

Datasheet TMS370C712BNT, TMS370C712BFNT, TMS370C712ANT, TMS370C712AFNT Datasheet (Texas Instruments)
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
1
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
D
CMOS/EEPROM/EPROM Technologies on
a Single Device
– Mask-ROM Devices for High-Volume
Production
– One-Time-Programmable (OTP) EPROM
Devices for Low-Volume Production
– Reprogrammable-EPROM Devices for
Prototyping Purposes
D
Internal System Memory Configurations
– On-Chip Program Memory Versions
– ROM: 2K, 4K, or 8K Bytes
– EPROM: 8K Bytes
– Data EEPROM: 256 Bytes
– Static RAM: 128 or 256 Bytes Usable as
Registers
D
Flexible Operating Features
– Low-Power Modes: STANDBY and HAL T
– Commercial, Industrial, and Automotive
T emperature Ranges
– Clock Options
– Divide-by-1 (2 MHz–5 MHz SYSCLK)
Phase-Locked Loop (PLL)
– Divide-by-4 (0.5 MHz–5 MHz SYSCLK)
– Supply Voltage (V
CC
) 5 V ±10%
D
16-Bit General Purpose Timer
– Software Configurable as
a 16-Bit Event Counter, or
a 16-Bit Pulse Accumulator, or
a 16-Bit Input Capture Functions, or
T wo Compare Registers, or a
Self-Contained PWM Function
– Software Programmable Input Polarity
– 8-Bit Prescaler, Providing a 24-Bit
Real-Time Timer
D
On-Chip 24-Bit Watchdog Timer
– EPROM/OTP Devices:
– EPROM ’712A Standard Watchdog
– EPROM ’712B Hard Watchdog
– Mask-ROM Devices: Hard Watchdog,
Simple Counter, or Standard Watchdog
D
Flexible Interrupt Handling
– Two Software Programmable Interrupt
Levels
– Global-and Individual-Interrupt Masking
– Programmable Rising- or Falling-Edge
Detect
– Individual Interrupt Vectors
D
Serial Peripheral Interface (SPI)
– Variable-Length High-Speed Shift
Register
– Synchronous Master/Slave Operation
D
TMS370 Series Compatibility
– Register-to-Register Architecture
– 128 or 256 General-Purpose Registers
– 14 Powerful Addressing Modes
– Instructions Upwardly Compatible With
All TMS370 Devices
D
CMOS/TTL Compatible I/O Pins/Packages
– All Peripheral Function Pins Software
Configurable for Digital I/O
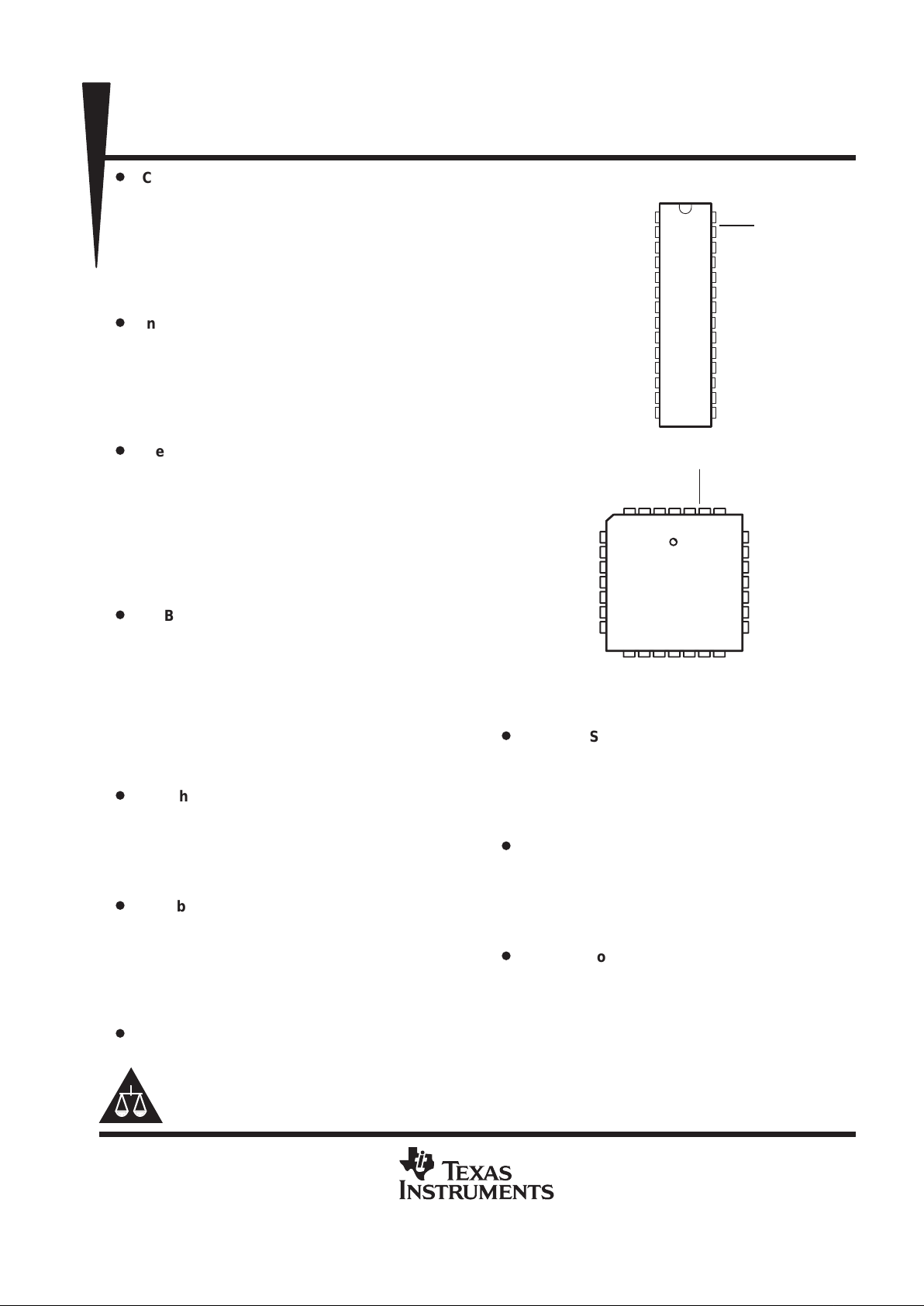
– 21 Bidirectional Pins, 1 Input Pin
– 28-Pin Plastic and Ceramic DIP, or
Leaded Chip Carrier (LCC) Packages
D
Workstation/PC-Based Development
System
– C Compiler and C Source Debugger
– Real-Time In-Circuit Emulation
– Extensive Breakpoint/Trace Capability
– Multi-Window User Interface
– Microcontroller Programmer
PRODUCTION DATA information is current as of publication date.
Products conform to specifications per the terms of Texas Instruments
standard warranty. Production processing does not necessarily include
testing of all parameters.
Copyright 1997, Texas Instruments Incorporated
Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of
Texas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
5
6
7
8
9
10
11
1
2
3
4
5
6
7
8
9
10
11
12
13
14
28
27
26
25
24
23
22
21
20
19
18
17
16
15
D6
D7
A7
V
CC
XTAL2/CLKIN
XTAL1
A6
A5
A4
A3
A2
V
SS
A1
A0
D3
RESET
D4
SPISOMI
SPICLK
SPISIMO
T1IC/CR
T1PWM
T1EVT
MC
INT3
INT2
INT1
D5
JD AND N PACKAGES
(TOP VIEW)
3212827
12 13
25
24
23
22
21
20
19
SPISOMI
SPICLK
SPISIMO
T1IC/CR
T1PWM
T1EVT
MC
XTAL2/CLKIN
XTAL1
A6
A5
A4
A3
A2
426
14 15 16 1718
SS
A1
A0
D5
INT1
INT2
INT3
VA7D7D6D3
RESET
D4
FZ AND FN PACKAGES
(TOP VIEW)
CC
V
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
2
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
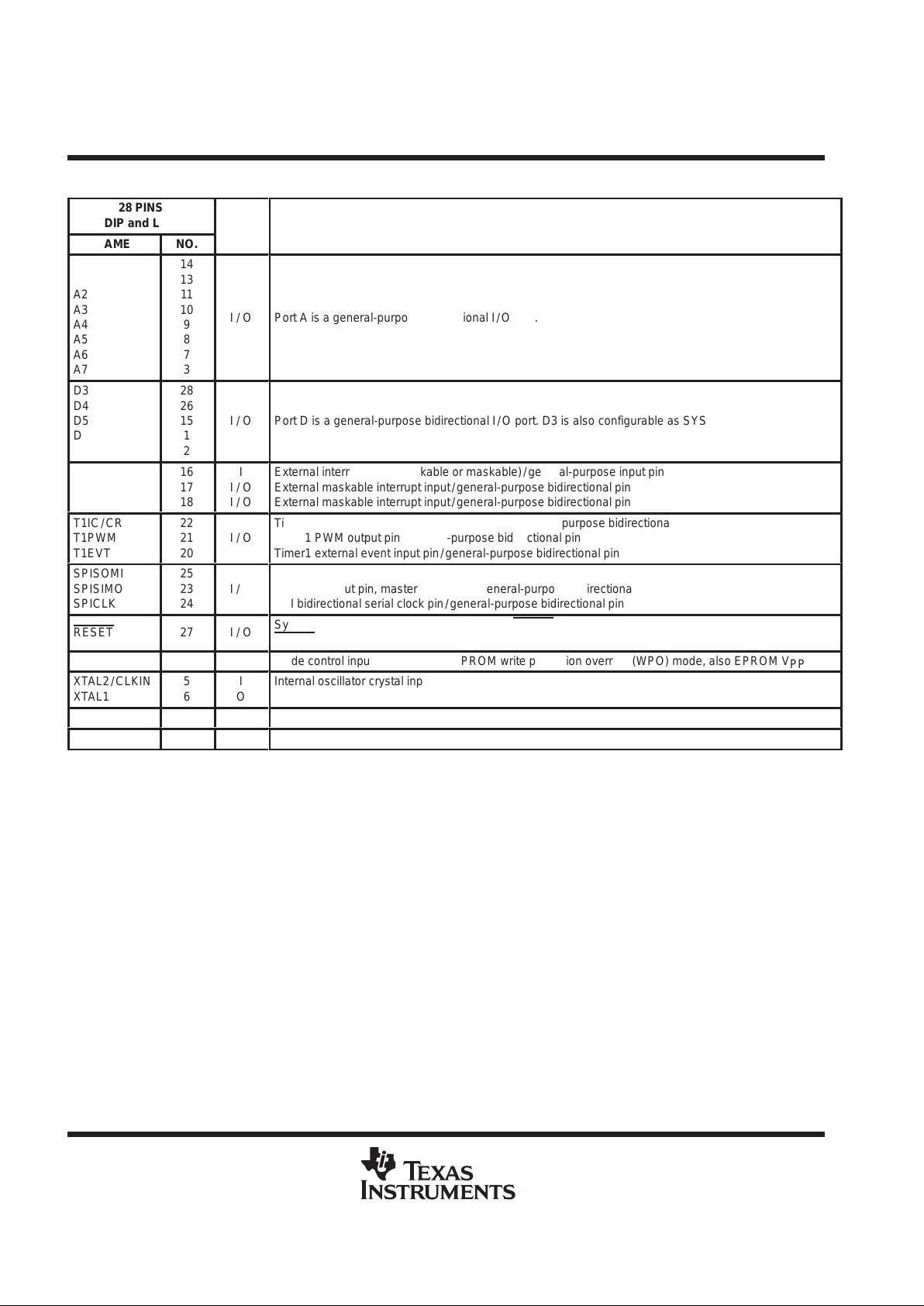
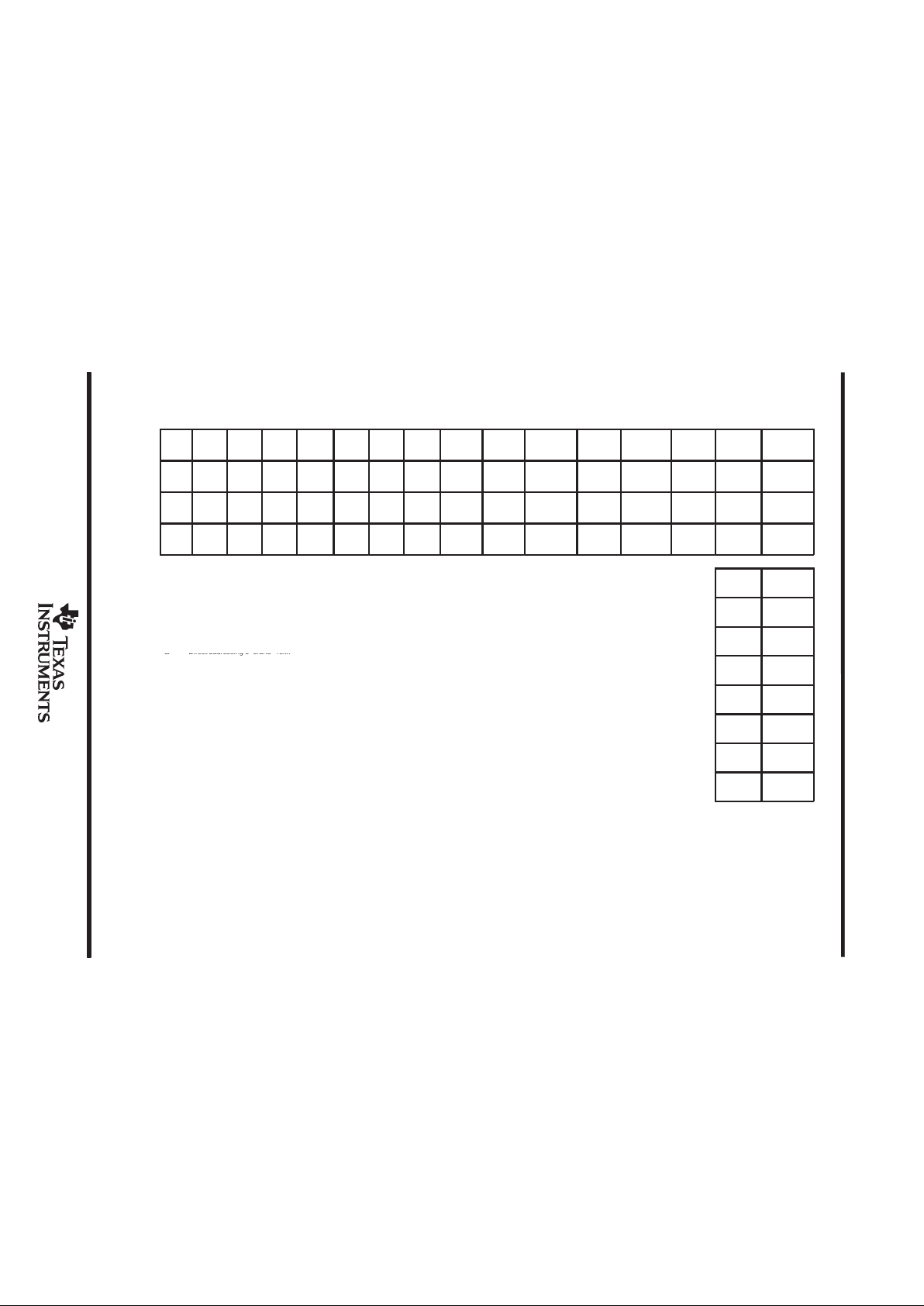
Pin Descriptions
28 PINS
DIP and LCC
I/O
†
DESCRIPTION
NAME
NO.
ÁÁÁ
Á
ÁÁÁ
Á
ÁÁÁ
Á
ÁÁÁ
Á
ÁÁÁ
Á
A0
A1
A2
A3
A4
A5
A6
A7
ÁÁ
Á
ÁÁ
Á
ÁÁ
Á
ÁÁ
Á
ÁÁ
Á
14
13
11
10
9
8
7
3
Á
Á
Á
Á
Á
Á
Á
Á
Á
Á
I/O
ББББББББББББББББББББББББ
Á
ББББББББББББББББББББББББ
Á
ББББББББББББББББББББББББ
Á
ББББББББББББББББББББББББ
Á
ББББББББББББББББББББББББ
Á
Port A is a general-purpose bidirectional I/O port.
ÁÁÁ
Á
ÁÁÁ
Á
D3
D4
D5
D6
D7
ÁÁ
Á
ÁÁ
Á
28
26
15
1
2
Á
Á
Á
Á
I/O
ББББББББББББББББББББББББ
Á
ББББББББББББББББББББББББ
Á
Port D is a general-purpose bidirectional I/O port. D3 is also configurable as SYSCLK.
ÁÁÁ
Á
INT1
INT2
INT3
ÁÁ
Á
16
17
18
Á
Á
I
I/O
I/O
ББББББББББББББББББББББББ
Á
External interrupt (non-maskable or maskable)/general-purpose input pin
External maskable interrupt input/general-purpose bidirectional pin
External maskable interrupt input/general-purpose bidirectional pin
ÁÁÁ
Á
T1IC/CR
T1PWM
T1EVT
ÁÁ
Á
22
21
20
Á
Á
I/O
ББББББББББББББББББББББББ
Á
Timer1 input capture/counter reset input pin /general-purpose bidirectional pin
Timer1 PWM output pin/general-purpose bidirectional pin
Timer1 external event input pin/general-purpose bidirectional pin
ÁÁÁ
Á
ÁÁÁ
Á
SPISOMI
SPISIMO
SPICLK
ÁÁ
Á
ÁÁ
Á
25
23
24
Á
Á
Á
Á
I/O
ББББББББББББББББББББББББ
Á
ББББББББББББББББББББББББ
Á
SPI slave output pin, master input pin/general-purpose bidirectional pin
SPI slave input pin, master output pin/general-purpose bidirectional pin
SPI bidirectional serial clock pin/general-purpose bidirectional pin
RESET
27
I/O
System reset bidirectional pin; as input pin, RESET initializes the microcontroller; as open-drain output,
RESET
indicates that an internal failure was detected by watchdog or oscillator fault circuit.
MC
19
I
Mode control input pin; enables EEPROM write protection override (WPO) mode, also EPROM V
PP
ÁÁÁ
Á
XTAL2/CLKIN
XTAL1
ÁÁ
Á
5
6
Á
Á
I
O
ББББББББББББББББББББББББ
Á
Internal oscillator crystal input/External clock source input
Internal oscillator output for crystal
V
CC
4
Positive supply voltage
V
SS
12
Ground reference
†
I = input, O = output
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
3
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
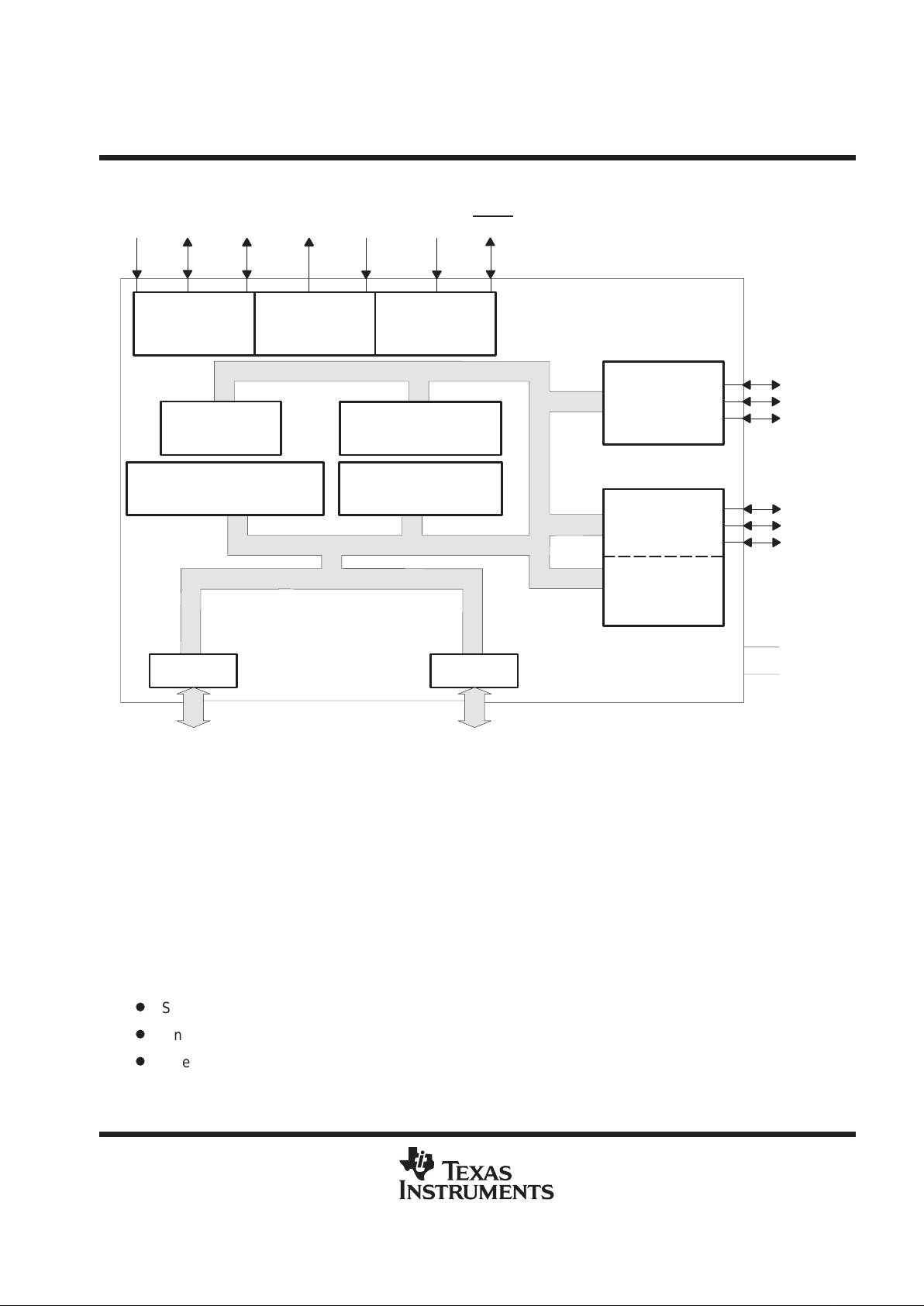
functional block diagram
Interrupts
T1IC/CR
T1EVT
T1PWM
V
System
Control
Clock Options:
Divide-By-4 or
Divide-By-1 (PLL)
RAM
128 or 256 Bytes
CPU
Port A Port D
Timer 1
Watchdog
INT1
INT2 INT3 XTAL1
XTAL2/
CLKIN
MC
SPISOMI
SPISIMO
SPICLK
Serial
Peripheral
Interface
RESET
SS
V
CC
Program Memory
ROM: 2K, 4K, or 8K Bytes
EPROM: 8K Bytes
Data EEPROM
0 or 256 Bytes
58
description
The TMS370C010, TMS370C012, TMS370C311, TMS370C310, TMS370C312, TMS370C712, and
SE370C712 devices are members of the TMS370 family of single-chip 8-bit microcontrollers. Unless otherwise
noted, the term TMS370Cx1x refers to these devices. The TMS370 family provides cost-effective real-time
system control through integration of advanced peripheral-function modules and various on-chip memory
configurations.
The TMS370Cx1x family of devices is implemented using high-performance silicon-gate CMOS EPROM and
EEPROM technologies. Low-operating power, wide-operating temperature range, and noise immunity of
CMOS technology coupled with the high performance and extensive on-chip peripheral functions make the
TMS370Cx1x devices attractive for system designs for automotive electronics, industrial motors, computer
peripheral controls, telecommunications, and consumer applications.
All TMS370Cx1x devices contain the following on-chip peripheral modules:
D
Serial peripheral interface (SPI)
D
One 24-bit general-purpose watchdog timer
D
One 16-bit general-purpose timer with an 8-bit prescaler
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
4
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
description (continued)
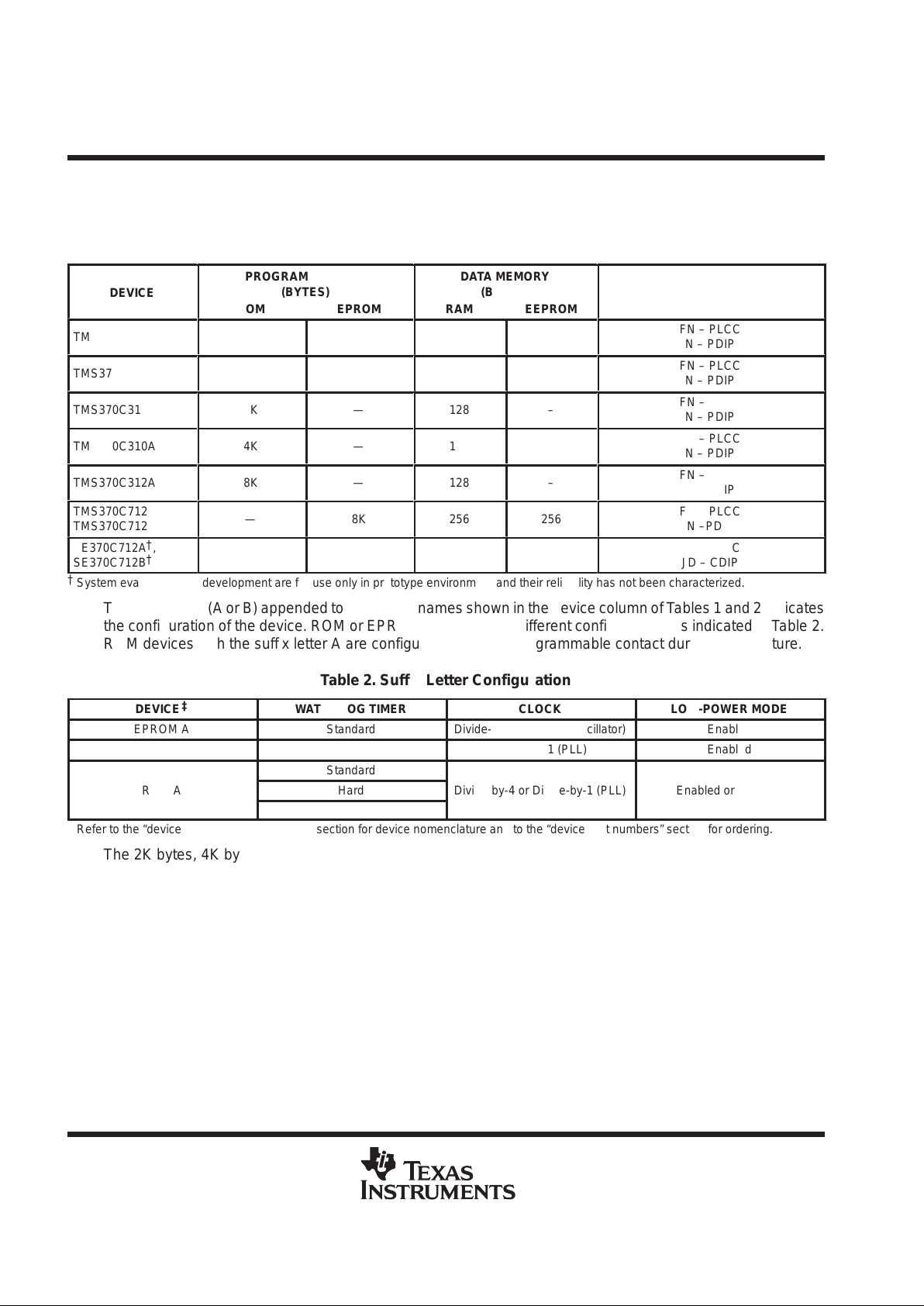
Table 1 provides a memory configuration overview of the TMS370Cx1x devices.
Table 1. Memory Configurations
DEVICE
PROGRAM MEMORY
(BYTES)
DATA MEMORY
(BYTES)
28 PIN PACKAGES
ROM
EPROM
RAM
EEPROM
TMS370C010A
4K
—
128
256
FN – PLCC
N – PDIP
БББББ
Á
TMS370C012A
ÁÁÁÁ
Á
8K
ÁÁÁ
Á
—
ÁÁÁ
Á
256
ÁÁÁ
Á
256
БББББББББ
Á
FN – PLCC
N – PDIP
БББББ
Á
TMS370C311A
ÁÁÁÁ
Á
2K
ÁÁÁ
Á
—
ÁÁÁ
Á
128
ÁÁÁ
Á
–
БББББББББ
Á
FN – PLCC
N – PDIP
TMS370C310A
4K
—
128
–
FN – PLCC
N – PDIP
БББББ
Á
TMS370C312A
ÁÁÁÁ
Á
8K
ÁÁÁ
Á
—
ÁÁÁ
Á
128
ÁÁÁ
Á
–
БББББББББ
Á
FN – PLCC
N – PDIP
TMS370C712A,
TMS370C712B
—
8K
256
256
FN – PLCC
N –PDIP
БББББ
Á
SE370C712A†,
SE370C712B
†
ÁÁÁÁ
Á
—
ÁÁÁ
Á
8K
ÁÁÁ
Á
256
ÁÁÁ
Á
256
БББББББББ
Á
FZ – CLCC
JD – CDIP
†
System evaluators and development are for use only in prototype environment and their reliability has not been characterized.
The suffix letter (A or B) appended to the device names shown in the device column of T ables 1 and 2 indicates
the configuration of the device. ROM or EPROM devices have different configurations as indicated in Table 2.
ROM devices with the suffix letter A are configured through a programmable contact during manufacture.
Table 2. Suffix Letter Configuration
DEVICE
‡
WATCHDOG TIMER CLOCK LOW-POWER MODE
EPROM A Standard Divide-by-4 (Standard oscillator) Enabled
EPROM B Hard Divide-by-1 (PLL) Enabled
Standard
ROM A
Hard
Divide-by-4 or Divide-by-1 (PLL) Enabled or disabled
Simple
‡
Refer to the “device numbering conventions” section for device nomenclature and to the “device part numbers” section for ordering.
The 2K bytes, 4K bytes, and 8K bytes of mask-programmable ROM in the associated TMS370Cx1x devices
are replaced in the TMS370C712 with 8K bytes of EPROM. All other available memory and on-chip peripherals
are identical, with the exception of no data EEPROM on the TMS370C31 1, TMS370C310, and TMS370C312
devices. The OTP (TMS370C712) device and reprogrammable (SE370C712) device are available.
TMS370C712 OTP devices are available in plastic packages. This microcontroller is effective to use for
immediate production updates for other members of the TMS370Cx1x family or for low volume production runs
when the mask charge or cycle time for the low-cost mask ROM devices is not practical.
The SE370C712 has a windowed ceramic package to allow reprogramming of the program EPROM memory
during the development/prototyping phase of design. The SE370C712 devices allow quick updates to
breadboards and prototype systems while iterating initial designs.
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
5
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
description (continued)
The TMS370Cx1x family provides two low-power modes (STANDBY and HALT) for applications where
low-power consumption is critical. Both modes stop all CPU activity (that is, no instructions are executed). In
the STANDBY mode, the internal oscillator and the general-purpose timer remain active. In the HALT mode,
all device activity is stopped. The device retains all RAM data and peripheral configuration bits throughout both
low-power modes.
The TMS370Cx1x features advanced register-to-register architecture that allows direct arithmetic and logical
operations without requiring an accumulator (for example, ADD R24, R47; add the contents of register 24 to
the contents of register 47 and store the result in register 47). The TMS370Cx1x family is fully
instruction-set-compatible, providing easy transition between members of the TMS370 8-bit microcontroller
family.
The SPI provides a convenient method of serial interaction for high-speed communications between simpler
shift register-type devices, such as display drivers, analog-to-digital (A/D) converters, PLL, input/output (I/O)
expansion, or other microcontrollers in the system.
The TMS370Cx1x family provides the system designer with economical, efficient solution to real-time control
applications. The TMS370 family extended development system (XDS) and compact development tool
(CDT) solve the challenge of efficiently developing the software and hardware required to design the
TMS370Cx1x into an ever-increasing number of complex applications. The application source code can be
written in assembly and C language, and the output code can be generated by the linker. The TMS370 family
XDS development tool communicates through a standard RS-232-C interface with an existing personal
computer. This allows the use of the PC’s editors and software utilities already familiar to the designer. The
TMS370 family XDS emphasizes ease-of-use through extensive menus and screen windowing so that a system
designer can begin developing software with minimal training. Precise real-time, in-circuit emulation and
extensive symbolic debug and analysis tools ensure efficient software and hardware implementation as well
as reducing the time-to-market cycle.
The TMS370Cx1x family together with the TMS370 family XDS22, CDT370, design kit, starter kit, software
tools, the SE370C712 reprogrammable devices, comprehensive product documentation, and customer
support provide a complete solution to the needs of the system designer.
central processing unit (CPU)
The CPU on the TMS370Cx1x device is the high-performance 8-bit TMS370 CPU module. The ’x1x implements
an efficient register-to-register architecture that eliminates the conventional accumulator bottleneck. The
complete ’x1x instruction map is shown in Table 17 in the TMS370Cx1x instruction set overview section.
The ’370Cx1x CPU architecture provides the following components:
CPU registers:
D
A stack pointer that points to the last entry in the memory stack
D
A status register that monitors the operation of the instructions and contains the global interrupt-enable bits
D
A program counter (PC) that points to the memory location of the next instruction to be executed
XDS and CDT are trademarks of Texas Instruments Incorporated.
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
6
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
central processing unit (CPU) (continued)
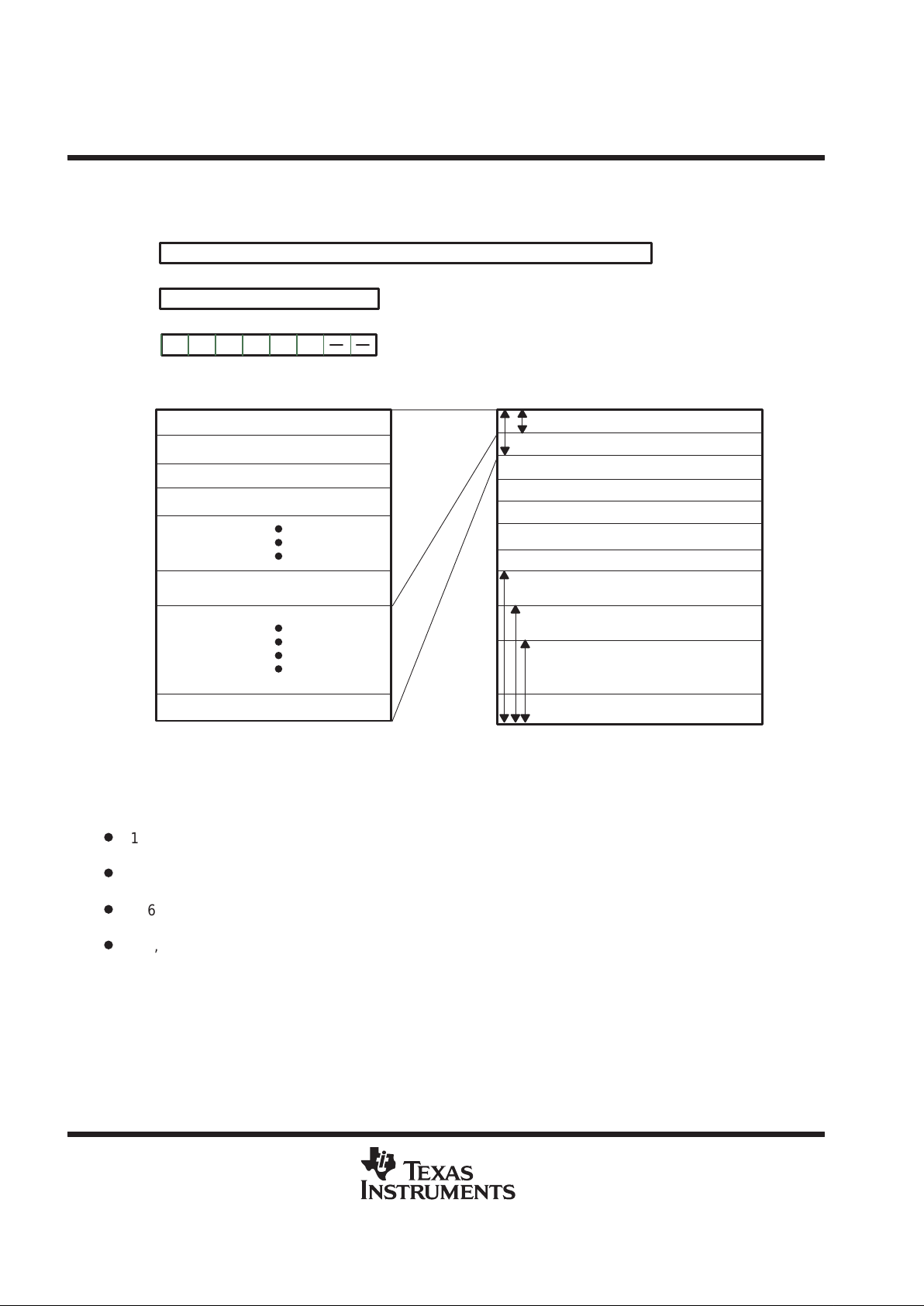
Figure 1 illustrates the CPU registers and memory blocks.
Reserved
†
Peripheral File
Not Available
‡
100Fh
1010h
1F00h
1FFFh
2000h
5FFFh
6000h
77FFh
7800h
Interrupts and Reset Vectors;
Trap Vectors
104Fh
1050h
1EFFh
Reserved
†
7FFFh
0
RAM (Includes up to 256-Byte Registers File)
015
Program Counter
7
Legend:
Z=Zero
IE1=Level 1 interrupts Enable
C=Carry
V=Overflow
N=Negative
IE2=Level 2 interrupts Enable
IE1IE2ZNC
01234567
V
Status Register (ST)
Stack Pointer (SP)
R0(A)
R1(B)
R3
R127
0000h
0001h
0002h
007Fh
R255
0003h
R2
00FFh
256-Byte Data EEPROM
2K-Byte ROM (7800h–7FFFh)
6FFFh
7000h
8K-Byte ROM/EPROM (6000h–7FFFh)
4K-Byte ROM (7000h–7FFFh)
7FC0h
7FBFh
128-Byte RAM (0000h–007Fh)
007Fh
0080h
00FFh
0100h
256-Byte RAM (0000h–00FFh)
0000h
†
Reserved means the address space is reserved for future expansion.
‡
Not available means the address space is not accessible.
Figure 1. Programmer’s Model
A memory map includes:
D
128- or 256-byte general-purpose RAM that can be used for data memory storage, program instructions,
general purpose register, or the stack
D
A peripheral file that provides access to all internal peripheral modules, system-wide control functions, and
EEPROM/EPROM programming control
D
256-byte EEPROM module, that provides in-circuit programmability and data retention in power-off
conditions
D
2K-, 4K-, or 8K-byte ROM or 8K-byte EPROM
stack pointer (SP)
The SP is an 8-bit CPU register. Stack operates as a last-in, first-out, read/write memory. T ypically, the stack
is used to store the return address on subroutine calls as well as the status register (ST) contents during interrupt
sequences.
The SP points to the last entry or top of the stack. The SP is incremented automatically before data is pushed
onto the stack and decremented after data is popped from the stack. The stack can be placed anywhere in the
on-chip RAM.
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
7
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
central processing unit (CPU) (continued)
status register (ST)
The ST monitors the operation of the instructions and contains the global interrupt-enable bits. The ST includes
four status bits (condition flags) and two interrupt-enable bits.
D
The four status bits indicate the outcome of the previous instruction; conditional instructions (for example,
the conditional-jump instructions) use the status bits to determine program flow.
D
The two interrupt-enable bits control the two interrupt levels.
The ST, status-bit notation, and status-bit definitions are shown in Table 3.
Table 3. Status Registers
7
6
5
4
3
ÁÁÁÁ
2
1
0
C
N
Z
V
IE2
ÁÁÁÁ
IE1 Reserved Reserved
RW-0
RW-0
RW-0
RW-0
RW-0
ÁÁÁÁ
RW-0
R = read, W = write, 0 = value after reset
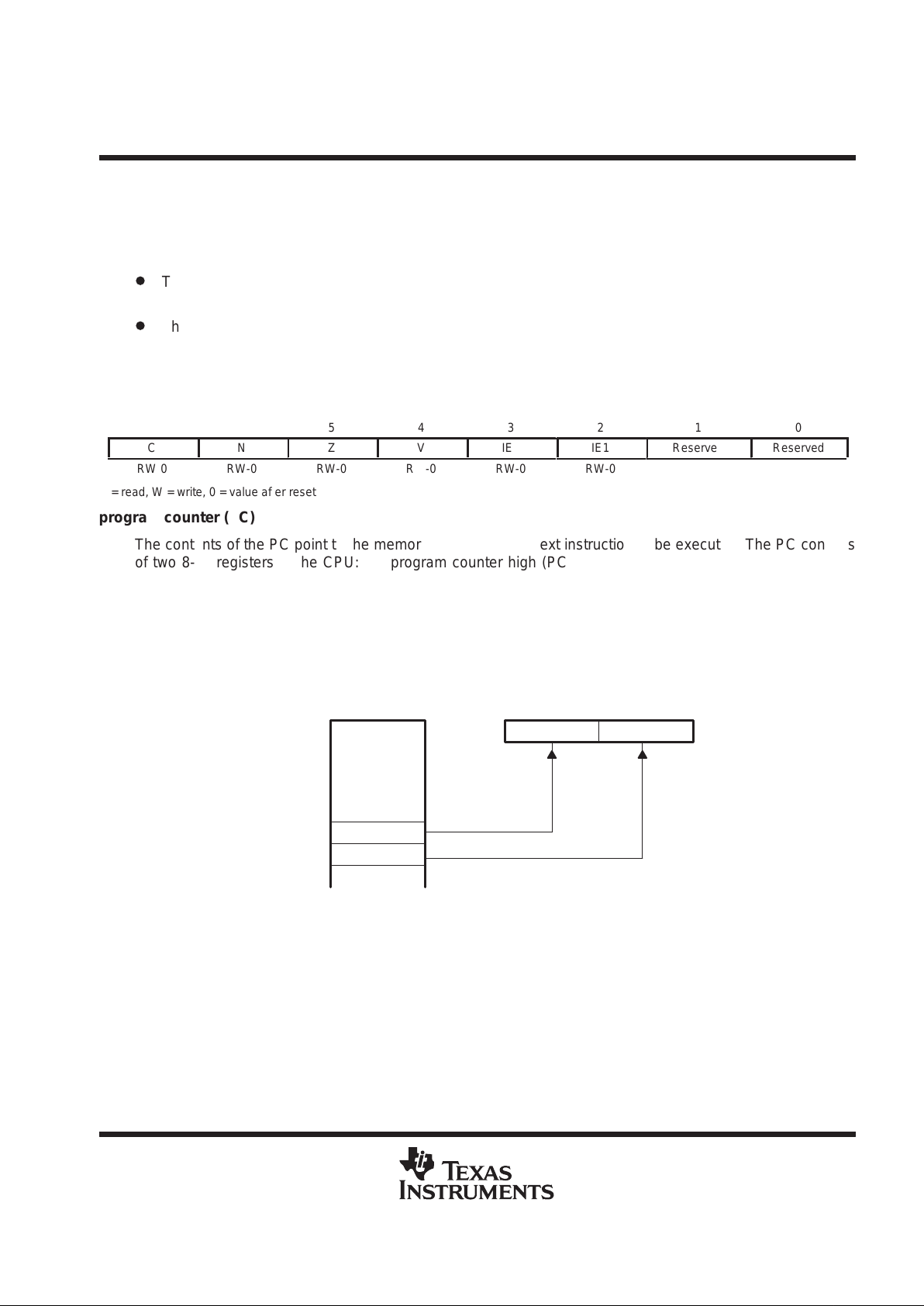
program counter (PC)
The contents of the PC point to the memory location of the next instruction to be executed. The PC consists
of two 8-bit registers in the CPU: the program counter high (PCH) and program counter low (PCL). These
registers contains the most significant byte (MSbyte) and least significant byte (LSbyte) of a 16-bit address.
During reset, the contents of the reset vector (7FFEh, 7FFFh) are loaded into the PC. The PCH (MSbyte of the
PC) is loaded with the contents of memory location 7FFEh, and the PCL (LSbyte of the PC) is loaded with the
contents of memory location 7FFFh. Figure 2 shows this operation using an example value of 6000h as the
contents of the reset vector.
Memory
Program Counter (PC)
60 00
PCH PCL
60
00
0000h
7FFEh
7FFFh
Figure 2. Program Counter After Reset
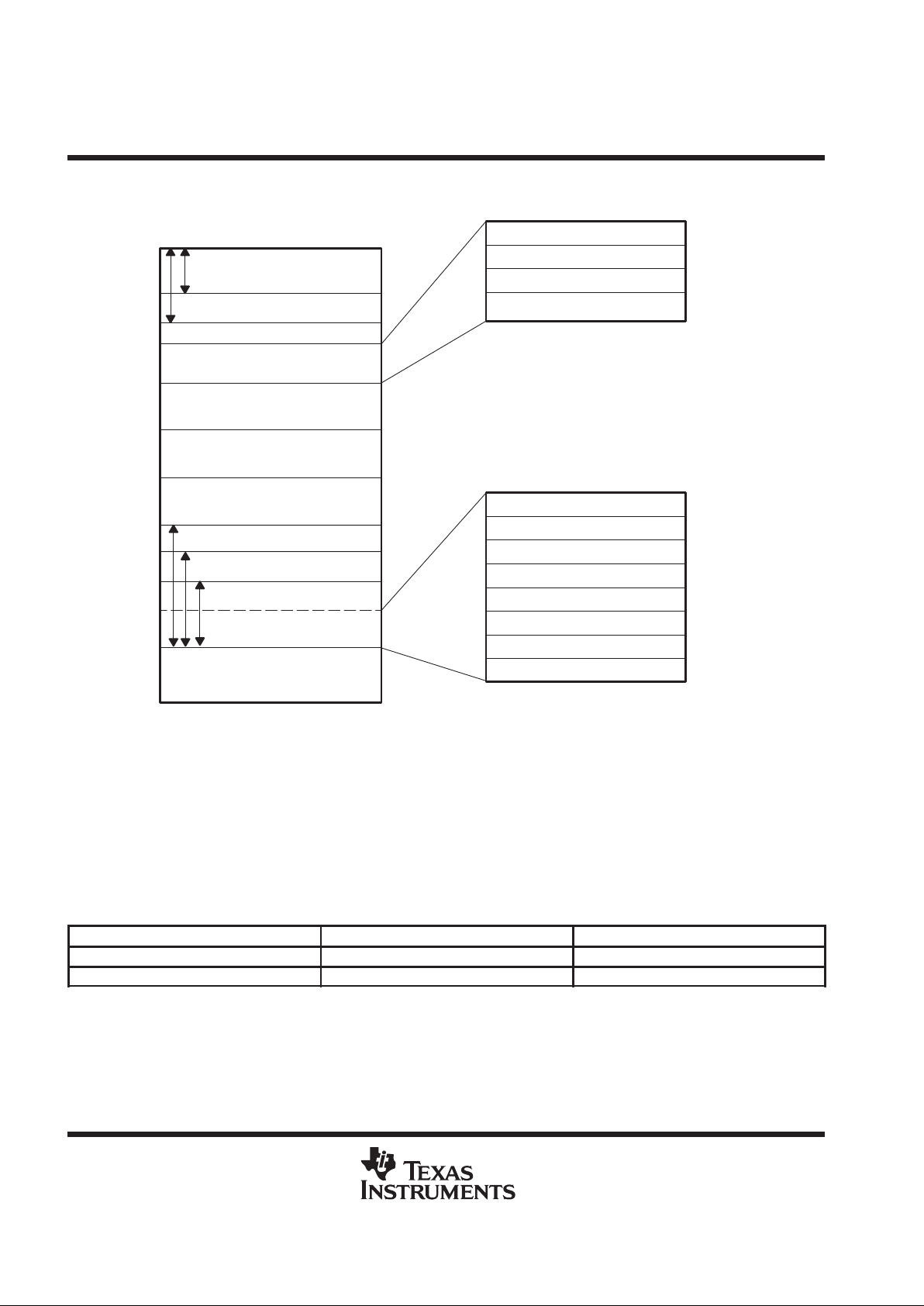
memory map
The TMS370Cx1x architecture is based on the Von Neuman architecture, where the program memory and data
memory share a common address space. All peripheral input/output is memory mapped in this same common
address space. As shown in Figure 3, the TMS370Cx1x provides memory-mapped RAM, ROM, data EEPROM,
I/O pins, peripheral functions, and system-interrupt vectors.
The peripheral file contains all I/O port control, peripheral status and control, EEPROM, EPROM, and
system-wide control functions. The peripheral file is located between 1010h to 104Fh and is divided logically
into four peripheral file frames of 16 bytes each. Each on-chip peripheral is assigned to a separate frame through
which peripheral control and data information is passed.
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
8
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
TMS370Cx1x CPU (continued)
256-Byte RAM
(Register File/Stack)
128-Byte RAM
(Register File/Stack)
Reserved
†
Peripheral File
Reserved
†
256-Byte Data EEPROM
Not Available
‡
7FC0hTrap 15–0
7FE0hReserved
7FF4h
Interrupt 3
Interrupt 2
Interrupt 1
Reset
1010h
1020h
System Control
Digital Port Control
1030h
1040h
Timer 1 Peripheral Control
Vectors
7FDFh
7FF3h
7FF5h
101Fh
102Fh
103Fh
104Fh
–
–
–
–
–
–
–
Not Available
‡
SPI Control
Timer 1
Serial Peripheral Interface
7FFAh 7FFBh–
7FFCh 7FFDh–
7FFEh 7FFFh–
0000h
0080h
007Fh
1010h
104Fh
1050h
1EFFh
1F00h
1FFFh
2000h
5FFFh
6000h
6FFFh
7000h
77FFh
7800h
FFFFh
100Fh
8K Bytes Start at 6000h
4K Bytes Start at 7000h
2K Bytes Start at 7800h
Interrupts and Reset Vectors;
Trap Vectors
7FBFh
7FC0h
7FFFh
8000h
7FF6h 7FF7h––
7FF8h 7FF9h–
Peripheral File Control Registers
0100h
00FFh
†
Reserved means that the address space is reserved for future expansion.
‡
Not available means that the address space is not accessible.
Figure 3. TMS370Cx1x Memory Map
RAM/register file (RF)
Locations within the RAM address space can serve as the RF, general-purpose read/write memory, program
memory, or the stack instructions. The TMS370Cx10, TMS370Cx11, and TMS370C312 contain 128 bytes of
internal RAM mapped beginning at location 0000h (R0) and continuing through location 007Fh (R127) which
is shown in Table 4 along with ’712 devices.
Table 4. RAM Memory Map
’x10, ’x11 AND ’312 ’712
RAM size 128 bytes 256 bytes
Memory mapped 0000h–007Fh 0000h–00FFh
The first two registers, R0 and R1, are also called register A and B, respectively. Some instructions implicitly
use register A or B; for example, the instruction LDSP (load SP) assumes that the value to be loaded into the
stack pointer is contained in register B. Registers A and B are the only registers cleared on reset.
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
9
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
peripheral file (PF)
The TMS370Cx1x control registers contain all the registers necessary to operate the system and peripheral
modules on the device. The instruction set includes some instructions that access the PF directly. These
instructions designate the register by the number of the PF relative to 1000h, preceded by P0 for a hexadecimal
designator or P for a decimal designator. For example, the system-control register 0 (SCCR0) is located at
address 1010h; its peripheral file hexadecimal designator is P010, and its decimal designator is P16. Table 5
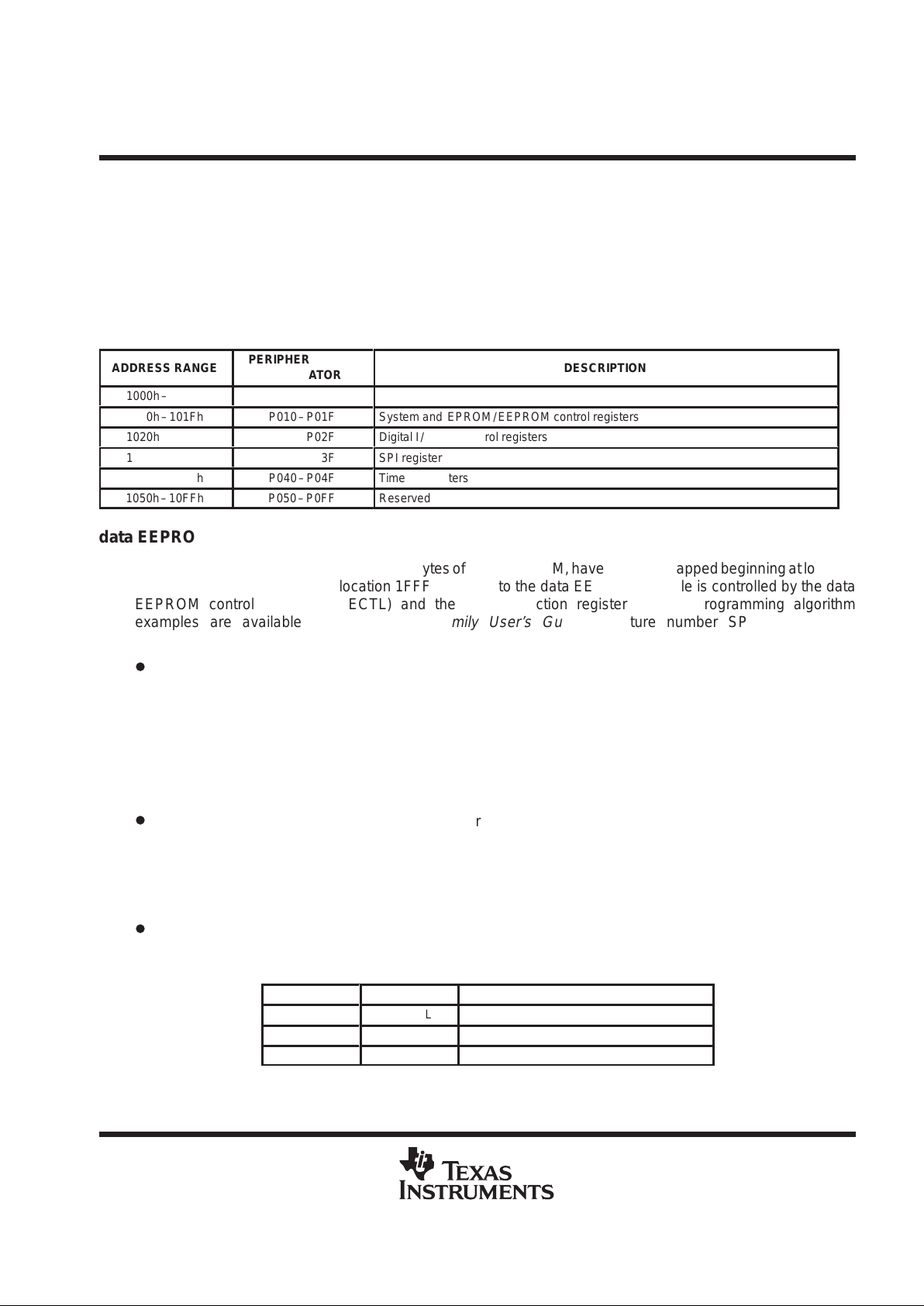
shows the TMS370Cx1x PF address map.
Table 5. TMS370Cx1x Peripheral File Address Map
БББББ
Á
ADDRESS RANGE
БББББББ
Á
БББББ
Á
PERIPHERAL FILE
DESIGNAT OR
БББББББББББББББББББ
Á
DESCRIPTION
1000h–100Fh
БББББББ
P000–P00F Reserved
1010h–101Fh
БББББББ
P010–P01F
System and EPROM/EEPROM control registers
1020h–102Fh
P020–P02F
Digital I/O port control registers
1030h–103Fh
БББББББ
P030–P03F
SPI registers
1040h–104Fh
БББББББ
P040–P04F
Timer 1 registers
1050h–10FFh
БББББББ
P050–P0FF Reserved
data EEPROM
The TMS370Cx1x devices, containing 256 bytes of data EEPROM, have memory mapped beginning at location
1F00h and continuing through location 1FFFh. Writing to the data EEPROM module is controlled by the data
EEPROM control register (DEECTL) and the write-protection register (WPR). Programming algorithm
examples are available in the
TMS370 Family User’s Guide
(literature number SPNU127) or the
TMS370 Family Data Manual
(literature number SPNS014B). The data EEPROM features include the following:
D
Programming:
– Bit-, byte-, and block-write/erase modes
– Internal charge pump circuitry. No external EEPROM programming voltage supply is needed.
– Control register: Data EEPROM programming is controlled by the DEECTL located in the PF frame
beginning at location P01A. See Table 6.
– In-circuit programming capability. There is no need to remove the device to program.
D
Write protection. Writes to the data EEPROM are disabled during the following conditions.
– Reset. All programming of the data EEPROM module is halted.
– Write protection active. There is one write-protect bit per 32-byte EEPROM block.
– Low-power mode operation
D
Write protection can be overridden by applying 12 V to MC.
T able 6. Data EEPROM and PROGRAM EPROM Control Registers Memory Map
ADDRESS
SYMBOL
NAME
P01A
DEECTL
Data EEPROM Control Register
P01B
— Reserved
P01C
EPCTL
Program EPROM Control Register
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
10
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
program EPROM
†
The TMS370C712 device contains 8K bytes of EPROM mapped, beginning at location 6000h and continuing
through location 7FFFh as shown in Figure 3. Reading the program EPROM modules is identical to reading
other internal memory. During programming, the EPROM is controlled by the EPROM control register (EPCTL).
The program EPROM module features include:
D
Programming
– In-circuit programming capability if V
PP
is applied to MC
– Control register: EPROM programming is controlled by the EPROM control register (EPCTL) located in
the peripheral file (PF) frame at location P01Ch as shown in Table 6.
D
Write protection: Writes to the program EPROM are disabled under the following conditions:
– Reset: All programming to the EPROM module is halted
– Low-power modes
– 13 V not applied to MC
program ROM
†
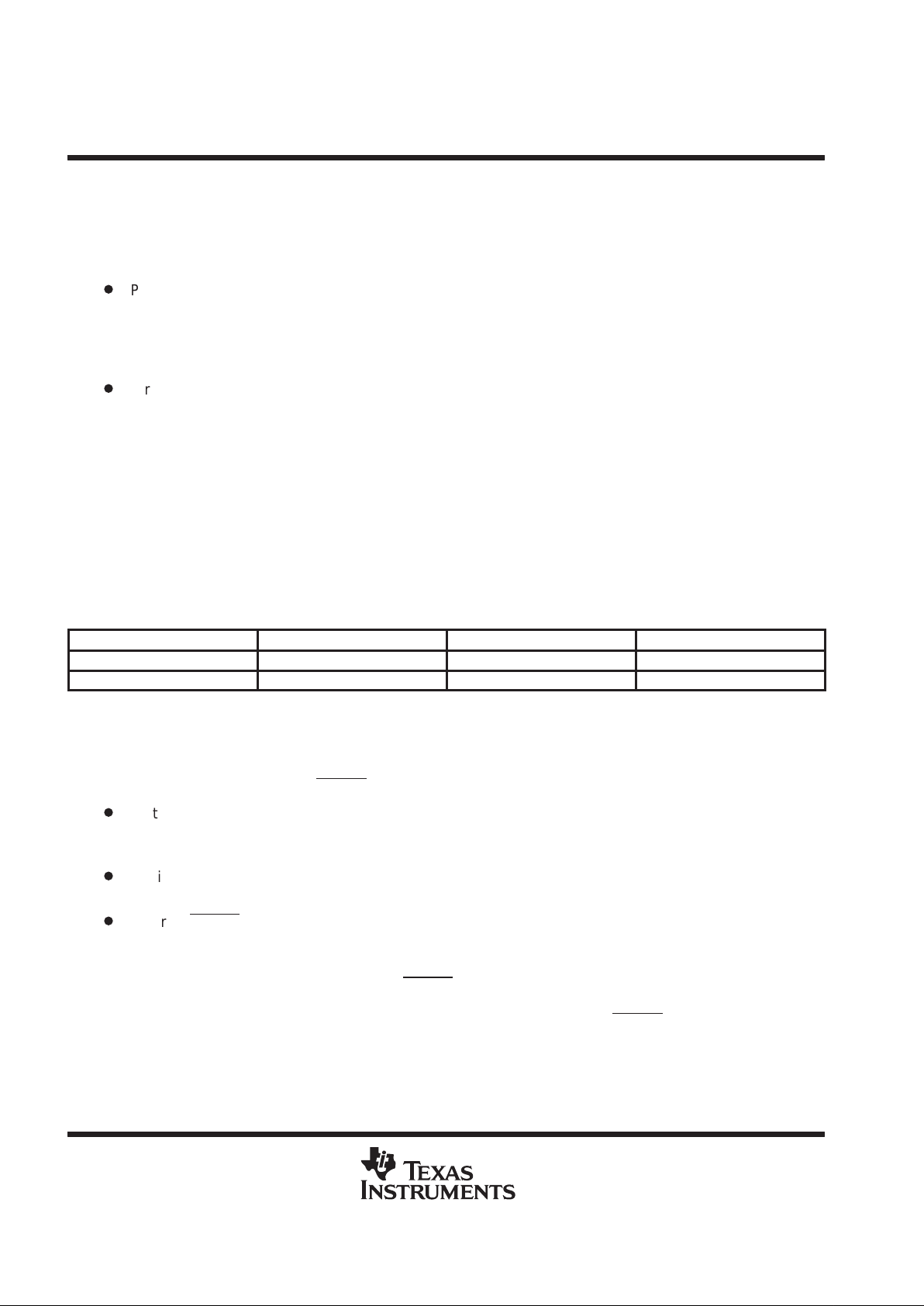
The program ROM consists of 2K to 8K bytes of mask programmable read-only memory (see Table 7). The
program ROM is used for permanent storage of data or instructions. Programming of the mask ROM is
performed at the time of device fabrication.
T able 7. Program ROM Memory Map
’x11 ’x10 ’x12
ROM size 2K bytes 4K bytes 8K bytes
Memory mapped 7800h–7FFFh 7000h–7FFFh 6000h–7FFFh
system reset
The system-reset operation ensures an orderly start-up sequence for the TMS370Cx1x CPU-based device.
There are up to three different actions that can cause a system reset to the device. Two of these actions are
generated internally , while one (RESET
pin) is controlled externally. These actions are as follows:
D
Watchdog (WD) timer. A watchdog-generated reset occurs if an improper value is written to the WD key
register, or if the re-initialization does not occur before the watchdog timer timeout . See the
TMS370 Family
User’s Guide
(literature number SPNU127) for more information.
D
Oscillator reset. Reset occurs when the oscillator operates outside of the recommended operating range.
See the
TMS370 Family User’s Guide
(literature number SPNU127) for more information.
D
External RESET pin. A low level signal can trigger an external reset. To ensure a reset, the external signal
should be held low for one SYSCLK cycle. Signals of less than one SYSCLK can generate a reset. See the
TMS370 Family User’s Guide
(literature number SPNU127) for more information.
Once a reset source is activated, the external RESET pin is driven (active) low for a minimum of eight SYSCLK
cycles. This allows the ’x1x device to reset external system components. Additionally , if a cold start (V
CC
is off
for several hundred milliseconds) condition or oscillator failure occurs or the RESET pin is held low, then the
reset logic holds the device in a reset state for as long as these actions are active.
†
Memory addresses 7FF8h through 7FFFh are reserved for interrupt and reset vectors. Trap vectors, used with TRAP0 through TRAP15
instructions are located between addresses 7FC0h and 7FDFh.
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
11
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
system reset (continued)
After a reset, the program can check the oscillator-fault flag (OSC FLT FLAG, SCCR0.4), the cold-start flag
(COLD ST ART , SCCR0.7) and the watchdog reset (WD OVRFL INT FLAG, T1CTL2.5) to determine the source
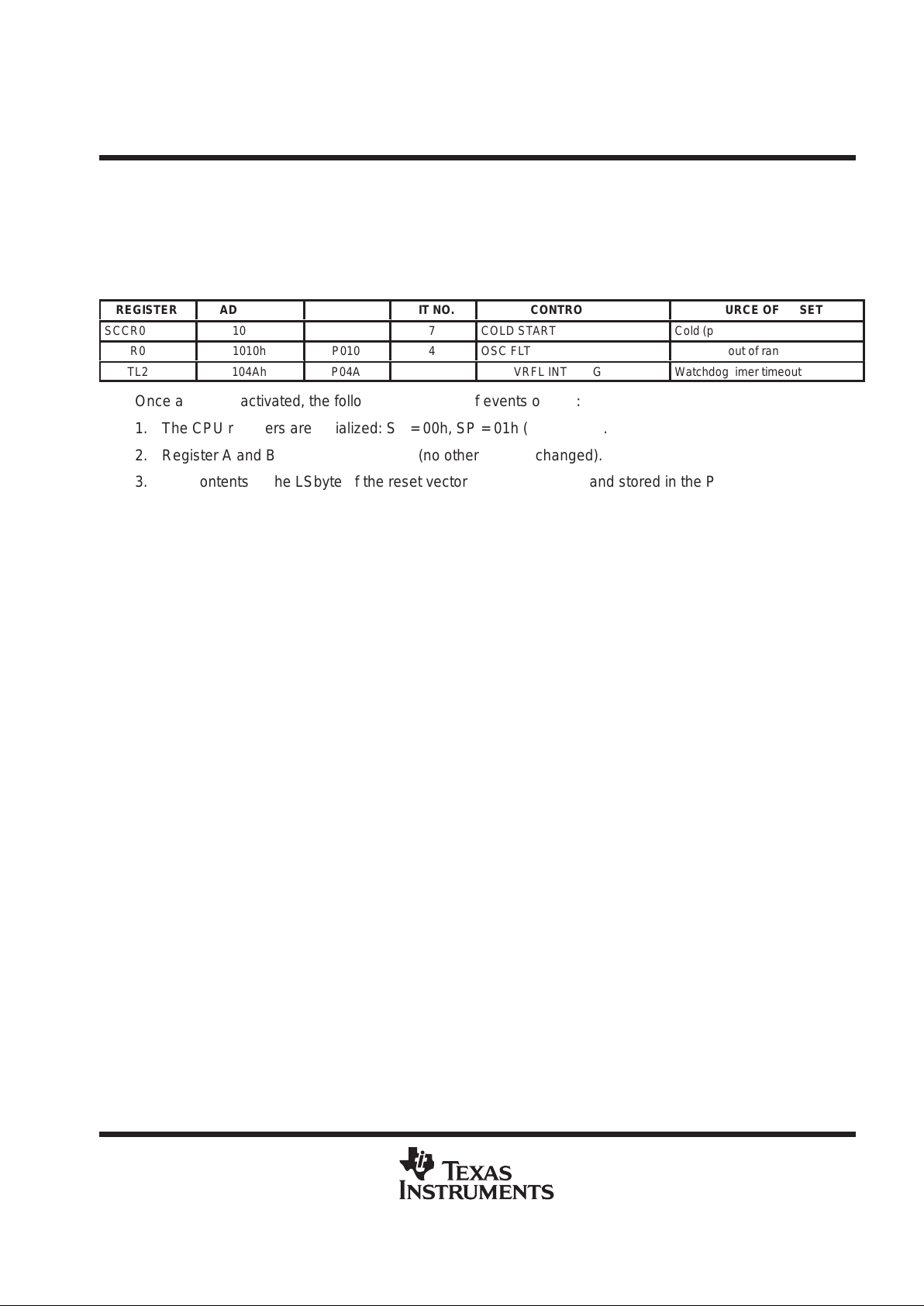
of the reset. A reset does not clear these flags. Table 8 depicts the reset sources.
Table 8. Reset Sources
REGISTER
ADDRESS
PF
BIT NO.
CONTROL BIT
SOURCE OF RESET
SCCR0
1010h
P010
7
COLD START
Cold (power-up)
SCCR0
1010h
P010
4
OSC FLT FLAG
Oscillator out of range
T1CTL2
104Ah
P04A
5
WD OVRFL INT FLAG
Watchdog timer timeout
Once a reset is activated, the following sequence of events occurs:
1. The CPU registers are initialized: ST = 00h, SP = 01h (reset state).
2. Register A and B are initialized to 00h (no other RAM is changed).
3. The contents of the LSbyte of the reset vector (07FFh) are read and stored in the PCL.
4. The contents of the MSbyte of the reset vector (07FEh) are read and stored in the PCH.
5. Program execution begins with an opcode fetch from the address pointed to the PC.
The reset sequence takes 20 SYSCLK cycles from the time the reset pulse is released until the first opcode
fetch. During a reset, RAM contents (except for registers A and B) remain unchanged, and the module control
register bits are initialized to their reset state.
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
12
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
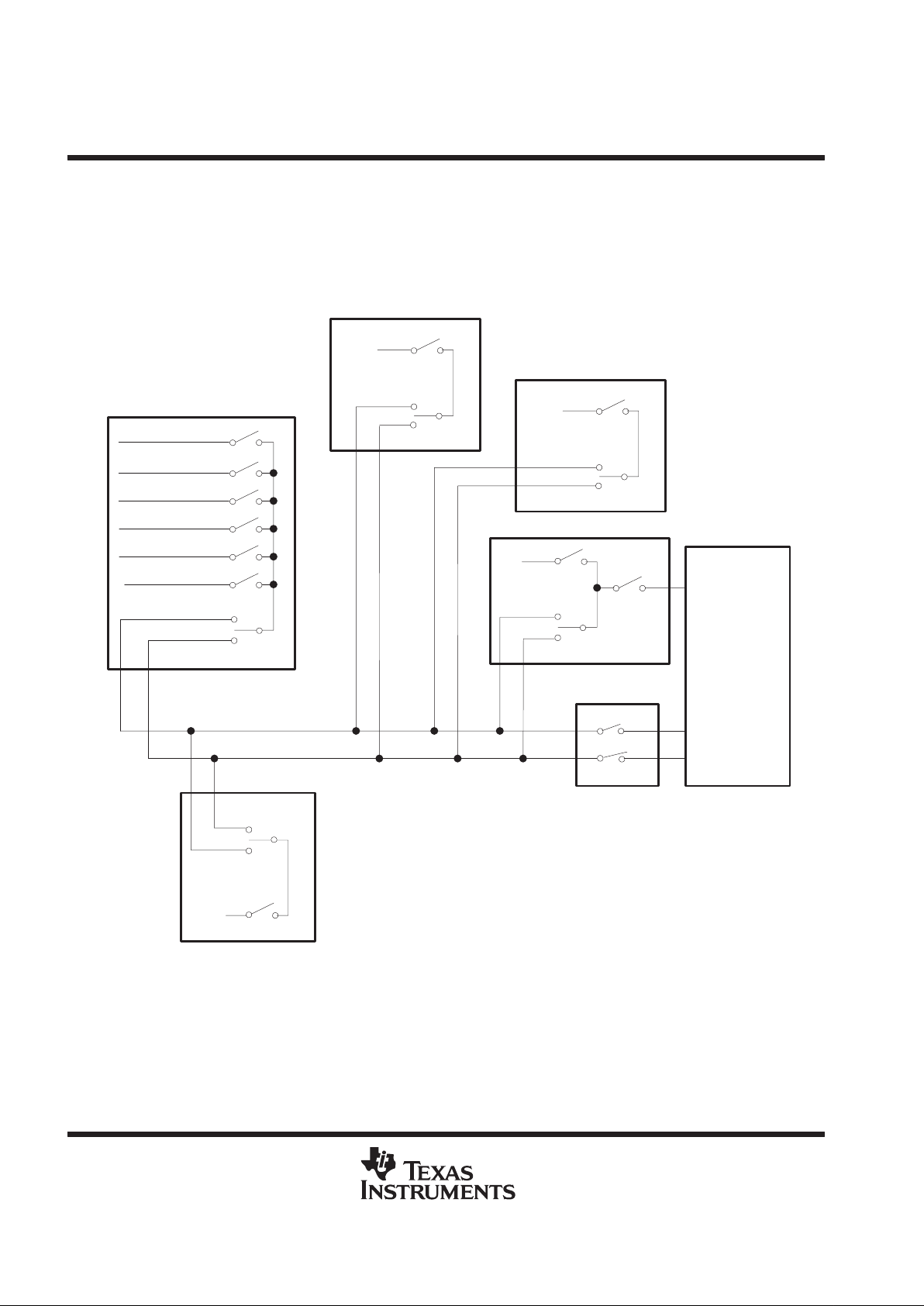
interrupts
The TMS370 family software-programmable interrupt structure permits flexible on-chip and external interrupt
configurations to meet real-time interrupt-driven application requirements. The hardware interrupt structure
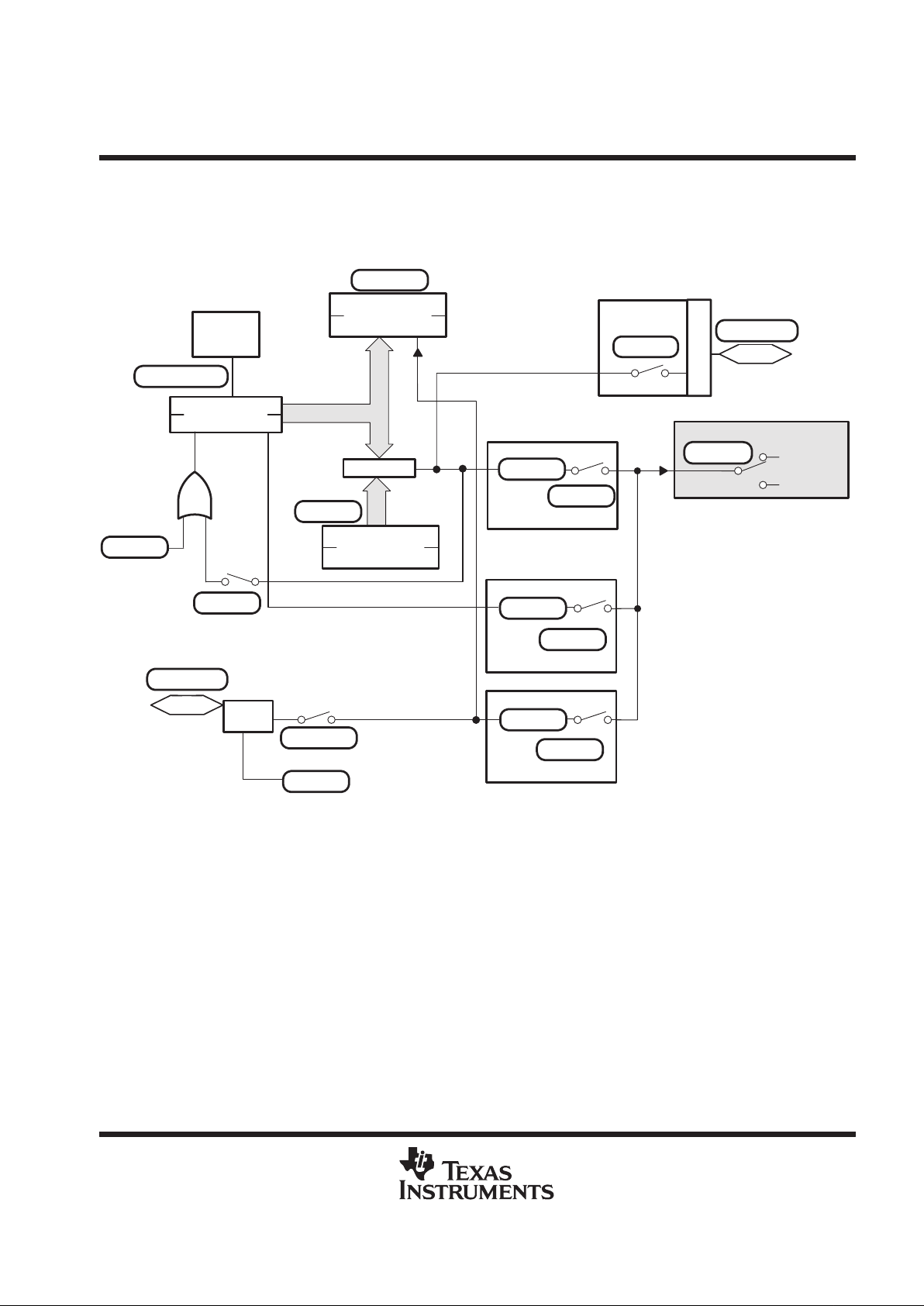
incorporates two priority levels as shown in Figure 4. Interrupt level 1 has a higher priority than interrupt
level 2. The two priority levels can be masked independently by the global interrupt mask bits (IE1 and IE2) of
the ST.
TIMER1
CPU
NMI
Logic
Enable
IE1
IE2
Level 1 INT
Level 2 INT
T1 PRI
Priority
Overflow
Compare1
Ext Edge
Compare2
Input Capture
Watchdog
EXT INT 3
INT3 PRI
INT 3
STATUS REG
EXT INT1
INT1 PRI
INT1
SPI INT
SPI PRI
SPI
EXT INT 2
INT2 PRI
INT 2
Figure 4. Interrupt Control
Each system interrupt is configured independently to either the high- or low-priority chain by the application
program during system initialization. Within each interrupt chain, the interrupt priority is fixed by the position of
the system interrupt. However, since each system interrupt is selectively configured on either the high- or
low-priority-interrupt chain, the application program can elevate any system interrupt to the highest priority.
Arbitration between the two priority levels is performed within the CPU. Arbitration within each of the priority
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
13
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
interrupts (continued)
chains is performed within the peripheral modules to support interrupt expansion for future modules.
Pending-interrupts are serviced upon completion of current instruction execution, depending on their interrupt
mask and priority conditions.
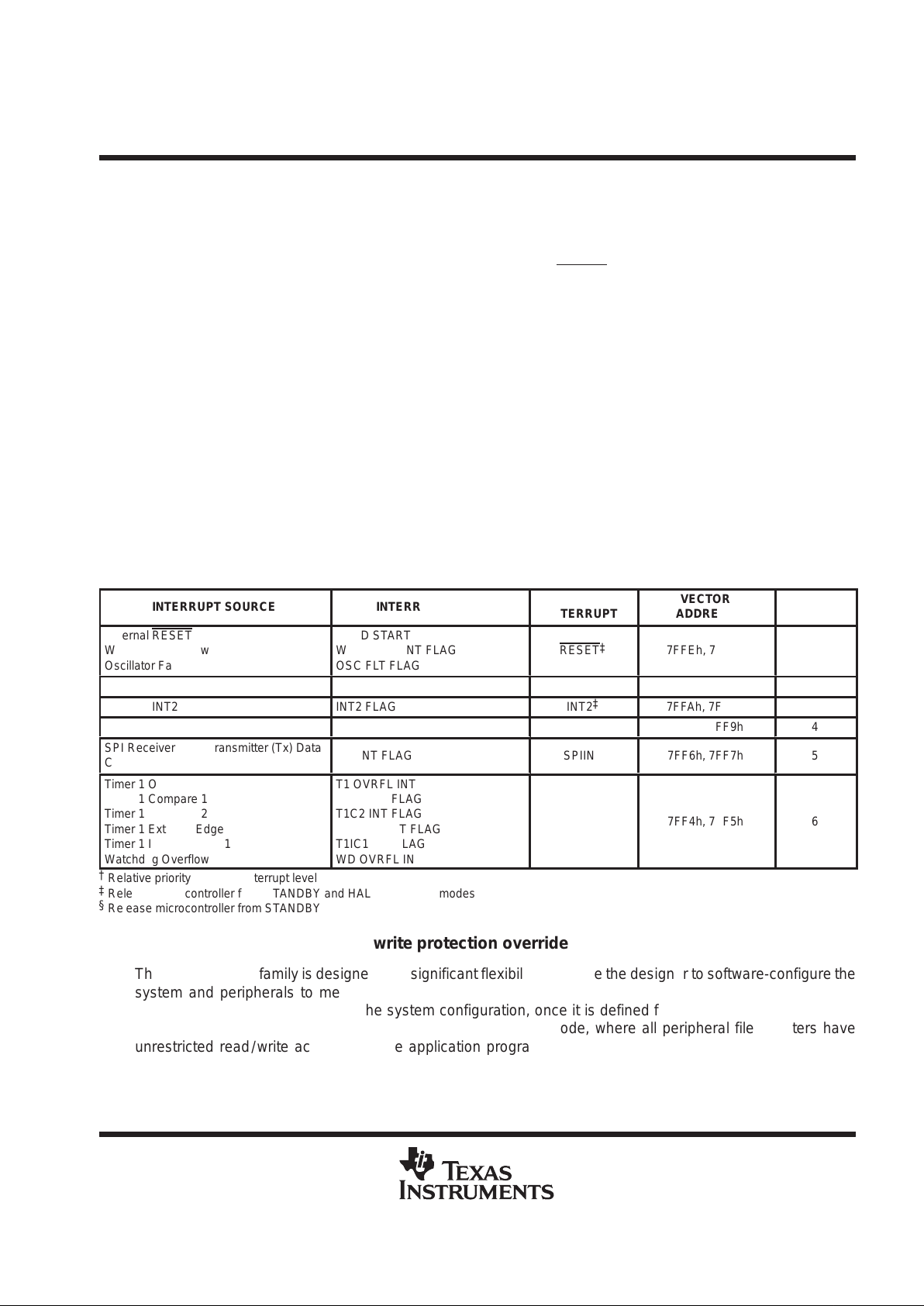
The TMS370Cx1x has five hardware system interrupts (plus RESET
) as shown in Table 9. Each system
interrupt has a dedicated vector located in program memory through which control is passed to the interrupt
service routines. A system interrupt may have multiple interrupt sources. All of the interrupt sources are
individually maskable by local interrupt enable control bits in the associated peripheral file. Each interrupt source
FLAG bit is individually readable for software polling or to determine which interrupt source generated the
associated system interrupt.
Two of the system interrupts are generated by on-chip peripheral functions, and three external interrupts are
supported. Software configuration of the external interrupts is performed through the INT1, INT2, and INT3
control registers in peripheral file frame 1. Each external interrupt is individually software configurable for input
polarity (rising or falling edge) for ease of system interface. External interrupt INT1 is software configurable as
either a maskable or non-maskable interrupt. When INT1 is configured as non-maskable, it cannot be masked
by the individual or global enable mask bits. The INT1 NMI bit is protected during non-privileged operation and,
therefore, should be configured during the initialization sequence following reset. To maximize pin flexibility,
external interrupts INT2 and INT3 can be software configured as general purpose input / output pins if the
interrupt function is not required (INT1 can be similarly configured as an input pin).
T able 9. Hardware System Interrupts
INTERRUPT SOURCE
INTERRUPT FLAG
SYSTEM
INTERRUPT
VECTOR
ADDRESS
PRIORITY
†
БББББББББ
Á
External RESET
Watchdog Overflow
Oscillator Fault Detect
БББББББ
Á
COLD START
WD OVRFL INT FLAG
OSC FLT FLAG
ÁÁÁÁ
Á
RESET
‡
БББББ
Á
7FFEh, 7FFFh
ÁÁ
Á
1
External INT1
INT1 FLAG
INT1
‡
7FFCh, 7FFDh
2
External INT2
INT2 FLAG
INT2
‡
7FFAh, 7FFBh
3
External INT3
INT3 FLAG
INT3
‡
7FF8h, 7FF9h
4
БББББББББ
Á
SPI Receiver (Rx)/Transmitter (Tx) Data
Complete
БББББББ
Á
SPI INT FLAG
ÁÁÁÁ
Á
SPIINT
БББББ
Á
7FF6h, 7FF7h
ÁÁ
Á
5
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
Timer 1 Overflow
Timer 1 Compare 1
Timer 1 Compare 2
Timer 1 External Edge
Timer 1 Input Capture 1
Watchdog Overflow
БББББББ
Á
БББББББ
Á
БББББББ
Á
T1 OVRFL INT FLAG
T1C1 INT FLAG
T1C2 INT FLAG
T1EDGE INT FLAG
T1IC1 INT FLAG
WD OVRFL INT FLAG
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
T1INT
§
БББББ
Á
БББББ
Á
БББББ
Á
7FF4h, 7FF5h
ÁÁ
Á
ÁÁ
Á
ÁÁ
Á
6
†
Relative priority within an interrupt level
‡
Release microcontroller from STANDBY and HALT low-power modes
§
Release microcontroller from STANDBY low-power mode
privileged operation and EEPROM write protection override
The TMS370Cx1x family is designed with significant flexibility to enable the designer to software-configure the
system and peripherals to meet the requirements of a variety of applications. The nonprivileged mode of
operation ensures the integrity of the system configuration, once it is defined for an application. Following a
hardware reset, the TMS370Cx1x operates in the privileged mode, where all peripheral file registers have
unrestricted read / write access, and the application program configures the system during the initialization
sequence following reset. As the last step of system initialization, the PRIVILEGE DISABLE bit (SCCR2.0) is
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
14
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
privileged operation and EEPROM write protection override (continued)
set to 1 to enter the nonprivileged mode, disabling write operations to specific configuration-control bits within
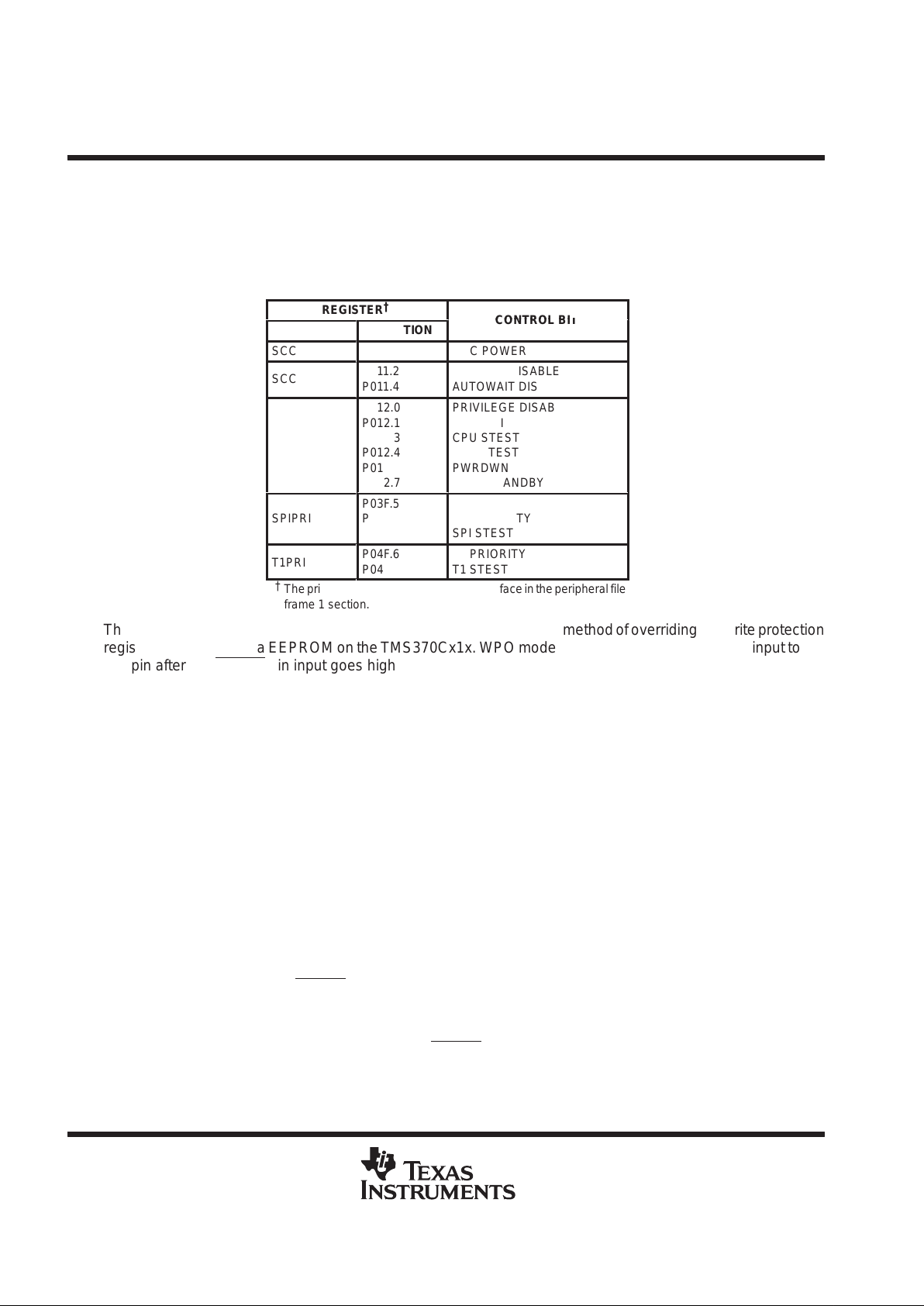
the PF . T able 10 displays the system-configuration bits which are write-protected during the nonprivileged mode
and must be configured by software prior to exiting the privileged mode.
Table 10. Privilege Bits
REGISTER
†
NAME
LOCATION
CONTROL BIT
SCCRO
P010.6
OSC POWER
SCCR1
P011.2
P011.4
MEMORY DISABLE
AUTOWAIT DISABLE
ÁÁÁ
Á
ÁÁÁ
Á
ÁÁÁ
Á
SCCR2
ÁÁÁ
Á
ÁÁÁ
Á
ÁÁÁ
Á
P012.0
P012.1
P012.3
P012.4
P012.6
P012.7
БББББББ
Á
БББББББ
Á
БББББББ
Á
PRIVILEGE DISABLE
INT1 NMI
CPU STEST
BUS STEST
PWRDWN/IDLE
HALT/STANDBY
ÁÁÁ
Á
ÁÁÁ
Á
SPIPRI
ÁÁÁ
Á
ÁÁÁ
Á
P03F.5
P03F.6
P03F.7
БББББББ
Á
БББББББ
Á
SPI ESPEN
SPI PRIORITY
SPI STEST
T1PRI
P04F.6
P04F.7
T1 PRIORITY
T1 STEST
†
The privilege bits are shown in a bold typeface in the peripheral file
frame 1 section.
The write protect override (WPO) mode provides an external hardware method of overriding the write protection
registers (WPRs) of data EEPROM on the TMS370Cx1x. WPO mode is entered by applying a 12-V input to the
MC pin after the RESET pin input goes high (logic 1). The high voltage on the MC pin during the WPO mode
is not the programming voltage for the data EEPROM or Program EPROM. All EEPROM programming voltages
are generated on-chip. The WPO mode provides hardware system level capability to modify the content of data
EEPROM while the device remains in the application but only while requiring a 12 V external input on the MC
pin (normally not available in the end application except in a service or diagnostic environment).
low-power and IDLE modes
The TMS370Cx1x devices have two low-power modes (STANDBY and HALT) and an IDLE mode. For
mask-ROM devices, low-power modes can be disabled permanently through a programmable contact at the
time when the mask is manufactured.
The ST ANDBY and HALT low-power modes significantly reduce power consumption by reducing or stopping
the activity of the various on-chip peripherals when processing is not required. Each of the low-power modes
is entered by executing the IDLE instruction when the PWRDWN/IDLE bit in SCCR2 has been set to 1. The
HALT/STANDBY bit in SCCR2 controls the low-power mode selection.
In the ST ANDBY mode (HAL T/ST ANDBY = 0), all CPU activity and most peripheral module activity is stopped;
however, the oscillator, internal clocks, and Timer 1 remain active. System processing is suspended until a
qualified interrupt (hardware RESET
, external interrupt on INT1, INT2, INT3, or timer 1 interrupt) is detected.
In the HAL T mode (HALT/STANDBY = 1), the TMS370Cx1x is placed in its lowest power consumption mode.
The oscillator and internal clocks are stopped, causing all internal activity to be halted. System activity is
suspended until a qualified interrupt (hardware RESET, external interrupt on the INT1, INT2, or INT3) is
detected. The power-down mode-selection bits are summarized in Table 11.
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
15
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
low-power and IDLE modes (continued)
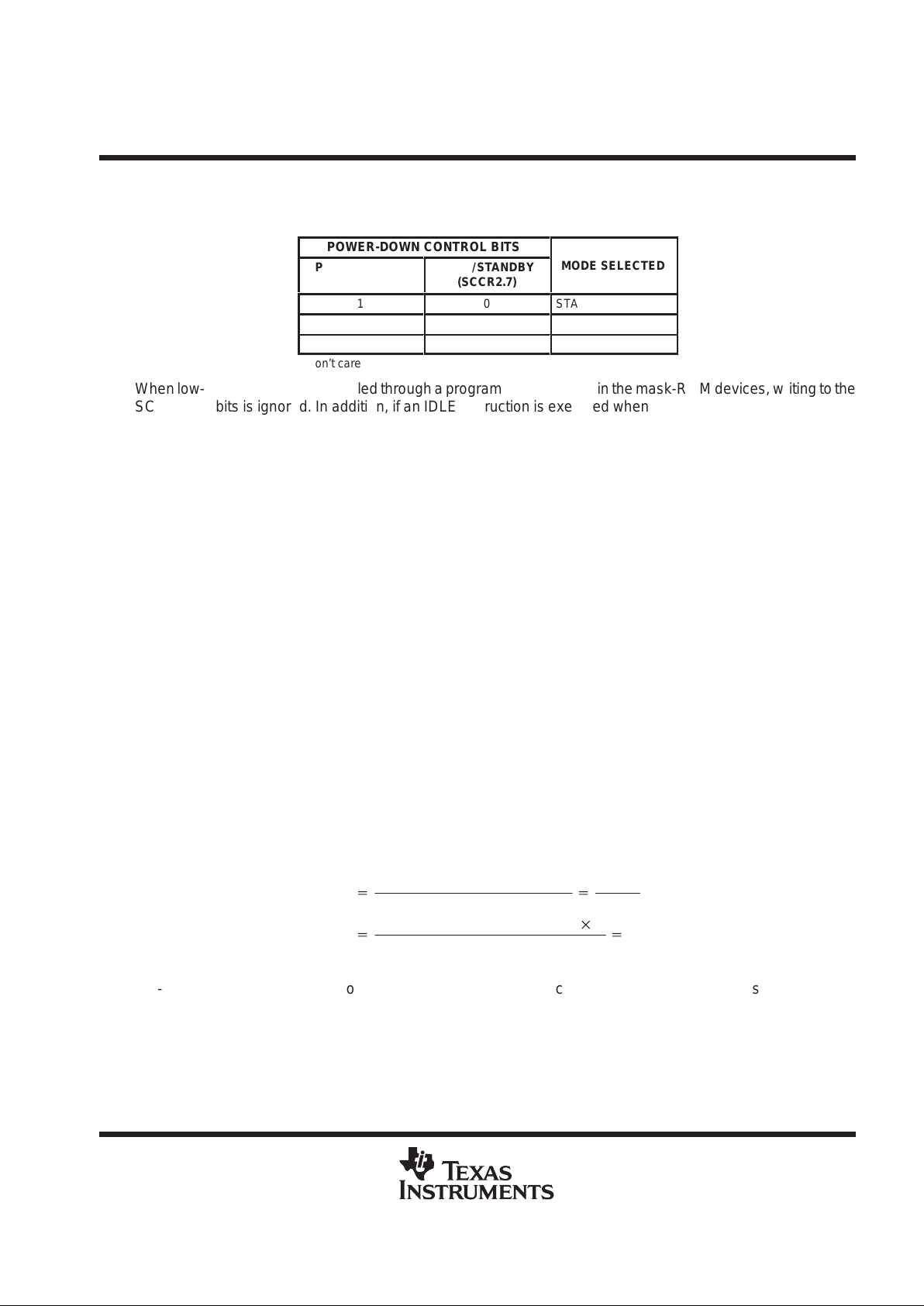
Table 11. Low-Power/Idle Control Bits
POWER-DOWN CONTROL BITS
БББББ
Á
PWRDWN/IDLE
(SCCR2.6)
ÁÁÁÁ
Á
HALT/STANDBY
(SCCR2.7)
БББББ
Á
MODE SELECTED
1
0
STANDBY
1
1
HALT
0
X
†
IDLE
†
Don’t care
When low-power modes are disabled through a programmable contact in the mask-ROM devices, writing to the
SCCR2.6-7 bits is ignored. In addition, if an IDLE instruction is executed when low-power modes are disabled
through a programmable contact, the device always enters the IDLE mode.
T o provide a method for always exiting low-power modes for mask-ROM devices, INT1 is enabled automatically
as a nonmaskable interrupt (NMI) during low-power modes when the hard watchdog mode is selected. This
means that the NMI is generated always, regardless of the interrupt enable flags.
The following information is preserved throughout both the STANDBY and HALT modes: RAM (register file),
CPU registers (SP , PC, and ST), I/O pin direction and output data, and status registers of all on-chip peripheral
functions. Since all CPU instruction processing is stopped during the ST ANDBY and HAL T modes, the clocking
of the WD timer is inhibited.
clock modules
The ’x1x family provides two clock options that are referred to as divide-by-1 (phase-locked loop) and
divide-by-4 (standard oscillator). Both the divide-by-1 and divide-by-4 options are configurable during the
manufacturing process of a TMS370 MCU. The ’x1x masked ROM devices offer both options to meet system
engineering requirements. Only one of the two clock options is allowed on each ROM device. The ’712A
EPROM has only the divide-by-4, while the ’712B has divide-by-1.
The divide-by-1 clock module option provides the capability for reduced electromagnetic interference (EMI) with
no added cost.
The divide-by-1 provides a one-to-one match of the external resonator frequency (CLKIN) to the internal system
clock (SYSCLK) frequency , whereas the divide-by-4 produces a SYSCLK which is one-fourth the frequency of
the external resonator. Inside of the divide-by-1 module, the frequency of the external resonator is multiplied
by four, and the clock module then divides the resulting signal by four to provide the four-phased internal system
clock signals. The resulting SYSCLK is equal to the resonator frequency. These are formulated as follows:
Divide-by-4 option : SYSCLK
+
external resonator frequency
4
+
CLKIN
4
Divide-by-1 option : SYSCLK
+
external resonator frequency 4
4
+
CLKIN
The main advantage of choosing a divide-by-1 oscillator is the improved EMI performance. The harmonics of
low-speed resonators extend through fewer of the emissions spectrum than the harmonics of faster resonators.
The divide-by-1 provides the capability of reducing the resonator speed by four times, and this results in a
steeper decay of emissions produced by the oscillator.

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
16
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
system configuration registers
Table 12 contains system-configuration and control functions and registers for controlling EEPROM
programming. The privileged bits are shown in a bold typeface and shaded areas.
Table 12. Peripheral File Frame 1: System-Configuration Registers
PF
BIT 7
BIT 6
BIT 5
BIT 4
BIT 3
BIT 2
BIT 1
BIT 0
REG
Á
Á
P010
ÁÁÁ
Á
COLD
START
OSC
POWER
PF AUTO
WAIT
ÁÁ
Á
OSC FLT
FLAG
ÁÁ
Á
MC PIN
WPO
ÁÁÁ
Á
MC PIN
DATA
ÁÁ
Á
—
ÁÁÁ
Á
µP/µC
MODE
ÁÁ
Á
SCCR0
Á
Á
P011
ÁÁÁ
Á
—
ÁÁ
Á
—
ÁÁÁ
Á
—
AUTO
WAIT
DISABLE
ÁÁ
Á
—
MEMORY
DISABLE
ÁÁ
Á
—
ÁÁÁ
Á
—
ÁÁ
Á
SCCR1
Á
Á
P012
HALT/
STANDBY
PWRDWN/
IDLE
ÁÁÁ
Á
—
BUS
STEST
CPU
STEST
ÁÁÁ
Á
—
INT1
NMI
PRIVILEGE
DISABLE
ÁÁ
Á
SCCR2
Á
Á
P013
to
P016
Reserved
ÁÁ
Á
Á
Á
P017
ÁÁÁ
Á
INT1
FLAG
ÁÁ
Á
INT1
PIN DATA
ÁÁÁ
Á
—
ÁÁ
Á
—
ÁÁ
Á
—
ÁÁÁ
Á
INT1
POLARITY
ÁÁ
Á
INT1
PRIORITY
ÁÁÁ
Á
INT1
ENABLE
ÁÁ
Á
INT1
P018
INT2
FLAG
INT2
PIN DATA
—
INT2
DATA DIR
INT2
DATA OUT
INT2
POLARITY
INT2
PRIORITY
INT2
ENABLE
INT2
Á
Á
P019
ÁÁÁ
Á
INT3
FLAG
ÁÁ
Á
INT3
PIN DATA
ÁÁÁ
Á
—
ÁÁ
Á
INT3
DATA DIR
ÁÁ
Á
INT3
DATA OUT
ÁÁÁ
Á
INT3
POLARITY
ÁÁ
Á
INT3
PRIORITY
ÁÁÁ
Á
INT3
ENABLE
ÁÁ
Á
INT3
P01A
BUSY
—
—
—
—
AP
W1W0
EXE
DEECTL
P01B Reserved
P01C
BUSY
V
PPS
—
—
—
—
W0
EXE
EPCTL
Á
Á
Á
Á
P01D
P01E
P01F
Reserved
ÁÁ
Á
ÁÁ
Á

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
17
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
digital port control registers
Peripheral file frame 2 contains the digital I/O pin configuration and control registers. T able 13 shows the specific
addresses, registers, and control bits within this peripheral file frame. Table 14 shows the port configuration
register setup.
Table 13. Peripheral File Frame 2: Digital Port-Control Registers
PF
BIT 7
BIT 6
BIT 5
BIT 4
BIT 3
BIT 2
BIT 1
BIT 0
REG
P020 Reserved
APORT1
P021
Port A Control Register 2 (must be 0)
APORT2
P022
Port A Data
ADATA
P023
Port A Direction
ADIR
Á
Á
P024
to
P02B
Reserved
Á
Á
P02C
Port D Control Register 1 (must be 0)
—
—
—
DPORT1
P02D
Port D Control Register 2 (must be 0)
†
—
—
—
DPORT2
P02E
Port D Data
—
—
—
DDATA
P02F
Port D Direction
—
—
—
DDIR
†
D3 as SYSCLK, set port D control register 2 = 08h.
Table 14. Port Configuration Register Setup
БББББББ
Á
PORT
БББББББ
Á
PIN
БББББББ
Á
abcd
00q1
БББББББ
Á
abcd
00y0
A
0 – 7
Data Out q
Data In y
D
3 – 7
Data Out q
Data In y
БББББББББББББББББББББББББББББББ
Á
БББББББББББББББББББББББББББББББ
Á
a = Port x Control Register 1
b = Port x Control Register 2
c = Data
d = Direction

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
18
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
programmable timer 1
The programmable Timer 1 (T1) module of the TMS370Cx1x provides the designer with the enhanced timer
resources required to perform real-time system control. The T1 module contains the general-purpose timer and
the watchdog (WD) timer. The two independent 16-bit timers, T1 and WD, allow program selection of input clock
sources (real-time, external event, or pulse accumulate) with multiple 16-bit registers (input capture and
compare) for special timer function control. The Timer 1 module includes three external device pins that can
be used for multiple counter functions (operation-mode dependent), or used as general-purpose I/O pins. The
T1 module block diagram is shown in Figure 5.
T1IC/CR
Edge
Select
16-Bit
Counter
T1EVT
MUX
MUX
16-Bit
Register
T1PWM
PWM
Toggle
16
16-Bit
WatchdogCounter
(Aux. Timer)
Interrupt
Logic
Capt/Comp
16-Bit
Register
Compare
Interrupt
Logic
8-Bit
Prescaler
Figure 5. Timer 1 Block Diagram
D
Three T1 I/O pins
– T1IC/CR: T1 input capture / counter-reset input pin, or general-purpose bidirectional I/O pin
– T1PWM: T1 pulse-width-modulation (PWM) output pin, or general-purpose bidirectional I/O pin
– T1EVT: T1 event input pin, or general-purpose bidirectional I/O pin
D
Two operational modes:
– Dual-compare mode: Provides PWM signal
– Capture/compare mode: Provides input capture pin
D
One 16-bit general-purpose resettable counter
D
One 16-bit compare register with associated compare logic
D
One 16-bit capture/compare register, which, depending on the mode of operation, operates as either
capture or compare registers.
D
One 16-bit WD counter can be used as an event counter, a pulse accumulator, or an interval timer if WD
feature is not needed.
D
Prescaler/clock sources that determine one of eight clock sources for general-purpose timer

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
19
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
programmable timer 1 (continued)
D
Selectable edge-detection circuitry that, depending on the mode of operation, senses active transitions on
the input capture pins (T1IC/CR)
D
Interrupts that can be generated on the occurrence of:
– A capture
– A compare equal
– A counter overflow
– An external edge detection
D
Sixteen T1 module control registers located in the PF frame beginning at address P040
The T1 module control registers are illustrated in Table 15.

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
20
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
programmable timer 1 (continued)
Table 15. Timer 1 Module Register Memory Map
ÁÁÁÁ
PF
BIT 7
BIT 6
BIT 5
BIT 4
BIT 3
BIT 2
BIT 1
BIT 0
REG
Modes: Dual-Compare and Capture/Compare
ÁÁÁÁ
P040
Bit 15 T1Counter MSbyte Bit 8
T1CNTR
P041
Bit 7 T1 Counter LSbyte Bit 0
P042
Bit 15 Compare Register MSbyte Bit 8
T1C
P043
Bit 7 Compare Register LSbyte Bit 0
P044
Bit 15 Capture/Compare Register MSbyte Bit 8
T1CC
P045
Bit 7 Capture/Compare Register LSbyte Bit 0
P046
Bit 15 Watchdog Counter MSbyte Bit 8
WDCNTR
P047
Bit 7 Watchdog Counter LSbyte Bit 0
P048
Bit 7 Watchdog Reset Key Bit 0
WDRST
ÁÁ
Á
P049
ÁÁ
Á
WD OVRFL
TAP SEL
†
ÁÁ
Á
WD INPUT
SELECT2
†
ÁÁÁ
Á
WD INPUT
SELECT1
†
ÁÁ
Á
WD INPUT
SELECT0
†
ÁÁÁ
Á
—
ÁÁÁÁ
Á
ÁÁ
Á
T1 INPUT
SELECT2
ÁÁ
Á
T1 INPUT
SELECT1
ÁÁÁ
Á
T1 INPUT
SELECT0
ÁÁ
Á
T1CTL1
P04A
WD OVRFL
RST ENA
†
WD OVRFL
INT ENA
WD OVRFL
INT FLAG
T1 OVRFL
INT ENA
T1 OVRFL
INT FLAG
ÁÁÁÁ
—
—
T1
SW RESET
T1CTL2
Mode: Dual-Compare
ÁÁÁÁ
ÁÁ
Á
P04B
ÁÁ
Á
T1EDGE
INT FLAG
ÁÁ
Á
T1C2
INT FLAG
ÁÁÁ
Á
T1C1
INT FLAG
ÁÁ
Á
—
ÁÁÁ
Á
—
ÁÁÁÁ
Á
ÁÁ
Á
T1EDGE
INT ENA
ÁÁ
Á
T1C2
INT ENA
ÁÁÁ
Á
T1C1
INT ENA
ÁÁ
Á
T1CTL3
ÁÁ
Á
P04C
ÁÁ
Á
T1
MODE=0
ÁÁ
Á
T1C1
OUT ENA
ÁÁÁ
Á
T1C2
OUT ENA
ÁÁ
Á
T1C1
RST ENA
ÁÁÁ
Á
T1CR
OUT ENA
ÁÁÁÁ
Á
ÁÁ
Á
T1EDGE
POLARITY
ÁÁ
Á
T1CR
RST ENA
ÁÁÁ
Á
T1EDGE
DET ENA
ÁÁ
Á
T1CTL4
Mode: Capture/Compare
ÁÁÁÁ
P04B
T1EDGE
INT FLAG
—
T1C1
INT FLAG
—
—
ÁÁÁÁ
T1EDGE
INT ENA
—
T1C1
INT ENA
T1CTL3
ÁÁ
Á
P04C
ÁÁ
Á
T1
MODE = 1
ÁÁ
Á
T1C1
OUT ENA
ÁÁÁ
Á
—
ÁÁ
Á
T1C1
RST ENA
ÁÁÁ
Á
—
ÁÁÁÁ
Á
ÁÁ
Á
T1EDGE
POLARITY
ÁÁ
Á
—
ÁÁÁ
Á
T1EDGE
DET ENA
ÁÁ
Á
T1CTL4
Modes: Dual-Compare and Capture/Compare
ÁÁÁÁ
P04D
—
—
—
—
T1EVT
DATA IN
ÁÁÁÁ
T1EVT
DATA OUT
T1EVT
FUNCTION
T1EVT
DATA DIR
T1PC1
ÁÁ
Á
P04E
ÁÁ
Á
T1PWM
DATA IN
ÁÁ
Á
T1PWM
DATA OUT
ÁÁÁ
Á
T1PWM
FUNCTION
ÁÁ
Á
T1PWM
DATA DIR
ÁÁÁ
Á
T1IC/CR
DATA IN
ÁÁÁÁ
Á
ÁÁ
Á
T1IC/CR
DATA OUT
ÁÁ
Á
T1IC/CR
FUNCTION
ÁÁÁ
Á
T1IC/CR
DATA DIR
ÁÁ
Á
T1PC2
P04F T1 STEST
T1
PRIORITY
—
—
—
ÁÁÁÁ
—
—
—
T1PRI
ÁÁÁÁ
†
Once the WD OVRFL RST ENA bit is set, these bits cannot be changed until a reset; this applies only to the standard
watchdog and to simple counter. In the hard watchdog, these bits can be modified at any time; the WD INPUT SELECT2
bits are ignored.
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
21
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
programmable timer 1 (continued)
Figure 6 shows the Timer 1 capture/compare mode block diagram. The annotations on the diagram identify the
register and the bit(s) in the PF. For example, the actual address of T1CTL2.0 is 104Ah, bit 0, in the T1CTL2
register.
T1CTL4.2
16
Compare=
Edge
Select
T1IC/CR
T1EDGE POLARITY
T1EDGE DET ENA
Prescale
Clock
Source
16-Bit
Counter
MSB
LSB
T1CNTR.15–0
Reset
T1C1
RST ENA
T1 SW
RESET
T1CTL2.0
T1CTL4.4
T1PC2.3-0
T1CTL4.0
T1EDGE INT FLAG
T1EDGE INT ENA
T1CTL3.7
T1CTL3.2
T1 OVRFL INT FLAG
T1 OVRFL INT ENA
T1CTL2.3
T1CTL2.4
T1C1 INT FLAG
T1C1 INT ENA
T1CTL3.5
T1CTL3.0
T1C1
OUT ENA
T1PWM
T1CTL4.6
Toggle
T1PC2.7-4
16-Bit
Capt/Comp
MSB
LSB
Register
T1CC.15-0
T1C.15-0
16-Bit
Compare
MSB
LSB
Register
T1 PRIORITY
T1PRI.6
Level 1 Int
Level 2 Int
0
1
Figure 6. Capture/Compare Mode

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
22
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
programmable timer 1 (continued)
Figure 7 shows the Timer 1 dual-compare mode block diagram. The annotations on the diagram identify the
register and the bit(s) in the peripheral frame. For example, the actual address of T1CTL2.0 is 104Ah, bit 0, in
the T1CTL2 register.
T1CTL4.1
T1CTL4.4
Prescaler
Clock
Source
16-Bit
Counter
16-Bit
16
Compare=
Compare=
Reset
T1C1
RST ENA
T1 SW
RESET
Edge
Select
T1EDGE DET ENA
Output
Enable
Capt/Comp
Register
MSB
LSB
MSB
LSB
T1CR OUT ENA
T1IC/CR
T1EDGE POLARITY
Toggle
16-Bit
Compare
MSB
LSB
Register
T1CC.15-0
T1C1 INT FLAG
T1CTL3.0
T1CTL3.5
T1C1 INT ENA
T1C2 INT FLAG
T1CTL3.1
T1CTL3.6
T1C2 INT ENA
T1 OVRFL INT FLAG
T1CTL2.4
T1CTL2.3
T1 OVRFL INT ENA
T1EDGE INT FLAG
T1CTL3.2
T1CTL3.7
T1EDGE INT ENA
T1 PRIORITY
T1C2 OUT ENA
T1C1 OUT ENA
T1CTL4.3
T1CTL4.6
T1CTL4.5
T1PWM
T1PC2.7-4
T1PRI.6
T1C.15-0
T1CNTR.15-0
T1CTL2.0
T1CR
RST ENA
T1PC2.3-0
T1CTL4.0
T1CTL4.2
Level 1 Int
Level 2 Int
0
1
Figure 7. Dual-Compare Mode

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
23
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
programmable timer 1 (continued)
The TMS370Cx1x device includes a 24-bit WD timer, contained in the T1 module, which can be programmed
as an event counter, pulse accumulator, or interval timer if the WD function is not used. The WD function is to
monitor software and hardware operation and to implement a system reset when the WD counter is not properly
serviced (WD counter overflow or WD counter is re-initialized by an incorrect value). The WD can be configured
as one of three mask options as follows: standard watchdog, hard WD, or simple counter.
D
Standard watchdog configuration (see Figure 8) for ’C712A EPROM and mask-ROM devices:
– Watchdog mode
– Ten different WD overflow rates ranging from 6.55 ms to 3.35 s at 5-MHz SYSCLK
– A WD reset key (WDRST) register is used to clear the watchdog counter (WDCNTR) when a correct
value is written.
– Generates a system reset if an incorrect value is written to the WD reset key or if the counter
overflows
– A WD overflow flag (WD OVRFL INT FLAG) bit that indicates whether the WD timer initiated a
system reset
– Non-watchdog mode
– Watchdog timer can be configured as an event counter, pulse accumulator or an interval timer
16-Bit
Watchdog Counter
Reset
Prescaler
Clock
Watchdog Reset Key
WD OVRFL
TAP SEL
WD OVRFL
RST ENA
System Reset
T1CTL1.7
WDRST.7-0
WDCNTR.15-0
T1CTL2.7
T1CTL2.5
WD OVRFL
INT ENA
Interrupt
T1CTL2.6
WD OVRFL
INT FLAG
Figure 8. Standard Watchdog

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
24
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
programmable timer 1 (continued)
D
Hard watchdog configuration (see Figure 9) for ’C712B EPROM and mask-ROM devices:
– Eight different WD overflow rates ranging from 26.2 ms to 3.35 s at 5-MHz SYSCLK
– A WD reset key (WDRST) register is used to clear the watchdog counter (WDCNTR) when a correct
value is written.
– Generates a system reset if an incorrect value is written to the WDRST or if the counter overflows
– A WD overflow flag (WD OVRFL INT FLAG) bit that indicates whether the WD timer initiated a system
reset
– Automatic activation of the WD timer upon power-up reset
– INT1 is enabled as a nonmaskable interrupt during low power modes.
16-Bit
Watchdog Counter
Reset
Prescaler
Clock
Watchdog Reset Key
WD OVRFL
TAP SEL
System Reset
T1CTL1.7
WDRST.7-0
WDCNTR.15-0
T1CTL2.5
WD OVRFL
INT FLAG
Figure 9. Hard Watchdog

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
25
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
programmable timer 1 (continued)
D
Simple counter configuration (see Figure 10) for mask-ROM devices only
– Simple counter can be configured as an event counter, pulse accumulator, or an internal timer.
16-Bit
Watchdog Counter
Reset
Prescaler
Clock
Watchdog Reset Key
WD OVRFL
TAP SEL
T1CTL1.7
WDRST.7-0
WDCNTR.15-0
T1CTL2.5
WD OVFL
INT FLAG
WD OVRFL
INT ENA
Interrupt
T1CTL2.6
Figure 10. Simple Counter
serial peripheral interface
The SPI is a high-speed synchronous serial I/O port that allows a serial bit stream of programmed length (one
to eight bits) to be shifted into and out of the device at a programmable bit transfer rate. The SPI normally is
used for communications between the microcontroller and external peripherals or another microcontroller.
Typical applications include external I/O or peripheral expansion by way of devices such as shift registers,
display drivers, and A/D converters. Multi-device communications are supported by the master/slave operation
of the SPI. The SPI module features include the following:
D
Three external pins
– SPISOMI: SPI slave output/master input pin or general-purpose bidirectional I/O pin
– SPISIMO: SPI slave input/master output pin or general-purpose bidirectional I/O pin
– SPICLK: SPI serial clock pin or general-purpose bidirectional I/O pin
D
Two operational modes: Master and slave
D
Baud rate: Eight different programmable rates
– Maximum baud rate in master mode: 2.5M bps at 5-MHz SYSCLK
SPI BAUD RATE
+
SYSCLK
2 2
b
where b=bit rate in SPICCR.5-3 (range 0–7)
– Maximum baud rate in slave mode: 625K bps at 5-MHz SYSCLK
for maximum slave SPI BAUD RA TE < SYSCLK/8
D
Data word format: one to eight data bits
D
Simultaneous receiver and transmitter operations (transmit function can be disabled in software)

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
26
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
serial peripheral interface (continued)
D
Transmitter and receiver operations are accomplished through either interrupt-driven or polled algorithms.
D
Seven SPI module control registers located in control register frame beginning at address P030h
The SPI module-control registers are illustrated in Table 16.
Table 16. SPI Module-Control Register Memory Map
PF
BIT 7
BIT 6
BIT 5
BIT 4
BIT 3
BIT 2
BIT 1
BIT 0
REG
ÁÁ
Á
P030
ÁÁ
Á
SPI SW
RESET
ÁÁ
Á
CLOCK
POLARITY
ÁÁÁ
Á
SPI BIT
RATE2
ÁÁ
Á
SPI BIT
RATE1
ÁÁÁ
Á
SPI BIT
RATE0
ÁÁ
Á
SPI
CHAR2
ÁÁ
Á
SPI
CHAR1
ÁÁÁ
Á
SPI
CHAR0
ÁÁ
Á
SPICCR
P031
RECEIVER
OVERRUN
SPI INT
FLAG
—
—
—
MASTER/
SLAVE
TALK
SPI INT
ENA
SPICTL
ÁÁ
Á
P032
to
P036
Reserved
ÁÁ
Á
P037
RCVD7
RCVD6
RCVD5
RCVD4
RCVD3
RCVD2
RCVD1
RCVD0
SPIBUF
P038 Reserved
P039
SDAT7
SDAT6
SDAT5
SDAT4
SDAT3
SDAT2
SDAT1
SDAT0
SPIDAT
ÁÁ
Á
P03A
to
P03C
Reserved
ÁÁ
Á
ÁÁ
Á
P03D
ÁÁ
Á
—
ÁÁ
Á
—
ÁÁÁ
Á
—
ÁÁ
Á
—
ÁÁÁ
Á
SPICLK
DATA IN
ÁÁ
Á
SPICLK
DATA OUT
ÁÁ
Á
SPICLK
FUNCTION
ÁÁÁ
Á
SPICLK
DATA DIR
ÁÁ
Á
SPIPC1
P03E
SPISIMO
DATA IN
SPISIMO
DATA OUT
SPISIMO
FUNCTION
SPISIMO
DATA DIR
SPISOMI
DATA IN
SPISOMI
DATA OUT
SPISOMI
FUNCTION
SPISOMI
DATA DIR
SPIPC2
ÁÁ
Á
P03F
SPI
STEST
SPI
PRIORITY
SPI
ESPEN
ÁÁ
Á
—
ÁÁÁ
Á
—
ÁÁ
Á
—
ÁÁ
Á
—
ÁÁÁ
Á
—
ÁÁ
Á
SPIPRI

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
27
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
serial peripheral interface (continued)
The SPI block diagram is illustrated in Figure 11.
SPIBUF Buffer
Register
SPIDAT
Data Register
SPIBUF.7-0
State Control
SPI CHAR
SPI BIT RATE
CLOCK POLARITY
SPI INT FLAG
SPICTL.6
SPIINT ENA
SPICTL.0
RECEIVER
OVERRUN
8
SPIDAT.7-0
SPICTL.1
TALK
201
3
4
5
SPICCR.2-0
SPICCR.5-3
System
Clock
SPICCR.6
SPICLK
MASTER/SLAVE
†
SPICTL.7
Level 2 INT
SPIPRI.6
1
SPIPC2.7-4
SPISIMO
SPICTL.2
SPIPC1.3-0
SPISOMI
SPIPC2.3-0
Level 1 INT
0
†
The diagram is shown in the slave mode.
Figure 11. SPI Block Diagram
instruction set overview
Table 17 provides an opcode to instruction cross reference of all 73 instructions and 274 opcodes of the
‘370Cx1x instruction set. The numbers at the top of this table represent the most significant nibble of the opcode
while the numbers at the left side of the table represent the least significant nibble (LBN). The instruction of these
two opcode nibbles contains the mnemonic, operands, and byte/cycle particular to that opcode.
For example, the opcode B5h points to the CLR A instruction. This instruction contains one byte and executes
in eight SYSCLK cycles.

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUARY 1997
Template Release Date: 7–11–94
28
POST OFFICE BOX 1443 HOUSTON, TEXAS 77251–1443
•
Table 17. TMS370 Family Opcode/Instruction Map
†
MSN
01234567 8 9 A B C D E F
0
JMP
ra
2/7
INCW
#n,Rd
3/11
MOV
Ps,A
2/8
CLRC /
TST A
1/9
MOV
A,B
1/9
MOV
A,Rd
2/7
TRAP
15
1/14
LDST
n
2/6
1JNra
2/5
MOV
A,Pd
2/8
MOV
B,Pd
2/8
MOV
Rs,Pd
3/10
MOV
Ps,B
2/7
MOV
B,Rd
2/7
TRAP
14
1/14
MOV
*n[SP],A
2/7
2JZra
2/5
MOV
Rs,A
2/7
MOV
#n,A
2/6
MOV
Rs,B
2/7
MOV
Rs,Rd
3/9
MOV
#n,B
2/6
MOV
B,A
1/8
MOV
#n,Rd
3/8
MOV
Ps,Rd
3/10
DEC
A
1/8
DEC
B
1/8
DEC
Rn
2/6
TRAP
13
1/14
MOV
A,*n[SP]
2/7
3JCra
2/5
AND
Rs,A
2/7
AND
#n,A
2/6
AND
Rs,B
2/7
AND
Rs,Rd
3/9
AND
#n,B
2/6
AND
B,A
1/8
AND
#n,Rd
3/8
AND
A,Pd
2/9
AND
B,Pd
2/9
AND
#n,Pd
3/10
INC
A
1/8
INC
B
1/8
INC
Rn
2/6
TRAP
12
1/14
CMP
*n[SP],A
2/8
4JPra
2/5
OR
Rs,A
2/7
OR
#n,A
2/6
OR
Rs,B
2/7
OR
Rs,Rd
3/9
OR
#n,B
2/6
OR
B,A
1/8
OR
#n,Rd
3/8
OR
A,Pd
2/9
OR
B,Pd
2/9
OR
#n,Pd
3/10
INV
A
1/8
INV
B
1/8
INV
Rn
2/6
TRAP
11
1/14
extend
inst,2
opcodes
L
S
5
JPZ
ra
2/5
XOR
Rs,A
2/7
XOR
#n,A
2/6
XOR
Rs,B
2/7
XOR
Rs,Rd
3/9
XOR
#n,B
2/6
XOR
B,A
1/8
XOR
#n,Rd
3/8
XOR
A,Pd
2/9
XOR
B,Pd
2/9
XOR
#n,Pd
3/10
CLR
A
1/8
CLR
B
1/8
CLR
Rn
2/6
TRAP
10
1/14
N
6
JNZ
ra
2/5
BTJO
Rs,A,ra
3/9
BTJO
#n,A,ra
3/8
BTJO
Rs,B,ra
3/9
BTJO
Rs,Rd,ra
4/11
BTJO
#n,B,ra
3/8
BTJO
B,A,ra
2/10
BTJO
#n,Rd,ra
4/10
BTJO
A,Pd,ra
3/11
BTJO
B,Pd,ra
3/10
BTJO
#n,Pd,ra
4/11
XCHB
A
1/10
XCHB A /
TST B
1/10
XCHB
Rn
2/8
TRAP
9
1/14
IDLE
1/6
7
JNC
ra
2/5
BTJZ
Rs.,A,ra
3/9
BTJZ
#n,A,ra
3/8
BTJZ
Rs,B,ra
3/9
BTJZ
Rs,Rd,ra
4/11
BTJZ
#n,B,ra
3/8
BTJZ
B,A,ra
2/10
BTJZ
#n,Rd,ra
4/10
BTJZ
A,Pd,ra
3/10
BTJZ
B,Pd,ra
3/10
BTJZ
#n,Pd,ra
4/11
SWAP
A
1/11
SWAP
B
1/11
SWAP
Rn
2/9
TRAP
8
1/14
MOV
#n,Pd
3/10
8JVra
2/5
ADD
Rs,A
2/7
ADD
#n,A
2/6
ADD
Rs,B
2/7
ADD
Rs,Rd
3/9
ADD
#n,B
2/6
ADD
B,A
1/8
ADD
#n,Rd
3/8
MOVW
#16,Rd
4/13
MOVW
Rs,Rd
3/12
MOVW
#16[B],Rd
4/15
PUSH
A
1/9
PUSH
B
1/9
PUSH
Rs
2/7
TRAP
7
1/14
SETC
1/7
9JLra
2/5
ADC
Rs,A
2/7
ADC
#n,A
2/6
ADC
Rs,B
2/7
ADC
Rs,Rd
3/9
ADC
#n,B
2/6
ADC
B,A
1/8
ADC
#n,Rd
3/8
JMPL
lab
3/9
JMPL
*Rd
2/8
JMPL
*lab[B]
3/11
POP
A
1/9
POP
B
1/9
POP
Rd
2/7
TRAP
6
1/14
RTS
1/9
A
JLE
ra
2/5
SUB
Rs,A
2/7
SUB
#n,A
2/6
SUB
Rs,B
2/7
SUB
Rs,Rd
3/9
SUB
#n,B
2/6
SUB
B,A
1/8
SUB
#n,Rd
3/8
MOV
& lab,A
3/10
MOV
*Rs,A
2/9
MOV
*lab[B],A
3/12
DJNZ
A,ra
2/10
DJNZ
B,ra
2/10
DJNZ
Rn,ra
3/8
TRAP
5
1/14
RTI
1/12
B
JHS
ra
2/5
SBB
Rs,A
2/7
SBB
#n,A
2/6
SBB
Rs,B
2/7
SBB
Rs,Rd
3/9
SBB
#n,B
2/6
SBB
B,A
1/8
SBB
#n,Rd
3/8
MOV
A, & lab
3/10
MOV
A, *Rd
2/9
MOV
A,*lab[B]
3/12
COMPL
A
1/8
COMPL
B
1/8
COMPL
Rn
2/6
TRAP
4
1/14
PUSH
ST
1/8
†
All conditional jumps (opcodes 01– 0F), BTJO, BTJZ, and DJNZ instructions use two additional cycles if the branch is taken. The BTJO, BTJZ, and DJNZ
instructions have a relative address as the last operand.
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUARY 1997
POST OFFICE BOX 1443 HOUSTON, TEXAS 77251–1443
• 29
Table 17. TMS370 Family Opcode/Instruction Map †(Continued)
MSN
01 2 3 4 5 6 7 8 9 A B C D E F
C
JNV
ra
2/5
MPY
Rs,A
2/46
MPY
#n,A
2/45
MPY
Rs,B
2/46
MPY
Rs,Rd
3/48
MPY
#n,B
2/45
MPY
B,A
1/47
MPY
#n,Rs
3/47
BR
lab
3/9
BR
*Rd
2/8
BR
*lab[B]
3/11
RR
A
1/8
RR
B
1/8
RR
Rn
2/6
TRAP
3
1/14
POP
ST
1/8
L
D
JGE
ra
2/5
CMP
Rs,A
2/7
CMP
#n,A
2/6
CMP
Rs,B
2/7
CMP
Rs,Rd
3/9
CMP
#n,B
2/6
CMP
B,A
1/8
CMP
#n,Rd
3/8
CMP
& lab,A
3/11
CMP
*Rs,A
2/10
CMP
*lab[B],A
3/13
RRC
A
1/8
RRC
B
1/8
RRC
Rn
2/6
TRAP
2
1/14
LDSP
1/7
S
N
EJGra
2/5
DAC
Rs,A
2/9
DAC
#n,A
2/8
DAC
Rs,B
2/9
DAC
Rs,Rd
3/11
DAC
#n,B
2/8
DAC
B,A
1/10
DAC
#n,Rd
3/10
CALL
lab
3/13
CALL
*Rd
2/12
CALL
*lab[B]
3/15
RL
A
1/8
RL
B
1/8
RL
Rn
2/6
TRAP
1
1/14
STSP
1/8
F
JLO
ra
2/5
DSB
Rs,A
2/9
DSB
#n,A
2/8
DSB
Rs,B
2/9
DSB
Rs,Rd
3/11
DSB
#n,B
2/8
DSB
B,A
1/10
DSB
#n,Rd
3/10
CALLR
lab
3/15
CALLR
*Rd
2/14
CALLR
*lab[B]
3/17
RLC
A
1/8
RLC
B
1/8
RLC
Rn
2/6
TRAP
0
1/14
NOP
1/7
Second byte of two-byte instructions (F4xx): F4 8
MOVW
*n[Rn]
4/15
DIV
Rn.A
3/14-63
F4 9
JMPL
*n[Rn]
4/16
Legend:
* = Indirect addressing operand prefix
& = Direct addressin
g
operand prefix
F4 A
MOV
*n[Rn],A
4/17
& Direct addressing o erand refix
# = immediate operand
#16 = immediate 16-bit number
lab = 16-label
F4 B
MOV
A,*n[Rn]
4/16
n = immediate 8-bit number
Pd = Peripheral register containing destination type
Pn = Peripheral register
F4 C
BR
*n[Rn]
4/16
Ps = Peripheral register containing source byte
ra = Relative address
Rd = Register containing destination type
F4 D
CMP
*n[Rn],A
4/18
Rn = Register file
Rp = Register pair
Rpd= Destination register pair
F4 E
CALL
*n[Rn]
4/20
R
ps =Source Register pair
Rs = Register containing source byte
F4 F
CALLR
*n[Rn]
4/22
†
All conditional jumps (opcodes 01–0F), BTJO, BTJZ, and DJNZ instructions use two additional cycles if the branch is taken. The BTJO, BTJZ, and DJNZ
instructions have a relative address as the last operand.

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
30
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
development system support
The TMS370 family development support tools include an assembler, a C-compiler, a linker, an in-circuit
emulator XDS/22, CDT and an EEPROM/UVEPROM programmer.
D
Assembler/linker (Part No. TMDS3740850–02 for PC)
– Includes extensive macro capability
– Provides high-speed operation
– Includes format conversion utilities for popular formats
D
ANSI C Compiler (Part No. TMDS3740855–02 for PC, Part No. TMDS3740555–09 for HP700, Sun-3
or Sun-4)
– Generate assembly code for the TMS370 that can be inspected easily
– Improves code execution speed and reduces code size with optional optimizer pass
– Enables direct reference the TMS370’s port registers by using a naming convention
– Provides flexibility in specifying the storage for data objects
– Interfaces C functions and assembly functions easily
– Includes assembler and linker
D
CDT370 (Compact Development Tool) real-time in-circuit emulation
– Base (Part Number EDSCDT370 – for PC, requires cable)
– Cable for 28-pin DIP (Part No. EDSTRG28DIL)
– Cable for 28-pin PLCC (Part No. EDSTRG28PLCC)
– EEPROM and EPROM programming support
– Allows inspection and modification of memory locations
– Includes compatibility to upload/download program and data memory
– Execute programs and software routines
– Includes 1024 samples trace buffer
– Includes single-step executable instructions
– Uses software breakpoints to halt program execution at selected address
D
XDS/22 in-circuit emulator
– Base (Part Number TMDS3762210 for PC, requires cable)
– Cable for 28-pin DIP/PLCC (Part No. TMDS3788828)
– Contains all the features of the CDT370 described previously but does not have the capability to
program the data EEPROM and program EPROM
– Contains sophisticated breakpoint trace and timing hardware that provides up to 2047 qualified trace
samples with symbolic disassembly
– Allows qualification of breakpoints by address and/or data on any type of memory acquisition. Up to four
levels of events can be combined to cause a breakpoint
HP700 is a trademark of Hewlett-Packard Company.
Sun-3 and Sun-4 are trademarks of Sun Microsystems, Incorporated.

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
31
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
development system support (continued)
– Provides timers for analyzing total and average time in routines
– Contains an eight-line logic probe for adding visibility of external signals to the breakpoint qualifier and
to trace display
D
Microcontroller programmer
– Base (Part No. TMDS3760500A – for PC, requires programmer head)
– Single unit head for 28-pin PLCC (Part No. TMDS3780510A)
– Single unit head for 28-pin DIP (Part No. TMDS3780511A)
– PC-based, window/function-key-oriented user interface for ease of use and rapid learning environment
D
Design kit (Part No. TMDS3770110 – for PC)
– Includes TMS370 Application Board and TMS370 Assembler diskette and documentation
– Supports quick evaluation of TMS370 functionality
– Capability to upload and download code
– Capability to execute programs and software routines, and to single-step executable instructions
– Software breakpoints to halt program execution at selected addresses
– Wire-wrap prototype area
– Reverse assembler
D
Starter Kit (Part No. TMDS37000 – for PC)
– Includes TMS370 Assembler diskette and documentation
– Includes TMS370 Simulator
– Includes programming adapter board and programming software
– Does not include (to be supplied by the user)
– + 5 V power supply
– ZIF sockets
– Nine-pin RS232 cable
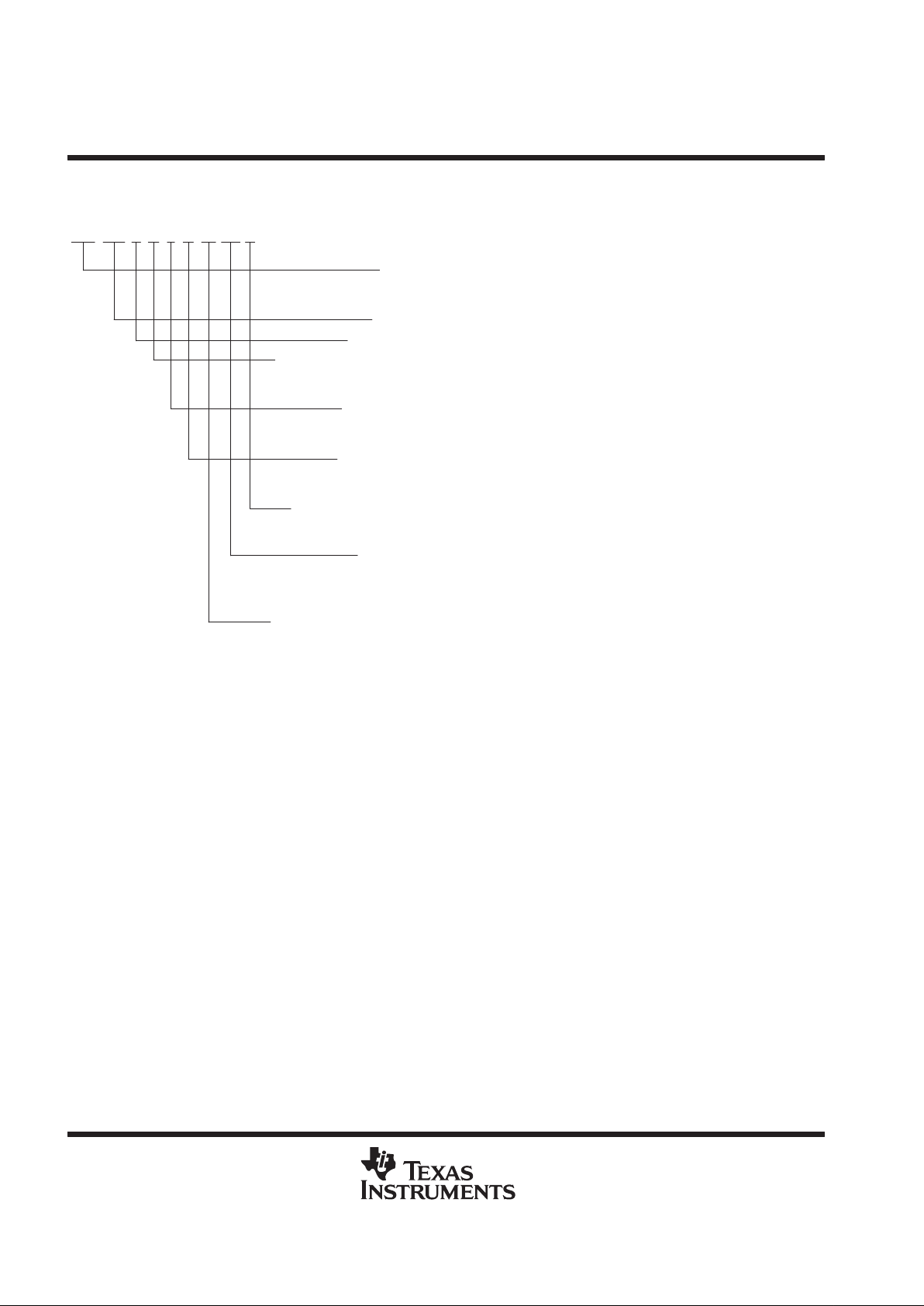
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
32
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
device numbering conventions
Figure 12 illustrates the numbering and symbol nomenclature for the TMS370Cx1x family.
7370 1 2C
Prefix: TMS = Standard prefix for fully qualified devices
SE = System evaluator (window EPROM) that is used for
prototyping purpose.
Family: 370 = TMS370 8-Bit Microcontroller Family
Technology: C = CMOS
Program Memory Types: 0 = Mask ROM
3 = Mask ROM, No Data EEPROM
7 = EPROM
Device Type: 1 = ’x1x device containing the following modules:
– Timer 1
– Serial Peripheral Interface
Memory Size: 0 = 4K bytes
1 = 2K bytes
2 = 8K bytes
Temperature Ranges: A = –40°C to 85°C
L = 0°C to 70°C
T = –40°C to 105°C
Packages: FN = Plastic Leaded Chip Carrier
FZ = Ceramic Leaded Chip Carrier
N = Plastic Dual-In-Line
JD = Ceramic Dual-in-Line
ROM and EPROM Option: A = For ROM device, the watchdog timer can be configured
as one of the three different mask options:
– A standard watchdog
– A hard watchdog
– A simple watchdog
The clock can be either:
– Divide-by-4 clock
– Divide-by-1 (PLL) clock
The low-power modes can be either:
– Enabled
– Disabled
A = For EPROM device, a standard watchdog, a divide-by-
4 clock, and low-power modes are enabled
B = For EPROM device, a hard watchdog, a divide-by-1
(PLL) clock, and low-power modes are enabled.
TMS
AFNL
Figure 12. TMS370Cx1x Family Nomenclature

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
33
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
device part numbers
T able 18 provides all of the ’x1x devices available. The device part number nomenclature is designed to assist
ordering. Upon ordering, the customer must specify not only the device part number, but also the clock and
watchdog timer options desired. Each device can have only one of the three possible watchdog timer options
and one of the two clock options. The options to be specified pertain solely to orders involving ROM devices.
T able 18. Device Part Numbers
DEVICES PART NUMBERS
FOR 28 PINS (LCC)
DEVICES PART NUMBERS
FOR 28 PINS (DIP)
TMS370C010AFNA
TMS370C010AFNL
TMS370C010AFNT
TMS370C010ANA
TMS370C010ANL
TMS370C010ANT
TMS370C012AFNA
TMS370C012AFNL
TMS370C012AFNT
TMS370C012ANA
TMS370C012ANL
TMS370C012ANT
TMS370C310AFNA
TMS370C310AFNL
TMS370C310AFNT
TMS370C310ANA
TMS370C310ANL
TMS370C310ANT
TMS370C311AFNA
TMS370C311AFNL
TMS370C311AFNT
TMS370C311ANA
TMS370C311ANL
TMS370C311ANT
TMS370C312AFNA
TMS370C312AFNL
TMS370C312AFNT
TMS370C312ANA
TMS370C312ANL
TMS370C312ANT
TMS370C712AFNT
TMS370C712BFNT
TMS370C712ANT
TMS370C712BNT
SE370C712AFZT
†
SE370C712BFZT
†
SE370C712AJDT
†
SE370C712BJDT
†
†
System evaluators are for use in prototype environment and their
reliability has not been characterized.

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
34
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
new code release form
Figure 13 shows a sample of the new code release form.
NEW CODE RELEASE FORM
TEXAS INSTRUMENTS
TMS370 MICROCONTROLLER PRODUCTS
DATE:
T o release a new customer algorithm to TI incorporated into a TMS370 family microcontroller, complete this form and submit with the following information:
1. A ROM description in object form on Floppy Disk, Modem XFR, or EPROM (Verification file will be returned via same media)
2. An attached specification if not using TI standard specification as incorporated in TI’s applicable device data book.
Company Name:
Street Address:
Street Address:
City: State Zip
Contact Mr./Ms.:
Phone: ( ) Ext.:
Customer Purchase Order Number:
Customer Part Number:
Customer Application:
Customer Print Number *Yes: #
No: (Std. spec to be followed)
*If Yes: Customer must provide ”print” to TI w/NCRF for approval before ROM
code processing starts.
TMS370 Device:
TI Customer ROM Number:
(provided by T exas Instruments)
CONTACT OPTIONS FOR THE ’A’ VERSION TMS370 MICROCONTROLLERS
OSCILLAT OR FREQUENCY
MIN TYP MAX
[] External Drive (CLKIN)
[] Crystal
[] Ceramic Resonator
Low Power Modes
[] Enabled
[] Disabled
Watchdog counter
[] Standard
[] Hard Enabled
[] Simple Counter
Clock Type
[] Standard (/4)
[] PLL (/1)
[] Supply Voltage MIN: MAX:
(std range: 4.5V to 5.5V)
NOTE:
Non ’A’ version ROM devices of the TMS370 microcontrollers will have the
“Low-power modes Enabled”, “Divide-by-4” Clock, and “Standard” Watchdog
options. See the
TMS370 Family User’s Guide
(literature number SPNU127)
or the
TMS370 Family Data Manual
(literature number SPNS014B).
TEMPERATURE RANGE
[] ’L’: 0° to 70°C (standard)
[] ’A’: –40° to 85°C
[] ’T’: –40° to 105°C
PACKAGE TYPE
[] ’N’ 28-pin PDIP [] “FN” 44-pin PLCC
[] “FN” 28-pin PLCC [] “FN” 68-pin PLCC
[] “N” 40-pin PDIP [] “NM” 64-pin PSDIP
[] “NJ” 40-pin PSDIP (formerly known as N2)
SYMBOLIZA TION BUS EXPANSION
[] TI standard symbolization
[] TI standard w/customer part number
[] Customer symbolization
(per attached spec, subject to approval)
[] YES [] NO
NON-STANDARD SPECIFICATIONS:
ALL NON-STANDARDS SPECIFICA TIONS MUST BE APPROVED BY THE TI ENGINEERING ST AFF: If the customer requires expedited production material
(i.e., product which must be started in process prior to prototype approval and full production release) and non-standard spec issues are not resolved to the
satisfaction of both the customer and TI in time for a scheduled shipment, the specification parameters in question will be processed/tested to the standard
TI spec. Any such devices which are shipped without conformance to a mutually approved spec, will be identified by a ’P’ in the symbolization preceding the
TI part number.
RELEASE AUTHORIZATION:
This document, including any referenced attachments, is and will be the controlling document for all orders placed for this TI custom device. Any changes must
be in writing and mutually agreed to by both the customer and TI. The prototype cycletime commences when this document is signed off and the verification
code is approved by the customer.
1. Customer: Date: 2. TI: Field Sales:
Marketing:
Prod. Eng.:
Proto. Release:
Figure 13. Sample New Code Release Form

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
35
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Table 19 is a collection of all the peripheral file frames used in the ’Cx1x (provided for a quick reference).
Table 19. Peripheral File Frame Compilation
ÁÁÁÁ
ÁÁÁÁ
PF
BIT 7
BIT 6
BIT 5
BIT 4
BIT 3
BIT 2
BIT 1
BIT 0
REG
System Configuration Registers
Á
Á
P010
ÁÁÁ
Á
COLD
START
OSC
POWER
PF AUTO
WAIT
ÁÁÁ
Á
OSC FLT
FLAG
ÁÁ
Á
MC PIN
WPO
ÁÁ
Á
MC PIN
DATA
ÁÁÁ
Á
—
ÁÁ
Á
µP/µC
MODE
ÁÁ
Á
SCCR0
Á
Á
P011
ÁÁÁ
Á
—
ÁÁ
Á
—
ÁÁ
Á
—
AUTO
WAIT
DISABLE
ÁÁ
Á
—
MEMORY
DISABLE
ÁÁÁ
Á
—
ÁÁ
Á
—
ÁÁ
Á
SCCR1
Á
Á
P012
HALT/
STANDBY
PWRDWN/
IDLE
ÁÁ
Á
—
BUS
STEST
CPU
STEST
ÁÁ
Á
—
INT1
NMI
PRIVILEGE
DISABLE
ÁÁ
Á
SCCR2
Á
Á
Á
Á
P013
to
P016
Reserved
ÁÁ
Á
ÁÁ
Á
P017
INT1
FLAG
INT1
PIN DATA
—
—
—
INT1
POLARITY
INT1
PRIORITY
INT1
ENABLE
INT1
Á
Á
P018
ÁÁÁ
Á
INT2
FLAG
ÁÁ
Á
INT2
PIN DATA
ÁÁ
Á
—
ÁÁÁ
Á
INT2
DATA DIR
ÁÁ
Á
INT2
DATA OUT
ÁÁ
Á
INT2
POLARITY
ÁÁÁ
Á
INT2
PRIORITY
ÁÁ
Á
INT2
ENABLE
ÁÁ
Á
INT2
P019
INT3
FLAG
INT3
PIN DATA
—
INT3
DATA DIR
INT3
DATA OUT
INT3
POLARITY
INT3
PRIORITY
INT3
ENABLE
INT3
P01A
BUSY
—
—
—
—
AP
W1W0
EXE
DEECTL
P01B Reserved
P01C
BUSY
VPPS
—
—
—
—
W0
EXE
EPCTL
Á
Á
P01D
P01E
P01F
Reserved
ÁÁ
Á
Digital Port Control Registers
P020 Reserved
APORT1
P021
Port A Control Register 2 (must be 0)
APORT2
P022
Port A Data
ADATA
P023
Port A Direction
ADIR
Á
Á
P024
to
P02B
Reserved
ÁÁ
Á
P02C
Port D Control Register 1 (must be 0)
—
—
—
DPORT1
P02D
Port D Control Register 2 (must be 0)
†
—
—
—
DPORT2
P02E
Port D Data
—
—
—
DDATA
P02F
Port D Direction
—
—
—
DDIR
SPI Module Control Register Memory Map
P030
SPI SW
RESET
CLOCK
POLARITY
SPI BIT
RATE2
SPI BIT
RATE1
SPI BIT
RATE0
SPI
CHAR2
SPI
CHAR1
SPI
CHAR0
SPICCR
Á
Á
P031
ÁÁÁ
Á
RECEIVER
OVERRUN
ÁÁ
Á
SPI INT
FLAG
ÁÁ
Á
—
ÁÁÁ
Á
—
ÁÁ
Á
—
ÁÁ
Á
MASTER/
SLAVE
ÁÁÁ
Á
TALK
ÁÁ
Á
SPI INT
ENA
ÁÁ
Á
SPICTL
Á
Á
P032
to
P036
Reserved
ÁÁ
Á
P037
RCVD7
RCVD6
RCVD5
RCVD4
RCVD3
RCVD2
RCVD1
RCVD0
SPIBUF
P038 Reserved
†
D3 as SYSCLK, set port D control register 2 = 08h.

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
36
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Table 19. Peripheral File Frame Compilation (Continued)
PF
BIT 7
BIT 6
BIT 5
BIT 4
BIT 3
ÁÁÁÁ
BIT 2
BIT 1
BIT 0
REG
P039
SDAT7
SDAT6
SDAT5
SDAT4
SDAT3
ÁÁÁÁ
SDAT2
SDAT1
SDAT0
SPIDAT
ÁÁ
Á
P03A
to
P03C
Reserved
ÁÁ
Á
P03D
—
—
—
—
SPICLK
DATA IN
ÁÁÁÁ
SPICLK
DATA OUT
SPICLK
FUNCTION
SPICLK
DATA DIR
SPIPC1
ÁÁ
Á
P03E
ÁÁ
Á
SPISIMO
DATA IN
ÁÁ
Á
SPISIMO
DATA OUT
ÁÁÁ
Á
SPISIMO
FUNCTION
ÁÁ
Á
SPISIMO
DATA DIR
ÁÁÁ
Á
SPISOMI
DATA IN
ÁÁÁÁ
Á
ÁÁ
Á
SPISOMI
DATA OUT
ÁÁ
Á
SPISOMI
FUNCTION
ÁÁÁ
Á
SPISOMI
DATA DIR
ÁÁ
Á
SPIPC2
P03F
SPI
STEST
SPI
RIORITY
SPI
ESPEN
—
—
ÁÁÁÁ
—
—
—
SPIPRI
Timer1 Module Register Memory Map
Modes: Dual-Compare and Capture/Compare
P040
Bit 15 T1Counter MSbyte Bit 8
T1CNTR
P041
Bit 7 T1 Counter LSbyte Bit 0
P042
Bit 15 Compare Register MSbyte Bit 8
T1C
P043
Bit 7 Compare Register LSbyte Bit 0
P044
Bit 15 Capture/Compare Register MSbyte Bit 8
T1CC
P045
Bit 7 Capture/Compare Register LSbyte Bit 0
P046
Bit 15 Watchdog Counter MSbyte Bit 8
WDCNTR
P047
Bit 7 Watchdog Counter LSbyte Bit 0
P048
Bit 7 Watchdog Reset Key Bit 0
WDRST
ÁÁ
Á
P049
ÁÁ
Á
WD OVRFL
TAP SEL
†
ÁÁ
Á
WD INPUT
SELECT2
†
ÁÁÁ
Á
WD INPUT
SELECT1
†
ÁÁ
Á
WD INPUT
SELECT0
†
ÁÁÁ
Á
—
ÁÁÁÁ
Á
ÁÁ
Á
T1 INPUT
SELECT2
ÁÁ
Á
T1 INPUT
SELECT1
ÁÁÁ
Á
T1 INPUT
SELECT0
ÁÁ
Á
T1CTL1
P04A
WD OVRFL
RST ENA
†
WD OVRFL
INT ENA
WD OVRFL
INT FLAG
T1 OVRFL
INT ENA
T1 OVRFL
INT FLAG
ÁÁÁÁ
—
—
T1
SW RESET
T1CTL2
Mode: Dual-Compare
ÁÁ
Á
P04B
ÁÁ
Á
T1EDGE
INT FLAG
ÁÁ
Á
T1C2
INT FLAG
ÁÁÁ
Á
T1C1
INT FLAG
ÁÁ
Á
—
ÁÁÁ
Á
—
ÁÁÁÁ
Á
ÁÁ
Á
T1EDGE
INT ENA
ÁÁ
Á
T1C2
INT ENA
ÁÁÁ
Á
T1C1
INT ENA
ÁÁ
Á
T1CTL3
P04C
T1 MODE=0
T1C1
OUT ENA
T1C2
OUT ENA
T1C1
RST ENA
T1CR
OUT ENA
ÁÁÁÁ
T1EDGE
POLARITY
T1CR
RST ENA
T1EDGE
DET ENA
T1CTL4
Mode: Capture/Compare
P04B
T1EDGE
INT FLAG
—
T1C1
INT FLAG
—
—
ÁÁÁÁ
T1EDGE
INT ENA
—
T1C1
INT ENA
T1CTL3
ÁÁ
Á
P04C
ÁÁ
Á
T1
MODE = 1
ÁÁ
Á
T1C1
OUT ENA
ÁÁÁ
Á
—
ÁÁ
Á
T1C1
RST ENA
ÁÁÁ
Á
—
ÁÁÁÁ
Á
ÁÁ
Á
T1EDGE
POLARITY
ÁÁ
Á
—
ÁÁÁ
Á
T1EDGE
DET ENA
ÁÁ
Á
T1CTL4
Modes: Dual-Compare and Capture/Compare
P04D
—
—
—
—
T1EVT
DATA IN
ÁÁÁÁ
T1EVT
DATA OUT
T1EVT
FUNCTION
T1EVT
DATA DIR
T1PC1
ÁÁ
Á
P04E
ÁÁ
Á
T1PWM
DATA IN
ÁÁ
Á
T1PWM
DATA OUT
ÁÁÁ
Á
T1PWM
FUNCTION
ÁÁ
Á
T1PWM
DATA DIR
ÁÁÁ
Á
T1IC/CR
DATA IN
ÁÁÁÁ
Á
ÁÁ
Á
T1IC/CR
DATA OUT
ÁÁ
Á
T1IC/CR
FUNCTION
ÁÁÁ
Á
T1IC/CR DATA
DIR
ÁÁ
Á
T1PC2
P04F T1 STEST
T1
PRIORITY
—
—
—
ÁÁÁÁ
—
—
—
T1PRI
ÁÁÁÁ
†
Once the WD OVRFL RST ENA bit is set, these bits cannot be changed until a reset; this applies only to the standard
watchdog and to simple counter. In the hard watchdog, these bits can be modified at any time; the WD INPUT SELECT2
bits are ignored.

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
37
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
absolute maximum ratings over operating free-air temperature range (unless otherwise noted)
†
Supply voltage range,VCC (see Note 1) –0.6 V to 7 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Input voltage range, All pins except MC –0.6 V to 7 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MC –0.6 V to 14 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Input clamp current, IIK (V
I
< 0 or V
I
> V
CC)
±20 mA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Output clamp current, I
OK
(VO < 0 or VO > VCC) ±20 mA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Continuous output current per buffer, IO (VO = 0 to V
CC)
) (see Note 2) ±10 mA. . . . . . . . . . . . . . . . . . . . . . . . .
Maximum I
CC
current 170 mA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Maximum I
SS
current – 170 mA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Continuous power dissipation 500 mW. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Operating free-air temperature range, TA: L version 0°C to 70°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A version –40°C to 85°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
T version –40°C to 105°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Storage temperature range, T
stg
–65°C to 150°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
†
Stresses beyond those listed under “absolute maximum ratings” may cause permanent damage to the device. These are stress ratings only, and
functional operation of the device at these or any other conditions beyond those indicated under “recommended operating conditions” is not
implied. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability.
NOTES: 1. Unless otherwise noted, all voltage values are with respect to VSS.
2. Electrical characteristics are specified with all output buffers loaded with specified IO current. Exceeding the specified IO current in
any buffer can affect the levels on other buffers.
recommended operating conditions
MIN NOM MAX UNIT
Supply voltage (see Note 1) 4.5 5 5.5 V
V
CC
RAM data-retention supply voltage (see Note 3) 3 5.5 V
p
All pins except MC V
SS
0.8
VILLow-level input voltage
MC, normal operation V
SS
0.3
V
All pins except MC, XTAL2/CLKIN, and
RESET
2 V
CC
V
IH
High-level input voltage
XTAL2/CLKIN
0.8 V
CC
V
CC
V
RESET 0.7 V
CC
V
CC
EEPROM write protect override (WPO) 11.7 12 13
V
MC
MC (mode control) voltage
EPROM programming voltage (VPP)
13 13.2 13.5
V
Microcomputer V
SS
0.3
L version 0 70
T
A
Operating free-air temperature
A version
– 40 85
°C
T version – 40 105
NOTES: 1. Unless otherwise noted, all voltage values are with respect to VSS.
3. RESET
must be externally activated when VCC or SYSCLK is not within the recommended operating range.

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
38
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
electrical characteristics over recommended operating free-air temperature range (unless
otherwise noted)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
V
OL
Low-level output voltage IOL = 1.4 mA 0.4 V
p
IOH = –50 µA 0.9 V
CC
VOHHigh-level output voltage
IOH = –2 mA 2.4
V
0 V ≤ VI ≤ 0.3 V 10
0.3 V < VI ≤ 13 V 650
µ
A
I
I
Input current
MC
See Note 4
12 V ≤ VI ≤ 13 V
50 mA
I/O pins 0 V ≤ VI ≤ V
CC
± 10 µA
I
OL
Low-level output current VOL = 0.4 V 1.4 mA
p
VOH = 0.9 V
CC
– 50 µA
IOHHigh-level output current
VOH = 2.4 V – 2 mA
See Notes 5 and 6
SYSCLK = 5 MHz
20 36
Supply current (operating mode)
OSC POWER bit = 0 (see Note 7)
See Notes 5 and 6
SYSCLK = 3 MHz
13 25
mA
See Notes 5 and 6
SYSCLK = 0.5 MHz
5 11
See Notes 5 and 6
SYSCLK = 5 MHz
10 17
I
CC
Supply current (STANDBY mode)
OSC POWER bit = 0 (see Note 8)
See Notes 5 and 6
SYSCLK = 3 MHz
6.5 11
mA
See Notes 5 and 6
SYSCLK = 0.5 MHz
2 3.5
Supply current (STANDBY mode)
See Notes 5 and 6
SYSCLK = 3 MHz
4.5 8.6
y( )
OSC POWER bit = 1 (see Note 9)
See Notes 5 and 6
SYSCLK = 0.5 MHz
1.5 3.0
mA
Supply current (HALT mode)
See Note 5
XTAL2/CLKIN < 0.2 V
1 30 µA
NOTES: 4. Input current IPP is a maximum of 50 mA only when you are programming EPROM.
5. Single chip mode, ports configured as inputs or outputs with no load. All inputs ≤ 0.2 V or ≥ VCC – 0.2V .
6. XTAL2/CLKIN is driven with an external square wave signal with 50% duty cycle and rise and fall times less than 10 ns. Current
can be higher with a crystal oscillator. At 5 MHz SYSCLK, this extra current = 0.01 mA x (total load capacitance + crystal capacitance
in pF).
7. Maximum operating current = 5.6 (SYSCLK) + 8 mA.
8. Maximum standby current = 3 (SYSCLK) + 2 mA. (OSC POWER bit = 0).
9. Maximum standby current = 2.24 (SYSCLK) + 1.9 mA. (OSC POWER bit = 1, only valid up to 3 MHz SYSCLK).

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
39
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
External
Clock Signal
XTAL1XTAL2/CLKIN
C2
(see Note B)
C1
(see Note B)
Crystal/Ceramic
Resonator
(see Note A)
XTAL1XTAL2/CLKIN
C3
(see Note B)
NOTES: A. The crystal/ceramic resonator frequency is four times the reciprocal of the system clock period.
B. The values of C1 and C2 are typically 15 pF and the value of C3 is typically 50 pF. See the manufacturer’s recommendations for
ceramic resonators.
Figure 14. Recommended Crystal/Clock Connections
1.2 kΩ
20 pF
V
O
Load Voltage
Case 1: VO = VOH = 2.4 V; Load Voltage = 0 V
Case 2: VO = VOL = 0.4 V; Load Voltage = 2.1 V
NOTE A: All measurements are made with the pin loading as shown unless otherwise noted. All measurements are made with XTAL2/CLKIN
driven by an external square wave signal with a 50% duty cycle and rise and fall times less than 10 ns unless otherwise stated.
Figure 15. Typical Output Load Circuit (See Note A)
V
CC
GND
300 Ω
20 Ω
I/O
Pin Data
Output
Enable
V
CC
GND
INT1
6 kΩ
20 Ω
30 Ω
Figure 16. T ypical Buffer Circuitry

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
40
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
PARAMETER MEASUREMENT INFORMATION
timing parameter symbology
Timing parameter symbols have been created in accordance with JEDEC Standard 100. In order to shorten the
symbols, some of the pin names and other related terminology have been abbreviated as follows:
AR Array SC SYSCLK
B Byte SIMO SPISIMO
CI XTAL2/CLKIN SOMI SPISOMI
M Master mode SPC SPICLK
S Slave mode
Lowercase subscripts and their meanings are:
c cycle time (period) su setup time
d delay time v valid time
f fall time w pulse duration (width)
r rise time
The following additional letters are used with these meanings:
H High
L Low
V Valid
All timings are measured between high and low measurement points as indicated in Figure 17 and Figure 18.
0.8 V (Low)
2 V (High)
0.8 V (Low)
0.8 VCC V (High)
Figure 17. XTAL2/CLKIN Measurement Points Figure 18. General Measurement Points
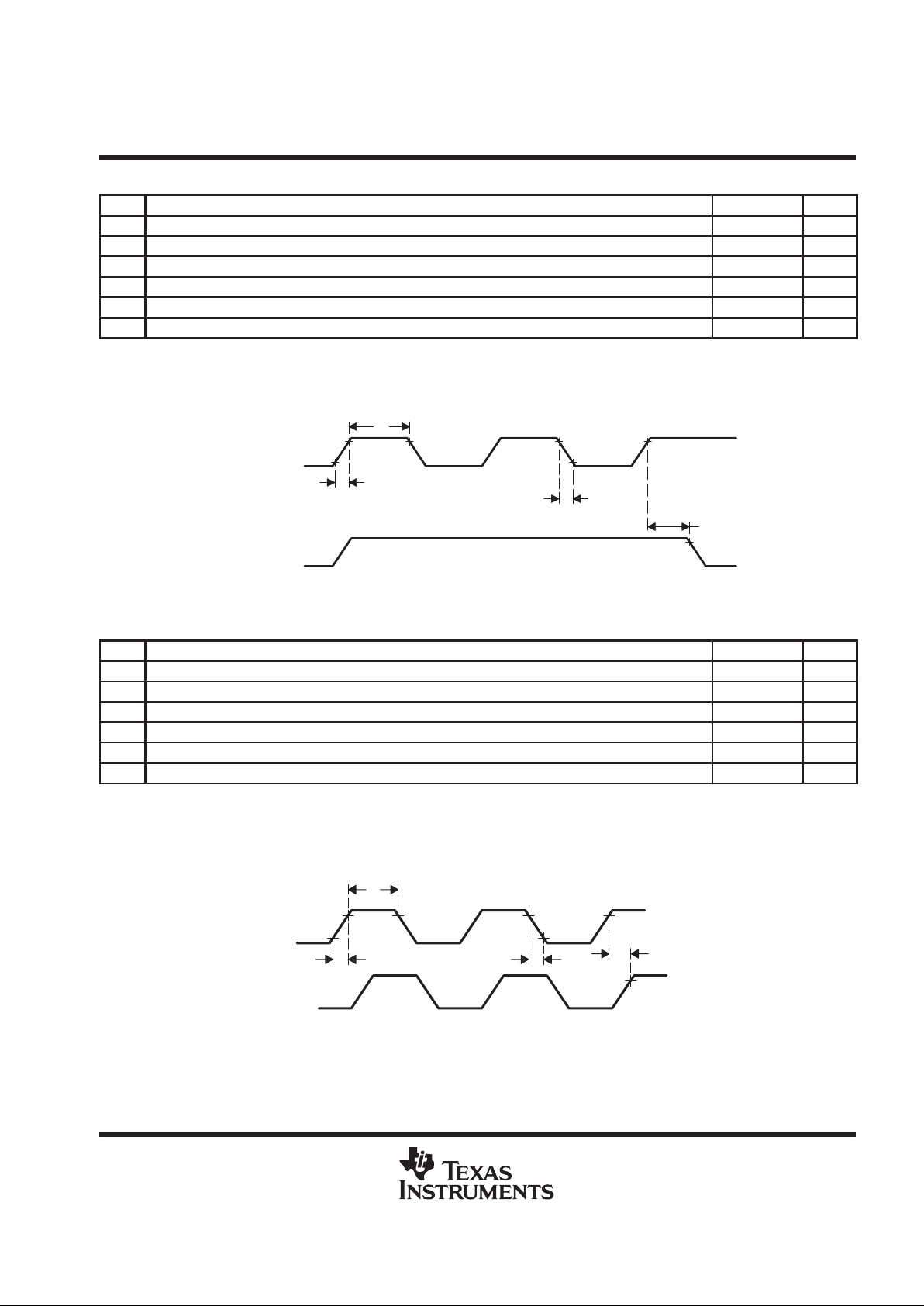
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
41
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
external clocking requirements for clock divided by 4 (see Note 10 and Figure 19)
NO. PARAMETER MIN MAX UNIT
1 t
w(Cl)
Pulse duration, XTAL2/CLKIN (see Note 11) 20 ns
2 t
r(Cl)
Rise time, XTAL2/CLKIN 30 ns
3 t
f(CI)
Fall time, XTAL2/CLKIN 30 ns
4 t
d(CIH-SCL)
Delay time, XTAL2/CLKIN rise to SYSCLK fall 100 ns
CLKIN Crystal operating frequency 2 20 MHz
SYSCLK Internal system clock operating frequency
†
0.5 5 MHz
†
SYSCLK = CLKIN/4
NOTES: 10. For VIL and VIH, refer to recommended operating conditions.
11. This pulse may be either a high pulse which extends from the earliest valid high to the final valid high in an XTAL2/CLKIN cycle or
a low pulse, which extends from the earliest valid low to the final valid low in an XTAL2/CLKIN cycle.
XTAL2/CLKIN
3
2
1
4
SYSCLK
Figure 19. External Clock Timing for Divide-by-4
external clocking requirements for clock divided by 1 (PLL) (see Note 10 and Figure 20)
NO. PARAMETER MIN MAX UNIT
1 t
w(Cl)
Pulse duration, XTAL2/CLKIN (see Note 11) 20 ns
2 t
r(Cl)
Rise time, XTAL2/CLKIN 30 ns
3 t
f(CI)
Fall time, XTAL2/CLKIN 30 ns
4 t
d(CIH-SCH)
Delay time, XTAL2/CLKIN rise to SYSCLK rise 100 ns
CLKIN Crystal operating frequency 2 5 MHz
SYSCLK Internal system clock operating frequency
‡
2 5 MHz
‡
SYSCLK = CLKIN/1
NOTES: 10. For VIL and VIH, refer to recommended operating conditions.
11. This pulse can be either a high pulse which extends from the earliest valid high to the final valid high in an XTAL2/CLKIN cycle or
a low pulse, which extends from the earliest valid low to the final valid low in an XTAL2/CLKIN cycle.
4
32
1
XTAL2/CLKIN
SYSCLK
Figure 20. External Clock Timing for Divide-by-1
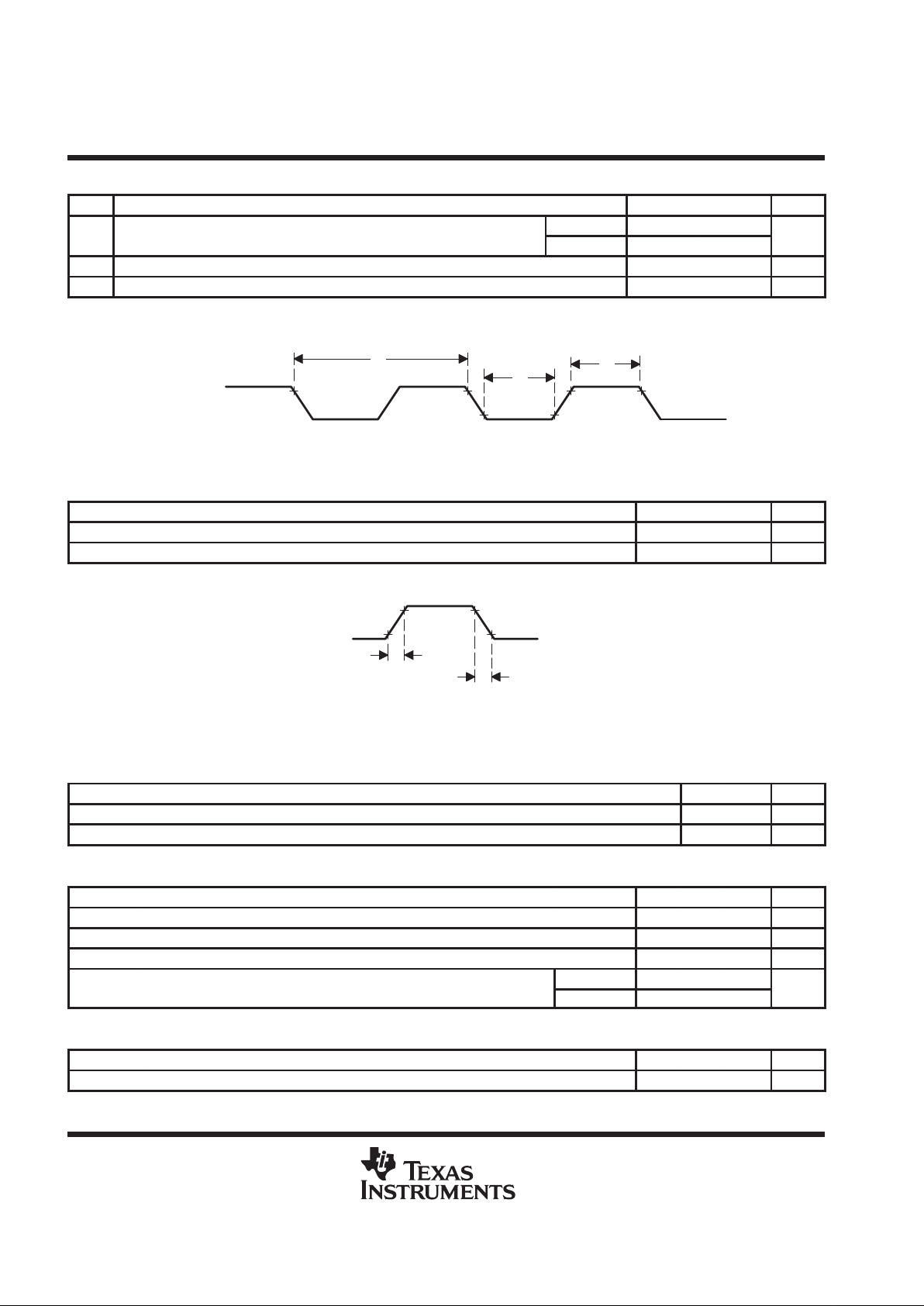
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
42
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
switching characteristics and timing requirements (see Note 12 and Figure 21)
NO. PARAMETER MIN MAX UNIT
Divide by 4 200 2000
5
tcCycle time, SYSCLK
Divide by 1 200 500
ns
6 t
w(SCL)
Pulse duration, SYSCLK low 0.5 tc–20 0.5 t
c
ns
7 t
w(SCH)
Pulse duration, SYSCLK high 0.5 t
c
0.5 tc + 20 ns
NOTE 12: tc = system-clock cycle time = 1/SYSCLK
SYSCLK
5
6
7
Figure 21. SYSCLK Timing
general purpose output signal switching time requirements (see Figure 22)
MIN NOM MAX UNIT
trRise time 30 ns
tfFall time 30 ns
t
f
t
r
Figure 22. Signal Switching Timing
recommended EEPROM timing requirements for programming
MIN MAX UNIT
t
w(PGM)B
Pulse duration, programming signal to ensure valid data is stored (byte mode) 10 ms
t
w(PGM)AR
Pulse duration, programming signal to ensure valid data is stored (array mode) 20 ms
recommended EPROM operating conditions for programming
MIN NOM MAX UNIT
V
CC
Supply voltage 4.75 5.5 6 V
V
PP
Supply voltage at MC pin 13 13.2 13.5 V
I
PP
Supply current at MC pin during programming (VPP = 13 V) 30 50 mA
Divide by 4 0.5 5
SYSCLK
System clock
Divide by 1 2 5
MH
z
recommended EPROM timing requirements for programming
MIN NOM MAX UNIT
t
w(EPGM)
Pulse duration, programming signal (see Note 13) 0.40 0.50 3 ms
NOTE 13: Programming pulse is active when both EXE (EPCTL.0) and V
PPS
(EPCTL.6) are set.

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
43
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
SPI master mode external timing characteristics and requirements (see Note 12 and Figure 23)
NO. MIN MAX UNIT
38 t
c(SPC)M
Cycle time, SPICLK 2t
c
256t
c
ns
39 t
w(SPCL)M
Pulse duration, SPICLK low tc– 45 0.5t
c(SPC)
+45 ns
40 t
w(SPCH)M
Pulse duration, SPICLK high tc– 55 0.5t
c(SPC)
+45 ns
41 t
d(SPCL-SIMOV)M
Delay time, SPISIMO valid after SPICLK low (polarity = 1) – 65 50 ns
42 t
v(SPCH-SIMO)M
Valid time, SPISIMO data valid after SPICLK high (polarity =1) t
w(SPCH)
– 50 ns
43 t
su(SOMI-SPCH)M
Setup time, SPISOMI to SPICLK high (polarity = 1) 0.25 tc + 150 ns
44 t
v(SPCH-SOMI)M
Valid time, SPISOMI data valid after SPICLK high
(polarity = 1)
0 ns
NOTE 12: tc = system-clock cycle time = 1/SYSCLK
Data Valid
Data Valid
SPISOMI
SPISIMO
SPICLK
44
43
4241
38
40
39
NOTE A: The diagram is for polarity = 1. SPICLK is inverted when polarity = 0.
Figure 23. SPI Master External Timing

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
44
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
SPI slave mode external timing characteristics and requirements (see Note 12 and Figure 24)
NO. MIN MAX UNIT
45 t
c(SPC)S
Cycle time, SPICLK 8t
c
ns
46 t
w(SPCL)S
Pulse duration, SPICLK low 4tc– 45 0.5t
c(SPC)S
+45 ns
47 t
w(SPCH)S
Pulse duration, SPICLK high 4tc– 45 0.5t
c(SPC)S
+45 ns
48 t
d(SPCL-SOMIV)S
Delay time, SPISOMI valid after SPICLK low (polarity = 1) 3.25tc + 130 ns
49 t
v(SPCH-SOMI)S
Valid time, SPISOMI data valid after SPICLK high (polarity =1) t
w(SPCH)S
ns
50 t
su(SIMO-SPCH)S
Setup time, SPISIMO to SPICLK high (polarity = 1) 0 ns
51 t
v(SPCH-SIMO)S
Valid time, SPISIMO data after SPICLK high (polarity = 1) 3tC + 100 ns
NOTE 12: tc = system-clock cycle time = 1/SYSCLK
Data Valid
Data Valid
SPISOMI
SPISIMO
SPICLK
51
50
4948
45
47
46
NOTE A: The diagram is for polarity = 1. SPICLK is inverted when polarity = 0.
Figure 24. SPI Slave External Timing

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
45
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Table 20 is designed to aid the user in referencing a device part number to a mechanical drawing. The table
shows a cross-reference of the device part number to the TMS370 generic package name and the associated
mechanical drawing by drawing number and name.
Table 20. TMS370Cx1x Family Package Type and Mechanical Cross-Reference
PKG TYPE
(mil pin spacing)
TMS370 GENERIC NAME
PKG TYPE NO. AND
MECHANICAL NAME
DEVICE PART NUMBERS
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
FN – 28 pin
(50-mil pin spacing)
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
PLASTIC LEADED CHIP CARRIER
(PLCC)
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
FN(S-PQCC-J**) PLASTIC J-LEADED
CHIP CARRIER
ББББББ
Á
ББББББ
Á
ББББББ
Á
ББББББ
Á
ББББББ
Á
ББББББ
Á
ББББББ
Á
ББББББ
Á
ББББББ
Á
ББББББ
Á
ББББББ
Á
TMS370C010AFNA
TMS370C010AFNL
TMS370C010AFNT
TMS370C012AFNA
TMS370C012AFNL
TMS370C012AFNT
TMS370C310AFNA
TMS370C310AFNL
TMS370C310AFNT
TMS370C311AFNA
TMS370C311AFNL
TMS370C311AFNT
TMS370C312AFNA
TMS370C312AFNL
TMS370C312AFNT
TMS370C712AFNT
TMS370C712BFNT
FZ – 28 pin
(50-mil pin spacing)
CERAMIC LEADED CHIP CARRIER
(CLCC)
FZ(S-CQCC-J**) J-LEADED CERAMIC
CHIP CARRIER
SE370C712AFZT
SE370C712BFZT
ÁÁÁÁ
Á
JD – 28 pin
(100-mil pin spacing)
БББББББББ
Á
CERAMIC DUAL-IN-LINE PACKAGE
(CDIP)
БББББББББ
Á
JD(R-CDIP-T**) CERAMIC SIDE-BRAZE
DUAL-IN-LINE PACKAGE
ББББББ
Á
SE370C712AJDT
SE370C712BJDT
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
ÁÁÁÁ
Á
N – 28 pin
(100-mil pin spacing)
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
PLASTIC DUAL-IN-LINE PACKAGE
(PDIP)
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
БББББББББ
Á
N(R-PDIP-T**) PLASTIC DUAL-IN-LINE
PACKAGE
ББББББ
Á
ББББББ
Á
ББББББ
Á
ББББББ
Á
ББББББ
Á
ББББББ
Á
ББББББ
Á
ББББББ
Á
ББББББ
Á
ББББББ
Á
TMS370C010ANA
TMS370C010ANL
TMS370C010ANT
TMS370C012ANA
TMS370C012ANL
TMS370C012ANT
TMS370C310ANA
TMS370C310ANL
TMS370C310ANT
TMS370C31 1ANA
TMS370C31 1ANL
TMS370C31 1ANT
TMS370C312ANA
TMS370C312ANL
TMS370C312ANT
TMS370C712ANT
TMS370C712BNT

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
46
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
MECHANICAL DATA
JD (R-CDIP-T**) CERAMIC SIDE-BRAZE DUAL-IN-LINE P ACKAGE
4040087/B 04/95
24 PIN SHOWN
2.650
(67,31)
52
PINS **
2.050
(52,07)(36,83)
1.450
0.590 (14,99)
0.620 (15,75)
1.250
DIM
A MAX
(31,75)
24 28 40
(61,85)
2.435
48
0.012 (0,30)
0.008 (0,20)
0.020 (0,51) MIN
Seating Plane
13
12
A
4 Places
0.075 (1,91) MAX
0.045 (1,14)
0.065 (1,65)
24
1
0.021 (0,53)
0.015 (0,38)
0.125 (3,18) MIN
0.175 (4,45)
0.140 (3,56)
TYP
0.590 (15,00)
0°–15°
0.100 (2,54)
NOTES: A. All linear dimensions are in inches (millimeters).
B. This drawing is subject to change without notice.
C. This package can be hermetically sealed with a metal lid.
D. The terminals are gold plated.
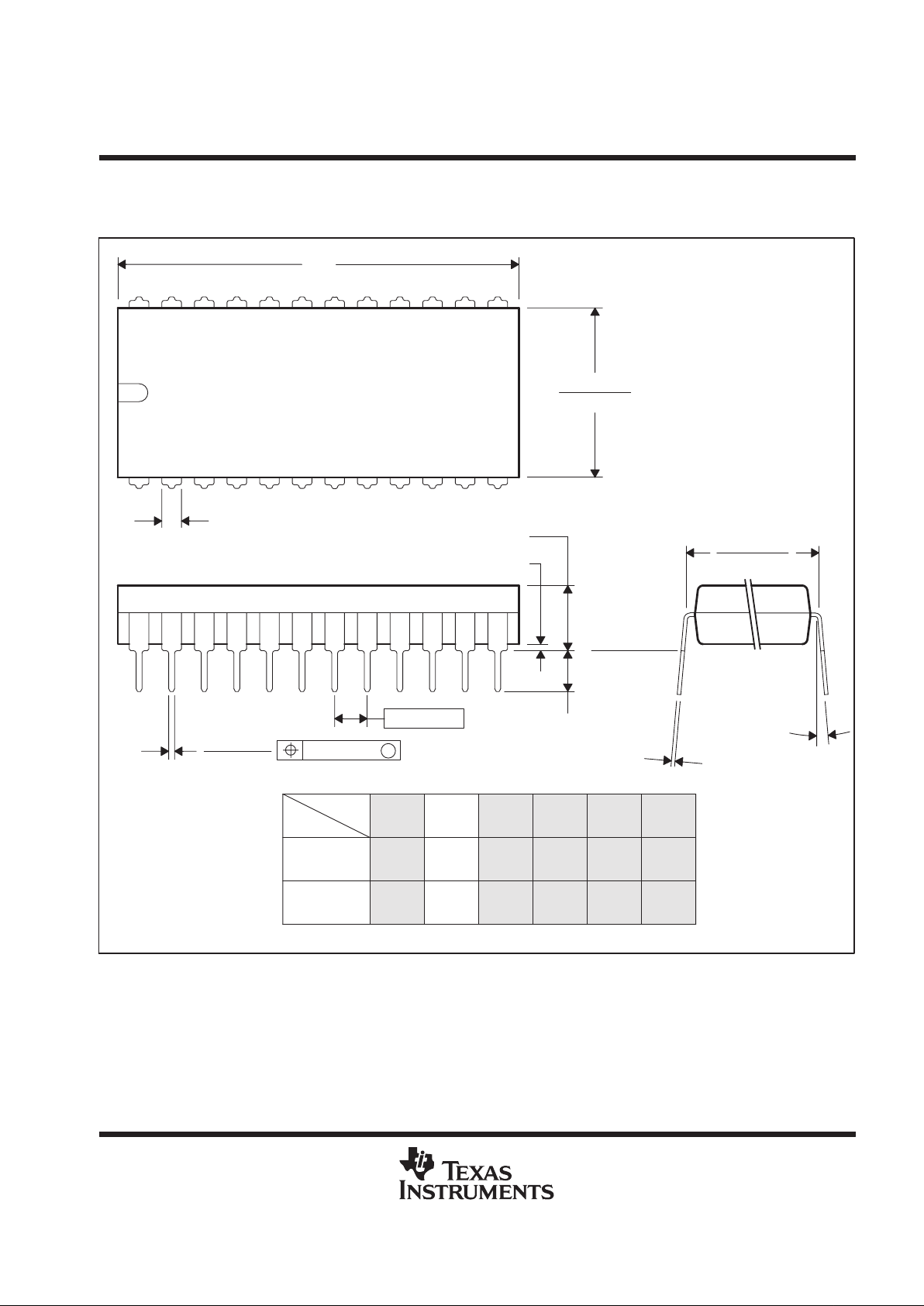
TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
47
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
MECHANICAL DATA
N (R-PDIP-T**) PLASTIC DUAL-IN-LINE PACKAGE
24 PIN SHOWN
12
Seating Plane
0.560 (14,22)
0.520 (13,21)
13
0.610 (15,49)
0.590 (14,99)
524840
0.125 (3,18) MIN
2.390
(60,71)
(62,23)(53,09)
(51,82)
2.040
2.090
2.450 2.650
(67,31)
(65,79)
2.590
0.010 (0,25) NOM
4040053/B 04/95
A
0.060 (1,52) TYP
1
24
322824
1.230
(31,24)
(32,26) (36,83)
(35,81)
1.410
1.450
1.270
PINS **
DIM
0.015 (0,38)
0.021 (0,53)
A MIN
A MAX
1.650
(41,91)
(40,89)
1.610
0.020 (0,51) MIN
0.200 (5,08) MAX
0.100 (2,54)
M
0.010 (0,25)
0°–15°
NOTES: A. All linear dimensions are in inches (millimeters).
B. This drawing is subject to change without notice.
C. Falls within JEDEC MS-011
D. Falls within JEDEC MS-015 (32 pin only)

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
48
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
MECHANICAL DATA
FN (S-PQCC-J**) PLASTIC J-LEADED CHIP CARRIER
4040005/B 03/95
20 PIN SHOWN
0.026 (0,66)
0.032 (0,81)
D2/E2
0.020 (0,51) MIN
0.180 (4,57) MAX
0.120 (3,05)
0.090 (2,29)
D2/E2
0.013 (0,33)
0.021 (0,53)
Seating Plane
MAX
D2/E2
0.219 (5,56)
0.169 (4,29)
0.319 (8,10)
0.469 (11,91)
0.569 (14,45)
0.369 (9,37)
MAX
0.356 (9,04)
0.456 (11,58)
0.656 (16,66)
0.008 (0,20) NOM
1.158 (29,41)
0.958 (24,33)
0.756 (19,20)
0.191 (4,85)
0.141 (3,58)
MIN
0.441 (11,20)
0.541 (13,74)
0.291 (7,39)
0.341 (8,66)
18
19
14
13
D
D1
13
9
E1E
4
8
MINMAXMIN
PINS
**
20
28
44
0.385 (9,78)
0.485 (12,32)
0.685 (17,40)
52
68
84
1.185 (30,10)
0.985 (25,02)
0.785 (19,94)
D/E
0.395 (10,03)
0.495 (12,57)
1.195 (30,35)
0.995 (25,27)
0.695 (17,65)
0.795 (20,19)
NO. OF
D1/E1
0.350 (8,89)
0.450 (11,43)
1.150 (29,21)
0.950 (24,13)
0.650 (16,51)
0.750 (19,05)
0.004 (0,10)
M
0.007 (0,18)
0.050 (1,27)
NOTES: A. All linear dimensions are in inches (millimeters).
B. This drawing is subject to change without notice.
C. Falls within JEDEC MS-018

TMS370Cx1x
8-BIT MICROCONTROLLER
SPNS012F – MAY 1987 – REVISED FEBRUAR Y 1997
49
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
MECHANICAL DATA
FZ (S-CQCC-J**) J-LEADED CERAMIC CHIP CARRIER
4040219/B 03/95
0.180 (4,57)
0.140 (3,55)
C
0.020 (0,51)
0.032 (0,81)
A B
A
B
0.025 (0,64) R TYP
0.026 (0,66)
0.120 (3,05)
0.155 (3,94)
0.014 (0,36)
0.120 (3,05)
0.040 (1,02) MIN
0.090 (2,29)
0.040 (1,02) 45°
A
MIN MAX
0.485
(12,32) (12,57)
0.495
0.455
(11,56)(10,92)
0.430
MAXMIN
BC
MIN MAX
0.410
(10,41) (10,92)
0.430
0.6300.6100.630 0.6550.6950.685
(16,00)(15,49)(16,00) (16,64)(17,65)(17,40)
0.7400.6800.730 0.7650.7950.785
(18,79)(17,28)(18,54) (19,43)(20,19)(19,94)
PINS**
28
44
52
NO. OFJEDEC
MO-087AC
MO-087AB
MO-087AA
OUTLINE
28 LEAD SHOWN
Seating Plane
(at Seating
Plane)
1426
25
19
18
12
11
5
0.050 (1,27)
0.9300.9100.930 0.9550.9950.985
(23,62)(23,11)(23,62) (24,26)(25,27)(25,02)
68MO-087AD
NOTES: A. All linear dimensions are in inches (millimeters).
B. This drawing is subject to change without notice.
C. This package can be hermetically sealed with a ceramic lid using glass frit.

IMPORTANT NOTICE
T exas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinue
any product or service without notice, and advise customers to obtain the latest version of relevant information
to verify, before placing orders, that information being relied on is current and complete. All products are sold
subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those
pertaining to warranty, patent infringement, and limitation of liability.
TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in
accordance with TI’s standard warranty. Testing and other quality control techniques are utilized to the extent
TI deems necessary to support this warranty. Specific testing of all parameters of each device is not necessarily
performed, except those mandated by government requirements.
CERT AIN APPLICATIONS USING SEMICONDUCTOR PRODUCTS MAY INVOLVE POTENTIAL RISKS OF
DEATH, PERSONAL INJURY, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE (“CRITICAL
APPLICATIONS”). TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, AUTHORIZED, OR
WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT DEVICES OR SYSTEMS OR OTHER
CRITICAL APPLICATIONS. INCLUSION OF TI PRODUCTS IN SUCH APPLICA TIONS IS UNDERSTOOD T O
BE FULLY AT THE CUSTOMER’S RISK.
In order to minimize risks associated with the customer’s applications, adequate design and operating
safeguards must be provided by the customer to minimize inherent or procedural hazards.
TI assumes no liability for applications assistance or customer product design. TI does not warrant or represent
that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other
intellectual property right of TI covering or relating to any combination, machine, or process in which such
semiconductor products or services might be or are used. TI’s publication of information regarding any third
party’s products or services does not constitute TI’s approval, warranty or endorsement thereof.
Copyright 1998, Texas Instruments Incorporated
 Loading...
Loading...