in the Location Log, while
the latest position will be displayed in the Message Log.
Rover User Manual Version 3.0 13
Location Log Readout
Timestamp
Date and time in UTC of this specific position reading
44.714406
Latitude of fix, decimal degrees
-63.604947
Longitude of fix, decimal degrees
Alarm: False
Indicates if the device has determined if it is in an alarm state
Bearing
Direction of movement determined by device
Speed (km/h)
Speed measurement in kilometers per hour
Speed (knots)
Speed measurement in knots
Altitude
Not used
SNR
SNR (Signal-to-noise ratio) of GPS Fix, higher is better (>37 is good)
Position Readout
06221600
Timestamp in UTC (Month/Day/Hour)
P
Type of message (Position)
44.71441
Latitude of fix, decimal degrees
-63.60495
Longitude of fix, decimal degrees
49
SNR (Signal-to-noise ratio) of GPS Fix, higher is better
848
Unloaded voltage of device at the time of GPS Fix
Each compressed message is 26 bytes in size, with an additional 11 bytes added for each
additional “stacked” position.
ASCII Position (Type P)
In ASCII position format, only the most recent fix is sent at each interval, therefore it is most
efficient to have GPS and Iridium intervals equal. This message also appears as it is shown below
in XeosOnline.
P-type messages are approximately 39 bytes:
The message type used can be changed using the $msgenable command.
Rover User Manual Version 3.0 14
 Loading...
Loading...