

Tibhar ROBO PRO MASTER Instruction Manual
Intelligent, programmable
and multifunctional table tennis robot
Intelligenter, programmierbarer
und multifunktionaler Tischtennisroboter
Robot de tennis de table intelligent,
programmable et multifonctionnel
Instruction Manual
Bedienungsanleitung
Mode d’emploi
Please read this manual before operation
Diese Bedienungsanleitung vor der Benutzung lesen
Lire le mode d’emploi avant chaque utilisation
1
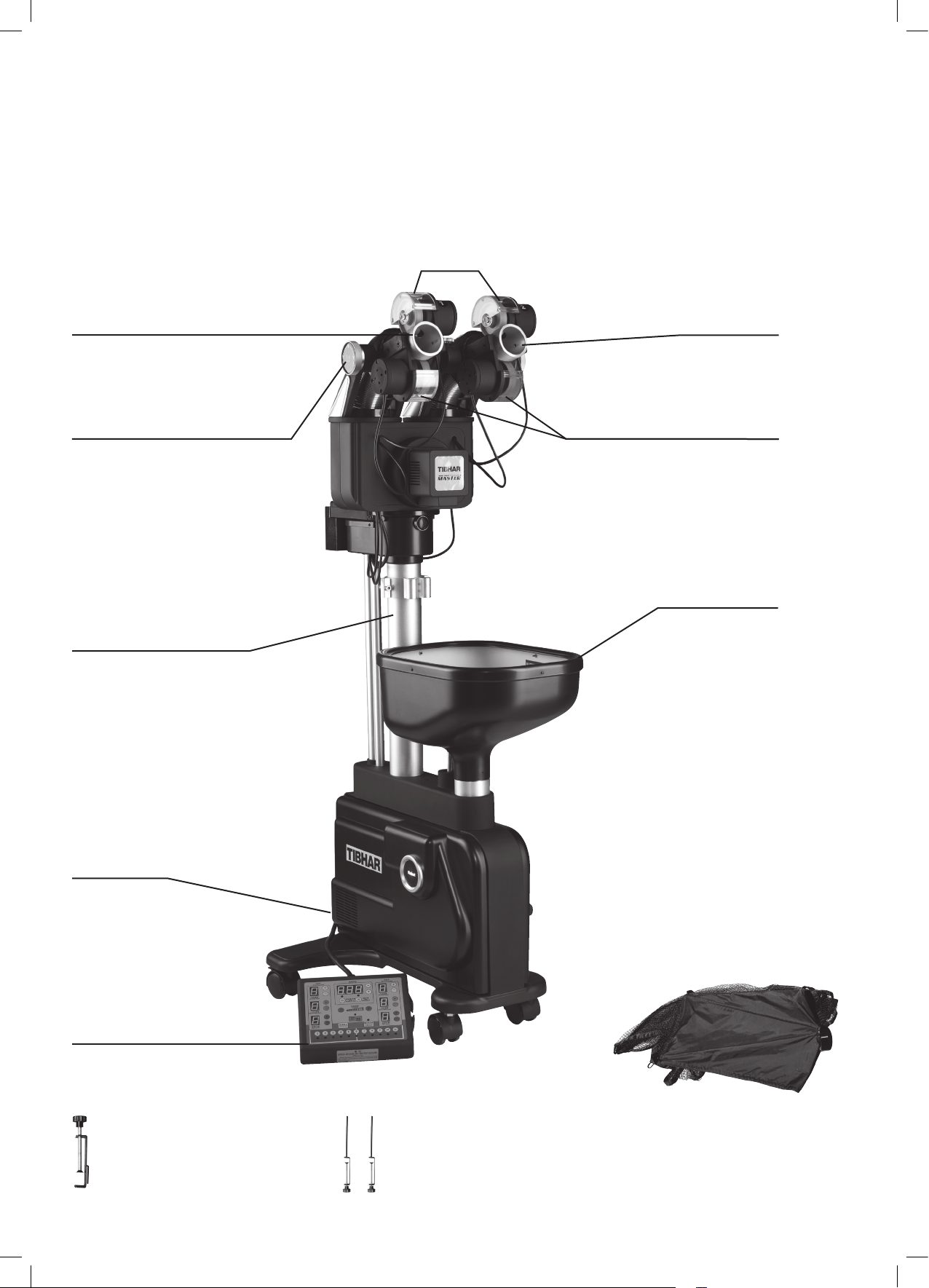
Table tennis robot components and ball collecting net
Bestandteile des Tischtennisroboters und Fangnetz
Composants du robot de tennis de table et filet de collection des balles
RoboPro Master
Top-wheels
Obere Laufräder
Roues supérieures
Shooting head 1
Ballauswurfkopf 1
Tête de service 1
Loop modulation knob
Knopf zur Einstellung der Flugkurve
Bouton de réglage de l’angle de la balle
Support frame
Vorrichtung zur Anbringung des
Fangnetzes
Dispositif pour la fixation du filet
de collection des balles
Shooting head 2
Ballauswurfkopf 2
Tête de service 2
Bottom-wheels
Untere Laufräder
Roues inférieures
Ball container
Ballbehälter
Conteneur pour balles
Power switch.
Ein-/Ausschalter
Interrupteur
Control box
Kontrollgerät zum Einstellen
der Roboterfunktionen
Boîtier de contrôle pour
ajuster les fonctions du robot
Control box‘s support
Befestigung des Kontrollgeräts
auf der Seite des Spielers
Support pour le boîtier de contrôle sur le côté du joueur
2
Net Support
Netzpfosten zur Befestigung des
Ballauffangnetzes am Tisch
Poteaux de fixation du filet à la
table
Ball collecting net
Ballauffangnetz, das um den
Roboter gespannt wird
Filet de collection des balles
BEFORE USE
VOR DER BENUTZUNG
A LIRE AVANT CHAQUE
UTILISATION
Table tennis robot components and ball collecting net
Bestandteile des Tischtennisroboters und Fangnetz
Composants du robot de tennis de table et filet de collection des balles ..........................2
How to assemble the ball collecting net
Anbringen des Fangnetzes
Fixation du filet de collection des balles .................................................................................4
How to position the table tennis robot
Aufstellen des Tischtennisroboters
Positionnement du robot de tennis de table ..........................................................................5
Starting apparatus
Inbetriebnahme
Mise en marche .........................................................................................................................6
INTRODUCTION TO FUNCTIONS
OF THE TABLE TENNIS ROBOT
FUNKTIONSBESCHREIBUNG
INTRODUCTION AUX FONCTIONS
DU ROBOT DE TENNIS DE TABLE
Ways to serve the ball
Möglichkeiten des Balleinwurfs
Réglage du lancer de balle .......................................................................................................7
Single head serve
Einkopf-Auswurf
Service avec une tête ................................................................................................................7
Double head serve
Zweikopf-Auswurf
Service avec deux têtes .............................................................................................................8
Control box
Steuergerät
Boîtier de contrôle .....................................................................................................................9
Speed modulation
Regulierung der Geschwindigkeit
Réglage de la vitesse ..............................................................................................................10
Frequency modulation
Regulierung der Ballwurffrequenz
Réglage de la fréquence .........................................................................................................11
How to select spin
Regulierung der Ballrotation
Réglage de la rotation .............................................................................................................11
Selecting the landing spot
Einstellung der Ballplatzierung auf dem Tisch
Réglage de la position de la balle sur la table .....................................................................12
Selecting number of balls
Einstellung der Ballanzahl
Réglage du nombre de balles ................................................................................................13
Selecting total number of balls
Einstellung der Gesamtanzahl der Bälle
Réglage du nombre total de balles........................................................................................13
Selecting preinstalled sequences
Einstellen vorinstallierter Übungen
Sélection des séquences de service .....................................................................................14
Selecting random sequences
Einstellen zufälliger Übungen
Sélection des séquences de service aléatoires ...................................................................14
Loop modulation
Einstellung der Flugkurve
Réglage de la trajectoire .........................................................................................................15
CAUTIONS AND MAINTENANCE
VORSICHTSMAßNAHMEN
UND WARTUNG
PRÉCAUTIONS D’EMPLOI
ET MAINTENANCE
Capacity of the ball container
Kapazität des Ballbehälters
Capacité du récipient pour balles ..........................................................................................15
How to maintain the table tennis robot
Wartung des Roboters
Maintenance du robot ........................................................................................................16–17
Trouble shooting
Fehlerbehebung
Que faire en cas de dysfonctionnement? ........................................................................18–19
Safety guidelines
Sicherheitsbestimmungen und –hinweise
Respect des règles de sécurité ..............................................................................................20
3
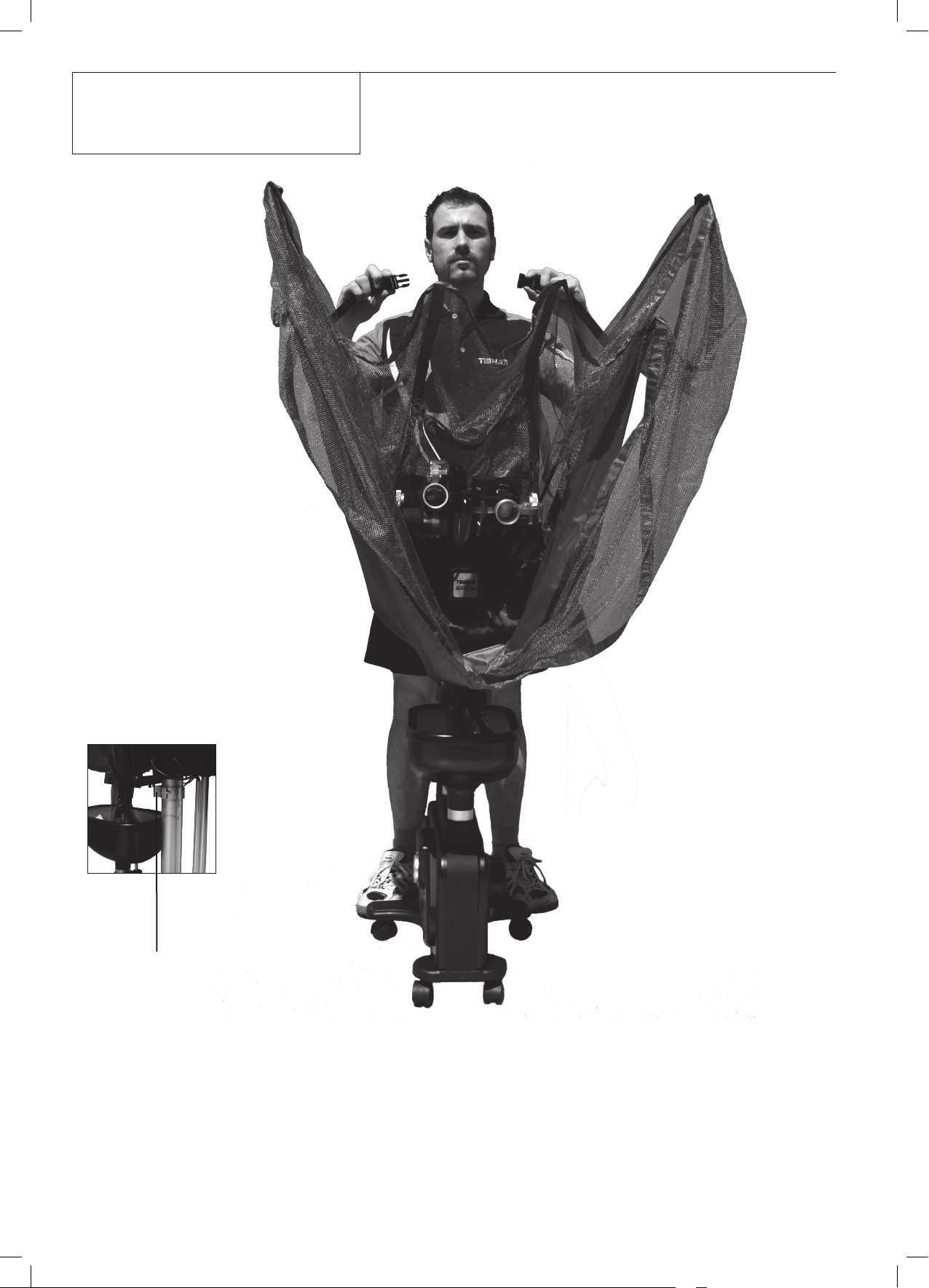
How to assemble the ball collecting net
Anbringen des Fangnetzes
Fixation du filet de collection des balles
Support frame
Vorrichtung, zur Anbringung
des Netzes
Support de fixation du filet
1. First, open the lock buckles of the ball
collecting net.
2. Partially unfold the ball collecting net,
adapt the square outlet of the net with
the robot head. Insert the pin in the ball
collecting net into the support frame of
the robot.
3. Spread out the ball collecting net with
both sides.
4
1. Öffnen Sie den Steckerverschluss.
2. Entfalten Sie das Netz nur teilweise
und passen Sie den Roboterkopf der
Aussparung im Netz an.
3. Öffnen Sie das Fangnetz
.
1. Ouvrir les sangles qui se situent sur le
filet.
2. Déplier partiellement le filet, faire passer
la tête du robot par l’ouverture rectangulaire du filet.
3. Déplier le filet de collection des balles.
How to position the table tennis robot
Aufstellen des Tischtennisroboters
Positionnement du robot de tennis de table
4. Put the table tennis robot
close to the edge of the table.
Open the wheel lock when
moving the robot.
5. Put both end sleeves of the
ball collecting net on the net
supports.
6. The net supports are clamped to both sides of the table
near the net.
4. Stellen Sie den Roboter mit
ausgebreitetem Netz an das
Tischende. Öffnen Sie vorher
die Bremsvorrichtung an den
Rädern des Roboters.
5. Stecken Sie die beiden Enden
des Fangnetzes auf die
Vorrichtungen an den beiliegenden Netzpfosten.
6. Befestigen Sie die Netzpfosten
an beiden Seiten des Tisches
möglichst nahe am Netz.
4. Positionner le robot avec filet
déplié à l’extrémité de la table.
Ouvrir le loquet de fermeture
des roues du robot avant de
déplacer le robot.
5. Insérer les deux extrémités du
filet dans les poteaux de fixation du filet.
6. Fixer les poteaux du filet des
deux côtés de la table, aussi
près que possible du filet.
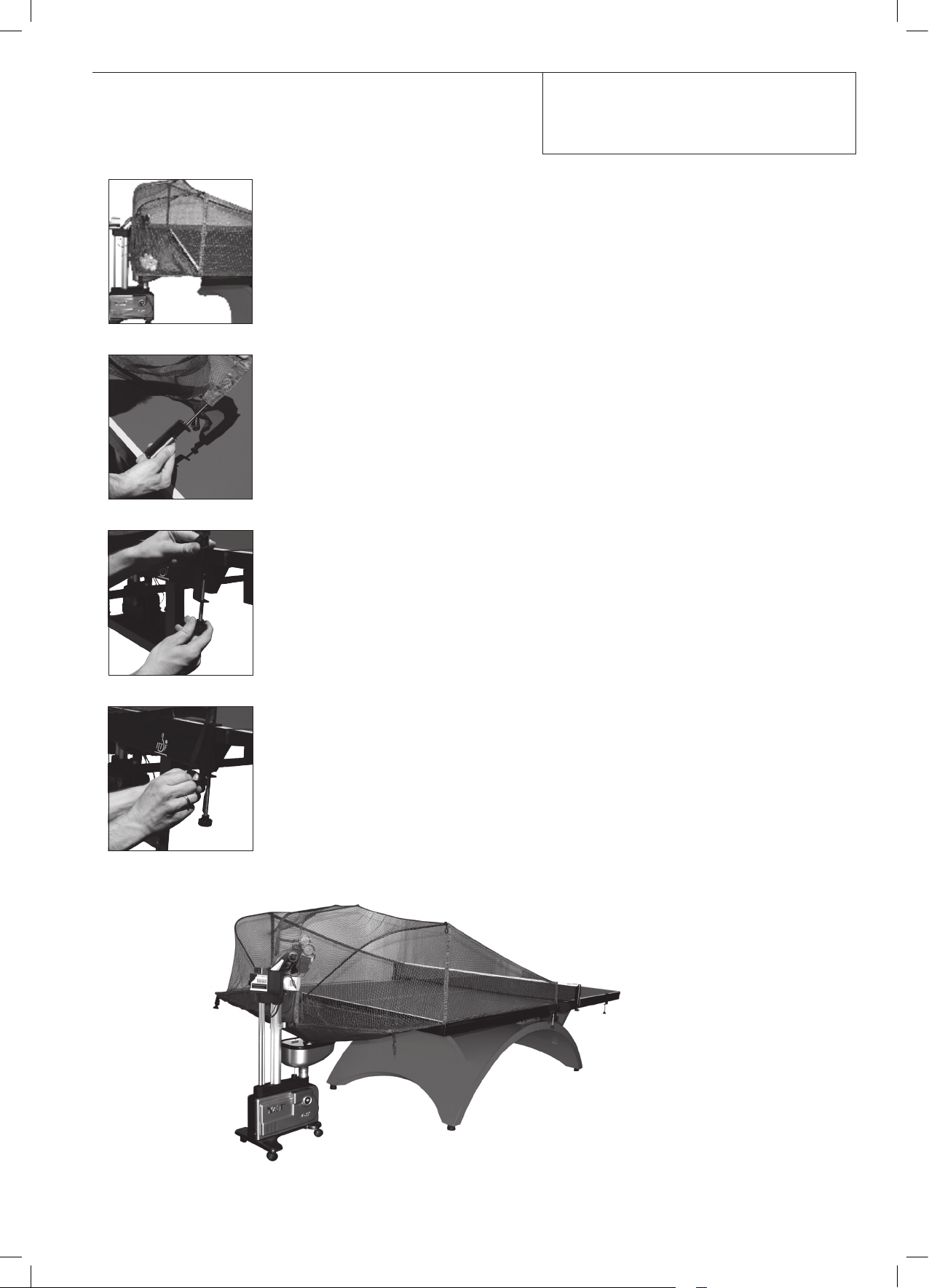
7. And the rubber rings are to be
buckled to the outsides of the
net support.
7. Spannen Sie die Schleifen
an den beiden Enden des
Fangnetzes um die
Netzpfosten des Roboters.
Picture of the complete installation
Dieses Bild zeigt die komplette Installation
Cette photo montre l’installation complète
7. Fermer les embouts des
poteaux du filet avec les
bagues en plastic.
5
How to position the table tennis robot
Aufstellen des Tischtennisroboters
Positionnement du robot de tennis de table
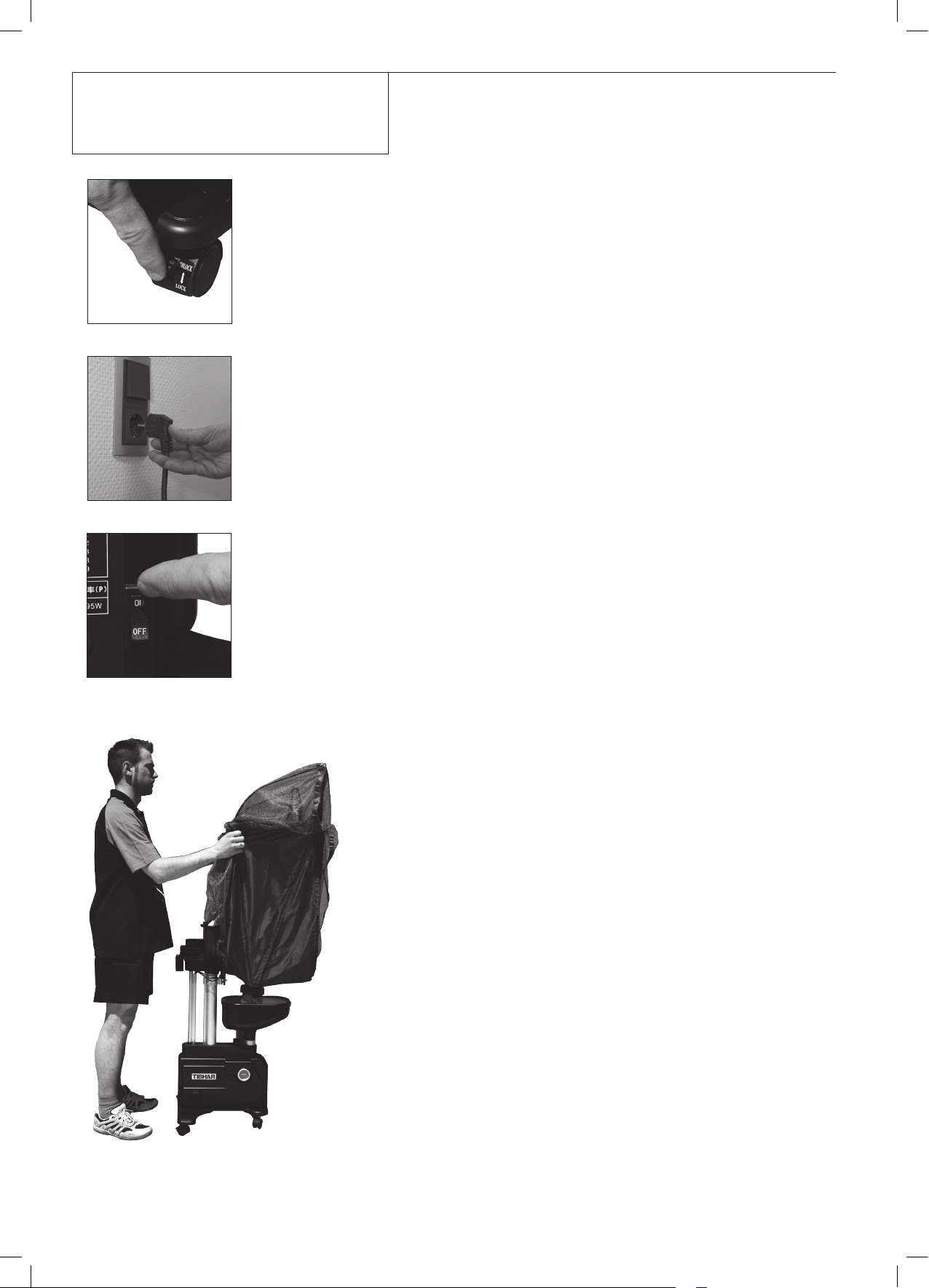
7. Before starting, active the
wheel brakes in order for the
robot to stand still.
8. The data of proper power
source for robot is marked
on the side of machine body,
which may be selected and
used optionally. The connec tion between plug and socket
should be perfect. They must
be pulled and separated
completely after use.
9. The power switch locates
at the back side of the
machine body, turn the
switch “on” before the use of
robot and turn the switch
“off” after use.
7. Aktivieren Sie vor dem
Start die Radbremsen,
damit sich der Roboter
nicht verschiebt.
8.
Die Informationen zu der
Betriebsspannung des
Roboters sind auf dem
Roboter angegeben. Die
Verbindung zwischen dem
Stecker und der Steckdose
muss einwandfrei sein. Bitte
ziehen Sie nach dem Gebrauch
des Gerätes den Stecker aus
der Steckdose!
9.
Der Ein-/Ausschalter befin det sich rechts unten auf
der Hinterseite des Roboters.
Um den Roboter einzuschal ten, stellen Sie den Schalter
auf „ON“. Nach dem Gebrauch
des Roboters stellen Sie den
Schalter auf „OFF“, um das
Gerät auszuschalten.
7. Avant utilisation, activer les
freins des roues afin que le robot
soit maintenu en place.
8.
Les informations relatives
à l’alimentation électrique
du robot figurent sur le côté
du corps du robot. La conne xion entre la fiche
d’alimentation et le secteur
doit être parfaite. Il faut
impérativement retirer la fiche
d’alimentation du secteur
après chaque utilisation.
9.
L’interrupteur se situe à
l’arrière du corps du robot
en bas à droite. Afin d’allumer
le robot appuyer sur « ON ».
Après chaque utilisation du
robot, appuyer sur « OFF »
pour l’éteindre.
10. After training, fold back
the ball collecting net in
a reverse order of the
original process, lock the
buckles in a right way,
and put it in any suitable
place.
10. Klappen Sie nach
dem Training das
Fangnetz wieder in
seine Ausgangsposition
zurück. Schließen Sie
den Steckverschluss
und bewahren Sie
den Roboter an einem
sicheren und geschützten
Ort auf.
10. Après la séance
d’entraînement, replier
le filet dans sa position
d’origine. Fermer les
sangles et placer le robot
dans un endroit sûr et
couvert.
6
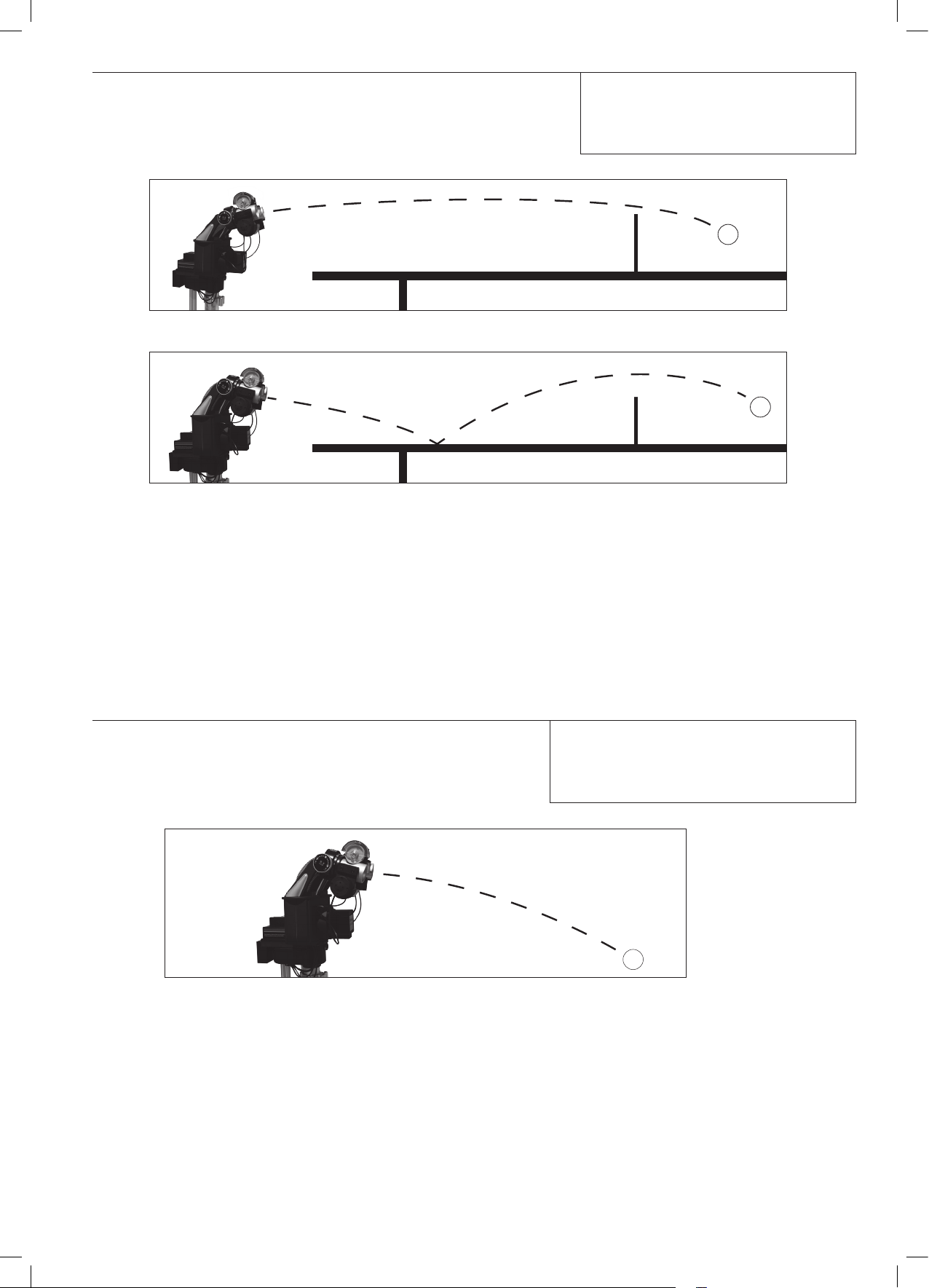
direct / direkt / directe
indirect / indirekt / indirecte
Ways to serve the ball
Möglichkeiten des Balleinwurfs
Réglage du lancer de balle
The ways of serving the balls consists
in the direct way and indirect way. The
speed and spin of the former will be
stronger than those of the latter. They
may be adjusted with the loop adjustment
knob.
Der Balleinwurf kann auf direktem oder
indirektem Weg durchgeführt werden.
Die Geschwindigkeit und die Rotation
der ersten Bälle ist weitaus stärker als
die der Bälle, die danach vom Roboter
gespielt werden. Die Bälle können jedoch
durch die Beeinflussung der Flugkurve
angepasst werden.
Spielbetrieb mit einem Ballauswurfkopf
Le lancer de balle peut être exécuté de
façon directe ou indirecte. La vitesse et la
rotation des premières balles sont beaucoup plus fortes que les balles qui seront
jouées ultérieurement par le robot. Le
lancer de balle peut cependant être adapté grâce à la modulation de la trajectoire.
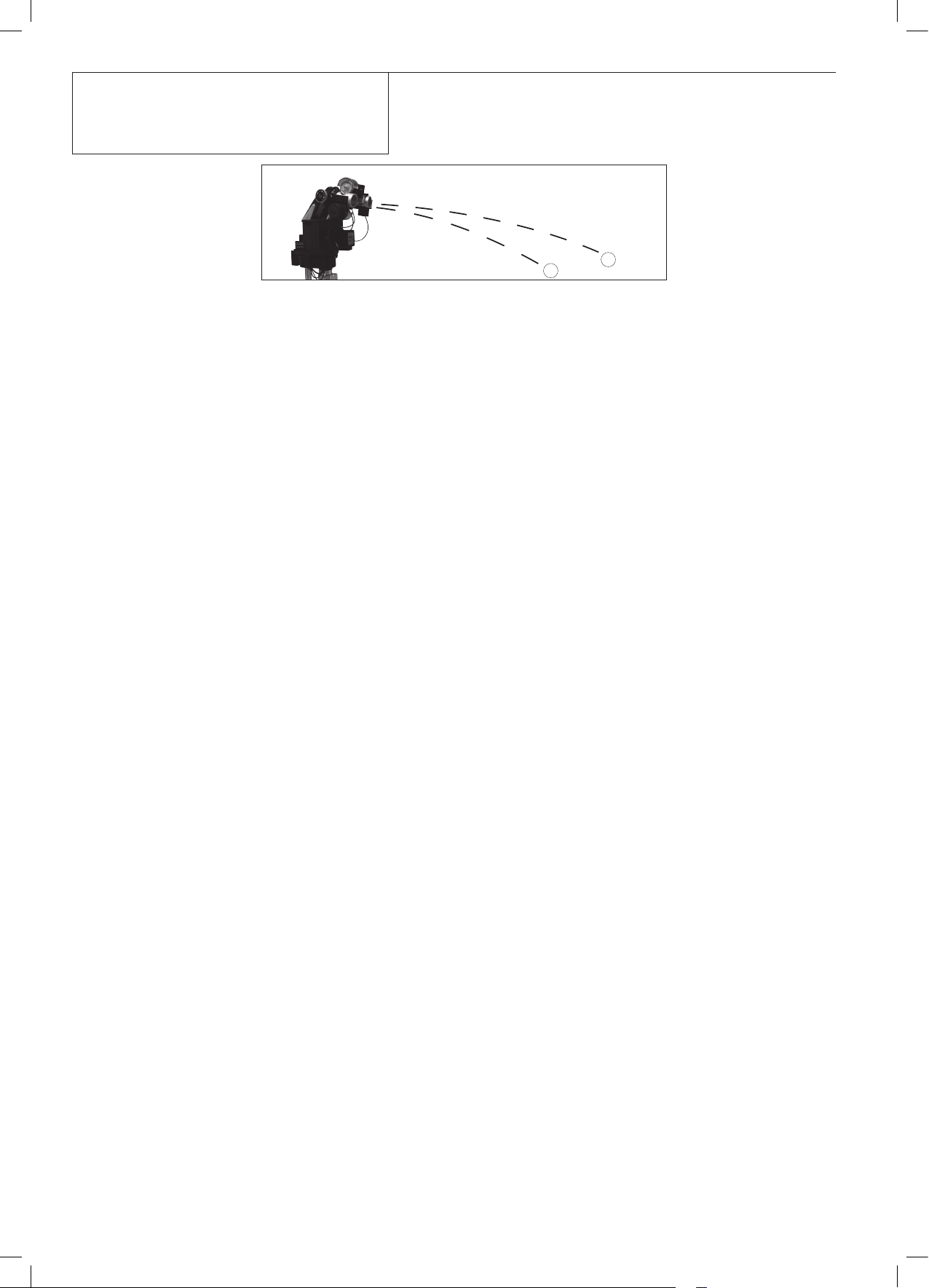
Single head serve
Service simple (1 tête)
To use the single head serve, set the
ball counter of one shooting head to be
infinite (“-“ indicates infinite or unlimited
amount). You can also adjust the speed,
frequency, spin, landing spot and total
number of balls at this point.
Bei Bedarf kann nur ein Ballauswurfkopf
des Roboters genutzt werden. Stellen
Sie hierfür einfach den Ballzähler auf
der Kontrollbox für den jeweiligen
Ballauswurfkopf auf unbegrenzte
Anzahl („-”). Natürlich kann auch eine
begrenzte Anzahl an Bällen eingestellt
werden. Zudem können die Parameter
Geschwindigkeit, Frequenz, Rotation und
Landepunkt angepasst werden.
Pour un service à une tête, positionner le
compteur de balles d’une tête du robot
sur nombre illimité (“-“ correspond à
nombre illimité). La vitesse, la fréquence,
la rotation, le point d’impact et le nombre de balles peuvent être ajustés à cet
endroit également.
7
Double head serve
Spielbetrieb mit zwei Ballauswurfköpfen
Service double (2 têtes)
Shooting head 1 and 2 take turns to serve
(in general the shooting head 1 begins
to serve the first ball when the robot
starts; however, broken balls may affect
the order of serve). The exercise starts
when the first ball is served by shooting
head 1.
Spin, speed, landing spot and number of
balls can be chosen individually for each
shooting head. For the first time a robot
allows to generate two different spins
(important notice: due to the angle, shooting head 1 can only be set for landing
spots 2-11 and shooting head 2 for
landing spots 1-10!)
For example: you want to generate two
undercut balls on your forehand (landing
spot 10) and 2 balls with undercut on
your backhand (landing spot 12). This
exercise should be repeated 10 times in
a row and start on your forehand.
Procedure:
1. Set the number of balls to be ejected
from each shooting head (in this exam ple, set the number to 2 balls)
2. Since shooting head 1 will start the
exercise, it will be used for the fore hand in our example. Set the bottom
and top wheel to the desired speed
and spin by using the +/- key. (Since
we want to generate topspin in our
example, the top wheel should be set
at a faster speed than the bottom
wheel).
3. Now you set the wheel of the shoo ting head 2. (Since we want to generate
undercut balls in our example, the bot tom wheel should be set at a fast
speed than the top wheel).
4. Set the frequency of the balls.
5. In order to repeat this exercise 10
times in a row (each exercise consists
in 4 balls), you need to set the number
of balls to 40 (4 balls x 10 services).
6. Press the “start/pause” button to start
the exercise.
8
Beim Betrieb beider Ballauswurfköpfe
werden die Bälle jeweils abwechselnd von Ballauswurfkopf 1 und
Ballauswurfkopf 2 serviert. Grundsätzlich
beginnt Ballauswurfkopf 1 mit dem
Auswurf. Wenn sich ein Ball weit vorne
im Auswurfkopf 2 befindet, kann es vorkommen, dass dieser zuerst ausgeworfen wird. Die Übung startet jedoch erst
wenn der erste Ball aus Ballauswurfkopf
1 geworfen wurde.
Die Parameter Geschwindigkeit, Rotation,
Ballplatzierung und Anzahl der Bälle pro
Auswurfkopf können jeweils für beide
Ballauswurfköpfe individuell eingestellt
werden.
Somit ist es mit diesem Roboter erstmals möglich, abwechselnd zwei verschiedene Rotationsarten zu generieren.
(Hinweis: Aufgrund des Winkels kann
Ballauswurfkopf nur die Landepunkte
2-11 und Ballauswurfkopf 2 nur die
Landepunkte 1-10 ansteuern!)
Beispiel:
Sie möchten zwei Bälle mit Unterschnitt
in die Vorhand (Landepunkt 10) und 2
Bälle mit Unterschnitt in Ihre Rückhand
(Landepunkt 2). Davon insgesamt 10
Wiederholungen. Die Übung soll in der
Vorhand beginnen.
Vorgehensweise:
1. Geben Sie zuerst die Anzahl der von
den Ballauswurfköpfen jeweils aus
zuwerfenden Bälle bei dem jeweiligen
Auswurfkopf ein (hier je 2).
2. Da immer Auswurfkopf 1 mit der
Übung beginnt wird er in diesem
Beispiel für die Vorhand verwendet.
Stellen Sie nun mit den +/- Knöpfen
das untere und obere Laufrad auf
die gewünschte Geschwindigkeit und
Rotation ein. (Da hier Topspin erzeugt
werden soll, muss das obere Laufrad
schneller eingestellt sein als das unte re.)
3. Nun stellen Sie die Laufräder des
zweiten Ballauswurfkopfes ein. (Da
hier Unterschnitt erzeugt werden soll,
muss das untere Laufrad schneller
eingestellt sein als das obere.)
4. Legen Sie jetzt die Frequenz fest, mit
der die Bälle ausgeworfen werden sol len.
5. Um insgesamt 10 Wiederholungen zu
erhalten müssen (jede Wiederholung
besteht aus 4 Bällen) muss die Ge samtanzahl auf 40 Bälle (4 Bälle à
10 Wiederholungen) eingestellt werden.
6. Drücken Sie den Start/Pause-Knopf,
um die Übung zu beginnen.
Lors d’un service double, la tête 1 et la
tête 2 du robot servent les balles par
intermittence. La règle veut cependant
que la tête 1 du robot serve en premier;
toutefois cette règle est caduque si une
balle se trouve tout à l’avant de la tête 2
du robot. L’exercice démarre lorsque la
première balle est servie par la tête 1 du
robot.
On peut ajuster individuellement pour
chacune des deux têtes du robot à la fois
la vitesse, la rotation, le point d’impact
ainsi que le nombre de balles. Ce robot
permet de régler deux rotations différentes à la fois (NB : en raison de l’angle,
la tête 1 ne peut être réglée que pour les
points d’impact de 2 à 11 et la tête 2 pour
les points d’impact de 1 à 10 !)
Exercice : pour générer deux balles coupées en coup droit (point d’impact 10 sur
la table) et deux balles coupées en revers
(point d’impact 12), à répéter 10 fois de
suite, en démarrant avec le coup droit,
suivre la procédure suivante :
1. Sélectionner le nombre de balles
pour chacune des têtes du robot (dans
l’exemple ci-dessus, sélectionner 2
balles / tête).
2. Etant donné que l’exercice démarre
avec la tête 1, elle sera utilisée pour
le coup droit dans l’exemple ci-dessus.
Positionner la roue supérieure et la
roue inférieure sur la vitesse et la rota
tion désirées en actionnant le bou ton +/-. (Pour le topspin prévu dans
l’exercice ci-dessus, la roue supéri eure devra être réglée sur une vitesse
supérieure à la vitesse de la roue infé rieure).
3. Régler la roue de la tête 2 du robot.
Pour générer les balles coupées de
l’exercice prévu ci-dessus, régler la
vitesse de la roue inférieure de sorte
qu’elle soit plus élevée que la vitesse
de la roue supérieure.
4. Régler la fréquence des balles.
5. Afin de répéter cet exercice 10 fois
de suite (chaque exercice consiste en
l’éjection de 4 balles), régler le nombre
de balles sur 40 (4 balles x 10 ser vices).
6. Actionner le bouton « start/pause »
pour démarrer l’exercice.
 Loading...
Loading...