

Toshiba TMP96C141AF, TLCS-900 Series User Manual

TOSHIBA
TLCS-900 Series
CMOS 16-bit Microcontroller
TMP96C141AF
1. Outline and Device Characteristics
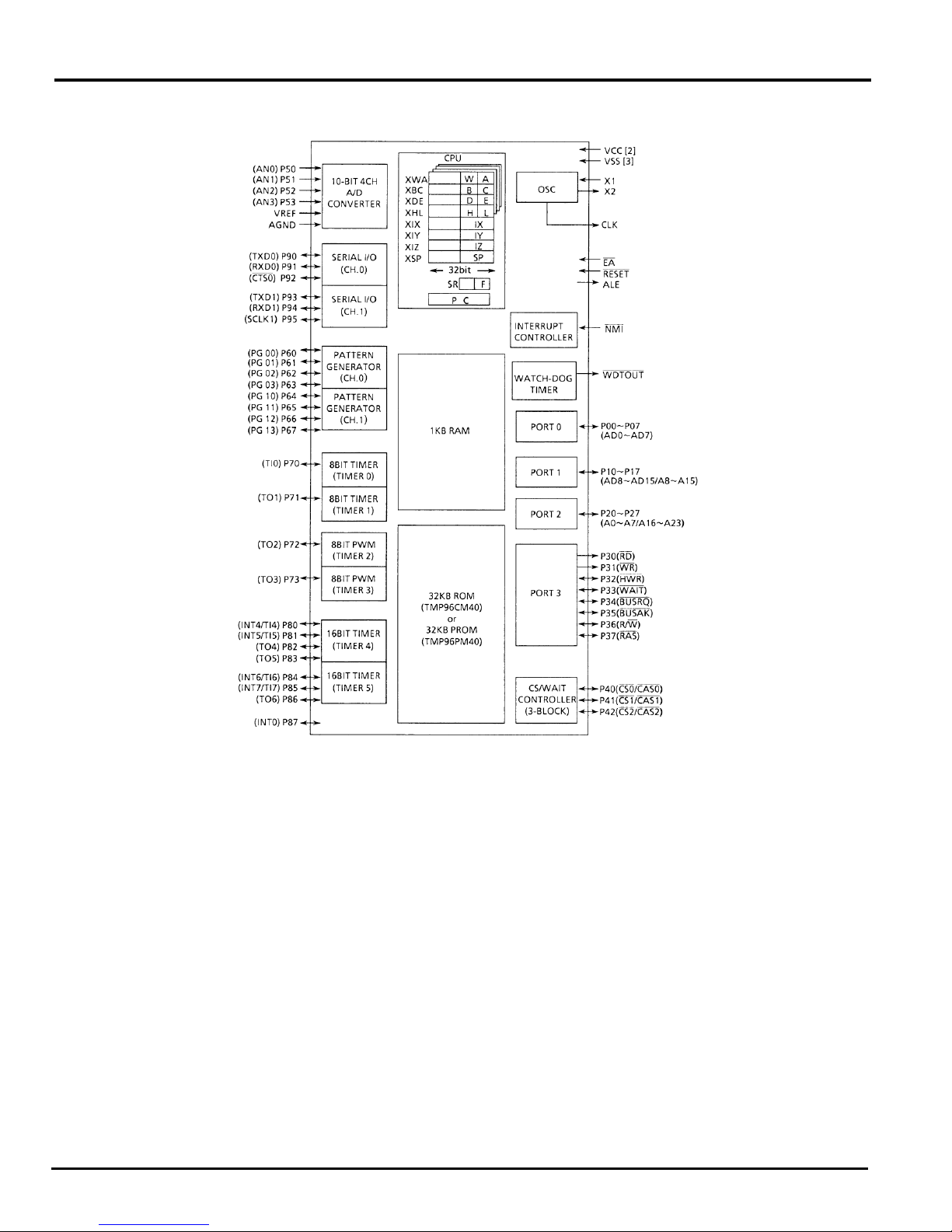
The TMP96C141AF is high-speed advanced 16-bit microcontroller developed for controlling medium to large-scale equipment.
The TMP96C141AF is housed in an 80-pin flat package.
Device characteristics are as follows:
(1) Original 16-bit CPU
• TLCS-90 instruction mnemonic upward compatible.
• 16M-byte linear address space
• General-purpose registers and register bank system
• 16-bit multiplication/division and bit transfer/arithmetic
instructions
• High-speed micro DMA
- 4 channels (1.6 µ s/2 bytes @ 20MHz)
(2) Minimum instruction execution time
- 200ns @ 20MHz
(3) Internal RAM: 1K byte
TMP96C141AF
Internal ROM: None
(4) External memory expansion
• Can be expanded up to 16M bytes (for both programs and
data).
• Can mix 8- and 16-bit external data buses.
(5) 8-bit timers: 2 channels
(6) 8-bit PWM timers: 2 channels
(7) 16-bit timers: 2 channels
(8) Pattern generators: 4 bits, 2 channels
(9) Serial interface: 2 channels
(10) 10-bit A/D converter: 4 channels
(11) Watchdog timer
(12) Chip select/wait controller: 3 blocks
(13) Interrupt functions
• 3 CPU interrupts
• 14 internal interrupts
• 6 external interrupts
(14) I/O ports
(15) Standby function : 3 halt modes (RUN, IDLE, STOP)
…
Dynamic data bus sizing
…
and Illegal instruction
…
SWI instruction, privileged violation,
7-level priority can be set.
The information contained here is subject to change without notice.
The information contained herein is presented only as guide for the applications of our products. No responsibility is assumed by TOSHIBA for any infringements of patents or other rights of the third parties
which may result from its use. No license is granted by implication or otherwise under any patent or patent rights of TOSHIBA or others. These TOSHIBA products are intended for usage in general electronic
equipments (office equipment, communication equipment, measuring equipment, domestic electrification, etc.) Please make sure that you consult with us before you use these TOSHIBA products in equipments which require high quality and/or reliability, and in equipments which could have major impact to the welfare of human life (atomic energy control, spaceship, traffic signal, combustion control, all types
of safety devices, etc.). TOSHIBA cannot accept liability to any damage which may occur in case these TOSHIBA products were used in the mentioned equipments without prior consultation with TOSHIBA.
TOSHIBA CORPORATION
1
TMP96C141AF
2
Figure 1. TMP96C141AF Block Diagram
TOSHIBA CORPORATION
TMP96C141AF
2. Pin Assignment and Functions
The assignment of input/output pins for TMP96C141AF, their
name and outline functions are described below.
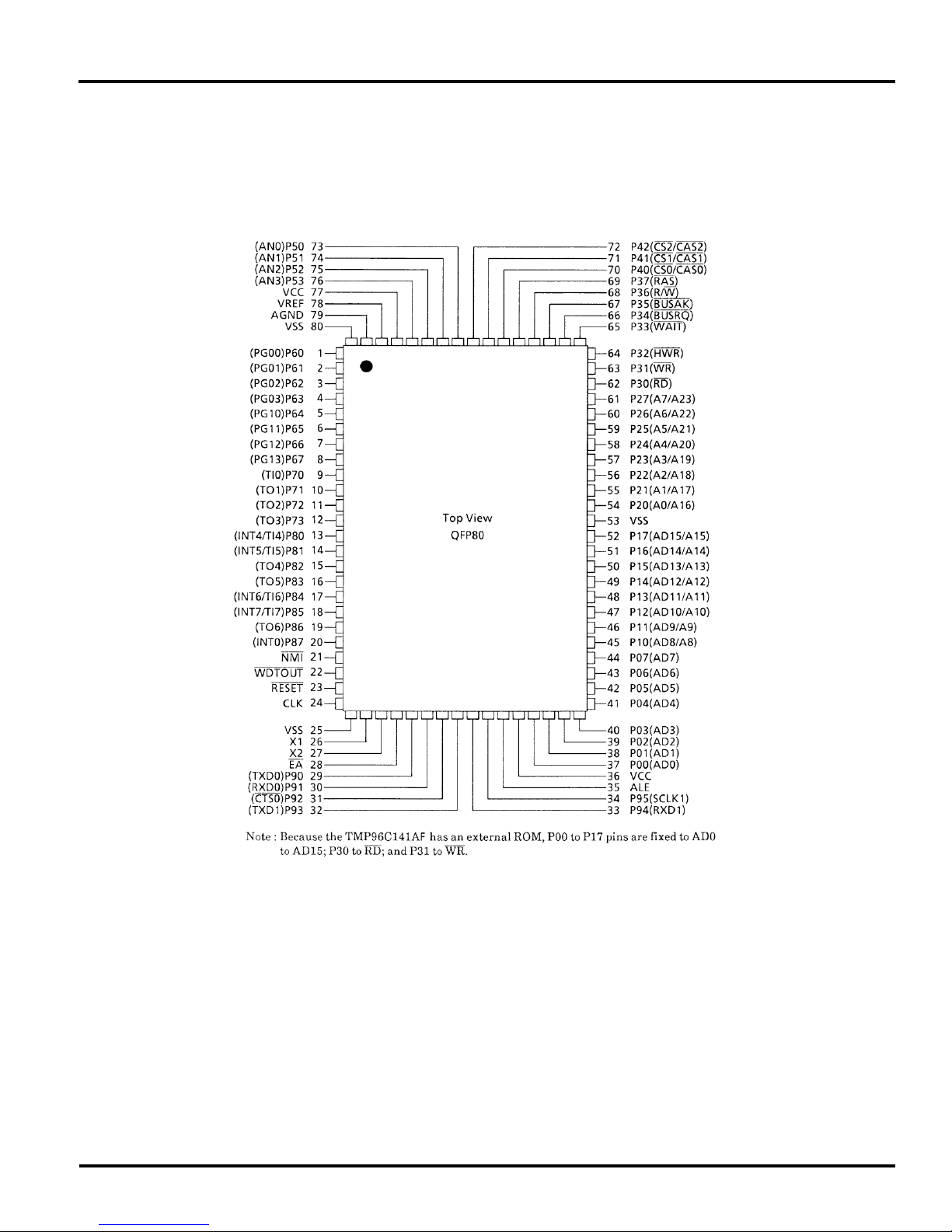
2.1 Pin Assignment
Figure 2.1 shows pin assignment of TMP96C141AF.
TOSHIBA CORPORATION
Figure 2.1 Pin Assignment (80-pin QFP)
3
TMP96C141AF
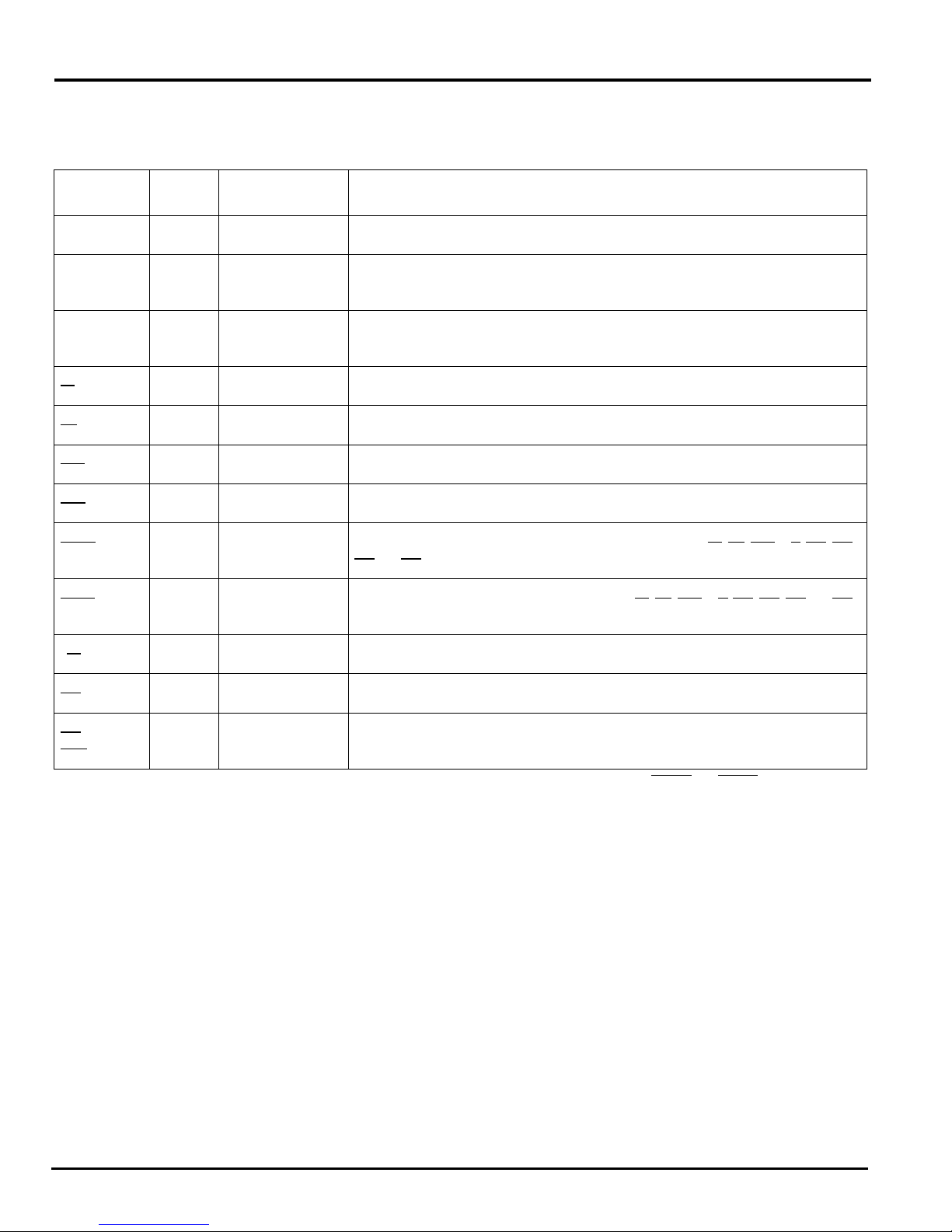
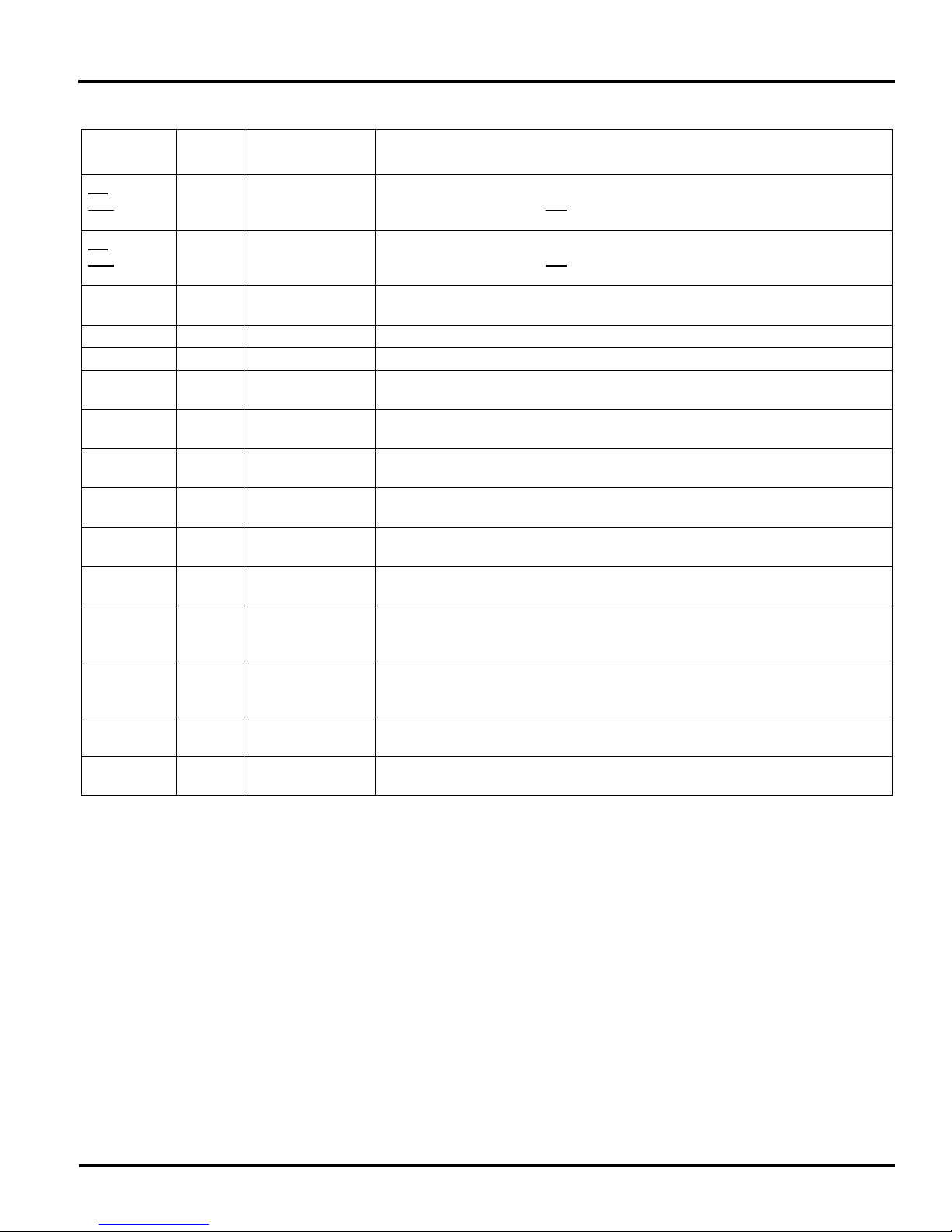
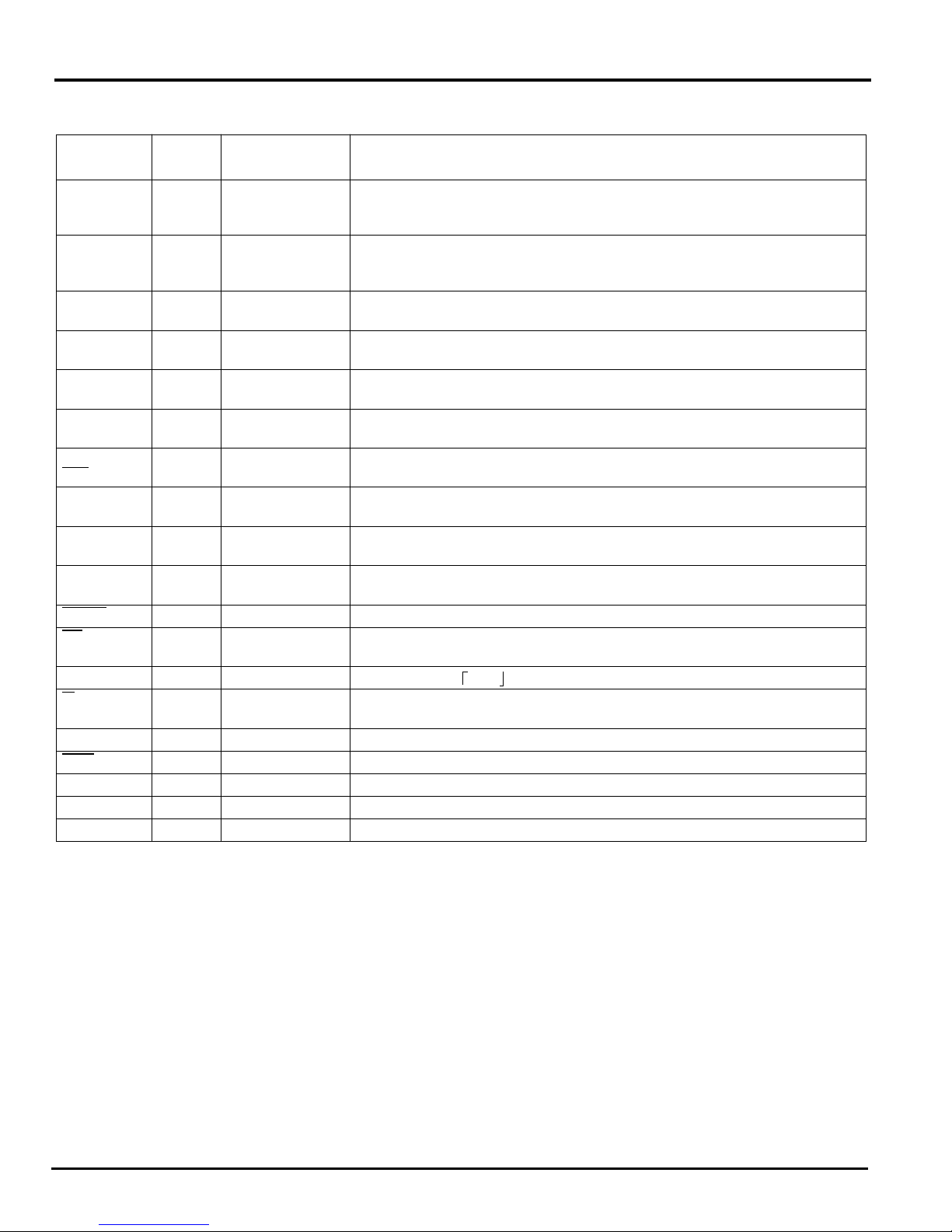
2.2 Pin Names and Functions
The names of input/output pins and their functions are described below.
Table 2.2. Pin Names and Functions
Pin Name
P00 ~ P07
AD0 ~ AD7
P10 ~ P17
AD8 ~ AD15
A8 ~ A15
P20 ~ P27
A0 ~ A7
A16 ~ A23
P30
RD
P31
WR
P32
HWR
P33
WAIT
P34
BUSRQ 1
P35
BUSAK
P36
R/W
P37
RAS
P40
CS0
CAS0
Note: With the external DMA controller, this device’s built-in memory or built-in I/O cannot be accessed using the BUSRQ
Number
of Pins
8
8
8
1
1
1
1
1
1
1
1
I/O Functions
I/O
Tri-state
I/O
Tri-state
Output
I/O
Output
Output
Output
Output
Output
Output
I/O
Output
I/O
Input
I/O
Input
I/O
Output
I/O
Output
I/O
Output
I/O
Output
Output
Port 0: I/O port that allows I/O to be selected on a bit basis
Address / data (lower): 0 - 7 for address / data bus
Port 1: I/O port that allows I/O to be selected on a bit basis
Address data (upper): 8 - 15 for address / data bus
Address: 8 to 15 for address bus
Port 2: I/O port that allows selection of I/O on a bit basis (with pull-down resistor)
Address: 0 - 7 for address bus
Address: 16 - 23 for address bus
Port 30: Output port
Read: Strobe signal for reading external memory
Port 31: Output port
Write: Strobe signal for writing data on pins AD0 -7
Port 32: I/O port (with pull-up resistor)
High write: Strobe signal for writing data on pins AD8 - 15
Port 33: I/O port (with pull-up resistor)
Wait: Pin used to request CPU bus wait
Port 34: I/O port (with pull-up resistor)
Bus request: Signal used to request high impedance for AD0 - 15, A0 - 23, RD, WR, HWR, R/W, RAS, CS0,
CS1
, and CS2 pins. (For external DMAC)
Port 35: I/O (with pull-up resistor)
Bus acknowledge: Signal indicating that AD0 - 15, A0 - 23, RD, WR, HWR, R/W, RAS, CS0, CS1, and CS2
pins are at high impedance after receiving BUSRQ. (For external DMAC)
Port 36: I/O port (with pull-up resistor)
Read/write: 1 represents read or dummy cycle; 0, write cycle.
Port 37: I/O port (with pull-up resistor)
Row address strobe: Outputs RAS strobe for DRAM.
Port 40: I/O port (with pull-up resistor)
Chip select 0: Outputs 0 when address is within specified address area.
Column address strobe 0: Outputs CAS strobe for DRAM when address is within specified address area.
and BUSAK pins.
4
TOSHIBA CORPORATION
TMP96C141AF
Pin Name
P41
CS1
CAS1
P42
CS2
CAS2
P50 ~ P53
AN0 ~ AN3
Number
of Pins
1
1
4
I/O Functions
I/O
Output
Output
I/O
Output
Output
Input
Input
Port 41: I/O port (with pull-up resistor)
Chip select 1: Outputs 0 if address is within specified address area.
Column address strobe 1: Outputs CAS
strobe for DRAM if address is within specified address area.
Port 42: I/O port (with pull-up resistor)
Chip select 2: Outputs 0 if address is within specified address area.
Column address strobe 2: Outputs CAS
strobe for DRAM if address is within specified address area.
Port 5: Input port
Analog input: Input to A/D converter
VREF 1 Input Pin for reference voltage input to A/D converter
AGND 1 Input Ground pin for A/D converter
P60 ~ P63
PG00 ~ PG03
P64 ~ P67
PG10 ~ PG13
P70
T10
P71
T01
P72
T02
P73
T03
P80
TI4
INT4
P81
TI5
INT5
P82
TO4
P83
TO5
4
4
1
1
1
1
1
1
1
1
I/O
Output
I/O
Output
I/O
Input
I/O
Output
I/O
Output
I/O
Output
I/O
Input
Input
I/O
Input
Input
I/O
Output
I/O
Output
Ports 60 - 63: I/O ports that allow selection of I/O on a bit basis (with pull-up resistor)
Pattern generator ports: 00 - 03
Ports 64 - 67: I/O ports that allow selection of I/O on a bit basis (with pull-up resistor)
Pattern generator ports: 10 - 13
Port 70: I/O port (with pull-up resistor)
Timer input 0: Timer 0 input
Port 71: I/O port (with pull-up resistor)
Timer output 1: Timer 0 or 1 output
Port 72: I/O port (with pull-up resistor)
PWM output 2: 8-bit PWM timer 2 output
Port 73: I/O port (with pull-up resistor)
PWM output 3: 8-bit PWM timer 3 output
Port 80: I/O port (with pull-up resistor)
Timer input 4: Timer 4 count/capture trigger signal input
Interrupt request pin 4: Interrupt request pin with programmable rising/falling edge
Port 81: I/O port (with pull-up resistor)
Timer input 5: Timer 4 count/capture trigger signal input
Interrupt request pin 5: Interrupt request pin with rising edge
Port 82: I/O port (with pull-up resistor)
Timer output 4: Timer 4 output pin
Port 83: I/O port (with pull-up resistor)
Timer output 5: Timer 4 output pin
TOSHIBA CORPORATION
5
TMP96C141AF
Pin Name
P84
TI6
INT6
P85
TI7
INT7
P86
TO6
P87
INT0
P90
TXD0
P91
RXD0
P92
CTS0
P93
TXD1
P94
RXD1
P95
SCLK1
WDTOUT
NMI
Number
of Pins
1
1
1
1
1
1
1
1
1
1
I/O Functions
I/O
Input
Input
I/O
Input
Input
I/O
Output
I/O
Input
I/O
Output
I/O
Input
I/O
Input
I/O
Output
I/O
Input
I/O
I/O
Port 84: I/O port (with pull-up resistor)
Timer input 6: Timer 5 count/capture trigger signal input
Interrupt request pin 6: Interrupt request pin with programmable rising/falling edge
Port 85: I/O port (with pull-up resistor)
Timer input 7: Timer 5 count/capture trigger signal input
Interrupt request pin 7: Interrupt request pin with rising edge
Port 86: I/O port (with pull-up resistor)
Timer output 6: Timer 5 output pin
Port 87: I/O port (with pull-up resistor)
Interrupt request pin 0: Interrupt request pin with programmable level/rising edge
Port 90: I/O port (with pull-up resistor)
Serial send data 0
Port 91: I/O port (with pull-up resistor)
Serial receive data 0
Port 92: I/O port (with pull-up resistor)
Serial data send enable 0 (Clear to Send)
Port 93: I/O port (with pull-up resistor)
Serial send data 1
Port 94: I/O port (with pull-up resistor)
Serial receive data 1
Port 95: I/O port (with pull-up resistor)
Serial clock I/O 1
1 Output Watchdog timer output pin
1 Input
Non-maskable interrupt request pin: Interrupt request pin with falling edge.
Can also be operated at rising edge by program.
CLK 1 Output Clock output: Outputs X1 ÷ 4 clock. Pulled-up during reset.
EA
1 Input
External access: 0 should be inputted with TMP96C141AF
1, with TMP96CM40F/TMP96PM40F.
ALE 1 Output Address latch enable
RESET
1 Input Reset: Initializes LSI. (With pull-up resistor)
X1/X2 2 I/O Oscillator connecting pin
VCC 2 Power supply pin (+ 5V)
VSS 3 GND pin (0V)
Note: Pull-up/pull-down resistor can be released from the pin by software.
6
TOSHIBA CORPORATION

TMP96C141AF
3. Operation
This section describes in blocks the functions and basic operations of the TMP96C141AF device.
Check the chapter Guidelines and Restrictions for proper
care of the device.
3.1 CPU
The TMP96C141AF device has a built-in high-performance
16-bit CPU. (For CPU operation, see TLCS-900 CPU in the
book Core Manual Architecture User Manual.)
This section describes CPU functions unique to
TMP96C141AF that are not described in that manual.
3.1.1 Reset
To reset the TMP96C141AF, the RESET
0 for at least 10 system clocks (10 states: 1 µ s with a 20MHz
system clock) within an operating voltage range and with a
stable oscillation.
When reset is accepted, the CPU sets as follows:
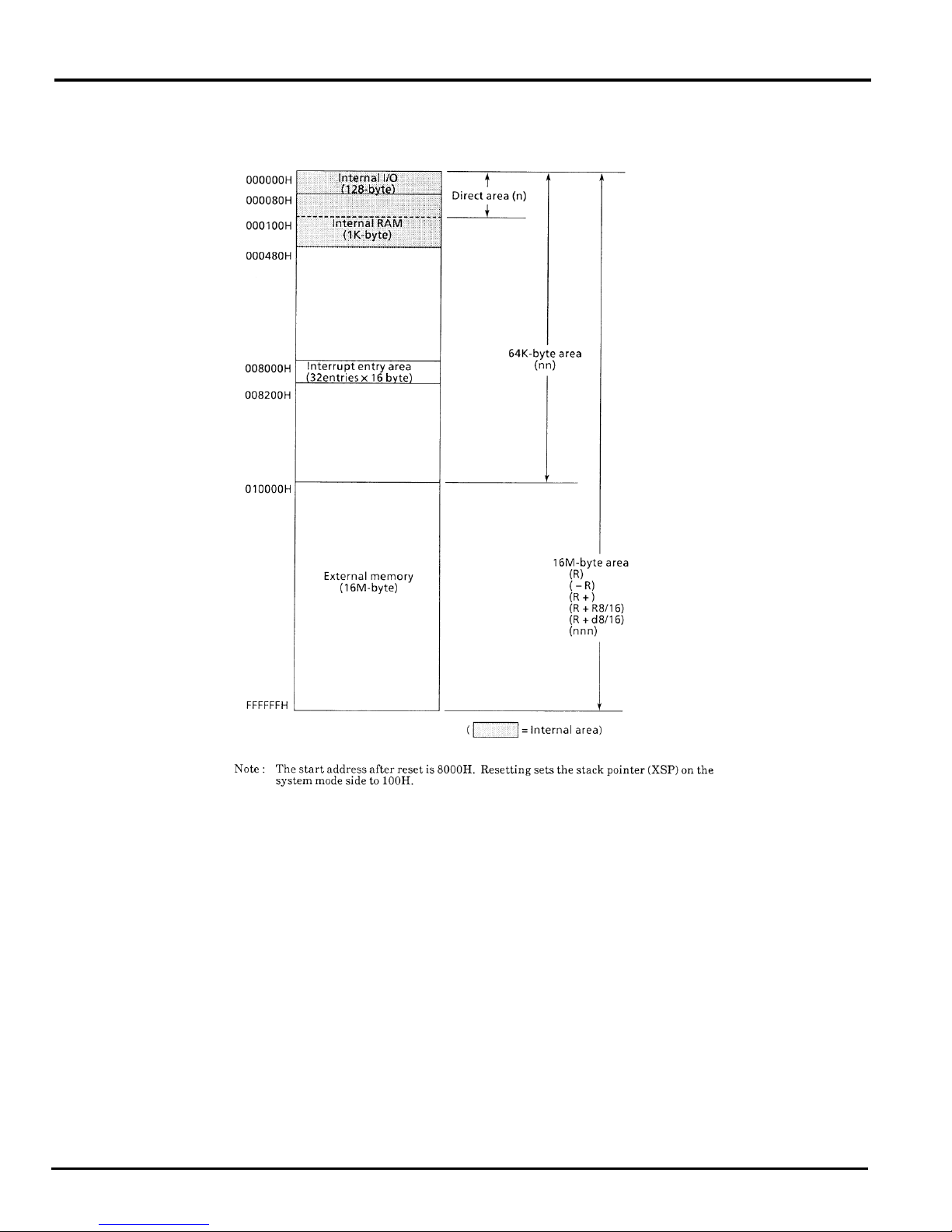
• Program counter (PC) to 8000H.
input must be kept at
• Stack pointer (XSP) for system mode to 100H.
• SYSM bit of status register (SR) to 1. (Sets to system mode.)
• IFF2 to 0 bits of status register to 111. (Sets mask register to
interrupt level 7.)
• MAX bit of status register to 0. (Sets to minimum mode.)
• Bits RFP2 to 0 of status register to 000. (Sets register banks
to 0.)
When reset is released, instruction execution starts from
address 8000H. CPU internal registers other than the above
are not changed.
When reset is accepted, processing for built-in I/Os,
ports, and other pins is as follows:
• Initializes built-in I/O registers as per specifications.
• Sets port pins (including pins also used as built-in I/Os) to
general-purpose input/output port mode (sets I/O ports to
input ports).
• Sets the WDTOUT pin to 0. (Watchdog timer is set to enable
after reset.)
• Pulls up the CLK pin to 1.
• Sets the ALE pin to 0.
TOSHIBA CORPORATION
7
TMP96C141AF
3.2 Memory Map
Figure 3.2 is a memory map of the TMP96C141AF.
8
Figure 3.2 Memory Map
TOSHIBA CORPORATION
TMP96C141AF
3.3 Interrupts
The TLCS-900 interrupts are controlled by the CPU interrupt
mask flip-flop (IFF2 to 0) and the built-in interrupt controller.
The TMP96C141AF have altogether the following 23
interrupt sources:
• Interrupts from the CPU
…
3
(Software interrupts, privileged violations, and Illegal (undefined) instruction execution)
• Interrupts from external pins (NMI, INT0, and INT4 to 7)
• Interrupts from built-in I/Os
…
14
sends the value of the priority of the interrupt source to the
CPU. When more than one interrupt is generated simultaneously, the interrupt controller sends the value of the highest
priority (7 for non-maskable interrupts is the highest) to the
CPU.
The CPU compares the value of the priority sent with the
value in the CPU interrupt mask register (IFF2 to 0). If the value
is greater than that of the CPU interrupt mask register, the
interrupt is accepted. The value in the CPU interrupt mask register (IFF2 to 0) can be changed using the EI instruction (contents of the EI num/IFF<2:0> = num). For example,
programming EI 3 enables acceptance of maskable interrupts
with a priority of 3 or greater, and non-maskable interrupts
which are set in the interrupt controller. The DI instruction
A fixed individual interrupt vector number is assigned to
each interrupt source; six levels of priority (variable) can also
be assigned to each maskable interrupt. Non-maskable interrupts have a fixed priority of 7.
When an interrupt is generated, the interrupt controller
…
6
(IFF<2:0> = 7) operates in the same way as the EI 7 instruction. Since the priority values for maskable interrupts are 0 to 6,
the DI instruction is used to disable maskable interrupts to be
accepted. The EI instruction becomes effective immediately
after execution. (With the TLCS-90, the EI instruction becomes
effective after execution of the subsequent instruction.)
In addition to the general-purpose interrupt processing
mode described above, there is also a high-speed micro DMA
processing mode. High-speed micro DMA is a mode used by
the CPU to automatically transfer byte or word data. It enables
the CPU to process interrupts such as data saves to built-in I/Os
at high speed.
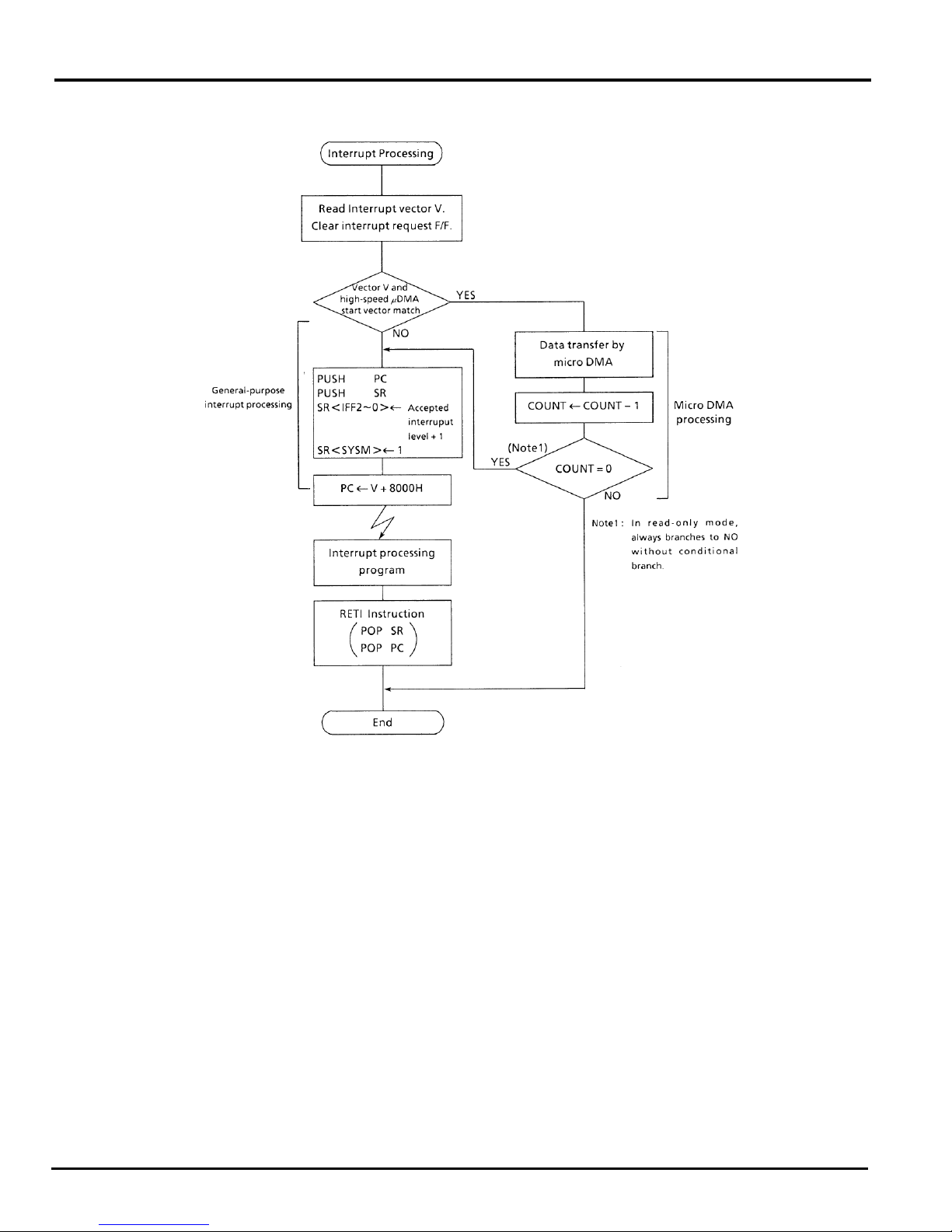
Figure 3.3 (1) is a flowchart showing overall interrupt
processing.
TOSHIBA CORPORATION
9
TMP96C141AF
Figure 3.3 (1) Interrupt Processing Flowchart
10
TOSHIBA CORPORATION
3.3.1 General-Purpose Interrupt Processing
When accepting an interrupt, the CPU operates as follows:
(1) The CPU reads the interrupt vector from the interrupt
controller. When more than one interrupt with the same
level is generated simultaneously, the interrupt controller
generates interrupt vectors in accordance with the
default priority (which is fixed as follows: the smaller the
vector value, the higher the priority), then clears the interrupt request.
(2) The CPU pushes the program counter and the status
register to the system stack area (area indicated by the
system mode stack pointer).
(3) The CPU sets a value in the CPU interrupt mask register
<IFF2 to 0> that is higher by 1 than the value of the
accepted interrupt level. However, if the value is 7, 7 is
set without an increment.
(4) The CPU sets the <SYSM> flag of the status register to 1
and enters the system mode.
(5) The CPU jumps to address 8000H + interrupt vector,
then starts the interrupt processing routine.
TMP96C141AF
Bus Width of Stack
Area
8 bit 23 19
16 bit 17 15
To return to the main routine after completion of the interrupt processing, the RETI instruction is usually used. Executing
this instruction restores the contents of the program counter
and the status registers.
Though acceptance of non-maskable interrupts cannot
be disabled by program, acceptance of maskable interrupts
can. A priority can be set for each source of maskable interrupts. The CPU accepts an interrupt request with a priority
higher than the value in the CPU mask register <IFF2 to 0>.
The CPU mask register <IFF2 to 0> is set to a value higher by
1 than the priority of the accepted interrupt. Thus, if an interrupt with a level higher than the interrupt being processed is
generated, the CPU accepts the interrupt with the higher level,
causing interrupt processing to nest. The CPU does not
accept an interrupt request of the same level as that of the
interrupt being processed.
Resetting initializes the CPU mask registers <IFF2 to 0>
to 7; therefore, maskable interrupts are disabled.
The addresses 008000H to 0081FFH (512 bytes) of the
TLCS-900 are assigned for interrupt processing entry area.
Interrupt Processing State Number
MAX mode Min mode
In minimum mode, all the above processing is completed
15 states
in (1.5
µ
s @ 20MHz). In maximum mode, it is com-
pleted in 17 states.
TOSHIBA CORPORATION
11
TMP96C141AF
Table 3.3 (1) TMP96C141AF Interrupt Table
Default Priority Type Interrupt Source
1
2 INTPREV: Privileged violation, or SWI1 0010H 8010H –
3 INTUNDEF: Illegal instruction, or SWI2 0020H 8020H –
4 SWI 3 Instruction 0030H 8030H –
5 SWI 4 Instruction 0040H 8040H –
6 SWI 5 Instruction 0050H 8050H –
7 SWI 6 Instruction 0060H 8060H –
8 SWI 7 Instruction 0070H 8070H –
9 NMI
10 INTWD: Watchdog timer 0090H 8090H 09H
11
12 INT4 pin 00B0H 80B0H 0BH
13 INT5 pin 00C0H 80C0H 0CH
14 INT6 pin 00D0H 80D0H 0DH
15 INT7 pin 00E0H 80E0H 0EH
- (Reserved) 00F0H 80F0H 0FH
16 INTT0: 8-bit timer 0 0100H 8100H 10H
17 INTT1: 8-bit timer 1 0110H 8110H 11H
18 INTT2: 8-bit timer 2/PWM0 0120H 8120H 12H
19 INTT3: 8-bit timer 3/PWM1 0130H 8130H 13H
20 INTTR4: 16-bit timer 4 (TREG4) 0140H 8140H 14H
21 INTTR5: 16-bit timer 4 (TREG5) 0150H 8150H 15H
22 INTTR6: 16-bit timer 5 (TREG6) 0160H 8160H 16H
23 INTTR7: 16-bit timer 5 (TREG7) 0170H 8170H 17H
24 INTRX0: Serial receive (Channel.0) 0180H 8180H 18H
25 INTTX0: Serial send (Channel.0) 0190H 8190H 19H
26 INTRX1: Serial receive (Channel.1) 01A0H 81A0H 1AH
27 INTTX1: Serial send (Channel.1) 01B0H 81B0H 1BH
28 INTAD: A / D conversion completion 0 1 C 0 H 81C0H 1CH
– (Reserved) 01D0H 81D0H 1DH
– (Reserved) 01E0H 81E0H 1EH
– (Reserved) 01F0H 81F0H 1FH
Non-
Maskable
Maskable
Reset , or SW10 instruction 0000H 8000H –
Pin 0080H 8080H 08H
INTO pin 00A0H 80A0H 0AH
Vector Value
“V”
Start Address
High-Speed
Micro DMA
Start Vector
3.3.2 High-Speed Micro DMA
In addition to the conventional interrupt processing, the TLCS900 also has a high-speed micro DMA function. When an
interrupt is accepted, in addition to an interrupt vector, the CPU
receives data indicating whether processing is high-speed micro
DMA mode or general-purpose interrupt. If high-speed micro
DMA mode is requested, the CPU performs high-speed micro
DMA processing.
12
The TLCS-900 can process at very high speed compared with the TLCS-90 micro DMA because it has transfer
parameters in dedicated registers in the CPU. Since those
dedicated registers are assigned as CPU control registers, they
can only be accessed by the LDC (privileged) instruction.
TOSHIBA CORPORATION

TMP96C141AF
(1) High-Speed Micro DMA Operation
High-speed micro DMA operation starts when the accepted
interrupt vector value matches the micro DMA start vector
value set in the interrupt controller. The high-speed micro DMA
has four channels so that it can be set for up to four types of
interrupt source.
When a high-speed micro DMA interrupt is accepted,
data is automatically transferred from the transfer source
address to the transfer destination address set in the control
register, and the transfer counter is decremented. If the value in
the counter after decrementing is other than 0, high-speed
micro DMA processing is completed. If the value in the counter
after decrementing is 0, general-purpose interrupt processing
is performed. In read-only mode, which is provided for DRAM
refresh, the value in the counter is ignored and dummy read is
repeated.
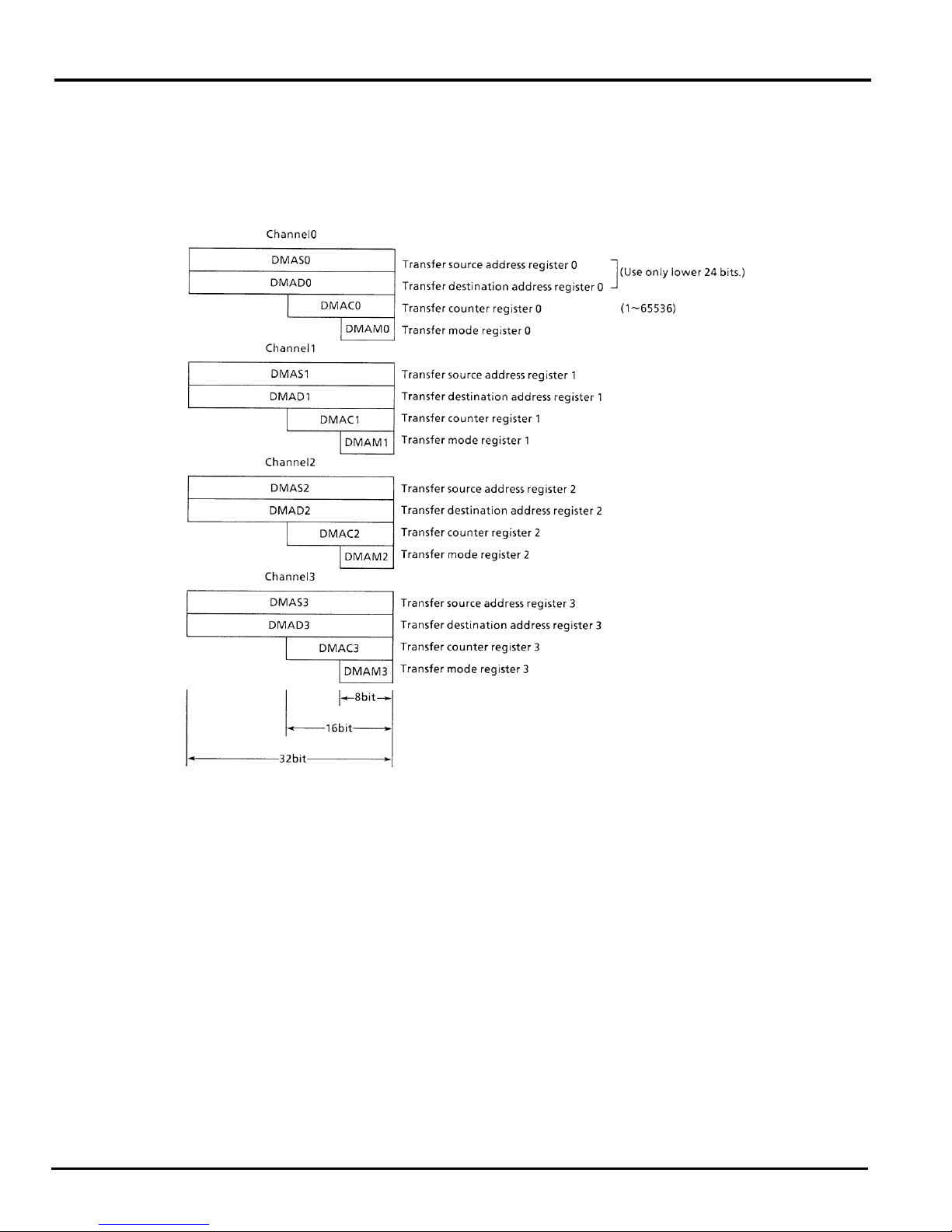
The 32-bit control registers are used for setting transfer
source/destination addresses. However, the TLCS-900 has
only 24 address pins for output. A 16M-byte space is available
for the high-speed micro DMA. Also in normal mode operation,
the all address space (in other words, the space for system
mode which is set by the CS/WAIT controller) can be
accessed by high-speed micro DMA processing.
There are two data transfer modes: one-byte mode and
one-word mode. Incrementing, decrementing, and fixing the
transfer source/destination address after transfer can be done
in both modes. Therefore data can easily be transferred
betweenI/O and memory and between I/Os. For details of
transfer modes, see the description of transfer mode registers.
The transfer counter has 16 bits, so up to 65536 transfers (the maximum when the initial value of the transfer counter
is 0000H) can be performed for one interrupt source by highspeed micro DMA processing.
A the data transferred by the µ DMA function, the transfer
nter was decreased.
When this counter is “0”H, the processor operates general interrupt processing. At this time if the same channel of
interrupt is required next interrupt, the transfer counter starts
from 65536.
Interrupt sources processed by high-speed micro DMA
processing are those with the high-speed micro DMA start
vectors listed in Table 3.3 (1).
TOSHIBA CORPORATION
13
TMP96C141AF
The following timing chart is a high-speed µ DMA cycle of
the Transfer Address Increment mode (the other mode exe-
(2) Register Configuration (CPU Control Register)
cept the Read-only mode is same as this)
(Condition: MIN mode, 16bit Bus width for 16M Byte, 0 wait)
These Control Registers cannot be set only “LCD cr, r” instruction.
14
TOSHIBA CORPORATION
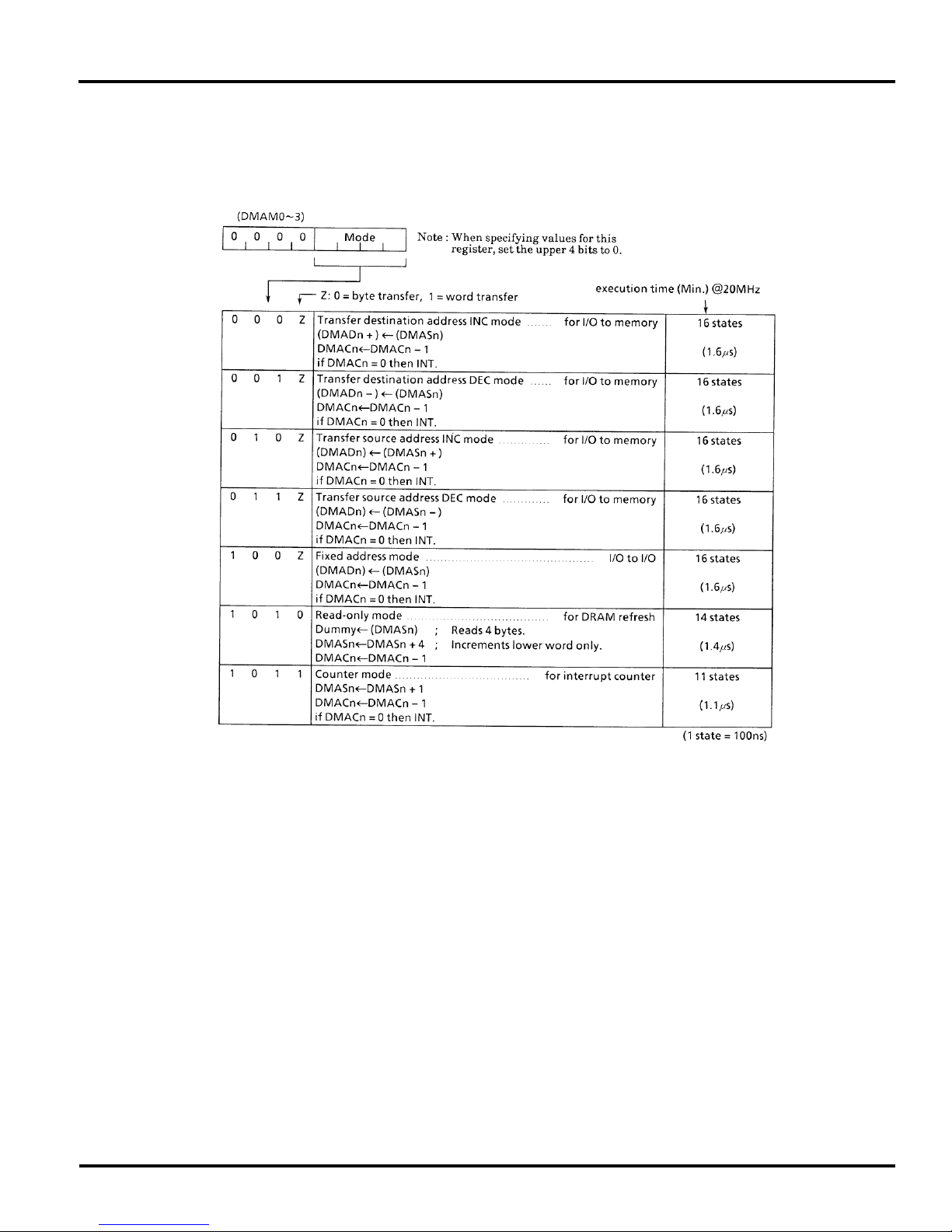
(3) Transfer Mode Register Details
TMP96C141AF
This condition is 16-bit bus width and 0 wait of source/destination address space.
Note: n: corresponds to high-speed µ DMA channels 0 - 3.
DMADn +/DMASn + : Post-increment (Increments register value after transfer.)
DMADn -/DMASn - : Post-decrement (Decrement register value after transfer.)
All address space (the space for system mode) can be
accessed by high-speed µ DMA. Do not use undefined codes
TOSHIBA CORPORATION
for transfer mode control.
15

TMP96C141AF
➀
➁
➂
<Usage of read only mode (DRAM refresh)>
When the hardware configuration is as follows:
DRAM mapping size: = 1MB
DRAM data bus size: = 8 bits
DRAM mapping address range: = 100000H to
1FFFFFH
Set the following registers first; refresh is performed
automatically.
Register initial value setting
LD XIX, 100000H
LDC DMAS0,XIX
LD A, 00001010B
LDC DMAM0, A
…
mapping start address
…
read only mode (for
DRAM refresh)
Timer Setting
Set the timers so that interrupts are generated at
intervals of 62.5 µ s or less.
Interrupt controller setting
Set the timer interrupt mask h other interrupt mask.
Write the above timer interrupt vector value in the
High-Speed µ DMA start vector register, DMA0V.
(Operation description)
The DRAM data bus is an 8-bit bus and the micro
DMA is in read-only mode (4 bytes), so refresh is performed four times per interrupt.
When a 512 refresh/8ms DRAM is connected, DRAM
refresh is performed sufficiently if the micro DMA is
started every 15.625 µ s x 4 = 62.4 µ s or less, since the
timing is 15.625 µ s/refresh.
(Overhead)
Each processing time by the micro DMA is 1.8 µ s (18
states) @ 20MHz with an 8-bit data bus.
In the above example, the micro DMA is started every
62.5 µ s, 1.8 µ s/62.5 µ s = 0.029; thus, the overhead is
2.9%.
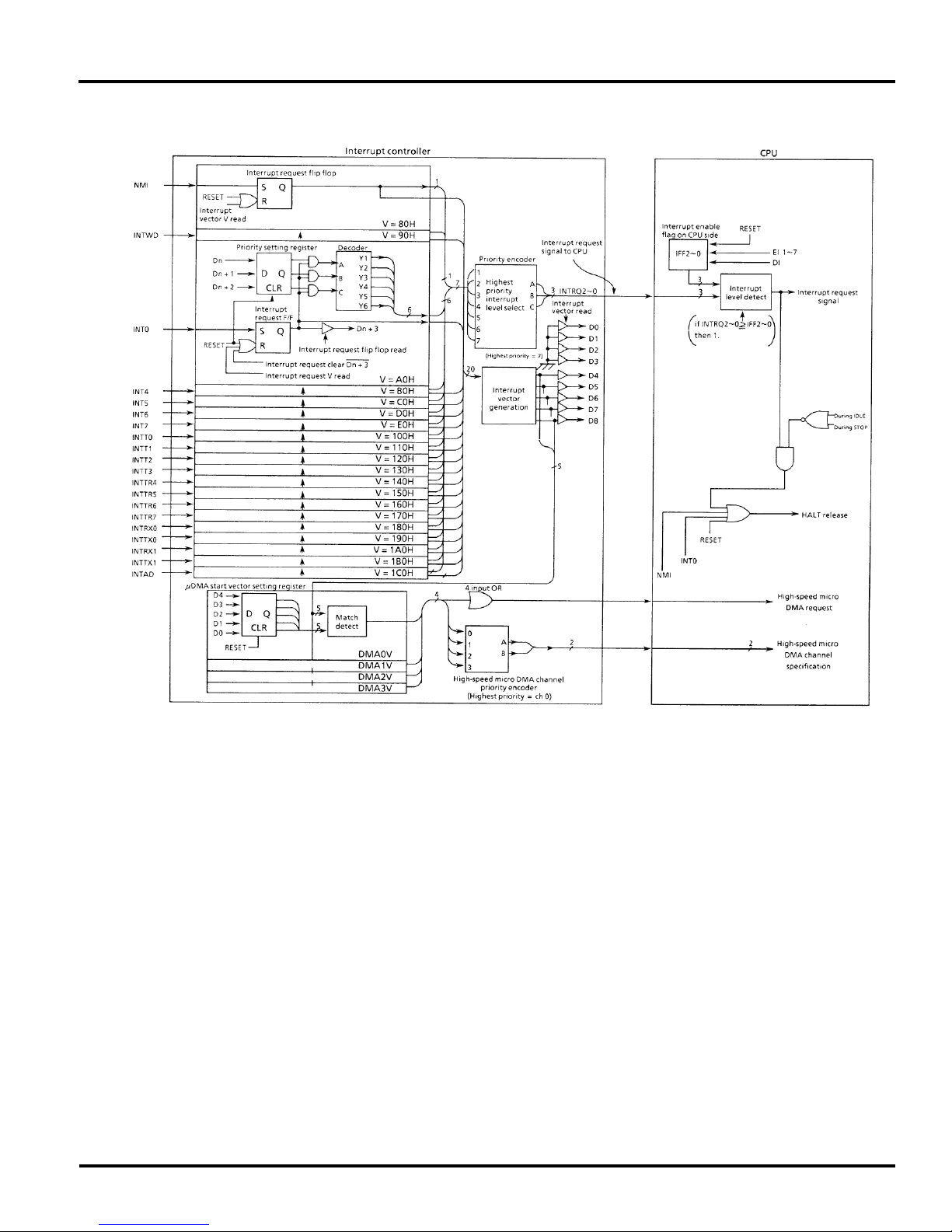
3.3.3 Interrupt Controller
Figure 3.3.3 (1) is a block diagram of the interrupt circuits. The
left half of the diagram shows the interrupt controller; the right
half includes the CPU interrupt request signal circuit and the
HALT release signal circuit.
Each interrupt channel (total of 20 channels) in the inter-
rupt controller has an interrupt request flip-flop, interrupt prior-
ity setting register, and a register for storing the high-speed
micro DMA start vector. The interrupt request flip-flop is used
to latch interrupt requests from peripheral devices. The flip-flop
is cleared to 0 at reset, when the CPU reads the interrupt
channel vector after the acceptance of interrupt, or when the
CPU executes an instruction that clears the interrupt of that
channel (writes 0 in the clear bit of the interrupt priority setting
register).
For example, to clear the INT0 interrupt request, set the
register after the as follows.
DI instruction
INTE0AD ← ---- 0 --- Zero-clears the INT0 Flip-Flop.
The status of the interrupt request flip-flop is detected by
reading the clear bit. Detects whether there is an interrupt
request for an interrupt channel.
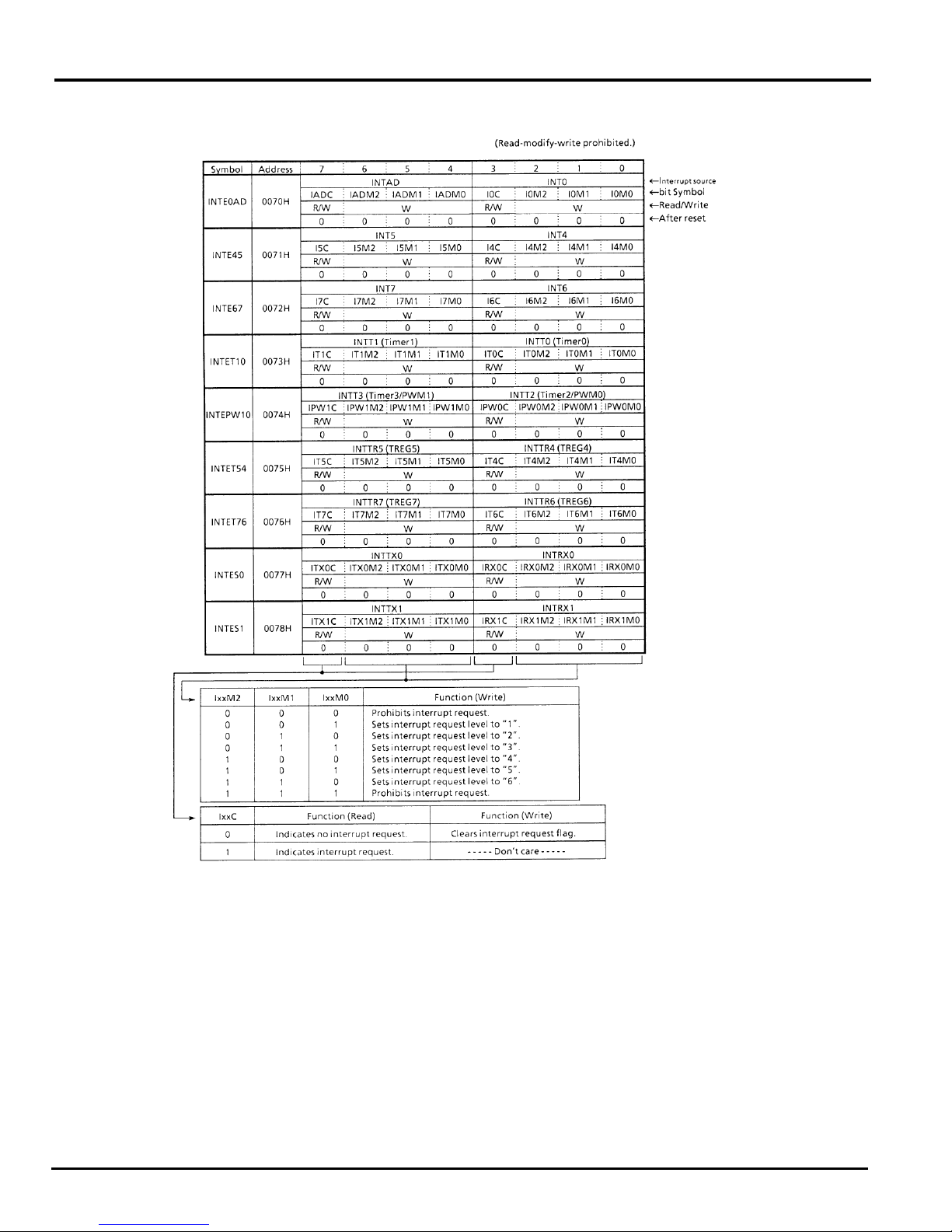
The interrupt priority can be set by writing the priority in
the interrupt priority setting register (e.g., INTE0AD, INTE45,
etc.) provided for each interrupt source. Interrupt levels to be
set are from 1 to 6. Writing 0 or 7 as the interrupt priority disables the corresponding interrupt request. The priority of the
non-maskable interrupt (NMI
pin, watchdog timer, etc.) is fixed
to 7. If interrupt requests with the same interrupt level are generated simultaneously, interrupts are accepted in accordance
with the default priority (the smaller the vector value, the higher
the priority).
The interrupt controller sends the interrupt request with
the highest priority among the simultaneous interrupts and its
vector address to the CPU. The CPU compares the priority
value <IFF2 to 0> set in the Status Register by the interrupt
request signal with the priority value sent; if the latter is higher,
the interrupt is accepted. Then the CPU sets a value higher
than the priority value by 1 in the CPU SR<IFF2 to 0>. Interrupt
requests where the priority value equals or is higher than the
set value are accepted simultaneously during the previous
interrupt routine. When interrupt processing is completed (after
execution of the RETI instruction), the CPU restores the priority
value saved in the stack before the interrupt was generated to
the CPU SR<IFF2 to 0>.
The interrupt controller also has four registers used to
store the high-speed micro other DMA start vector. These are I/
O registers; unlike other DMA registers (DMAS, DMAD, DMAM,
and DMAC), they can be accessed in either normal or system
mode. Writing the start vector of the interrupt source for the
micro DMA processing (see Table 3.3 (1)), enables the corresponding interrupt to be processed by micro DMA processing.
The values must be set in the micro DMA parameter registers
(e.g., DMAS and DMAD) prior to the micro DMA processing.
16
TOSHIBA CORPORATION
TMP96C141AF
TOSHIBA CORPORATION
Figure 3.3.3 (1) Block Diagram of Interrupt Controller
17
TMP96C141AF
(1) Interrupt Priority Setting Register
18
TOSHIBA CORPORATION
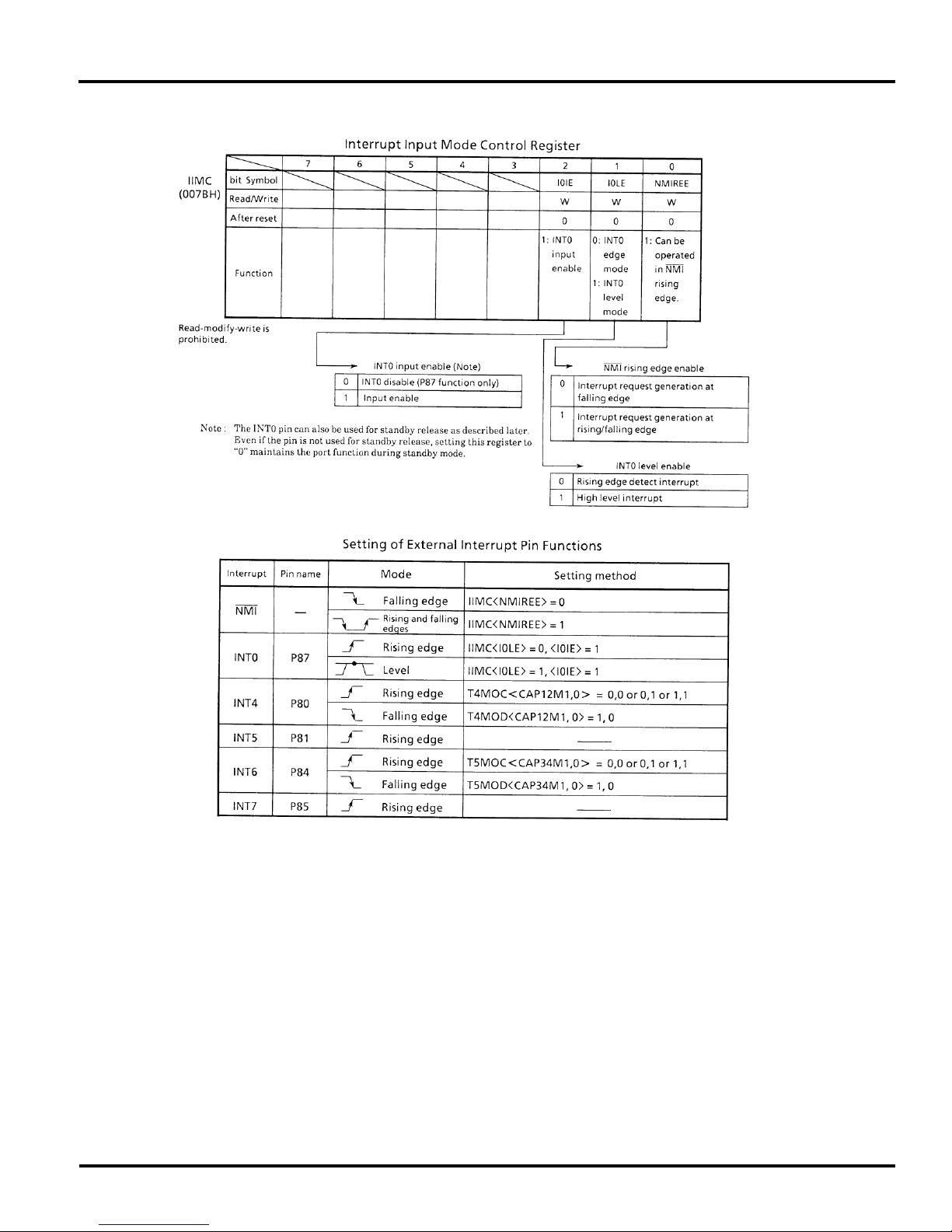
(2) External Interrupt Control
TMP96C141AF
TOSHIBA CORPORATION
19

TMP96C141AF
(3) High-Speed Micro DMA Start Vector
When the CPU reads the interrupt vector after accepting an interrupt, it simultaneously compares the interrupt vector with each
channel’s micro DMA start vector (bits 4 to 8 of the interrupt vec-
Micro DMA0 Start Vector
76543210
DMA0V
(007CH)
bit Symbol DMA0V8 DMA0V7 DMA0V6 DMA0V5 DMA0V4
Read / Write W
After reset 00000
Micro DMA1 Start Vector
76543210
DMA1V
(007DH)
bit Symbol DMA1V8 DMA1V7 DMA1V6 DMA1V5 DMA1V4
Read / Write W
After reset 00000
Micro DMA2 Start Vector
76543210
DMA2V
(007EH)
bit Symbol DMA2V8 DMA2V7 DMA2V6 DMA2V5 DMA2V4
Read / Write W
After reset 00000
Micro DMA3 Start Vector
76543210
DMA3V
(007FH)
bit Symbol DMA3V8 DMA3V7 DMA3V6 DMA3V5 DMA3V4
Read / Write W
After reset 00000
tor). When both match, the interrupt is processed in micro
DMA mode for the channel whose value matched.
If the interrupt vector matches more than one channel, the channel with the lower channel number has a
higher priority.
(read-modify-write is not possible.)
(read-modify-write is not possible.)
(read-modify-write is not possible.)
(read-modify-write is not possible.)
(4) Notes
The instruction execution unit and the bus interface unit of this
CPU operate independently of each other. Therefore, if the instruction used to clear an interrupt request flag of an interrupt is fetched
before the interrupt is generated, it is possible that the CPU might
execute the fetched instruction to clear the interrupt request flag
20
while reading the interrupt vector after accepting the interrupt. If so, the CPU would read the default vector 00A0H
and start the interrupt processing from the address
80A0H.
To avoid this, make sure that the instruction used to
clear the interrupt request flag comes after the DI instruction.
TOSHIBA CORPORATION
TMP96C141AF
≤
3.4 Standby Function
When the HALT instruction is executed, the TMP96C141AF
enters RUN, IDLE, or STOP mode depending on the contents
of the HALT mode setting register.
(1) RUN : Only the CPU halts; power consumption
remains unchanged.
(2) IDLE : Only the built-in oscillator operates, while all
76543210
WDMOD
(005CH)
Bit Symbol WDTE WDTP1 WDTP0 WARM HALTM1 HALTM0 RESCR DRVE
Read/Write R/W
After reset 10000000
1 : WDT
Enable
Function
16
00 : 2
/ fc
18
01 : 2
/ fc
20
10 : 2
/ fc
22
11 : 2
/ fc
Detection time
other built-in circuits halt. Power consumption is reduced to 1/10 or less than that during normal operation.
(3) STOP : All internal circuits including the built-in oscil-
lator halt. This greatly reduces power consumption. The states of the port pins in
STOP mode can be set as listed in Table 3.4
(1) using the I/O register
WDMOD<DRVE>bit.
Warming up
time
16
0 : 2
/fc
18
1 : 2
/fc
Standby mode
00 : RUN mode
01 : STOP mode
10 : IDLE mode
11 : Don’t care
1: Connects
watchdog
timer
output to
RESET
pin
internally.
1: Drive pin
even in
STOP
mode.
When STOP mode is released by other than a reset, the
system clock output starts after allowing some time for warming up set by the warming-up counter fro stabilizing the bulit-in
oscillator. To release STOP mode by reset, it is necessary to
Standby Release by Interrupt
Standby Mode
Interrupt Level
Can be released by any interrupt.
RUN
IDLE Can only be released by NMI
STOP ↑ (Note) ↑
After standby mode is released, interrupt processing starts.
is released, interrupt processing starts.
Interrupt Mask (IFF2 to 0)
Interrupt Request Level
or INT0 pin. After standby mode
allow the oscillator to stabilize.
To release standby mode, a reset or an interrupt is used.
To release IDLE or STOP mode, only an interrupt by the NMI or
INT0 pin, or a reset can be used. The details are described
below:
Interrupt Mask (IFF2 to 0)
> Interrupt Request Level
Can only be released by INT0 pin.
Processing resumes from address next to HALT instruction.
↑
TOSHIBA CORPORATION
21
TMP96C141AF
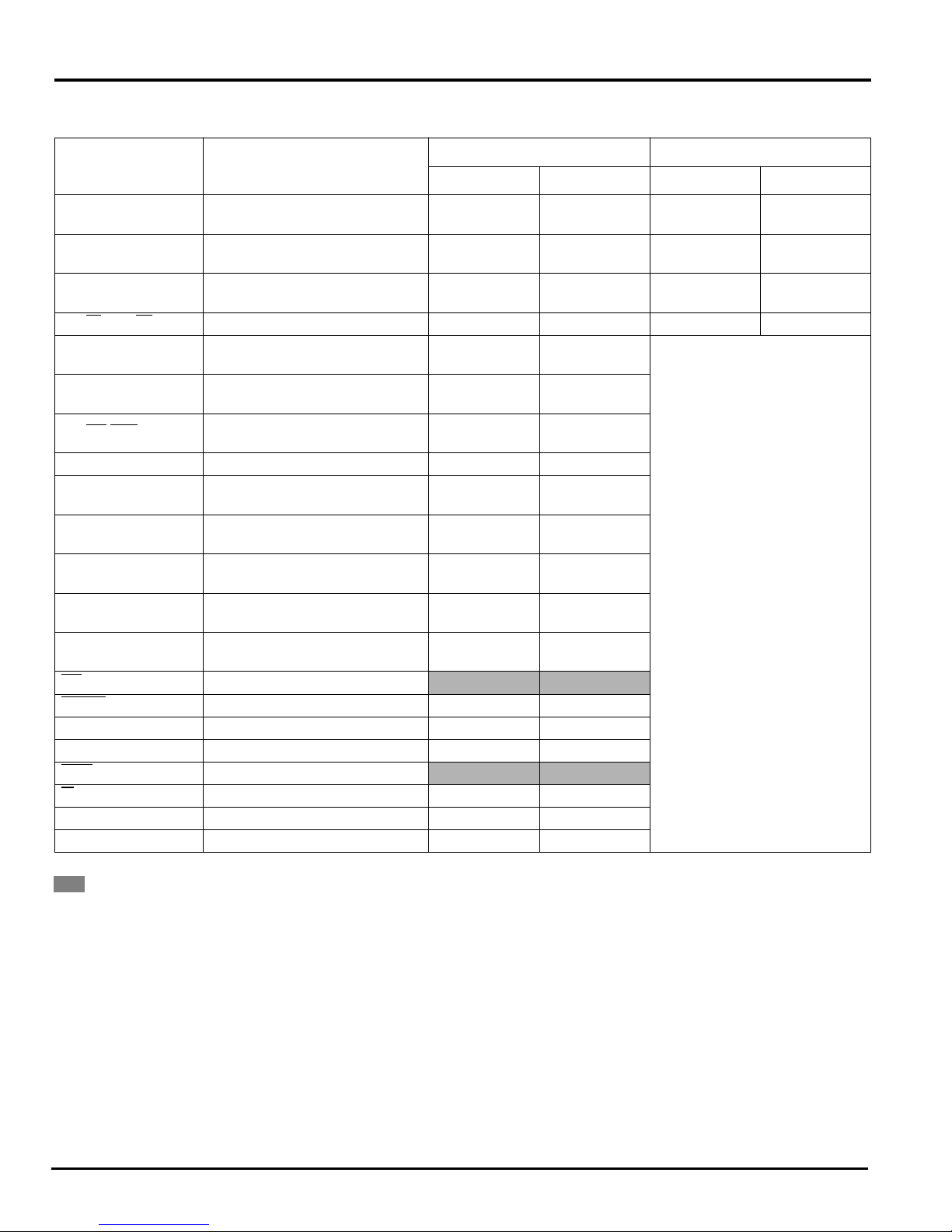
Table 3. 4 (1) Pin States in STOP Mode
Pin Name I/O
96C141AF 96CM40/96PM40
DRVE = 0 DRVE = 1 DRVE = 0 DRVE = 1
P0
P1
P2
P30 (RD
), P31 (WR) Output – “1” Output – Output
P32 ~ P37
P40, P41
P42 (CS2
/CAS2)
Input mode/AD0 ~ 7
Output mode
Input mode/AD8 ~ 15
Output mode/A8 ~ 15
Input mode
Output mode/A0 ~ 7, A16 ~ 23
Input mode
Output mode
Input mode
Output mode
Input mode
Output mode
–
x
–
x
PD*
PD*
PU
PU
PU*
PU*
PD*
PD*
–
x
–
x
PD*
Output
PU
Output
PU
Output
PD
Output
–
–
–
–
PD*
PD*
P5 Input – –
P6
P7
P80 ~ P86
P87 (INT0)
P9
NMI
WDTOUT
Input mode
Output mode
Input mode
Output mode
Input mode
Output mode
Input mode
Output mode
Input mode
Output mode
Input Input Input
Output Output Output
PU*
PU*
PU*
PU*
PU*
PU*
PU
PU
PU*
PU*
PU
Output
PU
Output
PU
Output
PU
Output
PU
Output
ALE Output “0” “0”
CLK Output – “1”
RESET
EA
Input Input Input
Input Input Input
X1 Input – –
X2 Output “1” “1”
–
Output
–
Output
PD*
Output
←
–: Input for input mode/input pin is invalid; output mode/output pin is at high impedance.
Input: Input enable state
Input: Input gate in operation. Fix input voltage to 0 or 1 so that input pin stays constant.
Output: Output state
PU: Programmable pull-up pin. Fix the pin to avoid through current since the input gate operates when a pull-up resistor is not set.
PD: Programmable pull-down pin. Fix the pin like a pull-up pin when a pull-down resistor is not set.
*: Input gate disable state. No through current even if the pin is set to high impedance.
x: Cannot set.
Note: Port registers are used for controlling programmable pull-up/pull-down. If a pin is also used for an output function (e.g., TO1) and the output function
is specified, whether pull-up or pull-down is selected depends on the output function data. If a pin is also used for an input function, whether pull-up or
pull-down is selected depends on the port register setting value only.
22 TOSHIBA CORPORATION
TMP96C141AF
3.5 Functions of Ports
The TMP96CM40F/TMP96PM40F has 65 bits for I/O ports.
The TMP96C141AF, TMP96C041AF has 47 bits for I/O ports
because Port0, Port1, P30, and P31 are dedicated pins for
AD0 to 7, AD8 to
15, RD, and WR.
These port pins have I/O functions for the built-in CPU
and internal I/Os as well as general-purpose I/O port functions. Table 3.5 lists the function of each port pin.
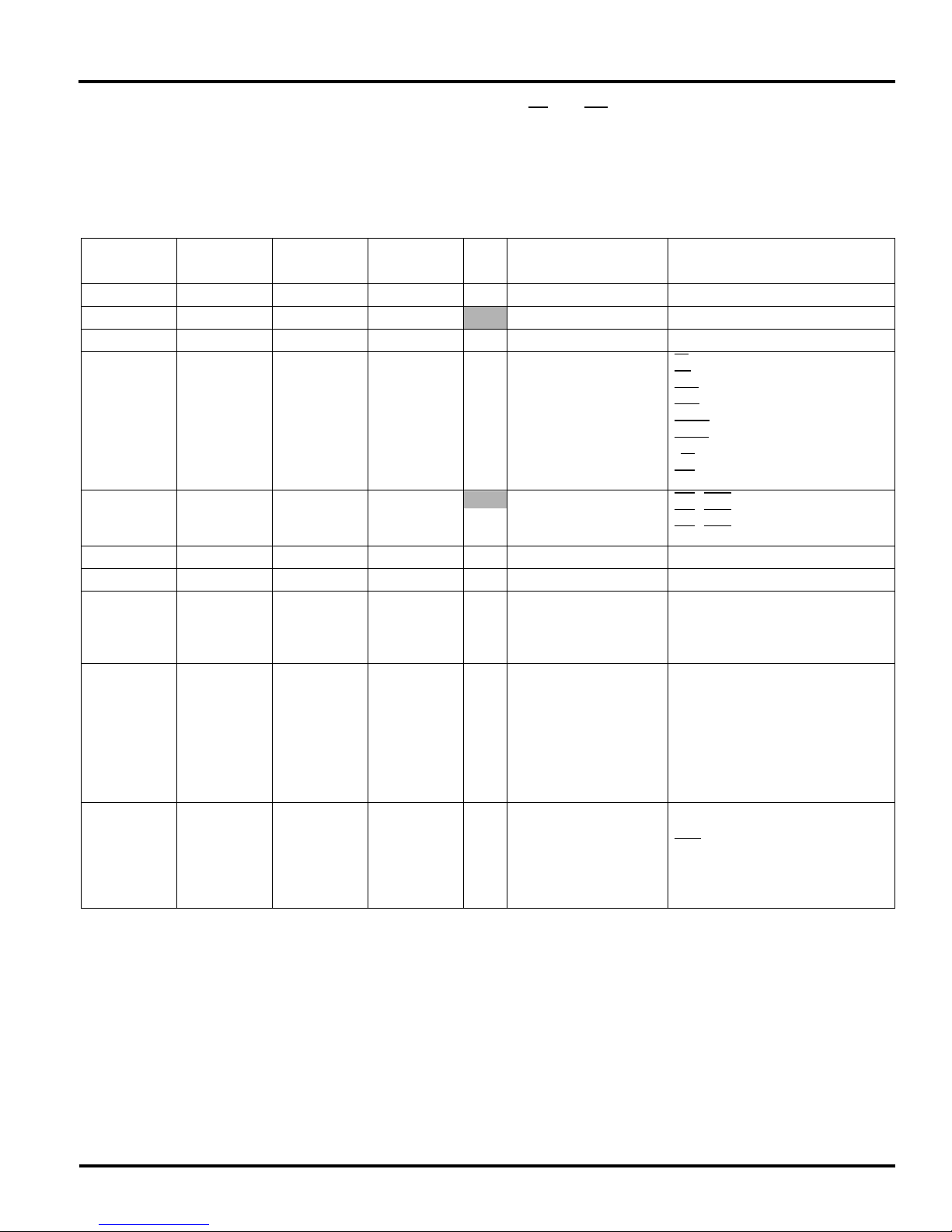
(R: ↑ = With programmable pull-up resistor
↓ = WIth programmable pull-down
Table 3.5 Functions of Ports
Port Name Pin Name
Port0 P00 ~ P07 8 I/O – Bit AD0 ~ AD7
Port1 P10 ~ P17 8 I/O
Port2 P20 ~ P27 8 I/O ↓ Bit A0 ~ A7/ A16 ~ A23
Port 3 P30
P31
P32
P33
P34
P35
P36
P37
Port4 P40
P41
P42
Port5 P50 ~ P53 4 Input – (Fixed) AN0 ~ AN3
Port6 P60 ~ P67 8 I/O ↑ Bit PG00 ~ PG03, PG10 ~ PG13
Port7 P70
P71
P72
P73
Port8 P80
P81
P82
P83
P84
P85
P86
P87
Port9 P90
P91
P92
P93
P94
P95
Number of
Pins
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
Direction R Direction Setting Unit Pin Name for Built-in Function
– Bit AD8 ~ AD15/ A8 ~ A15
Output
Output
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
–
–
↑
↑
↑
↑
↑
↑
↑
↑
↓
↑
↑
↑
↑
↑
↑
↑
↑
↑
↑
↑
↑
↑
↑
↑
↑
↑
↑
(Fixed)
(Fixed)
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
RD
WR
HWR
WAIT
BUSRQ
BUSAK
R/W
RAS
CS0 / CAS0
CS1 / CAS1
CS2 / CAS2
T10
TO1
TO2
TO3
T14/INT4
T15/INT5
TO4
TO5
T16 / INT6
T17 / INT7
TO6
INT0
TXD0
RXD0
CTS0
TXD1
RXD1
SCLK1
TOSHIBA CORPORATION 23
TMP96C141AF
Resetting makes the port pins listed below function as
general-purpose I/O ports.
I/O pins programmable for input or output function as
input ports.
To set port pins for built-in functions, a program is
required.
Since the TMP96C141AF has an external ROM, some
ports are permanently assigned to the CPU.
Pin Name
P00 - P07
(AD0 - AD7)
P10 - P17
(AD8 - AD15)
P30 (RD
)
P31 (WR
)
P32 (HWR
P37 (RAS
P36 (R/W
P40 (CS0
P41 (CS1
P42 (CS2
P20 - P27
(A16 - A23)
P42 (CS2
)
) ↑
)
/CAS0)
/CAS1)
/CAS2) ↑ (*) ↑
/CAS2)
No status change (these pins are not “Hz”) These pins are “Hz”.
• P00 ~ P07 →AD0 ~ AD7
• P10 ~ P17 →AD8 ~ AD15
• P30 →RD
• P31 →WR
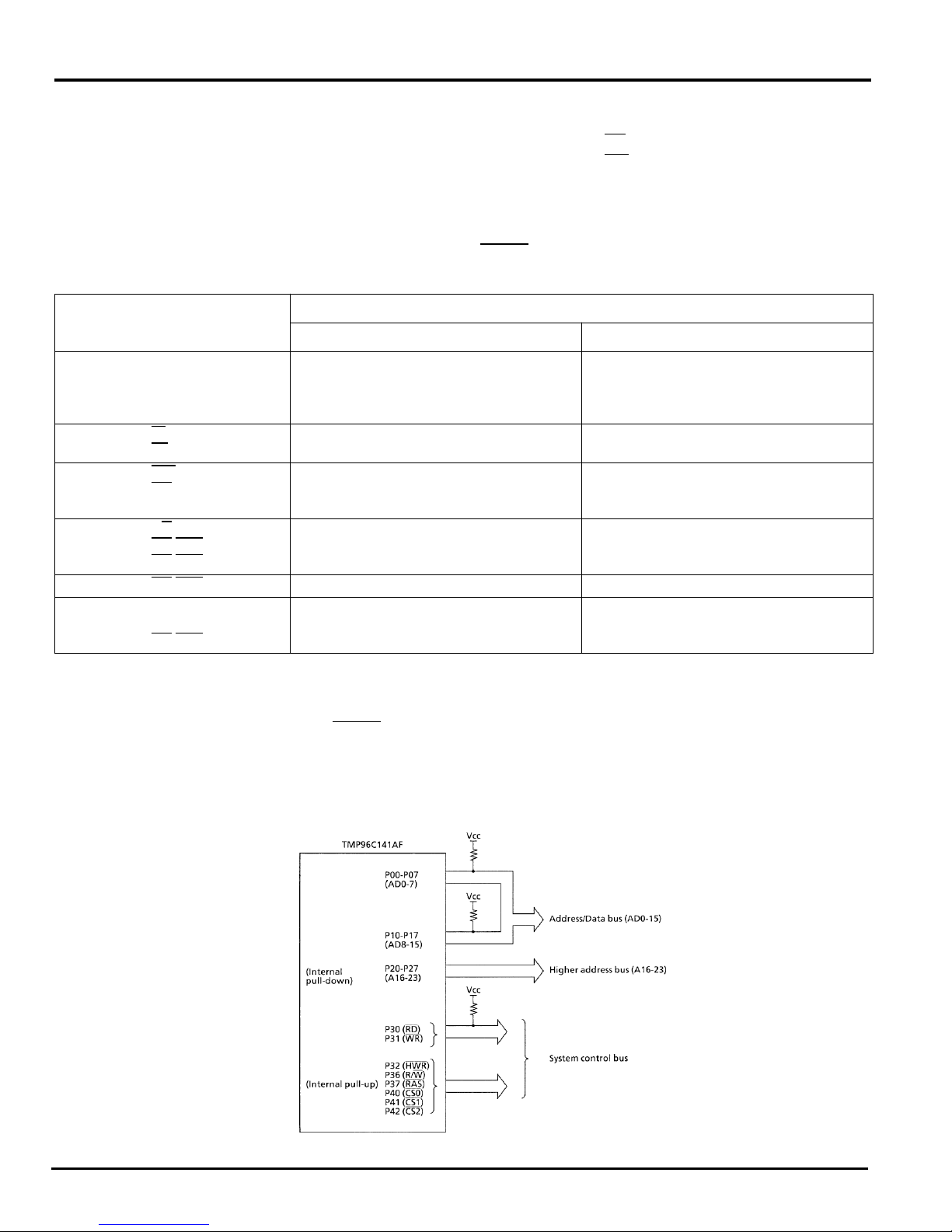
Bus release function
The TMP96C141AF has the internal pull-up and pull-
down resistors to fix the bus control signals at bus release.
Table 3.5 (1) shows the pin condition at bus release
(BUSAK) = “L”).
Pin state at bus release
Port mode Function mode
↑
↑↑
↑
These pins are “Hz”.
(“Hz” status after these pins are driven to high level.)
The output buffer is “OFF” after these pins are drinen high.
These pins are added in the internal resistor of pull-up. It’s
no relation for the value of output latch.
The output buffer is “OFF” after these pins are drinen high.
These pins are added in the internal resistor of pull-down.
It’s no relation for the value of output latch.
(*) P42 has the resistor of programmable pull-down, but
when the bus are released, P42 pin is added a resistor of pullup.
That is, when it is used for bus release (BUSAK = “0”), the
pins of below need pull-up or pull-down resistor for an external
circuit.
P00 - P07 (AD07)
P10 - P17 (AD8 - AD15)
P30 (RD)
P31 (WR)
When the bus is released, both internal memory and
internal I/O cannot be accessed. But the internal I/O continues
to run. Therefore, be careful about releasing time and set the
setection time WDT.
Figure 3.5. Example of external bus interface using bus release function.
24 TOSHIBA CORPORATION
TMP96C141AF
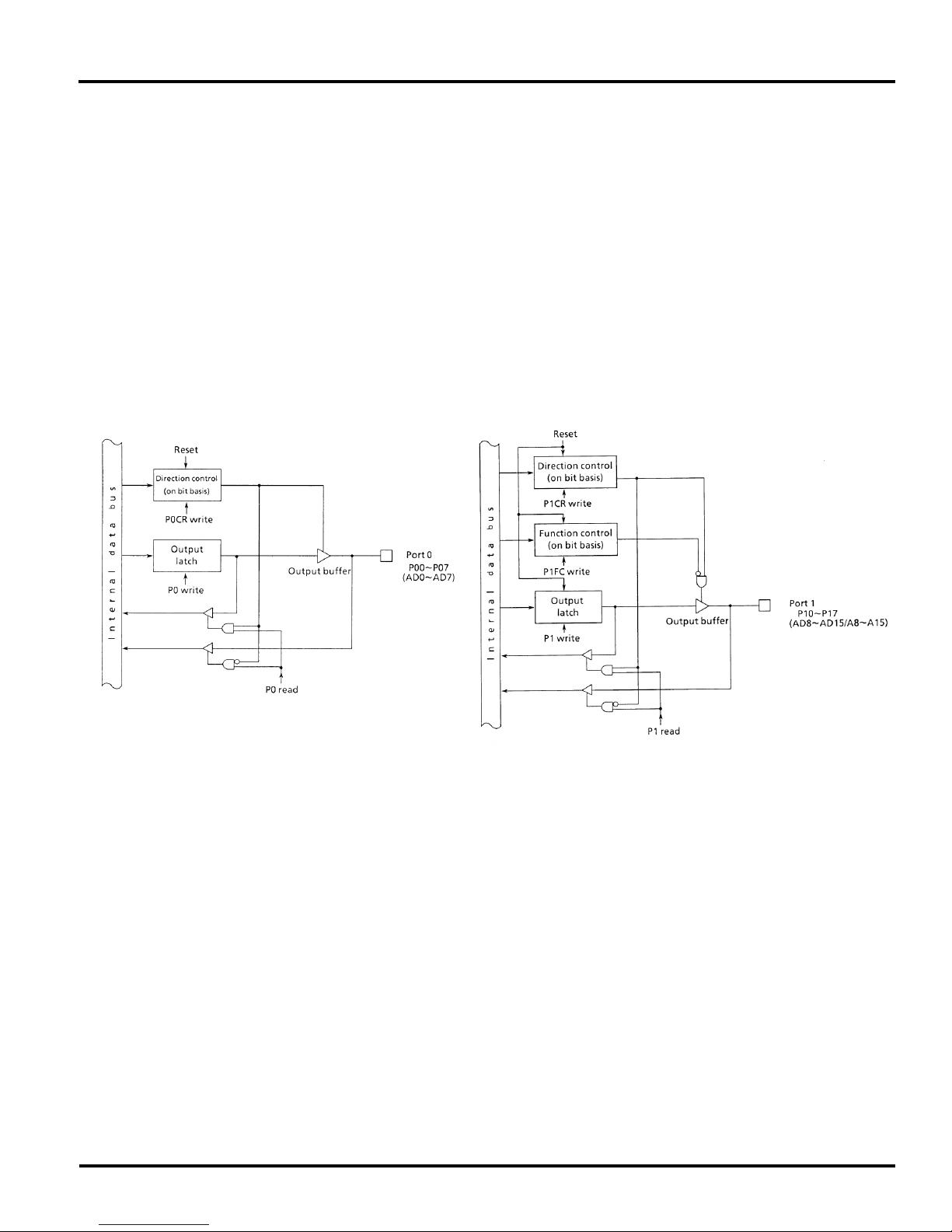
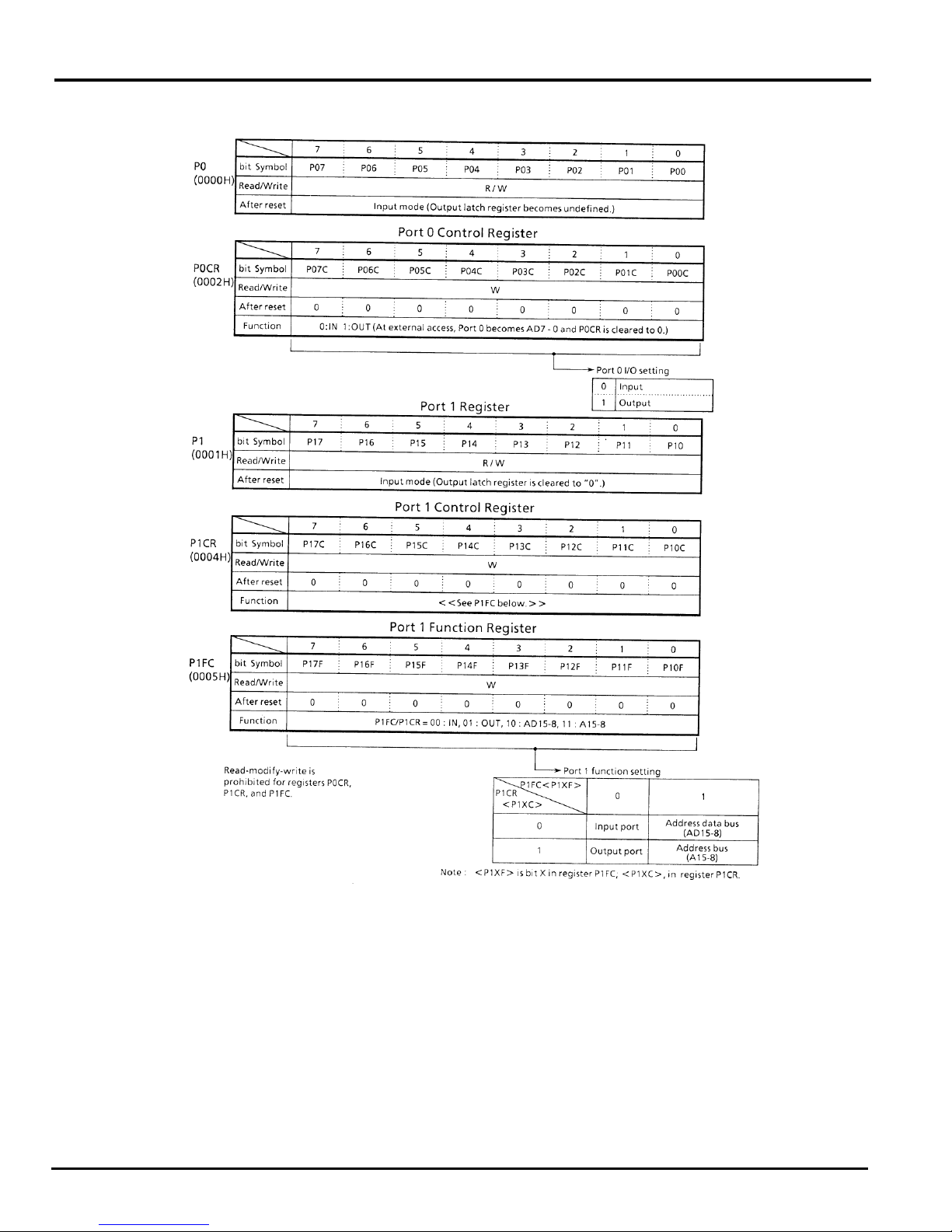
3.5.1 Port 0 (P00 - P07)
Port 0 is an 8-bit general-purpose I/O port. I/O can be set on a
bit basis using control register P0CR to 0 and sets Port 0 to
input mode.
In addition to functioning as a general purpose I/O port,
Port 0 also functions as an address data bus (AD0 to 7). To
access external memory, Port 0 functions as an address data
bus (AD 0 to 7) and all bits of the control register P0CR are
cleared to 0.
With the TMP96C141AF/TMP96C041AF, which comes
with an external ROM, Port 0 always functions as an address
data bus (AD0 to 7) regardless of the value set in control register P0CR.
3.5.2 Port 1 (P10 - P17)
Port 1 is an 8-bit general-purpose I/O port. I/O can be set on a
bit basis using control register P1CR and function register
P1FC. Resetting resets all bits of output latch P1, control register P1CR, and function register P1FC to 0 and sets Port 1 to
input mode.
In addition to functioning as a general purpose I/O port,
Port 1 also functions as an address data bus (AD8 to 15) or an
address bus (A8 to 15).
With the TMP96C141AF/TMP96C041AF, which comes
with an external ROM, Port 1 always functions as an address
data bus (AD8 to 15) regardless of the value set in control register P1CR.
Figure 3.5 (1). Port 0 Figure 3.5 (2). Port 1
TOSHIBA CORPORATION
25
TMP96C141AF
Port 0 Register
Figure 3.5 (3). Registers for Ports 0 and 1
26
TOSHIBA CORPORATION
TMP96C141AF
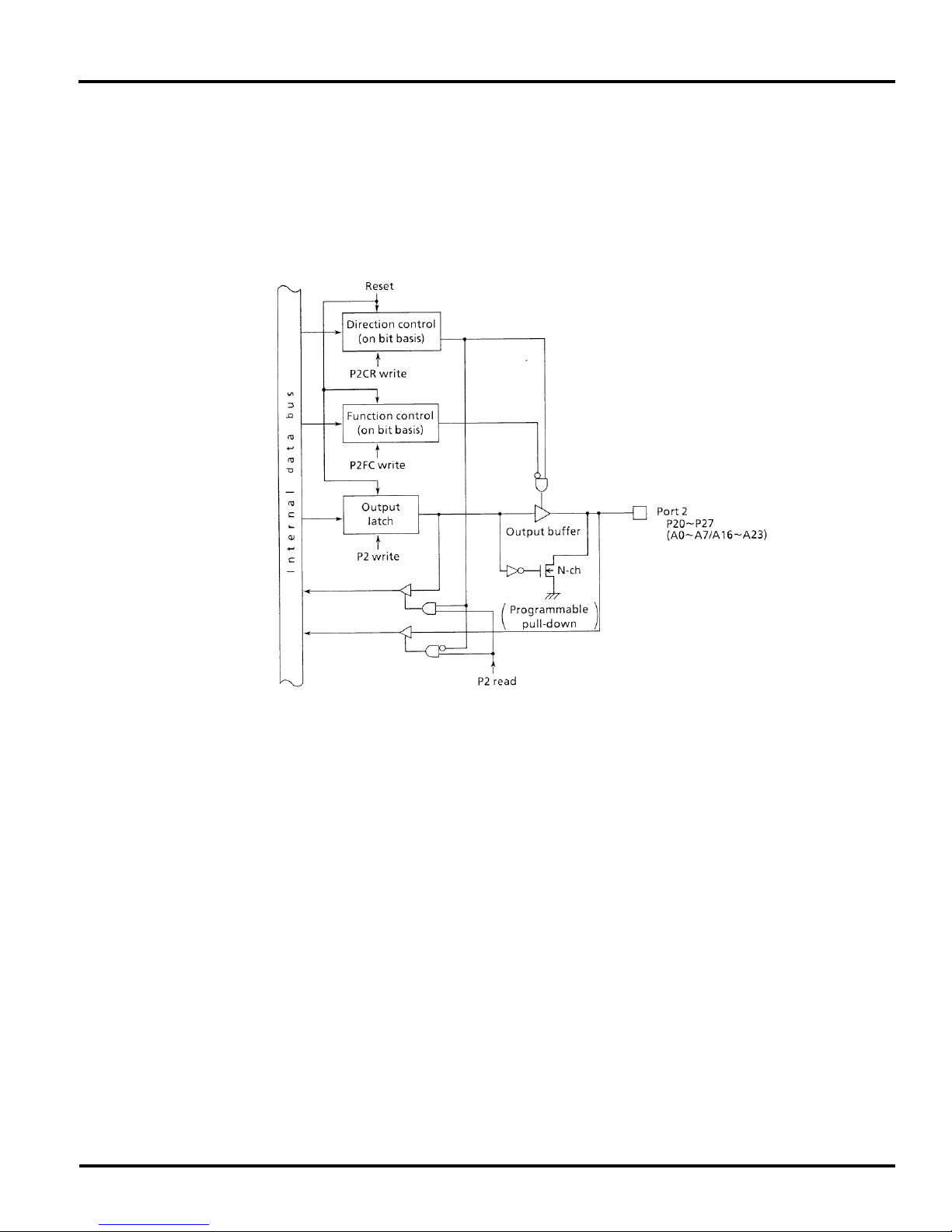
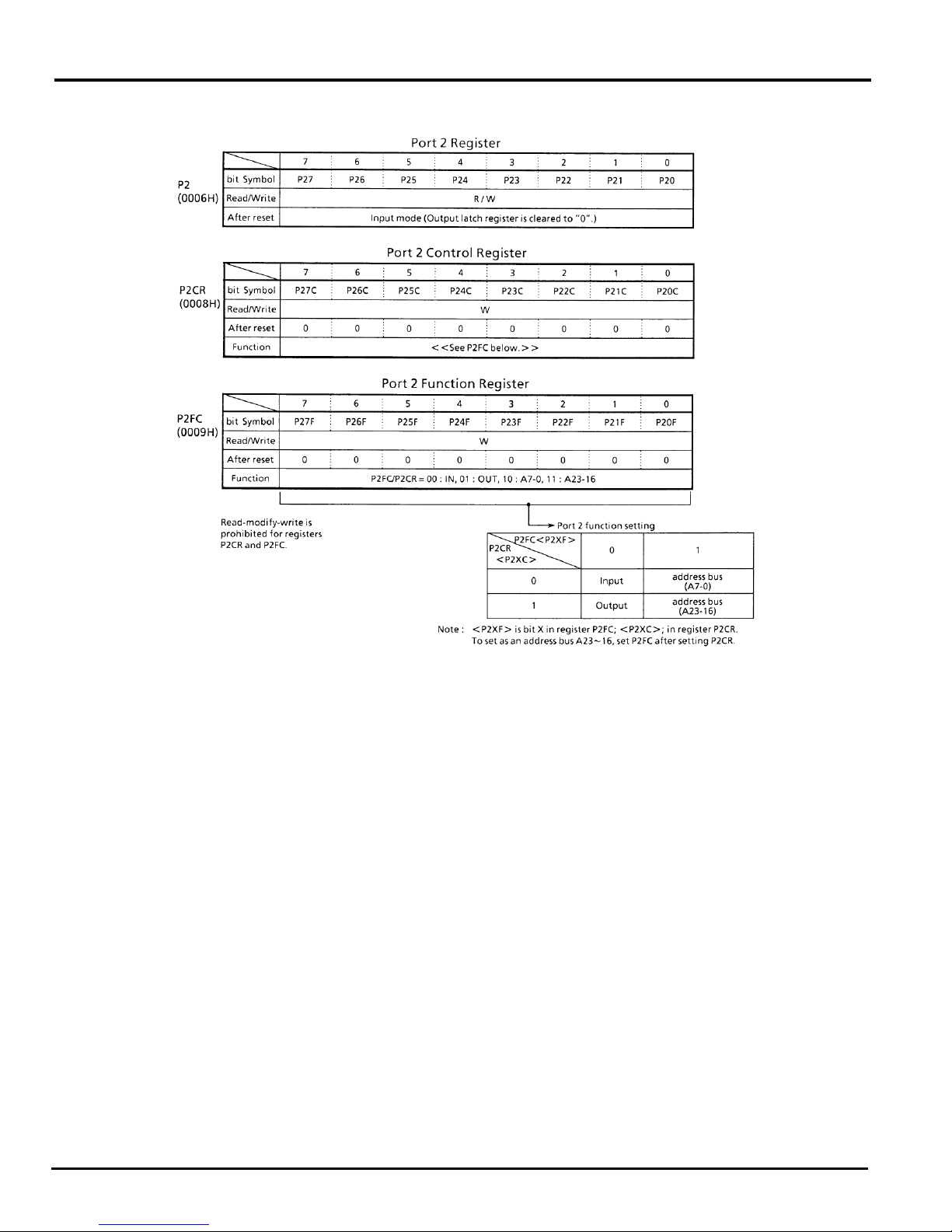
3.5.3 Port 2 (P20 - P27)
Port 2 is an 8-bit general-purpose I/O port. I/O can be set on
bit basis using the control register P2CR and function register
P2FC. Resetting resets all bits of output latch P2, control register P2CR and function register P2FC to 0. It also sets Port 2 to
input mode and connects a pull-down resistor. To disconnect
the pull-down resistor, write 1 in the output latch.
In addition to functioning as a general-purpose I/O port,
Port 2 also functions as an address data bus (A0 to 7) and an
address bus (A16 to 23).
TOSHIBA CORPORATION
Figure 3.5 (4). Port 2
27
TMP96C141AF
28
Figure 3.5 (5). Registers for Port 2
TOSHIBA CORPORATION
TMP96C141AF
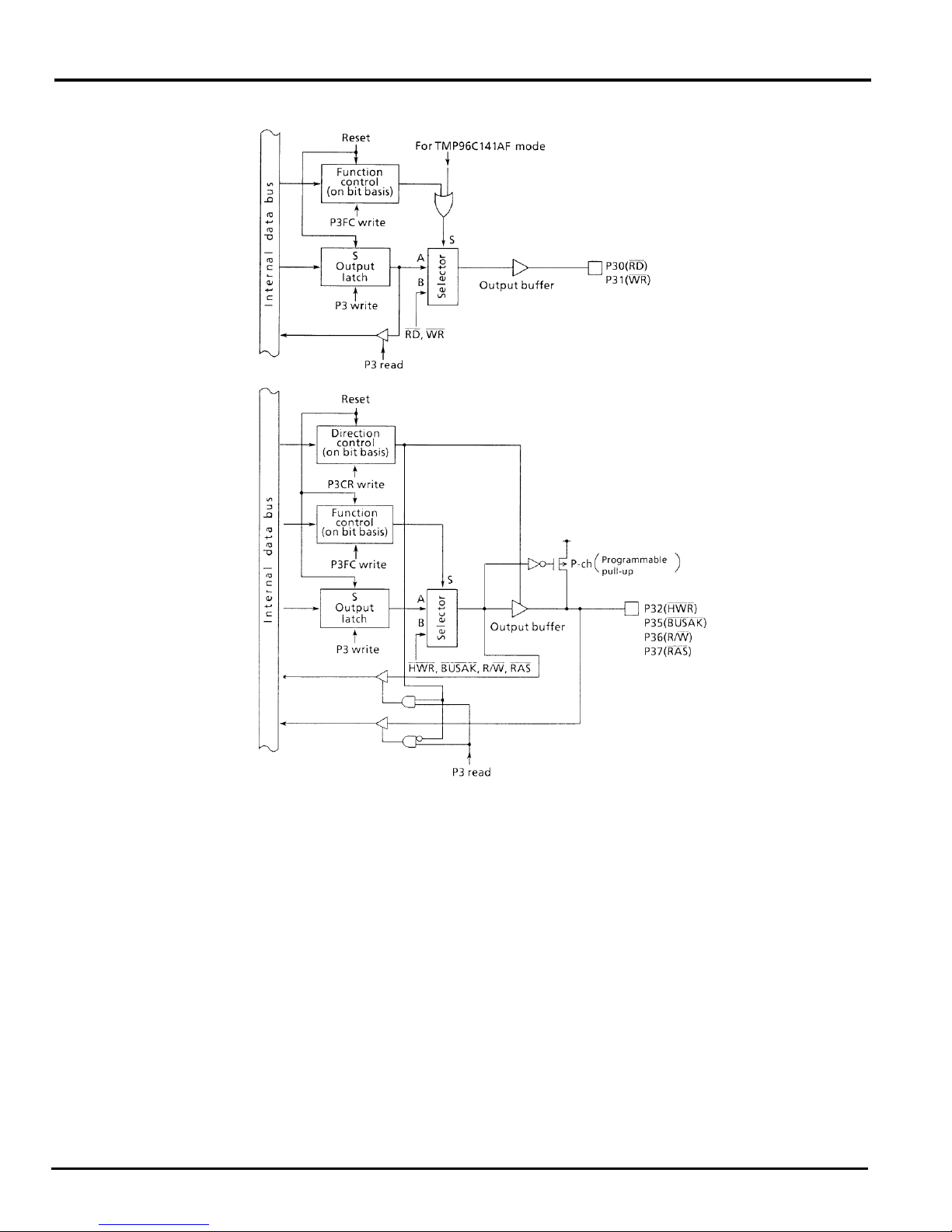
3.5.4 Port 3 (P30 - P37)
Port 3 is an 8-bit general-purpose I/O port.
I/O can be set on a bit basis, but note that P30 and P31
are used for output only. I/O is set using control register P3CR
and function register P3FC. Resetting resets all bits of output
latch P3, control register P3CR (bits 0 and 1 are unused), and
function register P3FC to 0. Resetting also outputs 1 from P30
and P31, sets P32 to P37 to input mode, and connects a pullup resistor.
In addition to functioning as a general-purpose I/O port,
Port 3 also functions as an I/O for the CPU’s control/status signal.
With the TMP96C141AF, when P30 pin is defined as RD
signal output mode (<P30F> = 1), clearing the output latch
register <P30> to 0 outputs the RD strobe (used for the
pseudo static RAM) from the P30 pin even when the internal
address area is accessed.
If the output latch register <P30> remains 1, the RD
strobe signal is output only when the external address area is
accessed.
With the TMP96C141AF/TMP96C041AF, which comes
with an external ROM, Port 30 outputs the RD signal; P31, the
WR signal, regardless of the values set in function registers
P30F and P31F.
TOSHIBA CORPORATION
29
TMP96C141AF
Figure 3.5 (6). Port 3 (P30, P31, P32, P35, P36, P37)
30
TOSHIBA CORPORATION
 Loading...
Loading...