

Page 1

SERVICE MANUAL
REVERSING AUTOMATIC DOCUMENT FEEDER
MR-3018
File No. SME05000600
R05032183100-TTEC
Ver00_2005-06
Page 2
© 2005 TOSHIBA TEC CORPORATION
All rights reserved
Page 3

General Precautions for Installation/Servicing/Maintenance
for the MR-3018
The installation and service should be done by a qualified service technician.
1) When installing the MR-3018 to the Equipment, be sure to follow the instructions described in the
“Unpacking/Set-Up Procedure for the MR-3018” booklet which comes with each unit of the MR-
3018.
2) The MR-3018 should be installed by an authorized/qualified person.
3) Before starting installation, servicing or maintenance work, be sure to turn OFF and unplug the
equipment first.
4) When servicing or maintaining the MR-3018, be careful about the rotating or operation sections
such as gears, pulleys, sprockets, cams, belts, etc.
5) When parts are disassembled, reassembly is basically the reverse of disassembly unless otherwise
noted in this manual or other related materials. Be careful not to reassemble small parts such as
screws, washers, pins, E-rings, toothed washers to the wrong places.
6) Basically, the machine should not be operated with any parts removed or disassembled.
7) Delicate parts for preventing safety hazard problems (such as switches, sensors, etc. if any) should
be handled/installed/adjusted correctly.
8) Use suitable measuring instruments and tools.
9) During servicing or maintenance work, be sure to check the serial No. plate and other cautionary
labels (if any) to see if they are clean and firmly fixed. If not, take appropriate actions.
10)The PC board must be stored in an anti-electrostatic bag and handled carefully using a wristband,
because the ICs on it may be damaged due to static electricity. Before using the wrist band, pull out
the power cord plug of the equipment and make sure that there is no uninsulated charged objects in
the vicinity.
11)For the recovery and disposal of used MR-3018, consumable parts and packing materials, follow the
relevant local regulations/rules should be followed.
12)After completing installation, servicing and maintenance of the MR-3018, return the MR-3018 to its
original state, and check operation.
Page 4

Page 5

CONTENTS
1. Specification ................................................................................................................1-1
2. GENERAL DESCRIPTION............................................................................................ 2-1
2.1 Main Components................................................................................................................ 2-1
2.2 Sectional View ..................................................................................................................... 2-2
2.3 Electric Parts Layout............................................................................................................ 2-3
2.4 Symbols and Functions of Various Components................................................................. 2-4
2.5 Diagram of Signal Blocks.....................................................................................................2-5
2.6 Description of Interface Signals ........................................................................................... 2-6
3. DESCRIPTION OF OPERATIONS ............................................................................... 3-1
3.1 DRIVE SYSTEM .................................................................................................................. 3-1
3.1.1 Outline ...................................................................................................................... 3-1
3.1.2 Original feed motor drive section.............................................................................. 3-2
3.1.3 Read motor drive section ......................................................................................... 3-3
3.1.4 Original exit/reverse motor drive section .................................................................. 3-4
3.2 Original Size Detection ........................................................................................................ 3-5
3.2.1 Outline ...................................................................................................................... 3-5
3.2.2 Original tray width sensor ......................................................................................... 3-5
3.2.3 Original width detection sensors-1 and -2 / Original length detection sensor........... 3-6
3.3 FLOW CHART ..................................................................................................................... 3-8
3.4 DESCRIPTION OF CIRCUIT............................................................................................. 3-16
3.4.1 Drive Circuit for Feed Motor ................................................................................... 3-16
3.4.2 Drive Circuit for Read Motor ................................................................................... 3-17
3.4.3 Drive Circuit for Exit Motor .................................................................................... 3-18
3.4.4 Drive Circuit for FAN Motor ................................................................................... 3-18
3.4.5 Reset Circuit .......................................................................................................... 3-19
3.4.6 Drive Circuit for Pickup Solenoid ........................................................................... 3-19
3.4.7 Drive Circuit for Gate Solenoid .............................................................................. 3-20
4. DISASSEMBLY AND ASSEMBLY ............................................................................... 4-1
4.1 Cover ................................................................................................................................... 4-1
4.2 Roller ................................................................................................................................... 4-6
4.3 Motor / Motor drive section ............................................................................................... 4-18
4.4 Solenoid............................................................................................................................. 4-24
4.5 Sensor/switch .................................................................................................................... 4-26
4.6 PC Board ........................................................................................................................... 4-34
4.7 Others................................................................................................................................ 4-35
5. Adjustment ................................................................................................................... 5-1
5.1 Adjustment of Position ......................................................................................................... 5-1
5.2 Adjustment of Height ........................................................................................................... 5-6
5.3 Adjustment of Skew ............................................................................................................. 5-8
5.4 Adjustment of the Leading Edge Position.......................................................................... 5-11
5.5 Adjustment of Horizontal Position...................................................................................... 5-13
5.6 Adjustment of Copy Ratio .................................................................................................. 5-14
5.7 Adjustment of RADF Opening/Closing Sensor .................................................................. 5-15
6. Troubleshooting .......................................................................................................... 6-1
6.1 Troubleshooting for Mechanical Errors................................................................................ 6-1
6.2 Troubleshooting for Electrical Errors ................................................................................... 6-2
7. MAINTENANCE AND REWRITING ROM .................................................................... 7-1
7.1 Periodic Maintenance .......................................................................................................... 7-1
7.2 Rewriting ROM (Firmware Updating)................................................................................... 7-2
June 2005 © TOSHIBA TEC MR-3018 CONTENTS
1
Page 6

8. CIRCUIT DIAGRAM / HARNESS DIAGRAM ............................................................... 8-1
8.1 Assembly of PC Board.........................................................................................................8-1
8.2 Circuit Diagram .................................................................................................................... 8-2
8.3 Control PC Board Circuit .....................................................................................................8-4
MR-3018 CONTENTS June 2005 © TOSHIBA TEC
2
Page 7

1. Specification
Item Contents Remarks
Maximum number of originals
on the original feeding tray
Acceptable paper size A5-R, A4, A4-R, B5, B5-R, B4, A3, FOLIO,
Acceptable paper weight
Dimensions W600 x D523 x H135 (mm) Excluding hinges and original tray
Weight 12.5 kg
Power consumption Approx. 49.5 W
Power requirements DC5 V, DC24 V Supplied from the equipment
Co-packed items Unpacking Instruction (1 set)
Up to 100 sheets or 16 mm in height.
ST-R, LT, LT-R, LG, LD, COMPUTER
2
1-sided: 35 - 157 g/m
(9.3 lb. Bond - 58 lb. Cover)
2-sided: 50 - 157 g/m
(13.3 lb. Bond - 58 lb. Cover)
Charts (A4/LT: 1 sheet each)
Mounting screws (6 pcs)
Positioning pins (2 pcs)
Washer (1 pc)
2
35 - 80 g/m
2
(9.3 - 21.3 lb. Bond)
1
June 2005 © TOSHIBA TEC MR-3018 Specification
1 - 1
Page 8

MR-3018 Specification June 2005 © TOSHIBA TEC
1 - 2
Page 9
2. GENERAL DESCRIPTION
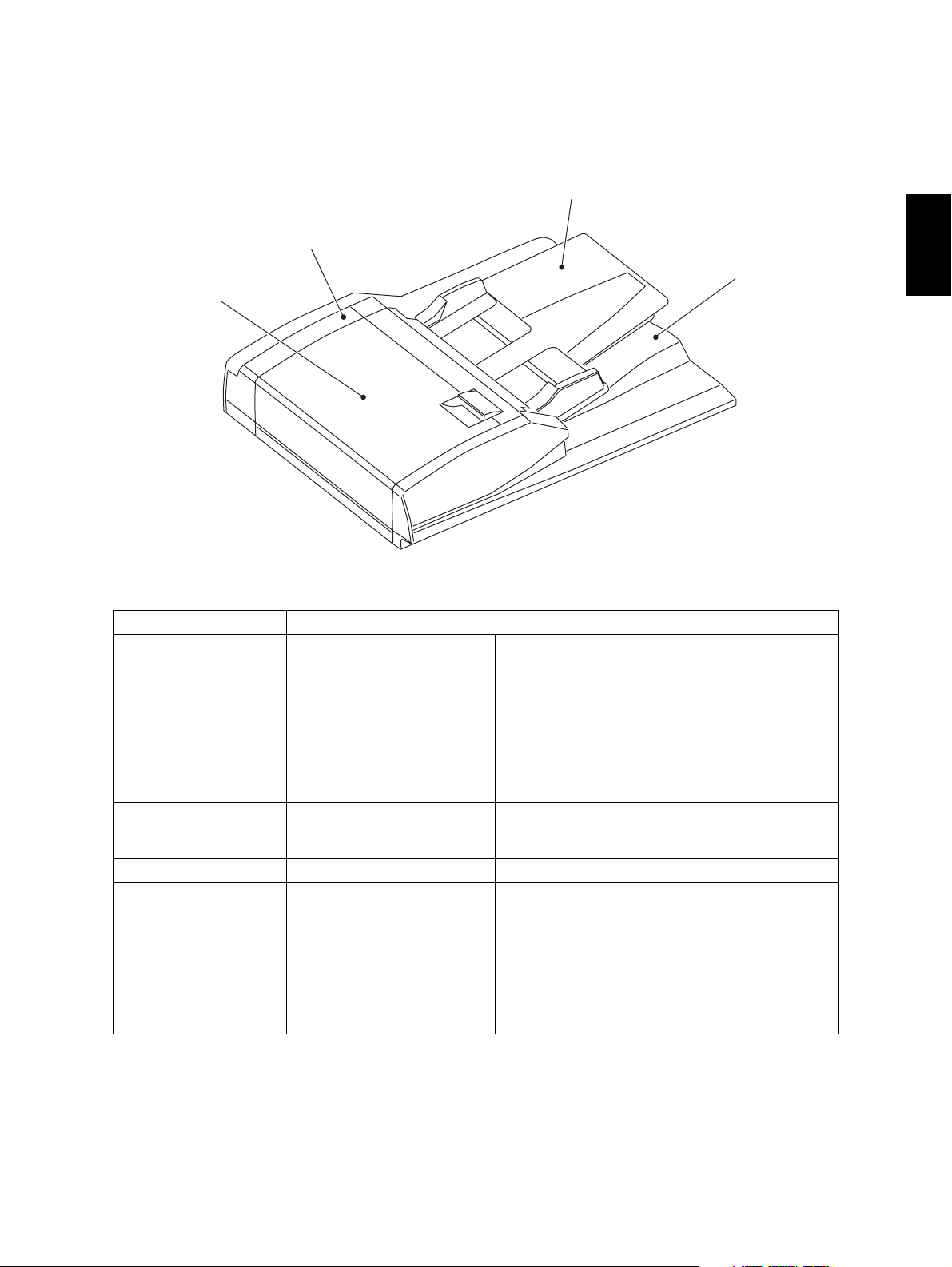
2.1 Main Components
Original tray section
Drive/Control section
Feeding/Transporting section
Fig.2-1
Location Components
Feeding/Transporting
section
Original tray section Original width guide
Original exit tray section Original exit tray
Drive/Control section Original feed motor (M1)
Pickup roller
Feed roller
Separation roller
Registration roller
Intermediate transfer roller
Pre-reading roller
Platen roller
Post-reading roller
Exit/reverse roller
Reverse registration roller
Original tray
Original reverse tray
Original empty sensor (S3)
Original length detection sensor (S4)
Original registration sensor (S5)
Original width detection sensor-1 (S6)
Original width detection sensor-2 (S7)
Original intermediate transport sensor(S8)
Read sensor (S9)
Original exit/reverse sensor (S10)
Jam access cover sensor (S11)
Original tray sensor (S1)
Original tray width sensor (S2)
Read motor (M2)
Original exit/reverse motor (M3)
Fan motor (M4)
Original pickup solenoid (SOL1)
Gate solenoid (SOL2)
RADF opening/closing sensor (S12)
Jam access cover opening/closing switch (SW1)
RADF control PC board (ADF)
2
Original exit tray section
June 2005 © TOSHIBA TEC MR-3018 GENERAL DESCRIPTION
2 - 1
Page 10

2.2 Sectional View
R1
R9
R5
R7
R8
R6
TRY1 Original tray R4 Registration roller
TRY2 Original reverse tray R5 Intermediate transfer roller
TRY3 Original exit tray R6 Pre-reading roller
FLP1 Exit gate R7 Platen roller
FLP2 Reverse flapper R8 Post-reading roller
R1 Pickup roller R9 Reverse registration roller
R2 Feed roller R10 Exit/reverse roller
R3 Separation roller
FLP1
R2
R10 FLP2
R3R4
Fig.2-2
TRY2
TRY3
TRY1
MR-3018 GENERAL DESCRIPTION June 2005 © TOSHIBA TEC
2 - 2
Page 11
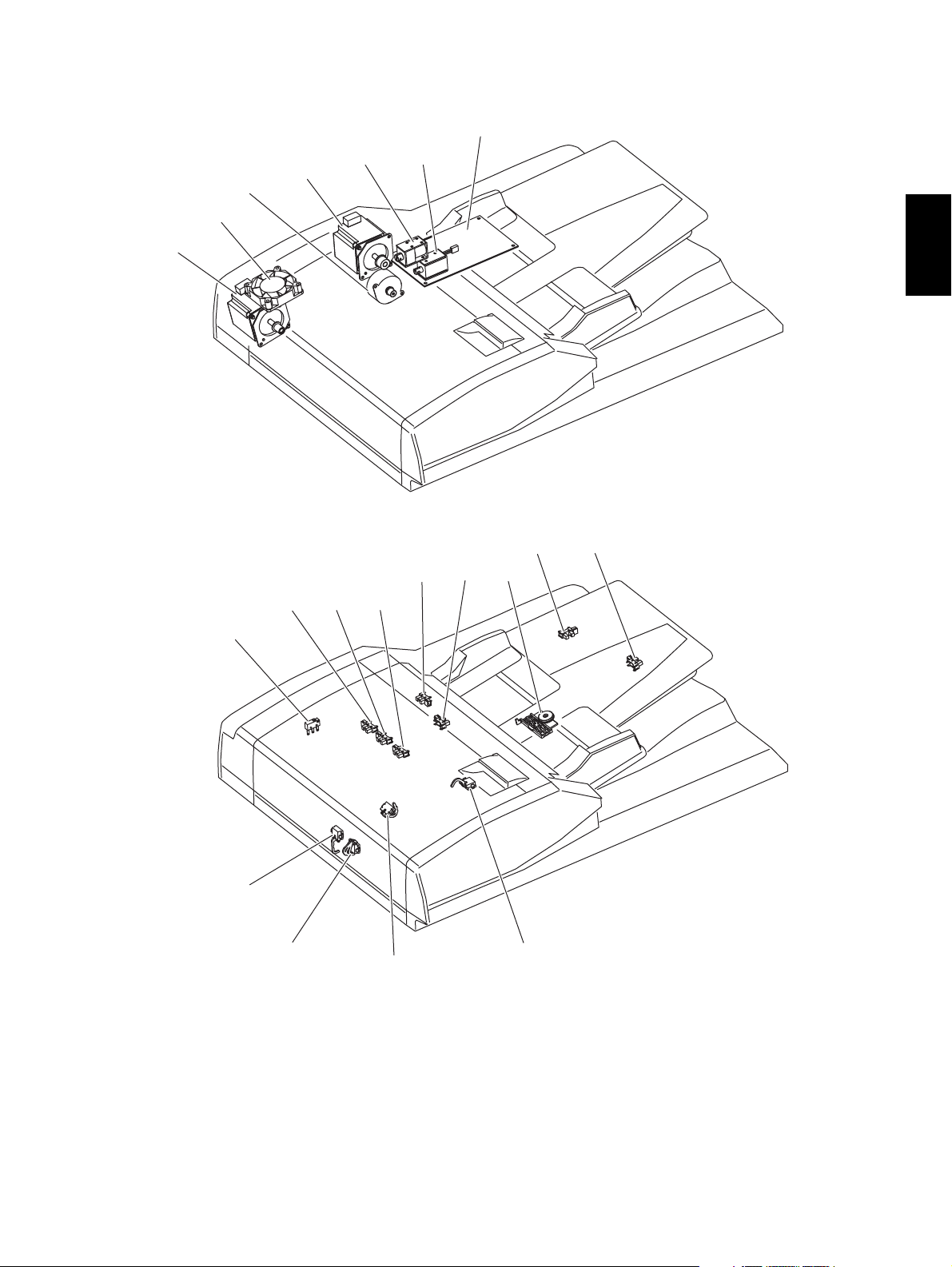
2.3 Electric Parts Layout
SOL1
M1
M3
M4
ADF
SOL2
M2
SW1
S7
S6
S5
S11
S3
S2
S12
2
S1
S9
S8
S10
Fig.2-3
June 2005 © TOSHIBA TEC MR-3018 GENERAL DESCRIPTION
2 - 3
S4
Page 12
2.4 Symbols and Functions of Various Components
1) Motors
Symbol Name Function
M1 Original feed motor Drives the original feed roller, pickup roller and registration roller.
M2 Read motor Transports originals by driving the intermediate transport roller, front
M3 Original exit/reverse motor Drives the original exit/reverse roller.
M4 Fan motor Cools off the ADF drive section and ADF board.
2) Sensors and Switches
Symbol Name Function
S1 Original tray sensor Detects the length of the original set on the original tray.
S2 Original tray width sensor Detects the width of the original set on the original tray.
S3 Original empty sensor Detects the original set on the original tray.
S4 Original length detection
sensor
S5 Original registration sensor Detects transport of the original at the registration roller section.
S6 Original width detection sen-
sor-1
S7 Original width detection sen-
sor-2
S8 Original intermediate trans-
port sensor
S9 Read sensor Detects the leading edge of the original at the original scanning section.
S10 Original exit/reverse sensor Detects the exit (transit) of an original. Also detects the stop reference
S11 Jam access cover sensor Detects opening/closing of the Jam access cover.
S12 RADF opening/closing sen-
sor
SW1 Jam access cover opening/
closing switch
read roller, platen roller, rear read roller and reverse registration roller.
Detects the length of the original.
Detects the width of the original.
Detects the width of the original.
Detects the original transported to the Pre-scanning section.
position for an original when in reverse.
Detects opening/closing of the RADF.
Switches between cutoff and supply state of the 24 V power by opening/closing of the jam access cover.
3) Solenoid
Symbol Name Function
SOL1 Original pickup solenoid Drives up and down the original pickup roller.
SOL2 Gate solenoid Drives the reverse flapper. (Switches the flapper to the reverse side
when turned to ON.)
4) PC board
Symbol Name Function
ADF RADF control PC board
(ADF board)
MR-3018 GENERAL DESCRIPTION June 2005 © TOSHIBA TEC
Controls the RADF.
2 - 4
Page 13

2.5 Diagram of Signal Blocks
Equipment
RxD
TxD
REQ
ACK
DF-REQ
DF-ACK
SCAN-ST
CNT
DC 24V
DC 5V
Downlad jig
RADF
Reset IC
CPU
Driver
Driver
Driver
Driver
Driver
Driver
Original feed motor (M1)
Read motor (M2)
Original exit/reverse motor (M3)
Fan motor (M4)
Original pickup solenoid (SOL1)
Gate solenoid (SOL2)
Original tray sensor (S1)
Original tray width sensor (S2)
Original empty sensor (S3)
Original length detection sensor (S4)
Original registration sensor (S5)
Original width detection sensor-1 (S6)
Original width detection sensor-2 (S7)
Original intermediate transport sensor (S8)
Read sensor (S9)
Original exit/reverse sensor (S10)
Jam access cover sensor (S11)
RADF opening/closing sensor (S12)
Jam access cover opening/closing switch (SW1)
2
Fig.2-4
June 2005 © TOSHIBA TEC MR-3018 GENERAL DESCRIPTION
2 - 5
Page 14
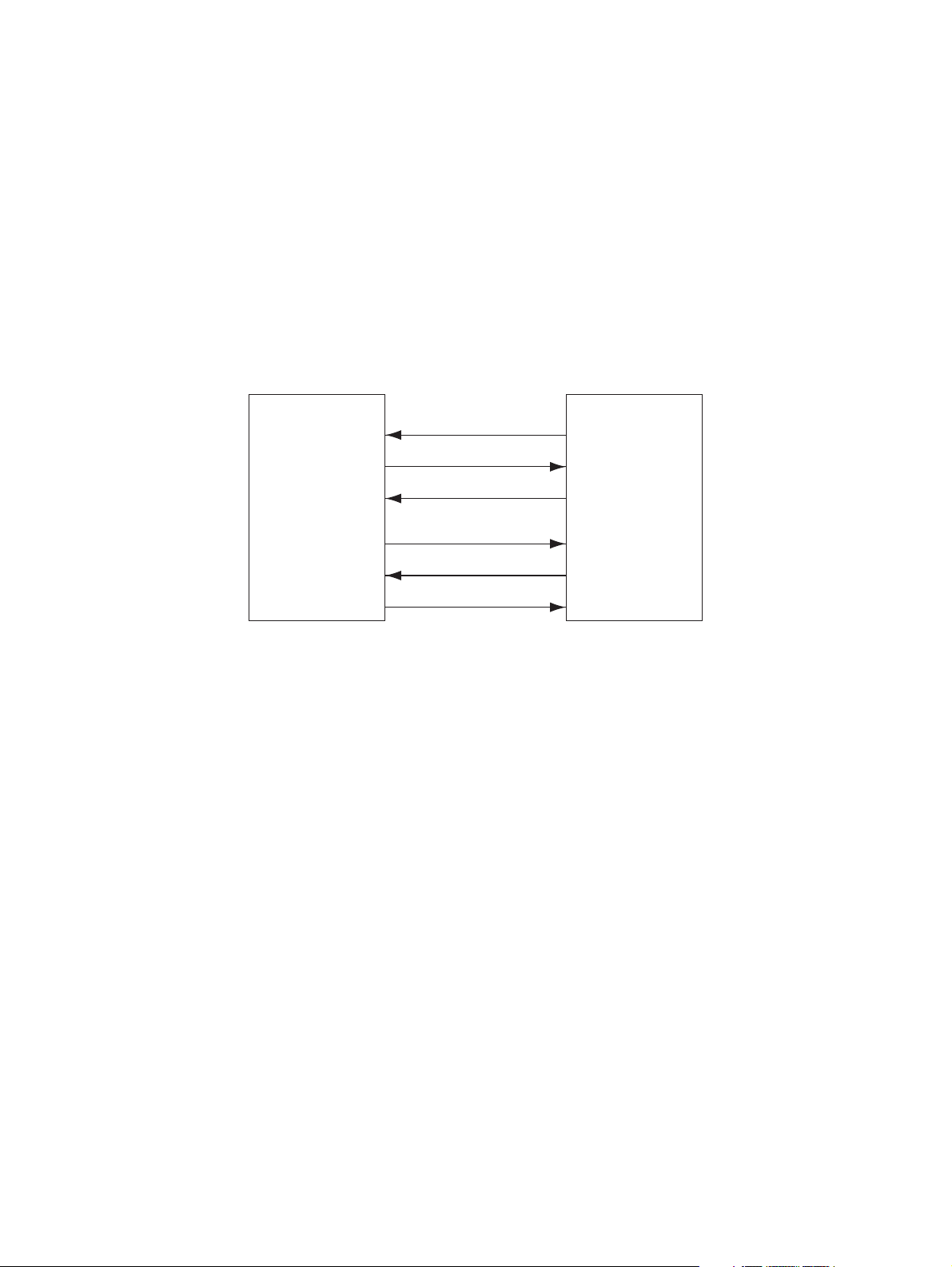
2.6 Description of Interface Signals
The following 6 lines are used to transmit/receive signals between the equipment and the RADF.
REQ ......................Communication request signal (from equipment to the RADF)
DF-REQ ................Communication request signal (from the RADF to equipment)
DF-ACK.................Communication request acknowledging signal (from the RADF to equipment)
ACK.......................Communication request acknowledging signal (from equipment to the RADF)
TxD .......................Data transmitted from equipment to the RADF
RxD .......................Data transmitted from the RADF to equipment
Data communication (RxD and TxD) between the scanner and the RADF has adopted the serial communication system which does not allow checking using testing devices to see whether the signals are
transmitted/received properly in the field.
RADF Equipment
REQ
DF-ACK
TxD
DF-REQ
ACK
RxD
Fig.2-5
MR-3018 GENERAL DESCRIPTION June 2005 © TOSHIBA TEC
2 - 6
Page 15
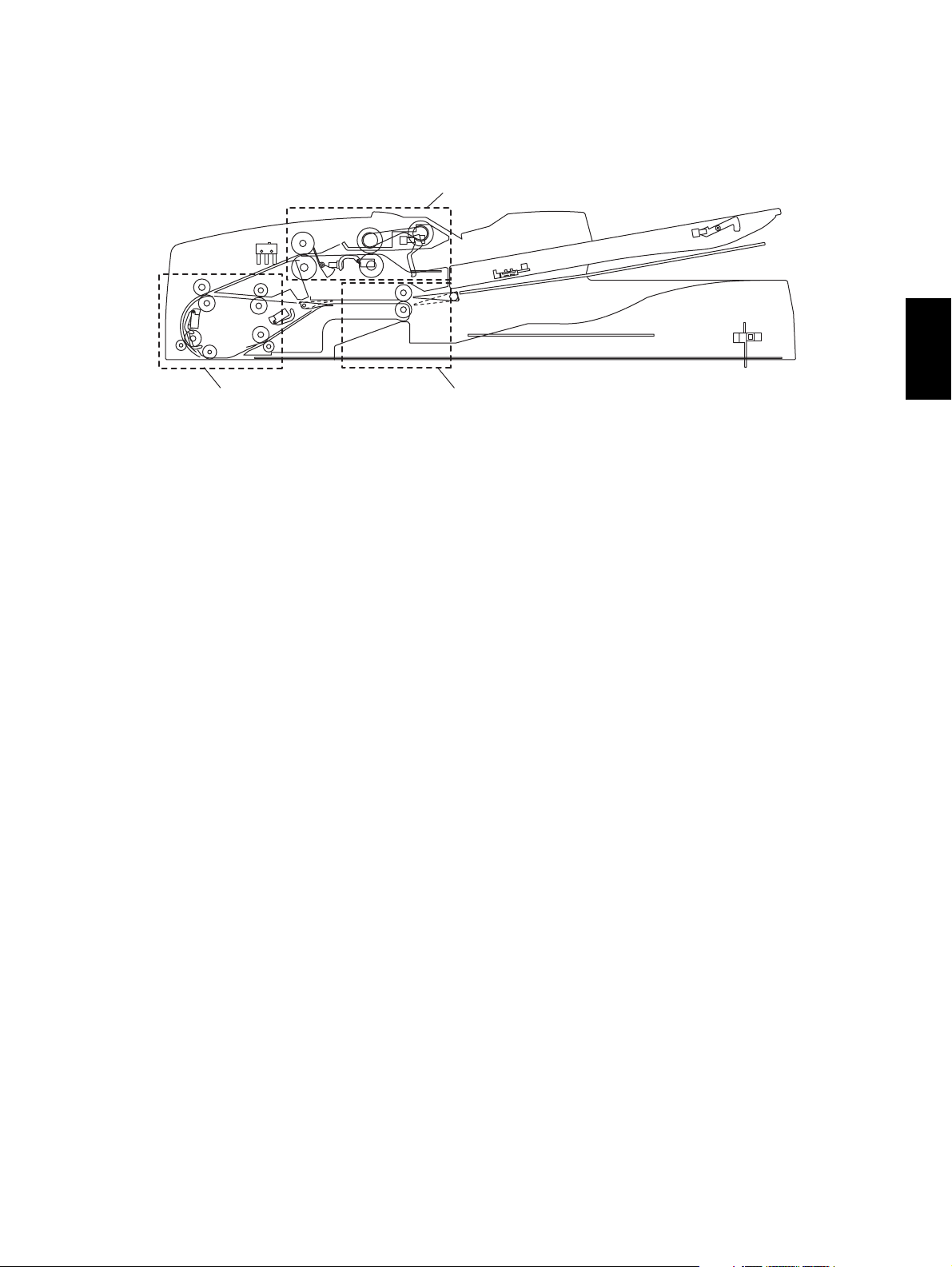
3. DESCRIPTION OF OPERATIONS
3.1 DRIVE SYSTEM
Feed motor drive section
3
Read motor drive section
Exit/reverse motor drive section
Fig.3-1
3.1.1 Outline
Originals are transported by the original feed motor, read motor and original exit/reverse motor. Each
motor has a drive section for the following operations:
Original feed motor drive section: picks up originals and drives the registration roller.
Read motor drive section: transports originals and drives parts such as the platen roller.
Original exit/reverse motor drive section: exits and reverses originals, and drives the exit/reverse roller.
The Original feed motor rotates reversely when the originals are being transported at the registration
roller, compared to its rotational direction when they are being picked up.
The original exit/reverse motor also rotates reversely when the originals are being reversed and transported, compared to its rotational direction when they are being exited.
The read motor always rotates in a constant direction.
June 2005 © TOSHIBA TEC MR-3018 DESCRIPTION OF OPERATIONS
3 - 1
Page 16
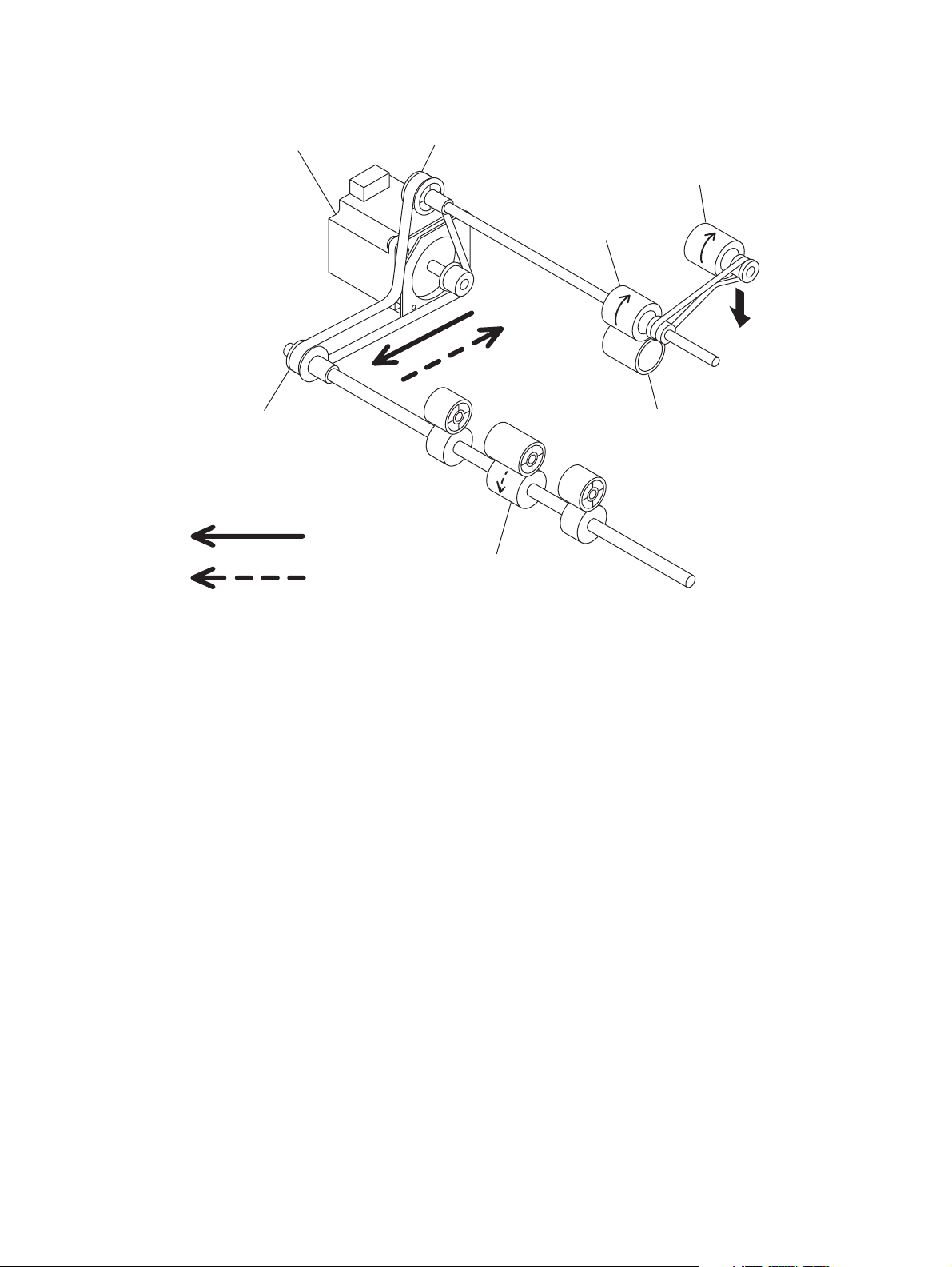
3.1.2 Original feed motor drive section
Original feed motor
Oneway clutch
Oneway clutch
Pickup roller
Feed roller
Separation roller
Pickup
Registration roller
Feed
Fig.3-2
When an original is placed on the original tray and the RADF receives a feed request signal from the
equipment, the feeding of the original is started.
The original empty sensor detects the presence of the original, and then the pickup roller is lowered by
the drive from the original pickup solenoid.
The Original feed motor rotates, and the pickup roller and the feed roller then rotate in a normal direction (shown in a solid line in the figure) to guide the original into the transport path. Then the original is
transported to the registration roller to be aligned.
The original aligned with the registration roller is then transported by the reverse rotation of the Original
feed motor (shown in a dotted line in the figure).
A one-way clutch is installed inside of each gear of the feed roller and the registration roller, so these
gears will not be driven in a reverse rotation.
When the original empty sensor detects that there is no original on the original tray, the original pickup
solenoid is turned OFF and the pickup roller is raised.
The original pickup solenoid is the one can operate both suction and recovery.
MR-3018 DESCRIPTION OF OPERATIONS June 2005 © TOSHIBA TEC
3 - 2
Page 17

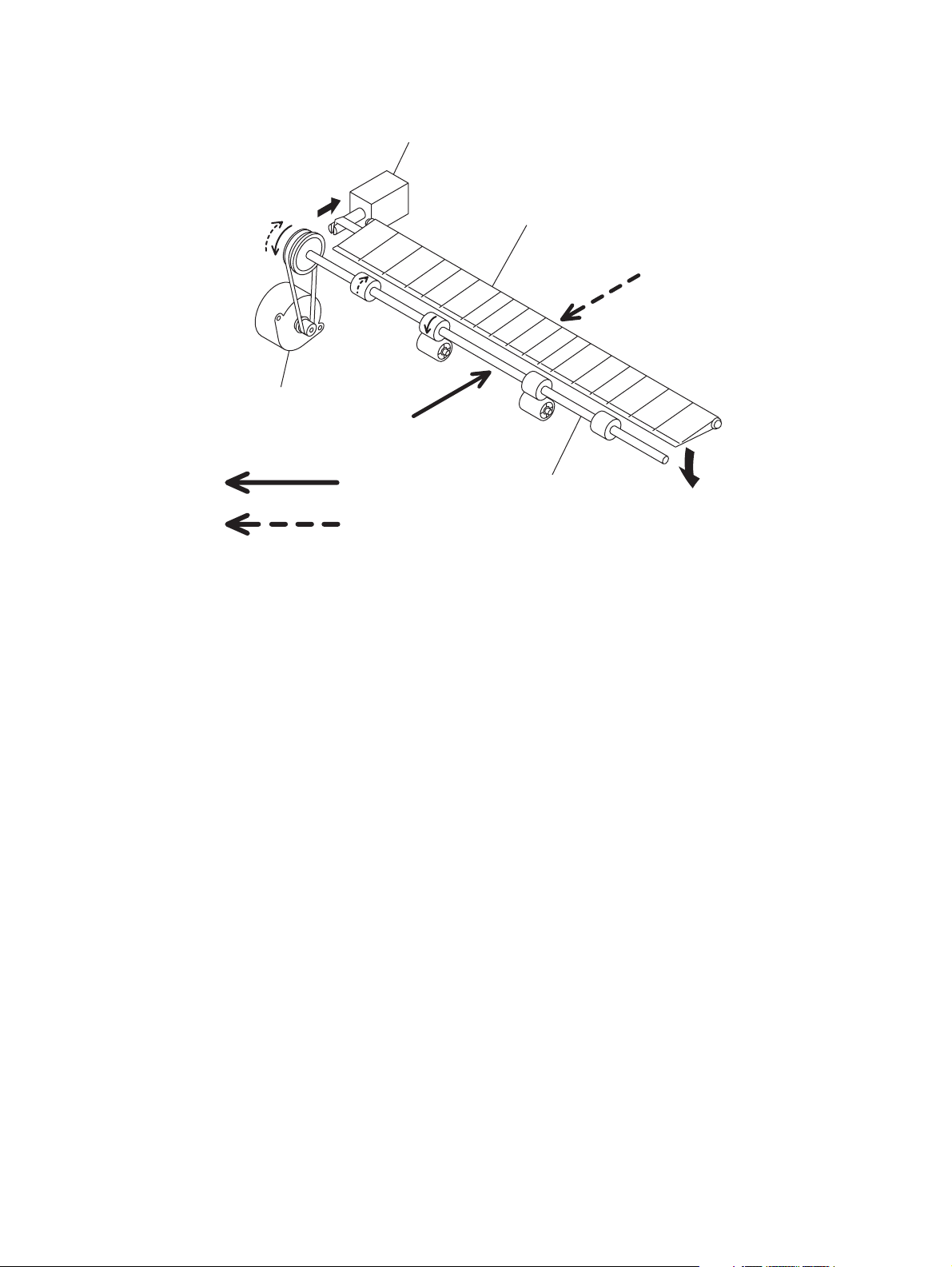
3.1.3 Read motor drive section
Read motor
Reverse registration roller
Post-reading roller
3
Platen roller
Intermediate transfer rollerPre-reading roller
Fig.3-3
The transported original is driven by the read motor.
Then the original is transported to a scanning start position by the intermediate transfer roller, pre-reading roller and platen roller.
The original transported to the scanning start position is then scanned in the scanner function of the
equipment.
When the data of the original have been scanned, the original is then transported to the original exit tray
side by the post-reading roller.
June 2005 © TOSHIBA TEC MR-3018 DESCRIPTION OF OPERATIONS
3 - 3
Page 18
3.1.4 Original exit/reverse motor drive section
Gate solenoid
Reverse fapper
Exit/reverse motor
Exit
Reverse
Exit/reverse rollor
Fig.3-4
When the data of the original have been scanned, the original is exited to the original exit tray by the
exit/reverse roller driven by the exit motor (shown in a solid line in the figure).
In the duplex scanning mode, the gate solenoid is turned ON and the reverse flapper is lowered to
switch the transport path to the reverse tray side when the scanning of one side of the original is completed.
When the reverse flapper is lowered, the original is temporarily transported to the reverse tray, and then
the exit motor rotates reversely to return the original to the transport path switched for reverse operation
(shown in a dotted line in the figure).
The reversed original is aligned with the reverse registration roller, and then the other side of the original is scanned. When the scanning is completed, the original is exited to the original exit tray.
MR-3018 DESCRIPTION OF OPERATIONS June 2005 © TOSHIBA TEC
3 - 4
Page 19

3.2 Original Size Detection
The original tray width sensor, original length detection sensor, and original width detection sensors-1
and -2 work in combination to detect the size of originals.
Original width detection sensor-2
Original width detection sensor-1
Original length
detection sensor
Fig.3-5
Original tray width sensor
3
3.2.1 Outline
When an original is placed on the original tray, the width of the original is detected by the positions of
the original width guides. Then the original width sensors -1 and -2 and the original length detection
sensor detect the size of the original being transported. Based on the detection result of these sensors,
the size of the original is finally determined.
3.2.2 Original tray width sensor
The original tray width sensor detects the width of the original placed on the original tray.
This sensor consists of a leaf spring and 4 contacting points (= 4 harnesses). When the original width
guides are moved, a protruded part located under the guides pushes the leaf spring, and the leaf spring
thus contacts the harnesses. The gap between these guides is detected by this contact.
A terminal connected with the black harness is for grounding (= common). When the leaf spring contacts with each harness of gray, yellow and orange, each terminal connected with these harnesses generates a signal at a low level.
The combination of these contact (= low level) and release (= high level) can determine the width of the
original.
Sizes detectable in combination of these contact and release are as follows:
TWIDTH2
(Orange)
HHH LD / LT
HHL HLH ST-R
LHH LD / LT
LHL L L H 8.5x8.5 / LT-R / KLG / 13”LG
LLL COMPUTER
TWIDTH1
(Yellow)
TWIDTH0
(Gray)
Original width size
H (= high level): Release L (= low level): Contact
June 2005 © TOSHIBA TEC MR-3018 DESCRIPTION OF OPERATIONS
3 - 5
Page 20

3.2.3 Original width detection sensors-1 and -2 / Original length
detection sensor
The size of the original is determined by the detection performed in combination of the original width
detection sensors-1 and -2 and the original length detection sensor, as well as the detection performed
by the original tray width sensor.
Sizes detectable in combination of these sensors are as follows:
A4 series (ORG-SRS: 1)
Original length
detection sensor
OFF
ON
A4 series (width sizes mixed at A3 / A4 standard)
Original length
detection sensor
ON
OFF
Original width
sensor-1
OFF OFF A5-R -
ON OFF B5 -
ON ON A4 -
OFF OFF B5-R -
ON OFF
ON ON A3 -
Original width
sensor-1
ON ON A3
OFF OFF A4-R / FOLIO
ON OFF B4
ON OFF B5
ON ON A4
Original width
sensor-2
Original width
sensor-2
Size determined Original tray width
A4-R / FOLIO
B4
Size determined Original tray width
Determined by a gap
between guides
A3 / A4
A4 series (width sizes mixed at B4 / B5 standard)
Original length
detection sensor
ON
OFF
Original width
sensor-1
OFF OFF A4-R / FOLIO
ON OFF B4
ON OFF B5
OFF OFF A5-R
Original width
sensor-2
A4 series (width sizes mixed at A4-R standard)
Original length
detection sensor
ON
OFF OFF OFF A5-R
Original width
sensor-1
OFF OFF B5-R
Original width
sensor-2
A4 series (width sizes mixed at B5-R standard)
Original length
detection sensor
ON OFF OFF B5-R
OFF OFF OFF A5-R
Original width
sensor-1
Original width
sensor-2
Size determined Original tray width
B4/B5
Size determined Original tray width
A4-RON OFF A4-R / FOLIO
Size determined Original tray width
B5-R
MR-3018 DESCRIPTION OF OPERATIONS June 2005 © TOSHIBA TEC
3 - 6
Page 21
LT series (ORG-SRS: 0)
Original length
detection sensor
OFF
ON
Original width
sensor-1
OFF OFF ST-R -
ON OFF 8.5x8.5 -
ON ON A4 -
ON OFF LT-R / LG / COMP / 13”LG -
ON ON LD -
Original width
sensor-2
LT series (width sizes mixed at LD / LT standard)
Original length
detection sensor
ON
OFF ON ON LT
Original width
sensor-1
ON ON LD
ON OFF COMP
OFF OFF LT-R / LG / 8.5x8.5 / 13”LG
Original width
sensor-2
LT series (width sizes mixed at LG / LT-R standard)
Original length
detection sensor
ON ON OFF LT-R / LG / 8.5x8.5 / 13”LG
OFF OFF OFF ST-R
Original width
sensor-1
Original width
sensor-2
Size determined Original tray width
Size determined Original tray width
3
LD / LT
Size determined Original tray width
LD / LT
June 2005 © TOSHIBA TEC MR-3018 DESCRIPTION OF OPERATIONS
3 - 7
Page 22
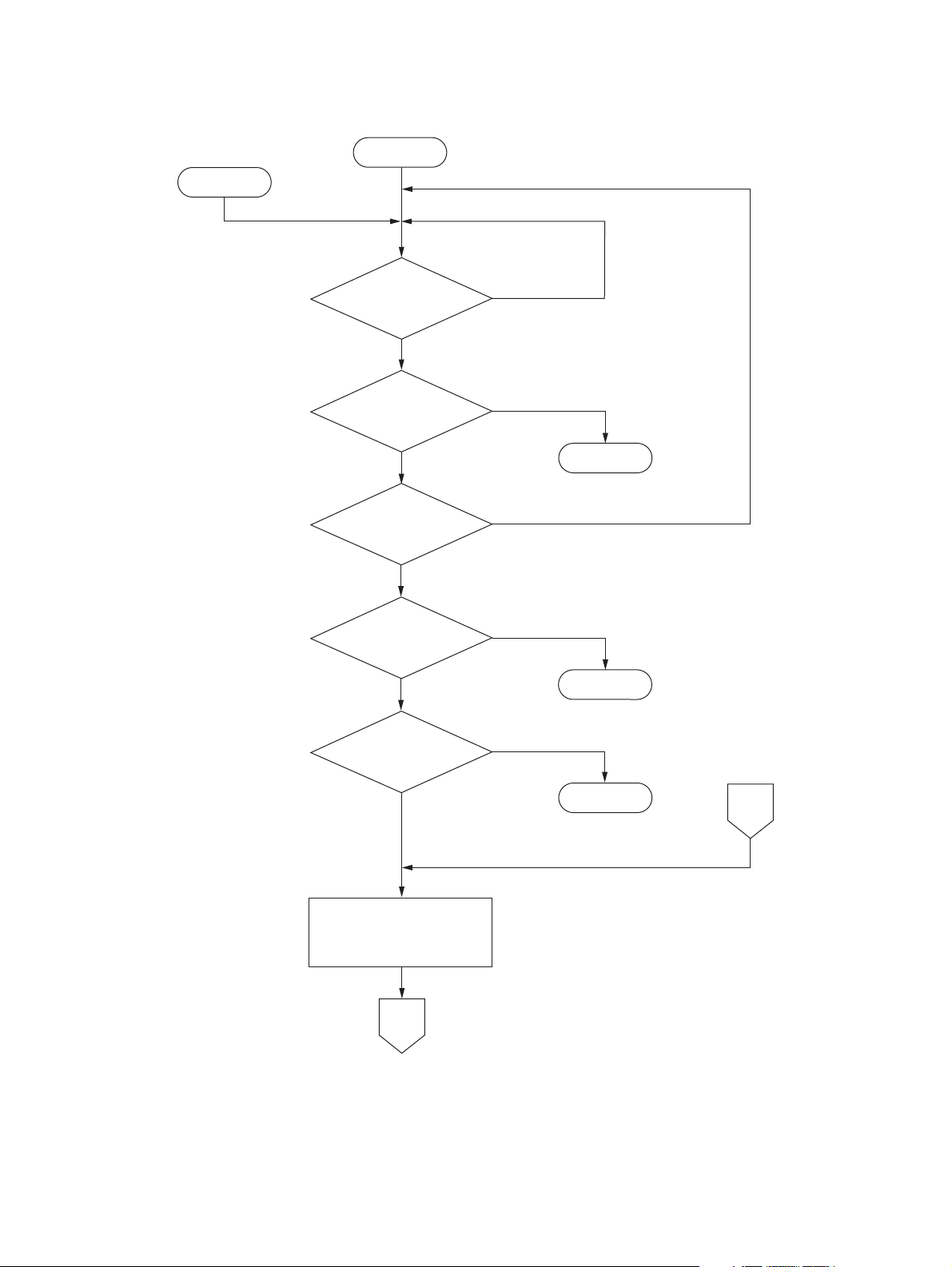
3.3 FLOW CHART
Standby
Power ON
RADF jam access
cover OPEN?
NO
All sensors OFF?
YES
Empty sensor ON?
YES
Feed request
signal received?
YES
Original on
feeding tray?
YES
NO
Jam
NO
NO
Standby
NO
YES
Pickup solenoid ON,
pickup roller goes down,
feed motor rotates forward.
A
MR-3018 DESCRIPTION OF OPERATIONS June 2005 © TOSHIBA TEC
3 - 8
Jam
D
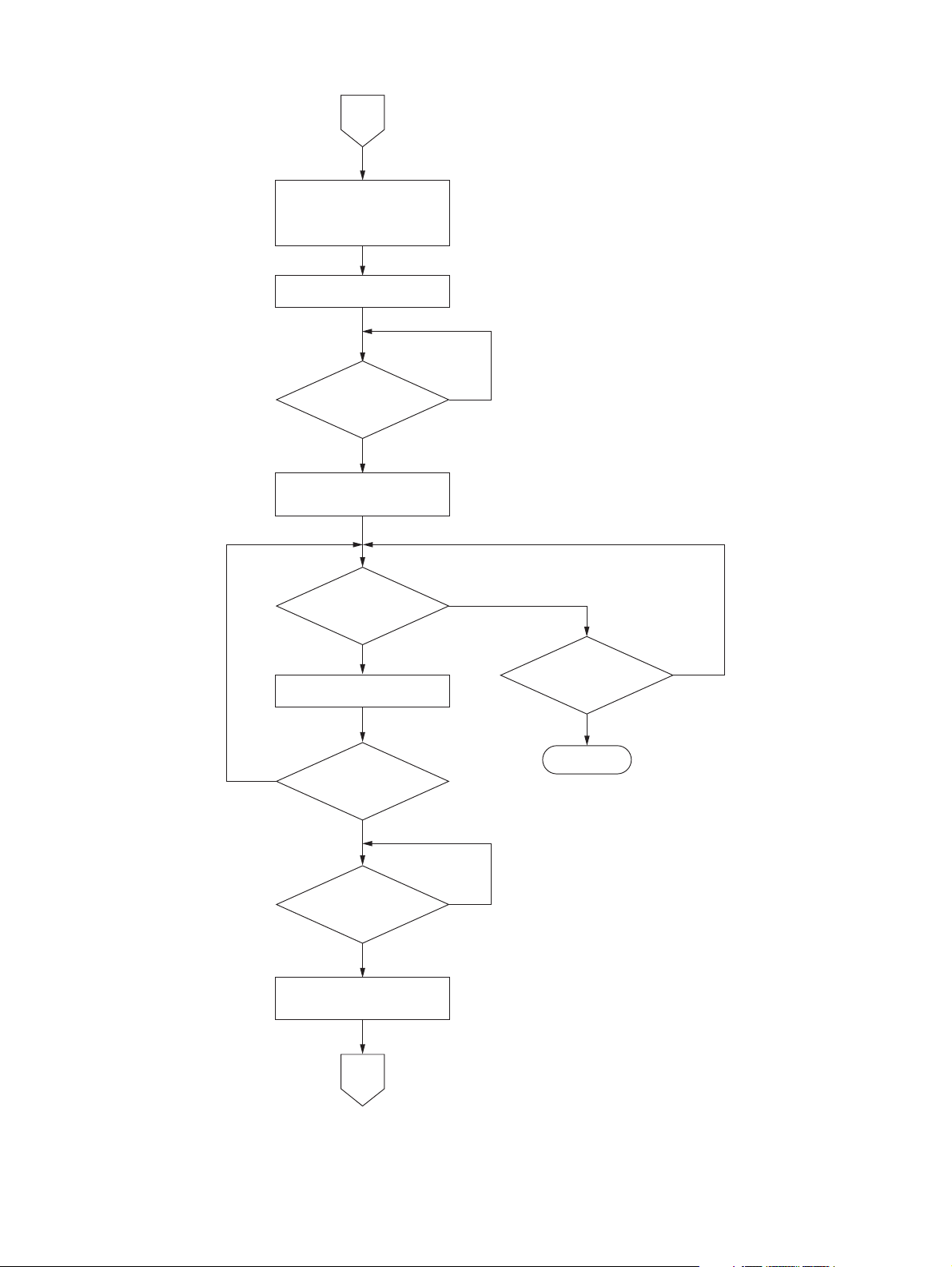
Page 23

A
Original registration
sensor ON?
YES
Feed motor stops after
transporting for a
certain period of time.
A certain period
of time passed?
YES
Registration roller rotates.
(Feed motor rotates reverse.)
Read motor rotates.
NO
NO
A certain period
of time passed?
YES
Jam
NO
3
Paper transprted
before the intermideate
transport roller?
YES
Feed motor rotation speed switches.
First scan: Highest speed
Second scan/later: Requested speed
B
NO
Monitoring registration
sensor by parallel processing.
Feed motor stops when registration
sensor detects trailing edge of
original. Skip to .
D
June 2005 © TOSHIBA TEC MR-3018 DESCRIPTION OF OPERATIONS
3 - 9
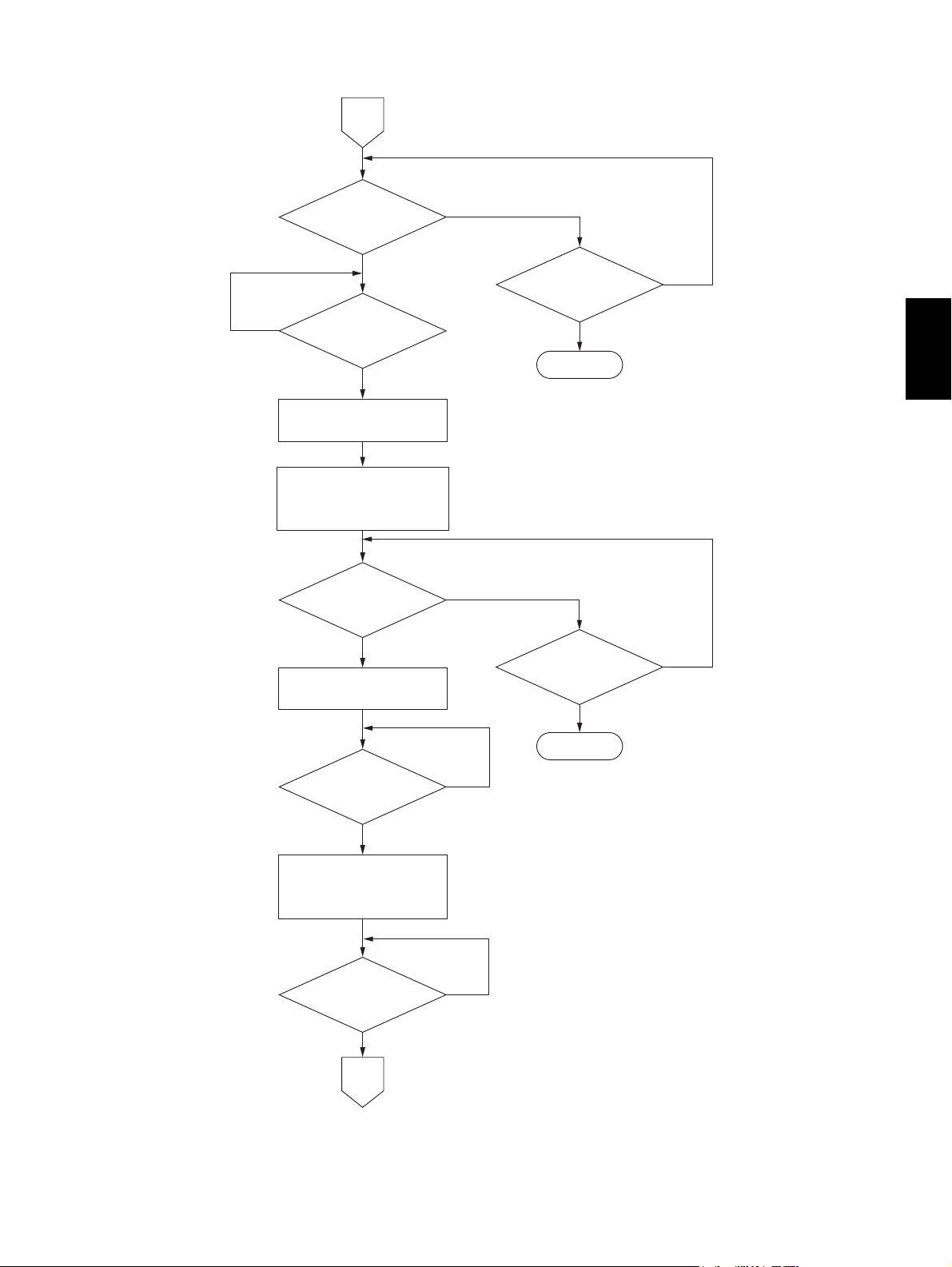
Page 24

B
Original intermediate
transport sensor ON?
YES
Feed motor and read motor
stop after transporting for
certain period of time.
Feed request signal
received?
YES
Duplex?
NO
Registration roller also rotates,
while read motor rotates
and registration sensor ON.
NO
NO
YES
A certain period
of time passed?
YES
Jam
NO
E
Transport for
a certain amount of
distance completed?
NO
YES
Scanning start signal
sent (level: High)
Exposure and scanning start.
C
MR-3018 DESCRIPTION OF OPERATIONS June 2005 © TOSHIBA TEC
3 - 10
Page 25

C
Original exit/reverse
sensor ON?
Original exit/reverse
motor rotates.
NO
Read sensor OFF?
A certain period
of time passed?
Scanning start signal
sent (level: High)
YES
YES
YES
NO
NO
A certain period
of time passed?
YES
Jam
Scanning completed.
NO
3
Original exit/reverse
D
sensor OFF?
YES
Read motor stops.
Transport for
a certain amount of
distance completed?
YES
Original exit/reverse
motor stops.
END
NO
NO
A certain period
of time passed?
YES
Jam
NO
June 2005 © TOSHIBA TEC MR-3018 DESCRIPTION OF OPERATIONS
3 - 11
Page 26
E
Registration roller also rotates,
while read motor rotates
and registration sensor ON.
Gate solenoid ON
Transport for
a certain amount of
distance completed?
YES
Scanning start signal
sent (level: High)
Original exit/reverse
sensor ON?
YES
Original exit/reverse
motor rotates.
Read sensor OFF?
YES
NO
NO
Exposure and scanning start.
A certain period
NO
of time passed?
YES
Jam
A certain period
NO
of time passed?
YES
Scanning start signal
sent (level: Low)
Scanning completed.
F
MR-3018 DESCRIPTION OF OPERATIONS June 2005 © TOSHIBA TEC
3 - 12
Page 27
F
Original exit/reverse
sensor OFF?
YES
NO
Transport for
a certain amount of
distance completed?
YES
Original exit/reverse motor
and read motor stop.
After a certain period of time,
original exit/reverse motor reverses,
read motor starts, reverse roller
aligns original, and then system reboots.
Original intermediate
transport sensor ON?
YES
Exit/reverse and read motor
stop after transporting for
a certain amount of distance.
NO
NO
A certain period
of time passed?
YES
Jam
A certain period
of time passed?
YES
NO
3
NO
Jam
Transport request
NO
signal received?
YES
Read motor and
exit/reverse motor rotate
at requested speed.
Transport for
a certain amount of
distance completed?
NO
YES
G
June 2005 © TOSHIBA TEC MR-3018 DESCRIPTION OF OPERATIONS
3 - 13
Page 28

G
Scanning start signal
sent (level: High)
Original exit/reverse
sensor ON?
Original exit/reverse
motor rotates.
NO
NO
Read sensor OFF?
A certain period
of time passed?
YES
YES
Exposure and scanning start.
NO
A certain period
of time passed?
Jam
NO
YES
Scanning start signal
sent (level: Low)
Original exit/reverse
sensor OFF?
NO
Transport for
a certain amount of
distance completed?
H
YES
YES
YES
Scanning completed.
NO
A certain period
of time passed?
YES
Jam
NO
MR-3018 DESCRIPTION OF OPERATIONS June 2005 © TOSHIBA TEC
3 - 14
Page 29

H
Original exit/reverse motor
and read motor stop.
After a certain period of time,
original exit/reverse motor reverses,
read motor starts, reverse roller
aligns original, and then system reboots.
3
NO
Original intermediate
transport sensor ON?
YES
Original exit/reverse
sensor OFF?
YES
Transport for
a certain amount of
distance completed?
YES
NO
NO
A certain period
of time passed?
YES
Jam
A certain period
of time passed?
YES
Jam
NO
NO
Original exit/reverse motor
and read motor stop.
Gate solenoid OFF
END
June 2005 © TOSHIBA TEC MR-3018 DESCRIPTION OF OPERATIONS
3 - 15
Page 30
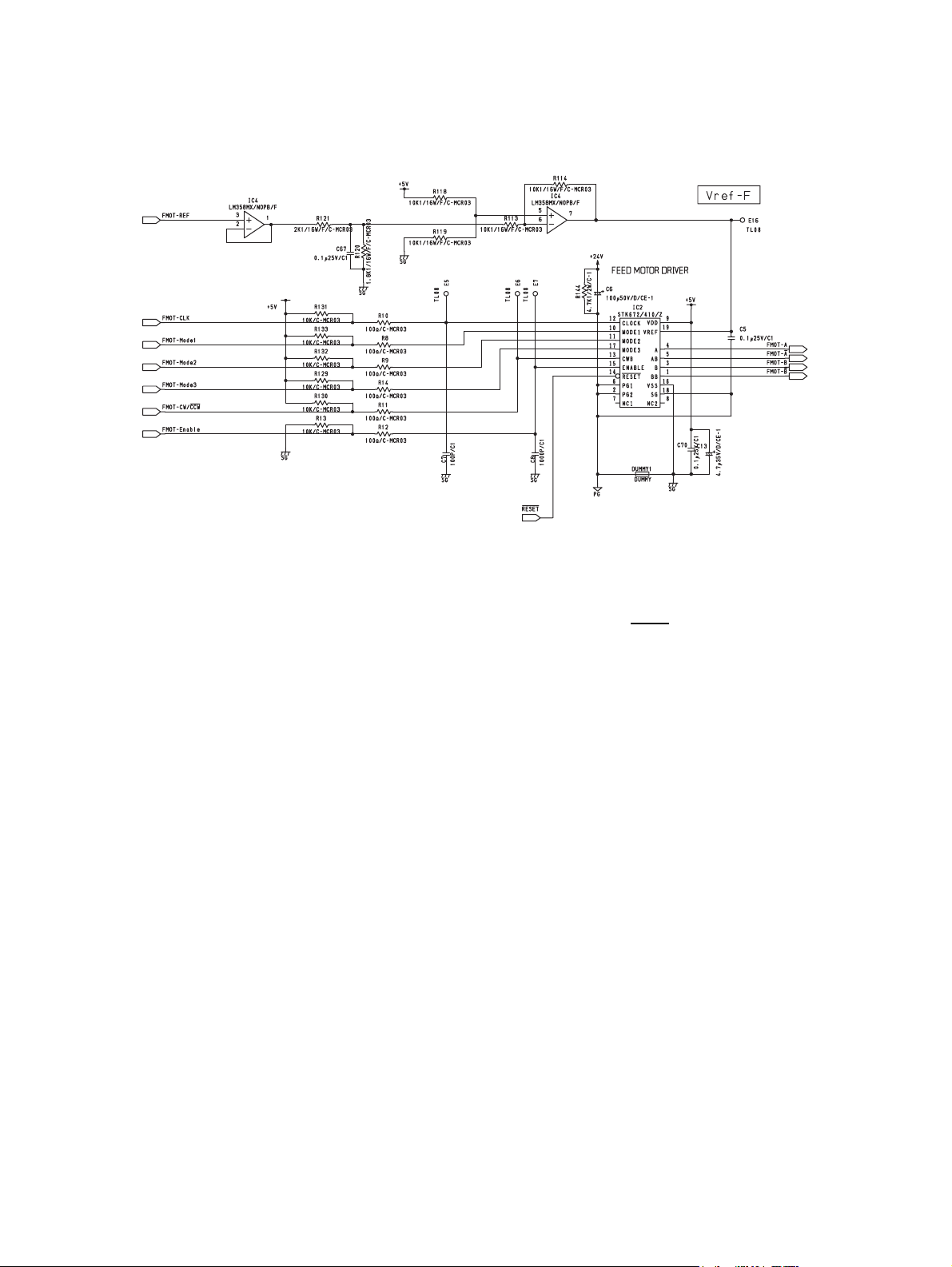
3.4 DESCRIPTION OF CIRCUIT
3.4.1 Drive Circuit for Feed Motor
Fig.3-6
This circuit controls the rotation/stoppage and the direction of rotation, excitation mode and motor current of the feed motor.
A drive clock signal (FMOT-CLK) and rotation direction signal (FMOT-CW/CCW
speed and direction of the motor rotation.
When the level of the enabling signal (FMOT-Enable) is set to "L", motor current is turned OFF regardless of the state of other signals.
For the excitation mode, either of 2 phase excitation, 1-2 phase excitation, W1-2 phase excitation,
2W1-2 phase excitation or the 4W1-2 phase excitation can be selected using the excitation switching
signal (FMOT-Mode1/FMOT-Mode2).
The edge switching signal (FMOT-Mode3) is used to specify the switching timing for excitation phase
either from when both the rise and decay edge of the CLK input are detected or when only the rising
edge is detected.
Motor current value can be set discretionary by changing the level of the reference setting signal
(FMOT-REF).
) are input to control the
MR-3018 DESCRIPTION OF OPERATIONS June 2005 © TOSHIBA TEC
3 - 16
Page 31

3.4.2 Drive Circuit for Read Motor
Fig.3-7
This circuit controls the rotation/stoppage and the direction of rotation, excitation mode and motor current of the read motor.
A drive clock signal (RMOT-CLK) and rotation direction signal (RMOT-CW/CCW
the speed and direction of the motor rotation.
When the level of the enabling signal (RMOT-Enable) is set to "L", motor current is turned to OFF
regardless of the state of other signals.
For the excitation mode, either of 2 phase excitation, 1-2 phase excitation, W1-2 phase excitation,
2W1-2 phase excitation or the 4W1-2 phase excitation can be selected using the excitation switching
signal (RMOT-Mode1/RMOT-Mode2).
The edge switching signal (RMOT-Mode3) is used to specify the switching timing for excitation phase
either from when both the rise and decay edge of the CLK input are detected or when only the rising
edge is detected.
Motor current value can be set discretionary by changing the level of the reference setting signal
(RMOT-REF).
) are input to control
3
June 2005 © TOSHIBA TEC MR-3018 DESCRIPTION OF OPERATIONS
3 - 17
Page 32

3.4.3 Drive Circuit for Exit Motor
Fig.3-8
This circuit controls the rotation/stoppage and the direction of rotation, excitation mode and motor current of the exit motor.
A drive clock signal (EMOT-CLK) and rotation direction signal (EMOT-CW/CCW
the speed and direction of the motor rotation.
When the level of the enabling signal (EMOT-Enable) is set to "L", motor current is turned OFF regardless of the state of other signals.
As IC3-10pin (MODE1) is connected to +5V, excitation mode is applied at 1-2 phase excitation.
The edge switching signal (EMOT-Mode3) is used to specify the switching timing for excitation phase
either from when both the rise and decay edge of the CLK input are detected or when only the rising
edge is detected.
Motor current value can be set discretionary by switching the level of the reference switching signal
(EMOT-REFS0,EMOT-REFS1).
) are input to control
3.4.4 Drive Circuit for FAN Motor
Fig.3-9
This circuit controls the rotation/stoppage of the fan motor. The FAN starts to rotate when the FAN
motor drive signal level is set to “H”, and stops when the level is set to “L”.
MR-3018 DESCRIPTION OF OPERATIONS June 2005 © TOSHIBA TEC
3 - 18
Page 33

3.4.5 Reset Circuit
Fig.3-10
This circuit generates a reset signal when the power is turned ON and the power voltage is blocked or
cut off/lowered temporarily.
At the power-ON, the circuit shifts the level of the reset signal from “L” to “H” to put the CPU in a operative state after the reset pulse duration (Tpd) determined by the capacitance of C58 has passed from
when the power voltage has reached the supervisory voltage (Vs) divided by R116 and R117.
When a power voltage drop (cutoff, temporary cutoff, temporary low voltage) occurs and the power voltage becomes lower than the set value for the supervisory voltage for the power, the circuit sets the level
of the reset signal (RESET
) to “L” to put the CPU in a halt state.
3.4.6 Drive Circuit for Pickup Solenoid
Fig.3-11
Pick up solenoid is a two-way solenoid that can be operated both in suction and recovery, and driven by
two transistors (Q4 and Q2) for each operation respectively.
When the PSOL-ON-Signal level is set to “L”, Q4 is turned ON, the power of 24V is applied to the coil
for suction operation, the solenoid is turned ON, and then the pickup roller goes down.
When the PSOL-ON-Signal level is set to “L”, Q2 is turned ON, the power of 24V is applied to the coil
for recovery operation, the solenoid is turned OFF, and then the pickup roller goes up.
3
June 2005 © TOSHIBA TEC MR-3018 DESCRIPTION OF OPERATIONS
3 - 19
Page 34

3.4.7 Drive Circuit for Gate Solenoid
Fig.3-12
Gate solenoid driven by the driver transistor (Q1) is a solenoid which is used to switch an original into
the reverse tray when in the duplex scanning mode.
When the GSOL-ON-Signal level is set to “L”, the reverse flapper goes down and the original is transported to the reverse tray.
MR-3018 DESCRIPTION OF OPERATIONS June 2005 © TOSHIBA TEC
3 - 20
Page 35

4. DISASSEMBLY AND ASSEMBLY
4.1 Cover
[A] Front cover
(1) Open the RADF and remove 3 screws.
(2) Close the RADF.
(3) Open the jam access cover and remove 2
screws.
4
Fig.4-1
Fig.4-2
(4) Take off the front cover toward you.
Front cover
Fig.4-3
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 1
Page 36

[B] Rear cover
(1) Open the jam access cover and remove 4
screws.
(2) Raise the original tray and take off the rear
cover upward.
Fig.4-4
Rear cover
[C] Jam access cover
(1) Take off the front cover.
( P.4-1 "[A] Front cover")
(2) Take off the rear cover.
( P.4-2 "[B] Rear cover")
(3) Remove 1 clip and then the dial and pin.
Fig.4-5
Pin
ClipDial
Fig.4-6
MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 2
Page 37

(4) Remove 1 screw and the hinge pin.
(5) Take off the jam access cover by sliding it.
Hinge pin
Fig.4-7
Jam access cover
4
[D] Left cover
(1) Remove 2 screws and take off the left cover.
Fig.4-8
Left cover
Fig.4-9
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 3
Page 38

[E] Original tray
(1) Take off the front cover.
( P.4-1 "[A] Front cover")
(2) Take off the rear cover.
( P.4-2 "[B] Rear cover")
(3) Take off the paper feeder unit.
( P.4-6 "[A] Paper feeder unit")
(4) Remove 2 screws. Lift up the feeder upper
guide by sliding it to the right.
Note: Note:
Do not pull the harness too strong.
(5) Disconnect 1 connector from the RADF con-
trol PC board.
Feeder upper guide Screw
Screw
Fig.4-10
(6) Remove 1 screw and take off the bushing.
(7) Take off the original tray.
Fig.4-11
Original tray
Bushing
Screw
Fig.4-12
MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 4
Page 39

[F] Original reverse tray
(1) Take off the original tray.
( P.4-4 "[E] Original tray")
(2) Remove 1 screw and take off the original
reverse tray.
Original reverse tray
Fig.4-13
4
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 5
Page 40

4.2 Roller
[A] Paper feeder unit
(1) Open the jam access cover.
(2) Remove 2 screws and take off the bracket.
(3) Remove 1 clip and slide 2 bushings.
Screw
Bracket
Fig.4-14
Clip
Fig.4-15
(4) Take off the paper feeder unit.
Paper feeder unit
T.B.D.
Fig.4-16
MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 6
Page 41

[B] Pickup roller [PM]
(1) Take off the paper feeder unit.
( P.4-6 "[A] Paper feeder unit")
(2) Remove 1 clip and pull out the shaft. Take off
the pickup roller.
Notes:
1. Be careful not to drop the pin because it
will come off when the shaft is pulled out.
2. Make sure you assemble the pickup roller
with the one-way clutch in the correct
direction.
Shaft Pin
Clip Pickup roller
Fig.4-17
4
T.B.D.
[C] Feed roller [PM]
(1) Take off the paper feeder unit.
( P.4-6 "[A] Paper feeder unit")
(2) Remove 1 clip.
Lock Lock
Fig.4-18
Clip
T.B.D.
Fig.4-19
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 7
Page 42

(3) Slide the pulley and remove 1 pin.
(4) Pull out the shaft and take off the feed roller.
Pin
T.B.D.
Pulley
Fig.4-20
Feed roller
Shaft
Note: Note:
Make sure you assemble the feed roller with
the one-way clutch in the correct direction.
Fig.4-21
T.B.D.
Lock Lock
Fig.4-22
MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 8
Page 43

[D] Separation roller [PM]
(1) Take off the paper feeder unit.
( P.4-6 "[A] Paper feeder unit")
(2) Remove 2 screws. Slide the feeder upper
guide to the right and raise it.
Note: Note:
Do not pull the harness out with too much
force.
(3) Remove 2 screws and take off the separation
roller holder and separation roller unit.
Feeder upper guide Screw
Fig.4-23
Separation roller unit Screw
Screw
4
(4) Remove 1 bushing and clip, and then take off
the separation roller.
Separation roller holder
Fig.4-24
Separation roller
T.B.D.
Clip
Fig.4-25
Bushing
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 9
Page 44

[E] Feeder lower guide
(1) Take off the original tray.
( P.4-4 "[E] Original tray")
(2) Take off the paper feeder unit.
( P.4-6 "[A] Paper feeder unit")
(3) Remove 2 screws and take off the stay.
(4) Take off the jam access guide.
Stay
Fig.4-26
Jam access guide
(5) Remove 4 screws. Disconnect 1 connector
and take off the feeder lower guide.
Fig.4-27
Feeder lower guide
Fig.4-28
MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 10
Page 45

[F] Registration roller
(1) Take off the feeder lower guide.
( P.4-10 "[E] Feeder lower guide")
(2) Take off the original feed motor drive section.
( P.4-21 "[E] Original feed motor drive section")
(3) Remove 1 E-ring and 1 bushing from the
front side of the registration roller shaft. Also,
remove 1 bushing, 1 pulley, 1 E-ring and 1
bushing from the rear side of the shaft, and
then take off the registration roller.
[G] Exit/reverse roller
(1) Take off the front cover.
( P.4-1 "[A] Front cover")
(2) Take off the original exit/reverse motor.
( P.4-23 "[F] Original exit/reverse motor
(M3)")
(3) Remove 1 clip, 1 pulley, 1 pin and 1 bushing
from the rear side of the exit/reverse roller
shaft.
Bushing
Pulley
E-ring
Bushing
Fig.4-29
Registration roller
Bushing
E-ring
Bushing
Pin
Pulley
4
Clip
Fig.4-30
(4) Remove 1 screw and take off the leaf spring.
(5) Remove 1 clip and 1 bushing from the front
Leaf spring
side of the exit/reverse roller shaft.
Bushing
Fig.4-31
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 11
Clip
Page 46

(6) Take off the jam access guide.
(7) Pull out the exit guide.
Jam access guide
Fig.4-32
Exit guide
(8) Take off the exit/reverse roller.
Fig.4-33
Exit/reverse roller
Fig.4-34
MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 12
Page 47

[H] Pre-reading lower guide / pre-reading upper guide
(1) Take off the front cover.
( P.4-1 "[A] Front cover")
(2) Take off the rear cover.
( P.4-2 "[B] Rear cover")
(3) Take off the jam access cover.
( P.4-2 "[C] Jam access cover")
(4) Take off the left cover.
( P.4-3 "[D] Left cover")
(5) Remove 4 screws and take off the pre-read-
ing lower guide.
(6) Disconnect 2 connectors. Remove 2 screws
and take off the pre-reading upper guide.
Pre-reading lower guide
Fig.4-35
4
[I] Intermediate transport roller
(1) Take off the pre-reading upper guide.
( P.4-13 "[H] Pre-reading lower guide /
pre-reading upper guide")
(2) Take off the read motor drive section.
( P.4-19 "[C] Read motor drive section")
(3) Remove 1 bushing, 1 E-ring, 1 pulley, 1 pin
and 1 bushing from the rear side of the intermediate transport roller shaft.
(4) Remove 1 bushing from the front side of the
intermediate transport roller shaft.
(5) Take off the intermediate transport roller.
Pre-reading upper guide
Fig.4-36
Bushing
E-ring
Pulley
Pin
Bushing
Intermediate transport roller
Fig.4-37
Bushing
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 13
Page 48

[J] Pre-reading roller
(1) Take off the pre-reading upper guide.
( P.4-13 "[H] Pre-reading lower guide /
pre-reading upper guide")
(2) Take off the read motor drive section.
( P.4-19 "[C] Read motor drive section")
(3) Remove 1 bushing and 1 E-ring from the rear
side of the pre-reading roller shaft. Loosen 2
setscrews and take off 1 flange. Then take
off 1 pulley and 1 bearing.
Flange
(4) Remove 1 clip and 1 bushing from the front
side of the pre-reading roller shaft.
(5) Take off the pre-reading roller.
[K] Platen roller / post-reading roller
(1) Take off the pre-reading lower guide.
( P.4-13 "[H] Pre-reading lower guide /
pre-reading upper guide")
(2) Disconnect 1 connector.
Bushing
Pre-reading roller
E-ring
Fig.4-38
Fig.4-39
Pulley
Bushing
Bearing
Clip
Connector
Fig.4-40
MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 14
Page 49

(3) Take off the read motor drive section.
( P.4-19 "[C] Read motor drive section")
(4) Remove 1 bushing, 1 E-ring and 1 pulley
from the rear side of the post-reading roller
shaft. Loosen 2 setscrews and take off 1
flange. Take off 1 bearing.
Bearing
(5) Remove 1 clip and 1 bushing from the front
side of the post-reading roller shaft.
(6) Open the RADF. Remove 4 screws, take off
2 holders and platen guide.
Bushing E-ring Pulley
Flange
Fig.4-41
4
Bushing Clip
Fig.4-42
Holder Screw
Screw
Screw
Fig.4-43
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 15
Platen guide
ScrewHolder
Page 50

(7) Remove 2 screws. Open the post-reading
lower guide and take off the post-reading
upper guide.
(8) Take off the platen roller and post-reading
roller.
Post-reading
upper guide
Fig.4-44
Post-reading roller
Platen roller
[L] Reverse registration roller
(1) Take off the platen roller and post-reading
roller.
( P.4-14 "[K] Platen roller / post-reading
roller")
(2) Remove 1 E-ring, 1 pulley, 1 pin and 1 bush-
ing from the rear side of the reverse registration roller shaft.
Bushing
Pin Bushing
E-ring
Fig.4-45
Pulley
Fig.4-46
MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 16
Page 51

(3) Remove 1 clip and 1 bushing from the front
side of the reverse registration roller shaft.
(4) Open the RADF. Take off the reverse regis-
tration roller.
Bushing Clip
Fig.4-47
4
Reverse registration
roller
Fig.4-48
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 17
Page 52

4.3 Motor / Motor drive section
[A] Fan motor (M4)
(1) Take off the rear cover.
( P.4-2 "[B] Rear cover")
(2) Disconnect 1 connector. Then remove 2
screws to take off the fan motor.
[B] Read motor (M2)
(1) Take off the rear cover.
( P.4-2 "[B] Rear cover")
(2) Take off the fan motor.
( P.4-18 "[A] Fan motor (M4)")
(3) Disconnect 1 connector. Then remove 2
screws to take off the read motor.
Connector
Screw
Fan motor
Fig.4-49
Connector
Screw
Fig.4-50
MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 18
Read motor
Page 53

[C] Read motor drive section
(1) Take off the rear cover.
( P.4-2 "[B] Rear cover")
(2) Take off the fan motor.
( P.4-18 "[A] Fan motor (M4)")
(3) Disconnect 1 connector, and then remove 1
spring. (Spring: Outside diameter of coil –
ø10.2 mm, active coils – 12.5)
(4) Remove 3 screws, and then take off the read
motor with its bracket.
Note: Note:
When the unit is being assembled, temporarily tighten the screws removed at step (3),
and then attach the spring removed at step
(2). Then fully tighten these screws.
Spring
Read motor
Connector
Fig.4-51
4
(5) Remove 1 spring. (Spring: Outside diameter
of coil –ø8.8 mm, active coils – 12.5)
(6) Release the harness from 2 harness clamps.
Screw
Harness clamp
Spring
Fig.4-52
Harness clamp
Fig.4-53
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 19
Page 54

(7) Remove 3 screws and then take off the
bracket.
(8) Take off 1 timing belt and 4 bushings.
(9) Loosen 1 screw of the belt tensioner.
(10) Remove the E-ring, and then take off the pul-
ley and timing belt.
Note: Note:
When the unit is being assembled, first install
the parts removed at steps (5), (6), (7) and
(9), and attach the spring removed at step (4)
next. Then tighten the screw loosened at
step (8).
Screw
Timing belt
Bushing
E-ring
Bracket
Fig.4-54
Fig.4-55
Tensioner
Timing belt
E-ring
Fig.4-56
MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 20
Page 55

[D] Original feed motor (M1)
(1) Take off the rear cover.
( P.4-2 "[B] Rear cover")
(2) Disconnect 1 connector. Then remove 2
screws to take off the original feed motor.
[E] Original feed motor drive section
(1) Take off the rear cover.
( P.4-2 "[B] Rear cover")
(2) Disconnect 1 connector, and then remove 1
spring. (Spring: Outside diameter of coil –
ø9.6 mm, acceptable turns of coil – 12 turns)
Connector
Original feed motor
Fig.4-57
4
Connector
Spring
Fig.4-58
(3) Remove 3 screws, and then take off the orig-
inal feed motor with its bracket.
Note: Note:
When the unit is being assembled, temporarily tighten the screws removed at step (3)
and then attach the spring removed at step
(2). Then fully tighten these screws.
Original feed motor
Fig.4-59
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 21
Page 56

(4) Release the harness from 3 harness clamps.
(5) Remove 1 E-ring and take off the bushing.
(6) Disconnect 2 terminals of the switch.
(7) Remove 4 screws, and then take off the
bracket.
Bushing
E-ring
Bracket
Screw
Fig.4-60
Harness clamp
Brown
Red
(8) Take off the timing belt, bushings and pulley.
Screw Screw
Fig.4-61
Pulley
Bushing Timing belt
Fig.4-62
MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 22
Page 57

[F] Original exit/reverse motor (M3)
(1) Take off the original feed motor drive section.
( P.4-21 "[E] Original feed motor drive section")
(2) Disconnect 1 connector from the RADF con-
trol PC board.
(3) Remove 2 screws, and then take off the orig-
inal exit/reverse motor with its bracket.
Fig.4-63
Original exit/reverse motor
4
(4) Remove 2 screws, and then take off the orig-
inal exit/reverse motor by sliding it from the
bracket.
Fig.4-64
Bracket
Original exit/reverse motor
Fig.4-65
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 23
Page 58

4.4 Solenoid
[A] Original pickup solenoid (SOL1)
(1) Take off the original feed motor drive section.
( P.4-21 "[E] Original feed motor drive section")
(2) Disconnect one connector. Remove 2
screws and take off the original pickup solenoid with the bracket.
(3) Remove 2 screws and take off the original
pickup solenoid from the bracket.
Screw
Original pickup solenoidConnector
Fig.4-66
Original pickup solenoid
Note: Note:
When installing the original pickup solenoid,
be sure to align the edge of the original
pickup solenoid with the mark-off line on the
frame.
Bracket
Fig.4-67
Mark-off line
Fig.4-68
MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 24
Page 59

[B] Gate solenoid (SOL2)
(1) Take off the original pickup solenoid.
( P.4-24 "[A] Original pickup solenoid
(SOL1)")
(2) Disconnect one connector. Remove 2
screws and take off the gate solenoid with
the bracket.
(3) Remove 2 screws and take off the gate sole-
noid from the bracket.
Screw
Gate solenoid
ScrewConnector
Fig.4-69
Gate solenoid
4
Note: Note:
When installing the gate solenoid, be sure to
align the edge of the bracket with the markoff line on the frame.
Fig.4-70
Mark-off line
Fig.4-71
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 25
Page 60

4.5 Sensor/switch
[A] Original tray width sensor (S2)
(1) Take off the original reverse tray.
( P.4-5 "[F] Original reverse tray")
(2) Remove 2 screws. Release 8 latches and
separate the original tray into 2 parts.
(3) Remove 1 screw and take off the original tray
width sensor.
Fig.4-72
Original tray
width sensor
Fig.4-73
[B] Original tray sensor (S1)
(1) Take off the original reverse tray.
( P.4-5 "[F] Original reverse tray")
(2) Remove 2 screws. Release 8 latches and
separate the original tray into 2 parts.
Fig.4-74
MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 26
Page 61

(3) Remove 2 screws and take off the holder.
(4) Release 2 latches and take off the original
tray sensor.
Holder
Fig.4-75
Original tray sensor
4
[C] Jam access cover sensor (S11)
(1) Open the jam access cover.
(2) Remove 1 screw and take off the metal plate
cover.
Fig.4-76
Metal plate cover
Fig.4-77
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 27
Page 62

(3) Disconnect 1 connector. Release 2 latches
and take off the jam access cover sensor.
[D] Original empty sensor (S3)
Jam access cover sensor
Fig.4-78
(1) Open the jam access cover.
(2) Remove 1 screw and take off the metal plate
cover.
(3) Remove 2 screws and take off the bracket.
Metal plate cover
Fig.4-79
Bracket
Fig.4-80
MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 28
Page 63

(4) Disconnect 1 connector. Release 2 latches
and take off the original empty sensor.
[E] Original length detection sensor (S4)
Original empty sensor
Fig.4-81
(1) Take off the feeder lower guide.
( P.4-10 "[E] Feeder lower guide")
(2) Disconnect 1 connector. Release 2 latches
and take off the original length detection sensor.
[F] Original registration sensor (S5)
(1) Take off the feeder lower guide.
( P.4-10 "[E] Feeder lower guide")
(2) Disconnect 1 connector. Release 2 latches
and take off the original registration sensor.
Original length detection sensor
4
Fig.4-82
Original registration sensor
Fig.4-83
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 29
Page 64

[G] Original width detection sensor-1 (S6)
(1) Take off the feeder lower guide.
( P.4-10 "[E] Feeder lower guide")
(2) Take off the actuator.
(3) Disconnect 1 connector. Release 2 latches
and take off the original width detection sensor-1.
[H] Original width detection sensor-2 (S7)
(1) Take off the feeder lower guide.
( P.4-10 "[E] Feeder lower guide")
(2) Take off the actuator.
(3) Disconnect 1 connector. Release 2 latches
and take off the Original width detection sensor-2.
Actuator Original width detection sensor-1
Fig.4-84
Actuator Original width detection sensor-2
Fig.4-85
[I] Read sensor (S9)
(1) Take off the pre-reading upper guide.
( P.4-13 "[H] Pre-reading lower guide /
Read sensor
pre-reading upper guide")
(2) Release 2 latches and take off the read sen-
sor from the pre-reading upper guide.
Fig.4-86
MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 30
Page 65

[J] Intermediate transport sensor (S8)
(1) Take off the pre-reading upper guide.
( P.4-13 "[H] Pre-reading lower guide /
pre-reading upper guide")
(2) Release 2 latches and take off the intermedi-
ate transport sensor from the pre-reading
upper guide.
Intermediate transport sensor
Fig.4-87
[K] Original exit/reverse sensor (S10)
(1) Take off the pre-reading lower guide.
( P.4-13 "[H] Pre-reading lower guide /
pre-reading upper guide")
(2) Disconnect 1 connector.
(3) Open the RADF. Remove 2 screws, and then
take off 2 holders and platen guide.
4
Connector
Fig.4-88
Holder Screw
Platen guide
ScrewHolder
Fig.4-89
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 31
Page 66

(4) Remove 2 screws. Open the post-reading
lower guide and take off the post-reading
upper guide.
(5) Release 2 latches and take off the Original
exit/reverse sensor from the post-reading
upper guide.
Post-reading
upper guide
Fig.4-90
Original exit/reverse sensor
[L] RADF opening/closing sensor (S12)
(1) Take off the rear cover.
( P.4-2 "[B] Rear cover")
(2) Disconnect 1 connector. Release 2 latches
and take off the RADF opening/closing sensor.
Fig.4-91
RADF opening/closing sensor
Fig.4-92
MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 32
Page 67

[M] Jam access cover opening/closing switch (SW1)
(1) Take off the bracket of the original feed motor
drive section.
( P.4-21 "[E] Original feed motor drive section")
(2) Disconnect 2 terminals. Remove 1 screw
and take off the jam access cover opening/
closing switch.
Screw
Screw
Bracket
Screw
Fig.4-93
Jam access cover
opening/closing
switch
Brown
Red
4
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 33
Page 68

4.6 PC Board
[A] RADF control PC board (ADF board)
(1) Take off the rear cover.
( P.4-2 "[B] Rear cover")
(2) Disconnect 11 connectors.
(3) Release 2 lock supports and 3 edge spacer.
Take off the ADF board.
Fig.4-94
ADF board
Fig.4-95
MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 34
Page 69

4.7 Others
[A] Hinge stopper
(1) Remove 1 screw and then take off the hinge
stopper.
Note: Note:
When the hinge stopper is taken off, the
opening angle for the RADF becomes
approx. 90 degrees. Take off the hinge stopper only when it is needed for installation,
maintenance service, etc.
Hinge stopper
Fig.4-96
4
Fig.4-97
June 2005 © TOSHIBA TEC MR-3018 DISASSEMBLY AND ASSEMBLY
4 - 35
Page 70

MR-3018 DISASSEMBLY AND ASSEMBLY June 2005 © TOSHIBA TEC
4 - 36
Page 71

5. Adjustment
5.1 Adjustment of Position
Perform this adjustment when the RADF is not installed in the correct position.
Note: Note:
Check if the image adjustment for the equipment is performed properly before this adjustment of
the RADF. (See the Service Handbook of the applicable equipment.)
[A] Checking
(1) Open the RADF and install 2 positioning pins
(the positioning pins are installed to the back
side of the hinge which is on the left side of
the RADF).
5
(2) Remove the platen sheet.
Fig.5-1
Fig.5-2
June 2005 © TOSHIBA TEC MR-3018 Adjustment
5 - 1
Page 72

(3) Close the RADF and check if the positioning
pins fit the holes on the RADF.
Fig.5-3
[B] Adjustment
If the pins cannot be fitted into the holes, perform the adjustment according to the following procedure.
(1) Remove the right-hand hinge screw at the
rear side.
Fig.5-4
(2) Loosen the left-hand hinge screw at the rear
side.
Fig.5-5
MR-3018 Adjustment June 2005 © TOSHIBA TEC
5 - 2
Page 73

(3) Loosen the hinge screws at the front side.
(4) Position the pins with the holes on the RADF
by moving it so that the pins fit into the holes
when the RADF is closed.
Fig.5-6
5
(5) Tighten the left-hand hinge screw at the rear
side.
Fig.5-7
Fig.5-8
June 2005 © TOSHIBA TEC MR-3018 Adjustment
5 - 3
Page 74

(6) Loosen the hole position adjustment screws
on the right hand side.
(7) Match the screw hole positions.
Fig.5-9
(8) Install the right-hand hinge screw at the rear
side.
Fig.5-10
Fig.5-11
MR-3018 Adjustment June 2005 © TOSHIBA TEC
5 - 4
Page 75

(9) Loosen the hinge screws at the front side.
(10) Place the platen sheet on the original glass
and align it to the top left corner.
Close the RADF gently and open it to check
if the platen sheet is attached properly.
Fig.5-12
5
Fig.5-13
June 2005 © TOSHIBA TEC MR-3018 Adjustment
5 - 5
Page 76

5.2 Adjustment of Height
Note: Note:
Check if the image adjustment for the equipment is performed properly before this adjustment of
the RADF. (See the Service Handbook of the applicable equipment.)
[A] Checking
(1) Close the RADF.
(2) Light the exposure lamp.
• Turn the power ON while pressing [0] and [3] simultaneously.
• Key in [267] and then press the [START] button. The exposure lamp is turned ON for a given
length of time.
(3) Visually check the gap between platen guide holder "A" and upper surface of the original glass
"B" from the left hand side of the equipment. If the value is not within the tolerance, perform the
adjustment according to the following procedure.
[Tolerance of the gap]
Rear side: 0 - 0.5 mm
Front side: 0 mm
0~0.5mm
MR-3018 Adjustment June 2005 © TOSHIBA TEC
A
B
A
B
Fig.5-14
5 - 6
0mm
Page 77

[B] Adjustment
(1) Close the RADF.
(2) Adjust it by turning the adjustment screws on the hinges.
• Adjust the height on the rear side by means of the screw on the hinge on the feed side of the
RADF.
Turn it clockwise ................. Heightened
Turn it counterclockwise ...... Lowered
Fig.5-15
• Adjust the gap on the rear side by means of the screw on the hinge on the feed side of the
RADF.
Turn it clockwis .................... Lowered
Turn it counterclockwise ...... Heightened
5
Fig.5-16
June 2005 © TOSHIBA TEC MR-3018 Adjustment
5 - 7
Page 78

5.3 Adjustment of Skew
Note: Note:
Check if the image adjustment for the equipment is performed properly before this adjustment of
the RADF. (See the Service Handbook of applicable equipment.) Also, the RADF position and
height shall be adjusted properly.
[A] Checking
Check the image using the chart (original) with vertical and horizontal lines in the following procedure.
Fig.5-17 Chart (Original)
Simplex copying:
(1) Place the chart provided as an original with its face up on the original tray of the RADF, select [1
Sided -> 1 Sided] and press the [START] button.
(2) Superimpose the chart on the copy and check the inclination of the copy image.
Duplex copying:
(1) Place the chart provided as an original with its face up on the original tray of the RADF, select [2
Sided -> 2 Sided] and press the [START] button.
(2) Superimpose the chart on the copy and check the inclination of the copy image.
MR-3018 Adjustment June 2005 © TOSHIBA TEC
5 - 8
Page 79

[B] Adjustment
Simplex copying:
(1) Shift the aligning plate with the scale as the guide shown in the figure below to adjust the skew.
Fig.5-18
(2) If the image skew is "C" as shown in the figure below, shift the aligning plate in the direction of
"+", and if "D", shift it to "-".
5
C
Fig.5-19
Shift the aligning plate in the direction of "+". Shift the aligning plate in the direction of "-".
Fig.5-20
D
June 2005 © TOSHIBA TEC MR-3018 Adjustment
5 - 9
Page 80

Duplex copying:
(1) Shift the aligning plate with the scale as the guide shown in the figure below to adjust the skew.
Fig.5-21
(2) If the image skew is "C" as shown in the figure below, shift the aligning plate in the direction of "-
", and if "D", shift it to "+".
C
Fig.5-22 Fig.5-23
Shift the aligning plate in the direction of "-". Shift the aligning plate in the direction of "+".
D
MR-3018 Adjustment June 2005 © TOSHIBA TEC
5 - 10
Page 81

5.4 Adjustment of the Leading Edge Position
Note: Note:
Check if the image adjustment for the equipment is performed properly before this adjustment of
the RADF. (See the Service Handbook of applicable equipment.) Also, the RADF position and
height shall be adjusted properly.
[A] Checking
Check the image using the chart (original) with vertical and horizontal lines in the following procedure.
Simplex copying:
(1) Place the chart provided as an original with its face up on the original tray of the RADF, select [1
Sided -> 1 Sided] and press the [START] button.
(2) Superimpose the chart on the copy and check the leading edge E of the chart and F of the copy.
Duplex copying:
(1) Place the chart provided as an original with its face up on the original tray of the RADF, select [2
Sided -> 2 Sided] and press the [START] button.
(2) Superimpose the chart on the copy and check the leading edge E of the chart and F of the copy.
E
Fig.5-24 Chart (Original)
[B] Adjustment
Simplex copying:
(1) Turn the power ON while pressing [0] and [5] simultaneously, key in [365] and then press the
[START] button.
(2) Enter the value.
• If the leading edge (F) margin of the copy image is larger than the (E) margin of the chart,
enter a value smaller than the current one.
Note: Note:
Changing one value shifts the copy image by 0.1 mm.
F
Fig.5-25 Copy
5
• If the leading edge (F) margin of the copy image is smaller than the (E) margin of the chart,
enter a value larger than the current one.
Note: Note:
Changing one value shifts the copy image by 0.1 mm.
(3) Press the [ENTER] button.
June 2005 © TOSHIBA TEC MR-3018 Adjustment
5 - 11
Page 82

Duplex copying:
(1) Turn the power ON while pressing [0] and [5] simultaneously, key in [366] and then press the
[START] button.
(2) Enter the value.
• If the leading edge (F) margin of the copy image is larger than the (E) margin of the chart,
enter a value smaller than the current one.
Note: Note:
Changing one value shifts the copy image by 0.1 mm.
• If the leading edge (F) margin of the copy image is smaller than the (E) margin of the chart,
enter a value larger than the current one.
Note: Note:
Changing one value shifts the copy image by 0.1 mm.
(3) Press the [ENTER] button.
MR-3018 Adjustment June 2005 © TOSHIBA TEC
5 - 12
Page 83

5.5 Adjustment of Horizontal Position
Note: Note:
Check if the image adjustment for the equipment is performed properly before this adjustment of
the RADF. (See the Service Handbook of applicable equipment.) Also, the RADF position and
height shall be adjusted properly.
[A] Checking
Check the image using the chart (original) with a center line in the following procedure.
(1) Place the chart provided as an original with its face up on the original tray of the RADF.
(2) Press the [START] button.
(3) Fold the copy in half and check if the center line is misaligned.
[B] Adjustment
(1) Turn the power ON while pressing [0] and [5] simultaneously.
(2) Key in [358] and then press the [START] button.
• If the center line of the copy image is shifted to the front side of the equipment, enter a value
larger than the current one.
Note: Note:
Changing one value shifts the copy image by 0.042 mm.
5
G
Fig.5-26
• If the center line of the copy image is shifted to the rear side of the equipment, enter a value
smaller than the current one.
Note: Note:
Changing one value shifts the copy image by 0.042 mm.
H
Fig.5-27
(3) Press the [ENTER] button.
June 2005 © TOSHIBA TEC MR-3018 Adjustment
5 - 13
Page 84

5.6 Adjustment of Copy Ratio
Note: Note:
Check if the image adjustment for the equipment is performed properly before this adjustment of
the RADF. (See the Service Handbook of applicable equipment.) Also, the RADF position and
height shall be adjusted properly.
[A] Checking
Check the image using the chart (original) with vertical and horizontal lines in the following procedure.
(1) Place the chart provided as an original with its face up on the original tray of the RADF.
(2) Press the [START] button.
(3) Superimpose the chart on the copy and check the image dimension “I”.
[B] Adjustment
(1) Turn the power ON while pressing [0] and [5] simultaneously.
(2) Key in [357] and then press the [START] button.
• If the copy image dimension “I” is larger than the chart dimension, enter a value smaller than
the current one.
• If the copy image dimension “I” is smaller than the chart dimension, enter a value larger than
the current one.
I
Fig.5-28
(3) Press the [ENTER] button.
MR-3018 Adjustment June 2005 © TOSHIBA TEC
5 - 14
Page 85

5.7 Adjustment of RADF Opening/Closing Sensor
Adjust the bracket position so that the sensor is turned ON when the height “A” becomes 100 mm or
less (within the empty weight falling limit).
A
Fig.5-29
5
Fig.5-30
June 2005 © TOSHIBA TEC MR-3018 Adjustment
5 - 15
Page 86

MR-3018 Adjustment June 2005 © TOSHIBA TEC
5 - 16
Page 87

6. Troubleshooting
6.1 Troubleshooting for Mechanical Errors
1) Multiple originals are transported simultaneously
Original abnormally curled or folded?
↓
NO
Separation roller is dirty?
↓ YES→ Clean the roller with alcohol
NO
Replace the separation rollers with new ones
2) Original is not transported to registration roller
Original thicker than specified?
↓
NO
Pickup roller and feed roller are dirty?
↓ YES→ Clean the rollers with alcohol
NO
Transport power of pickup roller and feed roller is weak?
↓
YES
Replace the rollers with new ones
YES→ Flatten the original and set it again
YES→ Use originals with permissible thickness.
Place thick originals manually on the platen cover to make a copy
3) Leading edge of original is skewed
Front and rear protrusions at bottom of RADF are out of contact with glass?
↓
NO
Transport rollers are dirty?
↓ YES→ Clean the rollers with alcohol
NO
Is the right hinge out of place?
↓
YES
Make a copy and adjust the position of the hinge
4) Edges of original and copied image are not aligned
Width between slides too wide compared to that of original?
↓
NO
Check the scanner adjustment
5) Black streaks appear on copied image
ADF original glass is dirty?
↓
NO
Check the scanner unit
YES→ Adjust the height of the left hinge
YES→ Move the slides so that they contact the edges of the original
YES→ Clean the glass with a dry/squeezed cloth
6
June 2005 © TOSHIBA TEC MR-3018 Troubleshooting
6 - 1
Page 88

6.2 Troubleshooting for Electrical Errors
1) RADF does not work (except in the case of a paper jam or when the cover is open)
Interface harness connected properly?
↓
YES
DC+5V supplied to CN70-2, 3pin?
↓ NO→ Connect the harness properly or replace it
YES
DC+24V supplied to CN70-6, 7pin?
↓ NO→ Connect the harness properly or replace it
YES
DC+24V supplied to CN72-4pin?
↓ NO→ Check or replace the jam access cover switch
YES
Empty sensor is ON when there is paper?
↓ NO→ Check or replace the empty sensor
YES
Check or replace the RADF board
2) Abnormality of motor
Power supplied and drives signals to connector of motor?
↓
YES
There is no mechanical overloading at the motor and the drive system is correct? (Belt tension etc.)
↓ NO→ Check or replace motor harness
YES
Check or replace the RADF board
NO→ Connect the harness properly or replace it
NO→ Check or replace motor
3) Communication error
Interface cable normal?
↓
NO→ Replace the interface cable
YES
Check or replace the RADF board and check the equipment
4) Size detection error
Original tray sensor is ON when there is paper?
↓
NO→ Replace the sensor or harness
YES
Registration roller does not catch the original?
↓ YES→ Clean the roller with alcohol or replace
NO
Original width detection sensor-1 is ON when there is paper?
↓ NO→ Replace the sensor or harness
YES
Original width detection sensor-2 is ON when there is paper?
↓ NO→ Replace the sensor or harness
YES
Check or replace the RADF board
MR-3018 Troubleshooting June 2005 © TOSHIBA TEC
6 - 2
Page 89

5) Abnormality of fan motor
Is there a foreign matter in the fan motor?
↓
YES→ Remove the extraneous material
NO
Fan harness connected properly?
↓ NO→ Connect the fan harness properly or replace it
YES
Power supplied at CN84-1pin when FAN is ON?
↓ YES→ Replace the fan motor
NO
Check or replace the RADF board
6
June 2005 © TOSHIBA TEC MR-3018 Troubleshooting
6 - 3
Page 90

MR-3018 Troubleshooting June 2005 © TOSHIBA TEC
6 - 4
Page 91

7. MAINTENANCE AND REWRITING ROM
7.1 Periodic Maintenance
5
6
9
4
8
7
10
3
2
1
11
Fig.7-1
Symbols used in the checklist
Cleaning Lubrication/Coating Replacement Operation check
A: Clean with alcohol
B: Clean with soft pad,
cloth or vacuum cleaner
L: Launa 40
SI: Silicon oil
W: White grease
(Molykote X5-6020)
AV: Alvania No.2
Preventive Maintenance Checklist
Note: Note:
Page-Item (P-I) is described in the column of the Parts list.
The number of sheets consumed before replacement
(Value x 1,000).
R: Replace if deformed or
damaged
O: After cleaning or
replacement, confirm
there is no problem
Item to check
1 Pickup roller A 120
2 Separation roller A 120
3 Feed roller A 120
4 Registration roller A
5 Intermediate transfer roller A
6 Front read roller A
7 Platen roller A
8 Rear read roller A
9 Reverse registration roller A
10 Exit/reverse roller A
11 Platen sheet B or A
Cleaning
(30K)
Lubrica-
tion/
Coating
Replace-
ment
(x1,000)
Operation
check
Parts list
(P-I)
Remarks
7
June 2005 © TOSHIBA TEC MR-3018 MAINTENANCE AND REWRITING ROM
7 - 1
Page 92

7.2 Rewriting ROM (Firmware Updating)
It is feasible to update the firmware automatically by connecting the download jig to the PC board and
turning the power of the equipment ON. The download jig K-PWA-DLM-320 is used.
< Procedure >
(1) Turning OFF the power of the equipment and take off the RADF rear cover.
(2) Connect the download jig with the connector (CN81) on the PC board.
(3) While pressing [0] and [8] simultaneously, turn ON the power. (rewriting data starts)
(4) During the data is rewritten, the LED on the download jig lights. When the data rewriting is com-
pleted, the LED blinks slowly (at an interval of 0.8 sec.). If the LED blinks fast (at an interval of
0.1 sec.), the rewriting has been failed.
(5) Turn OFF the power of the equipment and remove the download jig.
(6) Install the RADF rear cover.
* If rewriting data is failed, turn OFF the power and repeat the procedure.
Connector
Fig.7-2
MR-3018 MAINTENANCE AND REWRITING ROM June 2005 © TOSHIBA TEC
7 - 2
Page 93

8. CIRCUIT DIAGRAM / HARNESS DIAGRAM
8.1 Assembly of PC Board
• Component side
• Soldered side
Fig.8-1
8
Fig.8-2
June 2005 © TOSHIBA TEC MR-3018 CIRCUIT DIAGRAM / HARNESS DIAGRAM
8 - 1
Page 94

8.2 Circuit Diagram
PWA-F-DLM-320
DOWNLOAD JIG
18
19
20
FG
+24V
14
15
16
17
+24VSG+5V
DGDG+5V
J42
10
11
12
13
8
9
SC-REQ
CONECT
DF-ACK
DF-REQ
SG
RXD
1234567
TXDSGSC-ACK
SCAN-ST
+5V
LED
SG
A17A5A11A7A13
33343025262728
31
32
MA
+5V
LED
DLCNT
[
17
]
2
A15
29
MA
MA
MA
[
[
[
11
13
15
]
]
]
GSOL-ON
+24V
4
5
GSOL-ON
+24V
1
J99 J99
A9
MA
MA
MA
[
[
[
5
7
9
]
]
]
PSOL-OFF
PSOL-ON
CN79
J79
PSOL-OFF
PSOL-ON
2
3
J98 J98
A3
24
MA
[
3
]
+24V
123
1
A1
23
MA
[
1
]
+24V
D7
CE
22
MD
DLCS
[
7
]
D3SGA18
D5
D1
CN81
MD
MD
MD
SG
[
[
[
1
3
5
]
]
]
MA
SG
[
18
]
A2,B2
6
B3
A14
A16A4A8
A10
A12
131415161718192021
11
12
MA
MA
MA
MA
[
[
[
[
10
12
14
16
]
]
]
]
A1
A3
B1
CN78
J78
10
MA
[
8
]
123456789
TXDSGSC-ACK
SCAN-START
JAM-COM
JAM-NO
CN72
J72
1
2
SCANNER I/F
PWA-F-DLG-623
OESGA0
A6
A2
MA
MA
MA
[
[
[
4
6
2
]
]
]
12345
MA
[
0
]
MRD
D6
MD
[
8
]
MD
[
4
]
A
6
MD
[
2
]
ACCM
D0D2D4
123456789
MD
[
0
]
A
(-)
B
CN77
J77
BCOM
B
(-)
12345
+24V
A
6
+24V
ACCM
POWER
SUPPLY
10
1234567
SC-REQ
DF-REQ
+24V
J71
CN71
SG
DF-ACK
RXD
DF-COM
DF-NO
3
4
J70
CN70
SG
+5V
PG
PG
+5V
BCOM
A
B
(-)
(-)
B
CN76
J76
12345
DFCNT
(
SG
)
FANON
+24V
CN84
J84
1
2
FANON
1
2
J69
65432
B
(-)
J69
1
2
M4
Fan motor
COM
NO
COMNONC
SW1
Jam access cover
opening/closing switch
1
2
SOL2
Gate solenoid
SOL1
Original pickup solenoid
BCOM
ACCM
A
B
(-)
(-)
B
123
A2,B2
M3
A1
A3
B1
B3
Original exit/reverse
motor
A
1
M2
65432
J65
Read motor
1
M1
BCOM
ACCM
A
(-)
B
A
J66
Original feed motor
MR-3018 CIRCUIT DIAGRAM / HARNESS DIAGRAM June 2005 © TOSHIBA TEC
8 - 2
Page 95

PWA-F-DLG-623
CN83
CN82
CN80
SG
15
MID-S
+5V
13
14
SG
12
READ-S
+5V
10
11
SG
EXIT-S
+5V
CN75
J75
JCOVU-S
SG
1
6
+5V
SG
J92
J92
Not used
EMPTY-S
+5V
123456789
65432
12345
DFOPEN-S
SG
15
16
Not used
+5V
-
13
14
LENGTH-S
SG
11
12
LENGTH
SG
11
12
+5V
10
+5V
10
Not used
WIDTH1-S
SG
CN74
J74
SG
+5V
SG
WIDTH1
+5V
J86 J86
789
WIDTH2-S
+5V
WIDTH2
SG
987654321
456
+5V
SG
SG
10
ALIGN-S
+5V
123456789
ALIGN
+5V
12
11
123
TWIDTH2-S
SG
TWIDTH0-S
TWIDTH1-S
SG
CN73
J73
TLENGTH-S
+5V
1234567
+5V
READ-S
+5V
SG
12
11
10
J94
J94
123
S9
Read sensor
MID-S
SG
12
11
10
J95
J95
123
S8
Original intermediate
transport sensor
EXIT-S
+5V
SG
12
11
10
J93
J93
123
S10
Original exit/reverse
sensor
JCOVU-S
SG
J97
S11
Jam access cover
sensor
EMPTY-S
+5V
123
+5V
SG
123
J96
S3
Original empty sensor
LENGTH
+5V
SG
12
11
10
J91
J91
DFOPEN-S
SG
J87
S12
RADF opening/closing
sensor
123
+5V
123
S4
Original length
detection sensor
detection sensor-1
WIDTH1
+5V
SG
S7
SG
123
J90
S6
detection sensor-2
Original width
WIDTH2
J89
Original width
ALIGN
+5V
SG
123
123
J88
S5
Original registration
sensor
+5V
Orenge
Yellow
Black
Gray
GKY
O
S2
Original tray
width sensor
TLENG-S
+5V
SG
123
J85
S1
Original tray sensor
8
June 2005 © TOSHIBA TEC MR-3018 CIRCUIT DIAGRAM / HARNESS DIAGRAM
8 - 3
Page 96

8.3 Control PC Board Circuit
MR-3018 CIRCUIT DIAGRAM / HARNESS DIAGRAM June 2005 © TOSHIBA TEC
8 - 4
Page 97

June 2005 © TOSHIBA TEC MR-3018 CIRCUIT DIAGRAM / HARNESS DIAGRAM
8 - 5
8
Page 98

MR-3018 CIRCUIT DIAGRAM / HARNESS DIAGRAM June 2005 © TOSHIBA TEC
8 - 6
Page 99

June 2005 © TOSHIBA TEC MR-3018 CIRCUIT DIAGRAM / HARNESS DIAGRAM
8 - 7
8
Page 100

MR-3018 CIRCUIT DIAGRAM / HARNESS DIAGRAM June 2005 © TOSHIBA TEC
8 - 8
 Loading...
Loading...