

Page 1

4600LS Surveyor
Руководство по Эксплуатации
Part Number: 27564-00
Редакция: А
Дата: Ноябрь 1995
Продукция сертифицирована РОССТАНДАРТОМ
Page 2
Trimble Navigation Limited
Surveying & Mapping Products
4645 North Mary Avenue
Sunnyvale, CA 94086
U.S.A.
1-800-827-8000 в Северной Америке
1-408-481-8000 Международный
Факс: 1-408-481-8214
Trimble Navigation Europe Ltd.
Trimble House
Meridian Office Park
Osborn Way, Hook
Hampshire RG27 9HX England
+44-1256-760-150
Факс: +44-1256-760-148
Trimble Navigation Singapore Pte Ltd.
300 Beach Road #34-05
The Concourse
Singapore 0719
Singapore
+65-296-2700
Факс: +65-296-8033
Trimble Navigation Japan К. К.
Sumitomo-Hamamastu-cho Building 10F
1-18-16 Hamamastu-cho
Minato-ku Tokyo 105
Japan
+81-3-5372-0880
Факс: +81-3-5472-2326
Trimble Navigation New Zealand
11 Birmingham Drive
P.O. Box 8729, Riccarton
Christchurch, New Zealand
+64-3-339-1400
Факс: +64-3-339-1417
4600LS Surveyor
2
Page 3

Сообщение о редакции
Настоящее издание представляет собой первую редакцию Руководства по
Эксплуатации 4600LS Surveyor (4600 LS Surveyor Operation Manual), Part Number
(27564-00) Редакция А, Ноябрь 1995. В настоящем руководстве описывается версия
1.0 внутреннего микропрограммного обеспечения приемника
.
Формуляр отзыва пользователя
В конце настоящего руководства прилагается Формуляр Отзыва Пользователя. При
отсутствии данного Формуляра свои предложения и комментарии можно отправлять в
фирму Trimble Navigation Limited no адресу: 645 North Mary Avenue, Post Office Box
3642, Sunnyvale, CA 94088-3642. Все предложения и комментарии становятся
собственностью фирмы Trimble Navigation Limited.
Товарные знаки
4600LS, 7400MS1, 4000А, 4000АХ, 4000DS, 4000DSR, 4000MSK, 4000MSK DGPS
Reference Station, 4000RS, 4000RSR, 4000S, 4000SE, 4000SSE, 4000SSi, 4000SST,
Asset Surveyor, DeltaNav QC, FastStatic, Geodetic Surveyor, Geodetic Surveyor SSi,
Geodetic System Surveyor, Geodetic System Surveyor SSi, G1S Surveyor, DSM, Land
Surveyor II, Land Surveyor IID, NavBeacon XL, ProBeacon, Site Surveyor, Site Surveyor
SSi, Super-Irak, Survey Controller, Surveyor, System Surveyor II, TDC1, TRJMMAP,
TRIMNET, TR1MNET Plus, .TRIMTALK 900, TRIMTALK 450, TRIMVEC, TRIMVEC Plus,
TANS, TS1P, and WAVE являются товарными знаками компании Trimble Navigation
Limited. Scorpio является зарегистрированным товарным знаком Scorpio Marine
Electronics, Limited. IBM является зарегистрированным товарным знаком International
Business Machines, Inc. MS-DOS и Windows являются товарными знаками Microsoft
Corporation. Intel является товарным знаком Intel Corporation. Все другие товарные
знаки являются собственностью их компаний-владельцев.
Патенты
Приемники 4600LS Surveyor защищены патентами, которые выданы в США и имеют
следующие номера: 4754465, 4847862, 5148179, 5202694, 5296861, 5311149, 5357527,
5359332, а так же рядом других патентов, которые находятся на стадии регистрации.
Авторские права
© 1995 Trimble Navigation Limited. Все права защищены. Никакая часть данного
руководства не может быть скопирована, сфотографирована, репродуцирована,
переведена или перенесена на любой электронный носитель или приведена к
машинно-считываемой форме без предварительного письменного согласия со стороны
Trimble Navigation Limited.
Непризнание Претензий
Фирма Trimble Navigation Limited сохраняет за собой право без уведомления вносить
изменения в настоящее руководство. Фирма Trimble Navigation Limited не берет на
себя никакой ответственности и никакого обязательства по использованию настоящего
руководства или за нарушение любого авторского права, либо другого права
собственности, и все, что содержится в настоящем руководстве, не должно
4600LS Surveyor
3
Page 4

рассматриваться в качестве гарантии или поручительства фирмы Trimble Navigation
Limited.
Гарантии
Фирма Trimble Navigation Limited гарантирует отсутствие дефектов в материальной
части и работоспособности продукции. Гарантия действительна в течение 90 дней с
момента продажи. В течение гарантийного периода фирма Trimble Navigation Limited,
по своему усмотрению, произведет либо ремонт, либо замену продукции, имеющей
дефекты. Покупатель оплачивает доставку продукции, которая возвращается в фирму
Trimble Navigation Limited для гарантийного ремонта, а фирма Trimble Navigation Limited
оплачивает расходы по доставке этой продукции обратно покупателю. Однако,
покупатель должен оплатить все расходы по доставке, таможенные и налоговые
сборы, которыми облагается продукция, отправляемая в фирму Trimble Navigation
Limited, а также возвращаемая покупателю, если он находится за пределами
территории США.
Вышеупомянутая гарантия не распространяется на дефекты, возникшие в результате:
1. Небрежного или неправильного обращения со стороны покупателя
2. Работы программного обеспечения и интерфейса, используемого покупателем
3. Несанкционированного изменения или неправильного использования
4. Работы за пределами установленных эксплуатационных характеристик данной
продукции
5. Неправильной инсталляции (там, где это применимо)
6. Разрядов молнии или других электрических разрядов
7. Погружения в пресную или морскую воду или попадания капель жидкости
8. Обычного износа расходуемых компонентов (например, элементов питания)
Важно, чтобы питание приемника осуществлялось от источника постоянного тока,
снабженного регулятором напряжения и предохранителем. Если эти условия не
соблюдаются, гарантии на оборудование фирмы Trimble теряют свою силу.
Никакая другая гарантия не подразумевается и ни о какой другой гарантии нет
речи. Фирма Trimble Navigation Limited отказывается от подразумеваемых
гарантий по поводу пригодности товара для конкретной цели или для продажи
.
Где отпечатано Руководство по Эксплуатации
Руководство по эксплуатации отпечатано в Соединенных Штатах Америки на
бумаге из вторичного сырья.
4600LS Surveyor
4
Page 5
Содержание
Содержание
Предисловие
Сфера применения и аудитория пользователей…………………………….12
Структура изложения материала……………………………………………….12
Необходимая информация………………………………………………………13
Сообщения об изменениях………………………………………………………13
Электронная доска объявлений фирмы Trimble……………………………..13
Техническая помощь……………………………………………………………...14
Служба FaxBack……………………………………………………………………14
Оформление данного документа……………………………………………….15
Примечания, предостережения и предупреждения…………………………15
1 Общие представления о GPS съемке
1.1 Проектирование GPS съемок……………………………………………….18
1.2 Статическая съемка…………………………………………………………..19
1.3 Одночастотная быстростатическая съемка………………………………20
1.3.1 Сравнение статической и быстростатической
cъемки……………………………………………………………….20
1.3.2 Одночастотная быстростатическая съемка с
использованием TDCl Survey Controller……………………….20
1.3.3 Сравнение одночастотной быстростатической
и кинематической съемок………………………………………..21
1.4 Кинематическая съемка……………………………………………………..21
1.4.1 Инициализация…………………………………………………….22
1.4.2 Непрерывная кинематика………………………………………..23
1.4.3 Данные непрерывной кинематики и TDC1 Survey
Controller……………………………………………………………23
1.5 Пример полевой съемки с использованием
комбинированных методов……………………………………………..24
1.5.1 Сбор данных методом одночастотной быстрой
статики……………………………………………………………..24
1.5.2 Сбор данных методом кинематики…………………………….26
2 Общие принципы эксплуатации
2.1 Области применения………………………………………………………..28
2.2 Переключатели и светодиодные индикаторы…………………………..28
4600LS Surveyor
5
Page 6

Содержание
2.3 Организация питания……………………………………………………….31
2.3.1 Замена батареек………………………………………………….31
2.3.2 Внешние источники питания……………………………………31
2.4 Организация данных………………………………………………………..32
2.4.1 Выгрузка данных…………………………………………………..33
2.4.2 Архивация данных………………………………………………...33
2.5 Измерение высоты прибора……………………………………………….34
2.5.1 Штатив с фиксированной высотой.…………………………...36
2.6 Рабочие параметры…………………………………………………………36
2.6.1 Конфигурационная программа………………………………….37
Стирание энергонезависимой памяти (RAM)………………..38
2.6.2 Замечания по использованию приемника
и уходу за ним…………………………………………………….39
2.6.3 Сообщение об ограничениях КОКОМ…………………………39
3 Планирование перед съемкой
3.1 Подготовка……………………………………………………………..40
3.2 Рекогносцировка пунктов……………………………………………40
3.3 Проектирование сети…………………………………………………41
3.4 Планирование съемки.……………………………………………….41
3.4.1 Организация проекта…………………………………………41
3.4.2 Проверка доступности спутников…………………………..42
4 В поле - Создание сети опорных пунктов
4.1 Описание процедуры построения опорной сети…………………43
4.2 Основные этапы проекта съемки…………………………………..44
4.3 Методы одночастотной быстростатической съемки……………44
4.3.1 Требуемое оборудование и программное
обеспечение………………………………………………………45
4.3.2 Установка оборудования и проведение съемки…………….45
4.3.3 Минимальные периоды наблюдений…………………………47
4.3.4 Штатив с фиксированной высотой……………………………48
4600LS Surveyor
6
Page 7

Содержание
4.4 Методы статической съемки…………………………………………….48
4.4.1 Требуемое оборудование и программное
обеспечение…………………………………………………….48
4.4.2 Установка оборудования и проведение съемки…………..48
4.4.2 Периоды наблюдений и расстояния при
статической съемке…………………………………………...50
4.4.4 Штатив с фиксированной высотой…………………………..50
5 В поле - Кинематическая съемка
5.1 Описание кинематической съемки……………………………………..51
5.2 Требуемое оборудование и программное обеспечение……………52
5.2.1 Использование накопителя TDC1……………………………52
5.2.2 Использование интерфейса накопителя данных………….52
5.3 Основные этапы проекта кинематической съемки………………….53
5.4 Установка базового и подвижного приемников……………………...53
5.4.1 Установка штатива с трегером………………………………..54
5.4.2 Измерение высоты антенны приемника……………………..55
5.4.3 Штатив с фиксированной высотой……………………………56
5.4.4 Установка на вешку……………………………………………..56
5.5 Инициализация кинематической съемки……………………………..57
5.5.1 Проведение инициализации по наблюдениям
фиксированной базисной линии………………………………57
5.5.2 Использование нескольких базовых станций………………58
5.6 Проведение кинематической съемки в режиме
Stop-and-Go (Остановка-и-Движение)………………………………..59
5.7 Проведение непрерывной кинематической съемки………………..60
5.8 Переинициализация съемки……………………………………………61
5.8.1 Возвращение на пункт съемки, на котором
уже велись наблюдения………………………………………..61
5.8.2 Выполнение процедуры инициализации……………………62
5.8.3 Задержка переинициализации………………………………..63
5.8.4 Потеря захвата сигнала на базовой станции………………63
4600LS Surveyor
7
Page 8

Содержание
6 Возвращение в офис
6.1 Открытие проекта………………………………………………………..64
6.2 Выгрузка данных…………………………………………………………64
6.2.1 Организация файлов внутри приемника……………………65
6.3 Загрузка и проверка данных, введенных в поле……………………66
6.4 Архивация данных……………………………………………………….66
6.5 Обработка базисных линий…………………………………………….67
6.6 Просмотр результатов обработки базисных линий………………..67
6.7 Уравнивание сети………………………………………………………..67
6.7.1 Создание отчетов по проекту…………………………………68
4600LS Surveyor
8
Page 9
Содержание
АСхемы соединений
ВКонфигурация для приема сообщений RTCM-104
B.1 Прием сообщений в формате RTCM-104………………………………72
B.2 Вывод координат с введенными дифференциальными
поправками………………………………………………………………….72
С Вывод сообщений NMEA-0183
С.1 Элементы сообщений……………………………………………………..73
C.1.1 Поля и разделители…………………………………………73
С.1.2 Широта и долгота……………………………………………..74
С. 1.3 Полушарие………………………………………………………………..74
С.1.4 Время……………………………………………………………………...74
С.2 Поддерживаемые сообщения………………………………….74
С.2.1 GGA: Время, координаты и данные,
связанные с определением местоположения……………………..74
С.2.2 VTG: Истинный курс и скорость
относительно поверхности……………………………………………..75
D Выявление и устранение неисправностей
Литература
Словарь терминов
Предметный указатель
4600LS Surveyor
9
Page 10

Содержание
Список рисунков
Рисунок 1-1 Опорная сеть…………………………………………………………24
Рисунок 1-2 Базовая станция на пункте 1; Сессия сбора
данных в режиме одночастотной быстрой статики………….25
Рисунок 1-3 Базовая станция на пункте 3; Сессия сбора
данных в режиме одночастотной быстрой статики………….25
Рисунок 1-4 Кинематическая съемка в режиме Stop and Go……………….26
Рисунок 1-5 Непрерывная кинематическая съемка………………………….26
Рисунок 1-6 Сессия кинематической съемки в режимах
Stop and Go и непрерывной кинематики .……………………..26
Рисунок 2-1 Приемник 4600LS Surveyor………………………………………..28
Рисунок 2-2 Панель управления 4600LS Surveyor……………………………29
Рисунок 2-3 Замена батареек в приемнике 4600LS………………………….31
Рисунок 2-4 Пример подключения внешнего источника
питания 4600LS Surveyor…………………………………………32
Рисунок 2-5 Стандартная конфигурация для выгрузки данных……………33
Рисунок 2-6 Измерение высоты антенны 4600LS Surveyor…………………35
Рисунок 4-1 Приемник 4600LS Surveyor, установленный
на штативе……………………………………………………………45
Рисунок 4-2 Расположение приемника при чистом обзоре неба…………..46
Рисунок 5-1 Расположение приемника при чистом обзоре неба…………..54
Рисунок 5-2 Приемник 4600LS Surveyor, установленный
на штативе……………………………………………………………55
Рисунок 5-3 Приемник 4600LS Surveyor, установленный
на вешке……………………………………………………………...57
Рисунок 6-1 Стандартная конфигурация для выгрузки данных…………….65
Рисунок А-1 Приемник 4600LS Surveyor с TDC1 Survey ControUer…………69
Рисунок А-2 Приемник 4600LS Surveyor, установленный на вешке,
4600LS Surveyor
10
Page 11

Содержание
вместе с TDC1 Survey Controller, Y-кабелем и
внешней батареей………………………………………………….69
Рисунок А-3 Схема соединения двухпортового приемника 4600LS
с батареей типа camcorder и TDC1 Survey Controller…………70
Рисунок А-4 Соединение приемника 4600LS Surveyor
с персональным компьютером и внешними батареями
при помощи Y-кабеля………………………………………………70
Рисунок А-5 Соединение 4600LS Surveyor с персональным
компьютером и модулем OSM II
(питание и ввод/вывод данных)…………………………………..71
Рисунок А-б Конфигурация 4600LS для приема RTCM-поправок:
подключение радиомодема, TDC1 Survey Controller
и внешнего источника питания ……………………………….…71
Список таблиц
Таблица 1-1 Методы наблюдения базисных линий…………………………17
Таблица 2-1 Функции светоиндикаторов приемника 4600LS
Surveyor……………………………………………………………..30
Таблица 2-2 Параметры системы по умолчанию…………………………...36
Таблица 4-1 Периоды наблюдений при одночастотной
быстро-статической съемке…………………………………….47
Таблица D-1 Выявление и устранение неисправностей
в приемнике 4600LS Surveyor………………………………….76
4600LS Surveyor
11
Page 12

Предисловие
Предисловие
Перед Вами - Руководство по Эксплуатации 4600LS Surveyor. В данном
Руководстве приводится описание приемника 4600LS Surveyor и его
использования при проведении статических, быстростатических и
кинематических съемок. Приемник 4600LS Surveyor отслеживает сигналы GPS
спутников на частоте L1 и обеспечивает получение точных координат при
наземных съемках.
Сфера применения и аудитория пользователей
Даже если пользователю приходилось работать с другими приемниками
Глобальной Системы Позиционирования - Global Positioning System (GPS),
рекомендуется посвятить некоторое время прочтению данного руководства,
чтобы познакомиться с отличительными особенностями приемника 4600LS
Surveyor. В следующих разделах приведена справочная информация по
данному руководству, а также относительно другой документации, которая
поставляется пользователю вместе с данным прибором.
Структура изложения материала
В состав данного руководства входят следующие главы и приложения;
• Глава 1, Общие представления о GPS съемке - даются общие
представления о принципах GPS съемки и о программном обеспечении
GPSurvey в той его части, которая имеет отношение к приемнику 4600LS
Surveyor.
• Глава 2, Общие принципы эксплуатации - описываются устройства
управления и индикаторы приемника 4600LS Surveyor, а также порядок
действий при работе с приемником.
• Глава 3, Планирование перед съемкой - описываются действия, которые
необходимо предпринять при подготовке проекта GPS съемки с
постобработкой данных.
• Глава 4, В поле - Создание сети опорных пунктов - описываются действия,
которые необходимо предпринять в процессе реализации проекта GPS
съемки с использованием методов создания опорной сети.
• Глава 5, В поле - Кинематическая съемка - описываются действия, которые
необходимо предпринять в процессе реализации проекта GPS съемки с
использованием методов кинематической съемки.
• Глава 6, Возвращение в офис - описываются действия, которые следует
предпринять при подготовке данных GPS съемки к постобработке.
• Приложение А, Схемы соединений - приводятся примеры схем соединений,
показывающие как к приемнику 4600LS Surveyor можно подключать дополнительные
устройства управления и источники питания.
• Приложение В, Конфигурация для приема сообщений RTCM-104 -
описываются требования для приема сообщений в формате RTCM-104 и
выдачи координат с учетом дифференциальных поправок.
Page 13

Предисловие
• Приложение С, Вывод сообщений NMEA-0183 - описываются выходные
сообщения в формате NMEA-0183, которые можно получить на
двухпортовом приемнике 4600 LS Surveyor.
• Приложение D, Выявление и устранение неисправностей - содержит
информацию о признаках, возможных причинах и решениях, которые
предлагаются для устранения неисправностей в приемнике 4600LS Surveyor.
Необходимая информация
Данное руководство предполагает, что пользователь знаком с видами работ,
для которых он собирается применять 4600LS Surveyor. Так же
подразумевается, что пользователю известны принципы работы Глобальной
Системы Позиционирования (GPS) и терминология, которая используется при
ее обсуждении. Например, пользователь должен понимать такие термины, как
искусственный спутник (ИСЗ), Маска Возвышения и Фактор Снижения Точности -
Dilution of Precision (DOP).
Если пользователь не знаком с GPS, предлагается прочитать брошюру "GPS, A
Guide to the Next Utility" (P/N 16778), которую можно получить в фирме Trimble
Navigation. Полные данные об этой брошюре приводятся в Библиографии.
Прежде, чем перейти к следующей главе, просмотрите приведенные ниже
разделы для ознакомления с информацией, которая окажется полезной при
использовании данного прибора и при контактах с фирмой Trimble с целью
получения новых версий продукции и другой важной информации.
Сообщения об изменениях
Приемник 4600LS Surveyor поступает к пользователю вместе с гарантийным
талоном (Warranty Activation Sheet). После отсылки пользователем гарантийного
талона сообщения об усовершенствовании высылаются ему автоматически по
мере их появления. При получении таких информационных материалов их
следует прочитать. В них содержатся важные сведения об усовершенствованиях
в программном обеспечении и аппаратуре. Более подробную информацию o
соглашениях на техническое сопровождение программного и встроенного
микропрограммного обеспечения, а также о продлении срока гарантии на
приборы можно получить в региональном представительстве фирмы Trimble.
Электронная доска объявлений фирмы Trimble
Если у пользователя есть модем, то можно регулярно пользоваться электронной
доской объявлений - Bulletin Board Service (BBS), предоставляемой Службой
Поддержки Клиентов фирмы Trimble, с целью ознакомления с сообщениями по
применению, извещениями о выпуске нового программного обеспечения,
модификации встроенного микропрограммного обеспечения, сведениями об
обнаруженных проблемах в аппаратуре и программном обеспечении фирмы
Trimble. Пользование BBS подразумевает решение вопросов по устранению
проблем и преодолению затруднений. Телефон службы BBS:
+408-481-7800
4600LS Surveyor
13
Page 14

Предисловие
Техническая помощь
Если у пользователя возникают проблемы и он не может найти необходимую
для него информацию в документации по приемнику 4600 LS, следует
обратиться в Центр Технической Помощи фирмы Trimble -Technical Assistance
Center (TAC) по следующим телефонам:
1-800-SOS-4TAC (в Северной Америке)
+1-408-481-6940 (международный)
+1-408-481-9142 (факс)
Телефоны Центра Технической Помощи работают с 6.00 до 18.00 по Тихоокеанскому
Стандартному времени. Квалифицированный сотрудник Центра примет сообщение,
определит, в чем затруднение, и окажет техническую помощь.
Служба FaxBack
Служба FaxBack (Ответ по факсу) представляет собой полностью
автоматизированную систему передачи сообщений по факсу. Данная система
позволяет пользователю выбрать документы и каталоги (список имеющихся в
наличии документов), которые должны быть отправлены обратно на его
факсимильный аппарат. Чтобы воспользоваться этой услугой, следует набрать
номер телефона на кнопочном аппарате, и предварительно записанное
голосовое сообщение объяснит все дальнейшие действия.
Система FaxBack работает круглосуточно, без выходных. Документы, которые
можно заказать, включают рекламные листы, сообщения по применению,
техническую документацию, справочники по конфигурации, монтажные чертежи
и информацию общего характера. Необходимо просто набрать приведенный
ниже номер и следовать голосовым сообщениям:
Система FaxBack: +1-408-481-7704
После того, как Вам будет предложено ввести свой номер факса, необходимо
непосредственно перед номером дополнительно набрать:
011 (в США - выход на международную линию)
7 (код России)
код Вашего города.
Русификация руководства.
Перевод данного руководства на русский язык осуществлён компанией “АГП Навгеоком”.
Все отзывы и замечания по поводу перевода просим отправлять по адресу: 129278, Москва,
ул. Павла Корчагина, дом 2, офис 2408, либо по электронной почте: manuals@agp.ru Кроме
того, Вы можете позвонить нам по телефонам: (095) 747–51-31, 747-51-32, факс: 747-51-30.
В сети Internet Вы можете посетить наш сайт www.agp.ru
Copyright © Май 1999 года компания "АГП Навгеоком". Все права соблюдены.
4600LS Surveyor
14
Page 15

Предисловие
4600LS Surveyor
15
Page 16
Предисловие
Оформление данного документа
Курсивом выделены меню программ, команды меню, диалоговые окна и поля в
диалоговых окнах.
МАЛЫМИ ЗАГЛАВНЫМИ БУКВАМИ обозначены команды DOS, каталоги,
имена файлов и расширения имен файлов.
Шрифтом Courier выделено то, что выводится на экран DOS системой или
программой.
Шрифтом Courier Bold выделяется информация, которую необходимо вводить в окне
или на экране программы.
Символами (Return] или [CtriJ
аппаратуры или комбинация клавиш, которую необходимо нажать на
персональном компьютере, накопителе данных или приемнике.
Шрифтом Helvetica Bold показаны названия клавиш управления программой.
+ [с] обозначается функциональная клавиша
Примечания, предостережения и предупреждения
Примечания, предостережения и предупреждения используются для акцентирования
внимания на важной информации.
Примечание - В примечаниях содержатся дополнительные важные сведения по
предмету, чтобы пользователь мог расширить свои знания и руководствоваться
ими в своих действиях. Примечание может предварять текст, к которому оно
относится, или следовать за ним.
Предостережение - Предостережения информируют пользователя о ситуациях,
которые могут привести к повреждению аппаратных средств или ошибке в
программе. Предостережение предваряет текст, к которому оно относится.
Предупреждение - Предупреждения информируют пользователя о ситуациях, которые
могут привести к невосполнимой потере данных. Предупреждение предваряет текст, к
которому оно относится.
4600LS Surveyor
16
Page 17

Общие представления о GPS съемке
1 Общие представления о GPS съемке
Для проведения геодезической GPS съемки необходимо использование
приемной GPS аппаратуры, соответствующих полевых процедур и программного
обеспечения. Для использования GPS нет необходимости в доскональном
изучении всех принципов ее работы. Однако, полезно познакомиться с основной
терминологией относительно Глобальной Системы Позиционирования (GPS). В
этой главе даются общие представления о GPS съемке и о программном пакете
GPSurvey в той его части, которая касается приемника 4600LS Surveyor. Более
подробное объяснение принципов геодезической GPS съемки содержится в
Справочном Руководстве по GPS Съемке, которое входит в комплект
документации к программному пакету GPSurvey.
Глобальная Система Позиционирования (Global Positioning System - GPS)
- это спутниковая система определения местоположения, работающая под
контролем Министерства Обороны США (МО). GPS позволяет круглосуточно,
при любых погодных условиях получать информацию о времени и определять
координаты объектов в любой точке Земного шара.
Спутники непрерывно излучают сигналы, которые приемники используют для решения
задач позиционирования и навигации. Точность определения координат, обеспечиваемая
GPS, лежит в диапазоне от 100 метров до нескольких миллиметров в зависимости от
используемого оборудования и методов проведения съемки.
Использование GPS имеет ряд преимуществ по сравнению с традиционными методами
проведения геодезических работ:
• Не требуется прямой видимости между пунктами;
• Точность GPS-определений мало зависит от погодных условий
(дождя, снега, высокой или низкой температуры, а также
влажности);
• GPS позволяет значительно сократить сроки проведения работ по
сравнению с традиционными методами;
• GPS обеспечивает получение результатов в единой всемирной
системе координат;
• GPS результаты представляются в цифровом виде и могут быть
легко экспортированы в картографические или географические
информационные (ГИС) системы.
Существует несколько методов измерений базисных GPS линий. Например, GPS съемки
могут проводится как в реальном масштабе времени (RTK или Real-Time Kinematic Кинематика в Реальном масштабе Времени), так и с постобработкой измерений. Приемник
4600LS Surveyor, прежде всего, предназначен для съемок с постобработкой. При таких
съемках полевые измерения собираются в приемник или в портативный накопитель данных
TDC1, после чего в камеральных условиях их перегружают в персональный компьютер и
обрабатывают с использованием программного обеспечения GPSurvey.
Для сбора данных с целью их последующей обработки - применяется несколько
методов. Термины статика, одночастотная быстрая статика и кинематика
относятся к различным методам сбора данных в полевых условиях.
Кинематические съемки могут также включать в себя как кинематику в режиме
Page 18
Общие представления о GPS съемке
stop-and-go (остановка-и-движение), так и непрерывную кинематику. В общем
случае, если методика съемки или комплектация оборудования не
подразумевают работу в реальном масштабе времени, то следует полагать, что
данные собираются с целью их последующей обработки.
В Таблице 1-1 перечислены основные методики сбора данных для постобработки
для всех типов GPS приемников
Таблица 1-1 Методы наблюдения базисных линий
Методы наблюдения
базисных линий
одночастотными GPS
приемниками
Статика длинные базисные линии (10-20 км);
Одночастотная быстрая
статика
Кинематика в режиме
stop-and-go (остановкаи-движение)
Непрерывная
кинематика
Лучше всего подходит для ...
создание высокоточных опорных
сетей
сгущение опорных сетей, где
необходима высокая
производительность, а между
пунктами существует много
препятствий
высокая производительность при
работе на небольших участках с
немногочисленными препятствиями
для сигналов спутников
топографические съемки на открытых
участках местности, а также
определение координат подвижных
объектов
Все методы наблюдений базисных линий подразумевают использование, по крайней мере,
двух приемников. Определение базисных линий, по своей природе, носит относительный
характер. Пользователь определяет положение одного приемника относительно другого.
Непосредственным результатом обработки GPS-измерений является вычисление разности
координат между исходным и определяемым пунктами. Координаты определяемых точек
имеют тот же уровень точности, что и исходные координаты, относительно которых
производились вычисления. С помощью GPS можно с очень высокой точностью измерить
приращение координат между станциями, но абсолютная точность координат, полученных в
результате GPS съемки, зависит от точности координат исходных пунктов.
Каждому методу сбора данных присущи свои специальные условия, которые
определяют, как и когда может использоваться данный метод. В следующем
разделе сначала дается описание типов сетей GPS съемки, после чего
рассматриваются методы полевых наблюдений, при которых может
использоваться приемник 4600LS Surveyor.
4600LS Surveyor
18
Page 19
Общие представления о GPS съемке
1.1 Проектирование GPS съемок
Прежде, чем отправиться на полевые наблюдения, пользователю необходимо
составить схему или проект сети работ. Чтобы это выполнить, необходимо
ответить на основной вопрос: какова цель данной съемки?
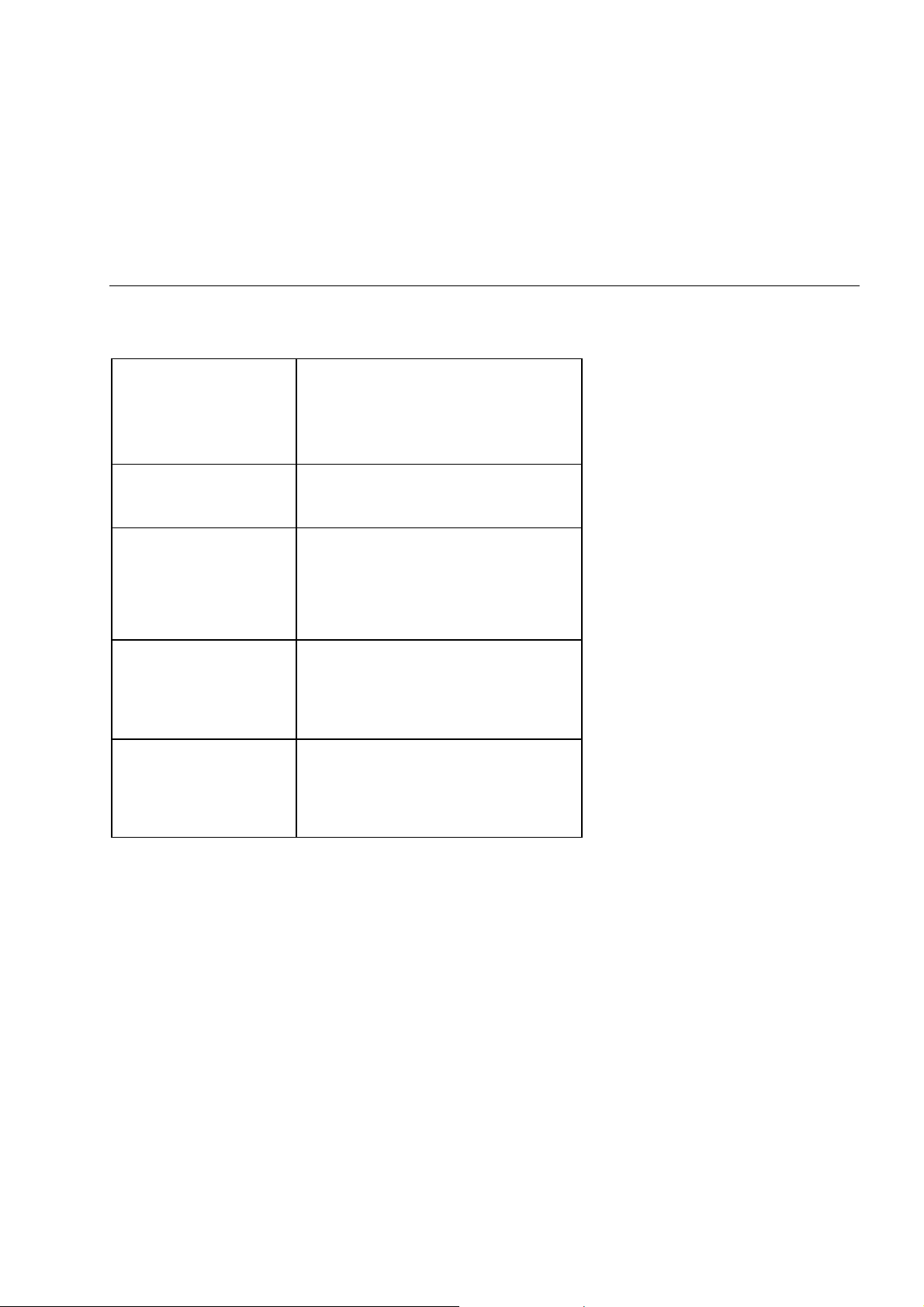
Если создается опорная геодезическая сеть, то первое, на что пользователю
следует обратить внимание — это требуемая конечная точность координат
пунктов. Следовательно, должна быть запроектирована сеть с большим
количеством избыточных или дополнительных измерений сверх необходимого
минимума. Сети данного типа включают оптимальное количество известных
пунктов с таким числом перекрестных связей и повторных измерений, которое
можно аргументированно обосновать.
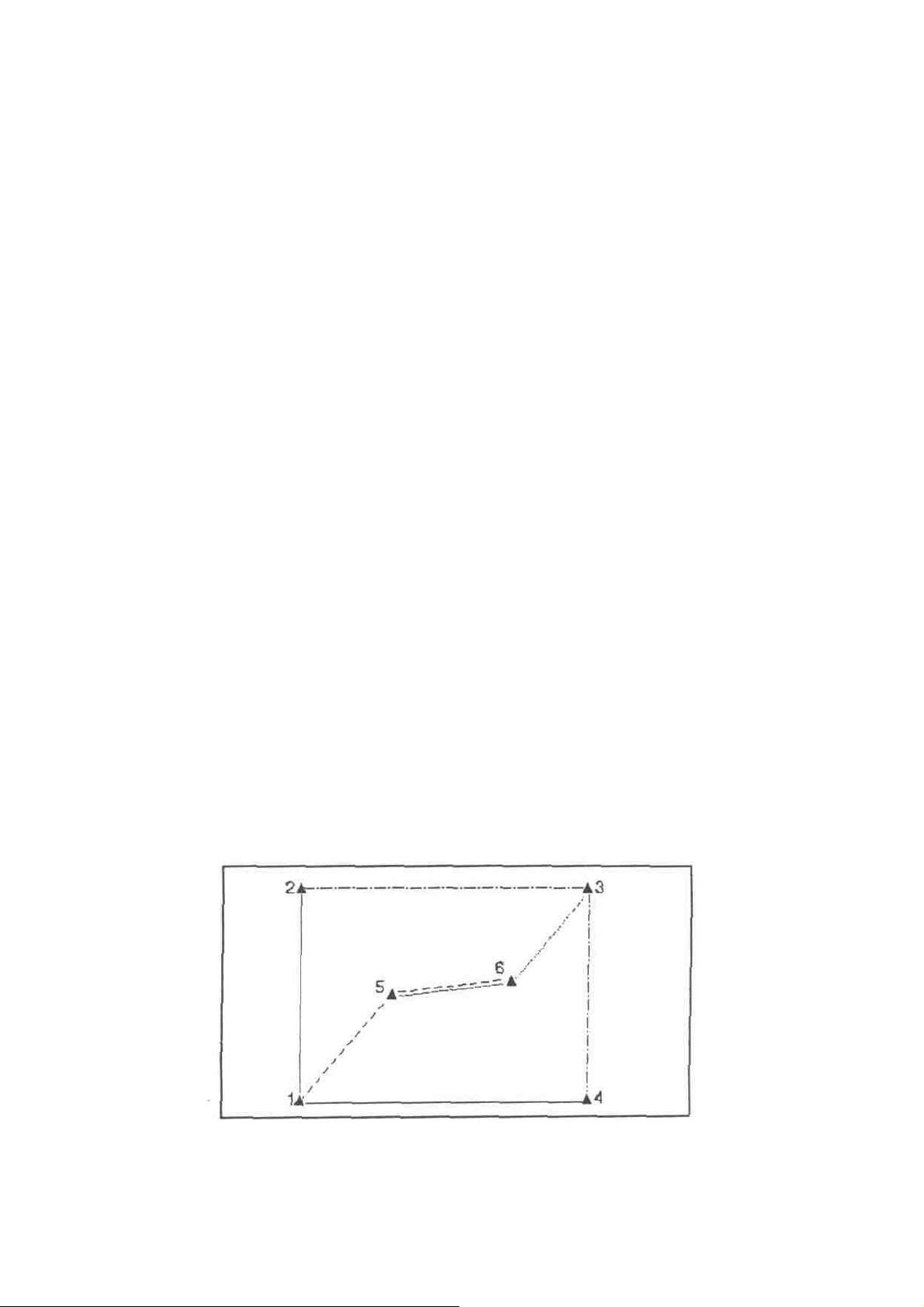
Для иллюстрации представлен пример сети станций и базисных линий:
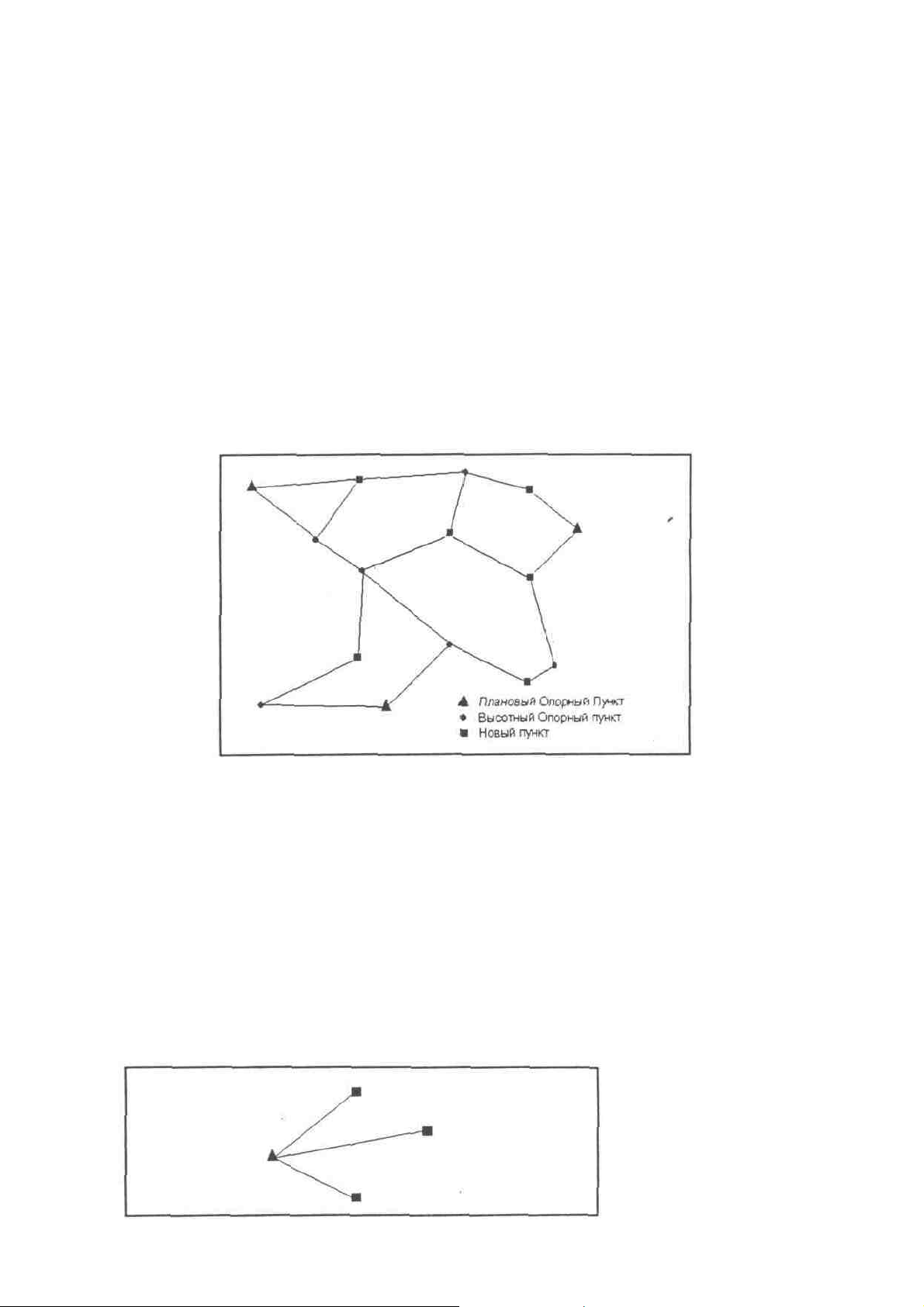
Предположим, что выполняется съемка небольшого участка местности, и главной целью
этой съемки является создание топографической карты этого участка. В подобном случае
не стоит задача получения координат с максимально возможной точностью. Вместо этого
пользователь заинтересован в проведении наблюдений на большом количестве пунктов с
максимально возможной эффективностью. Может существовать большое количество
разнообразных объектов и характерных точек на местности, координаты которых требуется
определить, кроме того, могут даже иметься большие открытые участки, где
предпочтительнее производить сбор данных с использованием транспортного средства.
В этом случае все измерения, выполненные пользователем, представляют собой
радиальные линии от одного (или более) базового (-ых) приемника (-ов).
При таком построении мало избыточных измерений, но эффективность сознательно
выбирается пользователем в качестве фактора, которому следует отдать предпочтение.
При этом, сеть измерений имеет примерно следующий вид:
4600LS Surveyor
19
Page 20
Общие представления о GPS съемке
После принятия решения относительно целей и приоритетов съемки можно приступать к
выбору методики полевых наблюдений: какой метод сбора данных является наиболее
оптимальным? В следующем разделе приводится описание методов сбора данных с
использованием приемника 4600LS Surveyor.
Примечание - В настоящем руководстве термины исходная станция, база или базовая
станция относятся к приемнику 4600LS Surveyor, расположенному на пункте с
известными координатами. Приемник 4600LS Surveyor, выполняющий измерения на
неизвестном пункте, называется подвижным приемником.
1.2 Статическая съемка
Статическая съемка - это наиболее точный метод GPS съемки, но в то же время и самый
медленный. Подобно остальным методам GPS съемки, для выполнения статической съемки
необходимы, по крайней мере, два приемника, по одному на каждом конце базисной линии,
одновременно проводящих измерения минимум по четырем спутникам. Отличительной
особенностью статической съемки является то, что наблюдения выполняются на
протяжении длительного периода времени, как правило, от 45 до 60 минут.
Хотя для проведения статической съемки требуется больше времени по сравнению с
другими методами, этот тип съемки менее всего подвержен всяким ограничениям. За один
час собирается большое количество данных, что позволяет при постобработке измерений
справиться с большим количеством проблем по сравнению с тем случаем, когда имеются
результаты более коротких периодов наблюдений. Кроме этого, большое количество
данных помогает получить более высокую точность решения базисной линии.
Информация, связанная со статическим сеансом наблюдений, хранится в особом
отдельном файле данных. В каждом таком файле содержится информация по одному и
только одному сеансу наблюдений. Если по какой-либо причине приемник выключался во
время проведения сеанса наблюдений, тогда может быть открыт второй файл и съемка
может продолжаться. В этом случае для одного сеанса наблюдений будет несколько
файлов, но, тем не менее, в одном файле будет содержаться информация только об одном
сеансе. В программном обеспечении GPSurvey предусмотрена возможность объединения
(комбинирования) таких файлов при их выгрузке из приемника.
Статическая съемка может выполняться с использованием как одночастотных, так и
двухчастотных приемников. Прибор 4600LS Surveyor - это одночастотный приемник. Обычно
одночастотная статическая съемка применяется в тех случаях, когда длина базисных линий
меньше 20 км. Если же базисные линии (или расстояния между станциями) превышают это
значение, тогда либо следует использовать двухчастотные приемники, либо необходимо
установить дополнительные промежуточные станции, которые позволят сократить длину
базисных линий. Причиной этого являются возможные различия в состоянии слоев
ионосферы над каждой станцией, а одночастотных измерений недостаточно для учета
влияния подобных различий.
Продолжительность сеанса наблюдений при статической съемке зависит от многих
факторов. Фирма Trimble рекомендует, чтобы сеанс наблюдений длился, по крайней мере,
45 минут при измерениях по пяти и более спутникам, или 60 минут, когда доступны только
лишь четыре спутника. Модуль Quick Plan (Быстрое Планирование), являющийся составной
частью программного обеспечения GPSurvey, помогает пользователю определить периоды
доступности спутников на выбранном пункте для заданного момента времени.
Статическая съемка используется, как правило, в проектах, где необходима максимальная
точность. Хотя для проведения съемки необходимы минимум два приемника, пользователь
может для повышения производительности использовать большее количество приемников.
4600LS Surveyor
20
Page 21

Общие представления о GPS съемке
Последовательность наблюдений должна зависеть от структуры геодезической сети.
Необходимо помнить самое важное правило GPS съемки:
обрабатывать можно только те данные, которые собранны несколькими приемниками
одновременно. Поэтому пользователь должен быть уверен, что его приемники проводят
измерения с одинаковой частотой, в одно и то же время и осуществляют наблюдения по
одним и тем же спутникам.
В "Полевом Руководстве по Статической Съемке" (Field Guidebook for Static Surveying) также
приводится описание мероприятий по статической съемке с акцентом на разработку проекта
съемки и планирование сеансов полевых наблюдений.
1.3 Одночастотная быстростатическая съемка
Одночастотная быстростатическая съемка (LI FastStatic) - это метод сбора данных, который
в чем-то похож на статическую съемку, а в чем-то подобен кинематической съемке.
Быстростатическая съемка может выполняться как одночастотными, так и двухчастотными
приемниками. Сеансы наблюдений, выполняемые одночастотными приемниками, включая и
приемник 4600LS Surveyor, более продолжительны по времени, чем сеансы наблюдений,
выполняемые двухчастотными приемниками фирмы Trimble.
1.3.1 Сравнение статической и быстростатической съемки
Быстростатическая съемка - это метод, при котором требуется, чтобы, по крайней мере, два
приемника на разных пунктах одновременно проводили измерения. Продолжительность
времени, в течение которого приемники собирают данные, зависит от количества
отслеживаемых спутников, их геометрии (PDOP) и качества собираемых данных..
Факторами, оказывающими влияние на качество данных, являются срывы цикла (перерывы
в измерениях по одному или более спутникам), многолучевость (отражение спутникового
сигнала от близлежащих поверхностей, таких как крыша автомобиля) и радиочастотная (РЧ)
интерференция. В общем случае, при одночастотной быстростатической съемке
продолжительность сеанса наблюдений на базисных линиях короче 10 км варьируется от 20
минут при 6 и более спутниках до 30 минут при 4 спутниках.
Одночастотная быстростатическая съемка похожа на статическую тем, что сбор данных
проводится только тогда, когда приемник неподвижен и установлен над пунктом. При
перемещении приемника с одного пункта на другой сбор данных не производится, поскольку
приемник может быть выключен. Кроме того, очень похож и способ, которым процессор
базисных линий обрабатывает данные.
Одночастотная быстростатическая съемка отличается от статической съемки меньшим
количеством собираемых данных. Продолжительность сеансов короче, поэтому процессор
базисных линий использует меньшее количество измерений. Вследствие этого,
предполагается, что точность базисных линий при одночастотной быстростатической
съемке меньше, чем при статической съемке.
1.3.2 Одночастотная быстростатическая съемка с использованием
TDC1 Survey Controller
Менее существенная разница между одночастотной быстростатической и статической
съемками заключается .в потенциальной возможности собирать в один файл данные
нескольких сеансов наблюдений. Для проведения одночастотной быстростатич&ской
съемки с записью нескольких сеансов в один файл, необходимо вместе с приемником
4600LS Surveyor использовать накопитель данных TDC1. В этом случае, файл данных
остается открытым, пока приемник перемешается между станциями, но накопление данных
при этом не производится. Преимуществом в данном случае является
4600LS Surveyor
21
Page 22

Общие представления о GPS съемке
эффективность в полевых условиях. Если же у пользователя нет накопителя данных TDC1,
тогда каждый из сеансов наблюдений при одночастотной быстростатической съемке
оформляется в приемнике 4600LS Surveyor как специальный отдельный файл, в котором
содержится информация только по одному сеансу наблюдений.
1.3.З Сравнение одночастотной быстростатической и
кинематической съемок
Одночастотная быстростатическая съемка также имеет сходство и с кинематической
съемкой. Так как одночастотная быстростатическая съемка выполняется с высокой
производительностью, она часто используется при построении тех же типов сетей, что и
кинематическая съемка. При таких работах используется по крайней мере один базовый
приемник, который непрерывно собирает данные в течение всей съемки, и один или
несколько мобильных приемников, перемещающихся от пункта к пункту и осуществляющих
сбор данных на каждом пункте в стационарном положении. Результат съемки - радиальные
вектора от каждого базового приемника.
Не стоит ограничивать возможности одночастотной быстростатической съемки построением
радиальной сети. Решение о применении того или иного метода сбора данных для каждого
типа сети принимается конкретным пользователем.
При одночастотной быстростатической съемки очень важно получить данные максимально
высокого качества. Поскольку сеансы наблюдений относительно короткие, необходимо
убедиться в том, что параметр PDOP невелик и многолучевость сведена к минимуму.
Также очень важно собрать данные без срывов цикла, поэтому каждую станцию необходимо
устанавливать на пунктах с минимальным количеством препятствий, закрывающих
небосклон. Если же на станциях существуют препятствия, то пользователь может
использовать модуль Quick Plan (Быстрое Планирование), который поможет учесть
препятствия и оптимизировать выбор периода полевых наблюдений.
Если при выполнении съемки планируется установить один приемник в качестве базового
на продолжительное время, то необходимо убедиться, что на выбранном пункте нет
препятствий для спутниковых сигналов. На подвижном приемнике необходимо также
обеспечить непрерывное отслеживание требуемого количества спутников на протяжении
минимального заданного периода времени. Медленным миганием светоиндикатора Данные
(желтого цвета) приемник 4600 LS Surveyor извещает пользователя о том, что собрано
достаточное количество данных.
1.4 Кинематическая съемка
Кинематическую съемку в широком смысле можно рассматривать как два самостоятельных
метода:
кинематику в режиме stop-and-go (остановка-и-движение) и непрерывную кинематику.
Используя приемники фирмы Trimble, включая и прибор 4600LS Surveyor, эти два метода
можно использовать в рамках одной и той же съемки.
Кинематическая съемка в режиме stop-and-go (остановка-и-движение) с точки зрения
полевых операций очень похожа на одночастотную быстростатическую съемку. В процессе
кинематической съемки в режиме stop-and-go выполняются очень короткие сеансы
наблюдений. Количество данных, собираемых на любом пункте, зависит от требований,
предъявляемых к съемке, и полевых условий, но абсолютный минимум требуемых данных
составляет всего лишь две эпохи. Это означает, что если запись измерений проводилась
через каждые 5 секунд (частота синхронизации - 5 секунд), тогда при проведении
кинематики stop-and-go на каждом пункте сеанс наблюдений должен продолжаться по
меньшей мере 10 секунд. Для обеспечения более надежных результатов на выбранных
пунктах можно собирать большее количество данных.
По аналогии со всеми методами GPS съемки для выполнения кинематической съемки в
режиме stop-and-go требуется одновременно собирать данные от одних и тех же спутников
4600LS Surveyor
22
Page 23
Общие представления о GPS съемке
и по меньшей мере двумя разными приемниками. Один приемник считается базовым, а
второй - подвижным. Результат съемки - это базисные линии, рассчитанные от базового
приемника до подвижного приемника для каждого сеанса наблюдений в режиме stop-and-go.
Подвижный приемник проводит сеанс наблюдений на первом пункте в течение более
длительного периода времени для инициализации, после чего может перемещается по
остальным пунктам, выполняя на них сеансы наблюдений в течение двух и более эпох.
Вместе с одним базовым приемником можно использовать несколько подвижных. Подобным
же образом, поскольку измерения, выполненные 4600LS Surveyor, проходят постобработку,
вместе с одним подвижным приемником можно использовать несколько базовых. В больших
топографических проектах для максимизации производительности используется один
базовый приемник с несколькими подвижными.
В отличие от статической и одночастотной быстростатической съемки, кинематическая
съемка в полевых условиях подвержена двум важным ограничениям: съемку необходимо
инициализировать и как минимум четыре спутника должны непрерывно отслеживаться
приемником на протяжении всей съемки, даже когда происходит перемещение между
пунктами. Если происходит потеря сигнала или количество отслеживаемых спутников
становится менее четырех, должна быть проведена повторная инициализация съемки.
1.4.1 Инициализация
Понятие об инициализации является ключевым для успешного выполнения кинематической
съемки. Несмотря на то, что инициализацию легко провести, однако, в ней не так легко
разобраться. Для получения фундаментальных сведений по типам инициализации следует
прочесть главы 2 и 3 общего Руководства по GPS Съемке.
Самое главное, что необходимо знать пользователю, - когда и как надо проводить
инициализацию.
• Пользователь обязан провести инициализацию в ходе кинематической съемки по
меньшей мере один раз, иначе процессор базисных линий не сможет успешно
обработать данные. Инициализацию лучше проводить в начале съемки.
• Пользователь должен также выполнить инициализацию, если количество
отслеживаемых спутников станет меньше четырех.
Приемником 4600LS Surveyor инициализацию можно провести несколькими способами:
• До начала кинематической съемки выполнить статическую съемку между базовой
станцией и станцией инициализации
• До начала кинематической съемки выполнить одночастотную быстростатическую съемку
между базовой станцией и станцией инициализации
• В процессе кинематической съемки провести достаточно длительный сеанс наблюдений
на первой станции, который можно было бы обработать, как сеанс одночастотной
быстростатической съемки (даже если измерения содержатся в файле данных
кинематической съемки)
• Провести повторные измерения на пункте, на котором уже проводились наблюдения (не
обязательно уже обработанном, но важно, чтобы это был пункт, на котором уже
проводились наблюдения в текущей кинематической съемке)
Каждый из этих методов представляет собой вариации на тему инициализации, известные
как статическая базисная линия, фиксированная базисная линия или известная базисная
линия. Все эти сценарии проведения инициализации НЕ требуют, чтобы данные заранее
4600LS Surveyor
23
Page 24

Общие представления о GPS съемке
обрабатывались. Процессор базисных линий автоматически рассматривает
продолжительный сеанс наблюдений (см. выше первые три варианта) как статическую
базисную линию, обрабатывая ее в первую очередь. Затем, процессор базисных линий в
GPSurvey использует информацию по этой базисной линии для инициализации и выполняет
обработку оставшихся кинематических данных.
При повторном измерении на пункте, на котором уже проводились наблюдения (повторный
сеанс наблюдений для процессора базисных линий), процессор автоматически использует
результаты, полученные от первого сеанса наблюдений, чтобы провести
переинициализацию второго сеанса, после чего процессор продолжает обработку
оставшихся данных. Ранее отснятый пункт не обязательно должен быть пунктом, на
котором были выполнены самые последние наблюдения.
1.4.2 Непрерывная кинематика
Самое важное отличие кинематической съемки от статической или одночастотной
быстростатической съемки заключается в том, что сбор данных выполняется и в процессе
перемещения приемника от пункта к пункту. Другими словами, в одном файле данных
пользователь имеет не только сеансы наблюдений на нескольких станциях, но и данные,
собранные в процессе перемещения между станциями. Эти данные называются данными
непрерывной кинематической съемки.
При непрерывной кинематической съемке не требуется, чтобы подвижный приемник
останавливался на отдельных пунктах. Сбор данных производится непрерывно в каждую
эпоху, даже когда приемник перемещается. При последующей обработке вычисляются
координаты подвижного приемника на каждую эпоху данных. Это может быть полезным при
топографических работах, основная цель которых заключается в построении горизонталей и
контуров.
В самом общем виде, данные непрерывной кинематики можно представить как измерения,
выполненные в процессе перемещения между сеансами в режиме stop-and-go. Если в
файле данных кинематической съемки нет сеансов наблюдений в режиме stop-and-go, то
такие данные относятся исключительно к непрерывной кинематической съемке. Говоря
другими словами, в файле кинематической съемки всегда присутствуют данные
непрерывной кинематики, а сеансы наблюдений в режиме stop-and-go могут как
присутствовать, так и отсутствовать.
Разница между данными непрерывной кинематики и данными в режиме stop-and-go лучше
всего видна графически. На Рисунке 1-4 в качестве примера полевой съемки представлен
файл данных подвижного приемника с четырьмя сеансами наблюдений в режиме stop-andgo. Все остальное содержимое этого файла представляет собой данные непрерывной
кинематики, которые собираются по умолчанию.
Данные непрерывной кинематики и TDC1 Survey Controller
Как уже было отмечено, в файле кинематической съемки всегда собираются данные
непрерывной кинематики. Но при использовании TDC1 Survey Controller пользователь
заметит опцию, позволяющую начинать и завершать процесс сбора данных непрерывной
кинематики. Это может показаться странным. Однако это означит только то, что Survey
Controller предлагает пользователю дополнительный способ маркировки выбранных блоков
данных непрерывной кинематики. Он также позволяет пользователю при необходимости
вводить различные значения высоты антенны.
С помощью этих специальных маркеров начала и завершения процессор базисных линий
может выборочно обработать блоки данных, полученных в ходе непрерывной
кинематической съемки. Без маркеров начала и завершения, сделанных накопителем
Survey Controller, процессор базисных линий может либо обработать все данные
непрерывной кинематики, либо их вообще не обрабатывать, в зависимости от того, какой
режим обработки задан пользователем
4600LS Surveyor
24
.
Page 25
Общие представления о GPS съемке
1.5 Пример полевой съемки с использованием комбинированных
методов
Рассмотрим съемку участка со стороной около 800 метров. В ходе съемки по всем четырем
углам закладываются пункты и выполняются измерения между этими пунктами для
составления топографической карты данного участка. В полевых условиях пользователь
мог бы действовать следующим образом.
1. Использовать метод одночастотной
быстростатической съемки для измерения базисных линий между пунктами.
2. В центре района работ заложить два
дополнительных пункта (для кинематической базовой станции и для пункта инициализации,
расположенного поблизости) и определить их методом одночастотной быстрой статики.
3. Выполнить кинематическую съемку для получения необходимой топографической
информации.
В данном примере предполагается, что для полевых работ используется три приемника
4600 LS Surveyor и два портативных накопителя данных TDC1 Survey Controller. На
диаграммах показаны базисные линии, которые можно измерить, а ниже следует
графическое представление файлов данных, которые могли быть собраны пользователем.
В этом примере для создания опорной сети на участке сначала используется одночастотная
быстростатическая съемка. После этого выполняется кинематическая съемка в режиме
stop-and-go и непрерывная кинематическая съемка. Перечисленные методы обеспечивают
избыточность при измерениях пунктов, а также начало и окончание кинематической съемки
на известных пунктах. Результатами данного примера будут опорные GPS пункты, пункты,
определенные методом кинематической съемки в режиме stop-and-go, и представление
данной территории в горизонталях.
1.5.1 Сбор данных методом одночастотной быстрой статики
Рисунок 1-1 Опорная сеть
4600LS Surveyor
25
Page 26
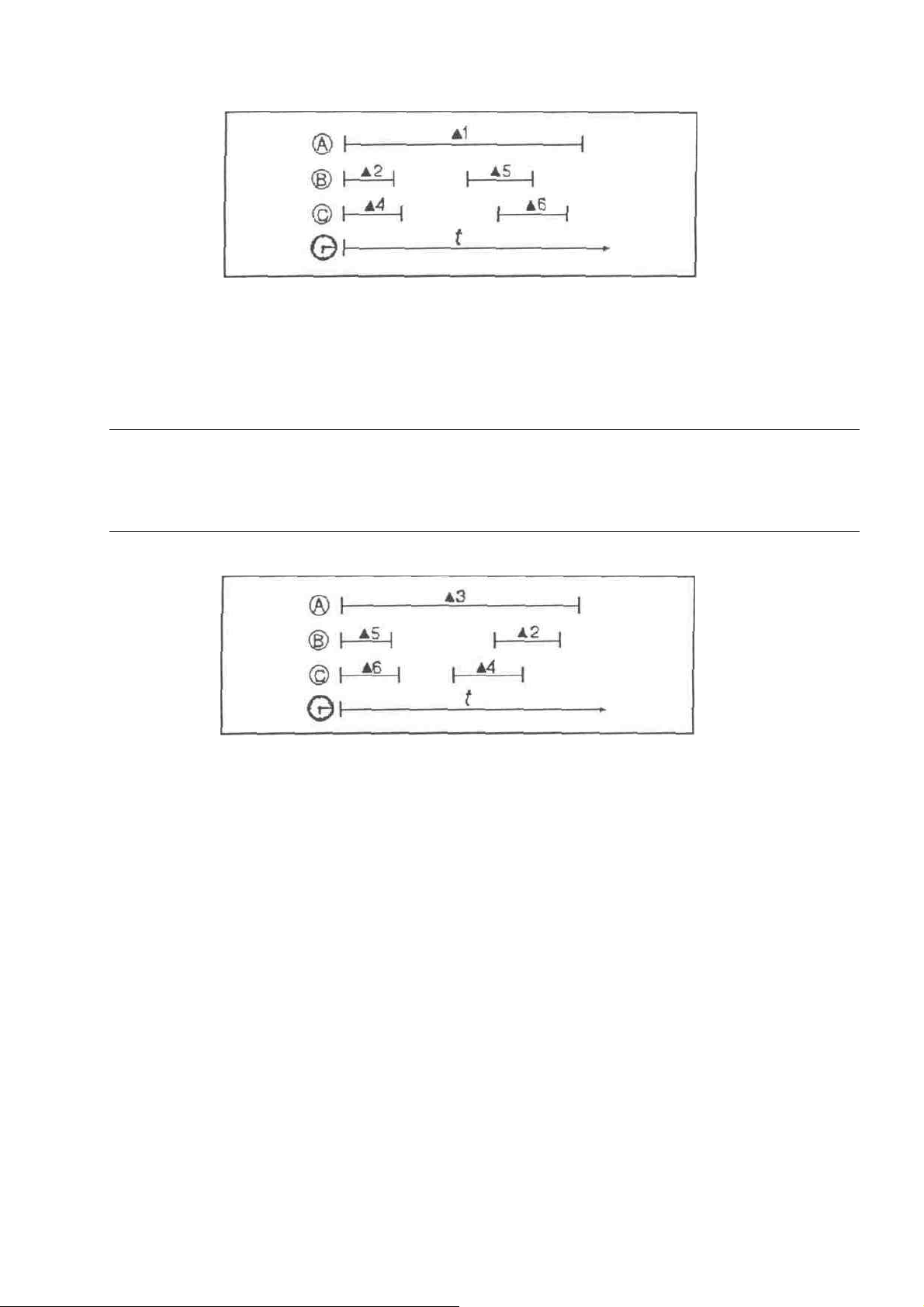
Общие представления о GPS съемке
Рисунок 1-2 Базовая станция на пункте 1;
Сессия сбора данных в режиме одночастотной быстрой статики
Приемник А является базовым, когда приемники В и С проводят измерения на пунктах 2 и 4.
Затем приемники В и С перемещаются на пункты 5 и 6.
Примечание - На графиках сплошные линии показывают, что приемник включен, находится
в стационарном положении и проводит сбор данных. Отсутствие линий означает, что
приемник выключен и перемещается, чтобы быть установленным на следующем пункте.
Пунктирные линии показывают, что приемник включен, процесс сбора данных
продолжается, но приемник находится в состоянии движения.
Рисунок 1-3 Базовая станция на пункте 3;
Сессия сбора данных в режиме одночастотной быстрой статики
Далее, приемник А переносится на пункт 3, а приемники В и С проводят повторные
измерения на пунктах 5 и 6. По завершении, приемники В и С перемещаются на пункты 2 и 4
для проведения повторных измерений. На этом завершается создание опорной
геодезической сети методом одночастотной быстрой статики.
4600LS Surveyor
26
Page 27
Общие представления о GPS съемке
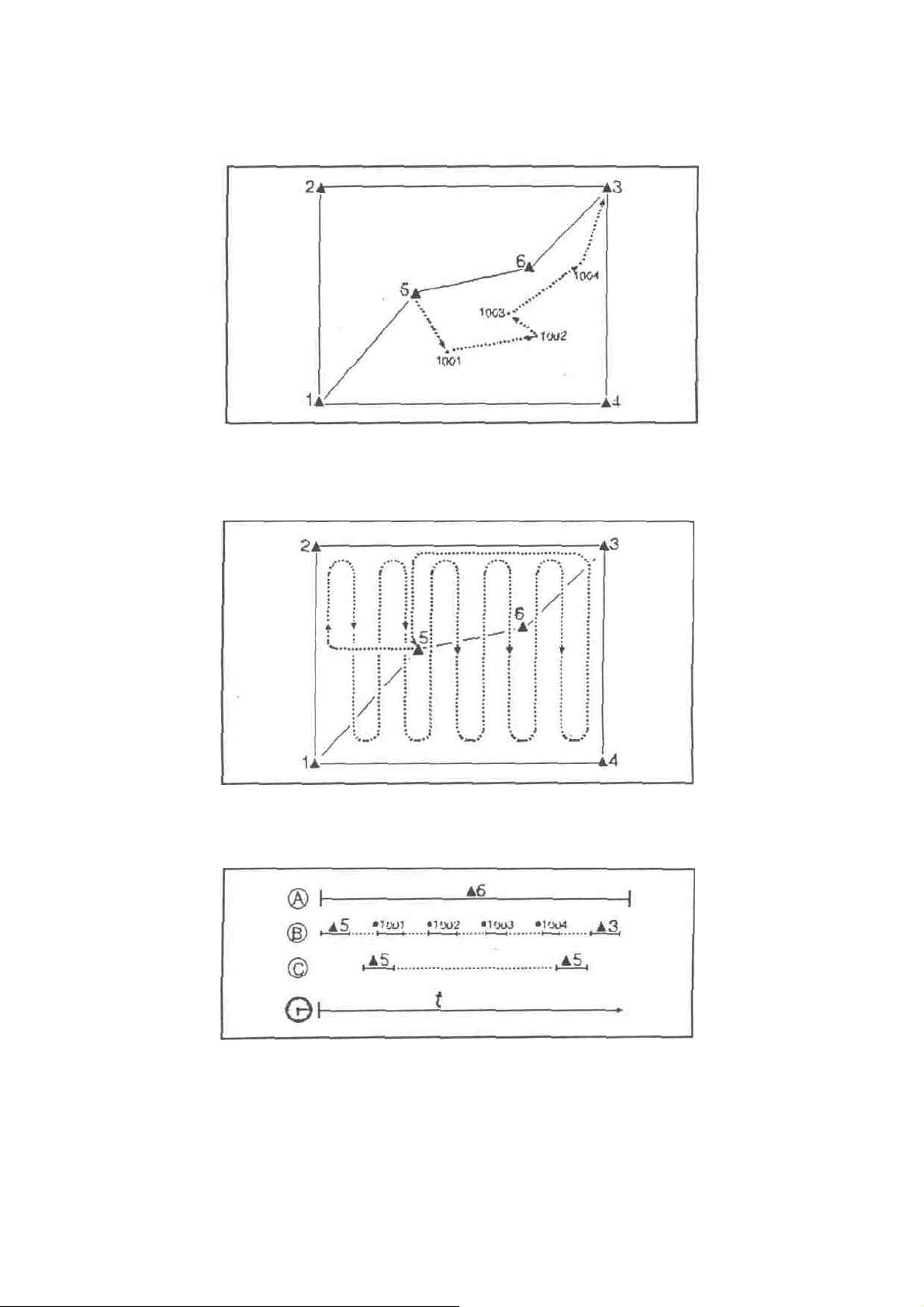
1.5.2 Сбор данных методом кинематики
Рисунок 1-4 Кинематическая съемка в режиме Stop and Go
Рисунок 1-5 Непрерывная кинематическая съемка
Рисунок 1-6 Сессия кинематической съемки в режимах
Stop and Go и непрерывной кинематики
Приемник А устанавливается в качестве базового на пункте 6. Приемник В, вместе с TDC1,
является подвижным и для инициализации съемки начинает работу на пункте 5. После
инициализации подвижный приемник В перемещается между пунктами от 1001 до 1004 для
проведения измерения. Сплошные линии показывают, что подвижный приемник находится
4600LS Surveyor
27
Page 28

Общие представления о GPS съемке
на пункте в стационарном положении на протяжении данного отрезка времени. Подвижный
приемник В завершает съемку на пункте 3, координаты которого известны.
Как только подвижный приемник В заканчивает измерения на пункте 5, приемник С с TDC1
приступает к инициализации непрерывной съемки на этом пункте. После инициализации
приемник устанавливается на транспортное средство, перемещающееся .по району съемки.
Завершает съемку подвижный приемник С тоже на известном пункте 5, куда он
устанавливается и проводит измерения в течение некоторого периода времени.
Это только один пример того, как можно комбинировать методы полевых наблюдений. По
мереболее глубокого знакомства с приемниками 4600 LS Surveyor и методами GPS съемки,
следует больше экспериментировать с этими гибкими и взаимодополняющими методами
сбора GPS данных.
4600LS Surveyor
28
Page 29
Общие принципы эксплуатации
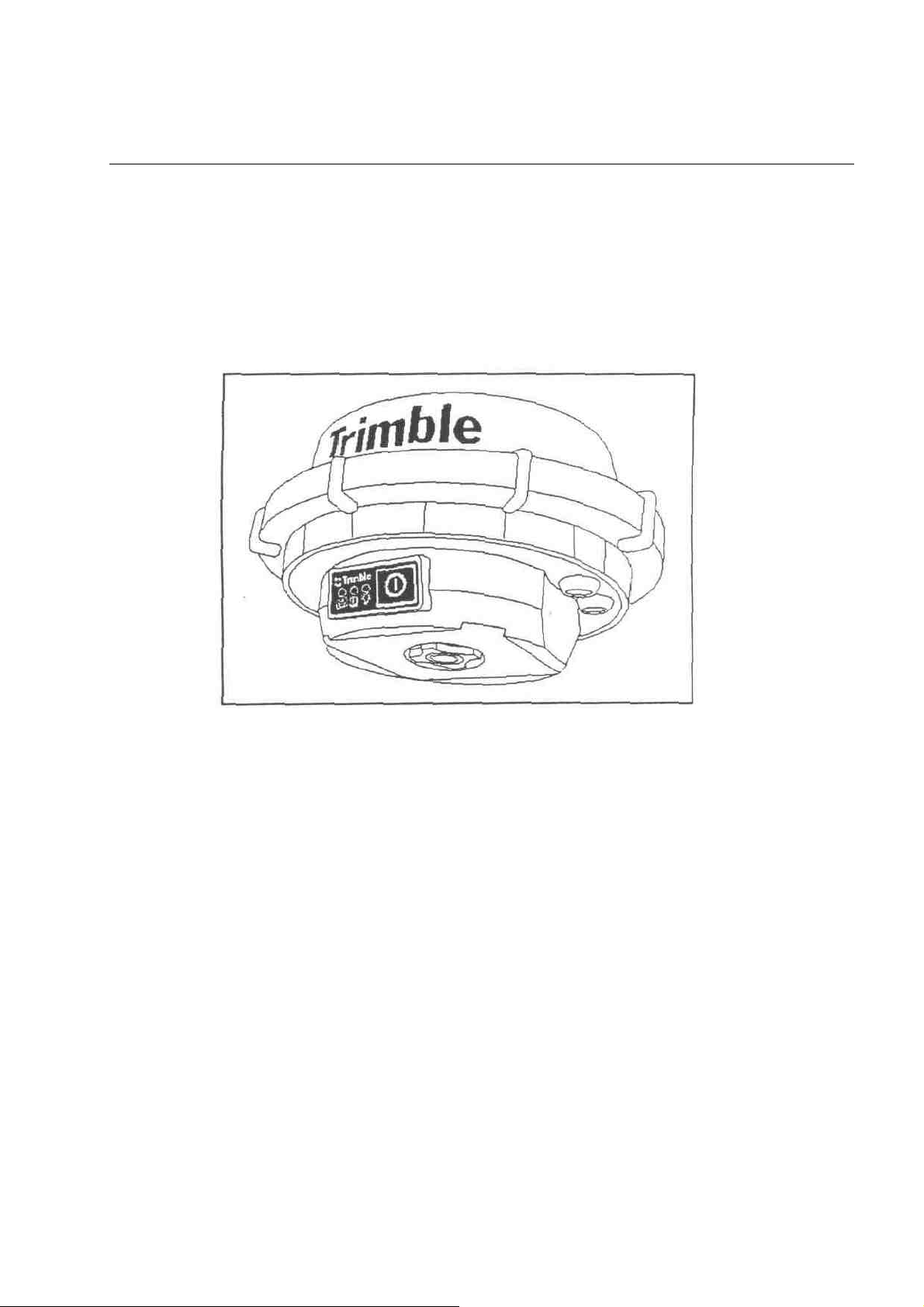
2 Общие принципы эксплуатации
Приемник 4600LS Surveyor, показанный на Рисунке 2-1, предназначен для геодезических и
картографических работ с использованием статических, быстростатических и
кинематических методов GPS съемки. Отличительная особенность прибора — наличие
одной единственной кнопки управления, что облегчает его использование, а также
светодиодных индикаторов, позволяющих контролировать процесс съемки. Приемник
4600LS Surveyor отслеживает GPS спутники на частоте L1 и обеспечивает получение
точных координат при наземных съемках.
Рисунок 2-1 Приемник 4600LS Surveyor
Приемник 4600LS Surveyor записывает GPS данные и обеспечивает доступ ко всем
необработанным и расчетным данным через двунаправленные RS-232 порты.
2.1 Области применения
Приемник 4600LS Surveyor разработан для эффективного применения в геодезических
работах. Он может выполнять статическую, одночастотную быстростатическую и
кинематическую съемку. Данные съемки накапливаются во внутреннюю память приемника и
впоследствии выгружаются в компьютер.
Фирма Trimble предлагает компьютерную программу GPSurvey, позволяющую провести
постобработку собранных данных при различных типах работ.
2.2 Переключатели и светодиодные индикаторы
Единственными устройствами управления прибора 4600LS Surveyor являются, как показано
на Рисунке 2-2, переключатель питания ВКЛ/ВЫКЛ и три светоиндикатора.
4600LS Surveyor
29
Page 30

Общие принципы эксплуатации
Рисунок 2-2 Панель управления 4600LS Surveyor
Три светоиндикатора означают:
Индикатор питания (зеленый)
Индикатор Сбора данныхПамяти (желтый)
Индикатор отслеживания спутников (красный)
В ходе обычной работы горящие или медленно мигающие индикаторы указывают на
нормальный режим работы прибора. Быстромигающие индикаторы указывают на наличие
условия, которое может негативно повлиять на съемку и потребовать внимание оператора.
Негорящие индикаторы указывают на то, что прибор в данный момент не работает. Во
время нормальной работы приемник 4600LS Surveyor проходит через три стадии:
1. Включение питания и инициализация - После нажатия кнопки питания для включения
приемника 4600LS Surveyor все светоиндикаторы сначала загораются на одну секунду.
После этого зеленый индикатор остается гореть, а другие - гаснут. Красный индикатор
процесса отслеживания спутников начинает быстро мигать, как только приемник захватит
первые 3 спутника. После того, как приемник начинает отслеживать сигналы от 4 или более
спутников, красный индикатор начинает мигать медленно. Когда красный индикатор
начинает медленно мигать, открывается файл данных и загорается желтый индикатор
процесса накопления данных.
2. Сбор Данных / Память - При нормальном накоплении данных красный индикатор
приемника 4600LS Surveyor медленно мигает , а желтый - горит непрерывно. В этот период
времени происходит запись данных, приемник отслеживает спутники, а внутренний
процессор ведет отсчет времени, необходимого для сбора данных при выполнении
одночастотной быстростатической съемки.
3. Когда приемник 4600LS Surveyor определяет, что для одночастотной быстростатической
съемки собрано достаточно данных (более подробнаяинформация об этом содержится в
разделе 3.7), то желтый индикатор начинает медленно мигать. После этого можно
выключать приемник, если базисная линия измеряется методом одночастотной
быстростатической съемки. Если же приемник оставить включенным, то он будет
продолжать нормальный сбор данных до тех пор, пока его не выключат, при условии
наличия питания и достаточного объема памяти.
В Таблице 2-1 описываются три светоиндикатора и функции каждого из них.
4600LS Surveyor
30
Page 31

Общие принципы эксплуатации
Примечание - Таймер сессии одночастотной быстростатической съемки в приемнике
4600LS Surveyor запускает отсчет времени, когда приемник начинает отслеживать 4 или
больше спутников и открывается файл сессии. Если в какой-то момент в ходе сессии
приемник теряет захват четвертого спутника и продолжает отслеживать только 3 или менее
спутников, то таймер сессии обнуляется. Когда приемник вновь начинает отслеживать 4 или
более спутников, таймер сессии перезапускается. В ходе такой сессии остается открытым
только один файл данных.
Таблица 2-1 Функции светоиндикаторов приемника 4600LS Surveyor
4600LS Surveyor
31
Page 32

Общие принципы эксплуатации
2.3 Организация питания
Для энергопитания приемника 4600LS Surveyor используются четыре батарейки типа С,
которые вставляются в нижнюю часть прибора. Можно использовать либо алкалиновые
батарейки, либо никель-кадмиевые аккумуляторы.
2.3.1 Замена батареек
Для замены батареек необходимо:
1. Поместить приемник на чистую, сухую поверхность, перевернув его
нижней частью кверху.
2. Отвернуть центральную гайку, которая удерживает нижнюю крышку, как
показано на Рисунке 2-3.
Рисунок 2-3 Замена батареек в приемнике 4600LS
3. Удалить из приемника старые использованные батарейки и вставить
четыре новые батарейки типа С.
4. Установить обратно нижнюю крышку и крепежную гайку. Гайку
следует аккуратно завернуть пальцами.
Теперь приемник 4600LS Surveyor готов к полевым работам.
2.3.2 Внешние источники питания
Приемник 4600LS Surveyor также способен работать от внешних источников питания, как
показано на Рисунке 2-4. Внешний источник подключается к приемнику через порт с
использованием разъема LEMO 5-pin. Для нормальной работы приемника любой внешний
источник питания должен обеспечивать напряжение от 9 до 20 В постоянного тока. Фирма
Trimble рекомендует использовать комплект батарей типа Camcorder (P/N 28613-00) или
аналогичный. У фирмы Trimble также можно приобрести зарядное устройство для батарей
типа camcorder (зарядное устройство OSM II - P/N 23001-00). Модуль OSM II также можно
использовать как внешний источник питания.
4600LS Surveyor
32
Page 33

Общие принципы эксплуатации
Рисунок 2-4 Пример подключения внешнего источника питания 4600LS
Surveyor.
Примечание - При одновременном подключении батареек типа С и внешнего источника
питания приемник 4600LS Surveyor работает сначала от внешнего источника.
Предупреждение - Если приемник 4600LS Surveyor имеет два порта, то НЕЛЬЗЯ
подключать внешние источники питания к обоим портам одновременно. Это может привести
к повреждению как одного, так и обоих источников питания. Нормальная работа приемника
осуществляется при вставленных батарейках и при подключении к любому порту одного
внешнего источника питания.
2.4 Организация данных
Приемник 4600LS Surveyor автоматически присваивает имя и создает файл сессии, когда он
после включения начинает отслеживать 4 или более спутников. В названии каждого файла
содержится информация о серийном номере конкретного приемника, о GPS-дате и
порядковом номере файла, которая выглядит следующим образом:
ААААВВВС
АААА =
где:
ВВВ =
С =
(от 0 до 9, от А до Z)
Такой порядок нумерации позволяет однозначно определить до 36 файлов сессий. Если
записано более 36 файлов сессий, то названия файлов для всех сессий после номера 36 (Z)
4600LS Surveyor
33
последние четыре цифры
серийного номера приемника
код GPS-даты
порядковый номер сессии
Page 34

Общие принципы эксплуатации
имеют одинаковые названия, но каждому файлу соответствует уникальный временной код,
который позволяет отличить его от предыдущих файлов.
2.4.1 Выгрузка данных
Первое, что необходимо сделать пользователю после завершения съемки и
возвращения в офис, это выгрузить данные из приемника в персональный
компьютер, на котором уже должна быть установлена последняя версия программного
обеспечения GPSurvey. Программный пакет GPSurvey предоставляет средства для
обработки данных съемки с целью получения базисных линий и координат.
Для подключения приемника 4600LS Surveyor к персональному компьютеру необходимо
использовать кабель LEM05 - DB9, как показано на Рисунке 2-5.
Рисунок 2-5 Стандартная конфигурация для выгрузки данных
Приемник 4600LS Surveyor хранит результаты спутниковых измерений и другие данные в
виде файлов в своей внутренней памяти. Эти файлы не могут быть обработаны до тех пор,
пока пользователь не перенесет (выгрузит) их в персональный компьютер.
Выгрузка файлов данных в компьютер проводится с использованием программного модуля
GPLoad, который позволяет выгрузить все или только отдельные файлы, находящиеся в
приемнике. Более подробно информация по выгрузке данных представлена в Руководстве
Пользователя GPLoad.
После завершения процесса выгрузки, программное обеспечение GPSurvey автоматически
начинает проверку выгруженных файлов и их размещение в базе данных текущего проекта.
Если использовался TDC1 Survey Controller, тогда в процессе выгрузки данных можно
исправить любые ошибки, которые были допущены при вводе данных в полевых условиях.
Архивация данных
После выгрузки данных из приемника всегда следует делать их архивную копию. Для
больших объемов данных целесообразно использовать программу сжатия файлов,
например, PKZIP.
Дополнительная информация по использованию опций архивации и восстановления
данных, которые имеются в программе GPSurvey, содержится в Руководстве Пользователя
GPSurvey.
4600LS Surveyor
34
Page 35

Общие принципы эксплуатации
2.5 Измерение высоты прибора
Точное измерение высоты инструмента особенно важно для получения качественных
результатов съемки. Просчеты при измерениях высоты являются наиболее типичным
источником ошибок при проведении GPS съемки. Пользователю следует убедиться в том,
что в полевом журнале правильно записаны результаты измерений высоты прибора, а
также еще и название базовой станции или пункта съемки, серийный номер приемника и
время. Измеренная высота может быть истинной высотой прибора на штативе или
наклонной высотой, полученной в результате измерения рулеткой расстояния от внешнего
края приемника до пункта съемки. Программное обеспечение GPSurvey при обработке
файлов использует любое из этих двух измерений для вычисления точных координат пункта
съемки.
Приемник 4600LS Surveyor поставляется вместе с рулеткой, а на его корпусе есть крючок
для ее крепления. Рулетка и крючок используются при измерении наклонной высоты
приемника, установленного на штативе, относительно пункта съемки. Для этого следует
зацепить конец рулетки за крючок, как показано на Рисунке 2-6, и измерить расстояние до
центра пункта съемки. Необходимо убедиться в точности записи типа измерения и
полученного при этом значения.
Примечание - На рулетке, которая поставляется вместе с приемником 4600LS Surveyor,
расстояние отсчитывается от края мерной ленты до наконечника на корпусе рулетки. При
измерении наклонной высоты от крючка на корпусе приемника 4600LS Surveyor до репера,
следует в качестве наклонного расстояния записать точное значение, отсчитанное по
рулетке.
4600LS Surveyor
35
Page 36

Общие принципы эксплуатации
Рисунок 2-6 Измерение высоты антенны 4600LS Surveyor
4600LS Surveyor
36
Page 37

Общие принципы эксплуатации
2.5.1 Штатив с фиксированной высотой
Штатив с фиксированной высотой имеет центральную вешку фиксированной длины,
которая совмещена с вертикальной осью для упрощения процесса измерения высоты.
Чтобы установить штатив с фиксированной высотой, необходимо поместить наконечник
центральной вешки на марку и освободить ножки штатива, которые автоматически
вытянутся до земли. Затем следует отнивелировать штатив, пока встроенный уровень на
центральной вешки не покажет, что штатив находится в вертикальном положении, и
закрепить ножки штатива.
2.6 Рабочие параметры
В Таблице 2-2 перечислены рабочие параметры, принятые по умолчанию в приемнике
4600LS Surveyor
.
Таблица 2-2 Параметры системы по умолчанию
Передача данных
Порт1 Скорость в бодах 38,400
Формат бит данных - 8, четность -odd,
столовый бит - 1
Порт2 Скорость в бодах 38,400
Формат бит данных - 8, четность -
none,столовый бит - 1
Предельные значения
Маска возвышения Для всех типов съемок: 15°
Маска PDOP 12.0
Накопление Данных
Минимальное количество ИСЗ 4
Интервал/Частота записи
измерений
Для всех типов съемок: с
интервалом в 15 секунд
Интервал/Частота записи
координат
Режим автоматического
проведения съемки
С интервалом в 2 минуты
Включен
Дифференциальный режим
RTCM-104 Вход Порт 2
Формат Версия 2.0
Возраст 60 секунд
Вывод сообщений в формате
NMEA-0183
4600LS Surveyor
37
GGA, VTG - Port 1 - off
Page 38

Общие принципы эксплуатации
2.6.1 Конфигурационная программа
Примечание
приемниками 4600LS Surveyor.
С помощью конфигурационной программы пользователь может изменить некоторые
рабочие параметры двухпортового приемника 4600LS Surveyor, которые приняты по
умолчанию. Конфигурационная программа (4600_CFG.EXE) позволяет установить скорость
передачи данных в бодах (baud rate) и четность (parity) для обоих портов, а также включить
или выключить функцию вывода сообщений в формате NMEA. Пользователь также может
стереть все данные из энергонезависимой памяти (RAM) приемника, в том числе
эфемериды, альманах и файлы данных съемки. Конфигурационная программа работает в
среде DOS и может быть запущена на персональном компьютере непосредственно из
командной строки DOS или из окна MS DOS в программной оболочке MS Windows.
Чтобы использовать конфигурационную программу для установки параметров системы по
умолчанию, необходимо выполнить следующее:
- Конфигурационная программа поставляется только с двухпортовыми
1. Подсоединить приемник 4600LS Surveyor через Порт 1 к
последовательному порту (СОМ1) персонального компьютера с
использованием кабеля LEM05 - DB9.
2. Нажать кнопку питания для включения приемника. При этом должен
загореться зеленый светоиндикатор.
3. Вставить в дисковод компьютера дискету с конфигурационным
программным обеспечением приемника 4600LS Surveyor.
4. На компьютере, в командной строке DOS набрать следующее:
A:\4600_CFG
или B:\4600_CFG (если используется дисковод В:)
и нажать [ENTER]. На экране появится следующее изображение.
4600LS Surveyor
38
Page 39

Общие принципы эксплуатации
5. Использовать клавиши со стрелками, чтобы
выделить параметр, который требуется изменить в колонке DESIRED, после чего нажимать
клавишу [ ПРОБЕЛ] до тех пор, пока на экране не появится требуемое значение. Возможны
следующие значения:
Baud Rates 2400, 4800, 9600, 38400
Parity None, Odd, Even
NMEA Outputs Enabled (Вкл.), Disabled (Выкл.)
6. После установки требуемой конфигурации следует нажать клавишу
[ F 10 ] для настройки прибора 4600 LS Surveyor.
Теперь приемник 4600LS Surveyor сконфигурирован для работы. С этого момента при
включении приемника эти установки будут использоваться по умолчанию.
Стирание энергонезависимой памяти (RAM)
Конфигурационная программа позволяет также стереть все данные, которые хранятся в
энергонезависимой памяти (RAM) приемника. В результате этого полностью стираются все
установки, информация и файлы данных, хранящиеся в памяти приемника 4600LS Surveyor.
Чтобы очистить энергонезависимую память приемника, необходимо
выполнить следующее:
1. Повторить с 1 по 4 действия, описанные в предыдущем разделе.
2. Нажать клавишу [F5]. На экране появится следующее сообщение:
3. Если требуется очистить энергонезависимую память (RAM) приемника, то
следует нажать клавиши [Y] и [ENTER]. В случае если пользователь
раздумал стирать энергонезависимую память (RAM), то следует нажать
клавиши [N] и |
ENTER].
4600LS Surveyor
39
Page 40

Общие принципы эксплуатации
2.6.2 3амечания по использованию приемника и уходу за ним
Приемник 4600LS Surveyor разработан таким образом, чтобы выдерживать разного рода
неаккуратное обращение, которому подвергается оборудование в полевых условиях. Но тем
не менее, приемник представляет собой высокоточный электронный инструмент, который
требует к себе бережного отношения
Приемник работает при температуре от —40° до +65°С.
Мощные сигналы от расположенных поблизости радиопередатчиков и радаров могут
оказывать влияние на процессы в электрической цепи приемника. Это не нанесет вреда
прибору, но может вызвать сбои в его работе. Чтобы избежать осложнений, не следует
использовать приемник 4600LS Surveyor ближе 400 метров от мощных радаров,
телевизионных и других передатчиков. Менее мощные передатчики, находящиеся, к
примеру, в переносных телефонах и портативных радиостанциях, как правило, не
оказывают влияния на работу приемника. Более подробная информация содержится в
технических примечаниях фирмы Trimble Using Radio Communication Systems with GPS
Surveying Receivers (Использование Систем Радиосвязи с Геодезическими GPS
Приемниками).
2.6.З Сообщение об ограничениях КОКОМ (СОСОМ)
Министерство Торговли США требует, чтобы вся GPS продукция, идущая на экспорт, имела
ограничения на ее применение, чтобы она не могла быть использована каким-либо образом
в ущерб безопасности Соединенных Штатов Америки. В приемник 4600LS Surveyor
заложены следующие ограничения.
Когда приемник определяет, что его скорость превышает 1000 узлов (1852 км/ч) или он
находится на высоте более 18000 метров, то блокируется прямой доступ к спутниковым
измерениям и навигационным результатам. Будет постоянно происходить сброс
результатов, до тех пор пока имеет место ситуация, при которой действуют ограничения
КОКОМ (СОСОМ).
4600LS Surveyor
40
Page 41

Планирование перед съемкой
3 Планирование перед съемкой
В данной главе содержатся краткие сведения о действиях, предпринимаемых при
подготовке проекта GPS съемки с постобработкой наблюдений. В следующих разделах в
общих чертах дается описание действий при планировании проекта съемки — от общей
идеи проекта до окончательного уравнивания сети съемки. Описываемые мероприятия
следует рассматривать как предложения, которые могут быть изменены под конкретный
проект, однако эти процедуры применимы в большинстве случаев. Задачи, которые
приводятся ниже, связаны с планированием и выполнением GPS съемки:
• подготовка;
• рекогносцировка пунктов;
• проектирование сети;
• планирование съемки.
3.1 Подготовка
Для эффективного проведения GPS съемки помимо хорошего понимания аппаратуры,
программного обеспечения и полевых процедур, имеющих отношение к GPS съемке,
требуется глубокое понимание принципов съемки. Необходимо осознавать все возможности
аппаратуры. Функциональные возможности аппаратуры определяют, следует ли для
наблюдений базисных линий в поле использовать процедуры создания опорной сети, такие
как статическая и одночастотная быстростатическая съемки, или кинематические
процедуры, такие как съемка в режиме stop-and-go (остановка-и-движение) и непрерывная
кинематическая съемка. Глубокое знание методик проведения полевых наблюдений
позволяет наиболее продуктивно выполнить GPS съемку, гарантируя при этом
высококачественное измерение базисных линий.
Следует подготовить письменный план проекта с описанием цели, объема работ и способов
сбора и использования данных. Иногда, собрав данные на нескольких дополнительных
пунктах, пользователь может в значительной мере улучшить геометрию сети. Помимо этого,
сбор большего, нежели требуется, количества данных обеспечивает наличее ценной
информации, которая может окажется полезной в будущем. Например, это может позволить
пользователю повторно не проводить съемку в случае обнаружения серьезных ошибок в
наблюдениях одной или нескольких базисных линий. Необходимо определить
целесообразность проведения наблюдений на дополнительных пунктах в рамках текущего
проекта.
3.2 Рекогносцировка пунктов
Как правило, рекогносцировка пунктов является необходимой частью планирования
полевых работ. Она позволяет:
• заложить или восстановить пункты съемки для полевой бригады;
• отметить наличие препятствий, которые могут повлиять на график наблюдений
или вызвать необходимость установки пунктов съемки в другом месте;
• получить от владельцев собственности разрешение на проведение работ по
проекту на территории принадлежащих им участков;
• определить наиболее оптимальный путь для достижения каждой станции
съемки в любую погоду и в любое время суток;
4600LS Surveyor
41
Page 42

Планирование перед съемкой
• нарисовать планы местности и составить инструкции, чтобы съемочная
бригада смогла добраться до места проведения работ и найти пункты, на
которых должны быть выполнены наблюдения;
• оценить время, требуемое для перемещения между станциями.
3.3 Проектирование сети
Для успешного создания опорной геодезической сети чрезвычайно важно спланировать ее с
хорошей геометрией. Даже в тех случаях, когда GPS используется для топографических
работ, требуется наличие опорных пунктов для привязки проекта к исходной системе
координат. Если планируется использовать кинематические методы, дополнительные
опорные пункты используются для проведения повторной инициализации.
При проектировании сети необходимо составить схему станций с учетом как опорных, так и
неизвестных пунктов, на которых должны выполняться наблюдения. Поскольку расстояние
между пунктами является важным фактором, схему следует выполнить в масштабе.
Помимо этого, необходимо составить график проведения наблюдений с учетом как периода
наблюдений для каждой станции, так и времени, которое требуется для перемещения
между станциями.
3.4 Планирование съемки
Создайте проект в программном обеспечении GPSurvey. При этом автоматически создаются
подкаталоги, которые потребуются для дальнейших операций по проекту, и осуществляется
инициализация базы данных нового проекта.
Примечание - Перед тем, как использовать программное обеспечение
GPSurvey, его необходимо установить на компьютере и выполнить
процедуру активации программного продукта. Соответствующие
указания содержатся в Руководстве Пользователя GPSurvey.
3.4.1 Организация проекта
Составная часть среды обработки GPSurvey, ответственная за организацию проектов,
содержит средства для ежедневной работы с проектами. Опции по работе с проектами
можно использовать для того, чтобы выполнить следующие операции:
• создать новый проект;
• открыть существующий проект;
• изменить параметры проекта;
4600LS Surveyor
• закрыть проект;
• удалить проект;
• просмотреть состояние проекта;
• заархивировать, восстановить проект и проверить базу данных.
42
Page 43

Планирование перед съемкой
Более подробная информация относительно модуля по управлению проектами в GPSurvey
содержится в Руководстве Пользователя GPSurvey.
3.4.2 Проверка доступности спутников
Модуль Quick Plan / Plan (Быстрое Планирование / Планирование) программного
обеспечения GPSurvey предоставляет следующие возможности для планирования полевых
наблюдений:
• создание сессии полевых наблюдений и определение всех станций, на которых
необходимо провести наблюдения;
• ввод информации из диаграмм препятствий, которые были составлены
пользователем во время посещения каждой станции съемки;
• вычисление периодов полевых наблюдений.
Используйте модуль Plan (Планирование) если необходимо сохранить информацию по
препятствиям и сессиям в базе данных проекта. Модуль Plan (Планирование) может
создавать несколько типов графиков и отчетов, которые помогут пользователю
спланировать полевые наблюдения. Это графики азимутов и возвышений спутников в
функции времени, изменений в созвездиях и траектории спутников на небесной сфере
(траектории спутников, как это видно со станции). График траекторий спутников на небесной
сфере включает в себя контуры любых препятствий, заданных пользователем при их
задании.
Более подробная информация о возможностях программного обеспечения GPSurvey по
планированию наблюдений и о функциональных различиях между модулями Quick Plan
(Быстрое Планирование) и Plan (Планирование) содержится в Руководстве Пользователя
Quick Plan / Plan. .
4600LS Surveyor
43
Page 44

В поле – Создание сети опорных пунктов
4 В поле – Создание сети опорных пунктов
В данной главе содержатся краткие сведения о мерах, предпринимаемых в процессе
реализации проекта GPS съемки с использованием методов создания сети опорных
пунктов. Для рассмотрения вопросов, связанных со специальными методиками создания
сети опорных геодезических пунктов, следует обратиться к документации по программному
обеспечению GPSurvey и другим публикациям фирмы Trimble.
Полевые процедуры сбора данных являются ключевым элементом, обеспечивающим успех
проведения GPS съемки. Недостаточно знать, как работает приемник 4600 LS Surveyor;
необходимо также разбираться в том, как необходимо использовать приемники для
измерения базисных линий, чтобы добиться максимально возможной точности и
эффективности.
4.1 Описание процедуры построения опорной сети
Цель построения опорной геодезической сети заключается в получении координат на
выбранных пунктах с заданным уровнем точности. Уровень точности устанавливается
достаточно высоким, чтобы распределенные ошибки при последующих съемках не
выходили за рамки допустимых пределов или требований, предъявляемых к проекту в
целом. Чтобы обеспечить такой высокий уровень точности, при проведении GPS работ по
созданию опорных геодезических сетей необходимо осуществить мероприятия, на
выполнение которых может потребоваться больше времени, чем при проведении других
GPS съемок.
Для проведения работ по созданию опорных геодезических сетей предлагается два метода
сбора данных: статическая съемка и одночастотная быстро статическая съемка. Также как и
для всех видов GPS съемок, для каждого из этих методов требуется, чтобы по меньшей
мере два приемника одновременно осуществляли сбор данных при наблюдениях одних и
тех же четырех или более спутников в течение заданного минимального отрезка времени.
Используя информацию о координатах опорных пунктов и значения базисных линий,
вычисленные на основе полевых GPS наблюдений, программное обеспечение
постобработки GPSurvey может рассчитать координаты для всех пунктов сети.
Статическая съемка является наиболее точным методом GPS-наблюдений, но в то же
время и самым медленным. При статической съемке необходимо производить наблюдения
по четырем или более спутникам в течение 45 - 60 минут. Это позволяет получить базисные
линии с точностью ±5 мм +1 мм/км длины базисной линии. Приемник 4600LS Surveyor
выполняет одночастотные статические съемки. Одночастотные статические съемки
предназначены для измерения базисных линий короче 20 км при хорошем состоянии
атмосферы.
Одночастотная быстростатическая съемка является менее точной, но занимает меньше
времени. Для ее проведения необходимо, чтобы в течение 20 - 30 минут одновременно
выполнялись наблюдения по одним и тем же четырем или более спутникам. Это позволяет
получить компоненты базисных линий с точностью ±5 мм +1 мм/км. Точность одночастотной
быстростатической съемки зависит от продолжительности наблюдений и условий ее
проведения. Благодаря относительно короткому периоду наблюдений, для выполнения
измерений на пунктах съемки используется, как правило, один подвижный приемник.
Одночастотная быстростатическая съемка ограничивается измерением базисных линий с
длиной примерно до 10 км, и она в большей степени восприимчива к срывам цикла и
высоким значениям фактора PDOP (который отражает плохую геометрию спутников), чем
статическая съемка.
Примечание - Пользователю следует ВСЕГДА проводить уравнивание съемочных сетей.
Непосредственными результатами постобработки GPS-данных являются базисные GPSлинии и неуравненные координаты, что недостаточно для стандартных геодезических
задач. Для выполнения этого этапа работы необходимо использовать опцию GPSurvey по
уравниванию сети.
4600LS Surveyor
44
Page 45

В поле – Создание сети опорных пунктов
4.2 Основные этапы проекта съемки
Главная задача, связанная с проведением GPS съемки, заключается в наблюдении
базисных линий - сборе данных. Полевые методы могут варьироваться, в зависимости от
требований к точности проекта, особенностей рельефа и препятствий, доступности пунктов
и многих других факторов. Однако, существует ряд полевых процедур, общих для всех GPS
съемок. Основными этапами полевых работ являются:
1. Установка приемников 4600LS Surveyor над пунктами съемки;
2. Измерение высот антенн приемников 4600LS;
3. Запись в полевом журнале высоты, ID (идентификатора) пункта, серийного номера
приемника и времени начала;
4. Выполнение наблюдений базисных линий путем включения приемников 4600LS
Surveyor и проверки того, что они производят сбор данных.
Примечание - Описываемые мероприятия следует рассматривать как предложения,
которые могут быть изменены под конкретный проект, однако эти процедуры применимы в
большинстве случаев.
Особое внимание следует уделить процессу измерения высоты инструмента. Точное
измерение высоты инструмента особенно важно для получения качественных результатов
съемки. Просчеты при измерениях высоты являются наиболее типичным источником
ошибок при проведении GPS съемки. Пользователю следует убедиться в том, что в
полевом журнале правильно записаны результаты измерений высоты прибора, а также еще
и название базовой станции или пункта съемки, серийный номер приемника и время.
Измеренная высота может быть истинной высотой прибора на штативе или наклонной
высотой, полученной в результате измерения рулеткой расстояния от внешнего края
приемника до пункта съемки. Программное обеспечение GPSuivey при обработке файлов
использует любое из этих двух измерений для вычисления точных координат пункта съемки.
4.3 Методы одночастотной
быстростатической съемки
Одночастотная быстростатическая съемка похожа на статическую съемку, за исключением
того, что пользователь не задерживается так долго на пункте.
Для проведения одночастотной быстростатической съемки необходимо, чтобы
одновременно отслеживались четыре или более спутников. Время сбора данных
составляет, как правило, 20-30 минут, в зависимости от состояния атмосферы и количества
доступных спутников.
Одночастотная быстростатическая съемка позволяет определять компоненты базисных
линий с точностью ±5 мм +1 мм/км. Точность одночастотной быстростатической съемки
зависит от продолжительности наблюдений и условий ее проведения. Предполагается, что
длина базисных линий не должна превышать 10 км. Данный вид съемки более восприимчив
к срывам цикла и высоким значениям фактора PDOP, нежели статическая съемка.
4600LS Surveyor
45
Page 46

В поле – Создание сети опорных пунктов
4.3.1 Требуемое оборудование и программное обеспечение
Для проведения одночастотной быстростатической съемки необходимы, по крайней мере,
два приемника 4600 LS Surveyor, установленных на штативах. Данные одночастотной
быстростатической съемки далее обрабатываются в программном обеспечении GPSurvey
4.3.2 Установка оборудования и проведение съемки
Приемник 4600LS Surveyor устанавливаются либо на штативе, как показано на Рисунке 4-1,
либо на вешке. В данном разделе описывается способ установки приемника на штатив и
метод проведения съемки.
Рисунок 4-1 Приемник 4600LS Surveyor,
установленный на штативе
4600LS Surveyor
46
Page 47

В поле – Создание сети опорных пунктов
Штатив с трегером и оптическим отвесом составляют стандартный комплект для установки
GPS антенн при создании опорных геодезических сетей, а также для всех типов GPS антенн
на временных базовых станциях. Процедура, описание которой дается ниже, позволяет
убедиться, что приемник установлен непосредственно над геодезической маркой, и что его
высота измерена точно. Кроме того, после установки приемник 4600LS Surveyor не должен
иметь препятствий для приема спутниковых сигналов, которые отслеживаются им в течение
съемки, как показано на рисунке 4-2. Установка приемника 4600LS Surveyor и выполнение
одночастотной быстростатической съемки следует производить в следующей
последовательности.
Рисунок 4-2 Расположение приемника при чистом обзоре неба
1. Установить штатив над геодезической маркой. Верх штатива должен быть примерно на
уровне глаз, что облегчает его регулировку и в то же время снижает угрозу
интерференции сигналов от близлежащих объектов.
2. Завинтить переходную втулку непосредственно в приемник 4600LS Surveyor. Установить
приемник с переходной втулкой на трегер и закрепить втулку.
3. Расположить приемник таким образом, чтобы отлитый логотип Е фирмы Trimble сверху и
снизу корпуса приемника был ориентирован на север.
4. Измерить высоту антенны приемника 4600LS Surveyor с помощью рулетки,
поставляемой в комплекте с приемником. Зацепить мерную ленту за крючок для ее
крепления на корпусе приемника и измерить точное расстояние до геодезической марки,
как показано на Рисунке 4-1.
Примечание - На рулетке, которая поставляется вместе с приемником 4600LS Surveyor,
расстояние отсчитывается от края мерной ленты до наконечника на корпусе рулетки. При
измерении наклонной высоты от крючка на корпусе приемника 4600LS Surveyor до репера,
следует в качестве наклонного расстояния записать точное значение, отсчитанное по
рулетке.
4600LS Surveyor
47
Page 48

В поле – Создание сети опорных пунктов
5. Записать в полевой журнал результаты измерений высоты прибора, название базовой
станции или пункта съемки, серийный номер приемника и время. Если известно точное
значение вертикальной высоты антенны приемника, то следует его записать в полевой
журнал.
Примечание - Аппаратура и процесс установки прибора для базовых станций и подвижных
приемников идентичны.
6. Повторить действия с 1 по 5 для установки одной или нескольких базовых станций
(называемых также опорными приемниками) на опорных пунктах, чьи координаты в
системах WGS-84 или NAD-83 известны с точностью, достаточной для решения
требуемых задач.
7. Повторить действия с 1 по 5 для установки одного или нескольких подвижных
приемников (приборов съемки) на геодезических марках, координаты которых должны
быть определены. Такие приемники 4600LS Surveyor называются подвижными
приемниками или приборами съемки.
8. Записать в полевой журнал для каждой установленной базовой станции и подвижного
приемника результаты измерений высоты прибора, название базовой станции или
пункта съемки, серийный номер приемника и время.
9. Включить каждый приемник нажатием кнопки Питание.
10. Следить за показаниями индикаторов, расположенных на панели управления каждого
приемника, чтобы убедиться в нормальной работе прибора (см. Главу 2).
11. Дождаться, пока желтый СД не начнет медленно мигать, после чего можно выключать
приемник.
12. Переместить данный приемник на следующую геодезическую марку и повторить
предыдущие действия по установке приемника 4600LS Surveyor.
4.З.З Минимальные периоды наблюдений
Для выполнения наблюдений подвижный приемник 4600LS Surveyor должен собирать
данные от требуемого количества спутников непрерывно на протяжении минимального
времени, заданного в параметрах внутренней настройки приемника, см. Таблицу 4-1
Таблица 4-1 Периоды наблюдений при одночастотной быстро-
статической съемке
Длина базисной
линии
<10 км 30 мин 25 мин 20 мин
4 спутника 5 спутников 6 или более
спутников
В случае сбоя приема сигнала от любого из отслеживаемых спутников приемник 4600LS
Surveyor не учитывает данные, полученные по этому спутнику, и увеличивает период
наблюдений, соответствующий меньшему количеству спутников. Бели число
4600LS Surveyor
48
Page 49

В поле – Создание сети опорных пунктов
отслеживаемых спутников становится меньше четырех, приемник начинает сеанс
наблюдений заново. Необходимо следить за светоиндикаторами, чтобы определить,
правильно ли приемник ведет накопление данных. Информация о светоиндикаторах,
расположенных на панели управления приемника, содержится в Главе 2.
Примечание — Таймер сессии приемника 4600LS Surveyor оптимизирован для базисных
линий длиной 10 км или менее. Базисные линии большей протяженности требуют более
продолжительных периодов наблюдений.
Примечание - Предполагается, что базовая станция должна быть установлена на открытом
участке местности, чтобы исключить появления срывов цикла. Срывы цикла на базовой
станции могут также отрицательно сказаться на наблюдениях, если вызывают сокращение
числа отслеживаемых спутников до значения меньшего, чем требуется для съемки, но
пользователь не будет об этом знать до тех пор, пока не обработает данные.
4.3.4 Штатив с фиксированной высотой
Штатив с фиксированной высотой имеет центральную вешку фиксированной длины,
которая совмещена с вертикальной осью для упрощения процесса измерения высоты.
Чтобы установить штатив с фиксированной высотой, необходимо поместить наконечник
центральной вешки на марку и освободить ножки штатива, которые автоматически
вытянутся до земли. Затем следует отнивелировать штатив, пока встроенный уровень на
центральной вешки не покажет, что штатив находится в вертикальном положении, и
закрепить ножки штатива.
4.4 Методы статической съемки
Статическая съемка является наиболее точным, но и самым медленным методом съемки,
который можно выполнить приемником 4600 LS Surveyor. Период наблюдений, требуемый
для проведения статической съемки, зависит от многих факторов. Фирма Trimble
рекомендует, чтобы период наблюдений составлял не менее 45 минут в периоды, когда
доступны пять или более спутников, или 60 минут в периоды, когда доступны только четыре
спутника. Модуль Quick Plan (Быстрое Планирование) поможет пользователю определить
доступность спутников на заданном пункте и в указанное время.
4.4.1 Требуемое оборудование и программное обеспечение
Для проведения статической съемки необходимы, по крайней мере, два приемника 4600LS
Surveyor, установленных на штативах. Данные статической съемки далее обрабатываются в
программном обеспечении GPSurvey.
4.4.2 Установка оборудования и проведение съемки
Приемник 4600LS Surveyor устанавливаются либо на штативе, как показано на Рисунке 4-1,
либо на вешке. В данном разделе описывается способ установки приемника на штатив и
метод проведения съемки.
Штатив с трегером и оптическим отвесом составляют стандартный комплект для установки
GPS антенн при создании опорных геодезических сетей, а также для всех типов GPS антенн
на временных базовых станциях.
4600LS Surveyor
49
Page 50

В поле – Создание сети опорных пунктов
Процедура, описание которой дается ниже, позволяет убедиться, что приемник установлен
непосредственно над геодезической маркой, и что его высота измерена точно. Кроме того,
после установки приемник 4600LS Surveyor не должен иметь препятствий для приема
спутниковых сигналов, которые отслеживаются им в течение съемки, как показано на
Рисунке 4-2.
Установку приемника 4600LS Surveyor и выполнение одночастотной быстростатической
съемки следует производить в следующей последовательности:
1. Установить штатив над геодезической маркой. Верх штатива должен быть примерно на
уровне глаз, что облегчает его регулировку и в то же время снижает угрозу интерференции
сигналов от близлежащих объектов;
2. Завинтить переходную втулку непосредственно в приемник 4600LS Surveyor. Установить
приемник с переходной втулкой на трегер и закрепить втулку;
3. Расположить приемник таким образом, чтобы отлитый логотип S5 фирмы Trimble
сверху и снизу корпуса приемника был ориентирован на север;
4. Измерить высоту антенны приемника с помощью рулетки, входящей в комплект.
Зацепить мерную ленту за крючок для ее крепления на корпусе приемника и измерить
точное расстояние до геодезической марки, как показано на Рисунке 4-1;
Примечание - На рулетке, поставляемой вместе с приемником 4600LS, расстояние
отсчитывается от края мерной ленты до наконечника на корпусе рулетки. При измерении
наклонной высоты от крючка на корпусе приемника до репера, следует в качестве
наклонного расстояния записать точное значение, отсчитанное по рулетке.
5. Записать в полевой журнал результаты измерений высоты прибора, название базовой
станции или пункта съемки, серийный номер приемника и время. Если известно точное
значение вертикальной высоты антенны приемника, то следует его записать в полевой
журнал;
Примечание — Аппаратура и процесс установки прибора для базовых станции и
подвижных приемников идентичны.
6. Повторить действия с 1 по 5 для установки одной или нескольких базовых станций
(называемых также опорными приемниками) на опорных пунктах, чьи координаты в
системах WGS-84 или NAD-83 известны с точностью, достаточной для решения
требуемых задач;
7. Повторить действия с 1 по 5 для установки одного шги нескольких подвижных
приемников (приборов съемки) на геодезических марках, координаты которых должны
быть определены. Такие приемники 4600LS Surveyor называются подвижными
приемниками или приборами съемки;
8. Записать в полевой журнал для каждой установленной базовой станции и подвижного
приемника результаты измерений высоты прибора, название базовой станции или
пункта съемки, серийный номер приемника и время.
9. Включить каждый приемник нажатием кнопки Питание;
10. Следить за показаниями индикаторов, расположенных на панели управления каждого
приемника, чтобы убедиться в нормальной работе прибора (см. Главу 2);
11. Дождаться, пока желтый светоиндикатор не начнет медленно мигать, после чего можно
выключать приемник;
4600LS Surveyor
50
Page 51

В поле – Создание сети опорных пунктов
12. Переместить данный приемник на следующую геодезическую марку и повторить
предыдущие действия по установке приемника 4600 LS Surveyor.
4.4.З Периоды наблюдений и расстояния при статической
съемке
Период наблюдений при статической съемке зависит от числа доступных спутников и длины
измеряемой базисной линии. Рекомендуются периоды наблюдений продолжительностью
между 45 и 60 минутами, в зависимости от длины базисной линии - от 10 до 20 км
.
4.4.4 Штатив с фиксированной высотой
Штатив с фиксированной высотой имеет центральную вешку фиксированной длины,
которая совмещена с вертикальной осью для упрощения процесса измерения высоты.
Чтобы установить штатив с фиксированной высотой, необходимо поместить наконечник
центральной вешки на марку и освободить ножки штатива, которые автоматически
вытянутся до земли.
Затем следует отнивелировать штатив, пока встроенный уровень на центральной вешки не
покажет, что штатив находится в вертикальном положении, и закрепить ножки штатива.
4600LS Surveyor
51
Page 52

В поле – Кинематическая съемка
5 В поле – Кинематическая съемка
В данной главе содержатся краткие сведения о мерах, предпринимаемых в процессе
реализации проекта GPS съемки с использованием методов кинематической съемки. Для
рассмотрения вопросов, связанных с особенностями методик проведения кинематической
съемки, следует обратиться к документации по программному обеспечению GPSurvey и
Field Guidebook for Dynamic Surveying (Полевому Руководству по Динамическим Съемкам)
фирмы Trimble.
Полевые процедуры сбора данных являются ключевым элементом, обеспечивающим успех
проведения GPS съемки. Недостаточно знать, как работает приемник 4600LS Surveyor;
необходимо также разбираться в том, как его использовать для измерения базисных линий,
чтобы добиться максимально возможной точности и эффективности.
Примечание — Для выполнения кинематической съемки с помощью приемника 4600LS
Surveyor требуется TDC1 Survey Controller версии 4.00 или более поздней. TDC1 Survey
Controller обеспечивает интерфейс с приемником, предоставляя пользователю возможность
задавать время начала и окончания сеансов стационарных наблюдений (наблюдений в
режиме stop-and-go) или сегментов при непрерывной кинематике. TDC1 Survey Controller
позволяет также вводить описания объектов и значения высоты антенны в момент работы
на станции или в процессе движения
.
5.1 Описание кинематической съемки
Кинематическая съемка является высокоэффективным методом сбора данных, который
удобен для проектов с большим числом пунктов и относительно небольшим количеством
препятствий для спутниковых сигналов. Сбор данных при топографической съемке часто
проводится в кинематическом режиме, поскольку эффективность в данном случае
представляется важным фактором.
При кинематической съемке используются один или несколько приемников на базовых
станциях, расположенных на пунктах с известными координатами, в то время как один или
несколько подвижных приемников перемещаются вокруг. Базовый и подвижный приемник
должны непрерывно на протяжении всей съемки принимать спутниковые сигналы. Если
любой из приемников теряет захват сигнала и общее количество совместно отслеживаемых
спутников становится менее четырех, то прежде, чем продолжать наблюдения,
пользователь должен выполнить повторную инициализацию.
Существует два типа кинематических съемок: съемка в режиме stop-and-go (остановка-идвижение), при которой подвижный приемник должен находиться во время наблюдений в
стационарном положении, и непрерывная съемка, во время которой подвижный приемник
может постоянно находится в движении. С помощью геодезических приемников фирмы
Trimble в ходе одной кинематической съемки можно совмещать эти методы
При проведении кинематической съемки в режиме stop-and-go (остановка-и-движение)
необходимо использовать TDC1 Survey Controller. Режим stop-and-go обычно используется
при топографической съемке. Для ее проведения необходимы, по меньшей мере, две эпохи
наблюдений; для достижения более высокой точности рекомендуется собирать большее
количество данных.
Режим непрерывной кинематики полезен при съемках земельных угодий и при морских
съемках, а также для негеодезических приложений, таких как контроль за маршрутом
транспортного средства. В этом режиме базисная линия определяется на каждую эпоху,
когда приемник отслеживает не менее четырех ИСЗ.
4600LS Surveyor
52
Page 53

В поле – Кинематическая съемка
Оба типа кинематической съемки обычно используются на расстояниях до 10 км и
обеспечивают точность порядка ±2 см + 2 мм/км
.
5.2 Требуемое оборудование и программное обеспечение
На каждой базовой станции необходимо иметь:
• приемник 4600LS Surveyor
• достаточно батарей для обеспечения работы на протяжении всей съемки
• штатив с трегером и оптическим отвесом, а также стандартную
переходную втулку
В каждом передвижном комплекте должны быть:
• приемник 4600LS Surveyor
• достаточно батарей для обеспечения работы на протяжении всей съемки
• раздвижная вешка с быстросъемным адаптером и байонетным
креплением. Опорная двунога или тренога (необязательна, но
настоятельно рекомендуется), помогающая добиться устойчивости
раздвижной вешки во время наблюдений.
• TDC1 Survey Controller — для его крепления в верхней части раздвижной
вешки можно использовать кронштейн.
5.2.1 Использование накопителя TDC1 Survey Controller
TDCl Survey Controller представляет собой портативное устройство, предназначенное для
управления подвижным приемником. Это устройство необходимо для проведения
кинематической съемки. Непосредственно сам портативный накопитель данных называется
TDC1, в то время как встроенное микропрограммное обеспечение - Survey Controller.
Процедуры проведения кинематической съемки с использованием накопителя Survey
Controller описаны в Survey Controller Operation Manual (Руководстве по Эксплуатации
Survey Controller).
Использование интерфейса накопителя данных
Накопители данных обеспечивают общий интерфейс между GPS приемниками и другим
геодезическим оборудованием для сбора данных, таким как GPS Total Station фирмы
Trimble. Использование накопителя данных обеспечивает многим наблюдателям удобную
основу для работы, поскольку накопитель данных является общеизвестным геодезическим
устройством, в то время как GPS приемник может таковым и не быть. В настоящее время
накопитель данных TDC1 со встроенным микропрограммным обеспечением Survey
Controller (TDCl/ Survey Controller) фирмы Trimble используется в двух различных случаях:
при работах с постобработкой данных и для съемки в реальном масштабе времени. При
правильной конфигурации аппаратуры и встроенного микропрограммного обеспечения эти
методики можно комбинировать в рамках одной съемки.
4600LS Surveyor
53
Page 54

В поле – Кинематическая съемка
5.3 Основные этапы проекта кинематической съемки
Главная задача, связанная с проведением GPS съемки, заключается в наблюдении
базисных линий - сборе данных. Полевые методы могут варьироваться в зависимости от
требований к точности проекта, особенностей рельефа и препятствий, доступности пунктов
и многих других факторов. Однако, существует ряд полевых процедур, общих для всех GPS
съемок. Основными этапами полевых работ являются:
1. Установка приемника 4600LS Surveyor на базовой станции с известными
координатами.
2. Измерение высоты антенны приемника 4600LS Surveyor.
3. Запись в полевом журнале высоты, ID (идентификатора) пункта,
серийного номера приемника и времени начала.
4. Включение базового приемника и проверка того, что он осуществляет
сбор данных.
5. Инициализация подвижного приемника.
6. Начало кинематической съемки.
Примечание - Описываемые мероприятия следует рассматривать как предложения,
которые могут быть изменены под конкретный проект, однако эти процедуры применимы в
большинстве случаев, Особое внимание следует уделить процессу измерения высоты
инструмента. Точное измерение высоты инструмента особенно важно для получения
качественных результатов съемки. Просчеты при измерениях высоты являются наиболее
типичным источником ошибок при проведении GPS съемки. Пользователю следует
убедиться в том, что в полевом журнале правильно записаны результаты измерений
высоты прибора, а также еще и название базовой станции или пункта съемки, серийный
номер приемника и время. Измеренная высота может быть истинной высотой прибора на
штативе или наклонной высотой, полученной в результате измерения рулеткой расстояния
от внешнего края приемника до пункта съемки. Программное обеспечение GPSurvey при
обработке файлов использует любое из этих двух измерений для вычисления точных
координат пункта съемки
.
5.4 Установка базового и подвижного приемников
Приемник 4600LS Surveyor устанавливается либо на штативе, либо на раздвижной вешке. В
следующих разделах приводится описание этих двух способов установки приемника.
Необходимо помнить, что самое главное, чтобы приемник 4600LS Surveyor во время съемки
не имел помех для приема спутниковых сигналов, как показано на Рисунке 5-1.
4600LS Surveyor
54
Page 55

В поле – Кинематическая съемка
Рисунок 5-1 Расположение приемника при чистом обзоре неба
5.4.1 Установка штатива с трегером
Штатив и трегер, как показано на Рисунке 5-2, составляют стандартный комплект для
установки GPS антенн при создании опорных геодезических сетей, а также для всех типов
GPS антенн на временных базовых станциях. Процедура, описываемая ниже, позволяет
убедиться, что приемник установлен непосредственно над геодезической маркой, и его
высота измерена точно.
1. Установить штатив над геодезической маркой. Верх штатива должен
быть примерно на уровне глаз, что облегчает его регулировку и в то же
время снижает угрозу интерференции сигналов от близлежащих
объектов.
2. Завинтить переходную втулку непосредственно в приемник 4600LS
Surveyor. Установить приемник с переходной втулкой на трегер и
закрепить втулку.
3. Расположить приемник таким образом, чтобы отлитый логотип В фирмы
Trimble сверху и снизу корпуса приемника был ориентирован на север.
При проведении наблюдений на пункте с использованием раздвижной вешки необходимо
установить ее наконечник на марку и удерживать раздвижную вешку неподвижно в
вертикальном положении на протяжении всего сеанса наблюдений. Чтобы поддерживать
вертикальное положение вешки, можно использовать находящийся на ней уровень.
4600LS Surveyor
55
Page 56

В поле – Кинематическая съемка
Пользователь может закрепить антенну и освободить руки для другой работы, используя
поставляемую по заказу опорную двуногу или треногу. Если пользователю требуется отойти
от вешки, то следует использовать опору с осторожностью, поскольку раздвижная вешка с
опорой менее устойчива, нежели обычный штатив при оптимальных условиях.
Рисунок 5-2 Приемник 4600LS Surveyor, установленный на штативе
5.4.2 Измерение высоты антенны приемника
Приемник 4600LS Surveyor поставляется с рулеткой и имеет на своем корпусе крючок для
крепления мерной ленты, как показано на Рисунке 5-2. Используя рулетку, поставляемую
вместе с приемником 4600LS Surveyor, необходимо измерить высоту антенны приемника
следующим образом:
1. Зацепить мерную ленту за крючок для ее крепления на корпусе
приемника и измерить точное расстояние до геодезической марки, как
показано на Рисунке 5-2.
2. Записать в полевой журнал результаты измерений высоты прибора,
название пункта съемки, серийный номер приемника и время.
4600LS Surveyor
56
Page 57

В поле – Кинематическая съемка
Измерение, выполненное в ходе данной процедуры, представляет собой наклонную высоту
антенны приемника. Если известно точное значение вертикальной высоты антенны
приемника, то следует его записать в полевой журнал.
Примечание - В полевом журнале необходимо указать, является ли измеренная высота
истинной вертикальной или наклонной.
5.4.3 Штатив с фиксированной высотой
Штатив с фиксированной высотой имеет центральную вешку фиксированной длины,
которая совмещена с вертикальной осью для упрощения процесса измерения высоты.
Чтобы установить штатив с фиксированной высотой, необходимо поместить наконечник
центральной вешки на марку и освободить ножки штатива, которые автоматически
вытянутся до земли. Затем следует отнивелировать штатив, пока встроенный уровень на
центральной вешки не покажет, что штатив находится в вертикальном положении, и
закрепить ножки штатива.
5.4.4 Установка на вешку
Вешка с фиксированной высотой фирмы Trimble, изображенная на Рисунке 5-3, с
поставляемыми по заказу Y-кабелем и дополнительным питанием рекомендуется для
установки антенн подвижных приемников при работах со средним уровнем точности с
короткими периодами наблюдений.
Рисунок 5-3 Приемник 4600LS Surveyor, установленный на вешке
4600LS Surveyor
57
Page 58

В поле – Кинематическая съемка
5.5 Инициализация кинематической съемки
Любая кинематическая съемка должна быть инициализирована. При работе с приемником
4600LS Surveyor инициализация кинематической съемки должна быть проведена на
известной базисной линии (которая называется иногда инициализацией по фиксированной
базисной линии). Инициализация кинематической съемки выполняется посредством
измерения (в течение очень короткого промежутка времени) базисной линии, которая ранее
уже была измерена с помощью GPS.
Базовый приемник следует установить на одном конце известной базисной линии, а на
другом ее конце выполнить наблюдения подвижным приемником. То, что известно о
базисной линии - это составляющие вектора в декартовой системе координат WGS-84,
которые вычисляются при обработке базисных линий.
Пользователю необязательно иметь данную информацию в поле. Однако она должна быть
в базе данных вашего проекта в программном обеспечении GPSurvey (см. Руководство
Пользователя WAVE). Самый легкий способ убедиться в том, что информация по
фиксированной базисной линии находится в базе данных проекта - это измерить данную
линию методом статической или одночастотной быстростатической съемки. Такое
измерение в поле можно провести до или после кинематической съемки. Перед обработкой
данных кинематической съемки просто следует убедиться в том, что фиксированная
базисная линия уже обработана.
Примечание - На базовой станции и пункте инициализации недостаточно иметь координаты
в системе плановой картографической проекции. Для нормальной
инициализации НЕОБХОДИМО предварительно измерить базисную линию с помощью GPS.
5.5.1 Проведение инициализации по наблюдениям фиксированной
базисной линии
В данном методе инициализации предполагается, что составляющие базисной линии
известны с точностью ±5 см. Ограничений по нижнему пределу длины базисной линии не
существует, но она, как правило, не должна быть длиннее 10 км. Неблагоприятное
состояние атмосферы могут вызвать невозможность инициализации съемки (или ее
проведения) при расстояниях более 10 км. Между базовой станцией и пунктом
инициализации не обязательно должна быть прямая видимость.
1. Установить базовый приемник 4600LS Surveyor на штативе с трегером на известном
пункте;
отцентрировать и отнивелировать его, после чего измерить высоту антенны приемника.
2. Расположить приемник таким образом, чтобы небольшой логотип В фирмы Trimble на
корпусе приемника был ориентирован на север.
3. Включить приемник, нажав для этого кнопку Питание.
4. Следить за показаниями световых индикаторов на панели управления приемника, чтобы
убедиться в нормальной работе приемника (см. Главу 2).
5. Записать в полевой журнал ID (идентификатор) пункта базовой станции. Сюда же
следует включить высоту антенны базового приемника, его серийный номер и время.
4600LS Surveyor
58
Page 59

В поле – Кинематическая съемка
6. Установить подвижный приемник над пунктом инициализации, который представляет
собой станцию на противоположном конце известной базисной линии. За инструкциями по
вводу ID станции, описаний объекта и высоты антенны следует обратиться к Руководству по
Survey Controller (Survey Controller manual).
Примечание - Несмотря на то, что с помощью Survey Controller информация по станции
вводится непосредственно в файл данных, настоятельно рекомендуется записывать эти же
самые сведения по проведению инициализации в полевой журнал.
7. Дать возможность приемникам 4600LS Surveyor одновременно собрать по меньшей мере
восемь эпох данных. Для получения более качественных результатов рекомендуется
собирать данные, по меньшей мере, две минуты.
8. Если подвижный приемник установлен на штативе, то его необходимо снять со штатива и
переставить на вешку, оснащенную байонетным креплением. Необходимо проверить
высоту антенны, и, если она изменилась, ввести в TDC1 новую высоту антенны на вешке.
Нельзя выключать ни один из приемников или допускать потери ими сигналов спутников
в любой момент съемки, в противном случае процедуру инициализации необходимо
повторить.
Теперь все готово к проведению кинематической съемки.
5.5.2 Использование нескольких базовых станций
Кинематическую съемку можно проводить с использованием двух или более базовых
станций, расположенных на различных пунктах. Данная методика имеет несколько
преимуществ. Он предохраняет от потери приема спутникового сигнала базовой станцией;
предполагается, что любой неблагоприятный фактор, оказывающий влияние на одну
базовую станцию, не будет влиять на другую. Данный метод позволяет также увеличить
площадь, охватываемую кинематической съемкой. Расположив приемники определенным
образом, можно провести съемку более обширной территории, нежели это можно сделать с
использованием единственной базовой станции.
Процедура инициализации съемки при использовании нескольких базовых приемников
проста. Необходимо выполнить процедуру инициализации по фиксированной базисной
линии, описание которой приведено выше, при этом пользователь должен иметь
фиксированные базисные линии от каждой использующейся станции до
инициализационного пункта. При отсутствии фиксированных базисных линий от каждой
базовой станции до отдельного пункта инициализации необходимо проведение
дополнительных сеансов наблюдений на пунктах инициализации. Такие наблюдения
должны проводиться в начале съемки, перед сбором всех других данных.
Завершив установку и инициализацию можно приступать к съемке. Если планируется
проведение кинематической съемки в режиме stop-and-go, необходимо обратиться к
разделу 5.6. Если же планируется проведение непрерывной кинематической съемки,
необходимо перейти к разделу 5.7. Порядок действий при переинициализации
кинематической съемки приводятся в разделе 5.8.
4600LS Surveyor
59
Page 60

В поле – Кинематическая съемка
5.6 Проведение кинематической съемки в режиме Stop-and-Go
(Остановка-и-Движение)
Данная процедура предполагает, что уже проведена установка базового приемника и
инициализация съемки. Базовая станция должна осуществлять сбор данных на опорном
пункте, а подвижный приемник должен быть установлен на вешке.
1. Переместить подвижный приемник на пункт наблюдений.
2. Установить приемник 4600LS Surveyor над маркой.
3. Дать возможность приемнику собрать по меньшей мере две эпохи данных. После того,
как приемник соберет данные в количестве, достаточном для полноценного наблюдения,
можно переместиться на следующий пункт.
Примечание - Фирма Trimble настоятельно рекомендует собирать больше данных, чем
минимально необходимые две эпохи. Сбор, по крайней мере, восьми эпох данных может
повысить качество и надежность измерений.
4. Если имеются еще пункты, на которых предстоит выполнить наблюдения, следует
вернуться к пункту.
5. Если же наблюдения выполнены на всех пунктах, то процесс съемки завершен и можно
выключать приемники.
Настоятельно рекомендуется завершать съемку либо на исходном пункте инициализации,
либо на другом пункте, связанном с базовой станцией известной базисной линией. Это не
обязательно, но может оказаться весьма полезным для обработки базисных линий
завершать съемку процедурой, которую можно назвать финальной инициализацией.
Процессор базисной линии может обрабатывать данные прямо и обратно по времени,
поэтому добавление такой последней инициализации может быть полезным для обработки
наборов данных с большим количеством срывов цикла.
Следует всегда помнить, что с приемником 4600LS Surveyor необходимо обращаться таким
образом, чтобы избежать потери приема спутниковых сигналов. При переноске вешки или
приемника руки следует держать ниже плоскости антенны.
Для оптимального использования нескольких базовых станций следует выполнять
наблюдения на каждой подвижной станции столько раз, сколько имеется базовых станций.
Таким образом, если у пользователя есть две базовые станции, то необходимо дважды
выполнить наблюдения на каждой подвижной станции, с интервалом времени между
сеансами не менее 15 минут. Это позволяет пользователю убедиться в том, что им
проведено столько действительно независимых сеансов наблюдений, сколько имеется
базовых приемников.
На практике это может показаться не осуществимым, особенно если большая часть данных,
полученных с помощью подвижных приемников, представляет собой результаты
топографической или детальной съемки. В этом случае необходимо попытаться выполнить
повторные наблюдения на выбранньк пунктах, обеспечив хотя бы минимальную
избыточность в сети.
4600LS Surveyor
60
Page 61

В поле – Кинематическая съемка
5.7 Проведение непрерывной кинематической съемки
Данная процедура предполагает, что уже проведена установка базового приемника и
инициализация съемки. Базовая станция должна вести сбор данных на опорном пункте, а
подвижный приемник должен быть закреплен на вешке.
1. Соответствующим образом осуществлять перемещение подвижного приемника.
2. Перемещать подвижный приемник по территории съемки. Если по результатам съемки
требуется получать высоты, необходимо обеспечить постоянное значение высоты антенны
над поверхностью земли.
3. При отсутствии пунктов для съемки в режиме stop-and-go (остановка-и-движение) по
окончании сбора данных непрерывной кинематической съемки следует перейти к действию
7. Если же пользователю надо провести сеансы наблюдений в режиме stop-and-go, то
следует переместить подвижный приемник на пункт для выполнения наблюдений.
4. Установить подвижный приемник над маркой.
5. Дать возможность приемнику собрать по меньшей мере две эпохи данных. После того,
как приемник соберет данные в количестве, достаточном для полноценного наблюдения,
можно перемещаться на следующий пункт.
6. Продолжать сбор данных непрерывной кинематики или в режиме stop-and-go в
соответствии с требованиями проекта.
7. Если больше не осталось участков для непрерывной кинематической съемки
и пунктов для наблюдений в режиме stop-and-go, съемка считается завершенной,
после чего необходимо выключить приемники 4600LS Surveyor.
Примечание - Необходимо заканчивать съемку на исходном пункте инициализации или на
другом пункте с известной базисной линией до базового приемника.
______________________________________________________________________________
_________________________________________________________________________
Примечание - Если имеется много пунктов для наблюдений или большие области для
покрытия съемкой, целесообразнее накапливать результаты съемки в несколько небольших
файлов, чем собирать все данные в одном большом файле. В этом случае при создании
каждого отдельного файла можно использовать процедуру инициализации, описанную в
разделе 5.8.1.
Всегда следует помнить о том, что необходимо:
• Удерживать вешку с приемником 4600LS Surveyor в вертикальном положении, если
важно получить точные плановые координаты и высоты.
• Переносить приемник 4600LS Surveyor таким образом, чтобы избежать перерывов в
приеме спутниковых сигналов. При переноске приемника или вешки с приемником следует
держать руки ниже плоскости антенны.
4600LS Surveyor
61
Page 62

В поле – Кинематическая съемка
5.8 Переинициализация съемки
Метод кинематической съемки чувствителен к потере спутниковых сигналов, которые
происходят в результате срывов цикла. Сочетание срывов цикла, которое приводит к тому,
что подвижный приемник отслеживает менее четырех спутников, прерывает съемку и
прекращает текущий процесс проведения наблюдений.
Если имеется вероятность того, что случай прерывания съемки может повториться,
необходимо предпринять соответствующие меры, чтобы этого избежать. Например, если
потеря сигнала приемником 4600LS Surveyor произошла из-за близости препятствия, то
следует выбрать другой путь, чтобы избежать влияния данного препятствия.
При прерывании процесса съемки из-за потери спутниковых сигналов необходимо перед ее
продолжением провести переинициализацию подвижного приемника.
Переинициализироватъ подвижный приемник можно двумя способами: либо возвратиться
на пункт съемки, на котором уже проводились наблюдения, либо выполнить
вышеописанную процедуру инициализации по фиксированной базисной линии, которая
использовалась при начале съемки.
5.8.1 Возвращение на пункт съемки, на котором уже велись
наблюдения
В данном разделе дается описание процедуры переинициализации путем возвращения на
предыдущий пункт съемки. Пользователь может вернуться на любой пункт, на котором в
ходе текущей съемки уже были успешно проведены наблюдения; необязательно, чтобы это
был последний пункт, на котором велась съемка перед потерей спутникового сигнала.
1. Вернуться на пункт, на котором в ходе данной съемки уже были успешно проведены
наблюдения;
необязательно, чтобы это был последний пункт, на котором выполнялись наблюдения.
2. Установить приемник 4600 LS Surveyor. Необходимо с точностью в пределах ±5 см
установить приемник на ту же самую точку, на которой изначально были выполнены
наблюдения на данном пункте.
3. Повторно ввести ID (идентификатор) данного пункта, указывая тот же самый ID, который
использовался при любых предыдущих наблюдениях. Необходимо убедиться в том, что ID
пункта введен правильно, чтобы программное обеспечение GPSurvey могло обработать
данные переинициализации.
4. Продолжить съемку.
4600LS Surveyor
62
Page 63

В поле – Кинематическая съемка
5.8.2 Выполнение процедуры инициализации
Процедура инициализации по фиксированной базисной линии, описанная в предыдущих
разделах, может быть использована для проведения переинициализации при срыве в
съемке. Для выполнения инициализации по фиксированной базисной линии не требуется
установки подвижного приемника на специальный пункт инициализации. Если такого пункта
поблизости нет, то его можно создать, выполнив для этого наблюдения методом создания
опорного обоснования. Такой вариант представляется весьма привлекательным, поскольку
приемник 4600LS Surveyor обладает возможностью проведения одночастотной
быстростатической съемки, что позволяет выполнить съемку на опорном пункте с высокой
точностью за 30 или менее минут.
Пользователю нет необходимости прерывать кинематическую съемку для проведения
одночастотной быстростатической съемки. Достаточно установить приемник как для
наблюдений на следующей кинематической станции и собрать данные в течение отрезка
времени согласно требованиям одночастотной быстростатической съемки. Необходимо
выполнять наблюдения в течение как минимум:
• 20 минут, если есть уверенность в отслеживании шести спутников на этом интервале
времени
• 25 минут, если есть уверенность в отслеживании пяти спутников
• 30 минут, если есть уверенность в отслеживании четырех спутников
При использовании этого очень эффективного полевого метода следует помнить о двух
вещах. Во-первых, поскольку наблюдения на данной станции проводятся в течение более
продолжительного периода времени (по крайней мере, в течение 20 минут, по сравнению с
несколькими эпохами для большей части других наблюдений), необходимо убедиться, что
приемник 4600 LS Surveyor установлен достаточно стабильно. Во-вторых, при
возникновении каких-либо сомнений относительно данного метода следует вместо того,
чтобы включать дополнительные данные в кинематический файл, попробовать
альтернативный подход.
Следует выполнить следующие действия:
1. Провести наблюдения на станции точно также, как в режиме stop-and-go (остановка-и-
движение).
2. Завершить кинематическую съемку.
3. Открыть отдельный файл и провести на данной станции традиционную одночастотную
быстростатическую съемку.
4. Приступить к новой кинематической съемке, используя данную станцию, как пункт
инициализации по (новой) известной базисной линии. Если на данный момент времени
базисная линия неизвестна, то она будет обработана по возвращении в офис и
информация о ней будет в базе данных.
4600LS Surveyor
63
Page 64

В поле – Кинематическая съемка
В периоды, когда значение фактора PDOP близко к предельному или доступно мало
спутников, имеет смысл провести традиционную одночастотную быстростатическую съемку
согласно действиям, описанным выше.
5.8.З Задержка переинициализации
Когда подвижный приемник теряет захват сигнала, рекомендуется, прежде чем продолжать
съемку, провести переинициализацию. Не рекомендуется продолжать съемку и откладывать
проведение переинициализации до некоторого последующего пункта. Задержка в
проведении переинициализации опасна тем, что может снова произойти потеря сигнала до
момента ее выполнения. Тогда придется повторить работу, которая была проделана с
момента первой потери сигналов.
5.8.4 Потеря захвата сигнала на базовой станции
Потеря захвата сигнала или высокое значение фактора PDOP на базовой станции являются
наиболее распространенной причиной сбоя при кинематической съемке, поскольку
невозможно узнать о том, что это произошло, если базовая станция оставлена без
присмотра. Следовательно, необходимо спланировать съемку и установить базовую
станцию таким образом, чтобы исключить возможность потери захвата сигнала.
При потере базовой станцией захвата сигнала обязательно следует переинициализировать
каждый подвижный приемник, даже если ни один из них не указывает на необходимость
переинициализации.
4600LS Surveyor
64
Page 65

Возвращение в офис
6 Возвращение в офис
В данной главе содержатся краткие сведения о мерах, предпринимаемых при подготовке
данных GPS съемки к постобработке. Хорошее владение программным обеспечением
помогает при планировании и обработке наблюдений базисных линий, а также помогает
управлять работой над проектом и составлять итоговые документы. Описываемые
мероприятия следует рассматривать как предложения, которые могут быть изменены под
конкретный проект, однако эти процедуры применимы в большинстве случаев.
Ниже перечислены задачи, связанные с постобработкой данных GPS съемки:
• открытие проекта
• выгрузка данных из приемника 4600LS Surveyor
• загрузка наблюдений в базу данных проекта и проверка информации, введенной в
поле
• архивация выгруженных данных
• проведение обработки базисных линий
• анализ результатов обработки
• уравнивание сети для получения окончательных координат
6.1 Открытие проекта
Прежде чем приступать к выгрузке данных из приемника, необходимо открыть проект в
GPSurvey. Если при планировании проекта использовался модуль Plan (Планирование),
входящий в состав программного обеспечения GPSurvey, то проект был создан в процессе
проведения планирования. Это не распространяется на тот случай, когда использовался
модуль QuickPlan (Быстрое Планирование).
6.2 Выгрузка данных
GPS приемник накапливает результаты спутниковых измерений и другие данные в файлы,
которые хранятся в его внутренней памяти. GPSurvey не может провести обработку данных,
пока эти файлы не будут перенесены (выгружены) в компьютер.
Выгрузка файлов в открытый проект производится при помощи модуля GPLoad, который
входит в состав программного обеспечения GPSurvey и позволяет выгружать из приемника
все или только выбранные файлы. Можно также загрузить файлы, которые уже были
перенесены из приемника в каталог, не имеющий отношения к текущему проекту, файлы с
решениями базисных линий из другого проекта или файлы данных съемки в реальном
масштабе времени из накопителя данных.
Более подробно информация .о процессе выгрузки данных приводится в Руководстве
Пользователя GPLoad.
4600LS Surveyor
65
Page 66

Возвращение в офис
Первое, что необходимо сделать пользователю после возвращения в офис, это
подсоединить, как показано на Рисунке 6-1, приемник 4600LS Surveyor к персональному
компьютеру, на котором заранее уже должно быть установлено программное обеспечение
GPSurvey версии 2.1 или более поздней. Пакет GPSurvey предоставляет средства для
обработки данных съемки с целью получения базисных линий и координат.
Рисунок 6-1 Стандартная конфигурация для выгрузки данных
6.2.1 Организация файлов внутри приемника 4600LS
Приемник 4600LS Surveyor автоматически присваивает имя и создает файл сессии, когда
приемник после включения начинает отслеживать 4 или более спутников. В названии
каждого файла содержится информация о серийном номере конкретного приемника, о GPSдате и порядковом номере файла, которая выглядит следующим образом:
ААААВВВС
где: АААА = последние четыре цифры
серийного номера приемника
ВВВ = код GPS-даты
С = порядковый номер сессии
(от 0 до 9, от А до Z)
Такой порядок нумерации позволяет однозначно определить до 36 файлов сессий. Если
записано более 36 файлов сессий, то названия файлов для всех сессий после номера 36 (Z)
имеют одинаковые названия, но каждому файлу соответствует уникальный временной код,
который позволяет отличить его от предыдущих файлов.
4600LS Surveyor
66
Page 67

Возвращение в офис
6.3 Загрузка и проверка данных, введенных в поле
Программа загрузки данных в GPSurvey имеет несколько параметров, управляющих
загрузкой результатов измерений в базу данных проекта. Большинство этих параметров
определяют методику исправления ошибок, выявленных в процессе загрузки данных; и то,
каким образом пользователь собирается исправлять эти ошибки. Помимо этого, можно
задать критерии для указания названий и идентификаторов станций. В процессе загрузки
можно ввести любую информацию о станции, которая была занесена в полевой журнал, но
которую нельзя было ввести в приемник в поле.
Прежде чем приступить к обработке любой базисной линии, необходимо убедиться в
правильности введенной информации. Неточная информация о станции, например, ее
название или высота антенны, приведет в процессе обработки базисных линий к
ошибочным результатам.
Программа загрузки данных используется также для редактирования и просмотра любой
введенной информации, такой как высота антенны и информация о станции. Полевые
записи можно использовать для сравнения действий, предпринятых в поле, с информацией,
присутствующей в наборе данных. Необходимо проверить названия станций для всех
приемников, а также значения высоты антенны для сеанса наблюдений на каждой станции и
для сегмента непрерывной кинематики.
Если использовалась нескорректированная высота антенны, то следует быть особенно
внимательным при указании типа измеренной высоты антенны (нескорректированная или
истинная вертикальная).
Если вводилась истинная вертикальная высота антенны, то следует иметь в виду, что на
протяжении всей обработки данных никакие поправки к этому значению программой
GPSurvey не вводятся.
Программное обеспечение GPSurvey поддерживает интерфейс с накопителем данных
TDC1, использующим встроенное микропро1раммное обеспечение Survey Controller,
который требуется для проведения кинематической съемки с приемником 4600LS Surveyor.
Если при работе в поле использовался накопитель данных, необходимо проверить больше
информации, а следовательно имеется больше источников возможных ошибок. Следует
проверить описательную информацию, такую как названия станций, а также данные съемки.
Это сэкономит время, если при последующей обработке возникнут затруднения.
Более подробно информация о проверке информации по станциям изложена в Руководстве
Пользователя GPSurvey.
6.4 Архивация данных
После выгрузки данных из приемника всегда следует делать их архивную копию. Для
больших объемов данных целесообразно использовать программу для сжатия файлов,
например, PKZIP.
Дополнительная информация по использованию опций архивации и восстановления
данных, которые имеются в программе GPSurvey, содержится в Руководстве Пользователя
GPSurvey.
4600LS Surveyor
67
Page 68

Возвращение в офис
6.5 Обработка базисных линий
Для обработки базисных линий, наблюдение которых производилось в поле, необходимо
использовать модуль WAVE (Weighted Ambiguity Vector Estimator) программного
обеспечения GPSurvey. Пользователю не придется ломать голову над вычислением
базисных линий, которые были измерены в поле комбинированными методами. Модуль
WAVE автоматически распознает и различает файлы данных, полученные при статических,
одночастотных быстростатических или кинематических съемках.
Полная информация по обработке базисных линий содержится в Руководстве
Пользователя WA VE.
6.6 Просмотр результатов обработки базисных линий
Программное обеспечение GPSurvey также предоставляет средства для просмотра станций
наблюдений и обработанных базисных линий на карте сети. Данные непрерывной
кинематической съемки отображаются на экране в виде точек, соединенных между собой
линиями, а маркеры событий — как отдельные символы.
Дополнительные опции можно использовать для выполнения замыканий полигонов и
просмотра подробной информации, которая содержится в журнале замыканий, либо
сформировать отчет по базисным линиям со списком файлов решений, соответствующих
выбранным базисным линиям.
Полная информация об опциях для просмотра карты сети содержится в Руководстве
Пользователя GPSurvey.
6.7 Уравнивание сети
Процедура уравнивания сети является наиболее важным инструментом для оценки общей
целостности наблюдений и съемочной сети. Тот факт, что базисная линия может быть
обработана в GPSurvey, вовсе не означает, что она хорошо вписывается в сеть съемки.
Недостаточно, чтобы базисная линия была статистически точной; необходимо, чтобы она
стыковалась с другими измеренными базисными линиями в рамках сети.
Поскольку GPS основывается на математическом эллипсоиде (WGS-84), то может
возникнуть необходимость в преобразовании GPS координат в какие-нибудь другие
исходные геодезические даты. Уравнивание сети поможет при решении задачи
преобразования координат между исходными геодезическими датами, моделирования
геоида и контроля качества координат. Данные непрерывной кинематической съемки не
уравниваются программой Trimnet Plus, но они могут быть преобразованы в местные
исходные геодезические даты с помощью модуля GPTrans.
TRIMNET Plus - программа уравнивания сети, входящая в состав программного
обеспечения GPSurvey, способна совместно обрабатывать GPS-данные, результаты
традиционных наблюдений, а также использовать модели геоида в процессе уравнивания
сети.
4600LS Surveyor
68
Page 69

Возвращение в офис
6.7.1 Создание отчетов по проекту
Утилиты, входящие в состав программного обеспечения GPSurvey, могут быть
использованы для создания, предварительного просмотра и вывода на печать следующих
настраиваемых пользователем отчетов по проекту:
Проект: общие сведения по проекту;
Станция: информация о выбранных станциях проекта;
Базисная линия: однострочные, краткие суммарные сведения о результатах обработки
выбранных базисных линий;
Решение базисной линии: краткая информация по обработке выбранных базисных линий;
Подробная сводка по базисной линии: подробная информация по обработке выбранной
базисной линии.
4600LS Surveyor
69
Page 70

А Схемы соединений
А Схемы соединений
В данном приложении приведены примеры схем соединений, которые показывают, каким
образом к приемнику 4600LS Surveyor можно подключать дополнительные внешние
устройства и источники питания.
Рисунок А-1 Приемник 4600LS Surveyor с TDC1 Survey Controller
Рисунок А-2 Приемник 4600LS Surveyor, установленный на вешке,
вместе с TDC1 Survey Controller, Y-кабелем и внешней батареей
4600LS Surveyor
70
Page 71

А Схемы соединений
Рисунок А-3 Схема соединения двухпортового приемника 4600LS с батареей типа camcorder
и TDC1 Survey Controller
Примечание - TDC1 Survey Controller всегда подключается к порту 1.
Рисунок А-4 Соединение приемника 4600LS Surveyor с персональным компьютером и
внешними батареями при помощи Y-кабеля
4600LS Surveyor
71
Page 72

А Схемы соединений
Рисунок А-5 Соединение 4600LS Surveyor с персональным компьютером и модулем OSM II
(питание и ввод/вывод данных)
Рисунок А-6 Конфигурация 4600LS для приема RTCM-поправок: подключение радиомодема,
TDC1 Survey Controller и внешнего источника питания
4600LS Surveyor
72
Page 73

В Конфигурация для приема сообщений RTCM-104
В Конфигурация для приема сообщений RTCM-104
Когда 4600LS Surveyor через Порт 2 принимает сообщения в формате RTCM SC-104, он
работает в качестве подвижного приемника при дифференциальном режиме использования
системы GPS (DGPS). В этом случае, приемник автоматически определяет свое
местоположение, используя поправки, расчитанные базовой DGPS-станцией. Значения
координат можно получить с помощью дополнительного TDC1 Survey Controller (версии 4.0
или более поздней) или из сообщений, выдаваемых в формате NMEA-0183.
Примечание - Прием поправок в формате RTCM возможен только для двухпортовых
моделей 4600LS Surveyor.
В.1 Прием сообщений в формате RTCM-104
Для приема RTCM-сообщений необходимо, чтобы по телеметрической линии связи они
поступили в Порт 2. Это можно осуществить при помощи радиосредств или пейджера,
способного принимать RTCM-сообщения. Параметры связи, принятые по умолчанию для
Порта 2, можно изменить при помощи конфигурационной программы, которая поставляется
вместе с двухпортовыми приемниками 4600LS Surveyor. Подробная информация об
использовании конфигурационной программы содержится в Главе 2. Когда приемник
4600LS Surveyor обнаруживает наличие RTCM-поправок, он автоматически вычисляет свои
координаты с точностью дифференциального режима. Приемник 4600LS Surveyor
поддерживает только RTCM-формат версии 2.0. Сообщения версии 2.1 для обеспечения
дифференциального режима GPS использовать невозможно.
В.2 Вывод координат с введенными дифференциальными
поправками
Существует два способа получить дифференциально скорректированные координаты.
Накопитель данных TDC1 Survey Controller, подсоединенный к Порту 1, способен
накапливать координаты в своей памяти. Имеется возможность накапливать координаты,
полученные как в режиме stop-and-go (остановка-и-движение) вместе с атрибутами и кодами
объектов, так и в режиме непрерывной кинематической съемки. Пример конфигурации
кабелей и оборудования показан на Рисунке А-6 в Приложении А. Более подробная
информация по конфигурациям оборудования с использованием RTCM-поправок
содержится в Survey Controller Operation Manual (Руководство по Эксплуатации Survey
Controller).
Координаты можно также получить с из выдаваемых сообщений GGA и VTG в формате
NMEA-0183. Конфигурационная программа используется для включения или отключения
таких сообщений. Вывод сообщений всегда осуществляется через Порт 1. Подробная
информация о включении/отключении выдачи сообщений в NMEA-формате содержится в
Главе 2. Подробное описание выходных сообщений в формате NMEA приводится в
Приложении С.
4600LS Surveyor
73
Page 74

С Вывод сообщений NMEA-0183
С Вывод сообщений NMEA-0183
После включения выдачи сообщения в формате NMEA-0183 они могут использоваться для
интеграции с данными от других датчиков.
Примечание - Такая возможность имеется только у двухпортовых приемников 4600LS
Surveyor.
С.1 Элементы сообщений
Все сообщения соответствуют формату NMEA-0183 версии 2.0. Все они начинаются со
знака S и заканчиваются символами возврата каретки и перевода строки. Поля данных
имеют различную длину и оканчиваются разделителем (,). За разделительным символом (,)
следуют нулевые поля, но они не содержат никакой информации.
Необязательное для заполнения поле контрольной суммы является последним полем в
сообщении и следует за разделительным символом (*). Контрольная сумма составляется
исключительно из 8 бит ИЛИ из всех знаков в сообщении, включая запятые, находящиеся
между разделителями $ и (*), однако сами эти символы в контрольную сумму не входят.
Результат из шестнадцатиричной системы преобразуется в два символа в ASCII кодах (0-9,
A-F). Наиболее важный знак появляется первым.
С.1.1 Поля и разделители
Каждое сообщение включает в себя:
• ID (идентификатор) сообщения, состоящий из символов $GP, за которыми следует тип
сообщения. Например, ID сообщения ALM выглядит как $GPALM
• Запятую
• набор полей, зависящих от типа сообщения, разделяемых запятыми
• звездочку контрольную сумму
Ниже приводится пример простого сообщения с шестью полями, ID сообщения и
контрольной суммой:
$GPZDA,152145,21,05,1993,-7,00*50
4600LS Surveyor
74
Page 75

С Вывод сообщений NMEA-0183
С.1.2 Широта и долгота
Широта представляется как ddmm.mmmm. Долгота всегда представляется как
dddmm.mmmm, где полушарие (северное, южное, восточное или западное) занимает
отдельное поле.
• dd или ddd представляют собой градусы
• mm.mmmm представляют собой минуты с десятыми долями
С.1.3 Полушарие
Полушарие описывается одним символом: N, S, Е или W - соответственно Север, Юг, Восток или
Запад.
С.1.4 Время
Значения времени выражены в системе UTC и представляются в виде hhmmss, где:
• hh - значение часов от 00 до 23
• mm - значение минут
• ss - значение секунд
С.2 Поддерживаемые сообщения
Поддерживаются следующие сообщения:
• GGA: Время, координаты и данные, связанные с определением местоположения.
• VTG: Истинный курс (actual track made good) и скорость относительно поверхности.
C.2.1 GGA: Время, координаты и данные, связанные с
определением местоположения
$GPGGA,151924,3723.454487, N,12202.269799, W, 2, 09, 0.9, -17.49, М, -25.67, М, 1, 0000*57
1. Время UTC момента определения местоположения
2. Широта
3. Полушарие широты (N или S)
4. Долгота
5. Полушарие долготы (Е или W)
6. Индикатор качества GPS:
О = местоопределение не действительно
4600LS Surveyor
75
Page 76

С Вывод сообщений NMEA-0183
1 = местоопределение с помощью GPS
2 = местоопределение в дифференциальном режиме (DGPS)
7. Число используемых ИСЗ, от 00 до 12
8. HDOP (Horizontal Delution of Precision - Фактор снижения точности определения
положения в плане)
9. Высота антенны относительно среднего уровня моря
10. Фиксированный текст показывает, что высота измеряется в метрах
11. Высота геоида
12. Фиксированный текст М показывает, что высоты геоида измеряется в метрах.
13. Возраст записи дифференциальных GPS данных, Тип 1. Ноль, когда режим DGPS не
использовался
14. ID (идентификатор) базовой станции 0000--1023
C.2.2 VTG: Истинный курс и скорость относительно поверхности
$GPVTG, 0, T,,, 0.00, N, 0.00, K*33
1. Истинный курс (Track made good)
2. Фиксированный текст 'Т показывает, что
истинный курс измерен относительно северного направления истинного
мередиана
3. Не используется
4. Не используется
5. Скорость относительно поверхности в узлах
6. Фиксированный текст N показывает, что скорость относительно поверхности измеряется в
узлах
7. Скорость относительно поверхности в километрах/ час
8. Фиксированный текст K показывает, что скорость относительно поверхности измеряется в
километрах/час
4600LS Surveyor
76
Page 77

D Выявление и устранение неисправностей
D Выявление и устранение неисправностей
В данном приложении содержится информация по выявлению и устранению
неисправностей в приемнике 4600LS Surveyor. Если при работе с приемником 4600LS
Surveyor пользователь сталкнулся с некоторой проблемой, следует обратиться к Таблице D1, в которой может содержаться описание признаков данной проблемы. Необходимо
установить возможную причину сбоя и попытаться осуществить предлагаемые действия для
устранения неисправности.
Таблица D-1 Выявление и устранение неисправностей в приемнике 4600LS Surveyor
Признак Возможная причина Возможное решение
Приемник не
включается.
Приемник не
накапливает данные.
Батарейки приемника
разряжены.
Разряжены батареи
внешнего источника
питания.
Неправильное
подсоединение или
дефект кабеля внешнего
источника питания.
Недостаточно памяти для
накопления данных в
текущей сессии.
(Быстрое мигание
желтого индикатора)
Приемник не может
отслеживать 4 или более
ИСЗ. (Быстрое мигание
красного индикатора)
Заменить батарейки(см. раздел
Замена батареек в Главе 3).
Заменить или перезарядить
батареи внешнего питания.
Проверить кабель внешнего
источника питания; убедиться,
что оба его конца подключены
должным образом. Проверить
все предохранители в данной
цепи.
Использовать программу
GPLoad для удаления из памяти
приемника файлов предыдущих
сессий.
Проверить расположение
пункта съемки на предмет
обнаружения поблизости
препятствий, деревьев, зданий,
вышек.
Приемник включен и
все три индикатора
длительное время
горят непрерывно.
4600LS Surveyor
77
Приемнику требуется
перезагрузка.
•Выключить приемник, после
чего снова включить его.
Page 78

Литература
Литература
Differential GPS Explained, Trimble P/N 23036 (1993)
Является дополнением к книге GPS, A Guide to the Next Utility и содержит описание
дифференциального режима использования GPS (DGPS).
GPLoad - Руководство пользователя, Trimble P/N 25750-00 (Редакция А,
Ноябрь 1994).
Руководство по программному обеспечению GPLoad, компьютерной программы для обмена
данными между компьютером и приемником 4600LS Surveyor или накопителем данных.
GPLoad можно приобрести и использовать как составной элемент GPSurvey или как
самостоятельный модуль.
GPS, A Guide to the Next Utility, Trimble P/N 18239 (1992)
Краткое популярное введение в систему GPS. Объясняется, что такое GPS, как она
работает, ее возможности и ограничения.
GPSurvey – Руководство пользователя, Trimble P/N 25749-00 (Редакция
А, Ноябрь 1994).
Руководство по программному обеспечению GPSurvey для постобработки результатов
съемки, работающему в среде Microsoft Windows.
GpTrans – Руководство пользователя, Trimble P/N 25752-00 (Ноябрь
1994).
Руководство по использованию программного обеспечения GPTrans – модуля GPSurvey,
предназначенного для преобразования координат.
Guide to GPS Positioning, David Wells (editor), Canadian GPS
Associates (1986).
Работа всесторонне знакомит пользователя с основами и областями применения GPS.
Несмотря на то, что приводимые в книге терминология и перспективы развития GPS
несколько устарели, она остается стандартным полевым руководством. Эта публикация
охватывает широкий спектр проблем: от общих понятий до узких технических характеристик.
NAVSTAR GPS Space Segment: Navigation User Interfaces, drawing
number ICD- GPS-200 (3 July 1991).
Официальная документация по форматам данных, используемых в спуниковых сигналах
системы GPS NAVSTAR.. Документ опубликован в двух вариантах: для общего пользования,
в который не вошла секретная информация о Р-коде; и для ограниценного пользования,
содержащий эту информацию. Версия для общего пользования распространяется Службой
Береговой Охраны США. Заказать документ в США можно письменно или по телефону:
Commanding Officer
USCG ONSCEN
7323 Telegraph Road
Alexandria, VA 22310
(703) 313-5900
4600LS Surveyor
78
Page 79

Литература
Proceedings of the Institute of Navigation, Washington DC
Серия из трех сборников аннотаций статей, опубликованных в Журнале Института
Навигации (Journal of the Institute of Navigation) за период с 1980 по 1986 годы.
Неотъемлемый источник информации для каждого системного разработчика.
Quick Plan / Plan - Руководство пользователя, Trimble P/N 25753-00 (Редакция
А, Ноябрь 1994).
Руководство по использованию Quick Plan и Plan -программ, позволяющих проводить
планирование полевых наблюдений в проектах съемки. Программа Plan является
составным элементом программного обеспечения GPSurvey и позволяет сохранять
информацию по планированию в базе данных проекта GPSurvey. Quick Plan является
самостоятельной программой; она может работать либо как модуль GPSurvey, либо как
отдельное приложение. Quick Plan не позволяет сохранять описания сессий; эта программа
позволяет лишь создать их и использовать в процессе одного сеанса работы с программой.
Survey Controller Operation Manual, Trimble P/N 24555-00 (Редакция A, June
1994).
Описывается использование микропрограммного обеспечения Survey Controller и Seismic
Controller для портативных накопителей данных. Эти приборы позволяют управлять работой
приемника, когда он переносится в рюкзаке и имеют буквенно-цифровую клавиатуру для
легкого ввода данных. Они традиционны для многих типов полевых работ и необходимы
для проведения некоторых из них.
Руководство по BBS Tumble, Trimble P/N 26184-00 (Редакция А,
Ноябрь 1994).
Описание двух систем электронной доски объявлений (BBS), для клиентов фирмы Trimble,
одна управляется Отделением Геодезии и Картографии, а вторая - Центром Технической
Помощи фирмы Trimble (ТАС). Объясняется, в каких случаях необходимо использовать
каждую из этих систем BBS, как осуществить подсоединение к этим системам и как с ними
работать.
TRIMMAP Survey Software General Reference Guide, Trimble P/N 22060
(Версия 5.50, March 1994).
Руководство по программному обеспечению TRIMMAP— DOS-приложения для создания
карт на основе имеющихся результатов координатных определений.
TRIMNET Plus Survey Network Software User's Guide, Trimble P/N
19043 (Редакция А2, November 1994).
Руководство по программному обеспечению уравнивания сетей TRIMNET Plus,
предоставляющей средства для предварительной обработки данных, объединения и
совместной обработки результатов измерений, выполненных с использованием GPS и
традиционных методов геодезических наблюдений, и для использования моделей геоида
при обработке геодезических сетей.
4600LS Surveyor
79
Page 80

Литература
WAVE - Руководство пользователя, Trimble P/N 25751-00 (Редакция A,
November 1994).
Руководство пользователя программы WAVE - модуля для обработки базисных линий
программного обеспечения GPSurvey. WAVE является аббревиатурой выражения Weighted
Ambiguity Vector Estimator.
4600LS Surveyor
80
Page 81

Словарь терминов
Словарь терминов
В настоящем разделе даны определения технических терминов и сокращений, которые
используются в документации фирмы Trimble. Многие из них даны в упрощенном виде, чтобы
исключить подробности, не относящиеся к приемнику 4600LS Surveyor, либо снизить объем общих
сведений технического характера, необходимых для их понимания. Данные определения
ориентированы на нужды пользователей приемника 4600LS Surveyor.
a priori errors априорные ошибки: Ошибки измерений,
оценка которых производится до уравнивания сети.
acquisition обнаружение: Процесс захвата С/А кода и Р-кода спутниковых
сигналов. После включения приемник начинает принимать сигналы от
всех доступных спутников, а также сигналы от остальных спутников
по мере их появления над горизонтом. После захвата сигнала со
спутника приемник продолжает отслеживать этот спутник до тех пор,
пока сигнал не прервется.
АН А/ч: Ампер/час(ы) - величина, характеризующая способность батареи
вырабатывать ток в течение некоторого промежутка времени. Батарея
емкостью 10 А/ч способна вырабатывать ток силой в 1 ампер на
протяжении 10 часов, в 2 ампера - на протяжении 5 часов, и т.д.
almacnac Альманах; Информация о Кеплеровых элементах орбиты спутников
NAVSTAR, поправках часов, параметрах задержки сигнала в
атмосфере и о состоянии работоспособности спутников, которая
передается каждым спутником. GPS приемники используют эту
информацию для захвата спутникового сигнала и для постобработки.
Anti-Spoofing (AS) Режим "Против Раскодирования": Режим, позволяющий
Министерству Обороны США передавать вместо Р-кода
зашифрованный "Y-код". Y-код предназначен для использования
только зарегистрированными пользователями (в первую очередь,
военными). Режим "Против Раскодирования" используется вместе с
Режимом Ограниченного Доступа (Selective Availability) с целью
лишения гражданских пользователей всей той точности, которую
обеспечивает система GPS NAVSTAR.
application приложение: Класс задач, для выполнения которых может
применяться GPS приемник. Примерами приложений являются
создание опорного обоснования (control surveying), топографическая
съемка (topographic surveying) и навигация (navigation).
autonomous
positioning автономное позиционирование: Режим работы, при котором GPS
приемник вычисляет свои координаты в реальном масштабе времени
только на основе данных, полученных со спутников, без использования
4600LS Surveyor
81
Page 82

Словарь терминов
данных с базовой станции. Автономное позиционирование является
наименее точной процедурой определения местоположения, которую
может выполнить GPS приемник. Координаты, полученные в этом
режиме, имеют точность в плане ±100 метров СКО при включенном
Режиме Ограниченного Доступа и ± 10-20 метров, если этот режим
отключен. Иногда используется термин абсолютное позиционирование
(absolute positioning).
base station или
reference station базовая станция: (1) Приемник вместе со своей антенной, штативом и
проч., который в ходе съемки или другой GPS процедуры производит
спутниковые наблюдения на пункте с известными координатами. (2)
Пункт, на котором работает такой приемник. Иногда применяется
также термин опорная станция (reference station).
baseline базисная линия: Трехмерный вектор между
двумя станциями, для которых одновременно производился сбор GPS
данных и их обработка по фазе несущей. Данный метод наблюдений
используется в геодезических приложениях и дает наиболее точные
результаты, какие можно получить с помощью GPS.
baseline surveying измерение базисных линий: Класс мероприятий, в ходе которых
наблюдения используются для создания сети векторов с высокими
показателями точности и внутренней сходимости. Процедуры
измерения базисных линий используются при работах, которые
принято относить к классу геодезических приложений.
broadcast ephemeris бортовые эфемериды: Набор данных, описывающих прогнозируемые
координаты GPS спутника в ближайшем будущем. Каждый GPS
спутник периодически передает свои собственные бортовые
эфемериды, которые загружаются на спутник Сегментом Управления
(Control Segment). См. также ephemeris (эфемериды), precise ephemeris
(точные эфемериды).
carrier beat phase фаза биений несущей: Разность между сигналом несущей,
сформированным внутренним генератором приемника, и сигналом
несущей, оступающим со спутника.
Coarse/Acquisition
code (С/А code) Грубый/Обнаруживаемый код: Псевдослучайный шумовой код
(pseudorandom noise code -PRN), которым модулируется спутниковый
GPS сигнал на частоте L1. Данный код позволяет приемнику провести
вычисление расстояния до спутника. См. также Р-код.
code phase
difference фазовая разность кодов: Фазовая разность между принятым С/А или
Р-кодом и аналогичным кодом, вырабатываемым внутри приемника.
Используется для определения дальности до спутника.
4600LS Surveyor
82
Page 83

Словарь терминов
continuous
kinematic surveying непрерывная кинематическая съемка: Тип кинематической съемки,
при котором фазовые наблюдения осуществляются подвижным
приемником в процессе перемещения. Метод непрерывной
кинематической съемки применяется при аэросъемке, топографической
съемке, а также в системах слежения за транспортом.
Control mark опорный пункт: Пункт на поверхности земли, чьи координаты
считаются известными и точными, либо они подлежат определению в
процессе съемки. Такой пункт служит в качестве опорного при других
съемках. В ряде процедур используются также термины control point
(опорный пункт) или control station (опорная станция).
Cycleslip срыв цикла: Потеря приемником синхронизации с сигналами со
спутника. При выполнении некоторых процедур съемки требуется
повторно начать наблюдения в том случае, если срыв цикла приводит к
временному уменьшению количества отслеживаемых спутников ниже
требуемого минимума.
Data logging сбор (накопление) данных: Процесс записи спутниковых данных в
файл, который хранится в памяти приемника или на диске компьютера.
См. также external data logging (внешнее накопление данных) и internal
data logging (внутреннее накопление данных).
Data logging
Parameters параметры сбора данных: Любая из нескольких групп параметров,
влияющих на порядок сбора данных приемником при выполнении
различных процедур. Параметры быстрого запуска (quick-start
parameters) используются для статических съемок с быстрым запуском;
параметры сессии хранятся в описании сессии для использования их в
процессе выполнения предварительно планируемых (preplanned)
статических съемок; параметры быстрой статики (FastStatic)
применяются при быстростатических съемках и т.д. Каждая группа
параметров сбора данных обычно включает в себя значение маски
возвышения (elevation mask), интервала измерений (sync time) и
минимального количества ИСЗ, необходимые для начала процесса
сбора данных.
Datum исходные геодезические даты (ИГД), исходная система координат:
Модель фигуры Земли, состоящая из эллипсоида и точки начала
отсчета. Местоположение выражается как широта и долгота
относительно конкретного пункта на поверхности. Эллипсоид и начало
отсчета обычно выбирают таким образом, чтобы добиться наиболее
точного приближения к поверхности картографирования. Смотрите
также local datum (местная исходная система координат) и WGS-84.
4600LS Surveyor
83
Page 84

Словарь терминов
DOP (Dilution of
Precision) Фактор снижения точности: Класс измерений величины
погрешности GPS измерений координат пункта, обусловленной
геометрией расположения спутников по отношению к GPS приемнику.
Имеется несколько факторы DOP для измерения различных
компонентов погрешности. См. также GDOP, HDOP, PDOP, TDOP и
VDOP.
DOY (Day of the
Year) День года: число от 1 до 365 (в високосном году от 1 до 366). Также
используется термин Юлианский день (Julian day).
Dual-frequency двухчастотный (приемник): Использование сигналов GPS спутников
на обеих несущих частотах L1 и L2. В приемнике 4600LS Surveyor
такая возможность отсутствует. См. также single-frequency
(одночастотный).
earth-centered earth-fixed Геоцентрическая неподвижная Декартова система координат,
используемая при определении координат по спутникам. Аббревиатура
ECEF (английская) и ГДСК (русская). Началом отсчета этой системы
является центр масс Земли. Ось .У проходит через О* северной
широты, 0' восточной долготы, с положительными значениями в
данном направлении. Ось У перпендикулярна оси Х и положительные
значения лежат в направлении 0' северной широты, 90' восточной
долготы. Исходная система координат WGS-84 отнесена к
геоцентрической неподвижной Декартовой системе координат.
ELEV (Elevation) Возвышение: Вертикальный угол между плоскостью горизонта и
наблюдаемым положением спутника.
Elevation Mask Маска Возвышения: Минимальное значение угла возвышения (в
градусах), при котором приемник будет сопровождать спутник.
ellipsoid эллипсоид: математическая фигура, образованная вращением эллипса
вокруг его малой оси. При выполнении геодезических работ эллипсоид
используется в качестве модели земной поверхности; малая ось
совмещена с осью вращения Земли. См. также reference, ellipsoid
(референц эллипсоид).
4600LS Surveyor
84
Page 85

Словарь терминов
ephemeris эфемериды: Набор данных, описывающих местоположение
космического объекта в функции времени. Форма единственного и
множественного числа совпадают. Каждый GPS спутник периодически
передает бортовые эфемериды (broadcast ephemeris), содержащие
информацию о предвычисленных на ближайшее будущее координатах
спутника, которая загружается на спутники Сегментом Управления
(Control Segment). Программы постобработки могут также
использовать точные эфемериды (precise ephemeris), в которых
содержатся точные координаты спутника на соответствующие моменты
в прошлом.
epoch эпоха: Интервал между измерениями, используемый GPS приемником;
данный интервал также имеет название цикл (cycle). Спутниковые
измерения, вычисления координат и большинство циклических
результатов производятся один раз за эпоху.
event mark метка события: Запись о свершении события, такого как закрытие
створки фотограмметрической камеры. Приемник может сохранить
метку события, содержащую информацию о времени этого события и
буквенно-цифровой комментарий, введенный с клавиатуры для
описания данного события. Регистрацию события можно осуществить
командой с клавиатуры или посредством ввода электрического сигнала
в один из портов приемника.
external data logging внешнее накопление данных: Процесс сбора данных наблюдений,
полученных GPS приемником, непосредственно на диск компьютера.
Данные по мере их формирования передаются из приемника в
компьютер через соответствующие последовательные порты.
FastStatic surveying быстростатическая съемка: Процедура геодезической съемки,
позволяющая получать точные результаты, удовлетворяющие
требованиям опорных геодезических сетей. Быстростатическая съемка
может быть не такой точной, как статическая съемка, но зато на ее
проведение требуется значительно меньше времени.
field notes полевые заметки: Алфавитно-цифровые записи, введенные в файл
накопителя данных во время процесса сбора данных, которые
относятся к сессии сбора данных в целом.
file файл: Набор связанных между собой данных, которые хранятся в
компьютерной системе или аналогичном приборе. Обычно
компьютеры хранят файлы на магнитных дисках. Приемник,
оснащенный опцией Память, может накапливать данные в файлы,
которые хранятся во внутренней памяти приемника (battery-powered
random access memory - RAM), даже когда он выключен.
4600LS Surveyor
85
Page 86

Словарь терминов
GDOP
(Geometric dilution
of precision) Геометрический фактор снижения точности определения
местоположения: Общая мера величины погрешностей DOP при
определении координат посредством GPS. PDOP (Фактор снижения
точности пространственного местоопределения) и TDOP (Фактор
снижения точности определения времени) являются составными
элементами GDOP. См. также DOP.
geodetic position геодезические координаты: Координаты пункта, отнесенные к
поверхности заданного эллипсоида.
geoid геоид: Поверхность, образованная точками с постоянным значением
силы тяжести, наиболее близко совпадающая со средним уровнем моря
на поверхности Земли.
G1S data acquisition сбор данных для ГИС: Способ использования GPS, при котором
приемник собирает информацию о координатах для базы данных
географической информационной системы (ГИС). Методика сбора
данных для ГИС аналогична методике координатных определений за
исключением того, что приемник в дополнение к информации о
местоположении сохраняет информацию об атрибутах пунктов,
представляющих интерес (такую как опознавательные номера или
названия улиц).
GMT
Greenwich
Mean Time) Гринвичское Среднее Время (ГСВ).
GPS
(Global Positioning
System) Глобальная Система Позиционирования;
Система для навигации/позиционирования, состоящая из спутников
NAVSTAR, наземных
станций слежения и GPS приемников, таких как 4600LS Surveyor.
GPS time системное время GPS: Эталонное время, используемое в системе
NAVSTAR. Время GPS основано на системе UTC (Всемирное
Координированное Время), но изменения в периоде вращения Земли
приводят к различию в значениях этих двух систем отсчета времени.
На 15 июля 1993 года время GPS опережало UTC на 9 секунд.
GRS-80
(Geodetic
Reference System
1980) Исходная Геодезическая Система 1980 года. Сжатый у полюсов
эллипсоид или эллипсоид вращения, лежащий в основе СевероАмериканских исходных геодезических дат 1983 года (NAD-83).
4600LS Surveyor
86
Page 87

Словарь терминов
Этот эллипсоид имеет такие же большую и малую полуоси, что и
WGS-84, который является исходным эллипсоидом для GPS, и
слегка отличается только по величине сжатия (1/f).
HDOP (Horizontal
dilution of precision) Фактор снижения точности определения положения в плане: Мера
величины погрешностей DOP по широте и долготе. См. также DOP.
HI
(Height of Instrument) высота инструмента: Высота GPS антенны над интересующим
пунктом. Является синонимом термина "высота антенны" (antenna
height). См. также corrected antenna height (скорректированная высота
антенны) и uncorrected antenna height (нескорректированная высота
антенны).
HVEL (Horizontal velocity) Горизонтальная скорость.
internal data logging внутреннее накопление данных: Процесс записи данных во
внутреннюю память приемника. Собранные данные должны быть
выгружены на жесткий диск компьютера для постобработки.
Issue of data ephemeris
(IODE) выпуск эфемеридных данных: значение, идентифицирующее версию
эфемерид.
Julian date дата по Юлианскому календарю: дата, выраженная годом и
порядковым номером дня в пределах этого года. Например, 1 января
1994 выражается Юлианской датой "94001"; 1 февраля 1994 —
"94032". Используются также термины Юлианский день (Julian day)
или день года (DOY).
kinematic surveying кинематическая съемка: Процедура GPS съемки, используемая,
главным образом, при проведении топографических съемок.
Кинематическая съемка является эффективным средством для
выполнения топографической съемки, однако, данный метод
чувствителен к высокому значению фактора PDOP и к потере
сопровождения спутников. См. также continuous kinematic surveying
(непрерывная кинематическая съемка) и stop-and-go kinematic surveying
(кинематическая съемка в режиме остановка-и-движение)
L1 Основной сигнал L-диапазона, излучаемый GPS спутниками с целью
передачи данных. Сигнал передается на частоте 1575.42 Мгц и
модулируется С/А кодом, Р-кодом, а также навигационным
сообщением (Navigation Message), скорость передачи которого 50 бит в
секунду.
4600LS Surveyor
87
Page 88

Словарь терминов
L2 Дополнительный сигнал L-диапазона, излучаемый GPS спутниками с
целью передачи данных. Сигнал передается на частоте 1227.6 Мгц и
модулируется Р-кодом и навигационным сообщением (Navigation
Message), скорость передачи которого 50 бит в секунду.
latitude (LAT) широта (ШИР): северная/южная компонента местоположения пункта
на поверхности Земли, выражаемая как угол между плоскостью
экватора и линией, идущей от центра Земли до интересующего пункта.
latitude/longitude/
height (LLH) широта/долгота/высота (ШДВ): метод описания местоположения
пункта как его широта и долгота в исходной системе координат. См.
также northing/easting/height (абсцисса/ордината/высота).
leapfrog kinematic
surveying кинематическая съемка в режиме "чехарда": Тип кинематической
съемки, в ходе выполнения которой базовая станция и подвижный
приемник меняются ролями. Данный метод можно использовать для
проведения съемки на более обширной территории по сравнению с той,
что может быть охвачена лучеообразной съемкой, при которой
единственный стационарный приемник на протяжении всей съемки
выполняет функцию базовой станции.
LED Светодиодный индикатор.
local datum местная исходная система координат:
Исходные геодезические даты, заданные для обеспечения точности и
удобства проведения геодезических работ на конкретной территории
путем выбора референц эллипсоида и точки начала отсчета. В
документации по приемнику 4600LS Surveyor любые системы
координат, отличные от WGS-84, рассматриваются как местные
исходные системы координат.
local zone местная зона: Проекция местной исходной системы координат на
плоскость, в которой координаты выражены как абсцисса (смещение к
северу) и ордината (смещение к востоку) относительно заданного на
плоскости начала отсчета. Также этим термином называется
территория, на которую распространяется такая проекция.
lock синхронизация: Состояние, при котором GPS приемник принимает и
распознает сигналы со спутника. В случае, если сигналы прерываются,
то имеет место потеря синхронизации (loss of lock), что является
распространенной причиной сбоя в процессе выполнения
кинематической съемки или съемки в реальном масштабе времени.
4600LS Surveyor
88
Page 89

Словарь терминов
longitude (LON) долгота (ДОЛ): Восточная/западная компонента местоположения
пункта на поверхности Земли. Долгота измеряется в угловых единицах
между плоскостью, проходящей через ось вращения Земли и нулевой
меридиан, и плоскостью, проходящей через ось вращения Земли и
интересующий пункт.
mark пункт, марка: Место, где находится антенна GPS приемника во время
наблюдения. До проведения съемки пункт, как правило, отмечают с
помощью колышка, краски или каким-либо другим способом.
Существуют два типа пунктов: опорные пункты (reference marks),
координаты которых известны, и пункты съемки (survey marks),
координаты которых должны быть определены. Некоторые экраны
приемников называют марку либо пунктом, либо станцией.
mark ID ID пункта, марки: Восьмизначный код, который используется для
идентификации пункта (марки) при быстростатической съемке.
Данный
термин имеет то же значение, что и point ID (ID пункта) в
кинематической съемке.
mean sea level (MSL) средний уровень моря (СУМ): Модель земной поверхности,
отражающая уровень моря, осредненный за некий период времени в
каждой точке, или высота поверхности этой модели в точке с
определенной широтой и долготой.
multipath error ошибка многолучевого распространения: Ошибка в полученных
GPS приемником координатах пункта, вызванная интерференцией,
возникающей в результате многолучевого распространения сигналов.
multipath interference интерференция из-за многолучевого распространения:
Интерференция, возникающая при одновременном обнаружении
приемником сигналов, полученных непосредственно с передатчика
спутника, и сигналов, отраженных от других объектов, например, от
грунта. Интерференция из-за многолучевого распространения является
типичной причиной появления "вторичного изображения" на
телевизионном экране. См. также multipath error (ошибка
многолучевого распространения).
NAD-83 Система координат, часто используемая в
качестве исходной для представления точных плановых координат в
Северной Америке и близлежащих областях. Сокращенно от "СевероАмериканская система исходных геодезических дат 1983 года" (North
American Datum, 1983). На территории Северной Америки NAD-83 в
основном эквивалентна WGS-84, чего нельзя сказать о ее
предшественнице, системе NAD-27.
4600LS Surveyor
89
Page 90

Словарь терминов
navigation навигация: Приложение, в котором приемник предоставляет
информацию о местонахождении транспортного средства и его
траектории, помогая тем самым оператору направлять его к пункту
назначения. Навигация может осуществляться на суше, на море или в
воздухе.
NAVSTAR Название, присвоенное GPS спутникам.
NAVSTAR - это сокращение, составленное из первых слогов и букв
следующего выражения: NAVigation Satellite Timing And Ranging
(система определения дальности и времени с помощью навигационных
спутников).
NGS
(National Geodetic
Survey) Национальная Геодезическая Служба США. Управление по
геодезической съемке при правительстве США.
NMEA-0183 Стандарт, установленный Национальной Ассоциацией Морской
Электроники (National Marine Electronics Association -NMEA), который
определяет электрические характеристики сигналов и протокол
передачи данных морских навигационных приборов.
northing/easting/
height (NEH) абсцисса/ордината/высота: Метод описания местоположения пункта
в виде его смешения к северу (абсцисса) и к востоку (ордината) от
точки начала отсчета в местной зоне (local zone). Высота имеет то же
значение, что и в исходных геодезических датах, связанных с местной
зоной. См. также latitude/longitude/ height (широта/долгота/высота).
observation наблюдение: Набор измерений, выполненных на пункте или в
процессе выполнения кинематической съемки при перемещении между
пунктами. GPS приемники выполняют наблюдения путем
отслеживания и анализа сигналов со спутников.
Real-Time Kinematic (RTK) кинематическая съемка в реальном масштабе времени: Процедура
съемки или позиционирования, которая позволяет получить
координаты в реальном масштабе времени с очень высокой точностью.
Данный вид съемки аналогичен процедуре проведения кинематической
съемки с той лишь разницей f что при нем используется радиосвязь
между базовой станцией и подвижным(и) приемником(ами), что
позволяет последним производить вычисление координат в реальном
масштабе времени. Подобно кинематической съемке, данный метод
чувствителен к высоким значениям фактора PDOP и потере
синхронизации со спутником.
4600LS Surveyor
90
Page 91

Словарь терминов
receiver приемник: В настоящем руководстве под словом приемник
понимается прибор 4600LS Surveyor. Если существует возможность
неправильного понимания термина, то указываются другие типы
приемников, например, "радиоприемник".
reference ellipsoid референц эллипсоид: В геодезии, любой эллипсоид, малой полуосью
которого является ось вращения Земли, а большая полуось лежит в
плоскости экватора. В основе многих общеземных систем координат в
качестве модели фигуры Земли лежит референц эллипсоид. См. также
WGS-84.
reference mark or point опорный пункт: Пункт, координаты которого известны с точностью,
остаточной для выполнения конкретного задания. Это может быть
также любой знак (колышек, нанесенная мелом метка), используемый
для обозначения местоположения пункта. Для выполнения многих
процедур GPS съемки необходимо ' использование одного или
нескольких приемников, установленных на опорных пунктах. В ряде
случае используется также термин reference point.
reference position исходные координаты: Известные координаты пункта, на котором
установлена GPS антенна приемника. Исходные координаты могут
быть введены вручную или получены на основании координат,
вычисленных приемником.
RF Радиочастота.
rover подвижный (мобильный) приемник: Приемник, осуществляющий
сбор спутниковых данных на пунктах съемки, координаты которых
подлежат определению. Термин подвижный приемник обычно
относится ко всему комплексу оборудования - антенне, вешке или
другому креплению антенны, кабелям, иному оборудованию, а также к
собственно приемнику. В некоторых процедурах также используются
термины survey receiver (приемник съемки) или differential station
(дифференциальная станция).
RTCM SC-104 Стандартный формат представления дифференциальных GPS
коррекций; используется для передачи коррекций с базовой станции на
подвижный приемник. Неформально называется RTCM-104, что
является сокращением от Radio Technical Commission for Maritime
Services, Special Committee 104 (Морская Радиотехническая Комиссия,
Особый Комитет 104). Так называется группа, которой определен
данный стандарт.
satellite data спутниковые данные: Данные, передаваемые GPS спутником. Этот
термин используется также для обозначения данных, собранных в файл
4600LS Surveyor
91
Page 92

Словарь терминов
GPS приемником; сюда относятся данные, вычисленные или
выработанные приемником, а также данные, полученные со спутников.
satellite geometry спутниковая геометрия: Взаимное расположение доступных GPS
спутников относительно GPS приемника на конкретный момент
времени. Набор координат спутников, приводящих к высокому (или
низкому) значению фактора PDOP, часто называется "слабой (или
хорошей) спутниковой геометрией".
schedule plot график видимости: Распечатка, отображающая на графике видимость
всех известных спутников в функции времени на любую дату.
Selective Availability (SA) Режим Ограниченного Доступа: Программа Министерства Обороны
США, направленная на ограничение точности автономного
позиционирования, выполняемого непривилегированными
(гражданскими) пользователями. Режим ограниченного доступа
заключается во внесении контролируемых значений погрешностей в
С/А код сигналов GPS спутников. В моменты действия Режима
ограниченного доступа ошибка определения плановых координат
отдельного пункта может составить 100 м СКО в плане. См. также Anti-
Spoofmg.
session сессия: Период сбора данных, характеризующийся временем начала
наблюдений, периодом наблюдений, маской возвышения и типом
данных, подлежащих накоплению (координаты и/или спутниковые
данные).
signal to noise ratio отношение сигнал-шум: Мера интенсивности (SNR) спутникового
сигнала (signal strength), выраженная в безразмерных единицах.
single-frequency одночастотные (приемники): Использование фазовых сигналов GPS
спутников только на несущей частоте L1. Данный термин
используется для описания приемников, антенн и процедур съемки.
См. также dual-frequency (двухчастотные).
Standard
positioning service
(SPS) режим стандартного позиционирования: Уровень точности
местоопределений, который обеспечивается системой GPS для
гражданских потребителей при использовании одночастотного С/А
кода. Точность режима стандартного позиционирования лимитируется
Режимом ограниченного доступа (Selective Availability). См. также
precise positioning service (режим точного позиционирования).
static surveying статическая съемка: Процедура съемки, в результате которой
достигается высокая точность определения базисных линий между
станциями, однако при этом требуются продолжительные периоды
измерений, обычно около часа на каждом пункте. Благодаря высокой
4600LS Surveyor
92
Page 93

Словарь терминов
точности, статическая съемка особенно хорошо подходит для развития
опорных геодезических сетей.
Station станция: (1) Приемник, используемый для выполнения процедур GPS
съемки, в комплексе с антенной, штативом или вешкой и т. д. Обычно
используется в сочетаниях типа базовая станция (base station). (2)
Пункт, на котором установлен приемник. (3) Любое из 30
местоположений, координаты которого могут быть сохранены в
памяти приемника и использованы для указания местонахождения
приемника в процессе выполнения статической съемки или съемки в
реальном масштабе времени. (4) Синоним термина mark (пункт) в
некоторых процедурах.
stop-and-go
kinematic surveying кинематическая съемка в режиме "остановка-и-движение":
Разнообразные методики проведения кинематической съемки, при
которых подвижный приемник производит на каждом пункте съемки
кратковременные наблюдения продолжительностью около двух минут.
См. также continuous kinematic surveying (непрерывная кинематическая
съемка).
survey mark or point марка или пункт съемки: Пункт, координаты которого должны быть
определены в ходе съемки. В некоторых процедурах также
используется термин survey point.
SV ИСЗ: космический корабль; в данном случае, GPS спутник.
sync time интервал измерений: Параметр приемника, определяющий
продолжительность цикла.
TDC1
(Trimble Data Collector) Накопитель данных фирмы Trimble TDC1: Портативный прибор,
созданный для управления подвижным GPS приемником; также
используется для управления данными. Он необходим для проведения
съемки в реальном масштабе времени и рекомендуется для проведения
кинематической съемки. С приемником 4600LS Surveyor может
использоваться накопитель данных Survey Controller фирмы Trimble.
TDOP
(Time dilution of
precision) Фактор снижения точности определения времени: Мера величины
ошибок определения координат пункта из-за смещения часов
приемника пользователя относительно системного времени GPS. См.
также ВОР.
Timebase генератор шкалы времени: Встроенный в GPS приемник генератор
шкалы времени, на основе которой производятся измерения. Во всех
приемниках 4600LS Surveyor в качестве генераторов шкалы времени
используются кварцевые генераторы. Приемник, имеющий
возможность входа внешней частоты (External Frequency Input Option),
может также принимать сигналы от высокоточного генератора шкалы
времени, каковым, например, являются атомные часы
4600LS Surveyor
93
Page 94

Словарь терминов
topographic surveying топографическая съемка: Вид работ, при которых определяются
относительные координаты пунктов в интересующем регионе в целях
осуществления картографирования и пространственного
моделирования. См. также control surveying (создание опорной
геодезической сети).
TOW (Time of week) Время недели, отсчитываемое в секундах от полуночи воскресенья
(00:00) в системе UTC.
Tracking слежение: Процесс приема и распознавания сигнала со спутника.
Например, приемник может иметь характеристику "отслеживает шесть
спутников". Приемник не обязательно использует сигналы от всех
спутников, которые он отслеживает; например, сигналы от спутника,
расположенного ниже значения маски угла возвышения, могут
отслеживаться, но не использоваться.
tribrach трегер: Прибор для центрирования и нивелирования инструмента. Часто
используется для установки на штативе GPS антенны или других
геодезических инструментов.
uncorrected antenna
height нескорректированная высота антенны: Высота антенны
относительно земной поверхности, измеренная в соответствии с
конкретной процедурой в зависимости от типа антенны. В
большинстве случаев измерения производятся по диагонали от марки
до соответствующей точки на отражателе антенны.
Universal Time
Coordinated (UTC) Всемирное Координированное Время: Стандарт времени, в основе
которого лежит местное среднее солнечное время на Гринвичском
меридиане. Данный стандарт поддерживается Военно-Морской
Обсерваторией США и равен Гринвичскому среднему времени (GMT).
См. также GPS time (системное время GPS).
User Range
Accuracy (URA) точность измерения расстояния от спутника до пользователя:
Величина ошибки измерения дальности до конкретного спутника,
которая может быть вызвана проблемами с данным спутником и
действием Режима ограниченного доступа (Selective Availability).
Значение URA, равное 32 метрам, указывает на то, что Режим
ограниченного доступа включен. Величина URA задается Сегментом
Управления (Control Segment) и содержится в навигационном
сообщении со спутника.
VDOP
(Vertical dilution of
precision) Фактор снижения точности высотных определений: Мера
величины ошибок определения высотной компоненты координат
пункта. См. также DO Р.
4600LS Surveyor
94
Page 95

Словарь терминов
WEL (Vertical velocity) Вертикальная скорость.
WGS-84 Всемирная Геодезическая Система (1984): Текущая стандартная
исходная система координат для глобального позиционирования и
геодезической съемки. В основе исходной системы координат WGS-84
лежит эллипсоид GRS-80. Любые системы координат, отличные от
WGS-84, рассматриваются приемником 4600LS Surveyor, как местные
исходные системы координат (local datum).
Y-code Зашифрованная форма информации, содержащейся в Р-коде, которую
в периоды действия режима "Против Раскодирования" (Anti- Spoofing)
спутники передают вместо Р-кода.
4600LS Surveyor
95
 Loading...
Loading...