

Page 1
PMA Prozeß- und Maschinen-Automation GmbH
1
Industrial controller KS 40-1,
KS41-1 and KS42-1
KS40-1
KS41-1
KS42-1
Operating manual
9499-040-62711
KS40-1
KS41-1
KS42-
English
Valid from: 8499
Page 2

û
ATTENTION!
Mini Version and Updates on
or on PMA-CD
www.pma-online.de
BlueControl
®
More efficiency in engineering,
more overview in operating:
The projecting environment for the BluePort
®
controllers
Description of symbols
in the text: on the device:
g General information a Follow the operating instructions
a General warning
l Attention: ESD-sensitive devices
© PMA Prozeß- und Maschinen-Automation GmbH • Printed in Germany
All rights reserved. No part of this document may bereproduced or published in any form or by any means
without prior written permission from the copyright owner.
A publication of PMA Prozeß- und Maschinen Automation
P.O.Box 310229
D-34058 Kassel
Germany
Page 3
Contents
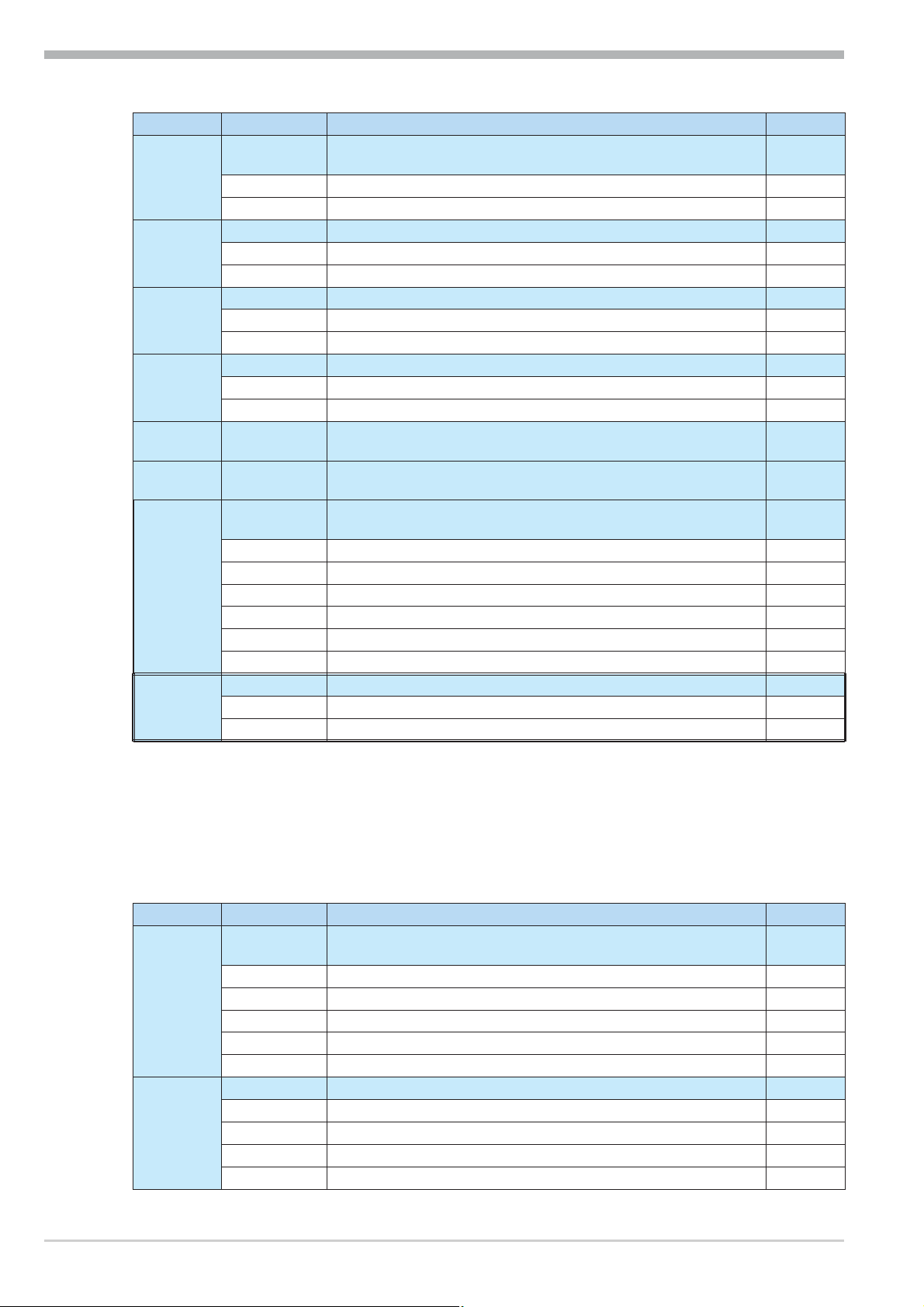
1 Mounting .............................. 5
2 Electrical connections ....................... 6
2.1 Connecting diagram......................... 6
2.2 Terminal connection ........................ 6
3 Operation ............................. 10
3.1 Front view ............................. 10
3.2 Behaviour after power-on ..................... 11
3.3 Operating level .......................... 11
3.4 Maintenance manager / Error list ................12
3.5 Self-tuning ............................. 14
3.5.1 Preparation for self-tuning........................14
3.5.2 Self-tuning sequence ..........................14
3.5.3 Self-tuning start ..........................15
3.5.4 Self-tuning cancellation ........................15
3.5.5 Acknowledgement procedures in case of unsuccessful self-tuning . 16
3.5.6 Examples for self-tuning attempts ..................16
3.6 Manual tuning ........................... 17
3.7 Alarm handling .......................... 18
3.8 Operating structure ........................ 20
4 Configuration level ........................21
4.1 Configuration survey ...................... 21
4.2 Configuration ........................... 22
4.3 Set-point processing ........................ 29
4.4 Configuration examples ...................... 30
4.4.1 On-Off controller / Signaller (inverse) .................30
4.4.2 2-point controller (inverse) .......................31
4.4.3 3-point controller (relay & relay) ....................32
4.4.4 3-point stepping controller (relay & relay) ...............33
4.4.5 Continuous controller (inverse) .....................34
4.4.6 D - Y - Off controller / 2-point controller with pre-contact .....35
4.4.7 KS4x-1 with measured value output ..................36
Operating KS4x-1 3
Page 4
5 Parameter setting level ...................... 37
5.1 Parameter survey ......................... 37
5.2 ................................... 37
5.3 ................................... 37
5.4 Parameters ............................. 38
5.5 Input scaling ............................ 40
5.5.1 Input Inp.1 ...............................40
5.5.2 Input InP.2 ............................40
6 Calibration level ......................... 41
7 Programmer .......................... 44
8 Timer ............................... 46
8.1 Setting up the timer ........................ 46
8.1.1 Operating modes ............................46
8.1.2 Tolerance band .............................47
8.1.3 Timer start ................................47
8.1.4 Signal end ................................48
8.2 Determining the timer run-time ..................48
8.3 Starting the timer ........................ 48
9 BlueControl ............................ 49
10 Versions .............................. 50
11 Technical data .......................... 51
12 Safety hints ............................ 55
12.1 Resetting to factory setting .................... 56
4 Operating KS4x-1
Page 5
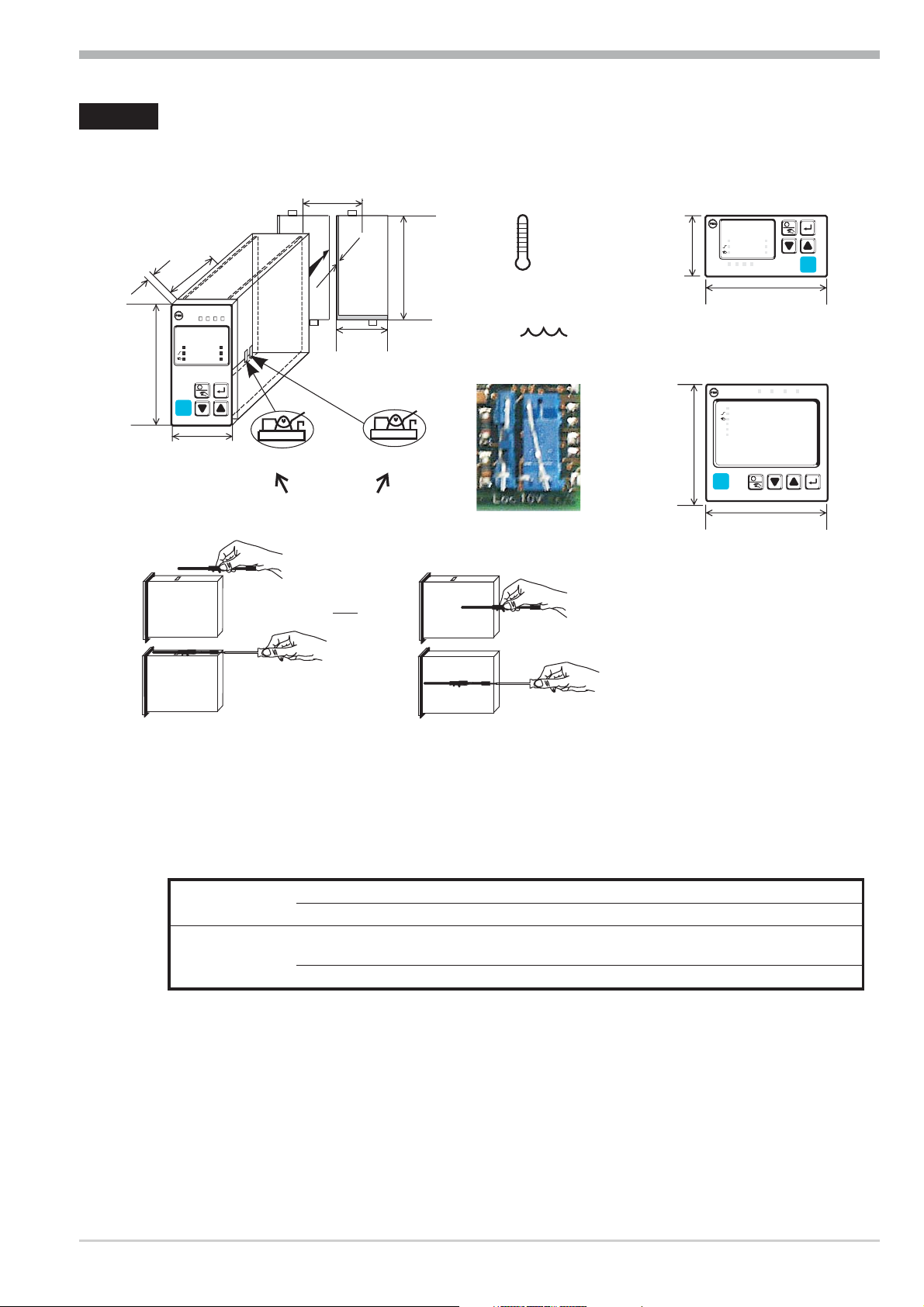
1 Mounting
SP.X
run
Err
Ada
SP.x
run
Err
Adada
SP.x
run
Err
Ada
Mounting
(0.4")
10
118
96 (3.78")
KS 40-1 universal
48 (1.89")
(4.65")
126
125
min.48
Loc
Safety switch
Ü
(1.89")
1..10
(0.04..0.4")
+0,6
45
+0.02
(1.77" )
10V i mA/Pt
or:
Front view KS41-1
max.
60°C
max.
95% rel.
0°Cmin.
48 (1.89")
%
+0.03
+0,8
92
(3.62" )
126.
125
KS 41-1 universal
96 (3.78")
Front view KS42-1
126.
Loc 10V mA/Pt
Loc 10V mA/Pt
Loc 10V mA/Pt
(3.78")
96
KS 42-1 universal
125
96 (3.78")
Ü
a
*
*
Safety switch:
For access to the safety switches, the controller must be withdrawn from the hou
sing. Squeeze the top and bottom of the front bezel between thumb and forefinger
and pull the controller firmly from the housing..
10V i mA/Pt right 1 Current signal / Pt100 / thermocouple at InP.1
left Voltage signal at InP.1
Loc open Access to the levels is as adjusted by means of BlueControl
(engineering tool)
2
closed 1 all levels accessible wihout restriction
1 Factory setting 2 Default setting: display of all levels
suppressed, password PASS = OFF
Safety switch 10V i mA/Pt always in position left or right. Leaving the
safety switch open may lead to faulty functions!
-
l
Caution! The unit contains ESD-sensitive components.
Operating KS4x-1 5
Page 6
Electrical connections
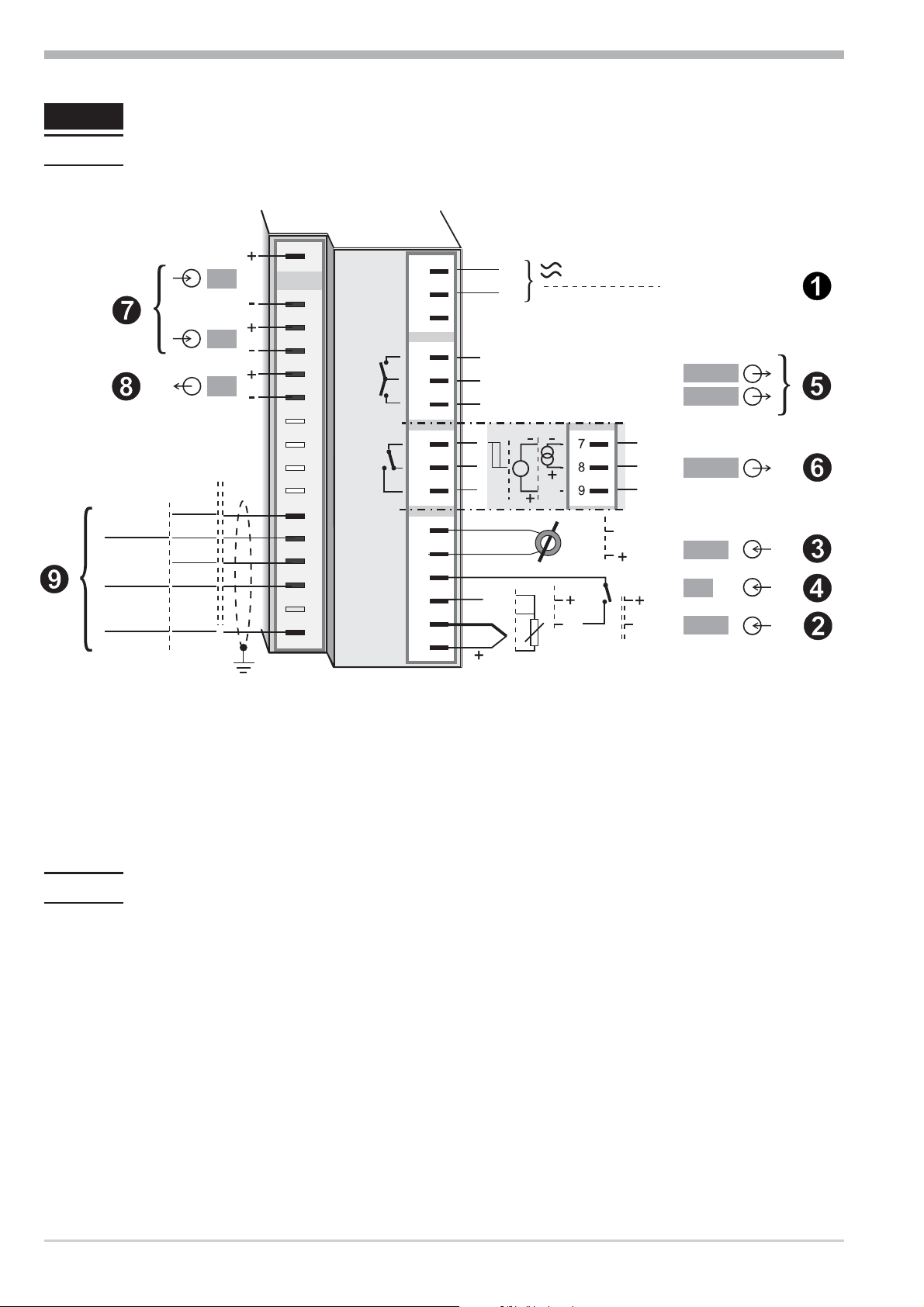
2 Electrical connections
2.1 Connecting diagram
di2
di3
T
U
Modbus RTU
RXD-B
RGND
DATA B
DATA A
RS485 RS422
GND
RXD-A
TXD-B
TXD-A
Option
1
(2)
3
4
5
6
7
8
9
10
11
12
13
14
15
(16)
17
a
10
11
12
13
14
15
1
2
3
4
5
6
7
8
9
L
N
e
Logic
90...250V
24V AC/DC
d
c
b
U
HC
mA
OUT1
OUT2
OUT3
INP2
di1
mA
0..10 V*
INP1
b
c
d
a
* Safety switch mA i V in position left
g
Dependent of order, the controller is fitted with :
flat-pin terminals 1 x 6,3mm or 2 x 2,8mm to DIN 46 244 or
w
screw terminals for 0,5 to 2,5mm²
2.2 Terminal connection
Power supply connection 1
See chapter 11 "Technical data"
Connection of input INP1 2
Input for variable x1 (process value)
a thermocouple
b resistance thermometer (Pt100/ Pt1000/ KTY/ ...)
c current (0/4...20mA)
d voltage (0/2...10V)
Connecting diagram 6 Operating KS4x-1
Page 7
Electrical connections
L
+
_
SSR
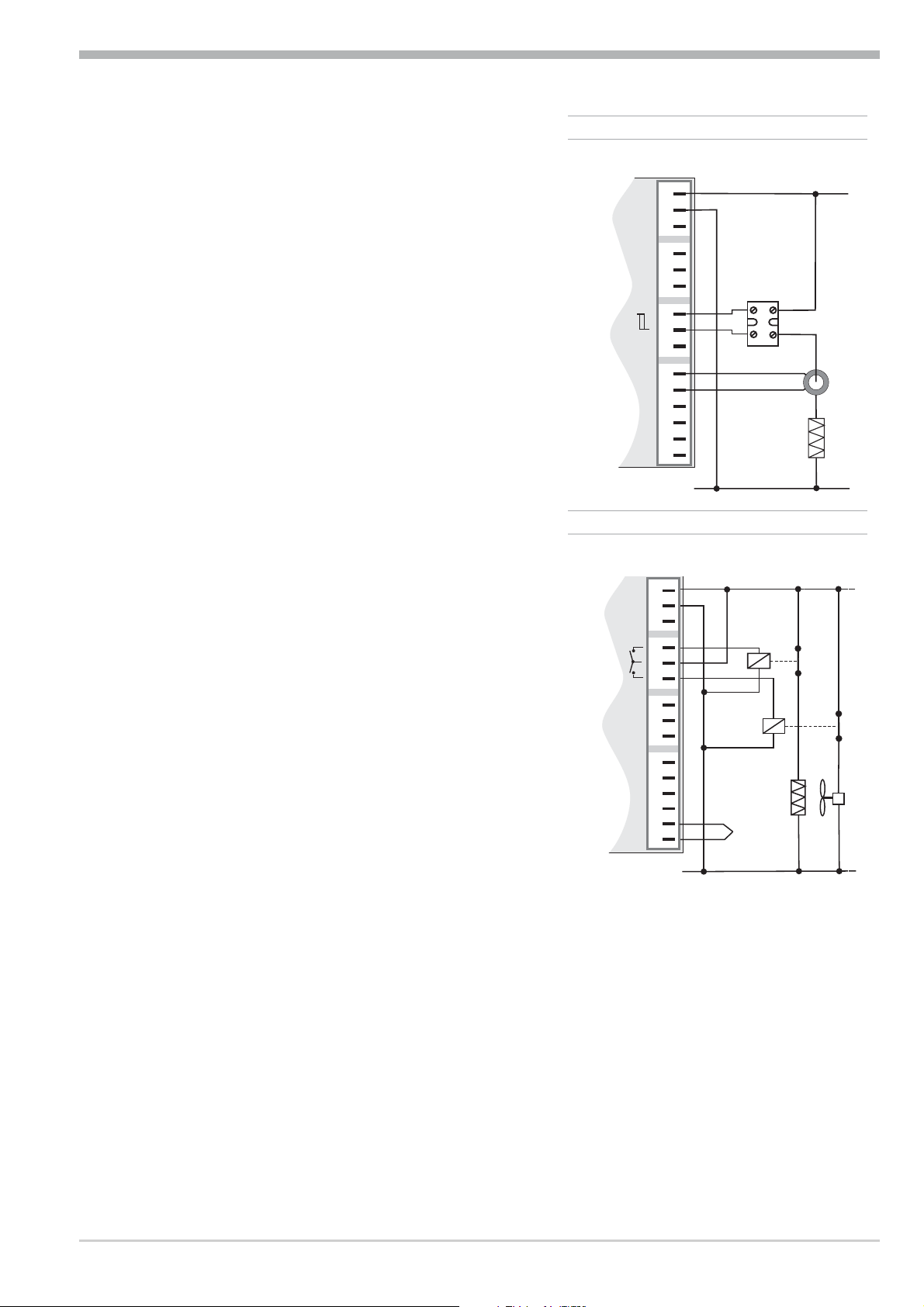
Connection of input INP2 3
Heating current input (0...50mA AC) or in
-
put for ext. set-point (0/4...20mA)
Connection of input di1 4
Digital input, configurable as switch or
push-button
Connection of outputs OUT1/2 5
Relay outputs 250V/2A normally open with
common contact connection
Connection of output OUT3 6
a relay (250V/2A), potential-free
changeover contact
universal output
b current (0/4...20mA)
c voltage (0/2...10V)
d transmitter supply
e logic (0..20mA / 0..12V)
Connection of inputs di2/3 7 (option)
Digital inputs (24VDC external), galvanically isolated, configurable as switch or
push-button
3 INP2 current tansformer
1
2
3
4
5
6
Logic
7
8
9
10
11
12
13
14
15
5 OUT1/2 heating/cooling
1
2
3
4
5
6
7
8
9
L
Connection of output U
8 (option)
T
Supply voltage connection for external ener
gization
Connection of bus interface 9 (option)
RS422/485 interface with Modbus RTU
protocol
10
-
11
12
13
14
15
+
N
Operating KS4x-1 7 Terminal connection
Page 8
Electrical connections
+
_
SSR
+
_
SSR
+
_
SSR
+
_
SSR
+
_
SSR
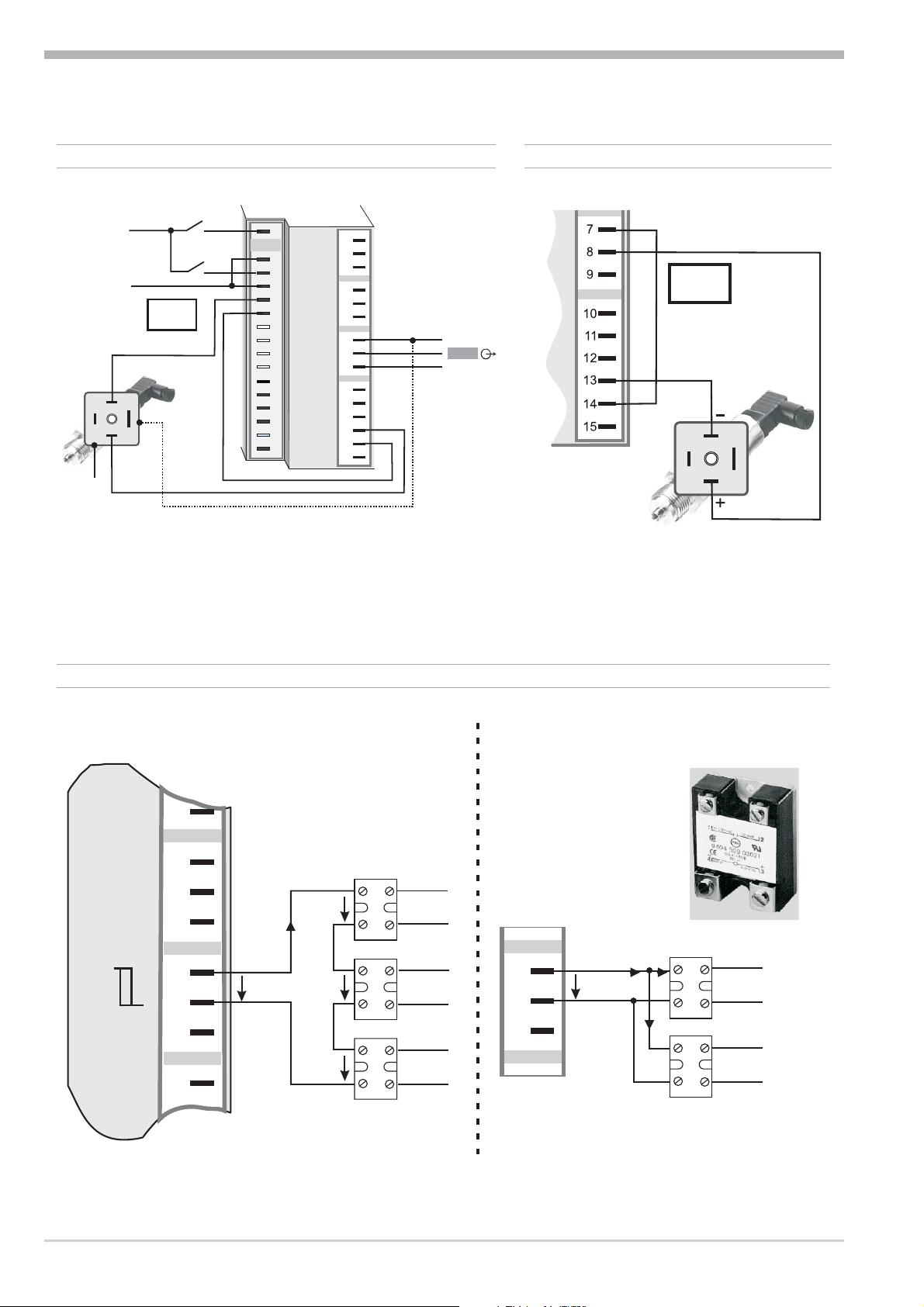
78 di2/3, UT2-wire transmitter supply
Option
+24VDC
3
0V
17,5V
22mA
+
1
K
2
-
5mA
5mA
1
(2)
3
4
5
+
6
7
-
8
9
10
11
12
13
14
15
(16)
17
1
2
3
4
5
6
7
8
9
10
11
12
+
13
14
-
15
J
x
a
If UTand the universal output OUT3 is used there may be no external galvanic
connection between measuring and output circuits!
OUT3
6 OUT3 transmitter supply
-
+
+
13V
22mA
-
2
3
K
1
6 OUT3 as logic output with solid-state relay (series and parallel connection)
Logic
3
4
5
6
7
7
8
8
9
9
10
Series connection
I =22mA
max
4V
12V
4V
4V
Parallel connection
I =22mA
max
7
7
12V
8
8
9
9
Terminal connection 8 Operating KS4x-1
Page 9
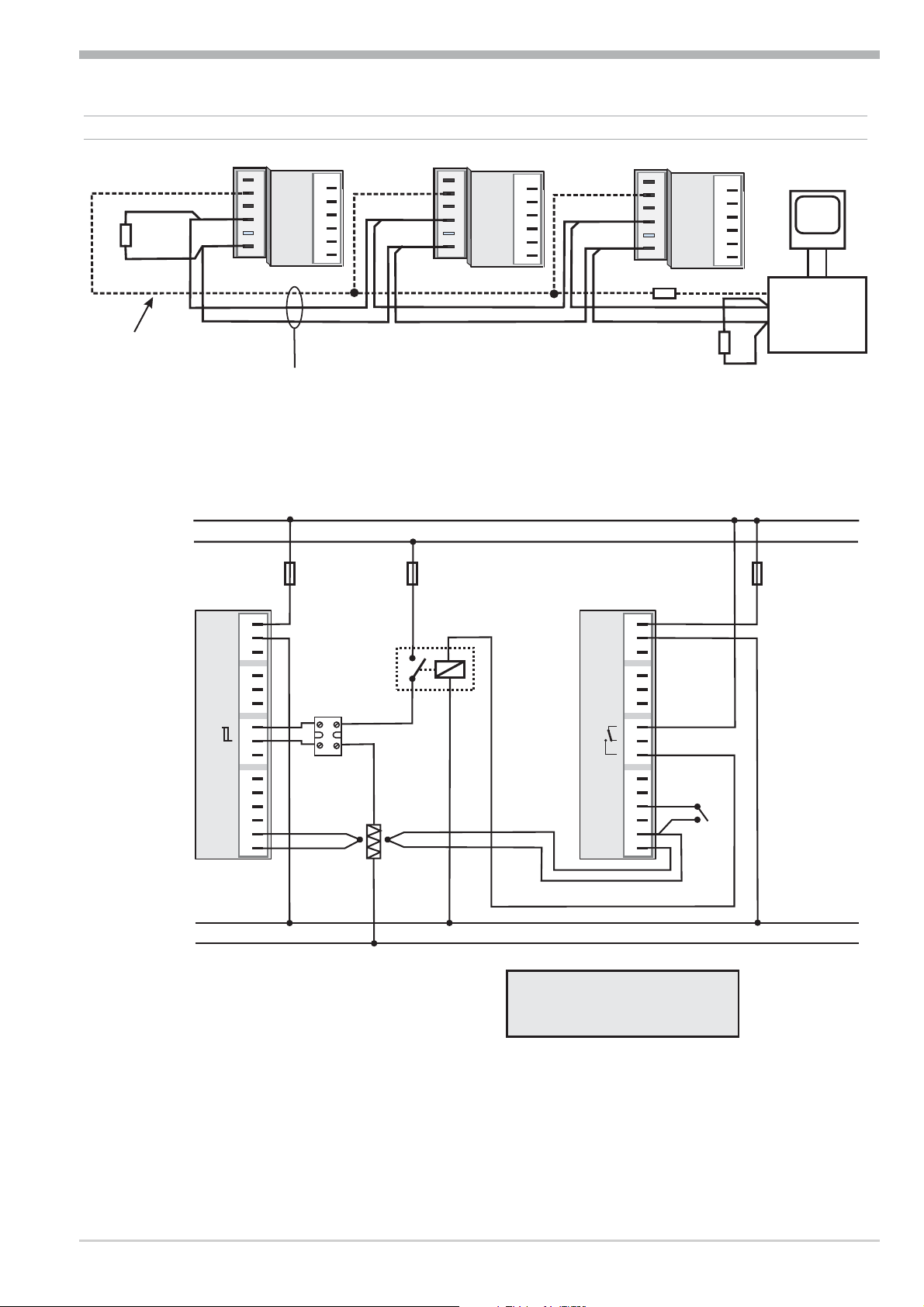
9 RS485 interface (with RS232-RS485 interface converter) *
+
_
Electrical connections
R = 120...200 OhmT
RT
RGND connection optional
* Interface description Modbus RTU in seperate manual: see page 50.
KS4x-1 connecting example:
L1
L2
RGND RGND
DATA B
DATA A
12
13
14
15
(16)
17
10
11
12
13
14
15
DATA B
DATA A
J
KS 40-1
Logic
fuse
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
SSR
contactor
+
fuse
heating
12
13
14
15
(16)
17
10
11
12
13
14
15
RGND
DATA B
DATA A
12
13
14
15
(16)
17
10
11
12
13
14
15
PC
R=100 Ohm
converter
RS485-RS232
max. 1000m
”Twisted Pair”
TB 40-1
1
Temperature limiter
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
RT
R = 120...200 OhmT
fuse
reset
+
N1
N2
1 TB 40-1 Temperature limiter
Standard version (3 relays):
TB40-100-0000D-000
other versions on requestr
a
CAUTION: Using a temperature limiter is recommendable in
systems where overtemperature implies a fire hazard or
other risks.
Operating KS4x-1 9 Terminal connection
Page 10
Operation
KS 40-1 universal
125
126.
SP.x
run
Err
Ada
123OK
3
1
2
3
4
0
5
!
6
"
7
8
§
9
$
%
KS 42-1 universal
125
126.
SP.x
run
Err
Ada
KS42-1
KS 41-1 universal
125
126.
SP.x
run
Err
Ada
KS41-1
KS40-1
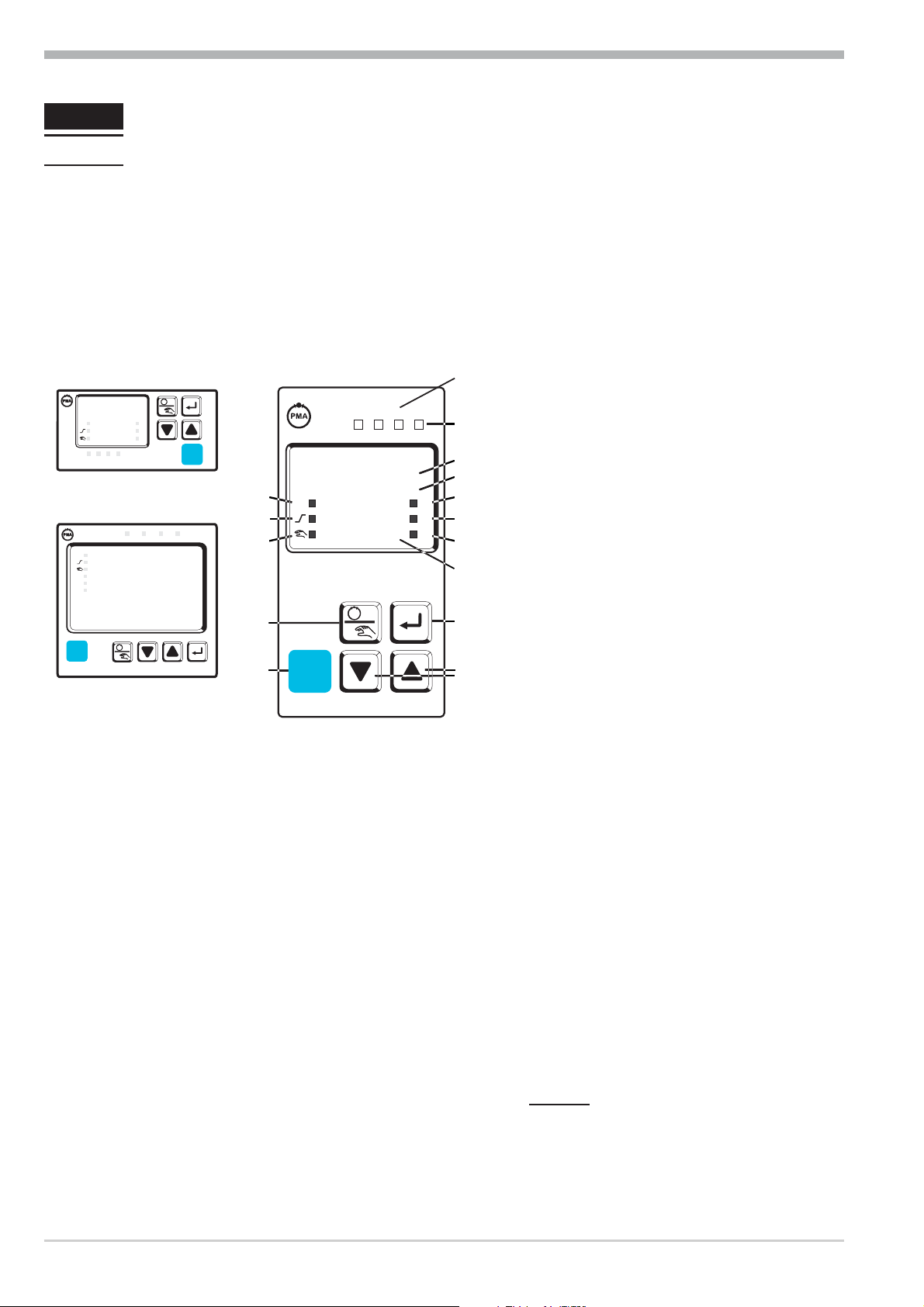
3 Operation
3.1 Front view
LED colours:
LED 1, 2, 3: yellow
LED OK: green
other LEDs: red
1 Status of switching outputs
OuT.1... 3
2 Lit with limit value 1 ( PArA /
Lim ) not exceeded
3 Process value display
4 Set-point, controller output
5 Signals ConF and PArA level
6 Programmer or timer running
7 Self-tuning active
8 Entry in error list
9 Set-point SP.2 or SP.E is
effective
0 Set-point gradient effective
! Manual/automatic switch-over:
Off: Automatic
On: Manual
(changing possible)
Blinks: Manual
(changing not possible
(r ConF/ Cntr/ MAn)
" Enter key:
calls up extended operating
level / error list
§ Up/down keys:
changing the set-point or the
controller output value
$ Manual mode /spec. function
(® ConF / LOGI )
% PC connection for
BlueControl (engineering
tool)
g
In the upper display line, the process value is always displayed. At parameter,
configuration, calibration as well as extended operating level, the bottom display
line changes cyclically between parameter name and parameter value.
Front view 10 Operating KS4x-1
Page 11
3.2 Behaviour after power-on
A
M
l
After supply voltage switch-on, the unit starts with the operating level.
The unit is in the condition which was active before power-off.
If KS4x-1 was in manual mode before power-off, the controller starts with cor
recting value Y2 after switching on again.
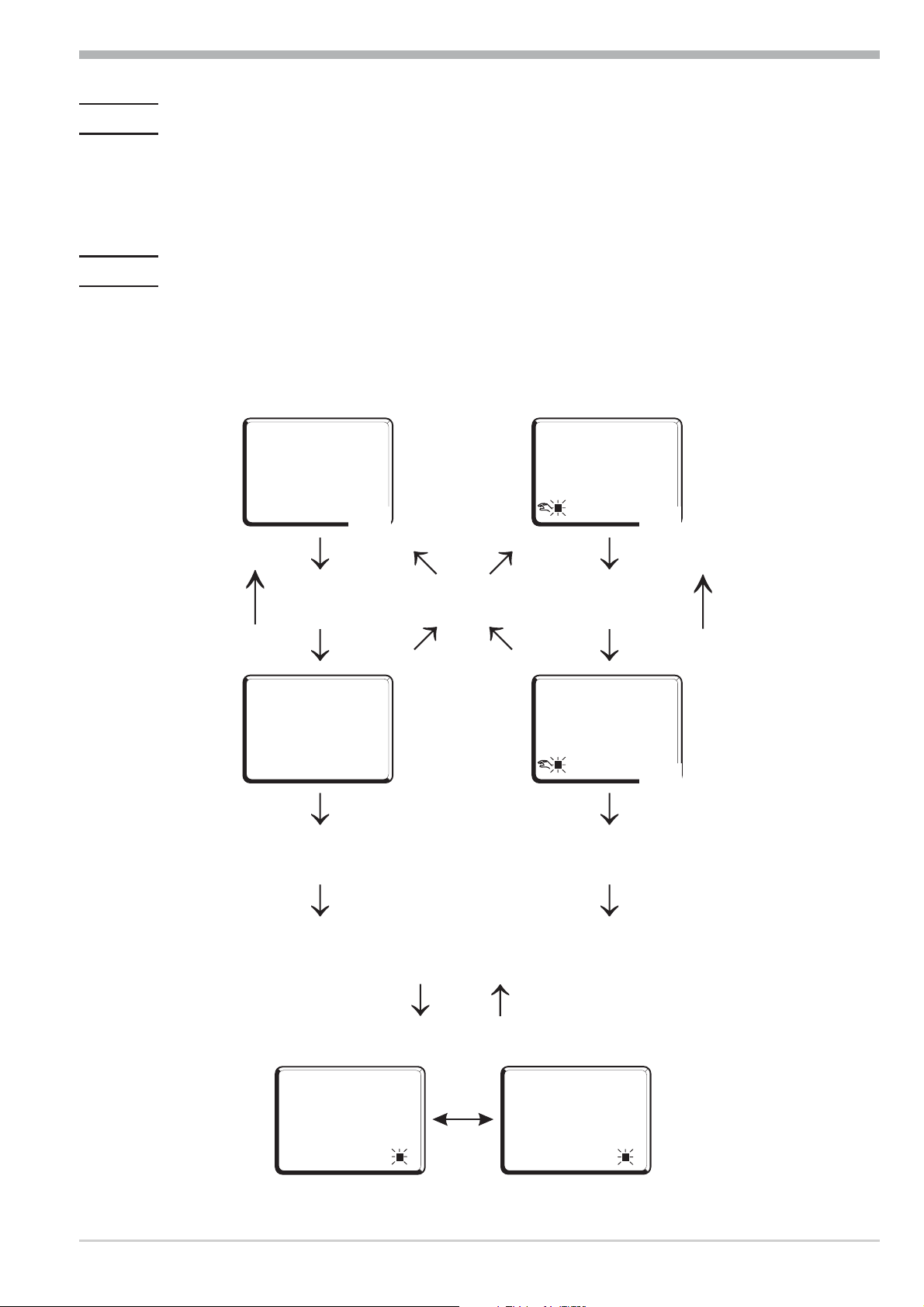
3.3 Operating level
Operation
-
The content of the extended operating level is determined by means of BlueCon
trol (engineering tool). Parameters which are used frequently or the display of
which is important can be copied to the extended operating level.
time
out
utomatic
126
125
È
Ì
Ù
126
i
Ò
Ò
i
anua
126
y21
Ù
126
È
Ì
time
out
-
y21
only
display
Ù
125
È
Ì
Ù
Extended operating level
time
out
Errorliste (if error exists)
126
FbF.1
display
switching
Err
126
2
Err
Operating KS4x-1 11 Behaviour after power-on
Page 12
Operation
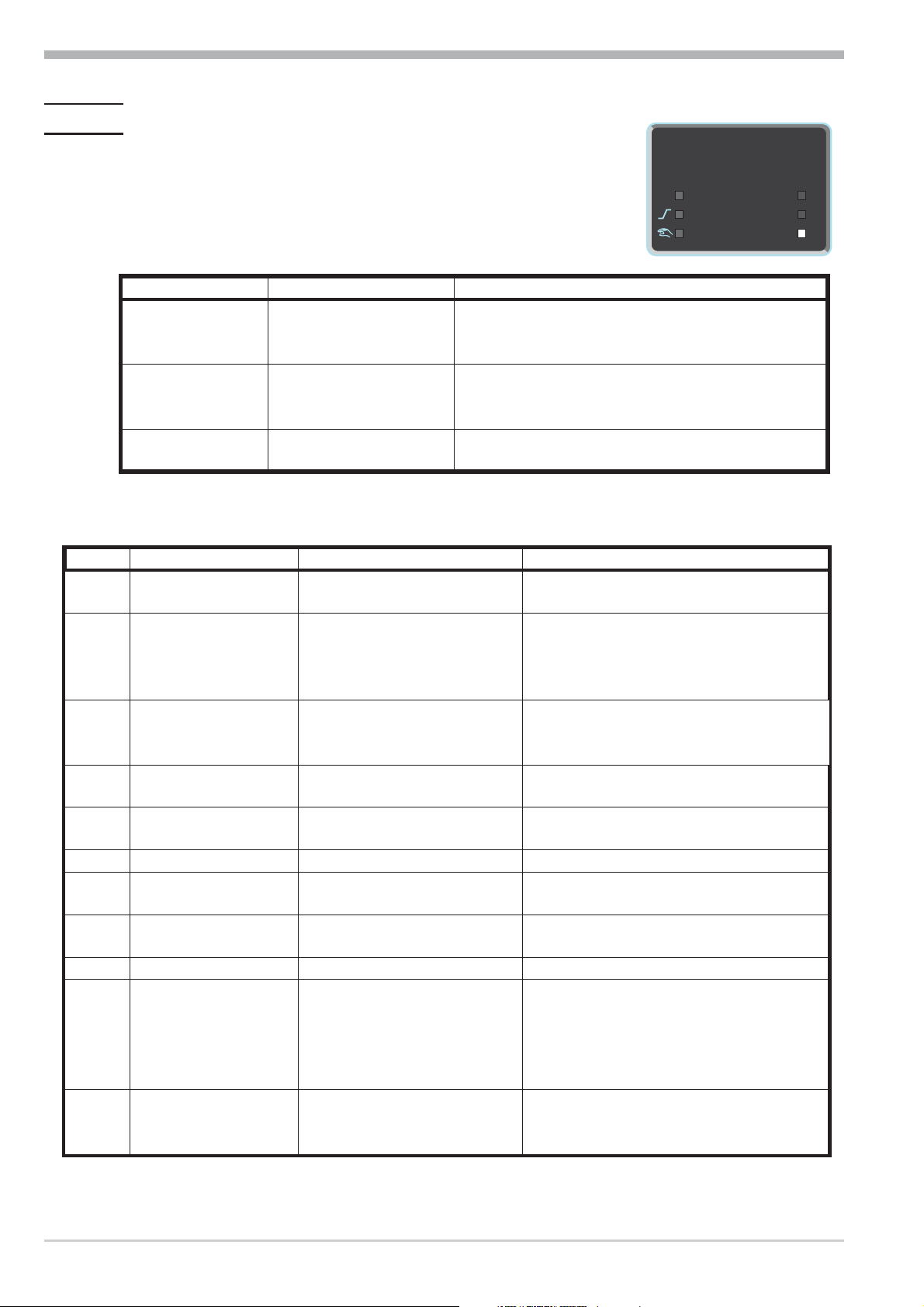
3.4 Maintenance manager / Error list
With one or several errors, the extended operating level
always starts with the error list. Signalling an actual entry
in the error list (alarm, error) is done by the Err LED in
the display. To reach the error list press Ù twice.
SP.x
Err LED status Signification Proceed as follows
blinks
(Status 2)
lit
(Status 1)
off
(Status 0)
Alarm due to existing
error
Error removed,
Alarm not acknowledged
No error,
all alarm entries deleted
Determine the error type in the error list via the
error number
-Change to status 1 after error removal.
Acknowledge the alarm in the error list pressing
key È or Ì
The alarm entry was deleted (Status 0).
-
-Not visible except when acknowledging
126
125
run
Ada
Err
Name
E.1
E.2
E.4
FbF.1
Sht.1
POL.1
FbF.2
Sht.2
POL.2
HCA
SSr
Error list:
Description Cause Possible remedial action
Internal error,
cannot be removed
Internal error, can be
reset
Hardware error - Codenumber and hardware
Sensor break INP1
Short circuit INP1
INP1polarity error
Sensor break INP2
Short circuit INP2
INP2 polarity
Heating current alarm
(HCA)
Heating current short
circuit (SSR)
- E.g. defective EEPROM - Contact PMA service
- Return unit to our factory
- e.g. EMC trouble - Keep measurement and power supply
cables in separate runs
- Ensure that interference suppression of
contactors is provided
- Contact PMA service
are not identical
- Elektronic-/Optioncard must be
exchanged
-
Sensor defective
-
Faulty cabling
-
Sensor defective
-
Faulty cabling
-
Faulty cabling
-
Sensor defective
-
Faulty cabling
-
Sensor defective
-
Faulty cabling
-
Faulty cabling
-
Heating current circuit
interrupted, I< HC.A or I>
-
Replace INP1 sensor
-
Check INP1 connection
-
Replace INP1 sensor
-
Check INP1 connection
-
Reverse INP1 polarity
-
Replace INP2 sensor
-
Check INP2 connection
-
Replace sensor INP2
-
Check INP2 connection
-
Reverse INP2 polarity
-
Check heating current circuit
-
If necessary, replace heater band
HC.A (dependent of
configuration)
-
Heater band defective
-
Current flow in heating
circuit with controller off
-
SSR defective
-
Check heating current circuit
-
If necessary, replace solid-state relay
Maintenance manager / Error list 12 Operating KS4x-1
Page 13
Operation
Name
LooP
AdA.H
AdA.C
LiM.1
Lim.2
Lim.3
Inf.1
Inf.2
Description Cause Possible remedial action
Control loop alarm
(LOOP)
Input signal defective or not
connected correctly
Output not connected
-
Check heating or cooling circuit
Check sensor and replace it, if necessary
Check controller and switching device
-
correctly
Self-tuning heating
alarm
See Self-tuning heating error
status
see Self-tuning heating error status
-
(ADAH)
Self-tuning heating
alarm cooling
See Self-tuning cooling error
status
see Self-tuning cooling error status
-
(ADAC)
stored limit alarm 1
adjusted limit value 1
-
check process
-
exceeded
stored limit alarm 2
adjusted limit value 2
-
check process
-
exceeded
stored limit alarm 3
adjusted limit value 3
-
check process
-
exceeded
time limit value
message
duty cycle message
(digital ouputs)
adjusted number of operating
hours reached
adjusted number of duty
cycles reached
application-specific
-
application-specific
-
g
g
Error status
0
3
4
5
6
7
8
Saved alarms (Err-LED is lit) can be acknowledged and deleted with the digital
input di1/2/3 or the Ò-key.
Configuration, see page 27: ConF / LOGI / Err.r
If an alarm is still valid that means the cause of the alarm is not removed so far
(Err-LED blinks), then other saved alarms can not be acknowledged and deleted.
Self-tuning heating ( ADA.H) and cooling ( ADA.C) error status:
Description Behaviour
No error
Faulty control action Re-configure controller (inverse i direct)
No response of process
variable
Low reversal point Increase ( ADA.H) max. output limiting Y.Hi or
Danger of exceeded set-point
(parameter determined)
Output step change too small
(dy > 5%)
Set-point reserve too small Increase set-point (invers), reduce set-point (direct)
The control loop is perhaps not closed: check sensor,
connections and process
decrease ( ADA.C) min. output limiting Y.Lo
If necessary, increase (inverse) or reduce (direct) set-point
Increase ( ADA.H) max. output limiting Y.Hi or reduce
( ADA.C) min. output limiting Y.Lo
or increase set-point range
(r PArA / SEtp / SP.LO and SP.Hi )
Operating KS4x-1 13 Maintenance manager / Error list
Page 14

Operation
3.5 Self-tuning
For determination of optimum process parameters, self-tuning is possible.
After starting by the operator, the controller makes an adaptation attempt, where
by the process characteristics are used to calculate the parameters for fast line-out
to the set-point without overshoot.
The following parameters are optimized when self-tuning:
Parameter set 1:
Pb1 - Proportional band 1 (heating) in engineering units [e.g. °C]
ti1 - Integral time 1 (heating) in [s] r only, unless set to OFF
td1 - Derivative time 1 (heating) in [s] r only, unless set to OFF
-
t1 - Minimum cycle time 1 (heating) in [s] r only, unless Adt0 was set to
“no self-tuning” during configuration by means of BlueControl
Pb2 - Proportional band 2 (cooling) in engineering units [e.g. °C]
ti2 - Integral time 2 (cooling) in [s] r only, unless set to OFF
td2 - Derivative time 2 (cooling) in [s] r only, unless set to OFF
t2 - Minimum cycle time 2 (cooling) in [s] r only, unless Adt0 was set to
“no self-tuning” during configuration by means of BlueControl
3.5.1 Preparation for self-tuning
Adjust the controller measuring range as control range limits. Set values
w
rnG.L and rnG.H to the limits of subsequent control. (Configuration
rControllerrlower and upper control range limits)
ConFrCntrr rnG.L and rnG.H
Determine which parameter set shall be optimized (see tables above).
w
3.5.2 Self-tuning sequence
®.
®
The controller outputs 0% correcting variable or Y.Lo and waits, until the process
is at rest (see start-conditions on page 8).
Subsequently, a correcting variable step change to 100% is output.
The controller attempts to calculate the optimum control parameters from the
process response. If this is done successfully, the optimized parameters are taken
over and used for line-out to the set-point.
With a 3-point controller, this is followed by “cooling”.
After completing the 1st step as described, a correcting variable of -100% (100%
cooling energy) is output from the set-point.
After successfull determination of the “cooling parameters”, line-out to the
set-point is using the optimized parameters.
Self-tuning 14 Operating KS4x-1
Page 15
Start condition:
Rest condition
w
For process evaluation, a stable condition is required. Therefore, the controller
waits until the process has reached a stable condition after self-tuning start.
The rest condition is considered being reached, when the process value oscillati
on is smaller than ± 0,5% of (rnG.H - rnG.L).
Set-point reserve
After having come to rest with 0% correcting variable or with Y.Lo, the
controller requires a sufficient set-point reserve for its self-tuning attempt, in
order to avoid overshoot.
Sufficient set-point reserve:
inverse controller:(with process value<set-point-(10% of SP.Hi - SP.LO)
direct controller:(with process value>set-point+ (10% of SP.Hi - SP.LO)
3.5.3 Self-tuning start
Operation
-
g
3.5.4 Self-tuning cancellation
Self-tuning start can be locked via BlueControl
(engineering tool) ( P.Loc).
The operator can start self-tuning at any time.
For this, keys Ù and È must be pressed simultaneously. The AdA LED starts blinking. The
controller outputs 0% or Y.Lo, waits until the
process is at rest and starts self-tuning (AdA
LED lit permanently).
After successful self-tuning, the AdA-LED is off and the controller continues
operating with the new control parameters.
By the operator:
Self-tuning can always be cancelled by the operator. For this, press Ù and È
key simultaneously. With manual-automatic switch-over configured via Ò key,
self-tuning can also be canceled by actuating Ò key. The controller continues
operating with the old parameters in automatic mode in the first case and in ma
nual mode in the second case.
By the controller:
If the Err LED starts blinking whilst self-tuning is running, successful self-tuning
is prevented due to the control conditions. In this case, self-tuning was cancelled
by the controller.
Dependent of control type, the output status is:
3-pnt. stepping controller:
w
actuator is closed (0% output)
2-pnt./ 3-pnt./ continuous controller:
w
If self-tuning was started from the automatic mode, the controller output is
0%. With self-tuning started from manual mode, the controller output is Y2.
SP.x
126
125
run
Ada
Err
-
Operating KS4x-1 15 Self-tuning
Page 16
Operation
3.5.5 Acknowledgement procedures in case of unsuccessful self-tuning
1. Press keys Ù and È simultaneously:
The controller continues controlling using the old parameters in automatic
mode. The Err LED continues blinking, until the self-tuning error was
acknowledged in the error list.
2. Press key Ò (if configured):
The controller goes to manual mode. The Err LED continues blinking,
until the self-tuning error was acknowleged in the error list.
3. Press key Ù :
Display of error list at extended operating level. After acknowledgement
of the error message, the controller continues control in automatic mode using
the old parameters.
Cancellation causes:
r page 13: "Error status self-tuning heating ( ADA.H) and cooling ( ADA.C)"
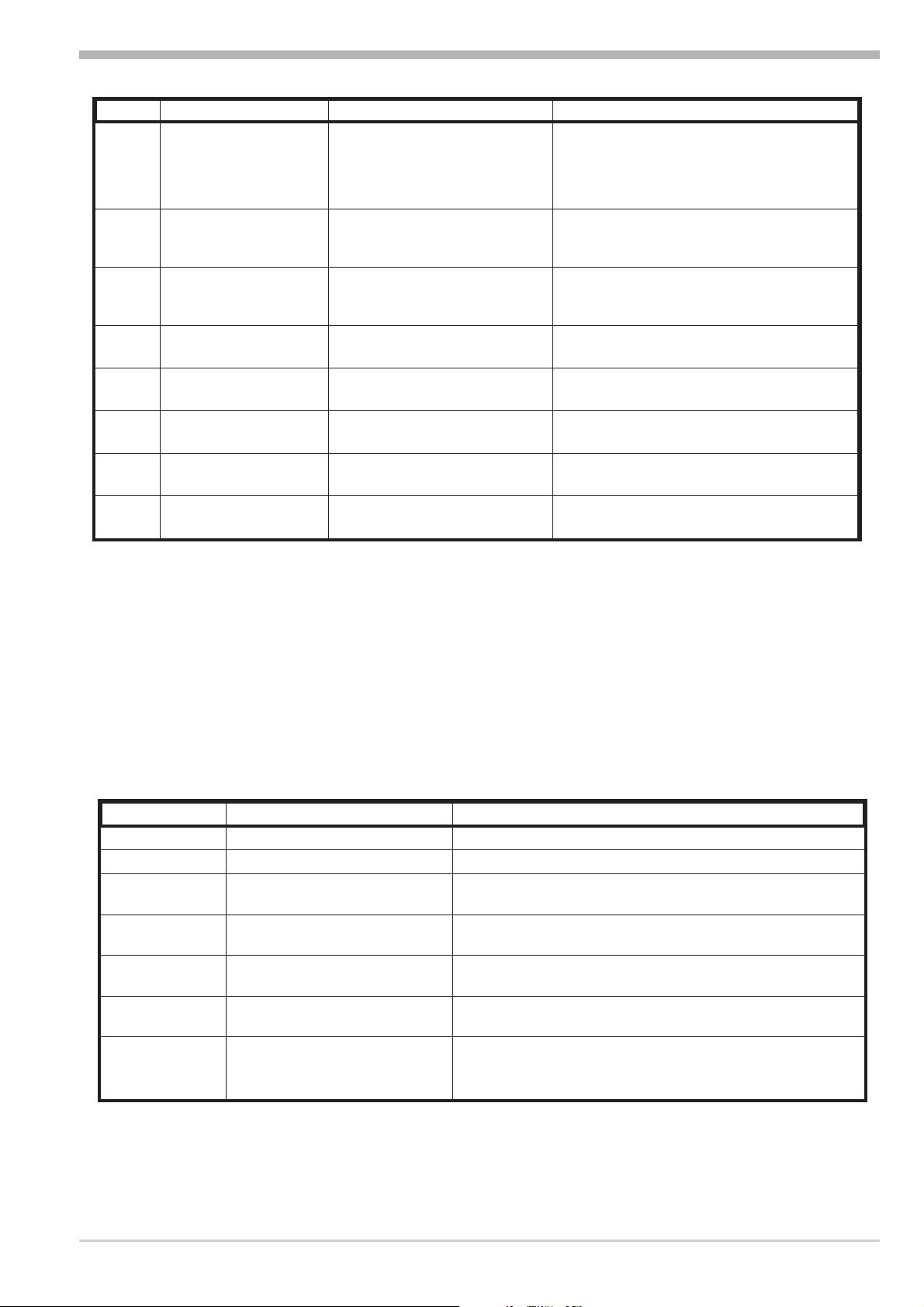
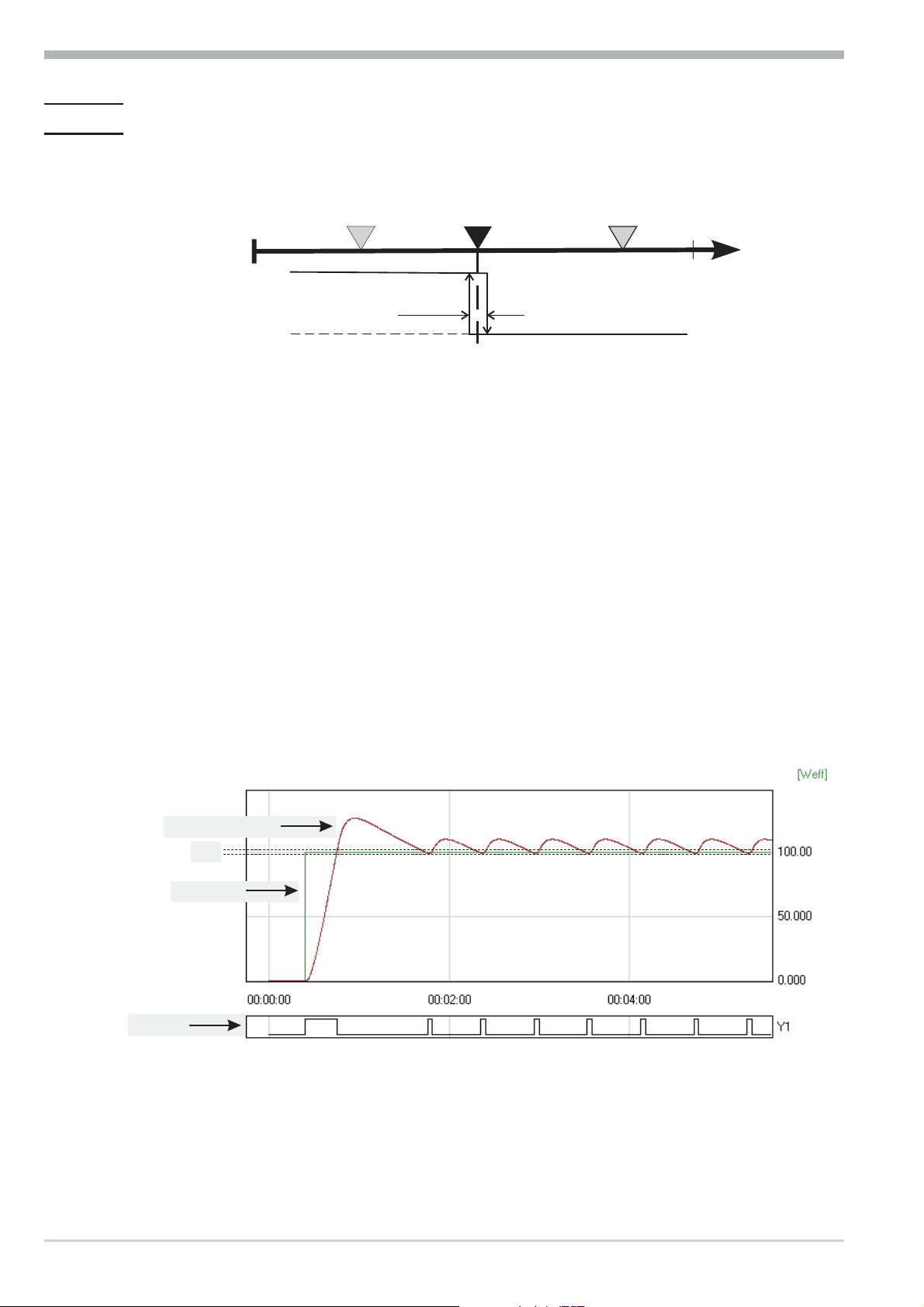
3.5.6 Examples for self-tuning attempts
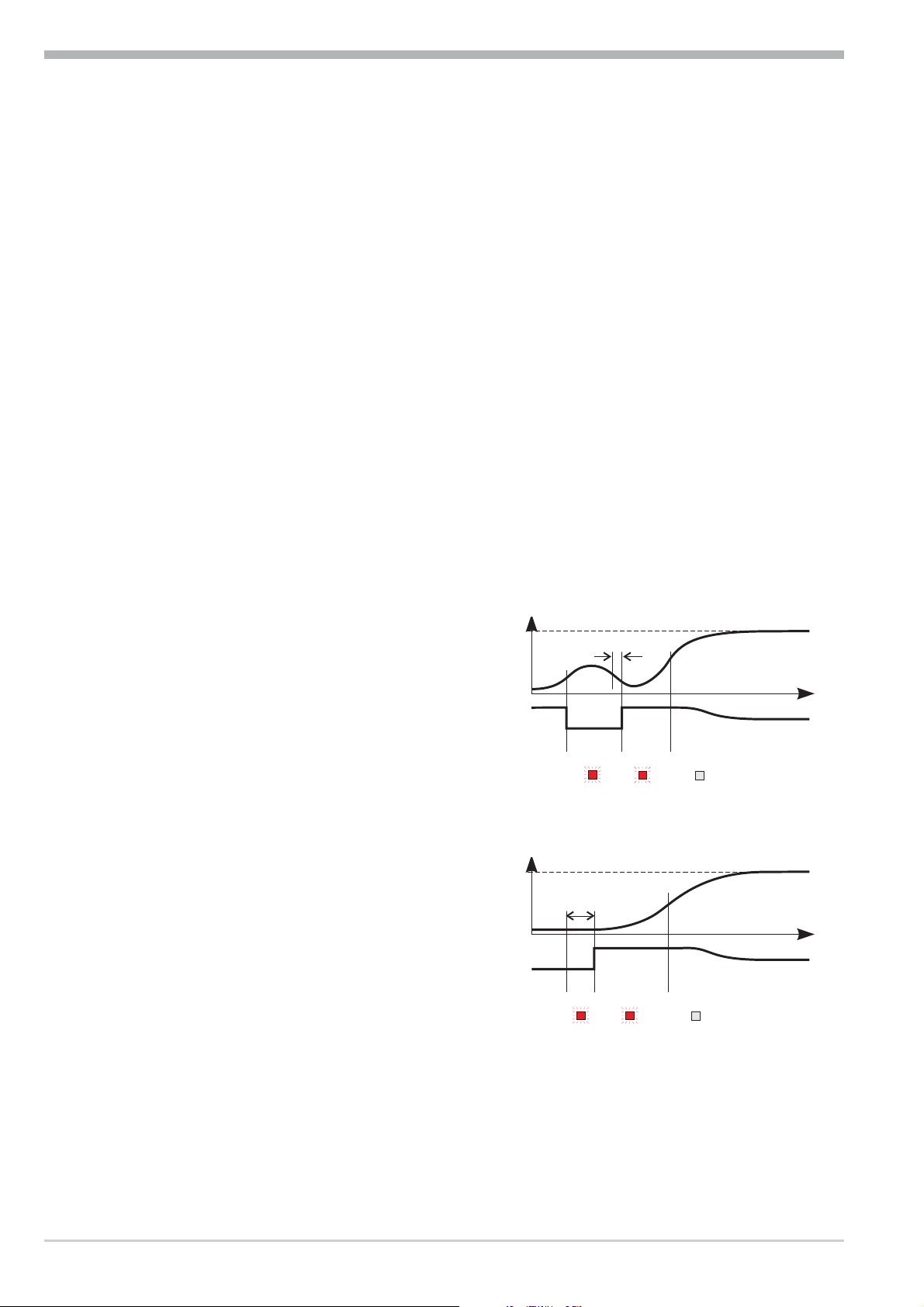
(controller inverse, heating or heating/cooling)
Start: heating power switched on
Heating power Y is switched off (1).
When the change of process value X
was constant during one minute (2),
the power is switched on (3).
At the reversal point, the self-tuning
attempt is finished and the new parameter are used for controlling to
set-point W.
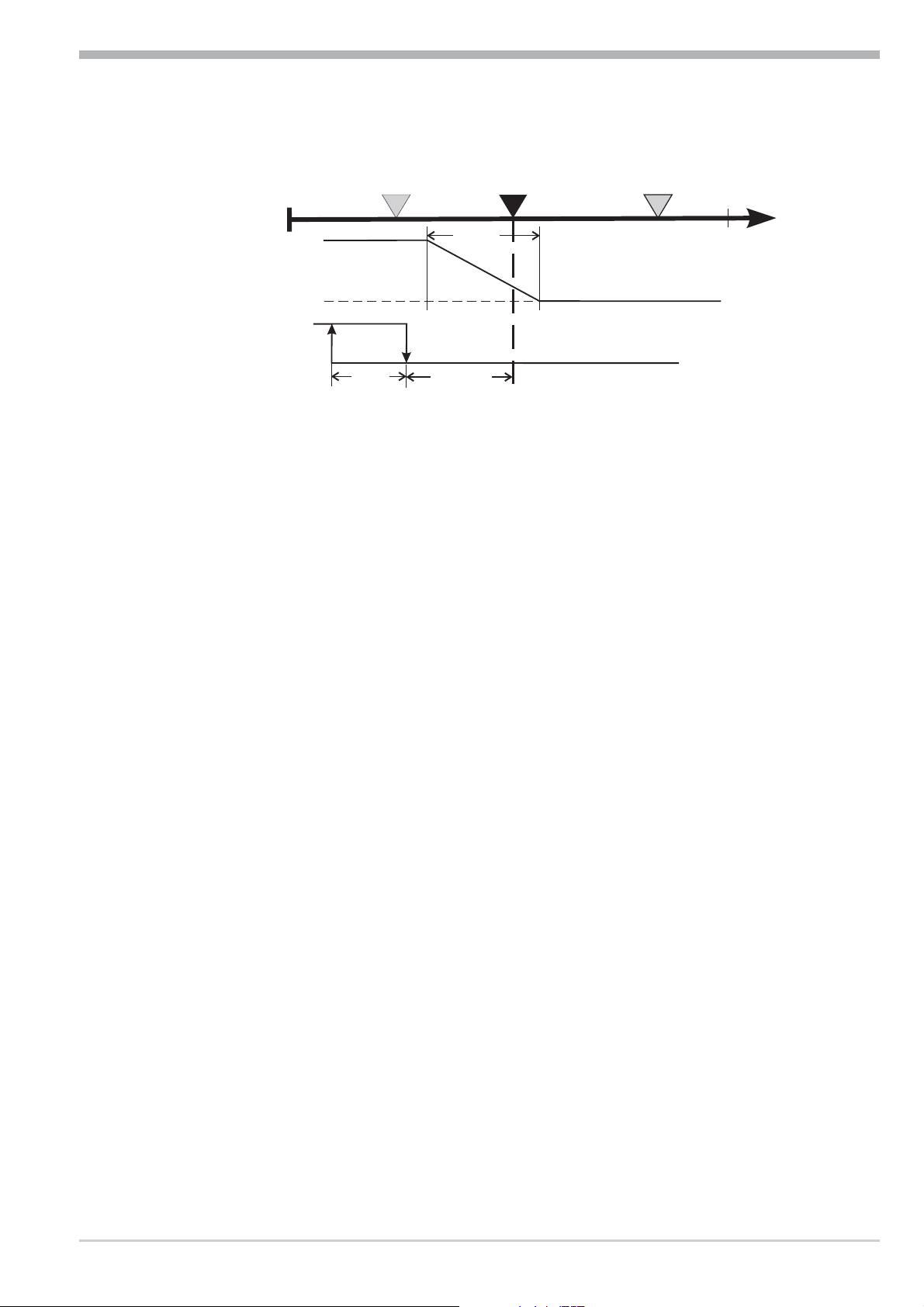
Start: heating power switched off
The controller waits 1,5 minutes (1).
Heating power Y is switched on (2).
At the reversal point, the self-tuning
attempt is finished and control to the
set-point is using the new parameters.
X
W
100%
0%
X
W
100%
0%
Y
Star t r
Y
start r
1
1
blinks
2
2
3
t
t reversal point
t
t reversal point
blinks
Self-tuning 16 Operating KS4x-1
Page 17
Operation
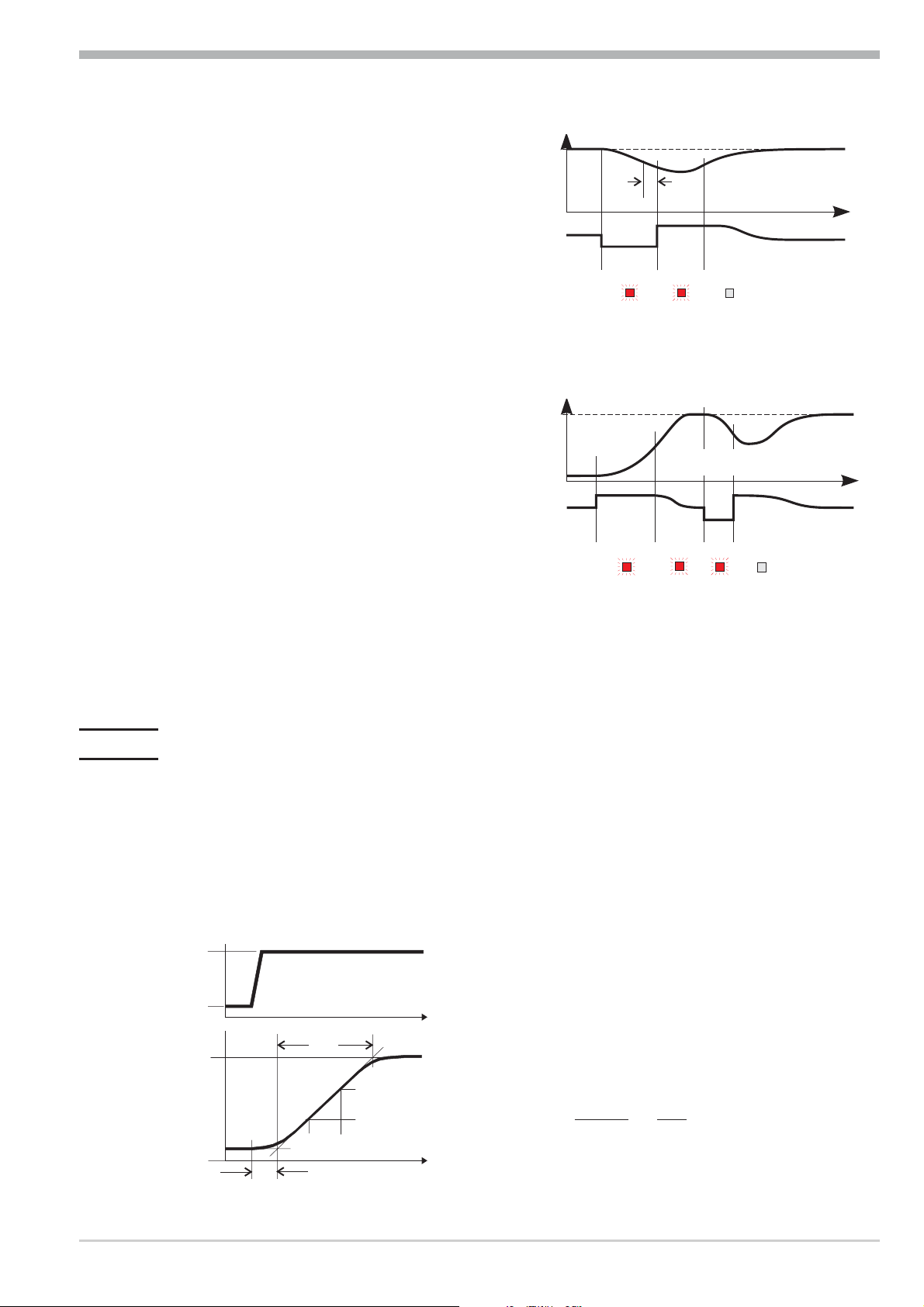
y
Start: at set-point
X
W
Heating power Y is switched off (1).
1
blinks
2
3
t reversal point
t
If the change of process value X was
constant during one minute and the
control deviation is > 10% of SP.Hi SP.LO (2), the power is switched on
(3). At the reversal point, the self-tu
ning attempt is finished, and control
to set-point W is using the new para
-
100%
Y
0%
start r
-
meters.
Three-point controller
The parameters for heating and coo
ling are determined in two attempts.
The heating power is switched on
(1). At reversal point 1, heating para
meters Pb1, ti1, td1 and t1
-
X
W
+100%
Y0%
-100%
start r
t reversal point 1
1
2
t reversal point 2
3
t
are determined. The process value is
lined out to the set-point (2). The
cooling power is switched on (3). At
reversal point 2, parameters Pb2, ti2, td2 and t2 are determined and the
self-tuning attempt is finished. Control to set-point W is using the new parameters.
3.6 Manual tuning
The optimization aid should be used with units on which the control parameters
shall be set without self-tuning.
For this, the response of process variable x after a step change of correcting va
riable y can be used. Frequently, plotting the complete response curve (0 to
100%) is not possible, because the process must be kept within defined limits.
Values T
sponse) can be used to determine the maximum rate of increase v
100%
Y
0%
x
X
max
and x
g
(step change from 0 to 100 %) or Dt and Dx (partial step re
max
.
max
y = correcting variable
h
Y
= control range
h
Tu = delay time (s)
Tu
t
Tg
{X
{t
t
Tg = recovery time (s)
X
V
= maximum process value
max
{{x
=
t
max
Xmax
=
Tg
= max. rate of
increase of process value
-
-
Operating KS4x-1 17 Manual tuning
Page 18
Operation
The control parameters can be determined from the values calculated for delay
time T
cording to the formulas given below. Increase Xp, if line-out to the set-point os
cillates.
Parameter adjustment effects
Parameter Control Line-out of disturbances Start-up behaviour
Pb1 higher increased damping slower line-out slower reduction of duty cycle
td1 higher reduced damping faster response to disturbances faster reduction of duty cycle
ti1 higher increased damping slower line-out slower reduction of duty cycle
, maximum rate of increase v
u
lower reduced damping faster line-out faster reduction of duty cycle
lower increased damping slower response to disturbances slower reduction of duty cycle
lower reduced damping faster line-out faster reduction of duty cycle
, control range Xhand characteristic K ac
max
-
-
Formulas
K = Vmax * Tu controller behavior Pb1 [phy. units] td1 [s] ti1 [s]
PID 1,7*K 2*Tu 2*Tu
With 2-point and
3-point controllers,
the cycle time must be
adjusted to
t1 / t2 £ 0,25 * Tu
PD 0,5 * K Tu OFF
PI 2,6 * K OFF 6*Tu
PKOFF OFF
3-point-stepping 1,7 * K Tu 2 * Tu
3.7 Alarm handling
Max. three alarms can be configured and assigned to the individual outputs. Ge
nerally, outputs OuT.1... OuT.3 can be used each for alarm signalling. If more
than one signal is linked to one output the signals are OR linked. Each of the 3 li
mit values Lim.1 … Lim.3 has 2 trigger points H.x (Max) and L.x (Min), which
can be switched off individually (parameter = “OFF”). Switching difference
HYS.x of each limit value is adjustable.
-
-
Alarm handling 18 Operating KS4x-1
Page 19

Operation
Ü Operaing principle absolut alarm
L.1 = OFF
InL.1
H.1
HYS.1
LED
1
2
H.1 = OFF
InL.1
L.1
HYS.1
LED
2
1
InH.1
InH.1
* Operating principle relative alarm
L.1 = OFF
SP
InL.1
H.1
HYS.1
1
2
H.1 = OFF
SP
InL.1
L.1
HYS.1
LED
2
1
InH.1
LED
InH.1
InL.1
2
H.1
L.1
HYS.1 HYS.1
LED
1
InH.1
LED
2
1: normally closed ( ConF/ Out.x/O.Act=1 )
2: normally open ( ConF/ Out.x/O.Act= 0 )
g
The variable to be monitored can be selected seperately for each alarm via
configuration
The following variables can be monitored:
process value
w
control deviation xw (process value - set-point)
w
control deviation xw + suppression after start-up or set-point change
w
effective set-point Weff
w
correcting variable y (controller output)
w
InL.1
2
LED
HYS.1
L.1
SP
1
InH.1
H.1
HYS.1
LED
2
Operating KS4x-1 19 Alarm handling
Page 20

Operation
g
If measured value monitoring + alarm status storage is chosen ( ConF / Lim /
Fnc.x=2), the alarm relay remains switched on until the alarm is resetted in the
error list ( Lim 1..3 = 1).
3.8 Operating structure
After supply voltage switch-on, the controller starts with the operating levels.
The controller status is as before power off.
126
Ù
125
3sec.
126
PArA
Ì
Ù
126
ConF
Ì
PASS
Ù
126
CAL
Ì
PASS
Ù
126
End
PASS
Ù
g
g
PArA - level: At PArA - level, the right decimal point of the upper
display line is lit continuously.
ConF - level: At ConF - level, the right decimal point of the upper
display line blinks
.
When safety switch Loc is open, only the levels enabled by me
PASS
gineering tool). Individual parameters accessible without password must be co
pied to the extended operating level.
Factory setting:
Safety switch
Loc
closed OFF / password disabled / enabled
open OFF / password disabled
open OFF enabled
open Password enabled
ans of BlueControl (engineering tool) are visible and accessible
by entry of the password adjusted by means of BlueControl (en
Safety switch Loc closed: all levels accessible without
restriction, password PASS = OFF.
Password entered with
BluePort®
Function disabled or enabled
with BluePort®
Access via the instrument
front panel:
enabled
disabled
enabled
enabled after password
entry
-
-
-
Operating structure 20 Operating KS4x-1
Page 21

4 Configuration level
4.1 Configuration survey
ConF Configuration level
Control and self-tuning
Cntr
È
SP.Fn StYP I.Fnc Fnc.1 O.Act
Ì
b.ti S.Lin StYP Src.1 Y.1 O.Act SP.2 Addr
C.Fnc Corr Fnc.2 Y.2 Y.1 SP.E PrtY
mAn Src.2 Lim.1 Y.2 Y.2 dELY
C.Act Fnc.3 Lim.2 Lim.1 mAn Unit
FAIL Src.3 Lim.3 Lim.2 C.oFF dP
rnG.L HC.AL LP.AL Lim.3 m.Loc C.dEl
rnG.H LP.AL HC.AL LP.AL Err.r
InP.1
Input 1
InP.2
Input 2
Lim
Limit value functions
OUt.1
Output 1
OUt.2
Output 2
OUt.3
O.tYP L_r bAud
See output 1
HC.SC HC.AL P.run
time HC.SC di.Fn
P.End time
FAi.1 P.End
FAi.2 FAi.1
FAi.2
OuT.0
Out.1
O.Src
Output 3
LOGI
Digital inputs
Configuration level
Othr
Display, operation,
interface
End
g
Adjustment:
The configuratiuons can be adjusted by means of keys ÈÌ .
w
Transition to the next configuration is by pressing key Ù .
w
After the last configuration of a group, donE is displayed and followed by
w
automatic change to the next group
Return to the beginning of a group is by pressing the Ù key for 3 sec.
Operating KS4x-1 21 Configuration survey
Page 22

Configuration level
4.2 Configuration
Cntr
Name Value range Description Default
SP.Fn
b.ti
C.Fnc
mAn
C.Act
FAIL
rnG.L
rnG.H
Adt0
0
1
2
3
4
5
6
7
0...9999
0
1
2
3
4
0
1
0
1
0
1
2
-1999...9999
-1999...9999
0
1
Basic configuration of setpoint processing
set-point controller can be switched over to external set-point
(® LOGI/SP.E)
program controller
timer, mode 1(bandwidth-controlled, switched off at the end)
timer, mode 2 (bandwidth-controlled, set-point remains
active at the end)
timer, mode 3 (switched off at the end)
timer, mode 4 (set-point remains active at the end)
timer, mode 5 (switch-on delay)
timer, mode 6 (set-point switch-over)
Timer tolerance band for timer mode 1, 2 and 6. The timer
starts when process value = setpoint ± b.ti
Control behaviour (algorithm)
on/off controller or signaller with one output
PID controller (2-point and continuous)
D / Y / Off, or 2-point controller with partial/full load
switch-over
2 x PID (3-point and continuous)
3-point stepping controller
Manual operation permitted
no
yes (see also LOGI/ mAn)
Method of controller operation
inverse, e.g. heating
direct, e.g. cooling
Behaviour at sensor break
controller outputs switched off
y=Y2
y = mean output. The maximum permissible output can be
adjusted with parameter Ym.H. To prevent determination of
inadmissible values, mean value formation is only if the
control deviation is lower than parameter L.Ym.
X0 (low limit range of control) 1
X100 (high limit range of control) 1
Optimization of T1, T2 (only visible with BlueControl!)
Automatic optimization
No optimization
0
5
1
0
0
1
0
900
0
1 rnG.L and rnG.H are indicating the range of control on which e.g. the
self-tuning is refering
Configuration 22 Operating KS4x-1
Page 23

Configuration level
InP.1
Name Value range Description Default
S.tYP
S.Lin
Corr
fAI1
20
21
22
23
30
40
Sensor type selection
0
1
2
3
4
5
thermocouple type L (-100...900°C) , Fe-CuNi DIN
thermocouple type J (-100...1200°C) , Fe-CuNi
thermocouple type K (-100...1350°C), NiCr-Ni
thermocouple type N (-100...1300°C), Nicrosil-Nisil
thermocouple type S (0...1760°C), PtRh-Pt10%
thermocouple type R (0...1760°C), PtRh-Pt13%
1
Pt100 (-200.0 ... 100,0 °C)
Pt100 (-200.0 ... 850,0 °C)
Pt1000 (-200.0 ... 200.0 °C)
special 0...4500 Ohm (pre-defined as KTY11-6)
0...20mA / 4...20mA 1
0...10V / 2...10V 1
Linearization (only at S.tYP = 23 (KTY 11-6),
0
30 (0..20mA) and 40 (0..10V) adjustable)
0
1
none
Linearization to specification. Creation of linearization table
withBlueControl (engineering tool) possible. The
characteristic for KTY 11-6 temperature sensors is preset.
Measured value correction / scaling
0
1
2
3
Without scaling
Offset correction (at CAL level)
2-point correction (at CAL level)
Scaling (at PArA level)
Forcing INP1 (only visible with BlueControl!)
0
1
No forcing
Forcing via serial interface
0
0
InP.2
Name Value range Description Default
I.Fnc
S.tYP
fAI2
30
31
Function selection of INP2
0
1
2
no function (subsequent input data are skipped)
heating current input
external set-point (SP.E)
Sensor type selection
0...20mA / 4...20mA 1
0...50mA AC 1
Forcing INP2 (only visible with BlueControl!)
0
1
No forcing
Forcing via serial interface
1
31
0
Configuration 23 Operating KS4x-1
Page 24

Configuration level
Lim
Name Value range Description Default
Fnc.1
Fnc.2
Fnc.3
Src.1
Src.2
Src.3
HC.AL
LP.AL
Hour
Swit
0
1
2
0
1
2
6
7
0
1
2
0
1
OFF..999999
OFF..999999
Function of limit 1/2/3
switched off
measured value monitoring
Measured value monitoring + alarm status storage. A stored
limit value can be reset via error list, Ò-key or a digital
input ( ® LOGI/ Err.r).
Source of limit 1/2/3
process value
control deviation xw (process value - set-point)
control deviation xw (with suppression after start-up and
set-point change)
effective set-point Weff
correcting variable y (controller output)
Alarm heat current function (INP2)
switched off
Overload short circuit monitoring
Break and short circuit monitoring
Monitoring of control loop interruption for heating
switched off / inactive
active
If ti1=0 LOOP alarm is inactive!
Operating hours (only visible with BlueControl!)
Output switching cycles (only visible with BlueControl!)
1
1
0
0
OFF
OFF
Out.1
Name Value range Description Default
O.Act
Y.1
Y.2
Lim.1
Lim.2
Lim.3
LP.AL
HC.AL
0
1
0
1
0
1
0
1
0
1
Method of operation of output OUT1
direct / normally open
inverse / normally closed
Controller output Y1/Y2
not active
active
Limit 1/2/3 signal
not active
active
Interruption alarm signal (LOOP)
not active
active
Heat current alarm signal
not active
active
1 with current and voltage input signals, scaling is required (see chapter 5.3)
0
1
0
0
0
g
Resetting the controller configuration to factory setting (Default)
r chapter 12.1 (page 56)
Configuration 24 Operating KS4x-1
Page 25

Configuration level
Name Value range Description Default
HC.SC
timE
P.End
FAi.1
FAi.2
fOut
Solid state relay (SSR) short circuit signal
0
1
not active
active
Timer end signal
0
1
not active
active
Programmer end signal
0
1
not active
active
INP1/ INP2 error signal
0
1
not active
active
Forcing OUT1 (only visible with BlueControl!)
0
1
No forcing
Forcing via serial interface
0
0
0
0
0
Out.2
Configuration parameters Out.2 as Out.1 except for: Default Y.1 =0 Y.2 =1
Out.3
Name Value range Description Default
O.tYP
O.Act
Y.1
Y.2
Lim.1
Lim.2
Lim.3
LP.AL
HC.AL
Signal type selection OUT3
0
1
2
3
4
5
relay / logic (only visible with current/logic voltage)
0 ... 20 mA continuous (only visible with current/logic/volt.)
4 ... 20 mA continuous (only visible with current/logic/volt.)
0...10 V continuous (only visible with current/logic/voltage)
2...10 V continuous (only visible with current/logic/voltage)
transmitter supply (only visible without OPTION)
Method of operation of output OUT3 (only visible when
O.TYP=0)
0
1
direct / normally open
inverse / normally closed
Controller output Y1/Y2 (only visible when O.TYP=0)
0
1
not active
active
Limit 1/2/3 signal (only visible when O.TYP=0)
0
1
not active
active
Interruption alarm signal (LOOP) (only visible when
O.TYP=0)
0
1
not active
active
Heat current alarm signal (only visible when O.TYP=0)
0
1
not active
active
0
1
0
1
0
0
Operating KS4x-1 25 Configuration
Page 26
Configuration level
Name Value range Description Default
HC.SC
timE
P.End
FAi.1
FAi.2
Out.0
Out.1
O.Src
fOut
0
1
0
1
0
1
0
1
-1999...9999
-1999...9999
0
1
2
3
4
5
0
1
Solid state relay (SSR) short circuit signal (only visible
when O.TYP=0)
not active
active
Timer end signal (only visible when O.TYP=0)
not active
active
Programmer end signal (only visible when O.TYP=0)
not active
active
INP1/ INP2 error (only visible when O.TYP=0)
not active
active
Scaling of the analog output for 0% (0/4mA or 0/2V, only
visible when O.TYP=1..5)
Scaling of the analog output for 100% (20mA or 10V, only
visible when O.TYP=1..5)
Signal source of the analog output OUT3 (only visible when
O.TYP=1..5)
not used
controller output y1 (continuous)
controller output y2 (continuous)
process value
effective set-point Weff
control deviation xw (process value - set-point)
Forcing OUT3 (only visible with BlueControl!)
No forcing
Forcing via serial interface
0
0
0
1
0
100
1
0
g
Method of operation and usage of output Out.1 to Out.3:
Is more than one signal chosen active as source, those signals are OR-linked.
LOGI
Name Value range Description Default
L_r
SP.2
Local / Remote switching (Remote: adjusting of all values
by front keys is blocked)
0
1
2
3
4
no function (switch-over via interface is possible)
active
DI1
DI2 (only visible with OPTION)
DI3 (only visible with OPTION)
Switching to second setpoint SP.2
0
2
3
4
no function (switch-over via interface is possible)
DI1
DI2 (only visible with OPTION)
DI3 (only visible with OPTION)
0
0
Configuration 26 Operating KS4x-1
Page 27

Configuration level
Name Value range Description Default
SP.E
Y2
mAn
C.oFF
m.Loc
Err.r
P.run
di.Fn
fDI1
Switching to external setpoint SP.E
0
1
2
3
4
no function (switch-over via interface is possible)
active
DI1
DI2 (only visible with OPTION)
DI3 (only visible with OPTION)
Y/Y2 switching
0
2
3
4
6
no function (switch-over via interface is possible)
DI1
DI2 (only visible with OPTION)
DI3 (only visible with OPTION)
Ò key
Automatic/manual switching
0
1
2
3
4
6
no function (switch-over via interface is possible)
always activated (manual station)
DI1
DI2 (only visible with OPTION)
DI3 (only visible with OPTION)
Ò key
Switching off the controller
0
2
3
4
6
no function (switch-over via interface is possible)
DI1
DI2 (only visible with OPTION)
DI3 (only visible with OPTION)
Ò key
Blockage of hand function
0
2
3
4
no function (switch-over via interface is possible)
DI1
DI2 (only visible with OPTION)
DI3 (only visible with OPTION)
Reset of all error list entries
0
2
3
4
6
no function (switch-over via interface is possible)
DI1
DI2 (only visible with OPTION)
DI3 (only visible with OPTION)
Ò key
Programmer Run/Stop (see page 44)
0
2
3
4
no function (switch-over via interface is possible)
DI1
DI2 (only visible with OPTION)
DI3 (only visible with OPTION)
Function of digital inputs (valid for all inputs)
0
1
2
direct
inverse
toggle key function
Forcing di1 (only visible with BlueControl!)
0
1
No forcing
Forcing via serial interface
0
0
0
0
0
0
0
0
0
Operating KS4x-1 27 Configuration
Page 28

Configuration level
Name Value range Description Default
fDI2
fDI3
othr
Name Value range Description Default
bAud
Addr
PrtY
dELY
Unit
dP
C.dEl
FrEq
ICof
IAda
IExo
Pass
0
1
0
1
0
1
2
3
1...247
0
1
2
0...200
0
1
2
0
1
2
3
0..200
0
1
0
1
0
1
0
1
OFF...9999
Forcing di2 (only visible with BlueControl!)
No forcing
Forcing via serial interface
Forcing di3 (only visible with BlueControl!)
No forcing
Forcing via serial interface
Baudrate of the interface (only visible with OPTION)
2400 Baud
4800 Baud
9600 Baud
19200 Baud
Address on the interace (only visible with OPTION)
Parity (only visible with OPTION)
no parity (2 stop bits)
even parity
odd parity
Delay of response signal [ms] (only visible with OPTION)
Unit
without unit
°C
°F
Decimal point (max. number of digits behind the decimal
point)
no digit behind the decimal point
1 digit behind the decimal point
2 digits behind the decimal point
3 digits behind the decimal point
Modem delay [ms]
Switching 50 Hz / 60 Hz (only visible with BlueControl!)
50 Hz
60 Hz
Block controller off (only visible with BlueControl!)
Released
Blocked
Block auto tuning (only visible with BlueControl!)
Released
Blocked
Block extended operating level (only visible with
BlueControl!)
Released
Blocked
Password (only visible with BlueControl!)
0
0
2
1
1
0
1
0
0
0
0
0
0
OFF
Configuration 28 Operating KS4x-1
Page 29

Configuration level
SP.x
run
Err
da
Name Value range Description Default
IPar
ICnf
ICal
Block parameter level (only visible with BlueControl!)
0
1
Released
Blocked
Block configuration level (only visible with BlueControl!)
0
1
Released
Block
Block calibration level (only visible with BlueControl!)
0
1
Released
Blocked
1
1
1
+
BlueControl - the engineering tool for the BluePortâcontroller series
3 engineering tools with different functionality facilitating KS4x-1 configuration
and parameter setting are available (see chapter 10: Accessory equipment with
ordering information).
In addition to configuration and parameter setting, the engineering tools are used
for data acquisition and offer long-term storage and print functions. The enginee
ring tools are connected to KS4x-1 via the front-panel interface "BluePort
means of PC (Windows 95 / 98 / NT) and a PC adaptor.
Description BlueControl: see chapter 9: BlueControl (page 49)
4.3 Set-point processing
The set-point processing structure is shown in the following picture:
126
125
Xeff
AAda
internal setpoint
Ü
â
"by
-
external
setpoint
INP2
2.setpoint
programmer
SP.E
0/4...20 mA
SP.2
Index:
Ü
: int/ext-setpoint switching
*
: configuration
Ö
: / switching
SP SP.2
ù
timer
SP.Fn
{
1
0
2
3
*
4
5
6
7
SP.Lo
limitation
SP.Hi
Ö
ramp
The ramp starts at process value
with the following switchings:
- int / ext-setpoint switching
- / switching
SP SP.2
- Manual-/ Automatic switching
- at power on
r.SP
-LED
actual
setpoint
Operating KS4x-1 29 Set-point processing
Page 30
Configuration level
4.4 Configuration examples
4.4.1 On-Off controller / Signaller (inverse)
SP.LO SP
SP.Hi
InH.1InL.1
InP.1Ê
100%
Out.1Â
0%
ConF / Cntr: SP.Fn = 0 set-point controller
C.Fnc = 0 signaller with one output
C.Act = 0 inverse action
ConF / Out.1: O.Act = 0 action Out.1 direct
Y.1 = 1 control output Y1 active
PArA / Cntr: SH = 0...9999 switching difference (symmetrical
PArA / SEtP: SP.LO = -1999...9999 set-point limit low for Weff
SP.Hi = -1999...9999 set-point limit high for Weff
SH
(e.g. heating applications)
to the trigger point)
g
For direct signaller action, the controller action must be changed
(ConF / Cntr / C.Act = 1 )
process value
SH
setpoint
output
Configuration examples 30 Operating KS4x-1
Page 31

4.4.2 2-point controller (inverse)
Configuration level
SP.LO SP
SP.Hi
InH.1InL.1
InP.1Ê
100%
PB1
Out.1Â
0%
ConF / Cntr: SP.Fn = 0 set-point controller
C.Fnc = 1 2-point controller (PID)
C.Act = 0 inverse action
(e.g. heating applications)
ConF / Out.1: O.Act = 0 action Out.1 direct
Y.1 = 1 control output Y1 active
PArA / Cntr: Pb1 = 0,1...9999 proportional band 1 (heating)
in units of phys. quantity (e.g. °C)
ti1 = 1...9999 integral time 1 (heating) in sec.
td1 = 1...9999 derivative time 1 (heating) in sec.
t1 = 0,4...9999 min. cycle time 1 (heating)
PArA / SEtP: SP.LO = -1999...9999 set-point limit low for Weff
SP.Hi = -1999...9999 set-point limit high for Weff
g
For direct action, the controller action must be changed
(ConF / Cntr / C.Act = 1 ).
setpoint
process value
output
Operating KS4x-1 31 Configuration examples
Page 32

Configuration level
Â
4.4.3 3-point controller (relay & relay)
SP.LO SP
SP.Hi
InH.1InL.1
InP.1Ê
100%
Out.1Â
0%
PB1
PB2
100%
Out.2
0%
ConF / Cntr: SP.Fn = 0 set-point controller
C.Fnc = 3 3-point controller (2xPID)
C.Act = 0 action inverse
(e.g. heating applications)
ConF / Out.1: O.Act = 0 action Out.1 direct
Y.1 = 1 control output Y1 active
Y.2 = 0 control output Y2 not active
ConF / Out.2: O.Act = 0 action Out.2 direct
Y.1 = 0 control output Y1 not active
Y.2 = 1 control output Y2 active
PArA / Cntr: Pb1 = 0,1...9999 proportional band 1 (heating)
in units of phys. quantity (e.g. °C)
Pb2 = 0,1...9999 proportional band 2 (cooling)
in units of phys. quantity (e.g. °C)
ti1 = 1...9999 integral time 1 (heating) in sec.
ti2 = 1...9999 derivative time 2 (cooling) in sec.
td1 = 1...9999 integral time 1 (heating) in sec.
td2 = 1...9999 derivative time 2 (cooling) in sec.
t1 = 0,4...9999 min. cycle time 1 (heating)
t2 = 0,4...9999 min. cycle time 2 (cooling)
SH = 0...9999 neutr. zone in units of phys.quantity
PArA / SEtP: SP.LO = -1999...9999 set-point limit low for Weff
SP.Hi = -1999...9999 set-point limit high for Weff
Configuration examples 32 Operating KS4x-1
Page 33

4.4.4 3-point stepping controller (relay & relay)
Â
Configuration level
SP.LO SP
SP.Hi
InH.1InL.1
InP.1Ê
100%
Out.1Â
0%
PB1
SH
100%
Out.2
0%
ConF / Cntr: SP.Fn = 0 set-point controller
C.Fnc = 4 3-point stepping controller
C.Act = 0 inverse action
(e.g. heating applications)
ConF / Out.1: O.Act = 0 action Out.1 direct
Y.1 = 1 control output Y1 active
Y.2 = 0 control output Y2 not active
ConF / Out.2: O.Act = 0 action Out.2 direct
Y.1 = 0 control output Y1 not active
Y.2 = 1 control output Y2 active
PArA / Cntr: Pb1 = 0,1...9999 proportional band 1 (heating)
in units of phys. quantity (e.g. °C)
ti1 = 1...9999 integral time 1 (heating) in sec.
td1 = 1...9999 derivative time 1 (heating) in sec.
t1 = 0,4...9999 min. cycle time 1 (heating)
SH = 0...9999 neutral zone in units of phy. quantity
tP = 0,1...9999 min. pulse length in sec.
tt = 3...9999 actuator travel time in sec.
PArA / SEtP: SP.LO = -1999...9999 set-point limit low for Weff
SP.Hi = -1999...9999 set-point limit high for Weff
g
For direct action of the 3-point stepping controller, the controller output action
must be changed ( ConF / Cntr / C.Act = 1 ).
setpoint
process value
output 1
output 2
Operating KS4x-1 33 Configuration examples
Page 34

Configuration level
4.4.5 Continuous controller (inverse)
SP.LO SP
SP.Hi
InH.1InL.1
InP.1Ê
20 mA
PB1
Out.3Â
0/4 mA
ConF / Cntr: SP.Fn = 0 set-point controller
C.Fnc = 1 continuous controller (PID)
C.Act = 0 inverse action
(e.g. heating applications)
ConF / Out.3: O.tYP = 1 / 2 Out.3 type ( 0/4 … 20mA )
Out.0 = -1999...9999 scaling analog output 0/4mA
Out.1 = -1999...9999 scaling analog output 20mA
PArA / Cntr: Pb1 = 0,1...9999 proportional band 1 (heating)
in units of phys. quantity (e.g. °C)
ti1 = 1...9999 integral time 1 (heating) in sec.
td1 = 1...9999 derivative time 1 (heating) in sec.
t1 = 0,4...9999 min. cycle time 1 (heating)
PArA / SEtP: SP.LO = -1999...9999 set-point limit low for Weff
SP.Hi = -1999...9999 set-point limit high for Weff
g
g
For direct action of the continuous controller, the controller action must be
changed ( ConF / Cntr / C.Act = 1 ).
To prevent control outputs Out.1 and Out.2 of the continuous controller from
switching simultaneously, the control function of outputs Out.1 and Out.2
must be switched off ( ConF / Out.1 and Out.2 / Y.1 and Y.2 = 0 ).
Configuration examples 34 Operating KS4x-1
Page 35
Configuration level
4.4.6 D - Y - Off controller / 2-point controller with pre-contact
SP.LO SP
SP.Hi
InH.1InL.1
InP.1Ê
100%
PB1
Out.1Â
0%
Out.2Â
SH
ConF / Cntr: SP.Fn = 0 set-point controller
C.Fnc = 2 D -Y-Off controller
C.Act = 0 inverse action
ConF / Out.1: O.Act = 0 action Out.1 direct
Y.1 = 1 control output Y1 active
Y.2 = 0 control output Y2 not active
ConF / Out.2: O.Act = 0 action Out.2 direct
Y.1 = 0 control output Y1 not active
Y.2 = 1 control output Y2 active
PArA / Cntr: Pb1 = 0,1...9999 proportional band 1 (heating)
ti1 = 1...9999 integral time 1 (heating) in sec.
td1 = 1...9999 derivative time 1 (heating) in sec.
t1 = 0,4...9999 min. cycle time 1 (heating)
SH = 0...9999 switching difference
d.SP = -1999...9999 trigg. point separation suppl. cont.
ty PArA / SEtP: SP.LO =
-1999...9999 set-point limit low for Weff
SP.Hi = -1999...9999 set-point limit high for Weff
d.SP
(e.g. heating applications)
in units of phys. quantity (e.g. °C)
D / Y / Off in units of phys. quanti
-
Operating KS4x-1 35 Configuration examples
Page 36

Configuration level
4.4.7 KS4x-1 with measured value output
phys.
quantity
Out.1
phys. quantity
mA / V
Out.0
0/4mA
0/2V
1
2
3
4
5
6
7
U
8
9
L
N
20mA
10V
90...250VAC
}
24VUC
OUT3
10
11
12
13
14
15
INP1
+
ConF / Out.3: O.tYP = 1 Out.3 0...20mA continuous
= 2 Out.3 4...20mA continuous
= 3 Out.3 0...10V continuous
= 4 Out.3 2...10V continuous
Out.0 = -1999...9999 scaling Out.3
for 0/4mA or 0/2V
Out.1 = -1999...9999 scaling Out.3
for 20mA or 10V
O.Src = 3 signal source for Out.3 is
the process value
Configuration examples 36 Operating KS4x-1
Page 37

Parameter setting level
5 Parameter setting level
5.1 Parameter survey
PArA Parameter setting level
È
Ì
Cntr Control and
self-tuning
SEtP Set-point and
Pb1 SP.Lo SP.01 InL.1 Inl.2 L.1
Pb2 SP.Hi Pt.01 OuL.1 OuL.2 H.1
ti1 SP.2 SP.02 InH.1 InH.2 HYS.1
ti2 r.SP Pt.02 OuH.1 OuH.2 L.2
td1 t.SP SP.03 tF.1 H.2
td2 Pt.03 HYS.2
t1 SP.04 dEl.2
t2 Pt.04 L.3
SH H.3
d.SP HYS.3
tP HC.A
tt
Y2
Y.Lo
Y.Hi
Y0
Ym.H
L.Ym
process value
Prog
Programmer
InP.1 Input 1
InP.2 Input 2
Lim
Limit value functions
End
Adjustment:
The parameters can be adjusted by means of keys ÈÌ
w
Transition to the next parameter is by pressing key Ù
w
After the last parameter of a group, donE is displayed, followed by
w
automatic change to the next group.
g
g
Return to the beginning of a group is by pressing the Ù key for 3 sec.
If for 30 sec. no keypress is excecuted the controler returns to the process
value and setpoint display ( Time Out = 30 sec. )
Parameter survey 37 Operating KS4x-1
Page 38
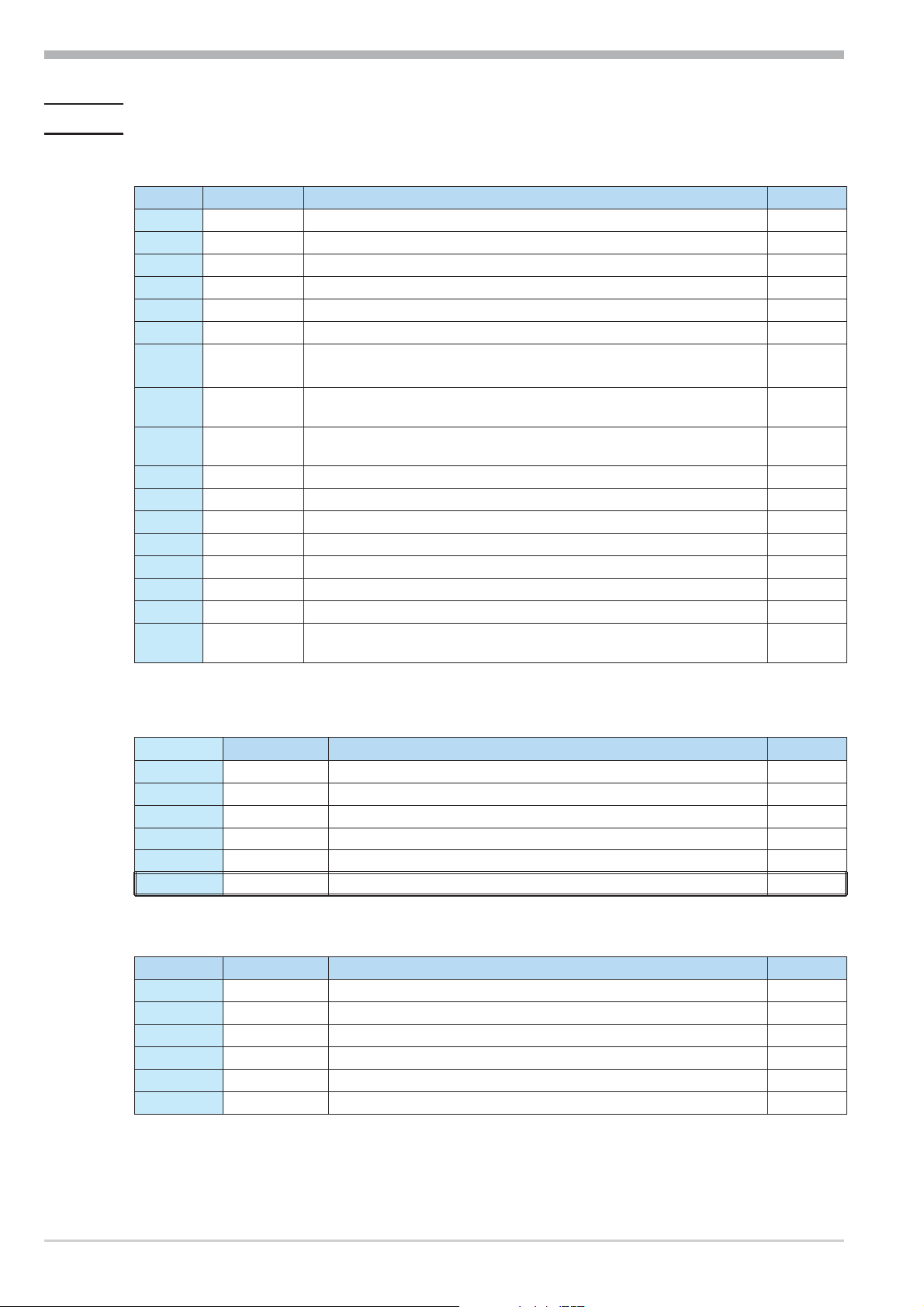
5.2 Parameters
Cntr
Parameter setting level
Name
Pb1
Pb2
ti1
ti2
td1
td2
t1
t2
SH
d.SP
tP
tt
Y2
Y.Lo
Y.Hi
Y.0
Ym.H
L.Ym
Value range Description Default
1...9999 1
1...9999 1
1...9999
1...9999
1...9999
1...9999
0,4...9999
Proportional band 1/2 (heating) in phys. dimensions (e.g. °C)
Proportional band 2 (cooling) in phys. dimensions (e.g. °C)
Integral action time 1 (heating) [s]
Integral action time 2 (cooling) [s]
Derivative action time 1 (heating) [s]
Derivative action time 2 (cooling) [s]
Minimal cycle duration 1/2 (heating/cooling) [s]. The minimum
100
100
180
180
180
180
10
impulse is 1/4 x t1/t2
0...9999
Dead zone or switching differential for on-off control [phys.
2
dimensions)
-1999...9999
Trigger point speration for series contact D / Y / Off [phys.
100
dimensions]
0,1...9999
3...9999
-120...120
-120...120
-120...120
-120...120
-120...120
0...9999
Minimum impulse [s]
Actuator response time for servo-motor [s]
2. correcting variable
Lower output limit [%]
Upper output limit [%]
Working point for the correcting variable [%]
Limitation of the mean value Ym [%]
Max. deviation xw at the start of mean value calculation [phys.
OFF
60
0
0
100
0
5
8
dimensions]
1 Valid for ConF/ othr/ DP = 0.At DP = 1/ 2/ 3 also 0,1 / 0,01 / 0,001.
SEtP
Name
SP.LO
SP.Hi
SP.2
r.SP
t.SP
SP
Value range Description Default
-1999...9999
-1999...9999
-1999...9999
0...9999
0...9999
-1999...9999
Set-point limit low for Weff
Set-point limit high for Weff
Set-point 2.
Set-point gradient [/min]
Timer time [min]
Set-point (only visible with BlueControl!)
0
900
0
OFF
5
0
ProG
Name
SP.01
Pt.01
SP.02
Pt.02
SP.03
Pt.03
Value range Description Default
-1999...9999
0...9999
-1999...9999
0...9999
-1999...9999
0...9999
Segment end set-point 1
Segment time 1 [min]
Segment end set-point 2
Segment time 2 [min]
Segment end set-point 3
Segment time 3 [min]
100 1
10 2
100 1
10 2
200 1
10 2
Operating KS4x-1 38 Parameters
Page 39

Parameter setting level
Name
SP.04
Pt.04
Value range Description Default
-1999...9999
0...9999
Segment end set-point 4
Segment time 4 [min]
1 If SP.01 … SP.04 = OFF then following parameters are not shown
2 If segment end set-point = OFF then the segment time is not visible
InP.1
Name
InL.1
OuL.1
InH.1
OuH.1
t.F1
Value range Description Default
-1999...9999
-1999...9999
-1999...9999
-1999...9999
-1999...9999
Input value for the lower scaling point
Displayed value for the lower scaling point
Input value for the upper scaling point
Displayed value for the lower scaling point
Filter time constant [s]
InP.2
Name
InL.2
OuL.2
InH.2
OuH.2
Value range Description Default
-1999...9999
-1999...9999
-1999...9999
-1999...9999
Input value for the lower scaling point
Displayed value for the lower scaling point
Input value for the upper scaling point
Displayed value for the upper scaling point
200 1
10 2
0
0
20
20
0,5
0
0
50
50
g
Lim
Name
L.1
H.1
HYS.1
L.2
H.2
HYS.2
L.3
H.3
HYS.3
HC.A
Resetting the controller configuration to factory setting (Default)
r chapter 12.1 (page 56)
Value range Description Default
-1999...9999
-1999...9999
0...9999
-1999...9999
-1999...9999
0...9999
-1999...9999
-1999...9999
0...9999
-1999...9999
Lower limit 1
Upper limit 1
Hysteresis limit 1
Lower limit 2
Upper limit 2
Hysteresis limit 2
Lower limit 3
Upper limit 3
Hysteresis limit 3
Heat current control limit [A]
-10
10
1
OFF
OFF
1
OFF
OFF
1
50
Operating KS4x-1 39 Parameters
Page 40

Parameter setting level
5.3 Input scaling
When using current or voltage signals as input variables for InP.1 or InP.2,
scaling of input and display values at parameter setting level is required. Specifi
cation of the input value for lower and higher scaling point is in the relevant elec
trical unit (mA / V).
phys.
quantity
OuH.x
-
-
mA / V
5.3.1 Input Inp.1
g
Parameters InL.1 , OuL.1, InH.1 and OuH.1 are only visible if
ConF / InP.1 / Corr = 3 is chosen.
S.tYP Input signal InL.1 OuL.1 InH.1 OuH.1
30
(0...20mA)
40
(0...10V)
In addition to these settings, InL.1 and InH.1 can be adjusted in the range
(0...20mA / 0...10V) determined by selection of S.tYP .
phys. quantity
OuL.x
InL.x
0…20mA 0 any 20 any
4…20mA 4 any 20 any
0…10V 0 any 10 any
2…10V 2 any 10 any
InH.x
mA/V
a
For using the predetermined scaling with thermocouple and resistance
thermometer (Pt100), the settings for InL.1 and OuL.1 and for InH.1 and
OuH.1 must have the same value.
g
Input scaling changes at calibration level (r page 41) are displayed by input
scaling at parameter setting level. After calibration reset (OFF), the scaling
parameters are reset to default.
5.3.2 Input InP.2
S.tYP Input signal InL.2 OuL2 InH.2 OuH.2
30 0…20mA 0 any 20 any
31 0…50mA 0 any 50 any
In addition to these settings, InL.2 and InH.2 can be adjusted in the range
(0...20/ 50mA) determined by selection of S.tYP.
Input scaling 40 Operating KS4x-1
Page 41

6 Calibration level
Calibration level
g
Measured value correction ( CAL) is only visible if ConF / InP.1 / Corr = 1
or 2 is chosen.
The measured value can be matched in the calibration menu ( CAL). Two me
-
thods are available:
Offset correction
( ConF/ InP.1 / Corr =1 ):
possible on-line at the
w
display
standard setting
offset correction
process
OuL.1
new
OuL.1old
2-point correction
( ConF/ InP.1 / Corr = 2 ):
w
is possible off-line with
process value simulator
display
OuH.1
OuH.1
OuL.1
new
OuL.1old
old
new
InL.1
InL.1
standard setting
2-point correction
InH.1
X
X
Operating KS4x-1 41
Page 42
Calibration level
SP.X
run
Err
Ada
Offset correction ( ConF/ InP.1 / Corr =1 ):
r
126
125
r
Ù
3sec.
r
PArA
Ì
:
CAL
r
InL.1: The input value of the scaling point is displayed.
The operator must wait, until the process is at rest.
Subsequently, the operator acknowledges the input value by pressing
key Ù.
OuL.1: The display value of the scaling point is displayed.
Before calibration, OuL.1 is equal to InL.1.
The operator can correct the display value by pressing keys ÈÌ .
Subsequently, he confirms the display value by pressing key Ù.
Ù
r
InP.1
r
Ù
r
r
r
InL.1
OuL.1
End
r
r
È
Ì
Ù
r
Ù
Ù
42 Operating KS4x-1
Page 43

2-point correction ( ConF/ InP.1 / Corr =1 ):
SP.X
run
Err
Ada
r
Calibration level
126
125
r
Ù
3sec.
r
PArA
Ì
:
CAL
r
InL.1: The input value of the lower scaling point is displayed.
The operator must adjust the lower input value by means of a
process value simulator and confirm the input value by pressing key Ù.
OuL.1: The display value of the lower scaling point is displayed.
Before calibration, OuL.1 equals InL.1.
The operator can correct the lower display value by pressing the ÈÌ
keys. Subsequently, he confirms the display value by pressing key Ù.
InH.1: The input value of the upper scaling point is displayed. .
The operator must adjust the upper input value by means of the
process value simulator and confirm the input value by pressing key Ù.
OuH.1: The display value of the upper scaling point is displayed.
Before calibration OuH.1 equals InH.1.
The operator can correct the upper display value by pressing keys ÈÌ
Subsequently, he confirms the display value by pressing key Ù.
Ù
r
InP.1
r
Ù
r
r
r
r
r
InL.1
OuL.1
InH.1
OuH.1
End
r
È
Ì
r
È
Ì
r
Ù
r
Ù
r
Ù
Ù
Ù
g
Operating KS4x-1 43
The parameters (OuL.1, OuH.1) changed at CAL level can be reset by adjusting
the parameters below the lowest adjustment value (OFF) by means of decrement
key Ì .
Page 44

Programmer
7 Programmer
W,X
W,X
Pt.01
SP.01
Pt.02
SP.02
Pt.03
SP.03
Pt.04
SP.04
W
t
Programmer set-up:
For using the controller as a programmer, select parameter SP.Fn = 1 in the
ConF menu (r page 21). The programmer is started via one of digital inputs
di1..3. Which input shall be used for starting the programmer is determined by
selecting parameter P.run = 2 / 3 / 4 in the ConF menu accordingly.
(r page 23).
For assigning the program end as a digital signal to one of the relay outputs, parameter P.End = 1 must be selected for the relevant output OUT.1...OUT.3 in the
ConF menu (r page 26, 27).
Programmer parameter setting:
A programmer with 4 segments is available to the user. Determine a segment duration Pt.01 .. Pt.04 (in minutes) and a segment target set-point SP.01 ..
SP.04 for each segment in the PArA menu (r page 38).
Starting/stopping the programmer:
Starting the programmer is done by a digital signal at input di1..3 selected by pa
rameter P.run (r page 23).
The programmer calculates a gradient from segment end setpoint and segment
time. This gradient is always valid. Normaly, the programmer starts the first seg
ment at process value. Because of this the effective run-time of the first segment
may differ from the at PArA level setted segment time (process value ¹ set
point).
After program end, the controller continues controlling with the target set-point
set last.
If the program is stopped during execution (signal at digital input di1..3 is taken
away), the programmer returns to program start and waits for a new start signal.
-
-
44 Operating KS4x-1
Page 45

Programmer
+
Program parameter changing while the program is running is possible.
Changing the segment time:
Changing the segment time leads to re-calculation of the required gradient. When
the segment time has already elapsed, starting with the new segment is done di
rectly, where the set-point changes with a step.
Changing the segment end setpoint:
Changing the set-point leads to re-calculation of the required gradient, in order to
reach the new set-point during the segment rest time, whereby the required gra
dient polarity sign can change.
-
-
Operating KS4x-1 45
Page 46

Timer
8 Timer
8.1 Setting up the timer
8.1.1 Operating modes
6 different timer modes are available to the user. The relevant timer mode can be
set via parameter SP.Fn in the Conf menu (r page 21).
Mode 1 (—)
After timer start, control is to the adjusted
set-point . The timer (t.SP) runs as soon as
the process value enters or leaves the band
around the set-point (x = SP _ b.ti). After
timer elapse, the controller returns to Y2.
End and the set-point are displayed alternate
ly in the lower display line.
Mode 2 (····)
Mode 2 corresponds to mode 1, except that
control is continued with the relevant
set-point after timer (t.SP) elapse.
u
SP b.ti_
SP
u
blinks
run
run
2
ò
blinks
End
1
-
Start
t.SP
Mode 3 (—)
After timer start, control is to the adjusted
set-point. The timer (t.SP) starts immediately
after switch-over. After timer elapsing the
controller switches off. End and the set-point
are displayed alternately in the bottom display
line.
Mode 4 (····)
Mode 4 corresponds to mode 3, except that
control is continued with the relevant
set-point after timer (t.SP) elapse.
Mode 5 (delay)
The timer starts immediately. The controller
output remains on Y2. After timer (t.SP)
elapse, control starts with the adjusted
set-point.
SP
Start
SP
run
run
t.SP
run
ò
3
blinks
4
ò
blinks
End
End
Start
Setting up the timer 46 Operating KS4x-1
t.SP
Page 47
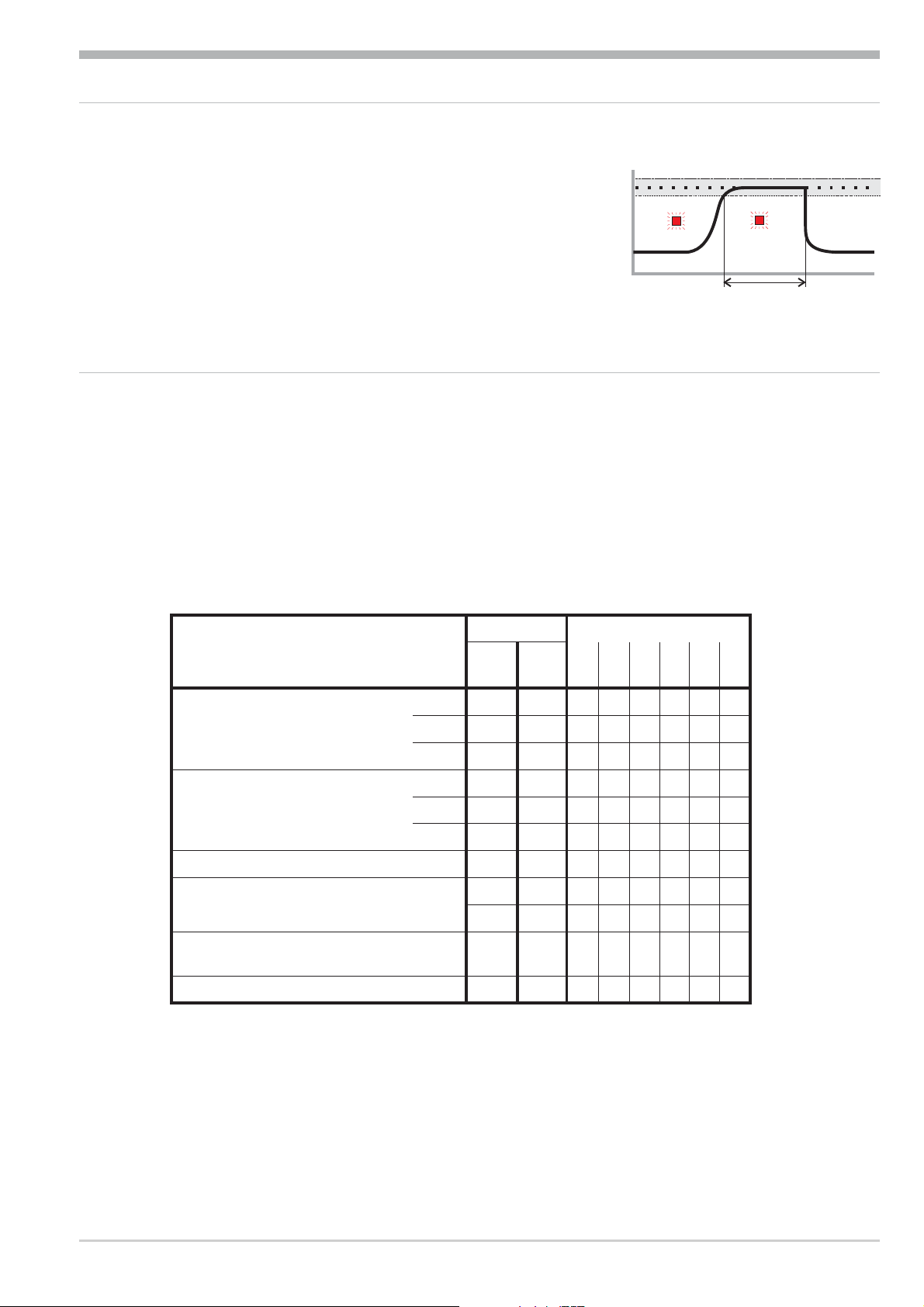
Mode 6
After set-point switch-over (SPr SP.2),
control is to SP.2. The timer (t.SP) starts
when the process value enters the adjusted
band around the set-point (x = SP.2 _ b.ti).
After time elapse the controller returns to SP.
End and the set-point are displayed alternate
ly in the lower display line.
8.1.2 Tolerance band
Timer modes 1,2 and 6 are provided with a freely adjustable tolerance band. The
tolerance band around the set-point can be adjusted via parameter b.ti in the
Conf menu (x = SP.2 _ b.ti )
(r page 21).
Timer
u
SP.2 b.ti_
SP.2
-
SP
Start
u
blinks
run
run
t.SP
End
SP
8.1.3 Timer start
Various procedures for starting the timer are possible:
Y / Y2 switch-over via digital
input
SP / SP.2 switch-over via
digital input
Pressing key Ò 6xddddd-
Power On 0 x dd ddd-
Changing t.ti (extended operating
level)
Serial interface (if provided) x x dddddd
1
( key function)
x no effect
1
when using a digital input, adjust parameter di.Fn = 2 ( ConF/ LOGI)
Start via LOGI Mode
Y2=SP.2=123456
di1 2 x ddddddi2 3 x ddddddi3 4 x ddddd-
1
di1 x 2 - - - - - d
di2 x 3 - - - - - d
di3 x 4 - - - - - d
x 0-----d
xxdddddd
Operating KS4x-1 47 Setting up the timer
Page 48

Timer
8.1.4 Signal end
If one of the relays shall switch after timer elapse, parameter TimE = 1 and in
verse action O.Act = 1 must be selected for the relevant output OUT.1 …
OUT.3 in the ConF menu (r page 25, 26). If direct action is selected, the rele
vant output signals the active timer.
8.2 Determining the timer run-time
The timer run-time can be determined via parameter t.SP in the PArA menu.
The timer run-time must be specified in minutes with one digit behind the deci
mal point (0,1 minutes = 6 seconds).
Alternatively, the timer run-time can be determined directly at extended opera
ting level (r chapter 8.3).
8.3 Starting the timer
Dependent of configuration, the timer start is as
follows:
by a positive flank at one of digital inputs
w
di1..3
by pressing key Ò
w
by switching on the controller (power On)
w
by changing the timer run-time t.ti >0
w
(extended operating level)
via the serial interface
w
SP.x
126
125
-
-
-
-
run
Ada
Err
g
Display:
Run LED Signification
blinks
lit
off
( End and setpoint are
displayed alternately)
With active timer, the time can be adjusted by changing parameter t.ti at
extended operating level.
-
timer was started
-
timer is not running yet
-
timer was started
-
timer is running
-
timer is off
-
timer has elapsed
-
deletion of End display by pressing any
key
Determining the timer run-time 48 Operating KS4x-1
Page 49

BlueControl
9 BlueControl
BlueControl is the projection environment for the BluePortâcontroller series of
PMA. The following 3 versions with graded functionality are available:
The mini version is - free of charge - at your disposal as download at PMA homepage www.pma-online.de or on the PMA-CD (please ask for).
At the end of
the installation the licen
ce number
has to be
stated or
DEMO mode
must be cho
sen.
At DEMO
mode the li
cence num
ber can be
stated subse
quently un
der Help r
Licence r
Change.
-
-
-
-
-
-
Operating KS4x-1 49
Page 50

Versions
10 Versions
Accessories delivered with the unit
Operating manual (if selected by the ordering code)
2 fixing clamps
w
operating note in 15 languages
w
Accessory equipment with ordering information
Description Order no.
Heating current transformer 50A AC 9404-407-50001
PC-adaptor for the front-panel interface 9407-998-00001
Standard rail adaptor 9407-998-00061
Operating manual German 9499-040-62718
Operating manual English 9499-040-62711
Operating manual French 9499-040-62732
Interface description Modbus RTU German 9499-040-63518
Interface description Modbus RTU English 9499-040-63511
BlueControl (engineering tool) Mini Download www.pma-online.de
BlueControl (engineering tool) Basic 9407-999-11001
BlueControl (engineering tool) Expert 9407-999-11011
50 Operating KS4x-1
Page 51

11 Technical data
INPUTS
Technical data
Measuring range: 0...50mA AC
Scaling: adjustable -1999...0,000...9999 A
PROCESS VALUE INPUT INP1
Resolution: > 14 bits
Decimal point: 0 to 3 digits behind the decimal point
Dig. input filter: adjustable 0,000...9999 s
Scanning cycle: 100 ms
Measured value
2-point or offset correction
correction:
Thermocouples
r Table 1 (page 53 )
Input resistance: ³1MW
Effect of source resistance: 1 mV/W
Cold-junction compensation
Maximal additional error: ± 0,5 K
Sensor break monitoring
Sensor current: £ 1mA
Configurable output action
Resistance thermometer
r Table 2 (page 53 )
Connection: 2 or 3-wire
Lead resistance: max. 30 Ohm
Input circuit monitor: break and short circuit
Special measuring range
BlueControl (engineering tool) can be used to
match the input to sensor KTY 11-6
(characteristic is stored in the controller).
Physical measuring range: 0...4500 Ohm
Linearization segments 16
Current and voltage signals
r Table 3 (page 53 )
Span start, end of
span:
Scaling: selectable -1999...9999
Linearization: 16 segments, adaptable with
Decimal point: adjustable
Input circuit monitor: 12,5% below span start (2mA,1V)
anywhere within measuring
range
BlueControl
SUPPLEMENTARY INPUT INP2
Resolution: > 14 bits
Scanning cycle: 100 ms
Accuracy: < 0,5 %
Heating current measurement
via current transformer (® Accessory equipment)
Current measuring range
Technical data as for INP1
CONTROL INPUT DI1
Configurable as switch or push-button!
Connection of a potential-free contact suitable
for switching “dry” circuits.
Switched voltage: 2,5 V
Current: 50 mA
CONTROL INPUTS DI2, DI3 (OPTION)
Configurable as switch or push-button!
Optocoupler input for active triggering
Nominal voltage 24 V DC external
Current sink (IEC 1131 type 1)
Logic “0” -3...5 V
Logic “1” 15...30 V
Current requirement approx.. 5 mA
TRANSMITTER SUPPLY UT (OPTION)
Power: 22 mA / ³18 V
If the universal output OUT3 is used there may
be no external galvanic connection between
measuring and output circuits!
GALVANIC ISOLATION
Safety isolation
Function isolation
Power supply
connections
Process value input INP1
Supplementary input INP2
Digital input di1
Relay outputs OUT 1,2 RS422/485 interface
Relay output OUT3 Digital inputs di2, 3
Universal output OUT3
Transmitter supply U
T
OUTPUTS
RELAY OUTPUTS OUT1, OUT2
Contact type: 2 NO contacts with common
connection
Max. contact rating: 500 VA, 250 V, 2A at 48...62Hz,
resistive load
Min. contact rating: 6V, 1 mA DC
Operating KS4x-1 51
Page 52

Technical data
Operating life
(electr.):
800.000 duty cycles with max.
rating
OUT3 USED AS RELAY OUTPUT
Contact type: potential-free changeover contact
Max.contact rating: 500 VA, 250 V, 2A at 48...62Hz,
resistive load
Min. contact rating: 5V, 10 mA AC/DC
Operating life
(electr.):
Note:
If the relays OUT1...OUT3 operate external
contactors, these must be fitted with RC
snubber circuits to manufacturer specifications
to prevent excessive switch-off voltage peaks.
600.000 duty cycles with max.
contact rating
OUT3 AS UNIVERSAL OUTPUT
Galvanically isolated from the inputs.
Freely scalable
Resolution: 11 bits
Current output
0/4...20 mA configurable.
Signal range: 0...approx.22mA
Max. load: £ 500 W
Load effect: no effect
Resolution: £22 mA (0,1%)
Accuracy £ 40 mA (0,2%)
Voltage output
0/2...10V configurable
Signal range: 0...11 V
Min. load:
Load effect: no effect
Resolution: £ 11 mV (0,1%)
Accuracy £20 mV (0,2%)
OUT3 used as transmitter supply
Output power: 22 mA / ³ 13 V
OUT3 used as logic output
Load£500
Load > 500
W
W
2kW
0/£ 20 mA
0/> 13 V
UNIVERSAL SUPPLY 24 V UC
AC voltage: 20,4...26,4 V AC
Frequency: 48...62 Hz
DC voltage: 18...31 V DC class 2
Power consumption: approx.. 7.3 VA
BEHAVIOUR WITH POWER FAILURE
Configuration, parameters and adjusted
set-points, control mode:
Non-volatile storage in EEPROM
BLUEPORT FRONT INTERFACE
Connection of PC via PC adapter (see
"Accessory equipment"). The BlueControl
software is used to configure, set parameters
and operate the KS4x-1.
BUS INTERFACE (OPTION)
Galvanically isolated
Physical: RS 422/485
Protocol: Modbus RTU
Transmission speed: 2400, 4800, 9600, 19.200 bits/sec
Address range: 1...247
Number of controllers per bus: 32
Repeaters must be used to connect a higher number
of controllers.
ENVIRONMENTAL CONDITIONS
Protection modes
Front panel: IP 65 (NEMA 4X)
Housing: IP 20
Terminals: IP 00
Permissible temperatures
For specified accuracy: 0...60°C
Warm-up time:
For operation: -20...65°C
For storage: -40...70°C
Humidity
75% yearly average, no condensation
Altitude
To 2000 m above sea level
15 minutes
POWER SUPPLY
Dependent of order:
AC SUPPLY
Voltage: 90...250 V AC
Frequency: 48...62 Hz
Power consumption approx. 7.3 VA
Shock and vibration
Vibration test Fc (DIN 68-2-6)
Frequency: 10...150 Hz
Unit in operation: 1g or 0,075 mm
Unit not in operation: 2g or 0,15 mm
52 Operating KS4x-1
Page 53

Shock test Ea (DIN IEC 68-2-27)
Shock: 15g
Duration: 11ms
Electromagnetic compatibility
Complies with EN 61 326-1
(for continuous, non-attended operation)
GENERAL
Housing
Material: Makrolon 9415
flame-retardant
Flammability class: UL 94 VO, self-extinguishing
Plug-in module, inserted from the front
Safety test
Complies with EN 61010-1 (VDE 0411-1):
Overvoltage category II
Contamination class 2
Working voltage range 300 V
Protection class II
Certifications
Technical data
Heat generating plants with outflow
w
temperatures up to 120°C to DIN 4751
Hot water plants with outflow temperatures
w
above 110°C to DIN 4752
Thermal transfer plants with organic transfer
w
media to DIN 4754
Oil-heated plants to DIN 4755
w
cULus certification
(Type 1, indoor use)
File: E 208286
Mounting
Panel mounting with two fixing clamps at
top/bottom or right/left,
High-density mounting possible
Mounting position: uncritical
Weight: 0,27kg
Accessories delivered with the unit
Operating manual
Fixing clamps
Type-tested to DIN EN 14597 (replaces DIN
3440 )
With the according sensors applicable for:
Table 1 Thermocouple measuring ranges
Thermocouple type Range Accuracy Resolution (Ô)
L Fe-CuNi (DIN) -100...900°C -148...1652°F ß 2K 0,1 K
J Fe-CuNi -100...1200°C -148...2192°F ß 2K 0,1 K
K NiCr-Ni -100...1350°C -148...2462°F ß 2K 0,2 K
N Nicrosil/Nisil -100...1300°C -148...2372°F ß 2K 0,2 K
S PtRh-Pt 10% 0...1760°C 32...3200°F ß 2K 0,2 K
R PtRh-Pt 13% 0...1760°C 32...3200°F ß 2K 0,2 K
Table 2 Resistance transducer measuring ranges
Type Sens. current Range Accuracy Resolution (Ô)
Pt100
Pt100 -200...850°C -140...1562°F ß 1K 0,1K
Pt1000 -200...850°C -140...1562°F ß 2K 0,1K
0,2mA
KTY 11-6 -50...150°C -58...302°F ß 2K 0,05K
-200...100°C -140...212°F ß 1K 0,1K
Table 3 Current and voltage measuring ranges
Range Input resistance Accuracy Resolution (Ô)
0-10 Volt
0-20 mA
Operating KS4x-1 53
~ 110 kΩ
49 Ω (voltage requirement ß 2,5 V)
ß 0,1 % ß 0,6 mV
ß 0,1 %
ß 1,5 μA
Page 54

Safety hints
12 Safety hints
This unit was built and tested in compliance with VDE 0411-1 / EN 61010-1 and
was delivered in safe condition.
The unit complies with European guideline 89/336/EWG (EMC) and is provided
with CE marking.
The unit was tested before delivery and has passed the tests required by the test
schedule. To maintain this condition and to ensure safe operation, the user must
follow the hints and warnings given in this operating manual.
The unit is intended exclusively for use as a measurement and control instrument
in technical installations.
a
Warning
If the unit is damaged to an extent that safe operation seems impossible, the unit
must not be taken into operation.
ELECTRICAL CONNECTIONS
The electrical wiring must conform to local standards (e.g. VDE 0100). The input
measurement and control leads must be kept separate from signal and power
supply leads.
In the installation of the controller a switch or a circuit-breaker must be used and
signified. The switch or circuit-breaker must be installed near by the controller
and the user must have easy access to the controller.
COMMISSIONING
Before instrument switch-on, check that the following information is taken into
account:
Ensure that the supply voltage corresponds to the specifications on the type
w
label.
All covers required for contact protection must be fitted.
w
If the controller is connected with other units in the same signal loop, check
w
that the equipment in the output circuit is not affected before switch-on. If
necessary, suitable protective measures must be taken.
The unit may be operated only in installed condition.
w
Before and during operation, the temperature restrictions specified for
w
controller operation must be met.
SHUT-DOWN
For taking the unit out of operation, disconnect it from all voltage sources and
protect it against accidental operation.
If the controller is connected with other equipment in the same signal loop, check
that other equipment in the output circuit is not affected before switch-off. If ne
cessary, suitable protective measures must be taken.
54 Operating KS4x-1
-
Page 55

MAINTENANCE, REPAIR AND MODIFICATION
The units do not need particular maintenance.
Safety hints
a
l
a
Warning
When opening the units, or when removing covers or components, live parts and
terminals may be exposed.
Before starting this work, the unit must be disconnected completely.
After completing this work, re-shut the unit and re-fit all covers and components.
Check if specifications on the type label must be changed and correct them, if ne
cessary.
Caution
When opening the units, components which are sensitive to electrostatic dischar
ge (ESD) can be exposed. The following work may be done only at workstations
with suitable ESD protection.
Modification, maintenance and repair work may be done only by trained and aut
horized personnel. For this purpose, the PMA service should be contacted.
The cleaning of the front of the controller should be done with a dry or a wetted
(spirit, water) kerchief.
-
-
-
Operating KS4x-1 55
Page 56

Safety hints
12.1 Resetting to factory setting
In case of faultyconfiguration, KS4x-1 can be reset to the default condition.
1
ÌÈ + Power on
FAC
SP.x
torY
1.
g
run
Ada
Err
For this, the operator must keep the keys increment and decrement pressed
1
during power-on.
Then, press key increment to select YES.
2
Confirm factory resetting with Enter and the copy procedure is started
3
(display COPY).
4 Afterwards the device restarts.
In all other cases, no reset will occur (timeout abortion).
If one of the operating levels was blocked and the safety lock is open, reset to
factory setting is not possible.
FAC
SP.x
2.
no
2
È
FAC
run
Ada
Err
SP.x
YES
run
Ada
Err
3
Ù
FAC
SP.x
COPY
run
Ada
Err
4
8.8.8.8.
SP.x
8.8.8.8.
run
Ada
Err
g
g
If a pass number was defined (via BlueControl®) and the safety lock is open, but
no operating level was blocked, enter the correct pass number when prompted in
3. A wrong pass number aborts the reset action.
The copy procedure ( COPY) can take some seconds.
Now, the transmitter is in normal operation.
Resetting to factory setting 56 Operating KS4x-1
Page 57

Index
0-9
2-point correction............41
A
Alarm handling ..........18-19
B
BlueControl...............49
Bus interface
Technical Data..........52
C
Calibration level (CAL)......41-43
Certifications ..............53
Configuration examples
2-point controller ........31
3-point controller ........32
3-point stepping controller . . . 33
Continuous controller ......34
D - Y -Off controller.......35
Measured value output .....36
Signaller .............30
Configuration level
Configuration parameters. . 22 - 28
Parameter survey ........21
Connecting diagram ...........6
Connecting examples
di2/3, 2-wire transmitter supply . 8
INP2 current transformer .....7
OUT1/2 heating/cooling .....7
OUT3 as logic output .......8
OUT3 transmitter supply .....8
RS485 interface ..........9
Control inputs di1, di2, di3
Technical data ..........51
Current signal measuring range ....51
D
Digital inputs di1, di2, di3
Configuration ..........26
Technical data ..........51
F
Front view ...............10
I
Input INP1
Configuration ..........23
Parameters ............39
Technical data ..........51
Input INP2
Configuration ..........23
Parameters ............39
Technical data ..........51
Input scaling ..............40
K
Kalibrierung (CAL) ..........41
L
LED
Ada-LED............10
Err-LED ............10
ì -LED.............10
LED colours ...........10
ò -LED.............10
run-LED............10
SP.x-LED............10
M
Maintenance manager
.......12-13
Manual tuning .............17
Mounting.................5
O
Offset correction ............41
Output OUT1
Configuration ..........24
Technical data ..........52
Output OUT2
Configuration ..........25
Technical data ..........52
Output OUT3
Configuration ..........25
Technical data ..........52
E
Environmental conditions .......53
Equipment ...............50
Error list ................12
Operating KS4x-1 57
P
Parameter setting level
Parameter survey ........37
Parameters .........38-39
Page 58

Power supply ..............52
Programmer
Changing segment end setpoint . 45
Changing segment time .....45
Parameter setting ........44
Set-up ..............44
Starting/Stopping ........44
R
Resetting to factory setting .......56
Resistance thermometer measuring range
.....................51
S
Safety hints ............55-56
Safety switch...............5
Safety test................53
Self-tuning
Cancelation ...........15
Cancelation causes........16
Start ...............15
Set-point processing ..........29
T
Thermocouple measuring range ....51
Timer
Display run-LED ........48
Operating modes.........46
Signal end ............48
Timer start ............47
Tolerance band .........47
V
Versions ................50
Voltage signal measuring range ....51
58 Operating KS4x-1
Page 59

Operating KS4x-1 59
Page 60

9499- 040- 62711
2
A5 auf A6 gefaltet, 2-fach geheftet, SW-Druck Normalpapier weiß 80g/m
Subject to alterations without notice © PMA Prozeß- und Maschinen-Automation GmbH
Änderungen vorbehalten P.O.B. 310 229, D-34058 Kassel, Germany
Sous réserve de toutes modifications Printed in Germany 9499-040-62711 (08/2013)
A6
 Loading...
Loading...