

Viewpro Z12TL User Manual
User manual
Z 1 2 TL
12x Zoom Laser Night Vision Object Tracking Camera Gimbal
Images are for reference only, please subject to the actual product.

Contents
Z12TL Pinpoint-precision Gimbal
Gimbal introduction ………………… …… … ………………… ……
1. …………… 2
Object tracking function …
2. …… …………… …… …… …………… …… …… …2
3. Gimbal description………… ……… …… ……… …………… …………… …………3
4. Packing list …… ………………… …… …………… …… ………………… …………4
5. Gimbal dimension …… …… ……………………… …… …… …… …… …………4
6. Installing ………………………………………………… …… …… …… …… …… …5
7. Mechanics@Electronic characteristics … ………… …… … … … ………… 5
8. Working characteristics ………………… …… …………… …… …………………5
9. Gimbal’s signal wire box …… …… …… …………………………… …… ……6
10. Connection of contral box and wiring instructions …… …… …… …… …… …6
Z12TL Network Camera
1. …………… …………1 1Camera characteristics ……… …
2. Light supplement characteristics
…
…
…
…
…
……
…
……
…………
…
…
……………
………………… …… …………… …… ………12
-1 -
Gimbal Introduction
Z12TL is a pinpoint-precision professional 3-axis gimbal with a 12x full 1080P
optical starlight zoom network camera which based on FOC motor control
technology, adopts pinpoint-precision encoder in each motor. Z10TL can
achieveaerial remote distance or zoom night recording, it is designed for
various fields like public security, fire fighting, electric power system and r
escue etc.
The speed of Z12TL gimbal is adjustable, LOW speed mode is used for
large zoom range, the control will be more accurate; Fast speed mode
is used for small zooming range, which makes the gimbal control sensitive
and quick. Also the one-key to center function will allow the gimbal return
to initial position automatically and rapidly.
Z12TL supports PWM and serial command control, suitable for close
range remote control or remote data command control.
Object Tracking Function
1. Function description
Build-in normalization, cross-correlation and tracking algorithm,
combining with object missing recapture algorithm, achieve stable
track of the target.
Support custom characters of user OSD, adaptive gate, cross cursor,
tracking information display.
2. Tracking Performance
1) Update rate of deviation pixel 50Hz
2) Output delay of deviation pixel <15ms
3) Minimum object contrast 5%
4) The minimal signal-to-noise ratio (SNR) 4
5) Minimum object size 16*16 pixel
6) Maximum object size 160*160 pixel
7) Tracking speed 32 pixel/frame
8) The mean square root values of pulse noise in the object position<0.5
pixel
-2 -
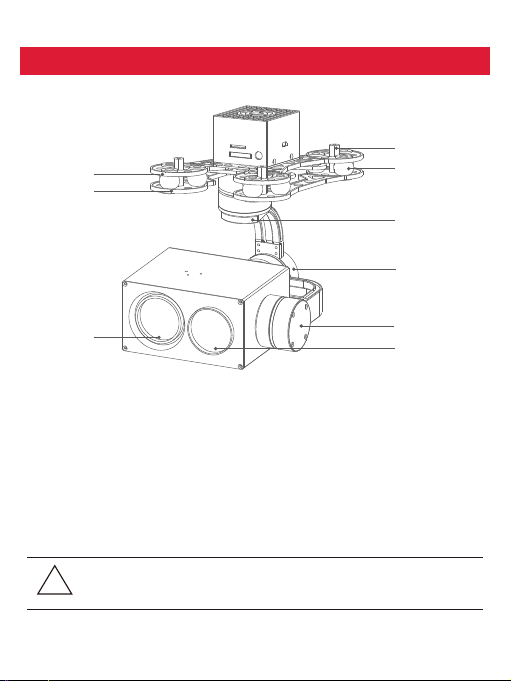
Gimbal Description
[3 ]
[4 ]
[1 ]
[2 ]
[5 ]
[6 ]
8]
[
[1] Gimbal fixed copper cylinder
[2] Damping balls
[3] Upper damping board
[4] Lower damping board
[5] YAW axis motorr
Please make sure that the motor is not stopped by any object during
the rotation, if the gimbal is blocked during rotation, please remove
!
the obstruction immediately.
[6] Roll axis motor
[7] Pitch axis motor
[8] Light supplement
[9] HD zoom network camera
-3 -
[7 ]
[9 ]
 Loading...
Loading...