

東芝インテリジェントパワーデバイス
高耐圧 シリコン モノリシック パワー集積回路
TPD4131K
TPD4131K は高耐圧 SOI プロセスによる、高圧 PWM 方式の DC
ブラシレスモータドライバです。PWM 回路、三相分配回路、レベルシ
フト型ハイサイドドライバ、ローサイドドライバ、過電流保護回路、
過熱保護回路、減電圧保護回路、出力 IGBT、FRD を内蔵しており、
ホールアンプ入力/ホール IC 入力及び、マイコン制御により直接 DC
ブラシレスモータを可変速駆動できます。
特 長
• 高圧大電流ピンと制御ピンをパッケージの両側に分離しています。
• ブートストラップ方式によりハイサイドドライバ電源が不要です。
• ブートストラップダイオードを内蔵しています。
• PWM 回路、三相分配回路を内蔵しています。
• 回転パルスを出力します。
• IGBT による三相フルブリッジを内蔵しています。
• FRD を内蔵しています。
• 過電流保護、過熱保護、減電圧保護機能を内蔵しています。
• パッケージは DIP26 ピンです。
• ホールアンプ入力及びホール IC 入力に対応しています。
この製品は MOS 構造ですので取り扱いの際には静電気にご注意ください。
HDIP26-P-1332-2.00
質量 3.8 g (標準)
TPD4131K
1
2010-09-30
TPD4131K
4131
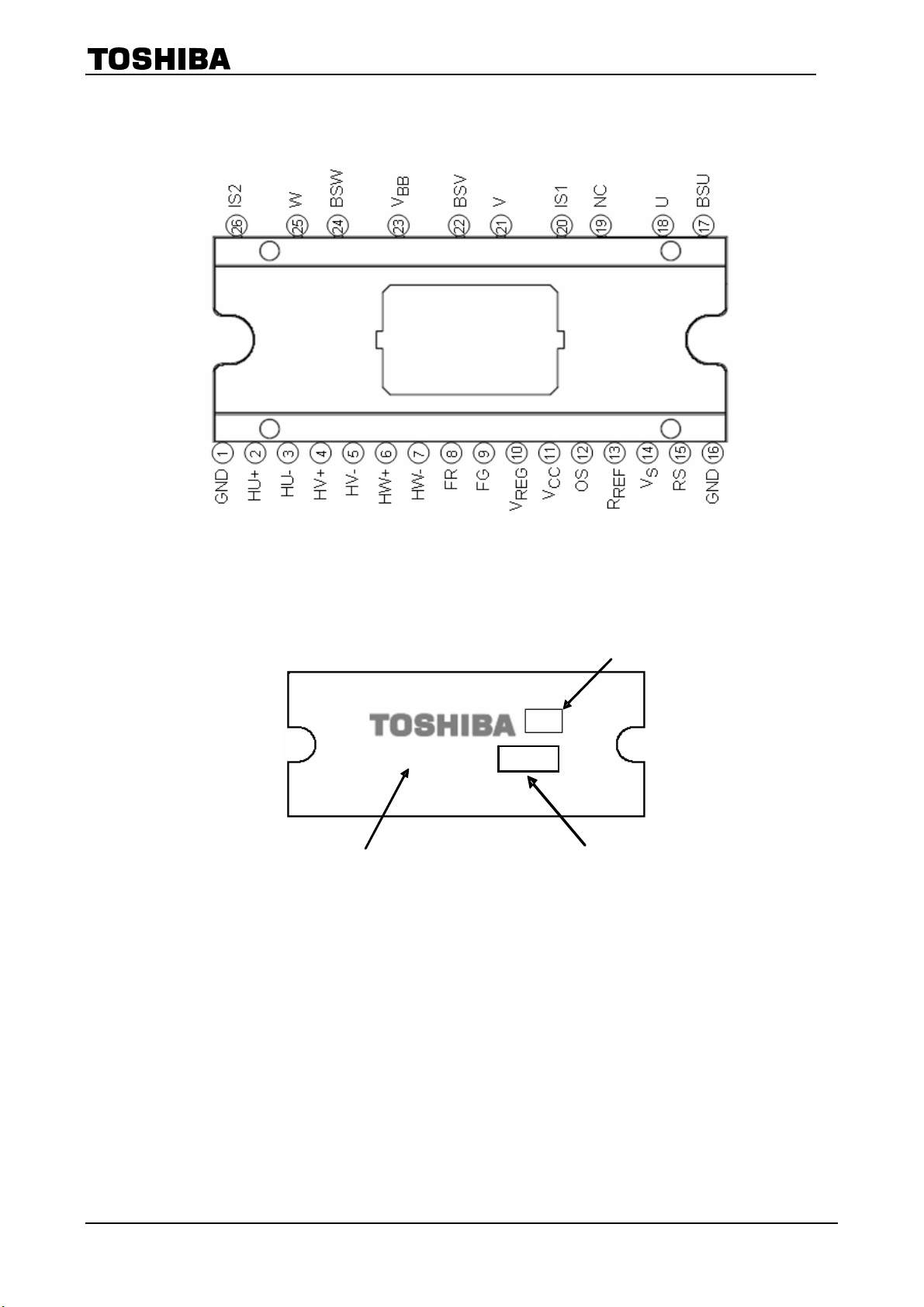
ピン接続
現品表示
TPD
製品名 (または略号)
ロット表示
(週別)
K
生産国名
2
2010-09-30
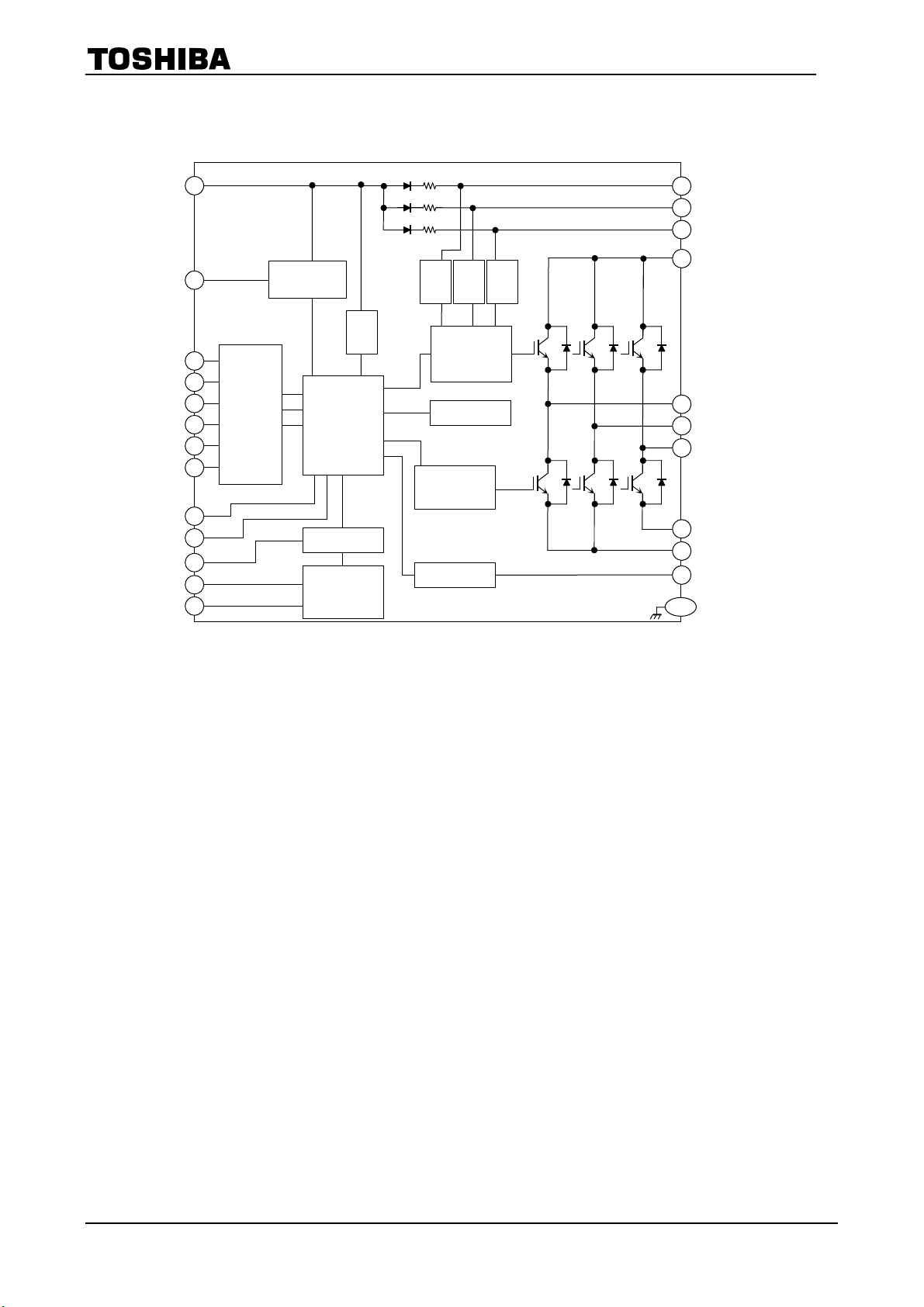
回路ブロック図
V
11
CC
V
10
REG
HU+ 2
HU-
3
4
HV+
HV- 5
6
HW+
HW-
7
FR
8
FG
9
V
14
S
R
13
REF
OS
12
ホール
アンプ
6 V
レギュレータ
三相分配
ロジック
PWM
三角波
発生
電源
低下
保護
電源
電源
低下
低下
保護
保護
ハイサイド
レベルシフト
ドライバ
過熱保護
ローサイド
ドライバ
過電流保護
電源
低下
保護
TPD4131K
17
BSU
BSV
22
BSW
24
V
23
BB
U
18
21
V
W
25
IS2
26
IS1
20
RS 15
GND
1/16
3
2010-09-30
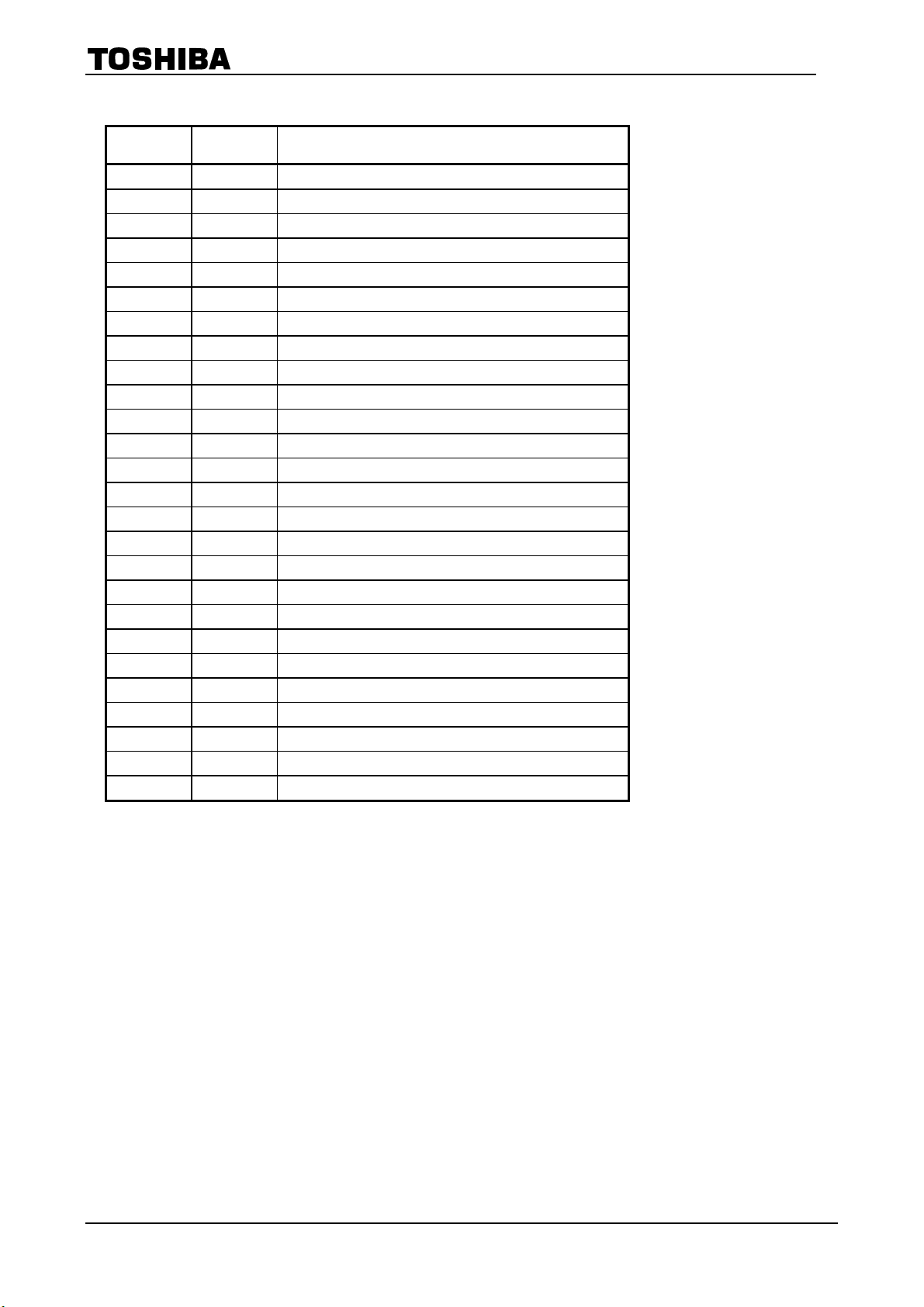
端子説明
端子番号 端子記号 端子の説明
1 GND 接地端子。
2 HU+ U 相ホールアンプ入力端子。(ホール IC も使用可)
3 HU- U 相ホールアンプ入力端子。(ホール IC も使用可)
4 HV+ V 相ホールアンプ入力端子。(ホール IC も使用可)
5 HV- V 相ホールアンプ入力端子。(ホール IC も使用可)
6 HW+ W 相ホールアンプ入力端子。(ホール IC も使用可)
7 HW- W 相ホールアンプ入力端子。(ホール IC も使用可)
8 FR 正転/逆転切り替え入力端子。
9 FG 回転パルス出力端子。
10 V
11 VCC 制御電源端子。
12 OS PWM 三角波発振周波数設定端子。(コンデンサを接続)
13 R
14 VS 速度制御信号入力端子。(PWM リファレンス電圧入力端子)
15 RS 過電流検出端子。
16 GND 接地端子。
17 BSU U 相ブートストラップコンデンサ接続端子。
18 U U 相出力端子。
19 NC 未使用端子。内部チップには接続されていません。
20 IS1 IGBT エミッタ/FRD アノード端子。
21 V V 相出力端子。
22 BSV V 相ブートストラップコンデンサ接続端子。
23 VBB 高圧電源端子。
24 BSW W 相ブートストラップコンデンサ接続端子。
25 W W 相出力端子。
26 IS2 IGBT エミッタ/FRD アノード端子。
6 V レギュレータ出力端子。
REG
PWM 三角波発振周波数設定端子。(抵抗を接続)
REF
TPD4131K
4
2010-09-30
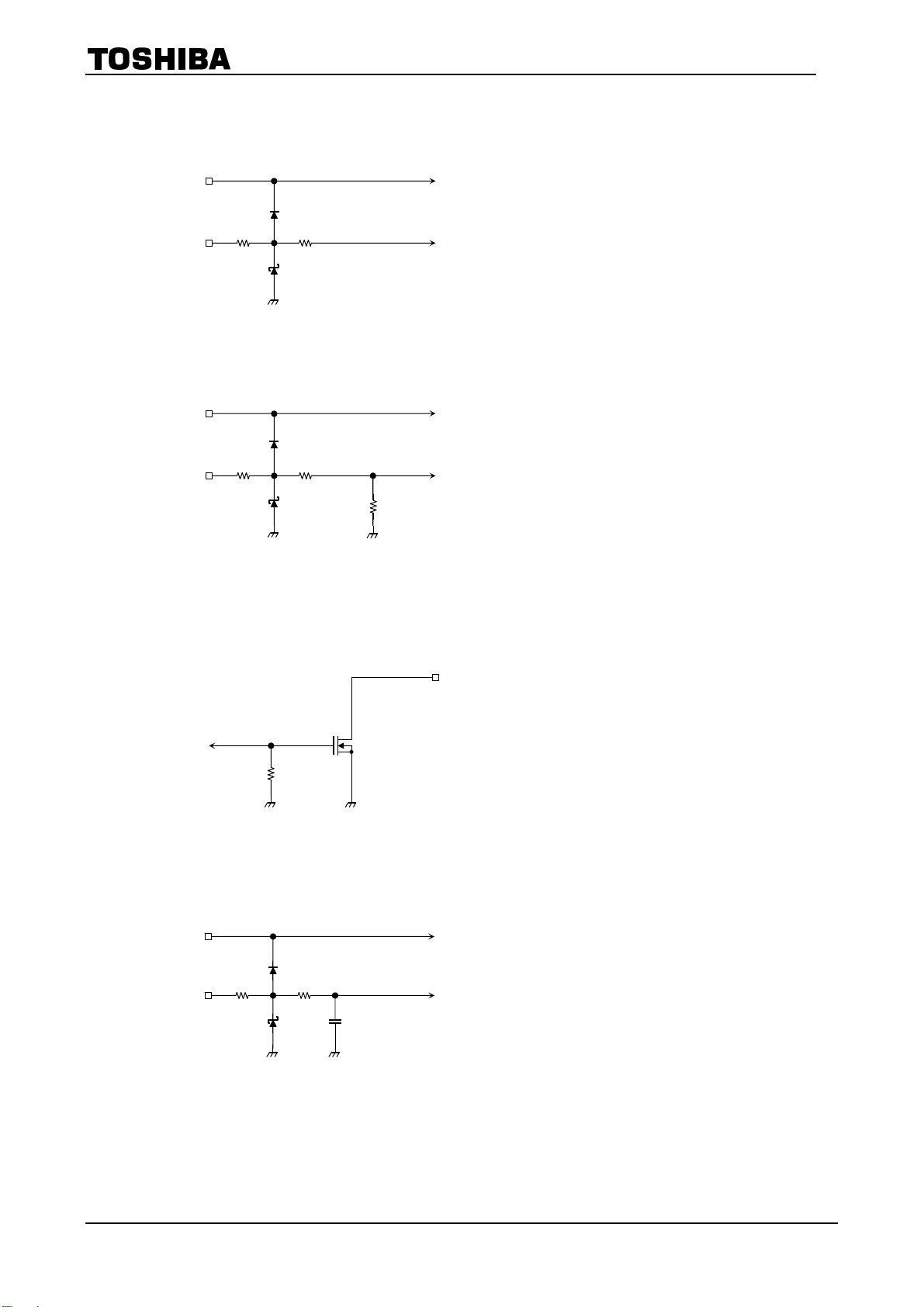
内部回路図
TPD4131K
HU+, HU-, HV+, HV-, HW+, HW-
端子内部回路図
V
S
FG
RS
VCC
HU+, HU-,
HV+, HV-,
HW+, HW-,
V
CC
V
S
4 kΩ 2 kΩ
19.5V
4 kΩ
19.5 V
端子内部回路図
内部回路へ
250kΩ
端子内部回路図
25 kΩ
入力端子内部回路図
内部回路へ
内部回路へ
225 kΩ
FG
V
CC
内部回路へ
4 kΩ 452 kΩ
RS
19.5 V
10pF
5
2010-09-30
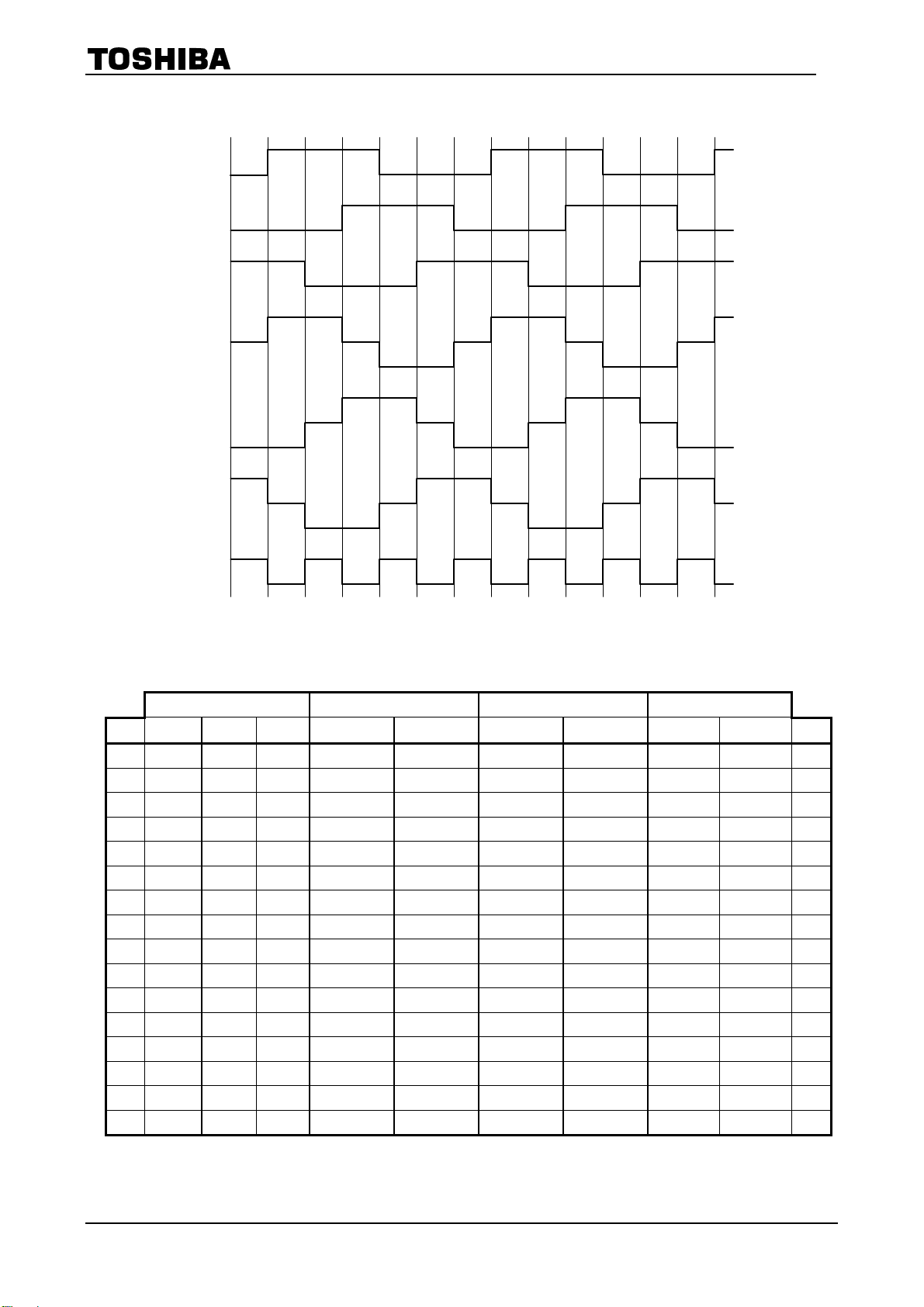
タイミングチャート
HU
ホールアンプ
入力状態
HV
HW
VU
TPD4131K
出力電圧
回転パルス出力
VV
VW
FG
注:ホールアンプ入力状態が「H」とは H*+ > H*-の状態を示します。(*:U/V/W)
真理値表
ホールアンプ入力状態 U相 V相 W相
FR HU HV HW ハイサイド ローサイド ハイサイド ローサイド ハイサイド ローサイド FG
H H L H ON OFF OFF ON OFF OFF L
H H L L ON OFF OFF OFF OFF ON H
H H H L OFF OFF ON OFF OFF ON L
H L H L OFF ON ON OFF OFF OFF H
H L H H OFF ON OFF OFF ON OFF L
H L L H OFF OFF OFF ON ON OFF H
H L L L OFF OFF OFF OFF OFF OFF L
H H H H OFF OFF OFF OFF OFF OFF L
L H L H OFF ON ON OFF OFF OFF H
L H L L OFF ON OFF OFF ON OFF L
L H H L OFF OFF OFF ON ON OFF H
L L H L ON OFF OFF ON OFF OFF L
L L H H ON OFF OFF OFF OFF ON H
L L L H OFF OFF ON OFF OFF ON L
L L L L OFF OFF OFF OFF OFF OFF L
L H H H OFF OFF OFF OFF OFF OFF L
注:ホールアンプ入力状態が「H」とは H*+ > H*-の状態を示します。(*:U/V/W)
6
2010-09-30
TPD4131K
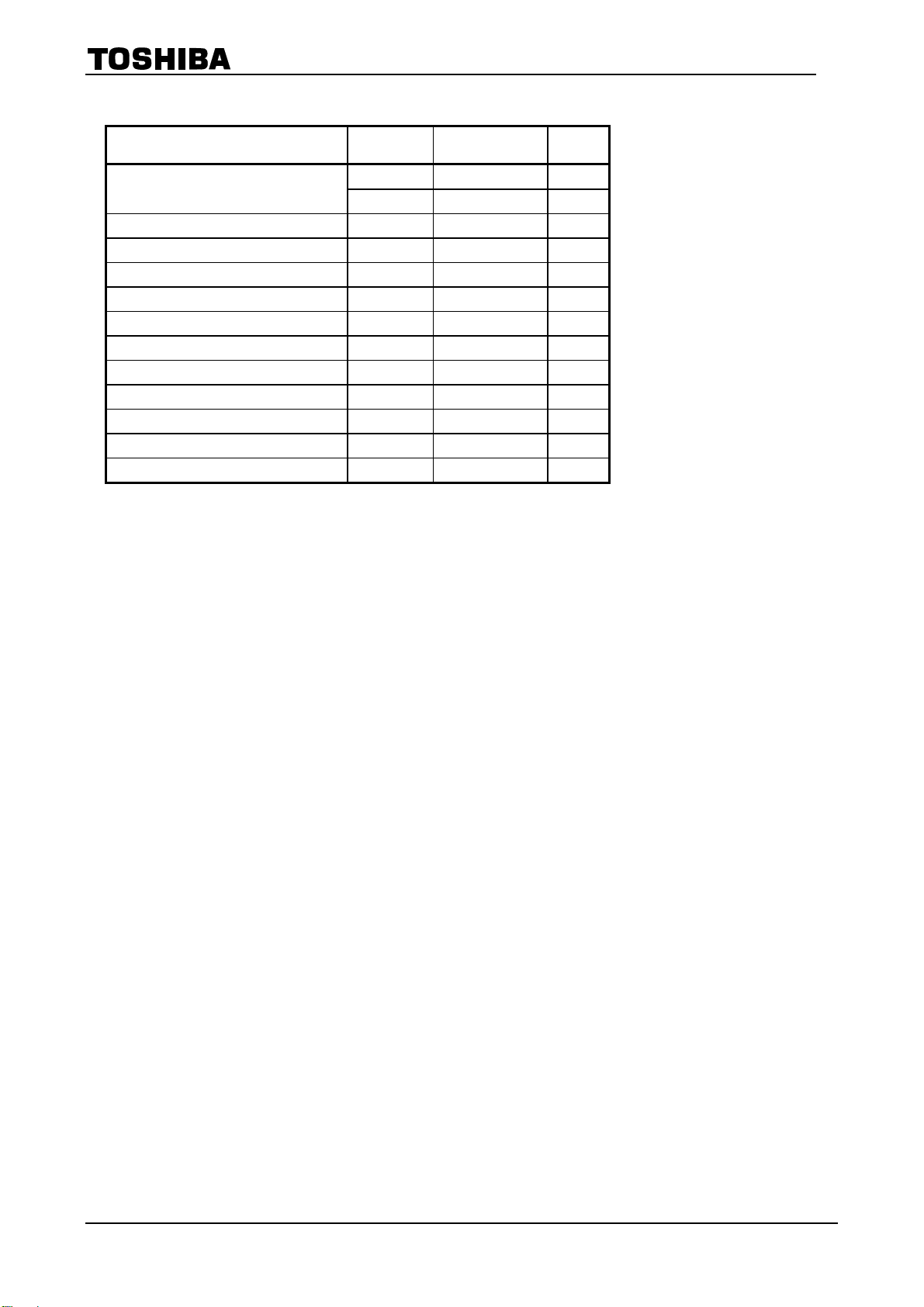
絶対最大定格
電源電圧
出力電流 (DC) I
出力電流 (パルス) I
入力電圧 (VSを除く) VIN -0.5~V
入力電圧 (VSのみ適用) VVS 8.2 V
V
REG
FG 電圧 VFG 20 V
FG 電流 IFG 20 mA
許 容 損 失 (Tc = 25°C) PC 23 W
動作接合温度 T
接合温度 T
保存温度 T
(Ta = 25°C)
項目 記号 定格 単位
VBB 250 V
V
CC
out
outp
電流 I
REG
jopr
150 °C
j
stg
20 V
1 A
2 A
+ 0.5 V
REG
50 mA
-40~135 °C
-55~150 °C
AC200 V 電源への一時的な誤接続を想定して VS < 1.1 V の条件で最大 315 V (1 分間) の耐量を有します。
注: 本製品の使用条件 (使用温度/電流/電圧等) が絶対最大定格/動作範囲以内での使用においても、高負荷 (高
温および大電流/高電圧印加、多大な温度変化等) で連続して使用される場合は、信頼性が著しく低下するお
それがあります。
弊社半導体信頼性ハンドブック (取り扱い上のご注意とお願いおよびディレーティングの考え方と方法) お
よび個別信頼性情報 (信頼性試験レポート、推定故障率等) をご確認の上、適切な信頼性設計をお願いします。
7
2010-09-30
TPD4131K
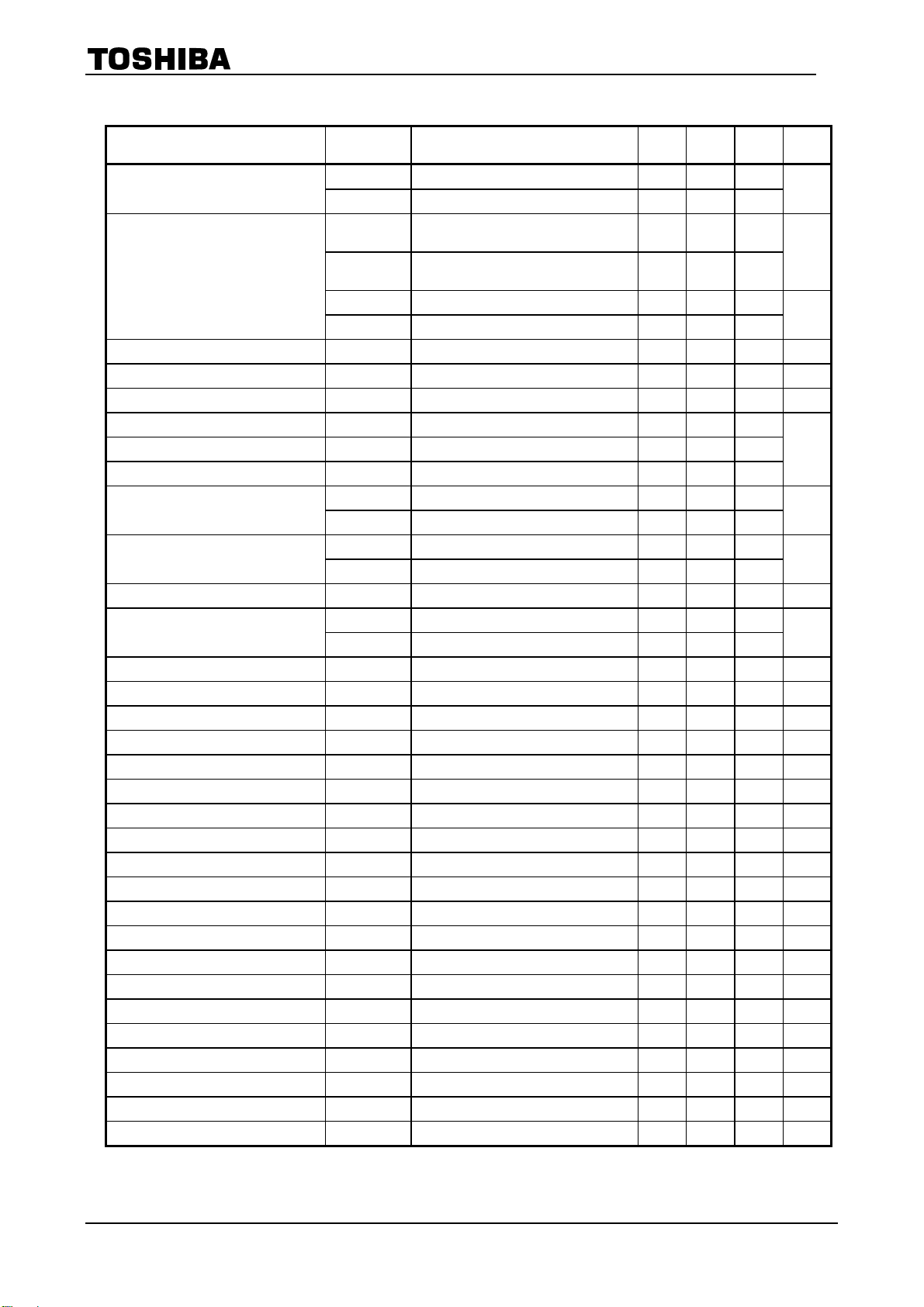
電気的特性
動作電源電圧
消費電流
ホールアンプ入力感度 VHSENS(HA) ⎯ 50 ― ― mV
ホールアンプ入力電流 IHB(HA) ⎯ -2 0 2 μA
ホールアンプ同相入力電圧 CMVIN(HA) ⎯ 0 ⎯ 8 V
ホールアンプヒステリシス幅 ΔVIN(HA) ⎯ 8 30 62
ホールアンプ入力電圧 L → H VLH(HA) ⎯ 4 15 31
ホールアンプ入力電圧 H → L VHL(HA) ⎯ -31 -15 -4
出力飽和電圧
FRD 順方向電圧
BSD 順方向電圧 V
PWM オンデューティ比
PWM オンデューティ比 0 % VVS0 % PWM = 0 % 1.7 2.1 2.5 V
PWM オンデューティ比 100 % VVS100 % PWM = 100 % 4.9 5.4 6.1 V
PWM オンデューティ設定電圧幅 VVSW VVS100 % − VVS0 % 2.8 3.3 3.8 V
出力オールオフ電圧 VVSOFF 出力オールオフ 1.1 1.3 1.5 V
レギュレータ電圧 V
速度制御電圧範囲 VS ⎯ 0 ⎯ 6.5 V
FG 出力飽和電圧 V
電流制限動作電圧 VR ⎯ 0.46 0.5 0.54 V
過熱保護温度 TSD ⎯ 135 ⎯ 185 °C
過熱保護ヒステリシス ΔTSD ⎯ ⎯ 50 ⎯ °C
V
CC
V
CC
V
BS
V
BS
リフレッシュ動作開始電圧 T
リフレッシュ動作停止電圧 T
三角波周波数 f
出力オン遅延時間 ton VBB = 141 V, VCC = 15 V, IC = 0.5 A ⎯ 1.8 3 μs
出力オフ遅延時間 t
FRD 逆回復時間 t
(Ta = 25°C)
項目 記号 測定条件 最小 標準 最大 単位
減電圧保護動作電圧 VCCUVD ⎯ 10 11 12 V
減電圧保護復帰電圧 VCCUVR ⎯ 10.5 11.5 12.5 V
減電圧保護動作電圧 VBSUVD ⎯ 9 10 11 V
減電圧保護復帰電圧 VBSUVR ⎯ 9.5 10.5 11.5 V
VBB ⎯ 50 141 185
⎯ 13.5 15 17.5
V
CC
V
= 185 V
IBB
ICC
I
BS (ON)
I
BS (OFF)
V
CEsat
V
CEsat
VFH IF = 0.5 A, ハイサイド ⎯ 1.6 2.1
V
L IF = 0.5 A, ローサイド ⎯ 1.6 2.1
F
F (BSD)
PWMMIN ⎯ 0 ⎯ ⎯
PWMMAX ⎯ ⎯ ⎯ 100
REG
FGsat
RFON
RFOFF
R = 27 kΩ, C = 1000 pF 16.5 20 25 kHz
c
VBB = 141 V, VCC = 15 V, IC = 0.5 A ⎯ 1.4 3 μs
off
VBB = 141 V, VCC = 15 V, IC = 0.5 A ⎯ 200 ⎯ ns
rr
BB
デューティ = 0 %
V
= 15 V
CC
デューティ = 0 %
VBS = 15 V, ハイサイドオン時 ⎯ 210 470
VBS = 15 V, ハイサイドオフ時 ⎯ 200 415
H VCC = 15 V, IC = 0.5 A, ハイサイド ⎯ 2.3 3.0
L VCC = 15 V, IC = 0.5 A, ローサイド ⎯ 2.3 3.0
IF = 500 μA ⎯ 0.8 1.2 V
VCC = 15 V, I
VCC = 15 V, IFG = 5 mA ⎯ ⎯ 0.5 V
リフレッシュ動作 1.1 1.3 1.5 V
リフレッシュ停止 3.1 3.8 4.6 V
= 30 mA 5 6 7 V
REG
⎯ ⎯ 0.5
⎯ 2.0 10
V
mA
μA
p-p
mV
V
V
%
8
2010-09-30

応用回路例
15 V
TPD4131K
R
3
回転パルス
速度指令
R
R2
C5
VCC
11
V
REG
10
C
6
HU+
C
HV+
C
HW+
R
C
FR
FG
R
V
S
R
C
R
REF
OS
C
4
2
3
4
5
6
7
8
9
14
13
12
ホール
アンプ
6 V
レギュレータ
電源
低下
保護
三相分配
ロジック
PWM
三角波
発生
電源
低下
保護
電源
低下
保護
ハイサイド
レベルシフト
ドライバ
過熱保護
ローサイド
ドライバ
過電流保護
電源
低下
保護
17
22
24
23
18
21
25
26
20
15
1/16
BSU
BSV
BSW
V
BB
U
V
W
IS2
IS1
RS
GND
C
C
C
2
1
3
C
M
R
1
9
2010-09-30
TPD4131K
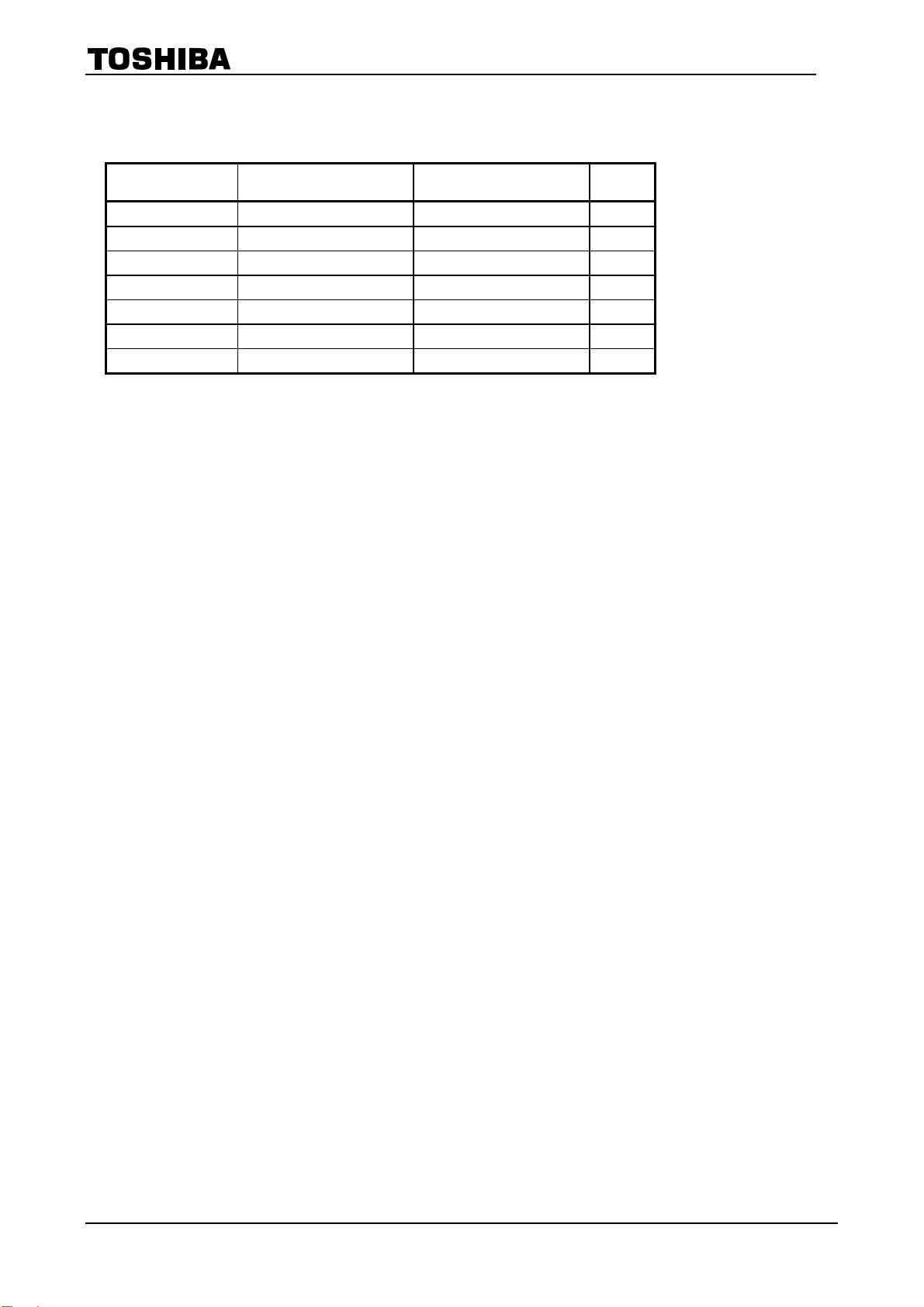
外付け部品
標準的な外付け部品を下表に示します。
部品 参考値 目的 備考
C1, C2, C3 25 V/2.2 μF ブートストラップ用 (注 1)
R1 0.62 Ω ± 1 % (1 W) 過電流検出用 (注 2)
C4 25 V / 1000 pF ± 5 % PWM 周波数設定用 (注 3)
R2 27 kΩ ± 5 % PWM 周波数設定用 (注 3)
C5 25 V/10 μF 制御電源安定用 (注 4)
C6 25 V/0.1 μF V
R3 5.1 kΩ FG 端子プルアップ抵抗 (注 5)
注 1: ブートストラップコンデンサの容量はモータのドライブ条件によって異なります。また、VBS減電圧保護動作
電圧まで動作はしますが、出力 IGBT の損失を小さく保つために、コンデンサの両端電圧は13.5 V 以上とするこ
とをお勧めします。また、コンデンサのストレス電圧は V
取りください。
電源安定用 (注 4)
REG
電圧値となります。十分にディレーティングをお
CC
注 2: 検出電流は次式により表されます。I
= VR ÷ R
O
(VR = 0.5 V typ.)
1
また、検出電流の最大値が 1 A 以下に設定されるようにご使用ください。
注 3: 表に示した C
の組み合わせで約 20 kHz の PWM 周波数になります。IC 固有の誤差要因は約 10 %です。
4、R2
PWM 周波数は、概ね下式で表されます。この際、基板の浮遊容量に対する配慮が必要です。
f
= 0.65 ÷ { C4 × (R2 + 4.25 kΩ)} [Hz]
c
R2によって PWM 三角波の充・放電回路の基準電流が作られますが、R2の値が小さすぎると、IC 内部回路の電
流容量を越えて三角波が歪んできます。R
は 9 kΩ以上を選んでください。
2
注 4: 使用に際しては、実際の使用環境に合わせて、合わせ込みが必要になります。また、実装時には、ノイズ除去効果
を高めるために IC リードの根元になるべく近い位置に配置してください。
注 5: FG 端子はオープンドレイン構造となっています。FG 端子を使用しない場合には、GND に接続してください。
注 6: 入力信号端子にノイズが見られる場合には、入力間にコンデンサを追加してください。
注 7: ホール素子は、インジウム・アンチモン系を使用ください。ホール素子のピーク出力電圧は、300mV 以上にて
設定されるようにご使用ください。
使用上の注意点
(1) 電源立ち上げ/下げに際しては、必ず、VS < VVSOFF の状態 (全 IGBT 出力 = OFF) で行ってください。こ
の場合には、V
回転中に V
断され、IC が破壊する恐れがありますので十分ご注意ください。
(2) 本 IC には、モータ正転/逆転切り替え端子 (FR) があります。モータの正逆転を行う場合は、V
V 以下の状態で、モータが停止してから F/R を切り替えてください。モータ回転中に F/R 端子を切り替わ
ると、下記のような問題が発生する恐れがあります。
出力段素子 (IGBT) において、切り替え瞬時に上下貫通電流が流れ破壊する可能性がある。
切り替え時に、過電流保護動作ができない経路で過電流が流れ破壊する可能性がある。
(3) 三角波発振回路は C
ノイズの影響を受けると、三角波の歪みや誤動作の原因になることがあります。これを避けるためには、外
付け部品を IC リードの根元に付けたり、大電流の流れる配線と分離するなどの対策が有効です。
(4) 本 IC の PWM 制御は、ハイサイド側の IGBT を ON/OFF 制御することで行います。
(5) V
電圧が低い状態且つ Duty100 %において、モータをロックさせると、負荷解除後も再起動できない場合
BB
があります。これは、V
が長くなりブートストラップ電圧が低下し、ハイサイド減電圧保護が動作しハイサイド出力が OFF となる
からです。この場合、ハイサイドを ON させるためのレベルシフトパルスが生成できないため、再起動でき
ません。レベルシフトパルスはホールセンサ出力のエッジか、もしくは内部 PWM 信号のエッジから生成さ
れますが、モータロック及び Duty100 %命令により、いずれのエッジも存在しません。ロック後に再起動す
るには①ハイサイド電源電圧が減電圧保護電圧値よりも 0.5V 高い電圧まで回復した状態にて、②ハイサイ
、VBBの順番はどちらでも構いません。上記のように電源を立ち下げる場合でもモータが
CC
ラインをリレーなどで切り離してしまうような場合には VBB電源への電流回生ルートが遮
BB
電圧を 1.1
S
, R2を外付けして、微少な電流の充放電を行っています。このため、IC の基板実装時に
4
電圧が低い状態でモータがロックされると、ロック直前でのハイサイド ON 時間
BB
10
2010-09-30
ド入力信号が入ることが必要です。ハイサイド入力信号は前述のレベルシフトパルスにより作成されます
f
ので、PWM の Duty を 100 %未満にするかもしくは強制的にモータを外部から回しホールセンサ出力に
エッジを作成することで再起動が可能です。システムとしてロック後の再起動を可能にするには、Duty の
最大値が 100 %未満となるようにモータ仕様上で制限して戴く必要があります。
保護機能の動作説明
(1) 過電流保護
起動加速時およびロータロック時に過大な電流が流れる状態から本 IC を保護する目的で過電流保護回路を
内蔵しています。過電流保護機能は、RS 端子に接続される電流検出抵抗に発生する電圧を検出し、これが
V
(= 0.5 V typ.) を超えるとマスク時間を経て ON 状態のハイサイド IGBT 出力をいったんシャットダウ
R
ンし電流の増加を抑えます。シャットダウン状態の解除は PWM の次にくる ON 信号でなされます。
PWM リファレンス電圧
(2) 電源電圧低下保護
V
CC
能を内蔵しております。V
関わらず全 IGBT 出力をシャットダウンします。この保護機能はヒステリシスを持ち、シャットダウン電圧
よりも 0.5 V 高い V
ます。また、V
ンし、シャットダウン電圧よりも 0.5 V 高い V
IGBT が ON します。
(3) 過熱保護
本 IC 温度が過度に上昇した異常状態から保護する目的で過熱保護回路を内蔵しております。外部的な要因、
あるいは、内部の発熱によってチップ温度が高くなり内部の設定値に達すると、入力に関わらず全 IGBT 出
力をシャットダウンします。この保護機能はヒステリシスΔTSD (= 50°C typ.) を持ち、チップ温度が TSD
− ΔTSD 以下の温度に下がると自動的に復帰して、再び入力に従って IGBT が ON します。
なお、チップ内の温度検出箇所は 1 箇所なので、例えば IGBT による発熱の場合、発熱源となる IGBT の検出
位置からの距離の違いで、シャットダウンまでの時間差が生じ、過熱保護回路が動作した時点で既にパワー
チップの温度は過熱保護温度以上に上昇することがあります。
三角波
過電流設定値
出力電流
電圧および VBS電圧が低下し、IGBT が非飽和領域で動作するのを防止する目的で電源電圧低下保護機
TPD4131K
Duty ON
Duty OFF
マスク時間 + t
t
of
過電流シャットダウン
電源が低下して IC 内部の設定値 VCCUVD (= 11 V typ.) に達すると、入力に
CC
UVR (= 11.5 V typ.) になると自動的に復帰して、再び入力に従って IGBT が ON し
CC
電源が低下して VBSUVD (= 10 V typ.)に達すると、ハイサイド IGBT 出力をシャットダウ
BS
ton t
UVR (= 10.5 V typ.) になると、再び入力信号に従って
BS
off
on
リトライ
11
2010-09-30

TPD4131K
A
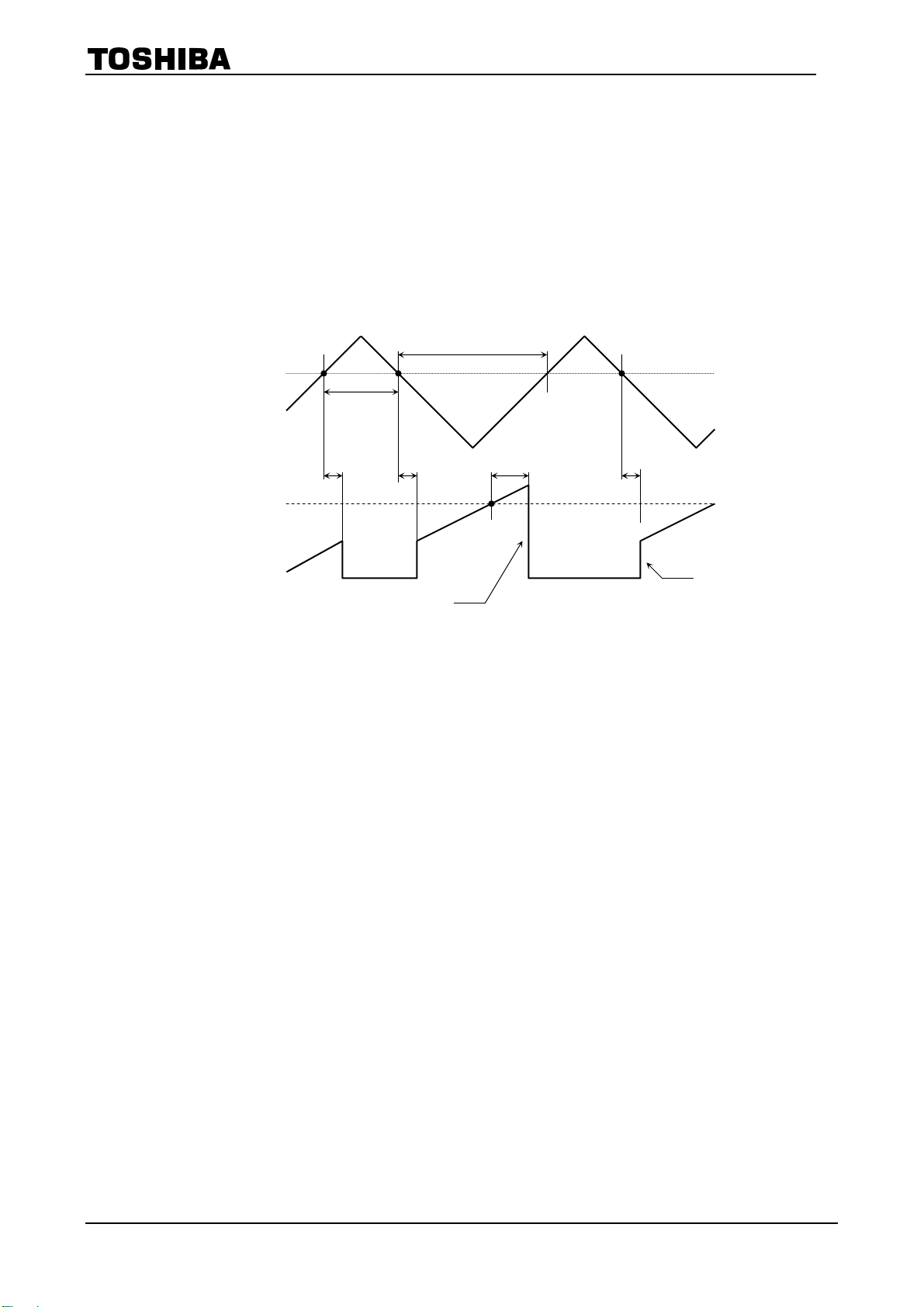
ブートストラップコンデンサの充電動作・容量説明
本 IC のハイサイドドライバの電源はブートストラップ方式を採用しています。
ブートストラップコンデンサの充電は、PWM 制御されているハイサイド IGBT の OFF 期間に同一アームのローサイド
IGBT をおよそ 1/5 の区間で ON させることで行います。(20 kHz で駆動する場合、充電時間は 1 周期当たり約 10 μs と
なります) PWM のオンデューティが高くなると、ローサイド IGBT の ON 期間でアーム短絡するため、V
3.8 V (デューティ 55 %) を超えると、ローサイド IGBT は連続して OFF 状態となります。このときにも PWM 制御はハ
イサイド IGBT で行っている関係で、ダイオード回生電流は PWM 制御されている IGBT のローサイド FRD に流れ、ブー
トストラップコンデンサは充電されます。しかしながら、オンデューティが 100 %の場合には、ダイオード回生電流は流れ
ないため、ブートストラップコンデンサは充電されません。100 %駆動を行う場合には、ブートストラップコンデンサの容
量を決める上で 100 %デューティでの電圧低減を考慮する必要があります。
ブートストラップコンデンサ容量 = ハイサイドドライバ消費電流 (最大値) × 最大駆動時間/ (V
V
V
V
F
(FRD)
F
F
− 13.5) [F]
:ブートストラップダイオード順方向電圧
(BSD)
:ファーストリカバリーダイオード順方向電圧
(FRD)
CC
− V
また、コンデンサ容量の経時変化および温度変化に注意が必要です。
Duty 100 % (VS: 5.4 V)
Duty 80 %
三角波
C
電圧がおよそ
S
F
(BSD)
+
Duty 55 % (V
PWM リファレンス電圧
Duty 0 % (V
VVsOFF (V
: 3.8 V)
S
: 2.1 V)
S
: 1.3 V)
S
GND
ローサイド ON
VS領域 IGBT 動作
A ハイ/ローサイドともに OFF
B 充電動作領域。タイミングチャートでハイサイドが ON する相のローサイド IGBT がリフレッシュ動作する
C 充電動作停止領域。タイミングチャートに従ってハイサイド → PWM、ローサイドはリフレッシュ動作しない
安全動作領域
1.0
ハイサイド Duty ON
B
ピーク巻線電流 (A)
0
0
電源電圧 VBB (V)
図 1: T
= 135℃の安全動作領域
j
*: 上記、安全動作領域は T
= 135°C (図 1)ものです。
j
185
12
2010-09-30
TPD4131K
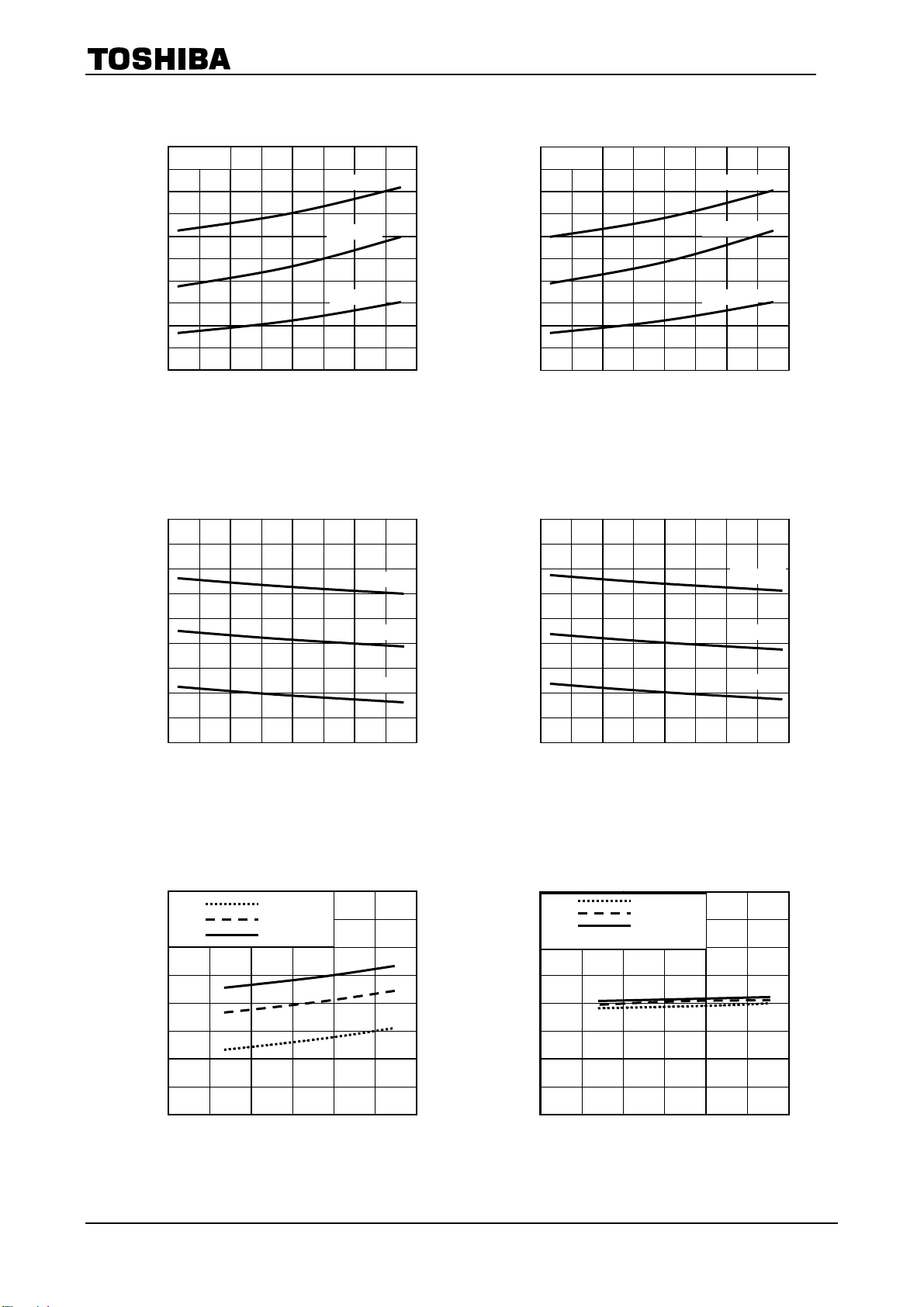
3.4
VCC = 15 V
3.0
H (V)
2.6
CEsat
2.2
1.8
IGBT 飽和電圧 V
1.4
−50
2.0
0 50 100 150
ジャンクション温度 Tj (°C)
V
CEsat
V
F
H – Tj
H – Tj
IC = 700 mA
IC = 500 mA
IC = 300 mA
V
L – Tj
3.4
3.0
VCC = 15 V
CEsat
IC = 700 mA
L (V)
2.6
CEsat
2.2
1.8
IC = 500 mA
IC = 300 mA
IGBT 飽和電圧 V
1.4
−50
0 50 100
150
ジャンクション温度 Tj (°C)
V
L – Tj
F
2.0
H (V)
F
1.8
1.6
1.4
IF = 700 mA
IF = 500 mA
IF = 300 mA
FRD 順方向電圧 V
1.2
−50 0 50 100 150
ジャンクション温度 Tj (°C)
I
– VCC
3.0
T
T
T
2.5
CC
=−40°C
j
=25°C
j
=135°C
j
(mA)
CC
2.0
L (V)
F
1.8
1.6
1.4
FRD 順方向電圧 V
1.2
−50 0 50 100
IF = 700 mA
IF = 500 mA
IF = 300 mA
150
ジャンクション温度 Tj (°C)
V
– V
REG
7.0
T
T
T
(V)
I
= 30 mA
6.5
REG
REG
6.0
=−40°C
j
=25°C
j
=135°C
j
CC
消費電流 I
1.5
1.0
12
14 16 18
制御電源電圧 VCC (V)
13
レギュレータ電圧 V
5.5
5.0
12
14 16
制御電源電圧 VCC (V)
18
2010-09-30

TPD4131K
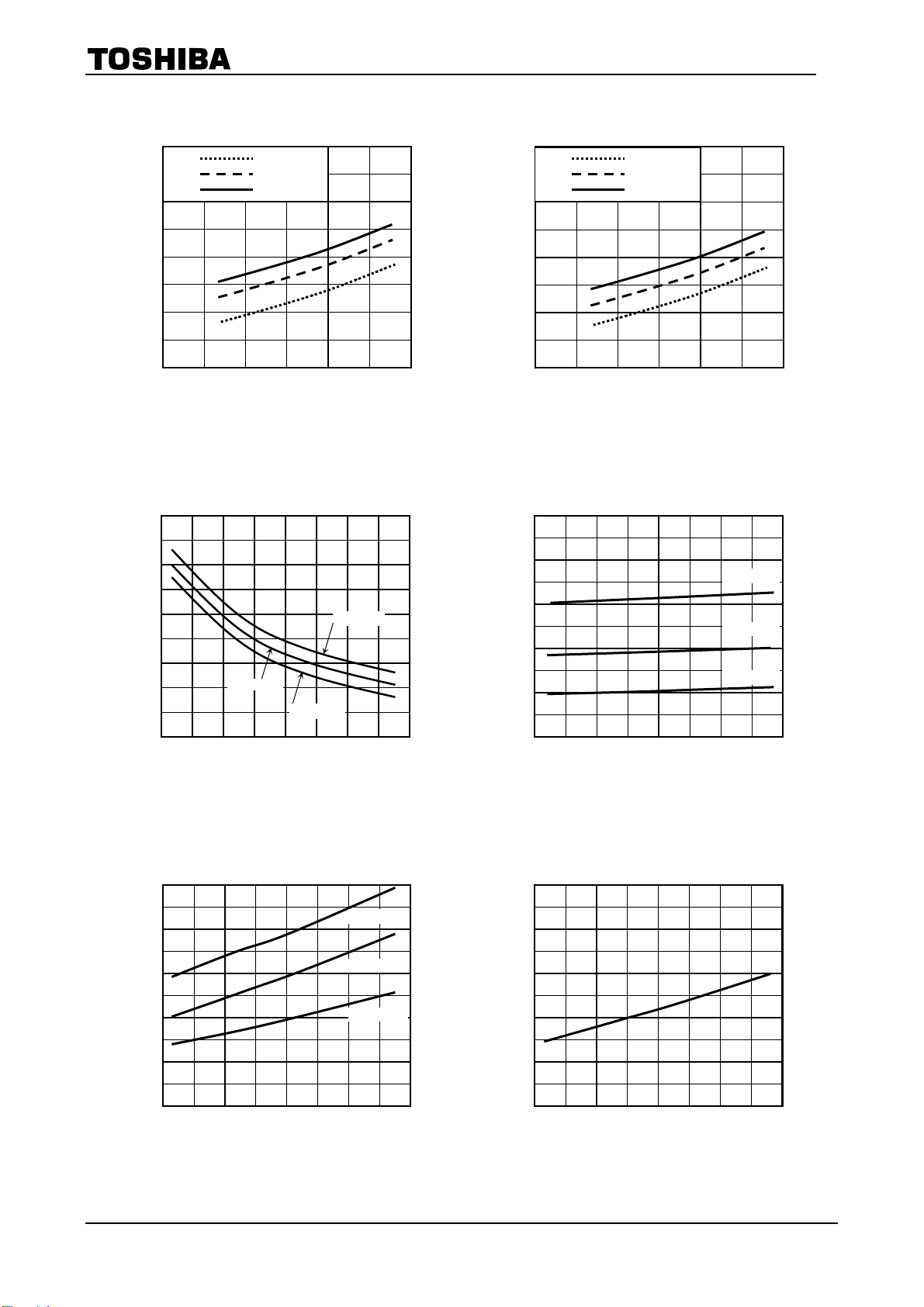
t
– Tj
3.0
(μs)
on
2.0
on
1.0
VBB = 141 V
VCC = 15 V
IC = 0.5 A
出力オン遅延時間 t
ハイサイド
ローサイド
0
−50 0 50 100 150
ジャンクション温度 Tj (°C)
V
– Tj
6.0
4.0
(V)
S
V
2.0
PWM オンデューティ設定電圧
VCC = 15 V
0
−50 0 50 100 150
S
ジャンクション温度 Tj (°C)
VS 100%
VSW
VS 0%
3.0
VBB = 141 V
VCC = 15 V
IC = 0.5 A
ハイサイド
(μs)
ローサイド
off
2.0
1.0
出力オフ遅延時間 t
0
−50 0 50 100 150
ジャンクション温度 Tj (°C)
12.5
V
V
12.0
UV (V)
CC
11. 5
11. 0
10.5
減電圧保護動作電圧 V
10.0
−50
050
ジャンクション温度 Tj (°C)
CC
CC
V
CC
UVD
UVR
t
– Tj
off
UV – Tj
100 150
V
UV – Tj
11. 5
V
V
11. 0
BS
BS
BS
UVD
UVR
UV (V)
BS
10.5
10.0
9.5
減電圧保護動作電圧 V
9.0
−50 0 50 100 150
ジャンクション温度 Tj (°C)
14
V
– Tj
1.0
0.8
(V)
R
0.6
VCC = 15 V
R
0.4
0.2
電流制限動作電圧 V
0
−50 0 50 100 150
ジャンクション温度 Tj (°C)
2010-09-30
TPD4131K
450
T
T
T
350
I
BS (ON)
j
j
j
– VBS
=−40°C
=25°C
=135°C
(μA)
250
BS (ON)
150
消費電流 I
50
12
14 16 18
制御電源電圧 VBS (V)
V
1.0
F (BSD)
– Tj
(V)
0.9
F (BSD)
0.8
IF = 700 μA
(μA)
BS (OFF)
消費電流 I
(μJ)
ton
450
I
T
T
T
350
250
150
50
12
14 16
BS (OFF)
=−40°C
j
=25°C
j
=135°C
j
– VBS
制御電源電圧 VBS (V)
W
– Tj
50
40
30
20
ton
IC = 700 mA
IC = 500 mA
18
0.7
BSD 順方向電圧 V
0.6
−50 0 50 100 150
IF = 500 μA
IF = 300 μA
ジャンクション温度 Tj (°C)
W
– Tj
10
8
toff
IC = 700 mA
(μJ)
toff
6
IC = 500 mA
IC = 300 mA
ターンオフロス W
4
2
0
−50
0 50 100 150
ジャンクション温度 Tj (°C)
ターンオンロス W
(HA) (mV)
IN
DV
ホールアンプヒステリシス幅
10
60
50
40
30
20
10
0
−50
−50
IC = 300 mA
0 50 100 150
ジャンクション温度 Tj (°C)
DV
(HA)– Tj
IN
0 50 100 150
ジャンクション温度 Tj (°C)
15
2010-09-30

測定回路
IGBT 飽和電圧 (U 相ローサイドの場合)
IS2
26
○
25
W
○
BSW
24
○
GND
HU+
HU-
1
2
○
○
HV+
3
4
○
○
FRD 順方向電圧 (U 相ローサイドの場合)
IS2
26
○
GND
1
○
HU+
2
○
W
25
○
HU-
3
○
BSW
24
○
HV+
4
○
5
5
HV-
○
HV-
○
BB
V
23
○
HW+
6
○
BB
V
23
○
HW+
6
○
7
7
HW-
○
HW-
○
FR
8
○
FR
8
○
BSV
22
○
BSV
22
○
FG
9
○
FG
9
○
V
21
○
REG
V
10
○
1000pF
V
21
○
REG
V
10
○
11
11
V
○
V
○
CC
CC
IS1
20
○
IS1
20
○
OS
12
○
OS
12
○
VM
NC
19
○
VM
NC
19
○
REF
R
13
○
27
kΩ
REF
R
13
○
V
14
○
V
14
○
S
S
0.5A
U
18
○
RS
15
○
0.5A
U
18
○
RS
15
○
BSU
17
○
GND
16
○
BSU
17
○
GND
16
○
TPD4131K
2.5V
HU+ = 0V
HV+ = 5V
HW+ = 0V
VCC = 15V
= 6.1V
V
S
16
2010-09-30

VCC消費電流
IS2
26
○
GND
1
○
レギュレータ電圧
26
GND
1
○
IS2
○
HU+
2
○
HU+
2
○
W
25
○
HU-
3
○
W
25
○
HU-
3
○
BSW
24
○
HV+
4
○
BSW
24
○
HV+
4
○
5
HV-
○
5
HV-
○
BB
V
23
○
HW+
6
○
BB
V
23
○
HW+
6
○
7
HW-
○
7
HW-
○
FR
8
○
FR
8
○
VM
BSV
22
○
BSV
22
○
FG
9
○
FG
9
○
V
21
○
REG
V
10
○
1000pF
V
21
○
REG
V
10
○
30
mA
1000pF
IM
11
V
○
11
CC
V
○
CC
IS1
20
○
IS1
20
○
OS
12
○
OS
12
○
NC
19
○
R
13
○
NC
19
○
13
REF
27
kΩ
REF
R
○
27
kΩ
V
14
○
14
S
V
○
TPD4131K
U
18
○
BSU
17
○
RS
GND
15
16
○
○
VCC = 15V
U
18
○
BSU
17
○
S
RS
GND
15
16
○
○
= 15V
V
CC
17
2010-09-30

出力オン・オフ遅延時間 (U 相ローサイドの場合)
5
HV-
○
BB
V
23
○
HW+
6
○
10%
BSV
22
○
HW-
FR
7
8
○
○
90%
t
t
on
IS2
26
○
W
25
○
BSW
24
○
GND
1
○
HU+
2
○
HU-
3
○
HV+
4
○
入力 (HV+)
IM
FG
9
○
V
21
○
V
10
○
1000pF
REG
TPD4131K
IM
282Ω
NC
IS1
19
20
○
○
OS
12
○
REF
R
13
○
CC
V
11
○
V
14
○
S
2.2μF
U
18
○
RS
15
○
BSU
17
○
GND
16
○
27
kΩ
90%
10%
off
U = 141V
2.5V
HU+ = 0V
HV+ = PG
HW+ = 0V
V
= 15V
CC
= 6.1V
V
S
18
2010-09-30

PWM オンデューティ設定電圧 (U 相ハイサイドの場合)
5
HV-
○
BB
V
23
○
HW+
6
○
7
HW-
○
FR
8
○
VM
BSV
22
○
FG
9
○
V
21
○
REG
V
10
○
1000pF
IS2
26
○
25
W
○
BSW
24
○
GND
1
○
HU+
2
○
HU-
3
○
HV+
4
○
*: V
端子電圧をスイープし、U 端子電圧をモニタする。
S
出力が ON から OFF したときの電圧を PWM = 0%、フル ON 時の電圧を PWM = 100%とする。
11
V
○
CC
IS1
20
○
OS
12
○
NC
19
○
R
13
○
REF
27
kΩ
2kΩ
V
14
○
TPD4131K
= 18V
V
15V
U
18
○
BSU
17
○
S
RS
GND
15
16
○
○
BB
2.5V
HU+ = 5V
HV+ = 0V
HW+ = 0V
VCC = 15V
V
= 6.1V → 0V
S
0V → 6.1V
19
2010-09-30

TPD4131K
減電圧保護動作・復帰電圧
V
CC
相ローサイドの場合
(U
IS2
26
○
W
25
○
BSW
24
○
BB
V
23
○
BSV
22
○
V
21
○
FG
9
○
REG
V
10
○
GND
HU+
HU-
HV+
HV-
HW+
HW-
1
○
2
3
4
5
○
○
○
○
6
○
FR
7
8
○
○
VM
1000pF
*: V
端子電圧を 15V からスイープし、U 端子電圧をモニタする。
CC
出力が OFF したときの VCC 端子電圧を減電圧保護動作電圧とする。
また、6V からスイープし、出力が ON したときの V
CC
VBS減電圧保護動作・復帰電圧 (U 相ハイサイドの場合)
IS2
26
○
W
25
○
BSW
24
○
GND
1
○
HU+
2
○
HU-
3
○
HV+
4
○
*: BSU 端子電圧を 15V からスイープし、V
電圧保護動作電圧とする。また、BSU 端子電圧を 6V からスイープし、測定値電圧値ごとに HU 端子を 5V→0V
→5V と入力し、V
端子電圧をモニタする。出力が ON となるまで、同様に繰り返す。出力が ON した BSU 端
BB
子電圧を減電圧保護復帰電圧とする。
2kΩ
BB
V
23
○
HV-
HW+
6
○
HW-
7
8
○
5
○
BSV
22
○
FR
○
FG
9
○
21
V
○
REG
V
10
○
1000pF
端子電圧をモニタする。出力が OFF したときの BSU 端子電圧を減
BB
)
2kΩ
NC
IS1
19
20
○
○
OS
12
○
R
13
○
REF
V
11
○
CC
27
kΩ
端子電圧を減電圧保護復帰電圧とする。
NC
IS1
19
20
○
○
OS
12
○
REF
R
13
○
CC
V
11
○
27
kΩ
U
18
○
BSU
17
○
S
V
RS
15
○
GND
16
○
14
○
VM
U
18
○
BSU
17
○
S
V
RS
15
○
GND
16
○
14
○
U = 18V
2.5V
HU+ = 0V
HV+ = 5V
HW+ = 0V
V
= 15V → 6V
CC
6V → 15V
VS = 6.1V
VBB = 18V
BSU = 15V → 6V
6V → 15V
2.5V
HU+ = 5V
HV+ = 0V
HW+ = 0V
= 15V
V
CC
VS = 6.1V
20
2010-09-30

電流制限動作電圧 (U 相ハイサイドの場合)
IS2
26
○
W
25
○
BSW
24
○
23
V
○
BB
GND
HU+
HU-
HV+
HV-
HW+
1
○
2
3
4
○
○
○
5
○
6
○
HW-
7
○
*: RS 端子電圧をスイープし、U 端子電圧をモニタする。
出力が OFF したときの RS 端子電圧を電流制限動作電圧とする。
VBS消費電流 (U 相ハイサイドの場合)
IS2
26
○
W
25
○
BSW
24
○
GND
HU+
HU-
1
○
2
○
3
○
HV+
4
○
BB
V
23
○
HV-
HW+
6
○
HW-
7
○
5
○
FR
8
○
VM
FR
8
○
BSV
22
○
BSV
22
○
FG
9
○
FG
9
○
V
21
○
V
10
○
1000pF
V
21
○
V
10
○
1000pF
REG
REG
TPD4131K
IS/RS = 0V → 0.6V
2kΩ
15V
NC
IS1
19
20
○
○
OS
12
○
REF
R
13
○
CC
V
11
○
U
18
○
BSU
17
○
S
V
RS
15
○
GND
16
○
14
○
27
kΩ
IM
NC
IS1
19
20
○
○
OS
12
○
REF
R
13
○
CC
V
11
○
U
18
○
BSU
17
○
S
V
RS
15
○
GND
16
○
14
○
27
kΩ
= 18V
V
BB
2.5V
HU+ = 5V
HV+ = 0V
HW+ = 0V
= 15V
V
CC
VS = 6.1V
BSU = 15V
2.5V
HU+ = 5V/0V
HV+ = 0V
HW+ = 0V
= 15V
V
CC
= 6.1V
V
S
21
2010-09-30
BSD 順方向電圧 (U 相の場合)
IS2
26
○
GND
1
○
HU+
2
○
W
25
○
HU-
3
○
HV+
4
○
BSW
24
○
5
HV-
○
BB
V
23
○
HW+
6
○
7
HW-
○
FR
8
○
BSV
22
○
FG
9
○
21
V
○
REG
V
10
○
11
V
○
CC
IS1
20
○
OS
12
○
NC
19
○
R
13
○
REF
VM
S
V
14
○
TPD4131K
500μA
U
18
○
BSU
17
○
RS
GND
15
16
○
○
22
2010-09-30

ターンオン・オフロス (ローサイド IGBT + ハイサイド FRD の場合)
IS2
26
○
W
25
○
BSW
24
○
BB
V
23
○
BSV
22
○
21
V
○
FG
9
○
REG
V
10
○
11
V
○
CC
GND
1
○
HU+
2
○
HU-
3
○
HV+
4
○
5
HV-
○
HW+
6
○
7
HW-
○
FR
8
○
1000pF
入力 (HV+)
IGBT (C-E 間電圧)
(U-GND)
電源電流
W
toff
IS1
20
○
OS
12
○
NC
19
○
VM
REF
R
13
○
27
kΩ
W
V
14
○
ton
TPD4131K
V
IM
5mH
L
2.2μF
U
18
○
BSU
17
○
S
RS
GND
15
16
○
○
/U = 141V
BB
2.5V
HU+ = 0V
HV+ = PG
HW+ = 0V
= 15V
V
CC
VS = 6.1V
23
2010-09-30

外形図
HDIP26-P-1332-2.00
質量: 3.8 g (標準)
TPD4131K
単位: mm
24
2010-09-30

TPD4131K
製品取り扱い上のお願い
• 本資料に掲載されているハードウェア、ソフトウェアおよびシステム(以下、本製品という)に関する情
報等、本資料の掲載内容は、技術の進歩などにより予告なしに変更されることがあります。
• 文書による当社の事前の承諾なしに本資料の転載複製を禁じます。また、文書による当社の事前の承諾を
得て本資料を転載複製する場合でも、記載内容に一切変更を加えたり、削除したりしないでください。
• 当社は品質、信頼性の向上に努めていますが、半導体製品は一般に誤作動または故障する場合があります。
本製品をご使用頂く場合は、本製品の誤作動や故障により生命・身体・財産が侵害されることのないよう
に、お客様の責任において、お客様のハードウェア・ソフトウェア・システムに必要な安全設計を行うこ
とをお願いします。なお、設計および使用に際しては、本製品に関する最新の情報(本資料、仕様書、デー
タシート、アプリケーションノート、半導体信頼性ハンドブックなど)および本製品が使用される機器の
取扱説明書、操作説明書などをご確認の上、これに従ってください。また、上記資料などに記載の製品デー
タ、図、表などに示す技術的な内容、プログラム、アルゴリズムその他応用回路例などの情報を使用する
場合は、お客様の製品単独およびシステム全体で十分に評価し、お客様の責任において適用可否を判断し
てください。
• 本製品は、一般的電子機器(コンピュータ、パーソナル機器、事務機器、計測機器、産業用ロボット、家
電機器など)または本資料に個別に記載されている用途に使用されることが意図されています。本製品は、
特別に高い品質・信頼性が要求され、またはその故障や誤作動が生命・身体に危害を及ぼす恐れ、膨大な
財産損害を引き起こす恐れ、もしくは社会に深刻な影響を及ぼす恐れのある機器(以下“特定用途”とい
う)に使用されることは意図されていませんし、保証もされていません。特定用途には原子力関連機器、
航空・宇宙機器、医療機器、車載・輸送機器、列車・船舶機器、交通信号機器、燃焼・爆発制御機器、各
種安全関連機器、昇降機器、電力機器、金融関連機器などが含まれます。本資料に個別に記載されている
場合を除き、本製品を特定用途に使用しないでください。
• 本製品を分解、解析、リバースエンジニアリング、改造、改変、翻案、複製等しないでください。
• 本製品を、国内外の法令、規則及び命令により、製造、使用、販売を禁止されている製品に使用すること
はできません。
• 本資料に掲載してある技術情報は、製品の代表的動作・応用を説明するためのもので、その使用に際して
当社及び第三者の知的財産権その他の権利に対する保証または実施権の許諾を行うものではありません。
• 別途、書面による契約またはお客様と当社が合意した仕様書がない限り、当社は、本製品および技術情報
に関して、明示的にも黙示的にも一切の保証(機能動作の保証、商品性の保証、特定目的への合致の保証、
情報の正確性の保証、第三者の権利の非侵害保証を含むがこれに限らない。)をしておりません。
• 本製品、または本資料に掲載されている技術情報を、大量破壊兵器の開発等の目的、軍事利用の目的、あ
るいはその他軍事用途の目的で使用しないでください。また、輸出に際しては、「外国為替及び外国貿易法」、
「米国輸出管理規則」等、適用ある輸出関連法令を遵守し、それらの定めるところにより必要な手続を行っ
てください。
• 本製品の RoHS 適合性など、詳細につきましては製品個別に必ず弊社営業窓口までお問合せください。本
製品のご使用に際しては、特定の物質の含有・使用を規制する RoHS 指令等、適用ある環境関連法令を十分
調査の上、かかる法令に適合するようご使用ください。お客様がかかる法令を遵守しないことにより生じ
た損害に関して、当社は一切の責任を負いかねます。
25
2010-09-30
 Loading...
Loading...