

Veikong VFD500-R75GT4B, VFD500-5R5G/7R5PT4B, VFD500-7R5G/011PT4B, VFD500-011G/015PT4B, VFD500-015G/018PT4B Operation Manual
...
Operation manual
VFD500 Series AC DRIVE
High Performance vector and torque
Preface
Thank you for purchasing the VFD500 series high performance vector and torque control frequency
inverter
VFD500 series Performance higher level than VFD300Afrequency inverterwith advanced functions, such
as high performance vector control of induction motor, user-programmable function and backstage
monitoring software, variable communication and supporting multiple PG cards etc. It is applicable to
textile, papermaking, tension control, wire drawing fans and pumps, machine tools, packaging, food and
all kinds of automatic production equipment.Its excellent performance is equivalent and competitive to
most of international brand AC drives
This manual introduces functional characteristics and usage of VFD500 series inverter, includes product
model selection, parameter settings, running and debugging, maintenance, checking, and so on. Please
be sure to read this manual carefully before operation. For equipment matching manufacturers, please
send this manual to your end user together with your devices, in order to facilitate the usage.
PRECAUTIONS
To describe the product details, the illustrations in the manual sometimes are under the state of
removing the outer housing or security covering. While using the product, please be sure to
mount the housing or covering as required, and operate in accordance with the contents of
manual.
The illustrations in this manual is only for explanation, may be different from the products you
ordered.
committed to constantly improving the products and features will continue to upgrade, the
information provided is subject to change without notice.
Please contact with the regional agent or client service center directly of factory if there is any
questions during usage.
EDIT: V2.1
TIME: 2018-07

Contents
Chapter 1 Safety Information and Precautions ................................................................................................. 1
1.1 Safety Precautions………………………………………………………………………………………………………………………….1
1.2 Precaution………………………………………………………………………………………………………………………………………2
Chapter 2 Product Information ..................................................................................................................... ….4
2.1 Designation Rules……………………………………………………………………………………………………………………………4
2.2product series instruction………………………………………………………………………………………………………………..4
2.3Technical Specifications…………………………………………………………………………………………………………………..5
Chapter 3 Product appearance and Installation Dimension……………………………………………………………….7
3.1 Product appearance and installation……………………………………………………………………………………..….…..7
3.1.1Product appearance .................................................................................................................. 7
3.1.2Appearance and Mounting Hole Dimension ............................................................................. 7
3.1.3Removal and installation of cover and inlet plate ................................................................... 10
3.2Wiring…………………………………………………………………………………………...............................................…..12
3.2.1 Standard wiring diagram ........................................................................................................ 12
3.2.2Main Circuit Terminals ............................................................................................................. 13
3.2.3 Terminal screws and wiring specifications ............................................................................. 14
3.2.4 Cautions for Main Circuit Wiring ............................................................................................ 14
3.2.4Control Circuit Terminal ........................................................................................................... 15
3.3EMCquestion and solution………………………………………………………………………........................................21
Chapter 4 Operation and display ..................................................................................................................... 23
4.1 LED Instruction of operation and display…………………………………………………………………………………...23
4.2 Display hierarchy and menu mode…………………………………………………………………………………………….24
4.3 Digital tube display……………………………………………………………………………………………………………………25
4.4 Test run………………………………………………………………………………………………………………………..………………26
Chapter 5 Function Code Table .................................................................................................................. 27
Chapter6 Fault Diagnosis and Solution .................................................................................................... 90
Chapter7 Selection Guide of inverter Accessory ..................................................................................... 95
7.1 Selection Guide of braking component………………………………………………………….95
7.2 PG card type………………………………………………………………………………………96
7.3 IO Extension card………………………………………………..………………………………...98
Chapter8 Daily maintenance of frequency inverters ............................................................................. 100
8.1 Daily maintenance……………………………………………………………………………….100
8.1.1 Daily maintenance ............................................................................................................ 100
8.1.2 Regular inspection ............................................................................................................ 100
8.2 Wearing parts replacement……………………………………………………………………..100
8.3Warranty Items……………………………………………………………………………………101
Appendix A Modbus communication protocol ..................................................................................... 102
VFD500 high performance vector control frequency inverter user manual Chapter 1 Safety information and precautions
- 1-
Chapter 1 Safety Information and Precautions
Safety Definitions: In this manual, safety precautions are divided into the following two categories:
indicates that failure to comply with the notice will result in serous injury or even death
indicates that failure to comply with the notice will result in moderate or minor injury andequipment
damage
Read this manual carefully so that you have a thorough understanding. Installation, commissioning or
maintenance may be performed in conjunction with this chapter. will assume no liability or responsibility
for any injury or loss caused by improper operation.
1.1 Safety Precautions
Use stage
Security Level
Precautions
Before
Installation
DANGER
packing water, parts missing or damaged parts, please do not install!
Packaging logo and physical name does not match, please do not
install!
WARNING
Handling should be light lift, otherwise there is the danger of damage
to equipment!
Do not use damaged drive or missing drive. Risk of injury!
Do not touch the control system components by hand, or there is the
danger of electrostatic damage!
During
Installation
DANGER
Please install the flame retardant objects such as metal, away from
combustibles, or may cause a fire!
WARNING
Do not allow lead wires or screws to fall into the drive, otherwise the
drive may be damaged!
Install the drive in a place where there is less vibration and direct
sunlight.
Drive placed in airtight cabinet or confined space, please note the
installation of space to ensure the cooling effect.
Wiring
DANGER
You must follow the guidance of this manual and be used by qualified
electrical engineers. Otherwise, unexpected danger may occur!
There must be a circuit breaker between the drive and the power
supply, otherwise a fire may occur!
Make sure the power supply is in zero-energy state before wiring,
otherwise there is danger of electric shock!
Please follow the standard to the drive properly grounded, otherwise
there is the risk of electric shock!
WARNING
Never connect input power to the drive's output terminals (U, V, W).
Note that the terminal markings, do not take the wrong line! Otherwise
it will cause damage to the drive!
Never connect the braking resistor directly to the DC bus +, - terminals.
Otherwise it will cause a fire!
Refer to the manual's recommendations for the wire diameter used.
Otherwise it may happen accident!
Do not disassemble the connecting cable inside the driver. Otherwise,
the internal of the servo driver may be damaged.
Before
Power-on
DANGER
Make sure the voltage level of the input power is the same as the rated
voltage of the driver. Check if the wiring position of the power input
terminals (R, S, T) and output terminals (U, V, W) is correct; Of the
external circuit is short-circuited, the connection is tightened, or cause
Chapter1 Safety information and precaution VFD500 high performance vector control frequency inverter user manual
- 2 -
Use stage
Security Level
Precautions
damage to the drive!
No part of the drive need to withstand voltage test, the product has
been made before the test. Otherwise it may cause accident!
WARNING
The driver must be covered before the cover can be powered,
otherwise it may cause electric shock!
All peripheral accessories must be wired according to the instructions
in this manual, and be properly wired in accordance with this manual.
Otherwise it may cause accident!
After
Power-on
DANGER
Do not open the cover after power on, otherwise there is danger of
electric shock!
If the indicator light does not light after power on, the keyboard does
not display the situation, immediately disconnect the power switch, do
not touch any input and output terminals of the drive, otherwise there is
the risk of electric shock!
WARNING
If parameter identification is required, preclude the possibility of injury
when rotating the motor!
Do not arbitrarily change the drive manufacturer parameters, or it may
cause damage to the device!
During
Operation
DANGER
Do not touch the cooling fan, radiator and discharge resistance to test
the temperature, otherwise it may cause burns!
Non-professional technicians Do not detect the signal during
operation, otherwise it may cause personal injury or equipment
damage!
WARNING
Drive operation, should avoid something falling into the device,
otherwise it will cause damage to the device!
Do not use the contactor on-off method to control the start and stop the
drive, otherwise it will cause damage to the equipment!
Maintenance
DANGER
Do not live on the equipment repair and maintenance, or there is a risk
of electric shock!
Turn off the input power for 10 minutes before performing maintenance
and repair on the drive, otherwise the residual charge on the capacitor
will cause harm to people!
Do not carry out maintenance and repair on the drive without
personnel who have been professionally trained, otherwise personal
injury or equipment damage will occur!
All pluggable plug-ins must be unplugged in the case of power failure!
The parameters must be set and checked after replacing the drive.
WARNING
Before performing maintenance work on the drive, make sure that the
motor is disconnected from the drive to prevent the motor from feeding
back power to the drive due to accidental rotation.
1.2 Precaution
Contactor using
If the contactor is installed on the power input side of the inverter, do not make the contactor frequent on-off
operation. The interval between ON and OFF of the contactor should not be less than one hour. Frequent
charging and discharging will reduce the use of capacitors in the inverter life.
If a contactor is installed between the inverter output terminals (U, V, W) and the motor, make sure that the
inverter is turned on and off when there is no output. Otherwise, the inverter may be damaged.
Lightning impulse protection
Although this series of inverters are equipped with lightning over-current protection device, there is a certain
degree of self-protection for inductive lightning, but for lightning frequent place, customers should also install
lightning protection device in the front of the inverter.

VFD500 high performance vector control frequency inverter user manual Chapter 1 Safety information and precautions
- 3-
Altitude and derating use
In areas above 1000m above sea level, it is necessary to derate the inverter due to poor air quality due to poor
air quality. In this case, please consult our company.
Power input
The inverter power input should not exceed the operating voltage range specified in this manual. If necessary,
use a step-up or step-down device to change the power supply to the specified voltage range.
Do not change the three-phase inverter to two-phase input, otherwise it will cause malfunction or inverter
damage.
Output filtering
When the cable length between the inverter and the motor exceeds 100 meters, it is suggested to use the
output AC reactor to avoid inverter over-current caused by excessive distributed capacitance. Output filter
according to the needs of the field matching.
Inverter output is PWM wave, please do not install the capacitor on the output side to improve the power factor
or lightning varistor, etc., otherwise it may easily lead to inverter instantaneous overcurrent or even damage the
inverter.
About motor heat and noise
Because the inverter output voltage is PWM wave, contains a certain degree of harmonics, so the motor
temperature rise, noise and vibration compared with the same frequency operation will be slightly increased.
Disposal
Electrolytic capacitors on the main circuit and electrolytic capacitors on the printed circuit board may explode
when incinerated, and poisonous gases are generated when plastic parts are burned. Please dispose as
industrial waste.
The scope of application
This product is not designed and manufactured for use on equipment where life is at stake. To use this product
on a mobile, medical, aerospace, nuclear or other special purpose device, please contact our company For more
information.
This product is manufactured under strict quality control and should be equipped with a safety device if it is
used in a device that may cause a serious accident or damage due to inverter failure.
Chapter 2 Product information VFD500 high performance vector control frequency inverter user manual
- 4 -
Chapter 2 Product Information
2.1 Designation Rules
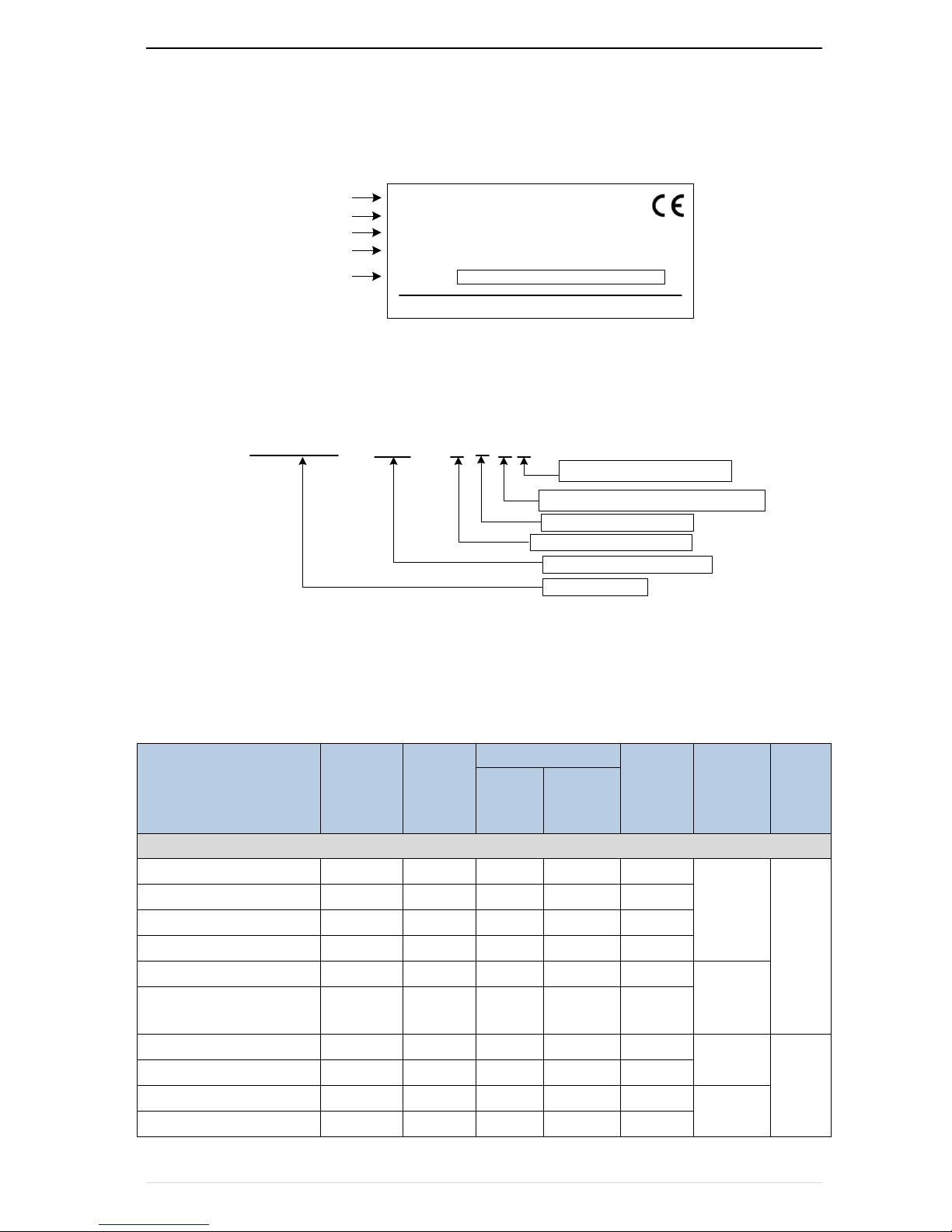
Name plate:
MODEL: VFD500-2R2GT4
POWER: 2.2kW/4.0kW
INPUT: 3PH AC380~440V 50Hz/60Hz
OUTPUT: 3PH 0~440V 0~600Hz 5.6A/9.4A
S/N:
TYPE
POWER
INPUT
OUTPUT
CODE
2-1 name plate
Model instruction:
2-2model instruction
2.2product series instruction
Table 2-1VFD500 inverter models and technical data
Model
Power
capacity
(KVA)
Input
current
(A)
Output current(A)
Adapta
ble
Motor
(KW)
SIZE
Brake
Unit
Heavy
load
Light
load
Three phase: 380-480V,50/60Hz
VFD500-R75GT4B
1.5
3.4
2.5
4.2
0.75
SIZE A
Inter
nal
VFD500-1R5GT4B
3 5 4.2
5.6
1.5
VFD500-2R2GT4B
4
5.8
5.6
9.4
2.2
VFD500-3R7G/5R5PT4B
5.9
10.5
9.4
13.0
3.7
VFD500-5R5G/7R5PT4B
8.9
14.6
13.0
17.0
5.5
SIZE B
VFD500-7R5G/011PT4B
11
20.5
17.0
23.0
7.5
VFD500-011G/015PT4B
17
26.0
25.0
31.0
11
SIZE C
Inter
nal
VFD500-015G/018PT4B
21
35.0
32.0
37.0
15
VFD500-018G/022PT4B
24
38.5
37.0
45.0
18.5
SIZE D
VFD500-022G/030PT4B
30
46.5
45.0
57.0
22
VFD500 -2R2 – G T 4 B
T:three phase
Load type:G normal duty
Power,2R2 means 2.2kW
Product series
B means breaking units
4:380-480v three phase 2: 200-240v
VFD500 high performance vector control frequency inverter user manual Chapter2 production information
- 5-
VFD500-030G/037PT4
40
62.0
60.0
75.0
30
SIZE E
optio
n
VFD500-037G/045PT4
50
76.0
75.0
87.0
37
VFD500-045G/055PT4
60
92.0
90.0
110.0
45
SIZE F
VFD500-055G/075PT4
85
113.0
112.0
135.0
55
VFD500-075G/090PT4
104
157.0
152.0
165.0
75
SIZE G
VFD500-090G/110PT4
112
170.0
176.0
210.0
90
2.3Technical Specifications
Table 2-2 VFD500Technical Specifications
Item
Specifiation
Input
Inuput Voltage
1phase/3phase 220V:200V~240V
3 phase 380V-480V:380V~480V
Allowed Voltage
fluctuation range
-15%~10%
Input frequency
50Hz / 60Hz,fluctuation less than 5%
Output
Output Voltage
3phase:0~input voltage
Overload capacity
General purpose application:60S for 150% of the rated current
Light load application:60S for 120% of the rated current
Control
Control mode
V/f control
Sensorless flux vector control without PG card(SVC)
Sensor speed flux vector control with PG card (VC)
Operating mode
Speed control、Torque control(SVC and VC)
Speed range
1:100 (V/f)
1:200( SVC)
1:1000 (VC)
Speed control
accuracy
±0.5% (V/f)
±0.2% (SVC)
±0.02% (VC)
Speed response
5Hz(V/f)
20Hz(SVC)
50Hz(VC)
frequency range
0.00~600.00Hz(V/f)
0.00~200.00Hz(SVC)
0.00~400.00Hz(VC)
Input frequency
resolution
Digital setting: 0.01 Hz
Analog setting: maximum frequency x 0.1%
Startup torque
150%/0.5Hz(V/f)
180%/0.25Hz(SVC)
200%/0Hz(VC)
Torque control
accuracy
SVC:within 5Hz10%,above 5Hz5%
VC:3.0%
V/f curve
V / f curve type: straight line, multipoint, power function, V / f separation;
Torque boost support: Automatic torque boost (factory setting), manual
torque boost
Frequency giving
ramp
Support linear and S curve acceleration and deceleration;
4 groups of acceleration and deceleration time, setting range 0.00s ~
60000s
DC bus voltage
control
Overvoltage stall control: limit the power generation of the motor by
adjusting the output frequency to avoid skipping the voltage fault;
Chapter 2 Product information VFD500 high performance vector control frequency inverter user manual
- 6 -
Undervoltage stall control: control the power consumption of the motor
by adjusting the output frequency to avoid yaw failure
VdcMax Control: Limit the amount of power generated by the motor by
adjusting the output frequency to avoid over-voltage trip;
VdcMin control: Control the power consumption of the motor by
adjusting the output frequency, to avoid jump undervoltage fault
Carrier frequency
1kHz~12kHz(Varies depending on the type)
Startup method
Direct start (can be superimposed DC brake); speed tracking start
Stop method
Deceleration stop (can be superimposed DC braking); free to stop
Maincontrol
function
Jog control, droop control, up to 16-speed operation, dangerous speed
avoidance, swing frequency operation, acceleration and deceleration
time switching, VF separation, over excitation braking, process PID
control, sleep and wake-up function, built-in simple PLC logic, virtual
Input and output terminals, built-in delay unit, built-in comparison unit
and logic unit, parameter backup and recovery, perfect fault record,fault
reset, two groups of motor parameters free switching, software swap
output wiring, terminals UP / DOWN
function
Keypad
LED Digital keyboard and LCD keypad(option)
communication
Standard:
MODBUS communication
Option:Profibus-DP and CAN OPEN
PG card
Incremental Encoder Interface Card (Differential Output and Open
Collector), Rotary transformer Card
Input terminal
Standard:
5 digital input terminals, one of which supports high-speed pulse input
up to 50kHz;
2 analog input terminals, support 0 ~ 10V voltage input or 0 ~ 20mA
current input;
Option card:
4 digital input terminals
2 analog input terminals.support-10V-+10V voltage input
Output terminal
standard:
1 digital output terminal;
1 high-speed pulse output terminal (open collector type), support 0 ~
50kHz square wave signal output;
1 relay output terminal(second relay is an option )
2 analog output terminals, support 0 ~ 20mA current output or 0 ~ 10V
voltage output;
Option card: 4 digital output terminals
Protection
Refer to Chapter 6 "Troubleshooting and Countermeasures" for the protection function
Environment
Installation
location
Indoor, no direct sunlight, dust, corrosive gas, combustible gas, oil
smoke, vapor, drip or salt.
Altitude
0-3000m.inverter will be derated if altitude higher than1000m and
rated output current will reduce by 1% if altitude increase by 100m
Ambient
temperature
-10°C~ +40°C,maximum 50°C (derated if the ambient temperature is
between 40°C and 50°C)Rated output current decrease by 1.5% if
temperature increase by 1°C
Humidity
Less than 95%RH, without condensing
Vibration
Less than 5.9 m/s2 (0.6 g)
Storage
temperature
-20°C ~ +60°C
others
Installation
Wall-mounted, floor-controlled cabinet, transmural
Protection level
IP20
cooling method
Forced air cooling
VFD500 high performance vector control frequency inverter user manual Chapter3 Product appearance and wiring
- 7-
Chapter 3 Product appearance and Installation Dimension
3.1 Product appearance and installation
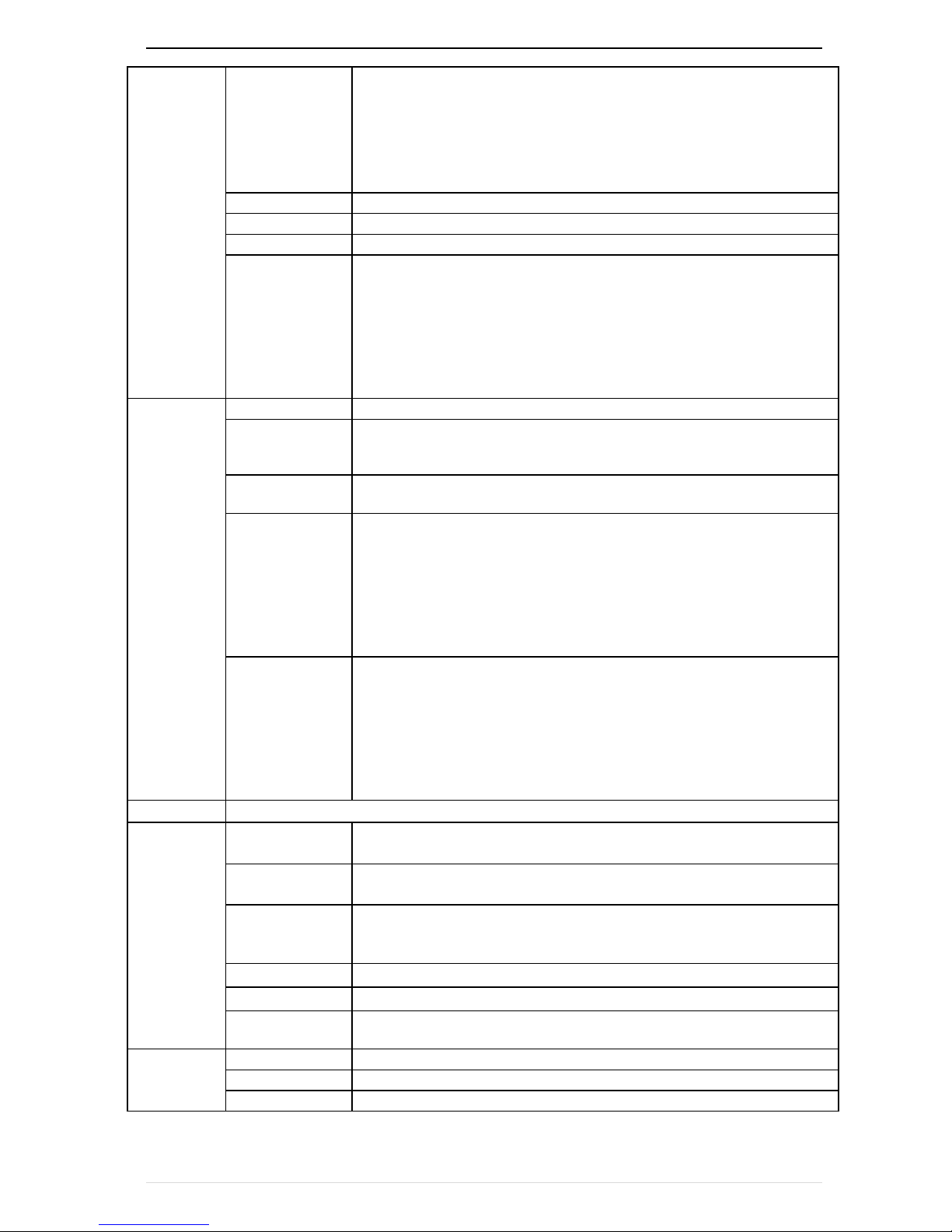
3.1.1Product appearance
fan
Name plate
cover
Line board
Keypad
Fan cover
Back cover
Front cover
Main circuit terminal
Extension card port
Control terminal
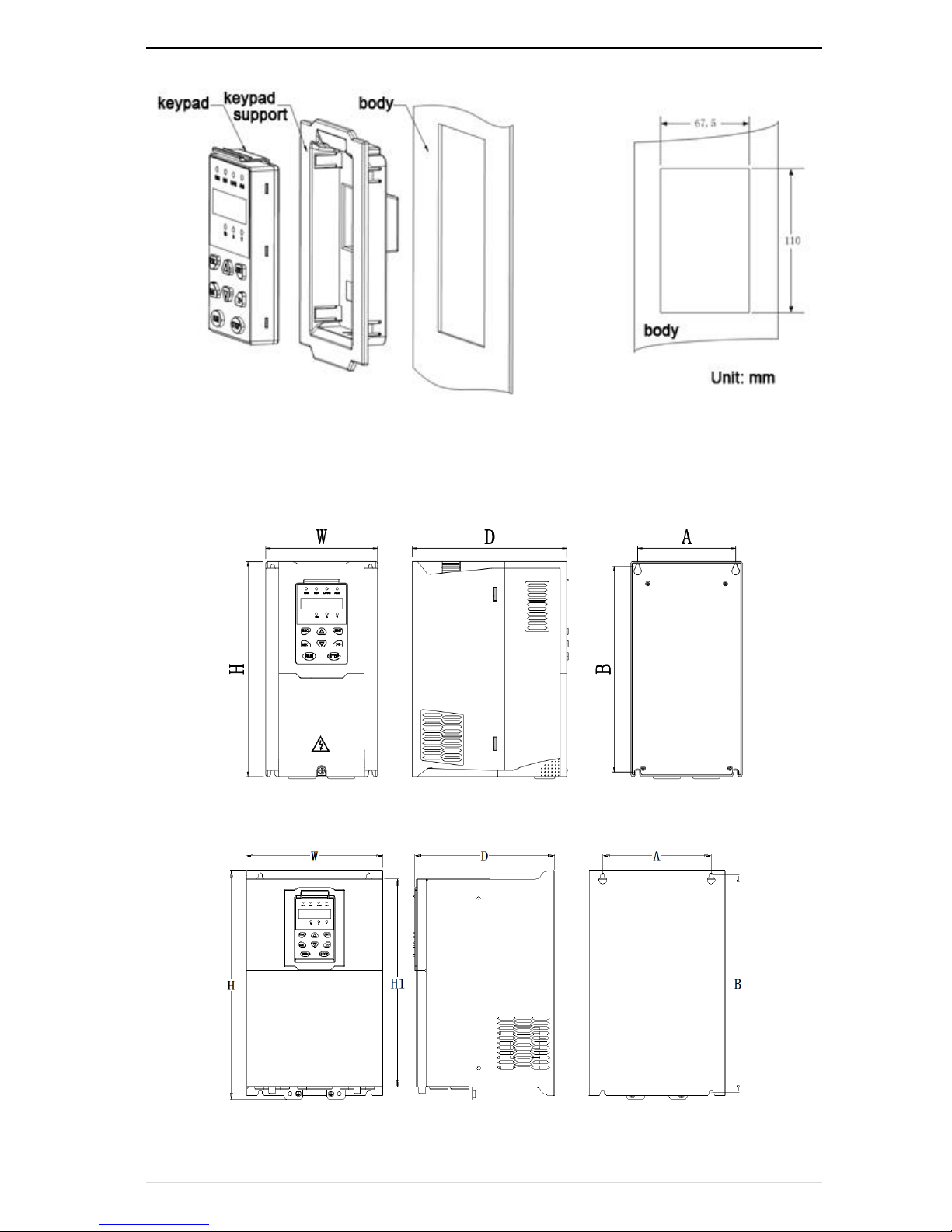
3-1:VFD500 series appearance
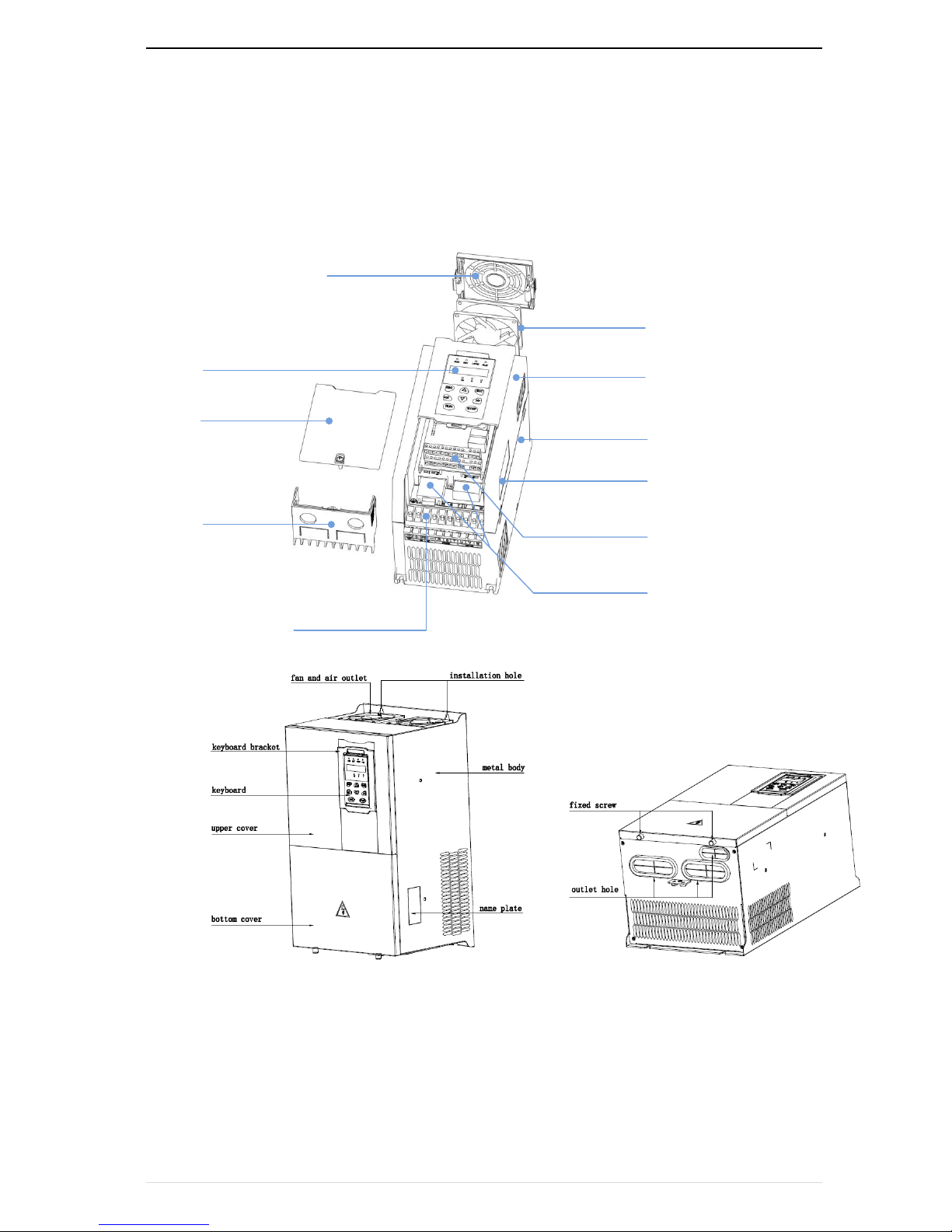
3.1.2Appearance and Mounting Hole Dimension
Keypay and keypad support size
The dimensions of the VFD500 series keypad are shown in Figure 3-1. When installing the keypad on the outside of
the control cabinet, use the two screws on the back of the keypad to fix it (right side of Figure 3-1).
Chapter3 product appearance and wiring VFD500 high performance vector control frequency inverter user manual
- 8 -
diagram 3-2keypad dimension
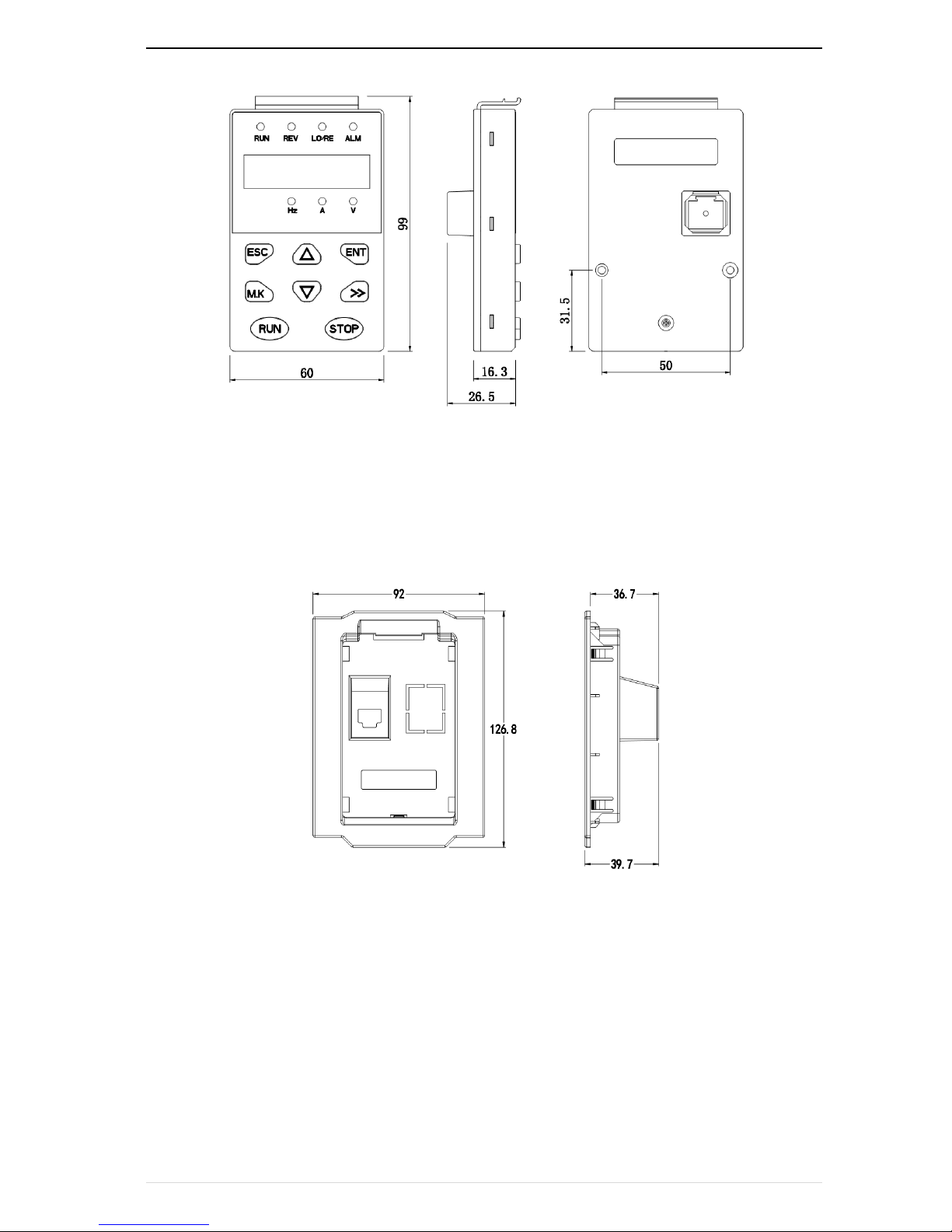
If you want to install the keypad on the inside of the control cabinet (to prevent the keypad from protruding toward
the outside of the control cabinet), use a keypad Bracket. The dimensions of the keypadbracket are shown in Figure
3-2. The dimensions of the installation diagram and control cabinet are shown in Figure 3-3.
M3 screw X2 depth 8mm (for
mounting to the control cabinet)
Figure 3-3 Keypad Holder Size (Unit: mm)
VFD500 high performance vector control frequency inverter user manual Chapter3 Product appearance and wiring
- 9-
Figure 3-4 Keypad support installation diagram and control cabinet processing dimensions
Inverter dimensions and installation dimensions
Figure 3-5 SIZE A to SIZE C Dimensions
Figure 3-6 SIZE D~G Dimensions
Chapter3 product appearance and wiring VFD500 high performance vector control frequency inverter user manual
- 10 -
Table 3-1 VFD500 series appearance and installation dimension
SIZE
Appearance and installation dimension(mm)
A B H
H1 W D
Φd
Mounting
screws
SIZE A
87
206.5
215 / 100
170
ø5.0
M4X16
SIZE B
114
239.5
250 / 130
180
ø5.0
M4X16
SIZE C
159
298
310 / 180
193
Ø6.0
M5X20
SIZE D
165
350
365 210
205
Ø6.0
M5X20
SIZE E
170
437
452.5 260
230
Ø7.0
M6X16
SIZE F
250
535
555 310
275
Ø10.0
M8X20
SIZE G
280
620
640 350
290
Ø10.0
M8X20
3.1.3Removal and installation of cover and inlet plate
SIZEA~SIZE CRemoval and installation of cover and inlet plate:
Removal steps
Step 1: Open the top cover
① Unscrew the screw on the cover
② Lift up the cover
③ Remove the cover from the front
Step 2: Take out the inlet board
① Hold down the sides of the inlet plate with your
thumb and middle finger
② Press to disengage the buckle and pull it out of the
board
installation steps
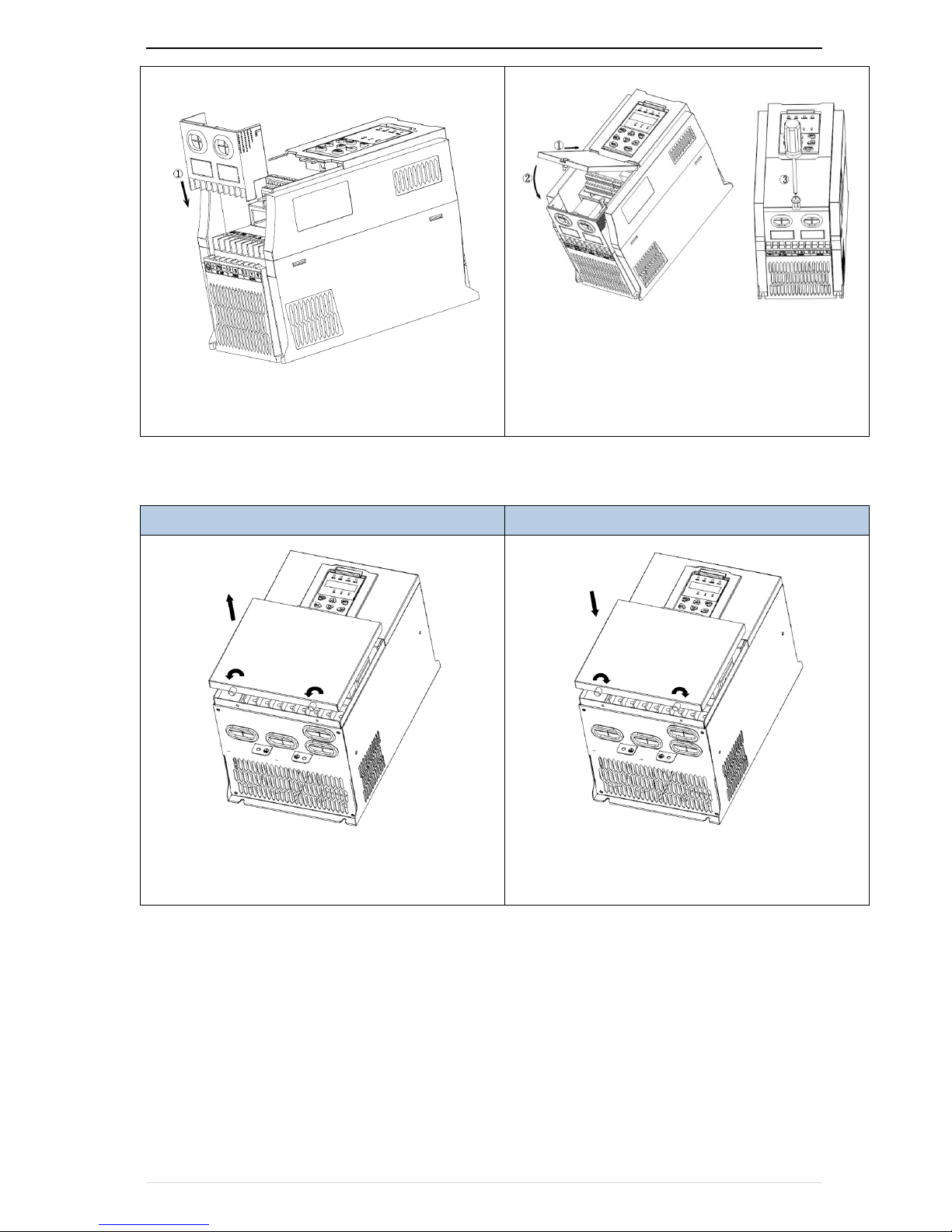
VFD500 high performance vector control frequency inverter user manual Chapter3 Product appearance and wiring
- 11-
① Step 1: Install the inlet board
② Put the inlet board from the top down into the
mounting position to ensure that the card buckles
Step 2: Install the upper cover
① Slant the front cover diagonally from the front to
the docking station
② Lower the cover plate toward the inlet board
③ Tighten the screws on the cover
SIZEDRemoval and installation of cover and inlet plate:
Removal steps
installation steps
① Unscrew the two screws at the bottom of the
bottom cover
② Remove the cover vertically
① Close the cover vertically
② Tighten the two screws on the bottom of the cover
○2
○1
○1
○2
○2
○1
Chapter3 product appearance and wiring VFD500 high performance vector control frequency inverter user manual
- 12 -
3.2Wiring
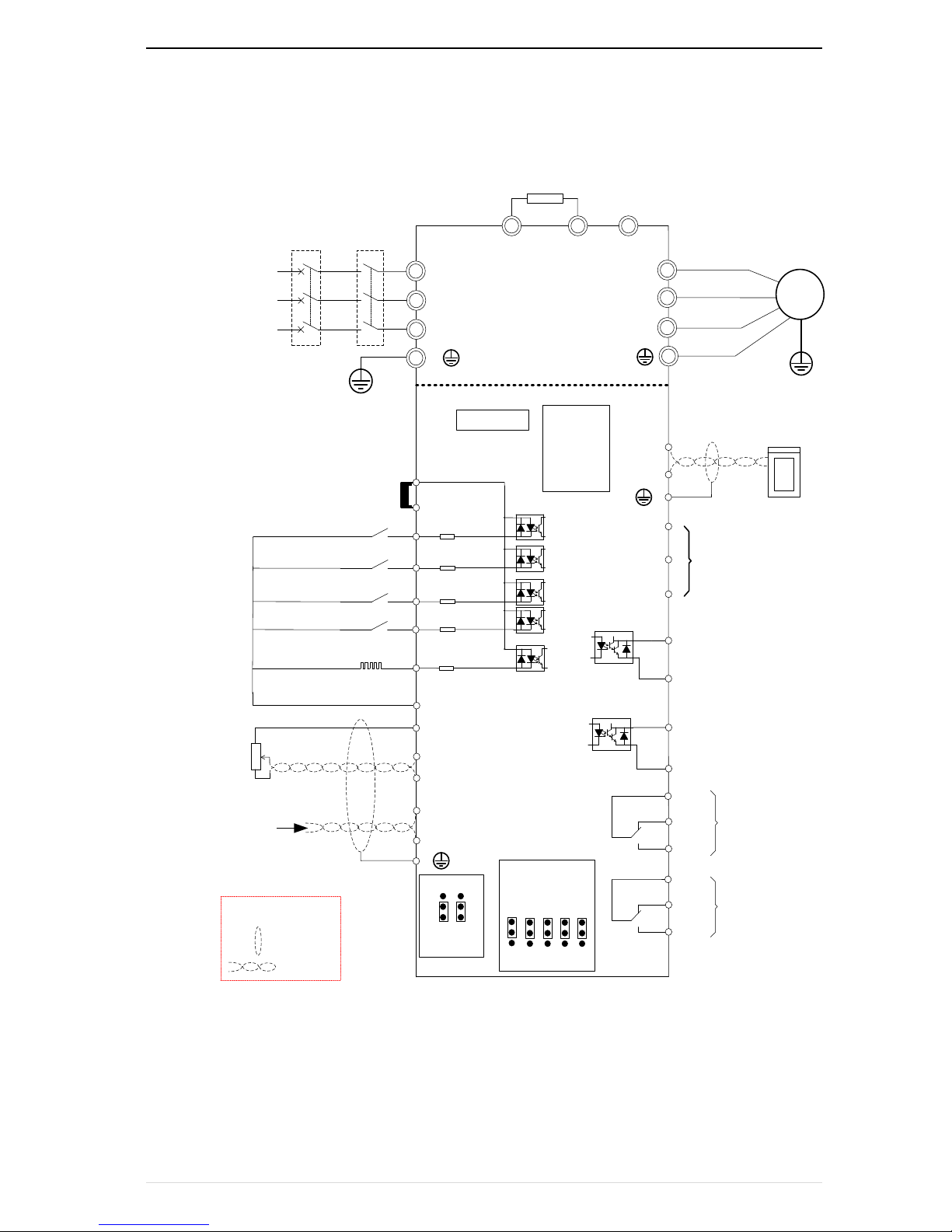
3.2.1 Standard wiring diagram
Break resistance
M
U
V
W
R/L1
S/L2
T/L3
3 phase AC input
DI1
DI2
DI3
DI4
COM
AI1
AI2
GND
485+
485-
RS485 port
AO2
GND
AO1、AO2 output:
0~10V/0~20mA
DO
1
CO
M
T1A
T1C
T1B
Relay
output 2
Digital input 1
Digital input 2
Digital input 3
Digital input 4
+10V
Open collector
output1
PLC
+24V
FWD
REV
-
+
PB
HDI
High speed
pluse
terminal
HD
O
COM
Open collector
output2
High speed pluse
output
IO
communi
cation
extension
card
PG card
AO1
380V~ 50/60Hz
Analog input
0~10V/0~20m
A
1~5k
T2A
T2B
T2C
Relay
output 1
485
OFF
ON
AI1VAI2
V
I I I I
AO
1
V
AO
2
V
ON ON
OFF OFF
Ground
Connector slip
GND
Twisted
cable
shield
Note
:
breaker
contactor
Main circuit
Control circuit
PE1
PE2
PC
Diagram 3-7standard wiring
VFD500 high performance vector control frequency inverter user manual Chapter3 Product appearance and wiring
- 13-
3.2.2Main Circuit Terminals
+ PB -
DC-LINK
R S T
POWER
MOTOR
U V W
Figure 3-8 SIZE A~SIZE C Main Circuit Terminal
Figure 3-9 SIZE D main circuit terminal block diagram
Figure 3-10 SIZE E(LEFT) SIZE F~G(RIGHT) Main Circuit Terminal Blocks
Table 3-2 Function description of the main circuit terminal of the inverter
Terminal
Function instruction
R、S、T
AC power input terminal, connect three-phase AC power
U、V、W
Inverter AC output terminal, connect three-phase AC motor
+、-
The positive and negative terminals of the internal DC bus are connected to the
external brake unit or For common DC bus
+、PB
Braking resistor connection terminal when built-in brake unit
Ground terminal, ground
EMC、VDR
Safety capacitor and varistor grounding selection screw (SIZE A~SIZE C EMC
screw on the left side of the fuselage)
Chapter3 product appearance and wiring VFD500 high performance vector control frequency inverter user manual
- 14 -
3.2.3 Terminal screws and wiring specifications
Table 3-3 Main circuit cable and screw specifications
Model number
Power terminal
Ground terminal
Screw
Tightening
torque(Nm)
Cable
diameter
(mm2)
screw
Tightening
torque(Nm)
Cable
diameter
(mm2)
VFD500-R75GT4B
M3
1.5
2.5
M3
1.5
2.5
VFD500-1R5GT4B
M3
1.5
2.5
M3
1.5
2.5
VFD500-2R2GT4B
M3
1.5
2.5
M3
1.5
2.5
VFD500-3R7G/5R5PT4B
M3
1.5
4
M3
1.5
4
VFD500-5R5G/7R5PT4B
M4 2 6
M4 2 6
VFD500-7R5G/011PT4B
M4 2 6
M4 2 6
VFD500-011G/015PT4B
M5 4 10
M5 4 10
VFD500-015G/018PT4B
M5 4 10
M5 4 10
VFD500-018G/022PT4B
M6 4 10
M6 4 10
VFD500-022G/030PT4B
M6 4 16
M6 4 16
VFD500-030G/037PT4
M8
10
16
M6 5 10
VFD500-037G/045PT4
M8
10
16
M6 5 10
VFD500-045G/055PT4
M8
10
35
M8 8 16
VFD500-055G/075PT4
M8
10
50
M8 8 25
VFD500-075G/090PT4
M10
20
70
M10
20
35
3.2.4 Cautions for Main Circuit Wiring
(1)Power Supply Wiring
◆ It is forbidden to connect the power cable to the output terminal of the inverter. Otherwise, the internal
components of the inverter will be damaged.
◆ In order to provide input side overcurrent protection and power outage overhaul convenience, the inverter should
be connected to the power supply through circuit breakers and contactors.
◆ Please confirm the power phase, the voltage is consistent with the product nameplate, do not match may result
in damage to the inverter.
(2)DC wiring
◆ Do not connect the braking resistor directly to +, -, which may cause the inverter to be damaged or
even fire.
◆ When using the external brake unit, pay attention to +, - can not be reversed, otherwise it will cause
damage to the inverter and brake unit or even cause a fire.
(3)Motor Wiring
◆It is forbidden to short circuit or ground the inverter output terminal, otherwise the internal components
of the inverter will be damaged.
VFD500 high performance vector control frequency inverter user manual Chapter3 Product appearance and wiring
- 15-
◆Avoid short circuit the output cables or with the inverter enclosure, otherwise there exists the danger of
electric shock.
◆It is forbidden to connect the output terminal of the inverter to the capacitor or LC/RC noise filter with
phase lead, otherwise, the internal components of the inverter may be damaged.
◆When contactor is installed between the inverter and the motor, it is forbidden to switch on/off the
contactor during the running of the inverter, otherwise, there will be large current flowing into the
inverter, triggering the inverter protection action.
◆Length of cable between the inverter and motor
If the cable between the inverter and the motor is too long, the higher harmonic leakage current of the
output end will produce by adverse impact on the inverter and the peripheral devices. It is suggested
that when the motor cable is longer than 100m, output AC reactor be installed. Refer to the following
table for the carrier frequency setting.
3.2.4Control Circuit Terminal
+10V
AI1
AO1
485+ GND
DI1 DI2
DI3
DI4
HDI
GND
AI2 AO2
485- COM
DO1 HDO
COM PLC +24V
T1/A
T1/B
T1/C
T2/A T2/B T2/C
485
V
I
ON OFF
AI1 AI2 AO1 AO2
ON OFF
PE1 PE2
K2
K1
Jumper switch
Diagram 3-11 VFD500 control circuit terminal
Chapter3 product appearance and wiring VFD500 high performance vector control frequency inverter user manual
- 16 -
Table 3-3VFD500 control circuit terminal instruction
Type
Terminal
Symbol
Terminal
Name
Terminal function description
Analog
input
voltage
+10V
Input voltage
10.10V±1%
Maximum output current:10mA,it provides power
supply to external potentiometer with resistance range
of:1KΩ~51KΩ
GND
Ananog
ground
Internal isolation from COM
AI1
Analog
input1
Input voltage:0~10V:Impedance 22KΩ,Maximum
input voltage
Input current:0~20mA:Impedance 500Ω,Maximum
input current
Through the jumper switch AI1 0 ~ 10V and 0 ~ 20mA
analog input switch, the factory default voltage input.
AI2
Analog input
2
Input voltage:0~10V:Impedance 22KΩ,Maximum
input voltage
Input current:0~20mA:Impedance 500Ω,Maximum
input current
Through the jumper switch AI1 0 ~ 10V and 0 ~ 20mA
analog input switch, the factory default voltage input.
Analog
input
AO1
Analog
output 1
Output voltage:0~10V:Impedance ≥10KΩ
Output current:0~20mA:Impedance 200Ω~500Ω
Through the jumper switch AO1 0 ~ 10V and 0 ~ 20mA
analog output switching, the factory default voltage
output.
AO2
Analog
output 2
Output voltage:0~10V:Impedance ≥10KΩ
Output current:0~20mA:Impedance 200Ω~500Ω
Through the jumper switch AO1 0 ~ 10V and 0 ~ 20mA
analog output switching, the factory default voltage
output.
GND
Ananog
ground
Internal isolation from COM
Switch
input
+24V
+24V current
24V±10%,Internal isolation from GND
Maximum output current:200mA
To provide 24V power supply, generally used as a
digital input and output terminal power supply and
external sensor power
PLC
Digital input
terminal
common
The factory default setting is connected PLC with
+24V
Terminal for on-off input high and low level switch
When using the external signal to drive DI1~DI5, it
will disconnect the connector slip of PLC with the +24V
COM
+24V ground
Internal isolation from GND
DI1~DI4
Digital input
terminal 1~4
Optocoupler isolation, compatible with bipolar input
Frequency range:0~200Hz
Voltage range:10V~30V
HDI
Digital input
Digital input terminal:same as DI1~DI4
VFD500 high performance vector control frequency inverter user manual Chapter3 Product appearance and wiring
- 17-
Type
Terminal
Symbol
Terminal
Name
Terminal function description
terminal
/High-speed
pulse input
Pulse input frequency input:0~50KHz
Voltage range:10V~30V
Switch
output
DO1
Open
collector
output
Optocoupler isolation
Voltage range:0V~24V
Current range:0mA ~50mA
HDO
Open
collector
output
/High-speed
pulse output
Open collector output:same as DO1
High-speed pulse output:0~50KHz
Relay
output 1
TA/TB/TC
Relay output
T1A-T1B:nomal open
T1A-T1C:nomal close
Contact rating:AC 250V,3A;DC 30V,1A
Relay
output2
(optional)
T2A/T2BT2C
Relay output
T2A-T2B:nomal open
T2A-T2C:nomal close
Contact rating:AC 250V,3A;DC 30V,1A
485 port
485+
485 Positive
differential
signal
Baud rate:
1200/2400/4800/9600/19200/38400/57600/115200bps
485-
485 Negative
differential
signal
Table 3-5 Functional Description of VFD500 Jumper Switch
Name
Function
Defaults
485
485 Termination resistor selection: ON has 100 ohm
terminating resistor, OFF is no terminating resistor
OFF
AI1
AI1 analog type selection: V is the voltage input (0 ~ 10V), I is
the current input (0 ~ 20mA)
V
AI2
AI2 analog type selection: V is the voltage input (0 ~ 10V), I is
the current input (0 ~ 20mA)
V
AO1
AO1 analog type selection: V is the voltage output (0 ~ 10V), I
is the current output (0 ~ 20mA)
V
AO2
AO2 analog type selection: V is the voltage output (0 ~ 10V), I
is the current output (0 ~ 20mA)
V
PE1
GND ground selection: ON is grounded through the safety
capacitor, OFF is not connected
OFF
PE2
COM ground selection: ON is grounded through the safety
capacitor, OFF is not connected
OFF
Analog input terminal instructions
The AI1 and AI2 terminals can accept both analog voltage input and analog current input. They can
be switched by jumpers “AI1” and “AI2” on the IO board. The connection method and jumper switch
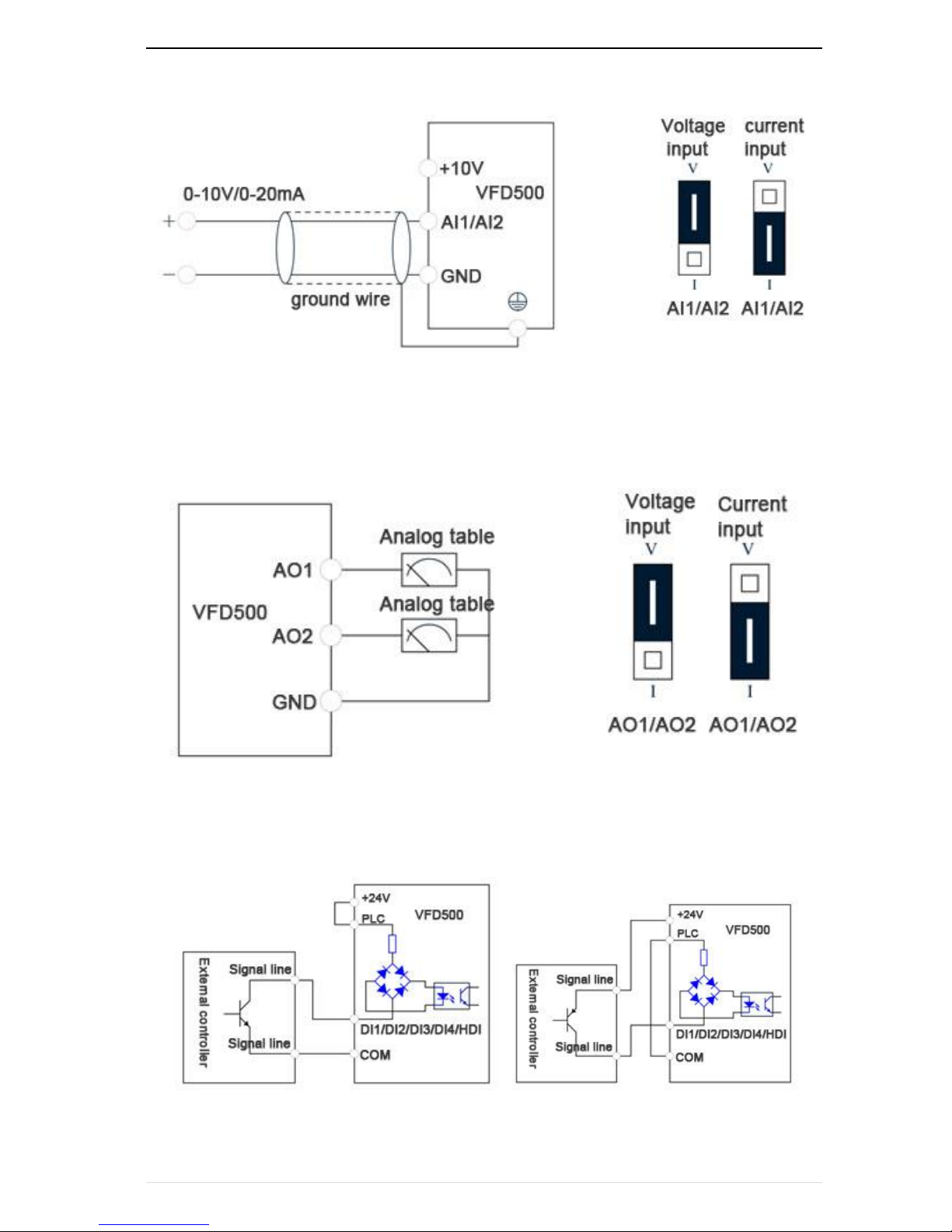
Chapter3 product appearance and wiring VFD500 high performance vector control frequency inverter user manual
- 18 -
configuration are shown in the following figure:
Figure 3-11 Analog input terminal wiring diagram
The AO1 and AO2 terminals support the voltage output (0~10V) and the current output (0~20mA). They are selected
by jumpers “AO1” and “AO2” on the IO board. The connection method is as shown in the figure below:
Figure 3-12 Analog output terminal wiring diagram
Digital input terminal instructions
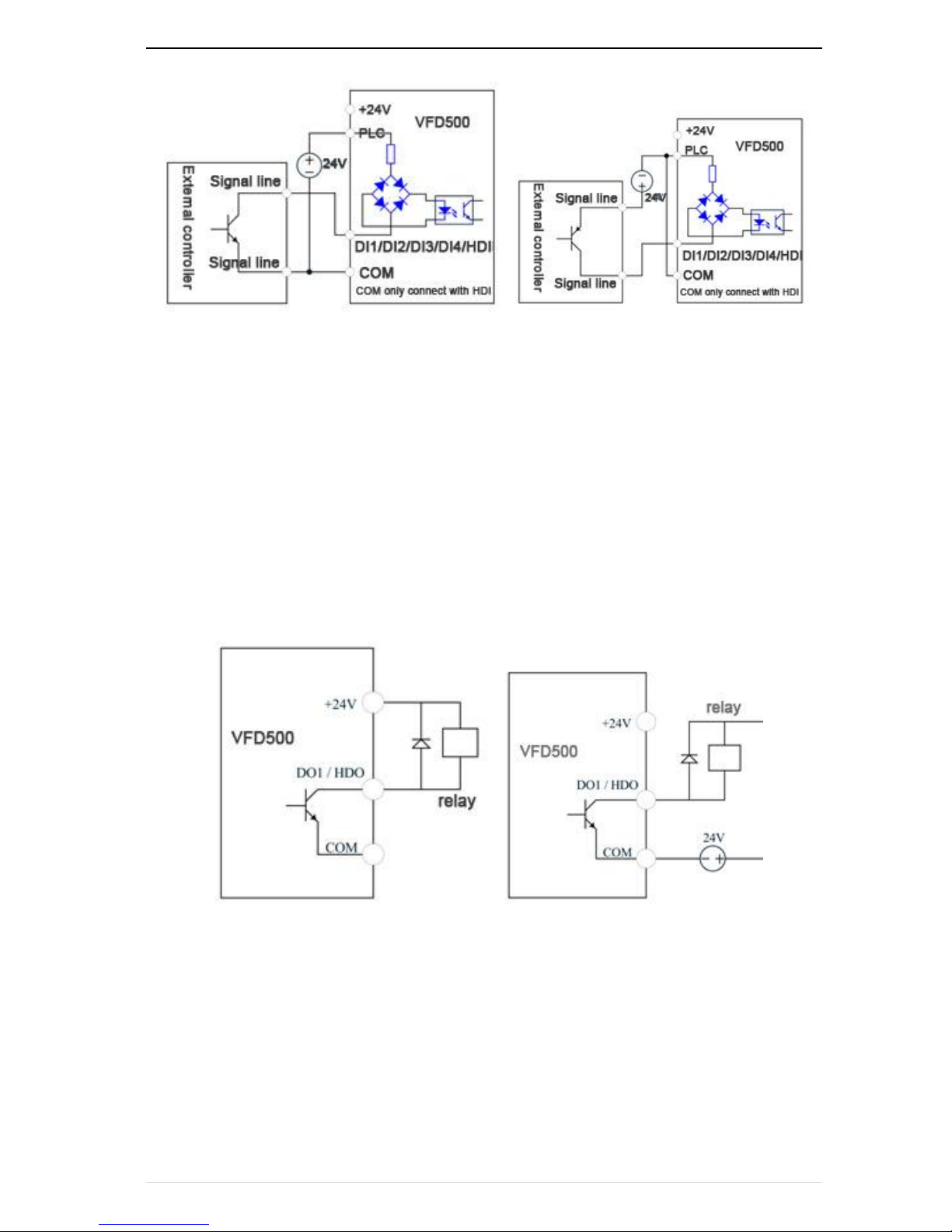
A:By internal 24V with NPN modeB:By internal 24V with PNP mode
VFD500 high performance vector control frequency inverter user manual Chapter3 Product appearance and wiring
- 19-
C:NPN mode uses external +24V power supplyD:PNPNPN mode uses external +24V power supply
3-13 Switching Digital input terminal wiring diagram
Note:
When using an external power supply, the shorting tab between +24V and PLC must be removed, otherwise the
product will be damaged!
When using an external power supply, connect the negative terminal of the external power supply to COM when
using HDI, otherwise HDI is invalid!
Switch output terminal instructions
The multi-function output terminals DO1 and HDO can be powered by the internal +24V power supply of the inverter
or an external power supply. The wiring diagram is as follows:
A、Use internal power supply B、Use external power supply
3-14 Switchingdigital output terminal wiring diagram
Note:
The multi-function terminal output is an open collector output with a maximum allowable current of 50mA. When
using the internal power supply, if the inductive load is driven, an absorption circuit such as an RC snubber circuit or
a freewheeling diode should be installed. When adding a freewheeling diode, be sure to confirm the polarity of the
diode, otherwise the product will be damaged. For external power supply, connect the negative terminal of the
Chapter3 product appearance and wiring VFD500 high performance vector control frequency inverter user manual
- 20 -
external power supply to the COM terminal.
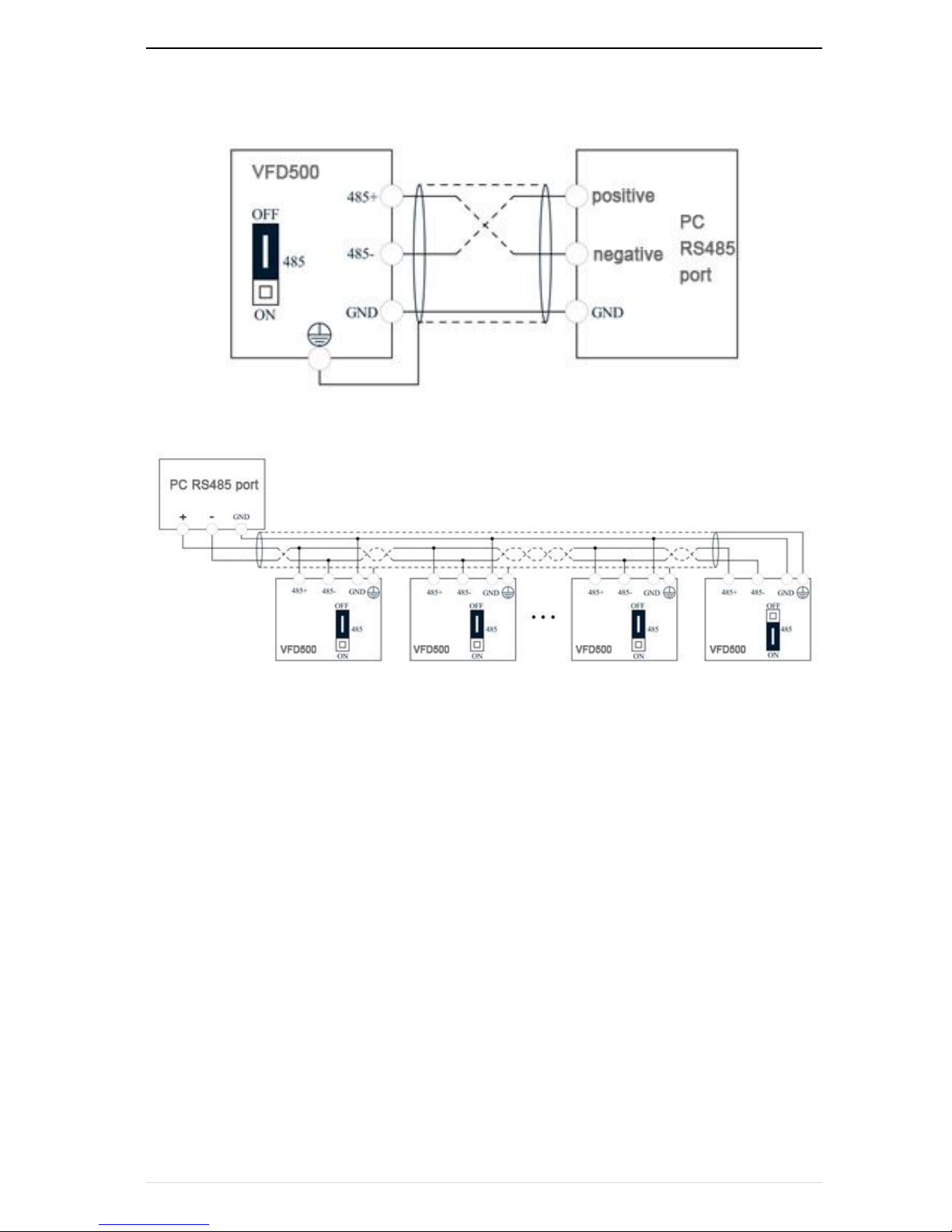
485Communication terminal instructions
3-15Single inverter RS485 directly communicates with the host computer
3-16Multiple inverter RS485 is connected to the host computer for communication
VFD500 high performance vector control frequency inverter user manual Chapter3 Product appearance and wiring
- 21-
3.3EMCquestion and solution
The working principle of the inverter determines that it will certainly produce electromagnetic interference,
affecting and interfering with other equipment. In the meantime, the frequency converter usually works under the
industrial environment with very strong noise,its internal weak signal is also easily disturbed. For safe and
trouble-free operation of the frequency converter, as well as the normal and orderly operation of other equipment,
install the equipment according to the following rules.。
Install the input noise filter,the filter to the inverter input power supply side of the wiring should be as short
as possible.
Filter shell and the installation of the cabinet should be a large area of reliable connection, in order to
reduce the noise current loop impedance.
The wiring distance between inverter and motor should be as short as possible. The motor cable adopts
4-core cable. One end of the ground wire is grounded at the inverter side and the other end is connected
with the motor case. The motor cable is sheathed into the metal pipe.
Input power line and output motor line should be far away from each other.
Easily affected equipment and signal lines should be installed away from the inverter.
The key signal cable should use shielded cable. It is suggested that the shielded cable layer should be
grounded by 360 degree grounding method and set in the metal pipe. As far as possible from the inverter
input power cable and output motor cable, if the signal cable must cross the input power cable or output
motor cable, the two should be orthogonal.
When using the analog voltage and current signals for remote frequency setting, double-stranded,
shielded and shielded cables should be used, and the shield should be connected to the grounding
terminal PE of the inverter. The longest signal cable should not exceed 50 meters.
The control circuit terminals T1A / T1B / T1C, T2A / T2B / T2C and other control circuit terminals should be
separated wiring.
It is forbidden to short-circuit the shield with other signal lines and equipment.
When connecting the inductive load device (magnetic contactor, relay, solenoid valve, etc.) to the inverter,
be sure to use the surge suppressor on the load device coil.
Correct and reliable grounding is safe and reliable operation of the foundation:
(1) Inverter will generate leakage current, the greater the carrier frequency, the greater the leakage current.
Inverter leakage current greater than 3.5mA, the size of the leakage current by the conditions of use, in order to
ensure safety, inverter and motor must be grounded;
(2) Grounding resistance should be less than 10 ohms. Grounding cable diameter requirement, refer to the
same type of input and output cables half of the cross-sectional area selection;
(3) Do not share the ground wire with welding machines and other power equipment;
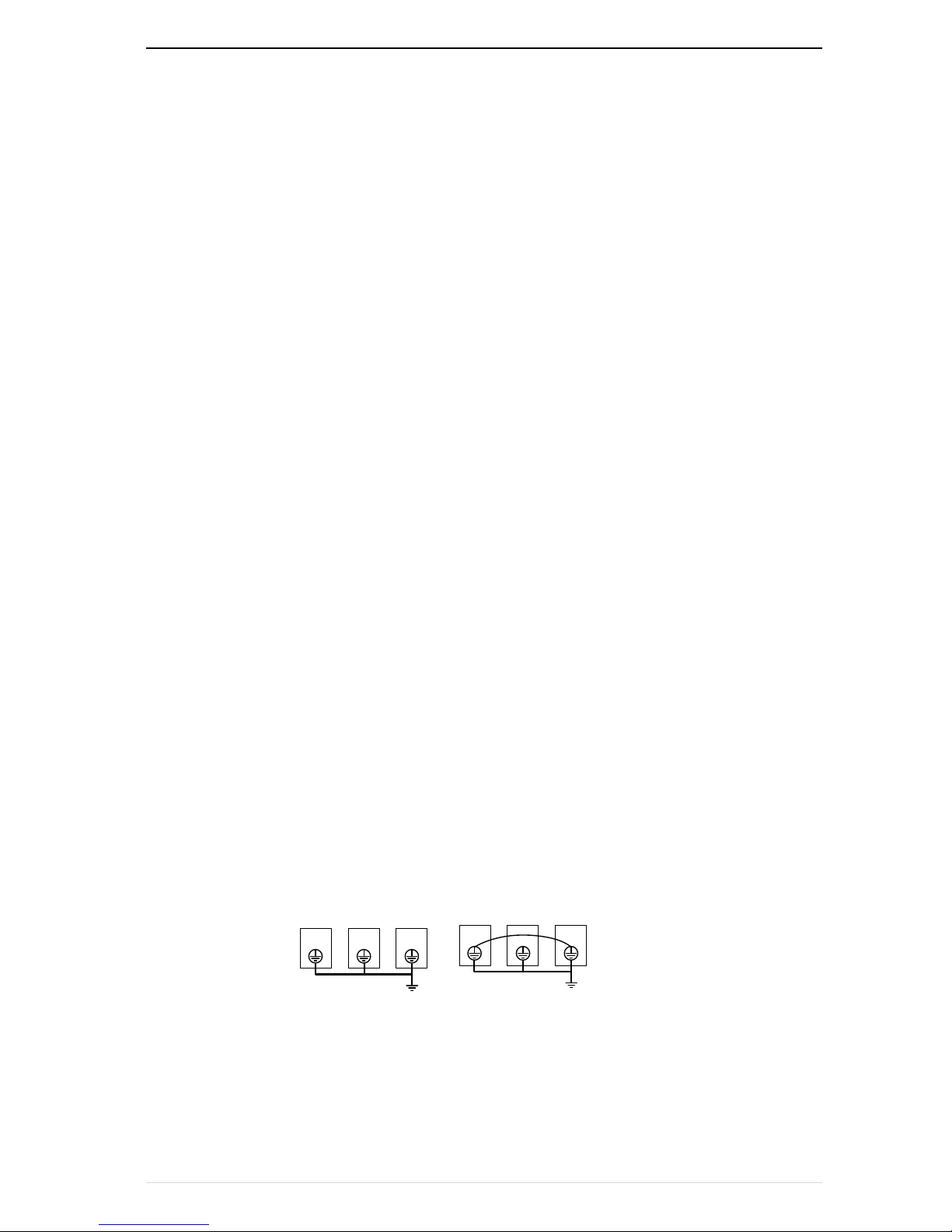
(4) When using more than two inverters, do not make the ground wire loop.。
Inverter1 inverter2 inverter3
Invert1 Inverter2 inverter3
Correctincorrect
3-6Ground wire connection diagram
Frequency converter to motor cable length and carrier frequency to maintain the appropriate
relationship
When the cable between the inverter and the motor is long, due to the influence of distributed capacitance, it is easy
to produce electrical resonance, thus generating a large current so that the inverter over-current protection. It is
Chapter3 product appearance and wiring VFD500 high performance vector control frequency inverter user manual
- 22 -
recommended to install the AC output reactor when the motor cable length exceeds 100 meters. Refer to the
following table for carrier frequency setting
.3-3 Inverter output cable length and carrier frequency table
Cable length between drive
and motor
20m below
50m below
100m below
100m above
Carrier frequency(P22.00)
15kHz below
8kHz below
4kHz below
2kHzbelow
Chapter 4 Operation and display VFD500 high performance vector control frequency inverter user manual
- 23-
Chapter 4 Operation and display
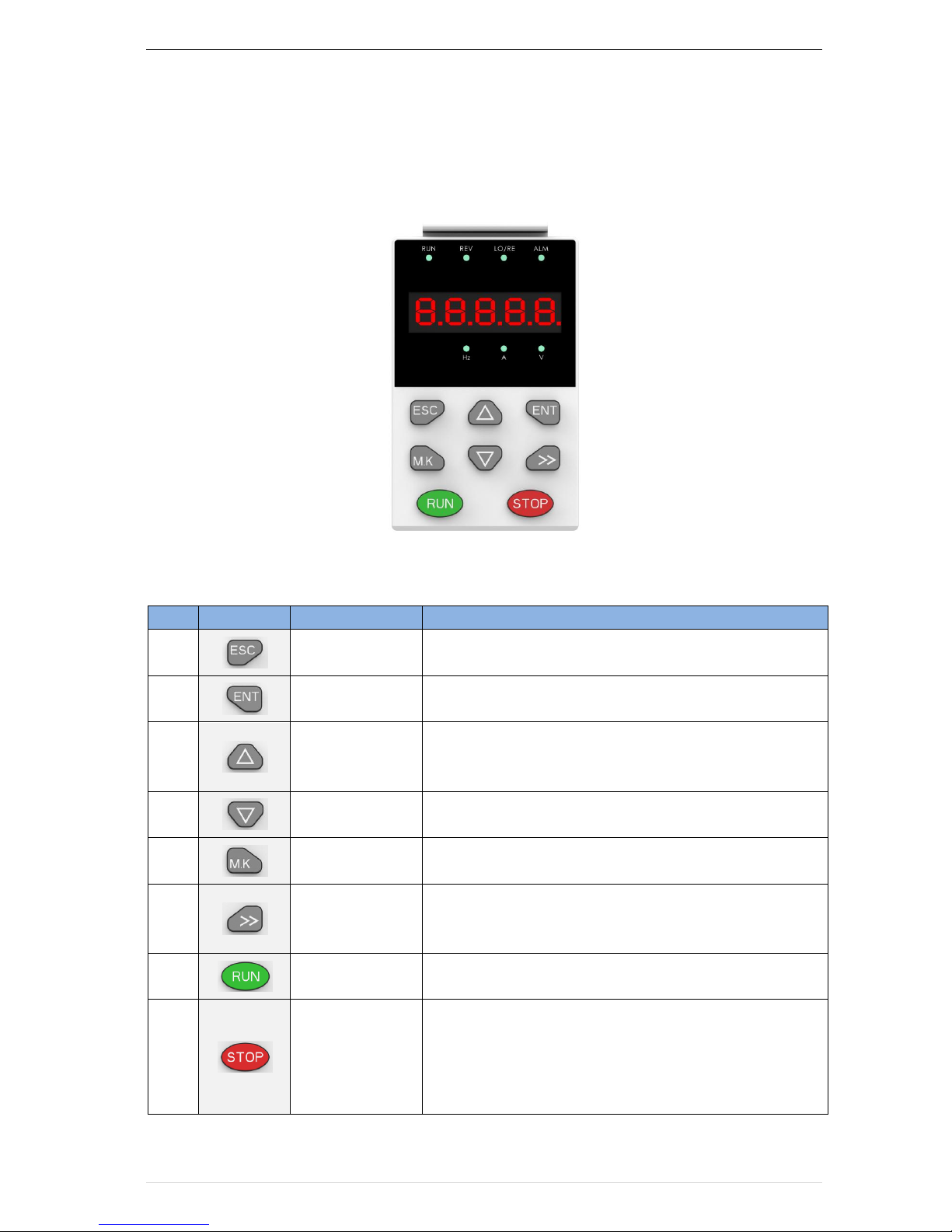
4.1 LED Instruction of operation and display
LED keyboard consists of 5 digital tubes, 7 lights, 8 keys and a potentiometer; can be used to set
the parameters, status monitoring and operation control, LED keyboard shape as shown in Figure 4-1:
Figure 4-1 Operating panel
Description of indicator
Table 4-1 The name and function of each part of the keyboard
No.
Part
Name
Function
1 Exit
•
exit menu level
2 Confirmation
•
Enter the menu interfaces level by level,
•
confirm the parameter setting and save to EEPROM
3 Increment
• The number indicated by the cursor increases by one.
• Next function code.
• Used to switch the left and right screens while in monitor mode
4 Decrement
·The number indicated by the cursor minus one.
• The previous function code.
5
Multi-function
·
Perform function switchover according to the setting of
21.02
6 Shift
• Cursor shift.
• Monitor Status Displays the next monitor volume.
• Switch left and right screens.
7 Run
Start the frequency inverter in the operation panel control
mode
8 Stop/Reset
• During operation, press to stop the operation (restricted by
parameter 21.03).
• In fault status, press this key to reset the fault.
VFD500 high performance vector control frequency inverter user manual Chapter 4 Operation and display
- 24 -
9 Indicator light:Hz
·Indicate the digital display unit, all three lights off menas other
units
10 Indicator light:A
11 Indicator light:V
12 Running lights
• Off: indicates a stop condition.
• On: indicates inverter is running.·
Blinking: Deceleration stopped.
13 Direction indicator
• Used to indicate the sign of the variable when the LED is
displaying one of the variables listed in 27.02;
• In other cases the sign of the output frequency is indicated.
14
Command source
indicator
• Off: The command source is the keyboard.
• On: The command source is terminal.
• Blinking: The command source is communication.
15 Fault indicator
• When it is on, the drive is faulty.
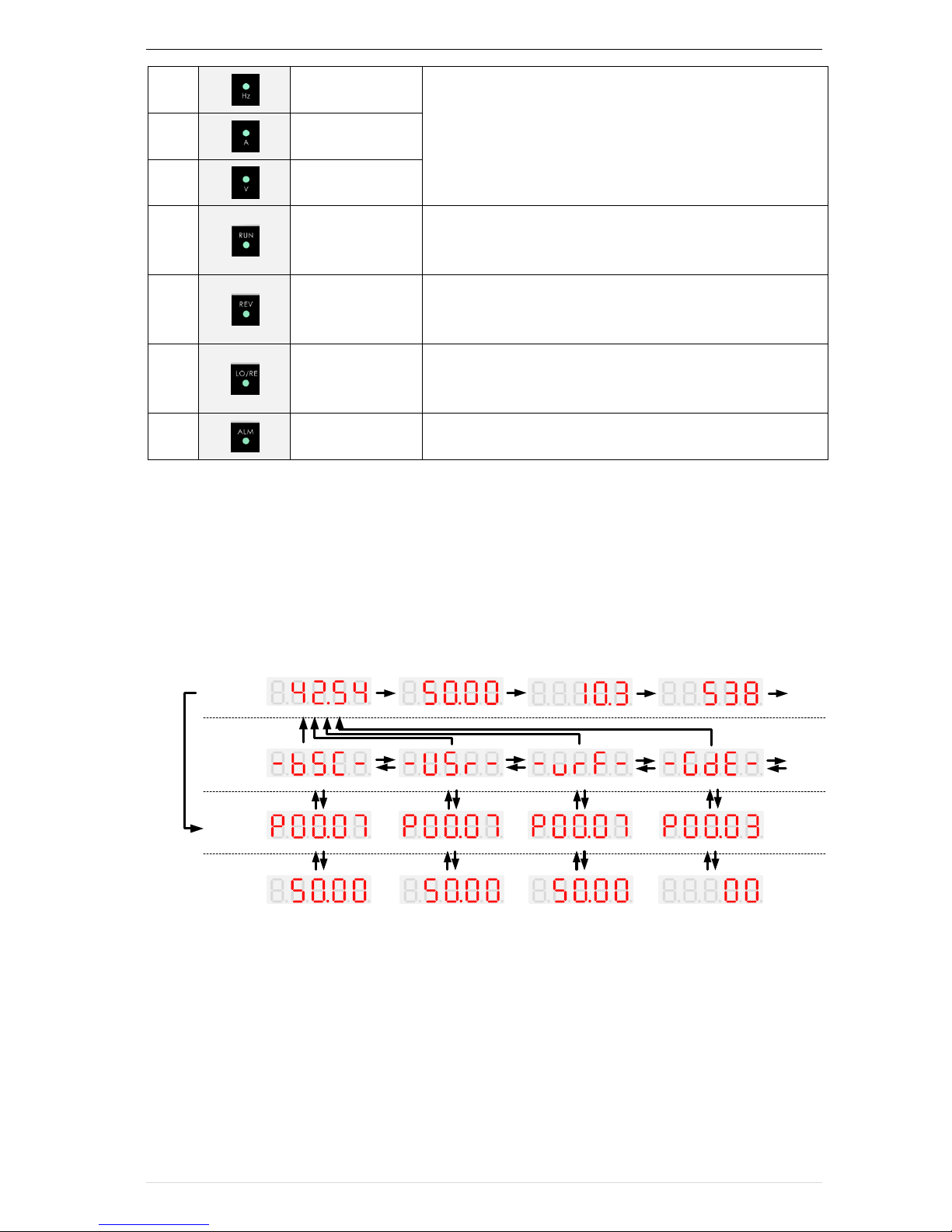
4.2 Display hierarchy and menu mode
VFD500 digital keyboard display is divided into four layers, from top to bottom are: monitoring status, menu
mode selection status, function code selection status, parameter editing / viewing status, as shown in Figure 4-2. In
the menu mode selection status, press 【UP】 or 【DOWN】 key to select menu mode, press 【ENTER】 to enter
the selected menu mode, the following describes several menu modes:
Wizard modeCheck mode
Standard mode
User-difined mode
ENTERESC
ENTERESC
UP
DOWN
UP
DOWN
UP
DOWN
“-bSC-
”
UP
DOWN
SHIF
T
SHIF
T
SHIF
T
SHIF
T
Monitoring volume1 Monitoring volume2
Monitoring volume3
Monitoring volume4
Monitoring
volume1
ESC
MONITO
R
STATUS
MENU
CHOOSE
STATE
COMMAND
CODE
PARAMETER
EDIT/VIEW
STATUS
ESC
ENTERESC ENTERESC
ENTERESC
ENTERESC ENTERESC ENTERESC
【UP、DOWN、SHIFT】 【UP、DOWN】 【UP、DOWN】 【UP、DOWN】
【UP、DOWN、SHIFT】 【UP、DOWN、SHIFT】 【UP、DOWN、SHIFT】 【UP、DOWN、SHIFT】
4-2Keyboard operation diagram
Standard mode(-bSC-)
If access (P00.01) is standard, all the function codes mentioned in this manual are accessible.
If access (P00.01) is the end user (in the state of user password lock), then only some function code can be
accessed.
User-difined mode(-USr-)
In this menu mode, only 20 user-defined parameters defined are displayed.
Chapter 4 Operation and display VFD500 high performance vector control frequency inverter user manual
- 25-
Verify mode(-vrF-)
In this menu mode, only parameters that differ from the factory settings are displayed。
Guide mode(-GdE-)
When users first use the inverter, can guide the user to complete a simple trial run。
4.3 Digital tube display
Display of decimal data
16 digits:
The range of unsigned numbers is 0 ~ 65535 (without decimal point). The displayed range of signed numbers
is -9999 ~ 32767 (excluding decimal point). The negative numbers less than -9999 will be displayed as -9999.
32 digits:
The left and right screen display, combined with the following figure to illustrate:
Dot5
Dot1
Dot1 is used to distinguish between the left and right screens. On indicates the left panel (upper 5 digits) and turns
off the right screen (lower 5 digits). When the left screen is displayed, Dot5 is used to indicate the sign digit. On
indicates that the value is negative, off indicates the value is Positive.
The display range of 32-bit unsigned numbers is 0 to 4294967295 (excluding decimal point), and the displayed
range of signed numbers is -2147483648 to 2147483647 (excluding the decimal point).
Binary data display
Binary number currently only supports 16 digits, points left and right screen display.
The leftmost digital tube is used to distinguish the left and right screens: the top digit segment lights up for the left
panel and the bottom segment segment lights for the right panel.
Remove the leftmost digital tube, from right to left, followed by Bit0 ~ Bit15. The upper segment is lit to indicate 1, the
lower segment to light to indicate 0.
Means right
screen,low 5bit
Means left screen,high 8bit
bit1=1
bit0=0bit15=0
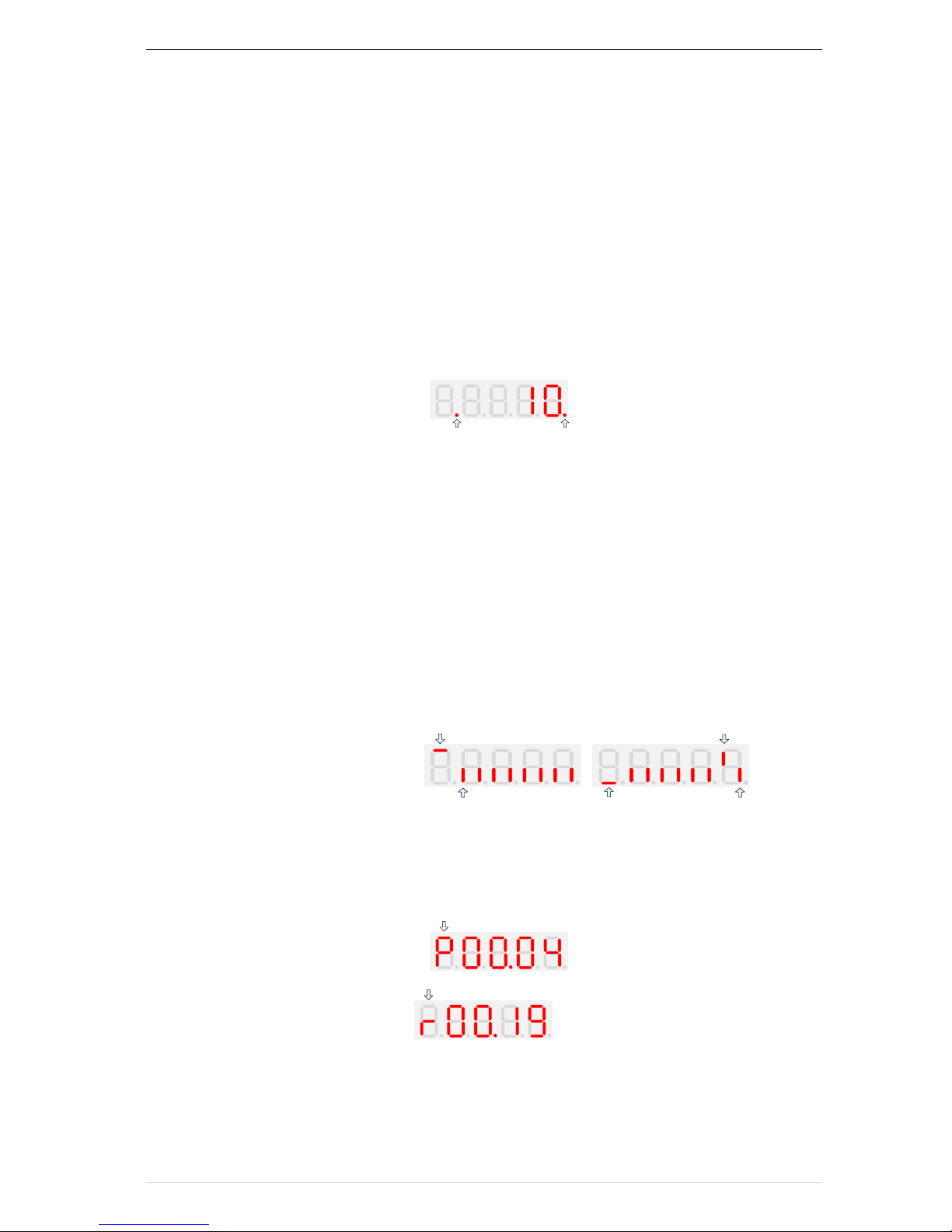
Parameter attribute identification
Editable parameters The leftmost LED displays "P"; the leftmost LED of the read-only parameter displays "r", as
shown below.
P means can edit
R means read only
Specific symbol
In some cases, the digital tube will display a specific symbol. The meaning of specific symbols is shown in the
following table:Table4-2 Digital tube display symbol and meaning
VFD500 high performance vector control frequency inverter user manual Chapter 4 Operation and display
- 26 -
Symbol
Meaning
tUnE
Motor parameter self-learning
bUSY
Processing parameter read and write requests
End
• Indicates that the parameters have been changed
and saved to the EEPROM
• The mission has been completed
Er.xxx
• Fault code, "XXX" is the fault type, see Chapter 6 for
details
4.4 Test run
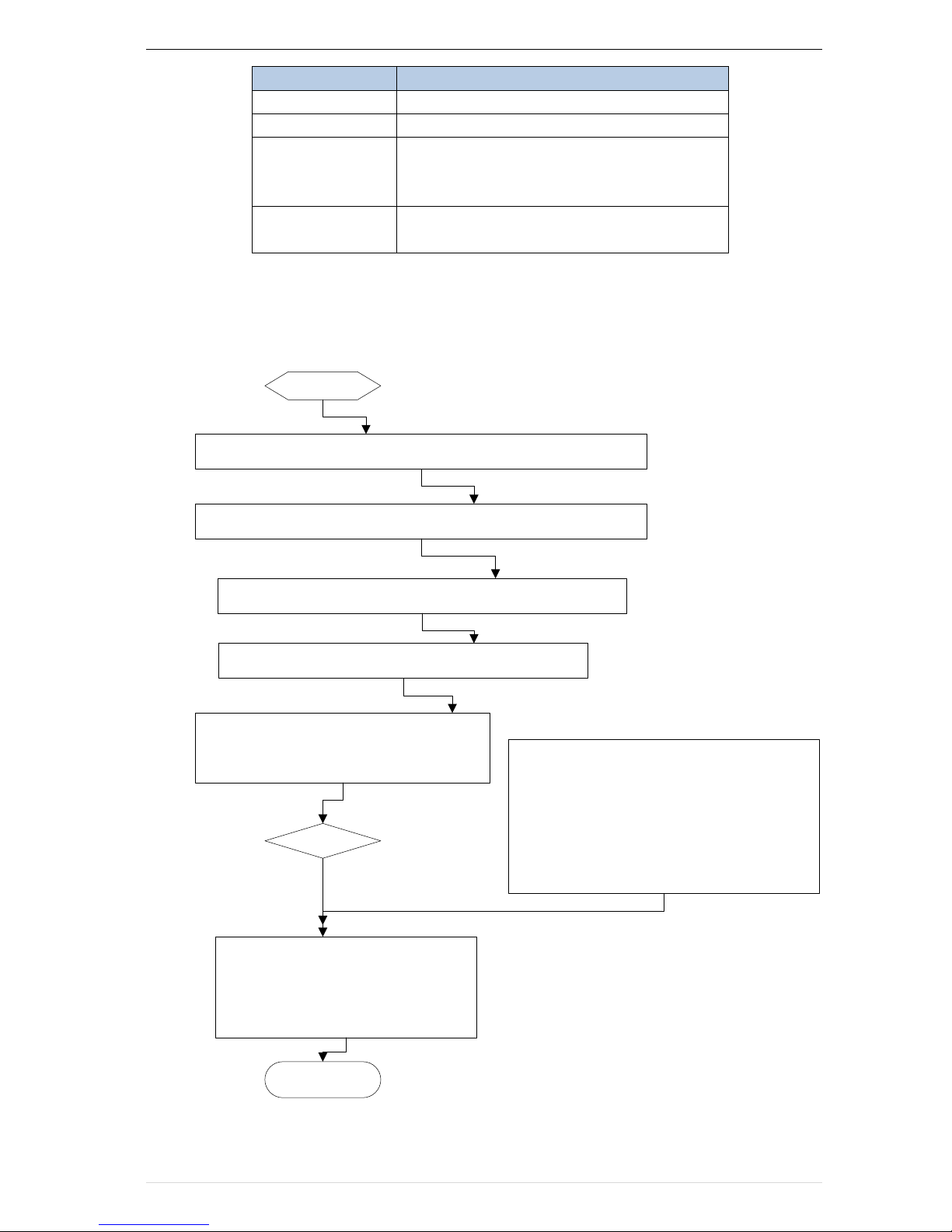
Please follow the procedure below to commission the first power-on。
start
Follow the instructions in Chapter 3 to install the inverter and wire it
Make sure the power cable, motor cable and brake unit are connected
correctly
Observe the safety precautions and switch on the power supply
Enter guide mode”-GdE-“
Set each parameter in turn according to the
guidance of the wizard, set the motor selflearning mode P11.10, press the run button,
waiting for the complete of self-learning
· Press “RUN”to Run inverter
· Press “STOP” to stop inverter
While monitoring the output frequency
or command frequency,press
“ENTER”to modify the target
frequency
End
close loop vector control(VC),Before normal
operation, ensure that the encoder P10.03 is in
the correct directionIf rotary self-learning is
performed, the encoder orientation can be
automatically recognized and storedIf it is not
executed, it needs to open the loop control to
run the motor and observe whether the encoder
feedback(r10.12) is in the same direction with
the given direction, if no,change as P10.03
Open control
Y
N
4-3Trial run flow chart
Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 27-
Chapter 5 Function Code Table
The following is the VFD500 parameter distribution list:
classification
Parameter group
Page
Common
parameters
00:Basic function
Page29
01:frequency source selection
Page31
02:start and stop
Page 37
03:Ramp and S curve
Page 39
04: Analog and pulse input
Page 41
05:Analog and pulse output
Page 45
06:Digital input (DI)
Page 46
07:Digital output(DO)
Page 49
08:Digital Output setting
Page 51
Motor control
10:encoder type
Page 53
11:Motor1 parmeter
Page 54
12:Motor1 VFcontrol parameter
Page 56
13:Motor1 Vector controlparameter
Page 58
14:Torque control
Page 59
16:Energy saving control
Page 60
Display and
protection
20:User-defined parameters
Page 61
21:key pad and display
Page 62
22:AC Drive configuration
Page 64
23:Drive protection
Page 66
24:Motor protection
Page 69
25:Fault tracking parameter
Page 71
26:Fault recording parameter
Page 71
27:Monitoring parameter
Page 72
Communication
30:Modbus communication
Page 73
Application
40:Process PID
Page 74
41:Sleep function
Page 78
42:Simply PLC
Page 79
43:Programmable delay unit
Page 81
44:Comparator and logic unit
Page 83
45:Multifunction counter
Page 87
Motor 2
60:motor2 basic parameter
Page 88
61:motor2 parameter
Page 89
62:motor2 VF control parameter
Page 89
63:motor2 vector control parameter
Page 89
Term Description:
The parameter is also called function code; the operation panel is also called the keyboard.
Due to usage habits, different terms may be used in different places in this manual, but all refer to the same
content.
Symbol Description:
"☆" means that the setting value of this parameter can be changed when the inverter is stopped or running.
"★" means that the setting value of this parameter can not be changed when the inverter is running.
"●" indicates that the value of this parameter is the actual test record value, which can not be changed

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 28 -
Function
code
Parameter name
Description
Default
Property
00Group Basic Function
P00.00
User password
0 ~ 65535
No user password status (P00.01 = 1
after power-on):
Entering the same non-zero value twice in
succession sets a user password and enters
lockout.
password lock state:
Enter the password to enter the unlock state.
unlocked state:
Enter the original password to enter the lock
state; enter the same value twice in a row to
change the password (clear the password if
you enter 0 twice in a row).
0
☆
P00.01
Access authority
0:END USER
Some parameter are not authorized to check
when user password in locked state 1:
Standard
ALL Parameter can be checked
1
★
P00.02
Parametercopy
andbackup
0:No action
11:save all parameter to EEPROM backup
space
12:Restore all parameter from EEPROM
backup space
13:Parameter upload to LCD VFD500
(excluded for motor parameter and auto
tune related parameter)
14: Parameter upload to LCD VFD500
(All parameter except for factory data)
0
★
P00.03
RESET
0:NO ACTION
11:Restore default parameter except for motor
parameter and auto-tune related parameter
and factory parameter
12:Restore default to factory parameter
13:Clear tripping record
0
★
P00.04
Motor Control mode
0:VF
1:SVC(sensorless vector control)
Open loop vector and torque
controlwithout encoder feedback
2:VC Vector control with sensor
Close loop vec tor and torque control
supporting encoder feedback in high
precision or torque control application
0
★

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 29-
Function
code
Parameter name
Description
Default
Property
P00.05
Running mode
0:Speed mode
1:Torque mode
If use with DI function,19:Switch between
torque and speed Control and 20: torque
control diabled. Actuall effective running
mode is related with DI status
0
★
P00.06
Source of the
Operation Command
0:keypad
1:terminal
2:communication
Command source: run、stop、forward、
reverse、jog、fast brake stop.etc
If use with DI function, 12:Switching run
command to Keypad and 13:Switching
run command to Communication,Actuall
effective command source is related with
DI status
0
★
P00.07
Numeric frequency
setting
00.00Hz~maximum frequency
50.00Hz
☆
P00.08
Rotation direction
0:Forward
1:Reverse
It is only for keypad control to change
running direction by giving frequency
symbol to be reverse)If command by
keypad/terminal /communication,and not
want to achieve reverse running by
giving frequency symbol to be
reverse,need to change P22.13 in stop
mode(see parameter P22.13)
0
☆
P00.09
Reverse control
0:enable
1:disbale
0
★
P00.10
Motor option
0:motor 1
1:motor 2
If use with DI function,16:Switch between
motor 1 and motor 2,Actuall effective
command source is related with DI status
0
★
P00.11
Special industry
0:standard drive
1:Reserved
0
★
r00.18
Power board software
version
- - ●
r00.19
Control board software
version
- - ●
r00.21
SN 1
- - ●
r00.22
SN 2
- - ●

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 30 -
Functio
n code
Parameter name
Description
Default
Property
01Group frequency source selction
P01.00
Main frequency source
selction (A)
0:Digital setting
1:AI1
2:AI2
3:AI3(reserved)
4:AI4(reserved)
5:HDI
6:multiple speed
7:communication
8:PID
9:Internal PLC
Notice:DI terminal function code 26-32 superior
than this function code
10
★
P01.01
Auxiliary frequency
source selction (B)
Same as P01.00
Notice:DI terminal function code 33 superior
than this function code
0 ★ P01.02
Reference option for
auxiliary frequency
source
0:Relative to Maximum frequency
1:Relative to main frequency
0
★
P01.03
Auxiliary frequency gains
0.0~300.0
100.0%
☆
P01.04
Frequency source
selection
0:main frequency sourceA
1:auxiliary frequency sourceB
2:Main and auxiliary arithmetic results
3:Switchover between main and auxiliary
frequency
4:switchover between main frequency source
A and A+B Arithmetic results
5:Switchover between B and (A+B)
(*)DI function code 25 effective to
corresponding terminal ,frequency will adopt
the latter
0
★
P01.05
Main and Auxiliary
arithmetic
0:A+B
1:A-B
2:The bigger of main A and Auxliary B
3:The smaller of Main A and Auxiliary B
0
★
P01.06
Maximum frequency
10.00~600.00Hz
50.00Hz
★
P01.07
Upper limit frequency
control
0:digital setting (set through P01.08)
1:AI1
2:AI2
3:Reserved
4:Reserved
5:Pulse setting HDI
6:Reserved
7:Communication setting
0
★

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 31-
Functio
n code
Parameter name
Description
Default
Property
P01.08
Upper limit frequency
Lower limit frequency(P01.09)~maximum
frequency (P01.06)
50.00Hz
☆
P01.09
Lower limit frequency
0.00Hz~upper limit frequency
0.00Hz
☆
P01.10
Action when set
frequency lower than
lower limit frequency
0:Run at low limit frequency
1:Stop after delaying P01.11
2:Run at zero speed
0 ★ P01.11
Delay time when set
frequency lower than
lower limit frequency
0.000s~30.000s
0.000s
★
P01.12
Jump frequency start up
protection
Unit/ten/hundred’digit:three jump frequency
1/2/3
0:Disable
1:Enable (avoid risk speed)
000
☆
P01.13
Jump frequency 1 lower
limit
0.00Hz~(P01.14)
0.00Hz
☆
P01.14
Jump frequency upper
limit
P01.13- (P01.06)Maximum frequency
0.00Hz
☆
P01.15
Jump frequency 2 lower
limit
0.00Hz~(P01.16)
0.00Hz
☆
P01.16
Jump frequency 2 upper
limit
P01.15~maximum frequency(P01.06)
0.00Hz
☆
P01.17
Jump frequency 3 lower
limit
0.00Hz~(P01.18)
0.00Hz
☆
P01.18
Jump frequency 3 upper
limit
P01.17~maximum frequency(P01.06)
0.00Hz
☆
Risk speed or Jump frequency start up protection is used to some situation which need avoid motor speed and
speed range,for example,due to mechanical resonance ,P01.12 will be enabled to avoide risk speed in forward or
reverse mode
。
Motor frequency
Giving frequency
P01.13
P01.15
P01.14
P01.17
P01.16
P01.18
P01.19
Multiple speed reference
source
Unit’digit:0 phase reference source
set by
0-multiple speed(P01.21)
1-preset frequency (P00.07)
2:AI1
00
★

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 32 -
Functio
n code
Parameter name
Description
Default
Property
3:AI2
4:Reserved
5:Reserved
6:HDI pulse
7:Communication
8:PID
Ten’s digit:Combination of multiple speed
0:Combination methord
1:Priority method
K1-K4 Each represent DI multiple terminal 1-4 status ,O represent ineffective ,1 represent effective,M indicates
current output number of speed.Instructions of multiple speed combination
0: Combination method
M = K1 + (K2*2) + (K3*4) + (K4*8)
For example: K0=1,K1=0,K2=1,K3=0,Then M=5,current output fifth phase speed
1: Priority method Multiple speed output 0~4 phase speed,Priority K4>K3>K2>K1。
For example: K4=1, then M=4;
K4=0,K3=1,then M=3;
K4=0,K3=0,K2=1,then M=2;
K4=0,K3=0,K2=0,K1=1, then M=1;
K1~K4 all to be 0, then M=0
P01.20
Multiple speed Rotation
direction
Bit0 ~ 15 corresponding to 0 ~ 15 phase
direction
0:forward direction 1:reverse direction
0
☆
P01.21
Multiple speed 0/in-built
plc 1
Lower limit frequency (P01.09) ~ maximum
frequency (P01.06)
0.00Hz
☆
P01.22
Multiple speed 1/in-built
plc 2
Lower limit frequency(P01.09) ~ maximum
frequency(P01.06)
0.00Hz
☆
P01.23
Multiple speed 2/in-built
plc 3
Lower limit frequency(P01.09) ~ maximum
frequency(P01.06)
0.00Hz
☆
P01.24
Multiple speed 3/in-built
plc 4
Lower limit frequency(P01.09) ~ maximum
frequency(P01.06)
0.00Hz
☆
P01.25
Multiple speed 4/in-built
plc 5
Lower limit frequency(P01.09) ~ maximum
frequency(P01.06)
0.00Hz
☆
P01.26
Multiple speed 5/in-built
plc 6
Lower limit frequency(P01.09) ~ maximum
frequency(P01.06)
0.00Hz
☆
P01.27
Multiple speed 6/in-built
plc 7
Lower limit frequency(P01.09) ~ maximum
frequency(P01.06)
0.00Hz
☆
P01.28
Multiple speed 7/in-built
plc 8
Lower limit frequency(P01.09) ~ maximum
frequency(P01.06)
0.00Hz
☆
P01.29
Multiple speed 8/in-built
plc 9
Lower limit frequency(P01.09) ~ maximum
frequency(P01.06)
0.00Hz
☆
P01.30
Multiple speed 9/in-built
plc 10
Lower limit frequency(P01.09) ~ maximum
frequency(P01.06)
0.00Hz
☆
P01.31
Multiple speed 10/in-built
Lower limit frequency(P01.09) ~ maximum
0.00Hz
☆

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 33-
Functio
n code
Parameter name
Description
Default
Property
plc 11
frequency(P01.06)
P01.32
Multiple speed 11/in-built
plc 12
Lower limit frequency(P01.09) ~ maximum
frequency(P01.06)
0.00Hz
☆
P01.33
Multiple speed 12/in-built
plc 13
Lower limit frequency(P01.09)~maximum
frequency(P01.06)
0.00Hz
☆
P01.34
Multiple speed 13/in-built
plc 14
Lower limit frequency(P01.09)~maximum
frequency(P01.06)
0.00Hz
☆
P01.35
Multiple speed 14/in-built
plc 15
Lower limit frequency(P01.09)~maximum
frequency(P01.06)
0.00Hz
☆
P01.36
Multiple speed 15/in-built
plc 16
Lower limit frequency(P01.09)~maximum
frequency(P01.06)
0.00Hz
☆
P01.37
Jog frequency
0.00Hz~maximum frequency(P01.06)
5.00Hz
☆
P01.38
Jog command when
running
0:not responsive
1:responsive
0
★
P01.39
UP/DOWN rates
0.00(auto rates)~600.00Hz/s
1.00Hz/s
☆
P01.40
UP/DOWN Control
Unit’digit:
0:zero clearing in non-running
1:zero clearning when UP/DOWN command
not effective
2:not zero cleaning (decide by remembering
digit when power failure
Ten’s digit:
0:non-zero cleaning at power failure
1:save at power failure UP/DOWN offset
Hundred’s digit: UP/DOWN near to zero
0: forbidden
1:enable
000
★
P01.41
Droop control gains
0.00~1.00
Rotation speed drop value based on Rated
load(relative to maximum frequency)
Frequency drop volume:Max
frequency*P01.41*Current load/rated load
0.00
☆
P01.42
Droop control filtering
time
0.000s~10.000s
0.050s
☆
P01.43
Textile frequency setting
0: relative to center of textile frequency
1: relative to maximum frequency
0
☆
P01.44
Textile frequency
0.0%~100% relative to center of textile
frequency P01.43 = 0Textile frequency Aw =
P01.44 * center frequency
P01.43 = 1: Textile frequency Aw = P01.44 *
max frequency
0.0%
☆
P01.45
Jump frequency
0.0%~50.0% relative to textile frequency
0.0%
☆
P01.46
Textile period
0.1s~3000.0s
10.0s
☆
P01.47
Triangle wave
0.1%~100.0% relative to textile period
50.0%
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 34 -
Functio
n code
Parameter name
Description
Default
Property
risingtimecoeffcient
This function is mostly used in textile and chemical industry and some application such as traversing and winding so
it is used for balancing the workload allocation when multiple motors are used to drive the same load. The output
frequency of the frequency inverters decreases as the load increases. You can reduce the workload of the motor
under load by decreasing the output frequency for this motor, implementing workload balancing among multiple
motors.P01.44 or P01.46=0,This function disable
Start acceleration
Deceleration stop
Frequency
swing center
Frequency swing
lower limit
Frequency swing range:AW-set the frequency(choose
P01.43)*P01.44 Kick-hop frequency:jw-aw*P01.45
+A
w
-Aw
Frequency swing
cycle (P01.46)
Triangle wave rise time:
P01.47*frequency swing
cycle
Running
command
Frequency
swing limit
Output frequency
Jw
Jw

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 35-
Function
code
Parameter name
Description
Default
Property
02 Group Start and stop Control
P02.00
Starting mode
0:direct start
Inverter will start from P02.01,After P02.02,It
will go to setting frequency as per S curve
1:speed tracking/Searching
Inverter will do search for motor speed and
recognize and accelerate and decelerate to
setting frequency.See Parameter
P02.16-P02.19
0
★
P02.01
Startup frequency
0.00Hz~10.00Hz
0.00Hz
★
P02.02
Startup frequency
holding time
0.000s~10.000s
0.000s
★
P02.03
Quick-response
excitation
0:disable
1:enable
Set 1= enable it will automatically calculate
pre-exciation current P02.04 and pre-excitaton
time ,after finishing calculation,this parameter
will reset to 0
0
★
P02.04
Pre-excitation current
0%~200% motor rated current
Depend
★
P02.05
Pre-excitation time
0.00s~10.00s
Pre-excitation enable Asynchronous motor for
magnetic field for higher starting torque
Depend
★
P02.06
DC brake current at
start-up
0~100% motor rated current
100%
☆
P02.07
DC brake time at
start-up
0.000s~30.000s
0.000s
★
P02.08
Stop method
0:ramp to stop
1:free coast to stop
0 ☆ P02.09
Startup frequency of DC
brake at stop
0.00Hz~50.00Hz
1.00Hz
★
P02.10
DC braking current at
stop
0~100% motor rated current(Maximum value
not higher than drive rated current)
100%
☆
P02.11
DC brake time at stop
0.000s~30.000s
0.000s
★
P02.12
Magnetic flux brake gain
1.00~1.50
Over excitation braking convert some kinetic
energy to motor heating by increasing motor
excitation.value 1 means ineffective: value
higher,better performance but output current
bigger
1.00
★
P02.13
Delaying frequency at
stop
0.00Hz~20.00Hz
0.50Hz
★
P02.14
Delaying time at stop
0.000s~60.000s
0.000s:no function for delaying time at stop
>0.000s:it is effective,when output frequency
0.000s
★

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 36 -
Function
code
Parameter name
Description
Default
Property
decrease lower than delaying frequency at
stop (P02.13),inverter will block pulse output
after delaying time at stop (P02.14).if run
command comes during delaying time,inverter
will restart.it is useful to some application with
jog function
P02.15
The minimum blocking
time after free stop
0.010s~30.000s
Depend
★
P02.16
Speed search mode
Unit’s digit:tracking mode
0 : speed search for maximum output
frequency
1:speed search for frequency at stop
2:speed search for grid frequency
Ten’s digit:direction choosing
0:only search at given frequency direction
1:search on the other direction when failed for
given frequency tracking
10
★
P02.17
Deceleration time for
speed search
0.1s~20.0s
2.0s
★
P02.18
Current for speed search
10%~150% motor rated current
40%
★
P02.19
Speed search
compensation factor
0.00~10.00
1.00
★

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 37-
Function
code
Parameter name
Description
Default
Property
03 Group Ramp and S curve
P03.00
Acceleration and
deceleration curve
selection
0:linear
1:S curve A
2:S curve B
0
★
Acceleration and deceleration curve, also known as "Ramp Frequency Generator (RFG)", is used to smooth the frequency
command. VFD300A/500 supports the following acceleration and deceleration curve:
0: linear acceleration / deceleration
The output changes at a constant acceleration or deceleration. Acceleration time refers to the time from when the inverter
accelerates from zero to the reference frequency (selected by P03.15); deceleration time refers to the time required to
decelerate from the reference frequency to zero.
1: S curve method
This acceleration and deceleration curve acceleration "a" changes in a ramp, start and stop relatively flat. Acceleration and
deceleration process as shown below, Tacc and Tdec for the set acceleration and deceleration time.
The acceleration and deceleration curve of the equivalent acceleration and deceleration time:
Acceleration time = Tacc + (Ts1 + Ts2) / 2
Deceleration time = Tdec + (Ts3 + Ts4) / 2
1S
T
t
2S
T
3S
T
4S
T
acc
T
dec
T
Output frequency
recommand
2: S curve method B
The time of this S-curve is defined as in the method A except that in the acceleration / deceleration process, if the target
frequency suddenly approaches or the acceleration / deceleration time changes, the S-curve is re-planned. In addition, when
the target frequency changes, the S Curves avoid "overshoot" as much as possible.
P03.01
Acceleration time 1
Setting value depend on P03.16
P03.16 = 2, 0.00~600.00s;
P03.16 = 1, 0.0s~6000.0s;
P03.16 = 0, 0s~60000s
Depend
on model
☆
P03.02
Deceleration time 1
Setting value depend on P03.16
P03.16 = 2, 0.00~600.00s;
P03.16 = 1, 0.0s~6000.0s;
P03.16 = 0, 0s~60000s
Depend
on model
☆
P03.03
Accelerationtime2
0.01~60000s same as P03.01
Depend
on model
☆
P03.04
Deceleration time2
0.01~60000s same as P03.02
Depend
on model
☆
P03.05
Acceleration time3
0.01~60000s same as P03.01
Depend
on model
☆
P03.06
Deceleration time3
0.01~60000s same as P03.02
Depend
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 38 -
Function
code
Parameter name
Description
Default
Property
on model
P03.07
Acceleration time4
0.01~60000s same as P03.01
Depend
on model
☆
P03.08
Deceleration time4
0.01~60000s same as P03.02
Depend
on model
☆
The VFD300A provides four groups of acceleration and deceleration time. The actual acceleration / deceleration time
can be selected by different methods such as DI terminal, output frequency and PLC running segments. Several methods can
not be used at the same time. Factory default is to use acceleration / deceleration time
1.DI terminal select acceleration and deceleration time of the mapping table is as follows::
Acceleration and
deceleration time
terminal 2
Acceleration and
deceleration time
terminal 1
Acceleration and deceleration time
terminal
OFF
OFF
Acceleration and deceleration time
terminal 1(P03.01,P03.02)
OFF
ON
Acceleration and deceleration time
terminal 2(P03.03,P03.04)
ON
OFF
Acceleration and deceleration time
terminal 3(P03.05,P03.06)
ON
ON
Acceleration and deceleration time
terminal 4(P03.07,P03.08)
The schematic diagram of selecting acceleration / deceleration time according to the output frequency is as follows:
t
Output frequency
Acceleration time
switch frequency1
(P03.18)
Deceleration time
switch frequency1
(P03.19)
Acceleration time2
Acceleration
time1
Deceleration time1
Deceleration time2
Other ways to select acceleration / deceleration time can be found in the description of relevant parameters。
P03.09
Jog Acceleration
time
Time Setting same as P03.01
6.00s
☆
P03.10
Jog Deceleration
time
Time Setting same as P03.02
10.00s
☆
P03.11
S-curve
Acceleration
begin time
Setting value depend on P03.16
P03.16 = 2, 0.01~30.00s;
P03.16 = 1, 0.1s~300.0s;
P03.16 = 0, 1s~3000s
0.50s
☆
P03.12
S-curve
Acceleration arrival
time
SAME AS P03.11
0.50s
☆
P03.13
S-curve
Deceleration
begin time
SAME AS P03.11
0.50s
☆

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 39-
Function
code
Parameter name
Description
Default
Property
P03.14
S-curve
Deceleration
Arrival time
SAME AS P03.11
0.50s
☆
P03.15
Accel and
Deceltime
frequency
benchmark
0:maximum frequency
1:Motor rated frequency
0
★
P03.16
Accel and Decel
time unit selection
0:1s
1:0.1s
2:0.01s
2
★
P03.17
Quickstop
deceleration time
0.01~65000s
5.00s
☆
P03.18
Switchingfrequency
1 in acceleration
time
0.00Hz~maximum frequency(P01.06)
0.00Hz
☆
P03.19
Switchingfrequency
1 in deceleration
time
0.00Hz~maximum frequency(P01.06)
0.00Hz
☆
P03.20
Forward/reverse
Ddeadband time
0.00s~30.00s Waiting time for zero speed during forward and
reverse switchover
0.00s
★
04 Group Analog and Pulse input
P04.00
Minimum input
pulse frequency
0.00kHz~
50.00kHz
P04.01
P04.03
HDI input frequency
Corresponding setting
P04.00
P04.02
1.00kHz
☆
P04.01
Maximum input
pulse frequency
0.00kHz~
50.00kHz
30.00kHz
☆
P04.02
Setting
Corresponding to
Minimum input
-100.0%~
100.0%
0.0%
☆
P04.03
Setting
Corresponding to
maximum input
-100.0%~
100.0%
100.0%
☆
P04.04
Pulse input filter
time
0.000s~10.000s
0.050s
☆
r04.05
Pluse input
frequency
0.00kHz~50.00kHz(it is used to check HDI pulse input
frequency)
- ● r04.06
HDI equivalent
value
-100.0%~100.0%(it is used to View the output of the HDI
mapping curve)
-
●
P04.07
AI 1 Curve setting
Unit’s:AI curve selection
0:curve A
1:curve B
2:Curve C
3:Curve D
00
★

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 40 -
Function
code
Parameter name
Description
Default
Property
Ten’unit:when input signal lower than minimum input
0:equal to minimum input
1:equal to 0.0%
P04.08
AI1 filter time
0.000s~10.000s
0.100s
☆
r04.09
AI 1 actual value
0.00V~10.00V ( it is used to view the port voltage of AI1. When
AI1 is a current type (0~20mA) input, multiplying this value by 2 is
the input current (mA) of the AI1 port.)
-
●
r04.10
AI 1 Conversion
value
-100.0%~100.0%(It is used to view the output of the AI1
mapped curve)
-
●
P04.11
AI 2 Curve setting
Unit’s:AI curve selection
0:curve A
1:curve B
2:Curve C
3:Curve D
Ten’unit:when input signal lower than minimum input
0:equal to minimum input
1:equal to 0.0%
01
★
P04.12
AI2 filter time
0.000s~10.000s
0.100s
☆
r04.13
AI 2 actual value
0.00V~10.00V ( it is used to view the port voltage of AI2. When
AI2 is a current type (0~20mA) input, multiplying this value by 2 is
the input current (mA) of the AI2 port.)
-
●
r04.14
AI 2 Conversion
value
-100.0%~100.0%(It is used to view the output of the AI2
mapped curve)
-
●
P04.15
AI 3(option card)
Curve setting
Unit’s:AI curve selection
0:curve A
1:curve B
2:Curve C
3:Curve D
Ten’unit:when input signal lower than minimum input
0:equal to minimum input
1:equal to 0.0%
02
★
P04.16
AI3(option card)
filter time
0.000s~10.000s
0.100s
☆
r04.17
AI3(option card)
actual value
0.00V~10.00V ( it is used to view the port voltage of AI3. When
AI3 is a current type (0~20mA) input, multiplying this value by 2 is
the input current (mA) of the AI3 port.)
-
●
r04.18
AI3(option card)
Conversion value
-100.0%~100.0%(It is used to view the output of the AI3
mapped curve)
-
●
P04.19
AI 4(option card)
Curve setting
Unit’s:AI curve selection
0:curve A
1:curve B
2:Curve C
3:Curve D
Ten’unit:when input signal lower than minimum input
03
★

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 41-
Function
code
Parameter name
Description
Default
Property
0:equal to minimum input
1:equal to 0.0%
P04.20
AI4(option card)
filter time
0.000s~10.000s
0.100s
☆
r04.21
AI4(option card)
actual value
0.00V~10.00V ( it is used to view the port voltage of AI4. When
AI4 is a current type (0~20mA) input, multiplying this value by 2 is
the input current (mA) of the AI4 port.)
-
●
r04.22
AI4(option card)
Conversion value
-100.0%~100.0%(It is used to view the output of the AI4
mapped curve)
-
●
P04.23
Curve A horizontal
axis 1
0.00V~
P04.25
P04.25
P04.2
6
AI
Correspondin
g setting
P04.2
3
P04.2
4
Note:input less than P04.23,output decide by curve
ten’s digit。
0.00V
☆
P04.24
Curve Avertical
axis 1
-100.0%~
100.0%
0.0%
☆
P04.25
Curve A horizontal
axis 2
P04.23~
10.00V
10.00V
☆
P04.26
Curve A vertical
axis 2
-100.0%~
100.0%
100.0%
☆
P04.27
Curve B horizontal
axis 1
0.00V~
P04.29
P04.29
P04.30
AI
Correspondi
ng setting
P04.27
P04.28
Note:input less than P04.27,output decide by curve
ten’s digit
0.00V
☆
P04.28
Curve B vertical
axis 1
-100.0%~
100.0%
0.0%
☆
P04.29
Curve B horizontal
axis 2
P04.27~
10.00V
10.00V
☆
P04.30
Curve B vertical
axis 2
-100.0%~
100.0%
100.0%
☆
P04.31
Curve C horizontal
axis 1
0.00V~
P04.33
P04.33
P04.34
P04.38
P04.35
AI
Corresponding setting
P04.31
P04.32
P04.36
P04.37
0.00V
☆
P04.32
Curve C vertical
axis 1
-100.0%~
100.0%
0.0%
☆
P04.33
Curve C horizontal
axis 2
P04.31~
P04.35
3.00V
☆
P04.34
Curve C vertical
axis 2
-100.0%~
100.0%
30.0%
☆
P04.35
Curve C horizontal
P04.33~
6.00V
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 42 -
Function
code
Parameter name
Description
Default
Property
axis 3
P04.37
Note:input less than P04.31,output decide by curve
ten’s digit
P04.36
Curve C vertical
axis 3
-100.0%~
100.0%
60.0%
☆
P04.37
Curve C horizontal
axis 4
P04.35~
10.00V
10.00V
☆
P04.38
Curve C vertical
axis 4
-100.0%~
100.0%
100.0%
☆
P04.39
Curve D horizontal
axis 1
0.00V~
P04.41
P04.41
P04.42
P04.46
P04.43
AI
Corresponding setting
P04.39
P04.40
P04.44
P04.45
Note:input less than P04.39,output decide by curve
ten’s digit
0.00V
☆
P04.40
Curve D vertical
axis 1
-100.0%~
100.0%
0.0%
☆
P04.41
Curve D horizontal
axis 2
P04.39~
P04.43
3.00V
☆
P04.42
Curve D vertical
axis 2
-100.0%~
100.0%
30.0%
☆
P04.43
Curve D horizontal
axis 3
P04.41~
P04.45
6.00V
☆
P04.44
Curve D vertical
axis 3
-100.0%~
100.0%
60.0%
☆
P04.45
Curve D horizontal
axis 4
P04.43~
10.00V
10.00V
☆
P04.46
Curve D vertical
axis 4
-100.0%~
100.0%
100.0%
☆
Description: The range of HDI, AI1 ~ AI4 mapping curve:
For frequency setting, 100% corresponds to the maximum frequency P01.06.
For torque setting, 100% corresponds to the maximum torque P14.02.
For other uses, see the description of the relevant function.

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 43-
05 Group Analog and Pulseoutput
r05.00
Actual output Pulse
frequency
0.00kHz~50.00kHz
-
●
P05.01
HDO Pulse Output type
0:Common numeric output (DO2 P07.02)
1:high frequency pulse output (Hdo)
0
☆
P05.02
High frequency pulse
output function(HDO)
0:Running frequency(0~max frequency)
1:set frequency(0~max frequency)
2:output current(0~2times motor rated current)
3:output torque(0~3times motor rated torque)
4:set torque(0~3times motor rated torque)
5:output voltage(0~2times motor rated
voltage)
6: DC bus voltage(0~2times drives standard
DC bus voltage)
7: output power(0~2times motor rated power)
8:encoder rotating speed(0-maximum
frequency rotating speed)
9: AI1(0.00~10.00V)
10: AI2(0.00~10.00V)
11: AI1(0.00~10.00V)
12: AI2(0.00~10.00V)
0
☆
P05.03
HDO Minimum output
pulse frequency
0.00kHz~50.00kHz
HDO terminal output pulse frequencywhen
Output signal source=0
1.00kHz
☆
P05.04
HDO Max output pulse
frequency
0.00kHz~50.00kHz
HDO terminal output pulse frequencywhen
Output signal source=maximum value
30.00kHz
☆
r05.05
AO1 actual value
0.0%~100.0%
-
●
P05.06
AO1 output function signal
selection
Same as P05.02
0
☆
P05.07
AO1 output offset
-100.0%~100.0%
0.0%
☆
P05.08
AO1 output gain
-10.00~10.00
1.00
☆
The output error of AO1 can be corrected by P05.07 and P05.08, or the mapping relationship between signal
source and actual output can be changed. The formula is:
AO.c = P05.07 + P05.08 × AO.pAO.c: the actual output of AO1;
AO.p: AO1 Value before correction
AO.c, AO.p, 100.0% of P05.07 corresponds to 10V or 20mA.
r05.09
AO2 actual value
0.0%~100.0%
-
●
P05.10
AO2 output function signal
selection
Same as P05.02
0
☆
P05.11
AO2 output offset
-100.0%~100.0%
0.0% ☆ P05.12
AO2 gain
-10.00~10.00
1.00
☆
The output error of AO2 can be corrected by P05.11 and P05.12, or the mapping relationship between signal
source and actual output can be changed. The formula is:
AO.c = P05.11 + P05.12 × AO.pAO.c: the actual output of AO2;
AO.p: AO2 value before correction;AO.c, AO.p, 100.0% of P05.11 corresponds to 10V or 20mA.

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 44 -
06 Group Digital input
r06.00
DI port status
Bit0~Bit6 Correspond to DO1~DO7
Bit12~Bit15 Correspond to VDI1~VDI4
-
●
P06.01
DI1 Numeric input function
0:no function
1:run terminal
2:reverse/Forward and reverse switchover
3:three wire control
4:forward jog command
5:reverse jog command
6:Terminal UP
7:Terminal DOWN
8:Clear up UP/DOWN offset
9:coast to stop/free stop
10:fault reset
11:Reverse forbidden
12:Switching run command to Keypad
13:Switching run command to Communication
14:fast stop
15:external stop
16:Switch between motor 1 and motor 2
17:Pause operatoin
18:DC braking
19:Switch between torque and speed Control
20:torque control diabled
21:Multi-step speed terminal 1
22:Multi-step speed terminal 2
23:Multi-step speed terminal 3
24:Multi-step speed terminal 4
25:frequency source switchover
26:Switch main frequency source to Numeric
frequency setting
27:Switch main frequency source to AI1
28:Switch main frequency source to AI2
29:Switch main frequency source to AI3
30:Switch main frequency source to AI4
31:Switch main frequency source to
high-frequency pulse input
32:Switch main frequency source to
communication setting
33:Switch auxiliary frequency source to numeric
frequency setting
34:Accel and Decel time terminal 1
35:Accel and Decel time termina2
1
★
P06.02
DI2 Numeric input function
2
★
P06.03
DI3 Numeric input function
4
★
P06.04
DI4 Numeric input function
10
★
P06.05
DI5(HDI) Numeric input
function
0
★
P06.06
DI6 Numeric input function
(option card)
0
★
P06.07
DI7 Numeric input function
(option card)
0
★
P06.13
VDI1 Numeric input
function(option card)
0
★

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 45-
P06.14
VDI2 Numeric input
function(option card)
36:Accel and Decel Stop
37:User-defined fault 1
38:User-defined fault 2
39:PID pause
40:PID integral pause
41:PID parameter Switchover
42:PID Positive/negative reaction switch
43:Preset PID terminal 1
44:Preset PID terminal 2
45:PID Main and Auxaliary command switch
46:PID Main and Auxaliary feedback switch
47:Simple PLC status reset
48:Simple PLC time stop
49:swing frequency stop
50:Counter 1 input
51:Counter 1 reset/clear
52:Counter 2 input
53:Counter 1 reset/clear
54:clear/reset timed running time
55:motor 2 Accel and Decel time selection
0
★
P06.15
VDI3 Numeric input
function(option card)
0
★
P06.16
VDI4 Numeric input
function(option card)
0
★
P06.17
Virtual input source
Unit’s digit:VDI1 input signal source
0:from forcing data (P06.18,P06.19)
1~4:variable selector 1-4 Output
5~8 logic block 1-4 output see P44
9~Eprogrammable relay 1~4 see P43
Ten’s digit:VDI2 input signal source
Same as Unit’digit
Hundred’s digit:VDI3 input signal source
Same as unit’s digit
Thousand’s digit:VDI4 input signal source
Same as Unit’digit
0000
★
P06.18
DI Forcing function
Define as per bit :disable;1:enable
Bit0-bit11:DI1-DI12
Bit12-bit15:VDI1-VDI4
H11110000
L00000000
★
P06.19
DI Forcing data
Define as per bit 0:effective;1:ineffective
Bit0-bit11:DI1-DI12
Bit12-bit15:VDI1-VDI4
0
☆
P06.20
Effective logic of
Numericinput terminal
Define as per bit 0:positive logic;1:negative logic
Bit0-bit11:DI1-DI12
Bit12-bit15:VDI1-VDI4
0
★
P06.21
DI1 Effective delay time
0.000s~30.000s
0.000s
☆
P06.22
DI1 ineffective delay time
0.000s~30.000s
0.000s
☆
P06.23
DI2 Effective delay time
0.000s~30.000s
0.000s
☆
P06.24
DI2 ineffective delay time
0.000s~30.000s
0.000s
☆
P06.25
DI3 Effective delay time
0.000s~30.000s
0.000s
☆
P06.26
DI3 ineffective delay time
0.000s~30.000s
0.000s
☆
P06.27
DI4 Effective delay time
0.000s~30.000s
0.000s
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 46 -
P06.28
DI4 ineffective delay time
0.000s~30.000s
0.000s
☆
P06.29
Two wire/3wire operation
control
0:2-wire mode (FWD+REV)1
1:2-wire mode RUN+DIRECTION)2
2:3-wire 1(FWD+REV+ENABLE)
3:3-wire 2 RUN +FWD/REV+ENABLE
0
★
DI1 Forward
Run (FWD)
DI2 Reverse
RUN (REV)
COM
K1
K2
DI1 operation
function
DI2 operation
direction
COM
K1
K2
Figure1:Two-line mode 1 Figure 2:Two-line mode2
DI1 forward
command
DI3 operation
command
DI2 reverse
command
COM
SB2
SB1
SB3
DI1 forward
command
DI3 stop
command
DI2 operation
direction
COM
SB2
SB1
K
Figure 3:Three-line mode1 Figure 4:Three-line mode2
Two-line mode 1:
K1 is closed, the drive is running forward, K2 closed reverse operation, K1, K2 at the same time closed or
disconnected, the inverter stops running.
Two-line mode 2:
In K1 closed state, K2 disconnect the inverter forward, K2 closed inverter reverse; K1 off the inverter to stop
running.
Three-line mode 1:
DI3 is set to three-wire control function. When the SB1 button is closed, press the SB2 button. The inverter is
forward running. Press the SB3 button to invert the inverter. When the SB1 button is off, the inverter will stop.
During normal start-up and running, it is necessary to keep the SB1 button closed, and the commands of SB2
and SB3 buttons take effect during the closing operation. The running status of the inverter takes the last key
action of the three buttons as the standard.
Three-line mode 2:
DI3 is set to three-wire control function. When the SB1 button is closed, press the SB2 button to run the inverter,
K to switch the inverter forward, K to close the inverter and SB1 to turn off the inverter. During normal start-up
and operation, it is necessary to keep the SB1 button closed and the command of the SB2 button effective during
the closing operation.
P06.30
Digital input
termimal filtering time
0.000~0.100s
0.010s
☆
P06.31
Terminal protection
function
0:no protection
When command is terminal ,power on and
terminal effective,inverter will run
1:protection
0
★

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 47-
When command is terminal ,power on and
terminal effective, inverter will not run ,so need
terminal ineffective then effective,then inverter
will run
P06.32
DI terminal on/ready time
0.000s~30.000s
1.000s
★
07 Group Digital output
r07.00
DO output port status
Define as per bit,
0:ineffective 1:effective
Bit0:DO1 Bit1:D02 Bit2:relay1, Bit 3:relay 2 Bit4:
DO3;Bit5: DO4 Bit6: DO5; Bit7: DO6
Bit8: VDO1;Bit9: VDO2
-
●
P07.01
DO1 Output terminal
function group
0:no function
1:READY
2:RUN
3:Error1(stop fault)
4:Error2(same as Error1 except undervoltage)
5:warning output(fault but in running)
6:swing frequency limit
7:torque limit
8:reverse running
9: upper limit frequency arrival
10:lower limit frequency arrival 1
11: lower limit frequency arrival2
12:FDT1 output frequency detection range
13:FDT2 output frequency detection range
14:setting frequency arrival
15:Desired frequency attained 1 P08.05
16:Desired frequency attained 2P08.07
17:zero speed (stop without output)
18: zero speed (stop with output)
19:zero current status
20:output current exceed limit
21:counter 1 setting value arrival
22:counter 1 setting value arrival
23:Simple PLC cycle finish
24:IGBT temperature arrival
25:Drive overload pre-warning
26: motor overload pre-warning
27: motor overheat pre-warning
28:in off loading
29:Accumulated on power time arrival
30:Accumulated running time arrival
0
☆
P07.02
DO2(HDO) Output
terminal function group
0
☆
P07.03
Relay 2 Output terminal
function group(T1A T1B
T1C)
3
☆
P07.04
Relay 2 Output terminal
function group(T2A T2B
T2C)
0
☆
P07.09
VDO1(virtual DO1) output
Terminal function
0
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 48 -
P07.10
VDO2(virtual DO2) output
Terminal function
31:Single running time arrival
32:Variable selector unit 1 output
33:Variable selector unit 2 output
34:Variable selector unit 3 output
35:Variable selector unit 4 output
36:Logic unit 1 output
37:Logic unit 2 output
38:Logic unit 3 output
39:Logic unit 4 output
40:delaying unit 1 output
41:delaying unit 2 output
42: delaying unit 3 output
43: delaying unit 4 output
44: delaying unit 5 output
45: delaying unit 6 output
0
☆
P07.11
output logic negative
Define as per bit O:off;1:on(negative)
Bit0:DO1
Bit1:DO2
Bit2:Relay 1
Bit3: Relay 2
Bit4: DO3;Bit5: DO4 Bit6: DO5; Bit7: DO6
Bit8: VDO1;Bit9: VDO2
Notice:posive logic equivalent to Normal open
point
And negative logic equivalent to Normal close
point
0
☆
P07.12
DO1 effective delay time
0.000s~30.000s
0.000s
☆
P07.13
DO1 ineffective delay time
0.000s~30.000s
0.000s
☆
P07.14
DO2 effective delay time
0.000s~30.000s
0.000s
☆
P07.15
DO2 ineffective delay time
0.000s~30.000s
0.000s
☆
P07.16
Relay 1 effective delay
time
0.000s~30.000s
0.000s
☆
P07.17
Relay 1 ineffective delay
time
0.000s~30.000s
0.000s
☆
P07.18
Relay 2 effective delay
time
0.000s~30.000s
0.000s
☆
P07.19
Relay 2 ineffective delay
time
0.000s~30.000s
0.000s
☆

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 49-
08Group Digital output setting
P08.00
Frequency detection value
(FDT1)
0.00Hz~maximum frequency(P01.06)
50.00Hz
☆
P08.01
Frequency detection
hysteresis 1
0.0%~100.0% FDT1
5.0%
☆
P08.02
Frequency detection value
2(FDT2)
0.00Hz~maximum frequency(P01.06)
50.00Hz
☆
P08.03
Frequency detection
hysteresis 2
0.0%~100.0% FDT2(P08.02)
5.0%
☆
FDT is used to check inverter output frequency,when output frequency is greater than frequency detection
value,FDT effective,when output frequency is less than frequency detection value*(1- Frequency detection
hysteresis),FDT ineffective;whenoutput frequency is between the above two,FDT output keep no
change,following is FDT chart
time
Output
frequency
P08.00
P08.00×P08.01
FDT
suatus
invalid
valid
invalid
time
P08.04
Detection range of
frequency arrival
0.0%~100.0% maximum frequency (P01.06)
When output frequency is between command
frequency ±P08.04*P01.06,corresponding DO
output effective signal
3.0%
☆
P08.05
Desired frequency attained
1
0.00Hz~maximum frequency (P01.06)
50.00Hz
☆
P08.06
Any frequency reaching
detection amplitude 1
0.0%~100.0% maximum frequency (P01.06)
3.0%
☆
P08.07
Desired frequency
attained2
0.00Hz~maximum frequency(P01.06)
50.00Hz
☆
P08.08
Any frequency reaching
detection amplitude 2
0.0%~100.0% maximum frequency (P01.06)
3.0%
☆
P08.09
Zero speed detection
amplitude
0.00H~5.00Hz
0.25Hz
☆
P08.10
Zero current detection
level
0.0%~100.0% rated motor current
5.0%
☆
P08.11
Zero current detection
delay time
0.000~30.000s
0.000~30.000s
Notice:When output current≤P08.10 and endure
P08.11 time,corresponding DO output effective
signal
0.100s
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 50 -
P08.12
Output overcurrent
threshold
0.0%~300.0% motor rated time
200.0%
☆
P08.13
Overcurrent detection
delay time
0.000~30.000sNotice:When output
current≥P08.12 and endure P08.13
time,corresponding DOoutput effective signal
0.100s
☆
P08.14
IGBT Module temperature
threshold
20.0~100.0℃
75.0℃
☆
P08.15
Accumulative power-on
time arrival threshold
0~65530h
0h
☆
P08.16
Accumulative power-on
time arrival threshold
0~65530h
0h
☆
P08.17
Action upon Running time
arrival
0:continue to run;1:stop
0
☆
P08.18
This time running time
arrival threshold
0~65530min
0min
☆
r08.19
This time Running time
monitoring
0~65535min
0min
●

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 51-
10 Group encoder type
P10.01
Encoder type
0: ABZ
1: ABZUVW
2: Rotary/resolver
3: sin/cos encoder
Consult factory when need PG card
0
★
P10.02
Encoder line number
1~65535
Rotary pulse number: 1024× rotary pair of poles
1024
★
P10.03
AB pulse direction
0: forward, 1: reverse
If control mode is VC (with PG card)we can
get this value by auto tuning for motor
We can run motor with open loop,and
observe r10.12 and r27.00 if they are in the
same direction,if not,then change this value
0
★
P10.07
Rotating ratio molecule
between motor and
encoder
1~65535
1000
★
P10.08
Rotating ratio
demonimator between
motor and encoder
1~65535
1000
★
When encoder is not installed on the motor rotor axis,asynchronous motor vector control with encoder is
effective by setting motor and encoder rotating speed ratio (P10.07 and P10.08)
For example:if motor rotating speed is 1500RPM and encoder speed 1000RPM,set P10.07=1500,
P10.08=1000。
P10.09
Encoder offline detection
time
0.0(not detecting)~10.0s
2.0
★
P10.11
Encoder rotation filter time
0~32 speed loop control cycle
1
★
r10.12
encoder feedback rotating
speed
Current rotating speed by measuing, unit:
0.01Hz/1Rpm
unit set by P21.17。
no symbolic number,Function code
r27.02:Bit5 for direction;keypad indicator
【REV】indicate direction
-
●
r10.13
Encoder current position
0 ~ 4*encoder pulse number -1
encoder current position refer Z pulse as zero
point,motor forward running and one cyle to Z
pulse ,then postion to zero
-
●
r10.14
Z pulse marking value
0 ~ 4*encoder pulse number-1
(it is used to monitor encoder slipping and AB
being disturbed )
-
●

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 52 -
11 Group Motor 1 Parameter
P11.00
Motor type
0:AC asynchronous motor
1:Synchronous motor(Special software)
0
●
P11.02
Motor rated power
0.1kW~800.0kW
when power is less than 1kw ,0.75kw set
to 0.8 as per round up principle ,0.55kw
motor set 0.6
when change motor rated power,AC drive
will automatically set other parameter of
motor name plate and motor model
parameter be careful to use
Depend
★
P11.03
Motor rated voltage
10V~2000V
Depend
★
P11.04
Motor rated current
P11.02<30kW:0.01A
P11.02>=30kW:0.1A
Depend
★
P11.05
Motor rated frequency
1.00Hz~600.00Hz
50.00Hz
★
P11.06
Motor rated RPM
1~60000rpm
Depend
★
P11.07
Motor rated power factor
0.500~1.000
Depend
★
r11.08
Motor rated torque
Read only,0.1Nm(P11.02<30KW);
1Nm(P11.02>30KW)
-
●
r11.09
Number of motor 1 pairs of
pole
Read only,It will auto calculate as per motor
rated frequency and rated rotating speed
-
●
P11.10
Auto-tune/self-learning
0:no auto tuning
1:Stationary auto tuning of Asynchronous
motor
2:Rotational auto tuning of Asynchronous
motor
0
★
1: Stationary auto tuning of Asynchronous motor
When do auto tuning ,motor stationary ,it can get parameter P11.11 ~P11.13。
Static self-learning can not learn all the motor parameters, so the control performance is difficult to achieve the
best; if the motor nameplate information is incomplete, or the motor is not a 4-pole 50Hz GB motor, it is
recommended to perform "rotation self-learning".
In the case of limited rotation, such as limited travel, limited load (crane), limited running direction, etc., static
self-learning is used.
2: Rotatoinal auto tuning of Asynchronous motor
When do auto tuning ,motor first stationary and rotary, ,it can get parameter P11.11~P11.18,as to close loop
contro,it can get P10.03 encoder directioin
When rotating self-learning, the motor will rotate forward and the speed can reach 50%~100% of the rated
speed. The lighter the load during self-learning, the better the learning effect.
note:
Notice: it can do motor auto tune when command source is keypad
Please self-learn when the motor is cold. Make sure the motor is at rest before learning!
Please confirm that the motor nameplate parameters have been set before self-learning. For closed-loop control,
you should also set the encoder parameters!
After setting this parameter, press the “RUN” button on the keyboard, the self-learning will start, and the inverter
will stop itself after the self-learning is completed.

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 53-
P11.11
Stator resistor of
Asynchronous motor
Unit:0.001Ω(P11.02<30kW)
Unit:0.01mΩ(P11.02>=30kW)
Depend
★
P11.12
Rotor resistor of
Asychronous motor
Unit:0.001Ω(P11.02<30kW)
Unit:0.01mΩ(P11.02>=30kW)
Depend
★
P11.13
Leakage inductance of
Asychronous motor
Unit:0.01mH(P11.02<30kW)
Unit:0.001mH(P11.02>=30kW)
Depend
★
P11.14
Mutual inductance of
Asynchronous motor
Unit:0.1mH(P11.02<30kW)
Unit:0.01mH(P11.02>=30kW)
Depend
★
P11.15
No-load excitation current of
Asynchronous motor
Unit:0.01AP11.02(<30kW)
Unit:0.1A(P11.02>=30kW)
Depend
★
P11.16
Excitation saturation factor 1
At non rated-excitation status
1.100
★
P11.17
Excitation saturation factor 2
At non rated-excitation status
0.900
★
P11.18
Excitation saturation factor3
At non rated-excitation status
0.800
★

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 54 -
12 Group Motor 1 VF control parameter
P12.00
VF curve
0:linear VF
1:Multi-point VF
2:VF to the 1.3
3:1.7 power
4:2.0 power
5:VFcomplete separation
6:VF Half separation
0
★
When the VF curve is straight line and power curve, the frequency-voltage curve is as follows:
Output
frequenc
y
Output
Voltage
Motor rated
frequency
0
Motor rated
Voltage
Straight line V/F
1.3
power
1.7powe
r
2.0
power
Figure 1:Straight line VF 和 1.3、1.7、2.0 power VF
multi-stage line type VF curve:
Motor rated
voltage
Output
voltage
Motor rated
frequency
Output
frequen
cy
0
F0F1F
2
F
3
V0
V1
V2
V3
Figure 2: multi-stage line type VF curve
VF full separation
The output voltage and output frequency are completely independent. The output frequency is determined by the
frequency source. The output voltage is determined by P12.20. Suitable for applications such as variable
frequency power or torque motors.
VF semi-isolated
At this point the ratio of output voltage and output frequency given by the voltage source, the formula is as
follows::
P12.01
Multi-point VF Frequency
1(F0)
0.00Hz~multi-point VF curve F1(P12.03)
0.00Hz
☆
P12.02
Multi-point VF Voltage 0(V0)
0.0%~100.0%
0.0%
☆
P12.03
Multi-point VF Frequency
1(F1)
multi-point VF curve F0(P12.01)~multi-point
VF curve F2(P12.05)
50.00Hz
☆
P12.04
Multi-point VF Voltage 1(V1)
0.0%~100.0%
100.0%
☆
P12.05
Multi-point VF Frequency
multi-point VF curve F1(P12.03)~multi-point
50.00Hz
☆

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 55-
1(F2)
VF curve F3(P12.08)
P12.06
Multi-point VF Voltage 2(V2)
0.0%~100.0%
100.0%
☆
P12.07
Multi-point VF Frequency
3(F3)
multi-point VF curveF2(P12.05)~600.00Hz
50.00Hz
☆
P12.08
Multi-point VFVoltage 3(V3)
0.0%~100.0%
100.0%
☆
P12.09
Torque boost
0%~200% 0% is automatic torque boost
0%
☆
Automatic torque boost
When P12.09=0=Automatic torque boost,inverter will automatically compensate output voltage to improve
torque in low frequency as per actual load ,it is useful for linear VF curve
Manual torque boost
When P12.09 not 0,it means manual torque output.Output frequency 0 torque increasing
value=p12.09*motor stator resistance *rated excitation current,,increasing value will be gradully decreased
as frequency increase ,if higher than 50% of motor rated frequency,increasing value will be zero
Notice:manual torque boost is useful to linear and power curve
P12.11
Slip compensation gain
0~200%
100%
☆
P12.12
Slip compensation filter time
0.01s~10.00s
1.00s
☆
P12.13
Oscillation suppression gains
0~2000
300
☆
P12.14
Oscillation suppression
effective frequency range
Oscillation suppression effective
range :100%~1200%
110%
☆
P12.15
Current limit function
selection
0:ineffective
1:only adjust output voltage
2:adjust output frequency
2
★
P12.16
Current limit level
20%~180% drive rated current
150%
☆
P12.17
Weak magnetic zone current
limit factor
optimize dynamic performance,10%~100%
0.60
☆
P12.20
Voltage source for VF
separation
0:digital setting
1:AI1
2:AI2
3:Reserved
4:keypad potentiometer
5:pulse setting HDI
6:multiple speed
7:communication
8:PID
0
★
P12.21
digital setting for VF
separation voltage
0.0%~100.0%
0.0%
☆
P12.22
VF separation voltage Accel
and Decel time
0.00s~60.00s
1.00s
☆
P12.23
VF Separation voltage rates
as per time
VF Separation Voltage variation every hour
range:-100.00%~100.00%
0.0%
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 56 -
13 Group Motor 1 vector control
P13.00
Speed Proportional Gain
ASR_P1
0.1~100.0
12.0
☆
P13.01
Speed Integral Time
constant ASR_T1
0.001s~30.000s
0.100s
☆
P13.02
Speed Proportional Gain
ASR_P2
0.1~100.0
8.0
☆
P13.03
Speed Integral Time
constant ASR_T1
0.001s~30.000s
0.300s
☆
P13.04
ASR parameter Switching
frequency 1
0.00Hz~ ASR switching frequency 2(P13.05)
5.00Hz
☆
P13.05
ASR parameter Switching
frequency 2
ASR switching frequency 1~600.00Hz(P13.04)
10.00Hz
☆
P13.00 and P13.01 are Speed adjuster parameter for low-speed use,scope of action from zero to P13.04
P13.02 and P13.03 are Speed adjuster parameter for high-speed use,scope of action from P13.05 to maximum
frequency
P13.04-P13.05 Two sets of parameter for linear tansitions
P13.06
Speed control torque limit
source selection
Unit’s digit:Electric torque limit source
0:digital setting
1:Ai1
2:Ai2
3-4(option card)
5:Pulse HDI
6:communication
Ten’unit:Electric torque limit source
Same as unit’digit
00
★
P13.07
Electric torque limit
0.0%~300.0%
160.0%
☆
P13.08
Upper limit of brake torque
0.0%~300.0%
160.0%
☆
P13.12
Torque current directives
filter time
Unit:current loop adjust cycle ,0~100
2
☆
P13.13
ACR Proportional Gain1
0.01~10.00
0.5
☆
P13.14
ACR Integral Time1
0.01~300.00ms
10.00ms
☆
P13.15
ACR Proportional Gain2
1~1000
0.5
☆
P13.16
ACR Integral Time2
0.01~300.00ms
10.00ms
☆
P13.17
Voltage feedforward Gain
0~100 improve the dynamic response of vector
control,
0
★
P13.19
Voltage margin
0.0%~50.0% improve the dynamic response of
weak magnetic curvature.
5.0%
☆
P13.20
Flux weakening adjuster
integral time
0.001s-5.000s
0.100s
☆
P13.22
Slip compensation
50%-200%
100%
☆
P13.23
SVC zero speed directives
0:no action 1:output DC current
0
★

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 57-
14 Group Torque control
P14.00
Torque setting
0:digital setting
1:AI1
2:AI2
3:AI3(reserved)
4:AI4(reserved)
5:HDI
6:communication
0
★
P14.01
Torque digital setting
-200.0~200.0%
0
☆
P14.02
Maximum torque
Benchmark 10.0%~300.0%
Notice:torque benchmarks for analog inputs and
high frequency pulse input as well as limit
output torque in torque control
200.0%
★
P14.03
Torque Acceleration time
0.000s~60.000s
Notice:Torque given time from zero to motor
rated torque
0.100s
☆
P14.04
Torque control
Deceleration time
0.000s~60.000s
Notice:Torque given time from motor rated
torque to zero
0.100s
☆
P14.05
Upper limit frequency of
torque control
0:digital setting
1:AI1
2:AI2
3:AI3(expansion card)
4:AI4(expansion card)
5:HDI high frequency pulse input
6:communication
0
★
P14.06
Upper limit frequency of
torque control
-100.0%~100.0%
100.0%
☆
P14.07
Reverse speed limit
Relative to maximum frequency:0.0%~100.0%
Notice:Speed limit for reverse speed direction
not specified by the speed limit source
40.0%
☆
P14.08
Torque setting over limit
speed
0:match torque setting
1:speed control
0
★
P14.10
Static friction torque
0.0%~50.0%
10.0%
☆
P14.11
Static friction torque
compensation
0.00Hz~50.00Hz
1.00Hz
★
P14.12
Dynamic friction factor
0.0%~50.0%
Dynamic friction at rated speed
Notice: motor sliding friction torque at rated
rotating speed
0.0%
☆
P14.13
Dynamic friction starting
value
0.0%~50.0%
0.0%
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 58 -
16 Group Energy saving control parameter
r16.00
Electricity meter count
(32BIT)
Unit:KW/H
-
●
r16.02
Output power
Unit:0.1kw,output power will be negative in regen
state
-
●
r16.03
Power factor
-1.000~1.000
-
●
P16.04
Electricity meter zero
clearing
0:no function;1111:clear to zero
0
☆
P16.05
Energy saving control
0:disable
1:enable
0
★
P16.06
Energy saving voltage
limit
0%~50%
0%
☆
P16.07
Energy saving filter time
0.0~10.0s
2.0s
☆

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 59-
20 Group User-defined function code menu
P20.00
User-defined function code
1
The value is the function code number,
ranging from 00.00 to 63.99.
Example: If you want to display P03.01 and
P13.00 in the user-defined menu mode
(-USr-), set P20.00=03.01, P20.01=13.00
00.00
☆
P20.01
User-defined function code
2
00.00
☆
P20.02
User-defined function code
3
00.00
☆
P20.03
User-defined function code
4
00.00
☆
P20.04
User-defined function code
5
00.00
☆
P20.05
User-defined function code
6
00.00
☆
P20.06
User-defined function code
7
00.00
☆
P20.07
User-defined function code
8
00.00
☆
P20.08
User-defined function code
9
00.00
☆
P20.09
User-defined function code
10
00.00
☆
P20.10
User-defined function code
11
00.00
☆
P20.11
User-defined function code
12
00.00
☆
P20.12
User-defined function code
13
00.00
☆
P20.13
User-defined function code
14
00.00
☆
P20.14
User-defined function code
1
00.00
☆
P20.15
User-defined function code
15
00.00
☆
P20.16
User-defined function code
16
00.00
☆
P20.17
User-defined function code
17
00.00
☆
P20.18
User-defined function code
18
00.00
☆
P20.19
User-defined function code
19
00.00
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 60 -
21 Group Keypad and Display Group
P21.00
LCD language option
0: Chinese
1: Englishthis parameter valid in VFD500
0
☆
P21.02
MKfunction option
0:no function; 1:Forward Jog
2:Reverse Jog; 3:Forward/reverse Switch
4:Quick stop; 5:coast to stop
6:Curse left shift(LCD keypad )
1
★
P21.03
STOP function
0:Valid only at Keypad Control
1:valid at all command Channels
1
☆
P21.04
Monitoring display1
00.00~99.99
27.00
☆
P21.05
Monitoring display2
00.00~99.99
27.01
☆
P21.06
Monitoring display3
00.00~99.99
27.06
☆
P21.07
Monitoring display4
00.00~99.99
27.05
☆
P21.08
Monitoring display5
00.00~99.99
27.03
☆
P21.09
Monitoring display6
00.00~99.99
27.08
☆
P21.10
Monitoring display7
00.00~99.99
06.00
☆
P21.11
Running status Monitoring
display parameter option
Unit’digit to Thousand’digit set 1-4 monitor
parameter
0 means no display,1~7 corresponds to monitor
parameter 1~7
Unit’digit:choose first monitoring data,0~7
Ten’s digit:choose second monitoring data,0~
7
Hundred’s digit:choose third monitoring data,
0~7
Thousand’s digit:choose fourth monitoring
display,0~7
5321
☆
P21.22
Stop status Monitoring
display parameter option
Same as P21.11
0052
☆
VFD500 digital keyboard monitoring interface supports up to 4 monitoring volume. Monitoring variables in
running status and monitoring variables in stop status are set by P21.11 and P21.12, respectively. Press
【SHIFT】 key on the keyboard to switch the monitoring volume from low to high of P21.11 or P21.12,
Encountered "0" then skip, cycle monitoring.
Take the shutdown monitoring interface for example, P21.12 = 0052, there are 2 monitoring variables, which are
r27.01 (monitor display parameter 2, P21.05 = 27.01) and r27.03 (monitor display parameter 5, P21.08 = 27.03),
press the 【SHIFT】 key on the keyboard to switch between the two monitors, as shown below.
Monitor display
parameter 2
Monitor display
parameter 5
P21.12 = 0052
To monitor
display parameter
2
Example of monitoring
interface (stop)
★ skip when
meet 0
The rules for running the monitoring interface are the same as the shutdown monitoring interface, and will
not be repeated

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 61-
P21.13
Digital keypad
personalized setting
Unit’s digit: quick editing function selection
0: invalid
1:Numeric frequency setting
2:Numeric torque setting
3:PID digital setting 0
Note: The quick editing function means that if the
current monitoring value is the output frequency
or command frequency under the monitoring
status, press the [ENTER] key to enter the
parameter editing interface directly. The edited
parameters are set by the ones digit of this
function code.
Ten’s digit: monitor pointer reset selection
0: When the display status is in the monitoring
status from other status, or when the running
monitoring status and stop monitoring status are
switched, the previously recorded monitoring
pointer position will be restored.
1: When the display status is in the monitoring
status by other status, or when the monitoring
status of running status and stop status are
switched, the monitor pointer will be reset to the
ones of P21.11 or P21.12.
Note: when power-on, the shutdown
monitoring pointer points to the P21.12 bits,
the operation monitoring pointer points to
P21.11 bits
01
★
P21.14
Load speed display factor
0.001~65.000
30.000
☆
P21.15
Load speed decimal point
digit
0~3 0 ☆
r21.16
Load speed display
Load speed =P27.00*P21.10
Decimal point digit defined by P21.11
-
●
P21.17
Speed display unit
0:0.01Hz;1: 1Rpm
r10.12, r27.00, r27.01 displaying unit
selection
0
★

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 62 -
22 Group AC drive data and configuration
P22.00
Carrier/swithcing frequency
Depend on drives power
≤7.5kW: 1kHz~12.0kHz
11kW~45kW: 1kHz~8kHz
≥55kw: 1kHz~4kHz
The carrier frequency can be reduced when it
came like following phenomenon:
1 The leakage current generated by the
inverter is large
2 The interference generated by the inverter
has an impact on peripheral devices
3 Long wiring distance between inverter and
motor
The carrier frequency can be increased
whenwhen it came like following
phenomenon:
1 The electromagnetic noise generated by the
motor is large
Depend
☆
P22.01
Carrier frequency adjustment
Unit’digit:adjustment as per Rotation
0:No;1:Yes
Ten’digit:adjustment as per Temperature
0 no;1:yes
00
★
P22.02
Low speed carrier frequency
1.0kHz~15.0kHz
Depend
☆
P22.03
High speed carrier frequency
1.0kHz~15.0kHz
Depend
☆
P22.04
Carrier frequency switching
point 1
0.00Hz~600.00HzWhen the carrier
frequency is adjusted according to the output
frequency, the carrier frequency set by
P22.02 is used when the output frequency is
lower than this set value.
7.00Hz
☆
P22.05
Carrier frequency switching
point2
0.00Hz~600.00Hz When the carrier
frequency is adjusted according to the output
frequency, the carrier frequency set by
P22.03 is used when the output frequency is
higher than this set value.
50.00Hz
☆
P22.06
PWM way
0:SVPWM
It is normally used
1:SVPWM+DPWM
Using this modulation method can reduce the
switching loss of the inverter and reduce the
probability of overheating alarm of the
inverter; however, the electromagnetic noise
of the motor in the medium speed section will
be too large.
2:PWM at random
The electromagnetic noise generated by the
motor is white noise, not a sharp squeak.
3:SPWM
0
★

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 63-
It is only used in special situation
P22.07
DPWM switching point
10%~100%(modulation percentage)
When P22.06 is set to 1, increasing this
setting vaule can reduce the electromagnetic
noise in the middle speed section.
30%
★
P22.08
Modulating limit
50%~110%
It is used to define the duty cycle of the
inverter side IGBT. Overmodulation is allowed
when it is set to 100% or more, and the
allowable overmodulation is deepened when
the set value is increased from 101 to 110.
105%
★
P22.10
AVR function
0:diabled
1:enabled
When the AVR function is enabled, the effect
of the DC bus voltage change on the output
voltage can be eliminated.
1
★
P22.11
Energy braking voltage
funtion
0-disabled
1-enabled
2-only enable when ramp to stop
This parameter is only used to control the
built-in brake unit. For models without a
built-in brake unit, this setting can be ignored.
1
☆
P22.12
Energy braking voltage
320V~400V(220V level )
600V~800V(380V level )
690V~900V(480V level )
950V~1250V(690V level)
Depend
☆
P22.13
Output phase switch
0:no Operation
1:output phase switch
(equal to change Phase between V and
W,For closed loop control, you need to
re-rotate the self-learning to confirm the
encoder direction)
0
★
P22.14
Cooling method (fan
control)
0:effective when running
1:Forced control( effective when power on)
2:adjustable as per drive temperature
0
☆
P22.15
G/P drive type
0-G type;1-P type
G means normal duty (constant torque
load)
P means light duty such as fan and
pump
0
★
r22.16
Drive rated power
Read only Unit:0.1kw
-
●
r22.17
Drive rated Voltage
Read only Unit:V
-
●
r22.18
Drive rated current
Read only Unit:0.1A
-
●

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 64 -
23 Group Drive protection function setting
P23.00
Bus voltage control option
Unit’digit :Overvoltage stall control
0:overvoltage stall disabled
1:overvoltage stall enabled
2:overvoltage stall self-adjustable
Ten’unit:Undervoltage stall control
0:undervoltage stall disabled
1:undervoltage stall deceleration(decelerate to
zero speed and run at zero speed)
2: undervoltage stall deceleration(decelerate to
zero and stop)
01
★
P23.01
Overvoltage stall threshold
220V Level: 320V~400V
380V Level: 540V~800V
480V Level:650V~950V
690V Level: 950V~1250V
Depend
★
P23.02
Undervoltage threshold
220V level: 160V~300V
380V level: 350V~520V
480V level: 400V~650V
690V level: 650V~900V
Depend
★
P23.03
Overvoltage stall ratio
0~10.0
1.0
☆
P23.04
undervoltage stall ratio
0~20.0
4.0
☆
P23.05
Undervoltage trip
threshold
220V Level:160V~300V
380V Level:350V~520V
480V Level:400V~650V
660V Level:650V~900V
Depend
★
P23.06
Undervoltage fault
detecting time
0.0s~30.0s
1.0s
☆
P23.07
Rapidcurrent limit
0:disabled
1:enabled
1
★
P23.10
Over-speed detection
value
0.0%~120.0% maximum frequency
120.0%
☆
P23.11
Over-speed detection time
0.0s~30.0s
0.:shielding
1.0s
☆
P23.12
Detection value of too
large speed deviation
0.0%~1P00.0%(motor rated frequency)
20.0%
☆
P23.13
Detection value of too
large speed deviation
0.0s~30.0s
0.0:shielding
0.0s
☆
P23.14
Input phase loss
detection time
0.0s~30.0s
0.0:forbidden
8.0s
☆
P23.15
Output phase loss
inbalance detecting
0%~100%
30%
☆
P23.18
Fault protection action
selection 1
Unit’s digit : input phase loss
0: coast to stop
1: Emergent stop
2: Stop as per stop mode
3: continue to Run
0000
☆

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 65-
Ten’unit: user self-defined fault 1
same as Unit’s digit
Hundred’unit: user self-defined fault 2
same as Unit’digit
Thousand’s unit: communication fault
same as unit’s digit
P23.19
Fault protection action
selection 2
Unit’s digit: motor overload
0: coast to stop
1: emergent stop
2: stop as per stop mode
3: continue to run
Ten’unit: motor overheat
same as unit’digit
Hundred’unit: too large speed deviation
same as unit’digit
Thousand’s unit: motor over speed
same as Unit’digit
0000
☆
P23.20
Fault protection action
selection 3
Unit’s digit: PID feedback lost during running
0: coast to stop
1: fast stop
2: stop as per stop mode
3: continue to run
Ten’unit: Reserved
same as unit’digit
Hundred’unit: reserved
same as unit’digit
thousand’unit: reserved
same as unit’digit
0000
☆
P23.21
Fault protection action
selection 4
Unit’s digit: output phase loss
0: coast to stop
1: fast stop
2: stop as per stop mode
Ten’unit: EEPROM fault
0: coast to stop
1: fast stop
2: stop as per stop mode
3: continue to run
Hundred’s unit: PG card fault(reserved)
0: coast to stop
1: fast stop
2: stop as per stop mode
3: continue to run
Thousand’s unit: off load fault
0: coast to stop
1: fast stop
2: stop as per stop mode
3: continue to run
0000
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 66 -
P23.24
fault reset
Define as per bit:
bit0-undervoltage;bit1- inverter overload
bit2-inverter overheat ;bit3-motor overload
bit4-motor overheat;bit5-user’fault 1
bit6- user’fault 2; bit7~15 reserved
0
☆
P23.25
fault source for auto reset
Define as per bit:
bit0-overcurrent during
acceleration;bit1-overcurrent during deceleration
bit2-overcurrent during constant speed;bit3-over
voltage during acceleration
bit4-overvoltage during
deceleratoin;bit5-overvoltage during
bit6-inverter undervoltage;bit7-input phase loss
bit8-inverter overload;bit9-inverter overheat
bit10-motor overload;bit11-motor overheat
bit12-user’fault 1;bit13-user’fault 2
bit14-Reserved;bit15-Reserved
0
☆
P23.26
Fault auto Reset times
0~99 0 ☆
P23.27
Numberic output Action at
fault reset
0:disabled
1:enabled
0
☆
P23.28
Interval time of fault auto
reset
0.1s~300.0s
0.5s
☆
P23.29
Fault auto reset times
clearing time
0.1s~3600.0s
10.0s
☆
P23.30
continuing Running
frequency selection when
trip
0:run at current frequency
1:run at setted frequency
2:run at upper limite frequency
3:run at lower limit frequency
4:run at abnormal back-up frequency
0
☆
P23.31
abnormal back-up
frequency
0.0%~100.0%(maximum frequency )
5.0%
☆

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 67-
24 Group motor Protection parameter
P24.00
Motor overload protection
gain
0.20~10.00
1.00
☆
P24.01
Motor overload starting
current at zero speed
50.0%~150.0%
100.0%
☆
P24.02
Motor overload starting
current at Rated speed
50.0%~150.0%
115.0%
☆
Motor output
frequency
Motor overload protection
starting current
P24.01
P24.02
0
Fn
Motor in self cooling mode, heat
dissipation is poor when in low
frequency but good in condition of high
frequency . P24.01 adn P24.02 is used to
set the starting point of zero and rated
speed overload current in order to
obtain a more reasonable under
different speed overload protection
Time curve
* Overload protection starting current
100% 120% 140% 160%
180%
200% 220%
Overload
time
Overload gain P24.00=1.20
Overload gain P24.00=1.00
Overload gain P24.00=0.80
5
s
160s
30min
80min
5min
64min
Left: Motor overload protection starting current Right: Motor Overload Protection Curve with Different
Overload Protection Gains
Motor overload Overload protection of motor 2 only when P24.04 bits equals one or overload protection of
motor 1 or P24.08 bits equals one. P24.00 is used to adjust the overload inverse time curve time, as shown in
the right figure above, the minimum motor overload time is 5.0s.
Note: Users need to correctly set the three parameters of P24.00, P24.01 and P24.02 according to the actual
overload capacity of the motor. If set unreasonable, prone to motor overheating damage and the inverter is not
timely warning of the danger of protection.
P24.04
Motor 1 protection
option
Unit’digit:motor protection selection
0:No
1:overload protection(motor 1)
2:PTC1000
3:PTC100
01
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 68 -
ten’unit:temperature detecting channel
0:AI3(IO card )
1:AI4(IO card)
P24.05
Motor 1 overheat
protection threshold
0.0℃~200.0℃
120.0℃
☆
P24.06
Motor 1 overheat warning
threshold
50%~100%
80%
☆
r24.07
Motor 1 temperature read
data
Unit 0.1℃
-
●
P24.08
Motor 2 protection
option
Unit’digit:motor protection selectoin
0:no
1:overload protection(motor 2)
2:PTC1000
3:PTC100
Ten’unit: temperature detecting channel
0:AI3(IO Card)
1:AI4(IO Card )
01
☆
P24.09
Motor 2 overheat
protection threshold
0.0℃~200.0℃
120.0℃
☆
P24.10
Motor 2 overheat warning
threshold
50%~100%
80%
☆
r24.11
Motor 2 temperature read
data
Unit 0.1℃
-
●
Motor can be protected from overload or overheat by setting P24.04 and P24.08 via motor1/2 protection
P24.12
Off load protection
0:effective 1:ineffective
0
☆
P24.13
Off load detection level
0.0%-100%
10.0%
☆
P24.14
Off load detection time
0.000s-60.000s
1.000s
☆

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 69-
25 Group Fault tracking parameter
r25.00
current fault type
- see detail chapter 6 fault diagnosis and
solution
-
●
r25.01
Output
frequency at
fault
Unit:0.01Hz
-
●
r25.02
Output current at
fault
Unit:0.1A
-
●
r25.03
Bus voltage at
fault
Unit:V
-
●
r25.04
Running mode
status 1at fault
- see Parameter r27.10 in detail
-
●
r25.05
Input terminal
status at fault
Bit0~Bit6 corresponds to DI1~DI7
Bit12~Bit15 corresponds to VDI1~VDI4
-
●
r25.06
Working time at
fault
Unit:0.01S
-
●
r25.07
Accumulated
working time at
fault
Unit:hour
-
●
r25.08
Frequency
source at fault
Unit:0.01hz
-
●
r25.09
Torque source at
fault
Unit:0.1% compared to motor rated torque
-
●
r25.10
Encoder speed
at fault
Unit:RPM
-
●
r25.11
Electrical angle
at fault
Unit: 0.1°
● r25.12
Running mode
status 2 1at fault
See Parameter r27.11 in detail
-
●
r25.13
Input terminal
status at fault
Define as per unit,0:ineffective,1:effective
Bit0: DO1; Bit1: DO2
Bit2: relay; Bit3~Bit7: reserved;
Bit8: VDO1; Bit9: VDO2
-
●
r25.14
Heat sink
temperature at
fault
Unit: 0.1°C
-
●
r25.15
Low-level fault
-
-
●
26 Group Fault recording parameter
r26.00
Last fault 1trip
type
SEE DETAILS IN CHAPTER 6
-
●
r26.01
Output
frequency at
fault
Unit:0.01Hz
-
●
r26.02
Output current at
fault
Unit:0.1A
-
●
r26.03
Bus voltage at
Unit:V
-
●

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 70 -
fault
r26.04
Running mode
status 1at fault
See Parameter r27.10
-
●
r26.05
Input terminal
status at fault
Bit0~Bit6 corresponds to DI1~DI7
Bit12~Bit15 corresponds to VDI1~VDI4
-
●
r26.06
working time at
fault
Unit:0.01S
-
●
r26.07
Accumulated
working time
atfault
Unit:hour
-
●
r26.08
Last fault 2 trip
type
Same as last fault description
-
-
-
-
-
-
-
●
r26.09
Output
frequency at
fault
-
●
r26.10
Output current at
fault
-
●
r26.11
Bus voltage at
fault
-
●
r26.12
Running mode
status 1at fault
-
●
r26.13
Input terminal
status at fault
-
●
r26.14
working time at
fault
-
●
r26.15
Accumulated
working time at
fault
-
●
r26.16
Last fault 3 trip
type
Same as last fault description
-
-
-
-
-
●
r26.17
Output
frequency at
fault
-
●
r26.18
Output current at
faul
-
●
r26.19
Bus voltage at
fault
-
●
r26.20
Running mode
status 1at fault
-
●
r26.21
Input terminal
status at fault
-
●
r26.22
working time at
fault
-
●
r26.23
Accumulated
working time
atfault
-
●

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 71-
27 Group Monitoring parameter
r27.00
Running
frequency
It can set unit as per Parameter P21.07
-
●
r27.01
Set frequency
It can set unit as per Parameter P21.07
-
●
r27.02
Direction
indicator
bit0:direction of running frequency
bit1:direction of setting frequency
bit2:direction of main frequency
bit3:direction of auxiliary frequency
bit4:direction of UpDown offset
bit5 reserved
-
●
r27.03
Bus voltage
Unit:1V
-
●
r27.04
VF separation
setting
unit:0.1%
-
●
r27.05
Output voltage
unit:0.1V
-
●
r27.06
Output current
unit:0.1A
-
●
r27.07
Output current
percentage
unit:0.1%(100% of motor rated current)
-
●
r27.08
Output torque
0.1%
-
●
r27.09
Torque setting
0.1%
-
●
r27.10
Drives running
mode status 1
Bit0:Running status 0-Stop;1-Run
Bit1:Motor direction0-Forward;1-Reverse
Bit2:Ready signal:0-not ready;1-ready
Bit3:fault status 0-no fault;1-fault
Bit4~5:fault type:0-free stop;1-fast
stop;2-stop as per stop mode;3:continue to
run
Bit6:jog status:0-no jog;1-jog status
Bit7:Auto tune :0-no;1-yes
Bit8:DC braking:0-Non DC braking;1-DC
braking
Bit9:Reserved
Bit10~11:Acceleration and Deceleration:
0:stop/zero output;1:speed up;2:slow
down;3:constant speed
Bit12:reserved
Bit13:current limit status:0-no;1-yes
Bit14:overvoltage stalladjustment:0-no ;1-yes
Bit15:undervoltage stall
adjustment :0-no;1-yes
-
●
r27.11
Drives running
mode2
Bit0~1:current command
source:0-keypad;1-terminal ;2-communicatoi
n
Bit2~3:motor option:0-motor 1;1-motor 2
Bit4~5:current motor
control:0-VF;1-SVC;2-VC
-
●

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 72 -
Bit6~7:current running
mode:0-speed;1-torque;2-position
r27.14
Accumulated
power on time
Unit:hour
-
●
r27.15
Accumulated
running time
Unit:hour
-
●
r27.18
Heat sink
temperature
Unit:0.1 ℃
-
●
r27.19
Main frequency
Unit:0.01Hz
-
●
r27.20
Auxiliary
frequency
unit:0.01Hz
-
●
r27.21
UpDown offset
frequency
unit:0.01Hz
-
●
30 Group Modbus communication parameter
P30.00
Communication
type
0:Modbus;
1~2:can Open/profibus and reserved
0
★
P30.01
Drive Address
1~247
Different slaves on the same network
should set different local addresses;
0 is the broadcast address, all slave
inverters can be identified
1
★
P30.02
Modbus baud rate
0:1200 bps; 1:2400 bps
2:4800 bps; 3:9600 bps
4:19200 bps; 5:38400 bps
6:57600 bps; 7:115200 bps
3
★
P30.03
Modbus data
format
0: 1-8-N-1
(1 start bit +8 data bits +1 stop bits )
1: 1-8-E-1
(1start bit +8 data bits +1 even parity +1
stop bit)
2: 1-8-0-1
(1 star bit+8 data bits +1odd parity+1
stop bits)
3: 1-8-N-2
(1 star bit+8 data bits+2 stop bits)
4: 1-8-E-2
(1 star bits+8 data bit+1 even parity+2
stop bits)
5: 1-8-0-2
(1 start bit +8 data bits+1 odd parity+2
stop bits)
0
★
P30.04
Modbus response
delay
1~20msThe delay time of the local to
answer the master
2ms
★
P30.05
Modbus overtime
0.0s(disabled)~60.0s(works for
master-slave system) When this function
code effective,if slave do not receive data
0.0s
★

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 73-
from master overtime,it will trip as Er.485
r30.06
Number of process
data received
Add 1 after receive one data,0~65535
count in cycle
-
●
r30.07
Number of process
data transmission
Add 1 after transmiss one data,0~65536
count in cycle
-
●
r30.08
Number of error
frames received by
Modbus
Each time an CRC error frame is received,
this value is incremented by 1,0 to 65535
cycles; it can be used to judge the degree
of communication interference.
-
●
P30.09
Modbus
master-slave option
0: slave
1: master(sent by broadcast )
0
★
P30.10
Slave memory
when inverter as
master
1~9 corresponds to 0x7001~0x7009
1
☆
P30.11
Data sent by
Master
0:output frequency
1:set frequency
2:output torque
3:set torque
4:PID setting
5:PID feedback
6:output current
0
☆
P30.12
Sending interval of
Master
0.010~10.000sAs a master, after sending
one frame of data, the next frame of data
is sent after this delay.
0.1s
☆
P30.13
Receiving
proportaionality
factor of slave
-10.000~10.000The values of slave
registers 0x7001 and 0x7002 take effect
after passing through this scaling factor
1.00
☆
P30.14
Communication
special register
speed unit
0: 0.01%
1: 0.01Hz
2: 1Rpm
Some units of specific communication
registers can be set by this parameter.
See Appendix A for details.
0
☆
P30.15
Modbus response
characteristics
When the format of the received frame is a
write register, this parameter can be set to
reply to the host.
0: Reply to the host (standard Modbus
protocol)
1: Do not reply to the host (non-standard
Modbus protocol)
0
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 74 -
40 Group PID function
r40.00
PID final output
value
Read only unit:0.1%
-
●
r40.01
PID final set
value
Read only unit:0.1%
-
●
r40.02
PID final
feedback value
Read only unit:0.1%
-
●
r40.03
PID deviation
value
Read only unit:0.1%
-
●
PID through the target signal (command) and the controlled amount of the difference between the feedback
signal proportional (P), integral (I) and differential (D) operation, adjust the inverter output frequency, etc., to achieve
closed-loop system, the controlled amount Stable at the target value.
VFD500 built-in process PID structure as shown below, suitable for flow control, pressure control, temperature
control and tension control applications.
P40.04
P40.05
P40.06
P40.07
P40.08
P40.09
P40.10
Order Ref
access
P40.11
P40.12
P40.13
Get
feedback
+
-
0
1
P40.14
Output
characteristic
s
Err
Kp
K1p
Ti s
Kp Td s
+
+
+
+
P40.41
P40.42
Output
compensatio
n
P40.40
Comman
d ramp
P40.33
Feedback filtering
P40.30
Differential limit
P40.15,P40.16
Output limited
P40.15
P40.16
Output
limited
P40.34
Output filtering
PID
output
+
1
P40.04
PID setting
source
Unit’s digit 0:PID main setting source(ref1)
0:Digtical setting
1:AI1
2:AI2
3:AI3(option card)
4:AI4(option card )
5:HDI high frequency pulse
6:communication
Ten’s digit :PID Auxilary setting source (ref2)
Same as Unit’s digit
00
☆
P40.05
PID given
feedback range
0.01~655.35
100
☆
P40.06
PID preset
setting 0
0.0~P40.05
0.0%
☆
P40.07
PID preset
setting 1
0.0~P40.05
0.0%
☆
P40.08
PID preset
setting 2
0.0~P40.05
0.0%
☆
P40.09
PID preset
setting 3
0.0~P40.05
0.0%
☆

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 75-
When PID reference source is digital setting, PID digital setting 0~3 depends on DI terminal function 43 (preset PID
terminal I ) and 44 ( preset PID terminal 2):
preset PID terminal1
preset PID terminal 2
PID Digital setting value(0.1%)
0
0
P40.06 * 100.0% / P40.05
1
0
P40.07 * 100.0% / P40.05
0
1
P40.08 * 100.0% / P40.05
1
1
P40.09 * 100.0% / P40.05
For example: When AI1 is used as PID feedback, if the full range corresponds to 16.0Kg pressure and require PID
control to be 8.0Kg; then set P40.05 PID feedback range to 16.00, PID digital reference terminal select to P40.06,
Set P40.06 (PID preset setting 0) to be 8.00
P40.10
PID setting source
selection
0:ref1
1:ref1+ref2
2:ref1-ref2
3:ref1*ref2
4:ref1/ref2
5:Min(ref1,ref2)
6:Max(ref1,ref2)
7(ref1+ref2)/2
8:sqrt(ref1)
9:sqrt(ref1-ref2)
10:sqrt(ref1+ref2)
11:sqrt(ref1)+sqrt(ref2)
12:ref1 and ref2 conversion
Sqrtmeans square root
calculation,eg:sqrt(50.0%)=70.7%
0
☆
P40.11
PID feedback
source1
Unit’s digit 0:PID feedback source1(fdb1)
0:AI1
1:AI2
2:AI3(option card)
3:AI4(option card)
4: PLUSE(HDI)
5: Communication
6: Motor rated output current
7: Motor rated output frequency
8: Motor rated output torque
9: Motor rated output frequency
Ten’s digit : PID feedback source2 (fdb2)
Same as Unit’s digit
00
☆
P40.13
PID feedback
function selection
0:fdb1
1:fdb1+fdb2
2:fdb1-fdb2
3:fdb1*fdb2
4:fdb1/fdb2
5:Min(fdb1,fdb2)Take fdb1.fdb2 smaller
value
6:Max(fdb1,fdb2) Take fdb1.fdb2 bigger
0
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 76 -
value
7: (ref1+ref2)/2
8:sqrt(fdb1)
9:sqrt(fdb1-fdb2)
10:sqrt(fdb1+fdb2)
11:sqrt(fdb1)+sqrt(fdb2)
12:fdb1and fdb2 switchover
Sqrt means square root
calculation,eg:sqrt(50.0%)=70.7%
P40.14
PID output feature
0-positive
1-negative
0
☆
The PID output characteristic is determined by P40.14 and Di terminal 42 function PID
positive/negative switching:
P40.14 = 0 and PID positive/negative switching terminal (DI function No. 42) is invalid: PID output characteristic is
positive
P40.14 = 0 and PID positive/negative switching terminal (DI function No. 42) is valid: PID output characteristic is
negative
P40.14 = 1 and PID positive/negative switching terminal (DI function No. 42) is invalid: PID output characteristic is
negative
P40.14 = 1 and PID positive/negative switching terminal (DI function No. 42) is valid: PID output characteristic is
positive
P40.15
Upper limit of
PID output
-100.0%~100.0%
100.0%
☆
P40.16
lower limit of PID
output
-100.0%~100.0%
0.0%
☆
P40.17
Proportaional
gain KP1
0.0~200.0%
5.0%
☆
P40.18
Integral time TI1
0.00s
(no any integral effect )~20.00s
1.00s
☆
P40.19
Differential time
TD1
0.000s~0.100s
0.000s
☆
P40.20
Proportaional
gain KP2
0.00~200.0%.
5.0%
☆
P40.21
Integral time TI2
0.00s
(no any integral effect )~20.00s
1.00s
☆
P40.22
Differential time
TD2
0.000s~0.100s
0.000s
☆
P40.23
PID parameter
switchover
condition
0:no switchover
Do not switch, use KP1, TI1, TD1
1:switchover via DI
Switch by DI terminal
KP1, TI1, TD1 are used when DI terminal No.
41 function is invalid; KP2, TI2, TD2 are used
0
☆

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 77-
when valid
2:automatic switchover based on deviation
The absolute value of PID command and
feedback deviation is less than P40.24, using
KP1, TI1, TD1; the absolute value of
deviation is greater than P40.25, using KP2,
TI2, TD2 parameters; the absolute value of
deviation is between P40.24~P40.25, The
two sets of parameters are linearly
transitioned.
P40.24
PID parameter
switchover
devation 1
0.0%~P40-25
20.0%
☆
P40.25
PID parameter
switchover
devation 2
P40-24~100.0%
80.0%
☆
P40.26
PID integral
separation
threshold
0.0%~100.0%
100.0%
☆
P40.27
PID initial value
0.0%~100.0%
0.0%
☆
P40.28
PID intial value
holding time
0.00~650.00s
0.00s
☆
This function is only valid when P40.39 = 0 which is not calculated. The PID output is reset after the inverter stops. If
P40.28 ≠ 0, when the inverter runs, the PID output is equal to the initial value of PID and keeps the time of
P40.28. .
P40.29
PID deviation
limit
0.0%~100.0%
0.0%
☆
P40.30
PID differential
limit 0.00%~100.00%
1.00%
☆
P40.33
PID feedback
filter time
0.000~30.000s
0.010s
☆
P40.34
PID output filter
time
0.000~30.000s
0.010s
☆
P40.35
Detection value
of PID feedback
loss ( lower limit)
0.0%(no detection )~100.0%
0.0%
☆
P40.36
Detection time of
PID feedback
loss
0.000s~30.000s
0.000s
☆
P40.37
Detection value
of PID feedback
loss( upper limit)
0.0%~100.0%(no detection)
100.0%
☆
P40.38
Upper Detection
time of PID
feedback loss
0.000s~30.000s
0.000s
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 78 -
P40.39
PID operation at
stop
0-No PID operation at stop
1-PID operation at stop
0
☆
P40.40
PID command
for accel and
decel time
0.0s~6000.0s
0.0s
☆
P40.41
PID offset
selection
0-digital setting
1-AI1
2-AI2
3-AI3(option card)
0
☆
P40.42
PID offset digital
setting
-100.0%~100.0%
0.0%
☆
41 Group Sleeping function
P41.00
Sleep mode and
wake up
selection
Unit’s digit: sleep mode selection
0:no sleep function
1:sleep by frequency
2:AI1 sleep (AI1 as pressure feedback)
3:AI2 sleep(AI2 as pressure feedback)
Ten’s digit :wake up mode selection
0:wake up by frequency
1:AI1wake up (AI1 as pressure
feedback)
2:AI2wake up (AI2 as pressure
feedback)
Hundred’s digit :
0: positive direction
Feedback big then sleep, feedback small
then wake up, P41.04 < P41.03
During running, pressure feedback > P41.03,
the inverter sleeps When sleeping, pressure
feedback < P41.04, the inverter wakes up
1: reverse direction
Feedback small then sleep, feedback big
then wake up, P41.04 > P41.03
During running, pressure feedback < P41.03,
inverter sleep When sleeping, pressure
feedback > P41.04, the inverter wakes up
Normally, the frequency source is PID
setting, and sleep by frequency
wake-up direction is the same as the
PID action direction P40.14.
Sincethe parameter setting is
unreasonable, when the wake-up
condition enables, even if the sleep
condition is established, the sleep mode
cannot be activated, and Pay special
attention to avoid accident when use
00
☆

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 79-
P41.01
Sleep setting
value by
frequency
0.00Hz~600HZ,It will sleep if value is less
than this value
0.00Hz
☆
P41.02
Wake up
threshold by
frequency
0.00hz~600.00hz, ,It will wake up if value is
bigger than this value
0.00Hz
☆
When selecting frequency sleep and frequency wake-up, it must be set by P41.01 < P41.02. When the frequency
source is PID setting, and the frequency wake-up must be set to PID shutdown operation: P40.39 = 1.
P41.03
Sleep setting
value by
pressure
0~100.0%
0.0%
☆
P41.04
Wake up
threshold by
pressure
0.~100.0%
0.0%
☆
P41.05
Sleep delay time
0.0s~6000.0s
0.0s
☆
P41.06
Wake up delay
up
0.0s~6000.0s
0.0s
☆
P41.07
Sleep
decelerating
time
0.00(coast to stop)~60000s
Setting value decide by P03.16
P03.16 = 2, 0.00~600.00s;
P03.16 = 1, 0.0s~6000.0s;
P03.16 = 0, 0s~60000s
P41.07 set to 0,sleeping stop mode to free
coast。
0.00s
☆
42 Group Simple PLC
r42.00
PLC current
running mode
Read only
-
●
r42.01
PLC current
running
remaining time
Read only
-
●
r42.02
PLC times of
cycles
Read only
-
●
P42.03
Simple PLC
running mode
Unit’digit:Running mode
0: single cycle then stop
1: single cycle then keep last speed
2: recycle
3: Plc reset when single cycle stop
Ten’s digit:saving selection at power off
0:power off without saving 1:power off with
saving
Hundred’digit:power save selection at stop
0:stop without power saving 1:stop with
saving
003
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 80 -
P42.04
PLC running
times
1~60000
1
☆
P42.05
PLC step 1
running time
0.0~6553.5 unit depend on P42.21
Notice:Running time do not conclude
acceleration and deceleration time,same as
following
0.0
☆
P42.06
PLC step 2
running time
0.0~6553.5 unit depend on P42.21
0.0
☆
P42.07
PLC step 3
running time
0.0~6553.5 unit depend on P42.21
0.0
☆
P42.08
PLC step 4
running time
0.0~6553.5 unit depend on P42.21
0.0
☆
P42.09
PLC step 5
running time
0.0~6553.5 unit depend on P42.21
0.0
☆
P42.10
PLC step 6
running time
0.0~6553.5 unit depend on P42.21
0.0
☆
P42.11
PLC step 7
running time
0.0~6553.5 unit depend on P42.21
0.0
☆
P42.12
PLC step 8
running time
0.0~6553.5 unit depend on P42.21
0.0
☆
P42.13
PLC step 9
running time
0.0~6553.5 unit depend on P42.21
0.0
☆
P42.14
PLC step 10
running time
0.0~6553.5 unit depend on P42.21
0.0
☆
P42.15
PLC step 11
running time
0.0~6553.5 unit depend on P42.21
0.0
☆
P42.16
PLC step 12
running time
0.0~6553.5 unit depend on P42.21
0.0
☆
P42.17
PLC step 13
running time
0.0~6553.5 unit depend on P42.21
0.0
☆
P42.18
PLC step 14
running time
0.0~6553.5 unit depend on P42.21
0.0
☆
P42.19
PLC step 15
running time
0.0~6553.5 unit depend on P42.21
0.0
☆
P42.20
PLC step 16
running time
0.0~6553.5 unit depend on P42.21
0.0
☆
P42.21
PLC running
time unit
0:S;1:minute;2:hour
0
☆
P42.22
PLC step 1-4
ACCEL/DECEL
time selector
Unit’digit:step 1 ACCEL/DECEL time selector
ten’digit: step 2 ACCEL/DECEL time selector
Hundred’s: step 3 ACCEL/DECEL time
selector
Thousand’unit:step 4 ACCEL/DECEL time
selector
0- ACCEL/DECEL time 1
1- ACCEL/DECEL time 2
0000
☆

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 81-
2- ACCEL/DECEL time 3
3- ACCEL/DECEL time 4
P42.23
PLC step 5-8
ACCEL/DECEL
time selector
Unit’digit: ACCEL/DECEL time 5
Ten’digit: ACCEL/DECEL time 6
Hundred’digit: ACCEL/DECEL time 7
Thousand’digit: ACCEL/DECEL time 8
0- ACCEL/DECEL time 1
1- ACCEL/DECEL time 2
2- ACCEL/DECEL time 3
3- ACCEL/DECEL time 4
0000
☆
P42.24
PLC step 9-12
ACCEL/DECEL
time selector
Unit’digit: ACCEL/DECEL time 9
ten’digit: ACCEL/DECEL time 10
Hundred’digit: ACCEL/DECEL time 11
Thousand’digit: ACCEL/DECEL time 12
0- ACCEL/DECEL time 1
1- ACCEL/DECEL time 2
2- ACCEL/DECEL time 3
3- ACCEL/DECEL time 4
0000
☆
P42.25
PLC step 13-16
ACCEL/DECEL
time selector
Unit’s Digit: ACCEL/DECEL time 13
Ten’Digit: ACCEL/DECEL time 14
Hundred’digit: ACCEL/DECEL time 15
Thousand’s digit: ACCEL/DECEL tim 16
0- ACCEL/DECEL time 1
1- ACCEL/DECEL time 2
2- ACCEL/DECEL time 3
3- ACCEL/DECEL time 4
0000
☆
P42.26
PLC stop
decelerating
time
0.01~60000s
Setting value decide by P03.16
P03.16 = 2, 0.00~600.00s;
P03.16 = 1, 0.0s~6000.0s;
P03.16 = 0, 0s~60000s
20.00s
☆
43 Group Programmingl delay-unit
r43.00
delay unit
1~6 output
status
Read only,define as per bit:0000~1111
Bit0:delay unit 1; Bit1: delay unit 2
Bit2: delay unit 3; Bit3: delay unit 4
Bit4: delay unit 5; Bit5: delay unit 6
-
●
VFD500 inverter built-in 6 delay unit. The delay unit can collect the status of 0 ~ 15 bits of all parameters that
can be viewed in the function code table, and finally output the delay unit status after delay processing and logic
selection. Can be used for Di / Do, comparator / logic unit output delay and other functions, but also as a virtual
relay.

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 82 -
Parameter input
Ref
Obtain delay unit
status parameter
input Ref bit x
Parameter bit selection
P43.03=x
Turn
on/turn off
delay
control
Delay control parameter
P43.04,P43.05
Logical
choice 0-
positive
logic 1inverse
logic
Parameter bit selection
P43.01
Delay Unit 1
output
Parameter
P43.02
(00.00~98.00)
delay unit 1 block diagram
The picture shows the delay unit 1 block diagram, delay unit 2 to 6 and so on. Delay unitss can be combined with
comparator units and logic units for more complex applications.
P43.01
Delay unit 1-6
logicl
000000B-111111B
0
☆
P43.02
Delay unit 1
input parameter
selection
00.00-98.99(function code index)
0000
☆
P43.03
Delay unit 1
input bit
selection
0-15
0000
☆
P43.04
Delayunit 1 on
delay time
0.0s~3000.0s
0000
☆
P43.05
Delayunit 1 off
delay time
0.0s~3000.0s
0000
☆
P43.06
Delay unit 2
input parameter
selection
00.00-98.99(function code index)
0000
☆
P43.07
Delay unit 2
input bit
selection
0-15
0000
☆
P43.08
Delay relay 2 on
delay time
0.0s~3000.0s
0.0s
☆
P43.09
Delayunit2 off
delay time
0.0s~3000.0s
0.0s
☆
P43.10
Delay unit 3
input parameter
selection
00.00-98.99(function code index)
0.0s
☆
P43.11
Delay unit 3
input bit
selection
0-15
0.0s
☆
P43.12
Delayunit3 on
delay time
0.0s~3000.0s
0.0s
☆
P43.13
Delayunit3 off
0.0s~3000.0s
0.0s
☆

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 83-
delay time
P43.14
Delay unit 4
input parameter
selection
00.00-98.99(function code index)
0.0s
☆
P43.15
Delay unit 4
input bit
selection
0-15
0.0s
☆
P43.16
Delay relay 4 on
delay time
0.0s~3000.0s
00.00
☆
P43.17
Delayunit4 off
delay time
0.0s~3000.0s
0.0s
☆
P43.18
Delay unit 5
input parameter
selection
00.00-98.99(function code index)
00.00
☆
P43.19
Delay unit 5
input bit
selection
0-15
0
☆
P43.20
Delayunit5 on
delay time
0.0s~3000.0s
0.0s
☆
P43.21
Delayunit5 off
delay time
0.0s~3000.0s
0.0s
☆
P43.22
Delay unit 6
input parameter
selection
00.00-98.99(function code index)
00.00
☆
P43.23
Delay unit 6
input bit
selection
0-15
0
☆
P43.24
Delayunit6 on
delay time
0.0s~3000.0s
0.0s
☆
P43.25
Delayunit6 off
delay time
0.0s~3000.0s
0.0s
☆
44 Group Variable selector and logic block
r44.00
Variable selector
1~4 output
bit0~3 indicate the output of variable
selector 1-4
-
●
r44.01
Logic block 1~4
output
bit0~3 indicate the output of logic block 1~4
-
●
P44.02
Variable selector
1 input
parameter
00.00~98.99(Function code index)
00.00
☆
P44.03
Variableselector
1 threshold
00.00~98.99(Function code index)
00.00
☆
P44.04
Variable selector
1 logic mode
0:>; 1:<; 2:≥;3:≤;4:=; 5:≠; 6:≈
0
☆
P44.05
Variable selector
1 hysteresis
width
0~65535
0
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 84 -
VFD500 inbuilt 4 group variable selector,this function can be used for any two function code parameters,by selecting
the comparison relationship, and output will be 1 if it meet conditions or it will be 0.Variable selector output can act
as DI,VDI,virtual relay input and DO,relay.etc output.Users can easily and flexibily get logic function ,variable
selector 1 frame as follows
P44.02
variable
selector1
input
P44.03
variable
selector1
referemce
P44.04
Compare logical choices
>
<
≥
≤
=
≠
≈
0
1
2
3
4
5
6
variable
selector1
output
P44.05
Hysteresis width
Left:variable selector graph Right: hysteresis width graph
P44.06
Variable selector
2 input
parameter
00.00-98.99(function code index)
00.00
☆
P44.07
Variable selector
2 threshold
00.00-98.99(function code index)
00.00
☆
P44.08
Variable selector
2 logic mode
0:>; 1:<; 2:≥;3:≤;4:=; 5:≠; 6:≈
0
☆
P44.09
Variable selector
2 hysteresis
width
0~65535
0
☆
P44.10
Variable selector
3 input
parameter
00.00-98.99(function code index)
00.00
☆
P44.11
Variable selector
3 threshold
00.00-98.99(function code index)
00.00
☆
P44.12
Variable selector
3 logic mode
0:>; 1:<; 2:≥;3:≤;4:=; 5:≠; 6:≈
0
☆
P44.13
Variable selector
3 hysteresis
width
0~65535
0
☆
P44.14
Variable selector
4 input
parameter
00.00-98.99(function code index)
00.00
☆
P44.15
Variable selector
4 threshold
00.00-98.99(function code index)
00.00
☆
P44.16
Variable selector
4 logic mode
0:>; 1:<; 2:≥;3:≤;4:=; 5:≠; 6:≈
0
☆

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 85-
P44.17
Variable selector
4 hysteresis
width
0~65535
0
☆
P44.18
Logic block 1
threshold
parameter 1
00.00-98.99(function code index)
00.00
☆
P44.19
Logic block 1
threshold
parameter2
00.00-98.99(function code index)
00.00
☆
P44.20
Logic block 1
input source
Unit’digit:parameter 1 bit selection
0-F (Represent 0-15),PP44.18 corresponds
to 0-15 bit
Ten’digit:parameter 2 bit selection
0-F (Represent 0-15),PP44.19 corresponds
to 0-15 bit
0
P44.21
Logic bock 1
function
0:no function;1:and;2:or;3:not and;4:not
or;5:Xor
6:Ref=1 effective;Ref2=1 ineffective
7:Ref1 up effective,Ref2 up ineffective
8:Ref1 up and signal reverse
9:Ref1 up and output 200ms pulse width
10:Ref2=0 ineffective always;Ref2=1,Ref1 up
effective
0
☆
VFD300A built-in 4 logical units. The logic unit can perform any one of 0-15 bits of any parameter 1 and any one of
0-15 bits of any parameter 2 for logic processing. The condition is true output 1, otherwise 0 is output. Logic unit
output can be used as DI, VDI, delay unit and other inputs, DO, relays and other output, the user can more flexible
access to the required logic. The schematic block diagram of the logic unit 1 is as follows.
P44.18
Parameter1
P44.19
parameter2
P44.21
Logical
function
processing
P44.20
Parameter bit
selection
Unit’s digit:select
1bit parameter
Ten’s digit:select
2bit parameter
Ref1
Ref2
Logical unit input
Logical unit
output
P44.22
Logic block 2
threshold
parameter 1
00.00-98.99(function code index)
00.00
☆
P44.23
Logic block 2
threshold
parameter2
00.00-98.99(function code index)
00.00
☆
P44.24
Logic block 2
input source
Unit’digit:parameter 1 bit selection
0-F (Represent 0-15),PP44.22 corresponds
to 0-15 bit
0
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 86 -
Ten’digit:parameter 2 bit selection
0-F (Represent 0-15),PP44.23 corresponds
to 0-15 bit
P44.25
Logic bock 2
function
0:no function;1:and;2:or;3:not and;4:not
or;5:Xor
6:Ref=1 effective;Ref2=1 ineffective
7:Ref1 up effective,Ref2 up ineffective
8:Ref1 up and signal reverse
9:Ref1 up and output 200ms pulse width
10:Ref2=0 ineffective always;Ref2=1,Ref1 up
effective
0
☆
P44.26
Logic block
3threshold
parameter 1
00.00-98.99(function code index)
00.00
☆
P44.27
Logic block 3
threshold
parameter2
00.00-98.99(function code index)
0
☆
P44.28
Logic block 3
input source
Unit’digit:parameter 1 bit selection
0-F (Represent 0-15),PP44.26 corresponds
to 0-15 bit
Ten’digit:parameter 2 bit selection
0-F (Represent 0-15),PP44.27 corresponds
to 0-15 bit
0
☆
P44.29
Logic bock 3
function
0:no function;1:and;2:or;3:not and;4:not
or;5:Xor
6:Ref=1 effective;Ref2=1 ineffective
7:Ref1 up effective,Ref2 up ineffective
8:Ref1 up and signal reverse
9:Ref1 up and output 200ms pulse width
10:Ref2=0 ineffective always;Ref2=1,Ref1 up
effective
0
☆
P44.30
Logic block 4
threshold
parameter 1
00.00-98.99(function code index)
00.00
☆
P44.31
Logic block 4
threshold
parameter2
00.00-98.99(function code index)
00.00
☆
P44.32
Logic block 4
input source
Unit’digit:parameter 1 bit selection
0-F (Represent 0-15),PP44.30 corresponds
to 0-15 bit
Ten’digit:parameter 2 bit selection
0-F (Represent 0-15),PP44.31 corresponds
to 0-15 bit
0
☆
P44.33
Logic bock 4
function
0:no function;1:and;2:or;3:not and;4:not
or;5:Xor
6:Ref=1 effective;Ref2=1 ineffective
7:Ref1 up effective,Ref2 up ineffective
0
☆

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 87-
8:Ref1 up and signal reverse
9:Ref1 up and output 200ms pulse width
10:Ref2=0 ineffective always;Ref2=1,Ref1 up
effective
P44.34
Constant setting
1
0~65535
0
☆
P44.35
Constant setting
2
0~65535
0
☆
P44.36
Constant setting
3
0~65535
0
☆
P44.37
Constant setting
4
-9999~9999
0
☆
P44.38
Constant setting
1 as per bit
definition
0~65535(define as bit)
0
☆
P44.39
Constant setting
2 as per bit
definition
0~65535(define as bit)
0
☆
P44.40
Constant setting
3 as per bit
definition
0~65535(define as bit)
0
☆
P44.41
Constant setting
4 as per bit
definition
0~65535(define as bit)
0
☆
Constant setting for reference of variable selector or logic block input
45 Group Multi-functional counter
r45.00
Counter 1(32bit)
actual value
(before
Electronic gear)
Read only (32 bit)save when power off
-
●
r45.02
Counter 1(32bit)
actual value
(after Electronic
gear)
Read only (32 bit)save when power off
-
●
P45.04
Counter 1 (32bit)
set value
(after Electronic
gear)
1~4294967295(32 bit)
1000
☆
P45.06
Counter 1(32bit)
max value
(after Electronic
gear)
1~4294967295(32 bit)
429496729
5
☆
P45.08
Counter 1
Electronic gear
numerator
1~65535
1
☆

VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
- 88 -
P45.09
Counter 1
Electronic gear
denominator
1~65535
1
☆
VFD500 has two inbuilt counters:counter 1 is for 32 bit multifunctional counter with electronic gear;Counter 2 is
a common counter with 16 bit without electronic gear.following is counter 1 function and use.
Counter 1 get input pulse signal via DI function 50 (counter 1 Input),when counter 1 comes to setting value
(P45.04) via electronic gear,it can come to signal via DO function (21) and counter will continue to count
When counter arrive maximum value,it will decide to overflow as per P45.13
Set Di(51) terminal to Count1 reset ,when terminal effective,counter 1 will reset
For example: P45.04=3, P45.08=3, P45.09=1,Count 1 functoin as following picture
1 2 3
1
Counter input:
Counter1 before
electronic gear
4 5 627 8 9
3
Set value arrival output
Counteer reset DI input
0 1 2 3 4
0 1
Counter1 after electronic
gear
r45.10
Counter 2(16 bit)
actual value
Read only and save when power off
-
●
P45.11
Counter 2 (16
bit) set value
1~65535
1000
☆
P45.12
Counter2 (16 bit)
maximum value
1~65535
65535
☆
P45.13
Counter 1/2
overflow action
0-stop;1-reset
00~11
Unit’digit:Count 1 overflow action
0: stop; 1:continue
Ten’digit:Count 1 overflow action
0: stop ; 1:continue
11
☆
Count 1/2 overflow action:when counter higher than maximum value as following chart
0
1
2
3
4
5
6
0
1
2
3
4
5
6
0
1
2
3
4
Pulse input
Counter
value
Maximum
setting
Stop counting
Continue counting
after overflowing
60 Group Motor 2 basic parameter
P60.00
Control mode
Same as P00.04
0
★
P60.01
Upper limit
frequency
Same as P01.07
0
★
P60.02
Upper limit
frequency digital
setting
Lower limit (P01.09)~ maximum
frequency(P01.06)
50.00Hz
☆
P60.04
Accel and Decel
0:same as motor 1
0
★

Chapter 5 Function code table VFD500 high performance vector control frequency inverter user manual
- 89-
time option
1:Accel and Decel time 3
When choose 1,Motor 2 can convert
betweens accel and decal time 3 and 4 by DI
terminal function code 55 or switch by output
frequency comparing with P60.05 P60.06)
P60.05
Accel time
frequency
switchover 2
0.00Hz~maximum frequency (P01.06)
0.00Hz
☆
P60.06
Decel time
frequency
switchover 2
0.00Hz~maxinumm frequency(P01.06)
0.00Hz
☆
61 Group Motor2 parameter
61.xx same as motor 1 parameter P11.xx
62 Group Motor 2 VF control parameter
62.xx same as motor 1 VF control P12.xx
63 Group Motor 2 Vector control parameter
63.xx same as motor 2 Vector control P13.xx

Chapter 6 Fault diagnosis and solutions VFD500 high performance vector control frequency inverter user manual
- 90 -
Chapter6Fault Diagnosis and Solution
VFD500 inverter has 24 types of warning information and protection function. In case of abnormal
fault,
the protection function will be invoked, the inverter will stop output, and the faulty relay contact of the
inverter will start, and the fault code will be displayed on the display panel of the inverter. Before
consulting the service department, the user can perform self-check according to the prompts of this
chapter, analyze the fault cause and find out t solution. If the fault is caused by the reasons as
described in the dotted frame, please consult the agents of inverter or our company directly
Fault Name
Display
Possible Causes
Solutions
Inverter unit
protection
Er. SC
1: The output circuit is grounded or
short circuited.
2: The connecting cable of the motor is
too long.
3: The IGBT overheat.
4: The internal connections become
loose.
5: The main control board is faulty.
6: The drive board is faulty.
7: The inverter IGBT is faulty.
1: Eliminate external faults.
2: Install a reactor or anoutput
filter.
3: Check the air filter and the
cooling fan.
4: Connect all cables properly.
5: Ask for technical support
6: Ask for technical support
7: Ask for technical support
Ground short circuit
Er.SC1
1. Short circuit of motor to ground
2, the motor and inverter wiring is too
long
3, module overheating
4. The internal wiring of the inverter is
loose
5. Control board is fault
6, Drive board is fault
7, inverter module is fault
1. Replace cable or motor
2. Install reactor or output filter
3. Check whether the air duct is
blocked, the fan is working
properly and eliminate the existing
problems
4. Plug in all the connections
5. Ask for technical support
6. Ask for technical support
7. Ask for technical support
Over current
during
acceleration
Er.OC1
1: The output circuit is grounded or
short circuited.
2: Motor auto-tuning is not performed.
3: The acceleration time is too short.
4: Manual torque boost or V/F curve is
not appropriate.
5: The voltage is too low.
6: The startup operation is performed
on the rotating motor.
7: A sudden load is added during
acceleration.
8: The frequency inverter model is of
too small power class.
1: Eliminate external faults.
2: Perform the motor autoTuning in cold state
3: Increase the acceleration
time.
4: Adjust the manual torque
boost or V/F curve.
5: Adjust the voltage to normal
range.
6: Select rotational speed
tracking restart or start the
motor after it stops.
7: Remove the added load.
8: Select a frequency inverter
Ofhigher power class.

VFD500 high performance vector control frequency inverter user manual Chapter6 Fault diagnosis and solutions
- 91-
Fault Name
Display
Possible Causes
Solutions
Over current
during
deceleration
Er.OC2
1: The output circuit is grounded or
short circuited.
2: Motor auto-tuning is not performed.
3: The deceleration time is too short.
4: The voltage is too low.
5: A sudden load is added during
deceleration.
6: The braking unit and braking
resistor are not installed
1: Eliminate external faults.
2: Perform the motor
auto-tuning.
3: Increase the decelerationtime.
4: Adjust the voltage to normal
range.
5: Remove the added load.
6: Install the braking unit
Andbraking resistor.
Over current
at constant
speed
Er.OC3
1: The output circuit is grounded or
short circuited.
2: Motor auto-tuning is notperformed.
3: The voltage is too low.
4: A sudden load is added during
operation.
5: The frequency inverter model is of
too small power class.
1:Eliminateexternalfaults.
2: Perform themotorauto-tuning.
3:AdjustThevoltagetonormalrange.
4: Remove the addedload.
5: Select afrequency
Inverterofhigher powerclass.
Overvoltage
during
acceleration
Er.OU1
1: The input voltage is too high.
2: An external force drives the motor
during acceleration.
3: The acceleration time is too short.
4: The braking unit and braking
resistor are not installed.
1:AdjustThevoltagetonormalrange.
2: Cancel theexternal forceor
install a braking resistor.
3: Increasethe accelerationtime.
4: Install thebraking unit
Andbraking resistor.
Overvoltage
during
deceleration
Er.OU2
1: The input voltage is too high.
2: An external force drives the motor
during deceleration.
3: The deceleration time is too short.
4: The braking unit and braking
resistor are not installed.
1:AdjustThevoltagetonormal
Range.
2: Cancel theexternal forceor
install thebraking resistor.
3: Increasethe decelerationtime.
4: Install thebraking unit
Andbraking resistor
Overvoltage
at constant
speed
Er.OU3
1: The input voltage is too high.
2: An external force drives the motor
during deceleration.
1:AdjustThevoltagetonormalrange.
2: Cancel theexternal forceor
install thebraking resistor.
Low voltage
Er.LU1
1: Instantaneous power failure occurs
on the input power supply.
2: The frequency inverter's input
voltage is not within the allowable
range.
3: The DC bus voltage is abnormal.
4: The rectifier bridge and buffer
resistor are faulty.
5: The drive board is faulty.
6: The main control board is faulty.
1: Reset thefault.
2:Adjust
Thevoltagetonormalrange.
3: Ask for technical support
4: Ask for technical support
5: Ask for technical support
6: Ask for technical support

Chapter 6 Fault diagnosis and solutions VFD500 high performance vector control frequency inverter user manual
- 92 -
Fault Name
Display
Possible Causes
Solutions
Contactor open
Er.LU2
1. Instantaneous power cut
2, the inverter input voltage is not in the
scope of the specification requirements
3. Abnormal bus voltage
4,rectifier bridgeand buffer resistance is
not normal
5, drive board is fault
6. control board is fault
1. Reset failure
2. Adjust the voltage to the normal
range
3. Ask for technical support
4. Ask for technical support
5. Ask for technical support
6.Ask for technical support
Frequency
inverter
overload
Er. oL
1: The load is too heavy or lockedrotor occurs on the motor.
2: The frequency inverter model is of
too small power class.
1: Reduce the load andcheck
the
motor and mechanical condition.
2: Select afrequency
Inverter of higher power level.
Motor
overload
Er.oL1
1: F8-02 is set improperly.
2: The load is too heavy or lockedrotor occurs on the motor.
3: The frequency inverter model is of
too small power class.
1: Set F8-02 correctly.
2: Reduce the load andcheck the
Motor and the mechanical
condition.
3: Select a motor of higher power
level
Motor
overheat
Er. oH3
1: The cabling of the temperature
sensor becomes loose.
2: The motor temperature is too high
1: Check the temperature sensor
cabling and eliminate the cabling
fault.
2: Lower the carrier frequency or
adopt other heat radiation
Power input
phase loss
Er.iPL
1: The three-phase power input is
abnormal.
2: The drive board is faulty.
3: Thelightning proof board is faulty.
4: The main control board is faulty.
1:Eliminate external faults.
2: Ask for technical support.
3: Ask for technical support.
4: Ask for technical support.
Power output
phase loss
Er.oPL
1: The cable connecting the frequency
inverter and the motor is faulty.
2: The frequency inverter's
three-phase outputs are unbalanced
when the motor is running.
3: The drive board is faulty.
4: The IGBT module is faulty.
1:Eliminate external faults.
2: Check whether the
Motor three phase winding
is normal.
3: Ask for technical support.
4: Ask for technical support.
IGBT Module
overheat
Er. oH
1: The ambient temperature is too
high.
2: The air filter is blocked.
3: The fan is damaged.
4: The thermally sensitive resistor of
the IGBT module is damaged.
5: The inverter IGBT module is
damaged
1:Lower the ambient temperature.
2: Clean theairfilter.
3: Replace thedamaged fan.
4: Replace the damaged thermally
sensitive resistor.
5: Replace the inverter module.

VFD500 high performance vector control frequency inverter user manual Chapter6 Fault diagnosis and solutions
- 93-
Fault Name
Display
Possible Causes
Solutions
module temperature
detection fault
Er.tCK
1, temperature detection line broken
2, drive board is faulty
3. Main control board is faulty
4, the environmental temperature is too
low
1. Check the thermistor wiring
2. Ask for technical support
3. Ask for technical support
4, manual intervention to drive the
temperature rise
485Communication
fault
Er.485
1, the work of the host computer is not
normal
2, the communication line is not normal
3, the communication parameter set is
incorrect
1. Check the connection of upper
computer
2. Check the communication
connection line
3. Set communication parameters
correctly
Current
detection fault
Er.CUr
1: The HALL device is faulty.
2: The drive board is faulty.
3: The control board is faulty
1: Replace the faulty HALL
device.
2: Replace the faulty drive board.
3: Ask for technical support.
Motor
auto-tuning
fault 1
Er.TU1
1: The motor parameters are not set
according to the nameplate.
2: The motor auto-tuning times out.
1: Set the motor
parametersaccording to the
nameplateproperly.
2: Check the cable connecting
between the Frequency inverter
and themotor.
Motor
auto-tuning
fault2
Er.TU2
1: The motor parameters are not set
according to the nameplate.
2: The motor auto-tuning times out.
1: Set the motor
parametersaccording to the
nameplateproperly.
2: Check the cable connecting
between the Frequency inverter
EEPROM
read- write
fault
Er.EEP
1、 Eeprom Operate too frequent
2、 The EEPROM chip is damaged.
1、 Operate Eeprom suitable
2、 Replace the main control
board
Off load
Er. LL
1、The frequency inverter running
currentis lower than the setting value.
1、Confirm whether the load is off
2、Check that the load is
disconnected or the parameter
setting is correct
PID feedback
lost during
running
Er.FbL
1、 PID feedback<P40.35 setting value
and P40.36 not zero,PID
feedback>P40.37 setting value and
P40.38 not zero
1、 check PID feedback signal
2、 P40.35 and P40.37 set correct
parameter
User-defined
fault 1
Er.Ud1
1: The signal of user-defined fault 1 is
input via DI.
2:The signal of user-defined fault 1 is
input via virtual I/O.
1: Reset the operation.
2: Reset the operation
User-defined
fault 2
Er.Ud2
1: The signal of user-defined fault 2 is
input via DI.
2:The signal of user-defined fault 2 is
input via virtual I/O.
1: Reset the operation.
2: Reset the operation

Chapter 6 Fault diagnosis and solutions VFD500 high performance vector control frequency inverter user manual
- 94 -
Fault Name
Display
Possible Causes
Solutions
By wave
current
limitingfault
Er.CbC
1: The load is too heavy or lockedrotor occurs on the motor.
2: The frequency inverter model is of
too small power class
1: Reduce the load and check
the motor and mechanical
condition.
2: Select a frequency inverter of
higher power class.
Too large
speed
deviation
Er.DEV
1: The encoder parameters are
setincorrectly.
2: The motor auto-tuning is
notperformed.
3: The detection parameters of toolarge
speed deviation are setincorrectly.
1: Set the encoder parameters
properly.
2: Perform the motor auto-tuning.
3: Set the detection parameters
correctly based on the
actualsituation.
Motor
over-speed
Er. oS
1: The encoder parameters are
setincorrectly.
2: The motor auto-tuning is
notperformed.
3: The over-speed detectionparameters
are set incorrectly
1: Set the encoder
parametersproperly.
2: Perform the motor auto-tuning.
3: Set the over-speed detection
parameter correctly based on the
actual situation.
Encoder offline
Er.PGL
1. motor locked
2. encoder pulse setting wrong
3. encoder offline
1 check motor and mechanical
condition
2 set correct parameter for encoder
3 check encoder connecting line

VFD300A high performance vector control frequency inverter user manual Chapter 7 Selection guide of inverter Accessory
- 95-
Chapter7Selection Guide of inverter Accessory
7.1 Selection Guide of braking component
The braking resistor is used to consume the energy fed back by the motor to the inverter during braking or
generating operation, so as to achieve quick braking or prevent the inverter from reporting the main circuit
overvoltage fault. Braking resistor selection has two parameters: resistance and power, under normal circumstances,
the greater the system inertia, the need for deceleration time is shorter, the more frequent braking, the braking
resistor selection should be greater power , The smaller the resistance.
1、Selection of braking units
When braking, almost all the renewable energy of motor is consumed on the braking resistor.
R =
U
2
P
B
Formula:
U --- The braking voltage when the system brakes stably (different system is different, for the 380VAC
system generally take 700V)
R - Braking resistor
Pb – Braking Power
2 、Selection power of braking resistor
Braking resistor power can be calculated according to the following formula:
𝑃
𝑅
= P
B
× D
Formula,
𝑃
𝑅
----Braking resistor power
D ---- Braking frequency (braking process accounts for the proportion of the entire process), by the load
conditions to determine the characteristics of common occasions typical values are shown in the table below:
Table 7-1 Braking frequency of common applications
applications
D value
elevator
10%~20%
Unwinding and winding
40%~50%
Centrifuge
40%~60%
Occasional brake load
5%
General application
10%
3 、braking components selection table
Table 7-2 VFD300A braking components selection table
Three phase 380V
Model
Recommend power of
braking resistor
(10%braking
Recommend
resistance value of
braking resistor
Braking unit
VFD500-R75GT4
100W
≥ 300Ω
Built-in as standard
VFD500-1R5GT4
150W
≥ 220Ω
VFD500-2R2GT4
300W
≥ 180Ω
VFD500-3R7G/5R5PT4B
500W
≥ 130Ω

Chapter 7 Selection guide of inverter Accessory VFD500 high performance vector control frequency inverter user manual
- 96 -
VFD500-5R5G/7R5PT4B
800W
≥ 90Ω
Built-in as option
VFD500-7R5G/011PT4B
1000W
≥ 68Ω
VFD500-011G/015PT4B
1.2KW
≥ 45Ω
VFD500-015G/018PT4B
1.5KW
≥ 32Ω
VFD500-018G/022PT4B
2.0KW
≥ 25Ω
VFD500-022G/030PT4B
2.5KW
≥ 22Ω
VFD500-030G/037PT4
3.0KW
≥ 15Ω
VFD500-037G/045PT4
3.7 KW
≥ 15Ω
VFD500-045G/055PT4
4.5 KW
≥ 10Ω
VFD500-055G/075PT4
5.5 KW
≥ 8Ω
VFD500-075G/090PT4
7.5 KW
≥ 8Ω
VFD500-090G/110PT4
VFD500-110G/132PT4~
VFD500-560G/630PT4
As per actual load and braking power
external
7.2 PG card type
The optional PG card and supported encoders for the VFD500 are shown in the table below.
Chart 7-3 PG type view chart
Model
name
USAGE
VFD500-PG-INC1
INCREMENTAL PG
open collector type, push-pull output type, differential output
type encoder.
VFD500-PG-RT1
RESOLVER PG
Rotary transformer encoder
(1)INCREMENTAL PG
Chart 7-4 Incremental encoder PG card (VFD500-PG-INC1) port definition
Pin number diagram
Pin number
Name
Usage
181716151413121110
1 2 3 4 5 6 7 8 9
1,10
PE
Shield terminal
2,11
VCC
Power output for powering the
encoder
5V ± 2%, maximum 200mA
12V±5%, maximum 200mA
3,12
GND
Power supply common terminal and
signal 4 /Z
Encoder Z-signal
5
Z
Encoder Z+signal
6
/B
Encoder B-signal
7
B
Encoder B+signal
8
/A
Encoder A-signal
9
A
E
ncoder A+signal

VFD300A high performance vector control frequency inverter user manual Chapter 7 Selection guide of inverter Accessory
- 97-
13
/W
Encoder
W-signal
Note:UVW is
used to the
synchronous
motor
incremental
encoder, no
need wiring
when it is not
used.
14
W
Encoder
W+signal
15
/V
Encoder
V-signal
16
V
Encoder
V+signal
17
/U
Encoder
U-signal
18
U
Encoder
U+signal
Open collector type, push-pull output type encoder wiring:
Select the encoder power supply through SW3 on the PG card, SW1 and SW2 to the OC side, as
shown below::
12V OC OC
5V
TP TP
SW3
SW2
SW1
12V OC OC
5V
TP TP
SW3
SW2
SW1
Chart 7-1 Collector open type, push-pull output type encoder DIP switch selection
When wiring, the /A, /B, /Z terminals of the PG card are not wired, and the signal output of the
encoder is connected to the A, B, and Z terminals of the PG card, as shown in the figure below.:
MT500-PG-INC1
VCC
0V
A
B
Z
PG
CARD
VCC
0V
A
B
Z
SHIELDING
CABLE
ENCODER
Chart 7-2 Collector open type, push-pull output type encoder wiring diagram
Differential output encoder wiring:
Select the encoder power supply through SW3 on the PG card, SW1 and SW2 to the TP side,
as shown below:
12V OC OC
5V
TP TP
SW3
SW2
SW1
12V OC OC
5V
TP TP
SW3
SW2
SW1
 Loading...
Loading...