

TB6562ANG/AFG 使用上の注意点
TB6562ANG/AFG 使用上の注意点
TB6562ANG/AFG は、2 相ステッピングモータをバイポーラ駆動します。
また、PWM 制御により定電流駆動を行います。
1. 電源電圧
(1) 動作電源電圧範囲
項目 記号 動作電源電圧範囲 単位
電源電圧 V
最大定格は 40 V です。動作電源電圧は、34 V 以下に設定してください。
10~34 V
CC
(2) 電源投入/遮断方法
VCC投入時の誤動作防止のために、SB = Low (スタンバイモード)
もしくは、XA1 = XA2 = XB1 = XB2 = High (電流値設定= 0%) に設定してください。
遮断時も同様に SB = Low (スタンバイモード)
もしくは、XA1 = XA2 = XB1 = XB2 = High (電流値設定= 0%) に設定してください。
2. 出力電流
最大定格は 1.5 A (peak)となっております。瞬時でもこの値を越えないでください。
平均許容電流はトータルの許容損失により制限されます。許容損失を超えない範囲でご使用ください。
3. 制御入力
(1) Phase 信号入力
各ブリッジ出力の Phase 端子によってコイルに流れる電流の向きを切り換えます。
2 相ステッピングを駆動する場合、この入力の切り換わりの周波数に応じてモータの回転数 (速度) が変わり
ます。
V
(H) = 2 V, VIN (L) = 0.8 V で、3 V 系の入力信号でも制御が可能です。
IN
プルダウン抵抗 100 kΩ (標準) を内蔵しております。
(2) スタンバイ入力
SB 端子を Low にすることでスタンバイ状態となり、出力トランジスタを全オフします。
この時、OUT 端子は全て Z (ハイインピーダンス状態) となります。
スタンバイ状態では、Phase 入力、X1, X2 入力の制御はかからなくなります。
V
(H) = 2 V, VIN (L) = 0.8 V で、3 V 系の入力信号でも制御が可能です。
IN
プルダウン抵抗 100 kΩ (標準) を内蔵しており、入力オープン時、スタンバイ状態になります。
(3) X1, X2 入力
X1, X2 入力によって、出力電流値を切り換わります。この入力信号により、デジタル的に電流値を切り換え
ることができ、2 相励磁、1-2 相励磁以外にも W1-2 相励磁が可能となります。
V
(H) = 2 V, VIN (L) = 0.8 V で、3 V 系の入力信号でも制御が可能です。
IN
プルダウン抵抗 100 kΩ (標準) を内蔵しており、入力オープン時、電流設定 100%になりますのでご注意くだ
さい。
1
2009-03-17
TB6562ANG/AFG 使用上の注意点
(4) V
ref
入力
出力電流を設定するために、外部の基準電圧入力です。0.5 V~7.0 V 以内に設定ください。
IC の 5 V 定電圧源 (V
) の抵抗分割にて設定することもできます。
reg
スイッチング時のノイズを抑制するために、コンデンサ (0.1 相当) を付けてください。
ただし、V
が 13 V 程度以下でご使用の場合、V
CC
が 7 V 未満で出力が飽和して、V
ref
と出力の直線性が
ref
得られない場合があります。
(5) V
端子
reg
VCC電源から 5 V 電源を作っており、それを V
電流能力は 1 mA であり、抵抗分割で V
へ入力することが可能です。
ref
端子に出力しております。
reg
この 5 V は、IC 内部のロジック電源としても使用しており、安定化のためにもセラミックコンデンサを接続
ください。
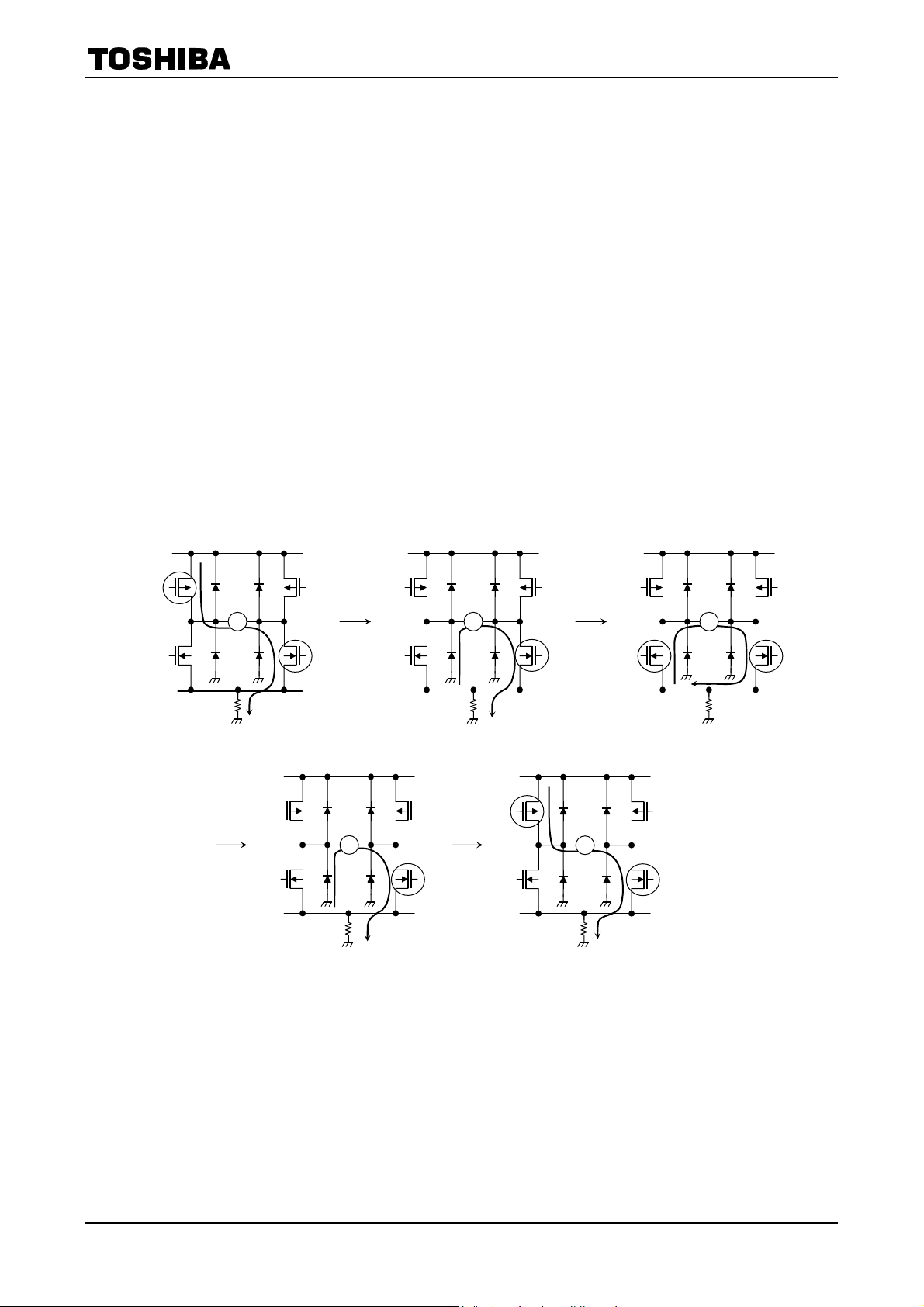
4. 定電流 PWM 動作
PWM 制御によりモータコイルに流れる電流を設定します。
PWM 制御時は、通常動作とショートブレーキの繰り返しとなります。
出力回路での上下パワートランジスタの同時 ON による貫通電流を防止するために上下のパワートランジスタの
ON ↔ OFFが切り替わるタイミングにおいて 300 ns (設計目標値) のデットタイムをIC 内部にて生成しています。
このため、外部入力により OFF タイムを挿入することなく、同期整流方式による PWM 制御が可能です。
なお、CW ↔ CCW, CW (CCW) ↔ ショートブレーキ時にも、内部にて生成されるデットタイムにより OFF タ
イムの挿入は不要です。
OUT1
M
PWM ON
t1
VCC
OUT1 OUT1
RS
M
PWM OFF → ON
t4 = 300 ns (typ.)
M
PWM ON → OFF
t2 = 300 ns (typ.)
V
CC
OUT1OUT1
RS
V
CC
RS
PWM ON
t5
V
CC
M
RS
PWM OFF
t3
V
CC
M
RS
2
2009-03-17
OSC
内部 CK
I
OUT
GND
TB6562ANG/AFG 使用上の注意点
PWM ON
t1
PWM OFF
t3
PWM ON
t5
PWM OFF
t3
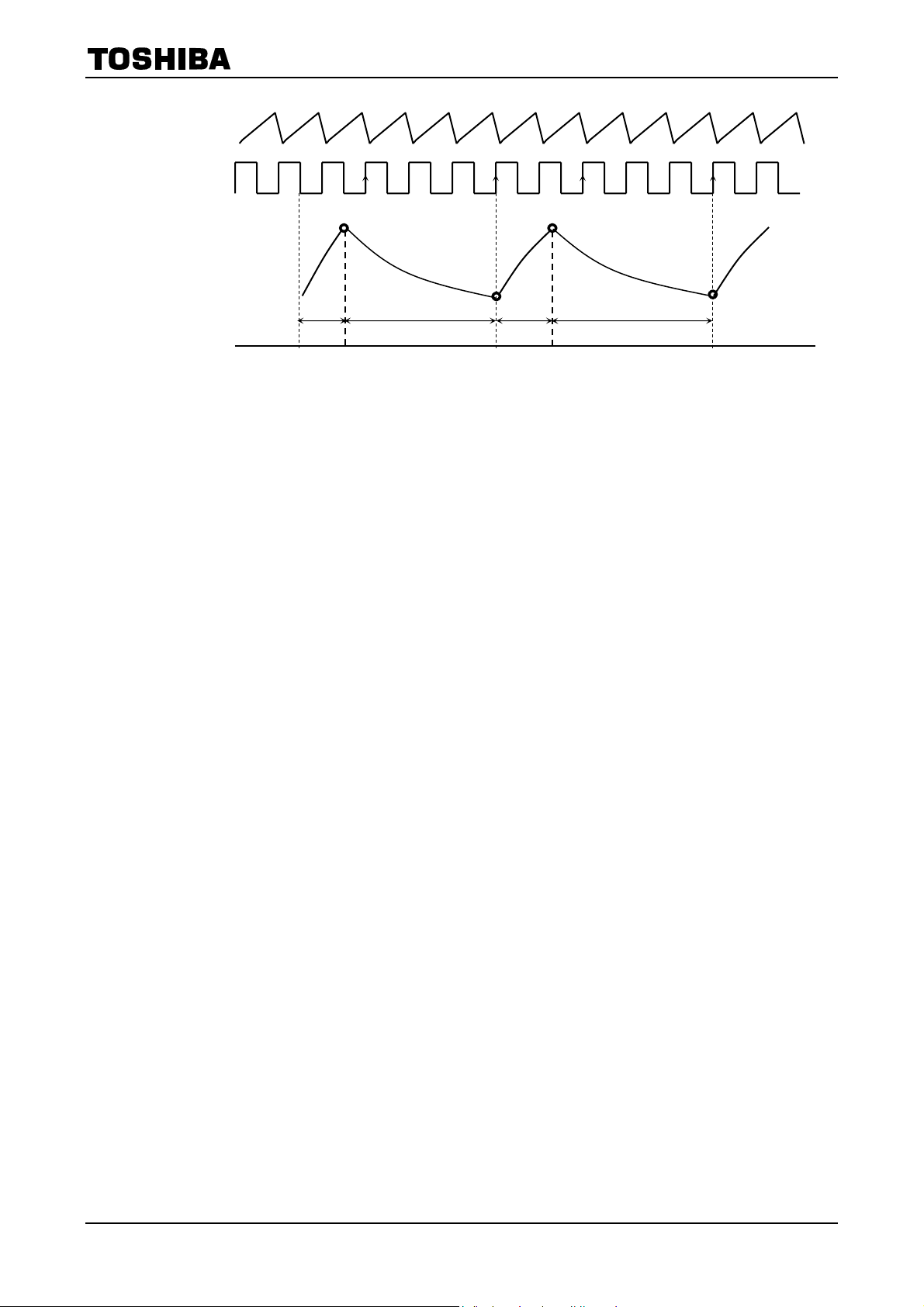
PWM OFF (t3) は、OSC 端子の発振より内部で生成されるクロック周波数により決定されます。
I
が設定値に到達後 PWM OFF し、内部 CK の4発目の立ち上がりで PWM ON する OFF 時間固定タイ
OUT
プです。
負荷条件 (モータの L, R 定数) や設定電流値により、ON 時間が変わりますので、PWM 周波数が可聴周波数
以上 (15 kHz 以上) になるように OFF 時間つまり外付けコンデンサ値を設定ください。
OSC 周波数の発振周波数は、以下の式で近似されます。
fosc = 1/(0.523 × (Cosc × 3700 + Cosc × 600))
また、OFF 時間が小さすぎると、モータ高速回転時、電流引き抜きが不十分となりモータ電流が乱れる場合
がありますのでご注意ください。
5. モータ電流の設定方法
モータ電流は、V
(1) X1 = X2 = L I
(2) X1 =L, X2 = H I
(3) X1 =H, X2 = L I
(4) X1 = X2 = H I
電圧、電流検出抵抗 RS, X1/X2 入力によって設定されます。
ref
O (peak)
O (peak)
O (peak)
O (peak)
= V
× 1/10 × 1/RS[A]
ref
= V
× 1/15 × 1/RS[A]
ref
= V
× 1/30 × 1/RS[A]
ref
= 0[A]: 出力 OFF (OUT 端子はZとなります)
3
2009-03-17
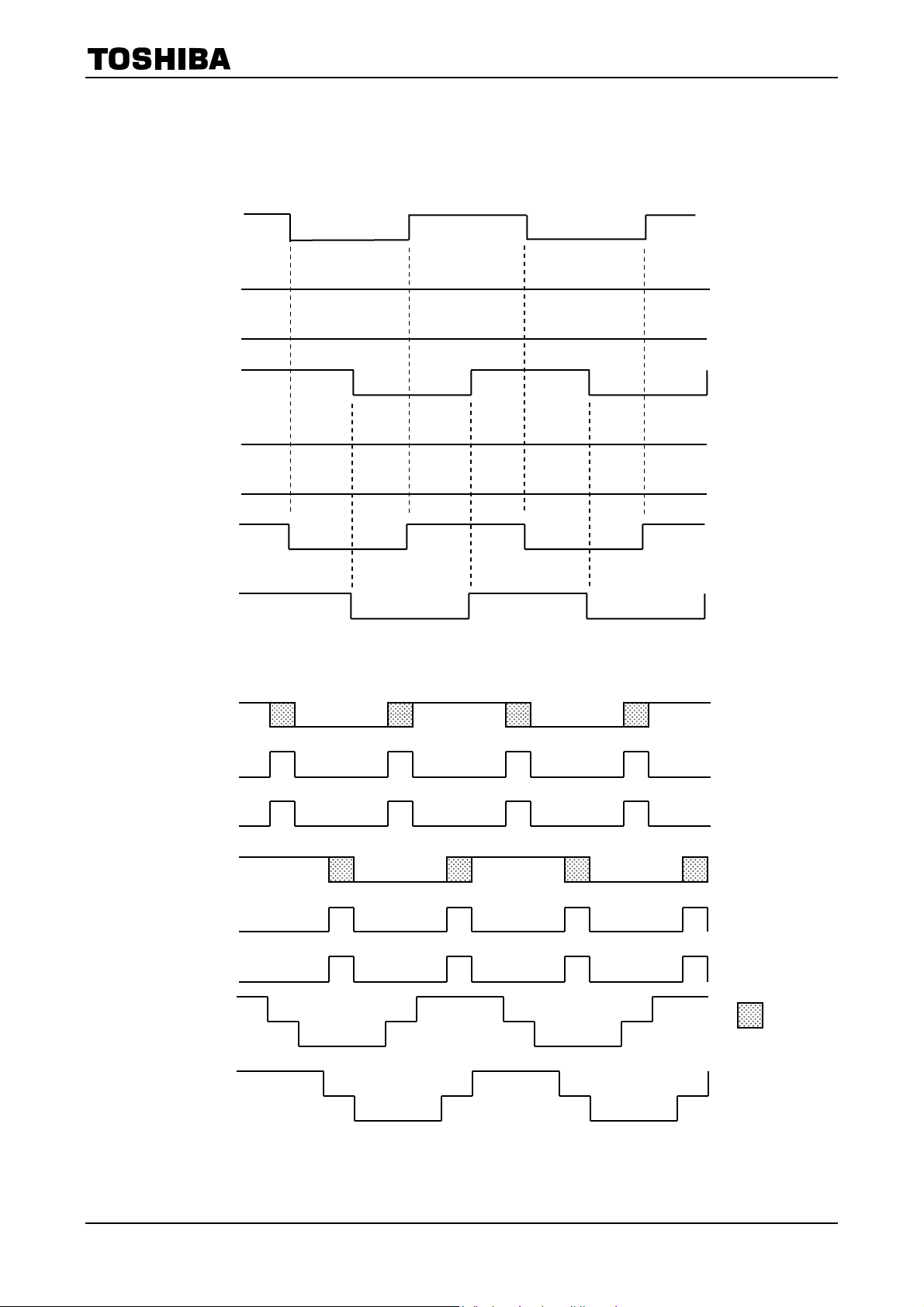
6. 励磁モード
各励磁モードの入力タイミングチャート例を以下に示します。
(1) 2 相励磁
TB6562ANG/AFG 使用上の注意点
Phase A
X1A
X2A
Phase B
X1B
X2B
(B)
100%
−100%
100%
−10%
IO (A)
I
O
(2) 1-2 相励磁
H
L
H
L
H
L
H
L
H
L
H
L
Phase A
X1A
X2A
Phase B
X1B
X2B
I
(A)
O
I
(B)
O
100%
0%
−100%
100%
0%
−100%
H
L
H
L
H
L
H
L
H
L
H
L
: H or L
4
2009-03-17

(3) 1-2 相励磁 (トルクリップル改善)
TB6562ANG/AFG 使用上の注意点
Phase A
X1A
X2A
Phase B
X1B
X2B
I
(A)
O
I
(B)
O
H
L
H
L
H
L
H
L
H
L
H
L
100%
66.7%
0%
−66.7%
−100%
100%
66.7%
0%
−66.7%
−100%
(4) W1-2 相励磁
: H or L
Phase A
X1A
X2A
Phase B
X1B
X2B
I
(A)
O
(B)
I
O
100%
66.7%
33.3%
0%
−33.3%
−66.7%
−100%
100%
66.7%
33.3%
0%
−33.3%
−66.7%
−100%
H
L
H
L
H
L
H
L
H
L
H
L
: H or L
5
2009-03-17

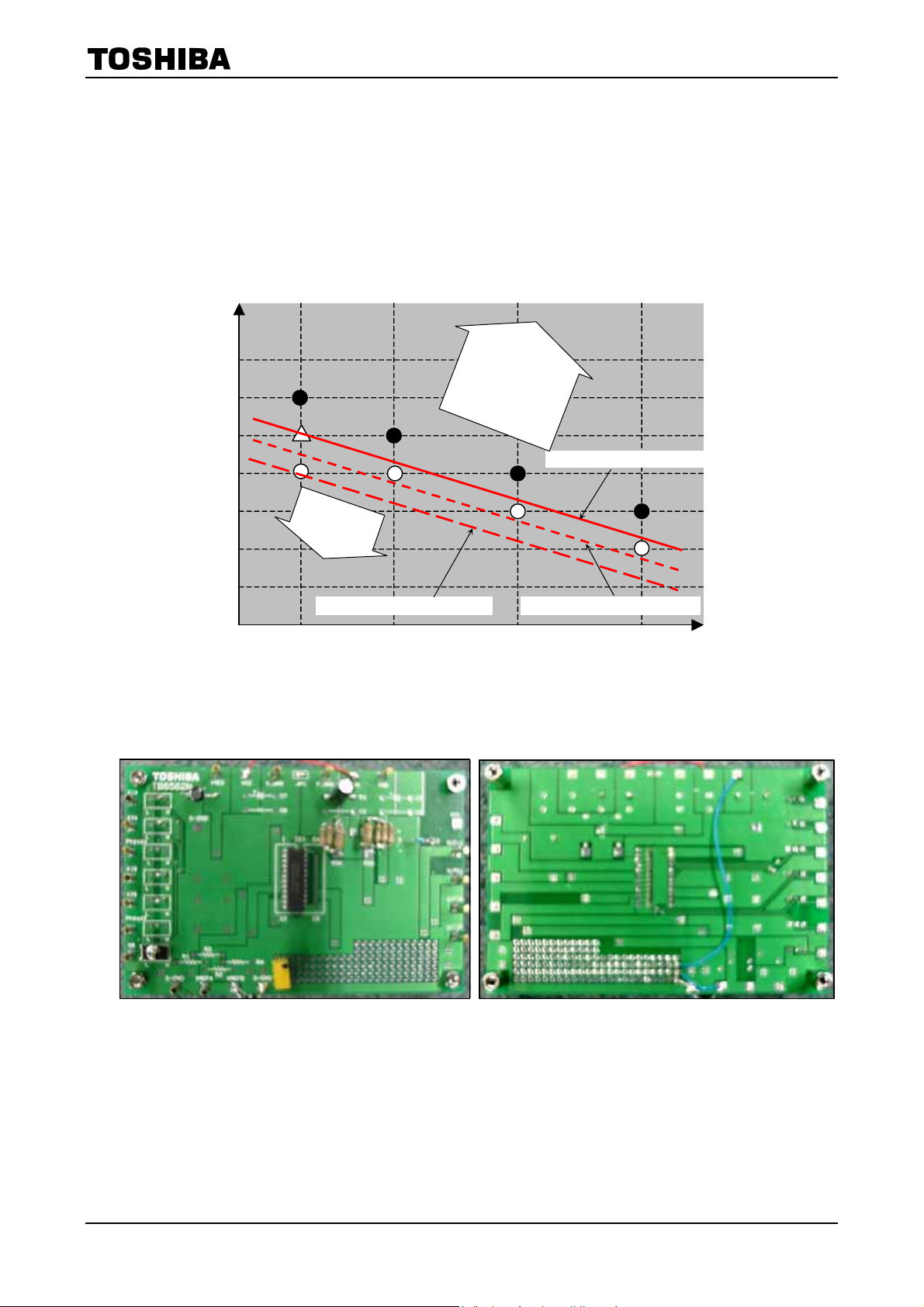
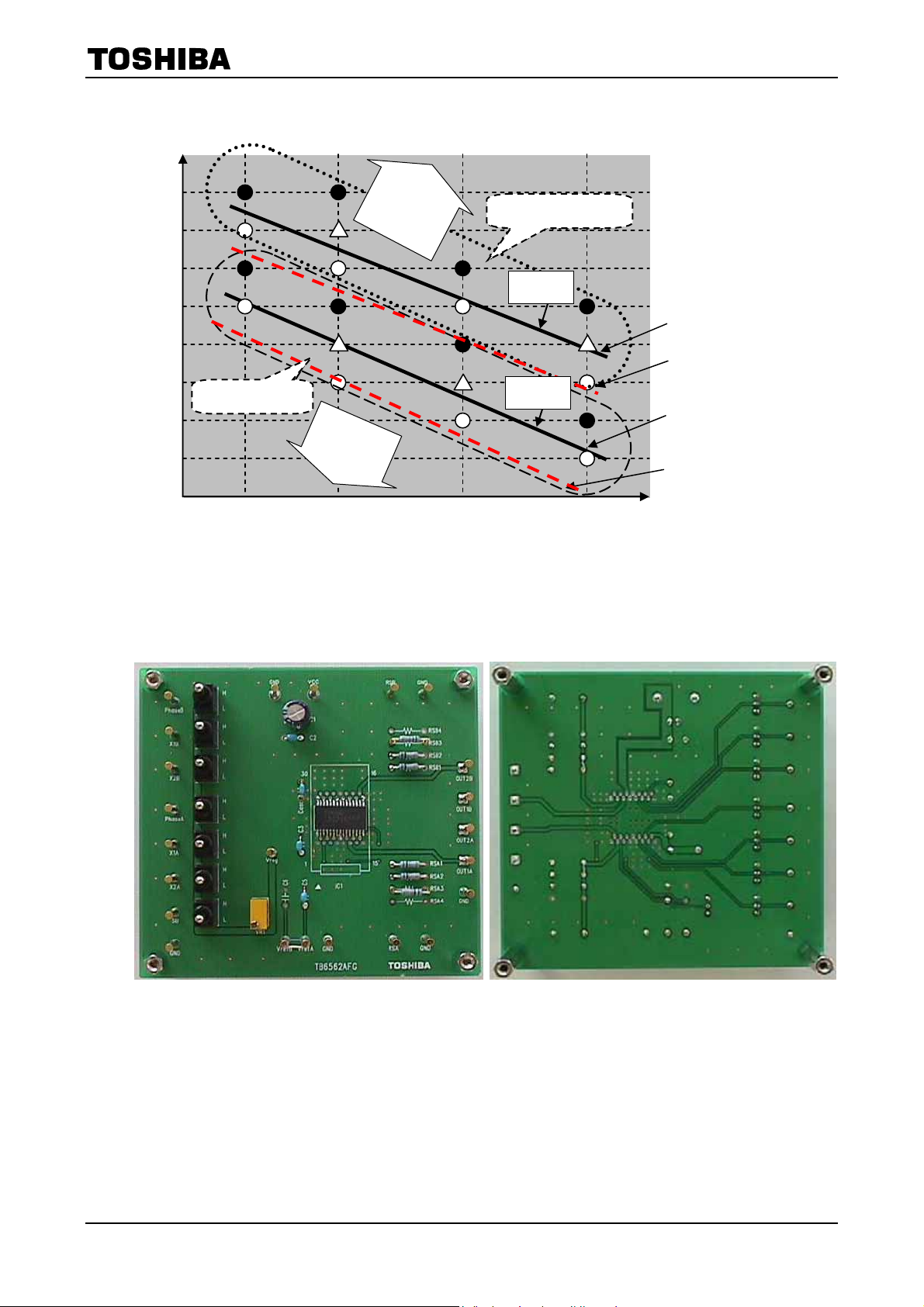
7. 合成ベクトル
=
右図に A 相電流、B 相電流をステップ変化
させた場合の合成ベクトルを示します。
矢印の傾きがステップ角 (1 ステップを90
度に正規化)、矢印の長さがトルクに相当し
ます。
(1) 2 相励磁の場合
4 → 9 → 14 → 19
(2) 1-2 相励磁の場合
1 → 4 → 6 → 9 → 11 → 14 → 16 → 19
2 相励磁と比べるとトルクは小さく
(1/√2) なりますが、ステップ角が半分に
なります。
(3) 1-2 相励磁の場合 (トルク改善)
1 → 3 → 6 → 8 → 11 → 13 → 16 → 18
(2) の場合と比べると 2 相同時通電の
タイミングでトルクを抑えトルクリップ
を改善できます。
(4) W1-2 相励磁の場合
1 → 2 → 3 → 5 → 6 → 7 → 8 → 10 → 11 → 12 → 13 → 15 → 16 → 17 → 18 → 20
1-2 相励磁の半分のステップ角にすることができ、よりモータの振動を抑えることができます。
10
11
−100%
12
14
TB6562ANG/AFG 使用上の注意点
B 相
100%
9
7
6
8
13
16
15
−100%
5
33.3%
17
18
3
66.7%
4
2
A 相
1
100%
20
19
8. 逆転方法
以下に 2 相励磁駆動を例に示します。
Phase A
Phase B
(1) Stop のタイミングは、どのタイミングでもかまいません。
入力の状態が変わらなければモータは、回転しません。
(2) 逆転時の入力信号は、今までの入力パターンが逆転のタイミングで折り返って進んでいくと考えれば分かり
やすいと思います。
X1A = X2A
正転
正転 逆転
X1B = X2B = L
stop
Stop
逆転
6
2009-03-17

9. 検出回路
p
μ
μ
本 IC は以下の機能を内蔵しておりますが、いかなる場合でも IC を保護するものではありません。
必ず定格以内でご使用ください。
(1) 過電流検出回路
8 つの出力トランジスタに流れる電流を検知し、1 つでも設定 (2.5 A 標準) を超えると全ての出力を OFF し
ます。出力 OFF 後、50 μs (標準) に復帰します。
過電流検出値はおよそ 1.5 A~3.5 A のばらつきを持っております。
(2) 熱遮断回路
ジャンクション温度が 160°C (標準)を超えると全出力を OFF します。
また温度ヒス= 4 0°C (標準) を持っており、ジャンクション温度が 120°C まで、下がると復帰します。
10. 応用回路例
0.7 A 設定例
TB6562ANG/AFG 使用上の注意点
2.2 kΩ
5.1 kΩ
SB
3
Phase A
4
XA1
5
XA2
6
Phase B
21
XB1
20
XB2
19
Vref
F
0. 1
V
F
4700
2 22 23 7 18
reg
V
refA
9 16
F
0.1
OSCV
refB
V
CC
TB6562ANG
1, 12, 13, 24
GND
11
10
17
14
15
24 V
8
Stepping
motor
0.5 Ω
0.5 Ω
CC
100 μF
V
CC
OUT1A
OUT2A
RSA
OUT1B
OUT2B
RSB
0.1 μF
V
7
2009-03-17
(1) 電源端子用コンデンサ
VCCと GND 間にコンデンサを、できるだけ IC の近くに接続してください。
推奨値
項目 推奨値 備考
TB6562ANG/AFG 使用上の注意点
(2) V
(3) V
VCC−GND 間
V
端子の 7 pin, 18 pin, 23 pin は必ず外でショートしてください。
CC
端子用コンデンサ
reg
V
と GND の間にコンデンサを、できるだけ IC の近くに接続してください。
reg
10 μF~100 μF 電解コンデンサ
0.1 μF~1 μF セラミックコンデンサ
推奨値
項目 推奨値 備考
V
−GND 間 0.1 μF~1 μF セラミックコンデンサ
reg
端子用コンデンサ
ref
定電流値を決定する基準電圧のため、スイッチングノイズ除去のためにセラミックコンデンサを接続くださ
い。
推奨値
項目 推奨値 備考
(4) GND
V
−GND 間 0.022 μF~0.1 μF セラミックコンデンサ
ref
GND 端子 (1 pin, 12 pin, 13 pin, 24 pin) は、IC のフレーム (リード) とつながっております。
またチップがこのリード上にマウントしておりますので、GND パターンを大きく取ることにより放熱効果が
上がります。電流が大きい場合は、GND パターンの強化をし、できるだけ広くしてください。
8
2009-03-17
TB6562ANG/AFG 使用上の注意点
11. 最大出力電流
励磁モードが 2 相励磁で連続通電し,周囲温度が高温になると熱遮断回路が動作しやすくなり、モータ電流が流せ
なくなります。
参考として、弊社評価基板に実装し2 相励磁連続通電時の出力電流の最大値を確認しましたので下図参照くださ
い。1-2 相励磁、W1-2相励磁では、平均電流が下がりますので、発熱も下がります。最大出力電流は 2 相励磁より
大きくなります。
また、GND パターンの強化による放熱効果の改善により、電流値のアップが可能です。
TB6562ANG 出力電流 使用範囲 (2 相励磁 )
I
OUT
1.2 A
1.1 A
1.0 A
0.9 A
熱遮断回路
動作領域
TSD動作 (Tj = 160°Cで動作)
参考データ
0.8 A
0.7 A
0.6 A
25°C
正常
T
= 140°C)
jMIN
40°C 60°C 85°C
jMAX
限界 (T
jMAX
= 150°C) TSD バラツキ (T
周囲温度 Ta
測定条件: VCC = 24 V, X1 = X2 = Low (2 相励磁), RS = 0.25 Ω、PHASE 入力周波数 = 100 Hz、
東芝評価基板 (80 mm × 120 mm 両面基板) に実装時 モータ接続時
東芝評価基板
9
2009-03-17
TB6562ANG/AFG 使用上の注意点
モータ
電流
モータ電流
I
OUT
1.5 A
1.5A
1.4 A
1.4A
1.3 A
1.3A
1.2 A
1.2A
1.1 A
1.1A
1.0 A
1.0A
0.9 A
0.9A
0.8 A
0.8A
Iout
TB6562AFG 出力電流 使用範囲
2 相励磁
2相励磁
熱保護動作
正常
W1-2 相励磁
W1-2相励磁
TSD 動作
TSD動作
TSD 動作
TSD動作
25℃ 40℃ 60℃ 85℃
参考データ
T
on (typ.) = 160°C
tsd
on (min) = 140°C
T
tsd
on (typ.) = 160°C
T
T
on (min) = 140°C
tsd
周囲温度 Ta
周囲温度 Ta
測定条件: VCC = 24 V, RS = 0.33 Ω, PHASE 入力周波数= 100 Hz、
東芝評価基板 (105 × 100 mm) に実装時 モータ接続時
東芝評価基板
10
2009-03-17

12. 駆動波形例 (2 相励磁、1A/相)
駆動波形
V phase-A
5 V/div
I
-A
OUT
1A/div
I
-B
OUT
1A/div
TB6562ANG/AFG 使用上の注意点
V phase-A
I
A
OUT
V
-A1
OUT
-A2
V
OUT
測定条件
VCC = 24 V, V
= 3.14 V (I
ref
= 1.0 Aにする調整), RS = 0.25 Ω, Cosc = 4700 pF, L = 10 mH + 5 Ω,
OUT
f phase = 100 Hz, X1 = X2 = Low (2 相励磁), Ta = 27°C
V RSA
11
2009-03-17

TB6562ANG/AFG 使用上の注意点
製品取り扱い上のお願い
• 本資料に掲載されているハードウェア、ソフトウェアおよびシステム(以下、本製品という)に関する情報等、本
資料の掲載内容は、技術の進歩などにより予告なしに変更されることがあります。
• 文書による当社の事前の承諾なしに本資料の転載複製を禁じます。また、文書による当社の事前の承諾を得て本資
料を転載複製する場合でも、記載内容に一切変更を加えたり、削除したりしないでください。
• 当社は品質、信頼性の向上に努めていますが、半導体製品は一般に誤作動または故障する場合があります。本製品
をご使用頂く場合は、本製品の誤作動や故障により生命・身体・財産が侵害されることのないように、お客様の責
任において、お客様のハードウェア・ソフトウェア・システムに必要な安全設計を行うことをお願いします。なお、
設計および使用に際しては、本製品に関する最新の情報(本資料、仕様書、データシート、アプリケーションノー
ト、半導体信頼性ハンドブックなど)および本製品が使用される機器の取扱説明書、操作説明書などをご確認の上、
これに従ってください。また、上記資料などに記載の製品データ、図、表などに示す技術的な内容、プログラム、
アルゴリズムその他応用回路例などの情報を使用する場合は、単独およびシステム全体で十分に評価し、お客様の
責任において適用可否を判断してください。当社は、適用可否に対する責任は負いません。
• 本製品は、一般的電子機器(コンピュータ、パーソナル機器、事務機器、計測機器、産業用ロボット、家電機器な
ど)または本資料に個別に記載されている用途に使用されることが意図されています。本製品は、特別に高い品質・
信頼性が要求され、またはその故障や誤作動が生命・身体に危害を及ぼす恐れ、膨大な財産損害を引き起こす恐れ、
もしくは社会に深刻な影響を及ぼす恐れのある機器(以下“特定用途”という)に使用されることは意図されてい
ませんし、保証もされていません。特定用途には原子力関連機器、航空・宇宙機器、医療機器、車載・輸送機器、
列車・船舶機器、交通信号機器、燃焼・爆発制御機器、各種安全関連機器、昇降機器、電力機器、金融関連機器な
どが含まれます。本資料に個別に記載されている場合を除き、本製品を特定用途に使用しないでください。
• 本製品を分解、解析、リバースエンジニアリング、改造、改変、翻案、複製等しないでください。
• 本製品を、国内外の法令、規則及び命令により、製造、使用、販売を禁止されている製品に使用することはできま
せん。
• 本資料に掲載してある技術情報は、製品の代表的動作・応用を説明するためのもので、その使用に際して当社及び
第三者の知的財産権その他の権利に対する保証または実施権の許諾を行うものではありません。
• 別途書面による契約がない限り、当社は、本製品および技術情報に関して、明示的にも黙示的にも一切の保証(機
能動作の保証、商品性の保証、特定目的への合致の保証、情報の正確性の保証、第三者の権利の非侵害保証を含む
がこれに限らない。)をせず、また当社は、本製品および技術情報に関する一切の損害(間接損害、結果的損害、
特別損害、付随的損害、逸失利益、機会損失、休業損、データ喪失等を含むがこれに限らない。)につき一切の責
任を負いません。
• 本製品、または本資料に掲載されている技術情報を、大量破壊兵器の開発等の目的、軍事利用の目的、あるいはそ
の他軍事用途の目的で使用しないでください。また、輸出に際しては、「外国為替及び外国貿易法」、「米国輸出管
理規則」等、適用ある輸出関連法令を遵守し、それらの定めるところにより必要な手続を行ってください。
• 本製品の RoHS 適合性など、詳細につきましては製品個別に必ず弊社営業窓口までお問合せください。本製品の
ご使用に際しては、特定の物質の含有・使用を規制するRoHS 指令等、適用ある環境関連法令を十分調査の上、か
かる法令に適合するようご使用ください。お客様がかかる法令を遵守しないことにより生じた損害に関して、当社
は一切の責任を負いかねます。
12
2009-03-17
 Loading...
Loading...