

Page 1

TB62209FG
東芝BiCDプロセス集積回路 シリコン モノリシック
TB62209FG
チョッパ方式マイクロステップ疑似正弦波駆動ステッピングモータドライバ
TB62209FG は、チョッパ方式マイクロステップ疑似正弦波駆動の
ステッピングモータドライバです。
2 相バイポーラタイプのステッピングモータを駆動する際に、低ト
ルクリップル、低振動駆動に最適と言われる、「マイクロステップ」
駆動をより容易に実現するためのシステムとして、CLK In マイクロ
ステップ用デコーダ回路を、オンチップで内蔵しているため、モー
タの駆動が容易でありモータを低トルクリップル、高効率で駆動す
ることができます。
さらに、DMOS (Power MOS FET) にて出力段を構成しているた
め、通常の Bipolar トランジスタ出力の IC よりも、出力部消費電力
を非常に小さく抑えることができます。
また、チョッピング時に電流の減衰比率を外部から切り替えるこ
とを可能にした 「MIXED DECAY MODE」 を内蔵し、電流減衰比率を負荷の特性に合わせて、4 段階に切り替え可能に
しています。
特 長
質量: 0.79 g (標準)
• バイポーラステッピングモータを 1 チップにてコントロール可能です。
• BiCD プロセスによる、モノリシック IC です。
• 低 On 抵抗 R
• マイクロステップ用のデコーダと 4 bit D/A を内蔵。
• 検出回路として、ISD、TSD、V
• チャージポンプ回路内蔵 (外付けコンデンサ × 2)
• パッケージ : 36 PIN POWER FLAT PACKAGE (HSOP36-P-450-0.65)
• 最大モータ電源電圧: 40 V (max)
• 最大モータ出力電流: 1.8 A (max)
• 2 相、1-2 (2 タイプ)、W1-2、2W1-2、4W1-2 相、および軸固定モードを選ぶことができます。
• 定電流方式として MIXED DECAY MODE を内蔵し、4 段階の減衰比率を指定できます。
• チョッピング周波数は外部コンデンサと抵抗にて設定可能です。
100 kHz 以上での高速チョッピングが可能です。
注: 使用に当たっては熱的条件に十分注意してください。一般の製品より静電耐圧が低いため、取り扱いにご注意
ください。
= 0.5 Ω (Tj = 25°C @1.0 A: typ.) を実現。
on
DD・VM
電源パワーオンリセット回路を内蔵。
2010-10-07 1
Page 2
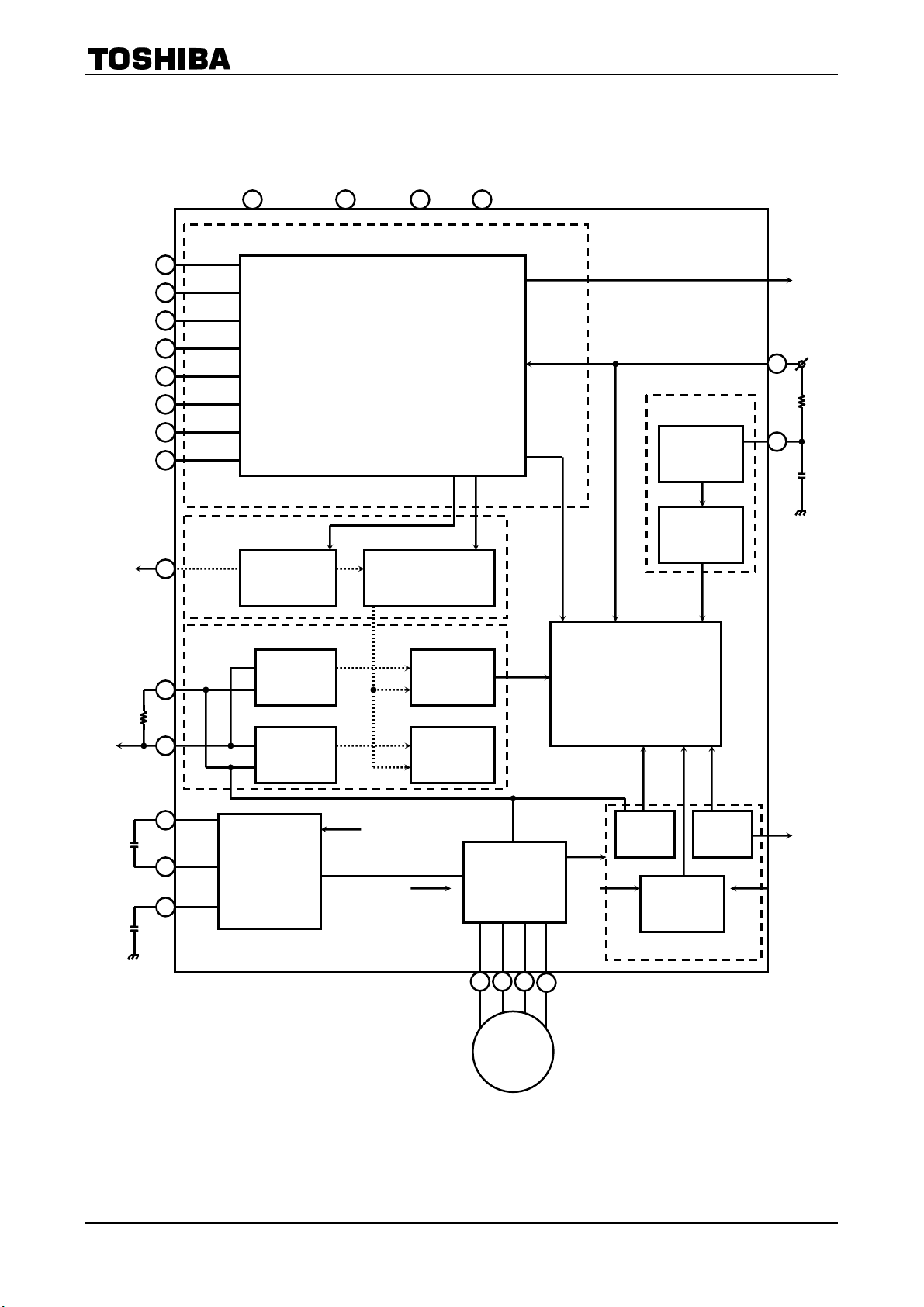
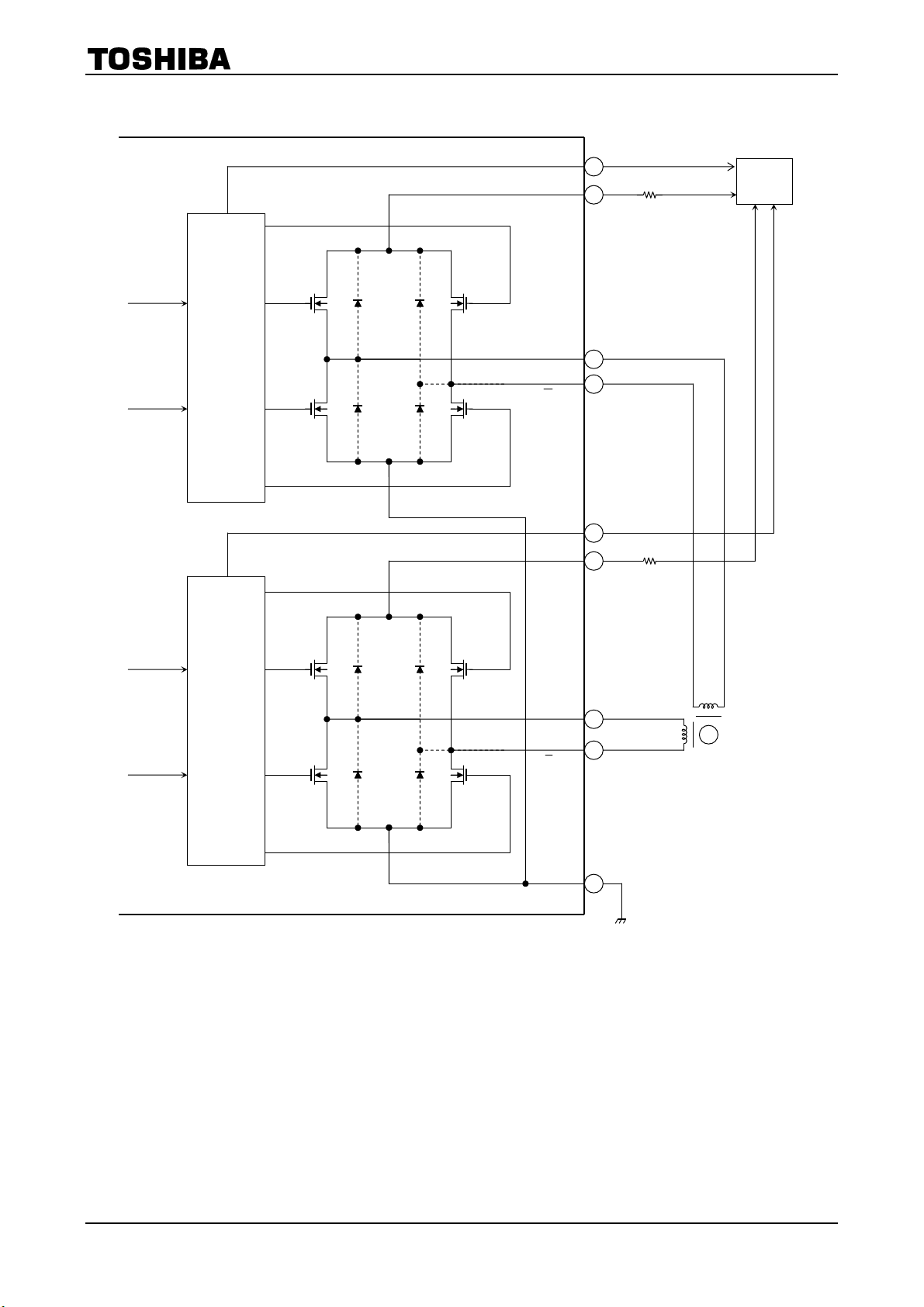
ブロック図
f
TB62209FG
1. 全体図
RESET
CW/CCW
ENABLE
STANDBY
D MODE 3
D MODE 2
D MODE 1
CLK
V
re
TORQUE 1
Current Level Set
TORQUE 2 MDT 1 MDT 2
Torque Control
Micro Step Decoder
4 Bit D/A (Sine Angle
Control)
V
DD
Chopper OSC
OCS
CR-CLK
Converter
MO
CR
V
M
Ccp C
Ccp B
Ccp A
Current Feedback (×2)
V
R
S
V
M
Charge
Pump
Unit
RS 1
V
RS 2
STANDBY
ENABLE V
R
S COMP 1
R
S COMP 2
(Mixed Decay Control)
Output
(H-Bridge)
×2
Stepping
Motor
Output Control
ISD
V
DDR/VMR
M
Detect
Detection Unit
TSD
VDD
TSD
Detect
2010-10-07 2
Page 3
TB62209FG
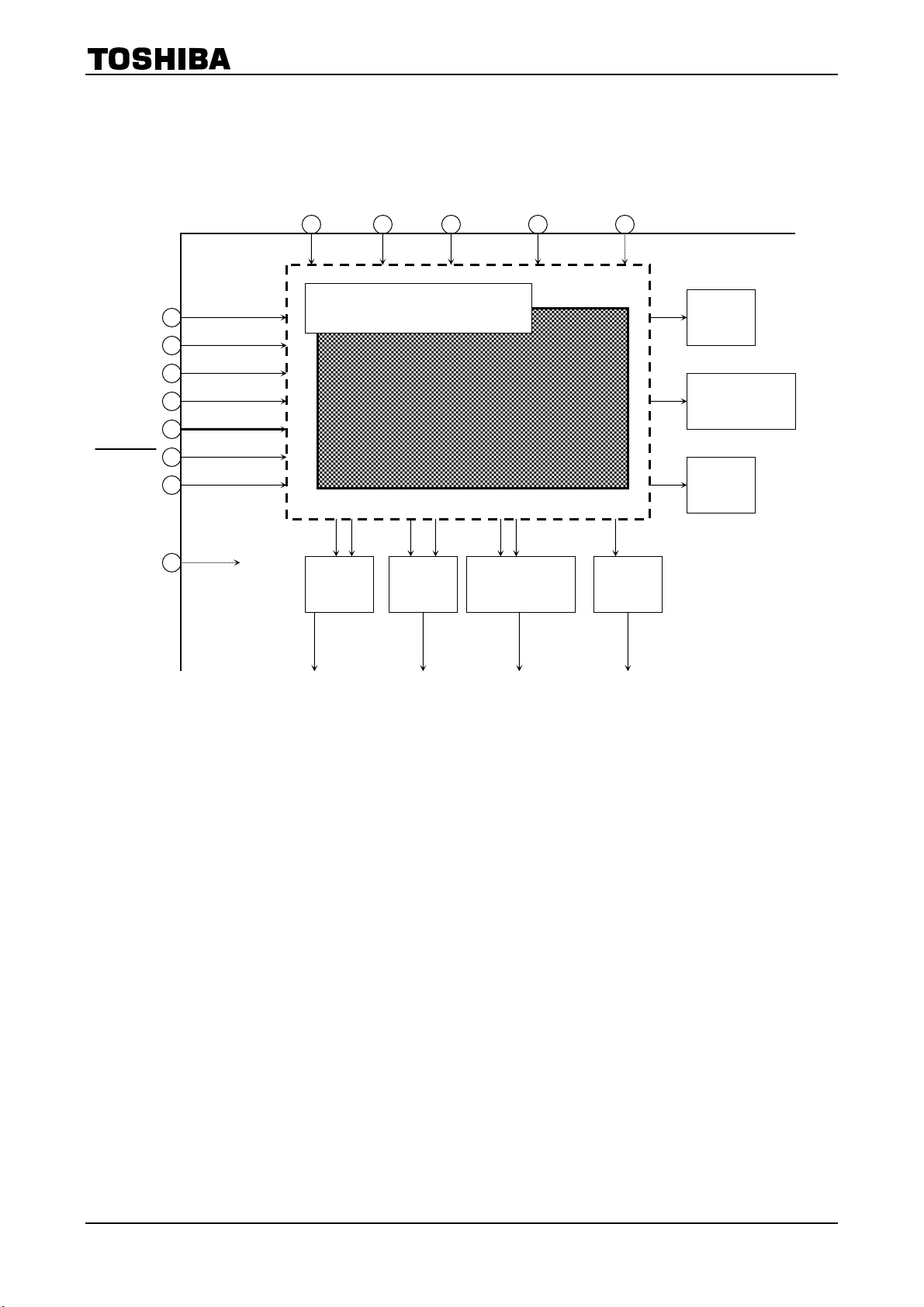
2.
LOGIC UNIT
D MODE 1
D MODE 2
D MODE 3
CW/CCW
CLK
STANDBY
RESET
機能
設定 PIN の論理によって、マイクロステップ電気角を出力します。
MDT 1 MDT 2
マイクロステップデコーダ
TORQUE 1 TORQUE 2
DATA MODE
DECAY
× 2 bit
A 側
階段電流データ
× 4 bit
A 側
位相情報
× 1 bit
A 側
ENABLE
出力制御
回路
TORQUE
× 2 bit
電流帰還
回路
DECAY
× 2 bit
MIXED
DECAY
回路
B 側
階段電流データ
× 4 bit
B 側
D/A 回路
位相情報
× 1 bit
B 側
出力制御
回路
2010-10-07 3
Page 4
TB62209FG
f
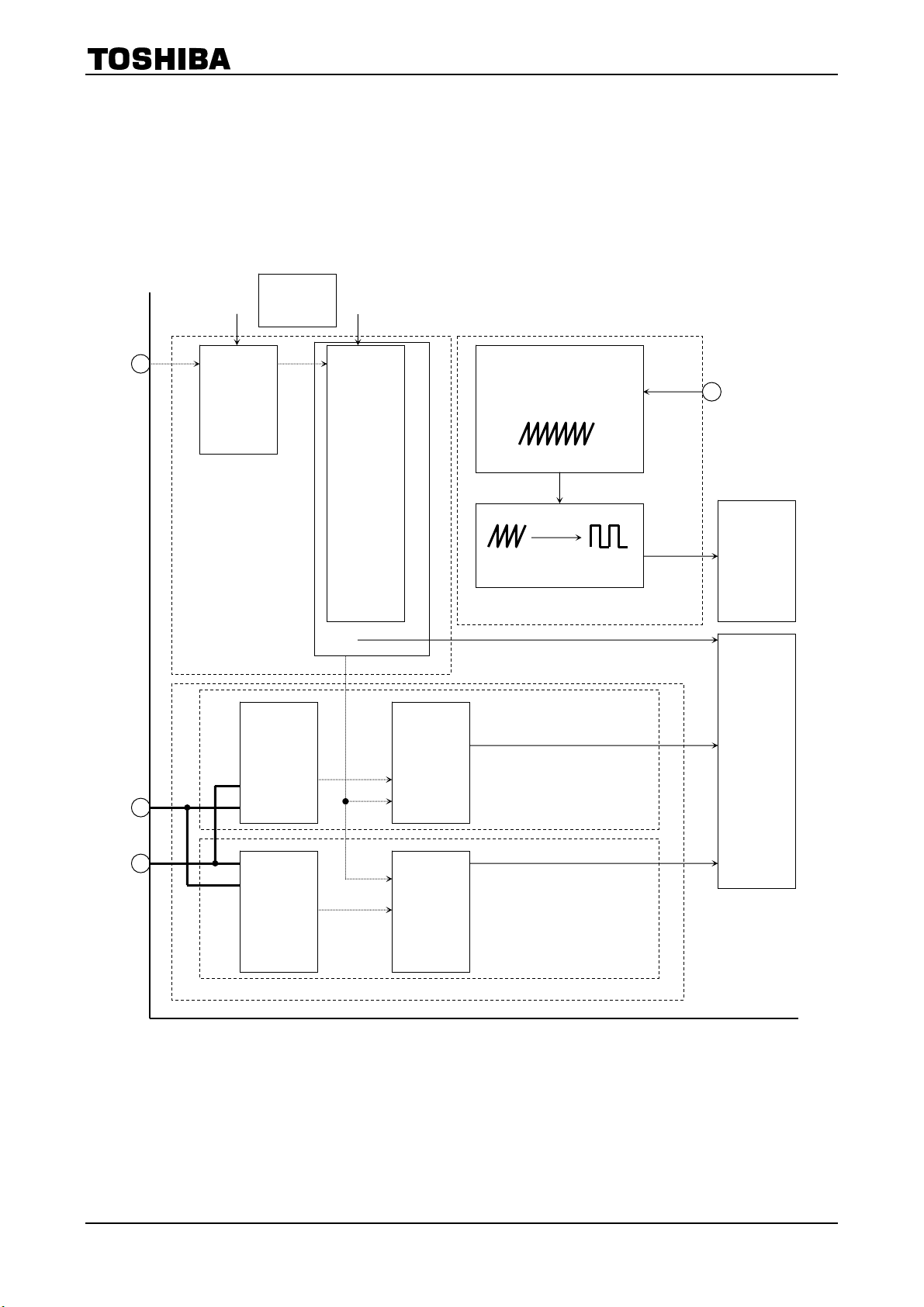
3. 電流値帰還回路、電流値設定回路
機能
電流設定回路は、電流設定デコーダによって出力電流値の基準電圧を設定します。
また電流帰還回路は、R
生する電位差と、電流設定回路より出力された基準電圧を比較することによって、電流設定値と出力電流の
関係を出力制御回路に出力します。
C/R が接続されたチョッピング基準信号作成回路では、チョッピング周波数の基準になる内部基準 CLK
(CR-CLK 信号) が作成されます。
TORQUE
0、1
V
re
100%
85%
70%
50%
TORQUE
制御回路
デコーダ
UNIT
より
S
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
と VMの間に接続される電流値センス抵抗 RRSに電流が流れることによって発
CURRENT
0-3
階
段
電
流
値
選
択
回
路
4 bit
D/A
回路
チョッピング基準
チョッピング基準作成回路
波形発生回路
波形整形回路
CR
MIXED
DECAY
TIMMING
回路
電源設定回路
DA 回路
VRS回路 1
(RS-VM
差電圧
検出)
R
S
V
M
電流帰還回路
VRS回路 2
(VM-RS
差電圧
検出)
0
出力停止信号 (ALL OFF)
CHARGE MODE
時に使用
NF
(設定電流
到達信号)
RNF
(設定電流
監視信号)
FAST MODE
時に使用
R
S COMP
回路
1
(注 1)
R
S COMP
回路
2
(注 2)
出力
制御
回路
注 1: R
注 2: R
S COMP1
S COMP2
: 設定電流値と出力電流を比較し、設定値に達した場合信号を出力します。
: チョッピング時の FAST MODE 最後の時間で、設定電流値と出力電流を比較し、設定電流値
が出力電流以下の場合、信号を出力します。
2010-10-07 4
Page 5
TB62209FG
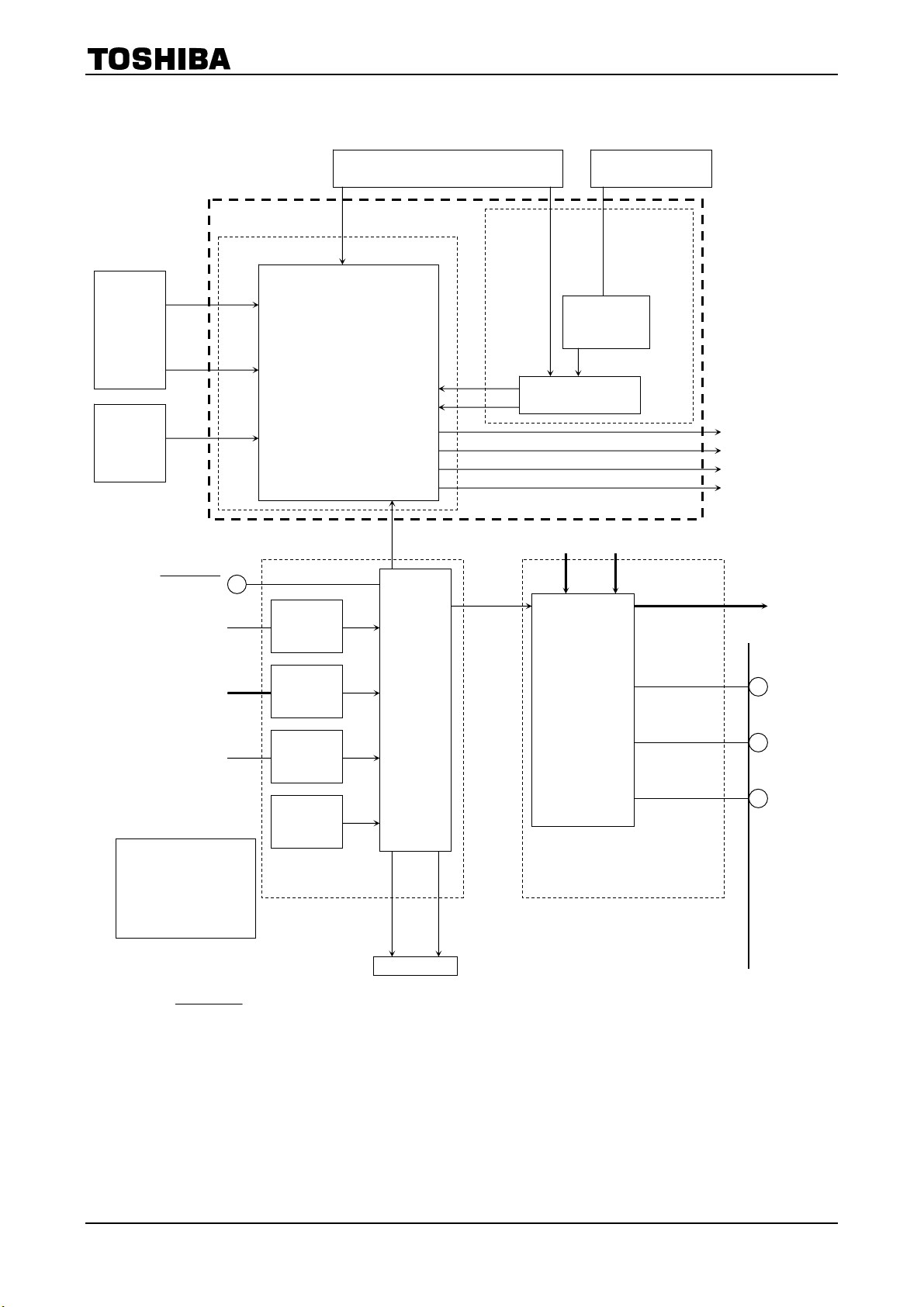
4. 出力制御回路電流値帰還回路、電流値設定回路
階段電流設定
デコーダ回路
出力制御回路
PHASE
電流
帰還
回路
電流
設定
回路
NF 設定電流
到達信号
RNF 設定電流
監視信号
出力停止信号
出力制御回路
MIXED
DECAY
TIMMING
Charge Start
U1
U2
L1
L2
出力 STOP 信号
DECAY
MODE
チョッピング基準
CR
COUNTER
CR Selector
V
DD
作成回路
TIMMING
V
M
MIXED
DECAY
回路
出力回路
STANDBY
出力端子
V
: VDD電源監視
DDR
VMR: VM電源監視
ISD: 過電流検出回路
TSD: 過熱検出回路
注: STANDBY 端子は IC 内部で約 100 kΩ の抵抗で PULL DOWN しています。
ISD
回路
V
M
V
DD
VMR
回路
V
DDR
回路
TSD
回路
検出回路
階段電流設定
LATCH CLEAR
信号
内部
停止
信号
選択
回路
LOGIC
CHARGE
PUMP
停止信号
CHARGE PUMP
MIXED DECAY
TIMMING TABLE
CLEAR 信号
CHARGE
PUMP
回路
回路
出力上側
ドライブ電源
VH
ただし、この端子の非使用時は必ず GND に接続してください。誤動作の可能性があります。
出力回路
Cop A
Cop B
Cop C
2010-10-07 5
Page 6
TB62209FG
5. 出力等価回路
出力制御
回路より
出力制御
回路より
出力上側
ドライブ
電源
(VH)
U1
U2
L1
L2
出力
駆動
回路
A 相
出力上側
ドライブ
電源
(VH)
U1
U2
L1
L2
出力
駆動
回路
B 相
V
M A
R
S A
U1
L1
U1
L1
L2
L2
U2
U2
A 出力
A 出力
R
SB
B 出力
B 出力
R
V
M B
R
RS B
PGND
RS A
VMへ
M
注: 点線のダイオードは、寄生ダイオードです。
2010-10-07 6
Page 7
TB62209FG
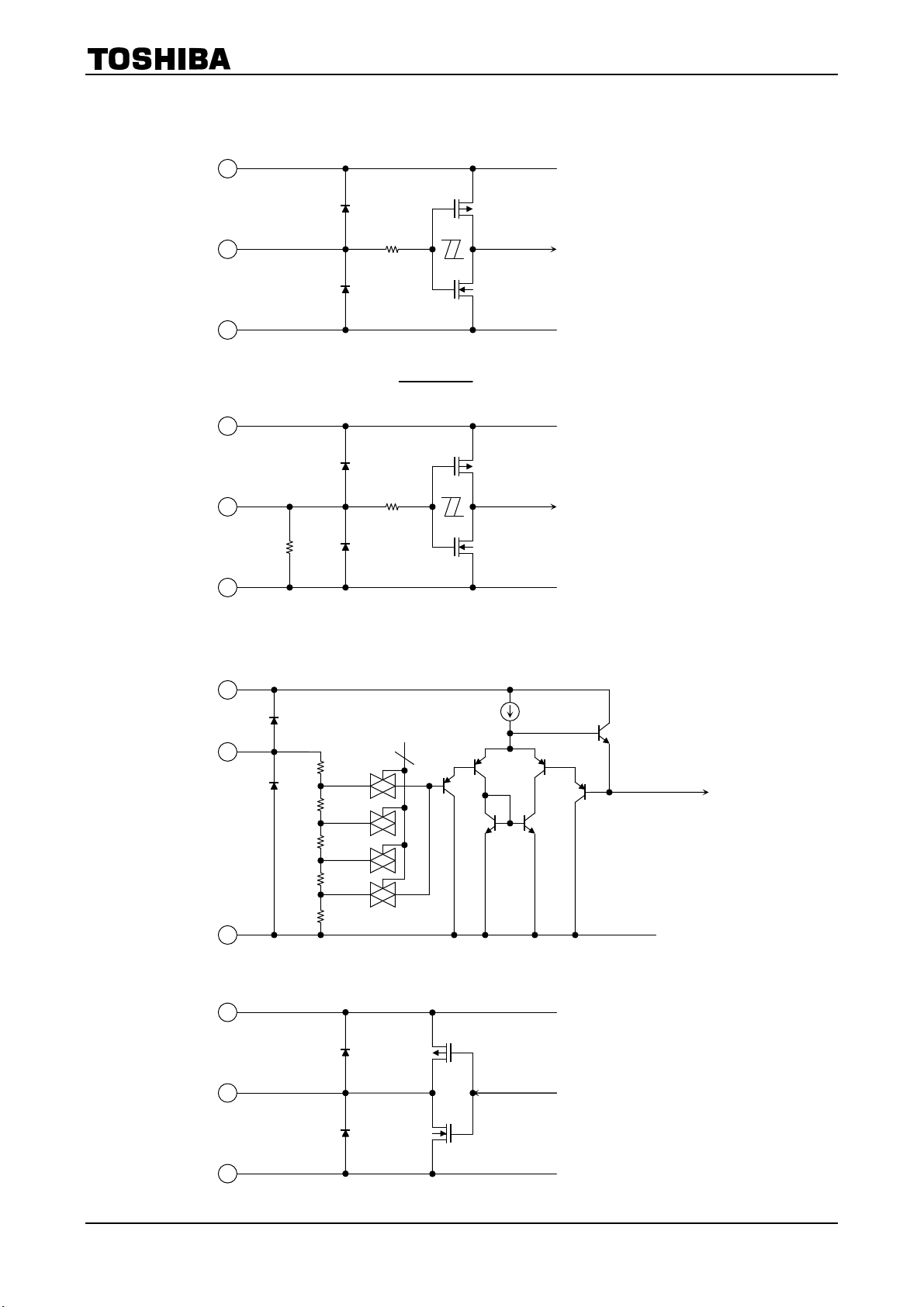
6. 入力等価回路
1.
入力回路
VDD
IN
VSS
2.
入力回路
VDD
IN
(CLK、TORQUE、MDT、CW/CCW)
(RESET、ENABLE、STANDBY、DATA MODE、Drive Mode)
150 Ω
150 Ω
内部
内部
LOGIC へ
GND
LOGIC へ
100 kΩ
VSS
3. V
入力回路
ref
VDD
IN
VSS
4.
出力回路
VDD
(MO、PROTECT)
GND
2
D/A 回路へ
GND
OUT
VSS
GND
2010-10-07 7
Page 8
TB62209FG
f
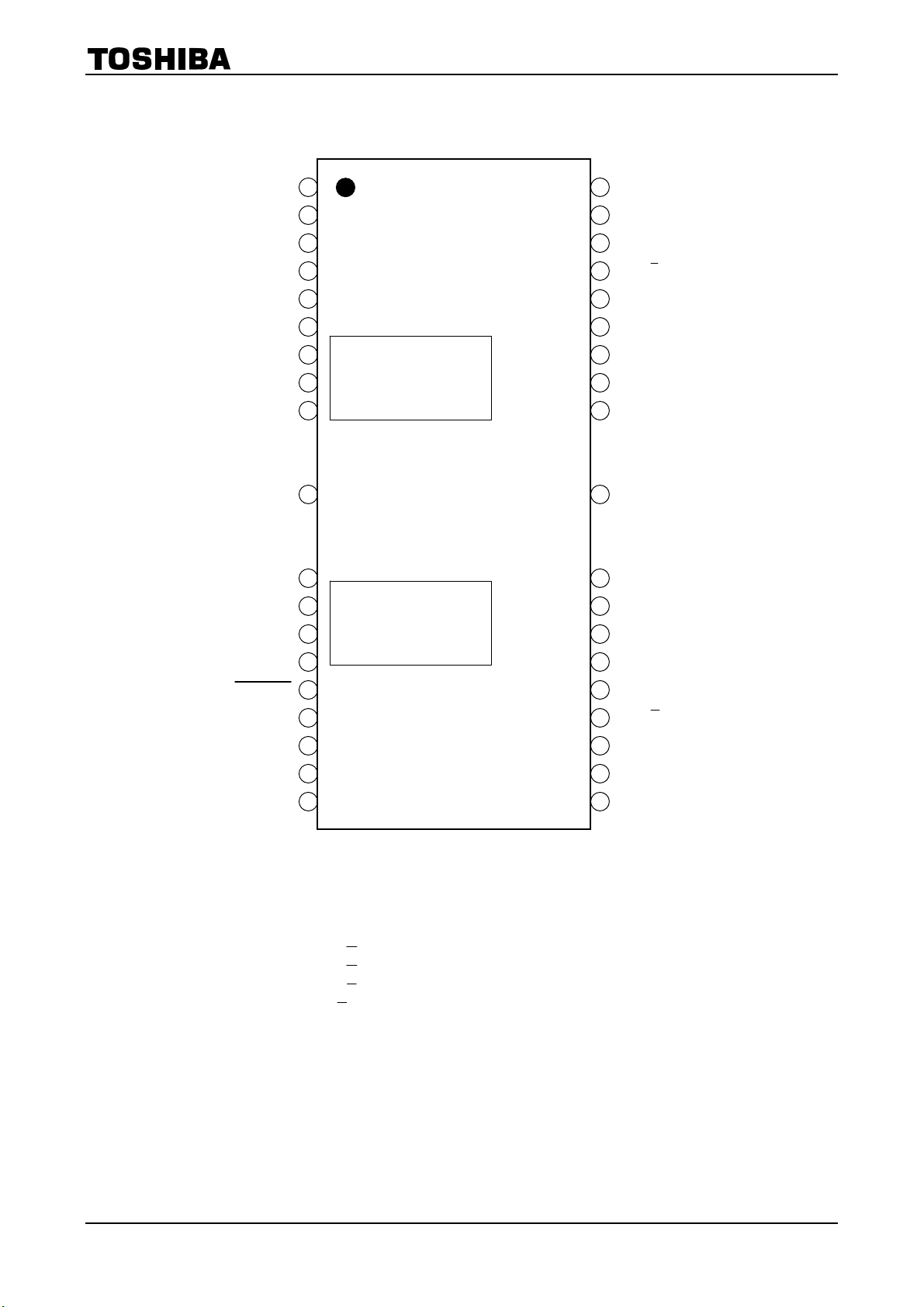
端子接続図
(top view)
1 D MODE 1
2 D MODE 2
3 D MODE 3
4 CW/CCW
5 V
DD
S B
6 V
re
7 ピンと 8 ピンとは
7 NC
リードフレームでショートして
8 NC
いますが、チップ上への
接続はありません。
9 R
(FIN)
10 R
S A
11 ピンと 12 ピンとは
11 NC
リードフレームでショートして
いますが、チップ上への
12 NC
接続はありません。
13 VM
14 STANDBY
15 Ccp A
16 Ccp B
17 Ccp C
18 MO
データモード、PWM時のピンアサイン
TB62209FG
36
CR
35
CLK
34 ENABLE
33 OUT B
32
RESET
31 DATA MODE
30 NC
29 OUT B
28 PGND
(FIN)
27 PGND
26 OUT A
25 NC
24 MDT 2
23 MDT 1
22 OUT A
21 TORQUE2
20 TORQUE1
19 PROTECT
D MODE 1 → GA+ (OUT A、 A)
D MODE 2
D MODE 3
CW/CCW
→ GA− (OUT A、 A)
→ GB+ (OUT B、 B)
→ GB− (OUT B、 B)
以上のように読み替えてください。
2010-10-07 8
Page 9

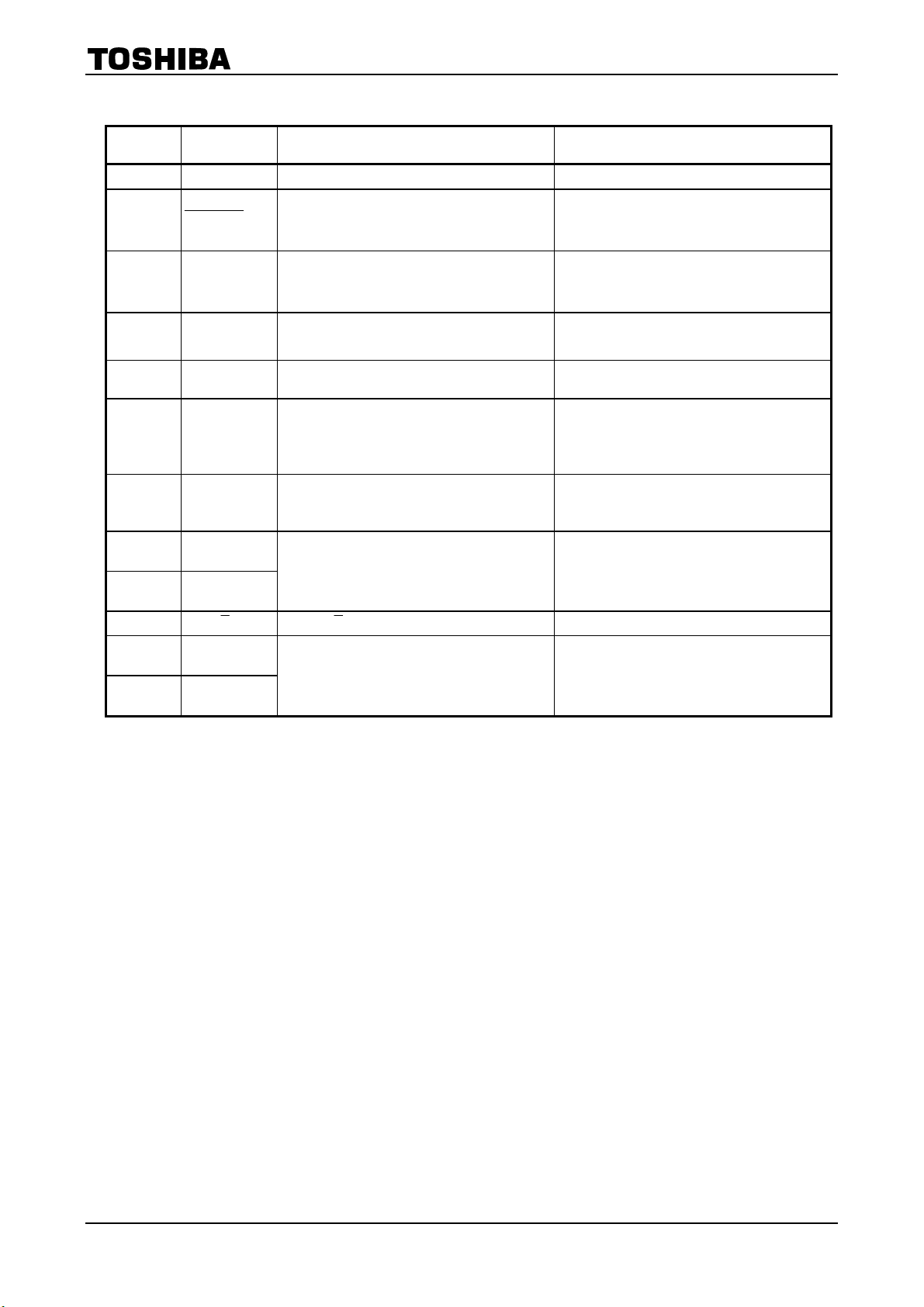
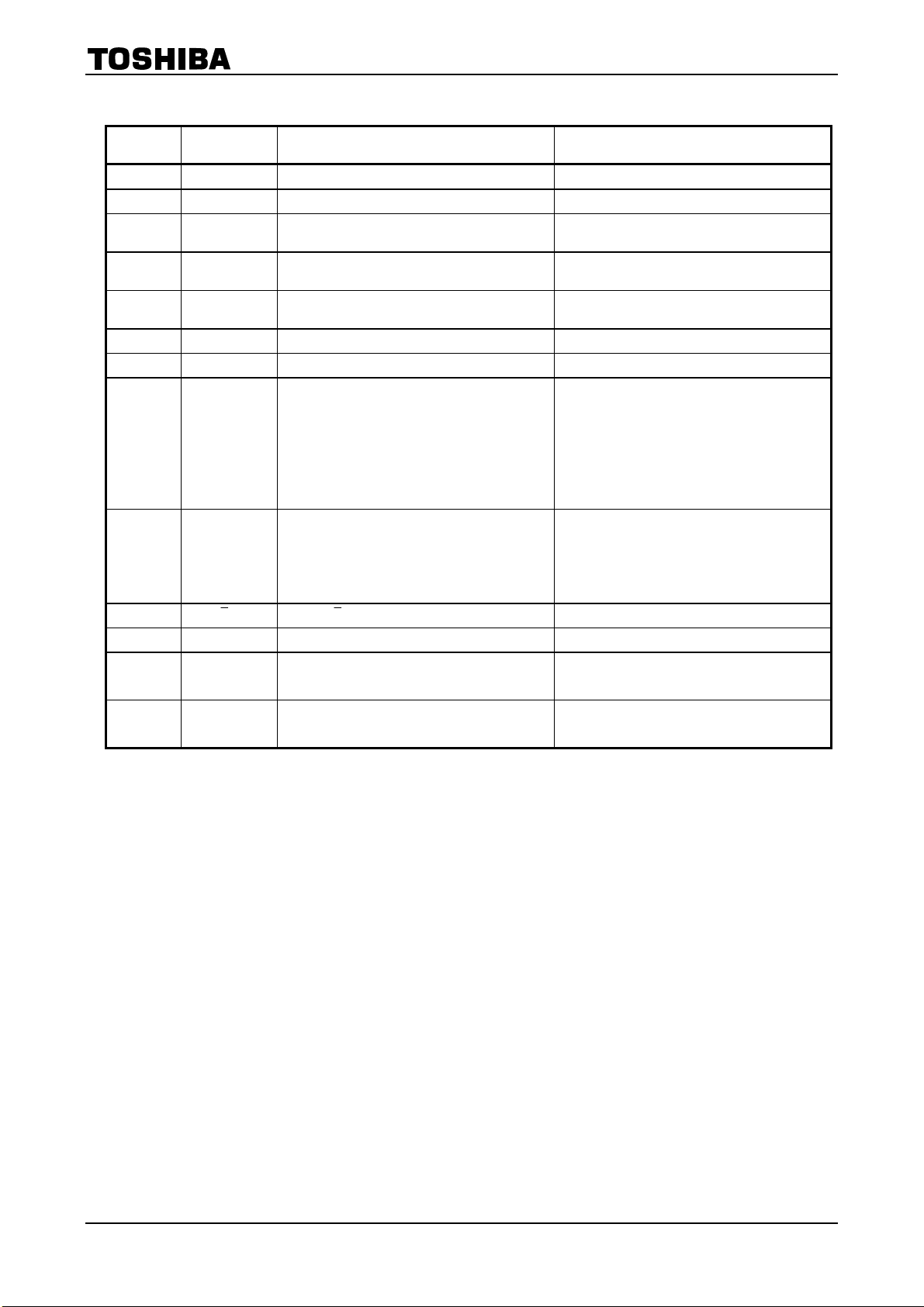
端子機能説明 1
ピン番号 端子名 機能 備考
D MODE 3、2、1
1 D MODE 1
2 D MODE 2
3 D MODE 3
4 CW/CCW モータ回転方向の設定
5 VDD ロジック電源接続端子 ロジック電源 (= 5 V) を接続します。
6 V
7 NC ノンコネクション 配線されていません。
8 NC ノンコネクション 配線されていません。
9 R
FIN FIN ロジックグラウンド
10 R
11 NC ノンコネクション 配線されていません。
12 NC ノンコネクション 配線されていません。
ref
S B
S A
モータ駆動モード
設定端子
出力電流設定用
リファレンス電源端子
B
軸側電源端子
(
電流検知用抵抗の接続端子)
A
軸側電源端子
(
電流検知用抵抗の接続端子)
LLL: STANDBY PIN と同様に低消費電力機能
LLH: 固定モード
LHL: 2 相励磁
LHH: 1-2 相励磁 (A)
HLL: 1-2 相励磁 (B)
HLH: W1-2 相励磁
HHL: 2W1-2 相励磁
HHH: 4W1-2 相励磁
CW:
正転
CCW:
逆転
電流設定用に電圧源を接続します。
電流センス抵抗を VMとの間に接続します。
必ずパワーグラウンドとショートしてください。
放熱の役割がありますので、熱設計を考慮してパ
ターンの設計をお願いします。
電流センス抵抗を VMとの間に接続します。
データモード、PWM時のピンアサイン
TB62209FG
D MODE 1 → GA+ (OUT A、 A)
D MODE 2
D MODE 3
CW/CCW
→ GA− (OUT A、 A)
→ GB+ (OUT B、 B)
→ GB− (OUT B、 B)
2010-10-07 9
Page 10
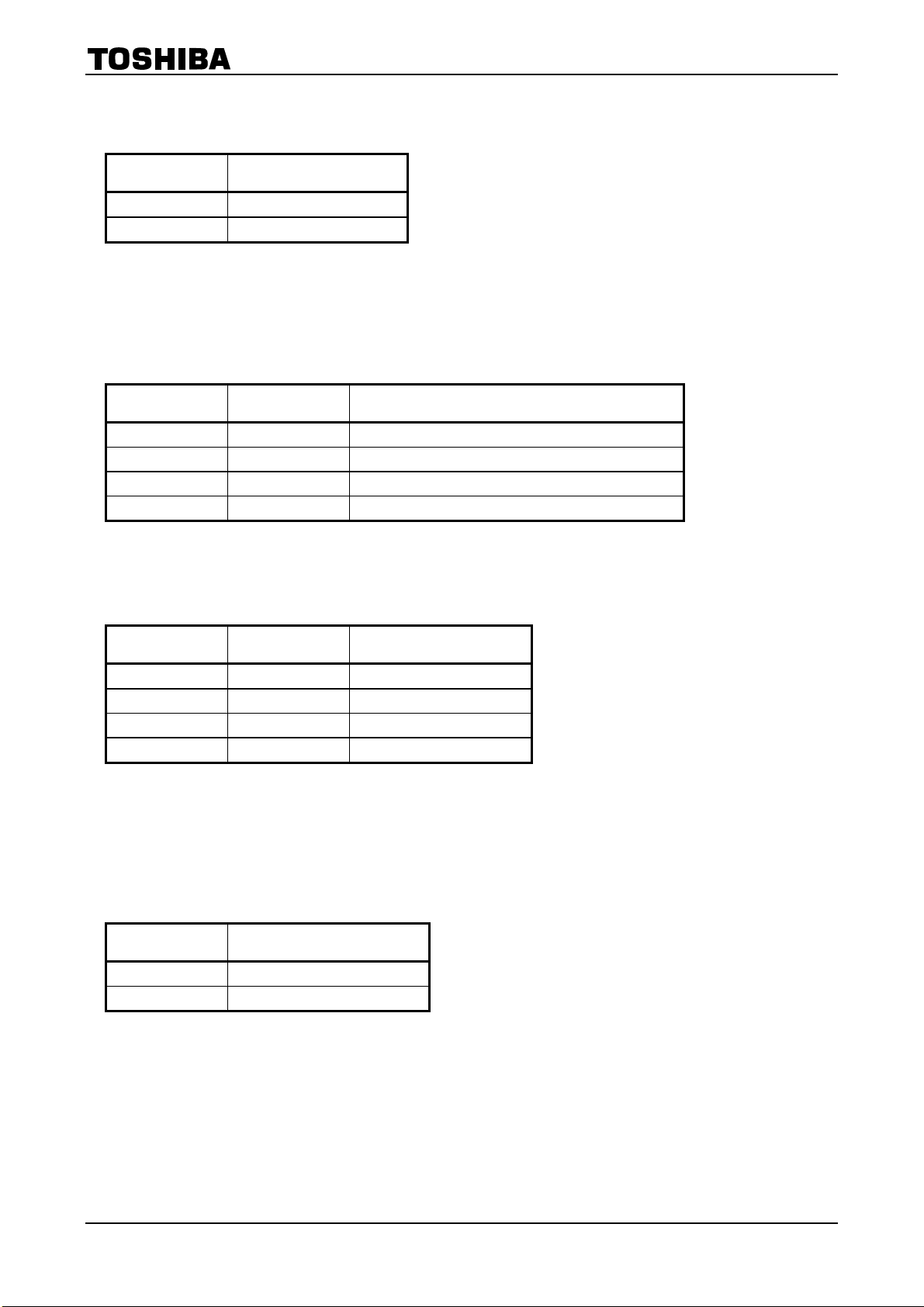
端子機能説明 2
ピン番号 端子名 機能 備考
13 VM モータ電源監視端子 モータ電源に接続します。
通常動作
H:
14 STANDBY 全機能イニシャライズ&省電力モード
15 Ccp A
16 Ccp B
17 Ccp C (汲み上げ側)
18 MO 電気角 (= 0 度) モニタ端子
19 PROTECT TSD 動作検知端子
20 TORQUE 1
21 TORQUE 2
出力段駆動電源昇圧用
コンデンサ接続端子 (対 GND: 蓄積側)
出力段駆動電源昇圧用
コンデンサ接続端子
モータトルク切り替え設定
L:
動作停止
チャージポンプ出力停止
チャージポンプ (電荷蓄積側) のコンデンサを
接続します。
V
+ V
M
チャージポンプ (電荷汲み上げ側) のコンデン
Ccp C との間に接続します。
サを
チャージポンプ (電荷汲み上げ側) のコンデン
Ccp B との間に接続します。
サを
4W1-2
0 度 (B: 100%、A: 0%) で出力。
2
相励磁では、電気角が 0 度(B: 100%、A: 100%)
で出力。
動作開始時、STANDBY を’H’にすることで、
'L'
を出力し、TSD (サーマルシャットダウン)
動作を検知して、H レベルを出力します。
Torque 2
LH: 85%
HL: 70%
LL: 50%
が発生します。
DD
、2W1-2、W1-2、1-2 相励磁で電気角が
、1 = HH: 100%
TB62209FG
22 OUT A 出力端子 A チャネル ⎯
MDT 2
23 MDT 1
24 MDT 2
MIXED DECAY
の設定
、1 = HH: 100%
HL: 75%
LH: 37.5%
LL: 12.5%
2010-10-07 10
Page 11
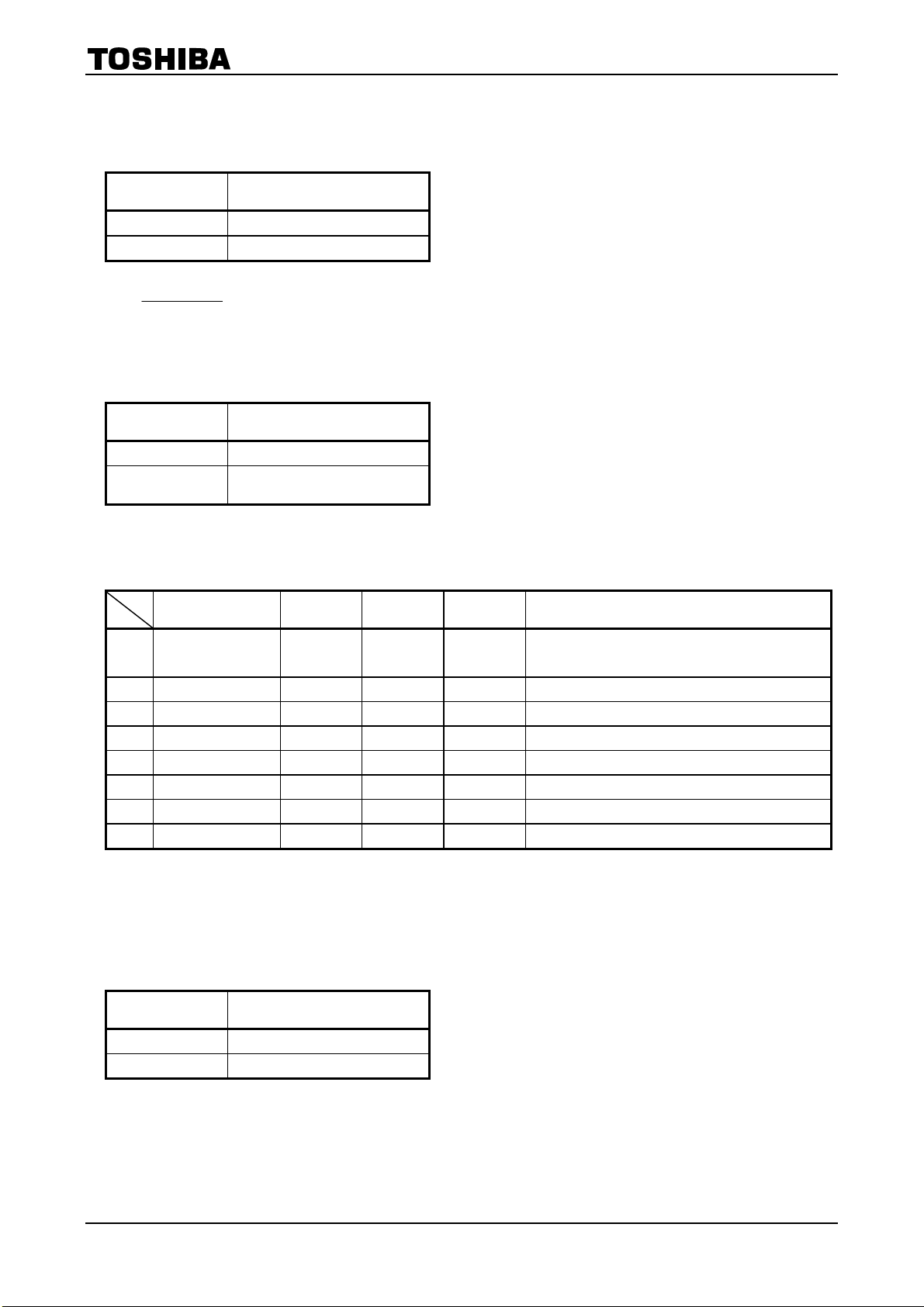
端子機能説明 3
ピン番号 端子名 機能 備考
25 NC ノンコネクション 配線されていません。
26 OUT A 出力端子 A チャネル ⎯
27 PGND パワーグラウンド
FIN FIN ロジックグラウンド
28 PGND パワーグラウンド
29 OUT B 出力端子 B チャネル ⎯
30 NC ノンコネクション 配線されていません。
31 DATA MODE
32 RESET 電気角の初期化
33 OUT B 出力端子 B チャネル ⎯
34 ENABLE 出力イネーブル端子 強制的に OFF します。
35 CLK
36 CR
CLK-In
切り替え
モータ回転数決定用
CLK
チョッピング基準周波数リファレンス端子
(チョッピング周波数の設定用)
動作と外部 PWM 制御との Mode
信号の入力
パワーグラウンド、VSSはすべてショートしてく
ださい。
放熱の役割がありますので、熱設計を考慮して、
パターンの設計をお願いします。
パワーグラウンドはすべてショートしてくださ
い。
H : 外部 PWM 制御 Mode
L : CLK-IN 動作 Mode
通常は、CLK-IN Mode (= L) での使用を推奨
します。
外部 PWM 制御(=H)のときは定電流制御などの
機能は一切働きませんので、Lレベルに固定
してください。
電気角を強制的にイニシャライズします。
このとき、ENABLE はモータの誤動作を
防ぐため、L にすることを推奨します。
H:
L:
CLK
Up
ここに接続する定数でチョッピング周波数
が決まります。
電気角のリセット
通常動作
ごとに電気角が一つ進みます。
エッジで信号が反映されます。
TB62209FG
2010-10-07 11
Page 12
TB62209FG
1.
CW/CCW
ステッピングモータの回転方向を切り替えます。
Input ファンクション
H 正転 (CW)
L 逆転 (CCW)
2.
DECAY MODE X0、X1
定電流制御時の、電流減衰速度を指定します。
% (
す。
(標準値は、37.5%です。)
MDT 2 MDT 1 ファンクション
L L 12.5% MIXED DECAY MODE
L H 37.5% MIXED DECAY MODE
H L 75% MIXED DECAY MODE
H H 100% MIXED DECAY MODE (FAST DECAY MODE)
3.
TORQUE X
電流のピーク値を、4 段階で可変します。起動時と定速回転で、使用電流値を変えたい場合などに使います。
のファンクション
割合) が大きいほど、電流の減衰力が大きくなりますが、電流波高値 (カレントリップル) が大きくなりま
のファンクション
のファンクション
TORQUE 2 TORQUE 1 コンパレータ基準電圧
H H 100%
L H 85%
H L 70%
L L 50%
4.
RESET
の場所
この機能です。
Input ファンクション
のファンクション (電気角の強制初期化
CLK 入力方式 (デコーダ方式) では、CLK 数をカウントしていないと、MO 以外では、その時点電気角がど
(電気角)にあるかがわかりません。そのために、強制的に電気角を初期化 (イニシャライズ) するのが、
MO
出力中 (電気角 = 0) に、励磁モードを他の駆動モードに替える場合などにも使用します。
H イニシャライズ (電気角 = 0)
L 通常動作
)
2010-10-07 12
Page 13
TB62209FG
5.
6.
7. 励磁
ENABLE
動作時に、すべての出力トランジスタを強制的に OFF します。
電気角や各動作モードなどのデータはすべて保持されます。
Input ファンクション
H 動作可能 (ACTIVE)
L 出力停止 (出力以外は動作)
STANDBY
出力を停止させるとともに、チャージポンプ回路 (昇圧電源回路) を停止します。電源投入時などは、Standby
Mode
(
このとき、電気角のデータは保持されます。)
Input ファンクション
H 動作可能 (ACTIVE)
L
のファンクション (出力の動作
のファンクション
にしておくことを推奨します。
出力停止 (省電力モード。
チャージポンプ停止)
MODE
のファンクション
)
励磁 MODE DM3 DM2 DM1 備考
1 低消費電力 Mode 0 0 0
2 軸固定 MODE 0 0 1 0 度のみでロック
3 2 相励磁 0 1 0 45 → 135 → 225 → 315 → 45 度
4 1-2 相励磁 (A) 0 1 1 0%,100%使用タイプ 1-2 相励磁
5 1-2 相励磁 (B) 1 0 0 0%,71%,100%使用タイプ 1-2 相励磁
6 W1-2 相励磁 1 0 1 2 bit Micro Step
7 2W1-2 相励磁 1 1 0 3 bit Micro Step
8 4W1-2 相励磁 1 1 1 4 bit Micro Step
8.
DATA MODE
外部 Duty 制御 (強制 PWM 制御) と、定電流 CLK-IN 制御を切り替えます。Phase Mode では、H ブリッジ
の強制反転、および出力
のみで有効です。
Input ファンクション
H PHASE MODE
L CLK-IN MODE
のファンクション
OFF のみが可能です。マイクロステップ駆動を含む定電流駆動制御は、CLK-IN 制御
STANDBY MODE
チャージポンプ停止
注: 通常は「CLK-IN」 Mode をお使いください。
2010-10-07 13
Page 14
TB62209FG
9. イニシャライズ直後の電気角設定
イニシャライズ (RESET を解除した直後) では、以下の電流がセットされます。
低消費電力モードでも、内部デコーダの電気角設定は進行しますが、電流は出力されません。
2
相励磁と nW1-2 相励磁 (n = 0、1、2、4) では、電気角の初期値が異なりますのでご注意ください。
励磁 MODE IB (%) IA (%) 備考
1 低消費電力 Mode 100 0 電気角は進行・出力なし
2 軸固定 MODE 100 0
3 2 相励磁 100 100 45 度
4 1-2 相励磁 (A) 100 0 0 度
5 1-2 相励磁 (B) 100 0 0 度
6 W1-2 相励磁 100 0 0 度
7 2W1-2 相励磁 100 0 0 度
8 4W1-2 相励磁 100 0 0 度
電気角は進行しますが、IA の出力がないためモータは
回りません。
注 1: IB = 100%、IA = 0%を電気角 0 度として、IB = 0%、IA = 100%を電気角+90 度とします。
10.
DATA MODE
のファンクション
相のみ記載
(A
)
外部の PWM 信号 (Duty 信号) を入力して、電流の制御をします。定電流制御の機能、過電流検出回路など
は動作しません。
CLK-In
制御にて、制御できない場合、使用を検討してください。
GA+ GA− 出力状態
(1) L L 出力 OFF
(2) L H A+相: L、A−相: H
(3) H L A+相: H、A−相: L
(4) H H 出力 OFF
(1)
U1
OFF
L1
OFF
・(4)
U2
OFF
L2
OFF
PGND
(2)
U1
OFF
L1
ON
注
負荷
PGND
U2
ON
L2
OFF
U1
ON
OFF
L1
(3)
注
負荷
U2
OFF
ON
L2
PGND
注 2: (1)・(4) では出力を OFF しています。
D MODE 1
D MODE 2
D MODE 3
CW/CCW
→ GA+ (OUT A、 A)
→ GA− (OUT A、 A)
→ GB+ (OUT B、 B)
→ GB− (OUT B、 B)
2010-10-07 14
Page 15

TB62209FG
絶対最大定格
ロジック電源電圧 V
モータ電源電圧 V
出力電流( 注 1)
電流検知端子電圧 V
チャージポンプ端子
最大電圧 (CCP1 端子)
ロジック入力電圧(注 2) V
許容損失
動作温度 T
保存温度 T
接合部温度 T
(Ta = 25°C)
項目 記号 定格 単位
DD
40
M
1.8 A/相
OUT
VM ± 4.5 V V
RS
V
V
H
~VDD + 0.4 V
IN
( 注 3) 1.4
( 注 4)
P
D
−40~85 °C
opr
−55~150 °C
stg
150 °C
j
7 V
V
+ 7.0 V
M
3.2
W
注 1: 通常時の最大電流値は熱計算の上、1 相当たり 1.5 A 以下を目処にご使用ください。
周囲温度条件、基板条件によっては発熱条件から電流が制限されることがあります。
注 2: V
は 7 V 以下を入力してください。
IN
注 3: 単体測定時 (Ta = 25°C)
注 4: 専用実装基板へ実装時 (Ta = 25°C)
Ta: IC 周囲温度です。
T
: 動作させるときの IC 周囲温度です。
opr
Tj: 動作中の IC チップ温度です。Tj最大値は過熱検出回路(TSD) の動作温度で制限されます。
動作条件
電源電圧 V
モータ電源電圧 V
出力電流 I
ロジック入力電圧 V
クロック周波数 f
チョッピング周波数 f
V
電流検知端子電圧 V
(Ta = 0~85°C、(注5))
項目 記号 測定条件 最小 標準 最大 単位
ref
基準電圧 V
⎯ 4.5 5.0 5.5 V
DD
V
= 5.0 V、Ccp1 = 0.22 μF、
M
OUT (1)
⎯ GND ⎯ VDD V
IN
CLK
chop
ref
RS
DD
Ccp2 = 0.022 μF
Ta = 25°C、1 相当たり ⎯ 1.2 1.5 A
VDD = 5.0 V ⎯ 1.0 150 KHz
VDD = 5.0 V 50 100 150 KHz
VM = 24 V、Torque = 100% 2.0 3.0 VDD V
VDD = 5.0 V 0 ±1.0 ±4.5 V
13 24 34 V
注 5: Tjの最大値は、120°C 程度を目処にお使いいただくよう、使用最大電流を考慮して設計してください。
2010-10-07 15
Page 16
TB62209FG
電気的特性 1
特に指定のない項目は
(
, Ta = 25°C, VDD = 5 V, VM = 24 V)
項目 記号
HIGH V
IN (H)
入力電圧
LOW V
入力ヒステリシス電圧 V
入力電流
消費電流 (V
DD
端子)
IN (L)
IN (HIS)
I
IN (H)
I
⎯ ⎯ 1.0
IN (H)
I
IN (L)
I
DD1
I
DD2
IM1
消費電流 (VM端子)
出力スタンバイ電流 上側 I
出力バイアス電流 上側 I
出力リーク電流 下側 I
HIGH
基準)
(
MID
コンパレータ
基準電圧比
HIGH
MID
LOW
LOW V
出力電流 ch 間誤差 ΔI
出力設定電流値誤差 ΔI
IM2
I
M3
OH
OB
OL
V
RS (H)
V
RS (MH)
V
RS (ML)
RS (L)
OUT1
OUT2
⎯
⎯
⎯
RS 端子電流 IRS ⎯
R
ON (D-S) 1
出力トランジスタ
R
ON (D-S) 1
ドレイン・ソース間
オン抵抗
R
ON (D-S) 2
R
ON (D-S) 2
測定
回路
2.0 VDD
⎯ LOGIC 系入力の各端子
⎯ LOGIC 系入力の各端子 200 400 700 mV
⎯
⎯
⎯
⎯
⎯ チャネル間 −5 ⎯ 5 %
⎯ I
⎯
測定条件
最小 標準 最大 単位
V
DD
+ 0.4
抵抗付き LOGIC 入力各端子
(STANDBY,RESET,ENABLE)
抵抗なし
V
L
出力
LOGIC ACTIVE
LOGIC 入力の各端子
= 5 V、LOGIC IN = ALL =
DD
、ロジック・出力段全非動作
OPEN、 f
= 1.0 kHz
CLK
、V
= 5 V、
DD
GND
− 0.4
GND 0.8
35 50 75
⎯
⎯ 1.0
1.0 2.0 3.0
1.0 2.5 3.5
ChargePump = 充電完了
出力 OPEN、LOGIC IN = ALL =
L
、ロジック・出力段全非動作
1.0 2.0 3.0
ChargePump = 非動作
、 f
OUT OPEN
LOGIC ACTIVE
VM = 24 V、出力段全非動作、
= 1 kHz
CLK
、V
DD
= 5 V、
2.0 4.0 5.0
ChargePump = 充電完了
OUT OPEN 、 f
LOGIC ACTIVE (2
100 kHz chopping)、 出力段
= 4 kHz
CLK
相励磁で
⎯
10 13
OPEN,ChargePump=充電完了
= VM = 24 V、V
V
RS
STANDBY = H、RESET= L CLK
OUT
= 0 V、
−200 −150 ⎯ μA
= L
V
= 0 V、STANDBY = H、
OUT
RESET= L CLK = L
V
= VM = CcpA = V
RS
V
、LOGIC IN = ALL = L
V
= 3.0 V、V
ref
TORQUE
V
ref
TORQUE
V
ref
TORQUE
V
ref
TORQUE
OUT
= (H) = 100%設定
= 3.0 V、V
= (MH) = 85%設定
= 3.0 V、V
= (ML) = 70%設定
= 3.0 V、V
= (L) = 50%設定
= 1000 mA −5 ⎯ 5 %
OUT
(Gain) = 1/5.0
ref
(Gain) = 1/5.0
ref
(Gain) = 1/5.0
ref
(Gain) = 1/5.0
ref
VRS = 24 V、VM = 24 V
STANDBY
I
OUT
= 25°C、順方向
T
j
I
OUT
= 25°C、逆方向
T
j
I
OUT
T
= 105°C、順方向
j
I
OUT
T
= 105°C、逆方向
j
= L (スタンバイ状態)
= 1.0 A、VDD = 5.0 V
= 1.0 A、VDD = 5.0 V
= 1.0 A、VDD = 5.0 V
= 1.0 A、VDD = 5.0 V
−100 −50 ⎯ μA
= 24
⎯ ⎯ 1.0 μA
⎯ 100 ⎯
83 85 87
68 70 72
48 50 52
⎯ 1 2 μA
⎯ 0.5 0.6
⎯ 0.5 0.6
⎯ 0.6 0.75
⎯ 0.6 0.75
V
μA
mA
mA
%
Ω
2010-10-07 16
Page 17

TB62209FG
電気的特性 2
チョッパ電流 ベクトル ⎯
(Ta = 25°C, VDD = 5 V, VM = 24 V, I
項目 記号
= 1.0 A)
OUT
測定
回路
測定
条件 最小 標準 最大 単位
θA = 90 (θ16) ⎯ 100 ⎯
θA = 84 (θ15) ⎯ 100 ⎯
θA = 79 (θ14) 93 98 ⎯
θA = 73 (θ13) 91 96 ⎯
θA = 68 (θ12) 87 92 97
θA = 62 (θ11) 83 88 93
θA = 56 (θ10) 78 83 88
θA = 51 (θ9) 72 77 82
θA = 45 (θ8) 66 71 76
θA = 40 (θ7) 58 63 68
θA = 34 (θ6) 51 56 61
θA = 28 (θ5) 42 47 52
θA = 23 (θ4) 33 38 43
θA = 17 (θ3) 24 29 34
θA = 11 (θ2) 15 20 25
θA = 6 (θ1) 5 10 15
θA = 0 (θ0)
⎯
⎯ 0 ⎯
%
2010-10-07 17
Page 18

TB62209FG
電気的特性 3
V
ref
V
ref
V
ref
TSD 温度 (注 1) TjTSD ⎯ VDD = 5 V、VM = 24 V 130 ⎯ 170 °C
TSD 復帰温度差 (注 1) ΔTjTSD ⎯ TjTSD = 130~170°C
V
DD
V
M
過電流検出回路動作電流
過温度モニタ端子出力電流 I
電気角モニタ端子出力電流 I
過温度モニタ端子出力電圧
電気角モニタ端子出力電圧
特に指定がない項目は
(
項目 記号
入力電圧 V
入力電流 I
減衰比 V
復帰電圧 V
復帰電圧 V
(注 2) ISD ⎯ VDD = 5 V、VM = 24 V ⎯ 3.0 ⎯ A
ref
9
ref
(GAIN) ⎯
ref
DDR
MR
protect
MO
V
protect (H)
V
protect (L)
V
MO2 (H)
V
MO2 (L)
, Ta = 25°C, VDD = 5 V, VM = 24 V)
測定
回路
9
10 VM = 24 V、STANDBY = H 2.0 3.0 4.0 V
11 VDD = 5 V、STANDBY = H 2.0 3.5 5.0 V
12 VDD = 5 V、TSD = 動作状態 1.0 3.0 5.0 mA
12
12 VDD = 5 V、TSD = 動作状態 ⎯ ⎯ 5.0
⎯
12
⎯
測定条件
= 24 V、VDD = 5 V、
V
M
STANDBY = H、RESET = L、
出力動作
STANDBY
出力動作、
5 V
VM = 24 V、VDD = 5 V、
STANDBY = H、RESET= L、
出力動作、
1.0 V
V
(IB
V
態
V
(IB = 100%、IA = 0%以外の
設定
V
(IB
CLK = 1 kHz
= H、RESET= L、
VM = 24 V、VDD =
、V
= 3.0 V
ref
V
ref
= 5 V、電気角 = 0 度
DD
= 100%、IA = 0%)
= 5 V、TSD = 非動作状
DD
= 5 V,電気角= 0 度以外
DD
)
= 5 V、電気角 = 0 度
DD
= 100%、IA = 0%)
最小 標準 最大 単位
= 2.0~VDD −
2.0
20 35 50
1/4.8 1/5.0 1/5.2
T
TSD
j
− 50
1.0 3.0 5.0 mA
0.0
⎯ ⎯ 5.0
0.0
⎯ V
TSD
T
j
− 35
⎯ ⎯
⎯ ⎯
T
j
− 20
DD
TSD
V
μA
⎯
°C
V
V
注 1: 過熱検出 (TSD) 回路について
この回路は、IC のジャンクション温度が規定温度に達し、TSD 回路が動作した場合、内部リセット回路が働き
出力部を OFF 状態にします。
TSD の動作温度の設定は 130°C (min) から 170°C (max) で動作します。TSD が動作した場合、次にスタンバ
イ機能が解除されるまで出力を停止します。TSD の動作状態では、チャージポンプは停止します。このとき、
PROTECT 端子は V
の電圧を出力します。
DD
また、TSD が動作して瞬時に STANDBY を H → L → H にした場合でも、IC のジャンクション温度が TSD 動
作温度−20°C (typ.) 以下になるまで、復帰しないようになっています。(ヒステリシス機能)
注 2: 過電流検出回路 (ISD) について
この回路は、出力に規定値以上の電流が流れた場合、内部リセット回路が働き、出力部を OFF 状態にします。
STANDBY 信号が再度、L → H になるまで、過電流検出回路は動作したままになります。
ISD の動作状態では、IC はスタンバイモードになり、チャージポンプも停止します。
2010-10-07 18
Page 19

TB62209FG
AC電気的特性
クロック周波数 f
最小クロックパルス幅
出力トランジスタ
スイッチング特性
トランジスタ
スイッチング特性
(MO
ノイズ除去用不感帯時間 t
CR 基準信号
発振周波数
チョッピング
可能周波数範囲
チョッピング設定
周波数
チャージポンプ
立ち上がり時間
(Ta = 25°C, VM = 24 V, VDD = 5 V, 6.8 mH/5.7 Ω)
項目 記号
、 PROTECT)
測定
回路
⎯ ⎯ ⎯ ⎯ 120 kHz
CLK
tw (t
) ⎯ ⎯ 100 ⎯ ⎯
CLK
twp ⎯ ⎯ 50 ⎯ ⎯
⎯ ⎯ 50 ⎯ ⎯
t
wn
tr ⎯ 6.8 mH/5.7 Ω負荷時 ⎯ 100 ⎯
tf ⎯ ⎯ ⎯ 100 ⎯
t
⎯ CLK~OUT 間 ⎯ 1000 ⎯
pLH
t
⎯ 6.8 mH/5.7 Ω負荷時 ⎯ 2000 ⎯
pHL
t
⎯ CR~OUT 間 ⎯ 500 ⎯
pLH
t
⎯ 6.8 mH/5.7 Ω負荷時 ⎯ 1000 ⎯
pHL
tr ⎯ ⎯ ⎯ 20 ⎯
tf ⎯ ⎯ ⎯ 20 ⎯
t
⎯ ⎯ ⎯ 20 ⎯
pLH
t
⎯ ⎯ ⎯ 20 ⎯
pHL
⎯ I
BRANK
f
⎯ C
CR
f
chop
t
ONG
⎯
⎯
⎯
f
chop (min)
f
chop (max)
測定条件
= 1.0 A 200 300 400 ns
OUT
= 560 pF、R
osc
VM = 24 V、VDD = 5 V、出力
ACTIVE (I
ステップ固定、Ccp1 = 0.22 μF、
Ccp2 = 0.022 μF
出力
ACTIVE (I
CR CLK = 800 kHz
= 0.22 μF、Ccp = 0.022 μF
Ccp
V
= 24 V、VDD = 5 V、
M
STANDBY = L → H
OUT
= 1.0 A)
最小 標準 最大 単位
= 3.6 kΩ ⎯ 800 ⎯ kHz
osc
40 100 150 kHz
= 1.0 A)、
OUT
⎯ 100 ⎯ kHz
⎯ 100 200 μs
ns
ns
ns
2010-10-07 19
Page 20

TB62209FG
11.
MIXED DECAY MODE
11-1.設定について
定電流制御の際、電流のふれ幅 (電流脈流分) DECAY MODE は、それぞれ、2 bit のパラレルデータによって、
0~3 のポイントを設定することが可能です。
「NF」 は、出力電流が設定電流値に到達したポイントをいい、「RNF」 は、設定電流の監視タイミング(1PWM
周期の最終タイミング)をいいます。
Mixed Decay Mode
が、電流の
端子
CR
内部 CLK
波形
DECAY MODE 0
12.5%
MIXED
DECAY
MODE
Decay 能力は低くなります。
NF
(以下 MDT)の設定値が小さいほど、電流のリップル分 (電流波高値) は小さくなります
f
chop
設定電流値
MDT
CHARGE MODE → NF: 設定電流値到達 → SLOW MODE →
MIXED DECAY TIMMING
(
設定電流値 > 出力電流の場合) CHARGE MODE
→ FAST MODE → 電流監視 →
RNF
37.5%
MIXED
DECAY
MODE
DECAY MODE 2
75%
MIXED
DECAY
MODE
DECAY MODE 3
FAST
DECAY
MODE
NF
CHARGE MODE → NF: 設定電流値到達 → SLOW MODE →
MIXED DECAY TIMMING
(
設定電流値 > 出力電流の場合) CHARGE MODE
NF
MDT
CHARGE MODE → NF: 設定電流値到達 → SLOW MODE →
MIXED DECAY TIMMING
(
設定電流値 > 出力電流の場合) CHARGE MODE
→ FAST MODE → 電流監視 →
→ FAST MODE → 電流監視 →
MDT
設定電流値 DECAY MODE 1
設定電流値
設定電流値
RNF
RNF
RNF
FAST MODE → RNF: 電流監視 → (設定電流値 > 出力電流の
場合
) CHARGE MODE → FAST MODE
100% 75% 50% 25% 0
RNF
2010-10-07 20
Page 21

TB62209FG
設定
電流値
設定
電流値
11-2.
MIXED (SLOW + FAST) DECAY MODE
効果について
○ 電流値増加方向 (正弦波)
Slow
設定
電流値
Fast
Slow Slow
Fast Charge
○
正弦波減少方向 (減衰時は MIXED DECAY MODE の減衰率 (MDT%) が大きい物を使用する場合)
Slow Slow
Charge
Charge
Fast
FastCharge
Fast
設定
電流値
Charge
電流の減衰が早いため、設定電流値への追従が早い。
Slow
Charge
Slow
Slow
Fast
Fast
○
正弦波減少方向 (減衰時は MIXED DECAY Mode の減衰率 (MDT%) が小さい物を使用する場合)
電流の減衰が遅いため、設定電流値への追従に非常に
(もしくは追従しない。)
Fast
設定
電流値
Charge
MIXED DECAY MODE
Slow
Fast
・FAST DECAY MODE において、RNF: 電流監視ポイントにて設定電流値 < 出力電
流の場合、次のチヨッピング周期では
Charge
時間がかかる。
Slow
Fast
Charge
設定
電流値
CHARGE MODE がなくなり、SLOW + FAST MODE (SLOW → FAST
Charge
Charge
は MDT にて) になります。
Fast
Fast
注: これらの図はイメージであり、実際には過渡応答カーブとなります。
2010-10-07 21
Page 22

TB62209FG
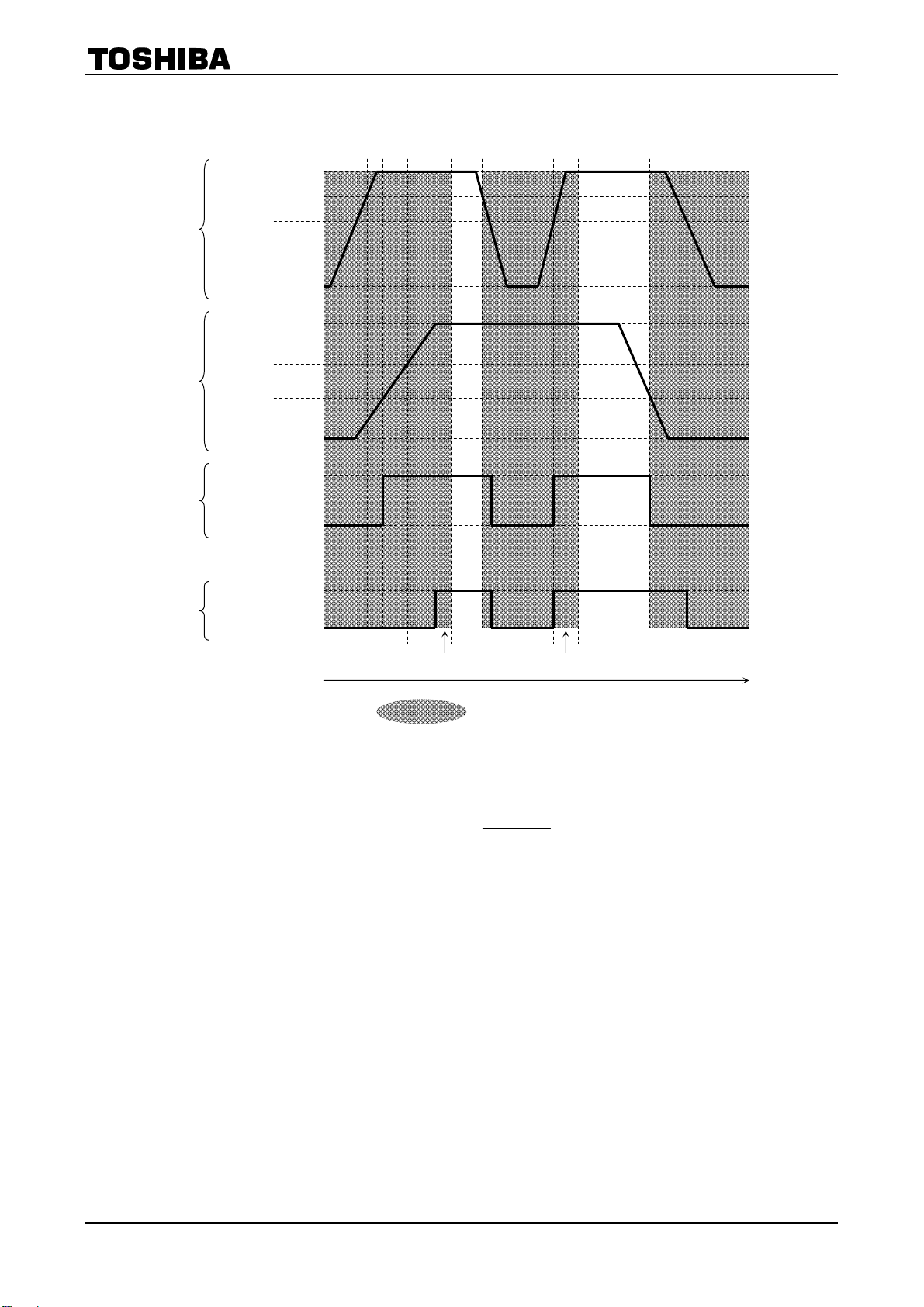
12.
内部 CR
CLK
I
OUT
設定電流値
25%
MIXED
DECAY
MODE
MIXED DECAY MODE
信号
NF
の波形 (電流波形
f
f
chop
MDT (MIXED DECAY TIMMING) ポイント
)
設定電流値
RNF
• NF ポイントが MIXED DECAY TIMMING より後の場合
chop
NF
CHARGE の後は FAST になります。
I
OUT
設定電流値
25%
MIXED
DECAY
MODE
設定電流値
I
OUT
25%
MIXED
DECAY
MODE
f
f
chop
設定電流値
MDT (MIXED DECAY TIMMING) ポイント
NF
NF
CLK 信号入力
• MIXED DECAY MODE にて出力電流値 > 設定電流値の場合
NF
f
chop
RNF
f
chop
設定電流値 > 出力電流なので次の周期で
CHARGE MODE はありません
は
チャージキャンセル機能)
(
設定電流値
MDT (MIXED DECAY TIMMING) ポイント
RNF
chop
f
chop
NF
RNF
NF
CLK 信号入力
2010-10-07 22
Page 23

TB62209FG
13.
設定電流値
I
OUT
FAST
DECAY
MODE
(100%
MIXED
DECAY
MODE)
FAST DECAY MODE
f
chop
の波形
RNF
設定電流値 > 出力電流なので次の周期でも
FAST DECAY MODE になります (チャージ
キャンセル機能
設定電流値
)。
NF
RNF
設定電流値 > 出力電流なので次の周期でも
CHAGE MODE → NF → FAST DECAY
になります。
MODE
RNF
CLK 信号入力
負荷への出力電流は、V
ドになります。
ref、RRS
、To rque などによって設定された電流値に到達した後、電源へのフル回生モー
2010-10-07 23
Page 24

TB62209FG
14.
内部 CR
CLK
信号
設定電流値
I
OUT
信号と内部
CLK
れたとき
)
f
chop
NF
CR CLK
・出力電流波形について
12.5% MIXED DECAY MODE
f
f
chop
設定電流値
MDT
RNF
NF
(SLOW MODE
chop
MDT
の途中で
CLK
が入力さ
RNF
CLK 信号入力
ここで CR カウンタをリセットします。
チョッピング用カウンタ (CR-CLK カウンタ) は、CLK 信号が入力されると次の CR-CLK タイミングで強制
的にリセットされます。
このため、入力データに対する反応はカウンタを強制リセットしない方式に比べ速くなります。
遅れ時間は、ロジック部理論値で CR 波形一周期: 5 μs @100 kHz CHOPPING となります。
CLK
信号入力による CR カウンタのリセット後は、電流比較のため一瞬必ず CHARGE MODE に入ります。
注: CLK 入力直後は、FAST DECAY MODE でも電流比較のため一瞬、必ず CHARGE MODE に入ります。
一瞬 CHARGE MODE に入ります。
2010-10-07 24
Page 25

TB62209FG
15.
内部 CR
信号
CLK
設定電流値
信号と内部
CLK
されたとき
I
OUT
f
chop
CR CLK
・出力電流波形について
(CHARGE MODE
の途中で
CLK
が入力
)
12.5% MIXED DECAY MODE
f
f
chop
MDT
NF
設定電流値
RNF
chop
MDT
RNF
CLK 信号入力
ここで CR カウンタをリセットします。
一瞬 CHARGE MODE に入ります。
2010-10-07 25
Page 26

TB62209FG
16.
内部 CR
CLK
信号
設定電流値
I
OUT
CLK
たとき
NF
信号と内部
)
f
chop
MDT
設定電流値
CR CLK
・出力電流波形について
12.5% MIXED DECAY MODE
f
chop
MDT
(FAST MODE
f
chop
NF
の途中で
MDT
CLK
が入力され
RNF
RNF
CLK 信号入力
ここで CR カウンタをリセットします。
一瞬 CHARGE MODE に入ります。
2010-10-07 26
Page 27

TB62209FG
17.
設定電流値
I
OUT
CLK
0
信号と内部
f
chop
CR CLK
・出力電流波形について
12.5% MIXED DECAY MODE
f
f
chop
(2
励磁で
chop
CLK
信号入力時
)
RNF
RNF
設定電流値
NF
CLK 信号入力
ここで CR カウンタをリセットします。
NF
MDT
2010-10-07 27
Page 28

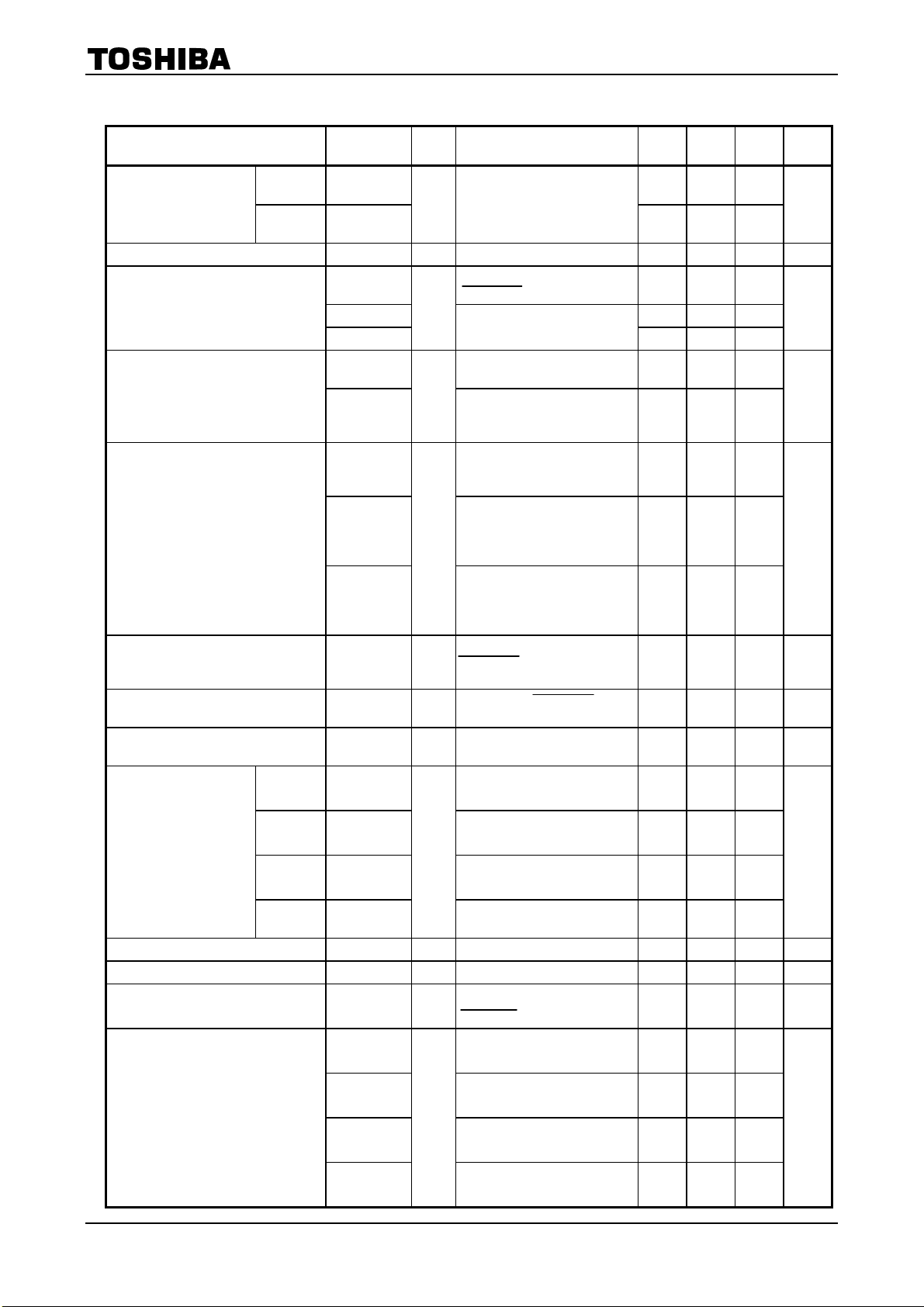
動作途中でENABLE=Lを入力した場合の電流の引き抜き経路について
Slow Mode 時、強制的に出力トランジスタすべてがオフされると、以下のような MODE でコイルのエネルギー
が引き抜かれます。
注: 点線の場所に寄生ダイオードが存在しますが、通常の MIXED DECAY MODE では使用しません。
TB62209FG
U1
ON
OFF
L1
V
M
R
RS
R
端子
S
U2
注
負荷
PGND
Charge
モード Slow モード 強制 OFF モード
OFF
ON
L2
U1
OFF
ON
L1
VM
R
RS
R
端子
S
注
負荷
U2
OFF
ENABLE=L を入力。
L2
ON
PGND
U1
OFF
L1
OFF
V
M
R
RS
R
端子
S
注
負荷
PGND
上図のように、出力段トランジスタには、寄生ダイオードが存在します。
通常、コイルのエネルギーを引き抜く場合は、各トランジスタが ON し、電流を通常と逆に流す動作をするた
め、寄生ダイオードは使用されませんが、出力トランジスタすべてが強制的にオフされると、寄生ダイオードを
通してコイルのエネルギーが引き抜かれます。
U2
OFF
L2
OFF
2010-10-07 28
Page 29
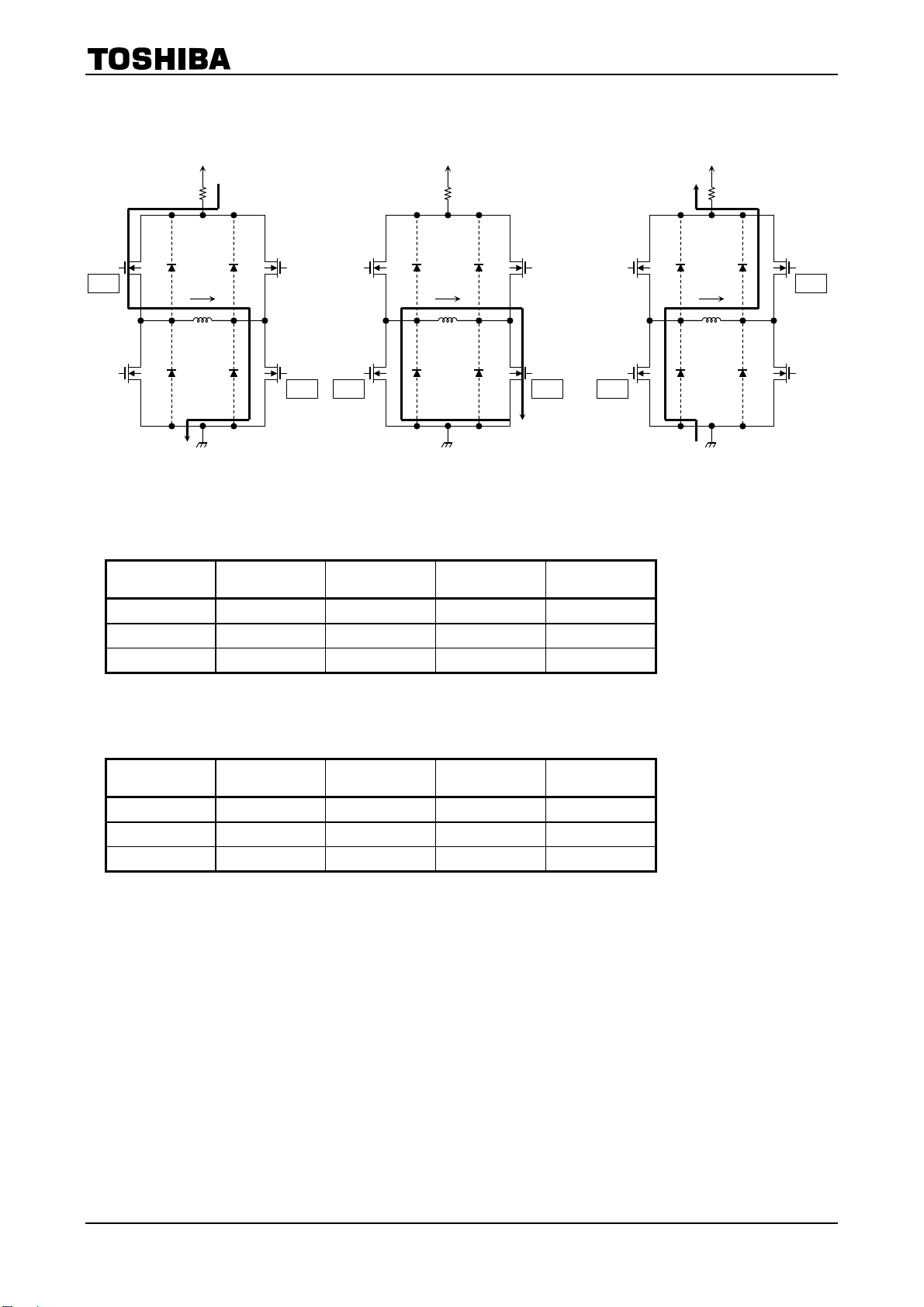
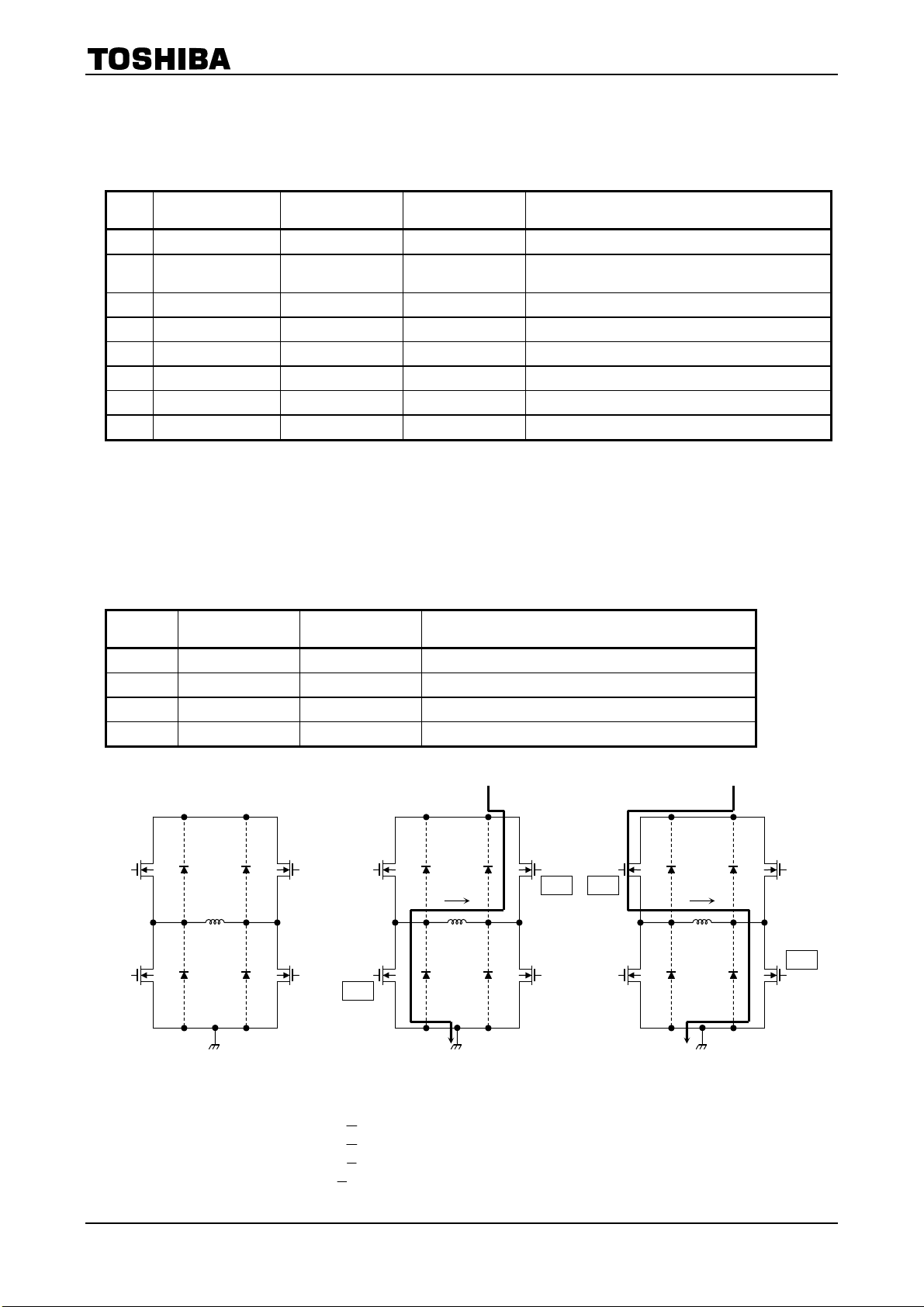
出力段トランジスタ動作モード
V
M
VM
TB62209FG
V
M
R
U1
ON
L1
OFF
RS
R
端子
S
U2
注
負荷
PGND
Charge
モード Slow モード Fast モード
OFF
L2
ON
U1
OFF
L1
R
RS
R
端子
S
U2
注
負荷
PGND
OFF
L2
ON
出力段トランジスタ動作のファンクション
CLK U1 U2 L1 L2
CHARGE ON OFF OFF ON
SLOW OFF OFF ON ON
FAST OFF ON ON OFF
U1
OFF
L1
ONON
R
端子
S
注
負荷
R
RS
PGND
U2
ON
L2
OFF
注: 上表は、例として上の図中の矢印の方向に電流を流す場合です。
逆方向の場合は、下表のようになります。
CLK U1 U2 L1 L2
CHARGE OFF ON ON OFF
SLOW OFF OFF ON ON
FAST ON OFF OFF ON
2010-10-07 29
Page 30
TB62209FG
電源のシーケンス
V
DD (max)
V
DD (min)
V
V
DD
V
M
内部動作可能
DDR
GND
VM
V
M (min)
V
MR
GND
動作
非動作
推奨
(
)
STANDBY
INPUT (
注 1)
STANDBY
H
L
動作可能になるまで、t
の時間だけかかります。
ONG
動作不可能領域
注 1: VM端子に規定の電圧が入力された状態で、VDDの値が V
以下になった場合、誤動作を防止するため IC は
DDR
内部停止 T 状態になります。
同様に、V
に規定の電圧が入力されている場合は、VMの値が VMR以下の電圧になった場合、誤動作を防止
DD
するため IC は内部停止状態になります。
誤動作防止のために、V
M・VDD
電源立ち上げ時には、STANDBY 端子には上記のタイミングで L 信号を INPUT
することをお勧めします。
また、出力制御用チャージポンプ回路が安定動作するまでは時間がかかりますので、電源が十分立ち上がるま
注 2: V
での時間 (t
の値が 3.3~5.5 V にある場合、内部のリセットは解除されるため、出力が動作状態になる場合があります。
M
) には十分余裕を持つことをお願いします。
ONG
しかし、この場合、チャージポンプは十分な動作ができない電圧であるため、安定した動作ができません。13 V
以上に V
が上がるまで、スタンバイ状態にすることを強く推奨します。
M
注 3: VDD = 0 V、VMに定格範囲の電源が印可されている場合、内部リセットにより出力はオフになりますが、この
際、V
また、V
間にパスがあるため、数ミリ程度の電流が流れます。
M-VDD
については、出力に電圧が加わるタイミングでは、必ず規定電圧がかかっている状態にすることを
DD
推奨します。
2010-10-07 30
Page 31

設定電流の計算式について
=
この IC では、CLK-IN モードにおいて定電流制御を行います。
そのときの最高電流値 (設定電流値) については、電流をセンスするためのセンス抵抗 (R
ス電圧
(V
) を設定することによって、決定することができます。
ref
50%) 70, 85, 100, (Torque Torque
%100)(R
(gain): V
ref
I
1
5.0
(V) V
××=
ref(max) OUT
減衰比です。(Spec については電気的特性をご参照ください)
ref
×Ω
RS
1/5.0
は V
例えば
V
= 3 V
ref
Torque
を入力して、I
= 100%
= 0.8 A を出力したい場合、RRS = 0.75 Ω (0.5 W 以上) が必要となります。
OUT
チョッピング周波数とOSC発振周波数の計算式について
この IC では、定電流制御を行う際、外付けのコンデンサ・抵抗によって決定される発振波形 (ノコギリ波) を
基準にチョッピングの動作を行います。
TB62209FG
では、チョッピング周波数の 8 倍の OSC 周波数が必要です。
この周波数の設定式は、以下のとおりになります。
TB62209FG
) と、リファレン
RS
f
=
CR
例えば
C
= 560 pF
osc
R
= 3.6 kΩ
osc
を接続した場合、f
CR
このときのチョッピング周波数 f
f
= fCR/8 = 101 kHz
chop
となります。
チョッピング周波数の決定の際には、以下のことを考慮の上、設定してください。
ICの消費電力について
IC が消費する電力については、大枠、出力部のトランジスタが消費する電力とロジック部およびチャージポ
ンプ回路の消費する電力の
• 出力部の消費電力 (R
charge Mode
ランジスタのうち、
1 H
ブリッジのトランジスタ部の電力は以下の式で表すことができます。
P (out)
4
ビットのマイクロステップ動作 (A 相と B 相は 90 度の位相差) をさせる条件での出力の平均消費電力は、
以下のように計算できます。
R
I
OUT
V
V
P (out)
ロジック&IM 系の消費電力は動作時と停止時に分けて計算します。
I (LOGIC)
I (I
I (I
ロジック部は V
することにより消費される電流の合計
積もることができます。
P (Logic&IM)
したがって、全体の消費電力 P は、
P
また、スタンバイ時の消費電力は以下のようになります。
P (
基板などにおける熱設計に関しては、十分実装評価を行ってください。
、Fast Decay Mode、Slow decay mode、いずれのモードでも、電力は H ブリッジ上下のト
= 2 (T
= 0.60 Ω (@1.0 A)
ON
(Peak: max) = 1.0 A
= 24 V
M
= 5 V
DD
= 2 (T
) = 10.0 mA (typ.): 動作時
M3
) = 2.0 mA (typ.): 停止時
M1
= P (out) + P (Logic&IM) = 1.45 (W) となります。
スタンバイ時) + P (out) = 24 (V) × 0.002 (A) + 5 (V) × 0.0025(A) = 0.06 (W)
1
C)600R(C0.523
×+××
= 813 kHz となります。
は
chop
2 つの部分に分けることができます。
= 0.60 Ω として計算しています。)
ON
2 つによって消費されます。
) × I
r
(A) × VDS (V) = 2 × I
OUT
2
× RON..............................(1)
OUT
) × 1.02 (A) × 0.60 (Ω) = 1.20 (W).............................................. (2)
r
= 2.5 mA (typ.):
(5 V) に、IM 系 (V
DD
に接続される回路により消費される電流と出力段がスイッチング
M
) は VM (24 V) に接続されていますので、消費電力は以下のように見
= 5 (V) × 0.0025 (A) + 24 (V) × 0.010 (A) = 0.25 (W) ............... (3)
2010-10-07 31
Page 32

測定波形
TB62209FG
CLK
V
M
GND
tCK t
t
pLH
50%
10%
tr t
t
pHL
CK
90% 90%
50%
10%
f
図 1 タイミング波形と名称
2010-10-07 32
Page 33

OSC (CR)
OUTPUT
Voltage A
OUTPUT
A
Voltage
設定電流
OSC-Charge Delay
H
L
H
L
H
L
50%
t
chop
TB62209FG
OSC-Fast Delay
50%
50%
OUTPUT
Current
L
Charge
Slow Fast
OSC-Charge DELAY:
OSC
の波形を内部 CR CLK へ変換するときに OSC 波形の立ち上がりのレベルを使用しているため、OSC
波形と内部 CR CLK の間には、最大 1.25 ns (@f
= 100 kHz: fCR = 400 kHz) の Delay が発生します。
chop
CR-CR CLK DELAY
CR 波形
内部 CR
CLK
波形
図 2 タイミング波形と名称 (CR と出力)
2010-10-07 33
Page 34

駆動モード入力タイミングとMOの関係
CLK 波形
MO 波形
• MO タイミングよりも前に駆動モード入力の変化があった場合
駆動モード
入力波形 (1)
駆動モード
入力内部
反映 (1)
パラレルの設定信号は反映されます。
• MO タイミングよりも後に駆動モード入力の変化があった場合
TB62209FG
モータ駆動モードの設
定が変化
この時点でモータ駆動モード
が実際に変化する
駆動モード
入力波形 (2)
駆動モード
入力内部
反映 (2)
モータ駆動モードの設
定が変化
この場合次に電気角が 0 度に
なったときにモータ駆動モー
ドが実際に変化する
パラレルの設定信号は、CLK の立ち上がりエッジの後なので反映されません。次に電気角が、0 度になっ
たときに駆動モードが変更されます。
注: TB62209FG では、駆動モード変更時の脱調を防止するため、「駆動モード変更予約方式」 を採用してい
ます。
MO 信号出力タイミングの時間または、その近くで切り替えるときには、次項のような決まりが存在し
ますので、ご参照ください。
2010-10-07 34
Page 35

各信号の反映点
駆動モードの
2 相励磁
1-2 相励磁
W1-2
相励磁
2W1-2
相励磁
4W1-2
相励磁
設定反映ポイント
(
下図①の領域)
45 (MO)
B 相、A 相 100%の
ハーフクロックより前
→B 相 100%の
ハーフクロックより前
他のパラレルの設定信号は、随時 (チョッピングに同期はかかる) 変更されます。
駆動モードの推奨切り替え点
波形
CLK
0 (MO)
CW/CCW
入力の立ち上がり時
CLK
入力の立ち上がり時
CLK
TB62209FG
MO 波形
②の領域では、駆動モードデータ切り換えの入力信号が入っても、
モータの駆動は変化しません。
駆動モード
データ切り換え
入力可能時間
MO 出力時 (相データ停止中:上図③の領域) に、駆動モードを強制的に切り替えたいときは、RESET= H に
して、電気角をイニシャライズする機能が必要です。
①
②
③
①の領域で入力した駆動モードが
反映される
2010-10-07 35
Page 36

TB62209FG
PD – Ta
(1)
(2)
注: R
(W)
D
許容損失 P
3.5
2.5
1.5
0.5
)
– Ta
P
D
3
2
1
0
0
(2)
(1)
25 50 75 100 125 150
周囲温度 Ta (°C)
パッケージの許容損失
(
HSOP36 R
単体 (96°C/W)
th (j-a)
専用基板実装時 (140 mm × 70 mm × 1.6 mm: 38°C/W: typ.)
8.5°C/W
th (j-c):
2010-10-07 36
Page 37

VMとVH (チャージポンプ電圧) の関係
TB62209FG
– VH (&Vcharge UP)
V
50
V
電圧 チャージアップ電圧 V
H
M
電圧
M
40
チャージポンプ
出力電圧
絶対最大定格電圧
STANDBY 信号を入力します。
30
VMR
VM電圧
20
電圧、チャージアップ電圧 (V)
H
V
10
VM 動作条件
チャージポンプ電圧範囲
0
0
2 3 10 20 30 404 5 6 7 8 9 11 12 13 14 15 16 17 18 21 22 23 24 25 2619 27 28 29 31 32 33 34 35 36 37 38 39 1
チャージポンプ電圧 V
電源電圧 V
(V)
M
= VDD + VM (= Ccp A) (V)
H
注: VDD = 5 V
Ccp 1 = 0.22 μF、Ccp 2 = 0.022 μF、f
= 150 kHz
chop
(チャージポンプコンデンサ容量の温度変化には、十分ご注意ください
2010-10-07 37
Page 38

チャージポンプ回路の動作について
VDD = 5 V
RS
TB62209FG
R
RS
V
= 24 V
M
V
M
V
H
Ccp A
7
コンパレータ
&
コントローラ
出力
出力
H
スイッチ
i2
Di2
r2
V
Di3
Di1
(1)
z
T
T
r1
i1
(2)
Ccp B
Ccp 2
(2)
R
1
0.022
Ccp C
μF
Ccp 1
0.22
μF
VH = VM + VDD = チャージポンプ電圧
i1 = チャージポンプ出力電流
i2 = ゲート部消費電流
• 初期充電
RESET が解除されると Tr1が ON、Tr2が OFF し、VM電源から Di1 を介して Ccp 2 が充電されます。
(1)
(2)
Tr1が OFF し、Tr2が ON すると、Ccp 2 から Di2 を介して Ccp 1 に充電されます。
(3)
VMと V
す。
(Ccp A の端子電圧 = チャージポンプ電圧) の電位差が、V
H
(定常状態)
以上になると動作を停止しま
DD
• 実動作時
f
(4)
(5)
(1)、(2) の動作を行いチャージアップいたします。
周期のスイッチングによって Ccp 1 の電荷 (i2) が使われ、VHの電位が下がります。
chop
出力のスイッチング
初期充電 定常状態
V
H
V
M
(1)
(2) (3)
(4)
t
(5)
(4)
(5)
2010-10-07 38
Page 39

チャージポンプ立ち上がり時間について
TB62209FG
V
M
STANDBY
t
ONG
+ VM
V
DD
+ (VDD × 90%)
VM
5 V
0 V
について
50%
t
ONG
Ccp 1 電圧
STANDBY を解除してから、Ccp 2 コンデンサ (電荷を汲み上げるコンデンサ) が、Ccp 1 (電荷をためるコン
デンサ
) に電荷を汲み上げ、VM + V
Ccp 1
の電圧が V
M
+ V
の電圧になるまで、回路内部がゲートを駆動できませんので必ず、t
DD
間をおいてから、モータの駆動を始めてください。
の電圧にチャージアップされるまでの時間です。
DD
ONG
基本的には、Ccp 1 のコンデンサの容量を大きくすると、初期チャージアップ時間が大きくなりますが、電圧
変動を小さくすることができます。
Ccp 1
のコンデンサの容量を小さくすると初期チャージアップ時間は短くできますが、電圧変動が大きくなり
ます。
また、コンデンサの組み合わせ (特に容量値が小さい場合) によっては、十分に昇圧できない可能性がありま
す。
昇圧電圧が十分でない場合、出力 DMOS の RONが基準の値より悪化するため、発熱が大きくなることがあり
ます。
したがまして、推奨の組み合わせ条件 (Ccp 1 = 0.22 μF、Ccp 2 = 0.022 μF) にて使用をお願いします。
以上の時
2010-10-07 39
Page 40

チャージポンプ用外付けコンデンサについて
V
DD
= 5 V、f
= 150 kHz、L = 10 mH を V
chop
の理論値は以下のとおりになります。
0.05
0.045
0.04
0.035
0.03
0.025
0.02
0.015
Ccp 2 の容量 (μF)
0.01
0.005
0
0
0.05 0.1 0.15 0.2 0.25 0.35 0.4
Ccp 1
と Ccp 2 の組み合わせは、上の図の使用可能領域の組み合わせにて選定してください。また Ccp 1:Ccp 2
は、10:1 以上の比を選ばれるようお願いします。(当社が推奨する推奨値 (Ccp 1= 0.22 μF、Ccp 2 = 0.022 μF) を
使っていただければ、仕様書の駆動条件をカバーできます
定数の設定の際は、動作状態においてチャージポンプ電圧が規格より下がっていないかを十分評価の上、余裕
を持った値
(Ccp 1、Ccp 2 とも大きい方が余裕があります) を設定してください。
また、コンデンサによっては容量に対する温度変化が非常に大きい物がありますので、使用される環境温度に
おいても、上記の容量が確保されていることをご確認ください。
Ccp 1 – Ccp 2
使用可能領域
Ccp 1 の容量 (μF)
TB62209FG
= 13 V、1.5 A の条件で駆動する場合、Ccp 1 と Ccp 2 の関係
M
推奨値
0.3
(コンデンサの温度特性がないのが条件です)
0.45 0.5
2010-10-07 40
Page 41

TB62209FG
(1) 低消費電力モード
A
相、B 相をオフし、チャージポンプも停止します。
出力状態やチャージポンプの動作に関しては、STANDBY 端子を L にしたときの動作と同じです。
(2)
軸固定モード
A
相をオフにしたまま、B 相のみの出力を ON します。
RESET
ロータを任意の値で、ホールド (ロック) させたいときに使用します。
(3)
2 相励磁
からのシーケンスは、IA = 0 のまま、IB = 100%から、4W1-2 相の動作電流が出力されます。
100
[%]
B 相
0
A 相
−100
STEP
100
2
IA (%)
0
相励磁 (typ.A)
IB (%)
100
電気角 360 度 = 4 CLK です。
注: 2 相励磁は、モータ誘起電力起因の負荷変動が大きい励磁方法です。電流の減衰能力 (電流の制御能
力) が小さいモードを使った場合、誘起電力による電流の盛り上がり現象を抑えられない場合があり
ます。その場合、Mixed Decay の割合が大きいモードを使ってください。
初期値 (一般条件) としては、37.5% MIXED DECAY MODE の使用を推奨します。
2010-10-07 41
Page 42

TB62209FG
(4) 1-2 相励磁 (a)
MO
CLK
100
[%]
B 相
A 相
0
−100
STEP
1-2
IB (%)
100
100
IA (%)
0
相励磁 (typ.A)
電気角 360 度 = 8 CLK です。
2010-10-07 42
Page 43

TB62209FG
(5) 1-2 相励磁 (b)
MO
CLK
100
[%]
71
A 相
B 相
0
−71
−100
STEP
1-2
IB (%)
71
100
100
71
IA (%)
0
相励磁 (typ.B)
電気角 360 度 = 8 CLK です。
2010-10-07 43
Page 44

TB62209FG
(6) W1-2 相励磁
[%]
100
92
71
38
A 相
B 相
0
−38
−71
−92
−100
STEP
100
92
71
相励磁 (2 Bitマイクロステップ)
W1-2
IA (%)
38
0
38
71
92
100
IB (%)
電気角 360 度 = 16 CLK です。
2010-10-07 44
Page 45

TB62209FG
(7) 2W1-2 相励磁
[%]
100
96
88
71
A 相
56
38
20
0
−20
B 相
−38
−56
−71
−83
−92
−98
−100
STEP
100
98
92
83
相励磁 (3 Bitマイクロステップ)
2W 1-2
71
56
IA (%)
38
20
0
71 38
92 100
98
83 56 20
IB (%)
電気角 360 度 = 32 CLK です。
2010-10-07 45
Page 46

TB62209FG
(8) 4W1-2 相励磁
[%]
100
98
96
92
88
83
77
71
63
56
47
38
29
20
10
0
A 相
B 相
−10
−20
−29
−38
−47
−56
−63
−71
−77
−83
−88
−92
−96
−98
−100
STEP
電気角 360 度 = 64 CLK です。
2010-10-07 46
Page 47

TB62209FG
4 Bitマイクロステップ出力電流ベクトル軌跡
100
98
96
92
88
83
77
71
63
56
47
IA (%)
38
X = 16
X = 15
X = 14
X = 13
X = 12
X = 11
ステップを90度に正規化
(1
X = 10
X = 9
X = 8
CCW
CW
X = 7
X = 6
)
X = 5
X = 4
29
20
10
θX
0
10 20 29 38 47 56 63 71 77 83 88 92 96 98 100
θX
X = 3
X = 2
X = 1
X = 0
IB (%)
入力するデータに関しては、ファンクション項目の Current のファンクション例の項目を参照ください。
2010-10-07 47
Page 48

応用回路例
各素子のところにある数値は推奨値です。各入力条件の数値につきましては、前述の推奨動作条件をご確認く
ださい。
SGND
5 V
5 V
0 V
5 V
0 V
5 V
0 V
5 V
0 V
5 V
0 V
5 V
0 V
5 V
0 V
5 V
0 V
5 V
0 V
5 V
0 V
5 V
0 V
R
C
= 3.6 kΩ
osc
= 560 pF
osc
10
μF
PGND
CR
V
DD
DATA MODE
CLK
ENABLE
CW/CCW
RESET
P-GND
DMODE 1
DMODE 2
DMODE 3
MDT 1
MDT 2
STANDBY
Ccp 1
0.22 μF
SGND
PROTECT
Ccp CCcp BCcp A
Ccp 2
0.022
V
(FIN)
μF
ref AB
R
RS A
R
RS B
V
SS
V
MO
M
A
A
B
B
SGND
OPEN
OPEN
TORQUE 1
TORQUE 2
DATA MODE
5 V
0 V
5 V
0 V
5 V
0 V
M
V
ref AB
R
RS A
Stepping
Motor
RS B
TB62209FG
3 V
SGND
0.66 Ω
Ω R
0.66
μF
100
SGND
1
μF
24V
注: 必要に応じて、バイパスコンデンサの追加を推奨いたします。
GND 配線は、できる限り 1 点接地になるようにし、放熱設計を考慮したパターンになるようにしてくださ
い。
各モードなどの設定端子を SW で制御する場合、ハイインピーダンスにならないように Pull-down または
Pull-Up してください。
入力するデータに関しては、ファンクションの項目をご参照の上、入力してください。
DATA MODEは、L レベルに固定して使用してください。
出力間のショート、および出力の天絡、地絡時に IC の破壊の恐れがありますので、出力ライン、V
GND ラインの設計は十分注意してください。
イン、
DD
2010-10-07 48
(VM) ラ
Page 49

外形図
HSOP36-P-450-0.65
TB62209FG
Unit: mm
質量: 0.79g(標準)
2010-10-07 49
Page 50

記載内容の留意点
1. ブロック図
ブロック図内の機能ブロック/回路/定数などは、機能を説明するため、一部省略・簡略化している場合がありま
す。
2. 等価回路
等価回路は、回路を説明するため、一部省略・簡略化している場合があります。
3. タイミングチャート
タイミングチャートは機能・動作を説明するため、単純化している場合があります。
4. 応用回路例
応用回路例は、参考例であり、量産設計に際しては、十分な評価を行ってください。
また、工業所有権の使用の許諾を行うものではありません。
5. 測定回路図
測定回路内の部品は、特性確認のために使用しているものであり、応用機器の誤動作や故障が発生しないことを
保証するものではありません。
使用上のご注意およびお願い事項
TB62209FG
使用上の注意事項
(1) 絶対最大定格は複数の定格の、どの一つの値も瞬時たりとも超えてはならない規格です。
複数の定格のいずれに対しても超えることができません。
絶対最大定格を超えると破壊、損傷および劣化の原因となり、破裂・燃焼による傷害を負うことがありま
す。
(2) デバイスの逆差し、差し違い、または電源のプラスとマイナスの逆接続はしないでください。電流や消費
電力が絶対最大定格を超え、破壊、損傷および劣化の原因になるだけでなく、破裂・燃焼により傷害を負
うことがあります。なお、逆差しおよび差し違いのままで通電したデバイスは使用しないでください。
(3) 過電流の発生や IC の故障の場合に大電流が流れ続けないように、適切な電源ヒューズを使用してください。
IC は絶対最大定格を超えた使い方、誤った配線、および配線や負荷から誘起される異常パルスノイズなど
が原因で破壊することがあり、この結果、IC に大電流が流れ続けることで、発煙・発火に至ることがあり
ます。破壊における大電流の流出入を想定し、影響を最小限にするため、ヒューズの容量や溶断時間、挿
入回路位置などの適切な設定が必要となります。
(4) モータの駆動など、コイルのような誘導性負荷がある場合、ON 時の突入電流や OFF 時の逆起電力による負
極性の電流に起因するデバイスの誤動作あるいは破壊を防止するための保護回路を接続してください。IC
が破壊した場合、傷害を負ったり発煙・発火に至ることがあります。
保護機能が内蔵されている IC には、安定した電源を使用してください。電源が不安定な場合、保護機能が
動作せず、IC が破壊することがあります。IC の破壊により、傷害を負ったり発煙・発火に至ることがあり
ます。
(5) パワーアンプおよびレギュレータなどの外部部品 (入力および負帰還コンデンサなど) や負荷部品 (ス
ピーカなど) の選定は十分に考慮してください。
入力および負帰還コンデンサなどのリーク電流が大きい場合には、IC の出力 DC 電圧が大きくなります。
この出力電圧を入力耐電圧が低いスピーカに接続すると、過電流の発生や IC の故障によりスピーカの発
煙・発火に至ることがあります。(IC 自体も発煙・発火する場合があります。) 特に出力 DC 電圧を直接ス
ピーカに入力する BTL (Bridge Tied Load) 接続方式の IC を用いる際は留意が必要です。
2010-10-07 50
Page 51

使用上の留意点
(1) 過電流検出回路
過電流制限回路 (通常: カレントリミッタ回路) はどのような場合でも IC を保護するわけではありません。
動作後は、速やかに過電流状態を解除するようお願いします。
絶対最大定格を超えた場合など、ご使用方法や状況により、過電流制限回路が正常に動作しなかったり、
動作する前に IC が破壊したりすることがあります。また、動作後、長時間過電流が流れ続けた場合、ご使
用方法や状況によっては、IC が発熱などにより破壊することがあります。
(2) 熱遮断回路
熱遮断回路 (通常: サーマルシャットダウン回路) は、どのような場合でも IC を保護するわけではありま
せん。動作後は、速やかに発熱状態を解除するようお願いします。
絶対最大定格を超えて使用した場合など、ご使用法や状況により、熱遮断回路が正常に動作しなかったり、
動作する前に IC が破壊したりすることがあります。
(3) 放熱設計
パワーアンプ、レギュレータ、ドライバなどの、大電流が流出入する IC の使用に際しては、適切な放熱を
行い、規定接合温度 (Tj) 以下になるように設計してください。これらの IC は通常使用時においても、自
己発熱をします。IC 放熱設計が不十分な場合、IC の寿命の低下・特性劣化・破壊が発生することがありま
す。また、IC の発熱に伴い、周辺に使用されている部品への影響も考慮して設計してください。
(4) 逆起電力
モータを逆転やストップ、急減速を行った場合に、モータの逆起電力の影響でモータから電源へ電流が流
れ込みますので、電源の Sink 能力が小さい場合、IC の電源端子、出力端子が定格以上に上昇する恐れが
あります。逆起電力により電源端子、出力端子が定格電圧を超えないように設計してください。
TB62209FG
2010-10-07 51
Page 52

TB62209FG
製品取り扱い上のお願い
• 本資料に掲載されているハードウェア、ソフトウェアおよびシステム(以下、本製品という)に関する情
報等、本資料の掲載内容は、技術の進歩などにより予告なしに変更されることがあります。
• 文書による当社の事前の承諾なしに本資料の転載複製を禁じます。また、文書による当社の事前の承諾を
得て本資料を転載複製する場合でも、記載内容に一切変更を加えたり、削除したりしないでください。
• 当社は品質、信頼性の向上に努めていますが、半導体製品は一般に誤作動または故障する場合があります。
本製品をご使用頂く場合は、本製品の誤作動や故障により生命・身体・財産が侵害されることのないよう
に、お客様の責任において、お客様のハードウェア・ソフトウェア・システムに必要な安全設計を行うこ
とをお願いします。なお、設計および使用に際しては、本製品に関する最新の情報(本資料、仕様書、デー
タシート、アプリケーションノート、半導体信頼性ハンドブックなど)および本製品が使用される機器の
取扱説明書、操作説明書などをご確認の上、これに従ってください。また、上記資料などに記載の製品デー
タ、図、表などに示す技術的な内容、プログラム、アルゴリズムその他応用回路例などの情報を使用する
場合は、お客様の製品単独およびシステム全体で十分に評価し、お客様の責任において適用可否を判断し
てください。
• 本製品は、一般的電子機器(コンピュータ、パーソナル機器、事務機器、計測機器、産業用ロボット、家
電機器など)または本資料に個別に記載されている用途に使用されることが意図されています。本製品は、
特別に高い品質・信頼性が要求され、またはその故障や誤作動が生命・身体に危害を及ぼす恐れ、膨大な
財産損害を引き起こす恐れ、もしくは社会に深刻な影響を及ぼす恐れのある機器(以下“特定用途”とい
う)に使用されることは意図されていませんし、保証もされていません。特定用途には原子力関連機器、
航空・宇宙機器、医療機器、車載・輸送機器、列車・船舶機器、交通信号機器、燃焼・爆発制御機器、各
種安全関連機器、昇降機器、電力機器、金融関連機器などが含まれます。本資料に個別に記載されている
場合を除き、本製品を特定用途に使用しないでください。
• 本製品を分解、解析、リバースエンジニアリング、改造、改変、翻案、複製等しないでください。
• 本製品を、国内外の法令、規則及び命令により、製造、使用、販売を禁止されている製品に使用すること
はできません。
• 本資料に掲載してある技術情報は、製品の代表的動作・応用を説明するためのもので、その使用に際して
当社及び第三者の知的財産権その他の権利に対する保証または実施権の許諾を行うものではありません。
• 別途、書面による契約またはお客様と当社が合意した仕様書がない限り、当社は、本製品および技術情報
に関して、明示的にも黙示的にも一切の保証(機能動作の保証、商品性の保証、特定目的への合致の保証、
情報の正確性の保証、第三者の権利の非侵害保証を含むがこれに限らない。)をしておりません。
• 本製品、または本資料に掲載されている技術情報を、大量破壊兵器の開発等の目的、軍事利用の目的、あ
るいはその他軍事用途の目的で使用しないでください。また、輸出に際しては、「外国為替及び外国貿易法」、
「米国輸出管理規則」等、適用ある輸出関連法令を遵守し、それらの定めるところにより必要な手続を行っ
てください。
• 本製品の RoHS 適合性など、詳細につきましては製品個別に必ず弊社営業窓口までお問合せください。本
製品のご使用に際しては、特定の物質の含有・使用を規制する RoHS 指令等、適用ある環境関連法令を十分
調査の上、かかる法令に適合するようご使用ください。お客様がかかる法令を遵守しないことにより生じ
た損害に関して、当社は一切の責任を負いかねます。
2010-10-07 52
 Loading...
Loading...