

Viewpro Q10F User Manual

User manual
10F
Q
10x Optical Zoom Camera Gimbal
Images are for reference only, please subject to the actual product.

Contents
Q10F Pinpoint-precision Gimbal
1.Gimbal introduction ..................................................................................2
2.Object tracking function (Optional)............................................................2
3.Gimbal description ....................................................................................3
4.Gimbal dimension .....................................................................................4
5.Mechanics@Electronic characteristics .....................................................5
6.Working characteristics .............................................................................5
7.Gimbal’s signal wire box ......................................... ..................................6
Q10F Camera
1.Camera introduction ..................................................................................9
2.Parameter index ........................................................................................9
3.Functional characteristics .........................................................................10
-1 -

Gimbal Introduction
Q10F pinpoint precision gimbal is specially tailored for 10x zoom cameras.
Factory, all the parameters have been adjusted, the user installed the
camera after hand and installed it to the flight Ready to use on the device.
The gimbal can be increased in three directions: level, roll and pitch design,
can greatly reduce mechanical vibration, can be applied in various fields like
public security, electric power, fire, zoom aerial photography and other i
ndustries in the application of drones.
Object Tracking Function
1. Function description
Build-in normalization, cross-correlation and tracking algorithm,
combining with object missing recapture algorithm, achieve stable
track of the target.
Support custom characters of user OSD, adaptive gate, cross cursor,
tracking information display.
2. Tracking Performance
1)Update rate of deviation pixel 50Hz
2)Output delay of deviation pixel <15ms
3)Minimum object contrast 5%
4)The minimal signal-to-noise ratio (SNR) 4
5)Minimum object size 16*16 pixel
6)Maximum object size 160*160 pixel
7)Tracking speed 32 pixel/frame
8)The mean square root values of pulse noise in the object position<0.5
pixel
-2 -
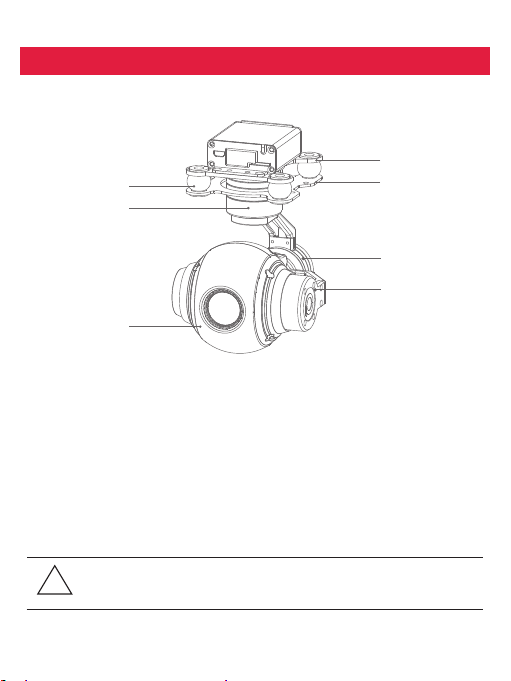
Gimbal Description
[3 ]
[4 ]
[7 ]
[1] Upper damping board
[2] Lower damping board
[3] Damping ball
[4] YAW axis motor
[5] Roll axis motor
Please make sure that the motor is not stopped by any object during
the rotation, if the gimbal is blocked during rotation, please remove
!
the obstruction immediately.
[6] Pitch axis motor
[7] 10x HD zoom camer
[1 ]
[2 ]
[5 ]
[6 ]
-3 -
 Loading...
Loading...