

Datasheet UCC3626DW, UCC3626PWTR, UCC3626PW, UCC3626N, UCC3626DWTR Datasheet (Texas Instruments)
...
UCC2626
UCC3626
PRELIMINARY
04/99
FEATURES
•
Two Quadrant and Four Quadrant
Operation
•
Integrated Absolute Value Current
Amplifier
•
Pulse-by-Pulse and Average Current
Sensing
•
Accurate, Variable Duty Cycle
Tachometer Output
•
Trimmed Precision Reference
•
Precision Oscillator
•
Direction Output
Brushless DC Motor Controller
17HALLC
8DIR_OUT
14PWM_NI
13PWM_I
16HALLB
SYNCH
11
OC_REF
9
SNS_I
3
4
1
5
22 CLOW
C_TACH
R_TACH
TACH_OUT
GND
2VREF
27 AHI
25 BHI
23 CHI
26
ALOW
10
SNS_NI
IOUT
7
6
12
CT
18COAST
21DIR_IN
15HALLA
19BRAKE
20QUAD
SENSE AMPLIFIER
OVER-CURRENT
COMPARATOR
OSCILLATOR
DIRECTION
DETECTOR
EDGE
DETECTOR
28 VDD
ONE SHOT
R•C
5VOLT
REFERENCE
QQSR
PWM LOGIC
24 BLOW
1.75V
DIRECTION
SELECT
HALL
DECODER
PWM COMPARATOR
X5
Q
Q
S
R
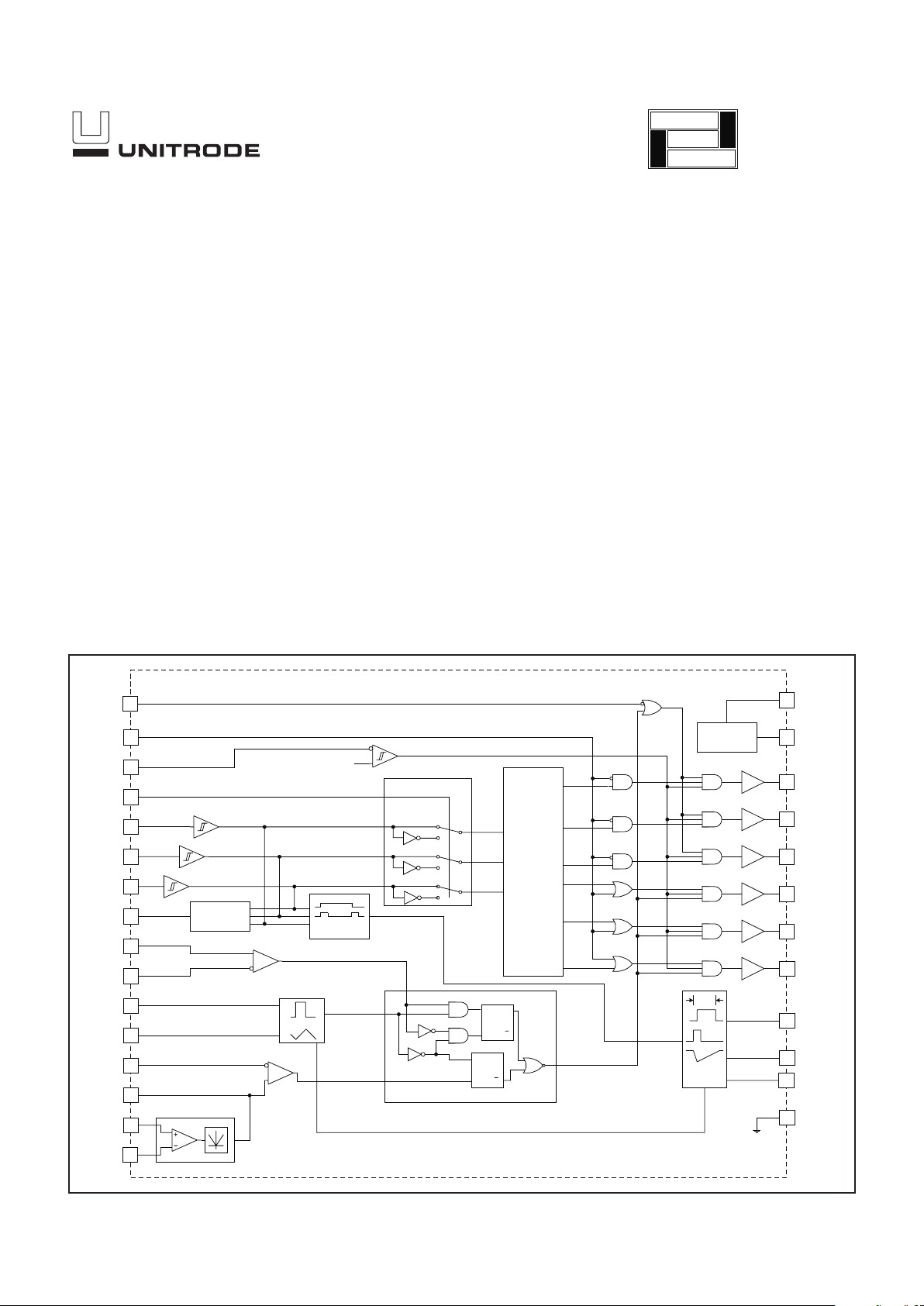
BLOCK DIAGRAM
UDG-97173
DESCRIPTION
The UCC3626 motor controller IC combines many of the functions re
quired to design a high performance, two or four quadrant, 3-phase,
brushless DC motor controller into one package. Rotor position inputs
are decoded to provide six outputs that control an external power stage.
A precision triangle oscillator and latched comparator provide PWM mo
tor control in either voltage or current mode configurations. The oscilla
tor is easily synchronized to an external master clock source via the
SYNCH input. Additionally, a QUAD select input configures the chip to
modulate either the low side switches only, or both upper and lower
switches, allowing the user to minimize switching losses in less de
manding two quadrant applications.
The chip includes a differential current sense amplifier and absolute
value circuit which provide an accurate reconstruction of motor current,
useful for pulse by pulse over current protection as well as closing a
current control loop. A precision tachometer is also provided for imple
menting closed loop speed control. The TACH_OUT signal is a variable
duty cycle, frequency output which can be used directly for digital control or filtered to provide an analog feedback signal. Other features include COAST, BRAKE, and DIR_IN commands along with a direction
output, DIR_OUT.
application
INFO
available
2
UCC2626
UCC3626
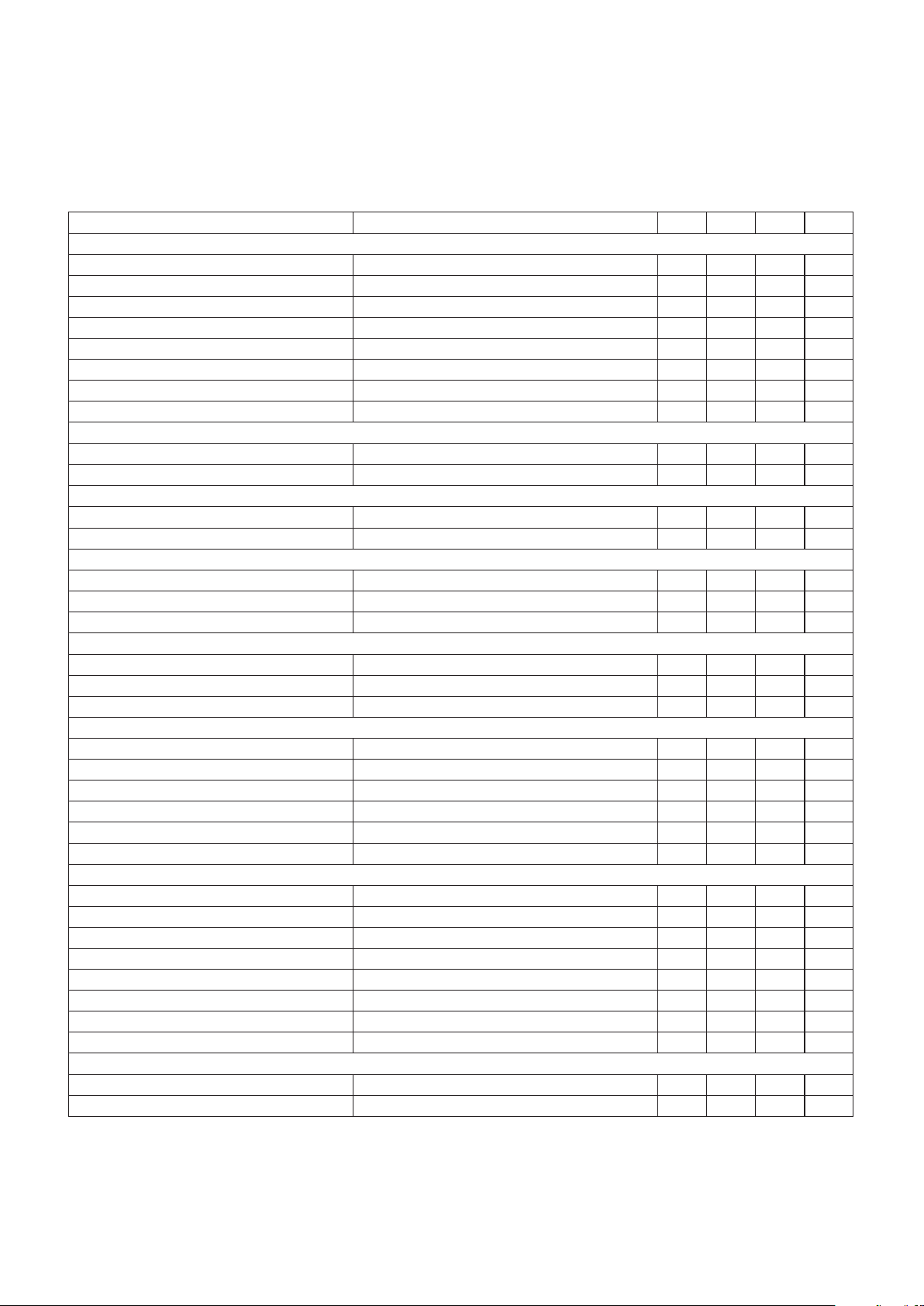
ELECTRICAL CHARACTERISTICS:
Unless otherwise stated, these specifications apply for VCC = 12V; CT = 1nF,
R
TACH
= 250K, C
TACH
= 100pF, TA=TJ, TA= –40°C to +85°C for the UCC2626, and 0°C to +70°C for the UCC3626.
PARAMETER TEST CONDITIONS MIN TYP MAX UNITS
Overall
Supply Current 310mA
Under-Voltage Lockout
Start Threshold 10.5 V
UVLO Hysteresis 0.5 V
5.0 V Reference
Output Voltage I
VREF
= –2mA 4.9 5 5.1 V
Line Regulation 11V < VCC < 14.5V 10 mV
Load Regulation –1 > I
VREF
> –5mA 30 mV
Short Circuit Current 40 120 mA
Coast Input Comparator
Threshold 1.75 V
Hysteresis 0.1 V
Input Bias Current 0.1 µA
IOUT
BHI
ALO
AHI
BRAKE
BLOW
CHI
CLOW
VDD
TACH_OUT
VREF
SNS_I
SYNCH
SNS_NI
R_TACH
C_TACH
CT
GND
DIR_OUT
OC_REF HALLC
DIR_IN
QUAD
COAST
PWM_NI
PWM_I
HALLA
HALLB
14
13
12
11
10
9
8
7
6
5
4
3
2
1
15
16
17
18
19
20
21
22
23
24
25
26
27
28
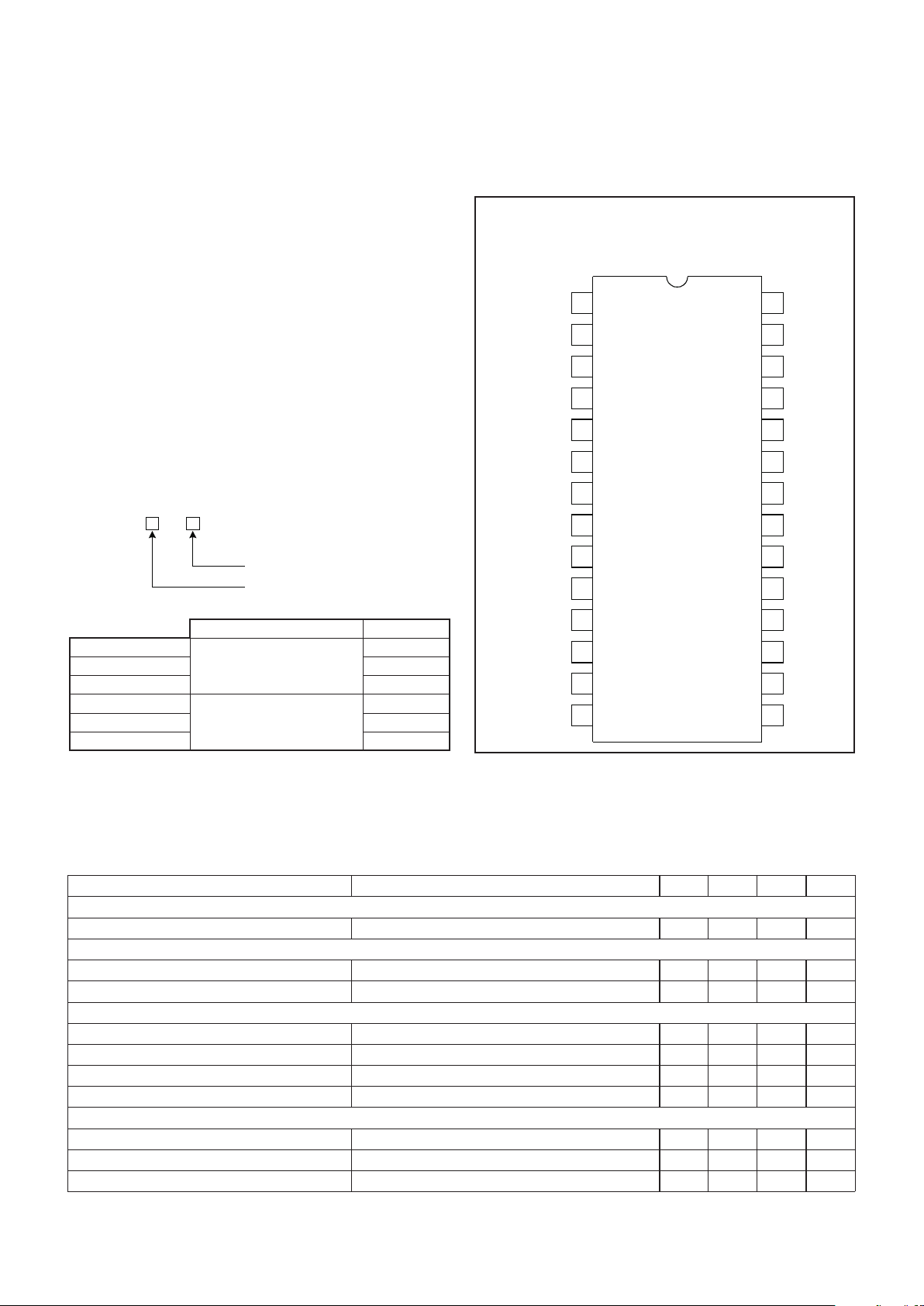
CONNECTION DIAGRAMS
ABSOLUTE MAXIMUM RATINGS
Supply Voltage VDD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . +15V
Inputs
Pins 20, 19, 18, 21, 15, 16, 17, 7, 12, 9, 10 . . . . –0.3V to V
DD
Pins 13, 14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . –0.3V to 8.0V
Output Current
Pins 22, 23, 24, 25, 26, 27 . . . . . . . . . . . . . . . . . . . . . ±200mA
Pins 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . –20mA
Pins 3. 8, 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1mA
Storage Temperature . . . . . . . . . . . . . . . . . . . –65°C to +150°C
Junction Temperature. . . . . . . . . . . . . . . . . . . –55°C to +150°C
Lead Temperature (Soldering 10 Seconds). . . . . . . . . . +300°C
Note: Unless otherwise indicated, voltages are referenced to
ground. Currents are positive into, negative out of specified ter
-
minal. Consult packaging section of Databook for thermal limi
-
tations and considerations of package.
DIL-28, SOIC-28, TSSOP-28 (Top View)
N Package, DW Package, PW Package
UCC
PACKAGE
626
TEMPERATURE RANGE
ORDERING INFORMATION
TEMPERATURE RANGE PACKAGE
UCC2626N DIL
UCC2626DW –40° C to +85° C SOIC
UCC2626PW TSSOP
UCC3626N DIL
UCC3626DW 0° C to +70° C SOIC
UCC3626PW TSSOP
3
UCC2626
UCC3626
ELECTRICAL CHARACTERISTICS:
Unless otherwise stated, these specifications apply for VCC = 12V; CT = 1nF,
R
TACH
= 250K, C
TACH
= 100pF, TA=TJ, TA= –40°C to +85°C for the UCC2626, and 0°C to +70°C for the UCC3626.
PARAMETER TEST CONDITIONS MIN TYP MAX UNITS
Current Sense Amplifier
Input Offset Voltage VCM = 0V 5 mV
Input Bias Current VCM = 0V 10 µA
Gain VCM = 0V 4.9 5 5.1 V/V
CMRR –0.3V < VCM < 0.5 60 dB
PSRR 11V < VCC <14.5V 60 dB
Output High Voltage I
IOUT
= –100µA5V
Output Low Voltage I
IOUT
= 100µA50mV
Output Source Current V
IOUT
= 2V 500 µA
PWM Comparator
Input Common Mode Range 2.0 8.0 V
Propogation Delay 75 nS
Over-Current Comparator
Input Common Mode Range 0.0 5.0 V
Propogation Delay 175 nS
Logic Inputs
Logic High QUAD, BRAKE, DIR 3.5 V
Logic Low QUAD, BRAKE, DIR 1.5 V
Input Current QUAD, BRAKE, DIR 0.1 µA
Hall Buffer Inputs
VIL HALLA, HALLB, HALLC 1 V
VIH HALLA, HALLB, HALLC 1.9 V
Input Current 0V < V
IN
< 5V –25 µA
Oscillator
Frequency R
TACH
= 250k, CT = 1nF 10 KHz
Frequency Change With Voltage 12V < VCC < 14.5V 5 %
CT Peak Voltage 7.5 V
CT Valley Voltage 2.5 V
CT Peak-to-Valley Voltage 5.0 V
SYNCH Pin Minimum Pulse Width –500 ns
Tachometer
V
OH/VREF
I
OUT
= –10µA 99 100 %
Vol I
OUT
= 10µA 0 20 mV
R
ON
High I
OUT
= –100µA1kΩ
R
ON
Low I
OUT
= 100µA1kΩ
Ramp Threshold, Lo 20 mV
Ramp Threshold, Hi 2.52 V
C
TACH
Charge Current R
TACH
= 49.9kΩ 50 µA
T-on Accuracy Note 1 –3 3 %
Direction Output
DIR OUT High Level I
OUT
= –100µA 3.5 5.1 V
DIR OUT Low Level I
OUT
= 100µA01V

4
UCC2626
UCC3626
PIN DESCRIPTIONS
AHI, BHI, CHI: Digital outputs used to control the high
side switches in a three phase inverter. For specific de
-
coding information reference Table I.
ALOW, BLOW, CLOW: Digital outputs used to control
the low side switches in a three phase inverter. For specific decoding information reference Table I.
BRAKE: BRAKE is a digital input which causes the device to enter brake mode. In brake mode all three high
side outputs are turned off, AHI, BHI & CHI, while all
three lowside outputs are turned on, ALOW, BLOW,
CLOW. During brake mode the tachometer output remains operational. The only conditions which can inhibit
the low side commands during brake are UVLO, ex
-
ceeding peak current, the output of the PWM compara
-
tor, or the COAST command.
COAST: The COAST input consists of a hysteretic com
parator which disables the outputs. The input is useful in
implementing an overvoltage bus clamp in four quadrant
applications. The outputs will be disabled when the input
is above 1.75V.
CT: This pin is used in conjunction with the R_TACH pin
to set the frequency of the oscillator. A timing capacitor
is normally connected between this point and ground
and is alternately charged and discharged between 2.5V
and 7.5V.
C_TACH: A timing capacitor is connected between this
pin and ground to set the width of the TACH_OUT pulse.
The capacitor is charged with a current set by the resis
tor on pin RT.
DIR_IN: DIR_IN is a digital input which determines the
order in which the HALLA,B & C inputs are decoded. For
specific decode information reference Table I.
DIR_OUT: DIR_OUT represents the actual direction of
the rotor as decoded from the HALLA,B&Cinputs. For
any valid combination of HALLA, B &C inputs there are
two valid transitions, one which translates to a clockwise
rotation and another which translates to a counterclockwise rotation. The polarity of DIR_OUT is the same as
DIR_IN while motoring, i.e. sequencing from top to bottom in Table 1.
GND: GND is the reference ground for all functions of the
part. Bypass and timing capacitors should be terminated
as close to this point as possible.
HALLA, HALLB, HALLC: These three inputs are de
signed to accept rotor position information positioned
120° apart. For specific decode information reference Ta
ble I. These inputs should be externally pulled-up to
VREF or another appropriate external supply.
IOUT: IOUT represents the output of the current sense
and absolute value amplifiers. The output signal appear
ing is a representation of the following expression:
I ABS ISENS I ISENS NI
OUT
=−•(_ _)5
This output can be used to close a current control loop as
well as provide additional filtering of the current sense
signal.
OC_REF: OC_REF is an analog input which sets the trip
voltage of the overcurrent comparator. The sense input of
the comparator is internally connected to the output of the
current sense amplifier and absolute value circuit.
PWM_NI: PWM_NI is the noninverting input to the PWM
comparator.
PWM_I: PWM_I is the inverting input to the PWM com
parator.
ELECTRICAL CHARACTERISTICS: Unless otherwise stated, these specifications apply for VCC = 12V; CT = 1nF,
R
TACH
= 250K, C
TACH
= 100pF, TA=TJ, TA= –40°C to +85°C for the UCC2626, and 0°C to +70°C for the UCC3626.
PARAMETER TEST CONDITIONS MIN TYP MAX UNITS
Output Section
Maximum Duty Cycle 100 %
Output Low Voltage I
OUT
= 10mA 0.4 V
Output High Voltage I
OUT
= –10mA 4.0 5.1 V
Output Low Voltage I
OUT
= 1mA 1 V
Output High Voltage I
OUT
= –1mA 4.0 5.1 V
Rise/Fall Time CI = 100pF 100 nS
Note 1: T(on) is calculated using the formula: T(on) = C
TAC H
(VHI–VLO)/I
CHARGE
. This number is compared to the formula T(on) =
R
TAC H
C
TAC H
.

5
UCC2626
UCC3626
Table 1 provides the decode logic for the six outputs,
AHI, BHI, CHI, ALOW, BLOW, and CLOW as a function
of the BRAKE, COAST, DIR_IN, HALLA, HALLB, and
HALLC inputs.
The UCC3626 is designed to operate with 120° position
sensor encoding. In this format, the three position sensor
signals are never simultaneously high or low. Motor's
whose sensors provide 60° encoding can be converted
to 120° using the circuit shown in Fig. 1.
In order to prevent noise from commanding improper
commutation states, some form of low pass filtering on
HALLA, HALLB, and HALLC is recommended. Passive
APPLICATION INFORMATION
QUAD: The QUAD input selects between “two” QUAD =
0 and “four” QUAD = 1 quadrant operation. When in
“two-quadrant” mode only the low side devices are ef
fected by the output of the PWM comparator. In
“four-quadrant” mode both high and low side devices are
controlled by the PWM comparator.
SYNCH: The SYNCH input is used to synchronize the
PWM oscillator with an external digital clock. When using
the SYNCH feature, a resistor equal to R
TA CH
must be
placed in parallel with CT. When not used, ground
SYNCH.
SNS_NI, SNS_I: These inputs are the noninverting and
inverting inputs to the current sense amplifier, respec
tively. The integrated amplifier is configured for a gain of
five. An absolute value function is also incorporated into
the output in order to provide a representation of actual
motor current when operating in four quadrant mode.
TACH_OUT: TACH_OUT is the output of a monostable
triggered by a change in the commutation state, thus pro
viding a variable duty cycle, frequency output. The
on-time of the monostable is set by the timing capacitor
connected to C_TACH. The monostable is capable of be
ing retriggered if a commutation occurs during it's
on-time.
R_TACH: A resistor connected between R_TACH and
ground programs the current for both the oscillator and
tachometer.
VDD: VDD is the input supply connection for this device.
Undervoltage lockout keeps the outputs off for inputs be
low 10.5V. The input should be bypassed with a 0.1µFce
ramic capacitor, minimum.
VREF: VREF is a 5V, 2% trimmed reference output with
5mA of maximum available output current. This pin
should be bypassed to ground with a 0.1µF ceramic ca
pacitor, minimum.
PIN DESCRIPTIONS (cont.)
B
R
A
K
E
C
O
A
S
T
D
I
R
_
IN
HALL
INPUTS
HIGH SIDE
OUTPUTS
LOW SIDE
OUTPUTS
ABCABCABC
001101100010
001100100001
001110010001
001010010100
001011001100
001001001010
000101010100
000001010001
000011100001
000010100010
000110001010
000100001100
X1XXXX000000
10XXXX000111
00X111000000
00X000000000
Table 1. Commutation truth table.
1kΩ
2N2222A
1kΩ
1kΩ
1kΩ
VREF
VREF
VREF
HALLB
HALLA
HALLC
HALLA
HALLB
HALLC
2.2nF
2.2nF
2.2nF
499Ω
499Ω
Figure 1. Circuit to convert 60° hall code to 120°
code.

6
UCC2626
UCC3626
RC networks generally work well and should be located
as close to the IC as possible. Fig. 2 illustrates these
techniques.
Configuring the Oscillator
The UCC3626 oscillator is designed to operate at frequencies up to 250kHz and provide a triangle waveform
on CT with a peak to peak amplitude of 5V for improved
noise immunity. The current used to program CT is de
-
rived off of the R_TACH resistor according to the follow
-
ing equation:
I
RTACH
Amps
OSC
=
25
_
Oscillator frequency is set by R_TACH and CT according
to the following relationship:
Frequency
RTACH CT
Hz
=
•
25.
(_ )
Timing resistor values should be between 25kΩ and
500kΩ while capacitor values should fall between 100pF
and 1µF. Fig. 4 provides a graph of oscillator frequency
for various combinations of timing components. As with
any high frequency oscillator, timing components should
be located as close to the IC pins as possible when lay
-
ing out the printed circuit board. It is also important to ref
erence the timing capacitor directly to the ground pin on
the UCC3626 rather than daisy chaining it to another
trace or the ground plane. This technique prevents
switching current spikes in the local ground from causing
jitter in the oscillator.
Synchronizing the Oscillator
A common system specification is for all oscillators in a
design to be synchronized to a master clock. The
UCC3626 provides a SYNCH input for exactly this pur
pose. The SYNCH input is designed to interface with a
digital clock pulse generated by the master oscillator. A
positive going edge on this input causes the UCC3626
oscillator to begin discharging. In order for the slave os
cillator to function properly it must be programmed for a
frequency slightly lower than that of the master. Also, a
resistor equal to R
TA CH
must be placed in parallel with
CT. Fig. 3 illustrates the waveforms for a slave oscillator
programmed to 20kHz with a master frequency of 30kHz.
The SYNCH pin should be grounded when not used.
APPLICATION INFORMATION (cont.)
1.E+03
1.E+04
1.E+05
1.E+06
1.E-10 1.E-09 1.E-08 1.E-07
CT (F)
PWM FREQUENCY (Hz)
R_TACH = 25k
R_TACH = 500k
R_TACH = 100k
R_TACH = 250k
Figure 4. PWM oscillator frequency vs. CTand
R_TACH.
SYNCH
CT
WITHOUT SYNCH
WITH SYNCH
Figure 3. Synchronized and unsynchronized
oscillator waveforms.
1kΩ
1kΩ
1kΩ
VREF
VREF
VREF
HALLA
HALLB
HALLC
HALLA
HALLB
HALLC
2.2nF
2.2nF
2.2nF
499Ω
499Ω
499Ω
Figure 2. Passive hall filtering technique.

7
UCC2626
UCC3626
Programming the Tachometer
The UCC3626 tachometer consists of a precision, 5V
monostable, triggered by either a rising or falling edge on
any of the three Hall inputs, HALLA, HALLB, HALLC. The
resulting TACH_OUT waveform is a variable dutycycle
square wave whose frequency is proportional to motor
speed, as given by:
TACH OUT
VP
Hz
_
()
=
•
20
where
P
is the number of motor pole pairs andVis motor
velocity in RPM.
The on-time of the monostable is programmed via timing
resistor R_TACH and capacitor C_TACH according to the
following equation:
On Time R TACH C TACH
−= •_ _ sec
Fig. 5 provides a graph of On-Time for various combina
tions of R_TACH and C_TACH. On-Time is typically set to
a value less than the minimum TACH-OUT period as
given by:
TPeriod
VP
MIN
MAX
_sec=
•
20
where
P
is the number of motor pole pairs andVis motor
velocity in RPM.
The TACH_OUT signal can be used to close a digital
velocity loop using a microcontroller, as shown in Fig. 6,
or directly low pass filtered in an analog implementation,
Fig. 7.
APPLICATION INFORMATION (cont.)
1.E-06
1.E-05
1.E-04
1.E-03
1.E-02
1.E-01
1.E+00
1.E-10 1.E-09 1.E-08 1.E-07 1.E-06
Ctach (F)
Ton (sec)
R_TACH = 25k
R_TACH = 500k
R_TACH = 100k
R_TACH = 250k
Figure 5. Tachometer on-time vs. C_TACH and
R_TACH.
5
4
14
R_TACH
C_TACH
PWM_NI
PWM_I
13
TACH_OUT
3
6CT
UCC3626
DB0 – DB7
VOUT
AD558
V
OUT
SENSE
V
OUT
SELECT
VCE
VCS
IC1
PB0 – PB7
PC0
MC68HC11
Figure 6. Digital velocity loop implementation using MC68HC11.
UDG-97188

8
UCC2626
UCC3626
Two Quadrant vs Four Quadrant Control
Fig. 8 illustrates the four possible quadrants of operation
for a motor. Two quadrant control refers to a system
whose operation is limited to quadrants I and III where
torque and velocity are in the same direction. With a two
quadrant brushless DC amplifier, there are no provisions
other than friction to decelerate the load, limiting the ap
proach to less demanding applications. Four quadrant
controllers, on the other hand, provide controlled opera
tion in all quadrants, including II and IV, where torque and
rotation are of opposite direction.
When configured for two quadrant operation, (QUAD=0),
the UCC3626 will only modulate the low side devices of
the output power stage. The current paths within the out
-
put stage during the PWM on and off times are illus
trated in Fig. 9. During the 'on' interval, both switches
are on and current flows through the load down to
ground. During the 'off' time, the lower switch is shut off
and the motor current circulates through the upper half
bridge via the flyback diode. The motor is assumed to be
operating in either quadrant I or III.
APPLICATION INFORMATION (cont.)
2
5
4
14
VREF
R_TACH
C_TACH
PWM_NI
PWM_I
13
TACH_OUT
3
6CT
+
–
UCC3626
Figure 7. Simple analog velocity loop.
UDG-97189
III
III IV
VELOCITY
CW
TORQUE
CW
CCW
CCW
Figure 8. Four quadrants of operation.
IPHASE
+ BEMF -
VMOT
IOFF
ION
S1
S3 S5
S2
S4
S6
Figure 10. Two quadrant reversal.
IPHASE
+ BEMF -
VMOT
IOFF
ION
S1
S3 S5
S2
S4
S6
Figure 9. Two quadrant chopping.

9
UCC2626
UCC3626
If one attempts to operate in quadrants II or IV by changing the DIR bit and reversing the torque, switches 1 and 4
are turned off and switches 2 and 3 turned on. Under this
condition motor current will very quickly decay, reverse
direction and increase until the control threshold is
reached. At this point switch 2 will turn off and current will
once again circulate in the upper half bridge, however, in
this case the motor's BEMF is in phase with the current,
i.e. the motor's direction of rotation has not yet changed.
Fig. 10 illustrates the current paths when operating in this
mode. Under these conditions there is nothing to limit the
current other than motor and drive impedance. These
high circulating currents can result in damage to the
power devices in addition to high, uncontrolled torque.
By pulse width modulating both the upper and lower
power devices (QUAD=1), motor current will always de
-
cay during the PWM “off” time, eliminating any uncon
trolled circulating currents. In addition, current will always
flow through the current sense resistor, thus providing a
suitable feedback signal. Fig. 11 illustrates the current
paths during a four quadrant torque reversal. Motor drive
waveforms for both two and four quadrant operation are
illustrated in Fig. 12.
Power Stage Design Considerations
The flexible architecture of the UCC3626 requires the
user to pay close attention to the design of the power
output stage. Two and Four Quadrant applications that do
not require the brake function are able to utilize the
power stage approach illustrated in Fig. 13A. In many
cases the body diode of the MOSFET can be utilized to
reduce parts count and cost. If efficiency is a key require
ment, Schottky diodes can be used in parallel with the
switches.
If the system requires a braking function, diodes must be
added in series with the lower power devices and the
lower flyback diodes returned to ground, as pictured in
Fig. 13B,C. This requirement prevents brake currents
from circulating in the lower half bridge and bypassing
the sense resistor. In addition, the combination of braking
and four quadrant control necessitates an additional resistor in the diode path to sense current during the PWM
'off' time as illustrated in Fig. 13C.
Current Sensing
The UCC3626 includes a differential current sense amplifier with a fixed gain of five, along with an absolute
value circuit. The current sense signal should be low
pass filtered to eliminate leading edge spikes. In order to
maximize performance, the input impedance of the amplifier should be balanced. If the sense voltage must be
trimmed for accuracy reasons, a low value input divider
or a differential divider should be used to maintain im
pedance matching, as shown in Fig. 14.
With four quadrant chopping motor current always flows
through the sense resistor. However, during the flyback
period the polarity across the sense resistor is reversed.
The absolute value amplifier cancels the polarity reversal
by inverting the negative sense signal during the flyback
time, see Fig. 15. Therefore, the output of the absolute
value amplifier is a reconstructed analog of the motor
current, suitable for protection as well as feedback loop
closure.
APPLICATION INFORMATION (cont.)
IPHASE
+ BEMF -
VMOT
IOFF
ION
S1
S3 S5
S2
S4
S6
Figure 11. Four quadrant reversal.

10
UCC2626
UCC3626
0 60 120 180 240 300 360 420 480 540 600 660 720
ROTOR POSITION IN ELECTRICAL DEGREES
Code
101 100 110 010 011 001 101 100
110
010 011 001
H1
H2
H3
AHI
BHI
CHI
ALO
BLO
CLO
+
0-A
+
0-B
+
0-C
MOTOR
PHASE
CURRENTS
QUAD=0
LOW SIDE
OUTPUTS
QUAD=0
HIGH SIDE
OUTPUTS
QUAD=0
SENSOR
INPUTS
AHI
BHI
CHI
ALO
BLO
CLO
+
0-A
+
0-B
+
0-C
MOTOR
PHASE
CURRENTS
QUAD=1
LOW SIDE
OUTPUTS
QUAD=1
HIGH SIDE
OUTPUTS
QUAD=1
100% Duty Cycle PWM 50% Duty Cycle PWM
Figure 12. Motor drive and current waveforms for 2 quadrant (QUAD=0) and 4 quadrant (QUAD=1) operation.
APPLICATION INFORMATION (cont.)
UDG-97190

11
UCC2626
UCC3626
TWO
QUADRANT
FOUR
QUADRANT
SAFE
BRAKING
POWER
REVERSAL
CURRENT SENSE
PULSE BY
PULSE
AVERAGE
(a)
Yes Yes No In 4-Quad Only Yes Yes
(b)
Yes No Yes No Yes No
(c)
Yes Yes Yes In 4-Quad Only Yes Yes
(b)
(c)
TO
MOTOR
VMOT
CURRENT
SENSE
TO
MOTOR
VMOT
CURRENT
SENSE
TO
MOTOR
VMOT
CURRENT
SENSE
(a)
Figure 13. Power stage topologies.
TYPICAL APPLICATIONS
Fig. 16 illustrates a simple 175V, 2A two quadrant velocity
controller using the UCC3626. The power stage is designed to operate with a rectified off-line supply using
IR2210s to provide the interface between the low voltage
control signals and the power MOSFETs. The power topology illustrated in Fig. 13C is implemented in order to
provide braking capability.
The controller's speed command is set by potentiometer
R30 while the speed feedback signal is obtained by low
pass filtering and buffering the TACH-OUT signal using
R11 and C9. Small signal compensation of the velocity
control loop is provided by amplifier U5A, whose output is
used to control the PWM duty cycle. The integrating ca
-
pacitor, C8, places a pole at 0Hz and a zero in conjunc
tion with R10. This zero can be used to cancel the low
frequency motor pole and cross the loop over with a
–20dB gain response.
Four quadrant applications require the control of motor
current. Fig. 17 illustrates a sign/magnitude current control loop within an outer bipolar velocity loop using the
UCC3626. U1 serves as the velocity loop error amplifier
and accepts a +/-5V command signal. Velocity feedback
is provided by low pass filtering and scaling the
TACH_OUT signal using U2. The direction output,
DIR_OUT, switch and U3 set the polarity of the tachometer gain according to the direction of rotation. The out
put of the velocity error amplifier, U1, is then converted
to sign/magnitude form using U5 and U6. The sign por
tion is used to drive the DIR input while the magnitude
commands the current error amplifier, U8. Current feed
back is provided by the internal current sense amplifier
via the IOUT pin.

12
UCC2626
UCC3626
IPHASE
+ BEMF -
VMOT
IOFF
ION
S1
S3 S5
S2
S4
S6
X5
Is
If
Im
Is
If
Im
Ip
Ip
5*Ip
Figure 15. Current sense amplifier waveform.
RF
RF
Rs
RADJ
CF
SNS_NI
SNS_I
(a)
RF
Rs
RADJ
CF
(b)
RF
SNS_I
SNS_NI
RF
RADJ << RF
Figure 14. (a) Differential divider and (b) low value divider.
TYPICAL APPLICATION (cont.)

TYPICAL APPLICATIONS (cont.)
13
UCC2626
UCC3626
Q1
IRF730
Q2
IRF730
R3
1k
C2
0.1µF
+12V
VREF
C3
2200pF
R4
499
R2
1k
C4
2200pF
R5
499
R1
1k
C5
2200pF
R6
499
C6
100pF
C11
0.1µF
VREF
C12
0.1µF
D16
11DF4
C13
0.1µF
+12V
R18
47
R17
10
R16
47
R15
10
D1
1N4148
D8
1N5418
MOTOR
PHASE A
C22
10µF
VMOT
Q3
IRF730
Q4
IRF730
C14
0.1µF
VREF
C15
0.1µF
D17
11DF4
C16
0.1µF
+12V
R22
47
R21
10
R20
47
R19
10
D11
1N5418
MOTOR
PHASE A
C21
10µF
VMOT
Q5
IRF730
Q6
IRF730
C17
0.1µF
VREF
C18
0.1µF
D18
11DF4
C19
0.1µF
+12V
R26
47
R25
10
R24
47
R23
10
D15
1N5418
MOTOR
PHASE A
C20
10µF
VMOT
R27
0.1
R28
0.1
C1
0.1µF
R13
35k
R14
15k
VREF
C10
3900pF
R12
250k
R7
10k
VREF
R8
10k
R9
10k
U5A
1/2 LM358
R11
160k
C9
0.1µF
R10
C8
C7
VREF
FROM HALL
SENSORS
R29
R30
2k
R31
2k
C23
0.01µF
R30
10K
VREF
Speed Set
D2
1N4148
D3
1N5818
D4
1N5818
D5
1N5818
D6
1N5818
IR2110
VB
6HO7VS5NC4
VCC
3LO1
COM
2
VDD
9NC8
HIN
10
LIN
12SD11NC14
VSS
13
IR2110
VB
6HO7VS5NC4
VCC
3LO1
COM
2
VDD
9NC8
HIN
10
LIN12SD11NC14VSS
13
IR2110
VB
6HO7VS5NC4
VCC
3LO1
COM
2
VDD
9NC8
HIN
10
LIN12SD
11NC14
VSS
13
UCC3626
AHI
27
BHI
25
CHI
ALOW
26
BLOW
CLOW
22
SNS_NI
9
SNS_I
10
IOUT
11
DIR_OUT
8
OC_REF
12
CTACH
5
RTACH
4
TACH_OUT
3
VDD
28
VREF
2
GND1HALLA
15
HALLB16HALLC17QUAD
20
DIR_IN
21
BRAKE19COAST18SYNCH
7CT6
PWM_NI
14
PWM_I
13
24
23
U5B
1/2 LM358
U1
U2
U3
U4
D7
1N5821
D10
1N5821
D13
1N5821
UDG-97184
Figure 16. Two quadrant velocity controller.

14
UCC2626
UCC3626
UNITRODE CORPORATION
7 CONTINENTAL BLVD. • MERRIMACK, NH 03054
TEL. (603) 424-2410 • FAX (603) 424-3460
11 IOUT
+
–
13 PWM_I
CURRENT
ERROR
AMPLIFIER
+
–
U6
10k10k
+
–
10k
10k
SIGN/MAGNITUDE CONVERTER
21 DIRU7
CURRENT SIGN
3 TACH_OUT
+
–
U2
TACHOMETER
FILTER
4.99k
10k
2N7002
8DIR_OUT
4.99k
+
–
U3
10k
BIPOLAR
TACH GAIN
10k
+
–
U1
VELOCITY
COMMAND
+/– 5V
CURRENT
MAGNITUDE
U5
U8
Figure 17. Four quadrant control loop.
TYPICAL APPLICATIONS (cont.)
UDG-99061

IMPORTANT NOTICE
T exas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinue
any product or service without notice, and advise customers to obtain the latest version of relevant information
to verify, before placing orders, that information being relied on is current and complete. All products are sold
subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those
pertaining to warranty, patent infringement, and limitation of liability.
TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in
accordance with TI’s standard warranty. Testing and other quality control techniques are utilized to the extent
TI deems necessary to support this warranty. Specific testing of all parameters of each device is not necessarily
performed, except those mandated by government requirements.
CERT AIN APPLICATIONS USING SEMICONDUCTOR PRODUCTS MAY INVOLVE POTENTIAL RISKS OF
DEATH, PERSONAL INJURY, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE (“CRITICAL
APPLICATIONS”). TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, AUTHORIZED, OR
WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT DEVICES OR SYSTEMS OR OTHER
CRITICAL APPLICATIONS. INCLUSION OF TI PRODUCTS IN SUCH APPLICA TIONS IS UNDERSTOOD T O
BE FULLY AT THE CUSTOMER’S RISK.
In order to minimize risks associated with the customer’s applications, adequate design and operating
safeguards must be provided by the customer to minimize inherent or procedural hazards.
TI assumes no liability for applications assistance or customer product design. TI does not warrant or represent
that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other
intellectual property right of TI covering or relating to any combination, machine, or process in which such
semiconductor products or services might be or are used. TI’s publication of information regarding any third
party’s products or services does not constitute TI’s approval, warranty or endorsement thereof.
Copyright 1999, Texas Instruments Incorporated
 Loading...
Loading...