

Page 1

User’s Guide
June 1999 Mixed-Signal Linear Products
SLVU013
Page 2

IMPORTANT NOTICE
T exas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinue
any product or service without notice, and advise customers to obtain the latest version of relevant information
to verify, before placing orders, that information being relied on is current and complete. All products are sold
subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those
pertaining to warranty, patent infringement, and limitation of liability.
TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in
accordance with TI’s standard warranty. Testing and other quality control techniques are utilized to the extent
TI deems necessary to support this warranty . Specific testing of all parameters of each device is not necessarily
performed, except those mandated by government requirements.
CERT AIN APPLICATIONS USING SEMICONDUCTOR PRODUCTS MA Y INVOLVE POTENTIAL RISKS OF
DEATH, PERSONAL INJURY, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE (“CRITICAL
APPLICATIONS”). TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, AUTHORIZED, OR
WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT DEVICES OR SYSTEMS OR OTHER
CRITICAL APPLICA TIONS. INCLUSION OF TI PRODUCTS IN SUCH APPLICATIONS IS UNDERST OOD TO
BE FULLY AT THE CUSTOMER’S RISK.
In order to minimize risks associated with the customer’s applications, adequate design and operating
safeguards must be provided by the customer to minimize inherent or procedural hazards.
TI assumes no liability for applications assistance or customer product design. TI does not warrant or represent
that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other
intellectual property right of TI covering or relating to any combination, machine, or process in which such
semiconductor products or services might be or are used. TI’s publication of information regarding any third
party’s products or services does not constitute TI’s approval, warranty or endorsement thereof.
Copyright 1999, Texas Instruments Incorporated
Page 3
About This Manual
This user’s guide describes techniques for designing synchronous buck
converters using TI’s SL VP11 1 1–114 evaluation modules (EVM) and TPS56xx
ripple regulator controllers.
How to Use This Manual
Information About Cautions and Warnings
Preface
Read This First
This document contains the following chapters:
Chapter 1 Introduction
Chapter 2 Design Procedure
Chapter 3 Test Results
Information About Cautions and Warnings
This book may contain cautions and warnings.
This is an example of a caution statement.
A caution statement describes a situation that could potentially
damage your software or equipment.
This is an example of a warning statement.
A warning statement describes a situation that could potentially
cause harm to you
.
The information in a caution or a warning is provided for your protection.
Please read each caution and warning carefully.
Read This First
iii
Page 4

Trademarks
Related Documentation From Texas Instruments
Synchronous Buck Converter Design Using TPS56xx Controllers in
SLVP10x EVMs User’s Guide
TPS56xx data sheet (literature number SLVS177A)
(literature number SLVU007).
Designer’s Notebook
The TPS56xx Family of Power Supply Controllers
(literature number SLVT140A)
Designing Fast Response Synchronous Buck Regulators Using the
TPS5210 (literaure number SLVA044).
FCC Warning
This equipment is intended for use in a laboratory test environment only . It generates, uses, and can radiate radio frequency energy and has not been tested
for compliance with the limits of computing devices pursuant to subpart J of
part 15 of FCC rules, which are designed to provide reasonable protection
against radio frequency interference. Operation of this equipment in other environments may cause interference with radio communications, in which case
the user at his own expense will be required to take whatever measures may
be required to correct this interference.
Trademarks
TI is a trademark of Texas Instruments Incorporated.
iv
Page 5
Running Title—Attribute Reference
Contents
1 Introduction 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Synchronous Buck Regulator Operation 1-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Hysteretic Control Operation 1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Design Strategy 1-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Design Specification Summary 1-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5 Schematic 1-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6 Bill of Materials 1-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.7 Board Layout 1-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Design Procedure 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 TPS56xx Functions 2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.1 V
2.1.2 Inhibit 2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.3 Slowstart Design 2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.4 Hysteresis Setting 2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.5 Noise Suppression 2-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.6 Overcurrent Protection 2-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.7 Overvoltage Protection 2-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.8 Power Good 2-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.9 Bias 2-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.10 Gate Drivers 2-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 External Component Selection 2-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Duty Cycle Estimate 2-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.2 Input Capacitance 2-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.3 Output Filter Design 2-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.4 Switching Frequency Analysis 2-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.5 Power MOSFET Selection 2-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Undervoltage Lockout 2-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CC
3 Test Results 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Test Summary 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1 Static Line and Load Regulation 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.2 Output Voltage Ripple 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.3 Efficiency and Power Losses 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.4 Output Start-Up and Overshoot 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.5 Frequency Variation 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.6 Load Current Transient Response 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.7 Features 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.8 Conclusion 3-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Test Setup 3-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Test Results 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapter Title—Attribute Reference
v
Page 6

Running Title—Attribute Reference
Figures
1–1 Simplified Synchronous Buck Converter Schematic 1-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1–2 Simplified Hysteretic Controlled Output Voltage Waveform 1-3. . . . . . . . . . . . . . . . . . . . . . . . . .
1–3 SLVP111–114 EVM Converter Schematic Diagram 1-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1–4 Top Assembly 1-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1–5 Bottom Assembly (Top View) 1-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1–6 Top Layer 1-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1–7 Bottom Layer (Top VIew) 1-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–1 TPS56xx Functional Block Diagram 2-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–2 Block Diagram Showing Noise Suppression Circuits 2-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–3 V
2–4 Gate Driver Block Diagram 2-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–5 I–V Characteristic Curve for Low-Side Gate Drivers 2-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–6 Output Ripple Voltage Detail 2-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–1 Test Setup 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–2 SLVP111 Measured Load Regulation 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–3 SLVP111Measured Efficiency 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–4 SLVP111Measured Power Dissipation 3-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–5 SLVP111Measured Switching Frequency 3-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–6 SLVP111 Measured Switching Waveforms 3-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–7 SLVP111Measured Start-Up (INHIBIT) Waveforms 3-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–8 SLVP111 Measured Start-Up (V
3–9 SLVP111Measured Start-Up (V
3–10 SLVP111 Measured Load Transient Waveforms 3-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–11 SLVP112 Measured Load Regulation 3-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–12 SLVP112 Measured Efficiency 3-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–13 SLVP112 Measured Power Dissipation 3-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–14 SLVP112 Measured Switching Frequency 3-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–15 SLVP112 Measured Switching W aveforms 3-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–16 SLVP112 Measured Start-Up (INHIBIT) W aveforms 3-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–17 SLVP112 Measured Start-Up (V
3–18 SLVP112 Measured Start-Up (VIN) Waveforms 3-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–19 SLVP112 Measured Load T ransient Waveforms 3-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–20 SLVP113 Measured Load Regulation 3-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–21 SLVP113 Measured Efficiency 3-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–22 SLVP113 Measured Power Dissipation 3-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–23 SLVP113 Measured Switching Frequency 3-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–24 SLVP113 Measured Switching W aveforms 3-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–25 SLVP113 Measured Start-Up (INHIBIT) W aveforms 3-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–26 SLVP113 Measured Start-Up (V
Sensing Circuit 2-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
DS
) Waveforms 3-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CC
) Waveforms 3-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IN
) Waveforms 3-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CC
) Waveforms 3-19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CC
vi
Page 7
Running Title—Attribute Reference
3–27 SLVP113 Measured Start-Up (VIN) Waveforms 3-19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–28 SLVP113 Measured Load T ransient Waveforms 3-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–29 SLVP114 Measured Load Regulation 3-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–30 SLVP114 Measured Efficiency 3-21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–31 SLVP114 Measured Power Dissipation 3-21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–32 SLVP114 Measured Switching Frequency 3-22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–33 SLVP114 Measured Switching W aveforms 3-22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–34 SLVP114 Measured Start-Up (INHIBIT) W aveforms 3-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3–35 SLVP114 Measured Start-Up (V
3–36 SLVP114 Measured Start-Up (V
3–37 SLVP114 Measured Load T ransient Waveforms 3-24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
) Waveforms 3-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CC
) Waveforms 3-24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IN
T ables
1–1 Summary of EVM Converter Modules 1-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1–2 EVM Converter Operating Specifications 1-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1–3 SLVP111–114 EVMs Bill of Materials 1-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Contents
vii
Page 8

viii
Page 9
Chapter 1
Introduction
The SLVP111/112/113/114 evaluation modules (EVMs) have been designed
and tested using the TPS56xx hysteretic controllers. These boards are
synchronous dc-dc buck converters with fixed output voltages of 3.3 V , 2.5 V,
1.8 V and 1.5 V respectively. They use only surface mount components and
are design examples of how to use TI’s TPS56xx controllers in high density,
low loss applications with tight static and dynamic output voltage
requirements. Detailed test results taken from the EVMs are presented.
Design simplicity , low component count, and lower cost make buck converters
popular solutions where low input voltages are available for the converter and
where isolation is not a requirement.
This user’s guide describes techniques for designing synchronous buck
converters using TI’s SLVP111–114 EVMs and TPS56xx ripple regulator
controllers. Synchronous buck converters provide an elegant power supply
solution for rapidly transitioning DSP loads (such as the Texas Instruments
TMS320C62x/67x family), fast memory, and similar processors. An order of
magnitude improvement in dynamic response of this converter over standard
control methods reduces hold-up capacitance needs near the transitioning
loads, thus saving cost and board space.
Topic Page
1.1 Synchronous Buck Regulator Operation 1–2. . . . . . . . . . . . . . . . . . . . . . . .
1.2 Hysteretic Control Operation 1–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Design Strategy 1–4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Design Specification Summary 1–5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5 Schematic 1–7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6 Bill of Materials 1–8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.7 Board Layout 1–10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Introduction
1-1
Page 10
Synchronous Buck Regulator Operation
1.1 Synchronous Buck Regulator Operation
The synchronous buck converter is a variation of the traditional buck
converter. The main switching device is usually a power MOSFET and is
driven in the same manner as in a traditional buck converter. The freewheeling
rectifier, usually a Schottky device, is replaced by a power MOSFET and is
driven in a complementary or synchronous fashion relative to the main
switching device; when one MOSFET is on, the other is off. The freewheeling
MOSFET is selected so that its ON voltage drop is less than the forward drop
of the original freewheeling rectifier, thus increasing conversion efficiency. A
very important design issue when using a synchronous buck converter is
preventing cross-conduction of the two power MOSFET s, i.e., preventing both
MOSFETs from being on simultaneously. A small amount of deadtime is
necessary.
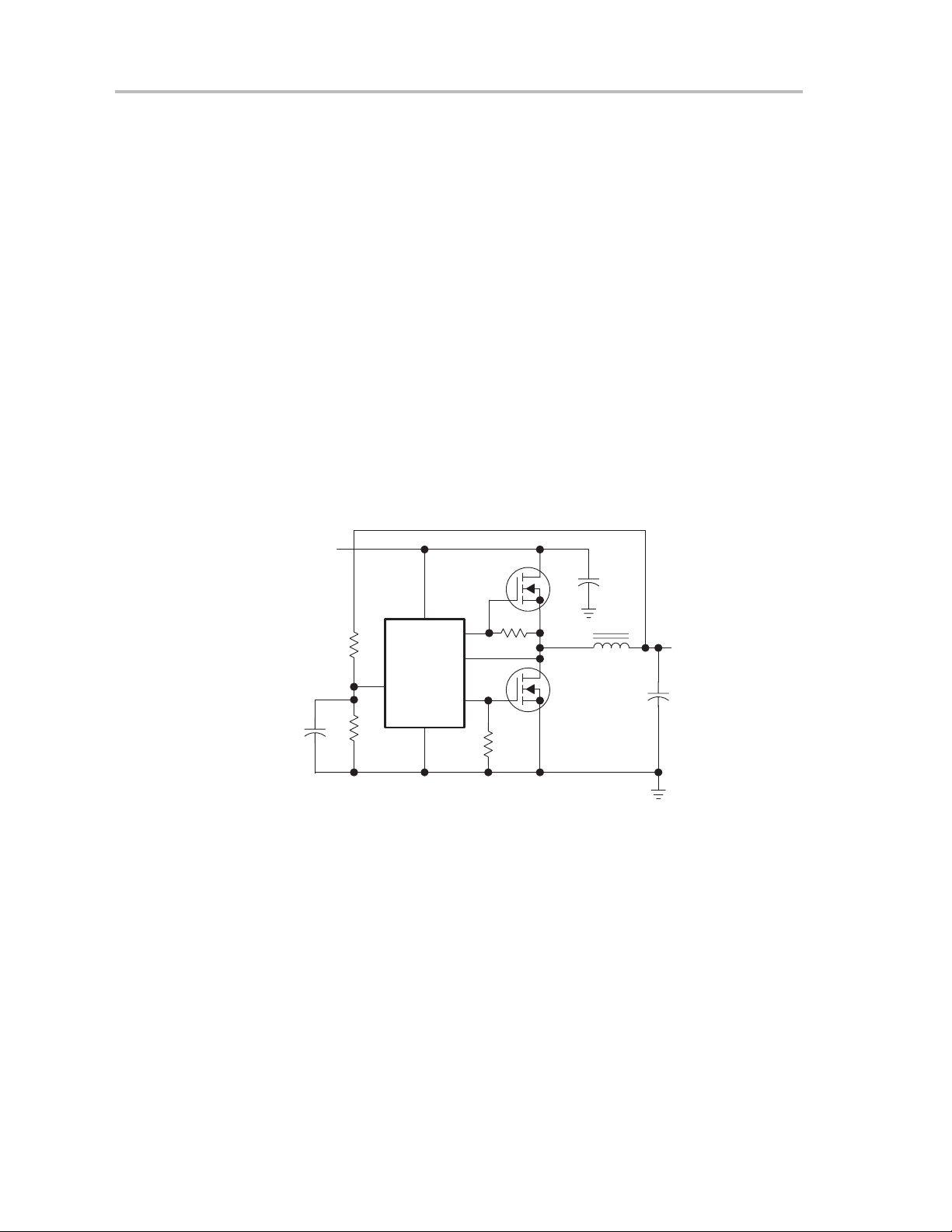
Figure 1 shows a simplified schematic of a synchronous buck converter. The
TPS56xx senses the output voltage and then drives Q1 and Q2 depending on
the sensed voltage. The TPS56xx senses the voltage at the junction of Q1, Q2,
and L1 and uses it to actively prevent simultaneous conduction of Q1 and Q2.
Figure 1–1.Simplified Synchronous Buck Converter Schematic
V
I
TPS56xx
Q1
Q2
+
L1
V
O
+
C
1-2
Page 11
1.2 Hysteretic Control Operation
Hysteretic control, also called bang-bang control or ripple regulator control,
maintains the output voltage within the hysteresis band centered about the
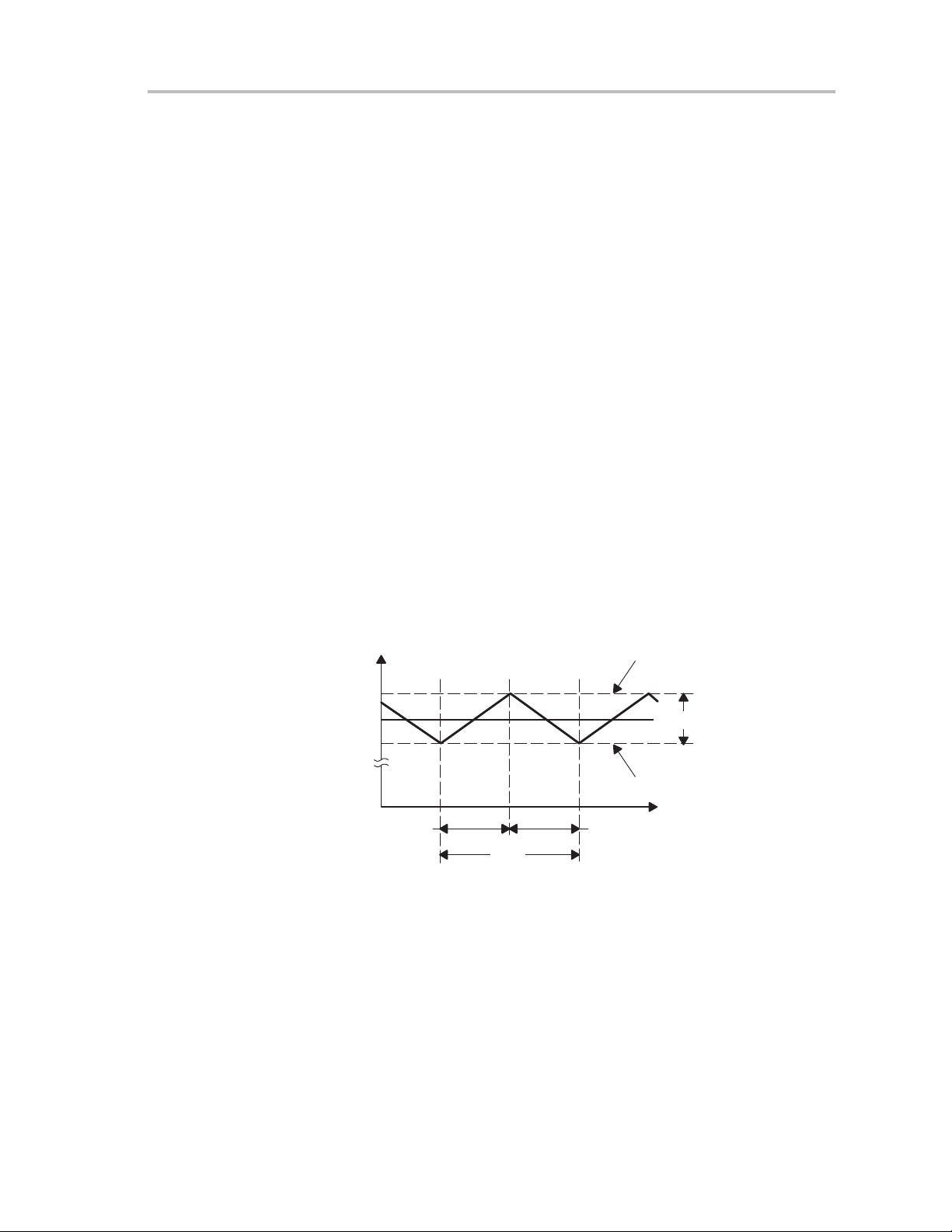
internal reference voltage. Figure 1–2 shows a simplified example of a
hysteretic controlled output voltage using the TPS5625 with a reference
voltage of 2.500 V and a hysteresis band of 50 mV. If the output voltage is at
or below the level of the reference minus one-half of the hysteresis band
(V
= 2.475 V), the TPS5625 turns off the low-side MOSFET (Q2 in Figure
Lo
1–1) and turns on the high-side MOSFET (Q1 in Figure 1–1) of the
synchronous buck converter power stage. This is the power stage on-state,
and it causes the output voltage to increase. When the output voltage reaches
or exceeds the reference plus one-half of the hysteresis band (V
the TPS5625 turns off the high-side MOSFET and turns on the low-side
MOSFET. This is the power stage off-state, and it causes the output voltage
to decrease. This hysteretic method of control keeps the output voltage within
the hysteresis band around the reference voltage. If output-load current steps
or input-voltage transients force the output voltage out of the hysteresis band,
the TPS5625 sets the power-stage MOSFET s in the continuous on or off state
as required to return the output voltage to the hysteresis band. Thus, the
output voltage is corrected as quickly as the output filter allows. There are no
error amplifier sensing and adjusting delays, as is the case with either voltageor current-mode controllers. Other advantages of hysteretic control include no
loop compensation design and no input filter interaction problems.
Hysteretic Control Operation
= 2.525 V),
Hi
Figure 1–2.Simplified Hysteretic Controlled Output Voltage Waveform
Output
Voltage
2.525 V
2.500 V
2.475 V
On Time Off Time
T
s
V
Hi
V
Lo
Time
Hysteresis
Introduction
1-3
Page 12
Design Strategy
1.3 Design Strategy
The SLVP111–114 evaluation modules (EVMs) are optimized for 5-V main
input voltage and 6-A output current. The EVMs need an additional low current
12-V (30 mA max) input voltage for the controller. TI’s application report,
Providing a DSP Power Solution from 5 V or 3.3 V Only Systems
number SPRA525 describes how one can implement a simple boost circuit for
5-V only input voltage applications. These EVMs are pin to pin compatible with
SLVP104/105/106/115 evaluation boards with 8 A output current, which
combine surface mount and through hole components. This surface mount
version has the same length, 2″, and width, 0.75″, but the height is significantly
lower, 0.375″ versus 0.6″ for through hole version.
The TI SLVP111–114 evaluation modules (EVM) provide synchronous buck
converter circuits for evaluating the capabilities of the TPS56xx family of ripple
regulator controllers. The EVM converters can provide proven, demonstrated
reference designs to aid in the rapid development of application-specific
synchronous buck converters. Output capacities of the EVM converters are
optimized for the Siliconix Si4410 power MOSFET device.
The 6-ampere output current level is a reasonable selection criteria for
powering circuit cards with multiple DSPs, and for providing the regulated
voltage to other hardware on the circuit card. Component size can be reduced
for designs requiring lower power levels.
, TI literature
The TPS56xx controllers each provide one of four popular output voltage
levels. The last two digits of the part number correlate to the set-point voltage
level: TPS5633 is the 3.3-V controller, TPS5625 is the 2.5-V controller,
TPS5618 is the 1.8-V controller, and TPS5615 is the 1.5-V controller. Many
digital devices, memories, and DSP I/O circuits use the 3.3-V level. The core
of the TMS320C6201 requires 2.5-V . All of the other DSPs in the TMS320C62x
and the TMS320C67x family need 1.8 V. The GTL bus, as well as various
processors and future DSPs, may require the 1.5-V controller. An external
resistor divider can be used to fine tune the output voltages of these controllers
for other applications including output voltages up to approximately
V
– 0.5 V.
IN
Table 1–1 summarizes the four EVM converter modules.
Table 1–1.Summary of EVM Converter Modules
EVM Part Number EVM Board
TPS5633EVM–111 SLVP111 TPS5633 3.3 V 6 A
TPS5625EVM–112 SLVP112 TPS5625 2.5 V 6 A
TPS5618EVM–113 SLVP113 TPS5618 1.8 V 6 A
TPS5615EVM–114 SLVP114 TPS5615 1.5 V 6 A
Number
Controller Output
Voltage
Max. Output
Current
†
†
†
†
1-4
†
Output current is limited by the temperature rise of the power MOSFETs chosen. Higher or
lower current designs are possible
.
Page 13

1.4 Design Specification Summary
g
y
k
O erating frequency
()
S
)
This section summarizes the design requirements of the EVM converters.
Although every attempt was made to accurately describe the performance of
the EVM converters and the TPS56xx controllers, in case of conflicts, the
TPS56xx data sheet takes precedence over this document.
The TPS56xx family of controllers provides the necessary regulation
functions. In addition to a reference voltage accuracy of ±1% over the full
operating temperature range, the controller has remote sense inputs to
provide a precisely regulated output voltage. The controller also provides
undervoltage lock-out, overload protection, overvoltage protection, and
overtemperature protection. The controller has a logic level INHIBIT input to
control the converter turn-on and turn-off and a power good output to indicate
output voltage status. Undervoltage lock-out prevents operation of the power
supply when the 12 Vdc input voltage is not sufficient for proper operation.
Overload protection protects the power supply from accidental overloads or
short circuits. Overvoltage protection prevents damage to the load in the event
of an internal power supply failure or presence of high voltages on the output
from an external condition. Both overvoltage and overcurrent cause a latched
shutdown. Both power MOSFETs are driven to an OFF state. Recovery from
shutdown requires removal of the 12 V control input supply for reset. T able 1–2
lists the operating specifications of the EVM converters.
Design Specification Summary
Table 1–2.EVM Converter Operating Specifications
Specification Min Typ Max Units
Power input voltage range 4.5 6 V
Control input voltage range 10.8 13.2 V
Static voltage tolerance
SLVP111 (3.3 V)
SLVP112 (2.5 V)
SLVP113 (1.8 V)
SLVP114 (1.5 V)
Line regulation
Load regulation
Transient response
Output current range
Current limit
Operatin
SLVP111 (3.3 V) 135 kHz
SLVP112 (2.5 V) 225 kHz
SLVP113 (1.8 V)
LVP114 (1.8 V
‡
§
#
frequenc
†
3.27
2.47
1.78
1.48
¶
#
3.30
2.50
1.80
1.50
± 0.05% ± 0.1%
± 0.2% ± 0.4%
± 100
50
06A
295
360 kHz
3.33
2.53
1.82
1.52
10 A
V
V
V
mV pk
µsec
kHz
Introduction
1-5
Page 14
Design Specification Summary
Table 1–2.EVM Converter Operating Specifications (Continued)
Specification Min Typ Max Units
Output ripple
SLVP111 (3.3 V)
SLVP112 (2.5 V)
SLVP113 (1.8 V)
SLVP114 (1.5 V)
||
66
50
36
30
mV p–p
mV p–p
mV p–p
mV p–p
Efficiency, 6 A load
SLVP111 (3.3 V)
SLVP112 (2.5 V)
SLVP113 (1.8 V)
SLVP114 (1.5 V)
90%
86.4%
83.2%
79.8%
Efficiency, 4 A load
SLVP111 (3.3 V)
SLVP112 (2.5 V)
SLVP113 (1.8 V)
SLVP114 (1.5 V)
†
Vi = 5 V, Io = 6 A
‡
Io = 6 A, Vi = 5 V ±10%
§
Vi = 5 V
¶
Vi = 5 V, Io stepped repetitively from 0 A to 6.5 A
#
Output current rating is limited by thermal considerations. Load currents above this rating may
cause damage to the power supply.
||
Unless otherwise specified, all test conditions are TA = 25_C, Vi = 5 V, Io = 6 A, Vo = nominal.
k
Vi = 5 V, Io = 6 A, Vo = nominal
91.6%
88.6%
85.1%
81.9%
1-6
Page 15
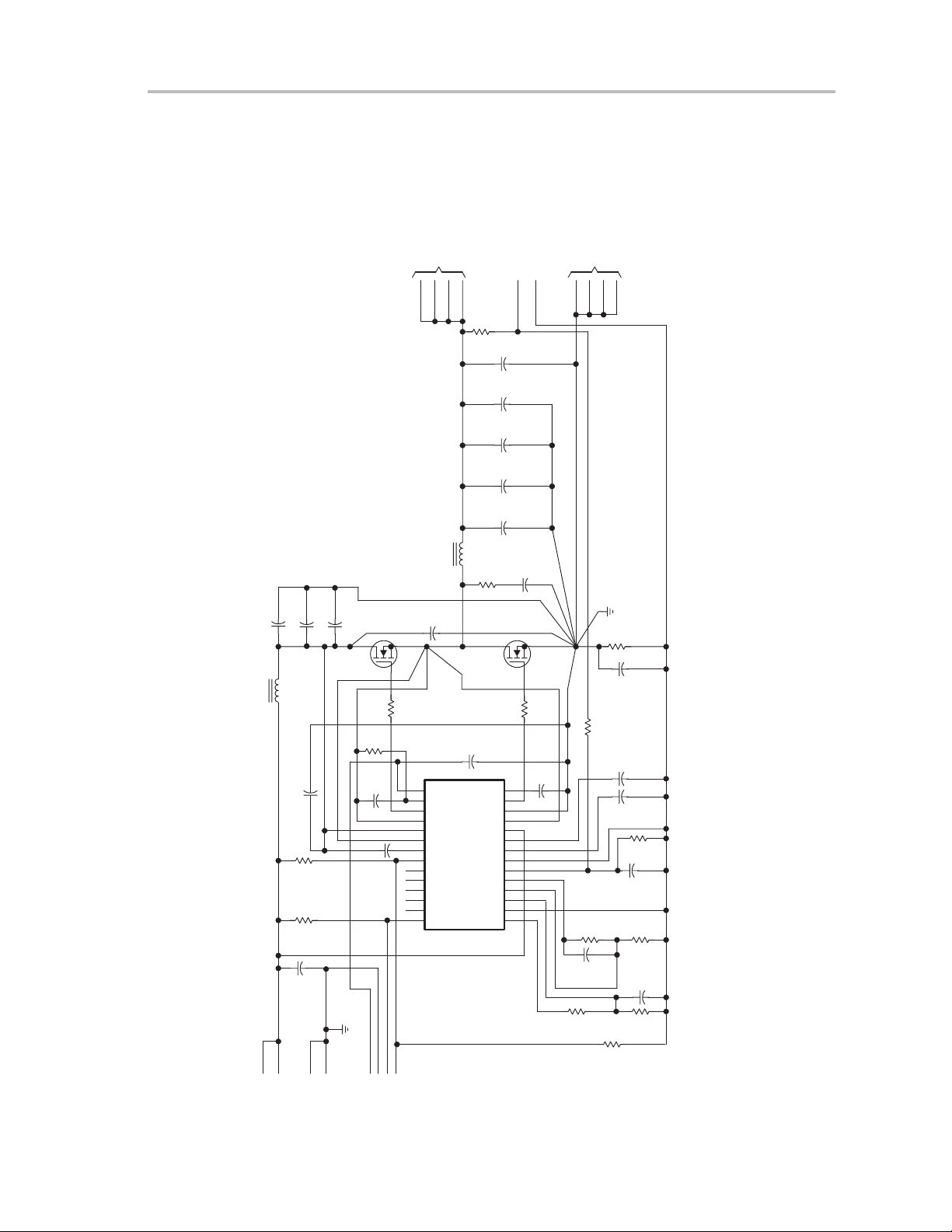
1.5 Schematic
Figure 1–3 shows the EVM converter schematic diagram. The schematic
diagrams for the other EVM converters are identical except for the controller
IC used.
Figure 1–3.SLVP111–114 EVM Converter Schematic Diagram
Schematic
O
V
J1–18
J1–17
J1–16
J1–15
SLVP111 = 3.3 V
SLVP112 = 2.5 V
SLVP113 = 1.8 V
SLVP114 = 1.5 V
L2
1.5 µ H
6.3 V
6.3 V
150 µ F
+
C2
L1
2.2 µ H
+C1
6.3 V
150 µ F
150 µ F
+
+
C3
C4
Q1
Si4410
R3
R15
1 M
C7
C5 0.1µF
R2
10 kΩ
R1
1 kΩ
10 V
33 µ F
1µF
0.1 µ F
C6
2.2 µ F
C9
10 Ω
C8
VCC
BOOT
16
HUGHDR
17
BOOTLO
18
HISENSE
19
LOSENSE
20
IOUTLO
21
INHIBIT
22
NC
23
NC
24
NC
25
NC
26
NC
27
PWRGD
28
J1–4
R6
4.7 Ω
10 µ F
C14
+
C13
150 µ F
+
C12
150 µ F
+
C11
150 µ F
+
C10
150 µ F
2.7 Ω
R5
R4
1µF
DRV
14 15
LOWDR
13
DRVGND
12
LOHIB
11
LODRV
10
BIAS
9
SLOWST
8
ANAGND
7
VSENSE
6
VREFB
5
VHYST
4
OCP
3
AGND2
2
IOUT
1
TPS5633 (See Note)
U1
SENSEHVSENSEL/VANAGND
J1–2
4 V
C15
0.01 µ F
Q2
10 Ω
C16
Si4410
1µF
PWR
GND
J1–11
J1–14
J1–13
J1–12
R12
4.7 Ω
C18
0.1 µ F
R8
100 Ω 1%
C22
1µF
C21
0.1 µ F
1%
R11
20 kΩ
C20
1000 pF
R10
C17
R7
1 kΩ
R10
1%
100 Ω
0.1 µ F
R9
1%
20 kΩ
C19
0.01 µ F
TPS5633 = 3.3 V (SLVP111)
TPS5625 = 2.5 V (SLVP112)
TPS5618 = 1.8 V (SLVP113)
R13
11 kΩ
750 Ω
TPS5618 = 1.5 V (SLVP114)
NOTE: Last two digits of U1 indicates output voltage option
J1–5
V
J1–6
I
J1–9
J1–10
RETURN
J1–7
12 V
J1–8
J1–3
PG
RETURN
J1–1
INHIBIT
Introduction
1-7
Page 16
Bill of Materials
1.6 Bill of Materials
Table 1–3 lists materials required for the SLVP111–114 EVMs.
Table 1–3.SLVP111–114 EVMs Bill of Materials
Ref Des Part Number Description MFG
C1 10TPA33M Capacitor, POSCAP, 33 µF, 10 V, 20% Sanyo
C2 6TPB150M Capacitor, POSCAP, 150 µF, 6.3 V, 20% Sanyo
C3 6TPB150M Capacitor, POSCAP, 150 µF, 6.3 V, 20% Sanyo
C4 6TPB150M Capacitor, POSCAP, 150 µF, 6.3 V, 20% Sanyo
C5 GRM39X7R104K016A Capacitor, Ceramic, 0.1 µF, 16 V, 10%, X7R muRata
C6 GRM39X7R104K016A Capacitor, Ceramic, 0.1 µF, 16 V, 10%, X7R muRata
C7 GRM42–6Y5V105Z016A Capacitor, Ceramic, 1.0 µF, 16 V, +80%–20% muRata
C8 GRM42–6Y5V105Z016A Capacitor, Ceramic, 1.0 µF, 16V, +80%–20% muRata
C9 GRM42–6Y5V225Z016A Capacitor, Ceramic, 2.2 µF, 16V, Y5V muRata
C10 4TPC150M Capacitor, POSCAP, 150 µF, 4 V, 20% Sanyo
C11 4TPC150M Capacitor, POSCAP, 150 µF, 4 V, 20% Sanyo
C12 4TPC150M Capacitor, POSCAP, 150 µF, 4 V, 20% Sanyo
C13 4TPC150M Capacitor, POSCAP, 150 µF, 4 V, 20% Sanyo
C14 GRM235Y5V106Z016A Capacitor, Ceramic, 10 µF, 16 V, Y5V muRata
C15 GRM42-6Y5V103Z025A Capacitor, Ceramic, 0.01 µF, 25 V, +80%–20%, Y5V muRata
C16 GRM42–6Y5V105Z016A Capacitor, Ceramic, 1.0 µF, 16 V, +80%–20% muRata
C17 GRM39X7R104K016A Capacitor, Ceramic, 0.1 µF, 16 V, 10%, X7R muRata
C18 GRM39X7R104K016A Capacitor, Ceramic, 0.1 µF, 16 V, 10%, X7R muRata
C19 GRM39X7R103K025A Capacitor, Ceramic, 0.01 µF, 25 V, 10%, X7R muRata
C20 GRM39X7R102K050A Capacitor, Ceramic, 1000 pF, 50 V, 10%, X7R muRata
C21 GRM39X7R104K016A Capacitor, Ceramic, 0.1 µF, 16 V, 10%, X7R muRata
C22 GRM42–6Y5V105Z016A Capacitor, Ceramic, 1.0 µF, 16 V, +80%–20% muRata
J1 S1122–18–ND Header, RA, 18-pin, 0.23 Posts x 0.20 Tails Sullins
L1 DO3316P–222HC Inductor, 2.2 µH, 7.4 A Coilcraft
L2 DO3316P–152HC Inductor, 1.5 µH, 9 A Coilcraft
Q1 Si4410DY FET , N-ch, 30-V, 10-A, 13-mΩ Siliconix
Q2 Si4410DY FET , N-ch, 30-V, 10-A, 13-mΩ Siliconix
R1 Std Resistor, Chip, 1 kΩ, 1/16W, 5%
R2 Std Resistor, Chip, 10 kΩ, 1/16W, 5%
R3 Std Resistor, Chip, 10 Ω, 1/10W, 5%
R4 Std Resistor, Chip, 10 Ω, 1/10W, 5%
R5 Std Resistor, Chip, 2.7 Ω, 1/4W, 5%
R6
Std Resistor, Chip, 4.7 Ω, 1/16W, 5%
1-8
Page 17
Bill of Materials
Table 1–3.SLVP111–114 EVMs Bill of Materials (Continued)
Ref Des Part Number Description MFG
R7 Std Resistor, Chip, 1 kΩ, 1/16W, 5%
R8 Std Resistor, Chip, 100 Ω, 1/16W, 1%
R9 Std Resistor, Chip, 11 kΩ, 1/16W, 5%
R10 Std Resistor, Chip, 100 Ω, 1/16W, 1%
R1 1 Std Resistor, Chip, 20 kΩ, 1/16W, 1%
R12 Std Resistor, Chip, 4.7 Ω, 1/16W, 5%
R13 Std Resistor, Chip, 750 Ω, 1/16W, 5%
R14 Std Resistor, Chip, 20 kΩ, 1/16W, 1%
R15 Std Resistor, Chip, 1 MΩ, 1/16W, 5%
U1a TPS5633PWP IC, PWM Ripple Controller, Fixed 3.3-V (SLVP111 only) TI
U1b TPS5625PWP IC, PWM Ripple Controller, Fixed 2.5-V (SLVP112 only) TI
U1c TPS5618PWP IC, PWM Ripple Controller, Fixed 1.8-V (SLVP113 only) TI
U1d
TPS5615PWP IC, PWM Ripple Controller, Fixed 1.5-V (SLVP114 only) TI
Introduction
1-9
Page 18
Board Layout
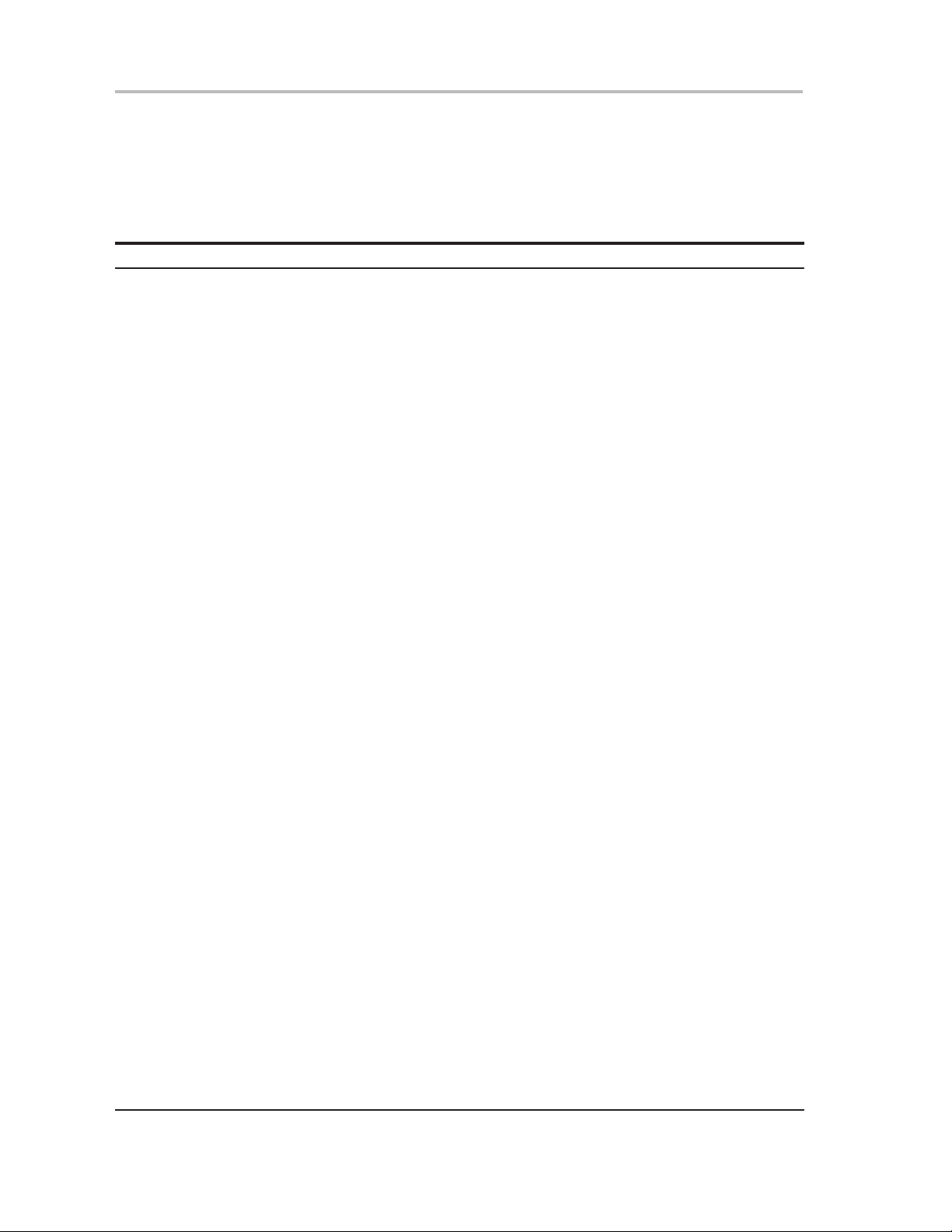
1.7 Board Layout
Figures 1–4 through 1–7 show the board layouts for the SLVP111–114
evaluation modules.
Figure 1–4.Top Assembly
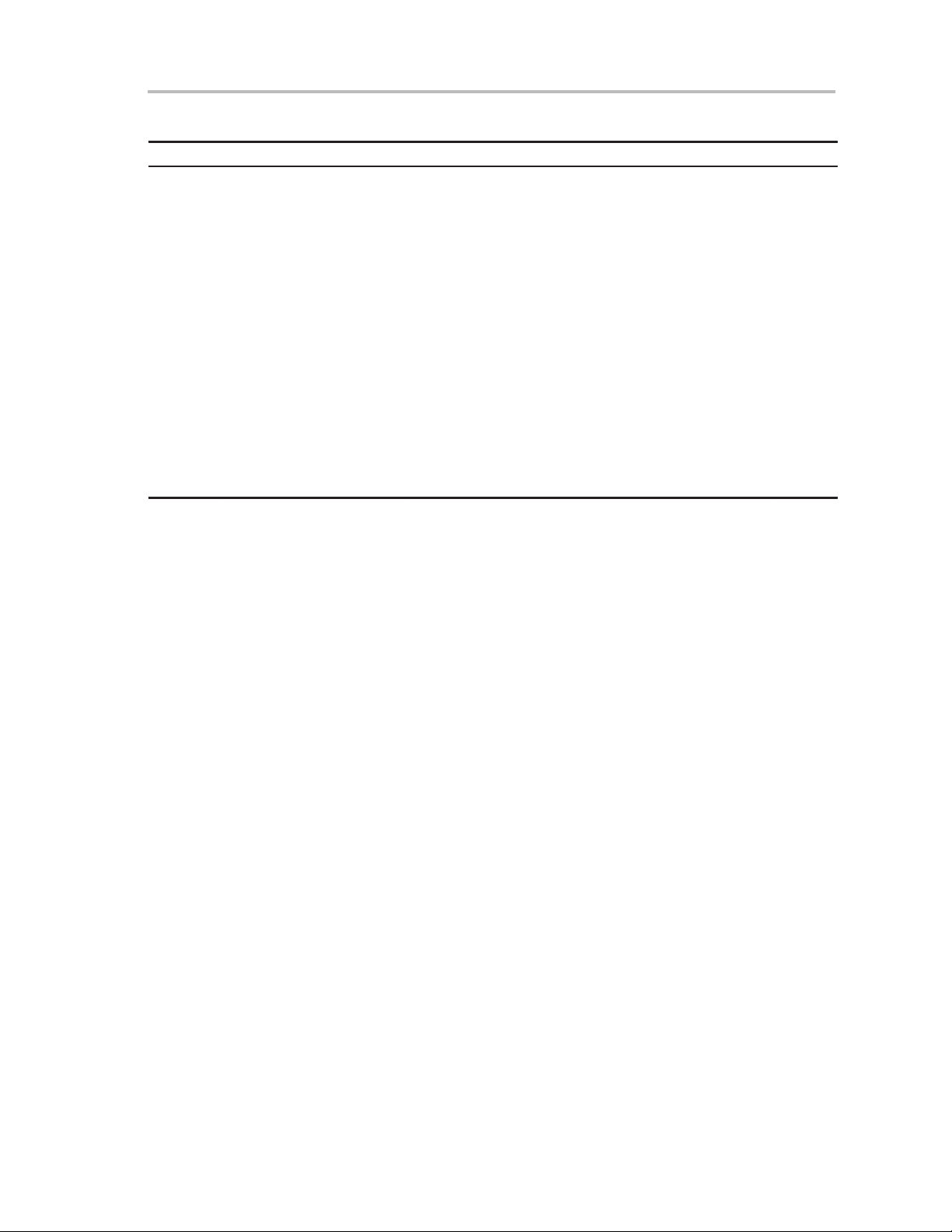
Figure 1–5.Bottom Assembly (Top View)
Top Assembly
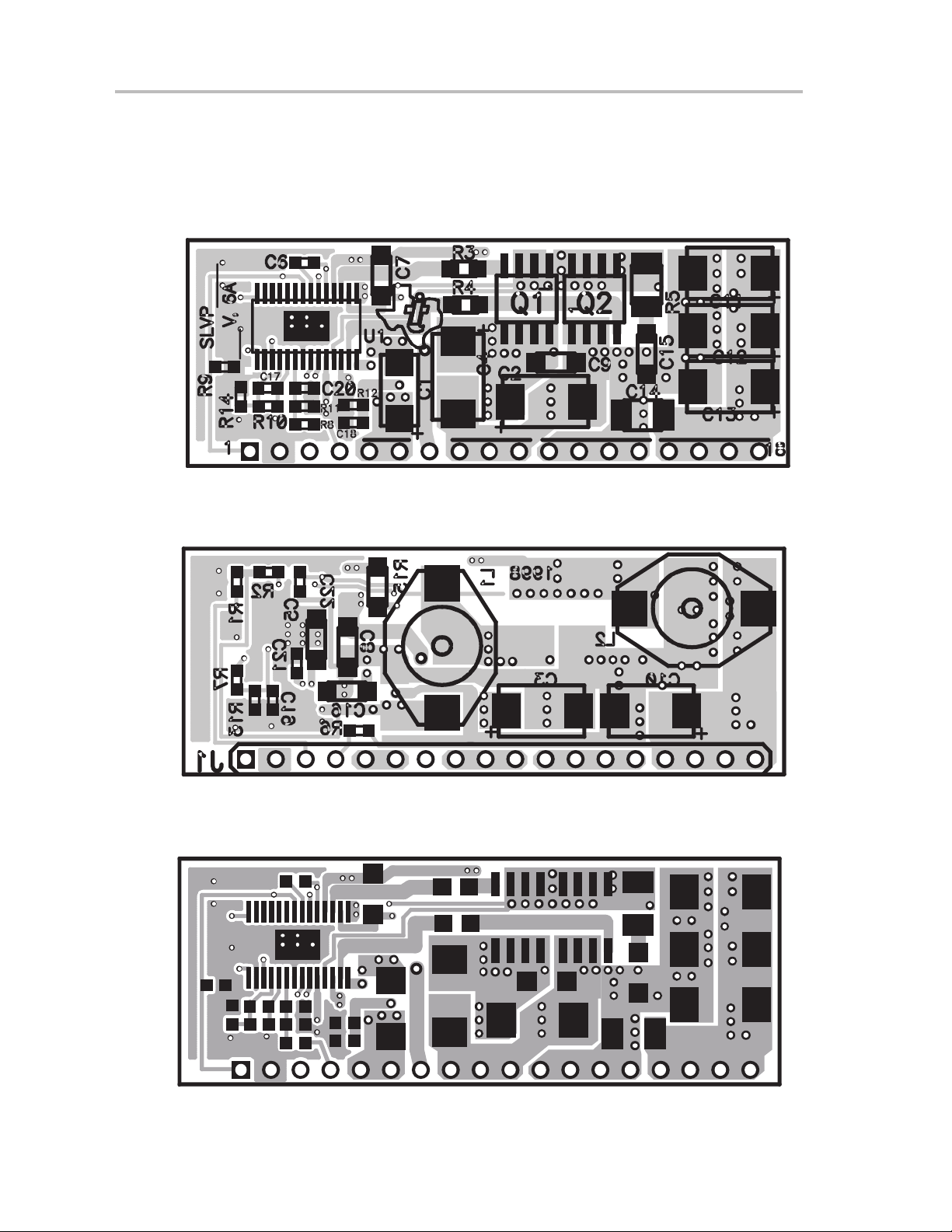
Figure 1–6.Top Layer
1-10
Bottom Assembly (Top View)
Top Layer
Page 19
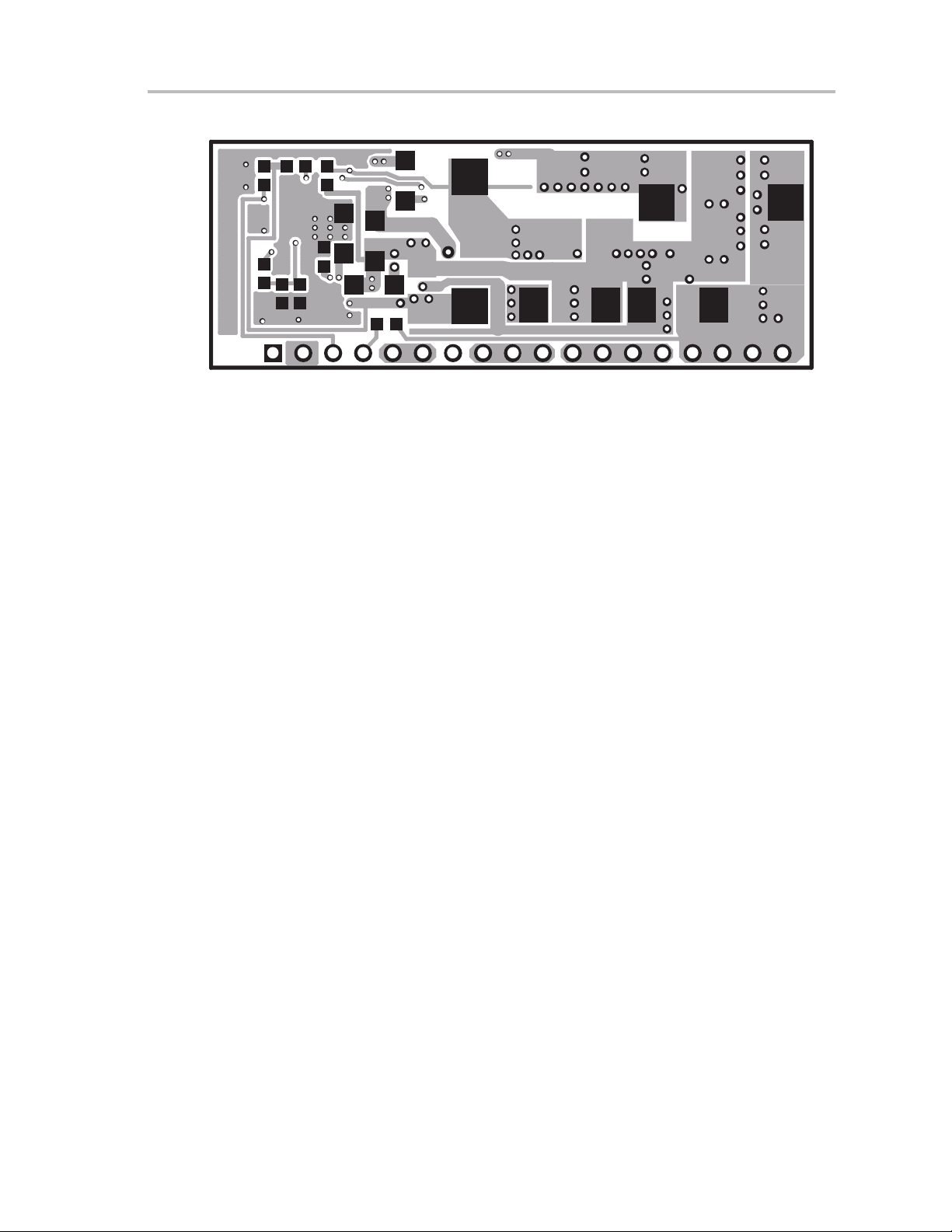
Figure 1–7.Bottom Layer (Top VIew)
Board Layout
Bottom Layer (Top View)
Introduction
1-1 1
Page 20

1-12
Page 21

Chapter 2
Design Procedure
The SL VP11 1–1 14 are dc-dc synchronous buck converter evaluation modules
(EVMs) that provide a regulated output voltage at up to 6 A with a power input
voltage range of 4.5 V to 6 V . A low power 12-V , 20-mA source is also required
to power the TPS56xx controller. The controller operates at a nominal
frequency of 135 kHz for 5 V input and 3.3 V output. T o provide the highest level
of performance, the EVM converters use
Hysteretic-controlled synchronous buck
over conventional PWM-controlled power supplies:
Correction of output voltage variations caused by output-load or input-
voltage transients is extremely fast.
The user controls output ripple by adjusting the operational parameters of
the converter, instead of relying on brute force methods requiring the
choice of an output filter.
hysteretic
converters have several advantages
, or ripple, control.
Hysteretic control sets the operational frequency of the converter. For a
given set of external components, the lower the permissible ripple setting,
the higher the operational frequency.
There is no control loop to design.
Topic Page
2.1 TPS56xx Functions 2–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 External Component Selection 2–14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Design Procedure
2-1
Page 22

TPS56xx Functions
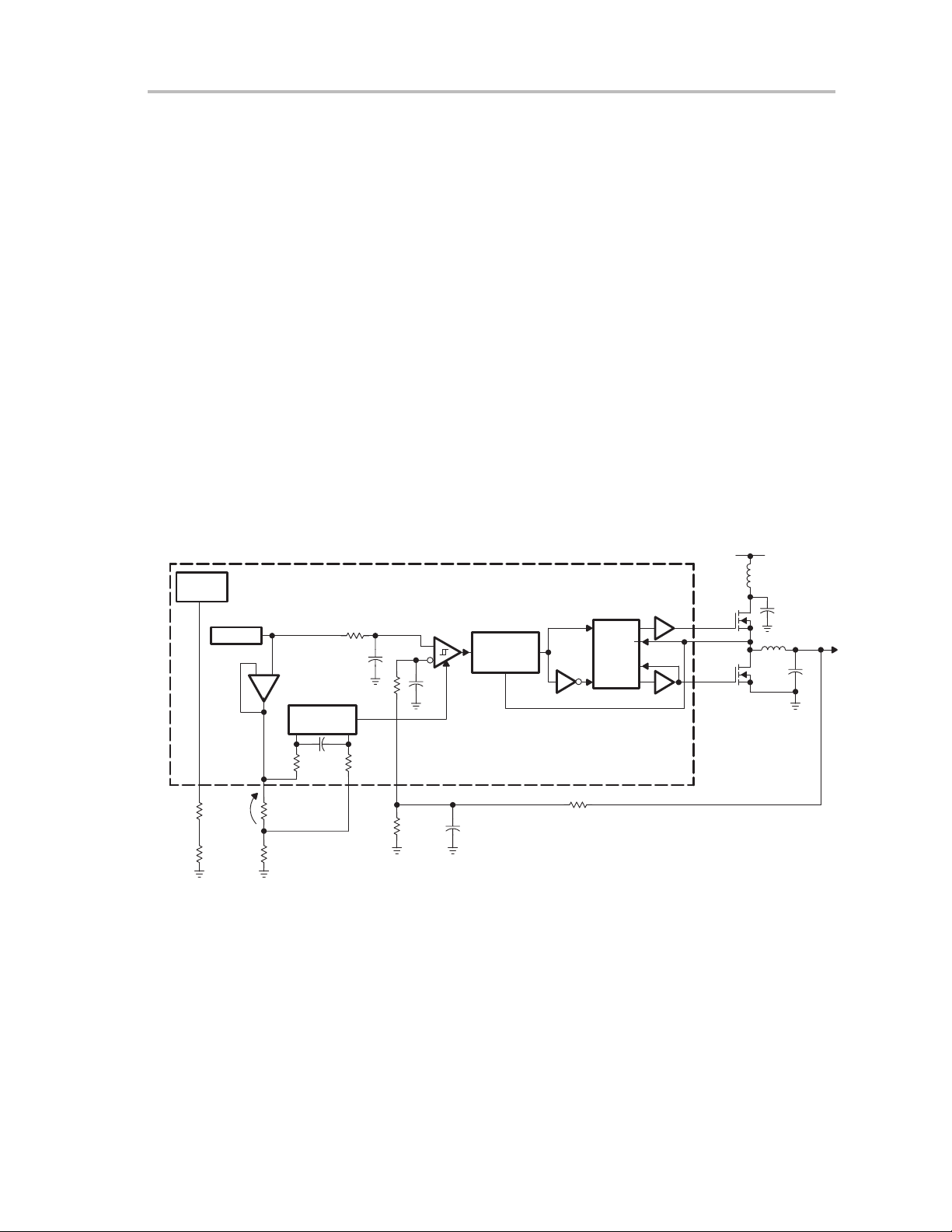
2.1 TPS56xx Functions
The functional block diagram of the TPS56xx family of controllers is given in
Figure 2–1. The controller has the following main features:
±1% reference over 0°C to125°C junction temperature range.
Synchronous-buck gate drivers with adaptive deadtime control
High-side MOSFET driver voltage rating of 30 V
MOSFET driver peak current rating of 2 A
Hysteretic comparator: 250-ns propagation delay to gate driver outputs,
2.5-mV offset voltage, symmetrical hysteresis, hysteresis setting is a
percentage of Vref.
Lossless output current sensing circuit
Slowstart circuit; slowstart time independent of VID setting
Internal 8-V drive regulator for reduced gate charge power losses
POWERGOOD comparator, 93% of Vref trip
UVLO, Vcc undervoltage lockout, 10-V start, 2-V hysteresis
INHIBIT comparator that can also monitor UVLO of the system logic
supply, 2.1-V start, 100-mV hysteresis.
Latched overcurrent shutdown circuit
Latched overvoltage shutdown circuit
LODRV pin that activates the low-side MOSFETs as a crowbar to protect
against a short across the high-side MOSFETs.
2-2
Page 23

Figure 2–1.TPS56xx Functional Block Diagram
15 7 28 20
V
CC
V
CC
TPS56xx Functions
21
19
HISENSEIOUTLOLOSENSEPWRGDANAGND
22
INHIBIT
3
OCP
8
SLOWST
V
_
+
100mV
Bandgap
2 V
10 V
CC
VOVP
1.15 VREF
+
Deglitch
Deglitch
Shutdown
_
UVLO
VSENSE
I
VREFB
VREF
_
+
I
VREFB
Analog
Bias
5
Q
S
R
CM Filters
Hysteresis
Setting
Fault
Shutdown
VPGD
0.93 VREF
Slowstart
Comparator
+
_
+
_
Shutdown
Hysteresis
Comparator
V
CC
PREREG
DRV REG
Rising
Edge
Delay
HIGHIN
Analog
Bias
HIGHDR
+
_
2X
9
BIAS
14
DRV
16
BOOT
17
HIGHDR
18
BOOTLO
13
LOWDR
12
DRVGND
1
IOUT
25 4 6 11 10
VREFBAGND2 VSENSEVHYST LODRVLOHIB
This section describes the functions governed by the TPS556xx. A procedure
is given to determine the values of components used in the example design
given in Figure 1–3. Example calculations for the 3.3-V output version accompany the design equations. There are many possible ways to proceed when
designing power supplies and some iteration may be necessary when actual
performance differs from design predictions. Reference designators refer to
the circuit in Figure 1–3.
2.1.1 VCC Undervoltage Lockout
The VCC undervoltage lockout circuit disables the controller while VCC is below
the 10-V start threshold during power up. While the controller is disabled, the
output drivers will be low and the slowstart capacitor will be shorted. When V
exceeds the start threshold, the short across the slowstart capacitor is
released and normal converter operation begins. There is a 2-V hysteresis in
the undervoltage lockout circuit for noise immunity.
Design Procedure
CC
2-3
Page 24

TPS56xx Functions
2.1.2 Inhibit
The inhibit circuit is a comparator with a 2.1-V start voltage and a 100-mV
hysteresis. When inhibit is low, the output drivers are low and the slowstart
capacitor is discharged. When inhibit is above the start threshold, the short
across the slowstart capacitor is released and normal operation begins.
When the system logic supply is connected to the inhibit pin, the inhibit pin also
controls power sequencing by locking out controller operation until the system
logic supply exceeds the input threshold voltage of the inhibit circuit; thus, the
12-V supply and the system logic supply must be above UVLO thresholds
before the controller is allowed to start up.
2.1.3 Slowstart Design
Slowstart or soft-start is added to reduce power-up transients. Without
slowstart, when input power is first applied, the TPS56xx attempts to raise the
output voltage (initially zero) to its normal operating level by turning on the top
MOSFET until the voltage is approximately Vref. This can cause high transient
currents to flow in the output inductor and output capacitor. Although this form
of startup usually does not cause component failures, it does apply stresses
much greater than those typically encountered in normal operation. It is good
design practice to include slowstart circuitry to avoid these unnecessary
stresses.
The slowstart circuit in the TPS56xx controls the rate at which the output
voltage powers up. A capacitor, C21, connected between SLOWST (pin 8) and
ANAGND (pin 7), is charged by an internal current source. This current source
is proportional to the reference voltage and is adjustable by an external
resistance selected by the user. The output voltage follows the voltage on the
slowstart capacitor during startup. Since the charging current is proportional
to the reference voltage, the slowstart time is independent of the reference
voltage for a given resistor value.
Choices of the slowstart time and the slowstart capacitor value are largely
arbitrary as long as system start-up time requirements are met. For this
example design, a slowstart time of 10 ms is chosen, and the slowstart
capacitor is chosen to be 0.1 µF. Therefore, to charge 0.1 µF from zero volts
to 3.3 V in 10 ms, the following equation holds:
I
SLOWSTART
C
SLOWSTART
t
V
c
0.1
ss
3.3
10
V
ms
33
A
F
The slowstart charging current is determined by the following equation:
I
SLOWSTART
I(VREFB
)
5
where I(VREFB) = the current out of VREFB (pin 5).
For an I
I(VREFB
SLOWSTART
)
5
current equal to 33 µA, I(VREFB) should be set to:
I
SLOWSTART
5 33 A 165
A
2-4
The voltage on VREFB (pin 5) is a buffered reference voltage. The resistance
from the VREFB pin to ANAGND can be calculated as:
Page 25

TPS56xx Functions
3.3
R
VREFB
This value is used to determine the values of R10 and R14 that set the
hysteresis level.
The equations above can be used to derive a simplified relationship for the
slowstart time as shown:
+
165 m
V
A
+ 20
k
W
t
SLOWSTART
V
O
Figures 3–7, 3–8, 3–9, 3–16, 3–17, 3–18, 3–25, 3–26, 3–27, 3–34, 3–35, and
3–36 in the test results section, showing that slowstart time is independent of
the reference voltage.
2.1.4 Hysteresis Setting
The next step in this design is choosing the desired output voltage ripple. As
a first approximation, the output voltage ripple is simply the difference between
the two levels (V
the hysteresis comparator of the TPS56xx sets these two levels. The
hysteresis is set by two external resistors and is centered around VREF (pin
5). The hysteretic comparator is designed with low input offset voltage
(±2.5 mV max) low propagation delays (250ns max to gate driver outputs with
10mV overdrive) and accurate hysteresis setting (±3.5 mV max). The
hysteresis is proportional to the reference voltage; setting Vref to a new value
automatically adjusts the hysteresis to be the same percentage of Vref.
The total output ripple is greater than the ripple set by the hysteresis comparator. To accurately choose the output voltage ripple, all of the propagation delays must be considered. The first step is to calculate the amount of ripple expected due to the delays, in addition to the ripple set by the hysteresis comparator. Using the terminology of Section 2.2.4.1, this additional ripple is equal
to V
+ 5
start-up waveforms for different reference voltage settings are given in
– Hyst and will be referred to V
p-p
C
SLOWSTART
and VHi) shown in Figure 1–2. The hysteresis setting of
LO
R
VREFB
for ease of reference. Or:
del
V
+
p-p
Where:
Assuming the output ripple during the delay time is primarily caused by the
inductor ripple current flowing through the output capacitors’ ESR, the
additional ripple, V
V
Where L is the value of the output inductor.
Hyst)V
V
=the total output ripple,
p-p
Hyst = the hysteresis setting of the hysteretic comparator, and
V
= the output ripple exceeding Hyst and due to all propagation
del
delays.
VI–V
ƪ
+
del
del
, can be estimated as:
del
O
L
t
del
ƫ
ESR
)
V
O
ƪ
t
L
Design Procedure
del
ƫ
ESR
V
+
I
L
t
del
2-5
Page 26
TPS56xx Functions
Note that V
To calculate V
is independent of the output voltage.
del
for this example design, use the component measurements
del
given in Section 2.2.4.2. They are repeated here for convenience:
L = 1.5 µH
ESR = 10 mΩ
T
= 400 ns
del
Now calculate V
V
+
del
Since V
does not depend on the output voltage setting, V
del
:
del
5
1.5 10
400 10
–
6
–
9
10 10
–
3
+ 13.3
mV
is a larger por-
del
tion of the total output voltage ripple for lower output voltages. So, the hysteresis (which is proportional to the output voltage setting) should be set so that
the desired output ripple voltage is obtained for the lowest output voltage. The
total output voltage ripple requirement per Table 1–2 for an output voltage of
1.5 V is 30 mV, the hysteresis is set as:
V
Hysteresis
+ 30
mV*V
del
+ 30
mV
* 13.3
mV
+ 16.7
mV
For convenience, and allowing a little margin, the hysteresis will be designed
for 15 mV.
To set the hysteresis, connect two external resistors to form a resistor divider
from VREFB (pin 5) to ANAGND (pin 7) with the center of the divider connected
to VHYST (pin 4). The hysteresis of the comparator is equal to twice the
voltage that is between the VREFB (pin 5) and VHYST (pin 4) pins. Or,
V
Hysteresis
+ 2
(
VREFB–VHYST
)
For this design, 15 mV of hysteresis was chosen for a 1.5 V output voltage.
V
Hysteresis
+ 15
mV
+ 2 (1.5
V–VHYST
)
Solving for VHYST:
V
VHYST+VREFB–
Hysteresis
2
+ 1.5
15
mV
–
2
+ 1.4925
V
Referring to the schematic, Figure 1–3, the two external resistors are R10 and
R14. From the previous section, the total resistance required is 20 kΩ. Since
R10 is very small compared to R14, for simplicity set R14 = 20 kΩ . T o calculate
the value of R13:
R
VHYST+VREFB
14
R
14 )R10
Solving for R10:
R
10 +
VREFB R
VHYST
14
–R
14 +
(
1.5
)(
V
1.4925
20
)
k
–20k
V
+ 100
The controller hysteresis is now set to 15 mV . This, in addition to the 13.3 mV
due to propagation delays, results in a total ripple voltage of less than the
design goal of 30 mV for an output voltage of 1.5 V.
2-6
Page 27
2.1.5 Noise Suppression
TPS56xx Functions
Hysteretic regulators, by nature, have a fast response time to V
and are thus inherently noise sensitive due to the very high bandwidth of the
controller. Noise suppression circuits were added to the TPS56xx to improve
the noise immunity , as shown in Figure 2–2. Internal low-pass filters with a pole
frequency of 5 MHz were added to the inputs of the hysteretic comparator.
These low-pass filters are referenced to the same analog ground as the
hysteretic comparator. There is a common-mode filter with a 4-MHz pole
between VREFB and VHYST to filter out noise between these pins. A double
pulse suppression circuit prohibits spurious pulses from propagating to the
gate drivers. The double pulse suppression circuit becomes active when the
comparator has toggled or when the LOHIB pin (which is connected to the
power MOSFETs) has transitioned, providing additional noise immunity from
internally and externally generated noise. The suppression circuit is active for
150 ns.
A low-pass filter is recommended between V
O
C3 in Figure 2–2); recommended values are 100 ohms and 1 nF . This low-pass
filter is included in the evaluation design of Figure 1–3 (R8, R11, and C20).
Figure 2–2.Block Diagram Showing Noise Suppression Circuits
V
ds
Sensing
5 MHz
Filter
5 MHz
Filter
Double Pulse
Suppression
Circuit
Adaptive
Deadtime
Control
Reference
V
ref
+–
transients
O
and the VSENSE pin (R1 and
V
in
L1
V
C1
L2
phase
C2
HIGHDR
LOHIB
LOWDR
VO
Hysteresis
Setting
4 MHz
Filter
IOUT
R5
VH_SET
R6
VREFB
R3
R4
VHYST
2.1.6 Overcurrent Protection
Overcurrent protection is provided by measuring the on-state voltage of the
high-side MOSFET, conditioning the measured voltage, and comparing the
result to a reference voltage. If the output current exceeds the current limit
setpoint, a fault latch is set and the output drivers are turned off. Vcc (12 V)
must be reduced to below the undervoltage lockout value to restart the
converter.
A sample-and-hold circuit measures the power supply output current by
sensing the on-state drain-to-source voltage of the high-side MOSFET (Q1 in
VSENSE
TPS56xx Synchronous-Buck Controller
R1
C3R2
Design Procedure
2-7
Page 28

TPS56xx Functions
Figure 1–3). This arrangement improves efficiency over solutions having a
separate current sensing resistor. The drain of the high-side MOSFET is
connected to HISENSE (pin 19). The source of the high-side MOSFET is
connected to LOSENSE (pin 20). When the high-side MOSFET is on, a
TPS56xx internal switch is also on and samples the source voltage of the
high-side MOSFET. This sampled voltage is applied to IOUTLO (pin 21) and
is held by the external 0.1-µF capacitor, C6, which is connected from IOUTLO
(pin 21) to HISENSE (pin 19). The TPS56xx amplifies (gain=2) the
sampled-and-held voltage on C6 and sends the output voltage to IOUT (pin
1).
Figure 2–3.VDS Sensing Circuit
Cs/h
IOUTLOHISENSE
+
–
Gain of 2
V
ref
Vds Sensing Circuit
Shutdown
Adaptive
Deadtime
Control
Rising
Edge
Delay
HIGHIN
LOWIN
HIGHDR
LOSENSE
LOWDR
V
in
L1
C1
VO
C2
V
phase
L2
IOUT
TPS56xx Synchronous-Buck Controller
R2
VSENSE
C3
R1
Figure 2–3 gives a simple block diagram of the Vds sensing circuit. The Vds
sensing circuit measures the average voltage across the high-side MOSFET
when the high-side MOSFET is on, and holds that value on a sample/hold
capacitor when the high-side MOSFET is off. The voltage on the sample/hold
capacitor is directly proportional to the load current. Sensing across the
high-side MOSFET rather than the low-side MOSFET ensures that shorted
loads can be detected. The RC time constant of the sample/hold network must
be greater than the conduction-time of the high-side MOSFET, otherwise the
sample/hold circuit will function as a peak detector circuit and will not hold the
average Vds voltage. The differential voltage across the sample/hold
capacitor is amplified by 2 and converted to a single-ended signal on the IOUT
pin. The DC CMRR of the Vds sensing amplifier is 69 dB minimum. Added logic
ensures that sampling begins and ends while the high-side MOSFET is
conducting. The turn-on and turn-off delays of the sample/hold switch are less
than 100 ns. Additional logic and a rising edge delay circuit are included to
guarantee sampling during a short-to-ground fault across the low-side
MOSFET; the rising edge delay time is 500 ns.
2-8
Resistors R7 and R13 in Figure 1–3 set the current limit setpoint. This
resistor-divider network applies the IOUT output voltage to OCP (pin 3). The
Page 29
TPS56xx Functions
resistor-divider network is designed so that the voltage applied to OCP is
100 mV for the desired output current limit point. If the voltage on OCP
exceeds 100 mV , a fault latch is set and the output drivers are turned of f. The
latch remains set until VCC (pin 15) goes below the undervoltage lockout
value.
The following equations summarize the relationships discussed above.
The on state drain-to-source voltage of the high-side MOSFET, Q1, is:
ǒ
V
HISENSE–VIOUTLO
where R
correction for elevated temperature if necessary.
The voltage difference,
gain of two to produce the IOUT (pin 1) signal.
V
IOUT
The
V
IOUT
OCP pin:
V
OCP
Therefore, to set the power supply output current, first calculate the quantity
IO × R
DS(on)
including its temperature dependence, should be considered, since this
parameter can vary a significant amount for typical MOSFETs. Next, multiply
this voltage by two. Finally , set the R7 and R13 voltage divider to produce 100
mV at the desired current limit point.
For this design, the maximum output current is 6 A. In most power supply
designs, the exact current limit set point rarely needs to be very accurate.
Limiting the current to a level that is not destructive is the main consideration.
In this case, the nominal current limit is set for approximately 25% above the
maximum, including an elevated temperature correction factor of 1.4 applied
to a nominal R
I
OCP
is the value obtained from the high-side MOSFET and includes
DS(on)
ǒ
+
V
HISENSE–VIOUTLO
signal is scaled for the desired current limit level and applied to the
+
V
IOUT
for the value of
DS(on)
+
I
O(Max
Ǔ
+
I
R
O
DS(on
)
V
HISENSE
R
of 11 mΩ. The current limit set point, I
1.25 + 6 (1.25) + 7.5
)
– V
IOUTLO
Ǔ
R
13
13 )R7
I
desired for current limit. V ariations in
O
, is internally amplified by a fixed
2
Amps
, is given by:
OCP
R
DS(on)
,
For the above current level, V
R
+
)
7 +
ǒ
I
O
ǒ
R
DS(on
V
IOUT(Trip
0.1
V
V
IOUT(Trip
Choose R13 = 750 Ω.
Now, calculate R7 using:
In the above calculations, the nominal value for R
Worst case analysis should always be performed to insure that current limit
does not interfere with delivering maximum load.
IOUT(Trip)
Ǔ
2 +(7.5A 0.011 1.4) 2 + 0.23
)
)
* 1
Ǔ
is given by:
R
13 + 983 +u 1
k
of 1 1 mΩ was used.
DS(on)
Design Procedure
V
2-9
Page 30

TPS56xx Functions
An alternate current sensing scheme is to insert a current sense resistor in
series with the drain of Q1. Higher accuracy may be obtained at the expense
of lower efficiency.
2.1.7 Overvoltage Protection
If V
exceeds Vref by 15%, a fault latch is set and the output gate drivers are
O
turned off. The latch remains set until VCC (pin 15) goes below the
undervoltage lockout value.
In addition to the standard OVP protection, the LODRV circuit protects the
processor against overvoltages due to a short across the high-side power
MOSFET. External components to sense an overvoltage condition are
required to use this feature. When a shorted high-side MOSFET occurs, the
low-side MOSFET is used as a crowbar. LODR V is pulled low and the low-side
MOSFET is turned on, overriding all control signals inside the controller. The
crowbar action shorts the input supply to ground through the faulted high-side
MOSFET. A fuse in series with V
short-circuit.
must be added to disconnect the
I
2.1.8 Power Good
2.1.9 Bias
2.1.10 Gate Drivers
The power-good circuit monitors for an undervoltage condition on VO. If V
drops below 93% of VREF, then the PWRGD output is pulled low. PWRGD is
an open-drain output and needs a pullup resistor.
Analog BIAS (pin 9), the output of the internal analog bias regulator, is
designed to provide a quiet bias supply for the internal TPS56xx circuitry.
External loads should not be driven by the bias regulator. A 1-µF capacitor,
C22, is connected from BIAS to ANAGND.
The gate drivers drive large capacitive loads quickly and efficiently . Figure 2–4
is a block diagram of the drivers. The output stage of the drivers consists of
bipolar and MOS transistors in parallel. The bipolar transistors provide the
majority of the 2-A drive current. The driver outputs get pulled to ground
(during sinking) or to the supply rail (during sourcing) by the MOS transistors.
If the MOS transistors were not in the design, the voltage level on the driver
outputs could only be driven to the saturation voltage level of the bipolar
transistors. This could be a serious limitation, especially if logic-level power
MOSFETs are used in the power stage, resulting in shoot-through current
through the power MOSFETs.
O
2-10
Page 31
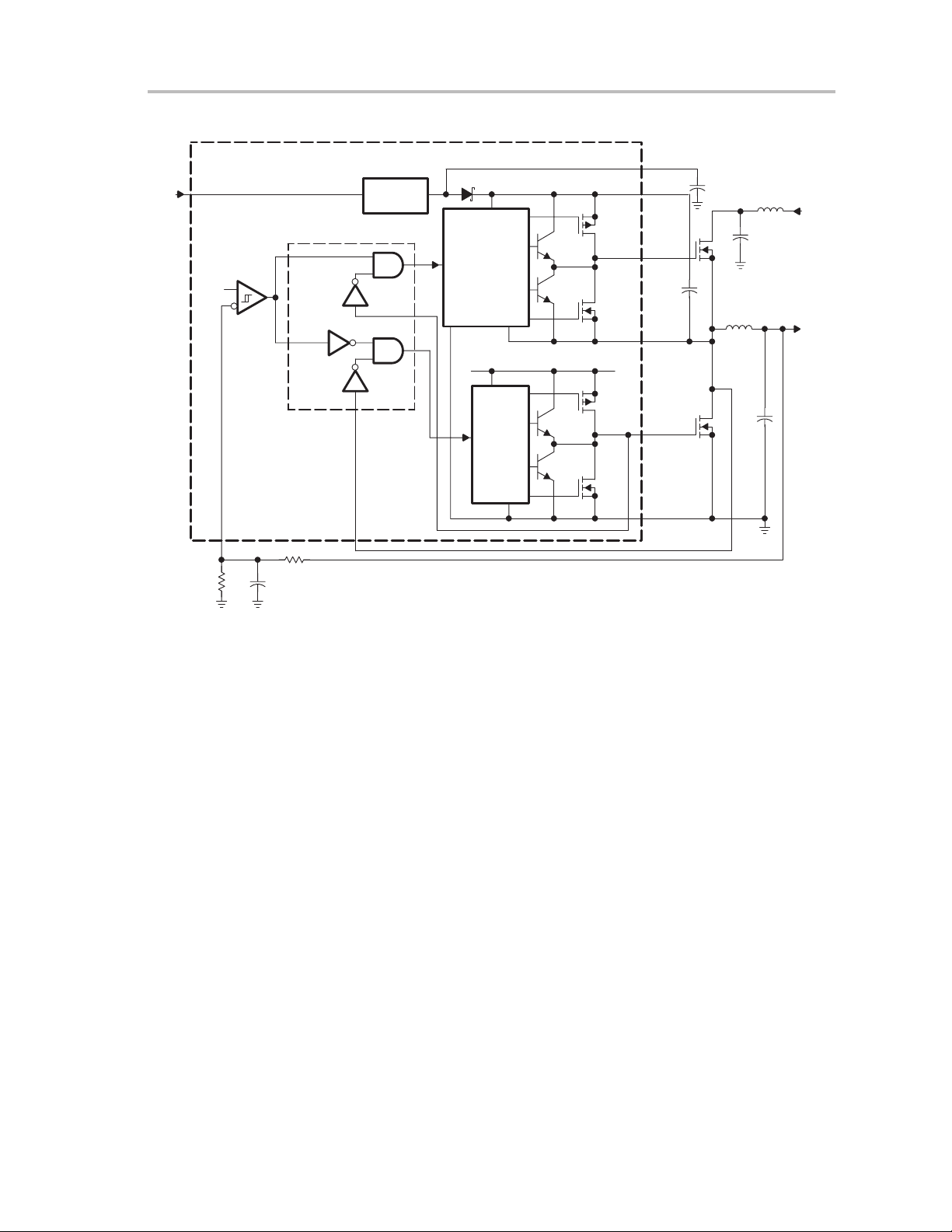
Figure 2–4.Gate Driver Block Diagram
TPS56xx Functions
TPS56xx Synchronous-Buck Controller
V
CC
12 V
V
REF
R1
R2
C5
Adaptive
Deadtime
Control
8 V Drive
Regulator
LOWDR
Level
Shifter/
Predriver
Predriver
Highside Driver
Lowside Driver
M1
45 Ω
M2
5 Ω
M3
45 Ω
M4
5 Ω
DRV
BOOT
HIGHDR
C4
BOOTLO
LOWDR
DRVGND
C3
V
phase
L1
V
in
C1
L2
C2
VO
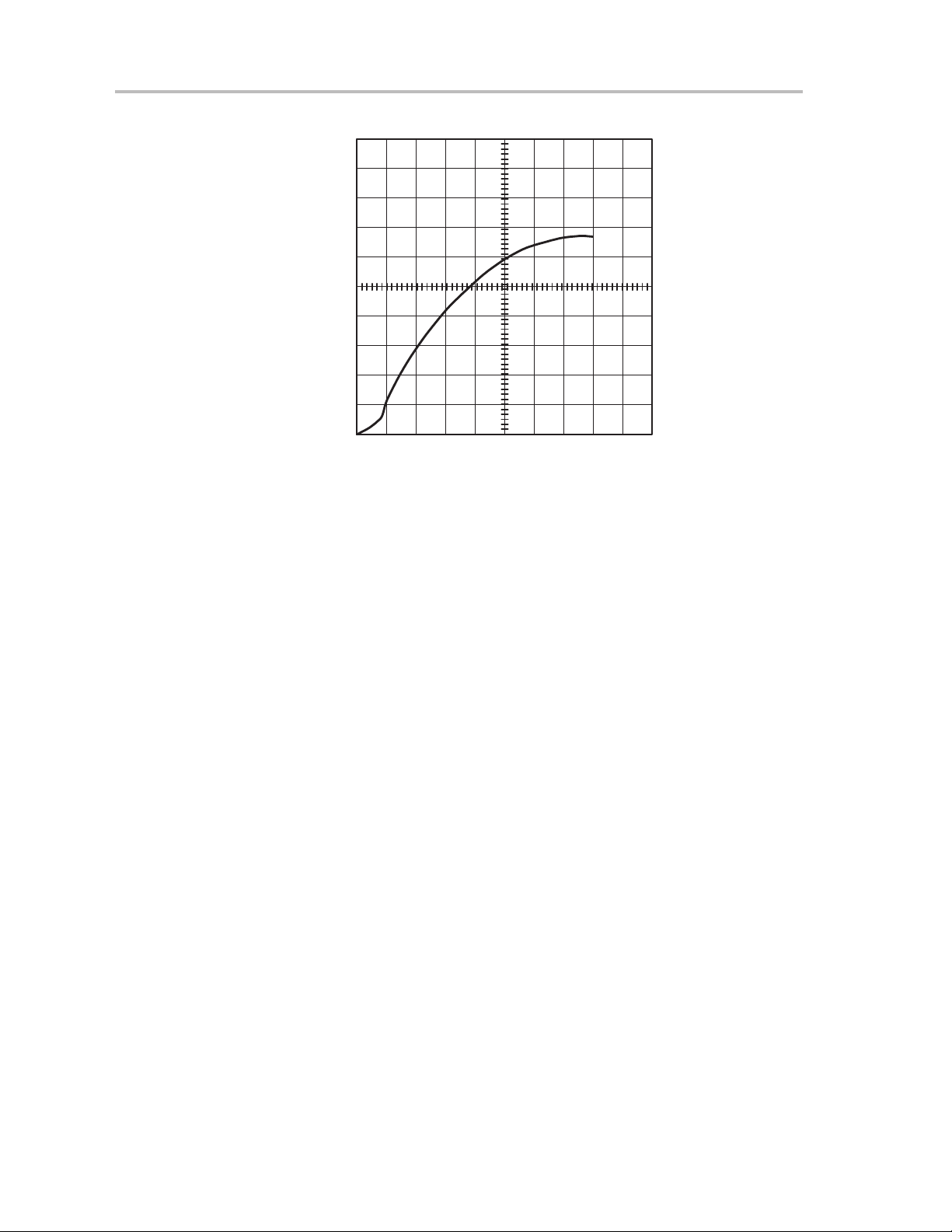
Figure 2–5 gives an I–V sweep of the low-side driver during sinking. The
Rds(on) of the MOS transistors for the sink stage is 5 Ω at T
= 125°C and is
J
45 Ω for the source stage. The Rds(on) is lower for the sink stage to provide
a low impedance path for the displacement current that flows through the Miller
capacitance of the power MOSFET when the drain switches. This is especially
important for the low-side driver to keep the low-side MOSFET off when the
high-side MOSFET is turned on.
Design Procedure
2-11
Page 32
TPS56xx Functions
Figure 2–5.I–V Characteristic Curve for Low-Side Gate Drivers
Driver Sink Current – 0.5 A/div
Driver Output Voltage – 1 V/div
The high-side gate driver is a bootstrap configuration with an internally
integrated Schottky bootstrap diode. The voltage rating of the BOOT pin to
DRVGND is 30 V. The gate drivers are biased from an internal 8-V drive
regulator to minimize the gate drive power losses that are dissipated inside the
TPS55xx.
The gate drivers have also been optimized to reduce the amount of internal
shoot-through current, which will result when either the low-side or high-side
driver is switching states.
The adaptive deadtime control minimizes the deadtime between conduction
intervals of the power MOSFETs.
The low-side gate driver is not allowed to turn on until the Vphase voltage is
below 2 V; the high-side gate driver is not allowed to turn on until the LOWDR
pin falls below 2 V.
Fast switching and short dead times improve efficiency. There is 100-mA
current limiting within the internal 8-V voltage regulator to protect the regulator
and IC against a short fault on one of the driver pins.
2.1.10.1 Low-Side Driver Controls
The TPS56xx contains two control inputs to control the low-side MOSFET
drive for various applications. They are LODRV (pin 10) and LOHIB (pin 11).
LODRV (pin 10) is an enable input for the low-side MOSFET driver. This pin
is connected to the 5-V input supply for normal synchronous operation.
For added overvoltage protection, external sensing circuitry can be included
to drive the LODRV input low in the event of an overvoltage. Applying a logic
low to LODRV causes the driver for the low-side MOSFET to go to a high state
causing the low-side MOSFET to turn on and act as a crowbar for the output.
This input has precedence over any input present at LOHIB (pin 1 1); i.e., a low
input to LODRV (pin 10) overrides the inhibit function.
2-12
Page 33

LOHIB (pin 11) is an inhibit input for the low-side MOSFET driver. This input
has to be logic low before the low-side MOSFET is allowed to be turned on,
i.e., a logic high on LOHIB prevents the low-side MOSFET driver from turning
on the low-side MOSFET. For normal synchronous operation, this pin is
connected to the junction of the high and low-side MOSFETs. This prevents
cross-conduction of the two MOSFET s by constraining the low-side MOSFET
to be OFF unless its drain-to-source voltage is at a low level. Shoot-through
current caused by both MOSFETs being ON simultaneously is actively
prevented. However, if LODRV is low, the low-side MOSFET is turned ON
regardless of the LOHIB input.
2.1.10.2 High-Side Driver
The driver for the high-side MOSFET can be configured either as a
ground-referenced driver or as a floating bootstrap driver. When configured as
a floating driver, the bias voltage to the driver is developed from the DRV
regulator. The maximum voltage that can be applied between BOOT and
DRVGND is 30 V. The driver can be referenced to ground by connecting
BOOTLO to DRVGND, and connecting VCC to BOOT. A 1-µF capacitor , C7, is
connected from BOOT (pin 16) to BOOTLO (pin 18) for bypassing.
2.1.10.3 Grounding
TPS56xx Functions
Three separate ground connections enable the user to isolate high-current
grounds from low current logic grounds. The low-current logic ground is called
analog
analog ground
ground. ANAGND (pin 7) and AGND2 (pin2) are the connections for
.
The high-current ground is called power ground and must be
connected to DRVGND (pin 12). The maximum voltage difference between
ANAGND and DRVGND must be limited to less than ±0.2 V.
Refer to the
Layout Guidelines
section of the TPS56xx data sheet for further
information on grounding.
Design Procedure
2-13
Page 34

External Component Selection
2.2 External Component Selection
This section shows the procedure used in designing and selecting the power
stage components to meet the performance parameters shown in Table 1–2
for the example circuit shown in Figure 1–3.
2.2.1 Duty Cycle Estimate
An estimate of the duty cycle is used frequently in the following sections. The
duty cycle, D, is the ratio of the high-side power-switch conduction time to the
period of one switching cycle. The duty cycle for a continuous mode step-down
converter is given by:
V
)
O
D
+
Where:
V
= An estimate of the on-voltage of the power MOSFETs.
DS(ON)
V
DS(ON
V
I
)
For an initial estimate for V
and an input voltage of 5 V, the duty cycle calculates to:
2.2.2 Input Capacitance
The input capacitance provides a low-impedance voltage source for the power
stage. The ESR, ESL, RMS current rating and capacitance value of the input
capacitance are important parameters in the selection process. The most
stringent requirement is often the RMS current that the capacitance must
handle. An equation for the RMS current seen by the input capacitance for a
buck converter is given by:
The above equation assumes that the output ripple current is small, that there
is an input inductor, and that its ripple current is small. For
I
= 6 A, we get:
O
I
Cin(RMS
3.3
V
Ǹ
) 0.2
5
V
Ǹ
+
D
)
D
+
I
Cin(RMS
+ 0.7 (1–0.7) 6
)
DS(ON)
V
+ 0.7
(
)
1
–D
, use 0.2 V . So, for an output voltage of 3.3 V
2
I
O
V
= 5 V and
I
2
+ 2.7
ARMS
The input capacitance for this design uses three 150-µF, 6.3-V Sanyo
POSCAP type electrolytic capacitors in parallel. They are C2, C3, and C4 in
Figure 1–3. The ripple current rating for one of these capacitors is 1.9 A RMS
at 45°C. The total ripple current rating for the input capacitance is
3 × 1.9 = 5.7 A RMS.
2.2.3 Output Filter Design
Unlike fixed-frequency PWM-controlled power supplies, the output filter
design is driven primarily by the need to provide satisfactory output voltage
2-14
Page 35

performance in response to fast load transients encountered when supplying
power to current- and next-generation microprocessors. A secondary
consideration is the switching frequency resulting from the output filter
component values. This section discusses important considerations when
selecting/designing the output filter elements. A detailed analysis of the output
voltage ripple characteristics is also presented, resulting in an expression for
predicting the power supply switching frequency.
2.2.3.1 Output Capacitance
Normally, the output capacitor is selected to limit ripple voltage to the level
required by the specification, but in a hysteretic regulator, such as this one, the
TPS55xx essentially determines the output voltage ripple. The output ripple
is previously chosen to be less than 2% of V
the output capacitor characteristics. Since output voltage ripple is set by the
comparator hysteresis band, the output capacitor is chosen to provide
satisfactory response to fast load transients.
To show the importance of the output capacitor characteristics, consider the
following: This example circuit is designed for a worst case load step of no load
(0 Amps) to full load (6 Amps) with a slew rate of 30 A/µs. For a transient of
this slew rate, the output filter alone controls the initial output voltage deviation.
Further examination shows that the output filter inductor current changes little
during the load transient. Therefore, for fast load transients, the output
capacitor characteristics dominate the output filter performance. In this
design, the output capacitor’s ESR (equivalent series resistance) and ESL
(equivalent series inductance) are the parameters that are most critical.
External Component Selection
and is relatively independent of
O
To calculate the ESR requirement, assume that all the load transient current
is supplied by the output capacitor. Also assume that the output voltage
change due to the capacitor’s capacitance is much smaller than the voltage
change due to the ESR, and that the capacitor’s ESL is negligible. In most
practical applications, these assumptions are reasonable and they greatly
simplify calculations. The ESR required to limit output voltage change to
100 mV due to a 6 amp load step is:
D
V
100
ESR
v
O
+
D
I
O
mV
+ 16.7
6
A
m
W
The required level of ESR requires a large amount of capacitance. For this
design, four Sanyo POSCAP type electrolytic capacitors connected in parallel
are selected. These capacitors are a good compromise between
performance, cost, and board area requirements. The particular part used is
an 150-µF, 4-V capacitor with a specified maximum ESR of 45 mΩ, giving a
total maximum ESR of 11.25 mΩ. These capacitors are C10, C11, C12, and
C13 in Figure 1–3. For good design practice, C14, a 10-µF ceramic capacitor,
is placed in parallel with C10–C13. Ceramic capacitors are very effective for
suppressing high frequency switching spikes and reducing the effects of the
ESL of C10–C13.
To summarize, the output capacitance must be selected to provide a
sufficiently low ESR. The capacitor(s) must have an adequate voltage rating
Design Procedure
2-15
Page 36

External Component Selection
for the particular application. In addition, the capacitor(s) must have an ample
ripple current rating to handle the applied ripple current. This ripple current is
dependent on the ripple current in the output inductance that is calculated in
the next section. The RMS current in the output capacitance is calculated as
follows for 3.3 V output:
I
CRMS
Where ∆IL is the peak-to-peak ripple current in the output inductor.
The ripple current rating for one of these capacitors is 1.7 A RMS at 45°C. The
total ripple current rating for the output capacitance is 4 × 1.7 = 6.8 A RMS assuming that each cap shares equally . Poor layout may cause one or more of
the caps to take an unequal share.
2.2.3.2 Output Inductance
The output filter inductance is the next quantity to be determined. Like the output capacitance selection, the primary consideration is providing satisfactory
response to a fast load transient.
The inductance affects the output voltage response to transient loads by
governing the rate at which its current can increase (or decrease). For
example, during a load transient where the output current increases from no
load to full load, the output capacitor supplies all of the output current until the
inductor current has time to increase to full load. So, a relatively small
inductance is desired.
+
Ǹ
3
I
+
I
L
6
0.289 + 7.3A 0.289 + 2.1
L
A
RMS
On the other hand, the inductance also plays a part in the power supply
switching frequency , because the inductance limits how fast the output voltage
traverses through the hysteresis band. As the inductance decreases, the
output voltage changes faster, giving rise to higher switching frequencies.
Therefore, the inductor value is fairly critical and should be stable over the
expected load and temperature range. Care should be exercised in the
inductance selection because design requirements for hysteretic regulators
are different from PWM controlled converters. Recall that for a fixed frequency
PWM controlled buck converter, for a given operating point, the output
inductance governs the peak-to-peak amplitude and the slope (di/dt) of the
inductor current. In a hysteretic regulator, the ripple current is set by the output
voltage ripple setting and the output capacitance impedance.
Other important factors to be considered when designing or selecting the
inductor are current capability, allowable operating frequency, and dc
resistance.
After choosing an initial inductance value, the power supply switching
frequency must be estimated to insure that it is within the desired range. The
switching frequency for the example design given in Figure 1–3 is nominally
135 kHz for 5-V input and a 3.3-V output. A detailed analysis of the switching
frequency and an equation to predict it is given later.
T o calculate the maximum inductance allowed for a given response time, load
step, and operating point, the following simple relationship is used:
2-16
Page 37

External Component Selection
V
+L
L
I
TRAN
t
åLv
V
I
TRAN
L
t
Where:
V
= the voltage applied across the output inductor,
L
I
= the magnitude of the load step, and
TRAN
∆t = the desired response time.
For a load step from light load to heavy load, the voltage applied across the
inductor can be assumed to be V
– VO. This also assumes that the duty cycle
I
is 100% as the output voltage is corrected. Alternatively , for a load step from
heavy load to light load, the voltage across the inductor can be assumed to be
. This assumes that the duty cycle is 0% as the output voltage is corrected.
V
O
For the example circuit described here, the condition which gives the smallest
inductor value is a load step from light load to heavy load for a 3.3-V output.
This is because the voltage applied to the output inductor is the lowest, i.e.,
the input voltage minus the output voltage. For this case, allowing 5 µs for the
inductor current to change, an inductance value is calculated as follows:
V
v
L
I
TRAN
t+
L
5
–
3.3
6
5 10
–
6
+ 1.4
H
For convenience, a 1.5-µH inductor was designed for this circuit.
Figures 3–10, 3–19, 3–28, and 3–37 illustrate satisfactory transient load performance for the output filter values selected in this and the previous sections.
2.2.4 Switching Frequency Analysis
After the elements of the output filter are determined, the power supply
switching frequency must be estimated. If the estimated switching frequency
is too high, the switching losses in the power MOSFET s will be high, resulting
in less than optimum efficiency . If the estimated switching frequency is too low,
the inductor value may be too high, resulting in unsatisfactory transient
response. A switching frequency outside the desired range should be
corrected by changing either the output ripple setting, the output capacitance,
or the output inductance.
To accurately predict the switching frequency of a hysteretic regulator, the
output voltage ripple must be investigated. This should be expected, since the
power supply switching instants are based upon the state of the output
voltage. A simple and accurate method of determining the switching frequency
is described below.
2.2.4.1 Output Ripple
The three elements of the capacitor that contribute to ripple are ESR, ESL, and
capacitance. Assume that all three elements are in series and there are no
other parasitic components to consider. Figure 2–6 shows the voltage
waveforms across each component of the output capacitor and the
corresponding equations.
Design Procedure
2-17
Page 38

External Component Selection
Figure 2–6.Output Ripple Voltage Detail
(a) Current waveform through output capacitor
(b) Voltage waveform across ideal capacitor with initial value at
∆Ι
Vp–p
beginning of high-side MOSFET on-time
V
+
C
2
(c) Voltage waveform across ESR
V
(d) Voltage waveform across ESL
(e) Composite output voltage ripple waveform
V
V
V
I
AC
V
ESR
ESL
ripple
t
(a)
C
(b)
(c)
(d)
t
del
(e)
t
on
off
T
s
t
t
t
t
H
yst
t
t
del
High-side MOSFET ON High-side MOSFET OFF
2
I t
Co D Ts
High-side MOSFET ON High-side MOSFET OFF
+
ESR
ESR
High-side MOSFET ON High-side MOSFET OFF
V
+
ESL
V
+
ripple
ESL
D
V
C
D
)
–
I
2
I t
Ts
V
Ts
I
ESR
Co
–
t
I
2
)
V
V
+
C
ESL
V
2
ESR
V
I t
Co
ESL
2
–
I
Co
I
–
2
ESL
(1–D)
(
1
(1–D)
–
+
ESR
+
2
t
–D
I
I
Ts
)
Ts
t
Ts
Figures 3–6, 3–15, 3–24, and 3–33 show the phase voltage (voltage at
junction of high-side MOSFET with low-side MOSFET), and output voltage
ripple waveforms for the example circuit of Figure 1–3. The output voltage
waveform is slightly different from the theoretical waveform of Figure 2–6(e)
due to the smoothing effect of the 10-µF ceramic capacitor in parallel with the
electrolytic capacitors.
2.2.4.2 Switching Frequency Equation
Assume that the input and output voltage ripple magnitudes are relatively
negligible compared to the dc component. Also assume that the time constant
L/(R
and R
DS(on)
DS(on)
+ RL)
, where L is the output inductance, RL is the inductor resistance
is the on-state resistance of the high-side MOSFET(s), is high in
comparison with the switching period. Assume the body diode conduction time
and switching transition time are much smaller than the switching period.
These assumptions are reasonable for low voltage ripple and high efficiency
regulators. In such a case the output inductor current can be modeled as
the sum of the dc component, which is equal to the output current Io, and
the ac linear ramp component, which flows through the output capacitor
[Figure 2–6(a)].
The numbered equations in this section are used to derive the switching
frequency equation.
2-18
Page 39
External Component Selection
Peak to peak value of the inductor current ∆I is given by the following equation:
VI–Io
I+
Where:
V
=the input voltage
I
V
= the output voltage
O
Ts = the switching period
+
Hyst,
ESL
L
ǒ
R
V
V
)Io
+
t
ON
Ts
Ts–tON)
– t
OFF
O
and tONis the on time of the high-side MOSFET.
(see Figure 2–6 (b)). In this case the voltage
V
p-p
del
D
D +
Referring to Figure 2–6 (e), the output voltage ripple,
hysteresis band,
switching instants are equal for simplicity. The ideal capacitor voltage
component has the same initial value during switching instants
(
On the other hand, the hysteresis band is equal to the difference between the
peak-peak values of the V
t
ǒ
R
DS(on
L
Ǔ
)
R
)
O
L
ESR
ripple,
DS(on
I
because of the delays,
V
) I
I
Ǔ
)
R
–V
L
)
is the duty cycle which is defined as :
v
ripple,
O
D
t
. Assume that delays for both
del
at the moments
Ts
V
,
is higher than the
p-p
V
is:
p-p
tON – t
t
ON
del
and
and
(1)
(2)
ESR
(3)
v
ESL
(4)
and
Hyst+V
After substituting equation (1) into equations for
(Figure 2–6) and using equations (2) and (3), the following equation for the
switching frequency,
f
+
s
V
I
Equation (4) shows that the switching frequency strongly depends on
ESL
. It is important that
t
ǒ
ESR t
ESL
If it does not, the voltage step across the ESL during switching exceeds the
hysteresis window, and the switching frequency becomes too high and
uncontrollable.
The switching frequency does not depend on the load current in equation (4),
because a synchronous regulator has the same two stages of operation during
the switching period over the load current range, including no load condition.
There is no discontinuous mode operation at very light loads. In reality there
is a weak dependence of the switching frequency on the load current because
ǒ
ripple
t
ON
f
, can be derived:
S
ǒ
V
VI–V
O
ǒ
V
ESR t
I
ESL
del
Ǔ
*
t
*
del
Ǔ ǒ
O
)
del
meet the following condition:
)
Hyst L DńVout
ǒ
V
ESR–t
Hyst L–ESL V
ripple
t
del
OFF
ń
Co
*
Ǔ
Ǔ
v
t
del
C
,
Ǔ
I
v
ESR
Ǔ
and
Design Procedure
2-19
Page 40

External Component Selection
of power losses and additional voltage drops through non-ideal components.
Equation (4) should be sufficiently accurate for the first frequency estimate at
the beginning of a design.
2.2.5 Power MOSFET Selection
The TPS56xx is designed to drive N-channel power MOSFETs in a
synchronous rectifier configuration. The MOSFET chosen for this design is the
Siliconix Si4410DY. This device is chosen for its low r
drain-to-source breakdown voltage rating of 30 V.
Power dissipation for the switching MOSFET s, which includes both conduction
and switching losses, is given by:
of 13.5 mΩ and
DS(on)
P
P
P
P
An example MOSFET power dissipation calculation for Q1 and Q3 is shown
below with the following assumptions:
The total switching time,
An
A 60°C maximum ambient temperature,
= 5.0 V, VO = 3.3 V, and IO = 6 A then :
V
I
2
(6)
+
D(Q
1)
+ 0.48 ) 0.20 + 0.68
2
(6)
+
D(Q
2)
+ 0.20 ) 0.20 + 0.40
The thermal impedance of these devices, R
copper and a one-inch-square pattern, thus:
T
J(Q
2
ǒ
+
I
D(Q
1)
ǒ
+
D(Q
2)
r
DS (on)
1)
high temperature adjustment factor = 1.4,
(
0.0135 1.4) 0.7 ) 0.5 5 6 100 10
(
0.0135 1.4) 0.3 ) 0.5 5 6 100 10
+
T
)
A
r
DS(on
O
2
I
r
DS(on
O
W
W
ǒ
R
JA
)
)
t
= 100 ns,
r+f
Ǔ
P
+ 60 )(50 0.90)+ 94°
D
ǒ
Ǔ
D
)
0.5
V
ǒ
Ǔ
(
)
1
–D
)
0.5
= 90°C/W for FR-4 with 2-oz.
θJA
I
i
V
t
r)f
O
I
i
t
O
–
9
135 10
–
9
135 10
C
r)f
f
sw
Ǔ
Ǔ
f
sw
3
3
2-20
T
It is good design practice to check power dissipation at the extreme limits of
input voltage to find the worst case.
J(Q
+
2)
ǒ
T
)
R
A
JA
Ǔ
P
+ 60 )(50 1.40)+ 80°
D
C
Page 41

Chapter 3
Test Results
This chapter shows the test setups used, and the test results obtained, in
designing the SLVP111–114 EVMS.
Topic Page
3.1 T est Summary 3–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Test Setup 3–5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 T est Results 3–7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Test Results
3-1
Page 42

Test Summary
3.1 Test Summary
The detailed test results and waveforms are presented in Figures 3–2 to 3–10
for the SL VP1 1 1, Figures 3–1 1 to 3–19 for the SLVP112, Figures 3–20 to 3–28
for the SL VP1 13 and Figures 3–29 to 3–37 for the SL VP1 14. The following are
summarized results.
3.1.1 Static Line and Load Regulation
The precise reference voltage regulator implemented in the TPS56XX
controller using both positive and negative remote sense pins provides
excellent regulation characteristics. The load regulation from no load to
6 amps load current does not exceed 0.26%. The line regulation is less than
0.045% for the input voltage range from 4.5 V to 5.5 V . Line and load regulation
is shown in Figures 3–2, 3–1 1, 3–20, and 3–29. The set point tolerance is less
than 0.333%. The measured results have a good margin for high volume
production.
3.1.2 Output Voltage Ripple
The output voltage peak to peak ripple is less than ±1%. This is a typical value
but it can be optimized for lower ripple applications. Measured output ripple
waveforms are shown in Figures 3–6, 3–15, 3–24, and 3–33.
The output filter for this EVM design is optimized for fast transient response
due to the high slew-rate load current transitions. Therefore, the output filter
is not optimized for low ripple and has a moderate amount of output ripple.
3.1.3 Efficiency and Power Losses
Efficiency and power losses for 5 V input voltage and maximum output current
6 A are presented in the following table:
Evaluation Board Efficiency, % Power Losses, W
SLVP111, 3.3V 90 2.2
SL VP112, 2.5V 86.4 2.37
SL VP113, 1.8V 83.2 2.18
SL VP114, 1.5V
Efficiency graphs versus load and at different line voltages are shown in
Figures 3–3, 3–12, 3–21, and 3–30.
Low power loss in each component decreases their temperature rise and
improves long term reliability. The EVMs do not require forced air cooling at
room temperature with good margin.
79.8 2.27
3.1.4 Output Start-Up and Overshoot
All possible start-up combinations are tested and waveforms are presented.
Output voltage rise time does not depend on the load current and ramps up
3-2
Page 43
in a linear fashion. There is no discernable overshoot in the waveforms. In this
application, output voltage rise time is set to approximately 9 mS with an
external capacitor. Although the EVMs have been tested with a very short Vcc
rise time, (see Figures 3–26 and 3–35) it is recommended to keep the rise time
of Vcc longer than 3mS as shown in Figures 3–8 and 3–17.
3.1.5 Frequency Variation
The switching frequency for a hysteretic controller depends on the input and
output voltages and the output filter characteristics. It has approximately the
same frequency variation as constant OFF time controllers. The precise
equation for switching frequency , confirmed by experiment, is presented in TI’s
application report
Using the TPS5210
Efficient Synchronous-Buck Controller for Microprocessor Power Supplies
http://www.ti.com/sc/docs/msp/papers/index.htm.
The frequency variation over all input voltage and output current combinations
is presented in the following table.
Switching frequency graphs versus load at different line voltages are shown
in Figures 3–5, 3–14, 3–23, and 3–32.
Test Summary
Designing Fast Response Synchronous Buck Converters
and in the paper, represented at HFPC–98
A Fast,
Evaluation Board
SLVP111, 3.3 V 97–175
SLVP112, 2.5 V 189–247
SLVP113, 1.8 V 262–312
SLVP114, 1.5 V
3.1.6 Load Current Transient Response
The hysteretic controller has excellent dynamic characteristics (see
Figures 3–10, 3–19, 3–28 and 3–37) and does not require any feedback
compensation circuitry . These figures show that the
load transient within the same switching cycle as when the transient occurs.
In addition, it is necessary to optimize the output filter to meet high slew-rate
load current transient requirements thus saving money and board space by
using only the fewest expensive bulk capacitors. Special attention should also
be paid to high frequency decoupling within the output filter to control the initial
transient voltage deviation because it does not depend on controller
characteristics.
3.1.7 Features
Frequency Variation,
(kHz)
296–378
controller
responds to a
The EVMs have all the features, which are described in detail in the datasheet
for TPS56XX controller.
The features include undervoltage lockout for both 12 V and 5 V input, inhibit
signal, power good signal, overvoltage protection, slow start, remote sense,
and overcurrent protection. Overcurrent limit is set to an 8 amp – 10 amp level.
Test Results
3-3
Page 44

Test Summary
3.1.8 Conclusion
The test results of the SLVP111/112/113/114 EVMs demonstrate the
advantages of TPS56xx controllers to meet stringent supply requirements to
power supplies, especially for powering DSPs and microprocessors. The
power system designer has a good solution to optimize system for his
particular application. Detailed information how to design a dc-dc converter by
using TPS56xx controller is represented in TI’s User’s Guide
Synchronous
Buck Converter Design Using TPS56xx Controllers in SLVP10x EVMs
Literature Number SL VU007 or
Regulators Using the TPS5210
Designing Fast Response Synchronous Buck
, Literature Number SLVA044.
,
3-4
Page 45

3.2 Test Setup
Follow these steps for initial power up of the SLVP112:
1) Connect an electronic load from Vout to PwrGND (J1-15, -16,
-17, -18 to J1-1 1, -12, -13, -14) adjusted to draw approximately
1 A at 2.5 V . The exact current is not critical; any nominal current
is sufficient. A fixed resistor can also be used in place of the
electronic load. The output current drawn by the resistor is
2.5
I
O
resistor power rating, P
V
amps where R is the value of the load resistor. The
R
should be at least
R
Connect the sense lines from the load to VsenseH and VsenseL
(J1-4 and J1-2).
2) Connect a 12-V lab power supply to the 12-V input (J1-7
referenced to PwrGND, J1-8) of the SL VP112. A current limit set
for 20 mA should be adequate for the controller’s power
requirements.
3) Connect another lab power supply to the 5 V dc input of the
SLVP112 (J1-5, -6 referenced to Return, J1-9, -10). Verify that
the current limit is set for at least 2 A and that it is set to 0 V.
2.5
2
R
Test Setup
2
Watts
.
4) Turn on the 12-V lab supply. Turn on the 5-V power supply and
ramp the input voltage up to 5 V. Once proper operation is
verified, this order is not important.
5) Verify that the SL VP1 12 output voltage (measured at the module
output pins) is 2.5 V ± 0.025 V.
6) For subsequent testing, ensure the lab supply output current
capacity and current limit are at least 7 A so that the SLVP112
can be operated at maximum load of 6 A.
7) For initial power up of the other converters, replace any
reference to 2.5 V in the above discussion with a reference to the
appropriate output voltage.
8) Refer to Chapter 3 for selected typical waveforms and operating
conditions for verification of proper module operation.
Figure 3–1 shows the SLVP112 test setup.
Test Results
3-5
Page 46

Test Setup
Figure 3–1.Test Setup
5V Power Supply
+
–
+
+–
–
Load
12-V Power Supply
3-6
Page 47

3.3 Test Results
Figures 3–2 to 3–102 show test results for the SLVP111.
Figure 3–2.SLVP111 Measured Load Regulation
SLVP111 MEASURED LOAD REGULATION
3.305
3.3
– V
O
V
3.295
Vin = 5.5 V
Vin = 5 V
Test Results
3.29
3.285
01234 56
Figure 3–3.SLVP111Measured Efficiency
SLVP111 MEASURED EFFICIENCY
94
Vin = 4.5 V
92
90
Vin = 5.5 V
88
Efficiency – %
86
84
Vin = 4.5 V
IO – A
Vin = 5 V
82
123456
IO – A
Test Results
3-7
Page 48
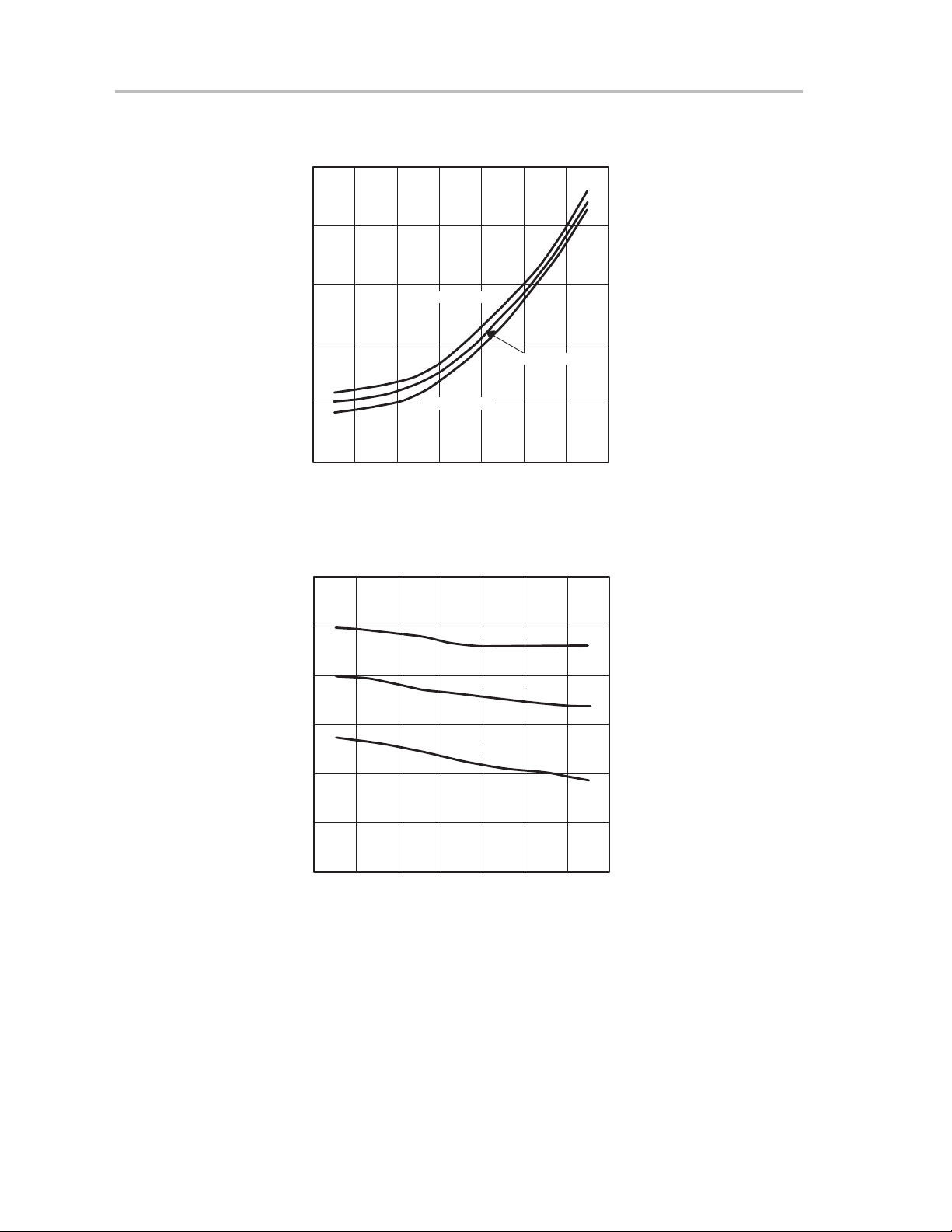
Test Results
Figure 3–4.SLVP111Measured Power Dissipation
SLVP111 MEASURED POWER DISSIPATION
2.5
2
1.5
Ploss – W
1
0.5
0
0123456
Vin = 4.5 V
Vin = 5 V
Vin = 5.5 V
IO – A
Figure 3–5.SLVP111Measured Switching Frequency
SLVP111 MEASURED SWITCHING FREQUENCY
200
175
150
125
Frequency – kHz
100
Vin = 5.5 V
Vin = 5 V
Vin = 4.5 V
3-8
75
50
0123456
IO – A
Page 49

Figure 3–6.SLVP111 Measured Switching Waveforms
V
O
20 mV/div
VDS Q2
2 V/div
2.5 µs/div
Figure 3–7.SLVP111Measured Start-Up (INHIBIT) Waveforms
Test Results
C3 Pk–Pk
50.8 mV
C3 Frequency
130.088 kHz
Low Signal
Amplitude
C4 Max
5.20 V
C4 + Duty
70.4%
V
O
2 V/div
INHIBIT
1 V/div
2.5 ms/div
C3 Pk–Pk
3.36 V
C3 Rise
7.500 ms
Low Signal
Amplitude
C3 + Over
2.5%
Test Results
3-9
Page 50

Test Results
Figure 3–8.SLVP111 Measured Start-Up (VCC) Waveforms
V
O
2 V/div
VCC (12 V)
5 V/div
UVLO
Threshold
2.5 ms/div
Figure 3–9.SLVP111Measured Start-Up (VIN) Waveforms
C3 Pk–Pk
3.36 V
C3 Rise
7.300 ms
Low Signal
Amplitude
C3 + Over
2.5%
V
O
2 V/div
VIN (5 V)
1 V/div
2.5 ms/div
C3 Pk–Pk
3.52 V
C3 Rise
8.540 ms
Low Signal
Amplitude
C3 + Over
2.4%
3-10
Page 51

Figure 3–10. SLVP111 Measured Load Transient Waveforms
V
O
100 mV/div
I
O
5 A/div
6.5 A
2.5 µs/div
Figure 3–11. SLVP112 Measured Load Regulation
SLVP112 MEASURED LOAD REGULATION
2.51
Test Results
C3 Pk–Pk
208 mV
C2 High
6.5 V
– VV
O
2.505
2.5
2.495
Vin = 5.5 V
0123456
IO – A
Vin = 5 V
Vin = 4.5 V
Test Results
3-11
Page 52

Test Results
Figure 3–12. SLVP112 Measured Efficiency
SLVP111 MEASURED EFFICIENCY
90
Vin = 4.5 V
88
Vin = 5 V
86
84
Eficiency – %
82
80
78
123456
Vin = 5.5 V
IO – A
Figure 3–13. SLVP112 Measured Power Dissipation
SLVP111 MEASURED POWER DISSIPATION
2.5
2
1.5
Ploss – W
1
Vin = 5 V
Vin = 5.5 V
3-12
Vin = 4.5 V
0.5
0
0123456
I
– A
O
Page 53

Figure 3–14. SLVP112 Measured Switching Frequency
SLVP112 MEASURED SWITCHING FREQUENCY
300
275
Test Results
250
225
Frequency – kHz
200
175
150
01234 56
Vin = 5 V
Vin = 5.5 V
Vin = 4.5 V
IO – A
Figure 3–15. SLVP112 Measured Switching Waveforms
V
O
20 mV/div
VDS Q2
2 V/div
C3 Pk–Pk
43.2 mV
C3 Frequency
218.800 kHz
Low Signal
Amplitude
C4 Max
5.72 V
2.5 µs/div
C3 + Duty
54.2%
Test Results
3-13
Page 54

Test Results
Figure 3–16. SLVP112 Measured Start-Up (INHIBIT) Waveforms
V
O
1 V/div
INHIBIT
1 V/div
2.5 ms/div
C3 Pk–Pk
2.64 V
C3 Rise
7.885 ms
C3 + Over
3.2%
Figure 3–17. SLVP112 Measured Start-Up (VCC) Waveforms
V
O
2 V/div
UVLO
Threshold
VCC (12 V)
5 V/div
2.5 ms/div
C3 Pk–Pk
2.56 V
C3 Rise
7.995 ms
C3 + Over
3.3%
3-14
Page 55

Figure 3–18. SLVP112 Measured Start-Up (VIN) Waveforms
Test Results
V
O
1 V/div
VIN (5 V)
1 V/div
2.5 ms/div
Figure 3–19. SLVP112 Measured Load Transient Waveforms
V
O
100 mV/div
I
O
2 A/div
C3 Pk–Pk
2.60 V
C3 Rise
7.635 ms
C3 + Over
3.2%
C3 Pk–Pk
200 mV
C2 High
7.00 V
5 A
25 µs/div
Test Results
3-15
Page 56

Test Results
Figure 3–20. SLVP113 Measured Load Regulation
SLVP113 MEASURED LOAD REGULATION
1.805
Vin = 5 V
IO – A
1.8025
– VV
1.8
O
1.7975
1.795
Vin = 5.5 V
Vin = 4.5 V
0123456
Figure 3–21. SLVP113 Measured Efficiency
SLVP113 MEASURED EFFICIENCY
88
86
Vin = 4.5 V
84
82
Vin = 5.5 V
80
Vin = 5 V
3-16
Efficiency – %
78
76
74
72
1 23456
IO – A
Page 57

Figure 3–22. SLVP113 Measured Power Dissipation
SLVP113 MEASURED POWER DISSIPATION
2.5
2
1.5
Vin = 5.5 V
Test Results
Ploss – W
1
0.5
0
Vin = 5 V
Vin = 4.5 V
0123456
I
– A
O
Figure 3–23. SLVP113 Measured Switching Frequency
SLVP113 MEASURED SWITCHING FREQUENCY
350
325
300
275
250
225
Frequency – kHz
Vin = 5.5 V
Vin = 5 V
Vin = 4.5 V
200
175
150
01234 56
IO – A
Test Results
3-17
Page 58
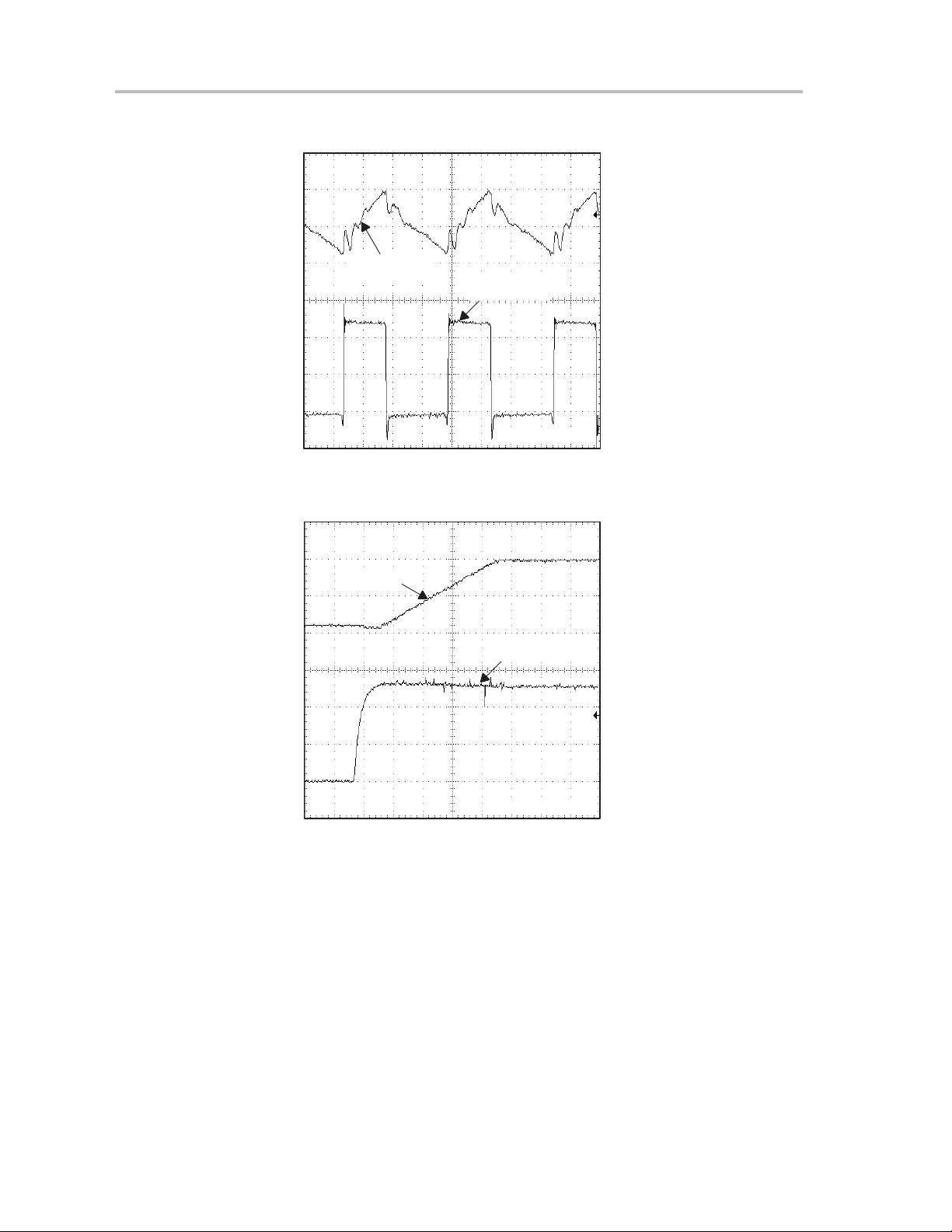
Test Results
Figure 3–24. SLVP113 Measured Switching Waveforms
V
O
20 mV/div
VDS Q2
2 V/div
1 µs/div
Figure 3–25. SLVP113 Measured Start-Up (INHIBIT) Waveforms
C3 Pk–Pk
34.8 mV
C3 Frequency
285.52 kHz
Low Signal
Amplitude
C5 Max
5.80 V
C4 + Duty
40.4%
V
O
1 V/div
INHIBIT
1 V/div
2.5 ms/div
C3 Pk–Pk
1.88 V
C3 Rise
7.360 ms
Low Signal
Amplitude
C3 + Over
2.3%
3-18
Page 59
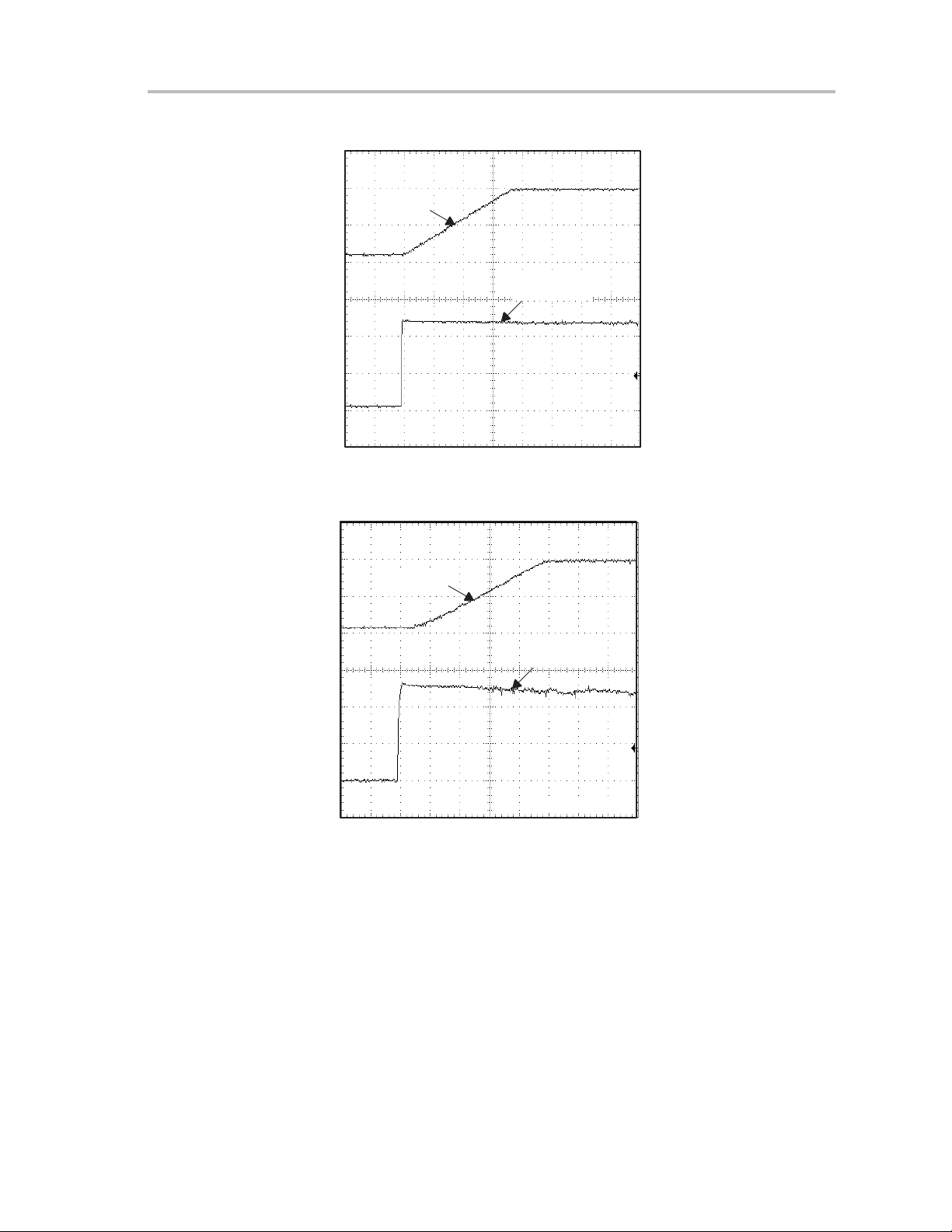
Figure 3–26. SLVP113 Measured Start-Up (VCC) Waveforms
Test Results
V
O
2 V/div
VCC (12 V)
5 V/div
2.5 ms/div
Figure 3–27. SLVP113 Measured Start-Up (VIN) Waveforms
V
O
1 V/div
VIN (5 V)
1 V/div
C3 Pk–Pk
1.84 V
C3 Rise
7.195 ms
Low Signal
Amplitude
C3 + Over
2.3%
C3 Pk–Pk
1.88 V
C3 Rise
8.300 ms
Low Signal
Amplitude
C3 + Over
2.2%
2.5 ms/div
Test Results
3-19
Page 60

Test Results
Figure 3–28. SLVP113 Measured Load Transient Waveforms
V
O
100 mV/div
I
O
5 A/div
3.6 A
25 µs/div
Figure 3–29. SLVP114 Measured Load Regulation
SLVP114 MEASURED LOAD REGULATION
1.5
C3 Pk–Pk
112 mV
C2 High
3.64 V
– VV
O
1.499
1.498
1.497
1.496
1.495
1.494
1.493
1.492
1.491
1.49
Vin = 5 V
Vin = 5.5 V
Vin = 4.5 V
0123456
IO – A
3-20
Page 61
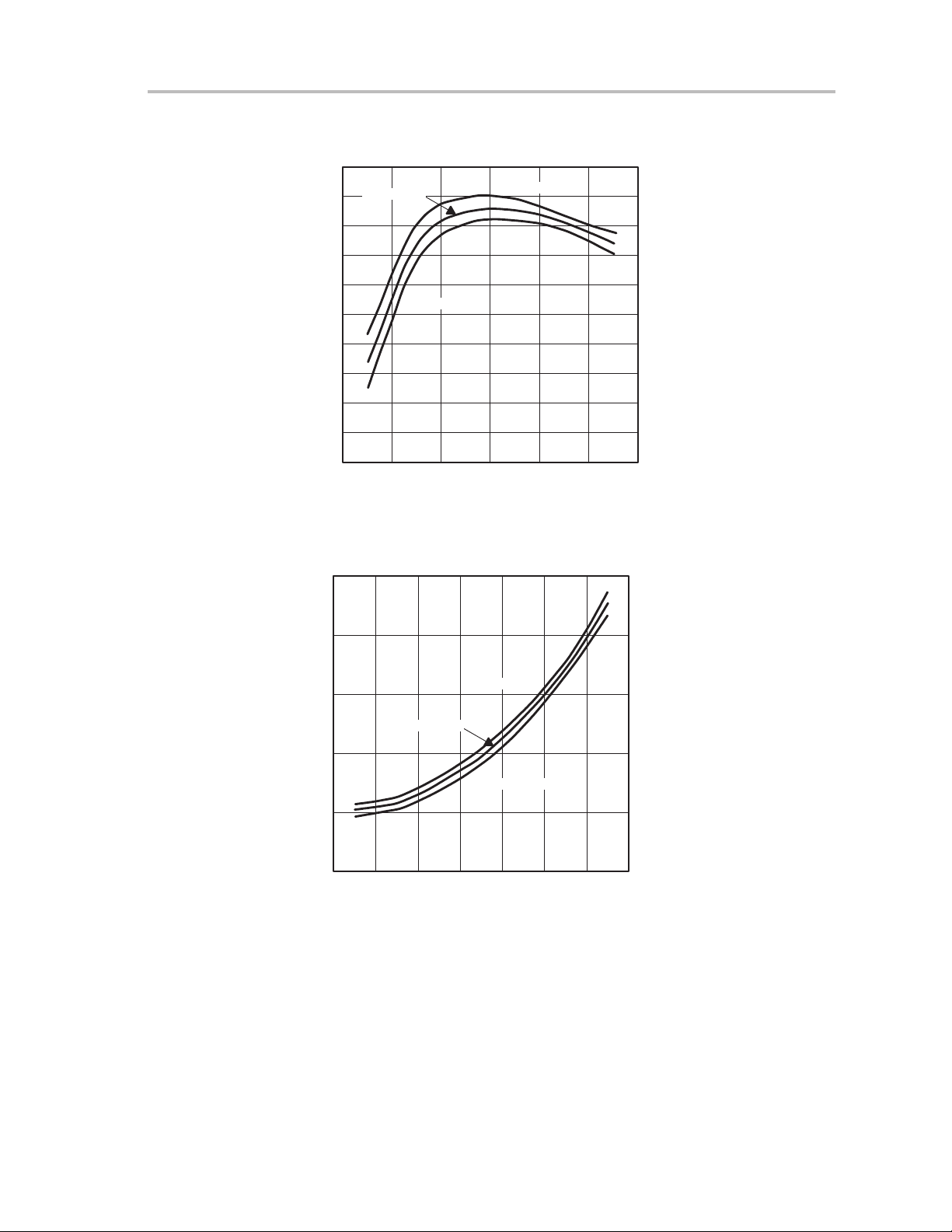
Figure 3–30. SLVP114 Measured Efficiency
SLVP114 MEASURED EFFICIENCY
85
Vin = 5 V
83
81
79
Test Results
Vin = 4.5 V
77
75
73
Efficiency – %
71
69
67
65
Vin = 5.5 V
12 3 4 5 6
IO – A
Figure 3–31. SLVP114 Measured Power Dissipation
SLVP114 MEASURED POWER DISSIPATION
2.5
2
1.5
Ploss – W
1
Vin = 5 V
Vin = 5.5 V
Vin = 4.5 V
0.5
0
0123456
IO – A
Test Results
3-21
Page 62
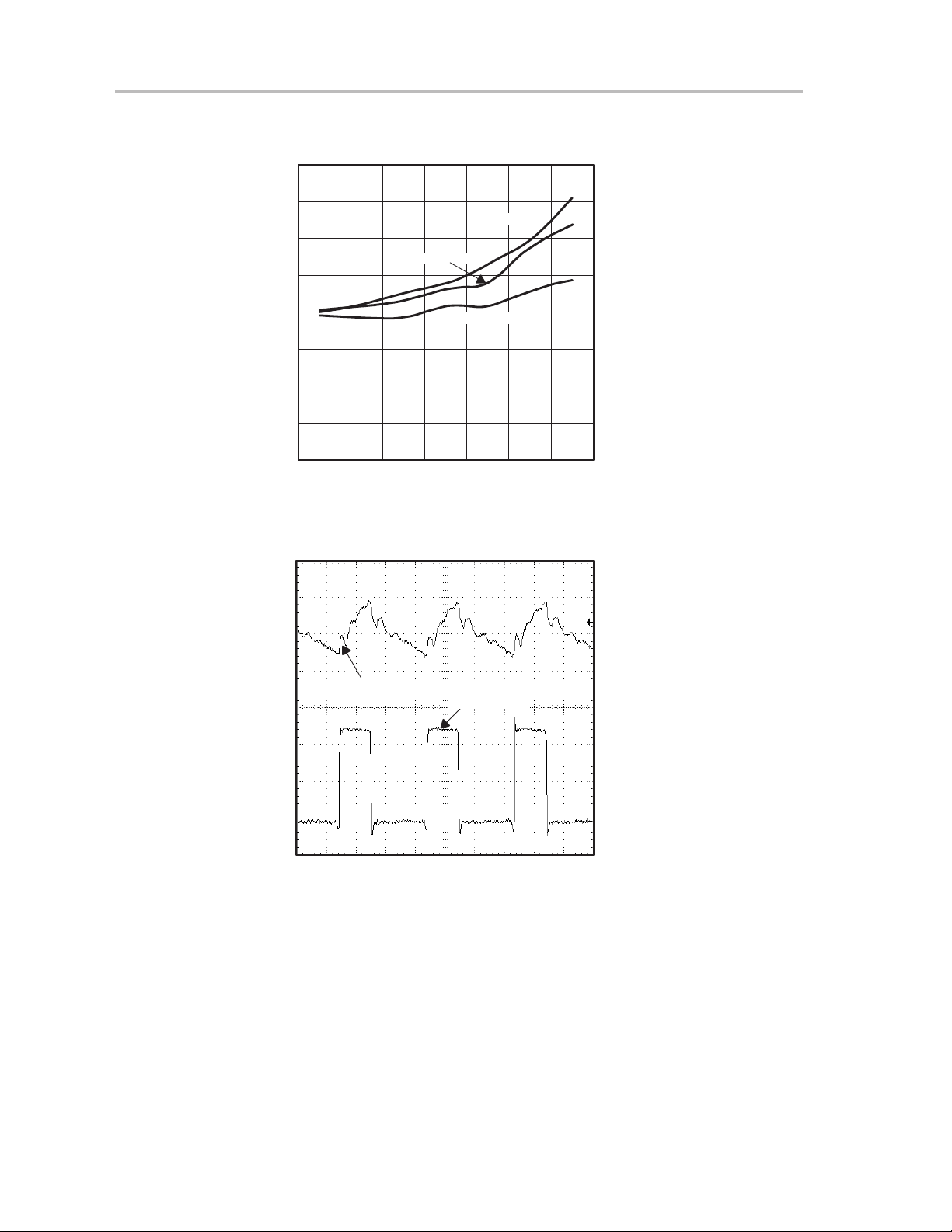
Test Results
Figure 3–32. SLVP114 Measured Switching Frequency
SLVP114 MEASURED SWITCHING FREQUENCY
400
375
350
325
300
275
Frequency – kHz
250
225
200
0123456
Vin = 5 V
Vin = 5.5 V
Vin = 4.5 V
IO – A
Figure 3–33. SLVP114 Measured Switching Waveforms
C3 Pk–Pk
30.8 mV
V
O
20 mV/div
VDS Q2
2 V/div
C3 Frequency
337.82 kHz
Low Signal
Amplitude
C4 Max
7.44 V
C4 + Duty
36.2%
1 µs/div
3-22
Page 63
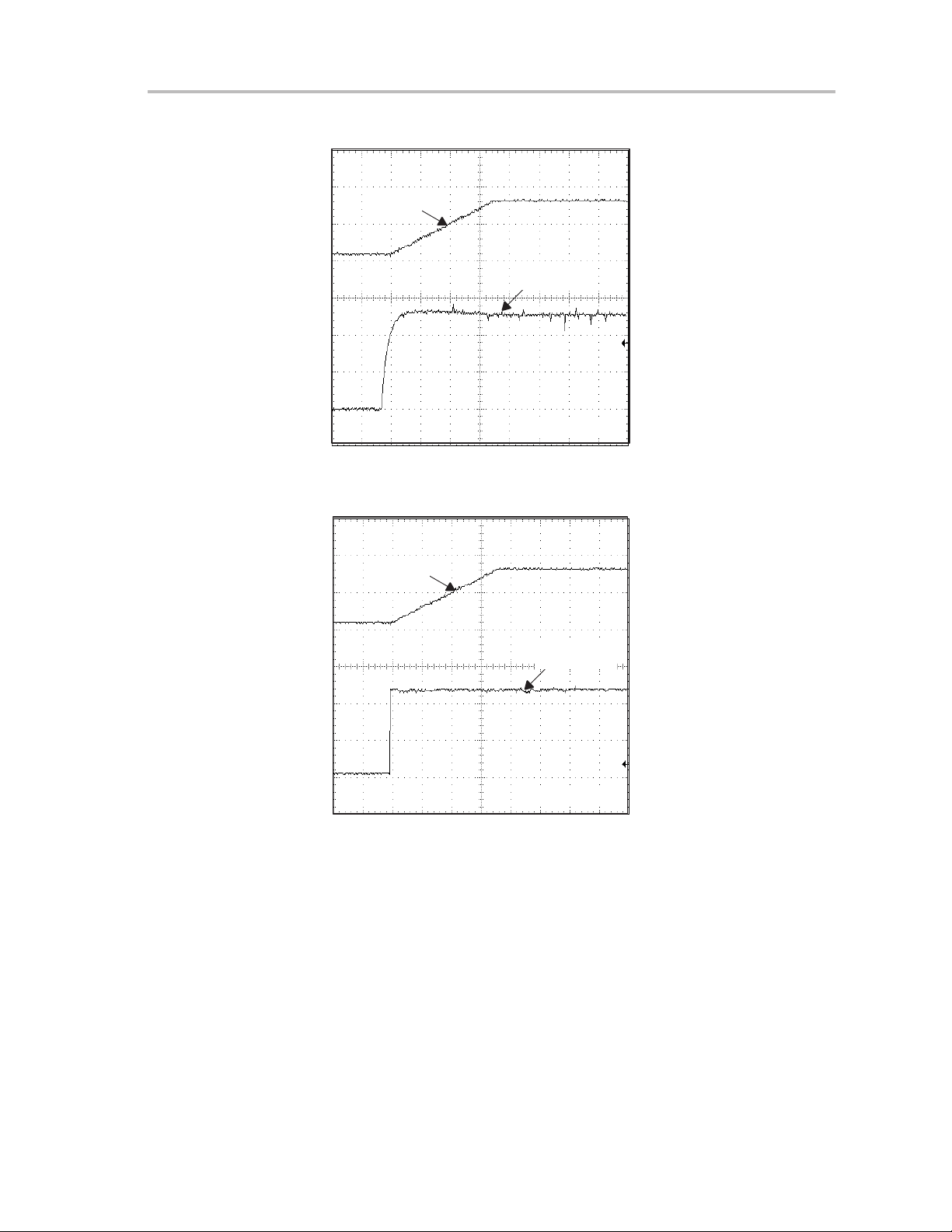
Figure 3–34. SLVP114 Measured Start-Up (INHIBIT) Waveforms
Test Results
V
O
1 V/div
INHIBIT
1 V/div
2.5 ms/div
Figure 3–35. SLVP114 Measured Start-Up (VCC) Waveforms
V
O
1 V/div
VCC (12 V)
5 V/div
C3 Pk–Pk
1.56 V
C3 Rise
6.990 ms
Low Signal
Amplitude
C3 + Over
2.8%
C3 Pk–Pk
1.56 V
C3 Rise
7.090 ms
Low Signal
Amplitude
C3 + Over
2.8%
2.5 ms/div
Test Results
3-23
Page 64
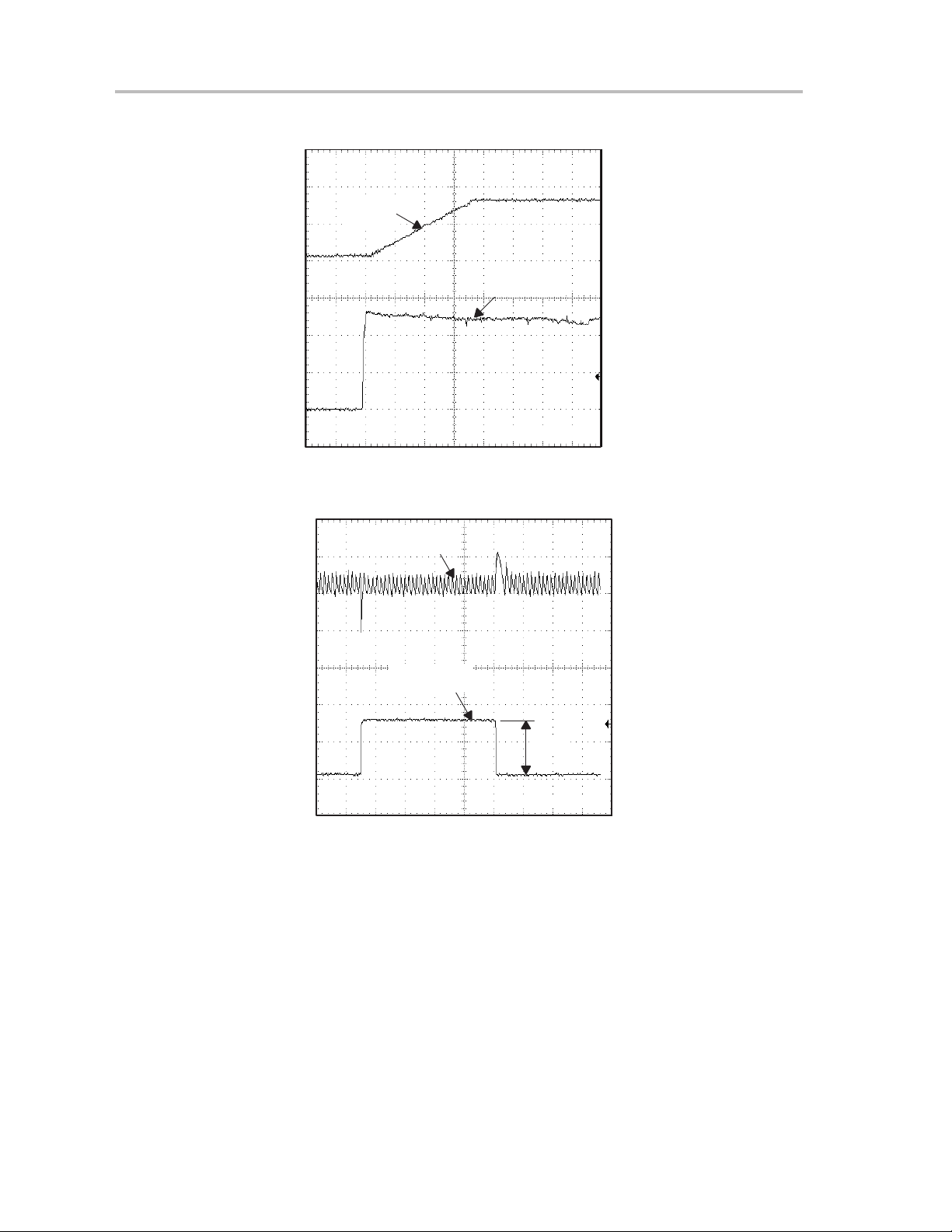
Test Results
Figure 3–36. SLVP114 Measured Start-Up (VIN) Waveforms
V
O
1 V/div
VIN (5 V)
1 V/div
2.5 ms/div
Figure 3–37. SLVP114 Measured Load Transient Waveforms
V
O
50 mV/div
C3 Pk–Pk
1.56 V
C3 Rise
7.07 ms
Low Signal
Amplitude
C3 + Over
2.7%
C3 Pk–Pk
108 mV
C2 High
3.08 V
I
O
2 A/div
3 A
25 µs/div
3-24
 Loading...
Loading...