

TRIMBLE EUROPE 110610 User Manual
Power-Off Screen Hold down the Power button for a few seconds. The Spectra
Precision logo will appear on the screen.
After a few seconds, the message “Powering off...” will follow,
indicating that the receiver is being turned off.
If the anti-theft protection is still enabled when you ask for
receiver power-off, a message will ask you to confirm your
request.
If you wish to keep using the anti-theft protection, press OK
and then the receiver will complete the power-off sequence
as described above.
If you want to remove the anti-theft protection before turning
off the receiver, press Escape, go back to Advanced Settings to
remove the anti-theft protection (see page 37). Then you can
turn off the receiver as explained above.
43
Using a USB Key
To Copy Files Whenever you connect a USB key to the receiver via cable
P/N107535, the following screen is displayed:
This screen is displayed for a few seconds. If you press OK
while this screen is still displayed, all the G-files and log files
stored in the receiver will be copied to the root folder on the
USB key (or will overwrite the files with same name).
Otherwise the copy operation will be skipped and the receiver
will come back to the General Status screen. The screen looks
like this while the files are being copied.
To Upgrade the
44
Firmware
195
The same will happen if you power on the receiver with a USB
key already connected to the receiver.
When a new firmware upgrade is available, it is easy to install
the new firmware using a USB key.
• Use your computer to copy the installation file (a *.tar file)
to the root directory of the USB key.
• The receiver being turned off, connect the USB key to the
receiver through cable P/N 107535 (provided).
• Press the OK button and the Power button simultaneously
for a few seconds. This starts the upgrade.

The screen will read successively:
{Spectra Precision logo}
USB Upload
Upgrading Firmware Step 1/5
Upgrading Firmware Step 2/5
Upgrading Firmware Step 3/5
Upgrading Firmware Step 4/5
Upgrading Firmware Step 5/5
Upgrading Firmware Complete
{Booting: Spectra Precision logo}
{Regular receiver startup to General Status screen}
Let the receiver proceed with the upgrade. Do not turn off
the receiver while the upgrade is in progress.
NOTE: If there is no USB key connected or the key does not
contain any firmware upgrade file, then the process will abort
after a few seconds.
Because data has to be decompressed on the USB key during
an upgrade, the USB key must be unlocked, with at least 100
MBytes of free memory, before starting the upgrade. The
upgrade will fail if there is not enough free space on the key.
45

Getting Started With the Web Server
Introduction to the
Web Server
Description and Function
The Web Server is a receiver-embedded, HTML-based
firmware application, designed to enable the receiver owner
(the “administrator”) to monitor and control the SP90m
GNSS receiver through a TCP/IP connection.
Running the Web Server for the First Time
As the receiver owner, after establishing a TCP/IP connection
between your computer and the receiver (via its Ethernet port
or via WiFi; see page 52 and page 47), do the following:
• Run a web browser on your computer.
• Type the IP address (or host name) of the receiver in the
web browser, then press the Enter key (see page 51).
This will launch the Web Server in the receiver, which in
turn will open a web page in the web browser.
Depending on how the Web Server has been configured,
you may be asked to log in. The first time you launch the
Web Server, use the default connection profile (the
“administrator profile”) to log in. This profile is the
following:
– Username: admin
– Password: password
You can customize the administrator profile by changing
the username and password. The Web Server will let you
do this from its Security page (see on-line Help file
attached to this page).
46
Security
The receiver owner may restrict the access to the Web Server
by implementing one of the three possible security levels
described below, sorted from the highest to the lowest
security level:
1. Enabled: On launching the Web Server, the user is
requested to log in by entering a username and password.
After having logged in, the user has full control over the
receiver (operation monitoring, access to configuration).
As the administrator, you may decide to share the
administrator profile (username and password) with other
trustworthy users. You may also create new connection
profiles for some other authorized users using $PASH
commands.
Remember that registered users have exactly the same
rights as the administrator, including managing users
through $PASH commands.
2. Enabled with Anonymous Access: Anyone who has been
given the IP address or host name of the receiver has
direct access to the Web Server (no log-in required). Only
receiver monitoring is allowed in this case. An anonymous
user CANNOT change the receiver configuration.
After the Web Server has been launched with this level of
security, the administrator, or any other authorized user,
can log in on the Security page (see on-line Help attached
to this web page).
3. Disabled: No security is implemented with this option.
Anyone who has been given the IP address or host name
of the receiver has direct access to the Web Server, both
for monitoring the receiver or changing its configuration.
With this low protection level, the receiver owner will be
well-advised to keep the receiver IP address or host name
as confidential as possible.
WiFi-Based TCP/IP
Connection
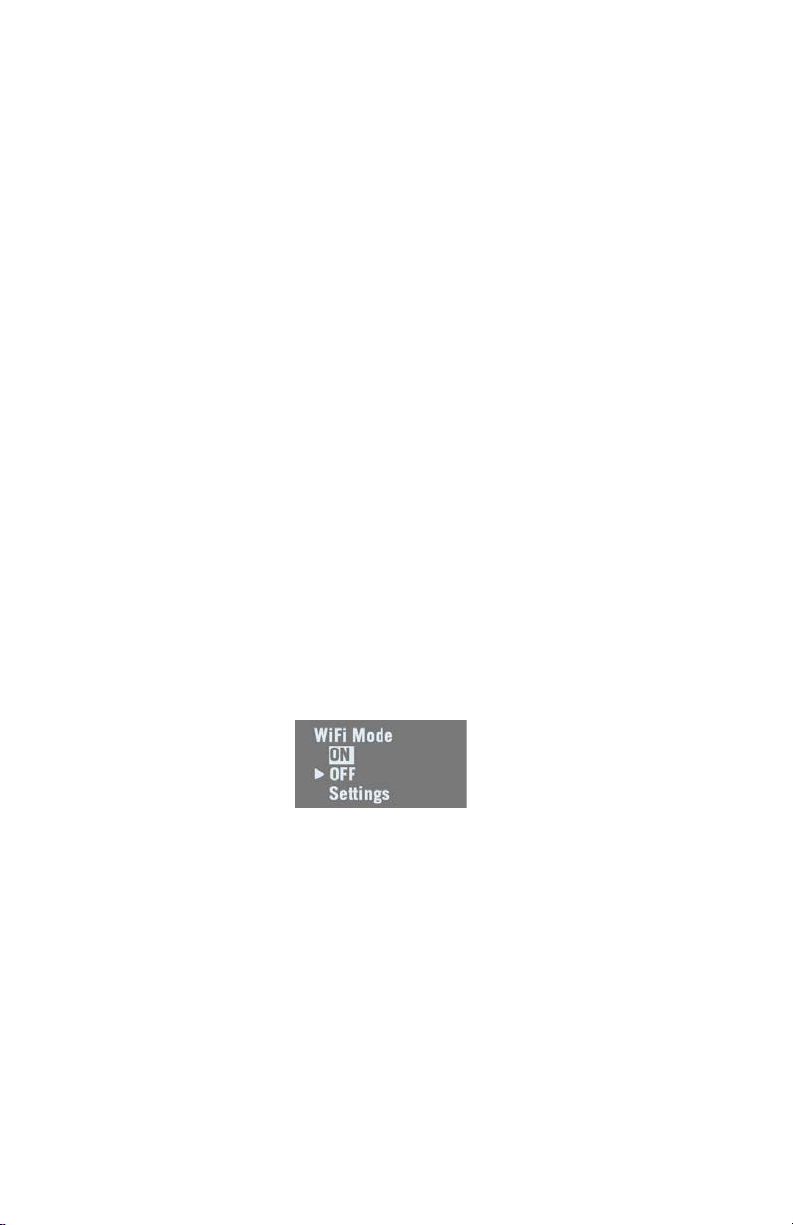
Setting Up the WiFi Device
• If the WiFi device has been turned off, it first needs to be
turned back on:
– On the receiver front panel, press one of the horizontal
keys until you see the WiFi screen.
–Press OK.
– Select ON:
–Press OK again. After a few seconds the screen
displays “WiFi ... ON”.
47
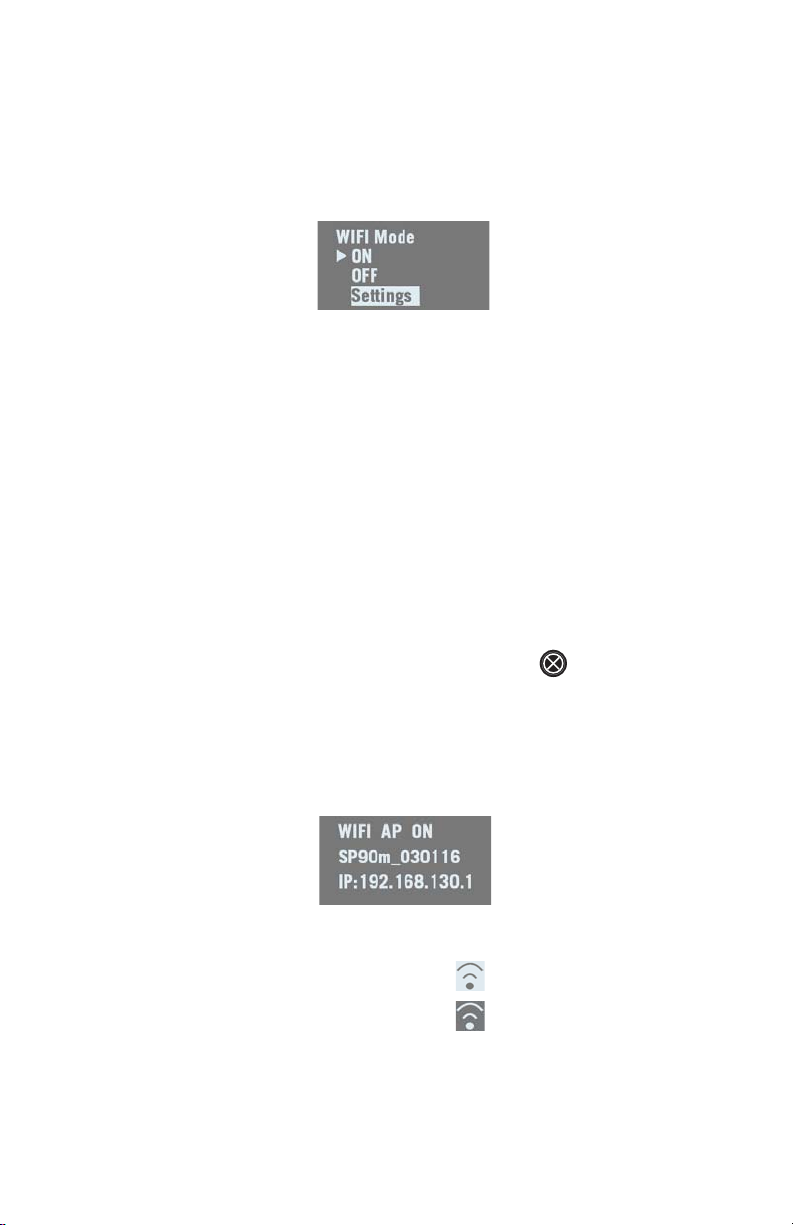
• Then you should indicate how the WiFi device will be
power-controlled and whether it will operate as a WiFi
client, as WiFi access point or both. Follow the steps
below:
– The previous screen being still displayed, press OK.
– Select Settings:
–Press OK again.
– Choose a power mode for the WiFi device: press OK,
select either Manual or Automatic (see explanations on
page 35 before making a choice) and then press OK.
– Press any of the vertical keys and then press OK.
– Choose an operating mode for the WiFi device: select
either Client, Access Point or AP and Client, depending on
the use case (see the next three sections below) and
then press OK.
– On your laptop or smart phone, start searching for WiFi
devices. When your SP90m receiver has been found,
select it and then enter the WiFi key (by default the
receiver serial number) to allow a WiFi connection with
the receiver.
– Back on receiver side, press to go back to the WiFi
“root” screen. If you have selected Access Point or AP
and Client, you will be able to read the IP address of the
WiFi access point in the lower line. Type in this IP
address (fixed, static address: 192.168.130.1) in your
computer or smart phone’s web browser to launch the
receiver’s Web Server.
48
When a WiFi connection is active, one or two of the
following icons appear on the General Status screen:
The first one indicates that the WiFi device is used as
an access point and the second one as a client.
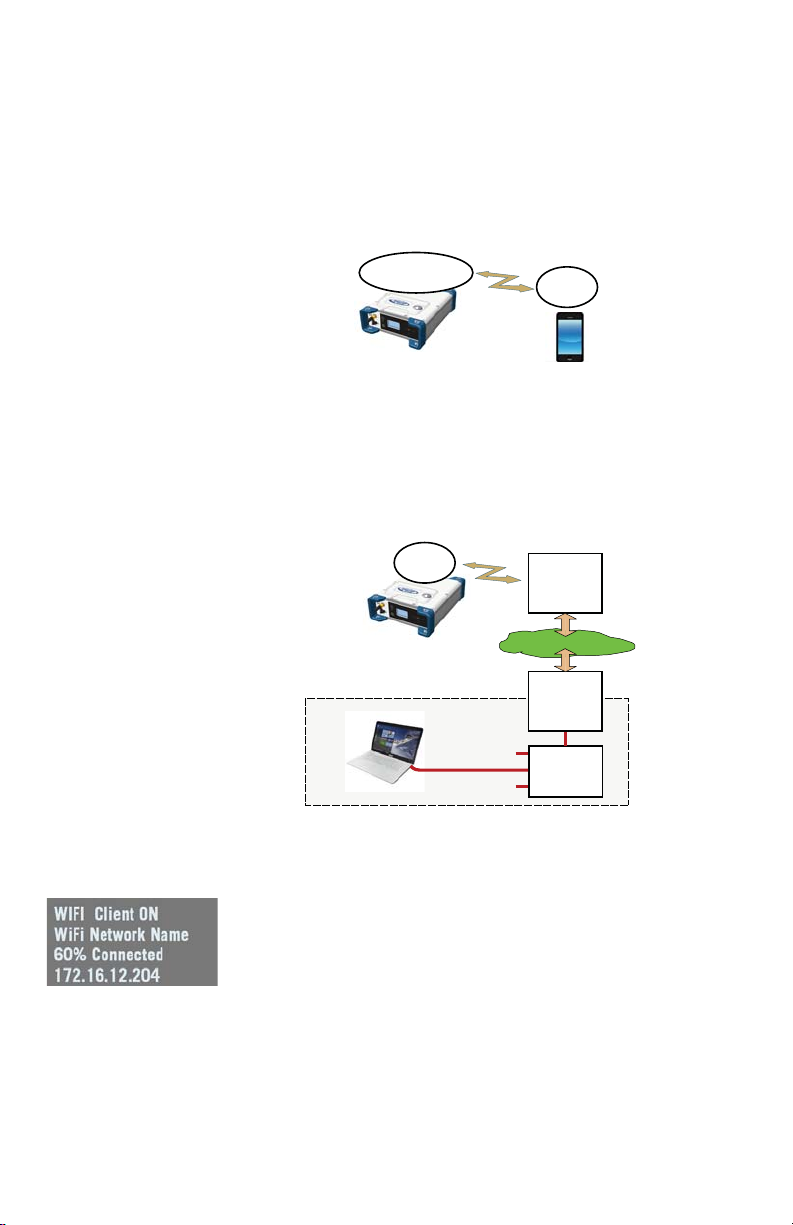
Using the WiFi Device as Access Point
WiFi
Access Point WiFi
Client
Public Internet
Ethernet cable
Hub or
Switch
Local Network
Gateway
or ADSL
Modem
WiFi
Local
Network
WiFi
Client
Remote User
Use the receiver’s WiFi device as access point in the following
cases:
• You want to access the Web Server from any WiFi-capable
device such as a computer or a mobile device (e.g. smart
phone).
• You are located within WiFi range of the SP90m.
Using the WiFi Device as Client
Use the receiver’s WiFi device as client in the following cases:
• You want a remote access to the Web Server and Internet
is easily accessible from the location where you are.
• The SP90m is operated in a location where only a local
WiFi network is available.
To select a WiFi network, you have to run the Web Server:
• Go to Receiver> Network> WiFi
• Unless already done, turn on the WiFi device, select the
client mode and click Configure.
• Scan for WiFi networks, select one and then connect to it.
The WiFi screen on the receiver should look as shown.
49
Using the WiFi Device as both Access Point and Client
Use the receiver’s WiFi device as both access point and client
in the following cases:
• You want to access the Web Server from your computer or
smart phone.
• The SP90m is configured to receive or transmit
corrections over the Internet via WiFi.
• You are located within WiFi range of the SP90m.
Web Server
WiFi
Client
In this use case, the Web Server will be run from the smart
phone via the receiver’s WiFi device used as access point,
whereas corrections will be routed over the Internet using the
receiver’s WiFi device as client.
WiFi
Access Point
WiFi
Client
Data
Network
Public Internet
WiFi
Local
Ethernet-Based
TCP/IP Connection
50
In this use case, you will have to use a standard Ethernet
cable (fitted with an RJ45 connector at either end) to connect
the receiver to the local network.
To make this connection successful, you may have to take
advice from your IT expert, depending on the local IP network
environment. You should inform this person of the following
before proceeding:
• The SP90m is not fitted –and cannot be fitted– with a
firewall. If a firewall is needed in your local network, it
should be installed on a device other than the SP90m.
• HTTP port #80 is used by default in the receiver to access
the Web Server.
The choice of using the DHCP mode or not within the local
network is also the decision and responsibility of the IT
expert.
Typically, there are two possible cases of TCP/IP connection:
• TCP/IP connection within a local network.
• TCP/IP connection through the public Internet.
These are detailed in the sections below.
NOTE: It is assumed that the reader knows how to send
$PASH commands to the receiver.
Setting Up the Ethernet Device
• If the Ethernet device has been turned off, you first need
to turn it back on:
– On the receiver front panel, press one of the horizontal
keys until you see the Ethernet screen.
–Press OK.
– Select ON:
–Press OK again. After a few seconds the screen
displays “Ethernet ON”.
• Then you should indicate whether the receiver will be
assigned a static IP address (DHCP off) or a dynamic IP
address (DHCP on). If you don’t know which option to use,
ask your local IT expert. Follow the steps below:
– The previous screen being still displayed, press OK.
– Select Settings:
–Press OK again.
– Choose the desired option and then press OK.
– If you chose DHCP Mode: ON, there is nothing else to be
done.
If you chose DHCP Mode: OFF, press one of the vertical
arrows to access the Static Address screen. Press OK
and then enter successively each of the figures making
up the static IP address. Press OK when you are done.
When the IP connection is active, the icon below
appears on the General Status screen:
NOTE: If you activate DHCP and there is no DHCP server
in your network responding to the request, a static IP
address (of the type 169.254.1.x) will be automatically
assigned to the receiver (and displayed on the Ethernet
screen). This is the IP address you should choose to
connect to.
51
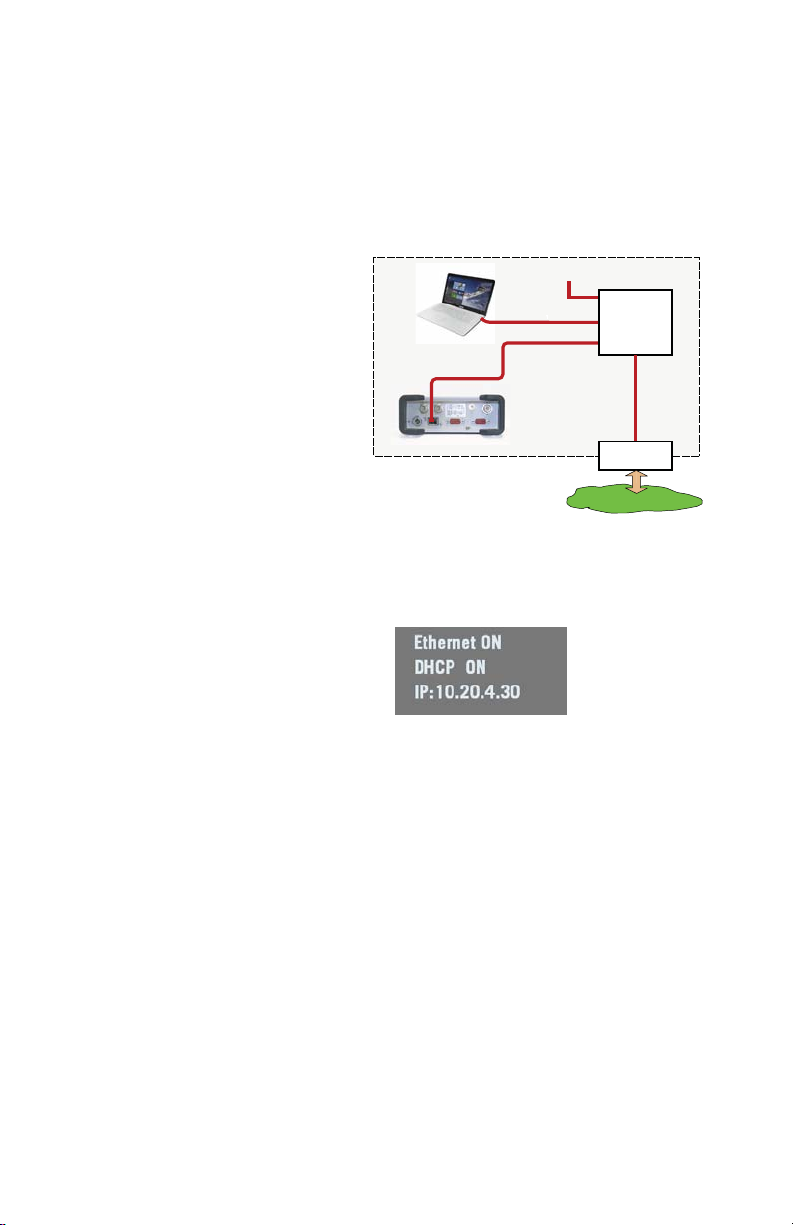
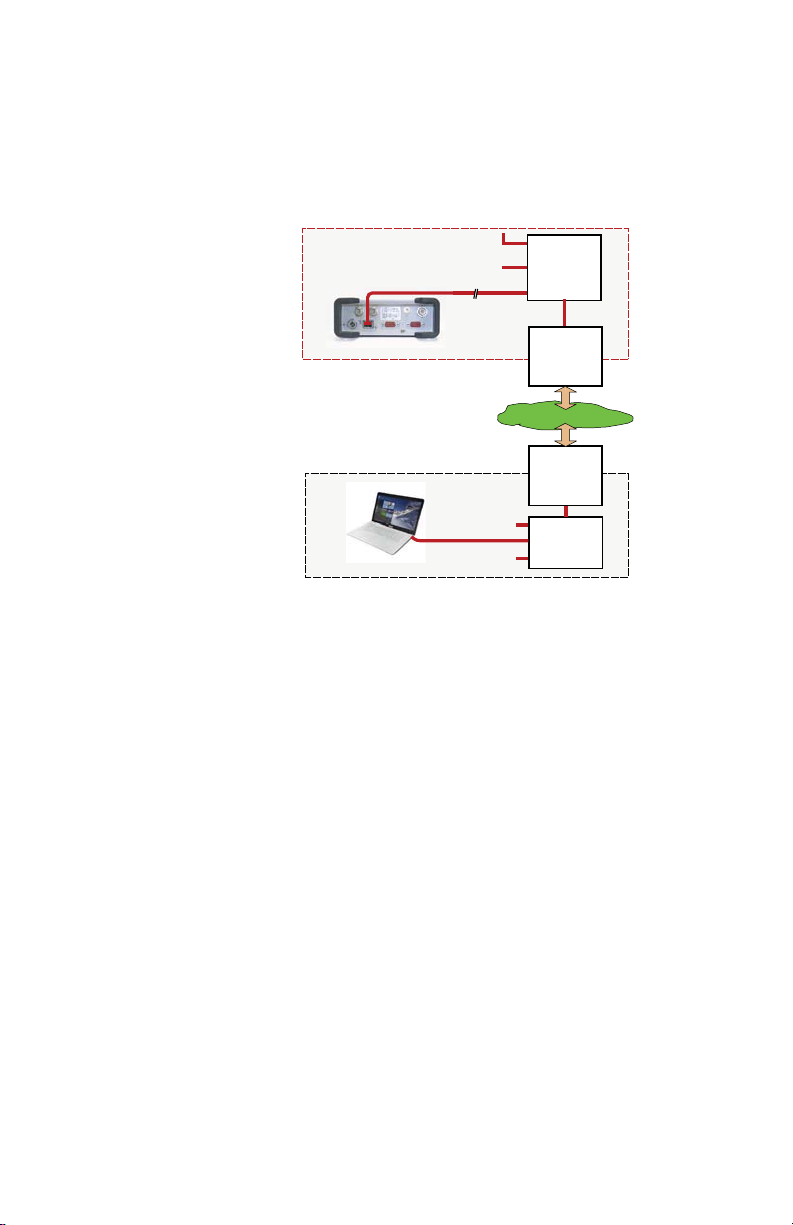
TCP/IP Connection Within a Local Network
Local Network
Ethernet cable
Ethernet cable
Hub or
Switch
Gateway or
ADSL Modem
Public Internet
Ethernet port
SP90m
Local User
In this use case, the receiver and the computer are connected
to the same local area network (LAN) and may even be in the
same room. Here the communication will not take place
through the public Internet, but simply within the local
network.
The connection diagram typically is the following.
The valid receiver IP address is the one shown in the lower
line on the Ethernet screen.
Example indicating the IP address to use with DHCP On:
52
TCP/IP Connection Through the Public Internet
Public Internet
Ethernet cable
Hub or
Switch
Public IP address
Local Network
Local Network
Ethernet cable
Hub or
Switch
Gateway
or ADSL
Modem
Gateway
or ADSL
Modem
Ethernet port
SP90m
Remote User
In this use case, the receiver and computer are connected to
different local networks. Here the communication will
necessarily take place through the public Internet.
The connection diagram typically is as follows.
In this configuration, the IT expert should take all the
necessary steps for the receiver owner to be able to access the
SP90m through the public IP address of the local network. In
this case, the IP address shown on the receiver display screen
is NOT the one to be entered in the web browser.
It is therefore the responsibility of the IT expert to provide the
appropriate connection information:
<IP address:port number> or host name
53

Introduction to
Multi-Operating
Mode
The SP90m is a multi-application GNSS receiver, making it
possible to use different operating modes simultaneously.
The limitation to that feature is very simple to understand:
The maximum number of baselines the SP90m can calculate
simultaneously is 3. The capability for the SP90m to support
several operating modes simultaneously is simply derived
from that statement.
NOTE: Working in a Trimble RTX mode does not “consume” a
baseline, which means that the above statement would be
more accurate if we said, “The maximum number of baselines
the SP90m can calculate simultaneously is 3 + RTX”.
The consequences of this rule are as follows:
• In single-antenna configuration:
– In Hot Standby RTK, you can configure the receiver to
use up to three independent correction sources (=
three baselines), thus making it possible to have up to
two different backup position solutions available in
case the first source of position solution fails.
– In Hot Standby RTK + Relative RTK, you can only set
two independent correction sources (= two baselines),
to have a backup position solution available in case the
first source of position solution fails. The third baseline
is dedicated to the Relative RTK mode.
• In a two-antenna configuration, the heading mode may be
combined with all of the existing rover modes:
– Autonomous
–RTK
– Hot Standby RTK
– RTK + Relative RTK
– Only Relative RTK
–Dual RTK
– Dual Relative RTK
However, in Hot Standby RTK, there can only be two
independent sets of corrections used (not three because
one baseline is dedicated to computing heading).
54
Besides, the rover and moving base modes can be run
simultaneously. To make this work, you should first configure
the receiver as a rover, then as a moving base (and not the
other way round). That way, while base corrections will be
generated and delivered via your programmed output
messages, the receiver will continue to compute RTK
positions for its own location provided the required external
corrections continue to enter the receiver.
Using SP90m With a Single Antenna
The reader is supposed to know how to run the Web Server
(see Getting Started With the Web Server on page 46) and
how to use the receiver user interface (see Receiver User
Interface on page 26) before reading this section.
Remember, when using the Web Server, at any time you can
access context-sensitive help by pressing this key:
Specifying the
Model of Antenna
Used
When using one single GNSS antenna connected to SP90m,
only GNSS input #1 can be used. GNSS input #2 must not
be used in a single GNSS antenna setup.
The setting described below is required prior to configuring
the receiver in any of the operating modes described in the
following sections.
Use the Web Server to specify the model of antenna
connected to GNSS input #1:
• Go to Receiver > Position > Sensors/Antennas Setup.
• Set Multi-Sensor Mode to Single Antenna.
• Choose the point on the antenna for which you want the
SP90m to compute the position (L1 phase center, ARP or
ground mark).
• Describe the model and height of antenna used as the
primary antenna:
– Manufacturer
– Antenna name and its RINEX name.
– Method used to measure the antenna height (i.e.
choice of the point on the antenna from which the
height measurement is performed).
– Value of measured distance according to the chosen
antenna height measurement method.
NOTE: Entering the height makes sense if you want to get
the position of the ground mark or if you enter the ground
mark coordinates as a base’s reference position.
• Keep the secondary antenna defined as UNKNOWN.
•Press Configure. The antenna model is now set.
NOTE: When configuring a static base from the receiver front
panel, you will be able to select the model of antenna used (for
the primary antenna). By default, if you leave the base mode
to operate the receiver as a rover, the receiver will assume this
antenna model is still used in the rover configuration
.
55
Raw Data
1
GNSS Raw Data
Acquisition
Recording
On the receiver’s General Status screen, the following icons
will appear in succession at a rate of 1 second when the
receiver is actually collecting raw data:
Using the Web Server
Using the Web Server to launch data recording is particularly
suitable for remote-controlled, static raw data collection.
• Go to Receiver > Memory.
• Enable Data Recording.
• Enter a site name for the location occupied by the
receiver.
• Choose the memory where to save the raw data file.
• Choose a recording interval in Hz. Additionally, you may
ask the receiver to record the “TTT” message resulting
from the advent of any incoming external event and/or the
“PTT” message providing the time-tagging of the PPS
signal.
• Click Configure. The receiver starts recording the default
messages programmed on port M (as listed after Data
type). To change the content of this message, refer to Raw
Data Recording on page 77).
In the right part of the Memory tab screen, at the bottom
of the list of files stored in the selected memory, you can
now see – shown in red – the name of the file being
created.
56
Working from the Receiver Front Panel
Working from the receiver front panel to launch data
recording allows a rover operator to choose between “Static”
or “Stop & Go” data collection. A USB key connected to the
receiver front panel may be used to save the raw data file
once created.
• Press one of the horizontal keys until you see the “Record
OFF” screen.
•Press OK.
• Choose the option that suits your requirements in terms of
data collection type (Static or Stop & Go), the storage
location (Mem or USB) used to save the file, then press
OK.
This starts the data recording. Refer to Raw Data
Recording on page 42 to learn more about the workflow
used.
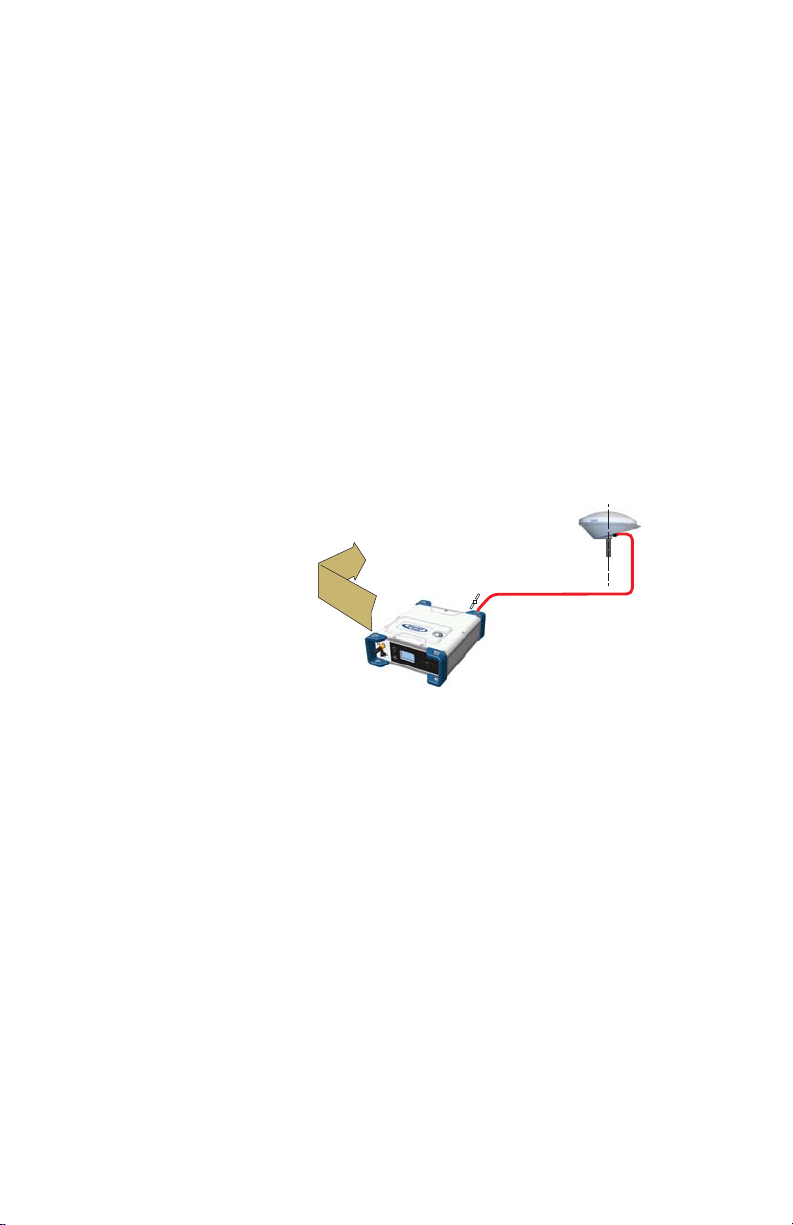
Autonomous or
SDGPS (SBAS)
Rover
XYZ or
Lat-Lon-Height
Position
1
On the receiver’s General Status screen, the receiver will
display “AUTO” or “SDGPS” when computing a position
respectively in autonomous or SDGPS mode. The computed
position is diplayed after pressing .
Use the Web Server to configure the receiver:
• Go to Receiver > Position > Rover Setup
• Set Processing Mode to Autonomous
• Additionally, in the Other Settings section, you may change
the primary GNSS system used (GPS is the default
selection), limit the level of position accuracy to SBAS
Differential Position or Standalone Position.
• Select the model of dynamics that suits the movement
pattern of your rover best.
• Click Configure. The receiver starts operating in
autonomous mode. If SBAS satellites are received, the
receiver will be able to deliver positions with SBAS
Differential accuracy (provided SBAS is enabled; see
Receiver > Satellites).
57
RTK or DGPS Rover
1
XYZ or
Lat-Lon-Height
Position
One set of corrections via:
• Internet (Ethernet, cellular modem, or WiFi), or
• UHF Radio
On the receiver’s General Status screen, the receiver will
display “FIXED” (with short “FLOAT” transition time) or
“DGPS” when computing a position respectively in RTK or
DGPS mode. The computed position is displayed after
pressing .
When corrections are received and used, is displayed on
the General Status screen together with the age of corrections
(see General Status on page 28).
To configure the receiver as a DGPS or RTK rover, use the Web
Server as follows:
• Go to Receiver > Position > Rover Setup.
• Set Processing Mode to RTK.
• Select how the corrections are being transmitted to the
receiver by setting Input Mode accordingly. If you choose
Automatic, the receiver will find by itself which of its ports
is used to acquire corrections. If you choose Manual, you
need to specify this port.
• Additionally, in the Other Settings section, you may change
the primary GNSS system used (GPS is the default
selection), limit the level of position accuracy to less than
what the receiver can actually achieve in this case.
Typically you will choose RTK Position or (RTCM) Differential
Position to match with the selected operating mode
(respectively RTK or DGPS).
• Select the model of dynamics that suits the movement
pattern of your rover best.
• Click Configure.
• Set the device used by the receiver to acquire corrections:
– If corrections are received via radio, go to Receiver >
Radio to enter all radio parameters. You may use the
internal radio or an external radio.
58
– If corrections are received over the Internet, go to
1
XYZ or
Lat-Lon-Height
Position
Two independent sets of corrections via:
• Internet (Ethernet, cellular modem, or WiFi), or
• UHF Radio
Receiver > Network to set the device used (this may be
Ethernet, Modem or WiFi; more information about how
to set up theses devices can be found in the relevant
context-sensitive Help). Then go to Receiver > I/Os to
start data reception in NTRIP or Direct IP mode.
Hot Standby RTK
Rover
Hot Standby RTK is similar to RTK except that two or three
independent sets of corrections are received instead of one.
The receiver will choose the best of the two or three sets of
corrections in order to improve position availability and
accuracy.
On the receiver’s General Status screen, the receiver will
display “FIXED” (with short “FLOAT” transition time) when
computing a position in Hot Standby RTK mode. The
computed position is diplayed after pressing .
When at least one set of corrections is received and used,
is displayed on the General Status screen together with the
age of corrections (see General Status on page 28). The
displayed age of corrections is always that of the corrections
actually used in the position computation.
To configure the receiver as a Hot Standby RTK rover, use the
Web Server as follows:
• Go to Receiver > Position > Rover Setup.
• Set Processing Mode to Hot Standby RTK.
• Select how the two (or three) sets of corrections are being
• Additionally, in the Other Settings section, you may change
transmitted to the receiver by setting Input Mode
accordingly. If you choose Automatic, the receiver will find
by itself which of its ports are used to acquire the sets of
corrections. If you choose Manual, you need to specify
each of the ports used.
the primary GNSS system used (GPS is the default
59
Trimble RTX Rover
1
X-Y-Z or
Lat-Lon-Height
Position
Trimble RTX service
via IP or satellite
selection), limit the level of position accuracy to less than
what the receiver can actually achieve in this case.
Typically you will choose RTK Position to match with the
selected operating mode.
• Select the model of dynamics that suits the movement
pattern of your rover best.
• Click Configure.
• Set the device used by the receiver to acquire the two sets
of corrections:
– If corrections are received via radio, go to Receiver >
Radio to enter all radio parameters. You may use the
internal radio or an external radio.
– If corrections are received over the Internet, go to
Receiver > Network to set the device used (this may be
Ethernet, Modem or WiFi; more information about how
to set up theses devices can be found in the relevant
context-sensitive Help). Then go to Receiver > I/Os to
start data reception in NTRIP or Direct IP mode.
60
Using a Trimble RTX service in the SP90m requires that you
first buy a subscription to this service. On the other hand, the
receiver is ready to operate in Trimble RTX mode (dedicated
firmware option has been pre-installed at the factory)
provided an L-band capable GNSS antenna is used.
On the receiver’s General Status screen, the receiver will
display “RTX” when computing a position using a Trimble
RTX service. The computed position is displayed after
pressing .

To configure the receiver in RTX, use the Web Server as
follows:
• Go to Receiver > Position > Rover Setup.
• Choose the channel through which RTX corrections enter
the receiver by setting Corrections Source accordingly:
– If you choose Automatic, the receiver will find by itself
which channel to use (L-Band or NTRIP).
– If you choose L-Band, the receiver will expect RTX
corrections to come from a satellite.
– If you choose NTRIP, the receiver will expect RTX
corrections to come from the Internet.
NOTE: RTX corrections will come from the Internet only
after you have taken all the steps to implement an active
IP connection, either via GSM, WiFi or Ethernet. The
connection to the remote RTX service will then be
automatic.
• Set Engine Mode to ON.
• Select the datum and plate in which to deliver the
coordinates of the computed position:
– If you select OFF, the position will be expressed in the
ITRF2014 current epoch datum.
– If you select ON, choose a datum and a tectonic plate.
• Additionally, in the Other Settings section, you may change
the primary GNSS system used (GPS is the default
selection), limit the level of position accuracy to less than
what the receiver can actually achieve in this case.
Typically you will choose PPP Position to match with RTX.
• Select the model of dynamics that suits the movement
pattern of your rover best.
• Click Configure.
WARNING: The way you set Processing Mode is very important
here. If for example it is set to RTK and every step has been
taken to have RTK corrections available (see page 58), then
the receiver will automatically choose between RTX and RTK
depending on which of these two modes is providing the best
position solution. You will be able to know which mode is
currently used by taking a look at the receiver’s General
Status screen.
61
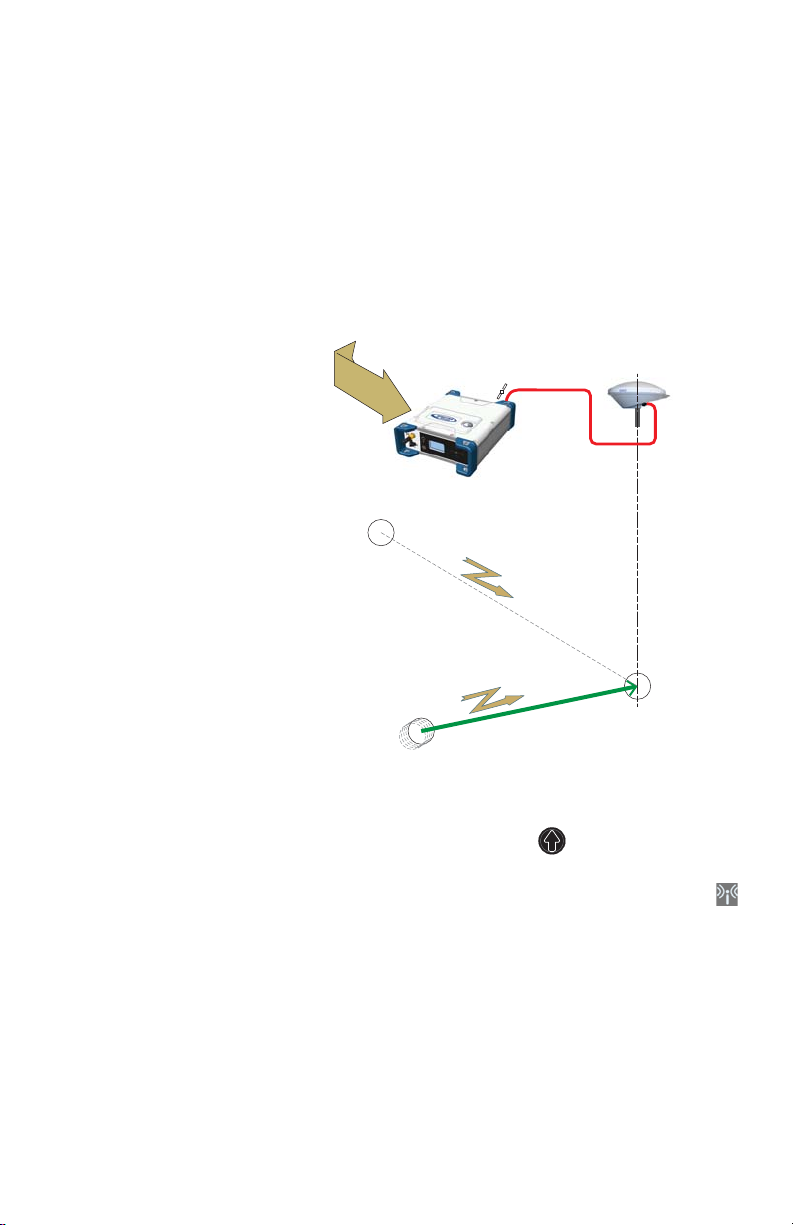
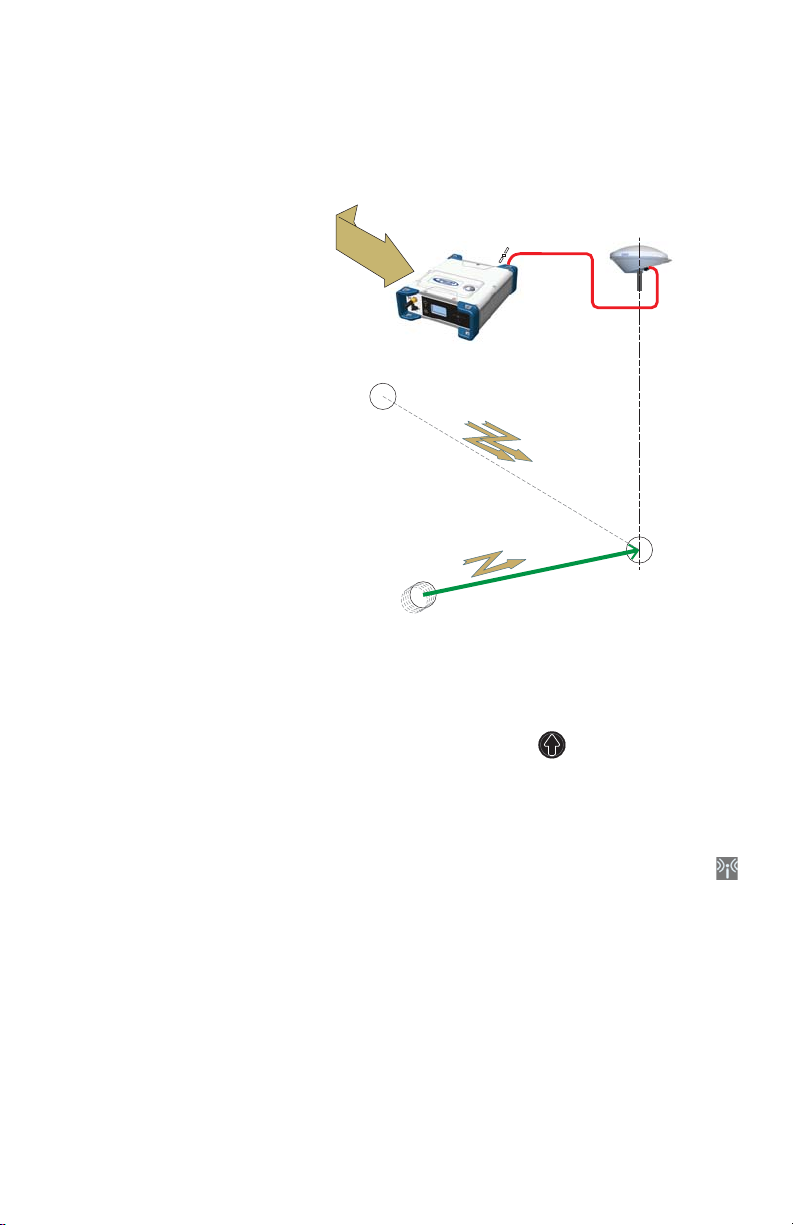
RTK + Relative
RTK Rover
Reminder: Relative RTK refers to the ability of the SP90m to
compute and deliver the three components of the vector
connecting a mobile base to this receiver. The components of
the vector are provided with centimeter accuracy, just as is
the position of the SP90m, as computed in RTK using
corrections received from a static base.
One of the typical applications of Relative RTK is the
constant monitoring of the position of a vessel relative to that
of another vessel or to the jib of a crane used on a quay.
Two independent sets of corrections via:
• Internet (Ethernet, cellular modem, or WiFi), or
• UHF Radio
1
Corrections
from static base
to compute
RTK position
Corrections
from moving base
to compute
3D-vector
3-D Vector
XYZ or
Lat-Lon-Height
Position
+
3-D Components
of Vector
RTK
Position
On the receiver’s General Status screen, the receiver will
display “FIXED” (with short “FLOAT” transition time) when
computing a position in RTK mode. The computed RTK
position is diplayed after pressing . A new press on this
button will display the components of the vector.
62
When at least one set of corrections is received and used,
is displayed on the General Status screen together with the
age of corrections (see General Status on page 28).
To configure the receiver in RTK+Relative RTK, use the Web
Server as follows:
• Go to Receiver > Position > Rover Setup.
• Set Processing Mode to RTK + Relative RTK.

• Select how the two sets of corrections are being
transmitted to the receiver by setting Input Mode
accordingly.
If you choose Automatic, the receiver will find by itself
which of its ports are used to acquire the two sets of
corrections.
If you choose Manual, you need to specify these two ports.
The “BRV” line defines the port routing the corrections
from a moving base allowing vector computation whereas
the “RTK” line defines the port routing the corrections
from a static base allowing position computation.
• Additionally, in the Other Settings section, you may change
the primary GNSS system used (GPS is the default
selection), limit the level of position accuracy to less than
what the receiver can actually achieve in this case.
Typically you will choose RTK Position to match with the
selected operating mode.
• Select the model of dynamics that suits the movement
pattern of your rover best.
• Click Configure.
• Set the device used by the receiver to acquire the two sets
of corrections:
– If corrections are received via radio, go to Receiver >
Radio to enter all radio parameters. You may use the
internal radio or an external radio.
– If corrections are received over the Internet, go to
Receiver > Network to set the device used (this may be
Ethernet, Modem or WiFi; more information about how
to set up theses devices can be found in the relevant
context-sensitive Help). Then go to Receiver > I/Os to
start data reception in NTRIP or Direct IP mode.
63
Hot Standby RTK+
1
XYZ or
Lat-Lon-Height
Position
+
3-D Components
of Vector
Hot Standby RTK
Position
3-D Vector
Three independent sets of corrections via:
• Internet (Ethernet, cellular modem, or WiFi), or
• UHF Radio
Two sets of corrections
from static base
to compute
RTK position
Corrections
from moving base
to compute
3D-vector
Relative RTK
This mode is similar to RTK+Relative RTK (see page 62)
except that the RTK position is a “Hot Standby RTK” one (see
also page 59). The combination of these two modes may be
summarized as shown in the diagram below.
On the receiver’s General Status screen, the receiver will
display “FIXED” (with short “FLOAT” transition time) when
computing a position in Hot Standby RTK mode. The
displayed age of corrections is always that of the corrections
actually used in the position computation. The computed
position is diplayed after pressing .
The components of the vector are visible in the Web Server
(in Receiver > Position > Vectors tab on the right) or by
programming an NMEA VCR or VCT message on one of the
receiver ports (see Web Server’s I/Os tab).
When at least one set of corrections is received and used,
is displayed on the General Status screen together with the
age of corrections (see General Status on page 28).
To configure the receiver in Hot Standby RTK + Relative RTK,
use the Web Server as follows:
• Make sure the Heading mode is off.
• Go to Receiver > Position > Rover Setup.
• Set Processing Mode to Hot Standby RTK + Relative RTK.
64

• Select how the three sets of corrections are being
transmitted to the receiver by setting Input Mode
accordingly.
If you choose Automatic, the receiver will find by itself
which of its ports are used to acquire the three sets of
corrections.
If you choose Manual, you need to specify these three
ports. The “BRV” line defines the port routing the
corrections from a moving base allowing vector
computation, whereas the “Standby RTK” lines define the
ports routing the corrections (from one or two static
bases), allowing position computation.
• Additionally, in the Other Settings section, you may change
the primary GNSS system used (GPS is the default
selection), limit the level of position accuracy to less than
what the receiver can actually achieve in this case.
Typically you will choose RTK Position to match to the
selected operating mode.
• Select the model of dynamics that suits the movement
pattern of your rover best.
• Click Configure.
• Set the device used by the receiver to acquire the three
sets of corrections:
– If corrections are received via radio, go to Receiver >
Radio to enter all radio parameters. You may use the
internal radio or an external radio.
– If corrections are received over the Internet, go to
Receiver > Network to set the device used (this may be
Ethernet, Modem or WiFi; more information about how
to set up theses devices can be found in the relevant
context-sensitive Help). Then go to Receiver > I/Os to
start data reception in NTRIP or Direct IP mode.
65
Relative RTK Rover Reminder: Relative RTK refers to the ability for the SP90m to
1
3-D Components
of Vector
3-D Vector
One set of corrections from moving base via:
• Internet (Ethernet, cellular modem, or WiFi), or
• UHF Radio
Corrections
from moving base
to compute
3D-vector
compute and deliver the three components of the vector
connecting it to a mobile base. The components of the vector
are provided with centimeter accuracy.
One of the typical applications of Relative RTK is the
constant monitoring of the position of a vessel relative to that
of another vessel or to the jib of a crane on a quay.
On the receiver’s General Status screen, the receiver will
display “AUTO” or “SDGPS” when computing a position in
standalone or SBAS mode. The computed position is
displayed after pressing .
The components of the vector are visible in the Web Server
(in Receiver > Position > Vectors tab on the right) or by
programming an NMEA VCR or VCT message on one of the
receiver ports (see Web Server’s I/Os tab).
66
When corrections are received and used, is displayed on
the General Status screen together with the age of corrections
(see General Status on page 28).
To configure the receiver in Relative RTK, use the Web Server
as follows:
• Go to Receiver > Position > Rover Setup.
• Set Processing Mode to Only Relative RTK.
• Select how the corrections are being transmitted to the
receiver by setting Input Mode accordingly. If you choose
Automatic, the receiver will find by itself which of its ports
are used to acquire the corrections. If you choose Manual,
you need to specify the port.
• Additionally, in the Other Settings section, you may change
the primary GNSS system used (GPS is the default
selection) or change the Output Position Type field. Be
Static or Moving
Base
aware the position computed in Relative RTK, in terms of
accuracy, is an SBAS Differential position at best.
• Select the model of dynamics that suits the movement
pattern of your rover best.
• Click Configure.
• Set the device used by the receiver to acquire the two sets
of corrections:
– If corrections are received via radio, go to Receiver >
Radio to enter all the radio parameters. You may use
the internal radio or an external radio.
– If corrections are received over the Internet, go to
Receiver > Network to set the device used (this may be
Ethernet, Modem or WiFi; more information about how
to set up theses devices can be found in the relevant
context-sensitive Help). Then go to Receiver > I/Os to
start data reception in NTRIP or Direct IP mode.
Base corrections delivered via:
• Internet (Ethernet, cellular modem, or WiFi), or
• UHF Radio
1
Using the Web Server
To configure the receiver as a base, use the Web Server as
follows:
• Go to Receiver > Position > Base Setup.
•Use the Station ID. field to enter the identification number.
Remember, the station ID should comply with the type of
correction data format it generates. As a reminder, this is
the list of authorized numbers in relation to the format
used:
– RTCM 2.3: 0-1023
– CMR/CMR+: 0-31
– ATOM & RTCM3.x: 0-4095
• Select whether the base is stationary (Static) or in motion
(Moving).
If you choose Static, you need to specify the exact location
of the base. You can do this in two different ways:
67

– Type in the three geographical coordinates (Latitude,
Longitude, Height) of the base, as well as the position
on the antenna (Reference Position) for which these
coordinates are given.
– Or click on the Get Current Position button to make the
currently computed position the new base position. In
this case, it is assumed that the receiver actually
calculates a position at the time you click the button.
As a result, the above three coordinates fields above
are overwritten with the current computed position,
and the Reference Position field is automatically set to
“L1 Phase Center”.
NOTE: The antenna height was entered when specifying
the number of antennas used (see page 55).
• Additionally, in the Other Settings section, you may change
the primary GNSS system used (GPS is the default
selection).
• Click Configure.
• Set the device used by the receiver to send out its
corrections:
– If corrections are broadcast via radio, go to Receiver >
Radio to enter all radio parameters. You may use the
internal radio or an external radio.
– If corrections are broadcast over the Internet, go to
Receiver > Network to set the device used (this may be
Ethernet, Modem or WiFi; more information about how
to set up theses devices can be found in the relevant
context-sensitive Help).
• You still have to set which corrections the base will
generate. This is detailed in Base Data Messages on
page 76.
NOTE: You may also set a base to use a virtual antenna. This
is required when a rover using the corrections from this base
has no information on the model of GNSS antenna used at
the base. In this case a virtual antenna can be used
(ADVNULLANTENNA or GPPNULLANTENNA). If you don’t
need a virtual antenna, just keep the Manufacturer field set to
OFF.
68
Working from the Receiver Front Panel
The receiver user interface offers an alternative to the Web
Server to set up a static base. Please follow the detailed
procedure described in Base Mode on page 39).
 Loading...
Loading...