

WEG MVW3000 A0040 V023, MVW3000 A0050 V023, MVW3000 A0090 V023, MVW3000 A0080 V023, MVW3000 A0100 V023 User Manual
...Page 1
User's Manual
Series: MVW3000
Language: English
Document: 10004823674 / 00
Please take this page out when
unpacking the product
13941741
Page 2
Page 3

Motors I Automation I Energy I Transmission & Distribution I Coatings
Medium Voltage Frequency Inverter
MVW3000
User's Manual
Page 4

Page 5
User’s Manual
Series: MVW3000
Language: English
Document: 10004823674 / 00
Publication Date: 03/2017
Page 6
Summary of Reviews
Vers ion Review Description
- R00 First edition
Page 7

Contents
1 SAFETY NOTICES ................................................................................1-1
1.1 SAFETY NOTICES IN THE MANUAL .........................................................................................1-1
1.2 SAFETY NOTICES ON THE PRODUCT .....................................................................................1-1
1.3 PRELIMINARY RECOMMENDATIONS ......................................................................................1-2
2 GENERAL INFORMATION ................................................................... 2-1
2.1 ABOUT THIS MANUAL ...............................................................................................................2-1
2.2 MVW3000 IDENTIFICATION LABEL ..........................................................................................2-2
2.3 RECEIVING AND STORAGE.......................................................................................................2-2
2.4 HOW TO SPECIFY THE MVW3000 MODEL ..............................................................................2-3
2.4.1 Available Models ...............................................................................................................2-5
3 PRODUCT CHARACTERISTICS .........................................................3-1
3.1 INPUT TRANSFORMER .............................................................................................................3-1
3.2 POWER CELLS ...........................................................................................................................3-3
3.3 CONNECTION OF THE CELLS ..................................................................................................3-5
3.4 CONTROL ....................................................................................................................................3-8
4 TECHNICAL DATA ..............................................................................4-1
4.1 MVW3000 PANEL ........................................................................................................................4-1
4.1.1 Panel Constructive Aspects .............................................................................................4-2
4.2 POWER CELLS ...........................................................................................................................4-4
4.2.1 Constructive Aspects .......................................................................................................4-4
4.2.2 Power Cell Boards and Connections ..............................................................................4-6
4.3 CONTROL RACK ........................................................................................................................4-6
4.4 OUTPUT FILTERS .......................................................................................................................4-7
5 SYNCHRONOUS MOTOR LINE ..........................................................5-1
5.1 ABSOLUTE ENCODER WITH RSSI BOARD .............................................................................5-1
5.1.1 Absolute Encoder ..............................................................................................................5-1
5.1.2 RSSI Board .........................................................................................................................5-2
5.2 FIELD EXCITATION SET (DC WITH BRUSHES) ........................................................................5-4
6 INSTALLATION, CONNECTION AND ENERGIZATION ......................6-1
6.1 MECHANICAL INSTALLATION ..................................................................................................6-1
6.1.1 Environmental Conditions ................................................................................................6-1
6.1.2 Handling Recommendations ............................................................................................6-2
6.1.3 Hoisting ..............................................................................................................................6-2
6.1.4 Moving ...............................................................................................................................6-3
6.1.5 Unpacking ..........................................................................................................................6-3
6.1.6 Positioning/Mounting........................................................................................................6-4
6.1.7 Insertion of the Power Cells .............................................................................................6-6
6.1.8 Electrical and Fiber Optic Connections on the Power Cells .........................................6-8
6.2 ELECTRICAL INSTALLATION ....................................................................................................6-10
6.2.1 Power Section ...................................................................................................................6-10
6.2.2 Input Cubicle ......................................................................................................................6-12
6.2.3 Low Voltage Auxiliary Supply ...........................................................................................6-13
6.3 ENERGIZATION, START-UP AND SAFE DE-ENERGIZATION .................................................6-14
6.3.1 Pre-power Checks ............................................................................................................6-14
6.3.2 Initial Power-up (Parameter Settings) ............................................................................6-15
6.3.3 Start-up .............................................................................................................................6-15
6.3.3.1 Start-up with HMI Operation and V/F 60 Hz Control Mode ................................6-15
6.3.4 Safe De-energization Instructions ...................................................................................6-17
Page 8

Contents
7 OPTIONAL ACCESSORIES AND BOARDS ........................................ 7-1
7.1 MVC4 SIGNAL AND CONTROL CONNECTIONS .....................................................................7-1
7.2 FUNCTION EXPANSION BOARDS ............................................................................................7-5
7.2.1 EBA (I/O Expansion Board A) ...........................................................................................7-5
7.2.2 EBB (I/O Expansion Board B) ...........................................................................................7-9
7.2.3 PLC2 ...................................................................................................................................7-12
7.3 INCREMENTAL ENCODER ........................................................................................................7-14
7.3.1 EBA/EBB Boards ...............................................................................................................7-14
7.3.2 EBC1 Board .......................................................................................................................7-16
7.4 SHORT UPS MODULE ................................................................................................................7-19
7.4.1 CFW10 Inverter Parameterization....................................................................................7-19
7.5 MVC3 CONTROL BOARD CONNECTIONS...............................................................................7-20
8 SPECIAL FUNCTIONS ......................................................................... 8-1
8.1 LOAD SHARE FUNCTION “MASTER/SLAVE” ..........................................................................8-1
8.2 SYNCHRONOUS TRANSFER FUNCTION .................................................................................8-3
8.3 CELL BYPASS .............................................................................................................................8-5
8.4 ANGLE ADJUSTMENT ...............................................................................................................8-6
9 COMMUNICATION NETWORKS ......................................................... 9-1
9.1 FIELDBUS KIT .............................................................................................................................9-1
9.1.1 Installation of the Fieldbus Kit .........................................................................................9-1
9.1.2 Profibus DP ........................................................................................................................9-2
9.1.3 DeviceNet ...........................................................................................................................9-5
9.1.4 DeviceNet Drive Profile .....................................................................................................9-7
9.1.5 Ethernet ..............................................................................................................................9-7
9.1.6 Fieldbus Application/MVW3000 Related Parameters ....................................................9-7
9.1.6.1 Variables Read From the Inverter .........................................................................9-8
9.1.6.2 Variables Written in Inverter ..................................................................................9-9
9.1.6.3 Error Indications .....................................................................................................9-11
9.1.6.4 MVW3000 Variable Addressing at the Fieldbus Devices ....................................9-12
9.2 WEGBUS SERIAL ........................................................................................................................9-12
9.2.1 Protocol Definitions ..........................................................................................................9-15
9.2.2 Variable Code ....................................................................................................................9-17
9.2.3 MVW3000 Special Parameters .........................................................................................9-21
9.2.4 RS-232 and RS-485 Physical Connection .......................................................................9-23
9.3 MODBUS-RTU ............................................................................................................................9-24
9.3.1 Introduction to the Modbus-RTU Protocol .....................................................................9-24
9.3.1.1 Transmission Modes ..............................................................................................9-24
9.3.1.2 RTU Mode Message Structure ..............................................................................9-25
9.3.2 Operation of the MVW3000 in the Modbus-RTU Network .............................................9-26
9.3.3 Detailed Description of the Functions .............................................................................9-30
9.3.3.1 Function 01 - Read Coils .......................................................................................9-30
9.3.3.2 Function 03 - Read Holding Register ...................................................................9-31
9.3.3.3 Function 05 - Write Single Coil .............................................................................9-32
9.3.3.4 Function 06 - Write Single Register ......................................................................9-32
9.3.3.5 Function 15 - Write Multiple Coils ........................................................................9-33
9.3.3.6 Function 16 - Write Multiple Registers .................................................................9-34
9.3.3.7 Function 43 - Read Device Identification .............................................................9-34
9.3.4 ModBus RTU Communication Error ................................................................................9-36
Page 9
MVW3000 | 1-1
11
Safety Notices
1 SAFETY NOTICES
This manual contains the necessary information for the correct use of the MVW3000 frequency inverter.
It has been written for qualified personnel with suitable training or technical qualifications to operate this type of
equipment.
This manual presents all the functions and parameters of the MVW3000. However, it is not intended to present
all the possible applications of the MVW3000. WEG will not take any liabilities for applications not described in
this manual.
1.1 SAFETY NOTICES IN THE MANUAL
Throughout this manual the following safety notes are used:
DANGER!
The procedures recommended in this warning have the purpose of protecting the user against dead,
serious injuries and considerable material damage.
DANGER!
Les procédures concernées par cet avertissement sont destinées à protéger l’utilisateur contre des
dangers mortels, des blessures et des détériorations matérielles importantes.
ATTENTION!
The procedures recommended in this warning have the purpose of avoiding material damage.
NOTE!
The text intents to supply important information for the correct understanding and good operation
of the product.
1.2 SAFETY NOTICES ON THE PRODUCT
The following symbols are attached to the product, serving as safety notices:
High voltages are present.
Components sensitive to electrostatic discharge.
Do not touch them.
Mandatory connection to the protective ground (PE).
Connection of the shield to the ground.
Hot surface.
Page 10
1-2 | MVW3000
1
Safety Notices
1.3 PRELIMINARY RECOMMENDATIONS
DANGER!
Only qualified personnel familiar with the MVW3000 frequency inverter and associated equipment
should plan or implement the installation, start-up and subsequent maintenance of this equipment
These personnel must follow all the safety instructions included in this manual and/or defined by local
regulations.
Failure to comply with these instructions can lead to death, serious injuries or considerable material
damage.
DANGER!
Seul le personnel qualifié et familier avec l’onduleur de fréquence MVW3000 et ses équipements
associés doit préparer et mettre en oeuvre l’installation, démarrer et ensuite entretenir cet équipement.
Ce personnel doit suivre toutes les instructions de sécurité comprises dans ce mode d’emploi et/ou
définies par la règlementation locale.
Le non respect de ces instructions peut causer la mort, des blessures graves ou d’importants dégâts
matériels.
NOTE!
For the purposes of this manual, qualified personnel are those trained to be able to:
1. Install, ground, energize and operate the MVW3000 according to this manual and the effective legal
safety procedures.
2. Use the protection equipments according to the established standards.
3. Give first aid services.
DANGER!
Always disconnect the input power before touching any electrical component associated to the
inverter.
Many components can remain charged with high voltages or remain in movement (fans) even after
that AC power is disconnected or switched off.
Wait at least 10 minutes to assure a total discharge of the capacitors.
Always connect the equipment frame to the protection earth (PE) at the suitable connection point.
DANGER!
Débranchez toujours l’alimentation générale avant de toucher un composant électrique associé au
convertisseur. Nombreux composants peuvent rester chargés avec haute tension et/ou en mouvement
(ventilateurs), même après que l’entrée d’alimentation CA a été débranchée ou coupée.
Attendez au moins 10 minutes pour s’assurer de la décharge totale des condensateurs.
Connectez toujours le boîtier de l’équipement à terre de protection (PE) au point adéquat pourça.
ATTENTION!
Electronic boards have components sensitive to electrostatic discharges. Do not touch directly
on components or connectors. If necessary, touch the grounded metallic frame before or use an
adequate grounded wrist strap.
Do not perform any high pot tests with the inverter!
If it is necessary consult WEG.
NOTE!
Frequency inverter may interfere with other electronic equipment. In order to reduce these effects,
take the precautions recommended.
NOTE!
Read the user’s manual completely before installing or operating the inverter.
Page 11
MVW3000 | 1-3
11
Safety Notices
DANGER!
This product was not designed to be used as a safety element. Additional measures must be taken
so as to avoid material and personal damages.
The product was manufactured under strict quality control, however, if installed in systems where its
failure causes risks of material or personal damages, additional external safety devices must ensure
a safety condition in case of a product failure, preventing accidents.
DANGER!
Ce produit n’est pas conçu pour être utilisé comme un élément de sécurité. Des précautions
supplémentaires doivent être prises afin d’éviter des dommages matériels ou corporels.
Ce produit a été fabriqué sous un contrôle de qualité conséquent, mais s’il est installé sur des
systèmes où son dysfonctionnement entraîne des risques de dommages matériels ou corporels,
alors des dispositifs de sécurité externes supplémentaires doivent assurer des conditions de sécurité
en cas de défaillance du produit, afin d’éviter des accidents.
Page 12

1-4 | MVW3000
1
Safety Notices
Page 13
MVW3000 | 2-1
2
MVW3000 | 2-1
General Information
2 GENERAL INFORMATION
This chapter defines the contents of this manual and describes the main characteristics of the MVW3000
frequency inverter and how to identify its components. It provides also additional information on the receiving
and storage of the product.
2.1 ABOUT THIS MANUAL
This manual presents 9 chapters, which have a logical sequence so that the user receives, installs, programs and
operates the MVW3000.
Chapter 1 SAFETY NOTICES on page 1-1.
Chapter 2 GENERAL INFORMATION on page 2-1.
Chapter 3 PRODUCT CHARACTERISTICS on page 3-1.
Chapter 4 TECHNICAL DATA on page 4-1.
Chapter 5 SYNCHRONOUS MOTOR LINE on page 5-1.
Chapter 6 INSTALLATION, CONNECTION AND ENERGIZATION on page 6-1.
Chapter 7 OPTIONAL ACCESSORIES AND BOARDS on page 7-1.
Chapter 8 SPECIAL FUNCTIONS on page 8-1.
Chapter 9 COMMUNICATION NETWORKS on page 9-1.
This user’s manual contains information about WEG MVW3000 medium voltage inverter. This document is
arranged in dedicated and specific chapters to explain the proper handling, installation, care, troubleshooting,
adaption to applications and functionalities of the equipment.
The characteristics and recommendations contained in this manual were based on models of the standard
MVW3000. However, it is possible to develop and provide customized solutions according to the customers’
needs and specific applications.
The MVW3000 product can be customized (engineered) to meet the needs and technical specifications of our
customers. Variations is sizes, technical recommendations, performance data and optional items can be changed
in relation to the information contained in this document.
The customer will receive the user’s manual, the programming manual and a detailed project of his product. This
project contains all the electrical and mechanical information, as well as instructions for the interface/installation
with other equipment regarding the MVW3000 supplied.
The MVW3000, as well as other WEG products, is in constant evolution in relation to both its internal parts
(hardware) and its programming (software/firmware). Any question about the equipment and its documentation
can be answered by means of WEG communication channels.
WEG is not liable for the improper use of the information contained in this manual.
Page 14
2-2 | MVW3000
2
General Information
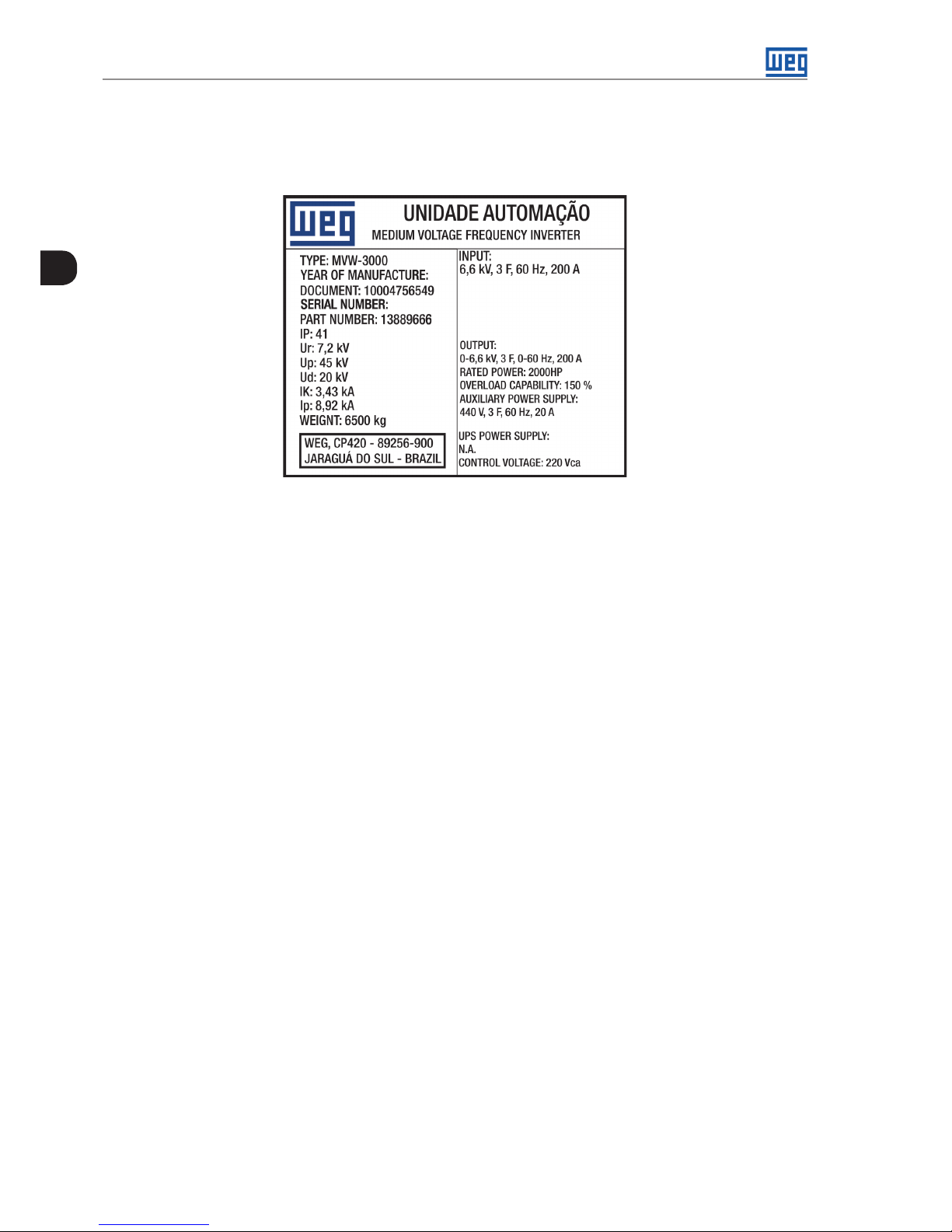
2.2 MVW3000 IDENTIFICATION LABEL
The MVW3000 identification label is positioned in the inner part of the Control Panel of the product. This label
describes important information about the inverter.
Figure 2.1: MVW3000 identification label (example)
2.3 RECEIVING AND STORAGE
The MVW3000 is supplied with the power cells separate from the panel and packed in sets of three cells per
package. The package is composed of OSB frame and injected foam shims. An identification label is affixed to
the outside of the package, identical to the label affixed to the side of the inverter. Compare the content of this
label to the purchase order.
In order to open the cells, see the procedures described in Item 6.1.5 Unpacking on page 6-3. If the MVW3000
cells are not install on the cabinet soon, store them in a clean and dry place (temperature between -25 °C ( -13 °F)
and 50 °C (122 °F) and humidity below 80 %), covered so as protect from dust accumulation and water splashes.
It is recommended to replace the silica gel every three months.
The MVW3000 cabinet has a dehumidifier module, which must remain turned on in case of storage for over thirty
days.
The MVW3000 cabinet is supplied in a cardboard and wood package. The directions for handling, transportation,
mechanical and electrical installations of the product are described in Chapter 6 INSTALLATION, CONNECTION
AND ENERGIZATION on page 6-1, in Item 6.1.5 Unpacking on page 6-3.
Page 15
MVW3000 | 2-3
2
MVW3000 | 2-3
General Information
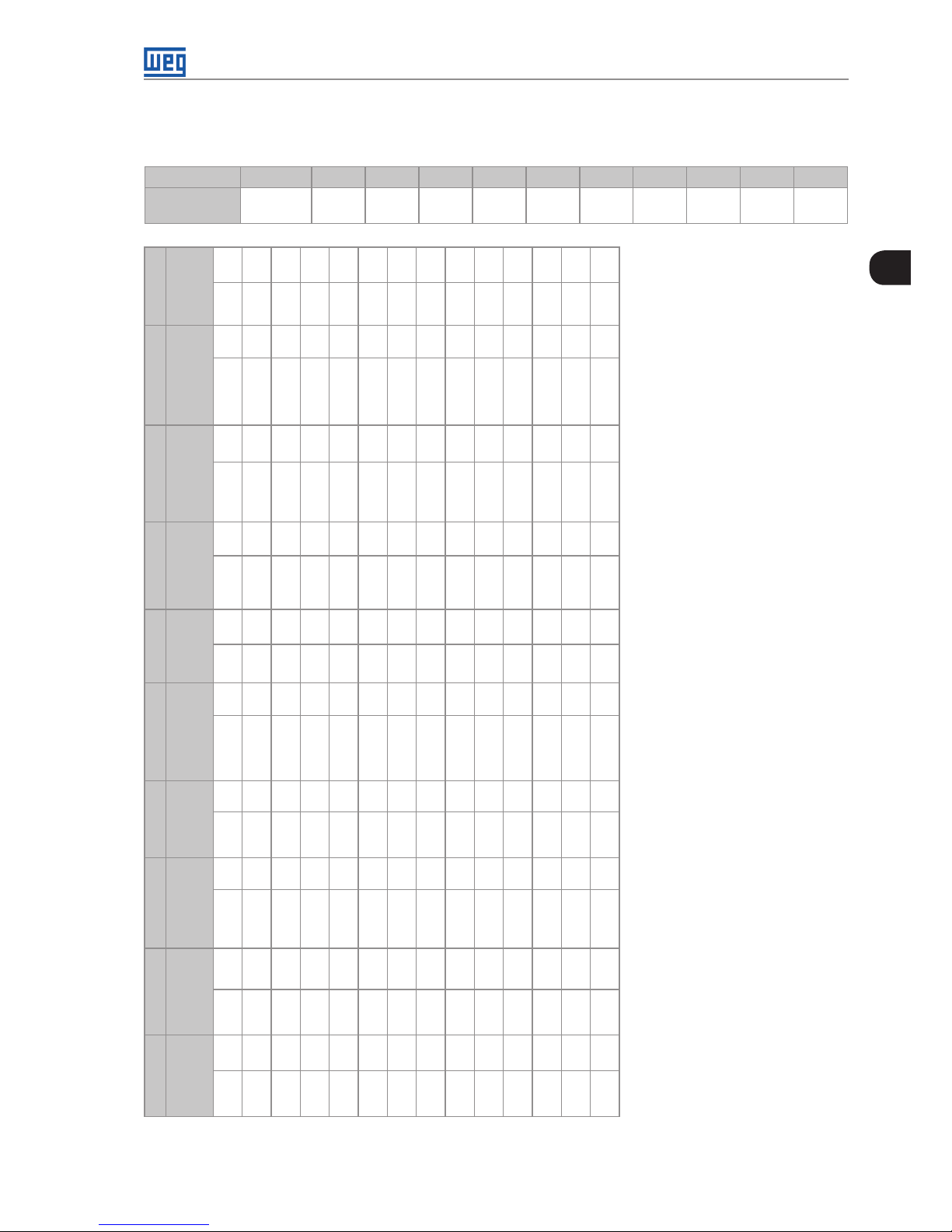
2.4 HOW TO SPECIFY THE MVW3000 MODEL
Table 2.1: MVW3000 Code
Lettering Line 1 2 3 4 5 6 7 8 9 10
Code Example
(¹)
MVW3000 A0140 V063 T5A 066 P A S E R D
1 2 3 4 5 6 7 8 9 10
Rated
Output
Current
Rated
Output
Volt age
Input
Transformer
Input
Rated
Volt age
Manual
Language
Cooling
System
Input
Cubicle
Capacitor
Typ e
Cell
Typ e
Rectifier
Typ e
40 A A0040 2300 V V023 Al - 50 Hz T5A 2300 V 023 English E Air A
Not
included
N Electrolytic E Standard S Diode D
50 A A0050 3300 V V033 Al - 60 Hz T6A 3300 V 033 Spanish S Water W Included S Film F Bypass B AFE A
60 A A0060 4160 V V041 Cu - 50 Hz T5C 416 0 V 0 41 Portuguese P - - - - - - Redundant R - -
70 A A0070 5500 V V055 Cu - 60 Hz T6C 5500 V 055 - - - - - - - - - - - -
80 A A0080 6300 V V063 - - 6000 V 060 - - - - - - - - - - - -
90 A A0090 6900 V V069 - - 6300 V 063 - - - - - - - - - - - -
100 A A0100 7200 V V072 - - 6600 V 066 - - - - - - - - - - - -
110 A A0110 8000 V V080 - - 6900 V 069 - - - - - - - - - - - -
125 A A0125 10000 V V10 0 - - 7200 V 072 - - - - - - - - - - - -
140 A A0140 11000 V V110 - - 8000 V 080 - - - - - - - - - - - -
160 A A0160 1320 0 V V132 - - 10000 V 100 - - - - - - - - - - - -
180 A A0180 138 00 V V138 - - 11000 V 110 - - - - - - - - - - - -
200 A A0200 - - - - 1320 0 V 132 - - - - - - - - - - - -
- - - - - - 1380 0 V 13 8 - - - - - - - - - - - -
(1) For available models, see Table 2.3 on page 2-5 to Table 2.10 on page 2-8.
Page 16
2-4 | MVW3000
2
General Information
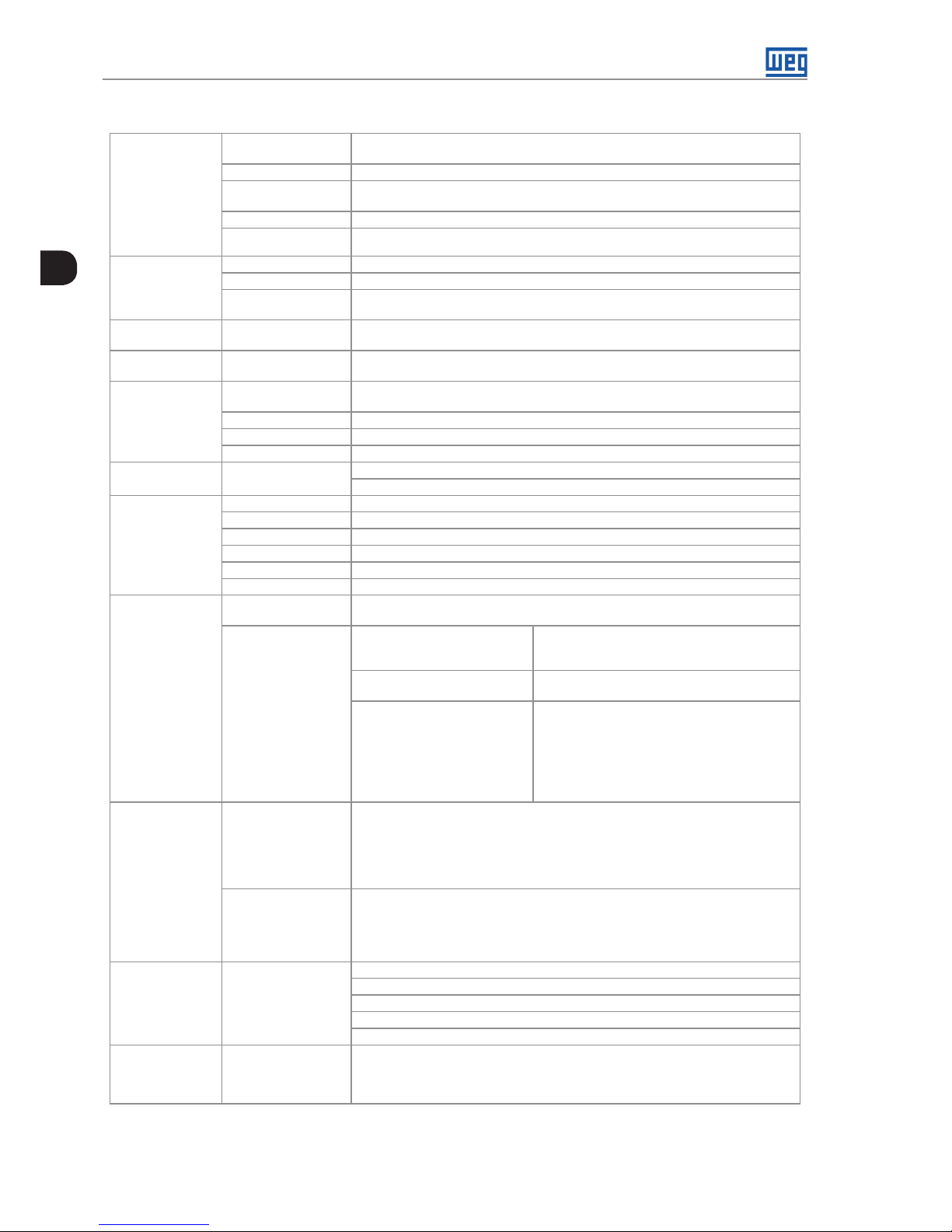
Table 2.2: General specification
POWER SUPPLY
Voltage
2300 V, 3300 V, 4160 V, 5500 V, 6000 V, 6300 V, 6600 V, 6900 V, 7200 V, 8000 V
(± 10 %, -20 % with output power reduction)
Frequency 50 or 60 Hz (specify as necessary) ±3 %
Voltage imbalance
between phases
<3 %
Cos j >0.95
Overvoltage category
Category III
AUXILIARY
SUPPLY
Voltage 220, 380, 400, 415, 440, 460 or 480 V
Frequency 50 or 60 Hz (±3 %)
Voltage imbalance
between phase
<3 %
PROTECTION
DEGREE
Standard
IP41
DIMENSION
Width / Height / Depth
(mm)
16 distinct frames. For all available frames, see Figure 4.3 on page 4-3 and Table 4.2
on page 4-3 to Table 4.8 on page 4-4
ENVIRONMENTAL
CONDITIONS
Temperature
0 to 40 °C (32 °F to 104 °F) (up to 50 °C (122 °F) with 2.5 % reduction in the output
current/ °C)
Humidity 5 to 90 % without condensation
Altitude 0 to 1000 m ( up to 4000 m with derating of 10% / 1000 m )
Pollution degree 2
FINISHING Color
Gray ultra dull (Doors)
Blue ultra dull (Base, Roof, Shutters)
CONTROL
Microprocessor 32 bits
Control method Sinusoidal PWM
Control types Scalar (Imposed Voltage - V/F), Vector (encoder and sensorless)
Switching frequency 500 Hz
Frequency range 0 to 120 Hz
Allowed overload 115 % during 60 seconds, every 10 minutes
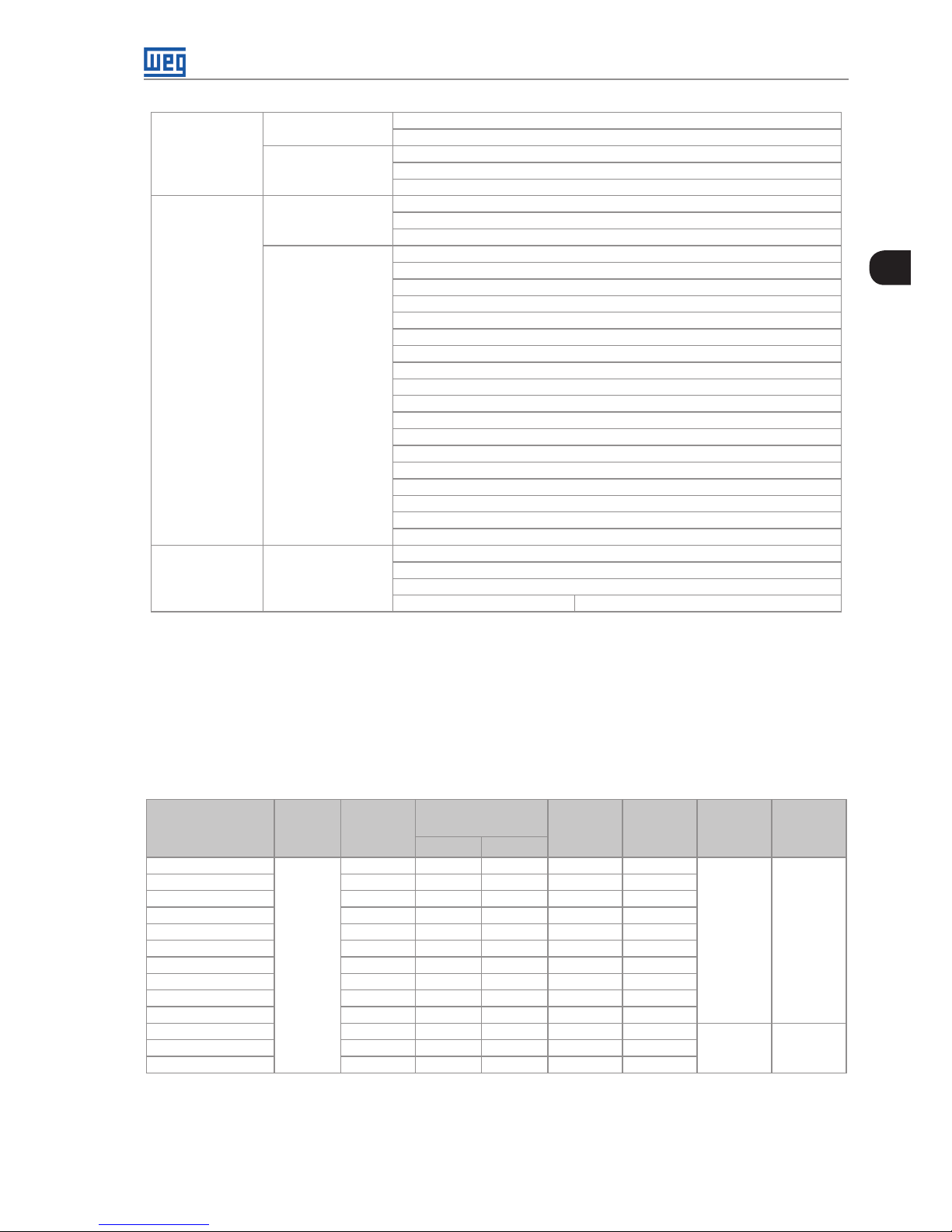
PERFORMANCE
Efficiency
Higher 96.5 % (with aluminum transformer)
Higher 97.0 % (with copper transformer)
Speed control
V/F Regulation: 1 % of the nominal speed with slip
compensation
Regulation: 1 rpm (keypad reference)
Sensorless Regulation: 0.5 % of the nominal speed
Speed variation range: 1:100
With Encoder
(using EBA, EBB or EBC board) )
Regulation:
±0.01 % of the nominal speed with a 14-bit analog
input (EBA)
±0.01 % of the nominal speed with digital reference
(keypad, Serial, Fieldbus, Electronic Potentiometer,
Multispeed)
±0.1 % of nominal speed with 10-bit analog input
INPUTS
OUTPUTS
Analogical
2 programmable differential inputs (10 bits ): 0 to 10 V, 0 to 20 mA or 4 to 20 mA
1 programmable bipolar input (14 bits ): -10 V to +10 V, 0 to 20 mA or 4 to 20 mA
1 programmable isolated input (10 bits ): 0 to 10 V, 0 to 20 mA or 4 to 20 mA
2 programmable outputs (11 bits ): 0 to 10 V
2 bipolar programmable outputs (14 bits ): (-10 to +10) V
2 programmable isolated outputs (11 bits): 0 to 20 mA or 4 to 20 mA
Digital Analog
Relay Transistor
8 programmable isolated inputs: 24 Vdc
1 programmable isolated input: 24 Vdc
1 programmable isolated input: 24 Vdc (for motor PTC thermistor)
5 programmable outputs, contacts NO/NC: 240 Vac, 1 A
2 programmable isolated open collector outputs: 24 Vdc, 50 mA
COMMUNICATION
Serial Interface
Fieldbus Networks
RS-232 (point to point)
RS-485, isolated, via EBA or EBB board (multipoint up to 30 inverters)
Modbus RTU (incorporated software) via RS-485 serial interface
Profibus DP or DeviceNet via additional kits
Ethernet and Profinet
SAFETY
Protections (memory
of the last 100 faults/
alarms with date and
time)
See fault in the programming manual available for download on: www.weg. net
Page 17
MVW3000 | 2-5
2
MVW3000 | 2-5
General Information
APPLICABLE
STA NDA RDS
Electromagnetic
compatibility
EMC directive 89 / 336 / EEC - industrial environment
EN 61800-3 Standard (EMC - Emission and Immunity)
CEI - IEC 61800
Adjustable Speed Electrical Power Drive System
Part 4 - General Requirements
Part 5 - Safety Requirements
HUMAN MACHINE
INTERFACE
(LCD DISPLAY)
Command
Start/Stop, Parameterization (Programming of general functions)
Increase/decrease the speed
JOG, Forward/Reverse selection, Local/Remote selection
Supervision (Reading)
Speed reference (rpm)
Motor speed (rpm)
Value proportional to the speed (e.g.: m/min)
Motor output frequency (Hz)
Voltage on the intermediate circuits (V)
Motor torque (%)
Output power (kW)
Energized time (h)
Operation time (h)
Motor current (A)
Motor voltage (V)
Inverter status
Digital input status
Digital output (transistor) status
Relay output status
Analog input values
100 last erros in the memory with date and time
Fault/alarm messages
AVAILABLE
RESOURCES/
FUNCTIONS
Options
Fieldbus network communication kits (installation inside the inverter)
SUPERDRIVE kit with RS-232 serial communication interface (Inverter - PC)
Kit Ethernet
Kit Expansão de I/Os Profibus DP
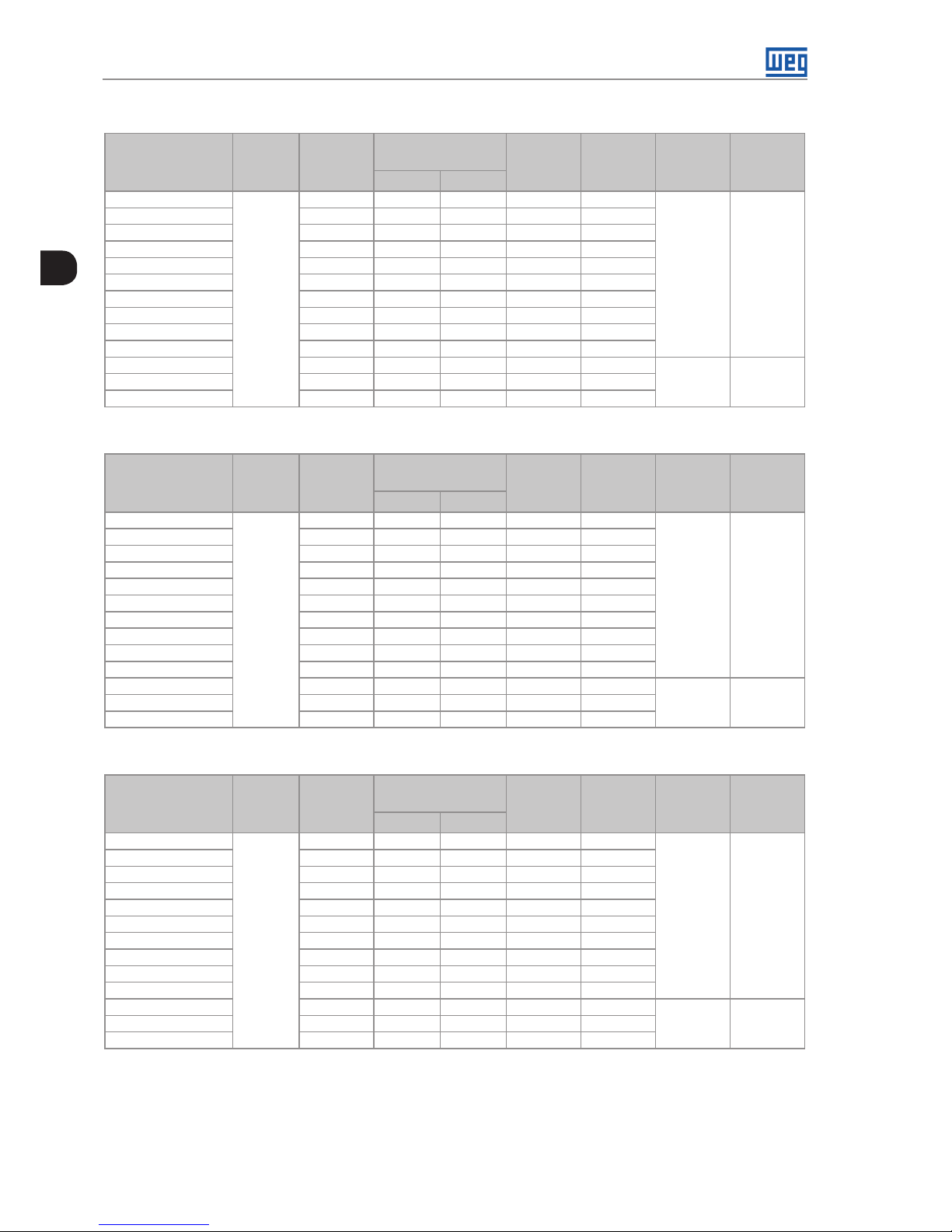
2.4.1 Available Models
The MVW3000 line of medium voltage inverters offers different models, classified according to their rated voltage
and current levels. Different models of the MVW3000 may have distinct frames, which are presented in Table 2.3
on page 2-5 with their respective codes. For the constructive aspects of the available frames, see Chapter 4
TECHNICAL DATA on page 4-1, Figure 4.3 on page 4-3 and Table 4.2 on page 4-3 to Table 4.8 on page
4-4. For models with rated voltage above 8000 V, contact WEG.
Table 2.3: MVW3000 2300 V models
Models
Nominal
Volt age [V]
Rated
Current
[A]
Motor Rated Power
(1)
Dissipated
Power
(2)
[kW]
Dissipated
Power
(3)
[kW]
Flow
Frame
Size
[HP] [kW]
MVW3000 A0040 V023
2300
40 170 130 5.03 4.29
7062 CFM or
12000 m³/h
B2
MVW3000 A0050 V023 50 220 165 6.29 5.36
MVW3000 A0060 V023 60 265 200 7.54 6.43
MVW3000 A0070 V023 70 315 235 8.80 7.5 0
MVW3000 A0080 V023 80 355 265 10.06 8.58
MVW3000 A0090 V023 90 400 300 11.31 9.65
MVW3000 A0100 V023 100 445 335 12.57 10.72
MVW3000 A0110 V023 110 485 365 13.83 11.79
MVW3000 A0125 V023 125 560 420 15.71 13.40
MVW3000 A0140 V023 140 630 470 17.6 0 15.01
MVW3000 A0160 V023 160 715 535 20.11 17.15
8828 CFM or
15000 m³/h
C2MVW3000 A0180 V023 180 810 605 22.63 19.29
MVW3000 A0200 V023 200 895 670 25.14 21.44
Page 18
2-6 | MVW3000
2
General Information
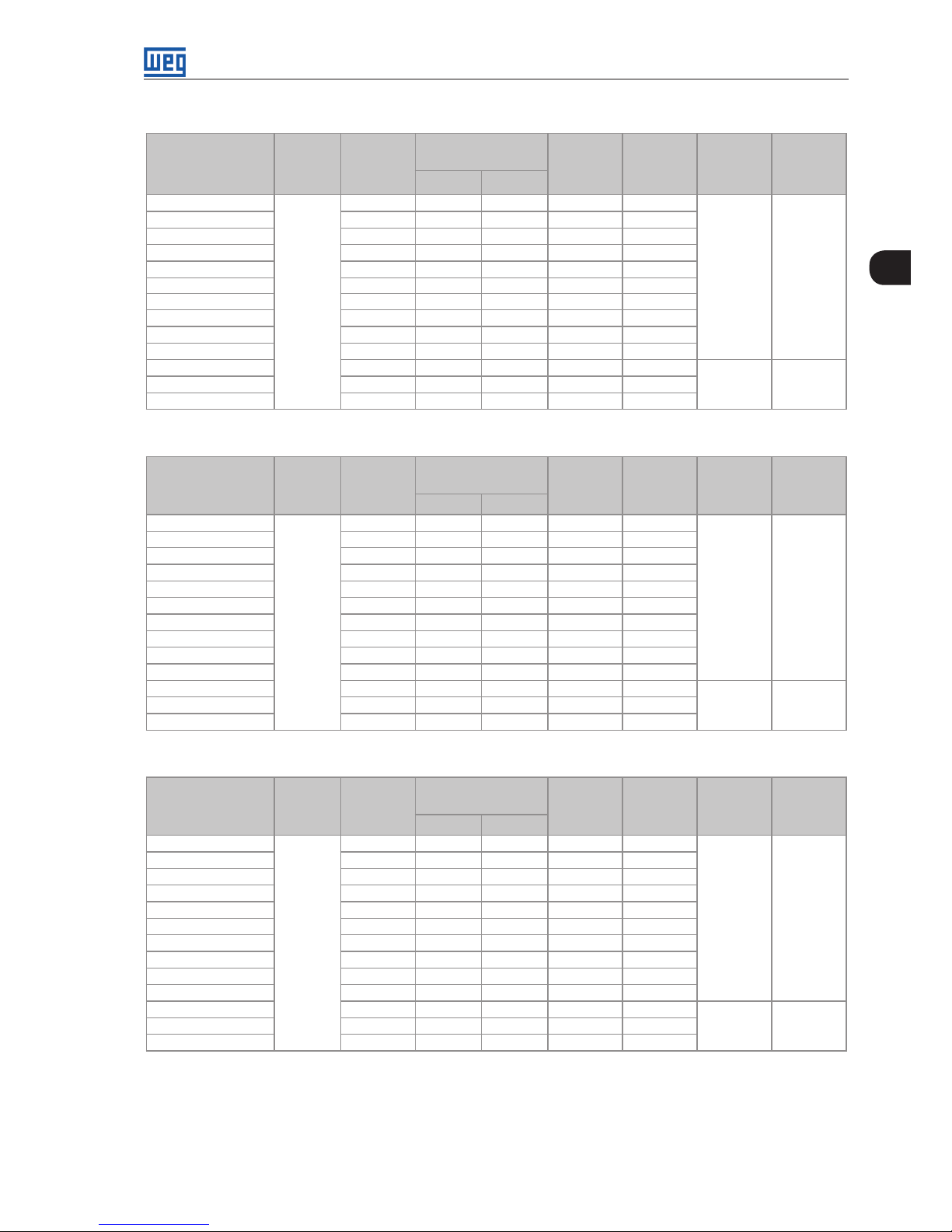
Table 2.4: MVW3000 3300 V models
Models
Nominal
Volt age
[V]
Rated
Current
[A]
Motor Rated Power
(1)
Dissipated
Power
(2)
[kW]
Dissipated
Power
(3)
[kW]
Flow
Frame
Size
[HP] [kW]
MVW3000 A0040 V033
3300
40 250 190 7.2 1 6 .15
7062 CFM or
12000 m³/h
B3
MVW3000 A0050 V033 50 320 240 9.02 7.6 9
MVW3000 A0060 V033 60 380 285 10.82 9.23
MVW3000 A0070 V033 70 445 335 12.63 10.77
MVW3000 A0080 V033 80 515 385 14.43 12. 30
MVW3000 A0090 V033 90 575 430 16.23 13.84
MVW3000 A0100 V033 100 640 480 18.04 15.3 8
MVW3000 A0110 V033 110 710 530 19.84 16.92
MVW3000 A0125 V033 125 800 600 22.54 19.22
MVW3000 A0140 V033 14 0 900 675 25.25 21.53
MVW3000 A0160 V033 160 1030 770 28.86 24.61
8828 CFM or
15000 m³/h
C3
MVW3000 A0180 V033 18 0 1155 865 32.46 2 7. 6 8
MVW3000 A0200 V033 200 1285 960 36.07 30.76
Table 2.5: MVW3000 4160 V models
Models
Nominal
Volt age
[V]
Rated
Current
[A]
Motor Rated Power
(1)
Dissipated
Power
(2)
[kW]
Dissipated
Power
(3)
[kW]
Flow
Frame
Size
[HP] [kW]
MVW3000 A0040 V041
4160
40 320 240 9.09 7.76
77062 CFM
or
12000 m³/h
B4
MVW3000 A0050 V041 50 400 300 11.37 9.69
MVW3000 A0060 V041 60 480 360 13.64 11.63
MVW3000 A0070 V041 70 565 425 15.92 13.57
MVW3000 A0080 V041 80 650 485 18.19 15.51
MVW3000 A0090 V041 90 730 545 20.46 17. 4 5
MVW3000 A0100 V041 100 810 605 2 2.74 19.39
MVW3000 A0110 V041 110 890 665 25.01 21.33
MVW3000 A0125 V041 125 1015 760 28.42 24.23
MV W30 0 0 A0140 V041 140 1135 850 31. 83 2 7.14
MVW3000 A0160 V041 160 1300 970 36.38 31.02
8828 CFM or
15000 m³/h
C4
MVW3000 A0180 V041 180 1460 1090 40.92 34.90
MVW3000 A0200 V041 200 1625 1215 4 5.47 38.78
Table 2.6: MVW3000 5500 V models
Modelos
Nominal
Volt age
[V]
Rated
Current
[A]
Motor Rated Power
(1)
Dissipated
Power
(2)
[kW]
Dissipated
Power
(3)
[kW]
Flow
Frame
Size
[HP] [kW]
MVW3000 A0040 V055
5500
40 425 320 12.02 10.25
7062 CFM or
12000 m³/h
B5
MVW3000 A0050 V055 50 535 400 15.03 12.82
MVW3000 A0060 V055 60 640 480 18.04 15.38
MVW3000 A0070 V055 70 750 560 21.0 4 17. 9 4
MVW3000 A0080 V055 80 855 640 24.05 20.51
MVW3000 A0090 V055 90 965 720 2 7. 0 5 23.07
MVW3000 A0100 V055 100 1070 800 30.06 25.63
MVW3000 A0110 V055 110 1175 880 33.07 28.20
MVW3000 A0125 V055 125 1340 1000 37. 5 7 32.04
MVW3000 A0140 V055 14 0 1505 1125 42.08 35.89
MVW3000 A0160 V055 160 1720 1285 4 8 .10 41.01
8828 CFM or
15000 m³/h
C5
MVW3000 A0180 V055 180 1935 1445 5 4.11 4 6 .14
MVW3000 A0200 V055 200 2150 1605 6 0 .12 51.27
Page 19
MVW3000 | 2-7
2
MVW3000 | 2-7
General Information
Table 2.7: MVW3000 6300 V models
Models
Nominal
Volt age
[V]
Rated
Current
[A]
Motor Rated Power
(1)
Dissipated
Power
(2)
[kW]
Dissipated
Power
(3)
[kW]
Flow
Frame
Size
[HP] [kW]
MVW3000 A0040 V063
6300
40 485 485 13.77 11.74
7062 CFM or
12000 m³/h
B6
MVW3000 A0050 V063 50 615 615 17. 2 2 14.68
MVW3000 A0060 V063 60 735 735 20.66 17. 6 2
MVW3000 A0070 V063 70 855 855 24 .10 20.55
MVW3000 A0080 V063 80 985 985 2 7. 5 5 23.49
MVW3000 A0090 V063 90 1105 110 5 30.99 26.42
MVW3000 A0100 V063 100 1230 1230 34.43 29.36
MVW3000 A0110 V063 110 1350 1350 3 7. 8 8 32.30
MVW3000 A0125 V063 125 1540 1540 43.04 36.70
MVW3000 A0140 V063 14 0 1720 172 0 48.20 41.11
MVW3000 A0160 V063 16 0 1970 1970 55.09 46.98
8828 CFM or
15000 m³/h
C6
MVW3000 A0180 V063 18 0 2215 2215 61. 98 52.85
MVW3000 A0200 V063 200 2465 2465 68.86 58.72
Table 2.8: MVW3000 6900 V models
Models
Nominal
Volt age
[V]
Rated
Current
[A]
Motor Rated Power
(1)
Dissipated
Power
(2)
[kW]
Dissipated
Power
(3)
[kW]
Flow
Frame
Size
[HP] [kW]
MVW3000 A0040 V069
6900
40 535 400 15.08 12.86
7062 CFM or
12000 m³/h
B6
MVW3000 A0050 V069 50 670 500 18.86 16.08
MVW3000 A0060 V069 60 810 605 22.63 19.29
MVW3000 A0070 V069 70 945 705 26.40 22.51
MVW3000 A0080 V069 80 1075 805 3 0.17 25.73
MVW3000 A0090 V069 90 1210 905 33.94 28.94
MVW3000 A0100 V069 100 1345 1005 3 7. 71 32.16
MVW3000 A0110 V069 110 1480 110 5 41.4 8 35.37
MVW3000 A0125 V069 125 1685 1260 4 7.14 40.20
MVW3000 A0140 V069 14 0 1890 1410 52.80 45.02
MVW3000 A0160 V069 16 0 2155 1610 60.34 51.4 5
8828 CFM or
15000 m³/h
C6
MVW3000 A0180 V069 18 0 2430 1815 67.8 8 5 7. 88
MVW3000 A0200 V069 200 2700 2015 75.42 64.31
Table 2.9: MVW3000 7200 V models
Models
Nominal
Volt age
[V]
Rated
Current
[A]
Motor Rated Power
(1)
Dissipated
Power
(2)
[kW]
Dissipated
Power
(3)
[kW]
Flow
Frame
Size
[HP] [kW]
MVW3000 A0040 V072
7200
40 560 420 15.74 13.42
10595 CFM or
18000 m³/h
B7
MVW3000 A0050 V072 50 700 525 19.68 16.78
MVW3000 A0060 V072 60 840 630 23.61 20.13
MVW3000 A0070 V072 70 985 735 27.5 5 23.49
MVW3000 A0080 V072 80 1125 840 31.48 26.84
MVW3000 A0090 V072 90 1265 945 35.42 30.20
MVW3000 A0100 V072 100 1405 1050 39.35 33.56
MVW3000 A0110 V072 110 1545 1155 43.29 36.91
MVW3000 A0125 V072 125 176 0 1315 49.19 41.94
MVW3000 A0140 V072 140 1970 1470 55.09 46.98
MVW3000 A0160 V072 160 2250 1680 62.96 53.69
13243 CFM or
22500 m³/h
C7
MVW3000 A0180 V072 180 2530 189 0 70.83 60.40
MVW3000 A0200 V072 200 2815 2100 78.70 6 7.11
Page 20
2-8 | MVW3000
2
General Information
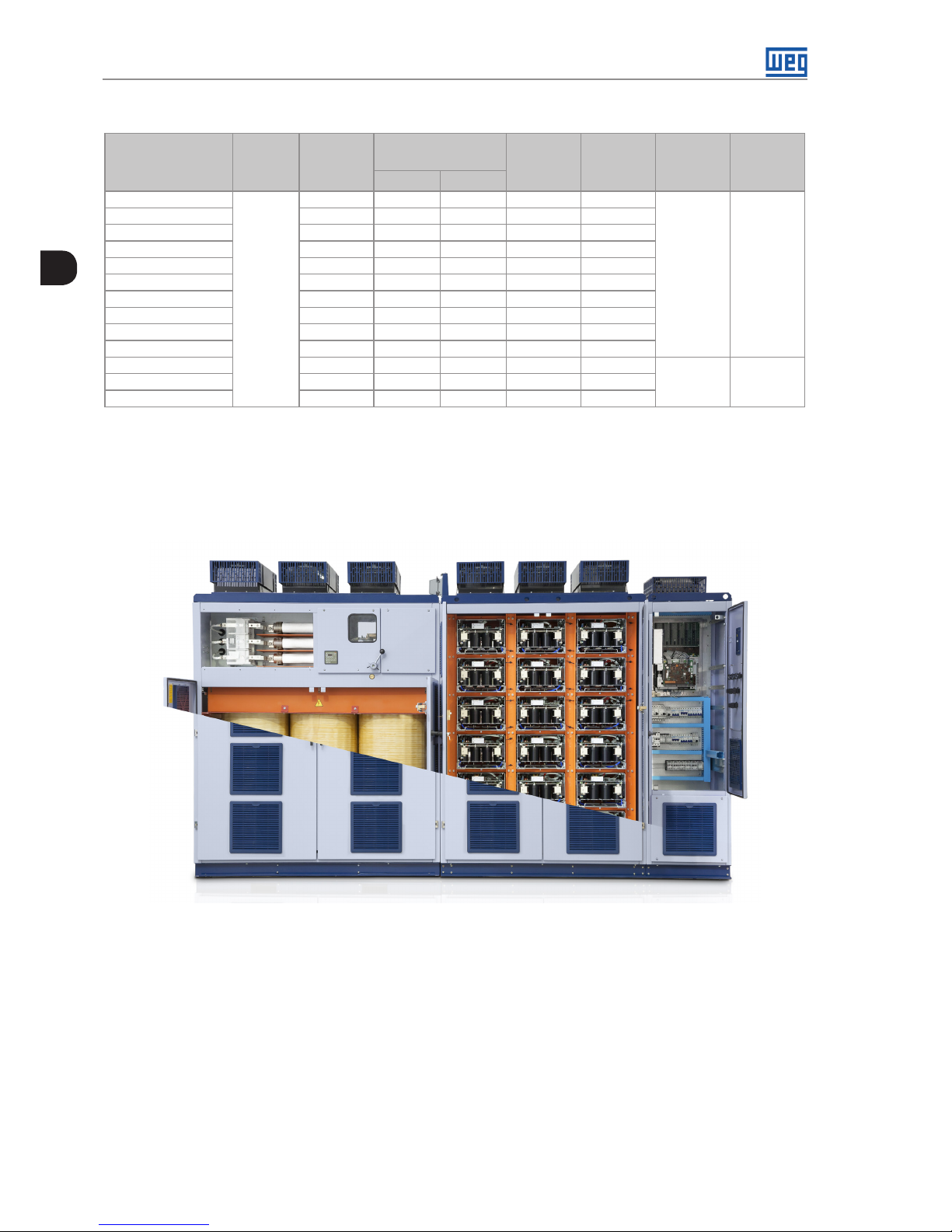
Table 2.10: MVW3000 8000 V models
Models
Nominal
Volt age
[V]
Rated
Current
[A]
Motor Rated Power
(1)
Dissipated
Power
(2)
[kW]
Dissipated
Power
(3)
[kW]
Flow
Frame
Size
[HP] [kW]
MVW3000 A0040 V080
8000
40 620 465 17.49 14.91
10595 CFM or
18000 m³/h
B8
MVW3000 A0050 V080 50 775 580 21.8 6 18.64
MVW3000 A0060 V080 60 935 700 26.23 22.37
MVW3000 A0070 V080 70 1090 815 30.61 2 6 .10
MVW3000 A0080 V080 80 1250 935 34.98 29.83
MVW3000 A0090 V080 90 14 0 5 1050 39.35 33.56
MVW3000 A0100 V080 100 1560 116 5 43.72 37.28
MVW3000 A0110 V080 110 1720 1285 4 8 .10 41.01
MVW3000 A0125 V080 125 1955 1460 54.65 46.60
MVW3000 A0140 V080 140 2190 1635 61. 21 52.20
MVW3000 A0160 V080 160 2505 1870 69.96 59.65
13243 CFM or
22500 m³/h
C8
MVW3000 A0180 V080 180 2815 2100 78.70 67.11
MVW3000 A0200 V080 200 3130 2335 87.45 74.57
(1) The motor powers are only illustrative, and the correct inverter selection must be done as a function of the rated current of the motor to be used, as well
as the overloads related to the application. The motor rated output takes into account the operation with power factor 0.87 and 97 % of efficiency at full load.
(2) Dissipated power considering transformer with aluminum winding and operation under the conditions of Note (1).
(3) Dissipated power considering transformer with copper winding and operation under the conditions of Note (1).
Notes:
1 hp = 0.746 kW
1kW = 3412.14 BTU/hour for the dissipated power.
1 m³/h = 0.5885 CFM
Figure 2.2: MVW3000 panel general view (Frame size B6)
Page 21
MVW3000 | 3-1
3
MVW3000 | 3-1
Product Characteristics
3 PRODUCT CHARACTERISTICS
A brief theoretical explanation about the operation and a simplified electrical scheme of the power cells and
their connections are presented below. The basic operation of the control system is presented at the end of this
chapte r.
The MVW3000 is a frequency inverter designed to control medium voltage motors at the rated values of 2.3 kV to
13.8 kV and for a power range of 150 HP to 5400 HP. Based on a topology where the low voltage cells (< 1000
V) are connected in series to form each inverter phase, its assembly is modular, enabling different configurations
if necessary to drive high power motors.
NOTE!
The characteristics contained in this manual were based on models of the standard MVW3000
intended for applications on 6.6 kV motors. Therefore, the MVW3000 used in the general illustrations
will contain 18 low voltage power cells (six in series per phase). Notice that the MVW3000 can be
engineered to meet the needs and technical specifications of our customers. Contact out technical
team for more details.
3.1 INPUT TRANSFORMER
The MVW3000 inverter has an input transformer, because the cascade cell topology demands the feeding of
each cell to be insulated from each other. This transformer is built so as to meet the different functions for the
MVW3000, such as the necessary insulation for the power cells, cancellation of the harmonic current coming
from the cell input rectifiers, and it also has an auxiliary winding responsible for the system pre-charge.
V phase cells
Medium voltage
input
Auxiliary input
(pre-charge)
W phase cells
U phase cells
U1
U2
Un
V1
V2
Vn
W1
W2
Wn
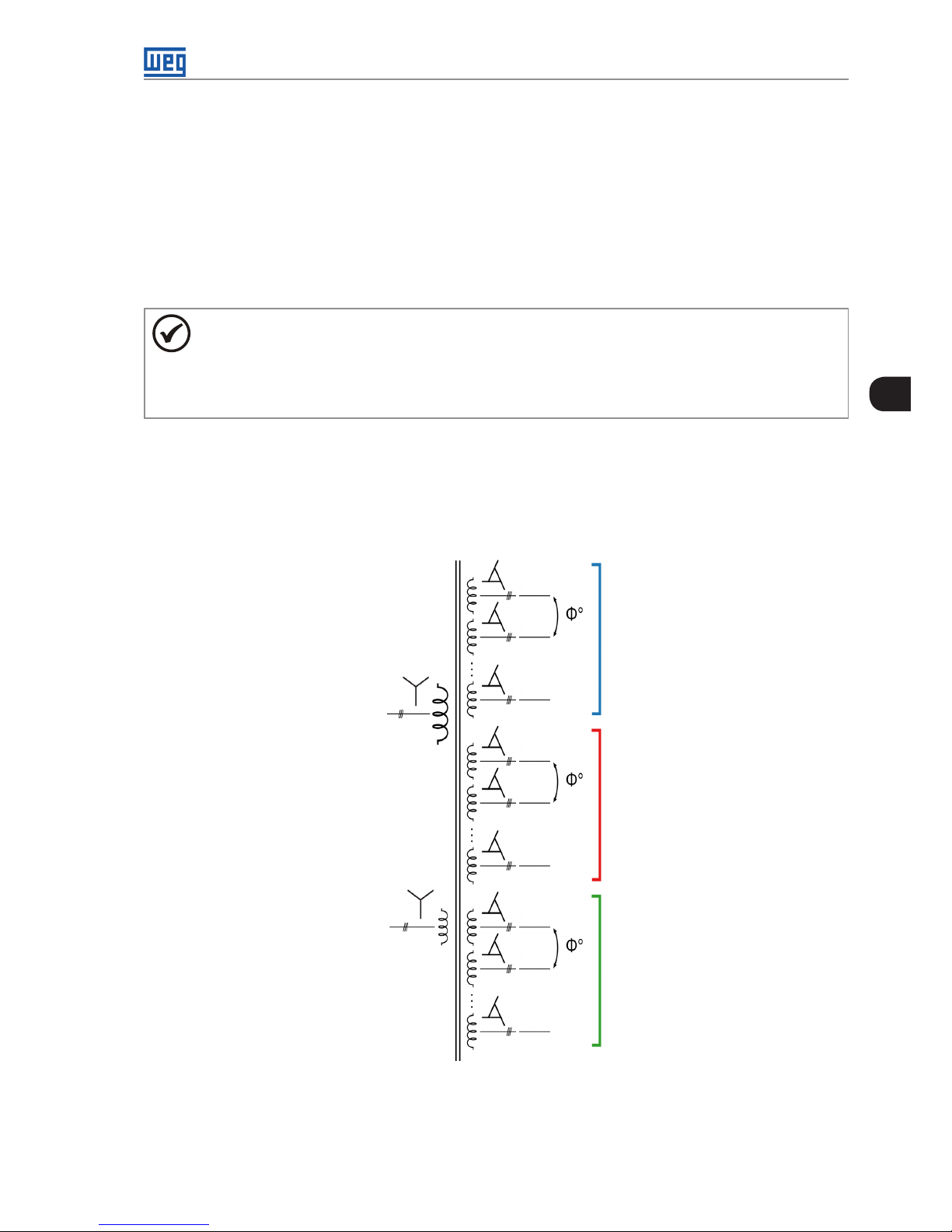
Figure 3.1: Input phase-shifting transformer diagram
Page 22
3-2 | MVW3000
3
Product Characteristics
The transformer configuration is made in star – extended delta, with phase-shifting angles j° between the
secondary windings of one same phase. The main primary windings (star connection) and the auxiliary input
windings (also star) do not present phase shifting between each other.
The transformer is designed according to the number of cells used on the inverter. 3x3xn windings (number of
motor phases x number of cell input phases x number of cells per phase) form n isolated secondary windings that
process 1/(3n) of the converter rated power, totalizing one secondary winding per cell.
Motor Voltage [kV] 2.3 3.3 4 .16 5.5 6-69 7. 2 8
Secondary Windings 3x2=6 3x3=9 3x4=12 3x 5 =15 3x 6 =18 3x7= 21 3x8=24
The transformer secondary windings have phase-shifting designed according to the number of cells and the
specified harmonic level, and it may be engineered upon the customer’s request The phase-shifting help cancel
the harmonic components coming from the non-controlled semiconductors devices. As each cell has a 6-pulse
diode rectifier at the input, and the secondary windings have a phase-shifting between each other, the transformer
primary winding perceives multiples of six pulses in its windings.
The bigger the number of pulses, the smaller the phase-shifting angle between the secondary windings, and
the smaller the Harmonic distortion rate observed by the transformer primary winding. Smaller phase-shifting
angles imply more complex manufacture and parameter control of the transformer. Thus, a good complexityperformance ratio is sought.
For the 18-cell MVW3000, the 36-pulse transformer Figure 3.2 on page 3-3 is used, which offers good
cost effectiveness with great performance regarding harmonic component cancellation and reduced cost, in
comparison to transformers with more pulses.
Table 3.1 on page 3-2 contains the possible input transformer configurations for different numbers of cells
installed on the MVW3000 panel.
Table 3.1: Possible number of pulses to obtain in relation to the number of cells
Cells per Phase Total Cells Number of Pulses
2 6 36, 18
(1)
, 12, 6
3 9 54, 18
(1)
, 6
4 12 72, 36, 24
(1)
, 18, 12, 6
5 15 90, 30
(1)
, 18, 6
6 18 108, 54, 36
(1)
, 18, 12, 6
7 21 12 6, 126, 42
(1)
, 18, 6
8 24 144, 72, 48, 36
(1)
, 24, 18, 12, 6
(1) Stand ard op tion.
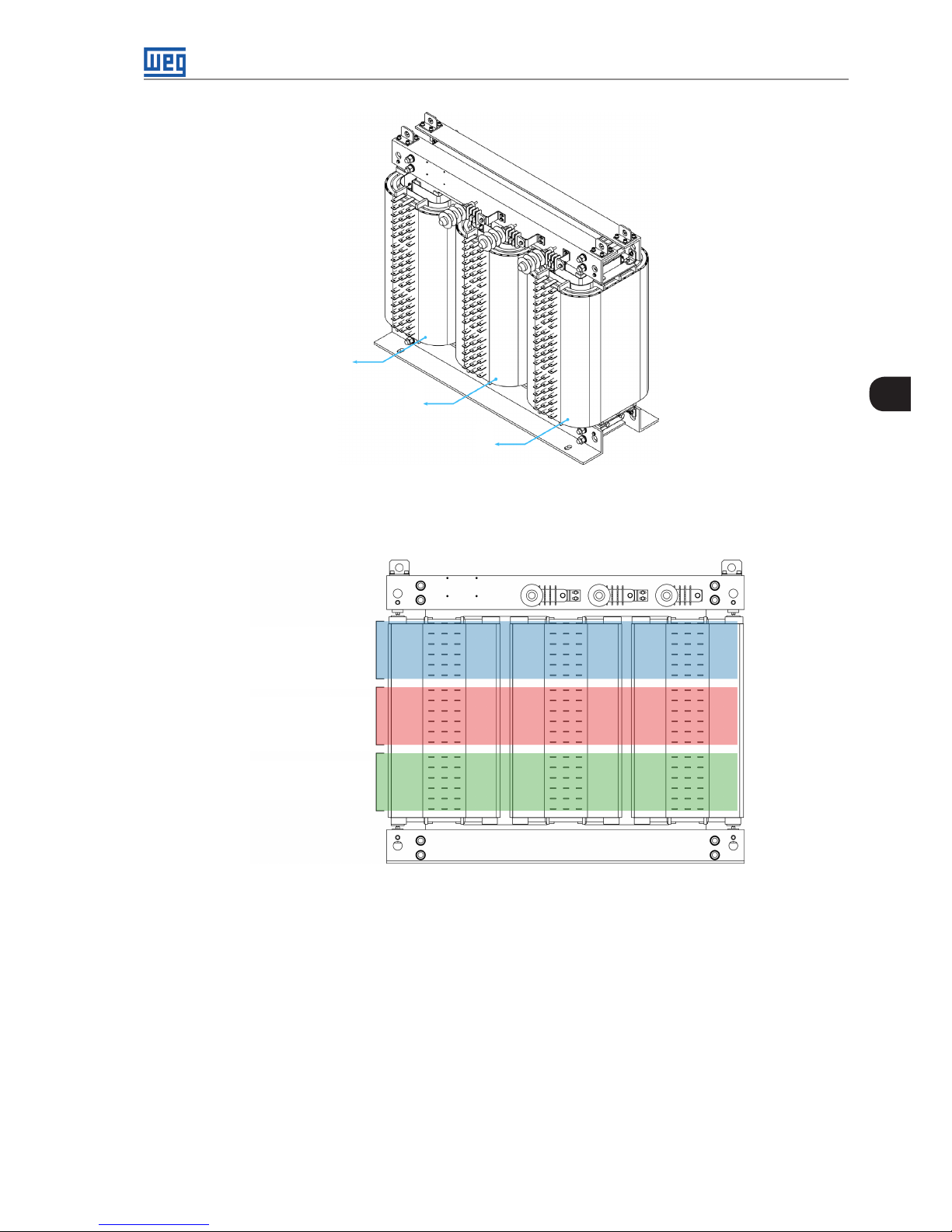
Figure 3.2 on page 3-3 indicates the connection points for the power cell inputs, in this case, the phases R, S
and T. The windings with 690 V
rms
of rated voltage process 1/18 of the converter rated power, in the case of the
18-cell MVW3000.
Page 23
MVW3000 | 3-3
3
MVW3000 | 3-3
Product Characteristics
R
S
T
Figure 3.2: Input transformer of the 18-cell MVW3000 (Frame B6)
Physically, the cells that form phases U, V and W are connected to the main transformer according to Figure 3.3
on page 3-3.
U phase cells
V phase cells
W phase cells
Figure 3.3: Cell connection area of each phase
The transformer has its own panel, being thus totally integrated to the MVW3000. For more details on the panels,
refer to Chapter 4 TECHNICAL DATA on page 4-1, Figure 4.3 on page 4-3, Table 4.2 on page 4-3 to Tabl e
4.8 on page 4-4.
3.2 POWER CELLS
The power cells used on the arms of the MVW3000 are single-phase low voltage inverters (output voltage of
690 V
rms
), in a topology known as H bridge or full bridge. A basic diagram of the rms power cell circuit can be seen
in Figure 3.4 on page 3-4. Each cell has the feeding of one own secondary winding (three-phase) of the main
transformer, which ensures the converter medium voltage insulation.
The three-phase voltages of the input of the modules are then rectified by a Graetz bridge using non-controlled
semiconductor devices (diodes), forming one own DC link (direct current) with the addition of the capacitors to
the cell (represented by symbol C1). They can be electrolytic or plastic film capacitors, depending on the model
of the used cell.
Page 24
3-4 | MVW3000
3
Product Characteristics
R
S
T
F1
F2
D1
D3 D5
D2 D4
D6
R1
R2
C1
Gate driver
Bypass
Gate driver
FA
NE
Measurement
Supply
Fiber optic
Local control
R
T
S
N
P
FA
NE
24 V
15 V
5 V
GND
NTC1
GND
S1n, S2n
15 v
XC3
15 v
GND
NTC2
S1f, S2f
Tx
Rx
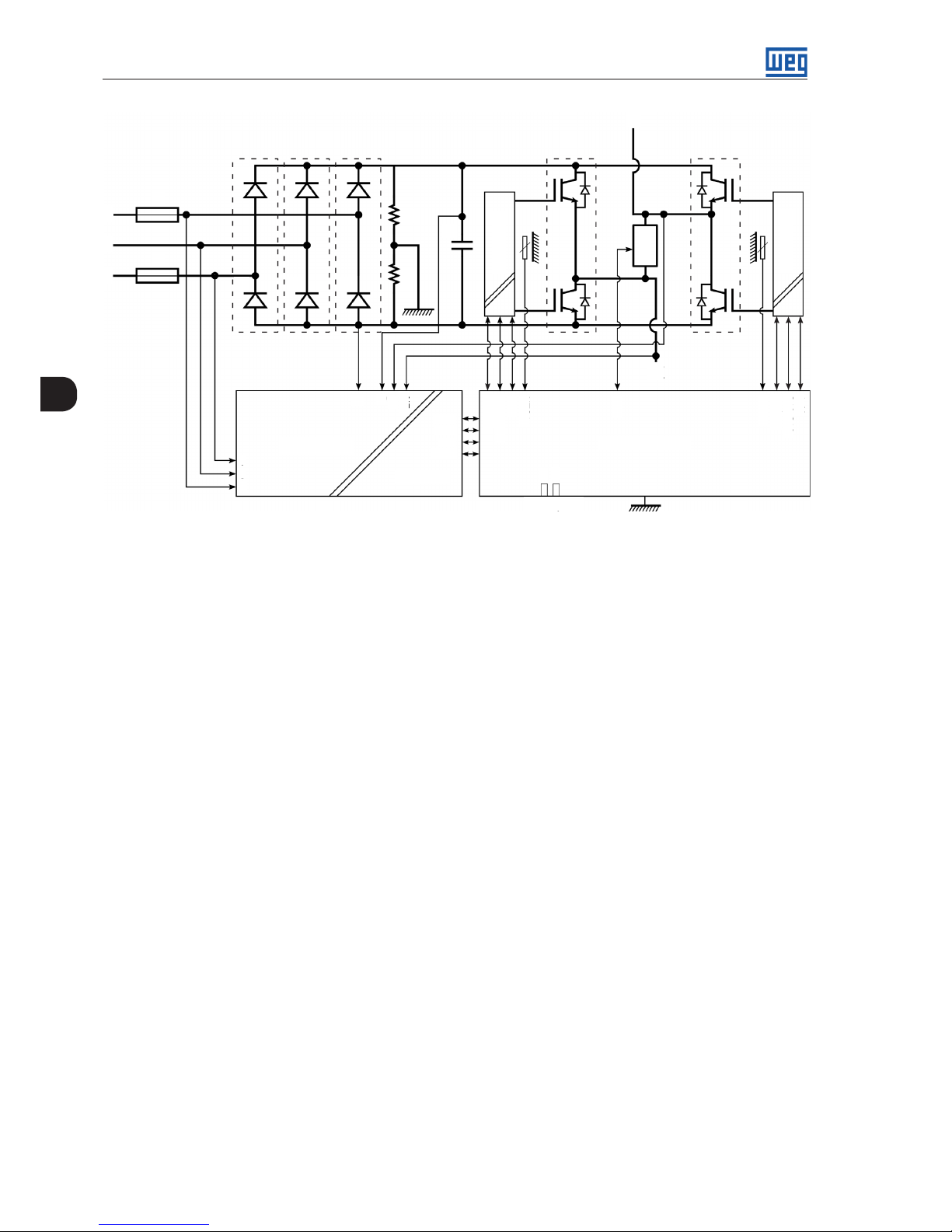
Figure 3.4: Basic diagram of a power cell
IGBT (Insulated Bipolar Gate Transistor) controlled semiconductor devices are used to implant the inverter bridge
in H; thus, each power cell has four IGBTs in the configuration shown above. During operation, the voltage
between FA and NE output terminals has three possible voltage levels. Considering that the DC link voltage of
each cell is VDC and that only two IGBTs can be operating simultaneously (due to short circuit protection), when
S1f and S2n are operating, the voltage between FA and NE will be + VDC, whereas if S1n and S2f start operating,
the voltage between FA and NE will be –VDC. If S1n and S1f or S2n and S2f are turned on, the voltage, in both
cases, will be equal the zero.
To protect the modules, two fuses F1 and F2 are connected to the input phases R and T, as shown in Figure 3.1
on page 3-1. In case a module presents some fault, the bypass system, when available, will be responsible for
circumventing the fault, removing it from the series and enabling the operation to continue.
When that occurs, control strategies will be applied so that the load remains operating. Further information can
be found in Chapter 8 SPECIAL FUNCTIONS on page 8-1, in Section 8.3 CELL BYPASS on page 8-5.
Each power cell has one local control module. This module communicates with the main control module by
means of an optical-fiber interface, necessary to obtain, in addition to the insulation degree required for the
communication, noise immunity, greater robustness and reliability, characteristics necessary for the application.
The local control makes acquisitions and monitors relevant magnitudes for the cell operation.
Some of the monitored magnitudes are the line voltages of the power cell, temperature of the diode modules and
IGBTs, voltage of the DC link capacitors, voltage of the cell power supplies, among others.
The local control is also responsible for local activations, such as the switching of the IGBTs and the trigger of
the bypass system. In case the cell presents readings out of the expected operation standards, for example,
temperatures close to damaging the semiconductors, overvoltage on the DC link, or other faults predicted by
the control, the bypass system may be activated for protection against a possible cell failure or for removing an
already damaged cell from operation.
Page 25
MVW3000 | 3-5
3
MVW3000 | 3-5
Product Characteristics
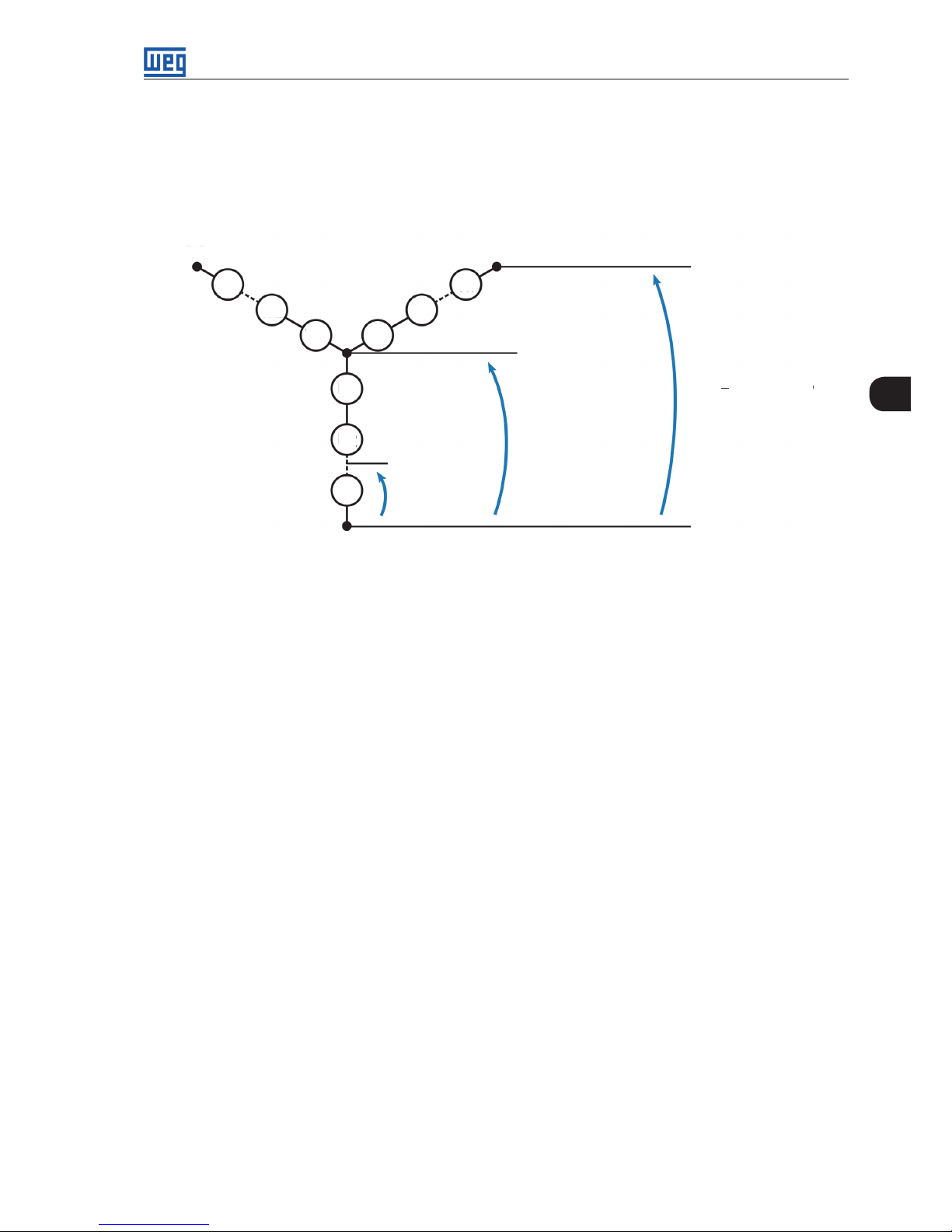
3.3 CONNECTION OF THE CELLS
To form a three-phase output, a number “n” of power cells that operate with 690 “V
rms
” of output are rms grouped
in series per phase. The cell sets that represent phases U, V and W are connected in star configuration, with a
floating neutral in common with the phases, as indicated in Figure 3.5 on page 3-5.
n x 690 V
690 V
V
W
U
√3 x n x 690 V
Vn
V2
V1W1
W2
Wn
U1
U2
Un
Figure 3.5: Cell-to-phase connection diagram
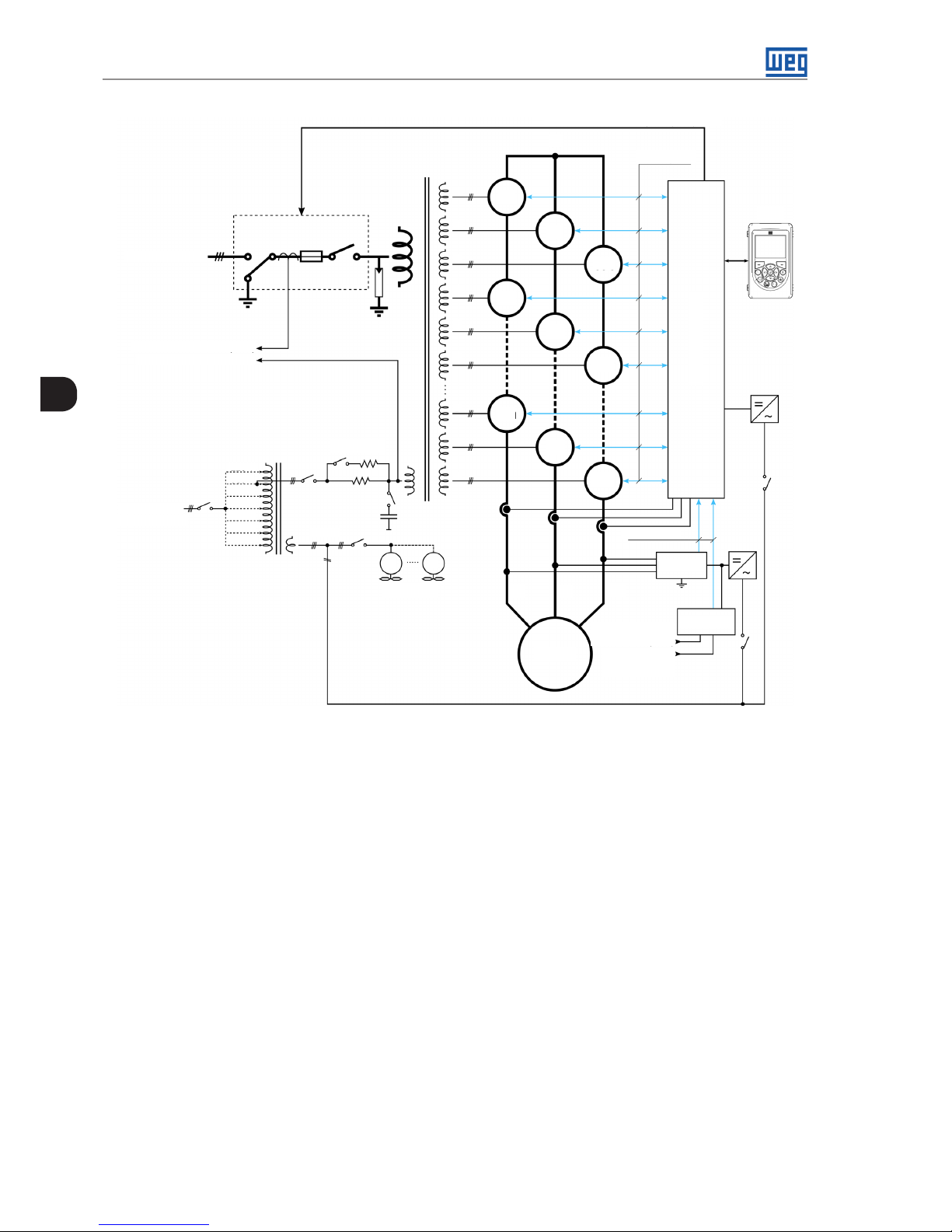
Figure 3.6 on page 3-6 shows the transformer, input switchgear and secondary winding connected to each
cell. This association in series enables more voltage levels at the inverter output. Locally, each cell produces three
voltage levels; however, at the converter three-phase output, it is possible to obtain 2n + 1 levels on the phase
voltage and 4n+1 levels on the line voltage.
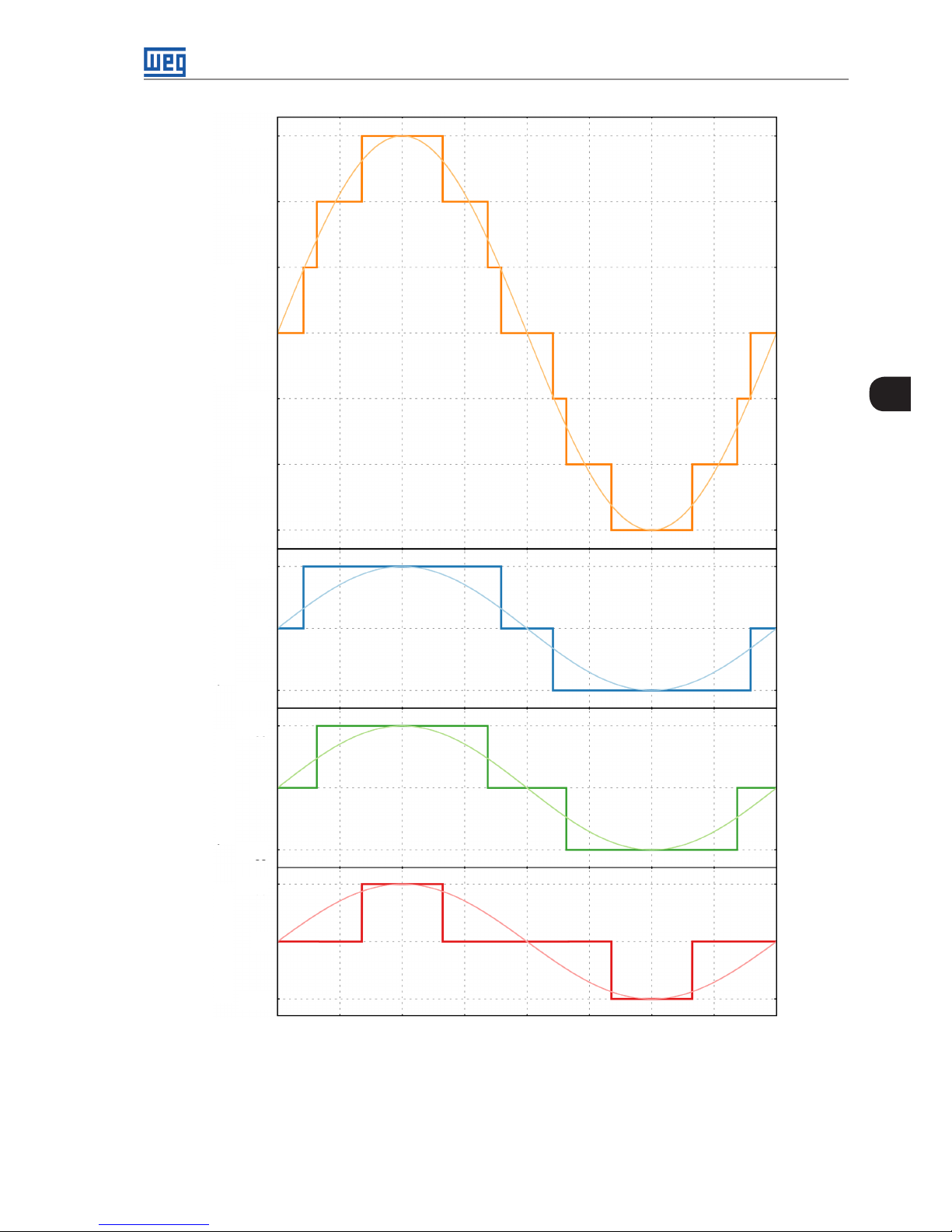
This effect occurs, because the voltage of each phase is instantaneously given by the addition of the voltages at
terminals FA and NE of each cell pertaining to the analyzed phase. Figure 3.7 on page 3-7 shows the sum of
the voltages of each cell to form the phase voltage in a 9-cell MVW3000 (3 per phase).
Page 26
3-6 | MVW3000
3
Product Characteristics
Input MT 3~
Currents (S andT)
Voltages (R, S and T)
Line BT 3~
220 V...480 V
220 V
380 V
400 V
415 V
440 V
440 V
440 V
Pre-load
Ventilation
220 V
M
M
zº
yº
zº
zº
yº
yº
xº
xº
xº
Fiber optic
Input switchgear command
HMI
N
U1
V1
W1
U2
V2
W2
Un
Vn
Wn
Fiber optic
Currents
(S and T)
Voltages
(R, S and T)
ISOC.22
ISOC2.00
Main control
Motor
U
V
W
Figure 3.6: MVW3000 simplified diagram for n power cells
Therefore, increasing the number of cells per phase, in addition to enabling the drive of motors with higher
voltages and powers, a better sinusoidal shaped wave is obtained. Thus, the converter provides a smaller THD
(total harmonic distortion), reduction of noises and vibration on the motor, operating with high efficiency.
Page 27
MVW3000 | 3-7
3
MVW3000 | 3-7
Product Characteristics
Voltage on phase U
+3 V
CC
Voltage on cell U1Voltage on cell U2
Voltage on cell U3
+2 V
CC
+V
CC
-V
CC
0
-2 V
CC
-3 V
CC
+V
CC
0
-V
CC
+V
CC
0
-V
CC
+V
CC
0
-V
CC
Figure 3.7: Wave form of the phase voltage for a CHB of 3 cells per phase
The diagram also shows the medium voltage input switchgear, the low voltage auxiliary winding to perform the
pre-charge of the cell capacitors, as well as the fiber optic interface between the main control and the local
control of the power cells.
Page 28
3-8 | MVW3000
3
Product Characteristics
3.4 CONTROL
The MVW3000 has protections against overload, short circuit, current limit, under and overvoltage,
overtemperature, ground fault and monitoring of the individual faults of each power cell. The control type can be
selected by the user between: scalar control (constant V/f ratio) or vector control (sensorless or with feedback by
speed sensor).
The MVW3000 inverter uses the PWM modulation technique (Pulse Width Modulation); from the direct voltage
of each independent DC links, it synthesizes an alternate voltage with variable frequency and amplitude at the
output terminals. The medium voltage level is obtained at the converter output terminals from the association of
“n” low voltage cells in series. For further information on the central control, refer to Section 4.3 CONTROL RACK
on page 4-6.
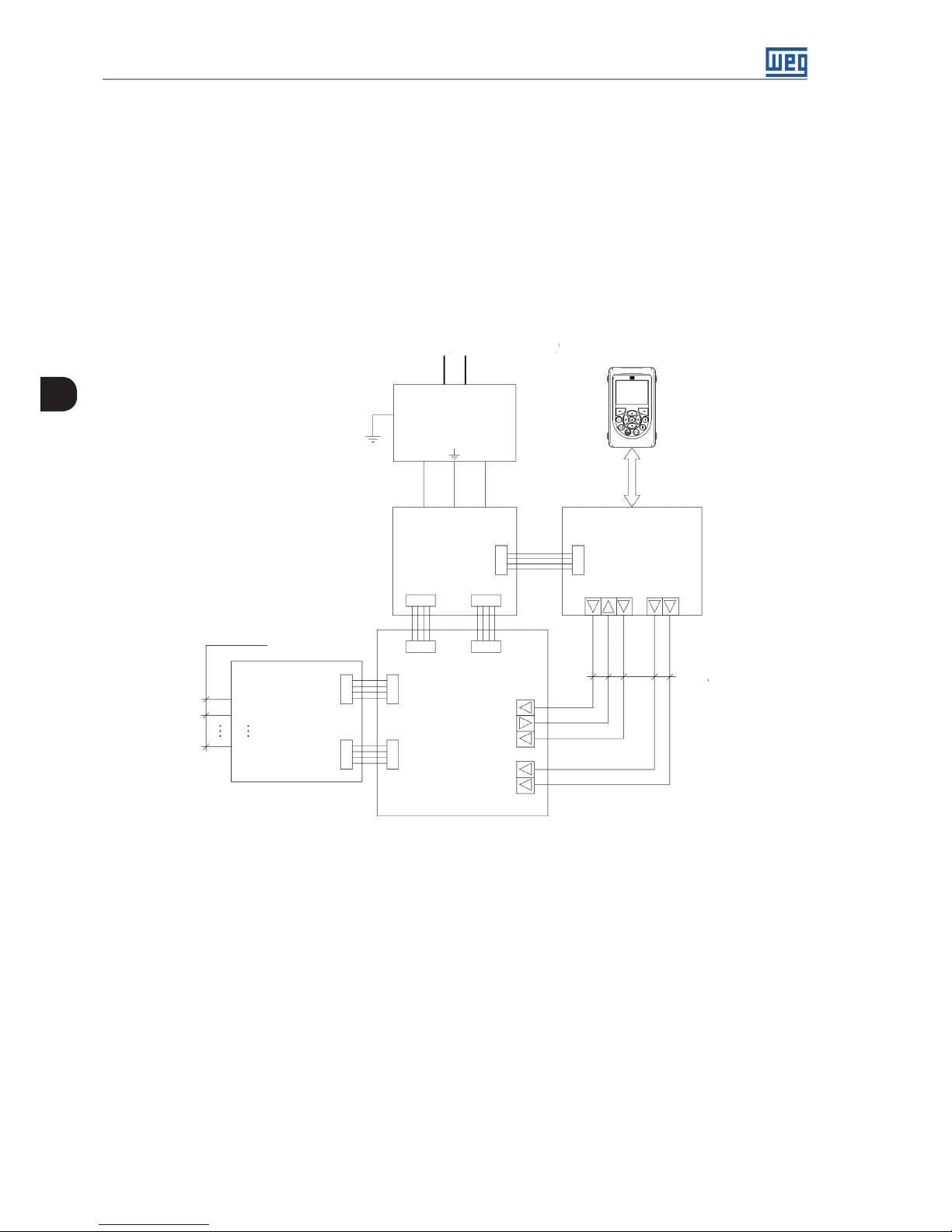
HMI
MVC4PIC
PS24
24 V 0 V
MVC3
F.O .
F.O .
U1
U2
Wn
FOI3.02
Input BT (220 V 1~ or 3~)
Figure 3.8: Central control simplified diagram
The output currents of the three phases (motor currents) are measured using the Hall-effect CTs (current
transformers). Those current signals are sent to the central control board. The measurement is done for indication
on the HMI and for implanting the converter control and protection functions.
The pre-charge is done by means of an auxiliary winding of the input transformer, which is driven by the inverter
auxiliary supply circuit via current limiter elements. In order to prevent high starting current levels on the inverter,
activation of protection systems or even damages to its own components, the cell capacitor pre-charge must be
done through and auxiliary winding of the input transformer. The auxiliary supply is also responsible for feeding
the control circuit and fans for the panel cooling.
Page 29

MVW3000 | 4-1
4
MVW3000 | 4-1
Technical Data
4 TECHNICAL DATA
This chapter contains technical information on the MVW3000, cabinet details, input transformer, power cell and
control rack. It also provides information about the available output filters for the MVW3000.
4.1 MVW3000 PANEL
The MVW3000 is assembled as coupled panels forming four distinct compartments. In the first column of the
panel, to the left, are the input safety devices, such as fuses and the input circuit breaker/contactor (if installed).
This part also shows the input transformer temperature on the temperature display. Below the safety devices, in
a separate section, is the main medium voltage input transformer. In the central section, the inverter power cells
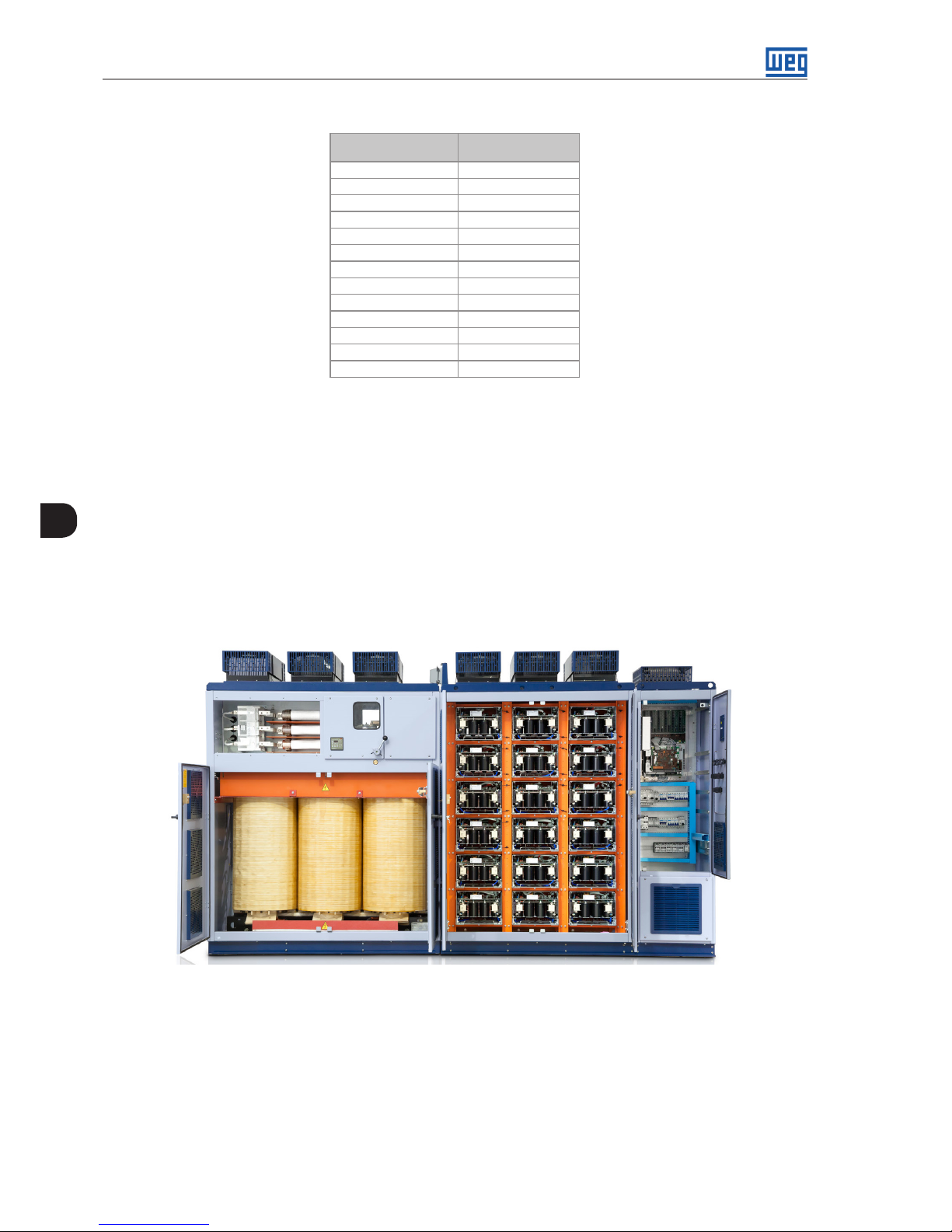
are installed; each of the three columns shown in Figure 4.2 on page 4-2 represents each of the three inverter
phases: U, V and W.
Transformer and Circuit
Inverter
Control
Figure 4.1: Closed panel of the 18-cell MVW3000 (Frame B6)
The handles of average tension that feed the cells of the invertor come from the secondary ones of the transforming
one of entrance. The number of cables and conductor diameter varies according to the number and current of
the cells installed on the MVW3000.
Each cell receives the input supply from and independent secondary winding insulated from the main transformer.
In the right panel, in the upper compartment, is the control compartment, containing the main control, user
interface, HMI, command and signalling, which are exclusively supplied by low voltage circuits.
The converter three-phase medium voltage output is located in the compartment below the control, and this
compartment can also be used to install optional output filters.
The standard panels of the models equipped with drive system and input protection feature medium voltage
fuses in order to protect the system against short circuit. The fuses must match the rated voltage of the input
medium voltage circuit.
Table 4.1 on page 4-2 presents the fuse models recommended for the standard inverters where the input and
output voltage are the same; for applications with voltage values different between input and output, the fuse
model will be informed upon request.
Page 30
4-2 | MVW3000
4
Technical Data
Table 4.1: Recommended fuses
Inverter Rated
Current (A)
Fuse
40 3R
50 3R
60 3R
70 5R
80 5R
90 5R
100 5R
110 12R
125 12R
140 12R
160 12R
180 18R
200 18R
The standard panels supplied for the MVW3000 are suitable for connection to medium voltage circuits capable
to supply a maximum symmetrical short circuit current of 40 kA.
The standard panels supplied for the MVW3000 are suitable for connection to medium voltage circuits capable
to supply a maximum symmetrical short circuit current of 40 kA.
4.1.1 Panel Constructive Aspects
The panel is made with steel sheets painted and processed (cutting, holes, folding, chemical treatment, painting
and finishing) by WEG, ensuring the quality in all the levels of the manufacture process. The inverter parts that
are not painted are zinc plated or have another suitable treatment in order to assure their resistance against
corrosion.
Transformer and Circuit Inverter
Control
Figure 4.2: Panel of the 18-cell MVW3000 (Frame B6)
The MVW3000 panel is supplied, in its standard structure, with degree of protection IP41 (openings smaller than
10 mm and protected against ingress of vertical drops). They can be supplied with distinct degrees of protection
according to the customer’s needs.
The panel cooling is done by means of forced convection. The air enters through the opening on the panel front
doors, goes through the transformer windings and also the power heatsinks located in each power cell. The
hot air leaves through the top do painel, of the panel, where the exhaust fans are located, allowing maintenance
without the need to open the inverter doors.
Page 31

MVW3000 | 4-3
4
MVW3000 | 4-3
Technical Data
Filter cleaning or replacement can be done by removing the external grid with no need to open the doors and to
interrupt the inverter operation. The internal grid with openings smaller than 10 m prevents the access to the
medium voltage compartment.
The MVW3000 complies with the international standards, such as harmonic limits, contained in IEEE-519 and
G5/4-1 standards, and also electromagnetic emission (EMC), contained in IEC61800-3 standard.
The medium voltage compartments are mechanically and electrically interlocked so as to prevent the access
to all the components that may present risk of electric shock with the system energized. Only after closing the
transformer and inverter panel doors is it possible to open the grounding system and close the input switch
disconnector.
In case of unlocking of the doors, the inverter will block the operation and turn off the input circuit breaker. The
control panel is fed by an auxiliary power supply (220 V – 480 V), which may be blocked to prevent its activation.
Bottom view
P
H
V
Top view
L
H
L
T
L
I
L
C
Figure 4.3: Panel constructive aspects
Table 4.2: Frame sizes available for 2300 V MVW3000
Frame Size LT [mm] LI [mm] LC [mm] L [mm] H [mm] HV [mm] P [mm]
Weight
kg (lb)
B2
150 0 1500 600 3900 2063 2405 110 0
2600 (5732)
C2 3250 ( 7165)
Table 4.3: Frame sizes available for 3300 V MVW3000
Frame size LT [mm] LI [mm] LC [mm] L [mm] H [mm] HV [mm] P [mm]
Weight
kg (lb)
B3
180 0 1500 600 3900 2063 2405 1100
3150 (6944)
C3 3950 (8708)
Page 32

4-4 | MVW3000
4
Technical Data
Table 4.4: Frame sizes available for 4160 V MVW3000
Frame size LT [mm] LI [mm] LC [mm] L [mm] H [mm] HV [mm] P [mm]
Weight
kg (lb)a [kg]
B4
180 0 1500 600 3900 2063 2405 1100
3550 (7826)
C4 4500 (9920)
Table 4.5: Frame sizes available for 5500 V MVW3000
Frame size LT [mm] LI [mm] LC [mm] L [mm] H [mm] HV [mm] P [mm]
Weight
kg (lb)
B5
180 0 1500 600 3900 2063 2405 1100
4200 (9259)
C5 54 50 (12015 )
Table 4.6: Frame sizes available for 6600 V and 6900 V MVW3000
Frame size LT [mm] LI [mm] LC [mm] L [mm] H [mm] HV [mm] P [mm]
Weight
kg (lb)
B6
180 0 1500 600 3900 2063 2405 1100
4850 (106 92)
C6 6350 (13999)
Table 4.7: Frame sizes available for 7200 V MVW3000
Frame size LT [mm] LI [mm] LC [mm] L [mm] H [mm] HV [mm] P [mm]
Weight
kg (lb)
B7
3600 3000 600 7200 2063 2405 1100
6100 (13448)
C7
78 50 (17306)
Table 4.8: Frame sizes available for 8000 V MVW3000
Frame size LT [mm] LI [mm] LC [mm] L [mm] H [mm] HV [mm] P [mm]
Weight
kg (lb)
B8
3600 3000 600 7200 2063 2405 1100
6550 (14440)
C8 8400 (18518)
4.2 POWER CELLS
4.2.1 Constructive Aspects
The power cells of the same MVW3000 have two frames available. The 140 A cell, of frambe “B”, has 9 plastic
film capacitors for the DC link. And the 200 A cell, of fram “C”, with 12 capacitors. Information about power cell
models and dimensions may be seen in Table 4.9 on page 4-5, as well as a cell illustration in Figure 4.4 on page
4-4.
H
W
L
Figure 4.4: Dimensions of the cell of power of MVW3000
Page 33

MVW3000 | 4-5
4
MVW3000 | 4-5
Technical Data
Table 4.9: Dimensions of the different frames available
Frame Size H = Height (mm) W = Width (mm) L = Length (mm)
Weight
kg (lb)
B 255 361 505 35 ( 7 7.16 )
C 255 361 595 40 ( 8 8 .18)
The power cells may also contain a bypass system, at the costumer’s discretion, which provides greater safety
and robustness for the applications. Thus, a power cell of the standard MVW3000 contains:
9 or 12 capacitors (according to the model).
6 diodes with blocking voltage of 1.6k V.
4 IGBTs with blocking voltage of 1.7 kV.
1 heatsink for heat exchange.
2 gate driver electronic boards.
1 switched-mode power supply electronic board.
1 local control electronic board with fiber optic interface.
2 input protection fuses.
2 temperature sensors.
The listed items can be found in Figure 4.4 on page 4-4 and Figure 4.6 on page 4-6.
Diodes
IG BTs
Gate driver
Heatsink
Gate driver
IG BTs
Fuse
Fuse
Capacitor
Figure 4.5: Position of the components of the MVW3000 140 A power cell
The mechanical structure of each cell is basically formed by galvanized steel plates, and it is easy to install due to
the connection clamp system and the insertion and extraction mechanism present in the the set.
As the connection and mounting of the cell to the MVW3000 do not require tools, a cell can be changed in few
minutes, reducing the downtime. For further information about cell installation and replacement, refer to Chapter
6 INSTALLATION, CONNECTION AND ENERGIZATION on page 6-1.
Page 34

4-6 | MVW3000
4
Technical Data
4.2.2 Power Cell Boards and Connections
The electrical connection inside the cell is done by means of laminated busbars, insulated between each other
by means of insulating material compatible with the applied voltage level.
Gate driver
RX/TX fiber optic
Supply
Gate driver
Local controll
NE
R
S
T
FA
Figure 4.6: Standard power cell boards and connections of the MVW3000 (frame B)
The local control and power supply electronic boards are in the upper part of the cell, above the laminated
busbars, insulated and fastened to a metal base. The serial communication between the cell and the main control
module occurs by means of the local control board via the fiber optic interface.
The modulation signals leave the local control and go to the gate driver boards by via multiway flat cables. The
power supply provides the voltages of: 5 V, 15 V, -15 V, 24 V that feed all the cell control part (local control, gate
drivers and bypass system).
The celll connection to the link is carried out by means of clamps, located in the back part of the cell. There are
five connections per cell, connecting it to the transformer three-phase secondary winding (terminals R, S and T)
and to the serial circuit of the phase applied by terminals FA and NE (phase and neutral).
ATTENTION!
Electronic boards have components sensitive to electrostatic discharges. Do not touch directly
on components or connectors. If necessary, touch the grounded metallic frame before or use an
adequate grounded wrist strap.
4.3 CONTROL RACK
For the control power supply, the auxiliary voltage (220 Vac - 480 Vac) must have available and connected to the
specific terminal strip, located in the control panel. The provided transformer has taps for different voltages in the
primary winding and supplies 220 Vac in the secondary winding to feed all the low voltage circuits and exhaust
fans present in the product.
The MVW3000 control rack has four electronic boards, grouped in a mechanical assembly that enables better
visualization and access to the analog, digital and fiber optic interfaces. For this assembly, MVC3, MVC4, FOI3
and PIC2 boards are represented.
Page 35

MVW3000 | 4-7
4
MVW3000 | 4-7
Technical Data
1
2
3
4
Figure 4.7: MVW3000 standard control rack
Lettering 1 2 3 4
Board Code MVC4 FOI3 MVC3 PIC2
Description
User’s
functions
board
Fiber optic
interface
board
Control board
Control I/O
and power
supply board
The control rack is supplied with 24 Vdc by the PS24 power supply, whose input is at 220 V, single-phase or threephase. The control rack is composed of the interface and power supply board (PIC2), one control board (MVC3),
the user’s function board (MVC4) and the fiber optic interface board (FOI3). The MVC3 board is responsible for the
motor and inverter control, and the MVC4 for the user’s interface tasks. Both boards are supplied with isolated
low voltages provided by the PIC2 board, where there are also opto-isolated digital inputs and relay outputs (220
Vac) for internal use of the MVW3000.
Optional Fieldbus communication and function expansion boards (EBA, EBB or EBC) can be connected to the
MVC4 control board. The connections between the MVC3 board and the power stages are made with fiber-optic
cables through the FOI interface boards.
ATTENTION!
Electronic boards have components sensitive to electrostatic discharges. Do not touch directly
on components or connectors. If necessary, touch the grounded metallic frame before or use an
adequate grounded wrist strap.
4.4 OUTPUT FILTERS
Depending on the installation conditions, it may be necessary the addition of an output filter. For drives with
cables between 200 and 500 m, it is recommended to use output filter on the motor phases. For drives with
long cables, above 500 m, or for motors not able to operate with PWM modulation (retrofitting applications), it is
recommended to use filter type 2 (contact WEG).
The available filter models follow the voltage and current informed in Table 2.3 on page 2-5 to Table 2.10 on
page 2-8.
Page 36

4-8 | MVW3000
4
Technical Data
Ground loop
Shield
cables
Motor
PE
PE
PE
Inverter
L
(a) Filter type 1, for applications with cable length between 200 and 500 m.
Shield
cables
Motor
Inverter
PE
PEPE
Ground loop
C
C
C
L
L
L
(b) Filter type 2, for applications with cable length above 500 m and retrofitting.
Figure 4.8 (a) and (b): Output filters for MVW3000 inverters
Page 37

MVW3000 | 5-1
5
MVW3000 | 5-1
Synchronous Motor Line
5 SYNCHRONOUS MOTOR LINE
In order to allow driving synchronous motors, the MVW3000 introduces a number of software functions and new
hardware elements for commanding and controlling these motors.
Figure 5.1 on page 5-1 presents the general diagram for driving the synchronous motor using the MVW3000.
For more details on the excitation control system and the direct connection of the motor to the line, refer to the
electrical project of the inverter.
Supply line
Auxiliary line
E
Y
Y
-
+
MS
Interlocked
AC/DC converter
Excitation
control
system
Crowbar
MVW3000
MVC3
MVC4
RSSI
Figure 5.1: General diagram of the inverter for synchronous motor
5.1 ABSOLUTE ENCODER WITH RSSI BOARD
In synchronous machine drive applications, it is necessary to use an absolute encoder so as to obtain the exact
rotor position in relation to the stator, since the incremental encoder is not able to provide such information.
5.1.1 Absolute Encoder
The synchronous motor control requires the use of an absolute encoder, which must follow the following
specifications:
Synchronous Serial Interface (SSI) communication protocol with RS-485 communication channel, with clock and
16 bit word size in the following format:
14 data bits
1 ZERO bit
1 even parity bit
Page 38

5-2 | MVW3000
5
Synchronous Motor Line
Clock
Data
MSB
BIT 13 BI T 12 BI T 11 BIT 0 Zero Pa r.
LSB Zero Parity
t1 T
nT
t2
Figure 5.2: Clock specification and data transfer for the absolute encoder
Supply voltage of 15 V, with consumption lower than 300 mA.
Resolution of 14 bits per turn, which ensures a dynamic equivalent to the conventional incremental encoder;
When mounting the encoder next to the motor, it is recommended:
Coupling the encoder directly to the motor shaft (using a flexible coupling, however without torsional flexibility).
Both the shaft and the metallic frame of the encoder must be electrically isolated from the motor (minimum
distance of 3 mm).
Use good quality flexible couplings that prevent mechanical oscillations or “backlash”.
NOTE!
The standard absolute encoder recommended for the MVW3000 is the Baumer MHAP 400 B5
XXXXSB14EZ D.
The maximum encoder cable length is 120 m.
Refer to the motor project to define the type of encoder mounting.
5.1.2 RSSI Board
The use of absolute encoder implies the need for an SSI data interface (Synchronous Serial Interface) between
the encoder and the inverter. The RSSI board was developed for the encoder specification previously described.
This board has the following features:
Supply voltage of 24 V DC, with consumption of up to 700 mA.
RS485 communication channel for data transmission and clock according to SSI standard with absolute encoder;
2 fiber optic communication channels for use with up to two boards, MVC3 control and FOI3.
For electric connection, use shielded cables, keeping them at least 25 cm away from the other cables (power,
control, etc.). Preferably inside a metal conduit.
Page 39

MVW3000 | 5-3
5
MVW3000 | 5-3
Synchronous Motor Line
Encoder
Connector
CLK + CLK +3
DATA + DATA +8
DATA - DATA -7
DGND DGND6
6 9
51
Shield Shield Ground
Reference
Power supply
Absolute
Encoder
Signals
Description
RSSI-XC2 Connector
MVW3000 RSSI
board
XC2 connector
(DB0 - Male)
5
Shield
Brown
White
Pink
Gray
Blue
Red
Vdc Vdc4
CLK - CLK -2
Figure 5.3: RSSI - Encoder connection cable
NDO1 - FOI3 RDA
RDB
N3_CHA
N3_CHB
N2_CHA
N2_CHB
NDO1 - FOI3
N2 - MVC 3
N2 - MVC 3
+ 24 V 1
Ground 2 XC1
XC2
Encoder
GND 3
N3 - MV C3
N3 - MV C3
MVW3000
(B)
RSSI
MVW3000
Figure 5.4: Diagram of the connection with MVC3 and FOI3 boards
1
1
1
2
2
2
1
2
XC1
XC3
ON
1
2
XC2
RDB RDA
3
3
3
3
RSSI
8
7
6
9
6
5
5
4
4
4
4
4
4
1
1
4
1
1
1
1
1
D1
CTRL Com (Common)
Com (Common)
12119560 (GBR R02)
N3_CHA N2_CHA N3_CHB N2_CHB
+5 V (+Output)
-15 V (-Aux)
+15 V (+Aux)
-Vi (-Input)
+Vi (+Input)
B1
S1
Figure 5.5: RSSI board
Page 40

5-4 | MVW3000
5
Synchronous Motor Line
5.2 FIELD EXCITATION SET (DC WITH BRUSHES)
The field excitation of the synchronous motor can be done through an AC-DC converter that presents the
possibility of being controlled by a control loop, and that has an input for current reference and presents an
analogue output with the information of its output current (feedback for the MVW3000).
Specifications:
Current reference input AC-DC: 0 V to 10 V (AC-DC 5 V = 1 PU, observe P0462);
Feedback of the output current for the MVW3000: 0 V to 10 V (MVW3000 5 V = 1 PU, observe P0462 and P0744).
NOTE!
The MVC3 board has only voltage signals, in order to use current signals an external current
transducer must be used.
Example of configuration of the field current reference and paremeter setting of the inverter is presented in
Figure 5.6 on page 5-4. The parameters presented are described in the programming manual available for
download on: www.weg.net.
Field current
reference
P0180
|m|
P0177 P0450
P0178 P0449P0175/ P 0176P0182/P 0183
∑ ∑
φ
|φ|
+ -
+ -
if*
|m| = modulation index modulus
φ = stator flux,
|φ| = module
i
*
f
= field current reference
Figure 5.6: Parameters used by the inverter in the calculation of the of the field current reference
NOTE!
Information presented in Chapter 5 SYNCHRONOUS MOTOR LINE on page 5-1 of this manual
refers to the operation of synchronous machines with DC excitation and with brushes.
In order to drive synchronous machines with other types of excitation, consult WEG.
Page 41

MVW3000 | 6-1
6
Installation, Connection and Energization
6 INSTALLATION, CONNECTION AND ENERGIZATION
This chapter describes the electrical and mechanical installation procedures for the MVW3000. The presented
guidance and suggestions must be followed in order to assure the proper inverter operation.
ATTENTION!
The handling of the MVW3000 and its mechanical and electrical installation must be carried out
by persons trained and qualified by WEG.
STORAGE OF THE MVW3000 PANEL AND CELLS:
After receiving the equipment, remove the plastic film in order to prevent moisture condensation.
Do not store exposed to sunshine and to temperatures above 40 °C (104 °F).
Store in a clean and protected place with the air relative humidity not above 80 %.
During all the storage period the conditions mentioned earlier must be satisfied, but when components are
stored for more than one year, measures must be taken to dehumidify the storage location.
When using equipment after a long storage period, verify whether the equipment is free of scratches, dirt, rust
and other damages.
The inverter performance and reliability can be impaired if the inverter or the power arms were stored in an
environment out of the conditions listed previously.
DANGER!
The procedures recommended in this warning have the purpose of protecting the user from death,
severe personal injury and considerable property damage.
Power supply isolating switches: equipment for isolating the inverter power and auxiliary supplies
must be planed. They must cut off the inverter supplies (e.g., during installation maintenance tasks).
This equipment cannot be used as emergency stop mechanism.
Make sure that the power supply is disconnected before starting the wiring.
The following information is intended to be a example for a proper installation. Comply with applicable
local regulations for electrical installations.
DANGER!
Les procédures recommandées dans cet avertissement visent à protéger l’utilisateur de la mort,
de blessures graves et de dégâts matériels importants.
Interrupteurs d’isolement de l’alimentation : Le matériel d’isolement de l’alimentation de l’onduleur
et des alimentations auxiliaires doit être prévu. Il doit couper les alimentations de l’onduleur (par
ex.: pendant les tâches de maintenance de l’installation).
Cet équipement ne doit pas être utilisé comme mécanisme d’arrêt d’urgence.
Vérifiez que l’alimentation est débranchée avant de commencer le câblage.
Les informations suivantes ont pour but de servir de exemple pour une bonne installation. Respectez
la réglementation locale applicable sur les installations électriques.
6.1 MECHANICAL INSTALLATION
6.1.1 Environmental Conditions
The inverter installation location is an important factor to assure good performance and high product reliability.
The inverter must be installed in an environment free of:
Direct exposure to sunlight, rain, high humidity, or sea-air.
Inflammable or corrosive gases or liquids.
Excessive vibration, dust or metallic particles and oil mist.
Page 42

6-2 | MVW3000
6
Installation, Connection and Energization
Allowed environmental conditions:
Temperature: from 0 ºC to 40 ºC (32 ºF to 140 ºF) - nominal conditions (no derating required).
From 40 ºC to 50 ºC (140 ºF to 122 ºF): current reduction of 2.5 % for each Celsius degree above 40 ºC (140 ºF).
Relative humidity: from 5 % to 90 % non-condensing.
Altitude: up to 1000 m (3.300 ft) - nominal conditions (no derating required).
From 1000 m to 4000 m (3.300 ft to 13.200 ft) - current derating of 1 % each 100 m (or 0.3 % each 100 ft)
above 1000 m (3.300 ft) altitude.
Pollution degree: 2 (according to IEC/UL standards) with non-conductive pollution.
Condensation shall not originate conduction through the accumulated residues.
The medium voltage inverter MVW3000 is supplied in form of a panel, whose dimensions are presented in
Table 4.2 on page 4-3 to Table 4.8 on page 4-4. According to the components assembled in each panel
division and their function, this whole panel results in the inseparable union of four functions: switching and
protection circuit, phase-shifting transformer, power cells and main control.
The inverter power arms are supplied separately in their own packing.
6.1.2 Handling Recommendations
The inverter package must be removed only at the installation site, where the panel will be operated. Before
hoisting or moving the panel, locate the hoisting eyes and fragile spots in the documentation that comes with the
product. Follow the instructions that come with the panel.
6.1.3 Hoisting
Make sure that the lifting device used to hoist the panel and the arms is suitable for their weight and shape, refer
to the Table 6.1 on page 6-2.
Table 6.1: Panel weight (approximately)
Frame Size
Inverter Panel
Mass
kg (lb)
Inverter Panel
Mass + Cells
kg (lb)
Transformer Panel
Mass
kg (lb)
Control Panel
Mass
kg (lb)
Total Mass
kg (lb)
B2 550 (1212) 750 (1653) 1450 (319 6) 40 0 (8 81) 2600 (2600)
C2 650 (143 3) 900 (1984) 1900 (4188) 450 (992) 3250 (7165)
B3 550 (1212) 900 (1984) 1850 (4078) 4 00 (881) 3150 (6944)
C3 650 (143 3) 1000 (2204) 2 5 0 0 ( 5 511) 450 (992) 3950 (8708)
B4 550 (1212) 1000 (2204) 2150 (4739) 400 (881) 3550 (7826)
C4 650 (14 3 3) 1100 (2425) 2950 (6503) 450 (992) 4500 (9920)
B5 550 (1212) 110 0 (24 25) 2700 (5952) 40 0 (881) 4200 (9259)
C5 650 (143 3) 1250 (2755) 3750 (8267) 450 (992) 54 50 (12015)
B6 550 (1212) 120 0 (2645 ) 3250 (7165) 40 0 (8 81) 4850 (10692)
C6 650 (143 3) 1350 (2976) 45 50 (10031) 450 (992) 6350 (13999)
B7 110 0 ( 242 5 ) 1850 (4078) 3850 (8487) 40 0 (8 81) 6100 (1344 8)
C7 1250 (2755) 2100 (4629) 5300 (11684) 450 (992) 785 0 (17306)
B8 110 0 (242 5 ) 1950 (4299) 4200 (9259) 400 (881) 65 5 0 (17306)
C8 1250 (2755) 2200 (4850) 5750 (12676) 450 (992) 84 00 (18 518)
Note: For models above 8 kV (8 cells per phase), the mass information will be supplied on request.
Observe the gravity center and ensure that the hoisting mechanism is adequate and safe. Use the configuration
showed in the Figure 6.1 on page 6-3.
Page 43

MVW3000 | 6-3
6
Installation, Connection and Energization
The cables or chains used for hoisting must be at a minimum angle of 45° regarding the horizontal plane.
Hoisting must be done in a slow and stable manner. Before starting make sure the entire pass is clear of obstacles.
If any alteration or damage in the panel structure is noticed, then abort the hoisting and rearrange the cables or
chains.
A
Multiple securing
points
A = Mín. 45º
Figure 6.1: Recommended hoisting mechanism for the panel movement
ATTENTION!
During lifting, connect chains or cables to all available hoisting points on the panel.
6.1.4 Moving
When cranes or pulleys are used, make sure that the movements are slow and smooth, so that the panel and the
arms do not suffer excessive swings and vibration.
When using movable hydraulic jacks, forklifts, rollers or other means, distribute the support points from one
extreme through the other, avoiding pressure on fragile areas. Make sure that all the panel doors be closed and
locked, and that the door handles be in protected position.
The transformer panel door must be handled with forklift only. For information about the transformer mass, see
Table 6.1 on page 6-2.
6.1.5 Unpacking
Use proper tools to unpack the MVW3000 panel and its arms. During this process, make sure that all the items
listed in the documentation that comes with the product are present and in perfect conditions. Contact your local
WEG representative in case of any irregularity.
Removes the package of the cells carefully, because they have fragile components (electronic boards, fiber optic
connectors, busbars, wiring, etc.). Avoid touching these components! The arms must always be handled through
their external metallic frame.
While opening the package, check if there are damages to the product. Do not to install the cells in case you
suspect any damage.
Remove all packing material (plastic, wood, polystyrene foam, metal, nails, bolts, nuts, etc.) that might have
remained inside the inverter panel or in the arms.
Page 44

6-4 | MVW3000
6
Installation, Connection and Energization
ATTENTION!
If any component presents problems (damages) it is recommended to:
Stop the unpacking immediately.
Contact the carrier and formally fill in a complaint with the problem found.
Take pictures of the damaged parts.
Contact your WEG representative or service.
Figure 6.2: Standard power cell with package
6.1.6 Positioning/Mounting
The MVW3000 panel must be placed on a flat leveled surface, thus avoiding mechanical instability, door
misalignment, among other problems.
ATTENTION!
Some models of the MVW3000 are transported with some parts disassembled.
All disassembled parts must be properly assembled during the commissioning.
The permanent operation position must allow heat radiation from all the surfaces and the necessary ventilation
for its operation. The area in front of the panel must remain unobstructed, so that a total opening of the doors be
possible, as well as the insertion and extraction of the arms and/or the power and control cables.
Table 4.2 on page 4-3 to Table 4.8 on page 4-4 present the dimensions of the available panels.
Page 45

MVW3000 | 6-5
6
Installation, Connection and Energization
ATTENTION!
Observe availability and access of the electrical connections:
Input cable for the MVW3000 panel and output for the motor.
Protection of the transformer and motor.
Digital and analog inputs and outputs.
Commands and states of the input switchgear when it is supplied separately from the MVW3000
panel. It is necessary to allow space behind the panel for back access to the internal components
during the product installation.
Notes: (1) Extracted from the WEG TBG-269a standard.
(2) Orientative instructions. Refer to the customer’s
specific project.
(3) Panel securing points at the base.
AB section
3/8"x3,3/4" expansion bolt
Detail Y
Panel
A
B
According
base
to project
20
(3)
13
75
75 75
757575
(3)
(3)
(3)
B
80
30
20
P
Cutout
Cutout
L
i
L
L
T
L
C
Figure 6.3: Anchoring the MVW3000 panel to the floor
NOTE!
Recommendations for anchoring the panel may vary for the several MVW3000 models. For more
information refer to the specific project documentation.
Page 46

6-6 | MVW3000
6
Installation, Connection and Energization
6.1.7 Insertion of the Power Cells
Figure 6.4: Inserted power cell
Figure 6.5: Power arm insertion/extraction/movement trolley
ATTENTION!
During the power arm transport, they must have the locking mechanism active and be transported
close to the floor. (Figure 6.6 on page 6-8 - picture 1).
Page 47

MVW3000 | 6-7
6
Installation, Connection and Energization
The power arm insertion must be performed with the help of the transport trolley as shown in Figure 6.5 on page
6-6 and according to the following procedure.
1. Rotate the crank handle until the trolley reaches the floor level.
2. Remove the cell from the package and place it on the cart tray.
3. Move the cart close to the panel, lift the cell up to the necessary height and couple the cart tray to the panel
support, Figure 6.6 on page 6-8 - pictures 2, 3 and 4.
4. Lock the cart wheels.
5. Push the cell, observing the alignment with the panel support, until the handles touch the panel support,
(Figure 6.6 on page 6-8 - picture 5).
6. Push the two brackets of the insertion mechanism simultaneously until the locking system is activated,
(Figure 6.6 on page 6-8 - pictures 6 and 7).
7. Lift the cart tray until it uncouple from the cell support and move the cart away from the panel
(Figure 6.6 on page 6-8 - picture 8).
Page 48

6-8 | MVW3000
6
Installation, Connection and Energization
1
2
3
4
5
6
7
8
Figure 6.6: Details of the cell insertion step
6.1.8 Electrical and Fiber Optic Connections on the Power Cells
After the power cells are inserted (phases U, V and W), connect them to the fiber optic cables, according to the
labels located on the cells and cables.
The identifications of the cables are presented in the Table 6.2 on page 6-9 and Table 6.3 on page 6-10.
Page 49

MVW3000 | 6-9
6
Installation, Connection and Energization
Table 6.2: Fiber optic cables identification
Power Cell
Connection
Main Control
Connection
Function
U1
N5_ U A1 RX
N1_U A1 TX
U2
N6_UA1 RX
N2 _ UA1 TX
U3
N7_ U A1 RX
N3_U A1 TX
U4
N8_U A1 RX
N4 _ UA1 TX
U5
N5_UB1 RX
N1_UB1 TX
U6
N6_UB1 RX
N2_UB1 TX
U7
N7_ U B1 RX
N3_UB1 TX
U8
N8_UB1 RX
N4_UB1 TX
V1
N5_VA1 RX
N1_VA1 TX
V2
N6_VA1 RX
N2_VA1 TX
V3
N7_VA1 RX
N3_VA1 TX
V4
N8_VA1 RX
N4_VA1 TX
V5
N5_VB1 RX
N1_VB1 TX
V6
N6_VB1 RX
N2_VB1 TX
V7
N7_VB1 RX
N3_VB1 TX
V8
N8_VB1 RX
N4_VB1 TX
W1
N5_ WA1 RX
N1_WA1 TX
W2
N6_WA1 RX
N2 _WA1 TX
W3
N7_ WA1 RX
N3_WA1 TX
W4
N8_WA1 RX
N4 _WA1 TX
W5
N5_WB1 RX
N1_WB1 TX
W6
N6_WB1 RX
N2_WB1 TX
W7
N7_ W B1 RX
N3_WB1 TX
W8
N8_WB1 RX
N4_WB1 TX
Page 50

6-10 | MVW3000
6
Installation, Connection and Energization
Figure 6.7: Details of the power arm supply and fiber optic cables installation stages
ATTENTION!
The fiber optic cables must be handled with care so as the material is not crushed, bent or cut. In
order to insert or remove the cables, exert force on the connectors only, never on the fiber.
NOTE!
In order to extract the power cells, follow the procedures described in the previous sections in the
reverse order. Remove the optic cable before removing the cell.
6.2 ELECTRICAL INSTALLATION
6.2.1 Power Section
The power cables that connect the grid input to the MVW3000 and those that connect the inverter panel to the
medium voltage motor (Figure 6.11 on page 6-14) must be specific for medium voltage applications and sized
for the rated currents.
Table 6.3: Maximum current to the power cables
Power Cables mm2 [in]:
R, S, T, U, V, W
Maximum
Current
[A]
Single Cable
10 [0.39] 71
16 [0.62] 96
25 [0.98] 126
35 [1.37 ] 157
50 [1.96] 189
70 [2.75] 241
Table 6.4: Recommended power cables cross section (copper) [in]
Gauge of the Power Cables
(S Cross Section) mm2 [in]
Minimun Gauge of the Grounding Cables
(S Cross Section) (PE) mm2 [in]
S ≤ 16 [0.62] S
16 [0.62] < S ≤ 35 [1.37] 16 [0.62]
35 [1.37] < S S / 2
NOTE!
The cable cross sections/gauges presented in the Table 6.3 on page 6-10 and Table 6.4 on page
6-10 are only orientative. In order to size the cables correctly the installation conditions, the applicable
standards and regulations, and the maximum allowed voltage drop must be considered.
Page 51

MVW3000 | 6-11
6
Installation, Connection and Energization
Shield
Inverter
PE V W UU V W PEPE
MV Input
MVW3000
Figure 6.8: Power and ground connections
Table 6.5 on page 6-11 contains the minimum insulation voltages of the inverter power cables.
Table 6.5: Minimum insulation voltage of the power cables
Rated Voltage [kV] Minimum Insulation Voltage [kV]
2.3 3.6/6
3.3, 4.16 and 5.5 6/10
6.3, 6.9, 7.2 and 8.0 8.7/15
10 and 11 12/20
13.2 and 13.8 15/25
Commercial examples:
Belden: 37540.
Cofiban: Cofialt 7 kV (without shield).
Pirelli: Eprotenax 6/10 kV.
Ficap: Fibep or EPDry 6/10 kV.
Use proper connectors for the power connections and the shield connections to the grounding bar.
Tighten the connections with the appropriate torque.
Table 6.6: Power connections cable lugs and tightening torque
Terminal Torque [Nm] ±20 %
M8 15
M10 30
M12 60
DANGER!
It is mandatory to connect the inverter to a protection ground (PE). The grounding connection must
follow the local regulations. Use at least conductors with the wire gauge indicated in the Table 6.4
on page 6-10. Connect the inverter to a specific grounding rod or to the general ground system
(resistance ≤ 10 Ohms).
Page 52

6-12 | MVW3000
6
Installation, Connection and Energization
DANGER!
Il est obligatoire de connecter l’onduleur à un connecteur de mise à la terre (PE). La connexion de
mise à la terre doit suivre les règlementations locales. Utilisez au moins des conducteurs avec le
calibre de fil indiqué dans le Table 6.4 on page 6-10. Connectez l’onduleur à une tige de mise à la
terre spécifique ou au système de mise à la terre général (résistance ≤ 10 ohms).
6.2.2 Input Cubicle
The MVW3000 operates the input circuit breaker. The power supply for the circuit breaker circuits comes from
the MVW3000. The following signals, provided by the circuit breaker, are necessary for its operation:
READY (Closed contact = ready): System ready to be operated.
ON (closed contact = ON): Contactor/circuit breaker status ON.
OFF (closed contact = OFF): Contactor/circuit breaker status OFF.
TRIP (open contact = defect): It indicates a defect in the driving system or actuation of the protection circuit.
NOTE!
Those signals must be dry contact (potential free).
Emergency circuits must be associated to the RE ADY signal and never to the TRIP signal.
Ready
Line
Protection
SO
No fault
OFF
Command
power supply
Minimum
voltage
coil
220 Vac
(2)
ON
OFF
MVW3000
5
6
7
8
3
2
1
x12:
220 Vac
OFF
link > 50 %
ON
220 Vac
DI4
DI3
5
4
3
2
1
x10:
OFF
ON
Fault
Ready
INPUT CIRCUIT BREAKER CUBICLE
(1)
Inverter
ready
Commands
Emergency
Feedback
DI2
DI5
Notes:
(1) 24 Vdc wiring: use shielded cables and keep them distant from power and command wiring.
(2) 220 Vac wiring: keep it distant from the power wiring.
(3) Example in 220 Vac. See the project.
+24 V
PS24
Transformer
+
Inverter
M
3~
Circuit
breaker
ON
(U<)
Figure 6.9: Connections of the inverter input circuit breaker for situations where it is supplied separately
NOTE!
When the switching circuit is supplied by third parties, it is strongly recommended that the MVW3000
door lock key be blocked together with the circuit breaker/contactor when it is in the non-grounded
position.
Page 53

MVW3000 | 6-13
6
Installation, Connection and Energization
Line
Command
power supply
Minimum
voltage
coil
(2)
MVW3000
5
6 7
8
3
2
1
X12:
220 Vac
OFF ON
220 Vac
+24 V
PS24
7
4
5
X10:
Fault
INPUT CONTACTOR PANEL
(1)
Inverter
ready
Commands
Emergency
Feedback
DI5
Notes:
(1) 24 Vdc wiring: use shielded cables and keep them distant from power and command wiring.
(2) 220 Vac wiring: keep it distant from the power wiring.
(3) Example in 220 Vac. See the project.
Contactor
Transformer
+
Inverter
M
3~
(U<)
S
F
M
M
M
(3)
3
ON
ON
DI4
DI3
Ready
2 6 81
4
DI2
Figure 6.10: Connections of the inverter input contactor for situations where it is supplied separately
NOTE!
The connection strips of Figure 6.9 on page 6-12 and Figure 6.10 on page 6-13 (X10 and X12) may
change according to the project. Always refer to the project that comes with the product.
ATTENTION!
The input circuit breaker must only be closed by the inverter, otherwise the transformer and the
inverter may be damaged.
DANGER!
Although the inverter commands the opening of the circuit breaker, there is no guarantee of its
opening. In order to open the medium voltage cabinets for maintenance, follow all the procedures of
safe de-energization (refer to the Item 6.3.4 Safe De-energization Instructions on page 6-17).
DANGER!
Bien que l’onduleur commande l’ouverture du coupe-circuit, il n’y a pas de garantie qu’il s’ouvre. Afin
d’ouvrir les armoires moyenne tension pour la maintenance, suivez toutes les procédures de mise
hors tension (élément Item 6.3.4 Safe De-energization Instructions on page 6-17).
6.2.3 Low Voltage Auxiliary Supply
Control column power supply nominal voltage selection
An auxiliary voltage supply (220 V-480 V) should be available in the installation. This voltage must be wired to the
terminal strip present in the control column. The command transformer (T1) taps must be selected according to
the available auxiliary voltage. For more details, refer to the MVW3000 electrical project.
Page 54

6-14 | MVW3000
6
Installation, Connection and Energization
H19-H20-H21
H16-H17-H18
H10-H11-H12
H13-H14-H15
H7-H8-H9
H4-H5-H6
H1-H2-H3
220 V
380 V
400 V
415 V
440 V
460 V
480 V
Primary Taps
Volt age
3
1
5
2
4
6
Q1
1
3
2
4
1
3
5
2
4
6
Q2
3~380 V
3~220 V
S6
S5
S1
S2
S3
N
S4
T2
H1
H2
H3
480/460/440/415/400/380/220-220 V
3000 VA
220 to 480 Vac 50/60 Hz
Three-phase power supply
Ventilation and control
Pre-charge
Figure 6.11: Auxiliary power supply
6.3 ENERGIZATION, START-UP AND SAFE DE-ENERGIZATION
This section provides the following information:
How to check and prepare the inverter before powering-up.
How to power-up and verify the energization success.
How to operate the inverter when installed according to the standard project (refer to the Section 6.2 ELECTRICAL
INSTALLATION on page 6-10 and the attached electric project).
How to de-energize the inverter safely.
6.3.1 Pre-power Checks
The inverter must have already been installed according to the Chapter 6 INSTALLATION, CONNECTION AND
ENERGIZATION on page 6-1. Even when the inverter electric project is different from the suggested one in the
attachment, the following recommendations are applicable.
DANGER!
Always disconnect all the power supplies before making any connections.
Although the inverter commands the opening of the input cubicle, there is no guarantee of its
opening and neither that no voltages are present.
DANGER!
Débranchez toujours toutes les alimentations avant d’effectuer des branchements.
Bien que l'onduleur commande l'ouverture de l'armoire d'entrée, il n'y a aucune garantie de son
ouverture et ni qu'aucune tensions sont présentes.
In order to open the medium voltage cabinets, follow all the safe de-energization procedures.
Page 55

MVW3000 | 6-15
6
Installation, Connection and Energization
1. Check if all the power, grounding and control connections are correct and tightened.
2. Clean the inverter internally, remove all packing material and installation residues from within the MVW3000
cabinets.
3. Check all motor connections and verify whether its voltage, current and frequency match the inverter
specifications.
4. If it is possible, decouple the motor mechanically from the load. If the motor cannot be decoupled, then make
sure that rotation in any speed direction (Forward or reverse) is not hazardous to people or to the machine.
5. Close and lock the panel doors.
6.3.2 Initial Power-up (Parameter Settings)
After the preparation for power-up, the inverter can be energized, according to the following steps:
Make sure:
1. The auxiliary power supply voltage and the medium voltage supply line voltage are available in the input
switchgear. Check that the low voltage auxiliary power supply voltage that feeds the control panel is within the
allowed range (rated voltage + 10 %/-15 %).
2. The control panel circuit breakers are installed according to the electrical project. Then closes the door of the
control panel.
3. The emergency button is not activated.
4. The control panel was energized, the switch-disconnector of the control panel auxiliary power supply is closed,
and check the initialization of the main control through the HMI.
5. The first power-up was successful, the initialization process was completed and the status of the HMI is
indicating inverter ready.
6.3.3 Start-up
This section describes the inverter start-up with keypad operation. The considered control mode is V/F 60 Hz.
DANGER!
High voltages may be present even after the power supply disconnection.
The following sequence is valid for the standard MVW3000 inverter. The inverter should have
already been installed and programmed, according to Chapter 6 INSTALLATION, CONNECTION
AND ENERGIZATION on page 6-1.
DANGER!
Des tensions élevées peuvent être présentes même après déconnexions de l’alimentation.
La séquence suivante est valable pour l’onduleur du MVW3000 standard. L’onduleur doit déjà
avoir été installé et programmé, comme décrit respectivement dans le Chapter 6 INSTALLATION,
CONNECTION AND ENERGIZATION on page 6-1.
6.3.3.1 Start-up with HMI Operation and V/F 60 Hz Control Mode
1. Apply power to the panel close the disconnector switch at the control column power supply input.
2. Once the control panel is energized, the main control board will go into the initialization process, and the HMI
will show the message “booting”:
- After the control has finished its initialization (approximately 10 seconds), the message “Inverter in Undervoltage”
is presented on the HMI.
Page 56

6-16 | MVW3000
6
Installation, Connection and Energization
At this moment the inverter is in undervoltage state (DC link is discharged) and the “ready to start” pilot light (H1)
at the control column door is on, indicating that it is already possible to initiate the inverter pre-charge.
3. Initiate the pre-charge / power section energization.
The MVW3000 inverter pre-charge command must be given manually:
With the ready to energize indicating light turned on, press the ON button.
Wait until the pre-charge is finished (approximately 15 seconds). During the pre-charge the pilot light must
remain on.
Once the pre-charge is successfully completed, the pre-charge indicating light (PRECHARGE) will turn off and
the Energized light will turn on, indicating the input switchgear was successfully closed.
The “inverter ready” message is displayed on the HMI.
NOTE!
The pre-charge procedure must not be repeated before 15 minutes. Doing so may damage the precharge system due to overload.
ATTENTION!
If during the pre-charge any problem occurs, the inverter indicates an error related to it. The possible
errors are:
F0092 – Pre-charge circuit not ready.
F0014 – Fault in the closing of the input switchgear.
F0017 – Input switchgear not ready.
F0020 – Time exceeded in the pre-charge process.
See the description of those faults/alarms in the programming manual available for download on:
www.weg.net.
NOTE!
The last speed reference value, set via the and keys, is saved in the memory (P0120 = 1).
If you want to change this value before enabling the inverter, change it through the parameter P0121
- (Keypad Speed Reference), which stores the keypad speed references.
NOTES:
1. If the motor speed direction is inverted, switch off the inverter following the safe de-energization instructions
and swap two of the motor cables.
The HMI must indicate the same direction seen looking against the motor shaft end.
2. It the current is too high during the acceleration, especially at low speeds, it is necessary to reduce the
acceleration ramp time (P0100 or P0102) or change P0136 - Torque boost setting.
Gradually increase and decrease the P0136 content until reaching an operation with approximately constant
current throughout the entire speed range. In the case above, see the description of the parameters in the
programming manual available for download on: www.weg.net.
3. In case some DC link overvoltage fault occurs during the deceleration, it will be necessary to increase the
deceleration time through P0101/P0103 and check P0151.
Page 57

MVW3000 | 6-17
6
Installation, Connection and Energization
ATTENTION!
If the inverter receives a general enabling or a start command before the pre-charge has been finished
(inverter still in undervoltage state), the command will be ignored and a warning message “inverter
undervoltage” will be displayed on the HMI.
6.3.4 Safe De-energization Instructions
DANGER!
Although the inverter commands the opening of the input cubicle, there is no guarantee of its opening
and neither that no voltages are present, because the capacitors remain charged for a long time
and they can also be charged through the auxiliary supply (pre-charge).
In order to open the medium voltage cabinets, follow all the safe de-energization procedures
described next.
DANGER!
Bien que l'onduleur commande l'ouverture de l'armoire d'entrée, il n'y a aucune garantie de son
ouverture et ni qu'aucune tensions sont présentes, parce que les condensateurs rester chargé
pendant un long moment et ils peuvent également être facturés par le biais de l'alimentation
auxiliaire (pré-charge).
Pour ouvrir les armoires moyenne tension moyenne, suivez toutes les procédures de mise hors
tension de sécurité décrites ci-dessous.
1. Decelerate the motor to a complete stop.
2. See the DC link voltage of the installed power cells at parameters P1000 to P1031 on the HMI.
3. Press the “POWER OFF” pushbutton. The input transformer cubicle is switched off at this moment, and the
“INPUT ON” pilot light going off indicates it.
ATTENTION!
If the input transformer cubicle does not open with the “POWER OFF” command, then open it
manually.
4. Monitor the DC link voltage decrease through the respective parameters on the HMI. Even with the indication
of zero volt, wait for ten minutes so as to ensure the full discharge of the DC link capacitors.
5. Press the emergency pushbutton located on the control column door and remove its key.
6. At the input transformer circuit breaker cubicle, extract the circuit breaker from its operation position and close
the transformer primary winding grounding switch. Lock the cubicle with the key and/or put a warning sign
“System in maintenance”.
7. Switch off the Q2 circuit breaker in the control column and lock it in the open position with a padlock and/or
put a warning sign “System in maintenance”.
8. Switch off the Q1 circuit breaker in the control column. Remove the auxiliary power supply.
It is only after the sequence of procedures here that medium voltage compartment doors can be opened.
DANGER!
Even after the DC link voltage parameters indicate 0 V on the HMI, 250 V may still be present on the
DC link of the power cells. Wait for ten minutes, and the cabinet doors may be opened.
DANGER!
Même lorsque les paramètres de tension du câble CC indiquent 0 V sur l’IHM, une tension de 250 V
pourra malgré tout être présente sur le bus CC des batteries.
Merci d’attendre dix minutes et les portes de l’armoire devraient s’ouvrir.
Page 58

6-18 | MVW3000
6
Installation, Connection and Energization
Page 59

MVW3000 | 7-1
7
MVW3000 | 7-1
Optional Accessories and Boards
7 OPTIONAL ACCESSORIES AND BOARDS
7.1 MVC4 SIGNAL AND CONTROL CONNECTIONS
The signal (analog inputs/outputs) and control (digital inputs/outputs and relay outputs) connections are made at
the following terminal strips on the MVC4 control board (refer to the Figure 7.1 on page 7-1).
XC1A : digital signals.
XC1B : analog signals.
XC1C : relay outputs.
XC1C
XC1A
XC2
D1
XC4
XC7
XC1
XC9
N2 N3 N5 N6 N4
K1
1 1
1
11
1110
10
2 2
2
12
12
3 3
3
13 134 4
4
14 145 5
5
15 156 616 167 78 89 9
K2 K3 K4 K5
XC1B
XC8
S3
S2
S5
S4
S1
1 11
10
2 123 134 145 156 167 8 9
Figure 7.1: MVC4 - Customer connectors
Page 60

7-2 | MVW3000
7
7-2 | MVW3000
7
Optional Accessories and Boards
Terminal Strip
XC1A
Factory Standard Function Specifications
1 24 Vdc Supply for the digital inputs Isolated 24 Vdc ±8 %, capacity: 90 mA
2 DI1 Start / Stop
6 isolated digital inputs
Minimum high level: 18 Vdc
Maximum low level: 3 Vdc
Maximum voltage: 30 Vdc
Input current: 11 mA @ 24 Vdc
3 DI2 Direction of rotation (remote)
4 DI3
No function
5 DI4
6 DI5 JOG (Remote mode)
7 DI6 Ramp 2 Selection
8 24 Vdc Supply for the digital inputs Isolated 24 Vdc ± 8 %, capacity: 90 mA
9 COM Digital inputs DI1 to DI6 common point -
10 DGND* 0 V reference of the 24 Vdc supply Grounded
11 24 Vdc Supply for the digital inputs Isolated 24 Vdc ± 8 %, capacity: 90 mA
12 DI9
No function Identical to the DI1 to DI6 specification
13 D I10
14 24 Vdc Supply for the digital inputs Isolated 24 Vdc ± 8 %, capacity: 90 mA
15 COM Digital inputs DI9 and DI10 common point -
16 DGND* 0 V reference of the 24 Vdc supply Grounded
Figure 7.2: XC1A terminal strip description: active high digital inputs
Terminal Strip
XC1A
Factory Standard Function Specifications
1 24 Vdc Supply for the digital inputs Isolated 24 Vdc ± 8 %, capacity: 90 mA
2 DI1 Start / Stop
6 isolated digital inputs
Minimum high level: 18 Vdc
Maximum low level: 3 Vdc
Maximum voltage: 30 Vdc
Input current: 11 mA @ 24 Vdc
3 DI2 Direction of rotation (remote)
4 DI3
No function
5 DI4
6 DI5 JOG (Remote mode)
7 DI6 Ramp 2 Selection
8 24 Vdc Supply for the digital inputs Isolated 24 Vdc ± 8 %, capacity: 90 mA
9 COM Digital inputs DI1 to DI6 common point -
10 DGND* 0 V reference of the 24 Vdc supply Grounded
11 24 Vdc Supply for the digital inputs Isolated 24 Vdc ± 8 %, capacity: 90 mA
12 DI9
No function Identical to the DI1 to DI6 specification
13 DI10
14 24 Vdc Supply for the digital inputs Isolated 24 Vdc ± 8 %, capacity: 90 mA
15 COM
Digital inputs DI9 and DI10 common
point
-
16 DGND* 0 V reference of the 24 Vdc supply Grounded
Figure 7.3: XC1A terminal strip description: active low digital inputs
Page 61

MVW3000 | 7-3
7
MVW3000 | 7-3
Optional Accessories and Boards
Terminal Strip
XC1B
Factory Default Function Specifications
1 + REF Positive reference for potentiometer +5.4 V ±5 %, capacity: 2 mA
2 A I1+ Analog input 1: speed reference
(remote mode)
Differential, resolution: 10 bits,
Impedance: 400 kΩ [0 to 10 V]
500 Ω (0 to 20) mA/(4 to 20) mA]
3 AI1-
4 - REF Negative reference for potentiometer - 4.7 V ± 5 %, capacity: 2 mA
5 AI2+ Analog input 2: no function Differential, resolution: 9 bits,
Impedance: 400 kΩ [-10 V to +10 V]
500 Ω [0 to 20) mA/(4 to 20) mA]
6 AI2-
7 AO1 Analog output 1: speed (0 to 10) V, R
L
≥ 10 kΩ (Maximum load)
Resolution: 11 bits
8 DGND 0 V Reference for analog outputs Grounded through a 5.1 Ω resistor
9 AO2 Analog output 2: motor current 0 to +10 V, R
L
≥ 10 kΩ (Maximum load)
Resolution: 11 bits
10 DGND 0 V Reference for analog outputs Grounded through a 5.1 Ω resistor
11 AI5+ Analog input 5: no function Isolated analog input signal:
(0 to 10) V or (0 to 20) mA / (4 to 20) mA
Resolution: 10 bits
Impedance: 400 kΩ [0 V to 10 V]
500 Ω [(0 to 20) mA/(4 to 20) mA]
12 AI5-
13 AO5 Analog output 5: speed Isolated analog output signals:
(0 to 20) mA / (4 to 20) mA
Scales: Refer to parameter descriptions
Resolution: 11 bits (0.05 % of the full scale)
R
L
≤ 600 Ω
14 GNDA05 0 V Reference for analog output 5
15 AO6 Analog output 6: motor current
16 GNDA06 0 V Reference for analog output 6
CW
CCW
RPM
A
RPM
A
≥5 kΩ
Figure 7.4: XC1B terminal strip description: analog inputs and outputs
Table 7.1: XC1C terminal strip description: relay outputs
Terminal Strip
XC1C
Factory Default Function Specifications
1 R L1 N A
Relay output 1- without error
Contact capacity:
1 A
240 Vac
2 R L1 C
3 RL1 NF
4 RL2 NA
Relay output 2 - N > Nx
5 RL2 C
6 RL2 NF
7 RL3 NA
Relay output 3 - N* > Nx
8 RL3 C
9 RL3 NF
10 RL4 NA
Relay output 4 - no function
11 RL4 C
12 RL4 NF
13 RL5 NA
Relay output 5 - no function
14 RL5 C
15 RL5 NF
16 -
- -
Note:
NF = normally closed contact.
NA = normally open contact.
C = common.
Page 62

7-4 | MVW3000
7
7-4 | MVW3000
7
Optional Accessories and Boards
Table 7.2: Configuration of the switches
Signal Factory Default Function Setting Element Selection
AI1 Speed reference S2.A
OFF - (0 to 10) V
(1)
ON - (0 to 20) mA / (4 to 20) mA
AI2 No function S2.B
OFF - (0 to 10) V
(1)
ON - (0 to 20) mA / (4 to 20) mA
AI5 No function S3.A
OFF - (0 to 10) V
(1)
ON - (0 to 20) mA / (4 to 20) mA
AO5 Speed S4.A
OFF - (0 to 20) mA
(1)
ON - (4 to 20) mA
AO6 Motor current S5.A
OFF - (0 to 20) mA
(1)
ON - (4 to 20) mA
(1) Factory default.
Related parameters: P0221, P0222, P0234 to P0240.
During the signal and control wiring installation, pay attention to:
1. Cable gauge 0.5 mm² to 1.5 mm².
2. Maximum torque: 0.50 N.m (4.50 lbf.in).
3. XC1A, XC1B and XC1C wiring must be made with shielded cables and be separated from other cables (power,
110/220 V command, etc.). If crossing of these cables is unavoidable, install them perpendicularly, keeping a minimum
separation distance of 5 cm (2 in) at the crossing point.
Connect the shield as shown below:
The shield connection screws are located on the MVC4 board and on its mounting plate.
Insulate with tape
Connect to the ground
Do not ground
Inverter side
Figure 7.5: Shield connection
4. It is necessary to use galvanic isolators at the XC1B terminal strip signals for wiring distances longer than 50 m
(150 f t).
5. Relays, contactors, solenoids or electromagnetic braking coils installed near inverters can generate interference
in the control circuit. In order to eliminate this interference, connect RC suppressors in parallel with the coils of AC
relays. Connect a free-wheeling diode in case of DC relays/coils.
6. When an external keypad (HMI) is used (for further information, refer to the programming manual available for
download on: www.weg.net), separate the cable that connects the keypad to the inverter from other cables of
the installation, keeping a minimum distance of 10 cm (4 in) between them.
Page 63

MVW3000 | 7-5
7
MVW3000 | 7-5
Optional Accessories and Boards
7.2 FUNCTION EXPANSION BOARDS
The function expansion boards increase the MVC4 control board functions. There are 3 expansion boards
available and their selection depends on the application and the desired functions. The three boards cannot be
used simultaneously. The difference between the EBA and EBB boards is in the analog inputs/outputs. The EBC1
board serves for the encoder connection; however, it does not have its own power supply as do the EBA/EBB
boards. Next, the detailed description of those boards is presented.
7.2.1 EBA (I/O Expansion Board A)
The EBA board can be supplied in different configurations, created from the combination of specific functions.
Table 7.3 on page 7-5 contains the available configurations.
Table 7.3: EBA board versions and available features
Available Features
EBA Board models - Code
EB A .01- A1 EBA.02-A2 EBA.03-A3
Differential input for incremental encoder with 12 V / 200 mA isolated internal
power supply, feedback for speed regulator, digital speed measurement, 14
bit resolution, 100 kHz maximum signal frequency.
Available Not available Not available
Buffered encoder output signals: isolated input signal repeater, differential
output, available to external 5 V to 15 V power supply.
Available Not available Not available
Analog differential input (AI4): 14 bits (0.006 % of the full scale range), bipolar:
-10 V to +10 V, (0 to 20) mA / (4 to 20) mA programmable.
Available Not available Available
2 Analog outputs (AO3/AO4): 14 bits (0.006 % of the range [±10 V]), bipolar:
-10 V to + 10 V, programmable.
Available Not available Available
Isolated RS-485 serial port. Available Available Not available
Digital Input (DI7): isolated, programmable, 24 V. Available Available Available
Digital Input (DI8) with special function for motor thermistor (PTC): actuation
3.9 kΩ, release 1.6 kΩ.
Available Available Available
2 isolated Open Collector transistor outputs (DO1/DO2): 24 V, 50 mA,
programmable.
Available Available Available
NOTE!
The use of the serial interface RS-485 does not allow the use of RS-232 card standard MVC2 or
MVC4. They cannot be used simultaneously.
Page 64

7-6 | MVW3000
7
7-6 | MVW3000
7
Optional Accessories and Boards
A
rpm
Rc ≥ 500 Ω
PTC
Rc ≥ 500 Ω
Terminal Strip
XC4
Factory Default Function Specifications
1 NC
Not connected -
2 DI8
Motor thermistor input 1 - PTC 1 (see P0270
in the programming manual)
Actuation 3.9 kΩ, Release:1.6 kΩ
Minimum resistance: 100 Ω
3 DGND
(DI8)
Motor thermistor input 2 - PTC 2 (see P0270
in the programming manual)
Reference to DGND (DI8) through a 249 Ω
resistor
4 DGND
0 V reference of the 24 Vdc Grounded via a 249 Ω resistor
5 DO1
Transistor output 1: not used
Isolated, open collector, 24 Vdc, 50 mA
maximum, eequired load (Rc) ≥ 500 Ω
6 COMUM
Common point for Digital Input DI7 and
Digital Outputs DO1 and DO2
-
7 DO2
Transistor output 2: not used
Isolated, open collector, 24 Vdc, 50 mA
maximum, required load (Rc) ≥ 500 Ω
8 24 Vdc
Power Supply for the digital inputs/outputs
24 Vdc ±8 %, isolated,
Capacity: 90 mA
9 DI7
Isolated Digital Input: Not used
Minimum high level: 18 Vdc
Maximum low level: 3 Vdc
Maximum voltage: 30 Vdc
Input current: 11 mA @ 24 Vdc
10 SREF
Reference for RS-485
Serial RS-485 isolada
11 A-LINE
RS-485 A-LINE (-)
12 B-LINE
RS-485 B-LINE (+)
13 AI4 +
Analog input 4: Speed reference
Program P0221 = 4 or P0222 = 4
Differential analog input programmable at
P0246:
-10 V to +10 V or (0 to 20) mA/(4 to 20) mA
Resolution: 14 bits (0.006 % of full scale
range)
Impedance: 40 kΩ (-10 V to +10 V)
500 Ω [(0 to 20) mA/(4 to 20) mA]
14 AI4 -
15 AGND
0 V reference for analog output
(internally grounded)
Analog outputs signals:
-10 V to +10 V
Scales: see P0255 and P0257 in the
programming manual available for download
on: www.weg.net
Resolution: 14 bits (0.006 % of ±10 V range)
Required load (Rc) ≥ 2 kΩ
16 AO3
Analog output 3: Speed
17 AGND
0 V reference for analog output
(internally grounded)
18 AO4
Analog output 4: Motor current
19 + V
Available to be connected to an external
power supply to feed the encoder repeater
output (XC8)
External power supply: 5 V to 15 V
Consumption: 100 mA @ 5 V not including
the outputs
20 COM 1
0 V reference of the external power supply
Figure 7.6: Terminal Block description (complete EBA board)
ENCODER CONNECTION: refer to Section 7.3 INCREMENTAL ENCODER on page 7-14.
INSTALLATION
The EBA board is installed directly on the MVC4 control board, secured with spacers and connected via terminal
blocks XC11 (24 V) and XC3.
Mounting instructions:
1. De-energize the control rack.
2. Configure the board via S2 and S3 DIP switches (refer to the Table 7.4 on page 7-8).
3. Carefully insert XC3 connector (EBA) into the female connector XC3 on the MVC4 control board. Make sure
that all pins fit in the XC3 connector.
Page 65

MVW3000 | 7-7
7
MVW3000 | 7-7
Optional Accessories and Boards
4. Press on the EBA board (near to XC3) and on the left top edge until the complete insertion of the connector
and the plastic spacer.
5. Secure the board to the 2 metallic spacers with the 2 provided bolts.
6. Plug the XC11 connector of the EBA board to the XC11 connector on the MVC4 control board.
Figure 7.7: EBA board installation procedure
Page 66

7-8 | MVW3000
7
7-8 | MVW3000
7
Optional Accessories and Boards
EBA board
MVC4 board
XC9
XC8
XC3
M3 x 8 mm bolt
Torque 1 Nm
XC9
XC4
XC 11
XC 11
XC8XC9
Figure 7.8: EBA board installation procedure
Table 7.4: EBA board configuration of setting elements
Switch Signal – Factor y Default OFF (Standard) ON
S2.1 Al4 - Speed Reference
( 0 to 10) V (0 to 20) mA or (4 to 20) mA
S3.1 RS-485 B - LINE (+)
Without termination With 120 Ω termination
S3.2 RS-485 A - LINE (-)
Note: Both switches, S3.1 and S3.2, must be adjusted for the same option.
Table 7.5: EBA board trimpot configurations
Tri mpo t Function Factory Default Function
RA1 AO3 - offset
Motor speed
RA2 AO3 - gain
RA3 AO4 - offset
Motor current
RA4 AO4 - gain
NOTE!
The external signal and control wiring must be connected to XC4 (EBA), following the same
recommendations as for the wiring of the MVC4 control board (refer to the Section 7.1 MVC4 SIGNAL
AND CONTROL CONNECTIONS on page 7-1).
Page 67

MVW3000 | 7-9
7
MVW3000 | 7-9
Optional Accessories and Boards
7.2.2 EBB (I/O Expansion Board B)
The EBB board can be supplied in different configurations, created from the combination of specific functions.
The available functions are presented in the Table 7.6 on page 7-9.
Table 7.6: EBB board versions and available features
Available Features
EBB Board Models - Code
EBB.01
B1
EBB.02
B2
EBB.03
B3
EBB.04
B4*
EBB.05
B5
Differential input for incremental encoder with 12 V / 200
mA isolated internal power supply, feedback for speed
regulator, digital speed measurement, 14 bit resolution, 100
kHz maximum signal frequency.
Available Available Not available Available Not available
Buffered encoder output signals: isolated input signal
repeater, differential output, available to external 5 V to 15 V
power supply.
Available Not available Not available Available Not available
Analog differential input (AI3): 10 bits (0 to 10) V, (0 to 20) mA
/ (4 to 20) mA, programmable.
Available Not available Available Available Not available
2 Analog outputs (AO1’/AO2’): 11 bits (0.05 % of the full scale
range), (0 to 20) mA / (4 to 20) mA, programmable.
Available Not available Available Available Available
Isolated RS-485 serial port. Available Available Not available Available Not available
Digital input (DI7): isolated, programmable, 24 V. Available Available Available Available Not available
Digital input (DI8) with special function for motor thermistor
(PTC): actuation 3.9 kΩ, release 1.6 kΩ.
Available Available Available Available Not available
2 isolated Open Collector transistor outputs (DO1/DO2):
24 V, 50 mA, programmable.
Available Available Available Available Not available
* Board with 5 V encoder power supply.
NOTE!
The use of the RS-485 serial interface does not allow the use of the standard RS-232 input - they
cannot be used simultaneously. The analog outputs AO1’ and AO2’ have the same functions and
parameters as AO1 and AO2 on the MVC4 control board.
Page 68

7-10 | MVW3000
7
7-10 | MVW3000
7
Optional Accessories and Boards
Rc ≥ 500 Ω
Rc ≥ 500 Ω
Terminal
Strip XC5
Factory Default Function Specifications
1 NC
Not connected -
2 DI8
Motor thermistor input 1 - PTC 1 (see P0270
in the programming manual)
Actuation 3.9 kΩ, Release: 1.6 kΩ
Minimum resistance: 100 Ω
3 DGND
(DI8)
Motor thermistor input 2 - PTC 2 (see P0270
in the programming manual)
Reference to DGND (DI8) through a 249 Ω
resistor
4 DGND
0 V reference of the 24 Vdc Grounded via a 249 Ω resistor
5 DO1
Transistor output 1: not used
Isolated, open collector, 24 Vdc, 50 mA
maximum, required load (RL) ≥ 500 Ω
6 COMUM
Common point for Digital Input DI7 and
Digital Outputs DO1 and DO2
-
7 DO2
Transistor output 2: not used
Isolated, open collector, 24 Vdc, 50 mA
maximum, required load (RL) ≥ 500 Ω
8 24 Vdc
Power Supply for the digital inputs/outputs
24 Vdc ±8 %, Isolated,
Capacity: 90 mA
9 DI7
Isolated Digital Input: not used
Minimum high level: 18 Vdc
Maximum low level: 3 Vdc
Maximum voltage: 30 Vdc
Input current: 11 mA @ 24 Vdc
10 SREF
Reference for RS-485
Isolated RS-485 serial port
11 A-LINE
RS-485 A-LINE
12 B-LINE
RS-485 B-LINE
13 AI3 +
Analog input 3: speed reference
Program P221 = 3 or P222 = 3
Isolated analog input programmable at P243:
(0 to 10) V or (0 to 20) mA/(4 to 20) mA
Resolution: 10 bits (0.1 % of full scale range)
Impedance: 400 kΩ (0 to 10) V
500 Ω [(0 to 20) mA/(4 to 20) mA]
14 AI3 -
15 AGND
I
0 V reference for analog output
(internally grounded)
Isolated analog outputs signals:
(0 to 20) mA / (4 to 20) mA
Scales: see the description of parameters
P0251 and P0253 in the programming manual
available for download on: www.weg.net
(P0251 and P0253)
Resolution: 11 bits (0.5 % of full scale range)
Required load ≥ 600 Ω
16 AO1
I
Analog output 1: speed
17 AGND
I
0 V reference for analog output
(internally grounded)
18 AO2
I
Analog output 2: motor current
19 + V
Available to be connected to an external
power supply to feed the encoder repeater
output (XC8)
External power supply: 5 V to 15 V
Consumption: 100 mA @ 5 V, not including
the outputs
20 COM 1
0 V reference of the external power supply
A
rpm
PTC
Figure 7.9: XC5 Terminal Block description (complete EBB board)
ATTENTION!
The analog input AI3 and the analog outputs AO1’ and AO2’ isolation has the purpose of interrupting
ground loops. Do not connect them to high potentials.
ENCODER CONNECTION: refer to Section 7.3 INCREMENTAL ENCODER on page 7-14.
INSTALLATION
The EBB board is installed directly on the MVC4 control board, secured with spacers and connected via terminal
blocks XC11 (24 V) and XC3.
Mounting instructions:
1. De-energize the control rack.
Page 69

MVW3000 | 7-11
7
MVW3000 | 7-11
Optional Accessories and Boards
2. Configure the board via S4, S5, S6 and S7 DIP switches (refer to the Table 7.7 on page 7-12).
3. Carefully insert XC3 connector (EBB) into the female connector XC3 on the MVC4 control board. Make sure
that all pins fit in the XC3 connector.
4. Press on the EBB board (near to XC3) and on the left top edge until the complete insertion of the connector
and the plastic spacer.
5. Secure the board to the 2 metallic spacers with the 2 provided bolts.
6. Plug the XC11 connector of the EBB board to the XC11 connector on the MVC4 control board.
Figure 7.10: EBB board layout
EBB board
MVC4 board
XC9
XC8
XC3
Figure 7.11: EBB board installation procedure
Page 70

7-12 | MVW3000
7
7-12 | MVW3000
7
Optional Accessories and Boards
XC9
XC4
XC 11
XC 11
XC8XC9
Figure 7.12: EBB board installation procedure
Table 7.7: EBB board DIP switch configurations
Switch Signal – Factory Default OFF ON
S4.1 Al3 - Speed reference
( 0 to 10) V
(1)
(0 to 20) mA or (4 to 20) mA
S5.1 and S5.2 AO1 - Speed
(0 to 20) mA
(2)
(4 to 20) mA
(1)
S6.1 and S6.2 AO2 - Motor current
S7.1 a n d S7. 2
RS-485 B - LINE (+)
Without termination
(1)
Without termination (120 Ω)
RS-485 A - LINE (-)
(1) Factory default setting. Note: Each group of switches must be set for the same option (ON or OFF). E.g., S6.1 and S6.2 = ON.
(2) When the outputs are set to (0 to 20) mA, it may be necessary to readjust the full scale.
Table 7.8: EBB board trimpot configurations
Tri mpo t Function Factory Default Function
RA5 AO1 Full scale adjustment
Motor speed
RA6 AO2 Full scale adjustment
Motor current
NOTE!
The external signal and control wiring must be connected to XC5 (EBB), following the same
recommendations as for the wiring of the MVC4 control board (refer to the Section 7.1 MVC4 SIGNAL
AND CONTROL CONNECTIONS on page 7-1).
7.2.3 PLC2
The PLC2 board adds to the MVW3000 inverter important PLC (Programmable Logic Controller) functions,
enabling the execution of complex interlocking programs, using the board digital inputs and outputs, as well as
the digital and analog inputs and outputs of the inverter itself, which may be accessed by the user’s program.
NOTE!
For more information on the PLC2 board, refer to the PLC2 V1.5x specific manual.
Page 71

MVW3000 | 7-13
7
MVW3000 | 7-13
Optional Accessories and Boards
XC9 XC10
XC7
XC4
XC3
EE
XC5
XC 11
XC22
XC21
C13
1
2
1
2
2
1
1
2
3 1
1
1
2 3 4 5
1
1 5
62
16
B1 B1 B1
B2 B2 B2
NA NA NA
K1
K2
K3
C C C
30
1
15
6 69 9
5 5
26
W7
39 51
75
76
50
24
25
1
1
2
33
34
31
32
33
34
DGND
DNDC
D6
D4
D1
W 11
XC1
XC2
XC82
XC81
XC6
W12
H7
2
1
1
1
1 2
S1 NO
1
XC17
1
Figure 7.13: PLC2 connectors
The connectors and their terminals function are described below.
XC21 Connector: Relay Outputs and Digital Inputs
XC21 Connector Function Specification
1 C
DO1
Digital relay outputs
Contact capacity:
3 A
250 Vac
2 N
3 C
DO2
4 NA
5 C
DO3
6 NA
7 COM DO
Reference for digital outputs DO4, DO5, DO6 -
8 DO4
Bidirectional opto-isolated
digital outputs
Maximum voltage: 48 Vdc
Current capacity: 500 mA
9 DO5
10 DO6
11 COM DI
Reference for digital inputs DI1 to DI9 -
12 DI9
Bidirectional
isolated digital Inputs
Input voltage: (15 to 30) Vdc
Input current: 11 mA @ 24 Vdc
13 DI8
14 DI7
15 DI6
+
-
+
-
+
-
+
-
Load
(*)
(*)
Figure 7.14: Description of XC21 connector
ATTENTION!
(*) External power supply.
Page 72

7-14 | MVW3000
7
7-14 | MVW3000
7
Optional Accessories and Boards
XC22 Connector: Transistor Outputs and Digital Inputs
XC22 Connector Function Specificationss
16 PTC1
Motor thermistor input
Actuation: 3.9 k Release: 1.6 k
Minimum resistance: 100 Ω
17 PTC2
PTC
18 GND ENC
Reference for the power supply of the
encoder input
-
19 + ENC
Encoder input
power supply
Controlled 5 Vdc or (8 to 24) Vdc
Current consumption: 50 mA +
Encoders current (**)
20 -
AO2
Analog output 2
(-10 to +10) Vdc or (0 to 20) mA
12 Bits
21 +
22 -
AO1
Analog output 1
(-10 to +10) Vdc or (0 to 20) mA
12 Bits
23 +
24 -
AI1
Differential analog
input 1
(-10 to +10) Vdc or (-20 to 20) mA
14 B its
25 +
26 DI1
Bidirectional, isolated
digital inputs
Input voltage: (15 to 30) Vdc
Input current: 11 mA @ 24 Vdc
27 DI2
28 DI3
29 DI4
30 DI5
+
-
+
-
(*)
COM DI
Figure 7.15: Description of XC22 connector
ATTENTION!
(*) External Power supply.
(**) For current, the S1 switch must be set ON.
7.3 INCREMENTAL ENCODER
Applications that require more speed or positioning accuracy, a speed feedback of the motor shaft by means of
incremental encoder is required. The connection to the inverter is made through the XC9 connector (DB9) on the
EBA function expansion board, or XC9 on EBB, or XC10 on EBC.
7.3.1 EBA/EBB Boards
When the EBA or EBB board is used, the selected encoder should have the following characteristics:
Power supply voltage: 12 Vdc, less than 200 mA current consumption.
2 quadrature channels (90º) + zero pulse with complementary outputs (differential):
Signals A, A, B, B, Z and Z.
"Linedriver" or "Push-Pull" output circuit type (12 V level).
Electronic circuit isolated from the encoder frame.
Recommended number of pulses per revolution: 1024 ppr.
Follow the recommendations bellow when mounting the encoder on the motor:
Couple the encoder directly to the motor shaft (use a flexible coupling without torsional flexibility).
Both the shaft and the metallic frame of the encoder must be electrically isolated from the motor (3 mm (0.119
in) minimum distance).
Use high quality flexible couplings to prevent mechanical oscillation or backlash.
The electrical connections must be made with shielded cable, maintaining a minimum distance of about 25 cm
(10 in) from other wires (power, control cables, etc.). If possible, install the encoder cable in a metallic conduit.
Page 73

MVW3000 | 7-15
7
MVW3000 | 7-15
Optional Accessories and Boards
During the commissioning, it is necessary to program the control type, P0202 = 4 (Vector with Encoder), in order
to operate with speed feedback via incremental encoder.
For further details on vector control, see the programming manual available for download on: www.weg.net.
The function expansion boards EBA and EBB have an encoder signal repeater, isolated and externally powered.
(1) Power supply voltage 12 Vdc / 220 mA for encoder.
(2) Referenced to ground via 1 μF in parallel with 1 kΩ.
(3) Connector pinout valid for HS35B Dynapar encoder. For other encoder models, verify the correct connection in order to meet
the required sequence.
XC9 connector (Male DB9)
red
blue
yellow
green
pink
white
brown
gray
shield
12 V
differential
(88C20)
Encoder
Maximum recommended length: 100 m (300 ft)
MVW3000 EBA or EBB board
Connector Encoder
(3)
A A
H A
B B
I B
C Z
J Z
D +VE
F COM
E NC
G
XC9 Connector Description
3 A
2 A Encoder Signals
1 B
9 B
8 Z
7
Z
4 +VE Power supply
(1)
6 COM 0 V reference
(2)
5 Ground
1 5
6 9
Figure 7.16: Encoder input
NOTE!
The maximum allowed encoder signal frequency is 100 kHz.
Sequence of the encoder signals:
Motor running in forward direction
B
t
A
t
Figure 7.17: Encoder signals
Page 74

7-16 | MVW3000
7
7-16 | MVW3000
7
Optional Accessories and Boards
XC8 connector (female DB9)
(*) Connection of the external power supply: 5 V to 15 V,
consumption: 100 mA @ 5 V not including the outputs.
Note: The external power supply can also be connected at:
XC4: 19 and XC4: 20 (EBA) or
XC5: 19 and XC5: 20 (EBB)
MVW3000 EBA or EBB board
9 6
5 1
NOTE!
There is no internal power supply
for XC8 on the expansion boards
EBA and EBB.
XC8 connector Description
3 A
2
A
1 B
9
B
8 Z
7
Z
4 +V
(*)
Supply
(*)
6 COM 1
(*)
0 V reference
5 Ground
Encoder signals
Line driver
differential
(88C30)
Average current:
50 mA high level
Figure 7.18: Encoder signal repeater output
7.3.2 EBC1 Board
When the board EBC1 is used, the selected encoder should have the following characteristics:
Power supply voltage: 5 V to 15 V.
2 quadrature channels (90 º) with complementary outputs (differential): Signals A, A, B and B.
"Linedriver" ou "Push-Pull" output circuit type (with identical level as the power supply voltage).
Electronic circuit isolated from the encoder frame.
Recommended number of pulses per revolution: 1024 ppr.
INSTALLATION OF THE EBC1 BOARD
The EBC board is installed directly on the MVC4 control board, secured by means of spacers and connected
through the XC3 connector.
Mounting instructions:
1. De-energize the control rack.
2. Carefully insert the pins of the connector XC3 (EBC1) into the female connector XC3 of the MVC4 control board.
Make sure that all pins fit in the XC3 connector.
3. Press on the board center (near to XC3) until the connector is completely inserted.
4. Secure the board to the 2 metallic spacers with the 2 provided bolts.
Page 75

MVW3000 | 7-17
7
MVW3000 | 7-17
Optional Accessories and Boards
X5
X2
X1
X3
N3
X4
ON
OFF
CH.A
GND
*
CH.B
S8
XC10
XC3
XC9
Figure 7.19: EBC1 board layout
NOTE!
The terminals XC10:22 and XC10:23 (see Figure 7.19 on page 7-17), should only be used for encoder
supply, when the encoder power supply is not coming from the DB9 connector.
EBC1 board
MVC4 board
Figure 7.20: EBC1 board installation procedure
M3 x 8 mm bolt
Torque 1 N.m
Spacer part
number 10191668
ON
OFF
XC10
XC3
XC9
Figure 7.21: EBC1 board installation procedure
Page 76

7-18 | MVW3000
7
7-18 | MVW3000
7
Optional Accessories and Boards
CONFIGURATIONS:
Table 7.9: EBC1 board configurations
Expansion Board Power Supply Encoder Voltage Necessary Setting
EB C1. 01
External 5 V
5 V
Commutate switch S8 to ON, see Figure
7.19 on page 7-17
External 8 V to 15 V
8 V to 15 V None
EB C1. 02 Internal 5 V
5 V None
EB C1. 03 Internal 12 V
12 V None
ENCODER MOUNTING:
Follow the recommendations bellow when mounting the encoder on the motor:
Couple the encoder directly to the motor shaft (use a flexible coupling without torsional flexibility).
Both the shaft and the metallic frame of the encoder must be electrically isolated from the motor (3 mm (0.119
in) minimum distance.
Use high quality flexible couplings to prevent mechanical oscillation or backlash.
The electrical connections must be made with shielded cable, maintaining a minimum distance of about 25 cm
(10 in) from other wires (power, control cables, etc.). If possible, install the encoder cable in a metallic conduit.
During the commissioning, it is necessary to program the control type, P0202 = 4 (Vector with Encoder), in order
to operate with speed feedback via incremental encoder.
For further details on vector control, see the programming manual available for download on: www.weg.
net.
(1) External encoder power supply: 5 to 15 Vdc. Consumption of 40 mA plus the encoder consumption;
(2) 0 V reference of the power supply voltage;
(3) Connector pinout valid for HS35B Dynapar encoder. For other encoder models, verify the correct connection in order to meet
the required sequence.
Conector XC9 (DB9 - Macho)
Comprimento máximo recomendado: 100m
XC9 connector (male DB9)
red
blue
yellow
green
white
brown
cable shield
Encoder
Maximum recommended length: 100 m (300 ft)
MVW3000 EBC board
Encoder Connector
(3)
A A
H A
B B
I
B
C Z
J
Z
D +VE
F COM
E NC
G
Connectors
Signal
Description
XC9 XC10
3 26 A
2 25
A
Encoder Signals
1 28 B (5 to 15 V)
9 27 B
8 Z
7
Z
4 21,22 +VE
Power supply
(1)
6 23,24 COM 0 V reference
(2)
5 Ground
1 5
6
9
Figure 7.22: EBC1 encoder input
Page 77

MVW3000 | 7-19
7
MVW3000 | 7-19
Optional Accessories and Boards
NOTE!
The maximum allowed encoder signal frequency is 100 kHz.
Sequence of the encoder signals:
Motor running in forward direction
B
t
A
t
Figure 7.23: Encoder signals
7.4 SHORT UPS MODULE
The Short UPS module is an accessory that provides autonomy of approximately 500 ms in case of failure of the
MVW3000 inverter auxiliary power supply. After the occurrence of the auxiliary power supply failure, the inverter
remains operational, without faults, during 500 ms.
The module is based on a low voltage frequency inverter, CFW10 and an external capacitor bank, which ensure
the energy supply to the power supplies during the specified period. A filter is added to the inverter output,
necessary because of the characteristic of the fed loads.
The Short UPS feeds the following loads:
PS1S power supply: responsible for feeding the gate drivers.
PS24 power supply: responsible for feeding the control.
General command: input circuit breaker supply and its undervoltage release.
7.4.1 CFW10 Inverter Parameterization
For the correct operation of the Short UPS module, the CFW10 inverter must be parameterized as shown below:
P100 = 1.0 (Acceleration time).
P101 = 0.5 (Deceleration time).
P121 = 57.4 (Output frequency).
P206 = 3 (Auto-reset time).
P222 = 0 (Remote speed reference).
P263 = 0 (DI1 Digital input).
P264 = 0 (DI2 Digital input).
P265 = 4 (DI3 Digital input).
P266 = 6 (DI4 Digital input).
P297 = 10 kHz (Switching frequency).
Page 78

7-20 | MVW3000
7
7-20 | MVW3000
7
Optional Accessories and Boards
7.5 MVC3 CONTROL BOARD CONNECTIONS
XCP2
XC8
XC7
N5 N2 N8 N3 N6
N4
XCP1
CN1
CN2
CN3
CN4
CN5
CN6
XC1
XC9
Figure 7.24: MVC3 board connections
Table 7.10: XC9 terminal strip connections
XC9 Terminal Strip Factory Standard Function Specifications
1 +5V4 Positive reference for potentiometer +5.4 V ±5 % capacity: 2 mA
2 AI1-
Analog input 1: 0 - no function (P0740)
Differential, resolution 11 bits
Impedance: 400 kΩ [-10 V to 10 V]
3 A I1+
4 -4V7 Negative reference for potentiometer -4.7 V ±5 % capacity: 2 mA
5 AO1+
Analog output 1: 2 - Iu (P0652) -10 V to 10 V, RL ≥ 10 kΩ (Maximum load) Resolution 11 bits
6 AGND
7 AO2+
Analog output 2: 5 - modulation index (P0654) -10 V to 10 V, RL ≥ 10 kΩ (Maximum load) Resolution 11 bits
8 AGND
9 AO3+
Analog output 3: 2 - Iu (P0656) -10 V to 10 V, RL ≥ 10 kΩ (Maximum load) Resolution 11 bits
10 AGND
11 AO4+
Analog output 4: 5 - modulation index (P0658) -10 V to 10 V, RL ≥ 10 kΩ (Maximum load) Resolution 11 bits
12 AGND
Table 7.11: XC1 terminal strip description
XC1 Terminal Strip Factory Standard Function Specifications
1 AI2-
Analog input 2: 0 - no function (P0744)
Differential, resolution 11 bits
Impedance: 400 kΩ [-10 V to 10 V]
2 AI 2+
Note: AI2 is not implemented in the MVC1, only in the MVC3.
ATTENTION!
The I/Os described above are not isolated. Their utilization must be with galvanic isolators.
Page 79

MVW3000 | 8-1
8
Special Functions
MVW3000 | 8-1
8 SPECIAL FUNCTIONS
8.1 LOAD SHARE FUNCTION “MASTER/SLAVE”
Conveyors belts and overhead cranes are classic examples of applications where the torque or position control
is used to maintain the conveyor belt voltage within the limits during the operation, start and stop procedures or
even in the transportation of materials in a rising of falling slope.
For motors connected to the same load, it is necessary to ensure a reliable load sharing. Such characteristic is
best achieved with the use of multiple inverters operating in speed reference mode (Master) and torque limitation
mode (Slave (s)).
Implementation Modes
Three modes to implement the load sharing function will be presented. For the first two modes, it is mandatory
that the inverters involved in the process be set to vector operating mode. For most applications, the vector
operating mode with speed or position sensor is recommended.
In order to implement the load sharing, the inverter assigned as master controls the load speed using all the other
inverters of the process as actuators.
In the vector mode, there are two ways to implement the load sharing function: in the first one, the master inverter
sends the slaves the torque reference signal; in the second one, it sends the torque reference limitation signal.
The mode to be used must be analyzed for each application.
For operation in scalar mode with load sharing, all inverters must receive the same speed reference signal. This
type of load sharing is called “droop” or negative slip.
The three implementation methods and the main parameters used in each method are shown below.
Torque Reference - Operation in Vector Mode
One of the possible ways to implement the load sharing function is by parameterizing the salve inverter(s) to follow
an external torque reference, which will be sent by the master inverter.
...
...
MVW3000
Master
Speed ref.
Tor q ue re f.
MVC4
MVC3
AOX
MVC3
AIX
MVC3
AIX
MVW3000
Slave 1
MVW3000
Slave n
Figure 8.1: General operation scheme of the function
In order to do so, the inverters must be parameterized as follows:
Master:
Parameterize one of the analog outputs of the MVC3 control board to send the torque reference to the slave
inverter(s). In the example below, the analog output AO1 is parameterized.
P0652 (Analog Output 1 Function) = 188 (Inverter torque reference).
Page 80

8-2 | MVW3000
88
Special Functions
Slave(s):
On the slave inverter(s), it is necessary to parameterize an analog input of MVC3 board to receive the torque
reference sent by the master inverter.
P0740 (Analog Input 1 Function) = 1 (Torque reference).
NOTE!
Observe the polarity of the analog ones at the moment of the connection between the inverters.
Limitation of the Torque Current - Operation in Vector Mode
As in the previous mode, the master inverter operates in speed control mode, while the slave inverter operates
in torque current regulation mode. Besides the limit value of the torque current, the slave inverter(s) receives the
speed reference signal; therefore, in a potential situation of sudden load reduction, the speed reference is
saturated, thereby avoiding a possible sudden acceleration of the motor.
The speed reference signal sent to the slave inverter(s) must be set to a value slightly above the master inverter
reference. It is recommended to apply an offset to the analog inputs of the slave(s) greater than 5 % added to the
reference sent by the master inverter; the ideal value may vary according to the application.
NOTE!
As the operation with negative torque reference is impossible, this method cannot be used for
regenerative inverters or with dynamic braking.
...
...
...
MVW3000
Master
Speed
reference
Speed reference
Torque reference
MVC4
AOX
MVC3
AOX
MVC3
AIX
MVC4
AIX
MVC4
AIX
MVC3
AIX
MVW3000
Slave 1
MVW3000
Slave n
Figure 8.2: General operation scheme of the function
Therefore, the inverters must be parameterized as follows:
Master:
Parameterize one of the analog outputs of the MVC3 board to send the torque current limit to the slave inverter(s).
The example below shows the parameterization of analog output AO1 of the MVC4 board to send the speed
reference.
P0652 (Analog Output 1 Function - MVC3) = 188 (Inverter torque reference).
P0251 (Analog Output 1 Function - MVC4) = 0 (Speed reference).
Slave:
The slave inverter(s) requires the parameterization of an analog input of the MVC3 board to receive the torque
current limit sent by the master inverter. For the speed reference, use the analog input AI1 of the MVC4 board,
whose standard function is the speed reference signal.
Page 81

MVW3000 | 8-3
8
Special Functions
MVW3000 | 8-3
P0740 (Analog Input 1 Function - MVC3) = 2 (Torque Current Limit).
P0221/P0222 (Speed Reference Selection Local/Remote Situation) = 1 (AI1 - MVC4).
P0236 (Input AI1 Offset) = 5.0 %.
P0133 (Minimum Speed Reference) = set according to the application.
P0134 (Maximum Speed Reference) = set according to the application; it must be 5 % above the maximum limit
of the master inverter.
Negative Slip – Operation in Scalar Mode
This method to implement the load sharing function is limited to applications of induction motor drive. It is based
on the decrease of the frequency according to the increase of load on the motor; thus there is a natural distribution
of the loads.
Regardless of the chosen speed reference source, it must be sent to all inverters. Due to the low accuracy of
analog inputs, its use as speed reference source is not recommended.
This method to implement the load sharing must not be used for applications that require dynamic performance,
which can only be used when the inverters drive motors with the same characteristic slip.
...
Mestre Escravo 1 Escravo n
MVC3
AOx
...
MVC3
AIx
MVC3
AIx
MVC4
AOx
MVC4
AIx
MVC4
AIx
...
...
...
Mestre Escravo 1 Escravo n
MVC3
AOx
...
MVC3
AIx
MVC3
AIx
MVC4
AOx
MVC4
AIx
MVC4
AIx
...
...
MVW3000
Master
Speed reference
PLC, Networks, ... PLC, Networks, ... PLC, Networks, ...
MVW3000
Slave 1
MVW3000
Slave n
Figure 8.3: General operation scheme of the function
Therefore, the inverters must be parameterized as follows:
P0138 (Rated slip) = the motor slip is recommended (negative signal).
P0139 (Output current filter) = it is recommended to start with the standard value and gradually increment it if the
system presents instability.
Besides the presented parameterization, the implementation of the load sharing function requires that all inverters
involved in the process be enabled simultaneously; thus, the “General Enable” and “Run/Stop” signals must be
sent to all inverters at the same time. There are several ways to meet this requirement and the most appropriate
way will depend on each application.
The description given of the ways to implement the load sharing function intends neither to approach all possibilities
of implementation, nor to detail all the aspects involved. The definition of the best implementation mode for a
certain application, as well as the optimal adjustment of each mode must be defined by WEG engineering and
application teams.
8.2 SYNCHRONOUS TRANSFER FUNCTION
For applications where speed variation is not required during operation, the synchronous transfer function enables
the motor to be accelerated through the inverter up to the rated operating frequency, and then the transfer to the
supply line occurs. Thus, it is possible to eliminate the effects of the starting current related to a direct on-line
start, and the inverter is sized only for the motor starting condition.
Page 82

8-4 | MVW3000
88
Special Functions
Line AC Input
cubicle
Transformer
Inverter
Bypass
reactor
Inverter
contactor
Line contactor
(Bypass)
MVW3000
Figure 8.4: General scheme of synchronous transfer
Basic Settings
The synchronous transfer process involves accelerating the motor up to the rated speed, synchronizing the
voltage imposed to the motor with the line voltage, and making the transfer to the line. For the transfer to occur
properly and with minimal impact on the motor and on the inverter, a series of parameters must be carefully
adjusted so as to ensure the phase synchronization, the minimum difference of the RMS value between the
inverter and the line voltages and the timely occurrence of each step of the process.
Even with the correct setting of parameters related to the synchronous transfer process, it is necessary to use
a reactor between the inverter and the motor in order to absorb differences between the inverter and the line
voltage, thus protecting the inverter during the closing of the line contactor.
Therefore, after making all the start-up procedure for inverter with operation in normal mode, it is necessary to:
Configure the motor voltage (P0400) equal to the line voltage to which the motor will be transferred. In the
operation with synchronous bypass, the inverter uses this value to calculate the RMS voltage that will be
imposed to the motor when operating at rated frequency.
E.g.: motor nameplate voltage of 4000 V and line of 4160 V. Configure P0400 = 4160 V.
Configure the inverter in synchronous transfer mode.
Choose one of the DIs available on the MVC4 board (DI3 to DI10) and configure it to start the synchronous
transfer (P0265 to P0272 = 23 or 25).
Configure one DO (RL1 to RL5) to indicate that the synchronism with the line is “OK” (P0277 to P0282 = 34).
Parameterization Used for Most Applications
In addition to the aforementioned basic settings, other parameters must be set for the correct operation of the
function. Below is a quick description of each parameter, as well as the setting used in most applications.
P0629 = 2 s Minimum time for which the inverter will have to keep the phase error between the input and
output voltage lower than the setting in P632 so as to signal synchronism OK.
P0630 = 60 s Synchronism with the network time out. Time counted from the drive of the MVC4 DI, which
starts searching until the signaling of synchronism OK. If this time is exceeded, A0008 will be indicated.
P0631 = adjusted in the application Delay of DI13 of the PIC2 board used to disable the inverter after the
bypass. This time is used to compensate the delay of the bypass circuit, preventing the motor from remaining
for a period without voltage.
P0632 = 1966 Phase error between the network and inverter voltage used in conjunction with P0629 to indicate
synchronism OK. (P0632/65536)*360º = value in degrees.
Page 83

MVW3000 | 8-5
8
Special Functions
MVW3000 | 8-5
P0636 = adjusted in the application - Parameter used to compensate the phase error between the voltage
that the inverter uses as reference for the synchronism and the actual voltage in the point where the motor will
be connected to the line.
Adjust is possible between (-180 ° and +180 º). (P0636/65536)*360 º = value in degrees.
Operating Sequency
Figure 8.5 on page 8-5 describes all the operating sequence of the signals involved in the synchronous transfer
process.
2 = inv. ready
26 = in sync.
25 = fast disab
24 = sync.
Search sinc.
5 = up ramp
Paral. line/inv
Gen. Enable
Run/Stop
Motor freq. (P0005)
Inverter status
DI (MVC4) = 25 ou 23
Start of synchronism
DO (MVC4) = 34
sinc. Ok
Command to close
switchgear
Switchgear status
Switch close
delay
P0631
∼2mS
DI13 (MVC3)
DI13 (MVC3)
Software delay
P010 0
7 = in
ref.
MVW - Synchronous Transfer
Figure 8.5: Operating diagram of the synchronous transfer function
8.3 CELL BYPASS
The MVW3000 has the cell bypass system as optional function. For this function to be available, the MVW3000
power cells must have the bypass system integrated. The bypass system goes into operation if some fault is
detected inside a cell. If a fault occurs, the main control requests the local control to activate the bypass system,
the main control inhibits the IGBT command pulses of the cell and starts ignoring the fault signals of this cell,
informing that the cell number “X” of phase “Y” went into bypass mode.
It is important to point out that during this process, the inverter continues operating normally with a small reduction
in the output voltage. Control techniques will be used for the application to continue operating normally. For
applications that cannot operate with reduced voltage, it is recommended to use an MVW3000 with voltage
above the motor rated voltage so as to withstand the load at full voltage even with a higher number of cells out
of operation simultaneously.
Page 84

8-6 | MVW3000
88
Special Functions
F1
F2
R
S
T
D2 D4 D6
R1
R2
D1 D3 D5
C1
FA
NE
Bypass
Figure 8.6: Power cell with bypass system active
Figure 8.6 on page 8-6 exemplifies the power cell operation with the bypass system active. The current of the
respective phase passes through the bypass system, and the cell no longer processes any energy. Therefore,
the inverter current capacity, when in bypass mode, is not reduced. That occurs due to the connection in series
of the power cells.
8.4 ANGLE ADJUSTMENT
During the operation of the MVW3000 in bypass mode, the inverter current capacity is preserved, because of
the connection is series of the power cells. Differently, the maximum voltage available at the motor terminals will
smaller, due to the connection in series. Such effect is not desired, since the motor torque is directly related to
the voltage and current applied to its terminals. In addition to the smaller voltage available for the load, the inverter
output also becomes unbalanced, jeopardizing the motor operation. Those problems can be circumvented by
using the technique of angle adjustment between the converter phases.
This technique consists in modifying the phase voltage angles so as to keep the balance between the line
voltages. Thus it is possible to maximize the line voltages and have a smaller impact of the cell bypass on
the application voltage. In order to exemplifies how the technique works, it is possible to represent an 18-cell
MVW3000 (6 per phase) for 18 power supplies (6 in series per phase, connected in Y to the neutral point). Under
normal operation of the inverter, with all the cells operating, the phase voltages are shifted 120° between each
other, and the line voltages have the same amplitude, as shown in Figure 8.7 on page 8-7 (a).
In bypass, without the angle adjustment technique, the line voltages are unbalanced, since the shift between
the phases is still 120°. This process can be seen in Figure 8.7 on page 8-7 (b). In practice, this case is not
compatible with the operation of the application; therefore, as soon as the cell bypass occurs, the inverter applies
the angle adjustment method to balance the line voltages.
For such situation, where 3 cells of phase W are out of operation and without the angle adjustment, Vvw and
Vwu voltages would fall down to 76 % (0.76 p.u.) of the inverter rated operating voltage, even having 15 cells
in operation (approximately 83.3 % of the cells). As the inverter neutral point is not connected to the motor, its
relative position can be easily changed by the angles of the phase voltages. Thus, even with the phase voltages
unbalanced, it is possible to obtain balanced line voltages with the best use of the available voltage.
With the angle adjustment, presented in Figure 8.7 on page 8-7 (c), it is possible to observe that the line voltages
remain balanced. The phase voltages have different shifts now. The voltage available at the motor terminals is
now 80% (0.80 p.u.) of the inverter rated voltage.
Page 85

MVW3000 | 8-7
8
Special Functions
MVW3000 | 8-7
V
VW
V
V
UV
U
W
V
WU
120 º
120 º
120 º
89º
135, 5º
135, 5º
V
UV
V
VW
V
VW
V
UV
V
WU
W
W
V
WU
120 º
120 º
120 º
U
U
Angle adjustment (c)
3 cells of phase W in bypass (b)
Under normal operation
1
0.5
-0.5
0
-1
U
V
W
UV
WU
VW
V
V
0
√3
-√3
√3/2
-√3/2
Figure 8.7: Phase (center) and line (below) voltage diagrams during a bypass
The graph of Figure 8.8 on page 8-7 shows the line voltage obtained (in p.u) after the bypass of only one cell,
on inverters with 2 to 12 cells per phase (range of possible values for the MVW3000). The situation without the
angle adjustment is compared to the situation with the adjustment. Such comparison presents the line voltage
gain using this control technique.
Cells per phase
with angle adjustment
without angle adjustment
Voltage after bypass (p.u)
0.50
0.55
0.60
0.65
0.75
0.70
8
7
6
5
4
3
2
0.80
0.85
0.90
0.95
1.0 0
Figure 8.8: Voltage after bypass of one cell
Page 86

8-8 | MVW3000
88
Special Functions
Table 8.1 on page 8-8 to Table 8.7 on page 8-9 exemplify the number of cells in operation at each phase
and the reduction in the line voltage available for the indicated situation. Only the cases where the line voltage
reduction is smaller than or equal to 20 % the rated one are indicated.
Table 8.1: Reduction in the line voltage in case of bypass (MVW3000 24 cells)
U V W
Reduction in the
Line Voltage
8 8 8 0 %
8 8 7 4 %
8 7 7 9 %
8 8 6 9 %
7 7 7 13 %
8 7 6 13 %
8 8 5 14 %
7 7 6 17 %
8 6 6 18 %
8 7 5 18 %
8 8 4 19 %
Table 8.2: Reduction in the line voltage in case of bypass (MVW3000 21 cells)
U V W
Reduction in the
Line Voltage
7 7 7 0 %
7 7 6 5 %
7 6 6 10 %
7 7 5 16 %
6 6 6 10 %
7 6 5 15 %
7 7 4 14 %
6 6 5 19 %
Table 8.3: Reduction in the line voltage in case of bypass (MVW3000 18 cells)
U V W
Reduction in the
Line Voltage
6 6 6 0 %
6 6 5 6 %
6 5 5 12 %
6 6 4 12 %
5 5 5 17 %
6 5 4 18 %
6 6 3 19 %
6 6 5 19 %
Table 8.4: Reduction in the line voltage in case of bypass (MVW3000 15 cells)
U V W
Reduction in the
Line Voltage
5 5 5 0 %
5 5 4 7 %
5 4 4 14 %
5 5 3 15 %
4 4 4 20 %
Table 8.5: Reduction in the line voltage in case of bypass (MVW3000 12 cells)
U V W
Reduction in the
Line Voltage
4 4 4 0 %
4 4 3 9 %
4 3 3 18 %
4 4 2 19 %
4 4 4 20 %
Page 87

MVW3000 | 8-9
8
Special Functions
MVW3000 | 8-9
Table 8.6: Reduction in the line voltage in case of bypass (MVW3000 9 cells)
U V W
Reduction in the
Line Voltage
3 3 3 0 %
3 3 2 12 %
Table 8.7: Reduction in the line voltage in case of bypass (MVW3000 6 cells)
U V W
Reduction in the
Line Voltage
2 2 2 0 %
2 2 1 19 %
It is important to point out that for any situation described in the tables above, the order of the phases is not
decisive in the reduction of the line voltage, but the number of remaining cells in the system. For example, the
situation where a phase W cell is removed from operation, presented in Table 8.7 on page 8-9, will present the
same reduction in the line voltage for any combination of remaining cells between the phases, even if the fault is
occurring in phases U, V or W.
NOTE!
For other possible configurations in bypass, contact WEG technical assistance.
Page 88

8-10 | MVW3000
88
Special Functions
Page 89

MVW3000 | 9-1
9
Communication Networks
MVW3000 | 9-1
9
MVW3000 | 9-1
9 COMMUNICATION NETWORKS
The MVW3000 can be connected to communication networks allowing its control and parameterization.
Therefore, it is necessary to install an optional electronic board according to the desired Fieldbus standard.
NOTE!
The chosen Fieldbus option can be specified in the suitable field of the MVW3000 model coding. In such
case, the MVW3000 will be supplied with all the necessary components already installed in the product.
In case of a later purchase of the Fieldbus optional kit, the user must install it.
9.1 FIELDBUS KIT
9.1.1 Installation of the Fieldbus Kit
The Fieldbus kit communication board is installed directly on the MVC4 control board, connected to the XC140
connector and fixed by spacers.
NOTE!
Follow the safety notes presented in the Chapter 1 SAFETY NOTICES on page 1-1.
In case there is a function expansion board (EBA/EBB/EBC) installed, it will be necessary to remove it for a while
so as to allow the installation of the chosen Fieldbus Kit.
1. Power down control Rack.
2. Remove the bolt from the metallic spacer next to the XC140 connector (MVC4 board).
3. Carefully fit the male XC140 connector into the correspondent MVC4 connector. Verify the exact coincidence
of all the XC140 connector pins (Figure 9.1 on page 9-1).
Figure 9.1: Fieldbus electronic board installation
Page 90

9-2 | MVW3000
9
Communication Networks
9-2 | MVW3000
4. Press the board close to XC140 and on the bottom right corner until the complete insertion of the connector
and the plastic spacer.
5. Secure the board to the metallic spacers with the provided bolt.
6. Connect one end of the Fieldbus cable to the MVW3000 control rack, according to the Figure 9.3 on page
9-2.
7. Connect the other end of the Fieldbus cable to the Fieldbus board, according to the Figure 9.3 on page 9-2.
DEVICENET PROFIBUS DP
112233445
5
6
Figure 9.2: Connection to the Fieldbus board
Figure 9.3: Connection to the Fieldbus board
9.1.2 Profibus DP
The inverter that is fitted with the Profibus DP Kit operates in slave mode, allowing the reading/writing of its
parameters through a master. The inverter does not start the communication with other nodes, it only answers
to the master controls. The physical medium uses a two-conductor twisted-pair cable (RS-485) allowing data
transmission at baud rates between 9.6 kbits/s and 12 Mbits/s. The Figure 9.4 on page 9-3 shows an overview
of a Profibus DP network.
Page 91

MVW3000 | 9-3
9
Communication Networks
MVW3000 | 9-3
Profibus DP
master
Profibus DP
slave node
#1
Profibus DP
slave node
#2
Profibus DP
slave node
#n
DP
RS-232
Personal computer with
configuration
software
Figure 9.4: Profibus DP network
Fieldbus Type: Profibus DP EN 50170 (DIN 19245).
Physical Interface
Transmission medium: Profibus busbar line, type A or B as specified in EN50170.
Topology: Master-Slave communication.
Insulation: the bus is fed by a DC/DC converter, which is galvanically isolated from the remaining electronics,
and the signals A and B are isolated by means of optocouplers.
It allows the connection/disconnection of a node without affecting the network.
Inverter user Fieldbus connector.
D-sub 9-pin female connector, pin assignment according to Table 9.1 on page 9-3.
Table 9.1: Profibus DP DB9 pinout
Pin Name Function
1 Not connected 2 Not connected 3 B-Line RxD/TxD positive, according to the RS-485 specification
4 Not connected 5 GND 0 V isolated from the RS-485 circuit
6 +5 V +5 V isolated from the RS-485 circuit
7 Not connected 8 A-Line RxD/TxD negative, according to the RS-485 specification
9 Not connected -
Frame Shield Connected to the protective ground (PE)
Line Termination
The initial and the end points of the network must present the characteristic impedance, in order to prevent
reflections. The DB9 cable male connector has the suitable termination resistor. When the inverter is the first or
the last of the network, the termination resistor switch must be set to “ON”. Otherwise, leave the switch in the
“OFF”position. The terminating switch of the Profibus DP board must be set to 1 (OFF).
Baudrate
The baud rate of a Profibus DP network is defined during the master configuration and only one rate is allowed
in the same network. The Profibus DP board has automatic baud rate detection and the user does not need to
configure it on the board. The supported baud rates are 9.6 kbits/s, 19.2 kbits/s, 45.45 kbits/s, 93.75 kbits/s,
187.5 kbits/s, 500 kbits/s, 1.5 Mbits/s, 3 Mbits/s, 6 Mbits/s and 12 Mbits/s.
Page 92

9-4 | MVW3000
9
Communication Networks
9-4 | MVW3000
Node Address
The node address is established by means of two rotating switches on the electronic Profibus DP board, allowing
the addressing from 1 to 99. Looking at the board with the inverter in normal position, the leftmost switch sets
the ten of the address, while the rightmost switch sets the units of the address:
Address = (leftmost rotary switch x 10) + (rightmost rotary switch x 1).
Ten setting Integer setting
Figure 9.5: Node address
NOTE!
The node address must not be changed with the network in operation.
Configuration File (GSD File)
Each element of a Profibus DP network is associated to a GSD file that has all information about the element
operation. This file is supplied together with the product and is used by the network configuration program.
Signaling
The electronic board has a bicolor LED indicating the status of the Fieldbus according to the Table 9.2 on page
9-4.
Table 9.2: Fieldbus status LED signaling
LED Color Frequency Status
Red 2 Hz Fault during the test of the ASIC and Flash ROM
Green 2 Hz Board has not been initialized
Green 1 Hz Board has been initialized and is operating
Red 1 Hz Fault during the RAM test
Red 4 Hz Fault during the DPRAM test
NOTE!
The red signalizations may indicate hardware problems on the electronic board. Its reset is performed
by cycling the power of the inverter. If the problem persists, replace the electronic board.
The board also has other four LEDs grouped at the right bottom corner, indicating the Fieldbus network status
do Fieldbus according to Figure 9.6 on page 9-4 and Table 9.3 on page 9-5 below.
Reserved
Fieldbus
diagnostics
On-line
Off-line
Figure 9.6: LEDs indicating the status of the Profibus DP network
Page 93

MVW3000 | 9-5
9
Communication Networks
MVW3000 | 9-5
Table 9.3: Profibus DP network status LEDs
LED Color
Function
Fieldbus
diagnostics
Red
It indicates the following faults on the Fieldbus side:
Flashing 1 Hz - Configuration error: the IN/OUT area size set at board initialization is different
from the size set during the network configuration.
Flashing 2 Hz - Error in the user parameter data: the size/content of the user parameter data
set at board initialization is different from the size/content set during the network configuration.
Flashing 4 Hz - Profibus Communication ASIC initialization error.
OFF - No present problems.
On-line Green
Indicates that the board is on-line in Fieldbus network:
ON - The board is on-line and the data exchange is possible.
OFF - The board is not on-line.
Off-line Red
Indicates that the board is off-line in Fieldbus network:
ON - The board is off-line and the data exchange is not possible.
OFF - The board is not off-line.
NOTE!
When power is applied to the drive and both on-line and off-line LEDs on the Profibus DP board flash
alternately, then a network address configuration or an installation problem may be present.
Check the installation and the network node address.
Use of related Profibus DP/Parameters of the MVW3000. See Item 9.1.6 Fieldbus Application/
MVW3000 Related Parameters on page 9-7.
9.1.3 DeviceNet
The DeviceNet communication is used for industrial automation, mainly for the control of valves, sensors, input/
output units and automation equipment. The DeviceNet communication link is based on a communication protocol
“broadcast oriented”, the Controller Area Network (CAN). The physical medium of the DeviceNet network consists
of a shielded cable comprising a twisted pair and two wires for the external power supply. The baud rate can be
set to 125 kbits/s, 250 kbits/s or 500 kbits/s. Figure 9.7 on page 9-5 shows a general view of a DeviceNet
network.
Controller
Other
devices
Device
configuration
Input/Output
devices
Motor
starter
DeviceNet
Sensor
Motor
controller
Push
button
cluster
Bar code
scanner
Drive
Figure 9.7: DeviceNet network
Inverter user Fieldbus connector.
5-way plug-in connector with screw terminal, pin assignment according to Table 9.4 on page 9-5.
Table 9.4: DeviceNet terminal block pinout
Terminal Description Color
1 V- Black
2 CAN_L Blue
3 Shield 4 CAN_H White
5 V+ Red
Page 94

9-6 | MVW3000
9
Communication Networks
9-6 | MVW3000
Line Termination
The initial and the end points of the network must present the characteristic impedance, in order to prevent
reflections. Thus a 121 Ω/0.5 W resistor must be connected between the terminals 2 and 4 of the Fieldbus
terminal block.
Baudrate/Node Address
There are three different baudrates for DeviceNet: 125 kbits/s, 250 kbits/s and 500 kbits/s. Choose the baudrate
by setting the DIP switches on the electronic board, before the network configuration. The node address is
selected through the six DIP switches on the electronic board, permitting addressing from 0 to 63.
Baudrate
[bits/s]
DIP Switches 1
and 2
125 k 00
250 k 01
500 k 10
Reserved 11
Address DIP3 to DIP8
0 000000
1 000001
2 000010
...
...
61 111101
62 111110
63 111111
AddressBaudrate
ON
1
1
0
2 3 4 5 6 7 8
Figure 9.8: DeviceNet baudrate and node address configuration
Configuration File (EDS File)
Each element of a DeviceNet network is associated to an EDS file, which has all information about the element.
This file supplied with the product is used by the network configuration program.
By means of the parameter P0309 it is possible to select 2, 4 or 6 input/output words, when P0309 is programmed
4, 5 or 6, respectively (refer to the Item 9.1.6 Fieldbus Application/MVW3000 Related Parameters on page 9-7).
Define in the network configuration program the number of exchanged words, according to the number selected
at the parameter P0309. The type of connection used for data exchange must be “Polled I/O”.
NOTE!
The PLC (master) must be programmed for Polled I/O connection.
Signaling
The electronic board has a bicolor LED indicating the status of the Fieldbus according to the Table 9.2 on page
9-4.
NOTE!
The red signalizations may indicate hardware problems on the electronic board. Its reset is performed
by cycling the power of the inverter. If the problem persists, replace the electronic board.
The board also has other four LEDs grouped at the right bottom corner, indicating the Fieldbus network status
according to Figure 9.9 on page 9-6 and Table 9.5 on page 9-7 below.
Reserved
Network status
Module
network status
Reserved
Figure 9.9: LEDs indicating the status of the DeviceNet network
Page 95

MVW3000 | 9-7
9
Communication Networks
MVW3000 | 9-7
Table 9.5: DeviceNet network status LEDs
LED Color
Description
Module Network Status Off Without supply
Module Network Status Red Nonrecoverable fault
Module Network Status Green Operational board
Module Network Status Flashing red Minor fault
Network Status Off Without supply/off-line
Network Status Green Operative link, connected
Network Status Red Link critical fault
Network Status Flashing green On-line, not connected
Network Status Flashing red Connection timeout
NOTE!
Refer to the Item 9.1.6 Fieldbus Application/MVW3000 Related Parameters on page 9-7 for
DeviceNet application/MVW3000 related parameters.
The company HMS Industrial Networks AB has developed the communication board that comes
with the product. Therefore, the network configuration software will not recognize the product as the
MVW3000 frequency inverter, but as the "Anybus-S DeviceNet" at the "Communications Adapter"
category. The differentiation will be done using the device network address, adjusted according to
the Figure 9.9 on page 9-6 and the Table 9.5 on page 9-7.
9.1.4 DeviceNet Drive Profile
NOTE!
Refer to the DeviceNet Drive Profiles manual.
9.1.5 Ethernet
NOTE!
Refer to the Ethernet SSW-06 manual.
9.1.6 Fieldbus Application/MVW3000 Related Parameters
There are two main parameters: P0309 and P0313.
P0309 - defines the used Fieldbus protocol (Profibus DP or DeviceNet) and the number of variables (I/O) exchanged
with the master (2, 4 or 6). The parameter P309 has the following options:
0 = Inactive.
1 = Profibus DP 2 I/O.
2 = Profibus DP 4 I/O.
3 = Profibus DP 6 I/O, (for Profibus DP).
4 = DeviceNet 2 I/O.
5 = DeviceNet 4 I/O.
6 = DeviceNet 6 I/O, (for DeviceNet).
7 = Modbus-RTU 2 I/O.
8 = Modbus-RTU 4 I/O.
9 = Modbus-RTU 6 I/O.
10 = Devicenet Drive Profile.
11 = Ethernet IP 2 I/O.
12 = Ethernet IP 4 I/O.
13 = Ethernet IP 6 I/O.
P0313 - defines the inverter behavior when the physical connection with the master is interrupted and/or the
Fieldbus board is inactive (A0128, A0129 or A0130 indicated on the display).
The parameter P0313 has the following options:
0 = disables the inverter by using the Start/Stop controls via deceleration ramp.
1 = disables the inverter by using the General Enabling, motor coasting.
2 = the inverter status is not changed.
3 = the inverter goes to Local mode.
Page 96

9-8 | MVW3000
9
Communication Networks
9-8 | MVW3000
9.1.6.1 Variables Read From the Inverter
1. Inverter logical status.
2. Motor speed, for the option P0309 = 1 or 4 (2I/O) - read 1 and 2.
3. Digital input status (P0012).
4. Parameter contents, for the option P0309 = 2 or 5 (4I/O) - read 1, 2, 3 and 4.
5. Parameter contents, for the option (P0009).
6. Motor current (P0003), for the option P3009 = 3 or 6 (6I/O) - read 1, 2, 3, 4, 5 and 6.
1. Status word (EL):
The status word is composed by a total of 16 bits, 8 high order bits and 8 low order bits. It has the following
construction:
High-order bits - they indicate the status of the associated function.
EL.15 - Active error: 0 = No, 1 = Yes.
EL.14 - PID Regulator: 0 = Manual, 1 = Automatic.
EL.13 - Undervoltage of the electronics power supplies: 0 = Without, 1 = With.
EL.12 - Local/Remote command: 0 = Local, 1 = Remote.
EL.11 - JOG command: 0 = Inactive, 1 = Active.
EL.10 - Forward/Reverse: 0 = Reverse, 1 = Forward.
EL.09 - General enabling: 0 = Disabled, 1 = Enabled.
EL.08
(*)
- Start/Stop: 0 = Stop, 1 = Start.
(*) O EL.08 = 1, means the inverter received the Run/Stop command via networks. This EL is not intended to signal that the motor is
effectively spinning.
Low-order bits -they indicate the error code number, i.e., 03, 07 or 87 (57h).
For further information on the faults and alarms, refer to the programming manual available for download on:
www.weg.net.
2. Motor speed:
This variable is shown by using 13-bit resolution plus signal. Thus, the rated value will be equal to 8191 (1FFFh)
(Forward) or -8191 (E001h) (Reverse) when the motor is running at synchronous speed (or base speed, for
instance 1800 rpm for a IV-pole motor, 60 Hz).
3. Digital input status:
It presents the parameter P0012 contents, where 1 indicates an active input and 0 indicates an inactive input.
For further information on parameters, refer to the programming manual available for download on: www.weg.net.
The digital inputs of this WORD are distributed as follows:
Bit.7 - DI1 status. Bit.2 - DI6 status.
Bit.6 - DI2 status. Bit.1 - DI7 status.
Bit.5 - DI3 status. Bit.0 - DI8 status.
Bit.4 - DI4 status. Bit.8 - DI9 status.
Bit.3 - DI5 status. Bit.9 - DI10 status.
4. Parameter contents:
This position allows reading the contents of inverter parameters, which are selected at the position 4 - Number
of the parameters to be read - of the variables written in the inverter. The read values have the same order of
magnitude of those described in the product manual or showed on the HMI.
The values are read without the decimal point, if that is the case.
Examples:
1. HMI displays 12.3, the Fieldbus reading will be 123.
2. HMI displays 0.246, the Fieldbus reading will be 246.
Page 97

MVW3000 | 9-9
9
Communication Networks
MVW3000 | 9-9
There are some parameters whose representation on the LED display can suppress the decimal position when
the values are higher than 99.9. These parameters are P0100, P0101, P0102, P0103, P0156, P0157, P0158,
P0169 (for P0202 < 3), P0290 and P0401.
Example: Indication on the LED display: 130.
Indication on the LCD : 130.0, Fieldbus reading is: 1300.
The reading of parameter P0006 via Fieldbus has the meaning presented in the detailed description of the
parameters, refer to the programming manual available for download on: www.weg.net.
5. Torque current:
This position indicates P009 parameter contents, without the decimal point. A low pass filter with a time constant
of 0.5 s filters this variable.
6. Motor current:
This position indicates P003 parameter contents, without the decimal point. A low pass filter with a time constant
of 0.3 s filters this variable.
9.1.6.2 Variables Written in Inverter
The variables are written in the following order:
1. Control word.
2. Motor speed reference, for the option P309 = 1 or 4 (2I/O) - it writes in 1 and 2.
3. Status of the digital outputs.
4. Number of the parameters to be read, for the option P0309 = 2 or 5 (4I/O) - it writes in 1, 2, 3 and 4.
5. Number of the parameter to be changed.
6. Content of the parameter to be changed, selected in the previous position, for the option P0309 = 3 or 6 (6I/O)
- it writes in 1, 2, 3, 4, 5 and 6.
1. Control word (C.L.):
The control word is composed by a total of 16 bits, 8 high order bits and 8 low order bits. It has the following
construction:
High-order bits - they select the functions to be controlled, when the correspondent bits are set to 1.
CL.15 - Inverter fault reset.
CL.14 - Without function.
CL.13 - To save the changes of parameters P0169/P0170 in the EEPROM.
CL.12 - Local/Remote command.
CL.11 - Jog command.
CL.10 - Forward/Reverse.
CL.09 - General Enabling.
CL.08 - Start/Stop.
Low-order bits - they determine the activation of the functions selected in the high-order bits,
CL.7 - Inverter fault reset: every time it changes from 0 to 1 it causes an inverter reset, except for the errors (except
A0124, A0125, A0126 and A0127);
CL.6 - No function.
CL.5 - To save P169/P170 in the EEPROM: 0 = to save, 1 = not to save.
CL.4 - Local/Remote command: 0 = Local, 1 = Remote.
CL.3 - Jog command: 0 = Inactive, 1 = Active.
CL.2 - Forward/Reverse: 0 = Reverse, 1 = Forward.
CL.1 - General enabling: 0 = Disabled, 1 = Enabled.
CL.0 - Start/Stop: 0 = Stop, 1 = Start.
Page 98

9-10 | MVW3000
9
Communication Networks
9-10 | MVW3000
NOTE!
The inverter will only execute the command defined in the low-order bit if the correspondent high-
order bit is set to 1 (one). If the high-order bit is set to 0 (zero), the inverter will disregard the value
of the correspondent low-order bit.
CL.13: The function of saving parameter content changes in the EEPROM occurs normally when the
HMI is used. The EEPROM allows a limited number of writings (100.000). In applications in which
the speed regulator remains saturated and torque control is required, this control can be achieved
by adjusting the torque limits P169/P170 (valid for P202 > 2). Therefore, if the network master keeps
writing continuously in P169/P170, then the correspondent bits must be programmed in order to
avoid that every change be saved in the EEPROM by setting: CL.13 = 1 and CL.5 = 1.
In order to enable the functions of the Control Word, it is necessary to set the inverter respective parameters with
the option “Fieldbus”.
a) Local/Remote Selection Source - P0220.
b) Speed Reference - P0221 and/or P0222.
c) Forward/Reverse Selection - P0223 and/or P0226.
d) General Enabling, Start/Stop Selection - P0224 and/or P0227.
e) JOG Selection - P0225 and/or P0228.
2. Motor speed reference:
This variable is presented using a 13 bit resolution. Therefore, the speed reference value for the motor synchronous
speed will be equal to 8191 (1FFFh).
This value must be used only as the base speed for the calculation of the desired speed (speed reference).
Examples:
1. 4-pole, 60 Hz motor, synchronous speed = 1800 rpm and speed reference = 650 rpm.
1800 rpm - 8191
650 rpm - X X = 2958 = 0B8Eh
This value (0B8Eh) must be written in the second word, which represents the motor speed reference (according
to the beginning of this item).
2. 6-pole, 60 Hz motor, synchronous speed = 1200 rpm and speed reference = 1000 rpm.
1200 rpm - 8191
1000 rpm - X X = 4096 = 1AAAh
This value (1AAAh) must be written in the second word, which represents the motor speed reference (according
to the beginning of this item).
NOTE!
Values above 8191 (1FFFh) are allowed when speed references above the motor synchronous speed
are required, as long as the maximum programmed speed reference is respected.
3. Status of the digital outputs:
It allows controlling the status of the digital outputs that have been programmed for Fieldbus at the parameters
P0275 to P0282. 16 bits, with the following construction, form the word that defines the status of the digital
outputs:
High-order bits: they define the outputs to be controlled, when set in 1.
Bit.08: 1 - DO1 output control.
Bit.09: 1 - DO2 output control.
Bit.10: 1 - RL1 output control.
Bit.11: 1 - RL2 output control.
Bit.12: 1 - RL3 output control.
Low-order bits: they define the status of the controlled outputs.
Bit.0 - DO1 status: 0 = inactive output, 1 = active output.
Bit.1 - DO2 status: idem.
Page 99

MVW3000 | 9-11
9
Communication Networks
MVW3000 | 9-11
Bit.2 - RL1 status: idem.
Bit.3 - RL2 status: idem.
Bit.4 - RL3 status: idem.
4. Number of the parameters to be read:
Through this position, the reading of any inverter parameter can be defined. The number of the parameter to be
read must be programmed here, and its contents will be presented at the position 4 of the variables read from
the inverter.
5. Number of the parameter to be changed: (parameter contents modification).
This position operates together with the position 6, described next.
When no parameter has to be changed, then fill this position with the code 999.
Changing process sequence:
- Keep 999 in the position 5.
- Replace 999 by the number of the parameter to be changed.
- If no error code (124 to 127) is signalized in the Status Word, then replace the parameter number by 999, in order
to conclude the modification.
The modification can be verified via the HMI or by reading the parameter contents.
NOTE!
1. The command to change from scalar to vector control will not be accepted if parameters P0409 to
P0413 are set to zero. That should be done via HMI.
2. Do not program P0204 = 5, because in the factory default settings P0309 = Inactive.
3. P0204 and P0408 do not accept modification via network command.
4. The parameter contents must be kept by the master during 15.0 ms.
Send a new value or write in another parameter only after this time has elapsed.
6. Content of the parameter to be changed, selected at the position 5: (Number of the parameter to be changed)
The format of the values adjusted in this position must be the ones described in the manual. The values, however,
must be written without the decimal point, if this is the case. When the parameters P409 to P413 are modified,
small differences in the contents may occur when comparing the value sent via Fieldbus and the value read at the
position 4. (Parameter contents) or at the HMI, because of the truncating during the reading process.
9.1.6.3 Error Indications
During the Fieldbus reading/writing process the following error indications may occur and be informed at the
Status Word variable:
Status Word variable indications:
A0124 - An attempt to change a parameter that can be modified only with disabled inverter.
- Parameterization error.
A0125 - Caused by:
- Reading of non-existent parameter, or
- Writing on non-existent parameter, or
- Writing on P0408 and P0204.
A0126 - An attempt to write a value out of the permitted range.
A0127 - Caused by:
a) A function selected by the Control Word has not been programmed for Fieldbus, or
b) Command of a digital output that has not been programmed for Fieldbus, or
c) An attempt to write in a read-only parameter.
The indication of the listed errors will be removed from the Status Word when the indented action is sent correctly,
except for A127 (“b” case), whose reset is performed writing in the Control Word.
Page 100

9-12 | MVW3000
9
Communication Networks
9-12 | MVW3000
Example: Assuming that no digital output has been programmed for Fieldbus, then if the word 11h is written in
the position 3, the inverter will respond indicating A127 in the Status Word. To remove this indication from the
Status Word it is necessary:
1. To write zero in the position 3 (because no DO has been programmed for Fieldbus).
2. To change the Control Word variable so that the A127 indication be removed from the Status Word.
The removal of the listed errors from the Status Word can also be achieved by writing the 999 code in the position
5 of the variables written in the inverter. Except for A127 (“b” and “a” cases), whose reset occurs only through the
writing in the Control Word, as exemplified above..
NOTE!
The alarms A0124, A0125, A0126 and A0127 do not cause any change in the inverter operation status.
HMI Indications:
A0129 - Inactive Fieldbus onnection
This indication occurs when the physical connection from the inverter to the master is interrupted. The action that
the inverter will take when A0129 is detected is programmed at P0313. The A0129 indication is removed from the
display when the HMI key is pressed.
E30 - Inactive Fieldbus board.
This indication will appear when:
1. P0309 is programmed different from Inactive, without the existence of the respective board mounted on the
MVC4 board XC140 connector, or
2. The Fieldbus board exists but it is defective, or
3. The board exists; however, the model programmed in P0309 does not match the used board model.
The action that the inverter will take when A0130 is detected is programmed at P0313. The E30 indication is
removed from the display when the HMI key is pressed.
9.1.6.4 MVW3000 Variable Addressing at the Fieldbus Devices
The variables are arranged in the Fieldbus device memory from 00h on, for both writing and reading. What deals
with the address differences is the protocol itself, and the communication board. The manner the variables are
arranged in each address of the Fieldbus device memory depends on the equipment that is being used as
master. In an A PLC, for instance, the variables are arranged High and Low, whereas in a B PLC the variables are
arranged Low and High.
9.2 WEGBUS SERIAL
The basic purpose of the serial communication is the physical connection of the inverters in an equipment
network configured in the following form:
Master PC, PLC, etc.
Slave 1
(Inverter)
Slave 2
(Inverter)
Slave n
(Inverter)
n ≤ 30
Figure 9.10: Serial configuration
 Loading...
Loading...