

Manual DINAMO Plug & Play Control your miniature world
Page 32 of 32 Version 1.2 – Dec 21st, 2017 2017 Leon van Perlo
(This page is intentionally left blank)
Author: Leon J.A. van Perlo
Version: 1.2
Date: December 21st, 2017
DINAMO Plug & Play
Manual
VPEB
Van Perlo Elektronica
& Besturingstechniek
VPEB
Van Perlo Elektronica
& Besturingstechniek
Smart electronics for your miniature world
Manual DINAMO Plug & Play Control your miniature world
Page 2 of 32 Version 1.2 – Dec 21st, 2017 2017 Leon van Perlo
Release Management
This manual applies to the kit consisting of:
Module:
•
RM-C/1+ Rev00/01
•
TM44 Rev01
•
OC32/NG Rev10
If you have an RM-U P&P and/or an OC32 (not /NG version) please refer to version 1.1 of
this manual for the hardware description of the respective parts. You can however use
all firmware and software described in this manual version 1.2.
Firmware:
•
RM-C Firmware 1.30A
•
TM44 Firmware 1.20
•
OC32 Firmware 3.01
Software:
•
DinamoConfig 1.30A
•
OC32Config 3.01
Preface
The Dinamo Control System is a versatile solution to control analogue trains, digital trains,
digital cars and all accessories on your miniature world in scale 00 (1:6 7.2) to scale Z
(1:220) including all intermediate scales. Application of Dinamo with larger scales is
possible, however some limitations may apply.
The versatility of Dinamo may confuse less electronic mind users. For th is reason VPEB
released Plug&Play. In this version, the number of different types of modu les and the
possible choices are reduced in favor of clarity and simplicity. Dinamo P&P is in contrast to
Dinamo “Classic” not suited for application with larger scales than H0/0 0 (and so primarily
intended for scales from 00 to Z).
This manual describes strictly the Dinamo Plug&Play concept and its application for the
operation of trains for the novice user as simply as possible. Dinamo P&P can be enhanced
with additional modules from the Dinamo “Classic” range e.g. the UCCI/E -s for controlling of
digital cars. There are also other choices not described in this manua l that are possible,
however these are outside the scope of this manual. The user is adv ised to refer to the
individual manuals for the other modules for in-depth details.
Even though the application of Dinamo P&P has been significant ly simplified compared to the
"Classic" version, before you apply this to your final model layout it is important to
understand the principles and to understand how the software and D inamo system
cooperate with each other. Creating a temporary simple test layout has proven to be very
effective way to learn and most of the items can be reused afterwa rds in your final layout.
2017 This document, or any information contained herein, may not be copied or distributed, in whole
or in parts, in whatever form, without the explicit written approval of the original author. The making of
copies and prints by users of the Dinamo system and/or Dinamo modules for their own use is allowed.
Control your miniature world Manual DINAMO Plug & Play
2017 Leon van Perlo Version 1.2 – Dec 21st, 2017 Page 31 of 32
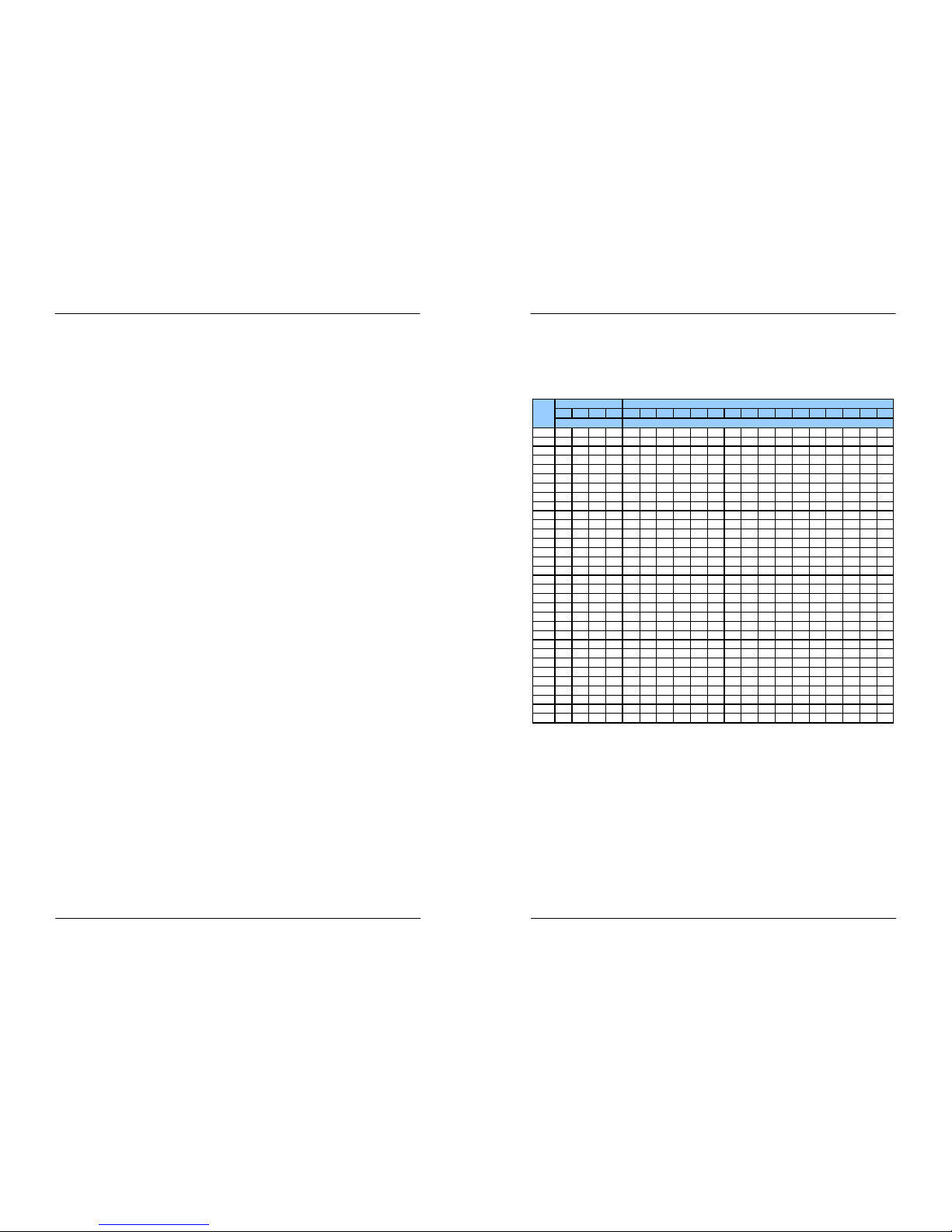
Appendix A: TM44 Address Table
This table applies if your control software uses linear addressing a nd adds an offset +1 to
block and feedback addresses.
Note that the TM44 numbering is kept as in this manual, starting fro m 0.0
TM440123
0B0
0B1
0B2
0B3
1B0
1B1
1B2
1B3
2B0
2B1
2B2
2B3
3B0
3B1
3B2
3B3
0.0123412345678910111213141516
0.1567865666768697071727374757677787980
1.0 9 10 11 12 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144
1.1 13 14 15 16 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208
2.017181920
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
2.121222324
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
3.025262728
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
3.129303132
449
450
451
452
453
454
455
456
457
458
459
460
461
462
463
464
4.033343536
513
514
515
516
517
518
519
520
521
522
523
524
525
526
527
528
4.137383940
577
578
579
580
581
582
583
584
585
586
587
588
589
590
591
592
5.0 41 42 43 44 641 642 643 644 645 646 647 648 649 650 651 652 653 654 655 656
5.145464748
705
706
707
708
709
710
711
712
713
714
715
716
717
718
719
720
6.049505152
769
770
771
772
773
774
775
776
777
778
779
780
781
782
783
784
6.153545556
833
834
835
836
837
838
839
840
841
842
843
844
845
846
847
848
7.057585960
897
898
899
900
901
902
903
904
905
906
907
908
909
910
911
912
7.161626364
961
962
963
964
965
966
967
968
969
970
971
972
973
974
975
976
8.065666768
1025
1026
1027
1028
1029
1030
1031
1032
1033
1034
1035
1036
1037
1038
1039
1040
8.169707172
1089
1090
1091
1092
1093
1094
1095
1096
1097
1098
1099
1100
1101
1102
1103
1104
9.0 73 74 75 76 1153 1154 1155 1156 1157 1158 1159 1160 1161 1162 1163 1164 1165 1166 1167 1 168
9.177787980
1217
1218
1219
1220
1221
1222
1223
1224
1225
1226
1227
1228
1229
1230
1231
1232
10.081828384
1281
1282
1283
1284
1285
1286
1287
1288
1289
1290
1291
1292
1293
1294
1295
1296
10.185868788
1345
1346
1347
1348
1349
1350
1351
1352
1353
1354
1355
1356
1357
1358
1359
1360
11.089909192
1409
1410
1411
1412
1413
1414
1415
1416
1417
1418
1419
1420
1421
1422
1423
1424
11.193949596
1473
1474
1475
1476
1477
1478
1479
1480
1481
1482
1483
1484
1485
1486
1487
1488
12.0979899100
1537
1538
1539
1540
1541
1542
1543
1544
1545
1546
1547
1548
1549
1550
1551
1552
12.1 101 102 103 104 1 601 1602 1603 1604 1605 1606 1607 1608 1609 1 610 1611 1612 1613 1614 1615 1616
13.0 105 106 107 108 1 665 1666 1667 1668 1669 1670 1671 1672 1673 1 674 1675 1676 1677 1678 1679 1680
13.1
109
110
111
112
1729
1730
1731
1732
1733
1734
1735
1736
1737
1738
1739
1740
1741
1742
1743
1744
14.0
113
114
115
116
1793
1794
1795
1796
1797
1798
1799
1800
1801
1802
1803
1804
1805
1806
1807
1808
14.1
117
118
119
120
1857
1858
1859
1860
1861
1862
1863
1864
1865
1866
1867
1868
1869
1870
1871
1872
15.0
121
122
123
124
1921
1922
1923
1924
1925
1926
1927
1928
1929
1930
1931
1932
1933
1934
1935
1936
15.1
125
126
127
128
1985
1986
1987
1988
1989
1990
1991
1992
1993
1994
1995
1996
1997
1998
1999
2000
Block Address
Block
Feedback Address
Section
Table 4: TM44 block –and section numbers

Manual DINAMO Plug & Play Control your miniature world
Page 30 of 32 Version 1.2 – Dec 21st, 2017 2017 Leon van Perlo
7.4 Delivering Track-power to Turnouts via Relays
In paragraph 7.3 we explained that in some cases it is necessary to power the track s on
turnout groups separately. If you don’t want to do that with an ad ditional block-output or if
you cannot do that because your software does not support it, you can solve this with a
relay, controlled from an OC32 output. Since the track, the relay pow ers, is only occupied
while the train passes to or from the adjacent blocks there is funct ionally no disadvantage,
except that it requires an electromechanical component and it ma y be slightly more complex
to wire.
We look again at the example from paragraph 7.3, the crossing turnout. To deliver power to
the tracks you need a relay with two crossover contacts (DPCO = Dual Pole Cross Over).
Each contact has 3 terminals on the relay: C (common), B (break) and M (make). If the relay
is not activated, C is connected to B and M is isolated. If the re lay is activated, C is
connected to M and B becomes isolated. Besides the 2 x 3 terminal s, on the relay you’ll find
2 additional terminals for the relay activation-coil. On some model s you will encounter an
explicit + (plus) and – (minus) pole, but in most cases it will be irre levant in which direction
current flows through the coil.
The relay activation-coil is connected to an OC32 output with sink-dr iver. In the example
below (figure 35) both “C” terminals are wired to rail A and B of turnout T1. The “B”
terminals are wired to the A and B3 connections of block 1. The “M” terminals are wired to
the A and B3 connections of block 3. We assume in this example that sections B3 of blocks
1 and 3 are not in use by the block itself.
If you have wired the setup according to figure 35, you need to instruct your PC control
software when the relay shall be activated. When a train passes fro m or to block 1, the
relay shall not be activated. When a train passes from or to block 3, the r elay shall be
activated.
Fig 35: Connecting turnout tracks by relays
Relays for this application can be obtained from a regular electronic s components store.
Types that are specified to switch 1Amp per contact are fine. Also th e VPEB partners offer
ready-made modules with one or more relays, equipped with plugg able connectors or screwtype terminals for easy wiring. Often you’ll find an additional LED, that shows whether the
relay is activated. Not absolutely necessary, but it may come in hand y while troubleshooting.
1A
3B23B1
1B1 1B2
block 3
block 1
block 4
T1 block 2
M
C B
M
C B+-
3A
3B3
1B3
1A
3A
TM44
OC32
Vp
OC32 output, sink driver
1A
3B23B1
1B1 1B2
block 3
block 1
block 4
T1 block 2
M
C B
M
C B+-
M
C B
M
C B+-
3A
3B3
1B3
1A
3A
TM44
OC32
Vp
OC32 output, sink driver
Control your miniature world Manual DINAMO Plug & Play
2017 Leon van Perlo Version 1.2 – Dec 21st, 2017 Page 3 of 32
Contents
1 Dinamo .................................................................................................................. 4
1.1 Principle .......................................................................................................... 4
1.2 Blocks and sections.......................................................................................... 4
1.3 Dinamo Plug & Play........................................................................................... 5
2 RM-C/1+................................................................................................................ 7
2.1 Introduction..................................................................................................... 7
2.2 Communication, power supply and mounting ....................................................... 7
2.3 LED indicators ................................................................................................. 7
2.4 PC Connection ................................................................................................. 7
2.5 Testing using DinamoConfig (Windows) and learn some of the basics .................... 8
3 TM44................................................................................................................... 11
3.1 Functions ...................................................................................................... 11
3.2 Overview of the TM44 and location of connections and functions ........................ 11
3.3 Mounting ....................................................................................................... 12
3.4 Connect Power Supply to the TM44................................................................. 12
3.5 Capacity and Choice of Power Supply ............................................................... 13
3.6 Safety ........................................................................................................... 13
3.7 Power Supply Cabling...................................................................................... 13
3.8 Connecting Blocks to the TM44....................................................................... 14
3.9 Cabling of Blocks ............................................................................................ 14
4 OC32/NG ............................................................................................................. 16
4.1 Introduction................................................................................................... 16
4.2 Overview of the OC32/NG and location of connections and function s .................. 17
4.3 Mounting the OC32/NG .................................................................................. 17
4.4 OC32/NG Power Supply .................................................................................. 18
5 The Dinamo RS485 network ................................................................................. 19
5.1 Wiring the network......................................................................................... 19
5.2 Terminators................................................................................................... 20
5.3 Addressing .................................................................................................... 22
5.3.1 TM44 Addressing .................................................................................... 22
5.3.2 TM44 Master/Slave ................................................................................. 23
5.3.3 OC32 Adressing ...................................................................................... 23
5.3.4 Changing Addresses ................................................................................ 24
6 Commissioning your Dinamo system ....................................................................... 25
6.1 Power-up your system .................................................................................... 25
6.2 Testing communication ................................................................................... 25
6.3 Some additional words on DinamoConfig ........................................................... 27
6.4 Configuring your OC32/NG’s ............................................................................ 27
7 Turnouts .............................................................................................................. 28
7.1 Provide track power to turnouts ..................................................................... 28
7.2 Turnout groups, Block Separations, Section Separations .................................. 28
7.3 Addtitional Pseudo-blocks ............................................................................... 29
7.4 Delivering Track-power to Turnouts via Relays................................................... 30
Appendix A: TM44 Address Table .................................................................................. 31
Manual DINAMO Plug & Play Control your miniature world
Page 4 of 32 Version 1.2 – Dec 21st, 2017 2017 Leon van Perlo
1 Dinamo
1.1 Principle
The control-principle of Dinamo is derived from the way train-traffic is usually secured: By
means of a block-system. The block-system means that the layout is subdivided into blocks.
A train may enter a block only when the block is free. This means an y block can contain no
more than a single train.
When using Dinamo, the layout is not only divided into blocks secur ity-wise, but also every
block has it’s individual electrical power circuit. Since every block can cont ain no more than a
single train, in this setup every train can be controlled individual ly as that specific train
requires at that specific moment. With Dinamo this applies to d igital (DCC) AND analogue
trains.
To determine in what way every block needs to be driven, at every momen t it must be known
which train is in which block. In practice this is achieved using con trol software on a PC that
keeps track of the positions of all trains on the layout. So the contr ol software not only
secures the traffic, but at the same time ensures the most opti mal control of every train.
In theory Dinamo can function without a PC, but in practice it is hard ly ever done.
To be clear: Controlling your layout by PC does not mean by definition ever ything runs
automatically. It is perfectly possible to control your layout by a PC a nd still make many
decisions yourself or even control trains “manually” and individually. Man y digital control
systems on the market are nothing more or less than specialised comput ers with
specialised software. In case of Dinamo this is no different, just th e control unit is not a
specialised “box”, but any ordinary PC with software.
Blocks can be connected sequentially, but also be separated by turn outs, so the train can
“choose” what the next block on it’s route will be. Security-wise the c ollection of turnouts
by which the train is routed from one block to the next is never par t of any block, however
electrically this can be the case (see chapter 7).
In the real World, the passage between 2 blocks is secured by signa ls. Signals are at the
exit of each block. If the next block in the route of the train is free, is reserved by that train
and the turnouts leading to the destination Block is free and safe, th e signalling system will
allow the train to pass on.
1.2 Blocks and sections
Dinamo drives blocks individually and symmetrically. Symmetric mean s that both tracks are
driven with an identical but exactly opposite electrical signal. So there is no track having
zero voltage or “ground”. Consequently Dinamo demands that ever y block has its both
tracks electrically separated from the surrounding blocks. In other w ords, between two
blocks both rails shall be electrically separated.
To control trains on the layout by software, it is necessary that the software is aware of
the position of the trains. Usually it is insufficient to know just in wh ich block the train is. In
addition the software needs to know where in the block the train is. To achieve that, blocks
are split in sections. The precise split in sections depends mainl y on the requirements of the
software, so for details you should consult the manual of your contro l software.
Dinamo P&P provides 4 sections per block. It is not necessary to u se all of them. In most
cases 2 or 3 sections per block will be sufficient. To be able to distingu ish between different
sections in the same block, between sections one of the rails needs to b e electrically
isolated.
Control your miniature world Manual DINAMO Plug & Play
2017 Leon van Perlo Version 1.2 – Dec 21st, 2017 Page 29 of 32
2. Do not make sections extremely short. Dinamo is by the design of the detector unit
capable to generate an event even at the shortest possible sect ions. However, to do
that, there must be something to detect. Some loco’s have a nu mber of wheels with
rubber tires that will not generate detection. If that loco runs w ith the isolated wheels
in front, only the second axle will generate the event. If the section th at generates a
stop in front of a signal starts just a few cm before that signal you will r isk the train
sticking it’s front past the signal, or even worse, over the turnout the signal should
protect.
Also bear in mind that an event needs to go from Dinamo to the PC , the PC-software
has to process it and then the PC has to send a command to Dina mo, that also has to
process it in order to stop the train. If the train has a decoder with mass-simulation it
may take some distance before the train actually stops. Even if ever ything is processed
fast, there is no guarantee that the response is immediate, so don’t bu ild it all too
critical in terms of lengths and distances.
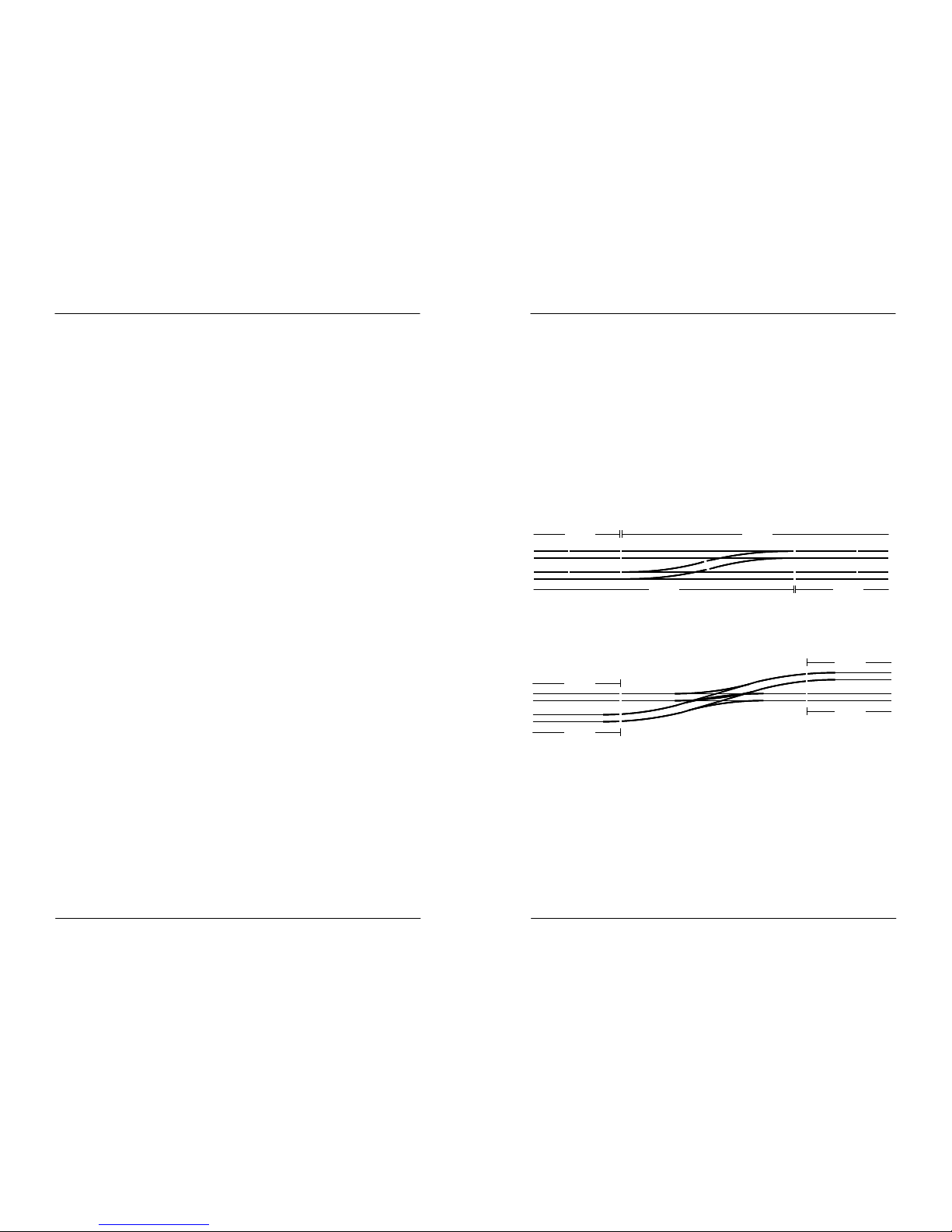
Since a turnout is never part of a block security-wise, it makes sense to assign a turnout
group that is fed from an adjacent block a separate section. If your softw are supports it, it
can then ‘see’ if the train is actually in the block itself or in the adjace nt turnout. In most
cases you’ll have sufficient sections available to do this.
Fig 33: Connected turnouts in separate sections
7.3 Addtitional Pseudo-blocks
In some cases a turnout cannot be passed to or from one single adj acent block only. An
example of such situation is the crossing turnout:
Fig 34: Crossing turnout
In the example above T1 can be passed from block 1 to block 2, but a lso from block 3 to
block 4. So there is no possibility to feed the tracks of T1 from either of the adjacent
blocks. There are two solutions for this problem:
1. Define T1 as a separate pseudo-block. Since a tu rnout is never part of any block this is
not a real block, but a piece of track that is powered separately as if it was a block.
2. Use a relay with 2 change-over contacts to conn ect the tracks on T1 to one of the
adjacent blocks, dependent on the selected route. See paragraph 7.4. In the above
example from figure 34, T1 can be connected to block 1 or block 2, becau se in any case
one of these blocks is part of the route the train follows.
Note that the capabilities of your control software may limit your cho ices to apply the above
options.
block 2
block 3
block 1
block 4
section 1.2 section 2.0
section 3.3section 3.2 section 4.0
section 2.1 section 2.2
section 4.1
section 1.1
section 3.1
block 2
block 3
block 1
block 4
section 1.2 section 2.0
section 3.3section 3.2 section 4.0
section 2.1 section 2.2
section 4.1
section 1.1
section 3.1
block 3
block 1
block 4
T1 block 2
block 3
block 1
block 4
T1 block 2
Manual DINAMO Plug & Play Control your miniature world
Page 28 of 32 Version 1.2 – Dec 21st, 2017 2017 Leon van Perlo
7 Turnouts
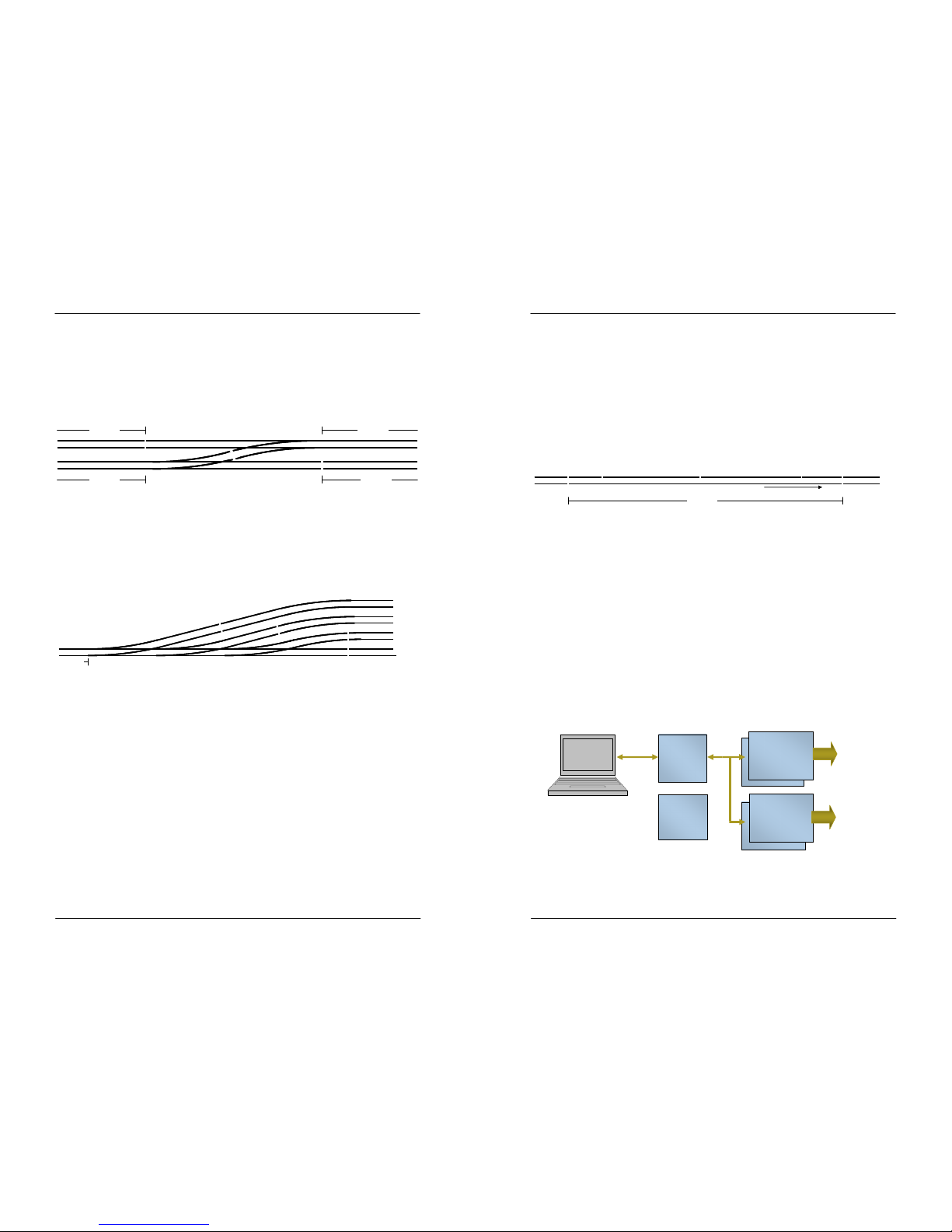
7.1 Provide track power to turnouts
As indicated in paragraph 1.1, turnouts and turnout-groups are not part of any block. The
rails on a turnout however will need power supply to allow the train to p ass over it. In a
Dinamo system a turnout usually is electrically attached to an adjacent bl ock when the
turnout can only be accessed when running to or from that block. As an example:
Fig 31: Attaching turnouts to an adjacent block
T1 can only be passed from or to block 2. So it is allowed to attach th e rails of T1
electrically to block 2. Also T2 can be passed only from or to block 3. Therefore it is allowed
to derive the power for T2 from block 3.
Rule: At the “sharp side” of a turnout (at the side where the track s join) there will
never be an electrical block-separation.
Even when multiple turnouts are lined up this rule counts. Have a look at the example in
figure 32:
Fig 32: Multiple turnouts in-line
T1, T2 and T3 all can only be accessed from or to block 1, so they are al l electrically
connected to block 1.
7.2 Turnout groups, Block Separations, Section Separations
The exact location where you make the block-separation is of no great importance to
Dinamo, however it may be important for your control software. Theref ore, read the
documentation of your control software product and/or make a test- layout before you apply
this to your target layout. Mind that a block separation is also a section separation by
definition, so it is a means for the software to determine where exact ly the train is. We
mention 2 important points of interest:
1. If you are using ‘full detection’, which means al l axles of all your rolling stock shall draw
some current from the tracks, your software can determine, if it sup ports this feature,
in which block and section something is present. So, for instance , your software can see
that a turnout-section is completely free before it is reserved for another train. In this
case it is important that ‘free’ means ‘truly free’ and not that the last tiny part of your
train still ‘hangs over’ the turnout. Therefore always keep some distan ce between the
block-separation and the adjacent turnout, as shown in figure 31.
Also if you do not use full detection, or if your software does not sup port it, it is good to
keep the above rule in mind. What is not the case now may become the ca se in the
future. Changing software is normally a lot easier than changing your physical layout.
block 2
block 3
block 1
block 4
T1
T2
block 2
block 3
block 1
block 4
T1
T2
block 2
block 1 T3T2T1
block 3
block 4
block 5
block 2
block 1 T3T2T1
block 3
block 4
block 5
Control your miniature world Manual DINAMO Plug & Play
2017 Leon van Perlo Version 1.2 – Dec 21st, 2017 Page 5 of 32
As a result, within one block, we have a continuous rail and a non-cont inuous rail split into
sections. Since every block offers the possibility to drive in both dire ctions and in case we
use digital (DCC) control, the signal is a square-wave alternating signa l it makes no sense to
talk about “plus” and “minus”. Therefore Dinamo talks about the A-rail and B-rail. The A-rail
always is continuous, the B-rail can be interrupted between sect ions. To identify the
direction in which the train travels, within Dinamo the “positive direct ion” is the direction
with the A-rail on the right hand side. To be clear: There is no need or r eason to have the
“positive direction” equal to the direction the train normally travels. “ Positive” and
“negative” directions are just names to identify in which way the tra in travels with respect
to the A-rail and B-rail. We explicitly do not use “forward” or “reverse” because this would
apply to the front and rear of the loco.
The general advise is to choose the rail in which you make the section-separations as
consistently as possible without taking into account normal direction of t ravel.
Fig 1: Subdivision of a block in a Dinamo system
1.3 Dinamo Plug & Play
Dinamo P&P consists of just 3 different modules, by which all pos sible parts of your layout
can be controlled, including analogue trains, digital trains, turnouts, signals and many other
accessories.
The modules that are part of the Plug & Play concept are:
•
RM-C/1+: This module handles communication with the PC, communi cation to all other
modules and ensures that all modules, for which this is necessar y, operate fully
synchronized;
•
TM44: This module controls trains and reads positions by mean s of current detection.
Each TM44 can drive 4 blocks and detects trains in 4 sections per b lock. Each system
(RM-C) can connect up to 32 TM44 modules for a total capacit y up to 128 blocks.
•
OC32(/NG): This module controls turnouts, signals, decouplers, railroad crossings and
virtually all other accessories you may find on your miniature world, requir ing control.
One system can host a maximum of 16 OC32 modules.
Schematically the topology looks as follows:
Fig 2: Dinamo P&P Diagram
A
B0 B1 B2 B3
block Nblock N-1 block N+1
positive direction
A
B0 B1 B2 B3
block Nblock N-1 block N+1
positive direction
OM32
RM-C
OC32/NG
Power
TM51
TM44
Trains
Turnouts
Signals
Decouplers
Scenery
…

Manual DINAMO Plug & Play Control your miniature world
Page 6 of 32 Version 1.2 – Dec 21st, 2017 2017 Leon van Perlo
The Power Supply is not part of the Dinamo P&P program and can in principle be every
decently stabilized DC power supply with sufficient power. The choice of power supply is not
primarily determined by Dinamo itself, but merely by what you want to control with Dinamo.
Instructions for the choice of power supply to provide your tra ins with the right energy, can
be found in paragraph 3.5. The supply for accessories in many cases can be derived fro m the
same power supply. In some cases however it may be wise or nece ssary to obtain a
separate power supply for (some) accessories.
Control your miniature world Manual DINAMO Plug & Play
2017 Leon van Perlo Version 1.2 – Dec 21st, 2017 Page 27 of 32
6.3 Some additional words on DinamoConfig
DinamoConfig is a simple program to check the basic functions of your Dinamo system and
change firmware settings of your TM44, TM-H, UCCI, PM32 and RM-U /RM-C modules. Many
of these modules are not considered part of the Dinamo P&P concept an d fall outside the
scope of this manual. Also we think that the factory-default setting s of your RM-C and
TM44 modules should be fine to start with. If you want to become more fa miliar with the
TM44 and RM-C settings, consult the respective manuals or ha ve a look at the firmware
release notes at https://www.dinamousers.net
6.4 Configuring your OC32/NG’s
Configuration of your OC32’s requires a separate (free of charge) p rogram “OC32Config”.
OC32 Configuration is described in detail in the OC32 configuration manua l. In this manual
we will just make one additional note how to connect OC32Config to your OC32 modules:
In earlier days, you had to put the RM-C in “Transparent Mod e” to configure your OC32’s,
connected behind an RM-C. With the current versions this is n o longer neccessary. Your
RM-C supports “Jumbo Packets” and “OC32 Message Tunnelling” b y which DinamoConfig
can configure and test OC32’s in your Dinamo P&P system.
Install OC32Config as described in the OC32 Configuration Manual. Befor e you run the
program close other programs that occupy the RM-C interface. Star t OC32Config, select
the COM port by wich your PC communicates with your RM-C (the sa me port as you used
for DinamoConfig) and tick the “Dinamo Tunnelling” box in the upper p art of the OC32Config
window. To check that it works you could select a valid OC32 module addr ess (mind the +1
offset if you keep that checkbox selected) and press “Request Vers ion”. Your OC32 should
report the same firmware as you saw when testing with DinamoConfig.
Fig 30: Communicating with OC32 at Address 0 via OC32Config

Manual DINAMO Plug & Play Control your miniature world
Page 26 of 32 Version 1.2 – Dec 21st, 2017 2017 Leon van Perlo
encounter different versions, upgrade all TM44’s to the latest firmw are level. How this can
be done is described in the manual TM44 Bootloader.
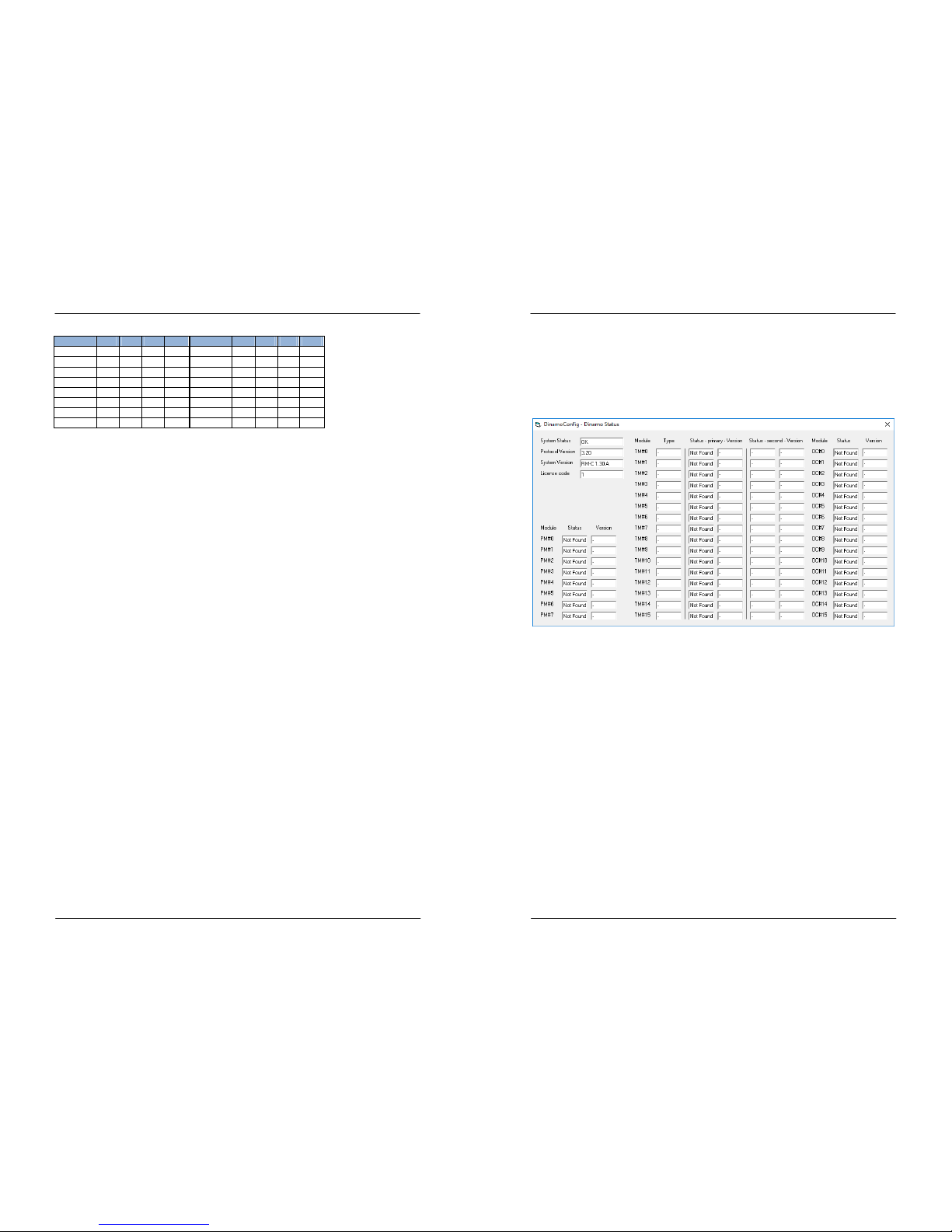
Fig 26: Status window of a live Dinamo P&P system
The version numbers of the OC32’s are less
crucial, however, we suggest that you also
keep your OC32’s on the same firmware level.
At this point you may want to perform one
additional test:
After you have hit the Status button at least
once (you may close the status window after
that, or leave it open), select the Tab
TMxx/UCCI-s and select Module = All_TM in
the upper left corner (fig 26).
A button “Check MS mode” will appear. If you
hit that button, a pop-up window appears
telling you the Master/Slave settings of your
system. If it does not report “OK”, check the
dipswitch settings of your TM44 modules and
remember that they need a reboot if you
change any.
Fig 27: Check Master/Slave settigs from DinamoConfig
Fig 28 (Left):
Master/Slave OK
Fig 29 (Right):
Master/Slave not OK:
Check your TM44 Dipswitches!
Control your miniature world Manual DINAMO Plug & Play
2017 Leon van Perlo Version 1.2 – Dec 21st, 2017 Page 7 of 32
2 RM-C/1+
2.1 Introduction
The RM-C is the central unit in a Dinamo
Plug & Play control system. A Dinamo
P&P system can be used to control
analogue/digital trains, digital cars or a
combination thereof. This manual however
applies to control of trains only.
The RM-C has the following main
functions:
•
Communicate to the PC via USB
•
Handle TM44 modules to control trains
•
Handle OC32(/NG) modules to control accessories (being everything excep t the trains
themselves)
2.2 Communication, power supply and mounting
The RM-C communicates with the controlling-PC by means of USB. The power for the RM-C
is supplied from the PC through the USB cable, so you won’t need a separate power supply
for your RM-C.
Communication with the TM44 and OC32 modules on your layout is done through RS485
(more on this in Chapter 5). RS485 is quite insensitive to electromagnetic disturbances and
the (total) length of the RS485 bus can be up to 1.200 meters. US B in the contrary is
much more susceptible to electromagnetic interference. Therefore, place the RM-C as close
to your PC as reasonably possible and keep the length of your US B cable short.
Mount the RM-C using the four screws that come with the unit or use do uble-sided
adhesive tape if you mount the RM-C on a surface you cannot or do not w ant to put screws
in.
2.3 LED indicators
On the RM-C you will find 5 LED indicators. From
left to right:
•
USB (Blue): USB Active
•
Tx0 (Yellow): Not Used on the RM-C/1+
•
Tx1 (Yellow): Transmit on RS485
•
TxH (Orange): Transmit on USB
•
CMD (Green): Command Received
To the right you’ll find a pushbutton to reset the
RM-C
2.4 PC Connection
To use USB, of course your PC needs to be equipped with one or more USB ports. Also you’ll
need a driver (software) to communicate with the USB interface on your RM-C. Windows
Vista and later will automatically detect and recognize the USB ch ip on your RM-C when it is
plugged in. If your PC has Internet access, it will automatically down load and install the
correct drivers, when you plug in the interface for the first time.
Fig 3: RM-
C/1+ (2 modules shown
)
Fig 4: RM-C LEDs and Reset b
u
tton

Manual DINAMO Plug & Play Control your miniature world
Page 8 of 32 Version 1.2 – Dec 21st, 2017 2017 Leon van Perlo
If your PC has no Internet access or when using an older version of the Windows OS, before
connecting your RM-C USB for the first time, you will have to download and install the
correct driver software manually. You can download them free of charge from the Future
Technology Devices website: www.ftdichip.com/Drivers/VCP.htm
Alternatively the driver can be downloaded from the Dinamo User Gr oup although then you
may not necessarily have the latest version..
The easiest way is to download and run the “setup executable for defau lt VID and PID
values”.
The FTDI drivers are available from Windows98 up. Correct operation u nder Windows95 is
not guaranteed. Besides Windows, there are drivers for Linux and Ma c OS-X. The latest
Linux kernels have default support for the FTDI chipset used in the USB interface.
After you have loaded the correct driver
software onto your PC, or have made
sure your PC has Internet access, you
can connect the RM-C with a standard
USB A-B cable. Preferably use one
specified for USB2.0, because usually
these have better screening. If all is well,
your RM-C is recognized automatically
and a “virtual com-port” is created for it.
When the PC is connected to RM-C, the
blue LED on the RM-C will be lit (during
installation of the driver the LED may
flash a few times).
2.5 Testing using DinamoConfig (Windows) and learn some of the basics
Testing whether your RM-C is correctly attached and recognized by your PC, can be done
with the DinamoConfig test –and configuration program. DinamoConfig can be downloaded
free of charge from the VPEB website (www.vpeb.nl) or the Dinamo User Group
(www.dinamousers.net). Make sure you have
DinamoConfig 1.30A or later.
Before starting DinamoConfig, the program
needs to be installed. Run the “Setup”
program (once) and follow the instructions.
After you have successfully installed
DinamoConfig, you can start the program.
You should see the window in fig 6. In the
top/left-hand corner you can select the comport by which DinamoConfig communicates
with your Dinamo system. Click on the
triangle next the blue field and select the
correct com-port. Sometimes it can be
troublesome to find out which com-port is
assigned to your RM-C. If this is the case,
follow this procedure:
Disconnect the USB cable between RM-C
and PC. Wait 5 seconds and click the
“Refresh” button. Now look at the list of
com-ports you can choose from and
remember this, or write it down. Reconnect
the RM-C to the PC. Wait 10 seconds and
click “Refresh”. Look again at the list of
com-ports you can choose from. You will have one additional port, tha t’s the one.
Fig 6: DinamoConfig 1.30A
Fig 5: RM-C USB Interface
Control your miniature world Manual DINAMO Plug & Play
2017 Leon van Perlo Version 1.2 – Dec 21st, 2017 Page 25 of 32
6 Commissioning your Dinamo system
6.1 Power-up your system
Now you have connected all your TM44’s and OC32/NG’s, and assigned u nique addresses to
all modules, you can verify whether they are correctly identified by you r RM-C.
While the power to your Dinamo system is off and your RM-C is conne cted to your PC,
watch the yellow Tx1 LED on the RM-C flash quickly. As written in pa ragraph 2.5 this
indicates that is RM-C is transmitting on the RS485 bus, but doe s not receive any
reponses. Every flash of the Tx1 LED is a message asking “is there anything out there?”
When you switch on your system power supply, the RM-C will cont inue scanning for
connected modules, but your modules will start to answer. Thi s search process will take
from 5 to 20 seconds, depending on the size of your system (read: the number of TM44
and OC32 modules). The bigger your system, the faster the search w ill be finished. During
search, the yellow Tx1 LED at the RM-C will continue to flash and th e orange LEDs at your
TM44’s and OC32’s will flash now and then.
When the search is finished, the yellow Tx1 LED at the RM-C will be lit co ntinuously and the
orange LEDs at your TM44’s and OC32’s will either be lit constant ly or flash quickly. The
RM-C now knows how many players are in it’s team and what kind they a re. It will constantly
monitor the status of all members. If one module fails (e.g. is di sconnected) the RM-C will
keep trying to reach this unit while still communicating with all other s. It will do so until all
units are gone. If there is nothing left to take care of, the RM-C w ill initiate a new search.
Note while the RM-C is communicating with it’s team members, it wi ll never search for
additional modules. So if you add another module “on the fly”, it wi ll not be recognized until
you either:
• Interrupt communication with all modules or
• Reset the RM-C
Note that in case you power TM44’s and OC32/NG’s from different power sources, these
power supplies shall be powered up more or less at the same time. Shou ld the detection of
your TM44’s be finished and just after that you power up your OC 32’s, the OC32’s will
never be found since the application to become a team member is alre ady closed.
If, once the search is finished, the Tx1 LED on your RM-C is not l it continuously, but goes off
briefly now and then, this is an indication that your network is not stab le. In that case,
check connections and terminators!
6.2 Testing communication
If you repeat the test from paragraph 2.5 and hit the “Status” button, the status window
now should show for each connected TM44 module the type (TM44), th e status and it’s
version. Also it will show the status and version of each OC32 modu le.
See figure 25 for an example: This system has two TM44’s and two O C32’s. Two TM44’s?
Yes. The TM#0 address reports Type=TM44 and reports a Primary module (0.0) and a
Secondary module (0.1), both version 1.20. In the column at the right you see OC#0 and
OC#1 both reporting version 3.01
Note that the RM-C only reports detected modules when the search i s finished. While
search is running and therefore, if you hit the Status button to earl y, the list will be empty.
At this point check that the reported version numbers of all your TM44 modules are
identical. If you mix different versions your system may behave unexpecte dly. If you
Manual DINAMO Plug & Play Control your miniature world
Page 24 of 32 Version 1.2 – Dec 21st, 2017 2017 Leon van Perlo
Address S1 S2 S3 S4 Address S1 S2 S3 S4
0 On On On On 8 On On On Off
1 Off On On On 9 Off On On Off
2 On Off On On 10 On Off On Off
3 Off Off On On 11 Off Off On Off
4 On On Off On 12 On On Off Off
5 Off On Off On 13 Off On Off Off
6 On Off Off On 14 On O ff Off Off
7 Off Off Off On 15 Off Off Off Off
Table 3: OC32 Addressing
As is the case with the TM44, mind that your control soft ware may offset all addresses
+1.
5.3.4 Changing Addresses
Be aware that if you change the DIPswitch settings on your TM44 and/ or OC32/NG modules
while the modules are powered-on, changes will have no effect at that time. DIPswitches are
only read by the modules at boot-time. Therefore in order to read the new address (and for
TM44, the maser/slave setting), your TM44 and OC32/NG modu les need to be rebooted
(power-off - power-on).
Changing addresses in a live Dinamo P&P network would not work anywa y and could lead to
very strange behaviour. If you read and understand section 6 of thi s manual you will know
why. To prevent these errors from happening, al modules store their add ress at boot-time
in memory.
Control your miniature world Manual DINAMO Plug & Play
2017 Leon van Perlo Version 1.2 – Dec 21st, 2017 Page 9 of 32
Select the correct com-port and click “Status”. A window similar to th e one in fig 7 will
show. Because you have connected nothing else to your RM-C so far, th e status of all
modules will show “Not Found”. In the top/left-hand corner you’ ll find the “Protocol Version”
and “System Version” of your RM-C. This indicates your PC and RM-C can communicate.
If “System Version” shows an older version than 1.30A, update t he firmware of your
RM-C, otherwise a large part of this manual does not apply to your system.
Fig 7: DinamoConfig Status Window
If “System Status” shows “Fault”, there is no reason (yet) to be worr ied. This is part of
“normal behaviour”.
At this point, notice the LEDs on your RM-C:
•
The blue LED should be lit to show you have USB connectivity.
•
The yellow Tx1 LED is flashing quickly to indicate that the RM-C is tran smitting on the
RS485 bus, but it does not find anything since you have not connected a ny modules yet.
•
The orange LED is flashing quickly to indicate the RM-C is actually inter changing
messages with the DinamoConfig program on your PC. Messages are empty, but are
send back and forth between the two systems to indicate all i s well (or not so well in
some cases).
•
The green LED indicates that the RM-C is processing a command fr om the PC. To see
this, you can press the “Status” button in the main window while watchin g the LEDs on
your RM-C. You should see the green LED lit briefly, indicating the “Sta tus” command is
processed (actually being some 45 commands al together being execute d).
While the orange LED is lit or flashing, do not disconnect your US B interface, since this will
cause the virtual com-port to disappear while it is in use by the DinamoC onfig program. If
you want to disconnect USB, you need to stop communication first. In DinamoConfig this
can be done by pressing the “Refresh” button in the main window. Th is will actually refresh
the list of com-ports available, but the side-effect is that the active c om-port is closed.
Now press the “Refresh” button and see the orange LED go off. Wait (a t least) 5 seconds
and press “Status”. You will see the window of fig 7, however “S ystem Status” will show

Manual DINAMO Plug & Play Control your miniature world
Page 10 of 32 Version 1.2 – Dec 21st, 2017 2017 Leon van Perlo
“Fault”. The reason for this is that communication with the Dinamo system has been
interrupted (by you) for more than 2 seconds. That caused the D inamo system to execute a
safety measure: “Stop all traffic!” If your trains (and/or cars) would b e running and your PC
or PC program should crash, an uncontrolled situation might occur ot herwise.
The Dinamo system demands a fault state to be explicitly cleared fro m the PC program.
DinamoConfig allows you to do that by pressing the “Reset Fault” button in the main
window. If you now press the “Status” button again, your status w indow should show
“System Status = OK”.
At the top of the DinamoConfig main window you see a tickbox “ Stop”. When active, this
makes sure that no traffic is running while DinamoConfig is act ive. The use of this function is
rare and is beyond the scope of this manual.
Control your miniature world Manual DINAMO Plug & Play
2017 Leon van Perlo Version 1.2 – Dec 21st, 2017 Page 23 of 32
The TM44 module/sub-address determines by which block number the b locks are controlled
from your control software and which feedback-numbers are report ed when a train occupies
a section. Per TM44 the numbering is as follows:
Section Number Section Number Section Number Section Number
0b0 0 1b0 4 2b0 8 3b0 12
0b1 1 1b1 5 2b1 9 3b1 13
0b2 2 1b2 6 2b2 10 3b2 14
0b3 3 1b3 7 2b3 11 3b3 15
Table 2: TM44 Block –and feedback numbering
Attention: The way your control program numbers the blocks and se ctions is determined by
your control software (iTrain, Koploper, Rocraill, etc). Some progra ms use a linear
numbering of blocks (0..127) and sections (0..2047) while other s use a modular approach,
like 0.0 to 31.3 or 0.0 to 15.7 for blocks and similar for sections. So me control programs
even give you a choice between different numbering schemes.
Also pay attention that many programs start numbering at 1 and theref ore add 1 to the
Dinamo module, block and section numbering. So TM44 module 0. 0 may show up like module
1.1 in your software and Dinamo Block 5 therefore may be Block 6 in your control software.
Note this is up to the control software and you will need to con sult the manual of the
respective software to get the details.
If your software uses linear addressing, the block and section number s should be as follows
•
Block number = Module-address x 8 + sub-address x 4 + block number (0..3)
•
Feedback = Module-address x 128 + sub-address x 64 + section-number (0..15)
And keep in mind that there may be an offset +1 introduced by your control software.
The above formulas should not be to difficult, but if you didn’t pay a ttention during math at
school, you will find a table in Appendix A of this manual to save you.
5.3.2 TM44 Master/Slave
The TM44’s shall be exactly synchronised to prevent a short circu it when a train passes
from one block to the next. To achieve that, exactly one TM44 shal l lead the crowd and all
others shall follow. The leading TM44 is called Master and the o thers are Slaves. Dipswitch
6 determines whether the module behaves as ‘Master’ or ‘Slave’. Each Dinamo system shall
have exactly one Master, so in a Dinamo P&P system there shou ld be exactly one TM44
that has S6=ON, all others shall have S6=OFF. Unless there is a c lear reason to deviate
from this, select module 0.0 as Master.
•
S6 ON = Master
•
S6 OFF= Slave
5.3.3 OC32 Adressing
As is the case with the TM44, every OC32 in the network shall have a unique address too.
You can connect a maximum of 16 OC32 modules per Dinamo P& P System. The OC32
address is selected with the dipswitches on the OC32.
Note that there are 6 DIPswitches on the OC32/NG. At
this point only 4 are used:
Fig
25: OC32/NG Dip
switches

Manual DINAMO Plug & Play Control your miniature world
Page 22 of 32 Version 1.2 – Dec 21st, 2017 2017 Leon van Perlo
you don’t insert them 90 degrees rotated, because then your networ k won’t work. To deactivate the terminator, remove both jumpers. If you don’t want to loo se the jumpers while
the terminator is de-activated, you can park the jumpers each on one p in only.
5.3 Addressing
Your Dinamo system will, at some point, consist of multiple TM44’s an d OC32/NG’s. In
order for the RM-C to communicate with every individual module, eac h module shall have a
unique address. OC32’s and TM44’s are different “families”, so you can h ave an OC32 with
address 5 and at the same time have a TM44 with address 5, but you may never have two
OC32’s or two TM44’s with identical addresses.
Note that there is no relation at all between the order the m odules are physically
interconnected (fig 21 and 22) and the address they use.
5.3.1 TM44 Addressing
TM44 modules are addressed in pairs of two. Every TM44-pair has a module-address (0..15)
and within each pair, each TM44 has a sub address (0/1). This resul ts in a total amount of
16 x 2 = 32 addresses, thus a maximum of 32 TM44 modules per s ystem.
If you have an odd number or TM44’s, at least one of them will remain s ingle. Any “single”
TM44 always shall have sub-address 0. A TM44 with sub-address 1 can exist only when
accompanied by a TM44 with sub-address 0 at the same module add ress.
Note in DinamoConfig TM44’s with sub-address 0 are
called “primary” while TM44’s with sub-address 1 are
called “secondary”. Be rested, there is no difference in
performance between a primary and secondary module
The module/sub-address is set by dipswitches 1 - 5
Adres S1 S2 S3 S4 S5 Adres S1 S2 S3 S4 S5
0.0 On On On On On 0.1 Off On On On On
1.0 On Off On On On 1.1 Off Off On On On
2.0 On On Off On On 2.1 Off On Off On On
3.0 On Off Off On On 3.1 Off Off Off On On
4.0 On On On Off On 4.1 Off On On Off On
5.0 On Off On Off On 5.1 Off Off On Off On
6.0 On On Off Off On 6.1 Off On Off Off On
7.0 On Off Off Off On 7.1 Off Off Off Off On
8.0 On On On On Off 8.1 Off On On On Off
9.0 On Off On On Off 9.1 Off Off On On Off
10.0 On On Off On Off 10.1 Off On Off On Off
11.0 On Off Off On Off 11.1 Off Off Off On Off
12.0 On On On Off Off 12.1 Off On On Off Off
13.0 On Off On Off Off 13.1 Off Off On Off Off
14.0 On On Off Off Off 14.1 Off On Off Off Off
15.0 On Off Off Off Off 15.1 Off Off Off Off Off
Table 1: TM44 Addressing
You are not obliged to number (address) your TM44’s consecutivel y, however it will make life
a lot easier if you do. So we suggest you start at 0.0, 0.1, 1.0, 1.1, etc and work your way
up that way. This will also lead to a logical numbering of blocks:
Fig24: TM44 Dipswitches
Control your miniature world Manual DINAMO Plug & Play
2017 Leon van Perlo Version 1.2 – Dec 21st, 2017 Page 11 of 32
Fig 8
: TM44 in e
nclosure (2
modules shown
)
3 TM44
3.1 Functions
The TM44 had been designed as blockcontrol unit, to be used in a Dinamo
control system and offers the
following functions:
•
Driving 4 independent blocks in 2-
rail configuration
•
Position feedback by means of current detection in 4 sections per b lock
•
Control of trains by Pulse Width Modulation (analogue)
•
Control of trains by DCC (digital)
•
Integrated HF illumination for analogue loco’s and trains
The TM44 is supplied as an assembled
module only. Optionally the TM44 can
be supplied with or without enclosure.
Enclosures are also sold separately.
The TM44 is part of the Dinamo Plug &
Play concept.
3.2 Overview of the TM44 and location of connections and functions
Fig 10: Overview and functions TM44
Fig 9
: TM44
(bare unit)
Power Supply
Block 0
Block 1
Block 2
Block 3
Indicator LEDs
Mounting Hole
Mounting Hole
Mounting Hole
Mounting Hole Dipswitches
RS485
network
Power Supply
Block 0
Block 1
Block 2
Block 3
Indicator LEDs
Mounting Hole
Mounting Hole
Mounting Hole
Mounting Hole Dipswitches
RS485
network

Manual DINAMO Plug & Play Control your miniature world
Page 12 of 32 Version 1.2 – Dec 21st, 2017 2017 Leon van Perlo
3.3 Mounting
The TM44 is intended to be placed behind or underneath the miniature wo rld. Preferably the
TM44 is mounted close to the tracks it supplies power to. It is reco mmended to limit the
cable length between TM44 and tracks to 10 meter. For practical re asons, multiple TM44’s
can be mounted close together, if this does not result in long lead s to the tracks.
The TM44 (bare unit) has 4 mounting holes (3mm). Preferably use spacers (approximately 10
mm) when mounting the TM44, so that the back of the TM44 doe s not get into contact
with the mounting panel. This is especially important when you mount the TM44 on a metal
surface! When mounting the TM44 on a metal surface, keep especia lly in mind that the
mounting holes are connected to 0V/GND and that the metal mount ing surface will carry the
same potential in this case.
The TM44’s (as bare unit) are ”stackable” by using M3 x 30mm spacers between the
modules. When mounting the modules, make sure to allow for enoug h space to insert the
connectors including cables and make sure you can still access the dipswitches at the side.
Fig 11: Stacking multiple TM44’s
If you have the TM44 in enclosure, simply mount the TM44 using th e 4 screws that come
with the unit or enclosure to a suitable flat surface. As with the bare un it, make sure to
allow for enough space to insert the connectors including cables and make sure you can still
access the dipswitches at the side.
3.4 Connect Power Supply to the TM44
The TM44 shall be powered by a DC power only!
Power supply is delivered to the TM44 through connector K1. Thi s connector has 4 terminals, from which P&P only uses Pin 1 and 2. So do not connect pin 3 a nd 4! (see figure 13)
1. PWR: +12..20 Volt DC
This terminal is meant for the running power (Vrs) = power for your tra ins.
2. GND: Ground, Earth, 0V or reference-potential, in other words, the ‘minus’ pole of the
power supply/supplies
Control your miniature world Manual DINAMO Plug & Play
2017 Leon van Perlo Version 1.2 – Dec 21st, 2017 Page 21 of 32
S7 & S8 OFF
USB
S7 & S8 OFF
Terminators OFF
KEEP SHORT!
RJ45 cable
RJ45 cable
TM44
TM44
OC32/NG
OC32/NG
RM-C/1+
Terminators OFF
OC32/NG
S7 & S8 OFF
TM44
Terminators ON
OC32/NG
Fig 22: Another Dinamo P&P network example
activated. All other modules shall have their terminator de-activa ted. If you don’t comply
with this rule, the good news is that your network will still work (in most cases). However,
the bad news is that communication may be instable, or at some po int become instable,
causing vague problems in your system.
The terminators on your TM44 modules are activated by dipswitche s you find at the side of
the unit (fig 24). S7 and S8 determine whether the terminator is ac tive:
• S7 & S8 = OFF: Terminator NOT active
• S7 & S8 = ON: Terminator Active
Always put both switches in either the ON or
OFF position
The terminators on the OC32/NG module are
activated by jumpers. If you have an OC32/NG
with enclosure you need to open the case. This
can be done very easily. For instructions, if you
need them, please consult the OC32/NG manual.
The location of the OC32/NG termination jumpers
is depicted in figure 16 and a detail is shown in
fig 23. To activate the terminator, place both
jumpers as indicated in fig 23. Pay attention that
Fig 23: Terminator location on the OC32/NG

Manual DINAMO Plug & Play Control your miniature world
Page 20 of 32 Version 1.2 – Dec 21st, 2017 2017 Leon van Perlo
Now insert another RJ45 cable in the other, free RJ45 socket of the module you just
connected and run the cable to the next TM44 or OC32/NG module. Inser t it in one of the
RJ45 sockets of the module. Repeat this process unless you have rea ched the last module.
Note that the order in which you connect your modules is comp letely irrelevant. Just follow
the route that is most practical.
When you are done, you should have a continuous string of modu les connected to each
other. We will call this string “a bus”. All modules have both RJ4 5 sockets occupied, except
for the RM-C/1+ and the last module in the chain. Your network shou ld look somewhat like
fig 21.
S7 & S8 OFF
S7 & S8 OFF
USB
S7 & S8 OFF
S7 & S8 ON
Terminators OFF
Terminators OFF
KEEP SHORT!
RJ45 cable
RJ45 cable
TM44 TM44 TM44
TM44
OC32/NG
OC32/NG
RM-C/1+
Fig 21: An example Dinamo P&P RS485 network
5.2 Terminators
This term is not referring to the sci-fi series with an Austrian actor. In RS485 a terminator
is used to close the RS485 bus. To visualize it, think of it as a plug in the end of the bus to
prevent the electrons from falling out.
The first module on your RS485 bus is the RM-C/1+. In standard c onfiguration your RMC/1+ will have the terminator activated by default. The last module on your bus is the
module with only one RJ45 socket occupied. Also this last module shal l have it’s terminator
Control your miniature world Manual DINAMO Plug & Play
2017 Leon van Perlo Version 1.2 – Dec 21st, 2017 Page 13 of 32
Fig 12: Connecting power supply to the TM44
3.5 Capacity and Choice of Power Supply
The total power supply to your layout shall be sufficient to supply your tr ains with energy. As
rule of thumb you can assume that a scale H0/00 train consume s about 1A. In scale N that
will be about half that figure. Consumption depends to a large exten t on the properties of
the trains, whether they have illumination, etc. The internal consumpt ion of the TM44 can
be ignored in the calculations.
For the running power voltage, (so what you supply to the PWR of the TM44), a value
between 14V and 18V is usually a good choice. For an average sized la yout, a power supply
with a capacity of 150W can be selected. In H0/00
this can provide power for about 10 trains running
simultaneously. In scale N probably more than 15. If
you need more power, use a higher capacity supply or
use multiple power supplies.
MeanWell have a suitable range of power supplies at a
very reasonable price. For universal use the HRP15015 could be selected. This is a compact 15V-10A
switching power supply, according to the specs
adjustable from 13.5V to 18V. Cost around €60.
For scale Z, a lower Voltage 10V to 13V and
significantly less power is necessary. In this case it is
better to use a smaller supply e.g. 12V adjustable +/20%
3.6 Safety
Connecting power supplies includes working with 230V mains power. Wor king on these
voltages and power can be potentially dangerous and in some c ountries it may only be done
by certified professionals.
In this manual we cannot give detailed directions for all possible cases. Stick to the legal
regulations, applicable for your region. Use common sense and if you are in doubt or do not
have the necessary knowledge, ask advice from someone you con sider knowledgeable or hire
a professional.
3.7 Power Supply Cabling
The electrical power for your trains is transported by copper wires fro m your power supply
unit to the TM44’s underneath your layout. To make sure the wires can t ransport enough
current, these wires should be properly sized. In the full TM44 manual you will find guidelines
and calculations for distances and wire sizes. In this manual we limit thi s to some “rules of
thumb” that should be sufficient in most cases:
•
Preferably use stranded wire (instead of wire with solid core), bec ause stranded wire
conducts current with high-frequencies better.
Fig 13: MeanWell HRP 150
-15
PWR GND
DO NOT CONNECT!
PWR GND
DO NOT CONNECT!

Manual DINAMO Plug & Play Control your miniature world
Page 14 of 32 Version 1.2 – Dec 21st, 2017 2017 Leon van Perlo
•
Wire as much as possible in star-topology from a central distribution po int near your
power supply.
•
Keep the wires (PWR and GND) together. Preferred is one cable w ith multiple
conductors.
•
H0/00: Use wire with a cross section of 1.5mm2 at minimum. Connect a maximum of 4
TM44’s per cable on a maximum distance of 3.5 meter. If the distance is more than
this, use wire with a cross section of 2.5mm2 and connect a maximum of 4 TM44’s per
cable on a maximum distance of 5 meter.
•
N: Use wire with a cross section of 1.0mm2 at minimum. Connect a maximum of 4
TM44’s per cable on a maximum distance of 3.5 meter. If the distance is more than
this, use wire with a cross section of 1.5mm2 and connect a maximum of 4 TM44’s per
cable on a maximum distance of 5 meter.
•
If desired you can use regular mains electrical cable with the correct cro ss section.
Mark the wire ends clearly, so you’ll never accidentally connect these cables to your
230V mains power system. Alternatively you can purchase special cable u sed for low
power halogen illumination in cross sections varying from 1,5mm2 to 6mm2.
3.8 Connecting Blocks to the TM44
On one side of the TM44 you’ll find 4 screw connectors to connect the blocks: 1 connector
per block. Each connector has 5 terminals. One for the A-rail and 4 fo r the sections B0 to
B3. The picture below shows the pinout and positions of the connector s.
Fig 14: Connecting blocks to the TM44
3.9 Cabling of Blocks
The cabling by which the blocks are connected to the TM44 tran sports the energy from the
TM44 to the track to make the train move and to enable other function s of the train to
work. The wiring needs to be thick enough to carry the necessary current . Thin wire leads to
loss of energy and possibly less constant behaviour of your trains. Wh en controlling digital
trains, to thin wire can lead to bad reception of information by the deco der and strange
behaviour.
Since the TM44 is designed to be placed in the direct vicinity of th e tracks it controls, the
wiring to the tracks can be kept relatively short. In that case the cro ss section of the wires
is not of crucial importance. The ‘standard’ 0.14mm2 model-railroad wire however is
considered somewhat to thin. Preferably use wire with a minimum cros s section of 0.2mm2.
If the wires are longer than 4 meter or so, then use a thicker wire. 0.5 mm2 has been used
successfully in practice on distances up to 10 meters.
To minimise electromagnetic interference as much as possible it is h ighly recommended to
keep the wires of a single Block together. Therefore a multi-conductor c able per block is the
preferred option.
If lengths are limited to approx. 4 meters, you can use UTP LAN cab le (8 wires). The quality
cat3, 5, 6 is unimportant. UTP LAN cable usually has a cross section of 24AWG (US
standard) which corresponds to approximately 0.2mm2. The wires in these cables are
twisted in pairs. Every pair usually has a white and a coloured wire.
A B0 B1 B2 B3 A B0 B1 B2 B3 A B0 B1 B2 B3 A B0 B1 B2 B3
Block 0 Block 1 Block 2 Block 3
A B0 B1 B2 B3 A B0 B1 B2 B3 A B0 B1 B2 B3 A B0 B1 B2 B3
Block 0 Block 1 Block 2 Block 3
Control your miniature world Manual DINAMO Plug & Play
2017 Leon van Perlo Version 1.2 – Dec 21st, 2017 Page 19 of 32
5 The Dinamo RS485 network
In the previous chapters we have described the three different Dinamo P&P modules. In this
chapter we will show how to interconnect the m and make the Dinamo system work.
5.1 Wiring the network
The easiest way to contruct the Dinamo RS485 n etwork is using standard RJ45 UTP
(unshielded twisted pair) network cables. These c ables can be attained in every shop selling
computers and or networking components. The “ quality” of the cable is unimportant,
certainly for the regular distances you encounter in a layout at home. So Cat3, Cat5,
Cat5e, Cat6 or no Cat, in principle it will all wor k, as long as the RJ45 connectors are
mounted properly and at least the inner 6 pins ar e connected straight.
The total length of the RJ45 network can (in t heory) be 1.200 meters. You will probably
need some ambition to reach that length at your layout at home. Therefore the length of the
cables you run between the units is not crucia l, however do not make (or buy) them
significantly longer than reasonably necessary, as if
it were only to keep the installation tidy.
The start of the RJ45 network is at the RM -C/1+.
Looking at the back of the unit (fig 18) you’ll see
two RJ45 sockets. In a standard configuration you
need to use the RJ45 socket closest to the g reen
3-pole socket.
On every TM44 and OC32/NG module you will find two RJ45 sockets as well:
Insert an RJ45 cable in the indicated RJ45 socke t of the RM-C/1+, run it to the closest
TM44 or OC32/NG module and insert the other e nd of the cable in one of the RJ45 sockets
on the TM44 or OC32/NG module. Which of the t wo RJ45 sockets you use is irrelevant,
however for ease of troubleshooting (should it be needed) you may want to keep the left
sockets to point towards the RM-C and the righ t ones to point away from the RM-C, or the
other way around as you like. As said, the choice is arbitrary and technically irrelevant.
Fig20: OC32/NG
RJ45 network socket
s
Fig19:
TM44
RJ45 network socket
s
Fig18: RM-C/1+ RJ45 network socket
RS485 Network
RS485 Network
RS485 Network

Manual DINAMO Plug & Play Control your miniature world
Page 18 of 32 Version 1.2 – Dec 21st, 2017
2017 Leon van Perlo
If you have the OC32/NG in enclosure, simply mou nt the OC32/NG using the 4 screws that
come with the unit or enclosure to a suitable flat surface. As with the bare unit, make sure
to allow for enough space to insert the connect ors including cables and make sure you can
still access the dipswitches at the side.
4.4 OC32/NG Power Supply
The power for the OC32 and the devices control led by the OC32 can be derived from the
power supply used for your trains (read: the TM4 4), or you choose one or more separate
power supplies for your OC32(‘s). Which choice y ou make depends on the optimal Voltage
you need to drive your accessories and the amoun t of power you need.
If you use multiple power supplies, make sure t he negative poles (minus or 0V terminals) of
all the power supplies in your system are connect ed to each other.
The power supply for your OC32 and connecte d devices shall always be a positive DC supply!
Most devices that, according to the manufactur er, need AC current, can be fed with DC
current without any problem. Should you have dev ices that absolutely need AC current, use
a relay to switch them.
The supply for the OC32 is connected to pin 1 ( +) and 2 (-) on the 4-pole connector. See
fig 17.
Fig 17: Connecting power supply to the OC32
PWR GND
DO NOT CONNECT!
PWR GND
DO NOT CONNECT!
Control your miniature world Manual DINAMO Plug & Play
2017 Leon van Perlo Version 1.2 – Dec 21st, 2017 Page 15 of 32
If you want to connect 4 sections per block, at t he side you connect to the TM44, bundle all
white wires and put then in the terminal for th e A-rail. The individual colours (blue, orange,
green, brown) are used as B0 - B3.
At the track-side, connect the colours blue, oran ge, green and brown to the B-rail of the
corresponding section. Connect the white wire of the same pair to the opposite side of the
track. In this way you feed the track at multip le locations which helps preventing problems
with bad rail contacts.
If you do not need 4 sections per block, you may u se each wire-pair as an individual wire. On
both ends bundle the coloured and white wire of each pair. This way you will effectively have a
cable with 4 conductors with a cross section of 0.4mm2 each to connect up to 3 sections
per block.
The best way to connect the wire to the track i s soldering it to the outer side or bottom of
the rail. Soldering to the bottom is usually on ly possible when you have not laid your track
yet. The advantage is that it is invisible. The d isadvantage is that maintenance can be
problematic. If the wire breaks you won’t be ab le to reconnect it the way you originally did.

Manual DINAMO Plug & Play Control your miniature world
Page 16 of 32 Version 1.2 – Dec 21st, 2017
2017 Leon van Perlo
4 OC32/NG
4.1 Introduction
Fig 15: OC32/NG (2 modules shown)
The OC32 can be used to control all accessor ies on and around your railroad and many other
applications. This manual applies to the use of the OC32/NG version only. If you have the
previous version of the OC32 (not /NG), please r efer to previous versions of this Dinamo P&P
manual.
The possibilities of the OC32 are almost infinite. It is impossible to cover all topics in this
Dinamo P&P manual. We therefore limit the de scription here to how you power the OC32/NG
and how you can connect the OC32/NG to the D inamo Network.
In most cases the OC32 has to be configured bef ore it can be used to control devices in
your miniature world. This configuration is done by the OC32Config program. For a
description how to connect devices to your OC 32 and how to configure the OC32, please
consult the appropriate OC32 manuals.
Control your miniature world Manual DINAMO Plug & Play
2017 Leon van Perlo Version 1.2 – Dec 21st, 2017 Page 17 of 32
4.2 Overview of the OC32/NG and location of connections and functions
Fig 16: OC32/NG Overview
The above picture only shows the elements relev ant for this manual. For a complete
overview, please consult the OC32/NG and OC 32 configuration manuals.
4.3 Mounting the OC32/NG
As the TM44, the OC32/NG is intended to be p laced behind or underneath your miniature
world. The OC32/NG is very flexible and configur able. Note that the OC32/NG can be used
simultaneously for many other things beside your train-accessories. Use the flexibility to
place your OC32/NG’s at strategic locations thro ughout your miniature world and keep the
wiring to your devices short and tidy.
The OC32/NG (bare unit) has 4 mounting hole s (3mm). Preferably use spacers
(approximately 10 mm) when mounting the OC 32/NG, so that the back of the module does
not get into contact with the mounting pane l. This is especially important when you mount
the OC32/NG on a metal surface! When mount ing the OC32/NG on a metal surface, keep
especially in mind that the mounting holes are con nected to 0V/GND and that the metal
mounting surface will carry the same potential in this case.
The OC32/NG’s (as bare unit) are ”stackable” by using M3 x 20mm spacers between the
modules. You can even stack TM44’s and OC3 2/NG’s since the mounting holes are aligned.
When mounting the modules, make sure to a llow for enough space to insert the connectors
including cables and make sure you can still acce ss the dipswitches at the side.
LED Green
LED Orange
RS485
interface
Power
Serial Address
Selection
RS485 Termination
Mounting hole
Mounting
hole
Mounting hole
Mounting
hole
LED Green
LED Orange
RS485
interface
Power
Serial Address
Selection
RS485 Termination
Mounting hole
Mounting
hole
Mounting hole
Mounting
hole
 Loading...
Loading...