

Trimble Outdoors 44326-00-ENG User Manual
FirstGPS™ Starter Kit
User Guide
Version 1.0
Part Number 44326-00-ENG
Revision A
March 2001
Corporate Office
Hardware Limited Warranty
Trimble Navigation Limited
645 North Mary Avenue
Post Office Box 3642
Sunnyvale, CA 94088-3642
U.S.A.
Phone: +1-408-481-8940, 1-800-545-7762
www.trimble.com
Support Offices
For support in Europe, call:
+44.1256.746.239
or send a fax to:
+44.1256.760.148.
For support outside Europe, call:
+1-408-481-8786
or send a fax to:
+1-408-481-2011
Copyright
© 2001, Trimble Navigation Limited. All rights
reserved.
Trademarks
The Sextant logo with Trimble is a trademark of
Trimble Navigation Limited, registered in the
United States Patent and Trademark Office.
The Globe & Triangle, Trimble, FirstGPS, and
Colossus are trademarks of Trimble Navigation
Limited.
All other trademarks are the property of their
respective owners.
Release Notice
This is the March 2001 release of the FirstGPS
Starter Kit User Guide, part number
44326-00-ENG. It applies to version 1.0 of the
FirstGPS API software.
Trimble warrant s that this Trimble hardware
product (the “Product”) shall be free from defects
in materials and workmanship and will
substantially conform to Trimble’s applicable
published specifications for the Product for a
period of one (1) year, starting from the date of
delivery. The warranty set forth in this paragraph
shall not apply to software/firmware products.
Software and Firmware License,
Limited Warranty
This Trimble software and/or firmware product
(the “Software”) is licensed and not sold . Its use is
governed by the provisions of the applicable End
User License Agreement (“EULA”), if any,
included with the Software. In the absence of a
separate EULA included with the Software
providing different limited warranty terms,
exclusions and limitations, the following terms
and conditions shall apply. Trimble warrants that
this Trimble Software product will substantially
conform to Trimble’s applicable published
specifications for the Software for a period of
ninety (90) days, starting from the date of
delivery.
Warranty Remedies
Trimble's sol e lia bil ity a nd you r exclusive remedy
under the warranties set forth above shall be, at
Trimble’s option, to repair or replace any Product
or Software that fails to c onf or m to suc h warra nt y
("Nonconforming Product") or refund the
purchase price paid by you for any such
Nonconforming Product, upon your return of any
Nonconforming Product to Trimble in accordance
with Trimble’s standard return material
authorization pr ocedures.
The following limited warranties gi ve you specif ic
legal rights. You may have others, which vary
from state/jurisdiction to state/jurisdiction.The
following limited warra nt ies give you specifi c
legal rights. You may have others, which vary
from state/jurisdiction to state/jurisdiction.

Warranty Exclusions and Disclaimer
These warranties shall be applied only in t he e vent
and to the extent that: (i) the Products and
Software are properly and correctly installe d,
configured, interfaced, maintained, stored, and
operated in accordance with Trimble's relevant
operator's manual and specifications, and; (ii) the
Products and Sof tware are not modified or
misused. The preceding warranties shall not apply
to, and Trimble shall not be responsible for defects
or performance problems resulting from (i) the
combination or utilization of the Product or
Software with products, information, data,
systems or devices not made, supplied or specified
by Trimble; (ii) the opera tion of the Produc t or
Software under any specification other than, or in
addition to, Trimble's standard specifications for
its products; (iii) the unauthor ized modif i cation or
use of the Product or Software; (iv) damage
caused by accident, li ghtning or other electrical
discharge, fresh or salt water immersion or spray;
or (v) normal wear and tear on consumable parts
(e.g., ba tteries).
HE WARRANTIES ABOVE STATE TRIMBLE'S
T
ENTIRE LIABILITY, AND YOUR EXCLUSIVE
REMEDIES, RELATING TO PERFORMANCE OF
THE PRODUCTS AND SOFTWARE. EXCEPT AS
OTHERWISE EXPRESSLY PROVIDED HEREIN
THE PRODUCTS, SOFTWARE, AND
ACCOMPANYING DOCUMENTATION AND
MATERIALS ARE PROVIDED “AS-IS” AND
WITHOUT EXPRESS OR IMPLIED WARRANTY
OF ANY KIND BY EITHER TRIMBLE
NAVIGATION LIMITED OR ANYONE WHO HAS
BEEN INVOLVED IN ITS CREATION
PRODUCTION, INSTALLATION, OR
DISTRIBUTION INCLUDING, BUT NOT LIMITED
TO, THE IMPLIED WARRANTIES OF
MERCHANTABILITY AND FITNESS FOR A
PARTICULAR PURPOSE, TITLE, AND
NONINFRINGEMENT. THE STATED EXPRESS
WARRANTIES ARE IN LIEU OF ALL
OBLIGATIONS OR LIABILITIES ON THE PART
OF TRIMBLE ARISING OUT OF, OR IN
CONNECTION WITH, ANY PRODUCTS OR
SOFTWARE. SOME STATES AND
JURISDICTIONS DO NOT ALLOW LIMITATIONS
ON DURATION OR THE EXCLUSION OF AN
IMPLIED WARRANTY, SO THE ABOVE
LIMITATION MAY NOT APPLY TO YOU
,
,
.
TRIMBLE NAVIGATION LIMITED IS NOT
RESPONSIBLE FOR THE OPERATION OR
FAILURE OF OPERATION OF GPS
SATELLITES OR THE A VAILABILITY OF
GPS SATELLITE SIGNALS.
Limitation of Liability
RIMBLE’S ENTIRE LIABILITY UNDER ANY
T
PROVISION HEREIN SHALL BE LIMITED TO
THE GREATER OF THE AMOUNT PAID BY YOU
FOR THE PRODUCT OR SOFTWARE LICENSE OR
U.S.$25.00. TO
PERMITTED BY APPLICABLE LAW, IN NO
EVENT SHALL TRIMBLE OR ITS SUPPLIERS BE
LIABLE FOR ANY INDIRECT, SPECIAL
INCIDENTAL OR CONSEQUENTIAL DAMAGES
WHATSOEVER UNDER ANY CIRCUMSTANCE
OR LEGAL THEORY RELATING IN ANY WAY TO
THE PRODUCTS, SOFTWARE AND
ACCOMPANYING DOCUMENTATION AND
MATERIALS
LIMITATION, DAMAGES FOR LOSS OF
BUSINESS PROFITS, BUSINESS INTERRUPTION
LOSS OF BUSINESS INFORMATION, OR ANY
OTHER PECUNIARY LOSS
WHETHER TRIMBLE HAS BEEN ADVISED OF
THE POSSIBILITY OF ANY SUCH LOSS AND
REGARDLESS OF THE COURSE OF DEALING
WHICH DEVELOPS OR HAS DEVELOPED
BETWEEN YOU AND TRIMBLE
SOME STATES AND JURISDICTIONS DO NOT
ALLOW THE EXCLUSION OR LIMITATION OF
LIABILITY FOR CONSEQUENTIAL OR
INCIDENTAL DAMAGES, THE ABOVE
LIMITATION MAY NOT APPLY TO YOU
THE MAXIMUM EXTENT
INCLUDING, WITHOUT
, (
REGARDLESS
),
. B
,
ECAUSE
.
,


Contents
About This Manual
Related Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . x
Technical Assistance . . . . . . . . . . . . . . . . . . . . . . . . . . .xi
Your Comments. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xi
Document Conventions . . . . . . . . . . . . . . . . . . . . . . . . . xii
1 FirstGPS Starter Kit Overview
Purpose of the Starter Kit . . . . . . . . . . . . . . . . . . . . . . . . . 2
FirstGPS Architecture. . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Input/Output Interface . . . . . . . . . . . . . . . . . . . . . . . 4
FirstGPS Software . . . . . . . . . . . . . . . . . . . . . . . . . 8
Application Layer . . . . . . . . . . . . . . . . . . . . . . . . . 9
Starter Kit Components. . . . . . . . . . . . . . . . . . . . . . . . . . 9
Measurement Platform Module (MPM) . . . . . . . . . . . . . . 9
Motherboard . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Antenna. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Power Supply. . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 Using the Starte r Kit
Touring the Sample Application . . . . . . . . . . . . . . . . . . . . 14
Running the FirstGPS Starter Kit for the First Time . . . . . . . . . . 14
Running the FirstGPS Starter Kit. . . . . . . . . . . . . . . . . . . . 16
FirstGPS Monitor Main User Interface . . . . . . . . . . . . . . . . . 17
Time [GPS]. . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
ENU Velocity [filt] . . . . . . . . . . . . . . . . . . . . . . . . 18
FirstGPS Starter Kit User Guide
v
LLA Position [filt] . . . . . . . . . . . . . . . . . . . . . . . . 18
Receiver Status. . . . . . . . . . . . . . . . . . . . . . . . . . 18
DOPs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Firmware Info . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Satellite Data . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Program Status . . . . . . . . . . . . . . . . . . . . . . . . . . 20
FirstGPS Monitor Features . . . . . . . . . . . . . . . . . . . . . . . 20
File Menu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Initialize Menu . . . . . . . . . . . . . . . . . . . . . . . . . . 20
View Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Configure Menu . . . . . . . . . . . . . . . . . . . . . . . . . 25
Tools Menu. . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Window Menu . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Help Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Configuring FirstGPS Monitor for the Output Protocols . . . . . . . . 29
3 Software Integration
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Power-Up and Power-Down . . . . . . . . . . . . . . . . . . . . . . 32
Polled vs. Event-Driven Data Collection . . . . . . . . . . . . . . . . 33
Event vs. API Table . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
A Using the FirstGPS API
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
FirstGPS API - Simple Data Types. . . . . . . . . . . . . . . . . . . 38
FirstGPS API - Navigation Data Types. . . . . . . . . . . . . . . . . 39
npAllChStatusType . . . . . . . . . . . . . . . . . . . . . . . . 39
npChStatusType . . . . . . . . . . . . . . . . . . . . . . . . . 39
npCompTimeType . . . . . . . . . . . . . . . . . . . . . . . . 40
npDgpsCorrType . . . . . . . . . . . . . . . . . . . . . . . . . 40
npDopType. . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
FirstGPS Starter Kit User Guide
vi
npErrorEstType. . . . . . . . . . . . . . . . . . . . . . . . . . 41
npFixChType. . . . . . . . . . . . . . . . . . . . . . . . . . . 41
npFixSvSelType . . . . . . . . . . . . . . . . . . . . . . . . . 42
npFixType . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
npNavConfigType . . . . . . . . . . . . . . . . . . . . . . . . 44
npNavFixType . . . . . . . . . . . . . . . . . . . . . . . . . . 45
npNavStatusType. . . . . . . . . . . . . . . . . . . . . . . . . 46
npOscStatusType . . . . . . . . . . . . . . . . . . . . . . . . . 48
npTempMeasType . . . . . . . . . . . . . . . . . . . . . . . . 48
npVersionTagType . . . . . . . . . . . . . . . . . . . . . . . . 49
npVersionType . . . . . . . . . . . . . . . . . . . . . . . . . . 49
FirstGPS API - #define Directives and Enumerated Data Types . . . . 50
Event Handling Constants . . . . . . . . . . . . . . . . . . . . 50
Almanac Status Code . . . . . . . . . . . . . . . . . . . . . . 50
Channel Status Code . . . . . . . . . . . . . . . . . . . . . . . 52
Navigation Status Code . . . . . . . . . . . . . . . . . . . . . 52
DGPS Operating Mode. . . . . . . . . . . . . . . . . . . . . . 52
DGPS Configuration Mode . . . . . . . . . . . . . . . . . . . 53
Dynamic Mode Flag . . . . . . . . . . . . . . . . . . . . . . . 53
Operating Dimension. . . . . . . . . . . . . . . . . . . . . . . 53
Oscillator Status Code . . . . . . . . . . . . . . . . . . . . . . 54
Position Fix Source . . . . . . . . . . . . . . . . . . . . . . . 54
Position Fix Status . . . . . . . . . . . . . . . . . . . . . . . . 55
Position Fix DGPS Status . . . . . . . . . . . . . . . . . . . . 55
Position Status Code . . . . . . . . . . . . . . . . . . . . . . . 56
Satellite Status Code . . . . . . . . . . . . . . . . . . . . . . . 57
Time Status Code. . . . . . . . . . . . . . . . . . . . . . . . . 57
Standard FirstGPS Events . . . . . . . . . . . . . . . . . . . . 58
FirstGPS API - Return Types . . . . . . . . . . . . . . . . . . . . . . 58
FirstGPS API - Function Descriptions . . . . . . . . . . . . . . . . . 59
navGetBbAddr . . . . . . . . . . . . . . . . . . . . . . . . . . 59
navGetChStatus . . . . . . . . . . . . . . . . . . . . . . . . . 60
FirstGPS Starter Kit User Guide
vii
navGetCompactTime. . . . . . . . . . . . . . . . . . . . . . . 61
navGetDgpsCorrParams . . . . . . . . . . . . . . . . . . . . . 62
navGetEvent . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
navGetLastFix . . . . . . . . . . . . . . . . . . . . . . . . . . 66
navGetNavConfig . . . . . . . . . . . . . . . . . . . . . . . . 67
navGetNavStatus . . . . . . . . . . . . . . . . . . . . . . . . . 68
navGetNavVersion . . . . . . . . . . . . . . . . . . . . . . . . 69
navGetOscStatus . . . . . . . . . . . . . . . . . . . . . . . . . 70
navInitTime. . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
navPutDgpsCorrParams . . . . . . . . . . . . . . . . . . . . . 72
navPutNavConfig . . . . . . . . . . . . . . . . . . . . . . . . 73
navPutOscFreqOffset. . . . . . . . . . . . . . . . . . . . . . . 74
navGetSvSelections . . . . . . . . . . . . . . . . . . . . . . . 75
navGetTempParams . . . . . . . . . . . . . . . . . . . . . . . 76
navStartTempMeas . . . . . . . . . . . . . . . . . . . . . . . . 78
navGpsShutDown . . . . . . . . . . . . . . . . . . . . . . . . 79
navGpsStart . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
navPutInitPosition . . . . . . . . . . . . . . . . . . . . . . . . 81
Glossary
Index
FirstGPS Starter Kit User Guide
viii
About This Manual
Welcome to the FirstGPS Starter Kit User Guide. This manual
describes how to install, set up, and use the FirstGPS™ Application
Programming Interface (API).
If you are not familiar with the Global Positioning System (GPS), visit
our We b site for an interactive look at Trimble and GPS at:
• www.trimble.com
Trimble assumes that you are familiar with Microsoft Windows and
know how to use a mouse, select options from menus and dialogs,
make selections from lists, and refer to online help.
FirstGPS Starter Kit User Guide
ix
About This Manual
Related Information
This manual is provided in portable document format (PDF).
Other sources of related information are:
• Help – The software has built-in, context-sensitive help that lets
you quickly find the information you need. Access it from the
Help menu. Altern atively, click the
press
mark in the top right corner of a dialog box then click the
relevant item.
• Readme.txt file – A Readme.txt f ile conta ins inf ormati on added
after the documentation was completed. To read this file,
double-click it or use a text editor to open it. The installation
program also copies this file into the program directory.
• Release notes – The release notes describe new features of the
product, information not included in the manual, and any
changes to the manual. The release notes are provided as a .doc
file on the CD and are installed in the program directory
(typically C:\Progr am Files\T rimble\ FirstGPS) when y ou install
the software. Use a text editor to view the contents of the
release notes.
Help
button in a dialog, or
[F1]
. To access the What’s This? Help, click the question
• ftp.trimble.com – Use the Trimble FTP site to send files or to
receiv e file s such as softw are patch es, utilities, service b ulleti ns,
and FAQs. Alternatively, access the FTP site from the Trimble
Web site at www.trimble.com/support/support.htm.
• Trimble training courses – Consider a training course to help
you use your GPS system to its fullest potential. For more
informati on, visit the Trimble Web site at:
– www.trimble.com/support/training.htm
FirstGPS Starter Kit User Guide
x
Technical Assistance
If you have a problem and ca nnot f ind the infor mation you nee d in the
product documentation, do one of the following:
• Send an e-mail to:
firstgps_support@trimble.com
• Contact support at one of the numbers li sted in the front sectio n
of this manual.
• Request technical support using the Trimble Web site at:
www.trimble.com/support/support.htm
Your Comments
Your feedback about the supporting documentation helps us to
improve it with each revision. To forward your comments, do one of
the following:
• Send an e-mail to:
About This Manual
ReaderFeedback@trimble.com.
• Complete the Reader Comment Form at the back of this
manual and mail it accordin g to the instruc tions a t the bo ttom of
the form.
If the reader comment form is not available, send comments and
suggestions to the address in the front of this manual. Please mark it
Attention: Documentation Group.
FirstGPS Starter Kit User Guide
xi
About This Manual
Document Conventions
The document conventions are as follows:
Convention Definition
Italics
Helvetica Narrow
Helvetica Bold
‘Select Italics / Italics’
Is an example of a hard ware function k ey tha t you
[Ctrl]
Identifies software menus, menu commands,
dialog boxes, and the dialog box fields.
Represents messages printed on the screen.
Identifies a software command button, or
represents information that you must type in a
software sc reen or wind ow.
Identifies the sequence of menus, commands, or
dialog boxes that you must choose in order to
reach a given screen.
must press on a personal computer (PC). If you
must press more than one of these at the same
time, this is represented by a plus sign, for
example,
[Ctrl]+[C]
.
FirstGPS Starter Kit User Guide
xii

CHAPTER
1
FirstGPS Starter Kit Overview
1
In this chapter:
■
Purpose of the Starter Kit
■
FirstGPS Architecture
■
Starter Kit Components
FirstGPS Starter Kit Overview
1
1.1
Purpose of the Starter Kit
FirstGPS™ technology is designed for customers who need a simple
Global Positioning System (GPS) chipset in th eir applica tions.
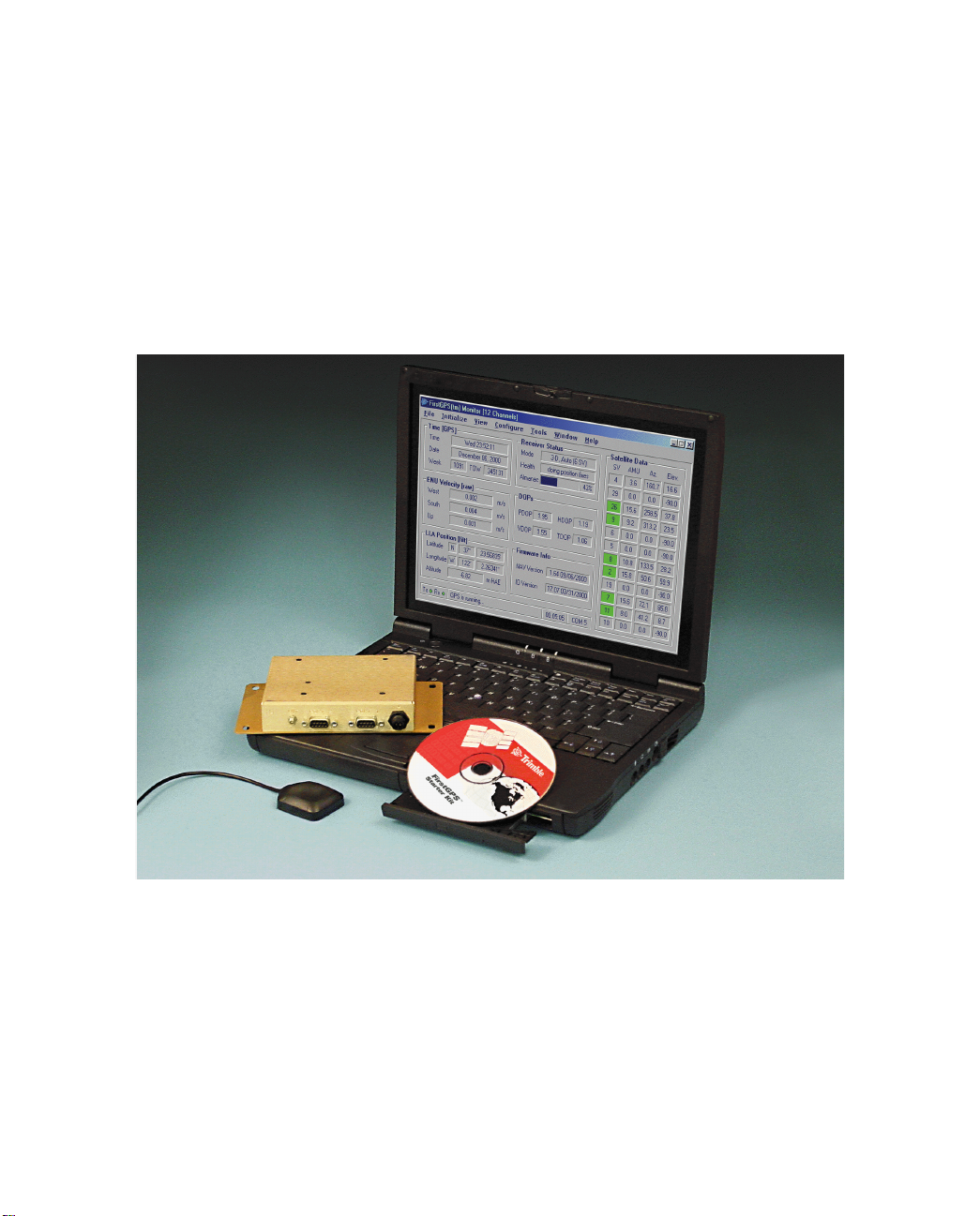
The Starte r Kit is for evaluation of FirstGPS software performance.
The Starter Kit include s:
• A sample hardware board
• A sample hardware environment, including antenna, po wer , a nd
serial communications
• A sample Windows software application (Microsoft®
Windows 95 / Windows 98 / Windows NT / Windows 2000)
• Sample source code for a typical application with examples of
API calls
• This manual in PDF format on the supplied CD
Together, these give a preliminary view of the hardware and software
interfaces and provide the basis for a high-level discussion of
hardware and software integration issues.
1.2
FirstGPS Architecture
With Firs tGPS softwa re, the Posi tion-Velocity-T ime (PVT) solution is
accessed directly by the host application through calls to an
Application Programm ing Interface (API). This is a significant
departure from past practice, where the GPS function was usually a
PVT-serial solution, that is, a c omplete GPS receiver board that
generated the Position Velocity Time (PVT) fix, and then
communicated the PVT fix to the host application through a serial
port. The API-based des ign off ers consider ably more fle xibilit y for the
applications designer, along with benefits in terms of size, power,
and cost.
FirstGPS Starter Kit User Guide
2
FirstGPS Starter Kit Overview
The FirstGPS architecture is built around three components designed
by Trimble:
• Colossus™ Radio Frequency (RF) ASIC
• IO Digital Signal Processing (DSP) ASIC
1
• FirstGPS software library
The Colossus and IO
2
chips are the center of the GPS function
hardware co re. The First GPS library is the software interface with the
GPS functio n hardware core, and it is lin ked into the customer’s
software application.
A complete FirstGPS implementation comprises the following
components:
• Power
• Antenna and low-noise amplifier (LNA)
• The GPS function hardware core
• The host software application (Application Layer and
FirstGPS library)
1
1.
The FirstGPS software library is sometimes referred to as simply the
FirstGPS library.
2.
The IO chip (pronounced EEH-ooh) is named after the moon of Jupiter,
whose discovery (along with the three other Galilean moons) was one of the
landmarks in the history of navigation. By marking the Jovian lunar
transits/eclipses (Galileo estimated there are three per day on average), two
navigators can easily synchronize their timepieces. This established the first
anywhere, anytime
equivalent to the meas urement of longitude, o bserv ation of the Jo vian moons
allowed absolute accurate positioning for the f irst time in the history of man .
For a more detailed account of Galileo’s discovery, and the invention of the
chronometer which
a Lone Genius Who Solved the Greatest Scientific Problem of His Time,
Dava Sobel, 1995.
time standard. Since the measurement of time is
eclipsed
his discovery , s ee
Longitude: The True Story of
FirstGPS Starter Kit User Guide
3
FirstGPS Starter Kit Overview
1
1.2.1
Input/Output Interface
The Starter Kit contains a complete sample FirstGPS implementation,
described in Starter Kit Components, page 9. The sample hardware
core is the Measurement Platform Module (MPM), described on
page 9. The sample host software application is a Windows-based
program described in detail in Chapter 2, Using the Starter Kit. The
sample power interface, anten na interface, and the serial interface
between MPM and host CPU are provided by the motherboard
housing the MPM.
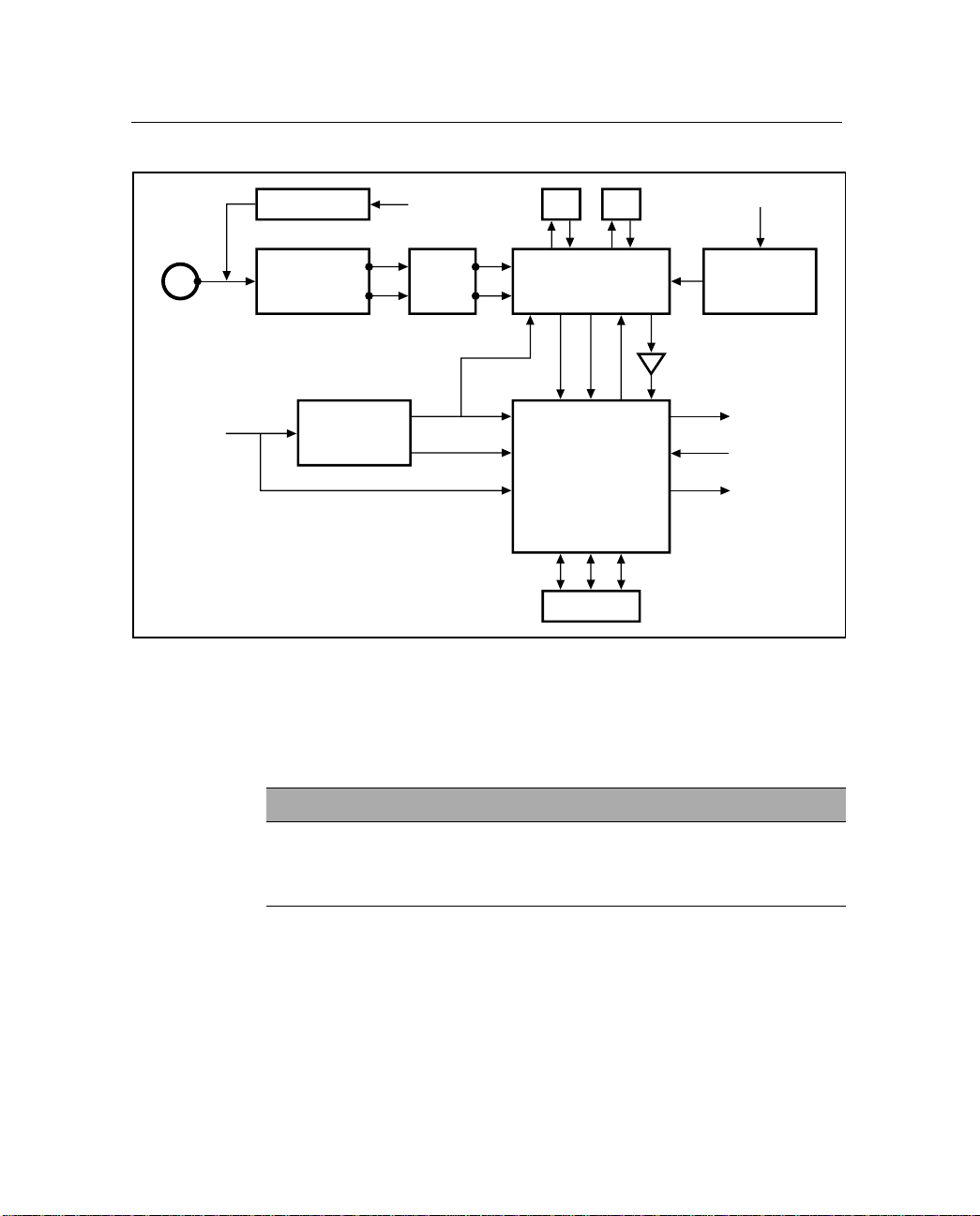
FirstGPS Hardware Core
There are two FirstGPS ASICs, an RFIC (Colossus) and a DSP ASIC
(IO). These two chips—combined with a voltage regulator, a Surface
Acoustic Wave (SAW) filter, and a crystal oscillator—create the GPS
function hardware core. Figure 1.1 shows the block diagram of this
hardware core.
The MPM in the FirstGPS Starter Kit is a sample board layout of the
GPS hardware component. The MPM board is described in
Measurement Platform Module (MPM), page 9. Layout depends upon
the customer’s application. Proper board layout is crucial to good
RF performance.
FirstGPS Starter Kit User Guide
4
FirstGPS Starter Kit Overview
1
RF+
RF-
Vcc
Matching
Network
V_RF
V_CORE
RF IN
Vcc
LI BLOCK
SAW
FILTER
VOLTAGE
REGULATOR
Figure 1.1 Colossus / IO Block Diagram
Power
BBI
FILT
BBQ
FILT
Colossus
RF ASIC
IO
DSP ASIC
and
COOLRISC
TEMP
SENSE
Fr
FrFsIQ
V_RF
12.504 MHZ
XTAL OSC
TxD
RxD
PPS
The hardware core requires three voltages:
Hardware Core Voltage
VCC 3.3 ±0.3 VDC
V_RF 3.0 ±0.3 VDC
V_CORE 2.0 ±0.2 VDC
In a typical implementation, 3.3 VDC is supplied to VCC and a
voltage regulator distributes the voltage to the various components
as required.
FirstGPS Starter Kit User Guide
5
FirstGPS Starter Kit Overview
1
Oscillator
The Local Oscillator (LO) for FirstGPS can be either 12.504 MH z or
13.000 MHz. The crystal must be accurate to wit hin 10 PPM. Trimble
recommends a Temperature-Compensated Crystal Oscillator (TCXO).
Colossus RFIC
The GPS signal conversion from an analog signal to digital data is
performed by the Coloss us RF AS IC. Thi s ASIC con ta ins a tw o- stage
down-converter using a 1400 MHz VCO located inside the chip. The
first conversion brings the GPS signal from 1575.42 MHz (L1) to an
Intermediate Frequen cy (IF) of 175.42 MHz. The second convers ion is
to the pseudo-base band frequency of 84 kHz. After the second
conversion, the GPS signal is divided into I and Q bits which are i n
phase-quadrature with respect to each other. The I and Q bits are
passed through a low-pass fil ter off chip, brought bac k in t o a li mi t ing
amplifier, and then s ampled b efore being pa ssed on to the IO DSP. The
sampling frequency input to the Colossus, by the IO DSP, is the
external LO frequency divided by four. For a 12.504 MHz system the
sampling frequency would be 3.126 MHz.
Note – Keep all of the above frequencies in mind for EMI purposes
when doing system design.
All three voltages listed in Power, page 5 are supplied to Colossus to
feed the separate sections of the IC, VCC_RF for the RF conversion,
VCC_DIG for the digital dividers, and VCC_OUT for the I and Q
output buffers.
IO DSP
The GPS signal-processing f uncti on is perf ormed b y the IO DSP. This
ASIC contains the GPS correlation channels and a small CoolRISC
processor core with its own RAM and ROM. The CoolRISC runs the
tracking loop code that controls the correlators.
FirstGPS Starter Kit User Guide
6
FirstGPS Starter Kit Overview
The FirstGPS architecture is different from most GPS receiver
architectures. In all modern GPS architectures, the software resides in
a multitasking environment. The tasks perform a variety of functions,
including:
• tracking loop control
• measurement conditioning
• position computations
• navigation data decoding
The highest priority task is the signal-processing code (tracking
loops). This code, although it has a small code footprint, has a very
high interrupt rate (up to 2000 Hz) with a stringent latency
requirement. The rest of the tasks can loosely be grouped as
navigation code. These form a larger body of code, heavy with
floating-position operations, but with higher tolerance to latency.
In typical GPS board imple mentations , all tasks are hosted i n the same
CPU even though they have significantly different characteristics. In
contrast, the FirstGPS architecture hosts the signal-processing
function on the IO and the navigation function on a host CPU,
allowing the processor characteristics to be optimized for each
function and reducing total system loading.
1
IO Interfaces
The outputs of the IO tracking loops are sent via serial link to the hos t
CPU, where the FirstGPS navigation c ode resides. There, the raw
outputs from IO are processed into range, Doppler, and orbit data
information, and then further processed into a PVT solution. These
results are mad e av ai lable t hrough a full y featured FirstGPS API to the
host application. In the reverse direction, IO receives tracking loop
controls from the FirstGPS sof tware via the serial link. The serial link
rate between IO and host CPU is typically 19200 baud.
FirstGPS Starter Kit User Guide
7
FirstGPS Starter Kit Overview
1
The IO has a Pulse-per-Second (PPS) function. One of the IO pins is
held high for approximately 5 microseconds at the start of every UTC
second. An API call is available to apply a small time bias, typically
an advance of a few microseconds, to account for cable lengths.
The IO also has a temper ature function. Inside t he IO chip is a
temperature-sensit ive counter. An API call provides the counts in realtime, and the counts can be converted into temperature using a simple
formula.
1.2.2
FirstGPS Sof tware
The FirstGPS software library is the GPS function software core.
It resides on the host CPU, so it shares RAM and ROM with the
customer’s application. The library must be compiled specific to each
application, depending on the CPU, Real-time Operating System
(RTOS), and co mpiler. The source code is very portable, written in C,
and it has been ported to a variety of different development
environments. The FirstGPS software library encompasses the
complete software interface with the IO chip, so the IO is essent ially
transparent to the application software.
A complete list of API calls for the FirstGPS software librar y is listed
in Appendix A, Using the FirstGPS API. In general, the application
program uses the FirstGPS API calls to:
• Boot the IO and start the GPS function.
• Initialize the receiver with non-volatile memory and current
time, if available.
• Change receiver control parameters (satellite masks,
DGPS corrections).
• Fetch current receiver status.
• Fetch the most recent PVT solution.
• Fetch ancillary data (for example, signal strengths).
• Stop the GPS function.
FirstGPS Starter Kit User Guide
8
FirstGPS Starter Kit Overview
1
1.2.3
Application Layer
The term Application Layer is used to describe the host application
software. This is typically software running a navigation system, a
cellular wireless device, or any of a number of devices that benefit
from knowledge of position, run ning on a Real- time Operating Syst em
(RTOS). This software provides at least the boot code and the user
interface, and it exercises the FirstGPS software library through the
function calls contained in the FirstGPS API.
1.3
Starter Kit Components
1.3.1
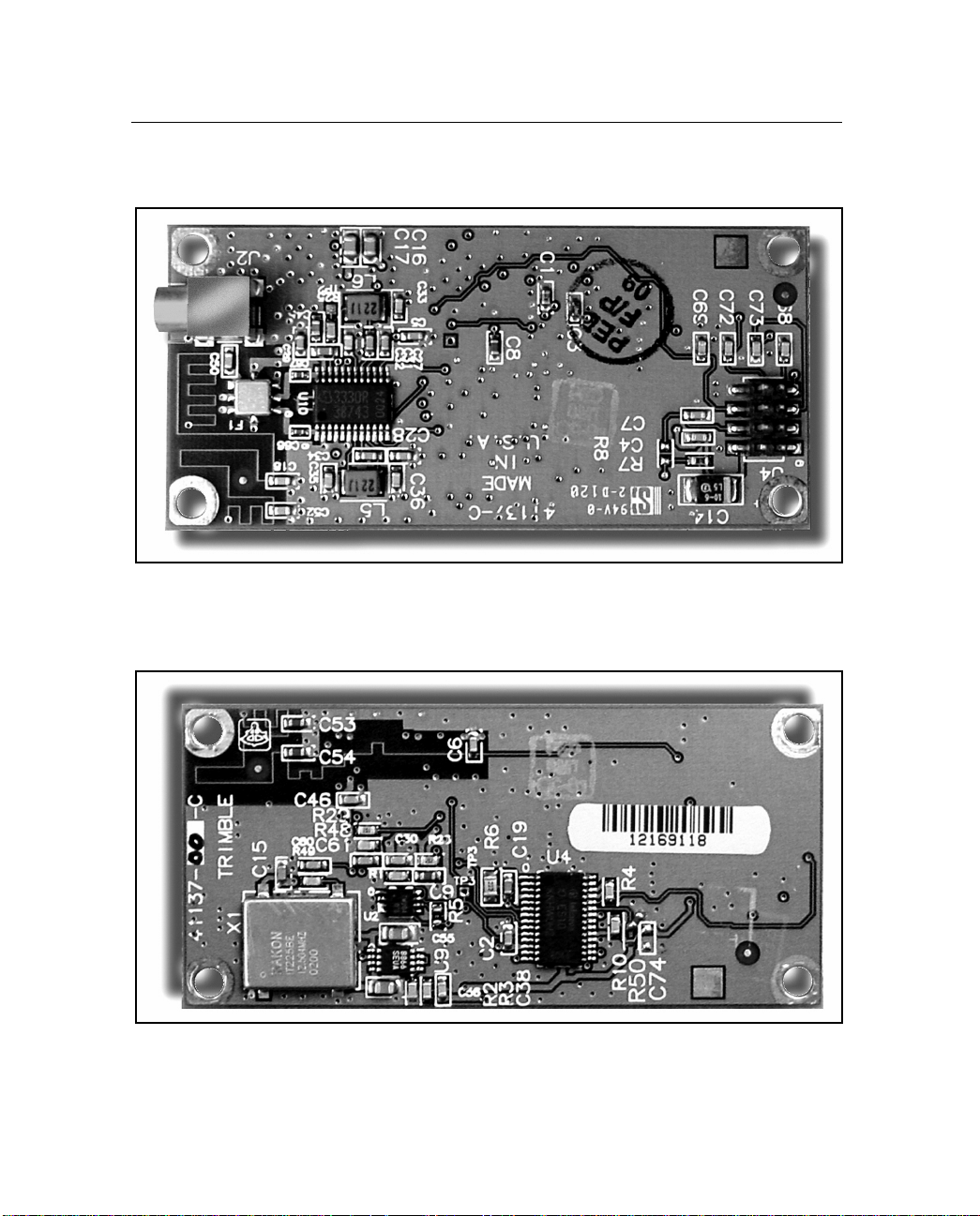
Measurement Platform Module (MPM)
The MPM board is a Trimble assembly designed for optimal
performance of the IO DSP and Colossus RF ASICs running at a
reference frequency of 12.504 MHz. A dual-output voltage regulator
is used to create the VCC_RF and VCC_Core needed to run both the
Colossus and IO DSP chips. The board size is a standard Trimble
form-factor of 32 mm x 66 mm. The antenna connector is a rightangle, board-mounted MCX connector. I/O interfacing is through an
8-pin male header with the following pin identities:
Pin # Function Pin # Function
1 No Connect 5 RXD
2 Power 6 PPS
3 TXD 7 SP_EN (Serial Port Enable)
4 VCC_Ant (power for 5 V antenna) 8 GND
FirstGPS Starter Kit User Guide
9
FirstGPS Starter Kit Overview
1
Figure 1.2 shows the top layout of Trimble’s MPM assembly:
Figure 1.2 Top MPM Assembly Layout
Figure 1.3 shows the bottom layout of Trimble’s MPM assembl y:
Figure 1.3 Bottom MPM Assembly La yout
FirstGPS Starter Kit User Guide
10
FirstGPS Starter Kit Overview
1
1.3.2
Motherboard
The MPM interface motherboard includes a +9 to +32 VDC input
software switching power supply that provides a regulated +3.3 VDC
to the MPM receiver. It also converts the TTL level I/O to RS-232 for
a direct interface to the computer. The motherboard provides an open
collector interface for the PPS. The input voltage must be between
+9 VDC and +32 VDC and is input to the board through a 3-pin
circular connector of which only two pins are used. Supplying power
outside the specified input range will damage the board.
Although there are t wo communicati on ports on t he motherboard, only
one is available for use by the MPM (Port 1).
The pin identities for PORT 1 are:
Pin # Function
1 NC
2 TX
3 RX
4 NC
5 GND
6 NC
7 NC
8 NC
9 PPS
Note – Due to the open-collector interface, through the 9-pin RS-232
port, the polarity of the PPS signal is inverted. The pulse is a 4
s
µ
negati ve-going pulse wit h the fa lling ed ge sync hronized to UTC. When
remov ed f rom the motherboard, the receiver provides a positive-going
TTL level pulse, with the rising edge synchronized to UTC.
FirstGPS Starter Kit User Guide
11
FirstGPS Starter Kit Overview
1
1.3.3
1.3.4
Antenna
The Antenna supplied with the Starter Kit is a 3.3 VDC patch antenna
with integrated cable and connector for terminating to the interface
unit. This is an act i ve ant enna with +28 dB of gain. The MPM requires
approximately 10 dB to 14 dB of gain at the antenna connector on
board for best performance.
Power Supply
There are two ways to power the MPM Starter Kit using either the DC
power cable or the AC/DC converter.
For DC:
1. Connect the terminated end of the power cable to the power
connector on the interface unit.
2. Connect the red lead to positive voltage (+9 to +32 VDC).
3. Connect the black lead to GND.
The yellow lead is not used.
For AC:
1. Connect the output cable of the converter to the 3-pin power
connector on the interface unit.
2. Using an appropriate three-prong AC power cable (not
provided), connect the converter to an AC wall socket
(110 VAC or 220 VAC).
1.3.5
Software
See Chapter 2, Using the Starter Kit.
FirstGPS Starter Kit User Guide
12

Using the Starter Kit
2
This chapter includes the following topics:
■
Touring the Sample Application
■
Running the FirstGPS Starter Kit for the First Time
■
Running the FirstGPS Starter Kit
■
FirstGPS Monitor Main User Interface
■
FirstGPS Monitor Features
■
Configuring FirstGPS Monitor for the Output Protocols
CHAPTER
2
Using the Starter Kit
2
2.1
Touring the Sample Application
This section provi des a brief o verview of the FirstGPS Starter Kit and
Monitor program.
The Monitor program is a graphical user interface (GUI) application,
which exercises the Trimble FirstGPS software library to generate
position, time, and velocity information in a user-friendly visual
Windows environment. The program allows performance evaluation
of the FirstGPS platform running on the Microsoft
Windows 95, 98,
NT or 2000 operating environment.
2.2
Running the FirstGPS Starter Kit for the First Time
This section describes how to set up the FirstGPS Starter Kit.
(The FirstGPS Monitor program is referred to as the GUI.)
To set up the FirstGPS Starter Kit:
1. Connect the motherboard to a 9–32 VDC power supply.
2. Attach the antenna cable to the connector on the motherboard
and place the antenna where over half the sky is visible.
Note – Windows with reflective glass or wire mesh can
sometimes block the GPS signal.
3. Use an RS-232 cable to connect Port 1 on the motherboard to a
serial COM port on your PC.
4. Run the GUI.
The FirstGP S Starter Ki t CD installs the GUI to your
C:\Program Files\Trimble\FirstGPS folder.
FirstGPS Starter Kit User Guide
14
Using the Starter Kit
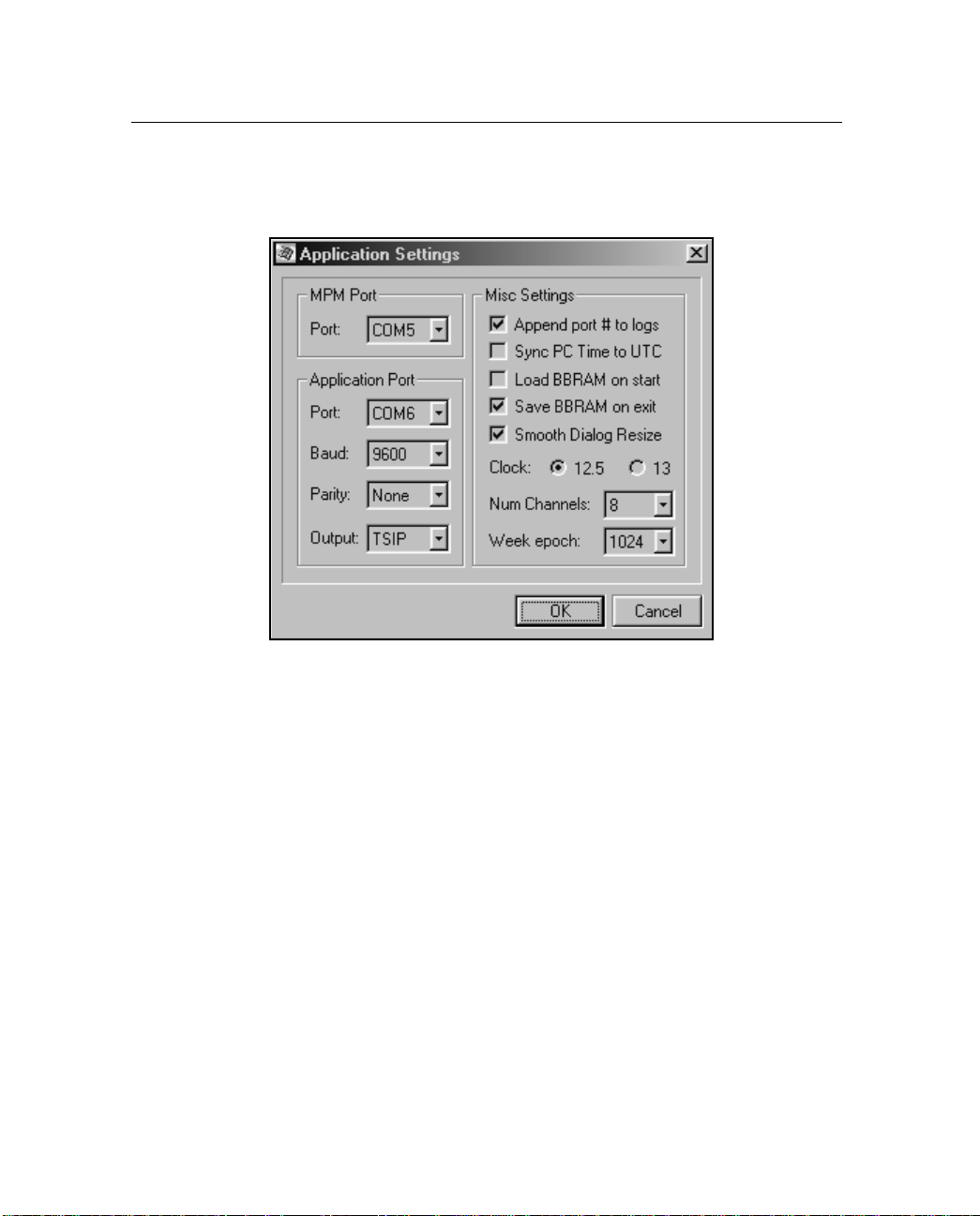
If this is the first time the program has been run, the a pplication
settings window shown below appears.
2
Be sure to select the correct application settings before running the
MPM kit:
1. Set the MPM Port to the name of the COM por t on the PC used
to connect with the MPM.
2. Select the Save BBRAM on exit check box.
This will provide a faster Time to First Fix (TTFF).
3. Set Clock to 12.504 MHz.
4. Set Num Channels to 12.
5. Set Week epoch to 1024.
This includes all dates between August 22, 1999 and
March 2019.
To modify these or other application settings at a later time, from the
FirstGPS Monitor menu, page 17, select Configure / Settings.
FirstGPS Starter Kit User Guide
15
Using the Starter Kit
2
2.3
Running the FirstGPS Starter Kit
When the Fi rstGPS Monitor main windo w appear s, sho wn on page 17,
the GPS engine is ready to start.
To launch the GPS engine (FirstGPS library):
• Select Initialize / Start GPS.
If the appli cation fails to initialize, a
startup failed
message is
displayed in the status bar on the bottom left of the main
window. If this occurs, please check that:
– The COM port settings are correct in the application
settings.
– The serial cable is connected between Port 1 of the MPM
and the PC’s COM port.
– The MPM kit is powe red up with a correct DC power
source.
To stop the GPS function after the GUI has been running:
• Select Initialize / Stop GPS.
This shuts down the FirstGPS library and the MPM. You can
then exit the GUI.
Note – If the GUI is still running when the MPM unit is disconnected
from the power source, you must restart the GUI application.
FirstGPS Starter Kit User Guide
16
2.4
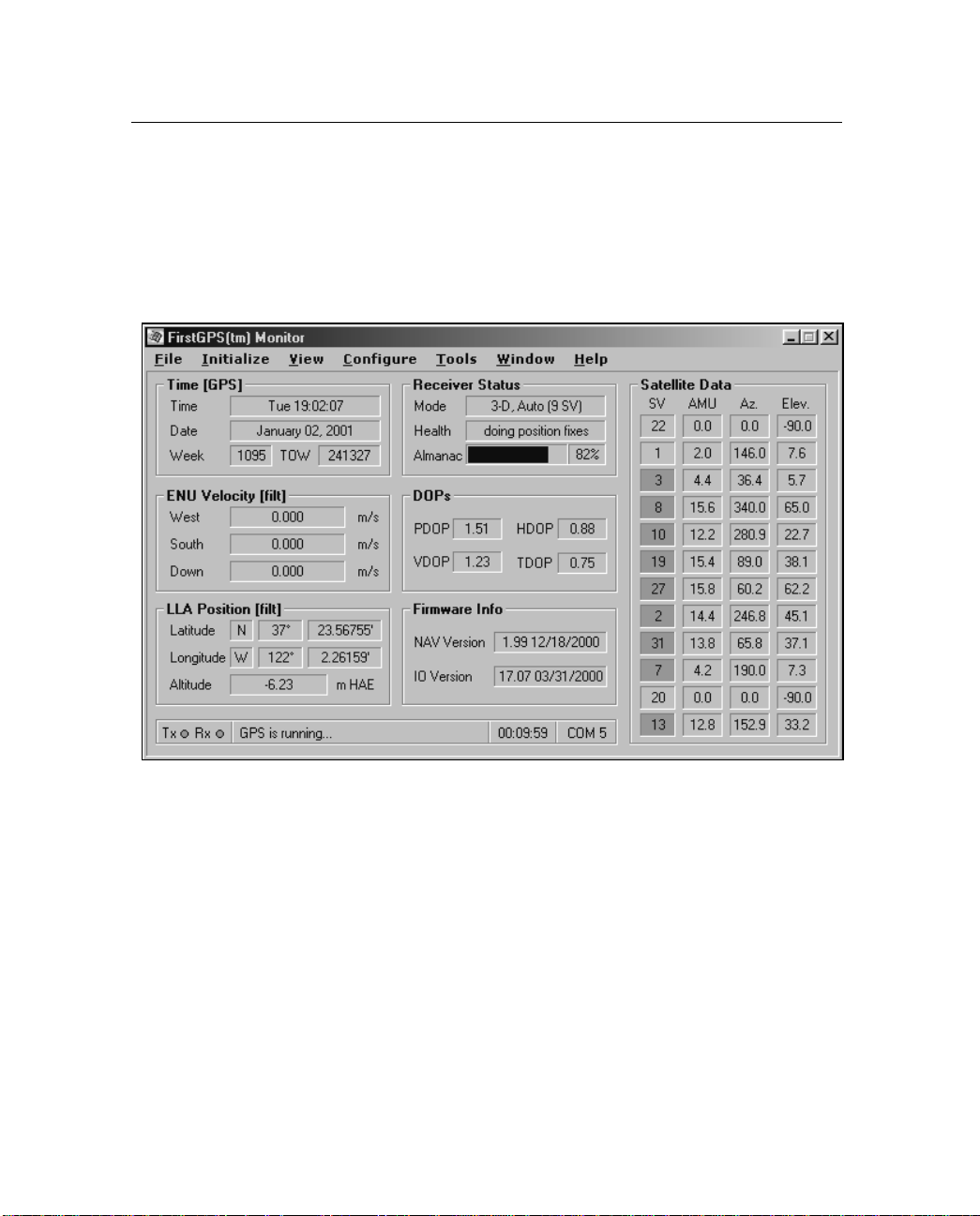
FirstGPS Monitor Main User Interface
The FirstGPS Monitor main window of the program, shown below, is
divided into eight sections. Once the GPS is running and the program
is communicating with the MPM kit, these sections are updated
dynamically with current GPS information.
Using the Starter Kit
2
2.4.1
Time [GPS]
The Time panel displays the following, relative to G PS or UTC
depending on the output options. (Refer to Timing Output, page 23.)
• Time – the day of the week, and time in hours: minut es : se conds
• Date – month, day, and year
• Week and TOW – the current GPS week number and time of
week respectively.
For more information, refer to navGetCompactTime, page 61.
FirstGPS Starter Kit User Guide
17
Using the Starter Kit
2
2.4.2
2.4.3
2.4.4
ENU Velocity [filt]
ENU Velocity is the cu rrent velocity (updated every second) in the
East-North-Up dir ections, in meters per second. F or more in formation,
refer to navGetLastFix, page 66.
LLA Position [filt]
LLA Position is the current position (updated every second) in
Latitude-Longitude-Altitude coordinates. Units are degrees and
minutes re lative to the WGS-84 datum. For latitude, N and S denote
North and South; for longitude, E and W denote East and West.
Altitude is computed in meters, referenced either to mean sea level or
to the WGS-84 ellipsoid depending on the output options. For more
information, refer to navGetLastFix, page 66.
Receiver Status
Receiver Status displays current receiver information:
• Mode – the operating mode: 2D or 3D, Automatic or Manual
• Health – the health of the FirstGPS library
• Almanac – the status of the collected GPS almanac pages
The window also shows how much of the almanac has been collected
and displays the message
has been completed. For more information, refer to navGetNavStatus,
page 68, and navGetSvSelections, page 75.
FirstGPS Starter Kit User Guide
18
complete & current
when the almanac col lectio n
 Loading...
Loading...