

TIMEZERO DFF3D Installation Manual
Installation of DFF3D Multibeam Sounder
© 1985-2018 Nobeltec - support@mytimezero.com - 1
Installation of DFF3D Multibeam Sounder
The "DFF3D” and “PBG” Modules need to be unlocked prior to configuring the Furuno DFF-3D in
TZ Professional.
Computer Setup
The DFF-3D connects to the PC through an Ethernet connection (100Base-T). All Furuno Ethernet sensors (including Ethernet sounders) only operate
on the 172.31.x.x. / 255.255.0.0 network.
• You will have to setup your computer IP address to match that network. We highly recommended using 172.31.3.150 as a fixed IP address
for the computer with a subnet mask of 255.255.0.0.
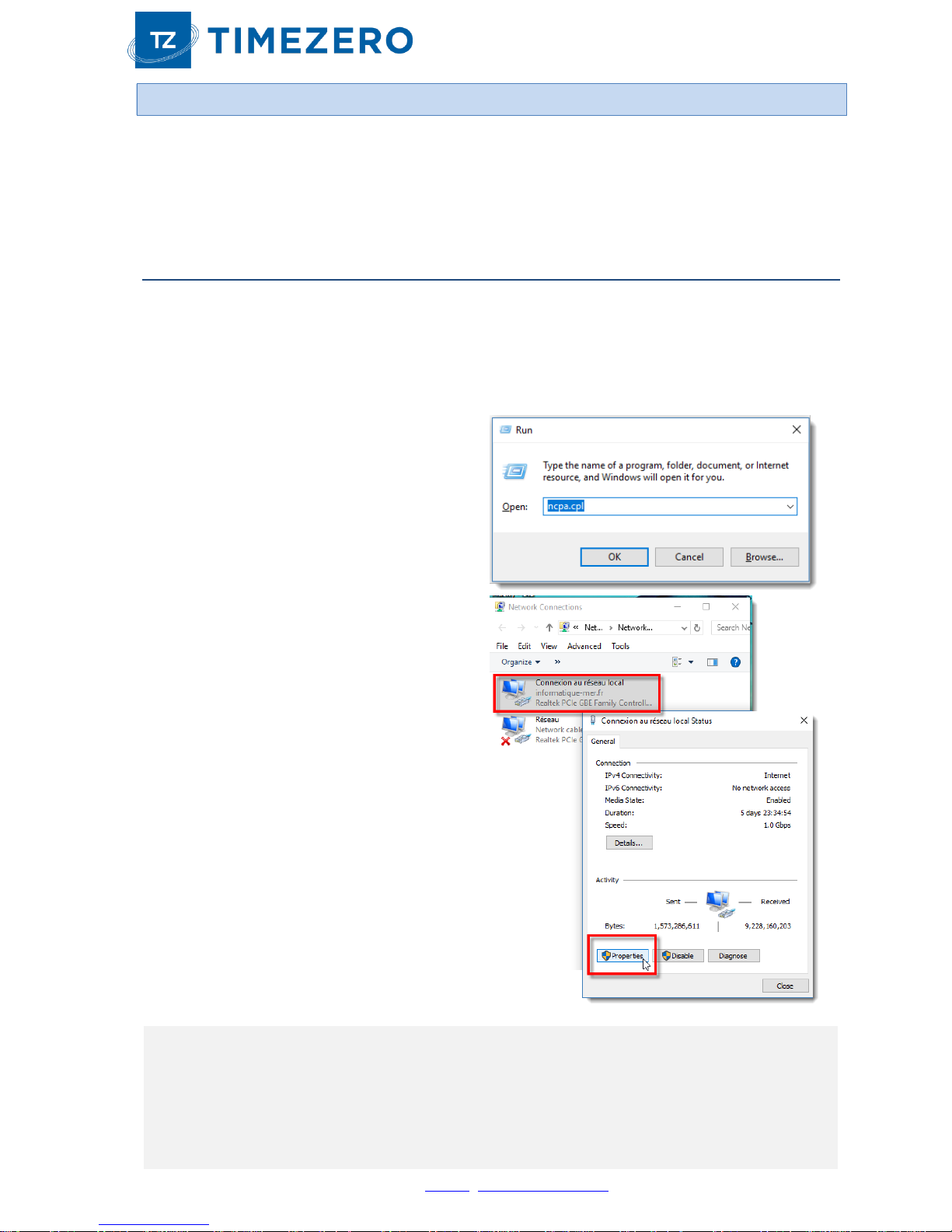
Open the "Network Connections" control panel of
your computer to adjust the IP address:
• Press [Windows] + [R] to bring up the Run
Dialog box
• Type “ncpa.cpl” and press [Enter]
• Double click on the Network Adapter
connected to the DFF-3D (usually “Local Area
Connection”).
• Select "Properties" on the "Local Area
Connection Status" window.
Note: If you have multiple Area Connections (multiple Ethernet Cards) and if you don’t know which one is connected
to the DFF-3D, you can temporary disconnect the Ethernet Cable connected to the DFF-3D from the computer and
look at which icon will display a red cross. This will indicate the LAN that has been disconnected from the computer,
and the one that needs to be configured.
Installation of DFF3D Multibeam Sounder
© 1985-2018 Nobeltec - support@mytimezero.com - 2
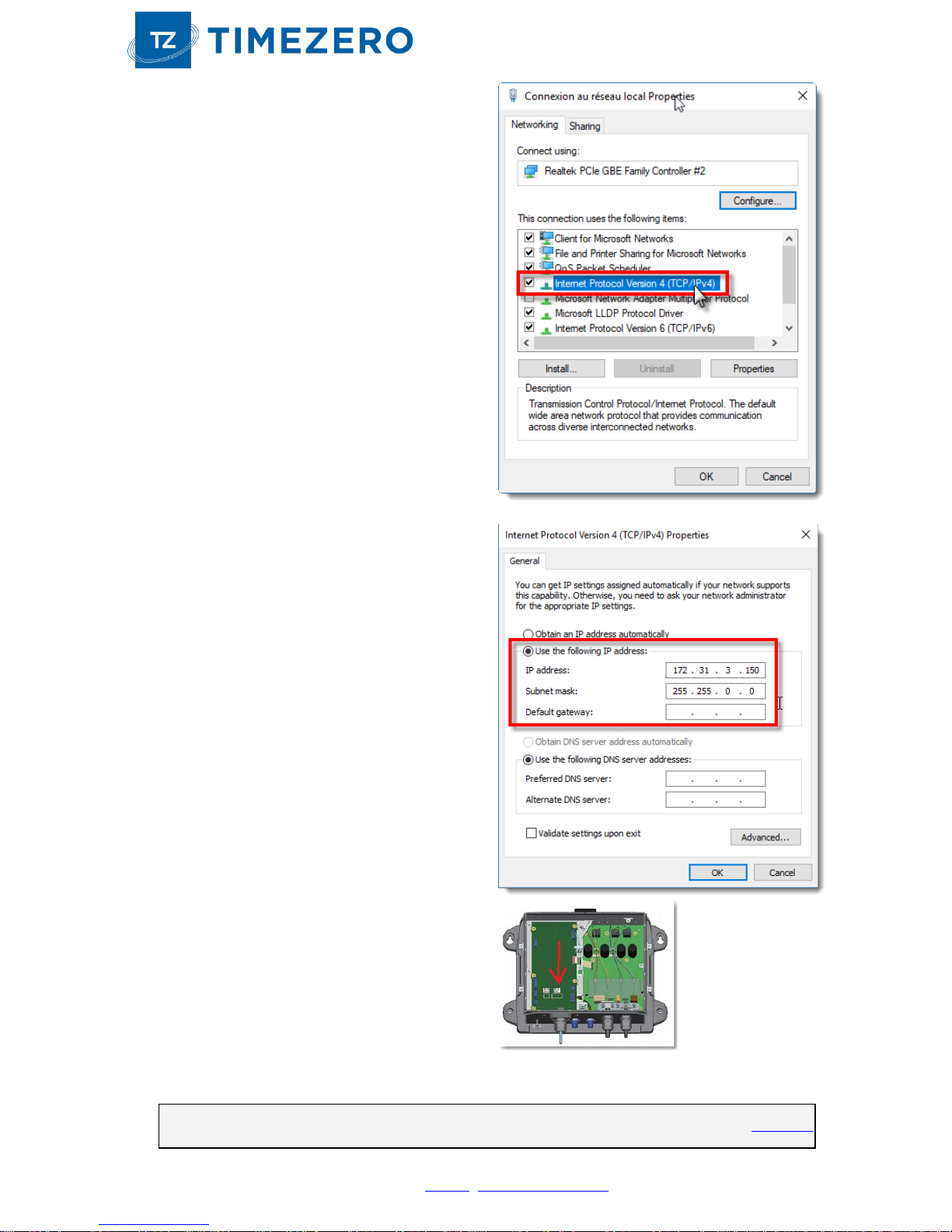
• Double click on “Internet Protocol Version 4
(TCP/IPv4)”.
• Use the fixed IP address 172.31.3.150 with a
subnet mask of 255.255.0.0:
Make sure that the DFF-3D is set for the fixed IP address
mode. Open the DFF-3D cover and make sure that all the
“S2” and "S3" DIP Switches are set to the OFF position:
Connect the DFF-3D to the computer directly or better, via a HUB/Switch.
Note: You can "Ping" the DFF-3D from the computer to make sure that the connection in between the computer and the DFF-3D is OK.
The address of the DFF3D to ping is: 172.31.92.21. For more information on how to ping an Ethernet device, refer to the How To Ping
chapter.
Installation of DFF3D Multibeam Sounder
© 1985-2018 Nobeltec - support@mytimezero.com - 3
TZ Professional settings
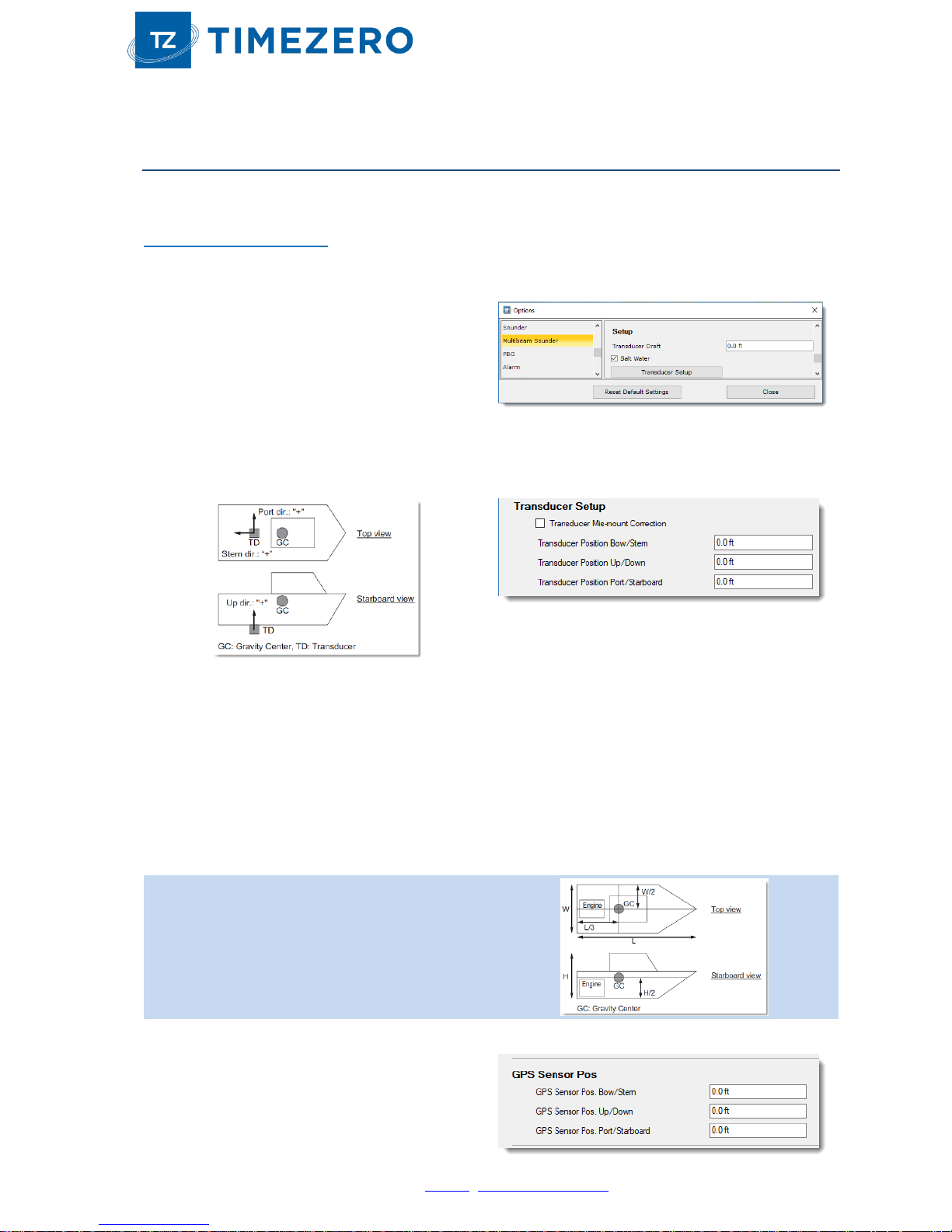
Open TZ Professional in Navigation mode, select the "Multibeam Sounder" Options.
DFF-3D Transducer Setup
Scroll down inside the "Multibeam Sounder" Options page to the "Setup" category.
1. Adjust the "Transducer Draft" (distance in between
the water line and the transducer location). This
should always be a positive number.
2. Select "Salt Water" if you are operating in Salt
Water (this adjusts the sound speed for distance
measurement).
3. Click on the “Transducer Setup” button.
Adjust the position of the Center of Gravity ("GC"), GPS, Heading and Motion Sensor (Pitch/Roll/Heave) relative to
the transducer using the coordinate system below:
• Select "Transducer Mis-mount Correction" if the DFF-3D transducer has been installed the wrong way
(reversed).
• Enter the distance (on the bow / stern axis) in between the transducer and the ship's center of gravity in
the "Transducer Position Bow/Stern" field. If the Center of Gravity is "in front" of the transducer (like the
picture above), enter a negative value.
• Enter the distance (on the down / up axis) in between the transducer and the ship's center of gravity in the
"Transducer Position Up/Down" field. For upward location of center of gravity (like the picture above),
enter a positive value.
• Enter the distance (on the starboard / port axis) in between the transducer and the ship's center of gravity
in the "Transducer Position Port/Starboard" field. For port location of the center of gravity, enter a positive
value.
TIPS: If the location of the Center of Gravity is unknown,
use the following approximation for its location:
Enter the GPS Sensor position using the same rules as
the Transducer to Center of Gravity location.
 Loading...
Loading...