

Page 1
查询TP13064A供应商
D
Complete PCM Codec and Filtering
Systems Include:
– Transmit High-Pass and Low-Pass
Filtering
– Receive Low-Pass Filter With (sin x)/x
Correction
– Active RC Noise Filters
– µ-Law or A-Law Compatible Coder and
Decoder
– Internal Precision Voltage Reference
– Serial I/O Interface
– Internal Autozero Circuitry
description
The TP3064A, TP3067A, TP13064A, and
TP13067A are comprised of a single-chip PCM
codec (pulse-code-modulated encoder and decoder) and PCM line filter. These devices provide
all the functions required to interface a full-duplex
(2-wire) voice telephone circuit with a TDM
(time-division-multiplexed) system. These devices are pin-for-pin compatible with the National
Semiconductor TP3064A and TP3067A, respectively. Primary applications include:
• Line interface for digital transmission and
switching of T1 carrier, PABX, and central
office telephone systems
• Subscriber line concentrators
• Digital-encryption systems
• Digital voice-band data-storage systems
• Digital signal processing
TP3064A, TP3067A, TP13064A, TP13067A
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
D
µ-Law – TP3064B and TP13064B
D
A-Law – TP3067B and TP13067B
D
±5-V Operation
D
Low Operating Power...70 mW Typ
D
Power-Down Standby Mode...3 mW Typ
D
Automatic Power Down
D
TTL- or CMOS-Compatible Digital Interface
D
Maximizes Line Interface Card Circuit
Density
D
Improved Versions of National
Semiconductor TP3064, TP3067, TP3064-X,
TP3067-X
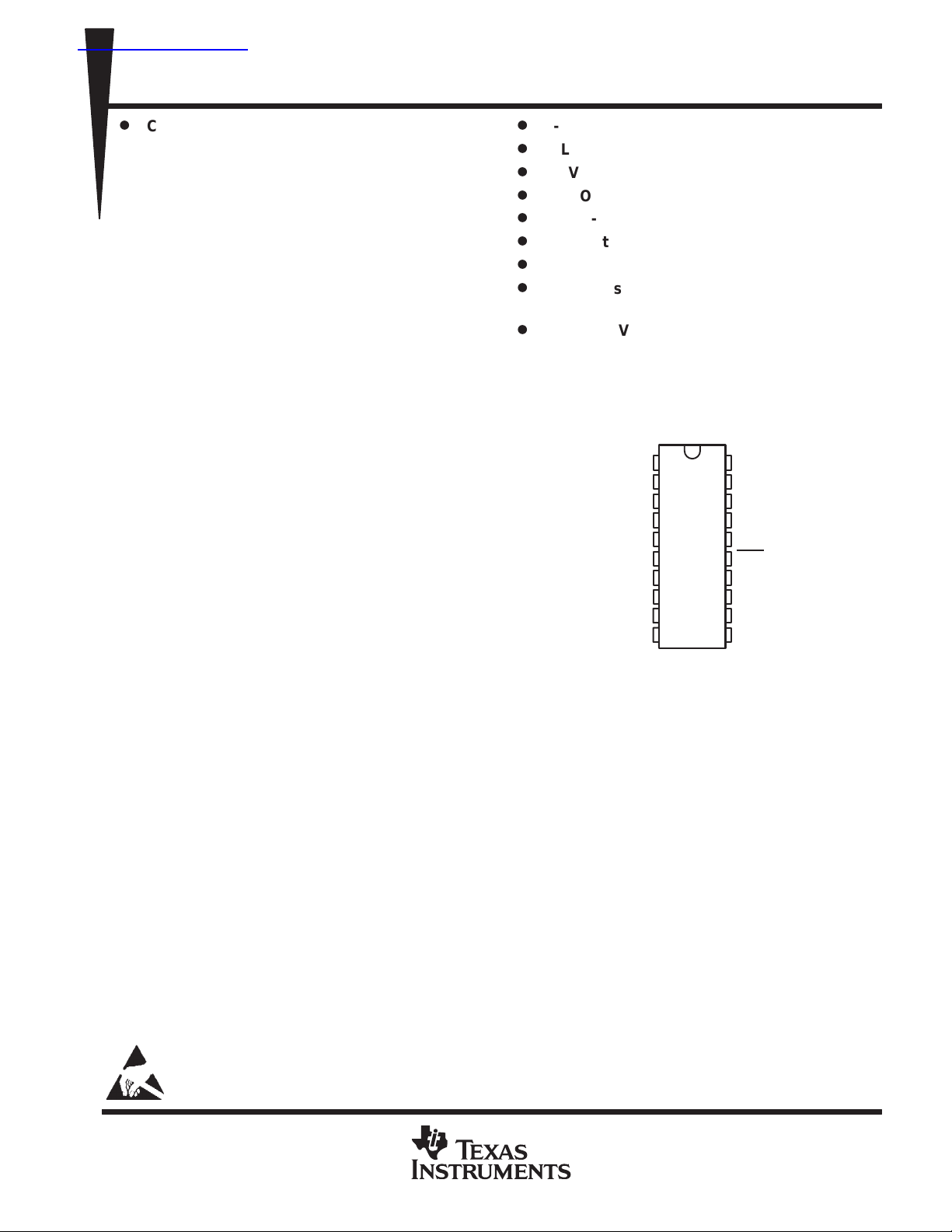
DW OR N PACKAGE
(TOP VIEW)
VPO+
ANLG GND
VPO–
VPI
VFRO
V
CC
FSR
DR
BCLKR/CLKSEL
MCLKR/PDN
1
2
3
4
5
6
7
8
9
10
V
20
BB
VFXI+
19
VFXI–
18
GSX
17
ANLG LOOP
16
TSX
15
FSX
14
DX
13
BCLKX
12
MCLKX
11
These devices are designed to perform the transmit encoding (A/D conversion) and receive decoding (D/A
conversion) as well as the transmit and receive filtering functions in a PCM system. They are intended to be
used at the analog termination of a PCM line or trunk. The devices require two transmit and receive master
clocks that may be asynchronous (1.536 MHz, 1.544 MHz, or 2.048 MHz), transmit and receive data clocks that
are synchronous with the master clock (but can vary from 64 kHz to 2.048 MHz), and transmit and receive
frame-sync pulses. The TP3064A, TP3067A, TP13064A, and TP13067A provide the band-pass filtering of the
analog signals prior to encoding and after decoding of voice and call progress tones. The TP3067A and
TP13067A contain patented circuitry to achieve low transmit channel idle noise and are not recommended for
applications in which the composite signals on the transmit side are below –55 dBm0.
The TP3064A and TP3067A are characterized for operation from 0°C to 70°C. The TP13064A and TP13067A
are characterized for operation from –40°C to 85°C.
These devices have limited built-in ESD protection. The leads should be shorted together or the device placed in conductive foam
during storage or handling to prevent electrostatic damage to the CMOS gates.
PRODUCTION DATA information is current as of publication date.
Products conform to specifications per the terms of Texas Instruments
standard warranty. Production processing does not necessarily include
testing of all parameters.
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
Copyright 1996, Texas Instruments Incorporated
1
Page 2
TP3064A, TP3067A, TP13064A, TP13067A
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
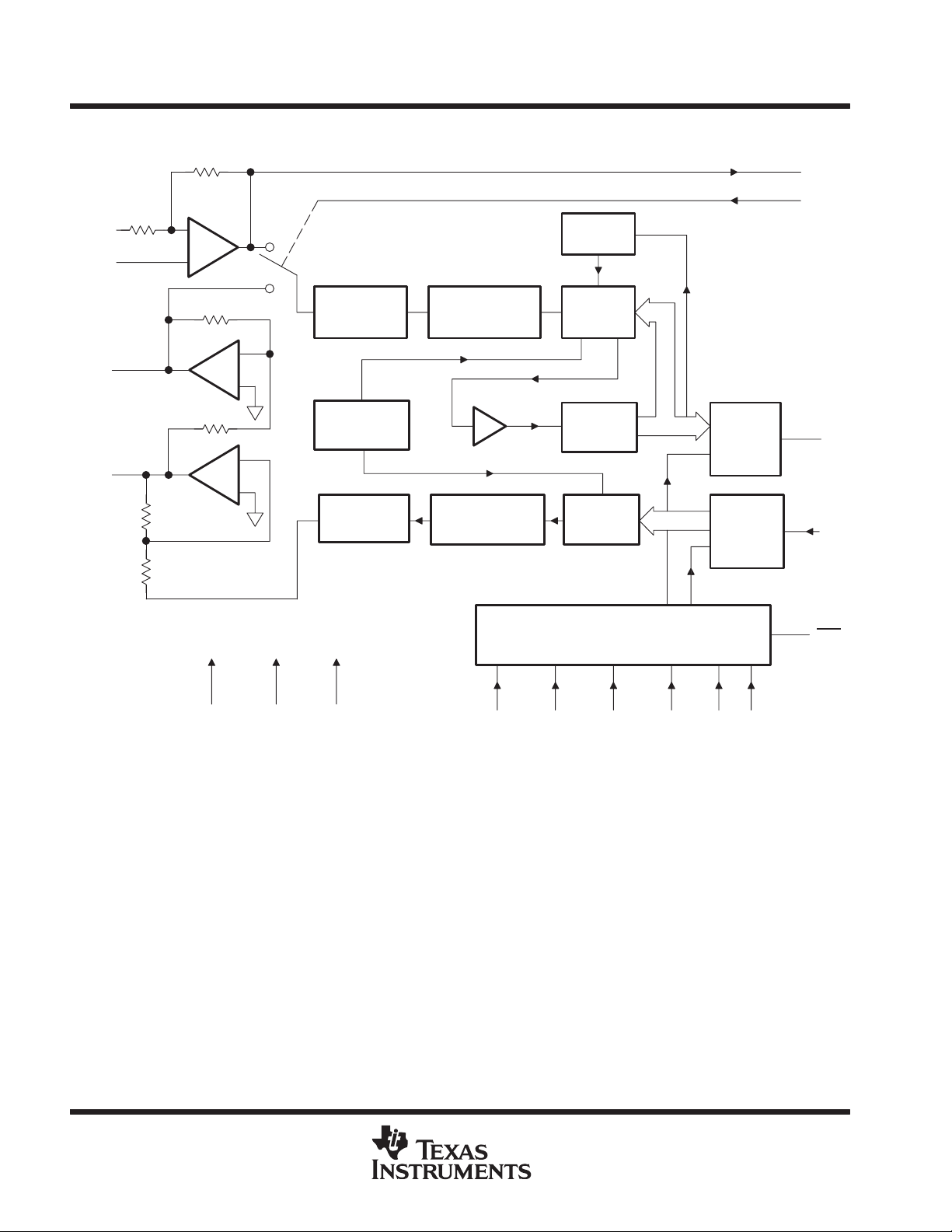
functional block diagram
VFXI–
VFXI+
VPO+
VPO–
Analog
Input
R1
18
19
1
3
R3
R4
4 VPI
5 VFRO
R2
–
+
R
–
+
R
–
+
RC
Active Filter
Voltage
Reference
RC Active
Filter
SwitchedCapacitor
Band-Pass Filter
Comparator
SwitchedCapacitor
Low-Pass Filter
Autozero
Logic
S/H
DAC
A/D
Control
Logic
S/H
DAC
Transmit
Regulator
OE
Receive
Regulator
CLK
17
16
13
GSX
ANLG
LOOP
8
DX
DR
–5 V5 V
620 2
V
ANLG GNDV
CC
BB
Timing and Control
11 10 12 9 147
MCLKX MCLKR/
PDN
BCLKX BCLKR/
CLKSEL
FSR
FSX
15
TSX
2
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
Page 3
DESCRIPTION
TP3064A, TP3067A, TP13064A, TP13067A
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
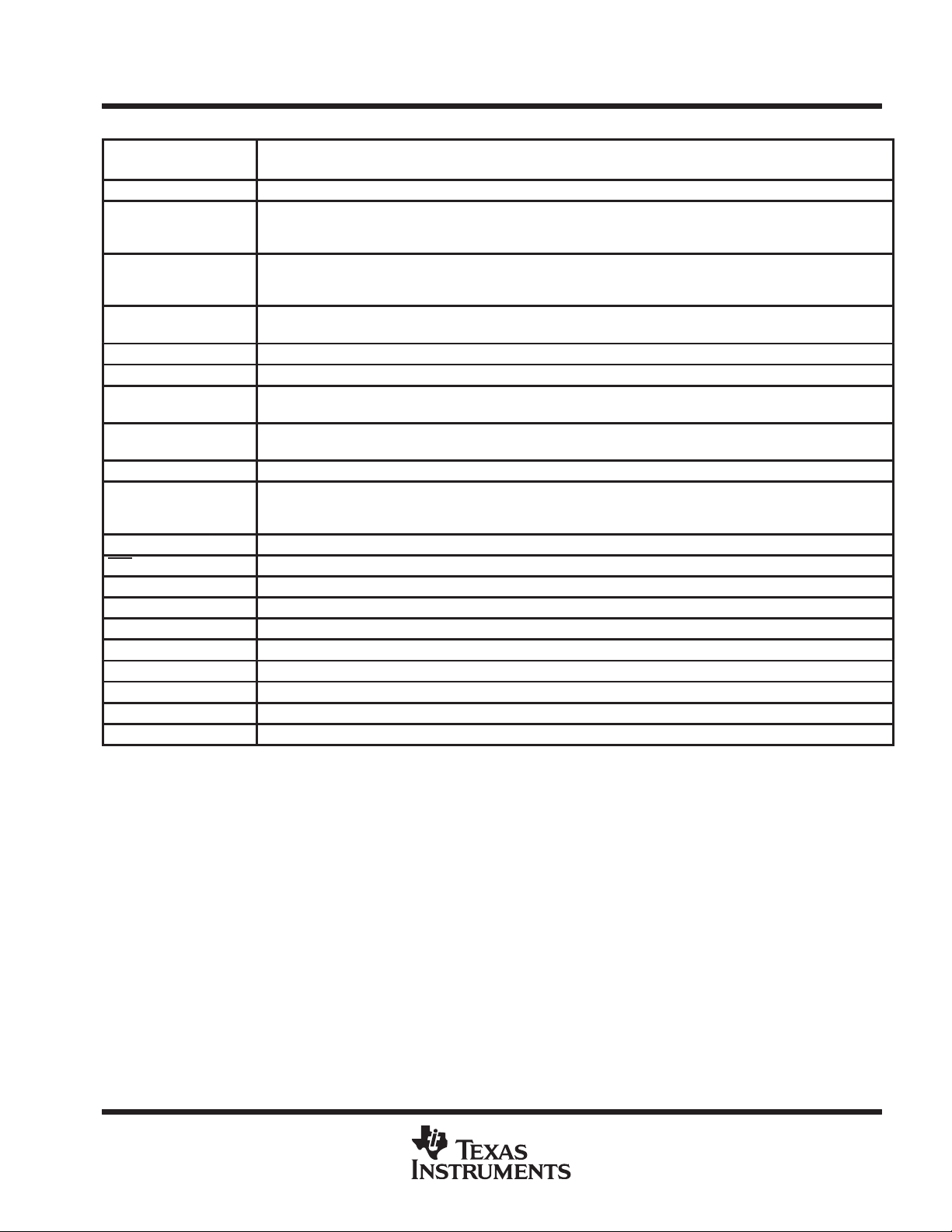
Terminal Functions
TERMINAL
NAME NO.
ANLG GND 2 Analog ground. All signals are referenced to ANLG GND.
ANLG LOOP 16 Analog loopback control input. Must be set to logic low for normal operation. When pulled to logic high, the transmit
BCLKR/CLKSEL 9 The bit clock that shifts data into DR after the FSR leading edge. May vary from 64 kHz to 2.048 MHz. Alternately,
BCLKX 12 The bit clock that shifts out the PCM data on DX. BCLKX can vary from 64 kHz to 2.048 MHz, but must be synchronous
DR 8 Receive data input. PCM data is shifted into DR following the FSR leading edge.
DX 13 The 3-state PCM data output that is enabled by FSX.
FSR 7 Receive frame sync pulse input that enables BCLKR to shift PCM data in DR. FSR is an 8-kHz pulse train (see Figures
FSX 14 Transmit frame sync pulse that enables BCLKX to shift out the PCM data on DX. FSX is an 8-kHz pulse train (see
GSX 17 Analog output of the transmit input amplifier. GSX is used to externally set gain.
MCLKR/PDN 10 Receive master clock (must be 1.536 MHz, 1.544 MHz, or 2.048 MHz). May be synchronous with MCLKX, but should
MCLKX 11 Transmit master clock (must be 1.536 MHz, 1.544 MHz, or 2.048 MHz). May be asynchronous with MCLKR
TSX 15 Open-drain output that pulses low during the encoder time slot
V
BB
V
CC
VFRO 5 Analog output of the receive filter
VFXI+ 19 Noninverting input of the transmit input amplifier
VFXI– 18 Inverting input of the transmit input amplifier
VPI 4 Inverting input to the receive power amplifier. Also powers down both amplifiers when connected to V
VPO+ 1 The noninverted output of the receive power amplifier
VPO– 3 The inverted output of the receive power amplifier
filter input is disconnected from the output of the transmit preamplifier and connected to VPO+ of the receive power
amplifier.
can be a logic input that selects either 1.536 MHz/1.544 MHz or 2.048 MHz for master clock in synchronous mode.
BCLKX is used for both transmit and receive directions (see Table 1).
with MCLKX.
1 and 2 for timing details).
Figures 1 and 2 for timing details).
be synchronous for best performance. When MCLKR is connected continuously low, MCLKX is selected for all internal
timing. When MCLKR is connected continuously high, the device is powered down.
20 Negative power supply. VBB = –5 V ± 5%
6 Positive power supply. VCC = 5 V ± 5%
BB
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
3
Page 4
TP3064A, TP3067A, TP13064A, TP13067A
Operating free-air temperature, T
°C
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
absolute maximum ratings over operating free-air temperature range (unless otherwise noted)
Supply voltage, V
Supply voltage, V
Voltage range at any analog input or output V
Voltage range at any digital input or output V
(see Note 1) 7 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CC
(see Note 1) –7 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
BB
CC
CC
+ 0.3 V to VBB – 0.3 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
+ 0.3 V to GND – 0.3 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
†
Continuous total dissipation See Dissipation Rating Table. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Operating free-air temperature range, T
: TP3064A, TP3067A 0°C to 70°C. . . . . . . . . . . . . . . . . . . . . . . . . .
A
TP13064A, TP13067A –40°C to 85°C. . . . . . . . . . . . . . . . . . . . . .
Storage temperature range, T
–65°C to 150°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
stg
Lead temperature 1,6 mm (1/16 inch) from case for 10 seconds: DW or N package 260°C. . . . . . . . . . . . . . .
†
Stresses beyond those listed under “absolute maximum ratings” may cause permanent damage to the device. These are stress ratings only, and
functional operation of the device at these or any other conditions beyond those indicated under “recommended operating conditions” is not
implied. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability.
NOTE 1: All voltages are with respect to GND.
DISSIPATION RATING TABLE
PACKAGE
DW 1025 mW 8.2 mW/°C 656 mW 533 mW
N 1150 mW 9.2 mW/°C 736 mW 598 mW
TA ≤ 25°C
POWER RATING
DERATING FACTOR
ABOVE TA = 25°C
TA = 70°C
POWER RATING
TA = 85°C
POWER RATING
recommended operating conditions (see Note 2)
MIN NOM MAX UNIT
Supply voltage, V
Supply voltage, V
High-level input voltage, V
Low-level input voltage, V
Common-mode input voltage range, V
Load resistance at GSX, R
Load capacitance at GSX, C
p
‡
Measure with CMRR > 60 dB.
NOTE 2: T o avoid possible damage to these CMOS devices and resulting reliability problems, the power-up procedure described in the device
CC
BB
IH
IL
L
L
p
power-up sequence paragraphs later in this document should be followed.
A
ICR
‡
TP3064A, TP3067A 0 70
TP13064A, TP13067A –40 85
4.75 5 5.25 V
–4.75 –5 –5.25 V
2.2 V
0.6 V
±2.5 V
10 kΩ
50 pF
°
4
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
Page 5
PARAMETER
TEST CONDITIONS
UNIT
ICCSupply current from V
No load
mA
IBBSupply current from V
No load
mA
VOLLow-level output voltage
V
TP3064A, TP3067A, TP13064A, TP13067A
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
electrical characteristics over recommended ranges of supply voltage and operating free-air
temperature (unless otherwise noted)
supply current
TP306xA TP1306xA
MIN TYP†MAX MIN TYP†MAX
pp
pp
†
All typical values are at VCC = 5 V, VBB = –5 V, and TA = 25°C.
CC
BB
Power down
Active
Power down
Active
electrical characteristics at VCC = 5 V ± 5%, VBB = –5 V ± 5%, GND at 0 V , TA = 25°C (unless otherwise
noted)
digital interface
PARAMETER TEST CONDITIONS MIN MAX UNIT
V
I
I
I
High-level output voltage DX IH = –3.2 mA 2.4 V
OH
p
High-level input current VI = VIH to V
IH
Low-level input current All digital inputs VI = GND to V
IL
Output current in high-impedance state DX VO = GND to V
OZ
DX IL = 3.2 mA 0.4
TSX IL = 3.2 mA, Drain open 0.4
0.5 1 0.5 1.2
6 10 6 11
0.5 1 0.5 1.2
6 10 6 11
CC
IL
CC
±10 µA
±10 µA
±10 µA
analog interface with transmit amplifier input
PARAMETER TEST CONDITIONS MIN TYP†MAX UNIT
I
I
r
i
r
o
A
V
B
I
V
IO
CMRR Common-mode rejection ratio 60 dB
k
SVR
†
All typical values are at VCC = 5 V, VBB = –5 V, and TA = 25°C.
Input current VFXI+ or VFXI– VI = –2.5 V to 2.5 V ±200 nA
Input resistance VFXI+ or VFXI– VI = –2.5 V to 2.5 V 10 MΩ
Output resistance Closed loop, Unit gain 1 3 Ω
Output dynamic range GSX RL ≥ 10 kΩ ±2.8 V
Open-loop voltage amplification VFXI+ to GSX 5000
Unity-gain bandwidth GSX 1 2 MHz
Input offset voltage VFXI+ or VFXI– ±20 mV
Supply-voltage rejection ratio 60 dB
analog interface with receive filter
PARAMETER TEST CONDITIONS MIN TYP†MAX UNIT
Output resistance VFRO 1 3 Ω
Load resistance VFRO = ±2.5 V 600 Ω
Load capacitance VFRO to GND 500 pF
Output dc offset voltage VFRO to GND ±200 mV
†
All typical values are at VCC = 5 V, VBB = –5 V, and TA = 25°C.
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
5
Page 6
TP3064A, TP3067A, TP13064A, TP13067A
k
Suppl
oltage rejection ratio of V
or V
VPO– connected to VPI
dB
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
analog interface with power amplifiers
PARAMETER TEST CONDITIONS MIN TYP†MAX UNIT
I
Input current VPI = –1 V to 1 V ±100 nA
I
r
Input resistance VPI = –1 V to 1 V 10 MΩ
i
r
Output resistance VPO+ or VPO– Inverting unity gain 1 Ω
o
A
Voltage amplification VPO– or VPO+ VPO– = 1.77 Vrms, RL = 600 Ω –1
V
B
Unity-gain bandwidth VPO– Open loop 400 kHz
I
V
Input offset voltage ±25 mV
IO
pp
SVR
R
L
C
L
†
All typical values are at VCC = 5 V, VBB = –5 V, and TA = 25°C.
y-v
Load resistance Connected from VPO+ to VPO– 600 Ω
Load capacitance 100 pF
CC
BB
0 kHz to 4 kHz 60
4 kHz to 50 kHz 36
6
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
Page 7

TP3064A, TP3067A, TP13064A, TP13067A
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
operating characteristics, over operating free-air temperature range VCC = 5 V ± 5%,
V
= –5 V ± 5%, GND at 0 V , VI = 1.2276 V , f = 1.02 kHz, transmit input amplifier connected for unity
BB
gain, noninverting (unless otherwise noted)
timing requirements
PARAMETER TEST CONDITIONS MIN TYP†MAX UNIT
MCLX
f
clock(M)
f
clock(B)
t
r1
t
f1
t
r2
t
f2
t
w1
t
w2
t
su1
t
w3
t
w4
t
h1
t
h2
t
su2
t
d1
t
d2
t
d3
t
d4
t
su3
t
h3
t
su4
t
h4
t
h5
t
w5
†
All typical values are at VCC = 5 V, VBB = –5 V, and TA = 25°C.
‡
Nominal input value for an LSTTL load is 18 kΩ.
NOTE 3: For short-frame sync timing, FSR and FSX must go high while their respective bit clocks are high.
Frequency of master clock
MCLKR
Frequency of bit clock, transmit BCLKX 64 2.048 MHz
MCLKX
Rise time of master clock
MCLKR
MCLKX
Fall time of master clock
MCLKR
Rise time of bit clock, transmit BCLKX Measured from 20% to 80% 50 ns
Fall time of bit clock, transmit BCLKX Measured from 20% to 80% 50 ns
Pulse duration, MCLKX and MCLKR high 160 ns
Pulse duration, MCLKX and MCLKR low 160 ns
Setup time, BCLKX high (and FSX in long-frame
sync mode) before MCLKX↓
Pulse duration, BCLKX and BCLKR high VIH = 2.2 V 160 ns
Pulse duration, BCLKX and BCLKR low VIL = 0.6 V 160 ns
Hold time, frame sync low after bit clock low (long
frame only)
Hold time, BCLKX high after frame sync↑ (short
frame only)
Setup time, frame sync high before bit clock↓ (long
frame only)
Delay time, BCLKX high to data valid Load = 150 pF plus 2 LSTTL loads
Delay time, BCLKX high to TSX low Load = 150 pF plus 2 LSTTL loads
Delay time, BCLKX (or 8 clock FSX in long frame
only) low to data output disabled
Delay time, FSX or BCLKX high to data valid (long
frame only)
Setup time, DR valid before BCLKR↓ 50 ns
Hold time, DR valid after BCLKR or BCLKX↓ 50 ns
Setup time, FSR or FSX high before BCLKR or
BCLKX↓
Hold time, FSX or FSR high after BCLKX or
BCLKR↓
Hold time, frame sync high after bit clock↓
Pulse duration of the frame sync pulse (low level) 64 kbps operating mode 160 ns
Depends on the device used and
and
BCLKX/CLKSEL
and
Measured from 20% to 80% 50 ns
and
Measured from 20% to 80% 50 ns
First bit clock after the leading edge
of FSX
‡
‡
CL = 0 pF to 150 pF 20 165 ns
Short-frame sync pulse (1- or 2-bit
clock periods long) (see Note 3)
Short-frame sync pulse (1- or 2-bit
clock periods long) (see Note 3)
Long-frame sync pulse (from 3- to
8-bit clock periods long)
1.536
1.544
2.048
100 ns
0 ns
0 ns
80 ns
0 140 ns
140 ns
50 165 ns
50 ns
100 ns
100 ns
MHz
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
7
Page 8

TP3064A, TP3067A, TP13064A, TP13067A
V
Transmit gain tracking error with level
dB
Receive filter gain, relative to absolute
dB
gg
Transmit and receive gain tracking error with
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
filter gains and tracking errors
PARAMETER TEST CONDITIONS
Maximum peak transmit
overload level
Transmit filter gain, absolute (at 0 dBm0) TA = 25°C –0.15 0.15 dB
Transmit filter gain, relative to absolute
Absolute transmit gain variation with
temperature and supply voltage
Receive filter gain, absolute (at 0 dBm0)
Absolute receive gain variation with temperature
and supply voltage
Receive gain tracking error with level
Receive output drive voltage RL = 10 kΩ ±2.5 V
level (A-law, CCITT C712)
†
All typical values are at VCC = 5 V, VBB = –5 V, and TA = 25°C.
‡
Absolute rms signal levels are defined as follows: VI = 1.2276 V = 0 dBm0 = 4 dBm at f = 1.02 kHz with RL = 600 Ω.
NOTE 4: Full range for the TP3064A and TP3067A is 0°C to 70°C. Full range for the TP13064A and TP13067A is –40°C to 85°C.
TP3064A, TP13064A 3.17 dBm0 2.501
TP3067A, TP13067A 3.14 dBm0 2.492
f = 16 Hz –40
f = 50 Hz –30
f = 60 Hz –26
f = 200 Hz –1.8 –0.1
f = 300 Hz to 3000 Hz –0.15 0.15
f = 3300 Hz –0.35 0.05
f = 3400 Hz –0.8 0
f = 4000 Hz –14
f ≥ 4600 Hz (measure response from 0 Hzto4000Hz) –32
Relative to absolute transmit gain –0.1 0.1 dB
Sinusoidal test method; Reference level = –10 dBm0
3 dBm0 ≥ input level ≥ –40 dBm0 ±0.2
–40 dBm0 > input level ≥ –50 dBm0 ±0.4
–50 dBm0 > input level ≥ –55 dBm0 ±0.8
Input is digital code sequence for 0 dBm0 signal,
TA = 25°C
f = 0 Hz to 3000 Hz, TA = 25°C –0.15 0.15
f = 3300 Hz –0.35 0.05
f = 3400 Hz –0.8 0
f = 4000 Hz –14
TA = full range, See Note 4 –0.1 0.1 dB
Sinusoidal test method; reference input PCM code
corresponds to an ideally encoded –10 dBm0 signal
3 dBm0 ≥ input level ≥ –40 dBm0 ±0.2
–40 dBm0 > input level ≥ –50 dBm0 ±0.4
–50 dBm0 > input level ≥ –55 dBm0 ±0.8
Pseudo-noise-test method; reference input PCM
code corresponds to an ideally encoded –10 dBm0
signal
3 dBm0 ≥ input level ≥ –40 dBm0 ±0.25
–40 dBm0 > input level ≥ –50 dBm0 ±0.3
–50 dBm0 > input level ≥ –55 dBm0 ±0.45
‡
MIN TYP†MAX UNIT
–0.15 0.15 dB
dB
dB
dB
8
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
Page 9
TP3064A, TP3067A, TP13064A, TP13067A
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
envelope delay distortion with frequency
PARAMETER TEST CONDITIONS MIN TYP†MAX UNIT
Transmit delay, absolute (at 0 dBm0) f = 1600 Hz 290 315 µs
f = 500 Hz to 600 Hz 195 220
f = 600 Hz to 800 Hz 120 145
f = 800 Hz to 1000 Hz 50 75
Transmit filter gain, relative to absolute
Receive delay, absolute (at 0 dBm0) f = 1600 Hz 180 200 µs
Receive delay, relative to absolute
†
All typical values are at VCC = 5 V, VBB = –5 V, and TA = 25°C.
f = 1000 Hz to 1600 Hz 20 40
f = 1600 Hz to 2600 Hz 55 75
f = 2600 Hz to 2800 Hz 80 105
f = 2800 Hz to 3000 Hz 130 155
f = 500 Hz to 1000 Hz –40 –25
f = 1000 Hz to 1600 Hz –30 –20
f = 1600 Hz to 2600 Hz 70 90
f = 2600 Hz to 2800 Hz 100 125
f = 2800 Hz to 3000 Hz 140 175
µs
µs
noise
PARAMETER TEST CONDITIONS MIN TYP†MAX UNIT
Transmit noise, C-message weighted
Transmit noise, psophometric weighted
(see Note 5)
Receive noise, C-message weighted
Receive noise, psophometric weighted
Noise, single frequency
†
All typical values are at VCC = 5 V, VBB = –5 V, and TA = 25°C.
NOTE 5: Measured by extrapolation from the distortion test result. This parameter is achieved through use of patented circuitry and is not
recommended for applications in which the composite signals on the transmit side are below –55 dBm0.
TP3064A,
TP13064A
TP3067A,
TP13067A
TP3064A,
TP13064A
TP3067A,
TP13067A
V
= 0 V 9 14 dBrnC0
FXI
V
= 0 V –78 –75 dBm0p
FXI
PCM code equals alternating positive
and negative zero
PCM code equals positive zero –86 –83 dBm0p
VFXI+ = 0 V, f = 0 kHz to 100 kHz,
Loop-around measurement
2 4 dBrnC0
–53 dBm0
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
9
Page 10

TP3064A, TP3067A, TP13064A, TP13067A
f
VFXI+ = –50 dBm0
f
VFXI+ = –50 dBm0
f
V
CC
100 mVrms
f
V
BB
100 mVrms
S urious out of band signals at the
dB
Si
l
‡
Level
dBm0
dBC
†
Level
dBm0
g, ()
(CCITT G.714)§
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
power supply rejection
PARAMETER TEST CONDITIONS MIN MAX UNIT
Positive power-supply rejection, transmit
Negative power-supply rejection, transmit
Positive power-supply rejection, receive
Negative power-supply rejection, receive
Spurious out-of-band signals at the
channel output (VFRO)
†
The unit dBC applies to C-message weighting.
VCC = 5 V + 100 mVrms,
VBB = –5 V + 100 mVrms,
–
PCM code equals positive zero,
= 5 V +
PCM code equals positive zero,
= –5 V +
0 dBm0, 300-Hz to 3400-Hz input applied to DR
(measure individual image signals at VFRO)
f = 4600 Hz to 7600 Hz –33
f = 7600 Hz to 100 kHz –40
= 0 Hz to 4 kHz
f = 4 kHz to 50 kHz 40 dB
= 0 Hz to 4 kHz
f = 4 kHz to 50 kHz 40 dB
= 0 Hz to 4 kHz
f = 4 kHz to 50 kHz 40 dB
= 0 Hz to 4 kHz
f = 4 kHz to 50 kHz 40 dB
A-law 38 dB
µ-law 38 dBC
A-law 35 dB
µ-law 35 dBC
A-law 40 dB
µ-law 40 dBC
A-law 38 dB
µ-law 38 dBC
–30 dB
†
†
†
†
distortion
PARAMETER TEST CONDITIONS MIN MAX UNIT
Level = 3 dBm0 33
Level = 0 dBm0 to –30 dBm0 36
gnal-to-distortion ratio, transmit or receive half-channe
Single-frequency distortion products, transmit –46 dB
Single-frequency distortion products, receive –46 dB
Intermodulation distortion
Signal-to-distortion ratio, transmit half-channel (A-Law)
(CCITT G.714)§
Signal-to-distortion ratio, receive half-channel (A-law)
†
The unit dBC applies to C-message weighting.
‡
Sinusoidal test method (see Note 6)
§
Pseudo-noise test method
NOTE 6: The TP13064A and TP3064A are measured using a C-message filter. The TP13067A and TP3067A are measured using a
psophometric weighted filter.
= –40
= –55
Loop-around measurement,
VFXI+ = –4 dBm0 to –21 dBm0,
Two frequencies in the range of 300 Hz to 3400 Hz
Pseudo noise test method
Level = –3 dBm0 33
Level = –6 dBm0 to –27 dBm0 36
Level = –34 dBm0 33.5
Level = –40 dBm0 28.5
Level = –55 dBm0 13.5
Level = –3 dBm0 33
Level = –6 dBm0 to –27 dBm0 36
Level = –34 dBm0 34.2
Level = –40 dBm0 30
Level = –55 dBm0 15
Transmit 29
Receive 30
Transmit 14
Receive 15
–41 dB
dB
dB
10
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
Page 11

TP3064A, TP3067A, TP13064A, TP13067A
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
crosstalk
PARAMETER TEST CONDITIONS MIN TYP†MAX UNIT
Crosstalk, transmit to receive f = 300 Hz to 3000 Hz, DR at steady PCM code –90 –75 dB
Crosstalk, receive to transmit (see Note 7) VFXI = 0 V, f = 300 Hz to 3000 Hz –90 –72 dB
†
All typical values are at VCC = 5 V, VBB = –5 V, and TA = 25°C.
NOTE 7: Receive-to-transmit crosstalk is measured with a –50 dBm0 activation signal applied to VFXI+.
power amplifiers
PARAMETER TEST CONDITIONS MIN MAX UNIT
Balanced load, RL connected between VPO+ and VPO –
Maximum 0 dBm0 rms level for better than ±0.1 dB
linearity over the range if –10 dBm0 to 3 dBm0
Signal/distortion RL = 600 Ω 50 dB
RL = 600 Ω 3.3
RL = 1200 Ω 3.5
RL = 30 kΩ 4
V
rms
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
11
Page 12

TP3064A, TP3067A, TP13064A, TP13067A
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
PARAMETER MEASUREMENT INFORMATION
TSX
MCLKX
MCLKR
BCLKX
FSX
DX
BCLKR
FSR
t
r1
t
f1
80% 80% 80%
80% 80%
20%
t
h2
t
20%
80% 80%
20% 20%
t
h2
t
20%
t
d2
20% 20%
t
w2
f
clock(M)
20% 20%
t
su1
t
w1
1 8765432
80%
t
d3
su4
t
h4
t
d1
87654321
su4
t
h4
80%
t
su3
t
h3
20%
t
d3
80%
87654321
20%
20%
t
h3
12
DR
87654321
Figure 1. Short-Frame Sync Timing
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
Page 13

TP3064A, TP3067A, TP13064A, TP13067A
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
PARAMETER MEASUREMENT INFORMATION
MCLKX
MCLKR
BCLKX
FSX
DX
BCLKR
FSR
t
r1
80% 80% 80%
20% 20% 20% 20%
t
su1
t
su1
20%
t
h1
t
d4
20% 20% 20%
t
h1
t
w1
t
20%
w3
t
w2
t
w4
80%
t
h5
t
f1
t
f2
t
r2
80%
80% 80%
20% 20% 20%
t
su2
t
d4
80%
t
su2
80% 80%
20%
t
w3
80%
80%
f
clock(M)
t
w4
f
clock(B)
t
h5
80%
987654321
20%
t
d1
t
d3
78654321
t
d3
20%
80%
20%
DR
t
su3
t
h3
123456 87
Figure 2. Long-Frame Sync Timing
t
h3
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
13
Page 14

TP3064A, TP3067A, TP13064A, TP13067A
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
PRINCIPLES OF OPERATION
system reliability and design considerations
TP306xA, TP1306xA system reliability and design considerations are described in the following paragraphs.
latch-up
Latch-up is possible in all CMOS devices. It is caused by the firing of a parasitic SCR that is present due to the
inherent nature of CMOS. When a latch-up occurs, the device draws excessive amounts of current and will
continue to draw heavy current until power is removed. Latch-up can result in permanent damage to the device
if supply current to the device is not limited.
Even though the TP306xA and TP1306xA devices are heavily protected against latch-up, it is still possible to
cause latch-up under certain conditions in which excess current is forced into or out of one or more terminals.
Latch-up can occur when the positive supply voltage drops momentarily below ground, when the negative
supply voltage rises momentarily above ground, or possibly if a signal is applied to a terminal after power has
been applied but before the ground is connected. This can happen if the device is hot-inserted into a card with
the power applied, or if the device is mounted on a card that has an edge connector and the card is hot-inserted
into a system with the power on.
To help ensure that latch-up does not occur, it is considered good design practice to connect a reverse-biased
Schottky diode (with a forward voltage drop of less than or equal to 0.4 V – 1N571 1 or equivalent) between the
power supply and GND (see Figure 3). If it is possible that a TP306xA- or TP1306xA-equipped card that has
an edge connector could be hot-inserted into a powered-up system, it is also important to ensure that the ground
edge connector traces are longer than the power and signal traces so that the card ground is always the first
to make contact.
device power-up sequence
Latch-up can also occur if a signal source is connected without the device being properly grounded. A signal
applied to one terminal could then find a ground through another signal terminal on the device. T o ensure proper
operation of the device and as a safeguard against this sort of latch-up, it is recommended that the following
power-up sequence always be used:
1. Ensure that no signals are applied to the device before the power-up sequence is complete.
2. Connect GND.
3. Apply V
4. Apply V
5. Force a power down condition in the device.
6. Connect clocks.
7. Release the power down condition.
8. Apply FS synchronization pulses.
9. Apply the signal inputs.
When powering down the device, this procedure should be followed in the reverse order.
(most negative voltage).
BB
(most positive voltage).
CC
14
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
Page 15

BCLKR/CLKSEL
TP3064A, TP3067A, TP13064A, TP13067A
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
PRINCIPLES OF OPERATION
V
CC
DGND
V
BB
Figure 3. Latch-Up Protection Diode Connection
internal sequencing
Power-on reset circuitry initializes the TP3064A, TP3067A, TP13064A, and TP13067A devices when power
is first applied, placing it into the power-down mode. DX and VFRO outputs go into high-impedance states and
all nonessential circuitry is disabled. A low level or clock applied to MCLKR/PDN powers up the device and
activates all circuits. DX, a 3-state PCM data output, remains in the high-impedance state until the arrival of the
second FSX pulse.
synchronous operation
For synchronous operation, a clock is applied to MCLKX. MCLKR/PDN is used as a power-down control. A low
level on MCLKR powers up the device and a high level powers it down. In either case, MCLKX is selected as
the master clock for both receive and transmit direction. BCLKX must also have a bit clock applied to it. The
selection of the proper internal divider for a master-clock frequency of 1.536 MHz, 1.544 MHz, or 2.048 MHz
can be done via BCLKR/CLKSEL. The device automatically compensates for the 193rd clock pulse of each
frame.
A fixed level on BCLKR/CLKSEL selects BCLKX as the bit clock for both the transmit and receive directions.
T able 1 indicates the frequencies of operation that can be selected depending on the state of BCLKR/CLKSEL.
In the synchronous mode, BCLKX may be in the range from 64 kHz to 2.048 MHz but must be synchronous
with MCLKX.
Table 1. Selection of Master-Clock Frequencies
MASTER-CLOCK FREQUENCY SELECTED
TP3064A, TP13064A TP3067A, TP13067A
Clock Input 1.536 MHz or 1.544 MHz 2.048 MHz
Logic Input L
(sync mode only)
Logic Input H (open)
(sync mode only)
The encoding cycle begins with each FSX pulse, and the PCM data from the previous cycle is shifted out of the
enabled DX output on the rising edge of BCLKX. After eight bit-clock periods, the 3-state DX output is returned
to the high-impedance state. With an FSR pulse, PCM data is latched via DR on the falling edge of BCLKX (or
BCLKR, if running). FSX and FSR must be synchronous with MCLKX and MCLKR.
2.048 MHz 1.536 MHz or 1.544 MHz
1.536 MHz or 1.544 MHz 2.048 MHz
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
15
Page 16

TP3064A, TP3067A, TP13064A, TP13067A
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
PRINCIPLES OF OPERATION
asynchronous operation
For asynchronous operation, separate transmit and receive clocks can be applied. MCLKX and MCLKR must
be 2.048 MHz for the TP3064A and TP13064A, 1.536 MHz or 1.544 MHz for the TP3067A and TP13067A and
need not be synchronous. However, for best performance, MCLKR should be synchronous with MCLKX. This
is easily achieved by applying only static logic levels to MCLKR/PDN. This connects MCLKX to all internal
MCLKR functions. For 1.544-MHz operation, the device compensates for the 193rd clock pulse of each frame.
Each encoding cycle is started with FSX, and FSX must be synchronous with MCLKX and BCLKX. Each
decoding cycle is started with FSR, and FSR must be synchronous with BCLKR. The logic levels shown in
Table 1 are not valid in the asynchronous mode. BCLKX and BCLKR can operate from 64 kHz to 2.048 MHz.
short-frame sync operation
The device can operate with either a short- or a long-frame sync pulse. On power up, the device automatically
goes into the short-frame mode where both FSX and FSR must be one bit-clock period long with timing
relationships specified in Figure 1. With FSX high during a falling edge of BCKLX, the next rising edge of BCLKX
enables the 3-state output buffer , DX, which outputs the sign bit. The remaining seven bits are clocked out on
the following seven rising edges, and the next falling edge disables DX. With FSR high during a falling edge
of BCLKR (BCLKX in synchronous mode), the next falling edge of BCLKR latches in the sign bit. The following
seven falling edges latch in the remaining bits. The short-frame sync pulse can be utilized in either the
synchronous or asynchronous mode.
long-frame sync operation
Both FSX and FSR must be three or more bit-clock periods long to use the long-frame sync mode with timing
relationships, as shown in Figure 2. Using the transmit frame sync (FSX), the device detects whether a shortor long-frame sync pulse is being used. For 64-kHz operation, the frame sync pulse must be kept low for a
minimum of 160 ns. The rising edge of FSX or BCLKX, which ever occurs later, enables the DX 3-state output
buffer. The first bit clocked out is the sign bit. The next seven rising edges of BCLKX edges clock out the
remaining seven bits. The falling edge of BCLKX following the eighth rising edge or FSX going low, whichever
occurs later, disables DX. A rising edge on FSR, the receive frame sync pulse, causes the PCM data at DR to
be latched in on the next eight falling edges of BCLKR (BCLKX in synchronous mode). The long-frame sync
pulse may be used in either the synchronous or asynchronous mode.
16
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
Page 17

TP3064A, TP3067A, TP13064A, TP13067A
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
PRINCIPLES OF OPERATION
transmit section
The transmit section input is an operational amplifier with provision for gain adjustment using two external
resistors. The low noise and wide bandwidth characteristics of these devices provide gains in excess of 20 dB
across the audio passband. The operational amplifier drives a unity-gain filter consisting of an RC active prefilter
followed by an eight-order switched-capacitor band-pass filter clocked at 256 kHz. The output of this filter
directly drives the encoder sample-and-hold circuit. As per µ-law (TP3064A and TP13064A) or A-law (TP3067A
and TP13067A) coding conventions, the ADC is a companding type. A precision voltage reference provides an
input overload of nominally 2.5-V peak. The sampling of the filter output is controlled by the FSX frame sync
pulse. Then the successive-approximation encoding cycle begins. The 8-bit code is loaded into a buffer and
shifted out through DX at the next FSX pulse. The total encoding delay is approximately 290 µs. Any offset
voltage due to the filters or comparator is cancelled by sign bit integration (see Table 2).
Table 2. Encoding Format at DX Output
TP3064A, TP13064A
µ-Law
VI = + Full scale 1 0 0 0 0 0 0 0 1 0 1 0 1 0 1 0
VI = 0
VI = – Full scale 0 0 0 0 0 0 0 0 0 0 1 0 1 0 1 0
1 1 1 1 1 1 1 1
0 1 1 1 1 1 1 1
TP3067A, TP13067A
A-Law
(INCLUDES EVEN-BIT INVERSION)
1 1 0 1 0 1 0 1
0 1 0 1 0 1 0 1
receive section
The receive section consists of an expanding DAC that drives a fifth-order low-pass filter clocked at 256 kHz.
The decoder is µ-law (TP3064A and TP13064A) or A-law (TP3067A and TP13067A), and the fifth-order
low-pass filter corrects for the (sin x)/x attenuation caused by the 8-kHz sample/hold. The filter is followed by
a second-order RC active post filter with its output at VFRO. The receive section is unity gain, but gain can be
added by using the power amplifiers. At FSR, the data at DR is clocked in on the falling edge of the next eight
BCLKR (BCLKX) periods. At the end of the decoder time slot, the decoding cycle begins and 10-µs later the
decoder DAC output is updated. The decoder delay is about 10 µs (decoder update) plus 110 µs (filter delay)
plus 62.5 µs (1/2 frame), or a total of approximately180 µs.
receive power amplifiers
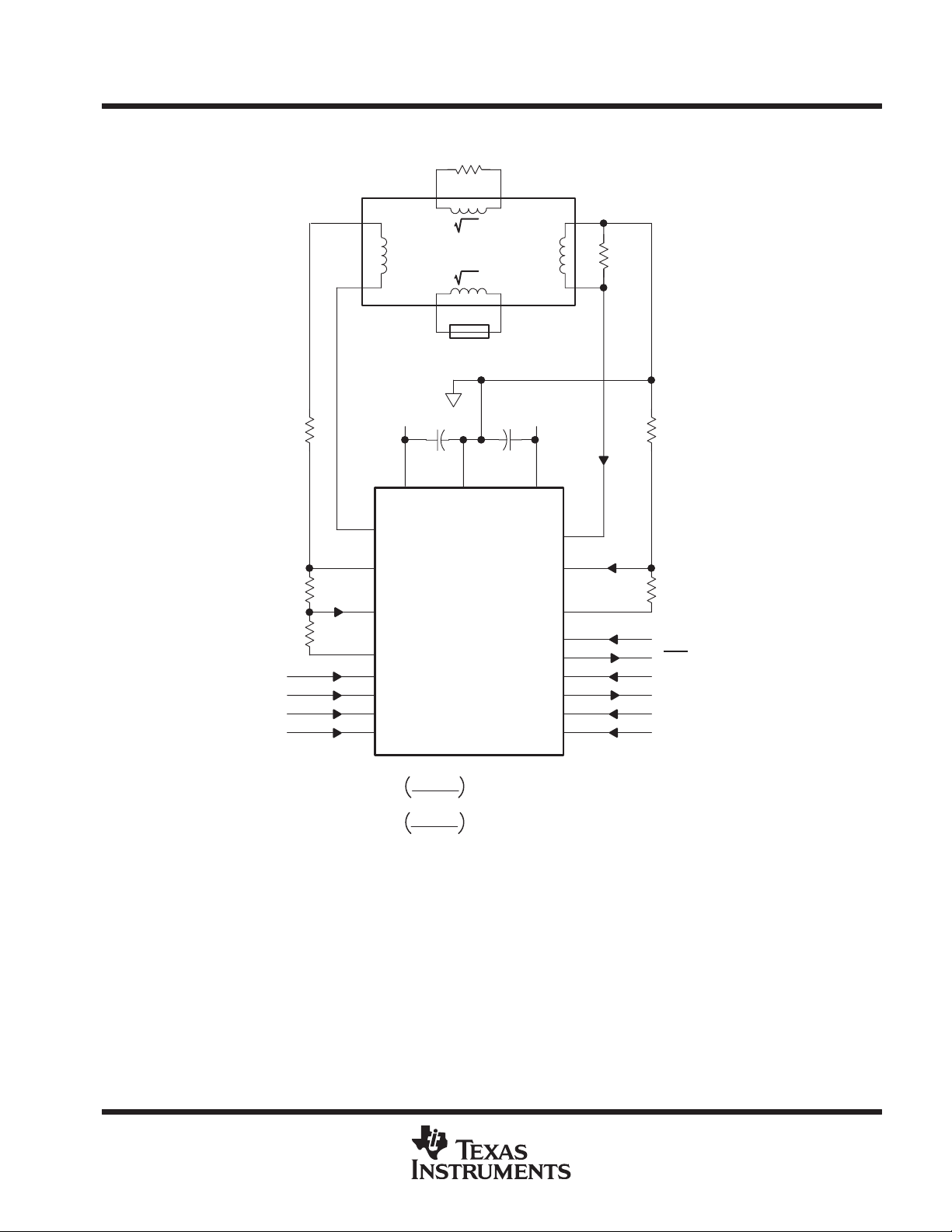
Two inverting-mode power amplifiers are provided for directly driving a match-line interface transformer. The
gain of the first power amplifier can be adjusted to boost the ±2.5-V peak output signal from the receive filter
up to the ±3.3-V peak into an unbalanced 300-Ω load, or ±4 V into an unbalanced 15-kΩ load. The second power
amplifier is internally connected in the unity-gain inverting mode to give 6 dB of signal gain for balanced loads.
Maximum power transfer to a 600-Ω subscriber line termination is obtained by differentially driving a balanced
transformer with √2:1
turns ratio, as shown in Figure 3. A total peak power of 15.6 dBm can be delivered to the
load plus termination.
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
17
Page 18

TP3064A, TP3067A, TP13064A, TP13067A
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
APPLICATION INFORMATION
power supplies
While the pins of the TP1306xA and TP306xA families are well protected against electrical misuse, it is
recommended that the standard CMOS practice be followed ensuring that ground is connected to the device
before any other connections are made. In applications where the printed-circuit board can be plugged into a
hot socket with power and clocks already present, an extra long ground pin in the connector should be used.
All ground connections to each device should meet at a common point as close as possible to ANLG GND. This
minimizes the interaction of ground return currents flowing through a common bus impedance. V
supplies should be decoupled by connecting 0.1-µF decoupling capacitors to this common point. These bypass
capacitors must be connected as close as possible to V
For best performance, the ground point of each codec/filter on a card should be connected to a common card
ground in star formation rather than via a ground bus. This common ground point should be decoupled to V
and VBB with 10-µF capacitors.
and VBB.
CC
CC
and V
BB
CC
18
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
Page 19
TP3064A, TP3067A, TP13064A, TP13067A
MONOLITHIC SERIAL INTERFACE
COMBINED PCM CODEC AND FILTER
SCTS025C – SEPTEMBER 1992 –REVISED JUL Y 1996
APPLICATION INFORMATION
600 Ω
2
1
Hybrid
2
Z
BAL
1
300 Ω
300 Ω
1
3
R3
R4
FSR
DR
BCLKR
MCLKR/PDN
NOTES: A. Transmit gain = 20 y log
B. Receive gain = 20 y log
4
5
7
8
9
10
6
V
CC
VPO+
VPO–
VPI
VFRO
0.1 µF
TP3064A
TP3067A
TP13064A
TP13067A
R1 + R2
R2
2 × R3
R4
0.1 µF
GND
VFXI+
VFXI–
,
(R1 + R2) ≥ 10 kΩ
,
R4 ≥ 10 kΩ
–5 V5 V
V
GSX
BB
20
19
18
18
17
16
15
14
13
12
11
R2
R1
ANLG LOOP
TSX
FSX
DX
BCLKX
MCLKX
Figure 4. Typical Synchronous Application
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
19
Page 20

IMPORTANT NOTICE
T exas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinue
any product or service without notice, and advise customers to obtain the latest version of relevant information
to verify, before placing orders, that information being relied on is current and complete. All products are sold
subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those
pertaining to warranty, patent infringement, and limitation of liability.
TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in
accordance with TI’s standard warranty. Testing and other quality control techniques are utilized to the extent
TI deems necessary to support this warranty . Specific testing of all parameters of each device is not necessarily
performed, except those mandated by government requirements.
CERT AIN APPLICATIONS USING SEMICONDUCTOR PRODUCTS MAY INVOLVE POTENTIAL RISKS OF
DEATH, PERSONAL INJURY, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE (“CRITICAL
APPLICATIONS”). TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, AUTHORIZED, OR
WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT DEVICES OR SYSTEMS OR OTHER
CRITICAL APPLICA TIONS. INCLUSION OF TI PRODUCTS IN SUCH APPLICATIONS IS UNDERST OOD TO
BE FULLY AT THE CUSTOMER’S RISK.
In order to minimize risks associated with the customer’s applications, adequate design and operating
safeguards must be provided by the customer to minimize inherent or procedural hazards.
TI assumes no liability for applications assistance or customer product design. TI does not warrant or represent
that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other
intellectual property right of TI covering or relating to any combination, machine, or process in which such
semiconductor products or services might be or are used. TI’s publication of information regarding any third
party’s products or services does not constitute TI’s approval, warranty or endorsement thereof.
Copyright 1998, Texas Instruments Incorporated
 Loading...
Loading...