

Page 1

WD Caviar®Blue
SATA Hard Drives
™
XL500S
Technical Reference Manual
WD5000AAKX
WD5000AAKS
WD3200AAKX
WD2500AAKX
WD CONFIDENTIAL
Page 2
© 2010 Western Digital Technologies, Inc.
All Rights Reserved
Information furnished by WD is believed to be accurate and reliable. No license is granted by implication or
otherwise under any patent or patent rights of WD. WD reserves the right to change specifications at any
time without notice.
Western Digital, WD, the WD logo, and WD Caviar are registered trademarks; and WD Caviar Blue,
IntelliSeek, NoTouch, Data Lifeguard, CacheFlow, and FIT Lab are trademarks of Western Digital
Technologies, Inc. Other marks may be mentioned herein that belong to other companies.
Western Digital
20511 Lake Forest Drive
Lake Forest, CA 92630
2679-701211-A06
Document Control Number Definition:
2679-701xxx- 0xx-Px NRD
Doc Control No. Doc Revision Level Non-Released Document
Oxx = Released Version
Px = Review Cycle
WD CONFIDENTIAL
Page 3
WD Caviar Blue XL500S
Technical Reference Manual
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL)
Page 4

RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 5

XL500S Table of Contents
TABLE OF CONTENTS
1. DESCRIPTION AND FEATURES ................................................................................................. 1
1.1 General Description....................................................................................................................................................................... 1
1.2 Product Features ............................................................................................................................................................................ 2
2. SPECIFICATIONS....................................................................................................................... 4
2.1 Performance Specifications ......................................................................................................................................................... 4
2.2 Physical Specifications.................................................................................................................................................................. 5
2.2.1 Physical Dimensions ...................................................................................................................................................... 6
2.3 Mechanical Specifications............................................................................................................................................................ 7
2.4 Electrical Specifications................................................................................................................................................................ 8
2.4.1 Current Requirements and Power Dissipation ........................................................................................................ 8
2.4.2 Input Voltage Requirements......................................................................................................................................... 9
2.4.3 Ripple................................................................................................................................................................................. 9
2.4.4 Power Connectors and Cables................................................................................................................................... 9
2.5 Environmental Specifications.....................................................................................................................................................10
2.5.1 Shock and Vibration .....................................................................................................................................................10
2.5.2 Temperature and Humidity .........................................................................................................................................11
2.5.3 Thermocouple Location...............................................................................................................................................11
2.5.4 Cooling............................................................................................................................................................................ 12
2.5.5 Atmospheric Pressure .................................................................................................................................................12
2.5.6 Acoustics ........................................................................................................................................................................12
2.5.7 RoHS (Restriction of Hazardous Substances) ......................................................................................................12
2.6 Reliability Specifications .............................................................................................................................................................12
2.7 Device Plug Connector Pin Definitions ...................................................................................................................................13
2.8 Agency Approvals.........................................................................................................................................................................14
2.9 Full Model Number Specification.............................................................................................................................................. 14
3. PRODUCT FEATURES.............................................................................................................. 15
3.1 SATA 6 Gb/s and 3 Gb/s .........................................................................................................................................................15
3.2 Perpendicular Magnetic Recording (PMR).............................................................................................................................16
3.3 IntelliSeek .......................................................................................................................................................................................16
3.4 NoTouch Ramp Load Technology ............................................................................................................................................16
3.5 Native Command Queuing (NCQ)...........................................................................................................................................16
3.6 Pre-emptive Wear Leveling (PWL) ..........................................................................................................................................16
3.7 Femto Slider...................................................................................................................................................................................17
3.8 S.M.A.R.T. Command Transport (SCT)...................................................................................................................................17
3.8.1 Write Same ....................................................................................................................................................................17
3.8.2 Read/Write Long ..........................................................................................................................................................17
3.8.3 Temperature Reporting................................................................................................................................................17
3.9 World Wide Name (WWN) .......................................................................................................................................................18
3.10 Reliability Features Set................................................................................................................................................................18
3.10.1 Data Lifeguard™ ............................................................................................................................................................18
3.10.2 Thermal Management ..................................................................................................................................................19
3.10.3 Internal Environmental Protection System ..............................................................................................................19
3.10.4 Recoverable Errors.......................................................................................................................................................19
3.10.5 Unrecoverable Errors ...................................................................................................................................................19
3.10.6 Self Test ..........................................................................................................................................................................19
3.10.7 ATA Error Logging........................................................................................................................................................20
3.10.8 Defect Management.....................................................................................................................................................20
3.10.9 Automatic Defect Retirement.....................................................................................................................................20
3.10.10 Error Recovery Process...............................................................................................................................................20
3.11 Hot Plug Support..........................................................................................................................................................................21
3.11.1 Hot Plug Technical Issues .......................................................................................................................................... 21
3.12 Active LED Status ........................................................................................................................................................................24
3.13 Fluid Dynamic Bearings (FDB)..................................................................................................................................................24
3.14 Staggered Spinup and Activity Indication (SATA Power Pin 11) .....................................................................................24
3.14.1 Staggered Spinup ........................................................................................................................................................24
2679-701211-A06 RELEASED 9/30/10 (WD CONFIDENTIAL) i
Page 6

Table of Contents XL500S
3.14.2 Activity Indication ..........................................................................................................................................................24
3.15 CacheFlow™ ..................................................................................................................................................................................24
3.15.1 Write Cache...................................................................................................................................................................25
3.15.2 Read Cache ...................................................................................................................................................................25
3.16 48-bit Logical Block Addressing (LBA) ..................................................................................................................................25
3.17 Power Management .....................................................................................................................................................................25
3.18 Self-Monitoring, Analysis, and Reporting Technology (S.M.A.R.T.)..................................................................................26
3.19 Security Mode ...............................................................................................................................................................................26
3.19.1 Master and User Passwords ......................................................................................................................................26
3.19.2 Security Levels ..............................................................................................................................................................26
3.20 Automatic Acoustic Management (AAM)................................................................................................................................26
4. ATA COMMAND SET ............................................................................................................. 27
4.1 Host Interface Commands .........................................................................................................................................................27
4.1.1 ATA-8 Commands........................................................................................................................................................27
4.1.2 Optional Subcommands .............................................................................................................................................28
4.1.3 Obsolete Commands...................................................................................................................................................28
4.1.4 SCT Commands ...........................................................................................................................................................29
4.2 S.M.A.R.T. (B0h)........................................................................................................................................................................... 29
4.2.1 Read Attribute Values Sub-Command ....................................................................................................................29
4.2.2 Supported Attributes ...................................................................................................................................................31
4.2.3 Read Log Sector...........................................................................................................................................................32
4.3 Identify Device (ECh)...................................................................................................................................................................33
4.4 Set Features (EFh) ......................................................................................................................................................................39
5. INSTALLATION AND SETUP PROCEDURES............................................................................. 40
5.1 Unpacking ......................................................................................................................................................................................40
5.1.1 Handling Precautions...................................................................................................................................................40
5.1.2 Inspection of Shipping Container .............................................................................................................................40
5.1.3 Removal From Shipping Container...........................................................................................................................40
5.1.4 Removal From Static Shielding Bag.........................................................................................................................40
5.1.5 Moving Precautions......................................................................................................................................................41
5.2 Mounting.........................................................................................................................................................................................41
5.2.1 Mounting Restrictions..................................................................................................................................................41
5.2.2 Orientation......................................................................................................................................................................41
5.2.3 Screw Size Limitations ................................................................................................................................................41
5.2.4 Grounding.......................................................................................................................................................................41
5.3 Hard Drive Installation.................................................................................................................................................................. 41
5.3.1 Jumper Settings.............................................................................................................................................................42
5.3.2 Attach the Power Supply Cable................................................................................................................................44
5.3.3 Attach SATA Interface Cable.....................................................................................................................................44
5.4 Serial ATA Latching Connector ................................................................................................................................................44
6. MAINTENANCE ........................................................................................................................ 45
ECHNICAL SUPPORT............................................................................................................. 46
7. T
7.1 WD Online Services ....................................................................................................................................................................46
8. GLOSSARY .............................................................................................................................. 47
ii RELEASED 9/30/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 7

XL500S List of Figures
LIST OF FIGURES
Figure 2-1 Mounting Dimensions...........................................................................................................................................7
Figure 2-2 Drive Base Casting Thermocouple Location ............................................................................................... 11
Figure 2-3 Forced Airflow Direction ................................................................................................................................... 12
Figure 2-4 Standard Factory Connectors ......................................................................................................................... 13
Figure 5-1 SATA 6 Gb/s Jumper Settings........................................................................................................................ 42
Figure 5-2 SATA 3 Gb/s Jumper Settings........................................................................................................................ 43
Figure 5-3 Connector Locations ......................................................................................................................................... 44
Figure 5-4 SATA Interface Cable........................................................................................................................................ 44
2679-701211-A06 RELEASED 9/30/10 (WD CONFIDENTIAL) iii
Page 8

List of Tables XL500S
LIST OF TABLES
Table 2-1 Shock and Vibration ............................................................................................................................................ 10
Table 2-2 Device Pin Connector Pin Definitions............................................................................................................. 13
Table 2-3 Full Model Number Description........................................................................................................................ 14
Table 4-1 ATA-8 Command Opcodes .............................................................................................................................. 27
Table 4-2 Optional Subcommands ................................................................................................................................... 28
Table 4-3 Obsolete Command Opcodes ......................................................................................................................... 28
Table 4-4 SCT Action Codes .............................................................................................................................................. 29
Table 4-5 Definitions for the 512 Bytes. ........................................................................................................................... 29
Table 4-6 Defined Error Logging Sectors......................................................................................................................... 32
Table 4-7 Identify Device Command.................................................................................................................................. 33
iv RELEASED 9/30/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 9

XL500S Description and Features
1.0 DESCRIPTION AND FEATURES
1.1 General Description
This WD SATA drive combines up to 16 MB cache and 6 Gb/s transfer rate for lightning-fast
performance and cool, quiet operation. WD’s IntelliSeek™ technology calculates the optimum
seek speeds to lower power consumption, noise and vibration. And to increase reliability,
NoTouch™ parks the recording head off the drive surface during spin up, spin down and when
the drive is off to ensure the head never touches the disk surface. These drives scored a
perfect 5.9 on the Windows Experience Index and are Windows Vista™ certified.
These hard drives are your best choice for today’s powerful, information-hungry systems
running Windows 2000 Advanced Server, Windows 2003 Server, Windows Vista, Windows
XP, and Windows 2000 operating systems on Intel
as AMD processors.
WD’s rugged and reliable hard drives are designed and manufactured to the highest
standards of quality and reliability. Built to last, this SATA hard drive is made for years of coolrunning, high-performance operation around the clock. Before shipping, every drive
undergoes over 200 rigorous tests to ensure functionality and compatibility.
®
Itanium®, Xeon™ and Pentium® 4 as well
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 1
Page 10

Description and Features XL500S
1.2 Product Features
Serial ATA (SATA) — Serial ATA (SATA) is the next generation bus interface for hard
drives. It is designed to replace Parallel ATA, and has many advantages including
increased transfer rate, improved signal integrity, enhanced data protection, and hot plug
support.
Perpendicular Magnetic Recording (PMR) — With PMR technology the
magnetization of each data bit is aligned vertically to the spinning disk, rather than
longitudinally as has been the case in hard drive technology for decades. This enables
more data on a given disk than is possible with conventional longitudinal recording, and
provides a platform for future expansion of hard drive densities.
IntelliSeek™ — Key product feature that calculates optimum seek speeds to lower
power consumption, noise, and vibration.
NoTouch™ Ramp Load Technology — The recording head never touches the disk media
ensuring significantly less wear to the recording head and media as well as better drive protection in
transit.
Native Command Queuing (NCQ) — Performance of a random I/O workload can be
improved through intelligent re-ordering of the I/O requests so they read/write to and from
the nearest available sectors and minimize the need for additional disk revolutions or head
actuator movement. This improvement can be achieved though Native Command Queing
(NCQ) , which is supported by these hard drives.
Pre-emptive Wear Leveling (PWL) —This WD feature provides a solution for
protecting the recording media against mechanical wear. In cases where the drive is so
busy with incoming commands that it is forced to stay in a same cylinder position for a
long time, the PWL control engine initiates forced seeks so that disk lubricant maintains
an even distribution and does not become depleted. This feature ensures reliability for
applications that perform a high incidence of read/write operations at the same physical
location on the disk.
Femto Slider — These drives incorporate the femto slider form factor in which the read/
write head is mounted on the small, lightweight femto slider which allows the head to
move more quickly from track to track on the disk.
S.M.A.R.T. Command Transport (SCT) — The SCT Command Transport feature set
provides a method for a host to send commands and data to a device and for a device to
send data and status to a host using log pages.
World Wide Name (WWN) — The World Wide Name (WWN) defined in ATA/ATAPI-7
is a modification of the IEEE extended unique identifier 64 bit standard (EUI-64) and is
comprised of three major components: naming authority, organizationally unique identifier
(OUI) and serial number. WD's OUI is 0014EEh.
Reliability Features Set-Data Lifeguard™ — Representing WD's ongoing
commitment to data protection, Data Lifeguard includes features that enhance the drive’s
ability to prevent data loss. Data Lifeguard data protection utilities include thermal
management, an environmental protection system, and embedded error detection and
repair features that automatically detect, isolate, and repair problem areas that may
develop over the extended use of the hard drive. With these enhanced data reliability
features, the drive can perform more accurate monitoring, error repair, and deliver
exceptional data security.
2 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 11

XL500S Description and Features
Hot Plug Support — SATA supports hot plugging (also known as “hot swapping”), the
ability to swap out a failed hard drive without having to power down the system or reboot.
This capability contributes to both data availability and serviceability without any
associated downtime, making it a critical feature for extending SATA into enterprise
applications.
Active LED Status — The drive supports external LED requirements. It provides an
activity LED output which is ON during command execution and OFF otherwise.
Fluid Dynamic Bearings (FDB) — Bearing design that incorporates a layer of high-
viscosity lubricant instead of ball bearings in the hard drive spindle motor. As an
alternative to conventional ball bearing technology, FDB designs provide increased nonoperational shock resistance, speed control, and improved acoustics.
Staggered Spin-Up — Next generation SATA 3.0 Gb/s feature that allows the system
to control whether the drive will spin up immediately or wait until the interface is fully
ready.
CacheFlow™ —WD’s unique, multi-generation caching algorithm evaluates the way data
is read from and written to the drive and adapts “on-the-fly” to the optimum read and write
caching methods. CacheFlow minimizes disk seek operations and overheads due to
rotational latency. CacheFlow supports sequential and random write cache. With write
cache and other CacheFlow features, the user can cache both read and write data. The
cache can hold multiple writes and collectively write them to the hard disk.
48-bit Logical Block Addressing (LBA) — WD SATA drives support both 48-bit and
28-bit LBA and CHS-based addressing. LBA is included in advanced BIOS and
operating system device drivers and ensures high capacity disk integration.
Power Management — The drive supports the ATA and SATA power management
command set, allowing the host to reduce the power consumption of the drive by issuing
a variety of power management commands.
Self-Monitoring, Analysis, and Reporting Technology (S.M.A.R.T.) — S.M.A.R.T.
enables a drive’s internal status to be monitored through diagnostic commands at the
host level and during offline activities. S.M.A.R.T. devices employ data analysis algorithms
that are used to predict the likelihood of some near-term degradation or fault conditions.
When used with a S.M.A.R.T. application, the drive can alert the host system of a negative
reliability status condition. The host system can then warn the user of the impending risk
of data loss and recommend an appropriate action.
ATA Security — The drive supports the ATA Security Mode Feature set. The ATA
Security Mode feature set allows the user to create a device lock password that prevents
unauthorized hard disk access even if the drive is removed from the host computer. The
correct password must be supplied to the hard drive in order to access user data. Both
the User and Master Password features are supported, along with the High and Maximum
security modes. The Master Password Revision code is also supported. This feature
varies by drive configuration and may not be available on all configurations.
Automatic Acoustic Management (AAM) — The drive supports the Automatic
Acoustic Management feature. This feature allows the host to select the acoustic level of
the hard drive.
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 3
Page 12
Specifications XL500S
2.0 SPECIFICATIONS
2.1 Performance Specifications
Average Latency 4.2 ms (nominal)
Rotational Speed 7200 RPM (nominal)
Data Transfer Rate (maximum)
- Buffer to Host
- Host to/from Drive
Interleave 1:1
Buffer Size 16 MB
Error Rate - Unrecoverable <1 in 10
Spindle Start Time
- From Power-on to Drive Ready
- From Power-on to Rotational Speed
Spindle Stop Time 5.1s average
Load/Unload Cycles
1
As used for buffer or cache, one megabyte (MB) = 1,048,576 bytes. As used for transfer rate or interface,
megabyte per second (MB/s) = one million bytes per second, and gigabit per second (Gb/s) = one billion bits
per second. Effective maximum SATA 3 Gb/s transfer rate calculated according to the Serial ATA specification
published by the SATA-IO organization as of the date of this specification sheet. Visit www.sata-io.org for details.
2
Defined as the time from power-on to the setting of Drive Ready and Seek Complete including calibration.
3
Defined as the time from power-on to when the full spindle rotational speed is reached.
4
Controlled unload at ambient condition.
4
1
2
3
6 Gb/s maximum (WDxxxxAAKX)
3 Gb/s maximum (WD5000AAKS)
126 MB/s sustained (maximum)
15
bits read
8.5s average
5.5s average
300,000
4 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 13
XL500S Specifications
2.2 Physical Specifications
Physical Specifications
Capacity 500,107 MB 320,072 MB 250,059 MB
Interface SATA 6 Gb/s (AAKX)
Number of Disks 1 1 1
Data Surfaces 221
Number of Heads 221
Bytes per Sector 512 512 512
User Sectors per Drive 976,773,168
Servo Type Embedded Embedded Embedded
Recording Method EPR4 Rate 16/17 PRML Rate 16/17 PRML Rate 16/17 PRML
ECC Reed-Solomon Reed-Solomon Reed-Solomon
Head Park
PRML - Partial Response Maximum Likelihood
1
2
3
Turning off the system power causes the drive to perform an automatic head park operation.
2
Specifications represented are of a typical production drive and may be subject to change or variation without
notice.
As used for storage capacity, one megabyte (MB) = one million bytes, one gigabyte (GB) = one billion bytes, and
one terabyte (TB) = one trillion bytes. Total accessible capacity varies depending on operating environment. As
used for buffer or cache, one megabyte (MB) = 1,048,576 bytes. As used for transfer rate or interface, megabyte
per second (MB/s) = one million bytes per second, and gigabit per second (Gb/s) = one billion bits per second.
Effective maximum SATA 3 Gb/s transfer rate calculated according to the Serial ATA specification published by the
SATA-IO organization as of the date of this specification sheet. Visit www.sata-io.org for details.
1,2
WD5000AAKX
WD3200AAKX WD2500AAKX
WD5000AAKS
SATA 3 Gb/s (AAKS)
Automatic Automatic Automatic
SATA 6 Gb/s SATA 6 Gb/s
625,142,448
488,397,168
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 5
Page 14
Specifications XL500S
2.2.1 Physical Dimensions
English Metric
Dimension Tolerance Dimension Tolerance
Height 1.028 inches MAX 26.1 mm MAX
Length 5.787 inches MAX 147.0 mm MAX
Width 4.00 inches ±0.01 inch 101.6 mm ±0.25 mm
Weight (QD) 0.99 pounds ±10% 0.45 kg ±10%
Weight (STD) 0.97 pounds ±10% 0.44 kg ±10%
6 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 15
XL500S Specifications
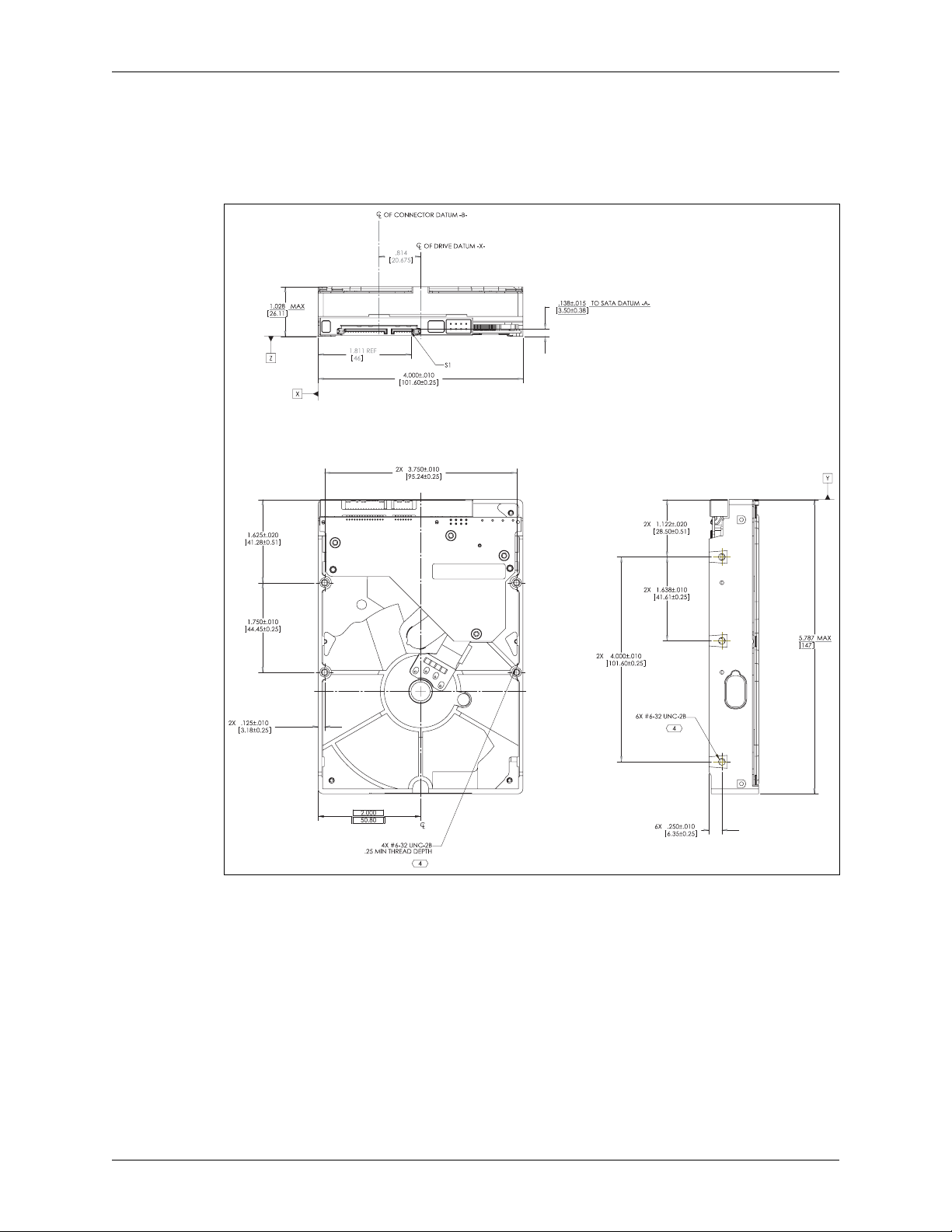
2.3 Mechanical Specifications
Figure 2-1 shows the mounting dimensions and locations of the screw holes for the drive.
Figure 2-1. Mounting Dimensions
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 7
Page 16
Specifications XL500S
2.4 Electrical Specifications
2.4.1 Current Requirements and Power Dissipation
Operating Mode
RMS Current
1
Power, Average
12 VDC 5 VDC
Spinup 1.6A (max) 490 mA 12.9W
Read/Write 275 mA 535 mA 6.0W
Seek 300 mA 525 mA 6.3W
POWER MANAGEMENT COMMANDS
Operating Mode
RMS Current
1
Power, Average
12 VDC 5 VDC
Idle (E1H) 275 mA 450 mA 5.6W
Standby (E0H) 6 mA 170 mA 0.92W
Sleep (E6H) 6 mA 170 mA 0.92W
1
All values are typical (25°C, 5.0V, and 12V input).
3.3V Serial ATA power not utilized in this product.
Note: Current measurements cut off frequency at 1 kHz.
1
1
8 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 17

XL500S Specifications
2.4.2 Input Voltage Requirements
The input voltage requirements are +5.0V ± 5% and +12.0V ± 10%.
2.4.3 Ripple
+12 VDC +5 VDC
Maximum
Frequency
200 mV (double amplitude)
0-30 MHz
100 mV (double amplitude)
0-30 MHz
2.4.4 Power Connectors and Cables
SATA Connectors
For information on SATA data connectors, refer to the Serial ATA 1.0 specification available
for download at www.serialata.org.
At the time of this printing, there are no published standards for SATA power/mating
connectors or power/data cable wire gauges.
Cabling Requirements for SATA
The SATA cable consists of four conductors in two differential pairs. The cable may also
include drain wires to be terminated to the ground pins in the SATA cable receptacle
connectors. See the SATA 1.0 specification for cable specifications. The cable's maximum
length is one meter.
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 9
Page 18
Specifications XL500S
2.5 Environmental Specifications
2.5.1 Shock and Vibration
Table 2-1. Shock and Vibration
Shock
Operating 30G, 2 ms (read/write)
65G, 2 ms (read)
Non-operating (2 ms) 350G
Note: Half-sine wave, measured without shock isolation and without non-recoverable errors.
Vibration
Operating Linear: 20-300 Hz, 0.75G (0 to peak)
2
Random: 0.008 g
Non-operating Linear: 20-500 Hz, 4.0G (0 to peak)
Random: 0.05 g
Sweep Rate 0.5 octave/minute minimum
Drive Generated Vibration
Operating 0.2 gm-mm average with the drive in an unconstrained condition
Rotational Shock Non-Operating
Amplitude 20K rad/sec
Duration 2 ms
/Hz (10-300 Hz)
2
/Hz (10-300 Hz)
2
Operating Vibration
Drives are tested by applying a random excitation in each linear axis, one axis at a time. The
drive incurs no physical damage and no hard errors while subjected to continuous vibration
not exceeding the level listed in Table 2-1. Operating performance may degrade during
periods of exposure to continuous vibration.
Non-Operating Vibration
Note: This specification applies to handling and transportation of unmounted drives.
Drives are tested by applying a random excitation in each linear axis, one axis at a time. The
drive incurs no physical damage when subjected to continuous vibration not exceeding the
level listed in Table 2-1.
Packaged Shock and Vibration
The shipping packaging is designed to meet the National/International Safe Transit
Association (N/ISTA) standards for packaged products. The drive incurs no physical damage
when subjected to the N/ISTA standards.
10 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 19

XL500S Specifications
2.5.2 Temperature and Humidity
Temperature & Humidity
Operating ambient temperature
Max base casting temperature
S.M.A.R.T. temperature value reported within ±3°C
Humidity 5-95% RH non-condensing
Thermal Gradient 20°C/hour (maximum)
Humidity Gradient 20%/hour (maximum)
Non-operating Temperature -40°C to 70°C
Humidity 5-95% RH non-condensing
Thermal Gradient 30°C/hour (maximum)
Humidity Gradient 20%/hour (maximum)
1
Ambient temperature is defined as the temperature of the environment immediately surrounding the drive. The
system environment must allow sufficient air flow to limit maximum surface temperatures as defined.
2
See Figure 2-2. Actual drive case temperature should be below 65°C and within the 0-60°C operating ambient
temperature.
1
0°C to 60°C
2
65°C
37.7°C (maximum wet bulb)
33°C (maximum wet bulb)
2.5.3 Thermocouple Location
Component Location
Drive base casting #1, Figure 2-2
Figure 2-2. Drive Base Casting Thermocouple Location
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 11
Page 20

Specifications XL500S
2.5.4 Cooling
If forced air cooling is required, the drive must be positioned to receive airflow from one or
more fans as indicated in Figure 2-3.
Figure 2-3. Forced Airflow Direction
2.5.5 Atmospheric Pressure
Altitude
Operating -1,000 feet to 10,000 feet (-305M to 3,050M)
Non-operating -1,000 feet to 40,000 feet (-305M to 12,200M)
2.5.6 Acoustics
TYPICAL SOUND POWER LEVEL
Idle Mode (average dBA)
Performance Seek Mode (average dBA)
1
Measured per ECMA-74/ISO 7779.
2
No audible pure tones.
3
Random seek at a rate of 26 seeks per second.
2
3
1
29
30
2.5.7 RoHS (Restriction of Hazardous Substances)
WD complies with the Restriction of Hazardous Substances (RoHS) Directive 2002/95/EC
of the European Parliament, which is effective in the EU beginning July 1, 2006. RoHS aims to
protect human health and the environment by restricting the use of certain hazardous
substances in new equipment, and consists of restrictions on lead, mercury, cadmium, and
other substances.
The reliability, performance, and specifications of WD products are unchanged from
previously manufactured WD products, remaining among the highest in the industry.
2.6 Reliability Specifications
Component Design Life 5 years
1
AFR <0.5%
1
In a typical desktop environment.
12 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 21

XL500S Specifications
2.7 Device Plug Connector Pin Definitions
These drives interface with the host I/O bus via the SATA interface connection illustrated in
Figure 2-4 below. The drive receives power from the SATA power connection or legacy ATA
4-pin power connector J3 in Figure 2-4. Table 2-2 identifies the pin definitions of the SATA
connectors and the corresponding signal names and signal functions.
Figure 2-4. Standard Factory Connectors
Table 2-2. Device Pin Connector Pin Definitions
S1 Gnd 2nd mate
S2 A+ Differential signal pair A from Phy
S3 A-
S4 Gnd 2nd mate
S5 B- Differential signal pair B from Phy
Signal segment
Power segment
S6 B+
S7 Gnd 2nd mate
Key and spacing separate signal and power segments
P1
P2
P3
P4 Gnd 1st mate, GROUND
P5 Gnd 2nd mate, GROUND
P6 Gnd 2nd mate, GROUND
P7
P8
P9
P10 Gnd 2nd mate, GROUND
P11 ACT- Activity LED- (O.C.)/Staggered Spin-up Disable Control
P12 Gnd 1st mate, GROUND
P13
P14
P15
V
33
V
33
V
33
V
5
V
5
V
5
V
12
V
12
V
12
3.3 V power, NC
3.3 V power, NC
3.3 V power, pre-charge, 2nd mate, NC
5V power, Precharge, 2nd mate
5V power
2nd mate, 5V power
12 V power, pre-charge, 2nd mate
12 V power
12 V power
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 13
Page 22

Specifications XL500S
2.8 Agency Approvals
XL500S Regulatory Number (R/N): 701640
These drives meet the standards of the following regulatory agencies:
Federal Communication Commission: Verified to comply with FCC Rules for
Radiated and Conducted Emission, Part 15, Subpart B, for Class B Equipment.
Underwriters Laboratories: Bi-National UL Standard CAN/CSA-C22.2 No. 60950-1-
03/UL 60950-1. Standard for Safety of Information Technology Equipment, including
Electrical Business Equipment (File E101559).
TUV Essen Laboratories: IEC-950 (EN60950) Standard for Safety of Information
Technology Equipment, including Electrical Business Equipment. EN60065. Standard of
Safety for Audio, Video, and Similar Electronic Apparatus.
CE Compliance for Europe: Verified to comply with EN55022:1998 for RF Emissions
and EN55024:1998 for Generic Immunity as applicable.
C-Tick Compliance for Australia: Verified to comply with AS/NZ3548 for RF
Emissions as required by the Australian Communications Authority.
Korean KCC Mark: Registered as a Class-B product with the South Korean Ministry of
Information and Communication.
Taiwan BSMI EMI Certification: Certified as a Class-B product with the Bureau of
Standards Metrology and Inspection (BSMI).
2.9 Full Model Number Specification
Table 2-3 below provides a summary specification of the model number suffix for this product
platform.
Table 2-3. Full Model Number Description
Model Number Format ID Product Brand RPM Description
WD5000AAKX-xx3CAX 3C WD Caviar Blue 7200 XL500S-4 16 MB SATA 6 Gb/s QD
WD5000AAKX-xx1CAX 1C WD Caviar Blue 7200 XL500S-4 16 MB SATA 6 Gb/s STD
WD5000AAKS-xxV0AX V0 WD Caviar Blue 7200 XL500S 16 MB SATA 3 Gb/s QD
WD5000AAKS-xxV1AX V1 WD Caviar Blue 7200 XL500S 16 MB SATA 3 Gb/s STD
WD5000AAKS-xxWWPA0 WWP WD Caviar Blue 7200 XL500S-4 16 MB SATA 3 Gb/s QD
WD5000AAKS-xxUU3A0 UU3 WD Caviar Blue 7200 XL500S-4 16 MB SATA 3 Gb/s STD
WD3200AAKX-xx3CAX 3C WD Caviar Blue 7200 XL500S-4 16 MB SATA 6 Gb/s QD
WD3200AAKX-xx1CAX 1C WD Caviar Blue 7200 XL500S-4 16 MB SATA 6 Gb/s STD
WD2500AAKX-xx3CAX 3C WD Caviar Blue 7200 XL500S-4 16 MB SATA 6 Gb/s QD
WD2500AAKX-xx1CAX 1C WD Caviar Blue 7200 XL500S-4 16 MB SATA 6 Gb/s STD
14 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 23

XL500S Product Features
3.0 PRODUCT FEATURES
SATA 6 Gb/s and SATA 3 Gb/s
Perpendicular Magnetic Recording (PMR)
IntelliSeek™
NoTouch™
Native Command Queuing (NCQ)
Pre-Emptive Wear Leveling (PWL)
Femto Slider
S.M.A.R.T. Command Transport (SCT)
World Wide Name (WWN)
Reliability Features Set—Data Lifeguard™
Hot Plug Support
Active LED Status
Fluid Dynamic Bearings (FDB)
Staggered Spin-Up and Activity Indication (SATA Power Pin 11)
CacheFlow™
48-bit Logical Block Addressing (LBA)
Power Management
Self-Monitoring, Analysis, and Reporting Technology (S.M.A.R.T.)
Security Mode
Automatic Acoustic Management (AAM)
3.1 SATA 6 Gb/s and 3 Gb/s
SATA 6 Gb/s and 3 Gb/s are the next generation interfaces for SATA hard drives. They add to
the functionality of the SATA I interface with the following features:
Native Command Queuing (NCQ) — server feature for performance in random I/O
transaction environments. It aggregates many small random data transfers and allows the
disk to reorder the commands in a sequential order for faster access.
Improved Power Management— provides improved power management features
including Host Initiated SATA Power Management (HIPM) and Device Initiated SATA
Power Management (DIPM).
Staggered Spin-up — allows the system to control whether the drive will spin up
immediately or wait until the interface is fully ready before spinning up.
Asynchronous Signal Recovery (ASR) — robustness feature that improves signal
recovery.
Enclosure Services — defines external enclosure management and support features.
Backplane Interconnect — defines how to lay out signal line traces in a backplane.
Auto-activate DMA — provides increased command efficiency through automated
activation of the DMA controller.
Device Configuration Overlay (DCO) — allows hiding of supported features via a
SATA feature mask.
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 15
Page 24

Product Features XL500S
3.2 Perpendicular Magnetic Recording (PMR)
In perpendicular magnetic recording (PMR), the magnetization of each data bit is aligned
vertically to the spinning disk, rather than longitudinally as has been the case in hard drive
technology for decades. In longitudinal recording, as the bits become smaller and closer
together, they experience an increasing demagnetizing field, much like two bar magnets that
are placed end-to-end repel one another. A property of the media called coercivity must be
increased to counteract the demagnetization to keep the bits stable under thermal
fluctuations; otherwise data corruption may occur over time. Higher media coercivity has
pushed the recording head write field to the limit of known materials.
In perpendicular recording, the adjacent bits attract instead of repel (as with bar magnets
placed side by side,) creating more thermally stable bits. In addition, the media contains a
magnetically soft underlayer (SUL) beneath the recording layer. This SUL allows a larger
effective write field, thus higher coercivity media, enabling further increases in density. Lastly,
because of the vertical orientation of the bits, the PMR recording layer tends to be thicker than
that used for longitudinal recording, providing increased signal for the read heads. All of these
benefits enable WD engineers to reliably pack more data on a given disk than is possible with
conventional longitudinal recording.
3.3 IntelliSeek
WD’s unique IntelliSeek technology proactively calculates an optimum seek speed to
eliminate hasty movement of the actuator that produces noise and requires power, which is
common in other drives. With IntelliSeek, the actuator’s movement is controlled so the head
reaches the next target sector just in time to read the next piece of information, rather than
rapidly accelerating and waiting for the drive rotation to catch up. This smooth motion reduces
power usage by more than 60 percent compared with standard drives, as well as quiets seek
operation and lowers vibration.
3.4 NoTouch Ramp Load Technology
Parks the recording heads off the disk surface during spin up, spin down and when the drive is
off. This ensures the recording head never touches the disk surface resulting in improved long
term reliability due to less head wear, and improved non-operational shock tolerance.
3.5 Native Command Queuing (NCQ)
These drives support Native Command Queuing. NCQ is a true Enterprise feature for
environments such as database, Web servers, and e-mail servers.
Performance of a random I/O workload can be improved through intelligent re-ordering of the
I/O requests so they read/write to and from the nearest available sectors and minimize the
need for additional disk revolutions or head actuator movement. This improvement is achieved
though Native Command Queuing (NCQ).
NCQ allows the drive to re-order read commands, thereby increasing random read IOPs.
Additional NCQ features that can prove beneficial include a Write Cache disabled IOP
increase and a queuing implementation built upon an existing, highly automated cache
architecture. Queued reads in NCQ leverage the same re-ordering schemes used for write
caching. The firmware design maintains the "order" of overlapping/colliding queued
commands. NCQ is designed to excel in multi-threaded environments with high random I/O
loads.
3.6 Pre-emptive Wear Leveling (PWL)
This WD feature provides a solution for protecting the recording media against mechanical
wear. In cases where the drive is so busy with incoming commands that it is forced to stay in
16 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 25

XL500S Product Features
a same cylinder position for a long time, the PWL control engine initiates forced seeks so that
disk lubricant maintains an even distribution and does not become depleted. This feature
ensures reliability for applications that perform a high incidence of read/write operations at the
same physical location on the disk.
3.7 Femto Slider
These drives incorporate the femto slider form factor in which the read/write head is mounted
on the small, lightweight femto slider which allows the head to move more quickly from track to
track on the disk. WD’s femto heads enhance tracking and increase shock tolerance,
producing a highly stable high-density drive platform.
3.8 S.M.A.R.T. Command Transport (SCT)
The SCT Command Transport feature set provides a method for a host to send commands
and data to a device and for a device to send data and status to a host using log pages.
Standard ATA commands may be interspersed with SCT commands, but SCT commands
cannot be nested. SCT commands that do not require a subsequent data transfer operation
are not interspersed with any ATA commands or each other.
The SCT Command Transport feature set provides a method for a host to send commands
and data to a device and for a device to send data and status to a host using log pages. This
capabilitility is used to pass commands through a driver interface or a bridge where new or
unknown commands may be filtered and not passed to the drive. SCT is also used for issuing
commands that require more than 8 parameter bytes. ATA8-ACS provides detailed
information on the usage and capabilities of SCT. The SCT feature set includes the following
commands:
Write Same
Read/Write Long
Temperature Reporting
3.8.1 Write Same
The Write Same command allows the host to erase the media, or write a pattern repeatedly
across the media, with a minimum of data transfer from the host. The host can clear the entire
media to zeros or a specific pattern by sending this command with the pattern as a
parameter—no data transfer is necessary. Write Same can write the entire media, or just a
portion of the media. The host can monitor the progress of the Write Same by issuing SCT
Status requests. This frees the host system to do other tasks while the media is being cleared.
3.8.2 Read/Write Long
The function performed by the Long Sector Access command is based on the obsolete ATA
READ LONG/WRITE LONG capability, and has been extended beyond 28-bit addressing.
The Long Sector data format for both reads and writes is two blocks long (i.e., each block is
512 bytes long). The first block contains the user data. The second data block contains the
error correction and detection bytes. The remainder of the second block should contain zeros.
Once the SCT command has been issued and the status response indicates that the device is
ready to transfer data, log page E1h should be read or written to transfer the data. Long
Sector Access commands cause a forced unit access to occur.
3.8.3 Temperature Reporting
The SCT Temperature Reporting (SCT TR) feature allows a host system to access
temperature information in the drive. The S.M.A.R.T. temperature value is reported within
±3°C of the base casting temperature. This information can been used to control fans or
adjust the usage of various system components to keep the drive within its normal operating
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 17
Page 26

Product Features XL500S
temperature. Applications include Enterprise, Laptop, Desktop and Consumer Electronics.
SCT TR reports the maximum and minimum sustained operating limits, warning level limits,
and drive damage limits. In addition to reporting the limits, SCT TR returns the current drive
temperature (a temperature history which the host can use to predict heating or cooling
trends) and the maximum temperature acheived during the lifetime of the drive as well as the
highest temperature achieved since the power was applied to the drive. Detailed information
on this capability can be found in ATA8-ACS.
3.9 World Wide Name (WWN)
It has become a critical requirement that hard drives be uniquely identified by computer
systems. This allows a drive to maintain its identity as it is transported from system to system
or placed on a network. IEEE has defined a format for serial numbers that is widely recognized
in the computing industry by adding World Wide Name (WWN) to ATA/ATAPI-7 in 2002.
The World Wide Name (WWN) defined in ATA/ATAPI-7 is a modification of the IEEE
Extended Unique Identifier 64 bit standard (EUI-64) and is comprised of three major
components: naming authority, organizationally unique identifier (OUI) and serial number.
WD's OUI is 0014EEh.
3.10 Reliability Features Set
3.10.1 Data Lifeguard™
Representing WD's ongoing commitment to data protection, Data Lifeguard includes features
that enhance the drive’s ability to prevent data loss. Data Lifeguard data protection utilities
include thermal management, an environmental protection system, and embedded error
detection and repair features that automatically detect, isolate, and repair problem areas that
may develop over the extended use of the hard drive. With these enhanced data reliability
features, the drive can perform more accurate monitoring, error repair, and deliver exceptional
data security.
This self-tuning feature is performed during offline data collection scan. All user sectors on the
hard drive are scanned during times of no activity from the host. Any sector determined to be
written poorly (e.g., off-track), or that is difficult to recover (e.g., because of a developing
media defect or thermal asperity), is marked for repair. Data Lifeguard actively guards your
data, even if S.M.A.R.T. operations are disabled.
All WD drives are defect-free and low-level formatted at the factory. After prolonged use, any
drive, including a WD drive, may develop defects. If you continue receiving data errors in any
given file, use the Data Lifeguard Diagnostics utility to recover, relocate and rewrite the user
data to the nearest spare sector and maintain a secondary defect list.
CAUTION: As with all format utilities, some options in the Data Lifeguard
Diagnostics utility will overwrite user data.
Download the latest versions of the Data Lifeguard Diagnostic and Data Lifeguard Tools
programs at http://support.wdc.com.
18 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 27

XL500S Product Features
3.10.2 Thermal Management
The drive is designed with Thermal Management features for high reliability.
State-of-the-art mechanical design—Mechanical design is optimized to reduce the
drive’s temperature. State-of-the-art thermal dissipation and windage design is employed.
Closed loop servo management—Thermal management monitors the drive
temperature and can control servo operations to maintain a stable operating temperature
under high temperature conditions. This is a closed loop servo and thermal control
system.
S.M.A.R.T. HDA Temperature Attribute—The S.M.A.R.T. HDA Temperature Attribute
is supported. The S.M.A.R.T. temperature value is reported within ±3°C of the base
casting temperature.
Ducted airflow—Provides protection to the Read/Write element from heated air.
3.10.3 Internal Environmental Protection System
This dual filter system protects the inside environment of the drive from contamination. System
features include:
Dual Filtration System to ensure fast clean-up times
Directed airflow to maximize mechanical cooling
Increase casting surface area to maximize cooling
Ducted air flow to protect Read Rite elements from heated air
Breather filter located at low pressure area
Enhanced heat dissipation
3.10.4 Recoverable Errors
A sector marked for repair is written back to the same location. The sector is then read several
times to be sure that it was written correctly and that there is no media damage at its location
(sector test). If the sector does not easily and consistently read correctly, the sector is then
relocated with original data.
3.10.5 Unrecoverable Errors
If an unrecoverable error is found during the offline scan, the sector is marked. Future reads
from this location will continue to perform full error recovery. However, the next write to this
location will perform a sector test to be sure the media is not damaged, and the sector
relocated if the sector test fails.
3.10.6 Self Test
Self Test is a quick way to determine the operation status of a drive. The following Self Tests
are supported:
Quick Test: Completes in less than two minutes.
Extended Test: Tests all the critical subsystems of the drive.
Conveyance Test: Quickly identifies issues caused by handling damage.
Selective Test: Scans host-defined sections of the drive.
The test may be run to completion or be performed as a background task as the drive
processes other commands from the host. The host may then poll the drive for runtime status
and test results. Since the test is embedded in the drive’s firmware, it is always available,
requires no installation and can be faster and more effective than a software-based drive test.
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 19
Page 28

Product Features XL500S
3.10.7 ATA Error Logging
ATA Error Logging provides an industry standard means to record error events and supporting
information that is then accessible by the host. The event record includes the exact command
that caused the failure, the response of the drive, the time of the event and information about
the four commands immediately prior to the errant command. Error Logging can reliably and
quickly determine whether a system problem is the result of a hard drive failure or other
component malfunction. Error Logging retains total error count for the life of the drive and
complete records for the last five errors.
3.10.8 Defect Management
Every WD drive undergoes factory-level intelligent burn in, which thoroughly tests for and
maps out defective sectors on the media before the drive leaves the manufacturing facility.
Following the factory tests, a primary defect list is created. The list contains the cylinder, head,
and sector numbers for all defects.
Defects managed at the factory are sector slipped. Grown defects that can occur in the field
are mapped out by relocation to spare sectors on the inner cylinders of the drive.
3.10.9 Automatic Defect Retirement
The automatic defect retirement feature automatically maps out defective sectors while
reading or writing. If a defective sector appears, the drive finds a spare sector.
The following item is specific to automatic defect retirement on writes (write auto-relocation):
Data is always written to disk (using automatic defect retirement if required) and no error
is reported.
The following item is specific to automatic defect retirement on reads (read auto-relocation):
When host retries are enabled, the drive will internally flag any unrecoverable errors
(DAMNF or ECC). This flagging allows subsequent write commands to this location to
relocate the sector only if the sector test fails.
3.10.10 Error Recovery Process
The drive has five means of error recovery:
ECC On-the-Fly
Preamp Thermal Asperity (TA) Compensation
Read/Write Retry Procedure
Extended Read Retry Procedure
ECC On-the-Fly – If an ECC error occurs, the drive attempts to correct it on-the-fly without
retries. Data can be corrected in this manner without performance penalty. The details of the
correction algorithm appear in the next section.
Preamp Thermal Asperity Compensation – A Thermal Asperity (TA) is a baseline shift in the
readback signal due to heating of the magnetoresistive stripe on the head as a result of
physical contact with the disk or a particle. The preamp circuit has the ability to detect and
compensate for thermal asperities. When an error cannot be corrected by ECC On-the-Fly,
another retry is performed, where the preamp with its thermal asperity detection feature
determines if the error is due to a thermal asperity. Once the preamp determines that the error
is due to thermal asperity, preamp compensation is enabled. If preamp compensation alone is
not enough to recover, then the channel performs a series of TA-specific recoveries.
Read/Write Retry Procedure – This retry procedure is used by all disk controller error types. If
the procedure succeeds in reading or writing the sector being tried, then recovery is complete
and the controller continues with the command. Each retry operation also checks for servo
20 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 29

XL500S Product Features
errors. The procedure ends when error recovery is achieved or when all possible retries have
been attempted.
Extended Read Retry Procedure – This retry procedure tries combinations of positive/negative
track offsets and data DAC manipulations to recover the data. This retry procedure applies
only to read data recovery. The Read/Write Retry procedure performs the actual retry
operation.
When an extended retry operation is successful, the controller continues with the command.
The controller clears any changes in track offset or data DAC settings before the command
continues.
3.11 Hot Plug Support
SATA supports hot plugging (also known as “hot swapping”), the ability to swap out a failed
hard drive without having to power down the system or reboot. This capability contributes to
both data availability and serviceability without any associated downtime, making it a critical
feature for extending SATA into enterprise applications.
The drive supports hot plugging only in systems where a SATA hard drive storage backplane
is used.
The Serial ATA revision 2.5 specification requires staggered pins for both the hard drive and
drive receptacles. Staggered pins mate the power signals in the appropriate sequences
required for powering up the hot plugged device. These pins are also specified to handle in
excess of the maximum allowed inrush current that occurs during drive insertion. SATAcompliant devices thus need no further modification to be hot pluggable and provide the
necessary building blocks for a robust hot plug solution, which typically includes:
Device detection even with power downed receptacles (typical of server applications).
Pre-charging resistors to passively limit inrush current during drive insertion.
Hot plug controllers to actively limit inrush current during drive insertion.
3.11.1 Hot Plug Technical Issues
Reliable hot plugging of disk drives requires careful design of specific issues. Generally, hot
plugging is only allowed when blind mating with a backplane, where there are controlled
tolerances for alignment of mating connectors. The main issue is preventing droop (a
momentary drop in voltage) of the backplane's voltage busses during insertion because of
inrush current to charging bypass capacitors in the disk drive.
3.11.1.1 Methods of Controlling Inrush Current
There are two methods of limiting inrush current when hot plugging disk drives. They are hot
plug controller IC's and precharge resistors.
3.11.1.1.1 Hot Plug Controller IC's
Hot plug controller IC's ramp up voltages to the inserted disk drive at a controlled slow rate (a
constant dv/dt), after full connector mating has been established. This eliminates almost all
inrush current. This method does not require staggered precharge contacts, although there
usually is a staggered ground 'mate first' pin(s) to ensure ground connection before making
power and signal connections. Sometimes added ground pins on both ends of the mating
connector are staggered 'mate last' providing the hot plug controller a clear indication of all
other pins making solid contact. From an engineering standpoint, this is the most reliable
method of hot plugging disk drives, but is expensive to implement on backplanes.
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 21
Page 30

Product Features XL500S
3.11.1.1.2 Precharge Resistors
Current limiting series precharge resistors on designated power pins make contact before
hard power connection is made, providing controlled partial charge of the disk drive's
decoupling capacitors. This partial charge is due to IR drop across the precharge resistor
caused by disk drive DC loads at partial power. A second current surge occurs when final
power connections are made, completing charge of the decoupling capacitors. Use of
precharge resistors requires three stages of contact sequencing on the mating connector.
The first stage makes initial ground contact, establishing a ground reference between the disk
drive and backplane. It also discharges any ESD voltage between the two devices. The
second stage contacts connect the precharge resistors, supplying limited current to the
inserting disk drive's voltage busses. This allows partial charging of decoupling capacitors on
the disk drive. Stage three contacts make hard power and signals connections. The ideal
value for precharge resistors is where peak inrush current for both the precharge resistor
connections and final hard power connections are similar in amplitude. Even with precharge
resistors, there may be some momentary droop of the backplane voltage busses. This residual
droop needs to be eliminated or at least reduced to a very small value because most power
distribution budgets do not provide allowances for this droop. Low ESR bulk capacitors
installed on the backplane voltage busses for each hot plug connector can minimize this
droop. Organic dielectric aluminum electrolytic's like OSCON capacitors are a good choice.
3.11.1.2 Capacitor Inrush Current Issues
Tantalum decoupling capacitors can be damaged if inrush current is excessive. Inrush current
issues with Tantalum capacitors are complex, but manufactures recommend, as a general rule,
1 ohm of resistance for every volt being switched or a maximum inrush current of 1 amp. See
"Surge in solid Tantalum Capacitors" by John Gill of AVX Corporation. This limits the lowest
value of precharge resistance for each voltage bus used to a resistance in ohms equal to the
bus voltage in volts.
3.11.1.3 Connector Inrush Current Issues
The SATA specification requires 1.5 amps current capacity for every power connector pin.
This is well above the initial precharge resistor inrush current limit set by tantalum capacitor
requirements. The second inrush current spike when hard power connection is made along
with whatever DC current has been established at that time could exceed 1.5 amps but for too
short a period of time (<1 ms) to have any affect on connector reliability.
3.11.1.4 Disk Drive Hot Plug Insertion Velocity
The delay between precharge resistor connections and final power connections must be
sufficient to allow precharge resistor charging of the disk drives power busses to at least 90%
of maximum value the precharge resistors are capable of. The following compares calculated
maximum allowable insertion velocity with SATA specification insertion velocity analysis.
3.11.1.4.1 Calculated Velocity
The minimum SATA mating connector staggered pin spacing is 0.35 millimeters. Disk drives
typically have around 20mF input capacitance on power busses. Assuming 20mF total
decoupling capacitance and a 10-ohm series precharge resistor, the precharge time constant
is 0.2 milliseconds. From this, the maximum total precharge time to 90% of full charge is
around 2.2 ´ 0.2 milliseconds or 0.44 milliseconds. Therefore, the maximum insertion velocity
allowed is .035 centimeters divided by 0.44 milliseconds giving a maximum insertion velocity
of 80 centimeters per second.
3.11.1.4.2 SATA Insertion Velocity Analysis
The SATA specification has done tests with hot plug insertion speed. The fastest insertion
velocities achieved produced a staggered contact delay of 3 milliseconds, well within the
22 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 31

XL500S Product Features
previous 0.44 millisecond calculated minimum staggered pin delay allowed. The SATA
specification also states that the average effective input capacitance of most of the disk drives
tested was 20 mF, the same value used in the previous calculations. The hot plug verification
test procedure later in this document includes a test to verify this information.
3.11.1.5 SATA Disk Drive Hot Plug Design Issues
The SATA specification provides pins for series precharge resistors allowing use of this less
expensive implementation. This does not exclude the backplane designer from using hot plug
controller IC's for a more robust design. The only design requirements for the SATA disk drive
its self are providing staggered precharge contacts on the hot plug connector per the SATA
specification and ensuring that decoupling capacitors can tolerate a momentary inrush current
of about 1 ampere.
3.11.1.5.1 Future Disk Drive Design Change Issues
Any increase in effective decoupling capacitance above 20 mF on any of the disk drive's
voltage busses could affect the hot plug compatibility. Any significant change in power-up DC
load at power up could also be a problem with backward compatibility. Both these issues
need new specification items in drive specifications to set limits for both the disk drive
designers and designers of hot plug enclosures.
3.11.1.6 Hot Plug Removal Issues
Generally, removal of hot plug disk drives does not present any technical issues. Drives are
usually in a low power state prior to removal. Decoupling capacitors in the disk drive will
continue to provide power long enough to soften the sudden loss of current. Bulk capacitors
in the power supply and backplane will absorb the drop in power long enough for the
regulators to adjust.
3.11.1.7 ESD Issues
Prior to insertion, disk drives can have static charges of thousands of volts relative to the
enclosure. This charge needs discharging during the insertion process. If insertion guides are
ESD resistive, they will discharge the static charge prior to contact with the mating connector.
If the guides are not conductive, then any static charge will discharge at first contact of the
mating connector ground pins. This sudden discharge will normally not cause any problems
because the static charge of the disk drive is common mode to all internal circuitry making
internal differential current and voltages low during discharge. Because of the unpredictable
nature of ESD, use of ESD resistive (not metal) insertion guides is a safer solution since it
gradually discharges any static charge. Having the disk drive enclosed in a canister also helps
ensure proper discharge. It is the responsibility of the hot plug enclosure designer to handle
ESD issues in a safe manner.
3.11.1.8 Drive Canisters
Hot pluggable disk drives can be enclosed in a canister for added protection. This added
protection is both mechanical and electrical. The main electrical protection is from ESD.
Canisters prevent any local discharge onto sensitive parts of the disk drive during handling
and insertion. Canisters do increase the cost of the system.
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 23
Page 32

Product Features XL500S
3.12 Active LED Status
The drive supports external LED requirements. It provides an activity LED output which is ON
during command execution and OFF otherwise.
The drive strength of this open Drain Drive Active signal is that it can sink 12mA to 0.4V Max.
It is 5V tolerant, meaning that the external LED may be driven from +5V or +3.3V so long as
the Host system provides a series resistor to limit the LED current to the lower of 12mA or the
rated operating current of the LED. As an example with +5V and a 2 volt forward drop across
a 10mA LED, a 300 Ohm 5% 1/16W resistor would be suitable. In the case of a 3.3V supply
for the same LED, the resistor would be 130 Ohm 5% 1/16W.
The pin corresponding to P11 shall be used for Active LED (see “Device Plug Connector Pin
Definitions” on page 13).
3.13 Fluid Dynamic Bearings (FDB)
Bearing design that incorporates a layer of high-viscosity lubricant instead of ball bearings in
the hard drive spindle motor. As an alternative to conventional ball bearing technology, FDB
designs provide increased non-operational shock resistance, speed control, and improved
acoustics.
3.14 Staggered Spinup and Activity Indication (SATA Power Pin 11)
SATA device power connector pin 11 (see “Standard Factory Connectors” on page 13) is
defined as a means by the host to DISABLE staggered spinup and it may also be used by the
device to provide the host with an activity indication. According to the SATA spec, "Staggered
Spin-up Disable and Activity Signal shall not be enabled at the same time."
3.14.1 Staggered Spinup
When multiple disks are installed in an enclosure, it is desirable to provide a simple
mechanism by which a subsystem controller can sequence hard drive initialization to minimize
the current load presented during power up. Staggered spinup provides this mechanism by
preventing the hard drives from spinning up until after successful PHY initialization (i.e., after
PHY enters DP7:DR_Ready state).
Staggered spinup is only applicable during initial power-up. If a drive is spun down using ATA
commands—as a result of having been placed in Standby or Sleep power modes, for
example—the drive shall spin up following the rules that govern spinup from low power modes
described in ATA/ATAPI-6 or later.
3.14.2 Activity Indication
The host controller through SATA power pin 11 may access storage device status and
activity. The signal provided by the device for activity indication is a low-voltage low-current
signal. It is not suitable for directly driving an LED. A buffer circuit external to the device must
be employed to drive the LED. The activity signal is based on an open-collector or open-drain
active low driver. The device shall tolerate the activity signal being shorted to ground.
3.15 CacheFlow™
CacheFlow is WD’s unique, multi-generation disk caching system. It incorporates read cache
with write cache.
WD designed CacheFlow to obtain maximum performance with today’s most popular
operating systems and applications. CacheFlow increases performance over prior caching
algorithms by increasing the number of times that requested data is in the cache. This reduces
24 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 33

XL500S Product Features
the number of host commands that require actual media access thereby improving overall
drive performance.
Typical applications perform a variety of access patterns, such as random, sequential, and
repetitive. CacheFlow is designed to dynamically adapt to the changes in access patterns that
occur during the course of application execution.
Random mode is the default operational mode for CacheFlow. Once CacheFlow detects a
sequential access pattern, it leaves random mode. CacheFlow also performs predictive read
operations to increase the probability that data requested in future commands already exists in
the cache.
CacheFlow partitions the buffer into multiple segments to allow for the fact that applications
may access multiple non-contiguous areas on the disk. CacheFlow tracks the amount of valid
data in each segment and controls the deallocation of segments to maximize drive
performance.
3.15.1 Write Cache
CacheFlow is designed to improve both single and multi-sector write performance by
reducing delays caused by seek time and rotational latency.
The write cache adaptively detects random and sequential access patterns during application
execution.
If a defective sector is found during a write cache operation, that sector is automatically
relocated before the write occurs.
3.15.2 Read Cache
CacheFlow implements a multiple segment read cache. Cache segments are assigned to
read commands as they are received from the host.
Each read segment consists of pre and post read sectors in addition to the host-requested
sectors. This maximizes the amount of cache data in the drive’s buffer, thereby increasing the
likelihood of cache hits and improving overall performance.
3.16 48-bit Logical Block Addressing (LBA)
The 48-bit Address feature set allows devices with capacities up to approximately 281 tera
sectors or approximately 144 peta bytes. In addition, the number of sectors that may be
transferred by a single command are increased by increasing the allowable sector count to 16
bits.
48-bit Address
Bits (47:40) Bits (39:32) Bits (31:24) Bits (23:16) Bits (15:8) Bits (7:0)
LBA High (exp) LBA Mid (exp) LBA Low (exp) LBA High LBA Mid LBA Low
16-bit Sector Count
Bits (15:8) Bits (7:0)
Sector Count
(exp)
Sector Count
3.17 Power Management
This drive supports the ATA power management commands that lower the average power
consumption of the hard drives. For example, to take advantage of the lower power
consumption modes of the drive, an energy efficient host system could implement a power
management scheme that issues a Standby Immediate command when a host resident disk
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 25
Page 34

Product Features XL500S
inactivity timer expires. The Standby Immediate command causes the drive to spin down and
enter a low-power mode. Subsequent disk access commands would cause the drive to spin
up and execute the new command. To avoid excessive wear on the drive due to the starting
and stopping of the HDA, set the host’s disk inactivity timer to no shorter than ten minutes.
The drive also supports the SATA power management feature that lowers the average power
consumption of the SATA interface.
3.18 Self-Monitoring, Analysis, and Reporting Technology (S.M.A.R.T.)
S.M.A.R.T. helps you monitor a drive’s internal status through diagnostic commands at the
host level.
The drive monitors Read Error Rate, Start/Stop Count, Re-allocated Sector Count, Seek Error
Rate, Power-on Hours Count, Spin-up Retry Count, Drive Calibration Retry Count, Drive
Power Cycle Count, Offline Scan Uncorrectable Sector Count, Ultra ATA CRC Error Rate,
Multi-zone Error Rate, Spin-up Time, Relocation Event Count, and Current Pending Sector
Count. The hard drive updates and stores these attributes in the reserved area of the disk. The
drive also stores a set of attribute thresholds that correspond to the calculated attribute
values. Each attribute threshold indicates the point at which its corresponding attribute value
achieves a negative reliability status.
3.19 Security Mode
The Security Mode feature set allows the user to create a device lock password that prevents
unauthorized hard drive access even if the drive is removed from the computer. This feature
varies by drive configuration and may not be available on all configurations.
3.19.1 Master and User Passwords
The manufacturer/dealer can set a master password using the Security Set Password
command, without enabling the device lock function. The user password should be given or
changed by a system user.
Master Password Identifier is supported and set to a default value of 00FE. If a Master
Password is set via a Security Set Password Command, a valid Master Password Revision
code value of 0001h – FFFEh must be used. A Master Password Identifier of 0000h is
ignored.
When the master password is set, the drive does not enable the device lock function. When
the user password is set, the drive enables the device lock function, and the drive is locked
after the next power on reset or hard reset.
3.19.2 Security Levels
High - If High level security is set and the user password is forgotten, the master password
can be used to unlock the drive and access the data.
Maximum - If Maximum level security is set and the user password is forgotten, data access is
impossible. Only the master password with a Security Erase Unit command can unlock the
drive when the device lock function is enabled and the user password has been forgotten.
When the Security Erase Unit command is used to unlock the drive, all user data is erased.
3.20 Automatic Acoustic Management (AAM)
The AAM feature allows the host to select the acoustic level of the hard drive. When quiet
operation is essential, the drive may be set to operate in the Acoustic Mode to minimize the
hard drive’s sound level.
The Performance Mode results in slightly higher acoustic levels while optimizing the
performance of the drive. The Set Features command is used to set the AAM level.
26 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 35

XL500S ATA Command Set
4.0 ATA COMMAND SET
4.1 Host Interface Commands
4.1.1 ATA-8 Commands
Table 4-1 lists the hexadecimal codes specific to each ATA-8 command supported by these
hard drives. Refer to the D1699 ATA8-ACS specification for full details on each command.
Table 4-1. ATA-8 Command Opcodes
COMMAND HEX OPCODE
CHECK POWER MODE E5
DEVICE CONFIGURATION OVERLAY B1
DOWNLOAD MICROCODE 92
EXECUTE DEVICE DIAGNOSTIC 90
FLUSH CACHE E7
FLUSH CACHE EXT EA
IDENTIFY DEVICE EC
IDLE E3
IDLE IMMEDIATE E1
NOP 00
READ BUFFER E4
READ DMA C8
READ DMA EXT 25
READ FPDMA QUEUED 60
READ LOG EXT 2F
READ LOG DMA EXT 47
READ MULTIPLE C4
READ MULTIPLE EXT 29
READ NATIVE MAX ADDRESS F8
READ NATIVE MAX ADDRESS EXT 27
READ SECTOR(S) 20
READ SECTORS(S) EXT 24
READ VERIFY SECTOR(S) EXT 42
READ VERIFY SECTORS(S) 40
S.M.A.R.T. B0
SECURITY DISABLE PASSWORD F6
SECURITY ERASE PREPARE F3
SECURITY ERASE UNIT F4
SECURITY FREEZE LOCK F5
SECURITY SET PASSWORD F1
SECURITY UNLOCK F2
SET FEATURES EF
SET MAX F9
SET MAX ADDRESS EXT 37
SET MULTIPLE C6
SLEEP E6
STANDBY E2
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 27
Page 36

ATA Command Set XL500S
COMMAND HEX OPCODE
STANDBY IMMEDIATE E0
WRITE BUFFER E8
WRITE DMA CA
WRITE DMA EXT 35
WRITE FPDMA QUEUED 61
WRITE LOG EXT 3F
WRITE LOG DMA EXT 57
WRITE MULTIPLE C5
WRITE MULTIPLE EXT 39
WRITE SECTOR(S) 30
WRITE SECTOR(S) EXT 34
WRITE UNCORRECTABLE EXT 45
4.1.2 Optional Subcommands
Table 4-2 lists the hexadecimal codes specific to each SATA 2.5 command supported by
these hard drives. Refer to the SATA 2.5 specification for full details on each command.
Table 4-2. Optional Subcommands
COMMAND SUBFUNCTION
DOWNLOAD MICROCODE Mode 3
4.1.3 Obsolete Commands
Table 4-3 lists the hexadecimal codes specific to each obsolete command supported by
these hard drives.
Table 4-3. Obsolete Command Opcodes
COMMAND HEX OPCODE
INITIALIZE DEVICE PARAMETERS 91
READ LONG 22
RECALIBRATE 10
SEEK 70
WRITE LONG 32
28 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 37

XL500S ATA Command Set
4.1.4 SCT Commands
SCT commands provide capabilities not covered in ATA/ATAPI-7 for commands that do not
fit the ATA command delivery model. Some SCT commands report completion when the
command begins execution. Execution progress for these commands may be checked by
requesting SCT status. For instance, the host can track the progress of a Write Same
command by issueing a status request once per minute. See ATA8-ACS for a full description
of SCT.
Table 4-4. SCT Action Codes
ACTION CODE DESCRIPTION
0000h RESERVED
0001h Long Sector Access
0002h Write Same
0003h Error Recovery Control
0004h Features Control
0005h SCT Data Tables
0006h Vendor specific
0007h SCT BIST
C000h FFFFh Vendor specific
4.2 S.M.A.R.T. (B0h)
The S.M.A.R.T. command provides access to attribute values, S.M.A.R.T. status, and other
S.M.A.R.T. information. These commands can be used for logging and reporting purposes,
and for accommodating special user needs.
Prior to writing the S.M.A.R.T. command to the Command Register, the host must write key
values into the LBA Mid and LBA High Registers (4Fh, C2h) or the command will be aborted
and an error will be reported.
The S.M.A.R.T. command has several sub-commands that are selectable via the Features
Register when the host issues the S.M.A.R.T. command. To select a sub-command, the host
must write the appropriate sub-command code to the Features Register before issuing the
S.M.A.R.T. command. The sub-commands and their respective codes are listed below. For
more detailed information on executing S.M.A.R.T. commands, see the ATA-7 specification.
4.2.1 Read Attribute Values Sub-Command
This command returns a sector of data with the drive's S.M.A.R.T. data structure.
Table 4-5. Definitions for the 512 Bytes.
BYTE VALUE DESCRIPTION
0 - 1 0001h S.M.A.R.T. Data Structure Revision
2 -361 XX S.M.A.R.T. Attribute Data
135 - 361 XX S.M.A.R.T. Attribute Data
362 XX
363 XX Self-Test execution status byte.
Offline data collection status
0Xh OL disabled
8Xh OL enabled
X0h scan not run
X2h scan complete
X4h scan suspended
X5h scan aborted
00h The previous self-test routine completed without error or no
01h The self-test routine was aborted by the host
self-test has ever been run
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 29
Page 38

ATA Command Set XL500S
BYTE VALUE DESCRIPTION
364 - 365 XX
366 XX
367 07Bh
368 - 369 0003h
370 01h
371 XX
372 XX
373 XX
374 XX
375 - 510 XX
511 XX
02h The self-test routine was interrupted by the host with a hard or
03h A fatal error or unknown test error occurred while the device
04h The previous self-test completed having a test element that
05h The previous self-test completed having a test element that
06h The previous self-test completed having a test element that
07h The previous self-test completed having a test element that
08h The previous self-test completed having a test element that
090Eh
0Fh Self-test routine in progress
Total time in seconds to complete offline data collection activity
Reserved
Offline data collection capability. Bits are as follows:
S.M.A.R.T. Capability. Bits are as follows:
Error logging capability. Bits are as follows:
Reserved
Short self-test routine completion time in minutes
Extended self-test routine completion time in minutes
Conveyance self-test routine completion time in minutes
Reserved
Checksum
soft reset
was executing its self-test routine. The device was unable to
complete the self-test routine.
failed. The test element that failed is not known.
failed. The electrical element of the test failed.
failed. The servo (and/or seek) test element of the test failed.
failed. The read element of the test failed.
failed. The element damage is suspected to be caused by
handling.
Reserved
1 = Offline Immediate Command supported
0
1 = Auto Offline enable\disable command supported
1
0 = Offline will suspend on and will resume after host
2
command
1 = Offline read scan implemented
3
1 = DST Short and Extended tests supported
4
1 = DST Conveyance test supported
5
0 - Reserved
6-7
1 = The device saves SMART data prior to going into a power
0
saving mode
1 = Device complies with SMART data autosave after an event
1
Reserved
2-15
1 = Error logging supported
0
Reserved
1
30 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 39

XL500S ATA Command Set
4.2.2 Supported Attributes
The drive supports the following attributes.
Attribute Attribute ID Number Pre-Failure/Advisory Bit
Read Error Rate 1 Pre-Failure
Spin-up Time 3 Pre-Failure
Start/Stop Count 4 Advisory
Re-allocated Sector Count 5 Pre-Failure
Seek Error Rate 7 Pre-Failure
Power-on Hours Count 9 Advisory
Spin-up Retry Count 10 Pre-Failure
Drive Calibration Retry Count 11 Advisory
Drive Power Cycle Count 12 Advisory
Emergency Retract Cycles 192 Advisory
Load/Unload Cycles 193 Advisory
HDA Temperature
Relocation Event Count 196 Advisory
Current Pending Sector Count 197 Advisory
Offline Scan Uncorrectable Sector Count 198 Advisory
Ultra ATA CRC Error Rate 199 Advisory
Multi-zone Error Rate 200 Pre-Failure
1
Status bits are typical but may vary.
2
See “Temperature Reporting” on page 17 for a better mechanism.
2
194 Advisory
(Status Flags bit 0)
1
Attributes that use the Pre-Failure/Advisory Bit Set can predict potential future degrading or
faulty conditions. Attributes with the Failure/Advisory Bit Clear are used for informational
purposes only, they do not indicate impending drive failure.
The S.M.A.R.T. data saving process is a background task. After a pre-determined idle period,
the self-monitoring data is automatically saved to the disk.
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 31
Page 40

ATA Command Set XL500S
4.2.3 Read Log Sector
There are several logs that can be read with the S.M.A.R.T. Read Log Sector sub-command.
The LBA Low Register indicates the log sector to be returned.
Table 4-6. Defined Error Logging Sectors
Log address Content Log Cmds R/W
00h Log directory ExtLog RO
01h Summary Log (up to 5 errors) SMART RO
02h
03h
04h-05h Reserved Reserved Reserved
06h SMART self-test log SMART RO
07h Extended SMART self-test log ExtLog RO
08h-0FH Reserved Reserved Reserved
10h NCQ command error ExtLog RO
09H Selective self-test log SMART R/W
0Ah-0Fh Reserved Reserved Reserved
11h SATA PHY Counters ExtLog RO
12h-17h Reserved Reserved Reserved
18h-7Fh Reserved Reserved Reserved
80h-9Fh Host vendor specific SMART / ExtLog R/W
A0h-BFh Device vendor specific SMART / ExtLog VS
E0h-E1h SMART Command Transport(SCT) SMART / ExtLog R/W
E2h-FFh Reserved Reserved Reserved
RO – Read Only
R/W – Read / Write
SMART – Supported by B0h command code.
ExtLog – Supported by 2Fh/3Fh/47Fh/57Fh command codes.
VS – Vendor Specific
Comprehensive SMART error log. (5 errors
Extended Comprehensive SMART error log.
per sectors)
(4 errors per sectors)
SMART RO
ExtLog RO
32 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 41

XL500S ATA Command Set
4.3 Identify Device (ECh)
The Identify Device command transfers 512 bytes of data that specify the drive’s parameters.
Table 4-7 lists the parameters read by the host
Table 4-7. Identify Device Command
WORD FIELD DESCRIPTION VALUE
0 General Configuration 427Ah
1Obsolete 0
2
3Obsolete 0
4-5 Retired 0
6Obsolete 0
7-8 Reserved 0
9 Retired 0
10-19 Serial Number (ATA String) WDnnnnnnnn
20-21 Retired 0
22 Obsolete 0
23-26 Firmware Revision (ATA String) nnnn
27-46 Model Numbers (ATA String)
47
48 Reserved 0
49
50
51-52 Obsolete 0
Specific Configuration
C837h = Device does not require Set Feature subcommand
to spin-up and Identify Device response is incomplete
Read/Write Multiple support
Bit 15-8: 80h
Bit 7-0: 00h = Reserved
01h-FFh = Maximum number of logical sectors that shall be
transferred perDRQ data block on READ/WRITE MULTIPLE
commands
Capabilities
Bit 15-14: Reserved for the IDENTIFY PACKET DEVICE
command.
Bit 13: 1 = Standby timer values as specified in this standard
are supported
0 = Standby timer values shall be managed by the device
Bit 12: Reserved for the IDENTIFY PACKET DEVICE
command.
Bit 11: 1 = IORDY supported 0 = IORDY may be supported
Bit 10: 1 = IORDY may be disabled
Bit 9: 1 = LBA supported
Bit 8: 1 = DMA supported.
Bit 7-0: Retired
Capabilities
Bit 15: Shall be cleared to zero.
Bit 14: Shall be set to one.
Bit 13-2: Reserved.
Bit 1: Obsolete
Bit 0: Shall be set to one to indicate a vendor specific Standby
timer value minimum
C837h
“WDC WD5000AAKX-nnnnnn”
“WDC WD5000AAKS-nnnnnn”
“WDC WD3200AAKX-nnnnnn”
“WDC WD2500AAKX-nnnnnn”
8010h
2F00h
4001h
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 33
Page 42

ATA Command Set XL500S
WORD FIELD DESCRIPTION VALUE
Additional Words Valid
Bit 15-8: Free-fall Control Sensitivity
00h = Vendor’s recommended setting
01h-FFh = Sensitivity level. A larger number is a more sensitive
53
54-58 Obsolete 0
59
60-61 Total number of user addressable logical sectors (Dword) XXXXh
62 Obsolete 0
63
64
65 Min. Multi-Word DMA Transfer Cycle Time per word (ns) 120
66 Manufacturer Recommended Multi-Word DMA Cycle Time (ns) 120
67 Min. PIO Transfer Cycle Time without flow control (ns) 120
68 Min. PIO Transfer Cycle Time with flow control (ns) 120
69-70 Reserved 0
71-74 Reserved for the IDENTIFY PACKET DEVICE command. 0
75
76
77 Reserved for Serial ATA 0
78
setting.
Bit 7-3: Reserved
Bit 2: 1 = the fields reported in word 88 are valid
0 = the fields reported in word 88 are not valid
Bit 1: 1 = the fields reported in words (64-70) are valid
0 = the fields reported in words (64-70) are not valid
Bit 0: Obsolete
Current Blocking Factor
Bit 15-9: Reserved
Bit 8: If set, Multiple sector setting is valid
Bit 7-0: Current setting for number of logical sectors that shall
be transferred per DRQ data block on READ/WRITE Multiple
commands
Multi-Word DMA Transfer Mode Supported
Bit 15-11: Reserved
Bit 10: If set, Multiword DMA mode 2 is selected
Bit 9: If set, Multiword DMA mode 1 is selected
Bit 8: If set, Multiword DMA mode 0 is selected
Bits 0-7: Multiword DMA mode 2 and below are supported
Advanced PIO Modes Supported
Bit 15-8: Reserved
Bits 7-0: PIO Modes supported
Queue Depth
Bit 15-5: Reserved
Bit 4-0: Maximum queue depth - 1
Serial ATA Capabilities
Bit 15-11: Reserved for Serial ATA
Bit 10: If set, supports Phy event counters
Bit 9: If set, supports receipt of host initiated
powermanagement requests
Bit 8: If set, supports native command queuing (NCQ)
Bit 7-3: Reserved for future SATA signaling speed grades
Bit 2: If set, supports Serial ATA Gen-2 signaling speed (300
MB/s)
Bit 1: If set, supports Serial ATA Gen-1 signaling speed (150
MB/s)
Bit 0: Cleared to 0
Serial ATA Features Supported
Bit 15-7: Reserved for Serial ATA
Bit 6: If set, device supports software settings preservation
Bit 5: Reserved for Serial ATA
Bit 4: If set, device supports in-order data delivery
Bit 3: If set, device supports initiating power management.
Bit 2: If set, device supports DMA Setup auto-activation
Bit 1: If set, device supports non-zero buffer offsets
Bit 0: Cleared to 0
0007h
01XXh
XX07h
0003h
001F
0001111100000110b
0000000001000100b
34 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 43

XL500S ATA Command Set
WORD FIELD DESCRIPTION VALUE
Serial ATA Features Enabled
Bit 15-7: Reserved for Serial ATA
Bit 6: If set, software settings preservation enabled
79
80
81 Minor Version Number 0000h
82
83
84
Bit 5: Reserved for Serial ATA
Bit 4: If set, in-order data delivery enabled.
Bit 3: If set, device initiating power management enabled
Bit 2: If set, DMA Setup auto-activation enabled
Bit 1: If set, Non-zero buffer offsets enabled
Bit 0: Cleared to 0
Major Version Number
ATA-8 and below supported
Commands and feature sets supported
Bit 15: Obsolete
Bit 14: If set, NOP command supported
Bit 13: If set, Read Buffer command supported
Bit 12: If set, Write Buffer command supported
Bit 11: Obsolete
Bit 10: If set, Host Protected Area Feature Set supported
Bit 9: If set, DEVICE RESET command supported
Bit 8: If set, SERVICE Interrupt supported
Bit 7: If set, Release Interrupt supported
Bit 6: If set, read look-ahead supported
Bit 5: If set, volatile write cache supported
Bit 4: Shall be cleared to zero to indicate that the PACKET
feature set is not supported.
Bit 3: If set, mandatory Power Management Feature Set
supported
Bit 2: Obsolete
Bit 1: Security Mode Feature Set supported
Bit 0: If set, SMART Feature Set supported
Commands and feature sets supported
Bit 15: Shall be cleared to zero
Bit 14: Shall be set to one
Bit 13: If set, Flush Cache EXT command supported
Bit 12: If set, mandatory FLUSH CACHE command supported
Bit 11: If set, Device Configuration Overlay feature set
supported
Bit 10: If set, 48-bit Address feature set supported
Bit 9: If set, Automatic Acoustic Management feature set
supported
Bit 8: If set, SET MAX security extension supported
Bit 7: Reserved
Bit 6: If set, SET FEATURES subcommand required to spin-up
after power-up
Bit 5: If set, Power-Up In Standby feature set supported
Bit 4: Obsolete
Bit 3: If set, Advanced Power Management feature set
supported
Bit 2: If set, CFA feature set supported
Bit 1: If set, READ/WRITE DMA QUEUED supported
Bit 0: If set, DOWNLOAD MICROCODE command supported
Commands and feature sets supported
Bit 15: Shall be cleared to zero
Bit 14: Shall be set to one
Bit 13: If set, IDLE IMMEDIATE with UNLOAD FEATURE
supported
Bit 12-11: Reserved
Bit 10-9: Obsolete
Bit 8: If set, 64-bit World wide name supported
Bit 7: If set, WRITE DMA QUEUED FUA EXT command
supported
Bit 6: If set, WRITE DMA FUA EXT and WRITE MULTIPLE
FUA EXT commands supported
Bit 5: If set, General Purpose Logging feature set supported
Bit 4: If set, Streaming feature set supported
Bit 3: If set, Media Card Pass Through Command feature set
supported
Bit 2: If set, Media serial number supported
Bit 1: If set, SMART self-test supported
Bit 0: If set, SMART error logging supported
00XXh
01FEh
0111010001101011b
0111111101100001b
0100000100100011b
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 35
Page 44

ATA Command Set XL500S
WORD FIELD DESCRIPTION VALUE
Commands and feature sets supported
Bit 15: Obsolete
Bit 14: If set, NOP command supported
Bit 13: If set, READ BUFFER command supported
Bit 12: If set, WRITE BUFFER command supported
Bit 11: Obsolete
Bit 10: If set, Host Protected Area has been established
Bit 9: If set, DEVICE RESET command supported
85
86
87
88
Bit 8: If set, SERVICE interrupt enabled
Bit 7: If set, release interrupt enabled
Bit 6: If set, read look-ahead enabled
Bit 5: If set, write cache enabled
Bit 4: Shall be cleared to zero to indicate that the PACKET
feature set is not supported.
Bit 3: If set, Power Management feature set enabled
Bit 2: Obsolete
Bit 1: If set, Security Mode feature set enabled
Bit 0: If set, SMART feature set enabled
Commands and feature sets supported
Bit 15: If set, Words 119-120 are valid
Bit 14: Reserved
Bit 13: If set, FLUSH CACHE EXT command supported
Bit 12: If set, FLUSH CACHE command supported
Bit 11: If set, Device Configuration Overlay supported
Bit 10: If set, 48-bit Address features set supported
Bit 9: If set, Automatic Acoustic Management feature set
enabled
Bit 8: If set, SET MAX security extension enabled by SET MAX
SET PASSWORD
Bit 7: Reserved
Bit 6: If set, SET FEATURES subcommand required to spinup after power-up
Bit 5: If set, Power-Up In Standby feature set enabled
Bit 4: Obsolete
Bit 3: If set, Advanced Power Management feature set enabled
Bit 2: If set, CFA feature set supported
Bit 1: If set, READ/WRITE DMA QUEUED command
supported
Bit 0: If set, DOWNLOAD MICROCODE command supported
Commands and feature sets supported
Bit 15: Shall be cleared to zero
Bit 14: Shall be set to one
Bit 13: If set, IDLE IMMEDIATE with UNLOAD FEATURE
supported
Bit 12-11: Reserved
Bit 10-9: Obsolete
Bit 8: If set, 64 bit World wide name supported
Bit 7: If set, WRITE DMA QUEUED FUA EXT command
supported
Bit 6: If set, WRITE DMA FUA EXT and WRITE MULTIPLE
FUA EXT commands supported
Bit 5: If set, General Purpose Logging feature set supported
Bit 4: Obsolete
Bit 3: If set, Media Card Pass Through Command feature set
supported
Bit 2: If set, Media serial number is valid
Bit 1: If set, SMART self-test supported
Bit 0: If set, SMART error logging supported
Ultra DMA modes
Bit 14: If set, Ultra DMA Mode 6 is selected
Bit 13: If set, Ultra DMA Mode 5 is selected
Bit 12: If set, Ultra DMA Mode 4 is selected
Bit 11: If set, Ultra DMA Mode 3 is selected
Bit 10: If set, Ultra DMA Mode 2 is selected
Bit 9: If set, Ultra DMA Mode 1 is selected
Bit 8: If set, Ultra DMA Mode 0 is selected
Bit 7: Reserved
Bit 6: Ultra DMA mode 6 and below are supported
Bit 5: Ultra DMA mode 5 and below are supported
Bit 4: Ultra DMA mode 4 and below are supported
Bit 3: Ultra DMA mode 3 and below are supported
Bit 2: Ultra DMA mode 2 and below are supported
Bit 1: Ultra DMA mode 1 and below are supported
Bit 0: Ultra DMA mode 0 supported
01110X0XXXX010XXb
101111XX01X0X001b
0100000100100011b
XX7Fh
36 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 45

XL500S ATA Command Set
WORD FIELD DESCRIPTION VALUE
89
90
91 Current advanced power management level value 0
92 Master Password Identifier XXXXh
93 Hardware Reset Result 0000h
94
95-99 Not supported 0
100-103 Maximum user LBA for 48-bit Address Feature Set (QWord)
104 Not supported 0
105 Reserved 0000h
106
107 Inter-seek delay for ISO-7779 acoustic testing in microseconds 0000h
108-111 World Wide Name XXXXXXXXXXXXXXXX
112-118 Not supported 0
119
120
121-126 Reserved 0
127 Obsolete 0
Time required for Normal Erase mode SECURITY ERASE UNIT
command
Time required for an Enhanced Erase mode SECURITY ERASE
UNIT command
Current automatic acoustic management value
Bits 15-8: Vendor’s recommended Acoustic Management
value
Bit 7-0: Current Automatic Acoustic Management value
80h = Acoustic Mode
FEh = Performance Mode
Physical sector size / Logical Sector Size
Bit 15: Shall be cleared to zero
Bit 14: Shall be set to one
Bit 13: If set, Device has multiple logical sectors per physical
sector.
Bit 12: If set, Device Logical Sector Longer than 256 Words
Bit 11-4: Reserved
Bit 3-0: 2PX logical sectors per physical sector
Commands and feature sets supported (Continued from words
82-84)
Bit 15: Shall be cleared to zero
Bit 14: Shall be set to one
Bit 13-6: Reserved
Bit 5: If set, Free-fall Control feature set is supported.
Bit 4: If set, DOWNLOAD MICROCODE with offsets is
supported.
Bit 3: If set, READ and WRITE DMA EXT GPL optional
commands are supported.
Bit 2: If set, WRITE UNCORRECTABLE EXT is supported.
Bit 1: If set, Write-Read-Verify feature set is supported.
Bit 0: Reserved
Commands and feature sets supported or en-abled (Continued
from words 85-87)
Bit 15: Shall be cleared to zero.
Bit 14: Shall be set to one.
Bit 13-6: Reserved
Bit 5: If set, Free-fall Control feature set is enabled.
Bit 4: If set, DOWNLOAD MICROCODE with offsets is
supported.
Bit 3: If set, READ and WRITE DMA EXT GPL optional
commands are supported.
Bit 2: If set, WRITE UNCORRECTABLE EXT is supported.
Bit 1: If set, Write-Read-Verify feature set is enabled.
Bit 0: Reserved
WD5000AAKx (976,773,168)
WD3200AAKX (
WD2500AAKX (488,397,168)
002Bh
002Bh
80XXh
625,142,448)
0000h
0100000000011000b
0100000000010100b
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 37
Page 46

ATA Command Set XL500S
WORD FIELD DESCRIPTION VALUE
Security Status
Bit 15-9: Reserved
Bit 8: Security level 0 = High, 1 = Maximum
Bit 7-6: Reserved
128
129-159 Vendor Specific 0
160
161-175 Reserved for assignment by the CompactFlash™ Association 0
176-205 Current media serial number (ATA String) 0
206
207-254 Reserved 0
255
Bit 5: If set, Enhanced security erase supported
Bit 4: If set, Security count expired
Bit 3: If set, Security frozen
Bit 2: If set, Security locked
Bit 1: If set, Security enabled
Bit 0: If set, Security supported
CFA power mode
Bit 15: Word 160 supported
Bit 14: Reserved
Bit 13: CFA power mode 1 is required for one or more
commands implemented by the device
Bit 12: CFA power mode 1 disabled
Bit 11-0: Maximum current in ma
SCT Command Transport
Bit 15-12: Vendor Specific
Bit 11-6: Reserved
Bit 5: SCT Command Transport Data Tables supported
Bit 4: SCT Command Transport Features Control supported
Bit 3: SCT Command Transport Error Recovery Control
supported
Bit 2: SCT Command Transport Write Same supported
Bit 1: SCT Command Transport Long Sector Access
supported
Bit 0: SCT Command Transport supported
Integrity Word
Bit 15-8: Checksum
Bit 7-0: Signature
0000000X001XXXX1b
0
303Fh
XXA5h
38 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 47

XL500S ATA Command Set
4.4 Set Features (EFh)
The Set Features command enables or disables the features listed in the following table
FUNCTION FEATURES
REGISTER
Enable read look-ahead
Disable read look-ahead
Enable write cache
Disable write cache
1
1
1
1
Set Transfer Mode 03h Don’t care
Enable use of Serial ATA Feature 10h 02h-DMA Setup FIS Auto-Activate optimization
Disable use of Serial ATA Feature 90h 02h-DMA Setup FIS Auto-Activate optimization
Set Acoustic Mode
Set Performance Mode
Disable Automatic Acoustic Management
Enable the PUIS feature set
Disablethe PUIS feature set
PUIS feature set device spinup
Enable/disable reverting to defaults
1
Changes are only valid while power remains applied to the drive. After power is cycled, the drive reverts to the default
settings.
2
Changes are valid through power cycles and hard resets.
2
2
2
1
1
1
1
AAh Don’t care
55h Don’t care
02h Don’t care
82h Don’t care
03h-Device-initiated interface power state transitions
06h-Software Settings Preservation
03h-Device-initiated interface power state transitions
06h-Software Settings Preservation
42h 80h
42h FEh
C2h Don’t care
06h Don’t care
86h Don’t care
07h Don’t care
66h Don’t care
SECTOR COUNT REGISTER
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 39
Page 48

Installation and Setup Procedures XL500S
5.0 INSTALLATION AND SETUP PROCEDURES
Hard drives are precision instruments that must be handled with care to prevent damage. It is
important to understand that drives are typically damaged because of Electrostatic Discharge (ESD),
rough handling, or shock and vibration. Refer to the latest version of the WD Drive Handling Guide
(2579-001027) for detailed instructions on all phases of drive handling.
Refer to support.wdc.com/warranty for detailed instructions on all phases of repackaging the drive.
Important: If your system does not support hot plugging (see “Hot Plug Support” on
page 21), it must be turned off and unplugged before installing your hard drive.
5.1 Unpacking
5.1.1 Handling Precautions
WD products are designed to withstand normal handling during unpacking and installation.
Take care to avoid excessive mechanical shock or electrostatic discharge (ESD), which can
permanently damage the hard drive and void the warranty. Hard drives are typically damaged
because of ESD, rough handling, or shock and vibration.
To avoid ESD problems, wear a properly grounded wrist strap when handling the hard drive.
Articles of clothing generate static electricity. Do not allow clothing to come in direct contact
with the hard drive or circuit board components.
When the WD drive is not in its shipping container or installed in its proper host enclosure, it
must remain in the antistatic bag. To prevent damage, do not unpack your WD drive until you
are ready to install it.
5.1.2 Inspection of Shipping Container
Carefully examine the container for obvious shipping damage, such as: holes, signs of
crushing, or stains. Notify the carrier and your WD representative if you observe any shipment
damage. Always move the shipping container in the upright position indicated by the arrows
on the container.
5.1.3 Removal From Shipping Container
Remove the WD drive from the shipping container only for inspection or installation. Carefully
open the box. When removing the WD drive from the box, follow these precautions:
Grasp the drive by the sides only; avoid touching the circuit board components.
Gently place the drive on its antistatic bag on a clean, level, grounded work area.
Do not stack drives or stand the WD drive on its edge.
CAUTION: When removing the drive from the shipping container, be careful not to drop it.
Dropping the drive can severely damage the head disk assembly or printed circuit board.
5.1.4 Removal From Static Shielding Bag
Before removing the drive from its static shielding bag:
Make sure that your work station is properly grounded.
Wear a properly grounded wrist strap with good skin contact.
Avoid contact with any component on the printed circuit board.
After attaching your wrist strap, gently remove the drive from the static shielding bag.
Handle the drive by the sides only; avoid touching the printed circuit board.
Handle the drive with the printed circuit board facing downward during installation.
40 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 49

XL500S Installation and Setup Procedures
Do not open the drive’s sealed compartment or remove the seals or any labels from the
drive; this will void the warranty.
5.1.5 Moving Precautions
If you need to move your computer, turn off the power to automatically unload the heads. This
helps protect the media and the heads from accidental damage due to vibration, moving, or
shipping.
5.2 Mounting
Use either the four bottom screws or at least four of the side mounting screws to rigidly
support the drive and prevent vibration. Some adaptor frames may not have the mechanical
design structure capable of mounting the drive to meet the specified shock and vibration
requirements.
The hard drive itself does not provide electrical isolation between mounting locations and
drive ground connection. If electrical isolation is required, the system designer or integrator
would be responsible for providing a solution.
5.2.1 Mounting Restrictions
If your system does not support hot plugging (see “Hot Plug Support” on page 21), it must be
turned off and unplugged before installing your hard drive.
5.2.2 Orientation
You can mount the hard drive in the X, Y, or Z axis, depending upon the physical design of
your system. For best results, mount the drive with all four screws grounded to the chassis. If
all four screws are not used, see "Grounding" on page 41.
5.2.3 Screw Size Limitations
The hard drive is mounted to the chassis using four 6-32 screws. Recommended screw
torque is 5 in-lb. Maximum screw torque is 10 in-lb.
CAUTION: Screws that are too long damage circuit board components. Each screw must
engage no more than six threads (3/16 inch). Side mounted screws should engage a
maximum of .188 inches (3/16”). Bottom mounted screws should engage a maximum of
.250 inches (1/4”).
5.2.4 Grounding
The PCBA and HDA grounds are always connected together in the drive and cannot be
disconnected. The drive mounting screws, unless intentionally isolated, will provide additional
ground connections between the HDA and the system chassis. If the drive isn't grounded via
mounting screws as described under “Mounting” on page 41, there may be increased
electrical emissions (EMI).
5.3 Hard Drive Installation
If your system does not support hot plugging (see “Hot Plug Support” on page 21), it must be
turned off and unplugged before installing your hard drive.
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 41
Page 50

Installation and Setup Procedures XL500S
5.3.1 Jumper Settings
It is not necessary to place a jumper shunt on the drive for workstation/desktop use. For
enterprise storage enviroments, the advanced settings are as follows:
5.3.1.1 SATA 6 Gb/s Hard Drives
SSC Mode – Spread spectrum clocking feature enabled or disabled (jumper on pins 1-2).
Default setting is disabled.
PM2 Enabled Mode – To designate the drive as power-up in standby (power management 2
or PM2) enabled, place a jumper on pins 3-4 (default setting is disabled). This mode enables
controlled spinup via spinup command per ATA standard. It is mainly used for server/
workstation environments operating in multiple drive configurations.
Important: PM2 mode requires a compatible BIOS that supports this feature. If PM2 is
enabled and not supported by BIOS, the drive will not spin up and therefore will not be
detected by the system.
Native Gen2 Enabled Mode – To revert to the SATA 3 Gb/s data transfer speed, place a
jumper on pins 5-6.
Force Gen1 Enabled Mode – To revert to the SATA 1.5 Gb/s data transfer speed, place
jumpers on pins 5-6 and 7-8.
Figure 5-1. SATA 6 Gb/s Jumper Settings
Default
Standard configuration – no jumper added; spread
spectrum clocking, PM2, Native Gen2, and Force
Gen1 disabled.
SSC (Enabled)
Spread spectrum clocking enabled (jumper on pins
1-2).
Native Gen2 (Enabled)
Gen2 enabled (jumper on pins 5-6). SATA 3 Gb/s
data transfer speed activated.
Force Gen1 (Enabled)
Gen1 enabled (jumpers on pins 5-6 and 7-8).
SATA 1.5 Gb/s data transfer speed activated.
PM2 (Enabled)
Power management enabled (jumper on pins 3-4).
Controlled spinup via spinup command per ATA standard.
42 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 51

XL500S Installation and Setup Procedures
5.3.1.2 SATA 3 Gb/s Hard Drives
SSC Mode – Spread spectrum clocking feature enabled or disabled (jumper on pins 1-2).
Default setting is disabled.
PM2 Enabled Mode – To designate the drive as power-up in standby (power management 2
or PM2) enabled, place a jumper on pins 3-4 (default setting is disabled). This mode enables
controlled spinup via spinup command per ATA standard. It is mainly used for server/
workstation environments operating in multiple drive configurations.
Important: PM2 mode requires a compatible BIOS that supports this feature. If PM2 is
enabled and not supported by BIOS, the drive will not spin up and therefore will not be
detected by the system.
Gen1 Enabled Mode – To revert to the SATA 1.5 Gb/s data transfer speed, place a jumper
on pins 5-6.
Figure 5-2. SATA 3 Gb/s Jumper Settings
Default
Standard configuration – no jumper added; spread
spectrum clocking, PM2, and Gen1 disabled.
efault 1
SSC (Enabled)
Spread spectrum clocking enabled (jumper on pins 1-2).
PM2 (Enabled)
Power management enabled (jumper on pins 3-4).
Controlled spinup via spinup command per ATA standard.
Gen1 (Enabled)
Gen1 enabled (jumper on pins 5-6). SATA 1.5 Gb/s data
transfer speed activated.
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 43
Page 52

Installation and Setup Procedures XL500S
5.3.2 Attach the Power Supply Cable
If your system does not support hot plugging (see “Hot Plug Support” on page 21), it must be
turned off and unplugged before installing your hard drive. This avoids the possibility of
reversing the polarity of the power connections and eliminating current surges that can
damage either the drive or computer.
Attach the SATA power supply cable to the SATA device plug power connector (see
"Standard Factory Connectors" on page 13). The SATA power connector is keyed to ensure
proper insertion.
Figure 5-3. Connector Locations
5.3.3 Attach SATA Interface Cable
You can configure the hard drive two ways:
1. Cable the drive directly to a SATA connector on the motherboard, or
2. Cable the drive to a host adapter card mounted in one of the expansion slots in the computer.
Both configurations use a SATA interface cable.
Make sure the SATA interface cable is no longer than 1 meter (39.37 inches) to minimize
noise that is induced on the data and control buses.
Figure 5-4. SATA Interface Cable
5.4 Serial ATA Latching Connector
This hard drive also allows Serial ATA latching cable connections. The latching connector
provides a secure connection between the drive and the cable connector via a locking latch
mechanism. The new latching connector design has two channels, one above the power
connection and one above the data connection. Latch alignment with these channels forms an
interlock when the latching cable is inserted into the drive. This latching feature makes the
SATA connector more robust against breakage from downward force and ensures a click-lock
connection which is verifiable even in noisy environments.
44 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 53

XL500S Maintenance
6.0 MAINTENANCE
The hard drive requires no preventative maintenance and contains no user-serviceable parts. The
service and repair of drives can only be performed at a WD Service Center. Please contact your WD
representative for warranty information and service/return procedures.
Observe the following precautions to prolong the life of the drive:
Do not attempt to open the sealed compartment of the drive as this will void the warranty.
Do not lift a drive by the printed circuit board.
Avoid static discharge when handling a drive.
Avoid harsh shocks or vibrations.
Do not touch the components on the printed circuit board.
Observe the environmental limits specified for this product.
If it becomes necessary to move your computer system, turn off the power to automatically unload
the heads. This helps protect the media and the heads from accidental damage due to vibration
while moving or shipping.
To protect your data, back it up regularly. WD assumes no responsibility for loss of data. For
information about back-up and restore procedures, consult your operating system manual. There
are also a number of utility programs available that you can use to back up your data.
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 45
Page 54

Technical Support XL500S
7.0 TECHNICAL SUPPORT
NORTH AMERICA
US/Canada
Monday - Thursday 9:00 am - 7:00 pm
Friday 9:00 am - 5:00 pm
Saturday 8:00 am - 5:00 pm
EUROPE
Central European Time (CET) +31.20.4467651
Monday - Thursday 9:30 am - 12:00 noon
Friday 9:30 am - 12:00 noon
(Central Time)
7.1 WD Online Services
WD provides a wide variety of technical support services on our Internet site at
http://support.wdc.com.
800.ASK.4WDC
1:00 pm - 5:30 pm
1:00 pm - 4:00 pm
46 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 55

XL500S Glossary
8.0 GLOSSARY
Active LED Status — The WD drive supports external LED requirements. It provides an activity LED
output which is ON during command execution and OFF otherwise.
Annualized Failure Rate (AFR) — A method of measuring failure rates or trends for a group of units
at a site. The rates are based on the monthly total number of returned field failure units divided by the
total cumulative installed base and multiplied by 12 (to annualize the failure rate).
Automatic Defect Retirement — If defective sectors are found during a read or write, they are
automatically mapped out and relocated.
Block — A group of bytes handled, stored, and accessed as a logical data unit, such as an individual
file record.
Buffer — A temporary data storage area that compensates for a difference in data transfer rates and/
or data processing rates between sender and receiver.
Command Queuing — See Native Command Queuing (NCQ)
Data Lifeguard™ — Representing WD's ongoing commitment to data protection, Data Lifeguard data
protection utilities include thermal management, an environmental protection system, and embedded
error detection and repair features that automatically detect, isolate, and repair problem areas that may
develop over the extended use of the hard drive.
Data Transfer Rate — The rate that digital data is transferred from one point to another, expressed in
bits per second or bytes per second.
Data Transfer Rate to Disk: The internal disk transfer rate in Mbits per second.
Data Transfer Rate from the Buffer to the Host: Based on the transfer of buffered data in MB per
second.
Defect Management — A general methodology of eliminating data errors on a recording surface by
mapping out known bad areas of the media.
ECC On-the-Fly — A hardware correction technique that corrects errors in the read buffer prior to
host transfer without any performance penalties. These error corrections are invisible to the host
system because they do not require assistance from the drive’s firmware.
Error Correction Code (ECC) — A mathematical algorithm that can detect and correct errors in a
data field by adding check bits to the original data.
Femto Slider — These drives incorporate the femto slider form factor in which the read/write head is
mounted on the small, lightweight femto slider which allows the head to move more quickly from track
to track on the disk.
F.I.T. (Functional Integrity Testing) — A suite of tests WD performs on all its drive products to
ensure compatibility with different hosts, operating systems, application programs, and peripherals.
This testing must be performed before the product can be released to manufacturing.
Fluid Dynamic Bearings (FDB) — Bearing design that incorporates a layer of high-viscosity
lubricant instead of ball bearings in the hard drive spindle motor. FDB designs provide increased nonoperational shock resistance, speed control, and improved acoustics.
Formatted Capacity — The actual capacity available to store data in a mass storage device. The
formatted capacity is the gross capacity minus the capacity taken up by the overhead data required for
formatting the media.
Hot Plugging — The ability to swap out a failed hard drive without having to power down the system
or reboot.
IntelliSeek — WD technology that proactively calculates an optimum seek speed to eliminate hasty
movement of the actuator that produces noise and requires power.
2679-701211-A06 RELEASED 10/21/10 (WD CONFIDENTIAL) 47
Page 56

Glossary XL500S
Latency — The period of time that the read/write heads wait for the disk to rotate the data to an
accessible position.
Logical Block Address — An alternative addressing methodology of identifying a given location on a
SATA drive that permits disk sizes greater than 528 MB.
Native Command Queuing (NCQ) — NCQ allows the drive to re-order read commands, thereby
increasing random read IOPs. NCQ is a true Enterprise feature for environments such as database,
Web servers, and e-mail servers.
NoTouch™ Ramp Load Technology — The recording head never touches the disk media ensuring
significantly less wear to the recording head and media as well as better drive protection in transit.
Pre-emptive Wear Leveling (PWL) — WD feature that provides a solution for protecting the
recording media against mechanical wear.
PRML (Partial Response Maximum Likelihood) — A read channel using sampled data, active
equalization and Veterbi detection to accurately retrieve the user data off the disk.
RoHS (Restriction of Hazardous Substances) — WD complies with the Restriction of Hazardous
Substances (RoHS) Directive 2002/95/EC of the European Parliament, which is effective in the EU
beginning July 1, 2006. RoHS aims to protect human health and the environment by restricting the use
of certain hazardous substances in new equipment, and consists of restrictions on lead, mercury,
cadmium, and other substances.
Rotational Latency — The amount of delay in obtaining information from a disk drive that can be
attributed to the rotation of the disk.
RPM (Revolutions per Minute) — Rotational speed of the media (disk), also known as the spindle
speed. Hard drives spin at one constant speed. The slower the RPM, the higher the mechanical
latencies. Disk RPM is a critical component of hard drive performance because it directly impacts the
rotational latency of the disk transfer rate.
Seek Time — The time it takes for the read/write head to move to a specific block of data on the hard
drive. The average seek time is computed by dividing the time it takes to complete a large number of
random seeks by the number of seeks performed.
Sector — A 512-byte packet of data.
Self-Monitoring, Analysis, and Reporting Technology (S.M.A.R.T.) — A technology to assist
the user in preventing possible system down time due to hard drive failure.
Serial ATA (SATA) — SATA is the next generation bus interface for hard drives. It is designed to
replace Parallel ATA, and has many advantages including increased transfer rate, improved signal
integrity, enhanced data protection, and hot plugging.
S.M.A.R.T. Command Transport (SCT) — The SCT Command Transport feature set provides a
method for a host to send commands and data to a device and for a device to send data and status to
a host using log pages.
Staggered Spinup — SATA feature that allows the system to control whether the drive will spin up
immediately or wait until the interface is fully ready.
Thermal Asperity — A thermal asperity is a baseline shift in the readback signal due to heating of the
magnetoresistive stripe on the head as a result of physical contact with the disk or a particle.
Unrecoverable Error — A read error that cannot be overcome by an ECC scheme or by rereading
the data when host retries are enabled.
World Wide Name (WWN) — The World Wide Name (WWN) defined in ATA/ATAPI-7 is a
modification of the IEEE extended unique identifier 64 bit standard (EUI-64) and is comprised of three
major components: naming authority, organizationally unique identifier (OUI) and serial number. WD's
OUI is 0014EEh.
Write Cache — A feature in CacheFlow that posts “command complete” prior to completing the
actual write.
48 RELEASED 10/21/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 57

Index XL500S
INDEX
—A—
Acoustics, 12, 14
Active LED Status, 24
Activity indication, 24
Agency Approvals, 14
Airflow, 12
Annualized Failure Rate, 47
Atmospheric Pressure, 12
Automatic Acoustic Management (AAM), 26
Automatic Defect Retirement, 20
—B—
Buffer Size, 4
Bytes per Sector, 5
—C—
Cabling, 9
Power Supply Cable Attachment, 44
SATA Interface Cable Attachment, 44
SATA Interface Cable Diagram, 44
CacheFlow6, 24
Commands
SCT, 29
Component Design Life, 12
Connectors
Serial ATA Latching, 44
Cooling
Airflow, 12
forced airflow direction, 12
CSS, 4
Current Requirements, 8
—D—
Data Lifeguard, 18
Data Surfaces, 5
Data Transfer Rate, 4
Defect Management, 20
Device Plug Connector Pin Definitions, 13
Dimensions, 6
—E—
ECC, 5
Error Rate, 4
Error Recovery Process, 20
—F—
Femto slider, 17
Fluid Dynamic Bearings (FDB), 24
—G—
Glossary, 47
Grounding (Hard Drive), 41
—H—
Head Parking, 5
Host Interface Commands, 27
Identify Drive, 33
S.M.A.R.T., 29
Set Features, 39
Hot Plug Support, 21
—I—
Input Voltage Requirements, 9
Installation and Setup, 40
Interleave, 4
Internal Environmental Protection System, 19
—J—
Jumper Settings, 42
—L—
Latency, 4
LED
active status, 24
activity indication, 24
Logical Block Addressing
48-bit, 25
—M—
Maintenance, 45
Model number specification, 14
Mounting
Orientation, 41
Screw Size Limitations, 41
Mounting (Hard Drive), 41
—N—
Native Command Queuing, 16
NoTouch, 16
—P—
Perpendicular magnetic recording (PMR), 16
Power, 9
Power Dissipation, 8, 11
Power management, 25
Pre-emptive Wear Leveling (PWL), 16
PWL, 16
—R—
Ramp load (NoTouch), 16
Read Cache, 25
Recording Method, 5
Reliability features set, 18
Ripple, 9
RoHS (Restriction of Hazardous Substances), 12
Rotational Speed, 4
RPM, 4
49 RELEASED 9/28/10 (WD CONFIDENTIAL) 2679-701211-A06
Page 58

XL500S Index
—S—
S.M.A.R.T., 26
S.M.A.R.T. Command Transport (SCT), 17
SATA 3 Gb/s interface, 15
SCT, 17
SCT commands, 29
SCT feature set
read/write long, 17
temperature reporting, 17
write same, 17
Security Mode, 26
Passwords, 26
Security Levels, 26
Serial ATA Latching Connector, 44
Servo Type, 5
Shock and Vibration, 10
Specifications, 4
Electrical, 8
Environmental, 10
Mechanical, 7
Performance, 4
Physical, 5
Reliability, 12
Spindle Start Time, 4
Staggered Spinup, 24
—T—
Technical Support, 46
Online Services, 46
Temperature
Airflow, 12
Thermocouple location, 11
Temperature and Humidity, 11
Thermal Management, 19
Thermocouple location, 11
—U—
Unpacking
Container Inspection, 40
Drive Removal - Container, 40
Drive Removal - Static Shielding Bag, 40
Handling Precautions, 40
Moving Precautions, 41
User Sectors per Drive, 5
—W—
World Wide Name (WWN), 18
Write Cache, 25
WWN, 18
2679-701211-A06 RELEASED 9/28/10 (WD CONFIDENTIAL) 50
Page 59

Western Digital
20511 Lake Forest Drive
Lake Forest, CA 92630
U.S.A.
For service and literature:
support.wdc.com
www.westerndigital.com
800.ASK.4WDC North America
949.832.4778 Latin America (Spanish)
+800.6008.6008 Asia Pacific
00800.ASK.4WDEUEurope (toll free where available)
+31.88.0062100 Europe/Middle East/Africa
2679-701211-A06
Oct 2010
WD CONFIDENTIAL
 Loading...
Loading...