

Page 1

BLOCK DIAGRAM
Step/Direction interface. The SPI interface
programmable 6 bit microstep
table (64 µsteps / fullstep) for best step
serial peripheral interfaces allow for
forms a complete motion control system.
TMC429
SPI to
Master
CLK
Position
Comparator
Interrupt
Controller
Ref. Switch
Processing
Step/Dir
Pulse
Generation
OUTPUT SELECT
- SPI
or
-
Step/Dir
Microstep
Table
Serial Driver
Interface
3x Ref. Switches
3x Linear
RAMP Generator
SPI to Stepper
Motor Driver 0/1/2
Step/Dir OUT 0/1/2
SPI to µC
SDO to µC
Muliplexed
Output
Position Compare OUT
MOTION CONTROLLER FOR STEPPER MOTORS INTEGRATED CIRCUITS
TMC429 DATASHEET
Intelligent Triple Stepper Motor Controller with Serial Peripheral Interfaces and Step/Direction
Full Compatible Successor of the TMC428
APPLICATIONS
CCTV, Security
Antenna Positioning
Heliostat Controller
Battery powered applications
Office Automation
ATM, Cash recycler, POS
Lab Automation
Liquid Handling
Medical
Printer and Scanner
Pumps and Valves
FEATURES AND BENEFITS
Controls up to three stepper motors
3.3 V or 5 V operation with CMOS / TTL compatible IOs
Serial 4-wire interface for µC with easy-to-use protocol
Interface for SPI™ motor drivers with data rates up to 1 Mbit/s
Step/Direction interface
Clock frequency: up to 32 MHz (can use CPU clock)
Internal position counters 24 bit wide
Microstep frequency up to 1 MHz
Read-out option for all motion parameters
Programmable 6 bit microstep table, up to 64 entries for a
quarter sine wave period
DESCRIPTION
The TMC429 is a miniaturized stepper motor
controller with an industry leading feature
set. It controls up to three motors via SPI or
provides a
accuracy with 2-phase stepper motors. Based
on target positions and velocities - which can
be altered on the fly - it performs all real
time critical tasks autonomously. The TMC429
offers high level control functions for robust
and reliable operation. Two separate 4 wire
Ramp generators for autonomous positioning / speed control
On-the-fly change of target motion parameters
Power boost automatic acceleration dependent current control
Low power operation: 1.25 mA at 4 MHz (typ.)
communication with the microcontroller and
with up to three daisy chained stepper motor
drivers.
Together with a microcontroller the TMC429
Compact Size: ultra small 16 pin SSOP package, small 24 pin SOP
package, and 32 pin QFN 5x5 mm package
Directly controls TMC23x, TMC24x, TMC26x, and TMC389
High integration and small form factor allow
for miniaturized designs for cost-effective and
highly competitive solutions.
TRINAMIC Motion Control GmbH & Co. KG
Hamburg, Germany
Page 2

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 2
Layout for Evaluation of TMC429 with
Controller/Driver Chain
TMC429
TMC429-LI
3-axis controller QFN32-package (5x5mm2), full functionality
5 x 5 mm2
package (TMC428 replacement
TMC429+26x-EVAL
Evaluation board for S/D chipset (TMC429with TMC260,
TMC261, TMC262 and TMC424)
16 x 10 cm2
TMC429+TMC24x-EVAL
Evaluation board for SPI chipset (TMC429, TMC246, and
TMC249)
13.5 x 8,2 cm2
is a single axis
It features the
This evaluation board is a development
in combination with TMC260, TMC261, and
The board
and RS232 interfaces. The control software
parameters and visualizing the dynamic
APPLICATION EXAMPLES: RELIABLE CONTROL FOR UP TO 3 MOTORS
The TMC429 scores with its autonomous handling of all real time critical tasks. By offloading the
motion-control function to the TMC429, up to three motors can be operated reliably with very little
demand for service from the microcontroller. Software only needs to send target positions, and the
TMC429 generates precisely timed step pulses by hardware for up to three stepper motor driver chips.
Parameters for each motor can be changed on the fly while software retains full control using an SPI
bus. This way, high precision and reliable operation is achieved while costs are kept down.
STEPROCKER™
The TMCM-1110 stepRocker
motor controller and driver board for 2-phase
bipolar stepper motors.
TRINAMIC controller/driver chain consisting of
TMC429 and TMC262. The Module is intended to
be a fully functional development platform with
6A MOSFETs. Because of the TMC429s ability to
control up to three motors the stepRocker can
be extended to a full 3-axes system.
Development platform with TMC262
TMC262, TMC261, and TMC260
ORDER CODES
Order code Description Size
TMC429-PI24 3-axis controller SOP24-
possible)
TMC429-I 3-axis controller SSOP16-package (SPI only, for TMC428
replacement)
TMC429+TMC26X-EVAL
platform for applications based on the TMC429
TMC262. Common supply voltages are +12V DC /
+24V DC / +48V DC (TMC261 only).
features an embedded microcontroller with USB
provides a user-friendly GUI for setting control
responses of the motors.
Motor movements can be controlled via the
step and direction interface using inputs from
an external source or signals generated by the
microcontroller acting as a step generator.
15.5 x 10.5 mm
6 x 5 mm2
2
www.trinamic.com
Page 3

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 3
TABLE OF CONTENTS
1 PRINCIPLES OF OPERATION 4
1.1 KEY CONCEPTS 4
1.2 CONTROL INTERFACES 5
1.3 SOFTWARE VISIBILITY 6
1.4 STEP FREQUENCIES 6
1.5 MOVING THE MOTOR 7
2 GENERAL DEFINITIONS, UNITS, AND
NOTATIONS 9
2.1 NOTATIONS 9
2.2 SIGNAL POLARITIES 9
2.3 UNITS OF MOTION PARAMETERS 9
2.4 REPRESENTATION OF SIGNED VALUES BY TWO’S
COMPLEMENT 9
3 PACKAGE VARIANTS 10
4 PIN ASSIGNMENTS 10
4.1 PACKAGE OUTLINES 11
4.2 SIGNAL DESCRIPTIONS 12
10 STEP/DIR DRIVERS 53
10.1 TIMING 53
11 SPI MODE DRIVER INTERFACE 54
11.1 BUS SIGNALS 54
11.2 TIMING 54
11.3 RAM ADDRESS PARTITIONING AND DATA
11.4 STEPPER DRIVER SPI DATAGRAM CONFIGURATION
11.5 INITIALIZATION OF MICROSTEP LOOK-UP TABLE62
12 RUNNING A MOTOR 67
12.1 GETTING STARTED 67
12.2 RUNNING A MOTOR WITH START-STOP-SPEED IN
13 ON-CHIP VOLTAGE REGULATOR 68
14 POWER-ON RESET 69
ORGANIZATION 55
57
RAMP
_MODE 67
5 SAMPLE CIRCUITS 13
5.1 APPLICATION EXAMPLE: TMC429 IN QFN32
PACKAGE 13
5.2 APPLICATION EXAMPLE: TMC429 IN SSOP16
PACKAGE 14
5.3 APPLICATION EXAMPLE: TMC429 WITH DRIVERS
WITHOUT
6 CONTROL INTERFACE 15
6.1 BUS SIGNALS 15
6.2 SERIAL PERIPHERAL INTERFACE FOR µC 15
7 ADDRESS SPACE PARTITIONS 20
7.1 READ AND WRITE 20
7.2 REGISTER SET 20
7.3 REGISTER MAPPING 21
8 REGISTER DESCRIPTION 22
8.1 AXIS PARAMETER REGISTERS 22
8.2 GLOBAL PARAMETER REGISTERS 39
9 REFERENCE SWITCH INPUTS 49
9.1 REFERENCE SWITCH CONFIGURATION, MOT1R,
AND REFMUX
9.2 TRIPLE SWITCH CONFIGURATION 51
9.3 HOMING PROCEDURE 52
9.4 SIMULTANEOUS START OF UP TO THREE STEPPER
MOTORS 52
SERIAL DATA OUTPUT (SDO) 14
49
15 ABSOLUTE MAXIMUM RATINGS 70
16 ELECTRICAL CHARACTERISTICS 70
16.1 POWER DISSIPATION 70
16.2 DC CHARACTERISTICS 71
16.3 TIMING CHARACTERISTICS 72
18 PACKAGE MACHANICAL DATA 73
18.1 TMC429-LI / QFN32 73
18.2 TMC429-PI24 / SOP24 74
18.4 TMC429-I / SSOP16 75
19 MARKING 76
20 COMPATIBILITY INFORMATION: TMC429
AND TMC428 77
20.1 SIGNAL DESCRIPTIONS: TMC428 VS. TMC42977
20.2 TMC428 SDO_C OUTPUT 78
20.3 UNUSED ADDRESSES 78
20.4 GENERAL TIMING PARAMETERS 79
21 DISCLAIMER 80
22 ESD SENSITIVE DEVICE 80
23 TABLE OF FIGURES 81
24 REVISION HISTORY 82
25 REFERENCES 83
www.trinamic.com
Page 4

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 4
Serial
µC
Inte
rface
3 x RAMP
Generator
3 x STEPPULS
Generator
3x Step/Dir
Microstep
Unit
(incl. Sequencer)
Serial Driver
Interface
Multiple Ported RAM
M
U
X
SPI Mode
6
Voltage
Regulator
GND
Power-on
Reset
POSCOMP
Interrupt Controller
REF1
REF2
REF
3
REF1R*
REF2R*
REF3R*
nSCS_C
SCK_C
SDI_C
nINT_SDO_C
TEST
SDOZ_C*
nSCS_S / Step 2
SCK_S / Dir 1
SDO_S / Step 1
SDI_S / Dir 2
nSCS3 / Dir 3*
nSCS2 / Step 3*
470nF
POSCMP*
CLK
4-32MHz
GND
DIE PAD
GND
GND
100nF
TMC429
GND
V5 /+5V supply or
+3V supply
* Not available with all IC packages. Please refer to the package outlines.
SPI
SPI / Step/Dir
to driver
SPI to
µC
Connect for
+3.3V operation
V33
V5
1 Principles of Operation
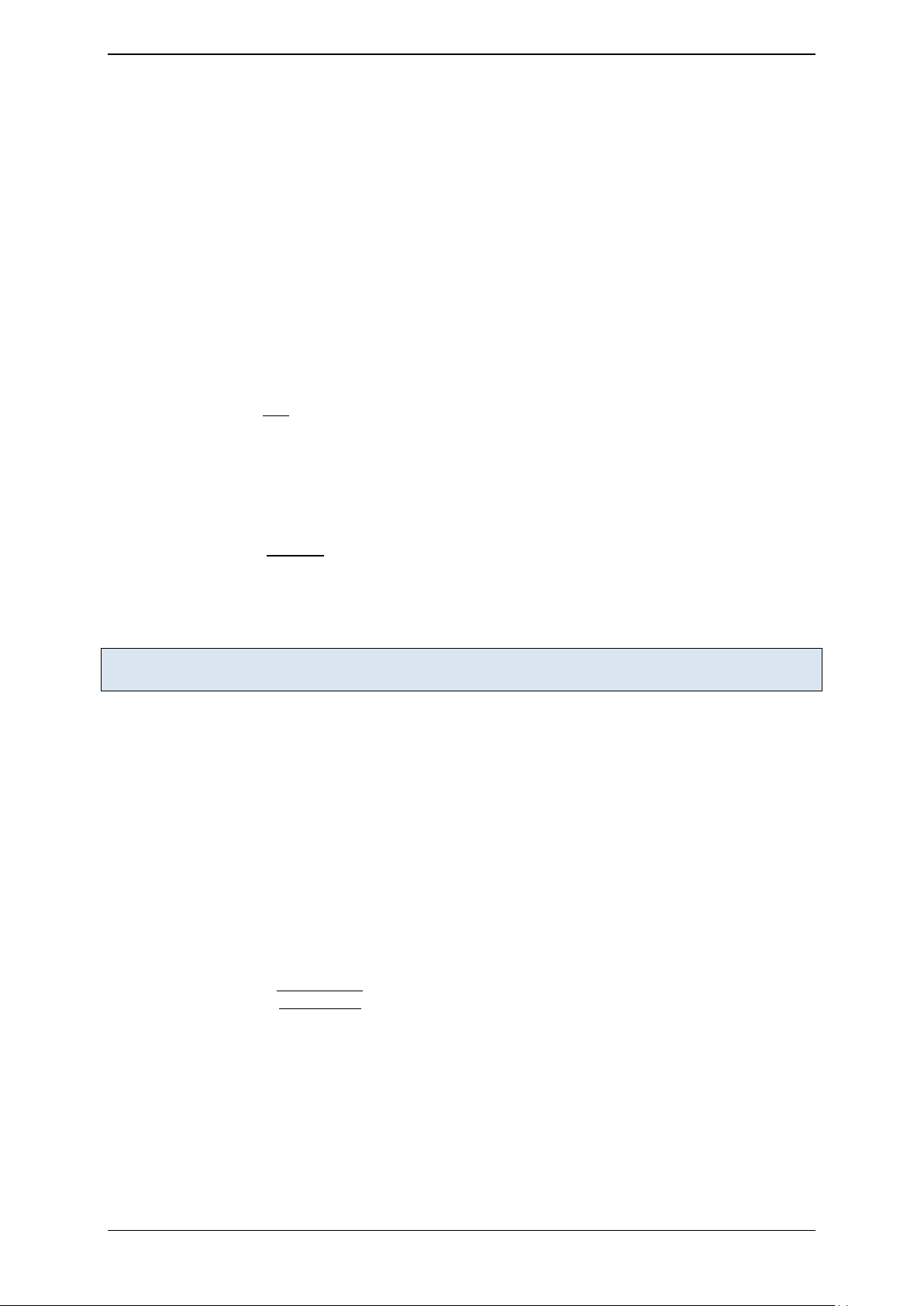
Figure 1.1 TMC429 functional block diagram
The TMC429 is a miniaturized high performance stepper motor controller with an outstanding costperformance ratio. It is designed for high volume automotive as well as for demanding industrial
motion control applications. Once initialized the TMC429 controls up to three 2-phase stepper motors
simultaneously. A programmable sequencer for 2-phase motors is integrated. The TMC429 motion
controller is equipped with an SPI™ host interface with easy-to-use protocol and two driver interfaces
(SPI and STEP/DIR) for addressing various stepper motor driver types.
1.1 Key Concepts
The TMC429 realizes real time critical tasks autonomously and guarantees for a robust and reliable
drive. These following features contribute toward greater precision, greater efficiency, higher
reliability, and smoother motion in many stepper motor applications.
Initialization Adapt the TMC429 to the driver type and configuration and send initial configuration
data to SPI drivers. Configure microstep resolution and waveform for SPI drivers.
Interfacing The TMC429 offers application specific interfacing via Step/Dir or SPI.
Positioning The TMC429 operates the motors based on user specified target positions and
Programming Every parameter can be changed at any time. The uniform access to any TMC429
Microstepping Based on internal position counters the TMC429 performs up to ±2
The range goes from full stepping (1 microstep = 1 full step) and half stepping (2
www.trinamic.com
velocities. Modify all motion target parameters on-the-fly during motion.
register simplifies application programming. A read-back option for all internal
registers is available.
23
(micro)steps
completely independent from the microcontroller. Microstep resolutions are
individually programmable for each stepper motor.
microsteps per full step) up to 6 bit micro stepping (64 microsteps per full step) for
precise positioning and noiseless stepper motor rotation. With STEP/DIR drivers any
microstep resolution is possible as supported by the driver.
The internal microstep table can be adapted to specific motor characteristics to
further reduce torque ripple, if desired.
Page 5

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 5
µC
High Level
Interface
Stepper Motor
Driver
e.g. TMC260/TMC261
M
Motor 3
Stepper Motor
Driver
e.g. TMC260/TMC261
M
Motor 2
Stepper Motor
Driver
e.g. TMC260/TMC261
M
Motor 1
TMC429
Motion Controller
SPI
Step/Dir 1 Step/Dir 3Step/Dir 2
SPI
µC
High Level
Interface
Stepper Motor
Driver
e.g. TMC236/TMC246
M
Motor 3
Stepper Motor
Driver
e.g. TMC236/TMC246
M
Motor 2
Stepper Motor
Driver
e.g. TMC236/TMC246
M
Motor 1
TMC429
Motion Controller
SPI
SPI
1.2 Control Interfaces
1.2.1 Serial µC Interface
From the software point of view, the TMC429 provides a set of registers, accessed by a
microcontroller via a serial interface in a uniform way. Each datagram contains address bits, a readwrite selection bit, and data bits to access the registers and the on-chip memory. Each time the
microcontroller sends a datagram to the TMC429 it simultaneously receives a datagram from the
TMC429. This simplifies the communication with the TMC429 and makes programming easy. Most
microcontrollers have an SPI hardware interface, which directly connects to the serial four wire
microcontroller interface of the TMC429. For microcontrollers without SPI
serial communication is sufficient and can easily be implemented.
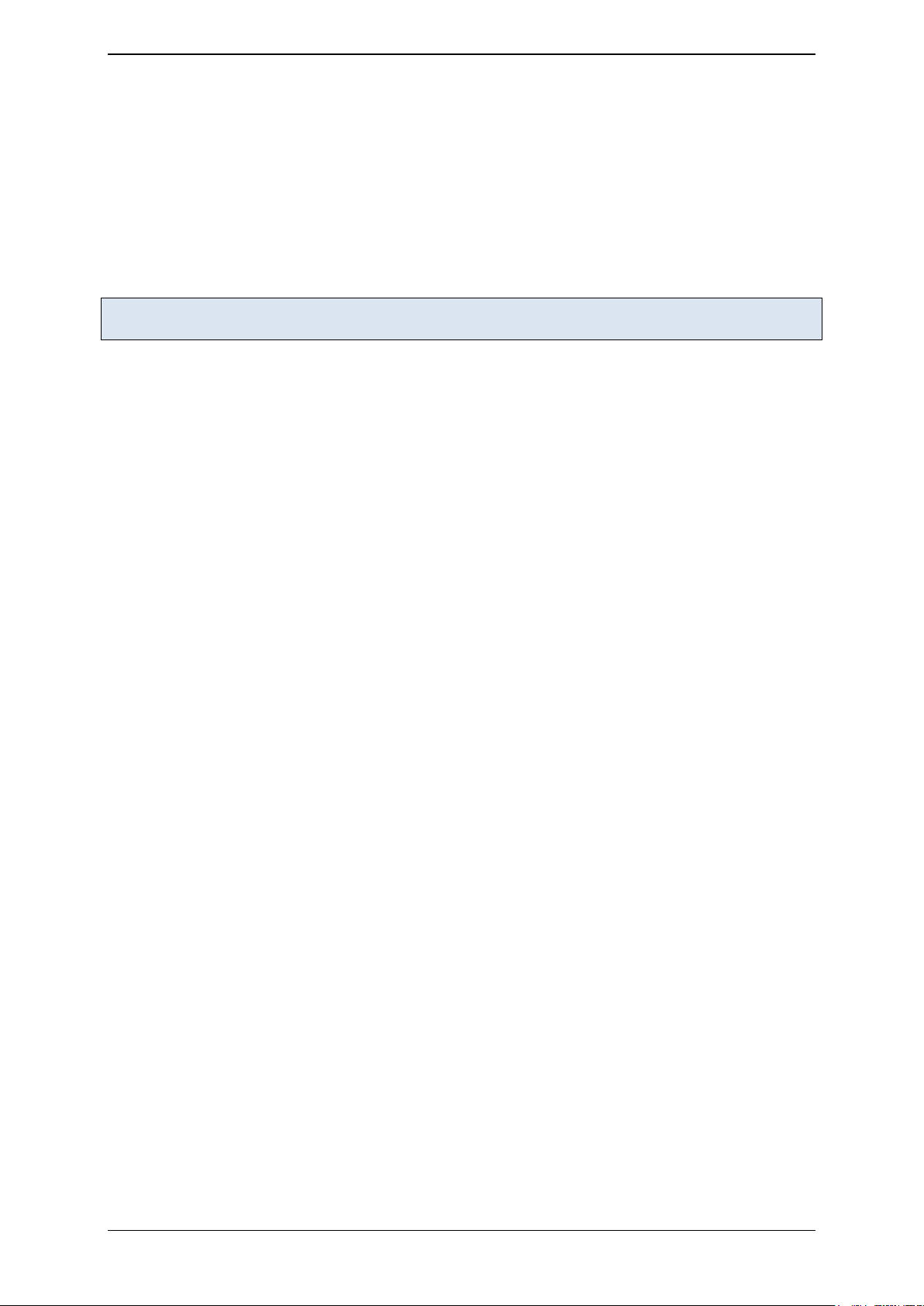
1.2.2 Step/Dir Driver Interface
The TMC429-LI controls the motor position by sending pulses on the STEP signal while indicating the
direction on the DIR signal. A programmable step pulse length and step frequencies up to 1MHz allow
operation at high speed and high microstep resolution. The driver chip converts these signals into the
coil currents which control the position of the motor. The TMC429-LI perfectly fits to the TMC26x smart
power Step/Dir driver family.
hardware software doing the
Figure 1.2 Application example using Step/Dir driver interface
1.2.3 Serial Driver Interface
The TMC429 automatically generates the required data-stream for SPI drivers and provides user
configurable microstep waves and motor ramps for up to three motors. The serial interface to the
motor drivers is flexibly configurable for different types (from different vendors) with up to 64 bit
length for the SPI daisy chain. The TMC429-I perfectly fits to the TMC24x driver family.
Figure 1.3 Application example using SPI driver interface
www.trinamic.com
Page 6
TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 6
1.3 Software Visibility
From the software point of view the TMC429 provides a set of registers and on-chip RAM (see Figure
1.1), accessed via the serial µC interface in a uniform way. The serial interface uses a simple protocol
with fixed datagram length for the read- and write-access. These registers are used for initializing the
chip as required by the hardware configuration. Afterwards the motor can be moved by writing target
positions or velocity and acceleration values.
1.4 Step Frequencies
The desired motor velocity is an important design parameter of an application. Therefore it is
important to understand the limiting factors.
1.4.1 Step Frequencies using the Step/Dir driver interface
The step pulses can directly be fed to a Step/Dir driver. The maximum full step rate (fsf
the microstep resolution of the external driver chip.
The TMC429 microstep rate (µsf) is up to 1/32 of the clock frequency:
f
=
f
32
EXAMPLE FOR FULL STEP FREQUENCY CALCULATION
f
= 16 MHz
CLK
= 500 kHz
µsf
max
µstep resolution of external driver: 16
) depends on
max
=
16
= 31.25
500
With a standard motor with 1.8° per full step this results in up to 31.25kHz/200= 156 rotations per
second, which is far above realistic motor velocities for this kind of motor and thus imposes no real
limit on the application.
A 16 microsteps resolution can be extrapolated to 256 microsteps within the driver when using the
TMC26x driver family.
1.4.2 Step frequencies using the SPI driver interface
The microstep unit with included sequencer processes step pulses from the pulse generator, which
represent microsteps, half steps, or full steps (depending on the selected step resolution). The serial
driver interface sends datagrams to the stepper motor driver chain whenever a step pulse comes.
The theoretical microstep frequency is identical to Step/Dir mode, but the achievable step frequency
may be limited by the SPI data rate. Maximum SPI frequency (bit rate) is clock frequency divided by 16
(when CLK2DIV=7). An overhead of 1.5 bits is required per datagram. The maximum microstep
transmission frequency depends on the total length of the datagrams sent to the SPI stepper motor
driver chain.
EXAMPLE FOR SPI DATA RATE CALCULATION
At a clock frequency of 16 MHz, with a daisy chain of three SPI stepper motor drivers of 12 bit
datagram length each (e.g. TMC246), the theoretical maximum SPI transmission frequency (fSPI
=
16
16
3 × 12 + 1.5
max
) is:
This is approximately 27 kHz. It is the theoretical upper limit for the fullstep frequency. In an
application, the maximum desired fullstep frequency should be a factor 4 to 8 lower in order to avoid
a beat between the step frequency and the SPI transmission rate.
The microstep rate may be higher than the SPI transmission frequency, even if the stepper motor
driver does not note all microsteps due to the SPI data rate limit. At high step rates (respectively
pulse rates) the differences between microstepping and full step excitation vanish.
www.trinamic.com
Page 7

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 7
1.5 Moving the Motor
Moving the motor is simple:
- To move a motor to a new target position, write the target position into the associated register
by sending a datagram to the TMC429.
- To move a motor with a new target velocity, write the velocity into the register assigned to the
stepper motor.
1.5.1 Motion Controller Functionality
The ramp generator monitors the motion parameters stored in its registers and calculates velocity
profiles. Based on the actual ramp generator velocity a pulse generator supplies step pulses to the
motor driver.
1.5.2 Modes of Motion – Individually Programmable for Each Axis
ramp_mode For positioning applications the ramp_mode is most suitable. The user sets the
position and the TMC429 calculates a trapezoidal velocity profile and drives
autonomously to the target position. During motion, the position may be altered
arbitrarily.
velocity_mode For constant velocity applications the velocity_mode is most suitable. In
velocity_mode, a target velocity is set by the user and the TMC429 takes into account
user defined limits of velocity and acceleration.
hold_mode In hold_mode, the user sets target velocities, but the TMC429 ignores any limits of
velocity and acceleration, to realize arbitrary velocity profiles, controlled completely
by the user.
soft_mode The soft_mode is similar to the ramp_mode, but the decrease of the velocity during
deceleration is done with a soft, exponentially shaped velocity profile.
1.5.3 Interrupts
The TMC429 has capabilities to generate interrupts. Interrupts are based on ramp generator conditions
which can be set using an interrupt mask. The interrupt controller (which continuously monitors
reference switches and ramp generator conditions) generates an interrupt if required.
SPECIAL HANDLING: TMC429-I / 16-PIN PACKAGE
- On 16-pin package the SDO_C signal becomes a low active interrupt signal called nINT_SDO_C
while nSCS_C is high. Set SDO_INT=1 to access the non-multiplexed interrupt signal output
nINT_SDO_C for the other packages.
- If the microcontroller disables the interrupt during access to the TMC429 and enables the
interrupt otherwise, the multiplexed interrupt output of the TMC429 behaves like a dedicated
interrupt output.
- For polling, the TMC429 sends the status of the interrupt signal to the microcontroller with each
datagram.
1.5.4 Reference Switch Handling
The TMC429 has a left and a right reference switch input for each motor. Note, that these inputs are
not available with all packages.
SPECIAL HANDLING: TMC429-I / 16-PIN PACKAGE
Because of its 16-pin package the TMC429-I has only three reference switch inputs: REF1, REF2, and
REF3. Therefore the TMC429-I provides two different modes for reference switch handling:
- In the Default Reference Switch Mode the three reference switch inputs are defined as left side
reference switches, one for each stepper motor.
- The Second Reference Switch Mode defines the first reference input REF1 as left reference switch
input of motor one, the second reference input REF2 as left reference switch input of motor two,
and the 3rd reference input REF3 as right reference switch input of motor one. In the second
reference switch mode there is no reference switch input available for stepper motor three.
- With an external multiplexer 74HC157 any stepper motor may have a left and a right reference
switch.
www.trinamic.com
Page 8
TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 8
1.5.5 Integrated Programmable µstep Sequencer
The serial SPI interface to the stepper motor driver chain has to be configured by an initialization
sequence which writes the configuration into the on-chip RAM. Once configured the serial driver
interface works autonomously. The internal multiple port RAM controller of the TMC429 takes care of
access scheduling. So, the user may read and write registers and on-chip RAM at any time. The
registers hold global configuration parameters and motion parameters. The on-chip RAM stores the
configuration of the serial driver interface and the microstep table.
The sequencer internally generates a number of control signals available for transmission to SPI
driver ICs. These sequencer output signals are selected as configured by the internal stepper motor
driver datagram configuration table.
During power-on reset, the TMC429 initializes a default configuration within the on-chip RAM for an
SPI driver chain for TMC23x and TMC24x stepper motor drivers.
1.5.6 Access to Status and Error Bits
STEP/DIR
The microcontroller directly controls and monitors the stepper drivers. It also needs to take care for
advanced current control, e.g. power down in stand still.
SPI
Many serial stepper motor drivers provide status bits (driver active, inactive…) and error bits (short to
ground, wire open…), which are sent back from the stepper motor driver chain to the motion
controller. To have access to error bits and datagrams with a total length up to 48 bits the TMC429
buffers the information by means of two 24 bit wide registers. The microcontroller has direct access
to these registers.
Although, the TMC429 provides datagrams with up to 64 bits to the driver chain, only the last 48 bits
sent back from the driver chain are buffered for read out by the microcontroller. Buffering of up to 48
bits is sufficient for a chain of three stepper motor drivers. For a chain of three TMC23x / TMC24x
stepper motor driver chips all status bits are accessible.
www.trinamic.com
Page 9

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 9
2 General Definitions, Units, and Notations
2.1 Notations
- Decimal numbers are used as usual without additional identification.
- Binary numbers are identified by a prefixed % character.
- Hexadecimal numbers are identified by a prefixed $ character.
EXAMPLE
Decimal: 42
Binary: %101010
Hexadecimal: $2A
TMC429 DATAGRAMS ARE WRITTEN AS 32 BIT NUMBERS, E.G.:
$1234ABCD = %0001 0010 0011 0100 1010 1011 1100 1101
TWO TO THE POWER OF N
In addition to the basic arithmetic operators (+, -, *, /) the operator two to the power of n is required
at different sections of this data sheet. For better readability instead of 2n the notation 2^n is used.
2.2 Signal Polarities
External and internal signals are high active per default, but the polarity of some signals is
programmable to be inverted. A pre-fixed lower case n indicates low active signals (e.g. nSCS_C,
nSCS_S). See chapter 8.2, too.
2.3 Units of Motion Parameters
The motion parameters position, velocity, and acceleration are given as integer values within TMC429
specific units. With a given stepper motor resolution one can calculate physical units for angle,
angular velocity, angular acceleration. (See chapter 8.1.13)
2.4 Representation of Signed Values by Two’s Complement
Motion parameters which have to cover negative and positive motion direction are processed as
signed numbers represented by two’s complement as usual. Limit motion parameters are represented
as unsigned binary numbers.
SIGNED MOTION PARAMETERS ARE:
V_TARGET / V_ACTUAL / A_ACTUAL / A_THRESHOLD
UNSIGNED MOTION PARAMETERS ARE:
V_MIN / V_MAX / A_MAX
POSITIONS
X_TARGET / X_ACTUAL can be treated as signed or unsigned, as desired.
www.trinamic.com
Page 10

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 10
including SPI and Step/Dir driver
- Fits best to TMC26x and TMC389.
p to three stepper driver
he right reference switch for motor 3 is not
SPI interface for up to three stepper motor driver
inputs
n additional multiplexer 74hc157 might be
necessary. The multiplexing control signal is only
available in SPI stepper motor driver chain mode.
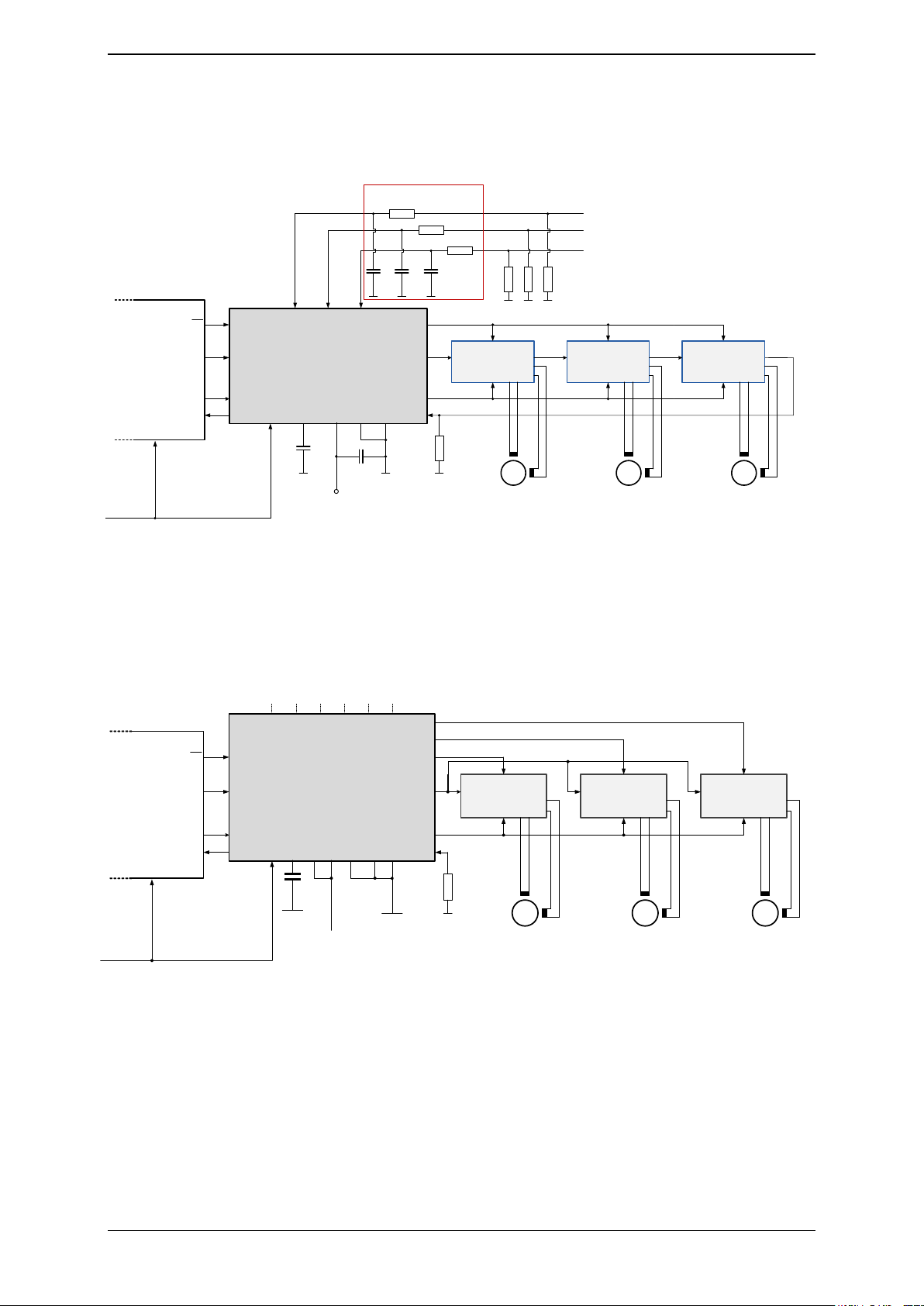
3 Package Variants
The TMC429 is available in three different package variants, qualified for the industrial temperature
range. An additional variant is available for the automotive temperature range. All package variants
are RoHS compilant.
Order code Package Characteristics JEDEC Drawing
TMC429-LI QFN32 5x5mm, 32 pins, plastic package, industrial (-40… +85°C) MO-220 ?
TMC429-PI24 SOP24 300 mils, 24 pins, plastic package, industrial (-40… +85°C) MS-013 (300 mils)
TMC429-I SSOP16 150 mils, 16 pins, plastic package, industrial (-40… +85°C) MO-137 (150 mils)
4 Pin Assignments
The three package variants of the TMC429 offer different signal sets for various applications:
Type Package Compatibility Remarks
Full functionality
TMC429-LI QFN32
TMC429-PI24 SOP24 TMC428-PI24
replacement
TMC429-I SSOP16
TMC428-I
replacement
interfaces for up to three stepper motor driver chips
-
SPI interface for up to three stepper driver chips
- STEP/DIR interface for u
chips
- T
available.
chips (complements the TMC24x).
- Step/Dir interface for up to two motors.
- The additional reference right side switch
REF1R, REF2R, and REF3R are not available.
- A
Some third party SPI stepper motor drivers have no serial data output and therefore cannot simply be
arranged in a daisy chain to drive more than one motor. The package variants SOP24 and QFN32 have
two additional driver selection outputs nSCS2 and nSCS3 for stepper motor drivers without serial data
output.
All inputs are Schmitt-Trigger. Unused inputs (REF1, REF2, REF3, and SDI_S) need to be connected to
ground. Unused reference switch inputs have to be connected to ground, too. A pull-down resistor is
necessary at the SDI_S input of the TMC429 for those serial peripheral interface stepper motor drivers
that set their serial data output to high impedance Z while inactive.
STEP function outputs are S1, S2, and S3. Corresponding DIR outputs are D1, D2, and D3. The
multiplexed output nINT_SDO_C of TMC429-LI and TMC429-PI24 can be configured in a de-multiplexed
mode. An additional output named POSCMP is available for triggering when moving over a
programmable position.
Attention
- After power on-reset, the TMC429 starts in TMC428 mode. That is, because the TMC429 is a 100%
compatible successor of the TMC428 motion controller. Additional outputs of the TMC429
including specific functions have to be activated by dedicated TMC429 configuration registers.
- Preferably, long wires to the reference switch inputs (REF1, REF2, and REF3) should be avoided.
For long wires, a low pass filter for spike suppression should be provided (refer the TMC429
evaluation board schematic as example).
www.trinamic.com
Page 11

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 11
TMC429-I
V33
nSCS_C
GND
SDI_C
TEST V5
SCK_C
SDI_S_D2
nINT_SDO_C
CLK nSCS_S_S2
REF2
REF1
REF3
SCK_S_D1
SDO_S_S1
1
2
3
4
5
6
7
8
16
10
11
12
13
14
15
9
SSOP16 (150 MILS)
TMC429-PI24
V33
nSCS_C
GND
SDI_C
TEST
V5
SCK_C
SDI_S_D2
nINT_SDO_C
CLK
nSCS_S_S2
REF2
REF1
REF3
SCK_S_D1
SDO_S_S1
3
4
5
6
7
8
9
10
23
15
16
17
20
21
22
14
1
2
11
12
24
13
18
nSCS2_S3
19
nSCS3_D3
SOP24 (300 MILS)
V5
GND
REFR1 [n.c. @ TMC428]
REFR2 [n.c. @ TMC428]
[n.c. @ TMC428] POSCMP
[n.c. @ TMC428] SDOZ_C
TMC429-LI
nSCS_C
TEST
SCK_C
CLK
REF2
REF3
3
4
5
6
7
8
9
1
2
QFN32 5x5mm
V5
GND
n.c.
10 11 12 13 14 15 16
32 31 30 29 28 27 26 25
22
21
20
19
18
17
24
23
REF1
n.c.
SDI_C
n.c.
SDOZ_C
REFR2
nINT_SDO_C
SDO_S_S1
n.c.
SCK_S_D1
nSCS_S_S2
nSCS2_S3
nSCS3_D3
V5
V33
GND
n.c.
SDI_S_D2
REFR1
REFR3
POSCMP
GND
n.c.
4.1 Package Outlines
Please refer to the application note
PCB_Guidelines_TRINAMIC_packages
for a practical guideline for all
available TRINAMIC IC packages and
PCB footprints. The application note
covers package dimensions, example
footprints and general information on
PCB footprints for these packages. It is
available on www.trinamic.com.
Figure 4.1 TMC429 pin out
www.trinamic.com
Page 12

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 12
Pin
SSOP16
SOP24
QFN32
In/Out
Description
Reset
- - - - Internal power-on reset.
CLK
5 7 5 I Clock input
nSCS_C
6 9 7 I Low active SPI chip select input driven from µC
SCK_C
7
10 8 I
Serial data clock input driven from µC
SDI_C
8
11
10 I Serial data input driven from µC
Multiplexed nINTERRUPT output if communication with
SDO_C will never be high impedance; the TMC429 is
equipped with an additional pin named SDOZ_C that
nSCS_S_S2
12
17
18 O SPI chip select signal to stepper motor driving chain
Step output S2 (for motor 2) in Step/Dir mode
nSCS3_D3
-
19
20 O SPI chip select signal (SOP24 only) /
SCK_S_D1
Serial data clock output to SPI stepper motor driver
DIR output D1 (for motor 1) in Step/Dir mode
SDO_S_S1
10
15
15 O Serial data output to SPI stepper motor driver chain /
SDI_S_D2
16
23
27
I
O
Serial data input from SPI stepper motor driver chain
down resistor at SDI_S avoids high
DIR output D2 (for motor 2) in Step/Dir mode
REF1
1 2 31 I Reference switch input 1
REF2
2 3 1 I Reference switch input 2
(no internal pull-up resistor)
(no internal pull-up resistor)
V5
13
5, 20
3, 21
+5V supply / +3.3V supply
V33
14
21
22 470nF ceramic capacitor pin / +3.3V supply
GND
15
8, 22
6, 23, 25
Ground
TEST
4 6 4 I Must be connected to GND as close as possible to the
n.c.
26, 32
POSCMP
- 1 30
n.c. / O
Position compare output for SOP24 and QFN32 /
SDOZ_C
-
12
12
O / Z
SDOZ_C becomes high impedance (Z) when nSCS_C=1 /
configured with TMC429
register to give the nINT signal directly without
multiplexing
REFR1 - 24
28 I Reference switch right 1 input
Only available for TMC429 in SOP24 package and
REFR2
SOP24 package and
QFN32 package (with internal pull-up resistor)
REFR3
- - 29 I Reference switch right 3 input
4.2 Signal Descriptions
No external reset input pin is available.
nINT_SDO_C
nSCS2_S3
REF3 3 4 2 I Reference switch input 3
9 14 14 O Serial data output to µC input /
µC is idle (resp. nSCS_C = 1)
becomes high impedance when nSCS_C=1.
- 18 19 O SPI chip select signal (SOP24 only) /
Step output S3 (for motor 3) in Step/Dir mode
DIR output D3 (for motor 3) in Step/Dir mode
11 16 17 O
chain /
STEP output S1 (for motor 1) in Step/Dir mode
(pull-up/impedance; SDI_S input is the power-on default) /
(no internal pull-up resistor)
- - 9, 11,
16, 24,
- 13 13 I Reference switch right 2 input
www.trinamic.com
chip. No user function.
- Not connected pins
Output for pos_comp function
The nINT signal is not mapped to SDOZ_C pin /
The pin nINT_SDO_C can be
QFN32 package (with internal pull-up resistor)
Only available for TMC429 in
Only available for TMC429 in QFN32 package
(with internal pull-up resistor)
Page 13

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 13
SCK_S_D1
SDO_S_S1
SDI_S_D2
nSCS_S_S2
REF2
REF3
REF1
TEST GND
SDI_C
nSCS_C
SCK_C
nINT_SDO_C
CLK
V5V33
TMC429-LI
nSCS3_D3
nSCS2_S3
POSCMP
REFR3
REFR2
REFR1
SDOZ_C
STP_3
DIR_3
STP_2
DIR_2
STP_1
DIR_1
MISO
MOSI
SCK
nSCS
µC
TMC26x
TMC26x
TMC26x
STEP
DIR
CSN
SCK
SDI
SDO
TMC26x
#1
STEP
DIR
CSN
SCK
SDI
SDO
TMC26x
#2
STEP
DIR
CSN
SCK
SDI
SDO
TMC26x
#3
nSCS2_S3
nSCS3_D3
nSCS_S_S2
SDI_S_D2
SDO_S_S1
SCK_S_D1
nSCS_C
SCK_C
SDI_C
SDOZ_C
MOSI
MISO
SCK
TMC429-LI
CSn_0
CSn_1
CSn_2
CSn_3
CLKCLK
100K
5 Sample Circuits
The sample circuits show the connection of the external components.
5.1 Application Example: TMC429 in QFN32 Package
All signals of the TMC429 are available with the QFN32 package. We recommend this package for
applications using TRINAMICs TMC26x smart power driver family.
Figure 5.1 TMC429 within QFN32 package
Figure 5.2 TMC429 / TMC26x outline for configuration via SPI and STEP/DIR for motion
PPLICATION ENVIRONMENT OF TMC429 (QFN32 PACKAGE) AND 3 X TMC26X STEPPER MOTOR DRIVER:
A
- One SPI chip select signal CSN_0 selects the TMC429 SPI microcontroller interface.
- Up to three SPI chip select signals (CSN_3, CSN_2, CSN1) select up to three TMC262 SPI for
- The TMC429 SDOZ_C is high impedance when nSCS_C is 1.
configuration.
www.trinamic.com
Page 14
TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 14
10K
SCK_S
SDO_S
SDI_S
nSCS_S
SDO
CSN
SDI
SCK
SDO
CSN
SDI
SCK
SDO
CSN
SDI
SCK
TMC23x / TMC24x
TMC23x / TMC24x TMC23x / TMC24x
REF2 REF3
REF1
TEST
GND
µC
SCK
MOSI
MISO
SS
SDI_C
nSCS_C
SCK_C
SDO_C
CLK
CLK
V5V33
470 nF
+5 V
1K 1K
Reference Switch Inputs
active high
SM#3
SM#2
SM#1
TMC429-LI
1K
100 nF
Output SDO_C will nerver
be high impedance
10nF
10nF
10nF
4.7K
4.7K
4.7K
Optional filter for long cables and to avoid
failure if switch wires are next to motor
cables.
10K
SCK_S
SDO_S
SDI_S
nSCS_S
nSCS
SDI
SCK
nSCS
SDI
SCK
nSCS
SDI
SCK
Driver
w/ o SDO
Driver
w/ o SDO
REF2 REF3
REF1
TEST
GND
µC
SCK
MOSI
MISO
SS
SDI_C
nSCS_C
SCK_C
SDO_C/
SDOZ_C
CLK
CLK
V5V33
470 nF
+ 5 V
SM#3 SM#2
SM#1
TMC429- LI /
TMC429-PI24
nSCS2
nSCS3
V5 GND
Output SDO_ C will nerver
be high impedance
Driver
w/ o SDO
REFR1 REFR2 REFR3
5.2 Application Example: TMC429 in SSOP16 Package
The low-prized TMC429-I is an optimum choice for SPI stepper motor drivers if the additional
functions of the TMC429-LI are not required. We recommend this package for TRINAMICs TMC23x and
TMC24x stepper driver family.
Figure 5.3 TMC429 application environment with TMC429 in SSOP16 package
5.3 Application Example: TMC429 with Drivers without Serial
For driver chips without serial data output the TMC429-LI and the TMC429-PI24 with two additional
chip select outputs are available. The TMC429 sends data to the driver chain on demand only, which
minimizes the interface traffic and reduces the power consumption.
Figure 5.4 Usage of drivers without serial data output (SDO) with TMC429 in SOP24 or in QFN32
packages
www.trinamic.com
Data Output (SDO)
Page 15

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 15
Bus clock input
SCK_C
Serial data input
SDI_C
Serial data output
SDO_C
6 Control Interface
The communication takes place via four wire serial interfaces and 32 bit datagrams of fixed length.
Stepper motor drivers with parallel inputs can be used in connection with the TMC429 with some
additional glue logic.
RESPONSIBILITIES ARE DEFINED AS FOLLOWS:
- The microcontroller is master of the TMC429.
- The TMC429 is master of the stepper motor driver daisy chain.
AUTOMATIC POWER-ON RESET:
- The TMC429 cannot be accessed before the power-on reset is completed and the clock is stable.
- All register bits are initialized with 0 during power-on-reset, except the SPI clock pre-divider
clk2_div that is initialized with 15 (see section 8.2.5.3).
6.1 Bus Signals
Signal Description TMC429 Microcontroller
Chip select input nSCS_C
6.2 Serial Peripheral Interface for µC
The serial microcontroller interface of the TMC429 acts as a 32 bit shift register.
COMMUNICATION BETWEEN µC AND THE TMC429
1. The serial µC interface shifts serial data into SDI_C with each rising edge of the clock signal
SCK_C.
2. Then, it copies the content of the 32 bit shift register into a buffer register with the rising
edge of the selection signal nSCS_C.
3. The serial interface of the TMC429 immediately sends back data read from registers or read
from internal RAM via the signal SDO_C.
4. The signal SDO_C can be sampled with the rising edge of SCK_C. SDO_C becomes valid at
least four CLK clock cycles after SCK_C becomes low as outlined in the timing diagram.
6.2.1 Timing
A complete serial datagram frame has a fixed length of 32 bit. Because of on-the-fly processing of the
input data stream, the serial µC interface of the TMC429 requires the serial data clock signal SCK_C to
have a minimum low / high time of three clock cycles. The SPI signals from the µC interface may be
asynchronous to the clock signal CLK of the TMC429.
If the microcontroller and the TMC429 work on different clock domains that run asynchronously by
the timing of the SPI interface of the microcontroller should be made conservative in the way that
the length of one SPI clock cycle equals 8 or more clock cycles of the TMC429 clock CLK.
www.trinamic.com
Page 16

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 16
t
SD
t
SD
CLK
sdi_c_bit#31
t
SCKCL
t
SCKCH
t
SUCSC
t
HDCSC
1 x SDI_C sampled
one full 32 bit datagram
SDO_C
(for TMC429-I)
SDI_C
SCK_C
nSCS_C
sdi_c_bit#30 . . . sdi_c_bit#1
30 x sampled SDI_C
sdi_c_bit#0
1 x SDI_C sampled
t
CLK
t
DATAGRAMuC
t
PD
t
IS
t
SD
t
SI
t
HDCSC
t
SUCSC
sdo_c_bit#31
sdo_c_bit#30 ... sdo_c_bit#1
sdo_c_bit#0
nINT
sdo_c_bit#31
sdo_c_bit#30 ... sdo_c_bit#1
sdo_c_bit#0
nINT
SDOZ_C
Figure 6.1 Timing diagram of the serial µC interface
EXPLANATORY NOTES
- While the data transmission from the microcontroller to the TMC429 is idle, the low active serial
chip select input nSCS_C and also the serial data clock signal SCK_C are set to high.
- While the signal nSCS_C is high, the TMC429 assigns the status of the internal low active
interrupt signal nINT to the serial data output SDO_C.
- The data signal SDI_C driven by the microcontroller has to be valid at the rising edge of the
serial data clock input SCK_C. The maximum duration of the serial data clock period is unlimited.
- While the µC interface of the TMC429 is idle, the SDO_C signal is the (active low) interrupt status
nINT of the integrated interrupt controller of the TMC429. The timing of the multiplexed interrupt
status signal nINT is characterized by the parameters t
The following SPI clock frequencies are recommended in order to avoid possible issues concerning
the SPI frequency between microcontroller and TMC429:
- For fCLK = 16MHz an upper SPI clock frequency of 1MHz is recommended.
- For fCLK = 32MHz an upper SPI clock frequency of 2MHz is recommended.
PROCEDURE OF DATA TRANSMISSION
1. The signal nSCS_C has to be high for at least three clock cycles before starting a datagram
transmission. To initiate a transmission, the signal nSCS_C has to be set to low.
2. Three clock cycles later the serial data clock may go low.
3. The most significant bit (MSB) of a 32 bit wide datagram comes first and the least significant
bit (LSB) is transmitted as the last one.
4. A data transmission is finished by setting nSCS_C high three or more CLK cycles after the last
rising SCK_C slope.
5. So, nSCS_C and SCK_C change in opposite order from low to high at the end of a data
transmission as these signals change from high to low at the beginning.
Information for TMC429-I / 16-pin package
In contrast to most other SPI compatible devices, the serial data output SDO_C of the TMC429-I is
always driven. It will never be high impedance Z. If high impedance is required for the SDO_C
connected to the microcontroller, it can be realized using a single gate 74HCT1G125. An additional pin
named SDOZ_C is available for the TMC429 with an integrated high impedance driver.
www.trinamic.com
and tSI (see chapter 16.3).
IS
Page 17

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 17
SCK_
S
SDO_
S
SDI_S
nSCS
_S
REF
2
REF
3
REF
1
TEST GND
CLK
V
5V
33
TMC
429
SCK
_C
SDI
_C
nSCS_C
SDOZ_C
SCK
_C
SDI_
C
nSCS_
C
SDOZ_C
nINT_SDO_C
nINT
nINTERRUPT status valid after
MSB
LSB
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
0
RRS
RW
Figure 6.2 The TMC429 has a high impedance pin SDOZ_C. The nINT_SDO_C can be configured as
non multiplexed interrupt output nINT if required.
TIMING CHARACTERISTICS OF THE SERIAL MICROCONTROLLER INTERFACE
Symbol Parameter Min Typ Max Unit
tSUCSC Setup Clocks for nSCS_C 3
tHDCSC Hold Clocks for nSCS_C 3
tSCKCL Serial Clock Low 3
tSCKCH Serial Clock High 3
∞
∞
∞
∞
CLK periods
CLK periods
CLK periods
CLK periods
tSD SDO_C valid after SCK_C low 2.5 3.5 CLK periods
tIS
2.5 CLK periods
nSCS_C low
tSI SDO_C valid after nSCS_C high 4.5 CLK periods
tDAMAGRAMuC Datagram Length 3+3+32*6= 198
tDAMAGRAMuC Datagram Length 12.375
∞
∞
CLK periods
µs
fCLK Clock Frequency 0 32 MHz
tCLK Clock Period tCLK = 1 / fCLK 31.25
tPD CLK-rising-edge-to-Output
5 ns
∞
ns
Propagation Delay
6.2.2 Datagram Structure
The µC communicates with the TMC429 via the four wire serial interface. Each datagram sent to the
TMC429 via the pin SDI_C and each datagram received from the TMC429 via the pin SDO_C is 32 bits
long.
The first bit sent is the most significant bit (MSB) sdi_c_bit#31. The last bit sent is the least significant
bit (LSB) sdi_c_bit#0 (see Figure 6.1). During the reception of a datagram, the TMC429 immediately
sends back a datagram of the same length to the microcontroller. This return datagram consists of
requested read data in the lower 24 datagram bits and status bits in the higher 8 datagram bits. A
read request is distinguished from a write request by the read/not write datagram bit (RW).
6.2.2.1 Datagrams Sent to the TMC429
The datagrams sent to the TMC429 are assorted in four groups of bits:
RRS The register RAM select (RRS) bit selects either registers or the on-chip RAM.
ADDRESS Address bits address memory within the register set or within the RAM area.
RW The read / not write (RW) bit distinguishes between read access and write access:
DATA Data bits are only for write access. For read access these bits are not used (don’t
ADDRESS
www.trinamic.com
read: RW = 1 / write RW = 0.
care) and should be set to 0.
32 BIT DATAGRAM SENT FROM µC TO THE TMC429 VIA PIN SDI_C
DATA
Page 18

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 18
MSB
LSB
INT
CDGW
SM3
SM2
SM1
RS3
xEQt3
RS2
xEQt2
RS1
xEQt1
NOTE
- Different internal registers of the TMC429 have different lengths. For some registers only a subset
of 24 data bits is used.
- Unused data bits should be set to 0.
- Some addresses select a couple of registers mapped together into the 24 data bit space.
6.2.2.2 Datagrams received by µC from the TMC429
The datagrams received by the µC from the TMC429 contain two groups of bits:
STATUS BITS The status bits, sent back with each datagram, comprehend the most important
internal status bits of the TMC429 and the settings of the reference switches
DATA BITS Data bits are only for write access.
The most significant bit MSB is received first; the least significant bit LSB is received last. The TMC429
only sends datagrams on demand.
32 BIT DATAGRAM SENT BACK FROM THE TMC429 TO µC VIA PIN SDO_C
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
STATUS BITS DATA BITS
STATUS INFORMATION BITS
INT The status bit INT is the internal high active interrupt controller status output
signal. Handling of interrupt conditions without using interrupt techniques is
possible by polling this status bit.
The interrupt signal is also directly available at the SDO_C pin of the TMC429
(set SDO_INT=1 in if_configuration_429 register). The pin SDO_C may directly be
connected to an interrupt input of the microcontroller.
Since the SDO_C / nINT output on TMC429-I (16-pin package) is multiplexed, the
microcontroller has to disable its interrupt input while it sends a datagram to
the TMC429. The SDO_C signal driven by the TMC429 alternates during datagram
transmission.
CDGW The CDGW cover datagram waiting bit is a handshake signal for the
microcontroller. It shows the state of a datagram covering mechanism that is
necessary for direct configuration data transmission to the stepper motor driver
chain, e.g. for configuring the drivers in the initialization phase.
The CDGW status bit also gives the status of the datagram_high_word and
datagram_low_word.
RS3, RS2, RS1 The status bits RS3, RS2 and RS1 represent the state of the left reference switch
inputs. They are also accessible in register %1111100 as l3, l2 and l1.
xEQt3, xEQt2, xEQt1 The three status bits xEQt3, xEQt2, and xEQt1 indicate individually for each
stepper motor, if it has reached its target position.
The status bits r1, r2, r3 and l1, l2, l3 and bits xEQt3, xEQt2, and xEQt1 can trigger an interrupt or
enable simple polling techniques.
www.trinamic.com
Page 19

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 19
6.2.3 Simple Datagram Examples
The % prefix – normally indicating binary representation in this data sheet – is omitted for the
following datagram examples. Assuming, one would like to write (RW=0) to a register (RRS=0) at the
address %001101 the following data word %0000 0000 0000 0001 0010 0011, one would have to send
the following 32 bit datagram
00011010000000000000000100100011
to the TMC429. With inactive interrupt (INT=0), no cover datagram waiting (CDGW=0), all reference
switches inactive (RS3=0, RS2=0, RS1=0), and all stepper motors at target position (xEQt3=1, xEQt2=1,
xEQt1=1) the status bits would be %10010101 the TMC429 would send back the 32 bit datagram:
10010101000000000000000000000000
To read (RW=1) back the register written before, one would have to send the 32 bit datagram
00011011000000000000000000000000
to the TMC429 and the TMC429 would reply with the datagram
10010101000000000000000100100011.
Write (RW=0) access to on-chip RAM (RRS=1) to an address %111111 occurs similar to register access,
but with RRS=1. To write two 6 bit data words %100001 and %100011 to successive pair-wise RAM
addresses %1111110 and %1111111 (%100001 to %1111110 and %100011 to %1111111) which are
commonly addressed by one datagram, one would have to send the datagram
11111110000000000010001100100001.
To read (rw=1) from that on-chip memory address, one would have to send the datagram
11111111000000000000000000000000.
www.trinamic.com
Page 20
TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 20
with up to
7 Address Space Partitions
The functionality of the TMC429 is mapped to registers which are combined to groups and mapped to
the address space:
- Each stepper motor has a set of registers individually assigned to it and arranged within a
contiguous address space.
- A set of registers within the address space holds the global parameters which are common for
all stepper motors. A single dedicated global parameter register is essential for the configuration
of the serial four wire stepper motor driver interface.
- One half of the on-chip RAM address space holds the configuration parameters for the stepper
motor driver chain (used for SPI mode, only).
- The other half of the on-chip RAM address space is provided to store a microstep table if
required (used for SPI mode, only).
- The first seven datagram bits (sdi_c_bit#31 and sdi_c_bit#30 ... sdi_c_bit#25, respectively RRS and
ADDRESS) address the whole address space of the TMC429.
ADDRESS SPACE PARTITIONS
Address ranges (incl. RRS) Assignment
%000 0000 . . . %000 1111 16 registers for stepper motor #1
%001 0000 . . . %001 1111 16 registers for stepper motor #2
%010 0000 . . . %010 1111 16 registers for stepper motor #3
%011 0000 . . . %011 1110 15 common registers
%011 1111 1 global parameter register
%100 0000 . . . %101 1111 32 addresses of 2x6 bit for driver chain configuration
%110 0000 . . . %111 1111 32 addresses of 2x6 bit for microstep table
Registers
24 bits
RAM
128x6 bit
CHANGING TARGET POSITION OR TARGET VELOCITY OF SINGLE MOTORS
The stepper motors are controlled directly by writing motion parameters into associated registers.
Only one register write access is necessary for changing a target motion parameter. Thus the
microcontroller has to send one 32 bit datagram to the TMC429 for altering the target position or the
target velocity of one stepper motor.
CHANGING DRIVER CONFIGURATION OR MICROSTEP TABLE OF ALL MOTORS
Some parameters are packed together in a single data word at a single address. These parameters
have to be initialized once and remain unchanged during operation. They have to be changed in
common. The access to the on-chip RAM addresses concern two successive RAM addresses. So, always
two data words are modified with each write access to the on-chip RAM.
Once initialized after power-up, the content of the RAM is usually left unchanged.
7.1 Read and Write
Read and write access is selected by the RW bit (sdi_c_bit#24) of the datagram sent from the µC to
the TMC429. The on-chip configuration RAM and the registers are writeable with read-back option.
Some addresses are read-only. Write access (RW=0) to some of those read-only registers triggers
additional functions, explained in detail later.
7.2 Register Set
The register address mapping is given in chapter 7.3. The registers are initialized internally during
power-up. During power-up initialization, the TMC429 does not send any datagrams to the stepper
motor driver chain.
The TMC429 loads a default RAM configuration for a TMC236 / TMC239 / TMC246 / TMC249 SPI driver
chain on power-on reset. For a Step/Dir driver chain this is of no relevance.
www.trinamic.com
Page 21

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 21
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
0
RRS
RW
RW=0 : WRITE access / RW=1 : READ access
0 0 0
1
X_ACTUAL
0 0 1 1
V_MAX
0 1 0 0
V_TARGET
0 1 0 1
V_ACTUAL
0 1 1 0
A_MAX
0 1 1 1
A_ACTUAL
1 0 0 0
A_THRESHOLD
1 0 1 0
REF_CONF
R_M
1 1 0 0 PULSE_DIV
RAMP_DIV
USRS
1 1 1
0
X_LATCHED
1 1 1 1 USTEP_COUNT_429
C
(SMDA=11)
0 0 0
0
DATAGRAM_LOW_WORD
0 0 1
0
COVER_POSITION
COVER_LEN
0 1 0 0
IF_CONFIGURATION_429
0 1 0
1
POS_COMP_429
0 1 1 0 POS_COMP_INT_429
M
I
P
1 1 1 0
mot1r
refmux
cont_update
cs_ComInd
dac_ab
fd_ab
ph_ab
sck_s
nscs_s
SMDA =
stepper motor driver address
M =
mask
cw =
cover waiting
RRS =
register RAM select
l1, l2, l3 =
left switch 1/2/3 (read-out)
r1, r2, r3 =
right switch 1/2/3 (read-out)
unused bits
7.3 Register Mapping
All register bits are initialized with 0 during power on reset, except the SPI clock pre-divider clk2_div
(see section 8.2.5.3) that is initialized with 15. The on-chip RAM of the TMC429 is initialized internally
during power-up. It can be modified by the microcontroller as required.
TMC429 REGISTER MAPPING
32 BIT DATAGRAM SENT FROM µC TO THE TMC429 VIA PIN SDI_C
0
SMDA
0
0
0
1
1
0
1 1
ADDRESS
IDX
THREE STEPPER MOTOR REGISTER SETS (SMDA={00, 01, 10})
DATA
0 0 0 0 X_TARGET
0 0 1 0 V_MIN
IS_AGTAT
IS_ALEAT
IS_v0
1 0 0 1 1 PMUL PDIV
lp
1 0 1 1 INTERRUPT_MASK INTERRUPF_FLAGS
1 1 0 1 DX_REF_TOLERANCE
JDX
OMMON REGISTERS
0 0 0 1 DATAGRAM_HIGH_WORD
cw
0 0 1 1 COVER_DATAGRAM
1 0 0 0
1 0 0 1 TYPE_VERSION_429 (= $429101 for TMC429 version 1.01, read-only)
1 1 1 1 1 1
R_M = RAMP_MODE I = interrupt
www.trinamic.com
OWER-DOWN
l3 r3 l2 r2 l1 r1
POLARITIES
CLK2_DIV
LSMD
0 0 0 0
STPDIV_429
(if en_sd=1)
Page 22

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 22
X_TARGET
R/W
24 bit
This register holds the current target position in units of
X_ACTUAL
24 bit
The current position of each stepper motor is available by read
Positions can be treated as signed or
unsigned.
V_MAX
R/W
11 bit
This parameter sets the maximum motor velocity.
of V_TARGET depends on the chosen mode of operation.
V_ACTUAL
12 bit signed
This read-only register holds the current velocity of the
A_MAX
R/W
11 bit
This register defines the absolute value of the desired
with a value range from 0 to 2047.
A_ACTUAL
R
12 bit signed
The actual acceleration can be read out by the microcontroller
IS_AGTAT
R/W
3 bit
unsigned
in SPI
RAMP_MODE
R/W
2 bit
The two bits RAMP_MODE (R_M) select one of the four possible
select the behavior of the
The bit called lp (latched position) is a read only status bit.
INTERRUPT_MASK
R/W
8 bit
The TMC429 provides one interrupt register of eight flags for
RAMP_DIV
R/W
4 bit
The parameter RAMP_DIV scales the acceleration parameter
s used for
setting the microstep resolution in SPI mode.
DX_REF_TOLERANCE
R/W
12 bit
DX_REF_TOLERANCE excludes a motion range to allow motion
unsigned
a change of the reference switch state.
holds the actual
8 Register Description
The TMC429 provides axis parameter registers and global parameter registers.
8.1 Axis Parameter Registers
The registers hold binary coded numbers. Some are unsigned (positive) numbers, some are signed
numbers in two’s complement, and some are control bits or single flags. The functionality of different
registers depends on the RAMP_MODE (refer to chapter 8.1.11).
OVERVIEW AXIS PARAMETER REGISTER MAPPING
REGISTER R / W TYPE DESCRIPTION
microsteps. Positions can be treated as signed or unsigned.
R/W*2
out of this register.
V_MIN R/W 11 bit
unsigned
unsigned
V_TARGET R/W 12 bit signed The V_TARGET register holds the current target velocity. The use
R*1
unsigned
IS_ALEAT
IS_V0
A_THRESHOLD
PMUL
PDIV
REF_CONF
lp
R/W
R/W
R/W
R/W
R/W
R/W
R
3 bit
3 bit
11 bit
1+7 bit
4 bit
unsigned
4 bit
1 bit
This register holds the absolute velocity value at or below which
the stepper motor can be stopped abruptly.
associated stepper motor.
acceleration for velocity_mode and ramp_mode (resp. soft_mode)
from the A_ACTUAL read-only register.
These parameters control the current scaling values I
driver mode. Depending on the ramp phase they are applied to
the motor by scaling the amplitudes of the internal sequencer.
These values form a floating point number with PMUL as
mantissa and PDIV as exponent. PMUL and PDIV are used for
calculating the deceleration ramp.
modes of operation.
The configuration bits REF_CONF
reference switches.
S
INTERRUPT_FLAGS
PULSE_DIV
USRS
X_LATCHED
USTEP_COUNT_429 R/W 8 bit The read-write register USTEP_COUNT_429
1
*
in hold_mode only, this register is a read-write register.
2
*
before overwriting X_ACTUAL choose velocity_mode or hold_mode. Refer to chapter 8.1.2.
www.trinamic.com
R/W
R/W
R/W
8 bit
4 bit
2 bit
R 24 bit
each stepper motor.
A_MAX.
The pulse generator clock – defining the maximum step pulse
rate – is determined by the parameter PULSE_DIV. The parameter
PULSE_DIV scales the velocity parameters.
The parameter USRS (µstep resolution selection) i
near the reference position.
This read-only register stores the actual position X_ACTUAL upon
microstep pointer of the internal sequencer.
Page 23

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 23
8.1.1 X_TARGET (IDX=%0000)
This register holds the current target position in units of microsteps.
UNIT OF TARGET POSITION
The unit of the target position depends on the setting of the associated microstep resolution register
usrs.
POSITIONING
- If the difference X_TARGET to X_ACTUAL is not zero and R_M = ramp_mode or soft_mode, the
TMC429 moves the stepper motor in the direction of X_TARGET in order to position X_ACTUAL to
X_TARGET. Usually X_TARGET is modified to start a positioning.
- The condition | X_TARGET – X_ACTUAL | < 2
- Target position X_TARGET and current position X_ACTUAL may be altered on the fly.
- To move from one position to another, the ramp generator of the TMC429 automatically
generates ramp profiles in consideration of the velocity limits V_MIN and V_MAX and acceleration
limit A_MAX.
The registers X_TARGET, X_ACTUAL, V_MIN, V_MAX, and A_MAX are initialized with zero after power up.
23
must be satisfied for motion into correct direction.
8.1.2 X_ACTUAL (IDX=%0001)
The current position of each stepper motor is available by read out of the registers called X_ACTUAL.
The actual position can be overwritten by the microcontroller. This feature is important for the
reference switch position calibration controlled by the microcontroller.
UNIT OF CURRENT POSITION
The unit of the target position depends on the setting of the associated microstep resolution register
usrs.
Attention
Before overwriting X_ACTUAL choose velocity_mode or hold_mode.
If X_ACTUAL is overwritten in ramp_mode or soft_mode the motor directly drives to X_TARGET.
www.trinamic.com
Page 24

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 24
t
v(t)
t
0
t
1
A
_
MAX
t3t
4
t
2
Δv
t
7
t
8
t
5
Δv
A_MAX
- A_MAX
- A_MAX
t
6
acceleration constant velocity deceleration
acceleration deceleration
Δt
01
Δt
56
8.1.3 V_MIN (IDX=%0010)
This register holds the absolute velocity value at or below which the stepper motor can be stopped
abruptly.
UNIT OF VELOCITY
The unit of velocity parameters is steps per time unit. The scale of velocity parameters (V_MIN, V_MAX,
V_TARGET, V_ACTUAL) is defined by the parameter PULSE_DIV (see page 8.1.13 for details) and depends
on the clock frequency of the TMC429.
DECELERATION
- The parameter V_MIN is relevant for deceleration while reaching a target position. V_MIN should
be set greater than zero.
- This control value allows reaching the target position faster because the stepper motor is not
slowed down below V_MIN before the target is reached.
- Due to the finite numerical representation of integral relations the target position cannot be
reached exactly, if the calculated velocity is less than one, before the target is reached. Setting
V_MIN to at least one assures reaching each target position exactly.
Figure 8.1 Velocity ramp parameters and velocity profiles
8.1.4 V_MAX (IDX=%0011)
This parameter sets the maximum motor velocity. The absolute value of the velocity will not exceed
this limit, except if the limit V_MAX is changed during motion to a value below the current velocity.
UNIT OF VELOCITY
The unit of velocity parameters is steps per time unit. The scale of velocity parameters (V_MIN, V_MAX,
V_TARGET, V_ACTUAL) is defined by the parameter PULSE_DIV (see page 8.1.13 for details) and depends
on the clock frequency of the TMC429.
HOMING PROCEDURE
To set target position X_TARGET and current position X_ACTUAL to an equivalent value (e.g. to set
both to zero at a reference point) the assigned stepper motor should be stopped first and the
parameter V_MAX should be set to zero to hold the assigned stepper motor at rest before writing into
the register X_TARGET and X_ACTUAL.
Attention
Before overwriting X_ACTUAL choose velocity_mode or hold_mode.
If X_ACTUAL is overwritten in ramp_mode or soft_mode the motor directly drives to X_TARGET.
www.trinamic.com
Page 25

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 25
ramp_mode
The V_TARGET register holds the current target velocity calculated internally
by the ramp generator.
register. The associated
stepper motor accelerates until it reaches the specified target velocity. The
velocity is changed according to the motion parameter limits if the register
hold_mode
The register V_TARGET is ignored.
register holds the current target velocity calculated internally
8.1.5 V_TARGET (IDX=%0100)
The use of V_TARGET depends on the chosen mode of operation:
Mode of operation Functionality of V_TARGET
velocity_mode A target velocity can be written into the V_TARGET
V_TARGET is changed.
soft_mode The V_TARGET
by the ramp generator.
UNIT OF VELOCITY
The unit of velocity parameters is steps per time unit. The scale of velocity parameters (V_MIN, V_MAX,
V_TARGET, V_ACTUAL) is defined by the parameter PULSE_DIV (see chapter 8.1.13 for details) and
depends on the clock frequency of the TMC429.
8.1.6 V_ACTUAL (IDX=%0101)
This read-only register holds the current velocity of the associated stepper motor. Internally, the ramp
generator of the TMC429 processes with 20 bits while only 12 bits (the most significant bits) can be
read out as V_ACTUAL.
In hold_mode only, this register is a read-write register. Writing zero to the register V_ACTUAL
immediately stops the associated stepper motor, because hidden bits are set to zero with each write
access to the register V_ACTUAL. In hold_mode motion parameters are ignored and the
microcontroller has the full control to generate a ramp. The TMC429 only handles the microstepping
and datagram generation for the associated stepper motor of the daisy chain.
UNIT
The unit of velocity parameters is steps per time unit. The scale of velocity parameters (V_MIN, V_MAX,
V_TARGET, and V_ACTUAL) is defined by the parameter PULSE_DIV (see chapter 8.1.13 for details) and
depends on the clock frequency of the TMC429.
An actual velocity of zero read out by the microcontroller means that the current velocity is in an
interval between zero and one. Therefore the actual velocity should not be used to detect a stop of a
stepper motor. It is advised to detect the target_reached flag instead.
8.1.7 A_MAX (IDX=%0110)
This register defines the absolute value of the desired acceleration for velocity_mode and ramp_mode
(resp. soft_mode) with a value range from 0 to 2047.
Note
The motion controller cannot stop the stepper motor if A_MAX is set to zero on the fly because
afterwards the velocity cannot be changed automatically any more.
UNIT
The unit of the acceleration is change of step frequency per time unit divided by 256. The scale of
acceleration parameters (A_MAX, A_ACTUAL, and A_THRESHOLD) is defined by the parameter RAMP_DIV
(see section 8.1.13) and depends on the clock frequency of the TMC429.
8.1.7.1 A_MAX in ramp_mode
As long as RAMP_DIV ≥ PULSE_DIV – 1 is valid, any value of A_MAX within its range (0… 2047) is
allowed and there exists a valid pair {PMUL, PDIV} for each A_MAX. The reason is that the acceleration
scaling determined by RAMP_DIV is compatible with the step velocity scaling determined by
PULSE_DIV. A large RAMP_DIV stands for low acceleration and a large PULSE_DIV stands for low
velocity. Low acceleration is compatible with low speed and high speed as well, but high acceleration
is more compatible with high speed.
www.trinamic.com
Page 26

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 26
Changing one parameter out of the triple {A_MAX, RAMP_DIV, PULSE_DIV} requires re-calculation of the
parameter pair {PMUL, PDIV} to update the associated register. For description of the parameters PMUL
and PDIV see section 8.1.10.
8.1.7.1.1 Deceleration in ramp_mode and soft_mode
If RAMP_DIV and PULSE_DIV differ more than one while deceleration in ramp_mode or soft_mode the
parameter A_MAX needs to have a lower limit (>1) and an upper limit (<2047). The reason is that the
deceleration ramp is internally limited to 2
THE LOWER LIMIT OF A_MAX IS GIVEN BY
19
steps (respectively microsteps).
_
- With V_MAX set to
_
- If RAMP_DIV – PULSE_DIV – 1 ≤ 0 the limit A_MAX
(__)
= 2
(≈ 1448) or lower the A_MAX
√
LOWER_LIMIT
LOWER_LIMIT
is half of this value.
is 1 and the parameter A_MAX may be
set to 1.
THE UPPER LIMIT OF A_MAX IS GIVEN BY
_
_
- If RAMP_DIV – PULSE_DIV + 1 ≥ 0 the A_MAX_UPPER_LIMIT is > 2048 and the parameter A_MAX
might be set to any value up to 2047.
(__)
= 2
- 1
CONDITIONS
The parameter A_MAX must not be set below A_MAX
A_MAX ≥ A_MAX
LOWER_LIMIT
as well as A_MAX ≤ A_MAX
LOWER_LIMIT
UPPER_LIMIT
position without oscillations. If that condition is not satisfied, oscillations around a target position
may occur.
except A_MAX is set to 0. The condition
must be satisfied to reach any target
8.1.8 A_ACTUAL (IDX=%0111)
The actual acceleration can be read out by the microcontroller from the A_ACTUAL read-only register.
The actual acceleration is used to select scale factors for the coil currents. It is updated with each
clock. The returned value A_ACTUAL is smoothed to avoid oscillations of the readout value. Thus,
returned A_ACTUAL values should not be used directly for precise calculations.
UNIT
The unit of the acceleration is change of step frequency per time unit divided by 256. The scale of
acceleration parameters (A_MAX, A_ACTUAL, and A_THRESHOLD) is defined by the parameter RAMP_DIV
(see section 8.1.13) and depends on the clock frequency of the TMC429.
8.1.9 IS_AGTAT, IS_ALEAT, IS_V0, and A_THRESHOLD (IDX=%1000)
These parameters are only relevant in SPI mode. The parameters IS_AGTAT, IS_ALEAT, IS_V0, and
A_THRESHOLD represent the current scaling values I
to the motor by scaling the current amplitudes of the internal sequencer.
The automatic motion dependent current scale feature of the TMC429 is provided primarily for
microstep operation. It may also be applied for full step or half step drivers, if those provide current
control bits. In this special case it is possible to initialize the microstep table with a constant
function, square function or sine wave using the two most significant DAC bits.
IS_AGTAT The parameter IS_AGTAT is applied if the acceleration is greater than the threshold
acceleration. This is used to increase current during acceleration phases.
IS_ALEAT The parameter IS_ALEAT is applied if the acceleration is lower than or equal to the
threshold acceleration. This is the nominal motor current.
IS_V0 The third parameter IS_V0 is applied if the stepper motor is at rest. The parameter is
used to save power, keep it cool, and avoid noise probably caused by chopper
drivers.
A_THRESHOLD The parameter A_THRESHOLD is the threshold used for comparing with the current
acceleration in order to select the current scale factor.
. Depending on the ramp phase they are applied
S
www.trinamic.com
Page 27

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 27
0 0 0
1
= 100 % 0 0 1
1 / 8
= 12.5 % 0 1 0
2 / 8
= 25 % 0 1 1
3 / 8
= 37.5 % 1 0 0
4 / 8
= 50 % 1 0 1
5 / 8
= 62.5 % 1 1 0
6 / 8
= 75 % 1 1 1
7 / 8
= 87.5
%
Velocity value
A
THRESHOLD
value
IS scale factor selection
A
THRESHOLD
> 1023
IS :=
*3)
| a | ≤ A
IS :=
| a | > A
THRESHOLD
IS :=
RELATIONSHIP BETWEEN IS_AGTAT, IS_ALEAT, AND IS_V0 AND THE INTERIM BIT VECTOR I_SCALE
The parameters IS_AGTAT, IS_ALEAT, and IS_V0 are bit vectors of three bit width. One of these bit
vectors is selected conditionally and assigned to the interim bit vector I_SCALE.
I_SCALE IS
NOTE
- The maximum current scaling factor 1 is selected by I_SCALE = %000. This is the power-on
default.
- The minimum current scaling factor 1/8 = 0.125 is selected by I_SCALE = %001.
- The current scaling factor I
step. For example, with I_SCALE = %100 (= 4/8 = 50%) the number of effective microsteps per full
step is halved.
- When a low current scaling factor I
step may decrease, because less DAC steps are used to distinguish the same number of current
levels. Therefore, it is advised to operate the application normally at 50% to 100% current scale.
proportionally reduces the effective number of microsteps per full
S
becomes used, the effective number of microsteps per full
S
The current scale selection scheme shows which of the scale factors IS_AGTAT, IS_ALEAT, and IS_V0 is
selected corresponding to their conditions:
If the velocity is zero, the parameter IS_V0 is used for scaling.
If the velocity is not zero, either IS_ALEAT or IS_AGTAT is used for scaling. This depends on the
absolute value of the acceleration and the acceleration threshold A_THRESHOLD.
CURRENT SCALE SELECTION SCHEME
v= 0*1) IS := IS_V0*2)
IS_ALEAT
v ≠ 0
1)
*
The configuration bit continuous_update of the stepper motor global parameter register must be
THRESHOLD
IS_ALEAT
IS_AGTAT
set to 1 to make sure that the coil current is scaled for v=0 if all motors are at rest. The current
scale for V=0 takes place delayed to avoid mechanical step loss due to oscillations of the motor
after it has been stopped.
_
[]
)
×(×
The delay time is:
2)
For selection of current scaling IS_V0 (at rest) IS_AGTAT and IS_ALEAT must be larger than 0.
*
3)
It is not advised to use A_THRESHOLD > 1023. Due to comparing of A_THRESHOLD with A_MAX a
*
__[]
=
setting of A_THRESHOLD with a value greater than 1023 results in using IS_ALEAT if A_MAX is
greater than 1023 during acceleration.
For most applications setting IS_ALEAT and IS_AGTAT to the same value and using a lower value for
IS_V0 is the best choice.
www.trinamic.com
Page 28

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 28
V_MAX
Target Position
Calculation
Velocity Ramp
Generator
(Micro-) Step pulses
V_TARGET
X_TARGET
X_ACTUAL
PDIVPMUL
A_MAXV_MIN
PULSE_DIVRAMP_DIV
clk32
CLOCK_DIV32clk
V_ACTUAL
Puls Generator
8.1.10 PMUL & PDIV (IDX=%1001)
In ramp mode, the TMC429 uses an internal algorithm to calculate the deceleration ramp on the fly.
This algorithm requires an additional proportionality factor P which allows the TMC429 to calculate
the velocity required for stopping in time to exactly reach the target position without overshooting.
This calculation is done for each ramp step. The result of this calculation can be read in the register
V_TARGET. Whenever V_TARGET falls below the actual velocity, the TMC429 decelerates. As there is a
large range of acceleration and velocity values, p is stored in a floating point representation, using
the registers PMUL (mantissa) and PDIV (exponent).
Using the proportionality factor P target positions are quickly reached without overshooting. The
proportionality factor primarily depends on the acceleration limit A_MAX and on the two clock divider
parameters PULSE_DIV and RAMP_DIV. These two separate clock divider parameters (set to the same
value for most applications) provide an extremely wide dynamic range for acceleration and velocity.
PULSE_DIV and RAMP_DIV allow reaching very high velocities with very low acceleration.
Changing one parameter out of the triple {A_MAX, RAMP_DIV, PULSE_DIV} requires re-calculation of the
parameter pair {PMUL, PDIV} to update the associated register.
8.1.10.1 Calculation of the Proportionality Factor p
The representation of the proportionality factor p by the two parameters PMUL and PDIV is a floating
point representation.
NOTATIONS
Registers are PMUL and PDIV.
Operating values are P
MUL
and P
DIV
.
CALCULATE P AS FOLLOWS:
=
with
P
= 128… 255 representing a factor of 1.000 to 1.992 (=1+127/128)
MUL
P
= {23, 24, 25… 214, 215, 216}
DIV
ranges from 128 to 255. P
P
MUL
than 128 can be achieved by increasing P
The TMC429 does not directly store the P
= 2
is a power of two with a range from 8 to 65536. Values of p less
DIV
.
DIV
parameter. The motion controller stores PDIV with
DIV
NOTE
- Setting the factor p too small will result in a slow approach to the target position.
- Setting the factor p too large will cause overshooting and even oscillations around the target
position.
- The parameters PMUL and PDIV share the address IDX=%1001. The MSB of PMUL is fixed set to 1
and cannot be changed. This way, PMUL represents a mantissa in the range 1.000 (%1000 0000)
to 1.992 (%1111 1111).
Figure 8.2 Target position calculation, ramp generator, and pulse generator
www.trinamic.com
Page 29

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 29
8.1.10.1.1 Calculation of p for a Given Acceleration
p and the fitting PMUL and PDIV values can be calculated by the microcontroller. Optionally a pair of
matching values of A_MAX, PMUL and PDIV can be stored into the microcontroller memory. The
acceleration limit is a stepper motor parameter which is fixed in most applications. If the acceleration
limit has to be changed nevertheless, the microcontroller can calculate a pair of PMUL and PDIV on
demand for each new acceleration limit A_MAX with RAMP_DIV and PULSE_DIV. Also, pre-calculated
pairs of PMUL and PDIV read from a table can be sufficient.
8.1.10.2 Calculation of PMUL and PDIV
A pair of PMUL and PDIV has to be calculated for each provided acceleration limit A_MAX. Note, that
there may be more than one valid pair of PMUL and PDIV for a given A_MAX acceleration limit.
CONSIDERATIONS FOR THE CALCULATION OF PMUL AND PDIV
- To accelerate, the ramp generator accumulates the acceleration value to the actual velocity with
each time step.
- The absolute value V_MAX of the velocity internally is represented by 11+8=19 bits, while only the
most significant 11 bits and the sign are used as input for the step pulse generator. So, there are
11
=2048 values possible for specifying a velocity within a range of 0 to 2047.
2
- The ramp generator accumulates 1/256*A_MAX with each time step to the actual velocity value
V_ACTUAL during acceleration phases. This accumulation uses 8 bits for decimals. So, the
acceleration from a velocity V_ACTUAL=0 to the maximum possible velocity V_MAX=2047 spans
over 2048*256 / A_MAX pulse generator clock pulses.
- Within the acceleration phase the pulse generator generates S = ½ * 2048* 256 / A_MAX * T steps
for the (micro) step unit.
- The parameter T is the clock divider ratio: T = 2
During the acceleration, the velocity has to be increased until the velocity limit V_MAX is reached or
deceleration is required in order to exactly reach the target position. The TMC429 automatically
determines the deceleration position in ramp_mode and decelerates. This calculation uses the
difference between current position and target position and the proportionality parameter p, which
has to be p = 2048 / S.
The following formula results:
=
1
2048
2
256
RAMP_DIV
2048
__
2
/ 2
PULSE_DIV
RAMP_DIV– PULSE_DIV
= 2
This can be simplified to
=
128 2
_
__
INTS
H
- To avoid overshooting, the parameter PMUL should be made approximately 1% smaller than
calculated. Alternatively set p reduced by an amount of 1%.
- If the proportionality parameter p is too small, the target position will be reached slower,
because the slow down ramp starts earlier. The target position is approached with minimal
velocity V_MIN, whenever the internally calculated target velocity becomes less than V_MIN.
- With a good parameter p the minimal velocity V_MIN is reached a couple of steps before the
target position.
- With parameter p set a little bit too large and a small V_MIN overshooting of one step
(respectively one microstep) may occur. A decrement of the parameter PMUL avoids this one-step
overshooting.
www.trinamic.com
Page 30

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 30
∆
v
V_MAX
v(t)
V_MIN
p too small
p too large
p good
t
1
t
0
t
2
Figure 8.3 Proportionality parameter p and outline of velocity profile(s)
8.1.10.2.1 Choosing a Pair of PMUL and PDIV
The calculation is based on the formula
=
=
2
CALCULATIONS
1. To represent the parameter p choose a pair of PMUL and PDIV which approximates p.
2. Value range for PMUL: 128… 255
3. Value range for PDIV: one out of {0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13} (representing P
one out of {8, 16, 32, 64, 128, 256, 512, 1024, 2048, 4096, 8192, 16384, 32786, 65536})
4. Try all 128 * 14 = 1792 possible pairs of PMUL and PDIV with a program and choose a matching
pair.
5. To find a pair, calculate for each pair of PMUL and PDIV
_
__
=
and
and
=
=
=
6. Select one of the pairs satisfying the condition 0.95 < q < 1.0. The value q interpreted as a
function q(a_max, ramp_div, pulse_div, pmul, pdiv) gives the quality criterion required.
Although q = 1.0 indicates that the chosen P_MUL and P_DIV perfectly represent the desired p factor
for a given A_MAX, overshooting could result because of finite numerical precision. On the other hand
in case of high resolution microstepping, overshooting of one microstep is negligible in most
applications.
To avoid overshooting, use P_MUL-1 instead of the selected P_MUL or select a pair (P_MUL, P_DIV)
with q = 0.99.
DIV
8.1.10.2.2 Optimized Calculation of PMUL and PDIV
The calculation of the parameters PMUL and PDIV can be simplified using the expression
= 2
2
with =
To avoid overshooting, use
= (1
[%]) with p_reduction approximately 1%
This results in:
=
22
= 0.99 22
PMUL becomes a function of the parameter PDIV. To find a valid pair {PMUL, PDIV} choose one out of
14 pairs for PDIV = {0, 1, 2, 3, ..., 13} with PMUL within the valid range 128 ≤ PMUL ≤ 255.
The C language example pmulpdiv.c can be found on www.trinamic.com. The source code can directly
be copied from the PDF datasheet file.
www.trinamic.com
_
__
Page 31

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 31
8.1.10.2.3 Calculation Example: PMUL and PDIV
/* PROGRAM EXAMPLE ‘pmulpdiv.c’ : How to Calculate p_mul & p_div for the TMC429 */
#include <math.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
void CalcPMulPDiv(int a_max, int ramp_div, int pulse_div, float p_reduction,
int *p_mul, int *p_div, double *PIdeal, double *PBest, double *PRedu )
{
int pdiv, pmul, pm, pd ;
double p_ideal, p_best, p, p_reduced;
pm=-1; pd=-1; // -1 indicates : no valid pair found
p_ideal = a_max / (pow(2, ramp_div-pulse_div)*128.0);
p = a_max / ( 128.0 * pow(2, ramp_div-pulse_div) );
p_reduced = p * ( 1.0 – p_reduction );
for (pdiv=0; pdiv<=13; pdiv++)
{
pmul = (int)(p_reduced * 8.0 * pow(2, pdiv)) – 128;
if ( (0 <= pmul) && (pmul <= 127) )
{
pm = pmul + 128;
pd = pdiv;
}
}
*p_mul = pm;
*p_div = pd;
p_best = ((double)(pm)) / ((double)pow(2,pd+3));
*PIdeal = p_ideal;
*PBest = p_best;
*PRedu = p_reduced;
}
int main(int argc, char **argv)
{
int a_max=0, ramp_div=0, pulse_div=0, p_mul, p_div,
a_max_lower_limit=0, a_max_upper_limit=0;
double pideal, pbest, predu;
float p_reduction=0.0;
char **argp;
if (argc>1)
{
while (argv++, argc--)
{
argp = argv + 1; if (*argp==NULL) break;
if ( (!strcmp(*argv,”-a”)) ) sscanf(*argp,”%d”,&a_max);
else if ( (!strcmp(*argv,”-r”)) ) sscanf(*argp,”%d”,&ramp_div);
else if ( (!strcmp(*argv,”-p”)) ) sscanf(*argp,”%d”,&pulse_div);
else if ( (!strcmp(*argv,”-pr”))) sscanf(*argp,”%f”,&p_reduction);
}
}
else
{
fprintf(stderr,”\n USAGE : pmulpdiv –a <a_max> -r <ramp_div> -p <pulse_div> -pr <0.00 .. 0.10>\n”
“ EXAMPLE : pmulpdiv –a 10 –r 3 –p 3 –pr 0.05\n”);
return 1;
}
printf(“\n\n a_max=%d\tramp_div=%d\tpulse_div=%d\tp_reduction=%f\n\n”,
a_max, ramp_div, pulse_div, p_reduction);
CalcPMulPDiv(a_max, ramp_div, pulse_div, p_reduction, &p_mul, &p_div, &pideal, &pbest, &predu );
printf(“ p_mul = %3.3d\n p_div = %3d\n\n p_ideal = %f\n p_best = %f\n p_redu = %f\n\n”,
p_mul, p_div, pideal, pbest, predu);
a_max_lower_limit = (int)pow(2,(ramp_div-pulse_div-1));
printf(“\n a_max_lower_limit = %d”,a_max_lower_limit);
if (a_max < a_max_lower_limit) printf(“ [WARNING: a_max < a_max_lower_limit]”);
a_max_upper_limit = ((int)pow(2,(12+(ramp_div-pulse_div)))) -1;
printf(“\n a_max_upper_limit = %d”,a_max_upper_limit);
if (a_max > a_max_upper_limit) printf(“ [WARNING: a_max > a_max_upper_limit]”);
printf(“\n\n”);
return 0;
}
/* -------------------------------------------------------------------------- */
www.trinamic.com
Page 32

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 32
RAMP_MODE
The two bits RAMP_MODE (R_M) select one of the four possible stepping
modes.
REF_CONF
The configuration bits REF_CONF select the behavior of the reference switches.
Default mode for positioning applications with trapezoidal
default mode for positioning
, but with soft target position
The target position is approached with
exponentially reduced velocity. This feature can be useful for
arget position have to be
Mode for velocity control applications, change of velocities with
is for applications, where stepper
The velocity is controlled by the microcontroller, motion
is provided for motion
control applications, where the ramp generation is completely
controlled by the microcontroller.
8.1.11 lp, RAMP_MODE, and REF_CONF (IDX=%1010)
The configuration words REF_CONF and RAMP_MODE are accessed via a common address.
LP, RAMP_MODE, AND REF_CONF
Bit or Register Function
lp The bit called lp (latched position) is a read only status bit.
8.1.11.1 RAMP_MODE Register
TMC429 MOTION MODES
RAMP_MODE bits Mode Function
%00 ramp_mode
%01 soft_mode
%10 velocity_mode
%11 hold_mode
ramp. This mode is provided as
tasks.
Similar to ramp_mode
approaching.
applications where vibrations at the t
minimized.
linear ramps. This mode
motors have to be driven precisely with constant velocity.
parameter limits are ignored. This mode
www.trinamic.com
Page 33

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 33
Negative direction
Mechanical inaccuracy of switches
(switching hysteresis
)
x
1
x
2
Motor
Traveller
Left switch
x
left
DX
_REF_TOLERANCE
Positive direction
x
3
x
4
x
right
Right switch
x
traveler
the velocity is negative
1 :
Left reference switch is disabled as an automatic stop switch.
> 0) and the
1 :
Right reference switch is disabled as an automatic stop switch.
0 :
Stopping takes place immediately; motion parameter limits are
ignored.
1 :
Stopping takes place in consideration of motion parameter limits;
stops with linear ramp.
0 :
) defines which
The definition of the reference switch by the configuration bit
has no effect on the stop function of the reference
The left reference switch controls reference switch functions.
1 :
The right (not left) reference switch controls reference switch
functions.
(latched position waiting)
has been initialized by a write access to latch the
position on a change of the reference switch. It is set to 0 after a
position has been latched.
8.1.11.2 The REF_CONF Register and the lp Read-Only Status Bit
A reference switch can be used as an automatic stop switch. The reference switch indicates the
reference position within a given tolerance. The automatic stop function of the switches can be
enabled or disabled. Also a reference tolerance range (see register DX_REF_TOLERANCE, chapter 8.1.14)
can be programmed to allow motion within the reference switch active range during homing.
When a reference switch is triggered, the actual position can be stored automatically. This allows a
precise determination of the reference point. It is initiated by writing a dummy value to the register
X_LATCHED (see chapter 8.1.15). The read-only status bit lp (latch position waiting) indicates that the
next change of the selected reference switch will trigger latching the position X_ACTUAL. The lp bit is
automatically reset after position latching.
Figure 8.4 Left switch and right switch for reference search and automatic stop function
The bits contained in the REF_CONF register control the semantic and the actions of the reference/stop
switch modes for interrupt generation as explained later. The stepper motor stops if the
reference/stop switch becomes active. This mechanism reacts only to the switch which corresponds to
the actual motion direction, e.g. the right switch when moving to a more positive position. The
configuration bits named disable_stop_l respectively disable_stop_r disable these automatic stop
functions. If the bit soft_stop is set, the motor stops with linear ramp as determined by A_MAX.
REFERENCE SWITCH CONFIGURATION BITS REF_CONF AND LP STATUS BIT
REF_CONF mnemonic Function
disable_stop_l
disable_stop_r
soft_stop
0 : The motor will be stopped when
(V_ACTUAL < 0) and the left reference switch becomes active.
0 : Stops a motor if the velocity is positive (V_ACTUAL
right reference switch becomes active.
The bit ref_RnL (reference switch Right not Left
switch will be used as the reference switch.
ref_RnL
0 : This is the power-on default of the lp
ref_RnL
switches if disable_stop_l = 0 respectively disable_stop_r = 0.
bit.
lp
1 : X_LATCHED
www.trinamic.com
Page 34

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 34
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
0
RRS
RW
RAMP_
MODE
latched position (waiting)
ref_RnL
soft_stop
disable_stop_r
disable_stop_l
%10 : velocity, %11 : hold
There is a functional difference between reference switches and stop switches. Reference switches are
used to determine a reference position for a stepper motor. Stop switches are used for automatic
stopping a motor when reaching a limit. The signals of switches are processed via the inputs REF1,
REF2, REF3, REFR1, REFR2, and REFR3. They might be used as automatic stop switches, reference
switches, or both.
32 BIT DATAGRAM SENT FROM A µC TO THE TMC429
SMDA
ADDRESS
1 0 1 0
lp
DATA
REF_CONF
%00 : ramp, %01 : soft,
0
TMC429-I REFERENCE SWITCHES (16-PIN PACKAGE)
The TMC429-I has three reference switch inputs REF1, REF2, REF3. Switches can be used as reference
switches and as automatic stop switches as well. Per default, one reference switch input is assigned
to each stepper motor as a left reference switch.
The reference switch input REF3 can alternatively be assigned as the right reference switch of stepper
motor one. In this configuration a left and a right reference switch is assigned to stepper motor one,
a left reference switch is assigned to stepper motor two, and no reference switch is assigned to
stepper motor three. The bit named mot1r in the stepper motor global parameter register (rrs=1 &
address=%111111) selects one of these configurations.
With a 74HC157 as additional hardware, up to six reference switches – a left and a right one assigned
to each stepper motor – are supported. Concerning the 74HC157 three of four 2-to-1-multiplexers are
used. The multiplexing feature is controlled by the bit named refmux in the stepper motor global
parameter register (rrs=1 & address=111111).
www.trinamic.com
Page 35

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 35
is 1,
Reference switch signal was active outside the reference switch tolerance
The switches processed via the inputs REF1, REF2, REF3, REFR1, REFR2, and
REFR3 can be used as stop switches for automatic motion limiting, as
reference switches, and for both. If a reference switch becomes active out of
is set if
the interrupt mask bit mask_ref_wrong is set.
is set if the reference switch is inactive at the 0
flag is set, if the reference switch has forced a stop during
flag is
reference switch changes from high to low and if the interrupt mask
flag is
d if the interrupt mask
flag
indicates that the left reference switch input changes from low to high if the
mask bit mask_stop_left_high is set.
flag
that the right reference switch input changes from low to high if
the mask bit mask_stop_right_high is set.
mask_pos_end
1: mask enabled; 0: mask disabled.
mask_ref_wrong
1: mask enabled; 0: mask disabled.
mask_ref_miss
1: mask enabled; 0: mask disabled.
mask_stop
1: mask enabled; 0: mask disabled.
mask_stop_left_low
1: mask enabled; 0: mask disabled.
mask_stop_left_high
1: mask enabled; 0: mask disabled.
8.1.12 INTERRUPT_MASK & INTERRUPT_FLAGS (IDX=%1011)
The TMC429 provides one interrupt register of eight flags for each stepper motor.
Interrupt bits are named int_<mnemonic>. The interrupt out nINT_SDO_C is set active low and the
interrupt status bit int is set active high if at least one interrupt flag of one motor becomes set. If the
interrupt status is inactive, nINT is high (1) and int is low (0).
SETTING MASKS AND FLAGS
- An interrupt flag is set to 1 if its assigned interrupt condition occurs.
- Each interrupt bit can either be enabled or disabled (1/0) individually by an associated interrupt
mask bit named mask_<mnemonic>.
- Interrupt flags are reset to 0 by a write access (RW=0) to their interrupt register address
(IDX=%1011). Write 1 at the position of the bit to clear the flag. Writing a 0 to the corresponding
position leaves the interrupt flag untouched.
- Interrupt flags are forced to 0 if the corresponding mask bit is disabled (0).
INTERRUPT FLAGS FOR EACH MOTOR
int_<mnemonic> Function
int_pos_end If a target position is reached while the interrupt mask mask_pos_end
the bit is set to 1.
int_ref_wrong
range (defined by the DX_REF_TOLERANCE register).
the reference switch tolerance range the interrupt flag int_ref_wrong
int_ref_miss The interrupt flag int_ref_miss
position and the mask mask_ref_miss is enabled.
int_stop The int_stop
motion and if the interrupt mask mask_stop is set.
int_stop_left_low High to low transition of left reference switch. The int_stop_left_low
set if the
bit mask_stop_left_low is set.
int_stop_right_low High to low transition of right reference switch. The int_stop_right_low
set if the reference switch changes from high to low an
bit mask_stop_right_low is set.
int_stop_left_high Low to high transition of left reference switch. The int_stop_left_high
int_stop_right_high Low to high transition of right reference switch. The int_stop_right_high
indicates
INTERRUPT MASK BIT FOR EACH MOTOR
mask_<mnemonic> Function
mask_stop_right_low 1: mask enabled; 0: mask disabled.
mask_stop_right_high 1: mask enabled; 0: mask disabled.
www.trinamic.com
Page 36

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 36
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
0
RRS
RW
mask_stop_right_high
mask_stop_left_high
mask_stop_right_low
mask_stop_left_low
mask_stop
mask_ref_miss
mask_ref_wrong
mask_pos_end
int_stop_right_high
int_stop_left_high
int_stop_right_low
int_stop_left_low
int_stop
int_ref_miss
int_ref_wrong
int_pos_end
32 BIT DATAGRAM SENT FROM A µC TO THE TMC429
ADDRESS
SMDA
0
1 0 1 1
INTERRUPT_MASK INTERRUPT_FLAGS
DATA
The interrupt status is mapped to the most significant bit (31) of each datagram sent back to the µC
and it is only available at the nINT_SDO_C pin of the TMC429 if the pin nSCS_C is high.
De-multiplexing of the multiplexed interrupt status signal at the pin nINT_SDO_C can be done using
additional hardware. It is not necessary if the microcontroller always disables its interrupt while it
sends a datagram to the TMC429.
8.1.13 PULSE_DIV & RAMP_DIV & USRS (IDX=%1100)
The frequency of the external clock signal (pin CLK) is divided by 32 (see Figure 8.2). This clock drives
two programmable clock dividers: RAMP_DIV for the ramp generator and PULSE_DIV for the pulse
generator.
RAMP_DIV and PULSE_DIV allow a division of 1/32 f
value 0 1 2 3 4 5 6 7 8 9 10 11 12 13
division by 1 2 4 8 16 32 64 128 256 512 1024 2048 4096 8192
PULSE_DIV The pulse generator clock – defining the maximum step pulse rate – is determined by
the parameter PULSE_DIV. The parameter PULSE_DIV scales the velocity parameters.
RAMP_DIV The parameter RAMP_DIV scales the acceleration parameter A_MAX.
USRS The parameter USRS (µstep resolution selection) is used for setting the microstep
frequency in SPI mode.
In Step/Dir mode the external driver controls the number of microsteps and USRS has no significance.
by the following value settings:
CLK
8.1.13.1 Calculating the Step Pulse Rate R
[]
]
[
=
_
2
where
[Hz] is the frequency of the external clock signal.
f
CLK
velocity is in range 0 to 2047 and represents parameters V_MIN, V_MAX, and absolute values of
V_TARGET and V_ACTUAL.
The pulse generator of the TMC429 generates one step pulse with each 1/(32*2^PULSE_DIV) clock pulse
with a given theoretical velocity setting of 2048. [Attention: Range ±2047]
www.trinamic.com
2048 32
Page 37

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 37
The full step frequency R
[]
=
#
The full step frequency R
]
=
[
2
[]
in Step/Dir mode is given by
FS
]
[
in SPI mode is given by
FS
The change ∆R in the pulse rate per time unit is given by
[/
[]
]
=
__
2
[]
_
where
∆R: pulse frequency change per second (acceleration)
29: the constant is derived form 2
29
= 25 * 25 * 28 * 211 = 32*32*256*2048.
32 comes from fixed clock pre-dividers,
256 comes from the velocity accumulation clock pre-divider, and
2048 comes from the velocity accumulation clock divider programmed by A_MAX. The parameter
A_MAX is in range 0 to 2047.
The change of fullstep frequency ∆R
∆
[]
=
#
∆[
in the pulse rate per time unit in Step/Dir mode is given by
FS
]
The change of fullstep frequency ∆R
]
∆
[]
∆[
=
2
in the pulse rate per time unit in SPI mode is given by
FS
The angular velocity of a stepper motor can be calculated based on the full step frequency RFS[Hz] for
a given number of full steps per rotation. Similarly, the angular acceleration of a stepper motor can
be calculated based on the change of the full step frequency per second ∆RFS[Hz].
8.1.13.2 Calculating the Number of Steps during Linear Acceleration
1
=
where
S = number of steps
a = linear acceleration
v = velocity
With v = R[Hz] and a = ∆R[Hz/s] one gets:
The number of full steps S
2
1
=
2
=
#
_
2
_
2
÷ 2
in Step/Dir mode during linear acceleration is given by
FS
The number of full steps S
=
2
in SPI mode during linear acceleration is given by
FS
Changing PULSE_DIV in velocity_mode or in hold_mode might force an internal microstep (with
microstep resolution defined by usrs) depending on the actual microstep position. This behavior can
be observed especially when the motor is at rest. In ramp_mode this does not occur.
PULSE_DIV should only be changed in ramp_mode!
www.trinamic.com
Page 38

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 38
Significant DAC Bits
(controlling current amplitude)
0 0 0
1
-
full step (constant current amplitude)
0 0 1
2
5 (MSB)
half step
0 1 0
4
5 (MSB), 4
0 1 1
8
5 (MSB), 4, 3
1 0 0
16
5 (MSB), 4, 3, 2
1 0 1
32
5 (MSB), 4, 3, 2, 1
1 1 0
1 1 1
8.1.13.3 Choosing the Microstep Resolution in SPI Mode
The three bit wide parameter USRS determine the microstep resolution for an associated stepper
motor. There is an individual set of 6 DAC bits provided for each of the two phases (coils) of each
motor. These two six bit values control the SPI driver coil currents. With 6 bit DAC resolution, the
TMC429 can provide up to 64 microsteps per full step. With 4 bits, fewer positions can be determined,
but still an improvement can be experienced when choosing more than 16 microsteps resolution.
Depending on the microstep resolution, a subset of the 6 DAC bits is significant. The motors also can
be operated in fullstep. For fullstepping, the current amplitude is constant for both phases of a
stepper motor and the polarity of one phase changes with each full step.
The microstep counters are initialized to 0 during power-on reset. With each microstep an associated
counter accumulates the programmed microstep resolution value USRS.
MICROSTEP RESOLUTION SELECTION (USRS) PARAMETER
USRS [Microsteps / full step]
microstepping
64 5 (MSB), 4, 3, 2, 1, 0 (LSB)
Comment
8.1.14 DX_REF_TOLERANCE (IDX=%1101)
Generally, the switch inputs REF1, REF2, REF3, REFR1, REFR2, and REFR3 can be used as stop switches
for automatic motion limiting and as reference switches defining a reference position for the stepper
motor. To allow the motor to drive near the reference point, it is possible to exclude a motion range
of steps from the stop switch function.
The parameter DX_REF_TOLERANCE disables automatic stopping by a switch around the origin (see
Figure 8.4). To use the DX_REF_TOLERANCE far from the origin, the actual position has to be adapted,
e.g. by setting it to zero in the center of the tolerance range. Additionally, the parameter
DX_REF_TOLERANCE affects interrupt conditions as described before (section 8.1.12).
8.1.15 X_LATCHED (IDX=%1110)
This read-only register stores the actual position X_ACTUAL upon a change of the reference switch
state. The reference switch is defined by the bit ref_RnL of the configuration register 8.2.4.5. Writing a
dummy value to the (read-only) register X_LATCHED initializes the position storage mechanism. The
actual position is saved with the next rising edge or falling edge signal of the reference switch
depending on the actual motion direction of the stepper motor. The actual position is latched when
the switch defined as the reference switch by the ref_RnL bit changes (see chapter 1.5.4). The status
bit lp signals, if latching of a position is pending. This way, a precise reference is available for
homing.
An event at the reference switch associated to the actual motion direction takes effect only during
motion (when V_ACTUAL ≠ 0).
8.1.16 USTEP_COUNT_429 (IDX=%1111)
The read only register USTEP_COUNT_429 holds the actual microstep pointer. This register is intended
for applications where the motion controller part is completely switched off for power saving and the
motor needs to be initialized to the same position after re-switching power on.
Reading the USTEP_COUNT_429 allows reading the actual sequencer position of the internal sequencer.
This is useful to support a system power down of an SPI driver based system without position loss:
Store the position counter and the microstep counter USTEP_COUNT_429 before power down. After
power up, set actual and target position to a value equal to the stored target position minus the
stored microstep counter. Then, move to the stored target position. The target position and electrical
position now match the values before power down. Afterwards, you can enable the stepper motor
driver.
www.trinamic.com
Page 39

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 39
R
D
DATAGRAM_HIGH_WORD
chain.
cdgw
The status bit signals an update of DATAGRAM_LOW_WORD and
COVER_DATAGRAM
The TMC429 provides for directly sending datagrams from the microcontroller to the
partially covering one datagram sent to the driver chain.
IF_CONFIGURATION_429
This register is used for configuration of
- the association of the position compare output signal to one stepper motor
- reference switch adjustments (TMC429-I)
8.2 Global Parameter Registers
The registers addressed by RRS=0 with SMDA=%11 are global common parameter registers. To
emphasize this difference, the address label JDX is used as index name instead of IDX (see overview
in chapter 7.3).
OVERVIEW GLOBAL PARAMETER REGISTER MAPPING
EGISTER
DATAGRAM_LOW_WORD
ESCRIPTION
The registers are used to store datagrams sent back from the stepper motor driver
DATAGRAM_HIGH_WORD.
stepper motor drivers. A datagram can be transferred to the stepper motor driver by
COVER_POS
COVER_LEN
STEPPER MOTOR
GLOBAL PARAMETER
REGISTER
The parameter COVER_POS defines the position of the first datagram bit to be covered
by the COVER_DATAGRAM (JDX=%0011).
The number of bits to be covered is defined by COVER_LEN.
- the reference switch inputs
- the de-multiplexed interrupt output
- the Step/Dir interface
This register holds different configuration bits for the stepper motor driver chain and
defines
- polarities and chip select signal (SPI)
- timing (SPI mode / Step/Dir mode)
- number of stepper motor drivers in the chain (SPI)
- updates (SPI)
- multiplexing reference switch inputs (TMC429-I and TMC429-PI24)
www.trinamic.com
Page 40

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 40
23 22 21 20 19
18 17 16 15 14 13
12 11
10 9 8 7 6 5 4 3 2 1 0
last TMC246 driver of the chain (stepper motor #1)
LD2 LD1 LD0 1 OT OTPW UV OCHS OLB OLA OCB OCA
DATAGRAM_HIGH_WORD
DATAGRAM_LOW_WORD
23 22 21 20 19
18
17 16
15 14
13
12 11
10 9 8 7 6 5 4 3 2 1 0
first TMC246 driver of the chain (stepper motor #3)second TMC246 driver of the chain (stepper motor #2)
LD2 LD1 LD0 1 OT OTPW UV OCHS OLB OLA OCB OCALD2 LD1 LD0 1 OT OTPW UV OCHS OLB OLA OCB OCA
SDI_S
8.2.1 DATAGRAM_LOW_WORD (JDX=%0000) &
DATAGRAM_HIGH_WORD (JDX=%0001)
The TMC429 stores datagrams sent back from the stepper motor driver chain with a total length of up
to 48 bits. The two registers DATAGRAM_LOW_WORD and DATAGRAM_HIGH_WORD form a 48 bit shift
register in which
DATAGRAM_LOW_WORD holds the lower 24 bits and
DATAGRAM_HIGH_WORD holds the higher 24 bits.
The data from the pin SDI_S is shifted left into the register with each datagram bit sent to the
stepper motor driver chain via the signal SDO_S. A write to one of these read-only registers initializes
them, to update their contents with the next datagram received from the driver chain.
Figure 8.5 Example of status bit mapping for a chain of three TMC246 or TMC249
8.2.1.1 Functionality of the cdgw Status Bit
The cdgw (= cover datagram waiting; see section 8.2.3) status bit is set to 1 until a datagram is
received from the stepper motor driver chain. In order to read out the DATAGRAM_LOW_WORD and
the DATAGRAM_HIGH_WORD the cdgw status bit is needed to detect a complete datagram transfer
after an initial write to one of the two registers. The fact that the cdgw is formed by a logical OR
between the cover datagram status and the status of the DATAGRAM_LOW_WORD and
DATAGRAM_HIGH_WORD does not cause any restriction concerning its usage. This is because a write
to the COVER_DATAGRAM register forces sending a datagram which results in an update of the
DATAGRAM_LOW_WORD and DATAGRAM_HIGH_WORD registers.
If the COVER_DATAGRAM mechanism is not used, the cdgw status bit is exclusively available as status
signal of DATAGRAM_LOW_WORD and DATAGRAM_HIGH_WORD.
www.trinamic.com
Page 41

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 41
0
1
2
3
4
5
6
7
8
9
10
11
12
34
35
36 37
38
6
5
4
3
2
1
0
47
23
22
21
20
19
18
17
16
15
14
13
12
11
10
9
8
7
6
MSB
5
4
3
2
1
0
LSB
length = 7: COVER_LEN = 7
up to 24 COVER_DATAGRAM bits
39
40
41
42
43
45
46datagram bits #39 to #46 covered by cover_datagram bits #6 to #0
position=39: COVER_POS = 39
cover datagram bits #6 to #0 cover the 7 datagram bits #39 to #46
48 datagram bits send to the stepper motor driver chain
MSB of the cover datagram (here bit #6) is sent first.
8.2.2 COVER_POS & COVER_LEN (JDX=%0010)
The TMC429 allows for directly sending datagrams to the stepper motor drivers. This is important for
initialization purpose when using drivers which require a configuration prior to operation, like the
TMC262 in SPI mode. Also during operation, datagrams may be required to change the driver mode of
operation. A datagram with up to 24 bits can be transferred to the stepper motor driver by covering
one datagram sent to the driver chain. The parameter COVER_POS defines the position of the first
datagram bit to be covered by the COVER_DATAGRAM (JDX=%0011) of length COVER_LEN. In contrast to
the datagram numbering order of bits, the position count for the cover datagram starts with 0. The
COVER_DATAGRAM bits indexed from cover_len-1 to 0 cover the datagram sent to the driver chain.
A step bit used to control stepper motor drivers must not be covered while a motor is running! The
reason is that the coverage of a step bit causes losing the associated step if the step bit is active.
WRITE ACCESS VERSUS READ ACCESS
The TMC429 stores COVER_POS+1 instead of COVER_POS due to internal requirements. So, one writes
COVER_POS but reads back COVER_POS+1. The cw (= cover waiting) bit is available by read out of this
register and indicates that the cover datagram has not been sent yet.
CDGW VERSUS CW
The cdgw status bit (see section 8.2.3) is the result of a logical OR between cw and an internal signal
that indicates the status of the stepper motor serial driver chain send register.
8.2.3 COVER_DATAGRAM (JDX=%0011)
The TMC429 provides direct sending of datagrams from the microcontroller to the stepper motor
drivers. A datagram can be transferred to the stepper motor driver by covering one datagram sent to
the driver chain. The register COVER_DATAGRAM holds up to 24 bit. A cover datagram covers the next
datagram sent to the stepper motor driver chain. If no datagrams are sent to the driver chain, the
cover datagram is sent immediately after writing it into the COVER_DATAGRAM register.
Figure 8.6 Cover datagram example with 7 bits covering 7 bits of a 48 bit datagram
The cdgw status bit has to be checked to be sure that no cover datagram is waiting to be processed.
After that, a new cover datagram can be written into the COVER_DATAGRAM register. The cdgw bit is
set to 1 until the COVER_DATAGRAM is sent.
The cdgw status bit is also used as status bit for the DATAGRAM_LOW_WORD and
DATAGRAM_HIGH_WORD (see section 0).
www.trinamic.com
Page 42

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 42
If this bit is set, a low level
multiplexed interrupt status to nINT_SDO_C (needs SDOZ_C
as SDO_C for read back information from the TMC429 to the microcontroller).
multiplexed nINT output to the
microcontroller
lse (this halfs the step frequency, both pulse edges
reduces the required step pulse bandwidth and is
This function can be used for the
inv_stp
Invert step pulse polarity. This configuration can be used for adaption of the
step polarity to external driver stages.
inv_dir
Invert dir signal polarity. This is for adaption to external driver stages.
direction of motion
for a motor, but do not use this as a direction bit because it has no effect on
Enable Step/Dir. This bit switches the driver to Step/Dir mode. If this flag is 0,
Note: The step pulse timing (length) must be compatible with both, the
desired step frequency and the external drivers’ requirements. The step pulse
timing is determined by the 4 LSBs of CLK2_DIV when Step/Dir mode is
%00
Motor 1
%10
Motor 3
en_refr
Enable TMC429 reference inputs REFR1, REFR2, REFR3. As a default, the right
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
0
RRS
RW
en_refr
pos_comp_sel_0
inv_dir
inv_stp
sdo_int
8.2.4 IF_CONFIGURATION_429 (JDX=%0100)
The register IF_CONFIGURATION_429 is the interface configuration register for the TMC429. It is used
for configuration of
- the additional reference inputs,
- the de-multiplexed interrupt output,
- the Step/Dir interface, and
- the association of the position compare output signal to one stepper motor.
INTERFACE CONFIGURATION REGISTER CONTROL BITS
IF_CONFIGURATION_429 Function
inv_ref Invert common polarity for all reference switches.
on the input signals an active reference switch.
sdo_int Map internal non-
With SDO_INT=1 the nINT_SDO_C is a non-
step_half Toggle on each step pu
represent steps). step_half
useful if for low-bandwidth optocouplers.
TMC262 stepper driver.
Alternatively, this can be used as a shaft bit to adjust the
the internal handling of signs (X_ACTUAL, V_ACTUAL…).
en_sd
it operates in SPI mode.
selected by EN_SD=1.
pos_comp_sel
Select one motor out of three motors for the position compare function
output of the TMC429 named POSCMP.
%01 Motor 2
reference inputs are disabled (EN_REFR=0).
32 BIT DATAGRAM SENT FROM A µC TO THE TMC429
ADDRESS
DATA
SMDA
0
www.trinamic.com
0 1 0 0
IF_CONFIGURATION_429
pos_comp_sel_1
en_sd
step_half
inv_ref
Page 43

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 43
1l
1r
2l
2r
3l
3r
1l
1r
2l
2r
3l
3r
1l
1r
2l
2r
3l
3r 0 0 0 x - x - x - x - x - x - x - x - x
-
0 0 1
don’t use
x x x x x
*1 x x x x x x
0 1 0 x x x - - -
don’t use
don’t use
1 0 0 x x x x x x x x x x x x
don’t use
NOTE
- After power-on, the TMC429 is in SPI mode. The output signals are logic high until they become
configured for step/direction mode.
- Open inputs REFR1, REFR2, and REFR3 in Step/Dir mode have active state if REFMUX=0 due to their
internal pull-up resistors. If EN_REFR=0 these additional reference switch inputs are ignored.
- REFMUX does not work in Step/Dir mode because the SPI signal nSCS_S is not available. The
output is signal S2 (step2) in Step/Dir mode
- Do not enable unused REFR1, REFR2, REFR3 inputs of the TMC429 as STOP switches if these
inputs are open!
8.2.4.1 POS_COMP_429 (JDX=%0101)
POS_COMP_429 defines a position, which becomes compared to the selected motor position (select via
pos_comp_sel). Whenever the positions match, the POS_COMP output becomes active.
8.2.4.2 POS_COMP_INT_429 (JDX=%0110)
The position compare interrupt mask (M) and interrupt flag (I) register hold the mask and interrupt
concerning the position compare function of the TMC429.
8.2.4.3 POWER_DOWN (JDX=%1000)
A write to the register address POWER_DOWN sets the TMC429 into the power down mode until it
detects a falling edge at the pin nSCS_C. During power down, all internal clocks are stopped. All
outputs remain stable, and all register contents are preserved.
8.2.4.4 TYPE_AND_VERSION_429 (JDX=%1001)
Read only register that gives type und version of the design. For the TMC429 version 1.01 it reads
0x429101.
8.2.4.5 REFERENCE_SWITCHES l3, r3, l2, r2, l1, and r1 (JDX=%1110)
The current state of the reference switches can be read out with this register. The TMC429-LI, TMC429PI24, and the TMC429-I require different settings of related bits and registers before a read-out of the
reference switch bits is possible.
OVERVIEW: REASONABLE SETTINGS FOR DIFFERENT PACKAGES
refmux mot1r en_refr
*1 always reads as high level (internal pull-ups)
If it is desired to invert the polarity of the reference switches, the bit inv_ref of the
IF_CONFIGURATION_429 register can be set. This allows matching normally open contacts or normally
closed contacts.
TMC429-LI
To enable right reference switch inputs (REFR1, REFR2 and REFR3) and the associated status bits r1, r2,
and r3 for the right switches set en_refr of the register IF_CONFIGURATION_429 to 1 (refer to chapter
0). With the default value en_refr=0 the right reference inputs REFR1, REFR2, and REFR3 are disabled
and shown as inactive.
TMC429-I TMC429-PI24 TMC429-LI
TMC429-PI24
To enable right reference switch inputs (REFR1, REFR2) and the associated status bits r1 and r2 for the
right switches set en_refr of the register IF_CONFIGURATION_429 to 1 (refer to chapter 0). With the
default value en_refr=0 the right reference inputs REFR1 and REFR2 are disabled and shown as
inactive.
If a right reference switch for the third motor is needed and SPI motor drivers are used, the refmux
bit of the STEPPER MOTOR GLOBAL PARAMETER CONTROL can be set to 1 (refer to chapter 0).
www.trinamic.com
Page 44

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 44
Note: the refmux bit is only used for multiplexing reference switch inputs by using a 74HC157
multiplexer. Related to the TMC429-PI24 this is only required for getting a third right reference switch
input. The bit continuous_update of the STEPPER MOTOR GLOBAL PARAMETER REGISTER (JDX=%1111) is
important for reading out the reference switches if the external multiplexer is used.
TMC429-I
With the default value 0 of the bit en_refr (see IF_CONFIGURATION_429, chapter 8.2.4) all three right
reference switch inputs of the TMC429-I are inactive, because the inputs are not available on the
package. There are different possibilities for configuration and multiplexing of the three reference
switch inputs. In chapter 8.2.4.5 they are explained in detail.
If all six reference switches are used in an SPI stepper motor driver chain (via an external 74HC157
multiplexer), these inputs are de-multiplexed internally by the TMC429-I. The states of the switches can
be read out from the REFERENCE_SWITCHES read-only register. The bit continuous_update of the
STEPPER MOTOR GLOBAL PARAMETER REGISTER (JDX=%1111) is important for reading out the reference
switches if SPI drivers and the external multiplexer are used.
www.trinamic.com
Page 45

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 45
bit register defines polarities and chip select signals for the
either if a single chip select signal nSCS_S is
used in common for all stepper motor driver chips or if three chip
select signals nSCS_S, nSCS2, nSCS3 are used to select stepper motor
driver chips individually.
determine the clock
frequency of the stepper motor driver chain clock
The timing of the Step/Dir interface is controlled by
register. The
. Please refer to
LSMD
SPI
For datagram configuration in SPI mode the number of stepper motor
last
bit can be set if a continuous update of the datagrams to the
motor driver chain is necessary and an external multiplexer is used. The
during rest periods
when using SPI drivers.
refmux
SPI refmux is used for multiplexing the reference switch inputs of the
can be
hree available
1
30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
0
RRS
RW
mot1r
continuous_update
polarity_dac_ab
polarity_ph_ab
polarity_sck_s
8.2.5 STEPPER MOTOR GLOBAL PARAMETER REGISTER (JDX=%1111)
This register holds different configuration bits for the stepper motor driver chain. The absolute
address (RRS & ADDRESS) of the stepper motor global parameter register is %01111110 = $7E.
Please note that these registers and bits are mainly for SPI mode.
In Step/Dir mode refmux and mot1r can be used for the switch configuration (TMC429-I) and the four
LSBs [3…0] of the CLK2_DIV register (named STPDIV_429 in Step/Dir mode) are used for timing. Please
refer to chapter 10 for the calculation of Step/Dir timing.
OVERVIEW OF STEPPER MOTOR GLOBAL PARAMETER CONTROL
Register Interface Function
POLARITIES SPI This five
stepper motor driver chain.
cs_ComInd SPI This bit is used to define
CLK2_DIV SPI
SPI mode: the eight bits named CLK2_DIV
and
Step/Dir
Step/Dir mode:
drivers is important. It is represented by the 2 bit parameter LSMD (
stepper motor driver).
continuous_update SPI
This
Setting
continuous update is carried out during periods of rest (velocity=0), too.
This bit is required for the automatic current control
TMC429_I (by using a 74HC157 multiplexer).
If a right reference switch for the third motor is needed refmux
used for the TMC429-PI24, too.
mot1r SPI
and
Step/Dir
This bit is only used with the TMC429-I (16-pin package). T
reference switches can be adjusted. Refer to chapter 9.1 (including
Figure 9.2 and Figure 9.3 for further information).
32 BIT DATAGRAM SENT FROM A µC TO THE TMC429
signal SCK_S.
the four LSBs [3…0] of the CLK2_DIV
CLK2_DIV[3…0] is named STPDIV_429
chapter 10 for the calculation of Step/Dir timing.
ADDRESS
1 1 1 1 1
1
0
www.trinamic.com
CLK2_DIV POLARITIES
refmux
DATA
LSMD
last stepper motor driver
csCommonIndividual
polarity_nscs_s
polarity_fd
Page 46

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 46
Controls the polarity of the selection signal nSCS_S for the stepper motor
0
The nSCS_S signal is low active.
1
The nSCS_S signal it is high active.
0
The clock polarity is according to Figure 11.1.
1
The clock signal SCK_S is inverted.
polarity_ph_ab
Defines the polarity of the phase bits for the stepper motor.
0
Normal polarity.
1
Fast decay is low active.
0
The DAC bits are high active (normal polarity).
csComInd
Defines either if a single chip select signal nSCS_S is used in common for
all stepper motor driver chips (e.g. for TMC236, TMC239, TMC246, TMC249) or
if three chip select signals nSCS_S, nSCS2, nSCS3 are used to select the
This feature is useful only for the TMC429 within the larger packages,
The polarity control bit for the nSCS_S signal must be set to
The chip select polarity is always negative for three individual chips select
8.2.5.1 POLARITIES
The global parameter register POLARITIES is only used with SPI motor drivers and defines all
polarities necessary.
POLARITIES - GLOBAL PARAMETER REGISTER
POLARITIES (6 bits) Function
polarity_nscs_s
driver chain.
polarity_sck_s Defines the polarity of the stepper motor driver chain clock signal SCK_S.
1 Polarity inverted.
polarity_fd Defines the polarity of the fast decay controlling bit.
0 Fast decay is high active.
polarity_dac_ab Defines the polarity of the DAC bit vectors.
1 The DAC bits are inverted (low active).
8.2.5.2 csCommonIndividual
CSCOMMONINDIVIDUAL - GLOBAL PARAMETER REGISTER
stepper motor driver chips individually.
where the two additional chip select signals (nSCS2, nSCS3) are available.
The common chip select signal nSCS_S is used if csCommonIndividual=0.
polarity_nscs_s=0 if csCommonIndividual=1.
signals.
8.2.5.3 CLK2_DIV
The eight CLK2_DIV bits determine the clock frequency of the motor driver chain in SPI mode. (For
information about timing in Step/Dir mode refer to chapter 10.)
UNIT
The range of CLK2_DIV is {7, 8, 9, … 253, 254, 255}.
- The default value after power-on reset is CLK2_DIV = 15.
- A value of 7 (%00000111, $07) is the lower limit for the clock divider parameter. With CLK2_DIV =
7 the clock frequency of SCK_S is at maximum. This value is best for the TRINAMIC drivers
TMC236 / TMC239 / TMC246 / TMC249.
- The frequency f
becomes asymmetric with respect to its duty cycle. An asymmetric duty cycle may cause instable
SPI transmission to stepper drivers, because the timing might become too fast.
- A value of 255 (%11111111, $FF) is the upper limit for the parameter CLK2_DIV. With CLK2_DIV =
255 the clock frequency of SCK_S is at minimum.
Which level of variations of step frequencies is acceptable depends on the application. At high
microstep resolutions the step rate can be a multiple of the SPI rate without impact on the motor
smoothness.
www.trinamic.com
[Hz] of SCK_S does not become higher for CLK2_DIV < 7, but the signal SCK_S
SCK_S
Page 47

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 47
LSMD
Number motor drivers
%01 (=1)
2 motor drivers
%11 (=3)
not allowed!
CLOCK FREQUENCY f
The frequency f
- For smooth motion even at high step frequencies the clock frequency f
_
SCK_S
=
[Hz]
SCK_S
[Hz] of the stepper motor driver chain clock signal SCK_S is given by
2 (2_+ 1)
[Hz] should be set as
SCK_S
high as possible by choosing the parameter CLK2_DIV in consideration of the data clock
frequency limit defined by the slowest stepper motor driver chip of the daisy chain.
- If step frequencies reach the order of magnitude of the maximum datagram frequency
(determined by the clock frequency of SCK_S and by the datagram length) the step frequencies
may jitter, which is an inherent property of SPI communication. Up to which level variations of
step frequencies are acceptable depends on the application.
For most applications, a setting of CLK2_DIV = 7 is recommended.
DATAGRAM FREQUENCY f
The datagram frequency f
=
1 + _[] + 1
DATAGRAM
[Hz]
[Hz] is given by
DATAGRAM
_
[]
This formula is an approximation for the upper limit.
- For CLK2_DIV = 7 the processing of the NxM bit (next motor bit) requires 1 SPI clock cycle.
- The processing of the NxM bit requires 1.5 SPI clock cycles for CLK2_DIV > 7.
As result for a chain of three drivers with 12 bit datagram length each, the upper limit of the
datagram frequency is
[Hz]
=
1 + 3
[]
_
(
12 + 1)+ 1
=
_
41
[]
8.2.5.4 LSMD - Last Stepper Motor Driver
For the datagram configuration in SPI mode the number of stepper motor drivers is important. It is
represented by the parameter LSMD (last stepper motor driver).
SETTING THE NUMBER OF STEPPER MOTOR DRIVERS
%00 (=0) 1 motor driver
%10 (=2) 3 motors drivers
www.trinamic.com
Page 48

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 48
is set to 0.
This reduces communication traffic. The multiplexed reference switch inputs
are only processed while datagrams are sent to the stepper motor driver
) stays
at rest until a new datagram is sent from the TMC429 to the stepper motor
driver chain. Afterwards, the stepper motor can be either moved into the
direction opposite to the reference switch or it can be moved in both
This setting is recommended for low power applications, e.g. if the stepper
motor drivers shall be put into standby mode.
exer, with the reference switches
configured to stop associated stepper motors automatically, the configuration
must be set to 1. This forces the periodic sending of
e
switches periodically, if all stepper motors are at rest. With this, a stepper
For automatic coil current scaling this bit must be set to 1. The coil current is
This is the normal setting enabling all features.
8.2.5.5 continuous_update
The TMC429 in SPI mode sends datagrams to the stepper motor driver chain only on demand. The
continuous_update bit offers two possibilities.
CONTINUOUS_UPDATE SETTINGS
continuous _update Description
No datagrams are sent during rest periods if continuous_update
chain.
A stepper motor (stopped at reference switch / switch became inactive
0
directions by disabling the automatic stop function.
There is no automatic coil current scaling if the motors are at rest!
When using a reference switch multipl
bit continuous_update
datagrams to the stepper motor driver chain and samples the referenc
1
motor restarts if the associated reference switch becomes inactive.
scaled even though all motors are at rest (velocity=0). Refer to chapter 8.1.9.
The continuous update datagram frequency is given by
_
[Hz] =
[Hz]
(
__
2
1
+
32768
1
__
2
+
__
2
1
)
where
RAMP_DIV_0, RAMP_DIV_1, and RAMP_DIV_2 are the RAMP_DIV settings of the three stepper motors.
www.trinamic.com
Page 49

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 49
refmux
SCK_S
SDO_S
SDI_S
nSCS_S
REF2R REF3
REF1R
TEST GNDCLK
V5V33
SCK_C
SDI_C
nSCS_C
SDOZ_C
nINT_ SDO_C
REF1
REF3RREF2
SCK_S
SDO_S
SDI_S
nSCS_S
REF2R REF3
REF1R
TEST GNDCLK
V5V33
SCK_C
SDI_C
nSCS_C
SDOZ_C
nINT_ SDO_C
REF1
REF2
TMC429-LI TMC429-PI24
9 Reference Switch Inputs
9.1 Reference Switch Configuration, mot1r, and refmux
mot1r is useful for single or dual motor applications with the TMC429-I. It can be used in SPI mode
and in Step/Dir mode. In a configuration with SPI drivers and external reference multiplexer (refmux
=1) all reference switches are available even with TMC429-I. This configuration may also be useful
with the TMC429-PI24. Without multiplexing the TMC429-PI24 offers three left switches but only two
right switches.
ASSOCIATION OF REFERENCE INPUTS DEPENDING ON CONFIGURATION BITS
TMC429-I and
TMC429-PI24
SPI only
mot1r
SPI only
left switch right switch left switch right switch left switch right switch
Motor 1 Motor 2 Motor 3
0 0 REF1 % REF2 % REF3 %
0 1 REF1 REF3 REF2 % % %
1 0 REF1_LEFT REF1_RIGHT REF2_LEFT REF2_RIGHT REF3_LEFT REF3_RIGHT
1 1 REF1_LEFT REF1_RIGHT REF2_LEFT REF2_RIGHT REF3_LEFT REF3_RIGHT
NOTES
- With refmux set to 0, the association of the reference switch inputs REF1, REF2, and REF3 depend
on the setting of mot1r.
- If reference switch multiplexing is enabled, mot1r is ignored.
- Power-on default values are refmux=0 and mot1r=0.
- After power-on-reset, the default setting (refmux=0 and mot1r=0) selects the basic single reference
switch configuration as outlined in Figure 9.2.
TMC429-LI AND TMC429-PI24
The TMC429-LI offers two reference switches (right and left) for each stepper motor. Therefore the
TMC429-LI does not need to be configured with refmux and mot1r.
The TMC429-PI24 offers one left reference switch for each motor and a right reference switch for
motor 1 and motor 2. refmux may be used with the TMC429-PI24 in SPI mode if a right reference
switch for motor 3 is needed. mot1r has no relevance for the TMC429-PI24.
Figure 9.1 TMC429-LI has three right reference inputs. TMC429-PI24 has two right reference inputs.
www.trinamic.com
Page 50

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 50
RE
F_SW3_LEFT
REF_SW2_LEFT
REF_SW1_LEFT
SCK_
S
SDO_S
SDI_S
nSCS_S
REF2 REF3REF1
TEST
GND
SDI
_C
nSCS
_C
SCK
_
C
SDO
_
C
CLK
V5V
33
TMC429-I
+ VCC
+
VCC
+
VCC
+ VCC
+ VCC
+
VCC
No reference switch for stepper motor 3.
SCK_
S
SDO_S
SDI_S
nSCS_S
REF2 REF3REF1
TEST GND
SDI_C
nSCS_C
SCK_C
SDO_C
CLK
V5V33
TMC429-I
REF_SW2_LEFT
REF_SW1_
RIGHT
REF_SW1_L EFT
TMC429-I
The TMC429-I offers three reference switch inputs, which can be used left-side-only or two-one-zero as
shown in Figure 9.2 and in Figure 9.3.
mot1r is used to set the reference switch configuration (left-side-only resp. two-one-zero).
refmux is used for the configuration of multiplexing the three reference switches (e.g. with 74HC157
multiplexer).
L
EFT-SIDE-ONLY
The power-on default value of mot1r is 0. With this default value, REF1 is associated to the left
reference switch of stepper motor #1, REF2 is associated to the left reference switch of stepper motor
#2, and REF3 is associated to the left reference switch of stepper motor #3.
Figure 9.2 Reference switch configuration left-side-only for mot1r=0 (and refmux=0)
WO-ONE-ZERO
T
If mot1r is set to 1 the input REF1 is also associated with the left reference switch of stepper motor
#1. REF2 is also associated to the left reference switch of stepper motor #2. But, the input REF3 is
associated to the right reference switch of stepper motor #1 and no reference switch input is
associated to stepper motor number#3 (see Figure 9.3)
Figure 9.3 Reference switch configuration two-one-zero for mot1r=1 (and refmux=0)
www.trinamic.com
Page 51

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 51
A1
A0
A < MUX
B
C
D
B1
B0
C1
C0
D1
D0
SEL1/ /0
/EN
REF1_ LEFT REF1_ RIGHT
REF2_ LEFT
REF2_ RIGHT
REF3_ LEFT
REF3_ RIGHT
+ VCC
74HC157
SCK_S
SDO_S
SDI_S
nSCS_S
REF2 REF3REF1
TEST GND
SDI_C
nSCS_C
SCK_C
SDO_C
CLK
V5V33
TMC429-I
Negative
direction
x'
1
x'
2
Left stop switch
x'
left
x
1
x
2
Reference switch
x
0
Positive
direction
x
3
x
4
x
right
Right stop switch
DX_REF_TOLERANCE
Motor
traveller
x
traveler
MULTIPLEXING (SPI DRIVER MODE, ONLY)
The refmux bit must be set to 1 to enable reference switch multiplexing (see Figure 9.4). For the two
variants TMC429-PI24 and TMC429-LI, the reference switch multiplexing also works for
csCommonIndividual=1 using three separate driver selection signals (nSCS_S, nSCS2, nSCS3) if the
signal nSCS_S is connected to the multiplexer 74HC157 according to Figure 9.7.
If continuous_update is 1, internal reference switch bits are updated periodically, even if all stepper
motors are at rest. Additionally, the chip select signal nSCS_S for the stepper motor driver chain is
also the control signal for a multiplexer in case of using the reference switch multiplexing option (see
Figure 9.4). So, the continuous_update must be set to 1 if automatic stop by reference switches is
enabled, if six multiplexed reference switches are used, and to get the states of reference switches
while all stepper motors are at rest.
Figure 9.4 Reference switch multiplexing with 74HC157 (refmux=1)
9.2 Triple Switch Configuration
The programmable tolerance range around the reference switch position is useful for a triple switch
configuration, as outlined in Figure 9.5. In this configuration two switches are used as automatic stop
switches and one additional switch is used as the reference switch between the left stop switch and
the right stop switch. The left stop switch and the reference switch are connected in series. In order
to use the reference switch, program a tolerance range into the register DX_REF_TOLERANCE. This
disables the automatic stop within the tolerance range of the reference switch. The homing procedure
can use the right switch to make sure, that the reference switch is found properly. The TMC429 can
automatically check the correct position of the driver whenever the reference switch is passed.
Figure 9.5 Triple switch configuration left stop switch – reference switch – right stop switch
www.trinamic.com
Page 52

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 52
mechanical inaccuracy of switches
(switching hysteresis)
x
1
x
2
reference
switch
dx
2
dx
1
DX_REF_TOLERANCE
x
ref
x
max
Motor
traveller
x
traveler
Negative
direction
Positive
direction
A1
A0
A < MUX
B
C
D
B1
B0
C1
C0
D1
D0
SEL1/ /0
/EN
REF1_LEFT REF1_RIGHT
REF2_LEFT
REF2_RIGHT
REF3_LEFT
REF3_RIGHT
+VCC
74HC157
74HC32
hold
hold
SCK_S
SDO_S
SDI_S
nSCS_S
REF2 REF3REF1
TEST GND
SDI_C
nSCS_C
SCK_C
SDO_C
CLK
V5V33
TMC429-I
SCK_S
SDO_S
SDI_S
nSCS_S
REF2R REF3
REF1R
TEST GNDCLK
V5V33
SCK_C
SDI_C
nSCS_C
SDOZ_C
nINT_SDO_C
REF1
REF3RREF2
TMC429-LI
9.3 Homing Procedure
In order to home the drive, the reference switch position x
(see Figure 9.6).
PROCEED AS FOLLOWS:
1. Due to mechanical inaccuracy of switches, the reference switch is active within the following
< x
range: x
the start of the homing procedure, it is necessary to leave this range, because the associated
reference switch is active. A dummy write access to X_LATCHED initializes the position latch
register.
2. With the traveler within the range x
position x
3. When reaching position x
4. With stop switch enabled, the stepper motor automatically stops if the position x
5. Now, set the DX_REF_TOLERANCE in order to allow motion within the active reference switch
range x
6. Afterwards initialize the register X_LATCHED again to latch the position x
target position x
7. When the positions x
Finally, one should move to the target position X_TARGET = x
X_ACTUAL := 0 when reached.
< x2, where x1 and x2 may vary. If the traveler is within the range x1 < xtraveler < x2 at
1
ref
< x
2
can simply be determined by motion with a target position X_TARGET set to –x
2
the position is latched automatically.
2
< x
< x2 and to move the traveler to a position x
1
ref
< x1.
traveler
and x2 are determined the reference position x
1
traveler
< x
must be determined after each power on
ref
and the register X_LATCHED initialized, the
max
max
is reached.
2
< x1 if desired.
traveler
by a motion to a
1
= (x1 + x2 ) / 2 can be set.
ref
and set X_TARGET := 0 and
ref
.
Figure 9.6 Reference search
9.4 Simultaneous Start of up to Three Stepper Motors
Starting stepper motors simultaneously can be achieved by sending successive datagrams starting the
stepper motors. If the delay between those datagrams is of the magnitude of some microseconds, the
stepper motors can be considered as started simultaneously. Feeding the reference switch signals
through or gates (see Figure 9.7) allows exact simultaneous start of the stepper motors under
software control.
Figure 9.7 Reference switch gateing for exact simultanous stepper motor start
www.trinamic.com
Page 53

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 53
STP
DIR
t
STEP
t
DIR2STP
= t
STEP
t
STEP
t
DIR2STP
= t
STEP
10 Step/Dir Drivers
Step/Dir drivers contain an internal sequencer. The Step/Dir interface is a simple and universal
interface for real time motion control. The internal sequencer of the TMC429 and its associated RAM
table is not used for Step/Dir drivers. All additional control functions like current control have to be
provided by the microcontroller directly communicating to the driver.
The Step/Dir mode is enabled if the control bit en_sd (enable Step/Dir) of the IF_CONFIGURATION_429
register is set to 1.
10.1 Timing
The timing of the Step/Dir interface should be adapted to the requirements of the driver and the
transmission line. The minimum pulse width may be limited.
The timing of the Step/Dir interface is controlled by the four LSBs [3…0] of the CLK2_DIV of the global
parameter register. Here, the CLK2_DIV[3…0] is named STPDIV_429.
For a given clock frequency f
[MHz] of the TMC429, the length t
CLK
[µs] of a step pulse is
STEP
[]
= 16
- For a clock frequency f
1 + _429
[]
[MHz] of 16MHz the step pulse length can be programmed in integer
CLK
multiple of 1µs by STPDIV_429.
- The STPDIV_429 has to be set compatible to the upper step frequency f
- The first step pulse after a change of direction is delayed by t
DIR2STP
avoid setup time violations of the Step/Dir power stage.
MAXIMUM STEP FREQUENCIES
Generally, the maximum step pulse frequency is f
For a clock frequency f
For a clock frequency f
[MHz] = 16 MHz the maximum step pulse frequency f
CLK
[MHz] = 32 MHz the maximum step pulse frequency f
CLK
Figure 10.1 Step/Dir timing (en_sd = 1; step_half = 0)
STEP_MAX
[MHz] = f
[MHz] / 32.
CLK
STEP
= 1/t
which is used.
STEP
which is equal to t
is 500kHz.
STEP_MAX
is 1MHz.
STEP_MAX
STEP
to
www.trinamic.com
Page 54

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 54
Bus clock input
SCK_S
Serial data input
SDI_S
CLK
t
CLK
SCK_S
nSCS_S
SDI_S
SDO_
S
sdi_s_bit#0
t
PD
t
PD
t
PD
1 x sampled SDI_S
t
SUSCSdrv
t
HDSCSdrv
t
CKSL
t
CKSH
sdo_s_bit#0
sdi_
s_bit#n-1
sdo_s_bit#n-1
sdo_s_bit#1
sdi_s_bit#1
sdo_s_bit#n
sdi_s_bit#n
m datagram bits
one full stepper motor driver datagram
t
DATAGRAMdrv
1 x sampled SDI_S
m x sampled SDI_S
11 SPI Mode Driver Interface
The TMC429 contains a microstep sequencer, which directly connects to SPI stepper motor drivers. The
internal sequencer provides the full set of control signals for three stepper motor driver ICs. The SPI
datagram is individually configurable for each stepper motor driver chip of the daisy chain. This is
necessary, because there is no standard for the sequence, the meaning, and the number of the
control bits for serial stepper motor drivers. The stepper motor driver datagram configuration adapts
the specific sequence of control bits required by the driver IC. It is stored within the first 32
addresses representing 64 values of the on-chip RAM (see chapter 10).
The TMC429 is simply configurable by sending a fixed sequence of datagrams to initialize it after
power-up. Once initialized, the TMC429 autonomously generates the datagrams for the stepper motor
driver daisy chain without any additional interventions of the microcontroller. To operate the TMC429
in SPI mode set en_sd to 0 (see chapter 0). The addressing of the stepper motor drivers within a
daisy chain is determined by their position in the SPI chain: the last IC in the chain is motor driver 0.
For TRINAMIC drivers, configuration data is provided.
11.1 Bus Signals
Signal Description TMC429 Stepper Driver
Serial data output SDO_S
Chip select input nSCS_S
11.2 Timing
The timing of the serial stepper motor interface is similar to that of the microcontroller interface.
Figure 11.1 Timing diagram of the serial stepper motor driver interface
EXPLANATORY NOTES
www.trinamic.com
- The clock divider provides 16 up to 512 clock cycles (tCLK) for a serial driver interface data clock
period.
- The default duration of a clock period (tSCKCL+tSCKCH) of the signal nSCS_S is 16+16=32 clock
periods of the clock signal CLK.
- The minimal duration of a serial interface clock period (tSCKCL+tSCKCH) is 8+8=16 clock cycles of
signal CLK. Set CLK_DIV=7. This setting provides best performance in most cases.
- The polarities of the signals nSCS_S and SCK_S are programmable to use driver chips with
inverted polarities without additional glue logic.
- The input SDI_S of the serial driver interface must always be driven to a defined level. To avoid
high impedance (Z) at this input pin while the stepper motor driver chain is idle, a pull-up
resistor or a pull-down resistor of 10 KΩ is required at the input.
Page 55

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 55
t
8 16
256
CLK periods
t
HDSCSdrv
t
CKSL
8 16
256
CLK periods
t
Datagram Length
8+8+1*16+8+8=48
512+64*512+512=
CLK periods
64 bits @ fCLK = 16 MHz
t
Datagram Duration for 1 –
3 1056
µs
CLK-rising-edge to Outputs
Delay
5
ns
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
0
RRS
RW
NxM_1
NxM_0
quarter sine wave
quarter sine wave
TIMING CHARACTERISTICS OF SERIAL STEPPER MOTOR DRIVER INTERFACE
Symbol
SUSCSdrv
Parameter Min Typ Max Unit
8 16 256 CLK periods
t
CKSH
DAMAGRAMdrv
t
DAMAGRAMdrv
DAMAGRAMdrv
8 16 256 CLK periods
33792
Datagram Duration for 1 -
64 bits @ fCLK = 32 MHz
3 2112 µs
tPD
11.3 RAM Address Partitioning and Data Organization
The SPI datagram for each stepper motor driver is composed of internal sequencer output signals
provided by the microstep unit of the TMC429 individually for each stepper motor. Each internal
sequencer output signal is represented by a five bit code word called driver configuration code. The
order of internal sequencer output signals forming the SPI
daisy chain is defined by the order of driver configuration code words in the configuration RAM area.
The on-chip RAM capacity is 128 x 6 bit. The 128 on-chip RAM cells of 6 bit width are addressed via 64
addresses with 2 x 6 data words. From the addressing point of view, the address space enfolds 64
addresses of 12 bit wide data. The 64 addresses are partitioned into two ranges of 32 addresses –
selected by the register RAM select RRS bit.
The registers of the TMC429 are addressed with RRS=0.
The on-chip RAM is addressed with RRS=1.
PARTITIONING OF THE ON-CHIP RAM ADDRESS SPACE
datagrams for the stepper motor driver
32 BIT DATAGRAM SENT FROM A µC TO THE TMC429 VIA PIN SDI_C
1 0
1 1
DRIVER CHAIN DATA CONFIGURATION
The sequencer internally generates a number of control signals available for transmission to SPI
driver ICs. These sequencer output signals are selected as configured by the internal stepper motor
driver datagram configuration table.
The first 32 addresses are provided for the configuration of the serial stepper motor driver chain. Each
of these 32 addresses stores two configuration words, composed of the so called NxM (next motor)
bit together with the 5 bit wide driver configuration code. While sending a datagram, the driver
www.trinamic.com
ADDRESS
32 x (2x6 bit)
driver chain
datagram
configuration
range
32 x (2x6 bit)
quarter period
sine wave LUT
range
DATA
data @ odd RAM
addresses
signal_codes
values
(amplitude)
data @ even
RAM addresses
signal_codes
values
(amplitude)
Page 56

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 56
configuration code words are read sequentially beginning with the first address of the driver chain
datagram configuration memory range. Each driver configuration code word selects a signal provided
by the microstep unit.
MICROSTEP TABLE
The second 32 addresses are provided to store the microstep table. This table usually is a quarter
period of a sine wave or of a periodic function, which has been optimized for a given motor type.
Different stepper motors may step with different microstep resolutions, but the microstep look up
table (LUT) is the same for all stepper motors controlled by one TMC429. Any quarter wave period
stored in the microstep table is expanded automatically to a full period wave together with its 90°
phase shifted wave.
NXM
The NxM bit tells the TMC429 that the last bit of a motor driver SPI register is reached. The TMC429
increments the internal stepper motor addressing counter and switches to the next driver in the chain
after reading an SPI configuration word with NxM=1. If the internal stepper motor addressing counter
is equivalent to the last stepper motor driver LSMD parameter, the datagram transmission is finished
and the counter is preset to %00 for the next datagram transmission to the stepper motor driver
chain.
The total data word width is six bit: five for an internal sequencer output signals and one NxM bit.
www.trinamic.com
Page 57

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 57
hex
bin
DAC_A_1
$01
%00001
DAC A, bit 1
DAC_A_3
$03
%00011
DAC A, bit 3
DAC_A_4
$04
%00100
DAC A, bit 4
DAC_A_5
$05
%00101
DAC A, bit 5 (MSB)
PH_A
$06
%00110
phase polarity bit A
DAC_B_0
$08
%01000
DAC B, bit 0 (LSB)
DAC_B_2
$0A
%01010
DAC B, bit 2
DAC_B_4
$0C
%01100
DAC B, bit 4
DAC_B_5
$0D
%01101
DAC B, bit 5 (MSB)
PH_B
$0E
%01110
phase polarity bit B
FD_B
$0F
%01111
fast decay bit B
zero
$10
%10000
constant 0
one
$11
%10001
constant 1
step
$13
%10011
step bit for Step/Dir control of drivers
$15
%10101
$17
%10111
$18
%11000
$19
%11001
$1A
%11010
$1B
%11011
$1C
%11100
$1E
%11110
11.4 Stepper Driver SPI Datagram Configuration
A number of control signals are required to drive 2-phase stepper motors. The serial driver interface
forms the link between the TMC429 and the stepper motor driver chain. The motor driver datagram
configuration defines the order of the control signals serially sent from TMC429 to the stepper motor
driver chain. To define the serial order of the control signals, driver configuration codes have to be
written into the stepper motor driver datagram configuration area of the on-chip configuration RAM of
the TMC429. The control signals required in a given application depend on the stepping mode (full
step, half step, or microstep) and on additional options related to the stepper motor driver chips
used. The TMC429 primarily provides a full set of control signals individually for each of the up to
three stepper motors respectively stepper motor driver chips of the daisy chain. Mnemonics for driver
configuration codes are given in the table below. The names of these signals may differ to the signal
names of the used stepper motor drivers.
STEPPER MOTOR DRIVER DATAGRAM CONFIGURATION
MNEMONIC
DAC_A_0 $00 %00000 DAC A, bit 0 (LSB)
DRIVER CONFIGURATION CODE
Function
DAC_A_2 $02 %00010 DAC A, bit 2
FD_A $07 %00111 fast decay bit A
DAC_B_1 $09 %01001 DAC B, bit 1
DAC_B_3 $0B %01011 DAC B, bit 3
direction $12 %10010 0 : up / 1 : down resp. counter clockwise / clockwise
$14 %10100
$16 %10110
UNUSED (these
codes might
be used for
future devices)
COIL A
COIL B
FOR EACH COIL OF EACH MOTOR THE FOLLOWING FUNCTION BITS ARE PROVIDED:
- 6 bit control signals for the DAC (current control),
- 1 bit for the phase polarity, and
- 1 bit for fast decay (only for stepper motor driver chips which offer fast decay).
www.trinamic.com
$1D %11101
$1F %11111
Page 58

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 58
Serial Driver Interface
Zero
One
DAC_A_0
DAC_A_1
...
PH_A
FD_A
DAC_B_0
DAC_B_1
...
PH_B
FD_B
Direction
Step
3 x
Micro Stepping Unit
(incl. sequencer)
TMC429
Multiple
Ported RAM
Serial-to-Parallel
Interface(s)
CA3
PHA
MDA
Stepper Motor Driver
Control Logic
Stepper Motor Driver (Chain)
e.g. TMC236 / TMC239 / TMC246 / TMC249
MSB
LSB
CA2
CA1
CA0
CB3
PHB
MDB
CB2
CB1
CB0
Status Signals
DAC_A_5
PH_A
FD_A
DAC_A_4
DAC_A_3
DAC_A_2
DAC_B_5
PH_B
FD_B
DAC_B_4
DAC_B_3
DAC_B2
CA3
PHA
MDA
CA2
CA1
CA0
CB3
PHB
MDB
CB2
CB1
CB0
n
Status Signals
Control Signals
Status Signals
n
FOR BOTH COILS OF EACH MOTOR FURTHER FUNCTION BITS ARE PROVIDED:
- 1 constant configuration bit named zero,
- 1 constant configuration bit named one,
- 1 direction bit for Step/dir control of drivers, and
- 1 step bit for Step/Dir control of drivers.
Figure 11.2 outlines how to connect the control signals of the TMC429 with the signals used to
control the digital part of a stepper motor driver.
Figure 11.2 Serially transmitted control and status signals between TMC429 and driver chain
If fullstep operation of an SPI stepper motor is desired, e.g. at higher velocities, the driver
configuration codes for the DAC bits can be replaced by constant ‘1’ bits (signal code %11) on the fly
during high velocity motion. This way, the microstep resolution does not need to be changed.
UNDERSTANDING THE CONFIGURABLE SPI DATAGRAM SEQUENCER
1. The TMC429 sends datagrams to the stepper motor driver chain only on demand. To guarantee
the integrity of each datagram, the status of all internal sequencer output signals is buffered
internally before sending.
2. Afterwards, the transmission starts with selection of the buffered internal sequencer output
signals of the first motor (SMDA=%00) by reading the first driver configuration code word (even
data word at on-chip RAM address %00000) from on-chip configuration RAM area.
3. The driver configuration codes select the sequencer output signals provided for the first stepper
motor.
The first stepper motor is addressed until the NxM (next motor) bit is read from on-chip
configuration RAM. The stepper motor driver address is incremented with each NxM=1 as long
as the current stepper motor driver address is below the value set by the parameter LSMD (last
stepper motor driver). If the stepper motor driver address is equivalent to the LSMD parameter,
NxM=1 indicates the completion of the transmission.
4. Now, the stepper motor driver address counter of the serial interface is reinitialized to %00 and
the unit waits for the next transmission request.
Note
- The order of driver configuration codes in the on-chip RAM configuration area determines the
order of datagram bits for the stepper motor driver chain, whereas the prefixed NxM bit
determines the stepper motor driver positions. If no NxM bit with a value of 1 is stored within
the on-chip RAM, the TMC429 will send endlessly.
- The on-chip RAM has to be configured first!
- After power-on reset, the registers of the TMC429 are initialized in a way that no transmission of
datagrams to the motor driver chain is required.
- Access to on-chip RAM is always possible, also during transmission of datagrams to the driver
chain.
www.trinamic.com
Page 59

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 59
11.4.1 Initialization of On-Chip RAM by µC after Power-On
After the automatic power-on reset all registers are initialized and all stepper motors are at rest. The
on-chip RAM of the TMC429 is initialized with a default configuration for a TMC23x or TM24x stepper
motor driver chain. Writing to TMC429 registers may cause action of the stepper motor units (initiated
by the TMC429) which results in sending datagrams to the stepper motor driver chain!
Before moving a motor using other stepper motor drivers than TMC236/TMC239/TMC246/TMC249 in an
SPI chain the on-chip RAM must be initialized.
www.trinamic.com
Page 60

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 60
Position
TMC429
RAM
TMC429
TMC23x
0
Zero
1 0 $05
$01
$05
DAC_A_5
→
CA3 2 0
$04
$02
$04
DAC_A_4
→
CA2
→
→
5 0 $06
$05
$06
PH_A
→
PHA
{One}
7 0 $0D
$07
$0D
DAC_B_5
→
CB3
→
9 0 $0B
$09
$0B
DAC_B_3
→
CB1
10 0 $0A
$0A
$0A
DAC_B_2
→
CB0
11 1 $0E
$0B
$2E
PH_B
→
PHB
{One}
→
14 0 $04
$0E
$04
DAC_A_4
→
CA2
15 0 $03
$0F
$03
DAC_A_3
→
CA1
16 0 $02
$10
$02
DAC_A_2
→
CA0
→
18 0 $10
$12
$10 {$11}
Zero
→
MDB
19 0 $0D
$13
$0D
DAC_B_5
→
CB3
20 0 $0C
$14
$0C
DAC_B_4
→
CB2
→
→
23 1 $0E
$17
$2E
PH_B
→
PHB
24
0
$07
$18
$07 {$11}
FD_A {One}
→
MDA
→
26 0 $04
$1A
$04
DAC_A_4
→
CA2
27 0 $03
$1B
$03
DAC_A_3
→
CA1
→
→
30 0 $0F
$1E
$0F {$11}
FD_B {One}
→
MDB
31 0 $0D
$1F
$0D
DAC_B_5
→
CB3
→
33 0 $0B
$21
$0B
DAC_B_3
→
CB1
34 0 $0A
$22
$0A
DAC_B_2
→
CB0
1
$23
$2E
→
11.4.2 Example for SPI Motor Driver Datagram Configuration
The following example demonstrates how to configure the datagram and shows what has to be
stored within the on-chip RAM to represent the desired configuration. The given example refers to a
driver chain of three TRINAMIC stepper motor drivers of type TMC236, TMC239, TMC246, or TMC249.
From the TMC429 datagram configuration point of view, there is no difference between these drivers.
All drivers have a serial interface of 12 bits length.
EXAMPLE CONFIGURATION:
- For the first and the second stepper motor driver of the chain the fast decay control bit (FD_A,
FD_B) is fixed to 0. This setting can be beneficial in stand still.
- For the third driver the fast decay control bit is used. This sample gives smoothest
microstepping.
- The sequence to be sent to the TMC429 for this configuration is outlined in the table below. In
power-on default, fast decay fixed on is shown. This will result in best microstep precision and
smoothest operation.
DATAGRAM EXAMPLE AND RAM CONTENTS FOR THREE STEPPER MOTOR DRIVER CHAIN
Power-On default initialization values of the TMC429 are marked as {One}.
within
datagram
3 0 $03 $03 $03 DAC_A_3
4 0 $02 $04 $02 DAC_A_2
6
8 0 $0C $08 $0C DAC_B_4
12
13 0 $05 $0D $05 DAC_A_5
17 0 $06 $11 $06 PH_A
Driver NxM
0 $10 $00 $10 {$11}
driver#1 (SMDA=%00)
0 $10 $06 $10 {$11}
0 $10 $0C $10 {$11}
driver#2 (SMDA=%01)
signal
code
RAM
address
data
{POR}
MNEMONIC
{POR default}
{One}
Zero
Zero
{One}
→
→
→
TMC24x
bit name
MDA
CA1
CA0
MDB
CB2
MDA
CA3
PHA
21 0 $0B $15 $0B DAC_B_3
22 0 $0A $16 $0A DAC_B_2
25 0 $05 $19 $05 DAC_A_5
28 0 $02 $1C $02 DAC_A_2
29 0 $06 $1D
32 0 $0C $20 $0C DAC_B_4
35
driver#3 (SMDA=%10)
$06 PH_A
$0E
PH_B
CB1
CB0
CA3
CA0
PHA
CB2
PHB
With LSMD = %10 the (third) NxM bit at address $23 (position 35) finishes the datagram transmission
www.trinamic.com
Page 61

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 61
The stepper motor driver datagram configuration can be accessed at any time without conflict, e.g. to
change between a configuration using fast decay versus a configuration where fast decay is disabled.
CONFIGURATION DATAGRAM SEQUENCE FOR THE EXAMPLE
with – = don’t cares
binary datagram specification : hexadecimal datagram
%10000000----------000101–010000 : $80000510
%10000010----------000011–000100 : $82000304
%10000100----------000110–000010 : $84000602
%10000110----------001101–010000 : $86000D10
%10001000----------001011–001100 : $88000B0C
%10001010----------101110–001010 : $8a002E0A
%10001100----------000101–010000 : $8c000510
%10001110----------000011–000100 : $8e000304
%10010000----------000110–000010 : $90000602
%10010010----------001101–010000 : $92000D10
%10010100----------001011–001100 : $94000B0C
%10010110----------101110–001010 : $96002E0A
%10011000----------000101–000111 : $98000507
%10011010----------000011–000100 : $9a000304
%10011100----------000110–000010 : $9c000602
%10011110----------001101–001111 : $9e000D0F
%10100000----------001011–001100 : $a0000B0C
%10100010----------101110–001010 : $a2002E0A
11.4.3 Initialization of SPI Motor Drivers Using Cover Datagrams
Some stepper drivers require an initialization. When they are driven in SPI-Mode by a TMC429 there is
no direct access from the µC to stepper motor drivers. The TMC429 supports tunneling of data from
the µC to each stepper motor driver in the chain. This mechanism is called cover datagram. Also,
status information from the drivers may need to be fed back to the µC for special functions. This is
enabled by a set of two registers: datagram-low-word and datagram-high-word buffer data sent back
from the drivers.
PROCEDURE:
- The TMC429 enables direct communication between the microcontroller and the stepper motor
driver chain by sending a cover datagram.
- The position cover_position and actual length cover_len of a cover datagram is specified by
writing them into a common register.
- Writing an up to 24 bit wide cover datagram to the register cover_datagram will fade in that
cover datagram into the next datagram sent to the stepper motor driver chain.
www.trinamic.com
Page 62

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 62
RRS
RW
data @ odd RAM
data @ even
2
0
8
6
11
9
14
12
…
…
…
…
…
62
62
63
63
63
63
63
63
11.5 Initialization of Microstep Look-Up Table
For an SPI driver chain the TMC429 provides a look-up table (LUT) of 64 values of 6 bit for
microstepping. The microstep LUT can be adapted by storing an arbitrary quarter period of a periodic
function to match individual stepper motor characteristics. It is common to use a sine wave function
for microstepping. With that, the current of one phase is driven with the sine function whereas the
other phase is driven with the cosine function.
To initialize the LUT for microstepping, load a quarter sine wave period into the microstep LUT. Each
two successive values of the sine wave function are combined in one datagram similar to the driver
configuration code words for the stepper motor driver chain configuration. The TMC429 automatically
expands the quarter sine wave period to a full sine and cosine function. The necessary data values y(i)
to represent a quarter sine wave period for the microstep LUT are defined by
()=
+ 64 sin
2 π
with i = { 0, 1, 2, 3,… 60, 61, 62, 63 }
where the conditional replacement y(i) := 63 for y(i) > 63 has to be done. The last five values
(which are calculated to be 64) have to be replaced by 63.
With this replacement one finally gets y(i) = { 0, 2, 3, 5, 6, 8, 9, 11, 12, 14, 16, 17, 19, 20, 22, 23,
24, 26, 27, 29, 30, 32, 33, 34, 36, 37, 38, 39, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50, 51, 52, 53, 54,
55, 56, 56, 57, 58, 59, 59, 60, 60, 61, 61, 62, 62, 62, 63, 63, 63, 63, 63, 63, 63, 63 }.
The power-on reset default initialization of the TMC429 sine wave LUT is with offset for
TMC236/TMC239/TMC246/TMC249 with mixed decay control = One (ON).
Step/Dir control: TMC260/TMC261/TMC262 have their own optimized build-in sine wave look-up table.
SCHEME OF ¼ SINE WAVE PERIOD WITH 6 BIT RESOLUTION AND 64 (32 X 2) VALUES
32 BIT DATAGRAM SENT FROM A µC TO THE TMC429 VIA PIN SDI_C
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
DATA
ADDRESS
…
1 1
0 0 0 0 0
0 0 0 0 1
0 0 0 1 0
0 0 0 1 1
0 0 1 0 0
…
1 1 0 1 1
1 1 1 0 0
1 1 1 0 1
1 1 1 1 0
1 1 1 1 1
…
(x)10
5
0
63
addresses
0 0 0 0 1 0
0 0 0 1 0 1
0 0 1 0 0 0
0 0 1 0 1 1
0 0 1 1 1 0
…
…
1 1 1 1 1 0
1 1 1 1 1 1
1 1 1 1 1 1
1 1 1 1 1 1
1 1 1 1 1 1
… …
These 64 values represent a quarter sine period in the interval [0… π/4] which is expanded
automatically by the TMC429 to a full sine cosine period (see section 11.5.1).
(x)
10
RAM addresses
0 0 0 0 0 0
0 0 0 0 1 1
3
0 0 0 1 1 0
0 0 1 0 0 1
0 0 1 1 0 0
63
… …
1 1 1 1 1 0
1 1 1 1 1 1
1 1 1 1 1 1
1 1 1 1 1 1
1 1 1 1 1 1
…
…
…
www.trinamic.com
Page 63

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 63
% binary representation of the datagram
: decimal represented pair of values
: $ hexadecimal representation
The table is sent to the on-chip RAM of the TMC429 by 32 datagrams:
% 11 00000 0 00000000 00 000010 00 000000 : 2 & 0 : $C0000200
% 11 00001 0 00000000 00 000101 00 000011 : 5 & 3 : $C2000503
% 11 00010 0 00000000 00 001000 00 000110 : 8 & 6 : $C4000806
% 11 00011 0 00000000 00 001011 00 001001 : 11 & 9 : $C6000B09
% 11 00100 0 00000000 00 001110 00 001100 : 14 & 12 : $C8000E0C
% 11 00101 0 00000000 00 010001 00 010000 : 17 & 16 : $CA001110
% 11 00110 0 00000000 00 010100 00 010011 : 20 & 19 : $CC001413
% 11 00111 0 00000000 00 010111 00 010110 : 23 & 22 : $CE001716
% 11 01000 0 00000000 00 011010 00 011000 : 26 & 24 : $D0001A18
% 11 01001 0 00000000 00 011101 00 011011 : 29 & 27 : $D2001D1B
% 11 01010 0 00000000 00 100000 00 011110 : 32 & 30 : $D400201E
% 11 01011 0 00000000 00 100010 00 100001 : 34 & 33 : $D6002221
% 11 01100 0 00000000 00 100101 00 100100 : 37 & 36 : $D8002524
% 11 01101 0 00000000 00 100111 00 100110 : 39 & 38 : $DA002726
% 11 01110 0 00000000 00 101010 00 101001 : 42 & 41 : $DC002A29
% 11 01111 0 00000000 00 101100 00 101011 : 44 & 43 : $DE002C2B
% 11 10000 0 00000000 00 101110 00 101101 : 46 & 45 : $E0002E2D
% 11 10001 0 00000000 00 110000 00 101111 : 48 & 47 : $E200302F
% 11 10010 0 00000000 00 110010 00 110001 : 50 & 49 : $E4003231
% 11 10011 0 00000000 00 110100 00 110011 : 52 & 51 : $E6003433
% 11 10100 0 00000000 00 110110 00 110101 : 54 & 53 : $E8003635
% 11 10101 0 00000000 00 111000 00 110111 : 56 & 55 : $EA003837
% 11 10110 0 00000000 00 111001 00 111000 : 57 & 56 : $EC003938
% 11 10111 0 00000000 00 111011 00 111010 : 59 & 58 : $EE003B3A
% 11 11000 0 00000000 00 111100 00 111011 : 60 & 59 : $F0003C3B
% 11 11001 0 00000000 00 111101 00 111100 : 61 & 60 : $F2003D3C
% 11 11010 0 00000000 00 111110 00 111101 : 62 & 61 : $F4003E3D
% 11 11011 0 00000000 00 111110 00 111110 : 62 & 62 : $F6003E3E
% 11 11100 0 00000000 00 111111 00 111111 : 63 &
% 11 11101 0 00000000 00 111111 00 111111 : 63 & 63 : $FA003F3F
% 11 11110 0 00000000 00 111111 00 111111 : 63 & 63 : $FC003F3F
% 11 11111 0 00000000 00 111111 00 111111 : 63 & 63 : $FE003F3F
(separated by & character)
63 : $F8003F3F
NOTE
- These 32 datagrams for initialization of a quarter sine wave period microstep look-up table are
sufficient for all programmable microstep resolutions.
- If microstepping is used for at least one stepper motor, these 32 datagrams have to be sent
once to the TMC429 for initialization of the microstep table after power-on reset.
- The initialization of the microstep look-up table is not necessary, if full stepping is used for all
stepper motors.
- A complete initialization of the microstep look-up table is recommended to avoid trouble caused
by missing look-up table entries.
- A fully initialized microstep look-up table allows the selection of individual microstep resolutions
for different stepper motors.
FURTHER FORMULAS FOR SINE WAVE LOOK-UP TABLES
A sine wave table tailored to the motor gives the best fit with respect to equidistance of microsteps
or concerning torque ripple. Alternatively, a sine wave look-up table based on the following formula
can be used:
()= 63 sin
2 π
Even, adding some offset o within theoretical range from 0 to 63 might enhance the microstep
behavior together with mixed decay:
()= + (63 ) sin
Finally, a sine wave look-up table has to be tested within the application and might need some fine
adjustments for optimization.
www.trinamic.com
2 π
Page 64

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 64
MSBs of full wave
ph_a
ph_b
fd_a
fd_b
%00
(0...63)
1st 1 1 0 1
%01
(64...127)
2nd 1 0 1 0
%10
(128...191)
3rd 0 0 0 1
%11
(192...255)
4th 0 1 1 0
increment
sin
0, 1, 2, 3, …, 61, 62, 63,
63, 63, 62, 61, …, 3, 2, 1,
0, 1, 2, 3, …, 61, 62, 63,
63, 63, 62, 61, …, 3, 2, 1
cos
63, 63, 62, 61, …, 2, 1,
0, 1, 2, 3, …, 61, 62, 63,
63, 63, 62, 61, …,3, 2, 1,
0, 1, 2, 3, …, 61, 62, 63
sin
0, 2, 4, 6, …, 58, 60, 62,
63, 60, 58, 56, …, 4, 2,
0, 2, 4, 6, …, 58, 60, 62,
63, 60, 58, 56, …, 4, 2
cos
63, 60, 58, 56, …, 4, 2,
0, 2, 4, 6, …, 58, 60, 62,
63, 60, 58, 56, …, 4, 2,
0, 2, 4, 6, …, 58, 60, 62
sin
0, 4, 8, 12, …, 56, 60,
63, 60, 56, …, 12, 8, 4,
0, 4, 8, 12, …, 56, 60,
63, 60, 56, …, 12, 8, 4
cos
63, 60, 56, …, 12, 8, 4,
0, 4, 8, 12, …, 56, 60,
63, 60, 56, …, 12, 8, 4,
0, 4, 8, 12, …, 56, 60
sin
0, 8, 16, 24, …, 48, 56
63, 56, 48, 40, …,16, 8,
0, 8, 16, 24, …, 48, 56
63, 56, 48, 40, …, 16, 8
cos
63, 56, 48, 40, …, 16, 8,
0, 8, 16, 24, …, 48, 56
63, 56, 48, 40, …, 16, 8,
0, 8, 16, 24, …, 48, 56
sin
0, 16, 32, 48,
63, 48, 32, 16,
0, 16, 32, 48,
63, 48, 32, 16
cos
63, 48, 32, 16,
0, 16, 32, 48,
63, 48, 32, 16,
0, 16, 32, 48
sin
0, 32,
63, 32,
0, 32,
63, 32
cos
63, 32,
0, 32,
63, 32
0, 32
sin
0,
63,
0,
63
cos
63,
0,
63
0
11.5.1 Stepping through the Wave Look-Up Table (LUT)
The 64 values of the wave look-up table (LUT) hold a quarter period of a sine wave, indexed from 0 to
63. This quarter sine wave is expanded to a full sine wave and full cosine wave by indexing the 64
values of the LUT. The LUT index is mapped from a wave index of a full period from 0 to 255. The
stepping through the LUT is done with fixed increment width. The increment width is a power of two
and it depends on the microstep resolution selection USRS. For motion in positive direction, the full
period index is incremented from microstep to microstep. For motion in negative direction, the full
period index is decremented from microstep to microstep. The sine is associated to phase A (ph_a)
and the cosine is associated to phase B (ph_b). The phase bits represent the sign of the sine resp.
cosine function. The polarity of the phase bit (ph_a, ph_b) and the polarity of the fast decay control
bits (fd_a, fd_b) can be changed by the polarity bits within the global stepper motor parameter
register (see section 0, page 45).
PHASE BITS AND FAST DECAY CONTROL BITS
index (range)
Quadrant
sin
cos
sin
cos
NOTE
- Always initialize the whole LUT to be sure to read valid wave values and use the MSB DAC bits
(no matter what microstep resolution is set).
- The addressing starts with 0 after power-on reset.
- Changing the microstep resolution after some microsteps causes an offset for the addressing
which has to be taken into account for positioning a stepper motor.
- With lower microstep resolutions, a slightly different motor behavior may be experienced for left
and right rotation. This is, because the TMC236 drivers treat zero current differently depending on
the polarity.
WAVE LUT INDICES FOR DIFFERENT µSTEP RESOLUTIONS
USRS
%110 1
%101 2
%100 4
width
1st quadrant 2nd quadrant 3rd quadrant 4th quadrant
%011 8
%010 16
%001
(HS)
%000
11.5.2 Partial Look-Up Table Initialization
If all stepper motors (except those driven in full step mode) are programmed to use the same
microstep resolution constantly before a single microstep is processed, a partially initialized microstep
table can be sufficient. With a partially initialized LUT, the microstep resolution must be chosen before
any step is made after power-on reset. A partially initialized LUT should only be taken into account, if
the memory of the host microcontroller is not big enough to store a full table.
Instead of a partial initialization of the TMC429 look-up table an initialization with a triangular
function
www.trinamic.com
(FS)
32
64
()
is recommended.
Page 65

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 65
x0
4
π
2
π
0
π
π
2
4
3
π
)(
ϕ
f
ϕ
box
rhomb
circle
1
1
2
π
y
up to 64 microsteps
1 full step
up to 64 micro steps within a quadrant
1 full step
2
1
11.5.3 Microstep Enhancement
Even for stepper motors optimized for sine-cosine control, it is possible to improve the microstep
behavior by adapting the microstep look-up table. For different types of stepper motors a periodic
trapezoidal or triangular function (similar to a sine function) as superposition or replacement might
be a good choice. Taking the physics of stepper motors into account, the choice of the function can
be determined by a single shape parameter σ.
The programmability of the microstep look-up table provides a simple and effective facility to enhance
microstepping for a given type of two-phase stepper motor. Enhanced microstepping requires accurate
current control. So, stepper motor driver chips with enabled and well tuned fast decay (resp. mixed
decay) have to be used, e.g. TRINAMICs TMC236 / TMC239 / TMC246 / TMC249 driver chips.
Non-linearity (resulting from magnetic field configuration determined by shapes of pole shoes),
ferromagnetic characteristics, and other stepper motor characteristics affect non-linearity in microstep
behavior of stepper motors. The non-linearity of microstepping causes microstep positioning
displacements, vibrations and noise, which can be reduced with an adapted microstep table. The best
fitting microstep table can be determined by measuring the microstep motor behavior, e.g. using a
laser pointer based on the sine-cosine microstepping table.
Nevertheless sine-cosine microstepping is a good first order approach for microstepping. The micro
step enhancement possible with the TMC429 is based on a replacement of the look-up table
ϕ
initialization function sin(
parameter σ. A quarter sine wave period is the basic approach for initialization of the microstep lookup table.
A quarter of a trapezoidal function or a quarter of a triangular function is chosen depending on the
shape parameter σ for a given stepper motor type:
) used for sine-cosine microstepping by a function with the shape
_
()
=
_
The look-up table () of the TMC429 enfolds a quarter period (0 <
expanded to a full period (0 < 2) and the phase shifted companion function value
added automatically by the TMC429 during operation. So, to reach a function value (
automatically gets a pair of function values {();
()
for > 0
()
for = 0
()
for < 0
with 1.0 +1.0 and 0 <
} respectively {sin (
2
) only. This quarter period is
ϕ
); cos (ϕ)}. This
is
)
, one
automatic expansion of the TMC429 functionality – primarily provided for sine cosine microstepping
)
(
= sin(
ϕ
) – also works fine with other microstep wave forms fσ.
Figure 11.3 Microstep enhancement by introduction of a shape function
www.trinamic.com
Page 66

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 66
The shape parameter σ selects one of three functions:
(respectively a superposition of two of them)
()
()
()
()
which is the sine function sin() as used for
-
-
-
The shape parameter σ = 0 selects the function
sine cosine microstepping. One gets the unit circle (r=1.0) by transformation to Cartesian coordinates
{y = sin(); x = cos()} as outlined in Figure 11.3. Shape parameter σ = +1.0 results in a box. Shape
parameter σ = -1.0 results in a rhomb. Other values result in something between a box and a circle
respectively something between a circle and a rhomb.
The data values (
)
of the look-up table range from 0 to 63 and the argument I ranges also from 0
to 63. In the following, natural angles (radians) ranging from (0 < 2) are used for the
description. The three functions for superposition controlled by the shape parameter σ are
()
()
()
=
= sin()
2
=
4
if 0 <
2
1
if
2
4
4
All together, these three functions are combined to form the function
()
()
=
+ [
()
for = 0
()
+ [
()
()
()
]
for > 0
]
()
for < 0
The shape parameter σ selects the type of function and it also provides a continuous transition
between circle and box respectively circle and rhomb. To estimate, what function is best for a given
type of stepper motor, try microstepping based on different shape parameters σ by downloading
different microstep tables on-the-fly into the TMC429 during motion of a stepper motor.
For the calculation of data for the microstep look-up table replace
ϕ → ϕ
ranging from 0 to π /2 for
I
the quarter period by
=
=
2
64
{
0,1,2,3, … ,63}
(
)
The amplitude of the shape function
has to be limited to the range of 0.0 to 1.0 respectively to
the range of 0 to 63 for the on-chip RAM.
A fourier synthesis or an experimentally optimized wave is an option. Sometimes even a small change
like a zero offset is beneficial.
www.trinamic.com
Page 67

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 67
12 Running a Motor
12.1 Getting Started
For starting a motor proceed as follows:
1. Write the stepper motor driver datagram configuration into the RAM area. (SPI mode only)
2. Initialize the microstep look-up table LUT when using microstepping. (SPI mode only; not
necessary for TRINAMIC motor driver chips)
3. Initialize the parameter LSMD, which is part of the global parameter register. (SPI mode only)
4. Set the velocity parameters V_MIN and V_MAX.
5. Set the clock pre-dividers PULSE_DIV and RAMP_DIV.
6. Set the microstep resolution USRS.
7. Set A_MAX with a valid pair of PMUL and PDIV.
8. Choose the ramp mode with RAMP_MODE register.
9. Choose the reference switch configuration with REF_CONF register. The reference switch inputs
REF1, REF2, and REF3 should be pulled down to ground. Use the REF_CONF register.
10. Now, the TMC429 runs a motor if you write either X_TARGET or V_TARGET, depending on the
choice of the ramp mode.
12.2 Running a Motor with Start-Stop-Speed in ramp_mode
The TMC429 has an integrated automatic start-stop-speed mechanism. This can easily be realized by a
simple command sequence. To start and stop with a speed V_START_STOP different from zero, one
has to proceed as follows:
1. Set V_MIN := V_START_STOP.
2. Set ramp_mode.
3. Set X_TARGET to desired target position.
4. Set V_ACTUAL immediately with correct sign for V_ACTUAL to +V_MIN resp. –V_MIN, depending
on the direction of positioning.
www.trinamic.com
Page 68

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 68
Operational mode
Necessary additional hardware
An external 100nF ceramic capacitor (CBLOCK) has to be connected
An external 470nF ceramic capacitor has to be connected between the
V33 pin and ground.
An external 100nF ceramic capacitor is necessary only between pin V33 and
ground.
Symbol
Parameter
Conditions
Min
Typ
Max
Unit
VDD5REG
Supply voltage vdd5
5 V Operational Mode
4.5 5 5.5
V
CBLOCK
Block capacitor
5 V Operational Mode, x7r ceramic
100 nF
VDD3REG
Supply voltage vdd3
3.3 V Operational Mode
2.9
3.3
3.6 V ICCNLREG
Current consumption
No load
50
100
µA
tSREG
Startup time
No external capacitor connected
20
µs
tSREGC
Startup time
C_load = 470 nF
150
µs
VRIPPLE
Ripple on vdd3
With ripple over 50 mV the input
thresholds may differ from that specified
100
mV
external capacitor with capacity
other than typical, the ripple should be
measured on pin v33 to be sure that
COPT
Optional capacitor
Optional parallel capacitor for additional
frequency ripple, c0g
470 pF
SCK_ S
SDO_ S
SDI_S
nSCS
_ S
REF2 REF 3
REF1
TEST GND
SDI_ C
nSCS_ C
SCK_ C
SDO_ C
CLK
V5V33
470 nF
*
+ 5 V
100 nF
*
Copt
Pins named GND and TEST have to be connected
to ground as close as possible to the chip..
* Capacitors should be placed as
cloase as possible to the chip.
SCK_ S
SDO_ S
SDI_ S
nSCS_ S
REF2 REF 3
REF1
TEST GND
SDI_ C
nSCS_ C
SCK _ C
SDO_ C
CLK
V5V33
TMC429
+3. 3V
100 nF
*
3.3V Operation (CMOS)
In most cases the optional capacitor Copt is not necessary.
.
TMC429
5V Operation (TTL)
13 On-Chip Voltage Regulator
The on-chip voltage regulator delivers a 3.3 V supply for the chip core. The TMC429 provides two
operational modes to operate in 5 V or in 3.3 V environments. For both operational modes one resp.
two external capacitors are required. Please keep all connections as short as possible!
OPERATIONAL MODE
-
5 V
3.3 V
CHARACTERISTICS OF THE ON-CHIP VOLTAGE REGULATOR
between pin V5 and ground.
-
capacitor
TDRFT Temperature drift 300 ppm /
°C
in the data sheet
CREG External capacitor Use x7r ceramic capacitors on pin 33.
33 470 nF
Using an
requirements are satisfied.
reduction of high
ceramic, unnecessary in most cases
Figure 13.1 3 V operation (CMOS) vs. 5 V operation (TTL)
www.trinamic.com
Page 69

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 69
Symbol
Parameter
Min
Typ
Max
Unit
Temp
Temperature
-55
25
125
°C
VOP
Reset ON/OFF hysteresis
0.80
V
V
OFF
Reset OFF
1.58
2.13
2.85
V
VON
Reset ON
1.49
1.98
2.70
V
Static
Dynamic
t
RESPOR
V
OFF
V
ON
V
OP
0
V
OFF
V
ON
V
OP
0
14 Power-On Reset
The TMC429 is equipped with a static and dynamic reset with an internal hysteresis. The chip
performs an automatic reset during power-on. If the power supply voltage falls below the threshold
, an automatic power-on reset is performed. The power-on reset time t
V
ON
power-up time of the on-chip voltage regulator.
CHARACTERISTICS OF THE ON-CHIP POWER-ON-RESET
VDD Power supply range 3.0 3.3 3.6 V
t
Reset time of on-chip power-on-reset 2.14 3.31 5.52 µs
RESPOR
depends on the
RESPOR
Figure 14.1 Operating principle of the power-on-reset
www.trinamic.com
Page 70

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 70
Voltage at Pin V33 in 3.3V
V
DD5
DC supply voltage
Voltage at Pin V5
-0.3
5.5
V
5V I/Os
5.5 max
±
Ambient air temperature
Ambient air temperature
TEMPD4
Ambient air temperature
Industrial type
-40
+105
°C
TSG
Storage temperature
-60
+150
°C
I
SC32MHZ
Supply current
f = 32 MHz at Tc = 25°C
15
mA
I
Supply current
f = 16 MHz at Tc = 25°C
5 10
mA
I
SC4MHZ
Supply current
f = 4 MHz at Tc = 25°C
1.25
2.5
mA
I
Power down current
Power down mode at
Tc = 25°C, 5V supply
70
150
µA
15 Absolute Maximum Ratings
The maximum ratings may not be exceeded under any circumstances. Operating the circuit at or near
more than one maximum rating at a time for extended periods shall be avoided by application
design.
Symbol Parameter Conditions Min Max Unit
V
DC supply voltage
DD3
VI3 DC input voltage,
3.3 V I/Os
VO3 DC output voltage,
3.3 V I/Os
mode
-0.3 V
-0.3 V
-0.3 3.6 V
+ 0.3 V
DD3
+ 0.3 V
DD3
VI5 DC input voltage,
VO5 DC output voltage,
Continuous DC Voltage -0.3 V
Continuous DC Voltage -0.3 V
5V I/Os
V
ESD voltage PAD cells are designed to
ESD
resist ESD voltages
according to Human Body
Model according to MILSTD-883, with R
MΩ, R
= 1.5 KΩ, and C
D
C
100 pF, but it cannot be
guaranteed.
TEMPD2
Industrial / consumer type
range
TEMPD3
Automotive type -55 +125 °C
range
range
16 Electrical Characteristics
= 1 – 10
S
+ 0.3,
DD5
+ 0.3,
DD5
V
V
5.5 max
2000
V
=
-40 +85 °C
16.1 Power Dissipation
General DC characteristics
Symbol Parameter Conditions Min Typ Max Unit
SC16MHZ
I
www.trinamic.com
Supply current f = 8 MHz at Tc = 25°C
SC8MHZ429
PDN25C
5 mA
(IOs driven)
Page 71

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 71
CIN
Input capacitance
7
pF
LIL
Input with pull up
V
= 0V (REF1R, REF2R,
REF3R)
-110
-30
-5
µA
V
DD3
DC supply voltage
3.0
3.3
3.6
V
VI3
DC input voltage
0
V
V
V
IL3
Low level input voltage
Pin TEST only
0
0.3 x V
DD3
V
V
High level input voltage
Pin TEST only
0.7 x V
V
+ 0.3
V
Low level input voltage
High level input voltage
V
Schmitt-Trigger
0.4 0.7
V
V
OL3
Low level output voltage
IOL = 0.3 mA
0.1
V
High level output
V
OL3
Low level output voltage
IOL = 2 mA
0.4
V
High level output
voltage
IOH = 2 mA
V
–0.4
V
V
DD5
DC supply voltage
4.5 5 5.5
V
V
IL5
Low level input voltage
Pin TEST only
0
0.3 x V
DD5
V
V
High level input voltage
Pin TEST only
0.7 x
5
V
+ 0.3
V
V
High level input voltage
threshold
All inputs except TEST,
V
DD5
=5V
1.5 1.9
V
V
Schmitt-Trigger
hysteresis
0.4 0.7
V
V
Low level output voltage
IOL = 0.3 mA
0.1
V
High level output
V
OL5
Low level output voltage
IOL = 4 mA
0.4
V
High level output
voltage
IOH = 4 mA
V
–0.4
V
16.2 DC Characteristics
DC characteristics contain the spread of values guaranteed within the specified supply voltage range
unless otherwise specified. A device with typical values will not leave Min/Max range within the full
temperature range.
General DC characteristics
Symbol Parameter Conditions Min Typ Max Unit
ILC Input leakage current -10 10 µA
IN
DC characteristics for 3.3V supply mode
Symbol Parameter Conditions Min Typ Max Unit
DD3
IH3
V
LTH3
All inputs except TEST 0.9 1.2 V
DD3
DD3
threshold
V
HTH3
All inputs except TEST 1.5 1.9 V
threshold
HYS3
hysteresis
V
OH3
I
= 0.3 mA V
OH
–0.1 V
DD3
voltage
OH3
DD3
Ripple on V
has to be taken into account when measuring thresholds and hysteresis.
DD3
DC characteristics for 5V supply mode
Symbol Parameter Conditions Min Typ Max Unit
VI5 DC input voltage 0 V
IH5
V
Low level input voltage
LTH5
threshold
HTH5
All inputs except TEST,
V
=5V
DD5
VDD
0.9 1.2 V
DD5
V
DD5
HYS5
OL5
V
OH5
voltage
OH5
www.trinamic.com
I
= 0.3 mA
OH
V
DD5
DD5
–0.1
V
Page 72

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 72
f
CLK
Operation frequency
f
CLK
= 1 / t
CLK
0
16
32
MHz
ising
∞
∞
t
CLK_H
Clock time high
12.5
∞ ns
10% to 90% except TEST
∞
90% to 10% except TEST
∞
t
RISE_O_429
Output signal rise time
10% to 90%
7
ns
t
Output signal fall time
90% to 10%
7
ns
Relative to falling clock
clock
t
Propagation delay time
50% of rising edge of
the clock CLK to the 50%
1 10
ns
t
CLK_L
t
CLK_H
t
CLK
t
SU
t
PD
90%
10%
50%
50%
t
HD
t
FALL
t
RISE
CLK
OUTPUT
16.3 Timing Characteristics
General timing parameters (TMC429 with EMI optimized output drivers)
Symbol Parameter Conditions Min Typ Max Unit
t
Clock period Rising edge to r
CLK
31.25
edge of CLK
t
Clock time low 12.5
CLK_L
t
Input signal rise time
RISE_I
0.5
pin
t
Input signal fall time
FALL_I
0.5
pin
FALL_O_429
tSU Setup time
1 ns
edge at CLK
tHD Hold time Relative to falling
1 ns
edge at CLK
PD_429
of the output
ns
ns
ns
ns
Figure 16.1 General timing parameters
www.trinamic.com
Page 73

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 73
Parameter
Ref
Min
Nom
Max
Total thickness
A
0.80
0.85
0.90
Standoff
A1
0.00
0.035
0.05
Mold thickness
A2 - 0.65
0.67
Lead frame thickness
A3 0.203
Lead width
b
0.2
0.25
0.3
Body size X
D 5.0
Body size Y
E 5.0
Lead pitch
e 0.5
Exposed die pad size X
J
3.2
3.3
3.4
Exposed die pad size Y
K
3.2
3.3
3.4
Lead length
L
0.35
0.4
0.45
Package edge tolerance
aaa
0.1
Mold flatness
bbb
0.1
Coplanarity
ccc
0.08
Lead offset
ddd
0.1
Exposed pad offset
eee
0.1
TMC429
QFN32 (RoHS)
-40° to +105°C
TMC429-LI
18 Package Machanical Data
The TMC429 is available within three packages: QFN32, SOP24, and SSOP16
18.1 TMC429-LI / QFN32
18.1.1 Dimensional Drawings
Attention: Drawings not to scale.
Figure 18.1 Dimensional drawings of QFN32
DIMENSIONS OF PACKAGE QFN32
18.1.2 Package Code
Device Package Temperature range Code/ Marking
www.trinamic.com
Page 74

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 74
1
2
3
HeE
D
A
A
1
h x 45°
B
h x
45°
A
2
C
L
TOP VIEW
SIDE VIEW
45678
910
11
12
13
14
15
16
17
18 19
20
21 22
23
N
=
24
24
END VIEW
α
Dimensions in MILLIMETERS
Dimensions in INCHES
Min
Typ
Max
Min
Typ
Max A 2.35 2.65
0.0926
0.1043
A1
0.1 0.3
0.004
0.0118
A2 B 0.33 0.51
0.013
0.02
C
0.23 0.32
0.0091
0.0125
D
15.2 15.6
0.5985
0.6141 E 7.4 7.6
0.2914
0.2992
e
1.27 best case
0.05 best case
H
10 10.65
0.394
0.419 h 0.25 0.75
0.01
0.029
L
0.4 1.27
0.016
0.05
N
24
24
α
TMC429
SOP24 (RoHS)
-40° to +105°C
TMC429-PI24
18.2 TMC429-PI24 / SOP24
18.2.1 Dimensional Drawings
Attention: Drawings not to scale.
Figure 18.2 Dimensional drawings SOP24, 300 MILS
DIMENSIONS OF PACKAGE SOP24, 300 MILS
Symbol
0°
8° 0°
8°
18.2.2 Package Code
Device Package Temperature range Code/ Marking
www.trinamic.com
Page 75

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 75
HE
h x 45°
1
23
16
8
9
e
D
A
A
1
h x 45°
A
2
L
WITH PLATING
b
1
c
1
c
b
BASE METAL
TOP VIEW
SIDE VIEW
C
B
4
5
6
7
151413121110
END VIEW
LEAD (SIDE VIEW)
N=16
S
α
Dimensions in MILLIMETERS
Dimensions in INCHES
Min
Typ
Max
Min
Typ
Max
A
1.55
1.63
1.73
0.061
0.064
0.068
A1
0.10
0.15
0.25
0.004
0.006
0.0098
A2
1.40
1.47
1.55
0.055
0.058
0.061
b
0.20 0.30
0.008
0.012
b1
0.20
0.25
0.28
0.008
0.010
0.011
c
0.18 0.25
0.007
0.010
c1
0.18
0.20
0.23
0.007
0.008
0.009
B
0.20
0.25
0.31
0.008
0.010
0.012
C
0.19
0.20
0.25
0.0075
0.008
0.0098
D
4.80
4.93
4.98
0.189
0.194
0.196
E
3.91 best case
0.154 best case
e
0.635 best case
0.025 best case
H
6.02 best case
0.237 best case
h
0.25
0.33
0.41
0.010
0.013
0.016
L
0.41
0.635
0.89
0.016
0.025
0.035
N
16
16
S
0.051
0.114
0.178
0.0020
0.0045
0.0070
α
0°
5°
8°
0°
5°
8°
TMC429
SSOP16 (RoHS)
-40° to +105°C
TMC429-I
18.4 TMC429-I / SSOP16
18.4.1 Dimensional Drawings
Attention: Drawings not to scale.
Figure 18.3 Dimensional drawings SSOP16, 150 MILS, 0.635mm (0.025 inch) pitch
DIMENSIONS OF PACKAGE SSOP16, 150 MILS
Symbol
18.4.2 Package Code
Device Package Temperature range Code/ Marking
www.trinamic.com
Page 76

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 76
Date code
WWYY (week WW and year YY)
Lot number identifier
LLLL
Logo
No
TMC429-I
Trinamic
WWYYLLLL
Package
QFN32 5mm * 5mm
Lot number identifier
LLLL
Logo
Yes
TRINAMIC
TMC429-LI
WWYY LLLL
Package
SOP24 – 300 MILS
Date code
WWYY (week WW and year YY)
Lot number identifier
LLLL
TMC429-PI24
Trinamic
WWYY LLLL
19 Marking
PRODUCT NAME TMC429-I
Package SSOP16 – 150 MILS
Zoomed Size
PRODUCT NAME TMC429-LI
Date code WWYY (week WW and year YY)
Zoomed Size
PRODUCT NAME TMC429-PI24
Logo Yes
Zoomed Size
www.trinamic.com
Page 77

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 77
Pin TMC429
SSOP16
SOP24
SOP24
In/Out
Description
Reset
- - - - Internal power-on reset
CLK 5 7 7 I
Clock input
nSCS_C
6 9 9 I Low active SPI chip select input driven from µC
SCK_C
7
10
10 I Serial data clock input driven from µC
SDI_C
8
11
11 I Serial data input driven from µC
nINT_SDO_C
9
14
14 O Serial data output to µC input / multiplexed
nINTERRUPT output if communication with µC is idle
SDO_C will never be high impedance, but this function
can be added with a single gate 74HCT1G125 (see
). The TMC429 is equipped with an
additional pin named SDOZ_C which becomes high
impedance when nSCS_C=1.
nSCS_S_S2
12
17
17 O SPI chip select signal to stepper motor driving chain
nSCS2_S3
nSCS2
-
18
18 O SPI chip select signal
nSCS3_D3
nSCS3
SCK_S_D1
11
16
16 O Serial data clock output to SPI stepper motor driver
SDO_S_S1
SDO_S
SDI_S_D2
16
23
23
I
Serial data input from SPI stepper motor driver chain
down resistor at SDI_S avoids high
REF1
1 2 2 I Reference switch input 1
No internal pull-up R
REF2
No internal pull-up R
REF3
3 4 4 I Reference switch input 3
V5
13
5, 20
5, 20
+5V supply / +3.3V supply
V33
14
21
21 470nF ceramic capacitor pin / +3.3V supply
GND
15
8, 22
8, 22
Ground
20 Compatibility Information: TMC429 and TMC428
The TMC429 is the 100% functional and pin compatible successor of the TMC428. The TMC429 can
replace a TMC428 in existing hardware / software environments.
There are some additional functions of the TMC429 which are mapped in register address ranges that
were indicated reserved addresses for later versions. When these additional registers of the TMC429
are not accessed, the TMC429 behaves identically as a TMC428. Registers, which are added in the
TMC429, are labeled with _429 (e.g. register if_configuration_429).
The TMC429 has a step/direction interface that perfectly fits to the TRINAMIC stepper motor driver
family TMC260, TMC261, and TMC262.
The TMC429 has a higher clock frequency range than the TMC428:
- The TMC428 can be clocked up to 16MHz.
- The TMC429 can be clocked with up to 32MHz.
20.1 Signal Descriptions: TMC428 vs. TMC429
Please note, that the STEP/DIR interface of the TMC429 is not mentioned in this section because elder
TMC428 applications always use SPI interface. All pin functions necessary for replacing the TMC428 by
the TMC429 are described in this table.
Pin TMC428
SDO_C / nINT
nSCS_S
SCK_S
TMC428
TMC429
(resp. nSCS_C = 1)
Figure 20.1
- 19 19 O SPI chip select signal
chain
10 15 15 O Serial data output to SPI stepper motor driver chain
SDI_S
2 3 3 I Reference switch input 2
www.trinamic.com
(pull-up/-
impedance; SDI_S input is the power-on default)
No internal pull-up R
Page 78

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 78
Pin TMC429
Pin TMC428
SSOP16
SOP24
TMC428
SOP24
TMC429
In/Out
Description
Must be connected to GND as close as possible to the
chip
n.c. - 1, 12,
- - Not connected pins
POSCMP
Position compare output for SOP24 / output for
REFR1
SOP24 package; internal
pull-up R
REFR2
-
n.c.
13
I
Reference switch right 2 input
Only available for TMC429 in SOP24 package; internal
SCK_
S
SDO_S
SDI_S
nSCS_S
REF2 REF3
REF1
TEST GNDCLK
V5V33
TMC429
SCK_C
SDI_C
nSCS_C
SDOZ_C
SCK_C
SDI_C
nSCS_C
SDOZ_C
nINT_SDO_C can be configured as non-mulitplexed interrupt output
nINT_SDO_C
nINT
SCK_S
SDO_S
SDI_S
nSCS_S
REF2 REF3
REF1
TEST GNDCLK
V5V33
TMC428
SCK_C
SDI_C
nSCS_C
SDO_C
74HCT1G125
SCK_C
SDI_C
nSCS_C
SDOZ_C
nINT
optional multiplexed interrupt output / Hint: disable µC Interrupt
input during SPI access while nSCS_C is low
TEST 4 6 6 I
13, 24
-
n.c.
n.c. 1 n.c. / O
pos_comp function (TMC429 only)
SDOZ_C - n.c. 12 O / Z SDOZ_C becomes high impedance (Z) when nSCS_C=1 /
The nINT signal is not mapped to SDOZ_C pin /
The TMC429 provides a register for configuration of the
pin nINT_SDO_C to give the nINT signal directly without
multiplexing.
- n.c. 24 I Reference switch right 1 input
Only available for TMC429 in
pull-up R
Note
When replacing a TMC428 in SOP24 package by a TMC429 in SOP24 package on an existing PCB make
sure that the pins 1 and 12 are not connected on the PCB. These pins are outputs for the TMC429 in
SOP24 package.
The TMC428-I in SSOP16 can be replaced by a TMC429-I without restrictions.
20.2 TMC428 SDO_C Output
Figure 20.1 TMC428 SDO_C tristate output using a single gate 74HCT1G125. The TMC429 has a
dedicated tristate output (SDOZ_C). nINT_SDO_C can be switched to nINT.
20.3 Unused Addresses
20.3.1 Unused Address (IDX=%1111)
Reading the register gives back the actual status bits and 24 data bits set to 0. Writing to this register
has no effect for the TMC428. This register address (IDX=%1111) within each stepper motor register
block {SMDA=%00, %01, %10} is unused for the TMC428.
20.3.2 Unused Addresses (JDX={%0100, %0101, %0110, %1001})
There are unused addresses within the address range of the global parameter registers. Access to
these addresses has no effect for the TMC428. However, access should be avoided, because this
address space may be used for future devices. For the TMC429, the global registers ad addresses
JDX={%0100, %0101, %0110, %1001}) are used for TMC429 specific function. Some bits of the clk2_div
(JDX=%1111}) are used for the timing configuration in step/direction mode of the TMC429.
For the TMC429 some of the un-used addresses are used for additional registers of the TMC429.
Additional registers of the TMC429 are named as <NAME>_429 to indicate that these have TMC429
specific functions that are not available for the TMC428.
www.trinamic.com
Page 79

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 79
f
CLK
Operation frequency
f
CLK
= 1 / t
CLK
0
16
32
MHz
t
Clock period
Raising edge to rising
edge of CLK
31.25
∞
ns
t
Clock time low
12.5
∞ ns
t
CLK_H
Clock time high
12.5
∞ ns
t
Input signal rise time
10% to 90% except TEST
pin
0.5
∞
ns
t
Input signal fall time
90% to 10% except TEST
pin
0.5
∞
ns
t
FALL_O_428
Output signal fall time
90% to 10%
3
ns
Relative to falling clock
Relative to falling clock
50% of rising edge of
the clock CLK to the 50%
20.4 General Timing Parameters
The TMC429 has improved values when compared to TMC428. In this table modified timing values are
summarized.
General timing parameters (TMC428 with EMI optimized output drivers)
Symbol Parameter Conditions Min Typ Max Unit
CLK
CLK_L
RISE_I
FALL_I
t
Output signal rise time 10% to 90% 3 ns
RISE_O_428
tSU Setup time
tHD Hold time
t
Propagation delay time
PD_428
edge at CLK
edge at CLK
of the output
1 ns
1 ns
1
5
ns
www.trinamic.com
Page 80

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 80
21 Disclaimer
TRINAMIC Motion Control GmbH & Co. KG does not authorize or warrant any of its products for use in
life support systems, without the specific written consent of TRINAMIC Motion Control GmbH & Co.
KG. Life support systems are equipment intended to support or sustain life, and whose failure to
perform, when properly used in accordance with instructions provided, can be reasonably expected to
result in personal injury or death.
Information given in this data sheet is believed to be accurate and reliable. However no responsibility
is assumed for the consequences of its use nor for any infringement of patents or other rights of
third parties which may result from its use.
Specifications are subject to change without notice.
All trademarks used are property of their respective owners.
22 ESD Sensitive Device
The TMC429 is an ESD-sensitive CMOS device and sensitive to electrostatic discharge. Take special care
to use adequate grounding of personnel and machines in manual handling. After soldering the
devices to the board, ESD requirements are more relaxed. Failure to do so can result in defects or
decreased reliability.
PAD cells are designed to resist ESD voltages corresponding to Human Body Model (MIL-STD-883, with
= 1 – 10 MΩ, R
R
C
= 1.5 KΩ, and C
D
= 100 pF).
S
Note: In a modern SMD manufacturing process, ESD voltages well below 100V are standard. A major
source for ESD is hot-plugging the motor during operation.
www.trinamic.com
Page 81

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 81
23 Table of Figures
Figure 1.1 TMC429 functional block diagram ................................................................................................................ 4
Figure 1.2 Application example using Step/Dir driver interface ............................................................................. 5
Figure 1.3 Application example using SPI driver interface ...................................................................................... 5
Figure 4.1 TMC429 pin out ............................................................................................................................................... 11
Figure 5.1 TMC429 within QFN32 package ................................................................................................................... 13
Figure 5.2 TMC429 / TMC26x outline for configuration via SPI and STEP/DIR for motion ............................ 13
Figure 5.3 TMC429 application environment with TMC429 in SSOP16 package ............................................... 14
Figure 5.4 Usage of drivers without serial data output (SDO) with TMC429 in SOP24 or in QFN32
packages ................................................................................................................................................................................ 14
Figure 6.1 Timing diagram of the serial µC interface .............................................................................................. 16
Figure 6.2 The TMC429 has a high impedance pin SDOZ_C. The nINT_SDO_C can be configured as non
multiplexed interrupt output nINT if required. .......................................................................................................... 17
Figure 8.1 Velocity ramp parameters and velocity profiles .................................................................................... 24
Figure 8.2 Target position calculation, ramp generator, and pulse generator................................................. 28
Figure 8.3 Proportionality parameter p and outline of velocity profile(s) ......................................................... 30
Figure 8.4 Left switch and right switch for reference search and automatic stop function ....................... 33
Figure 8.5 Example of status bit mapping for a chain of three TMC246 or TMC249 ...................................... 40
Figure 8.6 Cover datagram example with 7 bits covering 7 bits of a 48 bit datagram ................................ 41
Figure 9.1 TMC429-LI has three right reference inputs. TMC429-PI24 has two right reference inputs. .... 49
Figure 9.2 Reference switch configuration left-side-only for mot1r=0 (and refmux=0) .................................. 50
Figure 9.3 Reference switch configuration two-one-zero for mot1r=1 (and refmux=0) .................................. 50
Figure 9.4 Reference switch multiplexing with 74HC157 (refmux=1) ................................................................... 51
Figure 9.5 Triple switch configuration left stop switch – reference switch – right stop switch ................ 51
Figure 9.6 Reference search ............................................................................................................................................. 52
Figure 9.7 Reference switch gateing for exact simultanous stepper motor start ........................................... 52
Figure 10.1 Step/Dir timing (en_sd = 1; step_half = 0) ............................................................................................. 53
Figure 11.1 Timing diagram of the serial stepper motor driver interface ......................................................... 54
Figure 11.2 Serially transmitted control and status signals between TMC429 and driver chain ................ 58
Figure 11.3 Microstep enhancement by introduction of a shape function ....................................................... 65
Figure 13.1 3 V operation (CMOS) vs. 5 V operation (TTL) ..................................................................................... 68
Figure 14.1 Operating principle of the power-on-reset ........................................................................................... 69
Figure 16.1 General timing parameters ........................................................................................................................ 72
Figure 18.1 Dimensional drawings of QFN32 ............................................................................................................. 73
Figure 18.2 Dimensional drawings SOP24, 300 MILS ............................................................................................... 74
Figure 18.3 Dimensional drawings SSOP16, 150 MILS, 0.635mm (0.025 inch) pitch ....................................... 75
Figure 20.1 TMC428 SDO_C tristate output using a single gate 74HCT1G125. The TMC429 has a
dedicated tristate output (SDOZ_C). nINT_SDO_C can be switched to nINT. .................................................... 78
www.trinamic.com
Page 82

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 82
08
TMC429 Datasheet Rev. 1.00 based on TMC428 Datasheet
05
Hint added concerning changing of pluse_div while
VELOCITY_MODE or HOLD_MODE that might force am
2010-AUG-05
LL
- Pin out GND @ 25 and n.c. @ 32 added for QFN32
Pinning table updated with TMC428 SOP24 package
and section
modified / added
because this register was unused for the TMC428 but is a
2010-SEP-10
LL
- Figure 20.1 TMC428 SDO_C tristate output using a single
tristate
re and description added
Short description of differences between TMC428 vs.
Speed in
1.02
2010-NOV-01
LL
Pinning of SSOP16 (pin 10) package variant corrected.
1.03
2010-NOV-05
LL
- TMC428 drawings (Figure 20.1, Figure 9.2, Figure 9.3,
) updated concerning
equation tSTEP[µs]
1.05
2010-DEC-06
LL
- Position compare control register (pos_comp) and
06
Preliminary removed and version date updated; no
,
Typical current ISC32MHZ added and symbol ISC4MHZ429
on default initialization of the SPI driver chain for
24 Revision History
Version Date Author
LL – Lars Larsson
BD – Bernhard Dwersteg
SD – Sonja Dwersteg
1.00
2009-DEC-
2010-MAY-
LL -
LL - QFN32 package pinning added.
2010-AUG-26) LL - SDO_C renamed to iINT_SDC_C at package drawings.
Description
Rev. 2.03 / December 18, 2009.
- Corrections:
p = a_max / ( 128 * 2^( pulse_div – ramp_div ) )
p = a_max / ( 128 * 2^( ramp_div - pulse_div ) );
-
internal step pulse depending on the current position.
- DIL20 package of TMC428 removed.
package.
variant.
- Hints added for new functions of the TMC429.
- Section 20.3 Unused Addresses
- Unused Address (IDX=%1111) , p. 78
8.1.16USTEP_COUNT_429 (IDX=%1111)
read / write register for the TMC429.
- SPI configuration outline added.
1.01
1.04
2010-OCT-10 LL - Marking (section 19, p. 76) updated.
2010-NOV-11 LL - Section 10 Step/Dir , page 53
2011-APR-
LL -
2011-MAY-17
2011-AUG-02
2011-DEC-15
www.trinamic.com
gate 74HCT1G125. The TMC429 has a dedicated
output (SDOZ_C). nINT_SDO_C can be switched to nINT.
- Description of if_Configuration_429 finalized.
- Step/direction timing figu
(section 10 Step/Dir , page 53).
TMC429.
- Section 12.2 Running a Motor with Start-Stopramp_mode, page 67 new.
- Timing parameter updated
Figure 9.1, Figure 9.4, Figure 9.7
TMC428 / TMC429.
- Feature list updated concerning step direction interface;
corrected.
associated output poscmp labelling unified.
- TMC428 changed to TMC429 in text if necessary.
changes within the document itself.
- Hint concerning microstep frequency added in section 10
p. 53.
- Post address updated.
- Hint concerning current scaling at rest added.
corrected/changed to ISC8MHZ429.
- Power-
Page 83

TMC429 DATASHEET (Rev. 2.04 / 2015-JUN-03) 83
on defaults of sine wave table
1.06
2012-JAN-27
LL
- Section 12.2 Running a Motor with Start-Stop-Speed in
:= V_START_STOP
Hint concerning frequency of SPI clock SCK relative to
Updated concerning dimensioning drawing at rising edge
1.07
2012-AUG-01
SD
- Section 0 corrected: smda 0100.
2.02
2013-NOV-04
SD
- Application example in chapter 5.2 updated.
updated
- Chapter 1.2.1 (serial µC interface) corrected.
2.03
2015-MAR-10
BD
- A_ACTUAL is signed, 12 bit (p. 22)
2.04
2015-JUN-03
BD
Corrected meaning of RS bits in SPI status information field
Version Date Author
LL – Lars Larsson
BD – Bernhard Dwersteg
SD – Sonja Dwersteg
2012-JAN-19
2012-MAR-28
2012-MAY-22
2.00
2.01
2012-DEC-03 SD Amended datasheet version with new design. Several
2012-DEC-18 JP General DC characteristics changed
Description
TMC236/TMC239/TMC246/TMC249 SPI stepper motor chain
updated.
- TMC429 power-on reset (POR) default values added.
- Hint concerning poweradded.
ramp_mode item set X_TARGET
corrected to set X_TARGET to desired position.
Initialization of On-Chip RAM by µC after Power-On
updated.
TMC429 clock fCLK added.
of direction signal (signal shape itself was correct).
changes.
- USTEP_COUNT_429 description updated
- Value ranges for X_TARGET and X_ACTUAL
(signed and unsigned are possible).
25 References
[TMC429+26x-EVAL] TMC429+26x-EVAL Manual / Evaluation board for S/D chipset (TMC429with
TMC260, TMC261, TMC262 and TMC424)
[TMC429+TMC24x-EVAL] TMC429+TMC24x-EVAL Manual / Evaluation board for SPI chipset (TMC429,
TMC246, and TMC249)
www.trinamic.com
 Loading...
Loading...