

Page 1
85-86
TRIGGER
CBR
)
)
)
T
E
X
A
S
I
N
S
T
R
U
M
E
N
T
S
92
Calculator-Based Ranger
™
(CBR
™
)
Page 2
AN DE SLAG MET AN DE SLAG MET
AA
INCLUSIEFINCLUSIEF
ACTIVITEITEN VOORACTIVITEITEN VOOR
5 5
STUDENTENSTUDENTEN
CBR™CBR™
T
E
CBR
X
A
S
I
NS
T
R
U
)
M
E
)
N
T
)
S
TRIGGER
85-86
92
Page 3
T
E
CBR
X
A
S
I
NS
T
R
U
)
M
E
)
N
T
)
S
TRIGGER
85-86
92
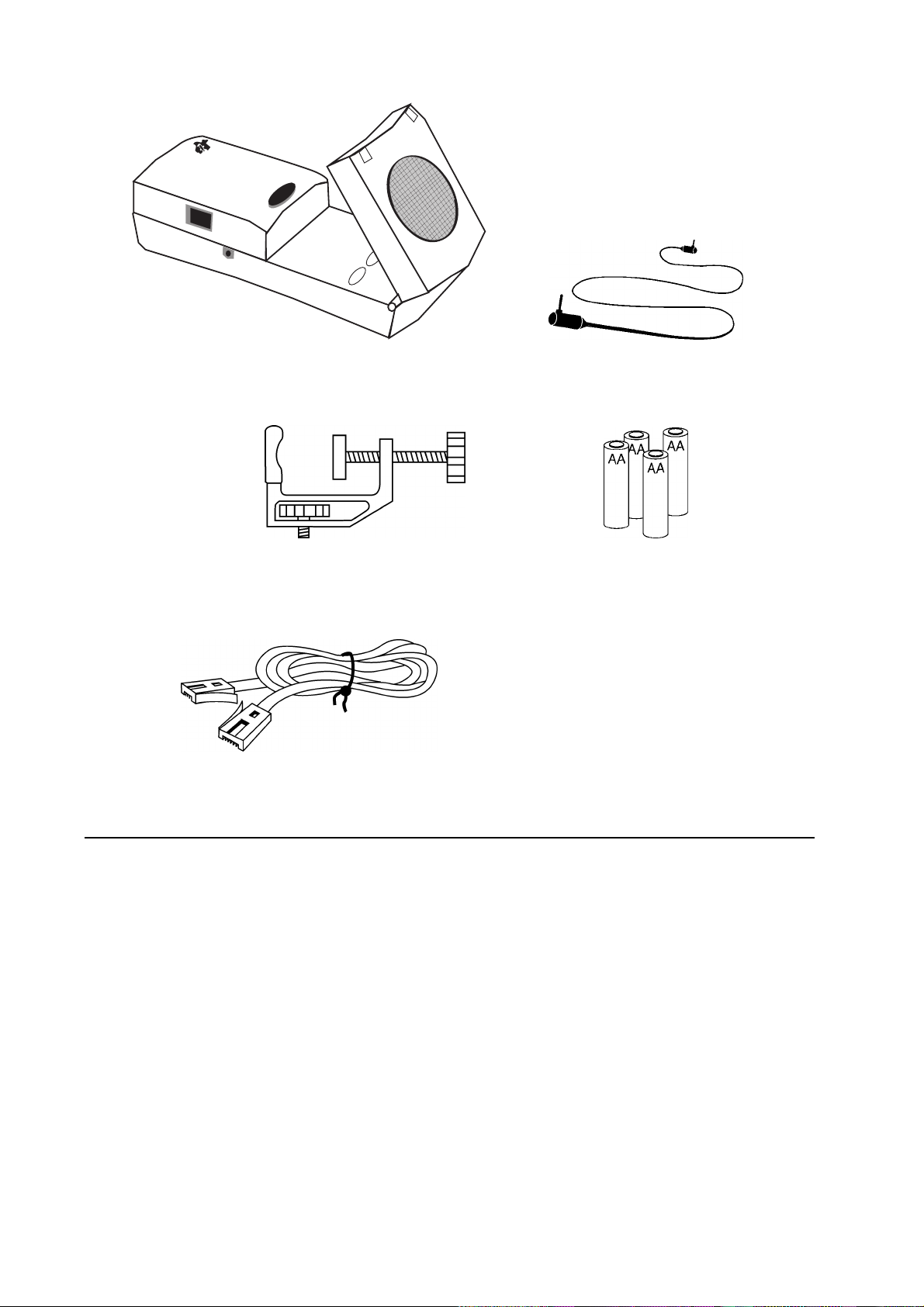
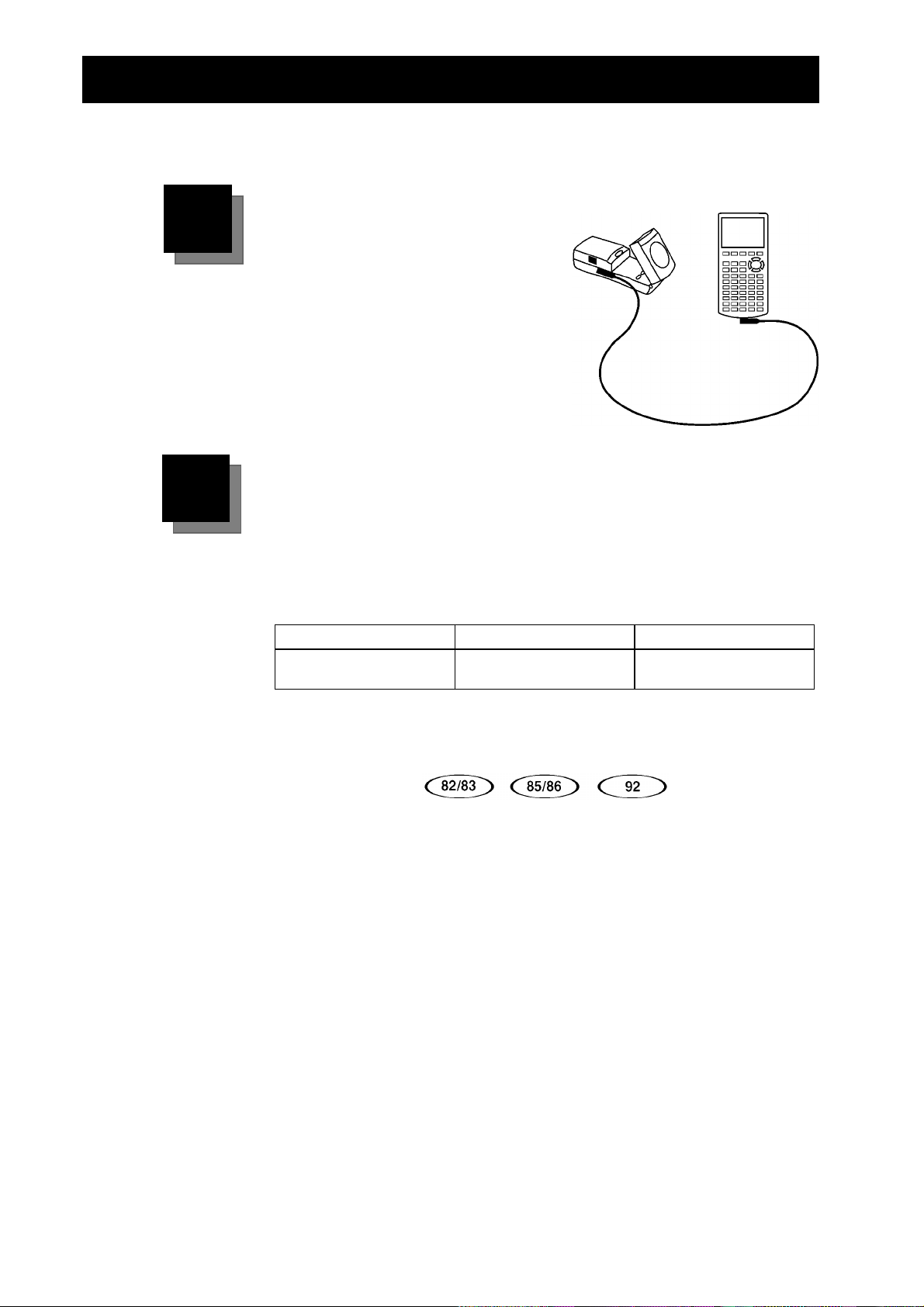
Calculator-Based Rangeré (CBRé) calculator-CBR-kabel
montageklem 4 AA-batterijen
CBL-CBR-kabel
Belangrijk
Texas Instruments biedt geen enkele garantie, hetzij impliciet hetzij
uitdrukkelijk, met inbegrip van en niet uitsluitend beperkt tot welke
impliciete garanties dan ook wat betreft de geschiktheid voor
verkoop en een specifiek gebruik, voor de programma’s of
documentatie en stelt deze documentatie slechts ter beschikking
“as-is”.
Texas Instruments kan in geen geval aansprakelijk worden gesteld
voor speciale, indirecte, toevallige of resulterende schade die in
verband zou staan met of het gevolg is van de aankoop of het
gebruik van deze produkten; de enige en uitsluitende
aansprakelijkheid, ongeacht de wijze van de juridische procedure,
die door Texas Instruments wordt gedragen, zal beperkt blijven tot
het bedrag van de aankoopprijs van deze apparatuur. Bovendien
kan Texas Instruments niet aansprakelijk worden gesteld indien een
eis tot schadevergoeding wordt ingediend, ongeacht de aard
ervan, tegen het gebruik van deze produkten door een andere
persoon.
1997 Texas Instruments Incorporated.
Alle rechten voorbehouden.
Leraars krijgen hierbij de toestemming om in klaslokalen,
workshops of tijdens seminaries de pagina's of bladen in dit werk
te herdrukken of te kopiëren waarop het Texas Instrument
copyright is vermeld. Die pagina's mogen door leraars worden
gereproduceerd voor gebruik in het klaslokaal, in workshops en
tijdens seminaries, op voorwaarde dat het copyright op elk
exemplaar is vermeld. De kopieën mogen niet worden verkocht en
verdere verspreiding is uitdrukkelijk verboden. Behalve in de
gevallen hierboven vermeld, is een voorafgaande schriftelijke
toestemming van Texas Instruments vereist om dit werk of
gedeelten ervan te reproduceren of te verzenden in gelijk welke
andere vorm of op gelijk welke elektronische of mechanische
manier, inclusief systemen voor het opslaan en opvragen van
informatie, behalve als dit uitdrukkelijk toegestaan is door de
desbetreffende wetgeving. Meer informatie kunt u krijgen bij Texas
Instruments Incorporated, PO Box 149149, Austin, TX, 787149149, M/S 2151, ter attentie van: Contracts Manager.
Page 4
Inhoudsopgave
T
E
CBR
X
A
S
I
NS
T
R
U
)
M
E
)
N
T
)
S
Inleiding
Wat is de CBR? 2
Aan de slag met CBR — Eenvoudiger kan het niet 4
Tips voor een goede meting 6
Activiteiten met aantekeningen voor docenten en leerling-werkbladen
TRIGGER
85-86
92
Activiteit 1 — De grafiek nadoen lineaire functie 13
³
Activiteit 2 — Speelgoedauto lineaire functie 17
³
Activiteit 3 — Slinger sinusfunctie 21
³
Activiteit 4 — Stuiterende bal parabolische functie 25
³
Activiteit 5 — Rollende bal parabolische functie 29
³
Informatie voor de docent 33
Technische informatie
CBR-gegevens worden opgeslagen in lijsten 37
RANGER instellingen 38
Het gebruik van CBR met CBL of met CBL programma’s 39
Programmeercommando’s 40
Onderhoudsinformatie
Batterijen 42
Bij moeilijkheden 43
TI service en garantie 44
Overzicht RANGER menu’s binnenzijde achterblad
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
1
Page 5
Wat is de CBR?
om de metingen en -analyse uit de werkelijkheid in de klas te brengen
het veelzijdige RANGER programma is een druk op de knop verwijderd
MATCH en BOUNCING BALL programma’s ingebouwd in de RANGER
de voornaamste parameters voor de metingen zijn gemakkelijk in te stellen
Wat doet de CBR?
Met de
verzamelen, bekijken en analyseren zonder lastige metingen en handmatig maken van
grafieken.
Met
CBR
snelheid, versnelling en tijd verkennen met gegevens die verzameld zijn tijdens
activiteiten die zij zelf hebben uitgevoerd. Hierdoor kunnen leerlingen van wiskundige en
natuurwetenschappelijk concepten onderzoeken zoals:
CBRCBRé (Calculator-Based RangerCalculator-Based Rangeré
)
ultrasone afstandssensor
CBL
voor gebruik met TI-82, TI-83, TI-85/
, TI-86 en TI-92
gemakkelijk te bedienen, op zichzelf staand
geen programmeerwerk vereist
Inclusief het RANGER programmaInclusief het RANGER programma
en een TI grafische calculator kunnen leerlingen gegevens over bewegingen
CBR
kunnen leerlingen de wiskundige en wetenschappelijke relaties tussen afstand,
beweging: afstand, snelheid, versnelling
0
grafieken: coördinaatassen, hellingshoek, bijbehorende x- of y-waarde
0
functies: lineair, kwadratisch, exponentieel, sinusfunctie
0
differentiaal- en integraalrekening: afgeleiden, integralen
0
statistiek en analyse van gegevens: methodes voor data acquisitie, statistische analyse
0
Wat staat in deze handleiding?
Aan de slag met CBR
met calculators of met programmeren. Hierin vindt u instructies om snel aan de slag te
gaan met de
, aanwijzingen over effectieve data acquisitie en vijf activiteiten voor in
CBR
de klas, waarbij de basisfuncties en -eigenschappen van bewegingen kunnen worden
onderzocht. Deze activiteiten (zie pagina 13–32) bevatten o.a.:
aantekeningen voor docenten voor elke activiteit, plus algemene informatie voor de
0
docent
instructies om stap voor stap te werk te gaan
0
een basismeting die geschikt is voor alle niveau’s
0
verkenningen om de gegevens nader te bestuderen, waaronder “wat-als” scenario’s
0
suggesties voor onderwerpen voor gevorderden, geschikt voor leerlingen die
0
integraalrekening al dan niet beheersen
reproduceerbare leerling-werkblad met open vragen die passen bij een breed
0
spectrum van onderwijsniveau’s
is bedoeld als handleiding voor docenten zonder veel ervaring
é
2
A
AN DE SLAG MET
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 6
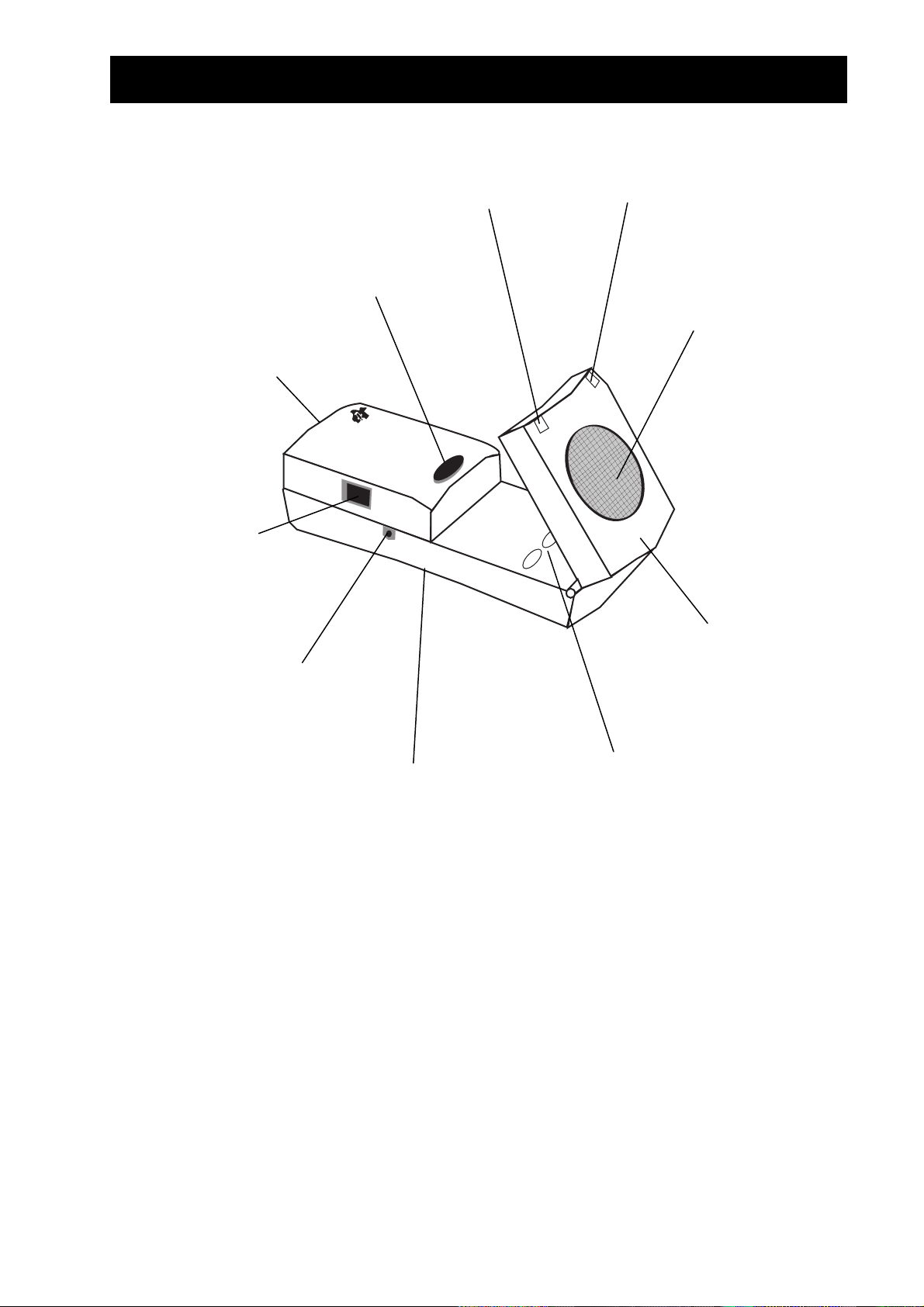
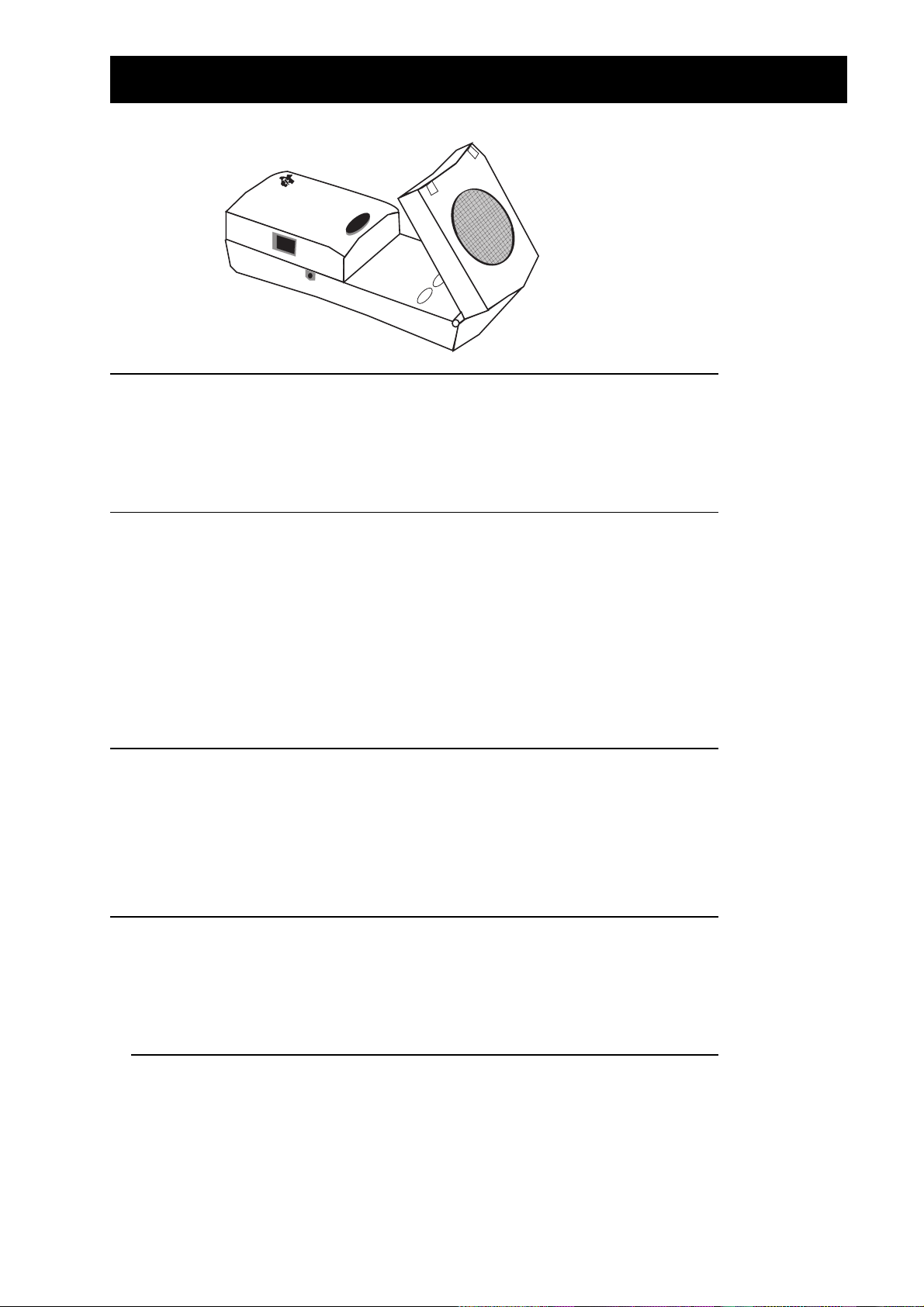
Wat is de CBR?
s
Z
s
s
g
g
s
g
g
g
(verv.)
¤
de meting te
tarten
batterijklepje
(onder)
poort voor aansluiting
op CBL (indien
ewenst)
poort voor aansluiting van TI
rafische calculators met de
bijgeleverde kabel van 2,25 m
roen lampje om aan te
even wanneer de meting
bezig is (ook met
eluidssignaal mogelijk
knop om
T
E
CBR
X
A
S
I
NS
T
R
U
)
M
E
)
N
T
)
S
rood lampje om een
peciale toestand
aan te duiden
onic sensor voor max.
200 metingen per s met
een bereik tussen 0,5 m
en 6 m
TRIGGER
85-86
92
wenkkop om sensor
nauwkeurig te richten
knoppen voor
overdracht van RANGER
programma naar
calculators
De
voet met standaard schroefdraad voor bevestiging aan
tatief of aan de meegeleverde
montageklem (achterkant)
bevat alles wat u nodig hebt om gemakkelijk en snel van start te gaan met activiteiten in de
CBR
klas— er is alleen nog een TI grafische calculator bij nodig (en verkrijgbare attributen voor sommige
activiteiten).
ultrasone afstandssensor
0
0
RANGER
programma in de
CBR
kabel tussen calculator en
0
4 AA batterijen
0
CBR
montageklem
0
5 leuke activiteiten
0
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
3
Page 7
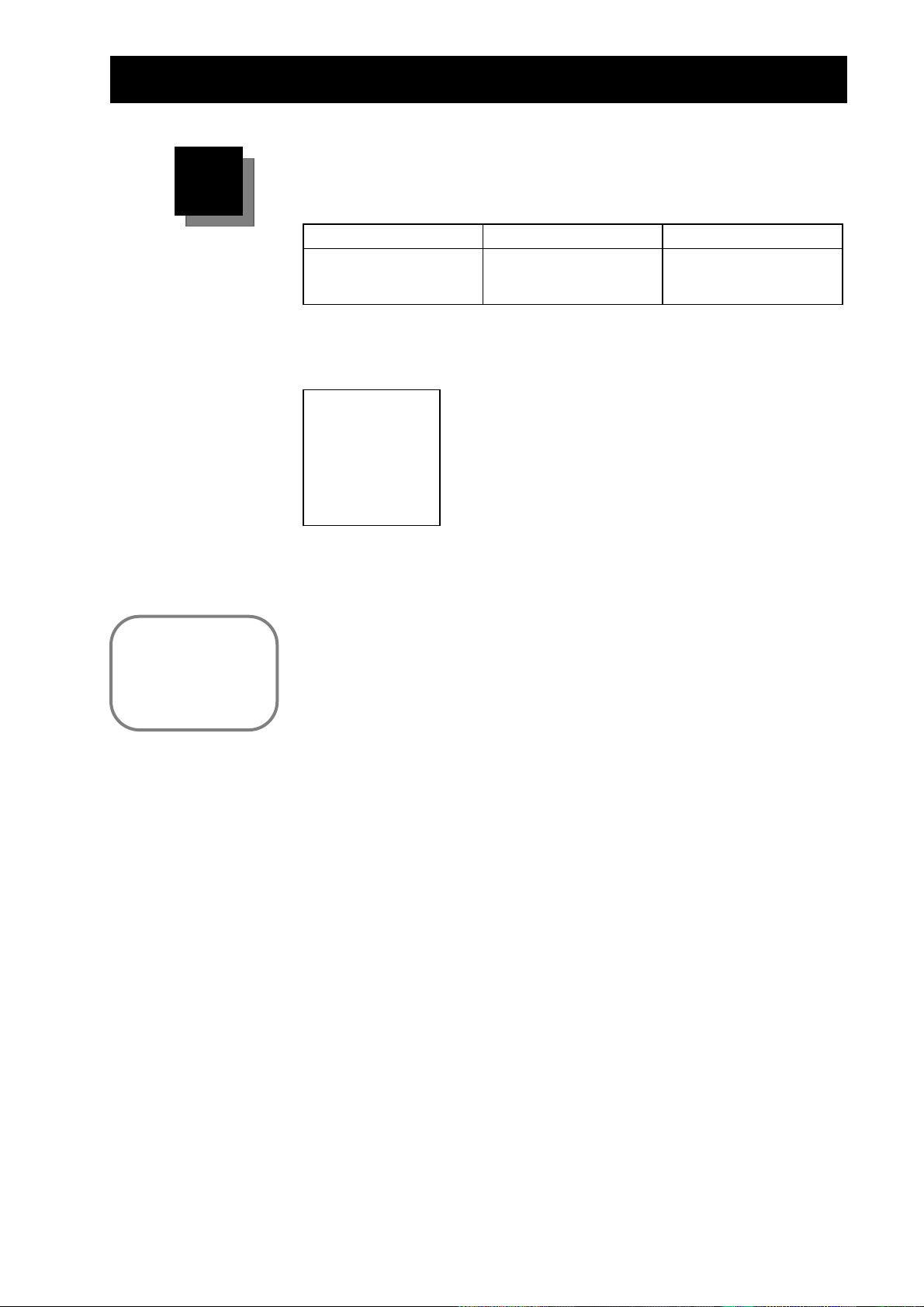
Aan de slag met CBR—Eenvoudiger kan het niet
g
g
Met
1
2
maakt u in drie stappen uw eerste meting!
CBR
Aansluiten
Met de calculator-CBR-kabel sluit u
de
calculator.
Druk de kabel aan weerszijden
vast.
Opmerkin
calculator-kabel die bij de calculator
geleverd wordt is ook bruikbaar.
aan op een grafische TI-
CBR
De korte calculator-
:
Zenden van programma
In de CBR bevindt zich RANGER, een programma dat voor iedere
calculator anders is. Dit programma kan eenvoudig van de CBR naar de
calculator worden overgebracht
Zorg er eerst voor dat de calculator klaar is om het programma te
ontvangen. Dat gaat met de onderstaande opdrachten.
stevi
TI-82 of TI-83 TI-85/CBL of TI-86 TI-92
LINK
Ÿ
[
Open vervolgens de scharnierende kop van de CBR en druk op de juiste
knop om het programma over te sturen.
Tijdens de overdracht toont de calculator
overdracht voltooid is, dan knippert het groene lampje op de
keer, de
Is er een probleem, dan knippert het rode lampje op de CBR twee keer en
piept de
Nadat u het
overgestuurd, hoeft u het niet opnieuw naar die calculator te sturen
zolang u het niet uit het geheugen van de calculator verwijdert.
Opmerking:
bytes geheugen nodig. Het kan nodig zijn programma’s en gegevens uit
het geheugen van de calculator te verwijderen. U kan de programma’s en
gegevens eerst bewaren door ze met TI-Graph Linké naar een computer
te sturen of met een calculator-calculator-kabel naar een andere
calculator te sturen (zie de handleiding van de calculator).
CBR
CBR
›
£
]
piept één keer, en het scherm van de calculator toont
twee keer.
RANGER-
Voor het programma en de gegevens zijn ongeveer 15500
programma van de
Ÿ
[
LINK
¡
]
RECEIVING
naar een calculator heeft
CBR
Ga naar het Home-
scherm.
(behalve TI-92). Als de
CBR
één
DONE
.
4
A
AN DE SLAG MET
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 8
Aan de slag met CBR—Eenvoudiger kan het niet
(verv.)
Starten
3
Probeer voor een snel
resultaat eens een van
de kant-en-klare
activiteiten in deze
handleiding
Start het
Druk op
Kies
Druk op
RANGER-
TI-82 of TI-83 TI-85/CBL of TI-86 TI-92
^
RANGER
›
programma met de opdrachten hieronder
.
.
.
Druk op
Kies
Druk op
^ A
RANGER
›
.
.
.
Druk op L [
RANGER
Kies
Druk op ¨
›
VAR-LINK
.
Het openingsscherm wordt getoond.
Druk op
MAIN MENU
SETUPàSAMPLE
SET DEFAULTS
APPLICATIONS
PLOT MENU
TOOLS
QUIT
Op het
getoond. Druk op
druk op
›. U ziet het
&
&
&
&
&
MAIN MENU
› om met het verzamelen van de gegevens te beginnen. Zo
kiest u
› om
MAIN MENU
bekijk en verander de instellingen voor het meten
verander de instellingen in de standaardinstellingen
DISTANCE MATCH, VELOCITY MATCH, BALL BOUNCE
grafiek opties
GET CBR DATA, GET CALC DATA, STATUS, STOPàCLEAR
SET DEFAULTS
START NOW
.
. Het
scherm wordt
SETUP
te kiezen. Stel de activiteit in en
eenvoudig is dat!
Belangrijke informatie
0
Deze handleiding is van toepassing op alle grafische TI-calculators die
met
gebruikt kunnen worden. Het kan dus gebeuren dat sommige
CBR
menu’s op uw calculator een andere naam hebben.
0
Beëindig het
RANGER
kiest dan zorgt het
afgesloten. Hierdoor is verzekerd dat
programma altijd met de
RANGER-
programma ervoor dat
goed geïnitialiseerd wordt als
CBR
optie. Als u QUIT
QUIT
correct wordt
CBR
u hem de volgende keer gebruikt.
0
Maak de verbinding tussen
en calculator altijd los voordat u de
CBR
opbergt.
].
.
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
5
Page 9
Tips voor een goede meting
Betere metingen verrichten
Hoe werkt de CBR?
De CBR zendt een ultrasone puls uit en meet hoe lang het duurt voor er een echo
terugkomt van het dichtstbijzijnde voorwerp.
De
meet, zoals iedere detector die gebruik maakt van geluidsgolven, de tijd die
CBR
verloopt tussen het uitzenden van de ultrasone puls en de eerste echo die terugkomt,
maar de
gegevens verzameld worden, berekent de
heeft een ingebouwde microprocessor die veel meer doet. Terwijl de
CBR
de afstand naar het voorwerp met behulp
CBR
van de bekende geluidssnelheid. Daarna differentieert hij de afstand één en twee keer
naar de tijd om de snelheid en de versnelling te bepalen. Deze gegevens worden
opgeslagen in de lijsten
L1, L2, L3
Het is interessant om de leerlingen dezelfde berekeningen als de
Verricht metingen in de mode
➊
Gebruik de tijden in
➋
L1
, en L4.
te laten uitvoeren.
CBR
REALTIME=NO
. Verlaat het
RANGER-
programma.
in combinatie met de afstand in L2 om de snelheid van het
object bij iedere meting te bepalen. Vergelijk de resultaten met de
(
L3
L2
.
n+1
+
)à2 N (
L2
n
N
L1
n+1
om de versnelling van het object bij iedere meting te
L1
L1
L2
+
n
n
L2
n-1
)à2
L4
.
snelheidsgegevens in
=
L3
n
Gebruik de snelheidsgegevens in L3 (of de door de leerling berekende waarden) in
➌
combinatie met de tijden in
bepalen. Vergelijk de resultaten met de versnellingsgegevens in
Grootte van het object
Werkt u met een klein object op een grote afstand, dan zijn de kansen op een
nauwkeurig resultaat geringer. Bijvoorbeeld, op een afstand van 5 meter detecteert u
een voetbal heel wat makkelijker dan een pingpongbal.
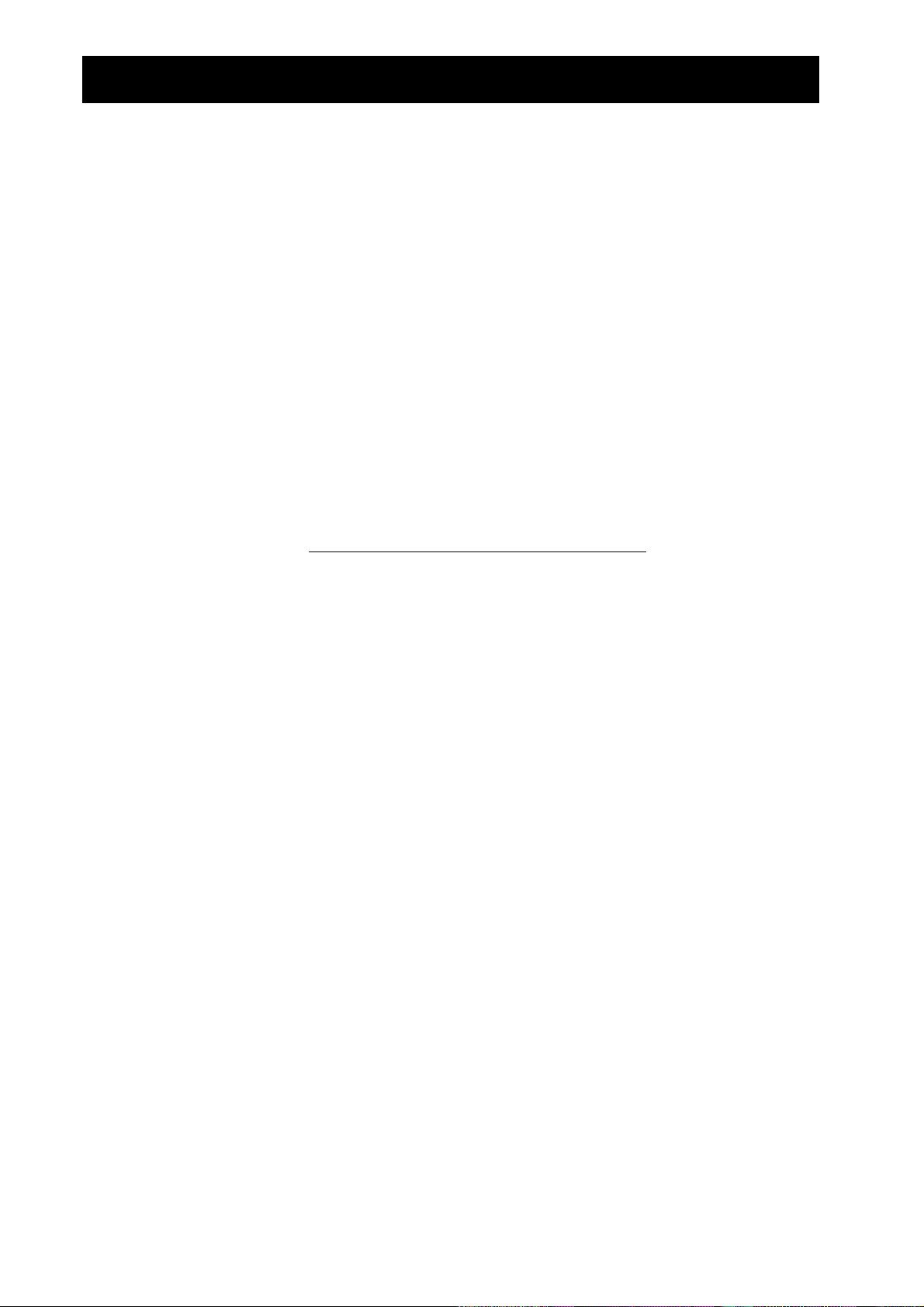
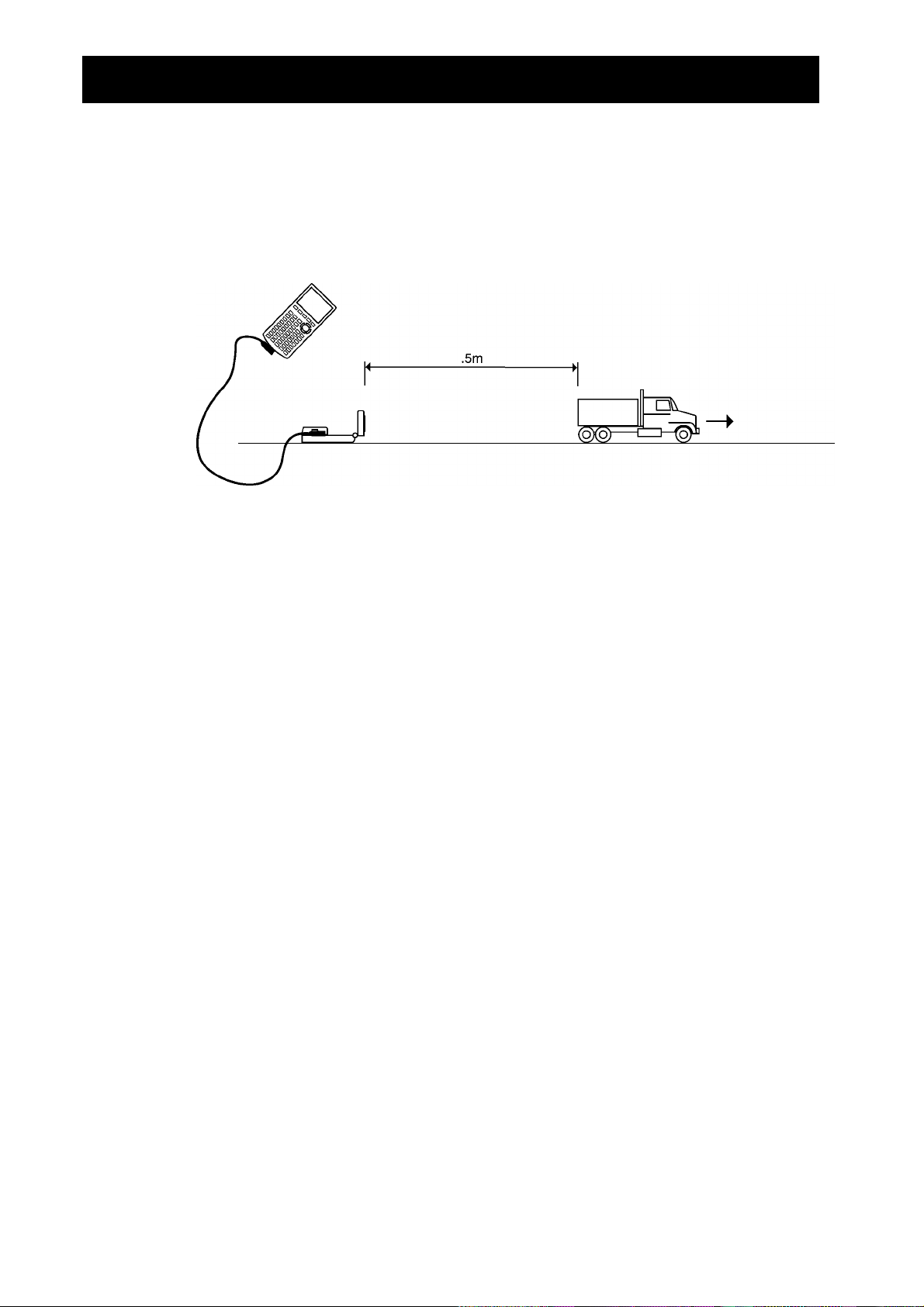
Minimumbereik
De
zendt een puls uit, de puls bereikt het object, kaatst terug en wordt door de
CBR
ontvangen. Als het object dichterbij is dan een halve meter, dan kunnen de
opeenvolgende pulsen elkaar overlappen, waardoor ze door
geïnterpreteerd worden. De grafiek wordt dan onnauwkeurig. Zet
CBR
verkeerd
dus op een
CBR
afstand van minstens een halve meter van het object.
Maximumbereik
Naarmate de puls verder moet reizen, verliest hij zijn kracht. Na ongeveer 12 meter (6
meter heen naar het object en 6 meter terug naar de
betrouwbaar gedetecteerd te kunnen worden. Dit beperkt de afstand waarop de
), wordt de echo te zwak om
CBR
CBR
betrouwbaar werkt tot 6 meter.
CBR
6
A
AN DE SLAG MET
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 10
Tips voor een goede meting
De vorm van de bundel
(verv.)
De bundel van de
heeft de vorm van een kegel met een hoek van 10°.
CBR
Om te vermijden dat andere objecten in de omgeving de uitlezing verstoren, is het
gewenst dat er geen andere objecten zijn in het pad van de
ervoor dat andere objecten niet door
worden opgemerkt.
CBR
bundel. Hiermee zorgt u
CBR-
ziet alleen het
CBR
dichtstbijzijnde object binnen het gebied van de bundel.
Reflecterende oppervlakken
Sommige oppervlakken reflecteren de pulsen beter dan andere. Bijvoorbeeld: met een
harde gladde bal krijgt u betere resultaten dan met een tennisbal. En als u werkt in een
ruimte waarin zich veel harde reflecterende voorwerpen bevinden, dan zult u veel
onbedoelde metingen zien. Metingen van onregelmatige oppervlakken (zoals een
speelgoedauto of een leerling die loopt met een calculator in zijn hand) zullen
onduidelijk zijn.
Een afstand-tijd grafiek van een stilstaand object kan kleine verschillen vertonen in de
berekende afstanden. Als deze waarden resulteren in een ander pixel, dan zal de
verwachte horizontale lijn kleine onregelmatigheden vertonen. Een afstand-tijd grafiek
zal nog onregelmatiger worden, want de verandering in afstand tussen twee punten is,
per definitie, de snelheid. Het kan dus nodig zijn dat u de gegevens enigszins
“gladstrijkt”.
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
7
Page 11

Tips voor een goede meting
Instellingen van RANGER
Frequentie van de meting
is de totale tijd in seconden waarin de meting wordt gedaan. Geef hier een geheel
TIME
getal op tussen 1 seconde (voor snel bewegende objecten) en 99 seconden (voor
langzaam bewegende objecten). Bij
(verv.)
REALTIME=YES
, is
altijd 15 seconden.
TIME
Naarmate
Bijvoorbeeld, als
zijn.
CBR
Starten en stoppen
Het
SETUP-
een lager getal is, moet het object zich dichter bij de
TIME
TIME=1 SECOND
scherm in het
RANGER
, dan kan het object niet verder dan 1,75 meter van de
-programma heeft diverse mogelijkheden om het meten
CBR
te starten en te stoppen.
0
BEGIN ON: [ENTER]
. Start de meting met de
-toets van de calculator als de
›
opstelling bediend wordt door iemand die in de buurt van de calculator zit.
0
BEGIN ON: [TRIGGER]
. Start en stopt de meting met de
¤
opstelling bediend wordt door iemand die in de buurt van de
Met deze optie kunt u de
verbindingskabel los, neem de
op
¤
›
, verricht de meting, verbind de
om de gegevens over te sturen. Gebruik
loskoppelen. Verzorg eerst de instellingen, maak de
CBR
naar de plaats waar gemeten moet worden, druk
CBR
weer met de calculator en druk op
CBR
BEGIN ON: [TRIGGER]
knop van de
-
zit.
CBR
als de kabel te kort
is of de meting zou kunnen verstoren. Dit is niet mogelijk in de mode
(zoals de
0
BEGIN ON: DELAY
MATCH-
toepassing).
. Start de meting tien seconden nadat u op
drukt. Dit is handig
›
als één persoon alle handelingen moet verrichten.
Start-knop
Het effect van
¤
hangt af van de instellingen.
bevinden.
als de
CBR
REALTIME=YES
¤
0
start de meting, zelfs als
BEGIN ON: [ENTER]
of
BEGIN ON: DELAY
geselecteerd is.
Deze knop stopt de meting ook, maar meestal zult u willen wachten tot de meting
voltooid is.
In
0
REALTIME=NO
kunt u, nadat de meting voltooid is,
¤
gebruiken om de laatste
meting automatisch te herhalen, zonder de gegevens naar de calculator te sturen. Om
de gegevens over te sturen opent u het
GET CBR DATA
PLOT MENU
. (U kunt een meting ook herhalen door
of
START NOW
op het
SETUP
scherm)
MAIN MENU
en kiest u
REPEAT SAMPLE
, en vervolgens
TOOLS
te kiezen op het
8
A
AN DE SLAG MET
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 12

Tips voor een goede meting
Filteren
(verv.)
Het
RANGER
-programma kan de gegevens filteren, waardoor het effect van storende
signalen en variaties in de metingen verminderd wordt. Overdrijf het filteren niet. Begin
zonder filtering of met
filtering. Verhoog het filteren tot het resultaat bevredigend
LIGHT
is
Is het zeer waarschijnlijk dat er storende signalen optreden, verhoog dan de filtering
0
op het
Heeft u al gegevens met
0
toepassen. Daarvoor moet de calculator met de
op het
Ruis—wat is het en hoe kom je ervan af?
Als de
CBR
scherm voordat u met de meting begint (zie pagina 38).
SETUP
verzameld, dan kunt u naderhand filtering
verbonden zijn. Kies
CBR
PLOT TOOLS
, en kies de graad van filtering.
PLOT MENU
, kies
SMOOTH DATA
REALTIME=NO
signalen ontvangt van andere objecten dan het object dat u bedoeld had, dan
toont de grafiek onjuiste punten (ruis) die niet overeenkomen met het algemene patroon
van de grafiek. Om ruis te verminderen:
Let erop dat de
0
naar een
een
Probeer te meten in een ruimte met weinig vreemde voorwerpen (zie de tekening van
0
REALTIME=YES-
REALTIME=NO-
direct op het doel wordt gericht. Stel de sensorkop in terwijl u
CBR
meting kijkt totdat u goede resultaten krijgt. Daarna kunt u
meting verrichten.
de vorm van de bundel op pagina 7).
Kies een groter object dat beter reflecteert, of zet het object dichter bij de
0
CBR
(maar
niet dichter dan een halve meter).
Gebruikt u meer dan één
0
in een ruimte, dan moet de ene groep klaar zijn met de
CBR
meting voordat de andere groep begint.
Is er veel ruis bij een
0
REALTIME=YES
-meting, herhaal de meting dan met een hogere
filteringsgraad tot de resultaten bevredigend zijn. (U kunt de filtering niet veranderen
in de toepassingen
Is er veel ruis bij een
0
DISTANCE MATCH, VELOCITY MATCH
REALTIME=NO
-meting, gebruik dan een hogere filteringsgraad met
, en
BALL BOUNCE
.)
de oorspronkelijke gegevens.
Geluidssnelheid
De afstand naar het object wordt bij benadering gevonden met behulp van de standaard
ingestelde geluidssnelheid. Evenwel, de geluidssnelheid is van diverse factoren
afhankelijk, vooral van de luchttemperatuur. Voor metingen waarbij alleen de relatieve
bewegingen van belang zijn, is deze factor niet van belang. Zijn nauwkeurige resultaten
vereist, dan kan een programmeercommando worden gebruikt om de
omgevingstemperatuur in te stellen. (zie pagina 40–41).
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
9
Page 13

Tips voor een goede meting
REALTIME=YES
(verv.)
Gebruik de
voor langzame objecten
0
om de resultaten te zien terwijl ze gemeten worden
0
als u slechts één soort gegevens (afstand, snelheid of versnelling) wilt zien
0
In
REALTIME=YES-
REALTIME=YES-
mode berekent de
mode:
de gevraagde plotgegevens (afstand, snelheid of
CBR
versnelling) direct van elk afzonderlijk meetpunt en verstuurt deze naar de calculator.
RANGER
tekent dan voor dat meetpunt een enkel pixel in de grafiek.
Omdat al deze bewerkingen voltooid moeten zijn voordat het volgende meting kan
worden gedaan, is de meetfrequentie in de
REALTIME=YES-
mode beperkt.
Er zijn ongeveer 0,080 seconden nodig voor een enkel meetpunt samen met de
verwerking en de overdracht van de gegevens. Er is extra tijd nodig voor het tekenen van
de grafiek, waardoor de benodigde tijd in
REALTIME=NO
Gebruik de
voor snellere objecten
0
als filtering nodig is (zie pagina 9)
0
als de
0
als u alle gegevenssoorten (afstand, snelheid en versnelling) van de meting wil weten.
0
REALTIME=NO-
niet permanent met de calculator verbonden is (zie pagina 11)
CBR
mode:
RANGER
stijgt tot ongeveer 0,125 seconden.
In
REALTIME=NO
-mode, worden de gegevens in de
opgeslagen en pas naar de
CBR
calculator gezonden als de hele meting voltooid is. De meetfrequentie kan voor
dichtbijzijnde objecten 200 metingen per seconde zijn. De gegevens van tijd, snelheid en
versnelling worden naar de calculator gestuurd.
Omdat de gegevens in de
worden opgeslagen, kunt u ze steeds weer naar de
CBR
calculator overzenden.
Elke keer als u de filtering verandert, past de
0
de nieuwe filteringsfactor toe, stuurt
CBR
de gewijzigde gegevens naar de calculator, en slaat de nieuwe waarden op in de
lijsten.
Kiest u een domein dan verandert dat de lijsten die in de calculator opgeslagen zijn.
0
Desgewenst kunt u de oorspronkelijke gegevens terughalen. Open het
het
RANGER
U kunt ook dezelfde gegevens met meerdere leerlingen gebruiken, zelfs als ze
0
-programma, kies
TOOLS
. Kies in het
TOOLS
menu
GET CBR DATA
MAIN MENU
.
in
verschillende grafische TI-calculatoren gebruiken. Hierdoor kunnen alle leerlingen met
dezelfde gegevens verwerkingsopdrachten uitvoeren. (zie pagina 11).
10
A
AN DE SLAG MET
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 14

Tips voor een goede meting
Gebruik van CBR zonder calculator
(verv.)
Omdat de
niet direct gegevens naar de calculator kan sturen als hij niet met de
CBR
calculator verbonden is, zijn bepaalde instellingen vereist. Maak op het
volgende instellingen:
0
REALTIME=NO
0
BEGIN ON=[TRIGGER]
Het
RANGER-
.
.
programma zegt u wanneer u de
moet worden aangesloten. Er is geen speciale procedure nodig.
Gemeenschappelijk gebruik van gegevens
Wilt u dat de hele klas dezelfde gegevens op hetzelfde moment analyseert? Met
kunt u de
Stuur het
➊
REALTIME=NO
RANGER-
-gegevens snel over de leerlingen verdelen.
programma naar de calculator van iedere leerling voordat u begint
met de meting.
Meet de gegevens met de
➋
Sluit de calculator van de eerste leerling aan op de
➌
CBR
of de calculator-calculator-kabel.
➍
Open het
menu
GET CBR DATA
MAIN MENU
in het
. Er staat nu
verschijnt
in
REALTIME=NO-
RANGER
-programma en kies
TRANSFERRING...
scherm de
SETUP
mag loskoppelen en wanneer hij weer
CBR
mode.
met de calculator-
CBR
TOOLS
. Kies in het
CBR-
TOOLS
op het scherm en de grafiek
CBR
kabel
-
Druk op › om terug te gaan naar het
➎
PLOT MENU
, en kies
. Maak de kabel
QUIT
los.
Sluit een andere calculator (van het zelfde type) aan op de calculator waarin de
➏
gegevens zich bevinden. Open op de tweede calculator het
RANGER
L1, L2, L3, L4
Stuur de gegevens van de
➐
-programma en kies
, en L5 worden automatisch naar de tweede calculator overgestuurd.
CBR
. Kies in het
TOOLS
TOOLS
naar de calculator van een andere leerling terwijl de
-menu
MAIN MENU
GET CALC DATA
in het
andere leerlingen de gegevens van calculator naar calculator aan elkaar doorgeven.
Als alle leerlingen dezelfde gegevens hebben, dan kunnen ze de gegevens in
PLOT MENU
analyseren, en zonder
RANGER
met de mogelijkheden van de calculator om
lijsten en grafieken te maken.
Om gegevens op de TI-85 gezamenlijk te gebruiken, gebruikt u de
niet
RANGER)
om de lijsten over te sturen.
-faciliteit, (dus
LINK
. Lijsten
RANGER
met
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
11
Page 15

Tips voor een goede meting
Niet alleen gewoon gegevens verzamelen
(verv.)
Nadat u met
RANGER
grafieken gemaakt heeft, kunt u de gegevens met een functie
verder verwerken. Omdat de gegevens als lijsten worden verzameld en als een
statistische grafiek worden getoond, kunt u
, , en œ gebruiken om de relatie
tussen de gegevens te onderzoeken.
Binnen RANGER
Onderzoek grafieken met
0
, wat automatisch wordt ingesteld. (Op de TI-85
TRACE
gebruikt u de vrijbewegende cursor.)
Bewerk de gegevens, bijvoorbeeld door filtering of door een deel te selecteren.
0
Buiten RANGER
Onderzoek de gegevens met de list-editor van de calculator.
0
Maak handmatig een functie-fit met de Y= editor van de calculator.
0
Fit automatisch de functie die het best met de gegevens overeenstemt door gebruik te
0
maken van de regressiemogelijkheden van de calculator.
Er kunnen nog veel meer verbanden onderzocht worden dan er worden geboden door
de plotopties in
RANGER
tegelijk worden getoond. In het
daarna geeft u op:
. Bijvoorbeeld kunnen de afstand-tijd en snelheid-tijd grafieken
als L1 versus L2 en
Plot1
MAIN MENU
van het
Plot2
RANGER
als L1 versus L3. (Het kan ook nodig zijn
-programma kiest u
QUIT
, en
om het venster bij te stellen)
Gegevens en grafieken kunnen met behulp van een TI-Graph Link naar een computer
worden gestuurd. Dat is vooral handig als de leerlingen uitgebreide verslagen
produceren van hun bevindingen.
Gebruik van CBR zonder het RANGER-programma
U kunt
RANGER
Voor informatie over het gebruik van
0
Voor informatie over het verkrijgen van programma’s en activiteiten, zie pagina 36.
0
Voor informatie over de programmeercommando’s waarmee u uw eigen
0
ook als afstandssensor gebruiken met
CBR
.
CBR
programma’s kunt schrijven, zie pagina’s 40–41.
met
of met andere programma’s dan
CBL
, zie pagina 39.
CBL
12
A
AN DE SLAG MET
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 16
Activiteit 1—De grafiek nadoen aantekeningen voor docenten
Concepten
Te verkennen functie: lineaire functie.
MATCH
introduceert de concepten afstand en tijd—
of, nauwkeuriger: het concept van afstand versus
tijd uit de werkelijkheid. Terwijl leerlingen proberen
om grafieken te reproduceren door te lopen, terwijl
zij hun eigen beweging in een grafiek zien, kan het
concept positie worden verkend.
In “Verkenning” wordt aan leerlingen gevraagd om
de loopsnelheid om te zetten van m/s in km/uur.
Als de leerlingen het nadoen van Afstand-tijdgrafieken onder de knie hebben, kunt u een nieuwe
uitdaging voor hen vinden in het nadoen van
Snelheid-tijd-grafieken.
Materiaal
calculator
CBR
calculator-to-calculator cable
Met een TI ViewScreené kunnen andere leerlingen
meekijken—waardoor deze activiteit nog leuker
wordt.
Aanwijzingen
Leerlingen vinden deze activiteit echt boeiend. Neem
genoeg tijd want iedereen wil aan de beurt komen!
Deze activiteit werkt het beste als de leerling die
loopt (evenals de hele klas) ziet hoe zijn/haar
beweging op een muur of scherm wordt
geprojecteerd.
Laat de leerlingen in één lijn met de CBR lopen,
want soms lopen zij zijwaarts (loodrecht op de lijn
naar de CBR) of springen omhoog!
De instructies stellen voor om de activiteit te laten
meten in meters, omdat dat overeenkomt met de
vraag op het leerling-werkblad.
Zie pagina 6–12 voor aanwijzingen over goede
metingen.
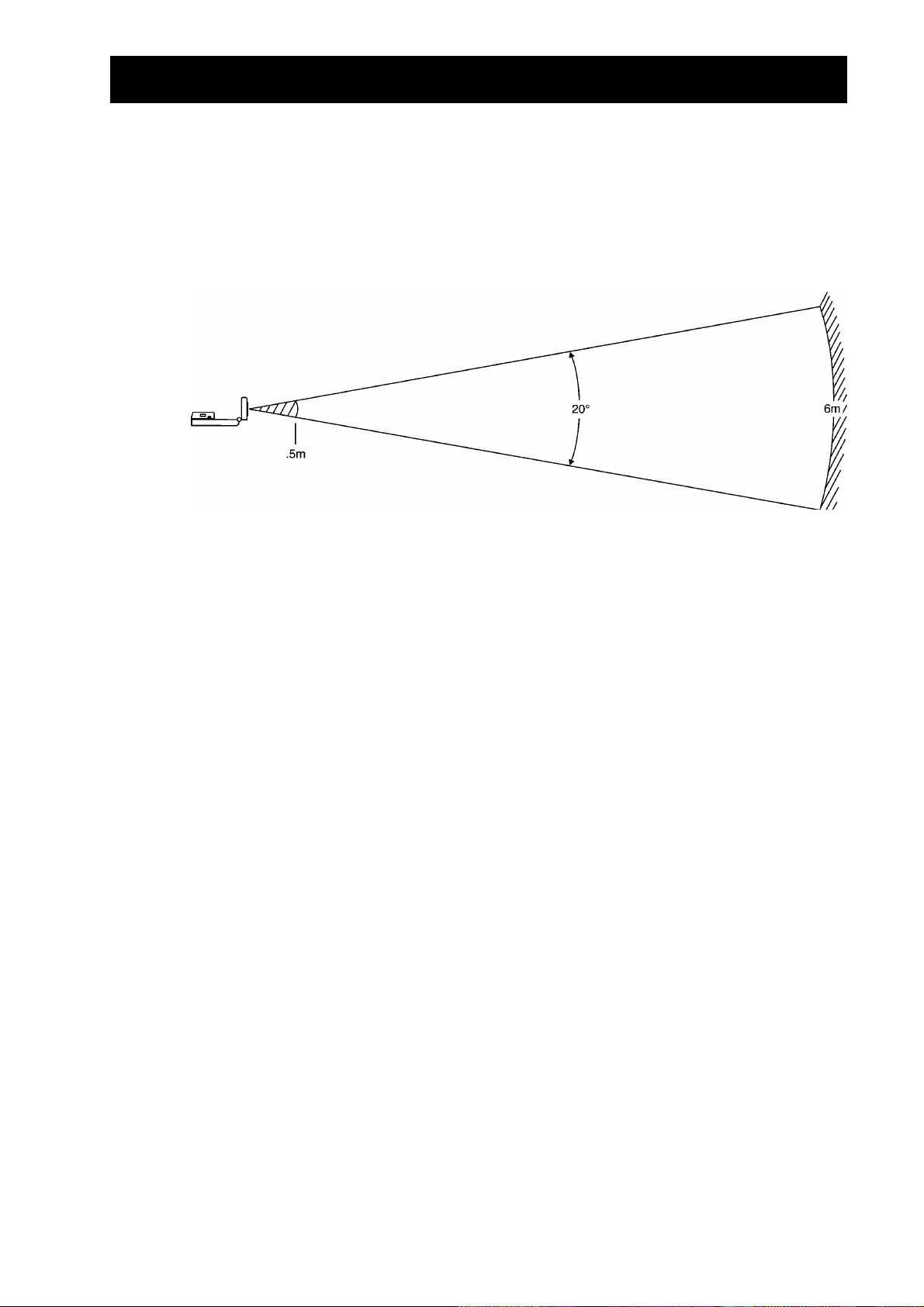
Te verwachten grafieken
Te verwachten antwoorden
1. tijd (vanaf begin meting); seconden; 1 seconde;
afstand (vanaf de CBR tot het voorwerp); meter;
1 meter
2. de overeenkomende waarde van y is de waarde
van de beginafstand
3. verschillend per leerling
4. achteruit (vergroot de afstand tussen de CBR en
het voorwerp)
5. vooruit (verklein de afstand tussen de CBR en het
voorwerp)
6. blijf stilstaan; hellingshoek nul houdt in: geen
wijziging van y (afstand)
7. verschillend per diagram; @yà3,3
8. verschillend per diagram; @yà1
9. het gedeelte met de grootste hellingshoek
(positief of negatief)
10.dit is een strikvraag—het vlakke gedeelte, want
je beweegt helemaal niet!
11.loopsnelheid; wanneer je van richting en/of van
snelheid verandert
12.snelheid (of snelheidsvector)
13.verschillend per diagram (voorbeeld: 1,5 meter in
3 seconden)
14.verschillend per diagram; voorbeeld: 0,5
meterà1 seconde
voorbeeld: (0,5 meter à 1 seconde) Q (60
seconden à 1 minuut) = 30 meter à minuut
voorbeeld: (30 meter à 1 minuut) Q (60 minuten
à 1 uur) = 1800 meter à uur
voorbeeld: (1800 meter à 1 uur) Q (1 kilometer à
1000 meter) = 1,8 kilometer à uur.
Laat leerlingen dit laatste getal vergelijken met
de snelheid van een auto. bijv. 96 kilometer à
uur.
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
15.verschillend per diagram; som van de @y voor elk
lijnsegment.
.
A
AN DE SLAG MET
CBR
13
Page 17
Activiteit 1—De grafiek nadoen lineaire functie
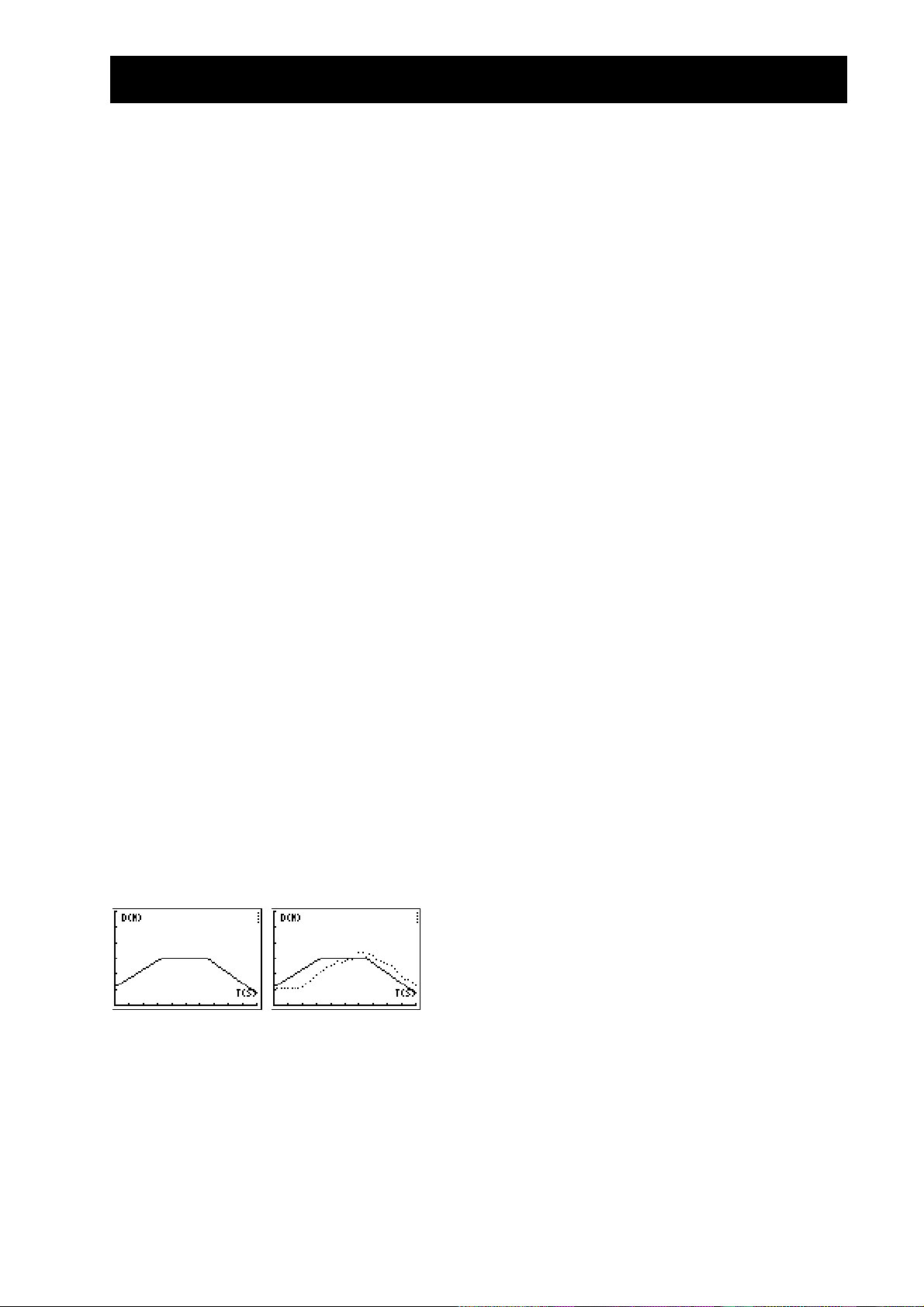
Metingen
Houd de
➊
CBR
op een muur.
Hints:
De maximale afstand van elk diagram is 4 meter vanaf de
afstand is 0,5 meter.
in één hand en de calculator in de andere. Richt de sensor rechtstreeks
. De minimale
CBR
➋
Start het
RANGER
programma (zie pagina 5 voor de toetsaanslagen voor elke
calculator).
Kies uit het
➌
Kies uit het
➍
instructies.
Druk op › om het na te doen diagram weer te geven. Neem even de tijd om het
➎
MAIN MENU: APPLICATIONS
APPLICATIONS
DISTANCE MATCH
menu:
zorgt automatisch voor de instellingen.
. Kies dan
DISTANCE MATCH
METERS
.
. Er verschijnen algemene
diagram te bestuderen. Beantwoord vraag 1 en 2 op het werkblad.
Ga naar de plaats waar je denkt dat het diagram begint. Druk op › om te
➏
beginnen met metingen. Je hoort een klikkend geluid en je ziet het groene lampje
terwijl er gegevens worden verzameld.
Loop achteruit en vooruit en probeer de grafiek na te doen. Je positie wordt op het
➐
scherm geplot.
Bestudeer, als de meting afgelopen is, hoe goed jouw “loopje” overeenkomt het
➑
diagram en beantwoord dan vraag 3.
Druk op › om het
➒
OPTIONS
menu weer te geven en kies
SAME MATCH
. Probeer
jouw looptechniek te verbeteren en beantwoord dan vraag 4, 5 en 6.
14
A
AN DE SLAG MET
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 18

Activiteit 1—De grafiek nadoen
Verkenning
(verv.)
lineaire functie
In
DISTANCE MATCH
Druk op › om het
➊
het eerste gedeelte en beantwoord vraag 7 en 8.
Bestudeer het hele diagram en beantwoord vraag 9 en 10.
➋
Ga naar de plaats waar je denkt dat het diagram begint, druk op › om te
➌
beginnen met metingen en probeer de grafiek na te doen.
Als de meting afgelopen is beantwoordt u vraag 11 en 12.
➍
Druk op › to display the
➎
Bestudeer de grafiek en beantwoord vraag 13, 14 en 15.
➏
Druk op › om het
➐
gewenst, of ga terug naar het
programma te verlaten.
Vervolgverkenning
De grafieken die door
Probeer nu
is pas moeilijk!
MATCH
is een erg gewild programma. Er kunnen extra versies die ingewikkelder
grafieken verkennen, beschikbaar komen. (zie pagina 36).
, bestaan alle grafieken uit 3 del en met rechte lijnen.
DISTANCE MATCH
VELOCITY MATCH
OPTIONS
OPTIONS
OPTIONS
menu weer te geven en kies
menu en kies
NEW MATCH
NEW MATCH
.
menu weer te geven. Herhaal de activiteit indien
MAIN MENU
en kies dan
QUIT
om het
. Bestudeer
RANGER
zijn gegenereerd, bestaan alle uit rechte lijnen
, waarbij je probeert een Snelheid-Tijd grafiek na te doen. Dit
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
15
Page 19

Activiteit 1—De grafiek nadoen
Naam _____________________________
Metingen
1. Welke natuurkundige grootheid staat langs de x-as? ________________________________________
Wat is de eenheid? Hoe ver staan de streepjes uit elkaar? ____________
Welke natuurkundige grootheid staat langs de y-as? ________________________________________
Wat is de eenheid? Hoe ver staan de streepjes uit elkaar? ____________
2. Hoe ver van de
moet je volgens jou beginnen? _________________________________________
CBR
3. Ben je te dichtbij, te ver of op de juiste plaats begonnen? ____________________________________
4. Moet je vooruit of achteruit lopen voor een gedeelte met een hellingshoek omhoog? ____________
Waarom? ____________________________________________________________________________
5. Moet je vooruit of achteruit lopen voor een gedeelte met een hellingshoek omlaag? _____________
Waarom? ____________________________________________________________________________
6. Wat moet je doen om een vlak gedeelte te krijgen? _________________________________________
Waarom? ____________________________________________________________________________
Verkenning
7. Als je één stap per seconde zet, hoe groot moet die stap dan zijn? ____________________________
8. Als je in plaats daarvan stappen van 1 meter neemt, hoeveel stappen moet u dan doen? __________
9. Bij welk gedeelte moet je het snelst lopen? ________________________________________________
Waarom? ____________________________________________________________________________
10. Bij welk gedeelte moet je het langzaamst lopen? ___________________________________________
Waarom? ____________________________________________________________________________
11. Welke andere factoren komen erbij kijken om precies de grafiek na te doen naast de beslissing om
vooruit of achteruit te lopen? ___________________________________________________________
_____________________________________________________________________________________
12. Voor welke natuurkundige grootheid staat de hellingshoek van het lijngedeelte? ________________
13. Hoeveel meter moet je lopen, in hoeveel seconden, voor het eerste lijngedeelte? ________________
1 seconde: _____________________________
14. Zet de waarde in vraag 13 (de snelheid) om in meter
Converteer naar meter
Converteer naar meter
Converteer naar kilometer
minuut: _________________________________________________________
à
àuur: _____________________________________________________________
àuur: _________________________________________________________
à
15. Hoe ver heb je feitelijk gelopen? _________________________________________________________
16
A
AN DE SLAG MET
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 20
Activiteit 2—Speelgoedauto aantekeningen voor docenten
Concepten
Te verkennen functie: lineaire functie.
Aan de hand van de beweging van een
gemotoriseerde speelgoedauto wordt geïllustreerd
wat het concept van een constante snelheid is.
Materiaal
calculator
CBR
CBR
calculator-
snoertje
speelgoedauto die op batterijen werkt
TI ViewScreen (optioneel)
Aanwijzingen
Speelgoedauto’s verschillen aanzienlijk is grootte,
vorm en weerkaatsingshoek van het invallende
ultrasone geluid. Daarom kunnen de grafieken die
het resultaat zijn, verschillen in kwaliteit. Sommige
auto’s hebben misschien een extra
weerkaatsingsoppervlak nodig om een goede
grafiek te krijgen. Probeer eens een stuk karton aan
de auto te bevestigen om een goed doelwit voor de
sensor te krijgen.
Misschien wilt u een aantal auto’s uitproberen om
de leerlingen een kans te geven deze effecten te
verkennen.
Langzamer speelgoedauto’s (bijv. voor jonge
kinderen) zijn beter geschikt voor deze activiteit.
Zoek een auto uit met een constante snelheid.
Zie pagina 6–12 voor hints over goede metingen.
Verkenning
De hellingshoek van de Afstand-tijd grafiek van een
voorwerp op een gegeven moment geeft de
snelheid van het voorwerp weer op dat moment.
Daarom is bij een voorwerp dat zich met een
constante snelheid beweegt, de hellingshoek in de
bijbehorende Afstand-tijd grafiek constant. Dit is de
reden waarom de Afstand-tijd grafiek lineair is.
Als u begint met gegevens te verzamelen voordat de
auto begint te rijden, merkt u dat de Afstand-tijd
grafiek niet lineair is aan het begin van de grafiek.
Waarom? De auto begint bij rust (v = 0). De
constante snelheid kan niet ineens worden bereikt.
Versnelling wordt weergegeven door:
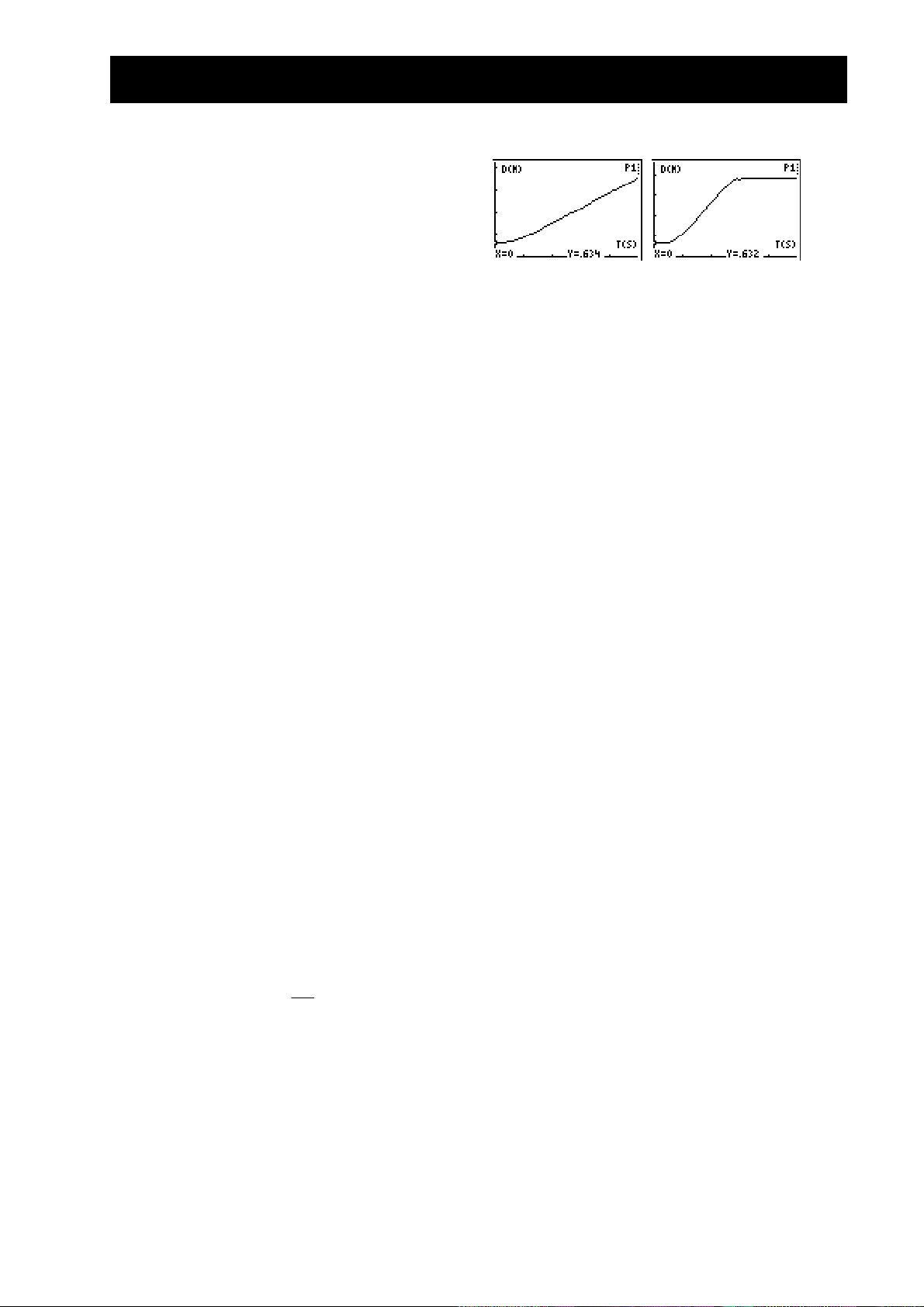
Te verwachten grafieken
Antwoorden op vragen
1. de eerste of de laatste grafiek; de afstand neemt
constant toe
2. de leerlingen voeren waarden in vanuit
TRACE
3. de waarde van de afstand neemt met een
constant getal toe
4. snelheid is de mate van verandering van afstand,
gemeten gedurende een gegeven tijd; de
waarden zijn gelijk voor elke gelijke toename van
de tijd
5. de leerling zou een waarde moeten vinden die
lijkt op de waarden, berekend voor m
lijkt op m
m staat voor de snelheid van de auto
6. b is de gevonden waarde van y;
bijv,: y = 2x + 0
7. varieert; bijvoorbeeld, als m = 2, is afstand (y) =
20 meter na 10 seconden (y = 2 Q 10 + 0); bij 1
minuut is y = 120 meter
Vervolgverkenning
De hellingshoek van een Snelheid-Tijd grafiek bij
constante snelheid is nul. Daarom geeft de
Versnelling-Tijd grafiek een a = 0 (in het ideale
geval) gedurende de tijd dat de snelheid constant is.
De oppervlakte die het resultaat vormt, is de
verplaatsing van het voorwerp (netto afgelegde
afstand) gedurende tijdinterval t
Voor leerlingen die integraalrekening beheersen, kan
verplaatsing worden gevonden uit:
=
svdt
1
t
2
∫
t
1
tot t2.
∆
v
=
a
∆
t
Als het voorwerp ineens vanuit rust naar een
constante snelheid zou gaan, zou ∆t = 0 zijn. Maar
dit impliceert oneindige versnelling, hetgeen in de
praktijk niet mogelijk is. (In feite zou op grond van
de tweede Wet van Newton, F = ma, een oneindige
versnelling slechts kunnen resulteren uit een
oneindige kracht, die eveneens onmogelijk is.)
Daarom moeten wij het voorwerp observeren, terwijl
het versnelt (de snelheid verhoogt) tot de constante
snelheid gedurende een eindige tijd.
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
waarbij s de verplaatsing van het voorwerp is
gedurende tijdinterval t
tot t2.
1
A
AN DE SLAG MET
CBR
17
Page 21
Activiteit 2—Speelgoedauto lineaire functie
Metingen
Plaats de auto tenminste 0,5 meter van de
➊
, met de voorkant van de
CBR
een rechte lijn.
Richt de sensor rechtstreeks op de auto en zorg ervoor dat er niets tussen de
Hints:
sensor en de auto staat (zie pagina 7).
Voordat u begint met metingen, beantwoord je eerst vraag 1 op het werkblad.
➋
➌
Start het
RANGER
programma (zie pagina 5 voor de toetsaanslagen voor elke
calculator).
Kies vanuit het
➍
MAIN MENU: SETUPàSAMPLE
. Bij deze activiteit hebt u de volgende
instellingen nodig:
CBR
af in
REALTIME: NO
TIME (S): 5 SECONDEN
DISPLAY: DISTANCE
BEGIN ON: [ENTER]
SMOOTHING: LIGHT
UNITS: METERS
De instructies voor het wijzigen van een instelling vindt u op pagina 38.
Kies
➎
➏
START NOW
Druk op › als je wilt beginnen. Start de auto en laat deze snel uit de clear zone
.
rijden. Je hoort een klikkend geluid tijdens het verzamelen van gegevens en je ziet
de melding
Nadat de gegevens verzameld zijn, geeft de calculator automatisch een Afstand-tijd
➐
TRANSFERRING...
op de calculator.
grafiek van de verzamelde meetpunten weer.
Vergelijk de grafiek van de meetresultaten met je prognose in antwoord 1 wat
➑
betreft overeenkomsten en verschillen.
18
A
AN DE SLAG MET
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 22

Activiteit 2—Speelgoedauto
Verkenning
De waarden van x (tijd) met tussenpozen van een halve seconde staan in de eerste
➊
kolom in vraag 2. Loop de grafiek na en vul de overeenkomende waarden van
y (afstand) in de tweede kolom.
gedeelte van de grafiek. Het is mogelijk dat je gegevens die niet kloppen met de rest,
aan het begin van de meting, buiten beschouwing moet laten. Het is ook mogelijk
dat je de afstand moet afronden (als de calculator de waarde van de afstand na
0,957 of 1,01 seconde geeft in plaats van na exact 1 seconde). Kies het
dichtstbijzijnde getal of het meest voor de hand liggende getal.
➋
Beantwoord vraag 3 en 4.
Bereken de veranderingen in afstand en tijd tussen elk van de punten en vul zo de
➌
derde en vierde kolom in. Om bijvoorbeeld de @Afstand (in meter) te berekenen na
1,5 seconde, trek je de afstand na 1 seconde af van de afstand na 1,5 seconde.
De functie die door deze activiteit wordt geïllustreerd is y = mx + b. m is de
➍
hellingshoek van een lijn. Deze wordt als volgt berekend:
(verv.)
Vul alleen resultaten in uit het lineaire
N.B.:
lineaire functie
De overeenkomende waarde van y is de waarde van b.
Bereken m voor elk punt. Vul de waarden in de tabel bij vraag 2.
➎
Beantwoord vraag 5, 6 en 7.
Vervolgverkenning
Door de hellingshoek van een Afstand-tijd grafiek op een gegeven moment te
berekenen, verkrijg je de snelheid (bij benadering) van het voorwerp op dat moment.
Door de hellingshoek van een Snelheid-Tijd grafiek te berekenen, verkrijg je de
versnelling (bij benadering) van het voorwerp op dat moment. Als de snelheid constant
is, wat is dan de waarde van de versnelling?
Maak een prognose van de vorm van de Versnelling-Tijd grafiek bij deze Afstand-tijd
grafiek.
Bereken de oppervlakte tussen de Snelheid-Tijd grafiek en de x-as, tussen twee
gemakkelijke tijdstippen t
rechthoeken bij elkaar op te tellen, waarvan elk de volgende oppervlakte heeft:
@afstand
@tijd
en t2. Dit is mogelijk door de oppervlakten van een of meer
1
afstand
of
oppervlakte = v∆t = v(t
2
tijd
N afstand
N tijd
2
1
2Nt1
1
of
)
N y
y
2
x2 N x
1
1
Wat is de natuurkundige betekenis van de berekende oppervlakte?
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
19
Page 23

Activiteit 2—Speelgoedauto
Naam ____________________________
Metingen
1. Welk van de onderstaande illustraties komt volgens u overeen met de Afstand-tijd grafiek van de
speelgoedauto?
Waarom?_____________________________________________________________________________
2.
Tijd Afstand
1 xxx xxx xxx
1,5
2
2.5
3
3.5
4
4.5
5
@
Afstand
@
Tijd
m
3. Wat valt je op aan de waarden voor de afstand?____________________________________________
4. Hoe blijkt uit deze resultaten dat de speelgoedauto een constante snelheid had?_________________
5. Bereken
@
tussen Tijd = 2 en Tijd = 4. ________________________________________
afstandà@tijd
Wat valt je op aan dit resultaat? _________________________________________________________
Waar staat
6. Wat is in de lineaire vergelijking
m
volgens jou voor? _________________________________________________________
y
= mx + b, de waarde van b? _______________________________
Noteer de vergelijking voor de lijn in de vorm
y
= mx + b en gebruik de waarden van m en b.______
7. Welke afstand zou de speelgoedauto in 10 seconden afleggen? ______________________________
In 1 minuut? _________________________________________________________________________
20
A
AN DE SLAG MET
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 24

Activiteit 3—Slinger aantekeningen voor docenten
Concepten
Te verkennen functie: sinusfunctie.
Verkenning van een enkelvoudige harmonische
beweging door waarneming van een vrij bewegende
slinger.
Materiaal
calculator
CBR
CBR
calculator-
snoertje
montageklem
stopwatch
slinger
lineaal
TI ViewScreen (optioneel)
Suggesties voor gewichten:
ballen van verschillende afmetingen (≥ 5 cm
0
diameter)
frisdrankblikjes (leeg en vol)
0
zakken met bonen
0
Aanwijzingen
Zie pagina 6–12 voor hints over goede metingen.
Natuurkundige verbanden
Een voorwerp voert een harmonische beweging
periodiek uit als gevolg van een terugwerkende
kracht die evenredig is met de verplaatsing van het
voorwerp uit de evenwichts- (rust)positie. Deze
beweging kan door twee grootheden worden
beschreven.
De tijdsduur T is de tijd benodigd voor een
0
volledige periode.
De amplitude A is de maximale verplaatsing van
0
het voorwerp uit de evenwichtspositie (de plaats
waar het gewicht zich in rust bevindt).
Voor een enkelvoudige slinger is de tijdsduur T:
T = 2p
waarbij L de lengte van het koord is en g de grootte
van de versnelling door de zwaartekracht. T hangt
niet af van de massa van het voorwerp of van de
amplitude van de beweging die het voorwerp
uitvoert.
De frequentie f (het aantal volledige periode per
seconde) wordt gevonden door:
1
f =
, waarbij f in hertz (Hz) wordt uitgedrukt als
T
T in seconden wordt uitgedrukt.
Een afgeleide van een sinusoïde grafiek is ook een
sinusoïde. Let met name op de relatie tussen de
fasen van de plaats van het gewicht en de snelheid
ervan.
L
g
Te verwachten grafieken
Te verwachten antwoorden
1. verschillend (in meter)
2. verschillend (in meter)
3. verschillend (in seconden); T (een periode)
= totale tijd: 10 periodenà10; het nemen van
een gemiddelde van meer metingen geeft een
vermindering van de meetfouten
4. de totale booglengte, die ca. 4x het antwoord
op vraag 2 moet zijn; omdat een boog langer is
dan een rechte lijn
5. sinusoïde, herhalend, periodiek; afstand van de
x-as tot de evenwichtspositie
6. elke periode wordt horizontaal “uitgesmeerd”;
een grafiek over 10 seconden moet meer
perioden in dezelfde grootte van het scherm
weergeven, daarom komen deze dichter bij
elkaar
7. (totaal aantal perioden)à(5 seconden) =
periodenàseconde; het is gemakkelijker om
volledige perioden te bekijken; minder
meetfouten
8. f = 1àT, waarbij T is de tijd gedurende 1 periode
9. verkleinde periode; vergrote periode
(De slingerlengte is rechtstreeks gerelateerd aan
de periode; hoe langer het koord, des te langer
de periode. Leerlingen kunnen deze relatie
verkennen door middel van de list editor van de
calculator, waarbij zij de tijdsduur voor
verschillende waarden van L kunnen berekenen.)
10.A (amplitude) = ¼ van de totale afstand die de
slinger aflegt in 1 periode
11.beide sinusoïden; verschillen in amplitude en fase
12.evenwichtspositie
13.als positie = maximum- of minimumwaarde
(wanneer het gewicht zich op de grootste
afstand van het evenwichtspunt bevindt).
14.Niet. T hangt alleen van L en g af, niet van de
massa.
Vervolgverkenning
Meting: de grafiek van L2 versus L3 vormt een ellips.
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
21
Page 25

Activiteit 3—Slinger sinusfunctie
Metingen
Plaats de slinger. Richt de slinger zó, dat deze in een rechte lijn met de
➊
tenminste 0,5 meter van het dichtstbijzijnde punt van het
Hints:
Plaats the
CBR
gewicht. Zorg ervoor dat er niets in de clear zone staat (zie pagina 7).
amplitude
evenwichtspositie
Meet met een lineaal de afstand vanaf de
➋
tot de evenwichtspositie.
CBR
Beantwoord vraag 1 op het werkblad.
CBR
beweegt.
Meet vanaf hoever je het gewicht van de evenwichtspositie af laat bewegen.
Beantwoord vraag 2.
Een periode is de tijd die de slinger nodig heeft voor een volledige beweging naar
➌
voor en naar achter. Meet met een stopwatch de tijdsduur, nodig voor tien volledige
periodes. Beantwoord vraag 3 en 4.
➍
Start het
RANGER
programma (zie pagina 5 voor de toetsaanslagen voor elke
calculator). Een efficiënte methode is dat één persoon de slinger start terwijl iemand
anders de calculator en
Druk op › om de instellingen weer te geven. Bij deze activiteit moeten deze als
➎
bedient. Kies vanuit het
CBR
MAIN MENU: SETUPàSAMPLE
volgt zijn:
REALTIME: NO
TIME (S): 10 SECONDEN
DISPLAY: DISTANCE
BEGIN ON: [ENTER]
SMOOTHING: LIGHT
UNITS: METERS
De instructies voor het wijzigen van een instelling vind je op pagina 38. Kies,
➏
wanneer deze juist zijn,
Druk op › als je wilt beginnen. Je hoort een klikkend geluid tijdens het
➐
START NOW
verzamelen van gegevens en u ziet de melding
.
TRANSFERRING...
op de calculator.
.
22
A
AN DE SLAG MET
Nadat de gegevens verzameld zijn, geeft de calculator automatisch een Afstand-tijd
➑
grafiek van de verzamelde meetpunten weer. Beantwoord vraag 5.
OPIËREN TOEGESTAAN MITS VERMELDING VAN
CBR
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 26

Activiteit 3—Slinger
Verkenning
Meting 2
(verv.)
sinusfunctie
Kies vanuit het
seconden. Herhaal de meting. Kijk naar de grafiek. Beantwoord vraag 6 en 7.
De hoeveelheid die je hebt vastgesteld (perioden per seconde) heet de frequentie.
Hoewel je de frequentie in vraag 7 hebt berekend met behulp van de grafiek, kun je
deze wiskundig berekenen uit:
f =
Beantwoord vraag 8.
Metingen 3 en 4
Herhaal de meting gedurende 5 seconden nog twee maal. Maak bij de eerste meting het
koord korter. Maak bij de tweede meting het koord langer. Beantwoord vraag 9 nadat
je deze grafieken hebt bestudeerd.
Een andere belangrijke afstands die invloed heeft op de beweging van de slinger is de
amplitude. Het antwoord op vraag 2 was de amplitude van die slingeruitlslag.
Beantwoord vraag 10.
Vervolgverkenning
Meting 5
Kies vanuit het
MAIN MENU: SETUPàSAMPLE
1
waarbij T de tijdsduur in seconden is en f de frequentie is in hertz (Hz).
T
PLOT MENU: VELOCITY-TIME
. Wijzig in het
. Beantwoord vraag 11, 12 en 13.
scherm de tijd van 10 in 5
SETUP
Meting 6
Herhaal de meting met een aanzienlijk lichter of zwaarder gewicht en beantwoord
daarna vraag 14.
Fit de afstand-tijd grafiek van de slinger met behulp van de formule voor een
sinusfunctie, S = A sin (wt + d), waarbij S de positie van het moment is, A de amplitude
is, w de frequentie is, d de fasehoek is en t de tijd is. De frequentie, w, is gerelateerd aan
de periode, T, door w = 2 pàT.
Voer deze vergelijking in in de Y= editor met de berekende waarden van A en w. Maak
gelijktijdig een diagram van deze functie en de statistische grafiek van
(tijd) versus
L1
L2
(afstand). Pas de waarden van A, w en d aan totdat er een goede “fit” ontstaat. Op de
TI-83 of TI-86 kunt u de sinusregressie gebruiken om de waarden vast te stellen.
Verken de relatie tussen positie en snelheid door een grafiek te maken van
versus
(snelheid). Hier zal de resulterende grafiek er naar je mening uit zien? Vergelijk
L3
(afstand)
L2
het uiteindelijke resultaat met jouw voorspelling.
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
23
Page 27

Activiteit 3—Slinger
Meting
Naam ____________________________________
1. Wat is de afstand vanaf de
tot de evenwichtspositie? ____________________________________
CBR
2. Hoe ver ga je de slinger vanuit de evenwichtspositie brengen? ________________________________
3. Wat was de tijd voor tien periodes? ______________________________________________________
Bereken hoe lang (in seconden) het duurt om een periode te voltooien. ________________________
Wat is het voordeel van het meten van tien volledige perioden i.p.v. slechts één? ________________
4. Schat de totale afstand die in één periode wordt afgelegd met behulp van het antwoord op vraag 2.
_____________________________________________________________________________________
Waarom is deze waarde lager dan de werkelijke afstand die in één periode wordt afgelegd? ______
5. Wat valt je op aan de vorm van de grafiek? ________________________________________________
Hoe wordt de waarde uit vraag 1 weergegeven in de grafiek? ________________________________
Verkenning
6. Hoe verandert de vorm van de grafiek? Waarom ? __________________________________________
_____________________________________________________________________________________
7. Bereken met behulp van d gegevens uit de grafiek, het aantal volledige perioden per seconde. ____
Waarom is het gemakkelijker om dit vast te stellen met de tweede grafiek (over 5 seconden) dan
met de eerste (over 10 seconden)?________________________________________________________
8. Bereken de frequentie voor een periode met de vergelijking.__________________________________
9. Welke invloed heeft het verkorten van de lengte van het koord op de tijdsduur van de slinger?_____
Welke invloed heeft het verlengen van het koord op de periode van de slinger?__________________
10. Wat is de relatie tussen de amplitude van de slingeruitslag en de totale afstand die de slinger aflegt
in een periode? _______________________________________________________________________
_____________________________________________________________________________________
Vervolgverkenning
11. Vergelijk de Afstand-tijd grafiek met de Snelheid-Tijd grafiek. Som de overeenkomsten en
verschillen.____________________________________________________________________________
_____________________________________________________________________________________
12. In welke positie is de snelheid van het gewicht maximaal? ____________________________________
13. In welke positie is de snelheid minimaal? __________________________________________________
14. Welke invloed heeft het veranderen van het gewicht op de grafiek? Waarom? __________________
_____________________________________________________________________________________
24
A
AN DE SLAG MET
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 28

Activiteit 4—Stuiterende bal aantekeningen voor docenten
Concepten
Te verkennen functie: parabolische functie.
Concepten uit de werkelijkheid zoals vrij vallende en
stuiterende voorwerpen, zwaartekracht en
eenparige versnelling zijn voorbeelden van
parabolische functies. Deze activiteit onderzoekt de
waarden van hoogte, tijd en de coëfficiënt A in de
kwadratische vergelijking, Y = A(X H)
2
+ K, de
het gedrag van een stuiterende bal beschrijft.
Materiaal
calculator
CBR
CBR
calculator-
snoertje
grote speelbal (20 cm)
TI ViewScreen (optioneel)
Aanwijzingen
Deze activiteit kan het beste door twee leerlingen
worden uitgevoerd, waarbij de een de bal vasthoudt
en de ander op ¤ drukt.
Zie pagina 6–12 voor hints over goede metingen.
De grafiek moet eruit zien als een stuiterende bal. Zo
niet, moet de meting worden herhaald, waarbij je
controleert of de
CBR
loodrecht op de bal is gericht.
Een grote bal is aan te bevelen.
Te verwachten grafieken
de bal. y = 0 is in de grafiek in feite het punt
waar de bal zich het verst van de
CBR
bevindt,
wanneer de bal de grond raakt.
4. Leerlingen dienen zich ervan bewust te zijn dat
de x-as de tijd voorstelt en niet de horizontale
afstand.
7. Het diagram voor A = 1 is zowel geïnverteerd als
breder dan de grafiek.
8. A < L1
9. parabool holle kant omhoog; holle kant omlaag;
lineair
12.hetzelfde; wiskundig staat coëfficiënt A voor de
mate van kromming van de parabool;
natuurkundig hangt A af van de versnelling door
de zwaartekracht, die tijdens de hele proef
constant blijft.
Vervolgverkenning
De stuiterhoogte van de bal (maximale hoogte voor
een gegeven stuitering) is bij benadering:
=
hp
x
, waarbij
y
y de stuiterhoogte is
0
h de hoogte is waarvan de bal wordt losgelaten
0
p een constante is die afhangt van de fysieke
0
kenmerken van de bal en de oppervlakte van de
grond
x is het volgnummer van de stuitering
0
Verkenning
Nadat een voorwerp is losgelaten, werkt de
zwaartekracht erop (waarbij de luchtweerstand
wordt verwaarloosd). Dus hangt A af van de
versnelling door de zwaartekracht, N9,8
meteràseconde
2
. Het minteken geeft aan dat de
versnelling omlaag gericht is.
De waarde van A is ca. de helft van de versnelling
door de zwaartekracht, of N4.9 meteràseconde
2
.
Te verwachten antwoorden
1. tijd (vanaf het begin van de meting); seconden;
hoogte à afstand van de bal boven de grond;
meter
2. starthoogte van de bal boven de grond (de
pieken staan voor de maximale hoogte van elke
stuitering); de grond staat voor y = 0.
3. De Afstand-tijd grafiek bij deze activiteit geeft
niet de afstand vanaf de
BALL BOUNCE
draait de afstandsgegevens om
zodat de grafiek beter overeenkomt met de
waarneming van leerlingen van het gedrag van
CBR
tot de bal weer.
Bij een gegeven bal en beginhoogte neemt de
stuiterhoogte exponentieel af bij elke
opeenvolgende stuitering. Wanneer x = 0, is y = h,
dus staat de overeenkomende waarde van y voor de
beginhoogte.
Ambitieuze leerlingen kunnen de coëfficiënten in
deze vergelijking uitzoeken op grond van de
verzamelde gegevens. Herhaal de activiteit voor
verschillende beginhoogten of met een andere bal
of op een andere oppervlakte.
Nadat er handmatig een “fit” van de kromme is
uitgevoerd, kunnen leerlingen de regressie- analyse
gebruiken om de functie te zoeken die het beste
model van de gegevens oplevert. Kies één enkele
stuitering met
Vervolgens
PLOT TOOLS, SELECT DOMAIN
QUIT
uit het
MAIN MENU
.
. Ga te werk
volgens de bedieningsinstructies van de calculator
voor het uitvoeren van een kwadratische regressie
L1
op list
en L2.
Uitbreidingen
Integreer onder de Snelheid-Tijd grafiek; dit geeft de
verplaatsing (netto afgelegde afstand)o voor een
willekeurig gekozen tijdsinterval. N.B.: de
verplaatsing is nul voor elke volledig uitgevoerde
stuitering (de bal begint en eindigt op de grond).
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
25
Page 29

Activiteit 4—Stuiterende bal parabolische functie
Meting
Begin met stuiteren bij wijze van test. Laat de bal vallen (niet gooien).
➊
tenminste 0,5 meter boven de hoogte van de hoogste
Hints:
Plaats de
stuitering. Houd de sensor rechtstreeks boven de bal en zorg ervoor dat zich niets in
de clear zone bevindt (zie pagina 7).
CBR
➋
Start het
RANGER
programma (zie pagina 5 voor de toetsaanslagen voor elke
calculator).
Kies vanuit het
➌
Kies vanuit het
➍
BALL BOUNCE
Houd de bal vast met gestrekte armen. Druk op ›. Het
➎
MAIN MENU: APPLICATIONS
APPLICATIONS
menu
zorgt automatisch voor de instellingen.
nu in Trigger mode. Op dit moment, kun je de
Druk op ¤. Als het groene lampje begint te knipperen, laat u de bal los en
➏
doet u een stap achteruit. (Ga, als de bal opzij stuitert, mee zodat de
boven de bal blijft, maar zorg ervoor dat de hoogte van de
. Kies
BALL BOUNCE
METERS
.
. Er volgen algemene instructies.
RANGER
van de calculator loskoppelen.
CBR
CBR
programma staat
CBR
niet verandert.)
Je hoort een klikkend geluid tijdens het verzamelen van gegevens. Er worden
gegevens verzameld over de tijd en afstand en er worden gegevens berekend over
snelheid en versnelling. Als je de
hebt losgekoppeld, sluit je deze nu weer aan
CBR
nadat de metingen klaar zijn.
Druk op ›. (Als de grafiek er niet goed uitziet, herhaal je de meting.) Bestudeer
➐
de grafiek. Beantwoord vraag 1 en 2 op het werkblad.
❽
Let op:
BALL BOUNCE
heeft automatisch de afstandsgegevens omgedraaid.
Beantwoord vraag 3 en 4.
recht
26
A
AN DE SLAG MET
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 30

Activiteit 4—Stuiterende bal
Verkenning
De Afstand-tijd grafiek van de stuitering heeft de vorm van een parabool.
(verv.)
parabolische functie
Druk op ›. Kies vanuit het
➊
PLOT MENU: PLOT TOOLS
en dan
SELECT DOMAIN
willen de eerste volledige stuitering selecteren. Breng de cursor naar de basis van het
begin van de stuitering en druk op
einde van die stuitering en druk op
›. Breng de cursor naar de basis aan het
›. De grafiek wordt opnieuw getekend,
waarbij slechts één stuitering in aanmerking wordt genomen.
De grafiek staat in
➋
mode. Bepaal de top van de stuitering. Beantwoord
TRACE
vraag 5 op het werkblad.
Druk op › om terug te gaan naar het
➌
De formule voor de top van de kwadratische vergelijking, Y = A(X H)
➍
bij deze analyse. Druk op
œ. Schakel in de
PLOT MENU
editor, eventueel geselecteerde
Y=
. Kies
MAIN MENU
. Kies
2
+ K, past
functies uit. Vul de formule voor de top van de kwadratische vergelijking:
Yn=A(XH)^2+K.
Sla in het Home scherm de waarde op die je in vraag 5 voor de hoogte hebt
➎
vastgesteld, in variabele K; sla de tijd die ermee overeenkomt op in variabele H; sla
1 op in variabele A.
Druk op om het diagram weer te geven. Beantwoord vraag 6 en 7.
➏
Probeer A = 2, 0, –1. Vul het eerste deel van de tabel in vraag 8 in en
➐
beantwoord vraag 9.
Kies eigen waarden voor A totdat er een goede match ontstaat voor de grafiek. Leg
➑
uw keuzes voor A vast in de tabel in vraag 8.
. Wij
QUIT
.
Herhaal de activiteit, maar kies nu de laatste (rechter) volledige stuitering.
➒
Beantwoord vraag 10, 11 en 12.
Vervolgverkenning
Herhaal de meting, maar kies niet één enkele parabool.
➊
Leg de tijd en hoogte van elke opeenvolgende stuitering vast.
➋
Bepaal de verhouding tussen de hoogten van elke opeenvolgende stuitering.
➌
Leg de betekenis (voorzover aanwezig) van deze verhouding uit.
➍
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
27
Page 31
Activiteit 4—Stuiterende bal
Naam ______________________________
Meting
1. Voor welke natuurkundige grootheid staat de x-as? _________________________________________
Wat zijn de eenheden? _________________________________________________________________
Voor welke natuurkundige grootheid staat de y-as? _________________________________________
Wat zijn de eenheden? _________________________________________________________________
2. Waarvoor staat het hoogste punt van de grafiek? __________________________________________
En het laagste punt? ___________________________________________________________________
3. Waarom heeft het
BALL BOUNCE
programma de grafiek omgedraaid? __________________________
4. Waarom lijkt het op de grafiek alsof de bal over de grond is gestuiterd? ________________________
Verkenning
5. Leg de maximale hoogte en overeenkomstige tijd vast voor de eerste volledige stuitering. _________
A
6. Komt het diagram voor
= 1 overeen met uw grafiek? _____________________________________
7. Waarom of waarom niet? ______________________________________________________________
8. Vul onderstaande tabel in.
A Wat levert een vergelijking van de data plot en het Yn diagram op?
1
2
0
1
-
A
9. Waarop duidt een positieve waarde voor
Waarop duidt een negatieve waarde voor
Waarop duidt een waarde nul voor
A
? _______________________________________________
A
? ______________________________________________
? ____________________________________________________
10. Leg de maximale hoogte en overeenkomstige tijd voor de laatste volledige stuitering vast. ________
A
11. Denk je dat
12. Wat levert de vergelijking van waarden van
Waarvoor denk je dat
28
A
AN DE SLAG MET
groter of kleiner is bij de laatste stuitering? ____________________________________
A
op? __________________________________________
A
zou kunnen staan? _______________________________________________
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 32

Activiteit 5—Rollende bal aantekeningen voor docenten
Concepten
Te verkennen functie: parabolische functie.
Het plotten van een bal die van een helling, met
diverse hellingshoeken, afrolt, levert een reeks
krommen op, die kunnen worden weergegeven
door een reeks kwadratische vergelijkingen. Deze
activiteit onderzoekt de waarden van de
coëfficiënten in de kwadratische vergelijking,
2
y = ax
+ bx + c.
Materiaal
calculator
CBR
CBR
calculator-
snoertje
montageklem
grote speelbal (20 cm)
lange helling (tenminste 2 meter—een
lichtgewicht plaat voldoet goed)
gradenboog om de hoek te meten
boeken als ondersteuning voor de helling
TI ViewScreen (optioneel)
Aanwijzingen
Bespreek hoe de hellingshoek wordt gemeten.
Laat leerlingen hun eigen creativiteit hierin
ontwikkelen. Het is mogelijk om een
trigonometrische berekening, gevouwen papier
of een gradenboog te gebruiken.
Zie pagina 6–12 voor hints over goede metingen.
Te verwachten grafieken
4. een parabool (kwadratisch)
5. verschillend
6. verschillend (moet zijn parabool met
toenemende kromming)
7. 0¡ is vlak (de bal kan niet rollen); 90¡ is gelijk
aan een bal in vrije val
Verkenning
De beweging van een lichaam waarop alleen de
zwaartekracht werkt, is een populair onderwerp
bij een natuurwetenschappelijke studie. Zo’n
beweging wordt meestal uitgedrukt door een
specifieke vorm van de kwadratische vergelijking
s = ½at
0
0
0
0
In de kwadratische vergelijking y = ax
2
+ v
t + s
i
waarbij
i
s de positie is van een voorwerp op tijd t
a de versnelling ervan is
de beginsnelheid ervan is
v
i
de beginpositie ervan is
s
i
2
+ bx + c,
staat y voor de waarde van de afstand vanaf de
CBR
tot de bal op tijd x als de beginpositite van
de bal c was, de beginsnelheid b was en
versnelling 2a is.
Vervolgverkenning:
Aangezien de bal in rust is bij het loslaten, zou b
dicht bij nul moeten liggen bij elke poging. c zou
de beginafstand moeten benaderen, nl. 0,5
meter. a neemt toe naarmate de hellingshoek
toeneemt.
15
¡
30
¡
Te verwachten antwoorden
1. de derde grafiek
2. tijd; seconden; afstand van het voorwerp
vanaf CBR; meter
3. verschillend (moet zijn de helft van een
parabool, holle kant omhoog)
Als leerlingen handmatig een fit voor de
vergelijking y = ax
2
+ bx + c zoeken, moet u
misschien aanwijzingen geven voor de waarden
van b en c. U kunt hen ook opdragen een
kwadratische regressie op lijst
L1, L2
te maken
met behulp van hun calculators. De versnelling
van de bal is te danken aan de zwaartekracht.
Dus, hoe steiler de helling (d.w.z. hoe groter de
hellingshoek), des te groter wordt de waarde van
a. a is maximaal als q = 90¡, en minimum bij
q = 0¡. In wezen is a evenredig met de sinus
van q.
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
29
Page 33

Activiteit 5—Rollende bal parabolische functie
Meting
➊
Beantwoord vraag 1 op het werkblad. Stel de helling in op een hoek van 15°.
Bevestig de klem aan de bovenkant van de helling. Bevestig de
Open de kop van de sensor en plaats deze loodrecht op de helling. Bevestig de
calculator aan de
CBR
.
aan de klem.
CBR
Maak een merkteken op de helling, op 0,5 meter van de
. Laat één leerling de
CBR
bal op dit punt vasthouden, terwijl een tweede leerling de calculator vasthoudt.
Richt de sensor rechtstreeks op de bal en zorg ervoor dat zich niets in de
Hints:
clear zone bevindt (zie pagina 7).
Start het
➋
RANGER
calculator). Kies uit het
Druk op › om de instellingen weer te geven. Voor deze activiteit moeten deze
➌
programma (zie pagina 5 voor de toetsaanslagen voor elke
MAIN MENU: SETUPàSAMPLE
.
als volgt zijn:
REALTIME: NO
TIME (S): 3 SECONDEN
DISPLAY: DISTANCE
BEGIN ON: [ENTER]
SMOOTHING: LIGHT
UNITS: METERS
30
A
AN DE SLAG MET
De instructies voor het wijzigen van een instelling vind je op pagina 38.
Kies, als de instellingen juist zijn,
➍
START NOW
. Druk op › om te beginnen met de
metingen.
Laat, wanneer je een klikgeluid hoort, de bal onmiddellijk los (zonder duwen) en
➎
doe een stap achteruit.
Nadat de meting voltooid is, wordt de Afstand-tijd grafiek automatisch
➏
weergegeven. Beantwoord vraag 2 en 3.
Druk op › om het
➐
SELECT DOMAIN
›. Breng de cursor naar de plaats waar de bal het einde van de helling
op
bereikte en druk op
PLOT MENU
. Breng de cursor naar de plaats waar de bal werd losgelaten en druk
›. De grafiek wordt opnieuw getekend, waarbij alleen dat
weer te geven. Kies
PLOT TOOLS
en kies daarna
gedeelte van de meting wordt weergegeven dat overeenkomt het afrollen van de
helling. Beantwoord vraag 4 en 5.
OPIËREN TOEGESTAAN MITS VERMELDING VAN
CBR
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 34

Activiteit 5—Rollende bal
Verkenning
Onderzoek wat er gebeurt bij verschillende hellingshoeken.
Voorspel wat er gebeurt als de hellingshoek toeneemt. Beantwoord vraag 6.
➊
Stel de hellingshoek in op 30¡. Herhaal stap 2 t/m 6. Voeg deze grafiek toe aan
➋
de tekening bij vraag 6, met het label 30¡.
Herhaal stap 2 t/m 6 voor hellingshoeken van 45¡ en 60¡ en voeg deze toe aan de
➌
tekening.
➍
Beantwoord vraag 7.
Vervolgverkenning
Stel de tijdwaarden zó in dat x = 0 voor de beginhoogte (de tijd waarop de bal werd
losgelaten). Je kunt dit handmatig doen door de x-waarde van het eerste punt van alle
punten op de grafiek af te trekken, of je kunt invoeren
Bereken de waarden van a, b en c voor de familie van krommen in de formule
➊
y = ax
Wat zijn de minimale en maximale waarden van a? Waarom?
➋
2
+ bx + c bij 0¡, 15¡, 30¡, 45¡, 60¡, 90¡.
(verv.)
parabolische functie
L1(1)"A:L1NA"L1
.
Geef de wiskundige relatie tussen a en de hellingshoek.
➌
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
31
Page 35

Activiteit 5—Rollende bal
Naam __________________________________
Meting
1. Welk van de onderstaande illustraties geeft volgens jou het beste de Afstand-tijd grafiek van een bal
weer die van een helling afrolt?
2. Welke natuurkundige geeft de x-as weer? _________________________________________________
Wat zijn de eenheden? _________________________________________________________________
Welke natuurkundige grootheid geeft de y-as weer? ________________________________________
Wat zijn de eenheden? _________________________________________________________________
3. Maak een schets van de grafiek zoals die er echt uitziet. Maak een schaalindeling langs de assen.
Markeer de punten waarop de bal losgelaten werd en waar deze het einde van de helling bereikte.
4. Welk type functie geeft deze grafiek weer? ________________________________________________
5. Bespreek hoe je begrip is veranderd tussen het diagram gekozen bij vraag 1 en de kromme die je bij
in vraag 3 hebt geschetst. ______________________________________________________________
_____________________________________________________________________________________
Verkenning
6. Maak een schets van hoe de grafiek er volgens jou uitziet bij een grotere hellingshoek. (Vermeld
hierbij prognose.)
7. Maak een schets van de bij 0
¡ en 90¡ en vermeld deze hellingshoeken erbij:
32
A
AN DE SLAG MET
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 36

Informatie voor de docent
Hoe zou uw les kunnen veranderen door CBR?
is een gemakkelijk te gebruiken systeem met functies die u helpen om de
CBR
CBR
snel
en gemakkelijk te integreren in uw lesplan.
biedt aanzienlijke verbeteringen ten opzichte van andere methodes voor het
CBR
verzamelen van gegevens, die u misschien in het verleden hebt gebruikt. Dit kan op zijn
beurt leiden tot een herstructurering van het gebruik van de lestijd, omdat uw leerlingen
enthousiaster worden voor het gebruik van gegevens uit reële situaties.
U zult constateren dat uw leerlingen zich meer betrokken gaan voelen tot de
0
gegevens omdat zij werkelijk deelnemen aan het verzamelen ervan in plaats van
gegevens uit boeken, tijdschriften of statische overzichten te halen. Dit maakt ze
duidelijk dat de concepten die u tijdens de les onderzoekt, te maken hebben met de
werkelijkheid en niet slechts abstracte ideeën zijn. Maar dit houdt ook in dat elke
leerling aan de beurt wil komen bij het verzamelen van de gegevens.
Het verzamelen van gegevens met de
0
is aanzienlijk effectiever dan het maken van
CBR
scenario’s en handmatig meten met een meetlat en een stopwatch. Aangezien meer
metingen een grotere resolutie opleveren en aangezien een ultrasone afstandssensor
zeer nauwkeurig is, is de vorm van de krommen sneller duidelijk. U hebt minder tijd
nodig voor het verzamelen van gegevens en hebt meer tijd voor analyse en
verkenning.
0
Met
kunnen leerlingen de herhaalbaaarheid van waarnemingen en variaties bij
CBR
“wat-als” scenario’s verkennen. Vragen zoals “Is het dezelfde parabool als we de bal
van een grotere hoogte laten vallen?” en “Is de parabool dezelfde bij de eerste keer
dat de bal stuitert en bij de laatste keer?” worden natuurlijke en waardevolle
uitbreidingen.
De kracht van visuele afbeeldingen stelt leerlingen in staat, snel de geplotte gegevens
0
te associëren met de natuurkundige eigenschappen en wiskundige functies die de
gegevens beschrijven.
Andere veranderingen treden op nadat de gegevens uit de werkelijkheid zijn verzameld.
Met
kunnen uw leerlingen onderliggende relaties zowel numeriek als grafisch
CBR
verkennen.
Gegevens grafisch verkennen
Het gebruik van automatisch gegenereerde grafieken met afstand, snelheid en
versnelling in relatie tot tijd voor verkenningen zoals:
Wat is de natuurkundige betekenis van de bijbehorende y-waarde? de bijbehorende x-
0
waarde? de hellingshoek? het maximum? het minimum? de afgeleiden? de
integralen?
Hoe herkennen we de functie (lineair, parabolisch, etc.) die de grafiek voorstelt?
0
Hoe zouden we een model van de gegevens maken met een representatieve functie?
0
Wat is de betekenis van de afzonderlijke coëfficiënten in de functie (bijv. AX
2
+ BX
+ C)?
Gegevens numeriek verkennen
Uw leerlingen kunnen gebruik maken van statistische methodes (gemiddelde, mediaan,
standaarddeviatie, enz.) die past bij hun niveau, om de numerieke gegevens te
verkennen. Als u het
waarin
REALTIME=NO
RANGER
gegevens voor tijd, afstand, snelheid en versnelling zijn opgeslagen.
programma verlaat, herinnert een prompt u aan de lijsten
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
33
Page 37

Informatie voor de docent
(verv.)
CBR grafieken—het verband tussen de fysieke wereld en wiskunde
De grafieken die op basis van de verzamelde gegevens door
RANGER
zijn gemaakt, zijn
een visuele weergave van de relaties tussen de natuurkundige en wiskundige
omschrijvingen van beweging. Leerlingen hebben aanmoediging nodig om de vorm van
de grafiek te herkennen, analyseren en bespreken in termen van zowel natuurkunde als
die van wiskunde. Extra dialoog en ontdekkingen zijn mogelijk als er functies worden
ingevoerd in de Y= editor en weergegeven met de grafieken.
Een Afstand-tijd grafiek stelt de positie (bij benadering) van een voorwerp voor
0
(afstand vanaf de
) op elk moment wanneer een meting wordt genomen. de y-as
CBR
wordt in meters uitgedrukt; de x-as wordt in seconden uitgedrukt.
Een Snelheid-tijd grafiek geeft de snelheid (bij benadering) van een voorwerp weer
0
(ten opzichte van en in de richting van de
) op elk moment wanneer een meting
CBR
wordt verricht. De y-as wordt in meteràseconde uitgedrukt; de x-as wordt in seconden
uitgedrukt.
Een Versnelling-tijd grafiek geeft de mate van verandering van snelheid van een
0
voorwerp (ten opzichte van en in de richting van de
meting wordt verricht. De y-as wordt in meteràseconde
) op elk moment wanneer een
CBR
2
uitgedrukt; de x-as wordt in
seconden uitgedrukt.
De eerste afgeleide (helling van het moment) is op elk punt van de Afstand-tijd grafiek
0
de snelheid op dat moment.
De eerste afgeleide (helling van het moment) is op elk punt van de Snelheid-tijd
0
grafiek de versnelling op dat moment. Dit is ook de tweede afgeleide op elk punt van
de Afstand-tijd grafiek.
Een bepaalde integraal (oppervlakte onder de grafiek tussen twee gegeven punten) op
0
de Snelheid-tijd grafiek is gelijk aan de verplaatsing (netto afgelegde afstand) door het
voorwerp gedurende dat tijdsinterval.
0
Snelheid en snelheidsvector kunnen gemakkelijk met elkaar worden verward. Dit zijn
afzonderlijke, maar met elkaar verband houdende, grootheden. Snelheid kan op een
schaal worden uitgedrukt; er is een grootte maar geen specifieke richting aan
verbonden, bijv. “6 meter per seconde.” Snelheidsvector is een vector; deze heeft een
specifieke richting en een grootte, bijv. “6 meter per seconde richting Noord.”
Snelheid-tijd grafiek geeft in feite de snelheid weer, niet de
Een gemiddelde
CBR
snelheidsvector. Alleen de grootheid (die positief, negatief of nul kan zijn) wordt
gegeven. Richting wordt slechts geïmpliceerd. Een positieve waarde voor de snelheid
geeft aan dat de beweging van de
de beweging naar de
meet afstand slechts langs een lijn vanaf de detector. Daardoor wordt, als een
CBR
toe gaat.
CBR
af gaat; een negatieve waarde geeft aan dat
CBR
voorwerp zich met een hoek op deze lijn beweegt, slechts de component van de
snelheid parallel aan deze lijn berekend. Een voorwerp dat zich bijvoorbeeld loodrecht
op de lijn vanaf de
beweegt, zal met snelheid 0 worden waargenomen.
CBR
34
A
AN DE SLAG MET
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 38

Informatie voor de docent
(verv.)
De wiskunde van afstand, snelheid en versnelling
d
2
d
V
gemiddeld
1
t
t
1
2
N d
d
=
@d
@t
=
t
2
1
= hellingshoek van Afstand-tijd grafiek
N t
2
1
Afstand-tijd grafiek
V
momentaan
d
1
d
2
=
lim
@t"
@d
(
0
@t
d(s)
=
)
waarbij s = afstand
dt
Snelheid-Tijd grafiek
t
t
1
2
N v
v
@v
2
A
gemiddeld
A
momentaan
=
=
@t
lim
@t"
=
0
(
1
= hellingshoek van Snelheid-tijd grafiek
N t
t
2
1
@v
@t
dv
=
)
dt
De oppervlakte onder de Snelheid-tijd grafiek van t1 tot t2 = @d = (d
van t
tot t2 (netto afgelegde afstand).
1
t=2
⌠
⌡
t=1
v(dt)
Daarom is @d =
(
t=2
∑
t=1
v(@t)
of @d =
)
) = verplaatsing
2Nd1
@
t
t
1
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
Versnelling-Tijd grafiek
t
2
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
35
Page 39

Informatie voor de docent
Web-site informatiebronnen
(verv.)
Op onze web site,
een opsomming van aanvullend materiaal voor gebruik met
0
calculators
een bibliotheek met programma’s voor gebruik bij
0
een activiteitenpagina met toepassingen, ontwikkeld voor en door docenten zoals u
0
programma’s die toegang bieden tot extra
0
CBR
meer gedetailleerde informatie over
0
Extra informatiebronnen
De Explorations boeken van Texas Instruments bevatten extra materiaal dat verband
houdt met TI grafische calculators, waaronder boeken met activiteiten in de klas voor
geschikt voor middelbare school, HBO- en universitair onderwijs.
CBR,
http:ààwww.ti.comàcalc
instellingen en programmeercommando’s
CBR-
, vindt u:
CBR
CBR, CBL
functies
CBR, CBL
en TI grafische
en TI grafische calculators
36
A
AN DE SLAG MET
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
CBR
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 40

CBR-gegevens worden opgeslagen in lijsten
Verzamelde gegevens worden opgeslagen in de lijsten L1, L2, L3 en L4
Tijdens het verzamelen van gegevens zendt de
waar deze in lijsten worden opgeslagen. Telkens wanneer u het
verlaat, wordt u eraan herinnerd waar de gegevens zijn opgeslagen.
bevat gegevens over tijd.
0
L1
bevat gegevens over afstand.
0
L2
bevat gegevens over snelheid.
0
L3
bevat gegevens over versnelling.
0
L4
Het vijfde element in lijst L1 is bijvoorbeeld de waarde van de tijd toen het 5de meetpunt
werd verzameld en het vijfde element in lijst
vijfde meetpunt.
Bij
REALTIME=YES
worden slechts de gegevens voor de geselcteerde grafiek (afstand,
snelheid of versnelling) berekend en verzonden. Bij
berekend en overgedragen.
Instellingen worden opgeslagen in lijst L5
Met het
RANGER SETUP
scherm is het gemakkelijk om de meest gebruikte
te wijzigen (zie pagina 38).
Als u het
RANGER
programma vanaf de
door een nieuwe lijst met de standaardwaarden.
deze automatisch naar de calculator,
CBR
RANGER
is de waarde van de afstand van het
L2
REALTIME=NO
verzendt, wordt L5 automatisch vervangen
CBR
worden alle gegevens
programma
parameters
CBR
Zie pagina 40–41 voor informatie over programmeercommando’s die de overige
instellingen wijzigen.
De lijsten met gegevens gebruiken
De lijsten worden niet verwijderd wanneer u het
blijven deze beschikbaar voor extra grafische, statistische en numerieke verkenning en
analyses.
U kunt de lijsten tegen elkaar afzetten en plotten, deze in de list editor weergeven,
regressie-analyse toepassen evenals andere analytische activiteiten uitvoeren. U kunt
bijvoorbeeld de gegevens van de slingerbeweging verzamelen met behulp van
dan
RANGER
verlaten en tenslotte een grafiek van de Snelheid-versnelling maken om
elliptische functies te verkennen. (Het is mogelijk dat u het venster moet aanpassen)
RANGER
programma verlaat. Daardoor
RANGER
,
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
37
Page 41
RANGER instellingen
RANGER instellingen wijzigen
RANGER
➊
geeft de meest gebruikte instellingen weer voordat de meting begint.
Kies uit het
MAIN MENU
in het
RANGER
programma:
SETUPàSAMPLE
. De huidige
instellingen worden weergegeven. 4 geeft de plaats van de cursor aan.
UNITS:
›
START NOW
of
YES
&
TOTAL TIME
&
DISTANCE, VELOCITY
&
[ENTER], [TRIGGER],
&
NONE, LIGHT, MEDIUM
&
METER
&
NO
= 1–99
SECONDEN
, or
ACCELERATION
or
10-SECOND DELAY
, of
HEAVY
(
slechts bij
REALTIME=NO
om de beschikbare opties te doorlopen. Druk op c om naar de
MAIN MENU
REALTIME:
TIME (S):
DISPLAY:
BEGIN ON:
SMOOTHING:
Druk op c of b om naar de gewenste instelling te gaan.
➋
Druk op
➌
volgende optie door te gaan als de waarde van de optie juist is. Om de waarde van
te wijzigen, voert u 1 of 2 getallen in en drukt u op c of b.
TIME
Wanneer alle instellingen juist zijn, drukt u op c of b totdat de cursor op
➍
staat.
NOW
0
Druk op
0
Druk op e om terug te gaan naar het
De nieuwe instellingen blijven van kracht tenzij u
om door te gaan.
›
MAIN MENU
en druk dan op
SET DEFAULTS
kiest, een applicatie
›
START
.
uitvoert, of een ander programma uitvoert waardoor de instellingen worden gewijzigd.
Als u met
werkt buiten het
L5
RANGER
standaard instellingen worden hersteld als u
programma of als u L5 verwijdert, kunnen de
RANGER
de volgende keer uitvoert.
)
De RANGER instellingen terugzetten op de standaardwaarden
De standaardinstellingen zijn geschikt voor een groot aantal meetsituaties. Als u niet
zeker weet wat de beste instellingen zijn, kunt u beginnen met de standaardinstellingen
en deze vervolgens aanpassen.
Kies uit het
➊
MAIN MENU
in het
RANGER
programma:
De instellingen worden veranderd in de standaardwaarden en het
wordt weergegeven.
Als u een standaardinstelling een andere waarde dan de standaardwaarde wilt
➋
geven, gaat u te werk zoals hierboven aangegeven.
➌
Druk op
als de cursor op
›
START NOW
staat, om door te gaan.
Andere RANGER instellingen
Het
RANGER
programma biedt toegang tot de meest gewijzigde instellingen.
nog andere instellingen. Zie pagina 40–41 voor informatie over
programmeercommando’s waardoor deze instellingen worden gewijzigd.
SET DEFAULTS
.
SETUP
scherm
heeft
CBR
38
A
AN DE SLAG MET
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 42

Het gebruik van CBR met CBL of met CBL programma’s
Het gebruik van CBR als conventionele afstandssensor met CBL
De
Instruments
is geschikt voor gebruik als conventionele afstandssensor met het Texas
CBR
é (Calculator-Based Laboratoryé) systeem.
CBL
De speciale kabel die vereist is voor
aansluiting van de
wordt meegeleverd.
Sluit de
calculator moet zijn aangesloten op de
Het is mogelijk dat u het
RANGER
niet op de
CBR
aan als de
CBL
programma moet wijzigen (zie instructies hieronder). Het
CBL
programma werkt niet met de
al op een calculator is aangesloten. De
CBR
.
CBL
.
CBL
Het gebruik van CBR met programma’s die zijn geschreven voor CBL
U kunt de
gebruiken met de meeste
CBR
programma’s die uitsluitend zijn geschreven
CBL
voor een afstandssensor zonder wijzigingen of slechts minimale wijzigingen aan het
programma.
op de CBL
CBR
De meting stoppen: Bij sommige
REALTIME=YES
gegevensverzameling gaat de
programma’s die gebruik maken van de
CBL
door met meetpunten. Ga op een van
CBR
de hierna beschreven manieren te werk om het verzamelen van gegevens aan het eind
van de meettijd te stoppen:
Druk op ¤ op de
0
Voeg “statements” toe aan het bestaande
0
naar de
te zenden. Dit statement moet staan na het moment waarop de gegevens
CBR
CBR
.
programma om het commando {6,0}
CBL
zijn verzonden en weergegeven. Bijvoorbeeld:
{6,0}"L6:SEND L6
Geluid aan of uitzetten: Om het geluid uit te zetten, voegt u statements toe aan het
bestaande
programma om het commando’ {6,3} naar de
CBL
te zenden. Het
CBR
statement moet staan voordat het verzamelen van gegevens begint. Bijvoorbeeld:
{6,3}"L6:SEND L6
Om het geluid aan te zetten. hoeft u het
Bij problemen: Als u een
programma uitvoert en het erop lijkt dat de
CBL
reageert of geblokkeerd is, start u het
RANGER
RANGER
pagina 36), waar mogelijk een bijgewerkte versie van het
programma alleen te starten.
niet
CBR
programma. Bezoek de TI web site (zie
programma staat.
CBL
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
39
Page 43
Programmeercommando’s
Command 0 Wist het system en voert een reset uit {0}
Wist alles. Stelt de standaardwaarden bij aanzetten in. Kanaal 11 wordt automatisch geselecteerd.
Command 1 Wist Kanaal {1,0}
Wist kanaal.
Command 1 Kanaal {1,11,
bewerking
REALTIME=NO
0(
REALTIME=NO
1(
REALTIME=NO
2(
REALTIME=NO
3(
bewerking
REALTIME=YES
0(
REALTIME=YES
1(
REALTIME=YES
2(
REALTIME=YES
3(
REALTIME=YES
4(
REALTIME=YES
5(
REALTIME=YES
6(
REALTIME=YES
7(
post_processing
0 (standaard) Geen
1(
2(
temperatuurconversie
0 (standaard) Schakelt temperatuurcompensatie uit.
1 Schakelt temperatuurcompensatie in.
REALTIME=NO
REALTIME=NO
) Wist alles. Stelt de standaardwaarden bij aanzetten in.
) Meter, de
) Meter, de
) Voet, de
) Wist alles. Stelt de standaardwaarden bij aanzetten in.
) Meter, de
) Meter, de
) Voet, de
) Meter, de CBR geeft {
) Voet, de
) Meter, de
) Voet, de
)dàdt (1e afgeleide)
)d
Command 2 Data setup {2,
data_type
1 (standaard) Lijst
Command 3 Meting/Trigger {3,
meting_tijd
0.005–1500 (0.1) Tijd in seconden tussen elke meting
0.0001–0.005 Rondt af naar 0,005.
1500<x<16000 Rondt af naar 1500.
sample#
L1 Selecteert
REALTIME=NO
1–512 (
trigger
0 Begint met meten zonder trigger.
1 (standaard) Begint met meten bij ¤.
7 Wacht 10 seconden en begint met meten.
record_time
0 (standaard) Geen
REALTIME=NO
1(
REALTIME=NO
2(
filter
(zie command 1, bewerkingsveld)
0 (standaard) Geen filtering
REALTIME=NO
1 (
REALTIME=NO
2 (
REALTIME=NO
3 (
REALTIME=NO
4 (
REALTIME=NO
5 (
REALTIME=NO
6 (
REALTIME=YES
7 (
REALTIME=YES
8 (
REALTIME=YES
9 (
) Neemt van 1 tot 12 steekproeven.
) Absolute tijd (start bij tijd 0 en past de meettijd aan)
) Relatieve tijd (start bij tijd 0 en past de meettijd aan)
) 5-punts Savitzsky-Golay effening
) 9-punts Savitzsky-Golay effening
) 17-punts Savitzsky-Golay effening
) 29-punts Savitzsky-Golay effening
) 3- punts filter voor vaststellen van mediaan
) 5- punts filter voor vaststellen van mediaan
) Light
) Medium
) Heavy
bewerking,post processing
Resultaten
CBR
CBR
CBR
Resultaten
CBR
CBR
CBR
CBR
CBR
CBR
Resultaten
2
àdt2 (2e afgeleide)
Resultaten
data_type
Resultaten
meting_tijd, metingnr.,trigger
Resultaten
Resultaten
REALTIME=YES
Resultaten
Resultaten
Resultaten
REALTIME=YES
REALTIME=YES
REALTIME=YES
,0,
afstand,@tijd
geeft {
afstand,@tijd
geeft {
afstand,@tijd
geeft {
afstand,@tijd
geeft {
afstand,@tijd
geeft {
afstand,@tijd
geeft {
afstand,snelheid,@tijd
afstand,snelheid,@tijd
geeft {
afstand,snelheid,versnelling,@tijd
geeft {
afstand,snelheid,versnelling,@tijd
geeft {
}
}
}
}
}
}
,0,0,0,0,0,0,0}
meetmode.
tracking filter
tracking filter
tracking filter
temperatuurconversie
}
}
}
}
,0,0,0,0,
record_tijd,filter
}
}
40
A
AN DE SLAG MET
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 44

Programmeercommando’s
(verv.)
Command 4 Temperatuurcompensatie {4,
equation#
equation_type
temperatuur
units
Command 5 (
first_channel
data_select
data_begin
data_end
0 (standaard) Wist alle vergelijkingen.
4 Wijst vergelijking 4 toe.
0 (standaard) Wist de vergelijking.
13 Wijst temperatuurcompensatie toe.
floating-point number Stelt de huidige temperatuur in.
0 (standaard) Geen (genegeerd door
1 Stelt graden = Fahrenheit.
2 Stelt graden = Celsius.
3 Stelt graden = Kelvin.
4 Stelt graden = Rankin where R = F + 459.7.
REALTIME=NO
0 (standaard) Selecteert het laagste actieve kanaal.
1, 2, 3, 11, 21 Specificeert ultrasoon kanaal.
M1 Registreert tijdlijst.
0 Filter gegevens {afstand}
1 Filter dàdt gegevens {snelheid}
2 Filter d
3 Ruwe gegevens {afstand}
4 Ruwe dàdt gegevens {snelheid}
5 Ruwe d
1–512 Eerste gegevenselement van GET
0–512 Laatste gegevenselement van GET (0 = laatste meting)
) Data range setup {5,
Resultaten
Resultaten
Resultaten
Resultaten
Resultaten
Resultaten
Resultaten
Resultaten
Command 6 Systems options {6,
system_command
0 Stopt met meten (voor compatibiliteit met CBL).
2 (standaard) Stopt met meten.
3 Schakelt geluid uit (geluid staat aan bij aanzetten).
4 Schakelt geluid in (geluid staat aan bij aanzetten).
5 Stelt ID-nummer in (
6 Stelt nieuw filter in op eerdere gegevens (
bewerking
floating-point number ID_Nummer van form
0–6 Nieuw filter voor eerder verzamelde gegevens (
Resultaten
Resultaten
Command 7 Request status {7}
Geeft een lijst met:
10.rrrr DeviceCode.RomVersie
0–99 Laatste foutcode (0 = geem fout)
0–2 Batterijstatus (0 = OK; 1 = laag tijdens meting; 2 = altijd laag)
11 Identificatie ultrasoon kanaal
sample_time Huidig meetinterval in seconden
trigger_condition Huidige trigger-optie
function Huidige kanaalfunctie (1–9)
post_processing Huidige post-processing optie (0–2)
filter Huidige filteringniveau (0–9)
samples Aantal bescjhikbare metinge; 0–512
recorded_time Geregistreerde tijdoptie (0–2)
temperature Temperatuur (¡C)
piezo_flag 0 = geluid uit; 1 = geluid aan
system_state 1 = geen setup; 2 = klaar om te starten; 3 = triggered/meten; 4 = klaar
window_start 0 = nog geen command 5; 1–512
window_end 0 = gebruik xx elementen; 1–512
id_number 6-cijferig ID-nr (standaard 0.00000) ingesteld door commando 6
vergelijking#,vergelijking_type,temperatuur,units
CBR
). Stelt T graden in op Celsius.
first_channel,data_select,data_begin,data_end
2
àdt2 gegevens {versnelling}
2
àdt2 gegevens {versnelling}
system_command[,bewerking]
bewerking
n.nnnnn
}
vereist).
bewerking
system_command
(
REALTIME=NO
system_command
(
= 5)
}
vereist).
= 5)
system_command
REALTIME=YES
; M1
}
= 6)
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
41
Page 45

Batterijen
Batterij type
De
batterijen werken als deze op een
Batterijen plaatsen
Terwijl u de
achterkant van de
het
met de aanduiding +.
met de aanduiding -.
is ontworpen voor gebruik met 4 AA alkali-batterijen. De
CBR
is aangesloten.
CBL
ondersteboven houdt, duwt u het kapje van de batterijhouder naar de
CBR
. Plaats de batterijen volgens de tekening aan de binnenkant van
CBR
batterijhouder. Er passen twee batterijen in met de +-kant omhoog, aan de kant
CBR
Er passen twee batterijen in met de - -kant omhoog aan de kant
Schuif het kapje weer op de plaats. De
CBR
kan alléén zonder
CBR
is klaar om te beginnen
met meten,
Waarschuwing dat de batterijen van de CBR (bijna) leeg zijn
De
beschikt over twee waarschuwingsmechanismen voor het geval dat de batterijen
CBR
(bijna) leeg zijn:
0
Het
RANGER
programma geeft een waarschuwingsmelding op de display van de
calculator weer tijdens het verzamelen van gegevens.
0
Het rode lampje knippert met tussenpozen tijdens het verzamelen van gegevens.
Status van de CBR batterijen
U kunt de status van de batterijen controleren voordat u begint met meten. Kies uit het
MAIN MENU: TOOLS
en kies dan
CBR STATUS
. De batterijstatus, OK of
REPLACE
, wordt dan
weergegeven.
Voorzorgsmaatregelen bij batterijen
0
Vervang alle 4 batterijen tegelijk. Gebruik geen verschillende merken batterijen door
elkaar. Gebruik geen verschillende batterijtypes van hetzelfde merk.
0
Plaats de batterijen volgens de aanduidingen in de batterijhouder.
0
Breng gebruikte batterijen onmiddellijk naar het daarvoor bestemde verzamelpunt.
Laat batterijen niet liggen binnen het bereik van kinderen.
0
Batterijen mogen niet worden verwarmd, verbrand of lekgeprikt. Batterijen bevatten
gevaarlijke chemische stoffen die kunnen leiden tot een explosie of lekkage van deze
stoffen.
0
Gebruik geen oplaadbare en niet-oplaadbare batterijen door elkaar.
0
Plaats batterijen die niet oplaadbaar zijn, NIET in een batterijlader.
42
A
AN DE SLAG MET
CBR
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 46

Bij moeilijkheden
j
g
g
j
g
g
g
g
j
g
g
g
j
j
j
g
g
g
g
g
Als dit probleem zich
Probeert u dit:
voordoet:
Problemen bij het overdragen
van het
of bi
RANGER
het verzamelen van
programma
gegevens
CBR
begint vanzelf met het
verzamelen van gegevens
Controleer of de verbindin
aangesloten. Duw beide uiteinden van de kabel altijd stevig aan.
Controleer of de batterijen (bijna) leeg zijn (zie pagina 42).
Als u de CBR neerzet met de
worden in
edrukt, waardoor de meting begint. Druk nog eens op
van de calculator met de
¤
knop omlaag, kan de
om te stoppen met de meting.
RANGER
van de calculator met de
LINK ERROR
Verlaat op de
CBR
opbergt, verlaat op de juiste manier het
melding Koppel de
Controleer of de verbindin
uiste manier het
CBR
aan de calculator met de kabel van de calculator naar de
aangesloten. Duw beide uiteinden van de kabel altijd stevig aan.
Als u de
om het
CBR
niet wilt (of kunt) aansluiten op de calculator, drukt u op
programma te verlaten en kiest u daarna
Onvoldoende geheugen Er moet voldoende geheugen voor het
lists aanwezi
zijn. De programma’s en lijsten hebben ca. 17.500 bytes
nodig. Verwijder (zo nodig) programma’s en/of gegevens.
Meldingen op de calculator
komen niet overeen met de
instructies bij de activiteit
Deze handleidin
kunnen worden gebruikt; daarom kan het zijn dat sommige menunamen,
schermen of toetsen in deze handleidin
is van toepassing voor alle TI calculators die met de
die van uw calculator. Kies de menunaam, het scherm of de toets die het
meest in de buurt komt. Als de instructies bi
Gegevens zien er niet goed uit:
0
punten staan niet op de
kromme
0
gerafelde grafieken
0
vlakke grafieken
0
gebroken grafiek
MATCH
,” zou u op de TI-83:
Herhaal de metin
, waarbij u controleert dat de CBR rechtstreeks op het
voorwerp gericht is.
Lees pagina 6–12 over het krijgen van goede gegevensmetingen.
Controleer of er geen leerlingen, tafels of iets anders in de clear zone staat.
Wanneer twee
roep de meting afronden voordat de volgende groep begint met de
één
CBR
units tegelijkertijd worden gebruikt in een vertrek, moet
meting.
Controleer of de verbindin
DIST MATCH
van de calculator met de
aangesloten. Duw beide uiteinden van de kabel altijd stevig aan.
Controleer of de batterijen (bijna) leeg zijn (zie pagina 42).
Controleer of de mate van smoothing niet te groot of te klein is.
CBR
werkt niet met een TI-85 Controleer of er “
CBL
” staat aan het einde van het serienummer op de
achterkant van de calculator; dit staat voor compatibiliteit met
De TI
-
85 heeft geen mogelijkheden tot het maken van statistische grafieken
en daarom zi
n sommige verkenningen (zoals het gebruik van
geplotte gegevens) niet mogelijk op de TI-85.
Kabel van de calculator naar de
CBR
is zoek
U kunt de kabel van de calculator naar een andere calculator die bi
calculator is
eleverd, gebruiken. (Deze kabel is veel korter, dus het kan
raadzaam zijn om een nieuwe kabel te bestellen.)
Batterijen zijn vaak (bijna) leeg Voordat u de
QUIT)
of enig ander
CBR
opbergt, dient u het
CBR
CBL
of
programma te verlaten en de
calculator los te koppelen.
Bij het starten van het
RANGER
programma gebeurt er niets
Nadat u het
ende keer wanneer u dit programma start, maximaal twee minuten
vol
duren voordat de calculator het pro
RANGER
programma hebt bewerkt of bekeken, kan het bij de
ramma klaar heeft om te starten. Dit is
niets bijzonders.
Foutmelding: Variabele is
eblokkeerd of beschermd
-
(uitsluitend bij TI
92)
Deblokkeer de variabelen L1, L2, L3, L4 en L5. Zie de handleidin
calculator.
CBR
goed is
knop
¤
voordat u de
½
CBR
programma (met
CBR
CBL
of
CBR
QUIT
.
RANGER
programma en voor de data
¤
QUIT)
programma.
goed is
niet (helemaal) overeenkomen met
voorbeeld luiden “Kies
DISTANCE
kiezen.
CBR
goed is
CBL
en
bi
CBR
de
RANGER
programma (met behulp van
CBR
van de
bij de
CBR
.
.
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
43
Page 47

Productinformatie, service en garantie TI
Product en serviceinformatie TI
Voor meer informatie over producten van en service door TI, kan per E-mail contact worden opgenomen met
TI. Ook is informatie te vinden op de TI-pagina op het World Wide Web.
E-mailadres:ti-cares@ti.com
Internetadres:http://www.ti.com/calc
Informatie service over garantie
Raadpleeg voor informatie over de garantievoorwaarden en -periode of over service, de garantiebepalingen
die bij dit product worden geleverd of neem contact op met het verkooppunt waar u dit TI-product heeft
gekocht.
44
A
AN DE SLAG MET
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
CBR
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
Page 48
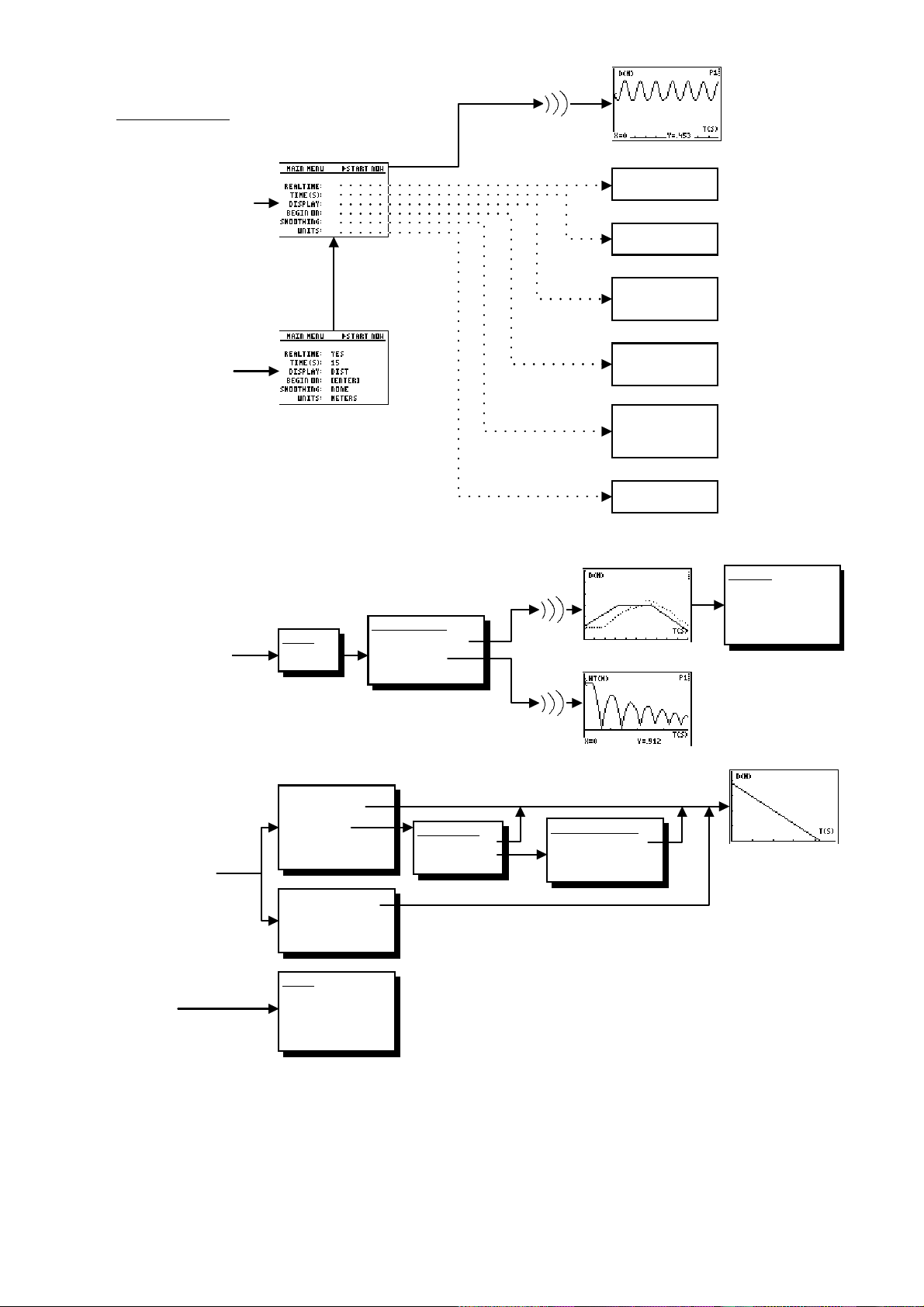
RANGE
R
MAIN MENU
SETUP / SAMPLE
SET DEFAULTS
NO
YES
1-99
(REALTIME=NO)
DISTANCE
VELOCITY
ACCELERATION
[ENTER]
[TRIGGER]
DELAY
NONE
LIGHT
MEDIUM
HEAVY
METERS
FEET
APPLICATIONS
REALTIME=NO
PLOT MENU
REALTIME=YES
TOOLS
QUIT
APPLICATIONS
UNITS
METERS
FEET
DISTANCE-TIME
VELOCITY-TIME
ACCELERATION-TIME
PLOT TOOLS
REPEAT SAMPLE
MAIN MENU
QUIT
SHOW PLOT
SELECT DOMAIN
REPEAT SAMPLE
MAIN MENU
QUIT
TOOLS
GET CBR DATA
GET CALC DATA
CBR STATUS
STOP/CLEAR CBR
MAIN MENU
DISTANCE MATCH
VELOCITY MATCH
BALL BOUNCE
MAIN MENU
PLOT TOOLS
SELECT DOMAIN
SMOOTH DATA
PLOT MENU
DATA SMOOTHING
LIGHT
MEDIUM
HEAVY
NONE
OPTIONS
SAME MATCH
NEW MATCH
APPLICATIONS
MAIN MENU
QUIT
OPIËREN TOEGESTAAN MITS VERMELDING VAN
K
EXAS INSTRUMENTS INCORPORATED
© 1997 T
COPYRIGHT
TI
.
A
AN DE SLAG MET
CBR
 Loading...
Loading...