

Unitronics UMI-B1 UL Series, UMI-0022BU-B1, UMI-0004BU-B1, UMI-0007BU-B1, UMI-0015EU-B1 Operation Manual
...
UM I-B1 UL Se ri es
Invert er
ww w.un itronicsPLC.com

UMI-B1 UL Series Inverter Contents
Contents
Contents .......................................................................................................................... i
1 Safety precautions ...................................................................................................... 1
1.1 Safety definition ................................................................................................... 1
1.2 Warning symbols ................................................................................................. 1
1.3 Safety guide ......................................................................................................... 2
2 Product overview ........................................................................................................ 5
2.1 Quick start-up ....................................................................................................... 5
2.2 Product specification ............................................................................................ 7
2.3 Name plate ......................................................................................................... 10
2.4 Type designation key ......................................................................................... 10
2.5 Structure diagram............................................................................................... 11
3 Installation guide ...................................................................................................... 12
3.1 Mechanical installation ....................................................................................... 12
3.2 Standard wiring .................................................................................................. 14
3.3 Layout protection ............................................................................................... 19
4 Keypad operation procedure ................................................................................... 21
4.1 Keypad introduction ........................................................................................... 21
4.2 Keypad displaying .............................................................................................. 23
4.3 Keypad operation ............................................................................................... 25
5 Function parameters ................................................................................................ 27
6 Fault Tracking ........................................................................................................... 98
6.1 Maintenance intervals ........................................................................................ 98
6.2 Fault solution.................................................................................................... 103
7 Communication protocol ....................................................................................... 109
7.1 Brief instruction to Modbus protocol ................................................................ 109
7.2 Application of the inverter ................................................................................ 109
7.3 RTU command code and communication data illustration .............................. 115
Appendix A Technical data ....................................................................................... 131
A.1 Ratings ............................................................................................................ 131
A.2 Marking ............................................................................................................ 132
A.3 EMC regulations .............................................................................................. 132
Appendix B Dimension drawings............................................................................. 134
B.1 External keypad (optional) structure ................................................................ 134
B.2 Inverter chart ................................................................................................... 135
Appendix C Further information .............................................................................. 137
C.1 Product and service inquiries .......................................................................... 137
i

UMI-B1 UL Series Inverter Safety precautions
Danger:
Serious physical injury or even death may occur if related
requirements are not followed
Warning:
Physical injury or damage to the devices may occur if related
requirements are not followed
Note:
Physical hurt may occur if related requirements are not
followed
Qualified
electricians:
People working on the device should take part in professional
electrical and safety training, receive the certification and be
familiar with all steps and requirements of installing,
commissioning, operating and maintaining the device to
avoid any emergency.
Symbols
Name
Instruction
Abbreviation
Danger
Danger
Serious physical injury or even
death may occur if related
requirements are not followed
Warning
Warning
Physical injury or damage to the
devices may occur if related
requirements are not followed
Do not
Electrostatic
discharge
Damage to the PCBA board may
occur if related requirements are
not followed
Hot sides
Hot sides
Sides of the device may become
hot. Do not touch.
Note
Note
Physical hurt may occur if related
requirements are not followed
Note
1 Safety precautions
Read this manual carefully and follow all safety precautions before moving, installing,
operating and servicing the inverter. If ignored, physical injury or death may occur, or
damage may occur to the devices.
If any physical injury or death or damage to the devices occurs for ignoring to the safety
precautions in the manual, our company will not be responsible for any damages and we
are not legally bound in any manner.
1.1 Safety definition
1.2 Warning symbols
Warnings caution you about conditions which can result in serious injury or death and/or
damage to the equipment, and advice on how to avoid the danger. Following warning
symbols are used in this manual:
1

UMI-B1 UL Series Inverter Safety precautions
• Only qualified electricians are allowed to operate on the inverter.
• Do not carry out any wiring and inspection or changing components
when the power supply is applied. Ensure all input power supplies are
disconnected before wiring and checking and always wait for at least the
time designated on the inverter or until the DC bus voltage is less than
36V. Below is the table of the waiting time:
Inverter module
Minimum waiting time
1PH 220V
0.5~3HP (0.4–2.2kW)
5 minutes
3PH 220V
0.5~1HP (0.4–0.75kW)
5 minutes
3PH 460V
1~3HP (0.75–2.2kW)
5 minutes
• Do not refit the inverter unauthorized; otherwise fire, electric shock or
other injury may occur.
• The base of the radiator may become hot during running. Do not touch
to avoid hurt.
• The electrical parts and components inside the inverter are electrostatic.
Take measurements to avoid electrostatic discharge during relevant
operation.
• Install the inverter on fire-retardant material and keep the inverter
away from combustible materials.
• Connect the braking optional parts (braking resistors, braking units or
feedback units) according to the wiring diagram.
• Do not operate on the inverter if there is any damage or components
loss to the inverter.
• Do not touch the inverter with wet items or body, otherwise electric
shock may occur.
• Solid-state motor overload protection is performed when the inverter
runs at 150% of FLA.
• The inverter does not provide motor over-temperature protection.
1.3 Safety guide
1.3.1 Delivery and installation
Note:
• Select appropriate moving and installing tools to ensure a safe and normal running of
the inverter and avoid physical injury or death. For physical safety, the erector should
take some mechanical protective measurements, such as wearing exposure shoes
and working uniforms.
• Ensure to avoid physical shock or vibration during delivery and installation.
2

UMI-B1 UL Series Inverter Safety precautions
• Disconnect all power supplies applied to the inverter before the
terminal wiring and wait for at least the designated time after
disconnecting the power supply.
• High voltage is present inside the inverter during running. Do not carry
out any operation except for the keypad setting.
• The inverter may start up by itself when P01.21=1. Do not get close to
the inverter and motor.
• The inverter can not be used as "Emergency-stop device".
• The inverter can not be used to break the motor suddenly. A
mechanical braking device should be provided.
• Only qualified electricians are allowed to perform the maintenance,
inspection, and components replacement of the inverter.
• Disconnect all power supplies to the inverter before the terminal
wiring. Wait for at least the time designated on the inverter after
disconnection.
• Take measures to avoid screws, cables and other conductive matters
to fall into the inverter during maintenance and component
replacement.
• Do not carry the inverter by its cover. The cover may fall off.
• Install away from children and other public places.
• The inverter cannot meet the requirements of low voltage protection in IEC61800-5-1
if the altitude of the installation site is above 6562ft (2000m).
• The leakage current of the inverter may be above 3.5mA during operation. Ground
with proper techniques and ensure the grounding resistance is less than 10Ω. The
conductivity of PE grounding conductor is the same as that of the phase conductor
(with the same cross sectional area).
• R, S and T are the input terminals of the power supply, while U, V and W are the
motor terminals. Connect the input power cables and motor cables with proper
techniques; otherwise the damage to the inverter may occur.
1.3.2 Commissioning and running
Note:
• Do not switch on or off the input power supply of the inverter frequently.
• For inverters that have been stored for a long time, check and fix the capacitance and
try to run it again before utilization (see Maintenance and Hardware Fault Diagnose).
• Cover the front board before running, otherwise electric shock may occur.
1.3.3 Maintenance and replacement of components
3

UMI-B1 UL Series Inverter Safety precautions
There are heavy metals in the inverter. Deal with it as industrial effluent.
Note:
• Select proper torque to tighten screws.
• Keep the inverter, parts and components away from combustible materials during
maintenance and component replacement.
• Do not carry out any isolation and pressure test on the inverter and do not measure
the control circuit of the inverter by megameter.
1.3.4 What to do after scrapping
4

UMI-B1 UL Series Inverter Product overview
1. Check whether the packing box is damaged or dampened. If yes, contact local
dealers or UNITRONICS offices.
2. Check the model identifier on the exterior surface of the packing box is consistent
with the purchased model. If no, contact local dealers or UNITRONICS offices.
3. Check whether the interior surface of packing box is abnormal, for example, in wet
condition, or whether the enclosure of the inverter is damaged or cracked. If yes,
contact local dealers or UNITRONICS offices.
4. Check whether the name plate of the inverter is consistent with the model identifier
on the exterior surface of the packing box. If no, contact local dealers or
UNITRONICS offices.
5. Check whether the accessories (including user's manual and control keypad)
inside the packing box are complete. If no, contact local dealers or UNITRONICS
offices.
1. Check the load type to verify that there is no overload of the inverter during work
and check whether the power degree of the inverter needs to be modified.
2. Check that the actual current of the motor is less than the rated current of the
inverter.
3. Check that the control accuracy of the load is the same of the inverter.
4. Check that the incoming supply voltage is correspondent to the rated voltage of the
inverter.
1. Check that the ambient temperature of the inverter is below 104°F (40°C ). If
exceeds, derate 1% for every additional 1.8°F (1°C ). Additionally, the inverter can not
be used if the ambient temperature is above 122°F (50°C ).
Note: For the cabinet inverter, the ambient temperature means the air temperature
inside the cabinet.
2. Check that the ambient temperature of the inverter in actual usage is above 14°F
(-10°C ). If no, add heating facilities.
Note: For the cabinet inverter, the ambient temperature means the air temperature
2 Product overview
2.1 Quick start-up
2.1.1 Unpacking inspection
Check as follows after receiving products:
2.1.2 Application confirmation
Check the machine before beginning to use the inverter:
2.1.3 Environment
Check as follows before the actual installation and usage:
5

UMI-B1 UL Series Inverter Product overview
inside the cabinet.
3. Check that the altitude of the actual usage site is below 3281ft (1000m). If exceeds,
derate1% for every additional 328ft (100m).
4. Check that the humidity of the actual usage site is below 90% and condensation is
not allowed. If no, add additional protection inverters.
5. Check that the actual usage site is away from direct sunlight and foreign objects
can not enter the inverter. If no, add additional protective measures.
6. Check that there is no conductive dust or flammable gas in the actual usage site. If
no, add additional protection to inverters.
1. Check that the load range of the input and output cables meet the need of actual
load.
2. Check that the accessories of the inverter are correctly and properly installed. The
installation cables should meet the needs of every component (including reactors,
input filters, output reactors, output filters, DC reactors, braking units and braking
resistors).
3. Check that the inverter is installed on non-flammable materials and the calorific
accessories (reactors and brake resistors) are away from flammable materials.
4. Check that all control cables and power cables are run separately and the routation
complies with EMC requirement.
5. Check that all grounding systems are properly grounded according to the
requirements of the inverter.
6. Check that the free space during installation is sufficient according to the
instructions in user's manual.
7. Check that the installation conforms to the instructions in user's manual. The
inverter must be installed in an upright position.
8. Check that the external connection terminals are tightly fastened and the torque is
appropriate.
9. Check that there are no screws, cables and other conductive items left in the
inverter. If no, get them out.
1. Autotune. If possible, de-coupled from the motor load to start dynamic autotune. Or
if no, static autotune is available.
2. Adjust the ACC/DEC time according to the actual running of the load.
3. Commission the device via jogging and check that the rotation direction is as
required. If no, change the rotation direction by changing the wiring of motor.
4. Set all control parameters and then operate.
2.1.4 Installation confirmation
Check as follows after the installation:
2.1.5 Basic commissioning
Complete the basic commissioning as follows before actual utilization:
6

UMI-B1 UL Series Inverter Product overview
Function
Specification
Power
input
Input voltage (V)
AC 1PH 200V–240V, rated voltage: 220V
AC 3PH 200V–240V, rated voltage: 220V
AC 3PH 380V–480V, rated voltage: 460V
Allowable voltage
fluctuation
-15%–+10%
Input current (A)
Refer to the rated value
Input frequency
(Hz)
50Hz or 60Hz Allowed range: 47–63Hz
Power
output
Output voltage (V)
0–input voltage
Output current (A)
Refer to the rated value
Output power
HP (kW)
Refer to the rated value
Output frequency
(Hz)
0–400Hz
Technical
control
feature
Control mode
SVPWM, SVC
Adjustable-speed
ratio
Asynchronous motor 1: 100 (SVC)
Speed control
accuracy
±0.2% (SVC)
Speed fluctuation
±0.3% (SVC)
Torque response
<20ms (SVC)
Torque control
accuracy
10%
Starting torque
0. 5Hz/150% (SVC)
Overload
capability
150% of rated current: 1 minute
180% of rated current: 10 seconds
200% of rated current: 1 second
2.2 Product specification
7

UMI-B1 UL Series Inverter Product overview
Function
Specification
Running
control
feature
Frequency setting
method
Digital setting, analog setting, pulse frequency
setting, multi-step speed running setting, simple
PLC setting, PID setting, MODBUS
communication setting
Shift between the set combination and set
channel.
Auto-adjustment
of the voltage
Keep a stable voltage automatically when the
grid voltage transients
Fault protection
Provide comprehensive fault protection
functions: overcurrent, overvoltage,
undervoltage, overheating, phase loss and
overload, etc.
Peripheral
interface
Analog input
1 input (AI2): 0–10V/0–20mA; 1 input (AI3):
-10–10V
Analog output
2 inputs (AO1, AO2): 0–10V/0–20mA
Digital input
4 common inputs, max. frequency: 1kHz;
1 high speed input, max. frequency: 50kHz
Digital output
1 Y1 terminal output; 2 programmable relay
outputs
Relay output
2 programmable relay outputs
RO1A NO, RO1B NC, RO1C common terminal
RO2A NO, RO2B NC, RO2C common terminal
Contact capacity: 3A/AC250V
Others
Mountable
method
Wall and rail mountable
Temperature of
the running
environment
14~122°F (-10–50°C), derate above 104°F
(40°C)
8

UMI-B1 UL Series Inverter Product overview
Function
Specification
Protective degree
Note:
1. The inverter with plastic casing should be
installed in metal distribution cabinet, which
conforms to IP20 and of which the top conforms
to IP3X.
2. Install device in pollution degree 2
environment
Cooling
Air-cooling
Braking unit
Embedded
EMI filter
Optional filter: meet the degree requirement of
IEC61800-3 C2, IEC61800-3 C3
Safety
Meet the requirements of CE, UL and CUL
Overvoltage
category
1PH&3PH 240V: Used in Canada only:
"Transient surge suppression shall be installed
on the line side of this equipment and shall be
rated 240V (phase to ground), 240V (phase to
phase), suitable for overvoltage category III, and
shall provide protection for a rated impulse
withstand voltage peak of 4kV" or equivalent.
3PH: Used in Canada only: "Transient surge
suppression shall be installed on the line side of
this equipment and shall be rated 480V (phase
to ground), 480V (phase to phase), suitable for
overvoltage category III, and shall provide
protection for a rated impulse withstand voltage
peak of 6kV" or equivalent.
9

UMI-B1 UL Series Inverter Product overview
Key
No.
Description
Detailed content
Product line
①
Abbreviation for
product line
UMI for Unitronics Inverters
Rated power
②
Power range
0004:400W
0022:2.2kW(3HP)
Voltage degree
③
Voltage degree
B: 1PH 200V–240V
C: 3PH 200V–240V
E: 3PH 380V–480V
Certification
④
Certification
U: UL
Optional
Braking unit
⑤
Optional Braking
unit
B: Built-in braking unit.
Product series
⑥
Product series
B1: for B1 Series Inverter Family
2.3 Name plate
Figure 2-1 Name plate
2.4 Type designation key
The type designation contains information on the inverter. The user can find the type
designation on the type designation label attached to the inverter or the simple name
plate.
UMI – 0022 – E – U – B – B1
① ② ③ ④ ⑤ ⑥
Figure 2-2 Product type
10

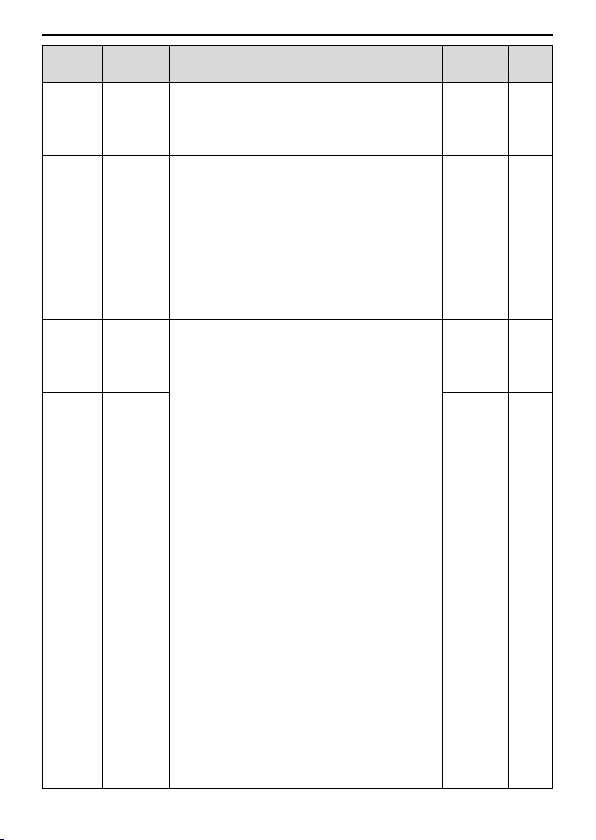
UMI-B1 UL Series Inverter Product overview
6
10
11
12
8
9
7
4
351
3
2
1
Serial
No.
Name
Description
1
External keypad port
Connect the external keypad
2
Port cover
Protect the external keypad port
3
Cover
Protect the internal parts and components
4
Hole for the sliding
cover
Fix the sliding cover
5
Trunking board
Protect the inner components and fix the cables
of the main circuit
6
Name plate
See Product Overview for detailed information
7
Potentiometer knob
Refer to the Keypad Operation Procedure
8
Control terminals
See Electric Installation for detailed information
9
Main circuit terminals
See Electric Installation for detailed information
10
Screw hole
Fix the fan cover and fan
11
Cooling fan
See Maintenance and Hardware Fault
Diagnose for detailed information
12
Fan cover
Protect the fan
Note: In above figure, the screws at 4 and 10 are provided with packaging and specific
installation depends on the requirements of customers.
2.5 Structure diagram
Figure 2-3 is the layout figure of the inverter (take the inverter of 1HP (0.75kW) as the
example).
Figure 2-3 Product structure
11

UMI-B1 UL Series Inverter Installation guide
• Only qualified electricians are allowed to carry out what described in
this chapter. Operate as the instructions in Safety Precautions.
Ignoring these may cause physical injury or death or damage to the
devices.
• Ensure the power supply of the inverter is disconnected during the
operation. Wait for at least the time designated after the disconnection
if the power supply is applied.
• The installation and design of the inverter should be complied with the
requirement of the local laws and regulations in the installation site. If
the installation infringes the requirement, our company will exempt
from any responsibility. Additionally, if users do not comply with the
suggestion, some damage beyond the assured maintenance range
may occur.
Environment
Conditions
Installation
site
Indoor
Environment
temperature
14~122°F (-10~50°C), and the temperature changing rate is less
than 0.9°F (0.5°C )/minute.
If the ambient temperature of the inverter is above 104°F (40°C ),
derate 1% for every additional 1.8°F (1°C ).
It is not recommended to use the inverter if the ambient
temperature is above 122°F (50°C ).
In order to improve the reliability of the device, do not use the
inverter if the ambient temperature changes frequently.
Provide cooling fan or air conditioner to control the internal ambient
temperature below the required one if the inverter is used in a close
space such as in the control cabinet.
When the temperature is too low, if the inverter needs to restart to
run after a long stop, it is necessary to provide an external heating
device to increase the internal temperature, otherwise damage to
the devices may occur.
3 Installation guide
The chapter describes the mechanical installation and electric installation.
3.1 Mechanical installation
3.1.1 Installation environment
The installation environment is the safeguard for a full performance and long-term stable
functions of the inverter. Check the installation environment as follows:
12

UMI-B1 UL Series Inverter Installation guide
Environment
Conditions
Humidity
RH≤90%
No condensation is allowed.
Storage
temperature
-40~+158°F (-40°C –+70°C ), and the temperature changing rate is
less than 1.8°F (1°C )/minute.
Running
environment
condition
The installation site of the inverter should:
keep away from the electromagnetic radiation source;
keep away from contaminative air, such as corrosive gas, oil mist
and flammable gas;
ensure foreign objects, such as metal power, dust, oil, water can
not enter into the inverter (do not install the inverter on the
flammable materials such as wood);
keep away from direct sunlight, oil mist, steam and vibration
environment.
Altitude
Below 3281ft (1000m)
If the altitude is above 3281ft (1000m, derate 1% for every
additional 328ft (100m).
Vibration
≤ 5.8m/s
2
(0.6g)
Installation
direction
The inverter should be installed on an upright position to ensure
sufficient cooling effect.
Note:
• UMI-B1 UL series inverters should be installed in a clean and ventilated environment
according to enclosure classification.
• Cooling air must be clean, free from corrosive materials and electrically conductive
dust.
3.1.2 Installation direction
The inverter may be installed in a cabinet.
The inverter needs be installed in the vertical position. Check the installation site
according to the requirements below. Refer to chapter Dimension Drawings in the
appendix for frame details.
3.1.3 Installation manner
The inverter can be installed in two different ways, depending on the frame size:
Figure 3-1: Wall mounting (for all frame sizes)
Figure 3-2: Rail mounting (for all frame sizes, but need optional installation bracket)
13

UMI-B1 UL Series Inverter Installation guide
Figure 3-1 Wall mounting
Figure 3-2 Rail mounting
R
S
T
W
V
U
PE
M
(+)
PB
Three-phase
380V~480V
50/60Hz
Braking resistor
Input
reactor
Input
filter
Fuse
Output
reactor
Output
filter
L
N
W
V
U
PE
M
(+)
PB
Single-phase
200V~240V
50/60Hz
Braking resistor
Input
reactor
Input
filter
Fuse
Output
reactor
Output
filter
Note: The minimum space of A and B is 100mm. H is 36.6mm and W is 35.0mm.
3.2 Standard wiring
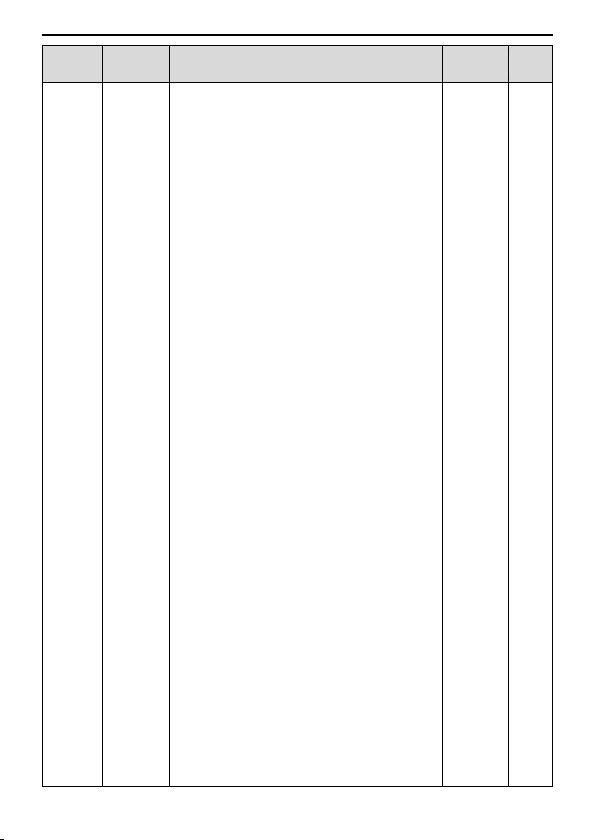
3.2.1 Connection diagram of main circuit
Figure 3-3 Connection diagram of main circuit
Note:
• The fuse, braking resistor, input reactor, input filter, output reactor, output filter are
optional parts. Refer to Peripheral Optional Parts for detailed information.
• Remove the yellow warning labels of PB, (+) and (-) on the terminals before
connecting the braking resistor; otherwise, poor connection may occur.
14

UMI-B1 UL Series Inverter Installation guide
Terminal
Terminal name
Function
L
Power input of the main
circuit
1-phase AC input terminals which are generally
connected with the power supply.
N
U
The inverter output
3-phase AC output terminals which are generally
connected with the motor.
V
W
PB, (+)
Braking resistor terminal
PB and (+) are connected to the external
resistor.
PE
Grounding terminal
Each machine should be grounded.
Terminal
Terminal name
Function
R, S, T
Power input of the main
circuit
3-phase AC input terminals which are generally
connected with the power supply.
U, V, W
The inverter output
3-phase AC output terminals which are generally
connected with the motor.
PB, (+)
Braking resistor terminal
PB and (+) are connected to the external
resistor.
PE
Grounding terminal
Each machine should be grounded.
3.2.2 Terminals figure of main circuit
Figure 3-4 1PH terminals of main circuit
Figure 3-5 3PH terminals of main circuit
Note:
• Do not use asymmetrically motor cables. If there is a symmetrically grounding
conductor in the motor cable in addition to the conductive shield, connect the
grounding conductor to the grounding terminal at the inverter and motor ends.
• Route the motor cable, input power cable and control cables separately.
• When selecting C3 input filters, connect the filters in parallel at the input side of the
inverter.
15

UMI-B1 UL Series Inverter Installation guide
Multi-function input terminal 1
Multi-function input terminal 2
Multi-function input terminal 4
High speed pulse input collector
Multi-function input terminal 3
Open collector input optional
Y1 output
Analog output
Analog output
Relay 1 output
Relay 2 output
S1
S2
S3
S4
HDI
COM
PW
+24V
PE
+10V
AI2
AI3
PE
GND
AI2
V I
Y1
COM
AO1
AO2
V I
V
I
AO1
AO2
0–10V/0–20mA
0–10V/0–20mA
COM
COM
RO1A
RO1B
RO1C
RO2A
RO2B
RO2C
Shield layer
Twisted pair
RS485
communication
485+
485-
GND
PE
J5
ON
GND
3.2.3 Wiring of terminals in main circuit
1. Connect the ground line of input power cable to the ground terminal of inverter (PE)
directly, and connect 3PH input cable to R, S and T and fasten up.
2. Connect the ground line of motor cable to the ground terminal of the inverter, and
connect the 3PH motor cable to U, V, W and fasten up.
3. Connect the brake resistor which carries cables to the designated position.
4. Fasten up all the cables on the outside of the inverter if allowed.
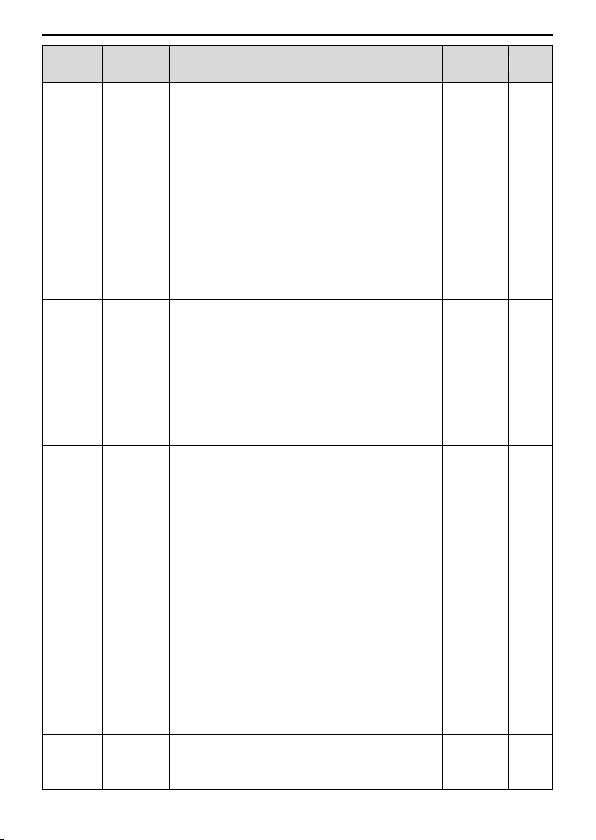
3.2.4 Wiring diagram of control circuit
Figure 3-6 Wiring of control circuit
3.2.5 Terminals of control circuit
Figure 3-7 Terminals of control circuit
16

UMI-B1 UL Series Inverter Installation guide
Type
Terminal
name
Function
description
Technical specifications
Communication
485+
485
communication
RS485 communication interface.
In order to ensure stable
communication channel:
• Use shielded twisted pair
cable.
• Connect the HOST RS485
signal ground to one of the
VFD CMD/GND terminals.
• Connect one of the CMD/GND
terminals to PE terminal.
• Earth the cable shield to the
PE terminal.
485-
Digital
input/output
S1
Digital input
1. Internal impedance: 3.3kΩ
2. 12–30V voltage input is
available
3. The terminal is the
dual-direction input terminal
4. Max. input frequency: 1kHz
S2
S3
S4
HDI
High frequency
input channel
Except for S1–S4, this terminal
can be used as high frequency
input channel.
Max. inputfrequency: 50kHz
Duty cycle: 30%–70%
PW
Digital power
supply
To provide the external digital
power supply
Voltage range: 12–30V
Y1
Digital output
Contact capacity: 50mA/30V
COM
Common terminal of the open
collector output
Analog
input/output
+10V
External 10V
reference
power supply
10V reference power supply
Max. output current: 50mA
As the adjusting power supply of
the external potentiometer
Potentiometer resistance: 5kΩ
above
AI2
Analog input
1. Input range: AI2 voltage and
current can be chosen:
0–10V/0–20mA; AI3:
-10V–+10V.
2. Input impedance:voltage
AI3
17

UMI-B1 UL Series Inverter Installation guide
Type
Terminal
name
Function
description
Technical specifications
input:
20kΩ; current input: 500Ω.
3.Voltage or current input can be
set by dip switch.
4. Resolution: the minimum
AI2/AI3 is 10mV/20mV when
10V corresponds to 60Hz.
GND
Analog
reference
ground
Analog reference ground
AO1
Analog output
1. Output range: 0–10V or
0–20mA
2. The voltage or the current
output is depended on the dip
switch.
3. Deviation±1%, 77°F (25°C )
when full range.
AO2
Relay output
RO1A
Relay 1 NO
contact
RO1 relay output, RO1A NO,
RO1B NC, RO1C common
terminal
RO2 relay output, RO2A NO,
RO2B NC, RO2C common
terminal
Contact capacity: 3A/AC250V
RO1B
Relay 1 NC
contact
RO1C
Relay 1
common
contact
RO2A
Relay 2 NO
contact
RO2B
Relay 2 NC
contact
RO2C
Relay 2
common
contact
18

UMI-B1 UL Series Inverter Installation guide
U-shaped contact
tag between
+24V and PW
U-shaped contact
tag between
COM and CME
S1
S2
COM
PW
+ 24V
COM
+24V
S1
S2
COM
PW
+ 24V
COM
+24V
+ 24V
S1
S2
COM
PW
+ 24V
COM
+24V
S1
S2
COM
PW
+ 24V
COM
+24V
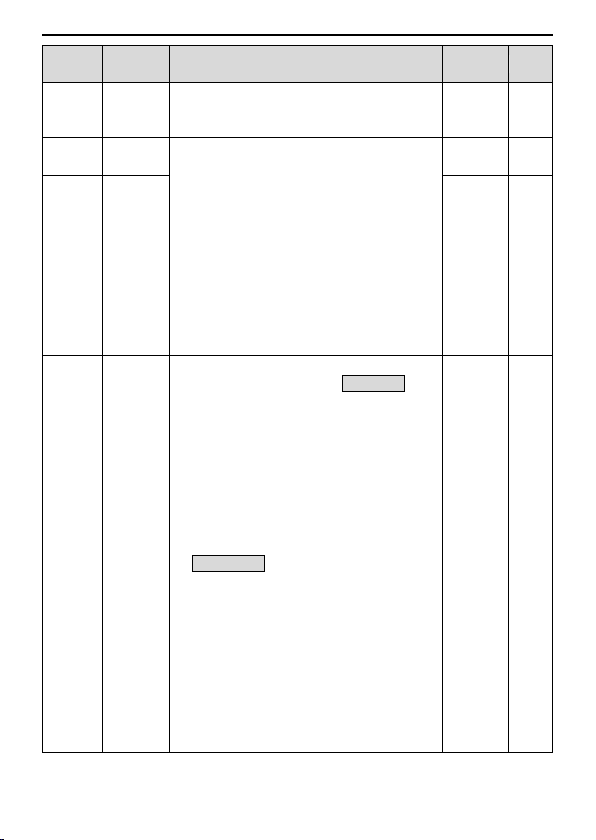
3.2.6 Input/Output signal connection figure
Use U-shaped contact tag to set NPN mode or PNP mode and the internal or external
power supply. The default setting is NPN internal mode.
Figure 3-8 U-shaped contact tag
If the signal is from NPN transistor, set the U-shaped contact tag between +24V and PW
as below according to the used power supply.
Figure 3-9 NPN modes
If the signal is from PNP transistor, set the U-shaped contact tag as below according to
the used power supply.
Figure 3-10 PNP modes
3.3 Layout protection
3.3.1 Protecting the inverter and input power cable in short-circuit situations
Protect the inverter and input power cable in short circuit situations and against thermal
overload.
Arrange the protection according to the following guide.
19

UMI-B1 UL Series Inverter Installation guide
Input cable
Inverter
Fuse
• If the inverter is connected to multiple motors, a separate thermal
overload switch or a circuit breaker must be used for protecting each
cable and motor. These devices may require a separate fuse to cut off
the short-circuit current.
• Never connect the supply power to the inverter output terminals U, V
and W. Power line voltage applied to the output can result in
permanent damage to the inverter.
Note: Select the fuse as the manual indicated. The fuse will protect the input power
Figure 3-11 Fuse configuration
cable from damage in short-circuit situations. It will protect the surrounding devices
when the internal of the inverter is short circuited.
3.3.2 Protecting the motor and motor cables
The inverter protects the motor and motor cable in a short-circuit situation when the
motor cable is dimensioned according to the rated current of the inverter. No additional
protection devices are needed.
3.3.3 Implementing a bypass connection
It is necessary to set power frequency and variable frequency conversion circuits for the
assurance of continuous normal work of the inverter if faults occur in some significant
situations.
In some special situations, for example, if it is only used in soft start, the inverter can be
conversed into power frequency running after starting and some corresponding bypass
should be added.
If frequent shifting is required, employ mechanically connected switches or contactors to
ensure that the motor terminals are not connected to the AC power line and inverter
output terminals simultaneously.
20

UMI-B1 UL Series Inverter Keypad operation procedure
Serial
No.
Name
Description
1
State LED
RUN/TUNE
LED off means that the inverter is in the
stopping state; LED blinking means the
inverter is in the parameter autotune state;
LED on means the inverter is in the running
state.
FWD/REV
FED/REV LED
LED off means the inverter is in the forward
rotation state; LED on means the inverter is
in the reverse rotation state
LOCAL/REMOT
LED for keypad operation, terminals
operation and remote communication
control
LED off means that the inverter is in the
keypad operation state; LED blinking
4 Keypad operation procedure
4.1 Keypad introduction
The keypad is used to control UMI-B1 UL series inverters, read the state data and adjust
parameters.
Note: The external keypads are optional (including the external keypads with and
without the function of parameter copying).
Figure 4-1 Keypad
21

UMI-B1 UL Series Inverter Keypad operation procedure
Serial
No.
Name
Description
means the inverter is in the terminals
operation state; LED on means the inverter
is in the remote communication control
state.
TRIP
LED for faults
LED on when the inverter is in the fault
state; LED off in normal state; LED blinking
means the inverter is in the pre-alarm state.
2
Unit LED
Mean the unit displayed currently
Hz
Frequency unit
RPM
Rotating speed unit
A
Current unit
%
Percentage
V
Voltage unit
3
Code
displaying
zone
5-figure LED display displays various monitoring data and alarm
code such as set frequency and output frequency.
0
3
6
9
C
F
L
O
S
v
1
4
7
A
d
H
N
P
t
.
2
5
8
b
E
l
n
r
U
-
Displayed
character
Displayed
character
Displayed
character
Corresponding
character
Corresponding
character
Corresponding
character
4
Buttons
Programmi
ng key
Enter or escape from the first level menu
and remove the parameter quickly
Entry key
Enter the menu step-by-step
Confirm parameters
22

UMI-B1 UL Series Inverter Keypad operation procedure
Serial
No.
Name
Description
UP key
Increase data or function code
progressively
DOWN key
Decrease data or function code
progressively
Right-shift
key
Move right to select the displaying
parameter circularly in stopping and
running mode.
Select the parameter modifying digit during
the parameter modification
Run key
This key is used to operate on the inverter
in key operation mode
Stop/
Reset key
This key is used to stop in running state
and it is limited by function code P07.04
This key is used to reset all control modes
in the fault alarm state
Quick key
The function of this key is confirmed by
function code P07.02.
5
Keypad
port
External keypad port. When the external keypad with the function
of parameter copying is valid, the local keypad LED is off; When
the external keypad without the function of parameter copying is
valid, the local and external keypad LEDs are on.
Note: Only the external keypad which has the function of
parameters copy owns the function of parameters copy, other
keypads do not have.
6
Analog
potentio
meter
AI1, When the external common keypad (without the function of
parameter copy) is valid, the difference between the local keypad
AI1 and the external keypad AI1 is:
when the external keypad AI1 is set to the Min. value, the local
keypad AI1 will be valid and P17.19 will be the voltage of the local
keypad AI1; otherwise, the external keypad AI1 will be valid and
P17.19 will be the voltage of the external keypad AI1.
Note: If the external keypad AI1 is frequency reference source,
adjust the local potentiometer AI1 to 0V/0mA before starting the
inverter.
4.2 Keypad displaying
The keypad displaying state of UMI-B1 UL series inverters is divided into stopping state
parameter, running state parameter, function code parameter editing state and fault
23

UMI-B1 UL Series Inverter Keypad operation procedure
alarm state and so on.
4.2.1 Displayed state of stopping parameter
When the inverter is in the stopping state, the keypad will display stopping parameters
which is shown in Figure 4-2.
In the stopping state, various kinds of parameters can be displayed. Select the
parameters to be displayed or not by P07.07. See the instructions of P07.07 for the
detailed definition of each bit.
In the stopping state, there are 14 stopping parameters can be selected to be displayed
or not. They are: set frequency, bus voltage, input terminals state, output terminals state,
PID given, PID feedback, torque set value, AI1, AI2, AI3, HDI, PLC and the current stage
of multi-step speeds, pulse counting value, length value. P07.07 can select the
parameter to be displayed or not by bit and 》/SHIFT can shift the parameters from left
to right, QUICK/JOG (P07.02=2) can shift the parameters from right to left.
4.1.2 Displayed state of running parameters
After the inverter receives valid running commands, the inverter will enter into the
running state and the keypad will display the running parameters. RUN/TUNE LED on
the keypad is on, while the FWD/REV is determined by the current running direction
which is shown in Figure 4-2.
In the running state, there are 24 parameters can be selected to be displayed or not.
They are: running frequency, set frequency, bus voltage, output voltage, output torque,
PID given, PID feedback, input terminals state, output terminals state, torque set value,
length value, PLC and the current stage of multi-step speeds, pulse counting value, AI1,
AI2, AI3, HDI, percentage of motor overload, percentage of inverter overload, ramp
given value, linear speed, AC input current. P07.05 and P07.06 can select the
parameter to be displayed or not by bit and 》/SHIFT can shift the parameters from left
to right, QUICK/JOG (P07.02=2) can shift the parameters from right to left.
4.1.3 Displayed state of fault
If the inverter detects the fault signal, it will enter into the fault pre-alarm displaying state.
The keypad will display the fault code by flicking. The TRIP LED on the keypad is on,
and the fault reset can be operated by the STOP/RST on the keypad, control terminals
or communication commands.
4.1.4 Displayed state of function codes editing
In the state of stopping, running or fault, press PRG/ESC to enter into the editing state
(if there is a password, see P07.00 ).The editing state is displayed on two classes of
menu, and the order is: function code group/function code number→function code
parameter, press DATA/ENT into the displayed state of function parameter. On this state,
press DATA/ENT to save the parameters or press PRG/ESC to escape.
24

UMI-B1 UL Series Inverter Keypad operation procedure
Stop parameters Running parameters
Fault display
Figure 4-2 Displayed state
4.3 Keypad operation
Operate the inverter via operation panel. See the detailed structure description of
function codes in the brief diagram of function codes.
4.3.1 How to modify the function codes of the inverter
The inverter has three levels menu, which are:
1. Group number of function code (first-level menu)
2. Tab of function code (second-level menu)
3. Set value of function code (third-level menu)
Remarks: Press both the PRG/ESC and the DATA/ENT can return to the second-level
menu from the third-level menu. The difference is: pressing DATA/ENT will save the set
parameters into the control panel, and then return to the second-level menu with shifting
to the next function code automatically; while pressing PRG/ESC will directly return to
the second-level menu without saving the parameters, and keep staying at the current
function code.
Under the third-level menu, if the parameter has no flickering bit, it means the function
code cannot be modified. The possible reasons could be:
1) This function code is not modifiable parameter, such as actual detected parameter,
operation records and so on;
2) This function code is not modifiable in running state, but modifiable in stop state.
Example: Set function code P00.01 from 0 to 1.
Figure 4-3 Sketch map of modifying parameters
25

UMI-B1 UL Series Inverter Keypad operation procedure
4.3.2 How to set the password of the inverter
UMI-B1 UL series inverters provide password protection function to users. Set P7.00 to
gain the password and the password protection becomes valid instantly after quitting
from the function code editing state. Press PRG/ESC again to the function code editing
state, "0.0.0.0.0" will be displayed. Unless using the correct password, the operators
cannot enter it.
Set P7.00 to 0 to cancel password protection function.
The password protection becomes effective instantly after retreating from the function
code editing state. Press PRG/ESC again to the function code editing state, "0.0.0.0.0"
will be displayed. Unless using the correct password, the operators cannot enter it.
Figure 4-4 Sketch map of password setting
4.3.3 How to watch the inverter state through function codes
UMI-B1 UL series inverters provide group P17 as the state inspection group. Users can
enter into P17 directly to watch the state.
Figure 4-5 Sketch map of state watching
26

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P00 Group Basic function group
P00.00
Speed
control
mode
0: SVC 0
.No need to install encoders. Suitable in
applications which need low frequency, big
torque for high accuracy of rotating speed
and torque control. Relative to mode 1, it is
more suitable for the applications which need
small power.
1: SVC 1
1 is suitable in high performance cases with
the advantage of high accuracy of rotating
1
◎
5 Function parameters
The function parameters of UMI-B1 UL series inverters have been divided into 30
groups (P00–P29) according to the function, of which P18–P28 are reserved. Each
function group contains certain function codes applying 3-level menus. For example,
"P08.08" means the eighth function code in the P8 group function, P29 group is factory
reserved, and users are forbidden to access these parameters.
For the convenience of function codes setting, the function group number corresponds
to the first level menu, the function code corresponds to the second level menu and the
function code corresponds to the third level menu.
1. Below is the instruction of the function lists:
The first column "Function code": codes of function parameter group and parameters;
The second column "Name": full name of function parameters;
The third column "Detailed illustration of parameters": Detailed illustration of the
function parameters
The fourth column "Default value": the original factory set value of the function
parameter;
The fifth column "Modify": the modifying character of function codes (the parameters
can be modified or not and the modifying conditions), below is the instruction:
"○": means the set value of the parameter can be modified on stop and running state;
"◎": means the set value of the parameter can not be modified on the running state;
"●": means the value of the parameter is the real detection value which can not be
modified.
27

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
speed and torque. It does not need to install
pulse encoder.
2: SVPWM control
2 is suitable in applications which do not need
high control accuracy, such as the load of fan
and pump. One inverter can drive multiple
motors.
P00.01
Run
command
channel
Select the run command channel of the
inverter.
The control command of the inverter includes:
start, stop, forward/reverse rotating, jogging
and fault reset.
0: Keypad running command channel
("LOCAL/REMOT" light off)
Carry out the command control by RUN,
STOP/RST on the keypad.
Set the multi-function key QUICK/JOG to
FWD/REVC shifting function (P07.02=3) to
change the running direction; press RUN and
STOP/RST simultaneously in running state to
make the inverter coast to stop.
1: Terminal running command channel
("LOCAL/REMOT" flickering)
Carry out the running command control by
the forward rotation, reverse rotation and
forward jogging and reverse jogging of the
multi-function terminals
2: Communication running command channel
("LOCAL/REMOT" on);
The running command is controlled by the
upper monitor via communication
0
○
P00.03
Max.
output
frequency
This parameter is used to set the maximum
output frequency of the inverter. Users need
to pay attention to this parameter because it
is the foundation of the frequency setting and
the speed of acceleration and deceleration.
Setting range: P00.04–400.00Hz
60.00Hz
◎
P00.04
Upper limit
of the
The upper limit of the running frequency is the
upper limit of the output frequency of the
60.00Hz
◎
28
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
running
frequency
inverter which is lower than or equal to the
maximum frequency.
Setting range: P00.05–P00.03 (Max. output
frequency)
P00.05
Lower limit
of the
running
frequency
The lower limit of the running frequency is
that of the output frequency of the inverter.
The inverter runs at the lower limit frequency
if the set frequency is lower than the lower
limit.
Note: Max. output frequency ≥ Upper limit
frequency ≥ Lower limit frequency
Setting range: 0.00Hz–P00.04 (Upper limit of
the running frequency)
0.00Hz
◎
P00.06
A
frequency
command
selection
0: Keypad data setting
Modify the value of function code P00.10 (set
the frequency by keypad) to modify the
frequency by the keypad.
1: Analog AI1 setting (corresponding keypad
potentiometer)
2: Analog AI2 setting (corresponding terminal
AI2)
3: Analog AI3 setting (corresponding terminal
AI3)
Set the frequency by analog input terminals.
UMI-B1 UL series inverters provide 3
channels analog input terminals as the
standard configuration, of which AI1 is
adjusting through analog potentiometer, while
AI2 is the voltage/current option
(0–10V/0–20mA) which can be shifted by
jumpers; while AI3 is voltage input
(-10V–+10V).
Note: when analog AI2 select 0–20mA input,
the corresponding voltage of 20mA is 10V.
100.0% of the analog input setting
corresponds to the maximum frequency
(function code P00.03) in forward direction
and -100.0% corresponds to the maximum
frequency in reverse direction (function code
0
○
P00.07
B
frequency
command
selection
2
○
29
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P00.03)
4: High-speed pulse HDI setting
The frequency is set by high-speed pulse
terminals. UMI-B1 UL series inverters provide
1 high speed pulse input as the standard
configuration. The pulse frequency range is
0.00–50.00kHz.
100.0% of the high speed pulse input setting
corresponds to the maximum frequency in
forward direction (function code P00.03) and
-100.0% corresponds to the maximum
frequency in reverse direction (function code
P00.03).
Note: The pulse setting can only be input by
multi-function terminals HDI. Set P05.00 (HDI
input selection) to high speed pulse input,
and set P05.49 (HDI high speed pulse input
function selection) to frequency setting input.
5: Simple PLC program setting
The inverter runs at simple PLC program
mode when P00.06=5 or P00.07=5. Set P10
(simple PLC and multi-step speed control) to
select the running frequency running
direction, ACC/DEC time and the keeping
time of corresponding stage. See the function
description of P10 for detailed information.
6: Multi-step speed running setting
The inverter runs at multi-step speed mode
when P00.06=6 or P00.07=6. Set P05 to
select the current running step, and set P10
to select the current running frequency.
The multi-step speed has the priority when
P00.06 or P00.07 does not equal to 6, but the
setting stage can only be the 1–15 stage. The
setting stage is 1–15 if P00.06 or P00.07
equals to 6.
7: PID control setting
The running mode of the inverter is process
PID control when P00.06=7 or P00.07=7. It is
30
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
necessary to set P09. The running frequency
of the inverter is the value after PID effect.
See P09 for the detailed information of the
preset source, preset value and feedback
source of PID.
8: MODBUS communication setting
The frequency is set by MODBUS
communication. See P14 for detailed
information.
9–11: Reserved
Note: A frequency and B frequency can not
set as the same frequency given method.
P00.08
B
frequency
command
reference
selection
0: Maximum output frequency, 100% of B
frequency setting corresponds to the
maximum output frequency
1: A frequency command, 100% of B
frequency setting corresponds to the
maximum output frequency. Select this
setting if it needs to adjust on the base of A
frequency command.
0
○
P00.09
Combinati
on of the
setting
source
0: A, the current frequency setting is A
frequency command
1: B, the current frequency setting is B
frequency command
2: A+B, the current frequency setting is A
frequency command + B frequency command
3: A-B, the current frequency setting is A
frequency command - B frequency command
4: Max (A, B): The bigger one between A
frequency command and B frequency is the
set frequency.
5: Min (A, B): The lower one between A
frequency command and B frequency is the
set frequency.
Note: The combination manner can be
shifted by P05 (terminal function)
0
○
P00.10
Keypad set
frequency
When A and B frequency commands are
selected as "keypad setting", this parameter
will be the initial value of inverter reference
60.00Hz
○
31
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
frequency
Setting range: 0.00 Hz–P00.03 (the Max.
frequency)
P00.11
ACC time
1
ACC time means the time needed if the
inverter speeds up from 0Hz to the Max. One
(P00.03).
DEC time means the time needed if the
inverter speeds down from the Max. Output
frequency to 0Hz (P00.03).
UMI-B1 UL series inverters have four groups
of ACC/DEC time which can be selected by
P05. The factory default ACC/DEC time of the
inverter is the first group.
Setting range of P00.11 and P00.12:
0.0–3600.0s
Depend
on model
○
P00.12
DEC time
1
Depend
on model
○
P00.13
Running
direction
selection
0: Runs at the default direction, the inverter
runs in the forward direction. FWD/REV
indicator is off.
1: Runs at the opposite direction, the inverter
runs in the reverse direction. FWD/REV
indicator is on.
Modify the function code to shift the rotation
direction of the motor. This effect equals to
the shifting the rotation direction by adjusting
either two of the motor lines (U, V and W).
The motor rotation direction can be changed
by QUICK/JOG on the keypad. Refer to
parameter P07.02.
Note: When the function parameter comes
back to the default value, the motor's running
direction will come back to the factory default
state, too. In some cases it should be used
with caution after commissioning if the
change of rotation direction is disabled.
2: Forbid to run in reverse direction: It can be
used in some special cases if the reverse
running is disabled.
0
○
32

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P00.14
Carrier
frequency
setting
Carrier
frequency
Electromagnetic
noise
Noise and leakage
current
Heating
eliminating
High
LowHigh
Low
High
Low
1kHz
10kHz
15kHz
The relationship table of the motor type and
carrier frequency:
Motor type
Factory setting of
carrier frequency
0.5~3HP
(0.4–2.2kW)
8kHz
The advantage of high carrier frequency:
ideal current waveform, little current harmonic
wave and motor noise.
The disadvantage of high carrier frequency:
increasing the switch loss, increasing inverter
temperature and the impact to the output
capacity. The inverter needs to derate on high
carrier frequency. At the same time, the
leakage and electrical magnetic interference
will increase.
Applying low carrier frequency is contrary to
the above, too low carrier frequency will
cause unstable running, torque decreasing
and surge.
The manufacturer has set a reasonable
carrier frequency when the inverter is in
factory. In general, users do not need to
change the parameter.
When the frequency used exceeds the
default carrier frequency, the inverter needs
to derate 20% for each additional 1k carrier
frequency.
Setting range: 1.0–15.0kHz
Depend
on model
○
P00.15
Motor
parameter
0: No operation
1: Rotation autotuning
0
◎
33

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
autotuning
Comprehensive motor parameter autotune
It is recommended to use rotation autotuning
when high control accuracy is needed.
2: Static autotuning 1 (autotune totally); It is
suitable in the cases when the motor can not
de-couple from the load. The antotuning for
the motor parameter will impact the control
accuracy.
3: Static autotuning 2 (autotune part
parameters); when the current motor is motor
1, autotune P02.06, P02.07, P02.08
P00.16
AVR
function
selection
0: Invalid
1: Valid during the whole procedure
The auto-adjusting function of the inverter
can cancel the impact on the output voltage
of the inverter because of the bus voltage
fluctuation.
1
○
P00.18
Function
restore
parameter
0: No operation
1: Restore the default value
2: Clear fault records
Note: The function code will restore to 0 after
finishing the operation of the selected
function code.
Restoring to the default value will cancel the
user password, use this function with caution.
0
◎
P01 Group Start-up and stop control
P01.00
Start mode
0: Start-up directly:start from the starting
frequency P01.01
1: Start-up after DC braking: start the motor
from the starting frequency after DC braking
(set the parameter P01.03 and P01.04). It is
suitable in the cases where reverse rotation
may occur to the low inertia load during
starting.
2: Reserved.
Note: It is recommended to start the
synchronous motor directly.
0
◎
P01.01
Starting
frequency
Starting frequency of direct start-up means
the original frequency during the inverter
0.50Hz
◎
34

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
of direct
start-up
starting. See P01.02 for detailed information.
Setting range: 0.00–50.00Hz
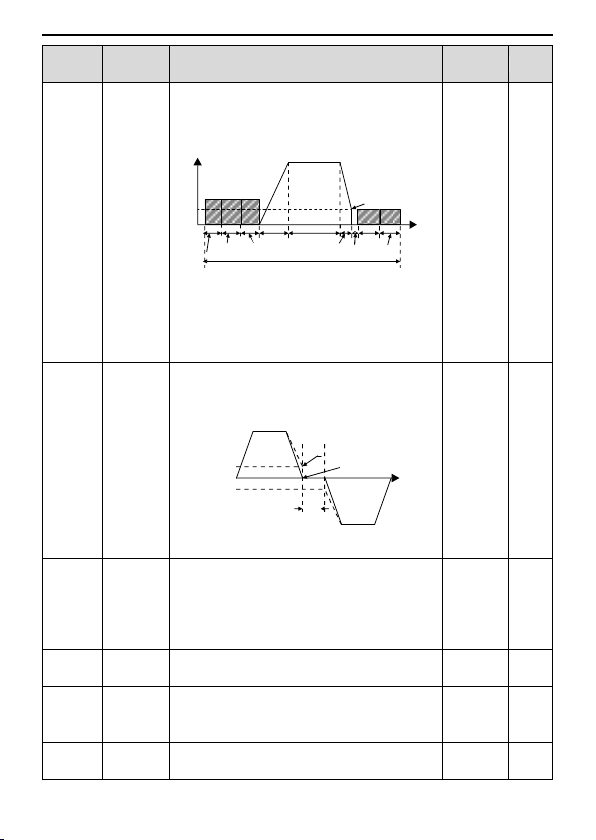
P01.02
Retention
time of the
starting
frequency
Set a proper starting frequency to increase
the torque of the inverter during starting.
During the retention time of the starting
frequency, the output frequency of the
inverter is the starting frequency. And then,
the inverter will run from the starting
frequency to the set frequency. If the set
frequency is lower than the starting
frequency, the inverter will stop running and
keep in the stand-by state. The starting
frequency is not limited in the lower limit
frequency.
Output frequency
fmax
t1
T
f1 set by P01.01
f1
t1 set by P01.02
Setting range: 0.0–50.0s
0.0s
◎
P01.03
The
braking
current
before
starting
The inverter will carry out DC braking at the
braking current set before starting and it will
speed up after the DC braking time. If the DC
braking time is set to 0, the DC braking is
invalid.
The stronger the braking current, the bigger
the braking power. The DC braking current
before starting means the percentage of the
rated current of the inverter.
The setting range of P01.03: 0.0–100.0%
The setting range of P01.04: 0.00–50.00s
0.0%
◎
P01.04
The
braking
time before
starting
0.00s
◎
P01.05
ACC/DEC
selection
The changing mode of the frequency during
start-up and running.
0: Linear type
The output frequency increases or decreases
linearly.
0
◎
35

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
fmax
Output frequency
t1 t2
T
1: S curve
P01.06
ACC time
of the
starting
step of S
curve
0.0–50.0s
3
4
t1=P01.06
t2=P01.07
t3=P01.06
t4=P01.07
Output frequency
T
0.1s
◎
P01.07
DEC time
of the
ending
step of S
curve
0.1s
◎
P01.08
Stop
selection
0: Decelerate to stop: after the stop command
becomes valid, the inverter decelerates to
reduce the output frequency during the set
time. When the frequency decreases to 0Hz,
the inverter stops.
1: Coast to stop: after the stop command
becomes valid, the inverter ceases the output
immediately. And the load coasts to stop at
the mechanical inertia.
0
○
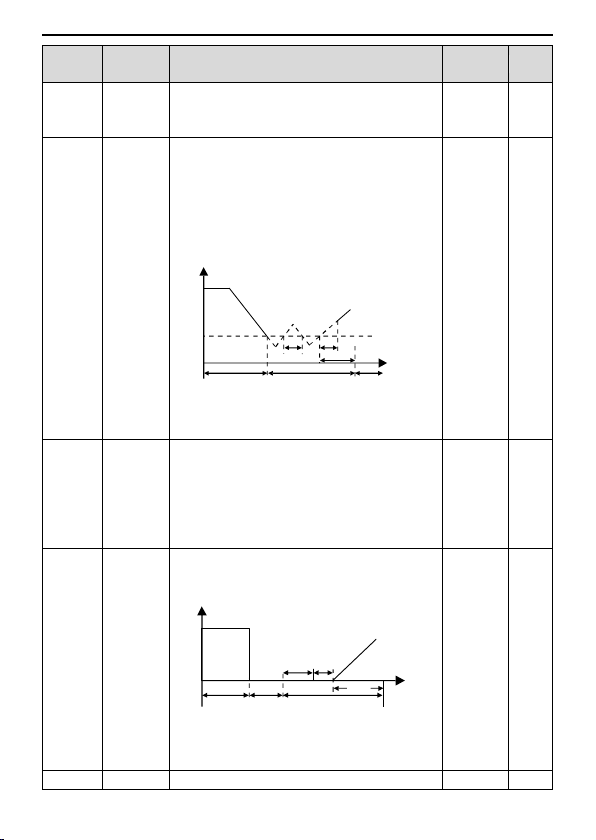
P01.09
Starting
frequency
of DC
braking
Starting frequency of DC braking: start the DC
braking when running frequency reaches
starting frequency determined by P1.09.
Waiting time before DC braking: Inverters
blocks the output before starting the DC
braking. After this waiting time, the DC
braking will be started so as to prevent
over-current fault caused by DC braking at
high speed.
DC braking current: the value of P01.11 is the
percentage of rated current of inverter. The
bigger the DC braking current is, the greater
the braking torque is.
0.00Hz
○
P01.10
Waiting
time before
DC braking
0.00s
○
P01.11
DC braking
current
0.0%
○
P01.12
DC braking
time
0.00s
○
36
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
DC braking time: the retention time of DC
braking. If the time is 0, the DC braking is
invalid. The inverter will stop at the set
deceleration time.
P01.04
ACC
P13.14
P01.23
Constant
speed
In running
DEC
P0110
P13.14
P01.12
P01.09
t
Setting range of P01.09: 0.00Hz–P00.03
(the Max. frequency)
Setting range of P01.10: 0.00–50.00s
Setting range of P01.11: 0.0–100.0%
Setting range of P01.12: 0.00–50.00s
P01.13
Dead time
of
FWD/REV
rotation
During the procedure of switching FWD/REV
rotation, set the threshold by P01.14, which is
as the table below:
Output frequency
FWD
REV
T
Starting
frequency
Shift after the
Zero frequency
Shift after the
Starting frequency
Setting range: 0.0–3600.0s
0.0s
○
P01.14
Switching
between
FWD/REV
rotation
Set the threshold point of the inverter:
0: Switch after zero frequency
1: Switch after the starting frequency
2: Switch after the speed reach P01.15 and
delay for P01.24
0
◎
P01.15
Stopping
speed
0.00–100.00Hz
0.50Hz
◎
P01.16
Detection
of stopping
speed
0: Detect at the setting speed
1: Detect at the feedback speed (only valid for
vector control)
1
◎
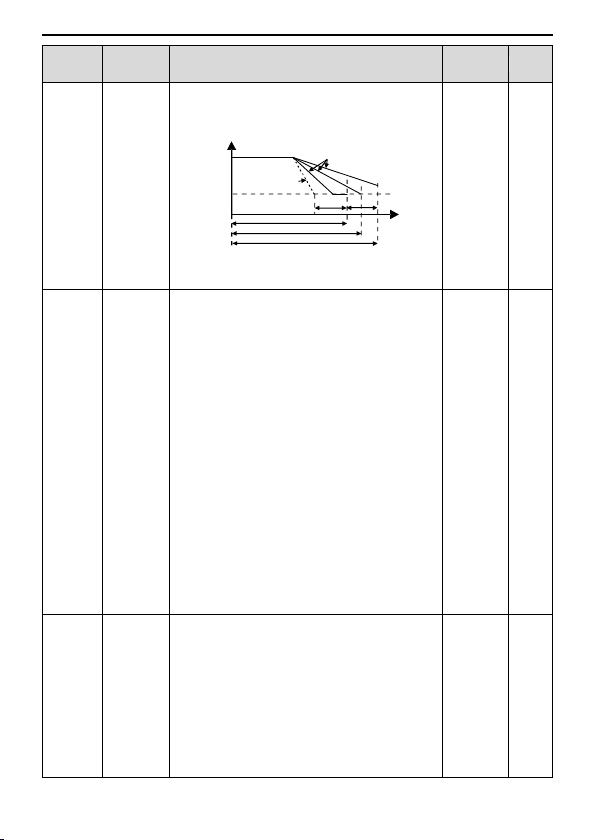
P01.17
Detection
time of the
When P01.16=1, the actual output frequency
of the inverter is less than or equal to P01.15
0.50s
◎
37
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
feedback
speed
and is detected during the time set by P01.17,
the inverter will stop; otherwise, the inverter
stops in the time set by P01.24.
T
Stop
speed
A
Ramp
reference
frequency
Output frequency
Frequency
P01.24 P01.17
B
C
Running A
Running B
Running C
Setting range: 0.00–100.00s (only valid when
P01.16=1)
P01.18
Terminal
running
protection
selection
when
powering
on
When the running command channel is the
terminal control, the system will detect the
state of the running terminal during powering
on.
0: The terminal running command is invalid
when powering on. Even the running
command is detected to be valid during
powering on, the inverter won't run and the
system keeps in the protection state until the
running command is canceled and enabled
again.
1: The terminal running command is valid
when powering on. If the running command is
detected to be valid during powering on, the
system will start the inverter automatically
after the initialization.
Note: This function should be selected with
cautions, or serious result may follow.
0
○
P01.19
The
running
frequency
is lower
than the
lower limit
one (valid
if the lower
limit
This function code determines the running
state of the inverter when the set frequency is
lower than the lower-limit one.
0: Run at the lower-limit frequency
1: Stop
2: Hibernation
The inverter will coast to stop when the set
frequency is lower than the lower-limit one.if
the set frequency is above the lower limit one
0
◎
38
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
frequency
is above 0)
again and it lasts for the time set by P01.20,
the inverter will come back to the running
state automatically.
P01.20
Hibernatio
n restore
delay time
This function code determines the hibernation
delay time. When the running frequency of
the inverter is lower than the lower limit one,
the inverter will stop to stand by.
When the set frequency is above the lower
limit one again and it lasts for the time set by
P01.20, the inverter will run automatically.
Running
Dormancy
t1 t2
Running
Time
Set frequency
t1<t3, so the inverter does not work
t1+t2=t3, so the inverter works
t3=P01.20
t3
Setting range: 0.0–3600.0s (valid when
P01.19=2)
0.0s
○
P01.21
Restart
after power
off
This function can enable the inverter start or
not after the power off and then power on.
0: Disabled
1: Enabled, if the starting need is met, the
inverter will run automatically after waiting for
the time defined by P01.22.
0
○
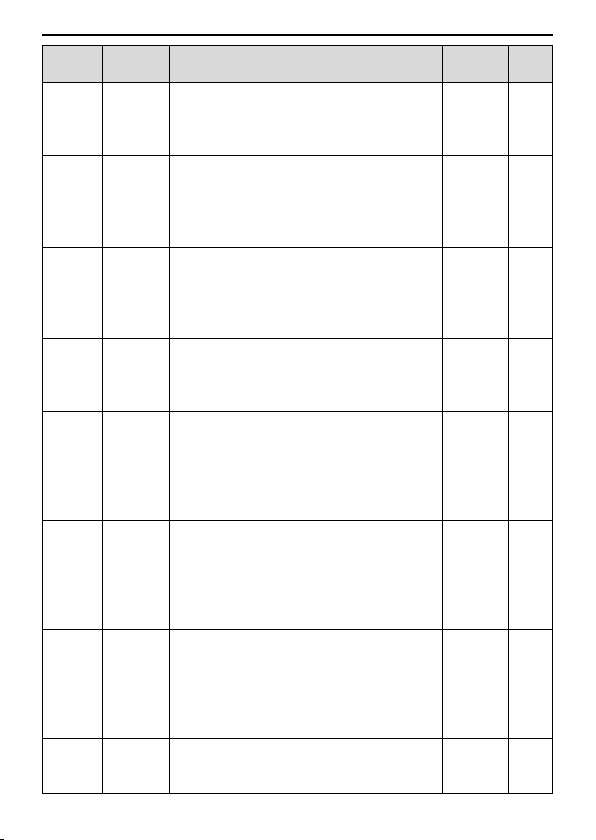
P01.22
The
waiting
time of
restart
after power
off
The function determines the waiting time
before the automatic running of the inverter
when powering off and then powering on.
Output frequency
Running
Power off Power on
Running
t
t1 t2
t1=P01.22
t2=P01.23
Setting range: 0.0–3600.0s (valid when
P01.21=1)
1.0s
○
P01.23
Start delay
The function determines the brake release
0.0s
○
39

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
time
after the running command is given, and the
inverter is in a stand-by state and wait for the
delay time set by P01.23
Setting range: 0.0–60.0s
P01.24
Delay of
the
stopping
speed
Setting range: 0.0–100.0s
0.0s
○
P01.25
0Hz
output
Select the 0Hz output of the inverter.
0: Output without voltage
1: Output with voltage
2: Output at the DC braking current
0
○
P02 Group Motor 1
P02.01
Rated
power of
asynchron
ous motor
0.4–2.2kW (0.5~3HP)
Depend
on model
◎
P02.02
Rated
frequency
of
asynchron
ous motor
0.01Hz–P00.03
60.00Hz
◎
P02.03
Rated
speed of
asynchron
ous motor
1–36000rpm
Depend
on model
◎
P02.04
Rated
voltage of
asynchron
ous motor
0–1200V
Depend
on model
◎
P02.05
Rated
current of
asynchron
ous motor
0.8–6000.0A
Depend
on model
◎
P02.06
Stator
resistor of
asynchron
ous motor
0.001–65.535Ω
Depend
on model
○
40
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P02.07
Rotor
resistor of
asynchron
ous motor
0.001–65.535Ω
Depend
on model
○
P02.08
Leakage
inductance
of
asynchron
ous motor
0.1–6553.5mH
Depend
on model
○
P02.09
Mutual
inductance
of
asynchron
ous motor
0.1–6553.5mH
Depend
on model
○
P02.10
Non-load
current of
asynchron
ous motor
0.1–6553.5A
Depend
on model
○
P02.11
Magnetic
saturation
coefficient
1 for the
iron core of
AM1
0.0–100.0%
80.0%
◎
P02.12
Magnetic
saturation
coefficient
2 for the
iron core of
AM1
0.0–100.0%
68.0%
◎
P02.13
Magnetic
saturation
coefficient
3 for the
iron core of
AM1
0.0–100.0%
57.0%
◎
P02.14
Magnetic
saturation
coefficient
0.0–100.0%
40.0%
◎
41

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
4 for the
iron core of
AM1
P02.26
Motor
overload
protection
selection
0: No protection
1: Common motor (with low speed
compensation). Because the heat-releasing
effect of the common motors will be
weakened, the corresponding electric heat
protection will be adjusted properly. The low
speed compensation characteristic
mentioned here means reducing the
threshold of the overload protection of the
motor whose running frequency is below
30Hz.
2: Frequency conversion motor (without low
speed compensation). Because the
heat-releasing of the specific motors won't be
impacted by the rotation speed, it is not
necessary to adjust the protection value
during low-speed running.
2
◎
P02.27
Motor
overload
protection
coefficient
Times of motor overload M = Iout/(In x K)
In is the rated current of the motor, Iout is the
output current of the inverter and K is the
motor protection coefficient.
So, the bigger the value of K is, the smaller
the value of M is. When M =116%, the fault
will be reported after 1 hour, when M =200%,
the fault will be reported after 1 minute, when
M>=400%, the fault will be reported instantly.
Times of motor overload
200%116%
1 hour
1 minute
Time
Setting range: 20.0%–120.0%
100.0%
○
P02.28
Correction
Correct the power displaying of motor 1.
1.00
○
42

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
coefficient
of motor 1
power
Only impact the displaying value other than
the control performance of the inverter.
Setting range: 0.00–3.00
P03 Group Vector control
P03.00
Speed
loop
proportion
al gain1
The parameters P03.00–P03.05 only apply to
vector control mode. Below the switching
frequency 1 (P03.02), the speed loop PI
parameters are: P03.00 and P03.01. Above
the switching frequency 2 (P03.05), the
speed loop PI parameters are: P03.03 and
P03.04. PI parameters are gained according
to the linear change of two groups of
parameters. It is shown as below:
Output frequency
PI parameters
P03.00, P03.01
P03.03, P03.04
P03.02 P03.05
PI has a close relationship with the inertia of
the system. Adjust on the base of PI
according to different loads to meet various
demands.
The setting range of P03.00 and P03.03: 0–
200.0
The setting range of P03.01 and P03.04:
0.000–10.000s
The setting range of P03.02: 0.00Hz–P00.05
The setting range of P03.05: P03.02–P00.03
20.0
○
P03.01
Speed
loop
integral
time1
0.200s
○
P03.02
Low
switching
frequency
5.00Hz
○
P03.03
Speed
loop
proportion
al gain 2
20.0
○
P03.04
Speed
loop
integral
time 2
0.200s
○
P03.05
High
switching
frequency
10.00Hz
○
P03.06
Speed
loop output
filter
0–8 (corresponds to 0–28/10ms)
0
○
P03.07
Compensa
tion
coefficient
of vector
control
Slip compensation coefficient is used to
adjust the slip frequency of the vector control
and improve the speed control accuracy of
the system. Adjusting the parameter properly
can control the speed steady-state error.
100%
○
43

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
electromoti
on slip
Setting range: 50%–200%
P03.08
Compensa
tion
coefficient
of vector
control
brake slip
100%
○
P03.09
Current
loop
percentag
e
coefficient
P
Note:
These two parameters adjust the PI
adjustment parameter of the current loop
which affects the dynamic response speed
and control accuracy directly. Generally,
users do not need to change the default
value;
Only apply to the vector control mode without
PG 0 (P00.00=0).
Setting range: 0–65535
1000
○
P03.10
Current
loop
integral
coefficient
I
1000
○
P03.11
Torque
setting
method
This parameter is used to enable the torque
control mode, and set the torque setting
means.
0: Torque control is invalid
1: Keypad setting torque (P03.12)
2: Analog AI1 setting torque
3: Analog AI2 setting torque
4: Analog AI3 setting torque
5: Pulse frequency HDI setting torque
6: Multi-step torque setting
7: MODBUS communication setting torque
8–10: Reserved
Note: Setting mode 2–7, 100% corresponds
to 3 times of the motor rated current
0
○
P03.12
Keypad
setting
torque
Setting range: -300.0%–300.0% (motor rated
current)
50.0%
○
P03.13
Torque
given filter
time
0.000–10.000s
0.100s
○
44

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P03.14
Setting
source of
forward
rotation
upper-limit
frequency
in torque
control
0: keypad setting upper-limit frequency
(P03.16 sets P03.14, P03.17 sets P03.15)
1: Analog AI1 setting upper-limit frequency
2: Analog AI2 setting upper-limit frequency
3: Analog AI3 setting upper-limit frequency
4: Pulse frequency HDI setting upper-limit
frequency
5: Multi-step setting upper-limit frequency
6: MODBUS communication setting
upper-limit frequency
7–9: Reserved
Note: setting method 1–9, 100% corresponds
to the maximum frequency
0
○
P03.15
Setting
source of
reverse
rotation
upper-limit
frequency
in torque
control
0
○
P03.16
Torque
control
forward
rotation
upper-limit
frequency
keypad
defined
value
This function is used to set the upper limit of
the frequency. P03.16 sets the value of
P03.14; P03.17 sets the value of P03.15.
Setting range: 0.00 Hz–P00.03 (the Max.
output frequency)
60.00 Hz
○
P03.17
Torque
control
reverse
rotation
upper-limit
frequency
keypad
defined
value
60.00 Hz
○
P03.18
Upper-limit
setting of
electromoti
on torque
This function code is used to select the
electromotion and braking torque upper-limit
setting source selection.
0: Keypad setting upper-limit frequency
0
○
45
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P03.19
Upper-limit
setting of
braking
torque
(P03.20 sets P03.18 and P03.21 sets
P03.19)
1: Analog AI1 setting upper-limit torque
2: Analog AI2 setting upper-limit torque
3: Analog AI3 setting upper-limit torque
4: Pulse frequency HDI setting upper-limit
torque
5: MODBUS communication setting
upper-limit torque
6–8: Reserved
Note: Setting mode 1–8, 100% corresponds
to three times of the motor current.
0
○
P03.20
Electromot
ion
torque
upper-limit
keypad
setting
The function code is used to set the limit of
the torque.
Setting range: 0.0–300.0% (motor rated
current)
180.0%
○
P03.21
Braking
torque
upper-limit
keypad
setting
180.0%
○
P03.22
Weakenin
g
coefficient
in constant
power
zone
The usage of motor in weakening control.
Function code P03.22 and P03.23 are
effective at constant power. The motor will
enter into the weakening state when the
motor runs at rated speed. Change the
weakening curve by modifying the weakening
control coefficient. The bigger the weakening
control coefficient is, the steeper the weak
curve is.
Setting range of P03.22: 0.1–2.0
Setting range of P03.23: 10%–100%
0.3
○
P03.23
The lowest
weakening
point in
constant
power
zone
20%
○
P03.24
Max.
voltage
limit
P03.24 set the Max. Voltage of the inverter,
which is dependent on the site situation.
Setting range: 0.0–120.0%
100.0%
◎
46

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P03.25
Pre-excitin
g time
Pre-activate the motor when the inverter
starts up. Build up a magnetic field inside the
inverter to improve the torque performance
during the starting process.
Setting time: 0.000–10.000s
0.300s
○
P03.26
Weakeni
ng
proportio
nal gain
0–8000
1200
○
P03.27
Speed
display
selection
of vector
control
0: Display at the actual value
1: Display at the setting value
0
○
P04 Group SVPWM control
P04.00
V/F curve
setting
These function codes define the V/F curve of
UMI-B1 UL motor 1 to meet the need of
different loads.
0: Straight line V/F curve; applying to the
constant torque load
1: Multi-dots V/F curve
2: 1.3th power low torque V/F curve
3: 1.7th power low torque V/F curve
4: 2.0th power low torque V/F curve
Curves 2–4 apply to the torque loads such as
fans and water pumps. Users can adjust
according to the features of the loads to get
the best performance.
5: Customized V/F (V/F separation); in this
mode, V can be separated from f and f can be
adjusted through the frequency given channel
set by P00.06 or the voltage given channel
set by P04.27 to change the feature of the
curve.
Note: Vb in the below picture is the motor
rated voltage and fb is the motor rated
frequency.
0
◎
47
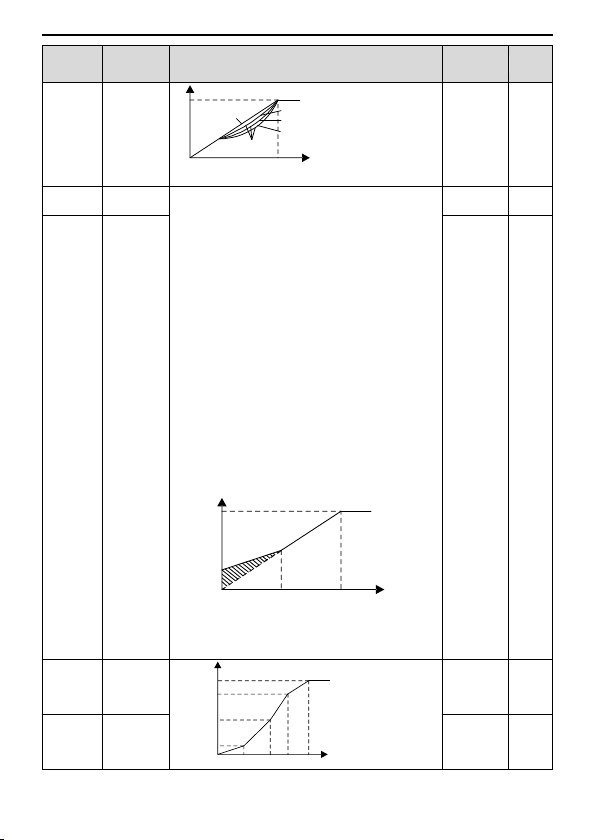
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
Output voltage
Output frequency
Linear type
Square type
Torque-stepdown characteristics V/F curve (1.3 order)
Torque-stepdown characteristics V/F curve (1.7 order)
Torque-stepdown characteristics V/F curve (2.0 order)
V
b
f
b
P04.01
Torque
boost
Torque boost to the output voltage for the
features of low frequency torque. P04.01 is
for the Max. output voltage Vb.
P04.02 defines the percentage of closing
frequency of manual torque to fb.
Torque boost should be selected according to
the load. The bigger the load is, the bigger
the torque is. Too big torque boost is
inappropriate because the motor will run with
over magnetic, and the current of the inverter
will increase to add the temperature of the
inverter and decrease the efficiency.
When the torque boost is set to 0.0%, the
inverter is automatic torque boost.
Torque boost threshold: below this frequency
point, the torque boost is valid, but over this
frequency point, the torque boost is invalid.
Output voltage
Output frequency
f
Cut-off
f
b
V
b
V
boost
The setting range of P04.01: 0.0%:
(automatic) 0.1%–10.0%
Setting range of P04.02: 0.0%–50.0%
0.0%
○
P04.02
Torque
boost
close
20.0%
○
P04.03
V/F
frequency
point 1
Output voltage
Output frequency
V1
V2
V3
f1 f2 f3
100% V
b
f
b
0.00Hz
○
P04.04
V/F
voltage
point 1
0.0%
○
48

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P04.05
V/F
frequency
point 2
When P04.00 =1, the user can set V//F curve
through P04.03–P04.08.
V/F is generally set according to the load of
the motor.
Note:V1<V2<V3, f1<f2<f3. Too high low
frequency voltage will heat the motor
excessively or damage. Overcurrent stall or
overcurrent protection may occur.
Setting range of P04.03: 0.00Hz–P04.05
Setting range of P04.04, P04.06 and P04.08:
0.0%–110.0% (rated motor voltage)
Setting range of P04.05: P04.03– P04.07
Setting range of P04.07: P04.05–P02.02
(rated motor voltage frequency)
0.00Hz
○
P04.06
V/F
voltage
point 2
0.0%
○
P04.07
V/F
frequency
point 3
0.00Hz
○
P04.08
V/F
voltage
point 3
0.0%
○
P04.09
V/F slip
compensat
ion gain
This function code is used to compensate the
change of the rotation speed caused by load
during compensation SVPWM control to
improve the rigidity of the motor. It can be set
to the rated slip frequency of the motor which
is counted as below:
△ f=fb-n x p/60
Of which, fb is the rated frequency of the
motor, its function code is P02.02; n is the
rated rotating speed of the motor and its
function code is P02.03; p is the pole pair of
the motor. 100.0% corresponds to the rated
slip frequency△ f.
Setting range: 0.0–200.0%
100.0%
○
P04.10
Low
frequency
vibration
control
factor
In the SVPWM control mode, current
fluctuation may occur to the motor on some
frequency, especially the motor with big
power. The motor can not run stably or
overcurrent may occur. These phenomena
can be canceled by adjusting this parameter.
Setting range of P04.10: 0–100
Setting range of P04.11: 0–100
Setting range of P04.12: 0.00Hz–P00.03 (the
Max. frequency)
10
○
P04.11
High
frequency
vibration
control
factor
10
○
P04.12
Vibration
30.00 Hz
○
49
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
control
threshold
P04.26
Energy-sa
ving
operation
selection
0: No operation
1: Automatic energy-saving operation
Motor on the light load conditions,
automatically adjusts the output voltage to
save energy
0
◎
P04.27
Voltage
Setting
channel
Select the output setting channel at V/F curve
separation.
0: Keypad setting voltage: the output voltage
is determined by P04.28.
1: AI1 setting voltage
2: AI2 setting voltage
3: AI3 setting voltage
4: HDI setting voltage
5: Multi-step speed setting voltage;
6: PID setting voltage;
7: MODBUS communication setting voltage;
8–10: Reversed
Note: 100% corresponds to the rated voltage
of the motor.
0
○
P04.28
Keypad
setting
voltage
The function code is the voltage digital set
value when the voltage setting channel is
selected as "keypad selection".
Setting range: 0.0%–100.0%
100.0%
○
P04.29
Voltage
increasing
time
Voltage increasing time is the time when the
inverter accelerates from the output minimum
voltage to the output maximum voltage.
Voltage decreasing time is the time when the
inverter decelerates from the output
maximum voltage to the output minimum
voltage.
Setting range: 0.0–3600.0s
5.0s
○
P04.30
Voltage
decreasing
time
5.0s
○
P04.31
Output
maximum
voltage
Set the upper and low limit of the output
voltage.
Setting range of P04.31: P04.32–100.0%
(the rated voltage of the motor)
Setting range of P04.32: 0.0%– P04.31
(the rated voltage of the motor)
100.0%
◎
P04.32
Output
minimum
voltage
0.0%
◎
50

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
Vmax
Vmin
Vset
t1 t2
Time
t1=P04.29
t2=P04.30
P04.33
Weakeni
ng
coefficien
t in
constant
power
zone
Adjust the output voltage of the inverter in
SVPWM mode when weakening.
Note: Invalid in the constant torque mode.
Output Voltage
Output frequency
V
out
V
b
fb2f
b
(P04.33-1.00) x V
b
Setting range of P04.33: 1.00–1.30
1.00
○
P05 Group Input terminals
P05.00
HDI input
selection
0: HDI is high pulse input. See
P05.49–P05.54
1: HDI is switch input
0
◎
P05.01
S1
terminals
function
selection
Note: S1–S4, HDI are the upper terminals on
the control board and P05.12 can be used to
set the function of S5–S8
0: No function
1: Forward rotation operation
2: Reverse rotation operation
3: 3-wire control operation
4: Forward jogging
5: Reverse jogging
6: Coast to stop
7: Fault reset
8: Operation pause
9: External fault input
10: Increasing frequency setting (UP)
11: Decreasing frequency setting (DOWN)
12: Cancel the frequency change setting
1
◎
P05.02
S2
terminals
function
selection
4
◎
P05.03
S3
terminals
function
selection
7
◎
P05.04
S4
terminals
function
selection
0
◎
51

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P05.05
S5
terminals
function
selection
13: Shift between A setting and B setting
14: Shift between combination setting and A
setting
15: Shift between combination setting and B
setting
16: Multi-step speed terminal 1
17: Multi-step speed terminal 2
18: Multi-step speed terminal 3
19: Multi- stage speed terminal 4
20: Multi- stage speed pause
21: ACC/DEC time 1
22: ACC/DEC time 2
23: Simple PLC stop reset
24: Simple PLC pause
25: PID control pause
26: Traverse Pause (stop at the current
frequency)
27: Traverse reset (return to the center
frequency)
28: Counter reset
29: Torque control prohibition
30: ACC/DEC prohibition
31: Counter trigger
32: Reserve
33: Cancel the frequency change setting
temporarily
34: DC brake
35: Reserve
36: Shift the command to the keypad
37: Shift the command to the terminals
38: Shift the command to the communication
39: Pre-magnetized command
40: Clear the power
41: Keep the power
42–60: Reserved
61: PID pole switching
62–63: Reserved
0
◎
P05.06
S6
terminals
function
selection
0 ◎ P05.07
S7
terminals
function
selection
0 ◎ P05.08
S8
terminals
function
selection
0
◎
P05.09
HDI
terminals
function
selection
0
◎
P05.10
Polarity
selection
The function code is used to set the polarity
of the input terminals.
0x000
○
52
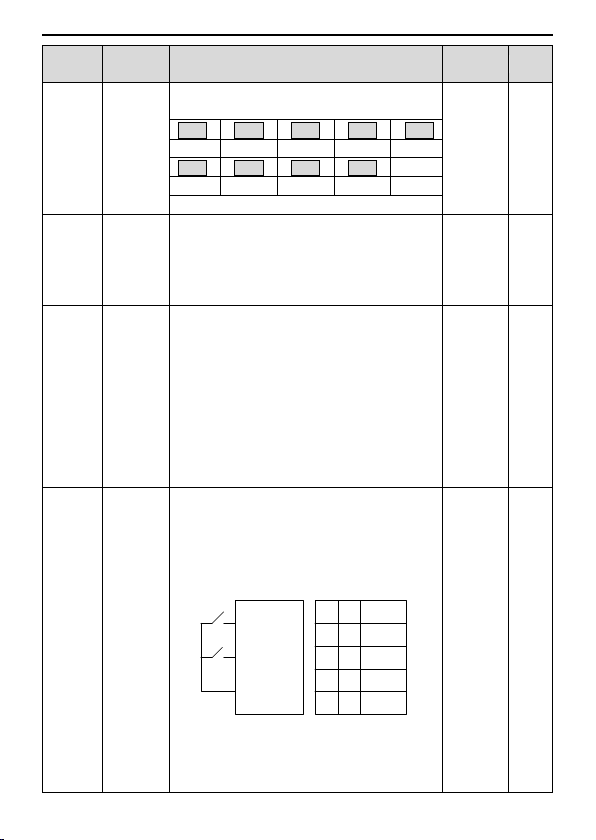
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
of the input
terminals
Set the bit to 0, the input terminal is anode.
Set the bit to 1, the input terminal is cathode.
BIT8
BIT7
BIT6
BIT5
BIT4
HDI
S8
S7
S6
S5
BIT3
BIT2
BIT1
BIT0 S4
S3
S2
S1 The setting range: 0x000–0x1FF
P05.11
Switch
filter time
Set the sample filter time of S1–S4 and HDI
terminals. If the interference is strong,
increase the parameter to avoid wrong
operation.
0.000–1.000s
0.010s
○
P05.12
Virtual
terminals
setting
0x000–0x1FF (0: Disabled, 1:Enabled )
BIT0: S1 virtual terminal
BIT1: S2 virtual terminal
BIT2: S3 virtual terminal
BIT3: S4 virtual terminal
BIT4: S5 virtual terminal
BIT5: S6 virtual terminal
BIT6: S7 virtual terminal
BIT7: S8 virtual terminal
BIT8: HDI virtual terminal
0x000
◎
P05.13
Terminals
control
running
mode
Set the operation mode of the terminals
control
0: 2-wire control 1, comply the enable with the
direction. This mode is widely used. It
determines the rotation direction by the
defined FWD and REV terminals command.
FWD
REV
COM
K1
K2
Running
command
FWD REV
OFF OFF
OFF
OFFONON
ON ON
Stopping
Hold on
Forward
running
Reverse
running
1: 2-wire control 2; Separate the enable from
the direction. FWD defined by this mode is
the enabling ones. The direction depends on
the state of the defined REV.
0
◎
53
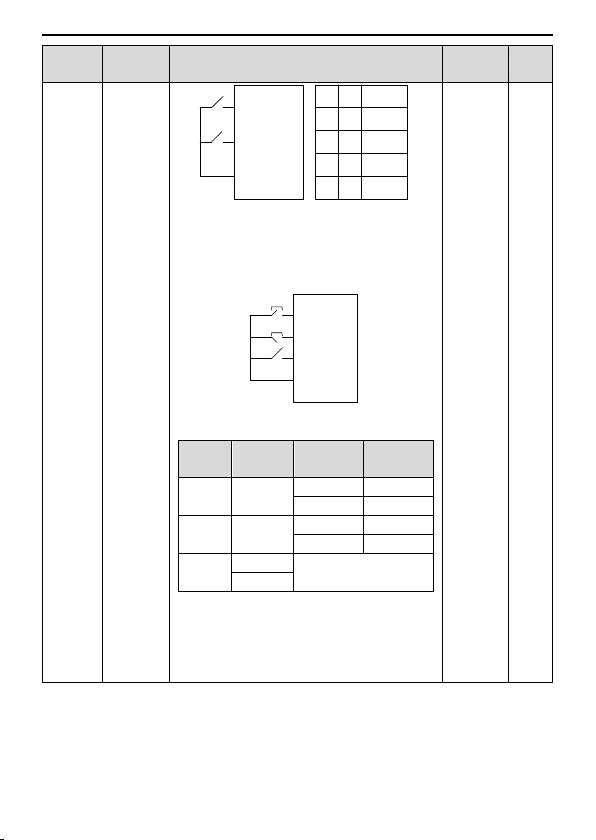
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
FWD
REV
COM
K1
K2
Running
command
FWD REV
OFF OFF
OFF
OFFONON
ON ON
Stopping
Stopping
Forward
running
Reverse
running
2: 3-wire control 1; Sin is the enabling
terminal on this mode, and the running
command is caused by FWD and the
direction is controlled by REV. Sin is natural
closed.
COM
K
SB2
SB1
FWD
REV
SIn
The direction control is as below during
operation:
Sln
REV
Previous
direction
Current
direction
ON
OFF→O
N
Forward
Reverse
Reverse
Forward
ON
ON→OF
F
Reverse
Forward
Forward
Reverse
ON→
OFF
ON
Decelerate to stop
OFF
3: 3-wire control 2; Sin is the enabling
terminal on this mode, and the running
command is caused by SB1 or SB3 and both
of them control the running direction.NC SB2
generates the stop command.
54

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
COM
SB3
SB2
SB1
FWD
REV
SIn
Sln
FWD
REV
Directio
n
ON
OFF→O
N
ON
Forward
OFF
Reverse
ON
ON
OFF→O
N
Forward
OFF
Reverse
ON→
OFF
Decelerat
e to stop
Note: For the 2-wire running mode, when
FWD/REV terminal is valid, the inverter stop
because of the stopping command from other
sources, even the control terminal FWD/REV
keeps valid; the inverter won't work when the
stopping command is canceled. Only when
FWD/REV is relaunched, the inverter can
start again. For example, the valid
STOP/RST stop when PLC signal cycles
stop, fixed-length stop and terminal control
(see P07.04).
P05.14
S1
terminal
switching
on delay
time
The function code defines the corresponding
delay time of electrical level of the
programmable terminals from switching on to
switching off.
Si electrical level
Si valid
Invalid Invalid
Switcn-on
delay
Switcn-off
delay
Valid
Setting range: 0.000–50.000s
0.000s
○
P05.15
S1
terminal
switching
off delay
time
0.000s
○
P05.16
S2
terminal
0.000s
○
55
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
switching
on delay
time
P05.17
S2
terminal
switching
off delay
time
0.000s
○
P05.18
S3
terminal
switching
on delay
time
0.000s
○
P05.19
S3
terminal
switching
off delay
time
0.000s
○
P05.20
S4
terminal
switching
on delay
time
0.000s
○
P05.21
S4
terminal
switching
off delay
time
0.000s
○
P05.30
HDI
terminal
switching
on delay
time
0.000s
○
P05.31
HDI
terminal
switching
off delay
time
0.000s
○
56
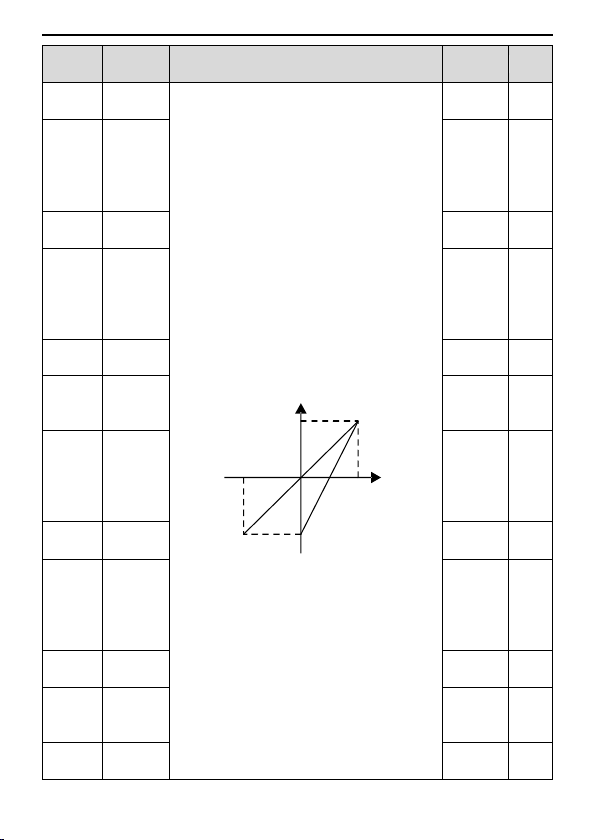
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P05.32
Lower limit
of AI1
AI1 is set by the analog potentiometer, AI2 is
set by control terminal AI2 and AI3 is set by
control terminal AI3. The function code
defines the relationship between the analog
input voltage and its corresponding set value.
If the analog input voltage beyond the set
minimum or maximum input value, the
inverter will count at the minimum or
maximum one.
When the analog input is the current input,
the corresponding voltage of 0–20mA is
0–10V.
In different cases, the corresponding rated
value of 100.0% is different. See the
application for detailed information.
The figure below illustrates different
applications:
Corresponding
setting
100%
-100%
-10V
Al3
AI1/AI2
20mA
AI
10V
Input filter time: this parameter is used to
adjust the sensitivity of the analog input.
Increasing the value properly can enhance
the anti-interference of the analog, but
weaken the sensitivity of the analog input
Note: AI1 supports 0–10V input and AI2
supports 0–10V or 0–20mA input, when AI2
selects 0–20mA input, the corresponding
voltage of 20mA is 10V. AI3 can support the
output of -10V–+10V.
Setting range of P05.32: 0.00V–P05.34
Setting range of P05.33: -100.0%–100.0%
0.00V
○
P05.33
Correspon
ding
setting of
the lower
limit of AI1
0.0%
○
P05.34
Upper limit
of AI1
10.00V
○
P05.35
Correspon
ding
setting of
the upper
limit of AI1
100.0%
○
P05.36
AI1 input
filter time
0.100s
○
P05.37
Lower limit
of
AI2
0.00V
○
P05.38
Correspon
ding
setting of
the lower
limit of AI2
0.0%
○
P05.39
Upper limit
of AI2
10.00V
○
P05.40
Correspon
ding
setting of
the upper
limit of AI2
100.0%
○
P05.41
AI2 input
filter time
0.100s
○
P05.42
Lower limit
of
AI3
-10.00V
○
P05.43
Correspon
ding
-100.0%
○
57

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
setting of
the lower
limit of AI3
Setting range of P05.34: P05.32–10.00V
Setting range of P05.35: -100.0%–100.0%
Setting range of P05.36: 0.000s–10.000s
Setting range of P05.37: 0.00V–P05.39
Setting range of P05.38: -100.0%–100.0%
Setting range of P05.39: P05.37–10.00V
Setting range of P05.40: -100.0%–100.0%
Setting range of P05.41: 0.000s–10.000s
Setting range of P05.42: -10.00V–P05.44
Setting range of P05.43: -100.0%–100.0%
Setting range of P05.44: P05.42–P05.46
Setting range of P05.45: -100.0%–100.0%
Setting range of P05.46: P05.44–10.00V
Setting range of P05.48: 0.000s–10.000s
P05.44
Middle
value of
AI3
0.00V
○
P05.45
Correspon
ding
middle
setting of
AI3
0.0%
○
P05.46
Upper limit
of AI3
10.00V
○
P05.47
Correspon
ding
setting of
the upper
limit of AI3
100.0%
○
P05.48
AI3 input
filter time
0.100s
○
P05.50
Lower limit
frequency
of HDI
0.000kHz–P05.52
0.000
kHz
○
P05.51
Correspon
ding
setting of
HDI low
frequency
setting
-100.0%–100.0%
0.0%
○
P05.52
Upper limit
frequency
of HDI
P05.50–50.000kHz
50.000
kHz
○
P05.53
Correspon
ding
setting of
upper limit
frequency
of HDI
-100.0%–100.0%
100.0%
○
58

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P05.54
HDI
frequency
input filter
time
0.000s–10.000s
0.100s
○
P06 Group Output terminals
P06.01
Y1 output
selection
0: Invalid
1: In operation
2: Forward rotation operation
3: Reverse rotation operation
4: Jogging operation
5: The inverter fault
6: Frequency degree test FDT1
7: Frequency degree test FDT2
8: Frequency arrival
9: Zero speed running
10: Upper limit frequency arrival
11: Lower limit frequency arrival
12: Ready for operation
13: Pre-magnetizing
14: Overload pre-alarm
15: Underload pre-alarm
16: Completion of simple PLC stage
17: Completion of simple PLC cycle
18: Setting count value arrival
19: Defined count value arrival
20: External fault valid
21: Reserved
22: Running time arrival
23: MODBUS communication virtual
terminals output
24–25: Reserved
26: Establishment of DC bus voltage
27–30: Reserved
0
P06.03
Relay RO1
output
selection
1
○
P06.04
Relay RO2
output
selection
5
○
P06.05
Polarity
selection
of output
terminals
The function code is used to set the pole of
the output terminal.
When the current bit is set to 0, input terminal
is positive.
When the current bit is set to 1, input terminal
is negative.
0
○
59
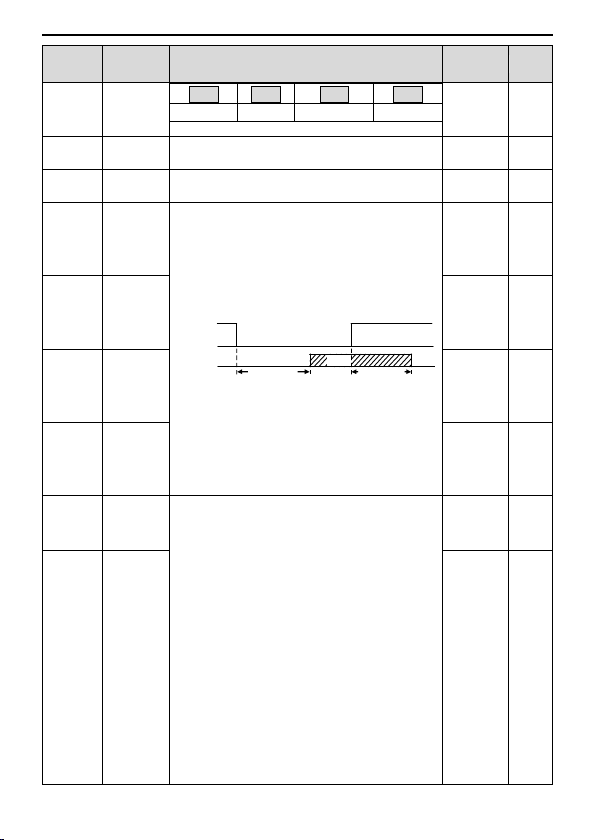
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
BIT3
BIT2
BIT1
BIT0
RO2
RO1
Reserved
Y1
Setting range: 0–F
P06.06
Y1 open
delay time
The setting range: 0.000–50.000s
0.000s
○
P06.07
Y1C off
delay time
The setting range: 0.000–50.000s
0.000s
○
P06.10
RO1
switching
on delay
time
The function code defines the corresponding
delay time of the electrical level change
during the programmable terminal switching
on and off.
RO electrical level
RO valid Invalid
Switch-on
delay
Invalid
Valid
Switch-off
delay
Setting range: 0.000–50.000s
Note: P06.08 and P06.08 are valid only when
P06.00=1.
0.000s
○
P06.11
RO1
switching
off delay
time
0.000s
○
P06.12
RO2
switching
on delay
time
0.000s
○
P06.13
RO2
switching
off delay
time
0.000s
○
P06.14
AO1
output
selection
0: Running frequency
1: Setting frequency
2: Ramp reference frequency
3: Running rotation speed
4: Output current (relative to 2 times rated
current of the inverter)
5: Output current (relative to 2 times rated
current of the motor)
6: Output voltage
7: Output power
8: Set torque value
9: Output torque
10: Analog AI1 input value
11: Analog AI2 input value
12: Analog AI3 input value
13: High speed pulse HDI input value
0
○
P06.15
AO2
output
selection
0
○
60

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
14: MODBUS communication set value 1
15: MODBUS communication set value 2
16–21: Reserved
22: Torque current (corresponds to 3 times
rated current of the motor)
23: Ramp reference frequency (with sign)
24–30: Reserved
P06.17
Lower limit
of AO1
output
The above function codes define the relative
relationship between the output value and
analog output. When the output value
exceeds the range of set maximum or
minimum output, it will count according to the
low-limit or upper-limit output.
When the analog output is current output,
1mA equals to 0.5V.
In different cases, the corresponding analog
output of 100% of the output value is
different. For detailed information, refer to
analog output instructions in Chapter 7.
100.0%0.0%
AO
10V (20mA)
Setting range of P06.17: -100.0%– P06.19
Setting range of P06.18: 0.00V–10.00V
Setting range of P06.19: P06.17–100.0%
Setting range of P06.20: 0.00V–10.00V
Setting range of P06.21: 0.000s–10.000s
Setting range of P06.22: -100.0%– P06.24
Setting range of P06.23: 0.00V–10.00V
Setting range of P06.24: P06.22–100.0%
Setting range of P06.25: 0.00V–10.00V
Setting range of P06.26: 0.000s–10.000s
0.0%
○
P06.18
Correspon
ding AO1
output to
the lower
limit
0.00V
○
P06.19
Upper limit
of AO1
output
100.0%
○
P06.20
The
correspon
ding AO1
output to
the upper
limit
10.00V
○
P06.21
AO1
output filter
time
0.000s
○
P06.22
Lower limit
of AO2
output
0.0%
○
P06.23
Correspon
ding AO2
output to
the lower
limit
0.00V
○
P06.24
Upper limit
of AO2
output
100.0%
○
61
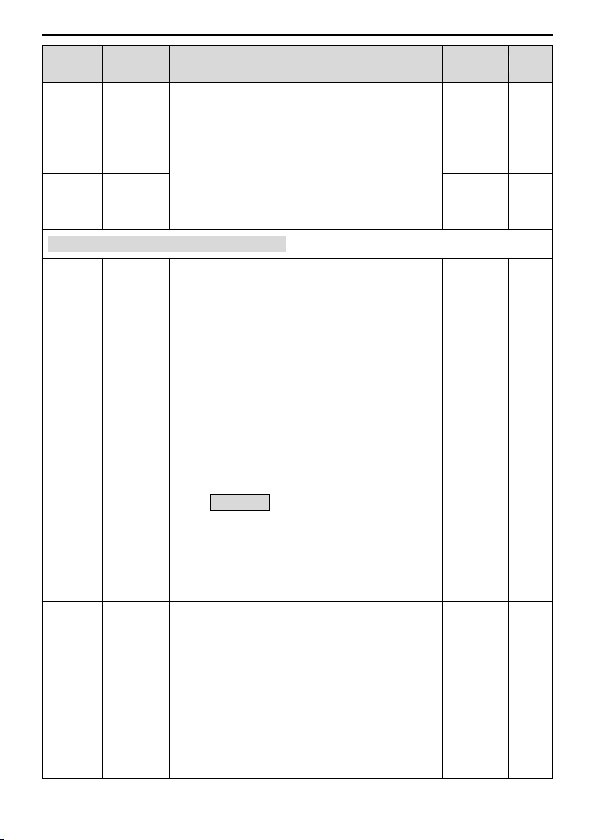
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P06.25
Correspon
ding AO2
output to
the upper
limit
10.00V
○
P06.26
AO2
output filter
time
0.000s
○
P07 Group Human-Machine Interface
P07.00
User's
password
0–65535
The password protection will be valid when
setting any non-zero number.
00000: Clear the previous user's password,
and make the password protection invalid.
After the user's password becomes valid, if
the password is incorrect, users cannot enter
the parameter menu. Only correct password
can make the user check or modify the
parameters. Remember all users' passwords.
Retreat editing state of the function codes
and the password protection will become
valid in 1 minute. If the password is available,
press PRG/ESC to enter into the editing state
of the function codes, and then "0.0.0.0.0" will
be displayed. Unless input right password,
the operator can not enter into it.
Note: Restoring to the default value can clear
the password, use it with caution.
0
○
P07.01
Parameter
copy
0: No operation
1: Upload the local function parameter to the
keypad
2: Download the keypad function parameter
to local address (including the motor
parameters)
3: Download the keypad function parameter
to local address (excluding the motor
parameter of P02 and P12 group)
4: Download the keypad function parameters
to local address (only for the motor parameter
0
◎
62

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
of P02 and P12 group)
Note: After finish 1–4, the parameter will
restore to 0 and the uploading and
downloading does not include P29.
P07.02
Key
function
selection
Ones: QUICK/JOG key function
0: Null
1: Jogging
2: Switch display state via shift key
3: Switch between FWD/REV rotation
4: Clear UP/DOWN setting
5: Coast to stop
6: Switch running command ref. mode in
order
7: Quick commission mode (based on
non-default parameter)
tens:
0: keys unlocked
1: Lock all keys
2: Lock part of the keys (lock PRG/ESC key
only)
1
◎
P07.03
QUICK/JO
G the
shifting
sequence
of running
command
When P07.02=6, set the shifting sequence of
running command channels.
0: Keypad control→terminals control
→communication control
1: Keypad control←→terminals control
2: Keypad control←→communication control
3: Terminals control←→communication
control
0
○
P07.04
STOP/RS
T stop
function
Select the stop function by STOP/RST.
STOP/RST is effective in any state for the
keypad reset.
0: Only valid for the keypad control
1: Both valid for keypad and terminals control
2: Both valid for keypad and communication
control
3: Valid for all control modes
0
○
P07.05
Displayed
parameter
s 1 of
0x0000–0xFFFF
BIT0: running frequency (Hz on)
BIT1: set frequency (Hz flickering)
0x03FF
○
63
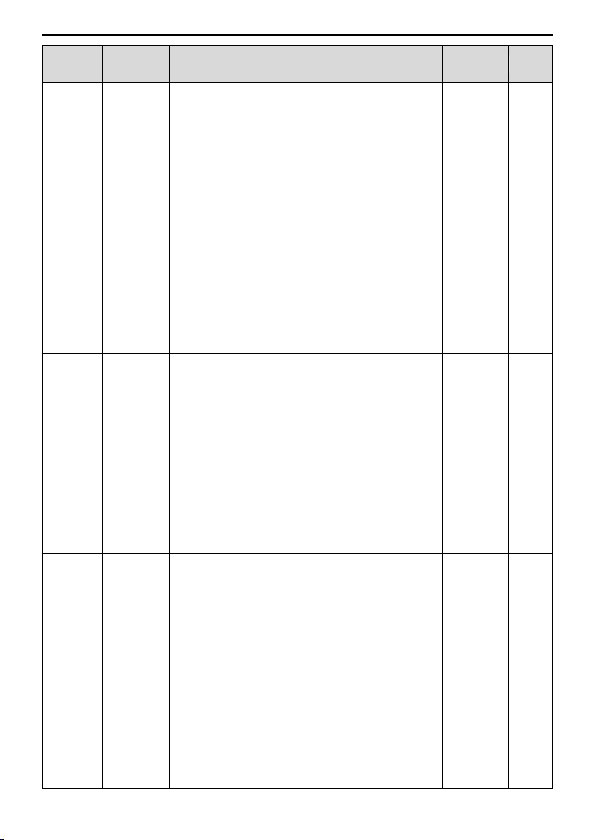
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
running
state
BIT2: bus voltage (Hz on)
BIT3: output voltage (V on)
BIT4: output current (A on)
BIT5: running rotation speed (rpm on)
BIT6: output power (% on)
BIT7: output torque (% on)
BIT8: PID reference (% flickering)
BIT9: PID feedback value (% on)
BIT10: input terminals state
BIT11: output terminals state
BIT12: torque set value (% on)
BIT13: pulse counter value
BIT14: reserved
BIT15: PLC and the current step of multi-step
speed
P07.06
Displayed
parameter
s 2 of
running
state
0x0000–0xFFFF
BIT0: analog AI1 value (V on)
BIT1: analog AI2 value (V on)
BIT2: analog AI3 value (V on)
BIT3: high speed pulse HDI frequency
BIT4: motor overload percentage (% on)
BIT5: the inverter overload percentage (% on)
BIT6: ramp frequency given value (Hz on)
BIT7: linear speed
BIT8: AC inlet current (A on)
BIT9–15: reserved
0x0000
P07.07
The
parameter
selection
of the stop
state
0x0000–0xFFFF
BIT0: set frequency (Hz on, frequency
flickering slowly)
BIT1: bus voltage (V on)
BIT2: input terminals state
BIT3: output terminals state
BIT4: PID reference (% flickering)
BIT5: PID feedback value (% flickering)
BIT6: torque reference (% flickering)
BIT7: analog AI1 value (V on)
BIT8: analog AI2 value (V on)
BIT9: analog AI3 value (V on)
BIT10: high speed pulse HDI frequency
0x00FF
○
64
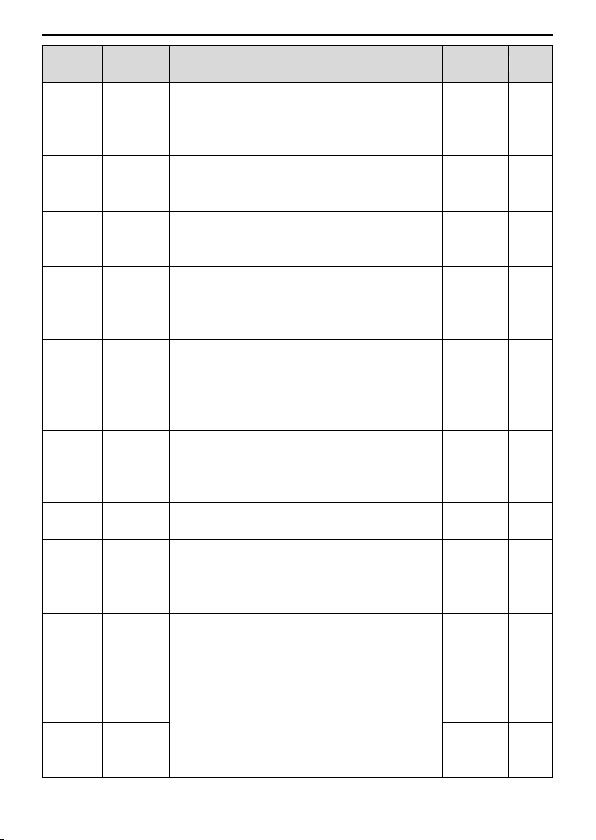
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
BIT11: PLC and the current step of multi-step
speed
BIT12: pulse counters
BIT13–BIT15: reserved
P07.08
Frequency
display
coefficient
0.01–10.00
Displayed frequency=running frequency x
P07.08
1.00
○
P07.09
Speed
display
coefficient
0.1–999.9%
Mechanical rotation speed =120 x displayed
running frequency×P07.09/motor pole pairs
100.0%
○
P07.10
Linear
speed
displayed
coefficient
0.1–999.9%
Linear speed= Mechanical rotation speed x
P07.10
1.0%
○
P07.11
Rectifier
bridge
module
temperatur
e
-4~248°F (-20.0–120.0°C )
●
P07.12
Converteri
ng module
temperatur
e
-4~248°F (-20.0–120.0°C )
●
P07.13
Software
version
1.00–655.35
●
P07.14
Local
accumulati
ve running
time
0–65535h
●
P07.15
Most
significant
digit of
power
consumpti
on
Display the power used by the inverter.
The power consumption of the inverter =
P07.15 x 1000 + P07.16
Setting range of P07.15: 0–65535kWh (x
1000)
Setting range of P07.16: 0.0–999.9kWh
●
P07.16
Least
significant
digit of
●
65

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
power
consumpti
on
P07.17
Reserved
Reserved
●
P07.18
The rated
power of
the inverter
0.4–2.2kW (0.5~3HP )
●
P07.19
The rated
voltage of
the inverter
50–1200V
●
P07.20
The rated
current of
the inverter
0.1–6000.0A
●
P07.21
Factory
bar code 1
0x0000–0xFFFF
●
P07.22
Factory
bar code 2
0x0000–0xFFFF
●
P07.23
Factory
bar code 3
0x0000–0xFFFF
●
P07.24
Factory
bar code 4
0x0000–0xFFFF
●
P07.25
Factory
bar code 5
0x0000–0xFFFF
●
P07.26
Factory
bar code 6
0x0000–0xFFFF
●
P07.27
Current
fault type
0: No fault
1–3: Reserved
4: OC1
●
66
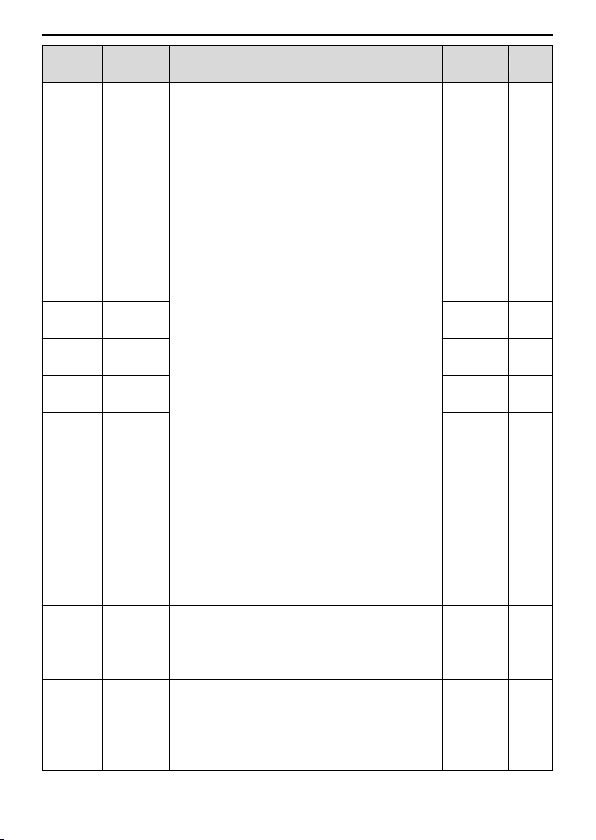
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P07.28
Previous
fault type
5: OC2
6: OC3
7: OV1
8: OV2
9: OV3
10: UV
11: Motor overload (OL1)
12: The inverter overload (OL2)
13: Input side phase loss (SPI)
14: Output side phase loss (SPO)
15: Overheat of the rectifier module (OH1)
16: Overheat fault of the inverter module
(OH2)
17: External fault (EF)
18: 485 communication fault (CE)
19: Current detection fault (ItE)
20: Motor antotune fault (tE)
21: EEPROM operation fault (EEP)
22: PID response offline fault (PIDE)
23: Reserved
24: Running time arrival (END)
25: Electrical overload (OL3)
26: PCE
27: UPE
28: DNE
29–33: Reserved
34: Speed deviation fault (dEu)
35: Maladjustment (STo)
36: Underload fault (LL)
●
P07.29
Previous 2
fault type
●
P07.30
Previous 3
fault type
●
P07.31
Previous 4
fault type
●
P07.32
Previous 5
fault type
●
P07.33
Current
fault
running
frequency
0.00Hz
●
P07.34
Ramp
reference
frequency
at current
fault
0.00Hz
67
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P07.35
Output
voltage at
the current
fault
0V
P07.36
Output
current at
the current
fault
0.0A
P07.37
Current
bus
voltage at
the current
fault
0.0V
P07.38
The Max.
temperatur
e at the
current
fault
0.0°F
(0.0°C)
P07.39
Input
terminals
state at the
current
fault
0
●
P07.40
Output
terminals
state at the
current
fault
0
●
P07.41
Reference
frequency
at previous
fault
0.00Hz
●
P07.42
Ramp
reference
frequency
at previous
fault
0.00Hz
●
P07.43
Output
0V
●
68
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
voltage at
previous
fault
P07.44
The output
current at
previous
fault
0.0A
●
P07.45
Bus
voltage at
previous
fault
0.0V
●
P07.46
The Max.
temperatur
e at
previous
fault
0.0°F
(0.0°C )
●
P07.47
Input
terminals
state at
previous
fault
0
●
P07.48
Output
terminals
state at
previous
fault
0 ●
P07.49
Reference
frequency
at previous
2 faults
0.00Hz
●
P07.50
Ramp
reference
frequency
at previous
2 faults
0.00Hz
●
P07.51
Output
voltage at
previous 2
0V
●
69
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
faults
P07.52
Output
current at
previous 2
faults
0.0A
●
P07.53
Bus
voltage at
previous 2
faults
0.0V
●
P07.54
The Max.
temperatur
e at
previous 2
faults
0.0°F
(0.0°C )
●
P07.55
Input
terminals
state at
previous 2
faults
0 ●
P07.56
Output
terminals
state at
previous 2
faults
0 ●
P08 Group Enhanced functions
P08.00
ACC time
2
Refer to P00.11 and P00.12 for detailed
definition.
UMI-B1 UL series define four groups of
ACC/DEC time which can be selected by P5
group. The first group of ACC/DEC time is the
factory default one.
Setting range: 0.0–3600.0s
Depend
on model
○
P08.01
DEC time
2
Depend
on model
○
P08.02
ACC time
3
Depend
on model
○
P08.03
DEC time
3
Depend
on model
○
P08.04
ACC time
4
Depend
on model
○
P08.05
DEC time
4
Depend
on model
○
P08.06
Jogging
This parameter is used to define the
5.00Hz
○
70

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
running
frequency
reference frequency during jogging.
Setting range: 0.00Hz–P00.03 (the Max.
frequency)
P08.07
Jogging
running
ACC time
The jogging ACC time means the time
needed if the inverter runs from 0Hz to the
Max. Frequency.
The jogging DEC time means the time
needed if the inverter goes from the Max.
Frequency (P00.03) to 0Hz.
Setting range: 0.0–3600.0s
Depend
on model
○
P08.08
Jogging
running
DEC time
Depend
on model
○
P08.09
Jumping
frequency
1
When the set frequency is in the range of
jumping frequency, the inverter will run at the
edge of the jumping frequency.
The inverter can avoid the mechanical
resonance point by setting the jumping
frequency. The inverter can set three jumping
frequency. But this function will be invalid if all
jumping points are 0.
Set frequency f
Time t
Jump
frequency 2
½ x Jump bandwidth 2
½ x Jump bandwidth 2
Jump
frequency1
½ x Jump bandwidth 1
½ x Jump bandwidth 1
Jump
frequency 3
½ x Jump bandwidth 3
½ x Jump bandwidth 3
Setting range: 0.00–P00.03 (the Max.
frequency)
0.00Hz
○
P08.10
jumping
frequency
range 1
0.00Hz
○
P08.11
Jumping
frequency
2
0.00Hz
○
P08.12
Jumping
frequency
range 2
0.00Hz
○
P08.13
Jumping
frequency
3
0.00Hz
○
P08.14
Jumping
frequency
range 3
0.00Hz
○
P08.15
Traverse
range
This function applies to the industries where
traverse and convolution function are
required such as textile and chemical fiber.
The traverse function means that the output
frequency of the inverter is fluctuated with the
set frequency as its center. The route of the
running frequency is illustrated as below, of
which the traverse is set by P08.15 and when
P08.15 is set as 0, the traverse is 0 with no
function.
0.0%
○
P08.16
Sudden
jumping
frequency
range
0.0%
○
P08.17
Traverse
boost time
5.0s
○
P08.18
Traverse
declining
5.0s
○
71
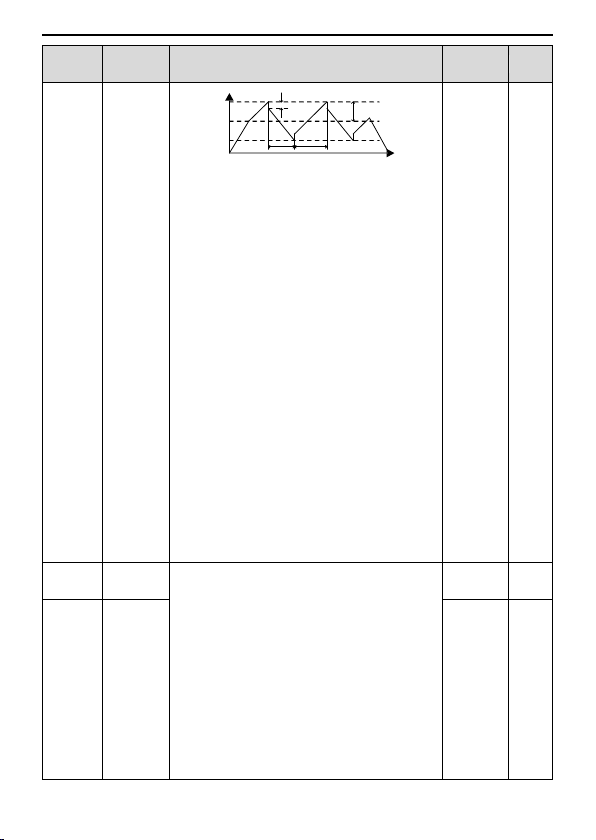
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
time
Output frequency
Jitter frequency
Accelerate
Decelerate
Traverse amplitude
Fall time
of traverse
Raise time
of traverse
Center
frequency
Upper limit
Lower limit
T
Traverse range: The traverse running is
limited by upper and low frequency.
The traverse range relative to the center
frequency: traverse range AW=center
frequency×traverse range P08.15.
Sudden jumping frequency=traverse range
AW×sudden jumping frequency range
P08.16. When run at the traverse frequency,
the value which is relative to the sudden
jumping frequency.
The raising time of the traverse frequency:
The time from the lowest point to the highest
one.
The declining time of the traverse frequency:
The time from the highest point to the lowest
one.
Setting range of P08.15: 0.0–100.0%
(relative to the set frequency)
Setting range of P08.16: 0.0–50.0%
(relative to the traverse range)
Setting range of P08.17: 0.1–3600.0s
Setting range of P08.18: 0.1–3600.0s
P08.25
Set count
value
The counter works based on the input pulse
signals of the HDI terminals.
When the count value reaches the specified
number, the multi-function output terminal
sends the signal of "The specified count value
is reached" and the counter continues to
count; when the count value reaches the set
number, the multi-function output terminal
sends the signal of "The set count value is
reached", and the counter will be reset to
zero and recount when the next pulse occurs.
The value of P08.26 cannot be greater than
0
○
P08.26
Specified
count
value
0
○
72
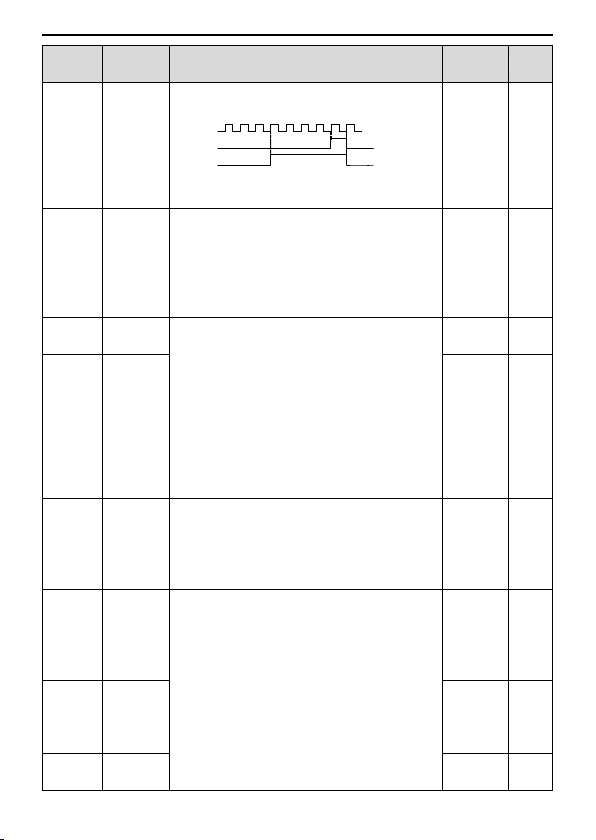
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
that of P08.25.
The function is illustrated as below:
RO1, RO2
S terminal
The set count
value is reached.
The specified count
value is reached.
Setting range of P08.25: P08.26–65535
Setting range of P08.26: 0–P08.25
P08.27
Setting
running
time
Pre-set running time of the inverter. When the
accumulative running time achieves the set
time, the multi-function digital output
terminals will output the signal of "running
time arrival".
Setting range: 0–65535min
0m
○
P08.28
Time of
fault reset
The time of the fault reset: set the fault reset
time by selecting this function. If the reset
time exceeds this set value, the inverter will
stop for the fault and wait to be repaired.
The interval time of the fault reset: The
interval between the time when the fault
occurs and the time when the reset action
occurs.
Setting range of P08.28: 0–10
Setting range of P08.29: 0.1–100.0s
0
○
P08.29
Interval
time of
automatic
fault reset
1.0s
○
P08.30
Frequency
decreasing
ratio in
drop
control
The output frequency of the inverter changes
as the load. And it is mainly used to balance
the power when several inverters drive one
load.
Setting range: 0.00–50.00Hz
0.00Hz
○
P08.32
FDT1
electrical
level
detection
value
When the output frequency exceeds the
corresponding frequency of FDT electrical
level, the multi-function digital output
terminals will output the signal of "frequency
level detect FDT" until the output frequency
decreases to a value lower than (FDT
electrical level—FDT retention detection
value) the corresponding frequency, the
signal is invalid. Below is the waveform
diagram:
60.00Hz
○
P08.33
FDT1
retention
detection
value
5.0%
○
P08.34
FDT2
electrical
60.00Hz
○
73

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
level
detection
value
Output frequency
FDT electrical level
FDT retention
Time
Time
Y, RO1, RO2
Setting range of P08.32: 0.00Hz–P00.03
(the Max. frequency)
Setting range of P08.33 and P08.35:
0.0–100.0%
Setting range of P08.34: 0.00Hz–P00.03
(the Max. frequency)
P08.35
FDT2
retention
detection
value
5.0%
○
P08.36
Frequency
arrival
detection
range
When the output frequency is among the
below or above range of the set frequency,
the multi-function digital output terminal will
output the signal of "frequency arrival", see
the diagram below for detailed information:
Y
RO1, RO2
,
Output frequency
Set frequency
Detectionn range
Time
Time
The setting range: 0.00Hz–P00.03 (the Max.
frequency)
0.00Hz
○
P08.37
Energy
Braking
enable
This parameter is used to control the internal
braking unit.
0: Disabled
1: Enabled
Note: Only applied to internal braking unit.
0
○
P08.38
Energy
braking
threshold
voltage
After setting the original bus voltage of
energy braking, you can adjust the voltage to
implement load braking. The factory changes
with the voltage level.
220V
voltage:
380.0V
○
460V
voltage:
740.0V
74

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
Setting range: 200.0–2000.0V
In order to prevent customers set the value is
too large, it is recommended setting range:
Voltage
220V
460V
Range
375–400V
715–780V
P08.39
Cooling
fan running
mode
0: Rated running mode
1: The fan keeps on running after power on
0
○
P08.40
PWM
selection
0x00–0x21
LED ones: PWM mode selection
0: PWM mode 1, three-phase modulation and
two-modulation
1: PWM mode 2, three-phase modulation
LED tens: low-speed carrier frequency limit
mode
0: Low-speed carrier frequency limit mode 1,
the carrier frequency will limit to 2k if it
exceeds 2k at low speed
1: Low-speed carrier frequency limit mode 2,
the carrier frequency will limit to 4k if it
exceeds 4k at low speed
2: No limit
0x01
◎
P08.41
Over
commissio
n selection
LED ones
0: Invalid
1: Valid
LED tens (for factory commissioning)
0: Light overcommission; in zone 1
1: Heavy overcommission; in zone 2
0x00
◎
P08.42
Keypad
data
control
setting
0x0000–0x1223
LED ones: frequency enable selection
0: Both ∧/∨ keys and analog potentiometer
adjustments are valid
1: Only ∧/∨ keys adjustment is valid
2: Only analog potentiometer adjustments is
valid
3: Neither ∧/∨ keys nor digital
potentiometer adjustments are valid
LED tens: frequency control selection
0: Only valid when P00.06=0 or P00.07=0
0x0000
○
75

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
1: Valid for all frequency setting manner
2: Invalid for multi-step speed when
multi-step speed has the priority
LED hundreds: action selection during
stopping
0: Setting is valid
1: Valid during running, cleared after stopping
2: Valid during running, cleared after
receiving the stop command
LED thousands: ∧/∨ keys and analog
potentiometer integral function
0: The Integral function is valid
1: The Integral function is invalid
P08.43
Integral
ratio of the
keypad
potentiome
ter
0.01–10.00s
0.10s
○
P08.44
UP/DOWN
terminals
control
setting
0x00–0x221
LED ones: frequency control selection
0: UP/DOWN terminals setting valid
1: UP/DOWN terminals setting valid
LED tens: frequency control selection
0: Only valid when P00.06=0 or P00.07=0
1: All frequency means are valid
2: When the multi-step are priority, it is invalid
to the multi-step
LED hundreds: action selection when stop
0: Setting valid
1: Valid in the running, clear after stop
2: Valid in the running, clear after receiving
the stop commands
0x000
○
P08.45
UP
terminals
frequency
changing
ratio
0.01–50.00s
0.50 s
○
P08.46
DOWN
terminals
0.01–50.00s
0.50 s
○
76

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
frequency
changing
ratio
P08.47
Action
selection
at power
loss
0x000–0x111
LED ones: Action selection when power off.
0: Save when power off
1: Clear when power off
LED tens: Action selection when MODBUS
set frequency off
0: Save when power off
1: Clear when power off
LED hundreds:The action selection when
other frequency set frequency off
0: Save when power off
1: Clear when power off
0x000
○
P08.48
Most
significant
digit of
original
power
consumpti
on
This parameter is used to set the original
value of the power consumption.
The original value of the power consumption
=P08.48 x 1000 + P08.49
Setting range of P08.48: 0–59999 kWh (k)
Setting range of P08.49:0.0–999.9 kWh
0 kWh
○
P08.49
Least
significant
digit of
original
power
consumpti
on
0.0 kWh
○
P08.50
Magnetic
flux
braking
This function code is used to enable magnetic
flux.
0: Invalid.
100–150: the bigger the coefficient, the
bigger the braking strength.
This inverter can slow down the motor by
increasing the magnetic flux. The energy
generated by the motor during braking can be
transformed into heat energy by increasing
the magnetic flux.
0
○
77

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
The inverter monitors the state of the motor
continuously even during the magnetic flux
period. So the magnetic flux can be used in
the motor stop, as well as to change the
rotation speed of the motor. Its other
advantages are:
Brake immediately after the stop command. It
does not need to wait the magnetic flux
weaken.
The cooling is better. The current of the stator
other than the rotor increases during
magnetic flux braking, while the cooling of the
stator is more effective than the rotor.
P08.51
Current
adjustment
coefficient
on the
input side
This function code is used to adjust the
displayed current of the AC input side.
Setting range: 0.00–1.00
0.56
○
P09 Group PID control
P09.00
PID
reference
source
When the frequency command selection
(P00.06, P00. 07) is 7 or the voltage setting
channel selection (P04.27) is 6, the running
mode of the inverter is procedure PID
controlled.
The parameter determines the target given
channel during the PID procures.
0: Keypad digital given (P09.01)
1: Analog channel AI1 given
2: Analog channel AI2 given
3: Analog channel AI3 set
4: High speed pulse HDI set
5: Multi-step speed set
6: MODBUS communication set
7–9:Reserved
The setting target of procedure PID is a
relative one, 100% of the setting equals to
100% of the response of the controlled
system.
0
○
78
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
The system is calculated according to the
relative value (0–100.0%).
Note: Multi-step speed given, it is realized by
setting P10 group parameters.
P09.01
Keypad
PID preset
When P09.00=0, set the parameter whose
basic value is the feedback value of the
system.
The setting range:-100.0%–100.0%
0.0%
○
P09.02
PID
feedback
source
Select the PID channel by the parameter.
0: Analog channel AI1 feedback
1: Analog channel AI2 feedback
2: Analog channel AI3 feedback
3: High speed HDI feedback
4: MODBUS communication feedback
5–7: Reserved
Note: The reference channel and the
feedback channel can not coincide,
otherwise, PID can not control effectively.
0 ○ P09.03
PID output
feature
0: PID output is positive: when the feedback
signal exceeds the PID reference value, the
output frequency of the inverter will decrease
to balance the PID. For example, the strain
PID control during wrapup
1: PID output is negative: When the feedback
signal is stronger than the PID reference
value, the output frequency of the inverter will
increase to balance the PID. For example,
the strain PID control during wrapdown
0
○
P09.04
Proportion
al gain
(Kp)
The function is applied to the proportional
gain P of PID input.
P determines the strength of the whole PID
adjuster. The parameter of 100 means that
when the offset of PID feedback and given
value is 100%, the adjusting range of PID
adjustor is the Max. frequency (ignoring
integral function and differential function).
The setting range:0.00–100.00
1.00
○
P09.05
Interval
time(Ti)
This parameter determines the speed of PID
adjustor to carry out integral adjustment on
0.10s
○
79

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
the deviation of PID feedback and reference.
When the deviation of PID feedback and
reference is 100%, the integral adjustor works
continuously after the time (ignoring the
proportional effect and differential effect) to
achieve the Max. Frequency (P00.03) or the
Max. Voltage (P04.31). Shorter the integral
time, stronger is the adjustment
Setting range: 0.00–10.00s
P09.06
Differential
time(Td)
This parameter determines the strength of the
change ratio when PID adjustor carries out
integral adjustment on the deviation of PID
feedback and reference.
If the PID feedback changes 100% during the
time, the adjustment of integral adjustor
(ignoring the proportional effect and
differential effect) is the Max. Frequency
(P00.03) or the Max. Voltage (P04.31).
Longer the integral time, stronger is the
adjusting.
Setting range: 0.00–10.00s
0.00s
○
P09.07
Sampling
cycle(T)
This parameter means the sampling cycle of
the feedback. The modulator calculates in
each sampling cycle. The longer the sapling
cycle is, the slower the response is.
Setting range: 0.001–10.000s
0.100s
○
P09.08
PID control
deviation
limit
The output of PID system is relative to the
maximum deviation of the close loop
reference. As shown in the diagram below,
PID adjustor stops to work during the
deviation limit. Set the function properly to
adjust the accuracy and stability of the
system.
0.0%
○
80
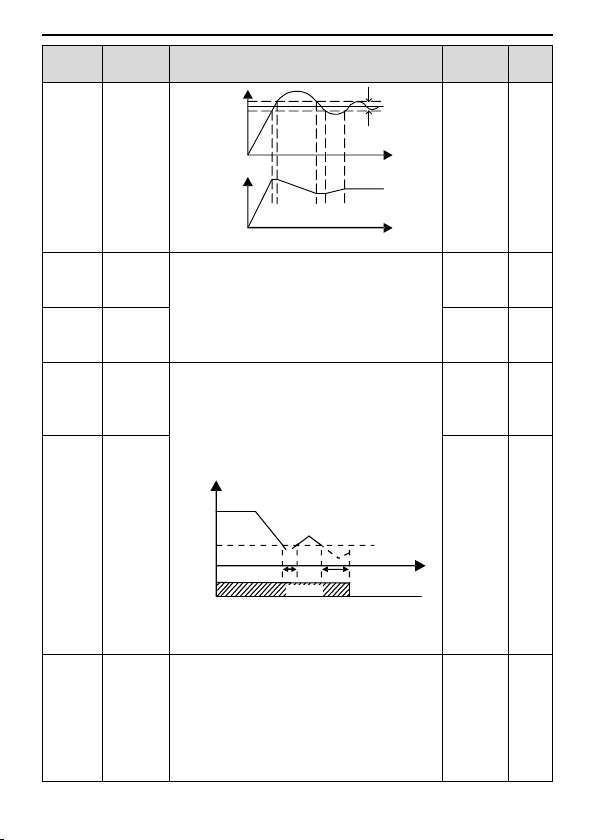
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
Output frequency
T
T
Feedback value
Bias limit
Reference
value
Setting range: 0.0–100.0%
P09.09
Output
upper limit
of PID
These parameters are used to set the upper
and lower limit of the PID adjustor output.
100.0 % corresponds to Max. Frequency or
the Max. Voltage of ( P04.31)
Setting range of P09.09: P09.10–100.0%
Setting range of P09.10: -100.0%–P09.09
100.0%
○
P09.10
Output
lower limit
of PID
0.0%
○
P09.11
Feedback
offline
detection
value
Set the PID feedback offline detection value,
when the detection value is smaller than or
equal to the feedback offline detection value,
and the lasting time exceeds the set value in
P09.12, the inverter will report "PID feedback
offline fault" and the keypad will display PIDE.
T
Output frequency
t1
t2
P09.11
t1<t2, so the inverter
continues to work
t2=P09.12
In running
Fault output PIDE
PIDE
Setting range of P09.11: 0.0–100.0%
Setting range of P09.12: 0.0–3600.0s
0.0%
○
P09.12
Feedback
offline
detection
time
1.0s
○
P09.13
PID
adjustment
selection
0x00–0x11
LED ones:
0: Keep on integral adjustment when the
frequency achieves the upper and low limit;
the integration shows the change between
the reference and the feedback unless it
reaches the internal integral limit. When the
0x0001
○
81

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
trend between the reference and the
feedback changes, it needs more time to
offset the impact of continuous working and
the integration will change with the trend.
1: Stop integral adjustment when the
frequency reaches the upper and low limit. If
the integration keeps stable, and the trend
between the reference and the feedback
changes, the integration will change with the
trend quickly.
LED tens:
0: The same with the setting direction; if the
output of PID adjustment is different from the
current running direction, the internal will
output 0 forcedly.
1: Opposite to the setting direction
LED hundreds:
0: Limit to the maximum frequency
1: Limit to A frequency
LED thousands:
0: A+B frequency, buffer ACC/DEC is invalid
for the main reference A frequency source
1: A+B frequency, buffer ACC/DEC is valid
for the main reference A frequency source
and the ACC/DEC is determined by time 4 of
P08.04
P09.14
Proportion
al gain at
low
frequency
(Kp)
0.00–100.00
1.00
○
P09.15
PID
command
of
ACC/DEC
time
0.0–1000.0s
0.0s
○
P09.16
PID output
filter time
0.000–10.000s
0.000s
○
82

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P10 Group Simple PLC and multi-step speed control
P10.00
Simple
PLC
means
0: Stop after running once. The inverter has
to be commanded again after finishing a
cycle.
1: Run at the final value after running once.
After finish a signal, the inverter will keep the
running frequency and direction of the last
run.
2: Cycle running. The inverter will keep on
running until receiving a stop command and
then, the system will stop.
0
○
P10.01
Simple
PLC
memory
selection
0: Power loss without memory
1: Power loss memory; PLC record the
running stage and frequency when power
loss.
0
○
P10.02
Multi-step
speed 0
100.0% of the frequency setting corresponds
to the Max. Frequency P00.03.
When selecting simple PLC running, set
P10.02–P10.33 to define the running
frequency and direction of all stages.
Note: The symbol of multi-step determines
the running direction of simple PLC. The
negative value means reverse rotation.
P10.02
P10.04
P10.06
P10.32
P10.30
P10.28DEC time
(2 stages)
ACC time
(2 stags)
P10.03 P10.05 P10.07 P10.31 P10.33
multi-step speeds are in the range of
--f
max–fmax
and it can be
UMI-B1 UL series inverters can set 16 stages
speed, selected by the combination of
multi-step terminals 1–4, corresponding to
the speed 0 to speed 15.
0.0%
○
P10.03
The
running
time of
stage 0
0.0s
○
P10.04
Multi-step
speed 1
0.0%
○
P10.05
The
running
time of
stage 1
0.0s
○
P10.06
Multi-step
speed 2
0.0%
○
P10.07
The
running
time of
stage 2
0.0s
○
P10.08
Multi-step
speed 3
0.0%
○
P10.09
The
running
time of
0.0s
○
83
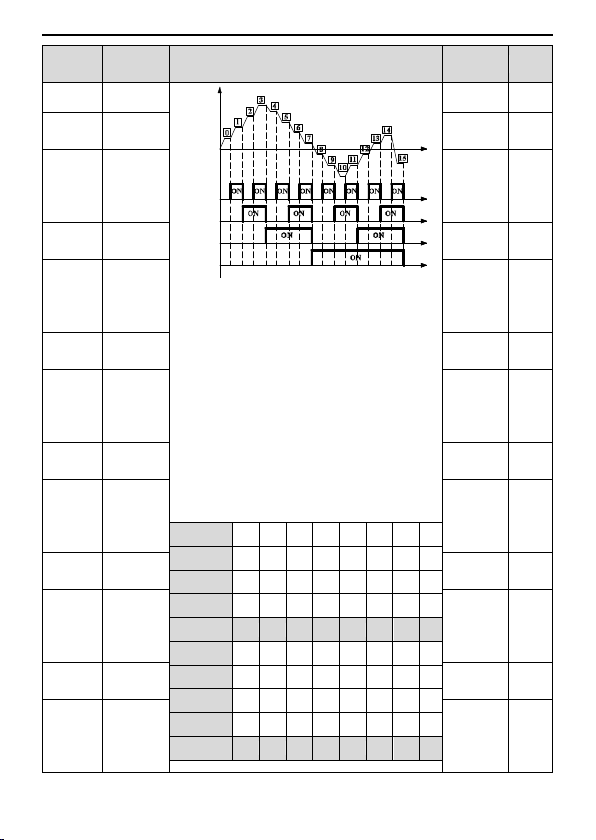
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
stage 3
Output frequency
t
t
t
t
t
Terminal 1
Terminal 2
Terminal 3
Terminal 4
When terminal 1= terminal 2= terminal 3=
terminal 4=OFF, the frequency input manner
is selected via code P00.06 or P00.07. When
all terminal 1= terminal 2= terminal 3=
terminal 4 terminals aren't off, it runs at
multi-step which takes precedence of keypad,
analog value, high-speed pulse, PLC,
communication frequency input. Select at
most 16 stages speed via the combination
code of terminal 1, terminal 2, terminal 3, and
terminal 4.
The start-up and stopping of multi-step
running is determined by function code
P00.06, the relationship between terminal 1,
terminal 2, terminal 3, terminal 4 terminals
and multi-step speed is as following:
Terminal 1
OFF
ON
OFF
ON
OFF
ON
OFF
ON
Terminal 2
OFF
OFF
ON
ON
OFF
OFF
ON
ON
Terminal 3
OFF
OFF
OFF
OFF
ON
ON
ON
ON
Terminal 4
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
step 0 1 2 3 4 5 6 7
Terminal 1
OFF
ON
OFF
ON
OFF
ON
OFF
ON
Terminal 2
OFF
OFF
ON
ON
OFF
OFF
ON
ON
Terminal 3
OFF
OFF
OFF
OFF
ON
ON
ON
ON
Terminal 4
ON
ON
ON
ON
ON
ON
ON
ON
step 8 9
10
11
12
13
14
15
P10.10
Multi-step
speed 4
0.0%
○
P10.11
The
running
time of
stage 4
0.0s
○
P10.12
Multi-step
speed 5
0.0%
○
P10.13
The
running
time of
stage 5
0.0s
○
P10.14
Multi-step
speed 6
0.0%
○
P10.15
The
running
time of
stage 6
0.0s
○
P10.16
Multi-step
speed 7
0.0%
○
P10.17
The
running
time of
stage 7
0.0s
○
P10.18
Multi-step
speed 8
0.0%
○
P10.19
The
running
time of
stage 8
0.0s
○
P10.20
Multi-step
speed 9
0.0%
○
P10.21
The
running
time of
stage 9
0.0s
○
84

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P10.22
Multi-step
speed 10
Setting range of P10.(2n,1<n<17):
-100.0–100.0%
Setting range of P10.(2n+1, 1<n<17):
0.0–6553.5s (min)
0.0%
○
P10.23
The
running
time of
stage 10
0.0s
○
P10.24
Multi-step
speed 11
0.0%
○
P10.25
The
running
time of
stage 11
0.0s
○
P10.26
Multi-step
speed 12
0.0%
○
P10.27
The
running
time of
stage 12
0.0s
○
P10.28
Multi-step
speed 13
0.0%
○
P10.29
The
running
time of
stage 13
0.0s
○
P10.30
Multi-step
speed 14
0.0%
○
P10.31
The
running
time of
stage 14
0.0s
○
P10.32
Multi-step
speed 15
0.0%
○
P10.33
The
running
time of
stage 15
0.0s
○
P10.34
Simple
PLC 0–7
0x0000
○
85

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
stage
ACC/DEC
time
selection
Below is the detailed instruction:
Functi
on
code
Binary bit
Step
ACC/
DEC
0
ACC/
DEC
1
ACC/
DEC
2
ACC/
DEC
3
P10.34
BIT1
BIT0 0 00
01
10
11
BIT3
BIT2 1 00
01
10
11
BIT5
BIT4 2 00
01
10
11
BIT7
BIT6 3 00
01
10
11
BIT9
BIT8 4 00
01
10
11
BIT11 BIT1
0
5
00
01
10
11
BIT13 BIT1
2
6
00
01
10
11
BIT15 BIT1
4
7
00
01
10
11
P10.35
BIT1
BIT0 8 00
01
10
11
BIT3
BIT2 9 00
01
10
11
BIT5
BIT4
10
00
01
10
11
BIT7
BIT6
11
00
01
10
11
BIT9
BIT8
12
00
01
10
11
BIT11 BIT1
0
13
00
01
10
11
BIT13 BIT1
2
14
00
01
10
11
BIT15 BIT1
4
15
00
01
10
11
After the users select the corresponding
ACC/DEC time, the combining 16 binary bit
will change into decimal bit, and then set the
corresponding function codes.
Setting range: -0x0000–0xFFFF
P10.35
Simple
PLC 8–15
stage
ACC/DEC
time
selection
0x0000
○
P10.36
PLC
0: Restart from the first stage; stop during
0
◎
86
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
restart
mode
running (cause by the stop command, fault or
power loss), run from the first stage after
restart.
1: Continue to run from the stop frequency;
stop during running (cause by stop command
and fault), the inverter will record the running
time automatically, enter into the stage after
restart and keep the remaining running at the
setting frequency.
P10.37
Multi-step
time unit
selection
0: Seconds; the running time of all stages is
counted by second
1: Minutes; the running time of all stages is
counted by minute
0
◎
P11 Group Protective parameters
P11.00
Phase loss
protection
0x00–0x11
LED ones:
0: Input phase loss protection disable
1: Input phase loss protection enable
LED tens:
0: Output phase loss protection disable
1: Output phase loss protection enable
0x10
○
P11.01
Frequency
-decreasin
g at
sudden
power loss
0: Enabled
1: Disabled
0
○
P11.02
Frequency
decreasing
ratio at
sudden
power loss
Setting range: 0.00Hz/s–P00.03 (the Max.
frequency)
After the power loss of the grid, the bus
voltage drops to the sudden
frequency-decreasing point, the inverter
begin to decrease the running frequency at
P11.02, to make the inverter generate power
again. The returning power can maintain the
bus voltage to ensure a rated running of the
inverter until the recovery of power.
Voltage degree
220V
460V
Frequency-decreasing
260V
530V
10.00
Hz/s
○
87
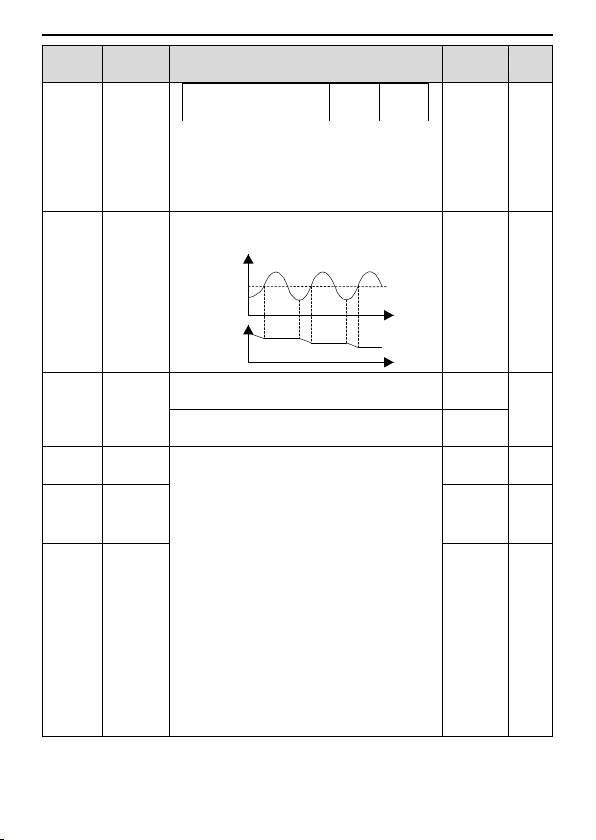
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
point at sudden power
loss
Note: 1. Adjust the parameter properly to
avoid the stopping caused by inverter
protection during the switching of the grid.
2. Prohibit the input phase protection to
enable this function.
P11.03
Overvoltag
e stall
protection
0: Disabled
1: Enabled
Output
current
Overvoltage
small point
Output
frequency
Time
Time
1
○
P11.04
Overvoltag
e stall
voltage
protection
120–150% (standard bus voltage)
(460V)
120%
○
120–150% (standard bus voltage)
(220V)
115%
P11.05
Current
limit action
The actual increasing ratio is less than the
ratio of output frequency because of the big
load during ACC running. It is necessary to
take measures to avoid overcurrent fault and
the inverter trips.
During the running of the inverter, this
function will detect the output current and
compare it with the limit level defined in
P11.06. If it exceeds the level, the inverter will
run at stable frequency in ACC running, or the
inverter will derate to run during the constant
running. If it exceeds the level continuously,
the output frequency will keep on decreasing
to the lower limit. If the output current is
detected to be lower than the limit level, the
inverter will accelerate to run.
0x01
◎
P11.06
Automatic
current
limit level
160.0%
◎
P11.07
The
decreasing
ratio during
current
limit
10.00
Hz/s
◎
88
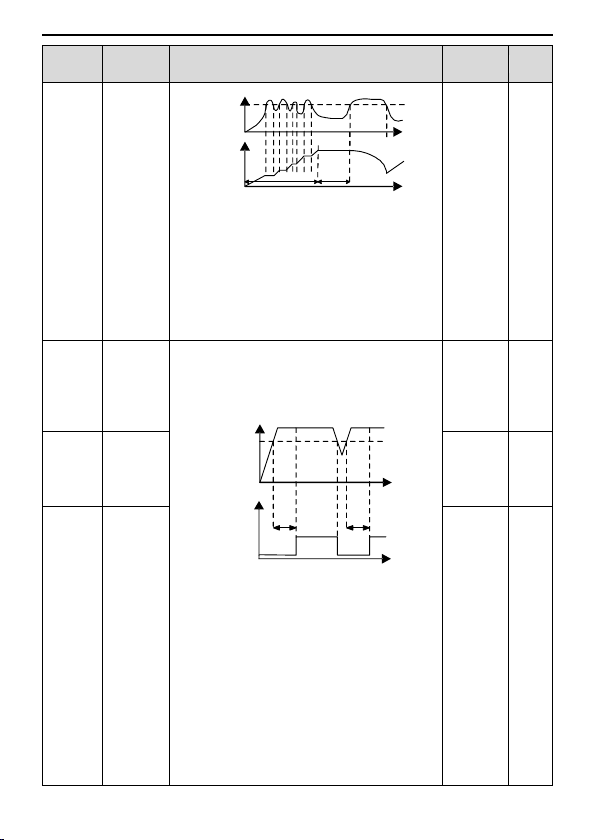
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
Output frequency
Output current
Limit point
Set frequency
ACC
Time
Time
Constant
speed
Setting range of P11.05:
0: current limit invalid
1: current limit valid
2: current limit is invalid during constant
speed
Setting range of P11.05: 0x00–0x12
Setting range of P11.06: 50.0–200.0%
Setting range of P11.07: 0.00–50.00Hz/s
P11.08
Overload
pre-alarm
of the
motor/
inverter
The output current of the inverter or the motor
is above P11.09 and the lasting time is
beyond P11.10, overload pre-alarm will be
output.
Output current
Overload
pre-alarm point
Time
Time
Pre-alarm
time
Pre-alarm
time
Y, RO1, RO2
Setting range of P11.08:
Enable and define the overload pre-alarm of
the inverter or the motor.
Setting range: 0x000–0x131
LED ones:
0: Overload pre-alarm of the motor, comply
with the rated current of the motor
1: Overload pre-alarm of the inverter, comply
with the rated current of the inverter
LED tens:
0: The inverter continues to work after
underload pre-alarm
0x000
○
P11.09
Overload
pre-alarm
test level
150%
○
P11.10
Overload
pre-alarm
detection
time
1.0s
○
89

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
1: The inverter continues to work after
underload pre-alarm and the inverter stops to
run after overload fault
2: The inverter continues to work after
overload pre-alarm and the inverter stops to
run after underload fault
3. The inverter stops when overloading or
underloading.
LED hundreds :
0: Detection all the time
1: Detection in constant running
Setting range of P11.09: P11.11–200%
Setting range of P11.10: 0.1–3600.0s
P11.11
Detection
level of the
underload
pre-alarm
If the inverter current or the output current is
lower than P11.11, and its lasting time is
beyond P11.12, the inverter will output
underload pre-alarm.
Setting range of P11.11: 0–P11.09
Setting range of P11.12: 0.1–3600.0s
50%
○
P11.12
Detection
time of the
underload
pre-alarm
1.0s
○
P11.13
Output
terminal
action
selection
during fault
Select the action of fault output terminals on
undervoltage and fault reset.
0x00–0x11
LED ones:
0: Action under fault undervoltage
1: No action under fault undervoltage
LED tens:
0: Action during the automatic reset
1: No action during the automatic reset
0x00
○
P11.14
Speed
deviation
detection
0.0–50.0%
Set the speed deviation detection time.
10.0%
○
P11.15
Speed
deviation
detection
time
This parameter is used to set the speed
deviation detection time.
0.5s
○
90
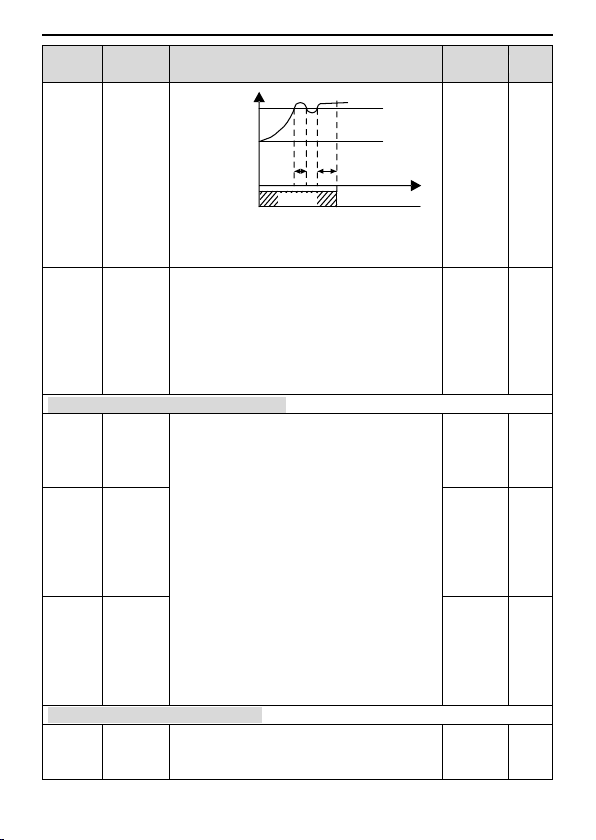
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
Actual detection
value
t1
t2
t1<t2, so the inverter continues to work
t2=P11.15
In running
Fault output dEu
Speed
Set detection
value
Time
Setting range of P11.15: 0.0–10.0s
P11.16
Automati
c
frequenc
y-decrea
sing at
voltage
drop
0: Invalid
1: Valid; ensure rated output torque when
voltage drop
0
○
P13 Group Control parameters of SM
P13.13
Braking
current of
short
circuit
After the inverter starts, when P01.00=0, set
P13.14 to non-zero value and begin short
circuit braking.
After the inverter stops, when the operation
frequency is less than P01.09, set P13.15 to
non-zero value and begin stopping
short-circuit braking and then DC braking.
Setting range of P13.13: 0.0–150.0%
(inverters)
Setting range of P13.14: 0.00–50.00s
0.0%
○
P13.14
Braking
retention
time of
starting
short
circuit
0.00s
○
P13.15
Braking
retention
time of
stopping
short
circuit
0.00s
○
P14 Group Serial communication
P14.00
local
communic
ation
Setting range: 1–247
When the master is writing the frame, the
communication address of the slave is set to
1
○
91
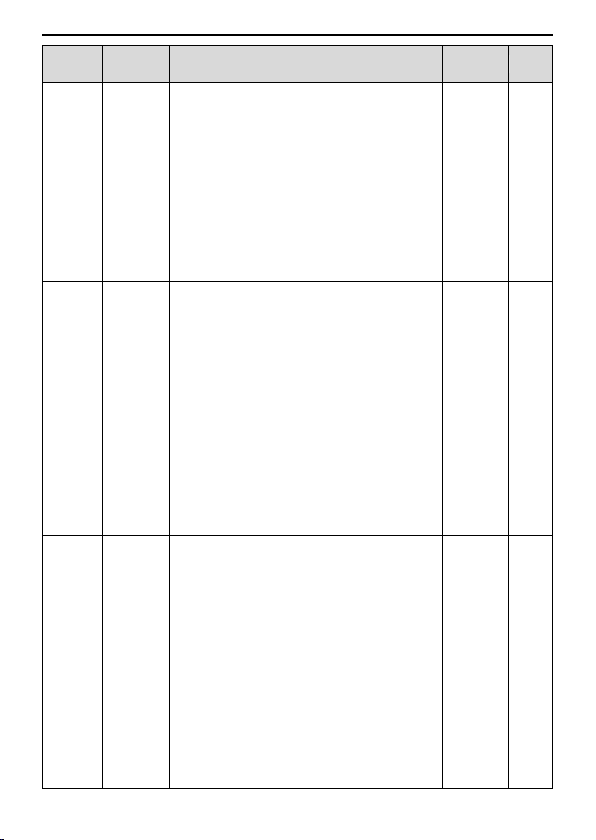
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
address
0; the broadcast address is the
communication address. All slaves on the
MODBUS fieldbus can receive the frame, but
the salve doesn't answer.
The communication address of the inverter is
unique in the communication net. This is the
fundamental for the point to point
communication between the upper monitor
and the inverter.
Note: The address of the slave cannot set to
0.
P14.01
Communic
ation baud
ratio
Set the digital transmission speed between
the upper monitor and the inverter.
0: 1200BPS
1: 2400BPS
2: 4800BPS
3: 9600BPS
4: 19200BPS
5: 38400BPS
6: 57600BPS
Note: The baud rate between the upper
monitor and the inverter must be the same.
Otherwise, the communication is not applied.
The bigger the baud rate, the quicker the
communication speed.
4
○
P14.02
Digital bit
checkout
The data format between the upper monitor
and the inverter must be the same.
Otherwise, the communication is not applied.
0: No check (N,8,1) for RTU
1: Even check (E,8,1) for RTU
2: Odd check (O,8,1) for RTU
3: No check (N,8,2) for RTU
4: Even check (E,8,2) for RTU
5: Odd check (O,8,2) for RTU
6: No check (N,7,1) for ASCII
7: Even check (E,7,1) for ASCII
8: Odd check (O,7,1) for ASCII
9: No check (N,7,2) for ASCII
10: Even check (E,7,2) for ASCII
1
○
92
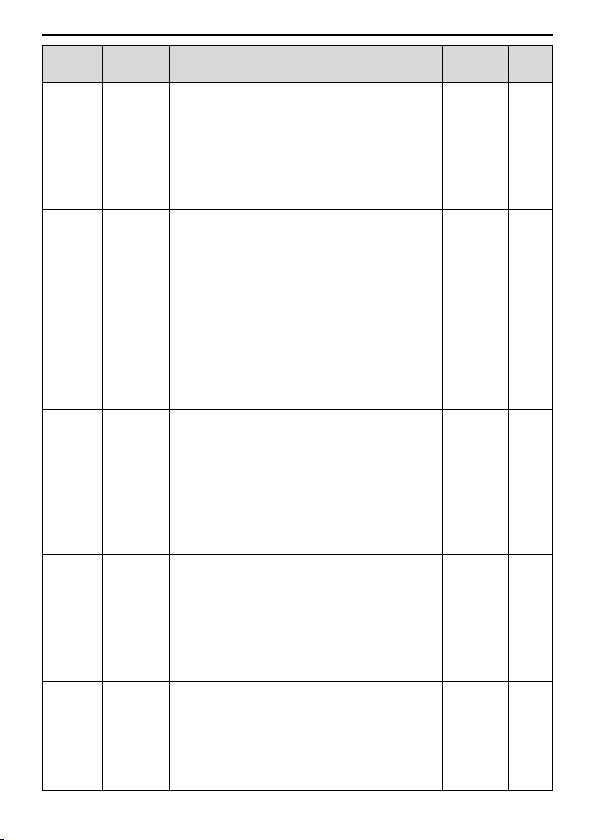
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
11: Odd check (O,7,2) for ASCII
12: No check (N,8,1) for ASCII
13: Even check (E,8,1) for ASCII
14: Odd check (O,8,1) for ASCII
15: No check (N,8,2) for ASCII
16: Even check (E,8,2) for ASCII
17: Odd check (O,8,2) for ASCII
P14.03
Communic
ation
answer
delay
0–200ms
It means the interval time between the time
the inverter receives the data and the time it
sends it to the upper monitor. If the answer
delay is shorter than the system processing
time, then the answer delay time is the
system processing time, if the answer delay
is longer than the system processing time,
then after the system deal with the data, waits
until achieving the answer delay time to send
the data to the upper monitor.
5
○
P14.04
Communic
ation
overtime
fault time
0.0 (invalid),0.1–60.0s
When the function code is set as 0.0, the
communication overtime parameter is invalid.
When the function code is set as non-zero, if
the interval time between two
communications exceeds the communication
overtime, the system will report "485
communication faults" (CE).
0.0s
○
P14.05
Transmissi
on fault
processing
0: Alarm and stop freely
1: No alarm and continue to run
2: No alarm and stop according to the stop
means (only under the communication
control)
3: No alarm and stop according to the stop
means (under all control modes)
0
○
P14.06
Communic
ation
processing
0x00–0x11
LED ones:
0: Write with response: the inverter will
respond to all reading and writing commands
of the upper monitor.
1: Write without response: the inverter only
0x00
○
93

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
responds to the reading command of the
upper monitor. The communication efficiency
can be increased in this mode.
LED tens: (reserved)
0: Communication encrypting is invalid
1: Communication encrypting is valid
P14.07
Reserved ● P14.08
Reserved
●
P17 Group Monitoring function
P17.00
Setting
frequency
Display current set frequency of the inverter
Range: 0.00Hz–P00.03
●
P17.01
Output
frequency
Display current output frequency of the
inverter
Range: 0.00Hz–P00.03
●
P17.02
Ramp
reference
frequency
Display current ramp reference frequency of
the inverter
Range: 0.00Hz–P00.03
●
P17.03
Output
voltage
Display current output voltage of the inverter
Range: 0–1200V
●
P17.04
Output
current
Display current output current of the inverter
Range: 0.0–5000.0A
●
P17.05
Motor
speed
Display the rotation speed of the motor.
Range: 0–65535RPM
●
P17.06
Torque
current
Display current torque current of the inverter
Range: 0.0–5000.0A
●
P17.07
Magnetize
d current
Display current magnetized current of the
inverter
Range: 0.0–5000.0A
●
P17.08
Motor
power
Display current power of the motor.
Setting range: -300.0%–300.0%
(the rated current of the motor)
●
P17.09
Output
Display the current output torque of the
●
94

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
torque
inverter.
Range: -250.0–250.0%
P17.10
The motor
frequency
evaluation
Evaluate the motor rotor frequency on open
loop vector
Range: 0.00– P00.03
●
P17.11
DC bus
voltage
Display current DC bus voltage of the inverter
Range: 0.0–2000.0V
●
P17.12
Switch
input
terminals
state
Display current Switch input terminals state of
the inverter
Range: 0000–00FF
●
P17.13
Switch
output
terminals
state
Display current Switch output terminals state
of the inverter
Range: 0000–000F
●
P17.14
Digital
adjustment
Display the adjustment through the keypad of
the inverter.
Range: 0.00Hz–P00.03
●
P17.15
Torque
reference
Display the torque reference, the percentage
to the current rated torque of the motor.
Setting range: -300.0%–300.0%
(the rated current of the motor)
●
P17.16
Linear
speed
Display the current linear speed of the
inverter.
Range: 0–65535
●
P17.17
Reserved
●
P17.18
Counting
value
Display the current counting number of the
inverter.
Range: 0–65535
●
P17.19
AI1 input
voltage
Display analog AI1 input signal
Range: 0.00–10.00V
●
95
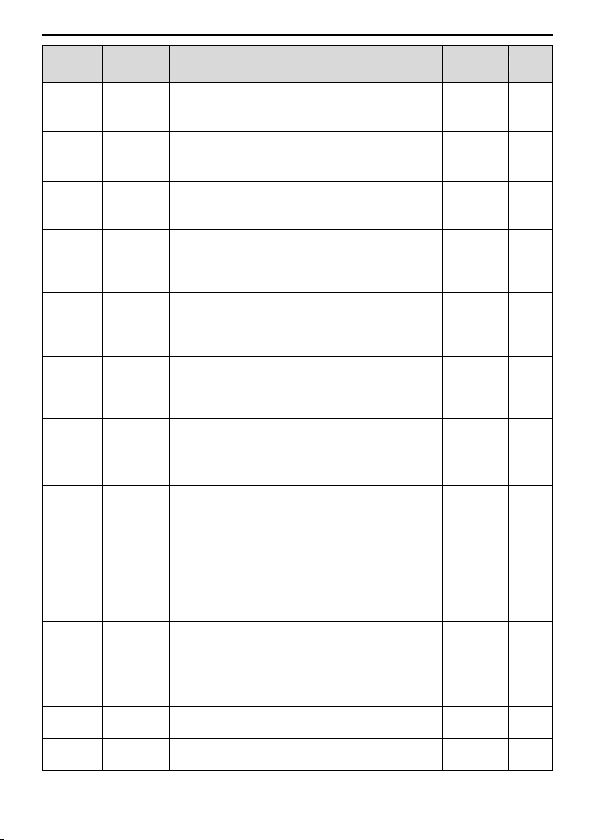
UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P17.20
AI2 input
voltage
Display analog AI2 input signal
Range: 0.00–10.00V
● P17.21
AI3 input
voltage
Display analog AI2 input signal
Range: -10.00–10.00V
●
P17.22
HDI input
frequency
Display HDI input frequency
Range: 0.00–50.00kHz
●
P17.23
PID
reference
value
Display PID reference value
Range: -100.0–100.0%
● P17.24
PID
feedback
value
Display PID feedback value
Range: -100.0–100.0%
●
P17.25
Power
factor of
the motor
Display the current power factor of the motor.
Range: -1.00–1.00
●
P17.26
Current
running
time
Display the current running time of the
inverter.
Range: 0–65535min
●
P17.27
Simple
PLC and
the current
stage of
the
multi-step
speed
Display simple PLC and the current stage of
the multi-step speed
Range: 0–15
●
P17.28
ASR
controller
output
The percentage of the rated torque of the
relative motor, display ASR controller output
Range: -300.0%–300.0% (the rated motor
current)
●
P17.29
Reserved
●
P17.30
Reserved
●
96

UMI-B1 UL Series Inverter Function parameters
Function
code
Name
Detailed instruction of parameters
Default
value
Modify
P17.31
Reserved
●
P17.32
Magnetic
flux linkage
Display the magnetic flux linkage of the
motor.
Range: 0.0%–200.0%
●
P17.33
Exciting
current
reference
Display the exciting current reference in the
vector control mode.
Range: -3000.0–3000.0A
●
P17.34
Torque
current
reference
Display the torque current reference in the
vector control mode.
Range: -3000.0–3000.0A
●
P17.35
AC input
current
Display the input current in AC side.
Range: 0.0–5000.0A
●
P17.36
Output
torque
Display the output torque. Positive value is in
the electromotion state, and negative value is
in the power generating state.
Range: -3000.0Nm–3000.0Nm
●
P17.37
Motor
overload
counting
0–100 (OL1 when 100)
●
P17.38
PID output
Display PID output
-100.00–100.00%
●
P17.39
Reserved
●
97
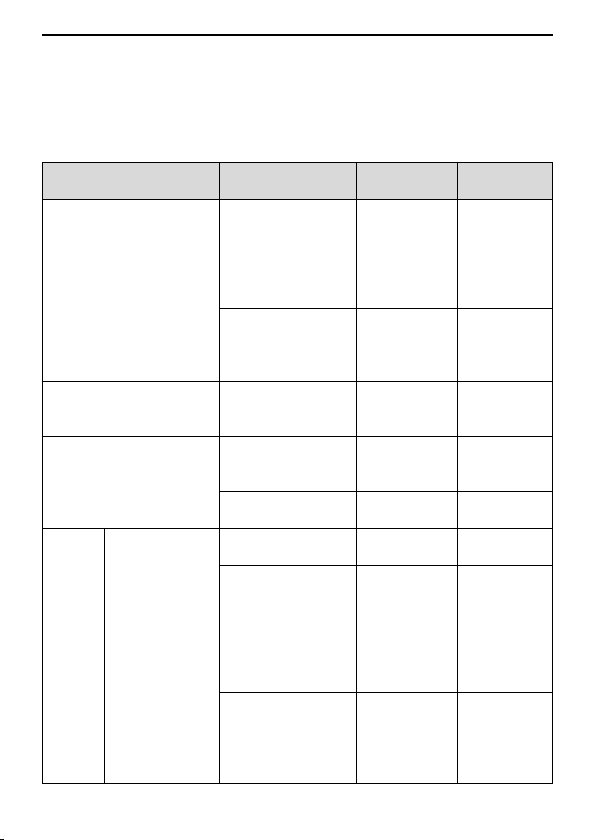
UMI-B1 UL Series Inverter Fault tracking
Checking part
Checking item
Checking
method
Criterion
Ambient environment
Check the ambient
temperature, humidity
and vibration and
ensure there is no
dust, gas, oil fog and
water drop.
Visual
examination
and instrument
test
Conforming to
the manual
Ensure there are no
tools or other foreign
or dangerous objects
Visual
examination
There are no
tools or
dangerous
objects.
Voltage
Ensure the main circuit
and control circuit are
normal.
Measurement
by millimeter
Conforming to
the manual
Keypad
Ensure the display is
clear enough
Visual
examination
The characters
are displayed
normally.
Ensure the characters
are displayed totally
Visual
examination
Conforming to
the manual
Main
circuit
For public use
Ensure the screws are
tightened securely.
Tighten up
NA
Ensure there is no
distortion, crackles,
damage or
color-changing caused
by overheating and
aging to the machine
and insulator.
Visual
examination
NA
Ensure there is no
dust and dirtiness
Visual
examination
NA
Note: if the
color of the
copper blocks
change, it does
6 Fault Tracking
6.1 Maintenance intervals
If installed in an appropriate environment, the inverter requires very little maintenance.
The table lists the routine maintenance intervals recommended by UNITRONICS.
98
 Loading...
Loading...