

查询CDC586供应商
D
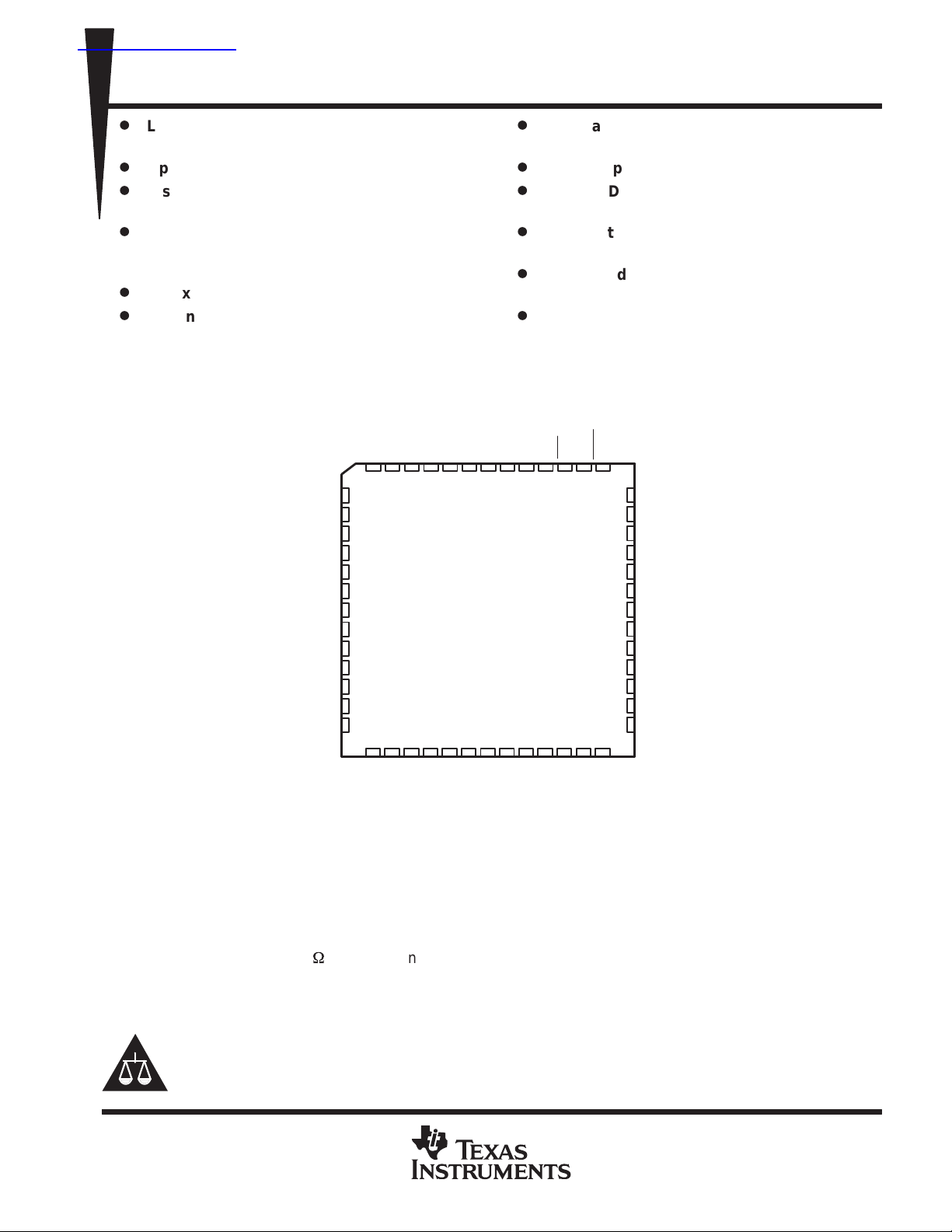
Low Output Skew for Clock-Distribution
and Clock-Generation Applications
D
Operates at 3.3-V V
D
Distributes One Clock Input to Twelve
Outputs
D
Two Select Inputs Configure Up to Nine
Outputs to Operate at One-Half or Double
the Input Frequency
D
No External RC Network Required
D
External Feedback Pin (FBIN) Is Used to
Synchronize the Outputs to the Clock Input
CC
3.3-V PHASE-LOCK-LOOP CLOCK DRIVER
D
D
D
D
D
D
PAH PACKAGE
(TOP VIEW)
CDC586
WITH 3-STATE OUTPUTS
SCAS336D – FEBRUARY 1993 – REVISED OCTOBER 1998
Application for Synchronous DRAM,
High-Speed Microprocessor
TTL-Compatible Inputs and Outputs
Outputs Drive Parallel 50-Ω Terminated
Transmission Lines
State-of-the-Art
Significantly Reduces Power Dissipation
Distributed VCC and Ground Pins Reduce
Switching Noise
Packaged in 52-Pin Thin Quad Flat Package
EPIC-ΙΙB
BiCMOS Design
GND
SEL1
SEL0
AGND
GND
1Y1
V
CC
GND
1Y2
V
CC
GND
1Y3
V
CC
GND
GND
2Y1
V
CC
NC – No internal connection
51 50 49 48 4752 46
1
2
3
4
5
6
7
8
9
10
11
12
13
15 16
14
2Y2
GND
18 19 20 21
17
CC
V
GND
FBIN
AGND
CC
2Y3
V
CC
AV
GND
CC
AV
CLKINNCOE
44 43 4245
22 23 24 25 26
3Y1
GND
CC
V
41 40
GND
TEST
CLR
39
38
37
36
35
34
33
32
31
30
29
28
27
CC
3Y2
V
V
CC
4Y3
GND
V
CC
4Y2
GND
V
CC
4Y1
GND
GND
V
CC
3Y3
GND
description
The CDC586 is a high-performance, low-skew, low-jitter clock driver . It uses a phase-lock loop (PLL) to precisely
align, in both frequency and phase, the clock output signals to the clock input (CLKIN) signal. It is specifically
designed for use with popular microprocessors operating at speeds from 50 MHz to 100 MHz or down to 25 MHz
on outputs configured as half-frequency outputs. The CDC586 operates at 3.3-V V
a properly terminated 50-W transmission line.
and is designed to drive
CC
Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of
Texas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
EPIC-ΙΙB is a trademark of Texas Instruments Incorporated.
PRODUCTION DATA information is current as of publication date.
Products conform to specifications per the terms of Texas Instruments
standard warranty. Production processing does not necessarily include
testing of all parameters.
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
Copyright 1998, Texas Instruments Incorporated
1

CDC586
3.3-V PHASE-LOCK-LOOP CLOCK DRIVER
WITH 3-STATE OUTPUTS
SCAS336D – FEBRUARY 1993 – REVISED OCTOBER 1998
description (continued)
The feedback input (FBIN) is used to synchronize the output clocks in frequency and phase to CLKIN. One of
the twelve output clocks must be fed back to FBIN for the PLL to maintain synchronization between the CLKIN
input and the outputs. The output used as the feedback pin is synchronized to the same frequency as the CLKIN
input.
The Y outputs can be configured to switch in phase and at the same frequency as CLKIN. Select inputs
(SEL1, SEL0) configure up to nine Y outputs, in banks of three, to operate at one-half or double the CLKIN
frequency , depending on which pin is fed back to FBIN (see Tables 1 and 2). All output signal duty cycles are
adjusted to 50%, independent of the duty cycle at CLKIN.
Output-enable (OE
When OE
the PLL. TEST should be strapped to GND for normal operation.
Unlike many products containing PLLs, the CDC586 does not require external RC networks. The loop filter for
the PLL is included on chip, minimizing component count, board space, and cost.
Because it is based on PLL circuitry, the CDC586 requires a stabilization time to achieve phase lock of the
feedback signal to the reference signal. This stabilization time is required following power up and application
of a fixed-frequency, fixed-phase signal at CLKIN, as well as following any changes to the PLL reference or
feedback signals. Such changes occur upon change of the select inputs, upon enabling of the PLL via TEST,
and upon enable of all outputs via OE
The CDC586 is characterized for operation from 0°C to 70°C.
is low, the outputs are active. TEST is used for factory testing of the device and can be used to bypass
) is provided for output control. When OE is high, the outputs are in the high-impedance state.
.
detailed description of output configurations
The voltage-controlled oscillator (VCO) used in the CDC586 PLL has a frequency range of 100 MHz to 200
MHz, twice the operating frequency range of the CDC586 outputs. The output of the VCO is divided by two and
by four to provide reference frequencies with a 50% duty cycle of one-half and one-fourth the VCO frequency .
SEL0 and SEL1 select which of the two signals are buffered to each bank of device outputs.
One device output must be externally wired to FBIN to complete the PLL. The VCO operates such that the
frequency and phase of this output match that of the CLKIN signal. In the case that a VCO/2 output is wired to
FBIN, the VCO must operate at twice the CLKIN frequency, resulting in device outputs that operate at either
the same or one-half the CLKIN frequency. If a VCO/4 output is wired to FBIN, the device outputs operate at
twice or the same frequency as the CLKIN frequency.
2
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
3.3-V PHASE-LOCK-LOOP CLOCK DRIVER
WITH 3-STATE OUTPUTS
SCAS336D – FEBRUARY 1993 – REVISED OCTOBER 1998
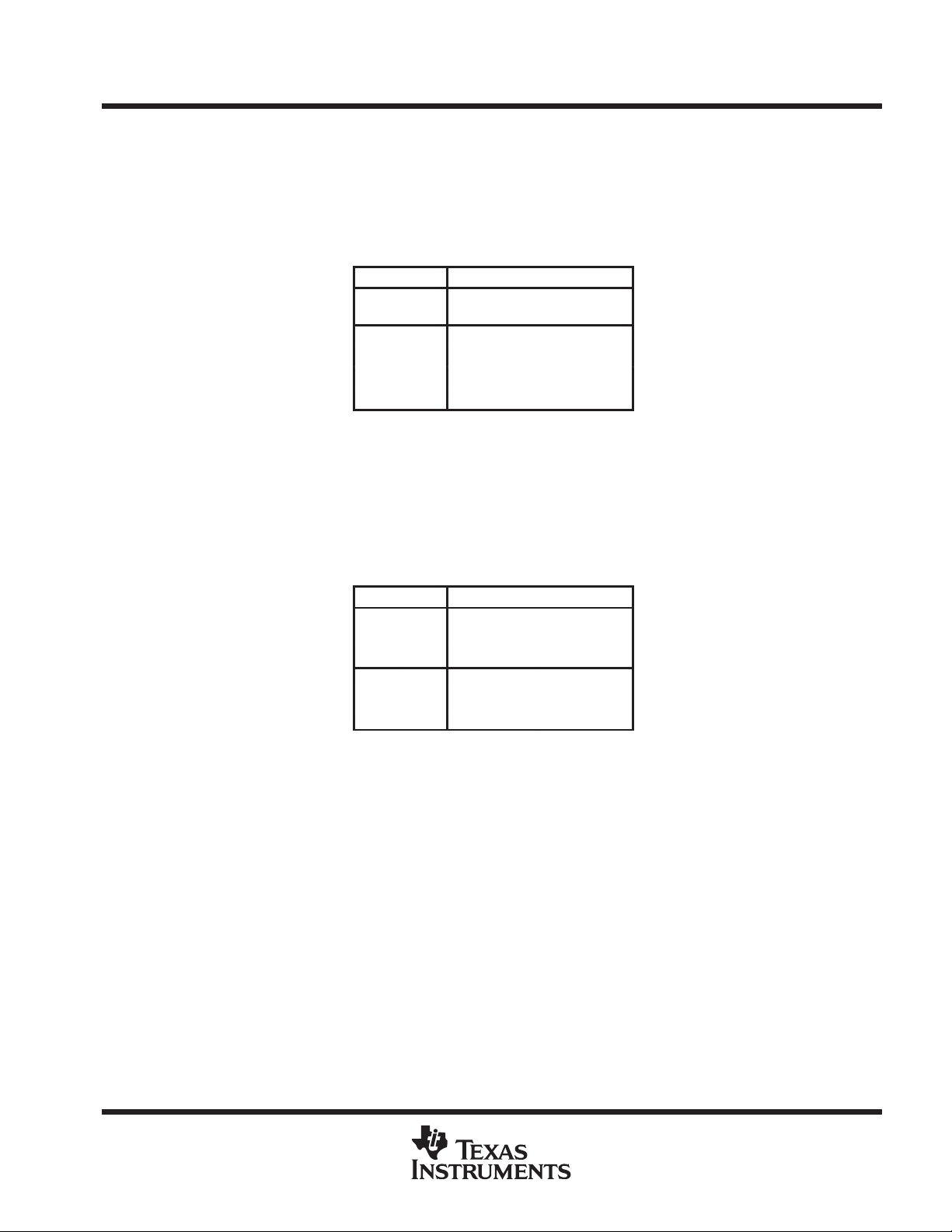
output configuration A
Output configuration A is valid when any output configured as a 1x frequency output in Table 1 is fed back to
FBIN. The input frequency range for CLKIN is 50 MHz to 100 MHz when using output configuration A. Outputs
configured as 1/2x outputs operate at half the CLKIN frequency , while outputs configured as 1x outputs operate
at the same frequency as CLKIN.
Table 1. Output Configuration A
CDC586
INPUTS
SEL1 SEL0
L L None All
L H 1Yn 2Yn, 3Yn, 4Yn
H L 1Yn, 2Yn 3Yn, 4Yn
H H 1Yn, 2Yn, 3Yn 4Yn
NOTE: n = 1, 2, 3
FREQUENCY1xFREQUENCY
OUTPUTS
1/2x
output configuration B
Output configuration B is valid when any output configured as a 1x frequency output in Table 2 is fed back to
FBIN. The input frequency range for CLKIN is 25 MHz to 50 MHz when using output configuration B. Outputs
configured as 1x outputs operate at the CLKIN frequency, while outputs configured as 2x outputs operate at
double the frequency of CLKIN.
Table 2. Output Configuration B
INPUTS
SEL1 SEL0
L L All None
L H 1Yn 2Yn, 3Yn, 4Yn
H L 1Yn, 2Yn 3Yn, 4Yn
H H 1Yn, 2Yn, 3Yn 4Yn
NOTE: n = 1, 2, 3
FREQUENCY2xFREQUENCY
OUTPUTS
1x
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
3
CDC586
ОООООО
ОООООО
ОООООО
3.3-V PHASE-LOCK-LOOP CLOCK DRIVER
WITH 3-STATE OUTPUTS
SCAS336D – FEBRUARY 1993 – REVISED OCTOBER 1998
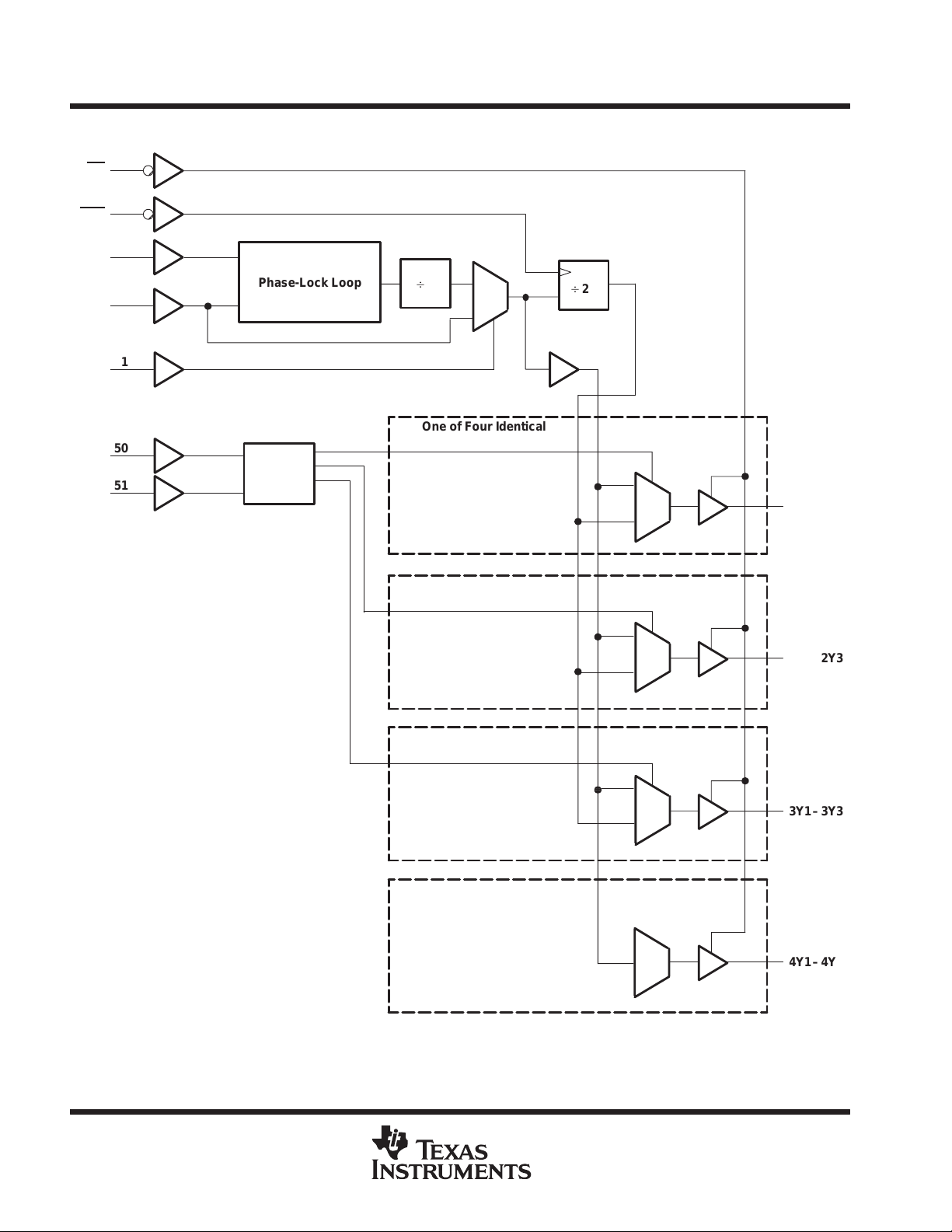
functional block diagram
42
OE
40
CLR
48
FBIN
CLKIN
TEST
SEL0
SEL1
45
41
50
51
Phase-Lock Loop
Select
Logic
B
2
One of Four Identical
Outputs – 1Yn
B
CLR
2
1Y1–1Y3
One of Four Identical
Outputs – 2Yn
One of Four Identical
Outputs – 3Yn
One of Four Identical
Outputs – 4Yn
2Y1–2Y3
3Y1–3Y3
4Y1–4Y3
4
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265

I/O
DESCRIPTION
Terminal Functions
TERMINAL
NAME NO.
Clock input. CLKIN is the clock signal distributed by the CDC586 clock-driver circuit. CLKIN provides the
reference signal to the integrated PLL that generates the clock output signals. CLKIN must have a fixed
CLKIN 45 I
CLR 40 I CLR is used for testing purposes only.
FBIN 48 I
OE 42 I
SEL1, SEL0 51, 50 I
TEST 41 I
1Y1–1Y3
2Y1–2Y3
3Y1–3Y3
4Y1–4Y3 32, 35, 38 O
2, 5, 8
12, 15, 18
22, 25, 28
frequency and fixed phase for the PLL to obtain phase lock. Once the circuit is powered up and a valid CLKIN
signal is applied, a stabilization time is required for the PLL to phase lock the feedback signal to its reference
signal.
Feedback input. FBIN provides the feedback signal to the internal PLL. FBIN must be hardwired to one of
the twelve clock outputs to provide frequency and phase lock. The internal PLL adjusts the output clocks
to obtain zero phase delay between FBIN and CLKIN.
Output enable. OE is the output enable for all outputs. When OE is low, all outputs are enabled. When OE
is high, all outputs are in the high-impedance state. Since the feedback signal for the PLL is taken directly
from an output terminal, placing the outputs in the high-impedance state interrupts the feedback loop;
therefore, when a high-to-low transition occurs at OE
required before the PLL obtains phase lock.
Output configuration select. SEL0 and SEL1 select the output configuration for each output bank
(e.g. 1×, 1/2×, or 2×). (see Tables 1 and 2).
TEST is used to bypass the PLL circuitry for factory testing of the device. When TEST is low, all outputs
operate using the PLL circuitry. When TEST is high, the outputs are placed in a test mode that bypasses
the PLL circuitry. TEST should be strapped to GND for normal operation.
Output ports. These outputs are configured by SEL1 and SEL0 to transmit one-half or one-fourth the
frequency of the VCO. The relationship between the CLKIN frequency and the output frequency is
O
dependent on SEL1 and SEL0 and the frequency of the output being fed back to FBIN. The duty cycle of
the Y output signals is nominally 50% independent of the duty cycle of CLKIN.
Output ports. 4Y1–4Y3 transmit one-half the frequency of the VCO regardless of the state of SEL1 and
SEL0. The relationship between the CLKIN frequency and the output frequency is dependent on the
frequency of the output being fed back to FBIN. The duty cycle of the Y output signals is nominally 50%
independent of the duty cycle of CLKIN.
CDC586
3.3-V PHASE-LOCK-LOOP CLOCK DRIVER
WITH 3-STATE OUTPUTS
SCAS336D – FEBRUARY 1993 – REVISED OCTOBER 1998
, enabling the output buffers, a stabilization time is
absolute maximum ratings over operating free-air temperature range (unless otherwise noted)
Supply voltage range, V
Input voltage range, V
Voltage range applied to any output in the high state or power-off state,
V
(see Note 1) –0.5 V to VCC + 0.5 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
O
Current into any output in the low state, I
Input clamp current, I
Output clamp current, I
Maximum power dissipation at T
Storage temperature range, T
†
Stresses beyond those listed under “absolute maximum ratings” may cause permanent damage to the device. These are stress ratings only, and
functional operation of the device at these or any other conditions beyond those indicated under “recommended operating conditions” is not
implied. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability.
NOTES: 1. The input and output negative-voltage ratings may be exceeded if the input and output clamp-current ratings are observed.
2. The maximum package power dissipation is calculated using a junction temperature of 150°C and a board trace length of 750 mils.
For more information, refer to the
Book
, literature number SCBD002.
–0.5 V to 4.6 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CC
(see Note 1) –0.5 V to 7 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I
64 mA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
(V
< 0) –20 mA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IK
I
(V
< 0) –50 mA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
OK
O
= 55°C (in still air) (see Note 2) 1.2 W. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A
–65°C to 150°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
stg
Package Thermal Considerations
O
application note in the
ABT Advanced BiCMOS T echnology Data
†
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
5

CDC586
PARAMETER
TEST CONDITIONS
UNIT
V
V
V
V
V
V
I
A
V
I
V
CC
GND
3.3-V PHASE-LOCK-LOOP CLOCK DRIVER
WITH 3-STATE OUTPUTS
SCAS336D – FEBRUARY 1993 – REVISED OCTOBER 1998
recommended operating conditions (see Note 3)
MIN MAX UNIT
V
CC
V
IH
V
IL
V
I
I
OH
I
OL
T
A
NOTE 3: Unused inputs must be held high or low.
electrical characteristics over recommended operating free-air temperature range (unless
otherwise noted)
†
For conditions shown as MIN or MAX, use the appropriate value specified under recommended operating conditions.
Supply voltage 3 3.6 V
High-level input voltage 2 V
Low-level input voltage 0.8 V
Input voltage 0 5.5 V
High-level output current –32 mA
Low-level output current 32 mA
Operating free-air temperature 0 70 °C
TA = 25°C
MIN MAX
V
IK
OH
OL
I
I
OZH
I
OZL
I
CC
C
i
C
o
VCC = 3 V, II = –18 mA –1.2 V
VCC = MIN to MAX†, IOH = –100 µA VCC–0.2
VCC = 3 V, IOH = – 32 mA 2
= 3
CC
VCC = 0 or MAX†, VI = 3.6 V ±10
VCC = 3.6 V, VI = VCC or GND ±1
VCC = 3.6 V, VO = 3 V 10 µA
VCC = 3.6 V, VO = 0 –10 µA
VCC = 3.6 V, IO = 0,
=
or
VI = VCC or GND 4 pF
VO = VCC or GND 8 pF
IOL = 100 µA 0.2
IOL = 32 mA 0.5
Outputs high 1
Outputs low 1
Outputs disabled 1
µ
mA
6
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265

f
Clock frequenc
MH
Stabilization time
†
s
CDC586
3.3-V PHASE-LOCK-LOOP CLOCK DRIVER
WITH 3-STATE OUTPUTS
SCAS336D – FEBRUARY 1993 – REVISED OCTOBER 1998
timing requirements over recommended ranges of supply voltage and operating free-air
temperature
MIN MAX UNIT
clock
Input clock duty cycle 40% 60%
†
Time required for the integrated PLL circuit to obtain phase lock of its feedback signal to its reference signal. For phase lock to be obtained, a
fixed-frequency , fixed-phase reference signal must be present at CLKIN. Until phase lock is obtained, the specifications for propagation delay
and skew parameters given in the switching characteristics table are not applicable.
y
switching characteristics over recommended ranges of supply voltage and operating free-air
temperature, C
PARAMETER
f
max
Duty cycle Y 45% 55%
t
phase error
Jitter
t
sk(o)
t
sk(pr)
t
r
t
‡
The propagation delay, t
are valid only for equal loading of all outputs.
NOTE 4: The specifications for parameters in this table are applicable only after any appropriate stabilization time has elapsed.
f
= 30 pF (see Note 4 and Figures 1 through 3)
L
FROM
(INPUT)
(pk-pk)
‡
‡
‡
phase error
, is dependent on the feedback path from any output to FBIN. The t
CLKIN↑ Y –500 +500 ps
CLKIN↑ Y 200 ps
VCO is operating at four times the CLKIN frequency 25 50
VCO is operating at double the CLKIN frequency
After SEL1, SEL0 50
After OE↓ 50
After power up 50
After CLKIN 50
TO
(OUTPUT)
phase error
, t
50 100
MIN MAX UNIT
100 MHz
, and t
sk(o)
sk(pr)
0.5 ns
1.4 ns
1.4 ns
specifications
z
µ
1 ns
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
7

CDC586
3.3-V PHASE-LOCK-LOOP CLOCK DRIVER
WITH 3-STATE OUTPUTS
SCAS336D – FEBRUARY 1993 – REVISED OCTOBER 1998
PARAMETER MEASUREMENT INFORMATION
From Output
Under Test
CL = 30 pF
(see Note A)
LOAD CIRCUIT FOR OUTPUTS
500 Ω
Input
t
phase error
Output
1.5 V 1.5 V
2 V
0.8 V
t
r
VOLTAGE WAVEFORMS
PROPAGATION DELAY TIMES
1.5 V
2 V
t
f
0.8 V
3 V
0 V
V
V
OH
OL
NOTES: A. CL includes probe and jig capacitance.
B. The outputs are measured one at a time with one transition per measurement.
C. All input pulses are supplied by generators having the following characteristics: PRR ≤ 100 MHz, ZO = 50 Ω, tr ≤ 2.5 ns, tf≤ 2.5 ns.
Figure 1. Load Circuit and Voltage Waveforms
8
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265

Outputs
Operating
at 1/2 CLKIN
Frequency
CLKIN
3.3-V PHASE-LOCK-LOOP CLOCK DRIVER
SCAS336D – FEBRUARY 1993 – REVISED OCTOBER 1998
PARAMETER MEASUREMENT INFORMATION
t
phase error 1
t
phase error 2
t
phase error 3
CDC586
WITH 3-STATE OUTPUTS
t
phase error 4
Outputs
Operating
at CLKIN
Frequency
NOTES: A. Output skew, t
– The difference between the fastest and slowest of t
– The difference between the fastest and slowest of t
B. Process skew, t
– The difference between the maximum and minimum t
operating conditions.
– The difference between the maximum and minimum t
operating conditions.
sk(o)
sk(pr)
t
phase error 5
t
phase error 6
, is calculated as the greater of:
phase error n
, is calculated as the greater of:
phase error n
Figure 2. Waveforms for Calculation of t
(n = 1, 2,...6)
(n = 7, 8, 9)
phase error n
phase error n
t
phase error 7
t
phase error 8
t
phase error 9
(n = 1, 2, . . .6) across multiple devices under identical
(n = 7, 8, 9) across multiple devices under identical
sk(o)
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
9

CDC586
3.3-V PHASE-LOCK-LOOP CLOCK DRIVER
WITH 3-STATE OUTPUTS
SCAS336D – FEBRUARY 1993 – REVISED OCTOBER 1998
PARAMETER MEASUREMENT INFORMATION
CLKIN
t
phase error 10
Outputs
Operating
at CLKIN
Frequency
t
phase error 11
t
phase error 12
t
phase error 13
Outputs
Operating
at 2X CLKIN
Frequency
NOTES: A. Output skew, t
– The difference between the fastest and slowest of t
B. Process skew, t
– The difference between the maximum and minimum t
operating conditions.
sk(o)
sk(pr)
t
phase error 14
t
phase error 15
, is calculated as the greater of:
, is calculated as the greater of:
phase error n
Figure 3. Waveforms for Calculation of t
(n = 10, 11,...15)
phase error n
(n = 10, 11,. . . 15) across multiple devices under identical
and t
sk(o)
sk(pr)
10
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265

CDC586
3.3-V PHASE-LOCK-LOOP CLOCK DRIVER
WITH 3-STATE OUTPUTS
SCAS336D – FEBRUARY 1993 – REVISED OCTOBER 1998
MECHANICAL DATA
PAH (S-PQFP-G52) PLASTIC QUAD FLATPACK
40
52
0,65
1,05
0,95
39
0,38
0,22
27
26
14
1
7,80 TYP
10,20
SQ
9,80
12,20
SQ
11,80
13
M
0,13
Seating Plane
0,05 MIN
0,13 NOM
Gage Plane
0,25
0°–7°
0,75
0,45
1,20 MAX
NOTES: A. All linear dimensions are in millimeters.
B. This drawing is subject to change without notice.
C. Falls within JEDEC MS-026
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
0,10
4040281/C 11/96
11

IMPORTANT NOTICE
T exas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinue
any product or service without notice, and advise customers to obtain the latest version of relevant information
to verify, before placing orders, that information being relied on is current and complete. All products are sold
subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those
pertaining to warranty, patent infringement, and limitation of liability.
TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in
accordance with TI’s standard warranty. Testing and other quality control techniques are utilized to the extent
TI deems necessary to support this warranty . Specific testing of all parameters of each device is not necessarily
performed, except those mandated by government requirements.
CERT AIN APPLICATIONS USING SEMICONDUCTOR PRODUCTS MAY INVOLVE POTENTIAL RISKS OF
DEATH, PERSONAL INJURY, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE (“CRITICAL
APPLICATIONS”). TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, AUTHORIZED, OR
WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT DEVICES OR SYSTEMS OR OTHER
CRITICAL APPLICA TIONS. INCLUSION OF TI PRODUCTS IN SUCH APPLICATIONS IS UNDERST OOD TO
BE FULLY AT THE CUSTOMER’S RISK.
In order to minimize risks associated with the customer’s applications, adequate design and operating
safeguards must be provided by the customer to minimize inherent or procedural hazards.
TI assumes no liability for applications assistance or customer product design. TI does not warrant or represent
that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other
intellectual property right of TI covering or relating to any combination, machine, or process in which such
semiconductor products or services might be or are used. TI’s publication of information regarding any third
party’s products or services does not constitute TI’s approval, warranty or endorsement thereof.
Copyright 1998, Texas Instruments Incorporated
 Loading...
Loading...