

Page 1

PMA Prozeß- und Maschinen-Automation GmbH
dli
90
Industrial and process controller
KS 90-1and KS 92-1
KS
-1
KS92-1
Operating manual
KS90-1
KS92-1
advance
ne
English
9499-040-62911
Valid from: 8499
Page 2

û
ATTENTION!
Mini Version and Updates on
or on PMA-CD
www.pma-online.de
BlueControl
More efficiency in engineering,
more overview in operating:
The projecting environment for the BluePort
®
controllers
Description of symbols
in the text: on the device:
g General information a Follow the operating instructions
a General warning
l Attention: ESD-sensitive devices
© PMA Prozeß- und Maschinen-Automation GmbH • Printed in Germany
All rights reserved. No part of this document may bereproduced or published in any form
or by any means without prior written permission from the copyright owner.
A publication of PMA Prozeß- und Maschinen Automation
P.O.Box 310229
D-34058 Kassel
Germany
Page 3
Contents
1 Mounting .............................. 5
2 Electrical connections ....................... 6
2.1 Connecting diagram ....................... 6
2.2 Terminal connection ........................ 7
3 Operation ............................. 11
3.1 Front view ............................ 11
3.2 Behaviour after power-on ..................... 12
3.3 Operating level .......................... 12
3.4 Error list / Maintenance manager ................. 13
3.5 Self-tuning ............................. 16
3.5.1 Preparation for self-tuning ...................16
3.5.2 Optimization after start-up or at the set-point .........17
3.5.3 Selecting the method ( ConF/ Cntr/ tunE).........17
3.5.4 Step attempt after start-up ..................18
3.5.5 Pulse attempt after start-up ...................18
3.5.6 Optimization at the set-point ..................18
3.5.7 Optimization at the set-point for 3-point stepping controller. . 20
3.5.8 Self-tuning start .........................21
3.5.9 Self-tuning cancellation.....................21
3.5.10 Acknowledgement procedures in case of
unsuccessful self-tuning ....................22
3.5.11 Examples for self-tuning attempts ...............23
3.6 Manual self-tuning......................... 24
3.7 Second PID parameter set .....................25
3.8 Alarm handling .......................... 26
3.9 Operating structure ........................ 28
4 Configuration level ........................29
4.1 Configuration survey ................... 29
4.2 Configuration parameters ................... 30
4.3 Set-point processing ........................ 44
4.3.1 Set-point gradient / ramp ....................44
4.4 Switching behaviuor ........................ 45
4.4.1 Standard ( CyCl= 0 ).....................45
KS 90-1 / KS 92-1 3
Page 4
4.4.2 Switching attitude linear ( CyCl= 1 ).............45
4.4.3 Switching attitude non-linear ( CyCl= 2 ) ..........46
4.4.4 Heating and cooling with constant period ( CyCl= 3 )....47
4.5 Configuration examples ......................48
4.5.1 On-Off controller / Signaller (inverse) .............48
4.5.2 2-point controller (inverse) ...................49
4.5.3 3-point controller (relay & relay) ................50
4.5.4 3-point stepping controller (relay & relay) ...........51
4.5.5 Continuous controller (inverse).................52
4.5.6 D - Y - Off controller / 2-point controller with pre-contact . 53
4.5.7 Continuous controller with position controller ........54
4.5.8 Measured value output .....................55
5 Parameter setting level ...................... 56
5.1 Parameter survey ....................... 56
5.2 Parameters ............................. 57
5.3 Input scaling ............................ 60
5.3.1 Input Inp.1 and InP.3 ...........60
5.3.2 Input InP.2 ..........................60
6 Calibration level ......................... 61
7 Special functions ......................... 64
7.1 DAC®– motor actuator monitoring ...............64
7.2 O2measurement .......................... 66
7.2.1 Connection ...........................66
7.2.2 Configuration:..........................67
7.3 Linearization............................ 68
7.4 Loop alarm............................. 69
7.5 Heating current input / heating current alarm ...........69
7.6 KS9x-1 as Modbus master..................... 70
7.7 Back-up controller (PROFIBUS) ................. 70
8 BlueControl ............................ 71
9 Versions .............................. 72
10 Technical data .......................... 74
11 Safety hints ............................ 78
11.1 Resetting to factory setting, ....................80
4 KS 90-1 / KS 92-1
Page 5
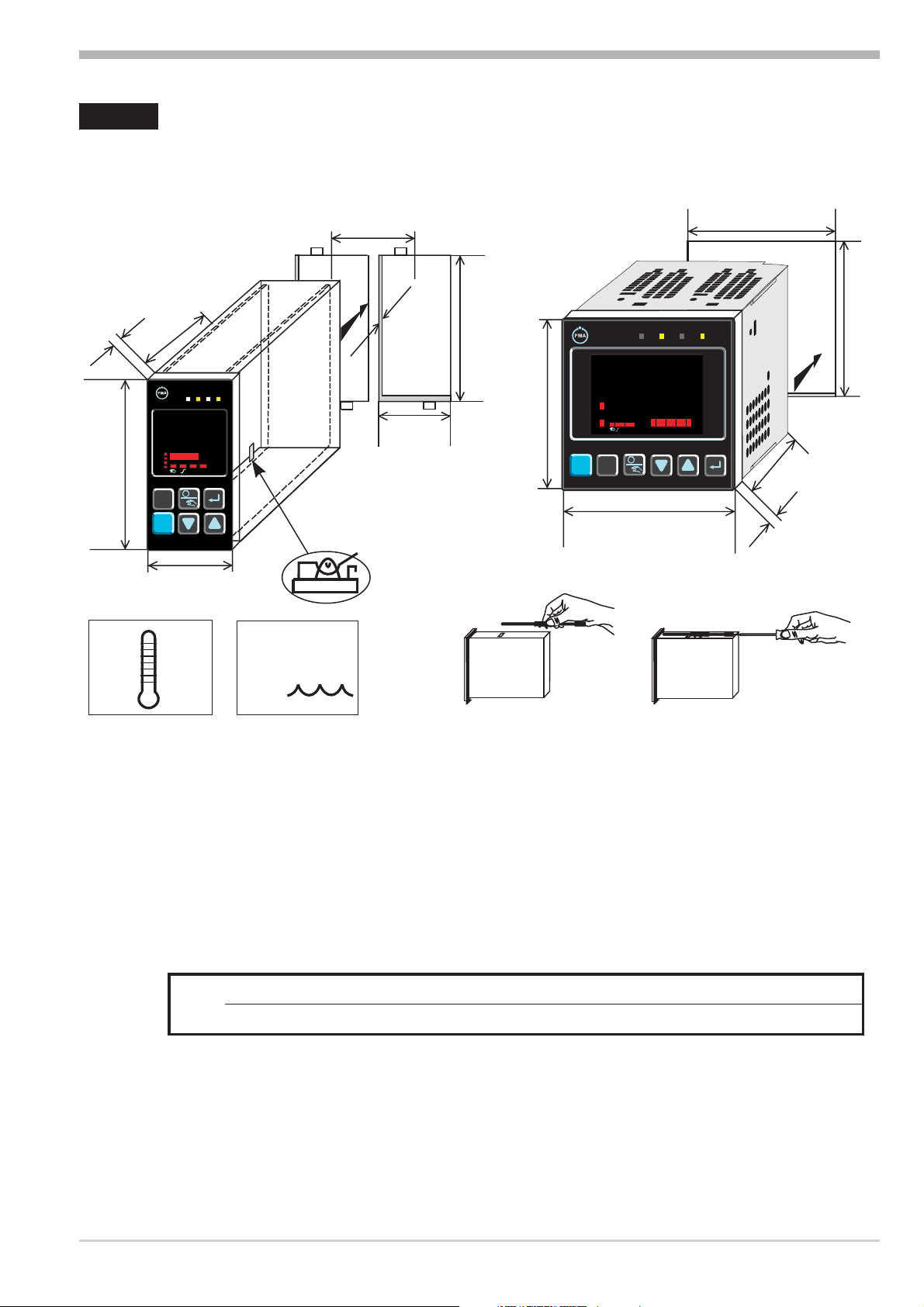
1 Mounting
min.48 (1.89")
92
Mounting
+0,8
10
(3.78")
96
48 (1.89")
max.
(0.4")
118
1199
1199
°C
°C
°F
°F
para
para
func
func
Ada
Ada
Err
Err
F
F
è
KS 92-1 advanced
KS 90-1
60°C
0°Cmin.
(4.65")
123
1234
1200
1200
SP.E
SP.2
SP.E
SP.2
advanced
4
max.
95% rel.
1..10
(0.04..0.4")
+0,6
45
+0.02
(1.77" )
Loc
locking switch
%
+0,8
+0.03
92
2
1
3
4
+0,8
92
(3.62" )
920.1
para
o
func
C
F
921.2
run
SP.E
SP.2
run
SP.E
SP.2
96
118
10
*
96
Ada
Err
KS 92-1 advanced
Ü
a
l
Fix the instrument only at top and bottom to avoid damaging it.
Safety switch:
For access to the safety switch, the controller must be withdrawn from the hou
sing. Squeeze the top and bottom of the front bezel between thumb and forefinger
and pull the controller firmly from the housing.
Loc open Access to the levels is as adjusted by means of BlueControl
â
(engineering tool) 2
closed 1 all levels accessible wihout restriction
1 Factory setting 2 Default setting: display of all levels
suppressed, password PASS = OFF
Caution! The unit contains ESD-sensitive components.
KS 90-1 / KS 92-1 5
Page 6
Electrical connections
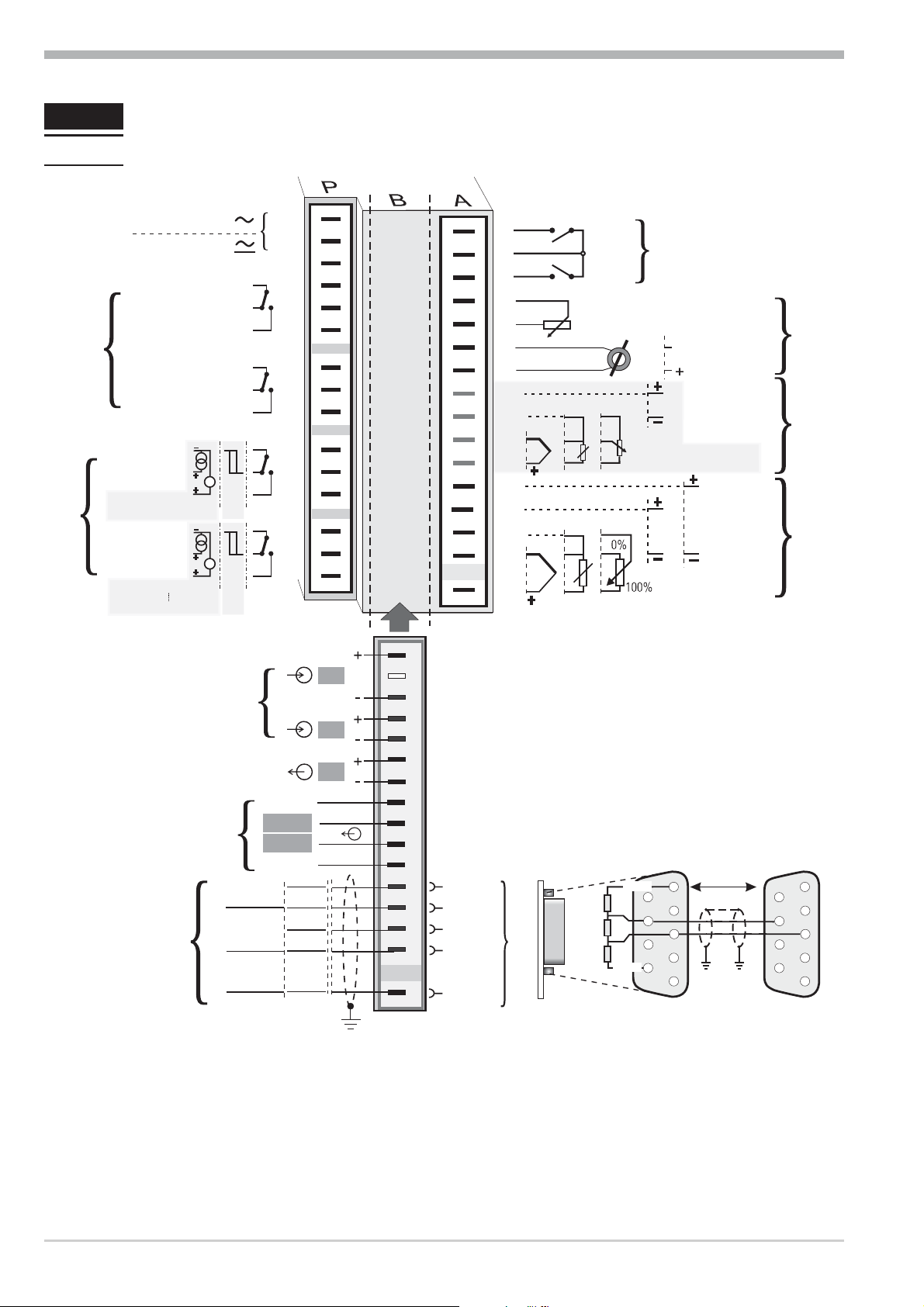
2 Electrical connections
2.1 Connecting diagram
3
1
2
90...250V
24VUC
OUT1
OUT2
OUT3
KS90-1. -4 ...
KS90-1. -5 ...
OUT4
KS90-1. -25...
!
V
V
d
b
c
e
8
9
0
RGND
DATA B
DATA A
RS485 RS422
Modbus RTU
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
a
+24V DC
OUT5
OUT6
24V GND
RXD-B
RXD-A
TXD-B
TXD-A
GND
di2
di3
U
1
2
3
di1
7
di2
4
5
6
7
g
HC
mA
INP2
f
5
8
9
10
11
(mV)
mA
0%
100%
INP3
KS90-1..-.1...
6
12
13
14
15
mA
Volt
INP1
4
(16)
Option
1
(2)
3
4
5
10
11
12
13
14
15
(16)
17
6
7
8
9
VP (5V)
DGND
RxD/TxD-N
RxD/TxD-P
Schirm/
Screen
T
17
(mV)
a
PROFIBUS-DP
Adapter
b
390 [
220 [
390 [
cd
DGND
9
8
7
VP (5V)
6
Profibus DP
e
max.
1200m
5
4
3
2
1
5
9
4
8
3
7
2
6
1
g
Dependent of order, the controller is fitted with :
flat-pin terminals 1 x 6,3mm or 2 x 2,8mm to DIN 46 244 or
w
screw terminals for 0,5 to 2,5mm²
w
On instruments with screw terminals, the insulation must be stripped by min.
12 mm. Choose end crimps accordingly!
Connecting diagram 6 KS 90-1 / KS 92-1
Page 7
2.2 Terminal connection
+
_
SSR
Power supply connection 1
See chapter "Technical data"
Electrical connections
Connection of outputs OUT1/2 2
2 OUT1/2 heating/cooling
Relay outputs (250V/2A), potential-free
changeover contact
L
Connection of outputs OUT3/4 3
a relay (250V/2A), potential-free
changeover contact
universal output
b current (0/4...20mA)
c voltage (0/2...10V)
d transmitter supply
e logic (0..20mA / 0..12V)
Connection of input INP1 4
N
Input mostly used for variable x1 (process value)
a thermocouple
b resistance thermometer (Pt100/ Pt1000/ KTY/ ...)
c current (0/4...20mA)
d voltage (0/2...10V)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
(16)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
17
+
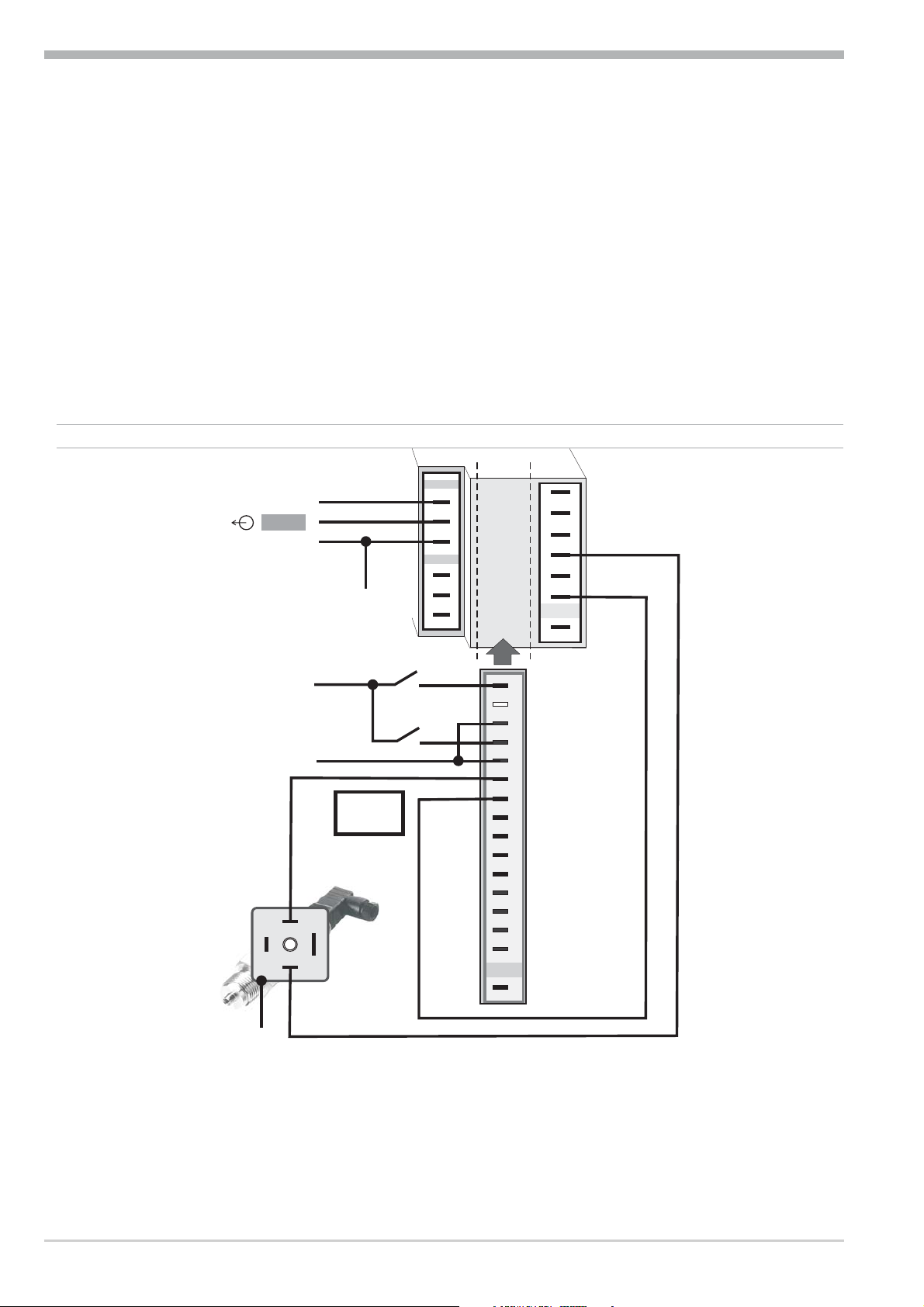
Connection of input INP2 5
f heating current input (0..50mA AC)
or input for ext. set-point (0/4...20mA)
g potentiometer input for position
feedback
Connection of input INP2 5
a Heating current input (0...50mA AC)
or input for ext. Set-point (0/4...20mA)
b Potentiometer input for position
feedback
Connection of input INP3 6
As input INP1, but without voltage
Connection of inputs di1, di2 7
Digital input, configurable as switch or
push-button
5 INP2 current tansformer
L
1
2
3
4
5
6
7
8
N
Logik
9
10
11
12
13
14
15
10
11
12
13
14
15
(16)
17
1
2
3
4
5
6
7
8
9
KS 90-1 / KS 92-1 7 Terminal connection
Page 8
Electrical connections
Connection of inputs di2/3 8 (option)
Digital inputs (24VDC external), galvanically isolated, configurable as switch or
push-button
Connection of output U
9 (option)
T
Supply voltage connection for external energization
Connection of outputs OUT5/6 0 (option)
Digital outputs (opto-coupler), galvanic isolated, common positive control volta
ge, output rating: 18...32VDC
Connection of bus interface ! (option)
PROFIBUS DP or RS422/485 interface with Modbus RTU protocol
89 di2/3, 2-wire transmitter supply
OUT3
J
10
11
12
13
14
15
Option
14
(16)
17
13
15
-
+
-
g
+24VDC
3
0V
+
1
2
-
17,5V
22mA
K
5mA
5mA
+
-
1
(2)
3
4
5
6
7
8
9
10
11
12
13
14
15
(16)
17
J
Analog outputs OUT3 or OUT4 and transmitter supply UTare connected to
different voltage potentials. Therefore, take care not to make an external galvanic
connection between OUT3/4 and U
with analog outputs!
T
Terminal connection 8 KS 90-1 / KS 92-1
Page 9
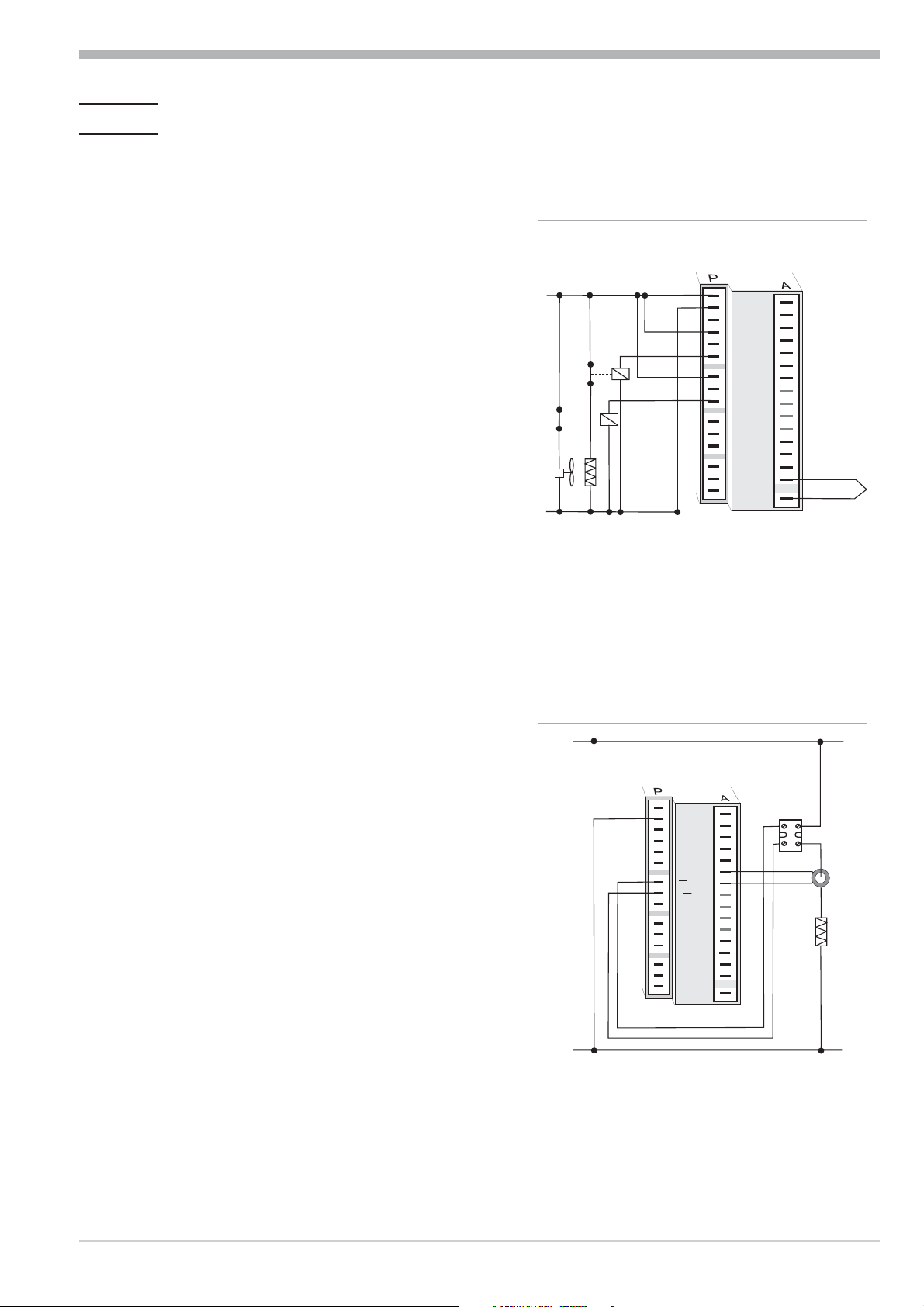
3 OUT3 transmitter supply
Electrical connections
3
13V
22mA
1
K
2
-
+
10
11
12
13
14
15
11
12
14
(16)
17
13
15
+
-
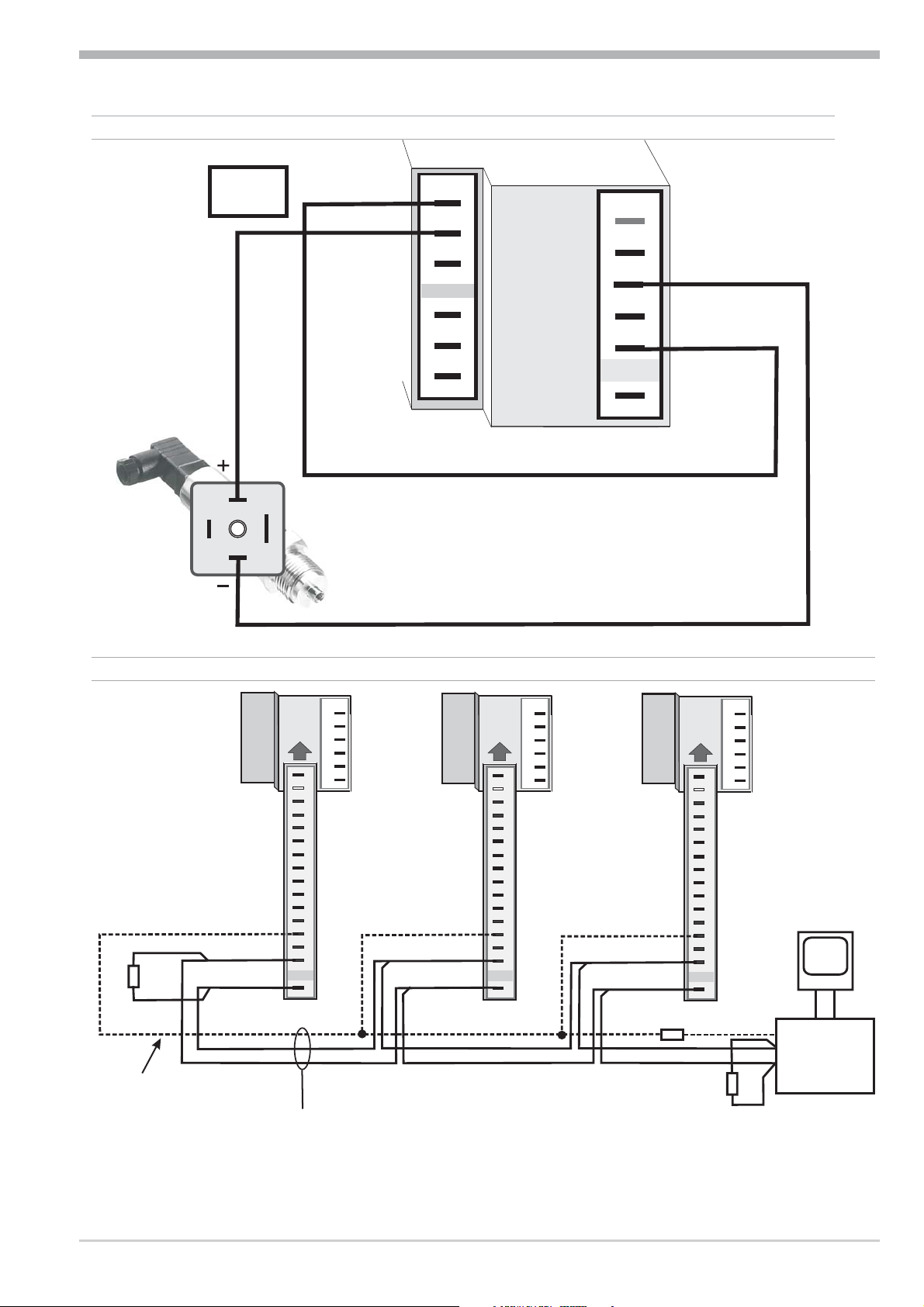
9 RS485 interface (with RS232-RS485 interface converter) *
R = 120...200 OhmT
RT
RGND connection optional
RGND
DATA B
DATA A
option
1
(2)
3
4
5
6
7
8
9
10
11
12
13
14
15
(16)
17
J
10
11
12
13
14
15
RGND
DATA B
DATA A
option
1
(2)
3
4
5
6
7
8
9
10
11
12
13
14
15
(16)
17
10
11
12
13
14
15
max. 1000m
"Twisted Pair” cable
RGND
DATA B
DATA A
R=100 Ohm
option
1
(2)
3
4
5
6
7
8
9
10
11
12
13
14
15
(16)
17
RT
R = 120...200 OhmT
10
11
12
13
14
15
PC
RS485-RS232
converter
* Interface description Modbus RTU in separate manual: see page 72.
KS 90-1 / KS 92-1 9 Terminal connection
Page 10
Electrical connections
+
_
SSR
+
_
SSR
+
_
SSR
+
_
SSR
+
_
SSR
+
_
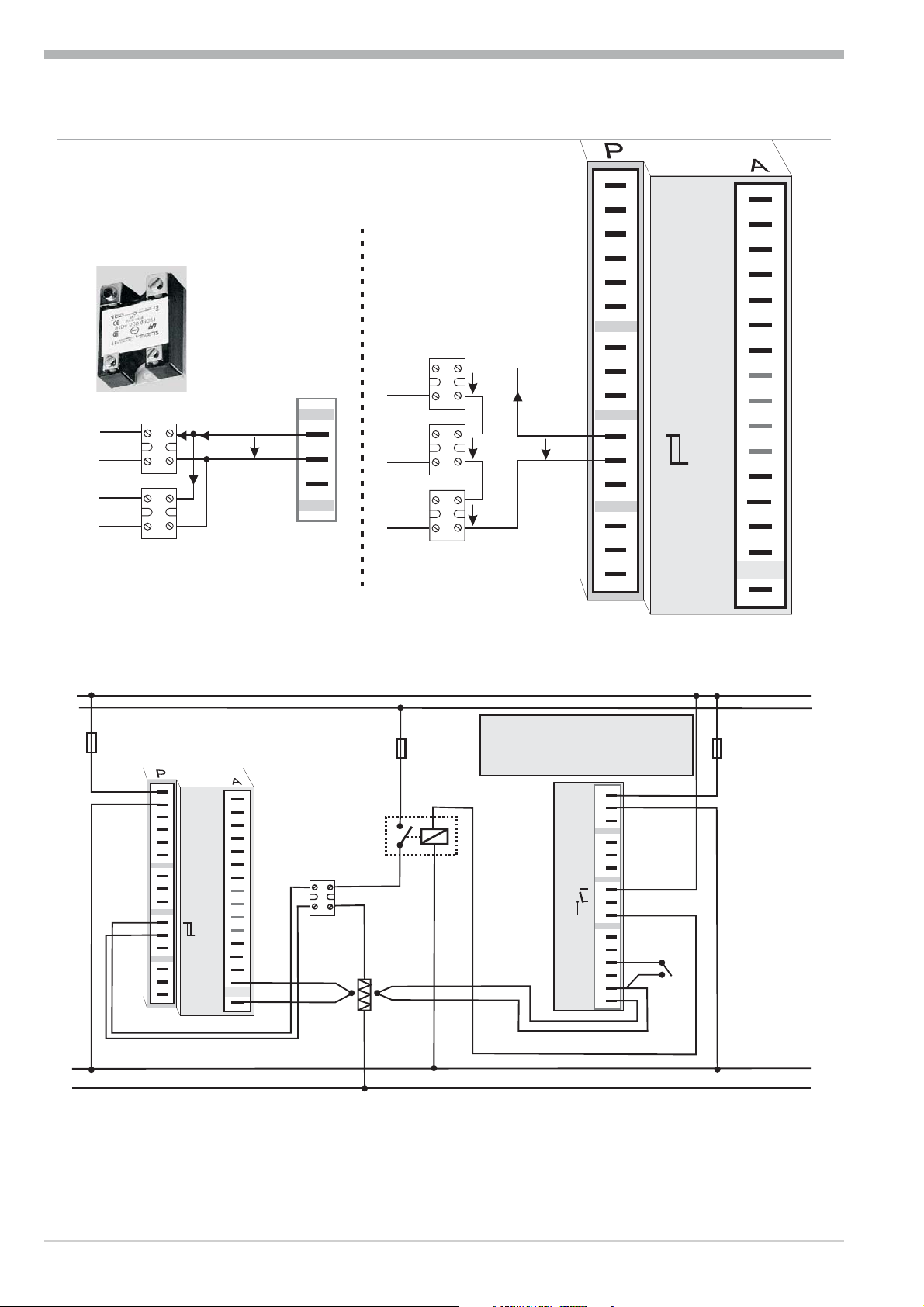
3 OUT3 as logic output with solid-state relay (series and parallel connection)
Parallel connection
Series connection
I =22mA
max
4V
I =22mA
max
12V
10
11
12
4V
12V
10
11
12
Logic
4V
KS9x-1 connecting example:
L1
L2
Fuse
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
KS90-1
Logik
10
11
12
13
14
(16)
1
2
3
4
5
6
7
8
9
SSR
15
17
Contactor
+
Fuse
Heating
1 TB 40-1 Temperaturelimiter
Standard-version (3 Relays):
TB40-100-0000D-000
further versions on requestr
1
2
3
4
1
TB 40-1
Temperaturelimiter
5
6
7
8
9
10
11
12
13
14
15
+
Resetkey
Fuse
N1
N2
a
CAUTION: Using a temperature limiter is recommendable in systems where
overtemperature implies a fire hazard or other risks.
Terminal connection 10 KS 90-1 / KS 92-1
Page 11
3 Operation
1 2 3
4
F
SP.E
SP.2
920.1
921.2
C
para
func
Ada
Err
SP.E
SP.2
o
1200
1199
°C
°F
SP.2
SP.E
para
func
Ada
Err
F
1 2 3
4
123
4
1200
1199
°C
°F
para
func
123
4
123
4
SP.E
SP.2
C
para
func
Ada
Err
SP.E
SP.2
o
1200
1199
°C
°F
para
func
Ada
Err
123
4
1
2
3
4
5
6
$
7
8
%
&
(
123
4
SP.E
SP.2
C
para
func
Ada
Err
SP.E
SP.2
o
4
123
4
SP.E
SP.2
C
para
func
Ada
Err
SP.E
SP.2
o
123
4
SP.E
SP.2
C
para
func
Ada
Err
SP.E
SP.2
o
1200
1199
°C
°F
para
func
Ada
Err
123
4
123
4
SP.E
SP.2
C
para
func
Ada
Err
SP.E
SP.2
o
123
4
SP.E
SP.2
C
para
func
Ada
Err
SP.E
SP.2
o
1200
1199
°C
°F
para
func
Ada
Err
123
4
/
123
4
1200
1199
°C
°F
parap
123
4
123
4
C
para
func
o
1200
1199
°C
°F
para
func
Ada
Err
123
4
123
4
123
4
123
4
1199
123
4
4
9
123
4
para
o
4
0
123
4
C
para
func
o
4
§"
!
123
4
SP.E
SP.2
C
SP.E
SP.2
o
123
4
SP.E
SP.2
C
SP.E
SP.2
o
123
4
123
4
4
123
4
C
o
123
4
4
9
0
123
4
SP.2
C
SP.2
123
4
SP.E
SP.2
C
SP.E
SP.2
o
!
§"
123
4
C
para
func
o
1200
1199
°C
°F
123
4
123
4
C
para
func
o
1200
123
4
7
8
123
4
C
para
func
Ada
Err
o
$
%
&
/
(
123
4
C
para
func
o
123
4
para
o
123
4
5
6
1
2
3
123
4
1200
1199
°C
°F
123
4
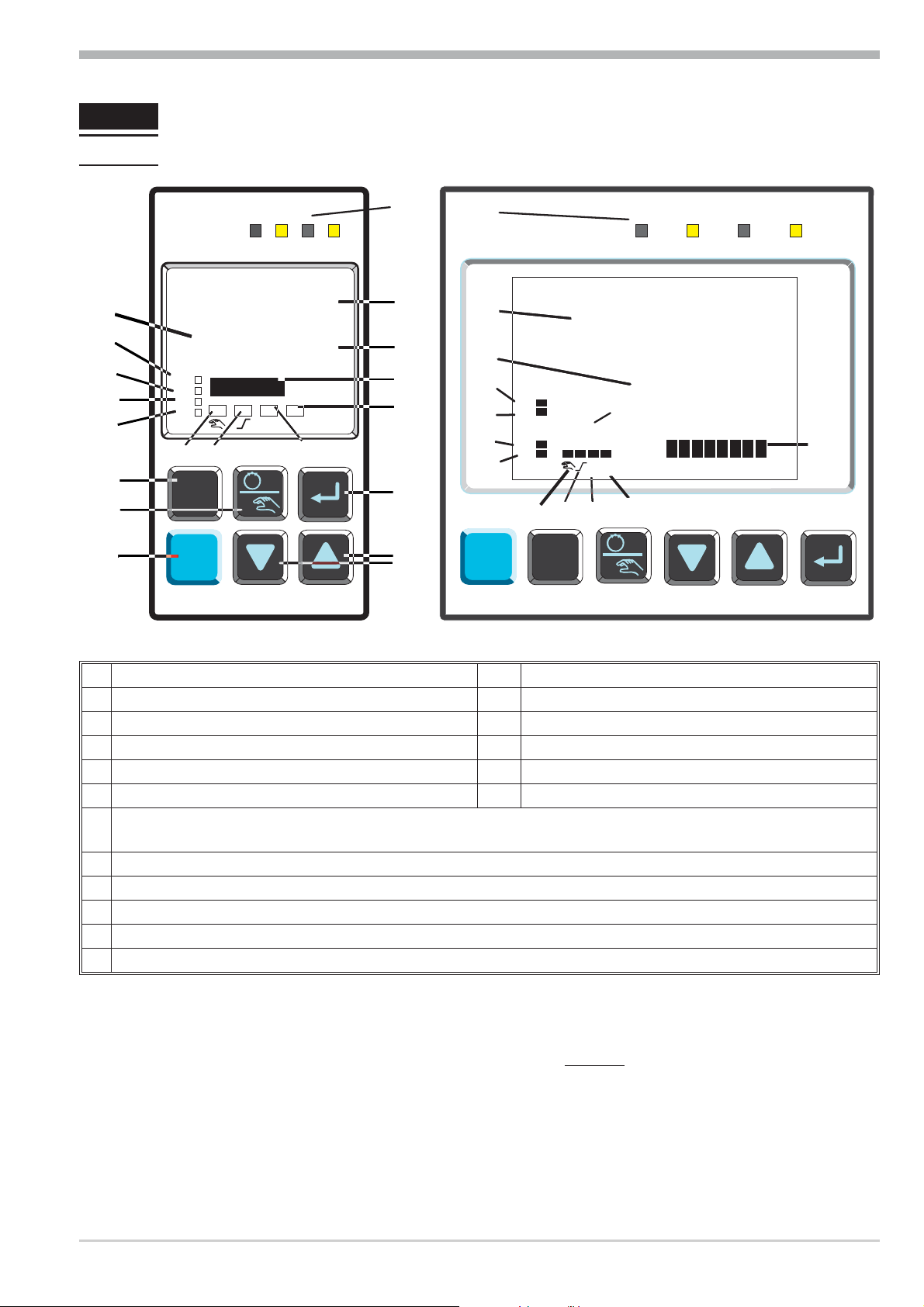
3.1 Front view
Operation
1 Statuses of switching outputsOuT.1... 6 2 Process value display
3 Setpoint or correcting variable display 4 °C or °F display signalling
5 Signals ConF- and PArA level 6 Signals activated function key
7 Selft-tuning active 8 Entry into the error list
9 Bargraph or plain text display 0 Setpoint SP.2 is effective
! Setpoint SP.E is effective " Setpoint gradient is effective
§ Manual-automatic switchover: Off: automatic On: manual mode (adjustment possible)
Blinks: manual mode (adjustment not possible (r ConF/ Cntr/ MAn))
$ Enter key: call up extented operating level / error list
% Up/ down keys: changing setpoint or correcting variable
& automatic/manual or other functions ( r ConF /LOGI)
/ freely configurable function key with pure controller operation
( PC connection for BlueControl (engineering tool)
g
KS 90-1 / KS 92-1 11 Front view
LED colours: LED 1, 2, 3, 4: yellow, Bargraph: red, other LEDs: red
In the upper display line, the process value is always displayed. At parameter,
configuration, calibration as well as extended operating level, the bottom display
line changes cyclically between parameter name and parameter value.
Page 12
Operation
A
M
l
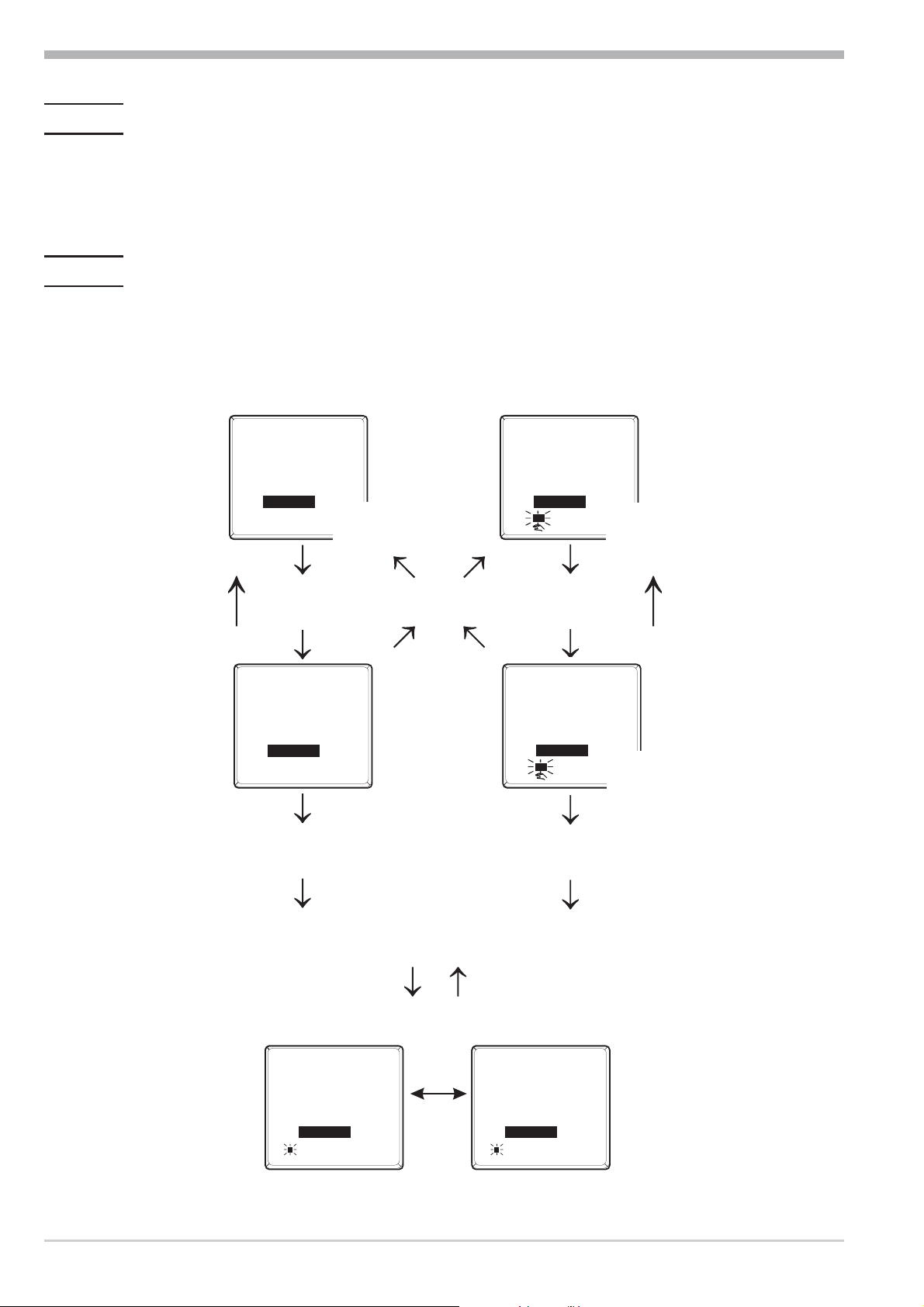
3.2 Behaviour after power-on
After supply voltage switch-on, the unit starts with the operating level.
The unit is in the condition which was active before power-off.
If the controller was in manual mode at supply voltage switch-off, the controller
will re-start with the last output value in manual mode at power-on.
3.3 Operating level
The content of the extended operating level is determined by means of BlueCon
trol (engineering tool). Parameters which are used frequently or the display of
which is important can be copied to the extended operating level.
time
out
utomatic
1199
1200
È
Ì
Ù
1199
Y21
i
Ò
Ò
i
anua
1199
Y21
È
Ì
Ù
1199
1200
time
out
-
È
Ù
only
display
Ù
Ì
Extended operating level
time
out
Error list (if error exists)
126
FbF.1
Err
Display
switching
126
2
Err
Behaviour after power-on 12 KS 90-1 / KS 92-1
Page 13
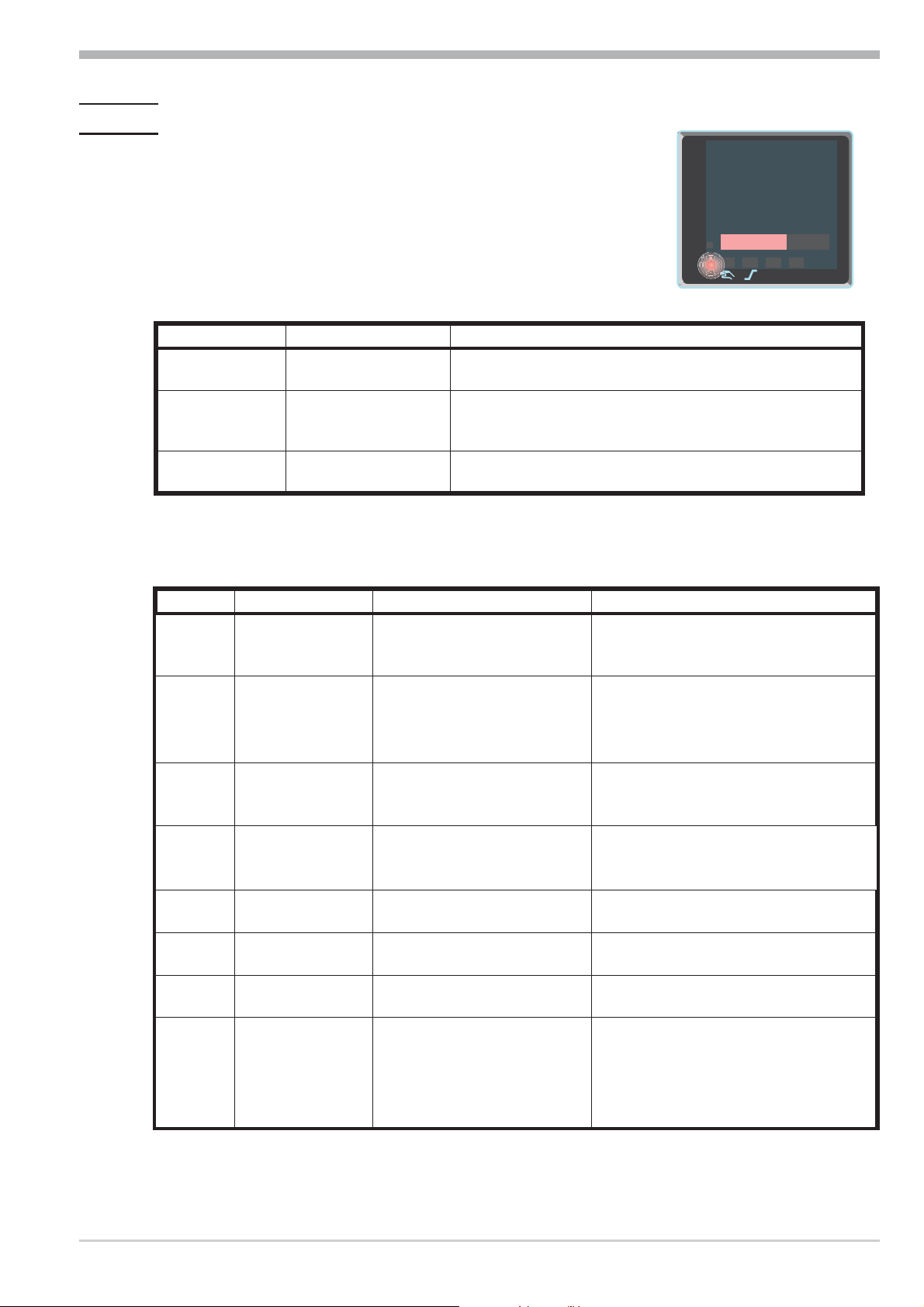
3.4 Error list / Maintenance manager
Operation
With one or several errors, the extended operating le
vel always starts with the error list. Signalling an ac
tual entry in the error list (alarm, error) is done by the
Err LED in the display. To reach the error list press
Ù twice.
-
-
1199
°C
°F
para
func
Ada
Err
Err LED status Signification Proceed as follows
blinks
(status 2)
lit
(status 1)
Alarm due to
existing error
Error removed,
alarm not
Determine the error type in the error list
After error correction the unit changes to status 1
Acknowledge the alarm in the error list pressing key ÈorÌ
The alarm entry was deleted (status 0).
-
acknowledged
off
(status 0)
No error, all alarm
entries deleted
-Not visible except when acknowledging
-
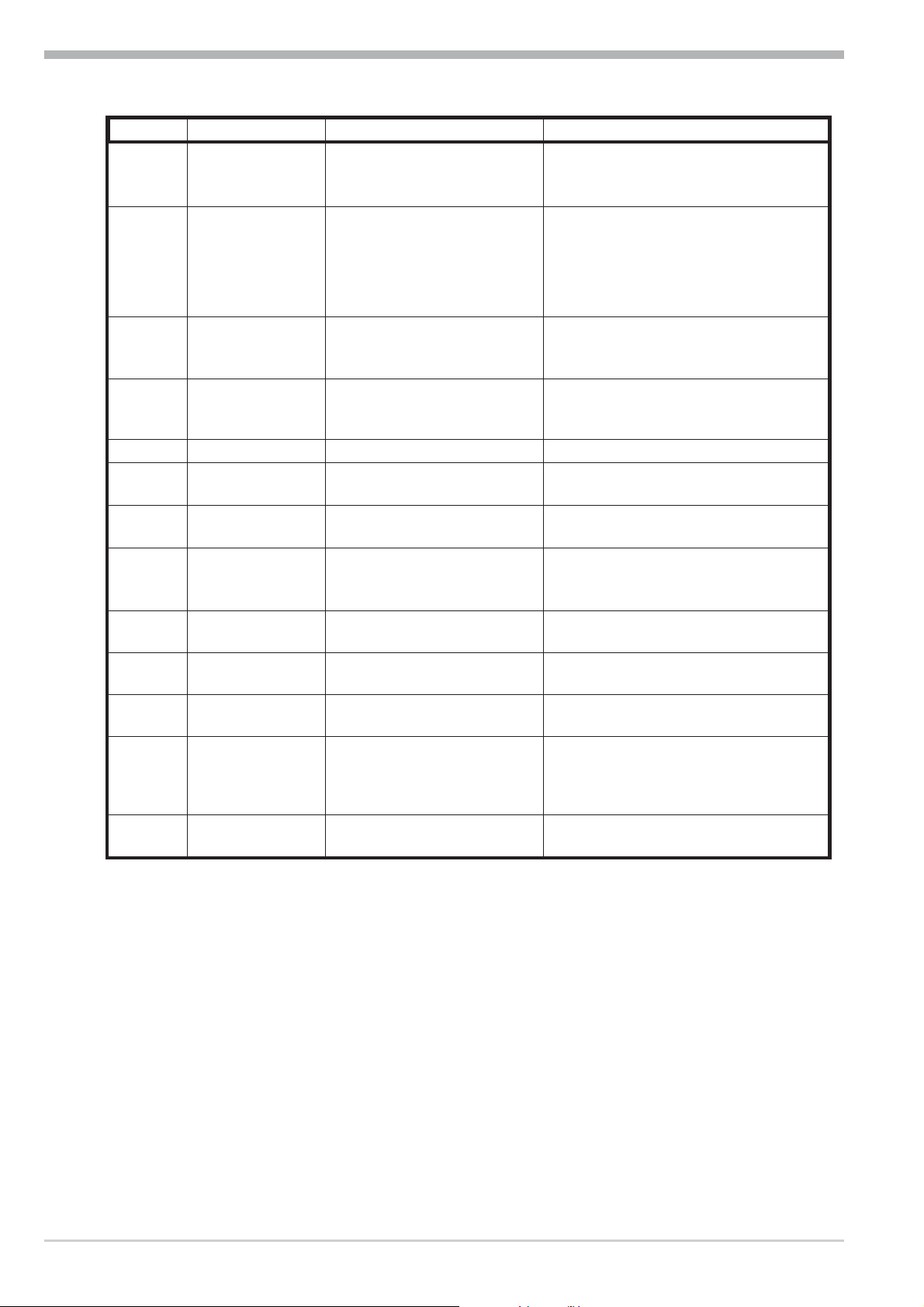
Error list:
1200
SP.E
SP.2
Name
E.1
E.2
E.3
E.4
FbF.
1/2/3
Sht.
1/2/3
POL.
1/2/3
HCA
Description Cause Possible remedial action
Internal error,
cannot be
- E.g. defective EEPROM - Contact PMA service
- Return unit to our factory
removed
Internal error,
can be reset
Configuration
error,
- e.g. EMC trouble - Keep measurement and power supply
cables in separate runs
- Ensure that interference suppression
of contactors is provided
-
wrong configuration
-
missing configuration
-
Check interaction of configuration /
parameters
can be reset
Hardware error
Sensor break
INP1/2/3
Short circuit
INP1/2/3
INP1/2/3
-
Codenumber and hardware
are not identical
-
Sensor defective
-
Faulty cabling
-
Sensor defective
-
Faulty cabling
-
Faulty cabling
-
Contact PMA service
-
Elektronic-/Optioncard must be
exchanged
-
Replace INP1/2/3 sensor
-
Check INP1/2/3 connection
-
Replace INP1/2/3 sensor
-
Check INP1/2/3 connection
-
Reverse INP1/2/3 polarity
polarity error
Heating current
alarm (HCA)
-
Heating current circuit
interrupted, I< HC.A or
I> HC.A (dependent of
configuration)
-
Heater band defective
-
Check heating current circuit
-
If necessary, replace heater band
KS 90-1 / KS 92-1 13 Error list / Maintenance manager
Page 14
Operation
Name
SSr
LooP
AdA.H
Description Cause Possible remedial action
Heating current
short circuit
(SSR)
Control loop
alarm (LOOP)
Self-tuning
heating alarm
Current flow in heating
circuit with controller off
SSR defective
Input signal defective or not
connected correctly
Output not connected
correctly
See Self-tuning heating
error status
Check heating current circuit
If necessary, replace solid-state relay
-
Check heating or cooling circuit
Check sensor and replace it, if
necessary
Check controller and switching
device
see Self-tuning heating error status
-
(ADAH)
AdA.C
Self-tuning
heating alarm
See Self-tuning cooling
error status
see Self-tuning cooling error status
-
cooling (ADAC)
dAC DAC-Alarm Actor error see errorstatus DAC-function
LiM.1/
2/3
Inf.1
Inf.2
stored limit
alarm 1/2/3
time limit value
message
duty cycle
message
adjusted limit value 1/2/3
exceeded
adjusted number of
operating hours reached
- adjusted number of duty
cycles reached
check process
-
application-specific
-
- application-specific
(digital ouputs)
E.5 Internal error in
DP module
dp.1 No access by bus
master
dp.2 Faulty
configuration
dp.3 Inadmissible
parameter
self-test errorinternal
communication interrupted
bus errorconnector
problemno bus connection
Faulty DP configuration
telegram
Faulty DP parameter
setting telegram
Switch on the instrument
againContact PMA service
Check cableCheck connectorCheck
connections
Check DP configuration telegram in
master
Check DP parameter setting
telegram in master
setting telegram
sent
dp.4 No data
communication
Bus errorAddress
errorMaster stopped
Check cable connectionCheck
addressCheck master setting
g
Saved alarms (Err-LED is lit) can be acknowledged and deleted with the digital
input di1/2/3, the è-key or the Ò-key.
Configuration, see page 37: ConF / LOGI / Err.r
g
If an alarm is still valid that means the cause of the alarm is not removed so far
(Err-LED blinks), then other saved alarms can not be acknowledged and deleted.
Error list / Maintenance manager 14 KS 90-1 / KS 92-1
Page 15
Self-tuning heating ( ADA.H) and cooling ( ADA.C) error status:
Operation
Error
status
0
3
4
5
6
7
8
Description Behaviour
No error
Faulty control
Re-configure controller (inverse i direct)
action
No response of
process variable
The control loop is perhaps not closed: check sensor,
connections and process
Low reversal point Increase ( ADA.H) max. output limiting Y.Hi or decrease (
ADA.C) min. output limiting Y.Lo
Danger of exceeded
If necessary, increase (inverse) or reduce (direct) set-point
set-point (parameter
determined)
Output step change
too small (dy > 5%)
Set-point reserve too
small
Increase ( ADA.H) max. output limiting Y.Hi or reduce (
ADA.C) min. output limiting Y.Lo
Acknowledgment of this error message leads to switch-over to
automatic mode.If self-tuning shall be continued,
increase set-point (invers), reduce set-point (direct)
or decrease set-point range
(r PArA / SEtp / SP.LO and SP.Hi )
DAC function ( DAC) error status:
Error status
0
3
4
5
6
No error
Output is blocked Check the drive for blockage
Wrong method of operation Wrong phasing, defect motor capacitor
Fail at Yp measurement Check the connection to the Yp input
Calibration error Manual calibration necessary
Description Behaviour
KS 90-1 / KS 92-1 15 Error list / Maintenance manager
Page 16

Operation
3.5 Self-tuning
For determination of optimum process parameters, self-tuning is possible.
After starting by the operator, the controller makes an adaptation attempt, where
by the process characteristics are used to calculate the parameters for fast line-out
to the set-point without overshoot.
The following parameters are optimized when self-tuning:
Parameter set 1:
Pb1 - Proportional band 1 (heating) in engineering units [e.g. °C]
ti1 - Integral time 1 (heating) in [s]r only, unless set to OFF
td1 - Derivative time 1 (heating) in [s]r only, unless set to OFF
t1 - Minimum cycle time 1 (heating) in [s]r only, unless Adt0 was
set to “no self-tuning” during configuration by means of
BlueControl
®
.
Pb2 - Proportional band 2 (cooling) in engineering units [e.g. °C]
ti2 - Integral time 2 (cooling) in [s]r only, unless set to OFF
td2 - Derivative time 2 (cooling) in [s]r only, unless set to OFF
t2 - Minimum cycle time 2 (cooling) in [s] r only, unless Adt0
was set to “no self-tuning” during configuration by means of
BlueControl
®
.
-
Parameter set 2: analogous to parameter set 1 (see page 25)
3.5.1 Preparation for self-tuning
Adjust the controller measuring range as control range limits. Set values
w
rnG.L and rnG.H to the limits of subsequent control.
(ConfigurationrControllerrlower and upper control range limits)
ConFrCntrr rnG.L and rnG.H
Determine which parameter set shall be optimized.
w
-The instantaneously effective parameter set is optimized.
r Activate the relevant parameter set (1 or 2).
Determine which parameter set shall be optimized (see tables above).
w
Select the self-tuning method
w
see chapter 3.5.3
-Step attempt after start-up
-Pulse attempt after start-up
-Optimization at the set-point
Self-tuning 16 KS 90-1 / KS 92-1
Page 17

3.5.2 Optimization after start-up or at the set-point
The two methods are optimization after start-up and at the set-point.
As control parameters are always optimal only for a limited process range, vari
ous methods can be selected dependent of requirements. If the process behaviour
is very different after start-up and directly at the set-point, parameter sets 1 and 2
can be optimized using different methods. Switch-over between parameter sets
dependent of process status is possible (see page ).
Optimization after start-up: (see page 4)
Optimization after start-up requires a certain separation between process value
and set-point. This separation enables the controller to determine the control pa
rameters by evaluation of the process when lining out to the set-point.
This method optimizes the control loop from the start conditions to the set-point,
whereby a wide control range is covered.
We recommend selecting optimization method “Step attempt after start-up”
with tunE = 0 first. Unless this attempt is completed successfully, we recom
mend a “Pulse attempt after start-up”.
Operation
-
-
-
Optimization at the set-point: (see page 18)
For optimizing at the set-point, the controller outputs a disturbance variable to the
process. This is done by changing the output variable shortly. The process value
changed by this pulse is evaluated. The detected process parameters are converted into control parameters and saved in the controller.
This procedure optimizes the control loop directly at the set-point. The advantage
is in the small control deviation during optimization.
3.5.3 Selecting the method ( ConF/ Cntr/ tunE)
Selection criteria for the optimization method:
Step attempt after start-up Pulse attempt after
start-up
tunE =0
tunE =1
tunE =2
sufficient set-point reserve
is provided
sufficient set-point
reserve is provided
always step attempt after
start-up
Optimization at the
set-point
sufficient set-point reserve is
not provided
sufficient set-point reserve is
not provided
Sufficient set-point reserve:
inverse controller:(with process value < set-point- (10% of rnGH - rnGL)
direct controller: (with process value > set-point + (10% of rnGH - rnGL)
KS 90-1 / KS 92-1 17 Self-tuning
Page 18

Operation
3.5.4 Step attempt after start-up
Condition: - tunE = 0 and sufficient set-point reserve provided
or - tunE =2
The controller outputs 0% correcting variable or Y.Lo and waits, until the process
is at rest (see start-conditions on page 8).
Subsequently, a correcting variable step change to 100% is output.
The controller attempts to calculate the optimum control parameters from the pro
cess response. If this is done successfully, the optimized parameters are taken
over and used for line-out to the set-point.
With a 3-point controller, this is followed by “cooling”.
After completing the 1st step as described, a correcting variable of -100% (100%
cooling energy) is output from the set-point. After successfull determination of
the “cooling parameters”, line-out to the set-point is using the optimized parame
ters.
-
-
3.5.5 Pulse attempt after start-up
Condition: - tunE = 1 and sufficient set-point reserve provided.
The controller outputs 0% correcting variable or Y.Lo and waits, until the process
is at rest (see start conditions page 8)
Subsequently, a short pulse of 100% is output (Y=100%) and reset.
The controller attempts to determine the optimum control parameters from the
process response. If this is completed successfully, these optimized parameters
are taken over and used for line-out to the set-point.
With a 3-point controller, this is followed by “cooling”.
After completing the 1st step as described and line-out to the set-point, correcting
variable "heating" remains unchanged and a cooling pulse (100% cooling energy)
is output additionally. After successful determination of the “cooling parame
ters”, the optimized parameters are used for line-out to the set-point.
3.5.6 Optimization at the set-point
Conditions:
A sufficient set-point reserve is not provided at self-tuning start (see page 17).
w
-
tunE is0or1
w
With Strt = 1 configured and detection of a process value oscillation by
w
more than ± 0,5% of (rnG.H - rnG.L) by the controller, the control
parameters are preset for process stabilization and the controller realizes an
optimization at the set-point (see figure “Optimization at the set-point”).
when the step attempt after power-on has failed
w
with active gradient function ( PArA/ SETP/ r.SP¹ OFF), the set-point
w
gradient is started from the process value and there isn't a sufficient set-point
reserve.
Self-tuning 18 KS 90-1 / KS 92-1
Page 19
Operation
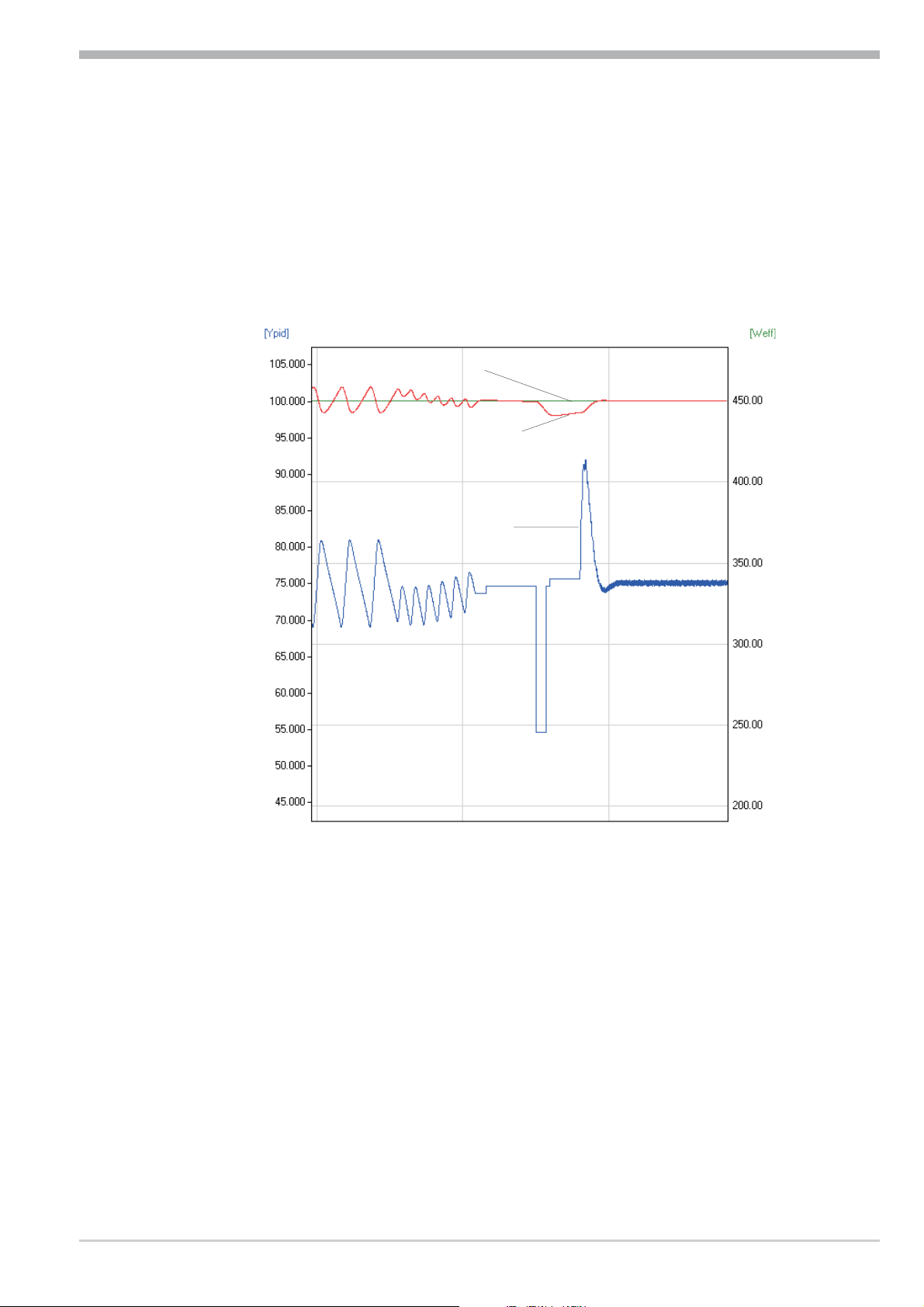
Optimization-at-the-set-point procedure:
The controller uses its instantaneous parameters for control to the set-point. In li
ned out condition, the controller makes a pulse attempt. This pulse reduces the
correcting variable by max. 20% 1, to generate a slight process value unders
hoot. The changing process is analyzed and the parameters thus calculated are re
corded in the controller. The optimized parameters are used for line-out to
theset-point.
Optimization at the set-point
-
set-point
process value
-
-
correcting
variable
With a 3-point controller, optimization for the “heating“ or “cooling” parameters
occurs dependent of the instantaneous condition.
These two optimizations must be started separately.
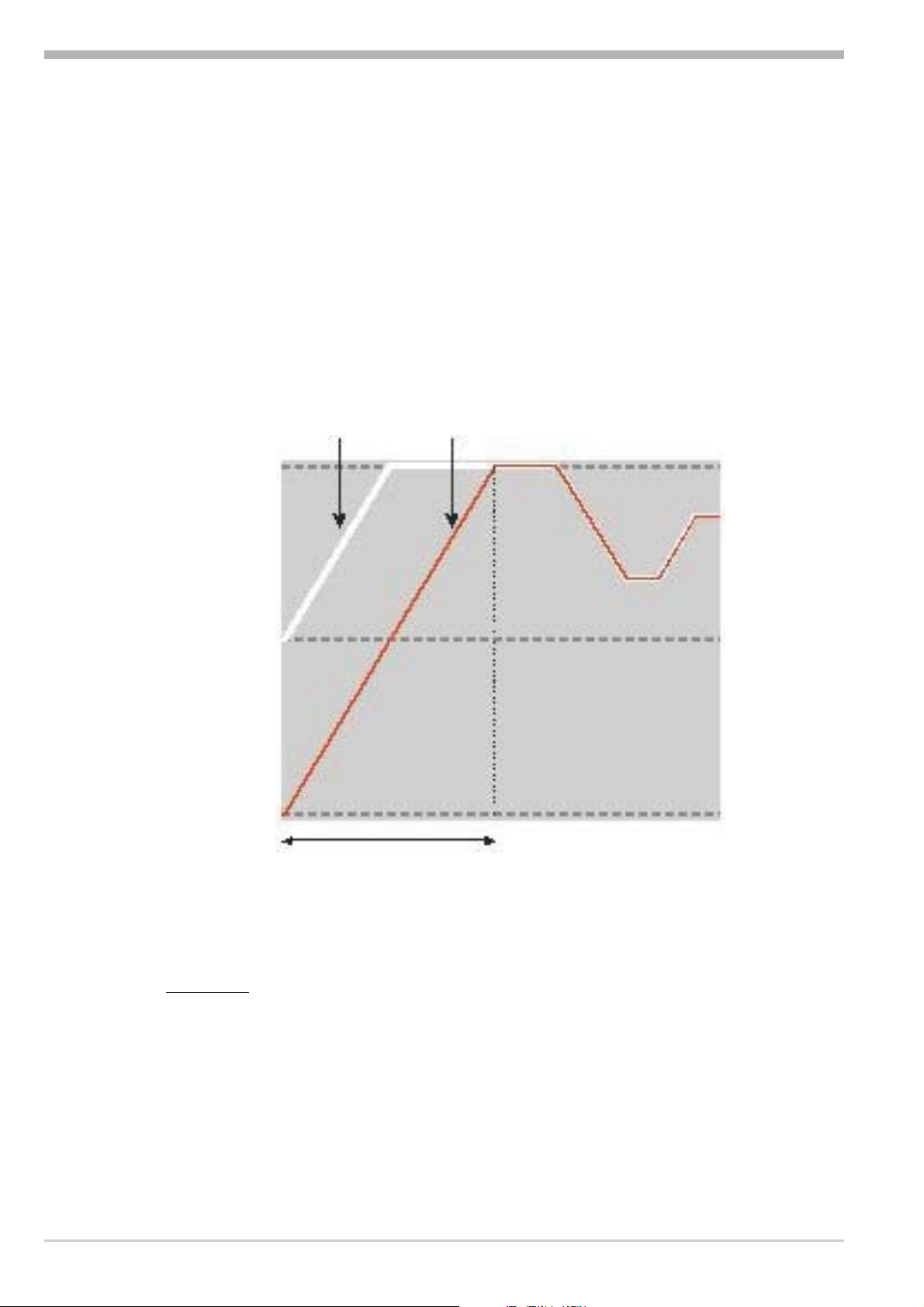
1 If the correcting variable is too low for reduction in lined out condition it is
increased by max. 20%.
KS 90-1 / KS 92-1 19 Self-tuning
Page 20
Operation
3.5.7 Optimization at the set-point for 3-point stepping controller
With 3-point stepping controllers, the pulse attempt can be made with or without
position feedback. Unless feedback is provided, the controller calculates the mo
tor actuator position internally by varying an integrator with the adjusted actuator
travel time. For this reason, precise entry of the actuator travel time (tt), as time
between stops is highly important. Due to position simulation, the controller
knows whether an increased or reduced pulse must be output. After supply volta
ge switch-on, position simulation is at 50%. When the motor actuator was varied
by the adjusted travel time in one go, internal calculation occurs, i.e. the position
corresponds to the simulation:
Simulation actual position
-
-
Internal calculation
tt
Internal calculation always occurs, when the actuator was varied by travel time
tt in one go
, independent of manual or automatic mode. When interrupting the
variation, internal calculation is cancelled. Unless internal calculation occurred
already after self-tuning start, it will occur automatically by closing the actuator
once.
Unless the positioning limits were reached within 10 hours, a significant deviati
on between simulation and actual position may have occurred. In this case, the
controller would realize minor internal calculation, i.e. the actuator would be clo
sed by 20 %, and re-opened by 20 % subsequently. As a result, the controller
knows that there is a 20% reserve for the attempt.
Self-tuning 20 KS 90-1 / KS 92-1
-
Page 21

3.5.8 Self-tuning start
Start condition:
For process evaluation, a stable condition is required. Therefore, the
w
controller waits until the process has reached a stable condition after
self-tuning start.
The rest condition is considered being reached, when the process value
oscillation is smaller than ± 0,5% of (rnG.H - rnG.L).
For self-tuning start after start-up, a 10% difference from (SP.LO ... SP.Hi)
w
is required.
Operation
g
3.5.9 Self-tuning cancellation
Self-tuning start can be blocked via BlueControl®(engineering tool) ( P.Loc).
Strt = 0 Only manual start by pressing keys Ù and È
simultaneously or via interface is possible.
Strt = 1 Manual start by press keys Ù and È simultaneously
via interface and automatic start after power-on and detection
of process oscillations.
Ada LED status Signification
blinks Waiting, until process calms down
lit Self-tuning is running
off Self-tuning not activ or ended
By the operator:
Self-tuning can always be cancelled by the operator. For this, press Ù and È
key simultaneously.With controller switch-over to manual mode after self-tuning
start, self-tuning is cancelled. When self-tuning is cancelled, the controller will
continue operating using the old parameter values.
1199
°C
°F
1200
para
func
Ada
Err
SP.E
SP.2
By the controller:
If the Err LED starts blinking whilst self-tuning is running, successful self-tuning
is prevented due to the control conditions. In this case, self-tuning was cancelled
by the controller. The controller continues operating with the old parameters in
automatic mode. In manual mode it continues with the old controller output va
lue.
KS 90-1 / KS 92-1 21 Self-tuning
-
Page 22

Operation
3.5.10 Acknowledgement procedures in case of unsuccessful self-tuning
1. Press keys Ù and È simultaneously:
The controller continues controlling using the old parameters in automatic
mode. The Err LED continues blinking, until the self-tuning error was
acknowledged in the error list.
2. Press key Ò (if configured):
The controller goes to manual mode. The Err LED continues blinking,
until the self-tuning error was acknowleged in the error list.
3. Press key Ù :
Display of error list at extended operating level. After acknowledgement
of the error message, the controller continues control in automatic mode using
the old parameters.
Cancellation causes:
r page 15: "Error status self-tuning heating ( ADA.H) and cooling ( ADA.C)"
Self-tuning 22 KS 90-1 / KS 92-1
Page 23
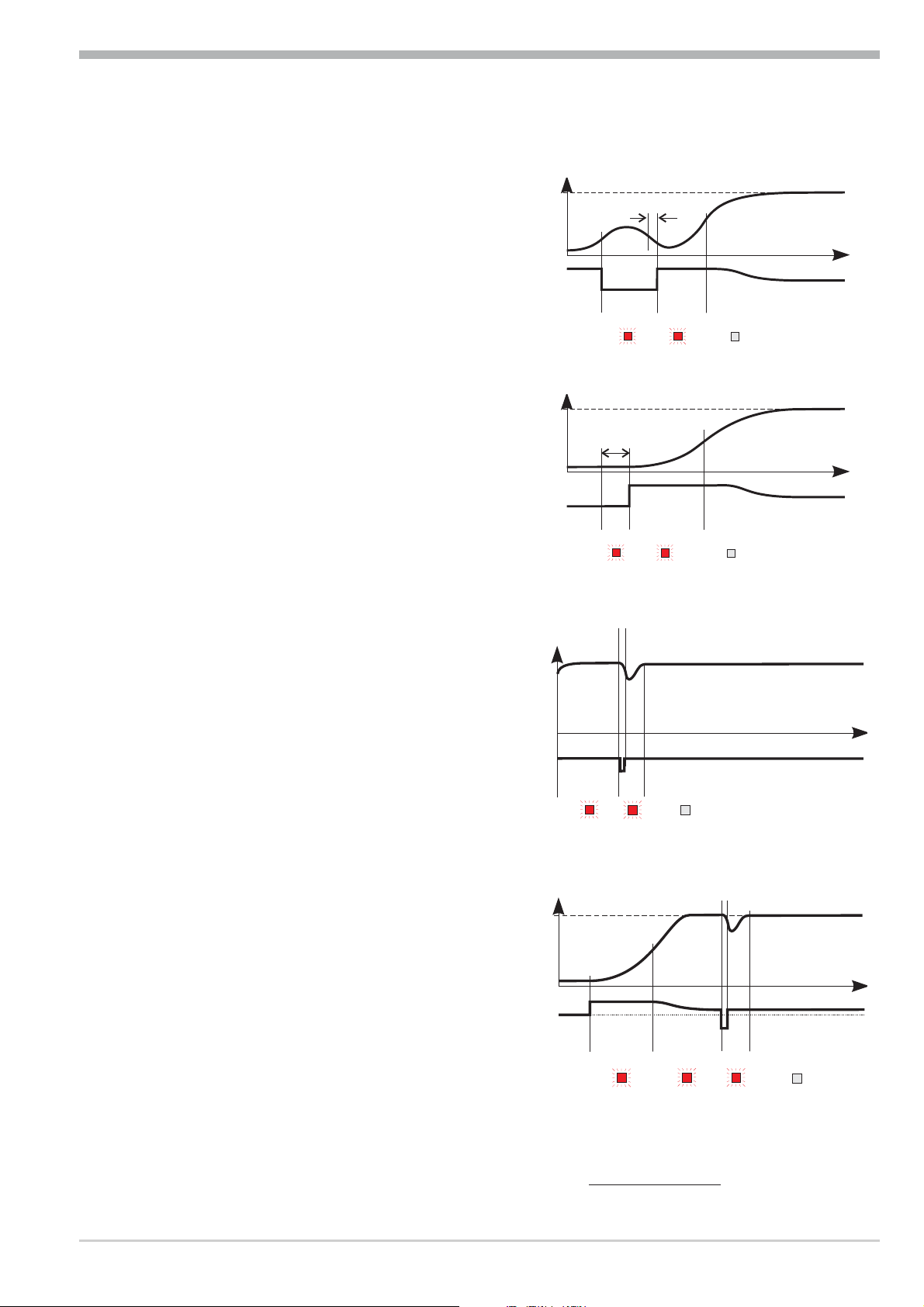
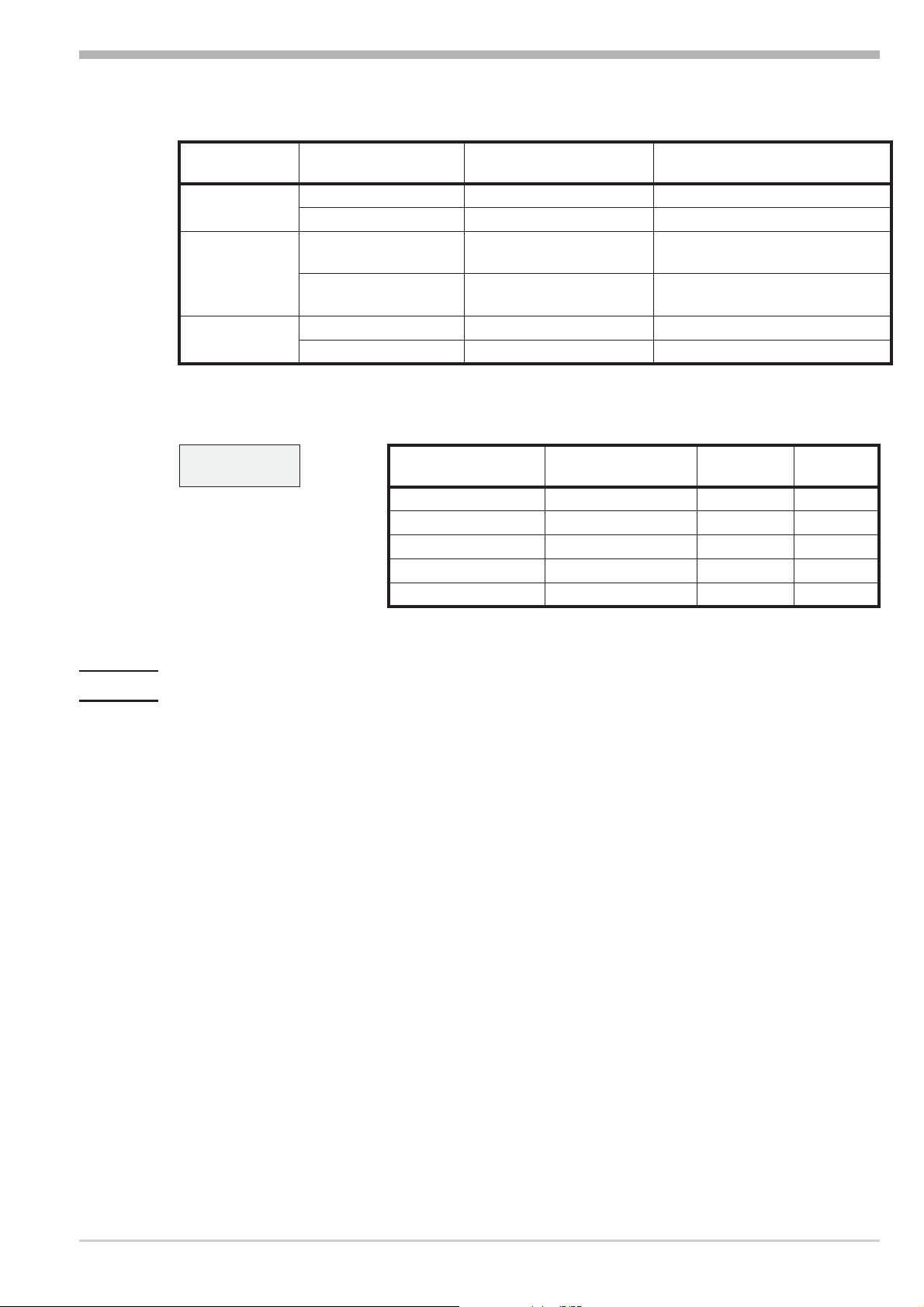
3.5.11 Examples for self-tuning attempts
S
(controller inverse, heating or heating/cooling)
Operation
Start: heating power switched on
Heating power Y is switched off (1).
When the change of process value X
was constant during one minute (2),
the power is switched on (3).
At the reversal point, the self-tuning at
tempt is finished and the new parameter
are used for controlling to set-point W.
Start: heating power switched off
The controller waits 1,5 minutes (1).
Heating power Y is switched on (2).
At the reversal point, the self-tuning
attempt is finished and control to the
set-point is using the new parameters.
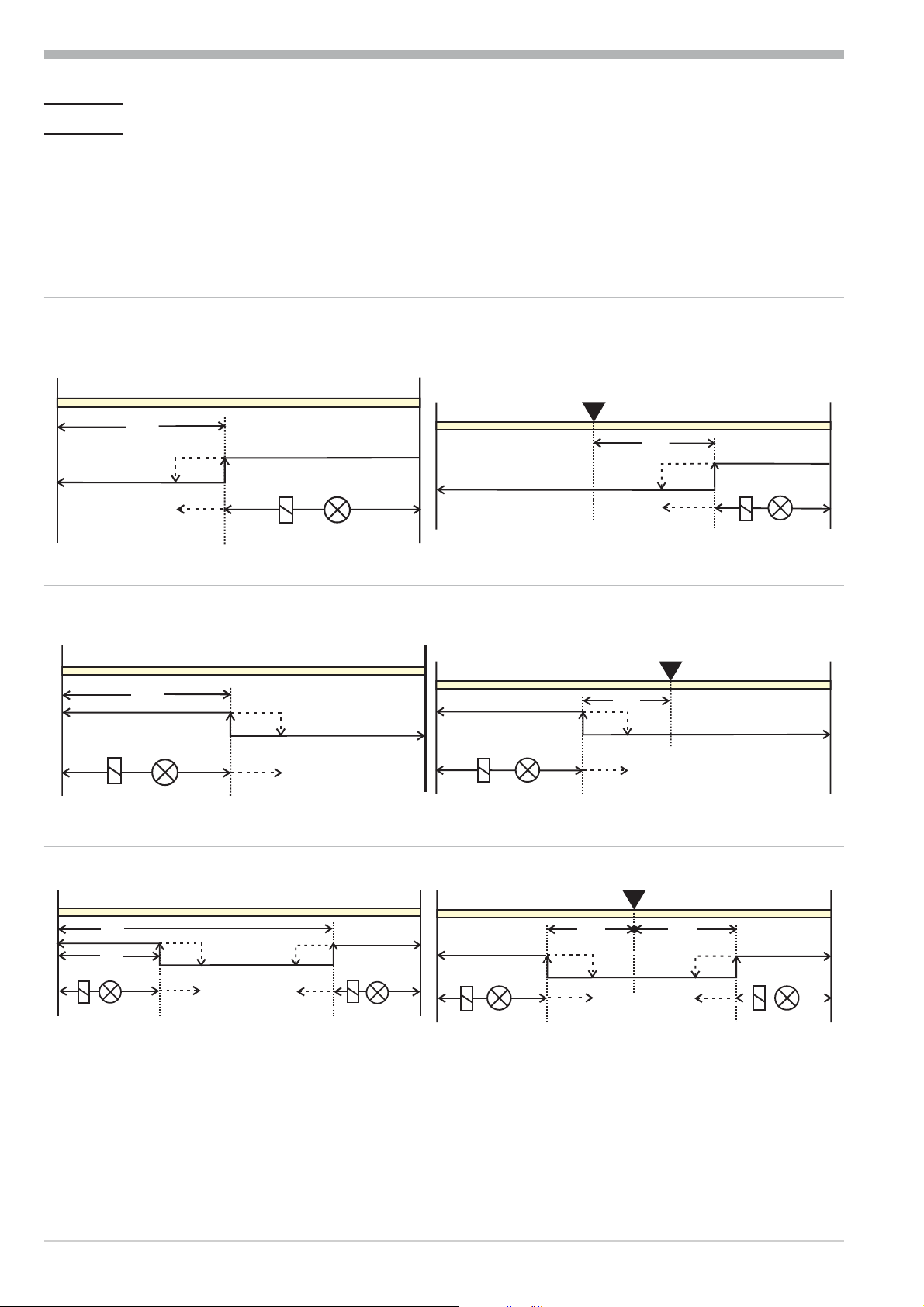
Self-tuning at the set-point a
The process is controlled to the
set-point. With the control deviation
constant during a defined time (1)
(i.e. constant separation of process value
and set-point), the controller outputs a
reduced correcting variable pulse (max.
20%) (2). After determination of the
control parameters using the process
characteristic (3), control is started
using the new parameters (4).
100%
100%
X
W
100%
0%
tart r
X
W
Y
0%
Star t r
X
W
Y
0%
start r
Y
1
blinks
1
blinks
r
blinks
2
1
t
3
2
2
3
4
t
t reversal point
t
t reversal point
t
Three-point controller a
The parameter for heating and cooling are
X
W
3
rt
determined in two attempts. The heating
power is switched on (1). Heating para
meters Pb1, ti1, td1 and t1 are de
termined at the reversal point. Control to
the set-point occurs(2). With constant
control deviation, the controller provides a
cooling correcting variable pulse (3). Af
-
-
+100%
Y0%
-100%
Start r
1
t reversal
point
2
4
t
5
-
ter determining its cooling parameters
Pb2, ti2, td2 and t2 (4) from the
process characteristics , control operation is started using the new parameters (5).
a
KS 90-1 / KS 92-1 23 Self-tuning
During phase 3, heating and cooling are done simultaneously!
Page 24
Operation
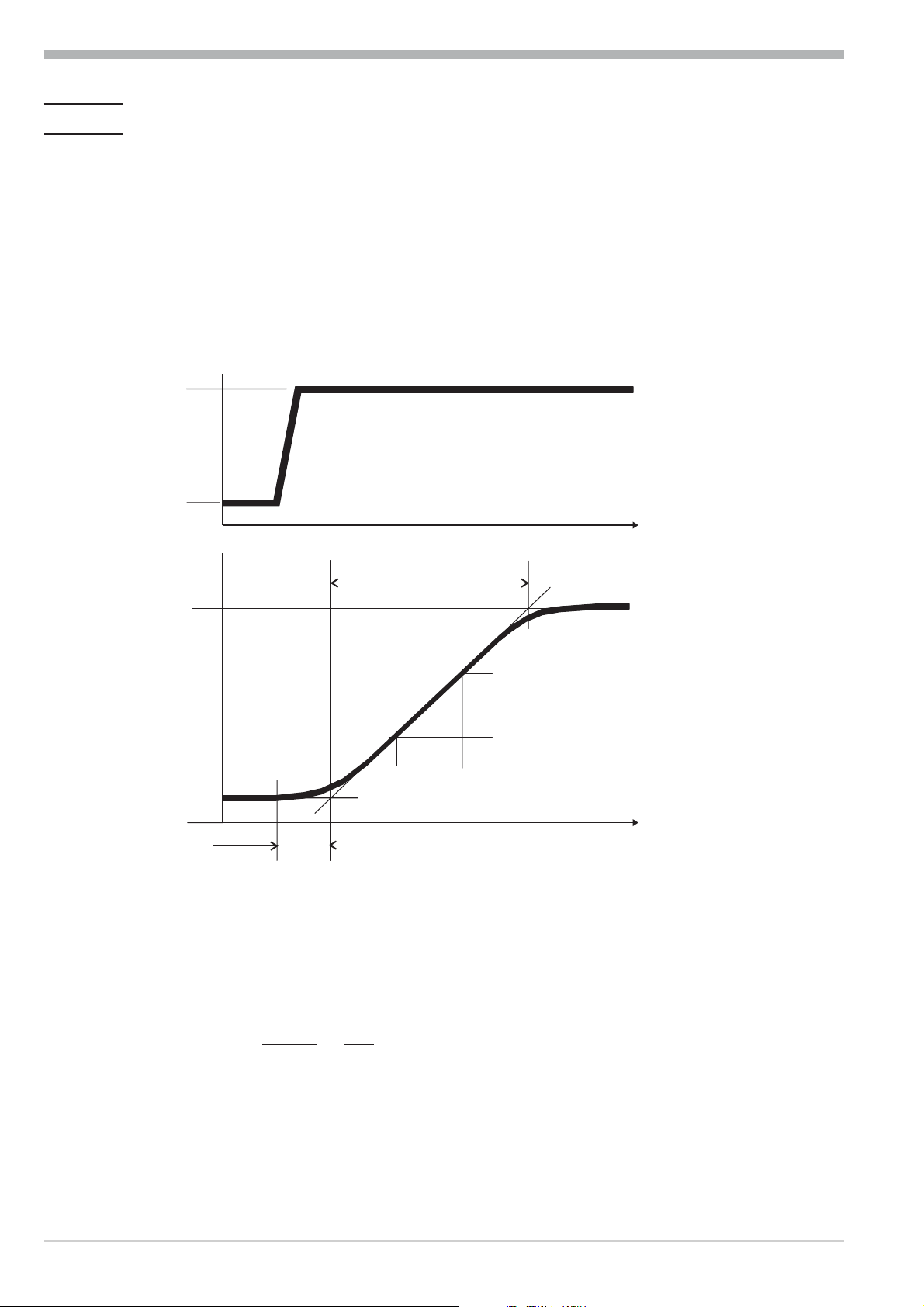
y
3.6 Manual self-tuning
The optimization aid can be used with units on which the control parameters shall
be set without self-tuning.
For this, the response of process variable x after a step change of correcting va
riable y can be used. Frequently, plotting the complete response curve (0 to
100%) is not possible, because the process must be kept within defined limits.
Values T
sponse) can be used to determine the maximum rate of increase v
and x
g
(step change from 0 to 100 %) or Dt and Dx (partial step re
max
.
max
100%
Y
h
0%
x
t
Tg
X
max
-
-
{X
{t
Tu
y = correcting variable
Y
h
Tu = delay time (s)
Tg = recovery time (s)
X
max
V
max
The control parameters can be determined from the values calculated for delay
time T
cording to the formulas given below. Increase Xp, if line-out to the set-point os
cillates.
= control range
= maximum process value
Xmax
=
, maximum rate of increase v
u
Tg
{{x
=
= max. rate of increase of process value
t
, control range Xhand characteristic K ac
max
t
-
-
Manual self-tuning 24 KS 90-1 / KS 92-1
Page 25
Operation
Parameter adjustment effects
Parameter Control Line-out of
disturbances
Pb1 higher increased damping slower line-out slower reduction of duty cycle
lower reduced damping faster line-out faster reduction of duty cycle
td1 higher reduced damping faster response to
disturbances
lower increased damping slower response to
disturbances
ti1 higher increased damping slower line-out slower reduction of duty cycle
lower reduced damping faster line-out faster reduction of duty cycle
Start-up behaviour
faster reduction of duty cycle
slower reduction of duty cycle
Formulas
K = Vmax *
Tu
With 2-point and 3-point
controllers, the cycle time
must be adjusted to
t1 / t2 £ 0,25 * Tu
controller behavior Pb1 [phy. units] td1 [s] ti1 [s]
PID 1,7*K 2*Tu 2*Tu
PD 0,5 * K Tu OFF
PI 2,6 * K OFF 6*Tu
PKOFF OFF
3-point-stepping 1,7 * K Tu 2 * Tu
3.7 Second PID parameter set
The process characteristic is frequently affected by various factors such as process value, correcting variable and material differences.
To comply with these requirements, KS 9x-1 can be switched over between two
parameter sets.
Parameter sets PArA and PAr.2 are provided for heating and cooling.
Dependent of configuration ( ConF/LOG/Pid.2), switch-over to the second pa
rameter set ( ConF/LOG/Pid.2) is via one of digital inputs di1, di2, di3,
key è or interface (OPTION).
g
Self-tuning is always done using the active parameter set, i.e. the second
parameter set must be active for optimizing.
-
KS 90-1 / KS 92-1 25 Second PID parameter set
Page 26
Operation
3.8 Alarm handling
Max. three alarms can be configured and assigned to the individual outputs. Ge
nerally, outputs OuT.1... OuT.6 can be used each for alarm signalling. If more
than one signal is linked to one output the signals are OR linked. Each of the 3 li
mit values Lim.1 … Lim.3 has 2 trigger points H.x (Max) and L.x (Min), which
can be switched off individually (parameter = “OFF”). Switching difference
HYS.x and delay dEl.x of each limit value is adjustable.
Ü Operaing principle absolut alarm
L.1 = OFF
InL.1
H.1
HYS.1
LED
InH.1
* Operating principle relative alarm
L.1 = OFF
SP
InL.1
H.1
HYS.1
-
-
InH.1
LED
H.1 = OFF
InL.1
InL.1
H.1
L.1
LED
L.1
HYS.1
LED
HYS.1 HYS.1
InH.1
InH.1
LED
H.1 = OFF
InL.1
InL.1
2
LED
LED
HYS.1
HYS.1
L.1
SP
InH.1
L.1
SP
InH.1
H.1
HYS.1
LED
2
1: normally closed ( ConF/ Out.x/O.Act=1 ) (see examples in the drawing)
2: normally open ( ConF/ Out.x/O.Act= 0 )(inverted output relay action)
Alarm handling 26 KS 90-1 / KS 92-1
Page 27

Operation
g
The variable to be monitored can be selected seperately for each alarm via
configuration
The following variables can be monitored:
process value
w
control deviation xw (process value - set-point)
w
control deviation xw + suppression after start-up or set-point change
w
After switching on or set-point changing, the alarm output is suppressed,
until the process value is within the limits for the first time. At the latest after
expiration of time 10 ti1, the alarm is activated. (ti1 = integral time 1;
parameter r Cntr)
If ti1 is switched off (ti1 = OFF), this is interpreted as Î, i.e. the alarm
is not activated, before the process value was within the limits once.
Measured value INP1
w
Measured value INP2
w
Measured value INP3
w
effective set-point Weff
w
correcting variable y (controller output)
w
g
Deviation from SP internal
w
x1-x2
w
control deviation xw + suppression after start-up or setpoint change
w
without time limit.
- after switch-on or setpoint change, alarm output is suppressed, until the
process value was within the limits once.
If measured value monitoring + alarm status storage is chosen ( ConF / Lim /
Fnc.x=2/4), the alarm relay remains switched on until the alarm is resetted in
the error list ( Lim 1..3 = 1).
KS 90-1 / KS 92-1 27 Alarm handling
Page 28

Operation
3.9 Operating structure
After supply voltage switch-on, the controller starts with the operating levels.
The controller status is as before power off.
g
g
1199
1200
Ù
3sec.
1199
PArA
para
Ì
Ù
1199
ConF
para
Ì
PASS
Ù
1199
CAL
PASS
Ù
PASS
1199
Ì
PArA - level: At PArA - level, the right decimal point of the bottom
display line is lit continuously.
ConF - level: At ConF - level, the right decimal point of bottom
display line blinks.
End
Ù
g
g
When safety switch Loc is open, only the levels enabled by means
PASS
tool). Individual parameters accessible without password must be copied to the
extended operating level.
All password-protected levels are disabled only, if the Loc safety switch is
closed.
Factory setting:Safety switch Loc closed: all levels accessible without
restriction, password PASS = OFF.
Safety
switch Loc
closed OFF / password disabled / enabled enabled
open OFF / password disabled disabled
open OFF enabled enabled
open Password enabled enabled after password entry
of BlueControl (engineering tool) are visible and accessible by entry
of the password also adjusted by means of BlueControl (engineering
Password entered
with BluePort®
Function disabled or
enabled with BluePort®
Access via the instrument
front panel:
Operating structure 28 KS 90-1 / KS 92-1
Page 29

4 Configuration level
4.1 Configuration survey
ConF Configuration level
Configuration level
Control and self-tuning
Cntr
SP.Fn I.Fnc I.Fnc I.Fnc Fnc.1 O.Act
È
C.tYP StYP StYP S.Lin Src.1 Y.1 O.Act O.Act SP.2 Addr
Ì
C.Fnc S.Lin Corr S.Typ Fnc.2 Y.2 OuT.0 Y.1 SP.E PrtY
C.dif Corr In.F Corr Src.2 Lim.1 Out.1 Y.2 Y.2 dELY
mAn In.F In.F Fnc.3 Lim.2 O.Src Lim.1 Y.E dp.Ad
C.Act Src.3 Lim.3 O.FAI Lim.2 mAn bc.up
FAIL HC.AL dAc.A Y.1 Lim.3 C.oFF O2
rnG.L LP.AL LP.AL Y.2 dAc.A m.Loc Unit
rnG.H dAc.A HC.AL Lim.1 LP.AL Err.r dP
CYCL HC.SC Lim.2 HC.AL Pid.2 LEd
tunE P.End Lim.3 HC.SC I.Chg dISP
Strt FAi.1 dAc.A P.End di.Fn C.dEl
Input 1
InP.1
InP.2
Input 2
Input 3
InP.3
Limit value functions
Lim
OUt.1
Output 1
OUt.2
Output 2
O.tYP O.tYP
See output 1
FAi.2 LP.AL FAi.1
FAi.3 HC.AL FAi.2
dP.Er HC.SC FAi.3
FAi.1 OuT.0
FAi.2 Out.1
FAi.3 O.Src
dP.Er
OUt.3
Output 3
OUt.4
Output 4
Out.5/6
Output 5/6
LOGI
L_r bAud
See output 1
Digital inpu ts
Othr Display,
operation, interface
Adjustment:
The configuration can be adjusted by means of keys ÈÌ .
w
Transition to the next configuration is by pressing key Ù .
w
After the last configuration of a group, donE is displayed and followed by
w
automatic change to the next group
Return to the beginning of a group is by pressing the Ù key for 3 sec.
KS 90-1 / KS 92-1 29 Configuration survey
Page 30

Configuration level
4.2 Configuration parameters
Cntr
Name Value range Description Default
SP.Fn
C.tYP
C.Fnc
C.dif
mAn
C.Act
Basic configuration of setpoint processing
0
set-point controller can be switched over to external set-point
0
(-> LOGI/ SP.E)
8
0
1
2
3
standard controller with external offset (SP.E)
Calculation of the process value
standard controller (process value = x1)
ratio controller (x1/x2)
difference (x1 - x2)
Maximum value of x1and x2. It is controlled with the bigger
0
value. At sensor failure it is controlled with the remaining
actual value.
4
Minimum value of x1and x2. It is controlled with the smaller
value. At sensor failure it is controlled with the remaining
actual value.
5
Mean value (x1, x2). With sensor error, controlling is
continued with the remaining process value.
6
7
8
0
1
2
Switchover between x1 and x2 (-> LOGI/ I.ChG)
O2function with constant sensor temperature
O2function with measured sensor temperature
Control behaviour (algorithm)
on/off controller or signaller with one output
PID controller (2-point and continuous)
D / Y / Off, or 2-point controller with partial/full load
1
switch-over
3
4
5
6
0
1
2 x PID (3-point and continuous)
3-point stepping controller
3-point stepping controller with position feedback Yp
continuous controller with integrated positioner
Output action of the PID controller derivative action
Derivative action acts only on the measured value.
Derivative action only acts on the control deviation
0
(set-point is also differentiated)
Manual operation permitted
0
1
no
yes (r LOGI / mAn)
Method of controller operation
0
inverse, e.g. heating
0
0
The correcting variable increases with decreasing process
value and decreases with increasing process value.
1
direct, e.g. cooling
The correcting variable increases with increasing process
value and decreases with decreasing process value.
Configuration parameters 30 KS 90-1 / KS 92-1
Page 31

Configuration level
Name Value range Description Default
FAIL
rnG.L
rnG.H
CYCL
tunE
Strt
Adt0
0
1
2
-1999...9999
-1999...9999
0
1
2
3
0
1
2
0
1
0
1
Behaviour at sensor break
controller outputs switched off
y=Y2
y = mean output. The maximum permissible output can be
adjusted with parameter Ym.H. To prevent determination of
inadmissible values, mean value formation is only if the
control deviation is lower than parameter L.Ym.
X0 (start of control range) 1
X100 (end of control range) 1
Characteristic for 2-point- and 3-point-controllers
standard
water cooling linear (siehe Seite 45)
water cooling non-linear
with constant cycle
Auto-tuning at start-up
At start-up with step attempt, at set-point with impulse attempt
At start-up and at set-point with impulse attempt. Setting for
fast controlled systems (e.g. hot runner control)
Always step attempt at start-up
Start of auto-tuning
Manual start of auto-tuning
Manual or automatic start of auto-tuning at power on or
when oscillating is detected
Optimization of T1, T2 (only visible with BlueControl!)
Automatic optimization
No optimization
1
-100
1200
0
0
0
0
1 rnG.L and rnG.H are indicating the range of control on which e.g. the
self-tuning is refering
InP.1
Name Value range Description Default
I.fnc
S.tYP
INP1 function selection
0
1
2
3
4
5
6
7
No function (following INP data are skipped)
Heating current input
External set-point SP.E (switch-over -> LOGI/ SP.E)
Position feedback Yp
Second process value x2 (ratio, min, max, mean)
External positioning value Y.E (switch-over r LOGI / Y.E)
No controller input (e.g. limit signalling instead)
Process value x1
Sensor type selection
0
1
2
3
thermocouple type L (-100...900°C) , Fe-CuNi DIN
thermocouple type J (-100...1200°C) , Fe-CuNi
thermocouple type K (-100...1350°C), NiCr-Ni
thermocouple type N (-100...1300°C), Nicrosil-Nisil
7
1
KS 90-1 / KS 92-1 31 Configuration parameters
Page 32

Configuration level
Name Value range Description Default
S.Lin
Corr
In.f
fAI1
-1999...999
4
5
6
7
8
9
10
18
20
21
22
23
24
30
40
41
42
50
51
52
53
0
1
0
1
2
3
4
9
0
1
thermocouple type S (0...1760°C), PtRh-Pt10%
thermocouple type R (0...1760°C), PtRh-Pt13%
thermocouple type T (-200...400°C), Cu-CuNi
thermocouple type C (0...2315°C), W5%Re-W26%Re
thermocouple type D (0...2315°C), W3%Re-W25%Re
thermocouple type E (-100...1000°C), NiCr-CuNi
thermocouple type B (0/100...1820°C), PtRh-Pt6%
special thermocouple
Pt100 (-200.0 ... 100,0 °C)
( -200,0 ... 150,0°C with reduced lead resistance: measuring
resistance + lead resistance ß160 [ )
Pt100 (-200.0 ... 850,0 °C)
Pt1000 (-200.0 ... 850.0 °C)
special 0...4500 Ohm (preset to KTY11-6)
special 0...450 Ohm
0...20mA / 4...20mA 1
0...10V / 2...10V 1
special -2,5...115 mV 1
special -25...1150 mV 1
potentiometer 0...160 Ohm 1
potentiometer 0...450 Ohm 1
potentiometer 0...1600 Ohm 1
potentiometer 0...4500 Ohm 1
Linearization (only at S.tYP = 23 (KTY 11-6), 24 (0...450 W), 30
(0..20mA), 40 (0..10V), 41 (0...100mV) and 42 (special -25...1150 mV))
none
Linearization to specification. Creation of linearization table
with BlueControl (engineering tool) possible. The
characteristic for KTY 11-6 temperature sensors is preset.
Measured value correction / scaling
Without scaling
Offset correction (at CAL level)
(controller offset adjustment is at CALlevel)
2-point correction (at CAL level)
(calibration is at the controller CALlevel)
Scaling (at PArA level)
Autom. calibration (only with positionfeedback Yp)
Alternative value for error at INP1
If a value is adjusted, this value is used for display and
calculation in case of error (e.g. FAIL).
a Before activating a substitute value, the effect in the
control loop should be considered!
Forcing INP1 (only visible with BlueControl!)
No forcing
Forcing via serial interface
0
0
OFF
0
1 with current and voltage input signals, scaling is required (see chapter 5.3)
Configuration parameters 32 KS 90-1 / KS 92-1
Page 33

Configuration level
InP.2
Name Value range Description Default
I.Fnc
S.tYP
Corr
In.F
fAI2
Function selection of INP2
0
1
2
3
4
5
6
7
no function (subsequent input data are skipped)
heating current input
external set-point (SP.E)
Yp input
Second process value X2
External positioning value Y.E (switch-over r LOGI / Y.E)
no controller input (e.g. transmitter input instead)
Process value x1
Sensor type selection
30
31
50
51
52
53
0...20mA / 4...20mA 1
0...50mA AC 1
Potentiometer ( 0...160 Ohm) 1
Potentiometer ( 0...450 Ohm) 1
Potentiometer ( 0...1600 Ohm) 1
Potentiometer ( 0...4500 Ohm) 1
Measured value correction / scaling 0
0 Without scaling
1 Offset correction (at CAL level)
(offset entry is at controller CALlevel)
2 2-point correction (at CALlevel)
(calibration is at controller CALlevel)
3 Scaling (at PArA level)
-1999...999
9
Alternative value for error at INP2
If a value is adjusted, this value is used for display and
calculation in case of error (e.g. FAIL).
a Before activating a substitute value, the effect in the
control loop should be considered!
Forcing INP2 (only visible with BlueControl!)
0
1
No forcing
Forcing via serial interface
1
30
OFF
0
1 with current and voltage input signals, scaling is required (see chapter 5.3)
InP.3
Name Value range Description Default
I.Fnc
0
1
2
3
4
5
6
7
KS 90-1 / KS 92-1 33 Configuration parameters
Function selection of INP3
no function (subsequent input data are skipped)
heating current input
External set-point SP.E (switch-over -> LOGI/ SP.E)
Yp input
Second process value X2
External positioning value Y.E (switch-over r LOGI / Y.E)
no controller input (e.g. transmitter input instead)
Process value x1
1
Page 34

Configuration level
Name Value range Description Default
S.Lin
S.tYP
Corr
In.F
fAI3
-1999...999
0
1
0
1
2
3
4
5
6
7
8
9
10
18
20
21
22
23
24
30
41
42
50
51
52
53
0
1
2
3
4
9
0
1
Linearization (only at S.tYP = 30 (0..20mA) and 40 (0..10V) adjustable)
none
Linearization to specification. Creation of linearization table
with BlueControl (engineering tool) possible. The
characteristic for KTY 11-6 temperature sensors is preset.
Sensor type selection
thermocouple type L (-100...900°C) , Fe-CuNi DIN
thermocouple type J (-100...1200°C) , Fe-CuNi
thermocouple type K (-100...1350°C), NiCr-Ni
thermocouple type N (-100...1300°C), Nicrosil-Nisil
thermocouple type S (0...1760°C), PtRh-Pt10%
thermocouple type R (0...1760°C), PtRh-Pt13%
thermocouple type T (-200...400°C), Cu-CuNi
thermocouple type C (0...2315°C), W5%Re-W26%Re
thermocouple type D (0...2315°C), W3%Re-W25%Re
thermocouple type E (-100...1000°C), NiCr-CuNi
thermocouple type B (0/100...1820°C), PtRh-Pt6%
special thermocouple
Pt100 (-200.0 ... 100,0 °C)
( -200,0 ... 150,0°C with reduced lead resistance: measuring
resistance + lead resistance ß160 [ )
Pt100 (-200.0 ... 850,0 °C)
Pt1000 (-200.0 ... 850.0 °C)
special 0...4500 Ohm (preset to KTY11-6)
special 0...450 Ohm
0...20mA / 4...20mA 1
special -2,5...115 mV 1
special -25...115 0mV 1
potentiometer 0...160 Ohm 1
potentiometer 0...450 Ohm 1
potentiometer 0...1600 Ohm 1
potentiometer 0...4500 Ohm 1
Measured value correction / scaling
Without scaling
Offset correction (at CAL level)
(offset entry is at controller CALlevel)
2-point correction (at CAL level)
(calibration is at controller CALlevel)
Scaling (at PArA level)
Automatic calibration (DAC)
Alternative value for error at INP3
If a value is adjusted, this value is used for display and
calculation in case of error (e.g. FAIL).
a Before activating a substitute value, the effect in the
control loop should be considered!
Forcing INP3 (only visible with BlueControl!)
No forcing
Forcing via serial interface
0
30
0
OFF
0
1 with current and voltage input signals, scaling is required (see chapter 5.3)
Configuration parameters 34 KS 90-1 / KS 92-1
Page 35

Configuration level
Lim
Name Value range Description Default
Fnc.1
Fnc.2
Fnc.3
Src.1
Src.2
Src.3
HC.AL
LP.AL
dAc.A
Function of limit 1/2/3
0
1
2
switched off
measured value monitoring
Measured value monitoring + alarm latch. A latched limit
value can be reset via error list or via a digital input, or by
pressing key Ò or è (-> LOGI/ Err.r)
3
4
signal change (change/minute)
signal change and storage (change/minute)
Source of Limit 1/2/3
0
1
2
process value
control deviation xw (process value - set-point)
Control deviation Xw (=relative alarm) with suppression after
start-up and setpoint change
After switch-on or setpoint change, alarm output is suppressed,
until the process value was within the limits once. At the latest after
elapse of time 10 ti1 the alarm is activated. (ti1 = integral
time 1; parameter r Cntr)
ti1 switched off (ti1 = 0) is considered as Î , i.e. the alarm
is not activated, until the process value was within the limits once.
3
4
5
6
7
measured value INP1
measured value INP2
measured value INP3
effective setpoint Weff
correcting variable y (controller output)
8 control variable deviation xw (actual value - internal setpoint)
= deviation alarm to internal setpoint
9
difference x1 - x2 (utilizable e.g. in combination with process value
function “mean value” for recognizing aged thermocouples
11
Control deviation (=relative alarm) with suppression after
start-up and setpoint change without time limit
After switch-on or setpoint change, alarm output is suppressed,
until the process was within the limits once.
Alarm heat current function (INP2)
0
1
2
switched off
Overload short circuit monitoring
Break and short circuit monitoring
Monitoring of control loop interruption for heating (see page 69)
0
1
switched off / inactive
LOOP alarm active. A loop alarm is output, unless the process
value reacts accordingly after elapse of 2 x ti1 with
Y=100%.
With ti1=0 , the LOOP alarm is inactive.
DAC alarm function (see page 69)
0
1
DAC alarm switched off / inactive
DAC alarm active
1
1
0
0
0
KS 90-1 / KS 92-1 35 Configuration parameters
Page 36

Configuration level
Name Value range Description Default
Hour
Swit
OFF...9999
OFF...9999
Out.1 and Out.2
Name Value range Description Default
O.Act
Y.1
Y.2
Lim.1
Lim.2
Lim.3
dAc.A
LP.AL
HC.AL
HC.SC
FAi.1
FAi.2
FAi.3
dP.Er
fOut
99
99
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
Operating hours (only visible with BlueControlâ!)
Output switching cycles (only visible with BlueControlâ!)
Method of operation of output OUT1
direct / normally open
inverse / normally closed
Controller output Y1/Y2
not active
active
Limit 1/2/3 signal
not active
active
Valve monitoring (DAC)
not active
active
Interruption alarm signal (LOOP)
not active
active
Heat current alarm signal
not active
active
Solid state relay (SSR) short circuit signal
not active
active
INP1/ INP2 / INP3 error signal
not active
active
PROFIBUS error
not active
active: Profibus trouble, no communication with this
instrument.
Forcing OUT1 (only visible with BlueControl!)
No forcing
Forcing via serial interface
OFF
OFF
0
1
0
0
0
0
0
0
0
0
Configuration parameters Out.2 = Out.1 except for:
Default Y.1 =0 Y.2 =1
Configuration parameters 36 KS 90-1 / KS 92-1
Page 37

Configuration level
Out.3 and Out4
Name Value range Description Default
O.tYP
O.Act
Out.0
Out.1
O.Src
O.FAI
Y.1
Y.2
Lim.1
Lim.2
Lim.3
dAc.A
LP.AL
0
1
2
3
4
5
0
1
-1999...9999
-1999...9999
0
1
2
3
4
5
6
7
8
9
0
1
0
1
0
1
0
1
0
1
Signal type selection OUT3
relay / logic (only visible with current/logic voltage)
0 ... 20 mA continuous (only visible with current/logic/voltage)
4 ... 20 mA continuous (only visible with current/logic/voltage)
0...10 V continuous (only visible with current/logic/voltage)
2...10 V continuous (only visible with current/logic/voltage)
transmitter supply (only visible without OPTION)
Method of operation of output OUT3 (only visible when O.TYP=0)
direct / normally open
inverse / normally closed
Scaling of the analog output for 0% (0/4mA or 0/2V, only
visible when O.TYP=1..5)
Scaling of the analog output for 100% (20mA or 10V, only
visible when O.TYP=1..5)
Signal source of the analog output OUT3 (only visible
when O.TYP=1..5)
not used
controller output y1 (continuous)
controller output y2 (continuous)
process value
effective set-point Weff
control deviation xw (process value - set-point)
measured value position feedback Yp
measured value INP1
measured value INP2
measured value INP3
Failbehaviour, behaviour of the analog output, if the signal
source (O.Src) is disturbed.
upscale
downscale
Controller output Y1/Y2 (only visible when O.TYP=0)
not active
active
Limit 1/2/3 signal (only visible when O.TYP=0)
not active
active
Valve monitoring (DAC) (only visible when O.TYP=0)
not active
active
Interruption alarm signal (LOOP) (only visible when
O.TYP=0) (Loop-Alarm)
not active
active
0
1
0
100
1
0
0
1
0
0
KS 90-1 / KS 92-1 37 Configuration parameters
Page 38

Configuration level
Name Value range Description Default
HC.AL
HC.SC
FAi.1
FAi.2
FAi.3
dP.Er
fOut
Heating current alarm signal (only visible when O.TYP=0)
0
1
not active
active
Solid state relay (SSR) short circuit signal (only visible when
0
0
O.TYP=0)
0
1
0
1
0
1
not active
active
INP1/ INP2 / INP3 error (only visible when O.TYP=0)
not active
active
PROFIBUS error
not active
active: Profibus trouble, no communication with this
1
0
instrument.
Forcing OUT3 (only visible with BlueControl!)
0
1
No forcing
Forcing via serial interface
0
Out.5/ Out.6
Configuration parameters Out.2 = Out.1 except for: Default Y.1 =0 Y.2 =0
g
Method of operation and usage of output Out.1 to Out.6:
Is more than one signal chosen active as source, those signals are OR-linked.
LOGI
Name Value range Description Default
L_r
0
1
2
3
4
5
SP.2
0
2
3
4
5
Local / Remote switching (Remote: adjusting of all values by
front keys is blocked)
no function (switch-over via interface is possible)
always active
DI1 switches
DI2 switches (basic instrument or OPTION)
DI3 switches (only visible with OPTION)
è - key switches
Switching to second setpoint SP.2
no function (switch-over via interface is possible)
DI1 switches
DI2 switches (only visible with OPTION)
DI3 switches (only visible with OPTION)
è - key switches
0
0
Configuration parameters 38 KS 90-1 / KS 92-1
Page 39

Configuration level
Name Value range Description Default
SP.E
Y2
Y.E
mAn
C.oFF
m.Loc
Switching to external setpoint SP.E
0
1
2
3
4
5
no function (switch-over via interface is possible)
always active
DI1 switches
DI2 switches (only visible with OPTION)
DI3 switches (only visible with OPTION)
è - key switches
Y/Y2 switching
0
2
3
4
5
6
no function (switch-over via interface is possible)
DI1 switches
DI2 switches (only visible with OPTION)
DI3 switches (only visible with OPTION)
è - key switches
Ò - key switches
Switching to fixed control output Y.E
0
1
2
3
4
5
6
no function (switch-over via interface is possible)
always activated (manual station)
DI1 switches
DI2 switches (only visible with OPTION)
DI3 switches (only visible with OPTION)
è - key switches
Ò - key switches
Automatic/manual switching
0
1
2
3
4
5
6
no function (switch-over via interface is possible)
always activated (manual station)
DI1 switches
DI2 switches (only visible with OPTION)
DI3 switches (only visible with OPTION)
è - key switches
Ò - key switches
Switching off the controller
0
2
3
4
5
6
no function (switch-over via interface is possible)
DI1 switches
DI2 switches (only visible with OPTION)
DI3 switches (only visible with OPTION)
è - key switches
Ò - key switches
Blockage of hand function
0
2
3
4
5
no function (switch-over via interface is possible)
DI1 switches
DI2 switches (only visible with OPTION)
DI3 switches (only visible with OPTION)
è - key switches
0
0
0
0
0
0
KS 90-1 / KS 92-1 39 Configuration parameters
Page 40

Configuration level
Name Value range Description Default
Err.r
Pid.2
I.Chg
di.Fn
fDI1
fDI2
fDI3
Reset of all error list entries
0
2
3
4
5
6
no function (switch-over via interface is possible)
DI1 switches
DI2 switches (only visible with OPTION)
DI3 switches (only visible with OPTION)
è - key switches
Ò - key switches
Switching of parameter set (Pb, ti, td)
0
2
3
4
5
no function (switch-over via interface is possible)
DI1 switches
DI2 switches (only visible with OPTION)
DI3 switches (only visible with OPTION)
è - key switches
Switching of the actual process value between Inp1 and X2
0
2
3
4
5
no function (switch-over via interface is possible)
DI1 switches
DI2 switches (only visible with OPTION)
DI3 switches (only visible with OPTION)
è - key switches
Function of digital inputs (valid for all inputs)
0
1
2
direct
inverse
toggle key function
Forcing di1/2/3 (only visible with BlueControl!)
0
1
No forcing
Forcing via serial interface
0
0
0
0
0
othr
Name Value range Description Default
bAud
0
1
2
3
Addr
1...247
PrtY
0
1
2
3
dELY
Configuration parameters 40 KS 90-1 / KS 92-1
0...200
Baudrate of the interface (only visible with OPTION)
2400 Baud
4800 Baud
9600 Baud
19200 Baud
Address on the interace (only visible with OPTION)
Data parity on the interface (only visible with OPTION)
no parity (2 stop bits)
even parity
odd parity
no parity (1 stopbit)
Delay of response signal [ms] (only visible with OPTION)
2
1
1
0
Page 41

Configuration level
Name Value range Description Default
dP.AD
bc.up
O2
Unit
dP
LED
dISP
C.dEl
FrEq
MAst
CycL
AdrO
AdrU
Numb
ICof
IAda
0...126
0
1
0
1
0
1
2
0
1
2
3
10
11
12
13
14
0...10
0..200
0
1
0
1
0...240
-32768...32767
-32768...32767
0...100
0
1
0
1
Profibus address
Behaviour as backup controller (see page )
No backup functionality
With backup functionality
Entering parameter for O
in ppm or %
2
Parameter for O2-function in ppm
Parameter for O2-function in %
Unit
without unit
°C
°F
Decimal point (max. number of digits behind the decimal point)
no digit behind the decimal point
1 digit behind the decimal point
2 digits behind the decimal point
3 digits behind the decimal point
Function allocation of status LEDs1/2/3/4
OUT1, OUT2, OUT3, OUT4
Heating, alarm 1, alarm 2, alarm 3
Heating, cooling, alarm 1, alarm 2
Cooling, heating, alarm 1, alarm 2
Bus error
Display luminosity
Modem delay [ms]
Additional delay time, before the received message is
evaluated in the Modbus. This time is required, unless
messages are transferred continuously during modem
transmission.
Switching 50 Hz / 60 Hz (only visible with BlueControl!)
50 Hz
60 Hz
Modbus master/slave (see page ) (visible only with BlueControl
®
)
No
Yes
Master cycle (sec.) (see page ) (visible only with BlueControl®!)
Destination address (see page ) (visible only with BlueControl®!)
Source address (see page ) (visible only with BlueControl®!)
Number of data (see page ) (visible only with BlueControl®!)
Block controller off (only visible with BlueControl!)
Released
Blocked
Block auto tuning (only visible with BlueControl!)
Released
Blocked
126
0
0
1
0
0
5
0
0
0
120
1100
1100
1
0
0
KS 90-1 / KS 92-1 41 Configuration parameters
Page 42

Configuration level
Name Value range Description Default
IExo
ILat
0 No: error message remain in the error list until
1 Yes alarms are deleted from the error list as soon as
Pass
IPar
ICnf
ICal
CDis3
TDis3
T.dis3
T.InF1
T.InF2
OFF...9999
2...60
8 Zeichen
8 Zeichen
8 Zeichen
Block extended operating level (only visible with BlueControl!)
0
1
Released
Blocked
Suppression error storage (visible only with BlueControl
®
!) 0
0
acknowledgement.
corrected
Password (only visible with BlueControl!)
Block parameter level (only visible with BlueControl!)
0
1
Released
Blocked
Block configuration level (only visible with BlueControl!)
0
1
Released
Block
Block calibration level (only visible with BlueControl!)
0
1
Released
Blocked
Display 3 controller operating level (only visible with BlueControl!)
0
1
2
3
4
No value / only text
Display of value
Output value as bargraph
Control deviation as bargraph
Process value as bargraph
Display 3 display alternation time [s] (only visible with BlueControl!)
OFF
0
0
0
2
10
Text display 3 (only visible with BlueControl!)
Text Inf.1 (only visible with BlueControl!)
Text Inf.2 (only visible with BlueControl!)
Lin (only visible with BlueControl
Name Value range Description Default
Lin
Linearization for inputs INP1 or INP3
â
Access to this table is always with selection special
thermocouple for InP.1 or InP.3or with setting
S.Lin = 1: special linearization for linearization.
Default: KTY 11-6 (0...4,5 kOhm)
U.LinT
In.1
0
1
2
-999.0..99999
Unit of linearization table
No unit
In Celsius [°C]
In Fahrenheit [°C]
Input value 1
0
1036
The signal is in [µV] or in [[] dependent of input type
Ou.1
0,001...9999
Output value 1
-49,94
Signal assigned to In.1
Configuration parameters 42 KS 90-1 / KS 92-1
Page 43

Configuration level
Name Value range Description Default
In.2
Ou.2
:
:
In.16
Ou.16
-999.0..99999 Input value 2
The signal is in [µV] or in [[] dependent of input type
0,001...9999 Output value 2
Signal assigned to In.2
:
:
-999.0..99999 Input value 16
The signal is in [µV] or in [[] dependent of input type
0,001...9999 Output value 1 6
Signal assigned to In.16
:
:
1150
-38,94
:
:
4470
150,0
+
BlueControl - the engineering tool for the BluePortâcontroller series
3 engineering tools with different functionality facilitating the device configu
ration and parameter setting are available (see chapter 9: Accessory equipment
with ordering information).
In addition to configuration and parameter setting, blue control
â
is used for
data acquisition and offers long-term storage and print functions. Blue control
is connected to the device via the front-panel interface "BluePortâ" by means
of PC (Windows 95 / 98 / NT) and a PC adaptor.
Description BlueControl
â
: see chapter 8: BlueControlâ(page 71).
-
â
KS 90-1 / KS 92-1 43 Configuration parameters
Page 44

Configuration level
4.3 Set-point processing
The set-point processing structure is shown in the following picture:
1199
°C
°F
1200
para
func
Ada
Err
External
set-point
INP2
2. set-point
SP.E
SP.2
SP.E
0/4...20 mA
SP.2
Index:
Ü
: int/ext-setpoint switching
*
: configuration
Ö
: / switching
Xeff
Internal
set-point
Ü
SP SP.2
SP.Fn
Ü
0
+
8
*
SP.Hi
SP.Lo
Limitation
Ö
r.SP
Ramp
Effektive
set-point
-LED
The ramp starts at process value
with the following switchings:
- int / ext-setpoint switching
- / switching
SP SP.2
- Manual-/ Automatic switching
- at power on
4.3.1
Set-point gradient / ramp
To prevent setpoint step changes, a maximum rate of change is adjustable for
parameter r setpoint r r.SP. This gradient acts both in positive and negative
direction.
With parameter r.SP set to OFFas in the factory setting, the gradient is
switched off and setpoint changes are made directly.
Set-point processing 44 KS 90-1 / KS 92-1
Page 45

4.4 Switching behaviuor
l
i
With these controllers, configuration parameter CYCL (ConF/ Cntr/ CYCL)
can be used for matching the cycle time of 2-point and 3-point controllers. This
can be done using the following 4 methods.
4.4.1 Standard ( CyCl= 0 )
Configuration level
The adjusted cycle times t1 and t2 are valid for 50% or -50% correcting varia
ble. With very small or very high values, the effective cycle time is extended to
prevent unreasonably short on and off pulses. The shortest pulses result from ¼
x t1 or¼x t2. The characteristic curve is also called “bath tub curve”
T/T
1
6,0
5,0
4,0
3,0
ve cycle duration
2,0
at
re
1,0
0,0
5 101520253035404550556065707580859095
-
4xt1
3xt1
2xt1
t1
Controller output [%]
Parameters to be adjusted: t1 : min. cycle time 1 (heating) [s]
( PArA/ Cntr) t2 : min. cycle time 2 (cooling) [s]
4.4.2 Switching attitude linear ( CyCl= 1 )
For heating (Y1), the standard method (see chapter 4.4.1) is used. For cooling
(Y2), a special algorithm for cooling with water is used. Generally, cooling is en
abled only at an adjustable process temperature (E.H2O), because low temperatu
-
-
res prevent evaporation with related cooling, whereby damage to the plant is
avoided. The cooling pulse length is adjustable using parameter t.on and is fi
-
xed for all output values.
The “off” time is varied dependent of output value. Parameter t.off is used for
determining the min “off” time. For output of a shorter off pulse, this pulse is
suppressed, i.e. the max. effective cooling output value is calculated according to
formula t.on /(t.on + t.off) w 100%.
Parameters to be adjusted: E.H2O: minimum temperature for water cooling
( PArA / Cntr) t.on: pulse duration water cooling
t.off: minimum pause water cooling
KS 90-1 / KS 92-1 45 Switching behaviuor
Page 46

Configuration level
4.4.3 Switching attitude non-linear ( CyCl= 2 )
With this method, the cooling power is nor
-
t.offt.on
mally much higher than the heating power,
i.e. the effect on the behaviour during tran
sition from heating to cooling may be nega
tive. The cooling curve ensures that the
control intervention with 0 to -70% correc
-
-
-
-82%
-87%
-90%
-92%
-95%
-67%
-80%
ting variable is very weak. Moreover, the
correcting variable increases very quickly to max. possible cooling. Parameter F.H2O can
be used for changing the characteristic curve. The standard method (see section 4.4.1) is
also used for heating. Cooling is also enabled dependent of process temperature .
70
60
50
40
30
20
Effective controller output
Water cooling non-linear, =1F.H2O
Water cooling non-linear, =2F.H2O
Water cooling non-linear, =0,5F.H2O
Water cooling linear
Parameter:
t.on = 0.4 sec
t.off = 0.2 sec
-100%
10
0
-100 -95 -90 -85 -80 -75 -70 -65 -60 -55 -50 -45 -40 -35 -30 -25 -20 -15 -10 -5
Controller output [%]
Parameters to be adjusted: F.H2O: adaptation of (non-linear) characteristic
( PArA / Cntr) Water cooling
t.on: Pulse duration water cooling
t.off: min. pause water cooling
E.H2O: min. temperature for water cooling
Switching behaviuor 46 KS 90-1 / KS 92-1
Page 47

4.4.4 Heating and cooling with constant period ( CyCl= 3 )
p
Configuration level
1and t2 are met in the overall output
range . To prevent unreasonably short
pulses, parameter tp is used for adju
-
t
t1 t2/
sting the shortest pulse duration. With
small correcting values which require a
50%
30%
20%
10%
pulse shorter than the value adjusted in
t1 t2/
50%
tp
70%
80%
90%
tp, this pulse is suppressed. However,
the controller stores the pulse and totali
zes further pulses, until a pulse of dura
tion tp can be output.
-
-
Parameters to be adjusted: t1 : Min. cycle time 1 (heating) [s]
( PArA/ Cntr) t2 : min. cycle time 2 (cooling) [s]
tp: min. pulse length [s]
KS 90-1 / KS 92-1 47 Switching behaviuor
Page 48

Configuration level
4.5 Configuration examples
4.5.1 On-Off controller / Signaller (inverse)
g
SP.LO SP
SP.Hi
InH.1InL.1
InP.1Ê
100%
Out.1Â
0%
ConF / Cntr: SP.Fn = 0 set-point controller
C.Fnc = 0 signaller with one output
C.Act = 0 inverse action
ConF / Out.1: O.Act = 0 action Out.1 direct
Y.1 =1 control output Y1 active
PArA / Cntr: Hys.l = 0...9999 switching difference below SP
PArA / Cntr: Hys.H = 0...9999 switching difference above SP
PArA / SEtP: SP.LO = -1999...9999 set-point limit low for Weff
SP.Hi = -1999...9999 set-point limit high for Weff
For direct signaller action, the controller action must be changed
(ConF / Cntr / C.Act = 1 )
SH
(e.g. heating applications)
process value
SH
setpoint
output
Configuration examples 48 KS 90-1 / KS 92-1
Page 49

4.5.2 2-point controller (inverse)
Configuration level
SP.LO SP
SP.Hi
InH.1InL.1
InP.1Ê
100%
PB1
Out.1Â
0%
ConF / Cntr: SP.Fn = 0 set-point controller
C.Fnc = 1 2-point controller (PID)
C.Act = 0 inverse action
(e.g. heating applications)
ConF / Out.1: O.Act = 0 action Out.1 direct
Y.1 = 1 control output Y1 active
PArA / Cntr: Pb1 = 1...9999 proportional band 1 (heating)
in units of phys. quantity (e.g. °C)
ti1 = 0,1...9999 integral time 1 (heating) in sec.
td1 = 0,1...9999 derivative time 1 (heating) in sec.
t1 = 0,4...9999 min. cycle time 1 (heating)
PArA / SEtP: SP.LO = -1999...9999 set-point limit low for Weff
SP.Hi = -1999...9999 set-point limit high for Weff
g
For direct action, the controller action must be changed
(ConF / Cntr / C.Act = 1 ).
setpoint
process value
output
KS 90-1 / KS 92-1 49 Configuration examples
Page 50

Configuration level
Â
4.5.3 3-point controller (relay & relay)
SP.LO SP
SP.Hi
InH.1InL.1
InP.1Ê
100%
Out.1Â
0%
PB1
PB2
100%
Out.2
0%
ConF / Cntr: SP.Fn = 0 set-point controller
C.Fnc = 3 3-point controller (2xPID)
C.Act = 0 action inverse
(e.g. heating applications)
ConF / Out.1: O.Act = 0 action Out.1 direct
Y.1 = 1 control output Y1 active
Y.2 = 0 control output Y2 not active
ConF / Out.2: O.Act = 0 action Out.2 direct
Y.1 = 0 control output Y1 not active
Y.2 = 1 control output Y2 active
PArA / Cntr: Pb1 = 1...9999 proportional band 1 (heating)
in units of phys. quantity (e.g. °C)
Pb2 = 1...9999 proportional band 2 (cooling)
in units of phys. quantity (e.g. °C)
ti1 = 0,1...9999 integral time 1 (heating) in sec.
ti2 = 0,1...9999 derivative time 2 (cooling) in sec.
td1 = 0,1...9999 integral time 1 (heating) in sec.
td2 = 0,1...9999 derivative time 2 (cooling) in sec.
t1 = 0,4...9999 min. cycle time 1 (heating)
t2 = 0,4...9999 min. cycle time 2 (cooling)
SH = 0...9999 neutr. zone in units of phys.quantity
PArA / SEtP: SP.LO = -1999...9999 set-point limit low for Weff
SP.Hi = -1999...9999 set-point limit high for Weff
Configuration examples 50 KS 90-1 / KS 92-1
Page 51
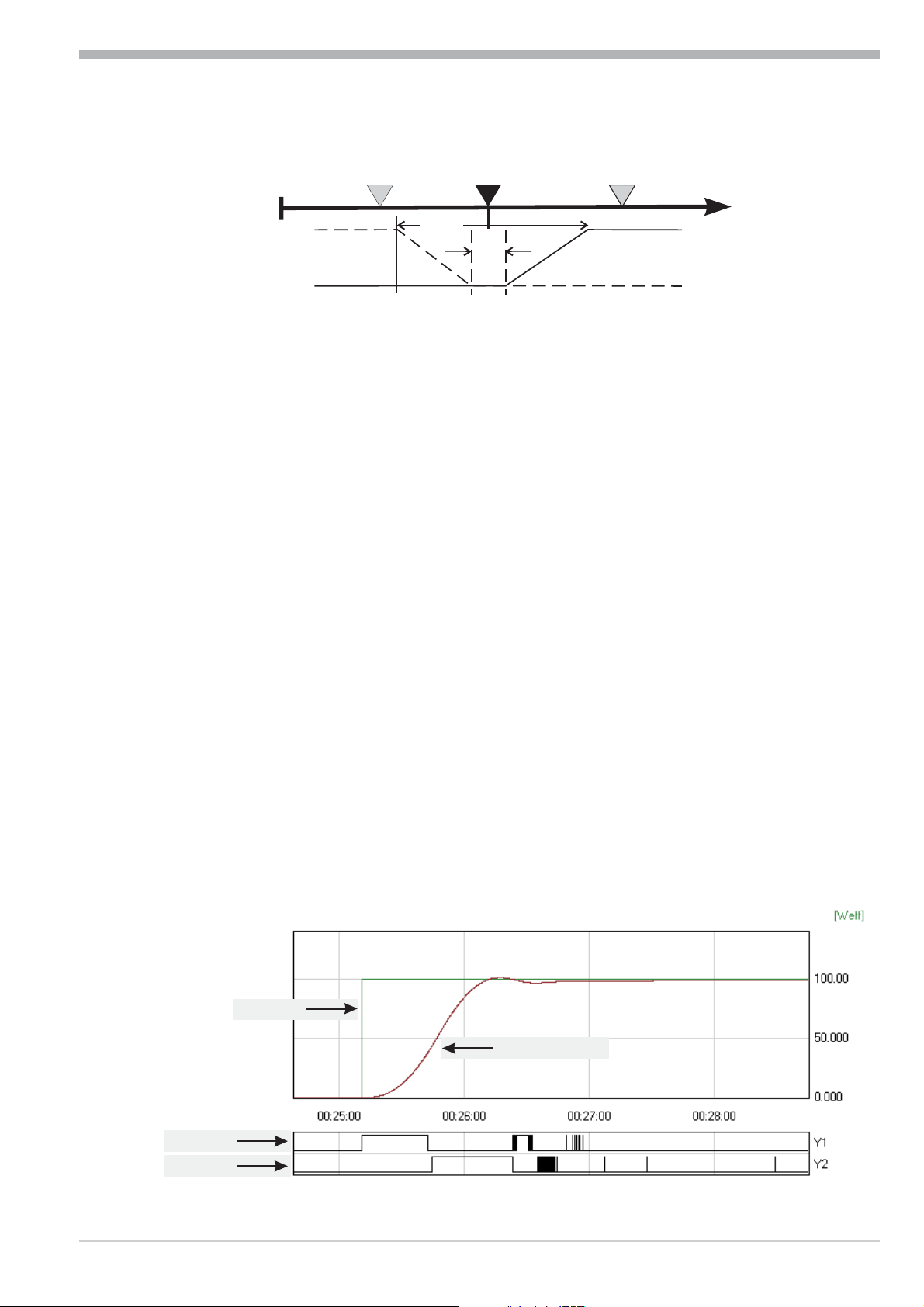
4.5.4 3-point stepping controller (relay & relay)
Â
Configuration level
SP.LO SP
SP.Hi
InH.1InL.1
InP.1Ê
100%
Out.1Â
0%
PB1
SH
100%
Out.2
0%
ConF / Cntr: SP.Fn = 0 set-point controller
C.Fnc = 4 3-point stepping controller
C.Act = 0 inverse action
(e.g. heating applications)
ConF / Out.1: O.Act = 0 action Out.1 direct
Y.1 = 1 control output Y1 active
Y.2 = 0 control output Y2 not active
ConF / Out.2: O.Act = 0 action Out.2 direct
Y.1 = 0 control output Y1 not active
Y.2 = 1 control output Y2 active
PArA / Cntr: Pb1 = 1...9999 proportional band 1 (heating)
in units of phys. quantity (e.g. °C)
ti1 = 0,1...9999 integral time 1 (heating) in sec.
td1 = 0,1...9999 derivative time 1 (heating) in sec.
t1 = 0,4...9999 min. cycle time 1 (heating)
SH = 0...9999 neutral zone in units of phy. quantity
tP = 0,1...9999 min. pulse length in sec.
tt = 3...9999 actuator travel time in sec.
PArA / SEtP: SP.LO = -1999...9999 set-point limit low for Weff
SP.Hi = -1999...9999 set-point limit high for Weff
g
For direct action of the 3-point stepping controller, the controller output action
must be changed ( ConF / Cntr / C.Act = 1 ).
setpoint
process value
output 1
output 2
KS 90-1 / KS 92-1 51 Configuration examples
Page 52

Configuration level
4.5.5 Continuous controller (inverse)
SP.LO SP
SP.Hi
InH.1InL.1
InP.1Ê
20 mA
PB1
Out.3Â
0/4 mA
ConF / Cntr: SP.Fn = 0 set-point controller
C.Fnc = 1 continuous controller (PID)
C.Act = 0 inverse action
(e.g. heating applications)
ConF / Out.3: O.tYP = 1 / 2 Out.3 type ( 0/4 … 20mA )
Out.0 = -1999...9999 scaling analog output 0/4mA
Out.1 = -1999...9999 scaling analog output 20mA
PArA / Cntr: Pb1 = 1...9999 proportional band 1 (heating)
in units of phys. quantity (e.g. °C)
ti1 = 0,1...9999 integral time 1 (heating) in sec.
td1 = 0,1...9999 derivative time 1 (heating) in sec.
t1 = 0,4...9999 min. cycle time 1 (heating)
PArA / SEtP: SP.LO = -1999...9999 set-point limit low for Weff
SP.Hi = -1999...9999 set-point limit high for Weff
g
g
For direct action of the continuous controller, the controller action must be
changed ( ConF / Cntr / C.Act = 1 ).
To prevent control outputs Out.1 and Out.2 of the continuous controller from
switching simultaneously, the control function of outputs Out.1 and Out.2
must be switched off ( ConF / Out.1 and Out.2 / Y.1 and Y.2 = 0 ).
Configuration examples 52 KS 90-1 / KS 92-1
Page 53

Configuration level
4.5.6 D - Y - Off controller / 2-point controller with pre-contact
SP.LO SP
SP.Hi
InH.1InL.1
InP.1Ê
100%
PB1
Out.1Â
0%
Out.2Â
SH
ConF / Cntr: SP.Fn = 0 set-point controller
C.Fnc = 2 D -Y-Off controller
C.Act = 0 inverse action
ConF / Out.1: O.Act = 0 action Out.1 direct
Y.1 = 1 control output Y1 active
Y.2 = 0 control output Y2 not active
ConF / Out.2: O.Act = 0 action Out.2 direct
Y.1 = 0 control output Y1 not active
Y.2 = 1 control output Y2 active
PArA / Cntr: Pb1 = 1...9999 proportional band 1 (heating)
ti1 = 0,1...9999 integral time 1 (heating) in sec.
td1 = 0,1...9999 derivative time 1 (heating) in sec.
t1 = 0,4...9999 min. cycle time 1 (heating)
SH = 0...9999 switching difference
d.SP = -1999...9999 trigg. point separation suppl. cont.
ty PArA / SEtP: SP.LO =
-1999...9999 set-point limit low for Weff
SP.Hi = -1999...9999 set-point limit high for Weff
d.SP
(e.g. heating applications)
in units of phys. quantity (e.g. °C)
D / Y / Off in units of phys. quanti
-
KS 90-1 / KS 92-1 53 Configuration examples
Page 54

Configuration level
4.5.7 Continuous controller with position controller
( Cntr/ C.Fnc =6)
SP
W
INP.1
INP.2
X
Master controller
Ypid
Ycontinuous
X
Position controller
W
Y. 1
Y. 2
OUT.4
OUT.1
M
OUT.2
Basically, this controller function is a cascade. A slave controller with three-point
stepping behaviour working with position feedback Yp as process value (INP2 or
INP3) is added to a continuous controller.
ConF / Cntr SP.Fn = 0 setpoint controller
C.Fnc = 6 continuous controller with
position controller
C.Act = 0 inverse output action
(e.g. heating applications)
ConF / InP.2: I.Fnc = 3 position feedback Yp
S.typ = 50 sensor e.g. potentiometer 0..160 W
ConF / Out.1: O.Act = 0 direct output action Out.1
Y.1 = 1 control output Y1 active
Y.2 = 0 control output Y2 not active
ConF / Out.2: O.Act = 0 direct output action Out.2
Y.1 = 0 control output Y1 not active
Y.2 = 1 control output Y2 active
PArA / Cntr: Pb1 = 0,1...9999 proportional band 1 (heating)
in units of the physical quantity
(e.g. °C)
ti1 = 1...9999 integral time 1 (heating) in sec.
td1 = 1...9999 derivative time 1 (heating) in sec.
t1 = 0,4...9999 min. cycle tim 1 (heating)
SH = 0...9999 switching difference
Configuration examples 54 KS 90-1 / KS 92-1
Page 55
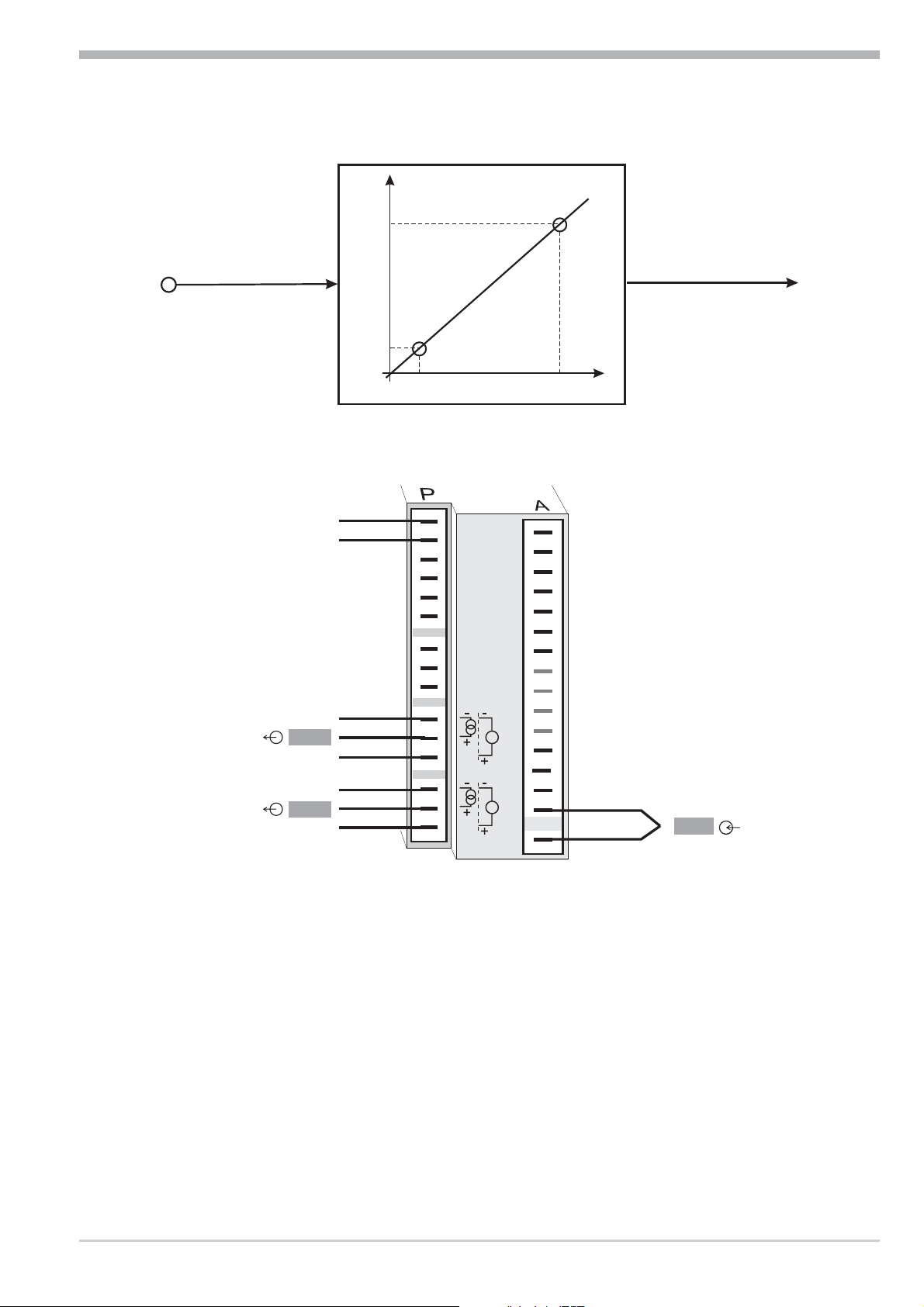
4.5.8 Measured value output
phys.
quantity
Out.1
Configuration level
phys. quantity
90...250VAC
24VUC
OUT3
OUT4
mA / V
Out.0
0/4mA
0/2V
1
L
}
2
N
3
4
5
6
7
8
9
10
11
12
13
14
15
U
U
20mA
10V
1
2
3
4
5
6
7
8
9
10
11
12
13
14
(16)
15
17
INP1
+
ConF / Out.3 / 4: O.tYP = 1 Out.3/ 4 0...20mA continuous
= 2 Out.3/ 4 4...20mA continuous
= 3 Out.3/ 4 0...10V continuous
= 4 Out.3/ 4 2...10V continuous
Out.0 = -1999...9999 scaling Out.3/ 4
for 0/4mA or 0/2V
Out.1 = -1999...9999 scaling Out.3/ 4
for 20mA or 10V
O.Src = 3 signal source for Out.3/ 4 is
the process value
KS 90-1 / KS 92-1 55 Configuration examples
Page 56

Parameter setting level
5 Parameter setting level
5.1 Parameter survey
PArA Parameter setting level
Cntr Control and
self-tuning
È
Pb1 Pb12 SP.Lo InL.1 Inl.2 InL.3 L.1
Pb2 Pb22 SP.Hi OuL.1 OuL.2 OuL.3 H.1
Ì
ti1 ti12 SP.2 InH.1 InH.2 InH.3 HYS.1
ti2 ti22 r.SP OuH.1 OuH.2 OuH.3 dEl.1
td1 td12 tF.1 tF.2 tF.3 L.2
td2 td22 E.tc E.tc H.2
t1 HYS.2
t2 dEl.2
SH L.3
Hys.l H.3
Hys.H HYS.3
d.SP dEl.3
tP HC.A
tt
Y.Lo
Y.Hi
Y2
Y0
Ym.H
L.Ym
E.H2O
t.on
t.off
FH2
oFFS
tEmp
PAr.2
2. set of parameters
SEtP Set-point and
process value
InP.3 Input 3
InP.1 Input 1
InP.2 Input 2
Lim
Limit value functions
End
Adjustment:
The parameters can be adjusted by means of keys ÈÌ
w
Transition to the next parameter is by pressing key Ù
w
After the last parameter of a group, donE is displayed, followed by
w
automatic change to the next group.
Parameter survey 56 KS 90-1 / KS 92-1
Page 57

Parameter setting level
g
Return to the beginning of a group is by pressing the Ù key for 3 sec.
If for 30 sec. no keypress is excecuted the controler returns to the process value
and setpoint display ( Time Out = 30 sec. )
5.2 Parameters
Cntr
Name Value range Description Default
Pb1
Pb2
ti1
ti2
td1
td2
t1
t2
SH
Hys.l
Hys.H
d.SP
tP
tt
Y.Lo
Y.Hi
Y2
Y.0
Ym.H
L.Ym
E.H2O
t.on
t.oFF
F.H2O
oFFS
tEmp
1...9999 1
1...9999 1
0,1...9999
0,1...9999
0,1...9999
0,1...9999
0,4...9999
0,4...9999
0...9999
0...9999
0...9999
-1999...9999
0,1...9999
3...9999
-120...120
-120...120
-100...100
-100...100
-100...100
0...9999
-1999...9999
0,1...9999
1...9999
0,1...9999
-120...120
0...9999
Proportional band 1 (heating) in phys. dimensions (e.g. °C)
Proportional band 2 (cooling) in phys. dimensions (e.g. °C)
Integral action time 1 (heating) [s]
Integral action time 2 (cooling) [s]
Derivative action time 1 (heating) [s]
Derivative action time 2 (cooling) [s]
Minimal cycle time 1 (heating) [s]. The minimum impulse
is 1/4 x t1
Minimal cycle time 2 (heating) [s]. The minimum impulse
is 1/4 x t2
Neutral zone or switching differential for on-off control
[phys. dimensions)
Switching difference Low signaller [engineering unit]
Switching difference High signaller [engineering unit]
Trigger point seperation for additional contactD /Y/
Off [phys. dimensions]
Minimum impulse [s]
Motor travel time [s]
Lower output limit [%]
Upper output limit [%]
2. correcting variable
Working point for the correcting variable [%]
Limitation of the mean value Ym [%]
Max. deviation xw at the start of mean value calculation
[phys. dimensions]
Min. temperature for water cooling. Below the set
temperature no water cooling happens
Impulse lenght for water cooling. Fixed for all values of
controller output.The pause time is varied.
Min. pause time for water cooling. The max. effective
controller output results from
t.on/(t.on+t.off)·100%
Modification of the (non-linear) water cooling
characteristic (see page 46)
Zero offset
Sensor temperature (in engineering units e.g. °C)
With oxygen measurement (O
) (see page 66)
2
100
100
180
180
180
180
10
10
2
1
1
100
OFF
60
0
100
0
0
5
8
0
1
10
1
0
750
1Valid for ConF/ othr/ dP = 0. With dP = 1 / 2 / 3 also 0,1 / 0,01 /
0,001 is possible.
KS 90-1 / KS 92-1 57 Parameters
Page 58

Parameter setting level
PAr.2
Name Value range Description Default
Pb12
Pb22
Ti22
Ti12
Td12
Td22
1...9999 1
1...9999 1
0,1...9999
0,1...9999
0,1...9999
0,1...9999
SEtP
Name Value range Description Default
SP.LO
SP.Hi
SP.2
r.SP
SP
-1999...9999
-1999...9999
-1999...9999
0...9999
-1999...9999
Proportional band 1 (heating) in phys. dimensions (e.g.
°C), 2. parameter set
Proportional band 2 (cooling) in phys. dimensions (e.g.
°C), 2. parameter set
Integral action time 2 (cooling) [s], 2. parameter set
Integral action time 1 (heating) [s], 2. parameter set
Derivative action time 1 (heating) [s], 2. parameter set
Derivative action time 2 (cooling) [s], 2. parameter set
Set-point limit low for Weff
Set-point limit high for Weff
Set-point 2.
Set-point gradient [/min]
Set-point (only visible with BlueControl!)
100
100
10
10
10
10
0
900
0
OFF
0
g
SP.LO and SP.Hi should be within the limits of rnGH and rnGL see
configuration r Controller page
InP.1
Name Value range Description Default
InL.1
OuL.1
InH.1
OuH.1
t.F1
Etc.1
-1999...9999
-1999...9999
-1999...9999
-1999...9999
0,0...9999
0...100 (°C)
32...212 (°F)
Input value for the lower scaling point
Displayed value for the lower scaling point
Input value for the upper scaling point
Displayed value for the lower scaling point
Filter time constant [s]
External cold-junction reference temperature (external
TC)
0
0
20
20
0,5
OFF
InP.2
Name Value range Description Default
InL.2
OuL.2
InH.2
OuH.2
t.F2
-1999...9999
-1999...9999
-1999...9999
-1999...9999
0,0...9999
Input value for the lower scaling point
Displayed value for the lower scaling point
Input value for the upper scaling point
Displayed value for the upper scaling point
Filter time constant [s]
0
0
50
50
0,5
InP.3
Parameters 58 KS 90-1 / KS 92-1
Page 59

Parameter setting level
Name Value range Description Default
InL.3
OuL.3
InH.3
OuH.3
t.F3
Etc.3
-1999...9999
-1999...9999
-1999...9999
-1999...9999
-1999...9999
0...100 (°C)
32...212 (°F
Lim
Name Value range Description Default
L.1
H.1
HYS.1
dEl.1
L.2
H.2
-1999...9999
-1999...9999
0...9999
0...9999
-1999...9999
-1999...9999
Input value for the lower scaling point
Displayed value for the lower scaling point
Input value for the upper scaling point
Displayed value for the upper scaling point
Filter time constant [s]
External cold-junction reference temperature (external
0
0
20
20
0
OFF
TC)
Lower limit 1
Upper limit 1
Hysteresis limit 1
Alarm delay from limit value 1
10
10
1
0
Lower limit 2 OFF
Upper limit 2 OFF
g
Resetting the controller configuration to factory setting (Default) or
resetting to the customer-specific default data set
r chapter 11.1 (Page 80)
Parameters 59 KS 90-1 / KS 92-1
Page 60

Parameter setting level
5.3 Input scaling
When using current, voltage or resistance signals as input variables for InP.1,
InP.2 or/and InP.3 scaling of input and display values at parameter setting le
vel is required. Specification of the input value for lower and higher scaling point
is in the relevant electrical unit (mA/V/W).
phys.
quantity
OuH.x
-
mA / V
OuL.x
S.tYP Input signal InL.x OuL.x InH.x OuH.x
30
(0...20mA)
40
(0...10V)
0…20mA 0 any 20 any
4…20mA 4 any 20 any
0…10V 0 any 10 any
2…10V 2 any 10 any
5.3.1 Input Inp.1 and InP.3
g
Parameters InL.x,OuL.x, InH.x and OuH.x are only visible if
ConF / InP.x/Corr = 3 is chosen.
In addition to these settings, InL.x and InH.x can be adjusted in the range
(0...20mA / 0...10V / W) determined by selection of S.tYP .
a
For using the predetermined scaling with thermocouple and resistance
thermometer (Pt100), the settings for InL.x and OuL.x and for InH.x and
OuH.x must have the same value.
InL.x
InH.x
phys. quantity
mA/V
g
Input scaling changes at calibration level (r page 61) are displayed by input
scaling at parameter setting level. After calibration reset (OFF), the scaling
parameters are reset to default.
5.3.2 Input InP.2
S.tYP Input signal InL.2 OuL.2 InH.2 OuH.2
30 0…20mA 0 any 20 any
In addition to these settings, InL.2 and InH.2 can be adjusted in the range
(0...20/ 50mA/W) determined by selection of S.tYP.
Input scaling 60 KS 90-1 / KS 92-1
Page 61

Calibration level
6 Calibration level
Measured value correction ( CAL) is only visible if ConF / InP.1 / Corr = 1
or 2 is chosen.
The measured value can be matched in the calibration menu ( CAL). Two me
thods are available:
Offset correction
( ConF/ InP.1 / Corr =1 ):
possible on-line at the
w
display
standard setting
offset correction
process
OuL.1
new
OuL.1old
InL.1
-
X
2-point correction
( ConF/ InP.1 / Corr = 2 ):
w
is possible off-line with
process value simulator
display
OuH.1
OuH.1
OuL.1
new
OuL.1old
old
new
InL.1
standard setting
2-point correction
InH.1
X
KS 90-1 / KS 92-1 61
Page 62

Calibration level
Offset correction ( ConF/ InP.1 / Corr =1 ):
r
1199
°C
°F
1200
para
func
Ada
Err
SP.E
SP.2
r
Ù
3sec.
r
PArA
Ì
:
CAL
r
Ù
r
InP.1
r
Ù
r
r
r
InL.1: The input value of the scaling point is displayed.
The operator must wait, until the process is at rest.
Subsequently, the operator acknowledges the input value by pressing
key Ù.
OuL.1: The display value of the scaling point is displayed.
Before calibration, OuL.1 is equal to InL.1.
The operator can correct the display value by pressing keys ÈÌ .
Subsequently, he confirms the display value by pressing key Ù.
InL.1
OuL.1
End
r
r
È
Ì
Ù
r
Ù
Ù
62 KS 90-1 / KS 92-1
Page 63

2-point correction ( ConF/ InP.1 / Corr = 2):
Ù
1199
°C
°F
1200
para
func
Ada
Err
SP.E
SP.2
r
Ù
3sec.
r
PArA
r
Ì
ConF
r
Ì
CAL
r
Ù
r
InP.1
È
Ì
InP.2
È
Ì
rr
Ù
InL.1
È
InL1
Ù
OuL.1
InH.1
Calibration level
r
Ù
È
r
Ì
r
Ù
Ù
InP.3
È
È
InH.1
Ù
Ì
OuH.1
End
InL.1: The input value of the lower scaling point is displayed.
The operator must adjust the lower input value by means of a
process value simulator and confirm the input value by pressing key Ù.
OuL.1: The display value of the lower scaling point is displayed.
Before calibration, OuL.1 equals InL.1.
The operator can correct the lower display value by pressing the ÈÌ
keys. Subsequently, he confirms the display value by pressing key Ù.
InH.1: The input value of the upper scaling point is displayed. .
The operator must adjust the upper input value by means of the
process value simulator and confirm the input value by pressing key Ù.
OuH.1: The display value of the upper scaling point is displayed.
Before calibration OuH.1 equals InH.1.
The operator can correct the upper display value by pressing keys ÈÌ
Subsequently, he confirms the display value by pressing key Ù.
È
Ì
r
Ù
g
The parameters (OuL.1, OuH.1) changed at CAL level can be reset by adjusting
the parameters below the lowest adjustment value (OFF) by means of decrement
key Ì .
KS 90-1 / KS 92-1 63
Page 64

Special functions
7 Special functions
7.1 DAC®– motor actuator monitoring
(Digital Actor Control DAC
®
)
With all controllers with position feedback Yp, the motor actuator can be monito
red for functional troubles. The DAC
®
function can be started by chosing the pa
-
rameter C.Fnc = 5 or 6 at the configuration level ( ConF):
ConF / Cntr / C.Fnc = 5 3-point-stepping controller with
w
position feedback Yp as potentiometer
ConF / Cntr / C.Fnc = 6 Continuous controller with integrated
w
positioner and position feedback Yp as
potentiometer
If an error occures, the controller switches to manual operation (ò - LED blinks)
and no impulses are given out any longer. If one of the relays shall switch when a
®
DAC
error occures, parameter dAC.A = 1 and inverse action O.Act = 1 must
be selected for the relevant output OUT.1 … OUT.4 in the ConF menu
( OUt.3 and 4 only possible if O.tYP = 0 [relay/logic]):
ConF / OUt.x/dAc.A = 1 Motor actuator monitoring (DAC) aktive
w
The system detects the following stepping controller errors:
-
defective motor
w
defective capacitor (wrong rotating direction)
w
wrong phase followers (wrong rotating direction)
w
defective force transmission at spindle or drive
w
excessive backlash due to wear
w
jamming of the control valve e.g. due to foreign body
w
In these cases the controller will change to manual operation and the outputs will
be switched off. Is the controller switched to automatic operation again or any
modification is done the controller activates the DAC function again and the out
puts will be setted.
Resetting of a DAC error:
After solving the technical problem the DAC errror can be acknowledged in the
error list. Thereafter the controller works again in normal operation mode.
See also chapter 3.4 "Mainenance manager / Error list", page 12 ff.
-
®
DAC
– motor actuator monitoring 64 KS 90-1 / KS 92-1
Page 65

Special functions
Functioning of the DAC function
No input filter should be defined for the Yp input ( PArA / InP.x/t.Fx=0).
Therewith no wrong detection of blocking or wrong method of operation can be
recognized.
The automatic calibration can be used with drives outfitted with spring assembly.
Execution of the calibration:
It is controlled if the mean alteration between two messurements is enough for
the DAC monitoring. The calibration will be stopped if the alteration between
two messurements is too small.
The position of 0% is searched. Therefor the drive will be closed until there is no
changing of the input signal for 0,5 sec.
Assuming that the drive is outfitted with spring assembly, the drive is opened for
2,8 sec. The drive should then still be within the spring assembly. This position is
allocated and stored as 0%.
With the same procedure the position for 100% is allocated and stored.
Simultaneously the motor running time is determined and saved as parameter tt.
Afterwards the controller sets the drive in the position before calibration.
Was the controller in automatic mode before calibration it will be set to automatic mode again otherwise it remains in manual mode.
g
g
g
The following errors can be occure during calibration:
the change of the Yp input is to small, no monitoring is possible
w
the motion is in wrong direction
w
the Yp input is broken
w
In these cases the automatic calibration will be stopped and the controller remains
in manual mode.
If the automatic calibration leads to no resonable results the calibration of the Yp
input can be done manual.
If the conroller reaches the positions of 0% or 100% the outputs will be switched
off. Also in manual mode it is not possible to exceed these limits.
Because no controller with continuouse output and Yp input is defined there
won't be the DAC function for this controlling type.
KS 90-1 / KS 92-1 65 DAC®– motor actuator monitoring
Page 66

Special functions
7.2 O2measurement
This function is available only on the instrument version with INP3.
As the O
-measurement result range can extend over many decades, automatic
2
display switch-over between“%”and“ppm“ was realized.
The instantaneous unit is displayed in
the lower line.
With set-point changing via keys I or
D, the unit of the set-point and of the
other parameters is displayed.
Lambda probes (l probes) are used as
sensors.
The electromotive force (in Volts) generated by l probes is dependent of instan
taneous oxygen content and temperature. Therefore, KS 9x-1 can only evaluate
exact measurement results, if it knows the sensor temperature.
Distinction of heated and non-heated lambda probes is made. Both can be evalua
ted by KS 9x-1.
Heated lambda probes
Controlled heating which ensures constant temperature is integrated in the heated
l probe. This temperature must be entered in KS 9x-1 parameter Probe temperature.
-
Parameter r Controller r Probe temperature r .....°C (/°F - dependent of confi-
guration)
Non-heated lambda probes
With the probe always operated at a fixed, known temperature, a procedure as
used for a heated probe can be used.
A non-heated l probe is used, unless the temperature is constant. In this case, the
probe temperature in addition to the probe mV value must be measured. For this
purpose, any temperature measurement with one of the analog inputs INP2 or
INP3 can be used. During function selection, the input must be set to X2 (second
process value).
7.2.1 Connection
Connect the input for the lambda probe to INP1.
Use terminals A15 and A17.
If necessary, temperature measurement must be connected to INP2 or INP3.
Cntr r tEmP temp. 0...9999
O2measurement 66 KS 90-1 / KS 92-1
Page 67

7.2.2 Configuration:
Oxygen measurement
Oxygen measurement with heated lambda probe
Controller r Process value processing r 7: O
temperature
Oxygen measurement with non-heated lambda probe
Controller r Process value processing r O
temperature
Input 1 r Function INP1 r 7: process value X1
InP.1 r 1.Fnc 7 X1-Input
functions with constant probe
2
Cntr r C.tYP 7 O2-const
functions with measured probe
2
Cntr r C.tYP 8 O2+temp
Special functions
g
In input 1, the sensor type is set for one of the high-impedance voltage inputs:
Input 1 r Sensor type r 42: special (-25...1150 mV) or
41: special (-2,5...115 mV)
InP.1 r S.tyP 41 115 mV
InP.1 r S.tyP 42 1150 mV
Input 1 r meas. value correction r 0: no correction
InP.1 r S.Lin 0no
Temperature measurement (required with non-heated lambda probe)
Any temperature measurement with one of analog inputs INP2 or INP3 can be
used. Select input X2 during function selection (second set-point).
With O2measurement, evaluation in ppm or % must be specified for all
parameters related to the process value.
This is done centrally during configuration.
Other r Parameter unit for O
othrr O2 0 unit : ppm
othrr O2 1 unit : %
r 0: parameter for O2function in ppm
2
1: parameter for O
function in %
2
g
Whether the temperature of the non-heated l probe is specified in °C or °F can
be selected during configuration.
Other r Unit r 1: in Celsius
2: in Fahrenheit
othrr Unit 1°C
othrr Unit 2°F
KS 90-1 / KS 92-1 67 O2measurement
Page 68

Special functions
I
7.3 Linearization
Linearization for inputs INP1 or INP3
Access to table “ Lin” is always with selection of sensor type S.TYP = 18:
special thermocouple in INP1 or INP3, or with selection of linearization S.Lin
1: special linearization.
Dependent of input type, the input signals are specified in µV or in Ohm
dependent of input type.
With up to 16 segment points, non-linear signals can be simulated or linearized.
Every segment point comprises an input (In.1 … In.16) and an output (Ou.1
… Ou.16). These segment points are interconnected automatically by means of
straight lines. The straight line between the first two segments is extended
downwards and the straight line between the two largest segments is extended
upwards. I.e. a defined output value is also provided for each input value.
When switching an In.x value to OFF, all other ones are switched off.
Condition for these configuration parameters is an ascending order.
In.1 < In.2 < ...< In.16 and Ou.1 < Ou.2 ...< Ou.16.
n.16
.
.
.
.
.
.
In 1
Ou.1 Ou.16.....................
Linearization 68 KS 90-1 / KS 92-1
Page 69

Special functions
7.4 Loop alarm
The loop alarm monitors the control loop for interruption
(not with three-point stepping controller and not with signallers.)
With parameter LP.AL switched to 1(= loop alarm active), an interruption of
the control loop is detected, unless the process value reacts accordingly with
Y=100% after elapse of 2xTi.
The loop alarm shows that the control loop is interrupted. You should check hea
ting or cooling circuit, sensor, controller and motor actuator.
During self-tuning, the control loop is not monitored (loop alarm is not active).
7.5 Heating current input / heating current alarm
The heating current alarm monitors the heating current.
In addition to short circuit monitoring, checking either for overload (current >
heating current limit value) or for interruption (current < heating current limit va
lue) is done.
Each of the analog inputs can be used as measurement input.
If electrical heating is concerned, INP2 which is always provided can be configured for measuring range 0...50mA AC and connected directly using a heating current transformer.
-
-
a
With t1 < 400 ms or tp < 200 ms (effective time!), heating current monitoring
is ineffective.
KS 90-1 / KS 92-1 69 Loop alarm
Page 70

Special functions
7.6 KS9x-1 as Modbus master
a
This function is only selectable with BlueControl (engineering tool)!
Additions othr (only visible with BlueControl!)
Name Value range Description Default
MASt
0
1
Cycl
AdrO
AdrU
The KS9x-1 can be used as Modbus master ( ConF / othr / MASt =1).The
Modbus master sends ist data to all slaves (Broadcast message, controller adress
0). It transmits its data (modbus adress AdrU) cyclic with the cycle time Cycl to
the bus. The slave controller receives the data transmitted by the masters and allocates it to the modbus target adress AdrO. If more than one data should be
transmitted by the master controller ( Numb > 1) , the modbus adress AdrU indicates the start adress of the data that should be transmitted and AdrO indicates
the first target adress where the received data should be stored. The following
data will be stored at the logically following modbus target adresses.
With this it is possible e.g. to specify the process value of the master controller as
set-point for the slave controllers.
0...200
1...65535
1...65535
Controller is used as Modbus master
Slave
Master
Cycle time [ms] for the Modbus master to transmit its
data to the bus.
Target address to which the with AdrU specified data
is given out on the bus.
Modbus address of the data that Modbus master gives
to the bus.
0
60
1
1
7.7 Back-up controller (PROFIBUS)
Back-up operation: calculation of the control outputs is in the master. The con
troller is used for process value measurement, correcting variable output and for
display.
With master or communication failure, control is taken over independently and
bumplessly by the controller.
KS9x-1 as Modbus master 70 KS 90-1 / KS 92-1
-
Page 71

BlueControl
8 BlueControl
BlueControl is the projecting environment for the BluePortâcontroller series of
PMA. The following 3 versions with graded functionality are available:
Functionality Mini Basic Expert
Parameter and configuration setting yes yes yes
Controller and loop simulation yes yes yes
Download: transfer of an engineering to the controller yes yes yes
Online mode / visualization SIM only yes yes
Defining an application specific linearization yes yes yes
Configuration in the extended operating level yes yes yes
Upload: reading an engineering from the controller SIM only yes yes
Basic diagnostic functions no no yes
Saving data file and engineering no yes yes
Printer function no yes yes
Online documentation, help yes yes yes
Implementation of measurement value correction yes yes yes
Data acquisition and trend display SIM only yes yes
Wizard function yes yes yes
Extended simulation no no yes
Customer-specific default data-set no no yes
Programeditor (KS 90-1programmer only) no no yes
Support for the "railline"-system no no yes
The mini version is - free of charge - at your disposal as download at PMA homepage www.pma-online.de or on the PMA-CD (please ask for).
At the end of the
installation the li
cence number has
to be stated or
DEMO mode
must be chosen.
At DEMO mode
the licence num
ber can be stated
subsequently un
der Help r Li
-
-
cence r Change.
KS 90-1 / KS 92-1 71
Page 72

Versions
g
9 Versions
KS 90-1 Format 48 x 96
KS 92-1 Format 96 x 96
0
2
Flat-pin connectors
Screw terminals
90..250V AC, 4 relays
24VAC / 18..30V DC, 4 relays
90..250V AC, 3 relays + mA/logic
24V AC / 18..30V DC, 3 relays + mA/logic
90..250V AC, 2 relays + 2x mA/logic
24V AC / 18..30V DC, 2 relays + 2x mA/logic
no option
RS422/485 + U + di2, di3 + OUT5, OUT6
T
PROFIBUS-DP + UT + di2,di3 + OUT5, OUT6
INP1 and INP2
INP1, INP2 and INP3 incl. O measurement
2
Standard configuration
Configuration to specification
no manual
manual german
manual english
manual french
Standard (CE-certified)
cULus-certified (with screw-terminals only)
EN 14597 (replaces DIN 3440) certified
Unit/front accordin
Accessories delivered with the unit
Operating manual (if selected by the ordering code)
2 fixing clamps
w
operating note in 12 languages
w
to customer specification
XX
72 KS 90-1 / KS 92-1
Page 73
Versions
Accessory equipment with ordering information
Description Order no.
Heating current transformer 50A AC 9404-407-50001
PC-adaptor for the front-panel interface 9407-998-00001
Standard rail adaptor 9407-998-00061
Operating manual German 9499-040-62918
Operating manual English 9499-040-62911
Operating manual French 9499-040-62932
Operating manual Russian 9499-040-62965
Interface description Modbus RTU German 9499-040-63718
Interface description Modbus RTU English 9499-040-63711
BlueControl (engineering tool) Mini Download www.pma-online.de
BlueControl (engineering tool) Basic 9407-999-11001
BlueControl (engineering tool) Expert 9407-999-11011
KS 90-1 / KS 92-1 73
Page 74

Technical data
10 Technical data
INPUTS
PROCESS VALUE INPUT INP1
Resolution: > 14 bits
Decimal point: 0 to 3 digits behind the decimal
point
Dig. input filter: adjustable 0,000...9999 s
Scanning cycle: 100 ms
Measured value
correction:
Thermocouples
r Table 1 (page 77 )
Internal and external temperature compensation
2-point or offset correction
Span start, end of span: anywhere within measuring range
Scaling: selectable -1999...9999
Linearization: 16 segments, adaptable with
BlueControl
Decimal point: adjustable
Input circuit monitor: 12.5% below span start (2mA, 1V)
SUPPLEMENTARY INPUT INP2
Resolution: > 14 bits
Scanning cycle: 100 ms
Heating current measurement
via current transformer (® Accessory equipment)
Measuring range: 0...50mA AC
Scaling: adjustable -1999...0.000...9999 A
Input resistance: ³1MW
Effect of source resistance: 1 mV/W
Internal temperature compensation
Maximal additional error: ± 0.5 K
Sensor break monitoring
Sensor current: £ 1 mA
Configurable output action
Thermocouple to specification
Measuring range -25...75mV in conjunction with
the linearization can be used for connecting
thermocouples which are not included in Table 1.
Resistance thermometer
r Table 2 (page 77 )
Connection: 3-wire
Lead resistance: max. 30 Ohm
Input circuit monitor: break and short circuit
Current measuring range
Technical data as for INP1
Potentiometer
r Table 2 (page 77 )
Connection: 2-wire
Lead resistance: max. 30 Ohm
Input circuit monitor: Break
SUPPLEMENTARY INPUT INP3 (OPTION)
Resolution: > 14 bits
Scanning cycle: 100 ms
Technical data as for INP1 except 10V range.
CONTROL INPUTS DI1, DI2
Configurable as switch or push-button!
Connection of a potential-free contact suitable
for switching “dry” circuits.
Special measuring range
BlueControl (engineering tool) can be used to
match the input to sensor KTY 11-6 (character
istic is stored in the controller).
Physical measuring range: 0...4500 Ohm
Linearization segments 16
Current and voltage signals
r Table 3 (page 77 )
Switched voltage: 5 V
Current: 100 mA
-
CONTROL INPUTS DI2, DI3 (OPTION)
The functions of control input di2 on the analog
card and of di2 on the options card are logically
ORed.
Configurable as direct or inverse switches or keys.
Optocoupler input for active triggering.
74 KS 90-1 / KS 92-1
Page 75

Technical data
Nominal voltage 24 V DC external
Current sink (IEC 1131 type 1)
Logic “0” -3...5 V
Logic “1” 15...30 V
Current requirement approx.. 5 mA
TRANSMITTER SUPPLY UT (OPTION)
Power: 22 mA / ³ 18 V
As analog outputs OUT3 or OUT4 and transmitter supply U
are connected to different
T
voltage potentials, an external galvanic connection between OUT3/4 and U
is not permissible
T
with analog outputs.
GALVANIC ISOLATION
Safety isolation
Function isolation
Process value input INP1
Mains supply Supplementary input INP2
Optional input INP3
Digital input di1, di2
Relay OUT1 RS422/485 interface
Relay OUT2 Digital inputs di2, 3
Relay OUT3 Universal output OUT3
Relay OUT4 Universal output OUT4
Transmitter supply U
T
OUTPUTS
RELAY OUTPUTS OUT1...OUT4
Current output
0/4...20 mA configurable.
Signal range: 0...approx.22mA
Max. load: £ 500 W
Load effect: no effect
Resolution: £ 22mA (0.1%)
Accuracy £40mA (0.2%)
Voltage output
0/2...10V configurable
Signal range: 0...11 V
Min. load: 2 kW
Load effect: no effect
Resolution: £ 11 mV (0.1%)
Accuracy £ 20 mV (0.2%)
OUT3, 4 used as transmitter supply
Output power: 22 mA / ³ 13 V
OUT3, 4 used as logic output
Load£ 500 W 0/£ 20 mA
Load > 500 W 0/> 13 V
OUTPUTS OUT5/6 (OPTION)
Galvanically isolated opto-coupler outputs.
Grounded load: common positive voltage.
Output rating: 18...32 VDC; 70 mA
Internal voltage drop: 1 V with I
Protective circuit: built-in against short circuit,
overload, reversed polarity (free-wheel diode
for relay loads).
max
Contact type: potential-free changeover contact
Max.contact rating: 500 VA, 250 V, 2A at 48...62 Hz,
resistive load
Min. contact rating: 6V, 1mA DC
Number of electical
switching cycles:
for I = 1A/2A: 800,000 / 500,000
(at ~ 250V (resistive load)
Note:
If the relays operate external contactors, these
must be fitted with RC snubber circuits to manufacturer specifications to prevent excessive
switch-off voltage peaks.
OUT3, 4 AS UNIVERSAL OUTPUT
Galvanically isolated from the inputs.
Freely scalable resolution: 11 bits
KS 90-1 / KS 92-1 75
POWER SUPPLY
Dependent of order:
AC SUPPLY
Voltage: 90...250 V AC
Frequency: 48...62 Hz
Power consumption approx. 10 VA
UNIVERSAL SUPPLY 24 V UC
AC voltage: 20.4...26.4 V AC
Frequency: 48...62 Hz
DC voltage: 18...31 V DC class 2
Power consumption: approx.. 10 VA
Page 76

Technical data
BEHAVIOUR WITH POWER FAILURE
Configuration, parameters and adjusted
set-points, control mode:
Non-volatile storage in EEPROM
BLUEPORT FRONT INTERFACE
Connection of PC via PC adapter (see "Accessory equipment"). The BlueControl software is
used to configure, set parameters and operate
the device.
BUS INTERFACE (OPTION)
Galvanically isolated
Physical: RS 422/485
Protocol: Modbus RTU
Transmission speed: 2400, 4800, 9600, 19.200 bits/sec
Address range: 1...247
Number of controllers per bus: 32
Repeaters must be used to connect a higher number of
controllers.
Shock test Ea (DIN IEC 68-2-27)
Shock: 15g
Duration: 11ms
Electromagnetic compatibility
Complies with EN 61 326-1
(for continuous, non-attended operation)
GENERAL
Housing
Material: Makrolon 9415 flame-retardant
Flammability class: UL 94 VO, self-extinguishing
Plug-in module, inserted from the front
Safety test
Complies with EN 61010-1 (VDE 0411-1):
Overvoltage category II
Contamination class 2
Working voltage range 300 V
Protection class II
ENVIRONMENTAL CONDITIONS
Protection modes
Front panel: IP 65 (NEMA 4X)
Housing: IP 20
Terminals: IP 00
Permissible temperatures
For specified accuracy: 0...60°C
Warm-up time: ≥ 15 minutes
For operation: -20...65°C
For storage: -40...70°C
Humidity
75% yearly average, no condensation
Altitude
To 2000 m above sea level
Shock and vibration
Vibration test Fc (DIN 68-2-6)
Frequency: 10...150 Hz
Unit in operation: 1g or 0.075 mm
Unit not in operation: 2g or 0.15 mm
Certifications
Type tested to EN 14597 (replaces DIN
3440)
With certified sensors applicable for:
w
Heat generating plants with outflow
temperatures up to 120°C to DIN 4751
w
Hot-water plants with outflow temperatures
above 110°C to DIN 4752
w
Thermal transfer plants with organic transfer
media to DIN 4754
w
Oil-heated plants to DIN 4755
cULus-certification
(Type 1, indoor use)
File: E 208286
Electrical connections
w
flat-pin terminals 1 x 6.3mm or 2 x 2.8mm to
DIN 46 244 or
w
screw terminals for 0.5 to 2.5mm²
On instruments with screw terminals, the
insulation must be stripped by min.12 mm.
Choose end crimps accordingly.
76 KS 90-1 / KS 92-1
Page 77

Technical data
Mounting
Panel mounting with two fixing clamps at top/ bot
tom or right/left, high-density mounting possible
Mounting position: uncritical
Weight: 0.27kg
Accessories delivered with the unit
Operating manual
Fixing clamps
Table 1 Thermocouples measuring ranges
Thermoelementtype Measuring range Accuracy Resolution (Ô)
L Fe-CuNi (DIN) -100...900°C -148...1652°F ß 2K 0.1 K
J Fe-CuNi -100...1200°C -148...2192°F ß 2K 0.1 K
K NiCr-Ni -100...1350°C -148...2462°F ß 2K 0.2 K
N Nicrosil/Nisil -100...1300°C -148...2372°F ß 2K 0.2 K
S PtRh-Pt 10% 0...1760°C 32...3200°F ß 2K 0.2 K
R PtRh-Pt 13% 0...1760°C 32...3200°F ß 2K 0.2 K
T Cu-CuNi -200...400°C -328...752°F ß 2K 0.05 K
C W5%Re-W26%Re 0...2315°C 32...4199°F ß 2K 0.4 K
D W3%Re-W25%Re 0...2315°C 32...4199°F ß 2K 0.4 K
E NiCr-CuNi -100...1000°C -148...1832°F ß 2K 0.1 K
B * PtRh-Pt6% 0(100)...1820°C 32(212)...3308°F ß 2K 0.3 K
* Specifications valid for 400°C
Table 2 Resistance transducer measuring ranges
Type Signal Current Measuring range Accuracy Resolution (Ô)
Pt100
-200...100°C (150**) -140...212°F ß 1K 0.1K
Pt100 -200...850°C -140...1,562°F ß 1K 0.1K
Pt1000 -200...850°C -140...1562°F ß 2K 0.1K
KTY 11-6 * -50...150°C -58...302°F ß 2K 0.05K
Spezial 0...4,500
Spezial 0...450
0,2mA
Poti 0...160
Poti 0...450
ß 0.1 % 0.01 %
Poti 0...1,600
Poti 0...4,500
* Or special
**Measuring range 150°C with reduced lead resistance. Max. 160 [ for meas. and lead
resistances (150°C = 157,33 [).
Table 3 Current and voltage measuring ranges
Measuring range Input impedance Accuracy Resolution (Ô)
0-10 Volt ~ 110 kW ß 0.1 % 0.6 mV
-2,5-115 mV ? 1MW ß 0.1 % 6 mV
-25-1,150 mV ? 1MW ß 0.1 % 60 mV
KS 90-1 / KS 92-1 77
Page 78

Safety hints
11 Safety hints
This unit was
–
–
–
–
–
–
built and tested in compliance with VDE 0411-1 / EN 61010-1 and
delivered in safe condition.
complies European guideline 89/336/EWG (EMC) and is provided with CE marking.
tested before delivery and passed the tests required by test schedule.
To maintain this condition and to ensure safe operation, the user must follow
the hints and warnings given in this operating manual.
The unit is intended exclusively for use as a measurement and control instru
-
ment in technical installations.
a
Warning
If the unit is damaged to an extent that safe operation seems impossible, the unit
must not be taken into operation.
ELECTRICAL CONNECTIONS
The electrical wiring must conform to local standards (e.g. VDE 0100).
–
The input measurement and control leads must be kept separate from signal
–
and power supply leads.
–
In the installation of the controller a switch or a circuit-breaker must be used
and signified.
–
The switch or circuit-breaker must be installed near by the controller and the
user must have easy access to the controller.
COMMISSIONING
Before instrument switch-on, check that the following information is taken into
account:
Ensure that the supply voltage corresponds to the specifications on the type label.
w
All covers required for contact protection must be fitted.
w
If the controller is connected with other units in the same signal loop, check
w
that the equipment in the output circuit is not affected before switch-on. If
necessary, suitable protective measures must be taken.
The unit may be operated only in installed condition.
w
Before and during operation, the temperature restrictions specified for
w
controller operation must be met.
78 KS 90-1 / KS 92-1
Page 79

Safety hints
SHUT-DOWN
For taking the unit out of operation, disconnect it from all voltage sources and
protect it against accidental operation.
If the controller is connected with other equipment in the same signal loop, check
that other equipment in the output circuit is not affected before switch-off. If ne
cessary, suitable protective measures must be taken.
MAINTENANCE, REPAIR AND MODIFICATION
The units do not need particular maintenance.
-
a
l
a
Warning
When opening the units, or when removing covers or components, live parts and
terminals may be exposed.
Before starting this work, the unit must be disconnected completely.
After completing this work, re-shut the unit and re-fit all covers and components. Check
if specifications on the type label must be changed and correct them, if necessary.
Caution
When opening the units, components which are sensitive to electrostatic discharge (ESD) can be exposed. The following work may be done only at workstations
with suitable ESD protection.
Modification, maintenance and repair work may be done only by trained and authorized personnel. For this purpose, the PMA service should be contacted.
The cleaning of the front of the controller should be done with a dry or a wetted
(spirit, water) handkerchief.
KS 90-1 / KS 92-1 79
Page 80

Safety hints
2.
11.1 Resetting to factory setting,
or to a customer-specific data set
In case of faultyconfiguration, the device can be reset to a default condition.
Unless changed, this basic setting is the manufacturer-specific controller default
setting.
However, this setting may have been changed by means of the BlueControl
software. This is recommendable e.g. when completing commissioning in order
to cancel accidental alteration easily.
Resetting can be activated as follows:
1
ÌÈ + Power on
FAC
Tory
1.
Press keys È and Ì simultaneously FACtory is displayed after power
–
on, after approx. 2 seconds, the display changes to FACno.
–
Keys È and Ì can be used for switch-over between no and yEs in the
second line.
FAC
no
2
È
FAC
YEs
®
1
–
When pressing the Enter key with ”no”, the unit starts without copying the de-
fault data.
–
When pressing the Enter key with ”yEs”, there are four possibilities:
FAC
COPY
2
FAC
COPY
3
FAC
PASS
8.8.8.8.
8.8.8.8.
4
Resetting to factory setting, 80 KS 90-1 / KS 92-1
Page 81

Safety hints
g
g
Safety
switches
1 closed any any always
2 open free none Factory reset without
3 open free defined Factory reset after entry
4 open min. 1
Timeout
Unless a key is pressed during 10 seconds, a timeout occurs and the instruments
starts without copying the default data.
The process COPY can take several seconds.
Subsequently, the instrument changes to normal operation.
Levels Password Instrument reaction after confirming
”YES” by pressing Ù
factory reset
prompt for the password
of the correct pass
number
any Factory reset is omitted
disabled
KS 90-1 / KS 92-1 81 Resetting to factory setting,
Page 82

Index
Current signal measuring range ....74
0-9
2-point correction............61
A
Alarm handling ..........26-27
B
Bargraph ................11
BlueControl...............71
Bus interface
Technical Data ..........76
-
C
Calibration level (CAL)......61-63
Certifications ..............76
Configuration examples
- 2-point controller .........49
- 3-point controller .........50
- 3-point stepping controller ....51
- Continuous controller .......52
- D - Y -Off controller .......53
- Measured value output ......55
- Signaller ..............48
Configuration level
-
Configuration parameters . . 30 - 43
-
Parameter survey .........29
Connecting diagram ...........6
Connecting examples
-
di2/3, 2-wire transmitter supply . . 8
-
INP2 current transformer......7
-
OUT1/2 heating/cooling ......7
-
OUT3 as logic output .......10
-
OUT3 transmitter supply ......9
-
RS485 interface...........9
Control inputs di1, di2, di3
-
Technical data ...........74
Cooling functions
-
Constant period ..........47
-
Standard ..............45
-
Water cooling non-linear .....46
D
DAC................64-65
Digital inputs di1, di2, di3
Configuration ...........38
-
Technical data ...........74
-
E
Environmental conditions .......76
Equipment ...............73
Error list ................13
F
Front view ...............11
I
Input INP1
- Configuration
...........31
- Parameters.............58
- Technical data ...........74
Input INP2
- Configuration ...........33
- Parameters.............58
- Technical data ...........74
Input INP3
-
Configuration ...........33
-
Parameters.............59
-
Technical data ...........74
Input scaling ..............60
L
LED
-
Ada-LED.............11
-
Err-LED.............11
-
func-LED ............11
-
ì -LED .............11
-
LED colours............11
-
ò -LED .............11
-
para-LED ............11
-
SP.2-LED ............11
-
SP.x-LED ............11
82 KS 90-1 / KS 92-1
Page 83

Linearization ..............68
S
Safety hints ............78-81
M
Mainenance manager .......13-15
Manual tuning .............24
Modbus master .............70
Mounting.................5
O
O2-measurement ............66
Offset correction ............61
Optimization at the setpoint ......18
Output OUT1
Configuration ...........36
-
Technical data ...........75
-
Output OUT2
- Technical data ...........75
Output OUT3
- Configuration ...........37
- Technical data ...........75
Output OUT4
- Technical data ...........75
Output OUT5
- Configuration ...........38
- Technical data ...........75
Output OUT6
-
Configuration ...........38
-
Technical data ...........75
Oxygen measurement .........66
Safety switch...............5
Safety test................76
Self-tuning
Cancelation ............21
-
Cancelation causes ........22
-
SEtP...................58
Set-point ................58
Set-point gradient............44
Set-point processing ..........44
T
Thermocouple measuring range ....74
V
Versions ..............72-73
Voltage signal measuring range ....74
P
Parameter setting level
-
Parameter survey .........56
-
Parameters ..........57-59
Power supply ..............75
R
Ramp ..................44
Resetting to factory setting ....80-81
Resistance thermometer measuring range
.....................74
KS 90-1 / KS 92-1 83
Page 84

9499- 040- 62911
Subject to alterations without notice © PMA Prozeß- und Maschinen-Automation GmbH
Änderungen vorbehalten P.O.B. 310 229, D-34058 Kassel, Germany
Sous réserve de toutes modifications Printed in Germany 9499-040-62911 (08/2013)
2
A5 auf A6 gefaltet, 2-fach geheftet, SW-Druck Normalpapier weiß 80g/m
 Loading...
Loading...