

TPS51640
VCC_CPU
VCC_GFX
Processor
3-phase CPU
Controller
IMVP-7
SVID Interface
1-phase GPU
Controller
TPS51601
FET Driver
CPU Power Stage
TPS51601
FET Driver
Internal
FET Driver
Internal
FET Driver
GPU Power Stage
UDG-11062
TPS51640A, TPS59640, TPS59641
www.ti.com
SLUSAQ2 –JANUARY 2012
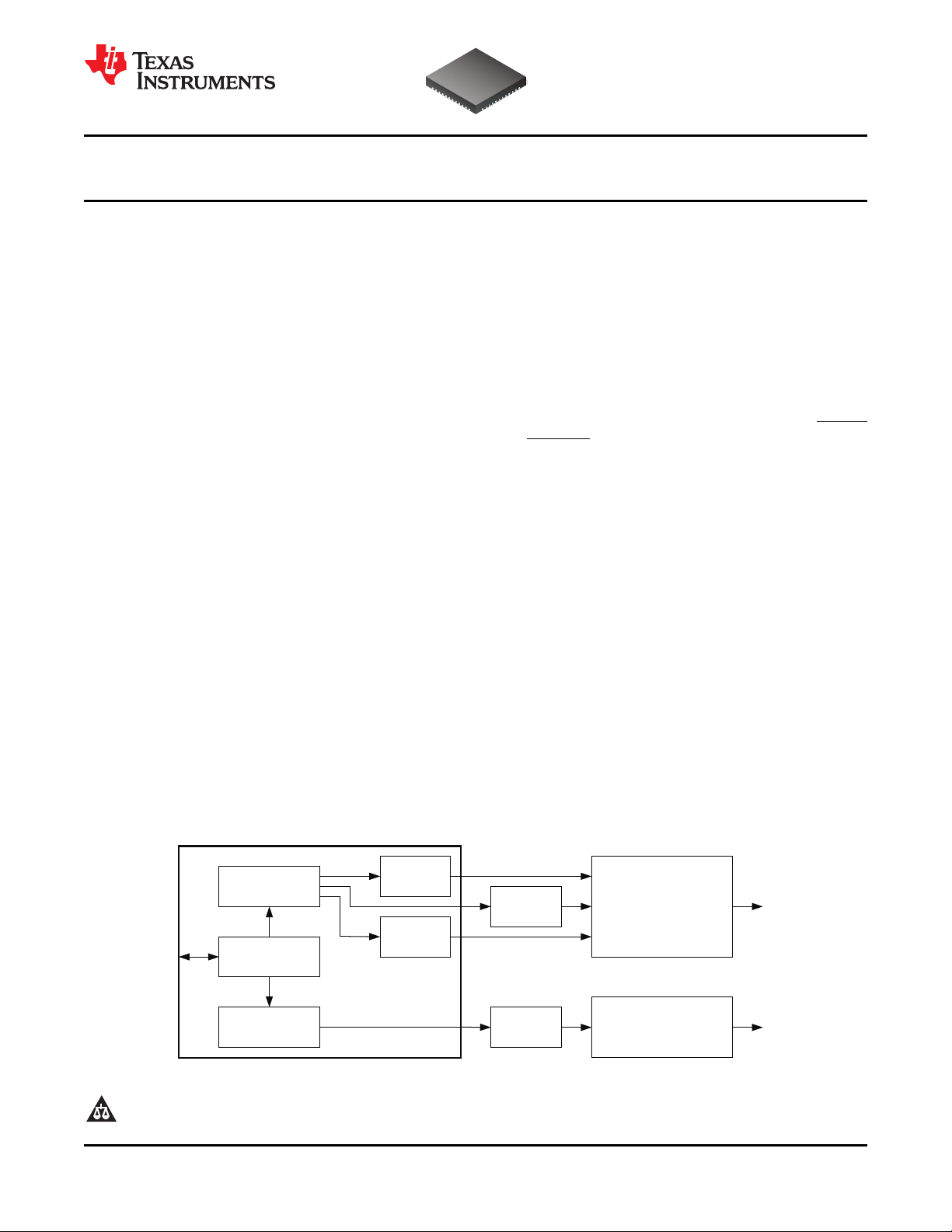
Dual-Channel (3-Phase CPU/1-Phase GPU) SVID, D-CAP+™ Step-Down Controller for
IMVP-7 V
1
FEATURES
2
• Intel IMVP-7 Serial VID (SVID) Compliant
with Two Integrated Drivers
CORE
• Supports CPU and GPU Outputs
• CPU Channel 1, 2, or 3 Phase
• Single-Phase GPU Channel
• Full IMVP-7 Mobile Feature Set Including
Digital Current Monitor
• 8-Bit DAC with 0.250-V to 1.52-V Output Range
• Optimized Efficiency at Light and Heavy Loads
• V
• V
Overshoot Reduction (OSR)
CORE
Undershoot Reduction (USR)
CORE
• Accurate, Adjustable Voltage Positioning
• 8 Independent Frequency Selections per
Channel (CPU/GPU)
• Patent Pending AutoBalance™ Phase
Balancing
• Selectable 8-Level Current Limit
• 3-V to 28-V Conversion Voltage Range
• Two Integrated Fast FET Drivers w/Integrated
Boost FET
• Internal Driver Bypass Mode for Use with
DrMOS Devices
• Small 6 × 6 , 48-Pin, QFN, PowerPAD™
Package
DESCRIPTION
The TPS51640A, TPS59640 and TPS59641 are
dual-channel, fully SVID compliant IMVP-7 step-down
controllers with two integrated gate drivers. Advanced
control features such as D-CAP™+ architecture with
overlapping pulse support (undershoot reduction,
USR) and overshoot reduction (OSR) provide fast
transient response, lowest output capacitance and
high efficiency. All of these controllers also support
single-phase operation for light loads. The full
compliment of IMVP-7 I/O is integrated into the
controllers including dual PGOOD signals, ALERT
and VR_HOT. Adjustable control of V
and voltage positioning round out the IMVP-7
features. In addition, the controllers' CPU channel
includes two high-current FET gate drivers to drive
high-side and low-side N-channel FETs with
exceptionally high speed and low switching loss. The
TPS51601 or TPS51601A driver is used for the third
phase of the CPU and the GPU channel.
The BOOT voltage (V
) on the TPS51640A and
BOOT
TPS59640 is 0 V. The TPS59641 is specifically
designed for a V
level of 1.1 V.
BOOT
These controllers are packaged in a space saving,
thermally enhanced 48-pin QFN. The TPS51640A is
rated to operate from –10°C to 105°C. The
TPS59640 and TPS59641 are rated to operate
from –40°C to 105°C.
CORE
slew rate
APPLICATIONS
• IMVP-7 V
Battery, NVDC or 3 V/5 V/12 V rails
1
Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of Texas
Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
2D-CAP+, PowerPAD, D-CAP are trademarks of Texas Instruments.
PRODUCTION DATA information is current as of publication date.
Products conform to specifications per the terms of the Texas
Instruments standard warranty. Production processing does not
necessarily include testing of all parameters.
Applications for Adapter,
CORE
SIMPLIFIED APPLICATION
Copyright © 2012, Texas Instruments Incorporated
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
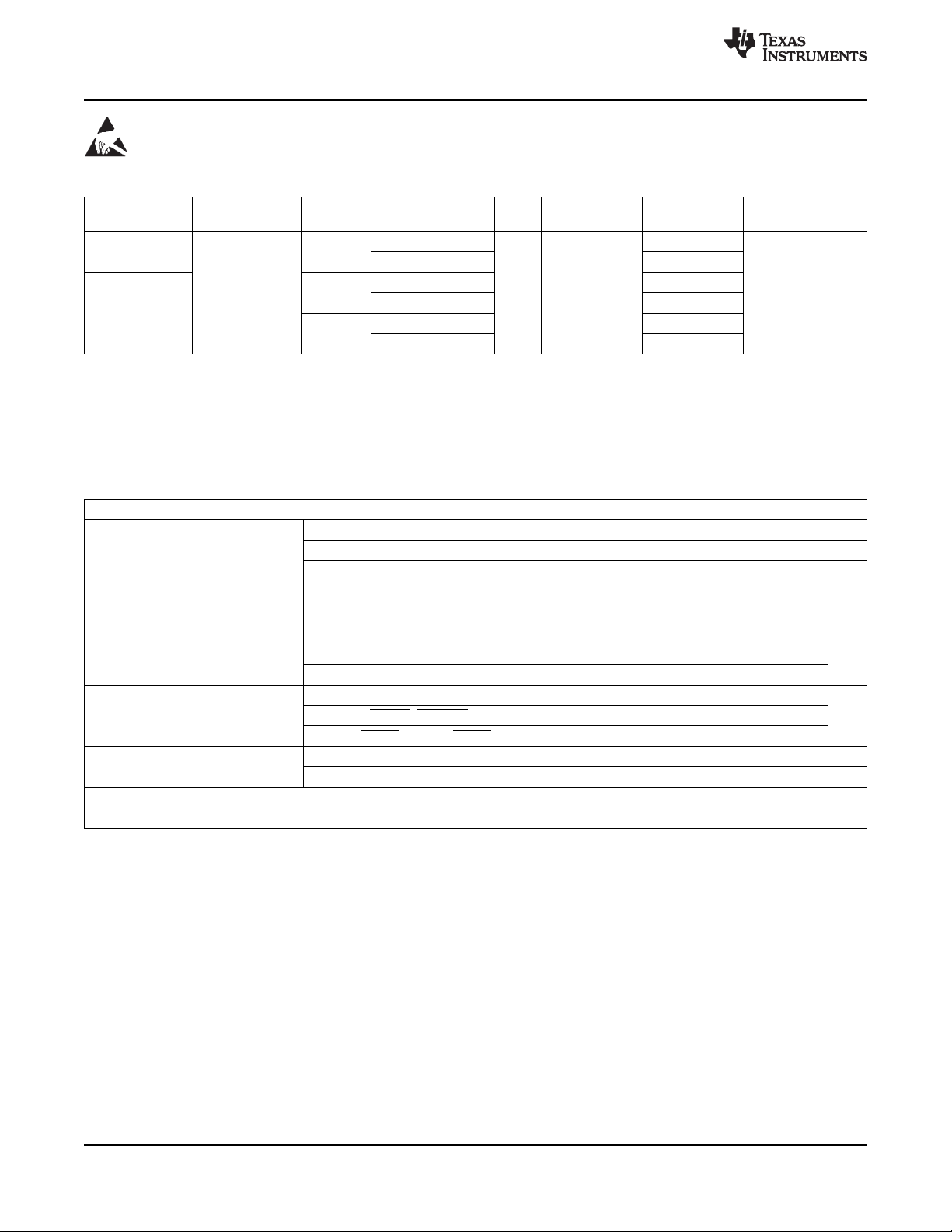
These devices have limited built-in ESD protection. The leads should be shorted together or the device placed in conductive foam
during storage or handling to prevent electrostatic damage to the MOS gates.
www.ti.com
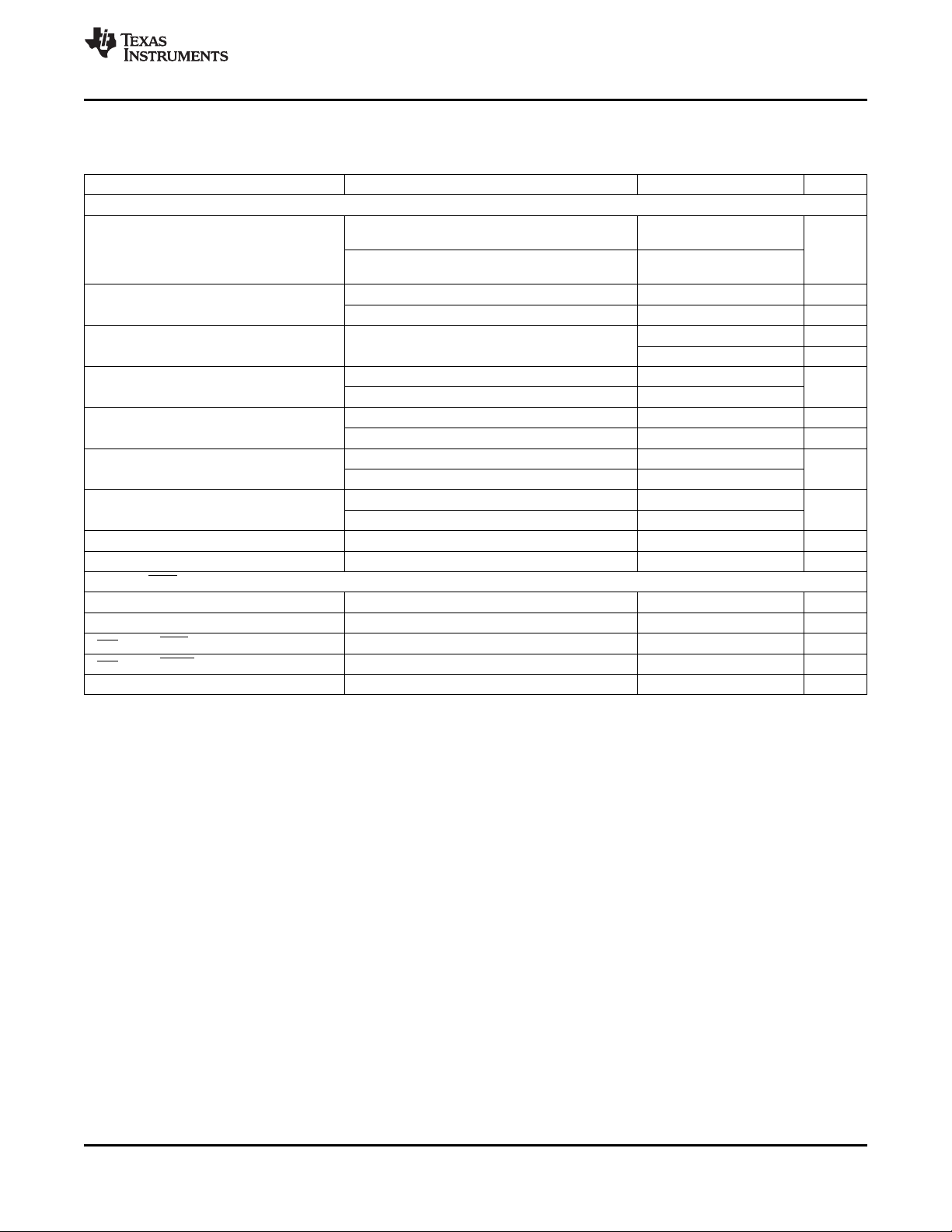
(1)(2)
Green (RoHS and
no Sb/Br)
250
2500
V
T
A
PACKAGE PINS ECO PLAN
BOOT
–10°C to 105°C 0
Plastic Quad Flat
Pack (QFN)
–40°C to 105°C
1.1
ORDERING INFORMATION
(V) NUMBER MEDIA QUANTITY
0 48 Tape-and-reel
ORDERABLE TRANSPORT MINIMUM
TPS51640ARSLT 250
TPS51640ARSLR 2500
TPS59640RSLT 250
TPS59640RSLR 2500
TPS59641RSLT
TPS59641RSLTR
(3)
(3)
(1) For the most current package and ordering information see the Package Option Addendum at the end of this document, or see the TI
web site at www.ti.com.
(2) Package drawings, thermal data, and symbolization are available at www.ti.com/packaging.
(3) Product preview. Not currently available.
ABSOLUTE MAXIMUM RATINGS
(1)(2)
over operating free-air temperature range (unless otherwise noted)
MIN TYP MAX UNIT
VBAT –0.3 32
CSW1, CSW2 –6.0 32 V
CDH1 to CSW1; CDH2 to CSW2; CBST1 to CSW1; CBST2 to CSW2 –0.3 6.0
Input voltage
CTHERM, CCOMP, CF-IMAX, GF-IMAX, GCOMP, GTHERM,
V5DRV, V5
COCP-I, CCSP1, CCSP2, CCSP3, CCSN1, CCSN2, CCSN3, CVFB,
CGFB, V3R3, VR_ON, VCLK, VDIO, SLEWA, GGFB, GVFB, GCSN, –0.3 3.6
GCSP, GOCP-I,
PGND –0.3 0.3
VREF –0.3 1.8
Output voltage CPGOOD, ALERT, VR_HOT, GPGOOD, CIMON, GIMON –0.3 3.6 V
CPWM3, CSKIP, GPWM, GSKIP, CDL1, CDL2 –0.3 6.0
Electrotatic discharge
Operating junction temperature, T
Storage temperature, T
stg
(HBM) QSS 009-105 (JESD22-A114A) 1.5 kV
(CDM) QSS 009-147 (JESD22-C101B.01) 500 V
J
(1) Stresses beyond those listed under absolute maximum ratings may cause permanent damage to the device. These are stress ratings
only and functional operation of the device at these or any other conditions beyond those indicated under recommended operating
conditions is not implied. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability.
(2) All voltage values are with respect to the network ground terminal unless otherwise noted.
–0.3 6.0
-40 125 °C
-55 150 °C
V
2 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated
TPS51640A, TPS59640, TPS59641
www.ti.com
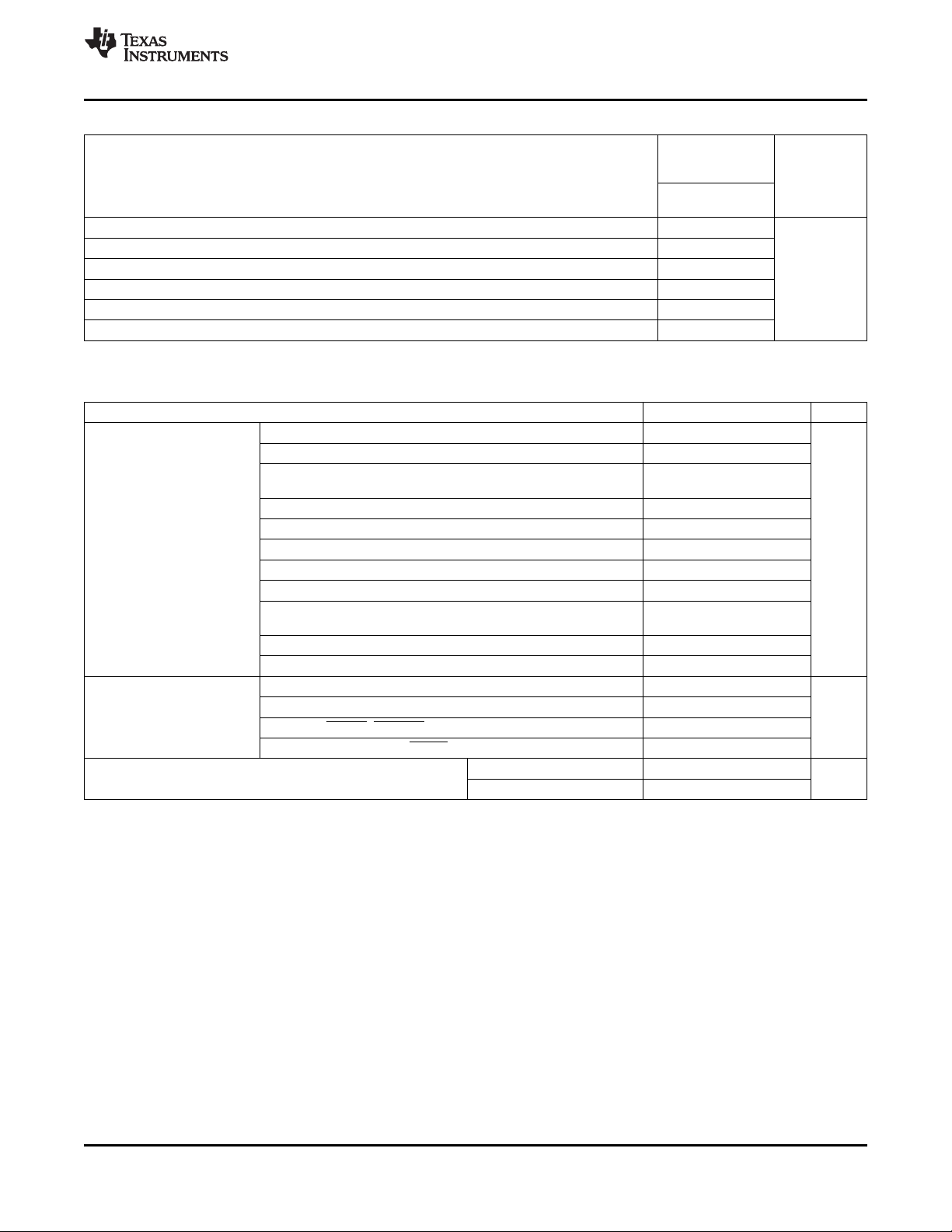
THERMAL INFORMATION
THERMAL METRIC
θ
JA
θ
JCtop
θ
JB
ψ
ψ
θ
JCbot
JT
JB
Junction-to-ambient thermal resistance 31.7
Junction-to-case (top) thermal resistance 19.8
Junction-to-board thermal resistance 7.1
Junction-to-top characterization parameter 0.3
Junction-to-board characterization parameter 7.1
Junction-to-case (bottom) thermal resistance 2.1
(1) For more information about traditional and new thermal metrics, see the IC Package Thermal Metrics application report, SPRA953.
(1)
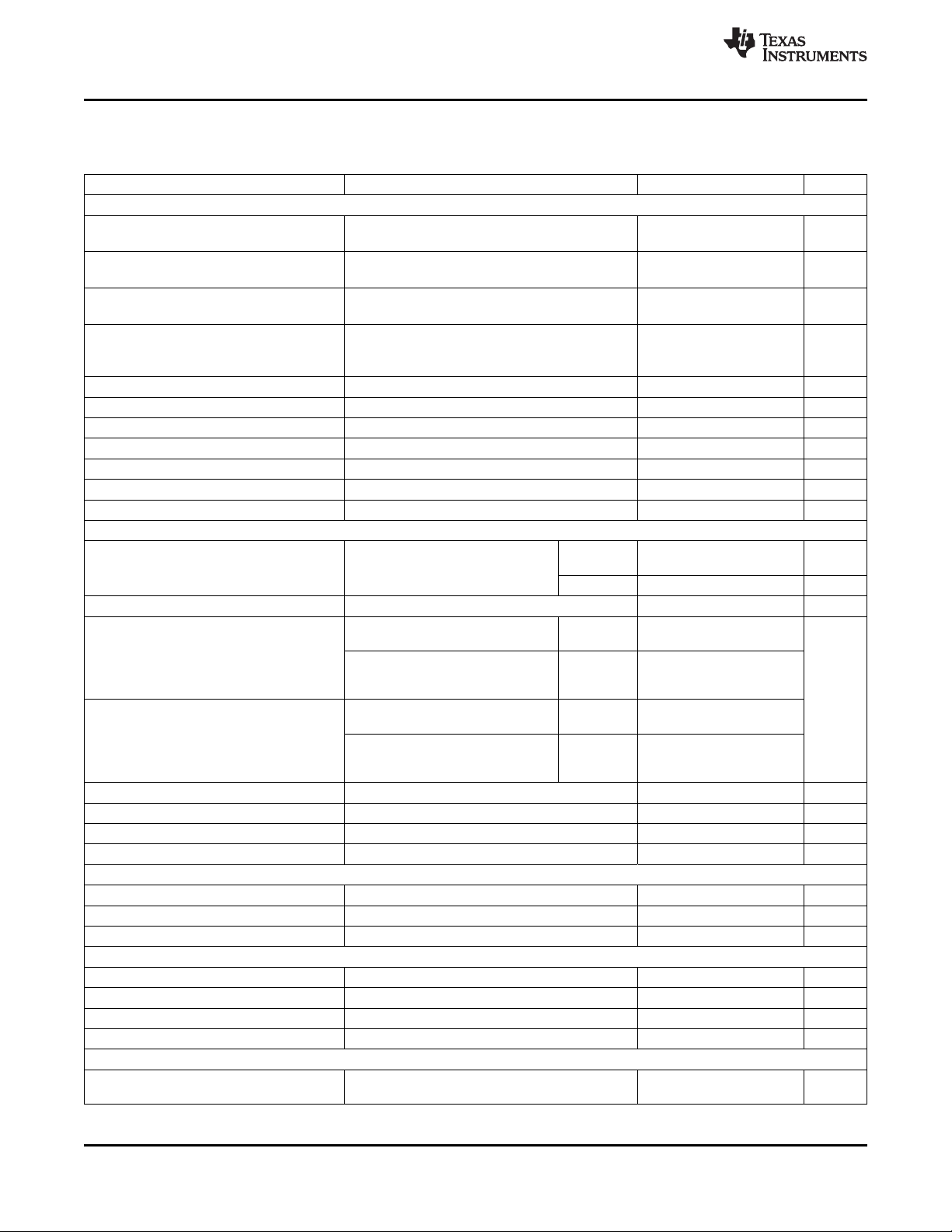
RECOMMENDED OPERATING CONDITIONS
MIN TYP MAX UNIT
VBAT –0.1 28
CSW1, CSW2 –3.0 30
CDH1 to CSW1; CDH2 to CSW2; CBST1 to CSW1; CBST2 to
CSW2
V5DRV, V5 4.5 5.5
V3R3 3.1 3.5
Input voltage CCOMP, GCOMP –0.1 2.5 V
CTHERM, GTHERM 0.1 3.6
CF-IMAX, GF-IMAX, COCP-I, GOCP-I 0.1 1.7
CCSP1, CCSP2, CCSP3, CCSN1, CCSN2, CCSN3, CVFB, CGFB,
GGFB, GVFB, GCSN, GCSP,
VR_ON, VCLK, VDIO, SLEWA, –0.1 3.5
PGND –0.1 0.1
VREF –0.1 1.72
Output voltage V
CIMON, GIMON –0.1 V
CPGOOD, ALERT, VR_HOT, GPGOOD, –0.1 V
CPWM3, CSKIP, GPWM, GSKIP, CDL1, CDL2, –0.1 V
Operating free air temperature, T
A
TPS59640,TPS59641 –40 105
TPS51460A –10 105
–0.1 5.5
–0.1 1.7
SLUSAQ2 –JANUARY 2012
TPS51640A
TPS59640
TPS59641
RSL
48 PINS
UNITS
°C/W
VREF
V3R3
V5
°C
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 3
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
ELECTRICAL CHARACTERISTICS
over recommended free-air temperature range, VV5= V
(Unless otherwise noted)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
SUPPLY: CURRENTS, UVLO AND POWER-ON RESET
I
V5-4
I
V5-3
I
V5-2
I
V5-PS3
I
V5STBY
V
UVLOH
V
UVLOL
I
V3R3
I
V3R3SBY
V
3UVLOH
V
3UVLOL
V5 supply current CPU: 3-phase
active GPU: 1-phase active
V5 supply current CPU: 2-phase
active GPU: 1-phase active
V5 supply current CPU: 1-phase IV5+ I
active GPU: 1-phase active
V5 supply current CPU: 3-phase
active GPU: 1-phase active
V5DRV standby current VR_ON = ‘LO’, IV5+ I
V5 UVLO 'OK' Threshold Ramp up, VR_ON=’HI’, 4.25 4.4 4.5 V
V5 UVLO fault threshold Ramp down, VR_ON = ’HI’, 3.95 4.2 4.3 V
V3R3 supply current SVID bus idle, VR_ON = ‘HI’ 0.5 1.0 mA
V3R3 standby current VR_ON = ‘LO’ 10 µA
V3R3 UVLO 'OK' threshold Ramp up, VR_ON=’HI’, 2.5 2.9 3.0 V
V3R3 UVLO fault threshold Ramp down, VR_ON = ’HI’, 2.4 2.7 2.8 V
IV5+ I
VR_ON = ‘HI’
IV5+ I
VR_ON = ‘HI’, V
VR_ON = ‘HI’, V
IV5+ I
VR_ON = ‘HI’, SetPS = PS3 5.1 mA
(Note: 3-phase CPU goes to 1-phase in PS3)
REFERENCES: DAC, VREF, VBOOT AND DRVL DISCHARGE FOR BOTH CPU AND GPU
V
BOOT
V
VIDSTP
Boot voltage
VID step size 5 mV
0.25 ≤ V
I
V
DAC1
xVFB tolerance no load active
xPU_CORE
0.25 ≤ V
I
xPU_CORE
–40°C ≤ TA≤ 105°C
1.000V ≤ V
I
V
DAC4
V
VREF
V
VREFSRC
V
VREFSNK
V
DLDQ
xVFB tolerance above 1 V VID
VREF Output 4.5 V ≤ VV5≤ 5.5 V, I
VREF output source 0 µA ≤ I
VREF output sink –500 µA ≤ I
DRVL discharge threshold Soft-stop transistor turns on at this point. 200 300 mV
xPU_CORE
1.000V ≤ V
I
xPU_CORE
–40°C ≤ TA≤ 105°C
VOLTAGE SENSE: xVFB AND xGFB FOR BOTH CPU AND GPU
I
xVFB
I
xGFB
A
GAINGND
xVFB input bias current V
xGFB input bias current V
xVFB
xVFB
xGFB/GND gain 1 V/V
CURRENT MONITOR
V
CiMONLK
V
CIMONLO
V
CIMONMID
V
CIMONHI
Zero level current output Σ∆CS = 0 mV, AIMON = 12 × (1+1.27) 35 mV
Low level current output Σ∆CS = 15.6 mV, AIMON = 12 × (1+1.27) 425 mV
Mid level current output Σ∆CS = 31.1 mV, AIMON = 12 × (1+1.27) 850 mV
High level current output Σ∆CS = 62.3 mV, AIMON = 12 × (1+1.27) 1700 mV
ZERO-CROSSING
V
Zx
Inductor zero crossing threshold
voltage
, V
V5DRV
, V
V5DRV
, V
V5DRV
, V
V5DRV
xVFB
= 0 A, 0°C ≤ TA≤ 85°C
xVFB
= 0 A, –6 8.3
xVFB
= 0 A, 0°C ≤ TA≤ 85°C
xVFB
= 0 A, –0.65% 1.0%
VREF
VREF
=2 V, V
=2 V, V
V5DRV
VDAC
VDAC
CCSP3
VDAC
CCSP3
VDAC
= 5.0 V; V
< V
xVFB
< V
xVFB
=3.3 V
< V
xVFB
= V
CCSP2
< V
xVFB
V5DRV
< (V
< (V
< (V
< (V
V3R3
VDAC
VDAC
VDAC
= 3.3 V
VDAC
= 3.3 V; V
+ 100 mV),
+ 100 mV),
+ 100 mV),
+ 100 mV),
TPS59640
TPS51640A
TPS59641 1.1
≤ 0.995V,
≤ 0.995V,
TPS51640A –5 5
TPS59640
TPS59641
≤ 1.520 V,
≤ 1.520 V,
TPS51640A –0.5% 0.5%
TPS59640
TPS59641
= 0 A 1.70 V
VREF
≤ 500 µA –4 –0.1 mV
≤ 0 µA 0.1 4 mV
=0 V 20 40 µA
xGFB
=0 V -40 -20 µA
xGFB
xGFB
= V
PGND
= V
, V
GND
xVFB
6.0 9.0 mA
5.5 mA
4.9 mA
10 20 µA
0 V
0 mV
www.ti.com
= V
CORE
mV
4 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated
TPS51640A, TPS59640, TPS59641
www.ti.com
ELECTRICAL CHARACTERISTICS (continued)
over recommended free-air temperature range, VV5= V
(Unless otherwise noted)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
CURRENT SENSE: OVERCURRENT, ZERO CROSSING, VOLTAGE POSITIONING AND PHASE BALANCING
R
= 20 kΩ
xOCP-I
R
= 24 kΩ
xOCP-I
R
= 30 kΩ
xOCP-I
R
= 39 kΩ
xOCP-I
V
OCPP
V
IMAX
I
CS
I
xVFBDQ
G
M-DROOP
I
BAL_TOL
A
CSINT
OCP voltage (valley current
limit)
R
= 56 kΩ
xOCP-I
R
= 75 kΩ
xOCP-I
R
= 100 kΩ
xOCP-I
R
= 150 kΩ
xOCP-I
IMAX values both channels
V
IMAX_MIN
V
IMAX
V
IMAX_MAX
= 133 mV, value of xIMAX,
= V
REF
= 653mV, value of xIMAX 98 A
CS pin input bias current CSPx and CSNx –1.0 0.2 1.0 µA
xVFB input bias current,
discharge
Droop amplifier
transconductance
Internal current share tolerance –3% +3%
End of soft-stop, xVFB = 100mV 90 125 180 µA
xVFB = 1 V µS
(V
– V
(V
CSP1
CSP3
– V
CSN1
CSN3
Internal current sense gain Gain from CSPx – CSNx to PWM comparator 11.65 12.00 12.30 V/V
V5DRV
× I
MAX
) = (V
) = V
= 5.0 V; V
/ 255
– V
CSP2
OCPP_MIN
CSN2
V3R3
= 3.3 V; V
xGFB
= V
PGND
= V
TPS51640A 5.1 7.0 9.7
TPS59640
TPS59641
4.6 7.0 9.7
TPS51640A 8.1 10.0 12.6
TPS59640
TPS59641
7.6 10.0 13.1
TPS51640A 12.1 14.0 16.7
TPS59640
TPS59641
11.6 14.0 17.2
TPS51640A 17.1 19.0 21.7
TPS59640
TPS59641
16.6 19.0 22.2
TPS51640A 23.1 25.0 27.9
TPS59640
TPS59641
22.6 25.0 28.4
TPS51640A 29.7 32.0 35.0
TPS59640
TPS59641
29.2 32.0 35.5
TPS51640A 37.9 40.0 43.3
TPS59640
TPS59641
37.4 40.0 43.8
TPS51640A 46.8 49.0 52.6
TPS59640
TPS59641
46.2 49.0 53.1
TPS51640A 486 497 518
TPS59640
TPS59641
480 497 518
) =
SLUSAQ2 –JANUARY 2012
, V
xVFB
= V
CORE
GND
mV
20 A
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 5
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
ELECTRICAL CHARACTERISTICS (continued)
over recommended free-air temperature range, VV5= V
(Unless otherwise noted)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
TIMERS: SLEW RATE, ISLEW, ADDR, ON-TIME AND I/O TIMING
V
t
STARTUP1
SL
STRTSTP
SL
SET
t
PGDDGLTO
t
PGDDGLTU
t
TON_CPU
Start-up time time from VR_ON until the controller responds to 5 ms
xVFB slew soft-start / soft-stop 1.25 1.50 1.75 mV/µs
Slew rate setting V
xPGOOD deglitch time 5 100 µs
xPGOOD deglitch time 150 500 µs
CPU on-time RCF=39 kΩ, V
BOOT
SVID commands
SLEWRATE = 12mV/µs, VR_ON goes ‘HI’,
VR_ON goes ‘LO = ‘Soft-stop’
VSLEWA ≤ 0.30V (Also disables SVID CLK timer) 10.0 12.0 14.5
V
SLEWA
V
SLEWA
0.75 V ≤ V
SLEWA
V
SLEWA
V
SLEWA
V
SLEWA
V
SLEWA
Time from xVFB out of +220 mV VDAC boundary
to xPGOOD low.
Time from xVFB out of –315 mV VDAC boundary
to xPGOOD low.
RCF=20 kΩ, V
(250 kHz)
RCF=24 kΩ, V
(300 kHz)
RCF=30 kΩ, V
(350 kHz)
(400 kHz)
RCF=56 kΩ, V
(450 kHz)
RCF=75 kΩ, V
(500 kHz)
RCF=100 kΩ, V
RCF=150 kΩ, V
V5DRV
> 0 V, SLEWRATE = 12 mV/µs, no faults,
= 0.4 V 3.5 4.0 5.0
= 0.6 V 7.5 8.5 9.5
≤ 0.85 V 10.0 12.0 14.5
SLEWA
= 1.0 V 16 mV/µs
= 1.2 V 20
= 1.4 V 23
= 1.6 V 26
≥ 2.50 V 26
=12 V, V
BAT
=12 V, V
BAT
=12 V, V
BAT
=12 V, V
BAT
=12 V, V
BAT
=12 V, V
BAT
BAT
BAT
= 5.0 V; V
=12 V, V
=12 V, V
= 3.3 V; V
V3R3
DAC
=1.1 V
TPS51640A 270 327 375
TPS59640
TPS59641
DAC
=1.1 V
TPS51640A 225 272 320
TPS59640
TPS59641
DAC
=1.1 V
TPS51640A 185 235 280
TPS59640
TPS59641
=1.1 V ns
DAC
TPS51640A 160 207 252
TPS59640
TPS59641
DAC
=1.1 V
TPS51640A 140 185 231
TPS59640
TPS59641
DAC
=1.1 V
TPS51640A 120 167 212
TPS59640
TPS59641
=1.1 V (550 kHz) 109 152 198
DAC
=1.1 V (600 kHz) 105 140 177
DAC
xGFB
= V
PGND
= V
GND
265 327 380
220 272 325
180 235 285
155 207 262
134 185 241
115 167 217
, V
xVFB
= V
www.ti.com
CORE
6 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated
TPS51640A, TPS59640, TPS59641
www.ti.com
ELECTRICAL CHARACTERISTICS (continued)
over recommended free-air temperature range, VV5= V
(Unless otherwise noted)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
TIMERS: SLEW RATE, ISLEW, ADDR, ON-TIME AND I/O TIMING (Continued)
RGF=20 kΩ, V
(275 kHz)
RGF=24 kΩ, V
(330 kHz)
RGF=30 kΩ, V
(385 kHz)
t
TON_GPU
t
MIN
t
VCCVID
t
VRONPGD
t
PGDVCC
t
VRTDGLT
R
SFTSTP
PROTECTION: OVP, UVP PGOOD, VR_HOT, ‘FAULTS OFF’ AND INTERNAL THERMAL SHUTDOWN
V
OVPH
V
PGDH
V
PGDL
V
THERM
I
THRM
TH
INT
TH
HYS
GPU on-time
RGF=39 kΩ,V
(440 kHz)
RGF=56 kΩ, V
(495 kHz)
RGF=75 kΩ, V
RGF=100 kΩ, V
RGF=150 kΩ, V
Controller minimum off time Fixed value 150 200 ns
ACK of SetVID-x command to start of voltage
VID change to xVFB change
(1)
ramp
VR_ON low to xPGOOD low 20 50 100 ns
xPGOOD low to xVFB change
(1)
VR_HOT# deglitch time 0.2 0.7 ms
Soft-stop transistor resistance Connect to CVFB, GVFB 550 770 1100 Ω
Fixed OVP voltage threshold
voltage
xPGOOD high threshold 190 220 245 mV
xPGOOD low threshold –348 –315 –280 mV
VCSN1 or VGCSN > V
Measured at the xVFB pin wrt/VID code,
device latches OFF
Measured at the xVFB pin wrt/VID code,
device latches OFF
bit0 of xTHERM register = high 757 783 808
bit1 of xTHERM register also is high 651 680 707
bit2 of xTHERM register also is high 611 638 663
bit3 of xTHERM register also is high 570 598 623
IMVP-7 thermal bit voltage
definition
bit4 of xTHERM register also is high 531 559 583
bit5 of xTHERM register also is high 496 523 548
bit6 of xTHERM register also is high,
ALERT goes low
bit7 of XTHERM register also is high,
VR_HOT goes low
CDLx goes low, CDHx goes low 373 410 425
THERM current Leakage current –5 5 µA
Internal controller thermal
Shutdown
Controller thermal SD
hysteresis
(1)
(1)
Latch off controller 155 °C
Cooling required before converter can be reset 20 °C
V5DRV
BAT
BAT
BAT
BAT
BAT
BAT
BAT
BAT
= 5.0 V; V
=12 V, V
=12 V, V
=12 V, V
=12 V, V
=12 V, V
=12 V, V
=12 V, V
=12 V, V
OVPH
DAC
V3R3
=1.1 V
= 3.3 V; V
TPS51640A 315 347 388
TPS59640
xGFB
= V
TPS59641
DAC
=1.1V
TPS51640A 251 287 330
TPS59640
TPS59641
DAC
=1.1 V
TPS51640A 215 245 287
TPS59640
TPS59641
DAC
=1.1 V
TPS51640A 180 216 252
TPS59640
TPS59641
DAC
=1.1 V
TPS51640A 160 190 223
TPS59640
TPS59641
=1.1 V (550 kHz) 145 171 210
DAC
=1.1 V (605 kHz) 120 156 205
DAC
=1.1 V (660 kHz) 100 150 201
DAC
for 1 µs, DRVL → ON 1.68 1.72 1.77 V
SLUSAQ2 –JANUARY 2012
= V
, V
PGND
GND
xVFB
= V
CORE
310 347 393
246 287 335
210 245 292 ns
175 216 257
155 190 228
2 µs
100 ns
461 488 513
428 455 481
mV
(1) Specified by design. Not production tested.
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 7
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
ELECTRICAL CHARACTERISTICS (continued)
over recommended free-air temperature range, VV5= V
(Unless otherwise noted)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
LOGIC (VCLK, VDIO, ALERT, VR_HOT, VR_ON) INTERFACE PINS: I/O VOLTAGE AND CURRENT
R
RSVIDL
R
RPGDL
I
VRTTLK
V
IL
V
IH
V
HYST
V
VR_ONL
V
VR_ONH
I
VR_ONH
Open drain pull down resistance 4 8 13 Ω
Open drain pull down resistance xPGOOD pull-down resistance at 0.31 V 36 50
Open drain leakage current -2 0.2 2 µA
Input logic low 0.45 V
Input logic high 0.65 V
Hysteresis voltage
(1)
VR_ON logic low 0.3 V
VR_ON logic high 0.8 V
I/O 3.3 V leakage Leakage current , V
OVERSHOOT AND UNDERSHOOT REDUCTION (OSR/USR) THRESHOLD SETTING
V
OSR
V
USR
V
OSR_OFF
V
OSRHYS
OSR voltage set mV
USR voltage set mV
OSR OFF setting V
OSR/USR voltage hysteresis
(2) Specified by design. Not production tested.
VDIO, ALERT, VR_HOT, pull-down resistance at
0.31 V
VR_HOT, xPGOOD, Hi-Z leakage,
apply 3.3-V in off state
VCLK, VDIO
R
= 20 kΩ 106
xSKIP
R
= 24 kΩ 156
xSKIP
R
= 30 kΩ 207
xSKIP
R
= 39 kΩ 257
xSKIP
R
= 56 kΩ 308
xSKIP
R
= 75 kΩ 409
xSKIP
R
= 100 kΩ 510
xSKIP
R
= 150 kΩ 610
xSKIP
R
= 20 kΩ 40
xSKIP
R
= 24 kΩ 60
xSKIP
R
= 30 kΩ 75
xSKIP
R
= 39 kΩ 115
xSKIP
R
= 56 kΩ 153
xSKIP
R
= 75 kΩ 190
xSKIP
R
= 100 kΩ 230
xSKIP
R
≥ 150 kΩ = OFF –
xSKIP
at start up 100 300 mV
xSKIP
(2)
All settings 20%
V5DRV
= 5.0 V; V
= 1.1 V 10 25.0 µA
VR_ON
V3R3
= 3.3 V; V
xGFB
= V
PGND
= V
, V
GND
xVFB
0.05 V
www.ti.com
= V
CORE
8 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated
TPS51640A, TPS59640, TPS59641
www.ti.com
ELECTRICAL CHARACTERISTICS (continued)
over recommended free-air temperature range, VV5= V
(Unless otherwise noted)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
DRIVERS: HIGH-SIDE, LOW-SIDE, CROSS CONDUCTION PREVENTION AND BOOST RECTIFIER
(V
– V
R
DRVH
DRVH ON resistance Ω
(V
(V
(V
V
I
DRVH
t
DRVH
R
DRVL
I
DRVL
t
DRVL
t
NONOVLP
R
DS(on)
I
BSTLK
DRVH sink/source current
(3)
DRVH transition time CDHx 10% to 90% or 90% to 10%, C
DRVL ON resistance Ω
DRVL sink/source current
(3)
DRVL transition time ns
Driver non overlap time ns
BST on-resistance (V
BST switch leakage current V
CDHx
V
CDHx
‘HI’ State, (V
‘LO’ State, (V
V
CDLx
V
CDLx
V
CDLx
V
CDLx
V
CSWx
CDLx falls to 1 V to CDHx rises to 1 V 13 25
VBST
PWM and SKIP OUTPUT: I/O Voltage and Current
V
PWML
V
PWMH
V
SKIPL
V
SKIPH
V
PW(leak)
xPWMy output low level 0.7 V
xPWMy output high level 4.2 V
SKIP output low level 0.7 V
xSKIP output high level 4.2 V
xPWM leakage Tri-state, V = 5 V 0.1 µA
(3) Specified by design. Not production tested.
CBSTx
VBST
CBSTx
DRVH
V5DRV
CSWx
– V
VDRVH
– V
CSWx
– VLL) = 0.25 V
= 2.5 V, (V
= 2.5 V, (V
= 2.5 V, Source 2.7 A
= 2.5 V, Sink 6 A
90% to 10%, C
10% to 90%, C
falls to 1 V to V
– V
VBST
= 34 V, V
V5DRV
= 5.0 V; V
V3R3
= 3.3 V; V
xGFB
) = 5 V, ‘HI’ state,
) = 0.25 V
) = 5 V, ‘LO’ state,
– V
) = 5 V, Source 2.2 A
CSWx
– V
) = 5 V, Sink 2.2 A
CSWx
= 3 nF
CDHx
) = 0.25 V 0.9 2
)= 0.2 V 0.4 1
PGND
= 3 nF 15 40
= 3 nF 15 40
rises to 1 V 13 25
V5DRV
VDRVL
CBSTx
CBSTx
– V
– V
VDRVL
CDLx
CDLx
CDLx
), IF= 5 mA 5 10 20 Ω
=28 V 0.1 1 µA
CSWx
= V
PGND
SLUSAQ2 –JANUARY 2012
= V
, V
xVFB
= V
GND
1.2 2.5
0.8 2.5
15 40 ns
15 40 ns
CORE
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 9
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
36
35
34
33
32
31
30
29
28
27
26
25
48
47
46
45
44
43
42
41
40
39
38
37
CTHERM
COCP-I
CIMON
CCSP1
CCSN1
CCSN2
CCSP2
CCSP3
CCSN3
CVFB
CCOMP
CGFB
CF-IMAX
VREF
V3R3
VR_ON
CPGOOD
VCLK
ALERT
VDIO
VR_HOT
SLEWA
GPGOOD
GF-IMAX
CPWM3
CSKIP
GPWM
GSKIP
GTHERM
GOCP-I
GIMON
GCSP
GCSN
GCOMP
GVFB
GGFB
V5
CDH1
CBST1
CSW1
CDL1
V5DRV
PGND
CDL2
CSW2
CBST2
CDH2
VBAT
TPS51640A
TPS59640
TPS59641
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
www.ti.com
DEVICE INFORMATION
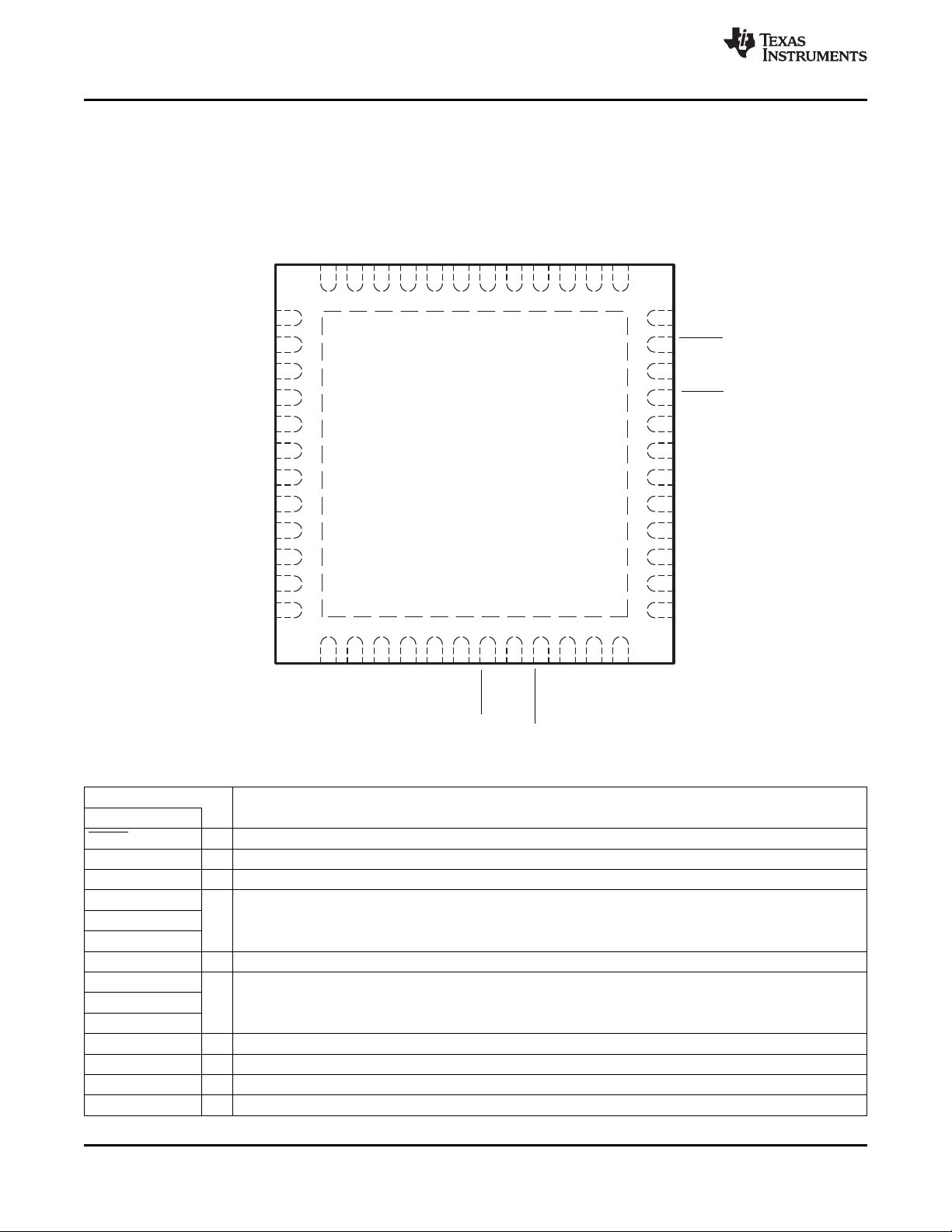
RSL PACKAGE
48 PINS
(TOP VIEW)
PIN FUNCTIONS
PIN
NAME NO.
ALERT 19 O SVID interrupt line, open drain. Route between VCLK and VDIO to prevent cross-talk.
CBST1 46 I Top N-channel FET bootstrap voltage input for CPU phase 1.
CBST2 39 I Top N-channel bootstrap voltage input for CPU phase 2.
CCSN1 5
CCSN2 6 I
CCSN3 9
CCOMP 10 O Output of GM error amplifier for the CPU converter. A resistor to VREF sets the droop gain.
CCSP1 4
CCSP2 7 I or inductor DCR sense network. Tie CCSP3, 2 or 1 (in that order) to V3R3 to disable the phase. Tie CCSP1 to
CCSP3 8
CDH1 47 O Top N-channel FET gate drive output for CPU phase 1.
CDH2 38 O Top N-channel FET gate drive output for CPU phase 2.
CDL1 44 O Synchronous N-channel FET gate drive output for CPU phase 1.
CDL2 41 O Synchronous N-channel FET gate drive output for CPU phase 2.
10 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated
I/O DESCRIPTION
Negative current sense inputs for the CPU converter. Connect to the most negative node of current sense
resistor or inductor DCR sense network. CCSN1 has a secondary OVP comparator.
Positive current sense inputs for the CPU converter. Connect to the most positive node of current sense resistor
V3R3 to run the GPU converter only.
www.ti.com
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
PIN
NAME NO.
I/O DESCRIPTION
Voltage divider to VREF. A resistor to GND sets the operating frequency of the CPU converter. The voltage level
CF-IMAX 13 I sets the maximum operating current of the CPU converter. The IMAX value is an 8-bit A/D where V
I
/ 255. Both are latched at start-up.
MAX
CGFB 12 I
CIMON 3 O
COCP-I 2 I
Voltage sense return tied for the CPU converter. Tie to GND with a 10-Ω resistor to close feedback when the
microprocessor is not in the socket.
Analog current monitor output for the CPU converter. V
220-nF capacitor to GND for stability.
Resistor to GND (R
voltage divider to CIMON. Resistor ratio sets the IMON gain (see CIMON pin description).
) selects 1 of 8 OCP levels (per phase, latched at start-up) of the CPU converter. Also,
COCP
= ΣVCS× ACS × (1 + R
CIMON
CIMON/RCOCP
= V
IMAX
REF
). Connect a
CPGOOD 17 O IMVP-7_PWRGD output for the CPU converter. Open-drain.
CSW1 45 I/O Top N-channel FET gate drive return for CPU phase 1.
CSW2 40 I/O Top N-channel FET gate drive return for CPU phase 2.
CPWM3 36 O PWM control for the external driver, 5V logic level.
CSKIP 35 O
CTHERM 1 I/O
CVFB 11 I
Skip mode control of the external driver for the CPU converter. A logic HI = FCCM, LO = SKIP. R to GND selects
1 of 8 OSR/USR levels. 0.1 V < V
< 0.3 V at start-up turns OSR off.
CSKIP
Thermal sensor connection for the CPU converter. A resistor connected to VREF forms a divider with an NTC
thermistor connected to GND.
Voltage sense line tied directly to V
feedback when µP is not in the socket. The soft-stop transistor is on this pin
of the CPU converter. Tie to V
CORE
with a 10-Ω resistor to close
CORE
Negative current sense input for the GPU converter. Connect to the most negative node of current sense resistor
GCSN 28 I or inductor DCR sense network. GCSN has a secondary OVP comparator and includes the soft-stop pull-down
transistor.
GCSP 29 I
Positive current sense input for the GPU converter. Connect to the most positive node of current sense resistor
or inductor DCR sense network. Tie to V3R3 to disable the GPU converter.
GCOMP 27 O Output of gMerror amplifier for the GPU converter. A resistor to VREF sets the droop gain.
GGFB 25 I
Voltage sense return tied for the GPU converter. Tie to GND with a 10-Ω resistor to close feedback when the
microprocessor is not in the socket.
24 I Voltage divider to VREF. R to GND sets the operating frequency of the GPU converter. The voltage level sets
GF-IMAX the maximum operating current of the GPU converter. The IMAX value is an 8-bit A/D where V
I
/ 255. Both are latched at start-up.
MAX
GIMON
GOCP-I
30 O Analog current monitor output for the GPU converter. V
220-nF capacitor to GND for stability.
31 I Voltage divider to GIMON. Resistor ratio sets the IMON gain (see GIMON pin). Resistor to GND (R
1 of 8 OCP levels (per phase, latched at start-up) of the GPU converter.
GIMON
= V
ISENSE
× (1 + R
GIMON/RGOCP
= V
IMAX
REF
). Connect a
GOCP
×
) selects
GPGOOD 23 O IMVP-7_PWRGD output for the GPU converter. Open-drain.
GPWM 34 O PWM control for the external driver, 5-V logic level.
GSKIP
GTHERM
GVFB
33 O Skip mode control of the external driver for the GPU converter, 5-V logic level. Logic HI = FCCM, LO = SKIP. R
to GND selects 1 of 8 OSR/USR levels. 0.1 V < V
< 0.3 V at start-up turns OSR off.
GSKIP
32 I/O Thermal sensor input for the GPU converter. A resistor connected to VREF forms a divider with an NTC
thermistor connected to GND.
26 I Voltage sense line tied directly to V
when the microprocessor is not in the socket. The soft-stop transistor is on this pin
of the GPU converter. Tie to V
GFX
with a 10-Ω resistor to close feedback
GFX
PGND 42 – Synchronous N-channel FET gate drive return.
SLEWA
V5
V5DRV
22 I The voltage at start-up sets 1 of 7 slew rates for both converters. The SLOW rate is SLEWRATE/4. Soft-start
and soft-stop rates are SLEWRATE/8. This value is latched at start-up. Tie to GND to disable SCLK timer.
48 I 5-V power input for analog circuits; connect through resistor to 5-V plane and bypass to GND with ≥1 µF ceramic
capacitor
43 I Power input for the gate drivers; connected with an external resistor to V5F; decouple with a ≥2.2 µF ceramic
capacitor.
V3R3 15 I 3.3-V power input; bypass to GND with ≥1 µF ceramic cap.
VBAT
37 I Provides VBAT information to the on-time circuits for both converters. A 10-kΩ series resistor protects the
adjacent pins from inadvertent shorts due to solder bridges or mis-probing during test.
VCLK 18 I SVID clock. 1-V logic level.
VDIO 20 I/O SVID digital I/O line. 1-V logic level.
VREF 14 O 1.7-V, 500-µA reference. Bypass to GND with a 0.22-µF ceramic capacitor.
×
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 11
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
www.ti.com
PIN
NAME NO.
VR_ON 16 I IMVP-7 VR enable; 1V I/O level; 100-ns de-bounce. Regulator enters controlled soft-stop when brought low.
VR_HOT
PAD GND – Thermal pad and analog circuit reference; tie to a quiet area in the system ground plane with multiple vias.
I/O DESCRIPTION
21 O IMVP-7 thermal flag open drain output – active low. Typically pulled up to 1-V logic level through 56 Ω. Fall time
< 100 ns. 1-ms de-glitch using consecutive 1-ms samples.
12 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated
0.80
0.85
0.90
0.95
1.00
1.05
Output Voltage (V)
VIN= 9 V
VIN= 20 V
Nominal
Specified Maximum
Specified Minimum
V
VID
= 1.05 V
0 10 20 90 100
Output Current (A)
30 40 50 70 8060
0.500
0.525
0.575
0.600
0.625
0.675
0.700
0 2 4 18 20
Output Current (A)
Output Voltage (V)
6 8 10 14 1612
VIN= 9 V
VIN= 20 V
Nominal
Specified Maximum
Specified Minimum
V
VID
= 0.6 V
0.550
0.650
65
75
80
85
90
Efficiency (%)
V
VID
= 0.6 V
70
VIN= 9 V
VIN= 20 V
0 2 4 18 20
Output Current (A)
6 8 10 14 1612
65
75
80
85
90
95
Efficiency (%)
V
VID
= 1.05 V
70
VIN= 9 V
VIN= 20 V
0 10 20 90 100
Output Current (A)
30 40 50 70 8060
0
100
150
200
350
400
Frequency (Hz)
50
0 10 20 90 100
Output Current (A)
30 40 50 70 8060
RCF= 24 kW
PS0, V
VID
= 1.05 V, VIN= 9 V
PS0, V
VID
= 1.05 V, VIN= 20 V
PS1, V
VID
= 1.05 V, VIN= 20 V
PS1, V
VID
= 1.05 V, VIN= 9 V
250
300
www.ti.com
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
TYPICAL CHARACTERISTICS
3-Phase Configuration, 94-A CPU
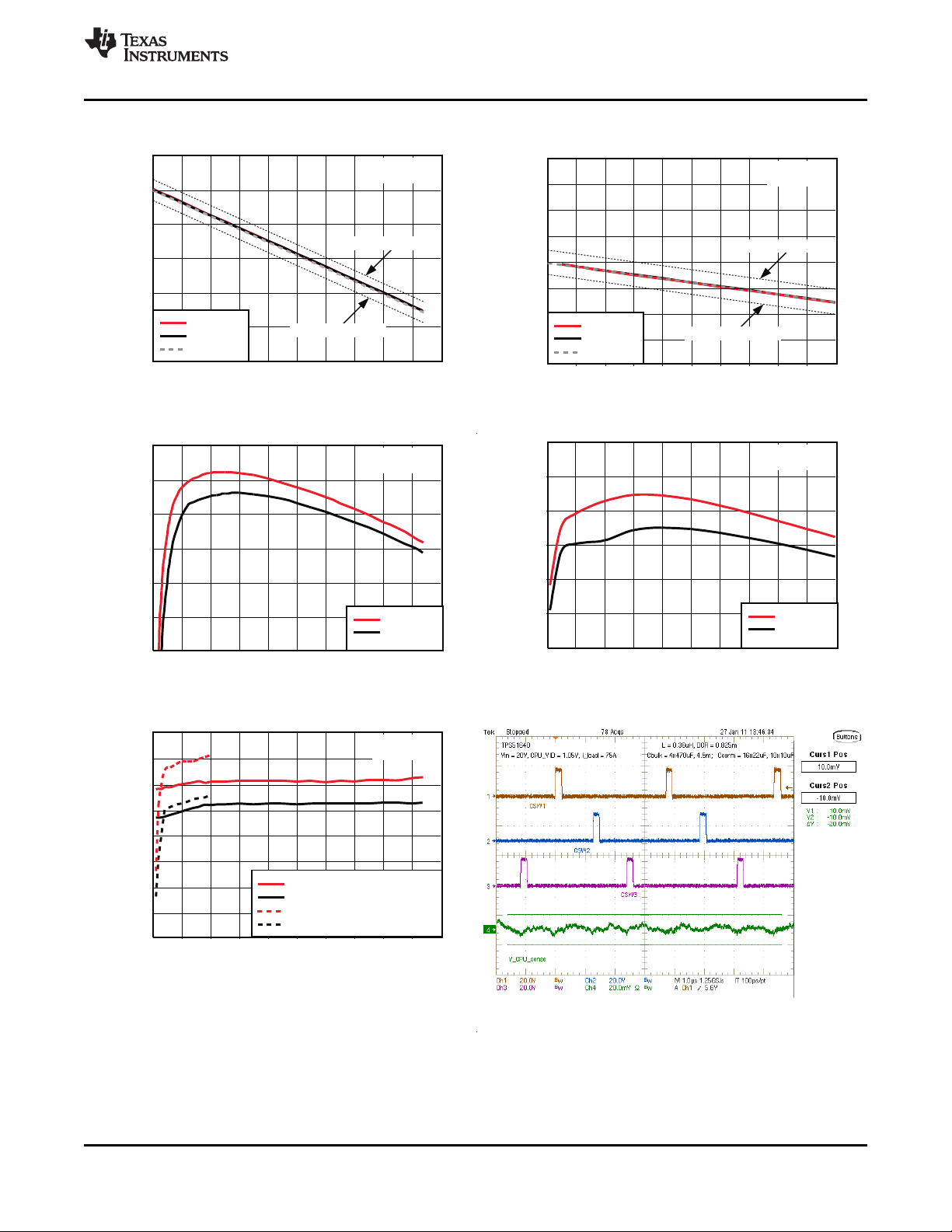
Figure 1. Output Voltage vs. Load Current in PS0 Figure 2. Output Voltage vs. Load Current in PS1
Figure 3. Efficiency vs. Load Current in PS0 Figure 4. Efficiency vs. Load Current in PS1
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 13
Figure 5. Frequency vs Load-Current (PS0 and PS1) Figure 6. Switching Ripple in PS0, VIN= 20 V
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
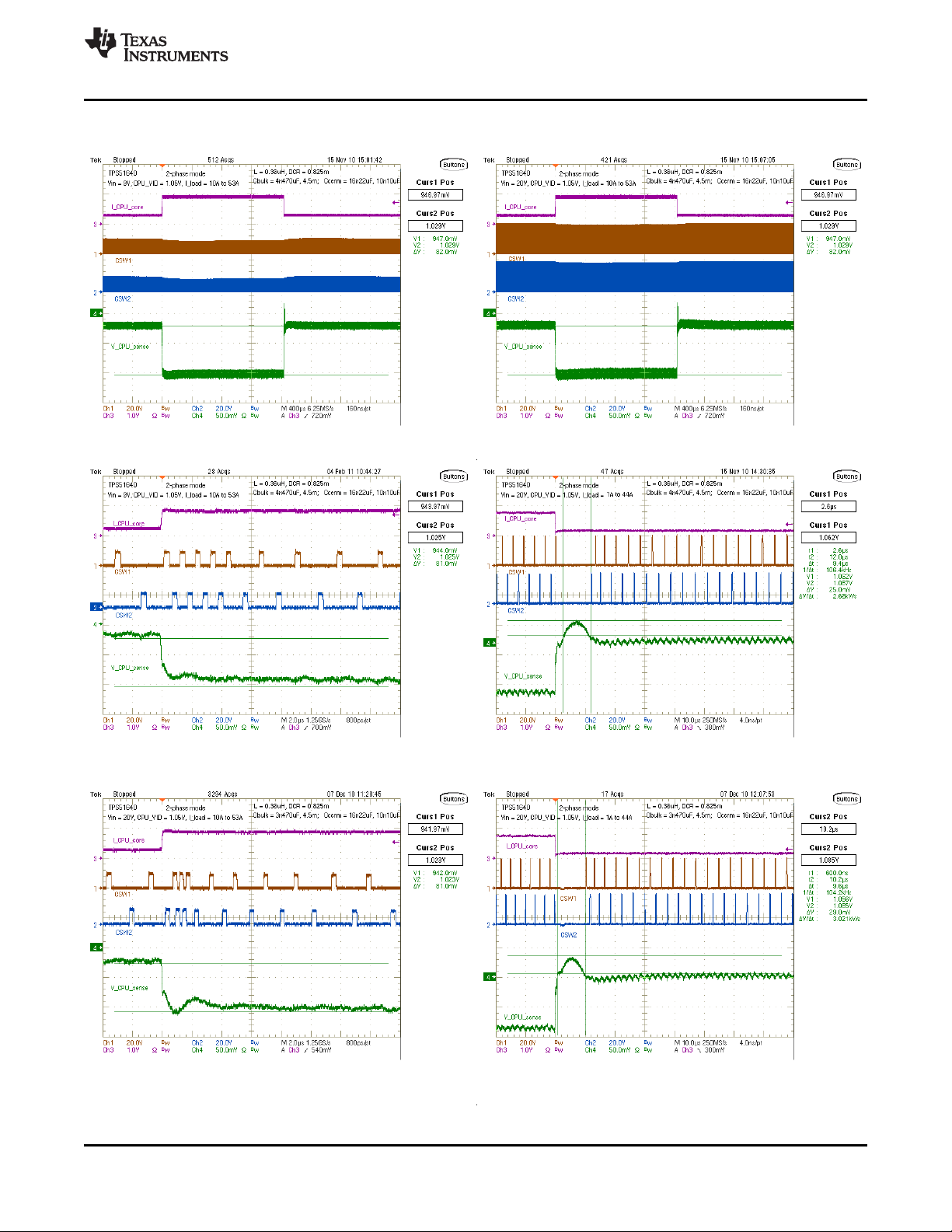
TYPICAL CHARACTERISTICS
3-Phase Configuration, 94-A CPU (continued)
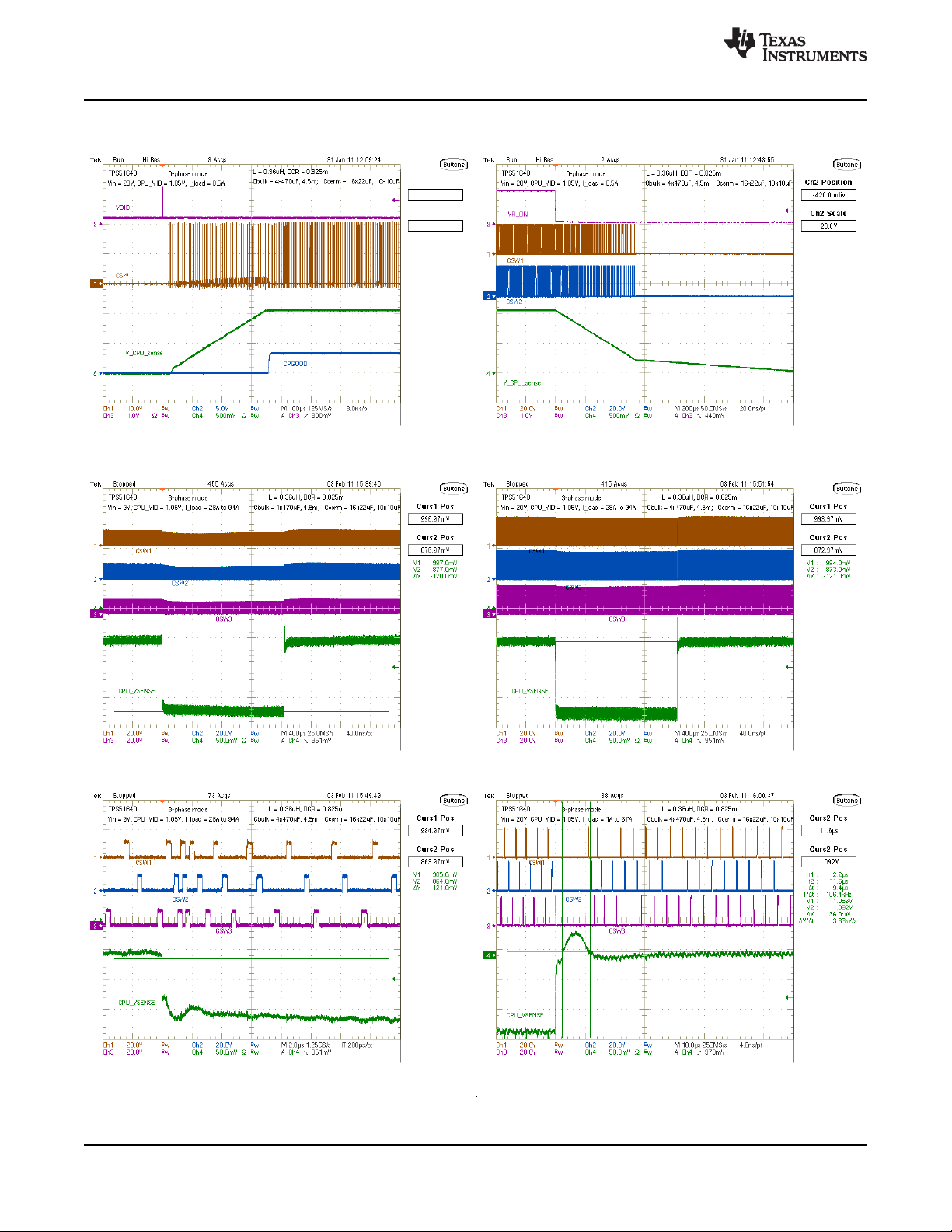
Figure 7. Start-Up and PGOOD Figure 8. Soft-Stop
(TPS51640A and TPS59640 Only)
www.ti.com
Figure 9. Load Transient, VIN= 9 V, Load step = 66 A Figure 10. Load Transient, VIN= 20 V, Load step = 66 A
Figure 11. Load Insertion, VIN= 9 V, Load step = 66 A Figure 12. Load Release, VIN= 20 V, Load step = 66 A
14 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated
100 1000 10000 100000 1000000
−50
−40
−30
−20
−10
0
10
20
30
40
50
−225
−180
−135
−90
−45
0
45
90
135
180
225
Frequency (Hz)
Magnitude (dB)
Phase (°)
Gain
Phase
3−Phase CPU
V
OUT
= 1.05 V
I
OUT
~ 20 A
0.0005
0.001
0.0015
0.002
0.0025
0.003
0.0035
0.004
0.0045
-80
-60
-40
-20
0
20
40
60
80
100 1 k 10 k 100 k 1 M
Frequency (Hz)
Z
OUT
Magnitude (W)
Z
OUT
Phase (°)
Magnitude
Target
Phase
CPU
3-Phase
www.ti.com
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
TYPICAL CHARACTERISTICS
3-Phase Configuration, 94-A CPU (continued)
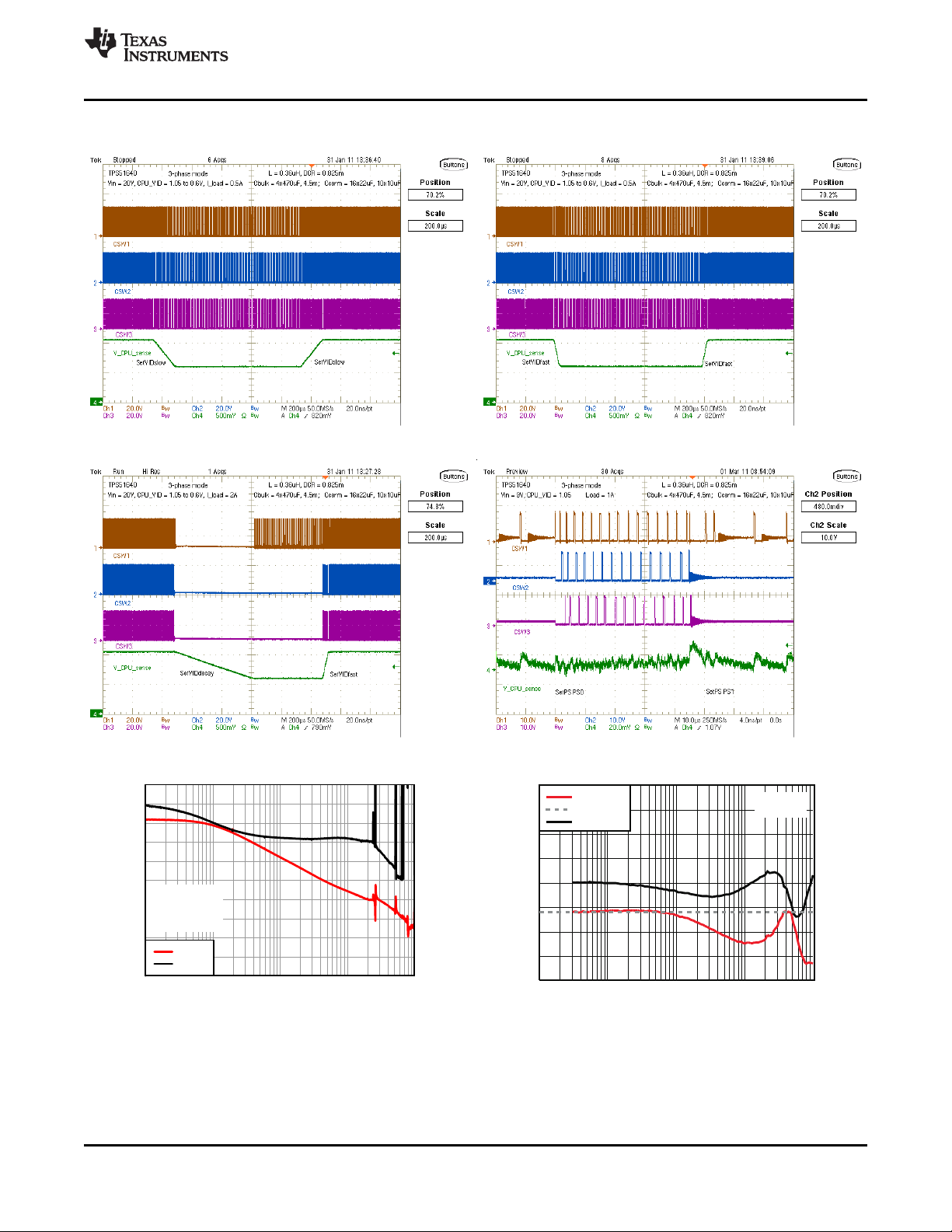
Figure 13. Dynamic VID: SetVID-Slow/SetVID-Slow Figure 14. Dynamic VID: SetVID-Fast/SetVID-Fast
Figure 15. SetVID-Decay/SetVID-Fast Figure 16. PS Change PS0 to PS1 Toggle
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 15
Figure 17. CPU Bode Plot Figure 18. Output Impedance
0.80
0.85
0.90
0.95
1.00
1.05
1.10
Output Voltage (V)
0 10 20
Output Current (A)
30 40 50 60
V
VID
= 1.05 V
VIN= 9 V
VIN= 20 V
Nominal
Specified Maximum
Specified Minimum
65
75
80
85
90
95
Efficiency (%)
70
0 5 10 50 55
Output Current (A)
15 20 25 40 4535
VIN= 9 V
VIN= 20 V
V
VID
= 1.05 V
30
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
TYPICAL CHARACTERISTICS
2-Phase Configuration, 53-A CPU
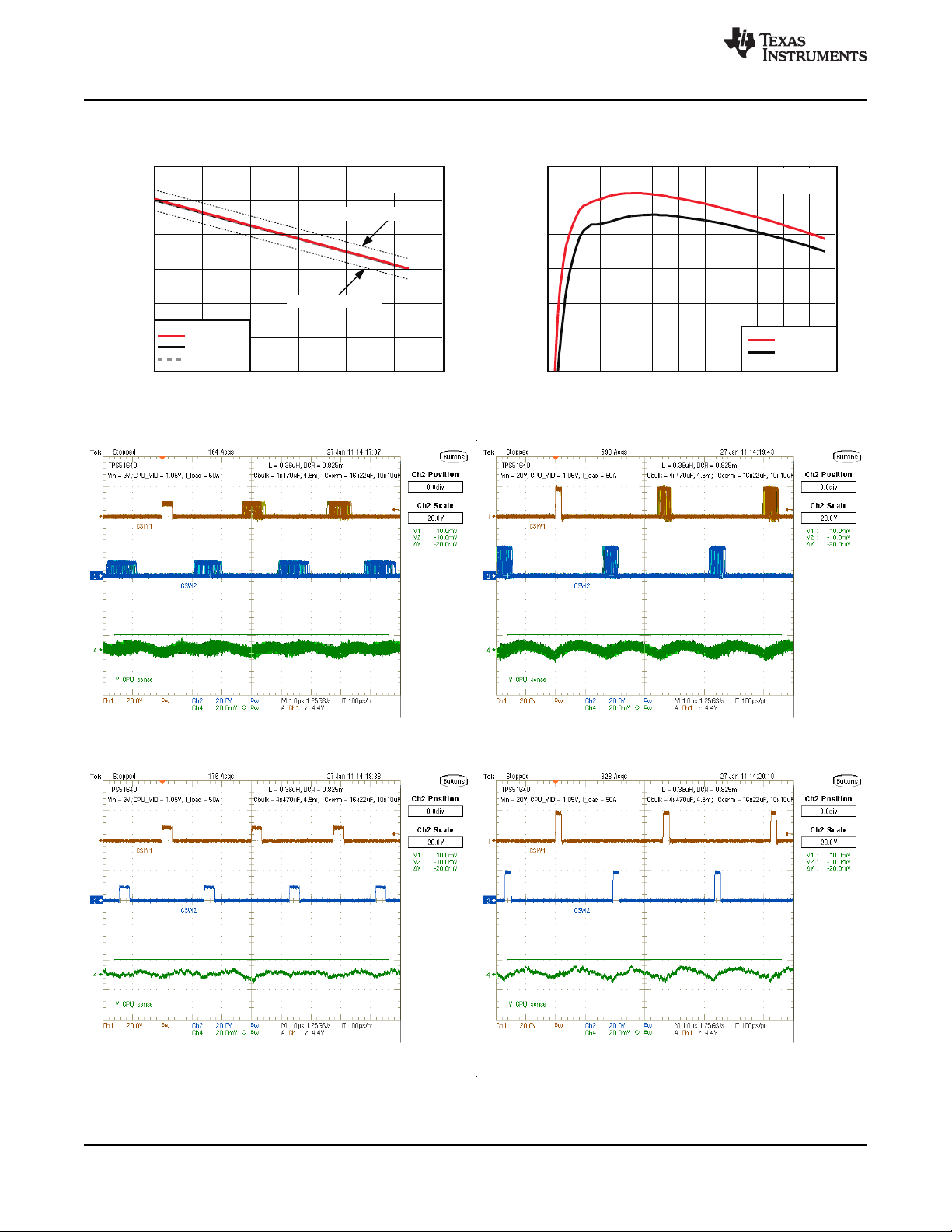
Figure 19. Output Voltage Vs. Load Current in PS0 Figure 20. Efficiency Vs. Load Current in PS0
www.ti.com
Figure 21. Switching Ripple in PS0 (Persistence), Figure 22. Switching Ripple in PS0 (Persistence),
16 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated
Figure 23. Switching Ripple in PS0, VIN= 9 V Figure 24. Switching Ripple in PS0, VIN= 20 V
VIN= 9 V VIN= 20 V
www.ti.com
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
TYPICAL CHARACTERISTICS
2-Phase Configuration, 53-A CPU (continued)
Figure 25. Load Transient, VIN= 9 V, Load Step = 43 A Figure 26. Load Transient, VIN= 20 V, Load Step = 43 A
Figure 27. Load Insertion, VIN= 9 V, Load Step = 43 A, Figure 28. Load Release, VIN= 20 V, Load Step = 43 A,
Figure 29. Load Insertion, VIN= 9 V, Load Step = 43 A, Figure 30. Load Release,VIN= 20 V, Load Step = 43 A,
OSR/USR Setting 39 kΩ (Reduced Output Capacitance) OSR/USR Setting 39 kΩ (Reduced Output Capacitance)
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 17
OSR/USR Setting 150 kΩ) OSR/USR Setting 150 kΩ)

0.0005
0.001
0.0015
0.002
0.0025
0.003
0.0035
0.004
0.0045
-80
-60
-40
-20
0
20
40
60
80
100 1 k 10 k 100 k 1 M
Frequency (Hz)
Z
OUT
Magnitude (W)
Z
OUT
Phase (°)
Magnitude
Target
Phase
CPU
2-Phase
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
TYPICAL CHARACTERISTICS
2-Phase Configuration, 53-A CPU (continued)
Figure 31. Dynamic VID: SetVID-Slow/SetVID-Slow Figure 32. Dynamic VID: SetVID-Fast/SetVID-Fast
www.ti.com
Figure 33. Dynamic VID: SetVID-Decay/SetVID-Fast, Figure 34. Dynamic VID: SetVID-Decay/SetVID-Fast,
Figure 35. PS Change PS0 to PS1 Toggle Figure 36. Output Impedance
18 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated
I
= 2 A I
LOAD
LOAD
= 0.5 A

1.050
1.100
1.125
1.150
1.175
1.200
1.250
Output Voltage (V)
0 5 10
Output Current (A)
20 25 30 35
V
VID
= 1.23 V
VIN= 9 V
VIN= 20 V
Nominal
Specified Maximum
Specified Minimum
15
1.225
1.075
0.500
0.525
0.575
0.600
0.625
0 2 4 18 20
Output Current (A)
Output Voltage (V)
6 8 10 14 1612
0.550
0.650
VIN= 9 V
VIN= 20 V
Nominal
Specified Maximum
Specified Minimum
V
VID
= 0.6 V
75
80
85
90
95
Efficiency (%)
70
VIN= 9 V
VIN= 20 V
V
VID
= 1.23 V
0 5 10
Output Current (A)
20 25 30 3515
55
70
75
85
90
95
Efficiency (%)
60
0 2 4 18 20
Output Current (A)
6 8 10 14 1612
VIN= 9 V
VIN= 20 V
V
VID
= 0.6 V
80
65
0
100
150
200
350
400
Frequency (Hz)
50
0 5 10
Output Current (A)
3515 25 3020
250
300
RGF= 30 kW
PS0, V
VID
= 1.23 V, VIN= 9 V
PS0, V
VID
= 1.23 V, VIN= 20 V
PS1, V
VID
= 0.06 V, VIN= 20 V
PS1, V
VID
= 0.06 V, VIN= 9 V
www.ti.com
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
TYPICAL CHARACTERISTICS
1-Phase Configuration, 33-A GPU
Figure 37. Output Voltage Vs. Load Current in PS0 Figure 38. Output Voltage Vs. Load Current in PS1
Figure 39. Efficiency Vs. Load Current in PS0 Figure 40. Efficiency Vs. Load Current in PS1
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 19
Figure 41. Frequency Vs. Load Current Figure 42. Switching Ripple in PS0

TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
TYPICAL CHARACTERISTICS
1-Phase Configuration, 33-A GPU (continued)
Figure 43. Start-Up and PGOOD Figure 44. Soft-Stop
(TPS51640A and TPS59640 Only)
www.ti.com
Figure 45. Load Transient, VIN= 9 V, Load Step = 20 A Figure 46. Load Transient, VIN= 20 V, Load Step = 20 A
Figure 47. Load Insertion, VIN= 9V, Load Step = 20 A Figure 48. Load Release, VIN= 20 V, Load Step = 20 A
20 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated

100 1000 10000 100000 1000000
−50
−40
−30
−20
−10
0
10
20
30
40
50
−225
−180
−135
−90
−45
0
45
90
135
180
225
Frequency (Hz)
Magnitude (dB)
Phase (°)
Gain
Phase
GPU
V
OUT
= 1.05 V
I
OUT
~ 10 A
www.ti.com
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
TYPICAL CHARACTERISTICS
1-Phase Configuration, 33-A GPU (continued)
Figure 49. Dynamic VID: SetVID-Slow/SetVID-Slow Figure 50. Dynamic VID: SetVID-Fast/SetVID-Fast
Figure 51. Dynamic VID: SetVID-Decay/SetVID-Fast, Figure 52. Dynamic VID: SetVID-Decay/SetVID-Fast,
I
= 0.5 A I
LOAD
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 21
Figure 53. Bode Plot
LOAD
= 2 A

11CVFB
12CGFB
4CCSP1
5CCSN1
6CCSP2
7CCSN2
14VREF
16VR_ON
17CPGOOD
18VCLK
19ALERT
20VDIO
21VR_HOT
23GPGOOD
22
SLEWA
3
CIMON
30
GIMON
1
CTHE RM32GTHERM
2
COCP-I
31
GOCP-I
13
CF-IMAX
24
GF-IMAX
26
GVFB
25
GGFB29GCSP
28
GCSN
27
GCOM P
+
+
DAC0
+
+
Acs
Acs
8CCSP3
9CCSN3
+
Acs
?
Current
Sharing
Circuitry
Gm
A
10
CCOMP
Ramp
Comparator
SVID
Interface
DAC0
and
DAC1
OSR/USR
Phase
Manager
CPWM1
CPWM2
CPWM3
+
+
On-Time
1
On-Time
2
On-Time
3
CF-IMAX
ISHARE
CLK
CLK1
CLK2
CLK3
CPU
Logic Protection
and Status Circuitry
GPU
Logic Protection
and Status Circuitry
COCP
CPx
CVD
ISUM
IS1
IS2
IS3
+
+
Gm
A
GVD
DAC1
+
Acs
+
+
CLK
Smart
Driver
Smart
Driver
Error
Amplifier
Integrator
Error
Amplifier
Integrator
On-Time
GOCP
GPx
GVD
1GFx
Ramp
Comparator
43 V5DRV
46 CBST1
47 CDH1
42 PGND
39
CBST2
38 CDH2
45 CSW1
44 CDL1
40 CSW2
41 CDL2
36 CPWM3
35 CSKIP
33 GSKIP
34 GPWM
VBAT
GF-IMAX
DAC0
DAC1
IS3
IS2
IS1
+
+
+
Pad
GND15V3R348V5
GPWM
USR
OSR
UDG-11271
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
TYPICAL CHARACTERISTICS (TPS59641 ONLY)
www.ti.com
Figure 54. Startup to V
Voltage and ALERT Figure 55. Startup to V
BOOT
Voltage and CPGOOD,
BOOT
GPGOOD
FUNCTIONAL BLOCK DIAGRAM
22 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated

CPU_VSNS
CCSP3
CCSP2
CCSN1
CCSP1
COCP-I
GFX_VSNS
GSCP
GIMON
V5
GIMON
VREF
GPGOOD
VDIO
ALERT
CPGOOD
VR_ON
GPWM
VCLK
VREF
VREF
COCP
-I
VBAT
CSKIP
SVID:ALERT
SVID:CLK
VIN
CCSP
2
CCSN
1
3R3V
VREF
VR_HOT
VCLK
VREF
CPU_GSNS
VREF
CCSN2
CCSN3
GSKIP
CIMON
VDIO
CPWM
3
CIMON
VREF
SVID:DATA
VIN
CCSN
2
CCSP
1
GFX_GSNS
GSCN
GOCP-I
V5DRV
+
ALERT
V5DRV
V5
I_TDC
= 21.5A
I_TDC
= 52A
GOCP
-I
VREF
VREF
To CPU SVID
Loadline
= 1.9mohm
Frequency setting
= 300
kHz
I_cc_max
= 33A
I_CC_max
= 94A
I_DYN
_max
= 66A
2
1
VCC_CORE
VREF
VCCIO
VCCIO
GFX
: GT2
CPU
: QC
Min. Over Current Limit
= 112
A
2
1
Loadline
= 3.9mohm
Frequency setting
= 385
kHz
I_DYNAMIC
= 20.2A
Note
:
VR_HOT
, CPGOOD and GPGOOD are open drain outputs
.
If used
, they would need pull
-up resistors
.
Min. Over Current Limit
= 37A
www.ti.com
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
APPLICATION INFORMATION
Figure 56. Application for 3-Phase CPU, 1-Phase GPU with Inductor DCR Current Sense (Controller with
2 internal drivers, 1st and 2nd Phase CPU Power)
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 23

GSKIP
GPWM V5
GCSN
VIN
+
GCSP
21
VGFX_CORE
CSKIP
CPWM3 V5
VCC_CORE
GCSN
VIN
21
GCSP
+
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
Figure 57. Application for 3-Phase CPU, 1-Phase GPU with Inductor DCR Current Sense continued
(External driver, 3rd Phase CPU Power)
www.ti.com
Figure 58. Application for 3-Phase CPU, 1-Phase GPU with Inductor DCR Current Sense continued
(External driver, GPU Power)
24 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated

CPU_VSNS
CCSP2
CCSN1
CCSP1
COCP-I
V5
VREF
VDIO
ALERT
CPGOOD
VR_ON
VCLK
VREF
COCP
-I
VBAT
SVID:ALERT
SVID:CLK
VIN
CCSP
2
CCSN
1
3R3V
VREF
VR_HOT
VCLK
VREF
3R3V
CPU_GSNS
VREF
CCSN2
3R3V
CIMON
VDIO
CIMON
VREF
SVID:DATA
VIN
CCSN
2
CCSP
1
V5DRV
+
ALERT
V5DRV
V5
I_TDC
= 36A
To CPU SVID
Loadline
= 1.9mohm
Frequency setting
= 300
kHz
I_CC_max
= 53A
I_DYN
_max
= 43A
2
1
VCC_CORE
VREF
VCCIO
VCCIO
CPU
: SV
Note
:
VR_HOT and CPGOOD are open drain outputs
.
If used
, they would need pull
-up resistors
.
Min. Over Current Limit
= 65A
2
1
GFX
: External
. GPU Not used
Note
:
R19 = 39k (OSR
/USR
)
if 3x470
uF bulk is used
www.ti.com
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
Figure 59. Application for Inductor DCR Current Sense Application Diagram for 2-Phase CPU and GPU
Disabled
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 25

TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
Table 1. Key External Component Recommendations
FUNCTION MANUFACTURER COMPONENT NUMBER
High-side MOSFET Texas Instruments CSD17302Q5A
Low-side MOSFET Texas Instruments CSD17303Q5
Powerblock MOSFET Texas Instruments CSD87350Q5D
Panasonic ETQP4LR36AFC
NEC-Tokin
Inductors
TOKO
ALPS GLMDR3601A
Panasonic EEFLXOD471R4
Bulk Output Capacitors Sanyo 2TPLF470M4E
KEMET T528Z477M2R5AT
Murata GRM21BR60J106KE19L
Ceramic Output Capacitors
NTC Thermistors
Sense Resistors
Murata GRM21BR60J226ME39L
Panasonic ECJ2FB0J106K
Panasonic ECJ2FB0J226K
Murata
Panasonic ERTJ1VS104F, ERTJ0ES104F
Vishay WSK0612L7500FEA
Stackpole CSSK0612FTL750
www.ti.com
MPCH1040LR36,
MPCG1040LR36
FDUE1040J-H-R36,
FCUL1040xxR36
NCP15WF104F03RC,
NCP18WF104F03RC
DETAILED DESCRIPTION
Functional Overview
The TPS51640A, TPS59640, and TPS59641 are a DCAP+™ mode adaptive on-time controllers.
The output voltage is set using a DAC that outputs a reference in accordance with the 8-bit VID code defined in
Intel IMVP-7 PWM Specification document. In adaptive on-time converters, the controller varies the on-time as a
function of input and output voltage to maintain a nearly constant frequency during steady-state conditions. In
conventional voltage-mode constant on-time converters, each cycle begins when the output voltage crosses to a
fixed reference level. However, in these devices, the cycle begins when the current feedback reaches an error
voltage level which corresponds to the amplified difference between the DAC voltage and the feedback output
voltage. In the case of two-phase or three-phase operation, the current feedback from all the phases is summed
up at the output of the internal current-sense amplifiers.
This approach has two advantages:
• The amplifier DC gain sets an accurate linear load-line; this is required for CPU core applications.
• The error voltage input to the PWM comparator is filtered to improve the noise performance.
In addition, the difference of the DAC-to-output voltage and the current feedback goes through an integrator to
give a more or less linear load-line even at light loads where the inductor current is in discontinuous conduction
mode (DCM).
In a steady-state condition, the phases of the TPS51640A, TPS59640, and TPS59641 switch 180°
phase-displacement for two-phase mode and 120° phase-displacement for three-phase mode. The phase
displacement is maintained both by the architecture (which does not allow both high-side gate drives to be on in
any condition except transients) and the current ripple (which forces the pulses to be spaced equally). The
controller forces current sharing adjusting the on-time of each phase. Current balancing requires no user
intervention, compensation, or extra components.
26 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated

TPS51640A, TPS59640, TPS59641
www.ti.com
User Selections
After the 5-V and the 3.3-V power are applied to the controller, the controller must be enabled by the VR_ON
signal going high to the VCCIO logic level. At this time, the following information is latched and cannot be
changed anytime during operation. The ELECTRICAL CHARACTERISTICS table defines the values of each of
the selections.
• Operating Frequency. The resistor from CF-IMAX pin to GND sets the frequency of the CPU channel. The
resistor from GF-IMAX to GND sets the frequency of the GPU channel. See the ELECTRICAL
CHARACTERISTICS table for the resistor settings corresponding to each frequency selection. It is to be
noted that the operating frequency is a quasi-fixed frequency in the sense that the ON time is fixed based on
the input voltage (at the VBAT pin) and output voltage (set by VID). The OFF time varies based on various
factors such as load and power-stage components.
• Maximum Current Limit (I
voltage on the CF-IMAX pin. The I
the GF-IMAX pin.
• Overcurrent Protection (OCP) Level. The resistor from COCP-I to GND sets the OCP level of the CPU
channel. The resistor from GOCP-I to GND sets the OCP level of the GPU channel.
• Current Monitor (IMON) Gain and Voltage. The resistor from CIMON to COCP-I sets the CIMON gain and
the CIMON voltage for the CPU channel. The resistor from GIMON to GOCP-I sets the GIMON gain and the
GIMON voltage for the GPU channel.
• Overshoot Reduction (OSR) and Undershoot Reduction (USR) Levels. The resistor from the CSKIP pin
to GND sets the OSR and USR for the CPU channel. The resistor from the GSKIP pin to GND sets the OSR
and USR level for GPU channel. The OSR can be disabled for CPU and/or GPU by setting a voltage of
approximately 200 mV on the corresponding xSKIP pin. This is accomplished by connecting a resistor from
VREF to the xSKIP pin.
• Slew Rate. The SetVID-Fast slew rate is set by the voltage on the SLEWA pin. The rate is the same for both
the CPU and GPU channels. The SetVID-Slow is ¼ of the SetVID-Fast rate.
) Information. The I
CC(max)
CC(max)
CC(max)
information of the CPU, which can be set by the
information of the GPU channel, which can be set by the voltage on
SLUSAQ2 –JANUARY 2012
CPU
(Active Phases)
GPU
(Active Phases)
Table 2. Key Selections Summary
SELECTION
RESISTANCE (kΩ)
20 Lowest Lowest
24
30
39
56
75
100
150 Highest Highest
(1) See ELECTRICAL CHARACTERISTICS table for complete settings and values.
FREQUENCY OCP OSR / USR
Rising Rising Rising
(1)
Table 3. Active Channels and Phases
CCSP1 CCSN1 CCSP2 CCSN2 CCSP3 CCSN3 GCSP CGSN
3 CS CS CS CS CS CS n/a n/a
2 CS CS CS CS 3.3 V GND n/a n/a
1 CS CS 3.3 V GND GND GND n/a n/a
OFF 3.3 V GND GND GND GND GND n/a n/a
1 n/a n/a n/a n/a n/a n/a CS CS
OFF n/a n/a n/a n/a n/a n/a 3.3 V GND
Least overshoot,
least undershoot
Maximum overshoot,
maximum undershoot
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 27

SW_CLK
V
COMP
Phase 1
Phase 2
Phase 3
I
SUM
V
CORE
Time
UDG-11031
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
PWM Operation
Referring to the FUNCTIONAL BLOCK DIAGRAM and Figure 60, in continuous conduction mode, the converter
operates as shown in Figure 60.
www.ti.com
Figure 60. D-CAP+ Mode Basic Waveforms
Starting with the condition that the hig-side FETs are off and the low-side FETs are on, the summed current
feedback (I
) is higher than the error amplifier output (V
SUM
COMP
). I
falls until it reaches the V
SUM
COMP
level, which
contains a component of the output ripple voltage. The PWM comparator senses where the two waveform values
cross and triggers the on-time generator. This generates the internal SW_CLK. Each SW_CLK corresponds to
one switching ON pulse for one phase.
During single-phase operation, every SW_CLK generates a switching pulse on the same phase. Also, I
SUM
voltage corresponds to just a single-phase inductor current.
During multi-phase operation, the SW_CLK is distributed to each of the phases in a cycle. Using the summed
inductor current and then cyclically distributing the ON-pulses to each phase automatically yields the required
interleaving of 360/N, where N is the number of phases.
Current Sensing
The TPS51640A, TPS59640 and TPS59641 provide independent channels of current feedback for every phase.
This increases the system accuracy and reduces the dependence of circuit performance on layout compared to
an externally summed architecture. The current sensing topology can be Inductor DCR Sensing, which yields the
best efficiency, or Resistor Current Sensing, which provides the most accuracy across wide temperature range.
DCR sensing can be optimized by using a NTC thermistor to reduce the variation of current sense with
temperature.
The pins CCSP1, CCSN1, CCSP2, CCSN2 and CCSP3, CCSN3 are used for the three phases of the CPU
channel. The pins GCSP and GCSN are used for the single-phase GPU channel.
28 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated

V
DROOP
V
VID
V
DROOP
= RLLx I
CC
Slope of Loadline R
LL
I
CC
UDG-11032
( )
´ ´
= ´ =
´
CS CC
CS eff
DROOP LL CC
DROOP M
R A I
V R I
R G
www.ti.com
Setting the Load-line (DROOP)
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
Figure 61. Load Line
where
• ACS is the gain of the current sense amplifier
• R
is the effective current sense resistance, whether a sense resistor or inductor DCR is used
CS(eff)
• ICCis the load current
• R
is the value of resistor from the DROOP pin to VREF
DROOP
• GMis the gain of the droop amplifier (1)
Load Transients
When there is a sudden load increase, the output voltage immediately drops. This is reflected as a rising voltage
on the COMP pin. This forces the PWM pulses to come in sooner and more frequent which causes the inductor
current to rapidly increase. As the inductor current reaches the new load current, a steady-state operating
condition is reached and the PWM switching resumes the steady-state frequency.
When there is a sudden load release, the output voltage rises. This is reflected as a falling voltage on the COMP
pin. This delays the PWM pulses until the inductor current reaches the new load current level. At that point,
switching resumes and steady-state switching continues.
For simplicity, neither Figure 62, nor Figure 63 show the ripple on the Output V
nor the COMP waveform.
CORE
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 29

LOAD
V
CORE
I
SUM
COMP
SW_CLK
Phase 1
Phase 2
Phase 3
UDG-11034
LOAD
V
CORE
I
SUM
COMP
SW_CLK
Phase 1
Phase 2
Phase 3
Time
UDG-11033
UDG-11035
+ 10.8 V –
12 V
L
– 1.2 V +
1.2 V
C
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
Figure 62. Operating Waveforms During Load Figure 63. needs a title
Transient
Overshoot Reduction (OSR)
In low duty-cycle synchronous buck converters, an overshoot condition results from the output inductor having a
too little voltage (V
In Figure 64, a single phase converter is shown for simplicity. In an ideal converter, with typical input voltage of
12 V and 1.2-V output, the inductor has 10.8 V (12 V – 1.2 V) to respond to a transient load increase, but only
1.2 V with which to respond once the load releases.
) with which to respond to a transient load release.
CORE
www.ti.com
Figure 64. Synchronous Converter
When the overshoot reduction feature is enabled, the output voltage increases beyond a value that corresponds
to a voltage difference between the ISUM voltage and the COMP voltage, exceeding the specified OSR voltage
specified in the ELECTRICAL CHARACTERISTICS. At that instant, the low-side drivers are turned OFF. When
the low-side driver is turned OFF, the energy in the inductor is partially dissipated by the body diodes. As the
overshoot reduces, the low-side drivers are turned ON again.
Figure 65 shows the overshoot without OSR. Figure 66 shows the overshoot with OSR. The overshoot reduces
by approximately 23 mV. This shows that reduced output capacitance can be used while continuing to meet the
specification. Note the low-side driver turning OFF briefly during the overshoot.
30 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated
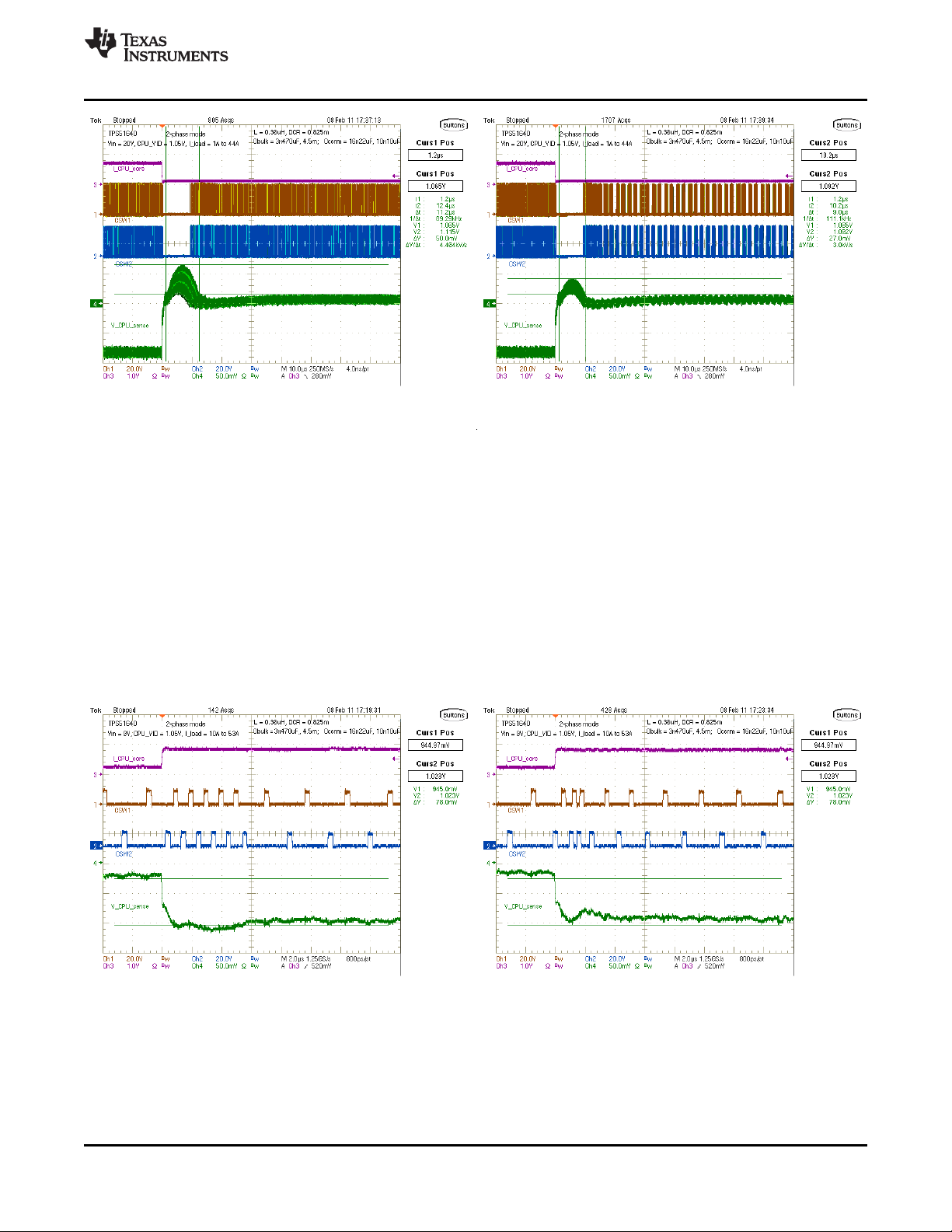
TPS51640A, TPS59640, TPS59641
www.ti.com
Figure 65. 43-A Load Transient Release Without Figure 66. 43-A Load Transient Release With OSR
OSR Enabled. Enabled
Undershoot Reduction (USR)
When the transient load increase becomes quite large, it becomes difficult to meet the energy demanded by the
load especially at lower input voltages. Then it is necessary to quickly increase the energy tin the inductors
during the transient load increase. This is achieved in these devices by enabling pulse overlapping. In order to
maintain the interleaving of the multi-phase configuration and yet be able to have pulse-overlapping during
load-insertion, the undershoot reduction (USR) mode is entered only when necessary. This mode is entered
when the difference between COMP voltage and ISUM voltage exceeds the USR voltage level specified in the
ELECTRICAL CHARACTERISTICS table.
Figure 67 shows the performance with undershoot reduction. Figure 68 shows the performance without
undershoot reduction and that it is possible to eliminate undershoot by enabling the undershoot reduction. This
allows reduced output capacitance to be used and still meet the specification.
When the transient condition is over, the interleaving of the phases is resumed. For Figure 67, note the
overlapping pulses for Phase 1 and Phase 2 with USR enabled.
SLUSAQ2 –JANUARY 2012
Figure 67. Performance for a 43-A Load Transient Figure 68. Performance for a 43-A Load Transient
Release Without USR Enabled Release With USR Enabled
A single-phase GPU operates in a similar way, but instead of pulse-overlap in multi-phase CPU, there is pulse
stretching to provide the needs of the transient load increase when USR is enabled.
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 31

+
37VBAT
4CCSP1
5CCSN1
Current
Amplifier
5 ms
Filter
I
AVG
+
V
DAC
R
T(on)
C
T(on)
PWM1
+
K x (I1-I
AVG
)
+
7CCSP2
6CCSN2
Current
Amplifier
5 ms
Filter
I
AVG
+
V
DAC
R
T(on)
C
T(on)
PWM2
+
K x (I2-I
AVG
)
Averaging
Circuit
I
AVG
+
8CCSP3
9CCSN3
Current
Amplifier
5 ms
Filter
I
AVG
+
V
DAC
R
T(on)
C
T(on)
PWM3
+
K x (I3-I
AVG
)
UDG-11036
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
AutoBalance™ Current Sharing
The basic mechanism for current sharing is to sense the average phase current, then adjust the pulse width of
each phase to equalize the current in each phase. (See Figure 69.)
The PWM comparator (not shown) starts a pulse when the feedback voltage meets the reference. The VBAT
voltage charges C
reference, normally the DAC voltage (V
The circuit operates in the following fashion, using Figure 69 as the block diagram. First assume that the 5-µs
averaged value of I1 = I2 = I3. In this case, the PWM modulator terminates at V
is delivered to the system. If instead, I1 > I
Phase 1 is shortened, reducing the current in Phase 1 to compensate. If I1 < I
produced, again compensating on a pulse-by-pulse basis.
t(ON)
through R
. The pulse is terminated when the voltage at C
t(ON)
DAC
).
, then an offset is subtracted from V
AVG
matches the t
t(ON)
, and the normal pulse width
DAC
, and the pulse width for
DAC
, then a longer pulse is
AVG
www.ti.com
(ON)
Figure 69. Schematic Representation of AutoBalance Current Sharing
Dynamic VID and Power-State Changes
In IMVP-7, there are 3 basic types of VID changes:
• SetVID-Fast
• SetVID-Slow
• SetVID-Decay
SetVID-Fast change and a SetVID-Slow change automatically puts the power state in PS0. A SetVID-Decay
change automatically puts the power state in PS2.
32 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated

TPS51640A, TPS59640, TPS59641
www.ti.com
The CPU operates in the maximum phase mode when it is in PS0. This means when the CPU channel of the
controller is configured as 3-phase, all 3 phases are active in PS0. When configured in 2-phase mode, the two
phases are active in PS0. But in PS1, PS2 and PS3, the operation is in single-phase mode. Additionally, the
CPU channel in PS0 mode operates in forced continuous conduction mode (FCCM). But in PS1, PS2 and PS3,
the CPU channel operates in diode emulation (DE) mode for additional power savings and higher efficiency.
The single-phase GPU section always operates in diode emulation (DE) mode in all PS states.
The slew rate for a SetVID-Fast is the slew rate set at the SLEWA pin. This slew rate is defined in the
ELECTRICAL CHARACTERISTICS table. The SetVID-Slow is ¼ of the SetVID-Fast slew rate. On a
SetVID-Decay the output voltage decays by the rate of the load current or 1/8 of the slew rate whichever is
slower.
Additionally, on a SetVID-Fast change for a VID-up transition, the gain of the gMamplifier is increased to speed
up the response of the output voltage to meet the Intel timing requirement. So, it is possible to observe an
overshoot at the output voltage on a VID-up transition. This overshoot is allowed by the Intel specification.
XXX
Table 4. VID (continued)
Table 4. VID
VID VID VID VID VID VID VID VID
7 6 5 4 3 2 1 0
0 0 0 0 0 0 0 0 00 0.000
0 0 0 0 0 0 0 1 01 0.250
0 0 0 0 0 0 1 0 02 0.255
0 0 0 0 0 0 1 1 03 0.260
0 0 0 0 0 1 0 0 04 0.265
0 0 0 0 0 1 0 1 05 0.270
0 0 0 0 0 1 1 0 06 0.275
0 0 0 0 0 1 1 1 07 0.280
0 0 0 0 1 0 0 0 08 0.285
0 0 0 0 1 0 0 1 09 0.290
0 0 0 0 1 0 1 0 0A 0.295
0 0 0 0 1 0 1 1 0B 0.300
0 0 0 0 1 1 0 0 0C 0.305
0 0 0 0 1 1 0 1 0D 0.310
0 0 0 0 1 1 1 0 0E 0.315
0 0 0 0 1 1 1 1 0F 0.320
0 0 0 1 0 0 0 0 10 0.325
0 0 0 1 0 0 0 1 11 0.330
0 0 0 1 0 0 1 0 12 0.335
0 0 0 1 0 0 1 1 13 0.340
0 0 0 1 0 1 0 0 14 0.345
0 0 0 1 0 1 0 1 15 0.350
0 0 0 1 0 1 1 0 16 0.355
0 0 0 1 0 1 1 1 17 0.360
0 0 0 1 1 0 0 0 18 0.365
0 0 0 1 1 0 0 1 19 0.370
0 0 0 1 1 0 1 0 1A 0.375
0 0 0 1 1 0 1 1 1B 0.380
0 0 0 1 1 1 0 0 1C 0.385
0 0 0 1 1 1 0 1 1D 0.390
0 0 0 1 1 1 1 0 1E 0.395
0 0 0 1 1 1 1 1 1F 0.400
HEX V
DAC
0 0 1 0 0 0 0 0 20 0.405
0 0 1 0 0 0 0 1 21 0.410
0 0 1 0 0 0 1 0 22 0.415
0 0 1 0 0 0 1 1 23 0.420
0 0 1 0 0 1 0 0 24 0.425
0 0 1 0 0 1 0 1 25 0.430
0 0 1 0 0 1 1 0 26 0.435
0 0 1 0 0 1 1 1 27 0.440
0 0 1 0 1 0 0 0 28 0.445
0 0 1 0 1 0 0 1 29 0.450
0 0 1 0 1 0 1 0 2A 0.455
0 0 1 0 1 0 1 1 2B 0.460
0 0 1 0 1 1 0 0 2C 0.465
0 0 1 0 1 1 0 1 2D 0.470
0 0 1 0 1 1 1 0 2E 0.475
0 0 1 0 1 1 1 1 2F 0.480
0 0 1 1 0 0 0 0 30 0.485
0 0 1 1 0 0 0 1 31 0.490
0 0 1 1 0 0 1 0 32 0.495
0 0 1 1 0 0 1 1 33 0.500
0 0 1 1 0 1 0 0 34 0.505
0 0 1 1 0 1 0 1 35 0.510
0 0 1 1 0 1 1 0 36 0.515
0 0 1 1 0 1 1 1 37 0.520
0 0 1 1 1 0 0 0 38 0.525
0 0 1 1 1 0 0 1 39 0.530
0 0 1 1 1 0 1 0 3A 0.535
0 0 1 1 1 0 1 1 3B 0.540
0 0 1 1 1 1 0 0 3C 0.545
0 0 1 1 1 1 0 1 3D 0.550
0 0 1 1 1 1 1 0 3E 0.555
0 0 1 1 1 1 1 1 3F 0.560
0 1 0 0 0 0 0 0 40 0.565
0 1 0 0 0 0 0 1 41 0.570
0 1 0 0 0 0 1 0 42 0.575
SLUSAQ2 –JANUARY 2012
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 33

TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
Table 4. VID (continued) Table 4. VID (continued)
0 1 0 0 0 0 1 1 43 0.580 0 1 1 1 0 0 1 1 73 0.820
0 1 0 0 0 1 0 0 44 0.585 0 1 1 1 0 1 0 0 74 0.825
0 1 0 0 0 1 0 1 45 0.590 0 1 1 1 0 1 0 1 75 0.830
0 1 0 0 0 1 1 0 46 0.595 0 1 1 1 0 1 1 0 76 0.835
0 1 0 0 0 1 1 1 47 0.600 0 1 1 1 0 1 1 1 77 0.840
0 1 0 0 1 0 0 0 48 0.605 0 1 1 1 1 0 0 0 78 0.845
0 1 0 0 1 0 0 1 49 0.610 0 1 1 1 1 0 0 1 79 0.850
0 1 0 0 1 0 1 0 4A 0.615 0 1 1 1 1 0 1 0 7A 0.855
0 1 0 0 1 0 1 1 4B 0.620 0 1 1 1 1 0 1 1 7B 0.860
0 1 0 0 1 1 0 0 4C 0.625 0 1 1 1 1 1 0 0 7C 0.865
0 1 0 0 1 1 0 1 4D 0.630 0 1 1 1 1 1 0 1 7D 0.870
0 1 0 0 1 1 1 0 4E 0.635 0 1 1 1 1 1 1 0 7E 0.875
0 1 0 0 1 1 1 1 4F 0.640 0 1 1 1 1 1 1 1 7F 0.880
0 1 0 1 0 0 0 0 50 0.645 1 0 0 0 0 0 0 0 80 0.885
0 1 0 1 0 0 0 1 51 0.650 1 0 0 0 0 0 0 1 81 0.890
0 1 0 1 0 0 1 0 52 0.655 1 0 0 0 0 0 1 0 82 0.895
0 1 0 1 0 0 1 1 53 0.660 1 0 0 0 0 0 1 1 83 0.900
0 1 0 1 0 1 0 0 54 0.665 1 0 0 0 0 1 0 0 84 0.905
0 1 0 1 0 1 0 1 55 0.670 1 0 0 0 0 1 0 1 85 0.910
0 1 0 1 0 1 1 0 56 0.675 1 0 0 0 0 1 1 0 86 0.915
0 1 0 1 0 1 1 1 57 0.680 1 0 0 0 0 1 1 1 87 0.920
0 1 0 1 1 0 0 0 58 0.685 1 0 0 0 1 0 0 0 88 0.925
0 1 0 1 1 0 0 1 59 0.690 1 0 0 0 1 0 0 1 89 0.930
0 1 0 1 1 0 1 0 5A 0.695 1 0 0 0 1 0 1 0 8A 0.935
0 1 0 1 1 0 1 1 5B 0.700 1 0 0 0 1 0 1 1 8B 0.940
0 1 0 1 1 1 0 0 5C 0.705 1 0 0 0 1 1 0 0 8C 0.945
0 1 0 1 1 1 0 1 5D 0.710 1 0 0 0 1 1 0 1 8D 0.950
0 1 0 1 1 1 1 0 5E 0.715 1 0 0 0 1 1 1 0 8E 0.955
0 1 0 1 1 1 1 1 5F 0.720 1 0 0 0 1 1 1 1 8F 0.960
0 1 1 0 0 0 0 0 60 0.725 1 0 0 1 0 0 0 0 90 0.965
0 1 1 0 0 0 0 1 61 0.730 1 0 0 1 0 0 0 1 91 0.970
0 1 1 0 0 0 1 0 62 0.735 1 0 0 1 0 0 1 0 92 0.975
0 1 1 0 0 0 1 1 63 0.740 1 0 0 1 0 0 1 1 93 0.980
0 1 1 0 0 1 0 0 64 0.745 1 0 0 1 0 1 0 0 94 0.985
0 1 1 0 0 1 0 1 65 0.750 1 0 0 1 0 1 0 1 95 0.990
0 1 1 0 0 1 1 0 66 0.755 1 0 0 1 0 1 1 0 96 0.995
0 1 1 0 0 1 1 1 67 0.760 1 0 0 1 0 1 1 1 97 1.000
0 1 1 0 1 0 0 0 68 0.765 1 0 0 1 1 0 0 0 98 1.005
0 1 1 0 1 0 0 1 69 0.770 1 0 0 1 1 0 0 1 99 1.010
0 1 1 0 1 0 1 0 6A 0.775 1 0 0 1 1 0 1 0 9A 1.015
0 1 1 0 1 0 1 1 6B 0.780 1 0 0 1 1 0 1 1 9B 1.020
0 1 1 0 1 1 0 0 6C 0.785 1 0 0 1 1 1 0 0 9C 1.025
0 1 1 0 1 1 0 1 6D 0.790 1 0 0 1 1 1 0 1 9D 1.030
0 1 1 0 1 1 1 0 6E 0.795 1 0 0 1 1 1 1 0 9E 1.035
0 1 1 0 1 1 1 1 6F 0.800 1 0 0 1 1 1 1 1 9F 1.040
0 1 1 1 0 0 0 0 70 0.805 1 0 1 0 0 0 0 0 A0 1.045
0 1 1 1 0 0 0 1 71 0.810 1 0 1 0 0 0 0 1 A1 1.050
0 1 1 1 0 0 1 0 72 0.815 1 0 1 0 0 0 1 0 A2 1.055
www.ti.com
34 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated

TPS51640A, TPS59640, TPS59641
www.ti.com
Table 4. VID (continued) Table 4. VID (continued)
1 0 1 0 0 0 1 1 A3 1.060 1 1 0 1 0 0 1 1 D3 1.300
1 0 1 0 0 1 0 0 A4 1.065 1 1 0 1 0 1 0 0 D4 1.305
1 0 1 0 0 1 0 1 A5 1.070 1 1 0 1 0 1 0 1 D5 1.310
1 0 1 0 0 1 1 0 A6 1.075 1 1 0 1 0 1 1 0 D6 1.315
1 0 1 0 0 1 1 1 A7 1.080 1 1 0 1 0 1 1 1 D7 1.320
1 0 1 0 1 0 0 0 A8 1.085 1 1 0 1 1 0 0 0 D8 1.325
1 0 1 0 1 0 0 1 A9 1.090 1 1 0 1 1 0 0 1 D9 1.330
1 0 1 0 1 0 1 0 AA 1.095 1 1 0 1 1 0 1 0 DA 1.335
1 0 1 0 1 0 1 1 AB 1.100 1 1 0 1 1 0 1 1 DB 1.340
1 0 1 0 1 1 0 0 AC 1.105 1 1 0 1 1 1 0 0 DC 1.345
1 0 1 0 1 1 0 1 AD 1.110 1 1 0 1 1 1 0 1 DD 1.350
1 0 1 0 1 1 1 0 AE 1.115 1 1 0 1 1 1 1 0 DE 1.355
1 0 1 0 1 1 1 1 AF 1.120 1 1 0 1 1 1 1 1 DF 1.360
1 0 1 1 0 0 0 0 B0 1.125 1 1 1 0 0 0 0 0 E0 1.365
1 0 1 1 0 0 0 1 B1 1.130 1 1 1 0 0 0 0 1 E1 1.370
1 0 1 1 0 0 1 0 B2 1.135 1 1 1 0 0 0 1 0 E2 1.375
1 0 1 1 0 0 1 1 B3 1.140 1 1 1 0 0 0 1 1 E3 1.380
1 0 1 1 0 1 0 0 B4 1.145 1 1 1 0 0 1 0 0 E4 1.385
1 0 1 1 0 1 0 1 B5 1.150 1 1 1 0 0 1 0 1 E5 1.390
1 0 1 1 0 1 1 0 B6 1.155 1 1 1 0 0 1 1 0 E6 1.395
1 0 1 1 0 1 1 1 B7 1.160 1 1 1 0 0 1 1 1 E7 1.400
1 0 1 1 1 0 0 0 B8 1.165 1 1 1 0 1 0 0 0 E8 1.405
1 0 1 1 1 0 0 1 B9 1.170 1 1 1 0 1 0 0 1 E9 1.410
1 0 1 1 1 0 1 0 BA 1.175 1 1 1 0 1 0 1 0 EA 1.415
1 0 1 1 1 0 1 1 BB 1.180 1 1 1 0 1 0 1 1 EB 1.420
1 0 1 1 1 1 0 0 BC 1.185 1 1 1 0 1 1 0 0 EC 1.425
1 0 1 1 1 1 0 1 BD 1.190 1 1 1 0 1 1 0 1 ED 1.430
1 0 1 1 1 1 1 0 BE 1.195 1 1 1 0 1 1 1 0 EE 1.435
1 0 1 1 1 1 1 1 BF 1.200 1 1 1 0 1 1 1 1 EF 1.440
1 0 0 0 0 0 0 C0 1.205 1 1 1 1 0 0 0 0 F0 1.445
1 1 0 0 0 0 0 1 C1 1.210 1 1 1 1 0 0 0 1 F1 1.450
1 1 0 0 0 0 1 0 C2 1.215 1 1 1 1 0 0 1 0 F2 1.455
1 1 0 0 0 0 1 1 C3 1.220 1 1 1 1 0 0 1 1 F3 1.460
1 1 0 0 0 1 0 0 C4 1.225 1 1 1 1 0 1 0 0 F4 1.465
1 1 0 0 0 1 0 1 C5 1.230 1 1 1 1 0 1 0 1 F5 1.470
1 1 0 0 0 1 1 0 C6 1.235 1 1 1 1 0 1 1 0 F6 1.475
1 1 0 0 0 1 1 1 C7 1.240 1 1 1 1 0 1 1 1 F7 1.480
1 1 0 0 1 0 0 0 C8 1.245 1 1 1 1 1 0 0 0 F8 1.485
1 1 0 0 1 0 0 1 C9 1.250 1 1 1 1 1 0 0 1 F9 1.490
1 1 0 0 1 0 1 0 CA 1.255 1 1 1 1 1 0 1 0 FA 1.495
1 1 0 0 1 0 1 1 CB 1.260 1 1 1 1 1 0 1 1 FB 1.500
1 1 0 0 1 1 0 0 CC 1.265 1 1 1 1 1 1 0 0 FC 1.505
1 1 0 0 1 1 0 1 CD 1.270 1 1 1 1 1 1 0 1 FD 1.510
1 1 0 0 1 1 1 0 CE 1.275 1 1 1 1 1 1 1 0 FE 1.515
1 1 0 0 1 1 1 1 CF 1.280 1 1 1 1 1 1 1 1 FF 1.520
1 1 0 1 0 0 0 0 D0 1.285
1 1 0 1 0 0 0 1 D1 1.290
1 1 0 1 0 0 1 0 D2 1.295
SLUSAQ2 –JANUARY 2012
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 35

TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
Gate Driver
The TPS51640A, TPS59640, and TPS59641 incorporate two internal strong, high-performance gate drives with
adaptive cross-conduction protection. These drivers are for two phases in the CPU channel. The third phase of
the CPU and the single-phase GPU channel require external drivers.
The internal driver in these devices uses the state of the CDLx and CSWx pins to be sure the high-side or
low-side FET is OFF before turning the other ON. Fast logic and high drive currents (up to 8-A typical) quickly
charge and discharge FET gates to minimize dead-time to increase efficiency. The high-side gate driver also
includes an integrated boost FET instead of merely a diode to increase the effective drive voltage for higher
efficiency. A zero-crossing detection logic, which detects the switch-node voltage before turning OFF the low-side
FET, is used to minimize losses during DCM operation.
Input Under Voltage Protection (5V and 3.3V)
The TPS51640A, TPS59640, and TPS59641 continuously monitor the voltage on the V5DRV, V5 and V3R3 pin
to be sure the value is high enough to bias the device properly and provide sufficient gate drive potential to
maintain high efficiency. The converter starts with approximately 4.4-V and has a nominal 200 mV of hysteresis.
The input (V
approximately 3 x V
) does not have a UVLO function, so the circuit operates with power inputs as low as
BAT
CORE
.
Power Good (CPGOOD and GPGOOD)
These devices have two open-drain power good pins that follow the requirements for IMVP-7. CPGOOD is used
for the CPU channel output voltage and GPGOOD is used for the GPU channel output voltage. Both of these
signals are active high. The upper and the lower limits for the output voltage for xPGOOD active are:
• Upper: V
• Lower : V
xPGOOD goes inactive (low) as soon as the VR_ON pin is pulled low or an undervoltage condition on V5 or
V3R3 is detected. The xPGOOD signals are masked during DAC transitions to prevent false triggering during
voltage slewing.
DAC
DAC
+220 mV
–315 mV
www.ti.com
Output Under Voltage Protection
Output undervoltage protection works in conjunction with the current protection described below. If V
below the low PGOOD threshold, then the drivers are turned OFF until VR_ON is cycled.
CORE
drops
Overcurrent Protection
The TPS51640A, TPS59640, and TPS59641 use a valley current limiting scheme, so the ripple current must be
considered. The DC current value at OCP is the OCP limit value plus half of the ripple current. Current limiting
occurs on a phase-by-phase and pulse-by-pulse basis. If the voltage between xCSPx and xCSNx is above the
OCP value, the converter delays the next ON pulse until it drops below the OCP limit. For inductor current
sensing circuits, the voltage between xCSPx and xCSNx is the inductor DCR value multiplied by the resistor
divider which is part of the NTC compensation network. As a result, a wide range of OCP values can be obtained
by changing the resistor divider value. In general, use the highest OCP setting possible with the least attenuation
in the resistor divider to provide as much signal to the device as possible. This provides the best performance for
all parameters related to current feedback.
In OCP mode, the voltage drops until the UVP limit is reached. Then, the converter sets the xPGOOD to inactive,
and the drivers are turned OFF. The converter remains in this state until the device is reset by the VR_ON.
Overvoltage Protection
An OVP condition is detected when V
sets xPGOOD inactive, and turns ON the drive for the Low-side FET. The converter remains in this state until the
device is reset by cycling VR_ON. However, because of the dynamic nature of IMVP-7 systems, the +220 mV
OVP threshold is blanked much of the time. In order to provide protection to the processor 100% of the time,
there is a second OVP level fixed at 1.7 V which is always active. If the fixed OVP condition is detected, the
PGOOD are forced inactive and the low-side FETs are tuned ON. The converter remains in this state until
VR_ON is cycled.
is more than 220 mV greater than V
CORE
. In this case, the converter
DAC
36 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated

æ ö
= ´ + ´
ç ÷
è ø
å
CIMON
CIMON CS CCSn
COCP
R
V A 1 V
R
æ ö
= ´ + ´
ç ÷
è ø
GIMON
GIMON CS GCS
GOCP
R
V A 1 V
R
TPS51640A, TPS59640, TPS59641
www.ti.com
Over Temperature Protection
Two types of thermal protection are provided in these devices:
• VR_HOT
• Thermal Shutdown
VR_HOT
The VR_HOT signal is an Intel-defined open-drain signal that is used to protect the V
VR_HOT, place an NTC thermistor at the hottest area of the CPU channel and connect it from CTHERM pin to
GND. Similarly for GPU channel, place the NTC thermistor at the hottest area and connect it from GTHERM to
GND. Also, connect a resistor from VREF to GTHERM and CTHERM. As the temperature increases, the
xTHERM voltage drops below the THERM threshold, VR_HOT is activated. A small capacitor may be connected
to the xTHERM pins for high frequency noise filtering.
lists the thermal zone register bits based on the xTHERM pin voltage.
Table 5. Thermal Zone Register Bits
OUTPUT IS VR_HOT xTHERM THRESHOLD VOLTAGE FOR THE TEMPERATURE
SHUTDOWN ASSERTED ZONE REGISTER BITS TO BE ASSERTED.
b7 b6 b5 b4 b3 b2 b1 b0
410 mV 455 mV 458 mV 523 mV 559 mV 598 mV 638 mV 680 mV 783 mV
Thermal Shutdown
When the xTHERM pin voltage continues to drop even after VR_HOT is asserted, the drivers turn OFF and the
output is shutdown. These devices also have an internal temperature sensor. When the temperature reaches a
nominal 155°C, the device shuts down until the temperature cools approximately 20°C. Then, the circuit can be
re-started by cycling VR_ON.
SVID ALERT ASSERTED
SLUSAQ2 –JANUARY 2012
power chain. To use
CORE
Current Monitor, IMON
The TPS51640A, TPS59640, and TPS59641 includes a current monitor (IMON) function each for CPU channel
and GPU channel. The current monitor puts out an analog voltage proportional to the output current on the
xIMON pins.
The current monitor function is tied with the OCP selection resistors. The R
from COCP-I and GOCP-I respectively to select the OCP levels. R
set the CIMON gain. Similarly, R
is the resistor from GIMON to GOCP-I to set the GIMON gain.
GIMON
is the resistor from CIMON to COCP-I to
CIMON
The calculation for the CIMON voltage is shown in Equation 2. The calculation for the GIMON voltages is shown
in Equation 3.
where
• ACSis given in the ELECTRICAL CHARACTERISTICS table
• Σ V
• V
is the sum of the DC voltages at the inputs to the CPU channel current sense amplifiers
CCS
is the DC voltage at the GPU channel current sense amplifier (3)
GCS
For the current monitor function to be stable, connect a 220-nF capacitor from CIMON and GIMON to GND.
COCP
and R
are resistors to GND
GOCP
(2)
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 37

( )
æ ö
= ´
ç ÷
+
è ø
CF
CC max CPU
CF CIMAX
R
I 255
R R
( )
æ ö
= ´
ç ÷
+
è ø
GF
CC max GPU
GF GIMAX
R
I 255
R R
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
www.ti.com
Setting the Maximum Processor Current (I
CC(max)
)
The TPS51640 controller allows the user to set the maximum processor current with the multi-function pins
CF-IMAX and GF-IMAX. The voltage on the CF-IMAX and GF-IMAX at start-up sets the maximum processor
current (I
) for CPU and GPU respectively.
CC(max)
The RCFand RGFare resistors to GND from CF-IMAX and GF-IMAX respectively to select the frequency setting.
R
Equation 4 describes the setting the I
I
is the resistor from VREF to CF-IMAX and R
CIMAX
CC(max)
for the GPU channel.
CC(max)
is the resistor from VREF to GF-IMAX.
GIMAX
for the CPU channel and Equation 5 describes the setting the
(4)
(5)
Internal Driver Bypass Mode
The controller can be configured to operate in internal driver bypass mode for use with DrMOS type devices and
driver-integrated PowerBlock devices. Consider the following items when designing for operation in this mode.
• Tie CSW2, CSW1 to V5DRV.
• CDL1 becomes the PWM input to the Phase 1 DrMOS device (or external driver)
• CDL2 becomes the PWM input to the Phase 2 DrMOS device (or external driver)
• CSKIP pin becomes the input to the SKIP/FCCM pin of the DrMOS device (or external driver)
• The Phase-2 and Phase-3 DrMOS device (or the external driver) must be configured in FCCM mode.
38 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated

-
= ´ =
P P
94 A
I 0.3 9.4 A
3
TPS51640A, TPS59640, TPS59641
www.ti.com
DESIGN STEPS
The design procedure using the TPS51640A, TPS59640, and TPS59641 is very simple . An excel-based
component value calculation tool is available. Contact your local TI representative to get a copy of the
spreadsheet.
The procedure is explained here below with the following design example:
SLUSAQ2 –JANUARY 2012
CPU V
No. of phases 3 1
Input Voltage Range 9 V to 20 V 9 V to 20 V
VHFM 0.9 V 1.23 V
I
CC(max)
IDYN-MAX 66 A 20 A
ICC-TDC 52 21.5
Load-line 1.9 mV/A 3.9 mV/A
Fast Slew Rate (minimum) 10 mV/µs 10 mV/µs
SPECIFICATIONS GFX V
CORE
94 A 33 A
SPECIFICATIONS
CORE
Step One: Select Switching Frequency.
The CPU channel switching frequency is selected by a resistor from CF-IMAX to GND (RCF) and GPU channel
switching frequency is selected by a resistor from GF-IMAX to GND (RGF). The frequency is an approximate
frequency and is expected to vary based on load and input voltage.
SELECTION RESISTANCE (kΩ)
20 250 275
24 300 330
30 350 385
39 400 440
56 450 495
75 500 550
100 550 605
150 600 660
CPU CHANNEL FREQUENCY GPU CHANNEL FREQUENCY
(kHz) (kHz)
For this design, the switching frequency for CPU channel is chosen to be 300 kHz and GPU channel is chosen to
be 385 kHz. Therefore,
RCF= 24 kΩ and RGF= 30 kΩ
Step Two: Set I
The I
CC(max)
resistors from VREF to CF-IMAX (R
CC(max)
is set by the voltage on CF-IMAX for CPU channel and GF-IMAX for GPU channel. This is set by the
) and from VREF to GF-IMAX (R
CMAX
GMAX
)
From Equation 4 and Equation 5,
R
= 42.2 kΩ and R
CMAX
GMAX
= 200 kΩ.
Step Three: Set the Slew Rate
The slew rate is set by the voltage setting on SLEWA pin. For a minimum 10 mV/ms slew rate, the voltage on the
SLEWA pin must be: 0.8 V. This is set by a resistor divider on SLEWA pin from VREF. The low-side resistor is
chosen to be 150 kΩ and the high-side resistor is calculated as 169 kΩ.
Step Four: Determine inductor value and choose inductor.
Smaller values of inductor have better transient performance but higher ripple and lower efficiency. Higher values
have the opposite characteristics. It is common practice to limit the ripple current to 20% to 40% of the maximum
current per phase. In this case, we use 30%:
(6)
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 39

-
´
=
P P
V dT
L
I
( )
-
æ ö
ç ÷
= + ´ =
ç ÷
è ø
CC max
P P
SAT
PHASE
I
I
I 1.2 43.2 A
N 2
I
UDG-11039
CSN
L
R
DCR
R
NTC
R
PAR
C
SENSE
R
SERIES
R
SEQU
CSP
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
In this equation,
V = V
An inductance value of 0.36 µH is chosen as this is a commonly used inductor for V
IN-MAX
– V
= 19. 1V; dT = V
HFM
HFM
/ (F x V
) = 150 ns; Ipp= 9.4A. So, calculating, L = 0.304 µH.
IN-MAX
CORE
application. The
inductor must not saturate during peak loading conditions.
The factor of 1.2 allows for current sensing and current limiting tolerances; the factor of 1.25 is the Intel 25%
momentary OCP requirement.
The chosen inductor should have the following characteristics:
• An inductance to current curve ratio equal to 1 (or as close possible). Inductor DCR sensing is based on the
idea L/DCR is approximately a constant through the current range of interest.
• Either high saturation or soft saturation.
• Low DCR for improved efficiency, but at least 0.7 mΩ for proper signal levels.
• DCR tolerance as low as possible for load-line accuracy.
For this application, a 0.36-µH, 0.825-mΩ inductor is chosen. Because the per phase current for GPU is same as
CPU, the same inductor for GPU channel is chosen.
Step Five: Determine current sensing method.
The TPS51640A, TPS59640, and TPS59641 support both resistor sensing and inductor DCR sensing. Inductor
DCR sensing is chosen. For resistor sensing, substitute the resistor value (0.75 mΩ recommended for a 3-phase
94-A application) for RCS in the subsequent equations and skip Step Four.
Step Six: Design the thermal compensation network and selection of OCP.
In most designs, NTC thermistors are used to compensate thermal variations in the resistance of the inductor
winding. This winding is generally copper, and so has a resistance coefficient of 3900 PPM/°C. NTC thermistors,
on the other hand, have very non-linear characteristics and need two or three resistors to linearize them over the
range of interest. The typical DCR circuit is shown in Figure 70.
www.ti.com
(7)
(8)
In this circuit, the voltage across the C
40 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated
Figure 70. Typical DCR Sensing Circuit
exactly equals the voltage across R
SENSE
when Equation 9 is true.
DCR

= ´
SENSE EQ
DCR
L
C R
R
=
+
P _ N
EQ
SEQU P _ N
R
R
R R
( )
´ +
=
+ +
PAR NTC SERIES
P _ N
PAR NTC SERIES
R R R
R
R R R
( )
= ´
+
P _ N
DCR
CS eff
SEQU P _ N
R
R R
R R
( )
´
W ´
= = = W
´ W´
CS
CS eff
GDROOP
LL M
R A
0.66m 12
R 4.12 k
R G 3.9m 0.497mS
( )
´
W ´
= = = W
´ W ´
CS
CS eff
CDROOP
LL M
R A
0.66m 12
R 8.45k
R G 1.9m 0.497 mS
TPS51640A, TPS59640, TPS59641
www.ti.com
where
C
SENSE
• REQis the series/parallel combination of R
should be a capacitor type which is stable over temperature. Use X7R or better dielectric (C0G
SEQU
, R
NTC
, R
SERIES
and R
PAR
preferred).
Since calculating these values by hand is difficult, TI has a spreadsheet using the Excel Solver function available
to calculate them. Contact a local TI representative to get a copy of the spreadsheet.
In this design, the following values are input to the spreadsheet:
• L = 0.36 µH
• R
• Load Line, R
= 0.825 mΩ
DCR
IMVP
= -1.9 mΩ
• Minimum overcurrent limit = 112 A
• Thermistor R25= 100 kΩ and "B" value = 4250 kΩ
The spreadsheet then calculates the OCP (overcurrent protection) setting and the values of R
R
PAR
, and C
. In this case, the OCP setting is the resistor value selection of 56 kΩ from COCP-I to GND and
SENSE
GOCP-I to GND. The nearest standard component values are:
• R
• R
• R
• C
SEQU
SERIES
PAR
SENSE
= 17.8 kΩ;
= 28.7 kΩ;
= 162 kΩ
=33 nF
Note the effective divider ratio for the inductor DCR. The effective current sense resistance (R
Equation 12.
SLUSAQ2 –JANUARY 2012
(9)
(10)
(11)
, R
SEQU
CS(eff)
SERIES
) is shown in
,
where
R
CS(eff)
• R
is 0.66 mΩ.
is the series/parallel combination of R
P_N
Step Seven: Set current monitor (IMON) setting resistor.
After the OCP selection resistor is selected in Step 6, the IMON is set by the resistor from CIMON to COCP-I
(R
R
) and GIMON to GOCP-I (R
CIMON
= 71.5 kΩ and R
CIMON
GIMON
GIMON
= 309 kΩ
). Based on Equation 2 and Equation 3,
Step Eight: Set the load line.
The load-line for CPU channel is set by the resistor, R
channel is set by the resistor, R
GDROOP
from the GCOMP pin to VREF. Using the Equation 1, the droop setting
resistors are calculated in Equation 14 and Equation 15.
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 41
NTC
, R
SERIES
CDROOP
and R
. (12)
PAR
from CCOMP to VREF. The load-line for GPU
(13)
(14)

( )
´
W ´
= = = W
´ W´
CS
CS eff
GDROOP
LL M
R A
0.66m 12
R 4.12 k
R G 3.9m 0.497mS
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
Step Nine: Programming the CTHERM and GTHERM pins.
The CTHERM and GTHERM pins should be set so that the resistor divider voltage would be greater than 458
mV at normal operation. For VR_HOT to be asserted, the xTHERM pin voltage should fall below 458 mV. The
NTC resistor from xTHERM to GND is chosen as 100 kΩ with a B of 4250K. With this, for a VR_HOT assertion
temperature of 105°C, the resistor from xTHERM to VREF can be calculated as 15.4 kΩ.
Step Ten: Determine the output capacitor configuration.
For the output capacitor, the Intel Power Delivery guideline gives the output capacitor recommendations. Using
these devices, it is possible to meet the load transient with lower capacitance by using the OSR and USR
feature. Eight settings are available and this selection has to be tuned based on transient measurement.
www.ti.com
(15)
42 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated

GND
1
2
3
4
5
6
7
8
9
10
11
12
13
20
19
18
17
16
14VREF
V3R3
VCLK
VDIO
ALERT
VR_HOT
CTHERM
GTHERM
CIMON
GIMON
CGFB
CVFB
GPGOOD
CPGOOD
15
24
30
29
28
27
26
25
21
22
23
GGFB
GVFB
COCP-I
CF-IMAX
CCOMP
VBAT
CCSN3
CCSP3
CCSN2
V5
CSKIP
GPWM
GSKIP
GOCP-I
VR_ON
CPWM3
31
40
39
38
37
36
35
34
33
32
44
43
42
41
48
47
46
45
SLEWA
CCSP2
CCSN1
CCSP1
GCOMP
GCSP
GCSN
CDH2
CBST2
CSW2
CDL2
V5DRV
PGND
CDL1
CSW1
CBST1
CDH1
GF-IMAX
Drivers Analog Digital Power
TPS51640A, TPS59640, TPS59641
www.ti.com
PCB LAYOUT GUIDELINE
SCHEMATIC REVIEW
Because the voltage and current feedback signals are fully differential it is a good idea to double check their
polarity.
1. CCSP1/CCSN1
2. CCSP2/CCSN2
3. CCSP2/CCSN2
4. GCSP/GCSN
5. VCCSENSE to CVFB/VSSSENSE to CGFB (for CPU)
6. VCCGTSENSE to GVFB/VSSGTSENSE to GGFB (for GPU)
Also, note the order of the current sense inputs on Pin 4 to Pin 9 as the second phase has a reverse order.
CAUTION
Separate noisy driver interface lines from sensitive analog interface lines: (This is the
MOST CRITICAL LAYOUT RULE)
The TPS51640A, TPS59640, and TPS59641 make this as easy as possible. The pin-out arrangement for
TPS51640A is shown in Figure 71. The driver outputs clearly separated from the sensitive analog and digital
circuitry. The driver has a separate PGND and this should be directly connected to the decoupling capacitor that
connects from V5DRV to PGND. The thermal pad of the package is the analog ground for these devices and
should NOT be connected directly to PGND (Pin 42).
SLUSAQ2 –JANUARY 2012
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 43
Figure 71. TPS51640A Pin-out Arranged by Pin Function

UDG-11038
V
CORE
LL
x
Noisy Quiet
Inductor
Outline
R
SEQ
Thermistor
R
SERIES
CSNx
CSPx
TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
Given the physical layout of most systems, the current feedback (xCSPx, xCSNx) may have to pass near the
power chain. Clean current feedback is required for good load-line, current sharing, and current limiting
performance of these devices, so please take the following precautions:
• Make a Kelvin connection to the pads of the resistor or inductor used for current sensing. See Figure 72 for a
layout example.
• Run the current feedback signals as a differential pair to the device.
• Run the lines in a quiet layer. Isolate them from noisy signals by a voltage or ground plane.
• Put the compensation capacitor for DCR sensing (C
) as close to the CS pins as possible.
SENSE
• Place any noise filtering capacitors directly underneath these devices and connect to the CS pins with the
shortest trace length possible.
www.ti.com
Figure 72. Make Kelvin Connections to the Inductor for DCR Sensing
44 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated
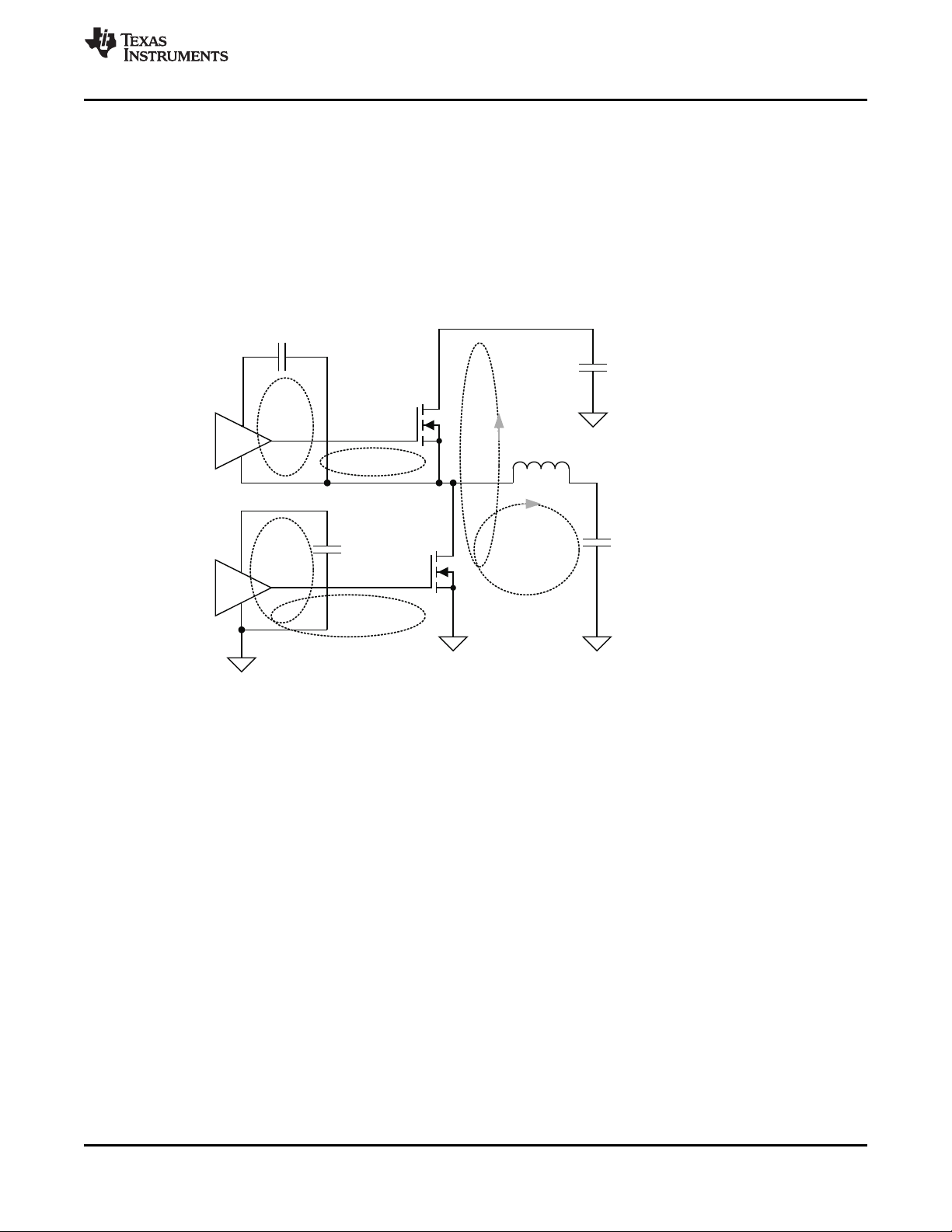
UDG-11040
C
B
4b
C
IN
L
C
OUT
4a
DRVH
Q1
1
2
3b
3a
DRVL
Q2
C
D
LL
PGND
V
CORE
V
BAT
TPS51640A, TPS59640, TPS59641
www.ti.com
Minimize High-Current Loops
Figure 73 shows the primary current loops in each phase, numbered in order of importance.
The most important loop to minimize the area of is Loop 1, the path from the input capacitor through the high and
low side FETs, and back to the capacitor through ground.
Loop 2 is from the inductor through the output capacitor, ground and Q2. The layout of the low side gate drive
(Loops 3a and 3b) is important. The guidelines for gate drive layout are:
• Make the low-side gate drive as short as possible (1 inch or less preferred).
• Make the DRVL width to length ratio of 1:10, wider (1:5) if possible.
• If changing layers is necessary, use at least two vias.
SLUSAQ2 –JANUARY 2012
Figure 73. Major Current Loops to Minimize
Power Chain Symmetry
The TPS51640A, TPS59640, and TPS59641 do not require special care in the layout of the power chain
components. This is because independent isolated current feedback is provided. If it is possible to lay out the
phases in a symmetrical manner, then please do so. The rule is: the current feedback from each phase needs to
be clean of noise and have the same effective current sense resistance.
Place analog components as close to the device as possible.
Place components close to the device in the following order.
1. CS pin noise filtering components
2. xCOMP pin compensation components
3. Decoupling capacitors for VREF, V3R3, V5
4. xTHERM filter capacitor
5. xIMON capacitor, resistors
6. xF-IMAX resistors
Copyright © 2012, Texas Instruments Incorporated Submit Documentation Feedback 45

TPS51640A, TPS59640, TPS59641
SLUSAQ2 –JANUARY 2012
Grounding Recommendations
These devices have separate analog and power grounds, and a thermal pad. The normal procedure for
connecting these is:
• The thermal pad is the analog ground.
• DO NOT connect the thermal pad to Pin 42 directly as Pin 42 is the PGND which is the Gate driver
Ground.
• Pin 42 (PGND) must be connected directly to the gate driver decoupling capacitor ground terminal.
• Tie the thermal pad (analog ground pin) to a ground island with at least 4 small vias or one large via.
• All the analog components can connect to this analog ground island.
• The analog ground can be connected to any quiet spot on the system ground. A quiet area is defined as a
area where no power supply switching currents are likely to flow. This applies to both the V
CORE
other regulators. Use a single point connection from analog ground to the system ground
• Make sure the low-side FET source connection and the decoupling capacitors have plenty of vias.
Decoupling Recommendations
• Decouple V5IN to PGND with at least a 2.2 µF ceramic capacitor.
• Decouple V5 and V3R3 with 1 µF to AGND with leads as short as possible,
• VREF to AGND with 0.33 µF, with short leads also
Conductor Widths
• Follow Intel guidelines with respect to the voltage feedback and logic interface connection requirements.
• Maximize the widths of power, ground and drive signal connections.
• For conductors in the power path, be sure there is adequate trace width for the amount of current flowing
through the traces.
• Make sure there are sufficient vias for connections between layers. A good guideline is to use a minimum of 1
via per ampere of current.
www.ti.com
regulator and
46 Submit Documentation Feedback Copyright © 2012, Texas Instruments Incorporated
PACKAGE OPTION ADDENDUM
www.ti.com
13-Jun-2012
PACKAGING INFORMATION
Orderable Device
TPS51640ARSLR ACTIVE VQFN RSL 48 2500 Green (RoHS
TPS51640ARSLT ACTIVE VQFN RSL 48 250 Green (RoHS
TPS59640RSLR ACTIVE VQFN RSL 48 2500 Green (RoHS
TPS59640RSLT ACTIVE VQFN RSL 48 250 Green (RoHS
TPS59641RSLR ACTIVE VQFN RSL 48 2500 Green (RoHS
TPS59641RSLT ACTIVE VQFN RSL 48 250 Green (RoHS
(1)
The marketing status values are defined as follows:
ACTIVE: Product device recommended for new designs.
LIFEBUY: TI has announced that the device will be discontinued, and a lifetime-buy period is in effect.
NRND: Not recommended for new designs. Device is in production to support existing customers, but TI does not recommend using this part in a new design.
PREVIEW: Device has been announced but is not in production. Samples may or may not be available.
OBSOLETE: TI has discontinued the production of the device.
Status
(1)
Package Type Package
Drawing
Pins Package Qty
Eco Plan
& no Sb/Br)
& no Sb/Br)
& no Sb/Br)
& no Sb/Br)
& no Sb/Br)
& no Sb/Br)
(2)
Lead/
Ball Finish
CU NIPDAUAGLevel-2-260C-1 YEAR
CU NIPDAUAGLevel-2-260C-1 YEAR
CU NIPDAUAGLevel-2-260C-1 YEAR
CU NIPDAUAGLevel-2-260C-1 YEAR
CU NIPDAUAGLevel-2-260C-1 YEAR
CU NIPDAUAGLevel-2-260C-1 YEAR
MSL Peak Temp
(3)
Samples
(Requires Login)
(2)
Eco Plan - The planned eco-friendly classification: Pb-Free (RoHS), Pb-Free (RoHS Exempt), or Green (RoHS & no Sb/Br) - please check http://www.ti.com/productcontent for the latest availability
information and additional product content details.
TBD: The Pb-Free/Green conversion plan has not been defined.
Pb-Free (RoHS): TI's terms "Lead-Free" or "Pb-Free" mean semiconductor products that are compatible with the current RoHS requirements for all 6 substances, including the requirement that
lead not exceed 0.1% by weight in homogeneous materials. Where designed to be soldered at high temperatures, TI Pb-Free products are suitable for use in specified lead-free processes.
Pb-Free (RoHS Exempt): This component has a RoHS exemption for either 1) lead-based flip-chip solder bumps used between the die and package, or 2) lead-based die adhesive used between
the die and leadframe. The component is otherwise considered Pb-Free (RoHS compatible) as defined above.
Green (RoHS & no Sb/Br): TI defines "Green" to mean Pb-Free (RoHS compatible), and free of Bromine (Br) and Antimony (Sb) based flame retardants (Br or Sb do not exceed 0.1% by weight
in homogeneous material)
(3)
MSL, Peak Temp. -- The Moisture Sensitivity Level rating according to the JEDEC industry standard classifications, and peak solder temperature.
Important Information and Disclaimer:The information provided on this page represents TI's knowledge and belief as of the date that it is provided. TI bases its knowledge and belief on information
provided by third parties, and makes no representation or warranty as to the accuracy of such information. Efforts are underway to better integrate information from third parties. TI has taken and
continues to take reasonable steps to provide representative and accurate information but may not have conducted destructive testing or chemical analysis on incoming materials and chemicals.
TI and TI suppliers consider certain information to be proprietary, and thus CAS numbers and other limited information may not be available for release.
Addendum-Page 1

PACKAGE OPTION ADDENDUM
www.ti.com
In no event shall TI's liability arising out of such information exceed the total purchase price of the TI part(s) at issue in this document sold by TI to Customer on an annual basis.
13-Jun-2012
Addendum-Page 2

PACKAGE MATERIALS INFORMATION
www.ti.com 14-Jul-2012
TAPE AND REEL INFORMATION
*All dimensions are nominal
Device Package
TPS51640ARSLR VQFN RSL 48 2500 330.0 16.4 6.3 6.3 1.5 12.0 16.0 Q2
TPS51640ARSLT VQFN RSL 48 250 180.0 16.4 6.3 6.3 1.5 12.0 16.0 Q2
TPS59640RSLR VQFN RSL 48 2500 330.0 16.4 6.3 6.3 1.5 12.0 16.0 Q2
TPS59640RSLT VQFN RSL 48 250 180.0 16.4 6.3 6.3 1.5 12.0 16.0 Q2
TPS59641RSLR VQFN RSL 48 2500 330.0 16.4 6.3 6.3 1.5 12.0 16.0 Q2
TPS59641RSLT VQFN RSL 48 250 180.0 16.4 6.3 6.3 1.5 12.0 16.0 Q2
Type
Package
Drawing
Pins SPQ Reel
Diameter
(mm)
Reel
Width
W1 (mm)
A0
(mm)B0(mm)K0(mm)P1(mm)W(mm)
Pin1
Quadrant
Pack Materials-Page 1

PACKAGE MATERIALS INFORMATION
www.ti.com 14-Jul-2012
*All dimensions are nominal
Device Package Type Package Drawing Pins SPQ Length (mm) Width (mm) Height (mm)
TPS51640ARSLR VQFN RSL 48 2500 367.0 367.0 38.0
TPS51640ARSLT VQFN RSL 48 250 210.0 185.0 35.0
TPS59640RSLR VQFN RSL 48 2500 367.0 367.0 38.0
TPS59640RSLT VQFN RSL 48 250 210.0 185.0 35.0
TPS59641RSLR VQFN RSL 48 2500 367.0 367.0 38.0
TPS59641RSLT VQFN RSL 48 250 210.0 185.0 35.0
Pack Materials-Page 2
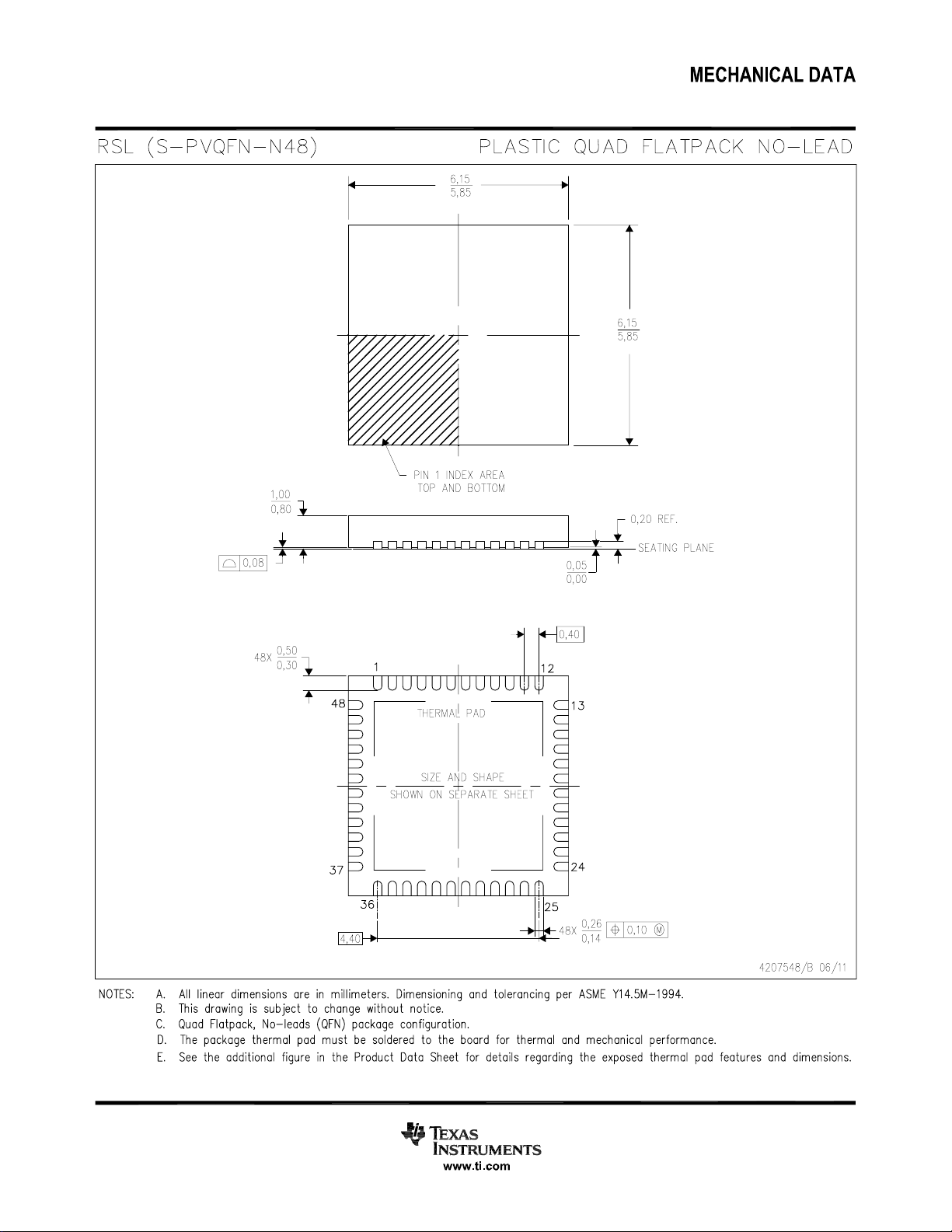



IMPORTANT NOTICE
Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, enhancements, improvements and other
changes to its semiconductor products and services per JESD46C and to discontinue any product or service per JESD48B. Buyers should
obtain the latest relevant information before placing orders and should verify that such information is current and complete. All
semiconductor products (also referred to herein as “components”) are sold subject to TI’s terms and conditions of sale supplied at the time
of order acknowledgment.
TI warrants performance of its components to the specifications applicable at the time of sale, in accordance with the warranty in TI’s terms
and conditions of sale of semiconductor products. Testing and other quality control techniques are used to the extent TI deems necessary
to support this warranty. Except where mandated by applicable law, testing of all parameters of each component is not necessarily
performed.
TI assumes no liability for applications assistance or the design of Buyers’ products. Buyers are responsible for their products and
applications using TI components. To minimize the risks associated with Buyers’ products and applications, Buyers should provide
adequate design and operating safeguards.
TI does not warrant or represent that any license, either express or implied, is granted under any patent right, copyright, mask work right, or
other intellectual property right relating to any combination, machine, or process in which TI components or services are used. Information
published by TI regarding third-party products or services does not constitute a license to use such products or services or a warranty or
endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual property of the
third party, or a license from TI under the patents or other intellectual property of TI.
Reproduction of significant portions of TI information in TI data books or data sheets is permissible only if reproduction is without alteration
and is accompanied by all associated warranties, conditions, limitations, and notices. TI is not responsible or liable for such altered
documentation. Information of third parties may be subject to additional restrictions.
Resale of TI components or services with statements different from or beyond the parameters stated by TI for that component or service
voids all express and any implied warranties for the associated TI component or service and is an unfair and deceptive business practice.
TI is not responsible or liable for any such statements.
Buyer acknowledges and agrees that it is solely responsible for compliance with all legal, regulatory and safety-related requirements
concerning its products, and any use of TI components in its applications, notwithstanding any applications-related information or support
that may be provided by TI. Buyer represents and agrees that it has all the necessary expertise to create and implement safeguards which
anticipate dangerous consequences of failures, monitor failures and their consequences, lessen the likelihood of failures that might cause
harm and take appropriate remedial actions. Buyer will fully indemnify TI and its representatives against any damages arising out of the use
of any TI components in safety-critical applications.
In some cases, TI components may be promoted specifically to facilitate safety-related applications. With such components, TI’s goal is to
help enable customers to design and create their own end-product solutions that meet applicable functional safety standards and
requirements. Nonetheless, such components are subject to these terms.
No TI components are authorized for use in FDA Class III (or similar life-critical medical equipment) unless authorized officers of the parties
have executed a special agreement specifically governing such use.
Only those TI components which TI has specifically designated as military grade or “enhanced plastic” are designed and intended for use in
military/aerospace applications or environments. Buyer acknowledges and agrees that any military or aerospace use of TI components
which have not been so designated is solely at the Buyer's risk, and that Buyer is solely responsible for compliance with all legal and
regulatory requirements in connection with such use.
TI has specifically designated certain components which meet ISO/TS16949 requirements, mainly for automotive use. Components which
have not been so designated are neither designed nor intended for automotive use; and TI will not be responsible for any failure of such
components to meet such requirements.
Products Applications
Audio www.ti.com/audio Automotive and Transportation www.ti.com/automotive
Amplifiers amplifier.ti.com Communications and Telecom www.ti.com/communications
Data Converters dataconverter.ti.com Computers and Peripherals www.ti.com/computers
DLP® Products www.dlp.com Consumer Electronics www.ti.com/consumer-apps
DSP dsp.ti.com Energy and Lighting www.ti.com/energy
Clocks and Timers www.ti.com/clocks Industrial www.ti.com/industrial
Interface interface.ti.com Medical www.ti.com/medical
Logic logic.ti.com Security www.ti.com/security
Power Mgmt power.ti.com Space, Avionics and Defense www.ti.com/space-avionics-defense
Microcontrollers microcontroller.ti.com Video and Imaging www.ti.com/video
RFID www.ti-rfid.com
OMAP Mobile Processors www.ti.com/omap TI E2E Community e2e.ti.com
Wireless Connectivity www.ti.com/wirelessconnectivity
Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265
Copyright © 2012, Texas Instruments Incorporated

 Loading...
Loading...