


Data Manual
June 2002 Digital Audio Products
SLES025A

IMPORTANT NOTICE
Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications,
enhancements, improvements, and other changes to its products and services at any time and to discontinue
any product or service without notice. Customers should obtain the latest relevant information before placing
orders and should verify that such information is current and complete. All products are sold subject to TI’s terms
and conditions of sale supplied at the time of order acknowledgment.
TI warrants performance of its hardware products to the specifications applicable at the time of sale in
accordance with TI’s standard warranty . Testing and other quality control techniques are used to the extent TI
deems necessary to support this warranty . Except where mandated by government requirements, testing of all
parameters of each product is not necessarily performed.
TI assumes no liability for applications assistance or customer product design. Customers are responsible for
their products and applications using TI components. T o minimize the risks associated with customer products
and applications, customers should provide adequate design and operating safeguards.
TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right,
copyright, mask work right, or other TI intellectual property right relating to any combination, machine, or process
in which TI products or services are used. Information published by TI regarding third-party products or services
does not constitute a license from TI to use such products or services or a warranty or endorsement thereof.
Use of such information may require a license from a third party under the patents or other intellectual property
of the third party , or a license from TI under the patents or other intellectual property of TI.
Reproduction of information in TI data books or data sheets is permissible only if reproduction is without
alteration and is accompanied by all associated warranties, conditions, limitations, and notices. Reproduction
of this information with alteration is an unfair and deceptive business practice. TI is not responsible or liable for
such altered documentation.
Resale of TI products or services with statements different from or beyond the parameters stated by TI for that
product or service voids all express and any implied warranties for the associated TI product or service and is
an unfair and deceptive business practice. TI is not responsible or liable for any such statements.
Mailing Address:
Texas Instruments
Post Office Box 655303
Dallas, Texas 75265
Copyright 2002, Texas Instruments Incorporated

Contents
Section Title Page
1 Introduction 1–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Features 1–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Functional Block Diagram 1–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Terminal Assignments—Normal Mode 1–3. . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Terminal Assignments—External MCU Mode 1–4. . . . . . . . . . . . . . . . . . . .
1.5 Ordering Information 1–4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6 Terminal Functions—Normal Mode 1–5. . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.7 Terminal Functions—External MCU Mode 1–6. . . . . . . . . . . . . . . . . . . . . .
1.8 Device Operation Modes 1–7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.9 Terminal Assignments for Codec Port Interface Modes 1–7. . . . . . . . . . .
2 Description 2–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Architectural Overview 2–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.1 Oscillator and PLL 2–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.2 Clock Generator and Sequencer Logic 2–1. . . . . . . . . . . . . . . .
2.1.3 Adaptive Clock Generator (ACG) 2–1. . . . . . . . . . . . . . . . . . . . .
2.1.4 USB Transceiver 2–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.5 USB Serial Interface Engine (SIE) 2–1. . . . . . . . . . . . . . . . . . . .
2.1.6 USB Buffer Manager (UBM) 2–2. . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.7 USB Frame Timer 2–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.8 USB Suspend and Resume Logic 2–2. . . . . . . . . . . . . . . . . . . . .
2.1.9 MCU Core 2–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.10 MCU Memory 2–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.11 USB Endpoint Configuration Blocks and Buffer Space 2–2. . .
2.1.12 DMA Controller 2–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.13 Codec Port Interface 2–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.14 I
2.1.15 General-Purpose IO Ports (GPIO) 2–3. . . . . . . . . . . . . . . . . . . .
2.1.16 Interrupt Logic 2–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.17 Reset Logic 2–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Device Operation 2–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Clock Generation 2–4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.2 Boot Process 2–4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.3 USB Enumeration 2–8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.4 TAS1020B USB Reset Logic 2–9. . . . . . . . . . . . . . . . . . . . . . . . .
2.2.5 USB Suspend and Resume Modes 2–10. . . . . . . . . . . . . . . . . . .
2.2.6 Adaptive Clock Generator (ACG) 2–11. . . . . . . . . . . . . . . . . . . . .
2.2.7 USB Transfers 2–14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.8 Microcontroller Unit 2–24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
C Interface 2–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
iii

2.2.9 External MCU Mode Operation 2–24. . . . . . . . . . . . . . . . . . . . . . .
2.2.10 Interrupt Logic 2–24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.11 General-Purpose I/O (GPIO) Ports 2–29. . . . . . . . . . . . . . . . . . . .
2.2.12 DMA Controller 2–32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.13 Codec Port Interface 2–32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
2.2.14 I
C Interface 2–43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Electrical Specifications 3–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Absolute Maximum Ratings Over Operating
Temperature Ranges 3–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Recommended Operating Conditions 3–1. . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Electrical Characteristics Over Recommended
Operating Conditions 3–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Timing Characteristics 3–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.1 Clock and Control Signals Over Recommended
Operating Conditions 3–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.2 USB Signals When Sourced by TAS1020B Over
Recommended Operating Conditions 3–2. . . . . . . . . . . . . . . . .
3.4.3 Codec Port Interface Signals (AC ’97 Modes),
= 25°C, DVDD = 3.3 V, AVDD = 3.3 V 3–3. . . . . . . . . . . . . . .
T
A
3.4.4 Codec Port Interface Signals (I2S Modes) Over
Recommended Operating Conditions 3–4. . . . . . . . . . . . . . . . . .
3.4.5 Codec Port Interface Signals (General-Purpose Mode)
Over Recommended Operating Conditions 3–4. . . . . . . . . . . . .
2
3.4.6 I
C Interface Signals Over Recommended
Operating Conditions 3–5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Application Information 4–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A MCU Memory and Memory-Mapped Registers A–1. . . . . . . . . . . . . . . . . . . . . . .
A.1 MCU Memory Space A–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2 Internal Data Memory A–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3 External MCU Mode Memory Space A–3. . . . . . . . . . . . . . . . . . . . . . . . . . .
A.4 USB Endpoint Configuration Blocks and Data Buffer Space A–4. . . . . . .
A.4.1 USB Endpoint Configuration Blocks A–4. . . . . . . . . . . . . . . . . . .
A.4.2 Data Buffer Space A–4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.4.3 USB OUT Endpoint Configuration Bytes A–9. . . . . . . . . . . . . . .
A.4.4 USB IN Endpoint Configuration Bytes A–12. . . . . . . . . . . . . . . . .
A.4.5 USB Control Endpoint Setup Stage Data Packet Buffer A–15. .
A.5 Memory-Mapped Registers A–16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.5.1 USB Registers A–18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.5.2 DMA Registers A–21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.5.3 Adaptive Clock Generator Registers A–25. . . . . . . . . . . . . . . . . . .
A.5.4 Codec Port Interface Registers A–28. . . . . . . . . . . . . . . . . . . . . . .
A.5.5 P3 Mask Register A–38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
A.5.6 I
C Interface Registers A–38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.5.7 Miscellaneous Registers A–41. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B Mechanical Data B–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
iv

List of Illustrations
Figure Title Page
2–1 Adaptive Clock Generator 2–12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–2 TAS1020B Interrupt, Reset, Suspend, and Resume Logic 2–25. . . . . . . . . . . . . .
2–3 Activation of Setup Stage Transaction Overwrite Interrupt 2–27. . . . . . . . . . . . . .
2–4 GPIO Port 1 and Port 3 Functionality 2–30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–5 Codec Port Interface Parameters – AC ’97 1.0 2–35. . . . . . . . . . . . . . . . . . . . . . . .
2–6 Codec Port Interface Parameters – AIC 2–36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–7 Codec Port Interface Parameters – I
2–8 Byte Reversal Example 2–39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–9 Connection of the TAS1020B to an AC ’97 Codec 2–40. . . . . . . . . . . . . . . . . . . . .
2–10 Connection of the TAS1020B to Multiple AC ’97 Codecs 2–41. . . . . . . . . . . . . .
2–11 Bit Transfer on the I
2–12 I
2
C START and STOP Conditions 2–44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
C Bus 2–44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–13 TAS1020B Acknowledge on the I
2–14 Single Byte Write Transfer 2–45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–15 Multiple Byte Write Transfer 2–45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–16 Single Byte Read Transfer 2–46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–17 Multiple Byte Read Transfer 2–46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–1 External Interrupt Timing Waveform 3–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–2 USB Differential Driver Timing Waveform 3–2. . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–3 BIT_CLK and SYNC Timing Waveforms 3–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–4 SYNC, SD_IN, and SD_OUT Timing Waveforms 3–3. . . . . . . . . . . . . . . . . . . . . .
2
3–5I
S Mode Timing Waveforms 3–4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–6 General-Purpose Mode Timing Waveforms 3–4. . . . . . . . . . . . . . . . . . . . . . . . . . .
3–7 SCL and SDA Timing Waveforms 3–5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–8 Start and Stop Conditions Timing Waveforms 3–5. . . . . . . . . . . . . . . . . . . . . . . . .
3–9 Acknowledge Timing Waveform 3–5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4–1 Typical TAS1020B Device Connections 4–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A–1 Boot Loader Mode Memory Map A–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A–2 Normal Operating Mode Memory Map A–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A–3 USB Endpoint Configuration Blocks and Buffer Space Memory Map A–5. . . . .
2
S2–38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
C Bus 2–45. . . . . . . . . . . . . . . . . . . . . . . . . . . .
v

List of Tables
Table Title Page
2–1 EEPROM Header 2–6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–2 ACG Frequency Registers 2–13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–3 Terminal Assignments for Codec Port Interface General-Purpose Mode 2–33. .
2–4 Terminal Assignments for Codec Port Interface AC ’97 1.0 Mode 2–39. . . . . . . .
2–5 Terminal Assignments for Codec Port Interface AC ’97 2.0 Mode 2–40. . . . . . . .
2
2–6 Terminal Assignments for Codec Port Interface I
2–7 SLOT Assignments for Codec Port Interface I
2–8 SLOT Assignments for Codec Port Interface I
2–9 Terminal Assignments for Codec Port Interface AIC Mode 2–43. . . . . . . . . . . . . .
A–1 USB Endpoint Configuration Blocks Address Map A–6. . . . . . . . . . . . . . . . . . . . .
A–2 USB Control Endpoint Setup Data Packet Buffer Address Map A–15. . . . . . . . .
A–3 Memory-Mapped Registers Address Map A–16. . . . . . . . . . . . . . . . . . . . . . . . . . . .
S Modes 2–41. . . . . . . . . . . . .
2
S Mode 4 2–42. . . . . . . . . . . . . . .
2
S Mode 5 2–42. . . . . . . . . . . . . . .
vi

1 Introduction
The TAS1020B integrated circuit (IC) is a universal serial bus (USB) peripheral interface device designed specifically
for applications that require isochronous data streaming. Applications include digital speakers, which require the
streaming of digital audio data between the host PC and the speaker system via the USB connection. The T AS1020B
device is fully compatible with the USB Specification Version 1.1 and the USB Audio Class Specification.
The TAS1020B uses a standard 8052 microcontroller unit (MCU) core with on-chip memory. The MCU memory
includes 8K bytes of program memory ROM that contains a boot loader program. At initialization, the boot loader
program downloads the application program code to a 6,016-byte RAM from either the host PC or a nonvolatile
memory on the printed-circuit board (PCB). The MCU handles all USB control, interrupt and bulk endpoint
transactions. DMA channels are provided to handle isochronous endpoint transactions.
The USB interface includes an integrated transceiver that supports 12 Mb/s (full speed) data transfers. In addition
to the USB control endpoint, support is provided for up to seven IN endpoints and seven OUT endpoints. The USB
endpoints are fully configurable by the MCU application code using a set of endpoint configuration blocks that reside
in on-chip RAM. All USB data transfer types are supported.
The T AS1020B device also includes a codec port interface (C-Port) that can be configured to support several industry
standard serial interface protocols. These protocols include the audio codec (AC) ’97 Revision 1.X, the AC ’97
Revision 2.X and several inter-IC sound (I
A direct memory access (DMA) controller with two channels is provided for streaming the USB isochronous data
packets to/from the codec port interface. Each DMA channel can support one USB isochronous endpoint.
An on-chip phase lock loop (PLL) and adaptive clock generator (ACG) provide support for the USB synchronization
modes, which include asynchronous, synchronous and adaptive.
Other on-chip MCU peripherals include an inter-IC control (I
input/output (GPIO) ports.
2
S) modes.
2
C) serial interface, and two 8-bit general-purpose
The T AS1020B device is implemented in a 3.3-V 0.25 µm CMOS technology.
1.1 Features
• Universal Serial Bus (USB)
• USB specification version 1.1 compatible
• USB audio class specification 1.0 compatible
• Integrated USB transceiver
• Supports 12 Mb/s data rate (full speed)
• Supports suspend/resume and remote wake-up
• Supports control, interrupt, bulk, and isochronous data transfer types
• Supports up to a total of seven IN endpoints and seven OUT endpoints in addition to the control endpoint
• Data transfer type, data buffer size, single or double buffering is programmable for each endpoint
• On-chip adaptive clock generator (ACG) supports asynchronous, synchronous and adaptive
synchronization modes for isochronous endpoints
• T o support synchronization for streaming USB audio data, the ACG can be used to generate the master
clock for the codec
1–1

• Micro-Controller Unit (MCU)
• Standard 8052 8-bit core
• 8K bytes of program memory ROM that contains a boot loader program and a library of commonly used
USB functions
• 6016 bytes of program memory RAM which is loaded by the boot loader program
• 256 bytes of internal data memory RAM
• Two GPIO ports
• MCU handles all USB control, interrupt, and bulk endpoint transfers
• DMA Controller
• Two DMA channels to support streaming USB audio data to/from the codec port interface
• Each channel can support a single USB isochronous endpoint
2
• In the I
S mode the device can support DAC/ADCs at different sampling frequencies
• A circular programmable FIFO used for isochronous audio data streaming
• Codec Port Interface
2
• Configurable to support AC ’97 1.X, AC ’97 2.X, AIC or I
2
S modes can support a combination of one DAC and/or two ADCs
• I
S serial interface formats
• Can be configured as a general-purpose serial interface
• Can support bulk data transfer using DMA for higher throughput
2
C Interface
• I
• Master only interface
• Does not support a multimaster bus environment
• Programmable to 100 kb/s or 400 kb/s data transfer speeds
• Supports wait states to accommodate slow slaves
• General Characteristics
• High performance 48-pin TQFP Package
• On-chip phase-locked loop (PLL) with internal oscillator is used to generate internal clocks from a 6 MHz
crystal input
• Reset output available which is asserted for both system and USB reset
• External MCU mode supports application firmware development
• 8K ROM with boot loader program and commonly used USB functions library
• 3.3 V core and I/O buffers
1–2
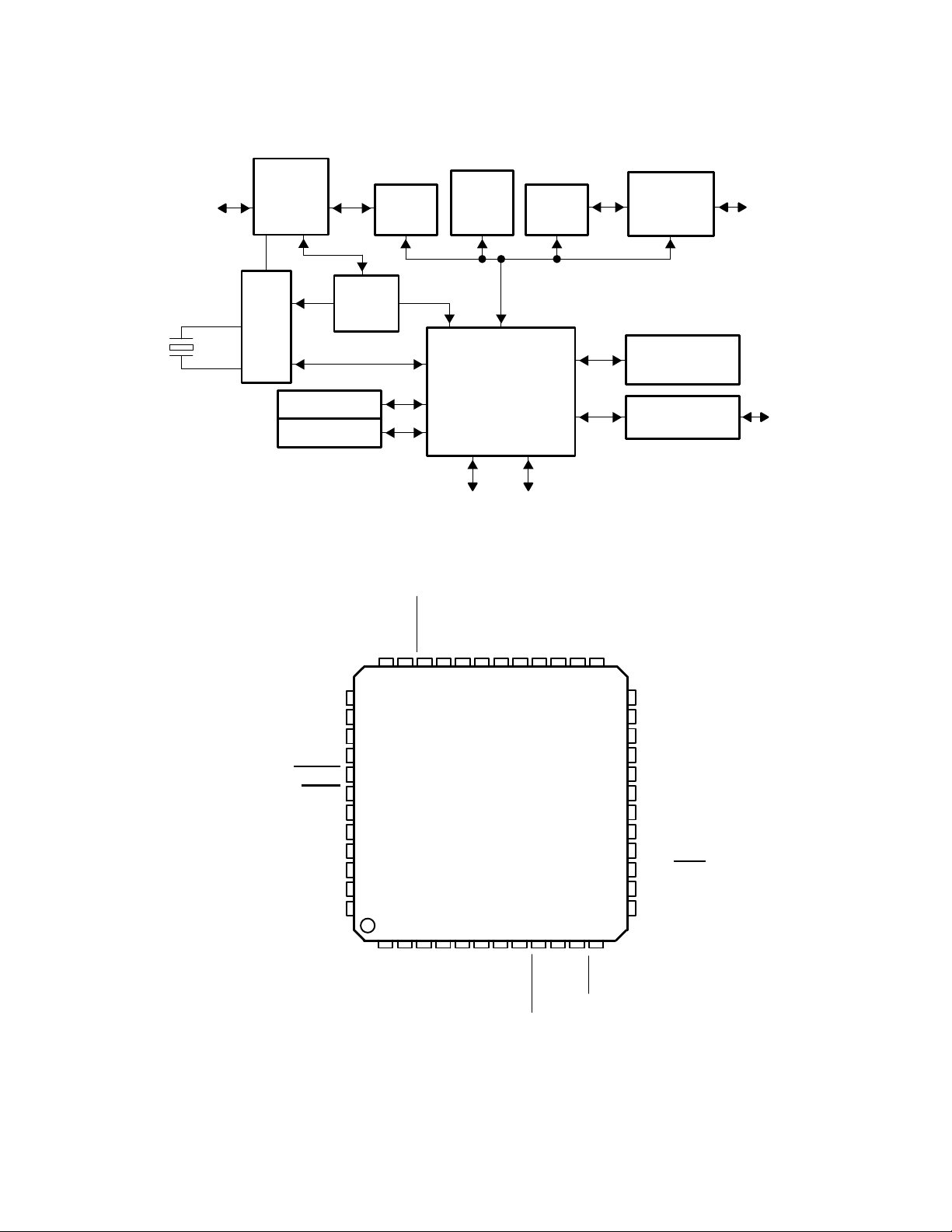
1.2 Functional Block Diagram
USB
6 MHz
USB Serial
SOF
OSC
PLL
ACG
Interface
Engine
8K ROM
6016 Byte RAM
UBM DMA
Suspend
/Resume
Logic
1520 Byte
SRAM
Port–3 Port–1
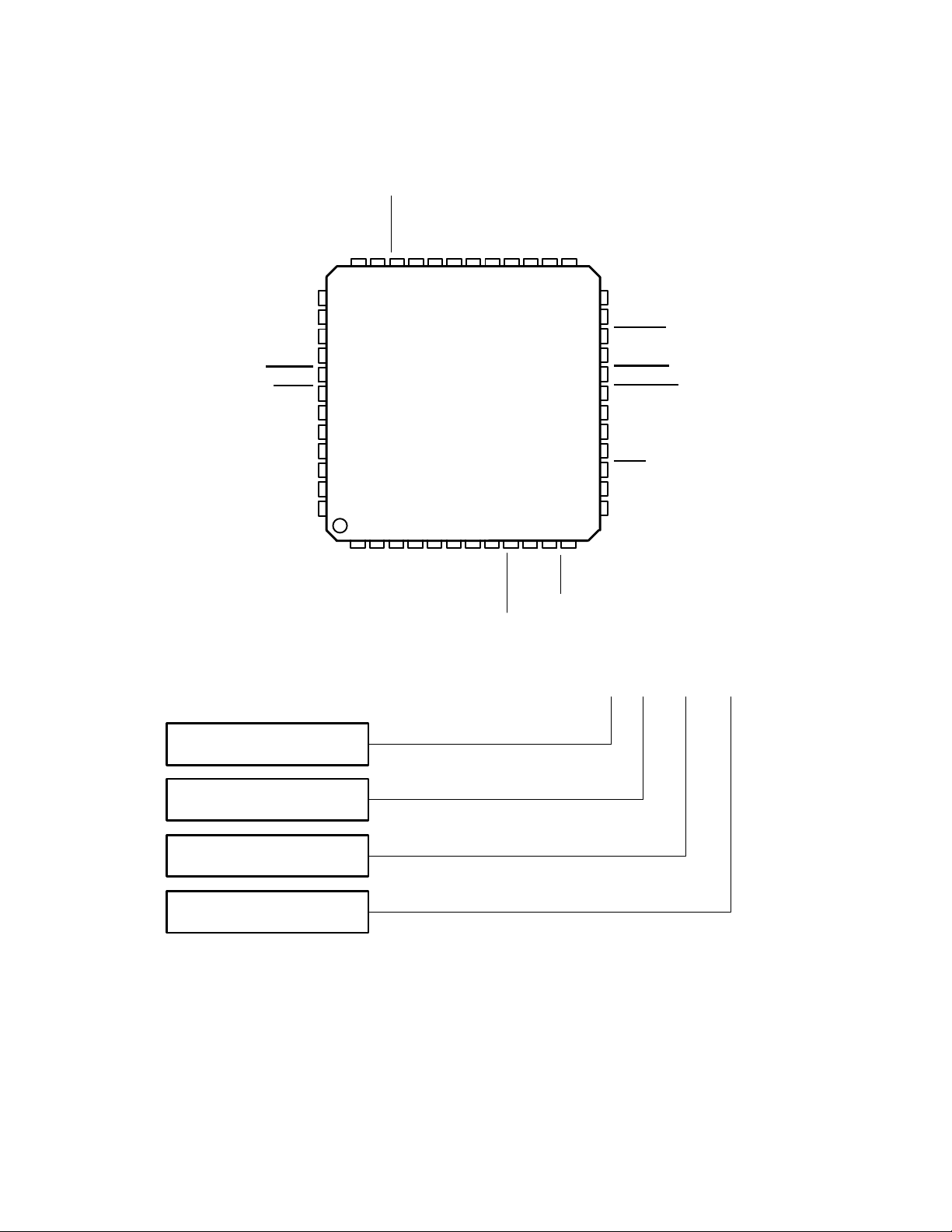
1.3 Terminal Assignments—Normal Mode
PFB PACKAGE (Normal Mode)
CDATI
CSYNC
(TOP VIEW)
DD
DV
CRESET
CSCHNE
8052 Core
P1.7
P1.6
P1.5
SS
DV
P1.4
P1.3
P1.2
CODEC
Interface
Global
Control/Status
Registers
2
I
C
Control
C–Port
I2C Bus
CSCLK
CDATO
MCLKO1
MCLKO2
RESET
VREN
SDA
SCL
AV
SS
XTALO
XTALI
PLLFILI
35 34 33 32 3136 30
37
38
39
40
41
42
43
44
45
46
47
48
23
1
DD
AV
PLLFILO
TAS1020B
5678
4
SS
DV
MCLKI
PUR
DP
DM
DD
DV
28 27 2629
9 10 11 12
TEST
EXTEN
MRESET
25
24
23
22
21
20
19
18
17
16
15
14
13
RSTO
P1.1
P1.0
NC
DV
DD
NC
P3.5
P3.4
P3.3
DV
SS
P3.2/XINT
P3.1
P3.0
1–3
1.4 Terminal Assignments—External MCU Mode
CSCLK
CDATO
MCLKO1
MCLKO2
RESET
VREN
SDA
SCL
AV
SS
XTALO
XTALI
PLLFILI
PFB PACKAGE (External Mode)
(TOP VIEW)
DD
CDATI
CSYNC
35 34 33 32 3136 30
37
38
39
40
41
42
43
44
45
46
47
48
23
1
DD
AV
CRESET
4
MCLKI
MCUAD7
DV
CSCHNE
TAS1020B
5678
SS
DP
PUR
DV
PLLFILO
SS
MCUAD5
MCUAD6
DV
28 27 2629
9
DD
DM
DV
MRESET
MCUAD4
MCUAD3
10 11 12
TEST
EXTEN
MCUAD2
25
24
23
22
21
20
19
18
17
16
15
14
13
RSTO
MCUAD1
MCUAD0
MCURD
DV
DD
MCUWR
MCUINTO
MCUALE
MCUA10
DV
SS
XINT
MCUA9
MCUA8
1.5 Ordering Information
Texas Instruments
Audio Solutions
Peripheral Device
Package Type
TQFP
48 pins PFB
T PFB1020BAS
1–4
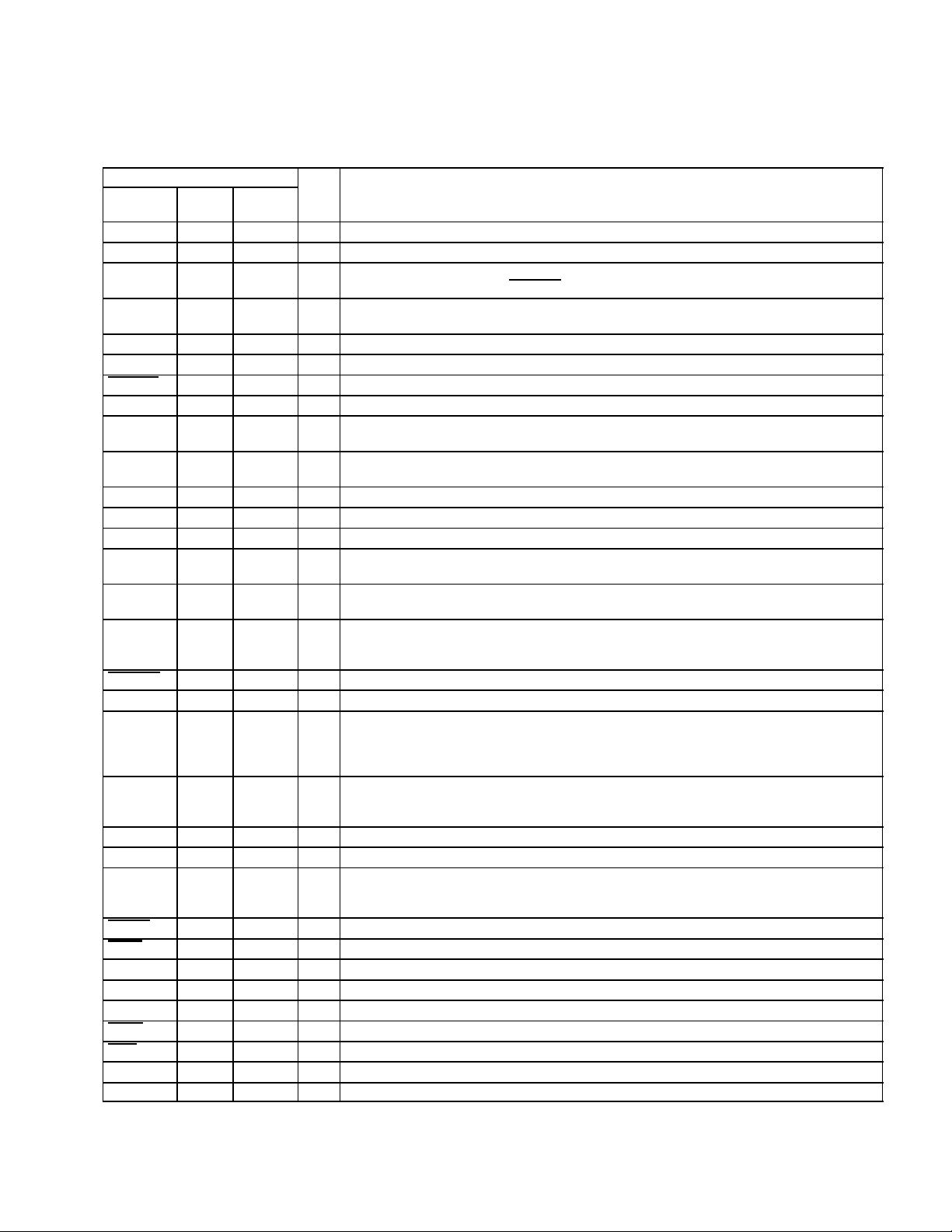
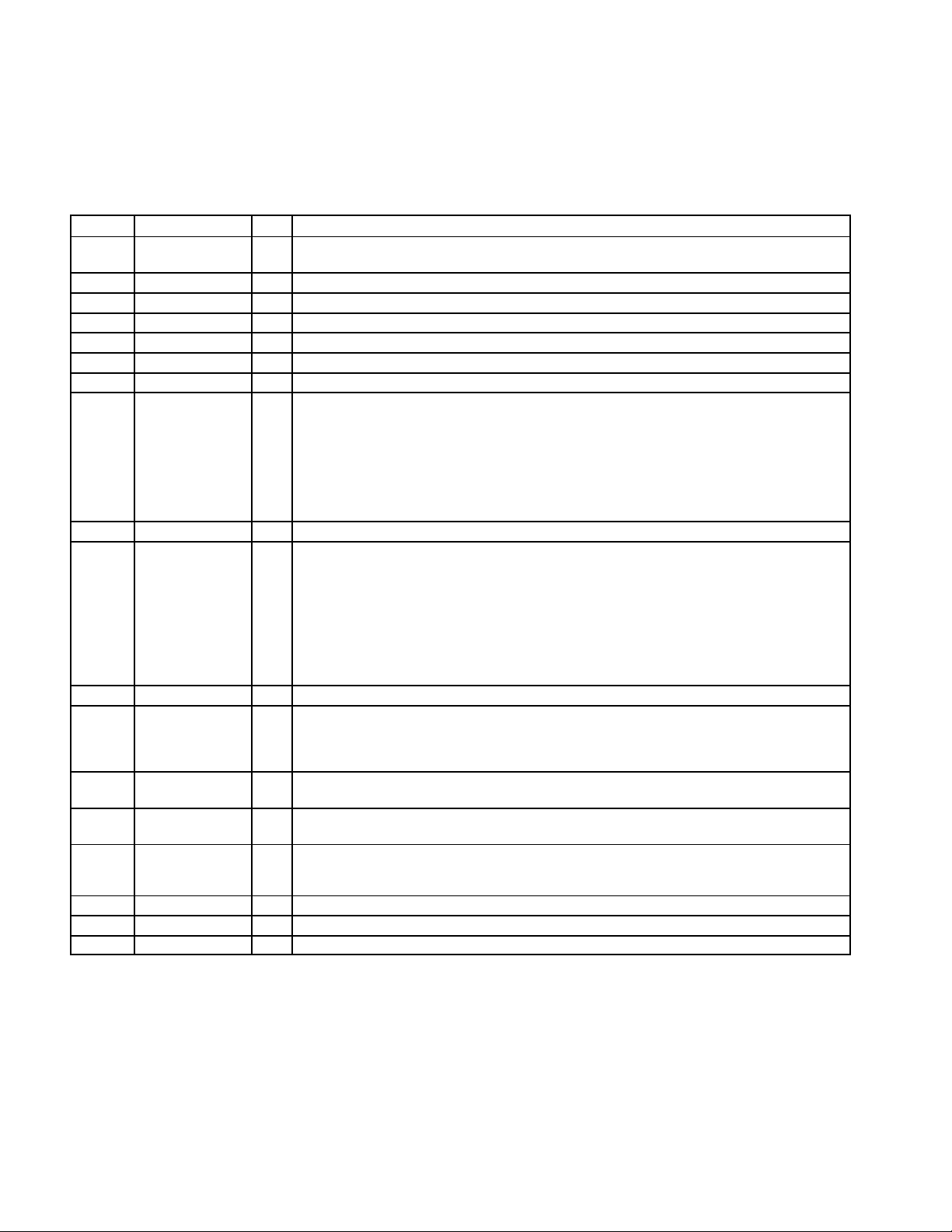
1.6 Terminal Functions—Normal Mode
TERMINAL
NAME
AV
DD
AV
SS
CSCLK CMOS 37 I/O Codec port interface serial clock: CSCLK is the serial clock for the codec port interface used to clock
CSYNC CMOS 35 I/O Codec port interface frame sync: CSYNC is the frame synchronization signal for the codec port
CDATO CMOS 38 I/O Codec port interface serial data out
CDATI CMOS 36 I/O Codec port interface serial data in
CRESET CMOS 34 I/O Codec port interface reset output
CSCHNE CMOS 32 I/O Codec port interface secondary channel enable
DP CMOS 6 I/O USB differential pair data signal plus. DP is the positive signal of the bidirectional USB differential
DM CMOS 7 I/O USB differential pair data signal minus. DM is the negative signal of the bidirectional USB differential
DV
DD
DV
SS
EXTEN CMOS 11 I External MCU mode enable: Input used to enable the device for the external MCU mode
MCLKI CMOS 3 I Master clock input. An input that can be used as the master clock for the codec port interface or the
MCLKO1 CMOS 39 O Master clock output 1: The output of the ACG that can be used as the master clock for the codec port
MCLKO2 CMOS 40 O Master clock output 2: An output that can be used as the master clock for the codec port interface and
MRESET CMOS 9 I Master reset: An active low asynchronous reset for the device that resets all logic to the default state
NC 20,22 Not used
P1.[0:7] CMOS 23, 24,
P3.[0:6] CMOS 13, 14,
PLLFILI CMOS 48 I PLL loop filter input: Input to on-chip PLL from external filter components
PLLFILO CMOS 1 O PLL loop filter output: Output from on-chip PLL to external filter components
PUR CMOS 5 O USB data signal plus pullup resistor connect. PUR is used to connect the pullup resistor on the DP
RESET CMOS 41 O General-purpose active-low output which is memory mapped
RSTO CMOS 12 O Reset output: An output that is active while the master reset input or the USB reset is active
SCL CMOS 44 O I2C interface serial clock
SDA CMOS 43 I/O I2C interface serial data
TEST CMOS 10 I Test mode enable: Factory test mode
VREN CMOS 42 O General-purpose active-low output which is memory mapped
XINT CMOS 15 I External interrupt: An active low input used by external circuitry to interrupt the on-chip 8052 MCU
XTALI CMOS 47 I Crystal input: Input to the on-chip oscillator from an external 6-MHz crystal
XTALO CMOS 46 O Crystal Output: Output from the on-chip oscillator to an external 6-MHz crystal
PIN
TYPE
Power 2 3.3-V analog supply voltage
Power 45 Analog ground
Power 8, 21, 33 3.3-V digital supply voltage
Power 4, 16, 28 Digital ground
NO.
25, 26,
27, 29,
30, 31
15, 17,
18, 19
I/O DESCRIPTION
the CSYNC, CDATO, CDATI, CRESET,
interface.
pair used to connect the TAS1020B device to the universal serial bus.
pair used to connect the TAS1020B device to the universal serial bus.
source for MCLKO2.
interface and the codec.
the codec used in I2S modes for receive. This clock signal can also be used as a miscellaneous
clock.
I/O General-purpose I/O port [bits 0 through 1]: A bidirectional 8-bit I/O port with an internal 100 µA
active pullup
I/O General-purpose I/O port [bits 0 through 1]: A bidirectional I/O port with an internal 100 µA active
pullup
signal from a high-impedance state to 3.3 V . When the DP signal is connected to 3.3-V the host PC
detects the connection of the TAS1020B device to the universal serial bus.
AND CSCHNE signals.
1–5
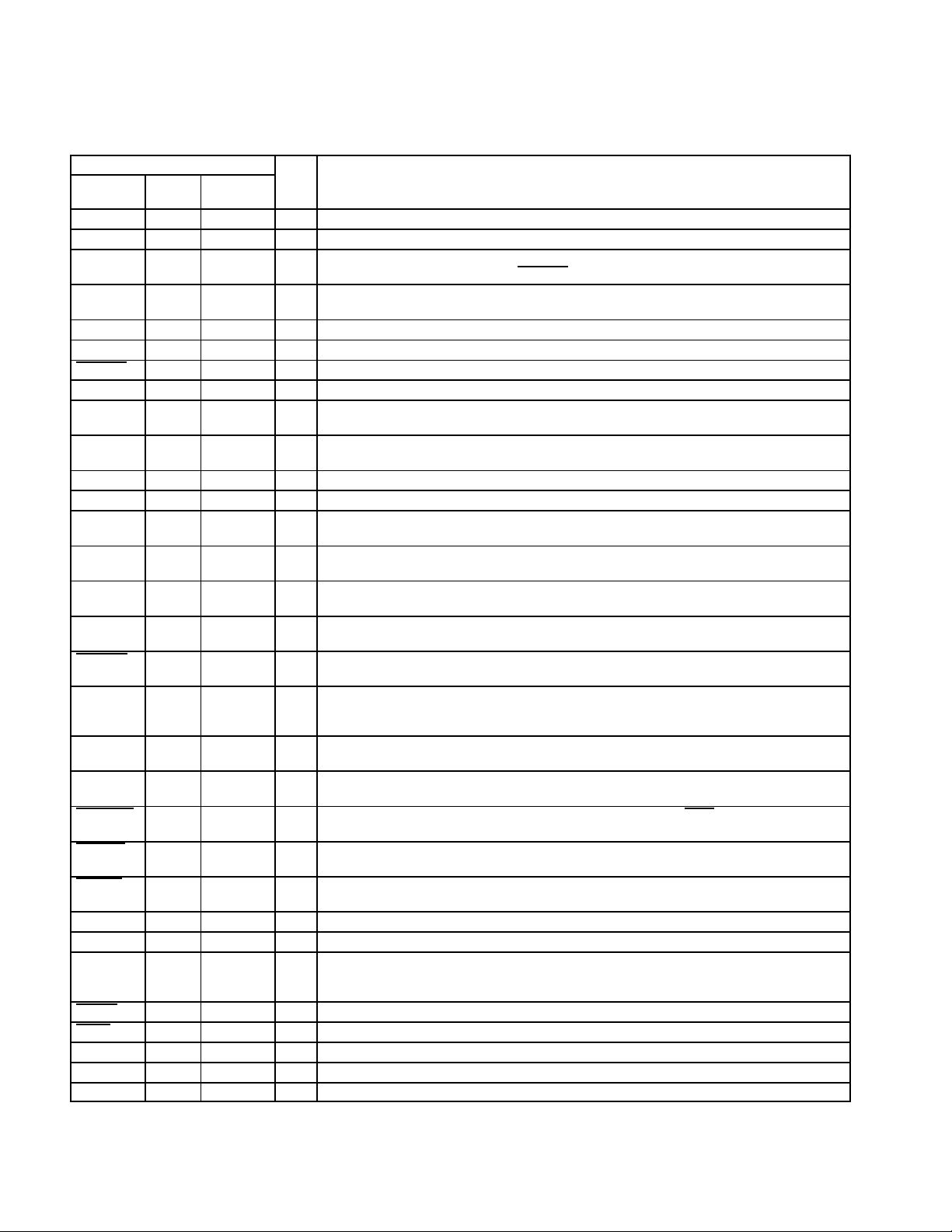
1.7 Terminal Functions—External MCU Mode
TERMINAL
NAME
AV
DD
AV
SS
CSCLK CMOS 37 I/O Codec port interface serial clock: CSCLK is the serial clock for the codec port interface used to
CSYNC CMOS 35 I/O Codec port interface frame sync: CSYNC is the frame synchronization signal for the codec port
CDATO CMOS 38 I/O Codec port interface serial data output
CDATI CMOS 36 I/O Codec port interface serial data input
CRESET CMOS 34 I/O Codec port interface reset output
CSCHNE CMOS 32 I/O Codec port interface secondary channel enable
DP CMOS 6 I/O USB differential pair data signal plus: DP is the positive signal of the bidirectional USB differential
DM CMOS 7 I/O USB differential pair data signal minus. DM is the negative signal of the bidirectional USB differen-
DV
DD
DV
SS
EXTEN CMOS 11 I External MCU mode enable: Input used to enable the device for the external MCU mode. This sig-
MCLKI CMOS 3 I Master clock input: An input that can be used as the master clock for the codec port interface or the
MCLKO1 CMOS 39 O Master clock output 1: The output of the ACG that can be used as the master clock for the codec
MCLKO2 CMOS 40 O Master clock output 2: An output that can be used as the master clock for the codec port interface
MRESET CMOS 9 I Master reset: An active low asynchronous reset for the device that resets all logic to the default
MCUAD
[0:7]
MCUA
[8:10]
MCUALE CMOS 18 I MCU address latch enable: Address latch enable for external MCU access to the TAS1020B exter-
MCUINTO CMOS 19 O MCU interrupt output: Interrupt output to be used for external MCU INTO input signal. All internal
MCUWR CMOS 20 I MCU write strobe: Write strobe for external MCU write access to the TAS1020B external data
MCURD CMOS 22 I MCU read strobe: Read strobe for external MCU read access to the TAS1020B external data
PLLFILI CMOS 48 I PLL loop filter input: Input to on-chip PLL from external filter components.
PLLFILO CMOS 1 O PLL loop filter output: Output to on-chip PLL from external filter components.
PUR CMOS 5 O USB data signal plus pullup resistor connect. PUR is used to connect the pullup resistor on the DP
RESET CMOS 41 O General-purpose active-low output which is memory mapped
RSTO CMOS 12 O Reset output: An output that is active while the master reset input or the USB reset is active.
SCL CMOS 44 O I2C interface serial clock
SDA CMOS 43 I/O I2C interface serial data input/output
TEST CMOS 10 I Test mode enable: Factory text mode
PIN
TYPE
Power 2 – 3.3-V Analog supply voltage
Power 45 – Analog ground
Power 8, 21, 33 – 3.3-V Digital supply voltage
Power 4, 16, 28 – Digital ground
CMOS 23, 24, 25,
CMOS 13, 14, 17 I/O MCU address bus: Multiplexed address bus bits[8:10] for external MCU access to the TAS1020B
NO.
26, 27, 29,
30, 31
I/O DESCRIPTION
clock the CSYNC, CDATO, CDATI, CRESET
interface.
pair used to connect the TAS1020B device to the universal serial bus.
tial pair used to connect the TAS1020B device to the universal serial bus.
nal uses a 3.3 V TTL/LVCMOS input buffer.
source for MCLKO2.
port interface and the codec.
and the codec. This clock signal can also be used as a miscellaneous clock.
state.
I/O MCU multiplexed address/data: Multiplexed address bits[0:7]/data bits[0:7] for external MCU ac-
cess to the TAS1020B external data memory space.
external data memory space.
nal data memory space.
TAS1020B interrupt sources are read together to generate this output signal.
memory space.
memory space.
signal to 3.3V from a high-impedance state. When the DP signal is connected in a 3.3-V state, the
host PC should detect the connection of the TAS1020B device to the universal serial bus.
AND CSCHNE signals.
1–6

1.7 Terminal Functions—External MCU Mode (Continued)
GP
AIC
AC 97 v1.X
AC 97 v2.X
I2S
I2S
TERMINAL
NAME
VREN CMOS 42 O General-purpose active-low output which is memory mapped.
XINT CMOS 15 I External interrupt: An active low input used by external circuitry to interrupt the on-chip 8052 MCU.
XTALI CMOS 47 I Crystal input: Input to the on-chip oscillator from an external 6-MHz crystal.
XTALO CMOS 46 O Crystal output: Output from the on-chip oscillator to an external 6-MHz crystal.
PIN
TYPE
NO.
I/O DESCRIPTION
1.8 Device Operation Modes
The EXTEN and TEST pins define the mode that the TAS1020B is in after reset.
MODE EXTEN TEST
Normal mode – internal MCU 0 0
External MCU mode 1 0
Factory test 0 1
Factory test 1 1
1.9 Terminal Assignments for Codec Port Interface Modes
The codec port interface has five modes of operation that support AC ’97, I2S, and AIC codecs. There is also a
general-purpose mode that is not specific to a serial interface. The mode is programmed by writing to the mode select
field of the codec port interface configuration register 1 (CPTCNF1). The codec port interface terminals CSYNC,
CSCLK, CDATO, CDATI, CRESET
shown in the following table.
, and CSCHNE take on functionality appropriate to the mode programmed as
TERMINAL
NO. NAME
35 CSYNC CSYNC I/O FS O SYNC O SYNC O LRCK O LRCK1 O
37 CSCLK CSCLK I/O SCLK O BIT_CLK I BIT_CLK I SCLK O SCLK1 O
38 CDATO CDATO O DOUT O SD_OUT O SD_OUT O SDOUT1 O SDOUT1 O
36 CDATI CDATI I DIN I SD_IN I SD_IN1 I SDIN1 I SDIN2 I
34 CRESET CRESET O RESET O RESET O RESET O CRESET O SCLK2 O
32 CSCHNE NC O FC O NC O SD_IN2 I SDIN2 I LRCK2 O
NOTES: 1. Signal names and I/O direction are with respect to the TAS1020B device. The signal names used for the TAS1020B terminals for
the various codec port interface modes reflect the nomenclature used by the codec devices.
2. NC indicates no connection for the terminal in a particular mode. The TAS1020B device drives the signal as an output for these
cases.
3. The CSYNC and CSCLK signals can be programmed as either an input or an output in the general-purpose mode.
GP AIC AC ’97 v1.X AC ’97 v2.X
Mode 0
Mode 1
Mode 2
Mode 3
I2S I2S
Mode 4
Mode 5
1–7

1–8

2 Description
2.1 Architectural Overview
2.1.1 Oscillator and PLL
Using an external 6-MHz crystal, the TAS1020B derives the fundamental 48-MHz internal clock signal using an
on-chip oscillator and PLL. Using the PLL output, the other required clock signals are generated by the clock
generator and adaptive clock generator.
2.1.2 Clock Generator and Sequencer Logic
Utilizing the 48-MHz output from the PLL, the clock generator logic generates all internal clock signals, except for the
codec port interface master clock (MCLK) and serial clock (CSCLK) signals. The T AS1020B internal clocks include
the 48-MHz clock, a 24-MHz clock, and a 12-MHz clock. A 12 MHz USB clock is also generated. The USB clock is
the same as the internal 12-MHz clock when the T AS1020B is transmitting data, but is derived from the data when
the T AS1020B is receiving data. T o derive the USB clock when receiving USB data, the T AS1020B utilizes an internal
digital PLL (DPLL) driven from the 48-MHz clock.
The sequencer logic controls the access to the SRAM used for the USB endpoint configuration blocks and the USB
endpoint buffer space. The SRAM can be accessed by the MCU, the USB buffer manager (UBM), or the DMA
channels. The sequencer controls the access to the memory using a round-robin fixed priority arbitration scheme.
This means that the sequencer logic generates grant signals for the MCU, UBM, and DMA channels at a
predetermined fixed frequency.
2.1.3 Adaptive Clock Generator (ACG)
The adaptive clock generator is used to generate a master clock output signal (MCLKO) to be used by the codec port
interface and the codec device. To synchronize data sent to or received from the codec to the USB frame rate, the
MCLKO signal generated by the adaptive clock generator must be used. The synchronization of the MCLKO signal
to the USB frame rate is achieved by the ACG, which, in turn, is controlled by a soft PLL, implemented in the MCU.
One of the tasks performed by the ACG is to maintain count of the number of MCLKO clocks between USB Start of
Frame (SOF) events. This count is monitored by the soft PLL in the MCU. Based on this count, the soft PLL outputs
corrections to the ACG to adjust MCLKO to obtain the correct number of MCLKO clocks between USB SOF events.
MCLKI, the master clock input, can also be selected to source the clocks used by the codec port interface. When
MCLKI is selected, it is used to derive the TAS1020B-sourced versions of the clocks CSCLK and CSYNC. In this
scenario, the codec device would also use the same master clock signal (MCLKI).
2.1.4 USB Transceiver
The TAS1020B provides an integrated transceiver for the USB port. The transceiver includes a differential output
driver, a dif ferential input receiver , and two single ended input buf fers. The transceiver connects to the USB DP and
DM signal terminals.
2.1.5 USB Serial Interface Engine (SIE)
The serial interface engine logic manages the USB packet protocol for packets being received and transmitted by
the T AS1020B. For packets being received, the SIE decodes the packet identifier field (PID) to determine the type
of packet being received and to ensure the PID is valid. The SIE then calculates the cycle redundancy check (CRC)
of the received token and data packets and compares the value to the CRC contained in the packet to verify that the
2–1

packet was not corrupted during transmission. For transmitted token and data packets, the SIE generates the CRC
that is transmitted with the packet. The SIE also generates the synchronization field (SYNC) and the correct PID for
all transmitted packets. Another major function of the SIE is the serial-to-parallel conversion of received data packets
and the parallel-to-serial conversion of transmitted data packets.
2.1.6 USB Buffer Manager (UBM)
The USB buffer manager provides the control logic that interfaces the SIE to the USB endpoint buffers. One of the
major functions of the UBM is to decode the USB function address to determine if the host PC is addressing the
T AS1020B device USB peripheral function. In addition, the endpoint address field and direction signal are decoded
to determine which particular USB endpoint is being addressed. Based on the direction of the USB transaction and
the endpoint number, the UBM will either write or read the data packet to or from the appropriate USB endpoint data
buffer.
2.1.7 USB Frame Timer
The USB frame timer logic receives the start of frame (SOF) packet from the host PC each USB frame. Each frame,
the logic stores the 1 1-bit frame number value from the SOF packet in a register and asserts the internal SOF signal.
The frame number register can be read by the MCU and the value can be used as a time stamp. For USB frames
in which the SOF packet is corrupted or not received, the frame timer logic will generate a pseudo start of frame
(PSOF) signal and increment the frame number register.
2.1.8 USB Suspend and Resume Logic
The USB suspend and resume logic detects suspend and resume conditions on the USB. This logic also provides
the internal signals used to control the TAS1020B device when these conditions occur. The capability to resume
operation from a suspend condition with a locally generated remote wake-up event is also provided.
2.1.9 MCU Core
The T AS1020B uses an 8-bit microcontroller core that is based on the industry standard 8052. The MCU is software
compatible with the 8052, 8032, 80C52, 80C53, and 87C52 MCUs. The 8052 MCU is the processing core of the
T AS1020B and handles all USB control, interrupt and bulk endpoint transfers. Bulk out end-point transfers can also
be handled by one of the two DMA channels.
2.1.10 MCU Memory
In accordance with the industry standard 8052, the TAS1020B MCU memory is organized into program memory,
external data memory and internal data memory . A boot ROM program is used to download the application code to
a 6K byte RAM that is mapped to the program memory space. The external data memory includes the USB endpoint
configuration blocks, USB data buffers, and memory mapped registers. The total external data memory space
available is 1.5K bytes. A total of 256 bytes are provided for the internal data memory.
2.1.11 USB Endpoint Configuration Blocks and Buffer Space
The USB endpoint configuration blocks are used by the MCU to configure and operate the required USB endpoints
for a particular application. In addition to the control end-point, the T AS1020B supports a total of seven IN endpoints
and seven OUT endpoints. A set of six bytes is provided for each endpoint to specify the endpoint type, buffer address,
buffer size, and data packet byte count.
The USB endpoint buffer configuration blocks and buffer space provided totals 1440 bytes. The buffer space to be
used by a particular endpoint is fully configurable by the MCU for a particular application. Therefore, the MCU can
configure each buffer based on the total number of endpoints to be used, the maximum packet size to be used for
each endpoint, and the selection of single or double buffering.
2.1.12 DMA Controller
Two DMA channels are provided to support the streaming of data for USB isochronous IN endpoints, isochronous
OUT endpoints, and bulk OUT endpoints. Each DMA channel can support one USB isochronous IN endpoint, or one
2–2

isochronous OUT endpoint, or one bulk OUT endpoint. The DMA channels are used to stream data between the USB
endpoint data buffers and the codec port interface. The USB endpoint number and direction can be programmed for
each DMA channel. Also, the codec port interface time slots to be serviced by each DMA channel can be
programmed.
2.1.13 Codec Port Interface
The T AS1020B provides a configurable full duplex bidirectional serial interface that can be used to connect to a codec
or other external device types for streaming USB isochronous data. The interface can be configured to support
several different industry standard protocols, including AC ’97 1.X, AC ’97 2.X, AIC, and I
a general-purpose mode to support other protocols.
2
S. The T AS1020B also has
2.1.14 I2C Interface
The I2C interface logic provides a two-wire serial interface that the 8052 MCU can use to access other ICs. The
TAS1020B is an I
interface can be programmed to operate at either 100 kbps or 400 kbps. In addition, the protocol supports 8-bit or
16-bit addressing for accessing the I
means slaves can assert wait state on the I
2
C master device only and supports single byte or multiple byte read and write operations. The
2
C slave device memory locations. The T AS1020B supports I2C wait states. This
2
C bus by pulling the SCL line low.
2.1.15 General-Purpose IO Ports (GPIO)
The T AS1020B provides two general-purpose IO ports that are controlled by the internal 8052 MCU. The two ports
are port 1 and port 3. Port 1 provides true GPIO capability. Each bit of port 1 can be independently used as either
an input or output, and consists of an output buffer , an input buffer, and a pullup resistor. Some of the bits of port 3
also provide true GPIO capability , but, in addition, some of the bits of port 3 also provide alternate input and output
uses. An example of this is P3.2, which is used as the external interrupt (XINT
description of the alternate uses of some of the port 3 bits is presented in Section 2.2.11.
The pullup resistors for port 1 and port 3 can be disabled by bits P1PUDIS and P3PUDIS respectively in the on-chip
register GLOBCTL. In addition, any port 3 pin can be used to wake up the host PC from a low-power suspend mode.
) input to the TAS1020B. A detailed
2.1.16 Interrupt Logic
The interrupt logic monitors the various conditions that can cause an interrupt and asserts the interrupt 0 (INTO) input
on the 8052 MCU core accordingly . All of the TAS1020B internal interrupt sources and the external interrupt (XINT
input are ORed together to generate the INT0 signal. An interrupt vector register is used by the MCU to identify the
interrupt source.
2.1.17 Reset Logic
)
An external master reset (MRESET) input signal that is asynchronous to the internal clocks can be used to reset the
T AS1020B logic. In addition to this master reset, the T AS1020B logic can also be reset by a USB reset from the host
PC if bit FRSTE in the on-chip register USBCTL is set to 1. The T AS1020B also provides a reset output (RSTO
that can be used by external devices. This signal is asserted when either a master reset occurs or when a USB reset
occurs and FRSTE is set to 1.
) signal
2.2 Device Operation
The operation of the T AS1020B is explained in the following sections. For additional information on USB, refer to the
Universal Serial Bus Specification, Version 1.1.
2–3

2.2.1 Clock Generation
The T AS1020B requires an external 6-MHz crystal with load capacitors and PLL loop filter components to derive all
the clocks needed for both USB and codec operation. Figure 4–1 shows the connection of these components to the
T AS1020B. Figure 4–1 also shows a ground shield residing on the top layer of the PCB and underneath the crystal
and its load capacitors and the PLL components. The PLL is an analog PLL, and noise pickup in these components
can translate to phase jitter at the output of the PLL, which in turn can translate to distortion at the codec. A ground
shield is recommended to attenuate the digital noise components on the board as seen at the PLL.
The A V
the digital noise residing on a board, A V
and A VDD pins on the T AS1020B are used exclusively to power the analog PLL. T o maintain isolation from
SS
should be a separate ground plane that connects to the primary ground
SS
plane (DGND) at a single point via a ferrite bead. The ferrite bead should exhibit around 9 Ω of impedance at 100 MHz.
AV
should also be distinct from DVDD. A recommended architecture is to generate DVDD and A VDD from the same
DD
regulator line, with each derived from a RC filter in series with the regulator output. It is finally recommended that the
ground shield for the crystal and its load capacitors and the PLL loop filter components be connected to A V
SS
at a
single point via a ferrite bead of the same type as above.
Using the low frequency 6-MHz crystal and generating the required higher frequency clocks internally in the
TAS1020B is a major advantage with regard to EMI.
2.2.2 Boot Process
The T AS1020B can boot from EEPROM or execute a host boot. Host boot will be used in the following circumstances:
• No EEPROM is present.
• An EEPROM is present, but does not contain a valid header.
• An EEPROM is present, but is a device EEPROM (contains header information only).
2.2.2.1 EEPROM Boot Process
If the target device has an application EEPROM (an EEPROM that contains both header and application data), and
if the header portion of the EEPROM content is valid, the EEPROM application code is downloaded to on-chip RAM.
During the download process, the RAM is mapped to data space, and the boot code that orchestrates the download
is part of the on-chip firmware housed in on-chip ROM. Also, while the application code is being downloaded, the
TAS1020B remains disconnected from the USB bus.
When the download is complete, the firmware sets the ROM disable bit SDW. The setting of this bit maps the RAM
from data space to program space, starting address 0x0000. Having set bit SDW, the firmware then branches to
address 0x0000, which is the reset entry point for the application code. The application code is now running.
The application code then switches on the PUR output. The PUR output pin is connected, through a resistor, to the
positive (DP) line of the differential USB bus. Switching PUR on informs the host that a full speed (12 Mb/s) device
is present on the bus. In the enumeration procedure that follows, the application code reports its run-time device
descriptor set. Following enumeration, the device is actively running its application.
2.2.2.2 Host Boot Process
The DFU code in the TAS1020B fully adheres to the USB Device Class Specification for DFU 1.0. In addition, the
T AS1020B utilizes the communication protocols from the DFU specification to implement a host boot capability for
those applications that do not have an EEPROM resource. In such cases, the TAS1020B, at power-up, reports its
DFU mode descriptor set rather than its run-time descriptor set and directly enters what the DFU specification terms
the DFU Program Mode. The host processor must be cognizant of the fact that the device under enumeration does
not have an EEPROM resource with valid code, and is already in the DFU mode awaiting a download per the DFU
protocol. All of this capability is provided by the ROM-based code (firmware) that resides on the TAS1020B.
Specifically, the host boot process addresses three cases—an EPROM is not present, an EEPROM is present but
the data in the EEPROM is invalid, or an EEPROM is present but the EEPROM is a device EEPROM (contains only
2–4

header data). In all three of these cases, the T AS1020B firmware comes up in the DFU Program Mode. A host boot
ensues, but the final destination of the download depends on the status of the onboard EEPROM.
• If the firmware determines that no EEPROM is present (by noting, when addressing the EEPROM, the
absence of an acknowledge from the EEPROM), a Vendor ID of 0xFFFF and a Product ID of 0xFFFE is
reported during enumeration. The download that follows enumeration is written to the on-chip RAM. The
download from the host must include a header (see Section 2.2.2.3.1), and the header overwrite bit in the
header downloaded must be set to 0. (The header overwrite bit is used to instruct the T AS1020B firmware
as to whether or not the header portion of the download is to be written into the EEPROM. Since, in this case,
no EEPROM is present, this header overwrite bit must be set to 0). It is noted that the host must have prior
knowledge that the target will initialize in the DFU program mode and will require a download of application
code (and header) to RAM.
• If the firmware determines that an EEPROM is present (acknowledges are received from the EEPROM),
but that the header data in the EEPROM is invalid, a Vendor ID of 0xFFFF and a Product ID of 0xFFFE is
reported during enumeration. The download that follows enumeration is written to EEPROM. Since the
EEPROM data was invalid, the host has to set the header overwrite bit in the header portion of the download
to a 1 to ensure that the header is written to the EEPROM. It is noted that the host must have prior knowledge
that the target does have an EEPROM, but that the data in the EEPROM is invalid. This could be a situation
such as the initial download of the application on a production line.
• If the firmware determines that an EEPROM is present, that the header data in the EEPROM is valid, but
that the header data in the EEPROM indicates that the EEPROM is a device EEPROM, the Vendor ID and
Product ID settings in the EEPROM-resident header is reported during enumeration. In addition, the strings
in the header, if applicable, are reported. The EEPROM download that follows enumeration will be written
to the on-chip RAM facility . In addition to downloading the application code to RAM, an option also exists
to download the header portion of the download image to the EEPROM. If the host does not wish to
overwrite the valid header data in the EEPROM, it must set the header overwrite bit in its download header
to a 0. It is noted that the host must have knowledge that the target contains an EEPROM, and that the
EEPROM is a device EEPROM.
2.2.2.3 EEPROM Data Organization
Two types of data can be stored in the EEPROM—header data, which contains USB device information, and
application code. The presence of header data in the EEPROM is mandatory , but the presence of application code
is optional.
2–5
2.2.2.3.1 EEPROM Header
Table 2–1 shows the format and information contained it the header data. As seen from Table 2–1, the header data
begins at address 0x0000 in the EEPROM and precedes the application code.
Table 2–1. EEPROM Header
OFFSET TYPE SIZE VALUE
0 headerChksum 1 Header check sum—derived by adding the header data, excluding the header checksum, in bytes, and
1 HeaderSize 1 Size, in units of bytes, of the header including strings if applied
2 Signature 2 Signature: 0x1234
4 VendorID 2 USB Vendor ID
6 ProductID 2 USB Product ID
8 ProductVersion 1 Product version
9 FirmwareVersion 1 Firmware version
10 UsbAttributes 1 USB attributes:
11 MaxPower 1 Maximum power the device needs in units of 2 mA.
12 Attributes 1 Device attributes:
13 WPageSize 1 Maximum I2C write page size, in units of bytes
14 DataType 1 This value defines if the device is an application EEPROM or a device EEPROM.
15 RpageSize 1 Maximum I2C read page size, in units of bytes. If the value is zero, the whole payLoadSize is read in one
16 payLoadSize 2 Size, in units of bytes, of the application, if using EEPROM as an application EEPROM, otherwise the
xxxx Language string 4 Language string in standard USB string format if applied. If this attribute is applied, the two attributes
xxxx Manufacture string ... Manufacture string in standard USB string format if applied.
xxxx Product string ... Product string in standard USB string format if applied.
xxxx Application Code ... Application code if applied
retaining the lower byte of the sum as the checksum.
Bit 0: If set to 1, the header includes all three strings: language, manufacture, and product strings, if set
to 0, the header does not include any string. The strings, if present, must conform to the USB
string format per USB spec 1.0 or later.
Bit 1 : Not used.
Bit 2: If set to 1, the device can be self powered, if set to 0, cannot be self powered.
Bit 3: If set to 1, the device can be bus powered, if set to 0, cannot be bus powered.
Bit 4 ... 7: Reserved
Bit 0: If set to 1, the CPU clock is 24 MHz, if set to 0, the CPU clock is 12 MHz.
Bit 1: If set to 1, the download version of the header will be written into the EEPROM (download target
has to be EEPROM). If the header is not to be overwritten, or if the target is RAM, this bit must be
cleared to 0.
Bit 2: Not used.
Bit 3: If set to 1, the EEPROM can support a 400 kHz I2C bus, if set to 0, the EEPROM cannot support
a 400 MHz I2C bus.
Bit 4 ... 7: Reserved
0x01: Application EEPROM—contains header and application code.
0x02: Device EEPROM—contains only header.
All other values are invalid.
I2C read setup.
value is 0.
that follow must also be applied. If this attribute is not applied, the following two attributes cannot be
applied.
The header checksum is used by the firmware to detect the presence of a valid header in the EEPROM. The header
size field supports future updates of the header.
2.2.2.3.2 Application Code
Application code is stored as a binary image in the EEPROM following the header information. The binary image must
always be mapped to MCU program space starting at address 0x0000, and must be stored in the EEPROM as a
continuous linear block of data.
2–6

2.2.2.4 I2C Serial EEPROM
The TAS1020B accesses the EEPROM via an I2C serial bus. Thus the EEPROM must be an I2C serial EEPROM.
The ROM boot loader assumes the EEPROM device uses the full 7-bit I
of the address (control code) set to 1010 and the three least significant bits (chip select bits) set to 000.
2
C device address with the upper four bits
2.2.2.5 DFU Upgrade Process
DFU compliance provides a host the capability of upgrading application code currently residing in a target’s onboard
EEPROM memory. The DFU upgrade process provided by the TAS1020B fully conforms to the requirements
specified in USB Device Class Specification For DFU 1.0.
The download must consist of both header and application code. The destination of the download must be defined
by the on-chip application code (as opposed to the application code being downloaded). Under normal
circumstances, the download destination would be EEPROM, but it is possible for the application code to specify
on-chip RAM as the download destination.
If the download destination is to be EEPROM, bit 1 of the Attribute field in the header data being downloaded
determines whether or not the header data in the download image is to be written to the EEPROM. A bit value of 1
results in the header in the EEPROM being overwritten by the header content in the download image. It is important
to note that if the application code targets RAM as the download destination, bit 1 in the Attribute field of the download
image must be 0.
2.2.2.6 Download Error Recovery
Safeguards are incorporated on the T AS1020B ROM to allow recovery from a host download that does not complete
due to a loss of power. Before downloading the application code, the TAS1020B saves the value of the Data Type
field in the EEPROM header and modify the Data Type field to indicate that a download is in progress. After successful
completion of the download, the TAS1020B restores the saved value in the Data Type field. If the download is
terminated prior to successful completion, the Data Type field still indicates that a download is in progress. In the case
of an unsuccessful download the T AS1020B reboots as a DFU device in DFU Program mode and uses the Vendor
and Product ID from the EEPROM header as the vendor and product ID in its USB device descriptor.
The download process consists of the following task flow.
1. Header portion of download is written to EEPROM, if applicable.
2. Header Data Type is retrieved and stored in RAM.
3. Header Data Type is overwritten with a value indicating that a download is in progress.
4. Application portion of download is written to EEPROM (or to RAM).
5. Header Data Type is overwritten with the previously recorded legal value.
If the download should terminate during the downloading of the header to EEPROM, the header checksum results
in the EEPROM being declared invalid on the next boot of the T AS1020B. If the download should terminate during
the downloading of the application code, the Data Type field indicates that a download was in progress and the
TAS1020B enters the DFU program mode on the next boot.
If the T AS1020B remains powered when a premature termination of a download occurs, the TAS1020B remains in
the DFU program mode. In this case, the host can again attempt a download; the TAS1020B does not have to be
rebooted.
2–7

2.2.2.7 ROM Support Functions
In order to conserve RAM memory resources on the T AS1020B, several USB-specific routines have been included
in the firmware resident in the on-chip ROM. The inclusion of these routines frees the application code from having
to implement USB-specific code.
The tasks provided by the ROM code include:
• A USB engine for handling USB control endpoint data transactions and states
• USB protocol handlers to support USB Chapter 9
• USB protocol handlers to support USB HID Class
• USB protocol handlers to support USB DFU Class
• USB protocol handlers to support the common features of USB Audio Class commands
• Feature Unit:
– Set/get volume control
– Set/get mute control
– Set/get bass control
– Set/get treble control
• Mixer unit: set/get input/output gain control
• End point: set/get the audio streaming endpoint sampling frequency
• For unsupported case, the ROM code passes the requests to the application code for processing.
2.2.3 USB Enumeration
USB enumeration is accomplished by interaction between the host PC and the T AS1020B. As described in Section
2.2.2, the TAS1020B can identify itself as an application device by reporting its application Vendor ID and Product
ID, or it can identify itself as a DFU device by reporting a Vendor ID of 0xFFFF and a Product ID of 0xFFFE. If the
TAS1020B fails to detect the presence of an EEPROM, or if an EEPROM is present but does not contain a valid
header, the Vendor ID of 0xFFFF and Product ID of 0xFFFE are reported. If an EEPROM is present, but contains
only valid header data, the Vendor ID and Product ID settings in the EEPROM header are reported, but the T AS1020B
firmware comes up as a DFU device in the DFU program mode. If an EEPROM is present, and contains both a valid
header and application code, the TAS1020B comes up as an application specific device.
For all cases where the TAS1020B comes up in the DFU program mode, once application code has been
downloaded, the TAS1020B is reset by a host-issued USB reset. After this reset, the TAS1020B comes up as an
application device. When the T AS1020B comes up as an application device, the ROM-resident boot loader retrieves
the application code from the EEPROM, if the EEPROM is not a device EEPROM, and then runs the application code.
It is the application code that connects the TAS1020B to the USB. During the enumeration that follows connection
to the USB, the application code identifies the device as an application specific device and the host loads the
appropriate host driver(s).
The boot loader and application code both use the CONT , SDW and FRSTE bits to control the enumeration process.
• The function connect (CONT) bit is set to a 1 by the MCU to connect the T AS1020B device to the USB. When
this bit is set to a 1, the USB DP line pullup resistor (PUR) output signal is enabled. Enabling PUR connects
the pullup on the PCB to the T AS1020B 3.3-V digital supply voltage. (When the T AS1020B powers up, this
bit is cleared to a 0 and the PUR output is in the high-impedance state.) This bit is not affected by subsequent
USB resets.
• The shadow the boot ROM (SDW) bit is set to 1 by the MCU to switch the MCU memory configuration from
boot loader mode to normal operating mode. Once set to 1, this bit is not affected by subsequent USB resets.
• The function reset enable (FRSTE) bit is set to a 1 by the MCU to enable the USB reset to reset all internal
logic including the MCU. However, the shadow the ROM (SDW) and the USB function connect (CONT) bits
are not reset. In addition, when the FRSTE bit is set, the reset output (RSTO
device is active whenever a USB reset occurs. This bit, once set, is not affected by subsequent USB resets.
) signal from the TAS1020B
2–8
2.2.4 TAS1020B USB Reset Logic
There are two mechanisms provided by the T AS1020B—an external reset MRESET and a USB reset. The reset logic
used in the TAS1020B is presented in Figure 2–2.
MRESET is a global reset that results in all the TAS1020B logic and the 8052 MCU core being reset. This input to
the TAS1020B is typically used to implement a power-on reset at the application of power, but it can also be used
with reset pushbutton switches and external circuits to implement global resets at any time. MRESET
asynchronous reset that must be active for a minimum time period of one microsecond.
The T AS1020B can also detect a USB reset condition. When this reset occurs, the TAS1020B responds by setting
the function reset (RSTR) bit in the USB status register (USBSTA). However, the extent to which the internal logic
is reset depends on the setting of the function reset enable bit (FRSTE) in the USB control register (USBCTL).
If the MCU has set FRSTE to 1, incoming USB resets are treated as global resets, with all T AS1020B logic and the
8052 MCU core being reset. However, the shadow the ROM (SDW) and the USB function connect (CONT) bits are
not reset. Also, if the USB reset results in a global reset being issued, an interrupt to the 8052 MCU is not generated.
But if the MCU has cleared FRSTE, incoming USB resets is treated as interrupts to the MCU (via INT0
corresponding function reset bit RSTR in the USB interrupt mask register USBMSK has been set by the MCU. If
neither FRSTE or RSTR has been set by the MCU, USB resets have no effect on the T AS1020B, other than resetting
the USB serial interface engine (SIE) and the USB buffer manager (UBM) in the TAS1020B.
Regardless of the status of FRSTE and bit RSTR in the USB interrupt mask register USBMSK, the function reset bit
RSTR in the USB status register USBST A is always set whenever a USB reset condition is detected. If the USB reset
results in the generation of a global reset, the global reset clears the function reset bit RSTR in USBST A. If, instead,
the USB reset results in an interrupt being generated, RSTR in register USBST A is cleared when the MCU writes to
the interrupt vector register VECINT while in the USB reset interrupt service routine (VECINT = 0x17).
is an
) if the
The TAS1020B has two reset outputs—RSTO
every time a USB reset occurs and bit FRSTE in the USB control register USBCTL is set. CRESET
as a codec reset. Although labeled a reset line, it has no direct relationship to MRESET
and CRESET. RSTO is activated every time MRESET is active, and
is typically used
or detected USB resets.
Instead, it is activated and deactivated when the on-chip 8052 MCU core writes a 0 and a 1, respectively , to the CRST
bit in the codec port interface control and status register CPTCTL.
2–9

2.2.5 USB Suspend and Resume Modes
The TAS1020B can recognize a suspend state. Figure 2–2 shows the logical implementation of the suspend and
resume modes in the T AS1020B. The T AS1020B enters a suspend mode if a constant idle state (j state) is observed
on the USB bus for a period of 5 ms. USB compliance also requires that a device enter a suspend state, drawing only
suspend current from the bus, after no more than 10 ms of bus inactivity , The TAS1020B supports this requirement
by creating a suspend interrupt to the on-chip MCU after a suspend condition has been present for 5 ms. Upon
receiving this interrupt, the MCU firmware can then take the steps necessary to assure that the device enters a
suspend state within the next 5 ms.
There are two ways for the T AS1020B device to exit the suspend mode: 1) detection of USB resume signaling and
2) proactively performing a local remote wake-up event.
2.2.5.1 USB Suspend Mode
When a suspend condition is detected on the USB, the suspend/resume logic sets the function suspend request bit
(SUSR) in the USB status register, resulting in the generation of the function suspend request interrupt SUSR. To
enter the low-power suspend state and disable all T AS1020B device clocks, the MCU firmware, upon receiving the
SUSR interrupt, must set the idle mode bit (IDL), which is bit 0 in the MCU power control (PCON) register. Setting
the IDL bit results in the T AS1020B suspending all internal clocks, including the clocks to the MCU. The MCU thus
suspends instruction execution while in the idle mode.
The MCU must not set the IDL bit while in the SUSR interrupt service routine (ISR), or while in any other ISR. As
described in Section 2.2.5.3, it is intended that the receipt of an INT0
state. But if the MCU has suspended instruction execution while in an ISR, subsequent INT0
as the MCU is still servicing an interrupt. For this reason then, it is necessary that IDL not be set while processing
an ISR. (As described in Section 2.2.5.3, an external wake-up event will resume clocks within the TAS1020B. But
even if the clocks to the MCU resume, if the MCU does not recognize INT0
core itself remains in the suspend state).
interrupt at the MCU result in exiting the suspend
activity is not recognized,
, the IDL bit remains set and thus the MCU
The SUSR bit is cleared while in the SUSR ISR by writing to the interrupt vector register VECINT . While servicing the
SUSR ISR, the VECINT output is 0x16 – the USB function suspend interrupt vector. As shown in Figure 2–2, the
occurrence of a write to VECINT, while the USB function suspend interrupt vector is being output, results in clearing
bit SUSR of the USB status register. (The data written to VECINT is of no consequence; the clearing action takes place
upon decoding the write transaction to VECINT).
2.2.5.2 USB Resume Mode
When the TAS1020B is in a suspend state, any non-idle signaling on the USB is detected by the suspend/resume
logic and device operation resumes. When the resume signal is detected, the T AS1020B clocks are enabled and the
function resume request bit (RESR) is set, resulting in the generation of the function resume request interrupt. The
function resume request interrupt to the MCU automatically clears the idle mode bit IDL in the PCON register, and
as a result the MCU exits the suspend state and becomes fully functional, with all internal clocks active. After the RETI
from the ISR, the next instruction to be executed is the one following the instruction that set the IDL bit. The RESR
bit is cleared while in the RESR ISR by writing to the interrupt vector register VECINT.
2.2.5.3 USB Remote Wake-Up Mode
The TAS1020B device has the capability to remotely wake up the USB by generating resume signaling upstream,
providing the host has granted permission to generate remote wake-ups via a SET_FEATURE
DEVICE_REMOTE_W AKEUP control transaction. If remote wakeup capability has been granted, the MCU firmware,
upon awakening from a suspend state, has to activate the remote wake-up request bit RWUP in the USB control
register USBCTL. Activation of RWUP consists of the MCU firmware writing a 1 followed by a 0 to RWUP. This action
creates a pulse, which results in the T AS1020B generating resume signaling upstream by driving a k state (non-idle)
onto the USB bus. The USB specification requires that remote wake-up resume signaling not be generated until the
2–10
suspend state has been active for at least 5 ms. In addition, the specification requires that the remote wake-up resume
signaling be generated for at least 1ms but for no more than 15 ms. The 5 ms requirement is met by not entering the
suspend mode until an idle state, or j state, is detected, uninterrupted, for 5 ms. The RWUP pulse results in driving
a k state onto the USB bus for 1 to 2 ms, and thus the 15 ms requirement is also met. Moreover, if an application wishes
to extend the duration of the k state on the USB bus, it need only extend the pulse width of RWUP. The resulting
duration of the resume signaling is the duration of the RWUP pulse plus 1 to 2 ms.
The condition that activates a remote wake-up is a transition from 1 to 0 on one of the P3 port bits whose
corresponding mask bit has been set to zero. (When in the suspend mode, the XINT
input is treated as port bit P3.2).
As seen in Figure 2–2, the P3 mask register bits are gated with the P3 port input lines from the I/O port cells. The
gated P3 port bits are then all ORed together and the output is ANDed with the suspend signal. The output of this
logic drives the clock input of a flip-flop, and when the output of this logic transitions from 0 to 1, the flip-flop is set
to 1. The setting of this flip-flop to 1 results in the TAS1020B exiting the suspend state and resuming all clocks,
including those to the MCU core. The output of this flip-flop is also gated with bit XINTEN in the global control register
GLOBCTL, and the output of this gate drives the INT0
an INT0
interrupt to the MCU only if bit XINTEN has been set. Therefore, before entering a suspend state, the firmware
interrupt logic. This means that a remote wake-up generates
must set XINTEN if remote wake-up capability is to be enabled.
The wake-up interrupt is seen by the firmware as an XINT
an output value of 0x1F. If the XINT
pin is to be used as an event marker during normal operation, and if one of the
interrupt; that is, the interrupt vector register VECINT has
P3 port bits is to be used for a wake-up interrupt, the firmware must be able to distinguish between a wake-up interrupt
and a normal XINT
register. If this bit is set, the interrupt event is a wake-up interrupt; otherwise, the interrupt is a normal XINT
If an XINT
event should occur during a suspend mode, the event is ignored if the mask bit for P3.2 is set. (During a
suspend mode the TAS1020B clocks are disabled, and thus an incoming XINT
through the synchronization logic and activate the MCU INT0
interrupt. One technique would be to examine the state of the IDL bit in the MCU power control
interrupt.
interrupt event does not propagate
input).
2.2.6 Adaptive Clock Generator (ACG)
The adaptive clock generator is used to generate two programmable master clock output signals (MCLKO and
MCLKO2) that can be used by the codec port interface and the codec device. Two separate and programmable
frequency synthesizers provide the two master clocks. This allows the TAS1020B to support different record and
playback rates for those devices that require separate master clocks to implement different rates. For isochronous
transactions, the ACG can also support USB asynchronous, synchronous, and adaptive modes of operation. The
ACG keeps count of the number of master clock events between USB SOF time marks, and the DCNTX/Y field of
the endpoint register IEPDCNTX/Y keeps track of the number of samples received between USB SOF time marks.
Synchronous isochronous operation can be accomplished by adjusting one of the two frequency synthesizers until
the correct number of master clock events is obtained between USB SOF time marks. Similarly, monitoring the
number of samples received between USB SOF events can accommodate adaptive isochronous operation. Here the
frequency synthesizer is adjusted to obtain the proper codec output rate for the number of samples received. The
TAS1020B can also accommodate asynchronous isochronous operation, and the input MCLKI is provided for this
case. For asynchronous isochronous operation, the external clock pin MCLKI is used to derive the data and sync
signal to the codec. However, the external clock that provides the input to pin MCLKI, instead of the master clock
output (MCLKO or MCLKO2) from the ACG, must also source the codec’s MCLK.
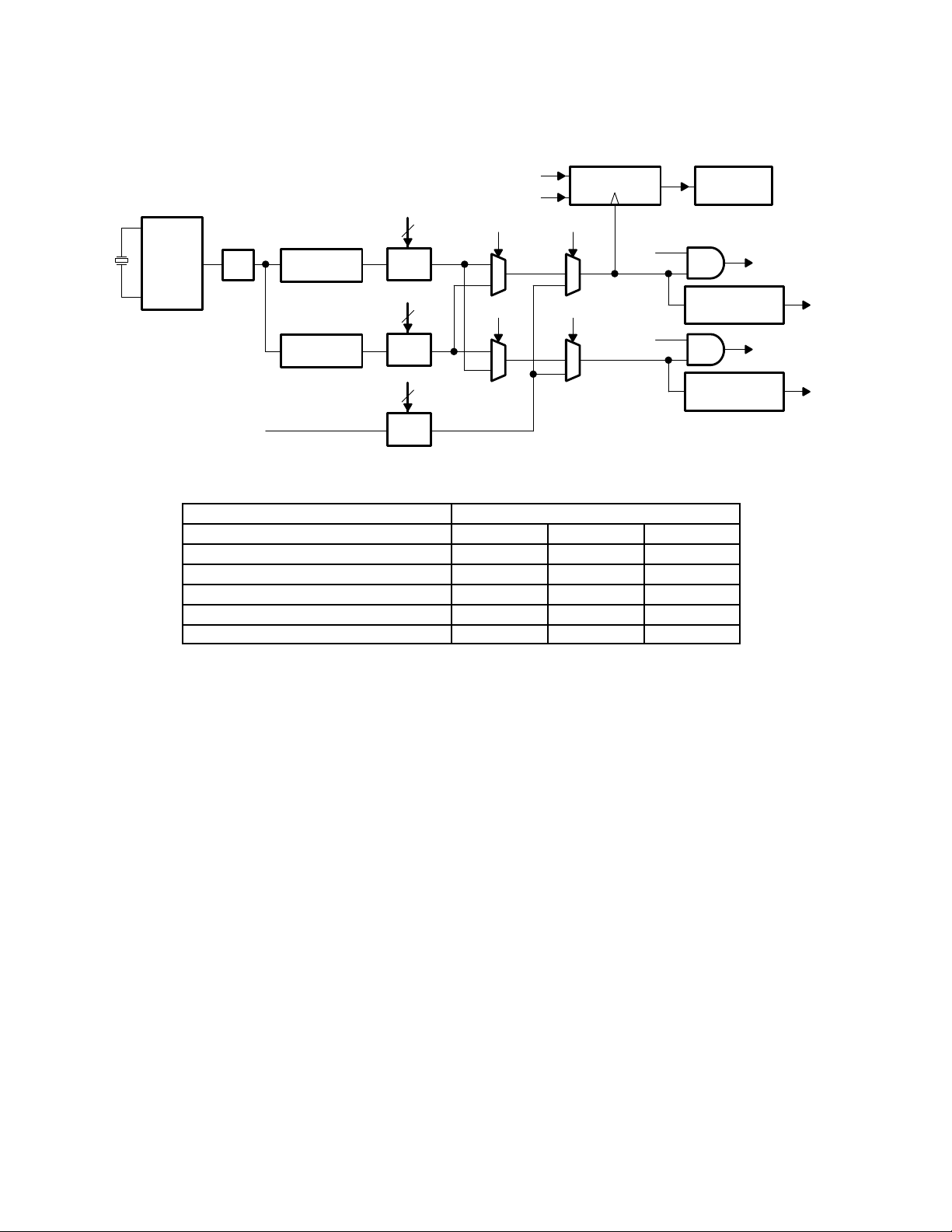
A block diagram of the adaptive clock generator is shown in Figure 2–1. Each frequency synthesizer circuit generates
a programmable clock with a frequency range of 12–25 MHz, and each frequency synthesizer output feeds a
divide-by-M-circuit, which can be programmed to divide by 1 to 16. As a result, the frequency range of each master
clock is 750 kHz to 25 MHz. Also, the duty cycle of each master clock is 50% for all programmable frequencies.
As indicated in Figure 2–1, multiplexers precede the master clocks MCLKO and MCLKO2. These multiplexers
provide the option of using the output of either frequency synthesizer (after division by the divide-by-M circuit) or the
MCLKI input (after division by the divide-by-I circuit) to source each master clock. Each master clock is also assigned
its own divide circuit to generate its associated CSCLK. The C-port serial clock (CSCLK) is derived by setting the
divide by B value in codec port interface configuration register CPTNCF4 [2:0] and the C-port serial clock2 (CSCLK2)
is derived by setting the divide by B2 value in codec port receive interface configuration register 4 CPTRXCNF4 [2:0].
2–11
In addition, although not shown in Figure 2–1, each master clock is assigned its own CSYNC generator, with the
length and polarity of each CSYNC separately programmable.
6 MHz
Oscillator
PLL
MCLKI
Frequency
Synthesizer
Frequency
Synthesizer
ACG1DCTL[7:4]
Divide
1
by M1
ACG2DCTL[7:4]
Divide
2
by M2
ACG1DCTL[2:0]
Divide
by I
SOF
PSOF
4
4
3
ACGCTL[4]
ACGCTL[1]
16-Bit Counter
ACGCTL[3]
ACGCTL[6]
ACGCTL[0]
ACGCTL[7]
Figure 2–1. Adaptive Clock Generator
The ACG is controlled by the following registers. Refer to section A.5.3 for details.
FUNCTIONAL REGISTER ACTUAL BYTE-WIDE REGISTERS
24-bit frequency register #1 ACG1FRQ2 ACG1FRQ1 ACG1FRQ0
16-bit capture register ACGCAPH ACGCAPL
8-bit synthesizer 1 divider control register ACG1DCTL
8-bit ACG control register ACGCTL
24-bit frequency register #2 ACG2FRQ2 ACG2FRQ1 ACG2FRQ0
8-bit synthesizer 2 divider control register ACG2DCTL
ACGCAPH
ACGCAPL
MCLK0
Divide by B
CPTCNF4 [2:0]
MCLK02
Divide by B2
CPTRXCNF4 [2:0]
CSCLK
CSCLK2
The main functional modules of the ACG are described in the following sections.
2.2.6.1 Programmable Frequency Synthesizer
The 24-bit ACG frequency register value is used to program the frequency synthesizer, and the value of the frequency
register can be updated by the MCU while the ACG is running. The high resolution of each frequency value
programmed allows the firmware to adjust the frequency value by +LSB or more to lock onto the USB start-of-frame
(SOF) signal and achieve a synchronous mode of operation, a necessity for streaming audio applications. The 24-bit
frequency register value is updated and used by the frequency synthesizer only when MCU writes to the ACGFRQ0
register. The proper way to update a frequency value then is to write the least significant byte (ACGFRQ0) last.
The frequency resolution of the output master clock depends on the actual frequency being output. In general, the
frequency resolution decreases with increasing output frequencies. The clock frequency of the MCLKO output signal
is calculated by using the formula:
For N q 24 and N < 50, MCLKO frequency = 600/N MHz
For N = 50, MCLKO frequency = 12 MHz
where N is the value in the 24-bit frequency register (ACGFRQ). The value of N can range from 24 to 50. The six most
significant bits of the 24-bit frequency register are used to represent the integer portion of N, and the remaining 18
bits of the frequency register are used to represent the fractional portion of N. An example is shown below.
Example Frequency Register Calculation
Suppose the desired MCLKO frequency is 24.576 MHz. Using the above formula, N = 24.4140625 decimal. To
determine the binary value to be written to the ACGFRQ register, separately convert the integer value (24) to 6-bit
binary and the fractional value (4140625) to 18-bit binary. As a result, the 24-bit binary value is
011000.011010100000000000.
2–12

The corresponding values to program into the ACGFRQ registers are:
ACGFRQ2 = 01100001b = 61h
ACGFRQ1 = 10101000b = A8h
ACGFRQ0 = 00000000b = 00h
Keep in mind that writing to register ACGFRQ0 loads the frequency synthesizer with the new 24-bit value in registers
ACGFRQ2, ACGFRQ1, and ACGFRQ0.
Example Frequency Resolution Calculation
To illustrate the frequency resolution capabilities of the ACG, the next possible higher and lower frequencies for
MCLKO can be calculated.
To get the next possible higher frequency of MCLKO (24.57600384 MHz), decrease the value of N by 1 LSB. Thus,
N = 011000.01 – 10100111 – 11111111 binary.
To get the next possible lower frequency of MCLKO (24.57599600 MHz), increase the value of N by 1 LSB. Thus,
N = 011000.01 – 10101000 – 00000001 binary.
For this example with a nominal MCLKO frequency of 24.576 MHz, the frequency resolution is approximately 4 Hz.
Table 2-2 lists typically used frequencies and the corresponding ACG frequency register values.
Table 2–2. ACG Frequency Registers
SYNTHESIZED CLOCK OUTPUT ACG1FRQ2/ACG2FRQ2 ACG1FRQ1/ACG2FRQ1 ACG1FRQ0/ACG2FRQ0
25 MHz 0x60 0 0
24.576 MHz 0x61 0×A8 0x0F
22.579 MHz 0x6A 0x4B 0x20
18.432 MHz 0x82 0x35 0x55
16.934 MHz 0x8D 0xBA 0x09
16.384 MHz 0x92 0x7C 0x00
12.288 MHz 0xC3 0x50 0x00
12 MHz 0xC8 0 0
2.2.6.2 Capture Counter and Register
The capture counter and register circuit consists of a 16-bit free running counter which runs at the capture clock
frequency. The capture clock source can be selected by programming bits MCLK01S0 and MCLK01S1 in the
ACGCTL register. The options are the divided output of frequency synthesizer no. 1, the divided output of frequency
synthesizer no. 2, or the divided input clock MCLKI. At each USB start-of-frame (SOF) event or pseudo-start-of-frame
(PSOF) event, the capture counter value is stored into the 16-bit capture register. This value is valid until the next
SOF or PSOF signal occurs (~1 ms). The MCU can read the 16-bit capture register value by reading the ACGCAPH
and ACGCAPL registers. Because the counter is a free running counter, and because the count range of the counter
extends over several frames before rolling over and beginning the count anew, the capture count values obtained
are correlated over several SOF cycles. This attribute is useful should a case ever arise when the MCU fails to read
the capture counter after a SOF event, and thus skips an SOF cycle.
As shown in Figure 2–1, there is only one capture counter and register, and its capture clock frequency is always the
clock selection for MCLKO. This means that MCLKO2 cannot be synchronized to the incoming USB data stream.
However, MCLKO2 is intended to support record capability for those cases where record and playback are conducted
at different master clock frequencies. Synchronization to the USB bus for record is handled by the handshaking
protocol established between the assigned DMA channel and the USB buffer manager (UBM) (see Section 2.2.7.4.1,
Subsection Circular Buffer Operation for Isochronous IN Transactions for more detail). Thus it is not necessary that
MCLKO2 itself be synchronized to the USB bus.
2–13

2.2.7 USB Transfers
The T AS1020B device supports all USB data transfer types: control, bulk, interrupt, and isochronous. In accordance
with the USB specification, endpoint zero is reserved for the control endpoint and is bidirectional. In addition to the
control endpoint, the T AS1020B is capable of supporting up to 7 IN endpoints and 7 OUT endpoints. These additional
endpoints can be configured as bulk, interrupt, or isochronous endpoints.
2.2.7.1 Control Transfers
Control transfers are used for configuration, command, and status communication between the host PC and the
T AS1020B device. Control transfers to the T AS1020B device use IN endpoint 0 and OUT endpoint 0. The three types
of control transfers are control write, control write with no data stage, and control reads.
2.2.7.1.1 Control Write Transfer (Out Transfer)
The host PC uses a control write transfer to write data to the USB function. A control write transfer always consists
of a setup stage transaction and an IN status stage, and can optionally contain one or more data stage transactions
between the setup and status transactions. If the data to be transferred can be contained in the two byte value field
of the setup transaction data packet, no data stage transaction is required. If the control information requires the
transfer of more than two bytes of data, a control write transfer with data stage transactions will be required. The steps
followed for a control write transfer are:
Initialization Stage:
1. MCU initializes IN endpoint 0 and OUT endpoint 0 by programming the appropriate USB endpoint
configuration blocks. This entails programming the buffer size and buffer base address, selecting the buffer
mode, enabling the endpoint interrupt, initializing the TOGGLE bit, enabling the endpoint, and clearing the
NACK bit for both IN endpoint 0 and OUT endpoint 0.
Setup Stage Transaction:
1. The host PC sends a setup token followed by the setup data packet addressed to OUT endpoint 0. If the
data is received without an error, the USB Buffer Manager (UBM) writes the data to the setup data packet
buffer, sets the setup stage transaction (SETUP) bit to a 1 in the USB status register, returns an ACK
handshake to the host PC, and asserts the setup stage transaction interrupt. Note that as long as the setup
stage transaction (SETUP) bit is set to a 1, the UBM returns a NACK handshake for any data stage or status
stage transactions regardless of the endpoint 0 NACK or STALL bit values.
2. The MCU services the interrupt, reads the setup data packet from the buf fer, and decodes the command.
If the command is not supported or valid, the MCU should set the STALL bit in the OUT endpoint 0
configuration byte and the IN endpoint 0 configuration byte before clearing the setup stage transaction
(SETUP) bit. This causes the device to return a STALL handshake for any data stage or status stage
transactions. If the command decoded is supported, the MCU clears the interrupt, which automatically
clears the setup stage transaction bit. The MCU also sets the TOGGLE bit in the OUT endpoint 0
configuration byte to a 1. For control write transfers, the PID used by the host for the first OUT data packet
is a DATA1 PID and the TOGGLE bit must match.
Optional Data Stage Transaction:
1. The host PC sends an out token packet followed by a data packet addressed to OUT endpoint 0. If the data
packet is received without errors the UBM writes the data to the endpoint buffer, updates the data count
value, toggles the TOGGLE bit, sets the NACK bit to a 1, returns an ACK handshake to the host PC, and
asserts the endpoint interrupt.
2. The MCU services the interrupt and reads the data packet from the buf fer. T o read the data packet, the MCU
first must obtain the data count value. After reading the data packet, the MCU must clear the interrupt and
clear the NACK bit to allow the reception of the next data packet from the host PC.
2–14

3. If the NACK bit is set to 1 when the in token packet is received, the UBM simply returns a NAK handshake
to the host PC. If the ST ALL bit is set to 1 when the in token packet is received, the UBM simply returns a
ST ALL handshake to the host PC. If a CRC or bit stuff error occurs when the data packet is received, then
no handshake is returned to the host PC.
Status Stage Transaction:
1. For IN endpoint 0, the MCU clears the data count value to zero, sets the T OGGLE bit to 1, and clears the
NACK bit to 0 to enable the data packet to be sent to the host PC. Note that for a status stage transaction
a null data packet with a DATA1 PID is sent to the host PC.
2. The host PC sends an IN token packet addressed to IN endpoint 0. After receiving the IN token, the UBM
transmits the null data packet to the host PC. If the data packet is received without errors by the host PC,
an ACK handshake is returned. Upon receiving the ACK handshake, the UBM toggles the TOGGLE bit, sets
the NACK bit to 1, and asserts the endpoint interrupt.
3. If the NACK bit is set to 1 when the IN token packet is received, the UBM simply returns a NAK handshake
to the host PC. If the STALL bit is set to 1 when the IN token packet is received, the UBM simply returns
a STALL handshake to the host PC. If no handshake packet is received from the host PC then the UBM
prepares to retransmit the same data packet again.
2.2.7.1.2 Control Read Transfer (In Transfer)
The host PC uses a control read transfer to read data from the USB function. A control read transfer consists of a
setup stage transaction, at least one in data stage transaction, and an out status stage transaction.
The steps followed for a control read transfer are:
Initialization Stage:
1. MCU initializes IN endpoint 0 and OUT endpoint 0 by programming the appropriate USB endpoint
configuration blocks. This entails programming the buffer size and buffer base address, selecting the buffer
mode, enabling the endpoint interrupt, initializing the TOGGLE bit, enabling the endpoint, and clearing the
NACK bit for both IN endpoint 0 and OUT endpoint 0.
Setup Stage Transaction:
1. The host PC sends a setup token followed by the setup data packet addressed to OUT endpoint 0. If the
data is received without an error, the UBM writes the data to the setup data packet buffer, sets the setup
stage transaction (SETUP) bit to a 1 in the USB status register, returns an ACK handshake to the host PC,
and asserts the setup stage transaction interrupt. Note that as long as the setup stage transaction (SETUP)
bit is set to a 1, the UBM returns a NACK handshake for any data stage or status stage transactions
regardless of the endpoint 0 NACK or STALL bit values.
2. The MCU services the interrupt, reads the setup data packet from the buf fer, and decodes the command.
If the command is not supported or is not valid, the MCU sets the STALL bit in the OUT endpoint 0
configuration byte and the IN endpoint 0 configuration byte before clearing the setup stage transaction
(SETUP) bit. This causes the device to return a STALL handshake for any data stage or status stage
transactions. If the command decoded is valid and is supported, the MCU clears the interrupt, which
automatically clears the setup stage transaction bit. The MCU also sets the TOGGLE bit in the IN endpoint
0 configuration byte to a 1. For control read transfers, the PID used by the host for the first IN data packet
is a DATA1 PID.
2–15

Data Stage Transaction:
1. The data packet to be sent to the host PC is written to the IN endpoint 0 buf fer by the MCU. The MCU also
updates the data count value then clears the IN endpoint 0 NACK bit to a 0 to enable the data packet to be
sent to the host PC.
2. The host PC sends an IN token packet addressed to IN endpoint 0. After receiving the IN token, the UBM
transmits the data packet to the host PC. If the data packet is received without an error by the host PC, then
an ACK handshake is returned. The UBM then toggles the TOGGLE bit, sets the NACK bit to 1, and asserts
the endpoint interrupt.
3. The MCU services the interrupt and prepares to send the next data packet to the host PC.
4. If the NACK bit is set to 1 when the IN token packet is received, the UBM simply returns a NAK handshake
to the host PC. If the STALL bit is set to 1 when the IN token packet is received, the UBM simply returns
a STALL handshake to the host PC. If no handshake packet is received from the host PC, then the UBM
prepares to retransmit the same data packet again.
5. MCU continues to send data packets until all data has been sent to the host PC.
Status Stage Transaction:
1. For OUT endpoint 0, the MCU sets the T OGGLE bit to 1, then clears the NACK bit to a 0 to enable a data
packet to be sent by the host PC. Note that for a status stage transaction a null data packet with the DA T A1
PID is sent by the host PC.
2. The host PC sends an OUT token packet and the null data packet to OUT endpoint 0. If the data packet
is received without an error the UBM updates the data count value, toggles to the TOGGLE bit, sets the
NACK bit to a 1, returns an ACK handshake to the host PC, and asserts the endpoint interrupt.
3. The MCU services the interrupt. If the status transaction completed successfully, then the MCU clears the
interrupt and clears the NACK bit.
4. If the NACK bit is set to 1 when the OUT token packet is received, the UBM simply returns a NAK handshake
to the host PC. If the ST ALL bit is set to 1 when the OUT token packet is received, the UBM simply returns
a ST ALL handshake to the host PC. If a CRC or bit stuff error occurs when the data packet is received, no
handshake is returned to the host PC.
2.2.7.2 Interrupt Transfers
The T AS1020B supports interrupt data transfers both to and from the host PC. Devices that need to send or receive
a small amount of data with a specified service period should use the interrupt transfer type. IN endpoints 1 through
7 and OUT endpoints 1 through 7 can all be configured as interrupt endpoints.
2.2.7.2.1 Interrupt Out Transaction
The steps followed for an interrupt out transaction are:
1. MCU initializes one of the OUT endpoints as an out interrupt endpoint by programming the appropriate USB
endpoint configuration block. This entails programming the buffer size and buffer base address, selecting
the buffer mode, enabling the endpoint interrupt, initializing the toggle bit, enabling the endpoint, and
clearing the NACK bit.
2. The host PC sends an OUT token packet followed by a data packet addressed to the OUT endpoint. If the
data is received without an error then the UBM writes the data to the endpoint buffer , updates the data count
value, toggles the toggle bit, sets the NACK bit to a 1, returns an ACK handshake to the host PC, and asserts
the endpoint interrupt.
2–16
3. The MCU services the interrupt and reads the data packet from the buf fer. T o read the data packet, the MCU
must first obtain the data count value. After reading the data packet, the MCU clears the interrupt and clears
the NACK bit to allow the reception of the next data packet from the host PC.
 Loading...
Loading...