


TLC320AD57C
Data Manual
Sigma-Delta Stereo Analog-to-Digital Converter
SLAS086A
January 1995
Printed on Recycled Paper

IMPORTANT NOTICE
T exas Instruments (TI) reserves the right to make changes to its products or to discontinue any
semiconductor product or service without notice, and advises its customers to obtain the latest
version of relevant information to verify , before placing orders, that the information being relied
on is current.
TI warrants performance of its semiconductor products and related software to the specifications
applicable at the time of sale in accordance with TI’s standard warranty . T esting and other quality
control techniques are utilized to the extent TI deems necessary to support this warranty.
Specific testing of all parameters of each device is not necessarily performed, except those
mandated by government requirements.
Certain applications using semiconductor products may involve potential risks of death,
personal injury , or severe property or environmental damage (“Critical Applications”).
TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, INTENDED, AUTHORIZED, OR
WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT APPLICATIONS, DEVICES
OR SYSTEMS OR OTHER CRITICAL APPLICATIONS.
Inclusion of TI products in such applications is understood to be fully at the risk of the customer.
Use of TI products in such applications requires the written approval of an appropriate TI officer .
Questions concerning potential risk applications should be directed to TI through a local SC
sales office.
In order to minimize risks associated with the customer’s applications, adequate design and
operating safeguards should be provided by the customer to minimize inherent or procedural
hazards.
TI assumes no liability for applications assistance, customer product design, software
performance, or infringement of patents or services described herein. Nor does TI warrant or
represent that any license, either express or implied, is granted under any patent right, copyright,
mask work right, or other intellectual property right of TI covering or relating to any combination,
machine, or process in which such semiconductor products or services might be or are used.
Copyright 1995, Texas Instruments Incorporated

Contents
Section Title Page
1 Introduction 1–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Features 1–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Functional Block Diagram 1–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Terminal Assignments 1–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Ordering Information 1–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5 Terminal Functions 1–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Detailed Description 2–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Power-Down and Reset Functions 2–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.1 Power Down 2–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.2 Reset Function 2–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Differential Input 2–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Sigma-Delta Modulator 2–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Decimation Filter 2–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5 High-Pass Filter 2–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6 Master-Clock Circuit 2–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.7 T est 2–4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.8 Serial Interface 2–4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.8.1 Master Mode 2–4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.8.2 Slave Mode 2–6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Specifications 3–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Absolute Maximum Ratings Over Operating Free-Air Temperature Range 3–1. . . . .
3.2 Recommended Operating Conditions 3–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Electrical Characteristics 3–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 Digital Interface, T
3.3.2 Analog Interface 3–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.3 Channel Characteristics, T
f
= 48 kHz 3–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Switching Characteristics 3–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
s
= 25°C, AVDD = DVDD = 5 V 3–2. . . . . . . . . . . . . . . . . . . .
A
= 25°C, AVDD = DVDD = 5 V,
A
4 Parameter Measurement Information 4–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
iii

List of Illustrations
Figure Title Page
2–1 Power-Down Timing Relationships 2–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–2 Differential Analog Input Configuration 2–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–3 Serial Master Transfer Modes 2–5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–4 Serial Slave Transfer Modes 2–6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4–1 SCLK to Fsync and DOUT – Master Mode 3 4–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4–2 SCLK to Fsync, DOUT and LRClk – Master Modes 4 and 6 4–1. . . . . . . . . . . . . . . . . . . .
4–3 SCLK to Fsync, DOUT, and LRClk – Master Mode 5 4–1. . . . . . . . . . . . . . . . . . . . . . . . . . .
4–4 SCLK to Fsync, DOUT, and LRClk – Master Mode 7 4–2. . . . . . . . . . . . . . . . . . . . . . . . . . .
4–5 SCLK to LRClk and DOUT – Slave Mode 0, Fsync High 4–2. . . . . . . . . . . . . . . . . . . . . . .
4–6 SCLK to Fsync, LRClk, and DOUT – Slave Mode 2, Fsync Controlled 4–2. . . . . . . . . . .
List of Tables
Table Title Page
2–1 Master-Clock to Sample-Rate Comparison 2–4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
iv
1 Introduction
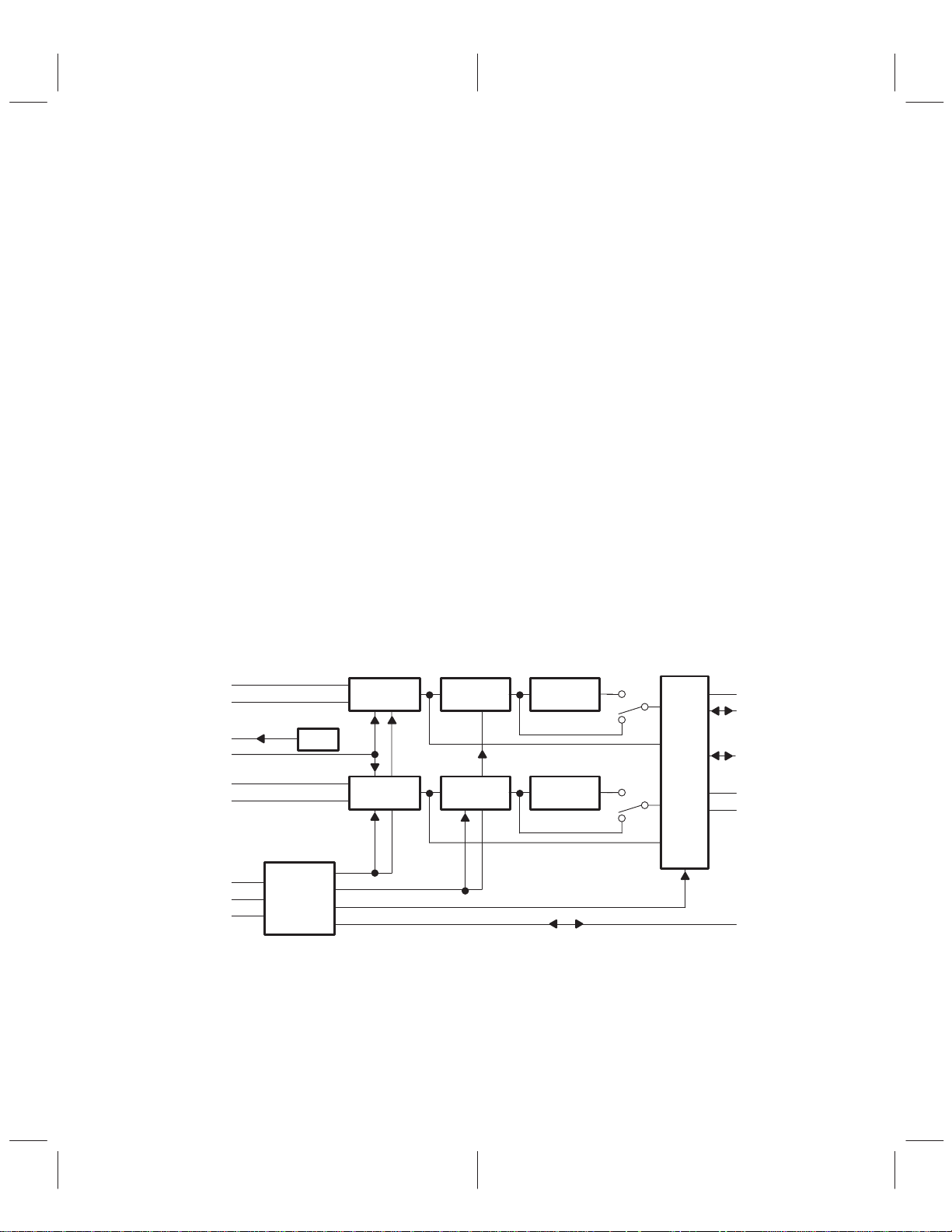
The TLC320AD57C provides high-resolution signal conversion from analog to digital using oversampling
sigma-delta technology. This device consists of two synchronous conversion paths. Also included is a
decimation filter after the modulator as shown in the functional block diagram. Other functions provide
analog filtering and on-chip timing and control.
A functional block diagram of the TLC320AD57C is included in section 1.2. Each block is described in the
Detailed Description section.
1.1 Features
• Single 5-V Power Supply
• Sample Rates (f
• 18-Bit Resolution
• Signal-to-Noise (EIAJ) of 97 dB
• Dynamic Range of 95 dB
• Total Signal-to-Noise+Distortion of 91 dB
• Internal Reference Voltage (V
• Serial Port Interface
• Differential Architecture
• Power Dissipation of 200 mW. Power-Down Mode for Low-Power Applications
• One Micron Advanced LinEPIC1Z Process
1.2 Functional Block Diagram
) up to 48 kHz
s
ref
)
INLP
INLM
REFO
REFI
INRP
INRM
MCLK
CMODE
MODE0–MODE2
Control
VREF
Sigma-Delta
Modulator
Sigma-Delta
Modulator
LinEPIC1Z is a trademark of Texas Instruments Incorporated.
Decimation
Filter
Decimation
Filter
High-Pass
Filter
High-Pass
Filter
I
S
n
e
t
r
e
i
r
a
f
l
a
c
e
DOUT
Fsync
LRClk
OSFR
OSFL
SCLK
1–1
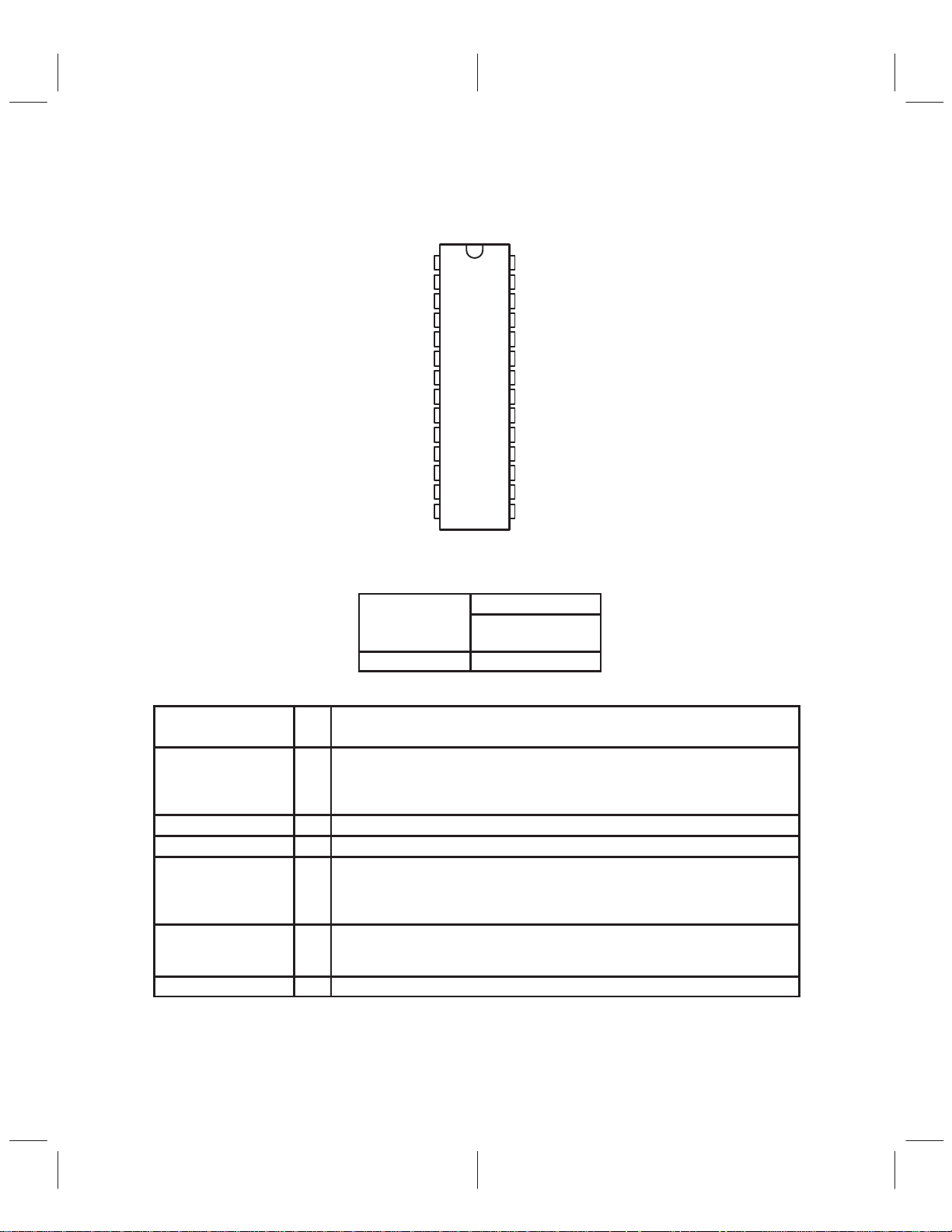
1.3 Terminal Assignments
I/O
DESCRIPTION
DW PACKAGE
(TOP VIEW)
INLP
INLM
REFI
AV
AV
AnaPD
HPByp
MODE2
OSFL
DigPD
TEST
CMODE
MODE0
LRClk
NC – No internal connection
DD
SS
1
2
3
4
5
6
7
8
9
10
11
12
13
14
28
27
26
25
24
23
22
21
20
19
18
17
16
15
INRP
INRM
REFO
LGND
Vlogic
NC
MODE1
OSFR
MCLK
DV
SS
DV
DD
Fsync
DOUT
SCLK
1.4 Ordering Information
PACKAGE
T
A
0°C to 70°C TLC320AD57CDW
SMALL OUTLINE
(DW)
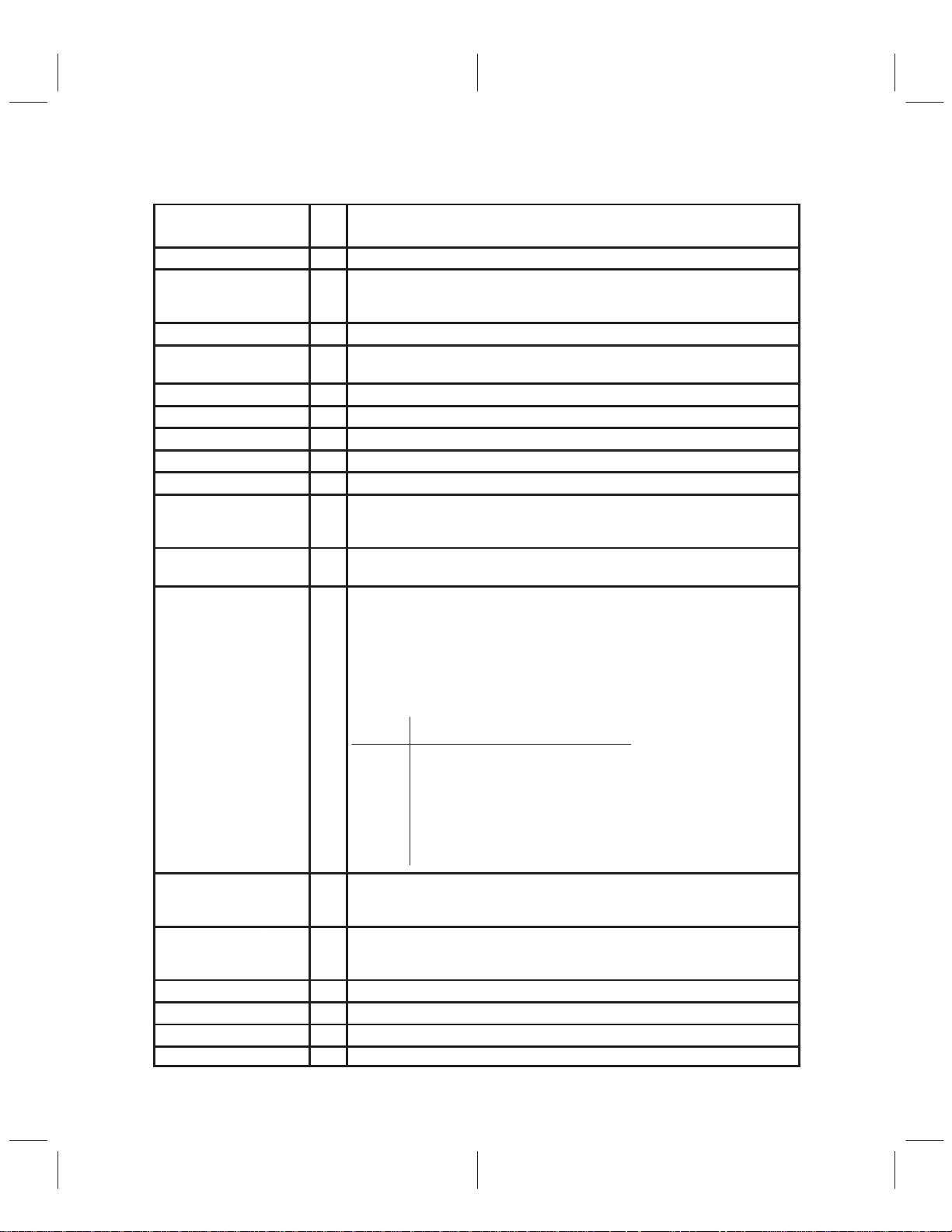
1.5 Terminal Functions
TERMINAL
NAME NO.
AnaPD 6 I Analog power-down mode. The analog power-down mode disables the analog
AV
DD
AV
SS
CMODE 12 I Clock mode. CMODE selects between two methods of determining the master clock
DOUT 16 O Data output. DOUT transmits the sigma-delta audio analog-to-digital converter (ADC)
DV
DD
4 I Analog supply voltage
5 I Analog ground
18 I Digital supply voltage
modulators. The single-bit modulator outputs become invalid, which renders the
outputs of the digital filters invalid. When AnaPD is pulled low, normal operation of the
device resumes.
frequency. When CMODE is high, the master clock input is 384× the conversion
frequency. When CMODE is low, the master clock input is 256× the conversion
frequency.
output data to a digital signal processor (DSP) serial port or other compatible serial
interface and is synchronized to SCLK. DOUT is low when DigPD is high.
1–2
1.5 Terminal Functions (Continued)
I/O
DESCRIPTION
TERMINAL
NAME NO.
DV
SS
DigPD 10 I Digital power-down mode. The digital power-down mode shuts down the digital
Fsync 17 I/O Frame synchronization. Fsync designates valid data from the ADC.
HPByp 7 I High-pass filter bypass. When HPByp is high, the high-pass filter is bypassed. This
INLM 2 I Inverting input to left analog input amplifier
INLP 1 I Noninverting input to left analog input amplifier
INRM 27 I Inverting input to right analog input amplifier
INRP 28 I Noninverting input to right analog input amplifier
LGND 25 I Logic-power-supply ground for analog modulator
LRClk 14 I/O Left/right clock. LRClk signifies whether the serial data is associated with the left
MCLK 20 I Master clock. MCLK derives all of the key logic signals of the sigma-delta audio
MODE0–MODE2 8, 13,22I Serial modes. MODE0–MODE2 configure this device for many different modes of
OSFL, OSFR 9, 21 O Over scale flag left/right. If the left/right channel analog input exceeds the full scale
SCLK 15 I/O Shift clock. If SCLK is confirgured as an input, SCLK clocks serial data out of the
TEST 11 I Test mode. TEST should be low for normal operation.
REFI 3 I Input voltage for modulator reference (normally connected to REFO, terminal 26).
REFO 26 I Internal voltage reference
Vlogic 24 I Logic power supply (5 V) for analog modulator
19 I Digital ground
filters and clock generators. All digital outputs are brought to unasserted levels.
When DigPD is pulled low, normal operation of the device resumes.
allows dc analog signal conversion.
channel ADC (when high) or the right channel ADC (when low). LRClk is low when
DigPD is high.
ADC. The nominal input frequency range is 18.432 MHz to 256 kHz.
operation. The different configurations are:
Master versus slave
16 bit versus 18 bit
MSB first versus LSB first
Slave: Fsync controlled versus Fsync high
Each of these modes is described in the Serial Interface section with timing
diagrams.
MODE MASTER/ MSB/LSB
0 1 2 SLAVE BITS FIRST
0 0 0 slave up to 18 MSB
0 0 1 slave 18 LSB
0 1 0 slave up to 18 MSB
0 1 1 master 16 MSB
1 0 0 master 18 MSB
1 0 1 master 18 LSB
1 1 0 master 16 MSB
1 1 1 master 16 LSB
input range for two consecutive conversions, OSFL and OSFR are set high for 4096
LRClk periods. OSFL and OSFR are low when DigPD is high.
sigma-delta audio ADC. If SCLK is configured as an output, SCLK stops clocking
when DigPD is high.
1–3

1–4

2 Detailed Description
The following sections contain a detailed description of the TLC320AD57C.
2.1 Power-Down and Reset Functions
The following sections contain descriptions of the power-down and reset functions of the TLC320AD57C.
2.1.1 Power Down
The power-down state is comprised of a separate digital and analog power down. The power consumption
of each is detailed in Section 3.3, Electrical Characteristics.
The digital power-down mode shuts down the digital filters and clock generators. All digital outputs are set
to an unasserted level. When the digital power-down terminal (DigPD) is pulled low, normal operation of the
device is initiated.
In slave mode, the conversion process must synchronize to an input on the LRClk terminal and the SCLK
terminal. Therefore, the conversion process is not initiated until the first rising edges on both SCLK and
LRClk are detected after DigPD is pulled low. This synchronizes the conversion cycle. All conversions are
performed at a fixed LRClk rate [MCLK /256 (CMODE low) or MCLK/384 (CMODE high)] after the initial
synchronization. After the digital power-down terminal is brought low, the output of the digital filters remains
invalid for 50 LRClk cycles [see Figures 2–1(a) and 2–1(b)].
In master mode, LRClk is an output; therefore, the conversion process initiates based on internal timing.
The first valid data out occurs as shown in Figure 2–1(c).
The analog power-down mode disables the analog modulators. The single-bit modulator outputs become
invalid, which renders the outputs of the digital filters invalid. When the analog power-down terminal is
brought low, the modulators are brought back online; however, the outputs of the digital filters require 50
LRClk cycles for valid results.
2–1

2.1.2 Reset Function
The conversion process is not initiated until the first rising edges on both SCLK and LRClk are detected after
DigPD is pulled low. This synchronizes the conversion cycle. All conversions are performed at a fixed LRClk
rate [MCLK/256 (CMODE low) or MCLK/384 (CMODE high)] after the initial synchronization.
t
su1
Slave Mode Digital Power Down
DigPD
LRClk
DOUT
DigPD
LRClk
DOUT
AnaPD
DOUT
Data Valid
(a)
t
su2
t
d1
Master Mode Digital Power Down
Data Valid
(b)
Analog Power Down
2–2
(c)
Figure 2–1. Power-Down Timing Relationships

2.2 Differential Input
The input is differential in order to provide common-mode noise rejection and increase the input dynamic
range. Figure 2–2 shows the analog input signals used in a differential configuration to achieve
6.4-V peak-to-peak differential swing with a 3.2-V peak-to-peak
4.1 V
swing per input line.
TLC320AD57
2.5 V
0.9 V
4.1 V
2.5 V
0.9 V
INLP, INRP
INLM, INRM
Figure 2–2. Differential Analog Input Configuration
2.3 Sigma-Delta Modulator
The modulator is a fourth order sigma-delta modulator with 64 times oversampling. The ADC provides
high-resolution, low-noise performance from a one-bit converter using oversampling techniques.
2.4 Decimation Filter
The decimation filter used after the sigma-delta modulator reduces the digital data rate to the sampling rate
of LRClk. This is accomplished by decimating with a ratio of 1:64. The output of this filter is a 2s complement
data word of up to 18 bits serially clocked out.
If the input value exceeds the full range of the converter, the output of the decimator is held at the appropriate
extreme until the input returns to within the dynamic range of the device.
2.5 High-Pass Filter
The high-pass filter removes dc from the input. With this filtering, offset calibration is not needed. The
high-pass filter can be circumvented by asserting the HPByp terminal to pass dc signals through the
converter. However, an offset due to the converter can be present when bypassing the high-pass filter.
2.6 Master-Clock Circuit
The master-clock circuit generates and distributes necessary clocks throughout the device. MCLK is the
external master-clock input. CMODE selects the relationship of MCLK to the sample rate, LRClk. When
CMODE is low, the sample rate of the data paths is set to LRClk = MCLK/256. When CMODE is high, the
sample rate is set to LRClk = MCLK/384. With a fixed oversampling ratio of 64× , the effect of changing MCLK
is shown in Table 2–1.
When the device is in master mode, SCLK is derived from MCLK in order to provide clocking of the serial
communications between the sigma-delta audio ADC and a digital signal processor (DSP) or control logic.
This is equivalent to a clock running at 64 × LRClk.
When the device is in slave mode, SCLK is externally derived.
2–3

T able 2–1. Master-Clock to Sample-Rate Comparison
3.0720
48
2.8224
44.1
2.0480
32
0.0640
1
(modes 1, 3, 4, 5)
MCLK
(MHz)
12.2880 Low
18.4320 High
11.2896 Low
16.9344 High
8.1920 Low
12.2880 High
0.2560 Low
0.3840 High
CMODE
SCLK
(MHz)
LRClk
(kHz)
2.7 Test
When the TEST input is high, the test mode is selected, which routes the high speed one-bit modulator result
to the serial port output. When in the test mode, the SCLK output frequency is equal to the data output rate.
LRClk is an input when the test mode is selected. This allows for the selection of the left or right modulator
output to be routed to the serial port (high = left and low = right).
2.8 Serial Interface
Although the serial data is shifted out in two seperate time packets that represent the left and right channels,
the inputs are sampled and converted simultaneously .
The serial interface protocol has master and slave modes each with different read-out modes. The master
mode sources the control signals for conversion synchronization while the slave mode allows an external
controller to provide conversion synchronization signals.
The five master modes are shown in Figures 2–3(a) through 2–3(e) and the three slave modes are shown
in Figures 2–4(a) through 2–4(c). For a 16-bit word, D15 is the most significant bit and D0 is the least
significant bit. Unless otherwise specified, all values are in 2s complement format.
In the master mode, SCLK is generated internally and is sourced as an output. The relationship of SCLK
to LRClk is 64× (modes 1, 3, 4, 5) or 32× (modes 6, 7). In the slave mode, SCLK is an input. SCLK timing
must meet the timing specifications listed in the Recommended Operating Conditions section.
2.8.1 Master Mode
As the master, the TLC320AD57C generates LRClk, Fsync, and SCLK from MCLK. These signals are
provided for synchronizing the serial port of a DSP or other control devices.
Fsync designates valid data from the ADC, and accomplishes this in the master modes by one of two
methods. The first method is to place a single pulse on Fsync prior to valid data. This indicates the starting
point for the data. The second method of frame synchronization is to hold Fsync high during the entire valid
data cycle which provides boundaries for the data.
LRClk is generated internally from MCLK. The frequency of this signal is fixed at the sampling frequency
f
[MCLK/256 (CMODE low) or MCLK/384 (CMODE high)]. During the high period of this signal, the left
s
channel data is serially shifted to the output; during the low period, the right channel data is shifted to the
output. The conversion cycle synchronizes with the rising edge of LRClk.
Five modes are available when the device is configured as a master. Two modes are for 18-bit
communications. These modes differ from each other in that the MSB is transferred first in one mode while
the LSB is transferred first in the second mode [see Figures 2–3(b) and 2–3(c)]. When the LSB is transferred
first, the data is right justified to the LRClk [see Figures 2–3(a) through 2–3(e)]. The three other modes
2–4

available as a master are 16-bit modes. Two of the modes differ as MSB first versus LSB first. These two
modes set SCLK = LRClk × 32. This is one half the frequency used in the other transfer modes [see Figures
2–3(d) and 2–3(e)]. The third 16-bit mode provides the data MSB first with one clock delay after LRClk [see
Figure 2–3(a)].
Mode 011
SCLK
Fsync
DOUT
LRClk
Mode 100
SCLK
Fsync
DOUT
LRClk
Mode 101
SCLK
Fsync
DOUT
LRClk
Mode 110
SCLK
Fsync
DOUT
LRClk
Left
17 16
Left
Left
Left
(a) MASTER MODE (Fsync bound)
15 14
. . .
1 0 15 14
(b) 18-BIT MASTER MODE
. . .
1 0 17 16
(c) 18-BIT MASTER MODE
. . .
01
(d) DSP CONTINUOUS MODE
. . .
14
1015 14
64 SCLKs
64 SCLKs
16 17 0 1
64 SCLKs
32 SCLKs
Right
Right
Right
Right
. . .
10
. . .
. . .
10
. . .
16 17
1015
17
15
Mode 11 1
SCLK
Fsync
DOUT
LRClk
(e) DSP CONTINUOUS MODE
. . .
1
Left
14 1501
32 SCLKs
Figure 2–3. Serial Master Transfer Modes
Right
. . .
14 150
0
2–5

2.8.2 Slave Mode
As a slave, the TLC320AD57C receives LRClk, Fsync, and SCLK as inputs. The conversion cycle
synchronizes to the rising edge of LRClk, and the data synchronizes to the falling edge of SCLK. SCLK must
meet the setup time requirements specified in Section 3.2, Recommended Operating Conditions.
Synchronization of the slave modes is accomplished with the digital power-down control.
In slave mode, Fsync is an input. Three modes are provided as shown in Figures 2–4(a) through 2–4(c).
SCLK and LRClk are externally generated and sourced. The first rising edges of SCLK and LRClk after a
power-down cycle initiate the conversion cycle. Refer to Section 2.8.1, Master Mode for signal functions.
Several modes are available when the TLC320AD57C is configured as a slave. Using the Mode0, Mode1,
and Mode2 terminals, the TLC320AD57C can be set to shift out the MSB first or the LSB first [see Figures
2–4(a) and 2–4(b)]. The number of bits shifted out can be controlled by the number of valid SCLK cycles
provided within the left or right channel period. If only enough clocks are provided to shift out 16 data bits
before LRClk changes state, this is equivalent to a 16-bit mode.
Mode 000 (a) SLAVE MODE (Fsync high)
SCLK
Fsync
DOUT
LRClk
input
input
output
input
17 16
Left
. . .
10
17 16
32–128 SCLKs
Right
. . .
10
Mode 001
SCLK
Fsync
DOUT
LRClk
Mode 010
SCLK
Fsync(1)
DOUT(1)
Fsync(2)
DOUT(2)
LRClk
(b) SLAVE MODE (Fsync high)
. . .
16
17
64 SCLKs
Right
017
0
32–128 SCLKs
Right
Left
Left
01
(c) SLAVE MODE (Fsync controlled)
17
17
. . .
. . .
Figure 2–4. Serial Slave Transfer Modes
01
. . .
0
17 0
. . .
. . .
16
17
2–6

3 Specifications
3.1 Absolute Maximum Ratings Over Operating Free-Air Temperature Range
(Unless Otherwise Noted)
Analog supply voltage range, AV
Digital supply voltage range, DV
Digital output voltage range, (externally applied) –0.3 V to DV
Digital input voltage range, MODE0 – MODE2 –0.3 V to DV
Analog input voltage range, INLP, INLM, INRP, INRM –0.3 V to A V
Operating free-air temperature range, T
Storage temperature range, T
Case temperature for 10 seconds, T
Lead temperature 1,6 mm (1/16 inch) from case for 10 seconds 260°C. . . . . . . . . . . . . .
†
Stresses beyond those listed under “absolute maximum ratings” may cause permanent damage to the device. These
are stress ratings only, and functional operation of the device at these or any other conditions beyond those indicated
under “recommended operating conditions” is not implied. Exposure to absolute-maximum-rated conditions for
extended periods may affect device reliability.
NOTES: 1. Voltage values for maximum ratings are with respect to AVSS.
2. Voltage values for maximum ratings are with respect to DVSS.
†
(see Note 1) –0.3 V to 6.5 V. . . . . . . . . . . . . . . . . . .
DD
(see Note 2) –0.3 V to 6.5 V. . . . . . . . . . . . . . . . . . .
DD
A
stg
C
) 0.3 V. . . . . . . . . . .
DD
) 0.3 V. . . . . . . . . . . .
DD
) 0.3 V. . . . . .
DD
0°C to 70°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
–65°C to 150°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
260°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Recommended Operating Conditions
MIN NOM MAX UNIT
Analog supply voltage, A VDD (see Note 3) 4.75 5 5.25 V
Digital supply voltage, DV
Analog logic supply voltage, at Vlogic 4.75 5 5.25 V
Reference voltage, V
Setup time, DigPD↓ to LRClk↑, slave mode, t
Setup time, DigPD↓ to LRClk↑, master mode, t
Setup time, SCLK↑ to LRClk, slave mode, t
Setup time, LRClk to SCLK↑, slave mode, t
Setup time, SCLK↑ to Fsync, slave mode, t
Setup time, Fsync to SCLK↑, slave mode, t
Load resistance at DOUT, R
Operating free-air temperature, T
NOTE 3: Voltages at analog inputs and outputs and A VDD are with respect to the AVSS terminal.
ref
DD
(see Figure 2–1(a)) 30 ns
su1
(see Figure 2–1(b)) 30 ns
su2
(see Figures 4–5 and 4–6) 30 ns
su3
(see Figure 4–5) 30 ns
su4
(see Figure 4–6) 30 ns
su5
(see Figure 4–6) 30 ns
su6
L
A
4.75 5 5.25 V
3.2 V
10 kΩ
0 70 °C
3–1

3.3 Electrical Characteristics
1dB down from
3.3.1 Digital Interface, TA = 25°C, AVDD = DVDD = 5 V
PARAMETER TEST CONDITIONS MIN TYP MAX
V
V
V
V
I
I
C
C
3.3.2 Analog Interface
High-level input voltage 2 4.6 V
IH
Low-level input voltage 0.2 0.8 V
IL
High-level output voltage, DOUT IOH = 2 mA 2.4 4.6 V
OH
Low-level output voltage, DOUT IOL = 2 mA 0.2 0.4 V
OL
High-level input current, any digital input 1 µA
IH
Low-level input current, any digital input 1 µA
IL
Input capacitance 5 pF
i
Output capacitance 5 pF
o
UNIT
3.3.2.1 ADC Modulator, T
= 25°C, AVDD = DVDD = 5 V, fs = 48 kHz, Bandwidth = 24 kHz,
A
HPByp = 1, CMODE = 0, MODE0 – 2 = 101
PARAMETER
Resolution 18 Bits
DYNAMIC PERFORMANCE
Signal to noise (EIAJ)
Dynamic range
Signal to noise + distortion (THD + N)
Total harmonic distortion (THD)
Interchannel isolation 108 dB
DC ACCURACY
Gain error ±0.2 dB
Interchannel gain mismatch ±0.2 dB
Offset error (18-bit resolution) ±5 mV
Offset drift ±0.17 LSB/°C
TEST CONDITIONS
INLP = INRP = 2.5 V dc
INLM = INRM = 2.5 V dc
–
6-V differential input between
INRP (INLP) and INRM (INLM)
MIN TYP MAX
93 97 dB
91 95 dB
91 dB
0.001%
UNIT
3–2

3.3.2.2 Inputs/Supplies, TA = 25°C, AVDD = DVDD = 5 V, fs = 48 kHz, Bandwidth = 24 kHz,
Input voltage
V
Power-supply current
HPByp = 1
PARAMETER TEST CONDITIONS MIN TYP MAX
ANALOG INPUT
p
Input impedance 50 kΩ
POWER SUPPLIES
pp
Power dissipation 230 mW
Differential input 6.4
Single-ended input 3.2
IDD (analog), operating 22 30 mA
IDD (digital), operating 24 32 mA
IDD (analog), power down 100 µA
IDD (digital), power down 40 µA
UNIT
3.3.3 Channel Characteristics, TA = 25°C, AVDD=DVDD = 5 V, fs = 48 kHz, HPByp = 1
PARAMETER TEST CONDITIONS MIN TYP MAX
Passband (–3 dB) HPByp = 0 0.001 24 kHz
Passband ripple 30 Hz – 21.8 kHz ±0.01 dB
Stopband attenuation 26.2 kHz – 3046 kHz 80 dB
Group delay 25/F
s
UNIT
s
3.4 Switching Characteristics
t
d1
t
d(MFSD)
t
d(MDD)
t
d(MIRD)
t
d(SDD1)
t
d(SDD2)
PARAMETER MIN TYP MAX
Delay time, AnaPD↓ to DOUT valid (see Figure 2–1(c)) 30 ns
Delay time, SCLK↓ to Fsync, master mode
(see Figures 4–1, 4–2, 4–3, and 4–4)
Delay time, SCLK↓ to DOUT, master mode
(see Figures 4–1, 4–2, 4–3, and 4–4)
Delay time, SCLK↓ to LRClk, master mode
(see Figures 4–2 and 4–4)
Delay time, LRClk to DOUT, slave mode (see Figure 4–5) 50 ns
Delay time, SCLK↓ to DOUT, slave mode
(see Figures 4–5 and 4–6)
–20 20
0 50
–20 20
50
UNIT
ns
ns
ns
ns
3–3

3–4

4 Parameter Measurement Information
SCLK
t
d(MFSD)
Fsync
t
d(MDD)
DOUT
LRClk
Figure 4–1. SCLK to Fsync and DOUT – Master Mode 3
SCLK
t
d(MFSD)
Fsync
t
d(MDD)
DOUT
t
d(MIRD)
MSB MSB–1
MSB MSB–1
. . .
. . .
LRClk
SCLK
Fsync
DOUT
LRClk
Figure 4–2. SCLK to Fsync, DOUT, and LRClk – Master Modes 4 and 6
t
d(MFSD)
t
d(MDD)
LSB LSB–1
Figure 4–3. SCLK to Fsync, DOUT, and LRClk – Master Mode 5
. . .
4–1

SCLK
Fsync
DOUT
LRClk
t
d(MFSD)
t
d(MDD)
LSB LSB–1
t
d(MIRD)
Figure 4–4. SCLK to Fsync, DOUT, and LRClk – Master Mode 7
. . .
SCLK
LRClk
DOUT
SCLK
Fsync
DOUT
t
su3
t
d(SDD1)
17 16
t
su4
t
d(SDD2)
. . .
Figure 4–5. SCLK to LRClk and DOUT – Slave Mode 0, Fsync High
t
su3
t
su5
17
t
t
d(SDD2)
su6
. . .
1
4–2
LRClk
Figure 4–6. SCLK to Fsync, LRClk, and DOUT – Slave Mode 2, Fsync Controlled

IMPORTANT NOTICE
T exas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinue
any product or service without notice, and advise customers to obtain the latest version of relevant information
to verify, before placing orders, that information being relied on is current and complete. All products are sold
subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those
pertaining to warranty, patent infringement, and limitation of liability.
TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in
accordance with TI’s standard warranty. Testing and other quality control techniques are utilized to the extent
TI deems necessary to support this warranty . Specific testing of all parameters of each device is not necessarily
performed, except those mandated by government requirements.
CERT AIN APPLICATIONS USING SEMICONDUCTOR PRODUCTS MA Y INVOLVE POTENTIAL RISKS OF
DEATH, PERSONAL INJURY, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE (“CRITICAL
APPLICATIONS”). TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, AUTHORIZED, OR
WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT DEVICES OR SYSTEMS OR OTHER
CRITICAL APPLICA TIONS. INCLUSION OF TI PRODUCTS IN SUCH APPLICATIONS IS UNDERST OOD TO
BE FULLY AT THE CUSTOMER’S RISK.
In order to minimize risks associated with the customer’s applications, adequate design and operating
safeguards must be provided by the customer to minimize inherent or procedural hazards.
TI assumes no liability for applications assistance or customer product design. TI does not warrant or represent
that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other
intellectual property right of TI covering or relating to any combination, machine, or process in which such
semiconductor products or services might be or are used. TI’s publication of information regarding any third
party’s products or services does not constitute TI’s approval, warranty or endorsement thereof.
Copyright 1998, Texas Instruments Incorporated
 Loading...
Loading...