

Page 1
TMP411
Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of Texas Instruments
SBOS383A − FEBRUAR Y 2007
±1°C Remote and Local TEMPERATURE SENSOR
with N-Factor and Series Resistance Correction
FEATURES
D ±1°C REMOTE DIODE SENSOR
D ±1°C LOCAL TEMPERATURE SENSOR
D PROGRAMMABLE NON-IDEALITY FACTOR
D SERIES RESISTANCE CANCELLATION
D ALERT FUNCTION
D PROGRAMMABLE RESOLUTION: 9 to 12 Bits
D PROGRAMMABLE THRESHOLD LIMITS
D TWO-WIRE/SMBus SERIAL INTERFACE
D MINIMUM AND MAXIMUM TEMPERATURE
MONITORS
D MULTIPLE INTERFACE ADDRESSES
D ALERT/THERM2 PIN CONFIGURATION
D DIODE FAULT DETECTION
APPLICATIONS
D LCD/DLP/LCOS PROJECTORS
D SERVERS
D INDUSTRIAL CONTROLLERS
D CENTRAL OFFICE TELECOM EQUIPMENT
D DESKTOP AND NOTEBOOK COMPUTERS
D STORAGE AREA NETWORKS (SAN)
D INDUSTRIAL AND MEDICAL
EQUIPMENT
D PROCESSOR/FPGA
TEMPERATURE MONITORING
V+
GND
SCL
SDA
V+
1
5
Conversion Rate
D+
2
3
−
D
8
7
TMP411
N−Factor
Correction
Local
Temperature
Register
Register
Remote
Temperature
Register
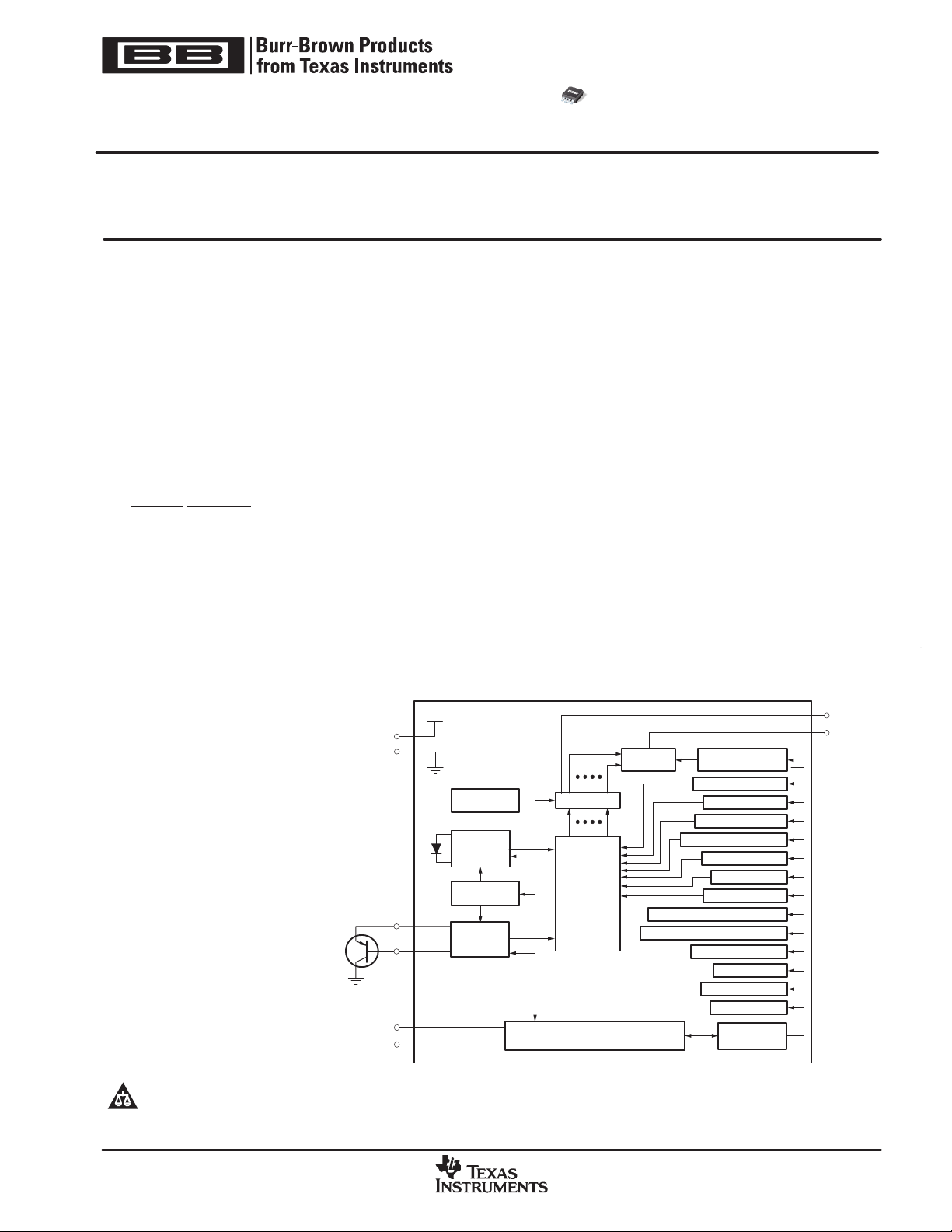
DESCRIPTION
The TMP411 is a remote temperature sensor monitor with
a built-in local temperature sensor. The remote
temperature sensor diode-connected transistors are
typically low-cost, NPN- or PNP-type transistors or diodes
that are an integral part of microcontrollers,
microprocessors, or FPGAs.
Remote accuracy is ±1°C for multiple IC manufacturers,
with no calibration needed. The Two-Wire serial interface
accepts SMBus write byte, read byte, send byte, and
receive byte commands to program the alarm thresholds
and to read temperature data.
Features that are included in the TMP411 are: series
resistance cancellation, programmable non-ideality factor,
programmable resolution, programmable threshold limits,
minimum and maximum temperature monitors, wide
remote temperature measurement range (up to +150°C),
diode fault detection, and temperature alert function.
The TMP411 is available in both MSOP-8 and SO-8
(available Q1 2007) packages.
4
THERM
6
ALERT/THERM2
Interrupt
Configuration
Status Regis ter
T
L
Temperature
Comparators
T
R
Bus Interface Pointer Register
Local Temperature Min/Max Register
Remote Temperature Min/Max Register
Consecutive Alert
Configuration Register
Remote Temp High Limit
Remote THERM Limit
Remote TempLow Limit
THERM Hysteresis Register
Local Temp High Limit
Local THE RM Limit
Local Temp Low Limit
Manufacturer IDRegister
Device ID Register
Configuration Register
Resolution Register
semiconductor products and disclaimers thereto appears at the end of this data sheet.
DLP is a registered trademark of Texas Instruments. SMBus is a trademark of Intel Corp.
All other trademarks are the property of their respective owners.
! !
www.ti.com
Copyright 2006−2007, Texas Instruments Incorporated
Page 2
"#$$
TMP411A
Remote Junction Temperature Sensor
100 1100
TMP411B
Remote Junction Temperature Sensor
100 1101
SBOS383A − FEBRUARY 2007
www.ti.com
ABSOLUTE MAXIMUM RATINGS
(1)
Power Supply, VS 7.0V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Input Voltage, pins 2, 3, 4 only −0.5V to VS + 0.5V. . . . . . . . . . . . .
Input Voltage, pins 6, 7, 8 only −0.5V to 7V. . . . . . . . . . . . . . . . . . .
Input Current 10mA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Operating Temperature Range −55°C to +127°C. . . . . . . . . . . . . . .
Storage Temperature Range −60°C to +130°C. . . . . . . . . . . . . . . . .
Junction Temperature (TJ max) +150°C. . . . . . . . . . . . . . . . . . . . . .
proper handling and installation procedures can cause damage.
ESD damage can range from subtle performance degradation to
complete device failure. Precision integrated circuits may be more
susceptible t o damage because very small parametric changes could
cause the device not to meet its published specifications.
This integrated circuit can be damaged by ESD. Texas
Instruments recommends that all integrated circuits be
handled with appropriate precautions. Failure to observe
ESD Rating:
Human Body Model (HBM) 3000V. . . . . . . . . . . . . . . . . . . . . . .
Charged Device Model (CDM) 1000V. . . . . . . . . . . . . . . . . . . .
Machine Model (MM) 200V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
(1)
Stresses above these ratings may cause permanent damage.
Exposure to absolute maximum conditions for extended periods
may degrade device reliability. These are stress ratings only , an d
functional operation of the device at these or any other conditions
beyond those specified is not supported.
ORDERING INFORMATION
PRODUCT DESCRIPTION I2C ADDRESS PACKAGE-LEAD
(1)
PACKAGE
DESIGNATOR
PACKAGE
MARKING
MSOP-8 DGK 411A
(2)
SO-8
D T411A
MSOP-8 DGK 411B
(2)
SO-8
(1)
For the most current package and ordering information see the Package Option Addendum at the end of this document, or see the TI web site
at www .ti.com.
(2)
Available Q1 2007.
D T411B
PIN CONFIGURATION
Top View MSOP, SO
TMP411
V+
D+
D
THERM
1
2
−
3
4
SCL
8
SDA
7
ALERT/THERM2
6
GND
5
PIN ASSIGNMENTS
PIN NAME DESCRIPTION
1 V+ Positive supply (2.7V to 5.5V)
2 D+
3 D−
4 THERM
5 GND Ground
6 ALERT/THERM2
7 SDA
8 SCL
Positive connection to remote temperature
sensor
Negative connection to remote temperature
sensor
Thermal flag, active low, open-drain;
requires pull-up resistor to V+
Alert (reconfigurable as second thermal
flag), active low, open-drain; requires
pull-up resistor to V+
Serial data line for SMBus, open-drain;
requires pull-up resistor to V+
Serial clock line for SMBus, open-drain;
requires pull-up resistor to V+
2
Page 3
"#$$
www.ti.com
SBOS383A − FEBRUARY 2007
ELECTRICAL CHARACTERISTICS
At TA = −40°C to +125°C and VS = 2.7V to 5.5V , unless otherwise noted.
TMP411
PARAMETERS CONDITIONS
TEMPERATURE ERROR
Local Temperature Sensor TE
Remote Temperature Sensor
vs Supply
Local/Remote VS = 2.7V to 5.5V ±0.2 ±0.5 °C/V
TEMPERATURE MEASUREMENT
Conversion Time (per channel) 105 115 125 ms
Resolution
Local Temperature Sensor (programmable) 9 12 Bits
Remote Temperature Sensor 12 Bits
Remote Sensor Source Currents
High Series Resistance 3kΩ Max 120 µA
Medium High 60 µA
Medium Low 12 µA
Low 6 µA
Remote Transistor Ideality Factor η TMP411 Optimized Ideality Factor 1.008
SMBus INTERFACE
Logic Input High Voltage (SCL, SDA) V
Logic Input Low Voltage (SCL, SDA) V
Hysteresis 500 mV
SMBus Output Low Sink Current 6 mA
Logic Input Current −1 +1 µA
SMBus Input Capacitance (SCL, SDA) 3 pF
SMBus Clock Frequency 3.4 MHz
SMBus Timeout 25 30 35 ms
SCL Falling Edge to SDA Valid T ime 1 µs
DIGITAL OUTPUTS
Output Low Voltage V
High-Level Output Leakage Current I
ALERT/THERM2 Output Low Sink Current ALERT/THERM2 Forced to 0.4V 6 mA
THERM Output Low Sink Current THERM Forced to 0.4V 6 mA
POWER SUPPLY
Specified Voltage Range V
Quiescent Current I
Undervoltage Lock Out 2.3 2.4 2.6 V
Power-On Reset Threshold POR 1.6 2.3 V
TEMPERATURE RANGE
Specified Range −40 +125 °C
Storage Range −60 +130 °C
Thermal Resistance
MSOP-8, SO-8 150 °C/W
(1)
Tested with less than 5Ω effective series resistance and 100pF differential input capacitance.
(1)
LOCAL
TE
REMOTETA
OL
OH
= +15°C to +75°C, TD = −40°C to +150°C, VS = 3.3V ±0.0625 ±1 °C
TA = −40°C to +100°C, TD = −40°C to +150°C, VS = 3.3V ±1 ±3 °C
TA = −40°C to +125°C, TD = −40°C to +150°C ±3 ±5 °C
IH
IL
S
Q
Serial Bus Active, fS = 400kHz, Shutdown Mode 90 µA
Serial Bus Active, fS = 3.4MHz, Shutdown Mode 350 µA
TA = −40°C to +125°C ±1.25 ±2.5 °C
TA = +15°C to +85°C, VS = 3.3V ±0.0625 ±1 °C
I
= 6mA 0.15 0.4 V
OUT
V
= V
OUT
S
0.0625 Conversions per Second 28 30 µA
Eight Conversions per Second 400 475 µA
Serial Bus Inactive, Shutdown Mode 3 10 µA
MIN TYP MAX
2.1 V
0.8 V
0.1 1 µA
2.7 5.5 V
UNITS
3
Page 4
"#$$
SBOS383A − FEBRUARY 2007
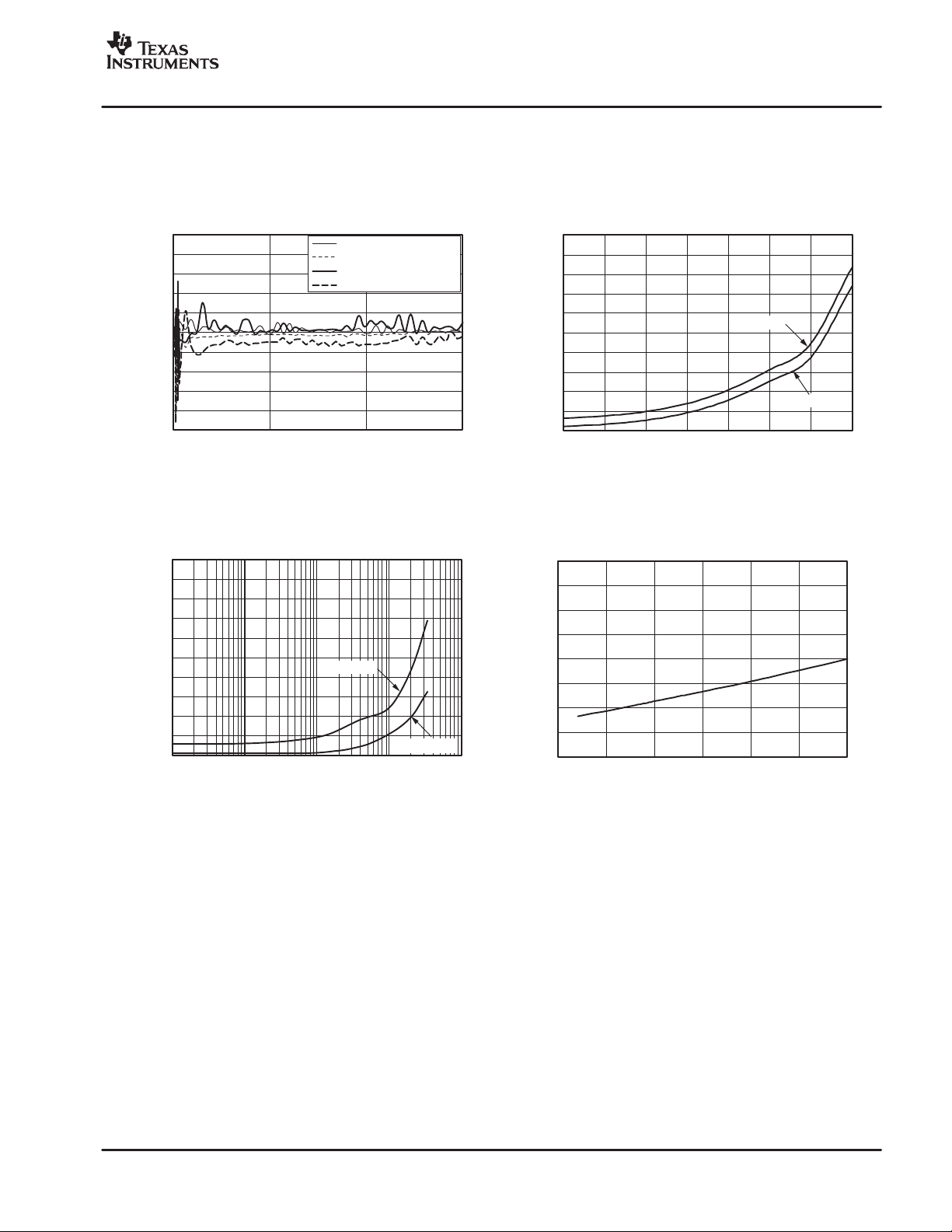
TYPICAL CHARACTERISTICS
At TA = +25°C and VS = 5.0V , unless otherwise noted.
www.ti.com
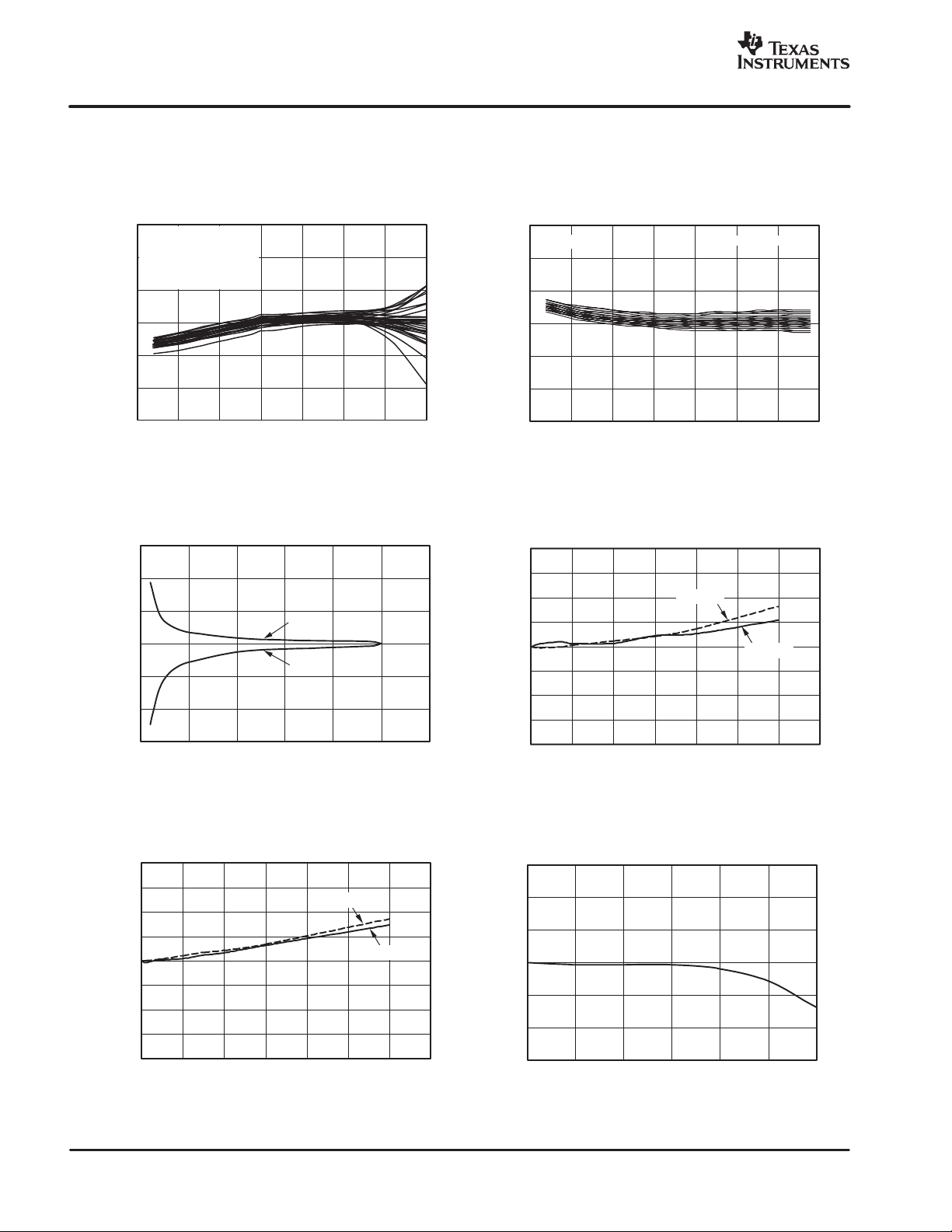
REMOTE TEMPERATURE ERROR
3
VS=3.3V
T
REMOTE
C)
2
_
30 Typical Units Shown
η
=1.008
1
0
−
1
−
2
Remote Temperature Error (
−
3
−
50−25 1251007550250
=+25_C
vs TEMPERATURE
Ambient Temperature, T
A
(_C)
Figure 1.
REMOTE TEMPERATURE ERROR
60
C)
40
_
20
0
−
20
−
40
Remote Temperature Error (
−
60
0 5 10 15 20 25 30
vs LEAKAGE RESISTANCE
R−GND
R−V
S
Leakage Resistance (MΩ)
Figure 3.
LOCAL TEMPERATURE ERROR
3.0
VS=3.3V
2.0
C)
_
1.0
0
−1.0
−2.0
Local Temperature Error (
−3.0
−50 125−25 0 25 50 75 100
vs TEMPERATURE
50 Units Shown
Ambient Temperature, TA(_C)
Figure 2.
REMOTE TEMPERATURE ERROR vsSERIES RESISTANCE
2.0
1.5
C)
_
1.0
0.5
0
− 0.5
− 1.0
− 1.5
Remote Temperature Error (
− 2.0
(Diode−Connected Transistor, 2N3906 PNP)
VS=2.7V
03500500 1000 1500 2000 2500 3000
RS(Ω)
Figure 4.
VS=5.5V
REMOTE TEMPERATURE ERROR vsSERIES RESISTANCE
(GND Collector−Connected Transistor, 2N3906 PNP)
2.0
1.5
C)
_
1.0
0.5
0
− 0.5
− 1.0
− 1.5
Remote Temperature Error (
− 2.0
03500500 1000 1500 2000 2500 3000
VS=2.7V
RS(Ω)
Figure 5.
VS=5.5V
3
C)
2
_
1
0
−
1
−
2
Remote Temperature Error (
−
3
0 0.5 1.0 1.5 2.0 2.5 3.0
REMOTE TEMPERATURE ERROR
vs DIFFERENTIAL CAPACITANCE
Capacitance (nF)
Figure 6.
4
Page 5
www.ti.com
TYPICAL CHARACTERISTICS (continued)
At TA = +25°C and VS = 5.0V , unless otherwise noted.
"#$$
SBOS383A − FEBRUAR Y 2007
TEMPERATUREERROR
25
20
15
C)
_
10
5
0
−
5
−
10
Temperature Error (
−
15
−
20
−
25
vs POWER−SUPPLY NOISE FREQUENCY
Local 100mVPPNoise
Remote 100mV
Local 250mV
Remote 250mV
051015
Frequency (MHz)
PP
Noise
PP
Noise
Noise
PP
Figure 7.
SHUTDOWN QUIESCENT CURRENT
500
450
400
350
300
A)
µ
250
(
Q
I
200
150
100
50
0
1k 10k 100k 1M 10M
vs SCL CLOCK FREQUENCY
VS=5.5V
VS=3.3V
SCLCLockFrequency(Hz)
QUIESCENT CURRENT
500
450
400
350
300
A)
µ
250
(
Q
I
200
150
100
50
0
0.0625 0.125 0.25 0.5 1 2 4 8
vs CONVERSION RATE
VS=5.5V
VS=2.7V
Conversion Rate (conversions/sec)
Figure 8.
SHUTDOWN QUIESCENT CURRENT
8
7
6
5
A)
µ
4
(
Q
I
3
2
1
0
vs SUPPLY VOLTAGE
4.53.0 3.5 4.0 5.55.02.5
VS(V)
Figure 9.
Figure 10.
5
Page 6
"#$$
SBOS383A − FEBRUAR Y 2007
www.ti.com
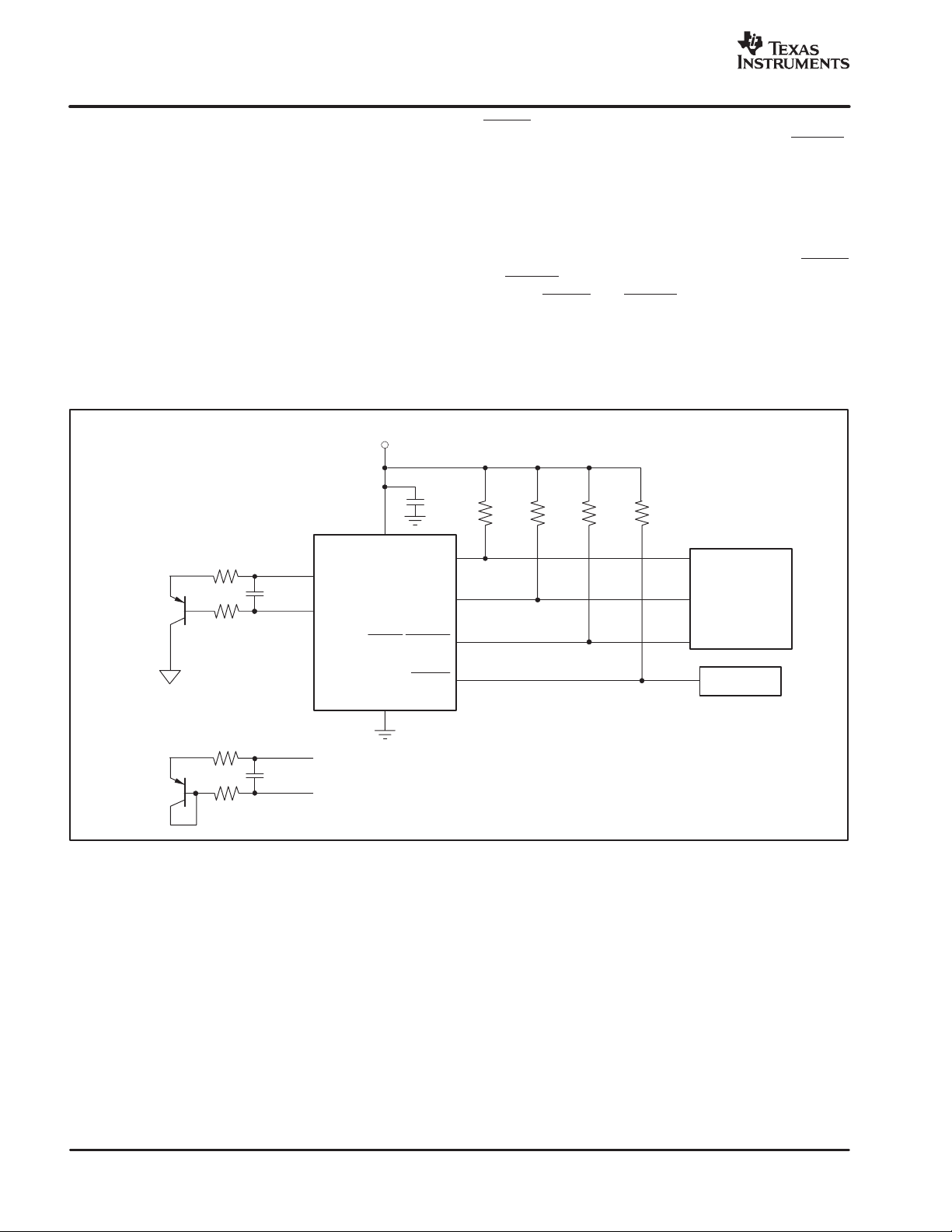
APPLICATIONS INFORMATION
The TMP411 is a dual-channel digital temperature sensor
that combines a local die temperature measurement
channel and a remote junction temperature measurement
channel in a single MSOP-8 or SO-8 package. The
TMP411 is Two-Wire- and SMBus interface-compatible
and is specified over a temperature range of −40°C to
+125°C. The TMP411 contains multiple registers for
holding configuration information, temperature
measurement results, temperature comparator
maximum/minimum limits, and status information.
User-programmed high and low temperature limits stored
in the TMP401 can be used to monitor local and remote
temperatures to trigger an over/under temperature alarm
+5V
(1)
Transistor−connected configuration
Series Resistance
(2)
R
S
(2)
R
S
:
2
D+
(3)
C
DIFF
3
−
D
1
V+
TMP411
SDA
ALERT/THERM2
0.1µF
SCL
(ALERT
). Additional thermal limits can be programmed
into the TMP411 and used to trigger another flag (THERM
that can be used to initiate a system response to rising
temperatures.
The TMP411 requires only a transistor connected between
D+ and D− for proper remote temperature sensing
operation. The SCL and SDA interface pins require pull-up
resistors as part of the communication bus, while ALERT
and THERM are open-drain outputs that also need pull−up
resistors. ALERT
and THERM may be shared with other
devices if desired for a wired-OR implementation. A 0.1µF
power-supply bypass capacitor is recommended for good
local bypassing. Figure 11 shows a typical configuration
for the TMP411.
10k
(typ)
Ω
Ω
10k
(typ)
8
7
6
10k
(typ)
Ω
10k
(typ)
Ω
SMBus
Controller
)
Diode−connectedconfiguration
(2)
R
S
(2)
R
S
THERM
GND
(1)
:
(3)
C
DIFF
5
(1) Diode−connected configuration provides better settling time.
NOTES:
(2) R
(3) C
4
Transistor−connected configuration provides better series resistance cancellation.
should be < 1.5kΩin most applications.
S
should be < 1000pF in most applications.
DIFF
Fan Controller
Figure 11. Basic Connections
6
Page 7
www.ti.com
TEMP
TEMP
"#$$
SBOS383A − FEBRUAR Y 2007
SERIES RESISTANCE CANCELLATION
Series resistance in an application circuit that typically
results from printed circuit board (PCB) trace resistance
and remote line length (see Figure 11) is automatically
cancelled by the TMP411, preventing what would
otherwise result in a temperature offset.
A total of up to 3kΩ of series line resistance is cancelled
by the TMP411, eliminating the need for additional
characterization and temperature offset correction.
See the two Remote Temperature Error vs Series
Resistance typical characteristics curves for details on the
effect of series resistance and power-supply voltage on
sensed remote temperature error.
DIFFERENTIAL INPUT CAPACITANCE
The TMP411 tolerates differential input capacitance of up
to 1000pF with minimal change in temperature error. The
effect of capacitance on sensed remote temperature error
is illustrated in typical characteristic Remote Temperature
Error vs Differential Capacitance.
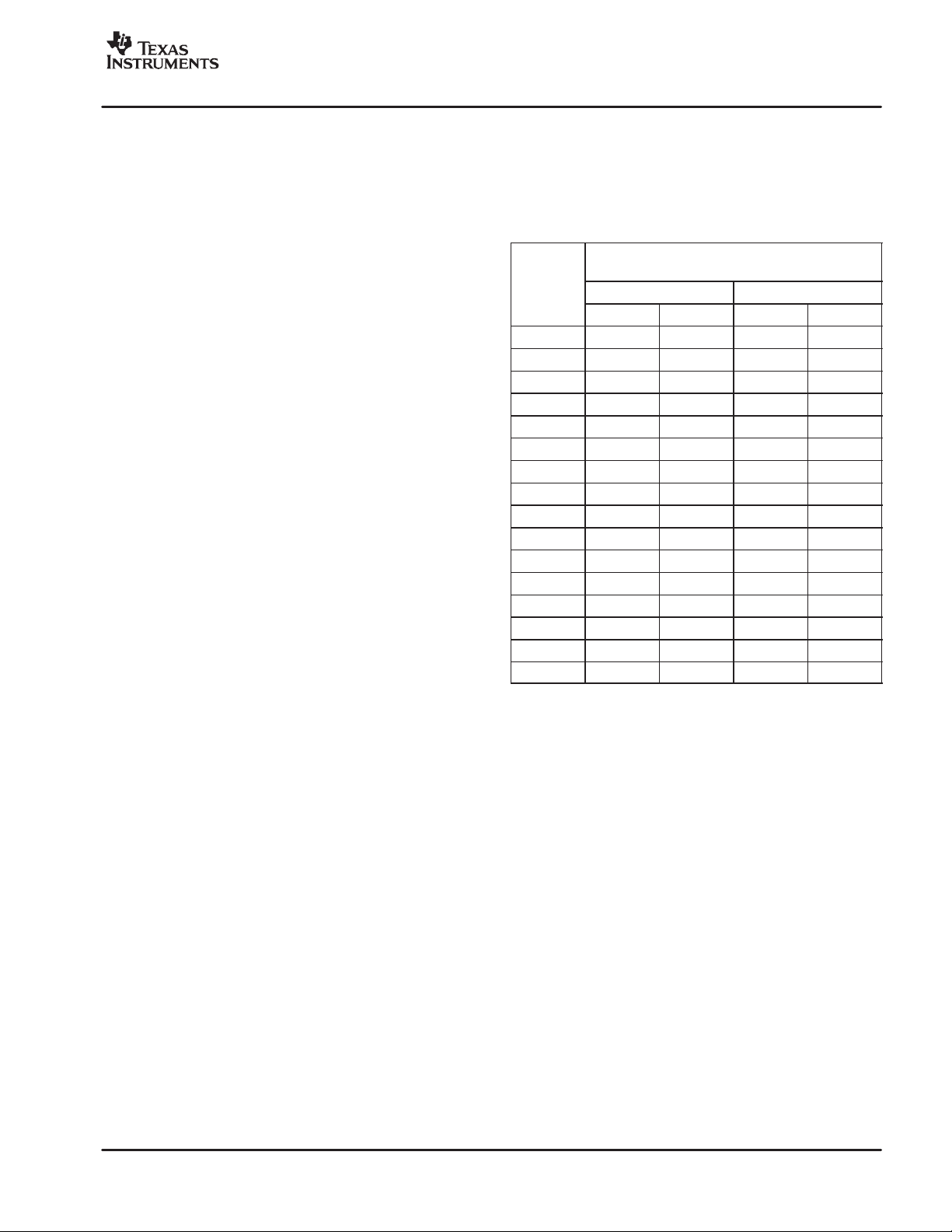
TEMPERATURE MEASUREMENT DATA
Temperature measurement data is taken over a default
range of 0 °C to +127°C for both local and remote locations.
Measurements from −55°C to +150°C can be made both
locally and remotely by reconfiguring the TMP411 for the
extended temperature range. To change the TMP411
configuration from the standard to the extended
temperature range, switch bit 2 (RANGE) of the
Configuration Register from low to high.
for ambient temperatures ranging from −40°C to +125°C.
Parameters in the Absolute Maximum Ratings table must
be observed.
Table 1. Temperature Data Format
(Local and Remote Temperature High Bytes)
LOCAL/REMOTE TEMPERATURE REGISTER
HIGH BYTE VALUE (+1°C RESOLUTION)
STANDARD BINARY EXTENDED BINARY
(°C)
−64 0000 0000 00 0000 0000 00
−50 0000 0000 00 0000 1110 0E
−25 0000 0000 00 0010 0111 27
0 0000 0000 00 0100 0000 40
1 0000 0001 01 0100 0001 41
5 0000 0101 05 0100 0101 45
10 0000 1010 0A 0100 1010 4A
25 0001 1001 19 0101 1001 59
50 0011 0010 32 0111 0010 72
75 0100 1011 4B 1000 1011 8B
100 0110 0100 64 1010 0100 A4
125 0111 1101 7D 1011 1101 BD
127 0111 1111 7F 1011 1111 BF
150 0111 1111 7F 1101 0110 D6
175 0111 1111 7F 1110 1111 EF
191 0111 1111 7F 1111 1111 FF
BINARY HEX BINARY HEX
Temperature data resulting from conversions within the
default measurement range is represented in binary form,
as shown in Table 1, Standard Binary column. Note that
any temperature below 0°C results in a data value of zero
(00h). Likewise, temperatures above +127°C result in a
value of 127 (7Fh). The device can be set to measure over
an extended temperature range by changing bit 2 of the
Configuration Register from low to high. The change in
measurement range and data format from standard binary
to extended binary occurs at the next temperature
conversion. For data captured in the extended
temperature range configuration, an offset of 64 (40h) is
added to the standard binary value, as shown in Table 1,
Extended Binary column. This configuration allows
measurement of temperatures below 0°C. Note that binary
values corresponding to temperatures as low as −64°C,
and as high as +191°C are possible; however, most
temperature sensing diodes only measure with the range
of −55°C to +150°C. Additionally, the TMP411 is rated only
NOTE: Whenever changing between standard and
extended temperature ranges, be aware that the
temperatures stored in the temperature limit registers are
NOT automatically reformatted to correspond to the new
temperature range format. These temperature limit values
must be reprogrammed in the appropriate binary or
extended binary format.
Both local and remote temperature data use two bytes for
data storage. The high byte stores the temperature with
1°C resolution. The second or low byte stores the decimal
fraction value of the temperature and allows a higher
measurement resolution; see Table 2. The measurement
resolution for the remote channel is 0.0625°C, and is not
adjustable. The measurement resolution for the local
channel is adjustable; it can be set for 0.5°C, 0.25°C,
0.125°C, or 0.0625°C by setting the RES1 and RES0 bits
of the Resolution Register; see the Resolution Register
section.
7
Page 8
"#$$
www.ti.com
SBOS383A − FEBRUAR Y 2007
Table 2. Decimal Fraction Temperature Data Format (Local and Remote Temperature Low Bytes)
REMOTE TEMPERA TURE
REGISTER LOW BYTE
VALUE
0.0625°C RESOLUTION 0.5°C RESOLUTION 0.25°C RESOLUTION 0.125°C RESOLUTION 0.0625°C RESOLUTION
TEMP
(°C)
0.0000 0000 0000 00 0000 0000 00 0000 0000 00 0000 0000 00 0000 0000 00
0.0625 0001 0000 10 0000 0000 00 0000 0000 00 0000 0000 00 0001 0000 10
0.1250 0010 0000 20 0000 0000 00 0000 0000 00 0010 0000 20 0010 0000 20
0.1875 0011 0000 30 0000 0000 00 0000 0000 00 0010 0000 20 0011 0000 30
0.2500 0100 0000 40 0000 0000 00 0100 0000 40 0100 0000 40 0100 0000 40
0.3125 0101 0000 50 0000 0000 00 0100 0000 40 0100 0000 40 0101 0000 50
0.3750 0110 0000 60 0000 0000 00 0100 0000 40 0110 0000 60 0110 0000 60
0.4375 0111 0000 70 0000 0000 00 0100 0000 40 0110 0000 60 0111 0000 70
0.5000 1000 0000 80 1000 0000 80 1000 0000 80 1000 0000 80 1000 0000 80
0.5625 1001 0000 90 1000 0000 80 1000 0000 80 1000 0000 80 1001 0000 90
0.6250 1010 0000 A0 1000 0000 80 1000 0000 80 1010 0000 A0 1010 0000 A0
0.6875 1011 0000 B0 1000 0000 80 1000 0000 80 1010 0000 A0 1011 0000 B0
0.7500 1100 0000 C0 1000 0000 80 1100 0000 C0 1100 0000 C0 1100 0000 C0
0.8125 1101 0000 D0 1000 0000 80 1100 0000 C0 1100 0000 C0 1101 0000 D0
0.8750 1110 0000 E0 1000 0000 80 1100 0000 C0 1110 0000 E0 1110 0000 E0
0.9385 1111 0000 F0 1000 0000 80 1100 0000 C0 1110 0000 E0 1111 0000 F0
BINARY
HEX
STANDARD
AND EXTENDED
STANDARD
AND EXTENDED
BINARY
LOCAL TEMPERATURE REGISTER LOW BYTE VALUE
HEX
STANDARD
AND EXTENDED
BINARY
HEX
STANDARD
AND EXTENDED
BINARY
HEX
STANDARD
AND EXTENDED
BINARY
HEX
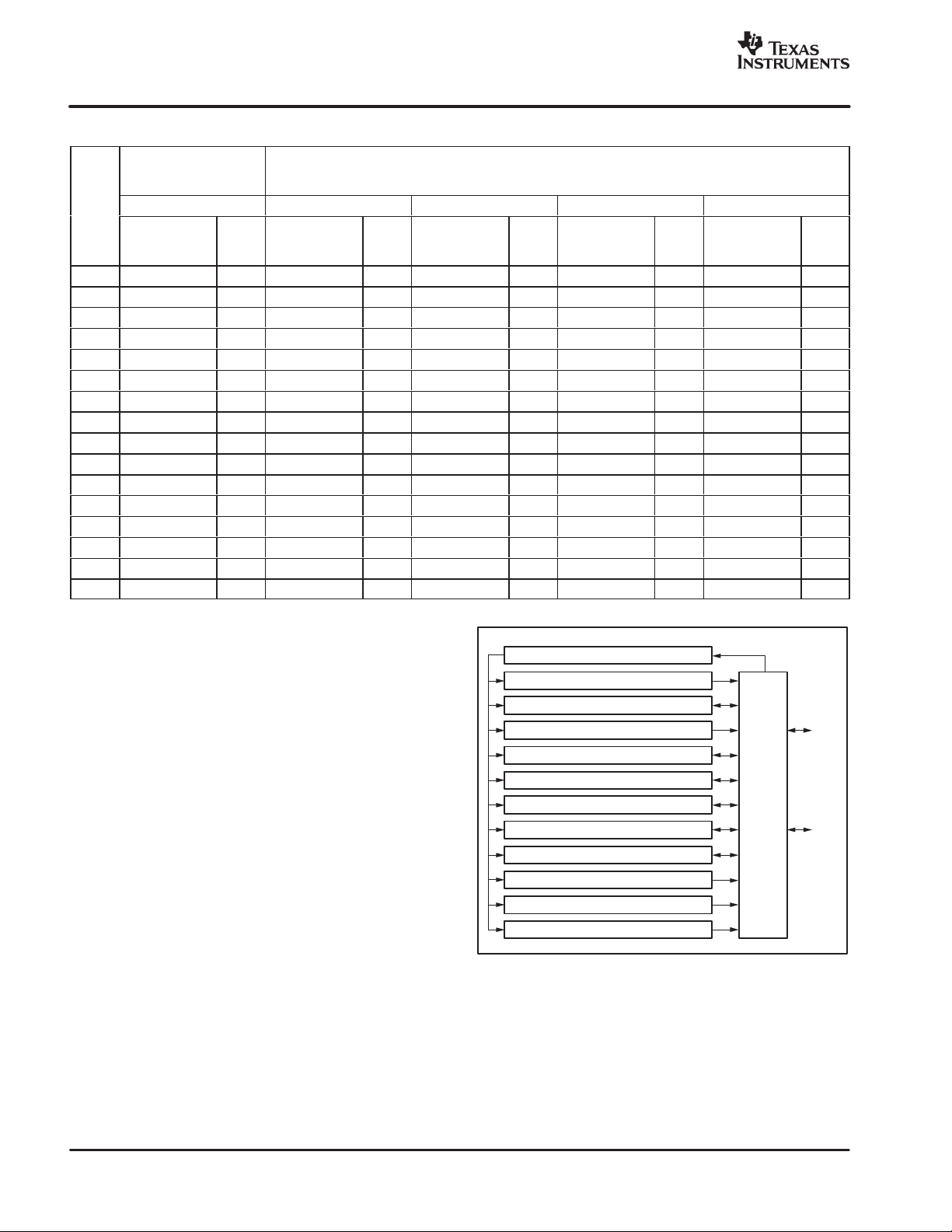
REGISTER INFORMATION
The TMP411 contains multiple registers for holding
configuration information, temperature measurement
results, temperature comparator maximum/minimum,
limits, and status information. These registers are
described in Figure 12 and Table 3.
POINTER REGISTER
Figure 12 shows the internal register structure of the
TMP411. The 8-bit Pointer Register is used to address a
given data register. The Pointer Register identifies which
of the data registers should respond to a read or write
command on the Two-Wire bus. This register is set with
every write command. A write command must be issued
to set the proper value in the Pointer Register before
executing a read command. Table 3 describes the pointer
address of the registers available in the TMP411. The
power-on reset (POR) value of the Pointer Register is 00h
(0000 0000b).
Pointer Register
Local and Remote Temperature Registers
Local and Remote Limit Registers
THERM Hysteresis Register
Status Register
Configuration Register
Resolution Register
Conversion Rate Register
Consecutive Alert Register
Identification Registers
Local Temperature Min/Max
Remote Temperature Min/Max
Control
Interface
Figure 12. Internal Register Structure
SDA
I/O
SCL
8
Page 9
"#$$
RESET
RESET
www.ti.com
SBOS383A − FEBRUAR Y 2007
Table 3. Register Map
POINTER
ADDRESS (HEX)
READ WRITE
00 NA
01 NA 00 RT11 RT10 RT9 RT8 RT7 RT6 RT5 RT4
02 NA XX BUSY LHIGH LLOW RHIGH RLOW OPEN RTHRM LTHRM Status Register
03 09 00 MASK1 SD AL/TH 0 0 RANGE 0 0 Configuration Register
04 0A 08 0 0 0 0 R3 R2 R1 R0 Conversion Rate Register
05 0B 55 LTH11 LTH10 LTH9 LTH8 LTH7 LTH6 LTH5 LTH4
06 0C 00 LTL11 LTL10 LTL9 LTL8 LTL7 LTL6 LTL5 LTL4
07 0D 55 RTH11 RTH10 RTH9 RTH8 RTH7 RTH6 RTH5 RTH4
08 0E 00 RTL11 RTL10 RTL9 RTL8 RTL7 RTL6 RTL5 RTL4
10 NA 00 RT3 RT2 RT1 RT0 0 0 0 0
13 13 00 RTH3 RTH2 RTH1 RTH0 0 0 0 0
14 14 00 RTL3 RTL2 RTL1 RTL0 0 0 0 0
15 NA 00 LT3 LT2 LT1 LT0 0 0 0 0 Local Temperature (Low Byte)
16 16 00 LTH3 LTH2 LTH1 LTH0 0 0 0 0
17 17 00 LTL3 LTL2 LTL1 LTL0 0 0 0 0
18 18 00 NC7 NC6 NC5 NC4 NC3 NC2 NC1 NC0 N-factor Correction
19 19 55 RTHL11 RTHL10 RTHL9 RTHL8 RTHL7 RTHL6 RTHL5 RTHL4 Remote THERM Limit
1A 1A 1C 0 0 0 1 1 1 RES1 RES0 Resolution Register
20 20 55 LTHL11 LTHL10 LTHL9 LTHL8 LTHL7 LTHL6 LTHL5 LTHL4 Local THERM Limit
21 21 0A TH11 TH10 TH9 TH8 TH7 TH6 TH5 TH4 THERM Hysteresis
22 22 80 TO_EN 0 0 0 C2 C1 C0 0 Consecutive Alert Register
30 30 FF LMT11 LMT10 LMT9 LMT8 LMT7 LMT6 LMT5 LMT4
31 31 F0 LMT3 LMT2 LMT1 LMT0 0 0 0 0
32 32 00 LXT11 LXT10 LXT9 LXT8 LXT7 LXT6 LXT5 LXT4
33 33 00 LXT3 LXT2 LXT1 LXT0 0 0 0 0
34 34 FF RMT11 RMT10 RMT9 RMT8 RMT7 RMT6 RMT5 RMT4
35 35 F0 RMT3 RMT2 RMT1 RMT0 0 0 0 0
36 36 00 RXT11 RXT10 RXT9 RXT8 RXT7 RXT6 RXT5 RXT4
37 37 00 RXT3 RXT2 RXT1 RXT0 0 0 0 0
NA FC XX X
FE NA 55 0 1 0 1 0 1 0 1 Manufacturer ID
FF NA 11 0 0 0 1 0 0 0 1 Device ID
(1)
NA = not applicable; register is write- or read-only.
(2)
X = indeterminate state.
(1)
POWER-ON
(HEX)
00 LT11 LT10 LT9 LT8 LT7 LT6 LT5 LT4 Local Temperature (High Byte)
D7 D6 D5 D4 D3 D2 D1 D0
(2)
X X X X X X X Software Reset
BIT DESCRIPTIONS
REGISTER DESCRIPTIONS
Remote Temperature
(High Byte)
Local T emperature High Limit
(High Byte)
Local Temperature Low Limit
(High Byte)
Remote Temperature
High Limit (High Byte)
Remote Temperature
Low Limit (High Byte)
Remote Temperature
(Low Byte)
Remote Temperature
High Limit (Low Byte)
Remote Temperature
Low Limit (Low Byte)
Local T emperature High Limit
(Low Byte)
Local Temperature Low Limit
(Low Byte)
Local Temperature Minimum
(High Byte)
Local Temperature Minimum
(Low Byte)
Local Temperature Maximum
(High Byte)
Local Temperature Maximum
(Low Byte)
Remote Temperature Minimum
(High Byte)
Remote Temperature Minimum
(Low Byte)
Remote Temperature
Maximum (High Byte)
Remote Temperature
Maximum (Low Byte)
9
Page 10

"#$$
SBOS383A − FEBRUARY 2007
www.ti.com
TEMPERATURE REGISTERS
The TMP411 has four 8-bit registers that hold temperature
measurement results. Both the local channel and the
remote channel have a high byte register that contains the
most significant bits (MSBs) of the te m perature ADC result
and a low byte register that contains the least significant
bits (LSBs) of the temperature ADC result. The local
channel high byte address is 00h; the local channel low
byte address is 15h. The remote channel high byte is at
address 01h; the remote channel low byte address is 10h.
These registers are read-only and are updated by the ADC
each time a temperature measurement is completed.
The TMP411 contains circuitry to assure that a low byte
register read command returns data from the same ADC
conversion as the immediately preceding high byte read
command. This assurance remains valid only until another
register is read. For proper operation, the high byte of a
temperature register should be read first. The low byte
register should be read in the next read command. The low
byte register may be left unread if the LSBs are not
needed. Alternatively, the temperature registers may be
read as a 16-bit register by using a single two-byte read
command from address 00h for the local channel result or
from address 01h for the remote channel result. The high
byte will be output first, followed by the low byte. Both bytes
of this read operation will be from the same ADC
conversion. The power-on reset value of both temperature
registers is 00h.
LIMIT REGISTERS
The TMP411 has 11 registers for setting comparator limits
for both the local and remote measurement channels.
These registers have read and write capability. The High
and Low Limit Registers for both channels span two
registers, as do the temperature registers. The local
temperature high limit is set by writing the high byte to
pointer address 0Bh and writing the low byte to pointer
address 16h, or by using a single two-byte write command
(high byte first) to pointer address 0Bh. The local
temperature high limit is obtained by reading the high byte
from pointer address 05h and the low byte from pointer
address 16h. The power-on reset value of the local
temperature high limit is 55h/00h (+85°C in standard
temperature mode; +21°C in extended temperature
mode).
Similarly, the local temperature low limit is set by writing
the high byte to pointer address 0Ch and writing the low
byte to pointer address 17h, or by using a single two-byte
write command to pointer address 0Ch. The local
temperature low limit is read by reading the high byte from
pointer address 06h and the low byte from pointer address
17h, or by using a two-byte read from pointer address 06h.
The power-on reset value of the local temperature low limit
register is 00h/00h (0°C in standard temperature mode;
−64°C in extended mode).
The remote temperature high limit is set by writing the high
byte to pointer address 0Dh and writing the low byte to
pointer address 13h, or by using a two-byte write
command to pointer address 0Dh. The remote
temperature high limit is obtained by reading the high byte
from pointer address 07h and the low byte from pointer
address 13h, or by using a two-byte read command from
pointer address 07h. The power-on reset value of the
Remote Temperature High Limit Register is 55h/00h
(+85°C in standard temperature mode; +21°C in extended
temperature mode).
The remote temperature low limit is set by writing the high
byte to pointer address 0Eh and writing the low byte to
pointer address 14h, or by using a two-byte write to pointer
address 0Eh. The remote temperature low limit is read by
reading the high byte from pointer address 08h and the low
byte from pointer address 14h, or by using a two-byte read
from pointer address 08h. The power-on reset value of the
Remote Temperature Low Limit Register is 00h/00h (0°C
in standard temperature mode; −64°C in extended mode).
The TMP41 1 also has a THERM limit register for both the
local and the remote channels. These registers are eight
bits and allow for THERM limits set to 1°C resolution. The
local channel THERM limit is set by writing to pointer
address 20h. The remote channel THERM limit is set by
writing to pointer address 19h. The local channel THERM
limit is obtained by reading from pointer address 20h; the
remote channel THERM limit is read by reading from
pointer address 19h. The power-on reset value of the
THERM limit registers is 55h (+85°C in standard
temperature mode; +21°C in extended temperature
mode). The THERM limit comparators also have
hysteresis. The hysteresis of both comparators is set by
writing to pointer address 21h. The hysteresis value is
obtained by reading from pointer address 21h. The value
in the Hysteresis Register is an unsigned number (always
positive). The power-on reset value of this register is 0Ah
(+10°C).
Whenever changing between standard and extended
temperature ranges, be aware that the temperatures
stored in the temperature limit registers are NOT
automatically reformatted to correspond to the new
temperature range format. These values must be
reprogrammed in the appropriate binary or extended
binary format.
10
Page 11

www.ti.com
"#$$
SBOS383A − FEBRUAR Y 2007
STATUS REGISTER
The TMP411 has a Status Register to report the state of
the temperature comparators. Table 4 shows the Status
Register bits. The Status Register is read-only and is read
by reading from pointer address 02h.
The BUSY bit reads as ‘1’ if the ADC is making a
conversion. It reads as ‘0’ if the ADC is not converting.
The OPEN bit reads as ‘1’ if the remote transistor was
detected as open since the last read of the Status Register.
The OPEN status is only detected when the ADC is
attempting to convert a remote temperature.
The RTHRM bit reads as ‘1’ if the remote temperature has
exceeded the remote THERM limit and remains greater
than the remote THERM limit less the value in the shared
Hysteresis Register; see Figure 17.
The LTHRM bit reads as ‘1’ if the local temperature has
exceeded the local THERM limit and remains greater than
the local THERM limit less the value in the shared
Hysteresis Register; see Figure 17.
The LHIGH and RHIGH bit values depend on the state of
the AL/TH bit in the Configuration Register. If the AL/TH bit
is ‘0’, the LHIGH bit reads as ‘1’ if the local high limit was
exceeded since the last clearing of the Status Register.
The RHIGH bit reads as ‘1’ if the remote high limit was
exceeded since the last clearing of the Status Register. If
the AL/TH bit is ‘1’, the remote high limit and the local high
limit are used to implement a THERM2
reads as ‘1’ if the local temperature has exceeded the local
high limit and remains greater than the local high limit less
the value in the Hysteresis Register.
function. LHIGH
The RHIGH bit reads as ‘1’ if the remote temperature has
exceeded the remote high limit and remains greater than
the remote high limit less the value in the Hysteresis
Register.
The LLOW and RLOW bits are not affected by the AL/TH
bit. The LLOW bit reads as ‘1’ if the local low limit was
exceeded since the last clearing of the Status Register.
The RLOW bit reads as ‘1’ if the remote low limit was
exceeded since the last clearing of the Status Register.
The values of the LLOW, RLOW, and OPEN (as well as
LHIGH and RHIGH when AL/TH is ‘0’) are latched and will
read as ‘1’ until the Status Register is read or a device reset
occurs. These bits are cleared by reading the Status
Register, provided that the condition causing the flag to be
set no longer exists. The values of BUSY, LTHRM, and
RTHRM (as well as LHIGH and RHIGH when AL/TH is ‘1’)
are not latched and are not cleared by reading the Status
Register. They always indicate the current state, and are
updated appropriately at the end of the corresponding
ADC conversion. Clearing the Status Register bits does
not clear the state of the ALERT
pin; an SMBus alert
response address command must be used to clear the
ALERT pin.
The TMP411 NORs LHIGH, LLOW, RHIGH, RLOW, and
OPEN, so a status change for any of these flags from ‘0’
to ‘1’ automatically causes the ALERT
applies when the ALERT
/THERM2 pin is configured for
pin to go low (only
ALERT mode).
BIT # D7 D6 D5 D4 D3 D2 D1 D0
BIT NAME BUSY LHIGH LLOW RHIGH RLOW OPEN RTHRM LTHRM
POR VALUE 0
(1)
The BUSY bit will change to
the TMP411 is converting a temperature reading.
(1)
‘1’ almost immediately (<< 100µs) following power-up, as the TMP411 begins the first temperature conversion. It will be high whenever
Table 4. Status Register Format
STATUS REGISTER (Read = 02h, Write = NA)
0 0 0 0 0 0 0
11
Page 12

"#$$
SBOS383A − FEBRUARY 2007
www.ti.com
CONFIGURATION REGISTER
The Configuration Register sets the temperature range,
controls shutdown mode, and determines how the
ALERT
Register is set by writing to pointer address 09h and read
by reading from pointer address 03h.
The MASK bit (bit 7) enables or disables the ALERT
output if AL/TH = 0. If AL/TH = 1 then the MASK bit has no
effect. If MASK is set to ‘0’, the ALERT
one of the temperature measurement channels exceeds
its high or low limits for the chosen number of consecutive
conversions. If the MASK bit is set to ‘1’, the TMP411
retains the ALERT
go low.
The shutdown (SD) bit (bit 6) enables or disables the
temperature measurement circuitry . I f S D = 0 , the TMP411
converts continuously at the rate set in the conversion rate
register. When SD is set to ‘1’, the TMP411 immediately
stops converting and enters a shutdown mode. When SD
is set to ‘0’ again, the TMP411 resumes continuous
conversions.
The AL/TH bit (bit 5) controls whether the ALERT
functions in ALERT mode or THERM2 mode. If AL/TH = 0,
the ALERT pin operates as an interrupt pin. In this mode,
/THERM2 pin functions. The Configuration
pin
pin goes low when
pin status, but the ALERT pin will not
pin
the ALERT pin goes low after the set number of
consecutive out-of-limit temperature measurements
occur.
If AL/TH = 1, the ALERT
THERM function (THERM2
/THERM2 pin implements a
). In this mode, THERM2
functions similar to the THERM pin except that the local
high limit and remote high limit registers are used for the
thresholds. THERM2 goes low when either RHIGH or
LHIGH is set.
The temperature range is set by configuring bit 2 of the
Configuration Register. Setting this bit low configures the
TMP411 for the standard measurement range (0°C to
+127°C); temperature conversions will be stored in the
standard binary format. Setting bit 2 high configures the
TMP411 for the extended measurement range (−55°C to
+150°C); temperature conversions will be stored in the
extended binary format (see Table 1).
The remaining bits of the Configuration Register are
reserved and must always be set to ‘0’. The power-on reset
value for this register is 00h. Table 5 summarizes the bits
of the Configuration Register.
Table 5. Configuration Register Bit Descriptions
CONFIGURATION REGISTER (Read = 02h, Write = NA, POR = 00h)
BIT NAME FUNCTION POWER-ON RESET VALUE
7 MASK
6 SD
5 AL/TH
4, 3 Reserved — 0
2 Temperature Range
1, 0 Reserved — 0
0 = ALERT Enabled
1 = ALERT Masked
0 = Run
1 = Shut Down
0 = ALERT Mode
1 = THERM Mode
0 = 0°C to +127°C
1 = −55°C to +150°C
0
0
0
0
12
Page 13

www.ti.com
"#$$
SBOS383A − FEBRUAR Y 2007
RESOLUTION REGISTER
The RES1 and RES0 bits (resolution bits 1 and 0) of the
Resolution Register set the resolution of the local
temperature measurement channel. Remote temperature
measurement channel resolution is not affected.
Changing the local channel resolution also affects the
conversion time and rate of the TMP411. The Resolution
Register is set by writing to pointer address 1Ah and is
read by reading from pointer address 1Ah. Table 6 shows
the resolution bits for the Resolution Register.
Table 6. Resolution Register:
Local Channel Programmable Resolution
RESOLUTION REGISTER (Read = 1Ah, Write = 1Ah, POR = 1Ch)
RES1 RES0 RESOLUTION
0 0 9 Bits (0.5°C) 12.5ms
0 1 10 Bits (0.25°C) 25ms
1 0 11 Bits (0.125°C) 50ms
1 1 12 Bits (0.0625°C) 100ms
Bits 2 through 4 of the Resolution Register must always be
set to ‘1’. Bits 5 through 7 of the Resolution Register must
always be set to ‘0’. The power-on reset value of this
register is 1Ch.
CONVERSION TIME
(Typical)
power dissipation to be balanced with the temperature
register update rate. Table 7 shows the conversion rate
options and corresponding current consumption.
N-FACTOR CORRECTION REGISTER
The TMP411 allows for a different n-factor value to be used
for converting remote channel measurements to
temperature. The remote channel uses sequential current
excitation to extract a differential V
measurement to determine the temperature of the remote
transistor. Equation 1 relates this voltage and temperature.
V
* V
BE2
BE1
+
nkT
I
2
ǒ
Ǔ
ln
q
I
1
The value n in Equation 1 is a characteristic of the
particular transistor used for the remote channel. The
default value for the TMP411 is n = 1.008. The value in the
N-Factor Correction Register may be used to adjust the
effective n-factor according to Equation 2 and Equation 3.
1.008 @ 300
+
eff
ǒ
300*N
+ 300*
Ǔ
ADJUST
300 @ 1.008
ǒ
n
eff
Ǔ
N
ADJUST
n
voltage
BE
(1)
(2)
(3)
CONVERSION RATE REGISTER
The Conversion Rate Register controls the rate at which
temperature conversions are performed. This register
adjusts the idle time between conversions but not the
conversion timing itself, thereby allowing the TMP411
two’s-complement format, yielding an effective data range
from −128 to +127. The n-correction value may be written
to and read from pointer address 18h. The register
power-on reset value is 00h, thus having no effect unless
written to.
Table 7. Conversion Rate Register
CONVERSION RATE REGISTER (Read = 04h, Write = 04h, POR = 08h)
AVERAGE IQ (TYP)
The n-correction value must be stored in
R7 R6 R5 R4 R3 R2 R1 R0 CONVERSION/SEC
0 0 0 0 0 0 0 0 0.0625 11 32
0 0 0 0 0 0 0 1 0.125 17 38
0 0 0 0 0 0 1 0 0.25 28 49
0 0 0 0 0 0 1 1 0.5 47 69
0 0 0 0 0 1 0 0 1 80 103
0 0 0 0 0 1 0 1 2 128 155
0 0 0 0 0 1 1 0 4 190 220
07h to 0Fh 8 373 413
VS = 2.7V VS = 5.5V
(µA)
13
Page 14

"#$$
SBOS383A − FEBRUAR Y 2007
www.ti.com
Table 8. N-Factor Range
N
ADJUST
BINARY HEX DECIMAL
01111111 7F 127 1.747977
00001010 0A 10 1.042759
00001000 08 8 1.035616
00000110 06 6 1.028571
00000100 04 4 1.021622
00000010 02 2 1.014765
00000001 01 1 1.011371
00000000 00 0 1.008
11111111 FF −1 1.004651
11111110 FE −2 1.001325
11111100 FC −4 0.994737
11111010 FA −6 0.988235
11111000 F8 −8 0.981818
11110110 F6 −10 0.975484
10000000 80 −128 0.706542
N
MINIMUM AND MAXIMUM REGISTERS
The TMP411 stores the minimum and maximum
temperature measured since power-on, chip-reset, or
minimum and maximum register reset for both the local
and remote channels. The Local Temperature Minimum
Register may be read by reading the high byte from pointer
address 30h and the low byte from pointer address 31h.
The Local Temperature Minimum Register may also be
read by using a two-byte read command from pointer
address 30h. The Local Temperature Minimum Register is
reset at power-on, by executing the chip-reset command,
or by writing any value to any of pointer addresses 30h
through 37h. The reset value for these registers is
FFh/F0h.
power-on by executing the chip reset command, or by
writing any value to any of pointer addresses 30h through
37h. The reset value for these registers is FFh/F0h.
The Remote Temperature Maximum Register may be read
by reading the high byte from pointer address 36h and the
low byte from pointer address 37h. The Remote
Temperature Maximum Register may also be read by
using a two-byte read command from pointer address 36h.
The Remote Temperature Maximum Register is reset at
power-on by executing the chip reset command, or by
writing any value to any of pointer addresses 30h through
37h. The reset value for these registers is 00h/00h.
SOFTWARE RESET
The TMP411 may be reset by writing any value to Pointer
Register FCh. This restores the power-on reset state to all
of the TMP411 registers as well as abort any conversion
in process and clear the ALERT
and THERM pins.
The TMP411 also supports reset via the two-wire general
call address (00000000). The TMP411 acknowledges the
general call address and responds to the second byte. If
the second byte is 00000110, the TMP411 executes a
software reset. The TMP411 takes no action in response
to other values in the second byte.
CONSECUTIVE ALERT REGISTER
The value in the Consecutive Alert Register (address 22h)
determines how many consecutive out-of-limit
measurements must occur on a measurement channel
before the ALERT
register does not affect bits in the Status Register . Values
of one, two, three, or four consecutive conversions can be
selected; one conversion is the default. This function
allows additional filtering for the ALERT
consecutive alert bits are shown in Table 9.
signal is activated. The value in this
pin. The
The Local Temperature Maximum Register may be read
by reading the high byte from pointer address 32h and the
low byte from pointer address 33h. The Local Temperature
Maximum Register may also be read by using a two-byte
read command from pointer address 32h. The Local
Temperature Maximum Register is reset at power-on by
executing the chip reset command, or by writing any value
to any of pointer addresses 30h through 37h. The reset
value for these registers is 00h/00h.
The Remote Temperature Minimum Register may be read
by reading the high byte from pointer address 34h and the
low byte from pointer address 35h. The Remote
Temperature Minimum Register may also be read by using
a two-byte read command from pointer address 34h. The
Remote Temperature Minimum Register is reset at
14
Table 9. Consecutive Alert Register
CONSECUTIVE ALERT REGISTER
(READ = 22h, WRITE = 22h, POR = 80h)
NUMBER OF CONSECUTIVE
C2 C1 C0
0 0 0 1
0 0 1 2
0 1 1 3
1 1 1 4
OUT-OF-LIMIT MEASUREMENTS
NOTE: Bit 7 of the Consecutive Alert Register controls the
enable/disable of the timeout function. See the Timeout
Function section for a description of this feature.
Page 15

www.ti.com
BIT #
D7D6D5D4D3D2D1
D0
"#$$
SBOS383A − FEBRUAR Y 2007
THERM HYSTERESIS REGISTER
The THERM Hysteresis Register stores the hysteresis
value used for the THERM
must be programmed with a value that is less than the
Local Temperature High Limit Register value, Remote
Temperature High Limit Register value, Local THERM
Limit Register value, or Remote THERM Limit Register
value; otherwise, the respective temperature comparator
will not trip on the measured temperature falling edges.
Allowable hysteresis values are shown in Table 10. The
default hysteresis value is 10°C, whether the device is
operating in the standard or extended mode setting.
Table 10. Allowable THERM Hysteresis Values
TEMPERATURE
(°C)
0 0000 0000 00
1 0000 0001 01
5 0000 0101 05
10 0000 1010 0A
25 0001 1001 19
50 0011 0010 32
75 0100 1011 4B
100 0110 0100 64
125 0111 1101 7D
127 0111 1111 7F
150 1001 0110 96
175 1010 1111 AF
200 1100 1000 C8
225 1110 0001 E1
255 1111 1111 FF
pin alarm function. This register
THERM HYSTERESIS VALUE
TH[11:4]
(STANDARD BINARY)
(HEX)
To address a specific device, a START condition is
initiated. START is indicated by pulling the data line (SDA)
from a high to low logic level while SCL is high. All slaves
on the bus shift in the slave address byte, with the last bit
indicating whether a read or write operation is intended.
During the ninth clock pulse, the slave being addressed
responds to the master by generating an Acknowledge
and pulling SDA low.
Data transfer is then initiated and sent over eight clock
pulses followed by an Acknowledge bit. During data
transfer SDA must remain stable while SCL is high,
because any change in SDA while SCL is high is
interpreted as a control signal.
Once all data has been transferred, the master generates
a STOP condition. STOP is indicated by pulling SDA from
low to high, while SCL is high.
SERIAL INTERFACE
The TMP411 operates only as a slave device on either the
Two-Wire bus or the SMBus. Connections to either bus are
made via the open-drain I/O lines, SDA and SCL. The SDA
and SCL pins feature integrated spike suppression filters
and Schmitt triggers to minimize the effects of input spikes
and bus noise. The TMP411 supports the transmission
protocol for fast (1kHz to 400kHz) and high-speed (1kHz
to 3.4MHz) modes. All data bytes are transmitted MSB
first.
SERIAL BUS ADDRESS
To communicate with the TMP411, the master must first
address slave devices via a slave address byte. The slave
address byte consists of seven address bits, and a
direction bit indicating the intent of executing a read or
write operation. The address of the TMP411 is 4Ch
(1001100b).
BUS OVERVIEW
The TMP411 is SMBus interface-compatible. In SMBus
protocol, the device that initiates the transfer is called a
master, and the devices controlled by the master are
slaves. The bus must be controlled by a master device that
generates the serial clock (SCL), controls the bus access,
and generates the START and STOP conditions.
READ/WRITE OPERATIONS
Accessing a particular register on the TMP411 is
accomplished by writing the appropriate value to the
Pointer Register. The value for the Pointer Register is the
first byte transferred after the slave address byte with the
R/W
bit low. Every write operation to the TMP411 requires
a value for the Pointer Register (see Figure 14).
Table 11. THERM Hysteresis Register Format
THERM HYSTERESIS REGISTER (Read = 21h, Write = 21h, POR = 0Ah)
BIT NAME TH11 TH10 TH9 TH8 TH7 TH6 TH5 TH4
POR VALUE 0 0 0 0 1 0 1 0
15
Page 16

"#$$
SBOS383A − FEBRUAR Y 2007
www.ti.com
When reading from the TMP411, the last value stored in
the Pointer Register by a write operation is used to
determine which register is read by a read operation. To
change the register pointer for a read operation, a new
value must be written to the Pointer Register. This
transaction is accomplished by issuing a slave address
byte with the R/W
bit low, followed by the Pointer Register
byte. No additional data is required. The master can then
generate a START condition and send the slave address
byte with the R/W
bit high to initiate the read command.
See Figure 15 for details of this sequence. If repeated
reads from the same register are desired, it is not
necessary to continually send the Pointer Register bytes,
because the TMP411 retains the Pointer Register value
until it is changed by the next write operation. Note that
register bytes are sent MSB first, followed by the LSB.
TIMING DIAGRAMS
The TMP411 is Two-Wire and SMBus-compatible.
Figure 13 to Figure 16 describe the various operations on
the TMP411. Bus definitions are given below. Parameters
for Figure 13 are defined in Table 12.
Bus Idle: Both SDA and SCL lines remain high.
Start Data Transfer: A change in the state of the SDA line,
from high to low, while the SCL line is high, defines a
START condition. Each data transfer is initiated with a
START condition.
Stop Data Transfer: A change in the state of the SDA line
from low to high while the SCL line is high defines a STOP
condition. Each data transfer terminates with a repeated
START or STOP condition.
Data Transfer: The number of data bytes transferred
between a START and a STOP condition is not limited and
is determined by the master device. The receiver
acknowledges the transfer of data.
Acknowledge: Each receiving device, when addressed,
is obliged to generate an Acknowledge bit. A device that
acknowledges must pull down the SDA line during the
Acknowledge clock pulse in such a way that the SDA line
is stable low during the high period of the Acknowledge
clock pulse. Setup and hold times must be taken into
account. On a master receive, data transfer termination
can be signaled by the master generating a
Not-Acknowledge on the last byte that has been
transmitted by the slave.
SCL
SDA
t
(LOW)
t
(HDSTA)
t
(BU F )
PS SP
t
R
t
(HDDAT)
t
F
t
(HIGH)t(SUSTA)
t
(SUDAT)
t
(HDSTA)
t
(SUSTO)
Figure 13. Two-Wire Timing Diagram
16
Page 17

www.ti.com
Table 12. Timing Diagram Definitions for Figure 13
PARAMETER MIN MAX MIN MAX UNITS
SCL Operating Frequency f
Bus Free Time Between STOP and START Condition t
Hold time after repeated START condition.
After this period, the first clock is generated.
Repeated START Condition Setup Time t
STOP Condition Setup Time t
Data Hold Time t
Data Setup Time t
SCL Clock LOW Period t
SCL Clock HIGH Period t
Clock/Data Fall Time t
Clock/Data Rise Time
for SCL ≤ 100kHz
(SCL)
(BUF)
t
(HDSTA)
(SUS TA )
(SUS TO)
(HDDA T)
(SUDA T)
(LOW)
(HIGH)
SBOS383A − FEBRUAR Y 2007
0.001 0.4 0.001 3.4 MHz
600 160 ns
100 100 ns
100 100 ns
100 100 ns
0 0 ns
100 10 ns
1300 160 ns
600 60 ns
F
t
R
t
R
300 160 ns
300
160
1000
"#$$
ns
191
SCL
SDA
StartBy
Master
SCL
(Continued)
SDA
(Continued)
NOTE (1): Bit = 0 for TMP411A. Bit = 1 for TMP411B.
1
001100
Frame 1 Two−Wire Slave Address Byte
1
D7
D6 D5 D4 D3 D2 D1 D0
Frame 3 Data Byte 1
Figure 14. Two-Wire Timing Diagram for Write Word Format
(1)
R/W P7P6P5P4P3P2P1P0
ACK By
TMP411A
Frame 2 Pointer Register Byte
9
ACK By
TMP411A
1
D7 D6 D5 D4 D3 D2 D1 D0
Frame 4 Data Byte 2
9
ACK By
TMP411A
…
…
9
ACK By
TMP411A
Stop By
Master
17
Page 18

"#$$
SBOS383A − FEBRUAR Y 2007
SCL
www.ti.com
1919
…
SDA
SCL
(Continued)
SDA
(Continued)
SCL
(Continued)
SDA
(Continued)
1
0 0 1 R/W P7 P6 P5 P4 P3 P2 P1 P0
Start By
Master
Frame 1 Two−Wire Slave Address Byte Fra me 2 Pointer Register Byte
1919
1001
Start By
Master
Frame3Two−WireSlaveAddressByte Frame4DataByte1ReadRegister
19
D7 D6 D5 D4 D3 D2 D1 D0
TMP411
Frame5DataByte2ReadRegister
100
100
From
(1)
ACK By
TMP411A
(1)
R/W D7 D6 D5 D4 D3 D2 D1 D0
ACK By
TMP411A
ACK By
Master
StopBy
Master
From
TMP411A
…
ACK By
TMP411A
…
…
ACK By
Master
NOTE (1): Bit = 0 for TMP411A. Bit = 1 for TMP411B.
Figure 15. Two-Wire Timing Diagram for Read Word Format
ALERT
1919
SCL
SDA
StartBy
Master
NOTE (1): Bit = 0 for TMP411A. Bit = 1 for TMP411B.
18
0001100R/W 1001100
Frame 1SMBusALERTResponse AddressByte Frame 2 SlaveAddress Byte
ACK By
TMP411A
Figure 16. Timing Diagram for SMBus ALERT
From
TMP411A
(1)
Status
NACK By
Master
StopBy
Master
Page 19

www.ti.com
"#$$
SBOS383A − FEBRUAR Y 2007
HIGH-SPEED MODE
In order for the Two-Wire bus to operate at frequencies
above 400kHz, the master device must issue a
High-speed mode (Hs-mode) master code (00001XXX) as
the first byte after a START condition to switch the bus to
high-speed operation. The TMP411 will not acknowledge
this byte, but will switch the input filters on SDA and SCL
and the output filter on SDA to operate in Hs-mode,
allowing transfers at up to 3.4MHz. After the Hs-mode
master code has been issued, the master transmits a
Two-Wire slave address to initiate a data transfer
operation. The bus continues to operate in Hs-mode until
a STOP condition occurs on the bus. Upon receiving the
STOP condition, the TMP411 switches the input and
output filter back to fast-mode operation.
TIMEOUT FUNCTION
When bit 7 of the Consecutive Alert Register is set high,
the TMP411 timeout function is enabled. The TMP411
resets the serial interface if either SCL or SDA are held low
for 30ms (typical) between a START and STOP condition.
If the TMP411 is holding the bus low, it releases the bus
and waits for a START condition. To avoid activating the
timeout function, it is necessary to maintain a
communication speed of at least 1kHz for the SCL
operating frequency. The default state of the timeout
function is enabled (bit 7 = high).
THERM (PIN 4) AND ALERT/THERM2 (PIN 6)
The TMP411 has two pins dedicated to alarm functions,
the THERM
open-drain outputs that each require a pull-up resistor to
V+. These pins can be wire-ORed together with other
alarm pins for system monitoring of multiple sensors. The
THERM
software disabled. The ALERT
an earlier warning interrupt, and can be software disabled,
or masked. The ALERT
and ALERT/THERM2 pins. Both pins are
pin provides a thermal interrupt that cannot be
pin is intended for use as
/THERM2 pin can also be
configured for use as THERM2
, a second THERM pin
(Configuration Register: AL/TH bit = 1). The default setting
configures pin 6 to function as ALERT (AL/TH = 0).
The THERM
pin asserts low when either the measured
local or remote temperature is outside of the temperature
range programmed in the corresponding Local/Remote
THERM Limit Register. The THERM temperature limit
range can be programmed with a wider range than that of
the limit registers, which allows ALERT
earlier warning than THERM
. The THERM alarm resets
to provide an
automatically when the measured temperature returns to
within the THERM temperature limit range minus the
hysteresis value stored in the THERM Hysteresis
Register. The allowable values of hysteresis are shown in
Table 10. The default hysteresis is 10°C. When the
ALERT
/THERM2 pin is configured as a second thermal
alarm (Configuration Register: bit 7 = 0, bit 5 = 1), it
functions the same as THERM
, but uses the temperatures
stored in the Local/Remote Temperature High/Low Limit
Registers to set its comparison range.
When ALERT
/THERM2 (pin 6) is configured as ALERT
(Configuration Register: bit 7 = 0, bit 5 = 0), the pin asserts
low when either the measured local or remote temperature
violates the range limit set by the corresponding
Local/Remote Temperature High/Low Limit Registers.
This alert function can be configured to assert only if the
range is violated a specified number of consecutive times
(1, 2, 3, or 4). The consecutive violation limit is set in the
Consecutive Alert Register. False alerts that occur as a
result of environmental noise can be prevented by
requiring consecutive faults. ALERT
also asserts low if the
remote temperature sensor is open-circuit. When the
MASK function is enabled (Configuration Register:
bit 7 = 1), ALERT
is disabled (that is, masked). ALERT
resets when the master reads the device address, as long
as the condition that caused the alert no longer persists,
and the Status Register has been reset.
Measured
Temperature
THERM
SMBusALERT
ALERT
THERM Limit and ALERT High Limit
ALERT Low Limit and THERM Limit Hysteresis
Read Read
Time
Read
Figure 17. SMBus Alert Timing Diagram
19
Page 20

"#$$
SBOS383A − FEBRUAR Y 2007
www.ti.com
SMBUS ALERT FUNCTION
The TMP411 supports the SMBus Alert function. When pin
6 is configured as an alert output, the ALERT
TMP411 may be connected as an SMBus Alert signal.
When a master detects an alert condition on the ALERT
line, the master sends an SMBus Alert command
(00011001) on the bus. If the ALERT
active, the devices will acknowledge the SMBus Alert
command and respond by returning its slave address on
the SDA line. The eighth bit (LSB) of the slave address
byte indicates whether the temperature exceeding one of
the temperature high limit settings or falling below one of
the temperature low limit settings caused the alert
condition. This bit will be high if the temperature is greater
than or equal to one of the temperature high limit settings;
this bit will be low if the temperature is less than one of the
temperature low limit settings. See Figure 16 for details of
this sequence.
If multiple devices on the bus respond to the SMBus Alert
command, arbitration during the slave address portion of
the SMBus Alert command determines which device will
clear its alert status. If the TMP41 1 wins the arbitration, its
ALERT
SMBus Alert command. If the TMP411 loses the
arbitration, the ALERT
pin becomes inactive at the completion of the
pin remains active.
pin of the TMP41 1 is
pin of the
SHUTDOWN MODE (SD)
The TMP411 Shutdown Mode allows the user to save
maximum power by shutting down all device circuitry other
than the serial interface, reducing current consumption to
typically less than 3µA; see typical characteristic curve
Shutdown Quiescent Current vs Supply Voltage.
Shutdown Mode is enabled when the SD bit of the
Configuration Register is high; the device shuts down
once the current conversion is completed. When SD is low ,
the device maintains a continuous conversion state.
SENSOR FAULT
The TMP411 will sense a fault at the D+ input resulting
from incorrect diode connection or an open circuit. The
detection circuitry consists of a voltage comparator that
trips when the voltage at D+ exceeds (V+) − 0.6V (typical).
The comparator output is continuously checked during a
conversion. If a fault is detected, the last valid measured
temperature is used for the temperature measurement
result, the OPEN bit (Status Register, bit 2) is set high, and,
if the alert function is enabled, ALERT
When not using the remote sensor with the TMP411, the
D+ and D− inputs must be connected together to prevent
meaningless fault warnings.
asserts low.
UNDER-VOLTAGE LOCKOUT
The TMP411 senses when the power-supply voltage has
reached a minimum voltage level for the ADC converter to
function. The detection circuitry consists of a voltage
comparator that enables the ADC converter after the
power supply (V+) exceeds 2.45V (typical). The
comparator output is continuously checked during a
conversion. The TMP411 will not perform a temperature
conversion if the power supply is not valid. The last valid
measured temperature is used for the temperature
measurement result.
GENERAL CALL RESET
The TMP411 supports reset via the T wo-Wire General Call
address 00h (0000 0000b). The TMP411 acknowledges
the General Call address and responds to the second byte.
If the second byte is 06h (0000 0110b), the TMP411
executes a software reset. This software reset restores the
power-on reset state to all TMP411 registers, aborts any
conversion in progress, and clears the ALERT
THERM
other values in the second byte.
pins. The TMP41 1 takes no action in response to
and
IDENTIFICATION REGISTERS
The TMP411 allows for the Two-Wire bus controller to
query the device for manufacturer and device IDs to allow
for software identification of the device at the particular
Two-Wire bus address. The manufacturer ID is obtained
by reading from pointer address FEh. The device ID is
obtained by reading from pointer address FFh. The
TMP411 returns 55h for the manufacturer code and 11h for
the device ID. These registers are read-only.
FILTERING
Remote junction temperature sensors are usually
implemented in a noisy environment. Noise is most often
created by fast digital signals, and it can corrupt
measurements. The TMP41 1 has a built-in 65kHz filter on
the inputs of D+ and D− to minimize the effects of noise.
However, a bypass capacitor placed differentially across
the inputs of the remote temperature sensor is
recommended to make the application more robust
against unwanted coupled signals. The value of the
capacitor should be between 100pF and 1nF. Some
applications attain better overall accuracy with additional
series resistance; however, this increased accuracy is
setup-specific. When series resistance is added, the value
should not be greater than 3kΩ.
20
Page 21

www.ti.com
"#$$
SBOS383A − FEBRUAR Y 2007
REMOTE SENSING
The TMP411 is designed to be used with either discrete
transistors or substrate transistors built into processor
chips and ASICs. Either NPN or PNP transistors can be
used, as long as the base-emitter junction is used as the
remote temperature sense. Either a transistor or diode
connection can also be used; see Figure 11.
Errors in remote temperature sensor readings will be the
consequence of the ideality factor and current excitation
used by the TMP411 versus the manufacturer-specified
operating current for a given transistor. Some
manufacturers specify a high-level and low-level current
for the temperature-sensing substrate transistors. The
TMP411 uses 6µA for I
TMP411 allows for different n-factor values; see the
N-Factor Correction Register section.
The ideality factor (n) is a measured characteristic of a
remote temperature sensor diode as compared to an ideal
diode. The ideality factor for the TMP411 is trimmed to be
1.008. For transistors whose ideality factor does not match
the TMP411, Equation 4 can be used to calculate the
temperature error. Note that for the equation to be used
correctly, actual temperature (°C) must be converted to
Kelvin (°K).
n * 1.008
T
Where:
For n = 1.004 and T(°C) = 100°C:
T
ERR
T
ERR
If a discrete transistor is used as the remote temperature
sensor with the TMP411, the best accuracy can be
achieved by selecting the transistor according to the
following criteria:
1. Base-emitter voltage > 0.25V at 6µA, at the highest
ǒ
+
ERR
n = Ideality factor of remote temperature sensor
T(°C) = actual temperature
T
ERR
Degree delta is the same for °C and °K
+
1.008
= Error in TMP411 reading due to n ≠ 1.008
1.004 * 1.008
ǒ
1.008
+*1.48°C
sensed temperature.
and 120µA for I
LOW
ǒ
Ǔ
273.15 ) Tǒ°C
ǒ
Ǔ
273.15 ) 100°C
. The
HIGH
Ǔ
Ǔ
(4)
Ǔ
(5)
2. Base-emitter voltage < 0.95V at 120µA, at the lowest
sensed temperature.
3. Base resistance < 100Ω.
4. Tight control of V
variations in h
Based on these criteria, two recommended small-signal
transistors are the 2N3904 (NPN) or 2N3906 (PNP).
characteristics indicated by small
BE
(that is, 50 to 150).
FE
MEASUREMENT ACCURACY AND THERMAL
CONSIDERATIONS
The temperature measurement accuracy of the TMP411
depends on the remote and/or local temperature sensor
being at the same temperature as the system point being
monitored. Clearly , i f the temperature sensor is not in good
thermal contact with the part of the system being
monitored, then there will be a delay in the response of the
sensor to a temperature change in the system. For remote
temperature sensing applications using a substrate
transistor (or a small, SOT23 transistor) placed close to the
device being monitored, this delay is usually not a concern.
The local temperature sensor inside the TMP411 monitors
the ambient air around the device. The thermal time
constant for the TMP411 is approximately two seconds.
This constant implies that if the ambient air changes
quickly by 100°C, it would take the TMP411 about 10
seconds (that is, five thermal time constants) to settle to
within 1°C of the final value. In most applications, the
TMP411 package is in electrical and therefore thermal
contact with the printed circuit board (PCB), as well as
subjected to forced airflow. The accuracy of the measured
temperature directly depends on how accurately the PCB
and forced airflow temperatures represent the
temperature that the TMP411 is measuring. Additionally,
the internal power dissipation of the TMP411 can cause
the temperature to rise above the ambient or PCB
temperature. The internal power dissipated as a result of
exciting the remote temperature sensor is negligible
because of the small currents used. For a 5.5V supply and
maximum conversion rate of eight conversions per
second, the TMP411 dissipates 1.82mW (PD
330µA). If both the ALERT
each sinking 1mA, an additional power of 0.8mW is
dissipated (PD
Total power dissipation is then 2.62mW (PD
and, with an q
temperature to rise approximately 0.393°C above the
ambient.
= 1mA × 0.4V + 1mA × 0.4V = 0.8mW).
OUT
JA
/THERM2 and THERM pins are
of 150°C/W, causes the junction
= 5.5V ×
IQ
+ PD
IQ
OUT
)
21
Page 22

"#$$
SBOS383A − FEBRUAR Y 2007
LAYOUT CONSIDERATIONS
Remote temperature sensing on the TMP411 measures
very small voltages using very low currents; therefore,
noise at the IC inputs must be minimized. Most
applications using the TMP411 will have high digital
content, with several clocks and logic level transitions
creating a noisy environment. Layout should adhere to the
following guidelines:
1. Place the TMP411 as close to the remote junction
sensor as possible.
2. Route the D+ and D− traces next to each other and
shield them from adjacent signals through the use of
ground guard traces, as shown in Figure 18. If a
multilayer PCB is used, bury these traces between
ground or V
noise sources. 5 mil PCB traces are recommended.
3. Minimize additional thermocouple junctions caused
by copper-to-solder connections. If these junctions
are used, make the same number and approximate
locations of copper-to-solder connections in both the
D+ and D− connections to cancel any thermocouple
effects.
4. Use a 0.1µF local bypass capacitor directly between
the V+ and GND of the TMP411, as shown in
Figure 19. Minimize filter capacitance between D+
and D− to 1000pF or less for optimum measurement
performance. This capacitance includes any cable
capacitance between the remote temperature sensor
and TMP411.
5. If the connection between the remote temperature
sensor and the TMP411 is between 8 inches and 12
feet long, use a twisted-wire pair connection. Beyond
this distance (up to 100 feet), use a twisted, shielded
pair with the shield grounded as close to the TMP411
as possible. Leave the remote sensor connection end
of the shield wire open to avoid ground loops and
60Hz pickup.
planes to shield them from extrinsic
DD
(1)
GND
(1)
D+
(1)
−
D
(1)
GND
NOTE: (1) 5 mil traces with 5 mil spacing.
Figure 18. Example Signal Traces
0.1µF Capacitor
V+
PCB Via
1
2
3
4
TMP411
www.ti.com
Ground or V+ layer
on bottom and/or
top, if possible.
GND
PCB Via
8
7
6
5
22
Figure 19. Suggested Bypass Capacitor
Placement
Page 23

PACKAGE OPTION ADDENDUM
www.ti.com
19-Feb-2007
PACKAGING INFORMATION
Orderable Device Status
(1)
Package
Type
Package
Drawing
Pins Package
Qty
Eco Plan
TMP411ADGKR ACTIVE MSOP DGK 8 2500 Green (RoHS &
no Sb/Br)
TMP411ADGKRG4 ACTIVE MSOP DGK 8 2500 Green (RoHS &
no Sb/Br)
TMP411ADGKT ACTIVE MSOP DGK 8 250 Green (RoHS &
no Sb/Br)
TMP411ADGKTG4 ACTIVE MSOP DGK 8 250 Green (RoHS &
no Sb/Br)
TMP411BDGKR ACTIVE MSOP DGK 8 2500 Green (RoHS &
no Sb/Br)
TMP411BDGKRG4 ACTIVE MSOP DGK 8 2500 Green (RoHS &
no Sb/Br)
TMP411BDGKT ACTIVE MSOP DGK 8 250 Green (RoHS &
no Sb/Br)
TMP411BDGKTG4 ACTIVE MSOP DGK 8 250 Green (RoHS &
no Sb/Br)
(1)
The marketing status values are defined as follows:
ACTIVE: Product device recommended for new designs.
LIFEBUY: TI has announced that the device will be discontinued, and a lifetime-buy period is in effect.
NRND: Not recommended for new designs. Device is in production to support existing customers, but TI does not recommend using this part in
a new design.
PREVIEW: Device has been announced but is not in production. Samples may or may not be available.
OBSOLETE: TI has discontinued the production of the device.
(2)
Lead/Ball Finish MSL Peak Temp
CU NIPDAU Level-2-260C-1 YEAR
CU NIPDAU Level-2-260C-1 YEAR
CU NIPDAU Level-2-260C-1 YEAR
CU NIPDAU Level-2-260C-1 YEAR
CU NIPDAU Level-2-260C-1 YEAR
CU NIPDAU Level-2-260C-1 YEAR
CU NIPDAU Level-2-260C-1 YEAR
CU NIPDAU Level-2-260C-1 YEAR
(3)
(2)
Eco Plan - The planned eco-friendly classification: Pb-Free (RoHS), Pb-Free (RoHS Exempt), or Green (RoHS & no Sb/Br) - please check
http://www.ti.com/productcontent for the latest availability information and additional product content details.
TBD: The Pb-Free/Green conversion plan has not been defined.
Pb-Free (RoHS): TI's terms "Lead-Free" or "Pb-Free" mean semiconductor products that are compatible with the current RoHS requirements
for all 6 substances, including the requirement that lead not exceed 0.1% by weight in homogeneous materials. Where designed to be soldered
at high temperatures, TI Pb-Free products are suitable for use in specified lead-free processes.
Pb-Free (RoHS Exempt): This component has a RoHS exemption for either 1) lead-based flip-chip solder bumps used between the die and
package, or 2) lead-based die adhesive used between the die and leadframe. The component is otherwise considered Pb-Free (RoHS
compatible) as defined above.
Green (RoHS & no Sb/Br): TI defines "Green" to mean Pb-Free (RoHS compatible), and free of Bromine (Br) and Antimony (Sb) based flame
retardants (Br or Sb do not exceed 0.1% by weight in homogeneous material)
(3)
MSL, Peak Temp. -- The Moisture Sensitivity Level rating according to the JEDEC industry standard classifications, and peak solder
temperature.
Important Information and Disclaimer:The information provided on this page represents TI's knowledge and belief as of the date that it is
provided. TI bases its knowledge and belief on information provided by third parties, and makes no representation or warranty as to the
accuracy of such information. Efforts are underway to better integrate information from third parties. TI has taken and continues to take
reasonable steps to provide representative and accurate information but may not have conducted destructive testing or chemical analysis on
incoming materials and chemicals. TI and TI suppliers consider certain information to be proprietary, and thus CAS numbers and other limited
information may not be available for release.
In no event shall TI's liability arising out of such information exceed the total purchase price of the TI part(s) at issue in this document sold by TI
to Customer on an annual basis.
Addendum-Page 1
Page 24

PACKAGE MATERIALS INFORMATION
www.ti.com
6-Jun-2007
TAPE AND REEL INFORMATION
Pack Materials-Page 1
Page 25

PACKAGE MATERIALS INFORMATION
www.ti.com
Device Package Pins Site Reel
Diameter
(mm)
TMP411ADGKR DGK 8 NSE 330 12 5.3 3.3 1.3 8 12 NONE
TMP411ADGKT DGK 8 NSE 330 12 5.3 3.3 1.3 8 12 NONE
TMP411BDGKR DGK 8 NSE 330 12 5.3 3.3 1.3 8 12 NONE
TMP411BDGKT DGK 8 NSE 330 12 5.3 3.3 1.3 8 12 NONE
Reel
Width
(mm)
A0 (mm) B0 (mm) K0 (mm) P1
(mm)W(mm)
6-Jun-2007
Pin1
Quadrant
TAPE AND REEL BOX INFORMATION
Device Package Pins Site Length (mm) Width (mm) Height (mm)
TMP411ADGKR DGK 8 NSE 370.0 355.0 55.0
TMP411ADGKT DGK 8 NSE 370.0 355.0 55.0
TMP411BDGKR DGK 8 NSE 370.0 355.0 55.0
TMP411BDGKT DGK 8 NSE 370.0 355.0 55.0
Pack Materials-Page 2
Page 26

PACKAGE MATERIALS INFORMATION
www.ti.com
6-Jun-2007
Pack Materials-Page 3
Page 27

Page 28

IMPORTANT NOTICE
Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications, enhancements,
improvements, and other changes to its products and services at any time and to discontinue any product or service without notice.
Customers should obtain the latest relevant information before placing orders and should verify that such information is current and
complete. All products are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment.
TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s
standard warranty. Testing and other quality control techniques are used to the extent TI deems necessary to support this
warranty. Except where mandated by government requirements, testing of all parameters of each product is not necessarily
performed.
TI assumes no liability for applications assistance or customer product design. Customers are responsible for their products and
applications using TI components. To minimize the risks associated with customer products and applications, customers should
provide adequate design and operating safeguards.
TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right, copyright, mask
work right, or other TI intellectual property right relating to any combination, machine, or process in which TI products or services
are used. Information published by TI regarding third-party products or services does not constitute a license from TI to use such
products or services or a warranty or endorsement thereof. Use of such information may require a license from a third party under
the patents or other intellectual property of the third party, or a license from TI under the patents or other intellectual property of TI.
Reproduction of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is
accompanied by all associated warranties, conditions, limitations, and notices. Reproduction of this information with alteration is an
unfair and deceptive business practice. TI is not responsible or liable for such altered documentation. Information of third parties
may be subject to additional restrictions.
Resale of TI products or services with statements different from or beyond the parameters stated by TI for that product or service
voids all express and any implied warranties for the associated TI product or service and is an unfair and deceptive business
practice. TI is not responsible or liable for any such statements.
TI products are not authorized for use in safety-critical applications (such as life support) where a failure of the TI product would
reasonably be expected to cause severe personal injury or death, unless officers of the parties have executed an agreement
specifically governing such use. Buyers represent that they have all necessary expertise in the safety and regulatory ramifications
of their applications, and acknowledge and agree that they are solely responsible for all legal, regulatory and safety-related
requirements concerning their products and any use of TI products in such safety-critical applications, notwithstanding any
applications-related information or support that may be provided by TI. Further, Buyers must fully indemnify TI and its
representatives against any damages arising out of the use of TI products in such safety-critical applications.
TI products are neither designed nor intended for use in military/aerospace applications or environments unless the TI products are
specifically designated by TI as military-grade or "enhanced plastic." Only products designated by TI as military-grade meet military
specifications. Buyers acknowledge and agree that any such use of TI products which TI has not designated as military-grade is
solely at the Buyer's risk, and that they are solely responsible for compliance with all legal and regulatory requirements in
connection with such use.
TI products are neither designed nor intended for use in automotive applications or environments unless the specific TI products
are designated by TI as compliant with ISO/TS 16949 requirements. Buyers acknowledge and agree that, if they use any
non-designated products in automotive applications, TI will not be responsible for any failure to meet such requirements.
Following are URLs where you can obtain information on other Texas Instruments products and application solutions:
Products Applications
Amplifiers amplifier.ti.com Audio www.ti.com/audio
Data Converters dataconverter.ti.com Automotive www.ti.com/automotive
DSP dsp.ti.com Broadband www.ti.com/broadband
Interface interface.ti.com Digital Control www.ti.com/digitalcontrol
Logic logic.ti.com Military www.ti.com/military
Power Mgmt power.ti.com Optical Networking www.ti.com/opticalnetwork
Microcontrollers microcontroller.ti.com Security www.ti.com/security
RFID www.ti-rfid.com Telephony www.ti.com/telephony
Low Power www.ti.com/lpw Video & Imaging www.ti.com/video
Wireless
Wireless www.ti.com/wireless
Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265
Copyright © 2007, Texas Instruments Incorporated
 Loading...
Loading...