

VAC TZIDC, TZIDC-200 Configuration And Parameterization Instruction

Con guration-, Parameteri zation Ins truc tion C OI/T ZIDC /TZI DC-2 00 -EN
TZIDC, TZIDC-200
Digital Positioner
Software revision 5.0
VALVE ACCESSORIES & CONTROLS

2 COI/TZIDC/TZIDC-200- EN | TZIDC, TZIDC- 200
Short product description
Digital positioner for the positioning of pneumatically controlled
actuators.
Device rmware version: 05.00.00
Further information
A
dditional documentation on TZIDC, TZIDC-200 is available to
download free of charge at www.abb.com/positioners.
A
lternatively simply scan this code:
Manufacturer
A
BB Automation Products GmbH
Process Automation
Schillerstr. 72
32425 Minden
Germany
Tel: +49 571 830-0
Fax: +49 571 830-1806
Customer service center
Tel: +49 180 5 222 580
Mail: automation.service@de.abb.com
Change from one to two columns

TZIDC, TZIDC- 200 | COI/TZIDC/TZIDC-200-EN 3
Contents
1 Safety ............................................................................... 5
1.1 General information and instructions .................... 5
1.2 Warnings ............................................................. 5
1.3 Intended use ........................................................ 5
1.4 Improper use ....................................................... 5
1.5 Warranty provisions ............................................. 5
2 Operatio n ......................................................................... 6
2.1 Safety instru ctions ............................................... 6
2.2 Parameterization of the device ............................. 6
2.2.1 Menu navigation .................................................. 6
2.3 Menu levels .......................................................... 7
2.4 Operating modes ................................................. 7
2.4.1 Operating mode 1.0: Control with adaptation ....... 7
2.4.2 Operating mode 1.1: Control without adaptation .. 7
2.4.3 Operating mode 1.2: Manual adjustment in the
stroke ra nge ........................................................ 8
2.4.4 Operating mode 1.3: Manual adjustment in the
sensor range ........................................................ 8
2.5 Inhibiting operation .............................................. 8
3 Congurat ion ................................................................... 9
3.1 General information .............................................. 9
3.2 Example .............................................................. 9
3.3 HART parameter description .............................. 10
3.4 HART parameter over view (graphic) ................... 12
3.5 Parametergroup 1: Standard ............................. 12
3.5.1 ACTUATOR – Actu ator type ............................... 12
3.5.2 AUTO_ADJ – automatic adjustment ................... 12
3.5.3 ADJ_MODE – Automatic adjustment mode ........ 13
3.5.4 TEST – Te st ....................................................... 14
3.5.5 FIND_DEV – Find device .................................... 14
3.5.6 EXIT – Return to op erating level ......................... 14
3.6 Parameter group 2: Setpoint .............................. 15
3.6.1 MIN_RGE – Setpoint range min. ........................ 15
3.6.2 MAX_RGE – Setpoint range max........................ 15
3.6.3 CHARACT – Character istic curve ....................... 15
3.6.4 ACTION – Direction of action (setpoint signal) ..... 15
3.6.5 SHUT_CLS – Shut-o value 0% ......................... 16
3.6.6 SHUT-OPN – Shut -o value 100%..................... 16
3.6.7 RAMP UP – Setpoint ramp (up) .......................... 16
3.6.8 RAMP DN – Setpoint ramp (down) ..................... 16
3.6.9 EXIT – Return to op erating level ......................... 17
3.7 Parameter group 3: Operating range .................. 17
3.7.1 MIN_RGE – Operatin g range min. ...................... 17
3.7.2 MAX_RGE – Operatin g range ma x. .................... 17
3.7.3 ZERO_POS – Zero position ................................ 18
3.7.4 EXIT – Return to op erating level ......................... 18
3.8 Parameter group 4: Messa ges ........................... 18
3.8.1 TIME_OUT – Dead band time limit ...................... 18
3.8.2 POS_SW1 – Switchin g point SW1 ..................... 18
3.8.3 POS_SW2 – Switchin g point SW2 ..................... 19
3.8.4 SW1_ACTV – Active direction SW1 .................... 19
3.8.5 SW2_ACTV – Active direction SW2 .................... 19
3.8.6 EXIT – Return to op erating level.......................... 19
3.9 Parameter group 5: Alarms ................................ 20
3.9.1 LEAKAGE – Leakage at actuator ........................ 20
3.9.2 SP_RGE – Setpoint monitoring .......................... 20
3.9.3 SENS_RGE – Operatin g range exceeded ........... 20
3.9.4 CTRLER – Contro ller inactive ............................. 20
3.9.5 TIME_OUT – Dead band time limit ...................... 20
3.9.6 STRK_CTR – Moveme nt counter ....................... 20
3.9.7 TRAVEL – Travel counter ................................... 21
3.9.8 EXIT – Return to op erating level.......................... 21
3.10 Parameter group 6: Ma nual adjustment ............. 21
3.10.1 MIN_VR – Operatin g range mi n. ......................... 21
3.10.2 MAX_VR – Operatin g range ma x. ....................... 22
3.10.3 ACTUATOR – Actu ator type ............................... 22
3.10.4 SPRNG_Y2 – Spring action (Y2) ......................... 22
3.10.5 DANG_DN – Dead Angle Close .......................... 23
3.10.6 DANG_UP – Dead Angle Open .......................... 23
3.10.7 BOLT_POS – Actua tor position .......................... 23
3.10.8 EXIT – Return to op erating level.......................... 23
3.11 Parameter group 7: Co ntrol parameters ............. 24
3.11.1 KP UP – KP va lue (up) ....................................... 24
3.11.2 KP DN – KP value (down) ................................... 24
3.11.3 TV UP – TV va lue (up) ........................................ 24
3.11.4 TV DN – TV va lue (down) ................................... 25
3.11.5 Y-OFS UP – Y oset (up) .................................... 25
3.11.6 Y-OFS DN – Os et (down) ................................. 25
3.11.7 TOL_BAND – Toler ance band ............................ 26
3.11.8 DEADBAND – Dead band .................................. 26
3.11.9 DB_APPR – Dead ba nd approach ..................... 26
3.11.10 DB_CALC – Dead-band determination ............... 26
3.11.11 LEAK_SEN – Leakage sensitivity ........................ 27
3.11.12 EXIT – Return to op erating level.......................... 27
3.12 Parameter group 8: Analog output ..................... 27
3.12.1 MIN_RGE – Current range min. .......................... 27
3.12.2 MAX_RGE – Current range max. ........................ 27
3.12.3 ACTION – Characteris tic curve action ................ 27
3.12.4 ALARM – Alarm ................................................. 28
3.12.5 RB_CHAR – Count back characteristic curve ..... 28
3.12.6 TEST – Te st ....................................................... 28
3.12.7 ALR_ENAB – Alarm vi a analog ou tput ................ 28
3.12.8 CLIPPING – Extending the signal output range ... 28
3.12.9 EXIT – Return to op erating level.......................... 28
4 COI/TZIDC/TZIDC-200- EN | TZIDC, TZIDC- 200
3.13 Parameter group 9: digital output ....................... 29
3.13.1 ALRM_LOG – Alarm ou tput logic ....................... 29
3.13.2 SW1_LOG – Logic ............................................. 29
3.13.3 SW2_LOG – Logic ............................................. 29
3.13.4 EXIT – Return to op erating level ......................... 29
3.14 Parameter group 10: digital input ....................... 30
3.14.1 FUNCTION – Digital input function selection ....... 30
3.14.2 EXIT – Return to op erating level ......................... 30
3.15 Parameter group 11: Safe positi on ..................... 31
3.15.1 FAIL_POS – Safe position .................................. 31
3.15.2 FACT_SET – Fac tory setting .............................. 31
3.15.3 IP-TYP – Type of the I/P module ........................ 32
3.15.4 IP_COMP – IP Co mpensation ............................ 32
3.15.5 HART_REV – HART versio n ............................... 32
3.15.6 EXIT – Return to op erating level ......................... 32
4 Diagnosis / erro r message s .......................................... 33
4.1 Error codes ........................................................ 33
4.2 Alarm co des ...................................................... 35
4.3 Message co des ................................................. 36
4.4 Error hand ling .................................................... 37
4.4.1 Positioner vibrates ............................................. 37
4.4.2 Positioner without function ................................. 38
TZIDC, TZIDC- 200 | COI/TZIDC/TZIDC-200-EN 5
1 Safety
Change from one to two columns
1.1 General information and instructions
These instructions are an impo rtant part of the product and
must be retained for future reference.
Installation, commissioning, and maintenance of the product
may only be performed by trained specialist personnel who
have been authorized by the plant operator accordingly. The
specialist personnel must have read and understood the
manual and must comply with its instructions.
For additional information or if specic problems occur that are
not discussed in these instruct ions, contact the manufacturer.
The content of these instructions is neither part of nor an
amendment to any previous or ex
isting agreement, promise or
legal relationship.
Modications and repairs to the product may only be
performed if expressly permitted by these instructions.
Information and symbols on the product must be observed.
These may not be removed and must be fully legible at all
times.
The operating company must stri ctly observe the applicable
national regulations relating to the installation, function testing,
repair and maintenance of electrical products.
1.2 Warnings
The warnings in these instructio ns are structured as follows:
DANGER
The signal word "DANGER" indicates an imminent danger.
Failure to observe this informat ion will result in death or
severe injury.
WARNING
The signal word "WARNING" in dicates an imminent danger.
Failure to observe this informat ion may result in death or
severe injury.
CAUTION
The signal word "CAUTION" in dicates an imminent danger.
Failure to observe this informat ion may result in minor or
moderate injury.
NOTE
The signal word "NOTE" in dicates useful or important
information about the product.
The signal word "NOTE" is n ot a signal word indicating a
danger to personnel. The signal word "NOTE" can also refer
to material damage.
1.3 Intended use
Positioning of pneumatically controlled actuators; designed for
mounting on linear and part-turn actuators.
The device is designed for use exclusively within the stated
values on the name plate and in the data sheet.
— The maximum operating temperature must not be
exceeded.
— The permissible ambient temperature must not be
exceeded.
— The housing protection ty pe must be observed.
1.4 Improper use
The following are considered to be instances of improper use
of the device:
— For use as a climbing aid, e.g. for mounting purposes
— For use as a support for extern al loads, e.g. as a support
for piping, etc.
— Material application, e.g. by painting over the name plate
or welding/soldering on parts.
— Material removal, e.g. by spot drilling the housing.
1.5 Warranty provisions
Usin
g the device in a manner that does not fall within the
scope of its intended use, disregarding this manual, using
underqualied personnel, or making unauthorized alterations
releases the manufacturer from liability for any resulting
damage. This renders the manufacturer's warranty null and
void.
6 COI/TZIDC/TZIDC-200- EN | TZIDC, TZIDC- 200
2 Operation
2.1 Safety instructions
CAUTION
Risk of injury due to incorrect parameter values!
Incorrect parameter values can cause the valve to move
unexpectedly. This can lead to process failures and result in
injuries.
— Before recommissioning a positioner that was previously
in use at another location, always reset the device to its
factory settings.
— Never start Auto Adjust before restoring the factory
settings.
If there is a chance that safe op eration is no lo nger possible,
take the device out of operation and secure it against
unintended startup.
2.2 Parameterization of the device
The LCD display features operat ing buttons which enable the
device to be operated with the housing cover open.
2.2.1 Menu navigation
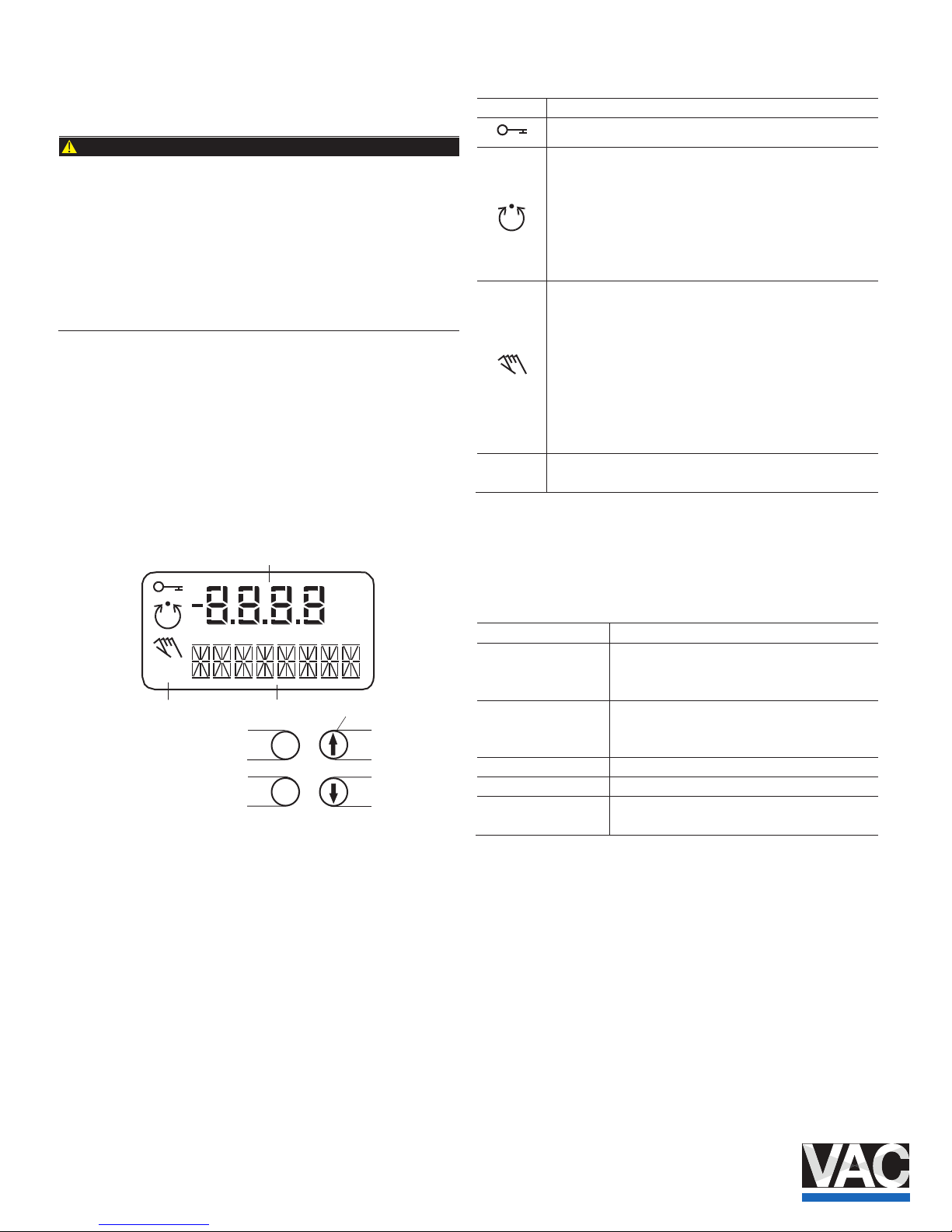
Fig. 1: LCD display with operating buttons
1 Value display with unit 2 Symbol display
3 Designator display 4 Operating buttons for menu navigation
Value display with unit
This 7-segment display with four digits indicates parameter
values or parameter reference numbers. For values, the
physical unit (°C, %, mA) is also displayed.
Designator display
This 14-segment display with eigh
t digits indicates the
designators of the parameters with their status, of the
parameter groups, and of the operating modes.
Description of symbols
Symbol Description
Operation or access is restricted.
Control loop is active.
The symbol is displayed when the positioner is in operating
mode 1.0 CTRL_ADP (adaptive control) or 1.1 CTRL_FIX
(xed control) at operating level. On the conguration level
there are test functions for which the controller will be active
as well. The control loop symbol will also be displayed when
these functions are active.
Manual adjustment.
The symbol is displayed when the positioner is in operating
mode 1.2 MANUAL (manual adjustment within the stroke
range) or 1.3 MAN_SENS (manual adjustment within the
measuring range) at operating level. At conguration level,
manual adjustment is active when setting the valve range
limits (parameter group 6 MIN_VR (min. of valve range) and
6 MAX_VR (max. of valve range)). The symbol will also be
displayed when these parameters are being set.
The conguration icon indicates that the positioner is at the
conguration level. The control operation is inactive.
The four operating buttons ENTER , MODE , and are
pressed individually or in cer tain combinations according to
the function desired.
Operating button functions
Control button
Meaning
ENTER — Acknowledge message
— Start an action
— Save in the non-volatile memory
MODE — Choose operating mode (operating level)
— Select parameter group or parameter
(conguration level)
nottub noitcerid PU
nottub noitcerid NWOD
Press and hold all four
buttons for 5 s
Reset
M10980
conf
mA
%
C
o
E
M
4
1
2
3
conf
TZIDC, TZIDC- 200 | COI/TZIDC/TZIDC-200-EN 7
2.3 Menu levels
The positioner has two operating levels:
Operating level
On the operating level the positioner operates in
one of four possible operating modes (two for
automatic control and tw o for manual mode).
Parameters cannot be changed or saved on this
level.
Conguration level
On this level most of the parameters of the
positioner can be changed locally. The PC is
required to change the limit values for the
movement counter, the travel counter, and the
user-dened characteristic curve.
On the conguration level the active operating
mode is deactivated. The I/P module is in neutral
position. The control operation is inactive.
NOTE
Property damage
During external conguration via a PC, the positioner no
longer responds to the setpoi nt current. This may lead to
process failures. Prior to extern al conguration, always move
the actuator to the safety position and activate manual
adjustment.
2.4 Operating modes
2.4.1 Operating mode 1.0: Control with adaptation
Controlling operation with automatic adaptation of the
control parameters
When the P1.0CTRL_ADP positioner is operated in "Adaptive
Mode", the control parameters are automatically optimized to
the operating conditions in small increments. This is especially
helpful if valves and ttings could not be operated with
reference conditions while the Auto Adjust function was in
progress.
Since self-optimization in "A daptive Mode" is subject to
several factors during operatio n and mismatches could result
over a longer period, we recommend that this operating mode
only be activated over severa l hours and be followed by the
mode P1.1 CTRL_FIX .
The valve position is indicated as a percentage of the
operating range (from 0 ... 100%).
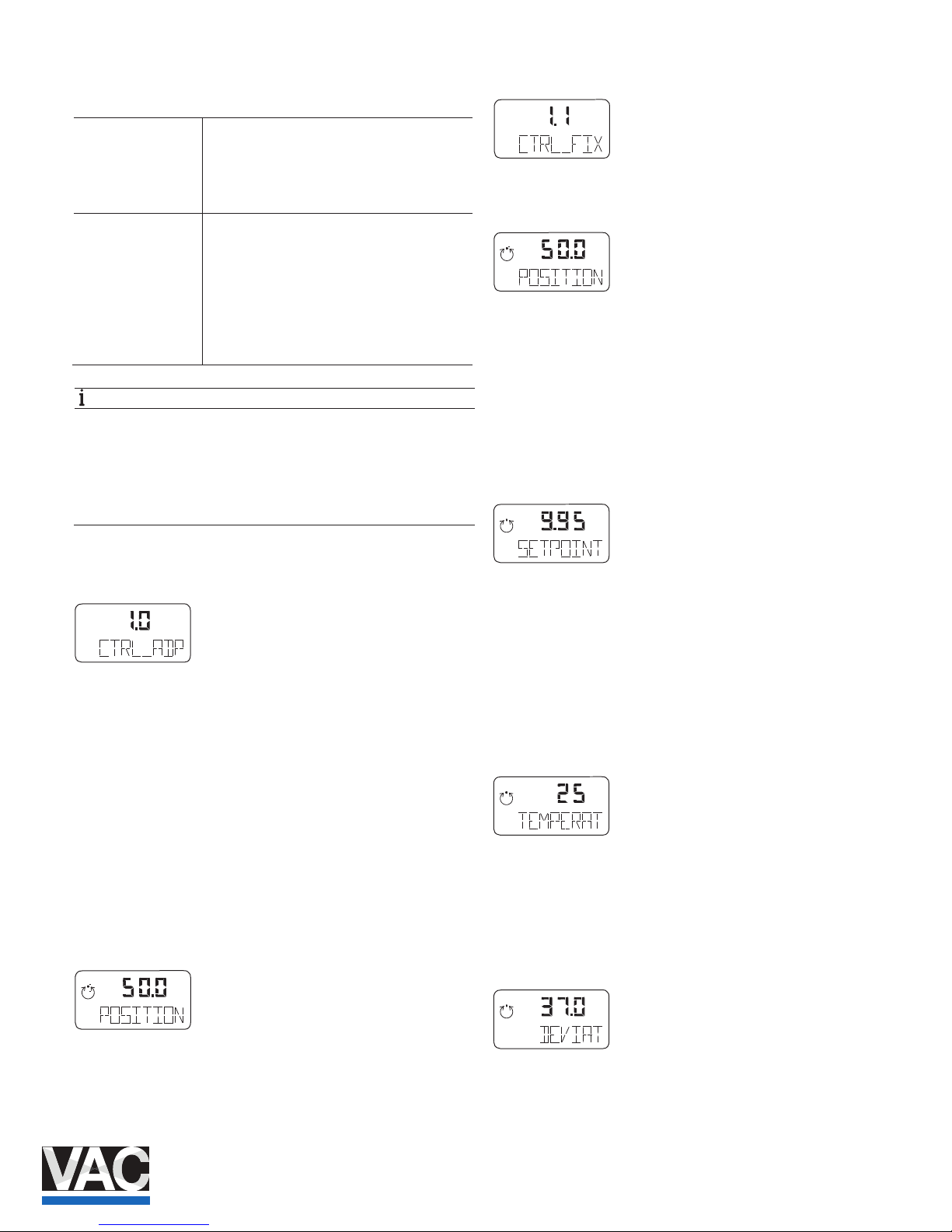
2.4.2 Operating mode 1.1: Control without adaptation
Controlling operation with xed parameters
This is the normal recommended operating mode.
In contrast to the operating mode P1.0 CTRL_ADP , the
control parameters are not automatically adjusted.
The valve position is indicated as a percentage of the
operating range (from 0 ... 100%).
In both control modes 1.0 and 1.1 , several values can be
displayed besides the current actuator position:
Setpoint display
1. Press and hold the button.
The setpoint is displayed.
2. Briey press ENTER .
The setpoint display is toggled between the setpoint current at
the input terminals i
n mA and the setpoint as a percentage of
the stroke range.
Temperature display
1. Press and hold the button.
The temperature inside the case is displayed.
2. Briey press ENTER .
3. The temperature display is toggled between °C and °F.
Display of control deviation
1. Press and hold the and button.
The control deviation is displayed as a percentage (%) of the
stroke range.
conf
mA
%
C
°
conf
mA
%
C
°
conf
mA
%
C
°
conf
mA
%
C
°
conf
mA
%
C
°
conf
mA
%
C
°
conf
mA
%
C
°

8 COI/TZIDC/TZIDC-200- EN | TZIDC, TZIDC- 200
2.4.3 Operating mode 1.2: Manual adjustment in the
stroke range
The valve is adjusted manually using the direction buttons
and within the stroke range.
1. Press and hold the button for the desired direction.
2. To activate the high speed mode in the manual mode,
press the second arrow button.
CAUTION
If air escapes due to a leakag e, the position will not be
readjusted.
Congured stroke limit positions and stroke times are not
eective in manual mode.
In this operating mode the valv e position is indicated as a
percentage (%) of the stroke range.
2.4.4 Operating mode 1.3: Manual adjustment in the
sensor range
See operating mode 1.2
Unlike step 1.2, this operating mode is used to determine
whether the available detection ra nge of the position sensor is
used correctly after mounting the positioner to the actuator. In
this mode, the valve position is indicated in angular degrees
with respect to the sensor range (i.e.,0 ... 140 °).
2.5 Inhibiting operation
Positioner operation can be inhibited completely or partially via
the digital input and the FUNCTION parameter in parameter
gro
up 10 ( DIG_IN (digital input)).
This allows the user to prevent or restrict operating actions of
unauthorized personnel as desired. When operation is
disabled in this way, the key symb ol is indicated in the display.
The following levels of conf iguration locks are possible:
Inhibiting the local conguration
Local operation on the operating level and remote operation
and conguration via a PC are still possible.
Inhibiting all local operating functions
No local operating actions can be executed. Both the
operating level and the conguration level are locked. Remote
operation and setting of parameters via a PC is still possible.
Inhibiting local operation and remote conguration
It is not possible to operate or congure the positioner locally
or congure it using a PC.
NOTE
This inhibit function can only be deactivated when a voltage
of 12 ... 24 V is applied at the digital input of the positioner
(see Function selection in parameter group 10 on page 30).
conf
mA
%
C
°
conf
mA
%
C
°
conf
mA
%
C
°
conf
mA
%
C
°
TZIDC, TZIDC- 200 | COI/TZIDC/TZIDC-200-EN 9
3 Conguration
3.1 General information
Most parameters for the position er can be set locally, meaning
that conguration only needs to be performed via the local
communication interface (LCI) or FSK modem and PC in
exceptional cases.
You may also deny or restrict local modication and saving of
parameters by completely or partially blocking access to the
conguration level (see Chapter "Inhibiting operation" on page
8 and the description of the Function parameter on page 30).
To simplify the process, the di erent parameters are grouped
as follows:
ID Designator Name
P1._ STANDARD Standard
P2._ SETPOINT Setpoint
P3._ ACTUATOR Actuator
P4._ MESSAGES Events
P5._ ALARMS Alarms
P6._ MAN_ADJ Manual adjustment
P7._ CTRL_PAR Control parameters
P8._ ANLG_OUT Analog output
P9._ DIG_OUT Digital output
P10._ DIG_IN Digital input
P11._ FS / IP Factory setting, I/P type
The following sections provide an overview (in tabular and
graphical format) of the overa ll structure of the parameter
groups and parameters.
Change from two to one column
3.2 Example
Parameter (1st line in
display)
Indicator (2nd line in
display)
Function Possible parameter settings Unit Factory Setting
P1._ STANDARD
P1.0 ACTUATOR Actuator type LINEAR, ROTARY - LINEAR
P1.1 AUTO_ADJ Autoadjust Command / Function is being
run
- -
P1.2 ADJ_MODE Automatic adjustment mode FULL, STROKE, CTRL, PAR,
ZERO_POS, LOCKED
- FULL
P1.3 TEST gnieb si noitcnuF / dnammoC tseT
run
- INACTIV
P1.4 EXIT Return to operating level Command / Function is being
run
- NV_SAVE
P2._ SETPOINT
conf
10 COI/TZIDC/TZIDC-200- EN | TZI DC, TZIDC-200
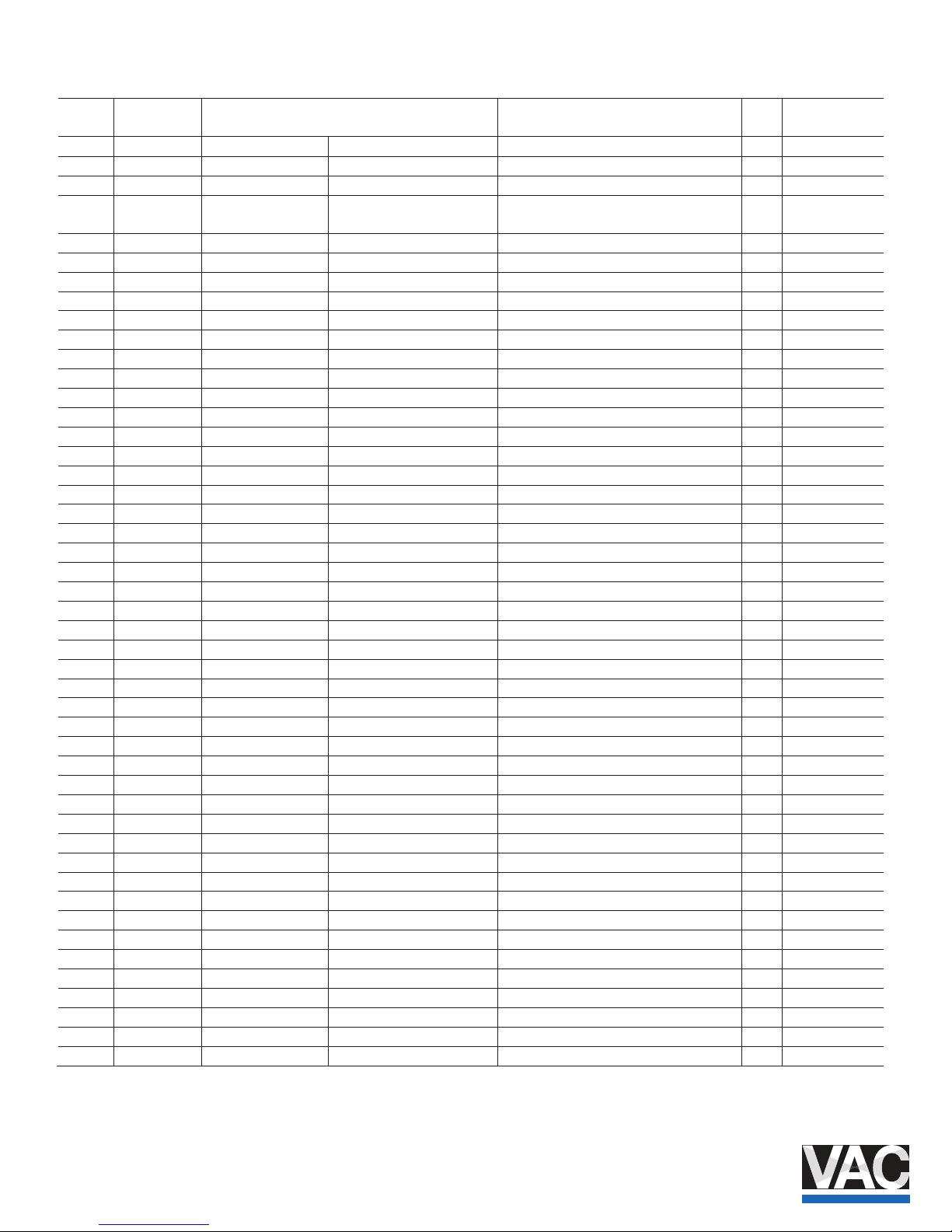
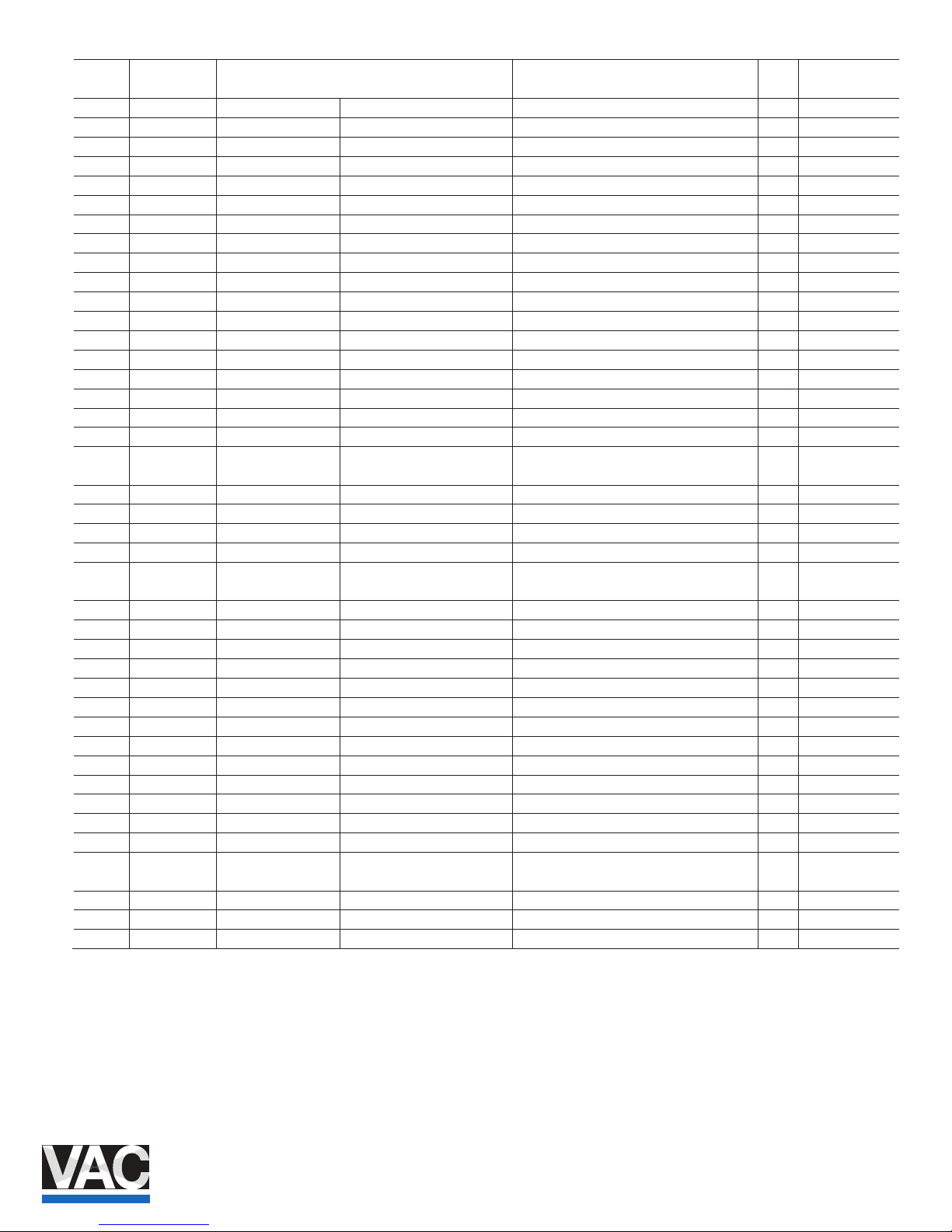
3.3 HART parameter description
Parame
ter
Display Function Possible parameter setting Unit Factory setting
P1._ STANDARD
P1.0 ACTUATOR RAENIL --- YRATOR ,RAENIL epyt rotautcA epyt rotautcA
P1.1 AUTO_ADJ --- --- noitcnuF tsujdaotuA tsujda otuA
P1.2 ADJ_MODE Auto adjust mode Automatic adjustment mode FULL,STROKE,CTRL_PAR, ZERO_POS,
LOCKED
FULL
P1.3 TEST EVITCANI --- noitcnuF tseT tseT
P1.4 FIND_DEV Find device Find device DISABLE, ONE TIME, CONTINOUS --- DISABLE
P1.5 EXIT EVAS_VN --- noitcnuF level gnitarepo ot nruteR nruteR
P2._ SETPOINT
P2.0 MIN_RGE 0.4 Am 4.81 … 0.4 egnar tnioptes .niM egnar tnioptes niM
P2.1 MAX_RGE 0.02 Am 6.5 … 0.02 egnar tnioptes .xaM egnar tnioptes xaM
P2.2 CHARACT Charact. curve Characteristic curve LINEAR, 1:25, 1:50, 25:1, 50:1, USERD --- LINEAR
P2.3 ACTION Valve action Eective directio TCERID --- ESREVER ,TCERID n
P2.4 SHUT_CLS 0.1 % 0.54 … 1.0 ,FFO % 0 eulav ffo-tuhS %0 eulav ffo-tuhS
P2.5 SHUT_OPN Shut o value 100% Shut-o FFO % FFO ,0.001 … 0.55 % 001 eulav
P2.6 RAMP UP Set point ramp, up Setpoint ra FFO --- 002 … 0 ,FFO )pu( pm
P2.7 RAMP DN FFO --- 002 … 0 ,FFO )nwod( pmar tniopteS nwod ,pmar tniop teS
P2.8 EXIT EVAS_VN --- noitcnuF level gnitarepo ot nruteR nruteR
P3._ ACTUATOR
P3.0 MIN_RGE 0.0 % 0.09 … 0.0 .nim ,egnar gnitarepO egnar ekorts fo .niM
P3.1 MAX_RGE 001 % 0.01 … 0.001 .xam ,egnar gnitarepO egnar ekorts fo .xaM
P3.2 ZERO_POS Zero position Zero position CLOC KWISE, CTCLOCKWISE --- CTCLOCKWISE
P3.3 EXIT EVAS_VN --- noitcnuF level gnitarepo ot nruteR nruteR
P4._ MESSAGES
P4.0 TIME_OUT Control time out Dead FFO --- 002 … ,FFO timil emit dnab
P4.1 POS_SW1 Position switch 1 0.0 % 0.001 … 0.0 1WS tniop gnihctiwS
P4.2 POS_SW2 Position switch 2 0.001 % 0.001 … 0.0 2WS tniop gnihctiwS
P4.3 SW1_ACTV LEB_LLAF --- DEECXE ,LEB_LLAF 1WS noitcerid evitcA elbane 1 tniophctiwS
P4.4 SW2_ACTV DEECXE --- DEECXE ,LEB_LLAF 2WS noitcerid evitcA elbane 2 tniophctiwS
P4.5 EXIT EVAS_VN --- noitcnuF level gnitarepo ot nruteR nruteR
P5._ ALARMS
P5.0 LEAKAGE EVITCANI --- EVITCANI ,EVITCA rotautca ot egakaeL noitceted egakaeL
P5.1 SP_RGE EVITCANI --- EVITCANI ,EVITCA egnar tnioptes eht edistuO rotinom gnr tniopteS
P5.2 SENS_RGE EVITCANI --- EVITCANI ,EVITCA dedeecxe egnar gnitarepO rotinom egnar .sneS
P5.3 CTRLER Controller monitor Controller inactive ACTIVE, INACTI EVITCANI --- EV
P5.4 TIME_OUT EVITCANI --- EVITCANI ,EVITCA timil emit dnab daeD tuo emit lortnoC
P5.5 STRK_CTR Stroke counter Movement counter ACTIVE, INACTIVE EVITCANI ---
P5.6 TRAVEL EVITCANI --- EVITCANI ,EVITCA retnuoc levarT retnuoc levarT
P5.7 EXIT EVAS_VN --- noitcnuF level gnitarepo ot nruteR nruteR
P6._ MAN_ADJ
P6.0 MIN_VR 0 % 0.001 … 0.0 .nim ,egnar gnitarepO egnar evlav .niM
P6.1 MAX_VR 001 % 0.001 … 0.0 .xam ,egnar gnitarepO egnar evlav .xaM
P6.2 ACTUATOR RAENIL --- YRATOR ,RAENIL epyt rotautcA epyt rotautcA
P6.3 SPRNG_Y2 Spring action (Y2) Spring action (Y2) CL OCKWISE, CTCLOCKWISE --- CTCLOCKWISE
P6.4 DANG_DN 0.0 % 0.54 … 0.0 % 0 elgna daeD esolc elgna daeD
P6.5 DANG_UP 0.001 % 0.001 … 0.55 % 001 elgna daeD nepo elgna daeD
P6.6 BOLT_POS REVEL --- METS ,REVEL noitisop rotautcA noitisop tloB
P6.7 EXIT EVAS_VN --- noitcnuF level gnitarepo ot nruteR nruteR
TZIDC, TZIDC- 200 | COI/TZIDC/TZIDC-200-EN 11
Parame
ter
Display Function Possible parameter setting Unit Factory setting
P7._ CTRL_PAR
P7.0 KP UP 0.5 --- 0.021 … 1.0 )pu( eulav PK pu ,eulav PK
P7.1 KP DN 0.5 --- 0.021 … 1.0 )nwod( eulav PK nwod ,eulav PK
P7.2 TV UP TV value, up TV value 002 --- 054 ... 01 )pu(
P7.3 TV DN 002 --- 054 ... 01 )nwod( eulav VT nwod ,eulav VT
P7.4 Y-OFS UP 0.84 % 0.001 … 0.0 )pu( tesffo Y pu ,tesffo Y
P7.5 Y-OFS DN 0.84 % 0.001 … 0.0 )nwod( tesffo Y nwod ,tesffo Y
P7.6 TOL_BAND 5.1 % 0.01 … 3.0 )enoz( dnab ecnareloT )enoz( dnab ecnareloT
P7.7 DEADBAND 01.0 % 00.01 … 01.0 dnab daeD dnabdaeD
P7.8 DB_APPR Deadband Approach Dead-band ap TSAF ,MUIDEM ,WOLS hcaorp
P7.9 TEST EVITCANI --- noitcnuF tseT tseT
P7.10 DB_CALC NO --- FFO ,NO noitanimreted dnab-daeD .taluclac dnabdaeD
P7.11 LEAK_SEN Leakage sensivity Leakag 03 S 0027 … 1 ytivitisnes e
P7.12 CLOSE_UP Pos. time out Po 0.03 % 0.001 … 0.0 gnirotinom noitis
P7.13 EXIT EVAS_VN --- noitcnuF level gnitarepo ot nruteR nruteR
P8._ ANLG_OUT
P8.0 MIN_RGE 0.4 Am 4.81 … 0.4 egnar tnerruc .niM egnar .niM
P8.1 MAX_RGE 0.02 Am 7.5 … 0.02 egnar tnerruc .xaM egnar .xaM
P8.2 ACTION Action Direction of action of
characteristic curve
TCERID --- ESREVER ,TCERID
P8.3 ALARM Alarm current Alarm message HI RUC_HGIH --- RUC_WOL ,RUC_HG
P8.4 RB_CHAR TCERID CLACER ,TCERID sretcarahc detrevnoC .retcarahc kcabdaeR
P8.5 TEST ENON --- noitcnuF tseT tseT
P8.6 ALR_ENAB NO --- FFO ,NO tuptuo golana aiv mralA delbane noitcnuf mralA
P8.7 CLIPPING Current signal
Signal clipping range
Extension of signal output to
3.8 … 20.5 mA
4.0 … 20.0; 3.8 … 20.5 mA mA 4.0 … 20.5
P8.8 EXIT --- --- noitcnuF level gnitarepo ot nruteR nruteR
P9._ DIG_OUT
P9.0 ALRM_LOG Alarm logic Alarm output logic ACTIVE_HI, ACTIVE_LO --- ACTIVE_HI
P9.1 SW1_LOG Switchpoint 1 logic Logic SW1 ACTIVE_HI, ACTIVE_LO --- ACTIVE_HI
P9.2 SW2_LOG Switchpoint 2 logic Logic SW2 ACTIVE_HI, ACTIVE_LO --- ACTIVE_HI
P9.3 TEST ENON --- noitcnuF tseT tseT
P9.4 EXIT EVAS_VN --- noitcnuF level gnitarepo ot nruteR nruteR
P10._ DIG_IN
P10.0 FUNCTION Function select Function selection NONE, POS_0 %, POS_100 %, POS_HOLD --- NONE
P10.1 EXIT --- --- noitcnuF level gnitarepo ot nruteR nruteR
P11._ FS / IP
P11.0 FAIL_POS EVITCANI --- EVITCANI ,EVITCA noitisop efaS noitisop evaS
P11.1 FACT_SET TRATS --- noitcnuF gnitteS yrotcaF gnittes yrotcaF
P11.2 IP-TYP I/P module type Type of l/P mo dule NO_F_POS,F_SAFE_1,F_SAFE_2,
F_FREEZE1, F_FREEZE2
--- [CUSTOM]
P11.3
1)
IP_COMP NO --- FFO ,NO noitasnepmoc PI noitasnepmoc PI
P11.4 HART_REV 5 --- 7 ;5 noisiveR TRAH noisiver TRAH
P11.5 EXIT EVAS_VN --- noitcnuF level gnitarepo ot nruteR nruteR
1) Activation only by A BB Service

12 COI/TZIDC/TZIDC-200- EN | TZI DC, TZIDC-200
3.4 HART parameter overview (graphic)
Fig. 2
Change from one to two columns
3.5 Parametergroup 1: Standard
3.5.1 ACTUATOR – Actuator type
With this parameter you can congure the positioner for
operation on a linear actuator (sensor range ±30°) or on a
part-turn actuator (sensor ra nge ±45°). No mechanical
modications to the positioner are required.
NOTE
After changing the actuator type , it is recommended that you
run automatic adjustment to prevent linearity errors.
Selection
LINEAR Linear actuator
ROTARY Part-turn actuator
3.5.2 AUTO_ADJ – automatic adjustment
The following values are determined during Auto Adjust:
— Direction of action of the actuator
— Direction of action of the reset spring
— Actuator travel of the multi-turn actuator / nal control
element
— Stroke time for both directions
— Control parameters
— Oset for the I/P module
NOTE
The mode and scope of the automatic adjustment function
can be selected using parameter
A
DJ_MODE .
M10487
I.3
conf
mA
%
C
°
conf conf con f conf conf conf conf con f conf
ENTER
MODE
ENTER
(3 ... 0)
(3 ... 0)
conf
I.0
CTRL_ADP
CTRL_FIX
I.2
MANUAL
MAN_SENS
I.I
ENTER
Parameter “EXIT”
(NV_SAVE)
P1.0
P1.1
P1.2
P1.3
P1.4
P1.5
P4.0
P4.1
P4.2
P4.3
P4.4
P4.5
P2.0
P2.1
P2.2
P2.3
P2.4
P2.5
P2.6
P2.7
P2.8
P3.0
P3.1
P3.2
P3.3
P5.0
P5.1
P5.2
P5.3
P5.4
P5.5
P5.6
P5.7
P6.0
P6.1
P6.2
P6.3
P6.4
P6.5
P6.6
P6.7
P7.0
P7.1
P7.2
P7.3
P7.4
P7.5
P7.6
P7.7
P7.8
P7.9
P7.10
P7.11
P7.12
P8.0
P8.1
P8.2
P8.3
P8.4
P8.5
P8.6
P8.7
P8.8
P9.0
P9.1
P9.2
P9.3
P9.4
P10.0
P10.1
P11.0
P11.1
P11.2
P11.3
P11.4
P11.5
conf
conf
conf
P1._
STANDARD
P2._
SETPOINT
P3._
ACTUATOR
P4._
MES
P5._
ALARMS
P6._
MAN_ADJ
P7._
CTRL_PAR
P8._
ANLG_OUT
P9._
DIG_OUT
P10._
DIG_IN
P11._
FS/IP
MODE
MODE
Configuration level
Operating level
P7.13
conf
conf
conf
mA
%
C
°
 Loading...
Loading...