

Page 1
Ultrasonic Anemometer 2D
Operating Instructions 4.3801.00.000
1. Range of Application
The Ultrasonic Anemometer 2D is designed to detect
the horizontal components of wind speed and wind
direction in two dimensions as well as the virtual
temperature. Due to its very short measurement
intervals, the instrument is ideal for the inertia-free
measurement of gusts and peak values.
In certain weather situations the accuracy of the air
temperature measurement (virtual-temperature)
surpasses that one of the classic method where the
temperature transmitter is used a weather and thermal
radiation shield.
The measured data are available as analogue signals
and as a data telegram via a serial interface. The
ultrasonic transducers as well as its carrying arms are
automatically heated so that the measuring results, in
case of critical ambient temperatures, are not affected
by icing rain or snow, and the risk of operation trouble,
caused by icing, is minimized.
2. Mode of Operation
The Ultrasonic Anemometer 2D consists of 4 ultrasonic transducers, in pairs of 2 which are opposite each
other at a distance of 200 mm.
The two measurement paths thus formed are vertical to each other.
The transformers act both as acoustic transmitters and acoustic receivers.
The respective measurement paths and their measurement direction are selected via the electronic control.
When a measurement starts, a sequence of 4 individual measurements in all 4 directions of the
measurement paths is carried out at maximum possible speed.
The measurement directions (acoustic propagation directions) rotate clockwise, first from south to north, then
from west to east, from north to south and finally from east to west.
The mean values are formed from the 4 individual measurements of the path directions and used for further
calculations.
A measurement sequence takes approx. 10 msec at +20°C.
.
1 - 10 021280/04/02
Page 2

3. Measurement Principle
3.1 Wind speed and direction
Wind from NNE
Y-Component
X-Component
E
N
W
S
The speed of propagation of the sound in calm air is
superposed by the speed components of an air flow in
wind direction.
A wind speed component in the direction of the
propagation of the sound supports the speed of
propagation, thus leading to an increase in the speed. A
wind speed component opposite to the direction of
propagation, on the contrary, leads to a reduction of the
speed of propagation.
The speed of propagation resulting from the
superposition leads to different propagation times of the
sound at different wind velocities and directions over a
fixed measurement path.
As the speed of sound is very dependent on the air
temperature, the propagation time of the sound is
measured on both of the measurement paths in both
directions. In this way, the influence of the temperaturedependent speed of sound on the measurement result
can be eliminated.
By combining the two measuring paths which are at right angles to each other, one obtains the
measurement results of the sum and the angle of the wind speed vector in the form of rectangular
components.
After the rectangular speed components have been measured, they are then transformed by the µ-processor
of the anemometer into polar co-ordinates and output as sum and angle of wind speed.
3.2 Acoustic-Virtual Temperature
As previously mentioned, the speed of the propagation of sound is shows a radix dependency on the
absolute air temperature, but is rather independent of air pressure, and only slightly dependent of humidity.
Thus these physical properties of gases can be used to measure air temperature at constant and known
chemical composition.
It is a measurement of gas temperature which is made without thermal coupling to a solid state sensor.
The advantages of this measured variable is, on the one hand, its inertia free reaction to the actual gas
temperature, and, on the other hand, the avoidance of measurement errors such as those which occur when
a solid state temperature sensor is heated up by radiation.
Due to the low dependency of the speed of propagation of the sound on the air humidity, the “Virtual
Temperature” refers to dry air (0% humidity) under the same pressure conditions as that one actually
measured.
The deviation of the measured “acoustic-virtual temperature”, compared with the real air temperature, is
linear-dependent from the absolute humidity content of the air.
The part of water vapour in the air increases proportionally the sonic speed, as H
2
O-molecules have approx.
only half of the mass of the remaining air-molecules (O
2
and N2).
The rise of the sonic speed leads to an apparent (virtual) rising of the measured temperature in humid air
compared with dry air of the same temperature.
The deviation of the measured virtual temperature in humid air, compared with real air temperature, can be
corrected according to the following correlation, when the value of absolute humidity is given:
Tr = Tv – Tv * 0,135 K * m3 / g * H
abs
and Tr represents the real air temperature, T
v
the measured acoustic-virtual temperature and H
abs
the
absolute humidity in grams H
2
O per m³ of air.
The virtual temperature at 100 % is too high by approx. 2 Kelvin with an air temperature of 20°C.
2 - 10 021280/04/02
Page 3
4. Technical Data
Wind Speed
Measurement range 0...65 m/s
Accuracy
± 0.1 m/s , at the range 0 ... 5 m/s
resp. ± 2 % rms from measured value at > 5 m/s
Resolution 0.1 m/s
Wind Direction
Meas. range 0...360°
Accuracy
± 1.0°
Resolution 1°
Virtual Temperature
Meas. range - 40 .... + 70 °C
Accuracy
± 0.5 K
Resolution 0.1 K
Data output digital
Interface RS 485 / RS 422
Baud rate 1200, 2400, 4800, 9600, 19200 selectable
Output
Instantaneous values of speed, direction and temperature
Gliding mean values 1sec.; 10sec.; 1min.; 2min.; 10min.
Output rate Spontaneous 1 per 100 msec up to 1 per 25.5 sec,
selectable
On request, asynchronous or synchronous measurement
Status identification
Heater status, path disturbance, δT temperature path to path
General
Internal meas. rate 400 measurements per second, at 25 °C
Temp. range - 40 ... + 70 °C
Operating voltage Supply 20…28 V
rms
AC/DC, max. 70 VA
Idling voltage when heating is switched-off: max. 32 V
rms
Protection IP 65
Icing according to THIES STD 012001
Corrosion No corrosion after 3 month of salt fog and condensation
EMV EN 55022 5/95 class B; EN50082-2 2/96
Model V4A Stainless steel for housing and sensor arms
Mounting to a mast tube 1
½ ”, for ex. DIN 2441
Type of connection 8 pole plug connector in the shaft
Weight approx. 2.5 kg
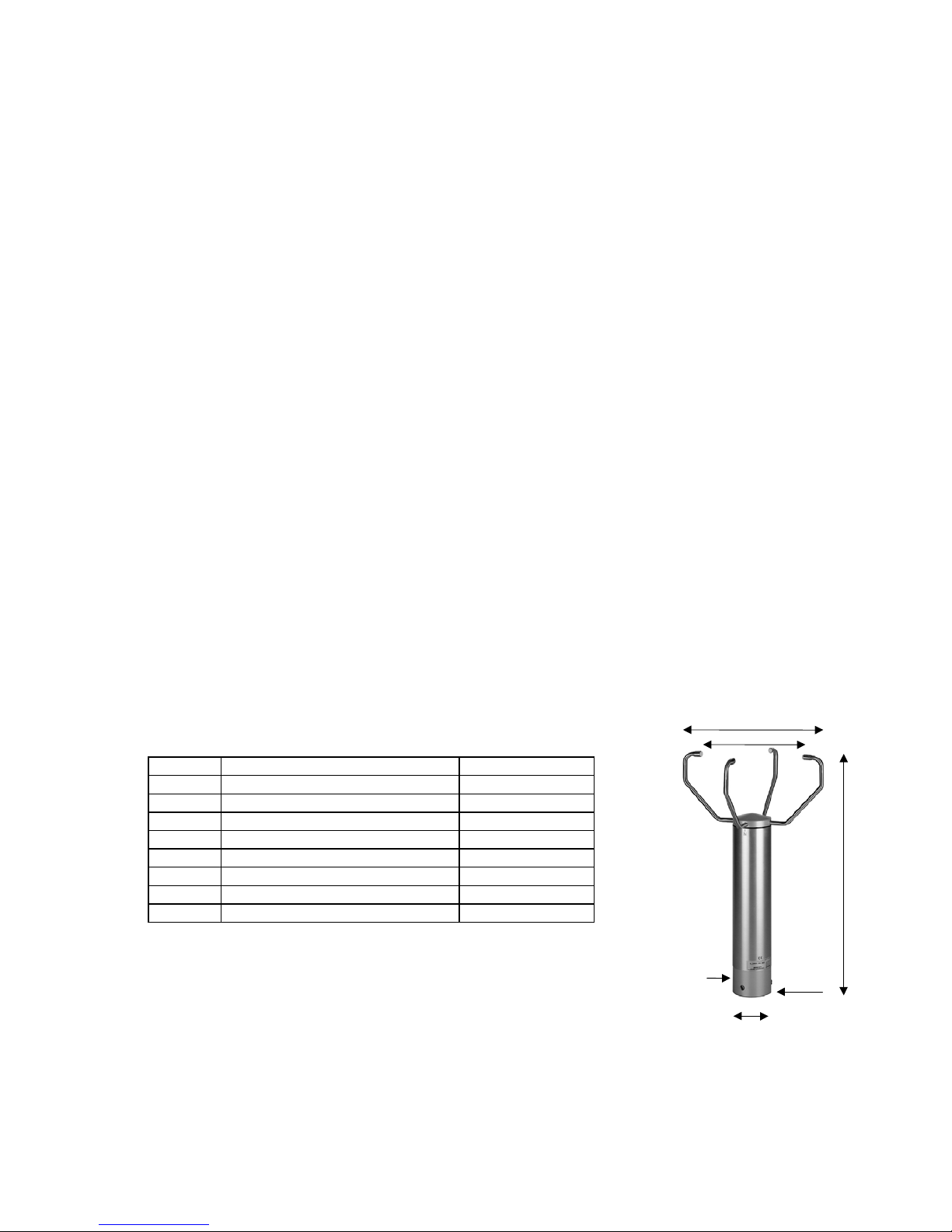
Scale Drawing
3 - 10 021280/04/02
5. Plug Connection Assignment
Pin-No. Function Remark
1 (A)
Selection Instr.-ID (Low active), bit 0 Pull up 10 KΩ intern
2 (B)
Selection Instr.-ID (Low active), bit 2 Pull up 10 KΩ intern.
3 (C)
TX− / RX− (Z) RS 485 / RS 422 Serial interface
4 (D)
Selection Instr.-ID (Low active), bit 1 Pull up 10 KΩ intern.
5 (E)
TX+ / RX+ (Y) RS 485 / RS 422 Serial interface
6 (F)
GND Serial interface
7 (G)
Supply 20−28 VAC, nom. 24 VAC Idling volt. 32 VAC
8 (H)
Supply 20−28 VAC, nom. 24 VAC Idling volt. 32 VAC
5.1 Hints for supplying the instrument:
The instrument must be supplied by 24 volts DC or AC
rms
, In order to guarantee the complete heating power.
Mounting sha ft
for Mast tube 1½“
40 mm depth
Ø 70
200
275
422
8 pole
plug
In the shaft
In order to protect the heating winding the supply voltage must not succeed an absolute value of 28v ac or
dc.
The maximum permissible idling voltage with switched-off heating is effectively 32 V DC or AC
rms
.
Page 4

6. Interface Description
6.1. Telegram „VESTAS“ ! I I V V V D D D S T T T B C R
4 - 10 021280/04/02
6.2 Definition of Checksum and Status byte
6.2.1 Forming of Checksum
The checksum is the result of the byte-wise EXOR-combination of the bytes in the telegram acc. following
definitions.
CSTEMP = XOR-Combination of Bytes 1..13 starting with 0 (Character '!' is not part of the
checksum)
Checksum = (High-Nibble(CSTEMP) XOR Low-Nibble(CSTEMP) ) + ASCII(0)
6.2.2 Definition of Status Byte
The status byte contains information about the current state of the system.
The information comprises:
• error events with the measurement value acquisition
• a possible de-calibration caused, e.g., by a change in the measurement path length
(due to mechanical deformation of the transducer carrying arms)
• the operation state of the instrument heating.
6.2.3 Structure of Status Byte
Bit 0 0 = data valid 1 = data invalid
Bit 1 temperature difference between X and Y measurement path (LSB)
Bit 2 temperature difference between X and Y measurement path (MSB)
Bit 3 Number of required measuring cycles for an error-free measurement value acquisition (LSB)
Bit 4 Number of required measuring cycles for an error-free measurement value acquisition (MSB)
Bit 5 Exceeding measuring range(counter overflow)
Bit 6 Reserved
Bit 7 0 = heating off 1 = heating on
6.2.4 Definition of Temperature Difference in Status Byte
Bit 2 Bit 1 Temperature difference x-path to y-path in Kelvin
0 0 0,0 K to 3,1 K
0 1 3,2 K to 6,3 K
1 0 6,4 K to 7,9 K
1 1 ≥ 8,0 K → invalid measurement
6.2.5 Definition of required measuring cycles in Status Byte
Bit 4 Bit 3 Number of required measuring cycles
0 0 = 16 measuring cycles
0 1 16 < measuring cycles < 32
1 0 32 < measuring cycles < 64
1 1 ≥ 64 measuring cycles, invalid measurement
CHARACT.NO CHARACTER AVAILABLE
FUNCTION
1 (!) ! Response character
2 (I) 0 ••• 9 Identifier Characters
3 (I) 0 ••• 9 Identifier characters
4 (V) 0 ••• 9 Wind speed * 10 1m/s
5 (V) 0 ••• 9 Wind speed * 10 0m/s
6 (V) 0 ••• 9 Wind speed * 10
-1
m/s
7 (D) 0 ••• 9 Wind direction * 10 2 degree
8 (D) 0 ••• 9 Wind direction * 10 1 degree
9 (D) 0 ••• 9 Wind direction * 10 0 degree
10 (S) + ••• − Sign
11 (T) 0 ••• 9 Temperature * 10 1 °C
12 (T) 0 ••• 9 Temperature * 10 0 °C
13 (T) 0 ••• 9 Temperature * 10
-1
°C
14 (B) ASCII Status byte, see item 6.2.2
15 (C) ASCII Check sum, see item 6.2.1
Page 5

5 - 10 021280/04/02
7. Averaging Procedure:
The Ultrasonic 2D forms the gliding mean value through a FIFO-memory the capacity of which comprises up
to 600 values.
In the free running measurement mode the measurement data rate is exactly 10 Hz or 100msec, and forms,
at the same time, the updating rate for the averaging memory (FIFO-memory).
If averaging is requested the measured data are recorded in the FIFO-memory stated above, the capacity of
which is built-up depending on the selected averaging period.
If the averaging period is, for example, 10 seconds, 100 memory cells are used, and in case of an averaging
period of 1 minute 600 cells.
From a selected averaging period > 1 minute up the data flow will be pre-averaged; because the memory
capacity of 600 values cannot be exceeded.
The Ultrasonic 2 D combines two different and useful procedures of mean value forming:
• The forming of vectorial mean values
• The forming of scalar mean values
These different procedures can be selected for the averaging of both the wind speed and wind direction,
depending on the application.
The procedure of forming the vectorial mean value takes the wind direction into account when averaging the
wind speed and vice versa.
Thus, the averaged dimensions of wind speed and wind direction are valued each one with the other.
This procedure of forming the mean value is well suited, for example, for measurements and analysis of
pollutant-propagation.
The procedure of forming the scalar mean value averages both dimensions of wind speed and wind direction
independently from each other.
These averaging procedures lead to results comparable with mechanical wind speed- and wind direction
transmitters.
The scalar averaging procedure is suited, for example, for location-analysis for wind power plants, where only
the dimension of the wind vector – important for power generation – is interesting but not its direction.
The vectorial and scalar procedure can be used independently with wind speed and wind direction within an
output telegram.
For this, you have to select one of the four possible combinations through the command AM (Average
Method).
Command for selecting the averaging procedure:
AM00000 (Average Method) vectorial averaging of speed and direction
AM00001 scalar averaging of speed and direction
AM00002 scalar averaging of speed and vectorial averaging of direction
AM00003 vectorial averaging of speed and scalar averaging of direction
Page 6

6 - 10 021280/04/02
8. Bus-Ability, Synchronisation of the Measurement on the Query Telegram:
8.1 Bus-Ability
The Ultrasonic supports absolutely any operation at an RS485/RS422 data bus in co-operation with further
instruments (bus operation).
The line drivers of the ultrasonic are contemporarily active only for each transmission-period of the
instrument.
The remaining time the line drivers are off-line (“three-state-mode”).
The direct connection to a PC with RS232 interface makes an interface-converter RS 485 / RS 232
necessary, e.g. our accessories order-no. 9.1702.20.000
In case of bus operation respond only those instruments with instrument-specific “ID” on request of the bus
masters
Spontaneous telegram output by selecting a respective telegram type (TT0000x) is suppressed when semiduplex operation is set, as this could lead to a blocking of the receivers at slow baud rates.
8.2 Synchronisation on Data Query
Certain application make it necessary to interrogate cyclically a collective of instruments within a short time
(e.g. 5 instruments within 100 ms).
There might be the following problem: the Ultrasonic can be contacted during a measurement by the
asynchronous query and is then not ready for transmission.
In order to guarantee an immediate instrument response without delay, the possibility of temporal
measurement synchronisation on the query is used.
In case the instrument receives, with active synchronisation, a telegram inquiry through the command
TR0000x, and further inquiry follow with intervals of less than 2,5 seconds, the instrument runs
synchronously to the inquiries and responds with smallest possible delay.
If there are no queries for more than 2,5 seconds, the instrument leaves the synchronous mode and changes
into a spontaneous measurement value acquisition.
This return to the spontaneous mode of measurement guarantees that all control functions derived from the
measurement data (e.g. switch-on heating etc.) will be able to operate also in case of a failure of query
telegram.
As soon as a new query occurs in the spontaneous mode the instrument synchronises immediately on the
query telegram.
8.3 Averaging with Active Synchronisation
In case the measurement values should be averaged please take care that – with active synchronisation –
the exact, internal time basis of 100 ms for forming the measurement values is not used. In this case, the
time is determined by the query-repetition-rate.
Page 7

7 - 10 021280/04/02
9. List of control commands
The Anemometer 2D can be controlled via its serial data interface using the commands in the following list.
Any standard terminal program such as “procomm“ , “telix“ or a Windows terminal program (e.g. “Hyper
Terminal” ) can be used.
All adjustments are stored in a E²ROM so that the adjusted parameters cannot get lost after switching
off or failure of power supply.
9.1 List of commands
Command Function Remark
<ID> AM 00000 Vectorial averaging
Vectorial averaging of wind speed and direction
<ID> AM 00001 Scalar averaging
Scalar averaging of wind speed and direction
<ID> AM 00002 Scalar / vectorial
averaging
Scalar averaging of speed / vectorial averaging of direction
<ID> AM 00003 Vectorial / Scalar
averaging
Vectorial averaging of speed / scalar averaging of direction
<ID> AV 00000 Instantaneous value
Output of the instantaneous values
<ID> AV 00001 Mean value over 1 second
Output of the gliding mean value over 1 second
<ID> AV 00002 Mean value over 10
seconds
Output of the gliding mean value over 10 seconds
<ID> AV 00003 Mean value over 1 minute
Output of the gliding mean value over 1 minute
<ID> AV 00004 Mean value over 2 minutes
Output of the gliding mean value over 2 minutes
<ID> AV 00005 Mean value over 10
minutes
Output of the gliding mean value over 10 minutes
<ID> BR 00002 1200 Baud N 8 1
Data rate 1200 Baud, 8 Data bits, No Parity, 1 Stop bit
<ID> BR 00010 1200 Baud E 7 1
Data rate 1200 Baud, 7 Data bits, Parity Even, 1 Stop bit
<ID> BR 00003 2400 Baud N 8 1
Data rate 2400 Baud, 8 Data bits, No Parity, 1 Stop bit
<ID> BR 00011 2400 Baud E 7 1
Data rate 2400 Baud, 7 Data bits, Parity Even, 1 Stop bit
<ID> BR 00004 4800 Baud N 8 1
Data rate 4800 Baud, 8 Data bits, No Parity, 1 Stop bit
<ID> BR 00012 4800 Baud E 7 1
Data rate 4800 Baud, 7 Data bits, Parity Even, 1 Stop bit
<ID> BR 00005 9600 Baud N 8 1
Data rate 9600 Baud, 8 Data bits, No Parity, 1 Stop bit
<ID> BR 00013 9600 Baud E 7 1
Data rate 9600 Baud, 7 Data bits, Parity Even, 1 Stop bit
<ID> BR 00006 19200 Baud N 8 1
Data rate 19200 Baud, 8 Data bits, No Parity, 1 Stop bit
<ID> BR 00014 19200 Baud E 7 1
Data rate 19200 Baud, 7 Data bits, Parity Even, 1 Stop bit
<ID> DV Device version request
Query of the software version of the instrument
<ID> ES 00000 Sign-echo switched off
Echo operation of transmitted characters (to Sonic) switched off
<ID> ES 00001 Sign-echo switched on
Echo operation of transmitted characters switched on
<ID> HT 00000 Heating locked
Switching on of heating suppressed
<ID> HT 00001 Heating energised
Heating operation possible
<ID> KY 00000 Key, no access
Software-key, access to EEPROM closed
<ID> KY 00001 Key, open access
Software-key, access to EEPROM open
<ID> NC 00xxx North correction in 1°
units
Input of north correction, value range 00000 up to 00360
<ID> OS 00000 Wind speed in m/s
Scale of Wind speed in meter per second
<ID> OS 00001 Wind speed in Km/h
Scaling of Wind speed in kilo meter per hour
<ID> OS 00002 Wind speed in mph
Scaling of Wind speed in miles per hour
<ID> OS 00003 Wind speed in Knots
Scaling of Wind speed in knots (nautically)
<ID> SH Serial number “High
Word”
Query of serial number, upper 4 characters
<ID> SL Serial number “Low
Word”
Query of serial number, lower 4 characters
<ID> SV Software version, SW-
Date, Hardware version,
SH, SL
Query of software version, of the date of making out the software, of
hardware version, of serial number high word and low word
<ID> TR 00009 VESTAS Telegram
Output of VESTAS telegram on request
Page 8

8 - 10 021280/04/02
9.2 Command Input
Please find your ID (identifier-number) in the works certificate included in the delivery.
For the input of commands and parameters please open first the access to the EEPROM by entering the
command (ID) KY00001.
After all inputs have been made the access to the EEPROM should be locked again through the command
(ID) KY00000 in order to avoid unauthorised changes of the system parameters.
The command is input by entering the instrument identification number (ID) followed by two letters which
specify the actual command followed by a 5-digit code number respective value.
The characters are entered without a space and are activated with Return.
All letters must be capitalised, otherwise they will not be accepted.
Correcting the command word during input when an error has occurred is not allowed and the command
will not be accepted.
Entering the command without the 5-digit code number is interpreted as a query of the command status and
leads to the output of the current command status.
Example :
Correcting an angle of displacement while setting up the anemometer by entering a corrective
angle:
Instrument ID is accepted as 12. The necessary angular correction is 47°. The angle stored in
the system up to that time was 15°. Attention: Input and representation in units of 1°.
The correction angle is added clockwise to the measured wind direction angle.
First, opening of the EE-prom access:
Input into the system: 12KY00001 response of the system: user access
Input into the system: 12NC response of the system: !12NC00015
Input into the system: 12NC00047 response of the system: !12NC00047
Input into the system: 12KY00000 response of the system: protect
The system verifies the accepted input and displays the set value.
Attention: After the supply voltage of the instrument has been switched on or switched off the
locking is automatically activated.
The ID-number selects the requested instrument.
Page 9

9 - 10 021280/04/02
10. Preparation for Use
10.1 Selecting the Site
As already described above the ultrasonic anemometer transmits sonic bursts which are necessary for the
measurement of the propagation speed. If these sonic bursts hit a well sonic-reflecting surface they are
reflected as echo and might cause error measurements – under unfavourable conditions.
It is, therefore, advisable to install the US-anemometer with a minimum distance of 1 meter to objects in
the measurement area.
In general wind measurement instruments should be able to detect the wind conditions over a wide area. In
order to obtain comparative values when determining the surface wind, measurements should be taken at a
height of 10 meters above a plane, unobstructed area. An unobstructed area is one where the distance
between the wind transmitter and any obstacle is at least 10 times greater than the height of the obstacle. (s.
VDI (German Engineers Association) 3786). If this requirement cannot be fulfilled, then the wind
measurement instrument should be set up at a height where the measured values are not influenced by any
local obstacles (approx. 6-10 m above the level of the obstacle). The anemometer should be set up in the
center of flat roofs, not at the edge in order to avoid possible preferred directions.
10.2 Mounting the wind transmitter
The wind transmitter can be mounted to a pipe piece of R 1 ½" (Ø 48.3 mm) which is 50 mm long. The
internal diameter of the pipe must be at least 40 mm as the wind transmitter is connected electrically from
below with a plug. Solder a flexible control line LiYCY with the corresponding number of cores to the
enclosed plug. After the wind transmitter has been connected, set it onto the pipe piece respectively the mast
piece. The branch of the red marked sonic transducer must be aligned to North. To do this, take a bearing via
the ultrasonic transducer of the North/South path onto an object to the North, for example a building or a
special geographic feature. Use the four screws with hexagonal recessed holes (SW 4 mm) to attach the
instrument to the shaft.
Note : When using a lightning rod please take care that it is mounted always in an angle of
45° to the measuring distance, as otherwise there might be deviations of measuring
value.
10.3 North Alignment
For the alignment of the anemometer the branch of the red marked sonic transducer must indicate to
North. For this, you select an obvious point in a northerly or southerly direction in the surroundings with the
aid of a compass; then turn the mast or the anemometer into this direction until both arms opposite are
situated in a straight line.
It is also possible that oneself stands in a northerly or southerly direction with respective distance, and a
partner turns the anemometer or mast by command until both sensor arms are situated in a straight line.
In this case, it is advisable to use a pair of field glasses.
11. Accessories
Connecting cable, complete 506 702
15 m cable with connecting plug at the
sensor, the other end open
PC Software Meteo-Online 9.1700.98.000
For graphic visualization of measured values
on PC screen
Power Supply Unit 9.3388.00.000
For the power supply of the Ultrasonic
Anemometer
Interface converter 9.1702.20.000
For signal conversion of interface
Lightning Rod 4.3100.99.150
For lightning protection
Page 10

12. Maintenance
As the instrument has no moving parts i.e. operates without wear or tear, only minimal maintenance is
required. As the sensor surface is permanently washed up by the falling rain it is only occasionally necessary
to clean the surface with non-aggressive cleansing agent and soft cloth. These cleansing activities can be
carried out – as far as necessary – on occasion of the routine checks.
13. Calibration
The ultrasonic anemometer does not contain any adjustable components such as electrical or mechanical
trimming elements. All of the components and materials are invariant in time. Thus, regular calibration
because of ageing is not required. Only a mechanical deformation of the transformer arms and the resulting
changes in the length of the measurement paths lead to errors in the measured values.
The virtual temperature can be used to check the length of the measurement path. A change in the
measurement path length of 0.17% and consequently a measurement error of 0.17% of the wind speed
corresponds to a 1 K deviation of the virtual temperature at 20 °C, thus at 6 K deviation, the measurement
error of wind speed is approx. 1%.
If the distance of measuring path of the anemometer is de-aligned please contact the producer for a recalibration of the instrument.
14. Warranty
Damages resulting from improper handling or caused by external influences, e.g. lightning, are excluded from
the warranty. The warranty expires if the instrument has been opened.
Attention :
A return of the instruments must be effected in the original packing as otherwise the
guarantee expires in case of mechanical damages e.g. by deformation of the
transducer arms.
ADOLF THIES GmbH & Co. KG
Hauptstraße 76 37083 Göttingen Germany
P.O. Box 3536 + 3541 37025 Göttingen
Phone ++551 79001-0 Fax ++551 79001-65
www.thiesclima.com info
@
thiesclima.com
- Alterations reserved -
10 - 10 021280/04/02
 Loading...
Loading...