

Datasheet TLV5628CN, TLV5628CDWR, TLV5628CDW, TLV5628IN, TLV5628IDWR Datasheet (Texas Instruments)
...
TLV5628C, TLV5628I
OCTAL 8-BIT DIGITAL-TO-ANALOG CONVERTERS
SLAS108A – JANUARY 1995 – REVISED NOVEMBER 1995
1
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
D
Eight 8-Bit Voltage Output DACs
D
3-V Single Supply Operation
D
Serial Interface
D
High-Impedance Reference Inputs
D
Programmable for 1 or 2 Times Output
Range
D
Simultaneous Update Facility
D
Internal Power-On Reset
D
Low Power Consumption
D
Half-Buffered Output
applications
D
Programmable V oltage Sources
D
Digitally Controlled Amplifiers/Attenuators
D
Mobile Communications
D
Automatic Test Equipment
D
Process Monitoring and Control
D
Signal Synthesis
description
The TL V5628C and TLV5628I are octal 8-bit voltage output digital-to-analog converters (DACs) with buf fered
reference inputs (high impedance). The DACs produce an output voltage that varies between one or two times
the reference voltages and GND, and the DACs are monotonic. The device is simple to use, running from a
single supply of 3 to 3.6 V . A power-on reset function is incorporated to ensure repeatable start-up conditions.
Digital control of the TL V5628C and TLV5628I is over a simple 3-wire serial bus that is CMOS compatible and
easily interfaced to all popular microprocessor and microcontroller devices. The 12-bit command word
comprises 8 bits of data, 3 DAC select bits and a range bit, the latter allowing selection between the times 1
or times 2 output range. The DAC registers are double buffered, allowing a complete set of new values to be
written to the device, then all DAC outputs are updated simultaneously through control of the LDAC terminal.
The digital inputs feature Schmitt triggers for high noise immunity.
The 16-terminal small-outline D package allows digital control of analog functions in space-critical applications.
The TLV5628C is characterized for operation from 0°C to 70°C. The TLV5628I is characterized for operation
from –40°C to 85°C. The TLV5628C and TLV5628I do not require external trimming.
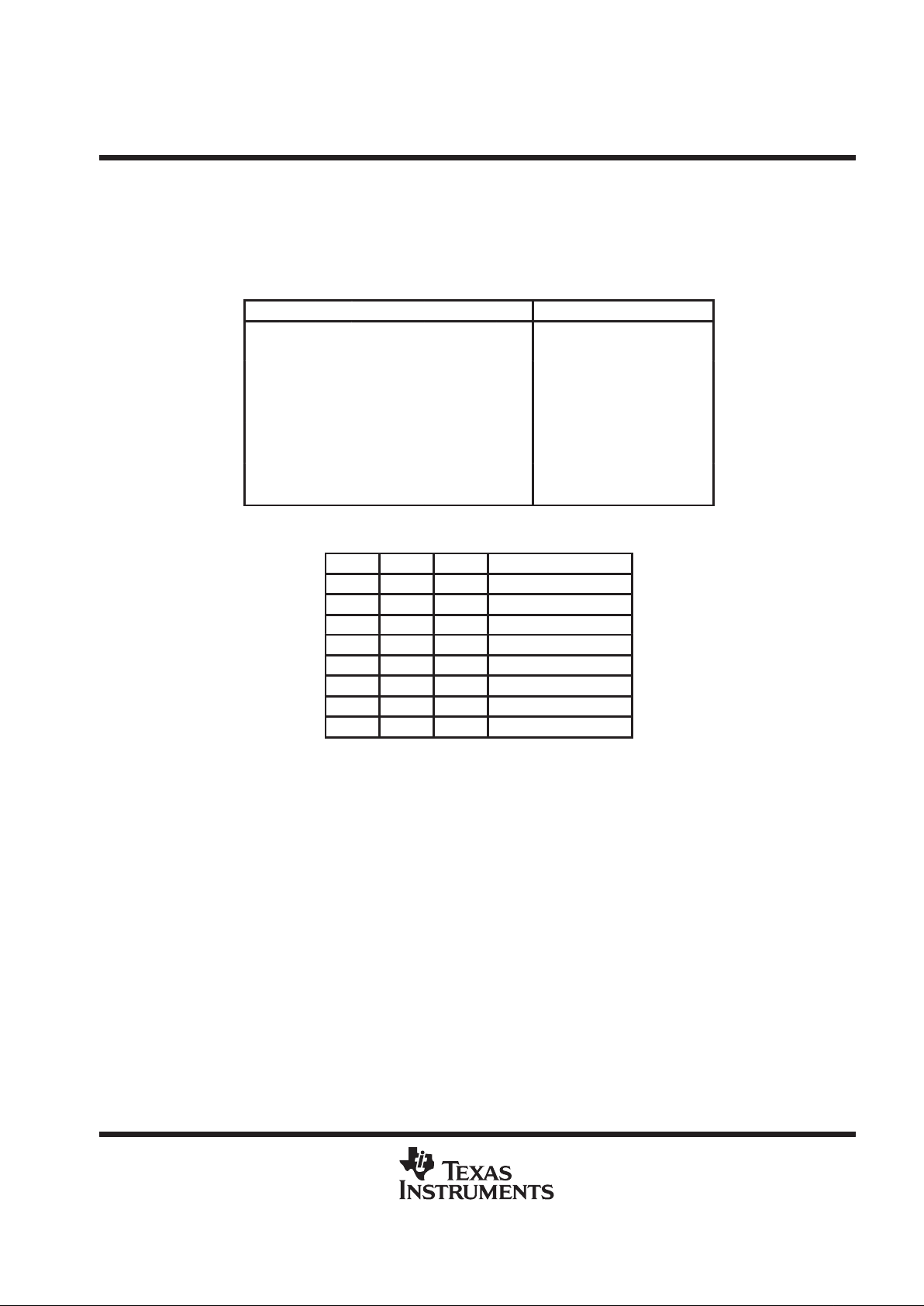
AVAILABLE OPTIONS
PACKAGE
T
A
SMALL OUTLINE
(DW)
PLASTIC DIP
(N)
0°C to 70°C TLV5628CDW TLV5628CN
–40°C to 85°C TLV5628IDW TLV5628IN
Copyright 1995, Texas Instruments Incorporated
PRODUCTION DATA information is current as of publication date.
Products conform to specifications per the terms of Texas Instruments
standard warranty. Production processing does not necessarily include
testing of all parameters.
Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of
Texas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
1
2
3
4
5
6
7
8
16
15
14
13
12
11
10
9
DACB
DACA
GND
DATA
CLK
V
DD
DACE
DACF
DACC
DACD
REF1
LDAC
LOAD
REF2
DACH
DACG
DW OR N PACKAGE
(TOP VIEW)
TLV5628C, TLV5628I
OCTAL 8-BIT DIGITAL-TO-ANALOG CONVERTERS
SLAS108A – JANUARY 1995 – REVISED NOVEMBER 1995
2
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
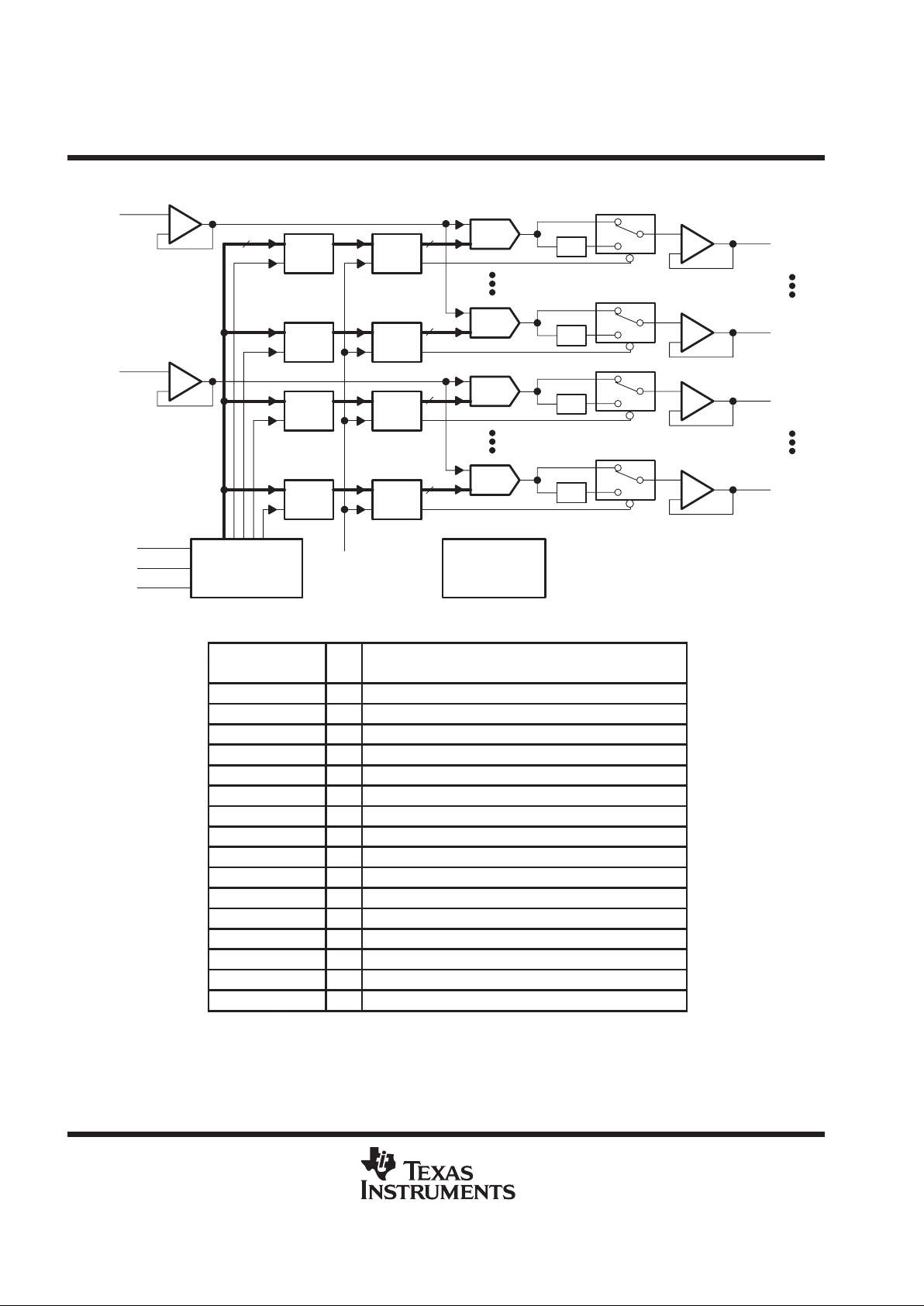
functional block diagram
Power-On
Reset
Serial
Interface
× 2
DAC
LatchLatch
Latch Latch
DAC
× 2
× 2
DAC
LatchLatch
Latch Latch
DAC
× 2
LDAC
REF1
+
–
+
–
+
–
+
–
+
–
+
–
REF2
CLK
DATA
LOAD
DACA
DACD
DACE
DACH
9 8
8
8
8
Terminal Functions
TERMINAL
NAME NO.
I/O
DESCRIPTION
CLK 5 I Serial-interface clock, data enters on the negative edge
DACA 2 O DACA analog output
DACB 1 O DACB analog output
DACC 16 O DACC analog output
DACD 15 O DACD analog output
DACE 7 O DACE analog output
DACF 8 O DACF analog output
DACG 9 O DACG analog output
DACH 10 O DACH analog output
DATA 4 I Serial-interface digital data input
GND 3 I Ground return and reference terminal
LDAC 13 I DAC-update latch control
LOAD 12 I Serial-interface load control
REF1 14 I Reference voltage input to DACA
REF2 11 I Reference voltage input to DACB
V
DD
6 I Positive supply voltage
TLV5628C, TLV5628I
OCTAL 8-BIT DIGITAL-TO-ANALOG CONVERTERS
SLAS108A – JANUARY 1995 – REVISED NOVEMBER 1995
3
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
detailed description
The TL V5628 is implemented using eight resistor-string DACs. The core of each DAC is a single resistor with
256 taps, corresponding to the 256 possible codes listed in T able 1. One end of each resistor string is connected
to the GND terminal and the other end is fed from the output of the reference input buffer. Monotonicity is
maintained by use of the resistor strings. Linearity depends upon the matching of the resistor elements and upon
the performance of the output buffer. Because the inputs are buffered, the DACs always present a
high-impedance load to the reference sources. There are two input reference terminals; REF1 is used for DACA
through DACD and REF2 is used by DACE through DACH.
Each DAC output is buffered by a configurable-gain output amplifier, which can be programmed to times 1 or
times 2 gain.
On power-up, the DACs are reset to CODE 0.
Each output voltage is given by:
VO(DACA|B|C|D|E|F|G|H)+REF
CODE
256
(1)
RNG bit value)
where CODE is in the range of 0 to 255 and the range (RNG) bit is a 0 or 1 within the serial-control word.
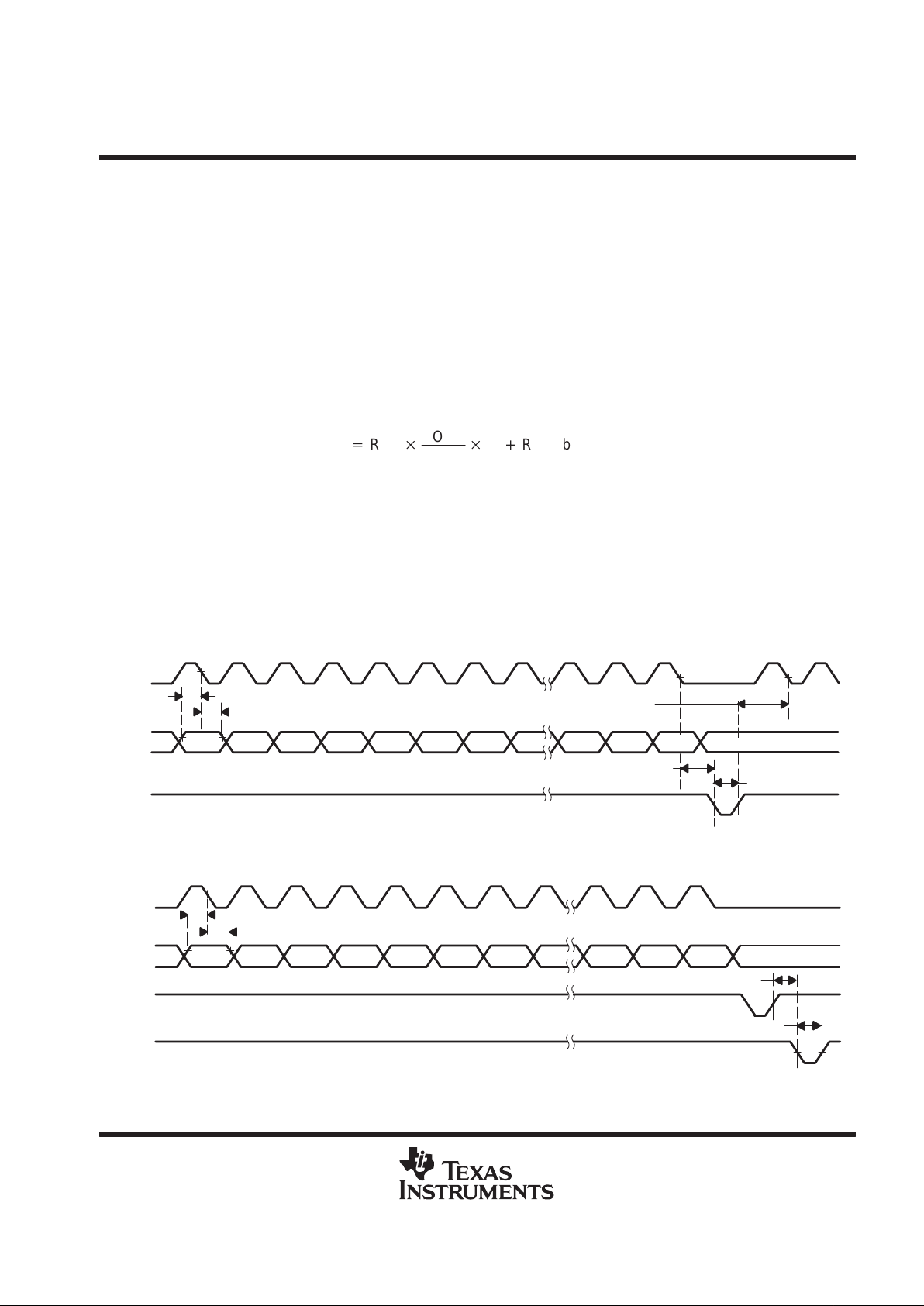
data interface
With LOAD high, data is clocked into the DATA terminal on each falling edge of CLK. Once all data bits have
been clocked in, LOAD is pulsed low to transfer the data from the serial-input register to the selected DAC as
shown in Figure 1. When LDAC is low, the selected DAC output voltage is updated and LOAD goes low . When
LDAC is high during serial programming, the new value is stored within the device and can be transferred to
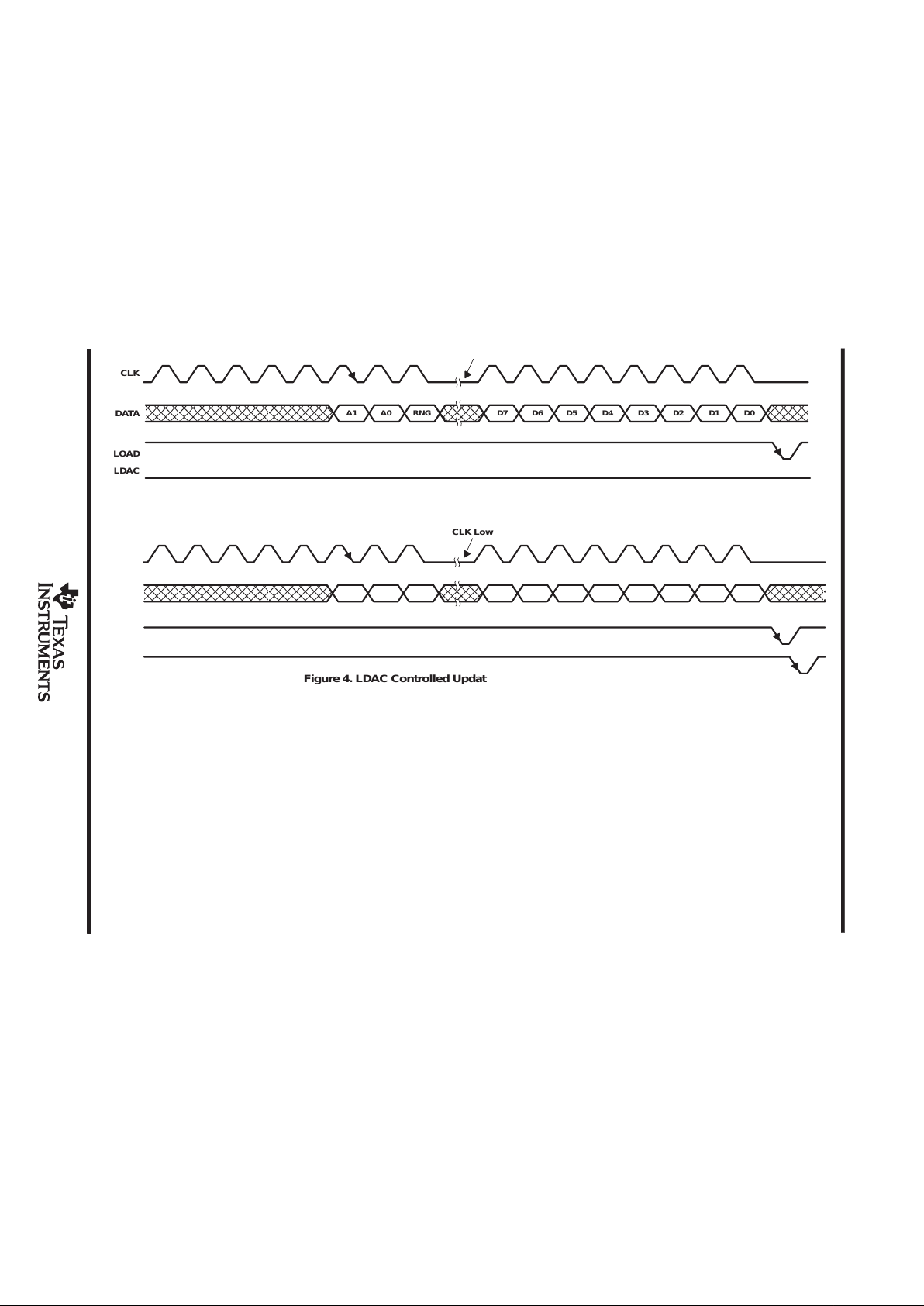
the DAC output at a later time by pulsing LDAC low as shown in Figure 2. Data is entered MSB first. Data
transfers using two 8 clock cycle periods are shown in Figures 3 and 4.
A2 A1 A0 RNG D7 D6 D5 D4 D2 D1 D0
DAC Update
CLK
DATA
LOAD
t
su(DATA-CLK)
t
v(DATA-CLK)
t
su(CLK-LOAD)
t
w(LOAD)
t
su(LOAD-CLK)
Figure 1. LOAD-Controlled Update (LDAC = Low)
CLK
DATA
LOAD
LDAC
DAC Update
A2 A1 A0 RNG D7 D6 D5 D4 D2 D1 D0
t
su(DATA-CLK)
t
v(DATA-CLK)
t
w(LDAC)
t
su(LOAD–LDAC)
Figure 2. LDAC-Controlled Update
TLV5628C, TLV5628I
OCTAL 8-BIT DIGITAL-TO-ANALOG CONVERTERS
SLAS108A – JANUARY 1995 – REVISED NOVEMBER 1995
Template Release Date: 7–11–94
4
POST OFFICE BOX 655303 DALLAS, TEXAS 75265
•
A1 A0 RNG D7 D6 D5 D4 D3 D2 D1 D0
CLK
DATA
LOAD
LDAC
CLK Low
Figure 3. Load Controlled Update Using 8-Bit Serial Word (LDAC = Low)
A1 A0 RNG D7 D6 D5 D4 D3 D2 D1 D0
CLK
DATA
LOAD
LDAC
CLK Low
Figure 4. LDAC Controlled Update Using 8-Bit Serial Word
TLV5628C, TLV5628I
OCTAL 8-BIT DIGITAL-TO-ANALOG CONVERTERS
SLAS108A – JANUARY 1995 – REVISED NOVEMBER 1995
5
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
data interface (continued)
T able 2 lists the A2, A1, and A0 bits and the selection of the updated DACs. The RNG bit controls the DAC output
range. When RNG = low, the output range is between the applied reference voltage and GND, and when
RNG = high, the range is between twice the applied reference voltage and GND.
Table 1. Ideal Output Transfer
D7 D6 D5 D4 D3 D2 D1 D0 OUTPUT VOLTAGE
0 0 0 0 0 0 0 0 GND
0 0000001 (1/256) × REF (1+RNG)
• ••••••• •
•••••••• •
01111111 (127/256) × REF (1+RNG)
1 0000000 (128/256) × REF (1+RNG)
• ••••••• •
•••••••• •
11111111 (255/256) × REF (1+RNG)
Table 2. Serial Input Decode
A2 A1 A0 DAC UPDATED
0 0 0 DACA
0 0 1 DACB
0 1 0 DACC
0 1 1 DACD
1 0 0 DACE
1 0 1 DACF
1 1 0 DACG
1 1 1 DACH

TLV5628C, TLV5628I
OCTAL 8-BIT DIGITAL-TO-ANALOG CONVERTERS
SLAS108A – JANUARY 1995 – REVISED NOVEMBER 1995
6
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
linearity, offset, and gain error
When an amplifier is operated from a single supply , the voltage offset can still be either positive or negative. With
a positive offset, the output voltage changes on the first code change. With a negative offset the output voltage
may not change with the first code depending on the magnitude of the offset voltage.
The output amplifier, with a negative voltage of fset, attempts to drive the output to a negative voltage. However,
since the most negative supply rail is ground, the output cannot drive to a negative voltage.
So when the output offset voltage is negative, the output voltage remains at 0 volts until the input code value
produces a sufficient output voltage to overcome the inherent negative offset voltage resulting in the transfer
function shown in Figure 5.
DAC Code
Output
Voltage
0 V
Negative
Offset
Figure 5. Effect of Negative Offset (Single Supply)
The negative offset error produces a breakpoint, not a linearity error. The transfer function would follow the
dotted line if the output buffer could drive to a negative voltage.
For a DAC, linearity is measured between zero input code (all inputs 0) and full scale code (all inputs 1) after
offset and full scale is adjusted out or accounted for in some way. However, single supply operation does not
allow for adjustment when the offset is negative due to the breakpoint in the transfer function. The linearity in
the unipolar mode is measured between full scale code and the lowest code which produces a positive output
voltage.
The code is calculated from the maximum specification for the negative offset.
equivalent inputs and outputs
GND
V
ref
Input
V
DD
To DAC
Resistor
String
_
+
V
DD
DAC
Voltage Output
I
SINK
60 µA
Typical
84 kΩ
84 kΩ
× 1
× 2
Output
Range
Select
Input from
Decoded DAC
Register String
INPUT CIRCUIT OUTPUT CIRCUIT
GND

TLV5628C, TLV5628I
OCTAL 8-BIT DIGITAL-TO-ANALOG CONVERTERS
SLAS108A – JANUARY 1995 – REVISED NOVEMBER 1995
7
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
absolute maximum ratings over operating free-air temperature range (unless otherwise noted)
†
Supply voltage (V
DD
– GND) 7 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Digital input voltage range, V
ID
GND – 0.3 V to VDD + 0.3 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Reference input voltage range GND – 0.3 V to V
DD
+ 0.3 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Operating free-air temperature range, T
A
: TLV5628C 0°C to 70°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
TLV5628I –40°C to 85°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Storage temperature range, T
stg
–50°C to 150° C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Lead temperature 1,6 mm (1/16 inch) from case for 10 seconds 230°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
†
Stresses beyond those listed under “absolute maximum ratings” may cause permanent damage to the device. These are stress ratings only, and
functional operation of the device at these or any other conditions beyond those indicated under “recommended operating conditions” is not
implied. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability.
recommended operating conditions
MIN NOM MAX UNIT
Supply voltage, V
DD
2.7 3.3 5.25 V
High-level digital input voltage, V
IH
0.8 V
DD
V
Low-level digital input voltage, V
IL
0.8 V
Reference voltage, V
ref
[A|B|C|D|E|F|G|H], X1 gain VDD–1.5 V
Load resistance, R
L
10 kΩ
Setup time, data input, t
su(DATA-CLK)
(see Figures 1 and 2) 50 ns
Valid time, data input valid after CLK↓, t
v(DATA-CLK)
(see Figures 1 and 2) 50 ns
Setup time, CLK eleventh falling edge to LOAD, t
su(CLK-LOAD)
(see Figure 1) 50 ns
Setup time, LOAD↑ to CLK↓, t
su(LOAD-CLK)
(see Figure 1) 50 ns
Pulse duration, LOAD, t
w(LOAD)
(see Figure 1) 250 ns
Pulse duration, LDAC, t
w(LDAC)
(see Figure 2) 250 ns
Setup time, LOAD↑ to LDAC↓, t
su(LOAD-LDAC)
(see Figure 2) 0 ns
CLK frequency 1 MHz
p
p
TLV5628C 0 70 °C
Operating free-air temperature, T
A
TLV5628I –40 85 °C

TLV5628C, TLV5628I
OCTAL 8-BIT DIGITAL-TO-ANALOG CONVERTERS
SLAS108A – JANUARY 1995 – REVISED NOVEMBER 1995
8
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
electrical characteristics over recommended operating free-air temperature range,
V
DD
= 3 V to 3.6 V, V
ref
= 2 V, × 1 gain output range (unless otherwise noted)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
I
IH
High-level digital input current VI = V
DD
±10 µA
I
IL
Low-level digital input current VI = 0 V ±10 µA
I
O(sink)
Output sink current
p
20 µA
I
O(source)
Output source current
Each DAC output
1 mA
Input capacitance 15
p
C
i
Reference input capacitance 15
pF
I
DD
Supply current VDD = 3.3 V 4 mA
I
ref
Reference input current VDD = 3.3 V, V
ref
= 1.5 V ±10 µA
E
L
Linearity error (end point corrected) V
ref
= 1.25 V , ×2 gain (see Note 1) ±1 LSB
E
D
Differential linearity error V
ref
= 1.25 V , ×2 gain (see Note 2) ±0.9 LSB
E
ZS
Zero-scale error V
ref
= 1.25 V , ×2 gain (see Note 3) 0 30 mV
Zero-scale error temperature coefficient V
ref
= 1.25 V , ×2 gain (see Note 4) 10 µV/°C
E
FS
Full-scale error V
ref
= 1.25 V , ×2 gain (see Note 5) ±60 mV
Full-scale error temperature coefficient V
ref
= 1.25 V , ×2 gain (see Note 6) ±25 µV/°C
PSRR Power supply sensitivity See Notes 7 and 8 0.5 mV/V
NOTES: 1. Integral nonlinearity (INL) is the maximum deviation of the output from the line between zero-scale and full scale (excluding the
effects of zero code and full-scale errors).
2. Differential nonlinearity (DNL) is the difference between the measured and ideal 1 LSB amplitude change of any two adjacent codes.
Monotonic means the output voltage changes in the same direction (or remains constant) as a change in the digital input code.
3. Zero-scale error is the deviation from zero voltage output when the digital input code is zero.
4. Zero-scale error temperature coefficient is given by: ZSETC = [ZSE(T
max
) – ZSE(T
min
)]/V
ref
× 106/(T
max
– T
min
).
5. Full-scale error is the deviation from the ideal full-scale output (V
ref
– 1 LSB) with an output load of 10 kΩ.
6. Full-scale temperature coefficient is given by: FSETC = [FSE(T
max
) – FSE (T
min
)]/V
ref
× 106/(T
max
– T
min
).
7. Zero-scale error rejection ratio (ZSE-RR) is measured by varying the VDD voltage from 4.5 V to 5.5 V dc and measuring the effect
of this signal on the zero-code output voltage.
8. Full-scale error rejection ratio (FSE-RR) is measured by varing the VDD voltage from 3 V to 3.6 V dc and measuring the effect of
this signal on the full-scale output voltage.
operating characteristics over recommended operating free-air temperature range,
V
DD
= 3 V to 3.6 V, V
ref
= 2 V, × 1 gain output range (unless otherwise noted)
TEST CONDITIONS MIN TYP MAX UNIT
Output slew rate CL = 100 pF, RL = 10 kΩ 1 V/µs
Output settling time To 0.5 LSB, CL = 100 pF, RL = 10 kΩ, See Note 9 10 µs
Large-signal bandwidth Measured at –3 dB point 100 kHz
Digital crosstalk CLK = 1-MHz square wave measured at DACA-DACH –50 dB
Reference feedthrough See Note 10 –60 dB
Channel-to-channel isolation See Note 11 –60 dB
Reference input bandwidth See Note 12 100 kHz
NOTES: 9. Settling time is the time for the output signal to remain within ±0.5 LSB of the final measured value for a digital input code change
of 00 hex to FF hex or FF hex to 00 hex. For TLC5628C VDD = 5 V, V
ref
= 2 V and range = × 2. For TLC5628I VDD = 3 V,
V
ref
= 1.25 V and range ×2.
10. Reference feedthrough is measured at any DAC output with an input code = 00 hex with a V
ref
input = 1 V dc + 1 VPP at 10 kHz.
11. Channel-to-channel isolation is measured by setting the input code of one DAC to FF hex and the code of all other DACs to 00 hex
with V
ref
input = 1 V dc + 1 VPP at 10 kHz.
12. Reference bandwidth is a –3 dB bandwidth with an input at V
ref
= 1.25 V dc + 2 VPP and with a full-scale digital input code.

TLV5628C, TLV5628I
OCTAL 8-BIT DIGITAL-TO-ANALOG CONVERTERS
SLAS108A – JANUARY 1995 – REVISED NOVEMBER 1995
9
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
PARAMETER MEASUREMENT INFORMATION
10 kΩ
CL = 100 pF
TLV5628
DACA
DACB
•
•
•
DACH
Figure 6. Slewing Settling Time and Linearity Measurements
TYPICAL CHARACTERISTICS
Figure 7
024681012
– Output Voltage – V
POSITIVE RISE TIME AND SETTLING TIME
14 16 18 20
VDD = 3 V
TA = 25°C
Code 00 to
FF Hex
Range = ×2
V
ref
= 1.25 V
(see Note A)
Time – µs
–1
–0.5
0.5
1
1.5
2
2.5
0
3
V
O
NOTE A: Rise time = 2.05 µs, positive slew rate = 0.96 V/µs,
settling time = 4.5 µs.
Figure 8
NEGATIVE FALL TIME AND SETTLING TIME
VDD = 3 V
TA = 25°C
Code FF to
00 Hex
Range = ×2
V
ref
= 1.25 V
(see Note B)
Time – µs
–1
–0.5
0.5
1
1.5
2
2.5
0
3
– Output Voltage – V
V
O
0 2 4 6 8 101214161820
NOTE B: Fall time = 4.25 µs, negative slew rate = 0.46 V/µs,
settling time = 8.5 µs.

TLV5628C, TLV5628I
OCTAL 8-BIT DIGITAL-TO-ANALOG CONVERTERS
SLAS108A – JANUARY 1995 – REVISED NOVEMBER 1995
10
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
TYPICAL CHARACTERISTICS
2
1.8
1.4
1.2
1
2.8
1.6
0 102030405060
– DAC Output Voltage – V
2.4
2.2
2.6
DAC OUTPUT VOLTAGE
vs
LOAD
3
70 80 90 100
V
O
Load – kΩ
VDD = 3 V,
V
ref
= 1.5 V,
Range = 2x
Figure 9
0.8
0.6
0.2
0
0102030405060
1
1.4
1.6
70 80 90 100
0.4
1.2
DAC OUTPUT VOLTAGE
vs
LOAD
VDD = 3 V,
V
ref
= 1.5 V,
Range = 1x
– DAC Output Voltage – V
V
O
Load – kΩ
Figure 10
1
0.9
0.85
0.8
– Supply Current – mA
1.1
1.15
SUPPLY CURRENT
vs
TEMPERATURE
1.2
1.05
0.95
–50 0 50 100
Range = ×2
Input Code = 255
VDD = 3 V
V
ref
1.25 V
I
DD
t – Temperature – ° C
Figure 11

TLV5628C, TLV5628I
OCTAL 8-BIT DIGITAL-TO-ANALOG CONVERTERS
SLAS108A – JANUARY 1995 – REVISED NOVEMBER 1995
11
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
APPLICATION INFORMATION
NOTE A: Resistor R w 10 kΩ
R
TLV5628
DACA
DACB
•
•
•
DACH
_
+
V
O
Figure 12. Output Buffering Scheme

TLV5628C, TLV5628I
OCTAL 8-BIT DIGITAL-TO-ANALOG CONVERTERS
SLAS108A – JANUARY 1995 – REVISED NOVEMBER 1995
12
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
MECHANICAL DATA
DW (R-PDSO-G**) PLASTIC SMALL-OUTLINE PACKAGE
16 PIN SHOWN
4040000/B 10/94
Seating Plane
0.400 (10,15)
0.419 (10,65)
0.104 (2,65) MAX
1
0.012 (0,30)
0.004 (0,10)
A
8
16
0.020 (0,51)
0.014 (0,35)
0.293 (7,45)
0.299 (7,59)
9
0.010 (0,25)
0.050 (1,27)
0.016 (0,40)
(15,24)
(15,49)
PINS **
0.010 (0,25) NOM
A MAX
DIM
A MIN
Gage Plane
20
0.500
(12,70)
(12,95)
0.510
(10,16)
(10,41)
0.400
0.410
16
0.600
24
0.610
(17,78)
28
0.700
(18,03)
0.710
0.004 (0,10)
M
0.010 (0,25)
0.050 (1,27)
0°–8°
NOTES: A. All linear dimensions are in inches (millimeters).
B. This drawing is subject to change without notice.
C. Body dimensions do not include mold flash or protrusion not to exceed 0.006 (0,15).
D. Falls within JEDEC MS-013

TLV5628C, TLV5628I
OCTAL 8-BIT DIGITAL-TO-ANALOG CONVERTERS
SLAS108A – JANUARY 1995 – REVISED NOVEMBER 1995
13
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
MECHANICAL DATA
N (R-PDIP-T**) PLASTIC DUAL-IN-LINE PACKAGE
4040049/C 7/95
16 PIN SHOWN
0.310 (7,87)
0.290 (7,37)
Seating Plane
0.010 (0,25) NOM
14 Pin Only
9
8
0.070 (1,78) MAX
A
0.035 (0,89) MAX
0.020 (0,51) MIN
16
1
0.015 (0,38)
0.021 (0,53)
0.200 (5,08) MAX
0.125 (3,18) MIN
0.240 (6,10)
0.260 (6,60)
0.100 (2,54)
M
0.010 (0,25)
0°–15°
20
0.975
(24,77)
(23,88)
0.940
18
0.920
0.850
14
0.775
(19,69)
0.745
(18,92)
16
0.775
(19,69)
(18,92)
0.745
PINS **
A MIN
DIM
A MAX
(23.37)
(21.59)
NOTES: A. All linear dimensions are in inches (millimeters).
B. This drawing is subject to change without notice.
C. Falls within JEDEC MS-001 (20-pin package is shorter than MS-001)

IMPORTANT NOTICE
T exas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinue
any product or service without notice, and advise customers to obtain the latest version of relevant information
to verify, before placing orders, that information being relied on is current and complete. All products are sold
subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those
pertaining to warranty, patent infringement, and limitation of liability.
TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in
accordance with TI’s standard warranty. Testing and other quality control techniques are utilized to the extent
TI deems necessary to support this warranty. Specific testing of all parameters of each device is not necessarily
performed, except those mandated by government requirements.
CERT AIN APPLICATIONS USING SEMICONDUCTOR PRODUCTS MAY INVOLVE POTENTIAL RISKS OF
DEATH, PERSONAL INJURY, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE (“CRITICAL
APPLICATIONS”). TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, AUTHORIZED, OR
WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT DEVICES OR SYSTEMS OR OTHER
CRITICAL APPLICATIONS. INCLUSION OF TI PRODUCTS IN SUCH APPLICA TIONS IS UNDERST OOD TO
BE FULLY AT THE CUSTOMER’S RISK.
In order to minimize risks associated with the customer’s applications, adequate design and operating
safeguards must be provided by the customer to minimize inherent or procedural hazards.
TI assumes no liability for applications assistance or customer product design. TI does not warrant or represent
that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other
intellectual property right of TI covering or relating to any combination, machine, or process in which such
semiconductor products or services might be or are used. TI’s publication of information regarding any third
party’s products or services does not constitute TI’s approval, warranty or endorsement thereof.
Copyright 1998, Texas Instruments Incorporated
 Loading...
Loading...