


P-Sea Underwater Console
P-Sea Underwater Console
Product Manual
0744-SOM-00002-1
0744-SOM-00002-1 1 © Tritech International Ltd.

P-Sea Underwater Console
© Tritech International Ltd
The copyright in this document is the property of Tritech International Ltd. The document is supplied by Tritech International Ltd on
the understanding that it may not be copied, used, or disclosed to others except as authorised in writing by Tritech International Ltd.
Tritech International Ltd reserves the right to change, modify and update designs and specifications as part of their ongoing
product development programme.
All product names are trademarks of their respective companies.
0744-SOM-00002-1 2 © Tritech International Ltd.

P-Sea Underwater Console
Table of Contents
Help & Support ........................................................................................................... 5
Warning Symbols ........................................................................................................ 6
1. Introduction ............................................................................................................. 7
2. Specification ........................................................................................................... 8
2.1. Dimensions .................................................................................................. 8
2.2. Physical and Electrical Properties ................................................................. 9
3. Getting Started ...................................................................................................... 10
3.1. Plugging in the cables ................................................................................ 10
3.2. First power on ............................................................................................ 14
4. Installation ............................................................................................................ 17
4.1. Power Connector ....................................................................................... 17
4.2. Sonar Connector ........................................................................................ 17
4.3. Serial Connectors ....................................................................................... 18
4.4. USB Connector .......................................................................................... 19
5. Basic Operation .................................................................................................... 20
5.1. Activity Indicators ....................................................................................... 20
5.2. User Controls ............................................................................................. 20
5.3. Recording Data .......................................................................................... 22
5.4. Transferring Data ....................................................................................... 23
6. Advanced Operation .............................................................................................. 24
6.1. User Screen ............................................................................................... 24
6.1.1. Overview ......................................................................................... 24
6.1.2. Online Button .................................................................................. 25
6.1.3. Record Button ................................................................................. 26
6.1.4. Player Controls ................................................................................ 26
6.1.5. Capture Screen ............................................................................... 28
6.1.6. Record Video .................................................................................. 29
6.1.7. Acoustic Zoom button ...................................................................... 29
6.1.8. CHIRP button .................................................................................. 30
6.1.9. Invert Display (Up/Down) ................................................................. 30
6.1.10. Flip Image (Left/Right) ................................................................... 30
6.1.11. Rotate Image ................................................................................. 31
6.1.12. Draw Grid ...................................................................................... 31
6.1.13. Zoom Button .................................................................................. 31
6.1.14. Filter Selector ................................................................................ 32
6.1.15. Sound Velocity Indicator ................................................................. 32
6.1.16. Palette Selector ............................................................................. 32
6.1.17. Gain Control .................................................................................. 33
6.1.18. Range Control ............................................................................... 33
6.1.19. Indicators ...................................................................................... 33
6.1.20. Sonar Swathe ................................................................................ 33
6.1.21. Measurements ............................................................................... 34
6.1.22. Warnings ....................................................................................... 34
6.2. Advanced Screen ....................................................................................... 35
6.2.1. System Data ................................................................................... 36
6.2.2. Configuration Options ...................................................................... 36
6.2.3. Application Settings ......................................................................... 39
6.2.4. Filter Settings .................................................................................. 41
6.2.5. Device Network Settings .................................................................. 42
6.2.6. Distance Marker .............................................................................. 43
6.2.7. Target Tracking ............................................................................... 44
6.3. Serial Data Input ........................................................................................ 47
6.3.1. Sonars & Sensors ........................................................................... 48
6.3.2. Gemini Hub ..................................................................................... 49
6.3.3. COM Ports ...................................................................................... 50
0744-SOM-00002-1 3 © Tritech International Ltd.

P-Sea Underwater Console
6.3.4. Aux Power ...................................................................................... 51
6.4. Gemini Firmware updates ........................................................................... 52
6.5. Multiple Head Operation ............................................................................. 53
6.6. Offline Mode .............................................................................................. 56
6.7. Automatic Online ........................................................................................ 56
6.8. Settings Files ............................................................................................. 56
6.9. Keyboard Shortcuts .................................................................................... 57
7. Maintenance ......................................................................................................... 58
7.1. General Guidance ...................................................................................... 58
7.2. Pre-Dive checks ......................................................................................... 58
7.3. Post-Dive checks ....................................................................................... 58
8. Troubleshooting .................................................................................................... 59
A. MetalSub Batteries ............................................................................................... 61
B. Cables .................................................................................................................. 62
C. Setting the computer IP address in Windows® XP ................................................. 64
D. Setting the computer IP address in Windows® 7 or Windows® 10 ........................... 66
E. Setting the Gemini Device IP Address in Gemini Software ...................................... 68
F. Gemini Software String Decode ............................................................................. 69
G. Gemini Software String Encode ............................................................................ 71
Glossary ................................................................................................................... 72
0744-SOM-00002-1 4 © Tritech International Ltd.

Help & Support
First please read this manual thoroughly (particularly the Troubleshooting section, if present).
If a warranty is applicable, further details can be found in the Warranty Statement, 0080STF-00139, available upon request.
Tritech International Ltd can be contacted as follows:
P-Sea Underwater Console
Mail Tritech International Ltd
Peregrine Road
Westhill Business Park
Westhill, Aberdeenshire
AB32 6JL, UK
Telephone ++44(0)1224 744 111
Fax ++44(0)1224 741 771
Email support@tritech.co.uk
Website www.tritech.co.uk
Prior to contacting Tritech International Ltd please ensure that the following is available:
1. The Serial Numbers of the product and any Tritech International Ltd equipment connected
directly or indirectly to it
2. Software or firmware revision numbers
3. A clear fault description
4. Details of any remedial action implemented
Contamination
If the product has been used in a contaminated or hazardous environment you
must de-contaminate the product and report any hazards prior to returning the
unit for repair. Under no circumstances should a product be returned that is
contaminated with radioactive material.
The name of the organisation which purchased the system is held on record at Tritech
International Ltd and details of new software or hardware packages will be announced at
regular intervals. This manual may not detail every aspect of operation and for the latest
revision of the manual please refer to
Tritech International Ltd can only undertake to provide software support of systems loaded
with the software in accordance with the instructions given in this manual. It is the customer's
responsibility to ensure the compatibility of any other package they choose to use.
www.tritech.co.uk
0744-SOM-00002-1 5 © Tritech International Ltd.

Warning Symbols
Throughout this manual the following symbols may be used where applicable to denote any
particular hazards or areas which should be given special attention:
Note
This symbol highlights anything which would be of particular interest to the reader
or provides extra information outside of the current topic.
Important
When this is shown there is potential to cause harm to the device due to
static discharge. The components should not be handled without appropriate
protection to prevent such a discharge occurring.
Caution
This highlights areas where extra care is needed to ensure that certain delicate
components are not damaged.
P-Sea Underwater Console
Warning
DANGER OF INJURY TO SELF OR OTHERS
Where this symbol is present there is a serious risk of injury or loss of life. Care
should be taken to follow the instructions correctly and also conduct a separate
Risk Assessment prior to commencing work.
0744-SOM-00002-1 6 © Tritech International Ltd.

1. Introduction
The P-Sea Underwater Console is a subsea computer system designed to provide divers
with a real time interface to Tritechs range of imaging Sonar products.
Power is supplied to the P-Sea via subsea battery packs, capable of providing +24V DC and
will consume 30W (excluding any power required for connected sonars or third party sensors)
Sensors and other external peripherals can be interfaced to the P-Sea through its two serial
ports (one set to RS232 and the other set to RS485). A USB port is also provided to aid the
transfer of logged data from the P-Sea to compatible storage devices.
The RS232 ports are capable of supporting up to 115k2 Baud and can provide +12V to +36V
at 1A to power additional devices.
The USB ports support USB 2.0 devices and are also backwards compatible with older USB
devices which support the USB 1.1 specification.
The P-Sea runs a Windows® 10 embedded OS and is has been optimised to run the Gemini
Software for display and data logging. The visual display is in the form of a 7” LCD display
with a native resolution of 1024 x 768.
P-Sea Underwater Console
The processor in the P-Sea is an Intel Atom CPU with 2Gb RAM. An Internal SSD provides
a dedicated storage capacity of 80Gb.
0744-SOM-00002-1 7 © Tritech International Ltd.

2. Specification
2.1. Dimensions
P-Sea Underwater Console
0744-SOM-00002-1 8 © Tritech International Ltd.

Specification P-Sea Underwater Console
2.2. Physical and Electrical Properties
Physical Properties
Property Details
Materials Aluminium ACP 5080 (Housing)
Tempered glass (Screen)
Finish Hard Anodised Black
Weight 5.98kg (2.2kg in water)
Depth rating 50m
Temperature range -10 to +40°C (-20 to +60°C in storage)
Connectors MKS(W)-307-FCR
IE55-1206-BCR
IE55-1204-BCR
Electrical and Computer Properties
Property Details
Power requirement 20 to 36VDC
Power consumption 30W (excluding external equipment)
Computer Processor AtomTM E3800
Installed RAM 2Gb
Internal Storage 120Gb (80Gb available for logging)
Display Size 7"
Display Resolution 1280 x 1024
0744-SOM-00002-1 9 © Tritech International Ltd.

3. Getting Started
The P-Sea has been designed with speed of deployment in mind and can quickly be rigged
up for use.
The following instructions assume that the P-Sea is being fully deployed with a Gemini 720is
Sonar, MetalSub battery packs and no Serial port devices.
P-Sea Underwater Console
3.1. Plugging in the cables
At the top of the P-Sea are the connectors for
• Serial Comms
• Ethernet Comms
• USB
• Power
0744-SOM-00002-1 10 © Tritech International Ltd.

Getting Started P-Sea Underwater Console
The SERIAL port closest to the edge of the P-Sea corresponds to COM Port 1 within
the embedded PC and is preset for RS485 communications. The SERIAL port next to the
ETHERNET port is COM Port 2 and this is preset for RS232 communications.
The USB port can be used to connect external USB devices, via its USB Cable, to the PSea, such as a mouse, keyboard or external HDD. A USB Hub can be used with this port
to allow more than one USB device to be connected at any one time. This is recommended
when attempting to transfer data from the P-Sea (see Section 5.4, “ Transferring Data ”) or
attempting to use some of the more advanced features of the Gemini software (see Chapter 6,
Advanced Operation).
The USB Port must be blanked off if the unit is being submerged. The USB Cable for the PSea is not rated for use underwater and is intended for dry use only.
Using the Gemini sonar cable, plug into the ETHERNET port on the P-Sea and onto the main
port of the Gemini sonar.
0744-SOM-00002-1 11 © Tritech International Ltd.

Getting Started P-Sea Underwater Console
Connect the MetalSub Power Cable to the P-Sea Power port
As no serial devices are being connected, ensure that both Serial Ports have also been
blanked off prior to the unit being submerged.
0744-SOM-00002-1 12 © Tritech International Ltd.

Getting Started P-Sea Underwater Console
Note
All the connectors on the P-Sea should be hand tightened, with care taken to
observe the orientation of the connectors prior to fitting.
Remove the blanking caps from the MetalSub batteries, by turning ¼ turn anti-clockwise,
and store in a safe place. Once all the other ports are connected, or blanked off, attach both
batteries to the MetalSub Power Cable.
The P-Sea will now power up, with the display showing a NO SYNC message.
0744-SOM-00002-1 13 © Tritech International Ltd.

Getting Started P-Sea Underwater Console
3.2. First power on
Note
When powering on the P-Sea for the first time it is highly recommended that
it is done as a dry test with the USB Cable attached. This will enable you
to acknowledge any Windows® OS messages that may obscure the screen.
Typically this only needs to be done once.
When the P-Sea powers on it will show a NO SYNC message on screen. To activate the unit
fully, press and hold the POWER button for about 3 seconds.
0744-SOM-00002-1 14 © Tritech International Ltd.

Getting Started P-Sea Underwater Console
The P-Sea will now boot up the internal computer and, after a short delay, the Gemini software
will be automatically loaded.
Once fully loaded, the Gemini software will automatically detect the attached Gemini sonar
and enable it for use.
0744-SOM-00002-1 15 © Tritech International Ltd.

Getting Started P-Sea Underwater Console
If the Gemini sonar is not submerged in water, an “Out Of Water” warning will be displayed.
This will disappear from screen once the unit is submerged. Control of the Gemini sonar
and software is discussed, in depth, in Chapter 5, Basic Operation and Chapter 6, Advanced
Operation.
0744-SOM-00002-1 16 © Tritech International Ltd.

4. Installation
1
2
3
1
2
3
4
1
2
5
3
6
7
4
1
2
5
3
6
7
The following pin out diagrams details the connections on the P-Sea
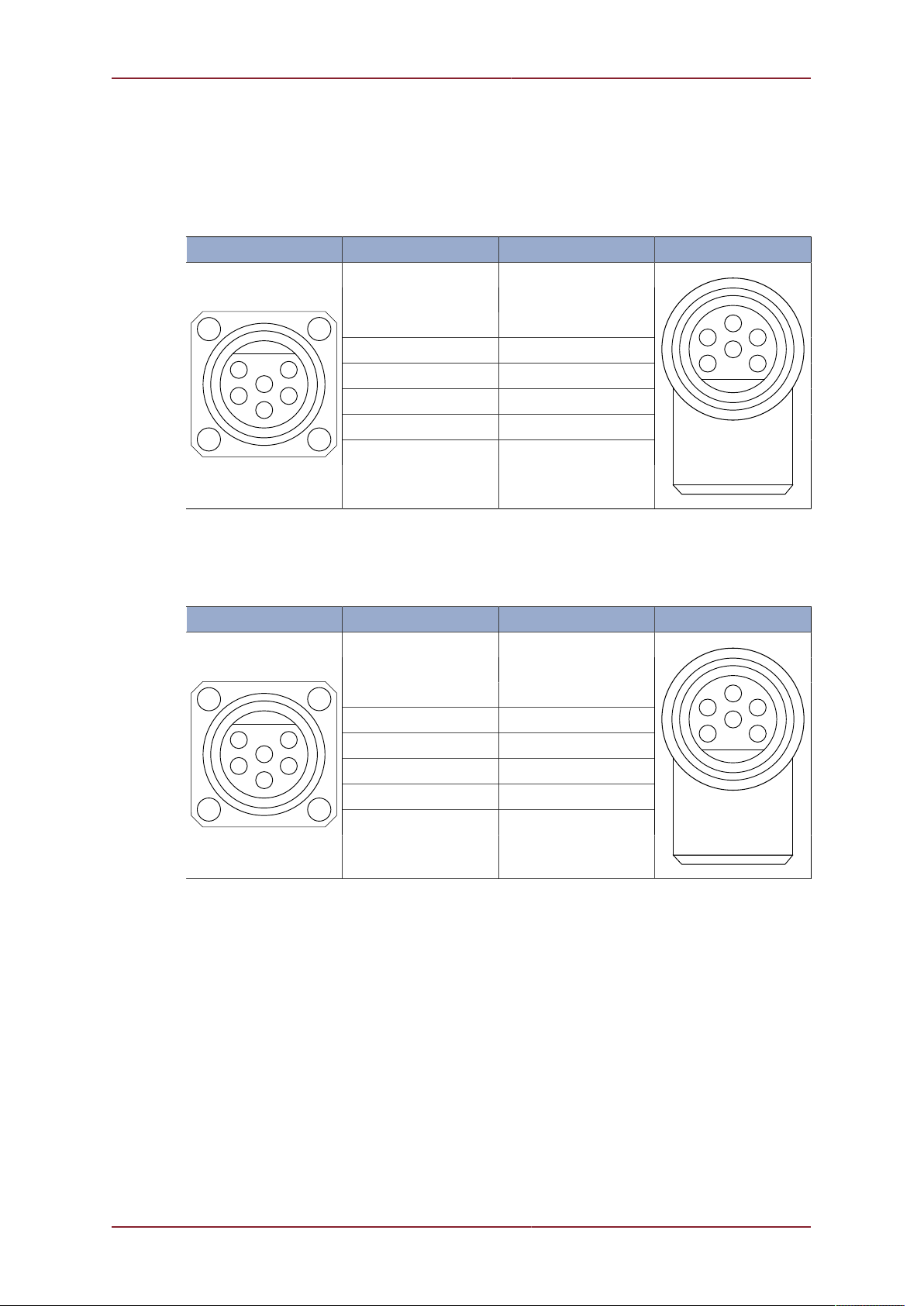
4.1. Power Connector
Bulkhead View Pin Function Cable View
P-Sea Underwater Console
1 + V
2 0 VDC
3 N/C
4.2. Sonar Connector
Bulkhead View Pin Function Cable View
1 0 VDC
2 + V
3 SCREEN
4 Ethernet RX-
5 Ethernet RX+
6 Ethernet TX+
7 Ethernet TX-
0744-SOM-00002-1 17 © Tritech International Ltd.
Installation P-Sea Underwater Console
3
1
2
5
4
6
3
1
2
5
4
6
3
1
2
5
4
6
3
1
2
5
4
6
4.3. Serial Connectors
COM Port 1 - RS485
Bulkhead View Pin Function Cable View
1 RS485 A
2 RS485 B
3 + V
4 0 VDC
5 N/C
6 SCREEN
COM Port 2 - RS232
Bulkhead View Pin Function Cable View
1 RS232 Tx
2 RS232 Rx
3 + V
4 0 VDC
5 RS232 Ground
6 SCREEN
0744-SOM-00002-1 18 © Tritech International Ltd.

Installation P-Sea Underwater Console
1
2
4
3
1
2
4
3
4.4. USB Connector
Bulkhead View Pin Function Cable View
1 Data -VE
2 Data +VE
3 5V DC
4 0 VDC
0744-SOM-00002-1 19 © Tritech International Ltd.

5. Basic Operation
5.1. Activity Indicators
At the top left of the P-Sea window there are two LEDs which are used to indicate its power
status and any activity that's being carried out.
P-Sea Underwater Console
The GREEN LED is used to indicate if power has been enabled.
The RED LED is used to indicate activity on the internal storage drives. During normal
operation this will may blink at seemingly random intervals.
5.2. User Controls
The P-Sea has a set of optimised controls for use subsea, providing a simplified interface for
performing the most common actions for controlling an attached Gemini sonar.
On either side of the P-Sea there are a series of control buttons.
0744-SOM-00002-1 20 © Tritech International Ltd.

Basic Operation P-Sea Underwater Console
Each button performs a unique function for controlling the sonar:
Range UP & DOWN
When pressing these buttons, the onscreen range indicator will slide right, or left respectively.
This will increase, or decrease the functional range of the Sonar. As the range increases, the
update rate of the Sonar will slowly decrease – this is due to it having to wait longer for its
acoustic transmissions to travel through the water.
POWER RANGE UP
LH MOUSE RANGE DOWN
ALT GAIN DOWN
DISPLAY GAIN UP
The amount of the increase, or decrease, in range is dependant on the current range being
used.
• For ranges up to 5M the range will change in steps of 0.5M
• For ranges between 5M and 15M the range will change in steps of 1M
• For ranges of 15M and above the range will change in steps of 5M
0744-SOM-00002-1 21 © Tritech International Ltd.

Basic Operation P-Sea Underwater Console
Gain UP & DOWN
When pressing these buttons, the onscreen gain indicator will slide right, or left respectively.
Increasing the Gain will amplifying the signals being received by the Sonar. This will increase
the amount of data shown onscreen, but can cause the image to become overly ‘noisy’.
Decreasing the Gain will reduce the overall appearance of the data onscreen, but too low
a Gain will result in almost no data shown onscreen at all. Each button press will raise, or
lower, the gain by 5%.
DISPLAY
Pressing this button will toggle the display of the P-Sea on or off. It will also disable power to
any connected Sonar and Serial devices. The software will continue to operate regardless.
MOUSE CONTROL
By pressing and holding the ALT button the buttons to the right of the P-Sea will allow you
to move the onscreen mouse up, down, left and right.
To select onscreen items, press the LH MOUSE button.
5.3. Recording Data
When communication has been established between the P-Sea and its attached Gemini the
onscreen display will update with the imagery from the unit. Should the data need to be saved
for later review, the Record button will need to be activated.
The Record button is located in the upper left hand side of the Gemini software and is
normally inactive.
Pressing this button will activate the recording function of the Gemini software, with data from
the Gemini Sonar and any attached devices being recorded to the internal harddrive.
While data is being recorded status text will appear beneath the Sonar display detailing the
filename and remaining harddrive space on the P-Sea.
By default, the data will be stored within the C:\GeminiData folder within the P-Sea. To
change the save location for the data, please see Chapter 6, Advanced Operation.
It is recommended that stored data is transferred off the P-Sea to a laptop or PC before replay
and that the storage space within the P-Sea is cleared after each demobilisation. Please see
Section 5.4, “ Transferring Data ” for more information.
0744-SOM-00002-1 22 © Tritech International Ltd.

Basic Operation P-Sea Underwater Console
5.4. Transferring Data
For transferring data, it is advised that the P-Sea is powered using the appropriate AC-DC
Mains adaptor. Performing data transfer operations under battery power is not recommended
as losing battery charge could cause the P-Sea to shut down mid-operation and result in a
loss of data.
Using the P-Sea to USB Cable, connect a USB Hub to the P-Sea unit. A USB Hard drive,
Mouse and Keyboard can now be connected to the USB Hub and be used to transfer files
across from the P-Seas internal storage.
• Close down the Gemini software, then use the Start Menu to run the Windows Explorer
application.
• Navigate to the following directory:
C:\GeminiData\
Within this directory will be sub-folders ordered according to the date of the recorded data.
For example, files recorded on the 29th March 2017 will be in a folder titled “LD20170329”.
Select the folders containing the data and move them onto the USB Hard drive.
Power down the P-Sea once all the files have been transferred across and then disconnect
the USB devices. The files can now be transferred to a PC or Laptop running the Gemini
software to review the logfiles and create shapshots or videos.
0744-SOM-00002-1 23 © Tritech International Ltd.

6. Advanced Operation
The Gemini software installed on the P-Sea retains features of the main software package
that would normally be installed onto a PC. However to use these features it is recommended
that a USB mouse and keyboard be attached to the P-Sea as setting up these features can
be quite GUI intensive.
When the Gemini software is running, it presents a choice of two screens, which are selected
by clicking on the tabs at the top left hand of the screen. The two screens are the User screen
and the Advanced screen. The User screen allows the maximum amount of screen to be
used for data display and the Advanced screen enables adjustment of the sonar settings.
6.1. User Screen
6.1.1. Overview
P-Sea Underwater Console
The 120° cone in the middle of the display shows the sonar image that the Gemini Sonar is
producing. Around this display are the most commonly used controls.
On the upper left hand corner are the controls for starting the sonar imaging, starting the
software logging of the images received from the sonar, replaying previously logged data,
and capturing images.
On the upper right hand corner are the controls for orienting the displayed sonar image,
controlling the zoom window, selecting the post processing filtering to be applied to the image,
and the sound velocity indicator.
In the middle of the left hand side of the screen is the palette selector.
On the lower left hand side of the screen are the range and gain controls for the sonar.
On the lower right hand side of the screen are the indicators showing the pointer position
within the display area.
0744-SOM-00002-1 24 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
Note
If serial sensor data is available and enabled from the Advanced tab, a subset
of the data will be shown at the bottom of the User screen as well.
6.1.2. Online Button
The Online button starts communication with the Gemini head. When the
software is started the head will not be running and the Online button will
be grey.
Clicking the Online button will start the Gemini head; the button and the sonar
cone image next to it will change to green. Clicking the button a second time
will stop communication with the head, and the button and sonar cone will
return to grey.
If the Online button is pressed while no heads are visible to the Gemini software, the
following message will be displayed.
Clicking OK will acknowledge the message, and the software will not go online.
If the Sonar ID entered in the Sonar box of the configuration settings is not one of the heads
visible to the Gemini software when the Online button is pressed, the software will present
one of two messages.
If only one head is visible, the software will offer the chance to start imaging from that head.
Clicking Yes will cause the software to select the head which is visible to it. Clicking No will
acknowledge the message, and the software will not change the selected head and will not
go online.
If there are multiple heads that are available, the software will display a message asking you
to change the Sonar ID to one of the detected units.
0744-SOM-00002-1 25 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
If the head is not able to connect due to being on a different network or having different
network settings the following will be displayed:
Note
To correctly set up the network refer to Appendix D, Setting the computer IP
address in Windows® 7 or Windows® 10 (or Appendix C, Setting the computer
IP address in Windows® XP) and Appendix E, Setting the Gemini Device IP
Address in Gemini Software.
6.1.3. Record Button
The Record Button controls the recording of the image being displayed by
the software. When the button is clicked the software will start recording data
and the button will be highlighted. Recording can be stopped by clicking on
the button again.
The Log Directory selector controls which directory the data is recorded in. The directory
displayed in the Log Directory selector is the root directory where all recorded data will
be stored. Below that, a directory will be created using the current date, and each log data
filename will include the time when recording started.
The software has a maximum file size for the logged data files. Once this size has been
reached, the software will stop logging to the current file and open a new file to resume
logging. The name of the new file will be based on the time the file was opened. If data is
logged for a significant period of time, a number of files will be created, each with a different
filename indicating when the data was first logged to that file.
For example, if the Log Directory selector is showing that the directory selected is
C:\GeminiData, and recording was started at 4:30:02pm on 18th of October 2014, the
data would be recorded in the file 163002_IMG.ECD in the directory C:\GeminiData
\LD20141018.
The software will automatically create any directories needed for recording.
6.1.4. Player Controls
The player controls manage the replay of Gemini data previously recorded by the software.
0744-SOM-00002-1 26 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
From left to right they are Play, Stop, Repeat and Load. The controls that are enabled will
depend on what the software is doing, for example, it is not possible to do anything with the
player controls whilst the software is acquiring data from the Gemini head, nor is it possible
to open a file whilst another file is already playing.
Play Button
The Play button is a play/pause control for the file player. When the data from
a file is loaded but not playing, the image is a green triangle.
Clicking the image will start the file playing and the image will change to a
Pause control (two vertical lines).
Clicking the image again will pause the file replay and the image will change back to the Play
control (triangle).
Stop Button
Repeat Button
Load Button
Multiple files may be selected in the file selection dialogue. The software will attempt to replay
the log files in sequential order according to filename. Replay order is not guaranteed if the
selected files are from different dates.
The Stop button stops file replay and resets the play progress to the start.
If the Repeat button is active and the player reaches the end of the file it is
playing, it will return to the start of the file and continue. Clicking the Repeat
button will alternate between the repeat being active and inactive.
When the Load button is pressed, the software will open a file selector to allow
the user to select a previously recorded data file to be replayed. To replay the
data recorded at 4:30:02pm on 18th October 2014, file selector would look like
this and the file 163002_IMG.ecd should be selected.
When replaying a log file, the filename, together with the date and time of recording, will be
displayed at the bottom of the screen (below the Gemini data) in green text, for example:
0744-SOM-00002-1 27 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
Frame Number and Speed Control
The Frame control is a slider bar which allows the user to move quickly around the file that
has been loaded. The number at the right hand end is the currently displayed frame number
from the file. The slider can be grabbed to move quickly to any position in the file, whilst the
two arrows at the end of the slider can be used to precisely position the frame being displayed
in the file. The frame number can be used changed whilst the file is playing or paused. This
control only appears when a file has been loaded.
The Speed control changes the replay speed of the data being replayed by the software.
The maximum speed is 5 x (500% as indicated by the number at the right hand end of the
slider bar). The slider can be grabbed to change the replay speed quickly, whilst the two
arrows at the end of the slider can used to precisely control the replay speed. The replay
speed can be changed whilst the file is playing or paused. This control only appears when
a file has been loaded.
6.1.5. Capture Screen
When clicked, the Capture Screen button will take a screenshot of
the Gemini data view and write it to an image file. This image is stored
in the Images subdirectory of the log data directory, with a filename of
Gemini_YYYY-MM-DD-HHmmSS.xxx, where:
• YYYY: Year
• MM: Month
• DD: Day
• HH: Hour
• mm: Minutes
• SS: Seconds
• xxx: Image file format. See Section 6.2.3, “Application Settings” for the
For example, using a logging directory of C:\GeminiData, the first image captured would
be stored in the file C:\GeminiData\Images\Gemini_2016-05-12-111555.jpg.
capture format and resolution options.
When the image has been captured, the Gemini software will display a message (as below)
giving the name of the file. This message will be displayed for five seconds and then will
close automatically.
0744-SOM-00002-1 28 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
6.1.6. Record Video
The Record Video button is used to capture replayed Gemini data as a video
file. Video capture is only available when a file is being replayed and cannot
be performed on live Gemini data.
When a file has been loaded and the playback of the file has been paused or stopped, the
Record Video button will be enabled. When the Record Video button is clicked, the video
capture process will take over the replaying of the data. The video capture process is ended
when the Record Video button is clicked for a second time.
The frame counter will be visible during recording as the user may select which part of the
log file they would like to capture. The video file will be captured so that the replay will occur
at approximately real time and it is not possible to change the speed of the playback during
recording.
The generated file is stored in the Images sub-directory of the log data directory with a
filename of Gemini_YYYY-MM-DD-HHmmSS.xxx, where:
• YYYY: Year
• MM: Month
• DD: Day
• HH: Hour
• mm: Minutes
• SS: Seconds
• xxx: Video file format. See Section 6.2.3, “Application Settings” for the video format and
resolution options.
When the video file has been captured, the Gemini software will display a message (as below)
giving the name of the file. This message will be displayed for five seconds and then will
close automatically.
6.1.7. Acoustic Zoom button
The Acoustic Zoom button is only displayed during the replay of logged data and opens
the Acoustic Zoom window. The Acoustic Zoom window will show any previously logged
Acoustic Zoom data.
When enabled, the Acoustic Zoom button will be highlighted as shown.
If no Acoustic Zoom data is available the Acoustic Zoom Window will display the following
message:
0744-SOM-00002-1 29 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
Zoom box example with Gemini Sonar data
In order for the Acoustic Zoom window to show data during replay, the Zoom button must
have been enabled with a CHIRP enabled Gemini unit during the initial recording of the file.
6.1.8. CHIRP button
The CHIRP button toggles the CHIRP function of the Gemini Sonar. CHIRP
transmissions use longer acoustic pulse lengths and advanced pattern
recognition to achieve a higher Signal to Noise ratio and will improve image
quality in acoustically noisy environments.
The default setting for the CHIRP function is auto mode. The Sonar will
automatically enable and disable the CHIRP function based upon the range
being used by the software. Below 4.8M (approximately) the Sonar will disable
CHIRP.
To override the auto mode and de-activate the CHIRP function, press the
CHIRP button until it looks similar to the graphic opposite.
To override the auto mode and activate the CHIRP function, press the CHIRP
button until it looks similar to the graphic opposite.
Please note that at short ranges (approximately less than 4.8M) the sonar
imagery may appear to be over saturated while the CHIRP function is active.
6.1.9. Invert Display (Up/Down)
The Invert Display (Up/Down) button is used to vertically invert the image
displayed by the software.
6.1.10. Flip Image (Left/Right)
If the sonar is mounted upside down, the software has the ability to flip the
image from left to right as viewed on the computer screen so that the image
still appears correctly oriented to the user. The illustration above shows the
button in the non-flipped state.
0744-SOM-00002-1 30 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
6.1.11. Rotate Image
The Rotate Image button turns the image from the sonar by 90°. The Invert
Display and Flip Image controls will still affect the image displayed on screen.
6.1.12. Draw Grid
6.1.13. Zoom Button
Rotate Image example with Gemini Sonar data
The Draw Grid button, when clicked, draws the range and bearing grid on the
displayed Gemini data. The illustration above shows the button in the on state.
When the Zoom button is clicked, a zoom window opens which shows the
data around the mouse pointer in more detail, as the following image shows.
Zoom box example with Gemini Sonar data
If the Gemini unit has CHIRP enabled, the zoom window will show Acoustic Zoom data.
Acoustic Zoom data is additional data collected by the Gemini unit for the highlighted area,
allowing a more detailed view without loss of resolution. If data is being recorded when this
button is enabled, the Acoustic Zoom data will also be recorded in addition to the normal
view data.
If the Gemini unit does not have CHIRP enabled, the zoom window will show Digital Zoom
data. This data is simply a magnified view of the data present on the normal view.
0744-SOM-00002-1 31 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
The zoom window positions itself to either the left hand side or the right hand side of the
screen so that it does not obscure the Gemini data. The magnification level of the window
is changed by using the mouse wheel, or by using the + and – buttons next to the zoom
button. The magnification level can be changed between 1.5x (minimum magnification)and
40x (maximum magnification).
Clicking within the Gemini data arc will lock the zoom at that point. Clicking outside of the arc
will release the lock and the zoomed area will follow the mouse pointer.
6.1.14. Filter Selector
The Gemini software allows three filters to be applied to the image after it has been received
from the Gemini Sonar and also to replayed data. From left to right, they are None, Average,
Persistence, and Movement.
There are controls on the advanced screen to change the setting for each of the filters and
they are described in more detail in Section 6.2.4, “Filter Settings”.
6.1.15. Sound Velocity Indicator
The sound velocity indicator at the upper right hand side of the display shows the sound
velocity used by the Gemini Sonar whilst producing the sonar image. The Gemini Sonar can
use a fixed value for the sound velocity or an automatically measured velocity.
6.1.16. Palette Selector
The Gemini software is supplied with a number of palettes which are used to show the
different intensities in the sonar image in different colours. The palette bar on the left hand
side of the screen shows the mapping currently being used.
Clicking on the palette bar opens a palette selector which allows the selection of the palette
to use. As the mouse is hovered over the different palettes, the sonar image will preview
that palette.
0744-SOM-00002-1 32 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
6.1.17. Gain Control
The Gain slider at the bottom left hand side of the display is used to change the gain level
being used by the Gemini head, and is expressed as a percentage between 0 (no gain being
applied) and 100 (full gain being applied).
The gain can be changed by either clicking on the dark blue indicator showing the current gain
position in the slider and dragging it left or right, or by using the arrows at the end to change
the gain one step at a time. The arrows are designed for fine control of the gain and operate
one step per click and clicking on the arrows and holding them down will have no effect.
The gain can also be altered using keyboard shortcuts ('z' to decrease gain, 'a' to increase
gain).
6.1.18. Range Control
The Range slider at the bottom left hand side of the display is used to change to the range
of the image being acquired by the Gemini head.
The range can be changed by either clicking on the dark blue indicator showing the current
range position in the slider and dragging it left or right, or by using the arrows at the end to
change the range one step at a time. The arrows are designed for fine control of the range
and operate one step per click and clicking on the arrows and holding them down will have no
effect. The range control has been implemented with a logarithmic scale so that the smaller
values of range can be more precisely selected.
The range can also be altered using keyboard shortcuts ('c' to decrease range, 'd' to increase
range).
6.1.19. Indicators
When the mouse pointer is within the ‘cone’ on the sonar display (that is over the displayed
sonar image), the indicators at the bottom right hand side of the screen will show the position
of the mouse pointer relative to the origin of the display (that is relative to the Gemini Sonar).
The pointer position is expressed as a range / bearing pair, and as a Cartesian co-ordinate
(X, Y).
6.1.20. Sonar Swathe
Around the edge of the sonar cone there are three handles that allow the swathe size (also
known as the aperture size) to be adjusted.
Click and hold the mouse over one of the handles. The clicked handle, and any other handles
that will move when the mouse is dragged, will be highlighted. Square shaped handles adjust
the edges of the swathe size. Diamond shaped handles adjust the centre of the swathe size.
0744-SOM-00002-1 33 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
Drag the mouse to move the handle to the desired location and then release the mouse
button. There will be a short delay (depending on network bandwidth) while the Gemini unit is
updated with the new swathe size. It is possible to adjust the swathe size using the keyboard
by pressing the b or g keys.
When altering the swathe size, the Gemini unit will automatically redistribute all of its beams
across the new swathe setting.
6.1.21. Measurements
When the mouse pointer is within the cone on the Gemini data display measurements can
be taken from the display. A single click on the cone will show the position of the click.
Clicking at one point on the cone and holding the left mouse button down whilst moving the
mouse will give a measurement between the two points.
When any measurement has been taken, clicking outside the cone will turn the measurement
off.
6.1.22. Warnings
Out of water
If the Gemini detects that it is not immersed in water, the warning “Out of water” will be
displayed in the centre of the scan image:
The sonar will continue to operate at full power during a 20 minute countdown period. During
the countdown period, toggling the Online button will reset the timer back to the start or
immersing the sonar back into water will clear the warning.
0744-SOM-00002-1 34 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
At the end of this period the sonar will enter a power saving mode to reduce the heat build
up within the unit. The software will still display information about the sonar during this power
saving mode, but the sonar will not re-enable it's ability to transmit until the Online button
has been toggled off then on.
Over temperature
If the temperature sensors within the sonar detect that the internal temperature is too high
an "Over temperature" warning will be displayed.
The sonar will enter a power saving mode and only basic communication with the unit will
be possible. Cooling the unit and then toggling the Online button will clear the warning and
resume the full capabilities of the sonar.
6.2. Advanced Screen
The Advanced screen is accessed by clicking the Advanced tab at the upper left hand
corner of the screen.
0744-SOM-00002-1 35 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
The Advanced screen shows more details about the Gemini system, and allows certain
options in the software to be configured. The screen is split into three areas: the User area,
which has been previously described in Section 6.1.1, “Overview”; the lower left area of
the screen contains the System Data tabs; and the Advanced Settings panel, which
contains the majority of the configurable settings for the software.
6.2.1. System Data
The first line on the screen gives the versions of the elements which make up the Gemini
software and the other lines show status information from the Gemini Sonar (or Sonars)
connected to the system. More than one Gemini Sonar can be communicating at any one
time and the Gemini software will display the images from up to a maximum of four of the
sonars.
If more than one Gemini Sonar is connected and powered, its details will appear on the
System Data screen. The currently active sonar will have green text and the dormant sonar(s)
will be in yellow.
For a multiple sonar setup the arrows allow the list of sonars to be scrolled.
6.2.2. Configuration Options
The Configuration Options allow the user to select which Gemini Sonar to use, select
the Sound Velocity to be used during image processing, modify sonar data rates, and finally
to change the network settings.
Note
In order to communicate with a Gemini Imaging sonar the software must be
set to run in Imager mode. This is done by setting the Sonar Type to “Imager”.
0744-SOM-00002-1 36 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
When changing this setting, the user will be prompted to allow the software to
restart. Once the software restarts, all Imager settings and relevant options will
be available.
Sonar Selection
The Sonar ID of the Gemini Sonar is used to determine which sonar will be used as the source
of images displayed by the software. The Sonar ID is available on the system data area of the
Advanced screen, and should be entered in the Sonar box. The number of sonars can also
be selected (up to 4) and each can have an ID. If multiple sonars are present the ID selection
field will change to allow the sonar to be positioned on the display with an offset and rotation.
When the Gemini software is loaded it will, by default, attempt to connect to all valid Gemini
devices that it discovers on the same network. This is indicated by the AUTO option in the
drop down selection for the number of sonar heads. This can be overridden by placing the
software offline then altering the number of sonars and their IDs.
The Gemini software will retrieve the IP address and Subnet Mask for the chosen Gemini
Sonar (if the sonar is visible to it) and use them to communicate with the Sonar.
Sound Velocity
The Sound Velocity controls are used to set how the Gemini obtains the sound velocity
which is used in producing the sonar image. The Gemini can either use a fixed sound velocity
(in which case the sound velocity to be used is entered in the Fixed Velocity box below
the sound velocity selector), or use a measured sound velocity.
The above example shows the fixed sound velocity selected with a value of 1499.2m·s-1.
When entering a fixed sound velocity, the software will verify the value is within the range
1400m·s-1 to 1588m·s-1. If not, a warning is displayed to the user and a default value of
1499.2m·s-1 is used.
Note
If the sonar is operating and Online has been selected then it will not be
possible to change the ID until the sonar is taken off-line.
Compression
Run Length Encoding (RLE) is a technique that is used to compress the image data as
it is transferred between the Gemini head and the software, thus reducing the required
bandwidth. RLE in Gemini is a lossy compression technique where all sonar data below a
determined level is set to zero before compression is applied. Increasing the compression
level will increase the efficiency of the compression and effectively reduce the bandwidth
required to transmit the image data. The consequence is that weaker returns are filtered out
of the sonar image. This will initially reduce potential noise but will start to remove smaller/
weaker targets from the image.
0744-SOM-00002-1 37 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
The Enable Compression button toggles the compression when clicked (black
background to the button means compression is off, blue background means compression
is on). The Compression control sets the level applied by the run length encoding; returns
below this intensity percentage will be set to zero. The live image displayed by the Gemini
software immediately shows the effect of the compression.
The live image displayed by the Gemini software shows the effect of the compression
immediately.
Example screenshot of sonar imagery with no compression.
Example screenshot of sonar imagery with a 25% compression level.
0744-SOM-00002-1 38 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
Note
Compression is applied before the software receives the sonar data and
therefore compression cannot be applied to data that has already been recorded.
Conversely, recorded data that has been compressed cannot be uncompressed.
Acquisition Speed
Acquisition speed is another mechanism available for reducing the sonar data rate and
required bandwidth. When the Half Speed Acquisition button is enabled (blue
background) the software will reduce the sonar image acquisition speed to approximately
half the maximum rate.
Note
Reducing the acquisition speed can also be useful if acoustic multipath is causing
false moving/transient targets to be observed in the sonar image.
Serial Inputs
Data from external serial sensors can input to the software via a Gemini Hub, the computer
COM Ports or via the additional serial ports on the Gemini unit itself. These options can be
enabled/disabled using the provided drop-down menus. See Section 6.3, “Serial Data Input”
for a detailed description of the related settings and options.
The Gemini Hub and COM Ports options can only be altered when the software is offline.
6.2.3. Application Settings
Units
The Units control selects between Metric and Imperial units. The selected unit type is then
used throughout the program to display measured values. For example, a Sound Velocity
displays as 1499.2m·s-1 using Metric and 4918.64 ft·s-1 with Imperial.
0744-SOM-00002-1 39 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
Measurement
The Measurement control selects between Measurement Tool annotation options that
display distance in the Gemini data view. The user may select the measurement to be shown
in polar coordinates, Cartesian coordinates, or no annotation displayed. For more information
on the Measurement Tool see Section 6.1.21, “Measurements”.
Logging Directories
The Primary logging directory selector indicates the write location for all data logging,
including screenshot captures and video (see Section 6.1.5, “Capture Screen” and
Section 6.1.6, “Record Video” for capture examples).
The Secondary logging directory selector allows the user to specify a second directory in
which Gemini log data will be written to. For example, this may be used to write to a backup
location. If both Primary and Secondary directories are specified a recorded log file will
be written to both directories.
Click the directory control (i.e. the box containing C:\GeminiData) in order to open the
Browse for Folder dialogue. Use the navigation tree to select the desired directory and then
press OK. The Cancel button closes the dialogue and does not change the logging directory.
Enable Auto Logging
This option will enable the Gemini software to start logging data immediately upon start up
and when the software goes online, without any additional user intervention. It will use the
Primary and Secondary locations for storage and use the ECD file format for storage.
Resolution
The Resolution dropdown menu provides options for screenshot and video capture
resolution. This can be used to increase or decrease the image/video size (width x height)
as well as the quality.
0744-SOM-00002-1 40 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
The list contains the following options: commonly used screen resolutions (i.e. 1920x1080)
and a Screen (x) option, which is the current monitor resolution.
Note
Recording large videos may fail on systems with insufficient memory. If videos
are not written correctly or have no frames then decrease the resolution before
recording. Additionally, AVI videos are less memory intensive and may work
better for larger resolutions.
Capture Format
The user may specify a standard image file format which is used when saving a captured
screenshot. Options provided include: BMP, GIF, JPG, and PNG.
Video Format
The user may specify a standard video file format which is used when saving a recorded
video. Options provided include: AVI and WMV.
Reset to Defaults
Pressing the Reset to Defaults button returns the software settings to the default values.
Caution should be taken as this will overwrite all user settings changes.
6.2.4. Filter Settings
The Filter Selector on the User screen selects one of three filters to be applied to the
image before it is displayed. The Filter Setting section of the Configuration Options screen
allows the settings of these three filters to be changed. The Filter Settings panel provide
three different data filters that may be applied to the sonar image before it is displayed. The
filters are only active if enabled in the sonar view (See Section 6.1.14, “Filter Selector”).
The Averaging filter applies an average over a number of images received from the sonar.
It has the effect of removing random noise and rapidly moving targets from the image.
The Persistence filter retains decreasing amounts of earlier images as well as the current
image. It has the effect of highlighting movement in the images, which appears as a decaying
“snail trail” behind the moving object.
0744-SOM-00002-1 41 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
The Movement filter highlights the changes between images and filters out static returns.
The Movement control sets how much background (i.e. non-moving data) is removed from
the image. With the Movement control set at maximum, the movement filter removes all of
the background and so the display only shows targets that are moving between images. With
the Movement control set at minimum, the movement filter retains almost all the background
(and becomes almost indistinguishable from the Persistence filter).
6.2.5. Device Network Settings
VDSL Settings
The VDSL Settings drop-down allows three different settings to be applied to the VDSL
link in order to cope with different levels of electrical noise experienced by the sonar cable.
Note
Only if difficulties are being experienced communicating with the Gemini head
should the VDSL settings be changed from Normal to one of the other values.
Appendix E, Setting the Gemini Device IP Address in Gemini Software describes how the
Gemini network settings can be altered to allow it to work with a desired network. Once the
head has been successfully configured it should not be necessary to change the settings
again unless moving to a different infrastructure.
0744-SOM-00002-1 42 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
6.2.6. Distance Marker
The Distance Marker provides a mechanism for measuring the distance between two
points in the Gemini data view. This is similar to the Measurement Tool but provides
additional options that allow it to be used as a more permanent measurement.
Enable the feature by clicking the Enable Distance Marker button. This will draw the
Distance Marker as a horizontal line and the Set Point as a small circle in the Gemini
data view.
For both the Distance Marker and Set Point, the corresponding colour selector may
be used to distinguish the markers from the head image. Click on each colour box to open a
colour selection dialogue. Additionally, for each marker, the Cartesian coordinate is displayed
in the Distance Marker panel. The Distance Marker line width can be set by entering a
value into the Marker Width field.
In the Gemini data view, each marker can be clicked and dragged to a new position. The
distance measurement will continuously update and reflect the distance between the two
markers.
Note
In order to click and drag the markers the click must be within the head image.
For example, if a marker is at location (0, 0) the clickable area is fairly small and
care must be taken to click the correct area. In this case, the Distance Marker
line may reach past the head image boundary and would only be clickable where
it overlaps the head image.
The distance between the Distance Marker and Set Point is displayed in the bottom
right of the Gemini data view (see image below). The displayed values are calculated as:
Distance (X, Y) = (Distance Marker - Set Point)
0744-SOM-00002-1 43 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
The Distance Marker range/ Y coordinate may be updated from an external sensor. Enabling
the Distance Range from Sensor button will update the value whenever a configured
sensor message is received. See Appendix F, Gemini Software String Decode for the
appropriate Marker Range decode options.
6.2.7. Target Tracking
Target Tracking provides a mechanism of highlighting objects and following their
movement over subsequent sonar frames. Once enabled, targets will be automatically
determined and tracked when selected. There are two main methods of target tracking
available within the Gemini software:
1. Click + Track
2. Detect + Track
Note
Although both options will only be displayed, the Detect + Track option will
only be available for selection if a Gemini 720is has been detected.
The Target Tracking method can be selected using the drop down selection on the
Tracking Mode box.
0744-SOM-00002-1 44 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
Click + Track
In order to track a single target, the Track Single Target option can be selected from
the Targets menu. This restricts the user to select one target at a time and has the benefit of
displaying the target position. As the target is tracked the Range/Bearing and X/Y Position
will be updated from each sonar frame.
The Track Multiple Targets option can be used to select and follow multiple targets.
Each right-click will attempt to find a target and track it separately. No position information is
displayed when tracking multiple targets. If the user changes from Multiple to Single tracking,
the target closest to the sonar will be used.
The Reset Targets button will clear all selected targets. This is useful when an incorrect
target has been selected or the user wants to track a new target.
Note
Noisy conditions may lead to inconsistent target recognition and tracking.
Targets that overlap with other objects or sections of visible seabed may result
in large targets that encompass more than the desired target. Ideally, a target
will have a high contrast to its surroundings.
0744-SOM-00002-1 45 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
Detect + Track
In order to track objects effectively, the various settings need to be optimised.
Target Size
This is the estimated size of target that is to be tracked.
Maximum Targets
This sets an upper limit of the number of targets that will be considered for tracking. Setting
this to a large number will increase the load on the computer CPU and may cause the Gemini
software to slow down.
Min. Detection Probability
This controls the ability of the software to retain, or drop targets based upon the intensity of
their acoustic return. A low value will cause the software to try and track an identified target
even when the target is very faint.
Active Range Window and Active Bearing Window
These settings set up a mask around a tracked target. As long as the target moves within
the mask from one instance to the next the target will remain tracked. If the target moves
too quickly tracking will cease.
Sensitivity
Increasing the sensitivity will allow the tracking to detect more potential objects, but can result
in a greater number of false positives.
The Reset to Defaults button will reset the above settings back to default values. It will
also automatically stop any active tracking.
To track a target, click on the Enable Target Detection button and setup the settings
to suit the current environment.
0744-SOM-00002-1 46 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
Once enabled, potential
targets will be highlighted in
the appropriate colour, green
in this instance.
To track one or more targets,
place the mouse cursor over
it and right click on it. A small
cross will appear in each
target selected.
To begin tracking either:
click the Enable Active
Tracking button; or double
right click the last target. The
highlight boxes will change
colour and the other potential
targets will no longer be
highlighted.
The Tracked Targets
information will now update
with details of the primary
target to be tracked. The
primary target is denoted by a
small cross within the highlight
box.
To change the primary target,
right click another highlighted
target. The cross will then
move to the new primary
target.
The Reset Targets button will stop any tracking that is currently taking place.
6.3. Serial Data Input
Data from external serial sensors can be input into the Gemini software and logged as part
of the sonar image record.
To enable data input to the system select Enabled for the COM Ports or Gemini Hub.
The COM Ports drop-down list is for serial ports that are connected to the computer
(either natively or through an RS232 to USB converter) and is also for configuration of the
RS232 functionality of the Gemini Sonar head. The Gemini Hub drop-down list is only for
configuration of connected Gemini Hubs.
0744-SOM-00002-1 47 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
Selecting Enabled for either Gemini Hub or COM Ports will alter the tab options in the
bottom left of the screen. If both are disabled there will be no tabs visible and the status area
will only display information about connected Gemini heads.
With Gemini Hub selected.
With COM Ports selected.
With Gemini Hub and COM Ports selected.
6.3.1. Sonars & Sensors
The Sonars tab is for displaying information and is the same display when no tabs are
present (for a full description see Section 6.2.1, “System Data”).
The Sensors tab is for displaying extra information from connected RS232 sensors.
Note
If serial sensor data is shown here, a subset of the data will also be shown at
the bottom of the User screen.
0744-SOM-00002-1 48 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
6.3.2. Gemini Hub
Hubs Tab
The Hubs tab shows the status information from any connected Gemini Hubs.
Hub Setup Tab
The Hub Setup tab allows configuration of the serial ports on the rear of the Gemini Hub to
allow RS232 data to pass through to the Gemini software from external sensors.
Port The port letter, corresponding to the label on the back of the Gemini
Hub.
Mode Can change between an ASCII decode, binary decode or can echo
the data on one of the other ports (ASCII is the default input, only the
Simrad EM3000 uses a binary input). Echo is used as an alternative to
a serial splitter cable in systems where the sensor data is also used by
another application or device.
Sync The sync character used to frame the ASCII string.
Baud The baud rate of the sensor connected to the port.
Decode The decode definition to apply for the expected receive data on the port.
Max Set the time in seconds to generate an alarm if no data is received.
Age The age of the data, shows when the last good data was received (see
note below).
Hz The incoming data rate
0744-SOM-00002-1 49 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
String The incoming data string, check this against the chosen Decode if the
data indicator is red.
Note
The data age status indicator will show the status of each port. A grey indicator
means no data is present, red is for an incorrect data string, yellow indicates an
incomplete data string and green is for normal operation.
6.3.3. COM Ports
The COM Ports enables two extra tabs called Serial Setup and Sonar Ports from
where all the serial communication (both connected to the PC and ports on the Gemini head)
are configured.
Serial setup
The Serial Setup tab controls the serial communication being inputted and exported by
the Gemini software.
COM Port The COM port to use.
... Open the settings dialog for configuring the port baud rate, data bits,
Mode Can change between an ASCII or binary decode (ASCII is the default
Sync The sync character used to frame the ASCII string.
Decode The decode definition to apply for the expected receive data on the port.
Max Set the time in seconds to generate an alarm if no data is received.
Age The age of the data, shows when the last good data was received (see
Hz The incoming data rate
String The incoming data string, check this against the chosen Decode if the
parity and flow control.
and binary is only used for the Simrad EM3000).
note below).
data indicator is red.
The Output COM Port section allows the user to export data from the Gemini software to
third party applications. Changing the Encode option will alter the output. For more details on
the data formats for each string, please refer to Appendix G, Gemini Software String Encode.
0744-SOM-00002-1 50 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
Note
The data age status indicator will show the status of each port. A grey indicator
means no data is present, red is for an incorrect data string, yellow indicates an
incomplete data string and green is for normal operation.
Sonar Ports
The Sonar Ports tab controls the two serial channels available on each Gemini 720is unit
that is connected.
Sonar ID The Gemini 720is ID number
Port The port, or serial channel, on the Gemini.
Function Changes the intended use for the data being put into the Gemini.
Decode will enable the selection boxes from Mode onwards and will
attempt to parse the data.
Route to... will pass the data from the Gemini onto a selected COM Port
that the software has been able to detect on the computer. This option
will hide the Mode, Sync, Decode, Max, Age, Hz and String information.
Protocol RS232 or RS485 can be used on Port 0. Only RS232 can be used on
Port 1.
Baud Rate The baud rate selection for the Port. Selectable between 9600 to
115200 Baud.
Mode Can change between an ASCII or binary decode (ASCII is the default
and binary is only used for the Simrad EM3000).
Sync The sync character used to frame the ASCII string.
Decode The decode definition to apply for the expected receive data on the port.
Max Set the time in seconds to generate an alarm if no data is received.
Age The age of the data, shows when the last good data was received (see
note below).
Hz The incoming data rate
String The incoming data string, check this against the chosen Decode if the
data indicator is red.
6.3.4. Aux Power
The Aux Power will enable, or disable power to the Aux port of the Gemini 720is.
0744-SOM-00002-1 51 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
Caution
As the Aux port is powered by an internal regulator, the maximum power limit
should never be exceeded. Doing so will damage the Gemini 720is.
Note
The Aux Power control will only affect Gemini 720is units that have serial based
Aux ports. The dual ethernet version of the Gemini 720is is unaffected by this
setting.
6.4. Gemini Firmware updates
Each release of the Gemini Software automatically contains the latest revision of firmware
suitable for the Gemini Sonar. The software will automatically check the existing firmware and
will advise if an update is available. Updating the firmware of the Gemini Sonar will improve
the capabilities of the unit as well as allow access to new features and enhancements as
they are developed.
Warning
During the update process, power to the Gemini Sonar should not be interrupted.
Power loss during this process may cause the Gemini Sonar to become unstable
and require immediate servicing.
In the Advanced screen, the Sonar tab contains details of all the Gemini Sonars detected by
the software. Should an update be available, the affected sonar will have its firmware details
highlighted with orange text - regardless of if the unit is Online or Offline.
To update the firmware of
the unit, ensure that the unit
is Offline and click on the
Update button.
The software will then ask you
to confirm the update process,
giving details of the existing
firmware and its replacement.
Click Ok to proceed.
0744-SOM-00002-1 52 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
The firmware update process
will start. It is a two step
process and both must be
completed in order for the
firmware to be completely
upgraded.
It is important that power to the
Gemini is not disconnected at
any point during the upgrade
process
Once both steps are fully
completed the Sonar will
reboot in order to finalise the
upgrade process
Once rebooted, the update
progress window will remain
visible until the Ok button is
clicked.
Once fully updated the
Update button will no longer
be visible and when connected
Online all the Sonar details
will be in green text.
If your Gemini Sonar fails to update correctly please contact Tritech International Ltd for
assistance.
6.5. Multiple Head Operation
Note
The following instructions refer to a Gemini Sonar with a 120° swathe. Other
products within the Gemini range may have differing swathes, but the same basic
principles described apply.
The number of heads connected to a system can be selected using the drop-down list on the
right-hand pane of the Advanced screen.
0744-SOM-00002-1 53 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
The first time the number of heads is altered the sonar display will place the sonars side-byside in a line. Any subsequent alterations to the position or rotation of each sonar image is
stored and recalled when the Gemini software is restarted.
The position of the sonar images can be altered using the text fields listed under Choose
and position the sonars. Each text field is editable and allows the sonar scans to be
moved around in relation to a central reference point. The default is as follows:
Example Layout
Changing the position values as follows:
Will arrange the sonar images in a circle:
0744-SOM-00002-1 54 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
Note
Turning off the range lines and text can improve the display.
In this case, sonar 1 is looking forward while 2 and 3 are looking aft. There is no overlap and
each sonar is displaying a full 120° arc.
Overlapping sonars is also possible and any images generated will be a combination of
echoes from both heads:
0744-SOM-00002-1 55 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
6.6. Offline Mode
If for some reason when the software is started it cannot initialise communications with the
Sonar (for example if another instance of the software already running) the following warning
will be displayed:
The software will then open with a cut down user interface which will allow the replay of data
which have already been recorded, but all the controls associated with the Gemini Sonar
will be removed.
Those controls which are present work in exactly the same way as if communications with
the Gemini Sonar was possible, and as described earlier in this manual.
6.7. Automatic Online
Once the Gemini Sonar and the Gemini software have been configured so that they can
communicate successfully, when the Gemini software is started it will automatically start
imaging as soon as it detects the presence of that Sonar. This allows unattended start up
of the Gemini software and system.
This functionality can be disabled by adding the command line switch /noautoonline to
the command which starts the Gemini software.
6.8. Settings Files
The Gemini software stores all the settings in the file C:\GeminiData\Settings
\Gemini.xml. A backup of this file can be kept as a record of all the Gemini settings. When
contacting Tritech International Ltd Technical Support it may be necessary to supply a copy
of this file.
The Gemini software keeps a historical log of settings files in the folder C:\GeminiData
\Settings, with folder and file names automatically generated from the date and time. This
can be useful for restoration of previously known good settings. To use a previous settings
file:
1. Shut down the Gemini software.
2. Delete (or rename) the C:\GeminiData\Settings\Gemini.xml file.
3. Copy the historical settings (*.xml) file into the location C:\GeminiData\Settings and
rename it to Gemini.xml
4. Start the Gemini software.
A factory settings file is stored in the install folder (normally C:\Program Files\Tritech
\Gemini\Factory.xml). To revert completely to the factory settings file:
0744-SOM-00002-1 56 © Tritech International Ltd.

Advanced Operation P-Sea Underwater Console
1. Shut down the Gemini software.
2. Delete (or rename) the C:\GeminiData\Settings\Gemini.xml file.
3. Start the Gemini software.
6.9. Keyboard Shortcuts
A number of keyboard shortcuts are available for commonly used activities.
F7 Toggle Logging of data
Ctrl F Capture the screen to file
A Increase gain
Z Decrease gain
D Increase range
C Decrease range
B Decrease sonar swathe
G Increase sonar swathe
0744-SOM-00002-1 57 © Tritech International Ltd.

7. Maintenance
7.1. General Guidance
The P-Sea is designed to be robust and easy to use. However care should be taken to fully
wash down the unit after each dive in order to maintain the longevity of the system.
7.2. Pre-Dive checks
• Check that any unused ports on the P-Sea are properly blanked off.
Any unused ports that are left open could cause the unit to fail subsea and may result in
terminal damage to the unit.
• Check that the batteries have been fully charged.
The recommended MetalSub batteries should be able to provide at least 3 hours
continuous operation when fully charged.
P-Sea Underwater Console
• Check that all attached cables are correctly fitted and are hand tight.
Incorrectly fitted cables could lead to damage to the unit when used subsea.
7.3. Post-Dive checks
• Fully wash down the P-Sea with warm, fresh water.
This will help remove any potential salt build up.
• Inspect each port to ensure that no water ingress has occurred.
Use a low pressure air source to dissipate any water droplets that remain.
• Inspect the batteries for damage or signs of water ingress.
If clear, place the batteries on charge.
• Transfer all recorded data from the P-Sea to an external HDD.
This will ensure the maximum possible amount of recording time during the next dive.
The actions detailed above should also be performed on any ancillary equipment attached
to the P-Sea, but it is recommended that you consult the relevant product manuals for that
equipment.
0744-SOM-00002-1 58 © Tritech International Ltd.

8. Troubleshooting
P-Sea fails to boot correctly
If battery powered, ensure that the batteries are fully charged before attaching to the P-Sea.
Detach batteries and power cabling, wait 30 seconds then re-attach and attempt to power on
again. This will allow any residual charge within the system to dissipate.
P-Sea boots to an error screen
The BIOS has not properly loaded the launch script for booting up the P-Sea. Simply switch
off, then on the unit and it should load correctly.
P-Sea Underwater Console
Windows® messages about a new network appear on screen
This usually occurs when running the P-Sea for the first time with a new Gemini sonar
attached. When connected a Gemini sonar to the P-Sea for the first time it is recommended
that it is done as a dry test and a USB mouse is connected to the P-Sea. This will enable you
to easily acknowledge any one-time pop up messages from the OS.
Attached Gemini sonar is not detected or running
When attaching a Gemini sonar for the first time to a P-Sea it is recommended that a USB
mouse is used with the P-Sea itself. This will allow you to adjust any necessary settings within
the Gemini software.
Check that the Gemini has been set to the correct IP address. As default, Gemini sonars will
operate on the IP address of 192.168.2.201 and the P-Sea is set to operate within the
192.168.2.xxx domain.
Alternatively, to ensure that the Gemini software will operate with any available Gemini power
up the P-Sea without any sonar attached, but with a USB mouse connected. Go to the
Advanced screen and expand the Configuration Options selection. In the Sonar
Type section, change the number of sonars to Auto. This will force the Gemini sonar to
use whichever unit it detects, rather than the last one it remembers. Close down the Gemini
software using the close icon at the top right of the screen - this will ensure the software
retains these settings for its next boot up.
Serial devices have lost configuration
Power up the P-Sea without any sonar attached, but with a USB mouse connected. Go to
the Advanced screen and expand the Configuration Options selection. Ensure that
the COM Ports section has been set to Enabled. At the bottom of the screen click on the
0744-SOM-00002-1 59 © Tritech International Ltd.

Troubleshooting P-Sea Underwater Console
Serial Setup tab to access the COM Port settings that the Gemini software uses. Ensure
that the information for each port is correct - especially the Baud rate, Sync and Decode
options. Once confirmed, close down the Gemini software using the close icon at the top
right of the screen - this will ensure the software retains these settings for its next boot up.
0744-SOM-00002-1 60 © Tritech International Ltd.

Appendix A. MetalSub Batteries
The MetalSub battery packs provides a re-chargeable power source for the P-Sea.
P-Sea Underwater Console
In order to power the P-Sea, the MetalSub batteries need to be connected in series (to provide
24VDC) using the special P-Sea Double Battery Cable.
The MetalSub battery will give an average of 4 hours operation before the battery discharges
and the P-Sea shuts down without warning. Current drawn by any sensors powered through
the console will reduce this battery life accordingly.
Specification
Property Description
Battery Type NiMH
Output 12V at 9000mAh
Weight 2.9kg (1.7kg in water)
Depth Rating 250m
Charger MP2500 Fast Charger
Note
As the MetalSub batteries are not a Tritech product, their specification cannot
be guaranteed.
0744-SOM-00002-1 61 © Tritech International Ltd.

Appendix B. Cables
The P-Sea can be supplied with a number of different cables to provide basic, and enhanced
functionality.
• P-Sea Double Battery Cable (S11646)
• P-Sea External Power Cable (S08408)
• P-Sea Sonar Comms Cable (S11647)
• P-Sea Serial Comms Cable (S11645)
• P-Sea USB Cable (S08410)
The P-Sea may also be supplied with some blanking connectors - to ensure unused ports
retain their integrity while the P-Sea is submerged.
• USB Port blanking plug (S08327)
• Serial Port blanking plug (S08328)
P-Sea Underwater Console
P-Sea Double Battery Cable (S11646)
This cable is used to power the P-Sea from two
MetalSub battery packs. For more information on
the MetalSub batteries, please refer to Appendix A,
MetalSub Batteries.
P-Sea External Power Cable (S08408)
This cable is used to power the P-Sea from a bench
power supply. It is recommended that this be used
when transferring data to and from the P-Sea.
0744-SOM-00002-1 62 © Tritech International Ltd.

Cables P-Sea Underwater Console
P-Sea Sonar Comms Cable (S11647)
This cable is used to connect the Gemini Sonar to
the P-Sea.
P-Sea Serial Comms Cable (S11645)
These cables are used to connect ancillary serial
devices to the COM1 or COM2 ports on the P-Sea.
These are usually provided as an unterminated whip.
P-Sea USB Cable (S08410)
For prices of spare and replacement cabling, please contact Tritech International Ltd.
This cable is used to provide a USB link to the P-Sea.
In normal usage attaching a USB Hub (not supplied)
to the P-Sea would allow the attaching of an external
HDD, Mouse and Keyboard.
0744-SOM-00002-1 63 © Tritech International Ltd.

P-Sea Underwater Console
Appendix C. Setting the computer IP address in Windows® XP
The following instructions apply to a computer running Windows® XP, though the sequence
for other operating systems will be similar.
If the computer is connected to a network already, disconnect it from that network.
From the Start Menu select Control Panel. From the Control Panel Explorer window that
opens, double click on Network Connections. From the list of available network connections
that opens, double click on the Ethernet connection which will be used to connect to the
Gemini head.
Click the Properties button on the dialog which opens. This will open a dialog which looks
like this:
Scrolling the "This connection uses the following items" box will reveal an item titled "Internet
Protocol (TCP/IP)". Click this item to select it, and then press the Properties button. The
following dialog should open:
0744-SOM-00002-1 64 © Tritech International Ltd.

Setting the computer IP address in Windows® XP P-Sea Underwater Console
Make a note of the settings as currently used by the computer; these will be needed to restore
the computer to any existing network. Refer to the appropriate section of this manual for the
correct IP address to use.
The following screenshot shows the dialog after those changes have been made:
0744-SOM-00002-1 65 © Tritech International Ltd.

P-Sea Underwater Console
Appendix D. Setting the computer IP address in Windows® 7 or Windows® 10
The following instructions apply to a computer running Windows® 7 or Windows® 10,
though the sequence for other operating systems will be similar. All screenshots are from a
Windows® 7 installation.
Disconnect the computer from any existing network.
First click on the Start Menu and select Control Panel.
Under Network and Internet click on View network status and tasks.
This will bring up the Network and Sharing Center which allows configuration of any
networks on the computer. Click on Change adapter settings on the left-hand pane.
0744-SOM-00002-1 66 © Tritech International Ltd.

Setting the computer IP address in Windows® 7 or Windows® 10 P-Sea Underwater Console
A list of attached network devices should now present itself. Find the one which the Gemini
head is to be connected to and double-click on it.
The Local Area Connection Properties dialog should be displayed. Find the entry
labelled Internet Protocol Version 4 (TCP/IPv4), select it and then click on the
Properties button.
In the properties dialog which opens there will either be Obtain an IP address
automatically or Use the following IP address selected. If an IP address is
already present, make a note of it before changing any values since it will be needed if the
computer is ever restored to the previous network. Refer to appropriate section of this manual
for the correct IP addresses to use.
0744-SOM-00002-1 67 © Tritech International Ltd.
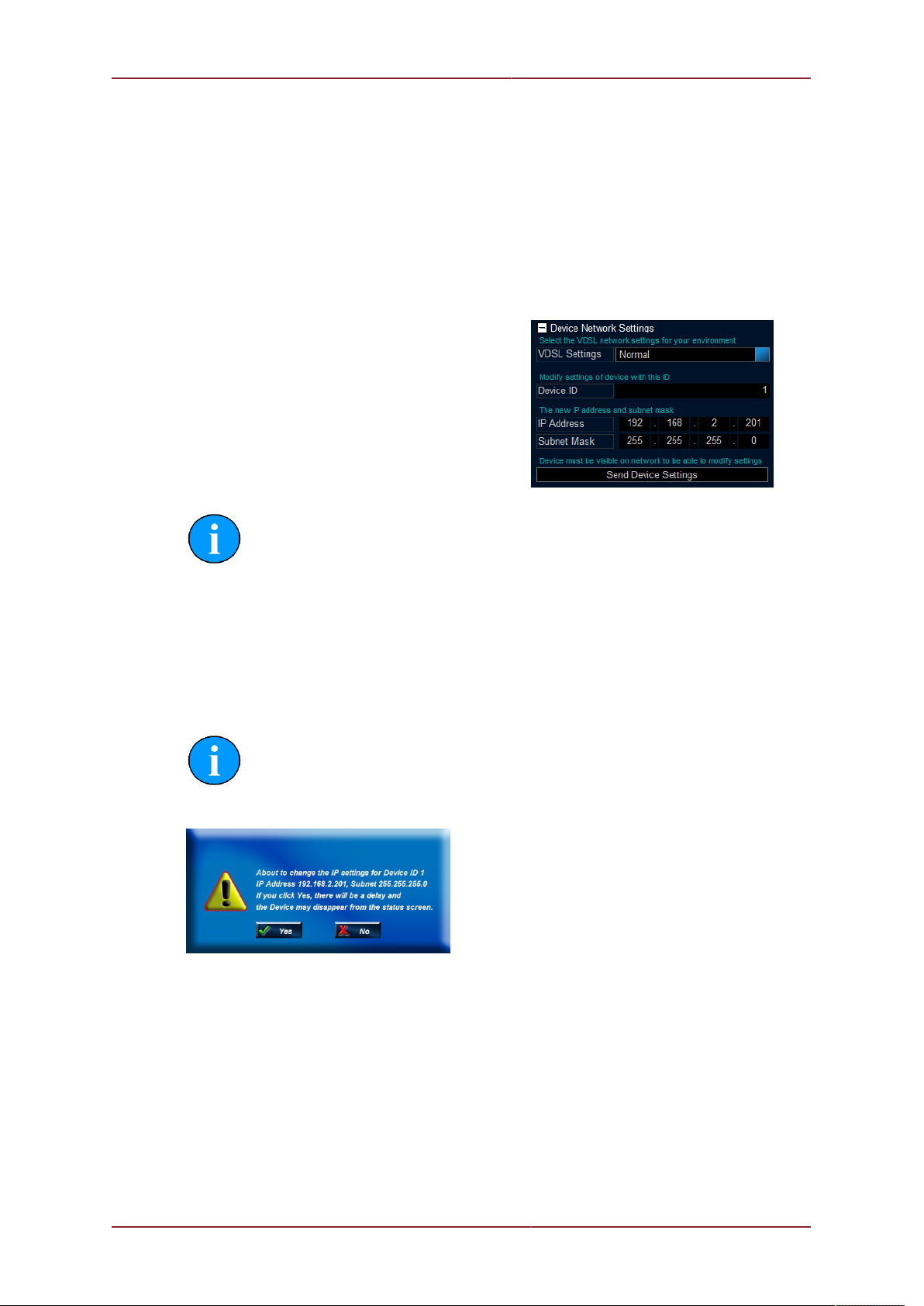
P-Sea Underwater Console
Appendix E. Setting the Gemini Device IP Address in Gemini Software
These instructions are applicable to any Gemini device.
For a Sonar or
Profiler
For a Hub Enter the ID into the Hub ID box on the Hub Setup tab.
After starting the Gemini software and
connecting a Gemini device click the
Advanced tab at the upper left hand side of
the screen to show the advanced settings
screen, and expand the Device Network
Details area by clicking the + button next
to it.
Enter the ID into the Sonar box of the Advanced Configuration options
(upper right hand side of the screen).
Note
The Gemini device should be connected directly to the computer and any other
Gemini devices should be disconnected.
Once the ID of the Gemini has been entered at the top of the screen, the details for the new
IP address can be entered. Three items need to be entered, the Device ID (to ensure that
the correct Gemini is being altered), the new IP Address and the new Subnet Mask.
Once these details have been entered, pressing the Send Device Details button will
start the process of changing the IP address. A dialog box will open, requesting confirmation
of the change.
Note
If the Gemini is online then it will not be possible to alter the IP address details.
Make sure that the Gemini is offline before trying to change it.
Clicking the Yes button will program the new IP address details into the Gemini. The new
IP address followed by a reboot command will be sent. When the device reboots it will be
using the new IP address, and therefore will not show up on the status display. Once the IP
address of the computer has been changed back to its original settings the Gemini should
once again appear on the status display.
0744-SOM-00002-1 68 © Tritech International Ltd.

P-Sea Underwater Console
Appendix F. Gemini Software String Decode
The Gemini Software is capable of handling input from various different types of sensors
using the following standard strings:
Depth strings
Name Description Format/Examples
Digi Parascientific Digiquartz
(depth sensor)
SonDepth Depth
Distance Marker strings
000.0
$SONDEP...
Name Description Format/Examples
TSS Altimeter 1 Marker Range
Ulvertech Bathy Marker Range
Rxx.xx
00000,xxxx
0744-SOM-00002-1 69 © Tritech International Ltd.

Gemini Software String Decode P-Sea Underwater Console
Heading, Position and Time strings
Name Description Format/Examples
CDL1 Heading, Pitch, Roll
Haaa.aP+ccc.ccR+eee.eeT...
GPGGA GPS position
GPGGA ZDA GPS position and UTC time
$GPZDA UTC Time
HEHDT Heading
Navi-Pack Position, Heading, Pitch, Roll
OctansAll Heading, Heave, Pitch,
Roll, Surge, Sway
$GPGGA...
$GPGGA...
$GPZDA...
$GPZDA...
$HEHDT...
$G...
$HEHDT...
$PHTRH...
$PHLIN...
OctansGHPR Heading, Heave, Pitch, Roll
$HEHDT...
$PHTRH...
OctansHead Heading
OctansLinear Heading, Heave, Surge, Sway
$HEHDT...
$HEHDT...
$PHLIN...
Octans Std 2 Heading, Heave, Pitch, Roll
:00000 -0000H-0000 -0000F
Simard EM3000 Heading, Heave, Pitch, Roll n/a
TSS Std 1
with HEHDT
Heave, Pitch, Roll and Heading
:000000 -0000H-0000 -0000
$HEHDT...
TSS 1
Pitch, Roll and Heading
(No Heave) with
HEHDT
Velocity of Sound strings
Name Description Format/Examples
AML Smart SVP Speed of Sound
Speed of Sound Speed of Sound
Note
With the exception of Simrad EM3000 (which is in binary format) all of the above
strings are in ASCII format and use <CR> as the synchronisation character.
:000000 -0000 -0000
$HEHDT...
0 1500.0
1500.0
0744-SOM-00002-1 70 © Tritech International Ltd.

P-Sea Underwater Console
Appendix G. Gemini Software String Encode
The Gemini Software is capable of outputting different data strings depending on the
requirement of the user:
PTRITAR target tracking string
This output string is available when using the Click + Track function of the software. This is
available to all models of Gemini Sonars.
Description Example
Date (DDMMYYYY) 19042017
Time (HHMMSS) 143059
Target ID 1
Range 23.45
Bearing 45.9
Checksum Sum of XOR on each character of the string expressed as
a char written in hex.
Terminator <CR><LF>
Example
Target located 1.88m from sonar at a 5.371232° bearing to the left of the central point of
the Sonar.
$PTRITAR,04042017,113818,1138140001,1.88,-5.371232,*7e<CR><LF>
PTRITR1 target tracking string
This output string is available when using the Detect + Track function of the software. For
this function to be available, a Gemini 720is or ik must be in use.
Description Example
Date (DDMMYYYY) 19042017
Time (HHMMSS) 143059
Format (always 1) 1
Target ID 1
Range 23.45
Bearing 45.9
Checksum Sum of XOR on each character of the string expressed as
a char written in hex.
Terminator <CR><LF>
Example
Target located 3.18m from sonar at a 9.2651052° bearing to the right of the central point
of the Sonar.
$PTRITR1,04042017,113806,1,103,3.18,9.265105*28<CR><LF>
0744-SOM-00002-1 71 © Tritech International Ltd.

P-Sea Underwater Console
Glossary
ASCII American Standard Code for Information Interchange - a character
encoding scheme originally based on the English alphabet.
AVI Audio Video Interleave - a video format introduced by Microsoft
BMP A raster graphics image file format used to store bitmap digital images.
Gemini Hub A rack mountable device capable of driving 2 Gemini sonars and
multiple serial sensors and outputting the data to a PC network.
GIF Graphics Interchange Format - a bitmap image format developed by
CompuServe.
GPS Global Positioning System.
IP Internet Protocol - generally used as a means of addressing individual
computers.
PC Personal Computer
PNG The standard filename extension for Portable Network Graphics - a
bitmapped image format employing lossless compression.
RLE Run-length Encoding - a form of data compression in which sequences
of data that have the same value are stored as a single datum point
and count.
RS232 Traditional name for a series of standards for serial binary data control
signals.
USB Universal Serial Bus.
UTC Coordinated Universal Time (time data closely related to Greenwich
Mean Time (GMT)).
VDSL Very-high-bitrate Digital Subscriber Line - a method of communicating
down un-twisted copper cable at uplink speeds of 18Mbit·s-1 and
downlink speeds of 50Mbit·s-1.
WMV Windows® Media Video - a compression format for several proprietary
codecs developed by Microsoft® for storing video files.
0744-SOM-00002-1 72 © Tritech International Ltd.
 Loading...
Loading...