

Page 1
VMS Capsat Transceiver
TT-3020C, TT-3022C, TT-3022D and
TT-3028CM
Configuration Manual
Page 2

Page 3

Page 4

Thrane & Thrane
VMS Capsat Transceiver
TT-3020C, TT-3022C, TT-3022D and
TT-3028CM
Configuration Manual
Copyright Thrane & Thrane A/S
ALL RIGHTS RESERVED
Page 5

Information in this document is subject to change without notice
and does not represent a commitment on the part of Thrane &
Thrane A/S.
© 2000 Thrane & Thrane A/S . All right reserved. Printed in Denmark.
Document Number TT98-112168-B.
Release Date: 9. November 2000
Page 6

Page 7

Table of Contents
9-Nov-00 Page i
Table of Contents
1 Introduction......................................................................................................1-1
1.1 An introduction to terms......................................................................1-1
1.2 Short feature description .................................................................... 1-3
1.2.1 Restriction to the SOLAS Fishery........................................1-5
2 LES Interface ................................................................................................... 2.1
2.1 DNID Common Format....................................................................... 2.1
2.1.1 API Header Format.................................................................2.2
2.1.2 First part of Positioning Report............................................2.3
2.1.3 Second Part of Positioning Report......................................2.5
3 Initial setup of transceiver ............................................................................. 3-1
3.1 TT-3020C SOLAS Transceiver..........................................................3-1
3.1.1 Making a SOLAS Fishery Transceiver ................................3-1
3.1.2 Ocean Registration................................................................3-2
3.2 TT-3028CM Dual Mode Fishery Transceiver.................................. 3-3
3.2.1 Making a SOLAS Fishery Transceiver ................................3-3
3.2.2 Ocean Registration................................................................3-4
3.3 TT-3022D Fishery Transceiver.......................................................... 3-5
3.3.1 Ocean registration..................................................................3-5
3.4 TT-3022C Landmobile Transceiver.................................................3-6
3.4.1 Making a Landmobile vehicle surveillance
Transceiver..............................................................................................3-6
3.4.2 Ocean Registration................................................................3-7
4 Transceiver Configuration.............................................................................4-1
4.1 Configuring the VMS behaviour.........................................................4-1
4.1.1 Quit............................................................................................4-2
4.1.2 Set all values to default.........................................................4-3
4.1.3 Date and time format.............................................................4-3
4.1.4 Antenna Blocked/Disconnected followed by normal
position report.........................................................................................4-6
4.1.5 Retransmit fail reports...........................................................4-6
4.1.6 Blocked GPS detection..........................................................4-7
4.1.7 Long to short report interval change...................................4-7
Page 8

Table of Contents
Page ii 9-Nov-00
4.1.8 Nice power down support....................................................4-8
4.1.9 Disable Send LED on position report TX........................4-11
4.1.10 Stop button initiates position report..................................4-11
4.1.11 Disable position report infos.............................................4-13
4.1.12 Password on da-command...............................................4-13
4.1.13 Only 1 packet per position report ......................................4-14
4.1.14 Mask out speed and course ..............................................4-14
4.1.15 Disable GPS first fix beep...................................................4-15
4.1.16 'A' in provider downloads VMS DNID................................4-15
4.1.17 Use VMS DNID for special reports ...................................4-16
4.1.18 Hide remote connections ...................................................4-17
4.1.19 Keep inactive connections .................................................4-18
4.1.20 MEM Code translation table...............................................4-18
4.1.21 Number of positions in storage queue............................4-19
4.1.22 Position report packet 2 - bit mask...................................4-20
4.1.23 Reporting intervals...............................................................4-21
4.1.24 Reporting interval change distance..................................4-22
4.1.25 VMS DNID and VMS LES ....................................................4-22
4.1.26 Number of active DNID in transceiver..............................4-23
4.2 Password protection.........................................................................4-23
4.3 Automatic ocean region shift...........................................................4-26
4.4 Reduced transmission mode.........................................................4-27
4.5 Sleep mode ........................................................................................4-30
4.5.1 Setting up Sleep mode operation.....................................4-31
4.6 Surveillance zones ............................................................................4-33
4.6.1 Setting up surveillance zones............................................4-35
5 Remote configuration of the transceiver via poll ......................................5-1
5.1 VMS Configuration ............................................................................... 5-1
5.2 Fishery Configuration (FI command) Poll....................................... 5-5
5.3 Zone Configuration Poll......................................................................5-7
5.4 VMS Set -up Acknowledgement.........................................................5-9
5.5 Fishery Set -up Poll Example...........................................................5-12
5.6 VMS connection for multiple ocean regions.................................5-14
5.7 Sleep mode Set-up Poll...................................................................5-17
5.8 Reduced transmission mode set-up poll.....................................5-18
6 Development tips ........................................................................................... 6-1
7 Index..................................................................................................................7-1
Page 9

Table of Contents
9-Nov-00 Page iii
Page 10

Page 11

Table of Figures
9-Nov-00 Page v
Table of Figures
Figure 1 System Overview..........................................................................................1-2
Figure 2 LES, DNID and member number.............................................................1-2
Figure 3 API header of DNID file...............................................................................2.2
Figure 4 First Part of Position Report .......................................................................2.3
Figure 5 Second Part of Position Report.................................................................2.5
Figure 6 TT-3020C Maritime Capsat Transceiver .................................................3-1
Figure 7 TT-3020C Maritime Capsat Transceiver .................................................3-3
Figure 8TT-3022D Fishery Capsat Transceiver.....................................................3-5
Figure 9 TT-3022C Land Mobile Transceiver.........................................................3-6
Figure 10 Fishery Configuration Menu (fi)...............................................................4-2
Figure 11 Position report format 1............................................................................4-4
Figure 12 Antenna blocked/Disconnected reports ................................................4-6
Figure 13 Automatic change of reporting interval ..................................................4-8
Figure 14 In-port button............................................................................................4-12
Figure 15 Reduced Transmission Mode .............................................................4-28
Figure 17 Position, speed and course shown graphically...............................4-29
Figure 18 Vessel/Vehicle track...............................................................................4-29
Figure 19 Reports from MES in reduced mode ..................................................4-29
Figure 20 Radius used to check for reduced transmission.............................4-30
Figure 21 Zone example..........................................................................................4-34
Figure 22 Poll Command Checksum Calculation ................................................5-4
Figure 23 Example of Remote Poll Configuration..............................................5-13
Figure 24 Open Connection Poll............................................................................5-15
Figure 25Sleep mode Set-up Poll.........................................................................5-17
Figure 26 Sleep mode Acknowledge Report.......................................................5-18
Figure 27 Reduced Mode Set-up Poll...................................................................5-18
Figure 28 Reduced Mode Acknowledge Report.................................................5-19
Page 12

Table of Figures
Page vi 9-Nov-00
This page is intentionally left blank
Page 13

Table of Tables
9-Nov-00 Page vii
Table of Tables
Table 1 Position report format 2................................................................................4-4
Table 2 Position report format 3................................................................................4-5
Table 3 Default Macro Encoded Messages.........................................................4-19
Table 4 Password Protected Commands...........................................................4-25
Table 5 Sleep Mode Command.............................................................................4-32
Table 6 Possible zone shapes..............................................................................4-34
Table 7 T&T Remote Configuration..........................................................................5-1
Table 8 T&T Poll Command List...............................................................................5-3
Table 9 Connection between entry number and parameters.............................5-7
Table 10 Connection between Zone type and Zone data ....................................5-8
Table 11 Positive Open Connection acknowledgement...................................5-16
Table 12 Negative Open Connection acknowledgement.................................5-16
Page 14

Table of Tables
Page viii 9-Nov-00
This page is intentionally left blank
Page 15

An introduction to terms Introduction
9-Nov-00 Page 1-1
1 Introduction
This manual provides instructions for configuring the Thrane &
Thrane fishery transceivers and land mobile transceiver for use in
Vessel/Vehicle Monitoring Systems. The manual provides information for both the TT-3020C SOLAS GMDSS Transceiver, the TT3028CM Dual Mode SOLAS GMDSS Transceiver, the TT-3022D
Non-SOLAS Fishery Transceiver and for the TT-3022C Land Mobile
Transceiver.
The manual contains no information about general installation of
the equipment. This information should be found in the relevant installation manuals. The TT-3020C Installation Manual (document
number TT98-107880 ), the TT-3028CM Installation Manual
(document number TT98-111327), the TT -3022D Installation Manual (document number TT98-107719) and the TT-3022C Installation Manual (document number TT98-107307).
This manual cover software versions from 3.28 and up.
1.1 An introduction to terms
This section describes the terms in vessel/vehicle surveillance that
are needed to understand the role of Inmarsat and T&T in VMS.
The most important terms used in VMS are Land Earth Stations
(LES), VMS Data Network Id (DNID) and Member numbers.
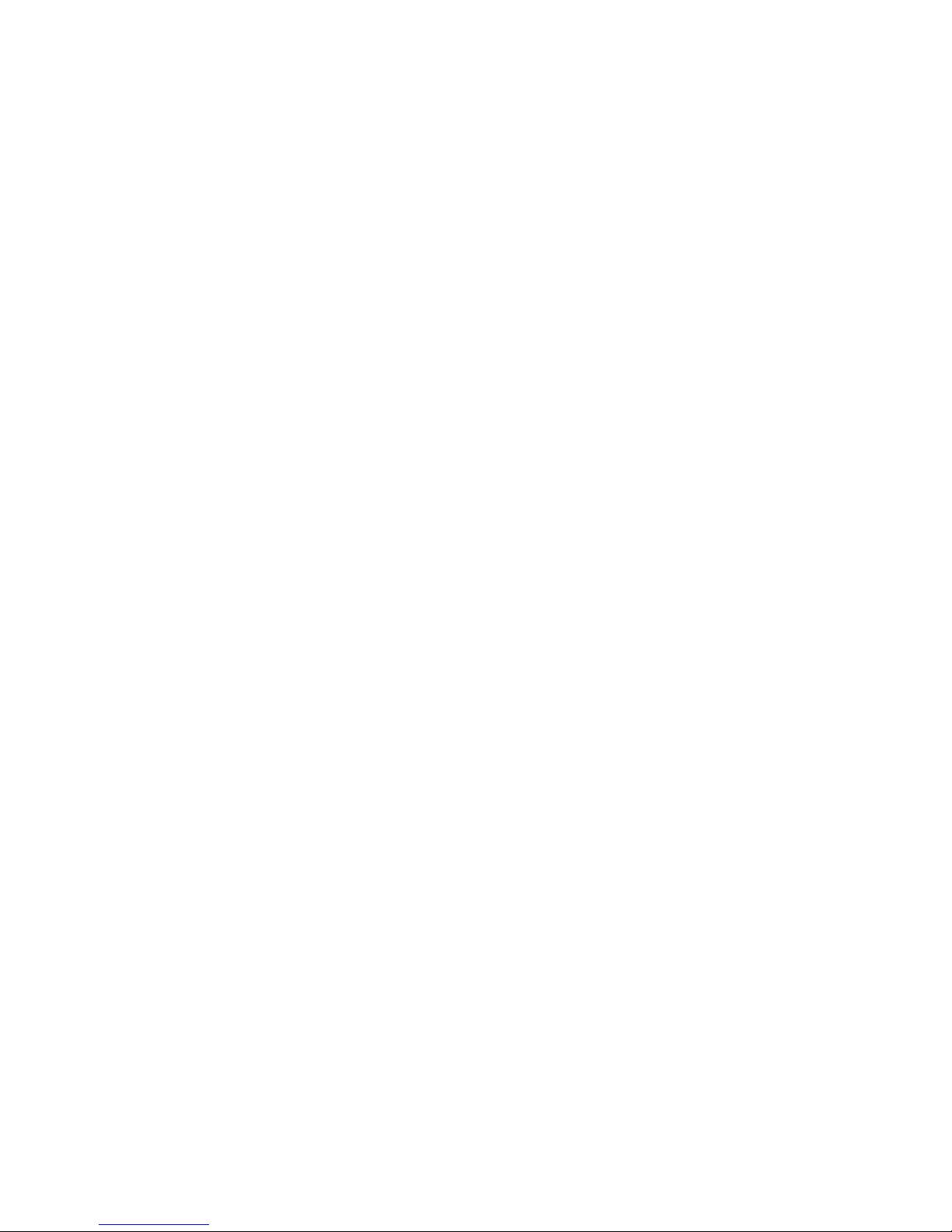
Figure 1 shows a typical transmission path of a position being
transferred from the Inmarsat-C transceiver in a fishery vessel to
the vessel surveillance centre. The same path applies - but in the
opposite direction - for commands send to the vessel.
Page 16
Introduction An introduction to terms
Page 1-2 9-Nov-00
Land Earth StationFishing vessel
Vesse surveillance
centre
Terrestrial
line
Figure 1 System Overview
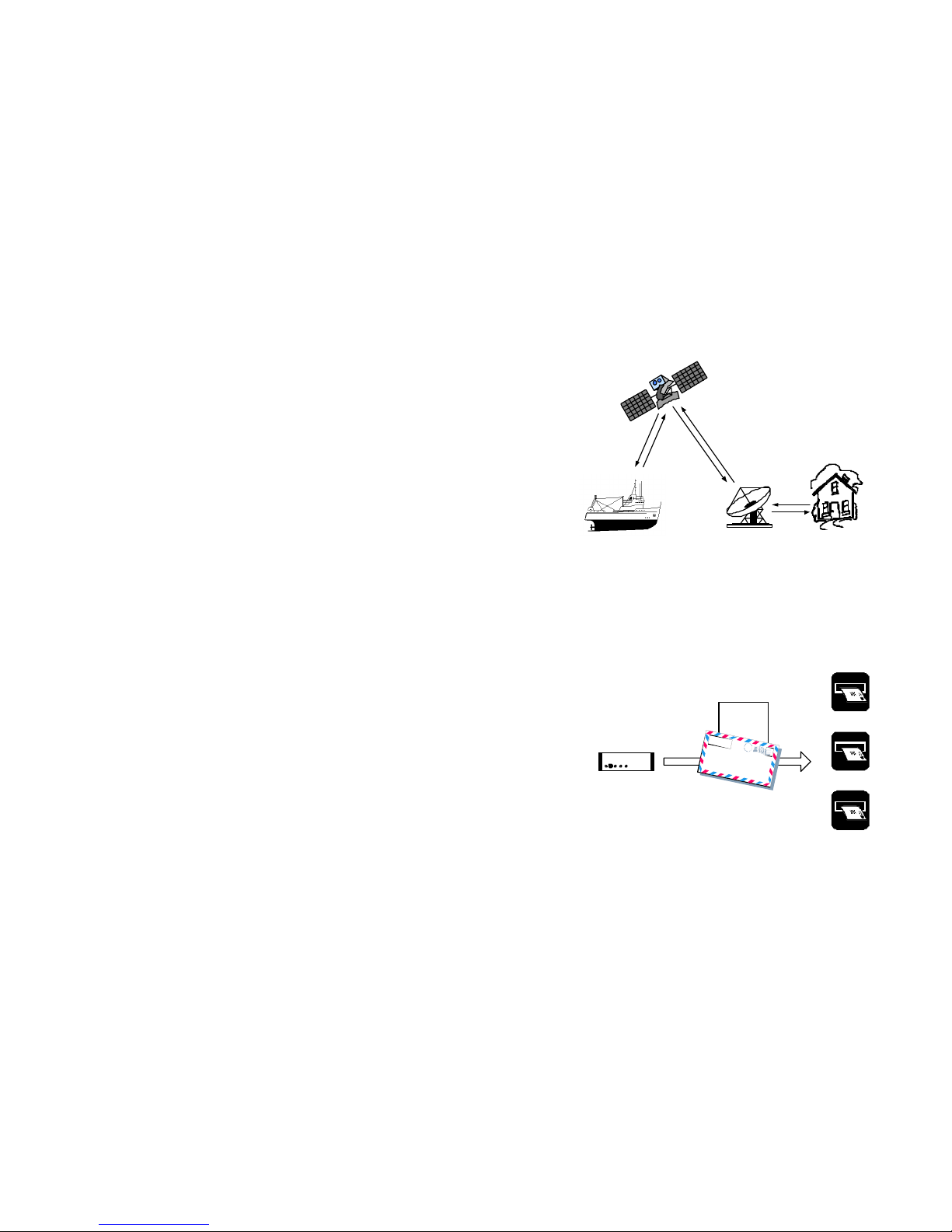
When a position is transmitted from the vessel/vehicle to the surveillance centre the address of the recipient must be known by the
Inmarsat-C transceiver otherwise the transceiver will not know
where to send it. This address is called the VMS DNID and VMS
LES. Figure 2 shows an antenna blocked position report being
sent to recipient LES 312 and DNID 12345.
Thrane & Thrane
Power Set Login Send Mail
TT-3022C
TT-3022D, TT-3020C,
TT-3028CM, TT-3022C
Antenna Blocked
55.44N 12.28E
11:37 am
10 knot
120 degree
To:
VMS LES: 312
VMS DNID: 12345
From:
member 47
LES312
LES204
LES102
Figure 2 LES, DNID and member number
Page 17

Short feature description Introduction
9-Nov-00 Page 1-3
The member number has a similar meaning as the return address
on an envelope. The member number is used by the vessel/vehicle surveillance centre to identify the transceiver that
transmitted the position report.
When a position report is received by the Land Earth Station (LES)
a DNID file is created from the packets received in the VMS DNID
mailbox. The DNID file can then be forwarded to the fishery authorities or other vessel/vehicle surveillance authorities via the terrestrial line. The type of network used to access the Inmarsat-C Land
Earth Station (X.25, PSTN etc.) is not discussed in this document. It
is also important to notice that the LES interface varies with the different producer of LES.
Position reports as transmitted by the Inmarsat-C transceiver are
one or two 15 bytes data packets on the satellite link but this information is packed into a DNID format before it is transmitted to the
vessel/vehicle surveillance centre. Therefore it is the DNID format
that is being described throughout this manual.
1.2 Short feature description
The Thrane & Thrane Fishery Transceiver is the market leader in
Inmarsat-C Vessel Monitoring Systems. The Transceiver has been
approved as Fishery Monitoring Unit in a large number of countries
and offers a great variety of configurations depending on the specific needs.
In the following is a short list of the primary features in both of the
Thrane & Thrane Inmarsat-C fishery transceivers.
• Freely configurable position reporting interval
• Detection and reporting of Inmarsat-C antenna blockage
• Detection and reporting of GPS blockage
Page 18

Introduction Short feature description
Page 1-4 9-Nov-00
• Configurable one or two packets report depending on the
need for speed and course information.
• 4 different formats for date and time information
• Remote configuration from VMS centre of key features in the
transceiver.
• Password protection of configuration and relevant commands.
• Possible reduced transmission mode with long and short re-
porting interval depending on vessel movements
• Button for initiating manual position report or indication in harbour status.
• Storing of up to 100 position reports when outside Inmarsat
coverage
• Configurable macro codes for different events.
• Possibility of retransmission of failed reports
• Possibility of hiding transmission (Not applicable for SOLAS
transceiver)
• Sleep mode where the transceiver automatic turns off to save
power when not sending (Not applicable for SOLAS transceiver)
• Differentiation between “Power down” status and “Nice power
down” status (special power off button).
• Surveillance zones giving a geographical area and a reporting
interval to be used in that area .
The Thrane & Thrane Land Mobile Transceiver includes full VMS
functionality identical to its maritime counterpart in both behaviour
and in packet format.
Page 19

Short feature description Introduction
9-Nov-00 Page 1-5
1.2.1 Restriction to the SOLAS Fishery
Some of the features described in this manual are in conflict with
the SOLAS GMDSS requirements. Therefore thes e features are not
implemented in the TT-3020C SOLAS Fishery Transceiver or in the
TT-3028CM Dual Mode SOLAS GMDSS Transceiver.
A short list of the missing features are listed in the following. A
more comprehensive description of the feature is given in the relevant sections of this manual.
• Nice Power Down Support. Please see section 4.1.8.
• Disable Send LED on position report TX. Please see section
4.1.9
• Position report packet 2 - bit mask. Due to the fact that no
GMDSS Message Terminal supports this feature. Please see
section 4.1.22.
• Sleep mode. Please see section 4.5.
• Password protection of the commands “Login” and “Scan”.
Please see section 4.2.
Page 20

Introduction Short feature description
Page 1-6 9-Nov-00
This page is intentionally left blank
Page 21

DNID Common Format LES Interface
9-Nov-00 Page 2.1
2 LES Interface
This manual does not discuss the interface between the Vessel
Monitoring Centre and the Inmarsat-C Land Earth Station. However
a description of the DNID file format is discussed in section 2.1 as
this should give a good hand-on feeling of the actual information
that can be passed between the Vessel Monitoring Unit and the
Vessel Monitoring Centre.
2.1 DNID Common Format
The format of the DNID file on the LES depends on the configuration of LES DNID account. In the following it is assumed that the
DNID files are stored using API headers. Please reed more in
about API headers in the document “TT-6000 Inmarsat-C Land
Earth Station API-Header Description”.
In Figure 3 the common API Header is described and in Figure 4
the first part of the position report is illustrated. Finally in Figure 5
the format of the optional second position report is described.
Page 22

LES Interface DNID Common Format
Page 2.2 9-Nov-00
2.1.1 API Header Format
0 01 1 byte Indication of header start (EOH)
1 ‘T’ 3 bytes
2 ‘&’
3 ‘T’
ASCII values for string "T&T"
i.e. byte values 54H,26H,54H
4 01 1 byte Type of API header (01 for DNID
header)
5 22 1 byte The length of this header in bytes
6 Msg. Ref. LSB 4 bytes
7 -
8 -
9 Msg. Ref. MSB
Message reference number
10 Presentation 1 byte Receive alphabet from satellite
side message reception, see note
1
11 LES ID 1 byte LES ID, can be used for
identification of ocean region for
multi ocean LES's
12 Data Length LSB 2 bytes
13 Data Length MSB
Number of data bytes following
the header
14 Stored time LSB 4 bytes
15 -
16 -
17 Stored time MSB
Giving the time of message store.
The bytes given will be the
number of seconds since
January 1. 1970 0:0:0
18 DNID LSB 2 bytes
19 DNID MSB
The DNID of the file.
20 Member number 1 byte Member number sent by the MES
in the position report
21 02 1 byte Indication of header end (STX)
Figure 3 API header of DNID file
Page 23
DNID Common Format LES Interface
9-Nov-00 Page 2.3
2.1.2 First part of Positioning Report
22 Cat
Position 2 bit : Category field
23
24
25
26
39 bit : Position - Latitude and
Longitude
27 MEM 7 bit : MEM code (Macro
Encoded Message)
28
29
Attribute 2 bytes : Time and date of position
Figure 4 First Part of Position Report
The format of the category field, Position field, MEM code and Attribute field is described in the following.
2.1.2.1 Cat (2 bits)
The Category is set to 01B (Maritime) in all Position Reports generated by the TT-3020C SOLAS Fishery, the TT-3028CM Dual Mode
SOLAS GMDSS Transceiver, the TT-3022D Non SOLAS Fis hery
transceiver and the TT-3022C Land Mobile Transceiver if configured for VMS . 01B indicates that the position in the report comes
directly from the build-in GPS in the transceiver. A category field different from 01B indicates that this is an operator generated data
report and the position is not included in the report.
2.1.2.2 Position (39 bits)
[Position] ::= [Latitude][Longitude]
Latitude (19 bits)
[Latitude] ::= [Hemisphere][Degrees][Minutes][Fractional part]
Page 24

LES Interface DNID Common Format
Page 2.4 9-Nov-00
Hemisphere (1 bit)
A North/South flag. Set to 0 for North or 1 for South.
Degrees (7 bits)
The degrees of Latitude, North or South. 1° being 60 minutes.
Minutes (6 bits)
The integer part of the Minutes of latitude. 1 minute being 1 nautical
mile - 1852 meters
Fractional part (5 bits)
The fractional part of the Minutes of latitude in units of 0.04 of a
Minute i.e. ~74 meters.
Longitude (20 bits)
[Longitude] ::= [Hemisphere][Degrees][Minutes][Fractional part]
Hemisphere (1 bit)
An East/West flag. Set to 0 for East or 1 for West.
Degrees (8 bits)
The degrees of Longitude, East or West.
Minutes (6 bits)
Page 25

DNID Common Format LES Interface
9-Nov-00 Page 2.5
The integer part of the Minutes of longitude.
Fractional part (5 bits)
The fractional part of the Minutes of longitude in units of 0.04 of a
Minute.
2.1.2.3 Macro Encoded Message (MEM) (7 bits)
A Macro Encoded Message (MEM) is a pre-defined message represented by a unique 7 bit code. Please refer to section 4.1.20 for
detailed description of Macro Encoded Messages.
2.1.2.4 Attribute (date and time) (16 bits)
Date, Time is put in this field and coded as:
[Date, time]::=[not used][day][hour][minute]
not used (1 bit): Always 0
day (5 bits): day of the month
hour (5 bits): hour of the day
minutes (5 bits): in units of 2 minutes
2.1.3 Second Part of Positioning Report
30 Speed 8 bit : Speed
31 Course 9 bit : Course
32 Reserved 15 bit : Reserved
33
Figure 5 Second Part of Position Report
Page 26

LES Interface DNID Common Format
Page 2.6 9-Nov-00
The format of the speed and course field are described in the following.
2.1.3.1 Speed (1 byte)
Speed is coded as a one byte unsigned binary number with a
resolution of 0.2 knots. If no valid data is available at the MES, the
field should be set to "FFH".
2.1.3.2 Course (9 bits)
The Course is coded as a 9 bit unsigned binary number with a
resolution of 1 degree.
2.1.3.3 Reserved (15 bits)
Unused and set to zero.
Page 27

TT-3020C SOLAS Transceiver Initial setup of transceiver
9-Nov-00 Page 3-1
3 Initial setup of transceiver
The initial set-up depends on the choice of transceiver. In the fo llowing the initial configuration of the two different Thrane & Thrane
transceiver are described.
3.1 TT-3020C SOLAS Transceiver
The TT-3020C is a GMDSS approved Inmarsat-C transceiver for
SOLAS applications. When the transceiver has installed software
version V3.24 or above is approved for both GMDSS and fishery
surveillance.
Figure 6 TT-3020C Maritime Capsat Transceiver
When receiving the transceiver the TT-3020C is default set to SOLAS Maritime behaviour i.e. no fishery surveillance is enabled.
Some configurations are necessary before setting the transceiver
on-air to fulfil the VMS requirements.
3.1.1 Making a SOLAS Fishery Transceiver
To change the TT-3020C SOLAS Maritime transceiver into a TT 3020C SOLAS Fishery transceiver the command “SE-B” must be
Page 28

Initial setup of transceiver TT-3020C SOLAS Transceiver
Page 3-2 9-Nov-00
executed in the transceiver terminal. The SE-B command enters
the system parameter initialisation menu. Menu entry 7 Change
MES into SOLAS Fishery transceiver changes the transceiver into a
SOLAS Fishery transceiver.
Please notice that once the transceiver has been changed to a
SOLAS Fishery it is no longer possible to change it back to a
normal SOLAS Maritime transceiver.
The transceiver will automatically reboot when changing transceiver type and after power-up identify itself as a SOLAS Fishery
transceiver.
TT-3020C SOLAS Fishery does not allow external position to set
the position of the transceiver and therefore NMEA input is disabled.
3.1.2 Ocean Registration
When the transceiver is configured for SOLAS Fishery the transceiver will automatically login to the ocean region with the best signal (if not already logged in). Using the transceiver terminal command "SET -O" the preferred ocean can be configured and the
transceiver will try to login into this preferred ocean when going onair for the first time.
Page 29

TT-3028CM Dual Mode Fishery Transceiver Initial setup of transceiver
9-Nov-00 Page 3-3
3.2 TT-3028CM Dual Mode Fishery
Transceiver
The TT-3028CM is a GMDSS approved Inmarsat-C transceiver and
Mini-M phone for SOLAS applications. When the transceiver has
installed software version V3.24 or above is approved for both
GMDSS and fishery surveillance.
Figure 7 TT-3020C Maritime Capsat Transceiver
When receiving the transceiver the TT-3028CM is default set to
SOLAS Maritime behaviour i.e. no fishery surveillance is enabled.
Some configurations are necessary before setting the transceiver
on-air to fulfil the VMS requirements.
3.2.1 Making a SOLAS Fishery Transceiver
To change the TT-3028CM SOLAS Maritime transceiver into a TT3028CM SOLAS Fishery transceiver the command “SE-B” must be
executed in the transceiver terminal. The SE-B command enters
the system parameter initialisation menu. Menu entry 7 Change
Page 30

Initial setup of transceiver TT-3028CM Dual Mode Fishery Transceiver
Page 3-4 9-Nov-00
MES into SOLAS Fishery transceiver changes the transceiver into a
SOLAS Fishery transceiver.
Please notice that once the transceiver has been changed to a
SOLAS Fishery it is no longer possible to change it back to a
normal SOLAS Maritime transceiver.
The transceiver will automatically reboot when changing transceiver type and after power-up identify itself as a SOLAS Fishery
transceiver.
TT-3028CM SOLAS Fishery does not allow external position to set
the position of the transceiver and therefore NMEA input is disabled.
3.2.2 Ocean Registration
When the transceiver is configured for SOLAS Fishery the transceiver will automatically login to the ocean region with the best signal (if not already logged in). Using the transceiver terminal command "SET -O" the preferred ocean can be configured and the
transceiver will try to login into this preferred ocean when going onair for the first time.
Page 31

TT-3022D Fishery Transceiver Initial setup of transceiver
9-Nov-00 Page 3-5
3.3 TT-3022D Fishery Transceiver
The TT-3022D is an Inmarsat-C transceiver for Non-SOLAS applications. All software version can be used for fishery surveillance
but this manual describes feature available in V3.27 and above.
When receiving the transceiver the TT-3022D is default set without
fishery surveillance. Some configurations are necessary before
setting the transceiver on-air to fulfil the VMS requirements.
Figure 8TT-3022D Fishery Capsat Transceiver
3.3.1 Ocean registration
The TT-3022D transceivers will always automatically login into the
ocean region with the best signal if the transceiver is logged out of
the Inmarsat network.
However the preferred ocean can be configured by using the transceiver terminal command "SET -O" and the transceiver will then try
to login to this preferred ocean when going on-air for the first time.
Page 32

Initial setup of transceiver TT-3022C Landmobile Transceiver
Page 3-6 9-Nov-00
3.4 TT-3022C Landmobile Transceiver
The TT-3022C is a Inmarsat-C transceiver approved for Landmobile applications. When the transceiver has installed software version V3.27 or above, it is approved for vehicle surveillance(VMS).
Figure 9 TT-3022C Land Mobile Transceiver
When receiving the transceiver the TT-3022C is default set to normal landmobile behaviour i.e. no vehicle surveillance is enabled.
Some configurations are necessary before setting the transceiver
on-air to fulfil the VMS requirements.
3.4.1 Making a Landmobile vehicle surveillance
Transceiver
To change the TT-3022C Landmobile transceiver into a TT-3022C
Landmobile vehicle surveillance transceiver th e command “SE-B”
must be executed in the transceiver terminal. The SE-B command
enters the system parameter initialisation menu. Menu entry 7
Vehicle Surveillance System changes the transceiver into a Landmobile vehicle surveillance transceiver.
The transceiver will automatically reboot when changing transceiver type. Using the command SE -b entry 7 again will change
the transceiver into an normal Landmobile transceiver.
Page 33

TT-3022C Landmobile Transceiver Initial setup of transceiver
9-Nov-00 Page 3-7
3.4.2 Ocean Registration
When the transceiver is configured for vehicle surveillance the
transceiver will automatically login to the ocean region with the
best signal (if not already logged in). Using the transceiver terminal
command "SET -O" the preferred ocean can be configured and the
transceiver will try to login into this preferred ocean when going onair for the first time.
Page 34

Initial setup of transceiver TT-3022C Landmobile Transceiver
Page 3-8 9-Nov-00
This page is intentionally left blank
Page 35

Configuring the VMS behaviour Transceiver Configuration
9-Nov-00 Page 4-1
4 Transceiver Configuration
This chapter provides specific information enabling you to configure the VMS functionality on one of the Thrane & Thrane InmarsatC transceivers with a minimal effort.
The transceivers can be configured to a wide range of different
VMS functionality’s. Not all functionality needs to be enabled. It depends on the requirement of the VMS project.
4.1 Configuring the VMS behaviour
In this chapter each entry in the fishery configuration menu in the
transceiver will be described in details. The fishery configuration is
also the configuration to use in case of land mobile VMS configuration.
The fishery configuration menu is entered using the transceiver
terminal command “FISHERY”.
The command has the following format:
Command: Fishery configuration
Purpose: Configure the behaviour of the Fishery Transceiver
Format: FISHERY [sub-menu]
FI [sub-menu]
Page 36

Transceiver Configuration Configuring the VMS behaviour
Page 4-2 9-Nov-00
Fishery configuration
No Field Current setting(s)
0 : Quit
1 : Set all values to default
10 : Date and time format : Default
20 : Antenna Blocked/Disconn followed
by normal position report : no
21 : Retransmit fail reports : no
22 : Blocked GPS detection : no
23 : Long to short report interval change : no
24 : Nice power down support : no
26 : Disable Send LED on position report TX : no
27 : Stop button initiates position report : no
28 : Disable position report infos. : no
29 : Password on da-command : no
31 : Only 1 packet per position report : no
32 : Mask out speed and course : no
33 : Disable GPS first fix beep : no
34 : 'A' in provider downloads VMS DNID : no
35 : Use VMS DNID for special reports : no
36 : Hide remote connections : no
37 : Keep inactive connections : no
40 : MEM Code translation table (HEX) :
0B 40 42 44 45 50 51
52 53 55 56 57 58 46 47
50 : Position report packet 2 - bit mask (HEX):
00 00 00 00 00 00 00 00
51 : Number of positions in storage queue : 0
60 : Reporting intervals
(long, short in minutes) :360(2500) 120(833)
61 : Reporting interval change distance
(in decameters) : 40
70 : VMS DNID (AORW, AORE, POR, IOR) : 0 0 0 0
71 : VMS LES (AORW, AORE, POR, IOR) : 0 0 0 0
72 : Number of active DNID in transceiver : 25
Enter field number >
Figure 10 Fishery Configuration Menu (fi)
4.1.1 Quit
This entry will quit the fishery configuration menu and return to
normal user interface.
Page 37

Configuring the VMS behaviour Transceiver Configuration
9-Nov-00 Page 4-3
The Quit command is executed by entering 0 in the fishery command entry.
4.1.2 Set all values to default
This entry sets the configuration of the transceiver to default VMS
behaviour. The default values are described in each entry description.
The command is executed by entering 1 in the fishery command
entry.
4.1.3 Date and time format
This entry is used to configure the format of the date and time information in position reports from the Transceiver.
The basic part of date and time information is identical for all configurations and the information is held in the API header (Figure 3)
and in the first part of the position report (Figure 4).
If more detailed information is required the date and time format
can be extended in three different ways.
This functionality is configured by entering 10 in the fishery command entry.
4.1.3.1 Setting 1 - default position report format
If the Date and time format entry is set to Default no further data is
added to the DNID file.
4.1.3.2 Setting 2 - position report format 1
If the Date and time format entry is set to Format 1 a more detailed
description of month and year is included in the position report.
Please see Figure 11 to have an illustration of the format.
Page 38

Transceiver Configuration Configuring the VMS behaviour
Page 4-4 9-Nov-00
Additional date of position information is coded as:
[Additional date of position]::= [Month][Year[not used]
34 Month Year 4 bits: full month information. Month
1-12
35 Year not used 6 bits: 00 - 63: i.e. gives year 1997
- 2060 year added to 1997
Figure 11 Position report format 1
4.1.3.3 Setting 3 - position report format 2
If Date and time format entry is set to Format 2 a more detailed
description of month, year and minute is included in the position
report.
Additional date of position information is coded as:
[Extended Attribute]::= [S][Year][Month][Day][Hour][Minutes][not used]
34
35
36
Extended Attribute 28 bits: Detailed time of GPS position
37 not used
Table 1 Position report format 2
Extended Attribute (date) (28 bits)
Page 39

Configuring the VMS behaviour Transceiver Configuration
9-Nov-00 Page 4-5
S(1 bit) Spare
Year(7 bit) 00 - 99: i.e. gives year 1998 – 2097
Month(4 bit) 1-12: full month information
Day(5 bit) 1-31: day of the month (same field as in normal
Attribute)
Hour(5 bit) 0-23: hour of the day (same field as in normal
Attribute)
Minutes(6 bit) 0-59: full minute information
reserved(4 bit) not used
4.1.3.4 Setting 4 - position report format 3
If Date and time format entry is set to Format 3 full year description
is included in the position report.
Additional date of position information is coded as:
Additional date of position]::= [S][Year][Month][Day][Hour][Minutes][not used]
34 S Year 1 bit: spare
12 bit: Year - gives exact year
0000 – 4095
35 Month 4 bit: Month - 1-12: full month
information
36 Day Ho- 5 bit:Day - 1-31: day of the month
(same field as in normal Attribute)
5 bit:Hour - 0-23: hour of the day
(same field as in normal Attribute)
37 ur Minutes 6 bit: Minutes - 0-59: full minute
information
38 not used 7 bit: not used
Table 2 Position report format 3
Page 40

Transceiver Configuration Configuring the VMS behaviour
Page 4-6 9-Nov-00
4.1.4 Antenna Blocked/Disconnected followed
by normal position report
If this entry is set to Yes every antenna blocked and antenna disconnected position report is followed by a normal position report
that includes the current position.
Antenna blocked or
disconnected
Position
time
Position when
blocked
Position when
Ok again
Time when position
reports are send
First report
includes position
before blockage
Second report
includes current
position
Figure 12 Antenna blocked/Disconnected reports
The functionality is configured by entering 20 in the fishery command entry.
4.1.5 Retransmit fail reports
If this entry is set to Yes a failed report will be retransmitted. I.e. a
failed antenna blocked position report will cause the antenna
blocked event to be re-initiated and cause retransmission of an a ntenna blocked position report to the VMS DNID.
The functionality is configured by entering 21 in the fishery command entry.
Page 41

Configuring the VMS behaviour Transceiver Configuration
9-Nov-00 Page 4-7
4.1.6 Blocked GPS detection
If this entry is set to Yes blockage detection on the GPS signal is
done parallel to the blockage detection of the Inmarsat NCS TDM
signal. If the GPS has no fix for 4½ minutes an antenna blocked
position report will transmitted when the signal becomes OK
again.
This is especially useful if a GPS jamming device is used to
scramble the GPS signal.
The functionality is configured by entering 22 in the fishery command entry.
4.1.7 Long to short report interval change
This feature enables the transceiver to have two different position
reporting intervals. A long reporting interval for use when the vessel/vehicle has not moved more that 400 meters since last report
and a short interval at all other times.
If the entry is set to Yes and
• an Inmarsat PU interval connection is set-up for the VMS
DNID.
• the reporting interval is longer than or equal to the long interval
configured in fishery configuration entry Reporting intervals
(section 4.1.23).
• the transceiver moves more than specified in fishery configuration Reporting interval change distance from the last reported position
Page 42

Transceiver Configuration Configuring the VMS behaviour
Page 4-8 9-Nov-00
then
• the positioning reporting program using the connection will be
changed to the short reporting interval configured in Reporting
intervals
The change in position is checked every 5 minutes.
Position
time
400m from
harbor
Position of
harbor
Interval changed
because vessel
has moved
Figure 13 Automatic change of reporting interval
This feature is useful when a vessel is in harbour or vehicle is in
home town because this will reduce the number of position reports
and will therefore also reduces the cost of positioning reporting.
The functionality is configured by entering 23 in the fishery command entry.
4.1.8 Nice power down support
Please notice that this command is not supported in the TT3020C SOLAS Fishery Transceiver nor in the TT-3028CM Dual
Mode SOLAS Fishery transceiver.
Page 43

Configuring the VMS behaviour Transceiver Configuration
9-Nov-00 Page 4-9
If set to Yes the sleep mode functionality (see section 4.5) of the
transceiver can be used to configured the transceiver for nice
power down.
Nice power down is used when it is necessary to separate "supply
power removed abruptly" from " supply power switched off nicely".
In addition to configuring this entry it is necessary to configure the
sleep mode behaviour (see section 4.5.1). This is done using the
terminal command “SL –i 0,0,0,0” which configures the sleep
mode to no interval wakeup and no fix time wakeup.
The default configuration of the transceiver is sleep mode functionality disabled.
If Nice power down support is set to Yes and Sleep mode is configured as “SL –i 0,0,0,0” then
• If the supply power is removed abruptly then the transceiver
will indicate this by sending "Power Down Report" and "Power
Up Report" when supply power has been re-established. The
"Power Down Report" includes the last known position before
the power was removed. The "Power Up Report" includes the
current position.
Thrane & Thrane
TT-3020C
PowerSetLoginSendMail
Capsat
Alarm Alarm
MES
Press both keys for 5
seconds to send alarm
Power Down Report
position report
• If the supply power is removed using the remote switch then
the transceiver will indicate this by sending an "Enter Sleep
Page 44

Transceiver Configuration Configuring the VMS behaviour
Page 4-10 9-Nov-00
Mode Report" ~1-5 min after transceiver is switched off and
"Leave Sleep Mode Report" when transceiver is switched on
again. The " Enter Sleep Mode Report " includes position at
the time of transceiver is switched off. The " Leave Sleep
Mode Report " includes position at the time of transceiver is
switched on again. Please refer to section 4.5 Sleep mode for
further description of transceiver behaviour.
Thrane & Thrane
TT-3020C
PowerSetLoginSendMail
Capsat
Alarm Alarm
MES
Press both keys for 5
seconds to send alarm
Enter Sleep Mode Report
position report
If Nice power down support is set to No and Sleep mode is configured as “SL –c” then
• If the supply power is removed abruptly using the remote
switch then the transceiver will indicate this by sending "Power
Down Report" and "Power Up Report" when supply power has
been re-established. The "Power Down Report" includes the
last known position before the power was removed. The
"Power Up Report" includes the current position.
If Nice power down support is set to No and Sleep mode is configured as “SL –I x,x,x,x” (x is any value) then
• Normal sleep mode configuration, please refer to section 4.5
Sleep mode.
The functionality is configured by entering 24 in the fishery command entry.
Page 45

Configuring the VMS behaviour Transceiver Configuration
9-Nov-00 Page 4-11
4.1.9 Disable Send LED on position report TX
Please notice that this command is not supported in the TT3020C SOLAS Fishery Transceiver nor in the TT-3028CM Dual
Mode SOLAS Fishery transceiver.
This entry is used to configure that the transceiver does not light up
the Send LED when transmitting position reports.
Usually the Send LED will lit while the transceiver is transmitting
but by setting this entry to Yes the transceiver will only turn on the
Send LED when sending messages, logging into/out of the ne twork, during performance verification test, distress alert etc.
The functionality is configured by entering 26 in the fishery command entry.
4.1.10 Stop button initiates position report
The stop button can be configured for two different purposes. Either it will cause the transmission of a manually initiated position
report or it will set the transceiver in In-Port mode where the number of position reports are reduced.
The feature is configured by entering 27 in the fishery command
entry.
4.1.10.1 Transmit manual initiated position report
If this entry is configured to Yes the Stop button on the front panel of
the transceiver (Figure 6 or Figure 8) can be used to initiates a position report with a MEM code that indicates that it is a manual
transmitted position report.
The Stop button must be pressed for 4-5 seconds until a “beep”
sound from the transceiver. This indicates that the transceiver has
initiated a manual position report.
Page 46

Transceiver Configuration Configuring the VMS behaviour
Page 4-12 9-Nov-00
When pressing the Stop button less than 4 seconds the button has
normal functionality i.e. acknowledging messages.
4.1.10.2 Set transceiver In-Port mode
If the entry is set to Yes/in-port mode then the stop button has the
same functionality as described in section 4.1.10.1 however:
• if a Inmarsat PU interval connection is set-up for the VMS DNID
then
• the connection will be changed to the long reporting interval as
described in section 4.1.23 Reporting intervals.
Position
time
Harbor
position
Short interval
Manual
position
report
Long interval
In-harbor
button
pressed
Figure 14 In-port button
This feature is useful when the vessel is in harbour or vehicle in
home town because it is reducing the number of position reports
and consequently also the cost.
Page 47

Configuring the VMS behaviour Transceiver Configuration
9-Nov-00 Page 4-13
4.1.11 Disable position report infos.
If this entry is set to Yes the transceiver will not display any INFO
messages related to VMS position reporting. It is recommended
that this entry is configured to Yes if information regarding VMS
should be kept hidden from the operator.
The feature is configured by entering 28 in the fishery command
entry.
4.1.12 Password on da-command
If this entry is set to Yes then the transceiver terminal command
“DATA” is password protected i.e. prohibiting the operator from
sending data reports using an external Message Terminal (including the TT-3606E Message Terminal DNID menu).
The "DATA" terminal command is used to transmit data reports.
It is recommended that this entry is set to No if the Hide remote
connections entry (section 4.1.18) is set to Yes.
Page 48

Transceiver Configuration Configuring the VMS behaviour
Page 4-14 9-Nov-00
If the Hide remote connections entry is set to No then this entry
could be set to Yes because then only VMS DNIDs are hidden from
the operator.
Additional DNIDs downloaded by other authorities are shown to
the operator and therefore a protection of these DNID can be accomplished by removing the possibility of sending data report to
these DNIDs.
The feature is configured by entering 29 in the fishery command
entry.
4.1.13 Only 1 packet per position report
If this entry is set to Yes the transceiver will only send 1 packet position reports i.e. no speed, course or extended information is
transmitted. The fields described in Figure 5 Second Part of Pos ition Report are not send and this reduces the number of position
reports transmitted from the vessel/vehicle by 50% and cons equently reduces the price of the position report.
The entry can also be controlled remotely via the satellite link i.e. it
is possible using special T&T poll to change the content of the position reports. Please see section 5 Remote configuration of the
transceiver via poll.
The feature is configured by entering 31 in the fishery command
entry.
4.1.14 Mask out speed and course
If this entry is set to Yes the transceiver will mask out speed and
course information from the data report. These fields will be set to
511 and 255. There is no reducing in size/cost of the position report.
Page 49

Configuring the VMS behaviour Transceiver Configuration
9-Nov-00 Page 4-15
This entry can also be configured remotely. This feature is only
useful where local regulations prohibits the authorities from getting
this information from the vessel/vehicle.
The feature is configured by entering 32 in the fishery command
entry.
4.1.15 Disable GPS first fix beep
If this entry is set to Yes the transceiver will not indicate to the operator when the GPS has calculated a position. Usually when the
transceiver gets the first position from the GPS after power-up the
transceiver beeps twice to indicate that the GPS is working. In the
Fishery transceiver this beep also indicates that the unit is transmitting the power-up position report that might should be hidden
from the operator.
It is recommended that this entry is set to No to ease remote diagnostics in case of equipment problems.
The feature is configured by entering 33 in the fishery command
entry.
4.1.16 'A' in provider downloads VMS DNID
If this entry is set to Yes it is possible to download the VMS DNID,
LES pair as described in section 4.1.25 VMS DNID and VMS LES
via normal Inmarsat-C download DNID poll. The last character in
the provider name field (character # 25) of the download DNID poll
must be an 'A'.
If this entry is set to No then the VMS DNID entry cannot be
changed remotely. However if the DNID used by the fishery authorities or vehicle fleet owner are fixed for each ocean region there is
no need for this option.
It is recommended that this feature is configured to NO.
Page 50

Transceiver Configuration Configuring the VMS behaviour
Page 4-16 9-Nov-00
The feature is configured by entering 34 in the fishery command
entry.
4.1.17 Use VMS DNID for special reports
If this entry is set to Yes then
Only the account on the LES for the (DNID, LES) pair described in
4.1.25 VMS DNID and 4.1.25 VMS LES will receive the special
position reports transmitted by the transceiver.
This setting is recommended because it allows global coverage
using 4 VMS DNID, LES pairs.
The special reports are all types of position reports except interval position report i.e.:
• Normal Position Report after Antenna Blockage/ Disconnection
• Power Up Report
• Power Down Report
• Antenna Disconnection Report
• Antenna Blockage Report
• Manual Position Report
• Stored Position Report
Interval position reports to VMS DNID, LES pairs can be done by
using normal Inmarsat program PU poll.
If this entry is set to No then
All DNIDs used in remote configured Inmarsat PU interval program will receive the special position reports transmitted by the
Page 51

Configuring the VMS behaviour Transceiver Configuration
9-Nov-00 Page 4-17
transceiver. This setting is not recommended due to the fact that
remote configured Inmarsat PU interval program can only be setup for one ocean region at a time.
The special reports are all position reports i.e.:
• Normal Position Report
• Power Up Report
• Power Down Report
• Antenna Disconnection Report
• Antenna Blockage Report
• Manual Position Report
Please notice that automatically storing of position in the transceiver when outside Inmarsat coverage is not supported if this
entry is No.
The feature is configured by entering 35 in the fishery command
entry.
4.1.18 Hide remote connections
If more than one VMS interval connection is required because other
authorities would like to survey the vessel/vehicle this entry should
be set to Yes. Setting this entry to Yes will make the transceiver
hide all remote connections - Inmarsat PU interval connection –
from the operator so that only local configured PU connection will
be displayed. DNID´s that are part of a remote programmed PU
are also hidden from the operator.
It is generally not recommended to have more VMS interval
connections as this will double the costs for positioning reports.
Alternatively a land based distribution should be used.
Page 52

Transceiver Configuration Configuring the VMS behaviour
Page 4-18 9-Nov-00
The feature is configured by entering 36 in the fishery command
entry.
4.1.19 Keep inactive connections
When a connection has no DNID in the ocean region where the
transceiver is logged in, the connection is inactive. Inactive connections are normally removed, but setting this option to yes will prevent the removal.
The feature is configured by entering 37 in the fishery command
entry.
4.1.20 MEM Code translation table
This entry is used to define the MEM codes used in each transmitted position report. There is no restriction on what value that is a ssigned to a Macro Encoded Message but please note that Inmarsat has predefined some Messages for Land Mobile Use in the
range 01H-3FH.
The default value for each Macro Encode Message is listed in
Table 3.
Page 53

Configuring the VMS behaviour Transceiver Configuration
9-Nov-00 Page 4-19
No Macro Encode Message Value
1 Normal Position Report 0BH
2 Power Up Report 40H
3 Power Down Report 42H
4 Antenna Disconnection Report 44H
5 Antenna Blockage Report 45H
6 Enter Sleep Mode Report 50H
7 In Sleep Mode Report 51H
8 Leave Sleep Mode Report 52H
9 Fix Time Begin Report 53H
10 Enter Reduced Transmission Mode Report 55H
11 In Reduced Transmission Mode Report 56H
12 Leave Reduced Transmission Mode Report 57H
13 Manual Position Report 58H
14 Stored Position Report 46H
15 I/O Status Report 47H
Table 3 Default Macro Encoded Messages
Please notice that Macro Encode Messages 6 + 7 + 8 and 9 are
unavailable in the TT-3020C/TT-3028CM SOLAS Fishery Transceivers due to the fact that Sleep Mode not is implemented in the
SOLAS Transceivers. I/O Status Report (15) is only available in the
TT-3022C landmobile transceivers.
The feature is configured by entering 40 in the fishery command
entry.
4.1.21 Number of positions in storage queue
The transceiver can store up to 100 positions at regular interval
when outside Inmarsat coverage. This entry defines the maximum
numbers of position that should be stored and later transmitted to
the VMS. The storage queue is a circular buffer i.e. the oldest p osition is deleted when the buffer is full.
Page 54

Transceiver Configuration Configuring the VMS behaviour
Page 4-20 9-Nov-00
When the Inmarsat-C signal is blocked for approximately 11½
minutes (80 Inmarsat TDM frames) and the GPS signal is still present the transceiver will go into a mode where it stores positions in
non-volatile memory.
At the same time the transceiver will start to give an audio alarm to
indicate to the operator that it is time for manual scanning of NCS's
due to high bulletin board error level.
When Inmarsat signal becomes OK again and has been OK for
approximately 3½ minutes i.e. the level where the audio alarm
stops because the transceiver has synchronised to a satellite, the
stored positions are transmitted to the VMS DNID, LES pair. One
position report at a time spaced 3 minutes from the completion of
the previous stored position transmission. This ensures 3 minutes
of NCS TDM listening between every report which will allow EGC
reception like safety calls or weather forecasts.
The interval used for storage of positions in non-volatile memory is
the short interval specified in the fishery configuration (see section
4.1.23 Reporting intervals). The first position stored is spaced this
short interval from the time of signal lost e.g. if short interval is 2
hours the first position is stored 2 hours after the Inmarsat signal
is lost. The position and the time when the Inmarsat signal is lost
is transmitted in an Antenna Blocked position report.
The feature is configured by entering 51 in the fishery command
entry.
4.1.22 Position report packet 2 - bit mask
The idea of this entry is to allowed a Message Terminal or data
terminal (only TT-3022D) to set some bits in the position report
packets.
This entry in the Fishery Configuration is used to select the bits in
the position report packet number 2 that can subsequently be
changed by the Message Terminal/data terminal software.
Page 55

Configuring the VMS behaviour Transceiver Configuration
9-Nov-00 Page 4-21
If these bits are unused it is recommended that the default values
of this entry are kept unchanged.
This bit mask is used to enable/mask bits in the “PG –B” buffer.
The bit mask is used in position report in the following way:
bytes6to13_ of_pack_2 =
bytes6to13_of_pack_2 OR (“PG –B” buffer AND “FI” bit mask)
The bit mask is entered in hexadecimal numbers.
Bytes6to13_of_pack2 is the same as byte 34 to 41 in the DNID file
with API Header (please see section 2.1.1).
This entry is only of interest if the Message Terminal/data terminal
connected to the Transceiver supports the possibility of altering the
specific bits in the positioning report. Currently the TT-3606E Message Terminal does not support this option.
A Message Terminal used for the TT-3020C/TT-3028CM SOLAS
Fishery Transceiver must be approved by Inmarsat and therefore
only very few Message Terminals are suited to fit this transceiver.
The TT-3022D Fishery Transceiver can however have various
Message Terminals/data terminals connected and a Message
Terminal for the Non SOLAS Transceiver must not be approved by
Inmarsat. It is therefore possible to develop customer designed
data terminals that supports the “Position report packet 2 – bit
mask” feature.
The feature is configured by entering 50 in the fishery command
entry.
4.1.23 Reporting intervals
In this entry the different reporting intervals must be configured.
The reporting interval thresholds are entered in minutes but the actual Inmarsat TDM frame numbers are also shown in brackets.
Page 56

Transceiver Configuration Configuring the VMS behaviour
Page 4-22 9-Nov-00
The reporting intervals configuration are used together with the following items: Long to short report interval change (please see section 4.1.7), Set transceiver In-Port mode (please see section
4.1.10.2) and in Number of positions in storage queue (please see
section 4.1.21).
The fields are configured by entering 60 in the fishery command
entry.
4.1.24 Reporting interval change distance
This entry specifies the distance that the vessel/vehicle must move
before the reporting interval of the VMS position report is changed
from long to short reporting interval.
The different reporting intervals are used as described in section
4.1.7 Long to short report interval change is changed and the different reporting intervals are configured as described in section
4.1.24 Reporting interval change distance.
The field is configured by entering 61 in the fishery command entry.
4.1.25 VMS DNID and VMS LES
This entry is used to specify which DNIDs in the DNID list that are
VMS DNIDs. Polls to the transceiver that changes the configuration
of the transceiver will only be accepted by the transceiver if the
polled DNID is in this VMS DNID list.
If the entry “Use VMS DNID for special reports” (page 4-16) is configured to Yes then as soon as a match is found between this configuration and the DNID list the transceiver starts sending special
reports to the VMS DNID. A DNID list can be listed by entering
“STATUS –D” in the Transceiver terminal.
DNIDs for all four oceans can be configured and it is important to
configure all ocean regions before shipping the equipment.
Page 57

Transceiver Configuration
9-Nov-00 Page 4-23
The VMS DNID and VMS LES entry can not be configured remotely
unless the fishery configuration “'A' in provider downloads VMS
DNID” (page 4-15) is set to Yes but it is recommended that fixed
VMS DNID, LES pairs are used and that the fishery configuration
entry “'A' in provider downloads VMS DNID” is configured to No.
Note that It is not possible to change these entries manually when
the ‘A’ in provider downloads VMS DNID" is set to yes. These entries are updated automatically when download DNID via the LES.
These fields are configured by entering 70 or 71 in the fishery
command entry.
4.1.26 Number of active DNID in transceiver
This entry is us ed to specify how many of the DNIDs in the DNID
list that are allowed to be active as positioning reporting DNIDs.
Up to 25 DNIDs can be downloaded but the number of active DNID
can be limited using this command. Only active DNID can be used
for position reporting. This entry can be used to limit the access to
local configured position reporting.
It is however not recommended that the default value of 25 is
changed because it reduces the functionality of the system when
used by an operator on a fishing vessel or truck.
The idea of this feature is to limit the number of DNIDs that can be
downloaded in the equipment. This is implemented by disabling
all DNIDs that are downloaded after the number of allowed DNIDs
are used. Changing this entry does NOT enable any already
downloaded DNIDs.
The field is configured by entering 72 in the fishery command entry.
Password protection
Password protection of the fishery configuration is a vital part of the
preparation of a Fishery Transceiver. Without password protection
Page 58

Transceiver Configuration Password protection
Page 4-24 9-Nov-00
it is possible for anyone to change the behaviour of the transceiver.
The transceiver allows passwords up to 8 characters.
The terminal command "SET -D N" is used to enter a new password.
When password protection is applied some features cannot be
accessed more unless the password is known. In Table 4 is listed
the transceiver terminal commands that are prohibited from being
used when password protection is applied to the Fishery transceiver.
Page 59

Password protection Transceiver Configuration
9-Nov-00 Page 4-25
Terminal Command Description Terminal
Command
Password
protected
when:
Fishery configuration FI always
Data report DA FI 29 = Yes
Logout LO always
Message Data Report RS always
Go to NCS NC -G always
Terminal baud rate setup SE -C always
Change into EGC only SE -E always
Initialise system parameters SE -B always
Set antenna voltage SE -F always
Reduced transmission mode SE -H always
Sleep mode SL always
Performance Verification Test TE FI 35 = No
Change Mobile ID number SE -U FI 35 = No
Open a local connection PG -O FI 35 = No
Close a local connection PG -C FI 35 = No
Program a local connection PG -P FI 35 = No
Initiate interval reporting on a local
connection
PG -I FI 35 = No
Stop interval reporting on a local
connection
PG -S FI 35 = No
Display a local connection PG -D FI 35 = No
Login (TT-3022D) LI always
Scan (TT-3022D) NC -S always
Login (TT-3020C/TT-3028CM) LI Never protected
Scan (TT-3020C/TT-3028CM) NC -S Never protected
Zone ZO Always
Table 4 Password Protected Commands
Page 60

Transceiver Configuration Automatic ocean region shift
Page 4-26 9-Nov-00
4.3 Automatic ocean region shift
Please notice that this command is not supported in the TT3020C SOLAS Fishery Transceiver nor in the TT-3028CM Dual
Mode SOLAS Fishery transceiver.
The transceiver can be configured to perform automatic ocean region shift depending on either position or signal strength. This
configuration is very useful when the vessel/vehicle operates in different ocean regions.
The configuration is done by setting the environment variable
OCEANSHIFT to either YES or SIGNAL.
se -z OCEANSHIFT=YES
• The Transceiver will make an automatic login to a new NCS if the
GPS position of the Transceiver has changed to make another
ocean area a better choice.
The environment variable OCEANSHIFT=SIGNAL
se -z OCEANSHIFT=SIGNAL
• The Transceiver will make an automatic login to the best NCS if
the Inmarsat -C sig nal has been bad for a few minutes.
Page 61

Transceiver Configuration
9-Nov-00 Page 4-27
Reduced transmission mode
The transceiver can be configured to run in reduced mode where
the number of transmitted position reports are limited - and consequently the airtime costs are reduced. By using the reduced
transmission mode this can be accomplished without reducing the
efficiency of the surveillance.
The transceiver can be configured to two different reduced transmission modes as illustrated in Figure 15:
• Reduced Mode 1 normally just called Reduced Mode and
• Reduced Mode 2 also known as Advanced Reduced Mode.
The configuration of the mode is done using the following transceiver terminal command "SE -H".
• "SE -H 1" configures the transceiver to Reduced Mode 1.
• SE -H 2" configures the transceiver to Reduced Mode 2.
• "SE -H 0" disables reduced mode and
• "SE -H" show current status.
Page 62

Transceiver Configuration Reduced transmission mode
Page 4-28 9-Nov-00
Reduced
mode
Ÿ
If the transceiver has sent 2 interval position reports with
positions within a radius as specified in "FI 61 - Reporting
interval change distance", further scheduled interval
position reports will not be transmitted as long as the
current position is still inside the radius.
Mode 2
Ÿ
Interval position reports are
transmitted with MEM code "In
Reduced Transmission Mode
Report"
Ÿ
When entering/leaving Mode 2 using terminal command
"SE -H" or remote configuration
poll - the transceiver transmits
"Enter Reduced Transmission
Mode Report"/"Leave Reduced
Transmission Mode Report"
Ÿ
Sleepmode interval wakeup
position reports are only
transmitted if the current position is
outside the radius as specified in
"FI 61 - Reporting interval change
distance" of the position in the last
transmitted position report.
Ÿ
"In Sleep Mode Report" are
changed to "In Reduced
Transmission Mode Report"
Mode 1
Ÿ
Interval position reports are
transmitted with MEM code
"Normal Position Report"
Figure 15 Reduced Transmission Mode
Please note that the sleep mode functionality in mode 2 of “Reduced transmission mode” cannot be used in the TT-3020C/TT3028CM SOLAS Fishery Transceiver.
The following example illustrates the used of reduced mode.
Page 63

Reduced transmission mode Transceiver Configuration
9-Nov-00 Page 4-29
A fishery vessel that sails at sea or a vehicle on the road returns its
position, speed and course at regular intervals. The positions from
a vessel/vehicle shown in Figure 17 indicates that the vessel/vehicle has moved as shown in Figure 18.
Figure 17 Position, speed and course shown graphically
Figure 18 Vessel/Vehicle track
Using reduced transmission mode will reduce the number of position, speed and course reports returned by the vessel/vehicle.
Figure 19 shows the position reports transmitted by the same vessel/vehicle used in Figure 17 but with reduced transmission mode
enabled.
Figure 19 Reports from MES in reduced mode
Page 64

Transceiver Configuration Sleep mode
Page 4-30 9-Nov-00
The number of position report is reduced because the ve ssel/vehicle at the time of interval reporting checks whether or not it
is still inside the radius of reduced mode as configured in the fishery configuration entry “Reporting interval change distance” (please
see page 4-22).
Figure 20 shows the radius and the position reports that are not
transmitted because the position is inside the radius defined for
reduced transmission mode.
Figure 20 Radius used to check for reduced transmission
4.5 Sleep mode
Please notice that this command is not supported in the TT3020C SOLAS Fishery Transceiver nor in the TT-3028CM Dual
Mode SOLAS Fishery transceiver.
When the transceiver is turned OFF/ON using the remote power
supply pin in DC connector X1 - Remote Switch - then the transceiver can be used in configurations where automatically power up
at regular intervals is preferred even in periods where the transceiver is turned "OFF". This feature is used where interval reporting
is wanted but battery power is limited.
The transceiver needs to be configured for this operation otherwise
the remote power supply pin in DC connector X1 - Remote Switch will have the same functionality as the ON/OFF button S1 - Main
Page 65

Sleep mode Transceiver Configuration
9-Nov-00 Page 4-31
Power Switch - namely abruptly removing the power supply from
the transceiver.
No matter the configuration the ON/OFF button S1 - Main Power
Switch - on the rear panel of the transceiver will always have same
effect as cutting the main power supply i.e. a power loss situation.
4.5.1 Setting up Sleep mode operation
Purpose: Control sleep mode operation.
Format: SLeep <options>
Page 66

Transceiver Configuration Sleep mode
Page 4-32 9-Nov-00
Option Description Detail
-d Show sleep
mode status.
-i
<T1>,
<HH>,
<MM>,
<T2>
Set-up sleep
mode operation.
Where:
T1: 0 - 24, Duration in hours the
transceiver sleeps between wake ups.
If T1=0, then there are no periodic wake
ups defined.
HH: 0 – 23
MM: 0 - 59, HH:MM specifies the time
(UTC) for Fix Time wake up.
T2: 15 - 60, Duration in minutes of Fix
Time wake up. The Transceiver will
always use a minimum Fix Time wake
up of 15 minutes.
-c Disables sleep
mode operation.
-m <M> This switch
control the
behaviour of the
transceiver in
case of main
power failure or
the master
power switch is
switched OFF at
the time of a
wake up.
M = 0: The Transceiver will not wake up
until next day exactly 24 hours later if
the main power has been restored at
that time. Otherwise the wake up will be
postponed for further 24 hours.
M = 1: The Transceiver will wake up 1
hour later if the main power has been
restored at that time. Otherwise the
wake up will be postponed for further 1
hour. This mode consumes a little bit
more power as the transceiver shortly
wakes up every hour just to check if
powering up is possible.
Table 5 Sleep Mode Command
• Transceiver will NOT go to sleep immediately after setting
Remote Switch OFF. The transceiver will first go to sleep when
Page 67

Surveillance zones Transceiver Configuration
9-Nov-00 Page 4-33
it has prepared the next wakeup time and this can easily take
up to 1 minute if the transceiver is not engaged in other traffic.
• Transceiver will wake up 1 minute after going to sleep and
transmit an "Enter Sleep Mode Report". (In software version
V3.20 this was 2 minutes).
• If the transceiver is powered up during this 1 minute sleep
(Remote Switch set ON again) NO reports are transmitted.
• There is a critical period of 10sec after wakeup. If the Main
Power fails during these 10 sec the transceiver will "sleep" for
24 hours. This critical period only applies to the interval wakeups during sleep and not the "Enter Sleep Mode Report" wake
up.
• "Power Down "/"Power Up " reports are transmitted in pairs but
if this occurs after "Enter Sleep Mode Report" the transceiver
will in addition to the power fail reports transmit a "Leave
Sleep Mode Report". When the transceiver goes to sleep
again (because Remote Switch is still OFF) a new "Enter
Sleep Mode Report" will be transmitted.
4.6 Surveillance zones
A surveillance zone is a geographical area, with a reporting interval
to be used when the vessel/vehicle is within the area. The zones
can be used to reduce or increase the number of transmitted position reports depending on, where the vessel/vehicle is. The surveillance zone only affects the reporting interval of the VMS connection,
and can therefor only be used in "fishery" and "landmobile" transceiver types. The surveillance zones are configured using a terminal program, or remotely using Inmarsat poll (VMS DNID). Before
the zones can be programmed a valid configuration password
must be entered.
7 types of zones with different shapes are defined
Page 68

Transceiver Configuration Surveillance zones
Page 4-34 9-Nov-00
Zone
type
Shape Limits
1 Circle Min radius 1 km
Max radius 65535 km (40000 km)
2 Polygon with 3 positions Max angle between sides = 180°
3 Polygon with 4 positions Max angle between sides = 180°
4 Polygon with 5 positions Max angle between sides = 180°
5 Polygon with 6 positions Max angle between sides = 180°
6 Polygon with 7 positions Max angle between sides = 180°
7 Polygon with 8 positions Max angle between sides = 180°
Table 6 Possible zone shapes
Figure 21 Zone example
Examples of zones: Zone 1 is a valid type 3 zone, Zone 2 is invalid
because of the angle above 180°
Page 69

Surveillance zones Transceiver Configuration
9-Nov-00 Page 4-35
If an invalid shape or invalid data is programmed the entire zone is
ignored. When zones overlap the zone with the highest priority
(lowest number) will determine the reporting interval.
4.6.1 Setting up surveillance zones
Purpose: Control surveillance zones.
Format : ZOne <options>
The zone has to be created using zone -n before the interval and
positions can be entered.
Note:. The Number of positions in storage queue in fishery menu
item 51 (please see section 4.1.21) must be less than 100 when
using surveillance zones ..
Options
-d ["zonenumber"]
Displays the zone configuration. Use "zonenumber" to select a
specific zone.
-i "zonenumber","reporting interval"
Add/Change the reporting interval in a zone
"reporting interval" = "20" - "65535"
-n "zonenumber","zonetype"
Create a new zone.
Zonetype Zonetypes
1 - Circle
2 - Triangle
3 - Quadrille
4 - Pentagon
5 - Hexagon
6 - Heptagon
Page 70

Transceiver Configuration Surveillance zones
Page 4-36 9-Nov-00
7 - Octagon
-o "zonenumber","radius"
Add/Change the zone radius.
"radius" = "1" - "65535"
-p "zonenumber","positionnumber","lat deg","lat min","lat
dsec","hemNS","lon deg","lon min","lon dsec","hemEW"
Add/Change a position in a zone.
"positionnumber" = "1" - "8"
"lat de g" = "0" - "90"
"lat min" = "0" - "59"
"lat dsec" = "0" - "99"
"hemNS" = "n"|"N"|"s"|"S"
"lon deg" = "0" - "180"
"lon min" = "0" - "59"
"lon dsec" = "0" - "99"
"hemEW" = "e"|"E"|"w"|"W"
-r "zonenumber"
Remove a zone.
Common parameters
"zonenumber" = "1" - "255"
Page 71

VMS Configuration Remote configuration of the transceiver via poll
9-Nov-00 Page 5-1
5 Remote configuration of
the transceiver via poll
5.1 VMS Configuration
The following poll to sub-address 1 is defined by T&T:
Poll command
number
Command
name
Meaning
6CH (108) T&T Remote
configuration
This poll is used to configure the
transceiver remotely
Table 7 T&T Remote Configuration
The Inmarsat defined individual poll format is:
[Individual] ::= [MES ID][LESID][Subadr][DNID][Resp][Spare]
[Poll Ack][Command Type][Seqno][Datapart]
The individual T&T remote configuration poll has the following format:
Poll Ack (1 bit)
If this bit is set the transceiver will send a acknowledgement Data
Report acknowledging the receipt of the Poll
Command Type (7 bit)
Value 6CH
Datapart
[Data Part] ::= [Zero field][Command array]
Page 72

Remote configuration of the transceiver via poll VMS Configuration
Page 5-2 9-Nov-00
Zero field (1 byte)
Value 00H.
Command array
[Command array] ::= [Packet Descriptor1][AckRef1][Type dependent fields1]
[Checksum1]...[Packet Descriptor27] [AckRef27][Type dependent
fields27][Checksum27]
Packet Descriptor
The packet descriptor field has the same format as the Inmarsat
packet descriptor, short and medium packet descriptor are supported.
[Packet Descriptor] ::= [Short Packet Descriptor]
or
[Packet Descriptor] ::= [Medium Packet Descriptor]
Short Packet Descriptor
[Short Packet Descriptor] ::= [Short][Type][Length]
Short ( 1 bit)
Value 0
Type (3 bit)
This field contains the command type that must be executed in the
transceiver. Please refer to 0
Length (4 bit)
Number of bytes from the end of the [Length] field that is a part of
this command.
Medium Packet Descriptor
[Medium Packet Descriptor] ::= [Medium][Type][Length]
Page 73

VMS Configuration Remote configuration of the transceiver via poll
9-Nov-00 Page 5-3
Medium (2 bit)
Value 2 (10 binary)
Type (6 bit)
This field contains the command type that must be executed in the
transceiver. Please refer to 0
Length (8 bit)
Number of bytes from the end of the [Length] field that is a part of
this command.
Type
The table below shows command types supported.
Type Meaning
00 Fishery Configuration
01 Zone Configuration
Table 8 T&T Poll Command List
AckRef
[AckRef] ::= [Spare][Command No]
Spare (3 bit)
Value 0
Command No (5 bit)
Current command reference number. Each command in this configuration poll must have a unique number. This number is used in
the acknowledgement poll to acknowledge the individual commands in the configuration poll. A maximum of 27 configuration
commands can be transmitted in one poll. Value 00H is reserved
and must not be used.
Page 74

Remote configuration of the transceiver via poll VMS Configuration
Page 5-4 9-Nov-00
Checksum (16 bit)
The [AckRef] and [Type dependent fields] are included in checksum calculation. Checksum is calculated in the following way
(same way as the checksum for normal Inmarsat packets).:
Figure 22 Poll Command Checksum Calculation
Page 75

Fishery Configuration (FI command) Poll Remote configuration of the
transceiver via poll
9-Nov-00 Page 5-5
5.2 Fishery Configuration (FI command)
Poll
Type dependent fields
[Type dependent fields] ::= [Entry No][Parameters]
Entry No (1 byte)
First parameter of the FI command. This is the entry of FI configuration what is normally entered in “Enter field number >”.
Parameters
The parameters field depends on the entry number.
Page 76

Remote configuration of the transceiver via poll Fishery Configuration (FI
command) Poll
Page 5-6 9-Nov-00
Entry Description Parameter(s)
10 Date and time format Value: 0,1,2 or 3 Size: 1 byte
20 Antenna Blocked/Disconn
followed by normal
position report
Value: 0 or 1 Size: 1 byte
21 Retransmit fail reports Value: 0 or 1 Size: 1 byte
22 Blocked GPS detection Value: 0 or 1 Size: 1 byte
23 Long to short report
interval change
Value: 0 or 1 Size: 1 byte
24 Nice power down support Value: 0 or 1 Size: 1 byte
26 Disable Send LED on
position report TX
Value: 0 or 1 Size: 1 byte
27 Stop button initiates
position report
Value: 0, 1 or 2 Size: 1 byte
28 Disable position report
infos.
Value: 0 or 1 Size: 1 byte
29 Password on da-
command
Value: 0 or 1 Size: 1 byte
31 Only 1 packet per position
report
Value: 0 or 1 Size: 1 byte
32 Mask out speed and
course
Value: 0 or 1 Size: 1 byte
33 Disable GPS first fix beep Value: 0 or 1 Size: 1 byte
35 Use VMS DNID for special
reports
Value: 0 or 1 Size: 1 byte
36 Hide remote connections Value: 0 or 1 Size: 1 byte
37 Keep inactive connections Value: 0 or 1 Size: 1 byte
40 MEM Code translation
table (HEX)
Value: 15 MEM code ranged from
00H to 7FH
Size: 15 bytes (medium packet
must be used)
50 Position report packet 2 –
bit mask (HEX)
Value: 8 mask values ranged from
00H to FFH
Size: 8 bytes
51 Number of positions in
storage queue
Value: 0..100 Size: 1 byte
Page 77

Zone Configuration Poll Remote configuration of the transceiver via poll
9-Nov-00 Page 5-7
60 Reporting intervals (long,
short in minutes)
Value: 2 intervals ranged from 1 to
9437. Each interval has the size of
2 bytes and must be specified
with LSB followed by MSB.
Size: 4 bytes
61 Reporting interval change
distance (in decameters)
Value: A distance ranged from 15
to 65535. The distance has the
size of 2 bytes and must be
specified with LSB followed by
MSB.
Size: 2 bytes
72 Number of active DNID in
transceiver
Value: 0..100 Size: 1 byte
Table 9 Connection between entry number and parameters.
5.3 Zone Configuration Poll
Type dependent fields
[Type dependent fields] ::= [Zone header][Zone data]
Zone header (4 bytes)
[Zone header] ::= [Zone No][Zone type][Zone reporting interval]
Zone No (1 byte)
Value 0..255
Zone type (1 byte)
Value 0..7
Zone reporting interval (2 bytes)
Value 20..65535 (frames) (LSB, MSB)
Zone data depends on the zone type.
Page 78

Remote configuration of the transceiver via poll Zone Configuration Poll
Page 5-8 9-Nov-00
Zone
type
Description Zone data
0 No zone <No zone data>
1 Circle [Pos][Radius]
2 Polygon with 3
sides
[Pos1] [Pos2] [Pos3]
3 Polygon with 4
sides
[Pos1] [Pos2] [Pos3] [Pos4]
4 Polygon with 5
sides
[Pos1] [Pos2] [Pos3] [Pos4] [Pos5]
5 Polygon with 6
sides
[Pos1] [Pos2] [Pos3] [Pos4] [Pos5]
[Pos6]
6 Polygon with 7
sides
[Pos1] [Pos2] [Pos3] [Pos4] [Pos5]
[Pos6] [Pos7]
7 Polygon with 8
sides
[Pos1] [Pos2] [Pos3] [Pos4] [Pos5]
[Pos6] [Pos7] [Pos8]
Table 10 Connection between Zone type and Zone data
Radius (2 bytes)
Value 1..65535 km (LSB, MSB)
Pos (40 bit)
[Pos] ::= [Latitude][Longitude][Spare]
Latitude (19 bit)
[Latitude] ::= [Hemisphere][Degrees][Minutes][Fractional part]
Hemisphere (1 bit)
A North/South flag. Set to 0 for North or 1 for South.
Degrees (7 bit)
The degrees of Latitude, North or South.
Page 79

VMS Set-up Acknowledgement Remote configuration of the transceiver via
poll
9-Nov-00 Page 5-9
Minutes (6 bit)
The integer part of the Minutes of latitude.
Fractional part (5 bit)
The fractional part of the Minutes of latitude in units of 0.04 of a
Minute.
Longitude (20)
[Longitude] ::= [Hemisphere][ Degrees] [Minutes][ Fractional part]
Hemisphere (1 bit)
An East/West flag. Set to 0 for East or 1 for West.
Degrees (8 bit)
The degrees of Longitude, East or West.
Minutes (6 bits)
The integer part of the Minutes of longitude.
Fractional part (5 bits)
The fractional part of the Minutes of longitude in units of 0.04 of a
Minute.
Spare (1 bit)
Spare bit set to zero
5.4 VMS Set-up Acknowledgement
When the transceiver has received the T&T Remote Configuration
poll and if acknowledgement is requested the transceiver returns a
acknowledgement data report with partly specific packet content as
defined by Inmarsat.
Page 80

Remote configuration of the transceiver via poll VMS Set-up
Acknowledgement
Page 5-10 9-Nov-00
[Acknowledgement data report] ::= [P][C][Type][DNID][LES ID]
[Member no][Category][Sub-Category][Command][Seqno][Spare][Data]
Type (6 bit)
Value 04H
Category (2 bit)
Value 02H
Sub-Category (6 bit)
Value 00H
Command (1 byte)
Set to same value as the poll command being acknowledged. For
Remote configuration poll this field has the value 6CH. The most
significant bit in the command field is the acknowledgement bit
described in 0
Data
Extended acknowledgement of the outcome of the configuration
change is added to the acknowledgement data report in the [Data]
field.
[Data] ::= [Result code][Extended result field]
Result code (16 bit)
The result code today ranges from 00H - 81H including results like:
Page 81

VMS Set-up Acknowledgement Remote configuration of the transceiver via
poll
9-Nov-00 Page 5-11
Result code Description
0000H No description of the outcome of the
poll is included
0004H Missing poll data
A new result code 6C is added
Result code Description
006CH Remote configuration acknowledge-
ment is found in Extended result field
[Extended result field for remote configuration poll] ::=
[Result1][Command No1]...[Result27][Command No27]
Result (3 bit)
This is the result code of the configuration command.
Result code Meaning Applies to command
type
(see Table 8)
0 No error – configuration
performed correctly
00 and 01
1 Unknown command 00 and 01
2 Invalid number of
parameters
00 and 01
3 No access 00 and 01
4 Invalid polygon 01
5 Not enough memory 01
6 No free space 01
7 Unspecified error 00 and 01
Command No (5 bit)
Page 82

Remote configuration of the transceiver via poll Fishery Set-up Poll Example
Page 5-12 9-Nov-00
This is the command number identifying the command in the configuration poll. Up to 27 (Result, Command No) pairs can be included in the response.
5.5 Fishery Set-up Poll Example
The following example shows poll illustrated in Figure 23 send
from the LES using T&T PSTN/PSDN dialup interface. The .DATA
prefix used to send binary data from the LES is NOT shown.
Please refer the T&T document “TT-6000 Inmarsat-C Land Earth
Station API-Header Description” for a detailed description of the
LES interface.
Page 83

Fishery Set-up Poll Example Remote configuration of the transceiver via poll
9-Nov-00 Page 5-13
Member no
LES ID
DNID
Cat. (
02H
) Sub-Category (
00H
)
Sequence No.
Command (
6CH
)
Result (Ok = 0H) Command No (e.g.
05H
)
Remote configuration respons
(Inmarsat signalling packet descriptor and checksum not shown)
Sub adr (
01H
)
MES ID
LES ID
DNID
Resp. Spare (
00H
)
Poll
Ack
Sequence No.
Command Type (
6CH
)
Zero field (
00H
)
Short
(0)
Type (FI=
00H
) Length (FI 30 »
05H
)
Spare (
000
) Command No (e.g.
05H
)
Entry No (FI 31 =
1FH
)
Parameter1 (FI 31 YES =
01H
)
Checksum (
4E8DH
)
Short
(0)
Type (FI=
00H
) Length (FI 31 »
05H
)
Spare (
000
) Command No (e.g.
06H
)
Entry No (FI 32 =
20H
)
Parameter1 (FI 32 NO =
00H
)
Checksum (
5288H
)
Only 1
packet per
pos report
YES
Mask out
speed and
course
NO
Remote configuration poll
(Inmarsat packet descriptor and checksum not shown)
Spare
Result Code (FI result =
006CH
)
Result (Ok = 0H) Command No (e.g.
06H
)
Packet 1
Packet 2
Figure 23 Example of Remote Poll Configuration
The poll illustrated in Figure 23 will set-up the transceiver fishery
configuration entry 31 and 32.
Page 84

Remote configuration of the transceiver via poll VMS connection for multiple
ocean regions
Page 5-14 9-Nov-00
31 : Only 1 packet per position report : Yes
32 : Mask out speed and course : No
> po -z 1 i 12345 n 1 491234567 108 0 0 0 1 ↵
[00] [05] [05] [1F] [01] [8D] [4E] [05] [06] [20] [00] [88] [52]
The value enclosed in brackets ([]) is the hexadecimal value of the
byte send to the LES interface.
5.6 VMS connection for multiple ocean
regions
The command type is 7CH. The poll must be addressed to subaddress 1.
The text field of the open connection poll contains the (LES id,
DNID) pairs. A connection can contain only one (LES id, DNID) pair
for each ocean region (max. 4).
Page 85

VMS connection for multiple ocean regions Remote configuration of the
transceiver via poll
9-Nov-00 Page 5-15
Spare
(8 bit)
Number of LES, DNID pairs to be
linked to this connection (8 bit)
LES id. #1
(8 bit)
DNID #1
(16 bit)
Member #1
(8 bit)
.
.
.
Figure 24 Open Connection Poll
The LES id is given in Inmarsat-C compressed format (The 2 MSB
gives the ocean region and the 6 LSB the LES no).
The poll must be addressed to a DNID which is given in the list of
DNID(s) and specified as VMS DNID in the fishery configuration.
Example:
poll 1 i 12345 n 1 491234567 124 67
<P8> <P9> 1 + followed by these bi-
nary data:
00h
(Spare),
02h
(No. of LES + DNID Pair),
5Fh
(LES ID, East + 31),
39h, 30h
(DNID No. 12345),
43h
(Member No. 67)
DFh
(LES ID, Indian + 31),
39h, 30h
(DNID No. 12345),
43h
(Member No. 67)
If the poll was successful the (LES id, DNID) pairs beside the
DNID which is polled are added to the list of DNID(s) and to the
VMS (LES id, DNID) pairs in the fishery configuration. The VMS con-
Page 86

Remote configuration of the transceiver via poll VMS connection for multiple
ocean regions
Page 5-16 9-Nov-00
connection is modified to contain all (LES id, DNID) pairs included
in the poll.
1 0 0 0 0 0 0 0
Command ( 8 bit)
Sequence Number (8 bit)
Spare (16 bit)
Result code = 1
(16 bit)
Checksum (8 bit)
Spare (8 bit)
Connection no. (8 bit) CN = connection no.
Table 11 Positive Open Connection acknowledgement
The value of the checksum field is adjusted so a modulus 256
sum from and including the result code field is zero.
For all other Result codes the acknowledge report of Open Connection will be
1 0 0 0 0 0 0 0
Command ( 8 bit)
Sequence Number (8 bit)
Spare (16 bit)
Result code
(16 bit)
Spare (8 bit)
Table 12 Negative Open Connection acknowledgement
Page 87

Sleep mode Set-up Poll Remote configuration of the transceiver via poll
9-Nov-00 Page 5-17
5.7 Sleep mode Set-up Poll
The command type is 6AH. The poll must be addressed to subaddress 1. The purpose of this poll is to allow remote setting up of
sleep mode.
T1 (8 bit)
HH (8 bit)
MM (8 bit)
T2 (8 bit)
Figure 25Sleep mode Set-up Poll
where:
T1: 0 - 24,
Duration in hours the transceiver sleeps between wake ups. If
T1=0, then there are no periodic wake ups defined.
HH: 0 – 23
MM: 0 – 59
HH:MM specifies the time (UTC) for Fix Time wake up.
T2: 0 – 60
Duration in minutes of Fix Time wake up.
Setting T1=0 and T2=0 is equivalent to using the sl -c command.
Example of Sleep mode set-up poll:
poll 1 i 12345 n 1 491234567 106 67 <P8> <P9> 1
0Ch (T1, Wake up every 12 hour.)
0Fh (HH, Set to hour 15)
00h (MM, Set to minute 00)
Page 88

Remote configuration of the transceiver via poll Reduced transmission mode
set-up poll
Page 5-18 9-Nov-00
30h (T2, Fix time wake up duration = 48 minutes)
The acknowledge report will be:
1 0 0 0 0 0 0 0
Command ( 8 bit)
Sequence Number (8 bit)
Spare (16 bit)
Result code
(16 bit)
Figure 26 Sleep mode Acknowledge Report
5.8 Reduced transmission mode set-up
poll
The command type is 6BH. The poll must be addressed to subaddress 1. The purpose of this poll is to allow remote setting up of
reduced transmission mode.
Reduced Transmission Mode
(8 bit)
Figure 27 Reduced Mode Set-up Poll
where:
Reduced Transmission Mode:
• 30H, equivalent to the se - h 0 command.
• 31H, equivalent to the se - h 1 command.
• 32H, equivalent to the se - h 2 command.
Page 89

Reduced transmission mode set-up poll Remote configuration of the
transceiver via poll
9-Nov-00 Page 5-19
Example of Reduced transmission set-up poll:
poll 1 i 12345 n 1 491234567 107 67 <P8> <P9> 1+
followed by one of three bytes:
30h or
31h or
32h.
The acknowledgement report will be:
1 0 0 0 0 0 0 0
Command ( 8 bit)
Sequence Number (8 bit)
Spare (16 bit)
Result code
(16 bit)
Figure 28 Reduced Mode Acknowledge Report
Page 90

Remote configuration of the transceiver via poll Reduced transmission mode
set-up poll
Page 5-20 9-Nov-00
This page is intentional left blank
Page 91

Reduced transmission mode set-up poll Development tips
9-Nov-00 Page 6-1
6 Development tips
This appendix includes some development tips in some cases not
specific for a special type of fishery transceiver in other cases very
specific for either the TT-3020C, the TT -3028CM or the TT-3022D
Fishery transceiver.
• The password described in the document and entered into the
transceiver using the "SE -D N" command must NOT be confused with the password found in Capsat Message Terminal
program. These are 2 different passwords.
• Developer using the terminal command "DA -B" must be
aware of the limitation in transmitting user defined reports. Using the "DA" command without "-o" - that specifies that this is a
position report - will result in a "Bad Parameter(s)" error if the 2
significant bits of the first byte transmitted to the transceiver is
binary 01B i.e. 01xxxxxxB - hex value 40H - 7FH.
The reason is that without a position in the report the first byte
send to the transceiver is byte 6 of the first packet in an Inmarsat data report. The 2 significant bits in byte 6 is the category
field described in detail in section 2.1.
• A printer must always be attached to the transceiver otherwise
the memory will be filled up with spool files of not printed
messages and the transceiver will BEEP.
• In TT-3022D it is possible to switch printing off using the terminal command “SE -Z PRINTER=OFF”
• In TT-3022D it is possible to switch beeping off using the terminal command “SE -Z BEEP=OFF”
• Routing of received messages must be configured before i nstalling the transceiver. Routing should be set to memory as it
Page 92

Development tips Reduced transmission mode set-up poll
Page 6-2 9-Nov-00
is not allowed to install any of the Fishery Transceivers without
a Message terminal.
• In TT -3022D setting up the routing to printer only and having
terminal command “SE -Z PRINTER=OFF” will result in messages being receive but send directly to the garbage can.
Please be aware of that the transceiver is billed for this message even though it was never seen as received.
• Setting up the EGC reception as appropriate.
Page 93

Index
9-Nov-00 Page 7-1
7 Index
A
Antenna blockage......................................................................................................1-3
Antenna blocked......................................................................................................... 4-6
API headers.................................................................................................................2.1
Automatic ocean region shift.................................................................................4-26
C
Checksum ................................................................................................................... 5-4
D
Data packets ...............................................................................................................1-3
Date format..........................................................................................................1-4, 4-3
Default..........................................................................................................................4-3
DNID.............................................................................................................................1-1
active ..................................................................................................4-23
format................................................................................................... 2.1
DNID file.......................................................................................................................1-3
E
EGC reception..................................................................................................4-20, 6-2
F
FI command................................................................................................................ 4-1
FISHERY command .................................................................................................. 4-1
G
GMDSS.........................................................................................................................1-5
GPS blockage.............................................................................................................4-7
H
Hide remote connections .......................................................................................4-17
Hiding transmission..................................................................................................1-4
Page 94

Index
Page 7-2 9-Nov-00
I
Inactive connections................................................................................................4-18
Info messages.........................................................................................................4-13
L
Land Earth Stations................................................................................................... 1-1
LES...............................................................................................................................1-1
Interface................................................................................................2.1
M
Macro codes ...............................................................................................................1-4
Main power switch...................................................................................................4-31
Manual position report....................................................................................1-4, 4-11
MEM codes................................................................................................................4-18
Member numbers...................................................................................................... 1-1
Mini-M phone ..............................................................................................................3-3
N
nc..................................................................................................................................4-1
NCS
Channel...............................................................................................4-1
Id 4-1
Nice power down....................................................................................................... 1-4
O
Ocean
Automatic shift..................................................................................4-26
Region................................................................................................. 3-2
Registration........................................................................................3-2
OCEANSHIFT variable............................................................................................4-26
One packet................................................................................................................4-14
Open connection poll..............................................................................................5-14
Outside Inmarsat coverage ..................................................................................... 1-4
P
Password..................................................................................................................4-13
Password protection.......................................................................................1-4, 4-24
Page 95

Index
9-Nov-00 Page 7-3
Poll................................................................................................................................ 5-1
Port mode..................................................................................................................4-12
Position Report....................................................................................................2.3, 2.5
Preferred ocean..................................................................................3-2, 3-4, 3-5, 3-7
Printer........................................................................................................................... 6-1
PSTN ............................................................................................................................1-3
Q
Quit................................................................................................................................ 4-3
R
Reduced transmission mode.......................................................................1-4, 4-27
Remote configuration................................................................................................ 1-4
Remote configuration poll........................................................................................ 5-1
Remote switch..........................................................................................................4-30
Reporting interval.............................................................................................1-3, 4-21
Retransmission .................................................................................................1-4, 4-6
S
Send LED..................................................................................................................4-11
Sleep mode.......................................................................................................1-4, 4-30
Configuring .......................................................................................4-31
SOLAS.......................................................................................................................... 1-5
Special reports .........................................................................................................4-16
Stop button ................................................................................................................4-11
Storing of positions..........................................................................................1-4, 4-19
Surveillance zones...................................................................................................4-33
T
Time format.........................................................................................................1-4, 4-3
Tips ............................................................................................................................... 6-1
TT-3022C.....................................................................................................................3-6
TT-3020C.....................................................................................................................3-1
TT-3022D.....................................................................................................................3-5
TT-3028CM..................................................................................................................3-3
Page 96

Index
Page 7-4 9-Nov-00
V
Vessel surveillance centre....................................................................................... 1-1
VMS
DNID ...................................................................4-15, 4-16, 4-22, 4-23
LES.....................................................................................................4-22
VMS Data Network Id................................................................................................. 1-1
X
X.25............................................................................................................................... 1-3
Z
Zones.........................................................................................................................4-33
 Loading...
Loading...