


TR - EMO - BA - DGB - 0019 - 08 / 06/06/2019
Benutzerhandbuch
Schnittstelle /
User Manual
Interface
_
Zusätzliche Sicherheitshinweise _Additional safety instructions
_PROFINET-Kommunikation _PROFINET communication
_Konfiguration / Parametrierung _Configuration / Parameterization
_Diagnose _Diagnosis
_Erstinbetriebnahme _Initial commissioning
Seite 2 - 126
Page 127 - 252
D
GB
MP-Series
MD-300
Dezentrale Stellantriebe /
Decentralized positioning drives
MA-Series
Inhaltsverzeichnis
Urheberrechtsschutz
Dieses Handbuch, einschließlich den darin enthaltenen Abbildungen, ist
urheberrechtlich geschützt. Drittanwendungen dieses Handbuchs, welche von den
urheberrechtlichen Bestimmungen abweichen, sind verboten. Die Reproduktion,
Übersetzung sowie die elektronische und fotografische Archivierung und
Veränderung bedarf der schriftlichen Genehmigung durch den Hersteller.
Zuwiderhandlungen verpflichten zu Schadenersatz.
Änderungsvorbehalt
Jegliche Änderungen, die dem technischen Fortschritt dienen, vorbehalten.
Dokumenteninformation
Ausgabe-/Rev.-Datum: 06/06/2019
Dokument-/Rev.-Nr.: TR - EMO - BA - DGB - 0019 - 08
Dateiname: TR-EMO-BA-DGB-0019-08.doc
Verfasser: MÜJ
Schreibweisen
Kursive oder fette Schreibweise steht für den Titel eines Dokuments oder wird zur
Hervorhebung benutzt.
Courier-Schrift zeigt Text an, der auf dem Display bzw. Bildschirm sichtbar ist und
Menüauswahlen von Software.
< > weist auf Tasten der Tastatur Ihres Computers hin
(wie etwa <RETURN>).
Marken
PROFINET IO und das PROFINET-Logo sind eingetragene Warenzeichen der
PROFIBUS Nutzerorganisation e.V. (PNO)
SIMATIC S7 und STEP 7 sind eingetragene Warenzeichen der SIEMENS AG
CoDeSys ist ein eingetragenes Warenzeichen der 3S – Smart Software Solutions GmbH
encoTRive ist ein eingetragenes Warenzeichen der TR-Electronic GmbH
TR-Electronic GmbH
D-78647 Trossingen
Eglishalde 6
Tel.: (0049) 07425/228-0
Fax: (0049) 07425/228-33
E-mail: info@tr-electronic.de
www.tr-electronic.de
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 2 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Inhaltsverzeichnis
Inhaltsverzeichnis ............................................................................................................................ 3
Änderungs-Index .............................................................................................................................. 10
1 Allgemeines ................................................................................................................................... 11
1.1 Zielgruppe ........................................................................................................................ 11
1.2 Geltungsbereich .............................................................................................................. 11
1.3 Referenzen ...................................................................................................................... 12
1.4 Verwendete Abkürzungen / Begriffe ................................................................................ 13
2 Zusätzliche Sicherheitshinweise ................................................................................................. 15
2.1 Symbol- und Hinweis-Definitionen .................................................................................. 15
2.2 Organisatorische Maßnahmen ........................................................................................ 15
3 PROFINET Allgemeine Informationen ......................................................................................... 16
3.1 PROFINET IO .................................................................................................................. 17
3.2 Real-Time Kommunikation .............................................................................................. 18
3.3 Protokollaufbau ................................................................................................................ 19
3.4 PROFINET IO – Dienste ................................................................................................. 20
3.5 PROFINET IO – Protokolle .............................................................................................. 20
3.6 PROFINET Systemhochlauf ............................................................................................ 21
3.7 PROFINET – Zertifikat, weitere Informationen ................................................................ 21
4 PROFIdrive Antriebsprofil ............................................................................................................ 22
4.1 Das Objektverzeichnis ..................................................................................................... 22
4.2 PROFIdrive Objektverzeichnis ........................................................................................ 22
4.3 Zustandsmaschine, Status- und Steuerwort ................................................................... 23
5 PROFINET Kommunikation mit encoTRive ................................................................................ 24
5.1 Kommunikation von Daten über PROFINET-IO .............................................................. 24
5.1.1 Kommunikationsbeziehung für den zyklischen Datenaustausch .................... 25
5.1.1.1 Zyklische Übertragung von Prozessdaten ....................................... 25
5.1.1.2 Zyklische Übertragung des PKW-Kanals ........................................ 25
5.1.2 Kommunikationsbeziehung für den azyklischen Datenaustausch .................. 26
5.1.3 Kommunikationsbeziehung für Alarme ............................................................ 26
5.2 Konfiguration der Prozessdaten ...................................................................................... 27
5.3 Parameterzugriff über PKW-Kanal .................................................................................. 30
5.3.1 Beispiele für Parameterzugriff über PKW-Kanal ............................................. 32
5.3.1.1 Leseauftrag P947[0]......................................................................... 32
5.3.1.2 Schreibauftrag P100 mit Wert 1000000 .......................................... 32
5.4 Parameterzugriff über azyklischen Datenaustausch (Record-Data) ............................... 33
5.4.1 Beispiele für Parameterzugriff, azyklischer Datenaustausch .......................... 35
5.4.1.1 Schreibauftrag: P930 mit Wert 2 ...................................................... 35
5.4.1.2 Schreibauftrag: P915 mit mehreren Werten beschreiben ............... 36
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 3 of 252

Inhaltsverzeichnis
6 Antriebsspezifische Funktionen .................................................................................................. 40
6.1 Allgemeine Zustandsmaschine ....................................................................................... 40
6.1.1 Steuerwort und Zustandswort .......................................................................... 42
6.1.2 Betriebsartanwahl ............................................................................................ 44
6.2 Betriebsart Positionieren ................................................................................................. 44
6.2.1 Zustandsmaschine Betriebsart "Positionieren" ............................................... 44
6.2.2 Referenzieren .................................................................................................. 47
6.2.3 Positionierungen durchführen .......................................................................... 47
6.2.4 Positionieren über Fahrsatztabelle .................................................................. 48
6.2.5 Stillstandüberwachung .................................................................................... 48
6.2.5.1 Funktion ........................................................................................... 48
6.3 Betriebsart Geschwindigkeitsregelung ............................................................................ 49
6.3.1 Zustandsmaschine Betriebsart "Geschwindigkeitsregelung" .......................... 49
6.4 Umrechnung in physikalische Einheiten.......................................................................... 53
6.4.1 Umrechnung von Positionseinheiten ............................................................... 53
6.4.2 Umrechnungen von Geschwindigkeits- und Beschleunigungseinheiten ........ 55
6.4.3 Standardsignale nach PROFIdrive .................................................................. 56
6.5 Verfahrbereich und Referenzpunktkoordinate ................................................................ 57
6.5.1 Definition des tatsächlichen Verfahrbereichs .................................................. 58
6.5.2 Definition der Referenzpunktkoordinate .......................................................... 59
6.5.2.1 Tatsächlicher Verfahrbereich Z = Max. Verfahrbereich X ............... 59
6.5.2.2 Tatsächlicher Verfahrbereich < Maximaler Verfahrbereich/2 .......... 59
6.5.2.3 Tatsächlicher Verfahrbereich > Maximaler Verfahrbereich/2 .......... 60
6.6 Rundachse mit Modulokorrektur ..................................................................................... 61
6.6.1 Beschreibung ................................................................................................... 61
6.6.2 Parametrierung der Rundachse ...................................................................... 62
6.6.3 Referenzieren .................................................................................................. 63
6.6.4 Betriebsarten bei parametrierter Rundachse .................................................. 63
6.6.4.1 Positioniermode ............................................................................... 63
6.6.4.2 Geschwindigkeitsmode .................................................................... 63
6.6.4.3 Beispiel fliegender Betriebsartwechsel ............................................ 64
6.6.4.4 Besondere Hinweise ........................................................................ 64
7 Störungen und Warnungen .......................................................................................................... 65
7.1 Störungen ........................................................................................................................ 65
7.2 Warnungen ...................................................................................................................... 67
8 Das Objektverzeichnis .................................................................................................................. 68
8.1 Parameterarten ................................................................................................................ 68
8.2 Datentypen ...................................................................................................................... 68
8.3 Parameterbeschreibung .................................................................................................. 70
8.4 Speicherung des OV im EEPROM / Werksvoreinstellungen .......................................... 71
8.5 Liste der encoTRive-Parameter ...................................................................................... 72
8.5.1 Herstellerspezifische Parameter ...................................................................... 73
8.5.1.1 PNU 001, Getriebefaktor ................................................................. 73
8.5.1.2 PNU 002, Steigung .......................................................................... 73
8.5.1.3 PNU 003, Referenzpunkt-Koordinate .............................................. 73
8.5.1.4 PNU 004, Invertierung ..................................................................... 73
8.5.1.5 PNU 006, Verfahrbereich ................................................................. 74
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 4 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

8.5.1.6 PNU 100, Lageistwert ...................................................................... 74
8.5.1.7 PNU 101, Stromistwert .................................................................... 74
8.5.1.8 PNU 102, Temperatur ...................................................................... 74
8.5.1.9 PNU 103, NIST_A ............................................................................ 74
8.5.1.10 PNU 104, Spg.-Leistung ................................................................ 74
8.5.1.11 PNU 200, Zielposition .................................................................... 75
8.5.1.12 PNU 201, Geschwindigkeit ............................................................ 75
8.5.1.13 PNU 202, Beschleunigung ............................................................. 75
8.5.1.14 PNU 203, Verzögerung .................................................................. 75
8.5.1.15 PNU 204, JOG Geschwindigkeit ................................................... 75
8.5.1.16 PNU 205, JOG Beschleunigung .................................................... 75
8.5.1.17 PNU 206, JOG Verzögerung ......................................................... 76
8.5.1.18 PNU 300, Software-Endschalter min. ............................................ 76
8.5.1.19 PNU 301, Software-Endschalter max. ........................................... 76
8.5.1.20 PNU 302, Strom max. .................................................................... 76
8.5.1.21 PNU 304, Zielbereich ..................................................................... 77
8.5.1.22 PNU 305, Schleppabstand ............................................................ 77
8.5.1.23 PNU 306, Temperatur max. ........................................................... 77
8.5.1.24 PNU 307, Überstrom ..................................................................... 77
8.5.1.25 PNU 308, Temperatur Warnung .................................................... 78
8.5.1.26 PNU 309, Stillstandsbereich .......................................................... 78
8.5.1.27 PNU 310, Überwachungszeit......................................................... 78
8.5.1.28 PNU 400, STW2 ............................................................................ 78
8.5.1.29 PNU 401, ZSW2 ............................................................................ 78
8.5.1.30 PNU 402, Satzanwahl .................................................................... 78
8.5.1.31 PNU 403, Aktueller Satz ................................................................ 79
8.5.1.32 PNU 500, Passwort ....................................................................... 79
8.5.1.33 PNU 501, KV_Proportional ............................................................ 79
8.5.1.34 PNU 502, KV_Differential .............................................................. 79
8.5.1.35 PNU 503, KV_Integral ................................................................... 80
8.5.1.36 PNU 505, Geberauflösung ............................................................. 80
8.5.1.37 PNU 508, Haltebremse .................................................................. 80
8.5.1.38 PNU 514, Max_Drehzahl ............................................................... 80
8.5.1.39 PNU 515, Max_Beschleunigung .................................................... 81
8.5.1.40 PNU 520, Betriebsstunden ............................................................ 81
8.5.1.41 PNU 802, Parameter initialisiert ..................................................... 81
8.5.1.42 PNU 803, Digital_Input; MD-300 ................................................... 81
8.5.1.43 PNU 804, Digital_Output; MD-300................................................. 81
8.5.1.44 PNU 805, Referenzpunkt gesetzt .................................................. 81
8.5.1.45 PNU 807, Dig In Funktion; MD-300 ............................................... 82
8.5.1.46 PNU 808, Dig Out Funktion; MD-300 ............................................ 82
8.5.1.47 PNU 809, Entprelldauer E; MD-300 .............................................. 82
8.5.2 Profilspezifische Parameter ............................................................................. 83
8.5.2.1 PNU 915, PZD Konfiguration Sollwerte ........................................... 83
8.5.2.2 PNU 916, PZD Konfiguration Istwerte ............................................. 83
8.5.2.3 PNU 922, Telegramm Auswahl ....................................................... 83
8.5.2.4 PNU 923, Standardsignale .............................................................. 83
8.5.2.5 PNU 927, Bedienhoheit ................................................................... 84
8.5.2.6 PNU 928, PZD Führungshoheit ....................................................... 84
8.5.2.7 PNU 930, Betriebsart ....................................................................... 84
8.5.2.8 PNU 947, Fehler/Störungen ............................................................ 84
8.5.2.9 PNU 953, Warnung .......................................................................... 84
8.5.2.10 PNU 964, Geräteidentifikation ....................................................... 85
8.5.2.11 PNU 965, Profilnummer ................................................................. 85
8.5.2.12 PNU 967, STW .............................................................................. 85
8.5.2.13 PNU 968, ZSW .............................................................................. 85
8.5.2.14 PNU 970, Werksvoreinstellung laden ............................................ 85
8.5.2.15 PNU 971, Im Flash speichern ........................................................ 86
8.5.2.16 PNU 980, Liste aller Parameter ..................................................... 86
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 5 of 252

Inhaltsverzeichnis
9 Funktion Digital- Eingänge / -Ausgänge; MD-300 Baureihe ..................................................... 87
9.1 Grundfunktionen .............................................................................................................. 87
9.1.1 Eingänge .......................................................................................................... 87
9.1.2 Ausgänge ......................................................................................................... 87
9.2 Funktionszuordnung ........................................................................................................ 88
9.2.1 Eingänge .......................................................................................................... 88
9.2.1.1 Realisierung der Hardware-Endschalter-Funktion .......................... 88
9.2.2 Ausgänge ......................................................................................................... 89
10 Installationshinweise .................................................................................................................. 90
11 Inbetriebnahme ............................................................................................................................ 91
11.1 Gerätebeschreibungsdatei (XML) ................................................................................. 91
11.2 Geräteidentifikation ........................................................................................................ 91
11.3 Datenaustausch bei PROFINET IO ............................................................................... 92
11.4 Adressvergabe .............................................................................................................. 93
11.4.1 MAC-Adresse ................................................................................................ 94
11.4.2 IP-Adresse ..................................................................................................... 94
11.4.3 Subnetzmaske ............................................................................................... 94
11.4.4 Zusammenhang IP-Adresse und Default-Subnetzmaske ............................. 95
11.4.5 Netzübergang / Router .................................................................................. 96
12 Projektierungsbeispiel mit SIMATIC® Manager ...................................................................... 97
12.1 GSDML-Datei Installation .............................................................................................. 97
12.2 Vergabe des PROFINET-Gerätenamens ...................................................................... 98
12.3 encoTRive in das Netzwerk mit aufnehmen .................................................................. 100
12.4 Telegrammauswahl ....................................................................................................... 101
12.5 Erstinbetriebnahme, manuelles Ansteuern mithilfe der Variablentabelle ................................. 101
12.6 Parametrierung über PROFINET .................................................................................. 102
13 Projektierungsbeispiel mit TIA® Portal ...................................................................................... 103
13.1 GSDML-Datei Installation .............................................................................................. 103
13.2 Vergabe des PROFINET-Gerätenamens ...................................................................... 104
13.3 encoTRive in das Netzwerk mit aufnehmen .................................................................. 106
13.4 Telegrammauswahl ....................................................................................................... 107
13.5 Erstinbetriebnahme, manuelles Ansteuern über Beobachtungstabelle ................................... 108
13.6 Parametrierung über PROFINET .................................................................................. 108
14 Vorgehensweise zum Positionieren, Referenzieren und Tippen
................................................. 109
14.1 Antrieb in Betriebsart „Positioning Mode“ versetzen ..................................................... 109
14.1.1 Referenzieren ................................................................................................ 110
14.1.2 Tippbetrieb ..................................................................................................... 110
14.1.3 Positionieren .................................................................................................. 111
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 6 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

15 Webserver .................................................................................................................................... 112
15.1 Beschreibung ................................................................................................................. 112
15.2 Security-Hinweis ............................................................................................................ 112
15.3 Webbrowser .................................................................................................................. 112
15.4 Verbindung zum Webserver herstellen ......................................................................... 112
15.5 Spracheinstellung .......................................................................................................... 112
15.6 Seiten Aktualisierungszeit ............................................................................................. 113
15.7 Webseiten ...................................................................................................................... 113
15.7.1 IDENTIFIKATION (Startseite) ........................................................................ 113
15.7.2 STATUS ......................................................................................................... 114
15.7.3 DIAGNOSE .................................................................................................... 115
15.7.4 DIAGNOSEPUFFER ..................................................................................... 116
15.7.5 MECHANIK .................................................................................................... 117
15.7.6 FAHRPARAMETER ....................................................................................... 118
15.7.7 BEGRENZUNG ............................................................................................. 119
15.7.8 REGLER ........................................................................................................ 120
15.7.9 RT-KOMMNIKATION ..................................................................................... 121
15.7.10 INFO ............................................................................................................ 122
16 Unterschied PROFIBUS => PROFINET ..................................................................................... 123
17 Die häufigsten Kundenfragen .................................................................................................... 125
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 7 of 252

Inhaltsverzeichnis
Tabellenverzeichnis
Tabelle 1: Beispiel freie PZD Konfiguration .......................................................................................... 27
Tabelle 2: PKW-Bereich ........................................................................................................................ 30
Tabelle 3: Parameterkennung (PKE) .................................................................................................... 31
Tabelle 4: PKW Fehlernummern ........................................................................................................... 31
Tabelle 5: Record Data Request ........................................................................................................... 33
Tabelle 6: Record Data Response ........................................................................................................ 34
Tabelle 7: Steuerwort P967 (STW) ....................................................................................................... 42
Tabelle 8: Zustandswort P968 (ZSW) ................................................................................................... 43
Tabelle 9: encoTRive-Betriebsarten (Werte für Parameter 930) .......................................................... 44
Tabelle 10: Steuerwort P967 Positionieren ........................................................................................... 46
Tabelle 11: Zustandswort P968 Positionieren ....................................................................................... 46
Tabelle 12: Parameter, die eine Positionierung beeinflussen ............................................................... 48
Tabelle 13: Steuerwort Geschwindigkeitsregelung ............................................................................... 51
Tabelle 14: Zustandswort Geschwindigkeitsregelung ........................................................................... 51
Tabelle 15: Parameter, die eine Positionierung beeinflussen ............................................................... 52
Tabelle 16: Parameter zur Umrechnung von Einheiten ........................................................................ 55
Tabelle 17: Standardsignale bei encoTRive ......................................................................................... 56
Tabelle 18: Für die Definition des Verfahrbereichs relevante Parameter ............................................. 57
Tabelle 19: Beispiele aus der Berechnung des maximalen Verfahrbereichs ....................................... 58
Tabelle 20: Für die Definition des Verfahrbereichs relevante Parameter ............................................. 62
Tabelle 21: Parameterbeispiele für Rundachsfunktion ......................................................................... 62
Tabelle 22: Parameterstruktur P947 Störungen .................................................................................... 65
Tabelle 23: encoTRive Störnummern ................................................................................................... 66
Tabelle 24: Warnungen bei encoTRive (Parameter 953) ..................................................................... 67
Tabelle 25: PROFIdrive-Datentypen, die von encoTRive verwendet werden ...................................... 69
Tabelle 26: Parameterbeschreibung ..................................................................................................... 70
Tabelle 27: Struktur des Parameters 807 „Dig In Funktion“. ................................................................. 88
Tabelle 28: Funktionsübersicht der Endschalter ................................................................................... 89
Tabelle 29: Unterschiede PROFIBUS => PROFINET ........................................................................ 124
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 8 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Abbildungsverzeichnis
Abbildung 1: PROFINET eingeordnet im ISO/OSI-Schichtenmodell .................................................... 16
Abbildung 2: PROFINET Kommunikationsmechanismus ..................................................................... 18
Abbildung 3: Ethernet Frame Struktur ................................................................................................... 19
Abbildung 4: PROFINET Systemhochlauf ............................................................................................ 21
Abbildung 5: encoTRive am Feldbus .................................................................................................... 24
Abbildung 6: Zyklische Kommunikation mit PKW-Kanal ....................................................................... 25
Abbildung 7: Zyklische Kommunikation ohne PKW-Kanal .................................................................... 26
Abbildung 8: PROFIdrive Zustandsmaschine, allgemeiner Teil ............................................................ 41
Abbildung 9: PROFIdrive Zustandsmaschine, Betriebsart Positionieren .............................................. 45
Abbildung 10: Rampeneinstellungen .................................................................................................... 47
Abbildung 11: PROFIdrive Zustandsmaschine, Betriebsart Geschwindigkeitsregelung ...................... 50
Abbildung 12: Rampeneinstellungen .................................................................................................... 52
Abbildung 13: Spindelanwendung ......................................................................................................... 53
Abbildung 14: Zahnriemenanwendung ................................................................................................. 54
Abbildung 15: Software-Endschalterpositionen / Referenzpunktkoordinate ......................................... 59
Abbildung 16: Maximale Referenzpunktkoordinate, Z < X/2 ................................................................. 59
Abbildung 17: Maximale Referenzpunktkoordinate, Z > X/2 ................................................................. 60
Abbildung 18: Modulokorrektur bei Rundtischanwendng ...................................................................... 61
Abbildung 19: encoTRive Objektverzeichnis ......................................................................................... 68
Abbildung 20: Funktionsprinzip Hardware-Endschalter ........................................................................ 88
Abbildung 21: GSDML-Datei für die Konfiguration [Quelle: PROFIBUS International]......................... 91
Abbildung 22: Geräte-Kommunikation .................................................................................................. 92
Abbildung 23: Eigenschaften - Ethernet Schnittstelle .......................................................................... 96
Abbildung 24: GSDML Datei installieren ............................................................................................... 97
Abbildung 25: Ethernet-Teilnehmer installieren .................................................................................... 98
Abbildung 26: Netzteilnehmer auswählen ............................................................................................. 98
Abbildung 27: Ethernet-Teilnehmer bearbeiten .................................................................................... 99
Abbildung 28: encoTRive in das Netzwerk mit aufnehmen ................................................................ 100
Abbildung 29: Vergabe des Gerätenamens in der Konfiguration ....................................................... 100
Abbildung 30: Ansteuern mithilfe Variablentabelle .............................................................................. 101
Abbildung 31: GSDML Datei installieren ............................................................................................. 103
Abbildung 32: PROFINET-Gerätename vergeben .............................................................................. 104
Abbildung 33: Rücksetzen auf Werkseinstellung ................................................................................ 105
Abbildung 34: encoTRive in das Netzwerk mit aufnehmen ................................................................ 106
Abbildung 35: Vergabe des Gerätenamens in der Konfiguration ....................................................... 106
Abbildung 36: Ansteuern mithilfe Beobachtungstabelle ...................................................................... 108
Abbildung 37: Webserver, IDENTIFICATION ..................................................................................... 113
Abbildung 38: Webserver, STATUS .................................................................................................... 114
Abbildung 39: Webserver, DIAGNOSE ............................................................................................... 115
Abbildung 40: Webserver, DIAGNOSEPUFFER ................................................................................ 116
Abbildung 41: Webserver, MECHANIK ............................................................................................... 117
Abbildung 42: Webserver, FAHRPARAMETER .................................................................................. 118
Abbildung 43: Webserver, BEGRENZUNG ........................................................................................ 119
Abbildung 44: Webserver, REGLER ................................................................................................... 120
Abbildung 45: Webserver, RT-KOMMNIKATION ................................................................................ 121
Abbildung 46: Webserver, INFO ......................................................................................................... 122
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 9 of 252
Änderungs-Index
Änderung
Datum
Index
Erstausgabe
16.12.08
00
Erweiterung und Unterscheidung der MD- und MP-Baureihe
20.07.12
01
Erweiterung der MA-Baureihe, insbesondere MA-130
08.07.14
02
PNU 305, 501, 502, 503 angepasst
16.06.15
03
RT-Verhalten angepasst
17.11.15
04
Hinweis Kap.: 13.4 für frei definierte Konfiguration PZD
05.04.16
05
Kapitel 13 Projektierungsbeispiel mit TIA® Portal
07.02.17
06
Erweiterung MP-280, MA-055 und MA-100
02.06.17
07
Rundachsenfunktion, Stillstandüberwachung und Webserver ergänzt
06.06.19
08
Änderungs-Index
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 10 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

1 Allgemeines
Das vorliegende encoTRive PROFINET-Handbuch beinhaltet folgende Themen:
● Zusätzliche Sicherheitshinweise
● PROFINET-Kommunikation
● Konfiguration / Parametrierung
● Diagnose
● Erstinbetriebnahme
Da die Dokumentation modular aufgebaut ist, stellt dieses encoTRive PROFINETHandbuch eine Ergänzung zu anderen Dokumentationen wie z.B. kundenspezifische
Benutzerhandbücher, Projektierungsanleitung, Maßzeichnungen, Prospekte etc. dar.
Das encoTRive PROFINET-Handbuch kann kundenspezifisch im Lieferumfang
enthalten sein, oder kann auch separat angefordert werden.
1.1 Zielgruppe
Die vorliegende Dokumentation richtet sich an
● Inbetriebnahme-, Bedien- und Wartungspersonal, die beauftragt sind entsprechende Tätigkeiten am dezentralen Stellantrieb MD-300-PN, MP-XXX-PN
oder MA-XXX-PN vorzunehmen.
Die entsprechende Qualifikation des Personals ist in der Projektierungsanleitung in
Kapitel "Personalauswahl und –qualifikation; grundsätzliche Pflichten" definiert.
1.2 Geltungsbereich
Das encoTRive PROFINET-Handbuch gilt ausschließlich für folgende dezentrale
Stellantriebs-Typen mit PROFINET-IO Schnittstelle:
● MD-300-PN
● MP-XXX-PN
● MA-XXX-PN
Die Produkte sind durch aufgeklebte Typenschilder gekennzeichnet und sind
Bestandteil einer Anlage.
Es gelten somit zusammen folgende Dokumentationen:
● anlagenspezifische Betriebsanleitungen des Betreibers,
● dieses encoTRive PROFINET-Handbuch,
● die Projektierungsanleitung TR-EMO-BA-DGB-0015,
● das kundenspezifische Benutzerhandbuch (optional),
● Inbetriebnahmeanleitung für CoDeSys/PLCopen/Funktionsbausteine/Handgerät
(optional)
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 11 of 252

Allgemeines
1.
IEC/PAS 62411 Real-time Ethernet PROFINET IO
International Electrotechnical Commission
2.
IEC 61158 Digital data communications for measurement and control
- Fieldbus for use in industrial control systems
3.
IEC 61784 Digital data communications for measurement and control
- Fieldbus for use in industrial control systems
- Profile sets for continuous and discrete manufacturing
relative to fieldbus use in industrial control systems
4.
ISO/IEC 8802-3 Carrier Sense Multiple Access with Collision Detection
(CSMA/CD)
Access Method and Physical Layer Specifications
5.
IEEE 802.1Q IEEE Standard for Priority Tagging
6.
IEEE 1588-2002 IEEE Standard for a Precision Clock Synchronization
Protocol for Networked Measurement and Control Systems
7.
PROFIBUS Profile Guidelines Part 1:
Guideline Identification & Maintenance Functions. Bestell-Nr.: 3.502
8.
PROFINET Planungsrichtlinie,
Guideline Bestell-Nr.: 8.061
9.
PROFINET Montagerichtlinie
Guideline Bestell-Nr.: 8.071
10.
PROFINET Inbetriebnahmerichtlinie
Guideline Bestell-Nr.: 8.081
1.3 Referenzen
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 12 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019
A
Ampere
AA
Auflösung der Anwendung
AM
Positionseinheiten pro Umdrehung
ASCII
American Standard Code for Information Interchange
Big Endian
Bit/Byte-Reihenfolge, MSB zuerst
CAT
Einteilung von Kabeln, die auch bei Ethernet verwendet wird
CPU
Central Processing Unit, Zentrale Verarbeitungseinheit
encoTRive
TR-spezifischer Begriff für den Antrieb
GSDML
Gerätestammdatei
HW
Hardware
i
Getriebeuntersetzungsverhältnis
IEC
Internationale Elektrotechnische Kommission
IEEE
Institute of Electrical and Electronics Engineers
inc
Increments, Inkremente
IND
Index
IRT
Isochronous Real-Time Kommunikation
ISO
International Standard Organisation
MAC
Media Access Control, Ethernet-ID
mm
Millimeter
OV
Objektverzeichnis
PAS
Publicly Available Specification
PC
Personal Computer
PKE
Parameterkennung
PKW
Parameter-Kennung-Wert
PLC
Programmierbare Steuerung
PNO
PROFIBUS NutzerOrganisation e.V.
PNU
Parameternummer
PROFIBUS
herstellerunabhängiger, offener Feldbusstandard
PROFIdrive
Profil für elektrische Antriebe
PROFINET
PROFINET ist der offene Industrial Ethernet Standard der
PROFIBUS Nutzerorganisation für die Automatisierung.
PWE
Parameterwert
Pxyz
Parameter xyz, z.B. P913 : Parameter 913
PZD
Prozessdaten
Record-Data
Parameterzugriff über azyklischen Datenaustausch
ro
read only
rpm
Revolutions per minute, Umdrehungen pro Minute
RT
Real-Time Kommunikation
rw
read/write
SAx
interne Antriebszustände, allgemeine Zustandmaschine
SCx
interne Antriebszustände, Betriebsart Positionieren
SCx
interne Antriebszustände, Betriebsart Geschwindigkeitsregelung
sec
second, Sekunde
1.4 Verwendete Abkürzungen / Begriffe
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 13 of 252
Allgemeines
Slot
Einschubsteckplatz: kann hier auch im logischen Sinn als
Adressierung von Modulen gemeint sein
SPS
Speicherprogrammierbare Steuerung
STP
Shielded Twistet Pair
STW
Steuerwort
STW.x
Bit x des Steuerworts
SW
Software
TAx
Zustandsübergänge, allgemeine Zustandmaschine
TCP
Transmission Control Protocol
TCx
Zustandsübergänge, Betriebsart Positionieren
TCx
Zustandsübergänge, Betriebsart Geschwindigkeitsregelung
UDP
User Datagram Protocol
V
Volt
XML
Extensible Markup Language
ZSW
Zustandswort
ZSW.x
Bit x des Zustandsworts
Fortsetzung „Verwendete Abkürzungen / Begriffe“
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 14 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

bedeutet, dass Tod oder schwere Körperverletzung eintreten kann, wenn die entsprechenden Vorsichtsmaßnahmen
nicht getroffen werden.
bedeutet, dass eine leichte Körperverletzung eintreten kann,
wenn die entsprechenden Vorsichtsmaßnahmen nicht
getroffen werden.
bedeutet, dass ein Sachschaden eintreten kann, wenn die
entsprechenden Vorsichtsmaßnahmen nicht getroffen
werden.
bezeichnet wichtige Informationen bzw. Merkmale und
Anwendungstipps des verwendeten Produkts.
2 Zusätzliche Sicherheitshinweise
2.1 Symbol- und Hinweis-Definitionen
2.2 Organisatorische Maßnahmen
● Dieses encoTRive PROFINET-Handbuch muss ständig am Einsatzort des
encoTRives griffbereit aufbewahrt werden.
● Das mit Tätigkeiten am encoTRive beauftragte Personal muss vor Arbeitsbeginn
- die Projektierungsanleitung, insbesondere das Kapitel "Grundlegende
Sicherheitshinweise",
- und dieses encoTRive PROFINET-Handbuch, insbesondere das Kapitel
"Zusätzliche Sicherheitshinweise", gelesen und verstanden haben.
Dies gilt in besonderem Maße für nur gelegentlich, z.B. bei der Parametrierung des
encoTRives, tätig werdendes Personal.
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 15 of 252

PROFINET Allgemeine Informationen
3 PROFINET Allgemeine Informationen
PROFINET ist der innovative und offene Standard für Industrial Ethernet und deckt
alle Anforderungen der Automatisierungstechnik ab.
PROFINET ist eine öffentlich zugängliche Spezifikation, die durch die IEC
(IEC/PAS 62411) im Jahr 2005 veröffentlicht worden ist und ist seit 2003 Teil der
Norm IEC 61158 und IEC 61784.
PROFINET wird durch „PROFIBUS International“ und den „INTERBUS Club“
unterstützt.
Abbildung 1: PROFINET eingeordnet im ISO/OSI-Schichtenmodell
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 16 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

3.1 PROFINET IO
Bei PROFINET IO wird der encoTRive, wie bei PROFIBUS-DP, als dezentrales
Feldgerät betrachtet. Das Gerätemodell hält sich an die grundlegenden Eigenschaften
von PROFIBUS und besteht aus Steckplätzen (Slots), Gruppen von I/O-Kanälen
(Sub-Slots) und einem Index. Der encoTRive entspricht dabei einem modularen
Gerät. Im Gegensatz zu einem kompakten Gerät kann der Ausbaugrad während der
Anlagen-Projektierung festgelegt werden.
Die technischen Eigenschaften des encoTRives werden durch die so genannte GSDDatei (General Station Description) auf XML-Basis beschrieben.
Bei der Projektierung wird der encoTRive wie gewohnt einer oder mehreren
Steuerungen zugeordnet.
Da alle Ethernet-Teilnehmer gleichberechtigt am Netz agieren, wird das bekannte
Master/Slave-Verfahren bei PROFINET IO als Provider/Consumer-Modell umgesetzt.
Der Provider (encoTRive) ist dabei der Sender, der seine Daten ohne Aufforderung an
die Kommunikationspartner, die Consumer (SPS), überträgt, welche die Daten dann
verarbeiten.
In einem PROFINET IO – System werden folgende Geräteklassen unterschieden:
● IO-Controller
Zum Beispiel eine SPS, die das angeschlossene IO-Device anspricht.
● IO-Device
Dezentral angeordnetes Feldgerät (encoTRive), das einem oder mehreren IOControllern zugeordnet ist und neben den Prozess- und Konfigurationsdaten auch
Alarme übermittelt.
● IO-Supervisor (Engineering Station)
Ein Programmiergerät oder Industrie-PC, welches parallel zum IO-Controller
Zugriff auf alle Prozess- und Parameterdaten hat.
Zwischen den einzelnen Komponenten bestehen Applikationsbeziehungen, die
mehrere Kommunikationsbeziehungen für die Übertragung von Konfigurationsdaten
(Standard-Kanal), Prozessdaten (Echtzeit-Kanal) sowie Alarmen (Echtzeit-Kanal)
enthalten.
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 17 of 252

PROFINET Allgemeine Informationen
3.2 Real-Time Kommunikation
Bei der PROFINET Kommunikation werden unterschiedliche Leistungsstufen definiert:
● Daten, die nicht zeitkritisch sind wie z.B. Parameter-Daten, Konfigurations-Daten
und Verschaltungsinformationen, werden bei PROFINET über den StandardDatenkanal auf Basis von TCP bzw. UDP und IP übertragen. Damit lässt sich die
Automatisierungsebene auch an andere Netze anbinden.
● Für die Übertragung von zeitkritischen Prozessdaten unterscheidet PROFINET
zwischen zwei Real-Time-Klassen, die sich hinsichtlich ihrer Leistungsfähigkeit
differenzieren:
– Real-Time (RT Class1, RT)
- Verwendung von Standard-Komponenten wie z.B. Switches
- Vergleichbare Real-Time-Eigenschaften wie PROFIBUS
- Typisches Anwendungsfeld ist die Factory Automation
- bei encoTRive realisiert
– Isochronous-Real-Time (RT Class 3, IRT), *** wird nicht unterstützt!
***
- Taktsynchrone Datenübertragung
- Hardwareunterstützung durch Switch-ASIC
- Typisches Anwendungsfeld sind Antriebsregelungen
in Motion Control-Applikationen
Abbildung 2: PROFINET Kommunikationsmechanismus
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 18 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019
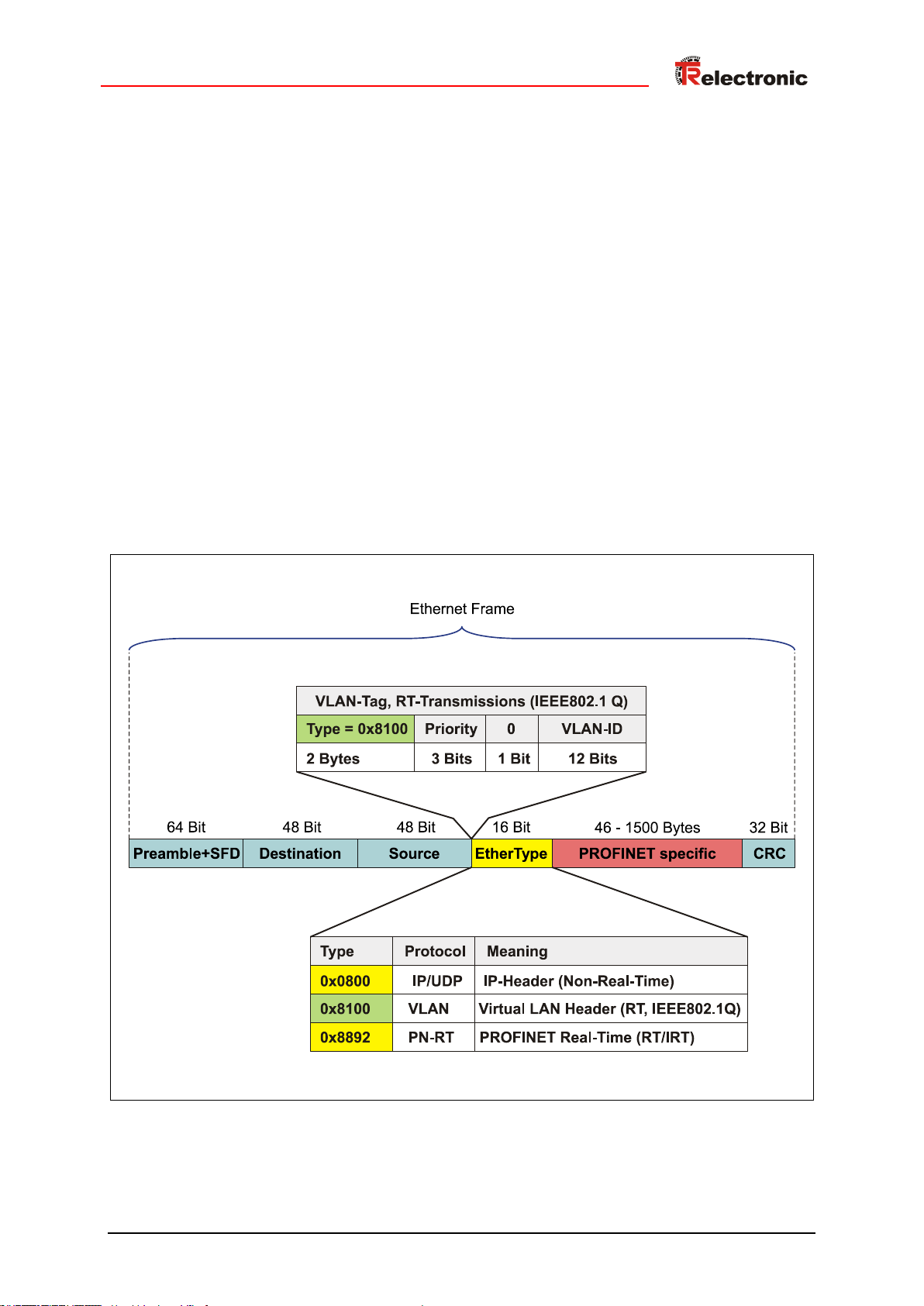
3.3 Protokollaufbau
Das für Prozessdaten optimierte PROFINET-Protokoll wird über einen speziellen
Ethertype direkt im Ethernet-Frame transportiert. Non-Real-Time-Frames (NRT)
benutzen den Ethertype 0x0800. PROFINET Real-Time-Frames (RT/IRT) benutzen
den Ethertype 0x8892. Bei Real-Time-Klasse 1 RT-Kommunikation wird zusätzlich für
die Datenpriorisierung ein so genannter „VLAN-Tag“ in den Ethernet-Frame eingefügt.
Dieser besitzt ebenfalls zusätzlich einen weiteren Ethertype und ist mit dem Wert
0x8100 belegt.
Anhand des Ethertypes werden die PROFINET-spezifischen Daten unterschiedlich
interpretiert.
UDP/IP-Datagramme werden ebenfalls unterstützt. Dies bedeutet, dass im Falle von
RT sich der Master und die PROFINET IO-Devices in unterschiedlichen Subnetzen
befinden können. Die Kommunikation über Router hinweg in andere Subnetze ist im
Falle von RT somit möglich.
PROFINET verwendet ausschließlich Standard-Frames nach IEEE802.3. Damit
können PROFINET-Frames von beliebigen Ethernet-Controllern verschickt (Master),
und Standard-Tools (z. B. Monitor) eingesetzt werden.
Abbildung 3: Ethernet Frame Struktur
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 19 of 252

PROFINET Allgemeine Informationen
3.4 PROFINET IO – Dienste
● Zyklischer Datenaustausch von Prozessdaten
– RT-Kommunikation innerhalb eines Netzwerkes,
ohne Verwendung von UDP/IP
– RT-Kommunikation zwischen Netzwerken,
mit Verwendung von UDP/IP *** wird nicht unterstützt! ***
– IRT-Kommunikation für die deterministische und taktsynchrone
Datenübertragung *** wird nicht unterstützt! ***
– Daten-Querverkehr (Multicast Communication Relation),
mit RT- und IRT-Kommunikation auf Basis des Provider/ConsumerModells
*** wird nicht unterstützt! ***
● Azyklischer Datenaustausch von Record-Daten (Read- / Write-Services)
– Parametrieren des encoTRives im Systemhochlauf
– Auslesen von Diagnoseinformationen
– Auslesen von Identifikations-Informationen gemäß den
„Identification and Maintenance (I&M) Functions“
– Lesen und Schreiben Objektverzeichnis des encoTRives
3.5 PROFINET IO – Protokolle
EDD, Ethernet Device Driver:
Generelle Mechanismen für das Senden/Empfangen
ACP, Alarm Consumer Provider: Bearbeitung von Alarmen
CM, Context Management: Aufbau und Verwaltung von Applikations- und
Kommunikationsbeziehungen zwischen IO-Devices und IO-Controller
DCP, Discovery and Control Programm:
Vergabe von IP-Adressen und Gerätenamen über Ethernet
LLDP, Link Layer Discovery Protokoll: Zur Topologie-Erkennung
u.a.
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 20 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

3.6 PROFINET Systemhochlauf
Abbildung 4: PROFINET Systemhochlauf
3.7 PROFINET – Zertifikat, weitere Informationen
Durch die vorgeschriebene Zertifizierung für PROFINET-Geräte wird ein hoher
Qualitätsstandard gewährleistet.
Die TR – PROFINET-Geräte wurden zum Nachweis der Qualität einem Zertifizierungsverfahren unterzogen. Das daraus resultierende PROFINET-Zertifikat
bescheinigt das normkonforme Verhalten nach IEC 61158 innerhalb eines
PROFINET-Netzwerkes.
Weitere Informationen zu PROFINET sind bei der Geschäftsstelle der PROFIBUSNutzerorganisation erhältlich:
PROFIBUS Nutzerorganisation e.V.,
Haid-und-Neu-Str. 7,
D-76131 Karlsruhe,
www.profibus.com/
Tel.: ++ 49 (0) 721 / 96 58 590
Fax: ++ 49 (0) 721 / 96 58 589
e-Mail: mailto:germany@profibus.com
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 21 of 252

PROFIdrive Antriebsprofil
4 PROFIdrive Antriebsprofil
Die Sprachmittel zur Ansteuerung eines Antriebs sind weitgehend
herstellerunabhängig. Aus diesem Grunde wurde die Kommunikation zwischen
Antrieb und übergeordneter Steuerung in so genannten Antriebsprofilen
standardisiert.
Ein Antriebsprofil spezifiziert, wie ein elektrischer Antrieb über einen Feldbus
angesteuert wird. Es definiert das Geräteverhalten und das Zugriffsverfahren auf die
Antriebsdaten. Insbesondere werden folgende Teilbereiche geregelt:
● Steuerung und Statusüberwachung
● standardisierte Parametrierung
● Wechsel von Betriebsarten
Das Profil für elektrische Antriebe am PROFIBUS oder innerhalb von PROFINET
heißt PROFIdrive.
encoTRive unterstützt als PROFINET-IO Device das Profil PROFIdrive V3.0.
Zwischen einem PROFINET-IO Controller (z.B. Steuerung) und einem Antrieb (z.B.
encoTRive), werden typischerweise folgende Informationen ausgetauscht:
Der Antrieb teilt seinen aktuellen Zustand (z.B. "Antrieb fährt") und eventuell
zusätzliche Information wie die aktuelle Position, die aktuelle Geschwindigkeit usw.
mit. In Gegenrichtung erteilt die Steuerung beispielsweise Positionieraufträge ("Fahre
mit Geschwindigkeit x an die Position y").
Ohne Profile wie PROFIdrive müsste jeder Hersteller eigene Protokolle zur
Übermittlung von Befehlen und Statusmeldungen spezifizieren, und es gäbe
entsprechend viele Anwendungen, die auf jeweils unterschiedliche Art und Weise
immer das gleiche leisten.
4.1 Das Objektverzeichnis
Grundlegend bei Antriebsprofilen ist das Objektverzeichnis (OV). Im OV sind
sämtliche Informationen (Parameter) zusammengefasst, die für ein Gerät relevant
sind. Ein Parameter wird durch seine Parameternummer (16 Bit) identifiziert.
Bestimmte Bereiche für die Parameternummer sind belegt bzw. reserviert, andere
stehen für so genannte herstellerspezifische Parameter zur Verfügung.
Unter den vordefinierten Parameter gibt es optionale Parameter und solche, die von
jedem profilkonformen Gerät zu unterstützen sind ("Mandatory Parameters").
4.2 PROFIdrive Objektverzeichnis
PROFIdrive benutzt für Parameternummern die dezimale Notation. Die
Parameternummern 900 bis 999 und 60000 bis 65535 sind als profilspezifische
Bereiche definiert und reserviert. Parameternummern außerhalb dieser beiden
Bereiche sind herstellerspezifisch.
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 22 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

4.3 Zustandsmaschine, Status- und Steuerwort
Ein zentrales Element im Antriebsprofil ist die Zustandsmaschine. Hier werden die
Betriebszustände und die Zustandsübergänge definiert. Es wird festgelegt, welche
Zustände das Gerät nach dem Einschalten durchläuft, und wie es in den Zustand
"Betriebsbereit" überführt wird, so dass z.B. eine Positionierung durchgeführt werden
kann.
Die meisten Zustandsübergänge werden von der Steuerung (z.B. SPS) sequenziell
veranlasst, indem diese im Steuerwort bestimmte Befehle in Form von Bitmuster
absetzt.
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 23 of 252

PROFINET Kommunikation mit encoTRive
5 PROFINET Kommunikation mit encoTRive
Alle Signale und Informationen, die für die Ansteuerung des encoTRives erforderlich
sind, werden über den Feldbus übertragen.
Abbildung 5: encoTRive am Feldbus
5.1 Kommunikation von Daten über PROFINET-IO
encoTRive wird als IO-Device in ein PROFINET-IO Netzwerk eingebunden.
Beim encoTRive handelt es sich um einen Antrieb der Applikationsklasse 3
(Positionierantrieb) gemäß Geräteprofil PROFIdrive V3.0. Die Definition besagt, dass
der zur Positionierung erforderliche Regelkreis im Gerät geschlossen wird.
Synchronisierte Kommunikation (Isochronous Real-Time Funktion) ist somit nicht
erforderlich und wird demzufolge vom encoTRive nicht unterstützt.
Es werden folgende Kommunikationsdienste vom encoTRive unterstützt:
● Zyklische Übertragung von I/O Daten
● Zyklische Übertragung von Alarmen
● Azyklische Übertragung von Daten
Die Kommunikationsdienste werden wiederum gemäß PROFINET-IO über so
genannte Kommunikationsbeziehungen realisiert.
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 24 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

5.1.1 Kommunikationsbeziehung für den zyklischen Datenaustausch
Bei dieser Kommunikationsbeziehung werden I/O-Daten zyklisch zwischen Provider
(encoTRive) und Consumer (Controller) unquittiert übertragen. Das Zeitraster für die
Übertragung ist parametrierbar.
5.1.1.1 Zyklische Übertragung von Prozessdaten
Beim encoTRive dient diese Kommunikationsbeziehung vorrangig zur bidirektionalen
Übertragung von Parametern zwischen dem Objektverzeichnis des Antriebs und der
Steuerung (z.B. SPS).
Dabei sendet die Steuerung in regelmäßigen Abständen das Ausgangstelegramm mit
Parametern zum encoTRive, und im Antworttelegramm überträgt der encoTRive seine
Parameter an die Steuerung. Die verwendeten Telegramme haben dabei während der
gesamten Laufzeit des encoTRives denselben Aufbau.
Diese Art der Kommunikation ist letztlich für Parameter geeignet, die ständig
aktualisiert werden müssen, den so genannten Prozessdaten (PZD). Solche Daten
sind Antriebsparameter und werden von der Applikation mit hoher Aktualität benötigt.
Hierzu zählen i.d.R. immer Steuerwort (STW), Statuswort (ZSW), häufig der aktuelle
Positionswert und die Zielposition.
Verschiedene Applikationen erfordern verschiedene Prozessdaten. Welche
Parameter letztlich als Prozessdaten zyklisch übertragen werden sollen, kann über
die so genannte freie PZD-Konfiguration definiert werden.
5.1.1.2 Zyklische Übertragung des PKW-Kanals
Beim encoTRive wurde zudem die Möglichkeit geschaffen, den so genannten PKWKanal zusätzlich mit den zyklischen Parameterdaten in beide Richtungen zu
übertragen.
Der PKW-Kanal dient ebenfalls dazu, Parameter in beide Richtungen zu übertragen.
Beim PKW-Mechanismus allerdings formuliert der Controller einen Auftrag, der
encoTRive prüft und bearbeitet den Auftrag und formuliert letztendlich die
entsprechende Antwort. Die Parameterwerte können gelesen oder geschrieben
werden bzw. die Parameterbeschreibung angefordert werden.
Der PKW-Kanal wird im Telegramm stets den Prozessdaten vorangestellt.
Der PKW-Kanal wurde bereits im PROFIdrive V2.0 spezifiziert und ist demzufolge
weit verbreitet. Damit können ältere PROFIBUS Applikationen mit genutztem PKWKanal problemlos auf PROFINET portiert werden.
Abbildung 6: Zyklische Kommunikation mit PKW-Kanal
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 25 of 252

PROFINET Kommunikation mit encoTRive
Abbildung 7: Zyklische Kommunikation ohne PKW-Kanal
Abbildung 7 zeigt die Telegramme, welche im Rahmen des zyklischen Datenverkehrs
zwischen SPS und encoTRive ausgetauscht werden. Als Prozessdaten werden dabei
vom IO-Controller zum encoTRive das Steuerwort und Zielposition, in Gegenrichtung
das Statuswort sowie der Positionswert übertragen.
5.1.2 Kommunikationsbeziehung für den azyklischen Datenaustausch
Bei dieser Kommunikationsbeziehung werden im Allgemeinen azyklische Daten
(Records) übertragen.
In erster Linie werden mit diesem Mechanismus Parameter zwischen dem
Objektverzeichnis des encoTRives und der Steuerung (z.B. SPS) gelesen und
geschrieben. Dazu wird vom Controller ein Auftrag formuliert, der encoTRive prüft und
bearbeitet den Auftrag und formuliert daraufhin die zugehörige Antwort.
Dieser Übertragungsmechanismus dient dazu Parameter zu lesen oder zu schreiben,
die sich während der gesamten Laufzeit nicht oder nur sehr selten bzw. im Bedarfsfall
verändern.
Ferner sind Records Bestandteil verschiedener PROFINET-Dienste, die hier nicht
näher erläutert werden.
5.1.3 Kommunikationsbeziehung für Alarme
Bei dieser Kommunikationsbeziehung für Alarme werden Daten hochprior vom
Provider (encoTRive) zum Consumer (Controller) gesendet.
Solche Daten sind beim encoTRive antriebsinterne Störungsmeldungen, die dem
Controller unmittelbar nach Eintritt der Störung azyklisch gesendet werden. Ob der
encoTRive diese Alarmübertragung unterstützen soll, kann innerhalb der
Geräteparametrierung über die GSDML-Datei eingestellt werden.
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 26 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

P922
P915 [0]
P915 [1]
P915 [2]
0
967
200
201 P916 [0]
P916 [1]
P916 [2]
968
100
103
5.2 Konfiguration der Prozessdaten
PROFIdrive lässt verschiedene Möglichkeiten zur Definition der Prozessdaten (PZD)
zu:
● Parameter 922: Dieser Parameter ("Telegrammauswahl") ermöglicht die Auswahl
aus einer Reihe von vordefinierten Telegrammen. Enthält Parameter 922 den Wert
0, so kann man die Telegramme in beiden Übertragungsrichtungen frei
konfigurieren. In diesem Fall definieren die Parameter 915 und 916 den Aufbau der
PZD. Anderenfalls werden gemäß der Nummer des Standardtelegramms die
entsprechenden PZD in die Parameter 915 und 916 übernommen.
● Parameter 915, 916: Bei diesen Parametern handelt es sich um Arrays, in denen
Parameternummern abgelegt sind. Parameter 915 ist für die Übertragungsrichtung
IO-Controller encoTRive zuständig, Parameter 916 für die Gegenrichtung. Die
Einträge werden bis zum ersten Index interpretiert, der den Wert 0 enthält. Dabei
muss der erste Eintrag von Parameter 915 die Parameternummer des Steuerworts
(STW) und der erste Eintrag von Parameter 916 die Parameternummer des
Statusworts (ZSW) sein.
Die eingestellte Konfiguration wird erst nach der remanenten Speicherung (P971=1)
und Neustart des encoTRives übernommen.
Im Folgenden sind einige Beispiele für die Einstellung der Prozessdaten und die
Definition der unterstützten Standardtelegramme aufgeführt:
Beispiel 1: Die Steuerung schreibt das Steuerwort P967, die Zielposition P200 und die
Geschwindigkeit zum encoTRive. Der encoTRive sendet das Statuswort P968, den
Lageistwert P100 und die Istgeschwindigkeit P103.
Tabelle 1: Beispiel freie PZD Konfiguration
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 27 of 252

PROFINET Kommunikation mit encoTRive
Wert
Telegrammaufbau
100
Herstellerspezifisches Telegramm 100
z.B. notwendig für den Einsatz des S7
Funktionsbausteins „control_pzd“
Parameter-
PZD-Aufbau
Position
Nummer
Bezeichnung
Länge
IO-Controller ->
encoTRive
1
P967
Steuerwort
WORD
13
WORDS
2
P200
Zielposition
DWORD
3
P201
Geschwindigkeit
WORD
4
P202
Beschleunigung
WORD
5
P203
Bremsbeschleunigung
WORD
6
P302
Maximaler Dauerstrom
DWORD
7
P400
Verfahrsatznummer
WORD
8
P804
Digitale Ausgänge
WORD
9
P930
Betriebsart
WORD
10
PXXX
Nicht benutzt
DWORD
encoTRive ->
IO-Controller
1
P968
Zustandswort
WORD
13
WORDS
2
P100
Lageistwert
DWORD
3
P102
Elektroniktemperatur
DWORD
4
P103
Drehzahlistwert
WORD
5
P101
Stromistwert
DWORD
6
P401
Aktueller Satz
WORD
7
P803
Digitale Eingänge
WORD
8
P947
Störungsnummer
WORD
9
P953
Warnungsnummer
WORD
10
PXXX
Nicht benutzt
WORD
Voreingestelles Telegramm „100“ bei Auslieferung
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 28 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Wert
Telegrammaufbau
7
Standardtelegramm 7
PROFIdrive Version 3.0
Parameter-
PZD-Aufbau
Position
Nummer
Bezeichnung
Länge
IO-Controller ->
encoTRive
1
P967
Steuerwort
WORD
2
WORDS
2
P400
Verfahrsatznummer
WORD
encoTRive ->
IO-Controller
1
P968
Zustandswort
WORD
2
WORDS
2
P401
Aktueller Satz
WORD
Wert
Telegrammaufbau
8
Standardtelegramm 8
PROFIdrive Version 3.0
Parameter-
PZD-Aufbau
Position
Nummer
Bezeichnung
Länge
IO-Controller ->
encoTRive
1
P967
Steuerwort
WORD
5
WORDS
2
P200
Zielposition
DWORD
3
P400
Verfahrsatznummer
WORD
4
P201
Geschwindigkeit
WORD
encoTRive ->
IO-Controller
1
P968
Zustandswort
WORD
5
WORDS
2
P100
Lageistwert
DWORD
3
P401
Aktueller Satz
WORD
4
P103
Ist-Geschwindigkeit
WORD
Aktivierungsreihenfolge des neu konfigurierten Telegramms:
1. Über Parameter 971 „Im EEPROM speichern“,
alle Parameterwerte remanent speichern.
2. Systemkaltstart ausführen, encoTRive vollständig von der kompletten
Spannungsversorgung trennen.
Fortsetzung Standard-Telegramme
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 29 of 252

PROFINET Kommunikation mit encoTRive
Byte 0
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Byte 6
Byte 7
PKE
(Parameterkennung)
IND
(Subindex)
PWE
(Parameterwert)
Subindex
0
5.3 Parameterzugriff über PKW-Kanal
Wird ein PKW-Kanal benutzt, so belegt dieser die ersten 8 Byte der Telegramme, die
zyklisch zwischen der Steuerung und encoTRive ausgetauscht werden. Der
encoTRive erkennt im Rahmen der Controller-Konfigurierung, ob mit oder ohne PKWKanal gearbeitet wird.
Zum Lesen oder Schreiben eines Parameters generiert die Steuerung einen Auftrag.
Im Auftrag enthalten ist die Zugriffsart, Parameternummer, Index und evtl. der zu
schreibende Wert. Dieser muss solange anstehen, bis der encoTRive die zugehörige
Antwort gesendet hat und von der Steuerung empfangen wurde.
Da beide PKW-Telegramme zyklisch gesendet werden, ist die Zuordnung Auftrag zu
Antwort nur über die Parameterkennungen und ggf. Index möglich.
Über den PKW können Parameterwerte geschrieben und gelesen, bzw. die
Parameterbeschreibung gelesen werden. Dabei gelten folgende Konventionen:
● Bei einfachen Parametern wird als Subindex stets 0 verwendet.
● Bei Array Parametern wird mit Subindex 0 begonnen
● Parameternummer und Parameterwerte werden in Big Endian Format: Ein
ganzzahliger 16-Bit-Wert 0x1234 wird so übertragen, dass zuerst 0x12 und
danach 0x34 folgt. Bei einem 32-Bit-Wert 0x12345678 erscheint im Telegramm
zuerst an der niedrigsten Adresse der Wert 0x12, gefolgt von den Werten 0x34,
0x56 und 0x78.
● Die Initiative geht immer vom IO-Controller aus (keine Spontanmeldungen)
Folgendes gilt es bei der Auftrags-/Antwortbearbeitung einzuhalten:
● Auftrag und Antwort beziehen sich immer auf einen Parameter, eine
Parameterbeschreibung mit entsprechendem Index.
● Den Auftrag immer solange anstehen lassen, bis der encoTRive die zugehörige
Antwort gesendet hat.
● encoTRive sendet die Antwort solange, bis die Steuerung einen neuen Auftrag
sendet.
● encoTRive aktualisiert automatisch die Werte bei wiederholt gleichem Auftrag.
Tabelle 2: PKW-Bereich
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 30 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Bit
Bedeutung
15-12
Auftragskennung: Steuerung => encoTRive
Antwortkennung: encoTRive => Steuerung
0 : kein Auftrag
1 : Parameterwert anfordern
2 : Parameterwert ändern (Wort)
3 : Parameterwert ändern (Doppelwort)
4 : Parameterbeschreibung anfordern
5 : 6 : Parameterwert anfordern (Array)
7 : Parameterwert ändern (Array Wort)
8 : Parameterwert ändern (Array Doppelwort)
9 : Anzahl Arrayelemente anfordern
0 : keine Antwort
1 : Parameterwert übertragen (Wort)
2 : Parameterwert übertragen (Doppelwort)
3 : Parameterbeschreibung übertragen
4 : Parameterwert übertragen (Array Wort)
5 : Parameterwert übertragen (Array Doppelwort).
6 : Anzahl Arrayelement übertragen
7 : Auftrag nicht ausführbar
11
reserviert
10-0
Parameternummer (PNU)
Fehlernummer
Bedeutung
0x0000
Ungültige PNU
0x0001
Wert nicht änderbar
0x0002
Wertebereich überschritten
0x0003
Ungültiger Subindex
0x0004
Parameter ist kein Array
0x0005
Falscher Datentyp
0x0006
Kein Setzen erlaubt
0x0007
Beschreibungselement nicht änderbar
0x0009
Beschreibungsdaten nicht vorhanden
0x000B
Keine Bedienhoheit
0x000C
Passwort falsch
0x0011
Falscher Betriebszustand
0x0012
Sonstiger Fehler
0x0014
Ungültiger Wert
0x0015
Antwort zu lang
0x0016
Adressbereich unzulässig
0x0017
ungültiges Format
0x0018
Anzahl Werte inkonsistent
Der PKE-Bereich dient zur Identifikation von Parameter und Zugriffsart:
Tabelle 3: Parameterkennung (PKE)
Ist als Antwortkennung der Wert 7 ("Auftrag nicht ausführbar") angegeben, so enthält
der PWE-Bereich eine Fehlernummer, welche die Fehlerursache angibt. In der
folgenden Tabelle sind diese dargestellt:
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 31 of 252
Tabelle 4: PKW Fehlernummern

PROFINET Kommunikation mit encoTRive
Byte 0
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Byte 6
Byte 7
PKE
IND
PWE
0x73
0xB3
0x00
0x00
0x00
0x00
0x00
0x00
Byte 0
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Byte 6
Byte 7
PKE
IND
PWE
0x43
0xB3
0x00
0x00
0x00
0x00
0x02
0xBC
Byte 0
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Byte 6
Byte 7
PKE
IND
PWE
0x30
0x64
0x00
0x00
0x00
0x0F
0x42
0x40
Byte 0
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Byte 6
Byte 7
PKE
IND
PWE
0x70
0x64
0x00
0x00
0x00
0x00
0x00
0x01
5.3.1 Beispiele für Parameterzugriff über PKW-Kanal
5.3.1.1 Leseauftrag P947[0]
Die Steuerung will das erste Element von Parameter 947 „Störungen“ lesen:
● PKE Auftragskennung: 7 (Parameterwert anfordern Array Wort) +
Parameternummer: 947 (0x3B3)
● IND Index = 0
● PWE Parameterwert = 0
PKW-Auftrag von der Steuerung:
PKW-Antwort vom encoTRive:
Ergebnis:
encoTRive antwortet positiv und liefert den Wert 700 (0x2BC) = Schleppfehler.
5.3.1.2 Schreibauftrag P100 mit Wert 1000000
Die Steuerung will Parameter 100 „Lageistwert“ mit Wert 1000 000 beschreiben:
PKE Auftragskennung= 3 (Parameterwert ändern (Doppelwort)) +
Parameternummer = 100 (0x64)
IND Index = 0
PWE Parameterwert = 1000000 (0xF4240)
PKW-Auftrag:
PKW-Antwort:
Ergebnis:
encoTRive antwortet negativ über PKE 0x7xxx => Auftrag nicht ausführbar und PWE
0x0001 => Wert nicht änderbar.
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 32 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Byte
Name
Bedeutung
0
Request-Referenz
Identifiziert Request / Response eindeutig. Die Steuerung ändert bei
jeder neuen Request die Referenz für eindeutige Zuordnung.
1
Request ID
0x01 Request parameter – Parameter lesen
0x02 Change parameter – Parameter schreiben
2
Axis
Achsen-Adressierung für Mehrachsenantriebe.
Wird derzeit nicht ausgewertet
3
Anzahl Parameter
Bei Multi-Parameter-Zugriffen enthält dieses Feld die Anzahl der
Parameter. Bei encoTRive: Wert 0x01
4
Attribut
Spezifiziert, auf was zugegriffen wird:
0x10 Zugriff auf Wert
0x20 Zugriff auf Beschreibung
5
Anzahl Elemente
Bei Zugriff auf einfache Parameter: Wert 0x00
Sonst: Anzahl Array-Elemente, auf die zugegriffen wird.
6
Parameternummer
High Byte
7
Parameternummer
Low Byte
8
Subindex
High Byte
9
Subindex
Low Byte
10
Format
Datentyp gemäß Tabelle 25 Seite 69;
Zusätzlich erlaubt sind:
0x41 Byte
0x42 Word
0x43 Double Word
Dieser Teil ist nur bei einem
Schreibzugriff auf Parameter
vorhanden
11
Anzahl Werte
Anzahl der folgenden Werte
12-...
Werte
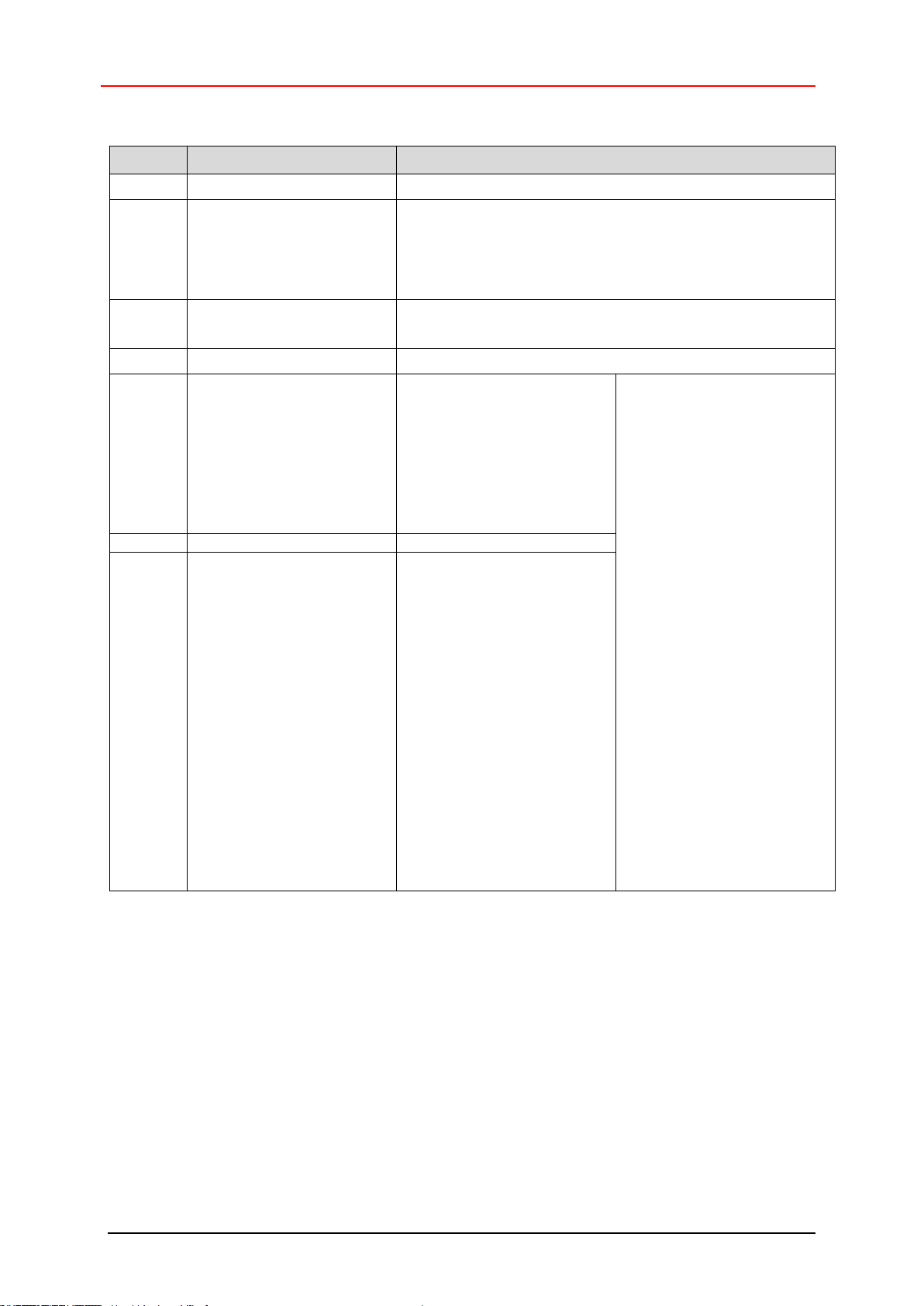
5.4 Parameterzugriff über azyklischen Datenaustausch (Record-Data)
Mit einem PKW-Auftrag können maximal 4 Byte Nutzdaten transportiert werden. Bei
einem azyklischen Parameterauftrag dagegen können wesentlich größere
Datenmengen transportiert werden. Insbesondere lassen sich Teilbereiche von Arrays
in einem Auftrag übertragen.
Die azyklische Verbindung zwischen IO-Controller und encoTRive wird automatisch
aufgebaut.
Der IO-Controller schreibt eine azyklische Request mit einer ID, der encoTRive prüft
und bearbeitet diese und sendet letztlich eine Response mit der zugehörigen ID.
Folgendes gilt es zu beachten:
● Es kann immer nur ein Auftrag bearbeitet werden.
● Die Initiative geht immer vom IO-Controller aus (keine Spontanmeldungen)
● In einem Auftrag kann nur ein Parameter bearbeitet werden.
Tabelle 5: Record Data Request
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 33 of 252
PROFINET Kommunikation mit encoTRive
Byte
Name
Bedeutung
0
Request-Referenz
Gespiegelte Identifizierung aus Request
1
Response ID
0x01 Parameter lesen erfolgreich
0x81 Parameter lesen nicht erfolgreich
0x02 Parameter schreiben erfolgreich
0x82 Parameter schreiben nicht erfolgreich
2
Axis (gespiegelt)
Achsen-Adressierung für Mehrachsenantriebe.
Wird derzeit nicht ausgewertet
3
Anzahl Parameter
Bei encoTRive: Wert 0x01
4
Format
Datentyp gemäß Tabelle 25
Seite 69; Zusätzlich erlaubt
sind:
0x41 Byte
0x42 Word
0x43 Double Word
0x44 Fehler
Dieser Teil ist bei einem
erfolgreichen Schreibzugriff
nicht vorhanden.
Im Fall einer (teilweise)
fehlgeschlagenen Request
ist
Format = 0x44
Anzahl Werte = 1
Wert = Fehlernummer
(siehe Tabelle 4: PKW
Fehlernummern)
oder
Format = 0x44
Anzahl Werte = 2
Wert1 = Fehlernummer
(siehe Tabelle 4: PKW
Fehlernummern)
Wert2 = Subindex des ersten
Array-Elements, bei dem der
Fehler auftrat.
5
Anzahl Werte
Anzahl der folgenden Werte
6-...
Werte /Fehlerinformation
Tabelle 6: Record Data Response
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 34 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Byte
Wert
Bedeutung
0
0xAB
Request Referenz
1
0x02
Request ID (Parameter schreiben)
2
0x00
Axis (Inhalt nicht relevant)
3
0x01
Anzahl Parameter (immer 1)
4
0x10
Attribut (Zugriff auf Wert)
5
0x00
Anzahl Elemente (einfach Param)
6
0x03
PNU (High Byte)
7
0xA2
PNU (Low Byte)
8
0x00
Subindex (High Byte)
9
0x00
Subindex (Low Byte)
10
0x42
Format (Word)
11
0x01
Anzahl Werte
12
0x00
Wert (High Byte)
13
0x02
Wert (Low Byte)
Byte
Wert
Bedeutung
0
0xAB
Request Referenz (gespiegelt aus Request)
1
0x02
Response ID (Parameter schreiben erfolgreich)
2
0x00
Axis (gespiegelt aus Request)
3
0x01
Anzahl Parameter (gespiegelt aus Request)
Byte
Wert
Bedeutung
0
0xAB
Request Referenz (gespiegelt aus Request)
1
0x82
Response ID (Fehler bei Parameter schreiben)
2
0x00
Axis (gespiegelt aus Request)
3
0x01
Anzahl Parameter (gespiegelt aus Request)
4
0x44
Format (Fehler)
5
0x01
Anzahl Werte
6
0x12
Fehlernummer (High Byte)
7
0x34
Fehlernummer (Low Byte)
5.4.1 Beispiele für Parameterzugriff, azyklischer Datenaustausch
5.4.1.1 Schreibauftrag: P930 mit Wert 2
Die Steuerung will Parameter 930 „Betriebsart“ mit Wert 2 beschreiben:
Request IO-Controller => encoTRive:
Response encoTRive => IO-Controller:
a) Bei erfolgreicher Ausführung:
b) Bei fehlerhafter Ausführung :
Als Fehlernummer wird 0x1234 unterstellt
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 35 of 252

PROFINET Kommunikation mit encoTRive
Byte
Wert
Bedeutung
0
0xAC
Request Referenz
1
0x02
Request ID (Parameter schreiben)
2
0x00
Axis (Inhalt nicht relevant)
3
0x01
Anzahl Parameter (immer 1)
4
0x10
Attribut (Zugriff auf Wert)
5
0x04
Anzahl Elemente
6
0x03
PNU (High Byte)
7
0x93
PNU (Low Byte )
8
0x00
Erster Subindex (High Byte)
9
0x01
Erster Subindex (Low Byte)
10
0x42
Format (Word)
11
0x04
Anzahl Werte
12
0x00
Wert 1 (High Byte)
13
0xC8
Wert 1 (Low Byte)
14
0x00
Wert 2 (High Byte)
15
0xC9
Wert 2 (Low Byte)
16
0x00
Wert 3 (High Byte)
17
0xCA
Wert 3 (Low Byte)
18
0x00
Wert 4 (High Byte)
19
0xCB
Wert 4 (Low Byte)
Byte
Wert
Bedeutung
0
0xAC
Request Referenz (gespiegelt aus Request)
1
0x02
Response ID (Parameter schreiben erfolgreich)
2
0x00
Axis (gespiegelt aus Request)
3
0x01
Anzahl Parameter (gespiegelt aus Request)
Byte
Wert
Bedeutung
0
0xAC
Request Referenz (gespiegelt aus Request)
1
0x82
Response ID (Fehler bei Parameter schreiben)
2
0x00
Axis (gespiegelt aus Request)
3
0x01
Anzahl Parameter (gespiegelt aus Request)
4
0x44
Format (Fehler)
5
0x01
Anzahl Werte
6
0xAB
Fehlernummer (High Byte)
7
0xCD
Fehlernummer (Low Byte)
5.4.1.2 Schreibauftrag: P915 mit mehreren Werten beschreiben
Die Steuerung will Parameter 915 „PZD Konfiguration Sollwerte“ mit folgenden
Werten beschreiben:
P915[1] = 200 (Zielposition), P915[2] = 201 (Geschwindigkeit),
P915[3] = 202 (Beschleunigung), P915[4] = 203 (Verzögerung)
Request IO-Controller => encoTRive
Response encoTRive => IO-Controller:
a) Bei erfolgreicher Ausführung:
b) Bei fehlerhafter Ausführung:
Als Fehlernummer wird 0xABCD unterstellt
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 36 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Byte
Wert
Bedeutung
0 – Request Referenz
1
0x82
Fehler bei Parameter schreiben
2
0x00
Axis
3
0x01
4
0x44
Format (Fehler)
5
0x02
Anzahl Werte: 2
6
0xAB
Fehlernummer (High Byte)
7
0xCD
Fehlernummer (Low Byte)
8
0x00
Subindex des ersten Elements,
bei dem der Fehler auftrat
9
0x03
Byte
Wert
Bedeutung
0 – Request Referenz
1
0x01
Parameter lesen
2
0x00
Axis
3
0x01
4
0x10
Wert
5
0x04
4 Elemente
6
0x03
PNU High Byte
7
0x93
PNU Low Byte
8
0x00
erster Subindex: 0x0001
9
0x01
Byte
Wert
Bedeutung
0 – Request Referenz
1
0x01
Parameter lesen erfolgreich
2
0x00
Axis
3
0x01
4
0x42
Format: Word
5
0x04
Anzahl Werte: 4
6
0x00
Wert 1
(0x0001)
7
0x01
8
0x00
Wert 200
(0x00C8)
9
0xC8
10
0x01
Wert 300
(0x012C)
11
0x2C
12
0x00
Wert 0
(0x0000)
13
0x00
Falls der Fehler erst beim Schreiben des dritten Elements (Wert 202) auftritt, kann die
encoTRive Response folgendes Format haben:
In diesem Fall sind die ersten beiden Array-Elemente erfolgreich überschrieben. P915
hat also nach dem teilweise fehlgeschlagenen Schreibzugriff den Inhalt
{ 967, 200, 201, 300, 0,0,..., 0} .
1. Parameter 915 (0x393) enthalten die Werte
{ 967, 1, 200, 300, 0,0,..., 0} .
Die grau unterlegten Werte sollen gelesen werden.
IO-Controller Request:
encoTRive Response bei erfolgreicher Ausführung:
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 37 of 252

PROFINET Kommunikation mit encoTRive
Byte
Wert
Bedeutung
0 – Request Referenz
1
0x01
Parameter lesen
2
0x00
Axis
3
0x01
4
0x20
Beschreibung
5
0x01
1 Element
6
0x03
PNU High Byte
7
0x93
PNU Low Byte
8
0x00
Subindex: 0x0000 (gesamte Beschreibung)
9
0x00
2. Lesen der gesamten Parameterbeschreibung von Parameter 915 (0x393):
IO-Controller Request:
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 38 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Byte
Wert
Bedeutung
0
–
Request Referenz
1
0x01
Parameter lesen erfolgreich
2
0x00
Axis
3
0x01
1 Parameter
4
0x41
Format: Byte
5
0x2E
Anzahl Werte: 46
6
0x40
Identifier: 0x4006: Array aus UNSIGNED16
7
0x06
8
0x00
Anzahl Array-Elemente: 6
9
0x06
10
0x3F
Normierungsfaktor: Gleitkommazahl 1.0
11
0x80
12
0x00
13
0x00
14
0x00
Attribut: 0x0000
15
0x00
16
0x00
reserviert
17
0x00
18
0x00
19
0x00
20
0x50
‚P’
Name: „PZD Setpt.conf.“
21
0x5A
‚Z’
22
0x44
‚D’
23
0x20
‚ ‚
24
0x73
‚S’
25
0x65
‚e’
26
0x74
‚t’
27
0x70
‚p’
28
0x74
‚t’
29
0x2E
‚.’
30
0x63
‚c’
31
0x6F
‚o’
32
0x6E
‚n’
33
0x66
‚f’
34
0x2E
‚.’
35
0x00
36
0x00
Unterer Grenzwert: 0x00000000
37
0x00
38
0x00
39
0x00
40
0x00
Oberer Grenzwert: 0x0000FFFF
(65535)
41
0x00
42
0xFF
43
0xFF
44
0x00
Reserviert /ID Extension / PZD Ref. /PZD Normierung
45
0x00
46
0x00
47
0x00
48
0x00
49
0x00
50
0x00
51
0x00
encoTRive Response bei erfolgreicher Ausführung:
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 39 of 252

Antriebsspezifische Funktionen
6 Antriebsspezifische Funktionen
6.1 Allgemeine Zustandsmaschine
Die Zustandsmaschine definiert die internen Zustände, die der encoTRive gemäß
PROFIdrive Profil einnehmen kann und die Ereignisse, die zum Übergang zwischen
diesen Zuständen führen. In Abbildung 8 sind die Zustände mit SAx bezeichnet, die
Übergänge mit TAx.
Die meisten Zustände werden durch bestimmte Statusbits im Zustandswort
(ZSW=P968) identifiziert. In der Abbildung wird dies durch ZSW.x = y beschrieben.
Dabei bedeutet ZSW.3=1: "Bit 3 des ZSW ist gesetzt (Wert 1)".
Die meisten Zustandsübergänge werden durch Bitmuster, die im Steuerwort
(STW=P967) abgesetzt werden, initiiert. Dies ist in der Abbildung z.B. durch STW.1=0
("Bit 1 des STW auf 0 setzen") gekennzeichnet.
STW.7: 0->1 bedeutet, dass an Bit 7 des STW eine Flanke von 0 nach 1 erzeugt
werden muss.
Andere Bedingungen, die zu Zustandsänderungen Anlass geben, sind hinter der
entsprechenden Zustandsänderung vermerkt. Bei gewissen Zustandsänderungen
sind eine Reihe von Ausgangszuständen zulässig. So kann man praktisch aus jedem
Zustand in den Zustand "Störung" gelangen. Solche Übergänge sind dadurch
gekennzeichnet, dass die Ausgangszustände durch ein Rechteck begrenzt sind, auf
dessen Rand ein ausgefüllter Kreis platziert ist. Dies deutet an: Ausgangszustand
kann jeder Zustand im Inneren des Rechtecks sein, auf dessen Rand sich der
ausgefüllte Kreis befindet.
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 40 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

SA1:
Spannung einschalten
SA2:
Einschaltsperre
ZSW.6=1
SA10:
AUS2 Lastschutz
öffnen
ZSW.4=0
SA11:
Fehler/Störung
ZSW.3=1
SA9:
AUS3 Stufe2.
Lastschutz öffnen
ZSW.5=0
SA3:
Einschaltbereit
ZSW.0=1
SA7:
Nicht betriebsbereit
Hauptschalter AUS
ZSW.1=0
SA5:
Betrieb sperren aktiv
ZSW.2=0
SA4:
Betriebsbereit
ZSW.1=1
SA8:
Antrieb schnellst-
möglich stoppen
ZSW.5=0
SA6:
AUS1 aktiv Stufe1
ZSW.1=0
TA15: interner oder
externer Fehler
TA16: Fehler beheben, STW.7:0->1
TA14: Lastschutz
geöffnet
TA1: Spannung EIN
TA13: STW.1=0
TA2: STW.2=1, STW.1=1,
STW.10=1, STW.0=0
TA9: Lastschutz
geöffnet
TA3: STW.0=1
TA4: STW.3=1
TA5: STW.3=0
TA6
TA7: STW.0=0
TA8: Drehzahl/
Strom = 0
TA10: STW.2=0
TA11: Drehzahl/
Strom = 0
TA12: Lastschutz
geöffnet
Betriebsartspezifische
Aktionen
Einstellung der
Betriebsart: P930
Betriebsartspezifische
Aktionen
Einstellung der
Betriebsart: P930
Abbildung 8: PROFIdrive Zustandsmaschine, allgemeiner Teil
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 41 of 252

Antriebsspezifische Funktionen
Bit
Wert
Bedeutung
Beschreibung
0
1
EIN
Betriebsbereit. Spannung an Stromrichter.
0
AUS 1
Stillsetzen (zurück in Zustand "Einschaltbereit"); Herunterfahren an der
Hochfahrrampe
1
1
Betriebsbedingung
Alle "AUS 2" Befehle sind aufgehoben.
0
AUS 2
Spannungsfreischaltung
2
1
Betriebsbedingung
Alle "AUS 3" Befehle sind aufgehoben.
0
AUS 3
Schnellhalt; falls notwendig: Betriebssperre aufheben;
schnellstmögliches Herunterfahren
3
1
Betrieb freigeben
Freigabe Elektronik und Impulse
0
Betrieb sperren
Antrieb trudelt aus und geht in den Zustand "Betriebsbereit"
4
Betriebsart spezifisch
5
Betriebsart spezifisch
6
Betriebsart spezifisch
7
1
Quittieren
Störung wird mit positiver Flanke (0->1) quittiert. Es folgt ein
Zustandsübergang nach "Einschaltsperre", wenn die Störung
erfolgreich behoben wurde.
0
ohne Bedeutung
8
1
Tippen 1 Ein
Voraussetzung: Betrieb freigegeben, kein Positioniervorgang aktiv.
0
Tippen 1 Aus
9
1
Tippen 2 Ein
Voraussetzung: Betrieb freigegeben, kein Positioniervorgang aktiv.
0
Tippen 2 Aus
10 1 Führung von Steuerung
Führung erfolgt durch Steuerung; Prozessdaten gültig
0 keine Führung
Prozessdaten ungültig
11
Betriebsart spezifisch
12-15
nicht benutzt
6.1.1 Steuerwort und Zustandswort
Im Steuerwort (P967) fordert die Steuerung einen antriebsinternen Zustandsübergang
vom encoTRive an. Im Zustandswort (P968) teilt der encoTRive Informationen über
seinen tatsächlichen Zustand mit.
Steuer- und Statuswort sind immer Prozessdaten und sind demzufolge fester
Bestandteil des zyklischen Telegramms, wobei diese immer jeweils an erster Stelle im
Telegramm platziert sein müssen.
Tabelle 7: Steuerwort P967 (STW)
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 42 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Bit
Wert
Bedeutung
Beschreibung
0
1
Einschaltbereit
Stromversorgung eingeschaltet, Elektronik initialisiert.
Hauptschütz ggf. abgefallen, Impulse gesperrt.
0
Nicht einschaltbereit
1
1
Betriebsbereit
Betriebsbereit. Spannung an Stromrichter.
0
Nicht betriebsbereit
2
1
Betrieb freigegeben
Freigabe Elektronik und Impulse
0
Betrieb gesperrt
3
1
Störung
Eine Störung liegt vor. Der Antrieb befindet sich im
Zustand "Störung".
0
Störungsfrei
4
1
kein AUS 2
0 AUS 2
AUS 2 Befehl steht an.
5
1
kein AUS 3
0 AUS 3
AUS 3 Befehl steht an.
6 1 Einschaltsperre
0 keine Einschaltsperre
7
1
Warnung
Antrieb weiter in Betrieb; Warnung liegt an und kann aus
P953 entnommen werden. Keine Quittierung
0
keine Warnung
8
Betriebsart spezifisch
9 1 Führung gefordert
Die Steuerung wird aufgefordert, die Führung zu
übernehmen
0 Betrieb vor Ort
Führung nur lokal möglich
10
Betriebsart spezifisch
11
Betriebsart spezifisch
12
Betriebsart spezifisch
13
Betriebsart spezifisch
14-15
nicht benutzt
Tabelle 8: Zustandswort P968 (ZSW)
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 43 of 252

Antriebsspezifische Funktionen
Kodierung
Beschreibung
0x0001
Geschwindigkeitsregelung
0x0002
Positionieren
6.1.2 Betriebsartanwahl
Nach dem Zustandsübergang TA4 können Aktionen ausgeführt werden, die abhängig
von der gewählten Betriebsart sind. Die Betriebsart muss zuvor in Parameter 930
angewählt werden. Innerhalb der aktivierten Betriebsart erfolgt der Betrieb über eine
spezielle Zustandsmaschine.
encoTRive unterstützt folgende Betriebsarten:
Tabelle 9: encoTRive-Betriebsarten (Werte für Parameter 930)
6.2 Betriebsart Positionieren
Innerhalb der Betriebsart „Positionieren“ ist es möglich eine parametrierte Zielposition
mit einer parametrierten Beschleunigung, Geschwindigkeit und Verzögerung
anzufahren. Der encoTRive meldet das Erreichen der Zielposition. Der encoTRive
regelt im Stillstand auf die zuletzt erreichte Zielposition.
Die Positionierungen können unterbrochen und anschließend fortgeführt werden.
Ein zusätzlicher Tipp-Modus ermöglicht das direkte Verfahren in Abhängigkeit zweier
Richtungsbits im Steuerwort.
Des Weiteren kann innerhalb der Betriebsart „Positionieren“ der interne
Positionsgeber referenziert werden.
6.2.1 Zustandsmaschine Betriebsart "Positionieren"
Es werden verschiedene interne Zustände (SCx) eingenommen. Diese Zustände
sowie die Übergänge (TCx) zwischen diesen Zuständen sind im Profil PROFIdrive
definiert. Bei der folgenden Abbildung 9 gelten die gleichen Konventionen wie bei der
allgemeinen Zustandsmaschine Abbildung 8. In der Betriebsart Positionieren wird
nach Zustandsübergang TA4 der Zustand SC1 eingenommen. Zustandsübergang
TA5 führt aus jedem der Zustände in Abbildung 9 in den Zustand SA5.
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 44 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019
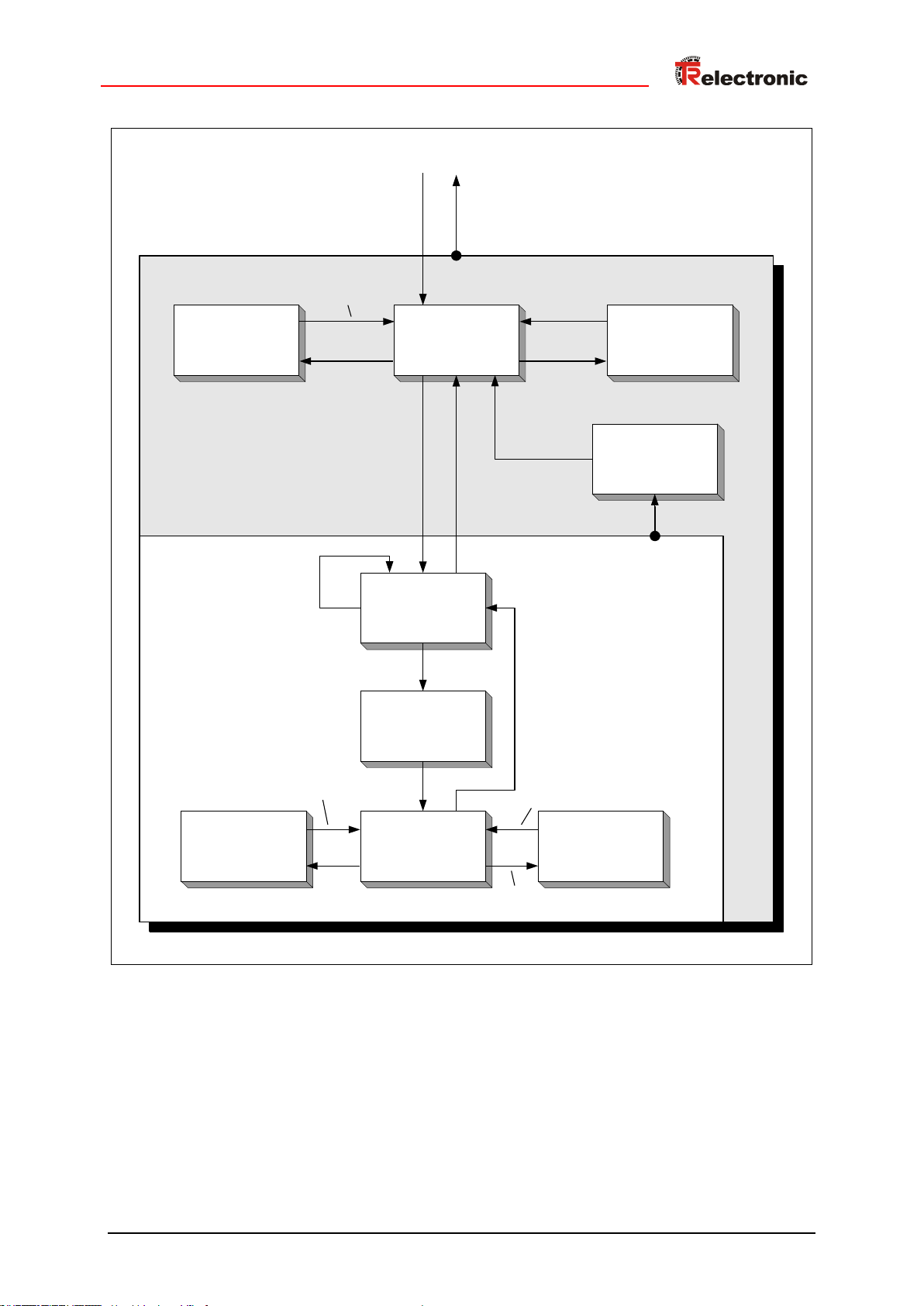
SC1:
Betrieb freigegeben
ZSW.2=1
TA4
SC7:
Bremsen mit max.
Bremsbeschleunigung
SC2:
Fahrauftrag aktiv
ZSW.10=0, ZSW.13=0
SC3:
Bremsen mit Rampe
SC4:
Zwischenhalt
ZSW.13=1
SC8:
Referenzieren
ZSW.11=1
SC9:
Tippen
SC5:
Referenzieren
ZSW.11=1
SC6:
Tippen
TA5
TC13:
STW.11=1
TC11: STW.4=0
TC12:
V = 0
TC15:
STW.8=1 oder
STW.9=1
TC16:
STW.8=0
STW.9=0
TC1:
STW.4=1, STW.5=1
Flanke bei STW.6, referenziert
TC3:
STW.10=1, Fahrauftrag fertig
TC2:
Flanke bei STW.6
TC4:
STW.5=0
TC5:
V = 0
ZSW.13=1
TC6:
STW.5=1
TC7:
STW.11=1
TC8:
STW.11=0 oder
Referenzpunkt gesetzt
TC9:
STW.8=1 oder STW.9=1
TC10:
STW.8=0, STW.9=0
TC14:
STW.11=0 oder
Referenzpunkt gesetzt
Abbildung 9: PROFIdrive Zustandsmaschine, Betriebsart Positionieren
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 45 of 252

Antriebsspezifische Funktionen
Bit
Wert
Bedeutung
Beschreibung
4
1
Betriebsbedingung
0
Fahrauftrag verwerfen
encoTRive bremst aus einem aktiven Fahrauftrag mit
maximaler Beschleunigung bis zum Stillstand. Der
aktuelle Fahrauftrag wird verworfen.
5
1
Betriebsbedingung für
Positionieren
0
Zwischenhalt
encoTRive bremst aus einem aktiven Fahrauftrag an
Rampe auf Drehzahl 0 und bleibt mit Haltemoment
stehen. Der Fahrauftrag wird nicht verworfen. Bei
Wechsel auf Bit 5 = 1 wird der Fahrauftrag fortgeführt.
6 Fahrauftrag aktivieren
Jede Flanke gibt einen Fahrauftrag oder einen Sollwert
frei. Ein Toggeln ohne veränderten Verfahrparameter ist
nicht zulässig.
11
1
Start Referenzieren
Referenziervorgang wird gestartet. ZSW.11 wird auf 0
gesetzt. Voraussetzung: Betrieb freigegeben.
0
Stopp Referenzieren
Ein laufender Referenziervorgang wird abgebrochen.
Antrieb stoppt an Rampe.
Bit
Wert
Bedeutung
Beschreibung
8
1
Kein Schleppfehler
Der dynamische Soll-Istwertvergleich liegt innerhalb des
Schleppfehlerfensters (P305)
0
Schleppfehler
Der dynamische Soll-Istwertvergleich liegt außerhalb des
Schleppfehlerfensters (P305)
10
1
Zielposition erreicht
Der Positionsistwert steht am Ende eines Fahrauftrags im
Positionierfenster (P304)
0
außerhalb Zielposition
Der Positionsistwert liegt außerhalb des
Positionierfensters (P304)
11
1
Referenzpunkt gesetzt
Referenzierung wurde durchgeführt und ist gültig.
ZSW.11 = 1: Dient als Rückmeldung des
Referenziervorgangs und ist nur bis zum nächsten
Systemkaltstart aktiv. Der Parameter 805 repräsentiert
den remanent gesetzten Referenzpunkt, siehe Kapitel
8.5.1 Herstellerspezifische Parameter.
0
kein Referenzpunkt
gesetzt
12 Sollwert Quittierung
Durch eine Flanke wird die Übernahme eines neuen
Fahrauftrags quittiert (gespiegelter, gleicher Pegel wie
STW.6)
13
1
Antrieb steht
Signalisiert den Abschluss eines Fahrauftrags oder den
Stillstand bei Zwischenhalt und Stopp.
0
Antrieb fährt
Fahrauftrag wird ausgeführt, Antrieb in Bewegung
Tabelle 10: Steuerwort P967 Positionieren
Tabelle 11: Zustandswort P968 Positionieren
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 46 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

6.2.2 Referenzieren
Einmalig bei Montage bzw. bei der Erstinbetriebnahme, muss das interne
Positionsmesssystem auf den Referenzpunkt der Maschine abgeglichen werden. Da
der encoTRive mit einem absoluten Multi-Turn-Positionsgeber ausgestattet ist, ist
nach Spannungsausfall oder Not-Aus kein erneutes Referenzieren erforderlich.
In den Zuständen SC1 (Betrieb freigegeben) und SC4 (Zwischenhalt) wird durch
Setzen von Bit 11 „Start Referenzieren“ des STW eine Referenzierung initiiert. Ist die
Referenzierung beendet, so wird automatisch in den Ausgangszustand SC1 bzw. SC4
zurückgekehrt und im Zustandswort Bit 11=1 einmalig die erfolgreiche Referenzierung
zurückgemeldet. Im Parameter P100 „Lageistwert“ wird der im P003
„Referenzpunktkoordinate“ gespeicherte Wert übernommen.
Im P805 „Referenzpunkt gesetzt“ wird die Information, dass der encoTRive
referenziert wurde, remanent gespeichert. Die Information bleibt solange erhalten, bis
Werksvoreinstellungen geladen werden oder der P805 selbst zurückgesetzt wird.
6.2.3 Positionierungen durchführen
Eine Positionierung kann im Zustand SC1 durchgeführt werden.
Das Starten einer Positionierung erfolgt durch einen Flankenwechsel des Bit 6
("Fahrauftrag aktivieren") im STW. Die Positionierung erfolgt gemäß einer Rampe, die
sich aus den aktuellen Einstellungen für die Geschwindigkeit P201, die
Beschleunigung P202 und die Bremsbeschleunigung P203 ergibt:
Abbildung 10: Rampeneinstellungen
Zunächst wird konstant entsprechend P202 beschleunigt, bis die gewünschte
Geschwindigkeit P201 erreicht ist. Es folgt eine Phase mit konstanter
Geschwindigkeit. Schließlich wird entsprechend P203 bis zum Stillstand abgebremst.
Die zurückzulegende Wegstrecke ergibt sich aus dem Lageistwert P100 beim Start
der Positionierung und der Zielposition P200. Liegen diese Werte nahe beieinander,
so kann es vorkommen, dass die Phase mit konstanter Geschwindigkeit fehlt, die in
P201 angeforderte Geschwindigkeit also nicht erreicht wird.
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 47 of 252

Antriebsspezifische Funktionen
Parameter
Bedeutung
200
Zielposition
201
Geschwindigkeit
202
Beschleunigung
203
Verzögerung
304
Zielbereich
305
Schleppabstand
400
Steuerwort 2
401
Zustandswort 2
402
Satzanwahl
403
Aktueller Satz
Die nachfolgend beschriebene „Stillstandüberwachung“ ist nur bei Antrieben
verfügbar, bei denen der Index der Firmware-Nummer an vorletzter Stelle ≥ 2 ist.
Beispiel: 0141x-xx2x
Das Ende der Positionierung wird vom Antrieb in ZSW.10=1 ("Sollposition erreicht")
signalisiert. Dieses Bit wird intern gesetzt, wenn der Istwert sich im definierten
Zielbereich P304 befindet.
Der maximale Schleppabstand P305 definiert die maximal zulässige Differenz
zwischen dynamisch intern berechneten Sollwert und aktuellen Lageistwert. Wird
dieser Wert überschritten, so wird der Fehler 700 "Schleppfehler" (siehe Fehlerliste
Seite 66) generiert und der Antrieb geht in den Zustand Störung (SA11). Zusätzlich
wird im Statuswort ZSW.8=0 („Schleppfehler“) der Fehler direkt angezeigt.
6.2.4 Positionieren über Fahrsatztabelle
Es besteht die Möglichkeit, bis zu 32 Parametersätze für Positionierungen im Antrieb
zu hinterlegen. Dies geschieht über Indizes der Parameter 200 bis 203. Jede
Indexnummer von 1 bis 31 entspricht hierbei einer Fahrsatznummer, die über die
P400 (STW2) oder P402 (Satzanwahl) aufgerufen werden kann.
P401 (ZSW2) und P403 (aktueller Satz) zeigen den aktuellen Fahrsatz an. Falls keine
Satzanwahl erfolgt ist, wird automatisch der Satz 0 bearbeitet.
Folgende Parameter beeinflussen einen Positionierauftrag:
Tabelle 12: Parameter, die eine Positionierung beeinflussen
6.2.5 Stillstandüberwachung
Die Stillstandüberwachung identifiziert das Verlassen der Zielposition im Stillstand.
6.2.5.1 Funktion
Mithilfe der Parameter P309 „Stillstandsbereich“ und P310 „Überwachungszeit“ kann
die Überwachung parametriert werden. Die Überwachungszeit wird nach Beendigung
einer Positionierung gestartet. Erst nach Ablauf der Überwachungszeit wird zyklisch
überwacht ob der Lageistwert (P100) sich noch im Stillstandbereich (P309) befindet,
anderenfalls wird eine Warnung (P953, Bit 5) Stillstandüberwachung gemeldet. Die
Stillstandüberwachung ist nur bei aktiviertem Regler wirksam.
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 48 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

6.3 Betriebsart Geschwindigkeitsregelung
Innerhalb dieser Betriebsart kann geschwindigkeitsgeregelt mit einer parametrierten
Geschwindigkeit verfahren werden. Der encoTRive meldet das Erreichen der
Sollgeschwindigkeit. Der encoTRive steht im Stillstand in Lageregelung.
Ein zusätzlicher Tipp-Modus ermöglicht das direkte Verfahren in Abhängigkeit zweier
Richtungsbits im Steuerwort.
Um eine neue Geschwindigkeit während der Drehzahlregelung vor zu geben, ist ein
zusätzlicher Flankenwechsel am STW Bit 6 nicht erforderlich. Sobald eine neue
Drehzahl an den encoTRive übergeben wird (Parameter 201, Geschwindigkeit), wird
diese fliegend übernommen.
6.3.1 Zustandsmaschine Betriebsart "Geschwindigkeitsregelung"
Es werden verschiedene interne Zustände (SBx) eingenommen. Diese Zustände,
sowie die Übergänge (TBx) zwischen diesen Zuständen, sind im Profil PROFIdrive
definiert. Bei der folgenden Abbildung 11 gelten die gleichen Konventionen wie bei der
allgemeinen Zustandsmaschine Abbildung 8. In der Betriebsart
"Geschwindigkeitsregelung" wird nach Zustandsübergang TA4 der Zustand SB1
eingenommen. Zustandsübergang TA5 führt aus jedem der aufgeführten Zustände in
den Zustand SA5 (siehe Abbildung 11).
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 49 of 252

Antriebsspezifische Funktionen
SB6:
Tippen
TA4
SB2:
Ausgang freigeschaltet
SB3:
Rampe
aufwärts freigeschaltet
SB4:
Betriebsstatus
ZSW.10=1
SB1:
Betrieb freigegeben
ZSW.2=1
TA5
TB11:
STW.8=0 and STW.9=0
TB2:
STW.5=1
TB3:
STW.6=1
TB9:
STW.8=1 oder STW.9=1 oder
STW.8=1 and STW.9=1
SB5:
Bremse mit max.
Beschleunigung
TB5:
STW.5=0
TB4:
STW.6=0
TB7:
STW.4=0
TB1:
Betriebszustand
STW.4=1
TB8:
Drehzahl = 0
TB10:
STW.8=1 oder STW.9=1 oder
STW.8=1 and STW.9=1
TB6:
STW.5=0
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 50 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019
Abbildung 11: PROFIdrive Zustandsmaschine, Betriebsart Geschwindigkeitsregelung

Gefahr von Körperverletzung und Sachschaden durch Überschreiten
der parametrierten Softwareendschalter P300 und P301!
Bit
Wert
Bedeutung
Beschreibung
4
1
Betriebsbedingung
0
Hochlaufgeber sperren
Antrieb fährt an Stromgrenze herunter, Stromrichter bleibt
eingeschaltet.
5
1
Hochlaufgeber freigeben
0
Hochlaufgeber stoppen
Antrieb fährt mit konfigurierter Bremsrampe (P203) herunter.
6
1
Sollwert freigeben
Antrieb fährt mit konfigurierter Hochlauframpe (P202) hoch
bis Geschwindigkeitssollwert (P201) erreicht ist.
0
Sollwert sperren
Antrieb fährt mit konfigurierter Bremsrampe (P203) herunter,
bis Antrieb steht.
11
In dieser Betriebsart keine Bedeutung
Bit
Wert
Bedeutung
Beschreibung
8
Wird von encoTRive nicht unterstützt, stattdessen Schleppfehlerfehlerüberwachung aktiv!
10
1
Sollgeschwindigkeit
erreicht
Die vorgewählte Geschwindigkeit (P201) ist erreicht.
0
Istgeschwindigkeit
kleiner als Sollgeschwindigkeit
Die vorgewählte Geschwindigkeit (P201) ist noch nicht
erreicht.
11
Keine Bedeutung
12
Keine Bedeutung
13
Keine Bedeutung
Im Sinne der Betriebsart "Geschwindigkeitsregelung" sind die parametrierten
Softwareendschalter P300 und P301, welche sich auf den Lageistwert
beziehen, ohne Funktion.
Durch das integrierte Positions-Messsystem z.B. ergeben sich bei
umlaufenden Anwendungen Bereichsüberschreitungen. Abhängig von der
Drehrichtung äußert sich dies durch einen Sprung des Lageistwert (P100):
Max --> Min / Min --> Max.
Die Anwendung darf deshalb nicht vom Lageistwert abhängig sein !
Tabelle 13: Steuerwort Geschwindigkeitsregelung
Tabelle 14: Zustandswort Geschwindigkeitsregelung
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 51 of 252

Antriebsspezifische Funktionen
Die für diese Betriebsart relevanten Positionierparameter P201-P203
beziehen sich auf den Index 0.
Parameter
Bedeutung
201
Geschwindigkeit
202
Beschleunigung
203
Verzögerung
305
Schleppabstand, (siehe Betriebsart Positionieren Seite 44)
Drehzahlgeregelter Betrieb durchführen
Geschwindigkeitsrampen-Einstellungen gemäß folgender Abbildung 12 vornehmen.
Abbildung 12: Rampeneinstellungen
Um drehzahlgeregelt verfahren zu können, müssen die Zustandsübergänge TB1 bis
TB3 durchlaufen werden. Nach TB3 beginnt der Antrieb gemäß der eingestellten
Rampe zu verfahren. Wenn die vorgewählte Geschwindigkeit erreicht ist, wird dies im
Statuswort Bit10 signalisiert. Die Geschwindigkeit wird solange beibehalten bis
entweder durch zurücksetzen des Bits 4 im Steuerwort das schnellstmögliche
Stillsetzen initiiert wird, oder durch zurücksetzen des Bit 5 oder 6 mit eingestellter
Bremsbeschleunigung herunter gerampt wird.
Im Zustand SB4, d.h. Antrieb hat die vorgegebene Drehzahl erreicht, übernimmt
dieser unverzüglich einen geänderten Drehzahlsollwert (P201).
Folgende Parameter beeinflussen einen Positionierauftrag:
Tabelle 15: Parameter, die eine Positionierung beeinflussen
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 52 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

6.4 Umrechnung in physikalische Einheiten
Antriebsnahe physikalische Parameter, wie beispielsweise Geschwindigkeit P201,
Zielposition P200, Stromistwert P101 etc., können nicht direkt in der entsprechenden
physikalischen Einheit übertragen werden.
Ein Grund dafür ist, dass für manche Parameter systembedingt höhere Genauigkeiten
gefordert sind, als die Grundeinheit eines Parameters liefern könnte. So ist es z.B. bei
der Positionsangabe sinnvoller die Werte nicht in mm, sondern in 1/10000 mm zu
übertragen.
Ein weiterer Grund ist, aus Applikationssicht möglichst systemunabhängig zu sein.
Manche Parameter wie z.B. Geschwindigkeit werden nicht in der üblichen Einheit
Umdr./min angegeben, sondern in %. Es ist damit sichergestellt, dass bei
verschiedenen Antriebstypen bei einer vorgegebenen Geschwindigkeit von 100 %
immer mit maximaler Geschwindigkeit verfahren wird.
Ferner ist anhand der Parameter P001 Getriebeuntersetzung und P002 Steigung die
Möglichkeit geschaffen, mit tatsächlichen maschinennahen Einheiten zu arbeiten. So
kann man letztlich den Verfahrweg in mm oder Grad vorgeben, wie er dann
tatsächlich an einer Maschine ausgeführt wird.
In der Praxis ist es erforderlich entsprechende Umrechnungen vorzunehmen, um den
Bezug zu den tatsächlichen physikalischen Einheiten zu schaffen.
6.4.1 Umrechnung von Positionseinheiten
Positionsangaben erfolgen generell in (mm) linear und (Grad) rotativ. Dabei wird der
Datentyp C4 verwendet (vgl. Tabelle 25). Ein C4 Wert 1234567 wird als 123.4567 mm
oder Grad interpretiert.
Die Positionsangaben können applikationsspezifisch wie in dargestellten Beispielen
definiert werden:
Beispiel 1 Spindel:
Positionsangaben = [mm]
P001 (Getriebefaktor) 50000 (C4 Datentyp) entspricht i = 5
P002 (Steigung) 40000 (C4 Datentyp) entspricht
f = 4 mm Weg pro Getriebeumdrehung
Abbildung 13: Spindelanwendung
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 53 of 252

Antriebsspezifische Funktionen
Beispiel 2 Riemen:
Positionsangaben = [mm]
P001 (Getriebefaktor) 50000 (C4 Datentyp) entspricht i = 5
P002 (Steigung) 2199114 (C4 Datentyp) entspricht
Umfang der treibenden Scheibe U = Pi * d
f = 219,9114 mm Weg pro Getriebeumdrehung
Abbildung 14: Zahnriemenanwendung
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 54 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

(PNU) Parameternummer
Bedeutung
001
Getriebefaktor
002
Steigung
201
Geschwindigkeit
202
Beschleunigung
505
Geberauflösung
514
Maximale Drehzahl
515
Maximale Beschleunigung
rehung]angabe/Umd[Positions Steigung
ktorGetriebefahung][Inc/Umdre sungGeberauflö
aktorPositionsf
•
=
[Inc/mm]1280 [Inc/mm]
4.0
0.51024
aktorPositionsf =
•
=
[mm/sec]58
[Inc/mm]1280
[Inc/sec]74240
gkeitGeschwindi Maximale ==
][mm/sec133,33
[Inc/mm]1280
]/sec170667[Inc
gungBeschleuni Maximale
2
2
==
6.4.2 Umrechnungen von Geschwindigkeits- und Beschleunigungseinheiten
Geschwindigkeiten P201 und Beschleunigungen P202 werden in Prozent angegeben.
Dabei wird der Datentyp N2 verwendet (vgl. Tabelle 25).
Ein N2-Wert x entspricht 100*x/16384 %. Die Bezugsgröße (100 %) ist dabei über die
maximale Drehzahl (Parameter 514) bzw. die maximale Beschleunigung (Parameter
515) gegeben. Diese sind in U/min (Parameter 514) bzw. (U/min)/sec (Parameter 515)
angegeben und sind systembedingt über ein Passwort geschützt.
Interpretation des N2-Wertes in physikalischen Einheiten, verdeutlicht folgendes
Beispiel:
Tabelle 16: Parameter zur Umrechnung von Einheiten
Feste Werte:
Geberauflösung P505 = 1024 Inc
Maximale Drehzahl P514 = 4350 U/min = 74240 Inc/sec
Maximale Beschleunigung P515 = 10000 (U/min) / sec = 170667 Inc/sec
Beispiel:
Gegeben seien:
P001 (Getriebefaktor) = 50000 C4 Datentyp
P002 (Steigung) = 40000 C4 Datentyp
Die Umrechnung in mm/sec bzw. mm/sec² erfolgt über einen Positionsfaktor:
Positionsfaktorberechnung:
Maximale Geschwindigkeitsberechnung:
2
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 55 of 252
58 mm/sec = 100 % = 16384 = 4350 U/min
Maximale Beschleunigungsberechnung:
133 mm/sec2 = 100 % =16384 = 10000 (U/min)/sec

Antriebsspezifische Funktionen
Standardsignal-Nr.
Bedeutung
Parameter-Nr. encoTRive
1
Steuerwort 1
967
2
Statuswort 1
968
3
Steuerwort 2
400
4
Statuswort 2
401
5
Geschwindigkeits-Sollwert
201
6
Geschwindigkeits-Istwert
103
21
Input (digital)
803
22
Output (digital)
804
27
Zielposition
200
28
Lageistwert
100
32
Fahrsatzanwahl
402
33
Aktueller Fahrsatz
403
100
Strom-Istwert
101
101
Temperatur-Istwert
102
6.4.3 Standardsignale nach PROFIdrive
Da PROFIdrive keine bestimmten Parameternummern z.B. für den Positions-Istwert
oder für den Geschwindigkeits-Istwert vorgibt, wird in einem speziellen Parameter
P923 die Zuordnung zwischen sog. Standardsignalen und herstellerspezifischen
Parametern vorgenommen, die der Tabelle 17 entnommen werden können.
Diese sieht bei encoTRive wie folgt aus:
Tabelle 17: Standardsignale bei encoTRive
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 56 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Parameternummer
Bedeutung
Wertebereichsprüfung
001
Getriebefaktor
statisch
002
Steigung
statisch
003
Referenzpunktkoordinate
dynamisch
300
Softwareendschalter min.
dynamisch
301
Softwareendschalter max.
dynamisch
6.5 Verfahrbereich und Referenzpunktkoordinate
Über den 32-Bit-Wertebereich und die erfassbare Anzahl Umdrehungen des
integrierten absoluten Positionsmesssystems, wird die Begrenzung für den
maximalen Verfahrbereich definiert.
Da der Parameter erfassbare Anzahl Umdrehungen nicht über das Typenschild
erfasst ist, muss dieser über die Parameter Umdrehungen und Untersetzung erst
ermittelt werden. Diese Angaben werden in der Regel bei der
Bestellung/Auftragsbestätigung dem Kunden übergeben.
Vom Positionsmesssystem unterstützte erfassbare Anzahl Umdrehungen sind:
1. Wert = 4079, wenn Umdrehungen * Untersetzung = 4096
2. Wert = 65472, wenn Umdrehungen * Untersetzung = 65536
Aus diesen Gegebenheiten resultiert die Gefahr, dass es während des
Positionierbetriebs, unter bestimmten Voraussetzungen, zu ungewollten Überläufen
des Positionsmesssystems kommen kann.
Um diese Gefahr zu verhindern prüft der encoTRive bereits bei der Parametrierung
die hierfür verantwortlichen Parameter. Da diese wiederum voneinander abhängen,
werden die zulässigen Wertebereiche im encoTRive dynamisch angepasst.
Tabelle 18: Für die Definition des Verfahrbereichs relevante Parameter
Des Weiteren gilt es folgenden Sachverhalt zu beachten:
● Werksvoreinstellung: Softwareendschalter befinden sich auf Maximalwerte
(Maximaler Verfahrbereich)
● Reihenfolge der Parametrierung beachten, d.h. beim sequenziellen Schreiben der
o.g. Parameter darf keine Bereichsüberschreitung stattfinden.
● Der Referenzpunkt wird antriebsintern immer als Mittelpunkt des maximalen
Verfahrbereichs betrachtet.
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 57 of 252

Antriebsspezifische Funktionen
]4C[10000*
tersetzungGetriebeun
Steigung*nUmdrehunge
]4C[icherfahrbereMaximalerV
Vorschub
Erfassbar
1
Max
=
BEISPIEL 1
C4 Datentyp
BEISPIEL 2
C4 Datentyp
BEISPIEL 3
C4 Datentyp
P001 (Getriebefaktor)
10 000
80 000
80 000
P002 (Steigung)
10 000
30 000
1 250 000
Min/Max Werte
Software-Endschalter
(P300/P301)
+/- 654 720 000
+/- 245 520 000
+/- 2 000 000 000
(+/- 10 230 000 000 )*
Maximaler
Verfahrbereich
(P301-P300)
654 720 000
245 520 000
4 000 000 000
(10 230 000 000)*
Ergebnis
Keine 32 Bit Bereichsverletzung
32 Bit
Bereichsverletzung
(gekennzeichnet mit *),
deshalb limitiert
Der 32-bit Zahlenbereich wird bei der Software-Endschalter Dimensionierung
geprüft. Tritt eine Bereichsüberschreitung auf, kann beispielsweise der
Steigungswert um Faktor 10 reduziert werden.
Der Steigungswert entspricht jetzt nicht mehr dem C4 Datentyp. Dies gilt auch für
den Lageistwert, die Zielposition und die Software-Endschalterpositionswerte.
6.5.1 Definition des tatsächlichen Verfahrbereichs
Der tatsächliche Verfahrbereich ist definiert über die Differenz der Parameter 300
„Softwareendschalter min.“ und Parameter 301 „Softwareendschalter max.“. Der
tatsächliche Verfahrbereich muss immer kleiner als der maximale Verfahrbereich sein.
Der maximale Verfahrbereich ist durch die Auflösung des internen
Positionsmesssystems begrenzt und es gelten folgende Konventionen:
● Positionsmesssystem: Erfassbare Anzahl Umdrehungen = 65472 oder 4079
● Wertebereich durch C4 Datentyp limitiert: -2147483648 bis 2147483648 (intern
wiederum limitiert auf statische Grenzen -200000000 bis 2000000000)
● Defaultwerte der Softwareendschalter beziehen sich immer auf die Defaultwerte
für P001 „Getriebeuntersetzung“ und P002 „Steigung“
Formel 1: Berechnung des max. Verfahrbereichs
Tabelle 19: Beispiele aus der Berechnung des maximalen Verfahrbereichs
1
Zahlenwert für Berechnung des maximalen Verfahrbereichs
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 58 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Tatsächlicher Verfahrbereich Z = Max. Verfahrbereich X
Y
Referenzpunktkoordinate
-X/2 +/- Y
Minimale
Software-
Endschalterposition
X/2 +/- Y
Maximale
Software-
Endschalterposition
- S1
Software-
Endschalterposition
Maximaler Verfahrbereich
X
Y
Referenzpunktkoordinate
Tatsächlicher Verfahrbereich
Z { Z < X/2}
S2
Software-
Endschalterposition
(X-Z)/2
-X/2 + Y
(X-Z)/2
X/2 + Y
Y
min
= W - (X-Z)/2
Y
max
= W + (X-Z)/2
W = (S1 + S2) / 2
6.5.2 Definition der Referenzpunktkoordinate
Grundsätzlich gilt es bei der Parametrierung der Referenzpunktkoordinate drei Fälle
zu unterscheiden.
6.5.2.1 Tatsächlicher Verfahrbereich Z = Max. Verfahrbereich X
Sollen die maximalen Software-Endschalterpositionen beibehalten werden, ist eine
Verschiebung der Referenzpunktkoordinate nicht möglich.
Der eingestellte Referenzpunkt muss als Differenz zu den beiden SoftwareEndschalterpositionen berücksichtigt werden, um den maximalen Verfahrbereich nicht
zu überschreiten.
Abbildung 15: Software-Endschalterpositionen / Referenzpunktkoordinate
6.5.2.2 Tatsächlicher Verfahrbereich < Maximaler Verfahrbereich/2
Ist der definierte Verfahrbereich kleiner als die Hälfte des maximal zulässigen
Verfahrbereichs, kann eine frei definierbare Referenzpunktkoordinate übergeben
werden.
Abbildung 16: Maximale Referenzpunktkoordinate, Z < X/2
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 59 of 252

Antriebsspezifische Funktionen
- S1
Software-
Endschalterposition
Maximaler Verfahrbereich
X
Y
Referenzpunktkoordinate
Tatsächlicher Verfahrbereich
Z { Z > X/2}
S2
Software-
Endschalterposition
(X-Z)/2
-X/2 +
Y
(X-Z)/2
X/2 + Y
Y
min
= W - (X-Z)/2
Y
max
= W + (X-Z)/2
W = (S1 + S2) / 2
6.5.2.3 Tatsächlicher Verfahrbereich > Maximaler Verfahrbereich/2
Ist der über die Software-Endschalterpositionen definierte tatsächliche Verfahrbereich
(Z) größer als die Hälfte des maximal Verfahrbereichs (X), kann eine maximale
Referenzpunktkoordinate (Y) aus der Differenz zwischen dem maximalen und dem
tatsächlichen Verfahrbereich definiert werden.
Abbildung 17: Maximale Referenzpunktkoordinate, Z > X/2
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 60 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Die nachfolgend beschriebene „Rundachsanwendung“ ist nur bei Antrieben
verfügbar, bei denen der Index der Firmware-Nummer an vorletzter Stelle ≥ 2 ist.
Beispiel: 0141x-xx2x.
6.6 Rundachse mit Modulokorrektur
6.6.1 Beschreibung
Zur Realisierung einer Rundachsanwendung mit fortlaufender Positionierung in einer
Richtung und einem mechanischen Getriebe mit beliebiger Untersetzung ist ein
Algorithmus zur Modulokorrektur bzw. Getriebefunktion erforderlich. Dadurch werden
Rundungsfehler kompensiert und ein Wegdriften des Positionswertes verhindert.
Das folgende Beispiel veranschaulicht die notwendige Modulokorrektur anhand einer
Rundtischanwendung:
Der encoTRive besitzt AM = 4096 Positionseinheiten pro Umdrehung und treibt einen
Rundtisch an. Zwischen Motor und Anwendung befindet sich ein Getriebe mit einer
Untersetzung von i = 39/17. Der Tisch dreht also 17 mal, während der Motor 39 mal
dreht. Somit entspricht eine Tischumdrehung 4096*39/17, also ungefähr
9396,70588… , tatsächlich sind es 9396 12/17 Positionseinheiten am Motor. Damit
der Rundtisch immer wieder korrekt in der Ausgangsposition steht, muss
abwechselnd 12 x 9396 und 17 x 9397 Positionseinheiten verfahren werden.
Abbildung 18: Modulokorrektur bei Rundtischanwendng
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 61 of 252

Antriebsspezifische Funktionen
Parameternummer [Index]
Bedeutung
001[0]
Getriebefaktor Zähler
001[1]
Getriebefaktor Nenner
006
Verfahrbereich
AA = P006 Verfahrbereich *
P001[1] Getriebefunktion Nenner
P001[0] Getriebefunktion Zähler
Beispiel 1
Beispiel 2
Beispiel 3
Beispiel 4
P006
Verfahrbereich
3600
36000
270000
360000
P001[0]
Getriebefaktor Zähler
39
32
800
3200
P001[1]
Getriebefaktor Nenner
17 1 9
156
i, Untersetzungsverhältnis
2,294117
32
88,8888
20,513
AA, Auflösung
1569,2308
1125
3037,5
17550
Ergebnis
OK
OK
OK
NOK
6.6.2 Parametrierung der Rundachse
Über die Parametrierung des encoTRive kann der antriebsinterne Positionssensor an
die anwendungsspezifische Rundachse mit Getriebe angepasst werden. Da der
encoTRive bzw. das zugrundeliegende Antriebsprofil PROFIdrive nur ganze Zahlen
unterstützt, muss die Getriebeuntersetzung „i“ als Bruch mit Zähler P001[0] und
Nenner P001[1] parametriert werden. Der Parameter P006 „Verfahrbereich“ definiert
den maximalen Positionswert der Anwendung, bevor der Lageistwert P100 wieder bei
Null beginnt.
Tabelle 20: Für die Definition des Verfahrbereichs relevante Parameter
Die Aktivierung der Rundachsenfunktionaliät erfolgt, sobald der Parameterwert
P006 > 0 ist.
Folgende Bedingungen müssen bei der Parametrierung eingehalten werden:
Getriebefaktor Zähler P001[0] < P006 Verfahrbereich
Getriebefaktor Zähler P001[0] < 32768
Verfahrbereich P006 > 0
Getriebefaktor Zähler P001[0] ≥ Getriebefaktor Nenner P001[1]
Auflösung der Anwendung „AA“:
Es gilt AA < AM, wobei AM = 4096
Tabelle 21: Parameterbeispiele für Rundachsfunktion
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 62 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Nach dem Schreiben der Parameter müssen diese über Parameter P971 = 1
remanent im Antrieb gespeichert werden. Nach erstmaligem Neustart muss der
Antrieb referenziert werden (siehe Kap.: 6.6.3) und erst danach ist der Lageistwert
P100 gültig.
Vorgehensweise bei der Parametrierung einer Rundachse (Beispiel 1):
1. Verfahrbereich P006 => 3600
2. Getriebefaktor Zähler P001[0] => 39
3. Getriebefaktor Nenner P001[1] => 17
4. Im Flash speichern P971 => 1
5. Antrieb neu starten
6. Antrieb referenzieren
6.6.3 Referenzieren
Das Referenzieren muss bei aktivem Regler in der Betriebsart Positionieren erfolgen.
Dazu muss im Steuerwort P967 Bit 11 = 1 gesetzt werden. Daraufhin übernimmt der
Antrieb die parametrierte Referenzpunkt-Koordinate P003 als neuen Lageistwert
P100.
Die Referenzpunkt-Koordinate muss kleiner als der zulässige Verfahrbereich P006
sein.
Da der encoTRive über einen absoluten Positionssensor verfügt, kann nach dem
Referenzieren, in spannungslosem Zustand, die Welle des Motors verdreht werden.
Die Anzahl maximal zulässiger Umdrehungen hängt von der Anzahl Umdrehungen
ab, die der Antrieb nach dem Referenzieren verdreht wurde. Dieser Wert muss von
65536 subtrahiert werden und es ergibt sich daraus die maximal zulässige
Umdrehungsanzahl im spannungslosen Zustand.
6.6.4 Betriebsarten bei parametrierter Rundachse
Es sind weiterhin beide Betriebsarten „Positioniermode“ und „Geschwindigkeitsmode“
bei parametrierter Rundachse möglich und der fliegende Betriebsartwechsel ist
zulässig. Das bedeutet, dass bei aktiviertem Regler zwischen beiden Betriebsarten
gewechselt werden kann.
6.6.4.1 Positioniermode
Innerhalb des Positioniermodes kann relativ innerhalb des Verfahrbereichs P006 in
positive und negative Richtung verfahren werden (Steuerwort P967 Bit 12 = 1). Die
Richtung wird dabei über das Vorzeichen der Zielposition P200 definiert.
Es besteht aber auch nach wie vor die Möglichkeit, die parametrierte Zielposition
P200 absolut (Steuerwort P967 Bit 12 = 0) anzufahren. Darüber hinaus kann über
Bit 13 = 1 im Steuerwort P967 festgelegt werden, ob direkt der kürzeste Weg
(Durchfahrt über Null Position) verfahren werden soll.
6.6.4.2 Geschwindigkeitsmode
Im Geschwindigkeitsmode verfährt der Antrieb standardmäßig gemäß der in P201
parametrierten Geschwindigkeit. Es kann auch tippend im Jog-Betrieb über die Bits 8
und 9 im Steuerwort P967 drehzahlgeregelt verfahren werden.
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 63 of 252

Antriebsspezifische Funktionen
6.6.4.3 Beispiel fliegender Betriebsartwechsel
Eine endlos drehende Rundachse im Geschwindigkeitsmode wird nach einer, erst zur
Laufzeit errechneten, Bedingung auf einen definierten Winkel positioniert.
1. Betriebsart Geschwindigkeitsmode anwählen P930 = 1
2. Einschaltsequenz für „Regler aktivieren“ durchführen (s. 6.3.1)
3. Geschwindigkeit P201 definieren
4. Startsequenz im Steuerwort P967 durchlaufen (s. 6.2.1) => Antrieb dreht
5. Betriebsart Positioniermode anwählen P930 = 2
6. Zielposition P200 definieren
7. Startbit im Steuerwort Bit 6 toggeln
Anschließend kann zurück in den Geschwindigkeitsmode gewechselt werden und der
Programmablauf beliebig oft wiederholt werden. Die Funktion „Fahre kürzester Weg“
ist nach einem fliegenden Betriebsartwechsel und während einer Positionierung nicht
möglich.
6.6.4.4 Besondere Hinweise
Generell müssen gegenüber der Standardparametrierung ohne
Rundachsfunktionalität folgende Punkte beachtet werden:
Die Softwareendschalter P300 und P301 sind generell nicht aktiv.
Der „Jog-Betrieb“ ist nur im „Geschwindigkeitsmode“ möglich.
Referenzierung ist nur im „Positioniermode“ möglich.
Die parametrierte Referenzpunkt-Koordinate P003 wird erst nach dem
Referenzieren übernommen.
Der Parameter P001 ist als Array-Parameter ausgeführt und die
Auftragskennung muss bei der Parametrierung über PKW berücksichtigt
werden.
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 64 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Störfall 1
P947 [0-7]
Störfall 2
P947 [8-15]
....
Störfall 8
P947 [54-63]
Störnummer 1
Störnummer 1
...
Störnummer 1
Störnummer 2
Störnummer 2
...
Störnummer 2
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
Störnummer 8
Störnummer 8
...
Störnummer 8
7 Störungen und Warnungen
Der encoTRive bietet verschiedene Möglichkeiten der Systemanalyse. Neben der
direkten Statusanzeige über die LEDs am Gehäusedeckel kann über das Auslesen
von bestimmten Parametern eine detaillierte Diagnose durchgeführt werden.
Nach PROFIdrive Profil wird zwischen Störungen und Warnungen unterschieden.
7.1 Störungen
Störungen sind interne Fehlerzustände des encoTRives, die eine Reaktion
verursachen: Der encoTRive verzögert im Betrieb schnellstmöglich und geht
anschließend in den Zustand "Störung" (SA11). Das Bit 3 im P968 „Zustandswort“ ist
daraufhin gesetzt. Die detaillierte Fehlerursache kann aus dem Parameter P947
ausgelesen werden.
Der Parameter 947 „Fehler/Störungen“ ist als Array ausgeführt und besteht aus 64
Indizes. Damit steht ein Fehlerspeicher mit 8 Stör- bzw. Fehlerfällen mit je 8 Indizes
für zugehörige Störnummern zur Verfügung. Jeweils die erste Störnummer zeigt die
fehlerauslösende Ursache an. Nachfolgende Einträge in den Indizes 1-7 zeigen evtl.
Folgefehler an und sind weniger bedeutsam.
Enthält ein Störfall im Array-Index an der Stelle Störnummer 1 den Wert 0, so folgen
keine weiteren Fehlerinformationen.
Tabelle 22: Parameterstruktur P947 Störungen
Störungen müssen nach Beseitigung der Fehlerursachen im P967 „Steuerwort“
quittiert werden. Zuvor muss jedoch die Ursache beseitigt werden. Nach erfolgreicher
Quittierung werden die Einträge um 8 Indizes weiter nach hinten verschoben und das
Bit 3 im P968 „Zustandswort“ wird auf den Wert 0 zurückgesetzt.
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 65 of 252

Störungen und Warnungen
Stör-Nr.
Beschreibung
Mögliche Ursache
Abhilfe
100
Allgemeiner Systemfehler im
Applikationsmodul
Hier sind alle Fehler des Applikationsmoduls implementiert,
welche nicht explizit aufgeführt
sind.
Neustart/Austausch encoTRive
101
Interner Kommunikationsfehler
interner fataler Fehler
Deckel nicht richtig
gesteckt
Neustart / Austausch
encoTRive
Deckel erneut stecken
102
Fehler im EEPROM
Fehler beim Lesen/ Schreiben
aus EEPROM
Erneut Schreiben/Lesen, ansonsten Austausch encoTRive
104
Kommunikationsfehler
Record Data
Fehler beim azyklischen
Schreiben/Lesen
Schreib-/Leseauftrag prüfen
110
Positionieren über digitale
Eingänge
Es wurde über die digitalen
Eingänge positioniert.
Handgerät entfernen
500
Systemfehler im Grundmodul
Verschiedene
Ausnahmeereignisse
Defekt Grundmodul
Neustart / Austausch
encoTRive
510
Fehler Überspannung
Leistungsspannung > 55,0V für
länger als 1s
Leistungsspannung
reduzieren
Rückspeiseschutz
vorsehen
520
Fehler Unterspannung
Leistungsspannung < 21,0V für
länger als 1s
Leistungsspannung erhöhen
530
Temperatur überschritten
Die interne Temperatur ist
größer als der eingestellte
maximal zulässige Grenzwert.
Mechanische Last
reduzieren
Umgebungstemperatur
verringern
531
Temperatursensor defekt
Der interne Temperatursensor
ist defekt
Neustart / Austausch
encoTRive
532
MA-XXX
Temperatur Ballastschaltung
überschritten
Die interne Temperatur der
Ballastwiderstände ist größer
als der eingestellte zulässige
Grenzwert.
Rampenparameter
verringern
Mechanische Last
reduzieren
550
Positionsgeber defekt
Die Signale des internen
Gebers sind unzulässig. Es
kann kein Positions- und
Geschwindigkeitssignal
generiert werden.
Neustart / Austausch
encoTRive
560
Positionierdauer zu groß
Die Fahrparameter sind so gewählt, dass eine Positionierung
zu lange dauern würde.
Rampenparameter
erhöhen
Zielposition verringern
580
MD-300
Positiver Hardware-
Endschalter angefahren
Als positiver Hardwareendschalter parametrierter digitaler
Eingang wurde aktiviert
Mechanik prüfen
Hardwareendschalter
prüfen
581
MD-300
Negativer Hardware-
Endschalter angefahren
Als negativer Hardwareendschalter parametrierter digitaler
Eingang wurde aktiviert
Mechanik prüfen
Hardwareendschalter
prüfen
700
Schleppfehler
Der maximale Schleppabstand
wurde überschritten
Mechanik prüfen
Schleppabstand P305 zu
klein eingestellt.
Mechanische Last zu groß
800
PROFINET-Kommunikation
Bestehende Real Time Kommunikation zum IO-Controller
wurde unterbrochen.
Verkabelung prüfen
Bustopologie prüfen
Folgende Störnummern sind beim encoTRive definiert:
Tabelle 23: encoTRive Störnummern
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 66 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Kodierung 953
Beschreibung
Mögliche Ursache
Abhilfe
1 (Bit 0)
Temperatur
Interner Temperatur-grenzwert
wurde überschritten.
Mechanische Last
reduzieren
Umgebungstempera-
tur verringern
2 (Bit 1)
Falsche
Zielposition
Parametrierte Zielposition liegt
außerhalb des zulässigen
Verfahrbereichs, welcher
durch die SoftwareEndschalter P300 u. P301
definiert ist.
Zielposition ändern
Softwareendschalter
P300 u. P301
verändern
8 (Bit 3)
MD-300
Hardware-
Endschalter
Hardwareendschalter wurde
angefahren. Nach
Fehlerquittierung Verfahren
über Tipp-Betrieb nur in
umgekehrte Richtung möglich,
solange bis der Antrieb wieder
innerhalb des definierten
Verfahrbereichs steht.
Entgegengesetzte
Tipprichtung anwählen
16 (Bit 4)
MA-XXX
Temperatur
Ballastschaltung
Interner Temperaturgrenzwert
der Ballastwiderstände wurde
überschritten.
Rampenparameter
verringern
Mechanische Last
reduzieren
32 (Bit 5)
Stillstandbereich
überschritten
Der Motor wurde im geregelten Stillstandbereich bewegt.
-
7.2 Warnungen
Warnungen sind vorübergehende Fehlersituationen, die zu keiner
zustandsbezogenen Reaktion führen, d.h. der Betrieb wird unvermindert fortgeführt.
Warnungen müssen nicht quittiert werden. Liegt die Ursache für die Warnung nicht
mehr vor, wird die Warnung aufgehoben.
Liegt eine Warnung an, so wird dies durch das Bit7 "Warnung" im P968
„Zustandswort“ signalisiert.
Im Fall einer Warnung enthält Parameter 953 (Warnung) bitkodiert die Ursache der
Warnung. Folgende Situationen werden als Warnungen gemeldet:
Tabelle 24: Warnungen bei encoTRive (Parameter 953)
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 67 of 252

Das Objektverzeichnis
8 Das Objektverzeichnis
Das Objektverzeichnis beinhaltet alle Parameter, die zur Kommunikation, Steuerung
und zum Antriebsverhalten des encoTRives erforderlich sind. Es stellt somit die
Schnittstelle zwischen Anwendung und encoTRive dar.
Die übergeordnete Steuerung greift über den zugehörigen IO-Controller via
PROFINET als Übertragungsmedium auf das Objektverzeichnis des encoTRives zu.
Abbildung 19: encoTRive Objektverzeichnis
8.1 Parameterarten
encoTRive unterscheidet gemäß PROFIdrive einfache Parameterwerte (Simple
Variable) und solche, die sich aus mehreren gleichartigen Informationen
zusammensetzen (Array Variable). Ein Array besteht aus einer Anzahl n von
Elementen gleichen Datentyps. Bei Arrays kann über den Subindex auf die einzelnen
Elemente zugegriffen werden.
8.2 Datentypen
encoTRive definiert gemäß PROFIDrive verschiedene Datentypen. Das dient dazu,
einerseits inhaltlich ausreichend genaue Informationsübertragung zu ermöglichen.
Andererseits sollen nicht überflüssige und ungenutzte Informationen die
Kommunikation unnötig belasten.
Dabei sind unter anderen ganzzahlige Datentypen verschiedener Länge definiert, die
mit und ohne Vorzeichen verwendet werden können. Bei vorzeichenbehafteten
ganzzahligen Datentypen signalisiert das höchstwertige Bit, ob es sich um eine
negative Zahl handelt.
Ebenso sind Datentypen definiert, die bezogen auf den Parameterinhalt, bereits eine
zielorientierte Formatierung besitzen. So ist z.B. der Datentyp N2 für den Parameter
P201 „Geschwindigkeit“ definiert. Damit kann die prozentuale Geschwindigkeit direkt
über einen Skalierungswert vorgegeben werden.
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 68 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Kodierung
Datentyp
Länge
Beschreibung
1
BOOLEAN
8 Bit
Zwei mögliche Werte: 0 (false) oder 1 (true)
2
INTEGER8
8 Bit
vorzeichenbehafteter ganzzahliger 8-Bit-Wert.
Wertebereich: -128 ... 127
3
INTEGER16
16 Bit
vorzeichenbehafteter ganzzahliger 16-Bit-Wert.
Wertebereich: -32768 ... 32767
4
INTEGER32
32 Bit
vorzeichenbehafteter ganzzahliger 32-Bit-Wert.
Wertebereich: -231... +231-1
5
UNSIGNED8
8 Bit
vorzeichenloser ganzzahliger 8-Bit-Wert.
Wertebereich: 0...255
6
UNSIGNED16
16 Bit
vorzeichenloser ganzzahliger 16-Bit-Wert.
Wertebereich: 0...65535
7
UNSIGNED32
32 Bit
0... 232-1
9
Visible String
variabel
Zeichenkette aus ASCII-Zeichen
33
N2
16 Bit
Linear normierter Wert.
0 % entspricht Wert 0,
100 % entspricht Wert 16384 (0x4000)
Auflösung: 100 % / 214 = 0.0061 %
N2-Wert x entspricht 100*x/16384 %.
34
N4
32 Bit
Linear normierter Wert.
0 % entspricht 0,
100 % entspricht 230.
Auflösung: 100 % / 230 = 0.000000093 %
39
T4
32 Bit
Der Wert wird in Vielfachen der konstanten Abtastrate
von 1ms angegeben.
42
C4
32 Bit
Linearer Festpunktwert mit vier Nachkommastellen.
Wert 0 in C4-Darstellung: 0
Wert 0.0001 in C4-Darstellung: 1
Wert 1 in C4-Darstellung: 10000
...
Wertebereich: wie INTEGER32.
Der C4-Wert stellt den durch 10000 dividierten Wert (4
Nachkommastellen) dar: C4-Wert 1234567 wird als
123.4567 interpretiert.
encoTRive verwendet folgende Teilmenge der PROFIdrive-Datentypen:
Tabelle 25: PROFIdrive-Datentypen, die von encoTRive verwendet werden
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 69 of 252

Das Objektverzeichnis
Subindex
Bedeutung
Bemerkung
0
Gesamte Beschreibung (46 Byte)
Inhalt der Subindizes 1-12
1
Identifier (2 Byte)
Bit
Bedeutung
15
reserviert
14
1-Array 0-einfacher Parameter
13
1-Parameter kann nur rückgesetzt
werden (z.B. Zeitdifferenz)
12
1-Parameter wurde gegenüber
Werksvoreinstellung verändert
11
reserviert
10
1-zusätzliches Textarray vorhanden
9
1-Parameter nicht beschreibbar
8
1-Normierung und Größenattribut nicht
relevant
0-7
Datentyp (vgl. Tabelle 25)
encoTRive verwendet nur die Bits
0-7, 9, 14.
Für die übrigen Bits sind folgende
Werte fest eingestellt:
Bit 13: 0
Bit 12: 0
Bit 10: 0
Bit 8: 0
2
Anzahl Array-Elemente bzw. Stringlänge (2 Byte)
Handelt es sich um einen Array-Parameter, so ist
hier die Anzahl der Array-Elemente angegeben.
Bei einer Zeichenkette enthält dieses Element die
Länge der Zeichenkette
3
Normierungsfaktor (4 Byte)
Gleitkommazahl, mit der ein interner Wert in eine
physikalische Darstellung umgerechnet werden kann.
Bei encoTRive nicht verwendet.
4
Attribute (2 Byte)
Physikalische Einheit / Größe
Bei encoTRive nicht verwendet.
5
Reserviert (4 Byte)
6
Name (16 Byte)
Name des Parameters. Zeichenkette
7
Unterer Grenzwert (4 Byte)
8
Oberer Grenzwert (4 Byte)
9
Reserviert (2 Byte)
10
ID Extension. Reserviert (2 Byte)
Bei encoTRive nicht verwendet.
11
PZD Referenzparameter (2 Byte)
Bei encoTRive nicht verwendet.
12
PZD Normierung (2 Byte)
Bei encoTRive nicht verwendet.
8.3 Parameterbeschreibung
Jeder Parameter im encoTRive-OV besitzt eine Parameterbeschreibung, welche
Informationen über den Parameter enthält. Die Parameterbeschreibung ist im
Speicher des encoTRive abgelegt und kann über einen PKW- bzw. azyklischen
Leseauftrag ausgelesen werden.
Die Parameterbeschreibung für einen Parameter hat eine feste Länge von 46 Byte.
Über den Subindex kann auf die einzelnen Elemente der Parameterbeschreibung
zugegriffen werden. Verwendet man Subindex 0, so ist die gesamte
Parameterbeschreibung gemeint.
Tabelle 26: Parameterbeschreibung
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 70 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

8.4 Speicherung des OV im EEPROM / Werksvoreinstellungen
Nach dem Einschalten von encoTRive wird zunächst das OV mit den
Werksvoreinstellungen vorbelegt. Enthält der EEPROM-Speicher ein gültiges Abbild
des OV´s, so wird das OV mit diesem Abbild überschrieben. Ansonsten werden die
Werksvoreinstellungen beibehalten.
Im laufenden Betrieb können Änderungen im OV im EEPROM gespeichert werden,
indem der Wert des Parameters 971 von 0 auf 1 verändert wird. Die so gespeicherten
Werte werden beim nächsten Hochlauf verwendet. Durch eine Änderung des Werts
von Parameter 970 von 1 auf 0 kann das OV wieder mit Werksvoreinstellungen
geladen werden. Diese lassen sich über Parameter 971 wieder im EEPROM
speichern.
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 71 of 252

Das Objektverzeichnis
PNU
Name
Attribut
Datentyp
Default
Min
Max
8.5 Liste der encoTRive-Parameter
Es folgt eine nach Parameternummer geordnete Liste sämtlicher encoTRive-Parameter. Dabei wird
jeder Parameter in der Form
spezifiziert, wobei
PNU Parameternummer
1-899 => encoTRive spezifische Parameter
900-999 => PROFIdrive-Profilparameter, d.h. Parameter die in Zusammenhang mit
der Kommunikation über PROFINET stehen.
Name Bezeichnung des Parameters
Attribut Angabe in der Form:
Zugriff/Flash-Speicherung/Werkvoreinstellung/Passwortgeschützt/PZD Konfiguration
Zugriff: rw – read/write: Parameter kann gelesen und geschrieben werden,
ro – read only: Parameter schreibgeschützt
Flash-Speicherung: f Parameter wird bei 0/1-Übergang des Werts von
Parameter 971 im Flash gespeichert.
- Parameter wird nicht im Flash gespeichert
Werksvoreinstellung: w Parameter wird bei Laden der Werksvoreinstellungen
(Parameter 970: 1/0-Übergang) mit Default vorbelegt
- Wert wird nicht mit Default vorbelegt
Passwortgeschützt: s Parameter kann erst nach Freigabe des Passwortes
geschrieben werden.
PZD Konfiguration: p Parameter kann im PZD-Telegramm gemappt werden
Datentyp Datentyp gemäß Tabelle 25 Seite 69 bei einfachen Parametern.
Bei Arrays: Array[AnzahlElemente] Datentyp der Arrayelemente
Default Wert der werksvoreingestellt ist.
Min Minimalwert, wobei beim Zusatz** dynamisch intern verändert wird
(s. Kapitel 8.5.1.3, 8.5.1.18, 8.5.1.19)
Max Maximalwert, wobei beim Zusatz** dynamisch intern verändert wird
(s. Kapitel 8.5.1.3, 8.5.1.18, 8.5.1.19)
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 72 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

PNU
Name
Attribut
Datentyp
Default
Min
Max
001
Getriebefaktor
rw/f/w
C4 1) 10000
1
2000000000
Der Getriebefaktor ist das Verhältnis vom Motorumdrehungen zu Umdrehungen der
Getriebeabtriebswelle:
lleAbtriebswe der nUmdrehunge
hungenMotorumdre
ktorGetriebefa =
1)
Der Defaultwert ist je nach eingesetztem Getriebe verschieden.
Beispiel: Defaultwert = 400000 = 40 Motorumdrehungen pro Umdrehung der Antriebswelle.
s. Kapitel 6.4 und innerhalb Sonderfunktion „Rundachse“ Kapitel 6.6
PNU
Name
Attribut
Datentyp
Default
Min
Max
002
Steigung
rw/f/w
C4
10000
1
2000000000
Dieser Parameter legt die Steigung einer Spindel bzw. den Vorschub fest.
lleAbtriebswe der Umdrehung
] bzw. [mm Weg
Steigung
Der Defaultwert 10000 entspricht 1 mm/° pro Umdrehung.
s. Kapitel 6.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
003
Referenzpunkt
-koordinate
rw/f/w
C4 0 -2000000000**
2000000000**
Der Parameter gibt die Position (in mm bzw. °) am Referenzpunkt an.
s. Kapitel 6.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
004
Invertierung
rw/f/w
UNSIGNED16
0 0 1
Drehrichtung der Motorwelle beim Blick auf die Abgangswelle des Motors.
Parameterwert
0 1 Positive Fahrrichtung
Im Uhrzeigersinn
Im Gegenuhrzeigersinn
Negative Fahrrichtung
Im Gegenuhrzeigersinn
Im Uhrzeigersinn
8.5.1 Herstellerspezifische Parameter
8.5.1.1 PNU 001, Getriebefaktor
8.5.1.2 PNU 002, Steigung
8.5.1.3 PNU 003, Referenzpunkt-Koordinate
8.5.1.4 PNU 004, Invertierung
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 73 of 252

Das Objektverzeichnis
PNU
Name
Attribut
Datentyp
Default
Min
Max
006
Verfahrbereich
rw/f/w
C4 0 0
2000000000
Der Verfahrbereich definiert den maximal möglichen Positionswert vor einem Werteüberlauf.
Nur innerhalb Sonderfunktion „Rundachse“ (s. Kapitel 6.6) relevant
PNU
Name
Attribut
Datentyp
Default
Min
Max
100
Lageistwert
ro/-/-/p
C4 - -2000000000
2000000000
Aktuelle Position in mm/°.
s. Kapitel 6.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
101
Stromistwert
ro/-/-/p
C4 - 1
10000000
Motorstrom in A
s. Kapitel 6.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
102
Temperatur
ro/-/-/p
C4 - - 1000000
2000000
Elektroniktemperatur in °C
s. Kapitel 6.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
103
NIST_A
ro/-/-/p
N2 - 0
65535
Ist-Geschwindigkeit in %.Die Bezugsgröße (100 %) wird über die maximale Drehzahl (Parameter 514)
festgelegt.
s. Kapitel 6.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
104
Spg.-Leistung
ro/-/-/p
C4 - 0
10000000
Versorgungsspannung der Leistung in V.
s. Kapitel 6.4
8.5.1.5 PNU 006, Verfahrbereich
8.5.1.6 PNU 100, Lageistwert
8.5.1.7 PNU 101, Stromistwert
8.5.1.8 PNU 102, Temperatur
8.5.1.9 PNU 103, NIST_A
8.5.1.10 PNU 104, Spg.-Leistung
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 74 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

PNU
Name
Attribut
Datentyp
Default
Min
Max
200
Zielposition
rw/f/w/p
Array[32] C4
0
-2000000000
2000000000
Zielposition in mm/°.
s. Kapitel 6.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
201
Geschwindigkeit
rw/f/w/p
Array[32] N2
16384
0
16384
Geschwindigkeit in %.
Die Bezugsgröße (100 %) wird über die maximale Drehzahl (Parameter 514) festgelegt.
s. Kapitel 6.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
202
Beschleunigung
rw/f/w/p
Array[32] N2
16384
0
16384
Beschleunigung in %.
Die Bezugsgröße (100 %) wird über die maximale Beschleunigung (Parameter 515) festgelegt.
s. Kapitel 6.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
203
Verzögerung
rw/f/w/p
Array[32] N2
16384
0
16384
Bremsbeschleunigung in %.
Die Bezugsgröße (100 %) wird über die maximale Beschleunigung (Parameter 515) festgelegt.
s. Kapitel 6.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
204
JOG
Geschwindigkeit
rw/f/w
N2
16384
0
16384
Geschwindigkeit beim Tippen (in %).
Die Bezugsgröße (100 %) wird über die maximale Drehzahl (Parameter 514) festgelegt.
s. Kapitel 6.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
205
JOG Beschleunigung
rw/f/w
N2
4096
0
16384
Beschleunigung beim Tippen (in %).
Die Bezugsgröße (100 %) wird über die maximale Beschleunigung (Parameter 515) festgelegt.
s. Kapitel 6.4
8.5.1.11 PNU 200, Zielposition
8.5.1.12 PNU 201, Geschwindigkeit
8.5.1.13 PNU 202, Beschleunigung
8.5.1.14 PNU 203, Verzögerung
8.5.1.15 PNU 204, JOG Geschwindigkeit
8.5.1.16 PNU 205, JOG Beschleunigung
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 75 of 252

Das Objektverzeichnis
PNU
Name
Attribut
Datentyp
Default
Min
Max
206
JOG Verzögerung
rw/f/w
N2
16384
0
16384
Bremsbeschleunigung beim Tippen (in %).
Die Bezugsgröße (100 %) wird über die maximale Beschleunigung (Parameter 515) festgelegt.
s. Kapitel 6.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
300
SoftwareEndschalter min.
rw/f/w
Array [4] C4
-
-2000000000**
2000000000**
Der Parameter gibt den SW-Endschalter in mm/° links an.
Der Defaultwert ist je nach eingesetztem Getriebe verschieden.
s. Kapitel 6.5
PNU
Name
Attribut
Datentyp
Default
Min
Max
301
SoftwareEndschalter max.
rw/f/w
Array [4] C4
-
-2000000000**
2000000000**
Der Parameter gibt den SW-Endschalter in mm/° rechts an.
Der Defaultwert ist je nach eingesetztem Getriebe verschieden.
s. Kapitel 6.5
PNU
Name
Attribut
Datentyp
Typ
Default
Min
Max
302
Strom max.
rw/f/w/p
C4
MD-300
95000
1
150000
MP-60
50000
1
80000
MP-100
70000
1
100000
MP-140
85000
1
140000
MP-180
12000
1
200000
MP-200
95000
1
150000
MP-280
207000
1
207000
MA-055
54000
1
56000
MA-100
61250
1
98000
MA-130
72500
1
116000
Mit diesem Parameter wird der maximale Dauerstrom in A definiert.
s. Kapitel 6.4
8.5.1.17 PNU 206, JOG Verzögerung
8.5.1.18 PNU 300, Software-Endschalter min.
8.5.1.19 PNU 301, Software-Endschalter max.
8.5.1.20 PNU 302, Strom max.
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 76 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

PNU
Name
Attribut
Datentyp
Typ
Default
Min
Max
304
Zielbereich
rw/f/w
C4
MD-300 / MP-XXX
100 1 100000
MA-XXX
10 1 100000
Der Parameter gibt das Genauigkeitsfenster (in mm/°) an. Befindet sich der Lageistwert in dem hiermit
spezifizierten Bereich um den Lagesollwert, so wird eine Positionierung als beendet angesehen. Wird
der Zielbereich zu klein gewählt, so kann es vorkommen, dass ein Positionierauftrag nicht beendet
wird. Der Zielbereich hängt von den Parametern 505 (Geberauflösung), 1 (Getriebefaktor) und 2
(Steigung) ab. Der Default-Wert entspricht 0.01 mm/°.
s. Kapitel 6.4
PNU
Name
Attribut
Datentyp
Typ
Default
Min
Max
305
Schleppabstand
rw/f/w
C4
MD-300
10240
0
2000000000
MP- / MA-XXX
40960
0
2000000000
Der maximale Schleppabstand definiert die maximal zulässige Differenz zwischen internen Positionssollwert und aktuellen Positionsistwert in Inkrementen. Wert "-1" bedeutet, dass die
Schleppfehlerüberwachung deaktiviert ist. Defaultwert-Interpretation: 1024 Encoderinkremente x 10
Motorumdrehungen
PNU
Name
Attribut
Datentyp
Default
Min
Max
306
Temperatur max.
rw/f/w
C4
1000000
0
2000000000
Maximal zulässige Elektroniktemperatur in °C.
s. Kapitel 6.4
PNU
Name
Attribut
Datentyp
Typ
Default
Min
Max
307
Überstrom
rw/f/w
C4
MD-300
150000
1
150000
MP-60
81000
1
120000
MP-100
100000
1
100000
MP-140
140000
1
140000
MP-180
200000
1
200000
MP-200
150000
1
150000
MP-280
207000
1
207000
MA-055
100000
1
100000
MA-100
150000
1
150000
MA-130
150000
1
150000
Mit diesem Parameter wird der maximale Überstrom in A definiert. Dieser Strom wird kurzzeitig beim
Beschleunigen für 500ms zugelassen, um das Losbrechmoment zu überwinden.
s. Kapitel 6.4
8.5.1.21 PNU 304, Zielbereich
8.5.1.22 PNU 305, Schleppabstand
8.5.1.23 PNU 306, Temperatur max.
8.5.1.24 PNU 307, Überstrom
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 77 of 252

Das Objektverzeichnis
PNU
Name
Attribut
Datentyp
Typ
Default
Min
Max
308
Temperatur
Warnung
rw/f/w
C4
MD-300 / MP-XXX
1000000
200000
1500000
MA-XXX
850000
200000
1000000
Beim Überschreiten der Elektroniktemperatur über diesen definierten Parameterwert wird eine
zugehörige Warnung ausgegeben.
s. Kapitel 6.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
309
Stillstandbereich
rw/f/w
C4
10000
0
2000000000
Der Stillstandsbereich definiert den maximal erlaubten Positionsbereich indem sich der Antrieb im
Stillstand bewegen darf, ohne eine Warnung zu melden.
(nur in einigen Varianten vorhanden) s. Kapitel 6.2.5
PNU
Name
Attribut
Datentyp
Default
Min
Max
310
Überwachungs-zeit
rw/f/w
T4
100 0 100000
Die Überwachungszeit definiert der zeitliche Beginn der Stillstandüberwachung nach einer
Positionierung.
(nur in einigen Varianten vorhanden) s. Kapitel 6.2.5
PNU
Name
Attribut
Datentyp
Default
Min
Max
400
STW2
rw/-/w/p
UNSIGNED16
0 0 65535
Über das Steuerwort 2 kann der Parameter Satzanwahl (P402) ebenfalls geschrieben werden. Nach
PROFIdrive Profil 3.0 ist dies innerhalb des Standardtelegramms 7 erforderlich.
s. Kapitel 6.2.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
401
ZSW2
ro/-/-/p
UNSIGNED16
0 0 65535
Über das Statuswort 2 kann der Parameter Aktueller Satz (P403) ebenfalls gelesen werden. Nach
PROFIdrive Profil 3.0 ist dies innerhalb des Standardtelegramms 7 erforderlich.
s. Kapitel 6.2.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
402
Satzanwahl
rw/-/w/p
UNSIGNED16
0 0 65535
Mit diesem Parameter kann ein Fahrsatz aus der Fahrsatztabelle vorgewählt werden. Dieser wird
beim nächsten Positionierstart ausgeführt.
s. Kapitel 6.2.4
8.5.1.25 PNU 308, Temperatur Warnung
8.5.1.26 PNU 309, Stillstandsbereich
8.5.1.27 PNU 310, Überwachungszeit
8.5.1.28 PNU 400, STW2
8.5.1.29 PNU 401, ZSW2
8.5.1.30 PNU 402, Satzanwahl
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 78 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

PNU
Name
Attribut
Datentyp
Default
Min
Max
403
Aktueller Satz
ro/-/w/p
UNSIGNED16
0 0 65535
Dieser Parameter zeigt den aktuellen Fahrsatz an.
s. Kapitel 6.2.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
500
Passwort
wo/-/w
Visible String
" "
- - Passwort für den Schreibzugriff auf die Parameter 501 – 520.
PNU
Name
Attribut
Datentyp
Typ
Default
Min
Max
501
KV_Proportional
rw/f/w/s
UNSIGNED16
MD-300
200 0 20000
MP-060
512 0 20000
MP-100
500 0 20000
MP-200
512 0 20000
MP-280
2600
0
20000
MA-055
35000
0
65535
MA-100
20000
0
65535
MA-130
20000
0
65535
Kreisverstärkungsfaktor vom P-Anteil
PNU
Name
Attribut
Datentyp
Typ
Default
Min
Max
502
KV_Differential
rw/f/w/s
UNSIGNED16
MD-300
2097
0
20000
MP-060
2097
0
20000
MP-100
7000
0
20000
MP-200
3072
0
20000
MP-280
3000
0
20000
MA-055
10000
0
65535
MA-100
1000
0
65535
MA-130
1000
0
65535
Kreisverstärkungsfaktor vom D-Anteil
8.5.1.31 PNU 403, Aktueller Satz
8.5.1.32 PNU 500, Passwort
8.5.1.33 PNU 501, KV_Proportional
8.5.1.34 PNU 502, KV_Differential
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 79 of 252

Das Objektverzeichnis
PNU
Name
Attribut
Datentyp
Typ
Default
Min
Max
503
KV_Integral
rw/f/w/s
UNSIGNED16
MD-300
524 0 20000
MP-060
602 0 20000
MP-100
500 0 20000
MP-200
256 0 20000
MP-280
100 0 20000
MA-055
100 0 65535
MA-100
100 0 65535
MA-130
100 0 65535
Kreisverstärkungsfaktor vom I-Anteil
PNU
Name
Attribut
Datentyp
Typ
Default
Min
Max
505
Geberauflösung
rw/f/w/s
C4
MD-300
1024
0
2000000000
MP- / MA-XXX
4096
0
2000000000
Geberauflösung. Der Parameter gibt die Anzahl Positionsinkremente pro Motorumdrehung an.
Keine C4 Datentypinterpretation.
PNU
Name
Attribut
Datentyp
Default
Min
Max
508
Haltebremse
rw/f/w/s
UNSIGNED16
1 0 1
Haltebremse vorhanden
PNU
Name
Attribut
Datentyp
Typ
Default
Min
Max
514
Max_Drehzahl
rw/f/w/s
C4
MD-300
4350
0
2000000000
MP-60
3080
0
2000000000
MP-100
3090
0
2000000000
MP-140
3250
0
2000000000
MP-180
3240
0
2000000000
MP-200
4350
0
2000000000
MP-280
4000
0
2000000000
MA-055
3000
0
2000000000
MA-100
3050
0
2000000000
MA-130
3200
0
2000000000
Maximale Drehzahl in Umdreh./min
Keine C4 Datentypinterpretation.
s. Kapitel 6.4
8.5.1.35 PNU 503, KV_Integral
8.5.1.36 PNU 505, Geberauflösung
8.5.1.37 PNU 508, Haltebremse
8.5.1.38 PNU 514, Max_Drehzahl
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 80 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

PNU
Name
Attribut
Datentyp
Typ
Default
Min
Max
515
Max_Beschleunigung
rw/f/w/s
C4
MD-300 / MP-XXX
10000
0
2000000000
MA-XXX
3000
0
200000000
Maximale Beschleunigung und Bremsbeschleunigung in (Umdreh./min)/sec
Keine C4 Datentypinterpretation.
s. Kapitel 6.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
520
Betriebsstunden
rw/-/-/s
UNSIGNED32
0 0 4294967295
Betriebsstundenzähler, Inkrementierung erfolgt nur bei aktiviertem Regler.
PNU
Name
Attribut
Datentyp
Default
Min
Max
802
Parameter initialisiert
ro/f/w
UNSIGNED16
- 0 1
Zeigt an, ob im Flash-Speicher ein gültiges Abbild des encoTRive-OV abgelegt ist.
Falls der Parameter den Wert 0xAB18 enthält, ist im Flash ein gültiges encoTRive-OV gespeichert.
PNU
Name
Attribut
Datentyp
Default
Min
Max
803
Digital_Input
ro/-/-/p
UNSIGNED16
- 0 16
Zeigt den Status der digitalen Eingänge an, wobei die Bits 0-3 den digitalen Eingängen 0-3
entsprechen.
s. Kapitel 9
PNU
Name
Attribut
Datentyp
Default
Min
Max
804
Digital_Output
rw/-/-/p
UNSIGNED16
0 0 16
Über diesen Parameter können bitcodiert die digitalen Ausgänge Bit 0-3 (Byte 0) angesteuert werden.
Über Bit 7=1 (Byte 1) kann übergeordnet die mechanische Bremse gelüftet werden.
Beispiel: 1000 0000 0000 1111
s. Kapitel 9
PNU
Name
Attribut
Datentyp
Default
Min
Max
805
Referenzpunkt
gesetzt
rw/-/w
UNSIGNED16
0 0 1
Zeigt an, ob der Antrieb referenziert ist. Wert 1: Antrieb referenziert, Wert 0: Antrieb nicht referenziert
Nach der Referenzierung wird der Parameterwert remanent auf eins gesetzt. Option
Werksvoreinstellung laden oder ein manuelles Überschreiben stellen sofort den Defaultwert 0
remanent wieder her.
s. Kapitel 6.2.2
8.5.1.39 PNU 515, Max_Beschleunigung
8.5.1.40 PNU 520, Betriebsstunden
8.5.1.41 PNU 802, Parameter initialisiert
8.5.1.42 PNU 803, Digital_Input; MD-300
8.5.1.43 PNU 804, Digital_Output; MD-300
8.5.1.44 PNU 805, Referenzpunkt gesetzt
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 81 of 252

Das Objektverzeichnis
PNU
Name
Attribut
Datentyp
Default
Min
Max
807
Dig In Funktion
rw/-/w
UNSIGNED32
0 0 2000000000
Über den 4-Byte-Parameter können den 4 Digital-Eingängen unterschiedliche Funktionen zugeordnet
werden z.B. Aktivierung der Hardwareendschalter. Hierbei ist für jeden Eingang ein Byte reserviert.
s. Kapitel 9
PNU
Name
Attribut
Datentyp
Default
Min
Max
808
Dig Out Funktion
rw/-/w
UNSIGNED32
0 0 2000000000
Über den 4-Byte-Parameter können den 4 Digital-Ausgängen unterschiedliche Funktionen zugeordnet
werden. Hierbei ist für jeden Ausgang ein Byte reserviert.
s. Kapitel 9
PNU
Name
Attribut
Datentyp
Default
Min
Max
809
Entprelldauer E
rw/-/w
T4
10 0 1000
Übernahme des Signal-Pegels nach der definierten Entprelldauer (ms).
8.5.1.45 PNU 807, Dig In Funktion; MD-300
8.5.1.46 PNU 808, Dig Out Funktion; MD-300
8.5.1.47 PNU 809, Entprelldauer E; MD-300
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 82 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

PNU
Name
Attribut
Datentyp
Default
Min
Max
915
PZD Konfiguration
Sollwerte
rw/f/w
Array[15]
UNSIGNED16
[967,0,... ]
0
65535
Konfiguration der PZD (Ausgangsdaten). Für das Telegramm IO-Controller encoTRive. Vgl. 5.2
s. Kapitel 5.2
PNU
Name
Attribut
Datentyp
Default
Min
Max
916
PZD Konfiguration
Istwerte
rw/f/w
Array[15]
UNSIGNED16
[968,0... ]
0
65535
Konfiguration der PZD (Eingangsdaten). Für das Telegramm encoTRive IO-Controller. Vgl. 5.2
s. Kapitel 5.2
PNU
Name
Attribut
Datentyp
Default
Min
Max
922
Telegramm Auswahl
rw/f/w
UNSIGNED16
0 0 65535
Mit diesem Parameter können die PZD konfiguriert werden. Enthält der Parameter den Wert 0, so sind
die beiden Parameter 915 und 916 für die PZD-Konfigurierung maßgebend. Ansonsten wird mit
Parameter 922 ein sog. Standardtelegramm ausgewählt.
s. Kapitel 5.2
PNU
Name
Attribut
Datentyp
Default
Min
Max
923
Standardsignale
ro/-/w
Array[100]
UNSIGNED16
siehe Tabelle 17:
Standardsignale bei
encoTRive
0
65535
Zuordnung zwischen Standardsignalen wie Zielposition, Lageistwert zu herstellerspezifischen
Parametern.
s. Kapitel 6.4.3
8.5.2 Profilspezifische Parameter
8.5.2.1 PNU 915, PZD Konfiguration Sollwerte
8.5.2.2 PNU 916, PZD Konfiguration Istwerte
8.5.2.3 PNU 922, Telegramm Auswahl
8.5.2.4 PNU 923, Standardsignale
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 83 of 252

Das Objektverzeichnis
PNU
Name
Attribut
Datentyp
Default
Min
Max
927
Bedienhoheit
rw/-/w
UNSIGNED16
2 0 65535
Dieser Parameter definiert, wer auf Parameter zugreifen darf.
Der encoTRive unterstützt zusätzlich zu PROFINET den Zugriff auf die Parameter des OV über
serielle Schnittstelle.
Erfolgt der Zugriff über die serielle Schnittstelle, so sind Parameterzugriffe über PROFINET
verriegelt.
Wert 1: Bedienhoheit lokal, d.h. über serielle Schnittstelle
Wert 2: Bedienhoheit PROFINET-IO
PNU
Name
Attribut
Datentyp
Default
Min
Max
928
PZD
Führungshoheit
rw/-/w
UNSIGNED16
2 0 65535
Definiert, wer schreibend auf die Prozessdaten zugreifen kann. Es ist möglich, dass auf Parameter
des OV gleichzeitig über die zyklischen RT-Daten und über die Record Data zugegriffen wird.
Wert 1: RT-Daten haben PZD Führungshoheit. Record Data-Schreibzugriffe auf PZD-Parameter
werden abgewiesen.
Wert 2: Record Data haben PZD Führungshoheit. IO-Daten werden ignoriert.
PNU
Name
Attribut
Datentyp
Default
Min
Max
930
Betriebsart
rw/-/w/p
UNSIGNED16
2 0 65535
Auswahl der Betriebsart.
siehe Tabelle 9 Seite 44
PNU
Name
Attribut
Datentyp
Default
Min
Max
947
Fehler/Störungen
ro/-/w/p
Array[64]
UNSIGNED16
0 0 65535
Fehlerspeicher. Störungsmeldungen werden in einem Ringpuffer remanent gespeichert. Liegt eine
neue Störung vor, so wird dies durch ZSW.3=1 angezeigt ("Störung liegt an").
s. Kapitel 7.1
PNU
Name
Attribut
Datentyp
Default
Min
Max
953
Warnung
ro/-/w/p
UNSIGNED16
0 0 65535
Zeigt an, ob eine Warnung anliegt.
s. Kapitel 7.2
8.5.2.5 PNU 927, Bedienhoheit
8.5.2.6 PNU 928, PZD Führungshoheit
8.5.2.7 PNU 930, Betriebsart
8.5.2.8 PNU 947, Fehler/Störungen
8.5.2.9 PNU 953, Warnung
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 84 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

PNU
Name
Attribut
Datentyp
Default
Min
Max
964
Geräteidentifikation
ro/-/w
Array[9]
UNSIGNED16
aktuelle Identifikation von
HW und SW
0
65535
Geräteidentifikation. Die einzelnen Elemente sind in folgender Reihenfolge zu lesen :
[0] => Hersteller: (0x0153)
[1] => Gerätetyp: 0x0201 (Vendor ID: TR-encoTRive)
[2] => Firmware-Version: xxyy (200 bedeutet: 2.00)
[3] => Firmware-Datum: Jahr
[4] => Firmware-Datum: ddmm (Tag/Monat)
[5] => Anzahl Achsen: 1
[6] => Hardware-Version: xxyy
[7] => Seriennummer: dddd
PNU
Name
Attribut
Datentyp
Default
Min
Max
965
Profilnummer
ro/-/w
UNSIGNED16
0x0303
0
65535
Profilnummer. Profilnummer = 03 (PROFIdrive), Version = 3
PNU
Name
Attribut
Datentyp
Default
Min
Max
967
STW
rw/-/w
UNSIGNED16
0 0 65535
Steuerwort (STW). Über das STW wird die encoTRive Zustandsmaschine gesteuert.
s. Kapitel 6.1
PNU
Name
Attribut
Datentyp
Default
Min
Max
968
ZSW
ro/-/-
UNSIGNED16
64 0 65535
Statuswort (ZSW). Das ZSW gibt Auskunft über aktuelle Zustände Vgl. Abschnitt 6.1
s. Kapitel 6.1
PNU
Name
Attribut
Datentyp
Default
Min
Max
970
Werksvoreinstellung
laden
rw/-/w
UNSIGNED16
1 0 65535
Durch eine Flanke 1 0 bei diesem Parameter werden sämtliche Parameter des OV mit ihren
Default-Werten belegt.
s. Kapitel 8.4
8.5.2.10 PNU 964, Geräteidentifikation
8.5.2.11 PNU 965, Profilnummer
8.5.2.12 PNU 967, STW
8.5.2.13 PNU 968, ZSW
8.5.2.14 PNU 970, Werksvoreinstellung laden
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 85 of 252

Das Objektverzeichnis
PNU
Name
Attribut
Datentyp
Default
Min
Max
971
Im Flash speichern
rw/-/w
UNSIGNED16
0 0 65535
Durch eine Flanke 0 1 wird das Speichern der aktuellen Inhalte aller speicherbaren Parameter im
Flash veranlasst.
s. Kapitel 8.4
PNU
Name
Attribut
Datentyp
Default
Min
Max
980
Liste aller Parameter
ro/-/w
Array[79]
UNSIGNED16
Nummern aller
definierten
Parameter
0
65535
Dieser Parameter enthält in aufsteigender Reihenfolge die Liste aller definierten Parameter. Ein
Eintrag mit Wert 0 signalisiert das Ende der Liste.
8.5.2.15 PNU 971, Im Flash speichern
8.5.2.16 PNU 980, Liste aller Parameter
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 86 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

9 Funktion Digital- Eingänge / -Ausgänge; MD-300 Baureihe
9.1 Grundfunktionen
9.1.1 Eingänge
Die vier integrierten digitalen Eingänge bieten einerseits auf der Feldebene die
Funktion eines zusätzlichen digitalen Eingangsmoduls. Signale der beispielsweise
angeschlossenen Sensoren oder Taster/Schalter werden über den Parameter P803
„Digital_Input“ bitcodiert abgebildet und haben zunächst keinen direkten Einfluss auf
die Antriebsaktivität.
Andererseits können den digitalen Eingängen verschiedene Funktionen zugeordnet
werden (s. Kapitel 9.2.1).
Weitere Informationen zu den digitalen Eingängen sind aus folgenden
Dokumentationen zu entnehmen:
● Steckerbelegung:
TR-EMO-TI-DGB-0066
● encoTRive Projektierungsanleitung:
TR-EMO-BA-DGB-0015
9.1.2 Ausgänge
Die vier integrierten digitalen Ausgänge bieten einerseits auf der Feldebene die
Funktion eines zusätzlichen Ausgangmoduls. Aktoren können über den Parameter
P804 „Digital_Output“ direkt von der Steuerung angesteuert werden.
Andererseits können den digitalen Ausgängen verschiedene Funktionen zugeordnet
werden (s. Kapitel 9.2.2).
Weitere Informationen zu digitalen Ausgängen sind aus folgenden Dokumentationen
zu entnehmen:
● Steckerbelegung
● encoTRive Projektierungsanleitung
TR-EMO-TI-DGB-0066
TR-EMO-BA-DGB-0015
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 87 of 252

Funktion Digital- Eingänge / -Ausgänge; MD-300 Baureihe
P807
Byte 3
Byte 2
Byte 1
Byte 0
Eingang 3
Eingang 2
Eingang 1
Eingang 0
0-255
0-255
0-255
0-255
Bereiche
Beschreibung
zulässige
Verfahrrichtung
1)
erforderliche Flankenfolge,
um nach 1 zurückzukehren
1
zulässiger
Verfahrbereich
positive / negative
High-aktiv
Low-aktiv
2p
stehen auf B
negative
3p
B überfahren
negative
2n
stehen auf A
positive
3n
A überfahren
positive
9.2 Funktionszuordnung
9.2.1 Eingänge
Über den 4-Byte-Parameter P807 „Dig In Funktion“ können den 4 Digital-Eingängen unterschiedliche
Funktionen zugeordnet werden. Hierbei ist für jeden Eingang ein Byte reserviert:
Tabelle 27: Struktur des Parameters 807 „Dig In Funktion“.
9.2.1.1 Realisierung der Hardware-Endschalter-Funktion
Abbildung 20: Funktionsprinzip Hardware-Endschalter
A: Negativer Endschalter
B: Positiver Endschalter
C: Negativer Soft Endschalter
D: Positiver Soft Endschalter
1)
nur möglich, wenn die Störung P947 „Hardware-Endschalter angefahren“ mit Fehlernummer
580/581 quittiert wurde
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 88 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Wert
aktiver Pegel
Funktion
Reaktion
0
-
Keine
Keine 2 High
Endschaltereingang positiv
Schnellhalt mit Störung 580
3
Low
4
High
Endschaltereingang negativ
Schnellhalt mit Störung 581
5
Low
6
High
Bremse lüften
Integrierte Haltebremse lüften
7
Low
Aktivierung der Hardware-Endschalter-Funktionen muss vor der ReglerFreigabe erfolgen.
Byte 3
Byte 2
Byte 1
Byte 0
00
00
05
03
P808
Byte 3
Byte 2
Byte 1
Byte 0
Ausgang 3
Ausgang 2
Ausgang 1
Ausgang 0
0-255
0-255
0-255
0-255
Tabelle 28: Funktionsübersicht der Endschalter
Beispiel:
Es sind 2 Hardware-Endschalter als Öffner an den digitalen Eingängen 0 und 1 angeschlossen. Um
die entsprechende Funktion zu aktivieren, muss folgender Wert für Parameter P807 geschrieben
werden:
Eingang 0 als positiver Endschalter, Low-aktiv Byte 0 = 03
Eingang 1 als negativer Endschalter, Low-aktiv Byte 1 = 05
Parameter P807 = 0x0000 0503 = 1283 dez.
9.2.2 Ausgänge
Über den 4-Byte-Parameter P808 „Dig Out Funktion“ können den 4 Digital-Ausgängen
unterschiedliche Funktionen zugeordnet werden. Hierbei ist für jeden Ausgang ein Byte reserviert:
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 89 of 252

Installationshinweise
Um einen sicheren und störungsfreien Betrieb zu gewährleisten, sind die
- PROFINET Planungsrichtlinie, PNO Bestell-Nr.: 8.061
- PROFINET Montagerichtlinie, PNO Bestell-Nr.: 8.071
- PROFINET Inbetriebnahmerichtlinie, PNO Bestell-Nr.: 8.081
- und die darin referenzierten Normen und PNO Dokumente
zu beachten!
Insbesondere ist die EMV-Richtlinie in der gültigen Fassung zu beachten!
10 Installationshinweise
PROFINET unterstützt Linien-, Baum- oder Sternstrukturen. Die bei Feldbussen
eingesetzte Bus- oder Linienstruktur wird damit auch für Ethernet verfügbar.
Für die Übertragung nach dem 100Base-TX Fast Ethernet Standard sind NetzwerkKabel und Steckverbinder der Kategorie STP CAT5 zu benutzen (2 x 2 paarweise
verdrillte und geschirmte Kupferdraht-Leitungen). Die Kabel sind ausgelegt für
Bitraten von bis zu 100 MBit/s. Die Übertragungsgeschwindigkeit wird vom encoTRive
automatisch erkannt und muss nicht durch Schalter eingestellt werden.
Eine Adressierung über Schalter ist ebenfalls nicht notwendig, diese wird automatisch
durch die Adressierungsmöglichkeiten des PROFINET-Controllers vorgenommen.
Die Kabellänge zwischen zwei Teilnehmern darf max. 100 m betragen.
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 90 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

11 Inbetriebnahme
11.1 Gerätebeschreibungsdatei (XML)
Um für PROFINET eine einfache Plug-and-Play Konfiguration zu erreichen, wurden
die charakteristischen Kommunikationsmerkmale von PROFINET-Geräten in Form
eines elektronischen Gerätedatenblatts, GSDML-Datei:
„General Station Description Markup Language“, festgelegt. Im Gegensatz zum
PROFIBUS-DP-System ist die GSDML-Datei mehrsprachig ausgelegt und beinhaltet
mehrere Geräte-Varianten in einer Datei.
Durch das festgelegte Dateiformat kann das Projektierungssystem die
Gerätestammdaten des encoTRives einfach einlesen und bei der Konfiguration des
Bussystems automatisch berücksichtigen.
Die GSDML-Datei ist Bestandteil des encoTRives und hat den Dateinamen
„GSDML-V2.2-TR-encoTRive-xxxxxxxx.xml“.
Zum encoTRive gehört weiterhin noch eine Bitmap Datei mit Namen:
"GSDML_0153_PN_encoTRive_V22.bmp"
Abbildung 21: GSDML-Datei für die Konfiguration [Quelle: PROFIBUS International]
11.2 Geräteidentifikation
Jedes PROFINET IO-Gerät besitzt eine Geräteidentifikation. Sie besteht aus einer
Firmenkennung, der Vendor-ID, und einem Hersteller-spezifischen Teil, der
Device-ID. Die Vendor-ID wird von der PNO vergeben und hat für die Firma
TR-Electronic den Wert 0x0153, die Device-ID hat den Wert 0x0201.
Im Hochlauf wird die projektierte Geräteidentifikation überprüft und somit Fehler in der
Projektierung erkannt.
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 91 of 252
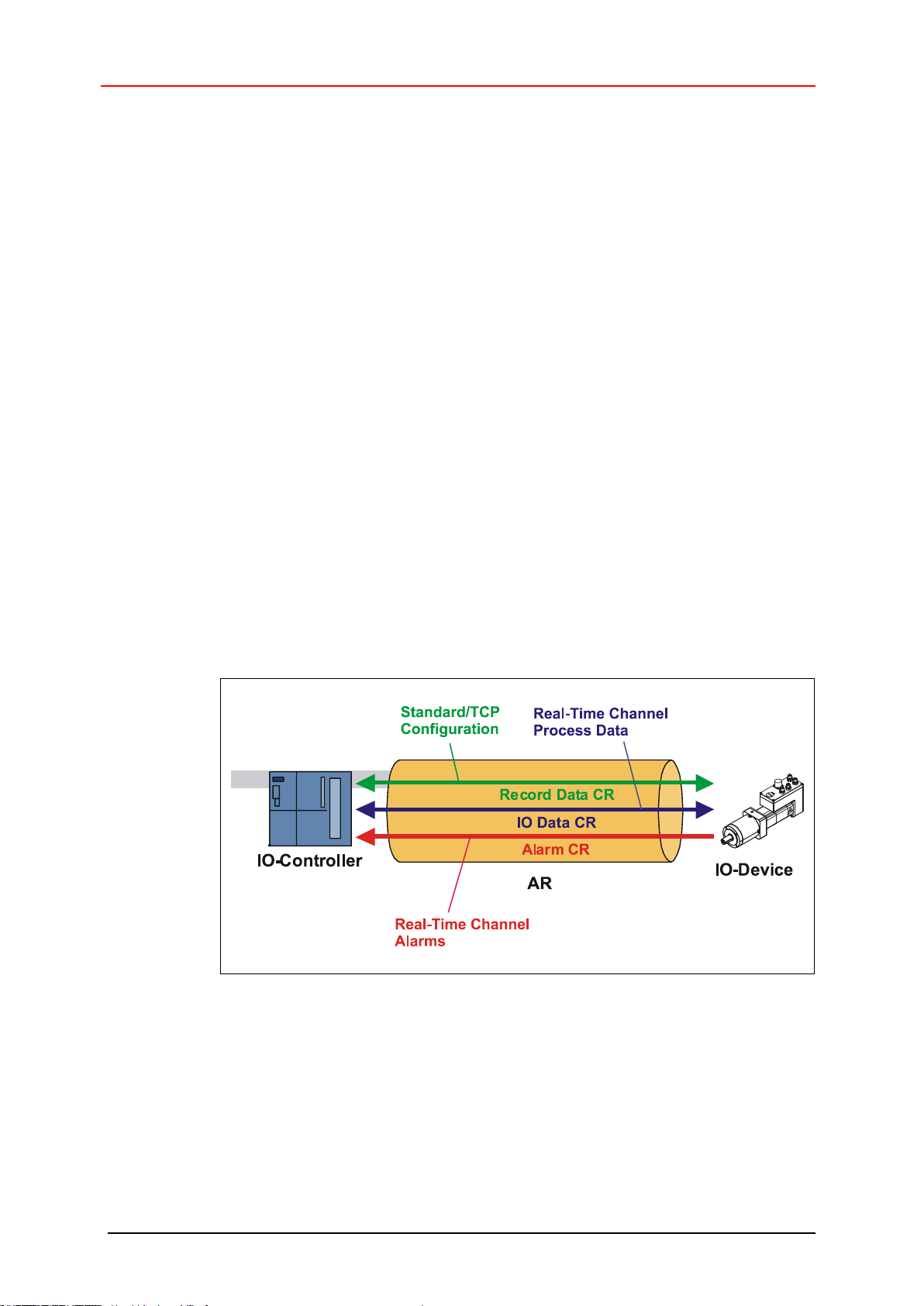
Inbetriebnahme
11.3 Datenaustausch bei PROFINET IO
PROFINET IO Kommunikationsablauf:
Der IO-Controller baut seiner Parametrierung folgend, eine oder mehrere
Applikationsbeziehungen zu den IO-Devices auf. Dafür sucht er im Netzwerk nach
den parametrierten Namen der IO-Devices und weist den gefundenen Geräten eine
IP-Adresse zu. Hierzu wird der Dienst DCP „Discovery and Control Program“ genutzt.
Für die parametrierten IO-Devices überträgt der IO-Controller dann im folgenden
Hochlauf den gewünschten Ausbaugrad (Module/Submodule) und alle Parameter. Es
werden die zyklischen IO-Daten, Alarme, azyklische Dienste und Querverbindungen
festgelegt.
Bei PROFINET IO kann die Übertragungsgeschwindigkeit der einzelnen zyklischen
Daten durch einen Untersetzungsfaktor eingestellt werden. Nach der Parametrierung
werden die IO-Daten nach einmaliger Anforderung des IO-Controllers vom IO-Device
in einem festen Takt übertragen. Zyklische Daten werden nicht quittiert. Alarme
dagegen müssen immer quittiert werden. Azyklische Daten werden ebenfalls quittiert.
Zum Schutz gegen Parametrierungsfehler werden der Soll- und Istausbau bezüglich
des Gerätetyps, der Bestellnummer sowie der Ein- und Ausgangsdaten verglichen.
Bei erfolgreichem Hochlauf beginnen die IO-Devices selbstständig mit der
Datenübertragung. Eine Kommunikationsbeziehung bei PROFINET IO folgt immer
dem Provider-Consumer-Modell. Bei der zyklischen Übertragung der IO-Daten ist das
IO-Device der Provider der Daten, der IO-Controller (z.B. eine SPS) der Consumer.
Die übertragenen Daten werden immer mit einem Status versehen (gut oder
schlecht).
Abbildung 22: Geräte-Kommunikation
AR:
Applikationsbeziehung zwischen IO-Controller und zugeordneten IO-Devices
CR:
Kommunikationsbeziehungen für Konfiguration, Prozessdaten und Alarme
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 92 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Geräte-Austausch
Bei einem Geräteaustausch muss darauf geachtet werden, dass der zuvor
vergebene Gerätename auch an das neue Gerät vergeben wird. Im Systemhochlauf
wird der Gerätenamen wieder erkannt und die neue MAC-Adresse und IP-Adresse
automatisch dem Gerätenamen zugeordnet.
Der IO-Controller führt automatisch eine Parametrierung und Konfigurierung des
neuen Gerätes durch. Anschließend wird der zyklische Nutzdatenaustausch wieder
hergestellt.
11.4 Adressvergabe
Der encoTRive hat standardmäßig im Auslieferungszustand seine MAC-Adresse und
den Gerätetyp gespeichert. Die MAC-Adresse ist auch auf der Anschluss-Haube
des Gerätes aufgedruckt, z.B. „00-03-12-02-40-00“.
Der von TR-Electronic vergebene Name für den Gerätetyp ist „TR Antriebe“.
In der Regel können diese Informationen auch über das Engineering Tool bei einem
so genannten Bus-Scan ausgelesen werden.
Bevor ein IO-Device von einem IO-Controller angesprochen werden kann, muss es
einen Gerätenamen haben, da die IP-Adresse dem Gerätenamen fest zugewiesen
ist. Diese Vorgehensweise hat den Vorteil, dass Namen einfacher zu handhaben sind
als komplexe IP-Adressen.
Das Zuweisen eines Gerätenamens für ein konkretes IO-Device ist zu vergleichen mit
dem Einstellen der PROFIBUS-Adresse bei einem DP-Slave.
Im Auslieferungszustand hat der encoTRive keinen Gerätenamen gespeichert. Erst
nach der Zuweisung eines Gerätenamens mit dem Engineering Tool ist der
encoTRive für einen IO-Controller adressierbar, z.B. für die Übertragung der
Projektierungsdaten (z.B. die IP-Adresse) im Anlauf oder für den Nutzdatenaustausch
im zyklischen Betrieb.
Die Namenszuweisung erfolgt vor der Inbetriebnahme vom Engineering Tool über das
standardmäßig bei PROFINET IO-Feldgeräten benutzte DCP-Protokoll.
Da PROFINET-Geräte auf dem TCP/IP-Protokoll basieren, benötigen sie daher für
den Betrieb am Ethernet noch eine IP-Adresse. Im Auslieferungszustand hat der
encoTRive die Default - IP-Adresse „0.0.0.0“ gespeichert.
Wenn wie oben angegeben ein Bus-Scan durchgeführt wird, wird zusätzlich zur MACAdresse und Gerätetyp auch der Gerätename und IP-Adresse in der NetzTeilnehmerliste angezeigt. In der Regel werden hier durch das Engineering Tool
Mechanismen zur Verfügung gestellt, die IP-Adresse, Subnetzmaske und
Gerätenamen einzutragen.
Ablauf der Vergabe von Gerätenamen und Adresse bei einem IO-Device:
- Gerätenamen, IP-Adresse und Subnetzmaske festlegen
- Gerätename wird einem IO-Device (MAC-Adresse) zugeordnet
- Gerätename an das Gerät übertragen
- Projektierung in den IO-Controller laden
IO-Controller vergibt im Anlauf die IP-Adressen an die Gerätenamen. Die Vergabe der
IP-Adresse kann auch abgeschaltet werden, in diesem Fall wird die vorhandene IPAdresse im IO-Device benutzt.
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 93 of 252

Inbetriebnahme
11.4.1 MAC-Adresse
Jedem PROFINET-Gerät wird bereits bei TR-Electronic eine weltweit eindeutige
Geräte-Identifikation zugewiesen und dient zur Identifizierung des Ethernet-Knotens.
Diese 6 Byte lange Geräte-Identifikation ist die MAC-Adresse und ist nicht
veränderbar.
Die MAC-Adresse teilt sich auf in:
3 Byte Herstellerkennung und
3 Byte Gerätekennung, laufende Nummer
Die MAC-Adresse steht im Regelfall auf dem Typenschild des encoTRives.
z.B.: „00-03-12-02-40-00“
11.4.2 IP-Adresse
Damit ein PROFINET-Gerät als Teilnehmer am Industrial Ethernet angesprochen
werden kann, benötigt dieses Gerät zusätzlich eine im Netz eindeutige IP-Adresse.
Die IP-Adresse besteht aus 4 Dezimalzahlen mit dem Wertebereich von 0 bis 255.
Die Dezimalzahlen sind durch einen Punkt voneinander getrennt.
Die IP-Adresse setzt sich zusammen aus
Der Adresse des (Sub-) Netzes und
Der Adresse des Teilnehmers, im Allgemeinen auch Host oder Netzknoten
genannt
11.4.3 Subnetzmaske
Die gesetzten Bits der Subnetzmaske bestimmen den Teil der IP-Adresse, der die
Adresse des (Sub-) Netzes enthält.
Allgemein gilt:
Die Netzadresse ergibt sich aus der UND-Verknüpfung von IP-Adresse und
Subnetzmaske.
Die Teilnehmeradresse ergibt sich aus der Verknüpfung
IP-Adresse UND (NICHT Subnetzmaske)
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 94 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Netzadressbereich (dez.)
IP-Adresse (bin.)
Adressklasse
Default
Subnetzmaske
1.0.0.0 - 126.0.0.0
0xxx xxxx
xxxx xxxx
xxxx xxxx
xxxx xxxx
A
255.0.0.0
128.1.0.0 - 191.254.0.0
10xx xxxx
xxxx xxxx
xxxx xxxx
xxxx xxxx
B
255.255.0.0
192.0.1.0 - 223.255.254.0
110x xxxx
xxxx xxxx
xxxx xxxx
xxxx xxxx
C
255.255.255.0
Dezimal
Binär
Berechnung
IP-Adresse
130.094.122.195
10000010 01011110 01111010 11000011
IP-Adresse
Netzmaske
255.255.255.224
11111111 11111111 11111111 11100000
UND Netzmaske
Netzadresse
130.094.122.192
10000010 01011110 01111010 11000000
= Netzadresse
IP-Adresse
130.094.122.195
10000010 01011110 01111010 11000011
IP-Adresse
Netzmaske
255.255.255.224
11111111 11111111 11111111 11100000
(00000000 00000000 00000000 00011111)
UND (NICHT Netzmaske)
Hostadresse
3
00000000 00000000 00000000 00000011
= Hostadresse
11.4.4 Zusammenhang IP-Adresse und Default-Subnetzmaske
Es gibt eine Vereinbarung hinsichtlich der Zuordnung von IP-Adressbereichen und so
genannten „Default-Subnetzmasken“. Die erste Dezimalzahl der IP-Adresse (von
links) bestimmt den Aufbau der Default-Subnetzmaske hinsichtlich der Anzahl der
Werte „1“ (binär) wie folgt:
Class A-Netz: 1 Byte Netzadresse, 3 Byte Hostadresse
Class B-Netz: 2 Byte Netzadresse, 2 Byte Hostadresse
Class C-Netz: 3 Byte Netzadresse, 1 Byte Hostadresse
Beispiel zur Subnetzmaske
IP-Adresse = 130.094.122.195,
Netzmaske = 255.255.255.224
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 95 of 252

Inbetriebnahme
11.4.5 Netzübergang / Router
Falls im IO-Controller ein Netzübergang (Router) definiert wird, muss die IP-Adresse
im encoTRive manuell eingetragen werden. Das bedeutet, die automatische
Zuweisung der IP-Adresse für den encoTRive muss in diesem Fall in der
Hardwarekonfiguration deaktiviert werden. Dies ist erforderlich, da der encoTRive die
Netzübergang-Funktion bisher noch nicht unterstützt. Aktiviert man diesen Punkt aber
im Controller, sendet dieser den Netzübergang an alle IO-Devices, bei denen die
automatische Zuweisung der IP-Adresse aktiviert ist. Dies kann zu einem
Fehlverhalten des encoTRives führen.
Ist die automatische Zuweisung der IP-Adresse für den encoTRive aktiviert, so muss
beim Netzübergang „Keinen Router verwenden“ ausgewählt sein,
siehe Abbildung 23.
Abbildung 23: Eigenschaften - Ethernet Schnittstelle
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 96 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

12 Projektierungsbeispiel mit SIMATIC® Manager
In diesem Kapitel wird die Projektierung vom encoTRive mit PROFINET mit der
aktuellen GSDML-Datei beschrieben. Die Projektierung wird beispielhaft anhand der
Projektierungssoftware SIMATIC Manager V5.4.2.0 mit einer SIMATIC CPU317-2
PN/DP erläutert.
12.1 GSDML-Datei Installation
Es ist zuerst erforderlich die encoTRive GSDML-Datei zu installieren. Die aktuelle
Datei kann unter der folgenden Homepage herunter geladen werden:
www.tr-electronic.de
Die Datei trägt den Namen GSDML-V2.2-TR-encoTRive-yyyymmdd.xml, wobei gilt:
yyyy: Jahr
mm: Monat
dd: Tag
Gehen Sie nun wie folgt vor:
● Starten Sie STEP7 HWKONFIG und wählen Sie im Menüpunkt Extras den
Menüpunkt GSD-Datei installieren... .
● Wählen Sie nun das entsprechende Ordnerverzeichnis über den Button
Durchsuchen aus, indem sich die herunter geladene GSDML-Datei befindet.
● Markieren Sie die gefundene GSDML-Datei und bestätigen Sie mit dem Button
Installieren den Installationsvorgang.
Abbildung 24: GSDML Datei installieren
● Nach der Installation ist es erfahrungsgemäß erforderlich einen Neustart der
gesamten STEP7 Entwicklungsumgebung vorzunehmen.
● Der encoTRive befindet sich anschließend im Katalog unter dem Verzeichnis
PROFINET IO/WeitereFeldgeräte/Drives/TR Antriebe/encoTRive
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 97 of 252

Projektierungsbeispiel mit SIMATIC Manager
12.2 Vergabe des PROFINET-Gerätenamens
Für die eindeutige Identifikation innerhalb eines Netzwerkes ist es erforderlich, einem
PROFINET Device einen Gerätenamen zu vergeben. Gehen Sie dazu wie folgt vor:
● Verbinden Sie den encoTRive direkt mit der Ethernet-Schnittstelle des
Projektierungs-PCs (z.B. PG).
● Stellen Sie diese über den Dialog PG/PC-Schnittstelle einstellen ein.
● Wählen Sie im STEP7 Hauptmenü Zielsystem den Menüpunkt Ethernet-
Teilnehmer bearbeiten... .
● Betätigen Sie den Button Durchsuchen
Abbildung 25: Ethernet-Teilnehmer installieren
Daraufhin erscheint eine Übersicht der im Netz verfügbaren Teilnehmer:
Abbildung 26: Netzteilnehmer auswählen
Durch Markieren des gewünschten Teilnehmers kann dieser anschließend bearbeitet
werden. Mit dem Button Blinken kann beim markierten encoTRive das Blinken der
beiden roten LEDs am Gehäuse erzwungen werden. Dadurch ist das Lokalisieren des
zugehörigen Teilnehmers im Feld vereinfacht.
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 98 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019

Nach Betätigen des Buttons OK gelangt man letztlich in das zugehörige TeilnehmerBearbeitungsfenster, indem man unter anderem den Gerätenamen zuweisen kann.
Abbildung 27: Ethernet-Teilnehmer bearbeiten
Zum Ändern des Gerätenamens muss im Eingabefeld Gerätename der Name
überschrieben werden und anschließend über den Button Name zuweisen bestätigt
werden.
Der neue Gerätename befindet sich solange remanent im Flash des encoTRives, bis
über den Button Zurücksetzen der Gerätename auf den Defaultnamen
zurückgesetzt wurde.
Printed in the Federal Republic of Germany TR-Electronic GmbH 2008, All Rights Reserved
06/06/2019 TR - EMO - BA - DGB - 0019 - 08 Page 99 of 252

Projektierungsbeispiel mit SIMATIC Manager
12.3 encoTRive in das Netzwerk mit aufnehmen
Entsprechend des Profils kann nun aus dem Hardware-Katalog der Antrieb
MD-300 entnommen und an das PROFINET Netz angehängt werden.
Abbildung 28: encoTRive in das Netzwerk mit aufnehmen
Zur eindeutigen Identifikation innerhalb des Netzes, muss der im Gerät zuvor
vergebene Gerätename über die Objekteigenschaften eingetragen werden.
Abbildung 29: Vergabe des Gerätenamens in der Konfiguration
TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 100 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019
 Loading...
Loading...