

Page 1

Manual
CANboardXL Interface Family
Version 4.2
English
Page 2

Imprint
Vector Informatik GmbH
Ingersheimer Straße 24
D-70499 Stuttgart
The information and data given in this user manual can be changed without prior notice. No part of this manual may be reproduced in
any form or by any means without the written permission of the publisher, regardless of which method or which instruments, electronic
or mechanical, are used. All technical information, drafts, etc. are liable to law of copyright protection.
Copyright 2015, Vector Informatik GmbH. All rights reserved.
Page 3
Manual Table of contents
Table of contents
1 Introduction 2
1.1 Safety Instructions and Hazard Warnings 3
1.1.1 Proper Use and Intended Purpose 3
1.1.2 Hazards 3
1.1.3 Disclaimer 3
1.2 About this User Manual 4
1.2.1 Certification 5
1.2.2 Warranty 5
1.2.3 Registered Trademarks 5
2 CANboardXL Interface Family 6
2.1 Introduction 7
2.2 Connectors 8
2.2.1 D-SUB9 9
2.2.2 External Sync Connector 9
2.2.3 Internal Sync Connector (CANboardXL PCIe only) 9
2.3 Driver Installation 10
2.4 Time Synchronization 10
2.5 Accessories 11
2.6 Technical Data 11
3 Hardware Installation 12
3.1 General Notes 13
3.2 CANboardXL and CANboardXL PCIe 13
3.3 CANboardXL pxi 13
3.4 Replacing Piggybacks 14
4 Common Features 16
4.1 Time Synchronization 17
4.1.1 General Information 17
4.1.2 Software Sync 19
4.1.3 Hardware Sync 20
5 Driver Installation 22
5.1 Minimum Requirements 23
5.2 Hints 24
5.3 Vector Driver Setup 25
5.4 Vector Hardware Configuration 27
5.5 Loop Tests 29
5.5.1 CAN 29
5.5.2 FlexRay 32
5.5.3 MOST 33
5.5.4 Ethernet 34
© Vector Informatik GmbH Version 4.2 - I -
Page 4
Manual Introduction
1.1 Safety Instructions and Hazard Warnings page 3
Proper Use and Intended Purpose
Hazards
Disclaimer
1.2 About this User Manual page 4
Certification
Warranty
Registered Trademarks
1 Introduction
In this chapter you find the following information:
© Vector Informatik GmbH Version 4.2 - 2 -
Page 5
Manual Introduction
Caution: In order to avoid personal injuries and damage to property, you have to
read and understand the following safety instructions and hazard warnings prior to
installation and use of this interface. Keep this documentation (manual) always near
the interface.
Caution: The interface is designed for analyzing, controlling and otherwise
influencing control systems and electronic control units. This includes, inter alia, bus
systems like CAN, LIN, K-Line, MOST, FlexRay, Ethernet and/or BroadR-Reach.
The interface may only be operated in a closed state. In particular, printed circuits
must not be visible. The interface may only be operated (i) according to the
instructions and descriptions of this manual; (ii) with the electric power supply
designed for the interface, e.g. USB-powered power supply; and (iii) with accessories
manufactured or approved by Vector.
The interface is exclusively designed for use by skilled personnel as its operation may
result in serious personal injuries and damage to property. Therefore, only those
persons may operate the interface who (i) have understood the possible effects of the
actions which may be caused by the interface; (ii) are specifically trained in the
handling with the interface, bus systems and the system intended to be influenced;
and (iii) have sufficient experience in using the interface safely.
The knowledge necessary for the operation of the interface can be acquired in
workshops and internal or external seminars offered by Vector. Additional and
interface specific information, such as „Known Issues“, are available in the „Vector
KnowledgeBase“ on Vector´s website at www.vector.com. Please consult the „Vector
KnowledgeBase“ for updated information prior to the operation of the interface.
Caution: The interface may control and/or otherwise influence the behavior of control
systems and electronic control units. Serious hazards for life, body and property may
arise, in particular, without limitation, by interventions in safety relevant systems (e.g.
by deactivating or otherwise manipulating the engine management, steering, airbag
and/or braking system) and/or if the interface is operated in public areas (e.g. public
traffic, airspace). Therefore, you must always ensure that the interface is used in a
safe manner. This includes, inter alia, the ability to put the system in which the
interface is used into a safe state at any time (e.g. by „emergency shutdown“), in
particular, without limitation, in the event of errors or hazards.
Comply with all safety standards and public regulations which are relevant for the
operation of the system. Before you operate the system in public areas, it should be
tested on a site which is not accessible to the public and specifically prepared for
performing test drives in order to reduce hazards.
Caution: Claims based on defects and liability claims against Vector are excluded to
the extent damages or errors are caused by improper use of the interface or use not
according to its intended purpose. The same applies to damages or errors arising
from insufficient training or lack of experience of personnel using the interface.
1.1 Safety Instructions and Hazard Warnings
1.1.1 Proper Use and Intended Purpose
1.1.2 Hazards
1.1.3 Disclaimer
© Vector Informatik GmbH Version 4.2 - 3 -
Page 6
Manual Introduction
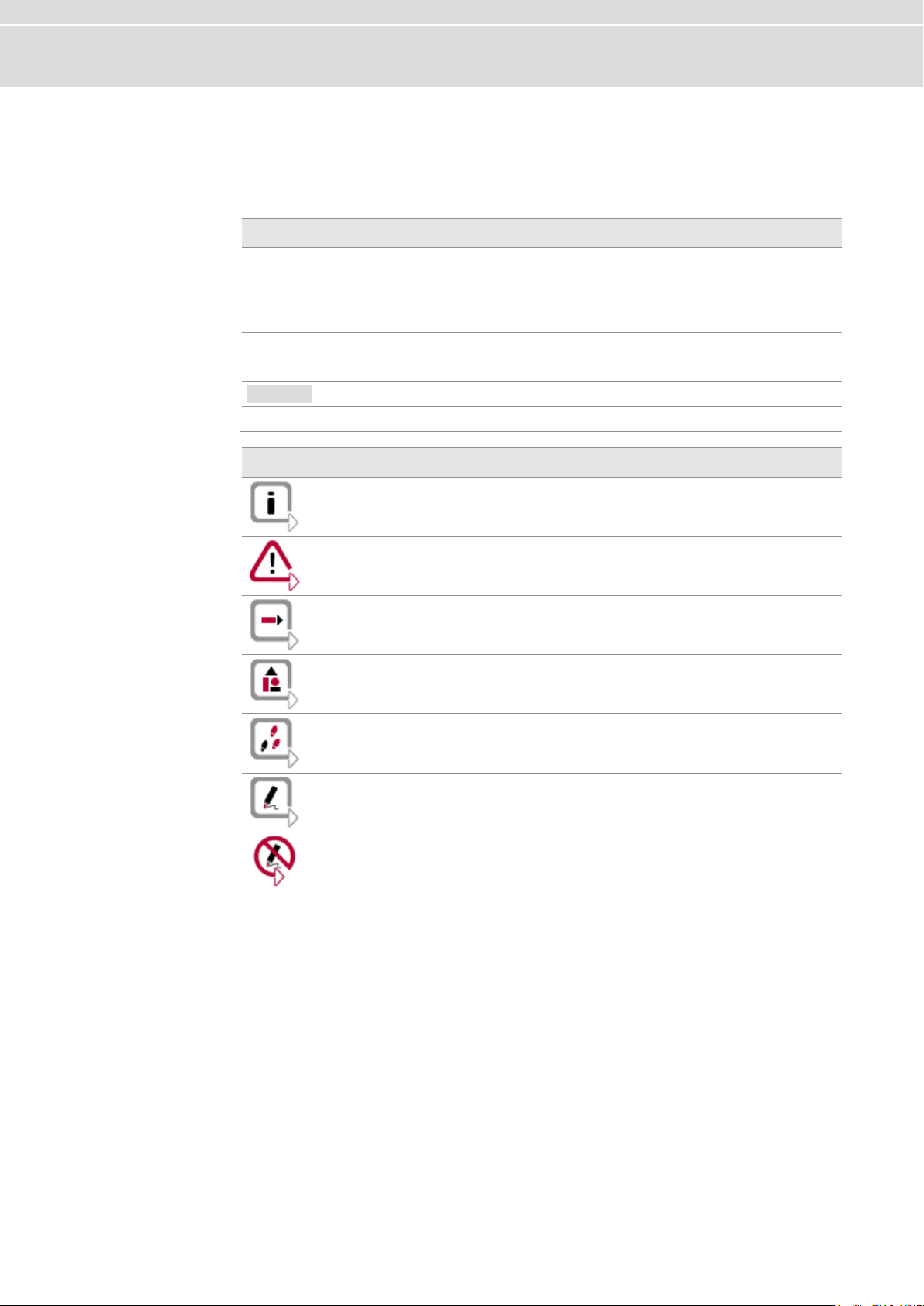
Conventions
In the two following charts you will find the conventions used in the user manual
regarding utilized spellings and symbols.
Style
Utilization
bold
Blocks, surface elements, window- and dialog names of the
software. Accentuation of warnings and advices.
[OK] Push buttons in brackets
File|Save Notation for menus and menu entries
Microsoft
Legally protected proper names and side notes.
Source Code
File name and source code.
Hyperlink
Hyperlinks and references.
<CTRL>+<S>
Notation for shortcuts.
Symbol
Utilization
Here you can obtain supplemental information.
This symbol calls your attention to warnings.
Here you can find additional information.
Here is an example that has been prepared for you.
Step-by-step instructions provide assistance at these points.
Instructions on editing files are found at these points.
This symbol warns you not to edit the specified file.
1.2 About this User Manual
© Vector Informatik GmbH Version 4.2 - 4 -
Page 7

Manual Introduction
Certified Quality
Management System
Vector Informatik GmbH has ISO 9001:2008 certification. The ISO standard is a
globally recognized standard.
Restriction
of warranty
We reserve the right to change the contents of the documentation and the software
without notice. Vector Informatik GmbH assumes no liability for correct contents or
damages which are resulted from the usage of the documentation. We are grateful for
references to mistakes or for suggestions for improvement to be able to offer you
even more efficient products in the future.
Registered
trademarks
All trademarks mentioned in this documentation and if necessary third party
registered are absolutely subject to the conditions of each valid label right and the
rights of particular registered proprietor. All trademarks, trade names or company
names are or can be trademarks or registered trademarks of their particular
proprietors. All rights which are not expressly allowed are reserved. If an explicit label
of trademarks, which are used in this documentation, fails, should not mean that a
name is free of third party rights.
Windows, Windows 7, Windows 8.1 are trademarks of the Microsoft Corporation.
1.2.1 Certification
1.2.2 Warranty
1.2.3 Registered Trademarks
© Vector Informatik GmbH Version 4.2 - 5 -
Page 8
Manual CANboardXL Interface Family
2.1 Introduction page 7
2.2 Connectors page 8
D-SUB9
External Sync Connector
Internal Sync Connector (CANboardXL PCIe only)
2.3 Driver Installation page 10
2.4 Time Synchronization page 10
2.5 Accessories page 11
2.6 Technical Data page 11
2 CANboardXL Interface Family
In this chapter you find the following information:
© Vector Informatik GmbH Version 4.2 - 6 -
Page 9

Manual CANboardXL Interface Family
CANboardXL for
PCI, PCIe and PXI
The CANboardXL is available in three variants that have identical functionalities
PCI card for installation in desktop PCs
PCI express card for installation in desktop PCs
Compact PCI/PXI backplane card for installation in industrial PCs
Each card has two CAN controllers which can send and receive CAN messages with
11 bit and 29 bit identifiers as well as remote frames without restrictions. Additionally,
the CANboardXL is able to detect and generate error frames on the bus.
Configuration
The CANboardXL interface family can be configured with the Vector Hardware
Config tool (Windows | Start | Settings | Control Panel | Vector Hardware).
Further details on the tool can be found in the separate installation instructions at the
end of this manual.
Bus types
Various transceivers are available to interface the CANboardXL to a particular type of
bus. These CAN and LIN transceivers are available as plug-in boards (Piggybacks)
and can be mounted on the CANboardXL. For information on installing transceivers
please refer to chapter Replacing Piggybacks on page 14. A list of available
Piggybacks is included in the accessories manual on the driver CD in
\Documentation\Accessories.
Connectors
The CANboardXL has the following connectors:
Two D-SUB9 connectors for independent CAN and LIN operation
Binder connector (type 711) for synchronization
Internal sync connector (CANboardXL PCIe only)
2.1 Introduction
© Vector Informatik GmbH Version 4.2 - 7 -
Page 10

Manual CANboardXL Interface Family
CANboardXL (PCI)
Figure 1: CH1/2 and sync at CANboardXL
CANboardXL PCIe
Figure 2: CH1/2, external and internal sync at CANboardXL PCIe
CANboardXL pxi
Figure 3: CH1/2 and sync at CANboardXL pxi
2.2 Connectors
© Vector Informatik GmbH Version 4.2 - 8 -
Page 11
Manual CANboardXL Interface Family
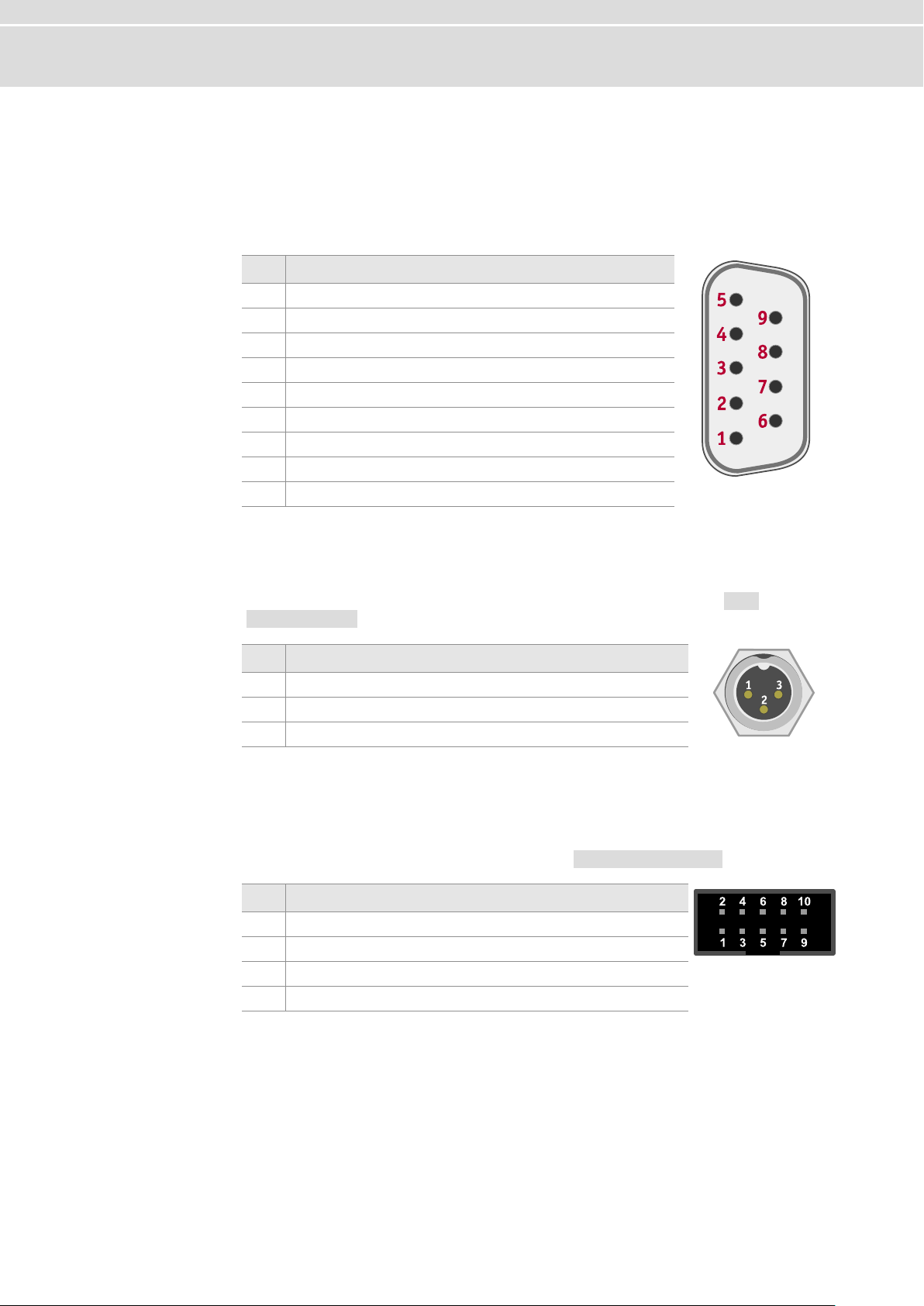
The pin assignments at the D-SUB9 connectors depend on the inserted Piggybacks.
Please refer to the accessories manual on the driver CD.
The general CAN pin assignment is as follows:
Pin
Assignment
1
Not connected
2
CAN Low
3
GND
4
Piggyback dependent
5
Shield
6
Not connected
7
CAN High
8
reserved
9
Piggyback dependent
Each CANboardXL variation provides a sync connector (Binder type 711) that can be
used for time synchronization of different Vector devices (see section Time
Synchronization on page 17).
Pin
Assignment
1
Not connected
2
Synchronization line (low active)
3
GND
The CANboardXL PCIe can also be synchronized via the internal 10-pin connector
(angled) next to the Piggyback socket. For synchronization a ribbon cable with a 10pin standard connector is required (see section Time Synchronization on page 17).
Pin
Assignment
1
GND
2..8
Reserved. Do not connect.
9
Synchronization line (low active)
10
Internal sync supply (output 5 V, 35 mA)
2.2.1 D-SUB9
2.2.2 External Sync Connector
2.2.3 Internal Sync Connector (CANboardXL PCIe only)
© Vector Informatik GmbH Version 4.2 - 9 -
Page 12
Manual CANboardXL Interface Family
Note: Information on the driver installation process can be found in section Driver
Installation on page 22.
Note: General information on time synchronization can be found in section Time
Synchronization on page 17.
Synchronization by
sync connector
(CANboardXL PCIe)
Multiple CANboardXL PCIe can be synchronized either by the Binder connector
outside the PC housing or by the internal sync connector. The internal sync connector
is a 10-pin connector (90° angled) and available next to the Piggyback slots. The
synchronization is done with a ribbon cable and a 10-pin standard socket.
Time synchronization
through
PXI backplane
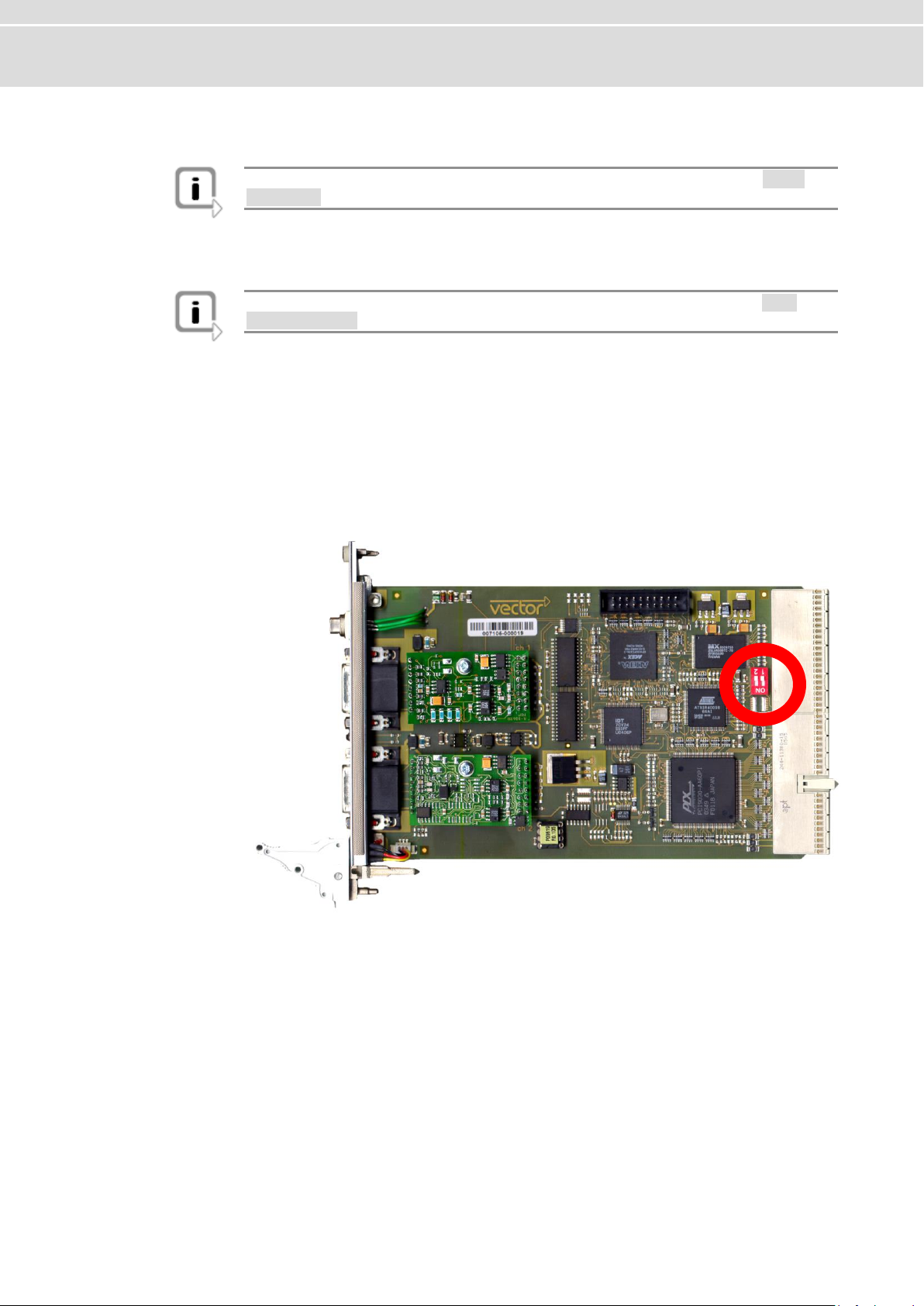
Additional to the synchronization described above, the CANboardXL pxi supports time
synchronization through the PXI backplane.
Figure 4 depicts the switches which control the synchronization between the cards.
Ch 1
Ch 2
Figure 4: Channel 1 and 2 on CANboardXL pxi
In position ON, the synchronization is active. The right and left end of the
synchronization line, which is built with multiple CANboardXL pxi cards, has to be cut
off. The cut off of the right end is done with switch 2, the cut off of the left end with
switch 1.
2.3 Driver Installation
2.4 Time Synchronization
© Vector Informatik GmbH Version 4.2 - 10 -
Page 13

Manual CANboardXL Interface Family
Example
Time synchronization with three CANboardXL pxi:
CANboardXL pxi
Switch 1
Switch 2
1 (left)
OFF
ON
2 (middle)
ON
ON
3 (right)
ON
OFF
Reference: Further information on the available accessories can be found in the
separate accessories manual on the driver CD in \Documentation\Accessories.
PC interface
CANboardXL: PCI
CANboardXL PCIe: PCI Express
CANboardXL pxi: Compact PCI/PXI
Channels
2 independent channels
for CAN, LIN and J1708
Transceiver
Piggybacks
CAN controller
2 Phillips SJA 1000
Max. baudrate
1 Mbit/s
Time stamp accuracy
1 µs
Error frame
Detection and generation
Power consumption
1 W for CANboardXL/pxi without Piggybacks
2.5 W for CANboardXL PCIe without Piggybacks
Configuration
Plug & Play
Dimensions
PCI: approx. 155 mm x 135 mm x 20 mm
PCIe: approx. 145 mm x 105 mm x 17 mm
PXI: approx. 210 mm x 135 mm x 20 mm
Weight
PCI: approx. 210 g without Piggybacks
PCIe: approx. 210 g without Piggybacks
PXI: approx. 350 g without Piggybacks
Temperature range
PCI: Operation: -20 °C...65 °C
PCIe: Operation: 0 °C...65 °C
PXI: Operation: -20 °C...75 °C
Transport and storage: -40 °C... 85 °C
Relative humidity
15 %...95 %, not condensing
Software requirements
Windows 7 (SP1), 32 bit or 64 bit
Windows 8.1, 32 bit or 64 bit
Hardware requirements
IBM PC AT or 100 % compatible;
CANboardXL: 1x PCI slot
CANboardXL PCIe: 1x PCIe slot
CANboardXL pxi: 1x Compact PCI slot
2.5 Accessories
2.6 Technical Data
© Vector Informatik GmbH Version 4.2 - 11 -
Page 14

Manual Hardware Installation
3.1 General Notes page 13
3.2 CANboardXL and CANboardXL PCIe page 13
3.3 CANboardXL pxi page 13
3.4 Replacing Piggybacks page 14
3 Hardware Installation
In this chapter you find the following information:
© Vector Informatik GmbH Version 4.2 - 12 -
Page 15

Manual Hardware Installation
Caution: Turn off the main power supply and disconnect your computer’s power cord.
Otherwise systems using an ATX power supply unit with soft power off may still be
powering the PCI slot. This can damage your CANboardXL when it is inserted into the
slot.
Caution: Do not force the CANboardXL into the slot. Make sure that the connectors
of the card’s PCI connector are aligned with the bus connector on the motherboard
before you insert the card into the slot. If it does not fit properly, gently remove it and
try again.
Note: Please observe all safety precautions prescribed by your PC manufacturer for
card installation!
Note: Do not touch the bottom and the topside of the PCBs (CANboardXL main
board and Piggybacks).
1. Turn off the computer and all peripheral devices.
2. Unplug the power cord.
3. Touch a metal plate on your computer to ground yourself and to discharge any
static electricity.
4. Open the case and remove the metal brackets from an unused slot.
5. Align the CANboardXL with the PCI slot (CANboardXL PCIe with the PCIe slot)
and press the card gently but firmly into the slot.
6. Close the computer cover.
7. Plug in the power cord.
1. Turn off the computer and all peripheral devices.
2. Unplug the power cord.
3. Touch a metal plate on your computer to ground yourself and to discharge any
static electricity.
4. Align the CANboardXL pxi with the slot and press the card gently but firmly into
the slot.
5. The CANboardXL pxi has to be fixed again with the screws.
3.1 General Notes
3.2 CANboardXL and CANboardXL PCIe
3.3 CANboardXL pxi
© Vector Informatik GmbH Version 4.2 - 13 -
Page 16

Manual Hardware Installation
1. Turn off the computer and all peripheral devices.
2. Unplug the power cord.
3. Touch a metal plate on your computer to ground yourself and to discharge any
static electricity.
4. Open the case and unplug the CANboardXL.
Note: Each of the Piggybacks is fixed with a screw.
5. Detach the screw with the screw protection and remove the Piggyback carefully.
6. Plug in the alternative Piggyback.
CANboardXL
Figure 5: Channel 1 and 2 on CANboardXL
3.4 Replacing Piggybacks
© Vector Informatik GmbH Version 4.2 - 14 -
Page 17

Manual Hardware Installation
CANboardXL pxi
Ch 1
Ch 2
Figure 6: Channel 1 and 2 on CANboardXL pxi
Info: The two-row connector and the one-row connector must fit and must not be
displaced laterally.
7. The Piggyback has to be fixed again with the screw and the screw protection.
8. Firmly insert the card into the selected slot. Push down to ensure the card is fully
seated.
9. Close the computer cover.
10. Plug in the power cord.
© Vector Informatik GmbH Version 4.2 - 15 -
Page 18

Manual Common Features
4.1 Time Synchronization page 17
General Information
Software Sync
Hardware Sync
4 Common Features
In this chapter you find the following information:
© Vector Informatik GmbH Version 4.2 - 16 -
Page 19

Manual Common Features
Time stamps
and events
Time stamps are useful when analyzing incoming or outgoing data or event
sequences on a specific bus.
Figure 1: Time stamps of two CAN channels in CANalyzer
Generating
time stamps
Each event which is sent or received by a Vector network interface has an accurate
time stamp. Time stamps are generated for each channel in the Vector network
interface. The base for these time stamps is a common hardware clock in the device.
Figure 2: Common time stamp clock for each channel
If the measurement setup requires more than one Vector network interface, a
synchronization of all connected interfaces and their hardware clocks is needed.
Due to manufacturing and temperature tolerances, the hardware clocks may vary in
speed, so time stamps of various Vector devices drift over time.
4.1 Time Synchronization
4.1.1 General Information
© Vector Informatik GmbH Version 4.2 - 17 -
Page 20

Manual Common Features
Figure 3: Example of unsynchronized network interfaces. Independent time stamps drift apart.
To compensate for these time stamp deviations between the Vector network
interfaces, the time stamps can be either synchronized by software or by hardware
(see next section).
Note: The accuracy of the software sync is typically in range of 100 µs.
Note: The accuracy of the hardware sync is typically in range of 1 µs.
© Vector Informatik GmbH Version 4.2 - 18 -
Page 21

Manual Common Features
Synchronization
by software
The software time synchronization is driver-based and available for all applications
without any restrictions. The time stamp deviations from different Vector network
interfaces are calculated and synchronized to the common PC clock. For this purpose
no further hardware setup is required.
Figure 4: Time stamps of devices are synchronized to the PC clock (accuracy in range of 100 µs)
The setting of the software time synchronization can be changed in the Vector
Hardware Config tool in General information | Settings | Software time
synchronization.
Figure 5: Switching on the software synchronization
YES
The software time synchronization is active.
NO
The software time synchronization is not active.
Use this setting only if the Vector network interfaces are being synchronized over
the sync line or if only a single device is used.
4.1.2 Software Sync
© Vector Informatik GmbH Version 4.2 - 19 -
Page 22

Manual Common Features
Synchronization
by hardware
A more accurate time synchronization of multiple devices is provided by the hardware
synchronization which has to be supported by the application (e. g CANalyzer,
CANoe). Two Vector network interfaces can therefore be connected with the
SYNCcableXL (see accessories manual, part number 05018).
In order to synchronize up to five devices at the same time, a distribution box is
available (see accessories manual, part number 05085).
Figure 6: Example of a time synchronization with multiple devices
Figure 7: Example of a time synchronization with VN8912 and additional devices
4.1.3 Hardware Sync
© Vector Informatik GmbH Version 4.2 - 20 -
Page 23

Manual Common Features
At each falling edge on the sync line which is initiated by the application, the Vector
network interface generates a time stamp that is provided to the application. This
allows the application to calculate the deviations between the network interfaces and
to synchronize the time stamps to a common time base (master clock) which is
defined by the application.
Figure 8: Time stamps are synchronized to the master clock (accuracy in range of 1 µs)
Note: The hardware synchronization must be supported by the application. For
further information please refer to the relevant application manual. Please note that
the software synchronization must be disabled (see Vector Hardware Config |
General information | Settings | Software time synchronization) if the hardware
synchronization is used.
© Vector Informatik GmbH Version 4.2 - 21 -
Page 24

Manual Driver Installation
5.1 Minimum Requirements page 23
5.2 Hints page 24
5.3 Vector Driver Setup page 25
5.4 Vector Hardware Configuration page 27
5.5 Loop Tests page 29
CAN
FlexRay
MOST
Ethernet
5 Driver Installation
In this chapter you find the following information:
© Vector Informatik GmbH Version 4.2 - 22 -
Page 25

Manual Driver Installation
Hardware
CPU
Pentium 4 or higher
Memory
512 MB or more
Network interface
CANcardXL : PCMCIA
CANcardXLe : ExpressCard 54
CANboardXL PCI : PCI
CANboardXL PCIe : PCI Express x1
CANboardXL pxi : Compact PCI/PXI
CANcaseXL : USB
CANcaseXL log : USB
VN1610 : USB
VN1611 : USB
VN1630A : USB
VN1640A : USB
VN2610 : USB
VN2640 : USB
VN3300 : PCI
VN3600 : USB
VN5610 : USB
VN7570 : PCI Express x1
VN7572 : PCI Express x1
VN7600 : USB
VN7610 : USB
VN8910A : USB
VN8912 : USB
Software
Operating system
Windows 7 (32/64 bit)
Windows 8.1 (32/64 bit)
Driver version
8.x
Measurement
application
The devices can be run with several applications from Vector
(e. g. CANoe, CANalyzer) or with measurement applications
from other companies. The devices require a related license.
Applications based on the Vector XL Driver Library can be run
without a license.
5.1 Minimum Requirements
© Vector Informatik GmbH Version 4.2 - 23 -
Page 26

Manual Driver Installation
Note: Many desktop PCs have power managers which block the CPU for a specific
time. This impairs accuracy of the time system. If your application has stringent timing
requirements (e. g. time-driven sending of messages or time-driven evaluations), you
have to deactivate these power managers. Power management settings may be contained in the BIOS setup or on the Control Panel of Windows 7 / Windows 8.1 (e. g.
Power options).
No further mention will be made of the power manager in this document.
Info: Please note that you will need Administrator Rights for the following steps.
5.2 Hints
© Vector Informatik GmbH Version 4.2 - 24 -
Page 27

Manual Driver Installation
General information
The Vector Driver Disk offers a driver setup which allows the installation or the
removal of Vector devices.
1. Execute the driver setup from the autostart menu or directly from
\Drivers\Setup.exe before the device is inserted or connected to the PC with
the included USB cable.
If you have already inserted or connected the device to the PC, the Windows
found new Hardware wizard appears. Close this wizard and then execute the
driver setup.
2. Click [Next] in the driver setup dialog. The initialization process starts.
5.3 Vector Driver Setup
© Vector Informatik GmbH Version 4.2 - 25 -
Page 28

Manual Driver Installation
3. In the driver selection dialog select your devices to be installed (or to be
uninstalled).
4. Click [Install] to execute the driver installation, or [Uninstall] to remove existing
drivers.
5. A confirmation dialog appears. Click [Close] to exit.
If the driver has been installed properly, the device can be inserted or connected
to the PC with the included USB cable. The device is ready for operation now.
© Vector Informatik GmbH Version 4.2 - 26 -
Page 29

Manual Driver Installation
Executing Vector
Hardware Config
After the successful installation you will find the configuration application Vector
Hardware in the Control Panel (see below). The tool gives you information about the
connected and installed Vector devices. There are also several settings that can be
changed.
Control panel
Windows 7
Category view
Windows Start | Control Panel | Hardware and Sound, click Vector Hardware
in the list.
Symbols view
Windows Start | Control Panel, click Vector Hardware in the list.
Control panel
Windows 8.1
Category view
<Windows key>+<X> | Control Panel | Hardware and Sound, click Vector
Hardware in the list.
Symbols view
<Windows key>+<X> | Control Panel, click Vector Hardware in the list.
The tool is split into two windows. The left window lets you access the installed Vector
devices, the right window displays the details of the selection. The following nodes
are available in the left window:
Hardware
Each installed Vector device is shown in Hardware. Additional details of available
channels are shown in a tree view. Status information on the device components and
the channels are also shown in this dialog.
Application
In Application, all available applications are shown with their configured channels. If
you click on an application, all of its channels are displayed in the right pane on the
screen.
General information
The General information section contains general information on Vector devices and
5.4 Vector Hardware Configuration
© Vector Informatik GmbH Version 4.2 - 27 -
Page 30

Manual Driver Installation
applications.
License
The License section contains information on all current valid licenses.
Note: You will find a detailed description of Vector Hardware Config in the online
help (Help | Contents).
© Vector Informatik GmbH Version 4.2 - 28 -
Page 31

Manual Driver Installation
Operating test
The test described here can be performed to check the functional integrity of the
driver and the device. This test is identical for Windows 7 / Windows 8.1 and
independent of the used application.
Device test
The operating test for CAN can be executed with the following devices:
CANcardXL
CANcardXLe
CANcaseXL
CANcaseXL log
CANboardXL Family
VN1610
VN1630A
VN1640A
VN5610
VN7570
VN7572
VN7600
VN8910A
VN8912
Loop3.exe
Either two High-Speed or two Low-Speed transceivers are necessary for this
functional test:
1. Connect two CAN channels with a suitable cable. If two High-Speed transceivers
are being used, we recommend our CANcable 1 (CANcable 0 for Low-Speed
transceivers).
2. Start \Drivers\Common\Loop3.exe from the driver CD.
This program accesses the Vector devices and transmits CAN messages.
3. Select the connected CAN channels of the device(s) to be tested.
4. Set the appropriate baudrate depending on the transceiver being used (HighSpeed max. 1,000,000 Bd, Low-Speed max. 125,000 Bd).
5.5 Loop Tests
5.5.1 CAN
© Vector Informatik GmbH Version 4.2 - 29 -
Page 32

Manual Driver Installation
5. Click [Start].
6. You will see statistical data in the lower part of the window if the system has been
configured properly.
Loop3 application
© Vector Informatik GmbH Version 4.2 - 30 -
Page 33

Manual Driver Installation
7. The test procedure can be terminated with the [Stop] button.
An OK should appear in the upper part of the window.
© Vector Informatik GmbH Version 4.2 - 31 -
Page 34

Manual Driver Installation
Device test
The operating test for FlexRay can be executed with the following devices:
VN3300
VN3600
VN7570
VN7572
VN7600
VN7610
VN8910A with VN8970
VN8912 with VN8970/VN8972
FRLoop.exe
This operating test requires an inserted FRpiggy.
1. Remove the FlexRay cable if it is connected.
2. Start \Drivers\Common\FRLoop.exe from the driver CD.
3. Execute the test.
4. If no error messages occur, the operating test was successful.
5.5.2 FlexRay
© Vector Informatik GmbH Version 4.2 - 32 -
Page 35

Manual Driver Installation
Device test
The operating test for MOST can be executed with the following devices:
VN2610
VN2640
MLoop.exe
This functional test requires a MOST fiber optic cable and a fiber coupler for HFBR
connectors.
1. VN2610
Start \Drivers\Common\MLoop.exe from the driver CD
VN2640
Start \Drivers\Common\M150Loop.exe from the driver CD.
2. Select the VN2610/VN2640 to be tested from the list of detected devices.
3. Click [Twinkle] and check if the power LED of the VN2610/VN2640 is blinking at
least for one second.
4. Connect the MOST fiber optic cable with the VN2610/VN2640 device, select
Master mode and check if the program displays the status Unlock. Check if red
light comes out of the TX fiber of the MOST fiber optic cable.
5. Connect both ends of the fiber with one fiber coupler to a ring and check if the
program displays the status Lock.
6. Close MLoop.exe with [Exit].
5.5.3 MOST
© Vector Informatik GmbH Version 4.2 - 33 -
Page 36

Manual Driver Installation
Device test
The operating test for Ethernet can be executed with the following devices:
VN5610
1. Connect both Ethernet channels of the VN5610 with an Ethernet cable.
2. Connect both BroadR-Reach channels at the D-SUB9 connector as follows:
3. Start \Drivers\Common\ETHloop.exe from the driver CD.
4. Select an installed VN5610 from the list.
5. Press [Twinkle] and check if the LED Status blinks.
6. Start the test by pressing the button [Start Test]. The test is successful if no error
messages occur.
5.5.4 Ethernet
© Vector Informatik GmbH Version 4.2 - 34 -
Page 37

Get more Information!
Visit our Website for:
> News
> Products
> Demo Software
> Support
> Training Classes
> Addresses
www.vector.com
 Loading...
Loading...