

Page 1

Valco Instruments Co. Inc.
Two Position Microelectric
Technical Note 413
Valve Actuator
The microelectric actuator consists of a control module, a stepper motor/gearbox assembly, a manual
controller (use is optional), a universal AC input (100-240 VAC, 50-60 Hz) to 24 VDC power supply,
and the interconnecting cables. The actuator is self-adjusting from 30° to 90° – no valve alignment is
necessary. Once a valve is installed by tightening the clamp screw, the actuator senses the positive
stops within the valve and memorizes them in the first four moves.
The time it takes a valve to cycle from Position A to Position B
depends on the amount of rotation involved. To determine the
number of degrees in the angle of rotation, divide 360° by the
number of ports in the valve. Then consult the table at right.
Installation and Use
(Control module serial numbers starting with EM2C)*
90
115
150
235
ED
140
175
235
300
EQ
EH EP
36°
45°
60°
90°
Switching times in milliseconds
60
70
85
115
70
85
110
145
ET
330
410
500
710
Getting Started
Figure 1 on the next page shows how to connect the various actuator components. There are four
connectors on the control module, keyed and sized to prevent incorrect connection.
Cable and Connector Functions
Input power
a coaxial connector: the inner pin is + voltage and the outer pin is ground.
The average DC current requirement is 2.5 amps. Standby current draw
is 60 milliamps. The actuator should not share a power supply with
other noise-sensitive electronics, as the high current draw can cause
problems.
Motor driver output
carry the stepper motor phase drive signals. Pin 3 is grounded and
tied to the cable shield to reduce electrical noise.
A three-pin connector is used for the
pin 2 is transmit to the host computer, and pin 3 is receive from the
host. (A discussion on serial control of the actuator starts on page 3.)
(20-30 VDC , with 24-28 VDC pref erred) is supplied through
is through the five-pin connector: pins 1, 2, 4, and 5
RS-232 interface
: pin 1 is ground,
Pin # Signal Description
Input Power Cable
inner +20-30 VDC power
outer Ground
Motor Driver Output Cable
1 Phase B
2 Phase B
3 Ground
4 Phase A
5 Phase A
The ten-pin connector is for the
controlled by
provide simultaneous control by an external system. (Digital control of the actuator is discussed on
page 3.)
* Serial numbers are on the underside of the control module. (Figure 2) Actuators of this series are further identified by a metallic
control module housing. If your actuator control module has a plastic housing and a serial number starting with E2CA, please refer to
Technical Note 421.
either
or
both
manual controller
. The manual controller has a through por t, so an additional cable can
or for
digital input/output signals
1
; the actuator can be
Page 2
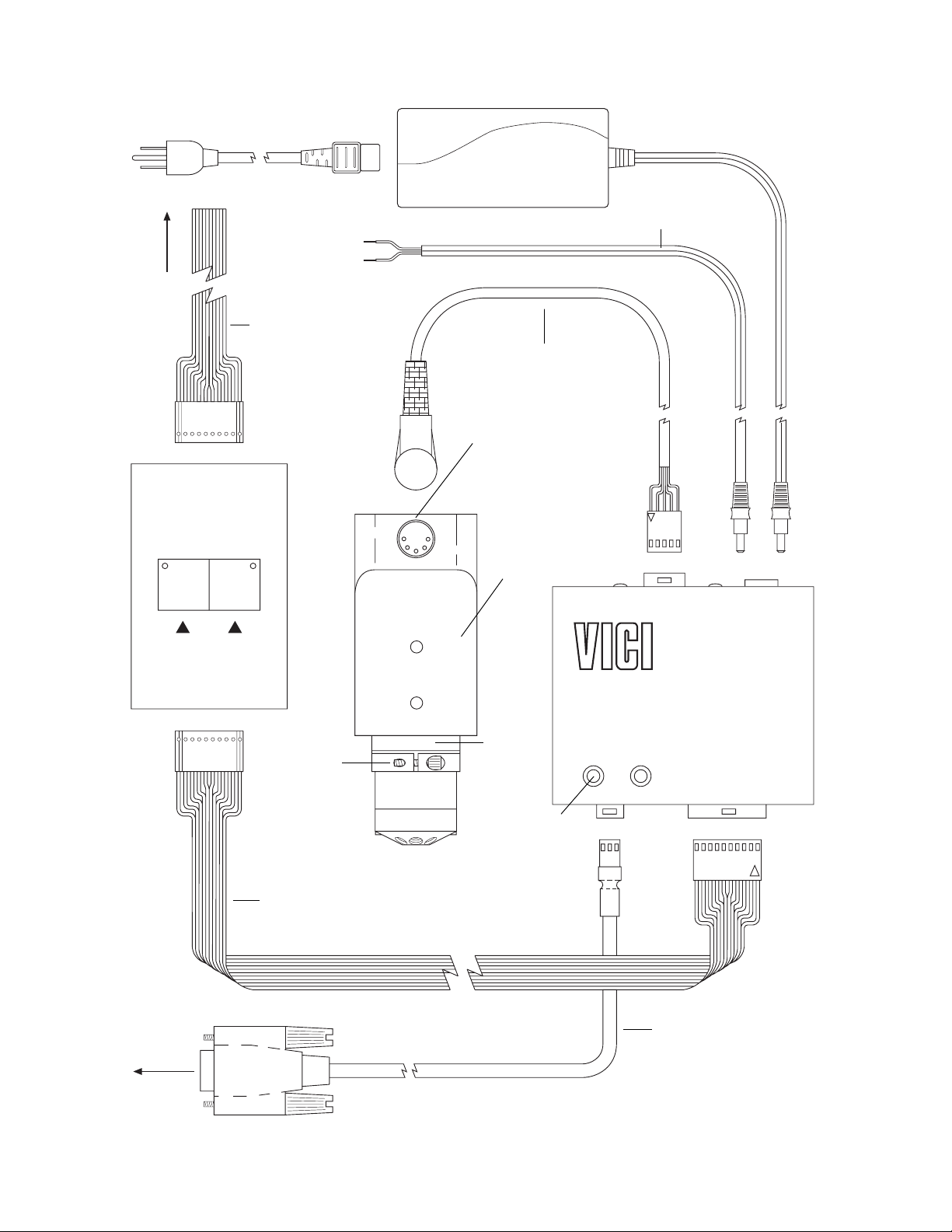
TO 110 OR 220 V A C
(User must supply other
line cord configurations)
TO
EXTERNAL
CONTROL
SYSTEM
LINE CORD (IEC-320)
P/N I-W-17600
+24-28 VDC
GND
DIGIT AL INPUT/
OUTPUT CABLE
P/N I-22537
POWER SUPPL Y
P/N PS24VDC-CE
BLACK / WHITE STRIPE
BLACK
OPTIONAL
INPUT POWER CABLE
P/N I-22535-CE
MOTOR DRIVER
OUTPUT CABLE
P/N I-22645
MANUAL
CONTROLLER
(Use optional)
P/N I-22689
POSITIONAPOSITION
PIN 1
B
PIN 1
CLAMP
SCREW
MOTOR/GEARBOX
ASSEMBL Y
P/N EQMA (Highest speed)
EHMA (High speed and
Medium torque)
EDMA (High torque
ETMA (Highest torque)
MOUNTING
BRACKET
PIN 1
P/N I-22596
2 POSITION ACTUATOR
CONTROL MODULE
CLAMP
RING
POSITION
AB
POSITION
INDICATOR
LIGHTS
Valco Instruments Co. Inc.
P/N:
EQCA-CE (Highest speed)
EHCA-CE (High speed)
EPCA-CE (Medium torque)
EDCA-CE (High torque)
ETCA-CE (Highest torque)
PIN 1 PIN 1
TO COMPUTER
MANUAL CONTROLLER CABLE
P/N I-22537-01
DB-9
CONNECTOR
(FEMALE)
Figure 1: Actuator and controller connections
OPTIONAL
SERIAL PORT
(RS-232) CABLE
P/N I-22697
2
Page 3

Mounting
Digital I/O Cable
Pin # Signal Description
1 Ground
2 +5 VDC
3 Position A output
4 Position B output
5 Position A input
6 Position B input
7 Position A relay contact output
8 Position A relay contact output
9 Position B relay contact output
10 Position B relay contact output
The actuator should be oriented so that any potential leakage of liquid
from the valve or fittings flows away from rather than into the actuator.
(below)
tor/gearbox assembly.
Figure 2 provides the mounting dimensions for the stepper mo-
3.4" for EH
4.4" for ET
1.95"
1.375"
OK
OK
3.24"
2.7"
2.2"
.7"
1" .75"
.9"
1"
8-32
MOUNTING HOLES*
The length of the 8-32 screws used for panel
mounting is not critical, as long as they extend
at least 1/4" into the actuator casting.
.973"
3.9"
3.1"
SERIAL
NUMBER
TAG
CONTROL MODULE
Figure 2
Initialization
Any time a valve is removed and reinstalled, the actuator must be initialized by following these steps:
1. Cycle the actuator twice with no valve, or with either end of the motor driver output cable unplugged.
2. Plug the cable back in, or put the valve back in the clamp ring. Orient the valve as desired and tighten
the clamp screw.
For the next few cycles the actuator will move at half its normal speed while it looks for the valve stops.
Once it determines the proper stroke, the actuator will return to normal speed. If you don’t hear a
change in speed, make sure that the clamp screw is tight.
Digital Control of the Actuator
Digital Communication Protocol
Pins 1 and 2 provide ground and +5 volt outputs, respectively; pins 3
and 4 are TTL outputs f or P osition A and P osition B, and are considered
asserted at 0 volts and deasserted at 5 volts. (This is sometimes referred to as “negative true logic”.) Pins 5 and 6 are digital inputs for
switching to P osition A and Position B . They can be driven either b y 5 volt
TTL/CMOS logic or by contact closure to ground (Pin 1). Isolated contact closure outputs are availab le at Pins 7 and 8 for P osition A and Pins
9 and 10 for Position B. If there is a positioning error due to valv e stic king, clamp ring slippage, etc., the output is set to “0” (all lines high for a
negative true output).
Input Modes
Two input mode options are provided to expand the control fle xibility of the actuator.
Mode 1
In mode 1 (default) the digital inputs are set to be compatible with the standard Valco AC actuator.
Asserting input pin 5 causes the actuator to go to Position A, and asserting input pin 6 sends it to
3
Page 4

Position B . Operation in this mode requires two relays, as shown in
the illustration at right. Relays should be asserted (turned on) for
a minimum of 30 msec and deasserted (turned off) for a minimum
of 30 msec before the next assertion.
Mode 2
Operation in this mode requires one relay. In mode 2, asserting
pin 5 causes the actuator to toggle from the current to the opposite position. Asserting pin 6 causes the actuator to toggle to the
opposite position, delay for a preset period of time (the default is
100 ms), and toggle back to the original position.
Mode Setup
To set the actuator mode, connect it to an RS-232 serial port as
described in the section below, Establishing Serial
Communications. To see the current setting, enter the SM
Mode 1
RELAY 1
RELAY 2
Mode 2
Toggle setup (A B A)
RELAY
Delay setup (A B)
RELAY
CABLE (I-22537)
CABLE (I-22537)
CABLE (I-22537)
PIN 1
PIN 5
PIN 6
PIN 1
PIN 5
PIN 1
PIN 6
command as shown in the Serial Commands chart on page 5. T o
n
change the mode, enter SM
, where n is 1 or 2. The DT command displays the current delay time
setting. This setting can be changed with the DTn command, where n is the desired time from 0 to
65,000 milliseconds.
Mode settings are saved when the power is off.
Serial Control of the Actuator
Establishing Serial Communications
Items required:
• Valco cable assembly I-22697 or equivalent
• Terminal emulation or communication software such as QModem, ProComm, or
Windows® Terminal or HyperTerminal, running on a PC-compatible computer
1. Connect the I-22697 cable to the actuator as indicated in Figure 1, and set the serial port at 9600
baud, no parity, 8 data bits, 1 stop bit, no hardware or software handshaking.
2. With the software running, check the bi-directional communication link between the keyboard/monitor of the computer and the serial port by typing VR<enter>. If the link is functioning and an actuator
ID has not been set, a message similar to the following will appear on your monitor, giving the
program number and date of the actuator firmware.
I-PD-ETX88RXX (XX = revision number)
2 - Aug - 99
If there is no response, it is possible that the ID has already been set. To force a response from a
device with an unknown ID, type *VR<enter>. The asterisk is a substitute ID wild card which will
elicit a response from all devices on line, no matter what their ID is.
Programmer’s note:
serial por t output is deactivated when not in use. At the beginning of a message the first character
transmitted is sometimes lost due to a framing error . To av oid this, a NULL char acter (zero value byte) is
sent at the beginning of each message. Most terminal programs will ignore the NULL character, but custom
software may require a character trap to delete it.
To permit multiple actuators to share the same computer serial port, the actuator
Serial Communication Protocol
Serial communication is based on an ASCII string protocol. Carriage return (OD hex) characters parse the communications by defining the end
of each command. Line feed characters (OA hex) are ignored.
A three-pin connector is used for the RS-232 interface: pin assignments
are indicated at right. Software flow control (Xon/Xoff) and hardware handshaking are not supported.
4
Serial Port (RS-232) Cable
Pin # Signal Description
1 Ground
2 Transmit to host
3 Receive from host
Page 5

Serial Commands
CP<enter> Displays the current actuator position
CW<enter> Sends the actuator to Position A
CC<enter> Sends the actuator to Position B
GOn<enter> Sends the actuator to Position n, where n is A or B
TO<enter> Toggles the actuator to the opposite position
TT<enter> Toggles the actuator to the opposite position, waits a preset
delay time, then rotates back to the original position.
ID<enter> Displays the current device ID setting
IDn<enter> Sets the device ID to value n, from 0 to 9
NOTE: When the ID feature is enabled, all commands
to the device must be prefaced by the ID number.
Entering ID* disables this feature (discussed below.)
ID*<enter> Clears the ID variable
SB<enter> Displays the current baud rate
SBnnnn<enter> Sets the baud rate to 1200, 2400, 4800, 9600 (default), 14400,
19200, 28800, or 38400. The parity setting, number of data
bits, and number of stop bits cannot be changed. (See
section entitled Setting a New Baud Rate on the next page)
SOnnnn<enter> Turns off the position outputs after a delay, set in milliseconds
to the closest 5 ms interval, from 0 to 30,000 ms. The outputs
are always on (SO=0) by default.
SM<enter> Displays the current digital input mode (See section entitled
Digital Control of the Actuator, subhead Input Modes)
SMn<enter> Sets the digital input mode to Mode n, where n is 1 or 2
DT<enter> Displays the current delay time in milliseconds
DTn<enter> Sets the delay time from 0 to 65,000 milliseconds
NOTE: The total delay time equals n = 2 milliseconds
VR<enter> Displays the part number and date of the firmware
/?<enter> Displays list of valid commands
IN<enter> Starts a re-inialization sequence
With the software-settable device “ID” feature enabled, the serial por t output (transmit line) of the
actuator is disabled (high impedance). Thus, as many as ten actuators can be controlled from a single
host serial port for a temporary multidrop application. For permanent multidrop applications, the
RS-485 option is the factory-recomended solution. The table above describes and explains all the
commands available.
Using the Device ID Feature
Actuators are shipped from the factory with this feature disabled. When it’s enabled, the actuator
responds only to commands which begin with the correct ID prefix, allowing up to 10 actuators to be
controlled from one serial port. A single command can be broadcast to all actuators by using an
Note:
asterisk (*) as the command prefix.
Any broadcast command which elicits a response from the
serial port (such as *VR or *ID1) will receive a combined and unintelligible response.
5
Page 6

JUMPERS
1 AND 2
To set the ID of an actuator, connect it to an RS-232 serial port as shown in Figure 1 on
page 2.
Caution: When installing or replacing actuators on a shared serial port, make sure that no
two devices have been set to the same ID number.
1. Remove all of the actuators from the serial daisy chain except the one for which you are setting the ID.
2. Type VR <enter>. You should get a response giving the firmware version, indicating that serial
communication with the actuator is established. If there is no response, type *VR<enter> to see
if the ID is already set. If there is still no response, check the cabling and connections.
set
3. To
To
To
an ID, type ID
change
disable
an ID, type
the ID feature, type
n<enter>
i
IDn<enter>, where
, where n is the new ID, from 0 to 9.
i
ID*<enter>, where
i
is the current ID and n is the new ID.
i
is the current ID.
Setting a New Baud Rate
To permanently set a new baud rate for the actuator:
1. Establish communications with the actuator at the current baud rate.
2. Issue the command SB
nnnn
to temporarily change the baud rate to the desired rate. If the power
goes down at this point, the baud rate will revert to the last permanent setting.
3. Change the host computer to the same baud rate just set in the actuator, and ver ify that you can
establish communications.
nnnn
4. Re-issue the same SB
command you did previously (in Step 2), and the current baud will be
made permanent.
RS-485 Option
Software
The RS-485 option involves three minor software adaptations to the RS-232 protocol. The first is that the ID r ange is
extended to include the characters “A” through “Z”, with
upper and lower cases treated as the same ID. The second
change is that the ID is required (either numbers from 0 to 9
or letters from A to Z), and must be included in all commands. The f actory-set default ID for all de vices
is “Z”. The third adaptation is that all commands must include a forward slash [/] as the start-ofmessage character.
Hardware
The RS-485 hardware includes two 3-pin connectors (Figure 3) used as in/out connectors for easy
daisy-chaining of additional devices. Wired in parallel, the signal assignments are as follows: Pin 1 is
Ground, Pin 2 is Phase B, and Pin 3 is Phase A.
Figure 3: Control module,
The four male pins in a vertical row to the left of these connectors are jumper headers, used to add
or remove terminating resistors from the communication lines. The top two and the bottom two should
be jumpered when term-ination is required. The RS-485 hardware specifications require termination at
each end of the communication line, so in a daisy-chaining application the jumpers should be removed
from all the intermediate devices. The RS-485 port on the host computer or controlling device generally
includes terminating resistors, so only the actuator on the end of the communication string needs to
have the jumpers installed.
North America, South America, and Australia/Oceania contact: Europe, Asia, and Africa contact:
®
Valco Instruments Co. Inc. VICI AG International
P.O. Box 55603
Houston, TX 77255
Sales: (800) 367-8424
Tech: (713) 688-9345
Fax: (713) 688-8106 valco@vici.com
Cheminert® and VICI® are registered trademarks of Valco Instruments Co. Inc. and VICI AG
®
Parkstrasse 2
CH-6214 Schenkon
Switzerland
Phone: +41 41 925 6200
Fax: +41 41 925 6201 info@vici.ch
TN-413 Rev 1/11
 Loading...
Loading...