

Page 1

Embedded Software and Systems
BASELABS Create Embedded
Data Fusion Development for Automated Driving Functions up to Series Production
What is BASELABS Create Embedded?
BASELABS Create Embedded* is a software solution for
the fast and efficient development of data fusion systems
for automated driving functions in embedded systems. Its
embedded library contains fusion algorithms that combine
data from radar, camera and LiDAR sensors. The resulting
object fusion provides a uniform object list of the vehicle
environment and serves as an input for path planning and
decision algorithms. BASELABS Create Embedded makes
it possible for the first time to take over the developed
sensor data fusion directly for production ECUs.
Overview of Advantages
>
Consistent solution for all development stages
>
Ready for series production
>
Developed according to Automotive SPICE
>
Complies with ISO 26262 (ASIL B), confirmed by exida
>
Fully documented development process:
consistent, traceable and verified
>
Complete test coverage and code verification
>
Optimized workflow with Vector‘s vADASdeveloper
and the middleware Robot Operating System (ROS)
>
Fully compatible with AUTOSAR Classic and Adaptive
>
Supports all relevant automotive sensors like radar,
camera and LiDAR
>
Scalable from radar-camera front fusion up to 360°
object fusion using multiple radars, cameras and
LiDAR sensors
>
MISRA-C:2012 compliant source code available for
all embedded hardware platforms
>
Graphical configuration
>
Easy adaption of data fusion applications to
different sensor setups or types
Application Areas and Driving Functions
Dynamic object fusion for SAE level 1-3: Automated
Emergency Braking (AEB), Adaptive Cruise Control (ACC),
Forward Collision Warning (FCW), and Highway Pilot.
The data fusion combines
detections and objects from all
configured sensors to provide a
unified object list of the vehicle’s
surroundings. For each object,
quantities like position, velocity
and classification are determined.
The data fusion eliminates
individual sensor weaknesses like
limited lateral or longitudinal
accuracy, limited detectability or
false positives.
Page 2
Fact Sheet BASELABS Create Embedded
From Pre-Development to Series Production
BASELABS Create Embedded makes implementing data
fusion systems much faster and more efficient.
The resulting C source code can be used along the entire
development chain - from pre-development through
embedded prototyping to the ECU for series production.
The powerful software enables the safety-compliant
development of data fusions, including documentation and
testing of safety-related use cases. This drastically reduces
the development effort.
Elements of BASELABS Create Embedded
>
Data Fusion Designer and Generator
With the data fusion designer, radar, camera and LiDAR
sensors of a vehicle setup are configured, customized and
parameterized. A specific object fusion system is
generated from this configuration.
>
Data Fusion Reference Architecture
The integrated reference architecture for object fusion
allows for building data fusion applications ranging from
two sensor systems to large 360° setups with many sensors.
The architecture can be customized and extended.
>
Data Fusion Library for Embedded Systems
The integrated data fusion library contains algorithms to
build custom object fusion systems such as:
>
Numerically stable Kalman filters
>
Data association methods
>
Sensor models
>
Existence probability handling
>
Track management algorithms
The C source code of the library is fully accessible and ready
for embedded platforms:
>
Compatible with common embedded platforms such as
Aurix 2G, Renesas RH850 and ARM Cortex-R52
>
Low CPU load and memory consumption
>
Customizable and extensible
>
Readable code comparable to manual implementation
>
MISRA-C:2012 compliant
>
No dependencies to external libraries
More information:
www.vector.com/create-embedded
www.baselabs.de/create-embedded
>
Full Middleware Compatibility
The middleware compatibility enables execution on
many platforms and in runtime environments such as
AUTOSAR Classic/Adaptive as well as vADASdeveloper
or ROS.
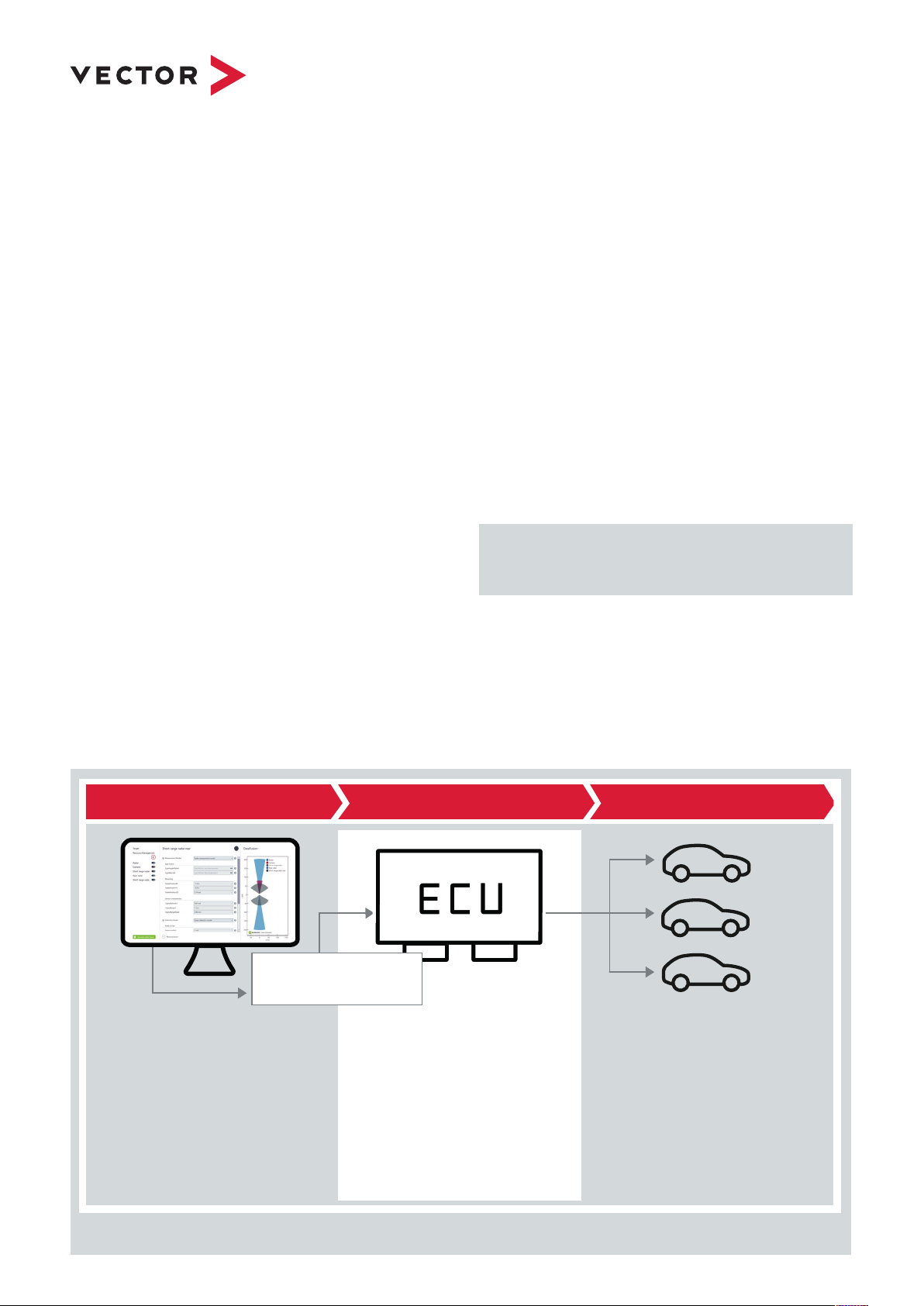
Pre-Development Embedded Prototyping Series Production
Data fusion algorithms
Unified object list
C source code
> Combines data from radar,
camera and LiDAR sensors
> Graphical configuration and/or
Software Development Kit usage
> Customizable and extensible
> „Round-trip“: Easy adaption to
different sensor setups or types
> C source code for typical
embedded hardware platforms
> Low CPU load and memory
consumption
> Readable code comparable to
manual implementation
* A product of BASELABS GmbH. Vector distributes the software
as part of its ADAS product portfolio.
> Developed according to Automotive
SPICE and ISO 26262 (ASIL B)
> MISRA-C:2012 compliant source
code
> Suitable license models for
OEM/Tier1/Tier2
BASELABS Create Embedded: Development of data fusion along the entire development chain.
www.vector.com/contact
Version 1.1 | 2020-11
 Loading...
Loading...