

Page 1

TMCM-171 module
Hardware Manual
BLDC servo motor controller 20A/48V
with RS485 and CAN interface
Trinamic Motion Control GmbH & Co. KG
D – 20357 Hamburg, Germany
http://www.trinamic.com
Sternstraße 67
Page 2

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 2
Contents
1 Features...........................................................................................................................................................................4
2 Life support policy .......................................................................................................................................................5
3 Electrical Description ...................................................................................................................................................6
3.1 Pinning...................................................................................................................................................................6
3.1.1 Power supply ............................................................................................................................................. 6
3.1.2 Motor ............................................................................................................................................................ 6
3.1.3 CAN and RS485 ..........................................................................................................................................6
3.1.4 Step / Dir.....................................................................................................................................................7
3.1.5 Encoder, Hall, Temperature....................................................................................................................7
3.1.6 I / O ..............................................................................................................................................................8
3.1.7 Programming connector.........................................................................................................................8
3.2 Jumper “Select Opto In”....................................................................................................................................8
3.3 Application circuit ...............................................................................................................................................9
3.4 Dimensions .........................................................................................................................................................10
3.5 Connectors...........................................................................................................................................................11
4 Operational / Limiting Ratings ...............................................................................................................................12
4.1 Power supply requirements...........................................................................................................................14
4.2 Bus Interface.......................................................................................................................................................14
4.2.1 Terminating the RS485 network.........................................................................................................14
5 Functional description...............................................................................................................................................15
5.1 Setting the basic values for operation (using the demonstration application).............................15
5.2 Start up for encoder based commutation .................................................................................................15
5.3 Encoder setting ..................................................................................................................................................16
5.4 Hall sensor only operation w/o encoder ...................................................................................................17
5.5 Stop switch .........................................................................................................................................................17
5.6 General Functions (explore using the Windows based demo software).........................................17
5.7 Temperature, Current and Voltage monitoring functions.....................................................................17
5.8 Programmable motor current limit..............................................................................................................18
6 Revision History ..........................................................................................................................................................19
6.1 Documentation Revision .................................................................................................................................19
6.2 Firmware Revision ............................................................................................................................................19
7 References.....................................................................................................................................................................19
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 3

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 3
List of Figures
Figure 3.1: Pinning of TMCM-171 ......................................................................................................................................6
Figure 3.2: Application circuit ............................................................................................................................................ 9
Figure 3.3: Circuit board dimensions.............................................................................................................................10
Figure 3.4: Housing dimensions .....................................................................................................................................11
List of Tables
Table 1.1: Order codes .........................................................................................................................................................4
Table 3.1: Pinning of power supply connector ............................................................................................................ 6
Table 3.2: Pinning of motor connector........................................................................................................................... 6
Table 3.3: Pinning of CAN and RS485 connector ......................................................................................................... 6
Table 3.4: Pinning of step / dir connector.....................................................................................................................7
Table 3.5: Pinning of Encoder, Hall, Temperature connector ...................................................................................7
Table 3.6: Pinning of I / O connector.............................................................................................................................. 8
Table 3.7: Programming connector (to be used by Trinamic only)........................................................................8
Table 3.8: Connectors.........................................................................................................................................................11
Table 4.1: Operational ratings..........................................................................................................................................13
Table 5.1: Temperature, Current and Voltage monitoring functions (LEDs) ......................................................17
Table 6.1: Documentation Revisions..............................................................................................................................19
Table 6.2: Firmware Revision...........................................................................................................................................19
Table 7.1: References..........................................................................................................................................................19
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 4

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 4
1 Features
The TMCM-171 is a controller / driver module for high performance servo drives based on brushless
DC motors. It gives a high resolution like a stepper motor coupled with the high dynamic, high
velocity and high reliability of a BLDC drive. The motors and switches can be connected easily with
screw terminals. A build-in ramp generator allows parameterized smooth positioning. The TMCM-171
supports BLDC motors with nearly any number of poles and incremental encoders with nearly any
resolution.
The TMCM-171 integrates a position regulator and a ramp generator, to allow for velocity modes.
The module can be remote controlled via a CAN or RS485 interface. Additionally the TMCM-171 is
equipped with a step direction interface. Stand alone operation is also possible.
Its integration into the TRINAMIC family of motor control modules makes it easy to choose either a
stepper motor or a BLDC motor or any combination for an application.
Applications
• Replacement of servo drive by high reliability / low cost BLDC drive
• Fast and precise positioning
• Smooth very low to very high constant / variable velocity drives
• Very high velocity stability drives
Motor / Encoder type
• Sine (or block) commutated BLDC motors with encoder and with / without additional hall sensors
• Hall sensor based motors can be operated without encoder
• Motor power from a few watts to 800W
• Motor velocity up to 100,000 RPM (electrical field)
• Incremental encoder (2 channel with option for N-channel) with resolution from 256 to 30000 /
motor rotation (opt. per electrical field rotation)
• 12V to 48V nominal motor voltage
• RMS motor current up to 20A (sine commutation)
Highlights
• High-efficiency operation, low power-dissipation
• Motor RMS current measurement in sine commutation mode
• Very fast response time leads to dynamic motor behavior
• CAN interface and RS485 integrated
• Step direction interface
• Stand alone capability
• Typical Supply voltage 14V – 48V
• Integrated Protection: Reverse polarity and overload / overtemperature / overvoltage
• Supports the TRINAMIC TMCL protocol and the TMCL software environment for parameterizing and
for update
• Integrated 1024 entry 10 bit motor sine commutation table
• External (stop) switch or encoder N channel can be used for absolute position reference
• Different start up modes for automatic commutation calibration
Order code Description
TMCM-171 BLDC servo module
Table 1.1: Order codes
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 5

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 5
2 Life support policy
TRINAMIC Motion Control GmbH & Co. KG does not
authorize or warrant any of its products for use in life
support systems, without the specific written consent
of TRINAMIC Motion Control GmbH & Co. KG.
Life support systems are equipment intended to
support or sustain life, and whose failure to perform,
when properly used in accordance with instructions
provided, can be reasonably expected to result in
personal injury or death.
© TRINAMIC Motion Control GmbH & Co. KG 2007
Information given in this data sheet is believed to be
accurate and reliable. However no responsibility is
assumed for the consequences of its use nor for any
infringement of patents or other rights of third
parties, which may result form its use.
Specifications subject to change without notice.
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 6

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 6
3 Electrical Description
3.1 Pinning
Pin1
CAN and
RS485
Pin1
Step / Dir
Pin1
I / O
1
1
1
2
2
2
Pin1
Pin1
Pin1
Pin1
Programming
Figure 3.1: Pinning of TMCM-171
3.1.1 Power supply
Pin Name Function
1 U+ Positive power supply voltage
2 GND GND, power
Pin1
Pin1
Pin1
Pin1
4
2
3
Pin1
Power
supply
Motor
Encoder,
Hall,
1
Temperature
Pin1
Table 3.1: Pinning of power supply connector
3.1.2 Motor
Pin Name Function
1 U
2 V
3 W
BLDC motor coil connection
Table 3.2: Pinning of motor connector
3.1.3 CAN and RS485
Connector 1 (screw) and 2 (JST)
Pin Name Function
1 CANH CAN high signal
2 CANL CAN low signal
3 GND GND
4 RS485 + Non inverting rs485 signal
5 RS485 - Inverting RS485 signal
Table 3.3: Pinning of CAN and RS485 connector
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 7

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 7
3.1.4 Step / Dir
Connector 1 (screw) Connector 2 (JST)
Pin Name Function Pin Name Function
1 Step +
2 Step -
3 Dir +
4 Dir -
-- -- -- 5 D - inverted direction input
Opto-decoupled non inverted
step input
Opto-decoupled inverted step
input
Opto-decoupled non inverted
direction input
Opto-decoupled inverted
direction input
Table 3.4: Pinning of step / dir connector
1 S + non inverted step input
2 S - inverted step input
3 GND GND
4 D + non inverted direction input
3.1.5 Encoder, Hall, Temperature1
Pin Name Function Pin Name Function
Connector 1 (screw) Connector 3 (JST 1x8)
1 +5V 5V supply for encoder 1 +5V 5V supply for encoder
2 GND GND 2 GND GND
3 E I Encoder indexer 3 E I Non inverted encoder indexer
4 E A Encoder channel A 4 E I - Inverted encoder indexer
5 E B Encoder channel B 5 E A Non inverted encoder channel A
6 +5V 5V supply for hall sensors 6 E A - Inverted encoder channel A
7 GND GND 7 E B Non inverted encoder channel B
8 H1 Hall sensor signal 1 8 E B - Inverted encoder channel B
9 H2 Hall sensor signal 2
10 H3 Hall sensor signal 3 1 +5V 5V supply for hall sensors
11 +5V 5V supply (reference) 2 GND GND
12 TEMP Temperature input 3 H1 Hall sensor signal 1
Connector 2 (JST 2x3 pin)2
1 5 H3 Hall sensor signal 3
Close to use differential encoder ( B ) of
connector 3. Leave open otherwise.
2
3 7 +5V +5V
Close to use differential encoder ( A ) of
connector 3. Leave open otherwise.
4
5 -- -- --
Close to use differential encoder ( I ) of
connector 3. Leave open otherwise.
6
4 H2 Hall sensor signal 2
6 GND GND
8 TEMP Temperature input
-- -- --
Connector 4 (JST 1x8)
Table 3.5: Pinning of Encoder, Hall, Temperature connector
1
Signals with identical names are electrically identical.
2
This connector serves as three jumpers to enable or disable the differential encoder of connector 3.
The inputs “E I”, “E A” and “E B” of connector 1 or 3 are for single ended encoders, if the jumpers of
connector 2 are open.
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 8

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 8
3.1.6 I / O
Connector 1 (screw) and 2 (JST)
Pin Name Function
1 +5V Constant +5V output
2 GND GND
3 OUT1 Digital output 1
4 OUT2 Digital output 2
5 AIN3 Analog input 3, 0-5V (free usage in TMCL)
6 AIN2 Analog input 2, 0-5V (free usage in TMCL)
7 GND GND
8 DIRIN Analog input 0, 0-5V (free usage in TMCL), has 10k pull up resistor to +5V
9
10 /STOP Reference switch input
The analog inputs can also be used as digital inputs. Threshold is ½ of maximum input voltage.
AIN1
Analog input 1 0-10V (free usage in TMCL or special function for stand alone
operation)
Table 3.6: Pinning of I / O connector
3.1.7 Programming connector
Pin Name Function Pin Name Function
1,3,4 Not connected 6 GND GND
2 /MCLR To be used by Trinamic only 7 PGD To be used by Trinamic only
5 PGC To be used by Trinamic only 8 +5V Constant +5V output
Table 3.7: Programming connector (to be used by Trinamic only)
3.2 Jumper “Select Opto In”
An open jumper deactivates the opto-decoupled step / direction inputs at the screw terminal and
activates inputs at the JST connector. Closing the jumper the screw terminal gets active and JST
connector inactive.
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 9

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 9
3.3 Application circuit
The schematic shows a typical application circuit using CAN bus interface. Optionally the unit allows
connection of motor hall sensors and encoder I- (N-)channel as well as further digital / analog pins
and different interface options.
System's
CAN bus
48V system
power
+
-
supply
keep distance
short for CAN
optional
capacitor if > 2m
4700µ,
63V
VS
GND
GND
CANL
CANH
TMCM-171
Encoder
E A
E B
E I
Termination
resistor at bus end
GND
/STOP
U
I/OInterface
V
W
GND
+5V
110R
Reference
Sw.
BLDC-
Motor
Mech. Axis
optional overvoltage
suppressor:
high power zener /
zener transistor
circuit
Encoder
Place unit near
encoder / motor
Figure 3.2: Application circuit
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 10

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 10
3.4 Dimensions
Height 31mm, hole diameter is 4.2mm
135,00
130,00
102,00
67,50
33,00
5,00
All
dimensions
are in
millimeter
Figure 3.3: Circuit board dimensions
5,00
47,50
18,00
89,00
76,00
94,00
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 11

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 11
Figure 3.4: Housing dimensions
3.5 Connectors
Name N0. On TMCM-171
Power supply - RIA type 320, RM5, 2 pin RIA type 349, RM5, 2 pin www.riaconnect.com
Motor - RIA type 320, RM5, 3 pin RIA type 349, RM5, 3 pin www.riaconnect.com
CAN, RS485
Step / Dir
Encoder, Hall,
Temperature
I / O
1 RIA type 183, RM3.5, 5 pin RIA type 169,RM3.5, 5 pin www.riaconnect.com
2 JST B5B-PH-K, RM2 www.farnell.com
1 RIA type 183, RM3.5, 4 pin RIA type 169,RM3.5, 4 pin www.riaconnect.com
2 JST B5B-PH-K, RM2 www.farnell.com
1 RIA type 183, RM3.5, 12 pin RIA type 169,RM3.5, 12 pin www.riaconnect.com
2 2x3 industry standard Jumper RM2.54
3 JST B8B-PH-K, RM2 www.farnell.com
4 JST B8B-PH-K, RM2 www.farnell.com
1 RIA type 183, RM3.5, 10 pin RIA type 169,RM3.5, 10 pin www.riaconnect.com
2 JST B10B-PH-K, RM2 www.farnell.com
Table 3.8: Connectors
Mate
Site
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 12

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 12
4 Operational / Limiting Ratings
The operational ratings show the intended / the characteristic range for the values and should be
used as design values. An operation within the limiting values is possible, but shall not be used for
extended periods, because the unit life time may be shortened. In no case shall the limiting values be
exceeded.
Symbol Parameter Min Typ Max Unit
VS Power supply voltage for operation 12.5 14 - 48 52 V
V
Maximum power supply voltage (for surge) 60 V
SMAX
V
Under voltage switch off trip point 9.5 10 10.5 V
SLOOFF
V
Under voltage switch on trip point 10.5 12 12.5 V
SON
V
VSD
SOFF
Over voltage switch off trip point (Feature can be
switched off, then V
limit applies)
SMAX
Power supply voltage for module operation with motor
disabled
Power supply current
IS
* maximum rating due to connector limitations when
using screw terminal connectors
PID
I
I
I
I
f
CHOP
V5
MCB
MCS
MPB
MPS
Module idle power consumption without encoder / hall
sensor
5 Volt (+-4%) output external load (encoder plus hall
sensors plus other load)
Continuous Motor RMS current in block commutation
mode (module surface at maximum 85°C)
Continuous Motor RMS current in sine commutation
mode (module surface at maximum 85°C)
Short time Motor current in acceleration periods
It is not recommended to set motor current above I
!
MC
Short time Motor current in acceleration periods
It is not recommended to set motor current above I
!
MC
Chopper frequency 20 kHz
52 55 58 V
7 8 9.5 V
0.04 (P
Motor
+3..10W)
/ V
S
I
MOT
or
16A*
2.4 W
0 200 mA
16 A
20 A
20 A
24 A
A
T
VI
Motor output slope (U, V, W) 100 ns
SL
Logic input voltage on digital inputs, encoder and hall
-0.3 V
sensor inputs
CC
0.3
+
V
IIH Pull-up resistor current for hall inputs 50 250 400 µA
IIE Pull-up resistor current for encoder inputs (1kOhm) 5 mA
IO
Logic output current on digital outputs (open drain
output with integrated 1k pullup resistor to +5V)
2 A
VO Output voltage on digital outputs with external load 55 V
V
Analog input voltage on input 1 -24 0 – 10 24 V
IA1
V
Analog input voltage on input 0, 2, 3 -24 0 – 5 24 V
IA023
EV Exactness of voltage measurement -5 +5 %
EC
Exactness of current measurement (the measured coil
current value might not correspond to the RMS current,
-10 +10 %
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 13

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 13
but is repeatable within the given exactness)
f
Encoder count rate (signals 50% duty cycle) 13.3 MHz
ENC
t
Step pulse length on (opto coupler on time) 0.7 µs
STEPON
t
Step pulse length off (opto coupler off time) 2.0 µs
STEPOFF
t
Direction valid setup time before next step 0 µs
DIRSETUP
f
ZEROCROSS
Zero crossing step frequency (also defines Direction hold
time after Step impulse)
1 kHz
TO Environment temperature operating -25 +85 °C
T
board
Temperature of the PCB, as measured by the integrated
sensor.
<105 115 °C
Table 4.1: Operational ratings
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 14

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 14
4.1 Power supply requirements
The power supply should be designed in a way, that it supplies the nominal motor voltage at the
desired maximum motor power. In no case shall the supply value exceed the upper / lower voltage
limit. The BLDC motor unit uses a chopper principle, i.e. the power supply to the motor is pulsed at a
frequency of 20kHz. To ensure reliable operation of the unit, the power supply has to have a sufficient
output capacitor and the supply cables should have a low resistance, so that the chopper operation
does not lead to an increased power supply ripple directly at the unit. Power supply ripple due to the
chopper operation should be kept at a maximum of a few 100mV.
Therefore we recommend to
a) keep power supply cables as short as possible
b) use large diameter for power supply cables
c) if the distance to the power supply is large (i.e. more than 2-3m), use a robust 4700µF or
larger additional filtering capacitor located near to the motor driver unit.
An effect the power supply has to cope with, is, that the motor can feed back substantial current into
the power supply whenever it is actively braked! While this generally is a positive effect (because it
saves energy), precautions have to be taken, to limit the supply voltage to within the operational
limits. The TMCM-171 contains an overvoltage protection circuit, which disables braking whenever the
upper supply voltage limit is exceeded. This automatic function may lead to an unwanted behavior,
i.e. overshooting the target position, and thus can be disabled. Disabling the overvoltage protection
should only be done, provided that the user takes additional precautions to limit the voltage:
It is recommended to use
a) a large capacitor on the power supply lines able to store substantial part of feed back energy
b) a zener / suppressor diode circuitry, limiting the power supply voltage to a maximum of 52-
60V
4.2 Bus Interface
The TMCM-171 can be operated via CAN or RS485 in the same way. CAN bus and RS485 require a
termination resistor at both ends of the cable (but not at every unit).
4.2.1 Terminating the RS485 network
For RS485 in addition to the termination resistor a termination network is required, which forces an
“inactive” level to the line, when no driver is on. Typically, use a 1K resistor to + 5V for RS485+ line
and a 1K resistor to GND for the RS485- line at some point of the network.
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 15

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 15
5 Functional description
5.1 Setting the basic values for operation (using the
demonstration application)
The TMCM-171 can use nearly any BLDC motor and encoder type. However, care has to be taken to
correctly set the motor pole count (default: 8) and encoder resolution (default: 4096) and direction
(default: Encoder gives same direction as motor) before trying to operate the motor! If a hall sensor is
used, please check if the hall sensor polarity is to be reversed (try operating the motor in block
commutation mode, first). Also choose a fitting initialization mode (2 is most universal) and set the
corresponding parameters (please see chapter on start up).
The motor behavior afterwards may still give unsatisfactory results: The next step is to tune the PID
parameters.
For these basic settings, the Windows based demonstration application can be used. It requires
connection to the CAN or the RS485 interface. As a first step use the TMCL-IDE to set the parameter
“Telegram pause time” to a value of about 20. Further basic settings are required for motor start up
(see next chapter).
To avoid motor operation or damage, before the unit is completely parameterized, use a
Hint:
supply voltage of only 8V! This disables the motor.
5.2 Start up for encoder based commutation
The TMCM-171 uses an incremental encoder for motor commutation. Incremental means, that the
encoder does not give an absolute position reference. Thus, the unit needs an internal start up
procedure, which determines the encoder position with respect to the actual pole motor orientation.
The TMCM-170 provides basically two modes for encoder initialization:
Mode 0 uses additional motor hall sensors for the start up phase. Therefore, the motor can not do a
precise positioning until it has done at least one electrical rotation. This can be perceived
by a somehow rough behavior on the first positioning run.
We recommend using this mode, when the motor has hall sensors and mode 1 does not
give reliable results.
However, the motor hall sensors typically are not as precise, as this would be desired for
sine commutation. To accomplish with the hall sensor error and hysteresis, you can set the
corresponding parameters “Init Sine Block Offset CW” and CCW.
Mode 1 drives the motor field into a known position and then evaluates the encoder position.
While this is a very precise scheme, it is susceptible to external force applied to the rotor:
The rotor is not to be blocked in any direction. Additionally external mechanical torque
applied to the axis should be kept low. To use this mode, it is important to set the “Sine
Initialization Current A” as high as possible (within the 20A limit). Default value is 10A. You
can set Sine Initialization Current B to a somewhat lower value (at least ½ of Current A) to
give optimum results. The best setting has do be determined for a given motor. To allow
for minimum motor movement upon initialization, this mode also checks the hall sensor
positions.
Mode 2 is the same as mode 1, but does not check if the motor has hall sensors.
Mode 3 is the most precise and reliable initialization mode: It uses the encoder N-channel for
initialization. To first find the N-channel reference position, the motor is turned by up to
one rotation, until the N-channel is found positive. The velocity and direction can be
specified using the parameter “Sine Init Velocity”. After finding the reference position, the
“Actual Commutation Offset” gives the angular relationship between motor and encoder.
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 16

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 16
Therefore this parameter has to be stored correctly in EEPROM before power on! Do not
enable this mode, before the parameter has been set correctly. Mode 4 helps for the very
first initialization of this mode.
Mode 4 helps to do a first initialization and tuning of mode 3. It searches for the N-channel
reference point first, and then does a mode 2 initialization to determine the correct setting
for the “Actual Commutation Offset”. The encoder N-channel polarity has to be high active
for this mode (the actual setting of the encoder null polarity has no influence in this mode),
and, additionally, you have to specify the polarity of the encoder A- and B-channel upon Nchannel activity using the setting “Encoder Null Polarity”, bits 1 and 2. The correct setting of
this depends on the encoder. If the N-channel referencing fails, the motor does two full
rotations and then stops. Try again with reversing the “Encoder Null Polarity”. After
successfully initializing the “Actual Commutation Offset”, you can try moving the motor and
tune the offset, if desired. Then store the offset and switch to mode 3. If any encoder errors
are flagged during operation of the motor, retry with a modified setting for A- and Bchannel polarity.
Attention:
The quality of the initialization phase result can be checked by rotating the motor left and right at the
maximum velocity (use a velocity setting slightly higher than the motor can follow). Maximum velocity
for left and right direction shall not differ by more than a few percent. Also make some checks if
results are reproducible.
Whenever changing one of these parameters, re-power the unit to restart initialization phase!
Initialization modes 1 to 4 apply a high current to the motor for a few seconds. Be sure
to parameterize the initialization current correctly (i.e. not more than 2* the maximum
rated motor current) before first powering on the unit.
5.3 Encoder setting
The N-channel (index channel) of the encoder is not required for motor operation, but it is very good
for motor initialization, because it gives an absolute and exact reference point. So, the motor
initialization modes 3 and 4 use the N-channel for motor initialization. Behavior of the N-channel
signal is very dependent on the encoder type and has to be taken into account for the setting of the
TMCM171 encoder interface. Please refer to the following figure for correct setting of the Encoder Null
Polarity flag.
A wrong setting may either hinder the module from initializing the sine mode, or might lead to the
Encoder Error flag being set, in spite of correct encoder function.
Set Encoder Null
Polarity to
binary 011
Enc-A
Enc-B
10
0
Enc-N
(index)
CW turn CCW turn CW turn CCW turn
zero event
Set Encoder Null
Polarity to
binary 001
0
zero event
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 17

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 17
5.4 Hall sensor only operation w/o encoder
The module can be used without an encoder. In this case, set the encoder resolution parameter (SGP
250) to the hall sensor resolution, i.e. 3 times the number of motor poles. Example: For a 4 pole
motor set the encoder resolution to 12. To avoid oscillations in positioning mode, the algorithm in
this mode stops regulation, as soon as the target distance is below the setting as determined by
“MVP target reached distance”. Adapt this setting to your needs. Switch the module to hall sensor
based commutation permanently in order to skip encoder initialization procedure in this configuration.
Please be aware, that the hall sensor resolution is very low, when compared to an encoder, and thus,
the PID regulator parameterization values have to be set much higher than the default setting.
Without encoder, the velocity measurement is not available. You may want to set a lower value than
the default for the “PWM Hysteresis” setting to get a softer response upon target reaching.
5.5 Stop switch
For positioning applications, typically some kind of global initialization is required. This can either be
done via a central unit operating the motor via its bus interface, or a reference switch can be
connected to the stop input (pull down to 0V at reference point). The position counter can be
automatically cleared when this point is reached. Be careful not to apply a voltage different from GND
to this digital input!
5.6 General Functions (explore using the Windows based
demo software)
The TMCM-171 module can either be remote controlled via the PC demonstration software or a user
specific program. The function of the stand alone mode can be modified by the user by writing
initialization values to the on-board EEPROM, e.g. a maximum rotation velocity, motor current limit
and rotation direction. For more detailed software information refer to the TMCM-170 Module –
Reference and Programming Manual (see 7: References).
5.7 Temperature, Current and Voltage monitoring functions
Name LED / Output Action Meaning
PWR Power On At least +5V power supply
The current limit LED blinks upon under voltage switch
off
Motor PWM is reduced due to exceeding the set motor
current limit or overvoltage threshold is exceeded
The power stage on the module has exceeded a critical
temperature of 85°C. (Pre-warning)
The power stage on the module has exceeded a critical
temperature of 115°C. The motor becomes switched
off, until temperature falls below 105°C. The
measurement is correct to about +/-10°C
CL
TEMP
Current Limit Blink
Current Limit On / Flicker
Temperature
Warning
Temperature
Warning
Blink
On
Table 5.1: Temperature, Current and Voltage monitoring functions (LEDs)
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 18

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 18
5.8 Programmable motor current limit
The motor current limiting function is meant as a function for torque limiting, and for protection of
motor, power supply and mechanical load.
Whenever the pre-programmed motor current is exceeded in a chopper cycle, the TMCM-171 calculates
a reduced PWM value for the next chopper cycle. New values are calculated 1000 times a second. The
response time of the current regulation can be set using the parameter “current regulation loop
delay”:
A value of zero means, that in every 1kHz period, the current correction calculation is directly executed
and the resulting PWM value is taken. A higher current loop delay acts like a filter for the current. The
higher the delay value, the slower the current loop response time. A value of 10 (default) leads to a
current regulation response time of about 10 ms for an 1/e response. On the mechanical side, a
higher value simulates a higher dynamic mass of the motor.
The actual current regulation time may differ, depending on the PID settings.
Attention:
The unit has a short circuit protection circuit, which limits coil current to about 40A.
There is a number of aspects when using the current limiting function:
• The current measurement is done at a point of the chopper cycle, where just one coil is switched
• The current measurement can not detect currents below about 200-300mA. If the current limit is
• The current limiting function is not meant as a protection against a hard short circuit.
• The performance of the current limiting depends on the motor and on the commutation mode.
• Operation of the current limiter and the PID regulator may result in instable behavior, if the
• If the motor is blocked and the ramp generator is not stopped, the motor will speed up and try
Please refer to the programming manual for the required current settings.
Please be careful, when programming a high value into the current regulation loop delay
register: The motor current could reach a very high peak value upon mechanical blocking
of the motor. The same goes for the motor current limit value: do not set higher than
16A if you are not sure about this. Please remark, that the current measurement gives
different results in block and in sine commutation mode, due to the different driving
scheme.
However, this function should not be relied on in normal operating conditions.
on. When using sine commutation, the effective motor current is calculated from a measurement
of all three coils.
set to a too low value, the motor may operate spuriously or become continuously switched off.
The current limit should be programmed to a value high enough, in order to achieve good
positioning and acceleration performance.
motor gets into a resonance area. Try adapting the current regulation loop delay parameter.
to catch up with the ramp generator position after removal of the blocking. To control this effect,
you can set the parameter “Clear Target Distance” in order to stop the ramp generator, when the
deviation between the positions become to large. The effect of this may look somehow weird if
the user does not expect it.
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 19

TMCM-171 Manual (V0.92 / Nov 7th, 2007) 19
6 Revision History
6.1 Documentation Revision
Version Date Author Description
0.90 22-Aug-07 HC Preliminary version
0.91 18-Okt-07 Dw div. tech data
0.92 07-Nov-07 Dw div. tech data + picture of module
Table 6.1: Documentation Revisions
6.2 Firmware Revision
Version Comment Description
0.90 Initial Version Attention: Use Documentation V0.90 or later for connector pinning!!!
0.92 First release Added encoder N-channel initialization
0.93 Added encoder N-channel for automatic correction and encoder error
flag
0.94 Allows specifying of CHA and CHB polarity for nulling of encoder –
uses higher bits of Encoder Null Polarity
1.00 Release 1.0 Added operation mode with hall sensors only.
1.01 Corrected RS485 behavior
1.02 Added stand alone mode feature
1.03 Fixed RS485 delay problem (master had to wait for timeout time before
sending new command), when multiple units share a bus
1.06 First version with Step-/Direction and with TMCL stand alone feature
Table 6.2: Firmware Revision
7 References
[TMCL] TMCL Manual, www.trinamic.com
TMCM–17X Programming Reference and Programming Manual for TMCM-170 and TMCM-171,
www.trinamic.com
Table 7.1: References
Copyright © 2007, TRINAMIC Motion Control GmbH & Co. KG
Page 20

TMCL
Reference and Programming
Manual
Version: 2.22
May 15th, 2008
Trinamic Motion Control GmbH & Co. KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Page 21

TMCL Reference Manual 2
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Version
Date
Author
Comment
2.11
22-Dec-04
OK
Corrections for SCO/GCO/CCO, Code protection feature
2.12
21-Feb-05
OK
ASCII interface included
2.13
22-Mar-05
OK
Minor error corrections
2.14
3-Jun-05
OK
New features of TMCL V3.23 included
2.15
11-Nov-05
OK
TMCM-109 and TMCM-111 added
2.16
20-Dec-05
OK
Features of version TMCL V3.26 and V3.27 included
2.17
22-Jun-06
OK
Error with CCO command corrected
2.18
20-Nov-06
OK
GAP/GGP/GIO/SIO command descriptions extended
2.20
23-Aug-07
OK
Command 138 added, Chapter 8 added
2.21
5-Dec-07
OK
TMCL Debugger added
2.22
5-Jun-08
OK
MVP COORD with TMCM-61x and TMCM-34x added
Version
Contents
1 Introduction ................................................................................................................................................................... 5
2 Basic TMCL Concepts ................................................................................................................................................... 6
2.1 Binary command format ................................................................................................................................... 6
2.1.1 Checksum calculation .............................................................................................................................. 6
2.2 The reply format .................................................................................................................................................. 7
2.2.1 Status codes ............................................................................................................................................... 7
2.3 Stand-alone applications ................................................................................................................................... 7
2.4 TMCL command overview ................................................................................................................................. 7
2.4.1 Motion commands ................................................................................................................................... 7
2.4.2 Parameter commands.............................................................................................................................. 8
2.4.3 I/O port commands .................................................................................................................................. 8
2.4.4 Control commands ................................................................................................................................... 8
2.4.5 Calculation commands ............................................................................................................................ 9
2.5 The ASCII interface ............................................................................................................................................. 9
2.5.1 Format of the command line ................................................................................................................ 9
2.5.2 Format of a reply ...................................................................................................................................... 9
2.5.3 Commands that can be used in ASCII mode ................................................................................ 10
2.5.4 Configuring the ASCII interface ......................................................................................................... 10
3 TMCL Command Dictionary ...................................................................................................................................... 11
3.1 ROR – Rotate Right ........................................................................................................................................... 12
3.2 ROL – Rotate Left ............................................................................................................................................... 13
3.3 MST – Motor Stop ............................................................................................................................................. 14
3.4 MVP – Move to Position .................................................................................................................................. 15
3.5 SAP – Set Axis Parameter ............................................................................................................................... 17
3.6 GAP – Get Axis Parameter .............................................................................................................................. 18
3.7 STAP – Store Axis Parameter ......................................................................................................................... 19
3.8 RSAP – Restore Axis Parameter ..................................................................................................................... 20
3.9 SGP – Set Global Parameter ........................................................................................................................... 21
3.10 GGP – Get Global Parameter .......................................................................................................................... 22
3.11 STGP – Store Global Parameter ..................................................................................................................... 23
3.12 RSGP – Restore Global Parameter ................................................................................................................ 24
3.13 RFS – Reference Search ................................................................................................................................... 25
3.14 SIO – Set Output ............................................................................................................................................... 26
3.15 GIO – Get Input / Output ................................................................................................................................ 28
Page 22

TMCL Reference Manual 3
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
3.16 CALC – Calculate ................................................................................................................................................ 30
3.17 COMP – Compare ............................................................................................................................................... 31
3.18 JC – Jump Conditional ..................................................................................................................................... 32
3.19 JA – Jump Always.............................................................................................................................................. 33
3.20 CSUB – Call Subroutine ................................................................................................................................... 34
3.21 RSUB – Return from Subroutine ................................................................................................................... 35
3.22 WAIT – Wait for an event to occur ............................................................................................................. 36
3.23 STOP – Stop TMCL program execution ....................................................................................................... 38
3.24 SAC – SPI Bus Access....................................................................................................................................... 39
3.25 SCO – Set Coordinate ....................................................................................................................................... 40
3.26 GCO – Get Coordinate ...................................................................................................................................... 41
3.27 CCO – Capture Coordinate .............................................................................................................................. 42
3.28 CALCX – Calculate using the X register ...................................................................................................... 43
3.29 AAP – Accumulator to Axis Parameter ........................................................................................................ 44
3.30 AGP – Accumulator to Global Parameter ................................................................................................... 45
3.31 CLE – Clear Error Flags ..................................................................................................................................... 46
3.32 User definable commands (UF0..UF7) .......................................................................................................... 47
3.33 Request target position reached event ...................................................................................................... 48
3.34 BIN – Return to Binary Mode ........................................................................................................................ 49
3.35 TMCL Control Functions ................................................................................................................................... 50
4 Axis Parameters .......................................................................................................................................................... 52
4.1 Basic axis parameters (all TMCL stepper motor modules except the TMCM-100 module and the Monopack
2) ............................................................................................................................................................................ 52
4.2 Advanced axis parameters (all TMCL stepper motor modules except the TMCM-100) .................. 53
4.3 Axis parameters on the TMCM-100 and on the Monopack 2................................................................ 56
5 Global Parameters ...................................................................................................................................................... 59
5.1 Bank 0 ................................................................................................................................................................... 59
5.2 Bank 1 ................................................................................................................................................................... 62
5.3 Bank 2 ................................................................................................................................................................... 63
6 Hints and Tips ............................................................................................................................................................. 64
6.1 Reference search with TMCM-3xx / 10x / 11x / 61x modules ................................................................ 64
6.2 Reference search with TMCM-100 modules ............................................................................................... 65
6.3 Using an incremental encoder with TMCM-100 modules ...................................................................... 65
6.3.1 Setting the resolution ........................................................................................................................... 65
6.3.2 Deviation detection ................................................................................................................................ 66
6.3.3 Position correction ................................................................................................................................. 66
6.4 Stall Detection (TMCL Version 3.06 or higher) .......................................................................................... 66
6.5 Fixing microstep errors (TMCL V3.13 or higher) ....................................................................................... 67
6.6 Using the RS485 interface ............................................................................................................................... 67
7 The TMCL IDE ............................................................................................................................................................... 68
7.1 Installation .......................................................................................................................................................... 68
7.2 Getting started ................................................................................................................................................... 69
7.3 The integrated editor ....................................................................................................................................... 69
7.4 The “File” menu ................................................................................................................................................. 69
7.4.1 New ............................................................................................................................................................. 69
7.4.2 Open ........................................................................................................................................................... 69
7.4.3 Save, Save as ........................................................................................................................................... 69
7.4.4 Save all ...................................................................................................................................................... 69
7.4.5 Close ........................................................................................................................................................... 69
7.4.6 Exit .............................................................................................................................................................. 69
7.5 The “TMCL” menu .............................................................................................................................................. 69
7.5.1 Basics.......................................................................................................................................................... 69
7.5.2 Direct mode .............................................................................................................................................. 70
7.5.3 Assemble a TMCL program .................................................................................................................. 70
7.5.4 Downloading the program .................................................................................................................. 71
Page 23

TMCL Reference Manual 4
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
7.5.5 The “Main file” function ........................................................................................................................ 71
7.5.6 The “Start” function ............................................................................................................................... 71
7.5.7 The “Stop” function ................................................................................................................................ 71
7.5.8 The “Continue” function ....................................................................................................................... 71
7.5.9 Disassembling a TMCL program ......................................................................................................... 71
7.6 The “Setup” menu ............................................................................................................................................. 72
7.6.1 Options ...................................................................................................................................................... 72
7.6.2 Configure ................................................................................................................................................... 73
7.6.3 Search ......................................................................................................................................................... 76
7.6.4 Install OS .................................................................................................................................................. 76
7.6.5 StallGuard adjusting tool ..................................................................................................................... 77
7.6.6 StallGuard profiler .................................................................................................................................. 77
7.6.7 Parameter calculation tool ................................................................................................................... 78
7.7 The TMCL debugger .......................................................................................................................................... 79
7.7.1 Starting the debugger ........................................................................................................................... 79
7.7.2 Breakpoints ............................................................................................................................................... 79
7.7.3 The “Run / Continue” function............................................................................................................ 79
7.7.4 The “Pause” function ............................................................................................................................. 80
7.7.5 The “Step” function ................................................................................................................................ 80
7.7.6 The “Animate” function ........................................................................................................................ 80
7.7.7 The “Stop / Reset” function ................................................................................................................. 80
7.7.8 The “Direct Mode” function in the debugger ................................................................................. 80
7.8 The syntax of TMCL in the TMCL assembler .............................................................................................. 80
7.8.1 Assembler directives .............................................................................................................................. 80
7.8.2 Symbolic constants ................................................................................................................................ 81
7.8.3 Constant expressions ............................................................................................................................. 81
7.8.4 Labels ......................................................................................................................................................... 82
7.8.5 Comments ................................................................................................................................................. 82
7.8.6 TMCL Commands ..................................................................................................................................... 82
8 TMCL Programming Techniques ............................................................................................................................. 84
8.1 General structure of a TMCL program ......................................................................................................... 84
8.1.1 Initialization ............................................................................................................................................. 84
8.1.2 Main loop .................................................................................................................................................. 84
8.2 Using symbolic constants ............................................................................................................................... 84
8.3 Using variables................................................................................................................................................... 85
8.4 Using subroutines ............................................................................................................................................. 85
8.5 Mixing direct mode and stand alone mode .............................................................................................. 85
Copyright 2003 - 2008 by Trinamic Motion Control GmbH & Co KG, Germany
All rights reserved. No part of the contents of this book may be reproduced or transmitted in any form or by any
means without the written permission of the publisher. Information given in this book is believed to be accurate
and reliable. However no responsibility is assumed for the consequences of its use or for any infringement of
patents or other rights of third parties which may result from its use. Specifications are subject to change without
notice.
Page 24

TMCL Reference Manual 5
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
1 Introduction
The Trinamic Motion Control Language (TMCL) provides a set of structured motion control commands. Every motion
control command can be given by a host computer or can be stored in an EEPROM on the TMCM module to form
programs that run stand alone on a module. For this purpose there are not only motion control commands but
also commands to control the program structure (like conditional jumps, compare and calculating). So, TMCL forms
a powerful language that can either be used to control a module directly from a host (direct mode) or to program
applications that run on a stand-alone module (program mode or stand-alone mode).
Every command has a binary representation and a mnemonic. The binary format is used to send commands from
the host to a module in direct mode, whereas the mnemonic format is used for easy usage of the commands
when developing stand-alone TMCL applications using the TMCL IDE (IDE means “Integrated Development
Environment”).
There is also a set of configuration variables for every axis and for global parameters which allow individual
configuration of nearly every function of a module.
This manual gives a detailed description of all TMCL commands and their usage. It also describes how to use the
TMCL IDE.
Page 25

TMCL Reference Manual 6
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Bytes
Meaning
1
Module address
1
Command number
1
Type number
1
Motor or Bank number
4
Value (MSB first!)
1
Checksum
2 Basic TMCL Concepts
2.1 Binary command format
Every command has a mnemonic and a binary representation. When commands are sent from a host to a module,
the binary format has to be used. Every command consists of a one-byte command field, a one-byte type field, a
one-byte motor/bank field and a four-byte value field. So the binary representation of a command always has
seven bytes. When a command is to be sent via RS232 or RS485 interface, it has to be enclosed by an address byte
at the beginning and a checksum byte at the end. So it then consists of nine bytes. This is not the case when
communicating via the CAN bus as address and checksum are included in the CAN standard in do not have to be
supplied by the user.
When using a module with IIC interface the first byte (address byte) is left out because IIC has its own addressing
scheme. So for IIC the telegram consists of eight bytes, starting with the command byte.
So the binary command format when using RS232 or RS485 is as follows:
The checksum is calculated by adding up all the other bytes using an 8-bit addition. When using CAN bus, just
leave out the first byte (module address) and the last byte (checksum). When using IIC, leave out the first byte.
2.1.1 Checksum calculation
As mentioned above, the checksum is calculated by adding up all bytes (including the module address byte) using
8-bit addition. Here are two examples to show how to do this:
in C:
unsigned char i, Checksum;
unsigned char Command[9];
//Set the “Command” array to the desired command
Checksum = Command[0];
for(i=1; i<8; i++)
Checksum+=Command[i];
Command[8]=Checksum; //insert checksum as last byte of the command
//Now, send it to the module
in Delphi:
var
i, Checksum: byte;
Command: array[0..8] of byte;
//Set the “Command” array to the desired command
//Calculate the Checksum:
Checksum:=Command[0];
for i:=1 to 7 do Checksum:=Checksum+Command[i];
Command[8]:=Checksum;
//Now, send the “Command” array (9 bytes) to the module
Page 26

TMCL Reference Manual 7
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Bytes
Meaning
1
Reply address
1
Module address
1
Status (e.g. 100 means “no error”)
1
Command number
4
Value (MSB first!)
1
Checksum
Code
Meaning
100
Successfully executed, no error
101
Command loaded into TMCL
program EEPROM
1
Wrong checksum
2
Invalid command
3
Wrong type
4
Invalid value
5
Configuration EEPROM locked
6
Command not available
2.2 The reply format
Every time a command has been sent to a module, the module sends a reply. When using RS232 or RS485 the
format of the reply is as follows:
The checksum is also calculated by adding up all the other bytes using an 8-bit addition. When using CAN bus, the
first byte (reply address) and the last byte (checksum) are left out. When using IIC bus the first byte (reply address)
is left out. Do not send the next command before you have received the reply!
2.2.1 Status codes
The reply contains a status code. This status code can have one of the following values:
2.3 Stand-alone applications
When the module which is used is equipped with an EEPROM to store TMCL applications, the TMCL-IDE can be
used to develop stand-alone TMCL applications that can be downloaded into the EEPROM of the module and then
run on the module. The TMCL IDE contains an editor and a “TMCL assembler” where the commands can be entered
using their mnemonic format and then assembled to their binary representations. This code can then be
downloaded into the module to be executed there. The TMCL IDE is described in detail in chapter 7 of this manual.
2.4 TMCL command overview
In this section an overview of the TMCL commands is given. All commands are described in detail in chapter 3.
Some TMCL programming techniques are given in chapter 8.
2.4.1 Motion commands
These commands control the motion of the motors. They are the most important commands and can be used in
direct mode or in stand-alone mode.
Page 27

TMCL Reference Manual 8
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Mnemonic
Command
number
Meaning
ROL
2
Rotate left
ROR
1
Rotate right
MVP
4
Move to position
MST
3
Motor stop
RFS
13
Reference search
SCO
30
Store coordinate
CCO
32
Capture coordinate
GCO
31
Get coordinate
Mnemonic
Command
number
Meaning
SAP
5
Set axis parameter
GAP
6
Get axis parameter
STAP
7
Store axis parameter into EEPROM
RSAP
8
Restore axis parameter from EEPROM
SGP
9
Set global parameter
GGP
10
Get global parameter
STGP
11
Store global parameter into EEPROM
RSGP
12
Restore global parameter from EEPROM
Mnemonic
Command
number
Meaning
SIO
14
Set output
GIO
15
Get input
SAC
29
Access to external SPI device
Mnemonic
Command
number
Meaning
JA
22
Jump always
JC
21
Jump conditional
COMP
20
Compare accumulator with constant
value
CLE
36
Clear error flags
CSUB
23
Call subroutine
RSUB
24
Return from subroutine
WAIT
27
Wait for a specified event
STOP
28
End of a TMCL program
2.4.2 Parameter commands
These commands are used to set, read and store axis parameters or global parameters. Axis parameters can be set
independently for every axis, whereas global parameters control the behaviour of the module itself. These
commands can also be used in direct mode and in stand-alone mode.
2.4.3 I/O port commands
These commands control the external I/O ports and can be used in direct mode and in stand-alone mode.
2.4.4 Control commands
These commands are used to control the program flow (loops, conditions, jumps etc.). It does not make sense to
use them in direct mode. They are intended for stand-alone mode only.
Page 28

TMCL Reference Manual 9
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Mnemonic
Command
number
Meaning
CALC
19
Calculate using the accumulator and a
constant value
CALCX
33
Calculate using the accumulator and the
X register
AAP
34
Copy accumulator to an axis parameter
AGP
35
Copy accumulator to a global parameter
2.4.5 Calculation commands
These commands are intended to be used for calculations within TMCL applications. Although they could also be
used in direct mode it does not make much sense to do so.
For calculating purposes there is an accumulator (or accu or A register) and an X register. When executed in a
TMCL program (in stand-alone mode), all TMCL commands that read a value store the result in the accumulator.
The X register can be used as an additional memory when doing calculations. It can be loaded from the
accumulator.
When a command that reads a value is executed in direct mode the accumulator will not be affected. This means
that while a TMCL program is running on the module (stand-alone mode), a host can still send commands like
GAP, GGP or GIO to the module (e.g. to query the actual position of the motor) without affecting the flow of the
TMCL program running on the module.
2.5 The ASCII interface
Since TMCL V3.21 there is also an ASCII interface that can be used to communicate with the module and to send
some commands as text strings. The ASCII command line interface is entered by sending the binary command 139
(enter ASCII mode). The commands are then entered as in the TMCL IDE, but not all commands can be entered in
ASCII mode. Only those commands that can be used in direct mode can also be entered in ASCII mode.
To leave the ASCII mode and re-enter the binary mode enter the command “BIN”.
2.5.1 Format of the command line
As the first character, the address character has to be sent. The address character is “A” when the module address
is 1, “B” for modules with address 2 and so on. After the address character there may be spaces (but this is not
necessary). Then, send the command with its parameters. At the end of a command line a <CR> character has to be
sent. Here are some examples for valid command lines:
AMVP ABS, 1, 50000
A MVP ABS, 1, 50000
AROL 2, 500
A MST 1
ABIN
These command would all address the module with address 1. To address e.g. module 3, use address character “C”
instead of “A”. The last command line shown above will make the module return to binary mode.
2.5.2 Format of a reply
After executing the command the module sends back a reply in ASCII format. This reply consists of:
the address character of the host (host address that can be set in the module)
the address character of the module
the status code as a decimal number
the return value of the command as a decimal number
a <CR> character
Page 29

TMCL Reference Manual 10
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
So, after sending AGAP 0, 1 the reply would be BA 100 –5000 if the actual position of axis 1 is –5000, the
host address is set to 2 and the module address is 1. The value “100” is the status code 100 that means “command
successfully executed”.
2.5.3 Commands that can be used in ASCII mode
The following commands can be used in ASCII mode: ROL, ROR, MST, MVP, SAP, GAP, STAP, RSAP, SGP, GGP, STGP,
RSGP, RFS, SIO, GIO, SAC, SCO, GCO, CCO, UF0, UF1, UF2, UF3, UF4, UF5, UF6, UF7.
There are also special commands that are only available in ASCII mode:
BIN: This command quits ASCII mode and returns to binary TMCL mode.
RUN: This command can be used to start a TMCL program in memory.
STOP: Stops a running TMCL application.
2.5.4 Configuring the ASCII interface
The module can be configured so that it starts up either in binary mode or in ASCII mode. Global parameter 67 is
used for this purpose (please see also chapter 5.1). Bit 0 determines the startup mode: if this bit is set, the module
starts up in ASCII mode, else it will start up in binary mode (default). Bit 4 and Bit 5 determine how the characters
that are entered are echoed back. Normally, both bits are set to zero. In this case every character that is entered is
echoed back when the module is addressed. Character can also be erased using the backspace character (press the
backspace key in a terminal program). When bit 4 is set and bit 5 is clear the characters that are entered are not
echoed back immediately but the entire line will be echoed back after the <CR> character has been sent. When bit
5 is set and bit 4 is clear there will be no echo, only the reply will be sent. This may be useful in RS485 systems.
Page 30

TMCL Reference Manual 11
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
3 TMCL Command Dictionary
This chapter describes all TMCL commands. The commands are sorted by their command numbers. For every
command the mnemonic with its syntax and the binary representation are given.
Ranges for the parameters are also given. They sometimes differ between the types of the modules. If this is the
case, value ranges are given for every module.
Last but not least some examples are given at the end of every command description. In the examples for the
binary representation always RS232/RS485 communication (9 byte) format is used with module address 1 and host
address 2. When using CAN bus communication just leave out the first and the last byte (as mentioned in chapter
2.1).
Page 31
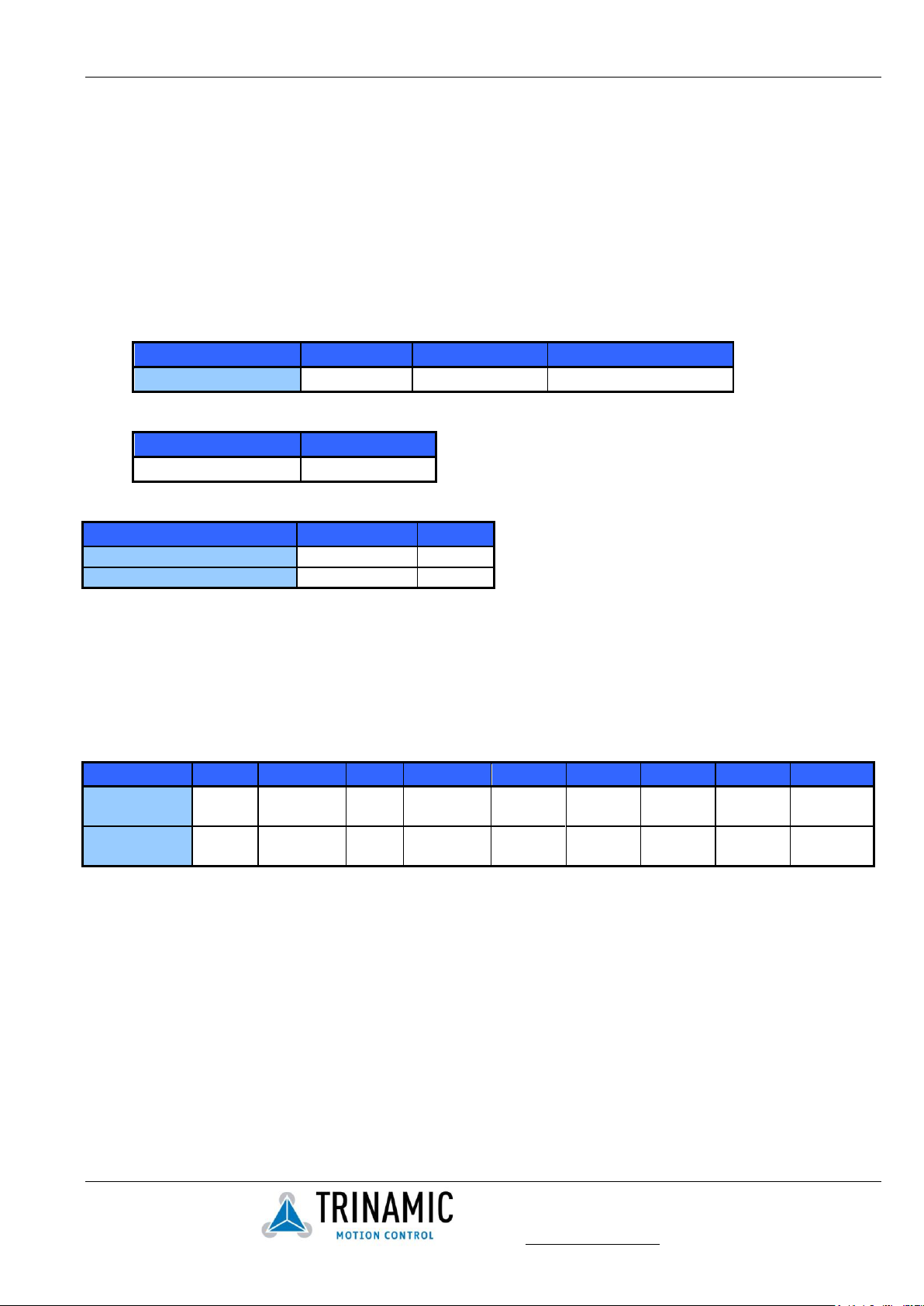
TMCL Reference Manual 12
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
1
(don't care)
<motor number>
<velocity>
STATUS
VALUE
100 – OK
(don't care)
Module
Motor number
Velocity
TMCM-300/301/302/303/310
0..2
0..2047
TMCM-100
always 0
0..8191
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$01
$00
$02
$00
$00
$01
$5e
$62
3.1 ROR – Rotate Right
Description: This instruction starts rotation in "right" direction, i.e. increasing the position counter.
Internal function: First, velocity mode is selected. Then, the velocity value is transferred to axis parameter #0
("target velocity").
Related commands: ROL, MST, SAP, GAP
Mnemonic: ROR <motor number>, <velocity>
Binary representation:
Reply in direct mode:
Parameter ranges:
Example:
Rotate right, motor #2, velocity = 350
Mnemonic: ROR 2, 350
Binary:
Note for TMCM-300/301/302/303/310 modules:
Adjust the axis parameter "pulse divisor" (no. 154, see Chapter 5), if the speed value is very low (<50) or above the
upper limit (2047). See TMC 428 datasheet (p.24) for calculation of physical units.
Note for TMCM-100 modules:
Adjust the axis parameter “pre-divider” if the speed is not within the desired range.
Note:
With some modules it is possible to use stall detection. Please see section 6.4 for details.
Page 32

TMCL Reference Manual 13
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
2
(don't care)
<motor number>
<velocity>
STATUS
VALUE
100 – OK
(don't care)
Module
Motor number
Velocity
TMCM-300/301/302/303/310
0..2
0..2047
TMCM-100
always 0
0..8191
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$02
$00
$01
$00
$00
$04
$b0
$b8
3.2 ROL – Rotate Left
Description: This instruction starts rotation in "left" direction, i.e. decreasing the position counter.
Internal function: First, velocity mode is selected. Then, the velocity value is transferred to axis parameter #0
("target velocity").
Related commands: ROR, MST, SAP, GAP
Mnemonic: ROL <motor number>, <velocity>
Binary representation:
Reply in direct mode:
Parameter ranges:
Example:
Rotate left, motor #1, velocity = 1200
Mnemonic: ROL 1, 1200
Binary:
Note for TMCM-300/301/302/303/310 modules:
Adjust the axis parameter "pulse divisor" (no. 154, see Chapter 5), if the speed value is very low (<50) or above the
upper limit (2047). See TMC 428 datasheet (p.24) for calculation of physical units.
Note for TMCM-100 modules:
Adjust the axis parameter “pre-divider” if the speed is not within the desired range.
Note:
With some modules it is possible to use stall detection. Please see section 6.4 for details.
Page 33

TMCL Reference Manual 14
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
3
(don't care)
<motor number>
(don't care)
STATUS
VALUE
100 – OK
(don't care)
Module
Motor number
TMCM-300/301/302/303/310
0..2
TMCM-100
always 0
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$03
$00
$01
$00
$00
$00
$00
$05
3.3 MST – Motor Stop
Description: This instruction stops the motor.
Internal function: the axis parameter "target velocity" is set to zero.
Related commands: ROL, ROR, SAP, GAP
Mnemonic: MST <motor number>
Binary representation:
Reply in direct mode:
Parameter ranges:
Example: Stop motor #1
Mnemonic: MST 1
Binary:
Note:
With some modules it is possible to use stall detection. Please see section 6.4 for details.
Page 34

TMCL Reference Manual 15
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
4
0 ABS – absolute
<motor number>
<position>
1 REL – relative
<motor number>
<offset>
2 COORD –
coordinate
0 motor 0
1 motor 1
2 motor 2
TMCM-301, 302,
303, 310:
3 (not allowed)
4 motors 0&1
5 motors 1&2
6 motors 0&2
7 motors 0,1,2
TMCM-6xx, 34x:
see below
<coordinate number
(0..20)
(Version >=3.17: 0..56)>
STATUS
VALUE
100 – OK
(don't care)
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
3.4 MVP – Move to Position
Description: A movement towards the specified position is started, with automatic generation of acceleration- and
deceleration ramps. The maximum velocity and acceleration are defined by axis parameters #4 and #5.
Three operation types are available:
- Moving to an absolute position in the range from - 8388608 to +8388608 (-223 to+223).
- Starting a relative movement by means of an offset to the actual position. In this case, the resulting
new position value must not exceed the above mentioned limits, too.
- Moving one or more motors to a (previously stored) coordinate, see SCO (section 3.25) for details. When moving
more than one axis the module will try to interpolate: The velocities will be calculated so that all motors reach
their target positions at the same time. It is important that the maximum accelerations (axis parameter #5) and the
ramp and pulse dividers (axis parameters #153 and #154) of all axes are set to the same values as otherwise
interpolation will not work correctly. With TMCM-100 modules there is no interpolation as it controls only one axis.
Internal function: A new position value is transferred to the axis parameter #2 target position”.
Related commands: SAP, GAP, SCO, CCO, GCO, MST
Mnemonic: MVP <ABS|REL|COORD>, <motor number>, <position|offset|coordinate number>
Binary representation:
Reply in direct mode:
Parameter ranges: The <motor number> parameter depends on the module type: always 0 on single axis modules,
0..2 on three axis modules and 0..5 on six axis modules. With MVP COORD, the motor number is interpreted
differently.
Examples:
Move motor #1 to (absolute) position 90000
Mnemonic: MVP ABS, 1, 9000
Binary:
Page 35

TMCL Reference Manual 16
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Value (hex)
$01
$04
$00
$01
$00
$01
$5f
$90
$f6
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$04
$01
$00
$ff
$ff
$fc
$18
$18
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$04
$02
$02
$00
$00
$00
$08
$11
Move motor #0 from current position 1000 steps backward (move relative –1000)
Mnemonic: MVP REL, 0, -1000
Move motor #2 to previously stored coordinate #8
Mnemonic: MVP COORD, 2, 8
Binary:
Note:
With some modules it is possible to use stall detection. Please see section 6.4 for details.
MVP COORD on TMCM-6xx and TMCM-34x modules
On these modules, there are some more options for the MVP COORD command. For this reason the “motor”
parameter with the MVP COORD command is interpreted as follows on those modules:
Moving only one motor: set the “Motor” parameter to the motor number (0..5).
Moving multiple motors without interpolation: Set bit 7 of the “Motor” parameter. Now the bits 0..5 of
the “Motor” parameter define which motors are to be started. Each of these bits stands for one motor.
Moving multiple motors using interpolation: Set bit 6 of the “Motor” parameter. . Now the bits 0..5 of
the “Motor” parameter define which motors are to be moved using interpolation. Each of these bits
stands for one motor. It is not possible to start a group of more than three motors using
interpolation. However, it is possible to start one group of three motors right after starting a group of
other three motors.
On the TMCM-610/611/612 modules the interpolation feature is not available in firmware versions prior to 6.31.
On the TMCM-341/342/343 modules the interpolation feature is available in all firmware versions that have been
released for these modules.
Examples:
MVP COORD, $47, 2 moves motors 0, 1 and 2 to coordinate 2 using interpolation.
MVP COORD, $87, 5 moves motors 0, 1 and 2 to coordinate 5 without using interpolation.
Page 36

TMCL Reference Manual 17
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
5
<parameter
number>
<motor number>
<value>
STATUS
VALUE
100 – OK
(don't care)
Module
Parameter number
Motor number
Value
TMCM-300/301/302/303/310
s. chapter 4
0..2
s. chapter 4
TMCM-100
s. chapter 4
always 0
s. chapter 4
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$05
$06
$01
$00
$00
$00
$c8
$d5
3.5 SAP – Set Axis Parameter
Description: Most parameters of a TMCM module can be adjusted individually for each axis. Although these
parameters vary widely in their formats (1 to 24 bits, signed or unsigned) and physical locations (TMC428, TMC453,
controller RAM, controller EEPROM), they all can be set by this function. See chapter 4 for a complete list of all
axis parameters. See STAP (section 3.7) for permanent storage of a modified value.
Internal function: the parameter format is converted ignoring leading zeros (or ones for negative values). The
parameter is transferred to the correct position in the appropriate device.
Related commands: GAP, STAP, RSAP , AAP
Mnemonic: SAP <parameter number>, <motor number>, <value>
Binary representation:
Reply in direct mode:
Parameter ranges:
Example:
set the absolute maximum current of motor #1 to 200mA
Mnemonic: SAP 6, 1, 200
Binary:
Note:
The parameter numbers are different in TMCL firmware versions before 2.18. Please upgrade to a newer
firmware version if you have such an old version.
Page 37

TMCL Reference Manual 18
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
6
<parameter number>
<motor number>
(don't care)
STATUS
VALUE
100 – OK
(don't care)
Module
Parameter number
Motor number
TMCM-300/301/302/303/310
s. chapter 4
0..2
TMCM-100
s. chapter 4
always 0
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$06
$01
$02
$00
$00
$00
$00
$0a
Byte Index
0 1 2 3 4 5 6 7 8
Function
Hostaddress
Targetaddress
Status
Instruction
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$02
$01
$64
$06
$00
$00
$02
$c7
$36
3.6 GAP – Get Axis Parameter
Description: Most parameters of a TMCM module can be adjusted individually for each axis. Although these
parameters vary widely in their formats (1 to 24 bits, signed or unsigned) and physical locations (TMC428, TMC453,
controller RAM, controller EEPROM), they all can be read by this function. In stand-alone mode the requested value
is also transferred to the accumulator register for further processing purposes such as conditioned jumps. In direct
mode, the value read is only output in the “value” field of the reply, without affecting the accumulator. See
chapter 4 for a complete list of all parameters.
Internal function: The parameter is read out of the correct position in the appropriate device. The parameter
format is converted adding leading zeros (or ones for negative values).
Related commands: SAP, STAP, AAP, RSAP
Mnemonic: GAP <parameter number>, <motor number>
Binary representation:
Reply in direct mode:
Parameter ranges:
Example: get the actual position of motor #2
Mnemonic: GAP 2, 1
Binary:
Reply:
status=no error, position=711
Page 38

TMCL Reference Manual 19
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
7
<parameter number>
<motor number>
(don't care)*
STATUS
VALUE
100 – OK
(don't care)
Parameter number
Motor number
Value
s. chapter 4
0..2
s. chapter 4
s. chapter 4
always 0
s. chapter 4
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$07
$04
$01
$00
$00
$00
$00
$0d
3.7 STAP – Store Axis Parameter
Description: Axis parameters are located in RAM memory, so modifications are lost at power down. This
instruction enables permanent storing. Most parameters are automatically restored after power up (see axis
parameter list in chapter 4).
Internal function: The specified parameter is copied from its RAM location the configuration EEPROM.
Related commands: SAP, RSAP, GAP, AAP
Mnemonic: STAP <parameter number>, <motor number>
Binary representation:
*the "value" operand of this function has no effect. Instead, the currently used value (e.g. selected by SAP) is
saved.
Reply in direct mode:
Parameter ranges:
Example: store the maximum speed of motor #1
Mnemonic: STAP 4, 1
Binary:
Note: The STAP command will not have any effect when the configuration EEPROM is locked (s. 5.1, “EEPROM lock
flag” and section 7.6.2.5). In direct mode, the error code 5 (configuration EEPROM locked, see also section 2.2.1) will
be returned in this case.
Page 39

TMCL Reference Manual 20
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
8
<parameter number>
<motor number>
(don't care)
STATUS
VALUE
100 – OK
(don't care)
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$08
$06
$01
$00
$00
$00
$00
$10
3.8 RSAP – Restore Axis Parameter
Description: For all configuration-related axis parameters, non-volatile memory locations are provided. By default,
most parameters are automatically restored after power up (see axis parameter list in chapter 4). A single
parameter that has been changed before can be reset by this instruction.
Internal function: The specified parameter is copied from the configuration EEPROM memory to its RAM location.
Relate commands: SAP, STAP, GAP, AAP
Mnemonic: RSAP <parameter number>, <motor number>
Binary representation:
Reply structure in direct mode:
Example: restore the maximum current of motor #1
Mnemonic: RSAP 6, 1
Binary:
Page 40

TMCL Reference Manual 21
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
9
<parameter
number>
<bank number>
<value>
STATUS
VALUE
100 – OK
(don't care)
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$09
$42
$00
$00
$00
$00
$03
$4f
3.9 SGP – Set Global Parameter
Description: Global parameters are related to the host interface, peripherals or application specific variables. The
different groups of these parameters are organised in "banks" to allow a larger total number for future products.
Currently, only bank 0 and 1 are used for global parameters, and bank 2 is used for user variables. See chapter 0
for a complete parameter list.
Internal function: the parameter format is converted ignoring leading zeros (or ones for negative values). The
parameter is transferred to the correct position in the appropriate (on board) device.
Related commands: GGP, STGP, RSGP, AGP
Mnemonic: SGP <parameter number>, <bank number>, <value>
Binary representation:
Reply in direct mode:
Example: set the serial address of the target device to 3
Mnemonic: SGP 66, 0, 3
Binary:
Page 41

TMCL Reference Manual 22
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
10
(see chapter 6)
<bank number>
see chapter 6
(don't care)
STATUS
VALUE
100 – OK
(don't care)
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$0a
$42
$00
$00
$00
$00
$00
$4d
Byte Index
0 1 2 3 4 5 6 7 8
Function
Hostaddress
Targetaddress
Status
Instruction
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$02
$01
$64
$0a
$00
$00
$00
$01
$72
3.10 GGP – Get Global Parameter
Description: All global parameters can be read with this function. In stand-alone mode, the result is copied to the
accumulator register for further processing purposes such as conditional jumps. In direct mode, the result is only
output in the “value” field of the reply, without affecting the accumulator. See chapter 0 for a complete parameter
list.
Internal function: The parameter is read out of the correct position in the appropriate device. The parameter
format is converted adding leading zeros (or ones for negative values).
Related commands: SGP, STGP, RSGP, AGP
Mnemonic: GGP <parameter number>, <bank number>
Binary representation:
Reply in direct mode:
Example: get the serial address of the target device
Mnemonic: GGP 66, 0
Binary:
Reply:
Status=no error, Value=1
Page 42

TMCL Reference Manual 23
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
11
(see chapter 6)
<bank number>
(see chapter 6)
(don't care)
STATUS
VALUE
100 – OK
(don't care)
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$0b
$42
$00
$00
$00
$00
$00
$4e
3.11 STGP – Store Global Parameter
Description: Some global parameters are located in RAM memory, so modifications are lost at power down. This
instruction enables permanent storing. Most parameters are automatically restored after power up (see the list of
global parameters in chapter 0).
Internal function: The specified parameter is copied from its RAM location to the configuration EEPROM.
Related commands: SGP, GGP, RSGP, AGP
Mnemonic: STGP <parameter number>, <bank number>
Binary representation:
Reply in direct mode:
Example: store the serial address of the target device
Mnemonic: STGP 42, 0
Binary:
Note: The STGP command will not have any effect when the configuration EEPROM is locked (s. 5.1, “EEPROM lock
flag” and section 7.6.2.5). In direct mode, the error code 5 (configuration EEPROM locked, see also section 2.2.1) will
be returned in this case.
Page 43

TMCL Reference Manual 24
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
12
<parameter number>
<bank number>
(don't care)
STATUS
VALUE
100 – OK
(don't care)
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$0c
$42
$00
$00
$00
$00
$00
$4f
3.12 RSGP – Restore Global Parameter
Description: This instruction recovers the (permanently) stores the value of a RAM-located parameter. Please see
chapter 0 for a list of available parameters.
Internal function: The specified parameter is copied from the configuration EEPROM to its RAM location.
Related commands: SGP, STGP, GGP, AGP
Mnemonic: RSGP <parameter number>, <motor number>
Binary representation:
Reply in direct mode:
Example: restore the serial address of the device
Mnemonic: RSGP 66, 0
Binary:
Page 44

TMCL Reference Manual 25
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
13
0 START – start ref. search
1 STOP – abort ref. search
2 STATUS – get status
<motor number>
(don't care)
STATUS
VALUE
100 – OK
(don't care)
STATUS
VALUE
100 – OK
0 – no ref. search active
other values – ref.
search is active
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$0d
$00
$01
$00
$00
$00
$00
$0f
3.13 RFS – Reference Search
Description: A build-in reference point search algorithm can be started (and stopped). The reference search
algorithm provides switching point calibration and three switch modes. The status of the reference search can also
be queried to see if it has already finished. (In a TMCL program it is better to use the WAIT command to wait for
the end of a reference search.) Please see the appropriate parameters in the axis parameter table to configure the
reference search algorithm to meet your needs (chapter 4). The reference search can be started or stopped, or the
actual status of the reference search can be checked.
Internal function: The reference search is implemented as a state machine, so interaction is possible during
execution.
Related commands: WAIT
Mnemonic: RFS <START|STOP|STATUS>, <motor number>
Binary representation:
Reply in direct mode:
When using type 0 (START) or 1 (STOP):
When using type 2 (STATUS):
Example: start reference search of motor #1
Mnemonic: RFS START, 1
Binary:
Note:
With some modules it is possible to use stall detection instead of a reference switch. Please see section 6.4 for
details.
Page 45

TMCL Reference Manual 26
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
14
<port number>
<bank number>
<value>
STATUS
VALUE
100 – OK
(don't care)
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$0e
$07
$02
$00
$00
$00
$01
$19
Type
I/O line
Range
0
DOUT0
0/1 1
DOUT1
0/1
2
DOUT2
0/1 3
DOUT3
0/1
4
DOUT4
0/1 5 DOUT5
0/1
6
DOUT6
0/1 7
DOUT7
0/1
3.14 SIO – Set Output
Description: This command sets the status of a digital output either to low (0) or to high (1). Please see the list of
the outputs in this section.
Internal function: The passed value is transferred to the specified output line.
Related commands: GIO, WAIT
Mnemonic: SIO <port number>, <bank number>, <value>
Binary representation:
Reply structure:
Example: turn the LED on the TMCM-300 base board off (bank 2, line 7)
Mnemonic: SIO 7, 2, 1
Binary:
Overview of available output ports:
With the TMCM-100/301/302/303/310/610 and TMCM-300 modules, only bank 2 is available and contains 8 output
lines:
Please see the manuals of the individual modules for detailed electrical description of the output ports of a
module.
Extension in TMCL version 3.23:
On the TMCM-301/302/303/310 and 61x modules it is now also possible to switch the pull-up resistors on the
inputs on and off. When using the inputs as digital inputs it is often useful to have the pull-up resistors switched
on, but when using the inputs as analogue inputs the pull-up resistors must be switched of. For this purpose, set
the bank parameter to 0 and the type parameter to the number of the desired input (please see the GIO command
for a list of the input numbers). Set the value parameter to 0 to switch off and to 1 to switch on a pull-up resistor.
The pull-up resistors are switched off by default.
Page 46

TMCL Reference Manual 27
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Extension in TMCL version 3.30 and 6.22:
On the TMCM-3xx, TMCM-34x and TMCM-61x modules it is now possible to address all eight output lines with one
single SIO command. This can be done by setting the type parameter to 255 and the bank parameter to 2. The
value parameter must then be set to a value between 0..255, where every bit represents one output line.
Furthermore, the value can also be set to –1. In this special case, the contents of the lower 8 bits of the
accumulator are copied to the eight output pins.
Example: SIO 255, 2, 255 sets all output pins high.
The following program will show the states of the eight input lines on the output lines:
Loop: GIO 255, 0
SIO 255,2,-1
JA Loop
Page 47

TMCL Reference Manual 28
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
15
<port number>
<bank number>
(don't care)
STATUS
VALUE
100 – OK
<status of the
port>
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$0f
$03
$01
$00
$00
$00
$00
$14
Byte Index
0 1 2 3 4 5 6 7 8
Function
Hostaddress
Targetaddress
Status
Instruction
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$02
$01
$64
$0f
$00
$00
$01
$fa
$72
3.15 GIO – Get Input / Output
Description: This function reads a digital or analogue input port. So, digital lines will read 0 and 1, while the ADC
channels deliver their 10 bit result in the range of 0…1023. In stand-alone mode the requested value is copied to
the "accumulator" (accu) for further processing purposes such as conditioned jumps. In direct mode the value is
only output in the “value” field of the reply, without affecting the accumulator. The actual status of a digital output
line can also be read.
Internal function: The specified line is read.
Related commands: SIO, WAIT
Mnemonic: GIO <port number>, <bank number>
Binary representation:
Reply in direct mode:
Example: get the analogue value of ADC channel 3
Mnemonic: GIO 3, 1
Binary:
Reply:
value: 506
Page 48

TMCL Reference Manual 29
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Type
I/O line
Range
0
ADIN0
0/1
1
ADIN1
0/1 2 ADIN2
0/1
3
ADIN3
0/1 4 ADIN4
0/1
5
ADIN5
0/1 6 ADIN6
0/1
7
ADIN7
0/1 8 OPTO1
0/1
9
OPTO2
0/1
10
SHUTDOWN
0/1
Type
I/O line
Range
0
ADIN0
0…1023
1
ADIN1
0…1023
2
ADIN2
0…1023
3
ADIN3
0…1023
4
ADIN4
0…1023
5
ADIN5
0…1023
6
ADIN6
0…1023
7
ADIN7
0…1023
Overview of available input ports:
I/O bank 0 – digital inputs. The ADIN lines can be read as digital or analogue inputs at the same time. The
analogue values can be accessed in bank 1.
Note: When using a digital input it is often useful to switch on its pull-up resistor. Please see the SIO command
on how to do this.
I/O bank 1 – analogue inputs (not on all modules). The ADIN lines can be read as digital or analogue inputs at the
same time. The digital states can be accessed in bank 0.
Note: When using an input in analogue mode its pull-up resistor must be switched off. Please see the SIO
command on how to do this.
I/O bank 2: here, the status of the digital outputs (see section 3.14) can be read back.
Note: Not all I/O lines are available on every module. Please see the documentation of the individual module for
details. There may also be more I/O lines on newer modules.
Extension in TMCL V3.30 and 6.22:
On the TMCM-30x, TMCM-34x and TMCM-61x modules it is now possible to read all eight digital inputs with only
one GIO command. This can be done by setting the type parameter to 255 and the bank parameter to 0. In this
case the status of all eight digital input lines will be read to the lower eight bits of the accumulator. So the
following program can be used to represent the states of the eight input lines on the eight output lines:
Loop: GIO 255, 0
SIO 255,2,-1
JA Loop
Page 49

TMCL Reference Manual 30
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
19
0 ADD – add to accu
1 SUB – subtract from accu
2 MUL – multiply accu by
3 DIV – divide accu by
4 MOD – modulo divide by
5 AND – logical and accu with
6 OR – logical or accu with
7 XOR – logical exor accu with
8 NOT – logical invert accu
9 LOAD – load operand to accu
(don't care)
<operand>
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$13
$02
$00
$FF
$FF
$EC
$78
$78
3.16 CALC – Calculate
Description: A value in the accumulator variable, previously read by a function such as GAP (get axis parameter),
can be modified with this instruction. Nine different arithmetic functions can be chosen and one constant operand
value must (in most cases) be specified. The result is written back to the accumulator, for further processing like
comparisons or data transfer.
Related commands: CALCX, COMP, JC, AAP, AGP, GAP, GGP, GIO
Mnemonic: CALC <op>, <value>
where <op> is ADD, SUB, MUL, DIV, MOD, AND, OR, XOR, NOT or LOAD
Binary representation:
Example: multiply accu by –5000
Mnemonic: CALC MUL, -5000
Binary:
Page 50

TMCL Reference Manual 31
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
20
(don't care)
(don't care)
<comparison value>
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$14
$00
$00
$00
$00
$03
$e8
$00
3.17 COMP – Compare
Description: The specified number is compared to the value in the accumulator register. The result of the
comparison can for example be used by the conditional jump (JC) instruction. This command is intend for use in
stand-alone operation only and must not be used indirect mode.
Internal function: The specified value is compared to the internal "accumulator", which holds the value of a
preceding "get" or calculate instruction (see GAP/GGP/GIO/CALC/CALCX). The internal arithmetic status flags are set
according to the comparison result.
Related commands: JC (jump conditional), GAP, GGP,GIO, CALC, CALCX
Binary representation:
Example:
Jump to the address given by the label when the position of motor #2 is greater than or equal to 1000.
GAP 1, 2, 0 //get axis parameter, type: no. 1 (actual position), motor: 2, value:0 (don't care)
COMP 1000 //compare actual value to 1000
JC GE, Label //jump, type: 5 greater/equal, the label must be defined somewhere else in the program
Binary format of the COMP 1000 command:
Note that the host address and the reply is only used to transfer this instruction to the TMCL program memory
during downloading of a TMCL program. It does not make sense to use this command in direct mode.
Page 51

TMCL Reference Manual 32
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
21
0 ZE - zero
1 NZ - not zero
2 EQ - equal
3 NE - not equal
4 GT - greater
5 GE - greater/equal
6 LT - lower
7 LE - lower/equal
8 ETO - time out error
9 EAL – external alarm
10 EDV – deviation error
11 EPO – position error
12 ESD – shutdown error
(don't care)
<jump address>
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$15
$05
$00
$00
$00
$00
$0a
$25
3.18 JC – Jump Conditional
Description: A conditional jump to a fixed address in the TMCL-program memory, if the specified condition is met.
The conditions refer to the result of a preceding comparison, e.g. by the COMP instruction. For stand-alone
operation only.
Internal function: the TMCL program counter is set to the passed value if the arithmetic status flags are in the
appropriate state(s).
Related commands: JA, COMP, WAIT, CLE
Mnemonic: JC <condition>, <label>
where <condition>=ZE|NZ|EQ|NE|GT|GE|LT|LE|ETO|EAL|EDV|EPO
Binary representation:
EDV and EPO: TMCM-100 only.
EAL and ESD: not available with TMCM-300.
Example: Jump to address given by the label when the position of motor #2 is greater than or equal to 1000.
GAP 1, 2, 0 //get axis parameter, type: no. 1 (actual position), motor: 2, value:0 (don't care)
COMP 1000 //compare actual value to 1000
JC GE, Label //jump, type: 5 greater/equal
...
...
Label: ROL 0, 1000
Binary format of “JC GE, Label” when Label is at address 10:
Note that the host address and the reply is only used to transfer this instruction to the TMCL program memory.
See the host-only control functions for details. It is not possible to use this command in direct mode.
Page 52

TMCL Reference Manual 33
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
22
(don't care)
(don't care)
<jump address>
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$16
$00
$00
$00
$00
$00
$14
$2b
3.19 JA – Jump Always
Description: Jump to a fixed address in the TMCL program memory. This command is intended for standalone
operation only and not to be used in direct mode.
Internal function: the TMCL program counter is set to the passed value.
Related commands: JC, WAIT, CSUB
Mnemonic: JA <Label>
Binary representation:
Example: An infinite loop in TMCL
Loop: MVP ABS, 0, 10000
WAIT POS, 0, 0
MVP ABS, 0, 0
WAIT POS, 0, 0
JA Loop //Jump to the label “Loop”
Binary format of “JA Loop” assuming that the label “Loop” is at address 20:
Note that the host address and the reply is only used to transfer this instruction to the TMCL program memory.
This command can not be used in direct mode.
Page 53

TMCL Reference Manual 34
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
23
(don't care)
(don't care)
<subroutine address>
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$17
$00
$00
$00
$00
$00
$64
$7c
3.20 CSUB – Call Subroutine
Description: Calls a subroutine in the TMCL program memory. This command is intended for standalone operation
only and must not be used in direct mode.
Internal function: The actual TMCL program counter value is saved to an internal stack, then overwritten with the
passed value. The number of entries in the internal stack is limited to 8. This also limits nesting of subroutine calls
to 8. The command will be ignored if there is no more stack space left.
Related commands: RSUB, JA
Mnemonic: CSUB <Label>
Binary representation:
Example: Call a subroutine
Loop: MVP ABS, 0, 10000
CSUB SubW //Save program counter and jump to label “SubW”
MVP ABS, 0, 0
JA Loop
SubW: WAIT POS, 0, 0
WAIT TICKS, 0, 50
RSUB //Continue with the command following the CSUB command
Binary format of the “CSUB SubW” command assuming that the label “SubW” is at address 100:
Note that the host address and the reply is only used to transfer this instruction to the TMCL program memory.
This command can not be used in direct mode.
Page 54

TMCL Reference Manual 35
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
24
(don't care)
(don't care)
(don't care)
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$18
$00
$00
$00
$00
$00
$00
$19
3.21 RSUB – Return from Subroutine
Description: Return from a subroutine to the command after the CSUB command that called it. This command is
intended for use in stand-alone mode only and must not be used in direct mode.
Internal function: the TMCL program counter is set to the last value of the stack. The command will be ignored if
the stack is empty.
Related command: CSUB
Mnemonic: RSUB
Binary representation:
Example: please see the CSUB example (section 3.20).
Binary format of RSUB:
Note that the host address and the reply is only used to transfer this instruction to the TMCL program memory.
This command can not be used in direct mode.
Page 55

TMCL Reference Manual 36
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
27
0 TICKS - timer ticks*
(don't care)
<no. of ticks*>
1 POS - target position reached
<motor number>
0..2 resp. 0..5
<no. of ticks* for timeout>,
0 for no timeout
2 REFSW – reference switch
<motor number>
0..2 resp. 0..5
<no. of ticks* for timeout>,
0 for no timeout
3 LIMSW – limit switch
<motor number>
0..2 resp. 0..5
<no. of ticks* for timeout>,
0 for no timeout
4 RFS – reference search
completed
<motor number>
0..2 resp. 0..5
<no. of ticks* for timeout>,
0 for no timeout
3.22 WAIT – Wait for an event to occur
Description: Pause the execution of the TMCL program until the specified condition is met. This command is
intended for stand-alone operation only and must not be used in direct mode. There are 5 different wait
conditions that can be used:
TICKS: wait until the number of timer ticks specified by the <ticks> parameter has been reached. The
<motor number> parameter is ignored in this case (set it to zero).
POS: wait until the target position of the motor specified by the <motor> parameter has been reached.
An optional timeout value (0 for no timeout) must be specified by the <ticks> parameter.
REFSW: wait until the reference switch of the motor specified by the <motor> parameter has been
trigerred. An optional timeout value (0 for no timeout) must be specified by the <ticks> parameter.
LIMSW: wait until a limit switch of the motor specified by the <motor> parameter has been triggered.
An optional timeout value (0 for no timeout) must be specified by the <ticks> parameter.
RFS: wait until the reference search of the motor specified by the <motor> field has been reached. An
optional timeout value (0 for no timeout) must be specified by the <ticks> parameter.
The timeout flag (ETO) will be set after a timeout limit has been reached. You can then use a JC ETO command to
check for such errors or clear the error using the CLE command.
Internal function: The TMCL program counter is held until the specified condition is met.
Related commands: JC, CLE
Mnemonic: WAIT <condition>, <motor number>, <ticks>
where <condition> is TICKS|POS|REFSW|LIMSW|RFS
Binary representation:
*one tick is 10 milliseconds (in standard firmware)
Parameter ranges:
Single axis modules: <motor number> must always be 0.
Three axis modules: <motor number> can be 0..2
Six axis modules: <motor number> can be 0..5
Page 56

TMCL Reference Manual 37
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$1b
$01
$01
$00
$00
$00
$00
$1e
Example: wait for motor #1 to reach its target position, without timeout
Mnemonic: WAIT POS, 1, 0
Binary:
Note that the host address and the reply is only used to transfer this instruction to the TMCL program memory.
This command is not to be used in direct mode.
Page 57

TMCL Reference Manual 38
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
28
(don't care)
(don't care)
(don't care)
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$1c
$00
$00
$00
$00
$00
$00
$1d
3.23 STOP – Stop TMCL program execution
Description: Stops executing a TMCL stand-alone program. This command should be placed at the end of every
TMCL program. It is intended for stand-alone operation only and must not be used in direct mode.
Internal function: TMCL instruction fetching is stopped.
Related commands: none
Mnemonic: STOP
Binary representation:
Example:
Mnemonic: STOP
Binary:
The host address and the reply is only used to transfer this instruction to the TMCL program memory. Do not use
this command in direct mode.
Page 58

TMCL Reference Manual 39
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
29
<bus number>
<number of bytes>
<send data>
STATUS
VALUE
100 – Success
<received data>
Bus number
Chip select output
0
SPI_SEL0, output direct value
1
Do not use
2
SPI_SEL1, output direct value
3
SPI_SEL2, output direct value
128
SPI_SEL0, output contents of accumulator
129
Do not use
130
SPI_SLE1, output contents of accumulator
131
SPI_SEL2, output contents of accumulator
3.24 SAC – SPI Bus Access
Description: Allows access to external SPI devices connected to the SPI bus of the module. Connection of external
SPI devices differs between the different module types. Please contact TRINAMIC for further details and see also
the hardware manual of your module.
Related commands: SIO, GIO
Mnemonic: SAC <bus number>, <number of bytes>, <send data>
Binary representation:
Reply in direct mode:
In version 3.23 of TMCL this command has been extended so that not only direct values but also the contents of
the accumulator register can be sent. In stand-alone mode the received data is also stored in the accumulator.
Most modules have three chip select outputs (SPI_SEL0, SPI_SEL1, SPI_SEL2). The “type” parameter (bus number)
determines the chip select output that is to be used. The “motor/bank” parameter determines the number of bytes
to be sent (1, 2, 3, or 4). The “value” parameter contains the data to be sent. When bit 7 of the bus number is set,
this value is ignored and the contents of the accumulator is sent instead. But please note that in the TMCL IDE
always all three values have to be specified (when sending the contents of the accumulator the “value” parameter
is a dummy parameter). The bus numbers are as follows (please note the gap in the bus numbers; do not use 1 or
129!):
Page 59

TMCL Reference Manual 40
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
30
<coordinate number>
(0…20)
<motor number>
<position>
(-223…+223)
STATUS
VALUE
100 – OK
(don't care)
Module
Motor number
TMCM-300/301/302/303/310
0..2
TMCM-1xx
always 0
TMCM-610/611/612
0..5
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$1e
$01
$02
$00
$00
$03
$e8
$0d
3.25 SCO – Set Coordinate
Description: Up to 20 position values (coordinates) can be stored for every axis for use with the MVP COORD
command (s. section 3.4). This command sets a coordinate to a specified value.
Note: the coordinate number 0 is only stored in RAM, all others are also stored in the EEPROM.
Internal function: The passed value is stored in the internal position array.
Related commands: GCO, CCO, MVP
Mnemonic: SCO <coordinate number>, <motor number>, <position>
Binary representation:
Reply in direct mode:
Parameter ranges:
Example: set coordinate #1 of motor #2 to 1000
Mnemonic: SCO 1, 2, 1000
Binary:
Page 60

TMCL Reference Manual 41
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
31
<coordinate number>
(0…20)
<motor number>
(don't care)
STATUS
VALUE
100 – OK
(don't care)
Module
Motor number
TMCM-300/301/302/303/310
0..2
TMCM-1xx
always 0
TMCM-610/611/612
0..5
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$1f
$01
$02
$00
$00
$00
$00
$23
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Targetaddress
Status
Instruction
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$02
$01
$64
$0a
$00
$00
$00
$00
$86
3.26 GCO – Get Coordinate
Description: Read a previously stored coordinate. In stand-alone mode the requested value is copied to the
accumulator register for further processing purposes such as conditioned jumps. In direct mode, the value is only
output in the value field of the reply, without affecting the accumulator. Note: the coordinate number 0 is stored
in RAM only, all others are also stored in the EEPROM.
Internal function: The desired value is read out of the internal coordinate array, copied to the accumulator register
and -in direct mode- returned in the “value” field of the reply.
Related commands: SCO, CCO, MVP
Mnemonic: GCO <coordinate number>, <motor number>
Binary representation:
Reply in direct mode:
Parameter ranges:
Example: get motor #2 value of coordinate 1
Mnemonic: GCO 1, 2
Binary:
Reply:
Value: 0
Page 61

TMCL Reference Manual 42
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
32
<coordinate number>
(0…20)
TMCM-3xx:
0 motor 0
1 motor 1
2 motor 2
3 (not allowed)
4 motors 0&1
5 motors 1&2
6 motors 0&2
7 motors 0,1,2
TMCM-6xx:
0..5 (motor number)
TMCM-1xx:
always 0
TMCM-34x:
0..2 (motor 0..2)
(don't care)
STATUS
VALUE
100 – OK
(don't care)
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$20
$03
$07
$00
$00
$00
$00
$2b
3.27 CCO – Capture Coordinate
Description: The actual positions of the specified axes are copied to the selected coordinate variables.
Note: the coordinate number 0 is stored in RAM only, all others are also stored in the EEPROM.
Internal function: The selected (24 bit) position values are written to the 20 by 3 bytes wide coordinate array.
Related commands: SCO, GCO, MVP
Mnemonic: CCO <coodinate number>, <motor number>
Binary representation:
Reply in direct mode:
Parameter ranges: The <motor number> value must always be 0 on TMCM-100 modules.
Example: store current position of all axes to coordinate 3
Mnemonic: CCO 3, 7
Binary:
Page 62

TMCL Reference Manual 43
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
33
0 ADD – add X register to accu
1 SUB – subtract X register from accu
2 MUL – multiply accu by X register
3 DIV – divide accu by X-register
4 MOD – modulo divide accu by x-register
5 AND – logical and accu with X-register
6 OR – logical or accu with X-register
7 XOR – logical exor accu with X-register
8 NOT – logical invert X-register
9 LOAD – load accu to X-register
10 SWAP – swap accu with X-register
(don't care)
(don't care)
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$21
$02
$00
$00
$00
$00
$00
$24
3.28 CALCX – Calculate using the X register
Description: This instruction is very similar to CALC, but the second operand comes from the X register. The X
register can be loaded with the LOAD or the SWAP type of this instruction. The result is written back to the
accumulator for further processing like comparisons or data transfer.
Related commands: CALC, COMP, JC, AAP, AGP
Mnemonic: CALCX <operation>
with <operation>=ADD|SUB|MUL|DIV|MOD|AND|OR|XOR|NOT|LOAD|SWAP
Binary representation:
Example: multiply accu by X-register
Mnemonic: CALCX MUL
Binary:
Page 63

TMCL Reference Manual 44
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
34
<parameter
number>
<motor number>,
<don't care>
STATUS
VALUE
100 – OK
(don't care)
Module
Parameter number
Motor number
TMCM-300/301/302/303/310
s. Table
0..2
TMCM-100
s. Table
always 0
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$22
$00
$00
$00
$00
$00
$00
$23
3.29 AAP – Accumulator to Axis Parameter
Description: The content of the accumulator register is transferred to the specified axis parameter. For practical
usage, the accumulator has to be loaded e.g. by a preceding GAP instruction. The accumulator may have been
modified by the CALC or CALCX (calculate) instruction.
See chapter 4 for a complete list of axis parameters.
Related commands: AGP, SAP, GAP, SGP, GGP, GIO, GCO, CALC, CALCX
Mnemonic: AAP <parameter number>, <motor number>
Binary representation:
Reply in direct mode:
Parameter ranges:
Example: Positioning motor #0 by a potentiometer connected to the analogue input #0:
Start: GIO 0,1 // get value of analogue input line 0
CALC MUL, 4 // multiply by 4
AAP 0,0 // transfer result to target position of motor 0
JA Start // jump back to start
Binary format of the AAP 0,0 command:
Page 64

TMCL Reference Manual 45
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
35
<parameter
number>
<bank number>
(don't care)
STATUS
VALUE
100 – OK
(don't care)
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$23
$03
$02
$00
$00
$00
$00
$29
3.30 AGP – Accumulator to Global Parameter
Description: The content of the accumulator register is transferred to the specified global parameter. For practical
usage, the accumulator has to be loaded e.g. by a preceding GAP instruction. The accumulator may have been
modified by the CALC or CALCX (calculate) instruction. Note that the global parameters in bank 0 are EEPROM-only
and thus should not be modified automatically by a stand-alone application.
See chapter 6 for a complete list of global parameters.
Related commands: AAP, SGP, GGP, SAP, GAP, GIO
Mnemonic: AGP <parameter number>, <bank number>
Binary representation:
Reply in direct mode:
Example: copy accumulator to TMCL user variable #3
Mnemonic: AGP 3, 2
Binary:
Page 65

TMCL Reference Manual 46
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
36
0 – (ALL) all flags
1 – (ETO) timeout flag
2 – (EAL) alarm flag
3 – (EDV) deviation flag
4 – (EPO) position flag
5 – (ESD) shutdown flag
(don't care)
(don't care)
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$24
$01
$00
$00
$00
$00
$00
$26
3.31 CLE – Clear Error Flags
Description: This command clears the internal error flags. It is intended for use in stand-alone mode only and
must not be used in direct mode. The following error flags can be cleared by this command (determined by the
<flag> parameter):
ALL: clear all error flags.
ETO: clear the timeout flag.
EAL: clear the external alarm flag
EDV: clear the deviation flag (modules with encoder feedback only, e.g. TMCM-100)
EPO: clear the position error flag (modules with encoder feedback only, e.g. TMCM-100)
Related commands: JC
Mnemonic: CLE <flags>
where <flags>=ALL|ETO|EDV|EPO
Binary representation:
Example: Reset the timeout flag
Mnemonic: CLE ETO
Binary:
Page 66

TMCL Reference Manual 47
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
64…71
(user defined)
(user defined)
(user defined)
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Targetaddress
Status
Instruction
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$02
$01
(user
defined)
64…71
(user
defined)
(user
defined)
(user
defined)
(user
defined)
<checksum
>
3.32 User definable commands (UF0..UF7)
Description: The user definable functions UF0 through UF7 are predefined, "empty" functions for user specific
purposes. Contact TRINAMIC for customer specific programming of these functions.
Internal function: Call user specific functions implemented in “C” by TRINAMIC.
Related commands: none
Mnemonic: UF0 .. UF7
Binary representation:
Reply in direct mode:
Page 67

TMCL Reference Manual 48
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
138
(don’t care)
(don’t care)
Motor bit mask
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Targetaddress
Status
Instruction
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$02
$01
100
138
$00
$00
$00
Motor bit
mask
<checksum
>
Byte Index
0 1 2 3 4 5 6 7 8
Function
Targetaddress
Targetaddress
Status
Instruction
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$02
$01
128
138
$00
$00
$00
Motor bit
mask
<checksum
>
3.33 Request target position reached event
Description: This command is the only exception to the TMCL protocol, as it sends two replies: one immediately
after the command has been executed (like all other commands also), and one additional reply that will be sent
when the specified motors have reached their target positions. This command can only be used in direct mode (in
stand alone mode, this is covered by the WAIT command) and hence does not have a mnemonic. Its opcode is
138.
This command is avialable since firmware version 3.26 (on the TMCM-301/302/303/310/110/109/111/112 modules)
resp. firmware version 6.24 (on the TMCM-610/611/612/101/102 modules).
Internal function: Send an additional reply when one or more motors have reached their target positions. Only
usable in direct mode.
Mnemonic: ---
Binary representation:
The contents of the “value” field is a bit mask where every bit stands for one motor: bit 0 = motor 0, bit 1 = motor
1, and so on. The additional reply will be sent when all motors for which the bits in the bit mask are set have
reached their target positions.
Reply in direct mode (right after execution of this command):
Additonal reply in direct mode (after motors have reached their target positions):
Page 68

TMCL Reference Manual 49
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
3.34 BIN – Return to Binary Mode
Description: This command can only be used in ASCII mode. It quits the ASCII mode and returns to binary mode.
It is available in version 3.21 or higher.
Related Commands: none
Mnemonic: BIN
Binary representation: This command does not have a binary representation as it can only be used in ASCII
mode.
Page 69

TMCL Reference Manual 50
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Instruction
Description
Type
Mot/Bank
Value
128 – stop application
a running TMCL standalone
application is stopped
(don't care)
(don't care)
(don't care)
129 – run application
TMCL execution is started (or
continued)
0 - run from
current address
1 - run from
specified address
(don't care)
(don't care)
starting address
130 – step application
only the next command of a
TMCL application is executed
(don't care)
(don't care)
(don't care)
131 – reset application
the program counter is set to
zero, and the standalone
application is stopped (when
running or stepped)
(don't care)
(don't care)
(don't care)
132 – start download
mode
target command execution is
stopped and all following
commands are transferred to
the TMCL memory
(don't care)
(don't care)
starting address of
the application
133 – quit download
mode
target command execution is
resumed
(don't care)
(don't care)
(don't care)
134 – read TMCL
memory
the specified program memory
location is read
(don't care)
(don't care)
<memory address>
135 – get application
status
one of these values is
returned:
0 – stop
1 –run
2 – step
3 - reset
(don't care)
(don't care)
(don't care)
136 – get firmware
version
return the module type and
firmware revision either as a
string or in binary format
0 – string
1 – binary
(don’t care)
(don’t care)
137 – restore factory
settings
reset all settings stored in the
EEPROM to their factory
defaults
This command does not send
back a reply.
(don’t care)
(don’t care)
must be 1234
138 – reserved
139 – enter ASCII
mode
Enter ASCII command line (see
chapter 2.5)
(don’t care)
(don’t care)
(don’t care)
3.35 TMCL Control Functions
Description: The following functions are for host control purposes only and are not allowed for stand-alone
mode. In most cases, there is no need for the customer to use one of those (except command 139). They are
mentioned here only for reasons of completeness. These commands have no mnemonics, as they can not be used
in TMCL programs.
They are to be used only by the TMCL IDE to communicate with the module, for example to download a TMCL
application into the module. The only control commands that could be useful for a user host application is “get
firmware revision” (command 136, please note the special reply format of this command, described at the end of
this section) and 129 (run application).
All other functions can be achieved by using the appropriate functions of the TMCL IDE.
Page 70

TMCL Reference Manual 51
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Byte index
Contents
1
Host Address
2..9
Version string (8 characters, e.g. “303V2.48”
Byte index in value field
Contents
1
Version number, low byte
2
Version number, high byte
3
Type number, low byte
(currently not used)
4
Type number, high byte
(currently not used)
Special reply format of command 136:
Type set to 0: reply as a string:
There is no checksum in this reply format! To get also the last byte when using the CAN bus interface, just send
this command in an eight byte frame instead of a seven byte frame. Then, eight bytes will be sent back, so you
will get all characters of the version string.
Type set to 1: version number in binary format: Here, the normal reply format is used. The version number is
output in the “value” field of the reply in the following way:
Page 71

TMCL Reference Manual 52
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Number
Axis Parameter
Description
Range
Access
0
target (next) position
The desired position in position mode (see ramp mode,
no. 138).
2
23
RW
1
actual position
The current position of the motor. Should only be
overwritten for reference point setting.
223
RW
2
target (next) speed
The desired speed in velocity mode (see ramp mode, no.
138). In position mode, this parameter is set by
hardware: to the maximum speed during acceleration,
and to zero during deceleration and rest.
2047
RW
3
actual speed
The current rotation speed. Should never be overwritten.
2047
R
4
maximum positioning
speed
Should not exceed the physically highest possible value.
Adjust the pulse divisor (no. 154), if the speed value is
very low (<50) or above the upper limit. See TMC 428
datasheet (p.24) for calculation of physical units.
0...2047
RWE
5
maximum acceleration
The limit for acceleration (and deceleration). Changing
this parameter requires re-calculation of the acceleration
factor (no. 146) and the acceleration divisor (no.137),
which is done automatically. See TMC 428 datasheet
(p.24) for calculation of physical units.
0... 2047
RWE
6
absolute max. current
The most important motor setting, since too high values
might cause motor damage! Note that on the TMCM-300
the phase current can not be reduced down to zero due
to the Allegro A3972 driver hardware.
On the TMCM-300, 303, 310, 110, 610, 611 and 612 the
maximum value is 1500 (which means 1.5A).
On all other modules the maximum value is 255 (which
means 100% of the maximum current of the module).
0…1500
resp.
0..255
RWE
7
standby current
The current limit two seconds after the motor has
stopped.
The value range of this parameter is the same as with
parameter 6.
0..1500
resp.
0..255
RWE
8
target pos. reached
Indicates that the actual position equals the target
position.
0/1
R
9
ref. switch status
The logical state of the reference (left) switch.
See the TMC 428 data sheet for the different switch
modes. Default is two switch mode: the left switch as
the reference switch, the right switch as a limit (stop)
switch.
0/1
R
10
right limit switch status
The logical state of the (right) limit switch.
0/1
R
4 Axis Parameters
The following sections describe all axis parameters that can be used with the SAP, GAP, AAP, STAP and RSAP
commands. Please note that some parameters are different with different module types. The letters under “access”
mean: R = readable (GAP), W = writable (SAP), E = automatically restored from EEPROM after reset or power-on.
4.1 Basic axis parameters (all TMCL stepper motor modules except
the TMCM-100 module and the Monopack 2)
The parameters described in the following table are those which are needed very often. Please note that the
TMCM-100 module uses a different parameter set (see chapter 4.3), but all other TMCL stepper motor modules use
these parameters.
Page 72
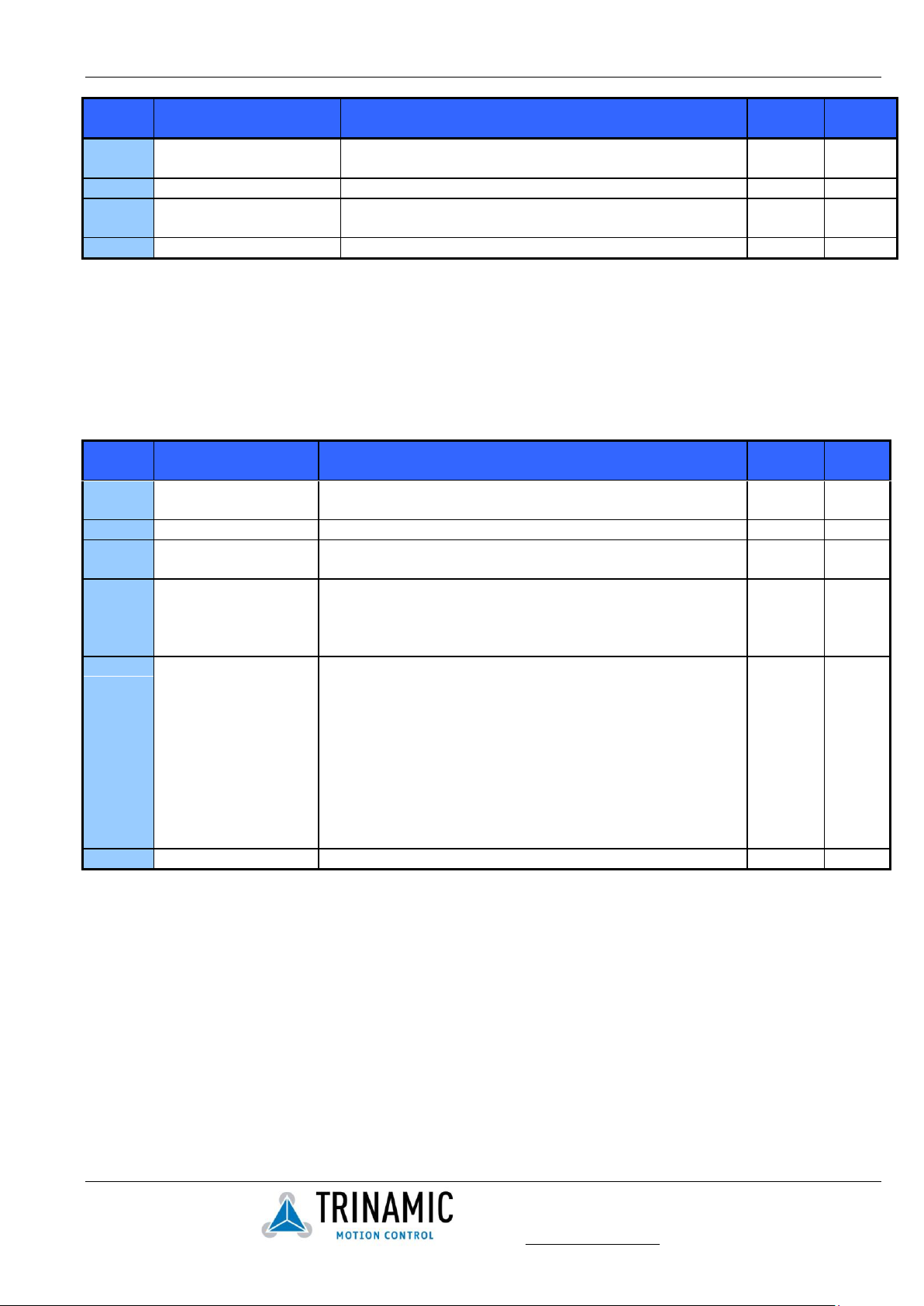
TMCL Reference Manual 53
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Number
Axis Parameter
Description
Range
Access
11
left limit switch status
The logical state of the left limit switch (in three switch
mode)
0/1
R
12
right limit switch disable
if set, deactivates the stop function of the right switch
0/1
RWE
13
left limit switch disable
deactivates the stop function of the left switch resp.
reference switch if set.
0/1
RWE
14
steprate prescaler
Currently not used, see parameters no. 153 and 154
Number
Parameter
Description
Range
Access
130
minimum speed
Should always be set 1 to ensure exact reaching of the
target position. Do not change!
0... 2047
RWE
135
actual acceleration
The current acceleration (read only).
0... 2047
R
136
acceleration threshold
specifies the threshold between low and high acceleration
values for the parameters 144&145. Normally not needed.
0... 2047
RWE
137
acceleration divisor
A ramping parameter, can be adjusted in special cases,
automatically calculated by setting the maximum
acceleration (e.g. during normal initialisation). See the
TMC428 data sheet for details. Normally no need to change.
0…13
RWE
138
ramp mode
In version 2.16 and later: automatically set when using ROR,
ROL, MST and MVP.
0: position mode. Steps are generated, when the parameters
actual position and target position differ. Trapezoidal speed
ramps are provided.
2: velocity mode. The motor will run continuously and the
speed will be changed with constant (maximum)
acceleration, if the parameter "target speed" is changed.
For special purposes, the soft mode (value 1) with
exponential decrease of speed can be selected.
0/1/2
RWE
139
interrupt flags
Must not be modified. See the TMC 428 datasheet for details.
16bits
RW
4.2 Advanced axis parameters (all TMCL stepper motor modules
except the TMCM-100)
These parameters are only needed if the desired needs can not be met by setting the basic parameters listed in
section 4.1. Some of these parameters influence the TMC428 directly so that advanced understanding of the
TMC428 chip is needed. There are even some parameters that should only be changed if recommended by
TRINAMIC. Please note that these paramters are not available on the TMCM-100 module.
Page 73

TMCL Reference Manual 54
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Number
Parameter
Description
Range
Access
140
microstep resolution
0 – full step *)
1 – half step *)
2 – 4 microsteps
3 – 8 microsteps
4 – 16 microsteps
5 - 32 microsteps
6 – 64 microsteps
Note that modifying this parameter will affect the rotation
speed in the same relation.
Note that modifying this parameter will affect the rotation
speed in the same relation. Even if the module is specified
for 16 microsteps only, switching to 32 or 64 microsteps still
brings an enhancement in resolution and smoothness. The
position counter will use the full resolution, but, however,
the motor will resolve a maximum of 24
different microsteps only for the 32 or 64 microstep units.
*) Please note that the fullstep setting as well as the half
step setting are not optimized for use without an adapted
microstepping table. These settings just step through the
microstep table in steps of 64 respectively 32. To get real
full stepping use axis parameter 211 or load an adapted
microstepping table.
0…6
RWE
141
ref. switch tolerance
For three-switch mode: a position range, where an
additional switch (connected to the REFL input) won't cause
motor stop. See section 6.1 for details.
0...4095
RW
142
snapshot position
For referencing purposes, the exact position at hitting of the
reference switch can be captured in this parameter. A
dummy value has to be written first to prepare caption.
223
RW
143
max. current at rest
In contrast to the standby current, this current limit
becomes immediately active when the motor speed reaches
zero. The value represents a fraction of the absolute
maximum current:
0 – no change of current at rest (default, 100%)
1..7 – 12.5%..87.5%
See the TMC428 datasheet for details. Normally not used,
use parameters 6 and 7 instead!
0…7
RWE
144
max. current at low
accel.
An optional current reduction factor, see parameters 136 and
143 for details. Normally not used, use parameters 6 and 7
instead!
0…7
RWE
145
max. current at high
accel.
An optional current reduction factor, see parameters 136 and
143 for details. Normally not used, use parameters 6 and 7
instead!
0…7
RWE
146
acceleration factor
A ramping parameter, can be adjusted in special cases,
automatically calculated by setting the maximum
acceleration (e.g. during normal initialisation). See the
TMC428 data sheet for details. Normally no need to change.
0…128
RWE
147
ref. switch disable
flag
If set, the reference switch (left switch) won't cause the
motor to stop. See parameters 12 and 13.
0/1
RWE
148
limit switch disable
flag
If set, the limit switch (right switch) won't cause the motor
to stop. See parameters 12 and 13.
0/1
RWE
149
soft stop flag
If cleared, the motor will stop immediately (disregarding
motor limits), when the reference or limit switch is hit.
0/1
RWE
Page 74

TMCL Reference Manual 55
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Number
Parameter
Description
Range
Access
150
(reserved)
Do not change!
0/1
R
151
position latch flag
Indicates that a position snapshot has been completed (see
parameter 142).
0/1
R
152
interrupt mask
Must not be modified. See the TMC 428 datasheet for details.
(16bits)
R
153
ramp divisor
The exponent of the scaling factor for the ramp generatorshould be de/incremented carefully (in steps of one).
0…13
RWE
154
pulse divisor
The exponent of the scaling factor for the pulse (step)
generator – should be de/incremented carefully (in steps of
one).
0…13
RWE
193
referencing mode
1 – Only the left reference switch is searched.
2 – The right switch is searched, then the left switch is
searched.
3 – Three-switch-mode: the right switch is searched first,
then the reference switch will be searched.
Please see chapter 6.1 for details on reference search.
1/2/3
RWE
194
referencing search
speed
For the reference search this value specifies the search
speed as a fraction of the maximum velocity:
0 – full speed
1 – half of the maximum speed
2 – a quarter of the maximum speed
3 – 1/8 of the maximum speed (etc.)
On the TMCM-34x modules the speed is given directly as a
value between 0..2047.
0…8
M-34x:
0..2047
RWE
195
referencing switch
speed
Similar to parameter no. 194, the speed for the switching
point calibration can be selected.
On the TMCM-34x modules the speed is given directly as a
value between 0..2047.
0..8
M-34x:
0..2047
RWE
196
(reserved)
Do not change!
197
(reserved)
Not used
0…2
15
RWE
198
driver off time
A special adjustment of the motor driver A3972 (TMCM-300
only). Low values may cause more mechanical vibrations,
while the higher ones lead to acoustic noise of the drivers.
The default value of 20 is a good compromise for most
applications. See the Allegro A3972 datasheet for details.
0…31
RWE
200
fast decay time
A special adjustment of the motor driver A3972 (TMCM-300
only), with less influence than the driver off time (no. 198)
in most cases. Low values generally reduce driver noise. See
the Allegro A3972 datasheet for details.
0…15
RWE
203
mixed decay threshold
If the actual velocity is above this threshold, mixed decay
will be used (all modules except the TMCM-300). Since
V3.13, this can also be set to –1 which turns on mixed decay
permanently also in the rising part of the microstep wave.
This can be used to fix microstep errors.
0..2048
or -1
RWE
204
freewheeling
Time after which the power to the motor will be cut when
its velocity has reached zero (TMCM-301 / 303 / 310 / 11x
and 61x only).
0..65535
0 = never
RWE
205
Stall Detection
Threshold
Stall detection threshold. Only usable on modules equipped
with TMC246 or TMC249 motor drivers. Set it to 0 for no stall
detection or to a value between 1 (low threshold) and 7
(high threshold). The motor will be stopped if the load value
exceeds the stall detection threshold. Switch off mixed decay
to get usable results.
0..7
RWE
Page 75

TMCL Reference Manual 56
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Number
Parameter
Description
Range
Access
206
Actual Load Value
Readout of the actual load value used for stall detection.
Only usable on modules equipped with TMC246 or TMC249
motor drivers. On other modules this value is undefined.
0..7
R
208
Driver Error Flags
TMC236 Error Flags
R
209
Encoder Position
(V3.21 or higher)
The value of an encoder register of a TMCM-323 module
connected to a TMCM-30x module can be read or written.
Please see the TMCM-323 manual for details.
RW
210
Encoder Pre-scaler
(V3.21 or higher)
Pre-scaler for an encoder connected to a TMCM-323 module.
Please see the TMCM-323 manual for details. This value can
not be read back!
This setting is also available on the TMCM-611, TMCM-101
and TMCM-102 modules. Please see the manuals of these
modules for the meaning of these parameter on a specific
module.
W
211
Fullstep Threshold
(V3.26 or higher)
When exceeding this speed the driver will switch to real full
step mode. To disable this feature set this parameter to zero
or to a value greater than 2047.
Setting a full step threshold allows higher motor torque of
the motor at higher velocity. When experimenting with this
in a given application, try to reduce the motor current in
order to be able to reach a higher motor velocity!
0..2048
RWE
212
Maximum Encoder
Deviation
When the actual position (parameter 1) and the encoder
position (parameter 209) differ more than set here the motor
will be stopped. This function is switched off when the
maximum deviation is set to zero.
Only on TMCM-101, TMCM-102 and TMCM-611 modules.
0..65535
RWE
213
Group index
All motors on one module that have the same group index
will also get the same commands when a ROL, ROR, MST,
MVP or RFS is issued for one of these motors. Only on
TMCM-610, TMCM-611, TMCM-612 and TMCM-34x modules.
0..255
RW
Number
Parameter
Description
Range
Access
0
Target position
Read: The target position of a currently executed
ramp.
Write: Same function as a MVP ABS command.
-8388608..
+8388607
RW 1 Actual position
Read: The actual position of the motor.
Write: Change the position and encoder counter
without moving the motor.
-8388608..
+8388607
RW
2
Target velocity
Write: value >0: same function as ROR
value <0: same function as ROL
value =0: same function as MST
Read: not possible
-8191..
+8191
W
3
Actual velocity
The actual velocity of the motor.
Write access not possible.
-8191..
+8191
R 4 Max. positioning
velocity
The maximum velocity used when executing a ramp
to a position. Do not set to zero!
1..8191
RWE
5
Max. acceleration
The maximum acceleration used to accelerate or
1..8191
RWE
4.3 Axis parameters on the TMCM-100 and on the Monopack 2
The axis parameters on the TMCM-100 module and on the Monopack 2 with TMCL differ from those on the other
modules. There are no “advanced” axis parameters on the TMCM-100 module.
Page 76

TMCL Reference Manual 57
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Number
Parameter
Description
Range
Access
decelerate the motor. Do not set to zero!
6
Current at constant
rotation
Maximum current when moving with constant velocity
(255 => 100%).
0 .. 255
RWE
7
Current at standby
Current when the motor is standing
(255 => 100%).
0..255
RWE
8
Position reached flag
Reads 1 when the actual position equals the target
position. Write access not possible.
0/1 R 9
Reference switch status
The logical state of the reference switch (connected to
the SYNC_IN pin).
0/1 R 10
Right stop switch status
The logical state of the right stop switch.
Write access not possible.
0/1 R 11
Left stop switch status
The logical state of the left stop switch.
Write access not possible.
0/1 R 12
Stop switch disable
Deactivates the function of both stop switches when
set to 1.
0/1
RWE
13
Stop switch disable
Same function as parameter #12.
0/1
RWE
14
Step rate prescaler
Prescaler for the step rate, determines the maximum
step frequency.
0..15
RWE
15
Bow
The bow parameter of the ramp function. Do not set
to zero!
1..8191
RWE
16
Microstep resolution
The number of microsteps to be used.
1..64: 1..64 microsteps
65: 100 microsteps
66: 202 microsteps
67: 406 microsteps
1..67
RWE
17
Microstep waveform
The microstep waveform to be used.
-127..+127
RWE
18
Step/direction mode
Activates the step/direction input when set to 1 (the
module then works as a step / direction sequencer).
0/1
RWE
19
Step pulse length
The length of the step pulses at the step / direction
output.
0..3
RWE
20
Phases
Set to 2 for two phase motors (default) or to 3 for 3
phase motors (currently not usable).
2/3
RWE
21
Current at acceleration
Current when the motor is accelerating or
decelerating (255 => 100%).
0..255
RWE
22
Reference search mode
(s. section 6.2)
0: Separate stop and reference switches.
1: Same switch for stop and reference point.
2: Circular mode: Only one reference switch, search
the switch from both sides.
0/1/2
RWE
23
Reference search
velocity
Velocity used for reference searching. If the velocity is
negative the right switch will be searched instead of
the left switch.
-8191..
+8191
RWE
24
Stop Switch
Deceleration
Deceleration when touching a stop switch. A value of
0 means a hard stop.
0..8191
RWE
25
Encoder Position
Actual position of the encoder (read only).
R
26
Encoder Configuration
Bit 0: polarity of the encoder N signal.
Bit 1: the next N signal clears the encoder position
counter.
Bit 4: set this bit to copy the actual encoder value to
the position register (bit resets automatically).
Bit 6: direction of the encoder signals
(1: A->B, 0: B->A).
RWE
27
Encoder Predivider
Predivider for the incremental encoder.
0..255
RWE
Page 77

TMCL Reference Manual 58
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Number
Parameter
Description
Range
Access
28
Encoder Multiplier
Multiplier for the incremental encoder.
1..255
RWE
29
Maximum deviation
Maximum deviation between motor and incremental
encoder.
0..65535
RWE
30
Deviation action
0: Disabled
1: Alarm, but no stop
2: Soft Stop
3: Hard Stop
0/1/2/3
RWE
31
Correction delay
Automatic correction after deviation alarm:
0: Disabled.
>0: 1/100s until correction starts.
0..65535
RWE
32
Correction retries
Number of retries when automatic position correction
is done.
0: Disabled, >0: number of retries.
0..255
RWE
33
Correction tolerance
Tolerance around the target position.
0..65535
RWE
34
Correction velocity
Velocity used for automatic position correction.
1..8191
RWE
Page 78

TMCL Reference Manual 59
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Number
Parameter
0
Datagram low word (read only)
1
Datagram high word (read only)
2
Cover datagram position
3
Cover datagram length
4
Cover datagram contents
5
Reference switch states (read only)
6
TMC428 SMGP register
7..22
Driver chain configuration long words 0..15
23..38
Microstep table long word 0..15
Number
Global parameter
Description
Range
Access
64
EEPROM magic
Setting this parameter to a different value as $E4 will
cause re-initialisation of the axis and global parameters
(to factory defaults) after the next power up. This is
useful in case of miss-configuration.
0…255
RWE
5 Global Parameters
The global parameters apply for all types of TMCM modules. They are grouped into 3 banks: bank 0 (global
configuration of the module), bank 1 (user C variables) and bank 2 (user TMCL variables). The letters under “access”
mean: R = readable (GGP), W = writeable (SGP), E = automatically restored from EEPROM after reset or power-on.
Use SGP and GGP (see sections 3.9 and 3.10) commands to write and read global parameters.
5.1 Bank 0
These parameters affect the global configuration of the module. The parameters 0..38 exist only on TMCM-300 / 301
/ 302 / 303 / 310 / 610 modules and must normally not be set by the user. They should never be changed on
TMCM-300, TMCM-302, TMCM-303, TMCM-310 and TMCM-610 modules. On TMCM-301 modules these parameters can
be changed to adapt the module to specific motor drivers. It is best to set these parameters by using the
appropriate functions of the TMCL DIE and not by entering many SGP commands (the TMCL IDE does this
automatically). The parameters 0..38 are only mentioned here in short form, for completeness. They are not
available on TMCM-100 modules.
An STGP 23, 0 command will store the entire microstep table, and an STGP 7, 0 command will store the entire
driver chain configuration table. Use the appropriate functions of the TMCL IDE to change these parameters
interactively, if really necessary! Take extreme care when doing this, as wrong configurations here may cause
damage to the motor drivers! The TMCM-301 modules is the only device where changes may be necessary
(when using it with other motor drivers than the TMC236/TMC239 chips).
The following parameters with the numbers from 64 on configure things like the serial address of the module
RS232 / RS485 baud rate or CAN bit rate. Change these parameters to meet your needs. The best and easiest way
to do this is to use the appropriate functions of the TMCL IDE. The parameters with numbers between 64 and 128
are stored in EEPROM only, so that an SGP command on such a parameter will always store it permanently (no
extra STGP command needed).
Take care when changing these parameters, and use the appropriate functions of the TMCL IDE to do it in an
interactive way!
Page 79

TMCL Reference Manual 60
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Number
Global parameter
Description
Range
Access
65
RS232 and RS485 baud
rate
0 – 9600 baud (default)
1 – 14400 baud
2 – 19200 baud
3 – 28800 baud
4 – 38400 baud
5 – 57600 baud
6 – 76800 baud Caution: Not supported by Windows!
7 – 115200 baud Caution: 115200 does not work with
most host PCs, as the baud rate error on the modules is
too high with this baud rate (-3.5% baud rate error).
0…7
RWE
66
Serial address
The module (target) address for RS-232 and RS-485.
0…255
RWE
67
ASCII mode
(available since version
3.21)
Configure the TMCL ASCII interface:
Bit 0: 0 – start up in binary (normal) mode
1 – start up in ASCII mode
Bits 4 and 5:
00 – Echo back each character
01 – Echo back complete command
10 – Do not send echo, only send command reply
RWE
68
Reserved
(currently not used, do not change!)
RWE
69
CAN bit rate
1 – 10kBit/s
2 – 20kBit/s
3 – 50kBit/s
4 – 100kBit/s
5 – 125kBit/s
6 – 250kBit/s (default)
7 – 500kBit/s
8 – 1000kBit/s (not supported by TMCM-30x/110/111/112)
1..7
RWE
70
CAN reply ID
The CAN ID for replies from the board (default: 2)
0..7ff
RWE
71
CAN ID
The module (target) address for CAN (default: 1)
0..7ff
RWE
72
System error mask
(currently not used, do not change!)
RWE
73
Configuration EEPROM
lock flag
Write: 1234 to lock the EEPROM, 4321 to unlock it.
Read: 1=EEPROM locked, 0=EEPROM unlocked.
0/1
RWE
74
Encoder interface
(available since version
3.21)
Determines if a TMCM-323 is connected to the external
SPI interface and to which SPI_SEL line it is connected:
0 – No TMCM-323 connected
1 – Connected to SPI_SEL0
2 – Connected to SPI_SEL1
3 – Connected to SPI_SEL2
Please see TMCM-323 manual for details!
RWE
75
Telegram pause time
Pause time before the reply via RS232 or RS485 will be
sent. For RS232 set to 0, for RS485 it is often necessary
to set it to 15 (for RS485 adapters controlled by the RTS
pin).
For CAN or IIC interface this parameter has no effect!
0…255
RWE
76
Serial host address
Host address used in the reply telegrams sent back via
RS232 or RS485.
0..255
RWE
77
Auto start mode
0: Do not start TMCL application after power-up (default).
1: Start TMCL application automatically after power-up.
0/1
RWE
78
Poll interval
(currently not used, do not change!)
--- ---
79
Port function mask
(currently not used, do not change!)
---
---
Page 80

TMCL Reference Manual 61
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Number
Global parameter
Description
Range
Access
80
Shutdown pin
functionality
Select the functionality of the SHUTDOWN pin (not with
TMCM-300).
0 – no function
1 – high active
2 – low active
0..2
RWE
81
TMCL code protection
Protect a TMCL program against disassembling or
overwriting.
0 – no protection
1 – protection against disassembling
2 – protection against overwriting
3 – protection against disassembling and overwriting
Note: When a user tries to switch off the protection
against disassembling, the program will be erased first!
So, when changing this value from 1 or 3 to 0 or 2, the
TMCL program will be erased.
0,1,2,3
RWE
128
TMCL application status
0 –stop
1 – run
2 – step
3 – reset
0..3
R
129
Download mode
0 – normal mode
1 – download mode
0/1
R
130
TMCL program counter
The index of the currently executed TMCL instruction.
R
131
Application error flags
(currently not used)
---
---
132
Tick timer
A 32 bit counter that gets incremented by one every
millisecond. It can also be reset to any start value.
RW
Page 81

TMCL Reference Manual 62
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Number
Global parameter
Description
Range
Access
0
C application state
The main state machine variable of
the example user C code.
0…255
RW
1
(not used)
0…255
RW
2
C application state timer
A universal timer, supposed for state
timing purposes.
0…255
RW 3 C application general purpose variable
"unsigned char #0"
0…255
RWE
4
C application general purpose variable
"unsigned char #1"
0…255
RWE
5
C application general purpose variable
"unsigned char #2"
0…255
RWE
6
C application general purpose variable
"unsigned int #0"
0…2
16
RWE
7
C application general purpose variable
"unsigned int #1"
0…216
RWE
8
C application general purpose variable
"unsigned int #2"
0…216
RWE
9
C application general purpose variable
"signed long #0"
-231…+2
31
RWE
10
C application general purpose variable
"signed long #1"
-231…+231
RWE
11
C application general purpose variable
"signed long #2"
-231…+231
RWE
5.2 Bank 1
The global parameter bank 1 contains a set of variables that are mainly intended for use in customer specific
extensions to the firmware. So, together with the user definable commands (see section 3.32) these variables form
the interface between extensions to the firmware (written in C) and a TMCL application. Although they could also
be used as general purpose variables in TMCL programs, it is much better to use the variables in bank 2 (see
section 5.3) for this purpose.
These parameters are not available on the TMCM-34x modules.
Page 82

TMCL Reference Manual 63
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Number
Global parameter
Description
Range
Access
0
General purpose variable #0
for use in TMCL applications
-231…+2
31
RWE
1
General purpose variable #1
for use in TMCL applications
-231…+231
RWE
2
General purpose variable #2
for use in TMCL applications
-231…+231
RWE
3
General purpose variable #3
for use in TMCL applications
-231…+2
31
RWE
4
General purpose variable #4
for use in TMCL applications
-231…+231
RWE
5
General purpose variable #5
for use in TMCL applications
-231…+231
RWE
6
General purpose variable #6
for use in TMCL applications
-231…+2
31
RWE
7
General purpose variable #7
for use in TMCL applications
-231…+231
RWE
8
General purpose variable #8
for use in TMCL applications
-231…+231
RWE
9
General purpose variable #9
for use in TMCL applications
-231…+2
31
RWE
10
General purpose variable #10
for use in TMCL applications
-231…+231
RWE
11
General purpose variable #11
for use in TMCL applications
-231…+231
RWE
12
General purpose variable #12
for use in TMCL applications
-231…+2
31
RWE
13
General purpose variable #13
for use in TMCL applications
-231…+231
RWE
14
General purpose variable #14
for use in TMCL applications
-231…+231
RWE
15
General purpose variable #15
for use in TMCL applications
-231…+2
31
RWE
16
General purpose variable #16
for use in TMCL applications
-231…+231
RWE
17
General purpose variable #17
for use in TMCL applications
-231…+231
RWE
18
General purpose variable #18
for use in TMCL applications
-231…+2
31
RWE
19
General purpose variable #19
for use in TMCL applications
-231…+231
RWE
20..55
General purpose variables
#20..#55
(TMCL Version 3.17 or higher)
for use in TMCL applications
-231…+231
RWE
5.3 Bank 2
Bank 2 contains general purpose 32 bit variables for the use in TMCL applications. They are located in RAM and can
be stored to EEPROM. After booting, their values are automatically restored to the RAM. By default, 20 variables are
available, but the number may be increased in future firmware modification versions. From firmware version 3.17
on, 56 user variables are available.
Page 83

TMCL Reference Manual 64
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Right Stop
Switch
Traveller
Left Stop
Switch
Reference
Switch
Negative
Direction
Positive
Direction
left stop
sw itch
right stop
sw itch
REF_L_x REF_R_x
motor
traveller
Figure 6.2: Two limit switches
left stop
sw itch
reference
sw itch
right stop
sw itch
REF_L_x REF_R_x
motor
traveller
Figure 6.3: Limit switches with extra
reference switch
motor
ref sw itch
eccentric
REF_L_x
Figure 6.4: Circular system
6 Hints and Tips
This chapter gives some hints and tips on using the functionality of TMCL, for example how to use and
parameterize the built-in reference point search algorithm or the incremental encoder interface.
6.1 Reference search with TMCM-3xx / 10x / 11x / 61x modules
The built-in reference search features switching point calibration and support of one or two reference switches.
The internal operation is based on three individual state machines (one per axis) that can be started, stopped and
monitored (instruction RFS, no. 13). The settings of the automatic stop functions corresponding to the switches
(axis parameters 12 and 13) have no influence on the reference search.
Figure 6.1: Definition of the switches
Selecting the referencing mode (axis parameter 193): in modes 1 and 2, the motor will start by moving "left"
(negative position counts). In mode 3 (three-switch mode), the right stop switch is searched first to distinguish
the left stop switch from the reference switch by the order of activation when moving left (reference switch
and left limit switch share the same electrical function).
Until the reference switch is found for the first time, the searching speed is identical to the maximum
positioning speed (axis parameter 4), unless reduced by axis parameter 194.
After hitting the reference switch, the motor slowly moves right until the switch is released. Finally the switch
is re-entered in left direction, setting the reference point to the center of the two switching points. This low
calibrating speed is a quarter of the maximum positioning speed by default (axis parameter 195).
In Figure 6.2 the connection of the left and the right limit switch is shown. Figure 6.3 shows the connection
of three switches as left and right limit switch and a reference switch for the reference point. The reference
switch is connected in series with the left limit switch. The differentiation between the left limit switch and
the reference switch is made through software. Switches with open contacts (normally closed) are used.
In circular systems there are no end points and thus only one reference switch is used for finding the
reference point.
Page 84

TMCL Reference Manual 65
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Right Stop
Switch
Traveller
Left Stop
Switch
Reference
Switch
Negative
Direction
Positive
Direction
Traveller
Reference
Switch
6.2 Reference search with TMCM-100 modules
The behaviour of the reference search depends on the reference search mode setting (axis parameter #22, section
4.3) and is as follows:
Mode 0: Linear mode, reference switch is also end switch: A move into the reference switch and then out
of the reference switch is executed. The zero position is then set to the beginning of the switch.
Mode 1: Linear mode, separate reference switch and end switch: First, the left or the right stop switch
(specified by the sign of the reference search velocity; value>0: left switch, value<0: right switch) is
searched. After that, the reference switch is searched at first from one, then from the other side. The zero
position is then set to the middle of the reference switch.
Figure 6.5: A linear drive (use mode 1)
Mode 2: Circular mode: The reference switch (connected to the reference switch input) is searched at first
from one and then form the other side. The zero position is then set to the middle of the reference
switch. There are no end points.
Figure 6.6: A circular drive (use mode 2)
The velocity of the reference search is specified by axis parameter #23 (section 4.3). Start the reference search with
a RFS START command. The reference search can be aborted by a RFS STOP command. To query if the reference
search is still running in direct mode, use a RFS STATUS command. In a stand-alone TMCL program, use WAIT RFS
to wait until a reference search has finished.
The reference switch always has to be connected to the “SYNC IN” pin of the module.
6.3 Using an incremental encoder with TMCM-100 modules
Using an incremental encoder allows exact position control, as it feeds back the steps of the motor into the
module. The module can then detect deviations and can also try to correct such deviations automatically. The
deviation detection and the automatic position correction after a deviation has occurred are easy to use features
that automatically detect and correct any errors during a movement.
6.3.1 Setting the resolution
The resolution of the encoder (pulses per revolution) must match the resolution of the motor to make deviation
detection and automatic position correction function correctly. If the resolutions do not match, they can be
adapted by changing one or more of the following parameters using GAP commands:
Microstep resolution (axis parameter #16, section 4.3): This parameter changes the resolution of the motor.
Encoder pre-divider (axis parameter #27, section 4.3): This can be used if the resolution of the encoder is
higher than the resolution of the motor. When for example the pre-divider is set to 4, only every 4th pulse of
the encoder will be used to increment or decrement the encoder counter register.
Page 85

TMCL Reference Manual 66
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Encoder multiplier (axis parameter #28, section 4.3): This can be used if the resolution of the encoder is lower
than the resolution of the motor. When for example the multiplier is set to 5, every encoder pulse will
increment or decrement the encoder counter register by 5.
To find the right combination of the parameters you can just let the motor run for example 10000 steps (using an
MVP command in direct mode, with deviation detection and automatic position correction switched off) and then
watch the encoder counter register (using GAP 25, 0). Before doing that, use a SAP 1,0,0 command to set all
position registers to zero.
6.3.2 Deviation detection
This function can be configured using axis parameters #29, #30 and #31. An error flag (EDV, see also section 3.18
and 3.31) will be set when the maximum deviation between motor and encoder is exceeded. Optionally the motor
can also be stopped then. Set the maximum deviation using parameter #29. The motor can also be stopped
immediately or softly when in case of deviation (parameter #30). Furthermore, the automatic position correction
(see ) can be started n/10 sec (n=1..65535, parameter #31) after a deviation has been detected.
6.3.3 Position correction
Automatic position correction can be done at the end of each ramp or when a deviation has been detected.
Automatic position correction can only be used in conjunction with an incremental encoder which has to be
configured correctly first.
When this function is turned on (by setting axis parameter #32 to a value greater than zero), the module checks if
the position counter of the incremental encoder matches the desired end position at the end of every ramp (a
tolerance window around the end position can be specified by axis parameter #33). If this is not the case, the
module will try to correct the position of the motor using the velocity specified by axis parameter #34. The
maximum number of retries after each ramp can also be configured by setting axis parameter #32. The EPO flag
(see also section 3.18 and 3.31) will be set and the position correction will be aborted if this number is exceeded.
6.4 Stall Detection (TMCL Version 3.06 or higher)
The modules TMCM-303, TMCM-310 and TMCM-610 can be equipped with TMC246 motor driver chips. These chips
feature load measurement that can be used for stall detection. Stall detection means that the motor will be
stopped when the load gets too high. It is controlled by axis parameter #205. If this parameter is set to a value
between 1 and 7 the stall detection will be activated. Setting it to 0 means that stall detection is turned off. A
greater value means a higher threshold. This also depends on the motor and on the velocity. There is no stall
detection while the motor is being accelerated or decelerated.
Stall detection can also be used with a TMCM-301 module together with a TMCM-035 module that is equipped with
a TMC249 chip.
Stall detection can also be used for finding the reference point. You can do this by using the following TMCL code:
SAP 205, 0, 5 //Turn on Stall Detection (use other threshold if needed)
ROL 0, 500 //Let the motor run (or use ROR or other velocity)
Loop: GAP 3, 0
COMP 0
JC NE, Loop //Wait until the motor has stopped
SAP 1, 0, 0 //Set this position as the zero position
Do not use RFS in this case.
Mixed decay should be switched off when StallGuard operational in order to get usable results.
Page 86

TMCL Reference Manual 67
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
6.5 Fixing microstep errors (TMCL V3.13 or higher)
Due to the “zero crossing problem” of the TMC236/TMC246 stepper motor drivers, microstep errors may occur with
some motors as the minimum motor current that can be reached is slightly higher than zero (depending on the
inductivity, resistance and supply voltage of the motor).
This can be solved by setting the “mixed decay threshold” parameter (axis parameter number 203) to the value –1.
This switches on mixed decay permanently, in every part of the microstepping waveform. Now the minimum
reachable motor current is always near zero which gives better microstepping results.
A further optimization is possible by adapting the motor current shape (waveform table, see sections 7.6.2.4 and
7.6.2.5 on how to do that).
Use SAP 203, <m>, -1 to turn on this feature (where <m> stands for the motor number).
6.6 Using the RS485 interface
For using the modules with RS485 interface they must be equipped with at least TMCL version 3.16 (except for
TMCM-110 modules).
With most RS485 converters that can be attached to the COM port of a PC the data direction is controlled by the
RTS pin of the COM port. Please note that this will only work with Windows 2000, Windows XP or Windows NT4,
not with Windows 95, Windows 98 or Windows ME (due to a bug in these operating systems). Another problem is
that Windows 2000/XP/NT4 switches the direction back to “receive” too late. To overcome this problem, set the
“telegram pause time” (global parameter #75) of the module to 15 (or more if needed) by issuing an “SGP 75, 0,
15” command in direct mode. The parameter will automatically be stored in the configuration EEPROM.
For RS232 set the “telegram pause time” to zero for maximum data throughput.
Page 87

TMCL Reference Manual 68
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
7 The TMCL IDE
The TMCL IDE is an integrated development environment mainly for developing stand-alone TMCL applications, but
it also includes a function for using the TMCL commands in direct mode. The TMCL IDE is a PC application running
under Windows 95/98/NT/2000/XP (Windows 3.x is not supported) that includes
a text editor for writing and modifying TMCL programs,
a TMCL assembler for translating TMCL programs from mnemonic to binary format and downloading them into
a module,
a TMCL disassembler for getting a TMCL application out of a module and translating it back to mnemonic
format,
a dialogue which allows setting the configuration of a module in an easy, interactive way,
a dialogue for entering and executing TMCL commands in direct mode,
a function for updating the firmware of a module.
and many more powerful features.
Please be sure to always use the latest version of the TMCL IDE a its functionality is being extended and improved
constantly.
7.1 Installation
To install the TMCL IDE to your computer, just copy the file “TMCL.EXE” to your hard disk. Then, just double click
the file to start the program.
Fig. 7.1: The TMCL IDE main window
After the first start of the program you should select the “Options...” function from the “Setup” menu (see section
7.6.1.2) and set up the COM port where your TMCM module is connected to. You should not need to change any
other settings.
Page 88

TMCL Reference Manual 69
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
7.2 Getting started
First, try out the TMCL commands in direct mode. Use the “Direct Mode” function for this purpose (see section
7.5.2). After you have successfully tried out the direct mode, have a look at the TMCL sample programs supplied on
the software CD. Load a program, assemble it, download it into a module and run it. Try to understand the TMCL
sample programs. After that you are ready to write your own TMCL programs. Read the chapters 2, 3 and 8 to
learn more about the TMCL programming language.
7.3 The integrated editor
The text editor of the TMCL-IDE mainly provides the functionality of a standard Windows text editor. An additional
function to the Windows standard is Ctrl-Y to delete a line. Some functions of the editor can be found in the “Edit”
menu. It is also possible to edit multiple documents. They are then shown in a workbook style.
7.4 The “File” menu
The file menu provides functions to load and save files. Some functions can also be found in the tool bar below
the menu bar.
7.4.1 New
This function opens a new editor page, so a new file can be created.
7.4.2 Open
After selecting the “Open” function a file selection dialog will be shown. Here you can select a file to be opened.
Then, a new editor page opens and the selected file will be loaded into that editor page.
7.4.3 Save, Save as
Select one of these functions to save the contents of the currently selected editor page into a file. The “Save as”
function allows to save a file using a new name.
7.4.4 Save all
Select this function to save all files that are currently loaded into the editor and have been changed.
7.4.5 Close
The “Close” function closes the actual editor page. This function can also be selected from the context menu of the
editor (click the right mouse button in the editor window to open the context menu).
7.4.6 Exit
Use this function to close the TMCL IDE. The same function can be achieved by closing the main window.
7.5 The “TMCL” menu
7.5.1 Basics
The “TMCL” menu contains all functions needed for assembling, downloading and disassembling TMCL programs. It
also contains the functions to run and stop a TMCL program on a module and to use TMCL commands in direct
mode. Assembling a TMCL program always takes place from the editor. So, a before assembling a TMCL file it must
be loaded into the editor.
Page 89

TMCL Reference Manual 70
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
7.5.2 Direct mode
Select the “Direct Mode” function in the “TMCL” menu to open the “Direct Mode” dialog (Fig. 7.2). The TMCL IDE
then first checks the type of the module that is connected (TMCM-3xx or TMCM-100), as some menus in the direct
mode dialogue differ between TMCM-3xx or TMCM-100 modules. If the type of the module could not be detected
(e.g. because there is no module connected), a little dialogue pops up where you are prompted to select your
module type. Do this by clicking the appropriate button.
By using the direct mode you can send commands to a module that are executed immediately. In the “TMCL
Instruction Selector” area you can select a command and its parameters. Click the “Execute” button in this area to
send the command to the module. The response is then displayed in the “Answer” section. By clicking the “Copy
to editor” button the command mnemonic will be copied to the TMCL editor.
You can also enter the instruction numbers directly in the “Manual Instruction Input” area an execute them by
clicking the appropriate “Execute” button (but this option is needed only very seldom). The “Copy” button in the
“TMCL Instruction Selector” area copies the instruction bytes to the “Manual Instruction Input” area.
Fig. 7.2: The Direct Mode dialog
7.5.3 Assemble a TMCL program
Selecting the “Assemble” function in the “TMCL” menu assembles a file. If more than one files are open and no
main file has been defined the currently selected file will be assembled. If a main file has been selected (see
section 7.5.5) the main file will always be assembled, regardless of the currently selected editor file.
The progress of the assembly is displayed.
Fig. 7.3: The progress of the assembly
If an error occurs, the line containing the error will be highlighted and the assembly will be aborted. The error
message will be displayed in the assembler progress dialog.
Page 90

TMCL Reference Manual 71
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
7.5.4 Downloading the program
After a TMCL program has been successfully assembled, it can be downloaded to the module. Make sure that the
module is connected to a COM port and that the port is selected in the “Options” dialogue. By selecting the
“Download” function the program will then be downloaded into the module. The download progress is shown in
a special window (Fig. 7.4). Downloading can be aborted by clicking the “Abort” button.
Fig. 7.4: The program download progress
7.5.5 The “Main file” function
By using this function you can select a main file. This file is then always used when assembling, regardless of
which file is currently selected in the editor. Click on the “Clear” button in the main file selection dialog to switch
off this function and to always assemble the currently selected editor file again.
Fig. 7.5: The "Main file" dialog
7.5.6 The “Start” function
This functions starts the TMCL program which is currently in the TMCL memory of the module just by sending a
reset and a run command to the module. The module then starts executing the program form the first command
on.
7.5.7 The “Stop” function
This functions sends a stop command to the module and so stops the execution of a TMCL program.
7.5.8 The “Continue” function
This function allows to continue the run of a TMCL program that has previously been stopped. It does this just by
sending a run command to the module (without sending a reset command before). The module then continues
executing the program from the next command before it had been stopped.
7.5.9 Disassembling a TMCL program
The “Disassemble” function reads out the TMCL memory of a module and disassembles its contents. The result is
then written into a new editor page. So this function allows to check the program which is currently in the TMCL
program memory of a module. The progress of downloading the program from the module and the disassembly is
shown in special windows. It can be aborted by clicking the “Abort” button.
Page 91

TMCL Reference Manual 72
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Fig. 7.6: Progress of disassembling a TMCL program
7.6 The “Setup” menu
7.6.1 Options
This function provides the “Options” dialogue which allows to set up all global options of the TMCL IDE.
7.6.1.1 Assembler options
The “Assembler” page in the “Options” dialogue provides the assembler options. There are the following options:
Include file path: The path where the assembler searches for include files included by the #include directive.
Automatically append a “STOP” command: If this option is ticked, the assembler automatically appends a
“STOP” command at the end of every TMCL program (if the last command in the program is not already a
“STOP” command).
Generate a symbol file: The assembler generates a text file that contains the address of every label. This can
be useful to start the program from other addresses than 0.
Write output to binary file: The assembler writes its output also to a binary file. For every command eight
bytes are written (the command with checksum, but without a device address).
Fig. 7.7: Assembler options
7.6.1.2 Connection options
Here the interface type and the port can be selected that are to be used to communicate with a module. First,
select the connection type. In most cases this will be “RS232 / RS485”. If you have a Trinamic CANnes card or
USB2X module and you would like to use the CAN or IIC interface of a module just select the appropriate
connection type. The connection parameters that are displayed below the connection type change according to the
selected interface.
When you have selected “RS232 / RS485” the COM port that is to be used, the baud rate and the module address
can be set. The factory default baud rate on a TMCM module is 9600. The factory default module address is 1.
If you do not know the address of the connected module, just click the “Search” button. The TMCL IDE then tries
to find the module address (please see section 7.6.3 for details).
N.B.: Versions prior to 1.18 also provided the option “XOR checksum”. This has now been removed, and it must not
be switched on in these older versions of the TMCL IDE.
Please note that RS485 adapters where the data direction is controlled by the RTS line of the COM port do not
work with Windows 95, Windows 98 or Windows ME (due to a bug in these operating systems). They can only be
Page 92

TMCL Reference Manual 73
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
used with Windows NT4, Windows 2000 or Windows XP, and also with these operating systems there may be the
problem that switching back to “receive” takes place too late.
Fig. 7.8: Some connection options
When the interface type “CANnes card” is selected, the CAN parameters are displayed and can be changed. “Device”
selects which CANnes card to use (if you have more than one CANnes card installed). The factory default of the
CAN bitrate on TMCM modules is normally 250kBit/s. “Termination” turns the termination resistor on the CANnes
card on or off. “Send ID” is the CAN ID to use when sending CAN datagrams to the module. “Recv. ID” is the ID
that the module uses to send back data to the PC.
Select “IIC (USB2X device)” when you wish to use the IIC interface of a Trinamic USB2X device. Here, only the
device name of the USB2X device and the IIC address of the module can be set. The factory default on a new
module is normally 2.
Select “CAN (USB2X device)” when you wish to use the CAN interface of a Trinamic USB2X device. The device name
of the USB2X device and the CAN send ID, receive ID and bit rate can be set. Please note that the USB2X device
must have firmware version 1.01 or higher to make use of this feature!
Select “RS485 (USB2X device)” when you wish to use the RS485 interface of a Trinamic USB2X device. The device
name of the USB2X, the bit rate and the module address can be set. Please note that the USB2X device must have
at least firmware version 2.05 to make use of this feature! This kind of RS485 interface is mainly useful for
updating modules that only have RS485 interface (e.g. TMCM-110/RS485).
When a TMCM-610 module is connected via USB the option “USB direct” can be used. The TMCL-IDE can
communicate with this module directly via USB. The device name of the TMCM-610 module can be selected here.
7.6.2 Configure
This function provides a dialogue for changing the configuration (global parameters) of a module.
7.6.2.1 RS232/RS485
Here, you can change the send address, the receive addresses and the baud rate of the serial interface of a
module. Just set the desired value and then click on the appropriate “Apply” button to send the new setting to the
module. Be careful, as most changes take effect immediately.
Fig. 7.9: RS232 / RS485 settings
Page 93

TMCL Reference Manual 74
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
7.6.2.2 CAN
This page provides the settings of the CAN interface of a module. The usage is the same as with the RS232/RS485
page. These settings do not have any effect on a TMCM-300 module as it does not have a CAN interface.
Fig. 7.10: CAN settings
7.6.2.3 Drivers
This page allows to change the settings for the SPI driver chain. See the TMC428 datasheet for details. These
settings must not be changed on modules other than TMCM-301! On TMCM-301 modules they only need changing
when motor drivers other than TMC-236 or TMC-239 are to be used.
When programming user specific driver configuration chain tables please disable the automatic mixed decay
handling for TMC236 drivers, the automatic full step switching and the freewheeling function first (axis parameters
203, 204 and 211). This is needed because these functions modifie the driver configuration table.
Fig. 7.11: The driver chain configuration
7.6.2.4 Microstepping (graphical view)
Here, the microstepping wave of the module can be changed to enhance the microstepping behaviour of a stepper
motor. The microstepping wave function can be changed between a triangular wave, a sine wave or a trapezoid
wave or something between that by changing the sigma value. Clicking the “Apply” button programs the new
wave table into the module. Just let the motor run and try out the best value.
The microstepping wave does not have any effect on the TMCM-302 module as it only provides step/direction
output.
Page 94
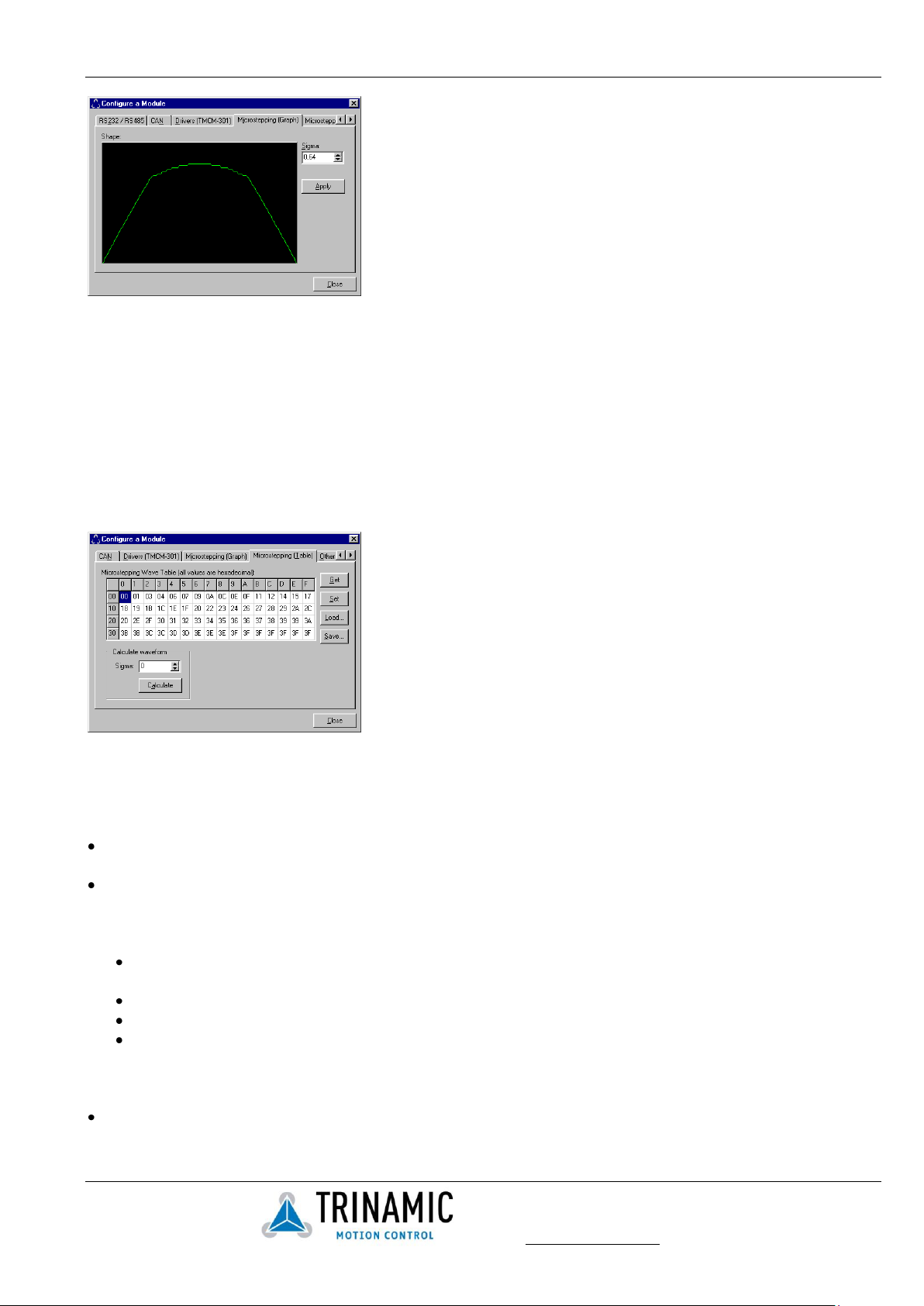
TMCL Reference Manual 75
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Fig. 7.12: Microstep wave form setting (graphical view)
7.6.2.5 Microstepping (table view)
The table view allows a finer adjusting of the microstep table. Clicking the “Get” button reads the actual microstep
table from the module. You can then edit the values. All values are hexadecimal numbers between 0 and 3F. The
“Set” button programs the table that can be seen on this screen into the module. Use the “Load” and “Save”
buttons to load a table from a file or store a table into the file.
When clicking the “Calculate” button a waveform will be calculated in the same manner as in the graphical view of
the microstepping function (section 7.6.2.4). This can be used as a basis of a table that can then be fine tuned
manually.
Fig. 7.13: Microstep wave form setting (table view)
7.6.2.6 Other
This page provides the following functions:
Firmware revision: Click the “Get” button in the “Firmware Revision” section to read the firmware revision of a
module. The result will be displayed beside the “Get” button.
Configuration EEPROM: Here you can lock or unlock the configuration EEPROM. When the configuration EEPROM
is locked, STAP and STGP commands do not have any effect so that the settings stored in the configuration
EEPROM can not be changed by accident. The buttons in the “Configuration EEPROM” section provide the
following functionality:
Button “Get State”: Click this button to see if the configuration EEPROM is locked. The state will then be
displayed beside the button.
“Lock”: Click this button to lock the configuration EEPROM.
“Unlock”: Click here to unlock the configuration EEPROM.
“Restore Factory Default”: Clicking this button will restore all settings stored in the configuration EEPROM
to their factory defaults and then reset the module. Please use this function with extreme care. If this
function should not work, try the “Clear EEPROM” function in the OS installation dialogue (see section
7.6.4).
TMCL Autostart: The TMCL program auto start option can be turned on or off by clicking the appropriate
button. Click the “Get state” button to see whether auto start is turned on or off on a module.
Page 95

TMCL Reference Manual 76
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Fig. 7.14: Other module settings
7.6.3 Search
If you do not know the RS232/RS485 address of a module you can use this function to find out: This function
provides the address search dialogue. Here, just click the “Start” button. Then, every address (1..255) will be tried
out.
Fig. 7.15: Searching a module address
7.6.4 Install OS
By using this function you can update the firmware of a module. First, load the new firmware file (which must be
in Intel-HEX format) by clicking the “Load” button. The file is then checked if it is a TMCL firmware file, and its
device type and version number will be displayed. Then, click the “Start” button to program the new firmware into
the module. Please make sure that there will be no power cut or cut of the serial connection during the
programming process. The program checks if the device type in the firmware file and the device type of the
module are identical. An error message will be displayed if this is should not be the case. If everything is okay,
the new firmware will be programmed into the module and verified afterwards. The programming progress is
shown by the status bar.
Fig. 7.16: Firmware update in progress
If you click the “Clear EEPROM” button, all settings stored in the EEPROM of the module will be erased. If you then
power the module off and on again, all settings will be restored to their factory defaults.
Attention: Before these functions can be used, TMCM-300 modules have to be prepared in the following way:
Connect the pins 1 and 2 (the pins near the LED) with a jumper, then power it on. The module is now in boot
Page 96

TMCL Reference Manual 77
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
mode. After you have finished updating the firmware of such a module, power it off, remove the jumper and
power it on again. With other modules (TMCM-301/302/303/310/100/110/610) there is no need to put on a jumper.
Please note that with most of the modules this function is only available when the RS232 interface of the module
is used. With the TMCM-110(/SG)-CAN module the firmware can be updated via the CAN interface, and with the
TMCM-610 module also the USB interface can be used to upgrade the firmware. The TMCM-103, TMCM-116 and
TMCM-34x modules also support firmware upgrading via CAN (at 1000kBit/s).
7.6.5 StallGuard adjusting tool
The StallGuard adjusting tool helps to find the necessary motor parameters when
StallGuard is to be used. This function can only be used when a module is connected
that features StallGuard. This is checked when the StallGuard adjusting tool is selected
in the “Setup” menu. After this has been successfully checked the StallGuard adjusting
tool is displayed.
First, select the axis that is to be used in the “Motor” area.
Now you can enter a velocity and an acceleration value in the “Drive” area and then
click “Rotate Left” or “Rotate Right”. Clicking one of these button will send the
necessary commands to the module so that the motor starts running. The red bar in
the “StallGuard” area on the right side of the windows displays the actual load value.
Use the slider to set the StallGuard threshold value. If the load value reaches this value
the motor stops. Clicking the “Stop” button also stops the motor.
All commands necessary to set the values entered in this dialogue are displayed in the
“Commands” area at the bottom of the window. There, they can be selected, copied
and pasted into the TMCL editor.
7.6.6 StallGuard profiler
The StallGuard profiler is a utility that helps you find the best parameters for using stall detection. It scans
through given velocities and shows which velocities are the best ones. Similar to the StallGuard adjusting tool it
can only be used together with a module that supports StallGuard. This is checked right after the StallGuard
profiler has been selected in the “Setup” menu. After this has been successfully checked the StallGuard profiler
window will be shown.
First, select the axis that is to be used. Then, enter the “Start velocity”
and the “End velocity”. The start velocity is used at the beginning at the
profile recording. The recording ends when the end velocity has been
reached. Start velocity and end velocity must not be equal. After you have
entered these parameters, click the “Start” button to start the StallGuard
profile recording. Depending on the range between start and end velocity
this can take several minutes, as the load value for every velocity value is
measured ten times. The “Actual velocity” value shows the velocity that is
currently being tested and so tells you the progress of the profile
recording. You can also abort a profile recording by clicking the “Abort”
button.
The result can also be exported to Excel or to a text file by using the
“Export” button.
Fig. 7.17: The StallGuard Profiler
7.6.6.1 The result of the StallGuard profiler
The result is shown as a graphic in the StallGuard profiler window. After the profile recording has finished you can
scroll through the profile graphic using the scroll bar below it. The scale on the vertical axis shows the load value:
Page 97

TMCL Reference Manual 78
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
a higher value means a higher load. The scale on the horizontal axis is the velocity scale. The colour of each line
shows the standard deviation of the ten load values that have been measured for the velocity at that point. This is
an indicator for the vibration of the motor at the given velocity. There are three colours used:
Green: The standard deviation is very low or zero. This means that there is effectively no vibration at this
velocity.
Yellow: This colour means that there might be some low vibration at this velocity.
Red: The red colour means that there is high vibration at that velocity.
7.6.6.2 Interpreting the result
In order to make effective use of the StallGuard feature you should choose a velocity where the load value is as
low as possible and where the colour is green. The very best velocity values are those where the load value is
zero (areas that do not show any green, yellow or red line). Velocities shown in yellow can also be used, but with
care as they might cause problems (maybe the motor stops even if it is not stalled).
Velocities shown in red should not be chosen. Because of vibration the load value is often unpredictable and so
not usable to produce good results when using stall detection.
As it is very seldom that exactly the same result is produced when recording a profile with the same parameters a
second time, always two or more profiles should be recorded and compared against each other.
7.6.7 Parameter calculation tool
The parameter calculation tool helps you to calculate the velocity and acceleration parameters in TMCL. Parameters
can be converted from physical units like rpm or rps into the internal units of TMCL and vice versa. There are
actually two parameter calculation tools: One for the TMCM-3xx, TMCM-6xx, TMCM-101/109/110/111 modules (which
are TMC428 based) and one for the TMCM-100 module (which is TMC453 based). You can choose the tool by
selecting the appropriate tab page in the parameter calculation dialogue. Always be sure to use the right one.
To use the calculation tool, just fill in the values that are known and then click the “Calculate” button. After
changing any parameter always the “Calculate” button again. When a parameter in the TMCL section has been
changed the physical units will be re-calculated with the next click on the “Calculate” button. When a paramater in
the physical units section has been changed the TMCL parameters will be re-calculated with the next click on the
“Calculate” button.
Page 98

TMCL Reference Manual 79
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
7.7 The TMCL debugger
The TMCL debugger makes source level debugging of TMCL programs possible. The TMCL program still runs on the
module, so true in-system debugging can be done. In order to use the debugger the module must have at least
firmware version 3.34 (TMCM-100, 110,111,3xx) resp. 6.28 (TMCM-101,102,6xx). Upgrade your module if needed.
7.7.1 Starting the debugger
Before starting the debugger you will first have to make sure that the module is connected to the PC and that the
program in the editor of the TMCL-IDE is the same as the program on your module. This can be done either by
assembling the program that currently is in the editor and afterwards downloading it to the module or by
disassembling the program that is currently stored on the module.
After these two preconditions have been verified you can start the debugger either by selecting the function
“Debugger active” in the “Debug” menu or by clicking the debugger icon on the tool bar. After the debugger has
been successfully started, the debugger functions will be enabled and most other functions of the TMCL-IDE will
be disabled (it is now also not possible to change the program in the editor).
You can exit the debugger by clicking “Debugger active” in the “Debug” menu or the debugger icon on the tool
bar once again. Then, all debugger functions will be disabled and all other functions of the TMCL-IDE will be
enabled again.
Figure 7.1: A TMCL program with two breakpoints, standing in the second breakpoint.
7.7.2 Breakpoints
Breakpoints can be set or removed by clicking the apropriate line on the left breakpoint bar of the editor. A blue
bullet is displayed in every line where a breakpoint can be set. When a breakpoint is set a red bullet with a green
tick is displayed in that line.
When a program is run either by the “Run” or by the “Animate” function of the debugger it will be stopped when
a breakpoint is reached. It can then be continued by clicking “Run”, “Animate” or “Step” again. It can also be reset
by clicking “Stop / Reset”, so that it can be restarted form the beginning again.
7.7.3 The “Run / Continue” function
Choose the “Run / Continue” function from the “Debug” menu (or click the “Run” icon or press F9) to start the
program resp. continue its execution. The program will be stopped either when its end is reached, it a breakpoint
is reached or when the “Pause” function in the “Debug” menu or the “Pause” icon is selected. In the latter two
cases the actual position in the program will be shown in the editor by a green arrow on the left side and the
program execution can be continued by using either the “Run / Continue” function, the “Step” function or the
“Animate” function. The contents of the accumulator and the X register are also shown on the status bar while the
program is paused.
Page 99

TMCL Reference Manual 80
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
If you wish to restart the program for the very beginning, select the “Stop/Reset” function before cicking “Run /
Continue”.
7.7.4 The “Pause” function
When a program is running (either started by the “Run / Continue” or by the “Animate” function), program
execution can be interrupted at any time by selecting the “Pause” function from the “Debug” menu or clicking the
“Pause” icon on the tool bar or pressing F2. Program execution can be continued by clicking “Run”, “Animate” or
“Step” again.
While a program is paused the actual position in the program is shown by a green arrow in the editor. The
contents of the accumulator and the X register are shown on the status bar of the TMCL-IDE.
7.7.5 The “Step” function
Use this function for a step-by-step execution of the TMCL program. Every time the “Step” function is selected
(either by selecting “Step” in the debug menu, clicking the “Step” icon on the tool bar or pressing F7) the next
command in the TMCL program is executed. The actual position is shown by a green arrow in the editor. The
contents of the accumulator and the X register are also shown on the status bar.
7.7.6 The “Animate” function
This function automatically executes the TMCL program step-by-step, so that the flow of the program can be seen.
The actual position in the program is shown and updated after every command, and the contents of the
accumulator and the X register are also shown on the status bar and updated after every command.
The program will be paused when running into a breakpoint or when the “Pause” function is selected. Program
execution can then be continued either by the “Run / Continue”, the “Animate” or the “Step” function.
7.7.7 The “Stop / Reset” function
Selecting “Stop / Reset” from the “Debug” menu (or clicking the “Stop / Reset” button or pressing Ctrl+F2) stops
program execution immediately and resets the program. This means that starting the program again using “Run /
Continue”, “Animate” or “Step” will start the program form the beginning.
This function can also be used when the program execution is paused (either by a breakpoint or by the “Pause”
function) to reset it and ensure that the program can be started again from the beginning.
7.7.8 The “Direct Mode” function in the debugger
While in the debugger, the “Direct Mode” can be used at any time when the program is not running to inspect or
change parameters. Use this with care, as changing parameters out of the normal program flow can lead to
unexpected behaviour of the TMCL program.
7.8 The syntax of TMCL in the TMCL assembler
Here, the syntax of the TMCL commands used by the TMCL assembler is given. Please see the chapter 3 for an
explanation of the functionality of the TMCL commands. The command mnemonics given there are used in the
TMCL assembler. Please see also the sample program files and chapter 3 and 8 to learn more about TMCL
programming.
7.8.1 Assembler directives
Assembler directives always start with a # sign. The only directive is #include to include a file. The name of that
file must be given after the #include directive. If that file is already in the editor, it will be taken from there.
Otherwise it will be loaded from file, using the include file path that can be set in the “Options” dialogue.
Example:
#include test.tmc
Page 100

TMCL Reference Manual 81
Trinamic Motion Control GmbH & Co KG
Sternstraße 67
D – 20357 Hamburg, Germany
http://www.trinamic.com
Name
Function
SIN
Sinus
COS
Cosinus
TAN
Tangens
ASIN
Arcus Sinus
ACOS
Arcus Cosinus
ATAN
Arcus Tangens
LOG
Logarithm Base 10
LN
Logarithm Base e
EXP
Power to Base e
SQRT
Square root
ABS
Absolute value
INT
Integer (truncate)
ROUND
Integer (Round)
SIGN
Returns
-1 if argument<1,
0 if argument=0
1 if argument>0
DEG
Converts from radiant to degrees
RAD
Converts from degrees to radiant
Symbol
Meaning
()
Parenthesis
^
Power
*
Multiplication
/
Division
+
Addition
-
Subtraction
7.8.2 Symbolic constants
Symbolic constants are defined using the syntax <Name>=<Value>. A name must always start with a letter or the
sign _ and may then contain any combination of letters, numbers and the sign _. A value must always be a
decimal, hexadecimal or binary number or a constant expression (see section 7.8.3). Hexadecimal numbers start
with a $ sign, binary numbers start with a % sign. Examples:
Speed=1000
Speed2=Speed/2
Mask=$FF
BinaryValue=%1010101
7.8.3 Constant expressions
Wherever a numerical value is needed, it can also be calculated during assembly. For this purpose constant
expressions can be used. A constant expression is just a formula that evaluates to a constant value. The syntax is
very similar to BASIC or other programming languages. Please note that the calculation takes place during
assembly and not during execution of the TMCL program on the module.
Internally, the assembler uses floating point arithmetic to evaluate a constant expression, but as TMCL commands
only take integer values, the result of a constant expression will always be rounded to an integer value when used
as an argument to a TMCL command. Here is a list of functions and operators that can be used in constant
expressions:
Functions:
Operators
Symbolic constants, floating point numbers, integer numbers, hexadecimal numbers and binary numbers can also
be used in constant expressions. Here are some examples of constant expressions used wherever constant values
can be placed:
 Loading...
Loading...