

Page 1
0600-0032-0019 Rev. A Hecho en los Estados Unidos
Enero de 2001 $10.00
Manual del Usuario
1241 Bundy Boulevard, Winona, Minnesota, EE. UU. 55987-4873
Teléf.: +1 (507) 454-5300, fax: +1 (507) 452-4507 http://www.watlow.com
Series F4P
Serie F4P, controladores de temperatura/proceso
de 1/4 DIN (96 X 96 mm)
Español (Spanish)
Empresa registrada
Winona, Minnesota EE. UU.
ISO 9001
Page 2

Información de seguridad de este manual
A lo largo de este manual se utilizan los símbolos de atención y advertencia
para alertar al lector sobre informaciones importantes relacionadas con la
operación del equipo y la seguridad.
Una “NOTA” es un mensaje corto que alerta al lector sobre algún detalle de
importancia.
Los avisos de “ATENCIÓN” contienen información de importancia para proteger
el equipo y su rendimiento.
Los avisos de “ADVERTENCIA” contienen información de importancia para la
protección de personas y del equipo. Preste especial atención a todas las
advertencias relativas a su aplicación.
El símbolo de alerta de seguridad, ç(un signo de exclamación encerrado en un
triángulo), precede a una declaración de ATENCIÓN o ADVERTENCIA general.
El símbolo de peligro por electricidad, Ó(un rayo dentro de un triángulo),
precede a una declaración de ATENCIÓN o ADVERTENCIA de peligro de
descargas eléctricas.
Asistencia técnica
Si tiene algún problema con el controlador Watlow, consulte la información
referente a la configuración del equipo, para verificar que las opciones
seleccionadas entradas, salidas, alarmas, límites, etc. sean las correctas para su
aplicación. Si el problema persiste después de haber realizado esta verificación,
podrá obtener asistencia técnica llamando a su representante local de Watlow
(véase la tapa posterior) o llamando al teléfono +1 (507) 494-5656 en los Estados
Unidos. Para soporte técnico relacionado con su aplicación, pida hablar con un
ingeniero de aplicaciones.
Al llamar, tenga a mano la siguiente información:
• Número completo del modelo • Toda la información de configuración
• Manual del Usuario • Contenido del menú de Diagnósticos
En la contraportada de este manual se encuentra la información sobre
garantía y devoluciones.
Sus comentarios
Mucho nos complacería recibir sus sugerencias o comentarios relativos a este
manual. Le rogamos nos los envíe a la siguiente dirección: Technical Literature
Team, Watlow Winona, 1241 Bundy Boulevard, P.O. Box 5580, Winona,
Minnesota, 55987-5580 EE. UU.; teléfono: +1 (507) 454-5300; fax: +1 (507) 452-
4507.
© Copyright 2001 por Watlow Winona, Inc. Reservados todos los derechos.
(1974)
ç
ATENCIÓN o
ADVERTENCIA
Ó
Peligro de
descargas
eléctricas
ATENCIÓN o
ADVERTENCIA
Page 3
Watlow Series F4P índice ■ i
Operación del controlador
Capítulo 1: Introducción . . . . . . . . . . . . . . . . 1.1
Pasos de configuración . . . . . . . . . . . . . .1.2
Capítulo 2: Operación desde el panel frontal .2.1
Teclas, pantallas e
indicadores luminosos . . . . . . . . . . . . . . .2.2
Programación guiada . . . . . . . . . . . . . . . .2.3
Página Principal Especial . . . . . . . . . . . .2.3
Operación automática y manual . . . . . . . .2.3
Resolución de problemas,
alarmas y errores . . . . . . . . . . . . . . . . . .2.4
Programación del controlador
Capítulo 3: Página Operaciones . . . . . . . . . .3.1
Puntos establecidos de alarma . . . . . . . .3.1
Eliminación de alarmas o errores . . . . . . .3.1
Autoafinación PID . . . . . . . . . . . . . . . . . .3.1
Editar PID . . . . . . . . . . . . . . . . . . . . . . . .3.2
Múltiples conjuntos PID . . . . . . . . . . . . . .3.3
Cascada . . . . . . . . . . . . . . . . . . . . . . . . .3.3
Capítulo 4: Página Configuración . . . . . . . . .4.1
Orden de configuración de los parámetros4.1
Configuración personalizada de la
Página Principal . . . . . . . . . . . . . . . . . . .4.2
Mensajes estáticos . . . . . . . . . . . . . . . . .4.2
Capítulo 5: Página Fábrica . . . . . . . . . . . . . .5.1
Seguridad . . . . . . . . . . . . . . . . . . . . . . . .5.1
Diagnósticos . . . . . . . . . . . . . . . . . . . . . .5.3
Calibración . . . . . . . . . . . . . . . . . . . . . . .5.3
Capítulo 6: Parámetros . . . . . . . . . . . . . . . . .6.1
Páginas, menús y parámetros . . . . . . . . .6.1
Página Principal . . . . . . . . . . . . . . . . . . .6.2
Tabla de parámetros de la
Página Operaciones . . . . . . . . . . . . . . . .6.4
Tabla de parámetros de la
Página Configuración . . . . . . . . . . . . . . .6.11
Tabla de parámetros de la
Página Fábrica . . . . . . . . . . . . . . . . . . . .6.26
Capítulo 7: Características . . . . . . . . . . . . . .7.1
Entradas . . . . . . . . . . . . . . . . . . . . . . . . .7.2
Métodos de control . . . . . . . . . . . . . . . . .7.5
Otras características . . . . . . . . . . . . . . . .7.9
Alarmas . . . . . . . . . . . . . . . . . . . . . . . . . .7.10
Características avanzadas . . . . . . . . . . . .7.12
Características del controlador de la
Serie F4P avanzada . . . . . . . . . . . . . . . .7.14
Instalación y cableado
Capítulo 8: Instalación y cableado . . . . . .8.1
Cableado del controlador F4P . . . . . . . . .8.5
Apéndice
Especificaciones . . . . . . . . . . . . . . . . . . .A.2
Información de pedido . . . . . . . . . . . . . . .A.3
Declaración de conformidad . . . . . . . . . .A.4
Glosario . . . . . . . . . . . . . . . . . . . . . . . . .A.5
índice de materias . . . . . . . . . . . . . . . . . .A.8
Mapa del software . . . . . . . . . . . . . . . . . .A.12
Acerca de Watlow. Información sobre garantía.
. . . . . . . . . . . . . . . . . . . . . . . Contraportada
Serie F4P: índice
í
En el sitio web de Watlow se ofrece gratuitamente una copia electrónica de este manual:
http://www.watlow.com.
Page 4

ii ■ índice Watlow Series F4P
Notas
Page 5
Watlow Series F4P Introduction ■ 1.1
1
Capítulo 1: Introducción
Entradas y salidas
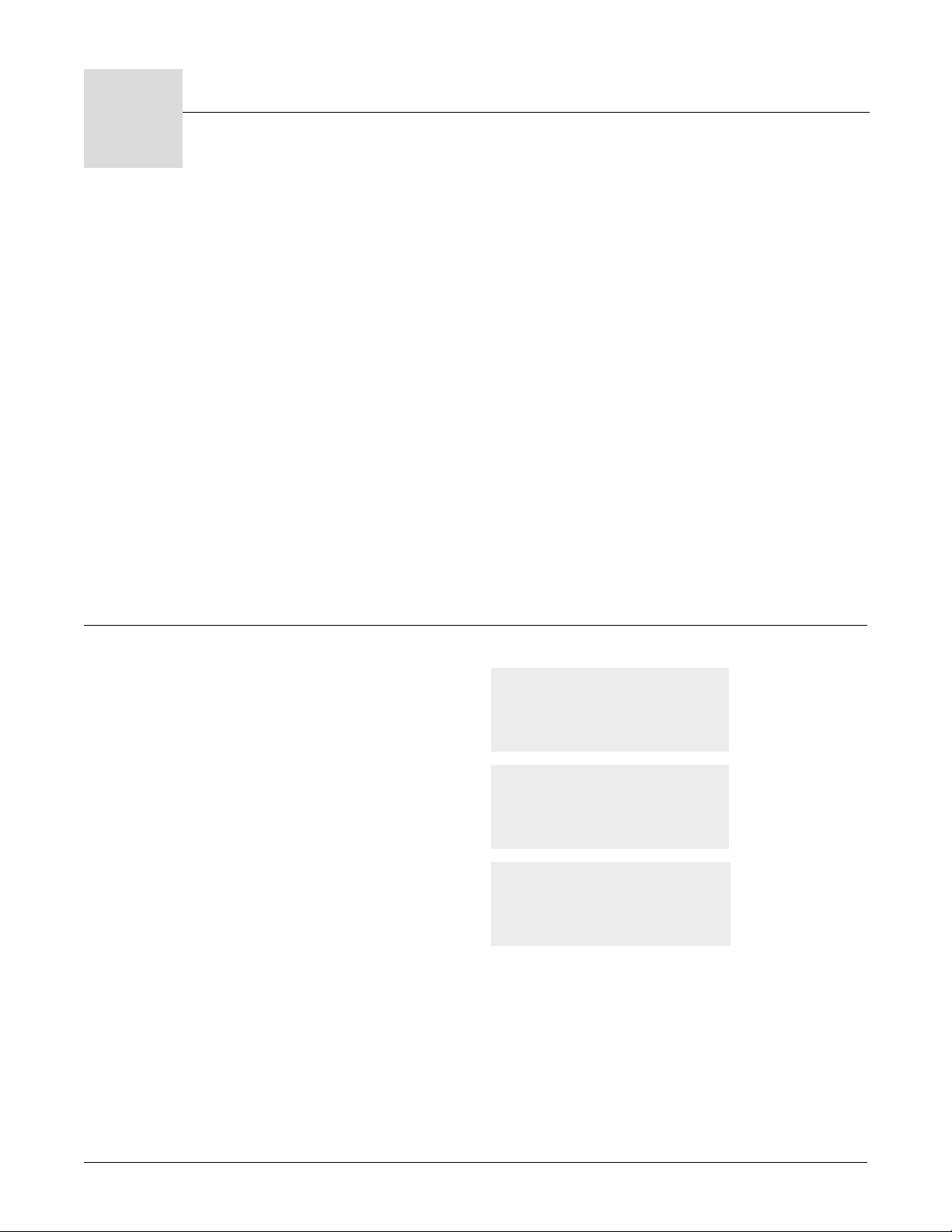
Figura 1.1 — Entradas y salidas del equipo Serie F4P (modelo estándar, 1 entrada, F4P _ - _ _ AA - _ _ _ _; y modelo
avanzado, 3 entradas, F4P _ - _ _ AB - _ _ _ _ ).
Los controladores de temperatura/proceso Serie F4P de
1/4 DIN (96 mm x 96 mm) de Watlow son fáciles de
configurar y programar, y toleran los ambientes hostiles.
Entre las características de estos equipos figuran las
siguientes:
• pantalla de LCD de cuatro líneas y alta resolución;
• software de configuración guiada;
• tecla de información referente al contexto;
• microprocesador de 16 bits;
• entradas universales y digitales.
F
4
1A
1B
1 o 3 entradas analógicas universales
4 entradas digitales
1 entrada/salida de comunicaciones
…Alarm desv. baja
–1
F
Ajusta valor
Previo Próximo
ˆ
å
2 salidas de control
2 salidas de alarma
1
2
2 salidas de retransmisión
(opcionales)
Page 6

1.2 ■ Introducción Watlow Series F4P
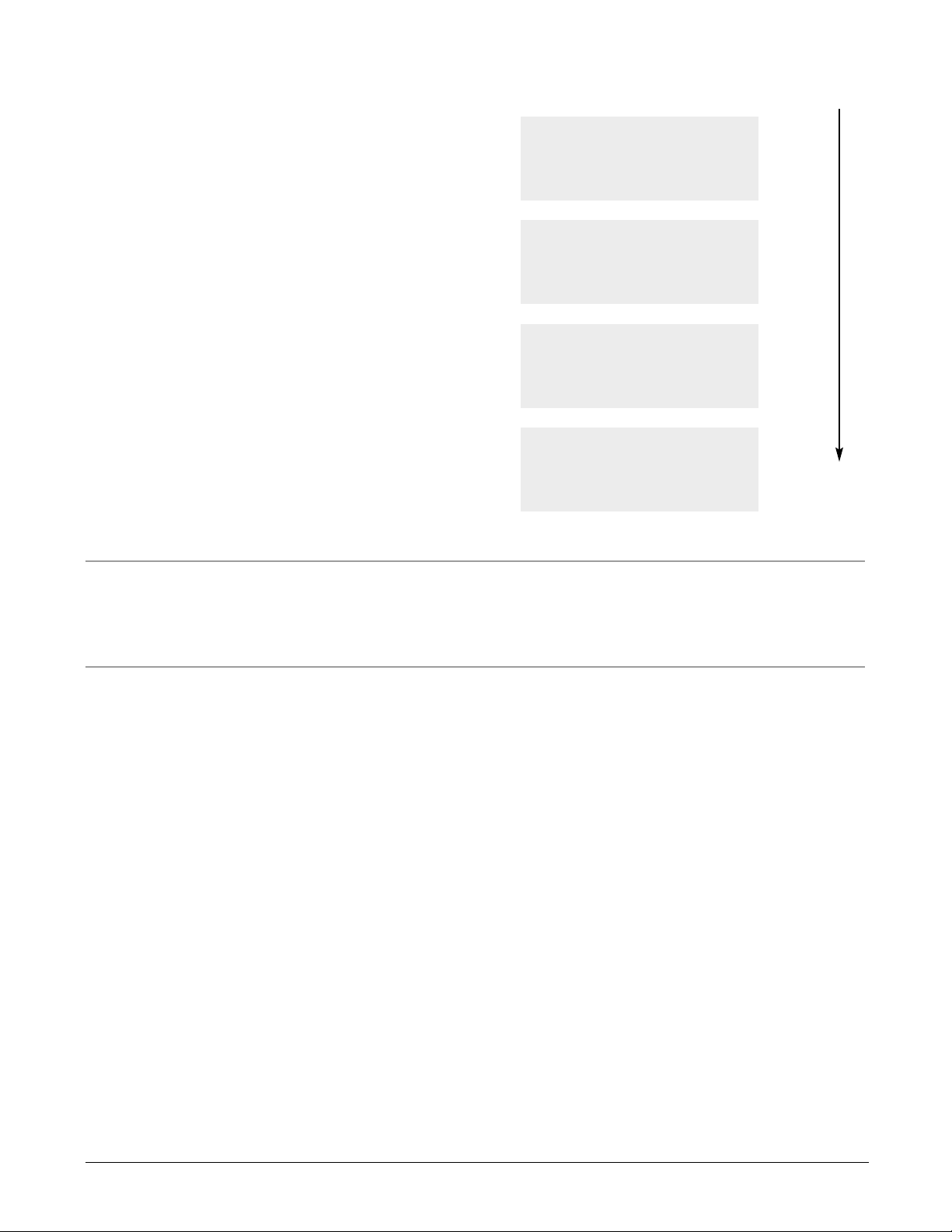
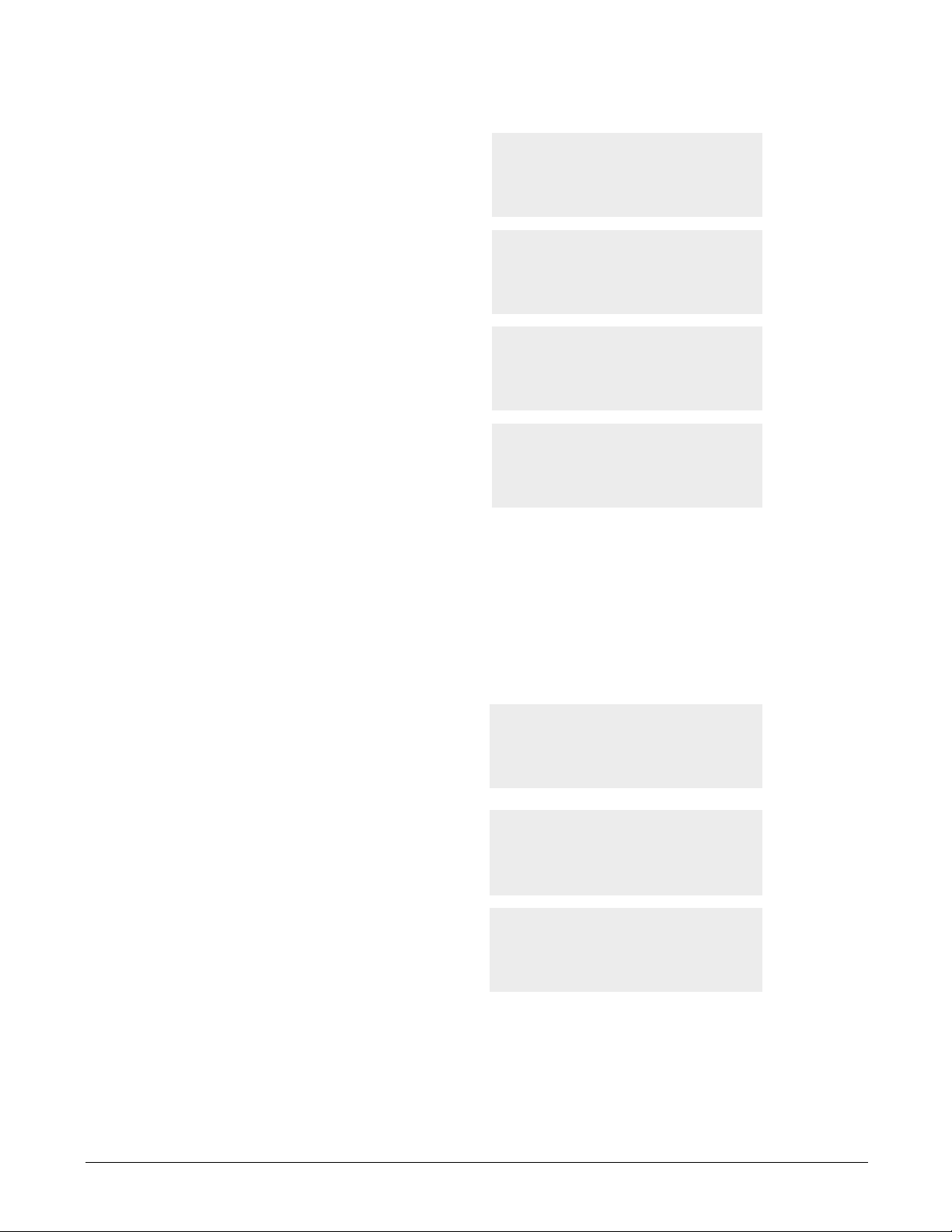
Pasos de configuración
Tecla
ˆˆ
A lo largo de todos estos pasos, la tecla Información
presentará definiciones y sugerencias útiles de
configuración. Simplemente coloque el cursor al lado del
elemento de interés, y después presione esta tecla;
presiónela nuevamente para volver a su tarea.
Consulte el capítulo 3 (Página Operaciones).
4
Establezca un punto de control para el
punto establecido estático
Consulte el capítulo 3 (Página Operaciones).
3
Afine el sistema y ajuste los puntos
establecidos de alarma.
Siga las instrucciones del capítulo 2 (Operación
desde el panel frontal), para aprender a manejar
el software, y después pase al capítulo 4 (Página
Configuración). Para más información consulte
el capítulo 7 (Características). (Este paso podría
no ser necesario si el controlador Serie F4P ya
está instalado en el equipo.)
2
Configure el controlador según su
aplicación.
Consulte el capítulo 8 (Instalación y cableado).
(Este paso no será necesario si el controlador
Serie F4P ya está instalado en el equipo.)
1
Instale y realice el cableado del
controlador.
Cómo hacerloQué hacer
Su controlador Serie F4P podría estar en forma de una unidad independiente, o quizás esté ya instalado en otro
equipo. Los pasos siguientes no se aplican necesariamente a todas las unidades. El software del modelo Serie F4P
puede bloquearse con distintos tipos de mecanismos de seguridad. Consulte el capítulo 5 (Página Fábrica).
Page 7
Watlow Series F4P Operación desde el panel frontal ■ 2.1
Capítulo 2: Operación desde el
panel frontal
Pantallas e indicadores luminosos . . . . . . . . . . . . .2.2
Programación guiada . . . . . . . . . . . . . . . . . . . . . .2.3
Página Principal Especial . . . . . . . . . . . . . . . . . . .2.3
Operación automática y manual . . . . . . . . . . . . . .2.3
Resolución de problemas, alarmas y errores . . . . .2.4
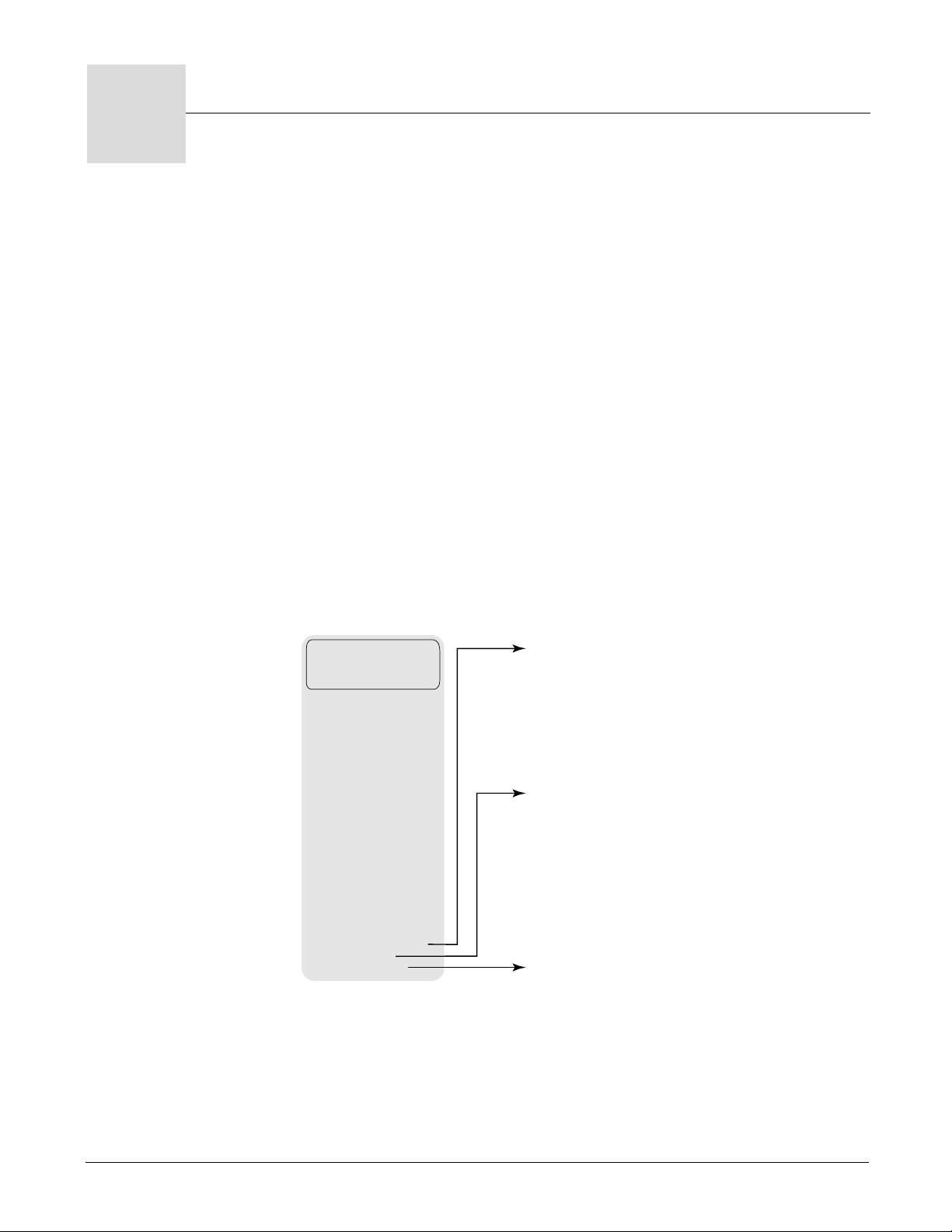
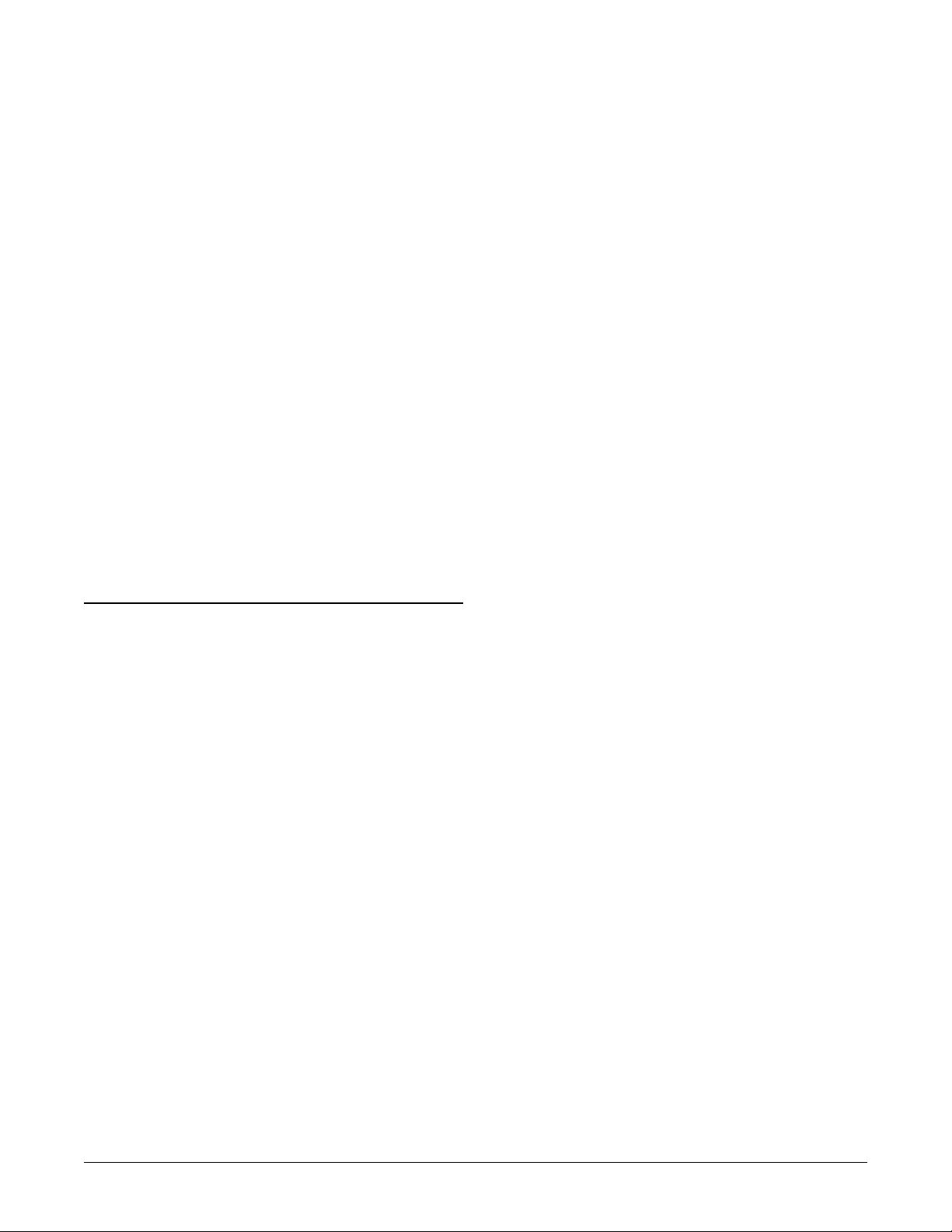
Figura 2.1 — Navegación de la página.
El software del controlador Serie F4P está organizado en
cuatro secciones llamadas “páginas”. La Página Principal
es una sección central predeterminada que presenta
información de estado en el la pantalla inferior. Es
preciso comenzar en la Página Principal para ir a otras
páginas.
✔ Nota: Durante la autoafinación del controlador, habrá
acceso limitado al software (no se podrá entrar a la
Página Configuración ni tampoco a la Página Fábrica).
2
Página Principal__
La Página Principal
muestra mensajes de error,
mensajes estáticos y la
condición de las entradas y
las salidas, según la
configuración de
parámetros de la Página
Principal Especial en la
Página Configuración.
Vaya a la parte inferior de
la Página Principal para
llegar a las otras páginas.
Cuando salga de la Página
Configuración o Página
Fábrica, el controlador le
pedirá restablecer los
ajustes anteriores o
guardar los nuevos.
Error entrada1
Error entrada2
Error entrada3
Cond. de alarma 1
Cond. de alarma 2
Estado de afinac.1
Valor entrada1
En 1 ■■■■
Valor entrada2
P.E. 1
P.e. 2
P.E. Digital
Potencia 1A
1A ■■
Potencia 1B
1B ■■■
Entradas dig 1234
Conj. PID activo
Mensaje 1
Mensaje 2
Mensaje 3
>Ir a Operaciones
Ir a Config.
Ir a Fábrica
Página Operaciones
Autoafinar PID
Conjunto PID can.1
Conjunto PID casc.
P.E. de alarma
Cambio de PID
Rampa al P.E.
PE de control
Página Configuración
Sistema
Entradas analógicas
Entradas digitales
Salidas control
Salidas de alarma
Salidas de retrans
Comunicaciones
Página Principal Especial
Mensajes estáticos
Página Fábrica
Fijar bloqueo
Calibrar entradas
Calibrar salidas
Diagnósticos
Prueba
Page 8
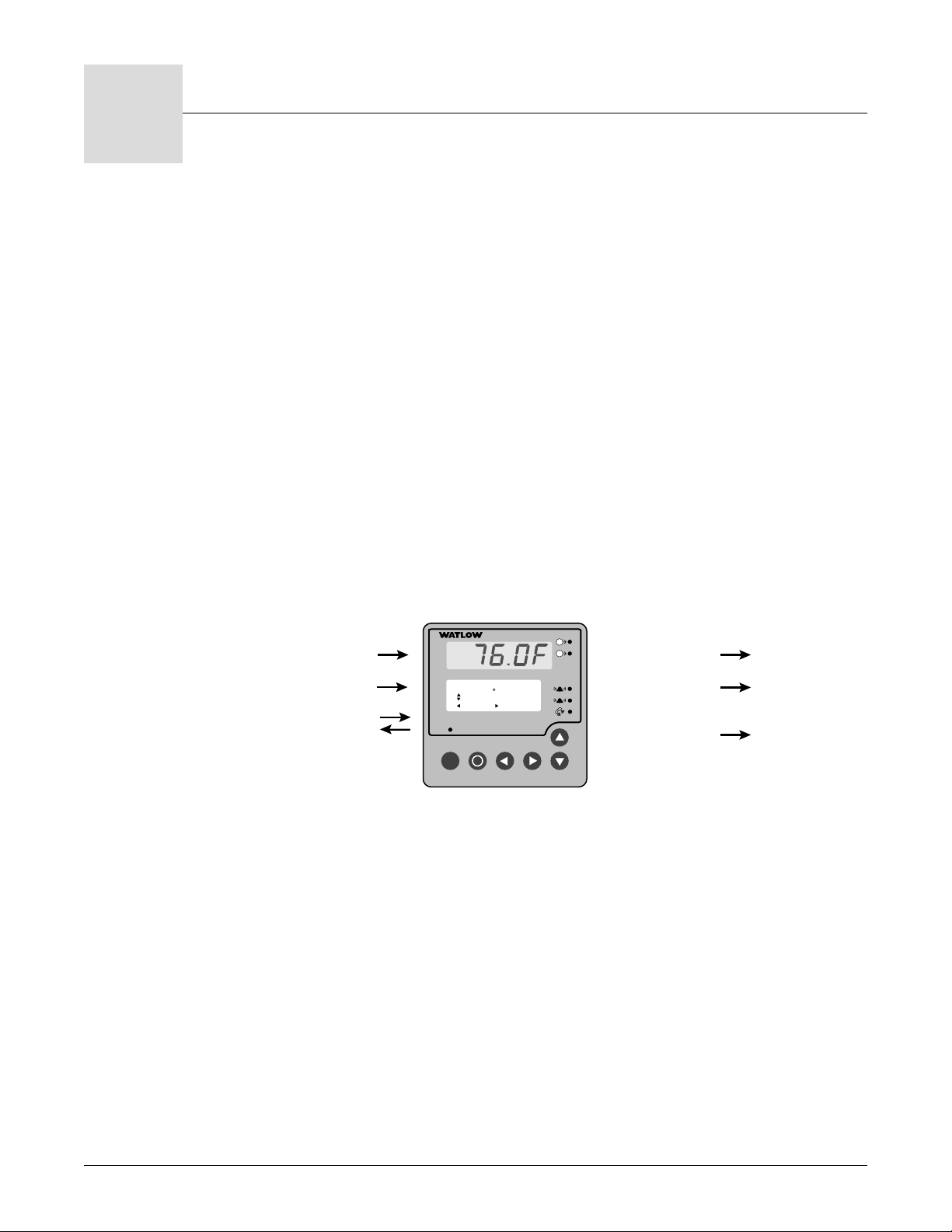
Teclas, pantallas e indicadores luminosos
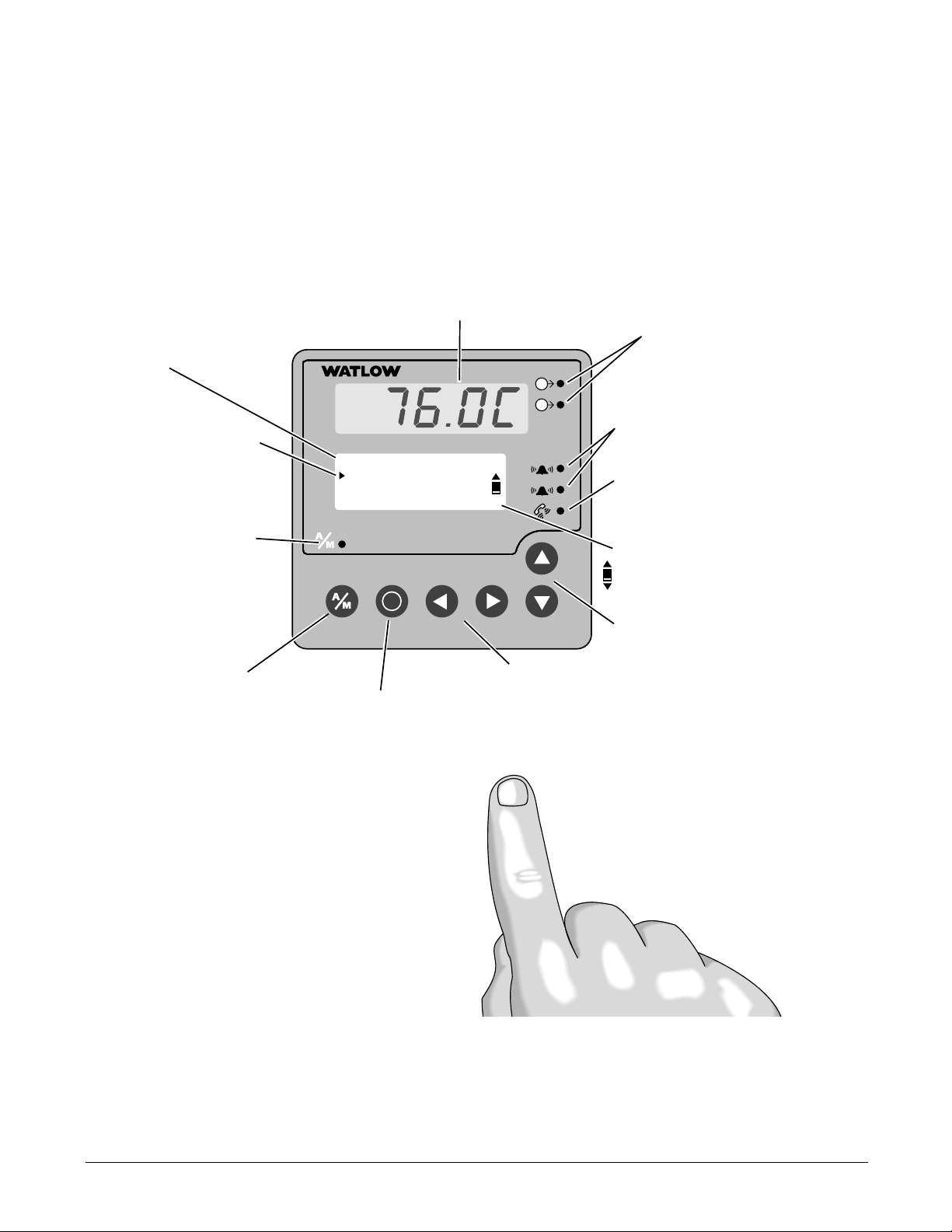
Figura 2.2 — Pantallas e indicadores luminosos de la Serie F4P.
2.2 ■ Operación desde el panel frontal Watlow Series F4P
Pantalla superior
Muestra los valores presentes
del canal 1 durante la
Pantalla inferior
Sirve de guía durante la configuración y
la operación; presenta información de
estado.
Cursor (>):
Apunta al parámetro seleccionado
o al valor presente. Se mueve por
medio de las teclas Arriba, Abajo,
Derecha e Izquierda.
Indicador luminoso de
estado automático-manual
(indica el estado del modo):
• Se ilumina durante el modo
manual.
• Destella por 10 segundos
después de que se presiona
la tecla å, mientras que el
usuario cambia de modo.
• Se apaga durante el modo
automático.
Tecla de control automáticomanual
Presiónela para alternar entre
control automático (lazo cerrado)
y manual (lazo abierto).
operación; también muestra
información sobre los errores
si éstos llegan a ocurrir.
Página Principal____
Ir a Operaciones
Ir a Config.
Ir a Fábrica
i
Tecla Información
Presiónela para obtener
sugerencias y definiciones;
presiónela nuevamente para
volver a la tarea original
F
4
1A
1B
1
2
Teclas Derecha e Izquierda
Presione la tecla Derecha
para seleccionar el elemento
a la derecha del cursor (>) y
seguir hacia la próxima
pantalla. Presione la tecla
Izquierda para moverse a la
izquierda o para salir.
Indicadores luminosos de
estado de salida activa
Se iluminan al activarse la
salida del canal
correspondiente del
controlador.
Indicadores luminosos de estado
de salida de alarma
Se iluminan durante un estado de
alarma.
Indicador luminoso de estado de
las comunicaciones
Destella cuando el controlador envía
o recibe datos.
Barra espaciadora
Indica que hay más
información (previa o
siguiente). Use las teclas
Arriba y Abajo.
Teclas Arriba y Abajo
Presiónelas para mover el
cursor (>), aumentar o
disminuir un valor, o cambiar
una letra del nombre.
Eliminación de alarmas o errores
En un estado de alarma, se encenderá el
indicador luminoso de estado de alarma y
aparecerá un mensaje de alarma en la
Página Principal (si está configurada para
hacerlo). Para silenciar la alarma, mueva el
cursor al mensaje de alarma y presione la
tecla Derecha; después aparecerá un
mensaje confirmando el silenciado de la
alarma y se apagará el indicador luminoso
de estado de alarma.
Después de corregir la condición que causó
el error o la alarma, vuelva al punto del
mensaje de error o alarma en la Página
Principal, y presione nuevamente la tecla
Derecha. Después aparecerá un mensaje
confirmando que la alarma no está
enganchada.
Page 9
Watlow Series F4P Operación desde el panel frontal ■ 2.3
Programación guiada
El software del controlador Serie F4P guía a los usuarios
a lo largo de la mayoría de las tareas. Para realizar una
tarea, simplemente proceda a través de la secuencia de
parámetros. Para cada parámetro, seleccione la opción o
establezca el valor correspondiente, luego presione la
tecla Derecha para continuar al parámetro de la pantalla
siguiente. Finalizará la tarea cuando vuelva al menú
inicial.
1. Use
> o < para mover el cursor a fin de seleccionar
un elemento en una lista.
2. Presione la tecla Derecha.
3. Ingrese el valor y haga una selección.
4. Presione nuevamente
5. Repita hasta que vuelva a la lista original.
Para cambiar un parámetro simple específico, proceda a
través de la secuencia de parámetros (sin cambiar
valores) hasta que llegue al parámetro que quiere
cambiar, y entonces haga el cambio. Después podrá salir
de la secuencia presionando la tecla Izquierda, o podrá
continuar allí presionando la tecla Derecha. Al salir de la
página deberá guardar los cambios o restablecer los
valores.
.
.
.
Elegir tiemp.ciclo:_
>Disparo variable
Tiempo fijo
Elegir función:____
>Calor
Frío
Elegir para config:_
>Salida control 1A
Salida control 2A
Página Principal____
Ir a Operaciones
Ir a Configuración
>Ir a Fábrica
Página Principal Especial
La Página Principal muestra mensajes de error y estados de entrada y salida, y permite además acceder al software del
controlador. Para que la Página Principal exhiba la información seleccionada, vaya al Menú de la Página Principal
Especial (Página Configuración). Consulte las instrucciones del capítulo 4 (Página Configuración).
Operación automática y manual
El controlador Serie F4P puede funcionar como un
controlador de punto establecido estático (modo
automático), o bien el usuario puede controlar las salidas
directamente (modo manual). En el modo de punto
establecido estático, el controlador Serie F4P puede
operarse únicamente en una configuración de lazo
cerrado.
El indicador luminoso automático-manual se enciende en
el modo manual. Para alternar entre los modos manual y
automático, presione primero å (tecla de control
automático-manual), y después confirme su selección en
la pantalla inferior. El indicador luminoso destellará al
Ud. presionar å , hasta que confirme su selección o hasta
que hayan transcurrido 10 segundos. Mientras esté en
modo manual, podrá ajustar el nivel de potencia de
salida para las salidas de proceso, o encender o apagar
las salidas del relé o del colector abierto.
ç
ADVERTENCIA: Cualquier cambio en el punto establecido del
controlador debe ser efectuado únicamente por técnicos
autorizados. El incumplimiento de esta recomendación puede
traer como consecuencia daños al equipo y la propiedad, y
lesiones al personal.
Control de punto establecido estático
Cuando el controlador Serie F4P está en modo de punto
establecido estático:
• la pantalla superior muestra la temperatura del
proceso real de la entrada 1;
• la pantalla inferior muestra los valores
predeterminados o la Página Principal configurada
por el usuario.
Para operar el controlador Serie F4P como un
controlador de punto establecido estático, seleccione PE1
en la Página Principal, y después ajuste el punto
establecido con las flechas Arriba y Abajo.
Se pueden establecer límites en el punto establecido, en
los parámetros Límite bajo del punto establecido y Límite
alto del punto establecido (Página Configuración >
Entrada analógica 1).
✔ Nota: Toda la actividad de control cesará cuando se
entre a los menús de Entrada Analógica, Entrada Digital,
Salida de Control, Salida de Alarma y Retransmisión de
la Página Configuración.
Page 10
2.4 ■ Operación desde el panel frontal Watlow Series F4P
• Verificar el funcionamiento con la
herramienta de comunicaciones Watlow.
• Puede ser necesario conectarlo e instalar
resistencias elevadoras y de descenso.
• Reiniciar el software de comunicaciones y
comprobar que los ajustes coincidan.
Verificar que el bus de comunicaciones esté
activo.
• Fallas en el software de aplicación.
• Revisar la documentación de la tarjeta de
comunicaciones para averiguar sobre las
variables configurables y pruebas
operativas.
• Protocolo o paridad incorrectos (deben ser 8,
n, 1).
• Reconfigurar el puerto de comunicaciones de
la computadora y comprobar las
comunicaciones.
• Incorrecta configuración o dirección del
software de comunicaciones.
• Revisar el cableado de la caja del
convertidor y su documentación.
• Configuración incorrecta del puerto de
comunicaciones de la computadora.
• Revisar el cableado de la caja del
convertidor y su documentación.
• Cableado incorrecto de la caja del
convertidor EIA-485.
• Comprobar las conexiones y las trayectorias
del cableado.
• Cableado de comunicaciones invertido,
cortocircuitado o abierto.
• Verificar que el circuito de la cadena
margarita no esté abierto.
• Desconexión de la cadena margarita de
unidad a unidad.
• Revisar el Menú de Configuración de
Comunicaciones y fijar una velocidad en
baudios correcta.
• Parámetro de velocidad en baudios
inadecuado.
• Revisar el Menú de Configuración de
Comunicaciones y fijar una dirección
correcta.
• Parámetro de dirección inadecuado..
Comunicaciones
• La unidad no se
comunica.
• Medir la alimentación de entrada para ver
si tiene el nivel requerido. Revisar el
número de la pieza y verificar que se esté
utilizando la alimentación requerida.
• Revisar el tamaño del cable.
• Comprobar que no haya conexiones
defectuosas.
• Alimentación de entrada inadecuada.
• Verificar la conexión de los conmutadores,
fusibles, interruptores automáticos,
interbloqueadores, límites, conectores, etc.,
y comprobar que estén activos.
• Desconexión de la energía eléctrica de la
unidad.
• Fusible fundido.
• Interruptor automático disparado.
• Activación del conmutador de la puerta de
interbloqueo de seguridad.
• Enganche de un control de límite del
sistema (independiente).
• Corte en el cableado..
Alimentación
• Las pantallas están
desactivadas
Acción correctivaCausas probablesIndicación
Resolución de problemas, alarmas y errores
Page 11
Watlow Series F4P Operación desde el panel frontal ■ 2.5
• Comprobar el valor del parámetro de
Desvío de calibración. Ajustarlo a un
nivel inferior.
• El parámetro de Desvío de calibración
está demasiado alto o bajo.
Superior [Atod`]
Inferior !Temporiz.
• Comprobar el funcionamiento del
sensor. El parámetro Detección de
lazo abierto indica la posibilidad de
un corte.
• La característica de detección de lazo
abierto muestra que hay un corte en
un sensor.
Superior [SEnhi]
Inferior !Sensor+ entrada
• Medir la alimentación de entrada
para ver si tiene el nivel requerido.
Revisar el número de pieza para
determinar la alimentación de
entrada requerida.
• Alimentación inadecuada.
Superior [SEnLo]
Inferior !Sensor- entrada
• Comprobar que el parámetro Sensor
coincida con el hardware del sensor.
• Tipo de entrada ajustado para el
sensor equivocado o no calibrado.
Superior [A-dhi]
Inferior !A-D+ entrada+
• Comprobar las conexiones y el
cableado del sensor.
• Comprobar las conexiones y el
cableado del sensor.
Superior [A-dLO]
Inferior !A-D- entrada
• Comprobar las conexiones del sensor.• Entrada en condición de error.
Errores de entrada
(La pantalla superior muestra el
código de error únicamente
para la entrada 1. La pantalla
inferior muestra el mensaje de
error. El indicador de salida de
alarma está encendido).
• Verificar que la lógica de la alarma
sea compatible con anunciadores y
equipos periféricos del sistema.
• Revisar la configuración del límite de
potencia.
• Revisar el modo de operación.
• Revisar la función de salida de la
alarma.
• Revisar los ajustes de ºC o ºF.
• Revisar el valor de compensación de
la calibración. Ajustarlo a un nivel
inferior.
• La alarma podría estar enganchada.
Mover el cursor al mensaje de alarma.
Presionar .
• Puntos establecidos de alarma
incorrectos.
• Histéresis de alarma incorrecta.
• Entrada en condición de error.
• No se apaga la alarma.
(Para apagar la alarma, corregir
la condición de alarma. Si la
alarma está enganchada,
presionar . con el cursor en
el mensaje de alarma de la
Página Principal.)
• Revisar la configuración del tipo de
alarma.
• El controlador está en el modo de
diagnósticos.
• Revisar la configuración de los lados
de alarma.
• Lados de la alarma incorrectos.
• Revisar los puntos establecidos de
alarma.
• Puntos establecidos de alarma
incorrectos.
• Configurar la salida como una
alarma.
• La salida de alarma está desactivada.
Alarmas
• No se activa la alarma.
Acción correctivaCausas probablesIndicación
Page 12
2.6 ■ Operación desde el panel frontal Watlow Series F4P
• Revisar todo el cableado y los
componentes.
• Apagar y encender nuevamente el
controlador.
• Falla del componente.
Detección de lazo abierto
Superior: [oPLP`]
Inferior: Lazo abierto
• Llamar al distribuidor o
representante de Watlow.
• Falla del componente, pérdida de
alimentación durante una carga de
archivos.
• Falló memoria flash. Enviar el
controlador a la fábrica.
• Llamar al distribuidor o
representante de Watlow.
• Falla del componente.• ¡Falló prueba de RAM! Enviar
el controlador a la fábrica.
• Apagar y encender nuevamente el
controlador.
• Pérdida de alimentación durante la
configuración de la memoria.
• ¡Error:suma compr.!, memoria
de conf.unid
• Pérdida de alimentación durante la
configuración de la memoria.
• Errores fatales (el controlador se
apaga.)
Errores fatales (el controlador
se apaga.)
• ¡Error:suma compr.!, memoria
de parámetro.
• Esperar hasta que la unidad se haya
inicializado.
• Actualización del firmware.• Cambió firmware. Inicialización
de los parámetros.
• Esperar hasta que la unidad se haya
inicializado.
• Actualización del firmware.• Primer arranque. Se están
inicializando los parámetros.
• Presionar cualquier tecla. Todos los
parámetros volverán a valores
previos.
• Módulo cambiado.• Cambio de módulo. Se
aplicarán valores previos.
Aceptar con cualquier tecla.
• Sacar el módulo recién instalado e
instalar uno nuevo.
• Falla del componente.• Imposible identificar:
Modificar: cambiar el módulo.
• Sustituir el módulo incorrecto por el
módulo de retransmisión.
• Módulo equivocado en la ranura de
retransmisión 2.
• ¡Error de módulo de
retransmisión 2! Sólo se
soportan módulos de proceso.
• Sustituir el módulo incorrecto por el
módulo de retransmisión.
• Módulo equivocado en la ranura de
retransmisión 1.
• ¡Error de módulo de
retransmisión 1! Sólo se
soportan módulos de proceso.
• Instalar el módulo en la ranura
correcta.
• Módulo de entrada 1 en la ranura de la
entrada 2-3.
• ¡Error de módulo de entrada 1!
Sólo se soportan módulos
de.canal doble.
• Instalar el módulo en la ranura
correcta.
• Módulo de entrada 2-3 en la ranura de
la entrada 1.
•¡Error de módulo de entrada 1!
Sólo se soportan módulos de
canal sencillo.
• Comprobar las conexiones del sensor.• Entrada en condición de error.
Errores de sistema
(La pantalla superior muestra
los números de los errores,
mientras que el inferior
muestra las causas y acciones
correctivas).
Acción correctivaCausas probablesIndicación
Page 13
Watlow Series F4P Página Operaciones ■ 3.1
Capítulo 3: Página Operaciones
Puntos establecidos de alarma . . . . . . . . . . . . . . .3.1
Autoafinar PID . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.2
Editar PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.2
Múltiples conjuntos PID . . . . . . . . . . . . . . . . . . . . .3.3
Afinación de cascada . . . . . . . . . . . . . . . . . . . . . .3.3
Este capítulo explica los procedimientos para establecer
los puntos establecidos de alarma, realizar la afinación
automática o manual, y establecer el control de cascada a
través de la Página Operaciones del software.
Para averiguar sobre cómo configurar las salidas de
alarma, vaya a la Página Configuración del software
(capítulo 6 [Parámetros]).
Para averiguar el procedimiento de eliminación de las
alarmas, consulte la tabla de resolución de problemas y
errores (capítulo 2 [Operación desde el panel frontal]).
Consulte el capítulo 7 (Características) para obtener
información acerca de alarmas; control proporcional,
integral, derivativo y cascada.
Puntos establecidos de alarma
El controlador Serie F4P consta de dos salidas de alarma
que pueden programarse como alarmas de proceso, de
desviación o de tasa.
Las alarmas de proceso advierten al usuario cuando los
valores de proceso exceden o caen por debajo de los
puntos establecidos bajos y altos de la alarma. Las
alarmas de desviación advierten cuando el proceso se
desvía del punto establecido más allá de los límites de
desviación. Las alarmas de tasa se activan como
respuesta a un cambio en el valor de la temperatura o
del proceso, que sea superior a la tasa seleccionada.
Para más información, consulte el capítulo 7
(Características). En el capítulo 4 (Página
Configuración), encontrará información para configurar
las alarmas.
Los puntos establecidos de alarma son aquellos a los
cuales se encienden o se apagan las alarmas, según la
configuración de las mismas. Para ver o cambiar dichos
puntos, vaya a los Menús de Punto Establecido de
Alarma (Página Operaciones).
El Punto establecido de alarma alto define el valor alto
que debe sobrepasarse para activar una alarma. Este
valor debe ser mayor que el punto establecido bajo de la
alarma y menor que el límite alto del rango del sensor.
La Desviación de alarma (baja) define el valor de
desviación en el lado bajo del punto establecido, al cual
se disparará la alarma.
La Desviación de alarma (alta) define el valor de
desviación en el lado alto del punto establecido, al cual se
disparará la alarma.
✔ Nota: Es aconsejable configurar las alarmas con
nombres que identifiquen las condiciones de la alarma
(consulte la Página Configuración).
Eliminación de alarmas o errores
En un estado de alarma, se encenderá el indicador
luminoso de estado de alarma y aparecerá un mensaje de
alarma en la Página Principal (si está configurada para
hacerlo). Para silenciar la alarma, mueva el cursor al
mensaje de alarma y presione la tecla Derecha; después
aparecerá un mensaje confirmando el silenciado de la
alarma y se apagará el indicador luminoso de estado de
alarma. Después de corregir la condición que causó el
error o la alarma, vuelva al mensaje de error o alarma en
la Página Principal, y presione nuevamente la tecla
Derecha. Un mensaje confirmará que la alarma no está
enganchada.
3
Page 14

3.2 ■ Página Operaciones Watlow Series F4P
Autoafinar PID
Durante la autoafinación, el controlador selecciona
automáticamente los parámetros PID para lograr el
control óptimo, basado en la respuesta térmica del
sistema. El controlador Serie F4P consta de cinco
conjuntos de valores PID. Hay valores PID
predeterminados para todos los conjuntos PID, aunque
tales valores típicamente no proporcionan un control
óptimo. Los valores PID pueden afinarse de manera
automática o manual. Una vez finalizada la afinación
automática, se almacenan los valores PID en el Menú
Editar PID.
Los cambios de puntos establecidos para control remoto,
control de relación y control diferencial no se utilizan
sino hasta después de finalizar la autoafinación.
Procedimiento de autoafinación
La autoafinación se inicia desde el Menú de Operaciones,
exclusivamente desde el modo de control de punto
establecido estático.
1. Antes de comenzar la autoafinación, vaya al Menú de
Sistema (Página Configuración), y fije el punto
establecido de autoafinación como un porcentaje del
punto establecido. Este porcentaje se basará en el
conocimiento que se tenga del sistema y en la cantidad
probable de sobrepaso y falta de alcance del control de
encendido-apagado.
Elija mostrar Estado de afinac.1 en el Menú de la Página
Principal Especial.
2. Vaya a la Página Principal y fije el punto establecido
estático.
3. Vaya al Menú de Autoafinar PID (Página Operaciones)
y elija el conjunto PID en el cual se almacenarán los
valores. En la Página Principal aparecerá un mensaje
durante el proceso de autoafinación.
4. Cuando haya terminado la afinación automática, el
controlador almacenará los valores de óptimo control
en el conjunto PID especificado.
Para más información acerca de la autoafinación y del
control proporcional, integral y derivativa, consulte el
capítulo 7 (Características).
✔ Nota: Durante la autoafinación del controlador,
únicamente se podrá entrar a la Página Operaciones del
software.
ç
ATENCIÓN: Elija un punto establecido de autoafinación que
pueda proteger a su producto de posibles daños causados por
sobrepaso o falta de alcance durante las oscilaciones de la
autoafinación. Si el producto es sensible, seleccione
cuidadosamente el punto establecido de autoafinación para
evitar daños.
Editar PID
El Menú Editar PID es útil para aquellos casos en que la
autoafinación no proporciona el control adecuado. Cada
uno de los parámetros PID —Banda proporcional,
Integral, Derivativa, y Banda muerta—pueden ser
ajustados manualmente.
Para obtener más información, consulte el capítulo 7
(Características).
Procedimiento de afinación manual
1. Encienda el controlador Serie F4P y establezca un
punto establecido en la Página Principal. Vaya al
Menú Editar PID (Página Operaciones), y seleccione el
canal y el conjunto PID. Fije valores para los
parámetros PID: Banda proporcional: 1; Integral
(Restablecimiento): 0; Derivativa (Compensación): 0; y
Autoafinar: No afinar. Una vez se seleccione un
conjunto PID, comenzará la afinación.
2. Cuando se estabilice el sistema, observe el valor de la
Entrada 1 en la Página Principal. Si este valor fluctúa,
aumente el ajuste de la banda proporcional hasta que
se estabilice. Ajuste la banda proporcional en
incrementos de 3º a 5º, dando tiempo al sistema para
que se estabilice entre un ajuste y otro.
3. Cuando se haya estabilizado la Entrada 1, observe el
porcentaje de potencia en la Página Principal. Debe
ser estable, ±10%. En este punto, la temperatura de
proceso debe también ser estable, pero exhibirá una
caída (estabilizada debajo del punto establecido) que
puede eliminarse con acción integral
(restablecimiento).
4. Comience con un ajuste de integral de 99.9 minutos y
espere 10 minutos para que la temperatura del
proceso llegue al punto establecido. Si no lo ha hecho,
disminuya el ajuste a la mitad y espere otros 10
minutos. Vuelva a dividir nuevamente el ajuste a la
mitad, y espere otros 10 minutos hasta que el valor de
proceso sea igual al punto establecido. Si el proceso se
desestabiliza, quiere decir que el valor de integral es
demasiado pequeño; auméntelo hasta que el proceso se
estabilice.
5. Aumente la acción Derivativa/Compensación de
excedente a 0.10 minutos. Aumente luego el punto
establecido en 11°C a 17°C. Observe la aproximación
del sistema al punto establecido. Si el valor del proceso
sobrepasa el punto establecido, aumente la
Derivativa/Compensación de excedente a 0.50 minutos.
Aumente el punto establecido en 11°C a 17°C y
observe la aproximación al punto establecido nuevo.
Un valor muy elevado de Derivativa/Compensación
retardará excesivamente dicha aproximación. Repita
cuantas veces sea necesario hasta que el sistema
aumente al punto establecido nuevo sin sobrepasar ni
ser lento.
6. Establezca el Tiempo del ciclo en el Menú de Salida de
Page 15

Watlow Series F4P Página Operaciones ■ 3.3
control (Página Configuración), según sea necesario. A
veces los tiempos más rápidos logran un mejor control
del sistema. Sin embargo, si un contactor mecánico o
un solenoide está conmutando alimentación a la carga,
es posible que se requiera un mayor tiempo de ciclo
para minimizar el desgaste en los componentes
mecánicos. Experimente hasta que el tiempo de ciclo
conduzca a un control de calidad adecuada.
Para obtener información adicional sobre la
característica de disparo rápido, afinación manual y
control PID, consulte el capítulo 7 (Características).
Múltiples conjuntos PID
Normalmente, las cámaras ambientales y los hornos
tienen distintos requisitos térmicos a temperaturas o
presiones altas y bajas. Para adaptarse a ello, el
controlador Serie F4P puede almacenar cinco conjuntos
PID diferentes.
Procedimiento de afinación múltiple
Para autoafinar múltiples conjuntos PID, siga el
procedimiento anterior de autoafinación para cada
conjunto PID. Al finalizar la autoafinación para un
conjunto, siga con otro.
Cascada
Los controladores de la Serie F4P avanzada (F4P _ - _ _
AB - _ _ _ _) ofrecen control de cascada. Para obtener
información sobre dicho control, consulte el capítulo 7
(Características).
Seleccione el control de cascada a través del Menú de
Entrada Analógica 3 (Página Configuración), y seleccione
Cascada de proceso o Cascada de desviación. Para
establecer el rango del punto establecido del lazo interno,
la Cascada de proceso emplea los ajustes de Rango bajo y
Rango alto, los cuales son independientes del punto
establecido; la Cascada de desviación usa los ajustes de
Desviación baja y alta, que son desviaciones del punto
establecido principal.
El proceso de afinación de un sistema de cascada debe
comenzar con la afinación del lazo interno. El lazo
interno comprende las salidas 1A y 1B y el sensor de
Entrada analógica 1, que normalmente mide la
temperatura de la fuente de energía. El dispositivo de
salida controla un dispositivo de conmutación de
alimentación, que a su vez conmuta el calentamiento y el
enfriamiento. El punto establecido para el lazo interno lo
genera el lazo externo. Para la Cascada de proceso, éste
oscilará entre el Rango bajo de cascada y el Rango alto de
cascada.
Procedimiento de configuración de cascada
1. Primero, configure la Entrada analógica 1, el Rango
bajo de cascada y el Rango alto de cascada.
Vaya al Menú de Entrada Analógica 3 (Página
Configuración). Seleccione Cascada de proceso o de
desviación. La Cascada de desviación es una
característica para usos expertos (no documentada),
que sólo debe ser empleada por técnicos autorizados.
Para el control de cascada de proceso de un sistema de
calentamiento/enfriamiento, establezca el Rango bajo
de cascada en un valor ligeramente inferior a la menor
temperatura deseada en la cámara. En los sistemas de
sólo calentamiento, ajuste el Rango bajo de cascada en
un valor ligeramente inferior a la temperatura
ambiente; de otra manera la salida de calor nunca se
apagará completamente.
Para sistemas de calentamiento/enfriamiento,
establezca el Rango alto de cascada en un valor
ligeramente superior a la mayor temperatura deseada
en la cámara. En los sistemas de sólo enfriamiento,
ajuste el Rango bajo de cascada en un valor
ligeramente superior a la temperatura ambiente; de
otra manera el enfriamiento nunca se apagará
completamente.
2. A continuación, configure el controlador para que se
afine y muestre datos para el lazo externo. Para ver el
Punto establecido del lazo interno en la pantalla
superior, vaya a la Página Configuración, Menú de
Página Principal Especial, seleccione Punto establecido
interno como uno de los parámetros, P1 a P16, para
que aparezcan en la Página Principal.
Procedimiento de autoafinación de cascada
1. Vaya a la Página Configuración, Menú de Página
Principal Especial. Seleccione Estado de afinac.1 para
que aparezca en la posición P1, y Estado de afinac.2 en
la posición P2. La Página Principal ahora mostrará el
estado del proceso de autoafinación.
2. Primero, afine automáticamente el lazo interno. Vaya
al Menú de Autoafinar PID (Página Operaciones) y
seleccione Lazo interno cascad. Seleccione Cascada
PID, y Conjunto 1 a 5, donde se almacenarán los
valores PID después de la autoafinación. La
autoafinación comenzará cuando se seleccione el
conjunto PID. Mientras hace la autoafinación, el
controlador F4P controlará la fuente de energía en un
modo de encendido-apagado a una temperatura igual a
la de la Cascada (ajuste de Rango alto x Autoafin.
P.E.).
3. A continuación afine automáticamente el lazo externo.
Vaya al Menú de Autoafinar PID (Página
Operaciones). Seleccione Cascada PID y Conjunto 1 a
5, dónde se almacenarán los valores PID después de la
Page 16

3.4 ■ Página Operaciones Watlow Series F4P
autoafinación. La autoafinación comenzará cuando se
seleccione el conjunto PID. Durante la autoafinación,
se controlará el lazo externo en un modo de encendidoapagado en un punto establecido igual al punto
establecido estático x Autoafin. P.E. Generalmente la
característica de autoafinación logra un control
aceptable. Si no es así, afine manualmente el lazo
externo (paso 4, a continuación). Antes de afinar
manualmente, anote los valores generados por la
característica de autoafinación.
4. Para afinar manualmente el lazo externo, vaya al
Menú Editar PID (Página Operaciones); Cascada PID,
seleccione Cascada PID Conjunto 1 a 5 y luego
comience la afinación manual poniendo la Banda
proporcional en 1, Integral (restablecimiento) en 0, y la
Compensación en 0. Establezca el punto establecido
deseado y permita que se estabilice el sistema. Una
vez estabilizado, observe el valor de la Entrada 1 en la
Página Principal. Si este valor fluctúa, aumente la
banda proporcional hasta que se estabilice. Ajuste la
banda proporcional en incrementos de 3º a 5º, dando
tiempo al sistema para que se estabilice entre ajustes.
5. Cuando se haya estabilizado la Entrada 1, observe el
porcentaje de potencia en la Página Principal. Debe ser
estable, ±10%. En este punto, la temperatura del
proceso debe también ser estable, pero exhibirá una
caída (estabilizada debajo del punto establecido) que
puede eliminarse con Integral (restablecimiento).
6. Comience con un ajuste de Integral de 99.9 minutos, y
espere 10 minutos para que la temperatura del proceso
llegue al punto establecido. Si no lo ha hecho,
disminuya el ajuste a la mitad y espere otros 10
minutos. Vuelva a dividir nuevamente el ajuste a la
mitad, y espere otros 10 minutos hasta que el valor de
proceso sea igual al punto establecido. Si el proceso se
desestabiliza, quiere decir que el valor Integral es
demasiado pequeño. Auméntelo hasta que el proceso se
estabilice.
Page 17
Watlow Series F4P Setup Page ■ 4.1
Capítulo 4: Página Configuración
Orden de configuración de los parámetros . . . . . .4.1
Configuración personalizada de la
Página Principal . . . . . . . . . . . . . . . . . . . . . . .4.2
Mensajes estáticos . . . . . . . . . . . . . . . . . . . . . . . .4.2
4
Este capítulo explica cómo configurar el software del
controlador utilizando los menús de la Página
Configuración. Los parámetros de la Página
Configuración afectan varios aspectos, tales como la
respuesta del controlador a su aplicación, los parámetros
y funciones visibles en otras páginas, y la presentación
de la información en la Página Principal. Configure
correctamente el controlador a fin de proporcionar una
base sólida para los ajustes de las otras páginas.
Para obtener información sobre rangos, parámetros
predeterminados y otra informacion sobre parámetros
específicos, consulte el capítulo 6 (Parámetros). Anote sus
valores en el Registro de configuración de parámetros del
mismo capítulo.
Para obtener información sobre entradas, salidas,
alarmas y otras características, consulte el capítulo 7
(Características).
Orden de configuración de los parámetros
La configuración inicial del controlador Serie F4P se
facilita siguiendo este orden:
1. Vaya al Menú de Sistema (Página Configuración)
para configurar los siguientes elementos:
• unidades PID —unidades del Sistema
Internacional SI (Integral, Derivativa) o inglesas
(Restablecimiento, Compensación);
• escalas en grados Celsius o Fahrenheit;
• presentación de unidades en la pantalla superior
del controlador;
• autoafinación (punto establecido);
• advertencias de detección de lazo abierto; y
• respuesta del controlador a interrupciones del
servicio eléctrico.
2. Vaya a otros menús de la Página Configuración para
configurar los siguientes elementos:
• Entrada analógica x (1 a 3);
• Entrada digital x (1 a 4);
• Salida de control (1A, 1B)
• Salida de alarma x (1 ó 2);
• Salida de retrans x (1 ó 2);
• Comunicaciones; y
• Página Principal Especial y mensajes
personalizados.
3. Vaya a la Página Operaciones para afinar los
conjuntos PID.
4. Vaya a la Página Operaciones para fijar los puntos
establecidos de alarma.
Después de esta configuración inicial, los cambios más
frecuentes serán los efectuados en la Página Operaciones
(puntos establecidos de alarma y conjuntos PID).
Si el controlador Serie F4P está ya instalado en una
cámara ambiental, una estufa, un horno u otro equipo, la
mayoría de los parámetros estarán ya configurados y es
posible que el acceso a la Página Configuración esté
limitado (consulte el capítulo 5 [Página Fábrica]).
Es posible que los cambios efectuados en la Página
Configuración lleven a cambios en otros parámetros. En
algunos casos, un cambio en un parámetro afectará los
valores predeterminados de otros. Para ver la agrupación
de páginas, menús y parámetros, consulte el mapa de
software que se encuentra en la contraportada interna de
este manual.
Si desea más información acerca del efecto que tienen los
ajustes de los parámetros sobre el funcionamiento del
controlador, consulte el capítulo 7 (Características).
ç
ADVERTENCIA: Cualquier cambio de los ajustes predeterminados
en fábrica, que podría provocar cambios en otros ajustes, debe
ser efectuado únicamente por técnicos autorizados. El
incumplimiento de esta recomendación puede traer como
consecuencia daño al equipo y la propiedad, y lesiones al
personal.
Page 18
4.2 ■ Setup Page Watlow Series F4P
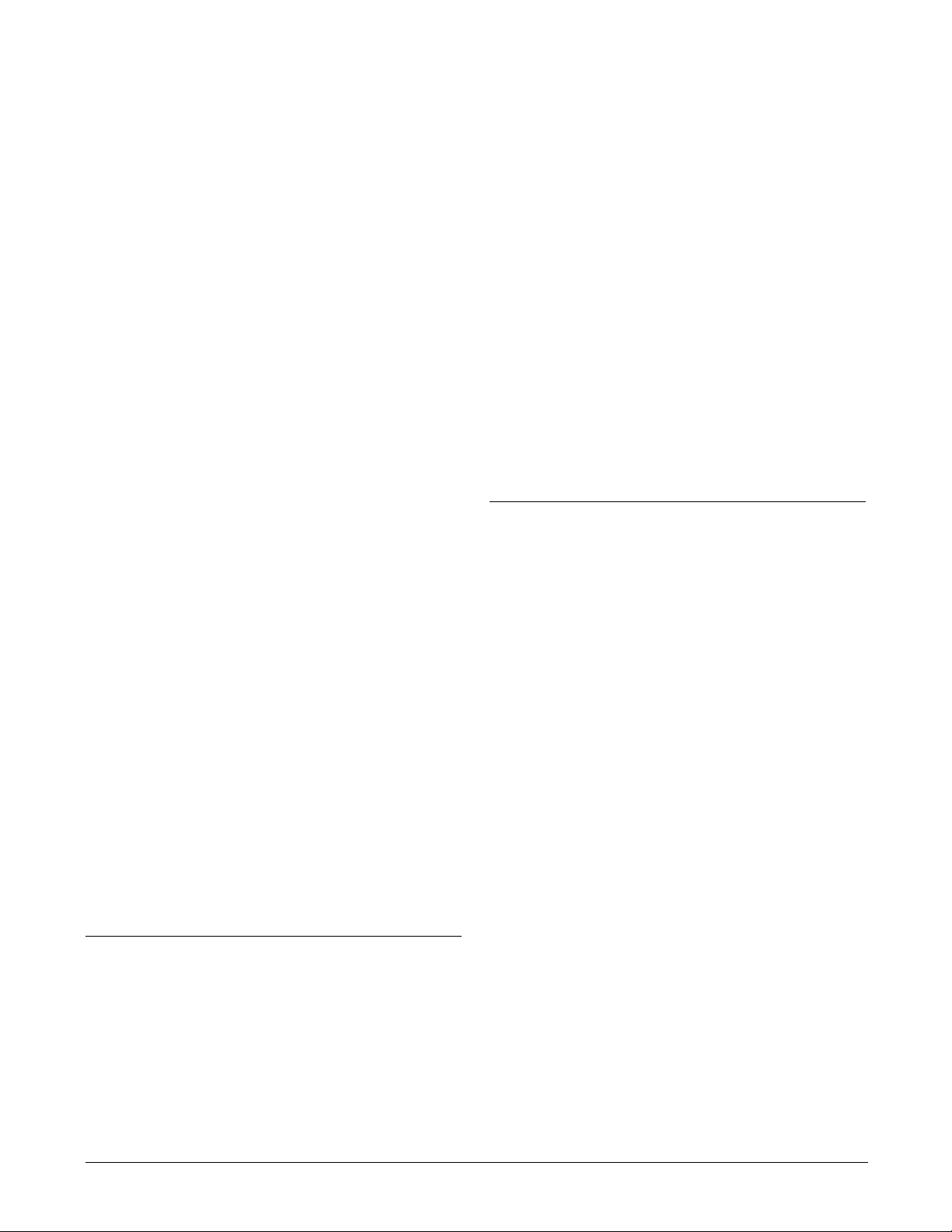
Configuración personalizada de la Página Principal
Se pueden agregar hasta 16 líneas a la Página Principal
para mostrar el estado y otra informacion del
controlador.
Vaya al Menú de Configuración de la Página Principal en
la Página Configuración. La primera pantalla le indicará
elegir una de las 16 líneas a personalizar, desde el
parámetro “P1" hasta el “P16". Después de presionar .
para seleccionar la línea, elija un parámetro de
monitoreo.
Todas sus selecciones aparecerán en la Página Principal
Especial, tabla de parámetros de la Página Configuración
(en este mismo capítulo).
Figura 4.2 — Ejemplo de parámetros en la Página
Principal Especial.
Entrada 1 26°C
Conjunto PID 1
Potencia1A 0%
Potencia1B 55%
Entrada digital _234
Elegir P:1 Mostrar_ _
>Ninguno
Valor ent. 1 ■
Valor barra ent.1 ▼
Elegir:_ _ _____
>Parámetro P1
Parámetro P2 ■
Parámetro P3 ▼
Mensajes estáticos
Las entradas digitales pueden ser configuradas para que
muestren un mensaje ingresado por el usuario. Dicho
mensaje aparecerá en la Página Principal cuando se
active la entrada digital.
Por ejemplo, se puede mostrar el mensaje “PUERTA
ABIERTA” en caso de que la puerta del horno no esté
completamente cerrada.
Page 19
Watlow Series F4P Fábrica ■ 5.1
Capítulo 5: Fábrica
Seguridad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.1
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.3
Calibración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.3
5
Seguridad
El controlador Serie F4P permite al usuario fijar niveles
de seguridad independientes para la indicación del Punto
establecido estático en la Página Principal, para todos los
menús de la Página Operaciones, así como también para
la Página Configuración y Página Fábrica. Hay cuatro
niveles de seguridad disponibles:
• Acceso total (los usuarios pueden entrar y cambiar
la configuración);
• Sólo lectura (los usuarios pueden leer la
configuración, pero no cambiarla);
• Contraseña (los usuarios pueden entrar y cambiar
la configuración después de ingresar una
contraseña); y
• Oculto (los usuarios no ven el menú o la página [no
se muestra]). No es posible ocultar los ajustes del
Punto establecido.
✔ Nota: La opción predeterminada para todos los menús
es “Acceso total”. A menos que se cambie el nivel de
acceso, los usuarios podrán leer y cambiar todos los
ajustes en cada menú del software del controlador Serie
F4P.
Cómo fijar los bloqueos
Usando este menú, se puede limitar el acceso a los
siguientes menús y páginas:
• Punto establecido, en la Página Principal
• Autoafinar PID, en la Página Operaciones
• Editar PID, en la Página Operaciones
• Punto establecido de alarma, en la Página
Operaciones
• Página Configuración
• Página Fábrica
Seleccione un elemento para bloquearlo, presione . y
seleccione el nivel de acceso: total, sólo lectura,
contraseña u oculto. Si selecciona “Contraseña”, deberá
establecerla (véase la información más adelante).
✔ Nota: Si desea más información acerca del efecto que
tienen los ajustes de los parámetros sobre el
funcionamiento del controlador, consulte el capítulo 7
(Características).
ç
ATENCIÓN: Cualquier trabajo de mantenimiento preventivo o
correctivo en esta unidad debe ser efectuado únicamente por
técnicos autorizados capacitados.
…Bloqueo>Autoafinar PID
Acceso total
Sólo lectura
Contraseña
.
…Fábrica>Fijar bloq
Punto establecido
Autoaf.PID (oper.)
Editar PID (oper.)
.
Principal>Fábrica
Fijar bloqueo
Diagnósticos
Prueba
Page 20
5.2 ■ Fábrica Watlow Series F4P
Ingreso de una contraseña
Si Ud. trata de establecer la seguridad de la contraseña
antes de haber ingresado una contraseña, aparecerá un
mensaje indicando ingresarla. Utilice las teclas > y <
para ingresar una contraseña de cuatro caracteres
(letras, números o ambos). Al realizar este paso y
confirmar la contraseña, vuelva al menú o a la página y
seleccione Seguridad de contraseña. Anote su contraseña
y guárdela en un sitio seguro.
Confirm contraseña:
_ _ _ _
▲▼ Ajusta carácter
< Previo >Próximo
Contraseña nueva:
_ _ _ _
▲▼ Ajusta carácter
< Previo >Próximo
Hay que reajustar el
bloqueo
tras fijar la contraseña
■ ■ ■ Oprima una tecla!■ ■ ■
>
¡No contraseña!
¿Establec.contraseñ
▼ No ▲ Sí
■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■
Uso de una contraseña
Para acceder a un área protegida, debe ingresar la
contraseña; si ingresa una incorrecta, aparecerá un
mensaje advirtiéndole del error y pidiéndole intentar
nuevamente. Cuando la contraseña esté correcta, elija
entrar nuevamente al menú o a la página que haya
seleccionado.
Cambio de la contraseña
El parámetro Cambiar contraseña está cerca del final de
la lista, bajo Fijar bloq (Página Fábrica). Para cambiar
una contraseña, deberá primero ingresar la antigua para
fines de verificación.
Escribir contraseña:
_ _ _ _
▲▼ Ajusta carácter
< Previo >Próximo
.
…Fábrica>Fijar bloqueo___
Configuración ▲
Fábrica ■
>Cambiar contraseña ▼
No válida, reentrar:____
▲▼ Ajusta carácter
< Previo >Próximo
Page 21
Watlow Series F4P Fábrica ■ 5.3
Diagnósticos
Los parámetros del Menú de Diagnósticos (Página
Fábrica) proporcionan información sobre la unidad de
controlador, la cual ayuda solucionar problemas. Por
ejemplo, el parámetro Modelo identificará el número de
pieza (12 dígitos) del controlador Serie F4P. El parámetro
Salida1A identificará el tipo de salida seleccionada para
la Salida 1A.
Seleccione el parámetro presionando la tecla Derecha . .
La información aparecerá en la pantalla inferior.
Algunos de los parámetros del Menú de Diagnósticos
proporcionan información para uso exclusivo de la
fábrica.
Para restablecer todos los parámetros a sus valores
originales de fábrica, utilice el parámetro Valores previos
en el Menú de Prueba.
Prueba
Este menú le permite revisar las salidas, las pantallas
(superior, inferior e indicadores luminosos de estado), y
hacer que el controlador vuelva a los valores
predeterminados de fábrica. Si se vuelve a los valores
predeterminados de fábrica, se borrará todo el software
preestablecido y el controlador volverá a unidades
inglesas PID (Restablecimiento y Compensación) y a la
escala de temperaturas en grados Fahrenheit.
Calibración
El menú de calibración en la Página Fábrica permite
Calibrar entradas y salidas. Los procedimientos de
calibración pueden ser efectuados únicamente por
técnicos capacitados con acceso al equipo listado en cada
sección.
Antes de comenzar los procedimientos de calibración,
precaliente el controlador durante un mínimo de 20
minutos.
Restablecimiento de los valores de fábrica
Cada controlador es calibrado antes de salir de la
fábrica Si en cualquier momento Ud. desea restablecer
los valores de calibración de fábrica, utilice los últimos
parámetros del menú: Restablecer cal.ent x (1 a 3).
Presione . No hace falta utilizar equipos especiales.
Procedimiento de entrada del termopar
Equipo
• Compensador de referencia tipo J con una junta de
referencia a 0°C/0°C, o calibrador de termopar tipo J
a 0°C/32°F
• Fuente de milivoltios de precisión, de 0 a 50mV de
alcance mínimo, 0.002mV de resolución
Ajuste y calibración de la entrada x (1 a 3)
Las entradas 2 y 3 aparecen únicamente en los
controladores de versión avanzada (F4P _ - _ _ AB - _ _ _ _).
1. Conecte la fuente de alimentación adecuada a los
terminales 1, 2 y 3 (consulte el capítulo “Cableado” y
el apéndice).
2. Conecte la fuente de milivoltios, con cable de cobre, a
los terminales 62 (-) y 61 (+) de la entrada 1, los
terminales 58 (-) y 57 (+) de la entrada 2, o a los
terminales 56 (-) y 55 (+) de la entrada 3.
3. Ingrese 50.000mV desde la fuente de milivoltios.
Espere por lo menos 10 segundos para que se
estabilice. Presione la tecla Derecha . una vez en el
indicador Calibrar entrada x (1 a 3) (Página
Fábrica). En el indicador 50.00mV presione . una
vez, y para almacenar 50.00mV presione una vez la
tecla Arriba > . .
4. Ingrese 0.000mV desde la fuente de milivoltios.
Espere por lo menos 10 segundos para que se
estabilice. En el indicador 0.00mV presione . una
vez, y para almacenar 0.00mV presione > una vez.
5. Desconecte la fuente de milivoltios y conecte el
compensador de referencia o calibrador de termopar
a los terminales 62 (-) y 61 (+) de la entrada 1, los
terminales 58 (-) y 57 (+) de la entrada 2, o los
terminales 56 (-) y 55 (+) de la entrada 3. Con un
alambre de termopar tipo J (si está utilizando un
compensador), enciéndalo y haga un corto con los
alambres de la entrada. Cuando utilice un calibrador
de tipo J, ajústelo para simular 0°C/32°F. Espere 10
segundos para que se estabilice el controlador.
Presione . una vez en el indicador Calibrar entrada
x (1 ó 2) (Página Fábrica). En el indicador 32°F Tipo
J presione . una vez, y presione una vez > para
almacenar la calibración del termopar tipo J.
6. Vuelva a hacer el cableado para la operación y
verifique la calibración.
Page 22
5.4 ■ Fábrica Watlow Series F4P
Procedimiento de entrada del RTD
Equipo
• Caja de décadas de 1 Ω con una resolución de 0.01Ω.
Ajuste y calibración de la entrada x (1 a 3)
Las entradas 2 y 3 aparecen únicamente en los
controladores de versión avanzada (F4P _ - _ _ AB - _ _ _ _).
1. Conecte la fuente de alimentación adecuada a los
terminales 1, 2 y 3 (consulte el capítulo “Cableado” y
el apéndice).
2. Ponga en cortocircuito los terminales 60, 61 y 62 de
la entrada 1; los terminales 54, 57 y 58 de la entrada
2; o los terminales 52, 55 y 56 de la entrada 3, juntos
con menos de 0.1Ω. Presione la tecla Derecha . una
vez en el indicador Calibrar entrada x (1 a 3). En el
indicador Tierra presione . una vez, y presione la
tecla Arriba > una vez para almacenar la entrada de
tierra.
3. Ponga en cortocircuito los terminales 60 y 61 de la
entrada 1; los terminales 54 y 57 de la entrada 2; o
los terminales 52 y 55 de la entrada 3, juntos con
menos de 0.5Ω. Presione . una vez en el indicador
Calibrar entrada x (1 a 3). En el indicador Cable
presione . una vez, y presione > una vez para
almacenar la resistencia del cable.
4. Con un cable de calibre 20 a 24, conecte la caja de
décadas a los terminales 60 (S2), 61 (S1) y 62 (S3) de
la entrada 1; los terminales 54 (S2), 57 (S1) y 58 (S3)
de la entrada 2; o los terminales 52 (S2), 55 (S1) y 56
(S3) de la entrada 3.
5. Ingrese 15.00Ω desde la caja de décadas. Espere por
lo menos 10 segundos para que se estabilice.
Presione . una vez en el indicador Calibrar entrada
x (1 a 3) (Página Fábrica). En el indicador 15.00 ?
presione . una vez, y presione > una vez para
almacenar la entrada de 15.00Ω.
6. Ingrese 380.00 Ω desde la caja de décadas. Espere
por lo menos 10 segundos para que se estabilice.
Presione . una vez en el indicador Calibrar entrada
x (1 a 3). En el indicador 380.0 Ω presione . una
vez, y presione > una vez para almacenar la entrada
de 380.0 Ω.
7. Vuelva a realizar el cableado para la operación del
equipo y verifique la calibración.
Procedimiento entrada del proceso (voltaje)
Equipo
• Fuente de voltaje de precisión, 0 a 10V (rango
mínimo), con una resolución de 0.001V.
Ajuste y calibración de la entrada x (1 a 3)
Las entradas 2 y 3 aparecen únicamente en los
controladores de versión avanzada (F4P _ - _ _ AB - _ _ _ _).
1. Conecte la fuente de alimentación adecuada a los
terminales 1, 2 y 3 (consulte el capítulo “Cableado” y
el apéndice).
2. Conecte la fuente de voltaje a los terminales 59 (+) y
62 (-) de la entrada 1, terminales 53 (+) y 58 (-) de la
entrada 2, o los terminales 51 (+) y 56 (-) de la
entrada 3.
3. Ingrese 0.000V desde la fuente de voltaje al
controlador. Espere por lo menos 10 segundos para
que se estabilice. Presione la tecla Derecha . en el
indicador Calibrar entrada 1. En el indicador 0.000V
presione . una vez, y presione una vez la tecla
Arriba > para almacenar 0.000V.
4. Ingrese 10.000V desde la fuente de voltaje al
controlador. Espere por lo menos 10 segundos para
que se estabilice. Presione . una vez en el indicador
Calibrar entrada 1. En el indicador de 10.000V
presione . una vez, y presione > una vez para
almacenar la entrada de 10.000V
5. Vuelva a realizar el cableado para la operación del
equipo y verifique la calibración.
Procedimiento de entrada del proceso (corriente)
Equipo
• Fuente de corriente de precisión, rango de 0 a 20
mA, con una resolución de 0.01 mA.
Ajuste y calibración de la entrada x (1 a 3)
Las entradas 2 y 3 aparecen únicamente en los
controladores de versión avanzada (F4P _ - _ _ AB - _ _ _ _)
1. Conecte la fuente de alimentación adecuada a los
terminales 1, 2 y 3 (consulte el capítulo “Cableado” y
el apéndice).
2. Conecte la fuente de corriente a los terminales 60 (+)
y 62 (-) de la entrada 1; los terminales 54 (+) y 58 (-)
de la entrada 2; o los terminales 52 (+) y 56 (-) de la
entrada 3.
3. Ingrese 4.000 mA desde la fuente de corriente al
controlador. Espere por lo menos 10 segundos para
que se estabilice. Presione la tecla Derecha . en el
indicador Calibrar entrada 1. En el indicador 4.000
mA presione . una vez, y presione una vez la tecla
Arriba > para almacenar 4.000 mA.
4. Ingrese 20.000 mA desde la fuente de corriente al
controlador. Espere por lo menos 10 segundos para
que se estabilice. Presione . una vez en el indicador
Calibrar entrada 1. En el indicador 20.000 mA
presione . una vez, y presione > una vez para
almacenar 20.000 mA.
5. Vuelva a realizar el cableado para la operación del
equipo y verifique la calibración.
Page 23

Watlow Series F4P Fábrica ■ 5.5
Procedimiento de salida del proceso
Equipo
• Voltímetro/Amperímetro con una resolución de 3.5
dígitos.
Ajuste y calibración de la salida 1A
1. Conecte la fuente de alimentación adecuada a los
terminales 1, 2 y 3 (consulte el capítulo “Cableado” y
el apéndice).
Miliamperios
2. Conecte el voltímetro/amperímetro a los terminales
42 (+) y 43 (-).
3. Presione la tecla Derecha . en el indicador Calibrar
salida 1A. En el indicador 4.000 mA presione . una
vez. Use la tecla Arriba > o la tecla Abajo < para
ajustar la pantalla según la lectura del
voltímetro/amperímetro. El controlador debe
estabilizarse en 1 segundo. Repita hasta que el
voltímetro/amperímetro lea 4.000 mA. Presione .
para almacenar el valor.
4. Presione la tecla Derecha . en el indicador Calibrar
salida 1A. En el indicador 20.000 mA presione . una
vez. Use la tecla Arriba > o la tecla Abajo < para
ajustar la pantalla según la lectura del
voltímetro/amperímetro. El controlador debe
estabilizarse en 1 segundo. Repita hasta que el
voltímetro/amperímetro lea 20.000 mA. Presione .
para almacenar el valor.
Voltios
5. Conecte el voltímetro/amperímetro a los terminales
44 (+) y 43 (-).
6. Presione la tecla Derecha . en el indicador Calibrar
salida 1A. En el indicador 1.000V presione . una
vez. Use la tecla Arriba > o la tecla Abajo < para
ajustar la pantalla según la lectura del
voltímetro/amperímetro. El controlador debe
estabilizarse en 1 segundo. Repita hasta que el
voltímetro/amperímetro lea 1.000V. Presione . para
almacenar el valor.
7. Presione la tecla Derecha . en el indicador Calibrar
salida 1A. En el indicador 10.000V presione . una
vez. Use la tecla Arriba > o la tecla Abajo < para
ajustar la pantalla según la lectura del
voltímetro/amperímetro. El controlador debe
estabilizarse en 1 segundo. Repita hasta que el
voltímetro/amperímetro lea 10.000V. Presione .
para almacenar el valor.
8. Vuelva a realizar el cableado para la operación del
equipo y verifique la calibración.
Ajuste y calibración de la salida 1B
1. Conecte la fuente de alimentación adecuada a los
terminales 1, 2 y 3 (consulte el capítulo “Cableado” y
el apéndice)
Miliamperios
2. Conecte el voltímetro/amperímetro a los terminales
39 (+) y 40 (-).
3. Presione la tecla Derecha . en el indicador Calibrar
salida 1B. En el indicador 4.000 mA presione . una
vez. Use la tecla Arriba > o la tecla Abajo < para
ajustar la pantalla según la lectura del
voltímetro/amperímetro. El controlador debe
estabilizarse en 1 segundo. Repita hasta que el
voltímetro/amperímetro lea 4.000 mA. Presione .
para almacenar el valor.
4. Presione la tecla Derecha . en el indicador Calibrar
salida 1B. En el indicador 20.000 mA presione . una
vez. Use la tecla Arriba > o la tecla Abajo < para
ajustar la pantalla según la lectura del
voltímetro/amperímetro. El controlador debe
estabilizarse en 1 segundo. Repita hasta que el
voltímetro/amperímetro lea 20.000 mA. Presione .
para almacenar el valor.
Voltios
5. Conecte el voltímetro/amperímetro a los terminales
41 (+) y 40 (-).
6.Presione la tecla Derecha . en el indicador Calibrar
salida 1B. En el indicador 1.000V presione . una
vez. Use la tecla Arriba > o la tecla Abajo < para
ajustar la pantalla según la lectura del
voltímetro/amperímetro. El controlador debe
estabilizarse en 1 segundo. Repita hasta que el
voltímetro/amperímetro lea 1.000V. Presione . para
almacenar el valor.
7. Presione la tecla Derecha . en el indicador Calibrar
salida 1B. En el indicador 10.000V presione . una
vez. Use la tecla Arriba > o la tecla Abajo < para
ajustar la pantalla según la lectura del
voltímetro/amperímetro. El controlador debe
estabilizarse en 1 segundo. Repita hasta que el
voltímetro/amperímetro lea 10.000V. Presione .
para almacenar el valor.
8. Vuelva a realizar el cableado para la operación del
equipo y verifique la calibración.
Page 24

5.6 ■ Fábrica Watlow Series F4P
Procedimiento de Salida de retransmisión
Equipo
• Voltímetro/Amperímetro con una resolución de 3.5
dígitos.
Ajuste y calibración de retransmisión 1
1. Conecte la fuente de alimentación adecuada a los
terminales 1, 2 y 3 (consulte el capítulo “Cableado” y
el apéndice).
Miliamperios
2. Conecte el voltímetro/amperímetro a los terminales
50 (+) y 49 (-).
3. Presione la tecla Derecha . en el indicador.
Retransmisión 1. En el indicador 4.000 mA presione
. una vez. Use la tecla Arriba > o la tecla Abajo <
para ajustar la pantalla según la lectura del
voltímetro/amperímetro. El controlador debe
estabilizarse en 1 segundo. Repita hasta que el
voltímetro/amperímetro lea 4.000 mA. Presione .
para almacenar el valor.
4. Presione la tecla Derecha . en el indicador Calibrar
retransmisión 1. En el indicador 20.000 mA presione
. una vez. Use la tecla Arriba > o la tecla Abajo <
para ajustar la pantalla según la lectura del
voltímetro/amperímetro. El controlador debe
estabilizarse en 1 segundo. Repita hasta que el
voltímetro/amperímetro lea 20.000 mA. Presione .
para almacenar el valor.
Voltios
5.Conecte el voltímetro/amperímetro a los terminales
48 (+) y 49 (-).
6. Presione la tecla Derecha . en el indicador Calibrar
retransmisión 1. En el indicador 1.000V presione .
una vez. Use la tecla Arriba > o la tecla Abajo <
para ajustar la pantalla según la lectura del
voltímetro/amperímetro. El controlador debe
estabilizarse en 1 segundo. Repita hasta que el
voltímetro/amperímetro lea 1.000V. Presione . para
almacenar el valor.
7. Presione la tecla Derecha . en el indicador Calibrar
retransmisión 1. En el indicador 10.000V presione .
una vez. Use la tecla Arriba > o la tecla Abajo <
para ajustar la pantalla según la lectura del
voltímetro/amperímetro. El controlador debe
estabilizarse en 1 segundo. Repita hasta que el
voltímetro/amperímetro lea 10.000V. Presione .
para almacenar el valor.
8. Vuelva a realizar el cableado para la operación del
equipo y verifique la calibración.
Ajuste y calibración de retransmisión 2
1. Conecte la fuente de alimentación adecuada a los
terminales 1, 2 y 3 (consulte el capítulo “Cableado” y el
apéndice).
Miliamperios
2. Conecte el voltímetro/amperímetro a los terminales
47 (+) y 46 (-).
3. Presione la tecla Derecha . en el indicador Calibrar
retransmisión 2. En el indicador 4.000 mA presione
. una vez. Use la tecla Arriba > o la tecla Abajo <
para ajustar la pantalla según la lectura del
voltímetro/amperímetro. El controlador debe
estabilizarse en 1 segundo. Repita hasta que el
voltímetro/amperímetro lea 4.000 mA. Presione .
para almacenar el valor.
4.Presione la tecla Derecha . en el indicador Calibrar
retransmisión.2. En el indicador 20.000 mA presione
. una vez. Use la tecla Arriba > o la tecla Abajo <
para ajustar la pantalla según la lectura del
voltímetro/amperímetro. El controlador debe
estabilizarse en 1 segundo. Repita hasta que el
voltímetro/amperímetro lea 20.000 mA. Presione .
para almacenar el valor.
Voltios
5. Conecte el voltímetro/amperímetro a los terminales
45 (+) y 46 (-).
6. Presione la tecla Derecha . en el indicador Calibrar
retransmisión 2. En el indicador 1.000V presione .
una vez. Use la tecla Arriba > o la tecla Abajo <
para ajustar la pantalla según la lectura del
voltímetro/amperímetro. El controlador debe
estabilizarse en 1 segundo. Repita hasta que el
voltímetro/amperímetro lea 1.000V. Presione . para
almacenar el valor.
7. Presione la tecla Derecha . en el indicador Calibrar
retransmisión 2. En el indicador 10.000V presione .
una vez. Use la tecla Arriba > o la tecla Abajo <
para ajustar la pantalla según la lectura del
voltímetro/amperímetro. El controlador debe
estabilizarse en 1 segundo. Repita hasta que el
voltímetro/amperímetro lea 10.000V. Presione .
para almacenar el valor.
8. Vuelva a realizar el cableado para la operación del
equipo y verifique la calibración.
Page 25
Watlow Series F4P Parámetros ■ 6.1
Capítulo 6: Parámetros
Páginas, menús y parámetros . . . . . . . . . . . . . . . .6.1
Página Principal . . . . . . . . . . . . . . . . . . . . . . . . . .6.2
Tabla de parámetros de la Página Operaciones . . .6.4
Registro de parámetros de la Página Operaciones .6.10
Tabla de parámetros de la Página Configuración . .6.11
Registro de parámetros de la Página
Configuración . . . . . . . . . . . . . . . . . . . . . . . . .6.23
Registro de parámetros de la Página Principal
Especial . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.25
Tabla de parámetros de la Página Fábrica . . . . . . .6.26
6
Páginas, menús y parámetros
Los parámetros del controlador Serie F4P están
dispuestos en cuatro grupos, o páginas: Principal,
Operaciones, Configuración y Fábrica. En los
capítulos correspondientes a cada página
encontrará información adicional. En el capítulo 7
(Características) se explican características tales
como alarmas y sus parámetros aplicables.
En el controlador aparecerán sólo los parámetros activos.
Por ejemplo, si se apaga la Salida 1B, no aparecerá
ningún otro parámetro de dicha salida.
Al cambiar algunos parámetros, cambiará también la
configuración de otros. La manera más segura y eficaz de
configurar el controlador Serie F4P por primera vez
consiste en configurar los parámetros de la Página
Configuración en el orden en que aparecen.
Es aconsejable hacer copias de los Registros de los
Parámetros para cada una de las páginas, así como del
Registro de la Página Principal Especial, y anotar los
ajustes para referencia futura.
✔ Nota: Si el controlador Serie F4P ya está instalado en
un horno, estufa u otro equipo, la mayoría de los
parámetros estarán ya configurados y es posible que el
acceso a la Página Configuración esté limitado
(bloqueado).
✔ Nota: Para ver la agrupación de páginas, menús y
parámetros, consulte el mapa de software ubicado en la
contraportada interna de este manual.
✔ Nota: Si desea más información acerca del efecto que
tienen los ajustes de los parámetros sobre el
funcionamiento del controlador, consulte el capítulo 7
(Características).
Page 26
✔ Nota: Presione ˆ (tecla Información) para obtener más sugerencias sobre la tarea.
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
6.2 ■ Parámetros Watlow Series F4P
Ir a Operaciones
Afine automáticamente
conjuntos PID, edite parámetros
PID y seleccione puntos
establecidos de alarma.
[Los parámetros
predeterminados
depende del tipo
de control
seleccionado y
de los ajustes en
Configuración>
Página Principal
Especial.]
Ninguno
Entrada 1 [valor]
Valor barra Ent. 1 [gráfico]
Entrada 2 [valor]
Valor barra Ent. 2 [gráfico]
Entrada 3 [valor]
Valor barra Ent. 3 [gráfico]
Valor diferencial digital
P. E. Diferencia
Fijar diferencia
Valor de relación dig.
P.E. (relación)
Fijar relación
P.E. Digital
P. E. remoto 2
P.E. remoto 3
P.E. objetivo.
[cascada] P.E. interno.
P.E. 1
Barra de P.E. 1 [gráfico]
% potencia 1A
% potencia 1B
% potencia 1A bar [gráfico]
% potencia 1B bar [gráfico]
Estado de afinación 1
Entradas digitales
Conjunto PID activo canal 1
Parámetro x (1 a 16)
Visualización de la lista de
parámetros especiales.
Autoafinación de canal x (1 ó 2)
Condición de alarma x (1 a 2)n
Error entrada x (1 a 3)
Página Principal
Página Principal
Parámetros de la Página Principal
Page 27
Tabla de parámetros de la Página Principal
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Watlow Series F4P Parámetros ■ 6.3
✔ Nota: Si desea más información acerca del efecto que tienen los ajustes de los parámetros sobre el funcionamiento
del controlador, consulte el capítulo 7 (Características).
Ir a Fábrica
Establezca los ajustes de
seguridad; calibre y restablezca
los valores de fábrica.
Ir a Configuración
Configure entradas y salidas,
configure el sistema y diseñe la
Página Principal.
Page 28
✔ Nota: Presione ˆ (tecla Información) para obtener más sugerencias sobre la tarea.
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Watlow Series F4P Parámetros ■ 6.4
Parámetros de la Página Operaciones
Activo si las unidades PID (Página
Configuración) están como unidades del
Sistema Internacional (SI) y si la Banda
proporcional no está puesta en 0.*
1A 1B Con
501 551 [1]
511 561 [2]
521 571 [3]
531 581 [4]
541 591 [5]
r/w
0 minutos0.00 a 99.99 minutos
Integral x (A o B)
Establezca el tiempo de integral
en minutos.
Activo: Siempre.*
1A 1B Con
500 550 [1]
510 560 [2]
520 570 [3]
530 580 [4]
540 590 [5]
r/w
25°F
14°C
0° a 30,000°
Banda proporcional x (A o B)
Defina la banda proporcional
para control PID.
Principal > Operaciones > Editar PID > Conjunto PID can.1 > Conjunto PID x (1 a 5)
Conjunto PID x (1 a 5)
Activo si el controlador está en modo
automático (lazo cerrado).
307
r/w
ApagadoÚnicamente calentar (0)
Únicamente enfriar (1)
Calentar y enfriar (3)
Autoafinar PID (tipo)
Seleccione la salida a
autoafinarse.
Activo si el Control (Entrada analógica 3)
está puesto en Cascada.
343
r/w
ApagadoNo afinar (0)
Conjunto PID 1 (1)
Conjunto PID 2 (2)
Conjunto PID 3 (3)
Conjunto PID 4 (4)
Conjunto PID 5 (5)
Lazo externo cascad
Seleccione los parámetros PID
a autoafinarse.
Activo si el Control (Entrada analógica 3)
está puesto en Cascada.
305
r/w
ApagadoNo afinar (0)
Conjunto PID 1 (1)
Conjunto PID 2 (2)
Conjunto PID 3 (3)
Conjunto PID 4 (4)
Conjunto PID 5 (5)
Lazo interno cascad
Seleccione los parámetros PID
a autoafinarse.
Activo si el controlador está en modo
automático (lazo cerrado).
305
r/w
ApagadoNo afinar (0)
Conjunto PID 1 (1)
Conjunto PID 2 (2)
Conjunto PID 3 (3)
Conjunto PID 4 (4)
Conjunto PID 5 (5)
Autoafinar PID
Seleccione los parámetros PID
a autoafinarse.
Principal > Operaciones > Autoafinar PID
Autoafinar PID
Page 29
Parámetros de la Página Operaciones
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeter-
minación
Rango
(Valor Modbus)
Parámetro Descripción
Watlow Series F4P Parámetros ■ 6.5
✔ Nota: Si desea más información acerca del efecto que tienen los ajustes de los parámetros sobre el funcionamiento
del controlador, consulte el capítulo 7 (Características).
*Ninguno de los parámetros B están activos si ambas salidas están puestas para enfriar o calentar.
Activo si el Control (Entrada analógica 3)
está puesto en Cascada, las Unidades
PID (Página Configuración) están como
unidades del Sistema Internacional (SI),
y si la Banda proporcional no está puesta
en 0*.
1A 1B Set
2601 2611 [1]
2621 2631 [2]
2641 2651 [3]
2661 2671 [4]
2681 2691 [5]
r/w
0 minuto0.00 a 99.99 minutes
Integral x (A o B)
Establezca el tiempo de
integral en minutos.
Activo si el Control (Entrada analógica 3)
está puesto en Cascada.*
1A 1B Set
2600 2610 [1]
2620 2630 [2]
2640 2650 [3]
2660 2670 [4]
2680 2690 [5]
r/w
25°F
14°C
0° a 30,000°
Banda proporcional x (A o B)
Defina la banda proporcional
para control PID.
Principal > Operaciones > Editar PID > Conjunto PID can.1 > Conjunto PID x (1 a 5)
Conjunto PID x (1 a 5)
*Ninguno de los parámetros B están activos si ambas salidas están puestas para enfriar o calentar.
Activo si la Banda proporcional no está
puesta en 0 y una salida está fija en
calentamiento y la otra en enfriamiento
(Página Configuración).*
1A 1B Set
507 557 [1]
517 567 [2]
527 577 [3]
537 587 [4]
547 597 [5]
r/w
31 a 30,000
Histéresis x (A o B)
Defina el cambio de la variable
del proceso desde el punto
establecido requerido para
volver a energizar la salida (en
el modo encendido-apagado).
Activo si la Banda proporcional no está
puesta en 0 y una salida está fija en
calentamiento y la otra en enfriamiento
(Página Configuración).*
1A 1B Set
505 555 [1]
515 565 [2]
525 575 [3]
535 585 [4]
545 595 [5]
r/w
00 a 30,000
Banda muerta x (A o B)
Defina el desplazamiento eficaz
en los puntos establecidos de
calentamiento y enfriamiento a
fin de evitar conflictos.
Activo si las unidades PID (Página
Configuración) están como unidades del
Sistema Internacional (SI), y si la Banda
proporcional no está puesta en 0.*
1A 1B Set
504 554 [1]
514 564 [2]
524 574 [3]
534 584 [4]
544 594 [5]
r/w
0.00 minuto0.00 a 9.99 minutes
Compensación x (A o B)
Establezca el tiempo de
compensación.
Activo si las unidades PID (Página
Configuración) están como unidades del
Sistema Internacional (SI), y si la Banda
proporcional no está puesta en 0.*
1A 1B Set
503 553 [1]
513 563 [2]
523 573 [3]
533 583 [4]
543 593 [5]
r/w
0.00 minuto0.00 a 9.99 minutes
Derivativa x (A o B)
Establezca el tiempo de
derivativa.
Activo si las unidades PID (Página
Configuración) están como unidades
inglesas, y si la Banda proporcional no
está puesta en 0.*
1A 1B Set
502 552 [1]
512 562 [2]
522 572 [3]
532 582 [4]
542 592 [5]
r/w
0 per minuto0.00 por minuto a 99.99 por
minuto
Restablecimiento x (A o B)
Establezca el tiempo de
restablecimiento en
repeticiones por minuto.
Page 30
6.6 ■ Parámetros Watlow Series F4P
Parámetros de la Página Operaciones
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
✔ Nota: Presione ˆ (tecla Información) para obtener más sugerencias sobre la tarea.
Activo si el Tipo de alarma x (Página
Configuración) se fija en Proceso.
303 [1]
322 [2]
r/w
<por sensor><por sensor> al Punto
establecido de alarma alto 2
Alarm x (1 or 2) High Set Point
Establezca el valor alto al cual
se disparará la alarma.
Activo si el Tipo de alarma x (Página
Configuración) se fija en Proceso.
302 [1]
321 [2]
r/w
<por sensor><por sensor> al Punto
establecido de alarma alto 2
Punto establecido de alarma
bajo x (1 ó 2),
Establezca el valor bajo al cual
se disparará la alarma.
Principal > Operaciones > Puntos est. alarma
Puntos est. alarma
*Ninguno de los parámetros B están activos si ambas salidas están puestas para enfriar o para calentar.
Activo si el Control (Entrada analógica
3) está puesto en Cascada, la Banda
proporcional no está puesta en 0 y una
salida está puesta para calentar y la
otra para enfriar (Página
Configuración).*
1A 1B Set
2607 2617 [1]
2627 2637 [2]
2647 2657 [3]
2667 2677 [4]
2687 2697 [5]
r/w
31 a 9,999
Histéresis x (A o B)
Defina el cambio de la variable
del proceso desde el punto
establecido requerido para
volver a energizar la salida (en
el modo encendido-apagado).
Activo si el Control (Entrada analógica
3) está puesto en Cascada, la Banda
proporcional no está puesta en 0 y una
salida está puesta para calentar y la
otra para enfriar (Página
Configuración).*
1A 1B Set
2605 2615 [1]
2625 2635 [2]
2645 2655 [3]
2665 2675 [4]
2685 2695 [5]
r/w
00 a 9,999
Banda muerta x (A o B)
Defina el desplazamiento eficaz
en los puntos establecidos de
calentamiento y enfriamiento,
para evitar conflictos.
Activo si el Control (Entrada analógica
3) está puesto en Cascada, las Unidades
PID (Página Configuración) están como
unidades del Sistema Internacional (SI)
y la Banda proporcional no está puesta
en 0.*
1A 1B Set
2604 2614 [1]
2624 2634 [2]
2644 2654 [3]
2664 2674 [4]
2684 2694 [5]
r/w
0.00 minuto0.00 a 9.99 minuto
Compensación x (A o B)
Establezca el tiempo de
compensación.
Activo si el Control (Entrada analógica
3) está puesto en Cascada, las Unidades
PID (Página Configuración) están como
unidades del Sistema Internacional (SI)
y la Banda proporcional no está puesta
en 0.*
1A 1B Set
2603 2613 [1]
2623 2633 [2]
2643 2653 [3]
2663 2673 [4]
2683 2693 [5]
r/w
0.00 minuto0.00 a 9.99 minuto
Derivativa x (A o B)
Establezca el tiempo de
derivativa.
Activo si el Control (Entrada analógica
3) está puesto en Cascada, las Unidades
PID (Página Configuración) están como
unidades inglesas y la Banda
proporcional no está puesta en 0.*
1A 1B Set
2602 2612 [1]
2622 2632 [2]
2642 2652 [3]
2662 2672 [4]
2682 2692 [5]
r/w
0 per minuto0.00 per minuto a 99.99 per
minuto
Restablecimiento x (A o B)
Establezca el tiempo de
restablecimiento en
repeticiones por minuto.
Page 31

Parámetros de la Página Operaciones
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeter-
minación
Rango
(Valor Modbus)
Parámetro Descripción
Watlow Series F4P Parámetros ■ 6.7
✔ Nota: Si desea más información acerca del efecto que tienen los ajustes de los parámetros sobre el funcionamiento
del controlador, consulte el capítulo 7 (Características).
Activo: Siempre.
1100 r/w
ApagadoApagado (0)
Arranque (1)
Arranque o Cambio (2)
Modo de rampa al PE
Elija si se va a limitar la
velocidad máxima de cambio de
valor de temperatura o proceso.
Principal> Operaciones > Rampa a punto est.
Rampa a punto est.
Aparece si el Cambio de PID no está
Apagado.
1961 [1-2]
1962 [2-3]
1963 [3-4]
1964 [4-5]
r/w
1 a 21 a 2
2 a 3
3 a 4
4 a 5
(-19,999 a 30,000)
Cambio de PID
Seleccione el valor que activará
un cambio en conjuntos PID.
Activo: Siempre.
1951
r/w
ApagadoApagado (0)
Proceso (1)
Punto establecido(2)
Cambio de PID
Seleccione el factor que
activará el cambio a otro
conjunto PID.
Principal> Operaciones
Operaciones
Activo si se fija el Tipo de alarma X
(Página Configuración) en Vel.máx.
303 [1]
322 [2]
r/w
100Vel.máx.baja +1 a 30,000
Velocidad máx. de alarma alta
x (1 ó 2)
Establezca el valor de máxima
rapidez de proceso por segundo
al cual se activará la alarma.
Activo si se fija el Tipo de alarma X
(Página Configuración) en Vel.máx.
302 [1]
321 [2]
r/w
-100-19,999 a Vel.máx.alta -1
Velocidad máx. de alarma baja
x (1 ó 2)
Establezca el valor de máxima
rapidez de proceso por segundo
al cual se activará la alarma.
Activo si se fija el Tipo de alarma X
(Página Configuración) en Desviación.
303 [1]
322 [2]
r/w
9991 a 20,000
Desviación de alarma (alta)
(1 ó 2)
Establezca la desviación por
encima del punto establecido 1
a la cual se disparará la
alarma.
Activo si se fija el Tipo de alarma X
(Página Configuración) en Desviación.
302 [1]
321 [2]
r/w
-999-19,999 a -1
Desviación de alarma (baja)
(1 ó 2)
Establezca la desviación por
debajo del punto establecido 1
a la cual se disparará la
alarma.
Page 32

6.8 ■ Parámetros Watlow Series F4P
✔ Nota: Presione ˆ (tecla Información) para obtener más sugerencias sobre la tarea.
Parámetros de la Página Operaciones
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Activo si cualquier entrada digital se fija
en P.E. Digital.
308 [1]
327 [2]
346 [3]
365 [4]
r/w
Límite bajo del punto
establecido a límite alto del
punto establecido
Punto establecido digital x
(1 a 4)
Seleccione el valor del punto
establecido que será activado
por la entrada digital x. El
nombre del punto establecido
puede cambiarse en la Página
Configuración.
Activo si el Tipo de potencia auxiliar
(Página Configuración > Salid.contr. 1B)
se fija en Aument.punto establ.
309 r/w
enfriamiento/
enfriamiento
Límite alto P.E.
(proceso)
999 (desv.)
calentamiento/
calentamiento
Límite bajo P.E
(proceso).
-999 (desv.)
-19,999 a 30,000 [desviación]
Límite bajo del punto
establecido a límite alto del
punto establecido [proceso]
Aument.punto establ (1B)
Elegir el punto establecido que
controlará la salida 1B.
Activo si el Tipo de potencia auxiliar
(Página Configuración > Salid.contr. 1B)
se fija en Aumentar potencia auxiliar.
884 r/w
00 a 999 segundos
Aument.tiem.retraso (1B)
Establezca el tiempo durante el
cual se debe exceder el nivel de
potencia antes de activar la
salida 1B.
Activo si el Tipo de potencia auxiliar
(Página Configuración > Salid.contr. 1B)
se fija en % de potencia auxiliar.
883 r/w
75%0.0% a 100.0%
% Potencia Auxiliar (1B)
Seleccione la mínima potencia
de salida 1A que activará la
salida 1B (con histéresis de
1.0%).
Principal > Operaciones > PE de control
PE de control
Activo si el Modo de rampa al PE no
está Apagado.
1101 r/w
100.01 a 999 grados o unidades
por minuto u hora
Velocidad de rampa del PE
Seleccione la velocidad máxima
del cambio del valor de
temperatura o de proceso.
Activo si el Modo de rampa al PE no
está Apagado.
1102 r/w
Degrees/ MinuteGrados/minuto (0)
Grados/hora (1)
Escala de rampa a PE
Seleccione las unidades de
medida para la rampa.
Page 33

Parámetros de la Página Operaciones
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeter-
minación
Rango
(Valor Modbus)
Parámetro Descripción
Watlow Series F4P Parámetros ■ 6.9
✔ Nota: Si desea más información acerca del efecto que tienen los ajustes de los parámetros sobre el funcionamiento
del controlador, consulte el capítulo 7 (Características).
Disponible si el Control (Página
Configuración > Entrada analógica 2) se
fija en Remoto.
316 r/w
Punto
establecido local
Punto establecido local (0)
Remoto 2 (1)
Remoto 3 (2)
Punto establecido remoto/local
Alterne entre el punto
establecido remoto y local.
Principal> Operaciones > Puntos establecidos remotos/locales
Puntos establecidos remotos/locales
Activo si cualquier entrada digital se fija
en Valor cocien. dig.
315 [1]
334 [2]
353 [3]
372 [4]
r/w
100%0% to 30,000%
P.E. Digital de relación
x (1 a 4)
Seleccione el valor de relación
que será activado por la
entrada digital x. El valor de
proceso de la entrada 3 será
multiplicado por este valor
mientras que la entrada digital
x esté activa. Para cambiar el
nombre del punto establecido,
vaya a la Página
Configuración.
Activo si cualquier entrada digital se fija
en Valor diferencial digital.
314 [1]
333 [2]
352 [3]
371 [4]
r/w
0-19,999 to 30,000
Punto establecido diferencial
digital x (1 a 4)
Seleccione el valor diferencial
que será activado por la
entrada digital x. Dicho valor
será añadido al valor de
proceso de la entrada 3
mientras que la entrada digital
X esté activa. Para cambiar el
nombre del punto establecido,
vaya a la Página
Configuración.
Page 34

6.10 ■ Parámetros Watlow Series F4P
Registro de parámetros de la Página Operaciones
Haga una fotocopia de esta página y anote sus ajustes en esa copia.
Nombre _________________________________________________
Fecha __________________________________________________
Menú de Autoafinar PID
Autoafinar PID
Lazo interno cascad
Lazo externo cascad
Tipo autoafinac. PID
Conjunto PID can.1
Banda proporc.A
Integral A / Restablecimiento A
Derivativa A / Comp.exc.A
Banda muerta A
Histéresis A
Banda proporc.B
Integral B / Restablecimiento B
Derivativa B / Comp.exc.B
Banda muerta B
Histéresis B
Con. PID 1 Con. PID 2 Con. PID 3 Con. PID 4 Con. PID 5
Conjunto PID casc.
Banda proporc.A
Integral A / Restablecimiento A
Derivativa A / Comp.exc.A
Banda muerta A
Histéresis A
Banda proporc.B
Integral B / Restablecimiento B
Derivativa B / Comp.exc.B
Banda muerta B
Histéresis B
Menú de Punto
estab. de alarma Alarma 1 Alarma 2
P.E. bajo
P.E. alto
Desv. baja
Desv. alta
Velocidad
Cambio de PID
Cambio de PID
Ramp x a Punto establecido
Modo de rampa al PE
Velocidad de rampa del PE
Escala de rampa a PE
PE de control
% de potencia auxiliar
Tiempo de retardo potencia
auxiliar
Punto establecido rem/local
P.E. Potencia. Auxiliar
Punto estab dig. x (1 a 4)
Punto establecido
diferencial digital x (1 a 4)
P.E. Digital de relación
x (1 a 4)
Con. PID 1 Con. PID 2 Con. PID 3 Con. PID 4 Con. PID 5
PID 1 a 2 PID 2 a 3 PID 3 a 4 PID 4 a 5
Dig. PE 1 Dig. PE 2 Dig. PE 3 Dig. PE 4
Page 35

✔ Nota: Si desea más información acerca del efecto que tienen los ajustes de los parámetros sobre el funcionamiento
del controlador, consulte el capítulo 7 (Características).
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
6.11 ■ Parámetros Watlow Series F4P
Parámetros de la Página Configuración
Activo: Siempre.
880 r/w
Transferencia
sin sobresaltos
Transferencia sin sobresaltos
(0)
Fijo (1)
Modo de falla
Seleccione el comportamiento
de las salidas si el controlador
se transfiere al modo manual
debido a un error de entrada.
Activo: Siempre.
304 r/w
90%50 a 150%
Autoafin. P.E.
Establezca el porcentaje del
punto establecido al cual
autoafinarse.
Activo: Siempre.
454 r/w
Restablecer PERestablecer PE (0)
Transferencia sin sobresaltos
(1)
Transferencia manual-auto
Seleccione la manera en que el
punto establecido será
determinado cuando el control
pase de modo manual a modo
automático.
Activo si una o ambas salidas de control
se fijan en enfriamiento [acción directa].
453 r/w
-100%-100% a 0%
Transf. máx. (frío)
Máxima potencia de salida de
enfriamiento cuando el control
pasa del modo automático al
manual.
Activo si una o ambas salidas de control
se fijan en calentamiento [acción
inversa].
452 r/w
100%0% a 100%
Transf. máx. (calor)
Máxima potencia de salida de
calentamiento cuando el control
pasa del modo automático al
manual.
Activo: Siempre.
1923 r/w
Sí, pantalla
superior
No, pantalla superior (0)
Sí, pantalla superior (1)
Mostrar °F o °C
Seleccione si mostrar u ocultar
°C ó °F en la pantalla superior.
Activo: Siempre.
901 r/w
°F°F (0)
°C (1)
°F o °C
Seleccione la escala de
temperatura.
Activo: Siempre.
900 r/w
Unidades
inglesas
(Restablecimiento/
Compensación de
excedente)
Unidades inglesas
(Restablecimiento/
Compensación de excedente)
(0) Unidades del Sistema
Internacional
(Integral/Derivativa) (1)
Unidades PID
Seleccione unidades para el
control PID.
Principal > Configuración > Sistema
Sistema
Page 36

6.12 ■ Parámetros Watlow Series F4P
✔ Nota: Presione ˆ (tecla Información) para obtener más sugerencias sobre la tarea.
Tabla de parámetros de la Página Configuración
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Activo si el Sensor no está Apagado.
Las entradas 2 y 3 aparecen únicamente
en los controladores de versión avanzada
(F4P _ - _ _ AB - _ _ _ _).
La selección que aparezca depende del
sensor seleccionado para el parámetro
anterior.
Input
601 [1]
611 [2]
621 [3]
r/w
J
DIN
4-20mA
Si el sensor está puesto en
termopar:
J (0)
K (1)
T (2)
E (3)
N (4)
C (5)
D (6)
PT2 (7)
R (8)
S (9)
B (10)
Si el sensor está puesto en
RTD:
JIS (12)
DIN (11)
Si el sensor está puesto en
Proceso:
4 a 20mA (13)
0 a 20mA (14)
0 a 5V (15)
1 a 5V (16)
0 a 10V (17)
0 a 50mV (18)
Tipo
Seleccione la tabla de
linealización a aplicar al
sensor.
Las entradas 2 y 3 aparecen únicamente
en los controladores de versión avanzada
(F4P _ - _ _ AB - _ _ _ _). Activo: Siempre.
Input
600 [1]
610 [2]
620 [3]
r/w
Termopar
Termopar (0)
RTD (1)
Proceso (2)
Posición de válvula (3) [sólo
Entrada analógica 3]
Apagado (4) [sólo Entradas
analógicas 2 y 3]
Sensor
Seleccione el sensor.
Principal > Configuración > Entrada analógica x (1 a 3)
Las entradas 2 y 3 aparecen únicamente en los controladores de versión avanzada (F4P _ - _ _ AB - _ _ _ _).
Entrada analógica x (1 a 3)
Activo: Siempre.
904 r/w
OffApagado (0)
Encendido (1)
Detección de lazo abierto
Seleccione si se apagarán las
salidas y se despliega un
mensaje de error.
Activo si el Modo de falla está Fijo.
903 r/w
0%0% a límite alto de potencia
(únicamente calentar o
únicamente enfriar)
Límite alto de potencia
(enfriamiento) a Límite alto
de potencia (calentamiento)
(calentamiento/
enfriamiento o enfriamiento/
calentamiento)
Entrada 1 (falla)
Seleccione la potencia de salida
que deberá mantenerse si el
control pasa al modo manual
debido a un error de entrada.
Page 37

Tabla de parámetros de la Página Configuración
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Watlow Series F4P Parámetros ■ 6.13
✔ Nota: Si desea más información acerca del efecto que tienen los ajustes de los parámetros sobre el funcionamiento
del controlador, consulte el capítulo 7 (Características).
Las entradas 2 y 3 aparecen
únicamente en los controladores de
versión avanzada
(F4P _ - _ _ AB - _ _ _ _). Activo si el
Tipo de compensación se fija en Lineal
sencillo.
Entrada
5572 [1]
5573 [2]
5574 [3]
r/w
Lineal sencilloLineal sencillo (0)
Punto múltiple (1)
Tipo de compensación
Seleccione uno o diez puntos de
compensación (desvío).
Las entradas 2 y 3 aparecen
únicamente en los controladores de
versión avanzada
(F4P _ - _ _ AB - _ _ _ _). Activo:
Siempre.
Entrada
603 [1]
613 [2]
623 [3]
r/w
—Depende del sensor.
Límite alto P.E.
Establezca el límite para un
punto establecido máximo.
Las entradas 2 y 3 aparecen
únicamente en los controladores de
versión avanzada
(F4P _ - _ _ AB - _ _ _ _). Activo:
Siempre.
Entrada
602 [1]
612 [2]
622 [3]
r/w
—Depende del sensor.
Límite bajo P.E.
Establezca el límite para un
punto establecido mínimo.
Las entradas 2 y 3 aparecen
únicamente en los controladores de
versión avanzada
(F4P _ - _ _ AB - _ _ _ _). Activo si el
Sensor se fija en Proceso.
Entrada
681 [1]
683 [2]
685 [3]
r/w
—Depende de la selección del
sensor y del punto decimal.
Escala alta
Establezca el valor de la
unidad para el extremo alto del
rango de corriente o voltaje.
Las entradas 2 y 3 aparecen
únicamente en los controladores de
versión avanzada
(F4P _ - _ _ AB - _ _ _ _). Activo si el
Sensor se fija en Proceso.
Entrada
680 [1]
682 [2]
684 [3]
r/w
—Depende de la selección del
sensor y del punto decimal.
Escala baja
Establezca el valor de unidad
para el extremo bajo del rango
de corriente o voltaje.
Las entradas 2 y 3 aparecen
únicamente en los controladores de
versión avanzada
(F4P _ - _ _ AB - _ _ _ _). Activo:
Siempre.
Entrada
606 [1]
616 [2]
626 [3]
r/w
00 (0)
0.0 (1)
0.00 (proceso) (2)
0.000 ( proceso) (3)
Decimal
Establezca el punto decimal
para la entrada.
Las entradas 2 y 3 aparecen
únicamente en los controladores de
versión avanzada
(F4P _ - _ _ AB - _ _ _ _). Activo si el
Sensor se fija en Proceso.
Entrada
608 [1]
3070 char 1
3071 char 2
3072 char 3
618 [2]
3073 char 1
3074 char 2
3075 char 3
628 [3]
3076 char 1
3077 char 2
3078 char 3
r/w
TemperaturaTemperatura (0)
Unidades (1) [3 car.]
Unidades
Seleccione las unidades de
medición para la entrada.
Principal > Configuración > Entrada analógica x (1 a 3)
Las entradas 2 y 3 aparecen únicamente en los controladores de versión avanzada (F4P _ - _ _ AB - _ _ _ _).
Entrada analógica x (1 a 3) (cont.)
Aparece si el controlador es de versión
avanzada
(F4P_ - _ _ AB- _ _ _ _), si se selecciona
la Entrada analógica 2 y se fija la
Entrada analógica 3 en Control normal.
1140 r/w
Normal
Normal (0)
Remoto (3)
Alterno (4)
Control
Seleccione el tipo de control.
Principal > Configuración > Entrada analógica 2
Las entradas 2 y 3 aparecen únicamente en los controladores de versión avanzada (F4P _ - _ _ AB - _ _ _ _).
Entrada analógica 2
Page 38

6.14 ■ Parámetros Watlow Series F4P
✔ Nota: Presione ˆ (tecla Información) para obtener más sugerencias sobre la tarea.
Tabla de parámetros de la Página Configuración
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
La Entrada 2 aparece únicamente en
controladores de versión avanzada
(F4P _ - _ _ AB - _ _ _ _). Activo:
Siempre.
5546 [1]
5547 [2]
5548 [3]
5549 [4]
5550 [5]
5551 [6]
5552 [7]
5553 [8]
5554 [9]
5555 [10]
r/w
0-1,000 a 1,000
Valor de compensación x (1 a
10), Entrada 2
Fije el tamaño de la
compensación.
La Entrada 2 aparece únicamente en
controladores de versión avanzada
(F4P _ - _ _ AB - _ _ _ _). Activo:
Siempre.
5516 [1]
5517 [2]
5518 [3]
5519 [4]
5520 [5]
5521 [6]
5522 [7]
5523 [8]
5524 [9]
5525 [10]
r/w
PE bajo + ((PE
alto-PE bajo) *
(x-1) /9)
-19,999 o Valor (x-1) de
compensación de entrada + 1
a Valor (x+1) de
compensación de entrada - 1
o 30,000.
Punto de compensación x (1 a
10), Entrada 2
Fije la temperatura o el valor
que disparará la compensación.
Activo: Siempre.
5536 [1] 5546 [1] 5556 [1]
5537 [2] 5547 [2] 5557 [2]
5538 [3] 5548 [3] 5558 [3]
5539 [4] 5549 [4] 5559 [4]
5540 [5] 5550 [5] 5560 [5]
5541 [6] 5551 [6] 5561 [6]
5542 [7] 5552 [7] 5562 [7]
5543 [8] 5553 [8] 5563 [8]
5544 [9] 5554 [9] 5564 [9]
5545 [10] 5555 [10] 5565 [10]
r/w
0-1,000 a 1,000
Valor de compensación x (1 a
10), Entrada 1
Fije el tamaño de la
compensación.
Activo: Siempre.
5506 [1] 5516 [1] 5526 [1]
5507 [2] 5517 [2] 5527 [2]
5508 [3] 5518 [3] 5528 [3]
5509 [4] 5519 [4] 5529 [4]
5510 [5] 5520 [5] 5530 [5]
5511 [6] 5521 [6] 5531 [6]
5512 [7] 5522 [7] 5532 [7]
5513 [8] 5523 [8] 5533 [8]
5514 [9] 5524 [9] 5534 [9]
5515 [10] 5525 [10] 5535 [10]
r/w
PE bajo + ((PE
alto-PE bajo) *
(x-1) /9)
-19,999 o Valor (x-1) de
compensación de entrada + 1
a Valor (x+1) de
compensación de entrada - 1
o 30,000.
Punto de compensación x (1 a
10), Entrada 1
Fije la temperatura o el valor
que disparará la compensación.
Las entradas 2 y 3 aparecen
únicamente en los controladores de
versión avanzada
(F4P _ - _ _ AB - _ _ _ _). Activo si el
Tipo de compensación se fija en Punto
múltiple.
Input
5566 [1]
5567 [2]
5568 [3]
r/w
NoNo (0)
Sí (1)
Restablec. valores x (1 a 3) de
desviós
Restablec. valores de
compensación a 0.
Las entradas 2 y 3 aparecen
únicamente en los controladores de
versión avanzada
(F4P _ - _ _ AB - _ _ _ _). Activo si el
Tipo de compensación se fija en Lineal
sencillo.
Input
605 [1]
615 [2]
625 [3]
r/w
—Límite bajo del punto
establecido a límite alto del
punto establecido
Valor de compensación de la
calibración
Seleccione el valor de
compensación de la entrada.
Page 39

Tabla de parámetros de la Página Configuración
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Watlow Series F4P Parámetros ■ 6.15
✔ Nota: Si desea más información acerca del efecto que tienen los ajustes de los parámetros sobre el funcionamiento
del controlador, consulte el capítulo 7 (Características).
Aparece si el controlador es de versión
avanzada
(F4P_ - _ _ AB- _ _ _ _), si se selecciona
la Entrada analógica 3, el Sensor se
fija en posición de válvula y la
calibración Automática/Manual se fija
en Manual.
1918
r/w
—
(Cierre la válvula
manualmente.)
Aprendizaje(cerrado)
Calibrar el potenciometro de
posición de válvula con la
válvula cerrada.
Aparece si el controlador es de versión
avanzada
(F4P_ - _ _ AB- _ _ _ _), si se selecciona
la Entrada analógica 3 y el Sensor se
fija en posición de válvula.
1915
r/w
Omitir
calibración
Omitir calibración (0)
Automática (1)
Manual (2)
Calibración del potenciometro
de posición de válvula
(auto/manual)
Seleccione el método de
calibración de la posición de
válvula
Principal> Configuración > Entrada analógica 3
Entrada analógica 3
Las entradas 2 y 3 aparecen
únicamente en los controladores de
versión avanzada
(F4P _ - _ _ AB - _ _ _ _). Activo si el
Sensor se fija en Proceso.
Entrada
5569 [1]
5570 [2]
5571 [3]
r/w
NoApagado (0)
Encendido (1)
Raíz cuadrada
Aplique el algoritmo de
extracción de raíz cuadrada a
la entrada.
Las entradas 2 y 3 aparecen únicamente
en los controladores de versión
avanzada
(F4P _ - _ _ AB - _ _ _ _). Activo:
Siempre.
Entrada
607 [1]
617 [2]
627 [3]
r/w
AutoborrarAutoborrar (0)
Enganche (1)
Error estado
Decida si la eliminación del
error será automática o
manual.
Las entradas 2 y 3 aparecen
únicamente en los controladores de
versión avanzada
(F4P _ - _ _ AB - _ _ _ _). Activo:
Siempre.
Entrada
604 [1]
614 [2]
624 [3]
r/w
0
1.0 si el
Decimal se fija
en 0.0 y el Tipo
de sensor se fija
en Termopar o
RTD.
-60.0 a 60.0
Tiempo de filtrado
Establezca el tiempo de
filtrado (en segundos) para las
entradas.
La Entrada 3 aparece únicamente en
controladores de versión avanzada
(F4P _ - _ _ AB - _ _ _ _). Activo:
Siempre.
En 1 En 2 En 3
5536 5546 5556 [1]
5537 5547 5557 [2]
5538 5548 5558 [3]
5539 5549 5559 [4]
5540 5550 5560 [5]
5541 5551 5561 [6]
5542 5552 5562 [7]
5543 5553 5563 [8]
5544 5554 5564 [9]
5545 5555 5565[10]
r/w
0-1,000 a 1,000
Valor de compensación x (1 a
10), Entrada 3
Fije el tamaño de la
compensación.
La Entrada 3 aparece únicamente en
controladores de versión avanzada
(F4P _ - _ _ AB - _ _ _ _). Activo:
Siempre.
En 1 En 2 En 3
5506 5516 5526 [1]
5507 5517 5527 [2]
5508 5518 5528 [3]
5509 5519 5529 [4]
5510 5520 5530 [5]
5511 5521 5531 [6]
5512 5522 5532 [7]
5513 5523 5533 [8]
5514 5524 5534 [9]
5515 5525 5535 [10]
r/w
PE bajo + ((PE
alto-PE bajo) *
(x-1) /9)
-19,999 o Valor (x-1) de
compensación de entrada + 1
a Valor (x+1) de
compensación de entrada - 1
o 30,000.
Punto de compensación x (1 a
10), Entrada 3
Fije la temperatura o el valor
que disparará la compensación.
Page 40

6.16 ■ Parámetros Watlow Series F4P
✔ Nota: Presione ˆ (tecla Información) para obtener más sugerencias sobre la tarea.
Tabla de parámetros de la Página Configuración
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Aparece si el controlador es de versión
avanzada (F4P_ - _ _ AB- _ _ _ _) y si la
Cascada se fija en Cascada de
desviación.
1927 r/w
9,9991 a 9,999
Desviac.alta(casc.)
Seleccione la desviación alta de
la cascada.
Aparece si el controlador es de versión
avanzada (F4P_ - _ _ AB- _ _ _ _) y si la
Cascada se fija en Cascada de
desviación.
1926 r/w
-19,999
-19,999 a-1
Desviac.baja(casc.)
Seleccione la desviación baja
de la cascada.
Aparece si el controlador es de versión
avanzada (F4P_ - _ _ AB- _ _ _ _) si se
selecciona la Entrada analógica 3 y si
se selecciona Cascada como el tipo de
control.
1927 r/w
<rango de
sensor alto>
<rango de sensor>
Margen alto(cascad)
Seleccione el rango alto de la
cascada.
Aparece si el controlador es de versión
avanzada (F4P_ - _ _ AB- _ _ _ _), si se
selecciona la Entrada analógica 3 y si
se selecciona Cascada como el tipo de
control.
1926 r/w
<rango de
sensor bajo>
<rango de sensor>
Margen bajo(cascad)
Seleccione el rango bajo de la
cascada.
Aparece si el controlador es de versión
avanzada (F4P_ - _ _ AB- _ _ _ _), si se
selecciona la Entrada analógica 3 y si
se selecciona Cascada como el tipo de
control.
1925 r/w
Cascada de
proceso
Cascada de proceso (0)
Cascada de desviación (1)
Cascada
Seleccione el método de control
de cascada.
Aparece si el controlador es de versión
avanzada (F4P_ - _ _ AB- _ _ _ _) y si
se selecciona Entrada analógica 2 ó 3.
1141
r/w
Normal
Normal (0)
Relación (1)
Diferencial (2)
Remoto (3)
Cascada (5)
Control
Seleccione el tipo de control.
Aparece si el controlador es de versión
avanzada (F4P_ - _ _ AB- _ _ _ _), si se
selecciona la Entrada analógica 3 y el
Sensor se fija en posición de válvula.
1917
r/w
0.0%
0.0% a 100.0%
Histéresis (posición de
válvula)
Seleccione la histéresis de la
posición de válvula.
Aparece si el controlador es de versión
avanzada (F4P_ - _ _ AB- _ _ _ _), si se
selecciona la Entrada analógica 3 y el
Sensor se fija en posición de válvula.
1916
r/w
1%
0.3% a 100.0%
Bandamuerta(res.cur)
Seleccione la banda muerta de
la posición de válvula.
Aparece si el controlador es de versión
avanzada (F4P_ - _ _ AB- _ _ _ _), si se
selecciona la Entrada analógica 3 , el
Sensor se fija en posición de válvula y la
calibración Automática/Manual se fija en
Manual.
1919
r/w
—
(Cierre la válvula
manualmente.)
Aprendizaje(abierto)
Calibrar el potenciometro de
posición de válvula con la
válvula abierta.
Page 41

Tabla de parámetros de la Página Configuración
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Watlow Series F4P Parámetros ■ 6.17
✔ Nota: Si desea más información acerca del efecto que tienen los ajustes de los parámetros sobre el funcionamiento
del controlador, consulte el capítulo 7 (Características).
Activo si la Función se fija en Activar
mensaje.
Entrada
3060 [1]
3061 [2]
3062 [3]
3063 [4]
r/w
10 segundos0 a 999
Duración del mensaje
Fije el tiempo de aparición del
mensaje.
Activo si la Función se fija en Activar
mensaje.
Entrada
3050 [1]
3051 [2]
3052 [3]
3053 [4]
r/w
Mensaje 1Mensaje 1 (0)
Mensaje 2 (1)
Mensaje 3 (2)
Mensaje 4 (3)
Activar mensaje
Seleccione el mensaje que se va
a exhibir.
Activo: Siempre.
3000-3006 [1]
3010-3016 [2]
3020-3026 [3]
3030-3036 [4]
r/w
DGT SPX<10 caracteres seleccionados
por el usuario>
Nombre
Asigne un nombre al punto
establecido digital, valor de
relación digital o valor
diferencial para fácil
referencia.
Activo: Siempre.
Sólo aparecerán en la lista las
características activas presentes.
Entrada
1060 [1]
1062 [2]
1064 [3]
1066 [4]
r/w
ApagadoApagado (0)
Bloqueo del panel (1) [nivel]
Restablecer alarma 1 (2)
[borde]
Restablecer alarma 2 (3)
[borde]
Restablecer ambas alarmas
(4) [borde]
Salidas dig.apagad (5) [nivel]
P.E. Digital (6) [nivel]
Valor diferencial dig. (7)
[nivel]
Valor de relación dig. (8)
[nivel]
Remoto [entrada analógica
del punto establecido] 2 (9)
[nivel]
Remoto [entrada analógica
del punto establecido] 3 (10)
[nivel]
Control alterno (11) [nivel]
Control manual (12) [nivel]
Salidas inversas (13) [nivel]
Activar mensaje (14) [borde]
Bloq.llave aut/man (15)
[nivel]
Función
Seleccione la función de
entrada digital.
Principal > Configuración > Entrada digital x (1 a 4)
Entrada digital x (1 a 4)
Page 42

6.18 ■ Parámetros Watlow Series F4P
✔ Nota: Presione ˆ (tecla Información) para obtener más sugerencias sobre la tarea.
Tabla de parámetros de la Página Configuración
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Activo si el Tipo de potencia auxiliar se
fija en Potencia.
881 r/w
Potencia
auxiliar
automática
Sólo automático (0)
Automático/Manual (1)
Modo % de potencia auxiliar.
(1B)
Elija si % de potencia auxiliar
opera en Modo manual.
Activo si ambas funciones de salida de
control se fijan en calentamiento o
enfriamiento..
885 r/w
Potencia% de potencia auxiliar. (0)
P.E. Potencia Auxiliar (1)
Tipo de potencia auxiliar (1B)
Seleccione lo que activará la
salida de control 1B.
Activo: Siempre.
Salida
715 [1A]
732 [1B]
r/w
0%0% a límite alto -1
Lími.potencia bajo
Establezca el nivel de potencia
de salida de control en el límite
bajo (sólo modo PID).
Activo: Siempre.
Salida
714 [1A]
731 [1B]
r/w
100%Límite bajo +1 a 100%
Lími. potencia alto
Establezca el nivel de potencia
de salida de control en el límite
alto (sólo modo PID).
Activo si la salida 1A es una salida de
proceso.
844 r/w
ApagadoApagado (0)
Encendido (1)
Dúplex (1A)
Control tanto del
calentamiento como del
enfriamiento desde una salida.
Activo si el controlador está equipado
con una salida de proceso.
Salida
701 [1A]
718 [1B]
r/w
4 a 20mA4 a 20mA (0)
0 a 20mA (1)
0 a 5V (2)
1 a 5V (3)
0 a 10V (4)
20 a 4mA (5) [valor inverso]
Proceso
Establezca el tipo de salida del
proceso.
Activo si el Tipo de tiempo de ciclo se
fija en Tiempo fijo.
Salida
506 [1A]
556 [1B]
1 segundo0.1 a 60 segundos
Valor del tiempo de ciclo
Seleccione el período del tiempo
de ciclo.
Activo si la salida x no es un relé
mecánico ni salida de proceso.
Salida
509 [1A]
559 [1B]
r/w
Tiempo fijoDisparo variable (0)
Tiempo fijo (1)
Tipo del tiempo del ciclo
Seleccione la base de tiempo.
Activo: Siempre.
Salida
700 [1A]
717 [1B]
r/w
Calentamiento
(1A)
Apagado (1B)
Apagado (0) [sólo 1B]
Calor (1) [acción inversa]
Frío (2) [acción directa]
Función
Seleccione el tipo de función
para la salida.
Principal > Configuración > Salida de control x (1A y 1B)
Salida contr. x (1A y 1B)
Activo: Siempre..
Entrada
1061 [1]
1063 [2]
1065 [3]
1067 [4]
r/w
BajoBajo (0)
Alto (1)
Condición
Seleccione la condición que
disparará la entrada digital.
Page 43

Tabla de parámetros de la Página Configuración
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Watlow Series F4P Parámetros ■ 6.19
✔ Nota: Si desea más información acerca del efecto que tienen los ajustes de los parámetros sobre el funcionamiento
del controlador, consulte el capítulo 7 (Características).
Activo si la Salida de alarma está
activada.
Salida
708 [1]
725 [2]
r/w
Sí en Página.
Principal
Sí en Página. Principal.(0)
No (1)
Mensajes de alarma
Seleccione la opción de mensaje
de alarma.
Activo si la Salida de alarma está
activada.
Salida
707 [1]
724 [2]
r/w
Abrir durante
alarma
Abrir durante alarma (0)
Cerrar durante alarma (1)
Lógica de alarmas
Elija la opción de la lógica de
alarma.
Activo si la Salida de alarma está
activada.
Salida
706 [1]
723 [2]
r/w
AmbosAmbos (0)
Bajo (1)
Alto (2)
Lados de alarma
Selección para activar los
puntos establecidos bajo, alto o
ambos.
Activo si la Salida de alarma está
activada.
Salida
703 [1]
720 [2]
r/w
31 a 9999
Histéresis alarma
Establezca la histéresis de
alarma.
Activo si la Salida de alarma está
activada.
Salida
705 [1]
722 [2]
r/w
NoNo (0)
Sí (1)
Silenciamiento
Decida si las alarmas se
silenciarán durante el
arranque.
Activo si la Salida de alarma está
activada.
Salida
704 [1]
721 [2]
r/w
AutoborradoAutoborrado (0)
Alarma enganchada (1)
Enganche
Seleccione el borrado de
alarmas automático o manual.
Activo si la fuente está habilitada.
Salida
716 [1]
733 [2]
r/w
Entrada 1Entrada 1 (0)
Entrada 2 (1)
Entrada 3 (2)
Fuente de alarma
Seleccione la fuente de alarma.
Activo: Siempre.
Salida
702 [1]
719 [2]
r/w
ApagadoApagado (0)
Proceso (1)
Desviación (2)
Tasa máxima (3)
Tipo de alarma
Seleccione el tipo de alarma.
Activo: Siempre.
3200-3209 [1]
3210-3219 [2]
r/w
ALARMX<10 caracteres seleccionados
por el usuario>
Nombre
Asigne un nombre a la alarma
para fácil referencia.
Principal > Configuración > Salida de alarma x (1 y 2)
Salida de alarma x (1 y2)
Activo si el Tipo de potencia auxiliar se
fija en Punto establecido.
882 r/w
ProcesoProceso (0)
Desviación (1)
Tipo de P.E. de Potencia Aux.
Seleccione el tipo de punto
establecido que controlará la
salida 1B.
Page 44

6.20 ■ Parámetros Watlow Series F4P
✔ Nota: Presione ˆ (tecla Información) para obtener más sugerencias sobre la tarea.
Tabla de parámetros de la Página Configuración
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Activo: Siempre.
No disponible
11 a 247
Dirección
Seleccione la dirección para el
controlador.
Activo: Siempre.
No disponible
1920019200 (0)
9600 (1)
Baudios
Seleccione la velocidad de
transmisión.
Principal > Configuración > Comunicaciones
Comunicaciones
Activo si la Fuente de retransmisión no
está Apagada.
Salida
712 [1]
729 [2]
r/w
0-9999 a 9999
Rango bajo a Rango alto
Compensación de escala
Desplaza la escala hacia arriba
(+) o abajo (-) para coincidir con
la fuente de la señal de origen.
Activo si la Fuente de retransmisión no
está Apagada.
Salida
711 [1]
728 [2]
r/w
Extremo alto del
rango del sensor
-9999 a 9999
(máximo rango de sensor)
Escala alta
Establezca el extremo alto del
rango de corriente o voltaje a
retransmitir.
Activo si la Fuente de retransmisión no
está Apagada.
Salida
710 [1]
727 [2]
r/w
Extremo bajo
del rango del
sensor
-9999 a 9999
(mínimo rango de sensor)
Escala baja
Establezca el extremo bajo del
rango de corriente o voltaje a
retransmitir.
Activo si la Fuente de retransmisión no
está Apagada.
Salida
836 [1]
837 [2]
r/w
4 a 20mA4 a 20mA (0)
0 a 20mA (1)
0 a 5V (2)
1 a 5V (3)
0 a 10V (4)
Rango analógico
Seleccione el rango de voltaje o
corriente a retransmitir.
Activo: Siempre. (Los valores aparecen
sólo si la fuente está habilitada).
Salida
709 [1]
726 [2]
r/w
Entrada 1 Apagado (0)
Entrada 1 (1)
Entrada 2 (2)
Entrada 3 (3)
P.E. 1 (4)
Potencia canal 1 (5)
Fuente de retransmisión
Seleccione una fuente para la
señal de retransmisión.
Principal > Configuración > Salida retransmi. x (1 y 2)
Salida de retrans x (1 y 2)
Page 45

Tabla de parámetros de la Página Configuración
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Watlow Series F4P Parámetros ■ 6.21
✔ Nota: Si desea más información acerca del efecto que tienen los ajustes de los parámetros sobre el funcionamiento
del controlador, consulte el capítulo 7 (Características).
Aparece: Siempre.
Las entrada analógicas 2 y 3 aparecen
únicamente en los controladores de
versión avanzada (F4P_ - _ _ AB- _ _ _
_).
*Aparece si la Entrada 3 se fija en
Diferencial.
**Aparece si la Entrada 3 se fija en
Relación.
***Cuando hay una entrada digital
activa, su número aparece en la
pantalla de la Página Principal; cuando
está inactiva, su posición está
subrayada.
Par.
1400 [1]
1401 [2]
1402 [3]
1403 [4]
1404 [5]
1405 [6]
1406 [7]
1407 [8]
1408 [9]
1409 [10]
1410 [11]
1411 [12]
1412 [13]
1413 [14]
1414 [15]
1415 [16]
r/w
Los parámetros
predeterminados
dependen del
tipo de control
seleccionado.
Ninguno (0)
Entrada 1 [valor] (1)
Valor barra ent. 1 [gráfico]
(2)
Entrada 2 [valor] (3)
Valor barra ent.2 [gráfico] (4)
Entrada 3 [valor] (5)
Valor barra ent.3 [gráfico] (6)
*Valor diferencial digital (8)
*P. E. Diferencia (9)
*Fijar diferencia(10)
**Valor de relación dig. (11)
**P.E. (relación) (12)
**Fijar (relación). (13)
P.E. Digital (7)
P.E. remoto 2 (14)
P.E. remoto 3 (15)
P.E. objetivo (16)
[cascada] P.E. interno (17)
P.E. 1 (18)
Barra de P.E. 1 [gráfico] (19)
% potencia 1A (20)
% potencia 1B (21)
% potencia 1A bar [gráfico]
(22)
% potencia 1B bar [gráfico]
(23)
Estado de afinac.1 (24)
***Entradas digitales (25)
Conjunto PID activo canal 1
(26)
Parámetro x (1 a 16)
Seleccione parámetros para
que aparezcan en la Página
Principal.
Principal > Configuración > Página Principal Especial
Página Principal Esp.
Page 46

6.22 ■ Parámetros Watlow Series F4P
✔ Nota: Presione ˆ (tecla Información) para obtener más sugerencias sobre la tarea.
Tabla de parámetros de la Página Configuración
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Activo: Siempre.Mens.
4501-4517 [1]
4521-4537 [1]
4541-4557 [1]
4561-4577 [1]
4581-4597 [2]
4601-4617 [2]
4621-4637 [2]
4641-4657 [2]
4661-4677 [3]
4681-4697 [3]
4701-4717 [3]
4721-4737 [3]
4741-4757 [4]
4761-4777 [4]
4781-4797 [4]
4801-4817 [4]
Mens. x Nombre
Mens. x Línea1
Mens. x Línea2
Mens. x Línea3
4 líneas de 17 caracteres
cada una
La primera línea sirve como
el nombre del mensaje.
Mensaje x (1 a 4)
Ingrese o cambie mensajes que
pueden exhibirse activando una
entrada digital.
Principal > Configuración > Mensaje estático
Mensaje estático
Aparece sólo si el controlador es de la
versión avanzada
(F4P_ - _ _ AB- _ _ _ _) y si la Pantalla
del proceso se fija en Alternando.
1914
80 a 15
Intensidad LED
Fije el nivel de brillo en la
pantalla superior.
Aparece sólo si el controlador es de la
versión avanzada
(F4P_ - _ _ AB- _ _ _ _) y si la Pantalla
del proceso se fija en Alternando.
Input
1911 [1]
1912 [2]
1913 [3]
2 segundos0 a 999 segundos
Duración
Seleccione el tiempo, en
segundos, que aparecerá cada
entrada en la pantalla superior.
Aparece sólo si el controlador es de la
versión avanzada
(F4P_ - _ _ AB- _ _ _ _).
1910
Entrada 1Entrada 1 (0)
Alternando (1)
Pantalla proceso
Seleccione el funcionamiento de
la pantalla superior.
Principal > Configuración > Pantalla proceso
Pantalla proceso
Page 47

Watlow Series F4P Parámetros ■ 6.23
Registro de parámetros de la Página Configuración
Haga una fotocopia de esta página y anote sus ajustes en esa copia.
Nombre ___________________________________________ Fecha ______________________________
Setup Page
Sistema Configuración
Unidades PID
°F o °C
Mostrar °F o °C
Transf. máx. (calor)
Transf. máx. (frío)
Transf. manual-auto
Autoafin. P.E.
Modo de falla
Entrada 1 (falla)
Detección de lazo abierto
Entrada analógica Ent. analóg. 1 Ent. analóg. 2 Ent. analóg. 3
Sensor
Tipo
Control
Nombre de unidades
Decimal
Escala baja
Escala alta
Límite bajo P.E.
Límite alto P.E.
Tipo de compensación
Puntos de comp. de entrada Comp.ent. 1 Comp.ent. 2 Comp.ent. 3 Comp.ent. 4 Comp.ent. 5 Comp.ent.6 Comp.ent. 7 Comp.ent. 8 Comp.ent. 9 Comp.ent. 10
Restablec. valores de desviós
Punto de compensación
Valor de compensación de la calibración
Tiempo de filtrado
Error estado
Raíz cuadrada
Calib. de la posición de válvula
Bandamuerta(res.cur)
Histéresis (posición de válvula)
Control
Cascada
Margen bajo(cascad)
Margen alto(cascad)
Desviac.baja(casc.)
Desviac.alta(casc.)
Entrada digital Ent. digital 1 Ent. digital 2 Ent. digital 3 Ent. digital 4
Función
Nombre
Activar mensaje
Duración del mensaje
Condición
Salida de control Salida 1A Salida 1B
Función
Tipo del tiempo del ciclo
Valor del tiempo de ciclo
Proceso
Dúplex
Lími.potencia alto
Lími.potencia bajo
Tipo de potencia auxiliar (1B)
(auto/man.)
Page 48

6.24 ■ Parámetros Watlow Series F4P
Salida de alarma Alarma 1 Alarma 2
Nombre
Tipo de alarma
Fuente de alarma
Enganche
Silenciam.
Histéresis alarma
Lados de alarma
Lógica de alarma
Mensajes de alarma
Salida de retrans Retrans 1 Retrans 2
Fuente de retransmisión
Rango analógico
Escala baja
Escala alta
Compensación de escala
Comunicaciones Configuración
Baudios
Dirección
Página Principal Especial (ver Registro de parámetros de la Página Principal Especial)
Pantalla proceso
Duración
Intensidad LED
Mensaje estático
Mensaje 1, Línea1
Mensaje 1, Línea2
Mensaje 1, Línea3
Mensaje 1, Línea4
Mensaje 2, Línea1
Mensaje 2, Línea2
Mensaje 2, Línea3
Mensaje 2, Línea4
Mensaje 3, Línea1
Mensaje 3, Línea2
Mensaje 3, Línea3
Mensaje 3, Línea4
Mensaje 4, Línea1
Mensaje 4, Línea2
Mensaje 4, Línea3
Mensaje 4, Línea4
Page 49

Watlow Series F4P Parámetros ■ 6.25
Registro de parámetros de la Página Principal Especial
Haga una fotocopia de esta página y anote sus ajustes en esa copia..
Nombre ___________________________________________ Fecha ______________________________
Ir a Operaciones
Ir a Configuración
Ir a Fábrica
Siempre aparecerá:
Ninguno
Entrada 1 [valor]
Valor barra ent.1 [gráfico]
Entrada 2 [valor]
Valor barra ent.2 [gráfico]
Entrada 3 [valor]
Valor barra ent. 3 [gráfico]
Valor de relación dig. *
P.E. (relación) *
Fijar relación *
Valor diferencial digital**
P. E. Diferencial**
Fijar diferencial **
P.E. Digital
P.E. remoto 2
P.E. remoto 3
P.E. objetivo
[cascada] P.E. interno
P.E. 1
Barra de P.E. 1 [gráfico]%
% potencia 1A
% potencia 1B
% potencia 1A bar [gráfico]
% potencia 1B bar [gráfico]
Estado de afinac.1
Entradas digitales
Conjunto PID activo canal 1
* aparece si la Entrada 3 se fija en Relación
** aparece si la Entrada 3 se fija en Diferencial
P1 _________________
P2 _________________
P3 _________________
P4 _________________
P5 _________________
P6 _________________
P7 _________________
P8 _________________
P9 _________________
P10 _________________
P11 _________________
P12 _________________
P13 _________________
P14 _________________
P15 _________________
P16 _________________
De la columna en el extremo
derecho, seleccione la información
que quiere que aparezca en la
Página Principal (en cualquier
orden):
(Parámetros posibles)
Condición de alarma 1
Condición de alarma 2
Autoafinación
(Posición en la Página Principal)
Aparecerá si está activo y
configurado para aparecer:
Página Principal
Error entrada1
Error entrada2
Error entrada3
Siempre aparecerá si está activo:
Page 50

✔ Nota: Presione ˆ (tecla Información) para obtener más sugerencias sobre la tarea.
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Watlow Series F4P Parámetros ■ 6.26
Activo: Siempre.
1315 r/w
Sí (0)
Eliminar bloqueos
Desbloquea puntos establecidos
y todas las páginas y menús.
Activo: Siempre.
1330 [1]
1331 [2]
1332 [3]
1333 [4]
r/w
ninguno4 caracteres
Establecer/Cambiar contraseña
Restablezca o cambie la
contraseña. Seleccione Sí para
cambiar la contraseña.
Activo: Siempre.
1303 r/w
Acceso totalAcceso total (0)
Sólo lectura (1)
Contraseña (2)
Página Fábrica
Limita el acceso a esta página.
Activo: Siempre.
1302r/w
Acceso totalAcceso total (0)
Sólo lectura (1)
Contraseña (2)
Oculto (3)
Página Configuración
Limita el acceso a esta página.
Activo: Siempre.
1308 r/w
Acceso totalAcceso total (0)
Sólo lectura (1)
Contraseña (2)
Oculto (3)
Operaciones, Punto
establecido de alarma
Limita el acceso a este menú.
Activo: Siempre.
1307 r/w
Acceso totalAcceso total (0)
Sólo lectura (1)
Contraseña (2)
Oculto (3)
Operaciones, Editar PID
Limita el acceso a este menú.
Activo: Siempre.
1306 r/w
Acceso totalAcceso total (0)
Sólo lectura (1)
Contraseña (2)
Oculto (3)
Operaciones, Autoafinar PID
Limita el acceso a este menú.
Activo: Siempre.
1300 r/w
Acceso totalAcceso total (0)
Sólo lectura (1)
Punto establecido
Establezca el nivel de acceso
del punto establecido.
Principal > Fábrica > Fijar bloq
Fijar bloq
Parámetros de la Página Fábrica
Page 51

Tabla de parámetros de la Página Fábrica
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Watlow Series F4P Parámetros ■ 6.27
✔ Nota: Si desea más información acerca del efecto que tienen los ajustes de los parámetros sobre el funcionamiento
del controlador, consulte el capítulo 7 (Características).
Activo: Siempre.
Las entradas 2 y 3 aparecen únicamente
en los controladores de versión
avanzada
(F4P _ - _ _ AB - _ _ _ _).
1603 [1]
1608 [2]
1613 [3]
r/w
Sí (5)
Cable
Almacena la calibración para la
resistencia del cable.
Activo: Siempre.
Las entradas 2 y 3 aparecen únicamente
en los controladores de versión
avanzada
(F4P _ - _ _ AB - _ _ _ _).
1603 [1]
1608 [2]
1613 [3]
r/w
Sí (4)
Tierra
Almacena la calibración para
tierra a ganancias de 1 y 32.
Activo: Siempre.
Las entradas 2 y 3 aparecen únicamente
en los controladores de versión
avanzada
(F4P _ - _ _ AB - _ _ _ _).
1603 [1]
1608 [2]
1613 [3]
r/w
Sí (3)
32°F Tipo J
Almacena la calibración de 32°F
tipo J.
Activo: Siempre.
Las entradas 2 y 3 aparecen únicamente
en los controladores de versión
avanzada
(F4P _ - _ _ AB - _ _ _ _).
1603 [1]
1608 [2]
1613 [3]
r/w
Sí (2)
Termopar de 50.00mV
Almacena la calibración de
50.000mV para la entrada del
termopar.
Activo: Siempre.
Las entradas 2 y 3 aparecen únicamente
en los controladores de versión
avanzada
(F4P _ - _ _ AB - _ _ _ _).
1603 [1]
1608 [2]
1613 [3]
r/w
Sí (1)
Termopar de 0.00mV
Almacena la calibración
0.000mV para la entrada de
termopar.
Página Principal > Fábrica > Calibración > Calibrar entrada x (1 a 3)
Calibrar entrada x (1 a 3)
Disponible si el Control (Página
Configuración > Entrada analógica 2 ó
3) se fija en Remoto.
1319 r/w
Acceso totalAcceso total (0)
Sólo lectura (1)
Contraseña (2)
Oculto (3)
Operaciones, Punto
establecido remoto/local
Fije el acceso al Punto
establecido remoto/local.
Activo si cualquier entrada digital se fija
en P.E. Digital.
1318 r/w
Acceso totalAcceso total (0)
Sólo lectura (1)
Contraseña (2)
Oculto (3)
Operaciones, Punto
establecido de alarma
Fije el acceso al Punto
establecido de control.
Activo: Siempre
1317 r/w
Acceso totalAcceso total (0)
Sólo lectura (1)
Contraseña (2)
Oculto (3)
Operaciones, Punto
establecido de rampa
Fije el acceso al Punto
establecido de rampa.
Activo: Siempre.
1316 r/w
Acceso totalAcceso total (0)
Sólo lectura (1)
Contraseña (2)
Oculto (3)
Operaciones, Cambio de PID
Fije el acceso al Cambio de
PID.
Page 52

6.28 ■ Parámetros Watlow Series F4P
✔ Nota: Presione ˆ (tecla Información) para obtener más sugerencias sobre la tarea.
Tabla de parámetros de la Página Fábrica
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Activo: Siempre.
Salida
1605 [1A]
1610 [1B]
Retransm
1625 [1]
1630 [2]
r/w
20.000mA0.000 a 24.000mA
20.000mA
Almacena la calibración de
20mA para la entrada de
proceso.
Activo: Siempre.
Salida
1604 [1A]
1609 [1B]
Retransm
1624 [1]
1629 [2]
r/w
4.000mA0.000mA a 6.000mA
4.000mA
Almacena la calibración de 4mA
para la entrada de proceso.
Principal > Fábrica > Calibración / Calibrar salida x (1A o 1B) y Retransm. x (1 y 2)
Calibrar salida x (1A o ) y Retransm. x (1 y 2)
Activo: Siempre.
Las entradas 2 y 3 aparecen únicamente
en los controladores de versión
avanzada
(F4P _ - _ _ AB - _ _ _ _).
1603 [1]
1608 [2]
1613 [3]
r/w
Sí (11)
20.000mA
Almacena la calibración de
20mA para la entrada de
proceso.
Activo: Siempre.
Las entradas 2 y 3 aparecen únicamente
en los controladores de versión
avanzada
(F4P _ - _ _ AB - _ _ _ _).
1603 [1]
1608 [2]
1613 [3]
r/w
Sí (10)
4.000mA
Almacena la calibración de 4mA
para la entrada de proceso.
Activo: Siempre.
Las entradas 2 y 3 aparecen únicamente
en los controladores de versión
avanzada
(F4P _ - _ _ AB - _ _ _ _).
1603 [1]
1608 [2]
1613 [3]
r/w
Sí (9)
10.000V
Almacena la calibración de
10.000V para la entrada de
proceso.
Activo: Siempre.
Las entradas 2 y 3 aparecen únicamente
en los controladores de versión
avanzada
(F4P _ - _ _ AB - _ _ _ _).
1603 [1]
1608 [2]
1613 [3]
r/w
Sí (8)
0.000V
Almacena la calibración de
0.000V para la entrada de
proceso.
Activo: Siempre.
Las entradas 2 y 3 aparecen únicamente
en los controladores de versión
avanzada
(F4P _ - _ _ AB - _ _ _ _).
1603 [1]
1608 [2]
1613 [3]
r/w
Sí (7)
1000 Ohmios
Almacena la calibración de
1000.00 Ω para la entrada del
RTD.
Activo: Siempre.
Las entradas 2 y 3 aparecen únicamente
en los controladores de versión
avanzada
(F4P _ - _ _ AB - _ _ _ _).
1603 [1]
1608 [2]
1613 [3]
r/w
Sí (7)
380.0 Ohmios
Almacena la calibración de
380.00 Ω para la entrada del
RTD.
Activo: Siempre.
Las entradas 2 y 3 aparecen únicamente
en los controladores de versión
avanzada
(F4P _ - _ _ AB - _ _ _ _).
1603 [1]
1608 [2]
1613 [3]
r/w
Sí (6)
15.0 Ohmios
Almacena la calibración de
15.00 Ω para la entrada del
RTD.
Page 53

Tabla de parámetros de la Página Fábrica
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Watlow Series F4P Parámetros ■ 6.29
✔ Nota: Si desea más información acerca del efecto que tienen los ajustes de los parámetros sobre el funcionamiento
del controlador, consulte el capítulo 7 (Características).
Activo: Siempre.
Entrada
8 [1]
9 [2]
10 [3]
r
Univ. (7)
Entrada x (1 a 3)
Muestra el tipo de entrada 3.
Activo: Siempre.4 r1.000.00 a 9.99
Revisión
Identifica la revisión del
hardware.
Activo: Siempre.3 r100 a 99
Núm.software
Identifica la revisión del
software.
Activo: Siempre.1 [primera
parte]
2 [segunda
parte]
r
000000000000 a 99,9999
Núm. serie
Identifica el controlador
individual.
Activo: Siempre.5 r0198xxxx
Fecha de manufactura
Identifica la Fecha fabr.
Activo: Siempre.0 rF4Px-xxxx-xxxxF4Px-xxxx-xxxx
Modelo
Identifica el número de pieza de
12 dígitos del controlador Serie
F4P.
Principal > Fábrica > Diagnóstic.
Diagnóstic
.
Activo: Siempre.
Las entradas 2 y 3 aparecen
únicamente en los controladores de
versión avanzada
(F4P _ - _ _ AB - _ _ _ _).
1601
sólo escritura
—
Entrada 1 (0)
Entrada 2 (1)
Entrada 3 (2)
Restablecer cal.ent x (1 a 3)
Restablece los valores de
calibración originales de
fábrica.
Principal > Fábrica > Calibración / Restablecer cal.ent (1 a 3)
Restablecer cal.ent x (1 a 3)
Activo: Siempre.
Entrada
1607 [1A]
1612 [1B]
Retransm
1627 [1]
1632 [2]
r/w
10.000V0.000 a 12.000V
10.000V
Almacena la calibración de
10.000V para la entrada de
proceso.
Activo: Siempre.
Entrada
1606 [1A]
1611 [1B]
Retransm
1626 [1]
1631 [2]
r/w
1.000V0.000 a 3.000V
1.000V
Almacena la calibración de
1,000V para la entrada de
proceso.
Page 54

6.30 ■ Parámetros Watlow Series F4P
✔ Nota: Presione ˆ (tecla Información) para obtener más sugerencias sobre la tarea.
Tabla de parámetros de la Página Fábrica
Condiciones para que
aparezcan los parámetros
Registro
Modbus
lectura/escritura
Ent./Sal.,Conjunto
Predeterminación
Rango
(Valor Modbus)
Parámetro Descripción
Activo: Siempre.1602 rSí (800)
Valores previos
Devuelve los valores de
parámetros a los
predeterminados en fábrica.
Activo: Siempre.1513 w(1)
Prueba de pantalla
Comprueba los segmentos de la
pantalla de LED,
encendiéndolos y apagándolos.
Activo: Siempre.1514 wTodo apagado (0)
Salida 1A (1)
Salida 1B (2)
Retransm. 1 (5)
Retransm. 2 (6)
Alarma1 (7)
Alarma2 (8)
Todos encendidos (9)
Comunicaciones (10)
Probar salidas
Seleccione la salida a probar.
Principal > Fábrica > Prueba
Prueba
Activo: Siempre.1515 rxx
Frec. de línea
Muestra la frecuencia de línea
de CA en hertz.
Activo: Siempre.
Salida
1500 [1]
1531 [2]
1531 [3]
r
xx.x
CJCx (1 a 3) Temp
Compensación de junta fría para
la Entrada analógica. Lee la
temperatura ambiente del
controlador.
Activo: Siempre.
Salida
1501 [1]
1532 [2]
1532 [3]
r
HHHH
CJCx (1 a 3) A a D
Sólo para uso en la fábrica
Activo: Siempre.
Salida
1504 [1]
1505 [2]
1506 [3]
r
HHHH
Entrada x (1 a 3) A a D
Sólo para uso en la fábrica
Activo: Siempre.
Salida
20 [1]
21 [2]
r
Ninguno (0)
Proceso (4)
Retransmisión x (1 ó 2)
Muestra la opción de
retransmisión.
Activo: Siempre.
Salida
16 [1A]
17 [1B]
r
Ninguno (0) [sólo salida 1B]
Relé mecánico (1)
SSR (2)
CC (3)
Proceso (4)
Salida x (1A o 1B)
Muestra el tipo de salida.
Page 55

Capítulo 7: Características
Entradas
Puntos múltiples de compensación de entrada 7.2
Constante tiempo de filtrado . . . . . . . . . . . . . .7.3
Límite alto y límite bajo del punto establecido .7.3
Escala alta y escala baja . . . . . . . . . . . . . . . . .7.4
Entradas digitales . . . . . . . . . . . . . . . . . . . . . .7.4
Métodos de control
Control automático-manual . . . . . . . . . . . . . . .7.5
Control de encendido-apagado . . . . . . . . . . . .7.6
Control proporcional . . . . . . . . . . . . . . . . . . . .7.6
Control PI . . . . . . . . . . . . . . . . . . . . . . . . . . .7.7
Control PID . . . . . . . . . . . . . . . . . . . . . . . . . . .7.7
Banda muerta . . . . . . . . . . . . . . . . . . . . . . . . .7.7
Múltiples conjuntos PID . . . . . . . . . . . . . . . . . .7.8
Disparo rápido . . . . . . . . . . . . . . . . . . . . . . . .7.8
Otras características
Autoafinación . . . . . . . . . . . . . . . . . . . . . . . . .7.9
Retransmisión . . . . . . . . . . . . . . . . . . . . . . . . .7.9
Detección de lazo abierto . . . . . . . . . . . . . . . .7.9
Alarmas
Puntos establecidos de alarma . . . . . . . . . . . .7.10
Histéresis de alarma . . . . . . . . . . . . . . . . . . . .7.10
Alarmas de proceso, de desviación o de tasa .7.10
Enganche de alarma . . . . . . . . . . . . . . . . . . . .7.11
Silenciamiento de alarma . . . . . . . . . . . . . . . .7.11
Lados de alarma . . . . . . . . . . . . . . . . . . . . . . .7.11
Características avanzadas
Potencia auxiliar calentar / enfriar . . . . . . . . . .7.12
Dúplex . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.12
Puntos establecidos digitales . . . . . . . . . . . . .7.13
Características del controlador de la Serie F4P avanzada
Punto establecido remoto . . . . . . . . . . . . . . . .7.14
Entrada alterna . . . . . . . . . . . . . . . . . . . . . . .7.14
Control de cascada . . . . . . . . . . . . . . . . . . . . .7.15
Control diferencial . . . . . . . . . . . . . . . . . . . . . .7.16
Control de relación . . . . . . . . . . . . . . . . . . . . .7.16
Control de posición de válvula mediante
potenciometro . . . . . . . . . . . . . . . . . . . . . . . . .7.17
Watlow Series F4P Características ■ 7.1
7
Page 56

Entradas
Puntos múltiples de compensación de entrada
Los puntos de compensación (“puntos de desvío”) sirven
para compensar las diferencias entre el valor objetivo del
proceso y el valor del sensor leído por el controlador Serie
F4P. Los puntos múltiples de compensación permiten al
F4P compensar las diferencias no lineales entre las
lecturas del sensor y los valores objetivos del proceso a lo
largo de todo el rango operativo del sistema térmico o de
proceso. Las diferencias en las lecturas del sensor pueden
deberse a factores tales como la colocación del sensor,
tolerancias, o resistencias imprecisas del sensor o del
cable.
El controlador Serie F4P puede funcionar con un punto
individual de compensación o con múltiples puntos de
compensación. La selección de punto individual o puntos
múltiples se hace en la Página Configuración > Menú de
Entrada analógica.
Un punto de compensación individual permite al F4P
controlar el proceso hasta por una diferencia del valor de
compensación (linealmente), bien sea por encima o por
debajo del valor detectado a lo largo de todo el rango
operativo.
Los puntos múltiples de compensación permiten al
controlador Serie F4P controlar el proceso hasta por diez
puntos diferentes de compensación a lo largo de todo el
rango operativo. Cada punto de compensación tiene un
valor de compensación programable positivo o negativo.
Los puntos de compensación pueden ser colocados en
cualquier parte del rango operativo. Los valores de los
puntos de compensación son programables entre -1,000 y
+1,000. Los valores de compensación se interpolan
linealmente entre los dos puntos de compensación más
cercanos. Estos valores son añadidos al valor detectado
para establecer un valor objetivo del proceso. El punto de
compensación 1 puede ser programado como el primer
punto o como el punto del extremo bajo del rango; los
puntos de compensación 2 al 10 siguen en secuencia. Los
valores de compensación inferiores al primer punto (punto
1) o superiores al último punto (punto 10) son iguales a
cero.
Ubicación en el software: Página Configuración > Menú de
Entrada analógica x (1 a 3) > Compensación de entrada x
(1 a 10).
Figura 7.2 — Puntos múltiples de compensación de entrada.
7.2 ■ Características Watlow Series F4P
Valor de
compensación 10
9
Lectura del sensor sin
compensación (valor real)
compensación 2
Temperatura
Valor de
compensación 1
4
3
Lectura del sensor con
compensación (valor exhibido)
8
7
6
5
Zona de compensación
Tiempo
Sin compensación
Page 57

Constante tiempo de filtrado
Un filtro de tiempo suaviza una señal de entrada
aplicando a la señal una constante de tiempo de filtrado
de primer orden. Es posible filtrar el valor mostrado, o
tanto el valor mostrado como el de control. Filtrar el
valor mostrado facilita el monitoreo; Filtrar la señal
podría mejorar el rendimiento del control PID en un
sistema que tenga mucho ruido o que sea muy dinámico.
Un valor positivo afecta sólo los valores visualizados,
mientras que uno negativo afecta tanto los valores
visualizados como los de control.
Ubicación en el software: Página Configuración > Entrada
analógica x (1 a 3).
Figura 7.3a — Señales de entrada filtradas y sin filtrar.
Watlow Series F4P Características ■ 7.3
Límite alto y límite bajo del punto establecido
Estos parámetros limitan el rango dentro del cual el
operador puede ajustar el punto de establecido. No se
pueden ajustar más altos ni más bajos que las
limitaciones del sensor.
Ubicación: Página Configuración > Entrada
analógica x (1 a 3).
Figura 7.3b — Rangos del sensor.
Señal de entrada sin filtrar
Temperatura
Tiempo
Señal de entrada filtrada
Temperatura
Tiempo
Límite superior del rango del sensor seleccionado
Rango del límite alto del punto establecido
(entre el límite alto del sensor y el límite bajo del punto establecido)
Rango del punto establecido
Temperatura
(entre el límite bajo y el límite alto del punto establecido)
Rango del límite bajo del punto establecido
(entre el límite bajo del sensor y el límite alto del punto establecido)
Límite inferior del rango del sensor seleccionado
Límite alto P.E.
Límite bajo P.E.
Page 58

7.4 ■ Características Watlow Series F4P
Escala alta y escala baja
Cuando se selecciona una entrada analógica como
entrada del proceso, es necesario seleccionar un valor que
represente los extremos alto y bajo del rango de corriente
o voltaje. Por ejemplo, si se selecciona una entrada
analógica con un sensor de proceso del tipo 4 a 20 mA,
entonces “0” podría representar 4 mA y “100” podría
representar 20 mA. El punto establecido estará limitado
al rango comprendido entre la escala baja y alta.
Ubicación en el software: Página Configuración >
Entrada analógica y Página Configuración > Salida de
retransm. x (1 ó 2).
Entradas digitales
Con una entrada digital, el usuario puede realizar ciertas
operaciones en un sistema, abriendo o cerrando un
interruptor o aplicando una señal lógica de CC al
controlador. Esta característica puede aportar
conveniencia o seguridad a un sistema.
En el controlador Serie F4P, las entradas digitales 1 a 4
pueden asignarse para exhibir mensajes, conmutar a otro
punto establecido o realizar otras funciones de control del
proceso.
Un estado bajo o alto activará un evento mientras dure
dicho estado. Un flanco ascendente activará un evento
cuando cambie de un estado bajo a uno alto. El evento
continuará hasta que vuelva a suceder el flanco
ascendente (estado bajo a alto).
Ubicación en el software: Página Configuración >
Condición de entrada digital x (1 a 4).
Page 59

Watlow Series F4P Características ■ 7.5
Métodos de control
Control automático (lazo cerrado) y manual (lazo abierto)
El control automático (lazo cerrado) se vale de un sensor
de proceso para determinar la diferencia entre el valor
del proceso y el punto establecido; despues el controlador
aplica potencia a una carga de salida de control a fin de
reducir esa diferencia.
El control manual (lazo abierto) permite al usuario fijar y
ajustar el nivel de potencia a la carga de salida de
control.
Cuando el controlador está en modo manual, se enciende
el indicador luminoso automático-manual del controlador
Serie F4P. El controlador puede conmutar entre los
modos automático y manual únicamente desde la Página
Principal. Para alternar entre el modo manual y el
automático, primero presione la tecla å y después
confirme su selección en la pantalla inferior. El indicador
luminoso destellará después de Ud. presionar la tecla å ,
hasta que confirme su elección o hasta que hayan
transcurrido 10 segundos.
En el modo manual, el usuario ajusta manualmente el
nivel de potencia de salida. Los cambios se hacen
efectivos después de que se ingrese el nuevo valor y de
que el controlador esté de vuelta en la Página Principal.
Antes de pasar del modo manual al automático, el F4P
verifica que haya un sensor operativo conectado a la
Entrada analógica 1.
El usuario puede seleccionar la manera en que el
controlador Serie F4 determina un punto establecido al
pasar de operación manual a automática. Por ejemplo, el
equipo puede regresar automáticamente al último punto
establecido utilizado en el modo automático, o puede
utilizar una transferencia inversa sin sobresaltos que
fijará un punto establecido equivalente al valor del
proceso en el momento en que cambió desde el modo
manual.
Ubicación en el software: Página Configuración >
Sistema.
El usuario puede proteger el proceso bajo control,
seleccionando los máximos niveles de potencia de salida
de control para cuando el controlador pase del modo
automático al manual.
Ubicación en el software: Página Configuración >
Sistema > Potencia de transferencia de calor (máx.) y
Potencia de transferencia de enfriamiento (máx.).
Page 60

7.6 ■ Características Watlow Series F4P
Control de encendido-apagado
El control de encendido-apagado activa y desactiva la
salida, según la entrada, el punto establecido y los valores
de histéresis. El valor de histéresis indica cuánto se debe
desviar el valor del proceso del punto establecido para
encender la salida. Si se aumenta el valor de la histéresis,
disminuirá la cantidad de veces que la salida se enciende
y se apague; si se disminuye la histéresis, mejorará la
capacidad de control. Si la histéresis se fija en 0, el valor
del proceso estaría más cerca del punto establecido, pero
la salida se encendería y apagaría con mayor frecuencia,
causando "vibración".
Fije la banda proporcional en 0 para ajustar el
controlador en el modo de control de encendido-apagado.
Ubicación de la banda proporcional x (A ó B) en el
software: Página Operaciones > Editar PID > Conjunto
PID x (1 a 5).
Ubicación de la histéresis x (A ó B) en el software: Página
Operaciones > Editar PID > Conjunto PID x (1 a 5).
✔ NOTA: La falla de potencia no funciona en el modo de
control encendido-apagado.
Figura 7.6a — Control de encendido-apagado para
calentamiento y enfriamiento.
Control proporcional
Algunos procesos requieren mantener una temperatura o
un valor de proceso más cercano al punto establecido que
lo que puede hacerlo un control de encendido/apagado.
Un control proporcional brinda ese control más estricto,
porque ajusta la salida cuando la temperatura o el valor
del proceso están dentro de una banda proporcional.
Cuando el valor está en la banda, el controlador ajusta la
salida dependiendo de cuán cerca esté el valor de proceso
al punto establecido; mientras más cerca esté del punto
establecido, menor será la salida Esto es similar a la
acción de quitar la presión del acelerador de un
automóvil al acercarnos a un alto. y evita la amplia
variación que habría en la temperatura o el valor del
proceso si se usara un simple control de encendidoapagado. Sin embargo, cuando el sistema se estabiliza, la
temperatura o el valor del proceso tienden a "caer" a un
valor ligeramente inferior al punto establecido.
Con un control proporcional, el nivel de potencia de
salida equivale al punto establecido menos el valor del
proceso, dividido por la banda proporcional. Ubicación en
el software: Página Operaciones > Editar PID >
Conjunto PID x (1 a 5).
Figura 7.6b — Control proporcional.
La acción de calentamiento se apaga cuando la temperatura
del proceso aumenta por encima del punto establecido.
Temperatura
Temperatura del proceso
La acción de calentamiento
se activa durante el arranque..
La acción de
enfriamiento se activa
durante el arranque.
Temperatura del proceso
Temperatura
Punto establecido
La acción de calentamiento se enciende cuando
la temperatura del proceso cae a un valor
inferior al punto establecido menos la histéresis.
Tiempo
La acción de enfriamiento se activa
cuando la temperatura del proceso
aumenta a un valor superior al punto
establecido mas la histéresis.
Punto establecido
Histéresis
Histéresis
La acción de enfriamiento se apaga cuando la temperatura
del proceso cae a un valor por debajo del punto establecido.
Tiempo
Punto establecido
Temperatura
Sobrepaso
Banda proporcional
Tiempo
Caída
Page 61

Watlow Series F4P Características ■ 7.7
Control proporcional más integral más derivativa (PID)
El control derivativo se utiliza para minimizar el
sobrepaso en sistemas controlados por una acción PI. La
derivativa ajusta la salida de acuerdo con la velocidad de
cambio de la temperatura o valor del proceso. Un exceso
de derivativa producirá lentitud en el sistema. Ubicación
en el software: Página Operaciones > Editar PID >
Conjunto PID x (1 a 5).
Figura 7.7b — Control PID.
Banda muerta
En una aplicación de PID, las bandas muertas por
encima y por debajo del punto establecido pueden servir
para ahorrar energía y minimizar el desgaste en una
aplicación, manteniendo la temperatura del proceso
dentro de rangos aceptables. La variación de los puntos
establecidos efectivos de enfriamiento y calentamiento
ayuda a evitar que ambos sistemas “luchen” entre sí.
La acción proporcional cesa cuando del valor del proceso
se encuentra dentro de la banda muerta. La acción
integral continúa acercando la temperatura del proceso
al punto establecido. Cuando el valor de la banda muerta
llega a cero, el elemento de calentamiento se activa al
caer la temperatura por debajo del punto establecido, y el
elemento de enfriamiento se activa cuando la
temperatura excede el punto establecido. Ubicación en el
software: Página Operaciones > Editar PID > Conjunto
PID x (1 a 5)
Figura 7.7c — Banda muerta de enfriamiento.
Control proporcional más integral (PI)
Para corregir la caída causada por el control
proporcional, se incorpora al sistema un control integral.
Cuando el sistema se ha estabilizado, se afina el valor
integral a fin de acercar la temperatura o el valor del
proceso al punto establecido. La acción integral
determina la velocidad de la corrección; sin embargo, esta
acción podría aumentar el sobrepaso que se produce en el
arranque del equipo o cuando se cambia el punto
establecido. Un exceso de integral producirá inestabilidad
en el sistema. ,Si el valor del proceso está fuera de la
banda proporcional,se eliminará la acción integral.
La acción integral se mide en minutos por repetición (en
unidades SI). Un valor integral bajo produce un acción
integral rápida. El restablecimiento se mide en unidades
de repeticiones por minuto (en unidades inglesas). Un
valor alto de restablecimiento produce una acción
integral rápida. Ubicación en el software: Página
Operaciones > Editar PID > Conjunto PID x (1 a 5).
Figura 7.7a — Control proporcional más integral.
Punto establecido
Caída
Punto establecido
Temperatura
Tiempo
Caída corregida
Set Point
Se reduce la velocidad de calentamiento
Temperatura
Sobrepaso reducido
Punto establecido
Punto establecido x 2
Tiempo
Punto establecido
de enfriamiento
Punto establecido
de calentamiento
Temperatura
Banda proporcional de enfriamiento
Banda muerta de enfriamiento
Banda proporcional de calentamiento
Tiempo
Page 62

7.8 ■ Características Watlow Series F4P
Múltiples conjuntos PID
El controlador Serie F4P puede funcionar con un máximo
de cinco conjuntos PID de calentamiento-enfriamiento.
Esto es algo sumamente útil si las características del
sistema térmico varían a lo largo de su rango operativo.
Todos los conjuntos PID pueden ser afinados de manera
manual o automática, y pueden modificarse en la Página
Operaciones. El controlador Serie F4P puede programarse
para funcionar con cualquiera de los cinco conjuntos,
basado en puntos de cambio del punto establecido o del
valor del proceso. Estas selecciones de programación
están disponibles en la Página Operaciones > Cambio de
PID.
Cuando el valor del proceso o del punto establecido cruza
el punto de cambio, el conjunto PID asignado para esa
región del rango operativo se utiliza para controlar el
porcentaje de potencia aplicado a la carga.
Hay una histéresis de – 1º para cada punto de cambio. Un
aumento de temperatura cambiará los conjuntos PID en
el valor de cambio, mientras que un descenso de
temperatura cambiará los conjuntos PID en el valor de
cambio -1°.
Ubicación en el software: Página Operaciones > Editar
PID > Cambio de PID x (1 a 4).
Figura 7.8a — Múltiples conjuntos PID.
Disparo rápido (base de tiempo variable)
La característica de disparo rápido proporciona una
potencia de salida uniforme con el más bajo nivel de
generación de ruido (es decir, interferencia de
radiofrecuencia, o RFI). El disparo rápido es el método
preferido para controlar una carga resistiva,
proporcionando un tiempo muy corto para alargar la vida
útil del calefactor.
El controlador determina el momento en que la onda
sinusoidal de CA cruza el punto de 0 voltios, y después
enciende o apaga la carga, únicamente en este punto,
minimizando las interferencias de RFI.
Ubicación: Página Configuración > Salida de
control x (1A a 1B).
Figura 7.8b — Disparo rápido.
Rango superior= 1,500°F
Rango operativo, conjunto PID 5
Cambio de PID 4 to 5
1,250 °F
Rango operativo, conjunto PID 4
Cambio de PID 3 to 4
1,000 °F
Rango operativo, conjunto PID 3
Cambio de PID 2 to 3
600 °F
Rango operativo, conjunto PID 2
Cambio de PID 1 to 2
300 °F
Rango operativo, conjunto PID 1
Rango inferior = 32°F
100% salida
10 encendido, 0 apagado
50% salida
1 encendido, 1 apagado
66% salida
2 encendido, 1 apagado
Page 63

Watlow Series F4P Características ■ 7.9
Otras características
Autoafinación
La característica de autoafinación permite al controlador
medir la respuesta del sistema a fin de determinar los
ajustes más eficaces para el control PID. Cuando se inicia
la autoafinación, el controlador vuelve al control de
encendido-apagado. La temperatura debe cruzar el punto
establecido de autoafinación cuatro veces para completar
el proceso de autoafinación. Una vez finalizado, el
controlador ejerce el control en el punto establecido
normal, utilizando los nuevos parámetros. El modelo F4P
almacena el valor en el conjunto PID especificado.
Ubicación en el software: Página Operaciones >
Autoafinar PID > Conjunto PID x (1 a 5).
ç
ATENCIÓN: Elija un punto establecido de autoafinación que
pueda proteger a su producto de posibles daños causados por
sobrepaso o falta de alcance durante las oscilaciones de la
autoafinación. Si el producto es sensible, seleccione
cuidadosamente el punto establecido de autoafinación para
evitar daños.
Figura 7.9 — Autoafinación.
✔ NOTA: Consulte el capítulo “Operaciones” para
conocer el procedimiento de afinación manual.
Retransmisión
Las salidas de retransmisión 1 y 2 pueden retransmitir
cualquier señal analógica para servir como una entrada
variable para otro dispositivo. La señal puede actuar
como un punto establecido remoto para otro controlador,
o como entrada para un aparato registrador de curvas a
fin de documentar el rendimiento del sistema a lo largo
del tiempo.
Ubicación en el software: Página Configuración.
Detección de lazo abierto
La característica de lazo abierto verifica la integridad del
lazo de control (compuesto por la salida del controlador,
el control de potencia, el calefactor y el sensor).
Si hay un máximo de potencia de salida durante un
período equivalente al tiempo de restablecimiento, y si la
entrada no ha cambiado al menos ± 5°F, el controlador
pasará al modo manual a una potencia de salida del 0%.
La pantalla superior exhibirá [oPLP`] mientras que en la
inferior aparecerá “Lazo abierto.”
Para eliminar un error de lazo abierto, corrija
primeramente el problema que lo causó, y seguidamente
apague y encienda nuevamente el controlador.
Ubicación en el software: Página Configuración >
Sistema.
Inicio de la autoafinación
(control encendido-apagado).
(Valor predeterminado: 90% del punto establecido del proceso.)
Temperatura
Punto establecido
del proceso
Autoafinación del punto establecido
Tiempo
Final de la autoafinación
(Control PID).
Page 64

7.10 ■ Características Watlow Series F4P
Una alarma se activa cuando la temperatura o el valor
del proceso sale de un rango definido. El usuario puede
configurar cómo y cuándo activar una alarma, y si la
misma debe apagarse automáticamente o efectuar
alguna acción particular después de que desaparezca la
condición que la originó. Configure las salidas de las
alarmas en la Página Configuración antes de ajustar los
puntos establecidos de alarma.
Puntos establecidos de alarma
El Punto establecido de alarma alta define la
temperatura o el valor del proceso que activará una
alarma alta. Este punto debe ser mayor que el Punto
establecido de alarma bajo, y menor que el límite alto del
rango del sensor.
El Punto establecido de alarma bajo define la
temperatura que activará una alarma baja. Este punto
debe ser menor que el Punto establecido de alarma alto, y
mayor que el límite bajo del rango del sensor.
Ubicación en el software: Página Operaciones > Punto
establecido de alarma > Alarma x (1 ó 2).
Histéresis de alarma
Cuando el valor del proceso llega al punto establecido
alto o bajo de alarma, se activa un estado de alarma. La
histéresis de alarma define el punto al que debe regresar
el proceso, dentro del rango operativo normal, antes de
que pueda eliminarse una alarma.
La histéresis de alarma es una zona que está dentro de
cada punto establecido de alarma. Para definir esta zona,
se añade o se resta el valor de histéresis al punto
establecido bajo o alto de la alarma, respectivamente.
Ubicación en el software: Página Configuración > Salida
de alarma x (1 ó 2).
Figura 7.10 — Ajustes de alarma.
Alarmas de proceso, de desviación o de tasa
Una alarma de proceso utiliza uno o dos puntos
establecidos absolutos para definir una condición de
alarma. Una alarma de desviación utiliza uno o dos
puntos establecidos, definidos como relativos con respecto
al punto establecido de control. Para calcular los puntos
establecidos alto y bajo de alarma, se suman o se restan
valores de desviación al del punto establecido de control.
Si cambia el punto establecido, cambiará
automáticamente la ventana definida por los puntos
establecidos de alarma.
La alarma de tasa se emite como respuesta a un cambio
(en el valor de temperatura o proceso) que supera a la
tasa seleccionada.
Ubicación en el software: Página Configuración > Salida
de alarma x (1 ó 2).
Alarmas
Rango de alarma alta
Histéresis de alarma
Rango operativo normal
Temperatura
Histéresis alarma
Rango de alarma baja
P.E. alto de alarma
P.E. bajo de alarma
Page 65

Watlow Series F4P Caracterí sticas ■ 7.11
Enganche de alarma
Una alarma enganchada permanecerá activa después de
cesar la condición de alarma (sólo podrá ser desactivada
por el usuario). Una alarma que no esté enganchada
(autoborrable) se desactivará automáticamente después
de que se elimine la condición de alarma.
Ubicación en el software: Página Configuración > Alarma
x (1 ó 2).
Figura 7.11a — Enganche de alarma.
Silenciar alarma
La función “silenciar alarma” tiene dos usos:
1. A menudo se utiliza después del arranque de un
sistema, para permitir el calentamiento inicial del
mismo. Cuando se enciende la función “silenciar
alarma”, no se emitirá una alarma cuando la
temperatura del proceso esté inicialmente por debajo
del Punto establecido de alarma bajo. El valor del
proceso tendrá que llegar al rango operativo normal,
pasando la zona de histéresis, para que se active la
función de alarma.
2. Asimismo, la función “silenciar alarma” permite al
operario deshabilitar la salida de alarma mientras el
controlador está en un estado de alarma. El valor del
proceso tiene que llegar al rango operativo normal,
pasando la zona de histéresis, para que se active la
función de salida de alarma.
Si el equipo Serie F4P tiene una salida que está
funcionando como una alarma de desviación, la alarma se
silenciará cuando cambie el punto establecido, hasta que
el valor del proceso vuelva al rango operativo normal.
Ubicación en el software:Página Configuración > Alarma
x (1 ó 2)
Figura 7.11b — Silenciar alarma.
Lados de alarma
Las alarmas pueden configurarse para que se activen si
el proceso excede el Punto establecido de alarma alto, el
Punto establecido de alarma bajo, o ambos.
Ubicación en el software: Página Configuración > Alarma
x (1 ó 2).
(Los puntos establecidos de la alarma se fijan en la
Página Operaciones.)
El estado de alarma comienza cuando la temperatura
alcanza el Punto establecido de alarma alta.
Histéresis de alarma
Rango operativo normal
El estado de alarma continuará hasta que
Temperatura
Temperatura
del proceso
la temperatura disminuya a un valor
equivalente al Punto establecido de alarma
alto menos la histéresis. En este punto, el
usuario podría apagar una alarma
enganchada. Una alarma no enganchada
se apagaría automáticamente.
Tiempo
Hysteresis
Rango operativo normal
Hysteresis
En este punto
se dispara la alarma.
Tiempo
En este punto
se habilita la alarma
Temperatura
(alarma deshabilitada)
Temperatura
del proceso
Arranque
Punto establecido
alto de alarma
Punto establecido
bajo de alarma
P.E. alto
de alarma
P.E. bajo
de alarma
Page 66

7.12 ■ Características Watlow Series F4P
Características avanzadas
Aumentar calor y Aumentar frío
La operación Aumentar funciona a través de la salida
1B; se habilita cuando las salidas 1A y 1B están
configuradas para realizar la misma función:
calentamiento/
calentamiento o enfriamiento/enfriamiento.
En el menú de la salida 1B se puede elegir “potencia
auxiliar” o “P.E de potencia auxiliar”.
Cuando se selecciona “potencia auxiliar”, la salida 1B se
enciende o se apaga según los requisitos de potencia de
carga de la salida. La “potencia de auxiliar” puede
habilitarse para operación solamente en modo
automático o en modo tanto automático como manual. Si
se elige, el nivel de potencia al cual se encenderá la
salida 1B se establece en la Página Operaciones > PE de
control. También se puede establecer un tiempo de
retardo, mediante el cual se retardará el encendido de la
salida de la potencia auxiliar hasta que se exceda el nivel
de potencia durante dicho tiempo. Hay una histéresis de
nivel de potencia del 5% entre la operación de encendido
y de la potencia auxiliar.
Cuando se selecciona “punto establecido de la potencia
auxiliar”, la salida 1B se enciende o se apaga según un
valor de punto establecido programable o según una
desviación del valor del punto establecido. Los puntos
establecidos de potencia auxiliar y los valores de
desviación de la potencia auxiliar se establecen en la
Página Operaciones > PE de control.
Figura 7.12a — Potencia auxiliar de calentamiento basado en
la potencia de salida.
Figure 7.12b —Potencia auxiliar de calentamiento basado en
un punto establecido fijo.
Dúplex
Ciertos sistemas requieren que una sola salida de
proceso controle tanto la salida de calentamiento como la
de enfriamiento. Un controlador Serie F4P que tenga una
salida de proceso en la salida 1A (F4P _ - F _ A A - _ _ _
_) puede funcionar como dos salidas separadas.
Como ejemplo, con una salida de 4 a 20 mA, la salida de
calentamiento podría operar de 12 a 20 mA (0 a +100%) y
las salidas de enfriamiento, de 12 a 4 mA (0 a -100%). El
dispositivo controlado por el controlador Serie F4P
requiere este tipo de salida en algunas situaciones, tal
como es el caso de una válvula de tres vías que abre una
vía con una señal de 12 a 20 mA, y abre la otra con una
señal de 4 a 12 mA. Esta función reduce el costo general
del sistema, porque una sola salida actúa como dos
salidas. Ubicación en el software: Página Configuración >
Salida control1A > Función.
100%
85%
0%
Potencia auxiliar
de calentamiento
% potencia de calentamiento
Encendido
Apagado
Tiempo de retardo de la potencia auxiliar
(30 segundos)
Porcentaje de Potencia auxiliar 85%
5% Histéresis
Tiempo
Punto establecido del proceso
Punto establecido de la potencia auxiliar
Temperatura
Tiempo
Potencia auxiliar
de calentamiento
Encendido
Apagado
Page 67

Watlow Series F4P Caracterí sticas ■ 7.13
Puntos establecidos digitales
Se pueden configurar hasta cuatro puntos establecidos
digitales (identificables) para controlar las salidas del
controlador Serie F4P. Cada una de las cuatro entradas
digitales del controlador Serie F4P pueden ser
configuradas para seleccionar un valor diferente de punto
establecido. Cuando se selecciona la función de punto
establecido digital en el Menú de Entrada Digital,
aparecerá un parámetro ajustable de valor de punto
establecido digital (con el nombre predeterminado “PEX
dig.”) en el Menú de Operaciones > PE de control.
Cuando la entrada digital seleccionada va a su condición
real (determinada en la Página Configuración) el
controlador Serie F4P controlará el valor habilitable del
punto establecido digital; dicho valor y nombre
reemplazarán el punto establecido local mostrado en la
Página Principal. Este punto establecido no puede ser
ajustado desde la Página Principal.
Sólo se puede habilitar un punto establecido digital a la
vez. Si se configura más de una entrada digital como un
punto establecido digital, se le dará prioridad al orden
escaneado por el controlador Serie F4P. El punto
establecido digital habilitado permanecerá habilitado
siempre que la entrada digital esté en su condición
verdadera. En ausencia de puntos establecidos digitales
habilitados, el control en el modo de lazo cerrado
regresará al valor del punto establecido local. Ubicación
en el software: Página Configuración > P.E. Digital x (1 a
4). (Los puntos establecidos digitales se fijan o se
cambian en la Página Operaciones.)
Page 68

7.14 ■ Características Watlow Series F4P
Punto establecido remoto
El controlador Serie F4P con opción de control avanzado
puede configurarse para funcionar hasta con dos puntos
establecidos remotos. Esta característica permite
efectuar cambios remotos del lazo cerrado y del punto
establecido del proceso.
En la operación de punto establecido remoto, se utiliza el
valor de proceso medido de la entrada del punto
establecido remoto, como el punto establecido de control
en una operación de lazo cerrado. Las entradas
analógicas 2 y 3 pueden configurarse como entradas de
punto establecido remoto. Los valores del punto
establecido remoto (Remoto 2 y Remoto 3) tienen un
rango limitado al rango operativo del sensor seleccionado
para la Entrada analógica 1, a menos que el rango
operativo del sensor de entrada del punto establecido
remoto sea menor que el rango operativo de la entrada 1.
Si tal es el caso, se utilizará el rango operativo del sensor
del punto establecido remoto.
Para hacer el cambio a una entrada de punto establecido
remoto como punto establecido de control, se utiliza una
entrada digital o se hace la selección correspondiente en
el Menú de Operaciones. La operación de punto
establecido remoto estará oculta si no se habilita en los
menús de entrada analógica 2 y 3. La operación de punto
establecido remoto tiene prioridad sobre la operación de
punto establecido local cuando así se seleccione mediante
una de las cuatro entradas digitales .
Ubicación en el software: Página Configuración >
Entrada analógica x (2 ó 3) y Página Configuración >
Entrada digital x (1 a 4).
Control alterno
El controlador Serie F4P con opción de control avanzado
puede configurarse para que la entrada analógica 1 o la
entrada analógica 2 funcionen como el sensor entrada
para control de lazo cerrado. Esta característica puede
utilizarse para satisfacer la necesidad de una operación
de sensor redundante, o en los casos en que los cambios
en la posición o en el tipo del sensor puedan mejorar el
control del proceso.
La transición entre entradas se hace a través de la
operación de la entrada digital designada. Para
garantizar un control apropiado, es necesario utilizar el
mismo sensor para las entradas analógicas 1 y 2. El tipo
de linealización puede ser diferente (por ejemplo, se
puede utilizar un termopar K en la entrada 1 y uno J en
la entrada 2). El valor decimal y el tipo de unidad sigue a
la selección de la entrada 1. El firmware del controlador
Serie F4P considera que el sensor inutilizado está
apagado. Las transiciones fuera del rango operativo
harán que el Serie F4 cambie al modo manual. Las
transiciones desde fuera del rango operativo del punto
establecido harán que el punto establecido de control
vaya al límite del punto establecido (bajo o alto, el que
esté más cerca).
La opción de entrada alterna está disponible únicamente
en la operación normal de Control. Las características de
punto establecido remoto y punto establecido digital no
están disponibles cuando la operación de entrada alterna
está habilitada.
Ubicación en el software: Página Configuración >
Entrada analógica 2 y Página Configuración > Entrada
digital x (1 a 4)
Características del controlador de la Serie F4P avanzada
Page 69

Watlow Series F4P Caracterí sticas ■ 7.15
Cascada
El control de cascada es una estrategia de control en la
que un lazo de control proporciona el punto establecido
para otro lazo. La cascada se usa para reducir al mínimo
el sobretemperatura y optimizar el rendimiento de los
sistemas térmicos con tiempos de retraso largos.
Este gráfico muestra un sistema térmico con un tiempo
de retraso largo. La curva A representa un sistema de
control de lazo simple con parámetros PID que permiten
una velocidad de calentamiento máxima. Se introduce
demasiada energía y se sobrepasa el punto establecido.
En la mayoría de los sistemas con un tiempo de retraso
largo, es posible que el valor de proceso nunca se
estabilice con un error aceptable. La curva C representa
un sistema de control simple ajustado para minimizar el
sobrepaso. Esto lleva a velocidades de calentamiento
inaceptables, demorando horas en alcanzar el valor final.
La curva B representa un sistema de cascada que limita
la energía introducida en el sistema, permitiendo una
velocidad de calentamiento óptima con un
sobretemperatura mínima.
El control de cascada usa dos lazos de control (externo e
interno) para controlar el proceso. El lazo externo
monitorea el proceso o la temperatura de la pieza, que se
compara luego con el punto establecido. El resultado de
esta comparación es una señal de error, sobre la cual
actúan los ajustes en un conjunto PID (C1 a C5),
generándose así un nivel de potencia para el lazo externo.
El punto establecido interno lo determina el nivel de
potencia del lazo externo, y el límite bajo del punto
establecido y el límite alto del punto establecido para la
entrada analógica 1.
El lazo interno monitorea la fuente de energía
(calentamiento y enfriamiento), y la compara con el punto
establecido interno generado por el lazo externo. El
resultado de la comparación es la señal de error, sobre la
cual actúan los ajustes de un conjunto PID (1 a 5),
generándose así un nivel de potencia de salida
comprendido entre -100% a +100%. Si el nivel de potencia
es positivo, se activará el calentamiento; si es negativo, se
activará el enfriamiento.
En los controladores Series F4, el control de cascada está
disponible en el canal 1. La entrada analógica 3 se usa
para medir el proceso del lazo externo, mientras que la
entrada analógica 1 permite medir la fuente de energía.
La potencia de la fuente de energía la suministran las
salidas 1A y 1B.
Para configurar y ajustar un sistema para control de
cascada, consulte el capítulo 3.
Ubicación: Página Configuración y Página
Operaciones.
Figura 7.15a — Tiempos de retraso de control.
Figura 7.15b — Control de cascada.
Curva A (PID)
Punto
establecido
Curva B (cascada)
Temperatura
Curva C (control simple)
Tiempo
Punto establecido
(Parte del proceso)
Entrada 3
Lazo externo
(Parte del proceso))
Entrada 1
Lazo interno
(Fuente de energía)
+
Señal de error
-
Límite bajo del punto establecido, entrada analógica 1 = X
Límite alto del punto establecido, entrada analógica 1 = X
+
Señal de error
-
PID C1-C5
SE/BP x 100 = % sal
Porcentaje de potencia
PID 1-5
ES/PB x 100 = % Out
0% a 100%
S1 (Calentamiento)
S2 (Enfriamiento)
Lazo externo
Lazo interno
0 a 100%
0 a -100%
Page 70

7.16 ■ Características Watlow Series F4P
Control diferencial
El controlador Serie F4P con opción de control avanzado
puede configurarse para funcionar con control diferencial.
El control diferencial permite al Serie F4P controlar un
proceso según una diferencia con otro proceso.
La entrada analógica 3 se configura como la entrada
diferencial. El valor del proceso medido en la entrada 3 se
añade al valor diferencial para convertirse el punto
establecido de control de lazo cerrado. Se pueden
habilitar remotamente cuatro valores diferenciales
adicionales (valor diferencial digital) a través de entradas
digitales designadas. Los valores diferenciales digitales
identificables se ingresan en el Menú de Operaciones >
PE de control.
El control diferencial está disponible únicamente en
operación normal de Control. Cualquier cambio que se
haga al valor diferencial o a la entrada analógica 3
durante la autoafinación no se hace efectivo sino hasta
que finalice el proceso de autoafinación o se interrumpa.
Ubicación en el software: Página Configuración >
Entrada analógica 3 y Página Configuración > Entrada
digital x (1 a 4).
Control de relación
El controlador Serie F4P con opción de control avanzado
puede configurarse para funcionar como control de
relación, una característica especialmente útil en
aplicaciones que involucran la mezcla de materiales.
La entrada analógica 3 se configura como la entrada de
relación. El valor del proceso medido en la entrada 3,
multiplicado por el valor de relación, se convierte en el
punto establecido de control del lazo cerrado. Se pueden
habilitar remotamente cuatro valores de relación
adicionales (valor de relación digital) a través de
entradas digitales designadas. Los valores de relación
digital identificables se ingresan en el Menú de
Operaciones > PE de control.
El “control de relación” está disponible únicamente en
operación normal de Control. Cualquier cambio que se
haga al valor de relación o a la entrada analógica 3
durante la autoafinación no se hace efectivo sino hasta
que finalice el proceso de autoafinación.
Ubicación en el software: Página Configuración >
Entrada analógica 3 y Página Configuración > Entrada
digital x (1 a 4).
Page 71

Watlow Series F4P Caracterí sticas ■ 7.17
Control de posición de válvula mediante potenciometro
El controlador Serie F4P con opción de control avanzado
puede configurarse para funcionar con un control de
posición de válvula mediante potenciometro. Para ello, se
mide un valor de proceso de lazo cerrado en la entrada
analógica 1 y se compara dicho valor con el punto
establecido de control. La diferencia entre el valor medido
y el punto establecido de control genera una señal de
error, la cual es accionada por el PID para generar un
porcentaje de salida. Este porcentaje de salida se
compara con potenciometro en la entrada analógica 3
para determinar si es necesario cerrar o abrir la válvula,
a fin de disminuir la diferencia entre el valor de proceso
de lazo cerrado y el punto establecido.
Se requieren dos salidas de tiempo proporcional para
controlar la posición de la válvula. Las salidas de control
1A y 1B se utilizan respectivamente para cerrar y abrir
la válvula. La salida 1A puede configurarse para
calentamiento (acción inversa) o enfriamiento (acción
directa). Con la salida 1A puesta en enfriamiento, la
válvula se abrirá conforme aumente el valor del proceso,
y la potencia en el modo manual podrá ajustarse de 0% a
100%. Con la salida 1A puesta en calentamiento, la
válvula se cerrará conforme aumente el valor del proceso,
y la potencia en el modo manual podrá ajustarse de 0% a
100%.
Con un 25% de salida generado por el PID, la salida 1A
puesta en enfriamiento (acción directa), un rango de
resistencia del potenciometro de posición de válvula de
100 a 1200 ohmios y a posición de válvula medida en la
entrada analógica 3 superior a 275 ohmios (25% de
rango), la salida 1B abrirá la válvula para aumentar el
efecto de enfriamiento a fin de disminuir el valor del
proceso hasta que la resistencia medida sea igual al 25%
del rango. Con las mismas condiciones y con una
resistencia medida inferior a 275 ohmios (25% del rango),
la salida 1A cerrará la válvula para disminuir el efecto de
enfriamiento hasta que la resistencia medida sea
equivalente a 25% del rango.
Para seleccionar el control de posición de válvula, fije la
Entrada analógica 3 > Sensor a Posición de válvula. La
característica de posición de válvula puede calibrarse de
manera automática o manual.
Haga un ajuste fino del comportamiento del control de
posición de válvula utilizando los parámetros Fluctuación
e Histéresis, en la Página Configuración > Entrada
analógica 3 > posición de válvula. Ubicación en el
software: Página Configuración > Entrada analógica 3.
Figura 7.17a — Posición de válvula.
Figura 7.17b —Fluctuación e histéresis de la resistencia
posición de válvula
(
)
Punto establecido
Sensor
Serie F4P
avanzada
% potencia
Potenciometro
(Entrada 3)
Comparador de
posición de válvula
Cerrar
(Salida 1A)
Abrir
Salida B
Punto de encendido (cerrar)
Fluctuación
Histéresis de la posición de válvula
Temperatura
Punto de apagado (cerrar)
Posición de la válvula
Punto establecido
Punto de apagado (abrir)
Punto de encendido (abrir)
Page 72

7.18 ■ Características Watlow Series F4P
Notas
Page 73

Watlow Series F4P Instalación y cableado ■ 8.1
Capítulo 8: Instalación y cableado
Dimensiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8.1
Instalación del controlador Serie F4P . . . . . . . . . .8.3
Desmontaje del controlador Serie F4P . . . . . . . . .8.4
Aislamiento de entrada a salida . . . . . . . . . . . . . . .8.5
Cableado de alimentación . . . . . . . . . . . . . . . . . . .8.5
Directrices para la instalación del sensor . . . . . . . .8.5
Entrada 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8.6
Entradas x (2 y 3) . . . . . . . . . . . . . . . . . . . . . . . . .8.7
Entradas digitales x (1 a 4) . . . . . . . . . . . . . . . . . .8.9
Salidas x (1A y 1B ) . . . . . . . . . . . . . . . . . . . . . . .8.10
Salida de Retransmisión y de alarma . . . . . . . . . .8.11
Cableado de comunicaciones . . . . . . . . . . . . . . . .8.12
Ejemplo de cableado . . . . . . . . . . . . . . . . . . . . . . .8.14
Notas del cableado . . . . . . . . . . . . . . . . . . . . . . . .8.15
Dimensiones
Figura 8.1 — Dimensiones de la vista frontal y dimensión de la separación para la junta.
8
99.8 mm
(3.930 pulg.)
108.8 mm
(4.284 pulg.)
99.8 mm
( 3.930 pulg.)
0.5 mm (0.020 pulg.) separación máxima entre el panel
frontal del controlador y el panel de montaje
Page 74

8.2 ■ Instalación y cableado Watlow Series F4P
Figura 8.2a — Dimensiones de la vista lateral y superior.
Dimensiones del panel
Figure 8.2b — Dimensiones de cortes múltiples del panel.
1B
1A
106.4 mm
(4.189 pulg.)
97.8 mm
(3.850 pulg.)
108.3 mm
(4.264 pulg.)
8.6 mm (.339 pulg.)
99.8 mm
(3.930 pulg.)
F
4
1A
1B
Main Page___________
Go to Operations
Go to Setup
Go to Factory
ˆ
å
1
99.8 mm
2
(3.930 pulg)
92 to 93 mm
(3.62 to 3.65 pulg.)
Recorte del panel
Espesor del panel
9.5 mm maximum
(0.375 in)
92 to 93 mm
(3.62 to 3.65 pulg.)
17.6 mm
(0.675 pulg.)
mínimo
16 mm
(0.625 pulg.)
mínimo
Page 75

Watlow Series F4P Instalación y cableado ■ 8.3
Instalación del controlador Serie F4P
La instalación y el montaje requieren acceso a la parte
posterior del panel.
Herramientas necesarias: un destornillador Phillips n.º 2
(cabezal en cruz).
1. Haga el recorte del panel usando las dimensiones de
la plantilla de montaje especificada en este capítulo.
2. Inserte el controlador en el recorte del panel.
Compruebe que el empaque de caucho quede
asentada en su ranura en la parte posterior del bisel.
Deslice el marco de retención sobre la caja,
colocándolo de forma tal que los agujeros abiertos
queden frente a la parte posterior de la caja.
3. Alinee el soporte de montaje con las puntas de los
tornillos apuntadas hacia el panel. Apretando los
lados arqueados del soporte, empújelo con suavidad y
firmeza sobre la caja hasta que los ganchos calcen en
las ranuras de la parte delantera de la caja.
4. Si la instalación no requiere un sello NEMA 4X,
apriete los cuatro tornillos con el destornillador
Phillips lo suficiente como para eliminar el espacio
entre la empaquetadura de caucho y el panel de
montaje.
Para obtener un sello NEMA 4X, apriete los cuatro
tornillos hasta que el espacio máximo entre el bisel y
la superficie del panel sea de 0.508 mm (0.020 pulg.).
(Ver Figura c.) Asegúrese de que no pueda mover el
controlador hacia adelante y atrás en el recorte. Si
puede hacerlo, quiere decir que no tiene un sello
correcto. No apriete en exceso. El apriete excesivo
podría dañar el soporte de montaje.
Figura 8.3a — Empaque asentado en el bisel.
Figura 8.3b — Marco de retención y soporte de montaje.
Figura 8.3c — Apriete de los tornillos.
Page 76

8.4 ■ Instalación y cableado Watlow Series F4P
Desmontaje del controlador Serie F4
El desmontaje del controlador puede hacerse fácilmente
desenganchando el soporte de montaje y empujando el
controlador hacia adelante a través del panel. Prepare el
área para poder soportar el equipo cuando se deslice
hacia adelante a través del panel.
Herramientas necesarias: destornillador Phillips n.º 2
(cabezal en cruz), destornillador de hoja plana y alguna
forma de soporte del controlador para cuando éste se
deslice hacia afuera por la parte delantera del panel.
1. Retire los conectores de cableado de la parte
posterior del controlador. Con el destornillador
Phillips, destornille los cuatro tornillos del soporte de
montaje (dos arriba, dos abajo) hasta que las puntas
estén totalmente retraídas dentro de los husillos.
2. Deslice la punta de un destornillador plano entre la
caja y el lado central superior del soporte de montaje.
Gire el destornillador 90 grados, separando el soporte
de la caja de manera que los ganchos del soporte se
separen de las ranuras de la caja. Sostenga el
soporte y empuje el controlador ligeramente hacia
adelante para evitar que los ganchos vuelvan a
introducirse nuevamente dentro de las ranuras.
3. Repita esta operación para liberar los ganchos del
lado inferior del soporte de montaje.
4. Presione con uno o dos dedos en la mitad inferior de
la parte posterior de la unidad, de manera que el
controlador se deslice hacia adelante a través del
panel. Sostenga firmemente el panel; no tire hacia
atrás. Esté listo para sostener el controlador
conforme éste vaya saliendo por la parte frontal del
panel. Saque los soportes de montaje y el marco de
retención desde el lado posterior del panel.
Figura 8.4— Desenganche del soporte de montaje.
Page 77

Watlow Series F4P Instalación y cableado ■ 8.5
Cableado del controlador Serie F4P
Las opciones de cableado dependen del número de modelo
(impreso en la parte posterior del controlador). La
explicación de los códigos del modelo aparece en el
apéndice de este documento.
Las etiquetas en los lados y en la parte posterior del
controlador contienen información básica de cableado del
controlador.
Aislamiento de entrada a salida
El controlador Serie F4P está diseñado con aislamiento
óptico y de transformador a fin de proporcionar una
barrera para evitar lazos a tierra al usar sensores
conectados a tierra o equipos periféricos (o ambos).
A continuación se da una lista de las barreras de
aislamiento:
• La entrada analógica 1 y todas las entradas y salidas
digitales están agrupadas.
• Las entradas analógicas 2 y 3 están agrupadas.
• Todas las salidas de control y las de retransmisión
están agrupadas.
• Ambas salidas de alarma están agrupadas.
• Las comunicaciones están aisladas de las otras
entradas y salidas.
Figura 8.5a — Bloques de aislamiento.
ç
ADVERTENCIA: Proporcione un interruptor o un disyuntor
rotulado conectado al cableado de alimentación del controlador
Serie F4P como medio de desconexión para llevar a cabo tareas
de servicio. El incumplimiento de esta medida puede traer como
consecuencia daños al equipo o propiedad, o lesiones o muerte
al personal.
Cableado de alimentación
Utilice únicamente conductores de cobre número 16 AWG
(1,3 mm
2
MCM) para realizar el cableado de potencia.
100 a 240V‡ (CA/CC), nominal (85 a 264 real) F4PH - _ _
_ _ - _ _ _ _
24 a 28V‡ (CA/CC), nominal (21 a 30 real) F4PL - _ _ _ _
- _ _ _ _
El controlador Serie F4P tiene un fusible tipo T no
reemplazable por el operario, de acción retardada y
capacidad nominal de 2.0 ó 5.0A a 250VÅ (CA).
Figura 8.5b — Cableado de alimentación.
Directrices para la instalación del sensor
Entradas de termopar: Para limitar errores, el cable de
extensión para los termopares debe ser de la misma
aleación que el termopar mismo.
Si para la entrada 2 se requiere un termopar conectado a
tierra, se debe aislar la señal 3 para evitar la posibilidad
de lazos de tierra.
Entrada de RTD: Cada 1 Ω de resistencia de conductor
puede causar un error de +2°F cuando se utiliza un RTD
de dos conductores. Este problema puede eliminarse
mediante el uso de un sensor de RTD de tres
conductores. Los tres conductores tienen que tener la
misma resistencia eléctrica (es decir, el mismo calibre,
largo, y metal; de trenza múltiple o revestido).
Entrada de proceso: Es necesario mantener el
aislamiento entre las entradas 2 y 3. Si ambas entradas
son señales del proceso, se debe usar una fuente de
alimentación separada para cada una. Estas entradas
deben estar aisladas eléctricamente entre ellas para
evitar lazos de tierra.
ç
ATENCIÓN: Si se aplica un voltaje alto a la unidad de bajo
voltaje, se producirán daños irreversibles.
ç∫
ADVERTENCIA: Para la instalación y operación del controlador
Serie F4P, utilice la normativa de cableado establecida por
National Electric (NEC) u otras normativas específicas del país.
El incumplimiento de esta indicación puede llevar a daños a
equipos y a la propiedad, y a lesiones físicas o pérdida de la
vida.
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 62
48 49 50
45 46 47
51 52 53 54 55 56 57 58
33 34 35
36 37 38
39 40 41
42 43 44
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
No hay comunicaciones eléctricas entre estos bloques.
Bloques de aislamiento
Entrada analógica 1
Entradas digitales
Entrada analógica 2 y 3
Salidas control
Salidas de retransmisión
ÅL1
+
L2
-
Puesta a tierra
Fusible
3
3
1
3
4
1
3
6
7
9
2
1
3
3
4
4
1
1 2 3 4 5
2
3
2
4
3
3
5
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
8
7
0
3
1
3
4
4
9
8
1
4
2
0
2
1
2
2
2
3
2
4
2
51 52 53 5
5
2
6
2
7
2
8
4 55 56 5
2
59 60 61
9
3
45
4
0
8 49 5
4
3
6 47
7 58
1
62
3
2
0
Comunicaciones
Salidas de alarma
Page 78

8.6 ■ Instalación y cableado Watlow Series F4P
ç
ADVERTENCIA: Para la
instalación y operación del
controlador Serie F4P,
utilice la normativa de
cableado establecida por
National Electric (NEC) u
otras normativas específicas
del país. El incumplimiento
de esta indicación puede
llevar a daños a equipos y a
la propiedad, y a lesiones
físicas o pérdida de la vida.
ç
ATENCIÓN: Mantenga el
aislamiento entre las
entradas 2 y 3 para evitar
un lazo de tierra. Un lazo de
tierra puede dar lugar a
lecturas equivocadas, o
también a la aparición de
rayas en la pantalla
superior o de códigos de
error. El incumplimiento de
esta medida podría traer
como consecuencia daños a
los equipos y al producto.
Entrada 1
Figura 8.6a — Termopar
Disponible en todas las unidades.
Impedancia: 20MΩ
Figura 8.6b — RTD (2 ó 3 cables) 100Ω, platino
Disponible en todas las unidades.
Figura 8.6c
—
0-5VÎ, 1-5VÎ or 0-10VÎ (CC), proceso
Disponible en todas las unidades.
Impedancia de entrada: 20kΩ
Figura 8.6d — 0-20mA o 4-20mA proceso
Disponible en todas las unidades
Impedancia de entrada: 100Ω
Figura 8.6e — O-50mV
Disponible en todas las unidades.
Impedancia: 20MΩ
59 60 61 62
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 62
48 49 50
45 46 47
51 52 53 54 55 56 57 58
33 34 35
36 37 38
39 40 41
42 43 44
59 60 61 62
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 62
48 49 50
45 46 47
51 52 53 54 55 56 57 58
33 34 35
36 37 38
39 40 41
42 43 44
59 60 61 62
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 62
48 49 50
45 46 47
51 52 53 54 55 56 57 58
33 34 35
36 37 38
39 40 41
42 43 44
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 62
48 49 50
45 46 47
51 52 53 54 55 56 57 58
33 34 35
36 37 38
39 40 41
42 43 44
59 60 61 62
59 60 61 62
59 60 61 62
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 62
48 49 50
45 46 47
51 52 53 54 55 56 57 58
33 34 35
36 37 38
39 40 41
42 43 44
3
3
1
3
4
1
6
+61
59 60 61 62
3
3
2
4
3
3
5
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
7
9
2
1
3
4
4
8
7
0
3
1
3
4
4
9
8
1
4
2
0
2
1
2
2
2
3
2
4
2
5
5
1 52 53 54
2
6
2
7
2
8
55 56 57 58
2
59
9
60
3
4
48 49 50
0
5 46 47
61 62
3
1
3
2
- 62
2 cables
puente de 60 a 62
59 60 61 62
60
61
S1
S3
62
+59
59 60 61 62
-62
1
2
3
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
3 cables
3
3
3
4
3
5
45 46 47
59 60 61 62
S2
60
61
S1
62
S3
3
1
3
4
6
7
9
2
1
3
4
4
8
7
0
3
1
3
4
4
9
8
1
4
2
0
2
1
2
2
2
3
2
4
2
51 52 53 54
5
2
6
2
7
2
8
55
2
59 60 61 62
9
56 57 58
3
48 49 50
0
3
1
3
2
3
3
1
3
4
1
3
6
7
9
2
1
3
3
4
4
2
4
3
3
5
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
8
7
0
3
1
3
4
4
9
8
1
4
2
0
2
1
2
2
2
3
2
4
2
51
5
52 53 54
2
6
2
7
2
8
55 56 57
2
59
9
6
3
4
48 49 50
0
0 61 62
5 46 47
3
1
58
3
2
3
3
1
3
4
1
3
6
7
9
2
1
3
3
4
59 60 61 62
+60
4
2
4
3
3
5
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
8
7
0
3
1
3
4
4
9
8
1
4
2
0
2
1
2
2
2
3
2
4
2
51 52 53 54 55
5
2
6
2
7
2
8
2
59 60 61 6
9
56 57 58
3
45
48
0
4
49 50
3
6 47
1
3
2
2
- 62
3
3
1
3
4
1
3
6
7
9
2
1
3
3
4
2
3
4
5
6
4
4
3
5
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
8
7
0
3
1
3
4
4
9
8
1
4
2
0
2
1
2
2
2
3
2
4
2
51 52 53 54
5
2
6
2
7
2
8
55 56 57 58
2
59 60 61 62
9
3
4
48 49 50
0
5 4
3
6 47
1
3
2
59 60 61 62
+61 (+mV)
-62 (-mV)
Page 79

Watlow Series F4P Instalación y cableado ■ 8.7
Entradas x (2 y 3)
Figura 8.7a — Termopar
F4P _ - _ _ AB - _ _ _ _
Impedancia: 20MΩ
Figura 8.7b — RTD (2-cables) 100Ω platino
F4P _ - _ _ AB - _ _ _ _
Figura 8.7c — RTD (3-cables) 100Ω platino
F4P _ - _ _ AB - _ _ _ _
Figura 8.7d — O-50mV
F4P _ - _ _ AB - _ _ _ _
Impedancia: 20MΩ
51 52 53 54 55 56 57 58
51 52 53 54 55 56 57 58
Entrada 2 Entrada 3
1
2
3
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1 2 3 4 5 6 7 8 9 10 11 12 13 14
1
5
1
6
15 16
1
7
1
8
1
9
2
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
8
2
9
3
0
3
1
3
2
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59
60
61 62
59 60 61 62
48 49 5048 49 50
4
5 4
6 47
45 46 47
51 5
2 53 54 55 56 57 58
51 52 53 54 55 56 57 58
3
3
3
4
3
5
33 34 35
3
6
3
7
3
8
36 37 38
3
9
4
0
4
1
39 40 41
4
2
4
3
4
4
42 43 44
+57 (+mV)
-58 (-mV)
+55 (+mV)
-56 (-mV)
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 62
48 49 50
45 46 47
51 52 53 54 55 56 57 58
33 34 35
36 37 38
39 40 41
42 43 44
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 62
48 49 50
45 46 47
51 52 53 54 55 56 57 58
33 34 35
36 37 38
39 40 41
42 43 44
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 62
48 49 50
45 46 47
51 52 53 54 55 56 57 58
33 34 35
36 37 38
39 40 41
42 43 44
ç
ADVERTENCIA: Para la
instalación y operación del
controlador Serie F4P,
utilice la normativa de
cableado establecida por
National Electric (NEC) u
otras normativas específicas
del país. El incumplimiento
de esta indicación puede
llevar a daños a equipos y a
la propiedad, y a lesiones
físicas o pérdida de la vida.
ç
ATENCIÓN: Mantenga el
aislamiento entre las
entradas 2 y 3 para evitar
un lazo de tierra. Un lazo de
tierra puede dar lugar a
lecturas equivocadas, o
también a la aparición de
rayas en la pantalla
superior o de códigos de
error. El incumplimiento de
esta medida podría traer
como consecuencia daños a
los equipos y al producto.
Entrada 2 Entrada 3
51 52 53 54 55 56 57 58
+55
-56
+57
-58
Entrada 2 Entrada 3
51 52 53 54 55 56 57 58
52
puente de 52 a 56
54
puente de 54 a 58
S1
S3
57
58
S1
S3
55
56
Entrada 2 Entrada 3
S2
54
57
S1
58
S3
51 52 53 54 55 56 57 58
S2
S1
S3
52
55
56
3
3
1
3
4
1
3
6
7
9
2
1
3
3
4
4
2
4
51 52 53 54 55 56 57 58
51 52 53 54 55 56 57 58
51 52 53 54 55 56 57 58
3
3
5
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
3
1
3
3
2
4
3
3
5
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
3
1
3
3
2
4
3
3
5
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
8
7
0
3
1
3
4
4
9
8
1
4
2
0
2
1
2
2
2
3
2
4
2
51
5
52 53 54
2
6
2
7
2
8
55 56 57 58
2
59 60 61 62
9
3
4
48 4
0
5 46 47
3
9 50
1
3
2
3
1
3
4
6
7
9
2
1
3
4
4
8
7
0
3
1
3
4
4
9
8
1
4
2
0
2
1
2
2
2
3
2
4
2
5
5
1 52 53 54 55 56 57 58
2
6
2
7
2
8
2
59 60 61 62
9
3
45 46 4
48 4
0
3
9 50
1
3
2
7
3
1
3
4
6
7
9
2
1
3
4
4
8
7
0
3
1
3
4
4
9
8
1
4
2
0
2
1
2
2
2
3
2
4
2
5
5
1 52 53 54 55 56 57 58
2
6
2
7
2
8
2
59 60 61 62
9
3
4
48 49 50
0
5 4
3
6 4
1
3
2
7
Page 80

8.8 ■ Instalación y cableado Watlow Series F4P
Entradas x (2 y 3) (cont.)
Figura 8.8a — 0-5VÎ, 1-5VÎ or 0-10VÎ (CC), proceso
F4P _ - _ _ AB - _ _ _ _
Impedancia de entrada: 20kΩ
Figura 8.8b — 0-20 mA o 4-20 mA, proceso
F4P _ - _ _ AB - _ _ _ _
Impedancia de entrada: 100Ω
Figura 8.8c — Entrada de resistencia (potenciometro) de posición
de válvula (sólo Entrada 3)
F4P _ - _ _ _AB - _ _ _ _
Rango de resistencia de posición de válvula: 100 a 1200Ω
51 52 53 54 55 56 57 58
52
CW
CCW
Potenciometro
55
56
Entrada 3
1
2
3
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1 2 3 4 5 6 7 8 9 10 11 12 13 14 1
5
1
6
15 16
1
7
1
8
1
9
2
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
8
2
9
3
0
3
1
3
2
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 6259 60 61 62
48 49 5048 49 50
45 46 4745 46 47
5
1 52 53 5
4 55 56
5
7 5
8
51 52 53 54 55 56 57 58
3
3
3
4
3
5
33 34 35
3
6
3
7
3
8
36 37 38
3
9
4
0
4
1
39 40 41
4
2
4
3
4
4
42 43 44
51 52 53 54 55 56 57 58
+54
-58
51 52 53 54 55 56 57 58
+52
-56
Entrada 2 Entrada 3
1
2
3
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1 2 3 4 5 6 7 8 9 10 11 12 13 14 1
5
1
6
15 16
1
7
1
8
1
9
2
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
8
2
9
3
0
3
1
3
2
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
5
9 60 61 62
59 60 61 62
4
8 49 50
48 49 50
45 46 4745 46 47
5
1 52 53 54 55 56 57 58
51 52 53 54 55 56 57 58
3
3
3
4
3
5
33 34 35
3
6
3
7
3
8
36 37 38
3
9
4
0
4
1
39 40 41
4
2
4
3
4
4
42 43 44
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 62
48 49 50
45 46 47
51 52 53 54 55 56 57 58
33 34 35
36 37 38
39 40 41
42 43 44
ç
ADVERTENCIA: Para la
instalación y operación del
controlador Serie F4P,
utilice la normativa de
cableado establecida por
National Electric (NEC) u
otras normativas
específicas del país. El
incumplimiento de esta
indicación puede llevar a
daños a equipos y a la
propiedad, y a lesiones
físicas o pérdida de la vida.
ç
ATENCIÓN: Mantenga el
aislamiento entre las
entradas 1,2 y 3 para evitar
un lazo de tierra. Un lazo de
tierra puede dar lugar a
lecturas equivocadas, o
también a la aparición de
rayas en la pantalla
superior o de códigos de
error. El incumplimiento de
esta medida podría traer
como consecuencia daños a
los equipos y al producto.
3
3
1
3
Entrada 2
+53
51 52 53 54 55 56 57 58
Entrada 3
+51
51 52 53 54 55 56 57 58
4
1
3
6
7
9
2
1
3
3
4
4
2
4
3
3
5
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
8
7
0
3
1
3
4
4
9
8
1
4
2
0
2
1
2
2
2
3
2
4
2
51 52 53 5
5
2
6
2
7
2
8
4 55 56 5
2
59 60 61 62
9
3
45 46 47
48 49 50
0
3
7 58
1
3
2
-56
-58
Page 81

Watlow Series F4P Instalación y cableado ■ 8.9
Entradas digitales x (1 a 4)
Figura 8.9 — Entradas digitales x (1 a 4)
Entrada de voltaje
0-2VÎ (CC) Estado de entrada de evento (bajo)
3-36VÎ (CC) Estado de entrada de evento (alto)
Cierre de contacto
0-2kΩ Estado de entrada de evento (bajo)
> 23kΩ Estado de entrada de evento (alto)
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 62
48 49 50
45 46 47
51 52 53 54 55 56 57 58
33 34 35
36 37 38
39 40 41
42 43 44
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
ç
ADVERTENCIA: Para la
instalación y operación del
controlador Serie F4P,
utilice la normativa de
cableado establecida por
National Electric (NEC) u
otras normativas específicas
del país. El incumplimiento
de esta indicación puede
llevar a daños a equipos y a
la propiedad, y a lesiones
físicas o pérdida de la vida.
ç
ATENCIÓN: Mantenga el
aislamiento entre las
entradas 2 y 3 para evitar
un lazo de tierra. Un lazo de
tierra puede dar lugar a
lecturas equivocadas, o
también a la aparición de
rayas en la pantalla
superior o de códigos de
error. El incumplimiento de
esta medida podría traer
como consecuencia daños a
los equipos y al producto.
Entrada de voltaje Cierre de contact
-
Tierra, ent. digital -27
Entrada digital 1 +28
+
Digital 2 +29
Digital 3 +30
Digital 4 +31
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
o (agregar una
resistencia
elevadora de
10kΩ para cada
entrada activa)
Tierra, ent. digital 27
Entrada digital 28
Digital 2 29
Digital 3 30
10kΩ
Digital 4 31
+5VÎ (dc) 32
3
3
1
3
4
1
3
6
7
9
2
1
3
3
4
4
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
2
4
3
3
5
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
8
7
0
3
1
3
4
4
9
8
1
4
2
0
2
1
2
2
2
3
2
4
2
5
5
1 52 53
2
6
2
7
5
2
8
4 55
2
5
9
9 60 61 62
56 57 58
3
4
48 49 50
0
5 46 47
3
1
3
2
Tierra de evento (27)
Entrada digital 1 (28)
Entrada digital 2 (29)
Entrada digital 3 (30)
Entrada digital 4 (31)
+5VÎ (dc) (32) +5VÎ (dc)
Circuitos internos
Page 82

8.10 ■ Instalación y cableado Watlow Series F4P
Salidas 1A y 1B
Figura 8.10a — Relé de estado sólido
24VÅ (CA) mínimo, 253VÅ (CA) máximo
0.5 Amp., impedancia de estado abierto 31 MΩ
Figura 8.10b — CC conmutada, colector abierto
• Configuración de CC conmutada (no se usa COM)
CC+ = 22 a 28VÎ (CC)
La corriente de alimentación máxima es 30 mA
• Salida de colector abierto (no se usa dc+)
CC: 42VÎ (CC) máximo
Apagado: Máxima corriente de fuga de desconexión:10 mA
Encendido: 0.2 V a 0.5 Amp. (caída)
Figura 8.10c — 0-20mA, 4-20mA, 0-5VÎ, 1-5VÎ and 0-10VÎ (CC),
proceso
39 40 4139 40 41
42 43 4442 43 44
42 Amp. +
Salida 1A
1
2
3
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1 2 3 4 5 6 7 8 9 10 11 12 13 14 1
5
1
6
15 16
1
7
1
8
1
9
2
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
8
2
9
3
0
3
1
3
2
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 6259 60 61 62
4
8 49
50
48 49 50
45 46 4745 46 47
5
1 52 53 54 55 56 57 58
51 52 53 54 55 56 57 58
3
3
3
4
3
5
33 34 35
3
6
3
7
3
8
36 37 38
3
9
4
0
4
1
39 40 41
4
2
4
3
4
4
42 43 44
1
2
3
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1 2 3 4 5 6 7 8 9 10 11 12 13 14 1
5
1
6
15 16
1
7
1
8
1
9
2
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
8
2
9
3
0
3
1
3
2
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 6259 60 61 62
48 49 5048 49 50
45 46 4745 46 47
5
1 52 53 54 55 56 57 5
8
51 52 53 54 55 56 57 58
3
3
3
4
3
5
33 34 35
3
6
3
7
3
8
36 37 38
3
9
4
0
4
1
39 40 41
4
2
4
3
4
4
42 43 44
Salida 1B
F4P _ - F _ _ _ - _ _ _ _ F4P _ - _ F _ _ - _ _ _ _
43 (COM)
39 Amp. +
40 (COM)
41V +44V +
39 40 41
42 43 44
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 62
48 49 50
45 46 47
51 52 53 54 55 56 57 58
33 34 35
36 37 38
39 40 41
42 43 44
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 62
48 49 50
45 46 47
51 52 53 54 55 56 57 58
33 34 35
36 37 38
39 40 41
42 43 44
39 40 41
42 43 44
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 62
48 49 50
45 46 47
51 52 53 54 55 56 57 58
33 34 35
36 37 38
39 40 41
42 43 44
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 62
48 49 50
45 46 47
51 52 53 54 55 56 57 58
33 34 35
36 37 38
39 40 41
42 43 44
✔ Nota: La conmutación
de cargas inductivas
(bobinas de relés,
solenoides, etc.) por el
relé mecánico, la CC
conmutada u opciones de
salida de relé de estado
sólido, requiere el uso de
un supresor de. R.C.
Watlow tiene en
inventario el supresor de
R.C. marca Quencharc,
marca registrada de ITW
Paktron, núm. de ref. de
Watlow: 0804-0147-0000.
ç
ADVERTENCIA: Para la
instalación y operación del
controlador Serie F4P,
utilice la normativa de
cableado establecida por
National Electric (NEC) u
otras normativas específicas
del país. El incumplimiento
de esta indicación puede
llevar a daños a equipos y a
la propiedad, y a lesiones
físicas o pérdida de la vida.
Salida 1A
42 43 44
42 N.O.
43 COM.
contacto
clave
F4 P _ - K _ _ _ - _ _ _ _ F4 P _ - _ K _ _ - _ _ _ _
Salida 1B
39 40 41
39 N.O.
40 COM.
contacto
clave
3
3
1
3
6
3
3
2
7
4
3
3
3
8
5
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
45 46 47
48 49 50
4
1
5
1
6
Salida 1A
42 43 44
42 CC43 COM.
Salida 1B
39 40 41
39 CC40 COM.
41 CC+44 CC+
F4 P _ - C _ _ _ - _ _ _ _ F4 P _ - _ C _ _ - _ _ _ _
3
3
1
3
4
1
3
6
7
9
2
1
3
3
4
4
2
4
3
3
5
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
8
7
0
3
1
3
4
4
9
8
1
4
2
0
2
1
2
2
2
3
2
4
2
51 52 5
5
2
6
2
3 54 55 56 57 5
7
2
8
2
59 60 61 62
9
3
45 4
48 49 50
0
3
6 47
1
3
2
8
3
3
1
3
4
1
6
3
3
2
4
3
3
5
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
7
9
2
1
3
4
4
8
7
0
3
1
3
4
4
9
8
1
4
2
0
2
1
2
2
2
3
2
4
2
51 52
5
2
6
53 54 55 56 57 58
2
7
2
8
2
5
9
9 60 6
3
45
4
0
8 4
46
3
9 5
1
1 62
47
3
2
0
22 a 28VÎ (CC)
Circuitos internos
22 a 28VÎ (CC)
Circuitos internos
22 a 28VÎ (CC)
Circuitos internos
3
9
4
0
4
1
51 52 53 54 55 56 57 58
4
2
4
3
4
4
1
7
1
8
1
9
2
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
8
2
59 60 61 62
9
3
0
3
1
3
2
CCCOM.
CC+
CC conmutada
CC-
COM.
CC+
Colector abierto
CC-
COM.
CC+
3
3
3
1
3
6
9
3
3
4
2
4
7
0
3
3
4
3
5
8
1
4
5
6
7
8
9
51 52 53 54 55 56 57 58
1
0
1
1
1
2
1
3
1
45 46 47
48 49 50
4
1
5
1
6
-
Relé de estado
sólido
+
Relé de estado
sólido
-
-
Fuente de
alimentación
4
2
4
3
4
4
59 60 61 62
1
7
1
8
1
9
2
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
8
2
9
3
0
3
1
3
2
Carga
externa
+
+
Page 83

Watlow Series F4P Instalación y cableado ■ 8.11
Salidas 1A y 1B (cont.)
Figura 8.11a — Relé mecánico
Salidas de Retransmisión y de alarmas
Figura 8.11b — Salidas de retransmisión x (1 y 2)
(mA) impedancia de carga máxima: 800Ω
VÎ (CC) impedancia de carga mínima: 1KΩ
Figura 8.11c — Salidas de alarma x (1 y 2)
Relé electromecánico sin supresión de contactos
Forma C, 2 Amp., impedancia de estado abierto: 31 mΩ
1
2
3
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1 2 3 4 5 6 7 8 9 10 11 12 13 14
1
5
1
6
15 16
1
7
1
8
1
9
2
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
8
2
9
3
0
3
1
3
2
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
5
9 6
0 61 62
59 60 61 62
48 49 5048 49 50
45 46 4745 46 47
51
52 53
54 55 56
57
58
51 52 53 54 55 56 57 58
3
3
3
4
3
5
33 34 35
3
6
3
7
3
8
36 37 38
3
9
4
0
4
1
39 40 41
4
2
4
3
4
4
42 43 44
4
5
1 2 3 4 5 6 7 8 9 10 11 12 13 14 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1615 16
COM.
N.O.
6
N.C.
7
8
1 2 3 4 5 6 7 8 9 10 11 12 13 14 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1615 16
COM.
N.O.
9
N.C.
Salida Alarma1 Salida Alarma 2
48V
Salida 1
1
2
3
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1 2 3 4 5 6 7 8 9 10 11 12 13 14
1
5
1
6
15 16
1
7
1
8
1
9
2
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
8
2
9
3
0
3
1
3
2
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61
62
59 60 61 62
48 49 5048 49 50
45 46 4745 46 47
5
1 52 53 54 55 56 57 5851 52 53 54 55 56 57 58
3
3
3
4
3
5
33 34 35
3
6
3
7
3
8
36 37 38
3
9
4
0
4
1
39 40 41
4
2
4
3
4
4
42 43 44
1
2
3
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1 2 3 4 5 6 7 8 9 10 11 12 13 14 1
5
1
6
15 16
1
7
1
8
1
9
2
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
8
2
9
3
0
3
1
3
2
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
5
9 60 61 62
59 60 61 62
48 49 5048 49 50
4
5 46 47
45 46 47
5
1 52 53 5
4 55 56 57 5
8
51 52 53 54 55 56 57 58
3
3
3
4
3
5
33 34 35
3
6
3
7
3
8
36 37 38
3
9
4
0
4
1
39 40 41
4
2
4
3
4
4
42 43 44
Salida 2
F4P_ - _ _ _ _ - 1 _ _ _
o F4P_ - _ _ _ _ - 2 _ _ _
F4P_ - _ _ _ _ - 2 _ _ _
COM. 49
50 Amp.
48 49 50
45 46 47
45V
COM. 46
47 Amp.
39 N.O.
40 COM.
41 N.C.
42 N.O.
43 COM.
44 N.C.
F4P_ -E _ _ _-_ _ _ _
F4P_ -_E_ _ - ____
Salida 1A
Salida 1B
✔ Nota: La conmutación
de cargas inductivas
(bobinas de relés,
solenoides, etc.) por el
relé mecánico, la CC
conmutada u opciones de
salida de relé de estado
sólido, requiere el uso de
un supresor de. R.C.
Watlow tiene en
inventario el supresor de
R.C. marca Quencharc,
marca registrada de ITW
Paktron, núm. de ref. de
Watlow: 0804-0147-0000.
ç
ADVERTENCIA: Para la
instalación y operación del
controlador Serie F4P,
utilice la normativa de
cableado establecida por
National Electric (NEC) u
otras normativas específicas
del país. El incumplimiento
de esta indicación puede
llevar a daños a equipos y a
la propiedad, y a lesiones
físicas o pérdida de la vida.
Page 84

8.12 ■ Instalación y cableado Watlow Series F4P
Cableado de comunicaciones
Figura 8.12a — Comunicaciones EIA/TIA 485 y EIA/TIA 232
Figura 8.12b — Terminación para convertidor EIA-232 a EIA-485
1 2 3 4 5 6 7 8 9 10 11 12 13 14
1 2 3 4 5 6 7 8 9 10 11 12 13 14
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 62
48 49 50
45 46 47
51 52 53 54 55 56 57 58
33 34 35
39 40 41
42 43 44
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
59 60 61 62
48 49 50
45 46 47
51 52 53 54 55 56 57 58
33 34 35
36 37 38
39 40 41
42 43 44
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
1 2 3 4 5 6 7 8 9 10 11 12 13 14
15 16
ç
ADVERTENCIA: Para la
instalación y operación del
controlador Serie F4P,
utilice la normativa de
cableado establecida por
National Electric (NEC) u
otras normativas específicas
del país. El incumplimiento
de esta indicación puede
llevar a daños a equipos y a
la propiedad, y a lesiones
físicas o pérdida de la vida.
3
3
1
3
4
1
3
6
7
9
2
1
3
3
4
4
EIA/TIA 485 EIA/TIA 232
5V+, polarización
de terminales
T+/R+
T-/R-
11
12
13
1 2 3 4 5 6 7 8 9 10 11 12 13 14
5V+, polarización
de terminales
15 16
Comunicaciones
16
Comunicaciones
Transmitir
Recibir
11
14
15
16
2
1 2 3 4 5 6 7 8 9 10 11 12 13 14
4
3
3
5
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
15 16
8
7
0
3
1
3
4
4
9
8
1
4
2
0
2
1
2
2
2
3
2
4
2
51
5
52 53
2
6
2
7
5
2
8
4 5
2
59 60 61 62
9
5 56
3
45 46 47
48 49
0
5
3
7 5
1
50
3
2
8
33 34 35
36 37 38
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
39 40 41
42 43 44
1 2 3 4 5 6 7 8 9 10 11 12 13 14
1 2 3 4 5 6 7 8 9 10 11 12 13 14
Terminales de
caja de convertidor
con resistencias
elevadoras y
reductoras.
1KΩ
B
120Ω
A
GND
1KΩ
+5V
T+/R+
T-/R-
Com
15 16
5
1
5
2
5
3
5
4
5
5
9
5
6
5
4
4
0
5
8
6
4
4
5
15 16
6
6
9
7
1
4
5
5
6
7
0
8
2
Page 85

Watlow Series F4P Instalación y cableado ■ 8.13
Cableado de comunicaciones (cont.)
Figura 8.13 — Conversión EIA/TIA 232 a EIA/TIA 485
Convertidor B&B (B&B Electronics Manufacturing Company, (815) 433-5100).
Convertidor CMC (CMC Connecticut Micro-Computer, Inc.
ç
ADVERTENCIA: Para la
instalación y operación del
controlador Serie F4P, utilice
la normativa de cableado
establecida por National
Electric (NEC) u otras
normativas específicas del
país. El incumplimiento de
esta indicación puede llevar
a daños a equipos y a la
propiedad, y a lesiones
físicas o pérdida de la vida.
✔
Nota:
El convertidor
CMC requiere una fuente
de alimentación externa
al ser usado con una
computadora portátil.
TD (A)
TD (B)
EIA-232
EIA-232
EIA-485
485OIC
ADA485L
EIA-485
G
9VÎ
G
B
A
B
A
RD (A)
RD (B)
DI/ODI/O
GND
GND
9VÎ (dc) (ver nota)
COM.
T+/R+
T-/R-
T-/R-
T+/R+
COM.
EIA-485
+
Fuente de alimentación
–
AD-1210
120VÅ (ac)
16
12
13
13
12
16
120V~ (ac)
Page 86

8.14 ■ Instalación y cableado Watlow Series F4P
Ejemplo de cableado
Figura 8.14 — Ejemplo de cableado del sistema.
1 2 3 4 5 6 7 8 9 10 11 12 13 14
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
∫ç
ADVERTENCIA: Para la
instalación y operación del
controlador Serie F4P,
utilice la normativa de
cableado establecida por
National Electric (NEC) u
otras normativas específicas
del país. El incumplimiento
de esta indicación puede
llevar a daños a equipos y a
la propiedad, y a lesiones
físicas o pérdida de la vida.
✔
Nota: El convertidor
CMC requiere una
fuente de alimentación
externa al ser usado con
una computadora
portátil.
ç
ADVERTENCIA: Instale una
protección de control de
límites altos o bajos de
temperatura en aquellos
casos en que una falla de
temperatura suponga
riesgos de incendio u otros
peligros. El incumplimiento
de estas recomendaciones
puede traer como
consecuencia daño al
equipo y la propiedad, y
lesiones o muerte al
personal.
L1
L2
Serie F4P
F4PH - CA_ _ - 01RG
vista posterior
1
1 2 3 4 5 6 7 8 9 10 11 12 13 14
2
15 16
1
2
3
4
5
6
7
8
9
10
11
12
13
luz de alta
temperatura
fusible
44 (dc+)
42 (dc-)
39 40 41
1
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
42 43 44
59 60 61 62
sensor de proceso
61 (+)
62 (-)
3
4
5
DA1C-1624-C000
T1
12
(+)
61
(-)
62
contactor
mecánico de
bobina
límite alto
DIN-a-mite
Calefactor
L2L1
T2
normalmente abierto
conmutador de acción
momentánea
sensor de límite
Serie F4P
F4PH - CA_ _ - O1RG
Controlador de temperatura
opcional
1
1
2
3
3
4
5
6 (-)
6
7 (+)
7
13 14 15
13 14 15
16 17 18
19 20 21
97A1-DDAA-00RR
Controlador de límite
8
9
9
10
11
12
44 42
(+) (-)
1 CR-1
1
8
9
67
L2L1
DIN-a-mite
DA1C-1624-C000
T1
Calefactor
10 11
1 2
12
(+)
(-)
1
18
98
13
14
15
16
Serie 97
1
97A1-DDAA-00RR
3
Controlador de lmite
7
6
14
T2
15
1CR
17
17
L2
2
2
2
17
16
R
20
luz de alta temperatura
14
1
15
19
2
Page 87

Watlow Series F4P Instalación y cableado ■ 8.15
Notas del cableado
Dibuje su aplicación o cópiela en esta página. Consulte el diagrama de cableado de este
capítulo.
Figura 8.15 — Notas de cableado.
∫ç
ADVERTENCIA: Para la
instalación y operación del
controlador Serie F4P,
utilice la normativa de
cableado establecida por
National Electric (NEC) u
otras normativas específicas
del país. El incumplimiento
de esta indicación puede
llevar a daños a equipos y a
la propiedad, y a lesiones
físicas o pérdida de la vida.
✔
Nota: El convertidor
CMC requiere una
fuente de alimentación
externa al ser usado con
una computadora
portátil.
ç
ADVERTENCIA: Instale una
protección de control de
límites altos o bajos de
temperatura en aquellos
casos en que una falla de
temperatura suponga
riesgos de incendio u otros
peligros. El incumplimiento
de estas recomendaciones
puede traer como
consecuencia daño al
equipo y la propiedad, y
lesiones o muerte al
personal.
L1 L2
12
Fuente
Page 88

8.16 ■ Instalación y cableado Watlow Series F4P
Notas
Page 89

Watlow Serie F4P Apéndice ■ A.1
Apéndice
Especificaciones . . . . . . . . . . . . . . . . . . . . . . . . . A.2
Información de pedido . . . . . . . . . . . . . . . . . . . . A.3
Declaración de conformidad . . . . . . . . . . . . . . . . .A.4
Glosario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .A.5
índice de materias . . . . . . . . . . . . . . . . . . . . . . . A.8
Mapa del software . . . . . . . . . . . . . . . . . . . . . . . .A.12
Acerca de Watlow. Información sobre garantía ......
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Contraportada
A
Page 90

A.2 ■ Apéndice Watlow Serie F4P
Entradas analógicas universales 1 (2 y 3 opcionales)
• Tasa de actualización, IN1 = 20 Hz, IN2 y IN3 = 10 Hz
Termopar
• Tipo J, K, T, N, C (W5), E, PTII, D (W3), B, R, S
RTD
• 2 ó 3 cables de platino, 100Ω
• Curvas JIS o DIN, indicación 1.0 ó 0.1
Proceso
• Resolución de entrada de ~ 50,000 bits a escala completa
• Rango seleccionable: 0-10VÎ(CC), 0-5VÎ(CC),
1-5VÎ(CC), 0-50mV, 0-20 mA, 4-20 mA
• Impedancia de entrada del voltaje: 20KΩ
• Impedancia de entrada de la corriente: 100Ω
Entradas digitales (4)
• Tasa de actualización = 10Hz
• Contacto o voltaje de CC
• Impedancia de entrada 10KΩ
Salida control (1A, 1B)
• Tasa de actualización = 20Hz
Colector abierto/CC conmutada
• Conmutación interna de cargas (nominal):
CC conmutada, 22 a 28V (CC), limitada a 30 mA
• Conmutación externa de cargas (máx.):
Colector abierto 42VÎ (CC) a 0.5 Amp.
Relé de estado sólido
• Conmutación en cero, acoplamiento óptico, 0.5A a 24V (CA)
mínimo, 253V (CA) máximo.
Relé electromecánico
• Forma C, 2 Amp.a 250VÅ (CA) o 30VÎ (CC) máximo
• Carga resistiva o inductiva
• Sin supresión de contacto
Salidas de proceso (retransmisión opcional)
• Tasa de actualización = 1Hz
• Seleccionable por el usuario 0-10VÎ (CC), 0-5VÎ (CC),
1-5VÎ (CC) a 1KΩ mín., 0-20mA, 4-20mA a 800Ω máx.
• Resolución:
angos de CC = 2.5mV nominal
rangos de mA = 5µA nominal
• Exactitud de calibración:
rangos de CC = ±15mV
rangos de mA = ±30µA
• Estabilidad de la temperatura 100ppm/°C
Salidas de alarma
• Tasa de actualización de salida: 1 Hz.
• Relé electromecánico, forma C, 2 Amp.
a 30VÎ (CC) o 240VÅ(CA) máximo
Comunicaciones
• Comunicaciones en serie EIA-232 y EIA-485 con protocolo
RTU de Modbus™
Aprobaciones de seguridad y agencias
•UL®/c-UL 916, núm. de archivo:E185611
Equipo de control para procesos
• CE
• EN 61010-1
• EN50082-2
• EN55011
• NEMA 4X e IP65
Terminales
• Bloques de terminales separables, Touch-safe, aceptan cables
de calibres 12 a 22
Dimensiones
• Ancho x alto x espesor
99 mm x 99 mm x 97 mm, montaje en panel
(3.93 pulg. x 3.93 pulg. x 3.85 pulg.)
Alimentación
• 100-240VÅ(CA), -15%, +10%; 50/60Hz, ±5%
• 24-28Vı(CA/CC), -15%, +10% (opción de pedido)
• 39 VA de consumo máximo de potencia
• Retención de datos en caso de interrupción del servicio
eléctrico (mediante memoria no volátil).
El aislamiento de la entrada del sensor, de entrada a entrada a
salida a circuito de comunicaciones, es de 500VÅ (CA).
Ambiente operativo
• -0 a 65°C (32 a 149°F)
• 0 a 90% de humedad relativa, sin condensación
• Temperatura de almacenamiento: -40 a 70°C (-40 a 158°F)
Exactitud
• Exactitud de calibración y conformidad de sensor: ±0.1% de
rango ±1 LSD a 25°C ±-15.00°C (77°F ±3°C) ambiente, y
voltaje nominal de línea ±10% con las siguientes excepciones:
Tipo T, 0.12% de rango para -200°C a -50°C
Tipos R y S, 0.15% de rango para 0°C a 100°C
Tipo B, 0.24% de rango para 870°C a 1700°C
• Rango de exactitud: Menor que, o igual a los rangos operativos,
540°C (1000°F) mínimo
• Estabilidad de la temperatura: ±0.1°C/°C (±0.1°F/°F) de
elevación en el ambiente para termopares
• ±0.05°C/°C (±0.05°F/°F)de elevación en el ambiente para
sensores RTD
Pantallas
• Proceso: 5, LED rojo, siete elementos
• Pantalla de interfase de control:LCD verde de alta definición
Rangos de exactitud de sensor:
Tipo J: 1.0 32 a 815.56°C o 0 a 815°C
Tipo K: 1.0 -328 a 1,371.11°C o -200 a 1370°C
Tipo T: 1.0 -328 a 398.89°C o -200 a 400°C
Tipo N: 1.0 32 a 2372°F o 0 a 1300°C
Tipo E: 1.0 -328 a 1470°F o -200 a 800°C
Tipo C: 1.0 32 a 4200°F o 0 a 2315°C
Tipo D: 1.0 32 a 4200°F o 0 a 2315°C
Tipo PTII: 1.0 32 a 2543°F o 0 a 1395°C
Tipo R: 1.0 32 a 3200°F o 0 a 1760°C
Tipo S: 1.0 32 a 3200°F o 0 a 1760°C
Tipo B: 1.0 32 a 3300°F o 0 a 1816°C
RTD (DIN): 1.0 -328 a 1472°F o -200 a 800°C
RTD (JIS): 1.0 -328 a 1166°F o -200 a 800°C
Proceso: -1999 a 9999 unidades
Rangos de exactitud de sensor:
Rangos de entrada
Type J: 32 a 1382°F o 0 a 750°C
Type K: -328 2282°F o -200 a 1250°C
Type T: -328 662°F o -200 a 350°C
Type N: 32 a 2282°F o 0 a 1250°C
Type E: -328 a 1470°F o -200 a 800°C
Type C(W5) 32 a 4200°F o 0 a 2315°C
Type D(W3) 32 a 4200°F o 0 a 2315°C
Type PTII: 32 a 2540°F o 0 a 1393°C
Type R: 32 a 2642°F o 0 a 1450°C
Type S: 32 a 2642°F o 0 a 1450°C
Type B: 1598 a 3092°F o 870 a 1700°C
RTD (DIN): -328 a 1472°F o -200 a 800°C
RTD (JIS): -328 a 630.00°C o -200 a 630°C
Proceso: -1999 a 9999 unidades
UL®es una marca registrada de Underwriter’s Laboratories, Inc.
NOTA: Las especificaciones están sujetas a cambio sin previo aviso.
Especificaciones (1947)
Page 91

Watlow Serie F4P Apéndice ■ A.3
Información de pedido (1948)
Controlador de rampa de un canal 1/4 DIN
Series F4P F4 P - A -
Controlador de
temperatura/proceso de un solo
canal, dos alarmas,
comunicaciones EIA -232/485,
cuatro entradas de eventos
Fuente de alimentación
H = 100-240Vı (CA/CC)
L = 24-28Vı (CA/CC)
Salida 1A
C = Colector abierto/CC conmutada
E = Relé electromecánico, Forma C,
2Amp.sin supresión de contactos
K = Relé de estado sólido, forma A,
0.5 Amp.sin supresión de contactos
F = Proceso, 0-5, 1-5, 0-10VÎ (CC),
0-20mA, 4-20mA
Salida 1B
A = Ninguno
C = Colector abierto/CC conmutada
E = Relé electromecánico Form C,
2A sin supresión de contactos
K = Relé de estado sólido, forma A, 0.5
Amp.sin supresión de contactos
F = Process, 0-5, 1-5, 0-10VÎ
(CC) 0-20mA, 4-20mA
Operación de control
A = Operación de control estándar
B = Operación de control avanzado, entradas
universales dobles, control de cascada,
de relación, dúplex, diferencial,
control de posición de la válvula
Módulo de retransmisión auxiliar
0 = Ninguno
1 = Salida de retransmisión simple 0-5, 1-5,
0-10VÎ (CC), 0-20mA, 4-20mA
2 = Salida de retransmisión dobles 0-5, 1-5,
0-10VÎ (CC), 0-20mA, 4-20mA
Opción de idioma (pregunte en la fábrica
sobre los idiomas disponibles)
1 = Inglés
2 = Alemán
3 = Francés
4 = Español
Pantalla
RG Pantalla rojo/verde
XX Opciones personalizadas software,
ajuste de parámetros, superposición
Page 92

A.4 ■ Apéndice Watlow Serie F4P
Declaration of Conformity
Series F4
WATLOW CONTROLS
1241 Bundy Boulevard
Winona, Minnesota 55987 USA
Declares that the following product: English
Designation: Series F4
Model Number(s): F4 (S D or P) (H or L) - (C E F or K) (A C E F or
K) (A C E F or K) (A C K F 0 or 6) (0, 1 or 2)
(Any three letters or numbers)
Classification: Temperature Controller, Installation Category II,
Pollution
RatedVoltage: 100 to 240VÎ or 24 to 28VÅ
Rated Frequency: 50/60 Hz
Rated Power
Consumption: 39VA maximum
Meets the essential requirements of the following European Union
Directive(s) using the relevant section(s) of the normalized standards and
related documents shown:
89/336/EEC Electromagnetic Compatibility Directive
EN 50082-2: 1995 EMC Generic immunity standard, Part 2:
Industrial environment
EN 61000-4-2: 1995 Electrostatic discharge
EN 61000-4-4: 1995 Electrical fast transients
EN 61000-4-3: 1996 Radiated immunity
EN 61000-4-6: 1996 Conducted immunity
ENV 50204: 1995 Cellular phone
EN 50081-2: 1994 EMC Generic emission standard, Part 2:
Industrial environment
EN 55011: 1991 Limits and methods of measurement of radio
disturbance characteristics of industrial, scientific
and medical radio-frequency equipment (Group 1,
Class A)
EN 61000-3-2: 1995 Limits for harmonic current emissions
EN 61000-3-3: 1995 Limitations of voltage fluctuations and flicker
73/23/EEC Low-Voltage Directive
EN 61010-1: 1993 Safety requirements for electrical equipment for
measurement, control, and laboratory use,Part
1: General requirements
Déclare que le produit suivant : Français
Désignation : Séries F4
Numéro(s) de modèle(s): F4 (S D ou P) (H ou L) - (C, E, F ou K) (A, C, E,
F ou K) (A, C, E, F ou K) (A, C, K, F, 0 ou 6) (0,
1 ou 2) (Trois lettres ou chiffres quelconques)
Classification : Commande, installation catégorie II, degré de
pollution II
Tension nominale : 100 à 240 VÎ ou 24 à 28 VÅ
Fréquence nominale : 50/60 Hz
Consommation
d’alimentation nominale: 39 VA maximum
Conforme aux exigences de la (ou des) directive(s) suivante(s) de l’Union
Européenne figurant aux sections correspondantes des normes et
documents associés ci-dessous :
89/336/EEC Directive de compatibilité électromagnétique
EN 50082-2 : 1995 Norme générique d’insensibilité
électromagnétique, Partie 2 : Environnement
industriel
EN 61000-4-2 : 1995 Décharge électrostatique
EN 61000-4-4 : 1995 Courants électriques transitoires rapides
EN 61000-4-3: 1996 Insensibilité à l’énergie rayonnée
EN 61000-4-6: 1996 Insensibilité à l’énergie par conduction
ENV 50204 : 1995 Téléphone cellulaire
EN 50081-2 : 1994 Norme générique sur les émissions
électromagnétiques, Partie 2 : Environnement
industriel
EN 55011 : 1991 Limites et méthodes de mesure des
caractéristiques d’interférences du matériel
radiofréquence industriel, scientifique et médical
(Groupe 1, Classe A)
EN 61000-3-2 : 1995 Limites d’émission d’harmoniques
EN 61000-3-3 : 1995 Limitations d’écarts de tension et de papillotement
73/23/EEC Directive liée aux basses tensions
EN 61010-1 : 1993 Exigences de sécurité pour le matériel
électrique de mesure, de commande et de
laboratoire, Partie 1 : Exigences générales
(1974)
Erklärt, daß das folgende Produkt: Deutsch
Beschreibung: Serie F4
Modellnummer(n): F4 (S D oder P) (C E F oder K) - (A C E F oder
K) (A C E F oder K) (A C K F 0 oder 6) (0, 1
oder 2) - (3 beliebige Buchstaben oder Ziffern)
Klassifikation: Regelsystem, Installationskategorie II,
Emissionsgrad II
Nennspannung: 100 bis 240 VÎ oder 24 bis 28 VÅ
Nennfrequenz: 50/60 Hz
Nominaler
Stromverbrauch: Max. 39 VA
Erfüllt die wichtigsten Normen der folgenden Anweisung(en) der
Europäischen Union unter Verwendung des wichtigsten Abschnitts bzw.
der wichtigsten Abschnitte der normalisierten Spezifikationen und der
untenstehenden einschlägigen Dokumente:
89/336/EEC Elektromagnetische Übereinstimmungsanweisung
EN 50082-2: 1995 EMC-Rahmennorm für Störsicherheit, Teil 2:
Industrielle Umwelt
EN 61000-4-2: 1995 Elektrostatische Entladung
EN 61000-4-4: 1995 Elektrische schnelle Stöße
EN 61000-4-3: 1996 Strahlungsimmunität
EN 61000-4-6: 1996 Leitungsimmunität
ENV 50204: 1995 Mobiltelefon
EN 50081-2: 1994 EMC-Rahmennorm für Emissionen, Teil 2:
Industrielle Umwelt
EN 55011: 1991 Beschränkungen und Methoden der Messung von
Funkstörungsmerkmalen industrieller,
wissenschaftlicher und medizinischer
Hochfrequenzgeräte (Gruppe 1, Klasse A)
EN 61000-3-2: 1995 Grenzen der Oberwellenstromemissionen
EN 61000-3-3: 1995 Grenzen der Spannungsschwankungen und
Flimmern
72/23/EEC Niederspannungsrichtlinie zu entsprechen
EN 61010-1: 1993 Sicherheitsrichtlinien für Elektrogeräte zur
Messung, zur Steuerung und im Labor,Teil 1:
Allgemeine Richtlinien
Declara que el siguiente producto: Español
Designación: Serie F4
Números de modelo: F4 (S D or P) (H or L) - (C E F o K) (A C E F o
K) (A C E F o K) (A C K F 0 o 6) - (Cualquier
combinación de tres números y letras)
Clasificación: Control, categoría de instalación II, grado de
contaminación ambiental II
Tensión nominal: 100 a 240 VÎ o 24 a 28Å
Frecuencia nominal: 50/60 Hz
Consumo nominal
de energía: 39 VA máximo
Cumple con los requisitos esenciales de las siguientes directivas de la
Unión Europea, usando las secciones pertinentes de las reglas
normalizadas y los documentos relacionados que se muestran:
89/336/EEC Directiva de compatibilidad electromagnética
EN 50082-2: 1995 Norma de inmunidad genérica del EMC, parte 2:
Ambiente industrial
EN 61000-4-2: 1995 Descarga electrostática
EN 61000-4-4: 1995 Perturbaciones transitorias eléctricas rápidas
EN 61000-4-3: 1996 Inmunidad radiada
EN 61000-4-6: 1996 Inmunidad conducida
ENV 50204: 1995 Teléfono portátil
EN 50081-2: 1994 Norma de emisión genérica del EMC, par te 2:
Ambiente industrial
EN 55011: 1991 Límites y métodos de medición de características
de perturbaciones de radio correspondientes a
equipos de radiofrecuencia industriales, científicos
y médicos (Grupo 1, Clase A)
EN 61000-3-2: 1995 Límites para emisiones de corriente armónica
EN 61000-3-3: 1995 Limitaciones de fluctuaciones del voltaje
73/23/EEC Directiva de baja tensión
EN 61010-1: 1993 Requerimientos de seguridad para equipos
eléctricos de medición, control y uso en
laboratorios, Parte 1: Requerimientos generales
Signature of Authorized Representative
Erwin D.Lowell
Name of Authorized
Representative
General Manager
Title of Authorized
Representative
Winona, Minnesota USA
Place of Issue
May 30, 1998
Date of Issue
Page 93

Watlow Serie F4P Apéndice ■ A.5
Glosario
aislamiento Separación eléctrica del sensor de circuitos de
alto voltaje. Permite utilizar dispositivos de detección
conectados o no a tierra.
American Wire Gauge (AWG) — Norma de las
características dimensionales de alambres utilizados para
conducir señales o corrientes eléctricas. La norma AWG es
idéntica a la calibración de alambres Brown and Sharpe (B
& S).
AWG — Ver American Wire Gauge.
banda de compensación Rango en el cual está activa la
función de velocidad de un controlador. Se expresa en
múltiplos de la banda proporcional. Ver PID.
banda proporcional (PB) Intervalo en el cual está activa
la función de dosificación del control. Se expresa en
unidades, grados o porcentaje de rango. Ver PID.
banda proporcional está a 20° y el proceso está a 10° por
debajo del punto establecido, el esfuerzo proporcionado de
calentamiento es 50 por ciento. Mientras más bajo sea el
valor PB, más alta será la ganancia.
CA (ÅÅ) Ver corriente alterna.
CA/CC (ıı) Ambas, corriente alterna y continua.
cascada Algoritmo de control en el cual la salida de un lazo
de control proporciona el punto establecido de otro lazo. El
segundo lazo determina a su vez la acción de control.
CE Marca de fabricante que demuestra el cumplimiento con
las leyes de la Unión Europea (UE) que rigen los productos
vendidos en Europa.
ciclo de trabajo Porcentaje de un tiempo de ciclo en el
cual la salida está activa.
CJC — Ver compensación de junta fría.
compensación de calibración Ajuste hecho para eliminar
la diferencia entre el valor indicado y el valor de proceso
real. Se le conoce también como compensación de entrada.
compensación de excedente Acción de anticipación
basada en la velocidad del cambio de temperatura, y que
compensa para minimizar el sobrepaso y la falta de alcance.
Ver derivativa.
compensación de junta fría Modo electrónico de
compensar para la temperatura real en la junta fría.
comunicaciones en serie Método de transmitir
información entre dispositivos mediante el envío en serie de
todos los bits a través de un canal de comunicación
control derivativo (D) Último término del algoritmo de
control PID. Acción que prevé la velocidad de cambio del
proceso, y compensa para minimizar un sobrepaso o una
falta de alcance. El control derivativo es un cambio
instantáneo de la salida de control en la misma dirección del
error proporcional, y se produce debido a un cambio en la
variable del proceso (PV) que disminuye en el tiempo de la
derivativa (TD). TD se expresa en unidades de segundos.
control P Control proporcional. La “P” del término PID.
control PD Control de dosificación de la acción derivativa
(rapidez).
control PDR Control proporcional derivativo con
restablecimiento manual, utilizado en sistemas de respuesta
rápida donde el restablecimiento provoca inestabilidades.
Con un control PDR, el usuario puede introducir un valor de
restablecimiento manual que elimina la variación (caída) en
el sistema.
control PI Control de dosificación con acción integral
(restablecimiento).
control proporcional Control que únicamente utiliza el
valor P (proporcional) del control PID.
control proporcional de tiempo Método de control de la
energía mediante la variación del encendido-apagado de un
ciclo de trabajo de una salida. Esta variancia es proporcional
a la diferencia entre el punto establecido y la temperatura
del proceso real.
controlador de encendido-apagado Controlador de
temperatura que funciona en modo bien sea encendido
completamente o apagado completamente.
controlador de límite Dispositivo de seguridad discreto y
confiable (redundante al controlador primario) que
monitoriza y limita la temperatura o algún punto del
proceso. Cuando la temperatura supera el (ó cae por debajo
del punto) punto establecido límite, el controlador de límite
interrumpe la energía a través de un circuito de carga de
modo manual
corriente alterna (ÅÅ) Corriente eléctrica que invierte la
polaridad en ciclos regulares.
derivativa Rapidez de cambio de una variable del proceso.
Se le conoce también como velocidad. Ver PID.
detector de temperatura de resistencia (RTD) Sensor
que utiliza la característica de resistencia variable sensible a
la temperatura para medir la temperatura. Hay dos tipos
básicos de RTD: el RTD de cable (hecho usualmente de
platino), y el termistor (hecho de un material
semiconductor). El RTD de cable es únicamente un sensor de
coeficiente de temperatura positivo, mientras que el
termistor puede tener un coeficiente de temperatura
negativo o positivo.
Deutsche Industrial Norm (DIN) Conjunto de normas
técnicas, científicas y dimensionales desarrolladas en
Alemania. Muchas normas DIN son utilizadas en el mundo
entero.
diferencial de conmutación Ver histéresis.
DIN Ver Deutsche Industrial Norm.
diodo emisor de luz (LED) Dispositivo electrónico de
estado sólido que se enrojece con el paso de corriente
eléctrica a través del mismo. Los paneles frontales de los
controladores están diseñados con pantallas LED que
exhiben la información.
Page 94

A.6 ■ Apéndice Watlow Serie F4P
disparo en cruce por cero Acción que proporciona
conmutación de salida únicamente en o cerca de los puntos
de cruce de cero voltaje de onda sinusoidal de corriente
alterna. Ver disparo rápido.
disparo rápido Método de control de potencia que
enciende y apaga continuamente ciclos completos de
corriente alterna. Conocido también como disparo en cruce
por cero, conmuta cerca del punto de cero voltaje de la onda
sinusoidal de corriente alterna. El disparo rápido con base
de tiempo variable mantiene o conduce selectivamente ciclos
de corriente alterna para lograr el nivel de potencia deseado.
EIA — Ver Electronics Industries of America
EIA/TIA -232, -422, -423 y -485. Normas de
comunicaciones de datos, establecidas por los organismos
Electronic Industries of America y Telecommunications
Industry Association. Antiguamente conocidas como RS(Recognized Standard).
Electronics Industries of America (EIA) Asociación
estadounidense que establece normas para comunicaciones
electrónicas y de datos.
filtro digital (DF) Filtro que retarda la respuesta de un
sistema si las entradas cambian de manera irreal o
demasiado rápida. Equivalente a un filtro resistor-capacitor
(RC) estándar.
Forma A Relé unipolar de 1 dirección que utiliza
únicamente los contactos normalmente abiertos (NA) y
comunes. Estos contactos se cierran cuando se activa la
bobina del relé, y se abren cuando se interrumpe la energía.
Forma B Relé unipolar de 1 dirección que utiliza
únicamente los contactos normalmente cerrados (NC) y
comunes. Estos contactos se abren cuando se activa la
bobina del relé, y se cierran cuando se interrumpe la
energía.
Forma C Relé unipolar de 2 direcciones que utiliza los
contactos normalmente abiertos (NA), normalmente cerrados
(NC) y comunes. El operario puede elegir un cableado para
un contacto de forma A o forma B.
fría, junta Ver junta fría.
fuente de alimentación de transmisor externo Fuente
de voltaje de corriente continua que activa dispositivos
externos.
Hertz (Hz) Frecuencia, medida en ciclos por segundo.
histéresis Cambio en la variable del proceso requerido
para reactivar el controlador o la salida de la alarma. En
ocasiones se le llama diferencial de conmutación.
integral (I) Acción de control que elimina automáticamente
las desviaciones, o variaciones (caídas), entre la temperatura
del punto establecido y del proceso real. Es la “I” del término
PID. Ver restablecimiento automático.
interferencia de radiofrecuencia (RFI) Ondas
electromagnéticas entre las frecuencias de 10 kHz y 300
GHz, que pueden afectar sistemas susceptible por
conducción a través de un sensor o de una línea de entrada
de potencia, y por radiación a través del espacio.
JIS Ver Joint Industrial Standards.
Joint Industrial Standards (JIS) Organismo japonés que
establece y mantiene normas para equipos y componentes.
Conocido también como JISC (Japanese Industrial
Standards Committee), su función es similar a la del
Deutsche Industrial Norm (DIN) de Alemania.
junta de referencia Junta en un circuito de termopar
mantenida a una temperatura estable y conocida (junta
fría). La temperatura de referencia estándar es 32°F (0°C).
junta fría Punto de conexión entre metales de termopar y
el instrumento electrónico. Ver junta de referencia.
lazo abierto Sistema de control sin retroalimentación de
sensor.
lazo cerrado Sistema de control que toma decisiones
basadas en la entrada de un sensor que mide una variable
del proceso.
LCD — Ver pantalla de cristal líquido.
LED — Ver diodo emisor de luz
modo de control Tipo de acción utilizada por un
controlador: encendido-apagado, control proporcional de
tiempo, PID, automático o manual y combinaciones de éstos.
modo manual Control de lazo abierto. El usuario fija los
niveles de salida.
NEMA 4X Especificación de la National Electric
Manufacturers Association para determinar la resistencia a
la infiltración de humedad y a la corrosión. Esta categoría
certifica el controlador como lavable y resistente a la
corrosión.
página Bloque de datos de longitud fija que puede
almacenarse como una unidad completa en la memoria de la
computadora.
pantalla de cristal líquido (LCD) Tipo de pantalla
digital hecha de un material que cambia su reflectancia o
transmitancia cuando se le aplica un campo eléctrico.
parámetros predeterminados Instrucciones
programadas, almacenadas permanentemente en el software
del microprocesador.
PID Proporcional, integral, derivativa. Modo de control con
tres funciones: la acción proporcional amortigua la respuesta
del sistema, la integral corrige los efectos de la variación
(caída), y la derivativa previene el sobrepaso y la falta de
alcance.
proporcional Esfuerzo de salida proporcional al error del
punto establecido. Por ejemplo, si la si la banda proporcional
es de 20° y la temperatura de proceso esta 10° por debajo del
punto establecido, el esfuerzo de calentamiento será de un
50%. A un valor más bajo de Banda Proporcional se tendrá
un valor mayor de ganancia o esfuerzo
protección contra rotura de termopar Capacidad de un
controlador de detectar una interrupción en el circuito del
termopar y tomar una medida predeterminada.
Page 95

Watlow Serie F4P Apéndice ■ A.7
rampa Aumento programado de la temperatura de un
sistema de punto establecido.
rango Zona entre dos límites en la cual se mide una
cantidad o un valor. Usualmente descrito en términos de
límites superiores e inferiores.
restablecimiento Acción de control que elimina
automáticamente la diferencia de temperatura, o variación
(caída), entre el punto establecido y la temperatura del
proceso real. Ver también integral.
restablecimiento automático Función integral
de un controlador de temperatura PI o PID que ajusta la
temperatura de proceso al punto establecido después de la
estabilización del sistema. Inverso de integral.
restablecimiento de potencia automático
Característica de controladores de límite de enganche que no
reconoce la interrupción de energía eléctrica como una
condición límite. Al restablecerse la energía, se activa la
salida automáticamente siempre que la temperatura se
encuentre dentro de los límites.
restablecimiento manual 1) En un controlador
de límite, característica que requiere intervención humana
para devolver el límite a funcionamiento normal una vez que
ha sucedido una condición límite. 2) Ajuste de un control
proporcional para elevar la banda proporcional a fin de
compensar los efectos de una variación (caída).
RFI Ver interferencia de radiofrecuencia
RTD Ver detector de temperatura de resistencia.
salida Acción de señal de control en respuesta a la
diferencia entre el punto establecido y la variable del
proceso.
sintonización automática, autoafinación Característica
que fija automáticamente valores PID de control de
temperatura para que equivalgan a un sistema térmico
particular.
Sistema Internacional (SI) Sistema de unidades métricas
estándar.
sistema térmico Ambiente regulado que consiste en una
fuente de calor, un medio o una carga de transferencia de
calor, un dispositivo sensor y un instrumento de control. .
sobrepaso Cantidad por la cual la variable del proceso
excede el punto establecido antes de estabilizarse.
termopar (T/C) Dispositivo de detección de temperatura
consistente en una junta de dos metales diferentes. Esta
junta produce un voltaje eléctrico en proporción a la
diferencia en temperatura entre la junta caliente (junta
sensora) y la conexión de cable al instrumento (junta fría).
tiempo del ciclo Tiempo requerido para que un
controlador finalice un ciclo de encendido-apagadoencendido. Usualmente expresado en segundos.
transmisor Dispositivo que transmite datos de
temperatura, bien sea desde un termopar o desde un
detector de temperatura de resistencia (RTD) mediante un
circuito de dos cables. Este circuito tiene una fuente de
alimentación externa. El transmisor funciona como un
resistor variable con respecto a su señal de entrada. Se
recomienda utilizarlos en situaciones en las que la existencia
de cables de extensión o cables largos producen degradación
de las señales.
variable del proceso Cualquier propiedad variable de un
proceso. Por ejemplo: temperatura, humedad relativa,
presión y flujo. Las variables alta y baja del proceso son,
respectivamente el más alto y el más bajo valor del rango del
proceso, expresadas en unidades de ingeniería.
variación (caída) En controladores proporcionales, la
diferencia entre el punto establecido y el valor real una vez
que se estabiliza el sistema.
velocidad en baudios Rapidez de transferencia de
información en las comunicaciones en serie, medida en
unidades de bits por segundo.
vibración Ciclos rápidos de encendido-apagado de un relé
electromecánico o relé de desplazamiento de mercurio, que
se producen debido a un insuficiente ancho de banda del
controlador. Comúnmente es el resultado de una ganancia
excesiva, histéresis baja, y de un tiempo de ciclo corto.
Page 96

A.8 ■ Apéndice Watlow Serie F4P
índice de materias
Los números de páginas impresos en letra
negrilla se refieren a entradas de
parámetros.
å key 2.2
0.000V, Calibrar, Entrada x (1 a 3) 6.28
0.00mV, termopar, Calibrar entrada x (1
a 3) 6.27
1.000V, Calibrar salida x (1A o 1B)
6.29
1.000V, Retransm. x (1 y 2) 6.29
4.000 mA, Calibrar entrada x (1 a 3)
6.28
4.000 mA, Calibrar salida x (1A o 1B)
6.28
4.000 mA, Calibrar retransmisión x (1 y
2) 6.28
10.000V, Calibrar entrada (1 a 3) 6.28
10.000V, Calibrar salida x (1A o 1B)
6.29
10.000V, Calibrar retransmisión x (1 y
2) 6.29
15.0 Ohmios, Calibrar entrada x (1 a 3)
6.28
20.000mA, Calibrar entrada (1 a 3)
6.28
20.000 mA, Calibrar salida x (1A o 1B)
6.28
20.000 mA, Calibrar retransmisión x (1
y 2) 6.28
32°F Tipo J, Calibrar entrada x (1 a 3)
6.27
50.00mV, Termopar, Calibrar entrada x
(1 a 3) 6.27
380.0 Ohmios, Calibrar entrada x (1 a
3) 6.28
1000 Ohmios, Calibrar entrada x (1 a 3)
6.28
°F o °C 6.11
A
A a D, CJC x ( 1 a 3) 6.30
A a D, Entrada x ( 1 a 3) 6.30
acceso total 5.1
acción integral 7.7
acción proporcional 7.6 – 7.7
Activar mensaje 6.17
afinación automática: ver autoafinación
afinación manual 2.3
aislamiento del transformador 8.5
aislamiento entrada a salida 8.5
ajuste de integral (restablecimiento)
3.2
Ajuste personalizado de la Página
Principal 4.2
alarma autoborrable 7.11
alarma de desviación 3.1, 7.10
alarma de proceso 7.10
alarma de tasa 3.1, 7.10
alarmas
autoborrado 7.11
borrado 3.1
características 7.10 - 7.11
desviación 3.1, 7.10
operación 3.1
proceso 3.1, 7.10
puntos establecidos 7.10
resolución de problemas 2.5
tasa 3.1, 7.10
alarmas de proceso o desviación 3.1,
7.10
Aprendizaje (abierto) 6.16
Aprendizaje (cerrado) 6.15
Aprobaciones de seguridad y agencias
A.2
asistencia técnica contraportada
anterior
P.E. de potencia auxiliar 6.8
Tiempo de retardo de la potencia
auxiliar 6.8
% de potencia auxiliar 6.8, 7.12
potencia auxiliar de calentamiento 7.12
Potencia auxiliar de enfriamiento 7.12
Autoafin. P.E. 6.11
autoafinación 3.1 – 3.2, 7.9
bloqueo 6.26
Múltiples conjuntos PID 3.3
PID 3.1-3.2
valor de punto establecido 3.2, 7.9
Autoafinación de canal x (1 ó 2) 6.2
Autoafinar PID 3.1 – 3.2, 6.4, 7.9
Autoafinación de canal x (1 ó 2) 6.2
B
banda muerta 3.2, 7.7
Banda muerta de posición de válvula
6.16
Banda muerta x (A o B), Cascada PID
3.3 – 3.4, 6.6, 7.15
Banda muerta x (A o B), Conjunto PID
can. 1 3.3 – 3.4, 6.5, 7.15
Bandprop: ver Banda proporcional
Banda proporcional x (A o B), Cascada
PID 3.3 – 3.4, 6.5, 7.15
Banda proporcional x (A o B), Conjunto
PID can. 1 3.2, 6.4, 7.6 – 7.7
barra espaciadora 2.2
barreras de aislamiento 8.5
Baudios 6.20
bloque de PID: ver Conjunto PID
bloqueo de la contraseña 5.1
bloqueos, información general 5.1
borrado de alarmas 3.1
borrado de errores 3.1
C
cableado 8.6 – 8.8
comunicaciones 8.12 – 8.13
entradas 8.6 – 8.9
información general 8.5
potencia 8.5
retransmisión y alarma 8.11
salidas 8.10 – 8.11
cableado de comunicaciones
conversión EIA-232 a EIA-485
8.13
convertidor B&B 8.13
convertidor CMC 8.13
EIA/TIA 232 8.12 – 8.13
EIA/TIA 485 8.12 – 8.13
cableado de entrada
analógica 8.6 – 8.8
digital 8.9
cableado de la salida 8.10 – 8.11
cableado de potencia 8.5
caída 7.6 – 7.7
Calibración de la resistencia de posición
de válvula (auto/manual) 6.15
calibración de salida 5.5 – 5.6
Calibración de salida de proceso 5.5
calibración, información general 5.3
entradas 5.3 – 5.4
salidas 5.5 – 5.6
Cambiar contraseña 5.2, 6.26
cambio y establecimiento de
contraseñas 6.26
Cascada 6.16
CJCx (1 a 3) A a D, Diagnósticos 6.30
CJCx (1 a 3) Temp., Diagnósticos 6.30
compensación de entrada x (1 a 10) 7.2
Compensación de escala 6.20
Compensación x (A o B), Cascada PID
3.3 – 3.4, 6.6, 7.15
Compensación x (A o B), Conjunto PID
can. 1 3.2, 6.5
compensador de referencia 5.3
Comunicaciones 6.20
Condición 6.18
Condición de alarma x (1ó 2) 6.2
configuración
configuración personalizada de la
Página Principal 4.2
directrices 4.1
Page 97

Watlow Serie F4P Apéndice ■ A.9
guiada 2.3
información general 4.1
orden de configuración de
parámetros 4.1
pasos 1.2
configuración de lazo cerrado 2.3, 7.5
Conjunto PID x (1 a 5), Cascada PID
3.3 – 3.4, 6.5 – 6.6, 7.15
Conjunto PID x (1 a 5), Conjunto PID
can. 1 6.4 – 6.5
conmutación de cruce por cero (disparo
rápido) 7.8
constante de tiempo de filtrado 7.3
contraseña, establecimiento o cambio
5.2
control de punto establecido estático:
ver punto establecido
control derivativa integral 7.7
control encendido-apagado 7.6
control integral 7.7
control PI 7.7
caída 7.7
Integral 7.7
restablecimiento 7.7
control proporcional 7.6 – 7.7
control proporcional integral derivativa
(PID) 7.7
autoafinación 7.9]
derivativa 7.7
control proporcional más integral (PI)
7.7
control proporcional más integral más
derivativa (PID) 7.7
Control, Entrada analógica 2 6.13
Control, Entrada analógica 3 6.16
controlador, información general 1.1
Convertidor B&B 8.13
convertidor CMC 8.13
cruce 7.8
Cambio de PID 6.7
cursor 2.2
D
Decimal, Entrada analógica x (1 a 3)
6.13
Declaración de conformidad, CE A.4
derivativa 7.7
Derivativa x (A o B) 3.2
Derivativa x (A o B), Cascada PID 3.3
– 3.4, 6.6, 7.15
Derivativa x (A o B), Conjunto PID
can. 1 6.5
desmontaje del controlador 8.4
desviación 3.1
Desviac. alta(casc.) 6.16
Desviac. baja(casc.) 6.16
Desviación de alarma x (alta) (1 ó 2) 6.7
Desviación de alarma x (baja) (1 ó 2)
6.7
Desvío de calibrac.: ver Puntos
múltiples de compensación de
entrada
Detección de lazo abierto 6.12, 7.9
detector de temperatura de resistencia:
ver RTD
diagnósticos, información general 5.3
diagramas
Registro de configuración 6.23 –
6.24
Registro de Página Operaciones
6.10
Registro de Página Principal
Especial 6.25
dimensiones 8.1 – 8.2
Dirección 6.20
directrices de instalación del sensor 8.5
entrada de proceso 8.6, 8.8
entrada de RTD 8.6 – 8.7
entradas de termopar 8.6 – 8.7
rangos de exactitud A.2
disparo rápido 7.8
generación de ruido (RFI) 7.8
onda sinusoidal 7.8
vida del calefactor 7.8
Dúplex 6.18, 7.12
Duración 6.22
Duración del mensaje 6.17
E
Editar PID 3.2, 6.4 – 6.6, 7.6 – 7.8
EIA/TIA 485 y EIA/TIA 232 8.12 –
8.13
ejemplo de cableado 8.14
Eliminar bloqueos 6.26
Enganche 6.19
Enganche de alarma 7.11
Enganche de error 6.15
Entrada 1 (falla) 6.12
Entrada de evento: ver Entradas
digitales x
entrada de proceso (corriente),
calibración 5.4
entrada de proceso, cableado 8.6, 8.8
entrada x (1 a 3)
Entrada x (1 a 3) A a D, Diagnósticos
6.30
Entrada x (1 a 3), Diagnósticos 6.29
entradas digitales 7.4
entradas digitales, cableado 8.9
entradas y salidas 1.1
calibración 5.3 – 5.6
cableado, información general 8.5
error de lazo abierto 7.9
Error entrada x (1 a 3) 6.2
errores
errores de entrada 2.5
errores del sistema 2.6
errores fatales 2.5
resolución de problemas 2.4 – 2.6
Escala alta 6.13, 6.20, 7.4
Escala baja 6.13, 6.20, 7.4
Escala de rampa a PE 6.8
escala de temperatura (°F o °C) 4.1,
6.11
Escala Fahrenheit o Celsius (°F o °C)
4.1, 6.11
oculto (nivel de seguridad) 5.1
Establecer/Cambiar contraseña 6.26
Establecer/Cambiar contraseña 6.26
estado alto 7.4
estado bajo 7.4
estado de alarma, indicador luminoso
2.2
estado de salida, indicadores 2.2
exactitud A.2
F
Fecha de manufactura 6.29
Filtro de tiempo 6.15, 7.3
flanco ascendente 7.4
Frecuencia de línea 6.30
Fuente de alarma 6.19
Fuente de retransmisión 6.20
Función, Entrada digital x (1 a 4) 6.17
Función, Salida de control x (1A y 1B)
6.18
G
garantía, contraportada
generación de ruido (RFI) 7.8
Glosario A.5 – A.7
H
histéresis 7.6
Histéresis de alarma 6.19, 7.10
Histéresis de la resistencia posición de
válvula 6.16
Histéresis x (A o B), Cascada PID 3.3 –
3.4, 6.6, 7.15
Histéresis x (A o B), Conjunto PID
can. 1 6.5
I, J, K
Indicador luminoso de estado
automático-manual 2.2
Page 98

A.10 ■ Apéndice Watlow Serie F4P
indicadores luminosos
indicador de comunicaciones 2.2
indicador de salida activa 2.2
Indicador de salida de alarma 2.2
información de seguridad portada
interna
instalación
dimensiones 8.1 – 8.2
herramientas necesarias 8.3
instalación 8.3
integral 7.7
Integral x (A o B), Cascada PID 3.3 –
3.4, 6.5, 7.15
Integral x (A o B), Conjunto PID can. 1
6.4
Intensidad de LED 6.22
Ir a Configuración 2.1, 6.3
Ir a Fábrica 2.1, 6.3
Ir a Operaciones 2.1, 6.2
L
Lados de alarma 6.19, 7.11
lazo abierto 7.5
lazo cerrado 7.5
Lazo externo de cascada 6.4
Lazo interno de cascada 6.4
Límite alto de potencia 6.18
Límite bajo de potencia 6.18
Límite alto del punto establecido 6.13,
7.3
Límite bajo del punto establecido 6.13,
7.3
linealización 6.12
Lógica de alarma 6.19
M
mapa del software A.12 – A.13
Margen alto(cascad) 6.16
Margen bajo(cascad) 6.16
Mensaje x (1 a 4) 6.22
Mensajes de alarma 6.19
Menú de Autoafinar PID 6.4
Menú de Bloqueo (Fijar bloqueo) 6.26 –
6.27
Menú de calibración de retransmisión x
(1 ó 2) 6.28 – 6.29
Menú de Calibrar entrada x (1 a 3)
6.27 -6.28
Menú de Calibrar salida x (1A o 1B) y
Retransmisión x (1 y 2) 6.28 – 6.29
Menú de Comunicaciones 6.20
Menú de Diagnósticos 6.29 - 6.30
Menú de entrada analógica 2 6.13
Menú de entrada analógica 3 6.15 –
6.16
Menú de Entrada analógica x (1 a 3)
6.12 – 6.15
Menú de Entrada digital x (1 a 4) 6.17
– 6.18
Menu de Fijar bloqueo 6.26 – 6.27
Menú de Mensaje estático 6.22
Menú de Operaciones 6.7
Menú de Página Principal Especial
6.21
Menú de Pantalla proceso 6.22
Menú de Prueba 6.30
Menú de Puntos establecidos de alarma
6.6 – 6.7
Menú de Puntos establecidos de control
6.8 – 6.9
Menú de Rampa a punto est. 6.7
Menú de Salida de alarma x (1 y 2)
6.19
Menú de salida de control x (1A y 1B)
6.18
Menú de salida de retransmisión x (1 y
2) 6.20, 7.4
Menú de Sistema 6.11 – 6.12
Modelo 6.29
Modo % de potencia auxiliar 6.18
Modo de falla 6.11
Modo de rampa al PE 6.7
Mostrar °F o °C 6.11
Múltiples conjuntos PID 3.3 – 3.4, 7.8
N
navegación
información general 2.1
teclas 2.2
nivel de potencia 7.12
niveles de bloqueo 5.1
contraseña 5.2
Página Configuración 5.1
Página Fábrica 5.1
Página Operaciones 5.1
punto establecido 5.1
mensajes de error on 2.1, 2.5 –
2.6, 6.2
Página principal especial 2.3, 4.2,
6.2, 6.21
niveles de seguridad 5.1
Nombre de alarma 6.19 — consulte
además Nombre
Nombre, Entrada digital x (1 a 4) 6.17
Nombre, salida de alarma x (1 y2) 6.19
notas de cableado 8.15
Número de serie 6.29
número del modelo 6.29, 8.5, A.3
Número del software 6.29
O
onda sinusoidal 7.8
Operación automática y manual 2.3
Operaciones, Autoafinar PID 6.4
Operaciones, Autoafinar PID, Fijar
bloqueo 6.26
Operaciones, Cambio de PID 6.7
Operaciones, Cambio de PID, Fijar
bloqueo 6.27
Operaciones, Editar PID, Fijar bloqueo
6.26
operaciones, información general 3.1
Operaciones, Menú de Punto
establecido de control 6.8
Operaciones, Menú de Rampa al punto
establecido 6.7 – 6.8
Operaciones, Menú Editar PID 6.4 –
6.5
Operaciones, punto establecido de
alarma 6.6 – 6.7
Operaciones, punto establecido de
alarma, Fijar bloqueo 6.26
Operaciones, Punto establecido de
control, Fijar bloqueo 6.27
Operaciones, Punto establecido de
rampa, Fijar bloqueo 6.27
Operaciones, Punto establecido
remoto/local, Fijar bloqueo 6.27
orden de configuración de parámetros
4.1
P, Q
Página Configuración 4.1 – 4.2, 6.11 –
6.25
Página Configuración, Fijar bloqueo
6.26
Página Fábrica 5.1 – 5.6, 6.26 – 6.30
Página Fábrica, Fijar bloqueo 5.1, 6.26
Página Operaciones 3.1 – 3.4, 6.4 –
6.10
Página Principal Especial 2.3, 4.21,
6.21, 6.25
páginas, software A.13 – A.14
pantalla del usuario
Pantalla inferior 2.2
Pantalla superior 2.2
Pantalla proceso 6.22
pantallas, información general 2.1 –
2.2
pantallas, panel frontal 2.2
barra espaciadora 2.2
cursor 2.2
Parámentro x (1 a 16) 6.2, 6.21
parámetros PID, ajuste manual 3.2
Boldface page numbers refer to parameter entries.
Page 99

Watlow Serie F4P Apéndice ■ A.11
parámetros predeterminados de la
Página Principal 2.1
PID 7.7
PID, conjuntos múltiples 7.8
polarización PV: ver Puntos múltiples
de compensación de entrada
Potencia de transferencia mínima 7.5
Probar salidas 6.30
Procedimiento de afinación múltiple
3.2
Proceso 6.18
proceso de voltaje, calibración de
entrada 5.4
programación guiada 2.3
Prueba de pantalla 5.3, 6.30
P.E. Digital de relación x (1 a 4) 6.9
P.E. Digital x (1 a 4) 6.8, 7.13
Punto establecido (P.E.) 6.26
punto establecido
afinación manual 3.2
bloqueo 5.1
control estático 2.3
rampa al 6.7 – 6.8
Punto establecido de alarma alto x
(1 ó 2) .7.10 – 7.11, 6.6
Punto establecido de alarma x bajo
(1 ó 2) 7.10 – 7.11, 6.6
Punto establecido diferencial digital x
(1 a 4) 6.9
Punto establecido remoto/local 6.9
Punto establecido, Fijar bloqueo 6.26
Puntos de compensación x (1 a 10),
Entrada 1 6.14
Puntos de compensación x (1 a 10),
Entrada 3 6.15
Puntos establecidos de alarma 3.1, 6.6,
7.10
puntos establecidos digitales 7.13
Puntos múltiples de compensación de
entrada 6.14, 7.2
R
Raíz cuadrada 6.15
Rango analógico 6.20
Registro de Página Principal Especial
6.25
Registro de parámetros de la Página
Configuración 6.23 – 6.24
Registro de parámetros de la
Página Operaciones 6.10
registros de parámetro
Página Configuración 6.23 – 6.24
Página Operaciones 6.10
Página Principal Especial 6.25
relé de estado sólido, cableado 8.10
resolución de alarmas y errores 2.5 –
2.6
Restablec. valores x (1 a 3) de desviós
6.14
Restablecer cal. ent x (1 a 3) 6.29
restablecimiento 7.7
restablecimiento de valores de
calibración de fábrica 5.3
Restablecimiento x (A o B) 3.2
Restablecimiento x (A o B),
Cascada PID 3.3 – 3.4, 6.6, 7.15
Restablecimiento x (A o B), Conjunto
PID can. 1 6.5
Retransm. (1 ó 2) 6.30
retransmisión 7.9
Revisión 6.29
RFI 7.8
RTD
calibración de entrada 5.3 – 5.4
entradas, cableado 8.6 – 8.7
S
Salida x (1A o 1B), Diagnósticos 6.30
Salidas de retrans
cableado 8.11
calibración 5.6
seguimiento del proceso 7.5
seguridad y bloqueos, información
general 5.1
contraseñas 5.2
Menú de Fijar bloqueo 6.26 –
6.27
niveles de seguridads 5.1
Sensor 6.12
Silenciar 6.19
silenciar, alarma 7.11
Sistema Internacional (SI) 4.1
sobrepaso 7.7
sólo lectura (nivel de seguridad) 5.1
T
Tabla de resolución de problemas 2.4 –
2.6
Tecla Abajo 2.2
Tecla Arriba 2.2
Tecla de control automático-manual
2.2
Tecla Derecha 2.2
tecla entrar 2.3
Tecla Información 1.2, 2.2
Tecla Izquierda 2.2
teclas 2.2, A.13
Tecla Información (tecla “i”) 1.2,
2.2
Teclas Arriba y Abajo 2.2
Teclas Derecha e Izquierda 2.2
teclas, pantallas y navegación,
información general 2.1 – 2.2
temperatura ambiente 3.3
terminales A.2
termopar
cableado 8.6 – 8.7
calibración de entrada 5.3 – 5.4
compensador de referencia 5.3
tiempo de derivativa (compensación)
3.2
retardo de la potencia auxiliar 7.12
Tierra 6.27
Tipo autoafinac. PID 6.4
Tipo de alarma 6.19
Tipo de P. E. Potencia auxiliar 6.19
Tipo de Potencia auxiliar 6.18
Tipo de compensación 6.13
Tipo del tiempo del ciclo 6.18
Tipo, Entrada analógica x (1 a 3) 6.12
Transf. manual-auto 2.3, 6.11
Transf. máx. (calor) 6.11
Transf. máx. (frío) 6.11
U
Unidades 6.13
PID 4.1, 6.11
SI/inglesas 4.1, 6.11
Unidades de PID 4.1, 6.11
Unidades inglesas 4.1
V — Z
Valor de compensación de la calibración
6.14
Valor de compensación x (1 a 10),
Entrada 1, Entrada 2 6.14
Valor de compensación x (1 a 10),
Entrada 3 6.15
valor de restablecimiento 7.7
Valor del tiempo de ciclo 6.18
Valores previos 5.3, 6.30
valores, ingreso de 2.3
variable configurable: ver punto
establecido
Velocidad de rampa del PE 6.8
Velocidad máx. de alarma alta x (1 ó 2)
6.7
Velocidad máx. de alarma baja x (1 ó 2)
6.7
vibración 7.6
vida del calefactor 7.8
Page 100

A.12 ■ Apéndice Watlow Serie F4P
Página Principal ver capítulo 2
Error entrada1
Condición de alarma x (1 a 2)
Parámetro x (1 a 16)
Valor del proceso 1
Valor barra ent.1 [gráfico]V
Punto establecido 1 (o punto
establecido libre)
Valor del punto establecido 1 (o punto
establecido libre) gráfico de barras
Punt.estab.remoto2
Punto estab.remoto3
Potencia de salida 1A
Potencia de salida 1A, gráfico de
barras
Potencia de salida 1B
Potencia de salida 1B, gráfico de
barras
Autoafinación
Tiempo restante
Conjunto PID activo
Ir a Operaciones
Ir a Configuración
Ir a Fábrica
Mapa de software del controlador Serie F4P
Para obtener los rangos, predeterminaciones,
números Modbus y otra información sobre los parámetros,
consulte las tablas de parámetros del capítulo 6.
F
4
1
2
ˆ
1B1B
1A1A
Pantalla superior
información del proceso
Estado de salida
Estado de alarma
Estado de
comunicaciones
Pantalla inferior
información de alarma, errores,
estado y acceso al software
Tecla Información
al presionarse, muestra
informaciones y definiciones
acerca del parámetro seleccionado
Mover hacia arriba,
aumentar
Mover hacia abajo,
disminuir
SiguientePrevio
Desplazarse hacia
arriba o abajo
Cursor
Tecla de control
automáticomanual
å
Indicador
luminoso de
estado
automáticomanual
Página Operaciones ver capítulo 3
Autoafinar PID
Autoafinar PID
Lazo interno cascad
Lazo externo cascad
Tipo autoafinac. PID
Editar PID
Conjunto PID can.1
Conjunto PID x (1 a 5)
Banda proporc. A
Integral A / Restablecimiento A
Derivativa A / Comp.exc.A
Banda muerta A
Histéresis A
Banda proporc.B
Integral B / Restablecimiento B
Derivativa B / Comp.exc.B
Banda muerta B
Histéresis B
Editar PID
Conjunto PID casc.
Conjunto PID x (1 a 5)
Banda proporc. A
Integral A / Restablecimiento A
Derivativa A / Comp.exc.A
Banda muerta A
Histéresis A
Banda proporc.B
Integral B / Restablecimiento B
Derivativa B / Comp.exc.B
Banda muerta B
Histéresis B
Menú de Punto establecido de alarma
P.E. bajo
P.E. alto
Desv. baja
Desv. alta
Velocidad
Cambio de PID x (1 a 4)
Cambio de PID
Rampa x a Punto establecido
Modo de rampa al PE
Velocidad de rampa del PE
Escala de rampa a PE
PE de control
% de potencia auxiliar
Tiempo de retardo de la potencia
auxiliar
Punto establecido remoto/local
P.E. potencia auxiliar
Entrada digital x (1 a 4)
Punto establecido diferencial digital x
(1 a 4)
P.E. de relación Dig. x (1 a 4)
 Loading...
Loading...