

Page 1

Pos: 2 /Dokumentation allgemein/Einband/Einband Handbuch - Deckblatt oh ne V ari ant enfel d ( Sta ndar d) @ 9 \mod_1285229289866_0.docx @ 64939 @ @ 1
Handbuch
WAGO-I/O-SYSTEM 750
Pos: 3 /Alle S erie n (Al lge mei ne M odul e) /Hin wei se z ur Dok umen ta tio n/Im pres sum für St and ardh and büc her - allg . Anga ben, A nschri ften, Telefo nnum mern un d E-Mail-A dres sen @ 3\mod_1219151118203_6.docx @ 21058 @ @ 1
DC-Drive-Controller 24 V/5 A
750-636(/xxx-xxx)
DC-Drive-Controller 24 V / 5 A
Version 2.0.2
Page 2
2 WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
© 2014 by WAGO Kontakttechnik GmbH & Co. KG
Alle Rechte vorbehalten.
WAGO Kontakttechnik GmbH & Co. KG
Hansastraße 27
D-32423 Minden
Tel.: +49 (0) 571/8 87 – 0
Fax: +49 (0) 571/8 87 – 1 69
E-Mail: info@wago.com
Web: http://www.wago.com
=== Ende der Liste für Textmarke Einband_vorne ===
Technischer Support
Tel.: +49 (0) 571/8 87 – 5 55
Fax: +49 (0) 571/8 87 – 85 55
E-Mail: support@wago.com
Es wurden alle erdenklichen Maßnahmen getroffen, um die Richtigkeit und
Vollständigkeit der vorliegenden Dokumentation zu gewährleisten. Da sich
Fehler, trotz aller Sorgfalt, nie vollständig vermeiden lassen, sind wir für
Hinweise und Anregungen jederzeit dankbar.
E-Mail: documentation@wago.com
Wir weisen darauf hin, dass die im Handbuch verwendeten Soft- und HardwareBezeichnungen und Markennamen der jeweiligen Firmen im Allgemeinen einem
Warenzeichenschutz, Markenzeichenschutz oder patentrechtlichem Schutz
unterliegen.
Handbuch
Version 2.0.2
Page 3

WAGO-I/O-SYSTEM 750 Inhaltsverzeichnis 3
750-636 DC-Drive-Controller 24 V/5 A
Pos: 5 /Dokume ntati on allg em ein /Ver zeic hni sse /Inh alts ver z eich nis - Ü bers chrif t oG und Ver zeic hnis @ 3\ mod_1219151230875_6.docx @ 21061 @ @ 1
Inhaltsverzeichnis
Inhaltsverzeichnis .................................................................................................. 3
1 Hinweise zu dieser Dokumentation ............................................................ 6
1.1 Gültigkeitsbereich ..................................................................................... 6
1.2 Urheberschutz ........................................................................................... 6
1.3 Symbole ..................................................................................................... 7
1.4 Darstellung der Zahlensysteme ................................................................. 8
1.5 Schriftkonventionen .................................................................................. 8
2 Wichtige Erläuterungen .............................................................................. 9
2.1 Rechtliche Grundlagen .............................................................................. 9
2.1.1 Änderungsvorbehalt ............................................................................. 9
2.1.2 Personalqualifikation ............................................................................ 9
2.1.3 Bestimmungsgemäße Verwendung der Serie 750 ................................ 9
2.1.4 Technischer Zustand der Geräte ......................................................... 10
2.2 Sicherheitshinweise ................................................................................. 11
3 Gerätebeschreibung ................................................................................... 13
3.1 Ansicht .................................................................................................... 15
3.2 Anschlüsse ............................................................................................... 16
3.2.1 Datenkontakte/Klemmenbus .............................................................. 16
3.2.2 Leistungskontakte/Feldversorgung..................................................... 17
3.2.3 CAGE CLAMP®-Anschlüsse ............................................................. 19
3.3 Anzeigeelemente ..................................................................................... 20
3.4 Schematisches Schaltbild ........................................................................ 21
3.5 Technische Daten .................................................................................... 22
3.5.1 Gerätedaten ......................................................................................... 22
3.5.2 Versorgung ......................................................................................... 22
3.5.3 Kommunikation .................................................................................. 22
3.5.4 Digitaleingänge................................................................................... 22
3.5.5 Encodereingänge ................................................................................ 23
3.6 Ausgänge ................................................................................................. 23
3.6.1 Anschlusstechnik ................................................................................ 25
3.6.2 Klimatische Umweltbedingungen ...................................................... 25
3.7 Normen und Richtlinien .......................................................................... 26
4 Funktionsbeschreibung ............................................................................. 27
4.1 Betriebsarten und Fahrfunktionen ........................................................... 27
4.2 Preset-Funktionen ................................................................................... 27
4.2.1 Hardware-Preset ................................................................................. 27
4.2.2 Software-Preset................................................................................... 27
4.3 Bremsfunktionen ..................................................................................... 28
4.4 Haltefunktionen ....................................................................................... 28
4.5 Schutzfunktionen ..................................................................................... 28
4.6 Betriebsarten für die Positionierung ........................................................ 30
4.7 Prestop (Vorhaltweg) .............................................................................. 31
4.8 Basis-Mode ............................................................................................. 31
4.9 Auto-Mode .............................................................................................. 32
4.9.1 Positionieren mit eingeschalteter Optimierung .................................. 33
Handbuch
Version 2.0.2
Page 4

4 Inhaltsverzeichnis WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
4.9.2 Positionieren mit eingeschalteter Optimierung und Retry ungleich 0
(Schleifenfahrt) ................................................................................... 34
4.9.3 Positionieren mit eingeschalteter Optimierung bei zu geringer Distanz35
4.9.4 Positionieren mit negativ initialisiertem Overtravel ........................... 36
4.9.5 Positionieren mit positiv initialisiertem Overtravel ........................... 37
4.9.6 Positionieren mit negativ initialisiertem Overtravel bei zu geringer
Distanz ................................................................................................ 38
4.10 Fliegender Sollwertwechsel .................................................................... 39
4.11 PWM-Steuerung bei der Positionierung ................................................. 40
4.11.1 Allgemein ........................................................................................... 40
4.11.2 Verfahrvarianten mit Umschaltung auf reduzierte Leistung .............. 41
4.12 Ausholfahrten mit anschließenden Sollpositionsfahrten ......................... 45
4.12.1 Definition der Ausholfahrten .............................................................. 45
4.12.2 Berechnung des Beschleunigungsweges ............................................ 46
4.12.3 Berechnung einer Ausholfahrt ............................................................ 47
4.13 Standstill-Bedingung ............................................................................... 48
4.14 Maximale Impulszahlfrequenz des Drehgebers ...................................... 50
5 Montieren.................................................................................................... 51
5.1 Montagereihenfolge ................................................................................ 51
5.2 Geräte einfügen und entfernen ................................................................ 52
5.2.1 Busklemme einfügen .......................................................................... 52
5.2.2 Busklemme entfernen ......................................................................... 53
6 Geräte anschließen ..................................................................................... 54
6.1 Leiter an CAGE CLAMP® anschließen .................................................. 54
7 Prozessabbild .............................................................................................. 55
7.1 Übersicht ................................................................................................. 55
7.2 Control-Bytes und Statusbytes ................................................................ 56
7.3 Erweiterte Statusbytes ............................................................................. 60
7.4 Prozessabbild bei Registerkommunikation ............................................. 61
8 Parametrieren ............................................................................................ 63
8.1 Registerkommunikation .......................................................................... 63
8.2 Parameterdatensätze ................................................................................ 66
8.2.1 Verfügbare Parameterdatensätze ........................................................ 66
8.2.1.1 Actual (1) ....................................................................................... 66
8.2.1.2 User Settings (2) ............................................................................ 66
8.2.1.3 Factory Default (3) ........................................................................ 66
8.2.2 Passwortschutz ................................................................................... 67
8.2.3 Ändern der Parameterdatensätze ........................................................ 67
8.2.3.1 Actual (1) ....................................................................................... 67
8.2.3.2 User Settings (2) ............................................................................ 68
8.2.3.3 Factory Default (3) ........................................................................ 68
8.2.4 Übertragung der Parameter-Datensätze .............................................. 68
8.2.4.1 Request/Response-Mechanismus .................................................. 68
8.2.4.2 Session-Counter ............................................................................. 68
8.2.4.3 Kommando-Übersicht .................................................................... 69
8.3 Parameterkanal ........................................................................................ 70
8.3.1 Parameterdaten (Register 56) ............................................................. 70
8.3.2 Kommunikationssteuerung (Register 57) ........................................... 71
Handbuch
Version 2.0.2
Page 5

WAGO-I/O-SYSTEM 750 Inhaltsverzeichnis 5
750-636 DC-Drive-Controller 24 V/5 A
8.4 Ablauf der Parameterübertragung ........................................................... 72
8.5 Allgemeine Parameterdaten (Systemparameterbereich) ......................... 73
8.6 Busklemmenspezifische Parameterdaten ................................................ 74
8.6.1 RampTime_START, RampTime_STOP ............................................ 75
8.6.2 Prestop_Pos ........................................................................................ 76
8.6.3 Prestop_Neg ....................................................................................... 76
8.6.4 Target_Window .................................................................................. 76
8.6.5 Standstill_Limit, EnginePowerSupply, Positioning_Retry,
Z_Input_Enable, Stop-Mode_PwrUp ................................................. 77
8.6.6 PresetValue ......................................................................................... 78
8.6.7 Overtravel ........................................................................................... 78
8.6.8 TriggerMode_Inputs, Stop-Mode, DirectionReversal_Delay ............ 79
8.6.9 Filter_Time ......................................................................................... 80
8.6.10 ShutDown_Distance ........................................................................... 81
8.6.11 CurrentLimit_PWM, CurrentControl_PWM ..................................... 82
8.6.12 CurrentLimit_Time, MotionDetectionTimeout .................................. 83
8.6.13 Brake-Mode, Stop-Mode_Entry, Gebergrenzfrequenz ...................... 84
8.6.14 Increase_Swing_Back ........................................................................ 85
8.6.15 Extended_Infos ................................................................................... 86
8.6.16 Swing_Back_Distance ........................................................................ 87
=== Ende der Li st e für Te xtm arke Ver zeic hni s_v or ne == =
Abbildungsverzeichnis ........................................................................................ 89
Tabellenverzeichnis ............................................................................................. 90
Handbuch
Version 2.0.2
Page 6
6 Hinweise zu dieser Dokumentation WAGO-I/O-SYSTEM 750
Tabelle 1: Varianten
Bestellnummer/Variante
Bezeichnung
750-636
DC-Drive-Controller 24 V/5 A
750-636/025-000
DC-Drive-Controller 24 V/5 A/T
750-636 DC-Drive-Controller 24 V/5 A
Pos: 7 /Alle S erie n (Al lge mei ne M odul e) /Üb ersc hri ften für all e S erie n/Hi n weis zur Do kum enta tio n/Hin wei se z ur Do kume nt atio n - Üb ers chr ift 1 @ 4 \mod_1237987661750_6.docx @ 29027 @ 1 @ 1
1 Hinweise zu dieser Dokumentation
Pos: 8 /Alle S eri en ( Allg em eine M od ul e)/H inw eise zur Do kum enta tio n/Hi n weis e/Hi nwei s: D o kume ntat ion auf bew ahr en @ 4\mod_1237987339812_6.docx @ 29024 @ @ 1
Hinweis
Dokumentation aufbewahren!
Diese Dokumentation ist Teil des Produkts. Bewahren Sie deshalb die
Dokumentation während der gesamten Lebensdauer des Gerätes auf. Geben
Sie die Dokumentation an jeden nachfolgenden Besitzer oder Benutzer des
Gerätes weiter. Stellen Sie darüber hinaus sicher, dass gegebenenfalls jede
erhaltene Ergänzung in die Dokumentation mit aufgenommen wird.
Pos: 9 /Alle S erie n (Al lge mei ne M odul e) /Üb ersc hri ften für all e S erie n/Hi n weis zur Do kum enta tio n/Gül tig kei ts berei ch - Ü bersc hrift 2 @ 12 \mod_1338912448776_6.docx @ 96457 @ 2 @ 1
1.1 Gültigkeitsbereich
Pos: 10 /Ser ie 75 0 (WA GO-I/ O-SYS TEM )/H in weis e z ur D okum ent ati on/ Gül tigk eits ber eic h/G ültig k eits ber eich Dok um enta tio n Bus kl emme 75 0-xxxx, Standardversion und aufgelistete Var ia nte n @ 1 4\mod_1358944038682_6.docx @ 109353 @ @ 1
Die vorliegende Dokumentation gilt für die Busklemme 750-636 (DC-DriveController 24 V/5 A) und die in der nachfolgenden Tabelle aufgelisteten
Varianten.
Pos: 11 /Serie 750 (WAGO-I/O-SYSTEM)/Hin weis e z ur D okum ent ati on/ Gül tigk eits ber eic h/Var ia nte nlis ten/ Var ia ntenl ist e - 7 50-xxx - Standardversion und Variante /025-000 (erweiterter T em per atur ber eic h) @ 9\ mod_1281521920414_6.docx @ 63092 @ @ 1
Pos: 12 /All e S eri en ( Allg emei n e Mod ule) /Hi nwei se zur Do ku ment ati on/Hi nw eise /Hin wei s: G ült ig keit der Ang ab en f ür S tan dar dversi on un d au fgel ist ete V ari ant en @ 9\ mod_1281520778141_6.docx @ 63084 @ @ 1
Hinweis
Pos: 13 /Ser ie 75 0 (WA GO-I/ O-SYS TEM )/H in weis e z ur D okum ent ati on/Hi n weis e/Ac ht ung : Hin wei s z ur D oku ment ati on B us kle mme n 75 0-xxxx @ 4\mod_1237986979656_6.docx @ 29021 @ @ 1
Gültigkeit der Dokumentation für Varianten
Wenn nicht anders beschrieben, gelten die Angaben zur Standardversion
750-636 auch für die aufgelisteten Varianten.
Die Busklemme 750-636 darf nur nach Anweisungen dieser Betriebsanleitung
und der Betriebsanleitung zum eingesetzten Feldbuskoppler/-controller installiert
und betrieben werden.
ACHTUNG
Versorgungsauslegung des WAGO-I/O-SYSTEMs 750 beachten!
Sie benötigen zusätzlich zu dieser Betriebsanleitung die Betriebsanleitung
zum eingesetzten Feldbuskoppler/-controller, die unter www.wago.com
herunterzuladen ist. Dort erhalten Sie unter anderem wichtige Informationen
zu Potentialtrennung, Systemversorgung und Einspeisungsvorschriften.
Pos: 14.1 /Al l e Ser ien ( Al lge mei ne M od ule)/H i nweis e z ur D ok ume ntati on /Urh eber sc hutz au sführ li ch @ 4\mod_1235565145234_6.docx @ 27690 @ 2 @ 1
1.2 Urheberschutz
Diese Dokumentation, einschließlich aller darin befindlichen Abbildungen, ist
urheberrechtlich geschützt. Jede Weiterverwendung dieser Dokumentation, die
von den urheberrechtlichen Bestimmungen abweicht, ist nicht gestattet. Die
Reproduktion, Übersetzung in andere Sprachen sowie die elektronische und
fototechnische Archivierung und Veränderung bedarf der schriftlichen
Genehmigung der WAGO Kontakttechnik GmbH & Co. KG, Minden.
Zuwiderhandlungen ziehen einen Schadenersatzanspruch nach sich.
Pos: 14.2 /Dokumentation allgemein/Glie der ungs ele mente /---Seit en wechs el--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 7
WAGO-I/O-SYSTEM 750 Hinweise zu dieser Dokumentation 7
750-636 DC-Drive-Controller 24 V/5 A
Pos: 14.3 /Al l e Ser ien ( Al lge mei ne M od ule)/Ü ber sc hrift e n für all e S eri en/Hi nw eis z ur D o kume ntati on /Sy mb ole - Ü ber schr if t 2 @ 13\ mod_1351068042408_6.docx @ 105268 @ 2 @ 1
1.3 Symbole
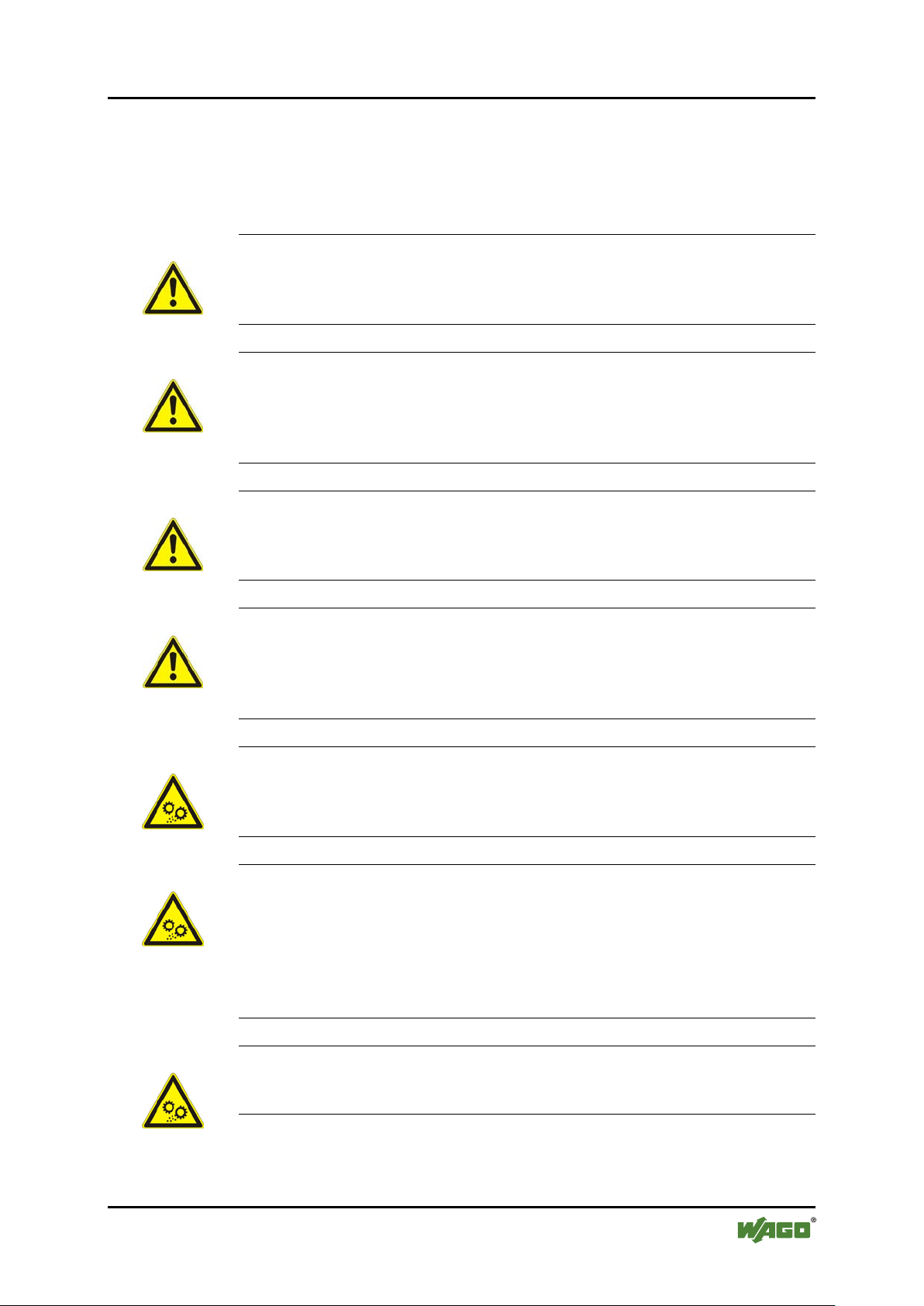
Pos: 14.4.1 /All e Serie n (All gemei ne Mod ule)/ Wichtig e Erlä uteru ngen/ Sich erheits - und sonstige Hinweise/Gefahr/Gefahr: _Warnung vor Personenschäden allgemein_ - Erläuterung @ 13\mod_1343309450020_6.docx @ 101017 @ @ 1
GEFAHR
Warnung vor Personenschäden!
Kennzeichnet eine unmittelbare Gefährdung mit hohem Risiko, die Tod
oder schwere Körperverletzung zur Folge haben wird, wenn sie nicht
vermieden wird.
Pos: 14.4.2 /All e Serie n (All gemei ne Mod ule)/ Wichtig e Erlä uteru ngen/ Sich erheits - und sonsti ge Hinw eise/ Gefahr /Gef ahr: _ Warnu ng vor Per sonen schä den durc h elekt risc hen Stro m_ - Erlä ut eru ng @ 13\mod_1343309694914_6.docx @ 101032 @ @ 1
GEFAHR
Warnung vor Personenschäden durch elektrischen Strom!
Kennzeichnet eine unmittelbare Gefährdung mit hohem Risiko, die Tod
oder schwere Körperverletzung zur Folge haben wird, wenn sie nicht
vermieden wird.
Pos: 14.4.3 /All e Serie n (All gemei ne Mod ule)/ Wichtig e Erlä uteru ngen/ Sich erheits - und sons ti ge Hi nw eis e/W arn ung/ War nung : _ Warn ung vor Per sonensc häd en allge mei n_ - Erläuterung @ 13\mod_1343309877041_6.docx @ 101033 @ @ 1
WARNUNG
Warnung vor Personenschäden!
Kennzeichnet eine mögliche Gefährdung mit mittlerem Risiko, die Tod oder
(schwere) Körperverletzung zur Folge haben kann, wenn sie nicht
vermieden wird.
Pos: 14.4.4 /All e Serie n (All gemei ne Mod ule)/ Wichtig e Erlä uteru ngen/ Sich erheits - und sonstige Hinweise/Vorsicht/V orsich t: _War nung v or Pers onensc häde n allge mein _ - Erläuterung @ 13\mod_1343310028762_6.docx @ 101036 @ @ 1
VORSICHT
Warnung vor Personenschäden!
Kennzeichnet eine mögliche Gefährdung mit geringem Risiko, die leichte
oder mittlere Körperverletzung zur Folge haben könnte, wenn sie nicht
vermieden wird.
Pos: 14.4.5 /All e Serie n (All gemei ne Mod ule)/ Wichtig e Erlä uteru nge n/Si cher heits - und sonstige Hinweise/Achtung/Achtung: _Warnung vor Sachschäden allgemein_ - Erläuterung @ 13\mod_1343310134623_6.docx @ 101039 @ @ 1
ACHTUNG
Warnung vor Sachschäden!
Kennzeichnet eine mögliche Gefährdung, die Sachschaden zur Folge haben
könnte, wenn sie nicht vermieden wird.
ESD
Warnung vor Sachschäden durch elektrostatische Aufladung!
Pos: 14.4.6 /All e Serie n (All gemei ne Mod ule)/ Wichtig e Erlä uteru ngen/ Sich erheits - und sonstige Hinweise/Achtung/Achtung: _Warnung vor Sachschäden durch elektrostatische Aufladung_ - Erläuterung @ 13\mod_1343310227702_6.docx @ 101042 @ @ 1
Kennzeichnet eine mögliche Gefährdung, die Sachschaden zur Folge haben
könnte, wenn sie nicht vermieden wird.
Pos: 14.4.7 /All e Serie n (All gemei ne Mod ule)/ Wichtig e Erlä uteru ngen/ Sich erheits - und sonstige Hinweise/Hinweis/Hinweis: _Wichtiger Hinweis allgemein_ - Erläuterung @ 13\mod_1343310326906_6.docx @ 101045 @ @ 1
Hinweis
Wichtiger Hinweis!
Kennzeichnet eine mögliche Fehlfunktion, die aber keinen Sachschaden zur
Folge hat, wenn sie nicht vermieden wird.
Pos: 14.4.8 /All e Serie n (All gemei ne Mod ule)/ Wichtig e Erlä uteru ngen/ Sich erheits - und sons ti ge Hi nw eis e/Inf or mati on/I nf orma tio n: _ Wei ter e Inf or mati on allg emei n_ - Erl äuter ung @ 13\ mod_1343310439814_6.docx @ 101049 @ @ 1
Information
Weitere Information
Weist auf weitere Informationen hin, die kein wesentlicher Bestandteil
dieser Dokumentation sind (z. B. Internet).
Pos: 14.5 /Dokumentation allgemein/Gliederungselemente/---Seitenwechsel--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 8
8 Hinweise zu dieser Dokumentation WAGO-I/O-SYSTEM 750
Tabelle 2: Darstellungen der Zahlensysteme
Zahlensystem
Beispiel
Bemerkung
Dezimal
100
Normale Schreibweise
Hexadezimal
0x64
C-Notation
Binär
'100'
'0110.0100'
In Hochkomma,
Nibble durch Punkt getrennt
Tabelle 3: Schriftkonventionen
Schriftart
Bedeutung
kursiv
Namen von Pfaden und Dateien werden kursiv dargestellt z. B.:
C:\Programme\WAGO-I/O-CHECK
Menü
Menüpunkte werden fett dargestellt z. B.:
Speichern
>
Ein „Größer als“- Zeichen zwischen zwei Namen bedeutet die
Datei > Neu
Eingabe
Bezeichnungen von Eingabe- oder Auswahlfeldern werden fett
Messbereichsanfang
„Wert“
Eingabe- oder Auswahlwerte werden in Anführungszeichen
Geben Sie unter Messbereichsanfang den Wert „4 mA“ ein.
[Button]
Schaltflächenbeschriftungen in Dialogen werden fett dargestellt und
[Eingabe]
[Taste]
Tastenbeschriftungen auf der Tastatur werden fett dargestellt und in
[F5]
750-636 DC-Drive-Controller 24 V/5 A
Pos: 14.6 /All e Serien ( Allge meine Module) /Hi nweise z ur Dok ument ation /Zahle nsys teme @ 3\ mod_1221059454015_6.docx @ 21709 @ 2 @ 1
1.4 Darstellung der Zahlensysteme
Pos: 14.7 /All e Serien ( Allge meine Module) /Hi nweise z ur Dok ument ation /Schri ftko nventi onen @ 3\mod_1221059521437_6.docx @ 21712 @ 2 @ 1
1.5 Schriftkonventionen
Auswahl eines Menüpunktes aus einem Menü z. B.:
dargestellt z. B.:
dargestellt z. B.:
in eckige Klammern eingefasst z. B.:
eckige Klammern eingefasst z. B.:
Pos: 15 /Dokum entati on allg emei n/Gli ederung sele mente /---Seit enwe chs el--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 9

WAGO-I/O-SYSTEM 750 Wichtige Erläuterungen 9
750-636 DC-Drive-Controller 24 V/5 A
Pos: 16 /All e S eri en ( Allg emei n e Mod ule)/Ü ber schrif ten für al le Ser ien/ Wichtig e Erlä uteru ngen/ Wichti ge Erl äuter ungen - Übersc hrift 1 @ 4\ mod_1241428899156_6.docx @ 32169 @ 1 @ 1
2 Wichtige Erläuterungen
Pos: 17.1 /Al l e Ser ien ( Al lge mei ne D oku men te) ( All ge mei ne Mo dul e)/ Wic htig e Er läut eru nge n/Einl eit ung Wic htige Er läut erung en @ 3\mod_1221059818031_6.docx @ 21715 @ @ 1
Dieses Kapitel beinhaltet ausschließlich eine Zusammenfassung der wichtigsten
Sicherheitsbestimmungen und Hinweise. Diese werden in den einzelnen Kapiteln
wieder aufgenommen. Zum Schutz vor Personenschäden und zur Vorbeugung von
Sachschäden an Geräten ist es notwendig, die Sicherheitsrichtlinien sorgfältig zu
lesen und einzuhalten.
Pos: 17.2 /All e Serien ( Allge meine Module) /Über schri fte n für alle S erie n/Wich tige Er läuter ungenR echt lic he G run dlag en - Üb ersc hrift 2 @ 3\ mod_1221060626343_6.docx @ 21724 @ 2 @ 1
2.1 Rechtliche Grundlagen
Pos: 17.3 /Alle Serien (Allgemeine Dokumente) (Allgemeine Module)/Wichtige Erläuterungen/Änderungsvorbehalt - Überschrift 3 u nd I nhal t @ 3\mod_1221060036484_6.docx @ 21718 @ 3 @ 1
2.1.1 Änderungsvorbehalt
Die WAGO Kontakttechnik GmbH & Co. KG behält sich Änderungen, die dem
technischen Fortschritt dienen, vor. Alle Rechte für den Fall der Patenterteilung
oder des Gebrauchsmusterschutzes sind der WAGO Kontakttechnik GmbH & Co.
KG vorbehalten. Fremdprodukte werden stets ohne Vermerk auf Patentrechte
genannt. Die Existenz solcher Rechte ist daher nicht auszuschließen.
Pos: 17.4 /Serie 750 (WAGO-I/O-SYSTEM)/Wi chtig e Erlä uteru ngen/ Person alqu alifi katio nPers onalqualifikation 750-xxxx - Übersc hrift 3 u nd Inhalt @ 3\mod_1224061208046_6.docx @ 24061 @ 3 @ 1
2.1.2 Personalqualifikation
Sämtliche Arbeitsschritte, die an den Geräten der Serie 750 durchgeführt werden,
dürfen nur von Elektrofachkräften mit ausreichenden Kenntnissen im Bereich der
Automatisierungstechnik vorgenommen werden. Diese müssen mit den aktuellen
Normen und Richtlinien für die Geräte und das Automatisierungsumfeld vertraut
sein.
Alle Eingriffe in die Steuerung sind stets von Fachkräften mit ausreichenden
Kenntnissen in der SPS-Programmierung durchzuführen.
Pos: 17.5 /Serie 750 (WAGO-I/O-SYSTEM)/Wichtige Erläuterungen/Bestimmungsgemäße VerwendungBestimmungsgemäße Verwendung 750-xxxx - Überschrift 3 und I nhal t @ 3\ mod_1224064151234_6.docx @ 24068 @ 3 @ 1
2.1.3 Bestimmungsgemäße Verwendung der Serie 750
Feldbuskoppler, Feldbuscontroller und Busklemmen des modularen
WAGO-I/O-SYSTEMs 750 dienen dazu, digitale und analoge Signale von
Sensoren aufzunehmen und an Aktoren auszugeben oder an übergeordnete
Steuerungen weiterzuleiten. Mit den programmierbaren Feldbuscontrollern ist
zudem eine (Vor-)Verarbeitung möglich.
Die Geräte sind für ein Arbeitsumfeld entwickelt, welches der Schutzklasse IP20
genügt. Es besteht Fingerschutz und Schutz gegen feste Fremdkörper bis
12,5 mm, jedoch kein Schutz gegen Wasser. Der Betrieb der Komponenten in
nasser und staubiger Umgebung ist nicht gestattet, sofern nicht anders angegeben.
Der Betrieb von Geräten der Serie 750 im Wohnbereich ist ohne weitere
Maßnahmen nur zulässig, wenn diese die Emissionsgrenzen (Störaussendungen)
gemäß EN 61000-6-3 einhalten. Entsprechende Angaben finden Sie im Kapitel
„Das WAGO-I/O-SYSTEM 750“ „Systembeschreibung“ „Technische
Daten“ im Handbuch zum eingesetzten Feldbuskoppler/-controller.
Handbuch
Version 2.0.2
Page 10

10 Wichtige Erläuterungen WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
Für den Betrieb des WAGO-I/O-SYSTEMs 750 in explosionsgefährdeten
Bereichen ist ein entsprechender Gehäuseschutz gemäß der Richtlinie 94/9/EG
erforderlich. Zusätzlich ist zu beachten, dass eine Baumusterprüfbescheinigung
erwirkt werden muss, die den korrekten Einbau des Systems im Gehäuse bzw.
Schaltschrank bestätigt.
Pos: 17.6 /Al l e Ser ien ( Al lge mei ne D oku men te) ( All ge mei ne Mo dul e)/ Wic htig e Er läut eru nge n/T ec hnis cher Z ustan d d er G erä te - Über schri ft 3 und In halt @ 3\ mod_1221060446109_6.docx @ 21721 @ 3 @ 1
2.1.4 Technischer Zustand der Geräte
Die Geräte werden ab Werk für den jeweiligen Anwendungsfall mit einer festen
Hard- und Software-Konfiguration ausgeliefert. Alle Veränderungen an der Hardoder Software sowie der nicht bestimmungsgemäße Gebrauch der Komponenten
bewirken den Haftungsausschluss der WAGO Kontakttechnik GmbH & Co. KG.
Wünsche an eine abgewandelte bzw. neue Hard- oder Software-Konfiguration
richten Sie bitte an die WAGO Kontakttechnik GmbH & Co. KG.
Pos: 17.7 /Dokumentation allgemein/Gliederungselemente/---Seitenwechsel--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 11
WAGO-I/O-SYSTEM 750 Wichtige Erläuterungen 11
750-636 DC-Drive-Controller 24 V/5 A
Pos: 17.8 /All e Serien ( Allge meine Module) /Über schri fte n für alle S erie n/Wich tige Er läuter ungen Sicher hei tshin weise - Ü bersc hrift 2 @ 6\mod_1260180299987_6.docx @ 46722 @ 2 @ 1
2.2 Sicherheitshinweise
Pos: 17.9 /Al l e Ser ien ( Al lge mei ne D oku men te) ( All ge mei ne Mo dul e)/ Wic htig e Er läut eru nge n/ Sich erh eits hi nweis e/ Einl eitu ng Sich erh eitshi nweis e Hard ware @ 6\ mod_1260180170493_6.docx @ 46719 @ @ 1
Beim Einbauen des Gerätes in Ihre Anlage und während des Betriebes sind
folgende Sicherheitshinweise zu beachten:
Pos: 17.10. 1 /A lle Ser ien ( All ge mein e D oku ment e) ( Allg em ein e M odul e)/ Wich tig e Er lä uter ung en/Si ch erh eits hin weis e/G efahr /G ef ahr: Nic ht an G erät en unter Sp ann ung ar beit en! @ 6\ mod_1260180365327_6.docx @ 46726 @ @ 1
GEFAHR
Nicht an Geräten unter Spannung arbeiten!
Schalten Sie immer alle verwendeten Spannungsversorgungen für das Gerät
ab, bevor Sie es montieren, Störungen beheben oder Wartungsarbeiten
vornehmen.
Pos: 17.10. 2 /S eri e 75 0 ( WAG O-I/O- SYST EM) /Wic htig e Er l äuter ung en /Sic her hei ts- und s onst ige H i nwei se/ Gef ahr/ Gefa hr: Ei nbau 07 50- xxxx nur in Geh äusen, Schrä nken oder ele ktrischen Betriebsräumen! @ 6\mod_1260180556692_6.docx @ 46730 @ @ 1
GEFAHR
Einbau nur in Gehäusen, Schränken oder elektrischen Betriebsräumen!
Das WAGO-I/O-SYSTEM 750 mit seinen Geräten ist ein offenes
Betriebsmittel. Bauen Sie dieses ausschließlich in abschließbaren Gehäusen,
Schränken oder in elektrischen Betriebsräumen auf. Ermöglichen Sie nur
autorisiertem Fachpersonal den Zugang mittels Schlüssel oder Werkzeug.
Pos: 17.10. 3 /A lle Ser ien ( All ge mein e D oku ment e) ( Allg em ein e M odul e)/ Wich tig e Er lä uter ung en/Si ch erh eits hin weis e/G efahr /G ef ahr: Un fall verh üt ungs vors chr ift en b each te n! @ 6\mod_1260180657000_6.docx @ 46734 @ @ 1
GEFAHR
Unfallverhütungsvorschriften beachten!
Beachten Sie bei der Montage, Inbetriebnahme, Wartung und Störbehebung
die für Ihre Maschine zutreffenden Unfallverhütungsvorschriften wie
beispielsweise die BGV A 3, „Elektrische Anlagen und Betriebsmittel“.
Pos: 17.10. 4 /A lle Ser ien ( All ge mein e D oku ment e) ( Allg em ein e M odul e)/ Wich tig e Er lä uter ung en/Si ch erh eits hin weis e/G efahr /G ef ahr: Auf nor mg erec hte n Ans chl uss ac hten! @ 6\mod_1260180753479_6.docx @ 46738 @ @ 1
GEFAHR
Auf normgerechten Anschluss achten!
Zur Vermeidung von Gefahren für das Personal und Störungen an Ihrer
Anlage, verlegen Sie die Daten- und Versorgungsleitungen normgerecht und
achten Sie auf die korrekte Anschlussbelegung. Beachten Sie die für Ihre
Anwendung zutreffenden EMV-Richtlinien.
Pos: 17.11. 1 /A lle Serien (Allgemeine Dokumente) (Allgemeine Module)/Wichtige Erläuterungen/Sicherheitshinweise/Achtung/Achtung: Defekte oder beschädigte Gerät e austaus chen! @ 6\mod_1260180857358_6.docx @ 46742 @ @ 1
ACHTUNG
Defekte oder beschädigte Geräte austauschen!
Tauschen Sie defekte oder beschädigte Geräte (z. B. bei deformierten
Kontakten) aus, da die Funktion der betroffenen Geräte langfristig nicht
sichergestellt ist.
Pos: 17.11. 2 /A lle Ser ien ( All ge mein e D oku ment e) ( Allg em ein e M odul e)/ Wich tig e Er lä uter ung en/Si ch erh eits hin weis e/Ac ht ung /Ac htu ng: Ger äte vor kriec hende n und isol iere nden Sto ffen sc hüt zen! @ 6\mod_1260181036216_6.docx @ 46746 @ @ 1
ACHTUNG
Geräte vor kriechenden und isolierenden Stoffen schützen!
Die Geräte sind unbeständig gegen Stoffe, die kriechende und isolierende
Eigenschaften besitzen, z. B. Aerosole, Silikone, Triglyceride (Bestandteil
einiger Handcremes). Sollten Sie nicht ausschließen können, dass diese
Stoffe im Umfeld der Geräte auftreten, bauen Sie die Geräte in ein Gehäuse
ein, das resistent gegen oben genannte Stoffe ist. Verwenden Sie generell
zur Handhabung der Geräte saubere Werkzeuge und Materialien.
Pos: 17.11. 3 /A lle Ser ien ( All ge mein e D oku ment e) ( Allg em ein e M odul e)/ Wich tig e Er lä uter ung en/Si ch erh eits hin weis e/Ac ht ung /Ac htu ng: R eini gu ng n ur mit z ul ässig en M at eri alie n! @ 6\mod_1260181203293_6.docx @ 46750 @ @ 1
ACHTUNG
Reinigung nur mit zulässigen Materialien!
Reinigen Sie verschmutzte Kontakte mit ölfreier Druckluft oder mit Spiritus
und einem Ledertuch.
Pos: 17.11. 4 /A lle Ser ien ( All ge mein e D oku ment e) ( Allg em ein e M odul e)/ Wich tig e Er lä uter ung en/Si ch erh eits hin weis e/Ac ht ung /Ac htu ng: K ei n Ko nta ktspr ay ver wend en! @ 6\mod_1260181290808_6.docx @ 46754 @ @ 1
Handbuch
Version 2.0.2
Page 12
12 Wichtige Erläuterungen WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
ACHTUNG
Kein Kontaktspray verwenden!
Verwenden Sie kein Kontaktspray, da in Verbindung mit Verunreinigungen
die Funktion der Kontaktstelle beeinträchtigt werden kann.
Pos: 17.11. 5 /A lle Ser ien ( All ge mein e D oku ment e) ( Allg em ein e M odul e)/ Wich tig e Er lä uter ung en/Si ch erh eits hin weis e/Ac ht ung /Ac htu ng: V erp ol ung ver meide n! @ 6\ mod_1260184045744_6.docx @ 46765 @ @ 1
ACHTUNG
Verpolungen vermeiden!
Vermeiden Sie die Verpolung der Daten- und Versorgungsleitungen, da dies
zu Schäden an den Geräten führen kann.
ESD
Elektrostatische Entladung vermeiden!
Pos: 17.11. 6 /A lle Ser ien ( All ge mein e D oku ment e) ( Allg em ein e M odul e)/ Wich tig e Er lä uter ung en/Si ch erh eits hin weis e/Ac ht ung /Ac htu ng: El ektr ostati sche E ntladu ng ver meide n! @ 6\mod_1260181364729_6.docx @ 46758 @ @ 1
In den Geräten sind elektronische Komponenten integriert, die Sie durch
elektrostatische Entladung bei Berührung zerstören können. Beachten Sie
die Sicherheitsmaßnahmen gegen elektrostatische Entladung gemäß DIN
EN 61340-5-1/-3. Achten Sie beim Umgang mit den Geräten auf gute
Erdung der Umgebung (Personen, Arbeitsplatz und Verpackung).
Pos: 18 /Dokum entati on allg emei n/Gli ederung sele mente /---Seit enwe chs el--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 13

WAGO-I/O-SYSTEM 750 Gerätebeschreibung 13
750-636 DC-Drive-Controller 24 V/5 A
Pos: 19 /All e S eri en ( Allg emei n e Mod ule) /Ü ber schri fte n f ür all e Serie n/Ger äteb eschrei bung /Gerä tebe schrei bung - Übersc hrift 1 @ 3\mod_1233756084656_6.docx @ 27094 @ 1 @ 1
3 Gerätebeschreibung
Pos: 20.1.1 /S erie 750 (W AGO- I/O-SYSTEM)/Gerätebeschreibung/Einleitung/Anwendung/SO/Anwendung 750-0636 @ 18\mod_1390462206892_6.docx @ 142935 @ @ 1
Die Busklemme 750-636 (DC-Drive-Controller 24 V/5 A) dient zum gesteuerten
Positionieren von Gleichstrom-Kollektormotoren bis 5 A Nennstrom, mit einem
Anlaufstrom von max. 15 A. Die Endstufe ist eine kurzschlussfeste H-Brücke mit
Brems- und Freilauffunktion. Zusätzlich ist die Leistungselektronik
temperaturüberwacht.
Die Busklemme kann sowohl als einfacher Leistungssteller als auch zum reinen
Erfassen von Inkrementalgebersignalen eingesetzt werden.
Neben einfachen Fahrbefehlen (MovePos, MoveNeg) gibt es eine
Positionierautomatik, die mittels verschiedener Funktionen und Parameter auf
unterschiedlichste Einsatzfälle optimiert werden kann. Zusätzlich zu den Startund Stopprampen ist es möglich den Motor mittels Pulsweitenmodulation (PWM)
zu verfahren.
Pos: 20.1.2 /S erie 750 (W AGO- I/O-S YSTEM )/G erä teb eschr ei bung/ Einl eit ung/ I/O-B esc hrei bung /SO /I/O- Bes chrei bung 7 50-0636_Eingänge @ 18\mod_1390463240700_6.docx @ 142939 @ @ 1
Die Busklemme 750-636 (DC-Drive-Controller 24 V/5 A) besitzt 3 digitale 24VEingänge gemäß IEC 61131-2 zum Anschluss von Endlagenschaltern (E+ und E-)
und zum Setzen des Referenzpunktes (P). 3 weitere digitale Eingänge dienen zum
Anschluss eines Inkrementalgebers (A und B) und zum Setzen des
Pos: 20.1.3 /S erie 750 (W AGO- I/O-S YSTEM )/G erä teb eschr ei bung/ Einl eit ung/ I/O-B esc hrei bung /SO /I/O- Bes chrei bung 7 50-0636_Ausgänge @ 18\mod_1390464875971_6.docx @ 142943 @ @ 1
Pos: 20.1.4 /S erie 750 (W AGO- I/O-S YSTEM )/G erä teb eschr ei bung/ Einl eit ung/ I/O-B esc hrei bu ng/Al lg emei n/V er weis auf Kapi tel "A nsc hlüs se" @ 8\mod_1276775378035_6.docx @ 57955 @ @ 1
Pos: 20.1.5 /S erie 750 (W AGO- I/O-S YSTEM )/G erä teb eschr ei bung/ Einl eit ung/ I/O-B esc hrei bu ng/Al lg emei n/V er weis auf Kapi tel "G erät e ansc hli eßen" > "A nschl us sbei spi el(e) " @ 5\ mod_1246015203281_6.docx @ 36197 @ @ 1
Pos: 20.1.6 /S erie 750 (W AGO- I/O-S YSTEM )/G erä teb eschr ei bung/ Einl eit ung/ I/O-B esc hrei bung /SO /I/O- Bes chrei bung 7 50-0636_Abschaltung Motorausgang @ 18\mod_1390464997463_6.docx @ 143017 @ @ 1
Pos: 20.1.7 /Do kumen tatio n allg emein/ Glie derung sele mente /------Leerzei le------ @ 3\mod_1224662755687_0.docx @ 24458 @ @ 1
Pos: 20.1.8 /Serie 750 (WAGO-I/O-SYSTEM)/G erä teb esc hrei bung /Ei nlei tung /LED- Anz eige/ LED Zus tand Si gnal /Betri ebsar t/Fe hler @ 18\mod_1390469225557_6.docx @ 143021 @ @ 1
Pos: 20.1.9 /S erie 750 (W AGO- I/O-S YSTEM )/G erä teb eschr ei bung/ Einl eit ung/ LED-A nzei ge/Ver weis auf Kapi tel "Anz eige elem ente" @ 5\ mod_1246010525000_6.docx @ 36193 @ @ 1
Pos: 20.1.1 0 /S eri e 75 0 ( WAG O-I/O- SYST EM)/G erät ebesc hreib ung/Ei nleit ung/ Versor gung /Vers orgung 24 V, 0 V üb er Leist ungs konta kte Stan dard @ 3\ mod_1226498974531_6.docx @ 25018 @ @ 1
Pos: 20.1.1 1 /S eri e 75 0 ( WAG O-I/O- SYST EM) /Wic htig e Er l äuter ung en /Sic her hei ts- und s onst ige H i nwei se/ Acht ung /Ac htung : Maxi mal er Str om Leis tung sko nta kte 10 A @ 3 \mod_1226499143500_6.docx @ 25027 @ @ 1
Referenzpunktes (Z).
An die Ausgänge A+ und A- wird ein Gleichstrommotor angeschlossen.
Die Belegung der Anschlüsse ist im Kapitel „Anschlüsse“ beschrieben.
Anschlussbeispiele finden Sie im Kapitel „Geräte anschließen“ > … >
„Anschlussbeispiel(e)“.
Der Motorausgang wird beim Erreichen der Endlagenschalter zwangsweise
abgeschaltet.
Vier grüne Status-LEDs zeigen den Signalzustand der digitalen Eingänge sowie
den Zustand der Spannungsversorgung an. Zwei gelbe LEDs und eine rote LED
zeigen die Betriebsart sowie Fehler an.
Die Bedeutung der LEDs ist im Kapitel „Anzeigeelemente“ beschrieben.
Die Busklemme 750-636 (DC-Drive-Controller 24 V/5 A) erhält über die als
Messerkontakte ausgeführten Leistungskontakte von einer vorgeschalteten
Busklemme oder dem Feldbuskoppler/-controller das 24V-Versorgungspotential
und das 0V-Potential für die Feldebene und stellt diese Potentiale über die als
Federkontakte ausgeführten Leistungskontakte für nachfolgende Busklemmen zur
Verfügung.
Handbuch
Version 2.0.2
Page 14
14 Gerätebeschreibung WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
ACHTUNG
Maximalen Strom über Leistungskontakte nicht überschreiten!
Der maximale Strom, der über die Leistungskontakte fließen darf, beträgt
10 A. Durch größere Ströme können die Leistungskontakte beschädigt
werden.
Achten Sie bei der Konfiguration des Systems darauf, dass dieser Strom
nicht überschritten wird. Sollte das der Fall sein, müssen Sie eine
zusätzliche Potentialeinspeiseklemme einsetzen.
Pos: 20.1.1 2 /S eri e 75 0 ( WAG O-I/O- SYST EM) /G erät ebe schr eib ung/ Einl eit ung /V ersor gu ng/G al vanis ch e Tre nnu ng F el d/S yste m @ 3\ mod_1233756478750_6.docx @ 27100 @ @ 1
Die Feldebene und die Systemebene sind galvanisch voneinander getrennt.
Pos: 20.1.1 3 /S eri e 75 0 ( WAG O-I/O- SYST EM) /G erät ebe schr eib ung/ Einl eit ung /V ersor gu ng/A nor dnu ng b ei Ein satz in s ic her heit sger ich tete n Anwendungen blockweise @ 5\mod_1246876694406_6.docx @ 36672 @ @ 1
Die Anordnung der Busklemme ist unter Berücksichtigung der Leistungskontakte
bei der Projektierung des Feldbusknotens beliebig. Eine blockweise Anordnung
ist nur bei Einsatz in sicherheitsgerichteten Anwendungen erforderlich.
Pos: 20.1.1 4 /S eri e 75 0 ( WAG O-I/O- SYST EM)/G erät ebesc hreib ung/Ei nleit ung/ Einsa tzber eich/ Einsa tzber eich 7 50-xxxx all e Ko ppl er/C o ntroll er oh ne Ei nsc hrä nku ng @ 3\ mod_1232541691906_6.docx @ 26520 @ @ 1
Die Busklemme 750-636 kann an allen Feldbuskopplern/-controllern des
WAGO-I/O-SYSTEM 750 betrieben werden.
Pos: 20.2 /Dokumentation allgemein/Gliederungselemente/---Seitenwechsel--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 15
WAGO-I/O-SYSTEM 750 Gerätebeschreibung 15
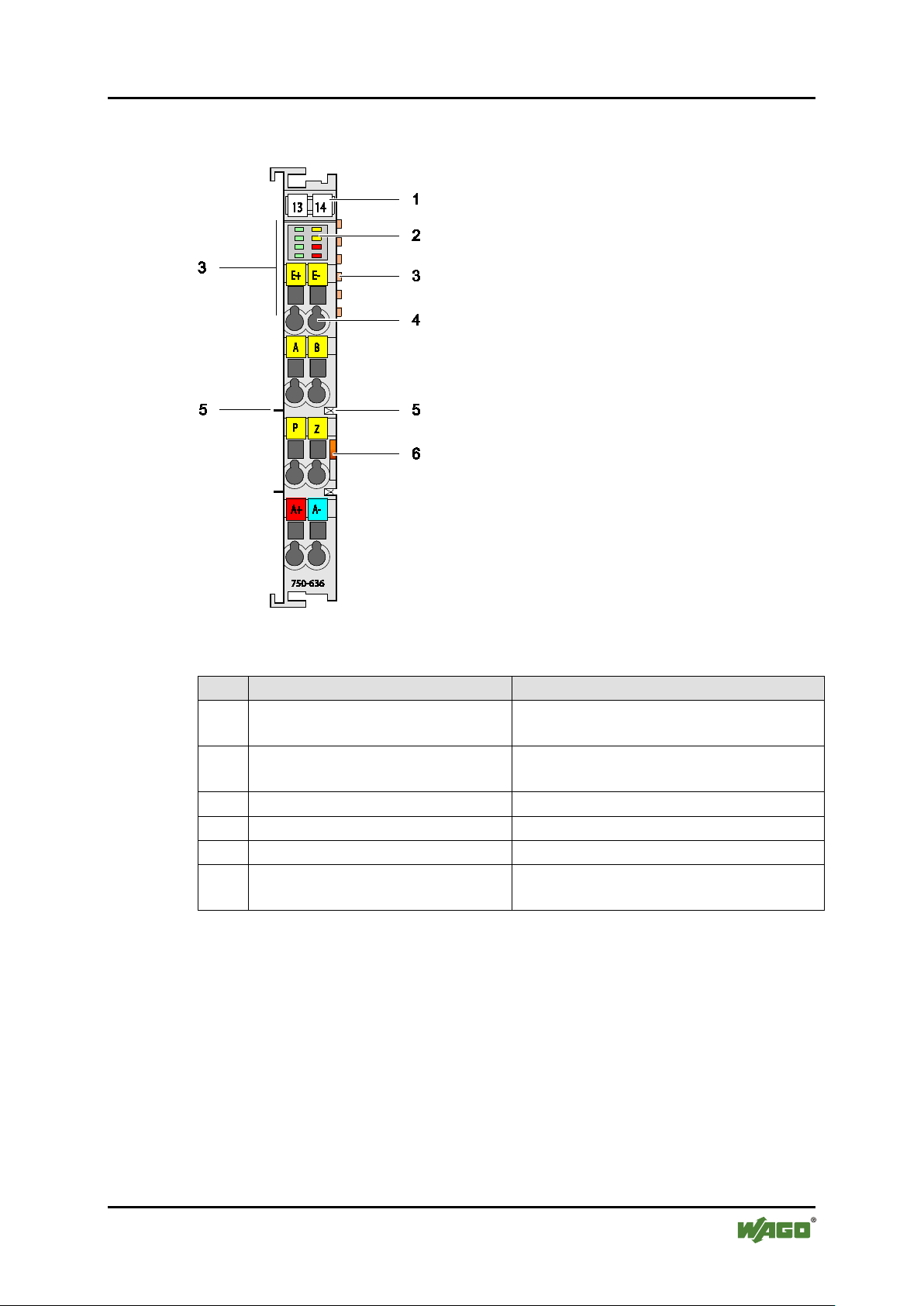
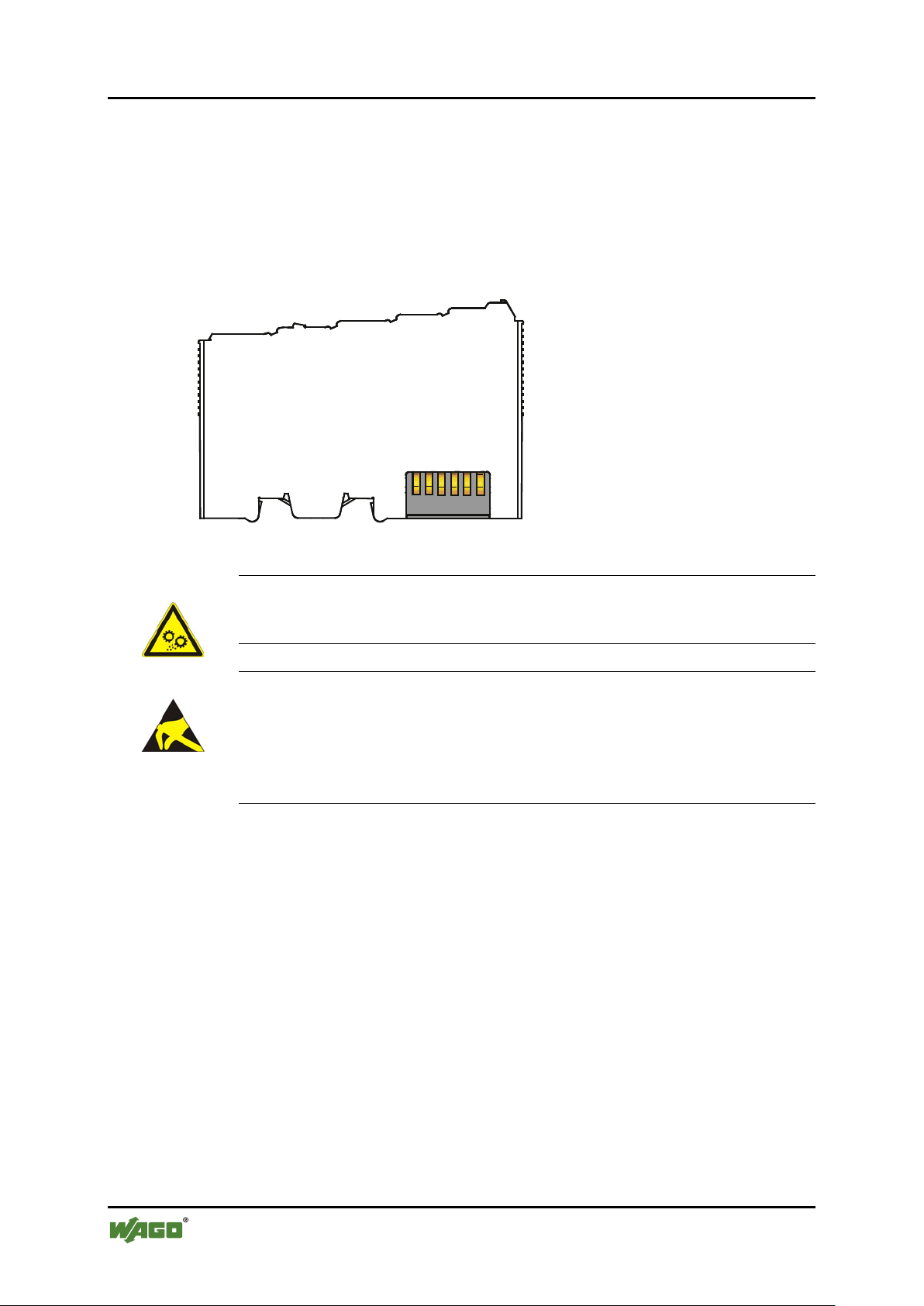
Tabelle 4: Legende zur Abbildung „Ansicht“
Pos.
Bedeutung
Details siehe Kapitel
1
Beschriftungsmöglichkeit mit
Mini-WSB
--- 2 Status-LEDs
„Gerätebeschreibung“ >
„Anzeigeelemente“
3
Datenkontakte
„Gerätebeschreibung“ > „Anschlüsse“
4
CAGE CLAMP®-Anschlüsse
„Gerätebeschreibung“ > „Anschlüsse“
5
Leistungskontakte
„Gerätebeschreibung“ > „Anschlüsse“
6
Entriegelungslasche
„Montieren“ > „Geräte einfügen und
entfernen“
750-636 DC-Drive-Controller 24 V/5 A
Pos: 20.3 /All e Serien ( Al lge mei ne Mo dul e)/Ü ber schr ift en f ür all e S erie n/G erä teb esc hreib ung /Ans ic ht - Ü ber schri ft 2 @ 4\ mod_1240984217343_6.docx @ 31946 @ 2 @ 1
3.1 Ansicht
Pos: 20.4 /Serie 750 (WAGO-I/O-SYSTEM)/G eräte beschr eibu ng/Ans icht /Sond erkle mmen/ Ansic ht 750-0636 @ 18\mod _13 90475431469_6.docx @ 143223 @ @ 1
Abbildung 1: Ansicht
Pos: 20.5 /Serie 750 (WAGO-I/O-SYSTEM)/G eräte bes chr eibu ng/A nsic ht/Ans icht C ageCl amp®_ Legen de mit LED @ 15\mod_1370867188922_6.docx @ 122226 @ @ 1
Pos: 20.6 /Dokumentation allgemein/Gliederungselemente/---Seitenwechsel--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 16
16 Gerätebeschreibung WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
Pos: 20.7 /Al l e Ser ien ( Al lge mei ne M od ule)/Ü ber sc hrift e n für all e S eri en/G erä teb esc hreib ung /A nsc hlüs se - Üb erschr ift 2 @ 4\mod_1240984262656_6.docx @ 31959 @ 2 @ 1
3.2 Anschlüsse
Pos: 20.8 /Serie 750 (WAGO-I/O-SYSTEM)/G eräte bes chr eibu ng/A nsc hlüs se/D ate nkon takt e/Kl em men bus - Ü bersc hrift 3 @ 6\ mod_1256294684083_6.docx @ 43659 @ 3 @ 1
3.2.1 Datenkontakte/Klemmenbus
Pos: 20.9.1 /S erie 750 (W AGO- I/O-SYSTEM)/Gerätebeschreibung/Anschlüsse/Datenkontakte - Feldbuskoppler /-con trol ler , A bbil dung u nd B esc hrei bu ng @ 3\mod_1231771259187_6.docx @ 26000 @ @ 1
Die Kommunikation zwischen Feldbuskoppler/-controller und Busklemmen sowie
die Systemversorgung der Busklemmen erfolgt über den Klemmenbus. Er besteht
aus 6 Datenkontakten, die als selbstreinigende Goldfederkontakte ausgeführt sind.
Abbildung 2: Datenkontakte
Pos: 20.9.2 /S erie 750 (W AGO- I/O-SYSTEM)/Wichtige Erläuterungen/Sicherheits- und sonstige Hinweise/A ch tung /A chtu ng: Bus kle mm en nic ht auf Gol dfe der kon takte leg en! @ 7\mod_1266318463636_6.docx @ 50693 @ @ 1
ACHTUNG
Busklemmen nicht auf Goldfederkontakte legen!
Um Verschmutzung und Kratzer zu vermeiden, legen Sie die Busklemmen
nicht auf die Goldfederkontakte.
ESD
Auf gute Erdung der Umgebung achten!
Pos: 20.9.3 /S erie 750 (W AGO- I/O-SYSTEM)/Wichtige Erläuterungen/Sicherheits- und sonstige Hinweise/Achtung/Achtung: ESD - Auf gute Er dung der Umgeb ung ac hten! @ 7\mod_1266318538667_6.docx @ 50696 @ @ 1
Die Geräte sind mit elektronischen Bauelementen bestückt, die bei
elektrostatischer Entladung zerstört werden können. Achten Sie beim
Umgang mit den Geräten auf gute Erdung der Umgebung (Personen,
Arbeitsplatz und Verpackung). Berühren Sie keine elektrisch leitenden
Bauteile, z. B. Datenkontakte.
Pos: 20.10 /D o kum entat io n all ge mei n/Gli ed eru ngsel e ment e/---Sei ten wec hsel --- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 17
WAGO-I/O-SYSTEM 750 Gerätebeschreibung 17
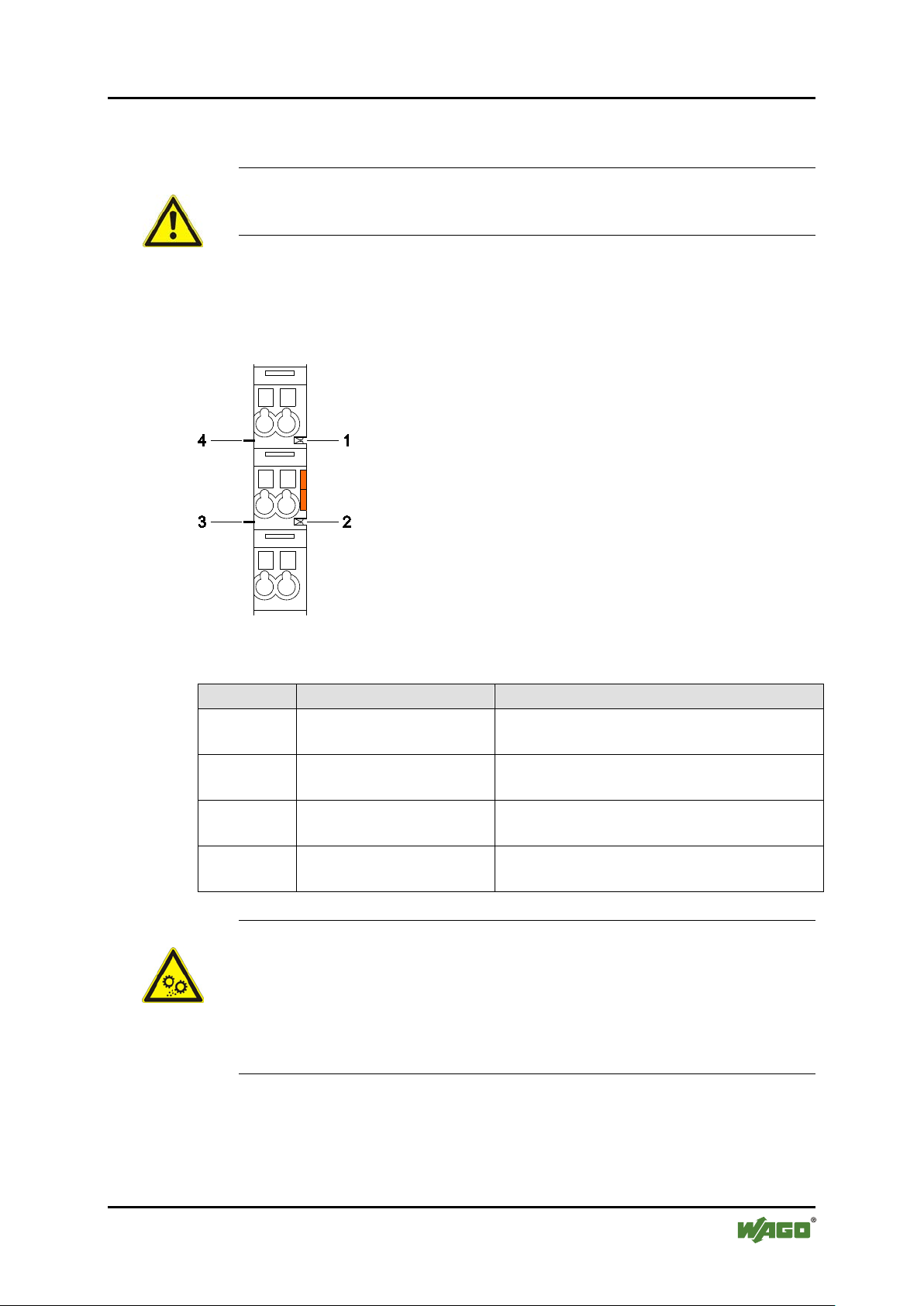
Tabelle 5: Legende zur Abbildung „Leistungskontakte“
Kontakt
Typ
Funktion
Weiterleitung des Potentials (Uv)
für die Feldversorgung
Weiterleitung des Potentials (0 V)
für die Feldversorgung
Einspeisung des Potentials (0 V)
für die Feldversorgung
Einspeisung des Potentials (Uv)
für die Feldversorgung
750-636 DC-Drive-Controller 24 V/5 A
Pos: 20.11 / Ser ie 750 ( WA GO-I/ O-SY STEM )/G erät ebe schr eibu ng/A nsc hlüss e/ Leist ungs ko ntak te/F eld vers org ung - Ü ber schr if t 3 @ 6\mod_1256294692864_6.docx @ 43663 @ 3 @ 1
3.2.2 Leistungskontakte/Feldversorgung
Pos: 20.12. 1 /S eri e 75 0 ( WAG O-I/O- SYST EM) /Wic htig e Er l äuter ung en /Sic her hei ts- und s onst ige H i nwei se/ Vors ich t/V orsic ht: V erlet zu ngsg efa hr d urc h sc har fka ntig e Mes ser kon ta kte! @ 6\mod_1256193279401_6.docx @ 43412 @ @ 1
VORSICHT
Verletzungsgefahr durch scharfkantige Messerkontakte!
Da die Messerkontakte sehr scharfkantig sind, besteht bei unvorsichtiger
Hantierung mit den Busklemmen Verletzungsgefahr.
Pos: 20.12. 2 /S eri e 75 0 ( WAG O-I/O- SYST EM) /G erät ebe schr eib ung/ Ans chl üss e/L eist ungs kon ta kte 2 LK ( M ess er/L eist ungs konta kte 2 LK (M esser/ Feder ) - Einl eitu ng @ 15\ mod_1371721641099_6.docx @ 123713 @ @ 1
Die Busklemme 750-636 besitzt 2 selbstreinigende Leistungskontakte für die
Einspeisung und Weiterleitung der Feldversorgungsspannung. Die Kontakte auf
der linken Seite der Busklemme sind als Messerkontakte ausgeführt und die
Kontakte auf der rechten Seite als Federkontakte.
Pos: 20.12. 3 /S eri e 75 0 ( WAG O-I/O- SYST EM) /G erät ebe schr eib ung/ Ans chl üss e/L eist ungs kon ta kte 2 LK ( Mess er/L eistu ngs kontakt e 2 LK (Mess er/F eder) - Abbild ung ( ei nfac he Brei te) @ 1 5\mod_1367500700037_6.docx @ 118395 @ @ 1
Abbildung 3: Leistungskontakte
Pos: 20.12. 4 /S eri e 75 0 ( WAG O-I/O- SYST EM) /Ger äte besc hrei bung /A nschl üss e/L eist ungs kon ta kte 2 LK ( M ess er/L eist ung s konta kte 2 LK (M esser /F eder ) - Leg end e @ 1 5\mod_1371721352500_6.docx @ 123709 @ @ 1
1 Federkontakt
2 Federkontakt
3 Messerkontakt
4 Messerkontakt
Pos: 20.12. 5 /S eri e 75 0 ( WAG O-I/O- SYST EM) /Wic htig e Er l äuter ung en /Sic her hei ts- und s onst ige H i nwei se/ Acht ung /Ac htung : Maxi mal er Str om Leis tung sko nta kte 10 A @ 3 \mod_1226499143500_6.docx @ 25027 @ @ 1
ACHTUNG
Maximalen Strom über Leistungskontakte nicht überschreiten!
Der maximale Strom, der über die Leistungskontakte fließen darf, beträgt
10 A. Durch größere Ströme können die Leistungskontakte beschädigt
werden.
Achten Sie bei der Konfiguration des Systems darauf, dass dieser Strom
nicht überschritten wird. Sollte das der Fall sein, müssen Sie eine
zusätzliche Potentialeinspeiseklemme einsetzen.
Pos: 20.12. 6 /S eri e 75 0 ( WAG O-I/O- SYST EM) /Wic htig e Er l äuter ung en /Sic her hei ts- und s onst ige H i nwei se/ Hin weis /Hi nwei s: P ot enti alei nsp eis ekl emm e für Er de eins etz en! @ 3\ mod_1226499037468_6.docx @ 25021 @ @ 1
Handbuch
Version 2.0.2
Page 18
18 Gerätebeschreibung WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
Hinweis
Potentialeinspeiseklemme für Erdpotential einsetzen!
Die Busklemme besitzt keine Leistungskontakte für die Aufnahme und
Weiterleitung des Erdpotentials.
Setzen Sie eine Potentialeinspeiseklemme ein, wenn bei den nachfolgenden
Busklemmen eine Einspeisung des Erdpotentials benötigt wird.
Pos: 20.13 /D o kum entat io n all ge mei n/Gli ed eru ngsel e ment e/---Sei ten wec hsel --- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 19
WAGO-I/O-SYSTEM 750 Gerätebeschreibung 19
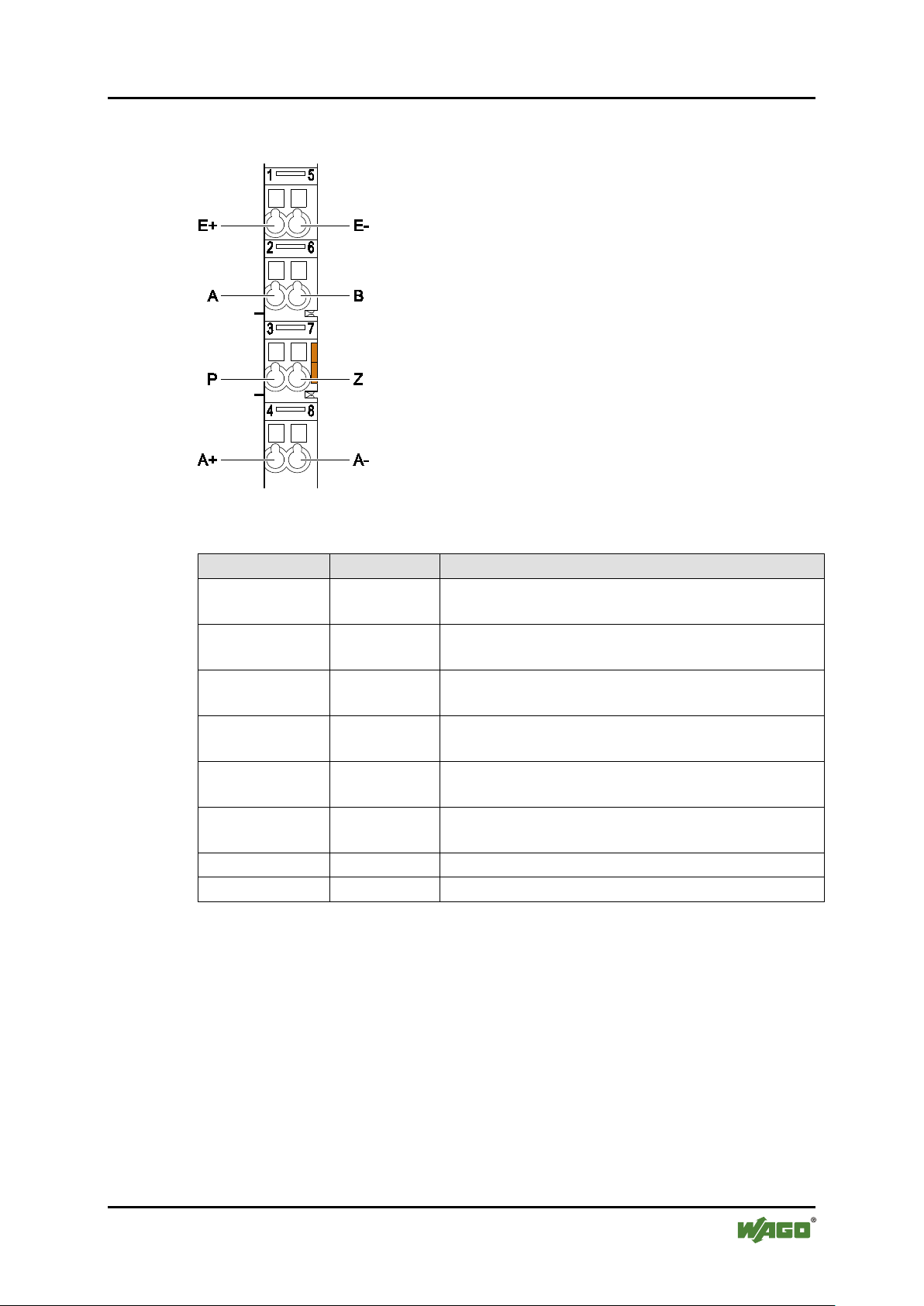
Tabelle 6: Legende zur Abbildung „CAGE CLAMP®-Anschlüsse“
Benennung
Anschluss
Funktion
Eingang für positiven Endlagenschalter
(Öffner/Schließer konfigurierbar)
Eingang für negativen Endlagenschalter
(Öffner/Schließer konfigurierbar)
Eingang für das A-Signal vom magnetischen
Impulsgeber (negativ schaltend)
Eingang für das B-Signal vom magnetischen
Impulsgeber (negativ schaltend)
Eingang für den Preset-Schalter
(Öffner/Schließer konfigurierbar)
Eingang Z-Signal vom magnetischen
Impulsgeber (negativ schaltend)
A+
4
Motoranschluss +
A-
8
Motoranschluss -
750-636 DC-Drive-Controller 24 V/5 A
Pos: 20.14 / Ser ie 750 ( WA GO-I/ O-SY STEM )/G erät ebe schr ei bu ng/A nsc hlüss e/C AG E C LAM P-Anschlü sse - Über schr ift 3 @ 6\mod_1256296337770_6.docx @ 43672 @ 3 @ 1
3.2.3 CAGE CLAMP®-Anschlüsse
Pos: 20.15 / Ser ie 750 ( WA GO-I/ O-SYS TEM) /Gerät ebes chrei bung /Ansc hlüsse/ Son derkl emmen/ Ansc hlüss e 750-0636 @ 18\mod_1390479777596_6.docx @ 143287 @ @ 1
Abbildung 4: CAGE CLAMP
®
-Anschlüsse
E+ 1
E- 5
A 2
B 6
P 3
Z 7
Pos: 20.16 /D o kum entat io n all ge mei n/Gli ed eru ngsel e ment e/---Sei ten wec hsel --- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 20
20 Gerätebeschreibung WAGO-I/O-SYSTEM 750
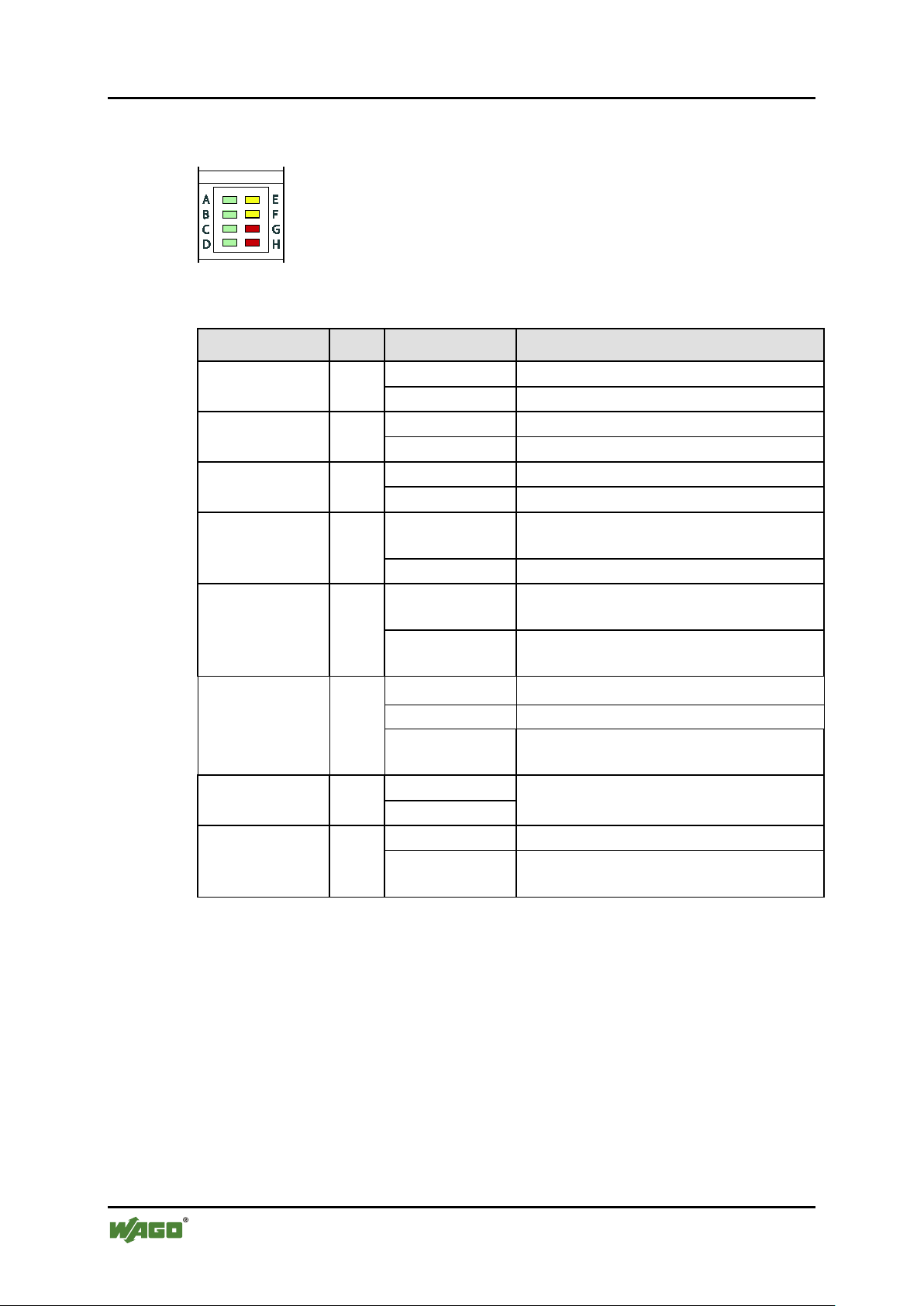
Tabelle 7: Legende zur Abbildung „Anzeigeelemente“
LimitSwitch
Aus
Eingang E+: Signalspannung (0)
Grün
Eingang E+: Signalspannung (1)
LimitSwitch
_Neg
Aus
Eingang E-: Signalspannung (0)
Grün
Eingang E-: Signalspannung (1)
Aus
Eingang P: Signalspannung (0)
Grün
Eingang P: Signalspannung (1)
Motorbetriebsspannung nicht
vorhanden
Grün
Motorbetriebsspannung vorhanden
Motorsteuerung ohne PWM (0 % oder
100 %)
Motorsteuerung mit PWM > 0 % und <
100 % (Strombegrenzung)
Aus
Istposition ungleich Sollposition
Gelb
Istposition gleich Sollposition
Gelb
5 Hz, blinkend
Aus
Rot
Aus
Kein Fehler
Interner Fehler oder H-Brücken
Diagnosesignal
750-636 DC-Drive-Controller 24 V/5 A
Pos: 20.17 / All e S erie n (Al lge mei ne M o dule) /Üb ersc hri ft en f ür all e Seri en/ Ger äte besc hr eibung / Anzei ge elem ent e - Ü bersc hr ift 2 @ 4\mod_1240984390875_6.docx @ 31962 @ 2 @ 1
3.3 Anzeigeelemente
Pos: 20.18 / Ser ie 750 ( WAG O-I/ O-SYST EM)/ Gerät ebesc hreib ung/A nzeig eele mente/ Son derkl emmen/ Anzei geele ment e 750-0636 @ 18\mod_1390482568226_6.docx @ 143307 @ @ 1
Abbildung 5: Anzeigeelemente
Benennung LED Zustand Funktion
_Pos
A
B
PresetInput C
24 V Ok D
PWM
_Active
E
OnTarget F
Reserviert G
Aus
Aus
Gelb
Positionierfahrt aktiv
Keine Funktion
Error H
Pos: 20.19 /D o kum entat io n all ge mei n/Gli ed eru ngsel e ment e/---Sei ten wec hsel --- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Rot
Page 21
WAGO-I/O-SYSTEM 750 Gerätebeschreibung 21
750-636 DC-Drive-Controller 24 V/5 A
Pos: 20.20 / All e S erie n (Al lge mei ne M o dule) /Üb ersc hri ft en f ür all e Seri en/ Ger äte beschr eibung /Sc hemati sch es Schalt bild - Übersc hrift 2 @ 4\mod_1240984441312_6.docx @ 31965 @ 2 @ 1
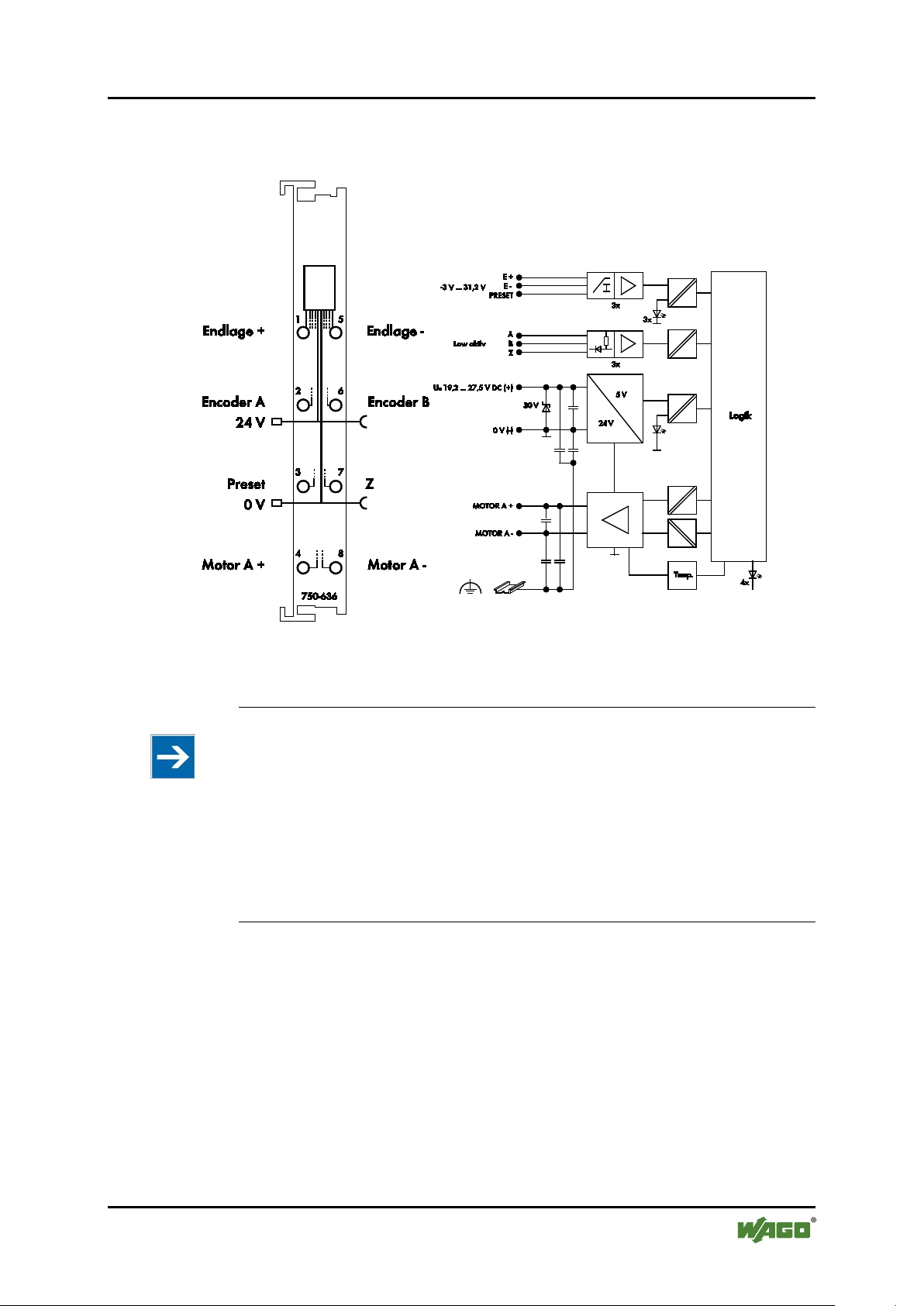
3.4 Schematisches Schaltbild
Pos: 20.21 / Ser ie 750 ( WA GO-I/ O-SY STEM) /Gerät ebes chrei bung /Sche matis che Sc haltbil der/ Sonder klem men/ Schem atisc hes Sch altbi ld 750- 0636 @ 18\mod_1390559665537_6.docx @ 143347 @ @ 1
Abbildung 6: Schematisches Schaltbild
Pos: 20.22 /Ser ie 750 (W AGO- I/O-SY ST EM)/ Wicht ig e Erl äu ter ung en/Si cher hei ts - un d so nstig e H in weis e/Hi nw eis/H in weis : R üc kspeis u ng d urch ge ner ator isch en B etri eb @ 1 8\mod_1390562451027_6.docx @ 143351 @ @ 1
ΩΩ
Hinweis
Unzulässigen Anstieg der Speisespannung vermeiden!
Beim Abbremsen oder Abschalten des Motors kann es zur Rückspeisung
durch den generatorischen Betrieb in das Netzteil kommen. Bei kleinen
Netzteilen bzw. ohne weitere Verbraucher kann die Speisespannung dann
über den zulässigen Wert steigen.
In diesem Fall schaltet die Busklemme während der Überspannung ab und
generiert die Fehlermeldung „Overload“. Schaffen Sie Abhilfe durch
größere Netzteilkapazität, zusätzliche Verbraucher oder eine Verlängerung
der Bremsrampe (siehe Kapitel „Prozessabbild“ > „Erweiterte Statusbytes“).
Pos: 20.23 /D o kum entat io n allg em ein/ Gli ederu ngs ele ment e/---Sei ten wec hsel--- @ 3 \mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 22
22 Gerätebeschreibung WAGO-I/O-SYSTEM 750
Tabelle 8: Technische Daten – Gerät
Breite
12 mm
Höhe (ab Oberkante Tragschiene)
64 mm
Tiefe
100 mm
Gewicht
50 g
Tabelle 9: Technische Daten – Versorgung
Spannungsversorgung
Über Systemspannung Klemmenbus
(24 V DC)
Stromaufnahme Systemspannung
(5 V DC)
55 mA
Stromaufnahme Leistungskontakte
(24 V DC)
12 mA + Last
Spannung über Leistungskontakte
DC 20 V … 28 V
Unter-/Überspannung überwacht
Strom über Leistungskontakte
max.
10 A
Potentialtrennung (Scheitelwert)
500 V Systemspannung/Feldebene
Tabelle 10: Technische Daten – Kommunikation
Datenbreite intern (Klemmenbus)
1 x 32 Bit Daten, 2 x 8 Bit Steuer/Status
Tabelle 11: Technische Daten – Digitaleingänge
Digitaleingänge (E+, E-, Preset)
Typ1 nach IEC 61131; positivschaltend
Eingangsstrom typ.
2,7 mA bei 24 V
Eingangsspannung
DC -3 V ... 30 V
Signalspannung (0)
DC -3 V ... + 5 V
Signalspannung (1)
DC 15 V … 30 V
750-636 DC-Drive-Controller 24 V/5 A
Pos: 20.24 / All e S erie n (Al lge mei ne M o dule) /Üb ersc hri ft en f ür all e Seri en/ Ger äte besc hr eibung /T ec hnis che D at en - Ü bersc hrift 2 @ 3\mod_1232967587687_6.docx @ 26923 @ 2 @ 1
3.5 Technische Daten
Pos: 20.25 / Ser ie 750 ( WA GO-I/ O-SY STEM )/G erät ebe schr ei bu ng/T ech nisc he D at en/ Sond er klem men/ Tec hnis ch e D aten 750- 0636 @ 18\mod_1390556212911_6.docx @ 143327 @ 333332 @ 1
3.5.1 Gerätedaten
3.5.2 Versorgung
(5 V DC) und Leistungskontakte
typ.
3.5.3 Kommunikation
3.5.4 Digitaleingänge
max.
Handbuch
Version 2.0.2
Page 23
WAGO-I/O-SYSTEM 750 Gerätebeschreibung 23
Tabelle 12: Technische Daten – Encodereingänge
Encoderanschluss
A, B, Zero negativschaltend;
DC 5 V ... 24 V/Open Collector
Eingangsspannung
DC -3 V ... 30 V
Signalspannung (0)
DC -3 V ... +1,5 V
Signalspannung (1)
DC 2,4 V … 30 V
Eingangsstrom typ.
-3,2 mA bei +0,3 V; 0 mA bei >+5 V
Grenzfrequenz
50 kHz
Quadraturdecoder.
1-fach-, 2-fach-, 4-fach-Auswertung
Zähler
32 Bit binär
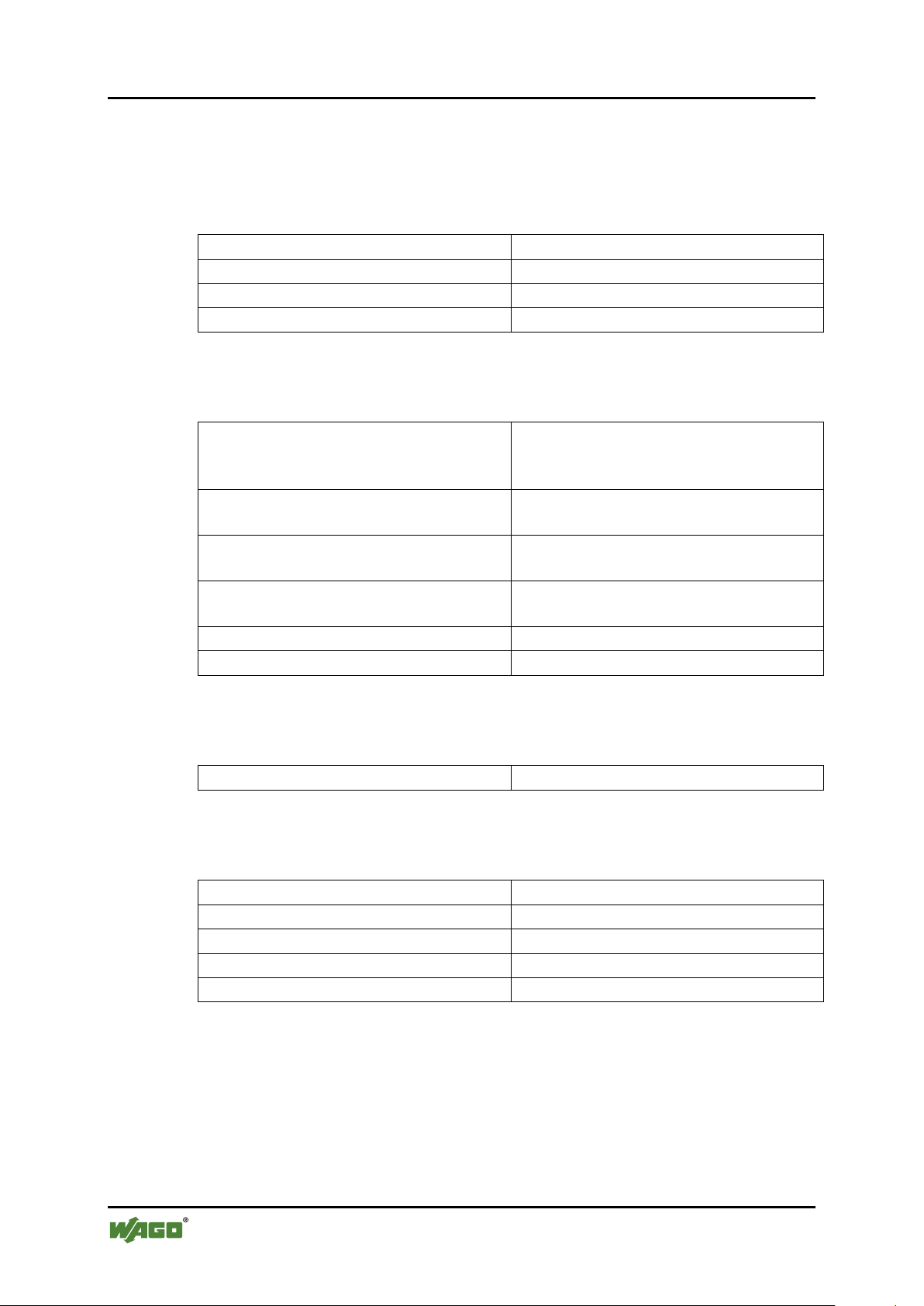
Tabelle 13: Technische Daten – Ausgänge
Anzahl der Ausgänge
1 Kanal
Motorstrom
5 A Nennstrom bei 100 % ED
(Einschaltdauer), 15 A / 500 ms
Motoranschluss
A+, A-, H-Brückenausgang
PWM-Frequenz typ.
20 kHz
Ausgangsstrom
5 A, kurzschlussfest
Ausgangsstrom nach UL-Prüfung
(dauernd)
5 A
Schaltfähigkeit nach
(U
Leistungskontakte max.
= ± 25,2 V)
Schaltfähigkeit nach
Abbildung 7: Anlaufstrom
750-636 DC-Drive-Controller 24 V/5 A
3.5.5 Encodereingänge
3.6 Ausgänge
Pkt.184 bei 100 % PWM und 100 % ED
EN 61131-2, EN 60947-6-2
Ausgangstyp DC13
(U
Leistungskontakte max.
= ± 26,4 V)
Ausgangstyp DC43
(U
Leistungskontakte max
. = ± 25,2 V)
Ausgangstyp DC45
EN 61131-2, EN 60947-6-2
Ausgangstyp DC13
(ULeistungskontakte max. = ± 26,4 V)
Ausgangstyp DC43
(ULeistungskontakte max. = ± 25,2 V)
Ausgangstyp DC45
(ULeistungskontakte max. = ± 25,2 V)
± 5.5 A
± 12.5 A
± 12.5 A
Handbuch
Version 2.0.2
Page 24
24 Gerätebeschreibung WAGO-I/O-SYSTEM 750
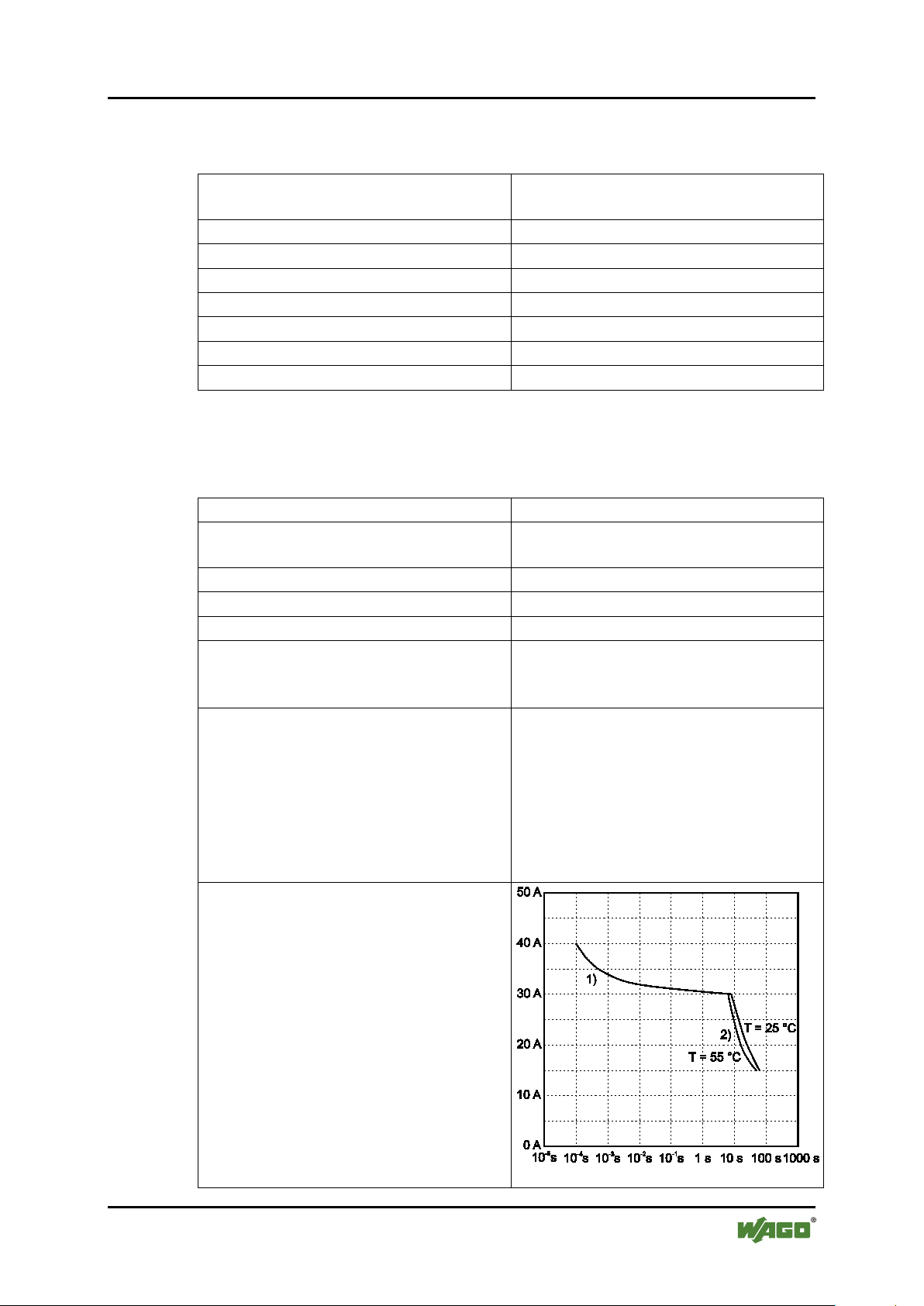
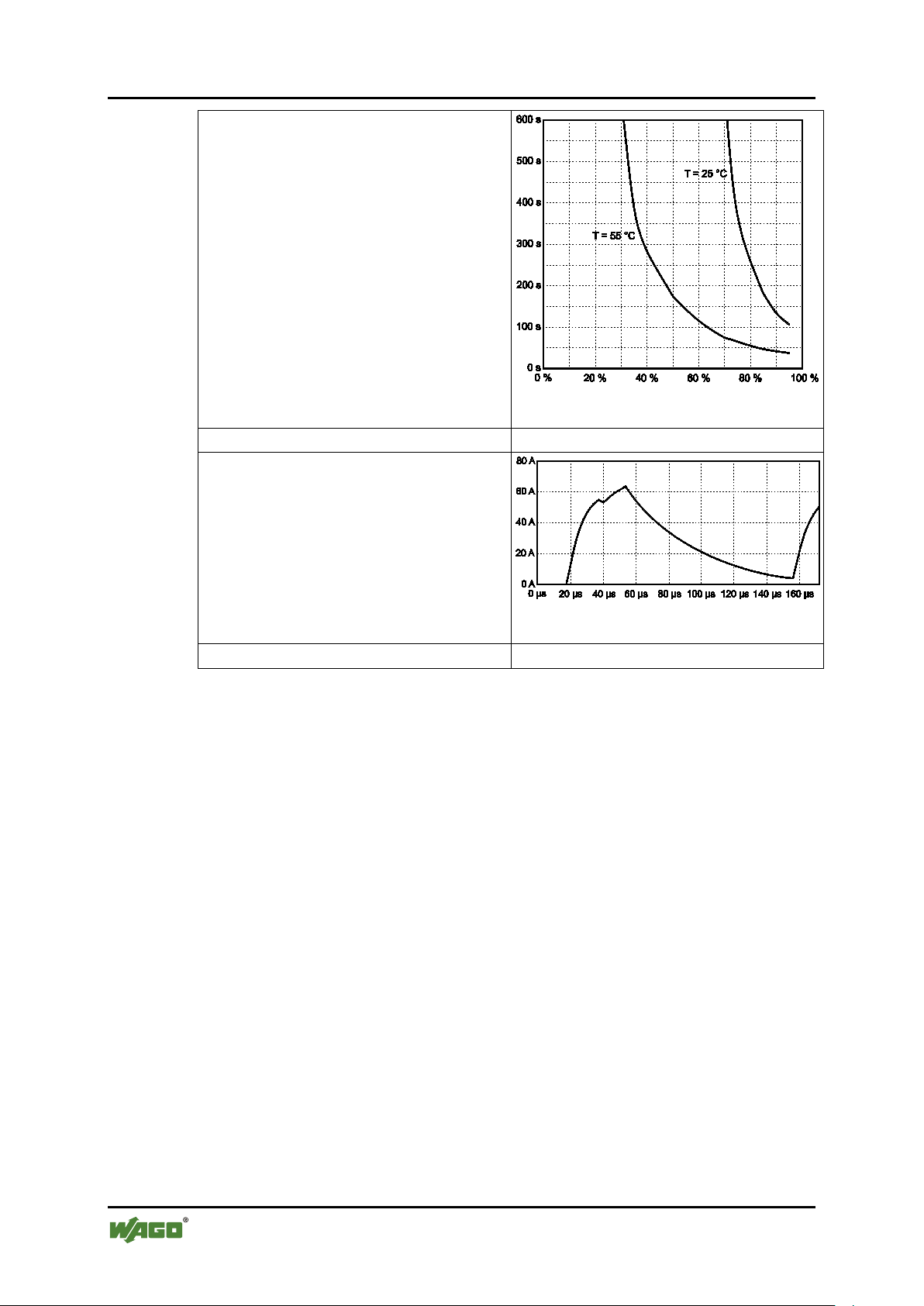
Einschaltdauer bei PWM-Betrieb
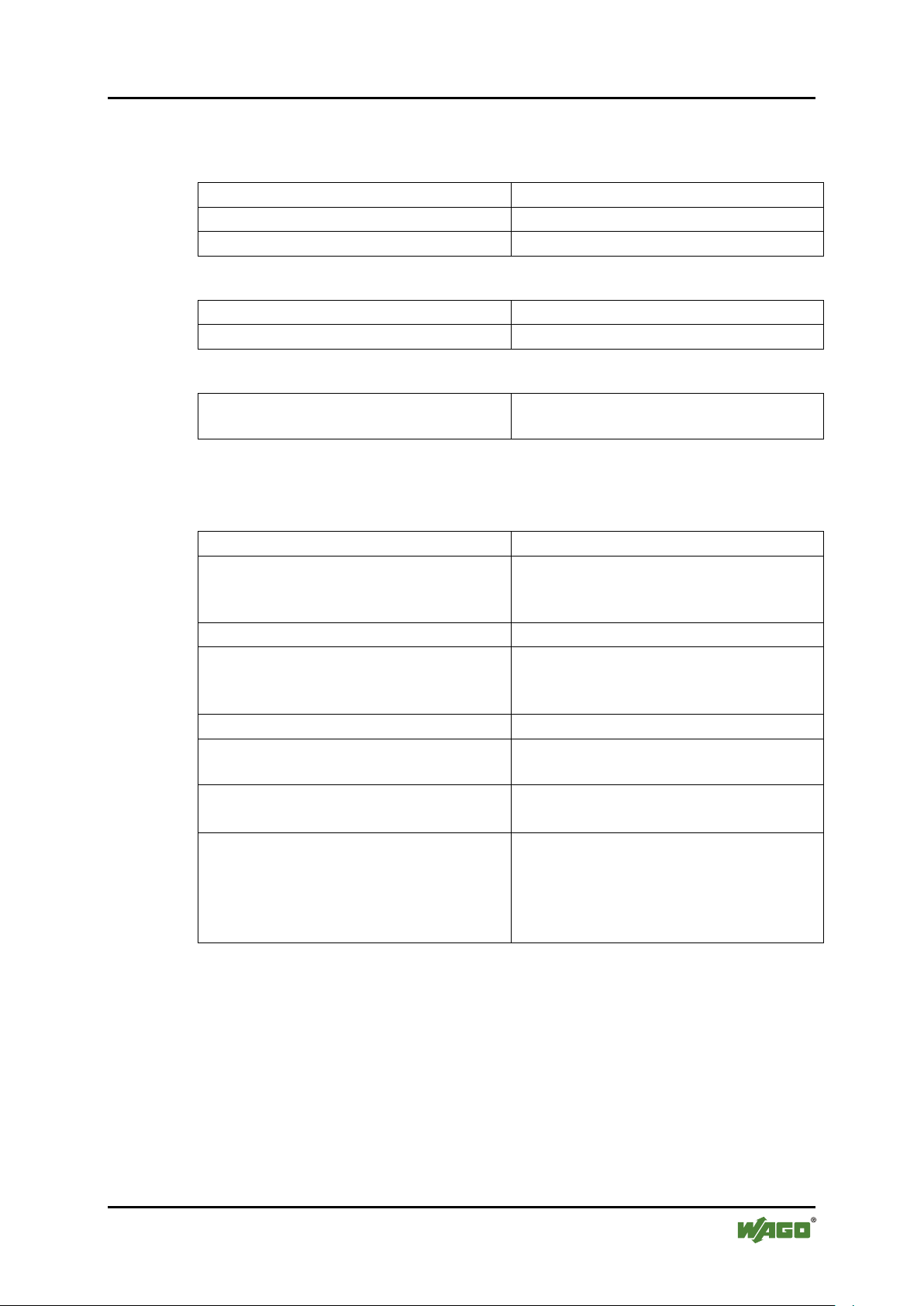
Kurzschlussstrom
65 A
Kurzschlussstromverlauf
PWM-Frequenz
typ.
20 kHz
750-636 DC-Drive-Controller 24 V/5 A
(55 °C, 27,5 V, 5 A (100 % IN),
25 °C, 27,5 V, 5 A (100 % IN))
Wird die Einschaltdauer bei
entsprechender Umgebungstemperatur
überschritten, kommt es zur
Abschaltung mit der Fehlermeldung
„Overload“.
Abbildung 8: Einschaltdauer
Die Peak-Spitze liegt bei 65 A. Die
Periodendauer der vom Chip
herbeigeführten Pulsung liegt bei 140
μs.
Pos: 20.26 /D o kum entat io n all gem ei n/Gli eder ungs ele ment e/---Sei ten wec hsel --- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Abbildung 9: Kurzschlussstromverlauf
Handbuch
Version 2.0.2
Page 25
WAGO-I/O-SYSTEM 750 Gerätebeschreibung 25
Tabelle 14: Technische Daten – Verdrahtungsebene
Anschlusstechnik
CAGE CLAMP®
Leiterquerschnitt
0,08 mm² … 2,5 mm², AWG 28 … 14
Abisolierlänge
8 mm … 9 mm / 0.33 in
Tabelle 15: Technische Daten – Leistungskontakte
Leistungskontakte
Messer-/Federkontakt, selbstreinigend
Spannungsabfall bei I
max.
< 1 V bei 64 Busklemmen
Tabelle 16: Technische Daten – Klemmenbus
Datenkontakte
Gleitkontakte, hartvergoldet,
selbstreinigend
Tabelle 17: Technische Daten – klimatische Umweltbedingungen
Betriebstemperaturbereich
0 °C … 55 °C
Betriebstemperaturbereich bei
Temperaturbereich (750-xxx/025-xxx)
-20 °C … +60 °C
Lagertemperaturbereich
-25 °C … +85 °C
Lagertemperaturbereich bei
Temperaturbereich (750-xxx/025-xxx)
-40 °C … +85 °C
Relative Feuchte
max. 5 % … 95 %, ohne Betauung
Beanspruchung durch Schadstoffe
gem. IEC 60068-2-42 u. IEC 60068-243
Max. Schadstoffkonzentration bei einer
SO2 ≤25 ppm
H2S ≤10 ppm
Besondere Bedingungen
Die Komponenten dürfen nicht ohne
Strahlung auftreten können.
750-636 DC-Drive-Controller 24 V/5 A
Pos: 20.27. 1 /A lle Ser ien ( All ge mein e M odul e)/ Über sc hrif ten für all e Ser ie n/G erät ebes chr ei bung /An schl uss tec hni k - Ü bersc hri ft 3 @ 17\ mod_1380123271324_6.docx @ 132786 @ 3 @ 1
3.6.1 Anschlusstechnik
Pos: 20.27. 2 /S eri e 75 0 ( WAG O-I/O- SYST EM) /G erät ebe schr eib ung/ Tec hni sch e D ate n/T echni sc he D aten V erdra htu ngs ebe ne CC - 0, 08 bis 2,5mm2 @ 17\mod_1380121238809_6.docx @ 132779 @ @ 1
Pos: 20.27. 3 /S eri e 75 0 ( WAG O-I/O- SYST EM) /G erät ebe schr eib ung/ Tec hni sch e D ate n/Ans chl uss tec hni k/Te ch nisc he D ate n Lei stu ngs kon tak te ( Mess er/ Fed er) @ 1 7\mod_1380123464149_6.docx @ 132789 @ @ 1
Pos: 20.27. 4 /S eri e 75 0 ( WAG O-I/O- SYST EM) /G erät ebe schr eib ung/ Tec hni sch e D ate n/Ans chl uss tec hni k/Te ch nisc he D ate n Kl em menb us @ 17\ mod_1380123495844_6.docx @ 132792 @ @ 1
Pos: 20.28 / Ser ie 750 ( WA GO-I/ O-SY STEM )/G erät ebe schr ei bu ng/T ech nisc he D at en/ Klim atisc h e Um wel tbe dingu nge n/T ec hnis che D at en Kl i matis che U mwelt bedi ng ung en m. er w. Tem pber eic h; 0 ... 55°C /-20 ...+60 °C/-25. ..+ 85 °C @ 5\mod_1247658089120_6.docx @ 37605 @ 3 @ 1
3.6.2 Klimatische Umweltbedingungen
Komponenten mit erweitertem
Komponenten mit erweitertem
relativen Feuchte <75 %
Pos: 20.29 /D o kum entat io n all ge mei n/Gli ed eru ngsel e ment e/---Sei ten wec hsel --- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Zusatzmaßnahmen an Orten eingesetzt
werden, an denen Staub, ätzende
Dämpfe, Gase oder ionisierende
Page 26

26 Gerätebeschreibung WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
Pos: 20.30 / All e S erie n (Al lge mei ne M o dule) /Üb ersc hri ft en f ür all e Seri en/ Ger äte besc hr eibung /N or men und Ri c htli nie n - Ü bers chri ft 2 @ 4\mod_1242804031875_6.docx @ 33644 @ 2 @ 1
3.7 Normen und Richtlinien
Pos: 20.31 / Ser ie 750 ( WA GO-I/ O-SY STEM )/G erät ebe schr ei bu ng/N orme n u nd R ich tli nien/ EMV -Normen Busklemme 750-xxxx, St andar dvers ion und al le Vari anten - Einlei tu ng @ 6\mod_1263981980650_6.docx @ 48119 @ @ 1
Die Standardversion und alle Varianten der Busklemme 750-636 erfüllen
folgende EMV-Normen:
Pos: 20.32 /Alle Serien (Allgemeine Module)/N orm en u nd R ic htlini en /EM V-Nor m en - StandardEMV CE-Störauss endung EN 61000- 6-4: 2007 @ 4\mod_1242798273984_6.docx @ 33601 @ @ 1
EMV CE-Störaussendung gem. EN 61000-6-4: 2007
Pos: 20.33 / All e S erie n (Al lge mei ne M o dule) /Nor m en u nd Richtlinien/EMV-Nor men - StandardEMV CE-Störfestigkeit EN 61000-6-2: 2005 @ 4\mod_1242797655625_6.docx @ 33589 @ @ 1
EMV CE-Störfestigkeit gem. EN 61000-6-2: 2005
Pos: 21 /Dokum entati on allg emei n/Gli ederung sele mente /---Seit enwe chs el--- @ 3\mod_1221108045078_0. docx @ 2 180 8 @ @ 1
Handbuch
Version 2.0.2
Page 27

WAGO-I/O-SYSTEM 750 Funktionsbeschreibung 27
750-636 DC-Drive-Controller 24 V/5 A
Pos: 22 /All e S eri en ( Allg emei n e Mod ule) /Ü ber schri fte n f ür al le Ser ien/ Fun ktio ns besc hr eibung - Ü ber schri ft 1 @ 4\ mod_1239025975389_6.docx @ 30001 @ 1 @ 1
4 Funktionsbeschreibung
Pos: 23 /Ser ie 75 0 (WA GO-I/ O-SYS TEM )/F unkt ions bes chrei bung /Funkti onsb eschr eibu ng 750-0636 @ 18\mod_1390898058849_6.docx @ 143427 @ 223322222223333332233233322 @ 1
4.1 Betriebsarten und Fahrfunktionen
Die Betriebsarten der Busklemme 750-636 (DC-Drive-Controller 24 V/5 A)
ermöglichen das einfache Verfahren in positive (MovePos) und negative
(MoveNeg) Richtung mit Positionsrückmeldung sowie das automatische
Anfahren einer Sollposition (Positioning).
Beim manuellen Verfahren kann die optional zuschaltbare PWM1 während des
Fahrens geändert werden. Die Einstellungen für Start- und Stop-Rampe sowie
CurrentLimit_PWM haben auch hier Gültigkeit.
Beim automatischen Verfahren kann die Busklemme mit einer zuschaltbaren
Optimierfunktion die Vorhaltwerte selbst berechnen. Eine Reihe zusätzlicher
Parameter wie ShutDown_Distance, Getriebespielausgleich (Overtravel), variable
Zielfenstergröße, Verlängerung des Ausholwegs sowie Anzahl der
Wiederholversuche (Positioning_Retry) ermöglichen die Anpassung an besondere
mechanische Gegebenheiten.
4.2 Preset-Funktionen
Zum Referenzieren des Antriebs gibt es zwei verschiedene Preset-Funktionen.
4.2.1 Hardware-Preset
Über einen Parameter kann ein Preset-Wert vorgegeben werden und nach
Freischaltung des Preset-Eingangs wird dieser Wert beim Anfahren des
Referenznockens dieser Position zugewiesen. Danach stoppt der Antrieb.
Bei der Busklemme 750-636 kann die Referenzierung zusätzlich vom Z-Eingang
abhängig gemacht werden.
4.2.2 Software-Preset
Die zweite Möglichkeit ist, durch die Steuerung den Wert aus der Sollvorgabe der
Istposition zuzuweisen.
Die erfolgreiche Abarbeitung der Preset-Funktionen wird über den Status der
Busklemme rückgemeldet. Das Bit ‚Reference_OK‘ geht in diesem Fall auf
logisch 1. Im laufenden Betrieb wird dieses Bit durch folgende Ereignisse wieder
auf logisch 0 gesetzt:
• Erneutes Starten einer Preset-Fahrt,
• Ausfall der feldseitigen 24 V (mit Ausnahme der separaten 24V-
Motorversorgung bei der Busklemme 750-636/000-800),
• Über- oder Unterlauf des Zählers für die Istposition,
Handbuch
Version 2.0.2
1
PWM = Pulsweitenmodulation
Page 28

28 Funktionsbeschreibung WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
• Umschaltung der Auswerteart des Quadratur-Encoders (1-fach-/2-fach-/4-
fach-Auswertung).
4.3 Bremsfunktionen
Hiermit wird die Bremsart (Brake-Mode) eingestellt. Für folgende Ereignisse
kann eine Bremsart zugeordnet werden:
• Brake-Mode_STANDARD (Move/Positioning),
• Brake-Mode_EXCEPTION (bei Betätigung der Endlagenschalter),
• Brake-Mode_EMERGENCY (siehe Kapitel „Schutzfunktionen“).
Diesen Ereignissen können folgende Bremsarten zugeordnet werden:
• Freilauf (Motorausgänge spannungslos),
• Rampe (siehe Kapitel „Busklemmenspezifische Parameterdaten, Parameter
0“),
• Bremse (die Motorausgänge sind kurzgeschlossen und liegen an 24 V (750-
636) bzw. am Motorspannungspotential UA (750-636/000-800)).
4.4 Haltefunktionen
Hiermit wird der Haltezustand (Stop-Mode) nach dem Bremsen eingestellt. Es
kann unterschieden werden, ob der Haltezustand am Ende der elektrischen Rampe
oder erst bei Stillstand des Antriebs angenommen werden soll (Register 49.8). Für
folgende Ereignisse kann ein Haltezustand zugeordnet werden:
• Stop-Mode_STANDARD (Move/Positioning),
• Stop-Mode_EXCEPTION (bei Betätigung der Endlagenschalter),
• Stop-Mode_EMERGENCY (siehe Kapitel „Schutzfunktionen“).
• Stop-Mode_Pwr_Up (Nach dem Einschalten des Knotens).
Diesen Ereignissen können folgende Haltezustände zugeordnet werden:
• Freilauf (Motorausgänge spannungslos),
• Bremse (die Motorausgänge sind kurzgeschlossen und liegen an 24 V (750-
636) bzw. am Motorspannungspotential UA (750-636/000-700 und 750636/000-800).
4.5 Schutzfunktionen
Die Busklemme überwacht die folgenden Ereignisse:
• Fahren gegen die Endlagenschalter,
• Übertemperatur der Busklemme,
• Übertemperatur der modulinternen Motorendstufe,
• Überlast (Strom/Spannung) in der Motorendstufe (z. B. ausgelöst durch
Rückspeisung bei zu steiler Bremsrampe, Abhilfe durch Stützen der
Versorgungsspannung oder Verlängerung der Bremsrampe),
• Kurzschlussstrom in der Motorendstufe,
Handbuch
Version 2.0.2
Page 29

WAGO-I/O-SYSTEM 750 Funktionsbeschreibung 29
750-636 DC-Drive-Controller 24 V/5 A
• Ausfall der feldseitigen 24 V (bei den Varianten 750-636/000-700 und 750-
636/000-800 differenziert nach Motor- und Logikversorgung).
In jedem dieser Fälle wird der Antrieb automatisch abgeschaltet und kann bis
zum Beheben der Fehlerursache nicht erneut gestartet werden.
Handbuch
Version 2.0.2
Page 30

30 Funktionsbeschreibung WAGO-I/O-SYSTEM 750
Tabelle 18: Prozessabbild
Minimale Anfahrdistanz für den
welcher Richtung die Sollposition angefahren wird.
Konfigurationsparameter
Anzahl der zulässigen Wiederholungsversuche bei
Fehlpositionierungen.
Mit ‚Optimize_ON’ wird beim Positionieren der
dem ermittelten Bremsweg neu initialisiert.
750-636 DC-Drive-Controller 24 V/5 A
4.6 Betriebsarten für die Positionierung
Die Betriebsarten zum Stellen des Antriebes unterteilen sich in den Basis- und in
den Auto-Mode. In der folgenden Tabelle wird veranschaulicht unter welchen
Konfigurationskombinationen die entsprechende Betriebsart selektiert wird.
Quelle Name Beschreibung
Konfigurationsparameter
Control-Byte Optimize_ON
Mode
Basis 0 0 0
A 0 0 1
B 0 n 0
C 0 n 1
D <> 0 0 0
Overtravel
Retry
Overtravel
Retry
Getriebespielausgleich. Das Vorzeichen bestimmt, aus
Vorhaltwert (Prestop) bei jedem Bremsvorgang mit
Optimize
_ON
Beschreibung
Einmal fahren bis zum Stopp oder dem
Erreichen der Sollposition. Wenn
Prestop <> 0 dann wird um PrestopInkremente vor der Sollposition
abgebremst.
Vorhaltwert wird aktualisiert mit dem
Bremsweg
Maximal n Positionierungsversuche.
(Optimize_ON = 0)
Maximal n Positionierungsversuche.
(Optimize_ON = 1)
Einmal fahren unter Berücksichtigung
des Getriebespiels und der
Anfahrrichtung.
(Optimize_ON = 0)
Auto
Handbuch
Version 2.0.2
E <> 0 0 1
F <> 0 n 0
G <> 0 n 1
Einmal fahren unter Berücksichtigung
des Getriebespiels und der
Anfahrrichtung.
(Optimize_ON = 1)
Maximal n Positionierungsversuche
unter Berücksichtigung des
Getriebespiels und der Anfahrrichtung.
(Optimize_ON = 0)
Maximal n Positionierungsversuche
unter Berücksichtigung des
Getriebespiels und der Anfahrrichtung.
(Optimize_ON = 1)
Page 31

WAGO-I/O-SYSTEM 750 Funktionsbeschreibung 31
Tabelle 19: Verwendete Abkürzungen
IP:
Istposition
BD:
Braking Distance
RT:
Retry
SP:
Sollposition
AD:
Acceleration
Distance
PU:
Prestop Up (RAM
Register)
OT:
Overtravel
BM:
Basis-Mode
PD:
Prestop Down
Register)
AP:
Abschaltposition
des Motors
AM:
Auto-Mode
D:
Distanz
HP:
Halteposition
OZ:
Optimize
V:
Value
750-636 DC-Drive-Controller 24 V/5 A
4.7 Prestop (Vorhaltweg)
Jede Fahrrichtung besitzt einen eigenen Prestop-Wert. Der richtungsabhängige
Wert wird bei der Positionierung zur Ermittlung der Abschalt- bzw.
Bremsposition berücksichtigt.
Wenn „Optimize_ON“ = 1 ist, wird bei jedem Haltevorgang der Prestop als
Funktion vom Bremsweg neu ermittelt. Bei Positionsfahrten mit „Optimize_ON“
= 1 im Auto-Mode sowie bei Fahrten mit Getriebespielausgleich wird der neu
ermittelte Prestop auf die entsprechenden RAM-Register der Busklemme zurück
geschrieben und steht dem Positionierungsinterface als aktualisierter Wert für die
nächste Positionsfahrt zur Verfügung.
Wenn „Optimize_ON“ = 0 ist, wird der Prestop nicht zurück geschrieben, es wird
der aktuelle Wert des entsprechenden RAM-Registers berücksichtigt. In dieser
Betriebsart kann die übergeordnete SPS die Werte in den RAM Registern über
den Parameterkanal applikationsspezifisch optimieren.
4.8 Basis-Mode
Bei den folgenden Betrachtungen wird davon ausgegangen, dass der
Beschleunigungs- und Bremsweg die gleiche Distanz besitzen.
(RAM
Beispiel 1:
Abbildung 10: Beispiel 1
Der Prestop ist mit 0 initialisiert. Die Abschaltposition des Motors liegt auf der
Sollposition. Die Sollposition wird um den Bremsweg überfahren.
Handbuch
Version 2.0.2
Page 32

32 Funktionsbeschreibung WAGO-I/O-SYSTEM 750
Tabelle 20: Verwendete Abkürzungen
IP:
Istposition
BD:
Braking Distance
RT:
Retry
SP:
Sollposition
AD:
Acceleration
Distance
PU:
Prestop Up (RAM
Register)
OT:
Overtravel
BM:
Basis-Mode
PD:
Prestop Down
Register)
AP:
Abschaltposition
des Motors
AM:
Auto-Mode
D:
Distanz
HP:
Halteposition
OZ:
Optimize
V:
Value
750-636 DC-Drive-Controller 24 V/5 A
Beispiel 2:
Abbildung 11: Beispiel 2
Der Prestop ist mit dem Bremsweg initialisiert. Die Abschaltposition des Motors
liegt unterhalb der Sollposition. Die Halteposition entspricht aufgrunddes
ausgeführten Prestops genau der Sollposition.
Beispiel 3:
Abbildung 12: Beispiel 3
Aufgrundder zu geringen Distanz zur Sollposition (SP-IP) < (AD+BD) kann in
diesem Fall trotz des richtig eingestellten Prestops die Sollposition nicht genau
erreicht werden.
4.9 Auto-Mode
Bei den folgenden Betrachtungen wird davon ausgegangen, dass der
Beschleunigungs- und Bremsweg die gleiche Distanz besitzen.
(RAM
Handbuch
Version 2.0.2
Page 33

WAGO-I/O-SYSTEM 750 Funktionsbeschreibung 33
750-636 DC-Drive-Controller 24 V/5 A
4.9.1 Positionieren mit eingeschalteter Optimierung
Beispiel 4:
Abbildung 13: Beispiel 4
Der Prestop für die Up-Richtung ist mit 0 initialisiert. Die Abschaltposition des
Motors liegt auf der Sollposition. Die Sollposition wird um den Bremsweg
überfahren und aufgrund von der eingeschalteten Optimierung wird der Prestop
mit dem Bremsweg in Up-Richtung initialisiert. Auch der Prestop für die DownRichtung wird hier mit dem Bremsweg initialisiert, weil dieser gegenwärtig noch
auf 0 steht. Dieses erspart für die nächsten Positionierungsfahrten in DownRichtung die Einmessfahrt und kann in vielen Fällen schon zu ausreichenden
Ergebnissen führen.
Beispiel 5:
Abbildung 14: Beispiel 5
Der Prestop für die Down-Richtung ist mit 0 initialisiert. Die Abschaltposition des
Motors liegt auf der Sollposition. Die Sollposition wird um den Bremsweg
überfahren und aufgrund von der eingeschalteten Optimierung wird der Prestop
mit dem Bremsweg in Down-Richtung initialisiert.
Hinweis
Prestop Up-Richtung
Der Prestop für die Up-Richtung wird in diesem Fall nicht gesetzt, weil
dieser bereits einen gültigen Wert besitzt.
Handbuch
Version 2.0.2
Page 34

34 Funktionsbeschreibung WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
4.9.2 Positionieren mit eingeschalteter Optimierung und Retry ungleich 0 (Schleifenfahrt)
Beispiel 6:
Abbildung 15: Beispiel 6
Der Prestop für die Up- und Down-Richtung ist mit 0 initialisiert und die
Istposition liegt unter der Sollposition. Die Ausgangssituation fordert mindestens
1 Wiederholung für die Positionierung. Zuerst muss der Prestop-Wert für die UpRichtung ermittelt werden und dann die Sollposition erreicht werden. Weiterhin
wird der Prestop für die Down-Richtung auch mit dem Bremsweg initialisiert,
weil dieser gegenwärtig noch 0 ist. Würde man diese Zuweisung nicht ausführen,
wäre in dem dargestellten Fall ein weiterer Wiederholungsversuch notwendig.
Handbuch
Version 2.0.2
Page 35

WAGO-I/O-SYSTEM 750 Funktionsbeschreibung 35
750-636 DC-Drive-Controller 24 V/5 A
4.9.3 Positionieren mit eingeschalteter Optimierung bei zu geringer Distanz
Beispiel 7:
Abbildung 16: Beispiel 7
Die Prestops für die Up- und Down-Richtung sind initialisiert und die Istposition
liegt unter der Sollposition. Es wird nun erkannt, dass die Distanz zur Sollposition
zu gering ist, um diese mit einer direkten Fahrt zu erreichen. Da der Retry
mindestens mit 1 initialisiert ist, darf und muss als erstes eine Ausholfahrt mit
anschließender Sollpositionsfahrt stattfinden. Ist der Retry mit 0 initialisiert, wird
sofort die Sollpositionsfahrt ausgeführt, auch wenn das Ergebnis mit dieser Fahrt
ein schlechteres Ergebnis liefert als ohne Fahrzyklus.
Handbuch
Version 2.0.2
Page 36

36 Funktionsbeschreibung WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
4.9.4 Positionieren mit negativ initialisiertem Overtravel
Beispiel 8:
Abbildung 17: Beispiel 8
Der negativ initialisierte Overtravel erzwingt, dass die Sollposition von unten
kommend angefahren werden muss. Die Anfahrposition wird durch die Addition
von Sollposition (SP) und Overtravel (OT) erzeugt.
Beispiel: SP = 1000, OT = -200 Anfahrposition = 800.
Da in diesem Fall die Istposition weiter als der Absolutwert des Overtravels
unterhalb der Sollposition ist, wird die Sollposition schon mit dem ersten
Fahrzyklus erreicht.
Beispiel 9:
Abbildung 18: Beispiel 9
Hier befindet sich die Istposition oberhalb der Sollposition. Der Antrieb muss die
Sollposition um den Betrag des Overtravel-Wertes überfahren, um die
Sollposition von unten her kommend erreichen. Die dargestellte genaue
Positionierung gelingt aber nur unter der Annahme, dass der Beschleunigungsweg
maximal so groß ist wie der Bremsweg und der Absolutwert des Overtravels
mindestens doppelt so groß ist wie der Bremsweg. Im Kapitel „Positionieren mit
positiv initialisiertem Overtravel“ wird verdeutlicht, was berücksichtigt wird,
wenn dieses nicht der Fall ist.
Handbuch
Version 2.0.2
Page 37

WAGO-I/O-SYSTEM 750 Funktionsbeschreibung 37
750-636 DC-Drive-Controller 24 V/5 A
4.9.5 Positionieren mit positiv initialisiertem Overtravel
Beispiel 10:
Abbildung 19: Beispiel 10
Der positive initialisierte Overtravel erzwingt, dass die Sollposition von oben
kommend angefahren werden muss. Da in diesem Fall die Istposition weiter als
der Absolutwert des Overtravels oberhalb der Sollposition liegt, wird die
Sollposition schon mit dem ersten Fahrzyklus erreicht.
Beispiel 11:
Abbildung 20: Beispiel 11
Hier befindet sich die Istposition unterhalb der Sollposition. Der Antrieb sollte
jetzt eigentlich die Sollposition um den Betrag des Absolutwertes vom
Overtravel-Wert überfahren. Es wird aber festgestellt, dass der Absolutwert des
Overtravels nicht mindestens doppelt so groß ist wie der gegenwärtige PrestopWert für die ‚Down’-Richtung. Aus diesem Grund wird die Sollposition in diesem
Fall um eine größere Distanz als der vorgegebene Overtravel überfahren, damit
der Fahrzyklus die erste Sollpositionsfahrt zum Erfolg führt.
Handbuch
Version 2.0.2
Page 38

38 Funktionsbeschreibung WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
4.9.6 Positionieren mit negativ initialisiertem Overtravel bei zu geringer Distanz
Beispiel 12:
Abbildung 21: Beispiel 12
Der negativ initialisierte Overtravel erzwingt, dass die Sollposition von unten
kommend angefahren werden muss. Es wird festgestellt, dass die Distanz zur
Sollposition kleiner ist als der Absolutwert des Overtravels. Die Istposition
befindet sich zwar unterhalb der Sollposition, aber nicht weit genug entfernt, um
ein erfolgreiches Positionieren durchzuführen. Daher wird durch den ersten
Fahrzyklus die Distanz zur Sollposition vergrößert und anschließend die
Sollposition angefahren.
Handbuch
Version 2.0.2
Page 39

WAGO-I/O-SYSTEM 750 Funktionsbeschreibung 39
750-636 DC-Drive-Controller 24 V/5 A
4.10 Fliegender Sollwertwechsel
Wird während einer aktiven Positionierungsfahrt die Sollposition im
Prozessabbild geändert, dann soll die Busklemme darauf reagieren. Liegt diese
neue Sollposition in Fahrtrichtung, dann wird die Busklemme unter
Berücksichtigung der softwaretechnischen Möglichkeiten versuchen ohne einen
Zwischenstopp diese Position zu erreichen. Der frühestmögliche Zeitpunkt für
diese Bewertung liegt nach dem Abschluss der Beschleunigungs- bzw.
Sanftanfahrtsphase. Weiterhin wird die aktuelle Distanz darauf hin untersucht, ob
diese den konfigurierten Anfahrkriterien noch gerecht wird. Sollte dies nicht der
Fall sein oder sich die neue Sollposition in Gegenrichtung befinden, dann stoppt
der Antrieb. In dieser Situation wird der ermittelte Bremsweg für die aktuelle
Richtung nicht in das entsprechende Prestop-RAM-Register kopiert. Steht der
konfigurierte Wiederholungszähler für die maximal möglichen Anfahrversuche
auf 0, dann wird der Positionierungsvorgang beendet und eine Fehlpositionierung
gemeldet. In allen anderen Fällen wird jetzt der erste Wiederholungsversuch zum
Erreichen der neuen Sollposition gestartet.
Beispiel 13:
Abbildung 22: Beispiel 13
Die Busklemme erkennt, dass das Anfahren der neuen Sollposition möglich ist
und setzt den Positionierungsvorgang fort.
Beispiel 14:
Abbildung 23: Beispiel 14
In diesem Fall reicht die zu geringe Distanz bis zur neuen Sollposition nicht mehr
für eine erfolgreiche Positionierung aus. Es wird gestoppt und kein weiterer
Positionierungsversuch vorgenommen, da der Wiederholungszähler mit 0
initialisiert ist. Eine erneute Positionierung auf SP_neu würde dann wie im
Beispiel 9 ablaufen.
Handbuch
Version 2.0.2
Page 40

40 Funktionsbeschreibung WAGO-I/O-SYSTEM 750
Tabelle 21: Tabellenname
Phase
Funktion
P1
Start-Rampe
P2
Strombegrenzungsphase (CurrentLimit_PWM)
P3
Fahren mit voller Leistung (PWM 100 %)
P4
Fahren mit reduzierter Leistung (CurrentControl_PWM)
P5
Bremsrampe bzw. Auslauf
750-636 DC-Drive-Controller 24 V/5 A
4.11 PWM-Steuerung bei der Positionierung
4.11.1 Allgemein
Die PWM-Steuerung kann unabhängig vom Verfahrmodus zugeschaltet werden.
Grundsätzlich wird die PWM-Steuerung die Richtung und die Anzahl der
Fahrzyklen beim Positionieren nicht beeinflussen. Vielmehr kann mit der PWMSteuerung das Drehzahl- bzw. Drehmomentprofil während eines Fahrzyklus
gesteuert werden.
Zur Erläuterung des Positionierens mit PWM-Steuerung wird ein Fahrzyklus in
fünf Phasen aufgeteilt:
Abbildung 24: Aufteilung des Fahrzyklus
P1:
Die Phase P1 ist nur dann aktiv, wenn ein Sanftanlauf über den Parameter
RampTime_START konfiguriert ist. Ohne Rampe hat diese Phase eine Laufzeit
von 0 s, sodass die Drehzahl erst in Phase P2 oder sogar Phase P3 ansteigt.
P2:
Die Phase P2 wird durch die beiden Parameter CurrentLimit_PWM und
CurrentLimit_Time bestimmt. CurrentLimit_PWM gibt hierbei das Tastverhältnis
für das Ansteuersignal der Endstufe und CurrentLimit_Time die Dauer der Phase
P2 vor.
Handbuch
Version 2.0.2
Page 41

WAGO-I/O-SYSTEM 750 Funktionsbeschreibung 41
750-636 DC-Drive-Controller 24 V/5 A
P3:
Die Länge der Phase P3 ergibt sich aus der Gesamtlänge und der Subtraktion aller
übrigen Phasen: P3 = Pges –(P1 + P2 + P4 + P5).
P4:
Der Einschaltzeitpunkt der Phase P4 wird durch einen Wegpunkt in Fahrtrichtung
vor der Sollposition bestimmt. Dieser Wegpunkt wird immer relativ zur
Sollposition aus dem Parameter ShutDown_Distance berechnet. Das
Tastverhältnis für die PWM der Phase P4 wird über den Parameter
CurrentControl_PWM eingestellt.
P5:
Die Phase P5 definiert die Bremsrampe und wird über den Parameter
RampTime_STOP eingestellt. Ist der Wert 0, wird sofort entsprechend dem StopMode abgeschaltet. Weiterhin kann die CurrentControl_PWM während einer
‚MovePos‘- bzw.‚MoveNeg‘-Fahrt spontan über das Control-Bit
CurrentControl_ON=1 aktiviert werden. Dieses ist auch bei einer
Positionierungsfahrt während der Phase P3 zulässig.
4.11.2 Verfahrvarianten mit Umschaltung auf reduzierte Leistung
Beispiel 15 „ShutDown_Distance wird in Phase P3 erreicht“:
Abbildung 25: „ShutDown_Distance wird in Phase P3 erreicht“
In diesem Beispiel überschneiden sich die einzelnen Phasen aufgrund der
Konfiguration nicht und werden sequentiell von P1 bis P5 abgearbeitet. Wird die
Distanz zwischen Start- und Sollposition immer geringer, dann kann es passieren,
dass die Phase P3 und sogar die Phase P2 vom Fahrzyklus übersprungen wird.
Dieses ist beispielhaft in den beiden folgenden Abbildungen dargestellt. Das
Control-Bit CurrentControl_ON ist inaktiv.
Handbuch
Version 2.0.2
Page 42

42 Funktionsbeschreibung WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
Beispiel 16 „ShutDown_Distance wird in Phase P2 erreicht“:
Abbildung 26: Beispiel 16, „ShutDown_Distance wird in Phase P2 erreicht“
Der sich durch die ShutDown_Distance ergebende Wegpunkt zum Starten der
Phase P4 liegt vor dem zeitlichen Ende von Phase P2. In diesem Fall darf die
Phase P2 vorzeitig beendet werden.
Beispiel 17 „ShutDown_Distance wird in Phase P1 erreicht“:
Hinweis
Abbildung 27: Beispiel 17, „ShutDown_Distance wird in Phase P1 erreicht“
Der Wegpunkt zum Starten von Phase P4 liegt bereits in Phase P1. Da es aber
nicht zulässig ist die Start-Rampe für den Sanftanlauf zu unterbrechen, darf Phase
P4 frühestens nach dem Ablauf der konfigurierten RampTime_START gestartet
werden. Phase P2 und P3 werden hierbei übersprungen.
Geringe Distanz zwischen Start- und Sollposition
Wenn die Distanz zwischen Start- und Sollposition geringer ist als die real
zurücklegbare Entfernung, bedingt durch die Laufzeiten von
RampTime_START und RampTime_STOP, wird auch Phase P4
übersprungen.
Handbuch
Version 2.0.2
Page 43

WAGO-I/O-SYSTEM 750 Funktionsbeschreibung 43
750-636 DC-Drive-Controller 24 V/5 A
Beispiel 18 „Fahren ohne CurrentControl_PWM“:
Abbildung 28: Beispiel 18, „Fahren ohne CurrentControl_PWM“
Das Fahren ohne Phase P4 bzw. CurrentControl kann gezielt dadurch erreicht
werden, dass man den Wert für die ShutDown_Distance auf 0 konfiguriert. Eine
weitere Ursache für das Ausbleiben der Phase P4 ergibt sich dadurch, dass der
richtungsabhängige Prestop mindestens so groß ist wie die eingestellte
ShutDown_Distance (ShutDown_Distance <= Prestop).
In den folgenden Beispielen ist zusätzlich das Control-Bit CurrentControl_ON
benutzt. Es darf zu jedem Zeitpunkt des Fahrzyklus gesetzt und zurückgesetzt
werden, führt aber nur in der Phase P3 zu einer Reaktion.
Beispiel 19 „Fahren mit CurrentControl_PWM =
f(Control.CurrentControl_ON), Variante 1“:
Abbildung 29: Beispiel 19, „Fahren mit CurrentControl_PWM = f(Control.CurrentControl_ON),
Variante 1“
Es ist auch möglich, nach dem Beginn der Phase P3 über das CurrentControl_ON
nicht nur die CurrentControl_PWM einzuschalten, sondern diese auch wieder
auszuschalten usw.
Handbuch
Version 2.0.2
Page 44

44 Funktionsbeschreibung WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
Beispiel 20 „Fahren mit CurrentControl_PWM =
f(Control.CurrentControl_ON), Variante 2“:
Abbildung 30: Beispiel 20, „Fahren mit CurrentControl_PWM = f(Control.CurrentControl_ON),
Variante 2“
Hier wird schon zur Laufzeit der Phase P2 CurrentControl_ON=1 gesetzt. Auch in
diesem Fall darf wie im Beispiel 16 (ShutDown_Distance in P2) die Phase P2
nicht vorzeitig abgebrochen werden. Mit CurrentControl_ON kann frühestens
nach Ablauf der CurrentLimit_Time die Phase P3 mit CurrentControl_PWM
gestartet werden. Zu beachten ist, dass durch das Rücksetzen von
CurrentControl_ON in der Phase P3 die PWM auf 100 % geschaltet werden kann.
Handbuch
Version 2.0.2
Page 45

WAGO-I/O-SYSTEM 750 Funktionsbeschreibung 45
750-636 DC-Drive-Controller 24 V/5 A
4.12 Ausholfahrten mit anschließenden Sollpositionsfahrten
Die Busklemme startet einen Bremsvorgang nur aus der CurrentControl_PWM
oder der Maximaldrehzahl heraus, niemals aber aus der CurrentLimit_PWM. Das
muss beim Projektieren beachtet werden. Das Resultat ist ein zeit- bzw.
wegoptimierter Positioniervorgang. Die Ausholfahrt berücksichtigt sowohl die
Phase P1 als auch die Phase P2. Für besonders träge Lasten ist der Faktor
Increase_Swing_Back (Ausholverlängerung) entsprechend höher zu wählen. Das
bewirkt eine künstliche Verlängerung der Ausholfahrt, sodass der Antrieb seine
Maximaldrehzahl oder die projektierte CurrentControl_PWM-Dehzahl erreichen
kann, bevor die Sollpositionsfahrt eingeleitet wird. Wird dies bei der
Projektierung nicht berücksichtigt, ist kein zeit- und wegoptimierter
Positioniervorgang in allen Verfahrsituationen gewährleistet.
Auch hier gilt wieder, wenn der Beschleunigungsweg kleiner ist als der
Bremsweg, dann wird der Betrag des Bremsweges für den Beschleunigungsweg
verwendet.
Ausholdistanz = ((Beschleunigungsweg + Bremsweg) * 110 %) * (100 % + X %)
Hinweis
Ausholdistanz berechnen
Mithilfe der Ausholdistanz wird festgestellt, ob sich der Antrieb weit genug
von der Sollposition entfernt befindet, damit diese erreicht werden kann. Je
nach Ergebnis muss eine Sollpositions- oder Ausholfahrt gestartet werden.
4.12.1 Definition der Ausholfahrten
In der folgenden Darstellung wird aufgrund einer nicht aktiven
ShutDown_Distance auch keine CurrentControl_PWM aktiviert, und der Antrieb
wird bei großen Sollpositionsfahrten immer aus 100%-PWM heraus gebremst
(rote Linie). Damit die 100%-PWM-Phase auch für kurze Wege während eines
Positioniervorganges erreicht wird, wird immer mindestens die dargestellte
Ausholfahrt ausgeführt (blaue Linie).
Abbildung 31: Bremsen aus 100%-PWM
Ein ähnliches Verhalten zeigt sich, wenn aufgrund einer parametrierten
ShutDown_Distance die Phase P4 mit CurrentControl_PWM gefahren werden
muss. In diesem Fall wird aber nicht aus 100%-PWM, sondern immer aus
Handbuch
Version 2.0.2
Page 46

46 Funktionsbeschreibung WAGO-I/O-SYSTEM 750
Tabelle 22: Beschleunigungsvarianten
P1 + P3
P1 Start
P1 Ende
X2 – X1
P2 + P3
P2 Start
P2 Ende
X2 – X1
P1 + P2 + P3
P1 Start
P2 Ende
X2 – X1
P3
nicht verfügbar
nicht verfügbar
= Bremsweg
750-636 DC-Drive-Controller 24 V/5 A
CurrentControl_PWM gebremst. Die hierbei ausgeführte kleinste Ausholfahrt ist
in der unten stehenden Grafik dargestellt (blaue Linie).
Abbildung 32: Bremsen aus CurrentControl_PWM (CurrentControl_PWM > CurrentLimit_PWM)
Ist CurrentControl_PWM kleiner als CurrentLimit_PWM, dann fährt der Antrieb
während der Beschleunigungsphase P2 mit der CurrentControl_PWM.
Abbildung 33: Bremsen aus CurrentControl_PWM (CurrentControl_PWM < CurrentLimit_PWM)
4.12.2 Berechnung des Beschleunigungsweges
Der Beschleunigungsweg wird nur bei einer Sollpositionsfahrt ermittelt. Die
Grundlage zur Berechnung des Beschleunigungsweges ist davon abhängig, mit
welcher Phase bzw. Phasensequenz eine Sollpositionsfahrt gestartet wird.
Die folgende Tabelle gibt einen Überblick über die möglichen
Beschleunigungsvarianten:
Phase Phasensequenz X1 X2 Beschleunigungsweg
Handbuch
Version 2.0.2
Page 47

WAGO-I/O-SYSTEM 750 Funktionsbeschreibung 47
750-636 DC-Drive-Controller 24 V/5 A
4.12.3 Berechnung einer Ausholfahrt
Die Zielposition einer Ausholfahrt wird relativ zur Sollposition bestimmt und die
Distanz zur Sollposition berechnet sich aus Summe von Beschleunigungs- und
Bremsweg (plus eines 10%igen Sicherheitsbetrags). Der Bremsweg entspricht
dem Prestop und wird für die negative und positive Drehrichtung bei jedem
Bremsvorgang getrennt ermittelt. Für eine nächste Sollpositionsfahrt ist somit
bekannt, in welcher Entfernung vor der Sollposition der Motor abgeschaltet
werden muss, um im unmittelbaren Bereich oder genau auf der Sollposition zum
Halten zu kommen.
Die im Kapitel „Definition der Ausholfahrten“ beschriebenen und zu
verwendenden Ausholfahrten garantieren, dass der Bremsweg und somit der
bereits ermittelte Prestop aufgrund der immer gleich bleibenden Drehzahl im
Bremsaugenblick annähernd unverändert bleibt.
Verändert sich aber die mechanische Dämpfung der Anlage, dann muss ggf. ein
neuer Prestop ermittelt werden. Diese Situation ist daran zu erkennen, dass nach
einer nicht erfolgreich abgeschlossenen Sollpositionsfahrt eine Ausholfahrt
stattfindet. Die anschließende Fahrt sollte dann im Idealfall wieder die
Sollposition treffen. Verändert sich die Dämpfung der Anlage ständig, dann muss
auch ständig ein neuer Prestop ermittelt werden.
Betrachtet man den zweiten Summand, den Beschleunigungsweg, welcher den
Gesamtbetrag einer Ausholfahrt bestimmt, dann muss man von gleichen
Überlegungen wie bei der Betrachtung des Bremsweges ausgehen. Der
Beschleunigungsweg ist vom Stillstand bis zum Ende der Start-Rampe definiert.
Er entspricht sicherlich nicht dem realen mechanischen Beschleunigungsweg und
ist als akzeptabler Kompromiss zu sehen.
Handbuch
Version 2.0.2
Page 48

48 Funktionsbeschreibung WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
4.13 Standstill-Bedingung
Während der Abarbeitung des Fahrbefehls wird bei jedem Haltevorgang der
Bremsweg des Antriebes bestimmt. Der Bremsweg ist immer dann abgeschlossen,
wenn die Busklemme den Stillstand des Motors über ausbleibende
Drehgeberimpulse detektiert. Zusätzlich wird die Stillstand-Betrachtung auch im
nicht aktiven Stellzyklus durchgeführt. Das Ergebnis wird in beiden Fällen im
Busklemmenstatus des Prozessabbildes dargestellt.
Unter Berücksichtigung der in Kapitel „Maximale Impulszahlfrequenz des
Drehgebers“ angestellten Betrachtungen der maximal zulässigen Impulse/s der
Busklemme ergibt sich für den Einsatz von unterschiedlichen Drehgebern
folgendes grafisches Bild für die Motordrehzahl in Impulsen/s.
Abbildung 34: Motordrehzahl in Impulsen/s
Handbuch
Version 2.0.2
Page 49

WAGO-I/O-SYSTEM 750 Funktionsbeschreibung 49
750-636 DC-Drive-Controller 24 V/5 A
Beispiel: 2 Impulse pro Erfassungsintervall
Abbildung 35: Standstill-Bedingung
Bezogen auf die Positionierungsqualität bedeutet ein Herabsetzen des
Grenzwertes einen geringeren Positionierungsfehler (insbesondere bei großen
Schwungmassen oder bei Gebern mit höherer Auflösung), aber auch eine
Verlängerung der Gesamtlaufzeit der Positionierungsfahrt.
Handbuch
Version 2.0.2
Page 50

50 Funktionsbeschreibung WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
4.14 Maximale Impulszahlfrequenz des Drehgebers
Übliche 24V-Gleichstrommotoren mit Kollektoren arbeiten in der Regel mit einer
maximalen Drehzahl von ca. 4.600 min-1. Gängige Drehgeber liefern 1 bis
maximal 10.000 Impulse/Umdrehung. Die Encodereingänge der Busklemme sind
für die Erfassung von maximal 50.000 Impulse/s ausgelegt.
Bezogen auf eine angenommene Drehzahl von 4.600 min
-1
und unter der
Berücksichtigung von 50.000 Impulsen/s liefert ein Drehgeber maximal 652
Impulse/Umdrehung. Für Anwendungen mit DC-Motoren reichen im
Allgemeinen Geber bis 512 Impulse/s aus.
Das unten stehende Diagramm verdeutlicht den Zusammenhang zwischen
Motordrehzahl und der daraus maximal zulässigen Anzahl von
Impulsen/Umdrehung des Drehgebers. Um keine Überlast für den QuadraturDecoder/Counter zu erzeugen, muss der Wert für den Drehgeber immer unterhalb
der Kennlinie liegen.
Abbildung 36: Maximale Impulse/Umdrehung
Pos: 24 /Dokum entati on allg emei n/Gli ederung sele mente /---Seit enwe chs el--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 51

WAGO-I/O-SYSTEM 750 Montieren 51
750-636 DC-Drive-Controller 24 V/5 A
Pos: 25 /All e S eri en ( Allg emei n e Mod ule) /Ü ber schri fte n f ür al le Ser ien/ Mont ier en - D e monti ere n/Mo ntier en - Über schri ft 1 @ 3\mod_1225446744750_6.docx @ 24898 @ 1 @ 1
5 Montieren
Pos: 26.1 /Serie 750 (WAGO-I/O-SYSTEM)/M ontier en/D emont ieren/M ont agerei henf olge @ 3\ mod_1231770210031_6.docx @ 25991 @ 2 @ 1
5.1 Montagereihenfolge
Feldbuskoppler/-controller und Busklemmen des WAGO-I/O-SYSTEMs
750/753 werden direkt auf eine Tragschiene gemäß EN 50022 (TS 35)
aufgerastet.
Die sichere Positionierung und Verbindung erfolgt über ein Nut- und FederSystem. Eine automatische Verriegelung garantiert den sicheren Halt auf der
Tragschiene.
Beginnend mit dem Feldbuskoppler/-controller werden die Busklemmen
entsprechend der Projektierung aneinandergereiht. Fehler bei der Projektierung
des Knotens bezüglich der Potentialgruppen (Verbindungen über die
Leistungskontakte) werden erkannt, da Busklemmen mit Leistungskontakten
(Messerkontakte) nicht an Busklemmen angereiht werden können, die weniger
Leistungskontakte besitzen.
Pos: 26.2 /Serie 750 (WAGO-I/O-SYSTEM)/Wi chtig e Erlä uteru ngen/ Sicher heits- und so nstig e H inw eis e/V orsic ht/ Vor sic ht: Verl etz ungs ge fahr dur ch s ch arf kan tige M es ser kont a kte! @ 6\ mod_1256193279401_6.docx @ 43412 @ @ 1
VORSICHT
Verletzungsgefahr durch scharfkantige Messerkontakte!
Da die Messerkontakte sehr scharfkantig sind, besteht bei unvorsichtiger
Hantierung mit den Busklemmen Verletzungsgefahr.
Pos: 26.3 /Serie 750 (WAGO-I/O-SYSTEM)/Wi chtig e Erlä uteru ngen/ Sicher heits- und so nstig e Hinweise/Achtung/Achtung: Busklemmen nur in vorgesehener Reihenfolge stecken! @ 6\mod_1256194177073_6.docx @ 43427 @ @ 1
ACHTUNG
Busklemmen nur in vorgesehener Reihenfolge stecken!
Alle Busklemmen verfügen an der rechten Seite über Nuten zur Aufnahme
von Messerkontakten. Bei einigen Busklemmen sind die Nuten oben
verschlossen. Andere Busklemmen, die an dieser Stelle linksseitig über
einen Messerkontakt verfügen, können dann nicht von oben angesteckt
werden. Diese mechanische Kodierung hilft dabei, Projektierungsfehler zu
vermeiden, die zur Zerstörung der Komponenten führen können. Stecken
Sie Busklemmen daher ausschließlich von rechts und von oben.
Pos: 26.4 /Serie 750 (WAGO-I/O-SYSTEM)/Wi chtig e Erlä uteru ngen/ Sicher heits- und so nstig e H inw eis e/Hi nwei s/Hi n weis : Bu sa bsc hlus s ni cht ver gess en! @ 6 \mod_1256194225557_6.docx @ 43430 @ @ 1
Hinweis
Busabschluss nicht vergessen!
Stecken Sie immer eine Busendklemme 750-600 an das Ende des
Feldbusknotens! Die Busendklemme muss in allen Feldbusknoten mit
Feldbuskopplern/-controllern des WAGO-I/O-SYSTEMs 750 eingesetzt
werden, um eine ordnungsgemäße Datenübertragung zu garantieren!
Pos: 26.5 /Dokumentation allgemein/Gliederungselemente/---Seitenwechsel--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 52

52 Montieren WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
Pos: 26.6 /Serie 750 (WAGO-I/O-SYSTEM)/M onti ere n/D emon tier en/ G erät e ein füg en u nd e nt fer nen - Ü b erschr if t 2 @ 3\ mod_1231768483250_6.docx @ 25948 @ 2 @ 1
5.2 Geräte einfügen und entfernen
Pos: 26.7 /Al l e Ser ien ( Al lge mei ne M od ule)/ Wic htig e Er lä uter ung en/ Sich erh eits- und so nsti ge H in weis e/A chtu ng/ Ach tung : A rbei ten an Ger ät en n ur s pan nung sfr ei d urc hführ en! @ 6\mod_1256193963573_6.docx @ 43424 @ @ 1
ACHTUNG
Arbeiten an Geräten nur spannungsfrei durchführen!
Arbeiten unter Spannung können zu Schäden an den Geräten führen.
Schalten Sie daher die Spannungsversorgung ab, bevor Sie an den Geräten
arbeiten.
Pos: 26.8 /Serie 750 (WAGO-I/O-SYSTEM)/M ontier en/D emont ieren/ Bus klemm e einfüg en @ 3\mod_1231769726703_6.docx @ 25987 @ 3 @ 1
5.2.1 Busklemme einfügen
1. Positionieren Sie die Busklemme so, dass Nut und Feder zum
Feldbuskoppler/-controller oder zur vorhergehenden und gegebenenfalls zur
nachfolgenden Busklemme verbunden sind.
Abbildung 37: Busklemme einsetzen (Beispiel)
2. Drücken Sie die Busklemme in den Verband, bis die Busklemme auf der
Tragschiene einrastet.
Abbildung 38: Busklemme einrasten (Beispiel)
Mit dem Einrasten der Busklemme sind die elektrischen Verbindungen der
Datenkontakte und (soweit vorhanden) der Leistungskontakte zum
Feldbuskoppler/-controller oder zur vorhergehenden und gegebenenfalls zur
nachfolgenden Busklemme hergestellt.
Pos: 26.9 /Dokumentation allgemein/Gliederungselemente/---Seitenwechsel--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 53

WAGO-I/O-SYSTEM 750 Montieren 53
750-636 DC-Drive-Controller 24 V/5 A
Pos: 26.10 / Ser ie 750 ( WA GO-I/ O-SY STEM) /Monti ere n/De montier en/Bus kle mme ent ferne n @ 4\mod_1239169375203_6.docx @ 30333 @ 3 @ 1
5.2.2 Busklemme entfernen
1. Ziehen Sie die Busklemme an der Entriegelungslasche aus dem Verband.
Abbildung 39: Busklemme lösen (Beispiel)
Mit dem Herausziehen der Busklemme sind die elektrischen Verbindungen der
Datenkontakte bzw. Leistungskontakte wieder getrennt.
Pos: 27 /Dokum entati on allg emei n/Gli ederung sele mente /---Seit enwe chs el--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 54

54 Geräte anschließen WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
Pos: 28 /All e S eri en ( Allg emei n e Mod ule) /Ü ber schri fte n f ür al le Ser ien/ Ansc hli eße n/ Ger äte a nsc hlie ße n - Über sc hrif t 1 @ 3\ mod_1234172889468_6.docx @ 27458 @ 1 @ 1
6 Geräte anschließen
Pos: 29 /Ser ie 75 0 (WA GO-I/ O-SYS TEM )/ Ans chli eße n/L eiter a n CA GE C LAM P ansc hli eßen ( al lg emei n) - Ü bersc hrift 2 u nd Text @ 3\mod_1225448660171_6.docx @ 24926 @ 2 @ 1
6.1 Leiter an CAGE CLAMP® anschließen
CAGE CLAMP®-Anschlüsse von WAGO sind für ein-, mehr- oder feindrähtige
Leiter ausgelegt.
Hinweis
Nur einen Leiter pro CAGE CLAMP® anschließen!
Sie dürfen an jedem CAGE CLAMP®-Anschluss nur einen Leiter
anschließen. Mehrere einzelne Leiter an einem Anschluss sind nicht
zulässig.
Müssen mehrere Leiter auf einen Anschluss gelegt werden, verbinden Sie diese in
einer vorgelagerten Verdrahtung, z. B. mit WAGO-Durchgangsklemmen.
Ausnahme:
Sollte es unvermeidbar sein, zwei mehr- oder feindrähtige Leiter an einem CAGE
CLAMP®-Anschluss anzuschließen, müssen Sie eine gemeinsame Aderendhülse
verwenden. Folgende Aderendhülsen sind einsetzbar:
Länge 8 mm
Nennquerschnitt
1 mm² für zwei mehr- oder feindrähtige Leiter
max.
mit je 0,5 mm²
WAGO-Produkt 216-103 oder Produkte mit gleichen Eigenschaften.
1. Zum Öffnen der CAGE CLAMP® führen Sie das Betätigungswerkzeug in
die Öffnung oberhalb des Anschlusses ein.
2. Führen Sie den Leiter in die entsprechende Anschlussöffnung ein.
3. Zum Schließen der CAGE CLAMP® entfernen Sie das
Betätigungswerkzeug wieder. Der Leiter ist festgeklemmt.
Pos: 30 /Dokum entati on allg emei n/Gli ederung sele mente /---Seit en wechs el--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Abbildung 40: Leiter an CAGE CLAMP
®
anschließen
Page 55

WAGO-I/O-SYSTEM 750 Prozessabbild 55
Tabelle 23: Übersicht
0
S0
Statusbyte S0
S0
Statusbyte S0
C0
Control-Byte C0
1
S1
Statusbyte S1
S1
Statusbyte S1
C1
Control-Byte C1
Sollposition
(LSB)
3
D1
Istposition
S3
Erw. Statusbyte S3
D1
Sollposition
4
D2
Istposition
S4
Erw. Statusbyte S4
D2
Sollposition
Sollposition
(MSB)
750-636 DC-Drive-Controller 24 V/5 A
Pos: 31 /All e S eri en ( Allg emei n e Mod ule) /Ü ber schri fte n f ür al le Ser ien/ Proz ess ab bild - Üb ersc hrift 1 @ 4\ mod_1240983067828_6.docx @ 31940 @ 1 @ 1
7 Prozessabbild
Pos: 32 /Ser ie 75 0 (WA GO-I/ O-S YSTEM) /Proz ess abbild Klemme nbus /Hinw eis: Pro zess abbil dmap ping abh ängig von FBK/ PFC, o hne Stat us-/C ontr olb yt e @ 6 \mod_1256126797251_6.docx @ 43339 @ @ 1
Hinweis
Mapping des Prozessabbildes im Feldbussystem
Die Abbildung der Prozessdaten der Busklemme im Prozessabbild des
Feldbussystems ist abhängig vom eingesetzten Feldbuskoppler/-controller.
Entnehmen Sie diese Angaben bitte dem Kapitel „Feldbusspezifischer
Aufbau der Prozessdaten“ in der Beschreibung zum Prozessabbild des
entsprechenden Feldbuskopplers/-controllers.
Pos: 33 /Ser ie 75 0 (WA GO-I/ O-SYS TEM )/ Proz ess abbi ld Kle mme nbus /S ond er klemm en/P roz ess ab bild 750- 0636 @ 18\mod_1390819709152_6.docx @ 143406 @ 222 @ 1
Die Busklemme 750-636 (DC-Drive-Controller 24 V/5 A) stellt dem
Feldbuskoppler/-controller über einen logischen Kanal 6 Byte Ein- und
Ausgangsprozessabbild zur Verfügung. Die zu sendenden und zu empfangenden
Positionsdaten werden in 4 Ausgangsbytes (D0 ... D3) und 4 Eingangsbytes (D0
... D3) abgelegt. 2 Steuerbytes (C0, C1) und 2 Statusbytes (S0, S1) dienen zur
Steuerung der Busklemme und des Antriebs.
Alternativ zu den Positionsdaten im Eingangsprozessabbild (D0 ... D3) können
erweiterte Statusinformationen (S2 ... S5) eingeblendet werden.
7.1 Übersicht
Off-
set
2 D0 Istposition (LSB) S2 Erw. Statusbyte S2 D0
ExtendedInfo_ON = 0 ExtendedInfo_ON = 1
Eingangsdaten
Ausgangsdaten
Handbuch
Version 2.0.2
5 D3 Istposition (MSB) S5 Erw. Statusbyte S5 D3
Die Umschaltung zwischen den Prozessdaten und den erweiterten Statusbytes im
Eingangsprozessabbild erfolgt über das Bit 3 (ExtendedInfo_ON) im ControlByte C1 (C1.3). Mit dem Bit 3 des Statusbytes S1 (S1.3) wird die Umschaltung
quittiert.
Page 56

56 Prozessabbild WAGO-I/O-SYSTEM 750
Tabelle 24: Control-Byte C0
Control-Byte C0
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Reg
X X Current
_ON
Preset
Positio
Move
Move
MoveNeg
Antrieb soll in negative Richtung fahren. Die Funktion wird nur ausgeführt,
Antrieb gestoppt.
0:
Keine Fahrt in negative Richtung
1:
Fahrt in negative Richtung
MovePos
Antrieb soll in positive Richtung fahren. Die Funktion wird nur ausgeführt,
Andernfalls wird der Antrieb gestoppt.
0:
Keine Fahrt in positive Richtung
1:
Fahrt in positive Richtung
Positioning
Antrieb soll zur Sollposition fahren. Die Funktion wird nur ausgeführt, wenn
Andernfalls wird der Antrieb gestoppt.
0:
Keine Positionsfahrt
1:
Positionsfahrt zur Sollposition
Preset
Beim Übergang dieses Bits von LOW nach HIGH wird der Wert der
Eingang.
01:
Sollposition als PRESET -Wert in die Istposition übertragen
CurrentControl_
Dieses Bit dient zum Fahren des Antriebes mit der konfigurierten
findet man im Abschnitt PWM Steuerung bei der ‚Positionierung‘.
0:
Antrieb wird nicht mit ‚CurrentControl_PWM‘ gefahren.
1:
Antrieb wird mit ‚ CurrentControl _PWM‘ gefahren.
Reg_Com
Registerkommunikation (vgl. Kapitel „Einstellen der Busklemme über den
Parameterkanal“ > „Registerkommunikation“).
0:
Prozessdatenkommunikation aktiv.
1:
Registerkommunikation aktiv.
X
Reserviert
750-636 DC-Drive-Controller 24 V/5 A
7.2 Control-Bytes und Statusbytes
_Com
Control
ning
Pos
Neg
wenn ‚MovePos‘ und ‚Positioning‘ nicht aktiv sind. Andernfalls wird der
wenn ‚MoveNeg‘ und ‚Positioning‘ nicht aktiv sind.
‚MoveNeg‘ und ‚MovePos‘ nicht aktiv sind.
Sollposition als Preset-Wert in die Ist-Position übertragen. Das Preset-Register
bleibt hiervon unbeeinflusst. Die L/H-Flanke wird nur berücksichtigt während
einer ‚MovePos’- und ‚MoveNeg’-Fahrt, sowie im Ruhezustand der
Busklemme (‚Busy’= 0). Ohne Wirkung bleibt der Zustandswechsel während
einer Positionierfahrt und bei aktiviertem bzw. freigeschaltetem Preset-
ON
‚CurrentControl_PWM‘. Während des Fahren mit ‚MoveNeg‘ und ‚MovePos‘
wird die PWM
2
unmittelbar an der Motorendstufe eingestellt wenn
‚CurrentControl_ON‘ = 1 ist. Beim Fahren im Mode ‚Positioning‘ wird dieses
Bit nur in Phase 3 des Positioniervorganges berücksichtigt. Näheres hierzu
2
PWM = Pulsweitenmodulation
Handbuch
Version 2.0.2
Page 57

WAGO-I/O-SYSTEM 750 Prozessabbild 57
Tabelle 25: Control-Byte C1
Control-Byte C1
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Error
X X X X Extended
Optimize
Preset
_Enable
PresetInput
Wird dieses Bit vor oder während einer ‚MovePos‘- oder ‚MoveNeg‘-
Statusbyte S1, Bit 1 umgeschaltet.
0:
Preset-Eingang ist nicht freigeschaltet.
Statusbyte S1, Bit 1 hat die Bedeutung ‚Optimize_ON‘.
1:
Preset-Eingang ist freigeschaltet.
Statusbyte S1, Bit 1 hat die Bedeutung ‚Z_Input‘.
Optimize_On
Mit diesem Bit wird der Busklemme beim Positionieren erlaubt, den
Optimierung“.
0:
Vorhaltweg (Prestop) wird nicht optimiert.
1:
Vorhaltweg (Prestop) wird optimiert.
ExtendedInfo
Mit diesem Bit wird der Inhalt der Daten im Prozesseingangsabbild
erweiterte Informationen ausgegeben.
0:
Erweiterte Statusinformationen sind ausgeschaltet.
1:
Erweiterte Statusinformationen sind eingeschaltet.
Error_Quit
Wenn dieses Bit auf ‚1‘ gesetzt ist, erfolgt eine Quittierung folgender
S2.5 -> Motion-Detection-Timeout.
0:
Fehlerbits werden nicht quittiert.
1:
Fehlerbits werden quittiert.
X
Reserviert
750-636 DC-Drive-Controller 24 V/5 A
_Quit
_Enable
_On
Info_On
Fahrt gesetzt, dann wird der Preset -Eingang freigeschaltet und beim
Erkennen der Preset -Eingangsbedingung der Wert des Preset -Registers
in den Istwert kopiert und der Motor gestoppt. Erfolgt das Setzen des
Bits ‚PresetInput_Enable‘ während einer Positionierfahrt, dann wird es
ignoriert. Mit dem Setzen dieses Bits wird zusätzlich die Bedeutung von
Vorhaltweg (Prestop) zu optimieren. D.h., dass der Vorhaltweg ab dem
nächsten Fahrzyklus bei jedem Stoppvorgang mit dem ermittelten
Bremsweg neu gesetzt wird. Zur Ermittlung des Bremsweges siehe
Kapitel „Funktionsbeschreibung“ > „Positionieren mit eingeschalteter
(Byte 2 ... 5) umgeschaltet. An Stelle der aktuellen Position werden nun
_On
Input
Fehlerbits:
S2.0 -> Overtemperature_Warning,
S2.1 -> Overtemperature,
S2.2 -> Overflow_Warning,
S2.3 -> 24V_OK,
S2.4 -> Overload,
Handbuch
Version 2.0.2
Page 58

58 Prozessabbild WAGO-I/O-SYSTEM 750
Tabelle 26: Statusbyte S0
Statusbyte S0
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Reg
_Com
Error
Refer
ence_OK
Standstill
Busy
OnTarget
Move
Pos
Move
Neg
MoveNeg
Dieses Bit zeigt eine Fahrt in negative Richtung an.
0:
Keine Fahrt in negative Richtung
1:
Fahrt in negative Richtung
MovePos
Dieses Bit zeigt eine Fahrt in positive Richtung an.
0:
Keine Fahrt in positive Richtung
1:
Fahrt in positive Richtung
OnTarget
Dieses Bit zeigt an, dass der Positioniervorgang im Zielfenster beendet wurde.
Parameter 3 (TargetWindow)“
0:
Das Zielfenster wurde verlassen.
1:
Der Positioniervorgang wurde im Zielfenster beendet.
Busy
Für die Dauer einer Befehlsausführung liefert dieses Bit logisch „1“ zurück.
Sonst ist dieses Bit „0“.
0:
Es wird kein Befehl ausgeführt.
1:
Ein Befehl wird ausgeführt.
Standstill
Dieses Bit wird immer dann auf logisch ‚1‘ gesetzt, wenn die Busklemme die
> „Standstill-Bedingung“.
0:
Die Standstillbedingung ist nicht erfüllt oder die Busklemme empfängt
Drehgeberimpulse.
1:
Die Standstillbedingung ist erfüllt und die Busklemme empfängt keine
Drehgeberimpulse.
Reference_OK
Dieses Bit wird immer dann auf logisch ‚1‘ gesetzt, wenn eine Preset -Funktion
Kapitel „Funktionsbeschreibung“ > „Preset-Funktionen“.
0:
Preset-Funktion nicht erfolgreich ausgeführt.
1:
Preset-Funktion erfolgreich ausgeführt.
Error
Dieses Bit zeigt an, dass eine Status-/Fehlermeldung vorliegt. Um
(ActualPosition) mit erweiterten Informationen überblendet.
0:
Es liegt keine Status-/Fehlermeldung vor.
1:
Eine Status-/Fehlermeldung liegt vor.
Reg_Com
Registerkommunikation (vgl. Kapitel „Einstellen der Busklemme über den
Parameterkanal“ > „Registerkommunikation“).
0:
Prozessdatenkommunikation aktiv.
1:
Registerkommunikation aktiv.
750-636 DC-Drive-Controller 24 V/5 A
Das Bit wird zurückgesetzt, wenn das Zielfenster verlassen wird, unabhängig
von einem Positioniervorgang. Siehe auch Kapitel „Einstellen der Busklemme
über den Parameterkanal“ > „Busklemmenspezifische Parameterdaten,
Standstill-Bedingung bzw. keine Drehgeberimpulse detektiert, unabhängig
davon, ob gerade ein Stellkommando ausgeführt wird oder nicht. Nähere
Information zu diesem Thema finden Sie im Kapitel „Funktionsbeschreibung“
erfolgreich beendet wurde. Es kann im laufenden Betrieb auch wieder auf
logisch ‚0‘ zurückfallen. Nähere Information zu diesem Thema finden Sie im
Detailinformationen anzuzeigen, setzen Sie das Control-Bit
,ExtendedInfo_ON‘ (C1.2) auf ‚1’. Dann wird die Anzeige der Istposition
Handbuch
Version 2.0.2
Page 59

WAGO-I/O-SYSTEM 750 Prozessabbild 59
Tabelle 27: Statusbyte S1
Statusbyte S1
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Limit
_Pos
Limit
_Neg
Preset
Current
_ON
PWM
Extended
Optimize
Z_Input
Preset
_Enabled
PresetInput
Mit diesem Bit wird die Freischaltung des Preset-Eingangs angezeigt.
Statusbyte S1, Bit 1 angezeigt.
0:
PRESET -Eingang ist nicht freigeschaltet.
Statusbyte S1, Bit 1 hat die Bedeutung ‚Optimize_ON‘.
1:
PRESET -Eingang ist freigeschaltet.
Statusbyte S1, Bit 1 hat die Bedeutung ‚Z_Input‘.
Optimize_On/
Dieses Bit hat abhängig von Control-Byte C1, Bit 0 bzw. Statusbyte S1,
Eingangs angezeigt.
Bit 0
Bit 1
Abhängige Bedeutung
0 0 Vorhaltweg (Prestop) wird nicht optimiert.
0 1 Vorhaltweg (Prestop) wird optimiert.
1 0 Z-Eingang ist nicht aktiv.
1 1 Z-Eingang ist aktiv.
ExtendedInfo
Mit diesem Bit wird die Umschaltung der Daten im
Prozesseingangsabbild (Byte 2 ... 5) angezeigt.
0:
Erweiterte Statusinformationen sind ausgeschaltet.
1:
Erweiterte Statusinformationen sind eingeschaltet.
PWM_Active
Dieses Bit zeigt an, ob die Busklemme am Motorausgang ein PWMSignal generiert.
0:
Kein PWM-Signal am Motorausgang.
1:
PWM-Signal am Motorausgang.
CurrentControl
Dieses Bit zeigt an, ob die Motorendstufe mit CurrentControl_PWM
betrieben wird.
0:
Motorendstufe wird nicht mit CurrentControl_PWM betrieben.
1:
Motorendstufe wird mit CurrentControl_PWM betrieben.
PresetInput
Dieses Bit zeigt den Zustand des Eingangs für den Preset-Schalter an.
0:
Am Eingang liegt die Signalspannung (0) an.
1:
Am Eingang liegt die Signalspannung (1) an.
LimitSwitch
Dieses Bit zeigt den Zustand des Eingangs für den negativen
Endlagenschalter an.
0:
Am Eingang liegt die Signalspannung (0) an.
1:
Am Eingang liegt die Signalspannung (1) an.
LimitSwitch
Dieses Bit zeigt den Zustand des Eingangs für den positiven
Endlagenschalter an.
0:
Am Eingang liegt die Signalspannung (0) an.
1:
Am Eingang liegt die Signalspannung (1) an.
750-636 DC-Drive-Controller 24 V/5 A
Switch
_Enabled
Z_Input
_On
Switch
Input
Weiterhin wird mit diesem Bit die Umschaltung der Bedeutung von
Bit 0 verschiedene Bedeutungen.
Bei ‚PresetInput_Enabled‘ = „0“ wird mit diesem Bit die VorhaltwegOptimierung beim Positioniervorgang angezeigt.
Bei ‚PresetInput_Enabled“ = „1“ wird mit diesem Bit der Zustand des Z-
Control
_Active
Info_On
_On/
Input
_ON
_Neg
_Pos
Handbuch
Version 2.0.2
Page 60

60 Prozessabbild WAGO-I/O-SYSTEM 750
Tabelle 28: Erweitertes Statusbyte S2
Erweitertes Statusbyte S2
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
X
Param
_Failed
Motion
Timeout
Overload
24V_O
Overflow
ing
Overtemp
Overtempe
_Warning
Overtemperature
Die Temperatur der modulinternen Elektronik liegt im kritischen Bereich.
0:
Die Temperatur liegt unterhalb des Warngrenzwertes.
1:
Die Temperatur hat den Warngrenzwert überschritten.
Overtemperature
Die Temperatur der modulinternen Elektronik hat den Grenzwert überschritten.
Die Busklemme hat sich daraufhin selbsttätig abgeschaltet.
0:
Die Temperatur liegt unterhalb des Abschaltgrenzwertes.
1:
Die Temperatur hat den Abschaltgrenzwert überschritten.
Overflow
Dieses Bit wird immer dann auf logisch 1 gesetzt, wenn sich die Istposition
vorgegebenen Bereiches befindet.
0:
Die Istposition liegt innerhalb der Grenzwerte.
1:
Die Istposition liegt außerhalb der Grenzwerte.
24V_OK
Sollten im laufenden Betrieb die feldseitigen 24 V ausfallen, dann wird dieses
„Funktionsbeschreibung“ > „Preset -Funktionen“).
0:
Eine 24V-Versorgungsspannung ist ausgefallen.
1:
Beide 24V-Versorgungsspannungen sind vorhanden.
Overload
Die Ausgangsstufe der Busklemme hat einen Überlastfehler detektiert.
Verlängerung der Bremsrampe.
0:
Kein Überlastfehler vorhanden.
1:
Überlastfehler vorhanden.
MotionDetection
Mit ‚MotionDetectionTimeout’ wird die maximale Wartezeit bis zum ersten
Control-Bits ‚MoveNeg‘, ‚MovePos‘ und ‚Positioning‘ auf 0 gesetzt sind.
0:
Innerhalb der konfigurierten Zeitspanne wurden Impulse erfasst.
1:
Es wurden keine Impulse innerhalb der konfigurierten Zeitspanne
erfasst.
Param_Write
Parametrierstatus
0:
Die Parametrierung wurde erfolgreich beendet.
1:
Die Parametrierung ist fehlerhaft.
X
Reserviert
750-636 DC-Drive-Controller 24 V/5 A
7.3 Erweiterte Statusbytes
_Warning
_Warning
_Write
Detection
außerhalb des durch die Grenzwerte -2.147.400.000 und +2.147.400.000
Bit auf logisch ‚0‘ gesetzt. Der Istpositionswert bleibt aber erhalten, obwohl
durch den Ausfall der 24 V eine Positionskontrolle über den QuadraturDecoder/Counter nicht mehr möglich ist (siehe dazu auch Kapitel
K
_Warn
erature
rature
Der aus der Treiberdiagnose abgeleitete Überlastfehler tritt sowohl bei
Überstrom als auch bei Überspannung auf. Letztere kann entstehen, wenn die
während der Bremsphase zurückgespeiste Energie vom Netzteil nicht mehr
ausgeregelt werden kann. Zum Schutz der Busklemme wird dann der
Überlastfehler generiert und der Motor in Freilauf geschaltet. Mögliche
Abhilfen: Größere Netzteilkapazität, zusätzliche Verbraucher oder
Timeout
_Failed
Drehgeberimpuls konfiguriert. Wird innerhalb dieser Wartezeit nach dem Start
kein Impuls detektiert, dann wird der Fahr- bzw. Positioniervorgang
abgebrochen und das zugehörige Fehlerbit ‚MotionDetectionTimeout’ in den
ExtendedInfos gesetzt. Dieses Fehlerbit kann nur quittiert werden, wenn die
Handbuch
Version 2.0.2
Page 61

WAGO-I/O-SYSTEM 750 Prozessabbild 61
Tabelle 29: Erweitertes Statusbyte S3
Erweitertes Statusbyte S3
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
X X X X X X X
X
X
Reserviert
Tabelle 30: Erweitertes Statusbyte S4
Erweitertes Statusbyte S4
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
X X X X X X X
X
X
Reserviert
Tabelle 31: Erweitertes Statusbyte S5
Erweitertes Statusbyte S5
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
X X X X X X X
X
X
Reserviert
Tabelle 32: Aufbau des Prozessabbildes bei der Registerkommunikation
Byte
Eingangsdaten
Ausgangsdaten
0
REG_C
REG_S
1
REG_D0
REG_D0
2
REG_D1
REG_D1
3 … 5
Ungültig
Ungültig
750-636 DC-Drive-Controller 24 V/5 A
Pos: 34 /Ser ie 75 0 (WA GO-I/ O-SYS TEM )/ Proz essab bild Klemmenbus/Sonderklemmen/Prozessabbild 750-0636_Regi ster ko mmuni kat ion @ 18\mod_1391420071154_6.docx @ 144216 @ 2 @ 1
7.4 Prozessabbild bei Registerkommunikation
Wird das Bit 2^7 des Control-Bytes C0 auf den Wert 1 gesetzt, so reagiert die
Busklemme darauf, indem sie Bit 2^7 des Status-Bytes S0 auf den Wert 1 setzt.
Das Prozessabbild erhält hierbei eine andere Bedeutung. Anstelle von
Prozessdaten enthält es nun Daten der Registerkommunikation. Das Protokoll der
Registerkommunikation verwendet die Bytes 0, 1 und 2 des Prozessabbilds. Alle
übrigen Bytes sind in diesem Zustand ungültig.
Handbuch
Version 2.0.2
Page 62

62 Prozessabbild WAGO-I/O-SYSTEM 750
Tabelle 33: Bedeutung des Prozessabbildes bei der Registerkommunikation
Bezeichnung
Bedeutung
REG_C
Control-Byte der Registerkommunikation
REG_S
Status-Byte der Registerkommunikation
REG_D0
Unteres Byte (LSB) eines Registerwertes, der von der Busklemme
Busklemme geschrieben werden soll (Prozessabbild der Ausgänge)
REG_D1
Oberes Byte (MSB) eines Registerwertes, der von der Busklemme
Busklemme geschrieben werden soll (Prozessabbild der Ausgänge)
750-636 DC-Drive-Controller 24 V/5 A
gelesen wurde (Prozessabbild der Eingänge) oder in die
gelesen wurde (Prozessabbild der Eingänge) oder in die
Pos: 35 /Dokum entati on allg emei n/Gli ederung sele mente /---Seit enwe chs el--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 63

WAGO-I/O-SYSTEM 750 Parametrieren 63
750-636 DC-Drive-Controller 24 V/5 A
Pos: 36.1 /Al l e Ser ien ( Al lge mei ne M od ule)/Ü ber schri fte n für alle S erie n/Inbetr ieb nehmen - Konfi guri eren - Par amet ri eren/ Para metr ier en - Ü bers chr ift 1 @ 3\mod_1223554593484_6.docx @ 23715 @ 1 @ 1
8 Parametrieren
Pos: 36.2 /Serie 750 (WAGO-I/O-SYSTEM)/I n Be trie b ne hme n/P ara metr ier en ü ber Par am eter kan al/P ara metr ier en 7 50- 0636_Einleitung @ 18\mod_1391519870404_6.docx @ 144392 @ @ 1
Das Verhalten der Busklemme wird durch Parameter beeinflusst. Insgesamt
verfügt die Busklemme über 3 Parameterdatensätze, zwischen denen umgeschaltet
werden kann. Das Verändern von Parametern erfolgt über den Parameterkanal.
Der Parameterkanal verwendet hierfür die Registerkommunikation (vgl. Kap.
„Parametrieren“ > „Parameterdatensätze“, „Parameterkanal“ und
„Registerkommunikation“).
Pos: 36.3 /Serie 750 (WAGO-I/O-SYSTEM)/In Be tri eb neh men/ Par am etrier en über P ara met er kanal /Par am etrier e n 75 0-0636_Registerkommunikation @ 18\mod_1391166786422_6.docx @ 144087 @ 2 @ 1
8.1 Registerkommunikation
Einige Busklemmen der Serie 750 bieten für die Konfiguration ein nachfolgend
als „Registerkommunikation“ bezeichnetes Protokoll. Die
Registerkommunikation ermöglicht den lesenden und/oder schreibenden Zugriff
auf bis zu 64 als „Register“ bezeichnete Datenworte der jeweiligen Busklemme.
Dieses Protokoll ermöglicht einen Datenaustausch beispielsweise zwischen der
Busklemme 750-636 (DC-Drive-Controller 24 V/5 A) und einer SPS-Applikation.
Hinweis
Die Registerkommunikation der Busklemme 750-636 (DC-Drive-Controller 24
V/5 A) ist nicht permanenter Bestandteil des Prozessabbilds, sondern kann
bedarfsbezogen eingeblendet werden. Ist sie eingeblendet, steht das Prozessabbild
ausschließlich für Registerkommunikation zur Verfügung, d. h. es können keine
anderen Daten übertragen werden.
Wird Bit 7 im Steuerbyte des Prozessabbilds der Ausgänge gesetzt, gilt dies als
Aufforderung an die Busklemme, die Registerkommunikation einzublenden. Die
Busklemme reagiert auf diese Aufforderung, indem sie Bit 7 im Statusbyte setzt.
Die Registerkommunikation gilt damit als eingeblendet.
Kein Zugriff auf Prozessdaten während der Registerkommunikation!
Während der Registerkommunikation kann nicht auf die Prozessdaten
zugegriffen werden! Prozessdaten, die eventuell noch angezeigt werden,
sind nicht gültig!
Alle Vorgänge der Registerkommunikation folgen dem Frage-Antwort-Prinzip:
1. Im Prozessabbild der Ausgänge (PAA) wird eine Anfrage gestellt. Diese
kann beispielsweise von einer SPS-Applikation erzeugt werden.
2. Die Busklemme erzeugt eine Antwort im Prozessabbild der Eingänge
(PAE).
Eine Anfrage liegt dann vor, wenn sich gegenüber dem vorherigen Zustand der
Wert des Control-Bytes REG_C der Registerkommunikation ändert oder die
Registerkommunikation neu eingeblendet wird. Handelt es sich um einen
Schreibzugriff, verarbeitet die Busklemme zusätzlich die Bytes REG_D0 und
REG_D1 des PAA als neuen Wert für das jeweilige Register.
Eine Antwort liegt dann vor, wenn sich gegenüber dem vorherigen Zustand der
Wert des Status-Bytes REG_S oder der Bytes D0 oder D1 im PAE ändert.
Handbuch
Version 2.0.2
Page 64

64 Parametrieren WAGO-I/O-SYSTEM 750
Tabelle 34: Belegung des Control-Bytes REG_C der Registerkommunikation
Steuerbyte REG_C
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
1
RW
REG_NO
REG_NO
Registernummer (beispielsweise 56 oder 57)
RW
0: Lesezugriff
1: Schreibzugriff
Tabelle 35: Belegung des Status-Bytes REG_S der Registerkommunikation
Status-Byte REG_S
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
1
0
REG_NO
REG_NO
Registernummer (beispielsweise 56 oder 57)
750-636 DC-Drive-Controller 24 V/5 A
Handelt es sich bei der vorhergehenden Anfrage um einen Lesezugriff, enthalten
die Bytes D0 und D1 des PAE nun den aktuellen Wert des jeweiligen Registers.
Die Bits 0 ... 5 des Control-Bytes REG_C enthalten die Registernummer. Über Bit
6 (R/W) des Control-Bytes REG_C wird die Zugriffsrichtung (Lesen/Schreiben)
eingestellt.
Die Busklemme bearbeitet den Vorgang der Registerkommunikation. Ist der
Vorgang abgeschlossen, spiegelt die Busklemme in den Bits 0 ... 5 und 7 des
Status-Bytes REG_S die entsprechenden Bits des Control-Bytes REG_C.
Hinweis
Hinweis
Handelte es sich um einen erfolgreichen Schreibvorgang, so hat die Busklemme
nun die in den Bytes REG_D0 und REG_D1 des PAA stehenden Daten im
entsprechenden Register gespeichert.
Handelte es sich um einen erfolgreichen Lesevorgang, so enthalten die Bytes
REG_D0 und REG_D1 des PAE nun den aus dem entsprechenden Register
gelesenen Wert.
Passwort eingeben!
Manche Register sind gegen versehentliche Änderung geschützt. Wenn Sie diese
Register ändern wollen, müssen Sie zuvor das Passwortregister 31 mit „0x1235“
beschreiben.
Schreibvorgang durch anschließenden Lesevorgang überprüfen!
Die Bestätigung eines Schreibzugriffs auf ein Register bestätigt nur den
Abschluss des Vorgangs. Für Register gelten bestimmte
Zugriffsberechtigungen und Gültigkeitsregeln. Entsprechend kann es
vorkommen, dass die Busklemme zwar den Vorgang bestätigt, aber das
Register nicht beschreibt. Kontrollieren Sie daher den Erfolg eines
Schreibvorgangs, indem Sie anschließend den Wert des Registers lesen.
Handbuch
Version 2.0.2
Page 65

WAGO-I/O-SYSTEM 750 Parametrieren 65
750-636 DC-Drive-Controller 24 V/5 A
Hinweis
Nicht vergessen: Passwort zurücksetzen!
Das Passwortregister 31 behält darauf geschriebene Werte bis zum nächsten
Abschalten der Versorgung. Beschreiben Sie daher das Passwortregister 31
mit „0x0000“, sobald Sie alle anstehenden Änderungen an Registern
durchgeführt haben. Dies stellt für alle passwortgeschützten Register den
Schutz gegen versehentliche Änderungen wieder her.
Pos: 36.4 /Dokumentation allgemein/Gliederungselemente/---Seitenwechsel--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 66

66 Parametrieren WAGO-I/O-SYSTEM 750
Tabelle 36: Tabellenname
Datensatz-
Nummer
1
Actual
Aktuelle Parameter, mit denen die Busklemme
arbeitet
2
User Settings
Kundenspezische Einstellungen der Parameter
3
Factory Default
Herstellerspezifische Einstellungen der Parameter
750-636 DC-Drive-Controller 24 V/5 A
Pos: 36.5 /Serie 750 (WAGO-I/O-SYSTEM)/In Betr ieb ne hme n/P ara metr ier en ü ber Par am eter kan al/P ara metr ier en 7 50- 0636 _Par am eter- Date nsä tz e @ 1 8\mod_1391170590486_6.docx @ 144090 @ 23444334443444 @ 1
8.2 Parameterdatensätze
8.2.1 Verfügbare Parameterdatensätze
Die Busklemme besitzt drei verschiedene Parameterdatensätze.
Abbildung 41: Parameterdatensätze 1… 3
Bezeichnung Beschreibung
8.2.1.1 Actual (1)
Der Parameterdatensatz Actual (1) beinhaltet die Parameter, mit denen die
Busklemme arbeitet. Der Parameterdatensatz Actual (1) wird beim Systemstart
der Busklemme, d.h. nach einem Power-Up oder einem Reset der Busklemme,
aus dem Parameterdatensatz User Settings (2) 1:1 kopiert.
8.2.1.2 User Settings (2)
Der Parameterdatensatz User Settings (2) bietet dem Anwender die Möglichkeit,
eine vorgenommene Parametrierung zur Laufzeit nicht flüchtig in der Busklemme
zu speichern und bei Bedarf zurückzuladen.
8.2.1.3 Factory Default (3)
Der Parameterdatensatz ‚Factory Default‘ (3) bietet dem Anwender die
Möglichkeit, bei Bedarf einen Parametersatz zu laden, welcher einen
vordefinierten Betriebszustand der Busklemme ermöglicht.
Handbuch
Version 2.0.2
Page 67

WAGO-I/O-SYSTEM 750 Parametrieren 67
750-636 DC-Drive-Controller 24 V/5 A
8.2.2 Passwortschutz
Um den Parameterdatensatz User Settings (2) abspeichern zu können, ist es
erforderlich, in Register 31 das Passwort 0x1235 einzutragen.
Hinweis
Zurücksetzen des Passwortregisters
Passwörter werden von der Busklemme nicht selbsttätig zurückgesetzt. Sie
sind ohne einen weiteren Schreibbefehl auf Register 31 bis zum PowerDown gültig.
Die Änderung des Parameterdatensatzes ‚Factory Default‘ (3) ist ausschließlich
WAGO Kontakttechnik GmbH & Co. KG vorbehalten.
8.2.3 Ändern der Parameterdatensätze
Abbildung 42: Ändern der Parameterdatensätze
8.2.3.1 Actual (1)
Der Parameterdatensatz Actual (1) wird durch einen Schreibzugriff über den
Parameterkanal der Busklemme (Register 56 und 57) geändert.
Nach dem Schreiben des Parameterdatensatzes, d.h. dem Schließen des
Parameterkanals, führt die Busklemme eine Plausibilitätsprüfung der
empfangenen Parameter durch. Eine zusätzliche Check-Summen-Prüfung in der
Busklemme, z.B. Datensicherung durch CRC, findet nicht statt.
Bei erfolgreicher Plausibilitätsprüfung übernimmt die Busklemme die neuen
Parameter und arbeitet mit der neuen Parametrierung.
Handbuch
Version 2.0.2
Page 68

68 Parametrieren WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
Bei einem evtl. Spannungsausfall verliert die Busklemme den ParameterDatensatz Actual (1). Bei einem Wiederanlauf verhält sich die Busklemme
entsprechend Kapitel „Einstellen der Busklemme über den Parameterkanal“ > …
> „Actual (1)“.
8.2.3.2 User Settings (2)
Der Parameter-Datensatz Actual (1) wird durch das Kommando
REQ_STORE_USER, welches im Register 3 des Moduls eingetragen wird, als
Parameter-Datensatz User Settings (2) in einen nicht-flüchtigen Speicherbereich
des Moduls übernommen. Voraussetzung dafür ist vorher der Eintrag 0x1235 in
Register 31.
Der User-Parametersatz kann nach einer Benutzeranfrage, d.h. dem Kommando
REQ_RESTORE_USER, den aktuellen Parametersatz Actual (1) überschreiben.
8.2.3.3 Factory Default (3)
Das Schreiben/Ändern des Parameter-Datensatzes Factory Default (3) ist
ausschließlich WAGO Kontakttechnik GmbH & Co. KG vorbehalten.
Der Parameter-Datensatz Factory Default (3) wird durch das Kommando
REQ_RESTORE_FACTORY, welches im Register 3 des Moduls eingetragen
wird, in den flüchtigen Speicherbereich des Moduls übernommen, d.h. in den
Parametersatz Actual (1).
8.2.4 Übertragung der Parameter-Datensätze
8.2.4.1 Request/Response-Mechanismus
Im Register 3 werden die Kommandos vom Feldbuskoppler/-controller an das
Modul übertragen. Hiermit wird festgelegt, wie die über den Parameterkanal, d.h.
mit Hilfe der Register 56 und 57 übertragenen Parameterdaten in der Klemme
weiter verarbeitet werden. Register 3 ist les- und beschreibbar (R/W) und wird für
einen Befehls-Request benutzt.
Register 4 ist nur lesbar und signalisiert die Kommando-Response. Der logische
Aufbau beider Register ist identisch.
8.2.4.2 Session-Counter
Das High-Byte der Register beinhaltet einen Session-Counter. Zur Anforderung
eines Befehls wird der Wert dieses Bytes in Register 3 inkrementiert (mit
Überlauf), die Ausführung wird vom Modul durch einen identischen Wert im
High-Byte des Registers 4 quittiert. Das Low-Byte beinhaltet das
applikationsspezifische Kommando bzw. den Response-Code.
Handbuch
Version 2.0.2
Page 69

WAGO-I/O-SYSTEM 750 Parametrieren 69
Tabelle 37: Session-Counter
Register
Bit 8 ... 15
Bit 0 ... 7
3
Session
Request
4
Session
Response
Tabelle 38: Kommando-Übersicht 1
Kommando (Request Reg. 3)
Wert
Beschreibung
Das Modul übernimmt den User-Parametersatz
(2) (NV Mem) als Actual (1).
Das Modul speichert Actual (1) als User settings
(2).
Das Modul übernimmt die Factory settings (3)
als Actual (1).
Tabelle 39: Kommando-Übersicht 2
Response (Quittierung Reg. 4)
Wert
Beschreibung
Positive Bestätigung zur Übernahme der Daten
auf das Kommando REQ_RESTORE_USER.
Negative (im Falle ungültiger Daten)
Kommando REQ_RESTORE_USER.
Positive Bestätigung zur Übernahme der Daten
auf das Kommando REQ_STORE_USER.
Negative (im Falle ungültiger Daten)
Kommando REQ_STORE_USER
Positive Bestätigung zur Übernahme der Daten
REQ_RESTORE_FACTORY
Negative (im Falle ungültiger Daten)
Kommando REQ_RESTORE_FACTORY
750-636 DC-Drive-Controller 24 V/5 A
8.2.4.3 Kommando-Übersicht
Die folgenden Tabellen listen die für dieses Modul relevanten Befehle für
Register 3 und die jeweils als Quittierung erwarteten Daten in Register 4, sowohl
für die positive als auch die negative Bestätigung.
REQ_RESTORE_USER 0x02
REQ_STORE_USER 0x03
REQ_RESTORE_FACTORY 0x04
RES_RESTORE_USER_OK 0x08
RES_RESTORE_USER_NOK 0x09
RES_STORE_USER_OK 0x0A
RES_STORE_USER_NOK 0x0B
RES_RESTORE_FACTORY_OK 0x0C
RES_RESTORE_FACTORY_NOK 0x0D
Pos: 36.6 /Dokumentation allgemein/Gliederungselemente/---Seitenwechsel--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Bestätigung zur Übernahme der Daten auf das
Bestätigung zur Übernahme der Daten auf das
auf das Kommando
Bestätigung zur Übernahme der Daten auf das
Handbuch
Version 2.0.2
Page 70

70 Parametrieren WAGO-I/O-SYSTEM 750
Tabelle 40: Register 56
Register 56
Bit
27
26
25
24
23
22
21
20
Parameter
PRM7
PRM6
PRM5
PRM4
PRM3
PRM2
PRM1
PRM0
Bit
215
214
213
212
211
210
29
28
Parameter
PRM15
PRM14
PRM13
PRM12
PRM11
PRM10
PRM9
PRM8
750-636 DC-Drive-Controller 24 V/5 A
Pos: 36.7 /Serie 750 (WAGO-I/O-SYSTEM)/I n Be trie b ne hme n/P ara metr ier en ü ber Par am eter kan al/P ara metr ier en 7 50- 0636_Parameterkanal @ 18\mod_1391422708725_6.docx @ 144219 @ 233 @ 1
8.3 Parameterkanal
Einige Busklemmen der Serie 750 bieten für die Konfiguration ein nachfolgend
als „Parameterkanal“ bezeichnetes Protokoll. Der Parameterkanal ermöglicht den
lesenden und/oder schreibenden Zugriff auf bis zu 256 Parameter, d. h. Datenworte der jeweiligen Busklemme.
Die Parameter der Busklemme werden in klemmenspezifische Parameter
(Parameter 0 bis 249) und allgemeine Systemparameter (Parameter 250 bis 255)
unterschieden.
Das Protokoll des Parameterkanals ermöglicht den Transfer von Parameterdaten
beispielsweise zwischen der Busklemme und einer SPS-Applikation.
Der Parameterkanal verwendet die Registerkommunikation, um Daten zu
transportieren:
• Register 56: Hier werden wortweise Parameterdaten abgelegt.
• Register 57: Hier erfolgt die Kommunikationssteuerung für die Daten.
Der grundlegende Ablauf für das Lesen eines Parameters ist:
1. Register 57 mit dem Kommando der Leseanfrage beschreiben.
2. Register 57 lesen, um den Status der Ausführung zu prüfen.
3. Wenn die Leseanfrage erfolgreich war: Register 56 lesen, um die
angefragten Daten zu erhalten.
Der grundlegende Ablauf für das Schreiben eines Parameters ist:
1. Register 56 schreiben, um die Daten der Schreibanfrage abzulegen.
2. Register 57 mit dem Kommando der Schreibanfrage beschreiben.
3. Register 57 lesen, um den Status der Ausführung zu prüfen.
Eine genauere Beschreibung finden Sie im Kapitel „Prozessabbild“ > … >
„Ablauf der Parameterübertragung“.
8.3.1 Parameterdaten (Register 56)
Das Register 56 dient zur Aufnahme der zu lesenden bzw. zu schreibenden Parameterdaten. Je nach Zugriff wird das Register 56 von der Busklemme (Parameter
lesen) oder vom Feldbuskoppler/-controller (Parameter schreiben) beschrieben.
Handbuch
Version 2.0.2
PRM0 … PRM15: Parameterdaten Bit 20 … Bit 2
15
Page 71

WAGO-I/O-SYSTEM 750 Parametrieren 71
Tabelle 41: Register 57
Register 57
Bit
27
26
25
24
23
22
21
20
Anfrageparam
eter
A7
A6
A5
A4
A3
A2
A1
A0
Antwortparam
eter
A7
A6
A5
A4
A3
A2
A1
A0
Bit
215
214
213
212
211
210
29
28
Anfrageparam
eter
TGL_
PRM_
MORE_
RES
RES
RES
RES
RES
Antwortparam
eter
TGL_
TIME
BUF_
PRM_
RES
RES
RES
RES
Parameter
Wertebereich
Beschreibung
A0 … A7
0 … 255
Wortadresse des aktuell zu schreibenden/zu lesenden Parameters.
TGL_MS
FALSE,
Toggle-Bit zum Absetzen neuer Aufträge von der Applikation zur
und derzeit in Bearbeitung.
PRM_RW
FALSE
Es werden Parameterdaten von A7 … A0 gelesen.
TRUE
Es werden Parameterdaten nach A7 … A0 geschrieben.
MORE_SM
FALSE
Die Parameterübertragung ist abgeschlossen.
TRUE
Es folgen noch weitere Parameterdaten.
TGL_SM
FALSE,
Toggle-Bit zur Signalisierung der Übernahme eines gesendeten
Parameter abgeschlossen.
TIMEOUT
FALSE
Die Übertragung der Parameter ist in der vereinbarten Zeit
(Parameteradresse 0) beendet worden.
TRUE
Die zuvor zwischen Busklemme und Applikation ausgehandelte
maximale Übertragungszeit für die Parameter wurde überschritten.
BUF_OVF
FALSE
Zugriffe auf den Schreib- bzw. Lesepuffer der Busklemme war
zulässig.
TRUE
Es wurde auf Parameter außerhalb des Schreib- bzw. Lesepuffers
zugegriffen.
PRM_ERR
FALSE
Der zuvor übertragene Parameter war bzw. alle übertragenen
Parameter waren gültig.
TRUE
Mindestens ein Parameter war bei der Übertragung fehlerhaft. Das
Abschluss der Parameterübertragung gesetzt werden.
RES
FALSE
Reserviert für Erweiterungen.
750-636 DC-Drive-Controller 24 V/5 A
8.3.2 Kommunikationssteuerung (Register 57)
Das Register 57 dient zur Steuerung und Diagnose des Parameterkanals.
MS
SM
RW
OUT
PRM
OVF
ERR
Anfrageparameter: Information wird von der Applikation geschrieben und von der
Busklemme gelesen.
Antwortparameter: Information wird von der Busklemme geschrieben und von der
Applikation gelesen.
TRUE
Busklemme. Haben TGL_SM und TGL_MS gleichen Status,
wurde noch kein neuer Auftrag angestoßen. Haben die Flags
unterschiedliche Status, ist ein neuer Auftrag angestoßen worden
TRUE
Parameters seitens der Busklemme. Ist der Zustand von TGL_SM
ungleich dem von TGL_MS, wird der entsprechende Auftrag von
der Busklemme bearbeitet. Haben beide Flags gleichen Status, so
ist der Auftrag für den zuvor gesendeten bzw. angeforderten
Flag kann entweder nach jedem erhaltenen Parameter oder nach
Pos: 36.8 /Dokumentation allgemein/Gliederungselemente/---Seitenwechsel--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 72

72 Parametrieren WAGO-I/O-SYSTEM 750
Anfrage (Applikation)
Parameter
Wert
Beschreibung
TGL_MS
!= TGL_SM
Auftrag eintragen
PRM_RW
= FALSE
Lesezugriff
= TRUE
Schreibzugriff
MORE_PRM
= FALSE
Parameterdatenübertragung ist mit dem
aktuell übertragenen Parameter beendet
= TRUE
Weitere Parameterdaten folgen
A0 … A7
0 … (n-1)
Adresse Parameterdatum
PRM0 … PRM15
0 … 65535
Parameterdatum bei Schreibzugriff
Antwort (Busklemme)
Parameter
Wert
Beschreibung
TGL_MS
= = TGL_SM
Auftrag ausgeführt
A0 … A7
0 … (n-1)
Adresse Parameterdatum gespiegelt
TIMEOUT
FALSE, TRUE
Überwachungszeit abgelaufen
BUF_OFL
FALSE, TRUE
Zugriff außerhalb des Parameterbereichs
der Busklemme
PRM_ERR
FALSE, TRUE
Parameter-/Parametersatzfehler
PRM0 … PRM15
0 … 65535
Parameterdatum bei Lesezugriff
750-636 DC-Drive-Controller 24 V/5 A
Pos: 36.9 /Serie 750 (WAGO-I/O-SYSTEM)/I n Betrie b nehme n/Par ametr ieren über Par am eter kan al/P ara metr ier en 7 50- 063 6_Abla uf der Par amet erüb ertrag ung @ 18 \mod_1391173018836_6.docx @ 144156 @ 2 @ 1
8.4 Ablauf der Parameterübertragung
Der Parameterdatenaustausch zwischen Applikation und Busklemme erfolgt über
das Anfrage-Antwort-Verfahren. Die Applikation initiiert einen Auftrag mit Hilfe
des Toggle-Bits (TGL_MS != TGL_SM). Anschließend fragt sie das
Kommunikationssteuerungsregister (R57) der Busklemme ab, bis diese die
Ausführung des Auftrags quittiert (TGL_SM = = TGL_MS).
Im Folgenden werden die möglichen Aufträge an die Parametrierschnittstelle der
Busklemme aufgeführt:
Parameter lesen/schreiben (klemmenspezifisch)
Fehler beim Austausch der Parameterdaten werden von der Busklemme in den
Fehler-Flags TIMEOUT, BUF_OV und PRM_ERR gemeldet.
Ist das letzte Parameterdatum zur Busklemme transferiert worden
(MORE_PRM = FALSE), wird der komplette Parametersatz von der Busklemme
geprüft und bei Korrektheit übernommen. Andernfalls liefert die Busklemme
Parametrierfehler (PRM_ERR = TRUE).
Pos: 36.10 /D o kum entat io n all ge mei n/Gli ed eru ngsel e ment e/---Sei ten wec hsel --- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 73

WAGO-I/O-SYSTEM 750 Parametrieren 73
Tabelle 42: Allgemeine Parameterdaten
Parameteradresse
RESERVED
Reserviert für Erweiterungen
250 ... 253
R/W
TIMEOUT
Dieser Parameter enthält die maximal
die Überwachungszeit unendlich
254
R/W
NO_OF_PRMS
Anzahl Parameterdaten der Busklemme in
Worten
255
R
SET_DEFAULT_PRMS
Die Busklemme wird auf
Werkseinstellung zurückgesetzt.
W
750-636 DC-Drive-Controller 24 V/5 A
Pos: 36.11 / Ser ie 750 ( WA GO-I/ O-SY STEM) /In Betr ieb ne hmen/ Para metri eren über Para meter kanal/ Para metri eren 750- 0636_Allgemeine Parameterdaten @ 18\mod_1391523041189_6.docx @ 144406 @ 2 @ 1
8.5 Allgemeine Parameterdaten (Systemparameterbereich)
Zum Einstellen der Busklemme über den Parameterkanal werden definierte
Parameter verwendet, die über Parameteradressen indiziert werden. Es wird
zwischen allgemeinen (Systemparametern) und klemmenspezifischen
Parameteradressen unterschieden.
Für den Zugriff auf Systemparameter der Busklemme werden folgende Parameter
und Parameteradressen definiert:
Parameter Beschreibung
Pos: 36.12 /D o kum entat io n all ge mei n/Gli ed eru ngsel e ment e/---Sei ten wec hsel --- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Zugriff
zulässige Zeit in Millisekunden, die für
den Transfer des Parametersatzes
verstreichen darf. Bei TIMEOUT = 0 ist
Handbuch
Version 2.0.2
Page 74

74 Parametrieren WAGO-I/O-SYSTEM 750
Tabelle 43: Busklemmenspezifische Parameterdaten
Parameteradresse
RampTime_START
Länge der Start-Rampe
RampTime_STOP
Länge der Stopp-Rampe
Vorhaltwert für die Fahrt in positive
Richtung
Vorhaltwert für die Fahrt in negative
Richtung
1-fach-, 2-fach- oder 4-fach-Auswertung
der Quadraturimpulse
Haltezustand bei fehlender
Versorgungsspannung
Preset-Wert (HighWord)
5
40
Preset-Wert (LowWord)
6
41
Distanz und Richtung für
Getriebespielausgleich
Eingangssensitivität der digitalen
Eingänge
Einschaltdistanz CurrentControl_PWM
(HighWord)
Einschaltdistanz CurrentControl_PWM
(LowWord)
750-636 DC-Drive-Controller 24 V/5 A
Pos: 36.13 / Ser ie 750 ( WA GO-I/ O-SY STEM) /In Betr ieb ne hmen/ Para metri eren über Para meter kanal/ Para metri eren 750- 063 6_B usklem mensp ezifis che Par ame terda ten @ 18\mod_1391416278710_6.docx @ 144192 @ 23333333333333333 @ 1
8.6 Busklemmenspezifische Parameterdaten
Folgende Parameter und Parameteradressen sind für die Busklemme 750-636
(DC-Drive-Controller 24 V/5 A) definiert:
Parameter Beschreibung
Register
0 35
Prestop_Pos
Prestop_Neg
1 36
2 37
Target_Window Toleranzfenster „Sollposition“ 3 38
Standstill_Limit Maximaldrehzahl „Stillstand“
EnginePowerSupply Auswahl Motorspannung
IncScale
4 39
Positioning_Retry Maximale Anzahl Wiederholversuche
Z_Input_Enable Freigabe Z-Eingang für Preset-Funktion
Stop-Mode_PwrUp
PresetValue
Overtravel
7 42
Triggermode_Inputs
Stop-Mode Auswahl Haltezustand
DirectionReversal
_Delay
Verzögerung Drehrichtungsumkehr
8 43
Filter_Time Entprellzeiten der digitalen Eingänge 9 44
10 45
ShutDown_Distance
11 46
CurrentLimit_PWM Tastverhältnis für das PWM-Signal
12 47
CurrentControl_PWM Tastverhältnis für das PWM-Signal
CurrentLimit_Time Einschaltdauer der CurrentLimit_PWM
MotionDetection
Timeout
maximale Wartezeit bis zum ersten
Drehgeberimpuls
13 48
Handbuch
Version 2.0.2
Page 75

WAGO-I/O-SYSTEM 750 Parametrieren 75
ParameterAdresse
Brake-Mode
Auswahl Bremseigenschaften
Stop-Mode_Entry
Übergang in den Haltezustand
Increase_Swing_Back
Verlängerung einer Ausholfahrt
15
50
Spiegelung der Informationen aus den
erweiterten Statusbytes S2 und S3
Swing_Back_Distance
Anzeige des aktuellen Ausholweges
17
52
Tabelle 44: RampTime_START, RampTime_STOP
Parameteradresse
Funktion
Zugriff
Werkseinstellung
0
RampTime_START,
0
Bit 0 ... 7: Länge der Start-Rampe [0 ... 255]
des Motors mit oder ohne Sanftanlauf ermöglicht. Zum Sanftanlauf wird die
Wertebereich von 0 bis 255.
0:
Keine Rampe
1 ... 255:
Rampendauer 25 ms ... 6375 ms mit einer Auflösung von 25 ms
64:*
Default-Rampendauer 1600 ms
Bit 8 ... 15: Länge der Stop-Rampe [0 ... 255]
vorzeichenlosen Integer-Wert im Wertebereich von 0 bis 255.
0:
Keine Rampe
1 ... 255:
Rampendauer 25 ms ... 6375 ms mit einer Auflösung von 25 ms
64:*
Default-Rampendauer 1600 ms
* Werkseinstellung
750-636 DC-Drive-Controller 24 V/5 A
Parameter Beschreibung
Extended_Infos
Die folgenden Tabellen zeigen die Belegung und Werkseinstellungen der
einzelnen Parameter.
8.6.1 RampTime_START, RampTime_STOP
Der hier konfigurierte Wert bestimmt die Dauer der Start-Rampe zur Strom- bzw. Ruckbegrenzung
während der Anlaufphase. Mit der Start-Rampenlänge wird das Standardstartverhalten bestimmt,
welches das Anfahren
implementierte Rampenfunktion unter Berücksichtigung der hier konfigurierten Rampendauer
verwendet. Die Rampe wird immer dann ausgeführt, wenn der konfigurierte Wert ungleich 0 ist.
Das Format des Parameters entspricht einem 8 Bit breiten vorzeichenlosen Integer-Wert im
Register
14 49
16 51
Der hier konfigurierte Wert bestimmt die Dauer der Stopp-Rampe zur Strom- bzw.
Ruckbegrenzung während der Bremsphase. Die hier parametrierte Rampendauer bestimmt auch
das Verhalten des Exception-Stops. Die Rampe wird immer dann ausgeführt, wenn der
konfigurierte Wert ungleich 0 ist. Das Format des Parameters entspricht einem 8 Bit breiten
Handbuch
Version 2.0.2
Page 76

76 Parametrieren WAGO-I/O-SYSTEM 750
Tabelle 45: Prestop_Pos
Parameteradresse
Funktion
Zugriff
Werkseinstellung
1
Prestop_Pos
R/W
0x0064
Vorhaltwert positive Richtung [0 ... 65535]
vorzeichenlosen Integer-Wert im Wertebereich von 0 bis 65535.
1 ... 65535:
Vorhaltwert bei Positionierungsfahrten
100:*
Default-Vorhaltwert positive Richtung
* Werkseinstellung
Tabelle 46: Prestop_Neg
Parameteradresse
Funktion
Zugriff
Werkseinstellung
2
Prestop_Neg
R/W
0x0064
Vorhaltwert negative Richtung [0 ... 65535]
vorzeichenlosen Integer-Wert im Wertebereich von 0 bis 65535.
1 ... 65535:
Vorhaltwert bei Positionierungsfahrten
100:*
Default-Vorhaltwert positive Richtung
* Werkseinstellung
Tabelle 47: Target_Window
Parameteradresse
Funktion
Zugriff
Werkseinstellung
3
Target_Window
R/W
0x000A
Toleranzfenster [0 ... 65535]
Wertebereich von 0 bis 65535.
0:
Positionierung muss mit Sollposition = Istposition enden.
1 ... 65535:
Positionierung kann auf den Fenstergrenzen oder innerhalb des Fensters
enden.
100:*
Default-Toleranzfenster
* Werkseinstellung
750-636 DC-Drive-Controller 24 V/5 A
8.6.2 Prestop_Pos
Der hier konfigurierte Wert bestimmt den für die Optimierung zu verwendenden Vorhaltwert bei
einer Positionierungsfahrt in positive Richtung, wenn die Option im Control-Byte des
Prozessabbildes gesetzt ist. Das Format dieses Wertes entspricht einem 16 Bit breiten
8.6.3 Prestop_Neg
Der hier konfigurierte Wert bestimmt den für die Optimierung zu verwendenden Vorhaltwert bei
einer Positionierungsfahrt in negative Richtung, wenn die Option im Control-Byte des
Prozessabbildes gesetzt ist. Das Format dieses Wertes entspricht einem 16 Bit breiten
8.6.4 Target_Window
Der hier konfigurierte Wert bestimmt die Größe des Toleranzfensters bei einer
Positionierungsfahrt. Er definiert das Fenster mit +/- um die Sollposition.
Das Format dieses Wertes entspricht einem 16 Bit breiten vorzeichenlosen Integer-Wert im
Handbuch
Version 2.0.2
Page 77

WAGO-I/O-SYSTEM 750 Parametrieren 77
Tabelle 48: Prestop_Pos
Parameteradresse
Funktion
Zugriff
Werkseinstellung
Standstill_Limit
Stop-Mode_PwrUp
Bit 0 ... 5: Standstill_Limit [0 ... 58]
kleineren Wert für Standstill_Limit ein.
0:
< 1 Impuls/s
1:
1 Impuls/s
2 ... 58:
n Impulse/s
5:*
5 Impulse/s
Bit 6: Reserviert
Bit 7: EnginePowerSupply (750-636/000-700 und 750-636/000-800)
betrieben werden. In diesem Fall ist die Motorspannungsüberwachung deaktiviert.
0:*
Motorspannung = 24 V
1:
Motorspannung < 24 V
Bit 8 … 9: [0 ... 3]
Auswertung der Quadraturimpulse
0:*
1-fache Auswertung der Quadraturimpulse
1:
2-fache Auswertung der Quadraturimpulse
2:
4-fache Auswertung der Quadraturimpulse
3:
Ungültiger Eintrag
Bit 10 ... 13: Positioning_Retry [0 ... 15]
Toleranzfenster vorgegebene Genauigkeit nicht erreicht wird.
0:
Keine erneute Positionierung bei Positionierungsfehler
1 ... 15:
Max. Anzahl von Positionierungswiederholungen bei Positionierungsfehler
5:*
Max. 5 Positionierungswiederholungen bei Positionierungsfehler
Bit 14: Z_Input_Enable (nur 750-636)
ist, dass das Control-Bit PresetInput_Enable gesetzt ist.
0:*
Preset-Funktion über den Preset-Eingang.
Istposition übernommen.
750-636 DC-Drive-Controller 24 V/5 A
8.6.5 Standstill_Limit, EnginePowerSupply, Positioning_Retry, Z_Input_Enable, Stop-Mode_PwrUp
EnginePowerSupply
4
Von dem hier eingestellten Wert wird abgeleitet ab welcher Drehzahl in Impulsen/s der Antrieb als
stillstehend angesehen wird. Nähere Informationen zur Stillstandsbedingung finden Sie im Kapitel
„Funktionsbeschreibung“ > „Standstill-Bedingung“.
Das kleinste Erfassungsintervall beträgt 17 ms und entspricht dem Wert 58. Kleinere Werte
verlängern das Erfassungsintervall. Bei Drehgebern mit sehr wenigen Impulsen pro Umdrehung (z.
B. 2) und kurzen Erfassungsintervallen (d. h. größeren Werten für Standstill_Limit) kann es bei
kleineren Drehzahlen zum Flackern der Stillstandserkennung kommen. Stellen Sie dann einen
IncScale
Positioning_Retry
Z_Input_Enable
R/W 0x1405
Ist dieses Bit gesetzt, dann kann die Busklemme mit Motorbetriebsspannungen kleiner 24 V
Bevor die Busklemme eine Fehlpositionierung meldet kann diese selbstständig entscheiden, ob ein
weiterer Positionierungsversuch bestehend aus Ausholfahrt und anschließender Sollpositionsfahrt
initiiert wird. Mit dem hier beschriebenen Parameter wird die maximal zulässige Anzahl der
Wiederholungsversuche festgelegt. Ein Positionierungsfehler wird erkannt, wenn die durch das
Über dieses Bit kann parametriert werden, dass die Preset-Funktion in Abhängigkeit vom ZEingang ausgelöst wird. Weitere Voraussetzung für das selbsttätige Ausführen der Preset-Funktion
Handbuch
Version 2.0.2
Beim Erkennen einer Flanke am Preset-Eingang wird der Preset-Wert in die
Page 78

78 Parametrieren WAGO-I/O-SYSTEM 750
Parameteradresse
Funktion
Zugriff
Werkseinstellung
1:
Preset-Funktion über den Preset-Eingang und den Z-Eingang.
Flanke am Z-Eingang der Preset-Wert in die Istposition übernommen.
Bit 15: Stop-Mode_PwrUp
V kurzschließt.
0:*
Motorendstufe schaltet Freilauf
1:
Motorendstufe schaltet Bremse
* Werkseinstellung
Tabelle 49: PresetValue
Parameteradresse
Funktion
Zugriff
Werkseinstellung
5
PresetValue (HighWord)
R/W
0x0000
6
PresetValue (LowWord)
R/W
0x0000
Detektiert die Busklemme während einer Preset-Fahrt die Preset-Bedingung am digitalen Preset-
Wertebereich von -2147483648 (0x80000000) bis +2147483647 (0x7FFFFFFF).
0x00000000*
... 0xFFFFFFFF
Wertebereich PresetValue
* Werkseinstellung
Tabelle 50: Overtravel
Parameteradresse
Funktion
Zugriff
Werkseinstellung
7
Overtravel
R/W
0x0000
Der in Overtravel hinterlegte Wert in Counter-Inkrementen bestimmt die zum
- Overtravel negativ: Overtravel-Position wird von kleineren Istwerten aus überfahren.
0:*
Fahrt ohne Overtravel
-32768 ... -1:
Sollposition wird immer von unterhalb aus angefahren
+1...+32767:
Sollposition wird immer von oberhalb aus angefahren
* Werkseinstellung
750-636 DC-Drive-Controller 24 V/5 A
Während des Aktivpegels des Preset-Eingangs wird beim Erkennen einer
Anhand dieses Bits kann konfiguriert werden, ob die Motorendstufe nach dem Power-Up der
Busklemme den Motor in den Freilauf schaltet oder die Motorwicklungen zum Bremsen gegen 24
8.6.6 PresetValue
Eingang, dann wird das Positionierungsinterface die Istposition mit dem Preset-Wert initialisieren.
Das Format dieses Wertes entspricht einem 32 Bit breiten vorzeichenbehafteten Integer-Wert im
8.6.7 Overtravel
Getriebespielausgleich notwendige Distanz und differenziert durch sein Vorzeichen die
Anfahrrichtung der Sollposition während einer Positionierungsfahrt.
Das Format dieses Wertes entspricht einem 16 Bit breiten vorzeichenbehafteten Integer-Wert im
Wertebereich von -32768 (0x8000) bis +32767 (0x7FFF).
Overtravel-Position ist Sollposition + Overtravel.
- Overtravel positiv: Overtravel-Position wird von größeren Istwerten aus überfahren.
Handbuch
Version 2.0.2
Page 79

WAGO-I/O-SYSTEM 750 Parametrieren 79
Tabelle 51: TriggerMode_Inputs, Stop-Mode, DirectionReversal_Delay
Parameteradresse
Funktion
Zugriff
Werkseinstellung
8
TriggerMode_Inputs
DirectionReversal_Delay
R/W
0x0A37
750-636 DC-Drive-Controller 24 V/5 A
8.6.8 TriggerMode_Inputs, Stop-Mode, DirectionReversal_Delay
Stop-Mode
Bit 0 ... 3: TriggerMode_Inputs
Eingangssensitivität der digitalen Eingänge
Bit 0: Eingangssensitivität digitaler Eingang E+, pegelsensitiv
0: aktiv LOW (Öffner)
1:* aktiv HIGH (Schließer)
Bit 1: Eingangssensitivität digitaler Eingang E-, pegelsensitiv
0: aktiv LOW (Öffner)
1:* aktiv HIGH (Schließer)
Bit 2: Eingangssensitivität digitaler Eingang P, flankensensitiv
0: Reaktion auf fallende Flanke (Öffner)
1:* Reaktion auf steigende Flanke (Schließer)
Bit 3: reserviert
Bit 4 ... 7: Stop-Mode
Mit diesen Bits kann konfiguriert werden, ob die Motorendstufe nach dem STANDARD-,
EXCEPTION- oder EMERGENCY-Bremsen der Busklemme den Motor in den Freilauf schaltet
oder die Motorwicklungen zum Bremsen kurzschließt und an 24 V (750-636) bzw. an das
Motorspannungspotential U
Die Aktion wird nur ausgeführt, wenn im entsprechenden Brake-Mode (Bremseigenschaften) eine
Rampe gewählt wurde, ansonsten wird der Stop-Mode (Haltezustand) durch die konfigurierten
Bremseigenschaften bestimmt.
Bit 4: Stop-Mode_STANDARD
0: Motorendstufe schaltet Freilauf
1:* Motorendstufe schaltet Bremse
Bit 5: Stop-Mode_EXCEPTION
0: Motorendstufe schaltet Freilauf
1:* Motorendstufe schaltet Bremse
Bit 6: Stop-Mode_EMERGENCY
0:* Motorendstufe schaltet Freilauf
1: Motorendstufe schaltet Bremse
(750-636/000-700 und 750-636/000-800) schaltet.
A
Bit 7: Reserviert
Handbuch
Version 2.0.2
Page 80

80 Parametrieren WAGO-I/O-SYSTEM 750
Parameteradresse
Funktion
Zugriff
Werkseinstellung
Tabelle 52: Filter_Time
9
Filter_Time
R/W
0x0AAA
Filter_Time
Entprellzeiten der digitalen Eingänge mit n mal 3ms.
Bit 0 ... 3: Entprellzeit digitaler Eingang E+ [0 ... 15]
0:
keine softwareseitige Entprellung
1 ... 15:
3 ms bis 45 ms Entprellzeit mit einer Auflösung von 3 ms
10:*
Default-Entprellzeit 30 ms
Bit 4 ... 7: Entprellzeit digitaler Eingang E- [0 ... 15]
0:
keine softwareseitige Entprellung
1 ... 15:
3 ms bis 45 ms Entprellzeit mit einer Auflösung von 3 ms
10:*
Default-Entprellzeit 30 ms
Bit 8 ... 11: Entprellzeit digitaler Eingang P [0 ... 15]
0:
keine softwareseitige Entprellung
1 ... 15:
3 ms bis 45 ms Entprellzeit mit einer Auflösung von 3 ms
10:*
Default-Entprellzeit 30 ms
Bit 12 ... 13: Entprellzeit Diagnosesignal der Endstufe (overload) [0 … 3]
als 3 Impulse auf, erfolgt ebenfalls die Signalisierung des Diagnosesignals.
0:*
0 ms (keine Filterung)
1:
0,5 ms
2:
1 ms
3:
3 ms
Bit 14 ... 15: Reserviert
* Werkseinstellung
750-636 DC-Drive-Controller 24 V/5 A
Bit 8 ... 15: DirectionReversal_Delay [0 ... 255]
Das Motor-Interface verzögert für die Dauer von n mal 10 ms den Einschaltvorgang bei
Drehrichtungsumkehr.
0: keine Verzögerung bei Drehrichtungsumkehr
1 ... 255: Verzögerung 10 ms bis 2550 ms mit einer Auflösung von 10 ms
10:* Default-Verzögerung 100 ms
* Werkseinstellung
8.6.9 Filter_Time
Parameteradresse Funktion Zugriff Werkseinstellung
Sehr kurze Impulse (kleiner als die Filterzeit) werden gezählt. Treten innerhalb einer Minute mehr
Handbuch
Version 2.0.2
Page 81

WAGO-I/O-SYSTEM 750 Parametrieren 81
Tabelle 53: ShutDown_Distance
Parameteradresse
Funktion
Zugriff
Werkseinstellung
ShutDown_Distance
der Verarbeitung durch die Busklemmenapplikation mit einem Zweierkomplement konvertiert.
0x00000000*
... 0xFFFFFFFF
Wertebereich ShutDown_Distance
* Werkseinstellung
750-636 DC-Drive-Controller 24 V/5 A
8.6.10 ShutDown_Distance
10 ShutDown_Distance (HighWord) R/W 0x0000
11 ShutDown_Distance (LowWord) R/W 0x0000
Während einer Positionierungsfahrt kann n Inkremente vor dem Erreichen der Sollposition die
CurrentControl_PWM an der Motorendstufe erzwungen werden. Dieser hier konfigurierte Wert
bestimmt diese Distanz zur Sollposition. Sollte die hier parametrierte Distanz kleiner als der
drehrichtungsabhängige Prestop oder 0 sein, dann wird die CurrentControl_PWM-Funktion nicht
ausgeführt. Weitere Informationen zur CurrentControl_PWM finden Sie im Kapitel
„Funktionsbeschreibung“ > „PWMSteuerung bei der Positionierung“..
Das Format dieses Wertes entspricht einem 32 Bit breiten vorzeichenlosen Integer-Wert im
Wertebereich von 0 (0x00000000) bis +2147483647 (0x7FFFFFFF). Negative Werte werden vor
Handbuch
Version 2.0.2
Page 82

82 Parametrieren WAGO-I/O-SYSTEM 750
Tabelle 54: CurrentLimit_PWM, CurrentControl_PWM
Parameteradresse
Funktion
Zugriff
Werkseinstellung
750-636 DC-Drive-Controller 24 V/5 A
8.6.11 CurrentLimit_PWM, CurrentControl_PWM
12
Bit 0 ... 7: CurrentLimit_PWM [0 ... 200]
Unter CurrentLimit_PWM wird ein Tastverhältnis für das PWM-Signal zur Motorsteuerung
konfiguriert.
Die hier beschriebene CurrentLimit_PWM wird vom DC-Drive Controller bei einer
Positionierungsfahrt während der Startphase für eine bestimmte Dauer an der Motorendstufe
eingestellt. Die Einschaltdauer der PWM richtet sich nach dem zugehörigen Parameter
CurrentLimit_Time und beginnt grundsätzlich mit dem Ende der Start-Rampe. Zum Freischalten der
CurrentLimit_PWM-Funktion ist es nicht nur erforderlich, dass das Tastverhältnis größer 0
konfiguriert ist, sondern auch, dass die CurrentLimit_Time einen Wert größer 0 aufweist.
Weitere Informationen zur CurrentLimit_PWM finden Sie im Kapitel Funktionsbeschreibung >
PWM-Steuerung bei der Positionierung.
0: Die CurrentLimit_PWM-Funktion ist abgeschaltet.
1 ... 200: PWM-Tastverhältnis 0,5 % ... 100 % mit einer Auflösung von 0,5 %
201 ... 255: PWM-Tastverhältnis 100 %
175:* PWM-Tastverhältnis 87,5 %
Bit 8 ... 15: CurrentControl_PWM [0 ... 200]
Mit CurrentControl_PWM wird ein Tastverhältnis für das PWM-Signal zur Motorsteuerung
konfiguriert.
Die CurrentControl_PWM wird unter zwei verschiedenen Bedingungen an der Motorendstufe
eingestellt. Zum einen immer dann, wenn während einer ‚MovePos’- oder ‚MoveNeg’-Fahrt das
Control-Bit ‚CurrentControl_ON’ auf High geschaltet wird, und zum anderen unter bestimmten
Bedingungen während einer Positionierungsfahrt.
Bei den einfachen Fahrbefehlen MovePos und MoveNeg kann die CurrentControl_PWM während
der Fahrt zusätzlich in den Grenzen von 1 % ... 99 % verändert werden. Zum sicheren Stoppen des
Antriebs ist der Fahrbefehl zurück zu nehmen und für 100 % ist das Bit CurrentControl_ON
zurückzusetzen.
Die CurrentControl_PWM dient der Leistungsreduzierung z. B. für Schleichfahrt.
Weitere Informationen zur CurrentControl_PWM finden Sie im Kapitel „Funktionsbeschreibung“ >
„PWMSteuerung bei der Positionierung“.
CurrentLimit_PWM
CurrentControl_PWM
R/W 0xB4AF
0: Die CurrentControl_PWM-Funktion ist abgeschaltet.
1 ... 200: PWM-Tastverhältnis 0,5 % ... 100 % mit einer Auflösung von 0,5 %
201 ... 255: PWM-Tastverhältnis 100 %
180:* PWM-Tastverhältnis 90 %
* Werkseinstellung
Handbuch
Version 2.0.2
Page 83

WAGO-I/O-SYSTEM 750 Parametrieren 83
Tabelle 55: CurrentLimit_Time, MotionDetectionTimeout
CurrentLimit_Time
MotionDetectionTimeout
Bit 0 ... 7: CurrentLimit_Time [0 ... 255]
Kapitel Funktionsbeschreibung > PWM-Steuerung bei der Positionierung.
0:*
Die CurrentLimit_PWM-Funktion ist abgeschaltet.
1 ... 255:
Die CurrentLimit_PWM-Funktion ist eingeschaltet mit einer
CurrentLimit_Time 100 ms ... 25,5 s mit einer Auflösung von 100 ms.
Bit 8 ... 13: MotionDetectionTimeout [0 ... 63]
Fahrzyklus vorzeitig beendet und die Meldung MotionDetectionTimeout im Status generiert.
0:*
Überwachungsfunktion abgeschaltet
1 ... 63:
Timeout nach Start-Rampe 1 s ... 63 s mit einer Auflösung von 1 s
Bit 14 ... 15: Reserviert
* Werkseinstellung
750-636 DC-Drive-Controller 24 V/5 A
8.6.12 CurrentLimit_Time, MotionDetectionTimeout
Parameteradresse Funktion Zugriff Werkseinstellung
13
Mit CurrentLimit_Time wird mit n mal 100 ms die Einschaltdauer der CurrentLimit_PWM beim
Positionieren mit PWM festgelegt. Weitere Informationen zur CurrentLimit_PWM finden Sie im
Mit MotionDetectionTimeout wird die maximale Wartezeit bis zum ersten Drehgeberimpuls
konfiguriert. Wird innerhalb dieser Wartezeit nach dem Start kein Impuls detektiert, dann wird der
R/W 0x0000
Handbuch
Version 2.0.2
Page 84

84 Parametrieren WAGO-I/O-SYSTEM 750
Tabelle 56: Brake-Mode, Stop-Mode_Entry, Gebergrenzfrequenz
Brake-Mode (Bremseigenschaften),
Gebergrenzfrequenz
Bit 0 ... 5: Brake-Mode (Bremseigenschaften)
Abschaltposition ausgeführt und endet im Haltezustand.
Bit 0 ... 1: Brake-Mode_STANDARD [0 ... 3]
0:
Motorendstufe schaltet Freilauf
1:*
Motorendstufe schaltet PWM-Rampe
2:
Reserviert
3:
Motorendstufe schaltet Bremse
Bit 2 ... 3: Brake-Mode_EXCEPTION [0 ... 3]
0:
Motorendstufe schaltet Freilauf
1:*
Motorendstufe schaltet PWM-Rampe
2:
Reserviert
3:
Motorendstufe schaltet Bremse
Bit 4 … 5: Brake-Mode_EMERGENCY [0 ... 3]
0:*
Motorendstufe schaltet Freilauf
1:
Motorendstufe schaltet PWM-Rampe
2:
Reserviert
3:
Motorendstufe schaltet Bremse
Bit 6 ... 7: Reserviert
Bit 8: Stop-Mode_Entry
Ende der elektrischen Rampe oder über die Standstill-Bedingung erfolgen soll.
0:
Ohne Standstill-Bedingung
1:*
Mit Standstill-Bedingung
Bit 9 … 11: Grenzfrequenz der Drehgeberimpulse
A/B-Eingänge störunempfindlicher gegen Störimpulse.
0:*
Grenzfrequenz 500 kHz (Abtastfrequenz 2 MHz)
1:
Grenzfrequenz 125 kHz (Abtastfrequenz 500 kHz)
2:
Grenzfrequenz 62,5 kHz (Abtastfrequenz 250 kHz)
3:
Grenzfrequenz 25 kHz (Abtastfrequenz 100 kHz)
4:
Grenzfrequenz 12,5 kHz (Abtastfrequenz 50 kHz)
5:
Grenzfrequenz 6,25 kHz (Abtastfrequenz 25 kHz)
6:
Grenzfrequenz 2,5 kHz (Abtastfrequenz 10 kHz)
7:
Grenzfrequenz 1,25 kHz (Abtastfrequenz 5 kHz)
Bit 12 ... 15: Reserviert
* Werkseinstellung
750-636 DC-Drive-Controller 24 V/5 A
8.6.13 Brake-Mode, Stop-Mode_Entry, Gebergrenzfrequenz
Parameteradresse Funktion Zugriff Werkseinstellung
14
Der Brake-Mode bestimmt die Bremseigenschaften der Motoransteuerung. Die Bremseigenschaft
differenziert Freilauf, PWM-Rampe und Bremse. Die konfigurierte Aktion wird beim Erreichen der
Stop-Mode_Entry,
R/W 0x0105
Über diese Einstellung wird vorgegeben, ob der Eintritt in den Haltezustand bedingungslos nach
Bei großen Leitungslängen kann es je nach verwendetem Kabel zum Übersprechen der A/B-Signale
mit der Folge falschen Zählens kommen. Das Herabsetzen dieser Parametergröße bis hinab auf die
maximale Istfrequenz des Gebers der jeweiligen Applikation erhöht die Filterfunktion für diese Art
der Störimpulse.Intern wird dabei die Abtastfrequenz des Gebersignals reduziert. Dadurch sind die
Handbuch
Version 2.0.2
Page 85

WAGO-I/O-SYSTEM 750 Parametrieren 85
Tabelle 57: Increase_Swing_Back
15
Increase_Swing_Back
R/W
0x0000
Bit 0 ... 7: Increase_Swing_Back [0 ... 255]
angegeben und dient der Verlängerung einer Ausholfahrt während eines Positioniervorganges.
0 ... 255:
0 % ... 2550% - prozentuale Verlängerung der Ausholfahrt mit einer
Auflösung von 10 %
0:*
Verlängerung der Ausholfahrt um 0 %
Bit 7 ... 15: Reserviert
* Werkseinstellung
750-636 DC-Drive-Controller 24 V/5 A
8.6.14 Increase_Swing_Back
Parameteradresse Funktion Zugriff Werkseinstellung
Dieser Wert wird in Prozenten mit einer Auflösung von 10 % im Wertebereich von 0 % bis 2550 %
Handbuch
Version 2.0.2
Page 86

86 Parametrieren WAGO-I/O-SYSTEM 750
Tabelle 58: Extended_Infos
16
Extended_Infos
R
0x000
Bit 0 ... 8: Spiegelung der Informationen aus den erweiterten Statusbytes S2 und S3. Angaben zu den
einzelnen Bits finden Sie im Kapitel „Prozessabbild“ >„ „Erweiterte Statusbytes“.
Bit 0: Overtemperature_Warning
0:
Die Temperatur liegt unterhalb des Warngrenzwertes.
1:
Die Temperatur hat den Warngrenzwert überschritten.
Bit 1: Overtemperature
0:
Die Temperatur liegt unterhalb des Abschaltgrenzwertes.
1:
Die Temperatur hat den Abschaltgrenzwert überschritten.
Bit 2: Overflow_Warning
0:
Die Istposition liegt innerhalb der Grenzwerte.
1:
Die Istposition liegt außerhalb der Grenzwerte.
Bit 3: 24V_OK (abhängig von der eingesetzten Busklemme)
0:
Die 24V-Feldversorgungsspannung ist ausgefallen. (nur 750-636)
636/000-800)
1:
Die 24V-Feldversorgungsspannung ist vorhanden. (nur 750-636)
750-636/000-800)
Bit 4: Overload
0:*
Kein Überlastfehler vorhanden.
1:
Überlastfehler vorhanden.
Bit 5: MotionDetectionTimeout
0:
Innerhalb der konfigurierten Zeitspanne wurden Impulse erfasst.
1:
Es wurden keine Impulse innerhalb der konfigurierten Zeitspanne erfasst.
Bit 6: Param_Write_Failed
0:
Die Parametrierung wurde erfolgreich beendet.
1:
Die Parametrierung ist fehlerhaft.
Bit 7: 24V_Motor_OK (750-636/000-700 und 750-636/000-800)
0:
Die 24V-Motorversorgungsspannung ist ausgefallen.
1:
Die 24V-Motorversorgungsspannung ist vorhanden.
Bit 8: 24V_Feld_OK (750-636/000-700 und 750-636/000-800)
0:
Die 24V-Feldversorgungsspannung ist ausgefallen.
1:
Die 24V-Feldversorgungsspannung ist vorhanden.
Bit 9 ... 15: Reserviert
750-636 DC-Drive-Controller 24 V/5 A
8.6.15 Extended_Infos
Parameteradresse Funktion Zugriff Werkseinstellung
Eine 24V-Versorgungsspannung ist ausgefallen. (750-636/000-700 und 750-
Beide 24V-Versorgungsspannungen sind vorhanden. (750-636/000-700 und
Handbuch
Version 2.0.2
Page 87

WAGO-I/O-SYSTEM 750 Parametrieren 87
Tabelle 59: Swing_Back_Distance
17
Swing_Back_Distance
R
0x0000
Anzeige des aktuellen Ausholweges. Das Format dieses Wertes entspricht einem 16 Bit breiten
vorzeichenbehafteten Integer-Wert im Wertebereich von -32768 (0x8000) bis +32767 (0x7FFF).
0x0000 ... 0xFFFF
Wertebereich Swing_Back_Distance
750-636 DC-Drive-Controller 24 V/5 A
8.6.16 Swing_Back_Distance
Parameteradresse Funktion Zugriff Werkseinstellung
Pos: 37 /Dokum entati on allg emei n/Gli ederung sele mente /---Seit enwe chs el--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 88

88 Parametrieren WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
=== Ende der Li st e für Te xtm arke Inh alt _mit te = ==
Handbuch
Version 2.0.2
Page 89

WAGO-I/O-SYSTEM 750 Abbildungsverzeichnis 89
750-636 DC-Drive-Controller 24 V/5 A
Pos: 39 /Dokum entati on allg emei n/Verz eichni sse/ Abbil dung sverz eichni s - Über schri ft oG un d Verzei chnis @ 3\mod_1219222916765_6.docx @ 21079 @ @ 1
Abbildungsverzeichnis
Abbildung 1: Ansicht ............................................................................................ 15
Abbildung 2: Datenkontakte ................................................................................. 16
Abbildung 3: Leistungskontakte ........................................................................... 17
Abbildung 4: CAGE CLAMP®-Anschlüsse.......................................................... 19
Abbildung 5: Anzeigeelemente ............................................................................. 20
Abbildung 6: Schematisches Schaltbild ................................................................ 21
Abbildung 7: Anlaufstrom ..................................................................................... 23
Abbildung 8: Einschaltdauer ................................................................................. 24
Abbildung 9: Kurzschlussstromverlauf ................................................................. 24
Abbildung 10: Beispiel 1 ....................................................................................... 31
Abbildung 11: Beispiel 2 ....................................................................................... 32
Abbildung 12: Beispiel 3 ....................................................................................... 32
Abbildung 13: Beispiel 4 ....................................................................................... 33
Abbildung 14: Beispiel 5 ....................................................................................... 33
Abbildung 15: Beispiel 6 ....................................................................................... 34
Abbildung 16: Beispiel 7 ....................................................................................... 35
Abbildung 17: Beispiel 8 ....................................................................................... 36
Abbildung 18: Beispiel 9 ....................................................................................... 36
Abbildung 19: Beispiel 10 ..................................................................................... 37
Abbildung 20: Beispiel 11 ..................................................................................... 37
Abbildung 21: Beispiel 12 ..................................................................................... 38
Abbildung 22: Beispiel 13 ..................................................................................... 39
Abbildung 23: Beispiel 14 ..................................................................................... 39
Abbildung 24: Aufteilung des Fahrzyklus ............................................................ 40
Abbildung 25: „ShutDown_Distance wird in Phase P3 erreicht“ ......................... 41
Abbildung 26: Beispiel 16, „ShutDown_Distance wird in Phase P2 erreicht“ ..... 42
Abbildung 27: Beispiel 17, „ShutDown_Distance wird in Phase P1 erreicht“ ..... 42
Abbildung 28: Beispiel 18, „Fahren ohne CurrentControl_PWM“ ...................... 43
Abbildung 29: Beispiel 19, „Fahren mit CurrentControl_PWM =
f(Control.CurrentControl_ON), Variante 1“ ................................................ 43
Abbildung 30: Beispiel 20, „Fahren mit CurrentControl_PWM =
f(Control.CurrentControl_ON), Variante 2“ ................................................ 44
Abbildung 31: Bremsen aus 100%-PWM ............................................................. 45
Abbildung 32: Bremsen aus CurrentControl_PWM (CurrentControl_PWM >
CurrentLimit_PWM).................................................................................... 46
Abbildung 33: Bremsen aus CurrentControl_PWM (CurrentControl_PWM <
CurrentLimit_PWM).................................................................................... 46
Abbildung 34: Motordrehzahl in Impulsen/s ........................................................ 48
Abbildung 35: Standstill-Bedingung ..................................................................... 49
Abbildung 36: Maximale Impulse/Umdrehung .................................................... 50
Abbildung 37: Busklemme einsetzen (Beispiel) ................................................... 52
Abbildung 38: Busklemme einrasten (Beispiel) ................................................... 52
Abbildung 39: Busklemme lösen (Beispiel) ......................................................... 53
Abbildung 40: Leiter an CAGE CLAMP® anschließen ........................................ 54
Abbildung 41: Parameterdatensätze 1… 3 ............................................................ 66
Abbildung 42: Ändern der Parameterdatensätze ................................................... 67
Pos: 40 /Dokum entati on allg emei n/Gli ederung sele mente /---Seit enwe chs el--- @ 3\mod_1221108045078_0.docx @ 21808 @ @ 1
Handbuch
Version 2.0.2
Page 90

90 Tabellenverzeichnis WAGO-I/O-SYSTEM 750
750-636 DC-Drive-Controller 24 V/5 A
Pos: 41 /Dokum entati on allg emei n/Verz eichni sse/ Tabell env erzei chnis - Ü bersc hrift oG und Ver zeich nis @ 3\mod_1219222958703_6.docx @ 21083 @ @ 1
Tabellenverzeichnis
Tabelle 1: Varianten ................................................................................................ 6
Tabelle 2: Darstellungen der Zahlensysteme .......................................................... 8
Tabelle 3: Schriftkonventionen ............................................................................... 8
Tabelle 4: Legende zur Abbildung „Ansicht“ ....................................................... 15
Tabelle 5: Legende zur Abbildung „Leistungskontakte“ ...................................... 17
Tabelle 6: Legende zur Abbildung „CAGE CLAMP®-Anschlüsse“ .................... 19
Tabelle 7: Legende zur Abbildung „Anzeigeelemente“ ........................................ 20
Tabelle 8: Technische Daten – Gerät .................................................................... 22
Tabelle 9: Technische Daten – Versorgung .......................................................... 22
Tabelle 10: Technische Daten – Kommunikation ................................................. 22
Tabelle 11: Technische Daten – Digitaleingänge .................................................. 22
Tabelle 12: Technische Daten – Encodereingänge ............................................... 23
Tabelle 13: Technische Daten – Ausgänge ........................................................... 23
Tabelle 14: Technische Daten – Verdrahtungsebene ............................................ 25
Tabelle 15: Technische Daten – Leistungskontakte .............................................. 25
Tabelle 16: Technische Daten – Klemmenbus ...................................................... 25
Tabelle 17: Technische Daten – klimatische Umweltbedingungen ...................... 25
Tabelle 18: Prozessabbild ...................................................................................... 30
Tabelle 19: Verwendete Abkürzungen .................................................................. 31
Tabelle 20: Verwendete Abkürzungen .................................................................. 32
Tabelle 21: Tabellenname ..................................................................................... 40
Tabelle 22: Beschleunigungsvarianten .................................................................. 46
Tabelle 23: Übersicht ............................................................................................ 55
Tabelle 24: Control-Byte C0 ................................................................................. 56
Tabelle 25: Control-Byte C1 ................................................................................. 57
Tabelle 26: Statusbyte S0 ...................................................................................... 58
Tabelle 27: Statusbyte S1 ...................................................................................... 59
Tabelle 28: Erweitertes Statusbyte S2 ................................................................... 60
Tabelle 29: Erweitertes Statusbyte S3 ................................................................... 61
Tabelle 30: Erweitertes Statusbyte S4 ................................................................... 61
Tabelle 31: Erweitertes Statusbyte S5 ................................................................... 61
Tabelle 32: Aufbau des Prozessabbildes bei der Registerkommunikation ........... 61
Tabelle 33: Bedeutung des Prozessabbildes bei der Registerkommunikation ...... 62
Tabelle 34: Belegung des Control-Bytes REG_C der Registerkommunikation ... 64
Tabelle 35: Belegung des Status-Bytes REG_S der Registerkommunikation ...... 64
Tabelle 36: Tabellenname ..................................................................................... 66
Tabelle 37: Session-Counter ................................................................................. 69
Tabelle 38: Kommando-Übersicht 1 ..................................................................... 69
Tabelle 39: Kommando-Übersicht 2 ..................................................................... 69
Tabelle 40: Register 56 .......................................................................................... 70
Tabelle 41: Register 57 .......................................................................................... 71
Tabelle 42: Allgemeine Parameterdaten ............................................................... 73
Tabelle 43: Busklemmenspezifische Parameterdaten ........................................... 74
Tabelle 44: RampTime_START, RampTime_STOP ........................................... 75
Tabelle 45: Prestop_Pos ........................................................................................ 76
Tabelle 46: Prestop_Neg ....................................................................................... 76
Tabelle 47: Target_Window .................................................................................. 76
Tabelle 48: Prestop_Pos ........................................................................................ 77
Handbuch
Version 2.0.2
Page 91

WAGO-I/O-SYSTEM 750 Tabellenverzeichnis 91
750-636 DC-Drive-Controller 24 V/5 A
Tabelle 49: PresetValue ......................................................................................... 78
Tabelle 50: Overtravel ........................................................................................... 78
Tabelle 51: TriggerMode_Inputs, Stop-Mode, DirectionReversal_Delay ............ 79
Tabelle 52: Filter_Time ......................................................................................... 80
Tabelle 53: ShutDown_Distance ........................................................................... 81
Tabelle 54: CurrentLimit_PWM, CurrentControl_PWM ..................................... 82
Tabelle 55: CurrentLimit_Time, MotionDetectionTimeout ................................. 83
Tabelle 56: Brake-Mode, Stop-Mode_Entry, Gebergrenzfrequenz ...................... 84
Tabelle 57: Increase_Swing_Back ........................................................................ 85
Tabelle 58: Extended_Infos ................................................................................... 86
Tabelle 59: Swing_Back_Distance ....................................................................... 87
=== Ende der Li st e für Te xtm arke Ver zeic hni s_hi nte n == =
Handbuch
Version 2.0.2
Page 92

WAGO Kontakttechnik GmbH & Co. KG
Pos: 43 /D okum ent atio n al lge mei n/Ei nb and/ Ein ban d Han dbuc h - R ück seite @ 9\ mod_1285229376516_6.docx @ 64942 @ @ 1
Postfach 2880 • D-32385 Minden
Hansastraße 27 • D-32423 Minden
Telefon: 05 71/8 87 – 0
Telefax: 05 71/8 87 – 1 69
E-Mail: info@wago.com
Internet: http://www.wago.com
=== Ende der Li st e für Te xtm arke Ei nba nd_ hinte n == =
 Loading...
Loading...