

Page 1
DE1812 1
DUET-AM, DUET-AM G3
Dual-Technology Microwave/PIR Intrusion Detector
Installation Instructions
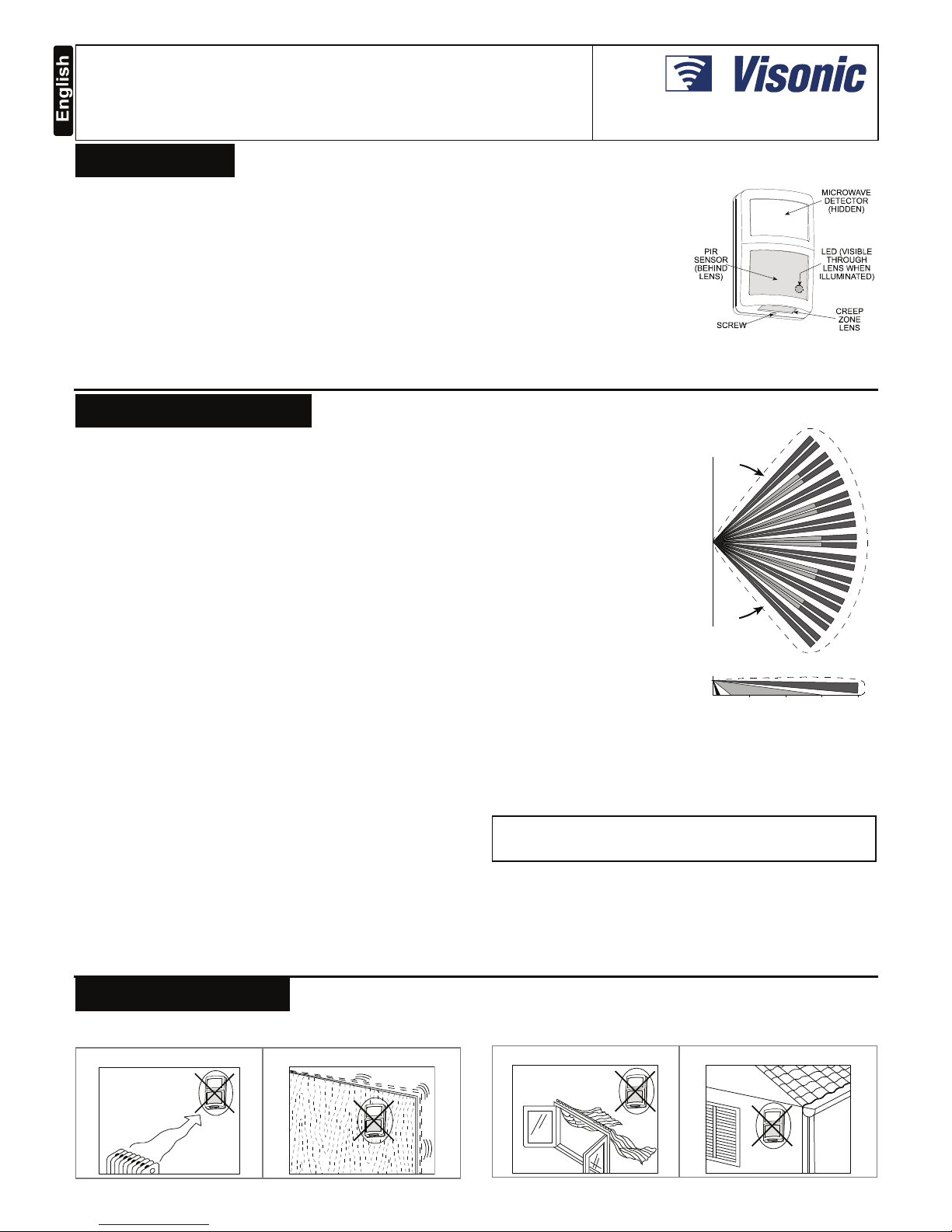
1. FEATURES
• Combined Fresnel and cylindrical optics improves detection
range and false alarm immunity.
• Look-down "creep zone" lens.
• True Motion Recognition™ (TMR) algorithm (patented) for
recognition of true motion of a human body.
• DRO-stabilized MW microstrip technology.
• MW Motion Simulator simulates the effect of a human body
moving in the MW field (patent pending for MW self-test).
• Range control for adjusting the MW coverage.
• PIR self-test by applying a short heat pulse.
• Temperature compensation for the PIR section.
• Unique tamper protection mechanism.
• Programmable motion event counter (1 or 2 events).
• Simple-to-use, three-position
vertical adjustment.
• TEST input to enable/disable
the walk test LED remotely
(per
new European standard).
• Relay output for trouble.
• Anti-masking protection.
• White light protection.
• Optional swivel brackets for
wall or ceiling installation.
• DUET-AM G3 has back
tamper switch and lowvoltage detection.
Figure 1. General View
2. SPECIFICATIONS
Input Voltage: 9 to 16 VDC
Current Drain @ 12 VDC: 21 mA standby, 29 mA max.
Low Voltage Detection (DUET-AM G3 only): Below 8.5 VDC
PIR SECTION
Sensor: Low noise dual-element pyroelectric type
Tripping Indication: LED flashes green for up to 5 seconds
Motion Event Verification Counter: Selectable, 1 or 2 events
Front Lens Data (see Figure 2)
Beams: 32 in two layers (10 curtain beams in bottom layer)
Max. Coverage: 20 x 20 m (60 x 60 ft) / 90° field of view
Vertical Adjustment: FAR, MID and NEAR, by sliding the circuit
board along a 3-position scale.
MW SECTION
Oscillator: Microstrip DRO-stabilized Doppler sensor
Frequency
: 10.687 GHz (in the UK only) or 10.525 GHz (10.525
GHz for movement detector is prohibited or restricted from use in
Austria, Czech Republic, Estonia, Finland, French, Germany,
Portugal, Slovak Republic, Turkey, UK, Spain and Sweden).
Detection Range: Adjustable from 25% to 100% (5 m to 20 m)
Tripping Indication: LED lights green for up to 5 seconds
ALARM, TAMPER & TROUBLE DATA
Alarm Indication: LED lights red for 1.3 to 5 seconds if both
sensors trip
Alarm output: Solid State Relay. NC, 100 mA / 30 VDC, 35 ohm
maximum internal resistance. "Open" for 2 – 3 sec. in case of
alarm, masking event (applicable for DUET-AM G3 only) or
complete power failure.
Alarm Duration: 1.3 to 5 seconds
Tamper Switch: N.C., rated at 50 mA resistive / 30 VDC
Trouble output: Solid State Relay. NC, 100 mA / 30 VDC, 35
ohm maximum internal resistance. "Open" in case of autodiagnostic failure, Anti-Mask event, low voltage (applicable for
DUET-AM G3 only) or complete power failure.
Masking Detection Delay: About 60 seconds
Trouble/ Masking Indication: LED alternately flashes green and
red and TRB relay opens until the detector is reset.
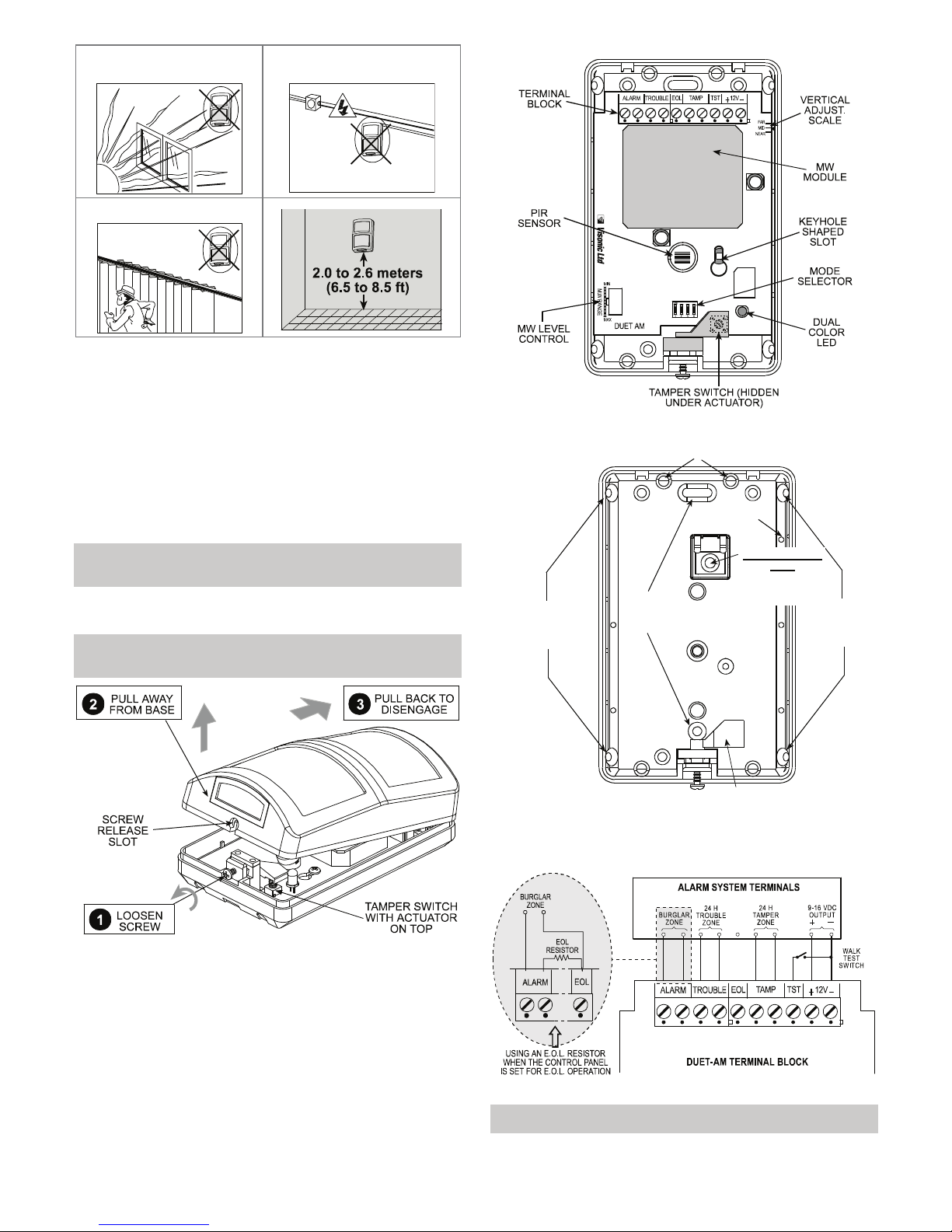
MOUNTING
Form: Surface or corner (no
brackets); surface, corner and
ceiling with brackets
Height: 2 - 2.6 m (6.5 - 8.5 ft)
without bracket, 2 - 3.6 m (6.5 12 ft) with bracket.
Note: Mounting heights of
greater than 2.6m (8.5 ft) may
reduce the detector's coverage
range.
Caution: with brackets in use,
effective detection ranges may
differ from those indicated in
Figures 2 and 8.
Optional Brackets: BR-1
(surface), BR-2 (corner) and
BR-3 (ceiling).
ENVIRONMENTAL
RFI Protection: >30 V/m up to
1000 MHz.
20 m151050
2 m
TOP VIEW
SIDE VIEW (”FAR” POSITION)
90°
CURTAINS
UPPER LAYER
60 ft453015
Figure 2. Coverage Pattern
Operating Temperatures: -10°C to 50°C (14°F to 122°F).
Storage Temperatures: -20°C to 60°C (-4°F to 140°F).
Standards: Complies with Part 15 of the FCC Rules.
EN 50131-1 Grade 2 (Grade 3 for DUET-AM G3) Class II, EN
50131-2-4.
This device complies with the essential requirements and provisions of
Directive 1999/5/EC of the European Parliament and of the Council of
9 March 1999 on radio and telecommunications terminal equipment.
See frequency restriction under "Frequency", at the left side.
PHYSICAL
Dimensions (H X W X D): 123 x 76 x 48 mm (4-13/16 x 3 x 1-7/8 in.)
Weight: 145 g (4.5 oz).
PATENTS
U.S. Patents 5,237,330 and 5,693,943
3. INSTALLATION
3.1 Installation Tips
To minimize false alarms:
Do not aim at heat sources
Mount on solid, stable surfaces
Do not expose to air drafts
Do not install outdoors
Page 2
2 DE1812
Prevent direct sunlight from
reaching the detector
Keep wiring away from
electrical power cables
Do not install behind partitions
In addition, a few important rules must be observed while selecting a
mounting location:
A. Microwave radiation passes through glass and non-metallic walls.
Be sure to adjust the MW range so that it does not exceed the
room limits, or else motion in the next room or moving traffic along
the outer side of the wall will cause the MW sensor to trip.
B. Large reflecting objects (especially metals) in the coverage area
can distort the microwave sensor's coverage pattern.
C. If two DUET-AM units are installed in the same room or on
opposite sides of a shared wall, they should not face each other
and must be mounted at least 2 meters apart.
D. Do not install the DUET-AM in places where one of the two sensor
circuits alarms constantly or intermittently, due to environmental
interference.
E. DUET-AM users are advised to mount the unit in locations
where inadvertent approach to less than 1 m (3 ft) from the
detector is unlikely to occur.
3.2 Mounting
A. Remove the front cover as shown in Figure 3.
IMPORTANT: When re-mounting the cover, remember to fasten the
screw well - this will force the tamper switch actuator upon the tamper
switch and will press it fully in.
Figure 3. Cover Removal
B. Loosen the vertical adjustment screw, slide the PCB up and
remove it via the “keyhole” (see Figure 4).
C. Put the PCB aside until required again.
D. Refer to Figure 5 and punch out the mounting knockouts at
the rear of the base (for surface mounting) or at the angled
sides (for corner mounting). For DUET-AM G3, punch out also
the back tamper screw knockout.
E. Punch out any one of the wiring knockouts shown in Figure 5.
F. Hold the base against the wall at the selected installation location,
mark the points for drilling and drill the holes (For DUET-AM G3,
also mark and drill hole for back tamper switch screw). Insert the
plastic dowels (supplied) if necessary.
G. Pass the wires through the wiring inlets into the base and attach
the base to the wall using the screws (supplied).
H. Return the PCB to its place within the base.
I. Proceed to wire the terminal block as instructed in Para. 3.3.
Figure 4. PCB Layout
SURFACE
MOUNTING
KNOCKOUTS
WIRING
KNOCKOUTS
POINTER
TAMPER SWITCH
ACTUATOR
CORNER
MOUNTING
KNOCKOUTS
CORNER
MOUNTING
KNOCKOUTS
FOR DUET-AM G3
ONLY
KNOCKOUT FOR
BACK TAMPER
SWITCH SCREW
Figure 5. Base after PCB Removal
3.3 Wiring
Refer to Figure 6 and wire up the terminal block:
Figure 6. Terminal Block Wiring
IMPORTANT: To comply with CE safety requirements, connect to
CE-approved control panels with current-limited DC output.
Note: Use RTV to seal the base opening(s) to prevent insects from
entering the detector.
Page 3

DE1812 3
TST INPUT LOGIC
The dual color LED may be enabled remotely for walk testing with a
test switch connected to the TST input as shown in Figure 6:
TST input grounded - LED active
TST input floating or high (+12V) - LED inactive (unless mode
switch 2 is ON).
3.4 The Power-up Process
After connecting the (+) and (–) terminals to the power source, the
DUET-AM starts a 60-second warm-up period, indicated by alternate
flashing of the green and red lights.
Caution! If the alternate flashing of the red and green lights does not
stop within 60 seconds, a failure has been detected by the self-test
circuitry or, if mode switch 3 is set to ON, the unit may be masked
(refer to Para. 3.5).
3.5 What Happens in Case of Masking?
Attention! The following procedure is true only while mode switch 3
is in the ON position.
If an attempt is made to stick masking material over the lens or put a
masking object close to the lens, a trouble alert will result about 60
seconds after masking:
• The LED will flash red and green alternately;
• The TRB relay will open and will remain so until masking is
removed and the detector is reset (see Para. 3.13 for
procedure).
3.6 Visual Indications
The dual color LED is used to signal various alarm and trouble
messages as shown in Table 1 below:
Table 1. Interpreting the Visual Indications
Visual Indication
Significance
None No detection
Steady green (5 seconds) MW walk-test detection
Flashing green PIR walk-test detection
Steady red (5 seconds) Alarm: MW + PIR detection
Flashing red and - Trouble is being detected (or
green (alternately) masking if mode switch 3 is ON)
- Initial warm-up routine (stops 60
seconds after power up).
Notes:
1. During walk testing, the green light glows steadily (MW detection)
or flashes (PIR detection), depending on which one of the two
sensors discovered the movement first. Upon subsequent discovery
of the movement by the other sensor, the green light goes off and
the red light glows (alarm).
2. If the LED maintains alternate red and green flashing beyond the
warm-up period, a malfunction has been diagnosed (or, if mode
switch 3 is ON, the detector may be masked).
3.7 Mode Selector
The DIP switch mode selector is mounted on the unit’s PC board
(see Figure 4). It controls four functions as demonstrated in
Figure 7.
ON
- 2 MOTION EVENTS
TRIGGER AN ALARM
OFF
- 1 MOTION EVENT
TRIGGERS AN ALARM
ON
1
2
3
4
ON
- ALARM RELAY OPENS
UPON ALARM, MASKING AND
SELF-TEST FAILURE EVENTS.
OFF
- ALARM RELAY OPENS
UPON ALARM AND MASKING
(APPLICABLE TO DUET-AM G3
ONLY) EVENTS.
ON
- LED PERMANENTLY
ENABLED
OFF
- LED DISABLED -
ENABLED VIA TST INPUT
ON
- ANTI-MASKING
ENABLED
OFF
- ANTI MASKING
DISABLED
NOTE:
SWITCH POSITION S SHOWN ARE FACTORY DEFAULTS
Figure 7. DIP Switch Mode Selector
3.8 Vertical Adjustment
The vertical adjustment scale for the PIR sensor is located at the
upper right edge of the PC board (refer to Figure 4). Three positions
are available - FAR, MID and NEAR. All new DUET-AM units are set
to the FAR position. To adjust, loosen the vertical adjustment screw,
slide the PC board along the vertical slot until the pointer indicates the
required position on the scale (see Figure 8). When done, tighten the
adjustment screw firmly.
Figure 8. Vertical Adjustment
Caution! With swivel brackets in use, the effective detection
ranges may differ from those indicated in Figures 2 and 8.
3.9 Setting the Motion Event Counter
If you wish to set the PIR sensor for maximum false alarm
immunity, shift DIP switch No. 1 (SW-1) to ON. In this position, two
consecutive motion events are required to trip the PIR sensor. For
faster catch performance, shift SW-1 to OFF. In this position, only
one motion event is required to trip the PIR sensor.
3.10 PIR Walk Test
A. Rotate the MW RANGE control fully counterclockwise to MIN.
B. Make sure that the LED is enabled, either by setting mode
switch SW-2 to ON or by grounding the TST input.
C. Mount the front cover in place.
D. Walk into the detector's field of view at the expected far edge
of the coverage area. The green light should flash for up to 5
seconds each time your motion is detected.
Note: If the LED lights green steadily for up to 5 seconds,
your motion has been detected by the MW sensor.
E. If PIR detection is not obtained at the far end of the coverage
area, remove the front cover and re-adjust the vertical
position. Replace the cover and retest.
3.11 MW Walk Test
A. Remove the front cover.
B. Verify that the MW RANGE control is set fully counterclockwise
to MIN and enable the LED either by setting mode switch SW-2
to ON or by grounding the TST input.
C. Start by moving into the coverage area at the far edge. The
LED should light green for up to 5 seconds each time your
motion is detected.
D. If your motion was not detected at the far edge, advance the
MW RANGE control slightly clockwise toward MAX and try
again until your motion is detected reliably at the far edge.
Caution! The MW detection range must not exceed the far
edge of the desired coverage area.
E. Walk across the coverage area at various ranges and verify
that your motion is consistently detected.
Note: MW LEVEL CONTROL (see figure 4) may need to be set to
maximum for achieving maximum area coverage.
3.12 Alarm Walk Test
A. Make sure that the LED is enabled, either by setting mode
switch SW-2 to ON or by grounding the TST input.
B. Install the front cover in place.
C. Walk across the detector’s field of view in different directions,
at various distances from the detector, and verify proper
alarming throughout the detector's coverage area (the LED
lights red for 1.3 to 5 seconds).
D. When done, disable the LED by setting set switch SW-2 to
OFF or by disconnecting the TST input (leaving it "floating").
Page 4

4 DE1812
E. Remount the cover and fasten it to the base using the small
screw at the bottom.
Attention! To assure proper function of the detector, the range
and coverage area should be checked at least twice a year.
Furthermore, it is recommended that users perform a walk test
at the far end of the coverage pattern to assure an alarm signal
prior to each time the alarm system is armed.
3.13 Resetting after Trouble
If trouble occurs while mode switch 3 is ON, proceed as follows:
• Search for masking material on the lens or a masking object in
front of the lens and remove them, if found.
• Reset the detector by walk testing: cross its field of view at the
far end (for DUET-AM G3 at 3m), causing it to alarm several
times (for DUET-AM G3, 3 times).
If everything is back to normal, the LED should stop flashing, and
the TRB relay should revert to the closed circuit state.
Note: If walk testing does not cause the trouble alert to stop and
mode switch 3 is ON, recheck for masking. Once masking is
ruled out, the trouble must be due to faulty PIR or MW circuitry.
4. MISCELLANEOUS COMMENTS
This device has been tested and found to comply with the limits for a
Class B digital device, pursuant to Part 15 of the FCC Rules. These
limits are designed to provide reasonable protection against harmful
interference in residential installations. This equipment generates,
uses and can radiate radio frequency energy and, if not installed and
used in accordance with the instructions, may cause harmful
interference to radio and television reception. However, there is no
guarantee that interference will not occur in a particular installation. If
this device does cause such interference, which can be verified by
turning the device off and on, the user is encouraged to eliminate the
interference by one or more of the following measures:
– Re-orient or re-locate the receiving antenna.
– Increase the distance between the device and the receiver.
– Connect the device to an outlet on a circuit different from the one
which supplies power to the receiver.
– Consult the dealer or an experienced radio/TV technician.
WARRANTY
Visonic Limited (the “Manufacturer") warrants this product only (the "Product") to the original purchaser only (the
“Purchaser”) against defective workmanship and materials under normal use of the Product for a period of twelve
(12) months from the date of shipment by the Manufacturer.
This Warranty is absolutely conditional upon the Product having been properly installed, maintained and operated
under conditions of normal use in accordance with the Manufacturers recommended installation and operation
instructions. Products which have become defective for any other reason, according to the Manufacturers
discretion, such as improper installation, failure to follow recommended installation and operational instructions,
neglect, willful damage, misuse or vandalism , accidental damage, alteration or tampering, or repair by anyone
other than the manufacturer, are not covered by this Warranty.
The Manufacturer does not represent that this Product may not be compromised and/or circumvented or that the
Product will prevent any death and/or personal injury and/or damage to property resulting from burglary, robbery,
fire or otherwise, or that the Product will in all cases provide adequate warning or protection. The Product,
properly installed and maintained, only reduces the risk of such events without warning and it is not a guarantee
or insurance that such events will not occur.
THIS WARRANTY IS EXCLUSIVE AND EXPRESSLY IN LIEU OF ALL OTHER WARRANTIES,
OBLIGATIONS OR LIABILITIES, WHETHER WRITTEN, ORAL, EXPRESS OR IMPLIED, INCLUDING ANY
WARRANTY OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE, OR OTHERWISE. IN
NO CASE SHALL THE MANUFACTURER BE LIABLE TO ANYONE FOR ANY CONSEQUENTIAL OR
INCIDENTAL DAMAGES FOR BREACH OF THIS WARRANTY OR ANY OTHER WARRANTIES
WHATSOEVER, AS AFORESAID.
THE MANUFACTURER SHALL IN NO EVENT BE LIABLE FOR ANY SPECIAL, INDIRECT, INCIDENTAL,
CONSEQUENTIAL OR PUNITIVE DAMAGES OR FOR LOSS, DAMAGE, OR EXPENSE, INCLUDING LOSS
OF USE, PROFITS, REVENUE, OR GOODWILL, DIRECTLY OR INDIRECTLY ARISING FROM
PURCHASER’S USE OR INABILITY TO USE THE PRODUCT, OR FOR LOSS OR DESTRUCTION OF
OTHER PROPERTY OR FROM ANY OTHER CAUSE, EVEN IF MANUFACTURER HAS BEEN ADVISED OF
THE POSSIBILITY OF SUCH DAMAGE.
THE MANUFACTURER SHALL HAVE NO LIABILITY FOR ANY DEATH, PERSONAL AND/OR BODILY
INJURY AND/OR DAMAGE TO PROPERTY OR OTHER LOSS WHETHER DIRECT, INDIRECT, INCIDENTAL,
CONSEQUENTIAL OR OTHERWISE, BASED ON A CLAIM THAT THE PRODUCT FAILED TO FUNCTION.
However, if the Manufacturer is held liable, whether directly or indirectly, for any loss or damage arising under this
limited warranty, THE MANUFACTURER'S MAXIMUM LIABILITY (IF ANY) SHALL NOT IN ANY CASE
EXCEED THE PURCHASE PRICE OF THE PRODUCT, which shall be fixed as liquidated damages and not as a
penalty, and shall be the complete and exclusive remedy against the Manufacturer.
When accepting the delivery of the Product, the Purchaser agrees to the said c onditions of sale and warranty and
he recognizes having been informed of.
Some jurisdictions do not allow the exclusion or limitation of incidental or c onsequential damages, so these
limitations may not apply under certain circumstances.
The Manufacturer shall be under no liability whatsoever arising out of the corruption and/or malfunctioning of any
telecommunication or electronic equipment or any programs.
The Manufacturers obligations under this W arranty are limited solely to repair and/or replace at the
Manufacturer’s discretion any Product or part thereof that may prove defective. Any repair and/or replacement
shall not extend the original Warranty period. The Manufacturer shall not be responsible for dismantling and/or
reinstallation costs. To exercise this W arranty the Product must be returned to the Manufacturer freight pre-paid
and insured. All freight and insurance costs are the responsibility of the Purchaser and are not included in this
Warranty.
This warranty shall not be modified, varied or extended, and the Manufacturer does not authorize any person to
act on its behalf in the modification, variation or extension of this warranty. This warranty shall apply to the
Product only. All products, accessories or attachments of others used in conjunction with the Product, including
batteries, shall be covered solely by their own warranty, if any. The Manufacturer shall not be liable for any
damage or loss whatsoever, whether directly, indirectly, incidentally, consequentially or otherwise, caused by the
malfunction of the Product due to products, accessories, or attachments of others, including batteries, used in
conjunction with the Products. This Warranty is exclusive to the original Purchaser and is not assignable.
This Warranty is in addition to and does not affect your legal rights. Any provision in this warranty which is
contrary to the Law in the state or country were the Product is supplied shall not apply.
Warning:
The user must follow the Manufacturer’s installation and operational ins tructions including testing the
Product and its whole system at least once a week and to take all necessary precautions for his/her s afety and
the protection of his/her property.
1/08
W.E.E.E. Product Recycling Declaration
For information regarding the recycling of this product you must contact the company from which you orignially purchased it. If you are discarding this product and not
returning it for repair then you must ensure that it is returned as identified by your supplier. This product is not to be thrown away with everyday waste.
Directive 2002/96/EC Waste Electrical and Electronic Equipment.
VISONIC LTD. (ISRAEL): P.O.B 22020 TEL-AVIV 61220 ISRAEL. PHONE: (972-3) 645-6789, FAX: (972-3) 645-6788
VISONIC INC. (U.S.A.): 65 WEST DUDLEY ROAD, BLOOMFIELD CT. 06002-1376. PHONE: (860) 243-0833, (800) 223-0020 FAX: (860) 242-8094
VISONIC LTD. (UK): FRASER ROAD, PRIORY BUSINESS PARK, BEDFORD MK44 3WH. PHONE: (0870) 7300800 FAX: (0870) 7300801
VISONIC GMBH (D): KIRCHFELDSTR. 118, D-42015 DÜSSELDORF, GERMANY, FAX (0211) 60069619 Email: info-dach@visonic.com
VISONIC IBERICA: ISLA DE PALMA, 32 NAVE 7, POLÍGONO INDUSTRIAL NORTE, 28700 SAN SEBASTIÁN DE LOS REYES, (MADRID),
ESPAÑA. TEL (34) 91659-3120, FAX (34) 91663-8468. www.visonic-iberica.es
INTERNET: www.visonic.com
©VISONIC LTD. 2009 DUET-AM, DUET-AM G3 DE1812- (REV. 3, 1/09)
 Loading...
Loading...