

85-86
TRIGGER
CBR
)
)
)
T
E
X
A
S
I
N
S
T
R
U
M
E
N
T
S
92
Calculator-Based Ranger
™
(CBR
™
)
OMMA IGÅNG MED OMMA IGÅNG MED
KK
NNEFATTARNNEFATTAR
II
ÖVNINGARÖVNINGAR
5 5
CBR™CBR™
T
E
CBR
X
A
S
I
NS
T
R
U
)
M
E
)
N
T
)
S
TRIGGER
85-86
92
T
E
CBR
X
A
S
I
NS
T
R
U
)
M
E
)
N
T
)
S
TRIGGER
85-86
92
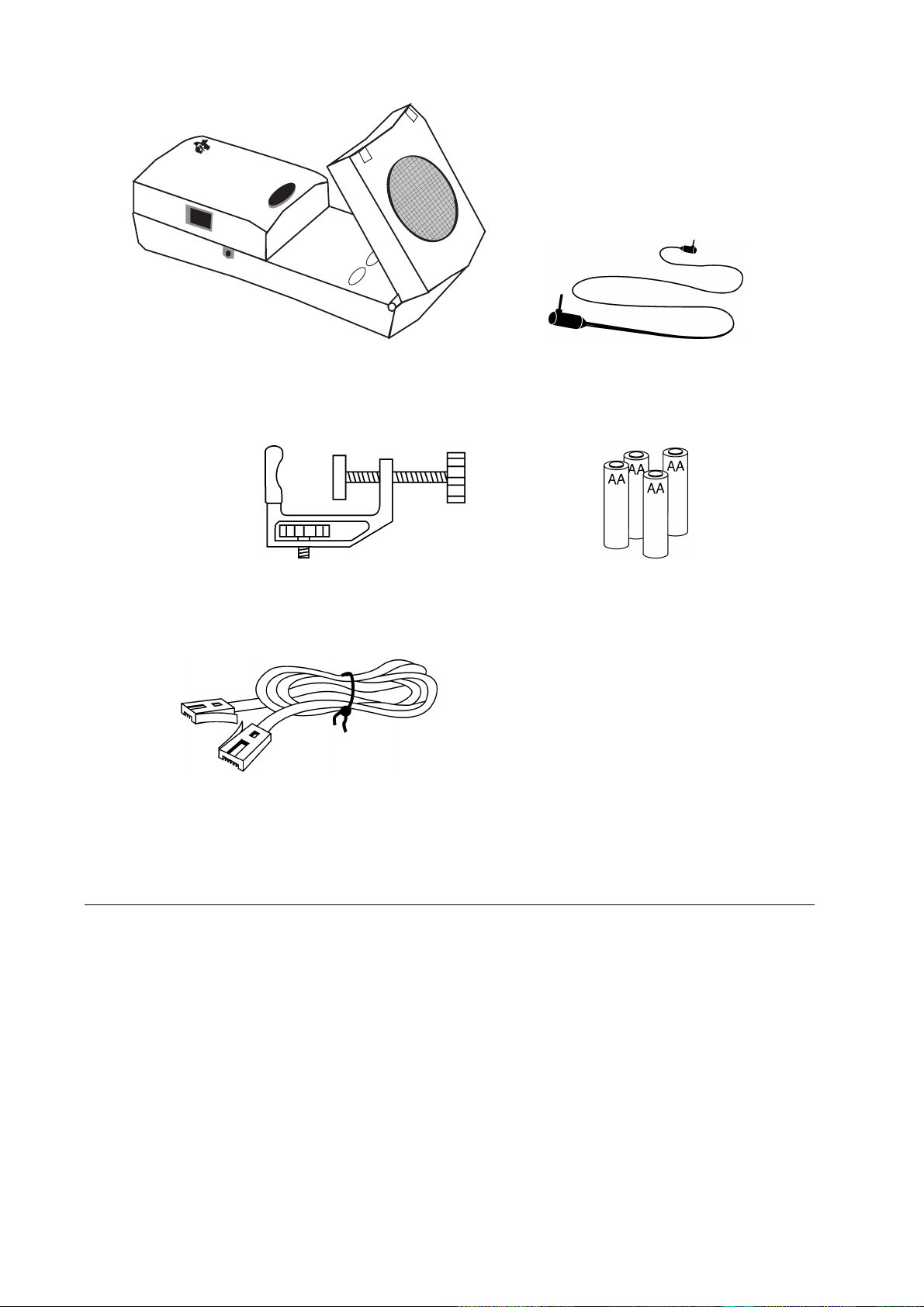
Calculator-Based Rangeré (CBRé) Räknare-CBR kabel
Akustisk rörelsedetektor
Klämma 4 AA-batterier
CBL-CBR kabel
Viktigt
Texas Instruments lämnar inga uttryckliga eller underförstådda
garantier för något program eller bok. Detta innefattar, men är inte
begränsat till, underförstådda garantier om säljbarhet eller
lämplighet för ett visst ändamål. Materialet tillhandahålles enbart
på “som det är”-basis.
Inte i något fall skall Texas Instruments kunna hållas ansvarigt för
speciella eller sekundära skador, skador på grund av olyckor eller
följdskador i anslutning till eller härrörande från inköp eller
användning av detta material. Det enda betalningsansvaret som
Texas Instruments påtar sig, oaktat handling, skall inte överstiga
inköpspriset för denna utrustning. Dessutom skall inte Texas
Instruments ha något betalningsansvar för några krav avseende
användning av detta material från annan part.
1997 tillhörande Texas Instruments Incorporated.
Med ensamrätt.
Härmed ges lärare tillstånd att göra särtryck eller fotokopior av de
sidor och arbetsblad som bär Texas Instruments copyrightmeddelande och som ingår i detta material, och detta i kvantiteter
motsvarande en skolklass, studiecirkel eller seminariegrupp. Dessa
sidor har utformats för att reproduceras av lärare för användning i
skolklasser, studiecirklar och seminarier, under förutsättning att
varje kopia som framställs uppvisar ovan nämnda copyrightmeddelande. Dessa kopior får inte säljas och all vidare spridning är
strängt förbjuden. Med undantag för vad som angivits krävs Texas
Instruments Incorporated i förhand givna skriftliga godkännande
för att reproducera, överföra detta material eller delar av det i alla
andra former eller via alla andra elektroniska eller mekaniska
hjälpmedel, inklusive alla informationssystem för lagring eller
insamlande, såvida inte detta uttryckligen tillåts i lokal copyrightlagstiftning. Förfrågningar ställs till Texas Instruments Incorporated,
PO Box 149149, Austin, TX, 78714-9149, M/S 2151, Att. Contracts
Manager.
Innehållsförteckning
T
E
CBR
X
A
S
I
NS
T
R
U
)
M
E
)
N
T
)
S
Inledning
Vad är CBR? 2
Komma igång med CBR — Hur lätt som helst 4
Tips för effektiv mätvärdesinsamling 6
Övningar med lärarnoteringar och arbetsblad
TRIGGER
85-86
92
Övning 1 — Matcha grafen linjär 13
³
Övning 2 — Leksaksbil linjär 17
³
Övning 3 — Pendel sinusformad 21
³
Övning 4 — Studsande boll parabolisk 25
³
Övning 5 — Rullande boll parabolisk 29
³
Lärarinformation 33
Teknisk information
CBR-värdena lagras i listor 37
RANGER-inställningar 38
Använda CBR med CBL eller med CBL-program 39
Programmeringskommandon 40
Service
Batterier 42
Om problem uppstår 43
TI-service och garanti 44
RANGER menyöversikt omslagets baksida
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
1

Vad är CBR?
används tillsammans med TI-82, TI-83, TI-85/
utför realistiska mätvärdesinsamlingar och analyser i klassrummet
det mångsidiga programmet RANGER är mycket lätt att använda
program för MATCHNING och STUDSANDE BOLL finns inbyggda i RANGER
Hur fungerar CBR?
Med
CBR
utan omständliga mätningar och manuell plottning.
låter eleverna utforska matematiska och vetenskapliga samband mellan storheter
CBR
som avstånd, hastighet, acceleration och tid med hjälp av värden som samlats in i
övningar som de själva genomför. Eleverna kan studera följande matematiska och
vetenskapliga begrepp:
CBRCBRé (Calculator-Based RangerCalculator-Based Rangeré
)
akustisk rörelsedetektor
CBL
, TI-86 och TI-92
enkel att använda och komplett
ingen programmering nödvändig
Innefattar programmet RANGERInnefattar programmet RANGER
primära insamlingsparametrar är enkla att ställa in
och en grafritande TI-räknare kan eleverna studera och analysera rörelsedata
Rörelse: avstånd, hastighet, acceleration
0
Grafer: koordinataxlar, lutningar, skärningspunkter
0
Funktioner: linjära, kvadratiska, exponentiella, sinusformade
0
Beräkning: derivator, integraler
0
Statistik och dataanalys: metoder för mätvärdesinsamling, statistisk analys
0
Vad innehåller den här handboken?
Komma igång med CBR
é
räknare och programmering. Den inkluderar snabbinstruktioner för CBR-användning, tips
om effektiv mätvärdesinsamling och fem lektionsövningar som undersöker
grundläggande funktioner för, och egenskaper hos rörelser. Övningarna (se sidorna
13-32) innefattar följande:
Lärarhandledning för varje övning plus allmän lärarinformation.
0
Instruktioner steg-för-steg.
0
En lämplig grundläggande mätvärdesinsamlingsövning för varje nivå.
0
Laborationer som mer noggrant utforskar mätvärdena inklusive olika antaganden.
0
Förslag till avancerade övningar lämpade för matematikstuderande på B - E-nivå.
0
Ett kopierbart arbetsblad med frågor lämpade för ett stort antal olika
0
utbildningsnivåer.
har utformats för lärare som inte besitter en lång erfarenhet av
2
KOMMA IGÅNG MED
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
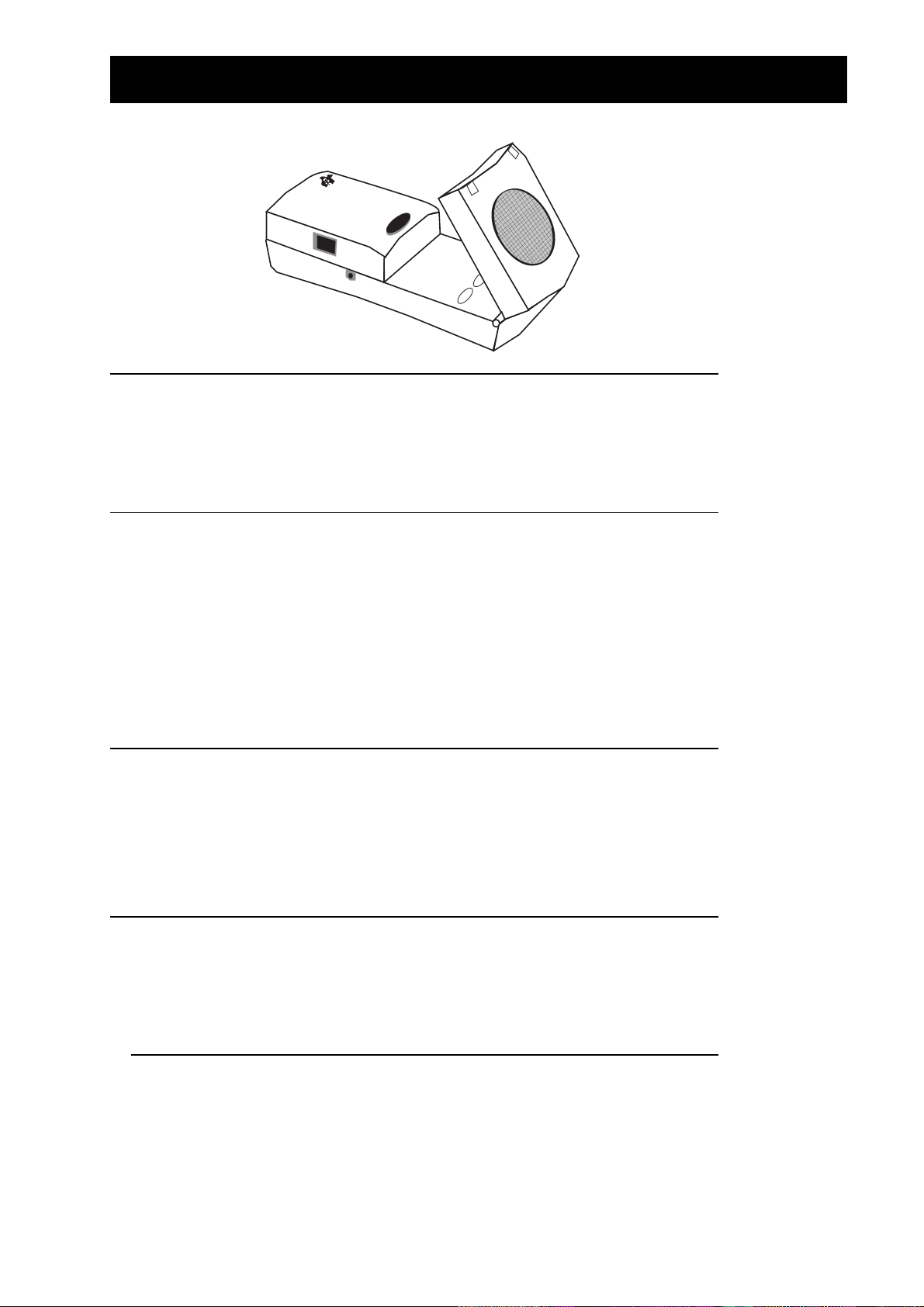
Vad är CBR?
s
¤
s
A
A
(forts)
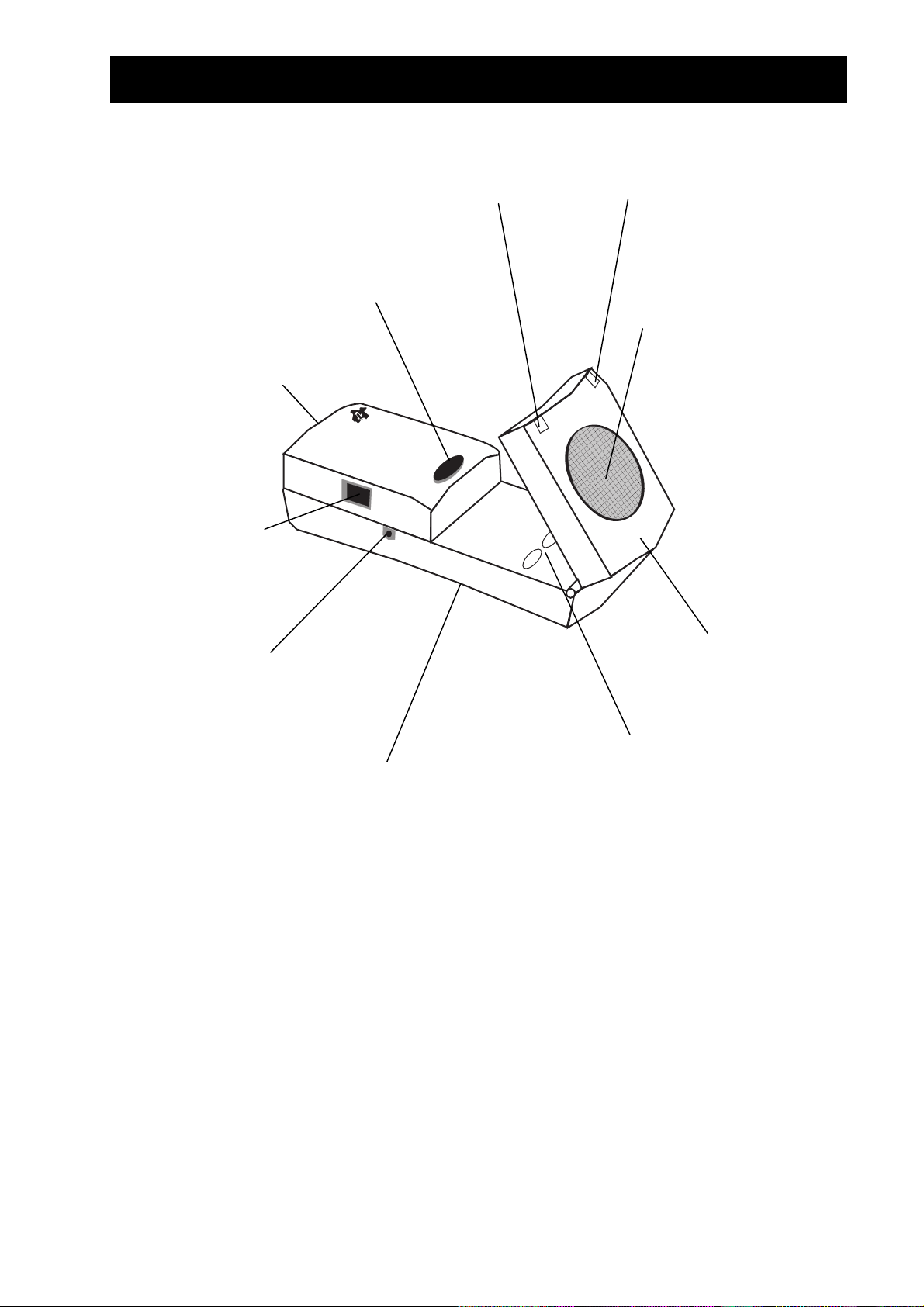
Batterilucka
(på undersidan).
nslutningskontakt till
CBL (vid behov).
nslutningskontakt till
TI-grafräknare via den
medföljande kabeln
(2,25 meter).
Grön lampa som indikerar
när mätvärdesinsamlingen
pågår (ljud finns också).
-knapp
för initiering av
ampling.
E
X
A
S
I
NS
T
R
U
M
E
N
T
S
Röd lampa som
indikerar speciella
omständigheter.
Ultraljudssensor som
registrerar 200 samplingar per
ekund inom ett
avståndsintervall på 0,5 och
6,0 meter.
T
CBR
)
)
)
TRIGGER
85-86
92
Uppfällbart huvud för
korrekt inriktning av
ultraljudssensorn.
Knappar för överföring
Standardgängad urtag för
montering på stativ eller den
av RANGER-program till
räknare.
medföljande fäst-anordningen
(på undersidan).
innehåller allt du behöver för att snabbt och enkelt påbörja övningarna — komplettera bara
CBR
med grafritande TI-räknare (och viss materiel för vissa av övningarna).
Rörelsedetektor
0
0
RANGER-
program i
CBR
Räknare-CBR kabel
0
4 AA batterier
0
Fästanordning
0
5 lektionsövningar
0
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
3
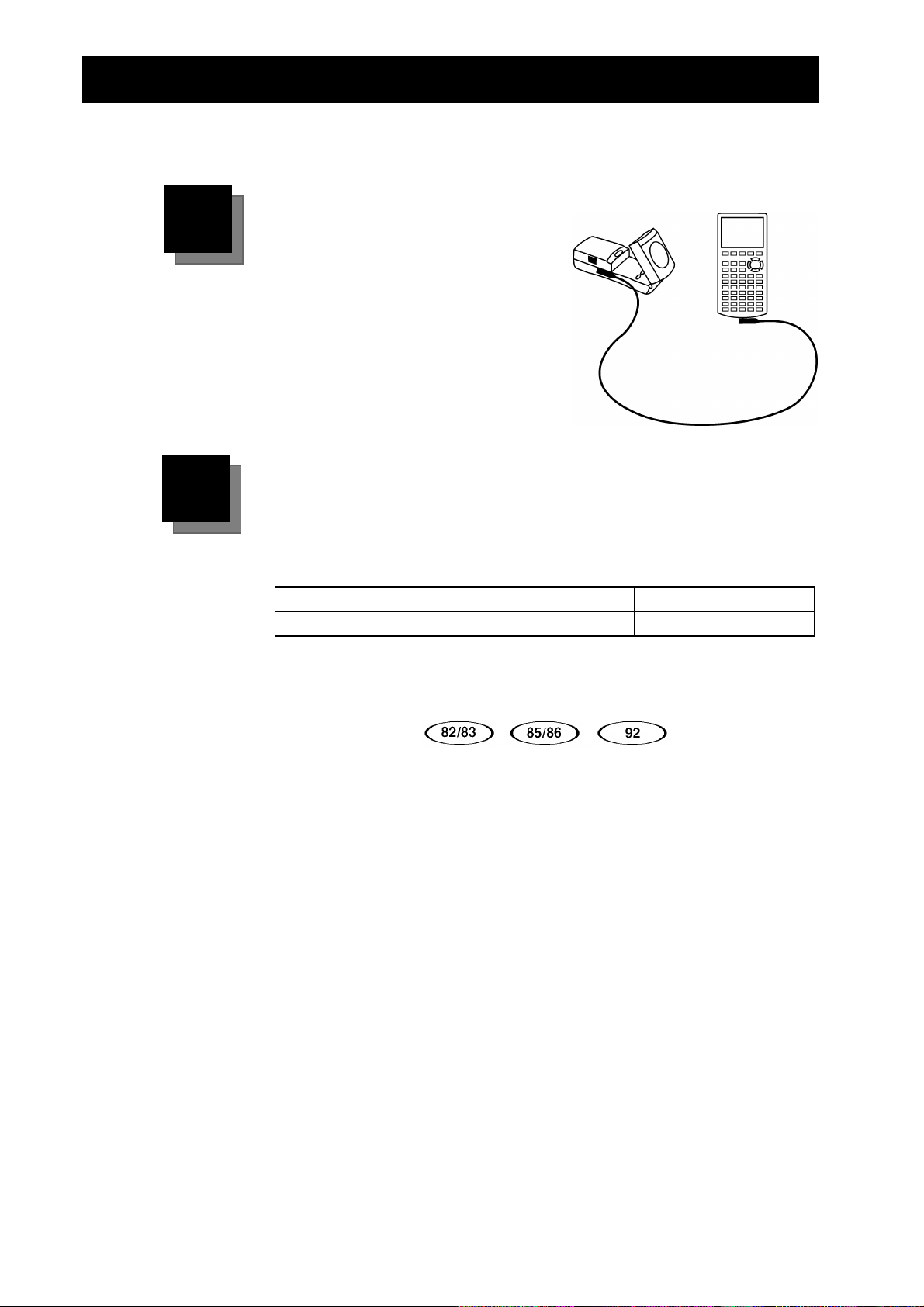
Komma igång med CBR — Hur lätt som helst
Med
1
2
är du bara tre steg från den första mätvärdesinsamlingen!
CBR
Anslut
Anslut
med räknare-
Tryck in kabelns båda ändar helt och
hållet.
Anm:
kabeln som medföljer räknaren kan
också användas.
till en grafritande TI-räknare
CBR
kabeln.
CBR
Den korta räknare-räknare
Överför
RANGER
CBR
Först förbereder du räknaren för programmottagning (se nedan).
är ett program som är anpassat för varje räknare och som ingår i
. Att överföra önskat program från
till en räknare är enkelt.
CBR
TI-82 eller TI-83 TI-85/CBL eller TI-86 TI-92
LINK
Ÿ
[
Öppna sedan det uppfällbara sensorhuvudet på
programöverföringsknapp på
Under överföringen visar räknaren
När överföringen är klar blinkar den gröna
från
blinkar den röda
När
inte överföras till den aktuella räknaren igen såvida inte programmet
raderas från räknarens minne.
Anm:
komma att behöva ta bort andra program och data från räknaren. Om du
vill spara dessa kan du lagra ner dem på en dator med hjälp av TI-Graph
Linké eller till en annan räknare med en räknare-räknare kabel eller
räknare-CBR kabel (se räknarens handbok).
hörs och i räknarens graffönster visas
CBR
RANGER
Programmet och data kräver cirka 17 500 byte minne. Du kan
›
£
]
-lampan två gånger och en signal hörs två gånger.
CBR
-programmet överförts från
Ÿ
CBR
LINK
[
]
.
RECEIVING
CBR
¡
(med undantag för TI-92).
CBR
till en räknare behöver det
Gå till Grundfönstret.
och tryck på lämplig
CBR
-lampan en gång, en signal
. Om ett fel inträffar
DONE
4
KOMMA IGÅNG MED
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
Komma igång med CBR — Hur lätt som helst
j
y
j
y
j
Kör
(forts)
3
Snabba resultat upnås
genom att genomföra
någon av övningarna i
den här handboken!
Kör programmet
TI-82 eller TI-83 TI-85/CBL eller TI-86 TI-92
^
Tryck
RANGER
Väl
›
Tryck
RANGER
.
.
.
(se nedan).
^ A
ck
Tr
RANGER
Väl
›
Tryck
RANGER
›
VAR-LINK
.
.
.
.
ck L [
Tr
Väl
Tryck ¨
Visas startbilden.
Tryck
›.
MAIN MENU
SETUPàSAMPLE
SET DEFAULTS
APPLICATIONS
PLOT MENU
TOOLS
QUIT
Från
MAIN MENU
att välja
START NOW
MAIN MENU
väljer du
visas.
&
Visa/ändra inställningarna innan mätning.
&
Återställ standardinställningarna.
&
DISTANCE MATCH, VELOCITY MATCH, BALL BOUNCE
&
Plottalternativ.
&
GET CBR DATA, GET CALC DATA, STATUS, STOPàCLEAR
SET DEFAULTS
. Bilden
visas. Tryck › för
SETUP
. Iordningställ övningen och tryck på › för att
påbörja mätvärdesinsamlingen. Så enkelt är det!
Viktig information
0
Den här handboken är tillämplig för alla grafritande TI-räknare som
kan användas tillsammans med
vilket innebär att vissa
CBR
menyalternativ inte exakt motsvarar de som finns på din räknare.
0
När du förbereder övningarna ska du kontrollera att
är ordentligt
CBR
fastsatt och att ingen kan snubbla över anslutningskabeln.
0
Avsluta alltid
det utför
RANGER
tillförsäkrar att
0
Koppla alltid isär
RANGER
-programmet med alternativet
-programmet en korrekt nedstängning av
initieras på rätt sätt nästa gång du använder den.
CBR
från räknaren innan du lägger undan den för
CBR
. När du gör
QUIT
CBR
förvaring.
].
.
.
.
. Detta
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
5
Tips för effektiv mätvärdesinsamling
Förbättra mätvärdesinsamlingen
Hur fungerar CBR?
Förståelse av hur en akustisk rörelsedetektor fungerar ger bättre förutsättningar för att
erhålla bra grafer. Rörelsedetektorn sänder ut en ultraljudspuls och mäter sedan hur lång
tid det tar för pulsen att återvända efter att ha studsat mot det närmast belägna
föremålet.
På samma sätt som andra akustiska rörelsedetektorer mäter
utsändningen av ultraljudspulsen och det första returnerade ekot, men därutöver har
tidsintervallet mellan
CBR
CBR
en inbyggd mikroprocessor som kan så mycket mer. När mätvärdena samlas in beräknar
avståndet till föremålet med hjälp av en ljudhastighetsberäkning. Därefter beräknas
CBR
första och andra derivatan med avseende på tiden utifrån avståndsinformationen för att
få värdena för hastigheten och accelerationen. Dessa mätvärden lagras sedan i listorna
L1, L2, L3
Att utföra samma beräkningar som
➊
➋
och L4.
Samla in mätvärdena i läget
Använd tidsvärdena i
tillsammans med avståndsvärdena i L2 för att beräkna
L1
är intressant och lärorikt.
CBR
REALTIME=NO
. Avsluta
RANGER
-programmet.
föremålets hastighet vid varje tidpunkt. Jämför sedan resultaten med
hastighetsvärdena i
=
L3
n
Använd hastighetsvärdena i L3 (eller de elevberäknade värdena) tillsammans med
➌
tidsvärdena i
för att beräkna föremålets acceleration vid varje tidpunkt. Jämför
L1
sedan resultaten med accelerationsvärdena i
Föremålens storlek
Ett litet föremål på långt avstånd från
L3
.
(
+
L2
n+1
)à2 N (
L2
n
L1
CBR
N
n+1
minskar möjligheterna till en korrekt
L1
L2
+
n
n
L4
)à2
L2
n-1
.
registrering. På 5 meter är det troligare att en fotboll registreras än en pingisboll.
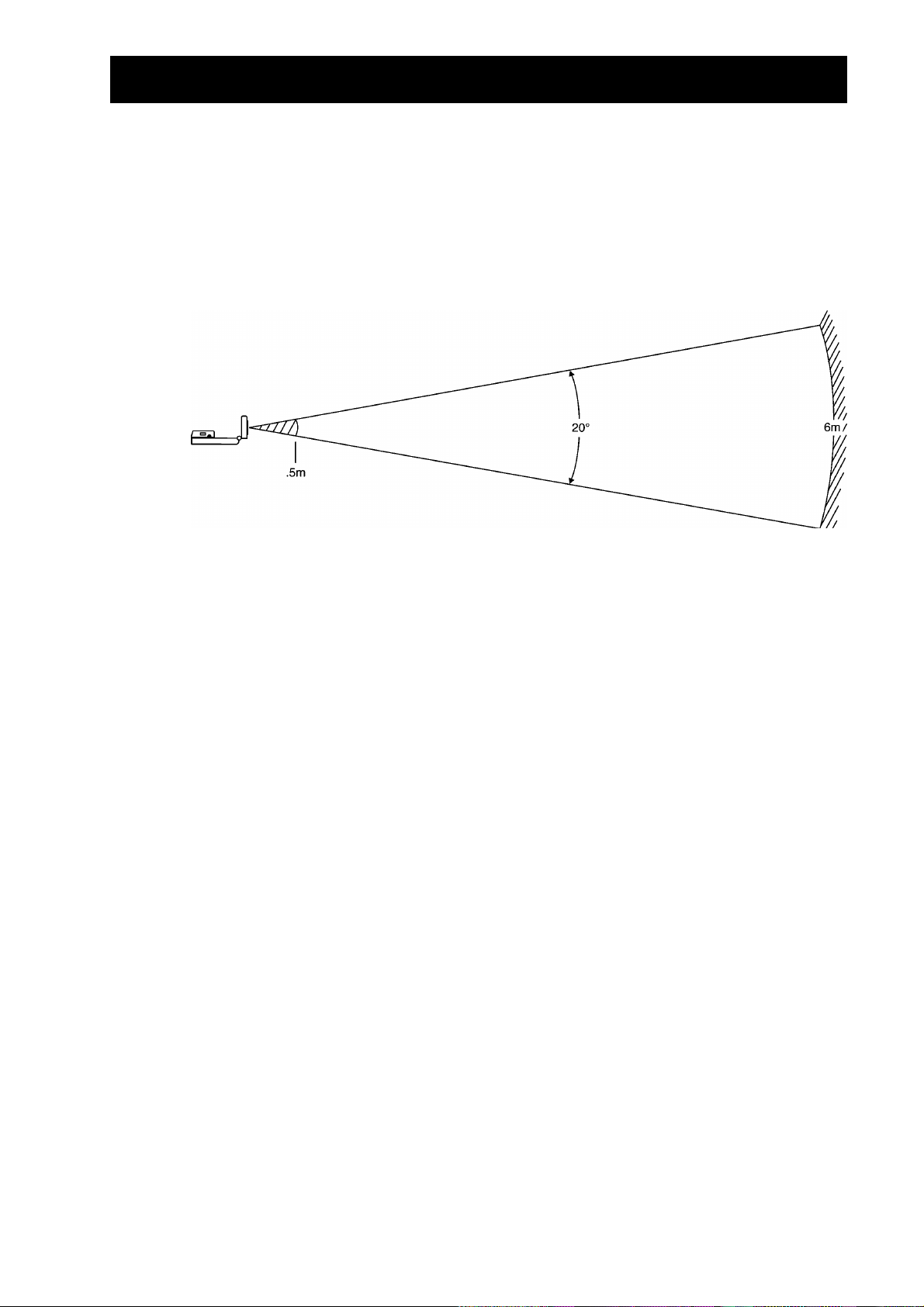
Minimiintervall
När
avståndet till ett föremål understiger 0,5 meter kan efterföljande pulser komma att
överlappa varandra och därför bli misstolkade av
blir felaktig. Placera därför
Maximiintervall
Ju längre pulsen färdas genom luften desto svagare blir den. Vid cirka 12 meter (6 meter
fram till föremålet och 6 meter tillbaka till
kunna registreras av
föremål till 6 meter eller mindre.
6
KOMMA IGÅNG MED
sänder ut en puls träffar den föremålet, studsar tillbaka och tas emot av
CBR
, vilket i sin tur leder till att grafen
CBR
minst 0,5 meter från föremålet.
CBR
) kan ekot bli för svagt för att tillförlitligt
CBR
. Detta begränsar det tillförlitliga mätavståndet mellan
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
CBR
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
CBR.
och
CBR
FINNS MED PÅ KOPIAN
TI
Om
Tips för effektiv mätvärdesinsamling
Fritt område
Ljudstrålens utsträckning är inte parallellsom ett rakt rör utan sprider sig som en
konformad tratt vars spridningsvinkel uppgår till 10°.
För att undvika interferens med andra närliggande föremål ska du försöka iordningställa
ett fritt område i
det önskade blir registrerat av
området.
-strålens väg. På detta sätt förhindras att något annat föremål än
CBR
CBR. CBR
registrerar det närmaste föremålet i det fria
(forts)
Reflekterande ytor
Vissa ytor reflekterar pulser bättre än andra. Exempelvis uppnås ett bättre resultat med
en relativt hård boll med jämn yta än med en tennisboll. Mätningar gjorda i ett rum med
många hårda reflekterande ytor kommer med större sannolikhet att uppvisa fler felaktiga
strövärden. Mätningar mot oregelbundna ytor (t ex en leksaksbil eller en gående elev
som håller i en räknare) kan komma att få en ojämn återgivning.
En avstånd–tid-graf för ett icke rörligt föremål kan uppvisa små skillnader i de beräknade
avståndsvärdena. Om något av dessa värden plottas som en annan pixel kan den
förväntade raka linjen uppvisa enstaka taggar. Grafen avstånd–tid kan bli än mer hackig
eftersom avståndet mellan två punkter sett över tid, per definition, är hastighet. Det kan
därför vara lämpligt att tillämpa en viss grad av utjämning av värdena.
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
7

Tips för effektiv mätvärdesinsamling
RANGER-inställningar
Mättid
(forts)
Funktionen
är den totala tiden för hela mätvärdesinsamlingen uttryckt i sekunder.
TIME
Ange ett heltal mellan 1 sekund (för föremål som rör sig snabbt) och 99 sekunder (för
föremål som rör sig långsamt). För
När
SECOND
Start och stopp
Bilden
ges ett lågt värde måste föremålet befinna sig närmare
TIME
, måste föremålet vara närmare än 1,75 meter från
SETUP
i
RANGER
-programmet har flera alternativ för att starta och stoppa
REALTIME=YES
är
alltid 15 sekunder.
TIME
CBR
.
CBR
. Vid t ex
TIME=1
mätvärdesinsamlingen.
0
BEGIN ON: [ENTER]
. Mätvärdesinsamlingen startas med räknarens ›-knapp. Använd
denna metod när du befinner dig närmast räknaren.
0
BEGIN ON: [TRIGGER]
. Mätvärdesinsamlingen startas med ¤-knappen på
Använd denna metod när du befinner dig närmast
Med det här alternativet kan du också koppla ur
försöket, koppla ur kabeln ur
¤, samla in mätvärden, återansluta
överföra mätvärdena till räknaren. Använd
, placera
CBR
CBR
CBR
BEGIN ON: [TRIGGER]
.
CBR
. Du kan alltså iordningställa
CBR
där insamlingen ska ske, trycka på
, och till sist trycka på › för att
när kabeln är för kort
CBR
.
eller riskerar att komma i vägen för mätvärdesinsamlingen. Detta går inte att göra i
läget
REALTIME=YES
0
BEGIN ON: DELAY
tryckt på
(t ex
MATCH
. Mätvärdesinsamlingen startas automatiskt 10 sekunder efter att du
›. Detta är speciellt användbart när en person ensam utför hela
-tillämpningen ).
övningen.
Triggknapp
Funktionen för ¤ varierar beroende på övriga inställningar.
¤ startar mätvärdesinsamlingen även när
0
BEGIN ON: [ENTER]
eller
BEGIN ON: DELAY
har valts. Knappen kan också användas för att stoppa mätvärdesinsamlingen men
oftast är det önskvärt att låta hela insamlingen löpa klart.
Vid
0
REALTIME=NO
och efter att mätvärdesinsamlingen är klar upprepar ¤
automatiskt den senaste mätvärdesinsamlingen utan att överföra informationen till
räknaren. För att överföra informationen väljer du
GET CBR DATA
SAMPLE
. (Du kan också upprepa en mätvärdesinsamling genom att välja
från
PLOT MENU
eller
START NOW
från bilden
TOOLS
SETUP
från
.)
MAIN MENU
och sedan
REPEAT
8
KOMMA IGÅNG MED
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI

Tips för effektiv mätvärdesinsamling
Utjämning
(forts)
Med utjämningsfunktionen i
RANGER
-programmet kan störsignalers inverkan och
variationer i avståndsmätningar reduceras. Undvik dock att utjämna för mycket. Försök
först utan utjämning eller med utjämningsalternativet
LIGHT
. Öka sedan
utjämningsgraden tills du erhåller ett tillfredsställande resultat.
Vid övningar med en hög sannolikhet för störsignaler kan det vara lämpligt att öka
0
utjämningsgraden på bilden
redan innan mätvärdesinsamlingen påbörjas (se
SETUP
sidan 38).
För mätvärden som insamlats med
0
REALTIME=NO
insamlade mätvärdena. Då måste räknaren vara ansluten till
från
PLOT MENU
Störningar — vad det är och hur du blir av med dem
När
tar emot signaler som reflekterats från andra föremål än det primära föremålet
CBR
, därefter
SMOOTH DATA
och till sist graden av utjämning.
kan utjämning tillämpas på de
. Välj först
CBR
PLOT TOOLS
kommer grafen att uppvisa felaktiga mätpunkter (störningstoppar) vilka inte
överensstämmer med grafens övergripande form. Minska störningsrisken så här:
Kontrollera att
0
REALTIME=NO
är riktad direkt mot målet. Innan du samlar in mätvärden med
CBR
kan du utföra en mätvärdesinsamling med
REALTIME=YES
och då justera
sensorhuvudet tills resultatet är tillfredsställande.
Försök att utföra mätvärdesinsamlingen i ett utrymme som är så fritt från störande
0
föremål som möjligt (se bilden i avsnittet Fritt område, sidan 7).
Välj ett större eller mer reflekterande föremål, alternativt flytta föremålet närmare
0
CBR
(dock inte närmare än 0,5 meter).
När du använder flera
0
i samma rum ska varje mätvärdesinsamling slutföras innan
CBR
nästa påbörjas.
Vid en mätvärdesinsamling med
0
REALTIME=YES
och många störsignaler ska du upprepa
insamlingen med högre grad av utjämning tills du uppnår ett tillfredsställande resultat.
(Du kan inte ändra utjämningen i tillämpningarna
och
BALL BOUNCE
Vid en mätvärdesinsamling med
0
.)
REALTIME=NO
DISTANCE MATCH, VELOCITY MATCH
och många störsignaler ska du använda
en högre grad av utjämning på de insamlade mätvärdena.
Ljudets hastighet
Det ungefärliga avståndet till föremålet beräknas utifrån ljudets hastighet vid
normaltillstånd. Ljudets faktiska hastighet varierar dock beroende på ett flertal faktorer,
där den vanligaste är luftens temperatur. För relativ rörelse utgör detta inget problem,
men för övningar som kräver noggranna mätningar finns det ett
programmeringskommando som kan användas för att ange den omgivande
temperaturen (se sidorna 40–41).
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
9
Tips för effektiv mätvärdesinsamling
REALTIME=YES
(forts)
Använd läget
för långsamma föremål
0
för att kunna se resultaten när de samlas in
0
när du endast behöver samla in en typ av mätvärden (avstånd, hastighet eller
0
REALTIME=YES
:
acceleration) under en mätvärdesinsamling.
I läget
REALTIME=YES
bearbetar
de begärda grafvärdena (avstånd, hastighet eller
CBR
acceleration) som efter varje enskild avståndsmätning överförs till räknaren. Därefter
plottar
RANGER
en specifik pixel för den pulsen.
Eftersom alla dessa operationer måste utföras innan nästa mätvärdesinsamling kan
påbörjas är bearbetningshastigheten för varje mätvärdesinsamling i
REALTIME=YES
begränsad.
För ett enda mätvärde tar det cirka 0,08 sekunder att samla in mätvärden, bearbeta och
överföra informationen. Därtill krävs ytterligare tid för att plotta punkten, vilket sänker
den effektiva insamlingsfrekvensen till cirka en per 0,125 sekunder i
REALTIME=NO
Använd läget
för snabba föremål
0
när utjämning behöver användas (se sidan 9)
0
för att hantera
0
när du behöver samla in eller plotta alla datatyper (avstånd, hastighet och
0
REALTIME=NO
CBR
:
när den är fristående (se sidan 11)
RANGER
.
acceleration) i en mätvärdesinsamling.
I läget
REALTIME=NO
lagras informationen i
och kan inte överföras till räknaren förrän
CBR
mätvärdesinsamlingen är klar. Insamlingsfrekvensen kan vara så hög som en per 0,005
sekunder för näraliggande föremål. Värden för tid, avstånd, hastighet och acceleration
överförs till räknaren.
Eftersom informationen lagras i
kan du överföra den från
CBR
till räknaren
CBR
upprepade gånger.
Varje gång utjämningen förändras tillämpar
0
den nya utjämningsgraden, överför
CBR
de justerade mätvärdena till räknaren och lagrar dem i listorna.
Om ett område väljs förändras också listorna som är lagrade i räknaren. Om du vill kan
0
du återställa de ursprungliga mätvärdena från
TOOLS
från
MAIN MENU
välja
Samma mätvärden kan också delas av flera elever samtidigt trots att de använder olika
0
och sedan
GET CBR DATA
genom att i
CBR
.
RANGER
-programmet
grafritande TI-räknare. Detta ger eleverna möjlighet att göra en analys utifrån identisk
information (se sidan 11).
10
KOMMA IGÅNG MED
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI

Tips för effektiv mätvärdesinsamling
Använda CBR fristående
(forts)
Dela data
Eftersom
inställningar är gjorda. På bilden
0
REALTIME=NO
0
BEGIN ON=[TRIGGER]
RANGER
inte kan sända data till räknaren direkt när den är fristående krävs att vissa
CBR
anges följande:
SETUP
.
-programmet uppmanar dig när du ska koppla ur
och sedan återansluta den.
CBR
Inga ytterligare åtgärder behövs.
Om du vill att hela klassen ska analysera samma data vid samma tillfälle kan du sprida
information från
Överför
➊
RANGER
REALTIME=NO
snabbt och enkelt i ett klassrum med
-programmet till alla elevers räknare innan mätvärdesinsamlingen
CBR
.
påbörjas.
Samla in mätvärdena med
➋
Låt den första eleven ansluta sin räknare till
➌
CBR
i läge
REALTIME=NO
med en räknare-CBR kabel eller en
CBR
.
räknare-räknare kabel.
Från
➍
Meddelandet
Återgå till
➎
MAIN MENU
i
RANGER
TRANSFERRING...
PLOT MENU
-programmet väljer du
visas och därefter själva grafen.
med › och välj
TOOLS
. Koppla ur kabeln.
QUIT
och sedan
GET CBR DATA
.
Anslut nästa räknare (av samma typ) till räknaren som du just har överfört
➏
mätvärdena till. På den andra räknaren väljer du
programmet och sedan
GET CALC DATA
. Listorna L1, L2, L3, L4 och L5 överförs
TOOLS
från
MAIN MENU
automatiskt till den andra räknaren.
Överför mätvärdena från
➐
till en tredje elevs räknare samtidigt som andra elever
CBR
fortsätter föregående överföringsprocess från räknare till räknare.
När alla elever har samma information i sina räknare kan denna analyseras i
VIEW PLOTS
eller utanför
RANGER
För att dela data på en TI-85 ska funktionen
med räknarnas funktioner för listor och grafer.
användas utanför
LINK
RANGER
överföring av listorna.
i
RANGER
RANGER
för
-
med
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
11

Tips för effektiv mätvärdesinsamling
Avancerad mätvärdesinsamling
(forts)
När du har samlat in och plottat mätvärdena i
RANGER
kan du fortsätta att studera
värdenas relation till någon funktion. Eftersom värdena lagras i listor och visas som
punktdiagram kan du använda
Inuti RANGER
Studera grafer med funktionen
0
, och œ för att utröna dessa samband.
som aktiveras automatiskt. (På TI-85 används
TRACE
den fritt rörliga markören.)
Manipulera mätvärdena genom att använda utjämning och välja område.
0
Utanför RANGER
Studera mätvärdena med hjälp av räknarens listeditor.
0
Ta manuellt fram en funktion utifrån mätvärdena med hjälp av räknarens Y= editor.
0
Ta fram den ekvation som bäst motsvarar mätvärdena med hjälp av räknarens
0
regressionsfunktioner.
Det går att studera andra samband än de som ingår i grafalternativen i
RANGER
. T ex kan
graferna avstånd–tid och hastighet–tid återges samtidig som punktdiagram. Från
i
MENU
och för
RANGER
Plot2 L1
-programmet väljer du
QUIT
, och för
anges L1 som en funktion av
Plot1
som en funktion av L3. (Du kan komma att behöva justera graffönstret.)
Mätvärden och grafer kan sändas till en dator med TI-Graph Link. Detta är speciellt
användbart när elever väljer att skriva mer omfattande rapporter utifrån sina
undersökningar.
MAIN
L2
Använda CBR utan RANGER-programmet
kan användas som en akustisk rörelsedetektor tillsammans med
CBR
program än
Information om användning av
0
Information om anskaffandet av program och övningar finns på sidan 36.
0
Information om programmeringskommandon för att skriva egna program finns på
0
RANGER
.
sidorna 40–41.
CBR
med
finns på sidan 39.
CBL
eller med andra
CBL
12
KOMMA IGÅNG MED
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
Övning 1—Matcha grafen lärarhandledning
Begrepp
Studerad funktion: linjär.
I denna övning presenteras begreppen avstånd och
tid – eller närmare bestämt begreppet avstånd som
en funktion av tid. När eleverna försöker efterlikna
sina grafer genom att gå samtidigt som de iakttar
plottningen av rörelsen kan begreppet position
studeras.
I laborationerna ombeds eleverna att omvandla sin
gånghastighet från meter per sekund till kilometer
per timme.
När eleverna behärskar att matcha avstånd mot tid
kan de utmanas att matcha hastighet mot tid.
Utrustning
räknare
CBR
räknare-räknare kabel
En TI ViewScreené gör det lättare för eleverna att
följa med i övningen – vilket naturligtvis ökar
behållningen.
Tips
Det här är en övning som de flesta elever kommer
att uppskatta. Se till att ha tillräckligt med tid
eftersom alla kommer att vilja pröva.
Övningen fungerar bäst om den gående eleven (och
resten av klassen) kan se sin rörelse projicerad på
väggen eller en skärm med hjälp av TI ViewScreen.
Se till att eleverna går i linje med CBR. Ibland
försöker eleverna gå i sidled (vinkelrätt mot CBR) och
även att hoppa framför den.
Se sidorna 6–12 för tips om effektiv
mätvärdesinsamling.
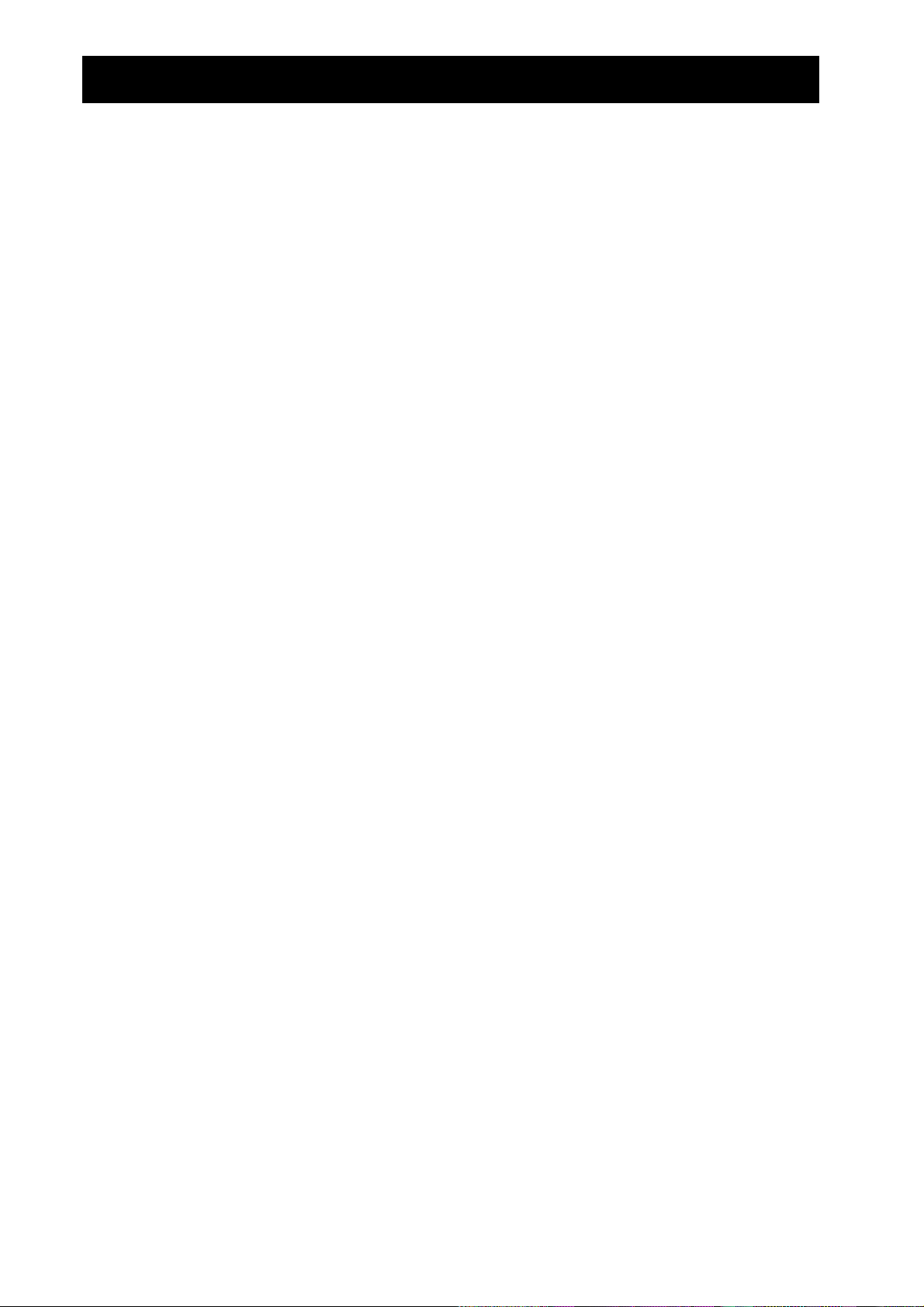
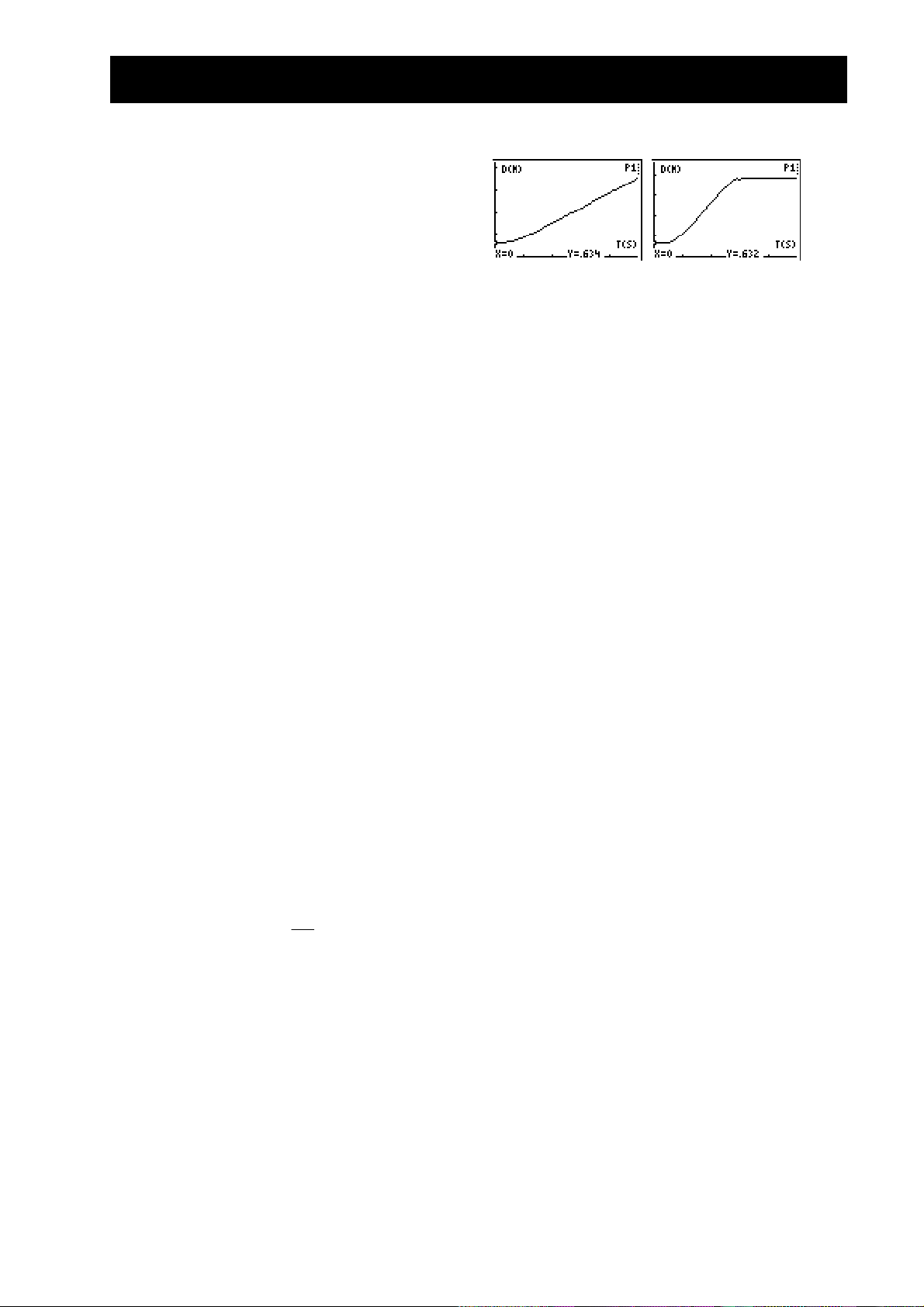
Typiska diagram
Typiska svar
1. Tid (från starten av mätvärdesinsamlingen);
sekunder; 1 sekund; avstånd (från CBR till
föremålet); meter; 1 meter.
2. Skärningspunkten med y-axeln representerar
startavståndet.
3. Varierar från elev till elev.
4. Bakåt (öka avståndet mellan CBR och föremålet).
5. Framåt (minska avståndet mellan CBR och
föremålet).
6. Stå still; nollutning kräver ingen justering i y-led
(avstånd).
7. Varierar från graf till graf; @yà3,3.
8. Varierar från graf till graf; @yà1.
9. Det segment som har den brantaste lutningen
(positiv eller negativ).
10. Detta är en kuggfråga – det plana segmentet,
eftersom personen inte rör sig alls!
11. Gånghastigheten; tidpunkten då riktningen
och/eller hastigheten ska ändras.
12. Hastighet.
13. Varierar från graf till graf (exempel: 1,5 meter på
3 sekunder).
14. Varierar från graf till graf (exempel: 0,5 meterà
1 sekund).
Exempel: (0,5 meter à 1 sekund) Q (60 sekunder
à 1 minut) = 30 meter à minut.
Exempel: (30 meter à 1 minut) Q (60 minuter
à 1 timme) = 1800 meter à timme.
Exempel: (1800 meter à 1 timme) Q (1 kilometer
à 1000 meter) = 1,8 kilometer à timme.
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
15. Varierar från graf till graf; summan av @y för
FINNS MED PÅ KOPIAN
TI
Låt eleverna jämföra det sista värdet med
hastigheten för ett fordon, t ex 96 kilometer
à timme.
varje linjesegment.
KOMMA IGÅNG MED
CBR
13
Övning 1—Matcha grafen linjär
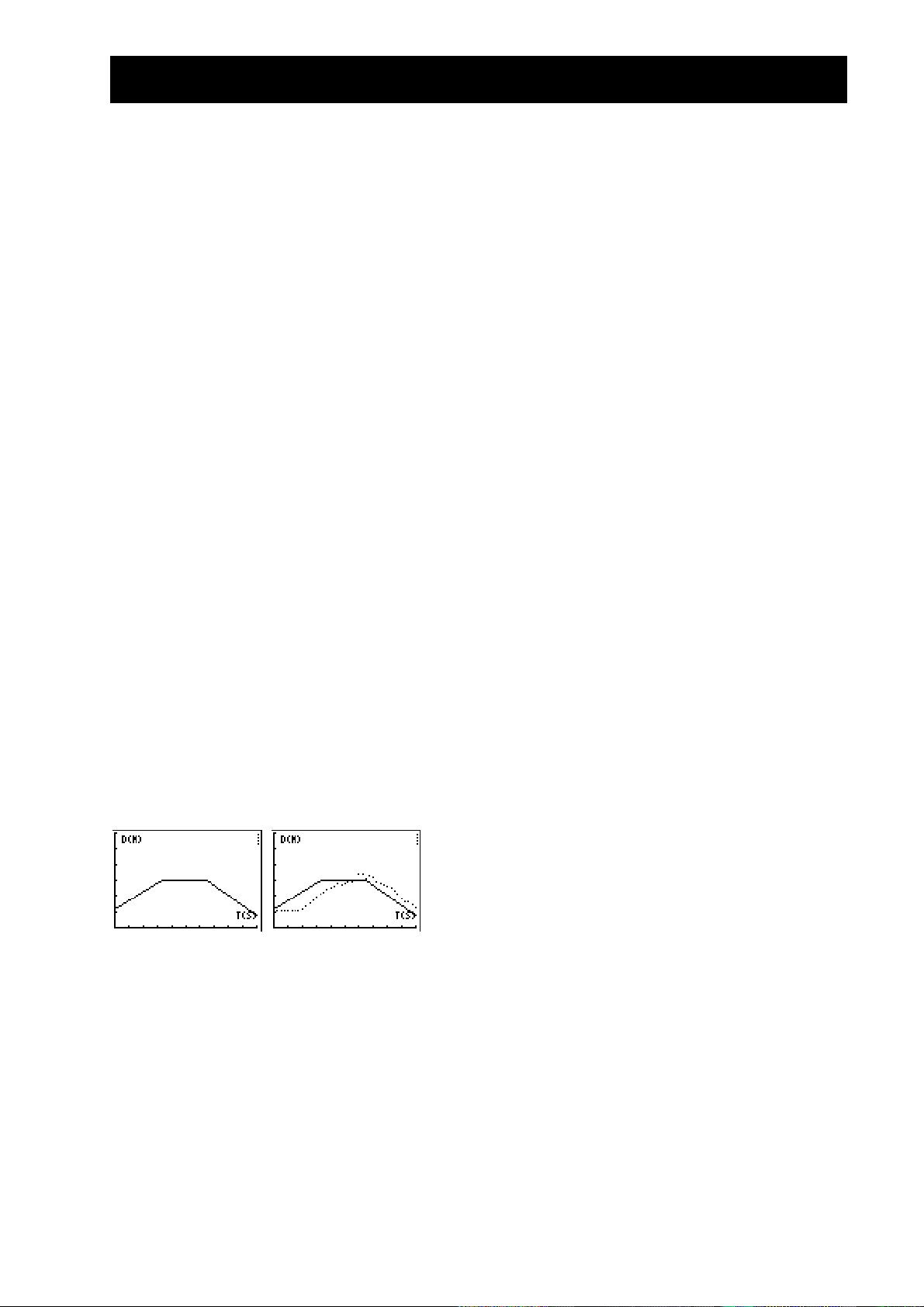
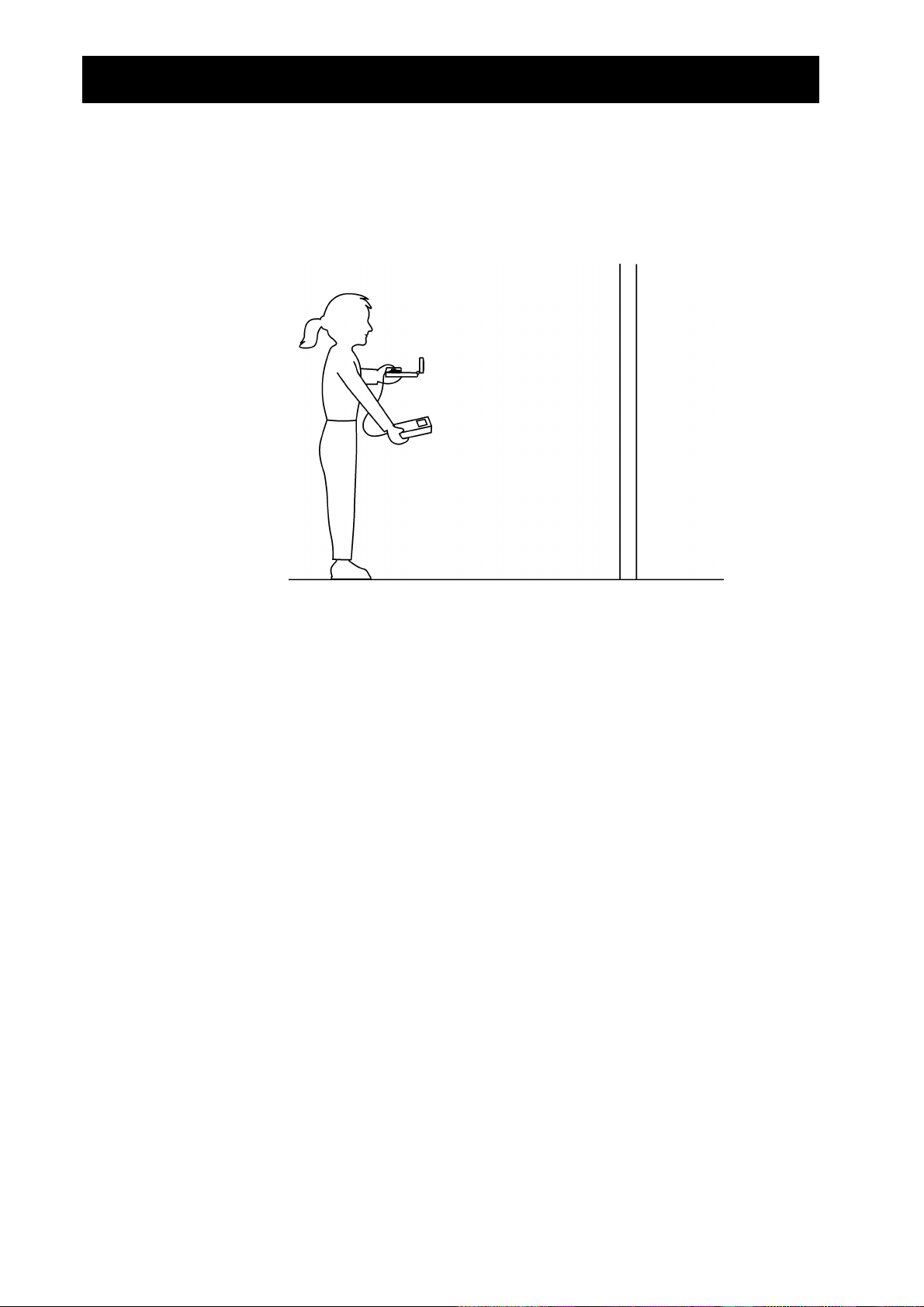
Mätvärdesinsamling
➊
Håll
Tips:
i en hand och räknaren i den andra. Rikta sensorn rakt mot en vägg.
CBR
. Minimiavståndet är 0,5
Maximiavståndet för en graf är 4 meter från
CBR
meter. Kontrollera att ingenting störande finns i det fria området (se sidan 7).
➋
Kör
RANGER
-programmet (se sidan 5 för räknarnas olika tangentsekvenser).
Välj
➌
➍
➎
APPLICATIONS
Välj
DISTANCE MATCH
DISTANCE MATCH
Tryck › för att ta fram grafen som ska matchas. Studera grafen en stund.
från
MAIN MENU
från menyn
och sedan
APPLICATIONS
METERS
.
. Allmänna anvisningar visas.
sköter automatiskt om alla relevanta inställningar.
Besvara frågorna 1 och 2 på arbetsbladet.
Placera dig själv där du tror att grafen börjar. Påbörja mätvärdesinsamlingen genom
➏
att trycka på
›. Du hör ett klickande ljud och ser den gröna lampan blinka när
mätvärdena samlas in.
Gå bakåt och framåt och försök att matcha grafen. Din position plottas i
➐
graffönstret.
När insamlingen är klar kontrollerar du hur väl dina rörelser överensstämmer med
➑
grafen. Besvara sedan fråga 3.
Tryck › för att ta fram menyn
➒
OPTIONS
och välj
SAME MATCH
. Försök att förbättra
din rörelseteknik och besvara sedan frågorna 4, 5 och 6.
14
KOMMA IGÅNG MED
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI

Övning 1—Matcha grafen
Laborationer
(forts)
linjär
I
DISTANCE MATCH
Ta fram menyn
➊
segmentet och besvara sedan frågorna 7 och 8.
Studera hela grafen och besvara frågorna 9 och 10.
➋
Placera dig själv där du tror att grafen börjar, påbörja mätvärdesinsamlingen genom
➌
att trycka på
När mätvärdesinsamlingen är klar besvarar du frågorna 11 och 12.
➍
Ta fram menyn
➎
Studera grafen och besvara frågorna 13, 14 och 15.
➏
Ta fram menyn
➐
till
MAIN MENU
Avancerade laborationer
Graferna som genereras av
VELOCITY MATCH
Den här övningen är svår!
MATCH
är ett populärt program. Ytterligare versioner som undersöker mer komplicerade
grafer kan finnas tillgängliga (se sidan 36).
består alla grafer av tre raklinjesegment.
OPTIONS
›, och försök att matcha grafen.
OPTIONS
OPTIONS
och välj
med › och välj sedan
med › och välj sedan
med ›. Upprepa övningen om det behövs eller återvänd
för att avsluta
QUIT
DISTANCE MATCH
RANGER
är alla raka linjer. Försök nu använda
NEW MATCH
NEW MATCH
-programmet.
. Studera det första
.
där du måste matcha en graf som motsvarar förhållandet hastighet–tid.
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
15

Övning 1—Matcha grafen
Namn ____________________________________
Mätvärdesinsamling
1. Vilken fysikalisk storhet representeras på x-axeln? __________________________________________
Vilken enhet används? Hur mycket är en markering? ___________________
Vilken fysikalisk storhet representeras på y-axeln? __________________________________________
Vilken enhet används? Hur mycket är en markering? ___________________
2. På vilket avstånd från
ska du stå när du börjar? _________________________________________
CBR
3. Började du för nära, långt bort eller precis rätt? ____________________________________________
4. Ska du gå framåt eller bakåt när ett segment lutar uppåt? ___________________________________
Varför? ______________________________________________________________________________
5. Ska du gå framåt eller bakåt när ett segment lutar nedåt? ___________________________________
Varför? ______________________________________________________________________________
6. Vad ska du göra när ett segment är horisontellt? ___________________________________________
Varför? ______________________________________________________________________________
Laborationer
7. Om du tar ett steg per sekund hur långt ska steget då vara? _________________________________
8. Om du istället tar steg som är 1 meter långa, hur många steg måste du då ta? __________________
9. För vilket segment måste du röra dig snabbast? ____________________________________________
Varför? ______________________________________________________________________________
10. För vilket segment måste du röra dig långsammast? ________________________________________
Varför? ______________________________________________________________________________
11. Utöver att avgöra om du ska gå framåt eller bakåt, vilka andra faktorer påverkar den exakta
matchningen av grafen? ________________________________________________________________
_____________________________________________________________________________________
12. Vilken fysikalisk storhet representeras av linjesegmentets grad av lutning? ______________________
13. Hur många meter på hur många sekunder måste du gå för det första linjesegmentet? ____________
1 sekund: ________________________________
14. Räkna om värdet i fråga 13 (hastigheten) till meter
Räkna om till meter
Räkna om till meter
Räkna om till kilometer
minut: _____________________________________________________________
à
àtimme: _____________________________________________________________
àtimme: __________________________________________________________
à
15. Hur långt gick du egentligen? ___________________________________________________________
16
KOMMA IGÅNG MED
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
Övning 2—Leksaksbil lärarhandledning
Begrepp
Studerad funktion: linjär.
Rörelsen hos en motorförsedd leksaksbil används för
att illustrera begreppet konstant hastighet.
Utrustning
räknare
CBR
räknare-CBR kabel
batteridriven leksaksbil
TI ViewScreen (valfritt)
Tips
Leksaksbilar varierar i storlek, form och
reflektionsvinklar för det infallande ultraljudet.
Därför kan kvaliteten på graferna komma att variera.
Vissa leksaksbilar kan kräva en extra reflektionsyta
för att uppnå goda resultat. Försök t ex med att
montera en pappskiva på leksaksbilen så att den blir
ett bra mål för sensorn.
Du kan vilja pröva med flera olika leksaksbilar för att
eleverna ska kunna studera resultaten.
Långsamma leksaksbilar (t ex de som är avsedda för
mindre barn) passar bäst för denna övning. Försök
hitta en leksaksbil som tycks hålla konstant
hastighet.
Se sidorna 6–12 för tips om effektiv
mätvärdesinsamling.
Laborationer
Lutningen på en graf avbildande avstånd–tid för ett
föremål vid en viss tidpunkt ger föremålets hastighet
vid det tillfället. Det betyder att graflutningen för ett
föremål som färdas med konstant hastighet också är
konstant. Det är anledningen till att grafen avstånd–
tid uppvisar ett linjärt förhållande.
Om du startar mätvärdesinsamlingen innan bilen
börjat röra sig kommer du att märka att grafen inte
är linjär i början. Det beror på att bilen startar från
viloläge (v = 0), och att den inte kan uppnå konstant
hastighet momentant. Accelerationen ges av:
∆
v
a
=
∆
t
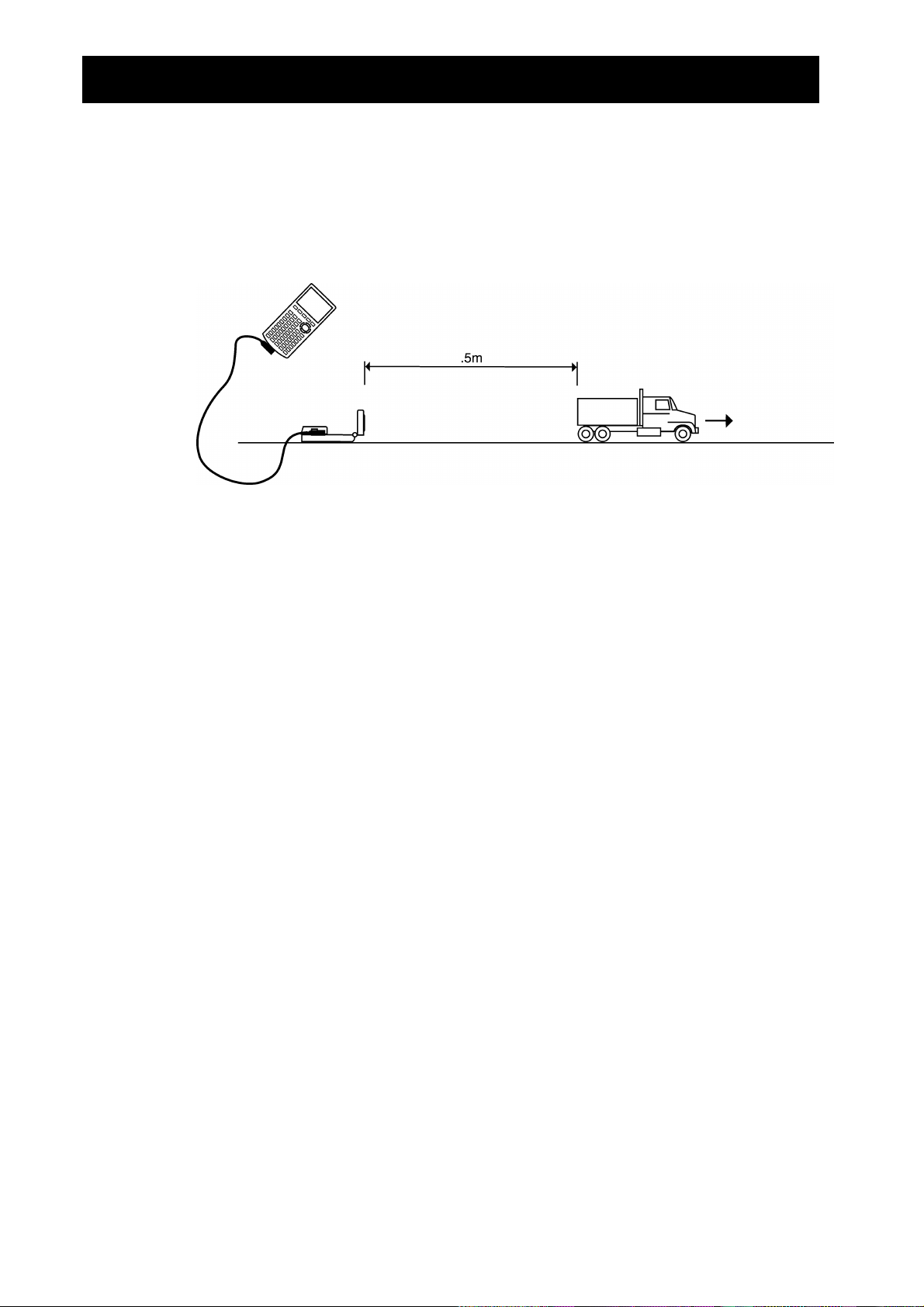
Typiska diagram
Typiska svar
1. Det första eller sista diagrammet; avståndet ökar
i konstant takt.
TRACE
2. Eleverna matar in värden från
.
3. Avståndet ökar med ett konstant värde.
4. Eftersom hastighet är avståndsändringen per
tidsenhet är avståndsändringarna lika stora.
5. Eleverna bör få värden som överensstämmer
med värdena som räknats fram för k.
Värdet överensstämmer med k
k representerar leksaksbilens hastighet.
6. m utgör skärningen med y-axeln; exempel:
y = 2x + 0.
7. Varierar; t ex om k = 2, avstånd (y) = 20 meter
efter 10 sekunder (y = 2 Q 10 + 0); för 1 minut
är y = 120 meter.
Avancerade laborationer
Lutningen för grafen hastighet–tid vid konstant
hastighet är noll. Därför uppvisar grafen
acceleration–tid a = 0 (i idealfallet) under den
tidsperiod då hastigheten är konstant.
Arean som bildas under grafen utgör föremålets
avvikelse (den totala förflyttningen) under
tidsintervallet t
För matematikelever på D-nivå kan förflyttningen
härledas ur:
där s är föremålets förflyttning i intervallet t1 till t2.
till t2.
1
t
2
=
svdt
∫
t
1
För att ett föremål momentant ska uppnå konstant
hastighet från viloläge ∆t = 0, krävs oändlig
acceleration vilket är fysikaliskt omöjligt. (Newtons
andra lag, F = ma, säger att oändlig acceleration
endast kan uppnås med oändlig kraft, vilket är lika
omöjligt). Det betyder att föremålet först måste
accelerera (öka hastigheten) till sin konstanta
hastighet under en begränsad tidsperiod.
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
17
Övning 2—Leksaksbil linjär
Mätvärdesinsamling
Placera leksaksbilen minst 0,5 meter från
➊
med färdriktningen vänd bort från
CBR
i en rak linje.
Rikta sensorn rakt mot leksaksbilen och förvissa dig om att det inte finns något
Tips:
i det fria området (se sidan 7).
Innan du startar mätvärdesinsamlingen ska du besvara fråga 1 på arbetsbladet.
➋
➌
➍
Kör
RANGER
Välj
SETUPàSAMPLE
-programmet (se sidan 5 för räknarnas olika tangentsekvenser).
från
MAIN MENU
. I den här övningen ska du ha följande
inställningar:
CBR
REALTIME: NO
TIME (S): 5 SECONDS
DISPLAY: DISTANCE
BEGIN ON: [ENTER]
SMOOTHING: LIGHT
UNITS: METERS
Information om hur du ändrar inställningarna finns på sidan 38.
Välj
➎
➏
START NOW
Tryck › när du vill starta. Starta bilen och flytta dig snabbt ut ur det fria
.
området. När mätvärdena samlas in hörs ett klickande ljud och meddelandet
TRANSFERRING...
När mätvärdesinsamlingen är klar visar räknaren automatiskt en graf för avstånd–tid
➐
visas på räknaren.
utifrån mätvärdena.
Jämför grafen med vad du angivit på arbetsbladet som svar 1 och notera likheter
➑
och skillnader.
18
KOMMA IGÅNG MED
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI

Övning 2—Leksaksbil
Laborationer
Värdena för x (tid) i halvsekundsintervall finns i tabellens första kolumn i fråga 2 på
➊
arbetsbladet. Följ grafen och ange motsvarande y-värden (avstånd) i den
andra kolumnen.
kan behöva ignorera avvikande mätvärden i början av mätvärdesinsamlingen. Du
kan också komma att behöva uppskatta avståndet (räknaren kan ange ett avstånd
för tidsvärdet 0,957 eller 1,01 sekunder istället för 1 sekund exakt). Ta det som
ligger närmast eller gissa så gott du kan.
➋
Besvara frågorna 3 och 4.
Beräkna förändringarna för avstånd och tid mellan varje mätpunkt för att
➌
komplettera den tredje och fjärde kolumnen i tabellen i fråga 2. För att t ex beräkna
@Avstånd (meter) för 1,5 sekunder, drar du bort avståndsvärdet vid 1 sekund från
avståndsvärdet vid 1,5 sekunder.
Funktionen som åskådliggör denna övning har följande utseende:y=kx+m Där k
➍
utgör linjens lutning och beräknas enligt:
(forts) linjär
Ta med resultaten från de linjära delarna av grafen. Du
Anm:
Skärningspunkten med y-axeln representeras av m
Beräkna k för varje punkt. För in värdena i tabellen i fråga 2.
➎
Besvara frågorna 5, 6 och 7.
Avancerade laborationer
Genom att beräkna lutningen för en graf som avbildar avstånd–tid vid en bestämd
tidpunkt erhålls föremålets ungefärliga hastighet vid denna tidpunkt. Genom att beräkna
lutningen för en graf som avbildar hastighet–tid erhålls föremålets ungefärliga
acceleration vid den aktuella tidpunkten. Om hastigheten är konstant vad blir då
accelerationen?
Förutsäg hur grafen acceleration–tid för grafen avstånd–tid kommer att se ut.
Räkna ut arean mellan grafen hastighet–tid och x-axeln mellan två fritt valda tidpunkter,
och t2. Detta kan göras genom addition av en eller flera rektanglar som var och en har
t
1
en area som beräknas enligt:
Vad representerar den uträknade arean?
@avstånd
@tid
eller
tid
area = v∆t = v(t
avstånd
N avstånd
2
N tid
2
2Nt1
1
)
1
eller
N y
y
2
x2 N x
1
1
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
19

Övning 2—Leksaksbil
2
Namn ____________________________________
Mätvärdesinsamling
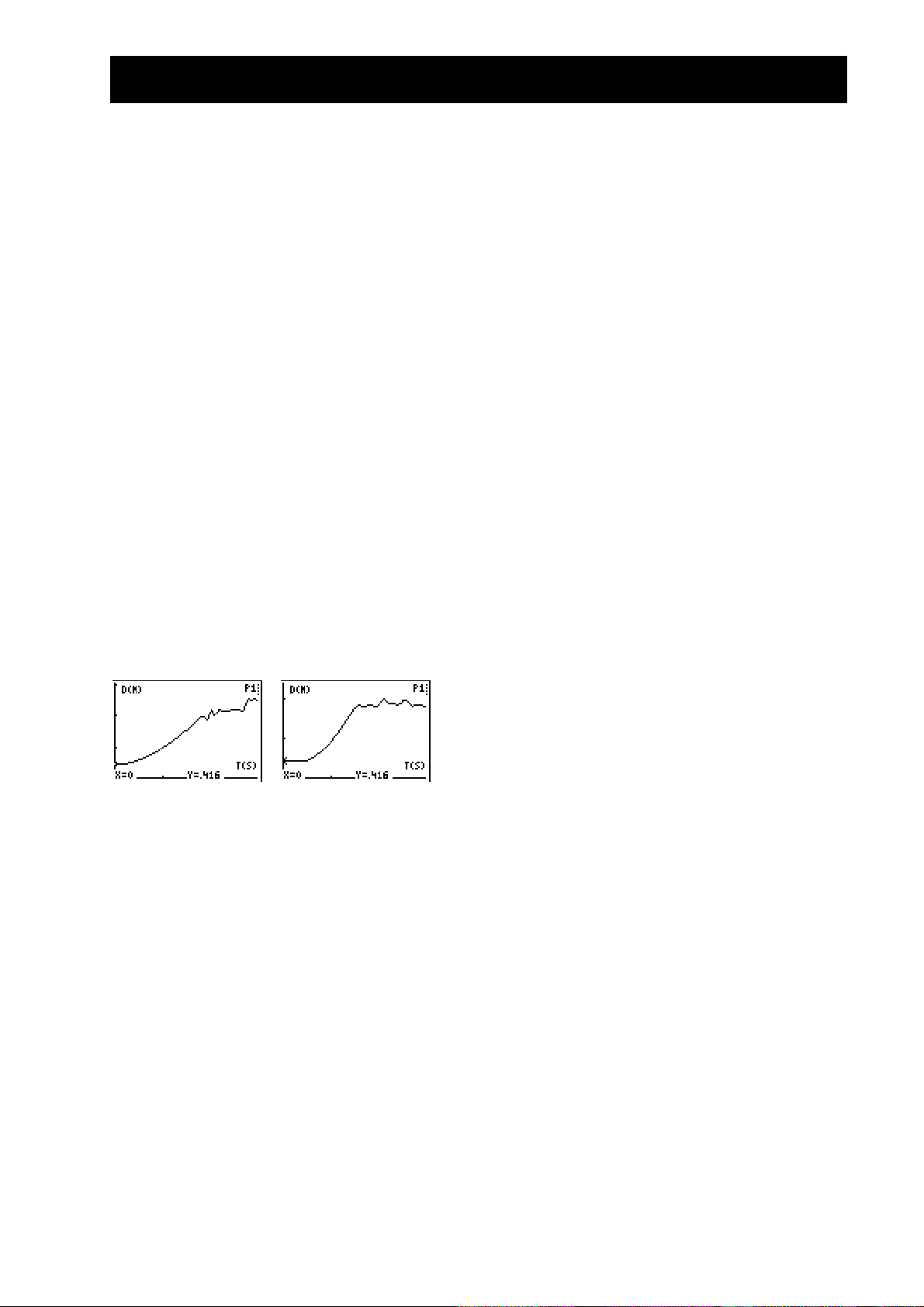
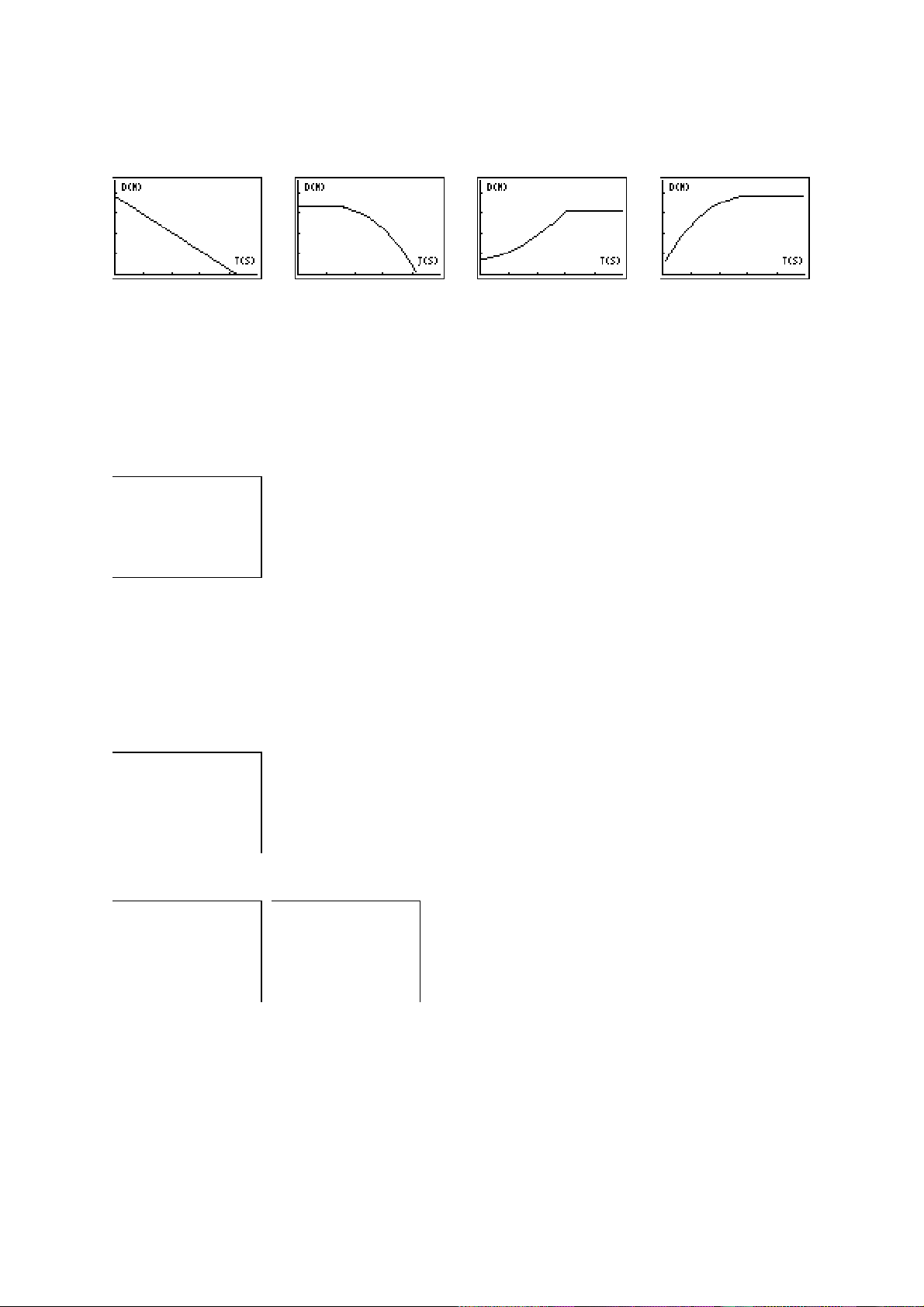
1. Vilket av dessa diagram tror du bäst motsvarar diagrammet avstånd–tid för leksaksbilen?
Varför? ______________________________________________________________________________
.
Tid Avstånd
1,0 xxx xxx xxx
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
@
Avstånd
@
Tid
m
3. Vad är att notera med avståndsvärdena? __________________________________________________
4. Hur utvisar dessa värden att leksaksbilen hastighet är konstant? ______________________________
5. Beräkna
@
mellan Tid = 2 och Tid = 4. ________________________________________
avståndà@tid
Vad är att märka med resultatet? ________________________________________________________
Vad representerar
6. För den linjära ekvationen y=kx+m, vad är värdet för
k
? __________________________________________________________________
m
? ____________________________________
Skriv linjens ekvation på formen y=kx+m, använd värdena för
k
och m._________________________
7. Hur långt har leksaksbilen hunnit på 10 sekunder? __________________________________________
Och på 1 minut? ______________________________________________________________________
20
KOMMA IGÅNG MED
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI

Övning 3—Pendel lärarhandledning
Begrepp
Studerad funktion: sinusformad.
I den här övningen undersöks en enkel harmonisk
rörelse genom observation av en svängandependel.
Utrustning
räknare
CBR
räknare-CBR kabel
fästanordning
stoppur
pendel
metermått
TI ViewScreen (valfritt)
Förslag till vikter:
bollar av olika storlekar (≥ 5 cm i diameter)
0
läskedrycksburkar (tomma och fyllda)
0
fyllda påsar
0
Tips
Se sidorna 6–12 för tips om effektiv
mätvärdesinsamling.
Fysikaliska anknytning
Ett föremål som befinner sig i periodisk rörelse som
ett resultat av en återförande kraft som är
proportionell mot dess avvikelse från jämviktsläget
(viloläge) sägs uppvisa enkel harmonisk rörelse. Enkel
harmonisk rörelse kan uttryckas med två kvantiteter:
Periodtiden T är tiden för en fullständig
0
svängning.
Amplituden A är föremålets maximala avvikelse
0
från jämviktsläget (föremålets viloläge).
För en enkel pendel ges periodtiden T av:
T = 2p
där L är pendelns längd och g är
tyngdaccelereationen. T är inte beroende av
föremålets massa eller dess amplitud.
Frekvensen f (antalet fullständiga svängningar per
sekund) kan härledas ur:
f =
där f uttrycks i hertz (Hz) och T i sekunder.
Derivatan av en sinusformad graf är också
sinusformad. Lägg märke till fasrelationen mellan
viktens position och dess hastighet.
L
g
1
T
Typiska diagram
Typiska svar
1. Varierar (anges i meter)
2. Varierar (anges i meter)
3. Varierar (anges i sekunder); T (en period)
= totaltiden för 10 perioderà10; ett medel för ett
större antal värden har en benägenhet att
minimera mätfel.
4. Den totala båglängden, vilken bör vara cirka fyra
gånger längre än svaret på fråga 2 eftersom
bågen är längre än en rak linje.
5. Sinusformad, repetitiv, periodisk; avståndet från
x-axeln till jämviktspositionen.
6. Varje cykel breder ut sig horisontellt; en graf som
är 10 sekunder lång måste rymma fler cykler i
samma utrymme i graffönstret, vilket gör att
cyklerna ligger tätare.
7. (Det totala antalet cykler)à(5 sekunder) =
cykleràsekund; det är lättare att studera hela
cykler och färre mätfel tas med.
8. f = 1àT, där T är tiden för 1 period.
9. Periodtiden ökar; periodtiden minskar.
(Pendelns längd står i direkt relation till
periodtiden, ju längre pendel desto längre
periodtid. Eleverna kan studera detta förhållande
med hjälp av räknarens listeditor och då beräkna
periodtiden för olika längder på L.)
10. A (amplitud) = ¼ av avståndet som pendeln
färdas under 1 period.
11. Båda är sinusformade; skillnaderna är
amplituden och fasen.
12. I jämviktsläget.
13. När positionen = maximi- eller minimivärdet (när
vikten befinner sig längst ifrån jämviktslägrt).
14. Ingenting förändras. T påverkas endast av L och
g, inte av massan.
Avancerade laborationer
Mätvärdesinsamling: graferna för L2 och L3 ger
tillsammans en ellips.
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
21

Övning 3—Pendel sinusformad
j
Mätvärdesinsamling
Iordningsställ pendeln. Anpassa pendeln så att den rör sig i linje med
➊
minst 0,5 meter från viktens närmaste position under pendlingen.
Tips:
Placera
CBR
Se till att ingenting är i vägen i det fria området (se sidan 7).
amplitud
ämviktsläge
Mät avståndet mellan
➋
och jämviktsläget med ett metermått. Besvara fråga 1
CBR
på arbetsbladet.
CBR
.
Mät hur långt bort från jämviktsläget du kommer att föra vikten. Besvara fråga 2.
En fulständig svängning (en period) består av en hel pendling fram och tillbaka. Ta
➌
tiden för tio fullständiga svängningar med stoppuret. Besvara frågorna 3 och 4.
➍
Kör
RANGER
-programmet (se sidan 5 för räknarnas olika tangentsekvenser). Ett
effektivt sätt är att låta en person starta pendeln och en annan sköter räknaren och
. Välj
CBR
Ta fram inställningarna med ›. I den här övningen ska du ha följande
➎
SETUPàSAMPLE
från
MAIN MENU
.
inställningar:
REALTIME: NO
TIME (S): 10 SECONDS
DISPLAY: DISTANCE
BEGIN ON: [ENTER]
SMOOTHING: LIGHT
UNITS: METERS
Information om hur du ändrar inställningarna finns på sidan 38. När de är korrekta
➏
väljer du
Tryck › när du är klar att starta. När mätvärdena samlas in hörs ett klickande ljud
➐
START NOW
och meddelandet
När insamlingen är klar visar räknaren automatiskt en graf för avstånd–tid utifrån de
➑
.
TRANSFERRING...
visas på räknaren.
insamlade värdena. Besvara fråga 5.
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
22
KOMMA IGÅNG MED
CBR
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI

Övning 3—Pendel
Laborationer
Mätvärdesinsamling 2
(forts)
sinusformad
Välj
SETUPàSAMPLE
sekunder. Upprepa mätvärdesinsamlingen. Studera grafen. Besvara frågorna 6 och 7.
Den storhet som du har valt (svängningar per sekund) kallas frekvens. Även om du har
beräknat frekvensen i fråga 7 utifrån grafen, så kan den härledas matematiskt ur:
1
f =
T
Besvara fråga 8.
Mätvärdesinsamling 3 och 4
Upprepa 5-sekundersinsamlingen två eller flera gånger. Förkorta först pendeln. Förläng
sedan pendeln. Studera graferna och besvara fråga 9.
En annan viktig avståndsfaktor som påverkar pendelns rörelse är amplituden. Svaret på
fråga 2 var amplitud för den pendelsvängningen. Besvara fråga 10.
Avancerade laborationer
Mätvärdesinsamling 5
Välj
VELOCITY-TIME
Mätvärdesinsamling 6
Upprepa insamlingen med avsevärt lättare eller tyngre vikt och besvara sedan fråga 14.
från
MAIN MENU
. På bilden
ändrar du tiden från 10 till 5
SETUP
där T är periodtiden i sekunder och f är frekvensen i hertz (Hz).
från
PLOT MENU
. Besvara frågorna 11, 12 och 13.
Ta reda på förhållandet avstånd–tid för pendelrörelsen med hjälp av en sinusfunktion,
S = A sin (wt + d), där S är den momentana positionen, A är amplituden, w är
frekvensen, d är fasvinkeln och t är tiden. Frekvensen, w, beror av periodtiden, T, på
följande sätt: w = 2 pàT.
Ange ekvationen i Y= editorn med de beräknade värdena för A och w. Samtidigt tar du
fram en graf för den här funktionen och punktdiagrammet för
(tid) och L2 (avstånd).
L1
Justera värdena för A, w och d tills en bra överensstämmelse uppnås. På TI-83 och TI-86
använder du sinusregressionen för att ta fram värdena.
Studera förhållandet mellan position och hastighet genom att ta fram en graf för
L2
(avstånd) och L3 (hastighet). Hur tror du grafen kommer att se ut? Jämför resultatet med
din egen förutsägelse.
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
23

Övning 3—Pendel
Mätvärdesinsamling
Namn ____________________________________
1. Vad är avståndet mellan
och jämviktsläget? ____________________________________________
CBR
2. Hur långt kommer pendeln att dras från jämviktsläget? ______________________________________
3. Hur lång tid tog tio perioder? ___________________________________________________________
Beräkna hur lång tid (i sekunder) en period är. _____________________________________________
Vad är fördelen med att ta tiden för tio hela perioder istället för en? ___________________________
4. Uppskatta avståndet som pendeln färdas under en fullständig svängning utifrån svaret i fråga 2.
_____________________________________________________________________________________
Varför är detta värde mindre än det faktiska avståndet pendeln färdas under en cykel? ___________
5. Vad är att märka med grafens form? _____________________________________________________
Hur representeras värdet från fråga 1 i grafen? _____________________________________________
Laborationer
6. Hur förändras grafens utseende? Varför? _________________________________________________
_____________________________________________________________________________________
7. Beräkna, utifrån grafens värden, antalet svängningar per sekund. _____________________________
Varför är det enklare att bestämma detta utifrån den andra grafen (5 sekunder) än den första
(10 sekunder)?
_____________________________________________________________________________________
8. Beräkna frekvensen hos svängningen med hjälp av ekvationen. _______________________________
9. Hur påverkas periodtiden om pendeln förkortas? ___________________________________________
Hur påverkas periodtiden om pendeln förlängs? ____________________________________________
10. Hur förhåller sig pendelsvängningens amplitud till avståndet som pendeln färdas under en period?
_____________________________________________________________________________________
Avancerade laborationer
11. Jämför grafen för avstånd–tid med den för hastighet–tid. Anteckna likheter och skillnader. ________
_____________________________________________________________________________________
12. I vilken position har vikten maximal hastighet? _____________________________________________
13. I vilken position har vikten minimal hastighet? _____________________________________________
14. Hur påverkas grafen om pendelns vikt förändras? Varför? ____________________________________
_____________________________________________________________________________________
24
KOMMA IGÅNG MED
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI

Övning 4—Studsande boll lärarhandledningr
Begrepp
Studerad funktion: parabolisk.
Begreppen fritt fall, studsande föremål, gravitation
och konstant acceleration är exempel på paraboliska
funktioner. Den här övningen studerar värdena för
höjd, tid och koefficienten A i andragradsekvationen
Y = A(X H)
2
+ K, som beskriver egenskaperna hos
en studsande boll.
Utrustning
räknare
CBR
räknare-CBR kabel
stor boll (20 cm)
TI ViewScreen (valfritt)
Tips
Den här övningen fungerar bäst om två elever
samarbetar, en som håller bollen och en annan som
trycker på ¤.
Se sidorna 6–12 för tips om effektiv
mätvärdesinsamling.
Grafen ska se ut som en studsande boll. Om den
inte gör det upprepas mätvärdesinsamlingen med
CBR
noga inriktad mot bollen. En stor boll
rekommenderas.
Typiska diagram
3. Grafen avstånd–tid för den här övningen
representerar inte avståndet mellan
bollen.
BALL BOUNCE
skiftar avståndsvärdena så
CBR
och
att grafen stämmer bättre överens med elevernas
intryck av bollens rörelse. y = 0 i grafen är i själva
verket den punkt där bollen befinner sig längst
bort från
CBR
, dvs när bollen träffar golvet.
4. Eleverna ska inse att x-axeln representerar tid,
och inte horisontellt avstånd.
7. Grafen för A = 1 är både inverterad och bredare
än den ursprungliga grafen.
8. A < L1.
9. En parabel som är konkav uppåt; en parabel som
är konkav nedåt; en linjär funktion.
12. Identisk; matematiskt representerar koefficienten
A parabelns kurvatur; fysikaliskt är A beroende
av tyngdaccelerationen, vilken förblir konstant
under alla studsar.
Avancerade laborationer
Bollens studshöjd (maximihöjden för en given studs)
kan härledas ur:
=
hp
x
, där
y
y är studshöjden
0
h är höjden från vilken bollen frigörs
0
p är en konstant som beror på bollens och
0
golvytans fysikaliska egenskaper
x är antalet studsar.
0
Laborationer
Efter att ett föremål frigörs påverkas det endast av
gravitationen (oaktat luftmotståndet). A utgör alltså
tyngdaccelerationen, N9,8 meteràsekund
2
.
Minustecknet anger att accelerationen är
nedåtriktad.
Värdet för A är ungefär hälften
avtyngdaccelerationen, eller N4,9 meteràsekund
2
.
Typiska svar
1. Tid (från starten av mätvärdesinsamlingen);
sekunder; höjd à avståndet mellan bollen och
golvet; meter.
2. Bollens initialhöjd ovanför golvet (topparna
representerar maximihöjden för varje studs);
y = 0 representerar golvet.
För en specifik boll och begynnelsehöjd minskar
studshöjden exponentiellt för varje studs. När x = 0,
y = h, så representerar skärningspunkten med
y-axeln begynnelsehöjden.
Ambitiösa elever kan räkna ut koefficienterna i
ovanstående ekvation utifrån de insamlade
mätvärdena. Upprepa övningen med olika
initialhöjder eller med olika bollar eller golvytor.
Efter att manuellt ha passat in kurvan kan eleverna
använda regressionsanalys för att hitta den funktion
som bäst överensstämmer med mätvärdena. Välj en
av studsarna med funktionerna
SELECT DOMAIN
. Välj sedan
QUIT
PLOT TOOLS
från
och
MAIN MENU
. Följ
räknarens anvisningar för att utföra en kvadratisk
regression för listorna
L1
och L2.
Fördjupning
Integrera arean under grafen hastighet–tid för att
erhålla förflyttningen (färdad sträcka) under ett
valfritt tidsintervall. Observera att avvikelsen är noll
för en fullständig studs (bollen börjar och slutar på
golvet).
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
25

Övning 4—Studsande boll parabolisk
Mätvärdesinsamling
Börja med en teststuds. Släpp bollen (kasta den inte).
➊
minst 0,5 meter ovanför höjden för den högsta studsen. Håll
Placera
Tips:
sensorn rakt ovanför bollen och se till att ingenting störande finns i det fria området
(se sidan 7).
CBR
Kör
➋
➌
➍
➎
RANGER
Välj
APPLICATIONS
Välj
BALL BOUNCE
BOUNCE
Håll bollen med utsträckt arm. Tryck ›.
det här läget kan
Tryck ¤. När den gröna lampan börjar blinka släpper du bollen och tar ett steg
➏
tillbaka. (Om bollen studsar i sidled flyttar du dig för att bibehålla
bollen, men var noga med att inte ändra höjden för
-programmet (se sidan 5 för räknarnas olika tangentsekvenser).
från
MAIN MENU
från menyn
. Välj sedan
APPLICATIONS
METERS
.
. Några allmänna anvisningar visas.
ställer automatiskt in inställningarna.
-programmet är nu i triggläge. I
.)
CBR
kopplas loss från räknaren.
CBR
RANGER
rakt ovanför
CBR
Du hör ett klickande ljud när mätvärdena samlas in. Insamlade värden är tid och
avstånd, och utifrån dessa beräknas värdena för hastighet och acceleration fram.
Om
Tryck ›. (Om grafen inte ser bra ut upprepas mätvärdesinsamlingen.) Studera
➐
har kopplats loss återansluts den till räknaren när insamlingen är klar.
CBR
grafen. Besvara frågorna 1 och 2 på arbetsbladet.
Observera att
➑
BALL BOUNCE
automatiskt har skiftat avståndsvärdena. Besvara
frågorna 3 och 4.
BALL
26
KOMMA IGÅNG MED
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI

Övning 4—Studsande boll
Laborationer
Studsens graf för avstånd–tid bildar en parabel.
(forts)
parabolisk
Tryck ›. Välj
➊
PLOT TOOLS
från
PLOT MENU
och sedan
SELECT DOMAIN
. Vi avser att
välja den första studsen. Flytta markören till basen av studsens början och tryck
›. Flytta markören sedan till basen av studsens slut och tryck ›. Grafen ritas
om och fokuseras på den markerade studsen.
Grafen är i läge
➋
. Bestäm studsens vändpunkt. Besvara fråga 5 på
TRACE
arbetsbladet.
Återgå till
➌
Formen av kurvans övre del för andragradsekvationen, Y = A(X H)
➍
PLOT MENU
lämplig för denna analys. Tryck
andragradsekvationen: Yn=A(XH)
Från grundfönstret anger och lagrar du höjdvärdet som registrerades i fråga 5 i
➎
med ›. Välj
œ. Stäng av alla valda funktioner i
MAIN MENU
2
+K.
och sedan
QUIT
.
2
+ K, är
editorn. Ange
Y=
variabel K, lagra sedan motsvarande tidsvärde i variabel H och lagra till sist värdet 1 i
variabel A.
Tryck för att ta fram grafen. Besvara frågorna 6 och 7.
➏
Försök med A = 2, 0, –1. Fyll i den första delen av tabellen i fråga 8 och
➐
besvara sedan fråga 9.
Välj dina egna värden för A tills du får en god överensstämmelse av grafen.
➑
Registrera dina värden för A i tabellen i fråga 8.
Upprepa övningen, men välj nu den sista (längst till höger) fullständiga studsen.
➒
Besvara frågorna 10, 11 och 12.
Avancerade laborationer
Upprepa mätvärdesinsamlingen men välj inte en enstaka parabel.
➊
Registrera tiden och höjden för varje efterföljande studs.
➋
Bestäm förhållandet mellan studsarnas olika höjder.
➌
Förklara innebörden, om det finns någon, av detta förhållande.
➍
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
27

Övning 4—Studsande boll
Namn ____________________________________
Mätvärdesinsamling
1. Vilken fysikalisk storhet representeras på x-axeln? __________________________________________
Vilken enhet används? _________________________________________________________________
Vilken fysikalisk storhet representeras på y-axeln? __________________________________________
Vilken enhet används? _________________________________________________________________
2. Vad representerar grafens högsta punkt? _________________________________________________
Vad representerar grafens lägsta punkt? __________________________________________________
3. Varför skiftas grafen av
BALL BOUNCE
? ____________________________________________________
4. Varför ser grafen ut som om bollen studsat utmed golvet? ___________________________________
Laborationer
5. Registrera maximihöjden och motsvarande tidsvärde för den första studsen. ____________________
A
6. Matchade grafen för
= 1 den ursprungliga grafen? _______________________________________
7. Varför eller varför inte? _________________________________________________________________
8. Fyll i nedanstående tabell.
A Hur väl överensstämmer grafen med Yn-grafen?
1
2
0
1
-
A
9. Vad innebär ett positivt värde för
Vad innebär ett negativt värde för
Vad innebär ett nollvärde för
? _____________________________________________________
A
? _____________________________________________________
A
? _________________________________________________________
10. Registrera maximihöjden och motsvarande tidsvärde för den sista fullständiga studsen. ___________
A
11. Tror du att
12. Hur väl överensstämde
Vad tror du att
28
KOMMA IGÅNG MED
kommer att vara större eller mindre i den sista studsen? __________________________
A
? ______________________________________________________________
A
representerar? _________________________________________________________
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
Övning 5—Rullande boll lärarhandledning
Begrepp
Studerad funktion: parabolisk.
Att plotta avståndet till en boll som rullar nedför
en ramp med varierande lutning resulterar i ett
antal olika kurvor, som i sin tur kan uttryckas med
ett antal olika andragradsekvationer. Den här
övningen studerar koefficientvärdena i
andragradsekvationen y = ax
2
+ bx + c.
Utrustning
räknare
CBR
räknare-CBR kabel
fästanordning
stor boll (20 cm)
lång ramp (minst 2 meter — en lätt bräda
fungerar utmärkt)
gradskiva (för att mäta vinklar)
böcker för att stötta rampen
TI ViewScreen (valfritt)
Tips
Diskutera igenom hur rampens vinkel ska mätas.
Låt eleverna vara kreativa här. De kan välja att
göra en trigonometrisk beräkning, använda ett
vikt papper eller en gradskiva.
Se sidorna 6–12 för tips om effektiv
mätvärdesinsamling.
Typiska diagram
3. Varierar (ska vara en halv parabel som är
konkav uppåt).
4. En parabel (andragradsfunktion).
5. Varierar.
6. Varierar (ska vara en parabel med tilltagande
kurvatur).
7. För 0¡ ska grafen vara linjär och plan (bollen
kan inte rulla); för 90¡ är grafen densamma
som för en fritt fallande boll.
Laborationer
Rörelsen hos en kropp som endast påverkas av
gravitationen är ett populärt ämne i fysikaliska
undersökningar. En sådan rörelse kan uttryckas
som ett specialfall av en andragradsekvation:
s = ½at
0
0
0
0
I andragradsekvationen y = ax
representerar y avståndet mellan
2
+ v
t + s
i
där
i
s är ett föremåls position vid tiden t
a är dess acceleration
är dess begynnelsehastighet
v
i
är dess startposition.
s
i
2
+ bx + c,
CBR
och bollen
vid tiden x om bollens startposition var c,
begynnelsehastighet var b och accelerationen är
2a.
Avancerade laborationer:
Eftersom bollen befinner sig i vila när den släpps
ska b närma sig noll för varje försök. c ska närma
sig initialavståndet, 0,5 meter. a ökar vartefter
lutningsvinkeln ökar.
15
¡
30
¡
Typiska svar
1. Det tredje diagrammet.
2. Tid; sekunder; föremålets avstånd från CBR;
meter.
Om eleverna beräknar ekvationen
2
y = ax
+ bx + c manuellt kan det vara
nödvändigt att tipsa om värdena för b och c. Du
kan även be dem att utföra en kvadratisk
regression utifrån listorna
L1
och L2 i deras
räknare. Bollens acceleration beror på jordens
gravitation. Det betyder att ju mer rampen lutar
(ju större lutningsvinkel) desto större värde får a.
Maximum för a inträffar vid q = 90¡, och
minimum vid q = 0¡. Närmare bestämt så är a
proportionellt mot sinus för q.
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
29

Övning 5—Rullande boll parabolisk
Mätvärdesinsamling
➊
Besvara fråga 1 på arbetsbladet. Arrangera rampen så att den har en lutning på
15°. Montera fästanordningen på rampens övre kant. Koppla fast
fästanordningen. Öppna sensorhuvudet och rikta in det vinkelrätt mot rampen.
Anslut räknaren till
CBR
.
CBR
på
Gör en markering på rampen 0,5 meter från
. Låt en elev hålla bollen på denna
CBR
markering medan en annan elev håller i räknaren.
Rikta sensorn rakt mot bollen och kontrollera att ingenting störande finns i det
Tips:
fria området (se sidan 7).
Kör
➋
➌
RANGER
SETUPàSAMPLE
Ta fram inställningarna med ›. I den här övningen ska du ha följande
-programmet (se sidan 5 för räknarnas olika tangentsekvenser). Välj
från
MAIN MENU
.
inställningar:
REALTIME: NO
TIME (S): 3 SECONDS
DISPLAY: DISTANCE
BEGIN ON: [ENTER]
SMOOTHING: LIGHT
UNITS: METERS
➍
➎
➏
➐
30
KOMMA IGÅNG MED
Information om hur du ändrar inställningarna finns på sidan 38.
När inställningarna är gjorda väljer du
›.
START NOW
. Starta mätvärdesinsamlingen med
När det klickande ljudet hörs släpper du bollen direkt (knuffa den inte) och tar ett
steg tillbaka.
När insamlingen är klar visas grafen för avstånd–tid automatiskt. Besvara frågorna
2 och 3.
Ta fram
PLOT MENU
markören till den punkt där bollen släpptes och tryck på
den punkt där bollen nådde rampens ände och tryck på
med ›. Välj
PLOT TOOLS
och sedan
SELECT DOMAIN
›. Flytta markören till
›. Grafen ritas om och
. Flytta
fokuseras på den delen av mätvärdesinsamlingen som motsvarar bollens rullande
nedför rampen. Besvara frågorna 4 och 5.
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI

Övning 5—Rullande boll
Laborationer
Studera vad som händer vid olika lutningar.
Förutsäg vad som kommer hända om lutningen ökar. Besvara fråga 6.
➊
Justera lutningen till 30¡. Upprepa steg 2 till 6 på föregående sida. Lägg till den
➋
här grafen i teckningen för fråga 6, märkt 30¡.
Upprepa steg 2 till 6 på föregående sida för lutningarna 45¡ och 60¡ och lägg till
➌
även dessa i teckningen.
➍
Besvara fråga 7.
Avancerade laborationer
Justera tidsvärdena så att x = 0 för initialhöjden (vid tidpunkten då bollen släpptes). Du
kan göra detta manuellt genom att dra ifrån x-värdet för den första punkten från alla
punkter i grafen. Du kan också ange
(forts)
L1(1)"A:L1NA"L1
parabolisk
.
Beräkna värdena för a, b och c för alla kurvorna på formen y = ax
➊
15¡, 30¡, 45¡, 60¡ och 90¡.
Vad är maximi- och minimivärdet för a? Varför?
➋
Skriv ett uttryck som beskriver det matematiska förhållandet mellan a och
➌
lutningsvinkeln.
2
+ bx + c vid 0¡,
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
31
Övning 5—Rullande boll
Namn ____________________________________
Mätvärdesinsamling
1. Vilket av dessa diagram tror du matchar grafen avstånd–tid för en boll som rullar nedför en ramp?
2. Vilken fysikalisk storhet representeras på x-axeln? __________________________________________
Vilken enhet används? _________________________________________________________________
Vilken fysikalisk storhet representeras på y-axeln? __________________________________________
Vilken enhet används? _________________________________________________________________
3. Rita av grafens utseende. Rubricera axlarna. Rubricera grafen vid punkterna där bollen släpptes och
där den nådde rampens ände.
4. Vilken typ av funktion tror du att grafen representerar? _____________________________________
5. Beskriv hur din förståelse förändrats mellan valet av graf i fråga 1 och kurvan du ritade i fråga 3.
_____________________________________________________________________________________
Laborationer
6. Rita hur du tror att grafen kommer att se ut med en större lutning. (Rubricera den Förutsägelse.)
7. Rita och rubricera graferna för 0
¡ och 90¡:
32
KOMMA IGÅNG MED
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI

Lärarinformation
Hur kan dina lektioner förändras med CBR?
är ett system som är enkelt att använda och som inbegriper funktioner vilka gör det
CBR
lätt att integrera
erbjuder markant förbättrade möjligheter jämfört med andra metoder för
CBR
mätvärdesinsamling som annars kan användas. Detta kan i sin tur medföra att
lektionstiden behöver struktureras om allteftersom dina elever blir positivare till att
använda verklighetsbaserad information.
Du kommer att finna att eleverna känner ett större ansvar för mätvärdena då de själva
0
deltar i insamlingsprocessen än då de använder läroböcker, tidskrifter eller
statistiksamlingar. Detta inskärper att de fysikaliska begrepp som studeras på
lektionerna är förankrade i verkligheten och inte bara utgör abstrakta idéer. Det
medför också att varje elev kommer att vilja vara med och samla in mätvärdena.
i lektionsarbetet.
CBR
Mätvärdesinsamling med
0
är betydligt effektivare än att tänka ut en mätsituation
CBR
och sedan mäta med linjal och stoppur. Eftersom fler mätvärdespunkter ger en högre
upplösning och en akustisk rörelsedetektor mäter mycket noggrant blir kurvornas
form tydligare. Du behöver använda mindre tid för mätvärdesinsamling och kan ägna
mer åt analys och granskning.
0
Med
kan eleverna utforska upprepbarheten av observationer och variationer i
CBR
hypotetiska situationer. Frågor som ”Erhålls samma parabel om en boll släpps från en
högre höjd?” och ”Är parabeln densamma för första studsen som för den sista?” blir
naturliga och värdefulla fördjupningar.
Styrkan i visualiseringen gör att eleven snabbt kan associera informationen i grafen
0
med de fysikaliska storheter och matematiska funktioner som informationen
representerar.
Andra förändringar inträffar efter att mätvärdena har samlats in. Med
kan eleverna
CBR
studera underliggande samband – både numeriska och grafiska.
Grafisk information
Använd de automatiskt genererade graferna för avstånd, hastighet och acceleration som
funktion av tiden för att undersöka följande:
Vad är den fysikaliska motsvarigheten till skärningspunkterna med y- och x-axlarna,
0
grafens lutning, maximivärden, minimivärden, derivata och integral?
Hur känner vi igen funktionen (linjär, parabolisk, etc) utifrån grafens utseende?
0
Hur kan vi finna en representativ funktion för mätvärdena? Vilken betydelse har de
0
olika koefficienterna i en viss funktion (t ex AX
Numerisk information
Eleverna kan tillämpa statistiska metoder (medelvärde, medianvärde, standardavvikelse,
etc) som är lämpliga för deras utbildningsnivå. När du avslutar
du påmind om listorna i vilka
REALTIME=NO
acceleration finns lagrade.
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
-värden för tid, avstånd, hastighet och
FINNS MED PÅ KOPIAN
TI
2
+ BX + C)?
RANGER
KOMMA IGÅNG MED
-programmet blir
CBR
33

Lärarinformation
(forts)
CBR-grafer — koppla samman verklighet och matematik
Graferna som genereras från mätvärden som
RANGER
samlat in utgör visuella
representationer av sambandet mellan fysiska och matematiska rörelsebeskrivningar.
Eleverna bör uppmuntras att betrakta, analysera och diskutera grafens form både i
fysiska och matematiska termer. Ytterligare förståelse och nya upptäckter kan uppnås
när funktionerna matas in i Y= editorn och visas tillsammans med graferna.
En graf avstånd–tid representerar ett föremåls ungefärliga position (avstånd från
0
CBR
vid varje tidpunkt som ett mätvärde samlas in. Enheten för y-axeln är meter och
sekunder för x-axeln.
En graf hastighet–tid representerar ett föremåls ungefärliga hastighet (relativt
0
positionen för, och i linje med
) vid varje tidpunkt som ett mätvärde samlas in.
CBR
Enheten för y-axeln är meteràsekund och sekunder för x-axeln.
En graf acceleration–tid representerar ett föremåls ungefärliga hastighetsförändring
0
(relativt positionen för, och i linje med
in. Enheten för y-axeln är meteràsekund
Den första derivatan (momentan lutning) för en valfri punkt på grafen avstånd–tid är
0
) vid varje tidpunkt som ett mätvärde samlas
CBR
2
och sekunder för x-axeln.
hastigheten vid den tidpunkten.
Den första derivatan (momentan lutning) för en valfri punkt på grafen hastighet–tid är
0
accelerationen vid den tidpunkten. Detta är också den andra derivatan för en valfri
punkt på grafen avstånd–tid.
En bestämd integral (arean mellan grafen och x-axeln mellan två valfria punkter) för
0
grafen hastighet–tid motsvarar föremålets avvikelse (den totala förflyttningen) under
det aktuella tidsintervallet.
)
0
Fart och hastighet används ofta som likbetydande. Termerna är visserligen besläktade
men skiljer sig åt i betydelse. Fart är en skalär kvantitet som har magnitud men ingen
riktningsbestämning, t ex ”2 meter per sekund”. Hastighet är egentligen en
vektorkvantitet som både har riktningsangivelse och magnitud, t ex ”2 meter per
sekund norrut”.
-diagram för hastighet–tid representerar hastighetskomposanten i
Ett typiskt
CBR:ns mätriktning. Ett positivt hastighetsvärde indikerar en rörelse bort från
ett negativt värde en rörelse mot
mäter endast avståndet längs en linje från detektorn. Om ett föremål rör sig i
CBR
CBR
CBR
CBR
.
vinkel till denna linje beräknas endast hastigheten parallellt med linjen. Om ett föremål
exempelvis rör sig vinkelrätt mot
-linjen visas hastigheten noll.
CBR
och
34
KOMMA IGÅNG MED
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI

Lärarinformation
(forts)
Matematiken för avstånd, hastighet och acceleration
d
2
d
V
1
medel
=
@d
@t
t
1
=
t
2
N d
d
2
1
= lutningen på grafen avstånd–tid
N t
t
2
1
Avstånd-tid diagram
V
momentant
v
1
v
2
=
lim
@t"
@d
(
0
@t
d(s)
=
)
där s = avstånd
dt
Hastighet–tid diagram
t
t
1
2
N v
v
A
medel
A
momentant
=
@v
@t
=
=
lim
@t"
t
0
2
1
= lutningen på grafen hastighet–tid
N t
2
1
@v
(
@t
dv
=
)
dt
Arean under grafen hastighet–tid från t1 till t2 = @d = (d
till t2 (den totala förflyttningen).
t
1
t=2
⌠
⌡
t=1
v(dt)
M.a.o., @d =
(
t=2
v(@t)
∑
t=1
eller @d =
)
) = lägesförändringen från
2Nd1
@
t
t
t
1
2
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
Acceleration-tid diagram
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
35

Lärarinformation
Web-sideresurser
(forts)
På web-sidan,
En lista över tilläggsmaterial till
0
Ett antal program till
0
En övningssida med tillämpningar som utvecklas och delas av lärare.
0
-program som ger tillgång till ytterligare
0
CBR
Utförlig information om
0
Ytterligare resurser
Texas Instruments böcker i serien Explorations tillhandahåller material som berör
grafritande TI-räknare, inklusive lektionsövningar för
matematikundervisning på gymnasienivå.
http:ààwww.ti.comàcalc
CBR, CBL
CBR, CBL
och grafritande TI-räknare.
-inställningar och programmeringskommandon.
CBR
, finns:
och grafritande TI-räknare.
-funktioner.
CBR
vilka är lämpliga för
CBR
36
KOMMA IGÅNG MED
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
CBR
TI
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN

CBR-värdena lagras i listor
I listorna L1, L2, L3 och L4 lagras de insamlade värdena
När
Varje gång
0
0
0
0
samlar in mätvärden överförs dessa automatiskt till räknaren och lagras i listor.
CBR
RANGER
innehåller tidsvärden.
L1
innehåller avståndsvärden.
L2
innehåller hastighetsvärden.
L3
innehåller accelerationsvärden.
L4
-programmet avslutas blir du påmind om var mätvärdena har lagrats.
Exempel: det femte elementet i lista L1 representerar tidpunkten då den femte
mätpunkten samlades in, och det femte elementet i lista
den femte mätpunkten.
I läge
REALTIME=YES
beräknas och överförs endast värdena för den begärda grafen
(avstånd, hastighet eller acceleration). I
I lista L5 lagras inställningarna
Bilden
RANGER SETUP
sidan 38).
När
RANGER
-programmet överförs från
innehåller standardvärdena.
Ytterligare information om programmeringskommandon som ändrar andra inställningar
finns på sidorna 40–41.
REALTIME=NO
gör det enkelt att ändra de
ersätts L5 automatiskt med en ny lista som
CBR
representerar avståndet för
L2
beräknas och överförs alla värden.
-parametrar som används oftast (se
CBR
Användning av listorna
Listorna raderas inte när
grafiska, statistiska och numeriska undersökningar och analyser.
Du kan plotta listorna mot varandra, ta fram dem i listeditorn, använda regressionsanalys
och utföra andra analytiska aktiviteter. Du kan t ex samla in mätvärden från en
pendelrörelse med
acceleration för att studera elliptiska funktioner. (Du kan behöva justera fönstret.)
RANGER
RANGER
-programmet avslutas. De kan användas för vidare
, avsluta
RANGER
och sedan plotta grafen hastighet–
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
37
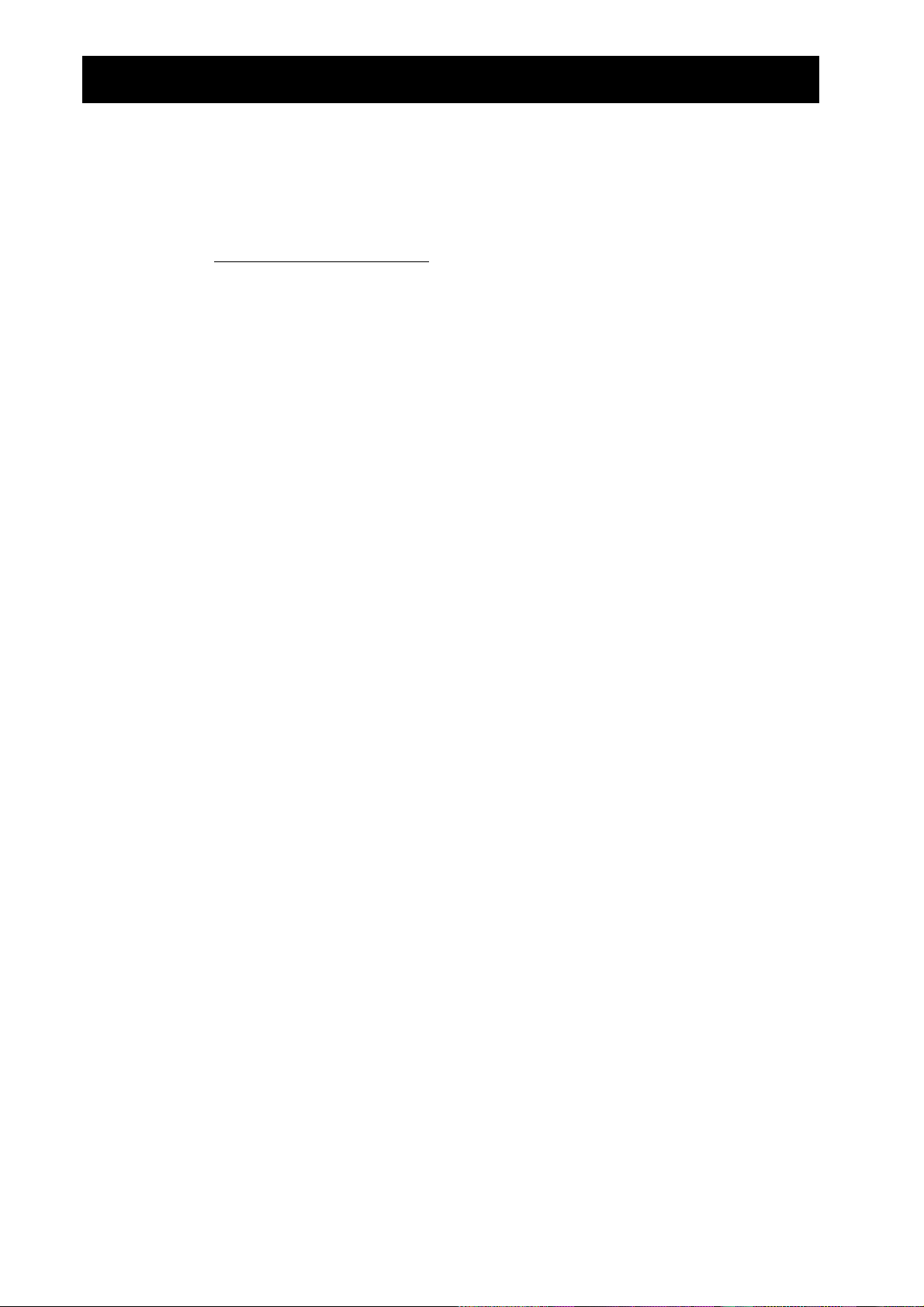
RANGER-inställningar
Ändra RANGER-inställningarna
RANGER
➊
visar de inställningar som oftast används innan mätvärdesinsamlingen börjar.
Välj
SETUPàSAMPLE
från
MAIN MENU
i
RANGER
-programmet. De aktuella
inställningarna visas. 4 anger markörens placering.
MAIN MENU
REALTIME:
TIME (S):
DISPLAY:
BEGIN ON:
SMOOTHING:
Tryck c eller b för att ta fram inställningen som du vill ändra.
➋
Tryck
➌
›
trycker du på c för att gå vidare. Om du vill ändra
UNITS:
START NOW
YES
&
&
&
&
&
&
eller
TOTAL TIME
DISTANCE, VELOCITY
[ENTER], [TRIGGER],
NONE, LIGHT, MEDIUM
METERS
eller
NO
= 1–99
FEET
SECONDS
,
ACCELERATION
eller
10-SECOND DELAY
eller
,
HEAVY
eller
(
REALTIME=NO
endast
för att bläddra igenom tillgängliga alternativ. När önskat alternativ visas
anger du en eller två siffror
TIME
och trycker sedan på c eller b.
När alla inställningar är de önskade trycker du på c eller b tills markören befinner
➍
sig på
START NOW
0
Fortsätt genom att trycka på
0
För att återgå till
De nya inställningarna blir kvar tills du väljer
annat program som ändrar inställningarna. Om du gör ändringar i
programmet eller raderar
.
.
›
MAIN MENU
, kan standardinställningarna återställas nästa gång
L5
trycker du på e och sedan på
SET DEFAULTS
, kör en tillämpning eller kör ett
›
utanför
L5
.
körs.
)
RANGER
RANGER
-
Återställa RANGER-inställningarnas standardvärden
Standardinställningarna är tillämpliga för ett stort antal olika situationer. Om du är
osäker på vilka inställningarna som är de bästa bör du börja med att använda
standardinställningarna och därefter justera dessa.
➊
Välj
SET DEFAULTS
från
MAIN MENU
i
RANGER
Inställningarna ändras till standardvärdena och bilden
Om du vill ändra någon av standardinställningarna följer du ovanstående
➋
anvisningar.
Fortsätt genom att trycka på
➌
när markören befinner sig på
›
Övriga RANGER-inställningar
RANGER
antal inställningar till i
-programmet använder de inställningar som ändras oftast. Därtill finns det ett
. Ytterligare information om att ändra dessa inställningar med
CBR
programmeringskommandon finns på sidorna 40–41.
-programmet.
SETUP
visas.
START NOW
.
38
KOMMA IGÅNG MED
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI

Använda CBR med CBL eller med CBL-program
Använda CBR som en konventionell rörelsedetektor med CBL
kan användas som en konventionell rörelsedetektor med Texas Instruments system
CBR
(Calculator-Based Laboratoryé).
CBL
é
Specialkabeln som krävs för att
ansluta
CBR
till
CBL
ingår.
Anslut inte
ansluten till
Du kan behöva ändra
fungerar inte med
CBR
CBL
till
.
samtidigt som
CBL
-programmet enligt nedanstående sidor.
CBL
.
CBL
Använda CBR med program skrivna för CBL
kan användas med de flesta
CBR
CBL
rörelsedetektorer utan att några ändringar (eller endast smärre sådana) behöver göras i
programmet.
Stoppa mätvärdesinsamlingen: Vissa
med
REALTIME=YES
resulterar i att
mätvärdesinsamlingen när insamlingen är klar kan du då göra något av följande:
Tryck på ¤ på
0
Lägg till några satser i
0
.
CBR
-programmet som sänder kommandot {6,0} till
CBL
Programsatsen måste ligga på en position då mätvärdena har överförts och visats.
T ex:
{6,0}"L6:SEND L6
Stänga av ljudet: Om du vill stänga av ljudet lägger du till några satser i
programmet som sänder kommandot {6,3} till
position innan datainsamlingen börjar. T ex:
är ansluten till en räknare. Räknaren måste vara
CBR
RANGER
-program som har skrivits uteslutande för
-program som använder mätvärdesinsamling
CBL
fortsätter att sampla utan slut. För att stoppa
CBR
. Programsatsen måste ligga på en
CBR
-programmet
.
CBR
-
CBL
{6,3}"L6:SEND L6
För att sätta på ljudet kör du bara
Om problem uppstår: Om du kör ett
inte svarar kör du
RANGER
-programmet. Kontrollera web-sidan för TI-räknare (se sidan
36) där det kan finnas en uppdaterad version av
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
RANGER
TI
-programmet.
-program och
CBL
FINNS MED PÅ KOPIAN
CBR
-programmet.
CBL
verkar ha hängt sig eller
KOMMA IGÅNG MED
CBR
39
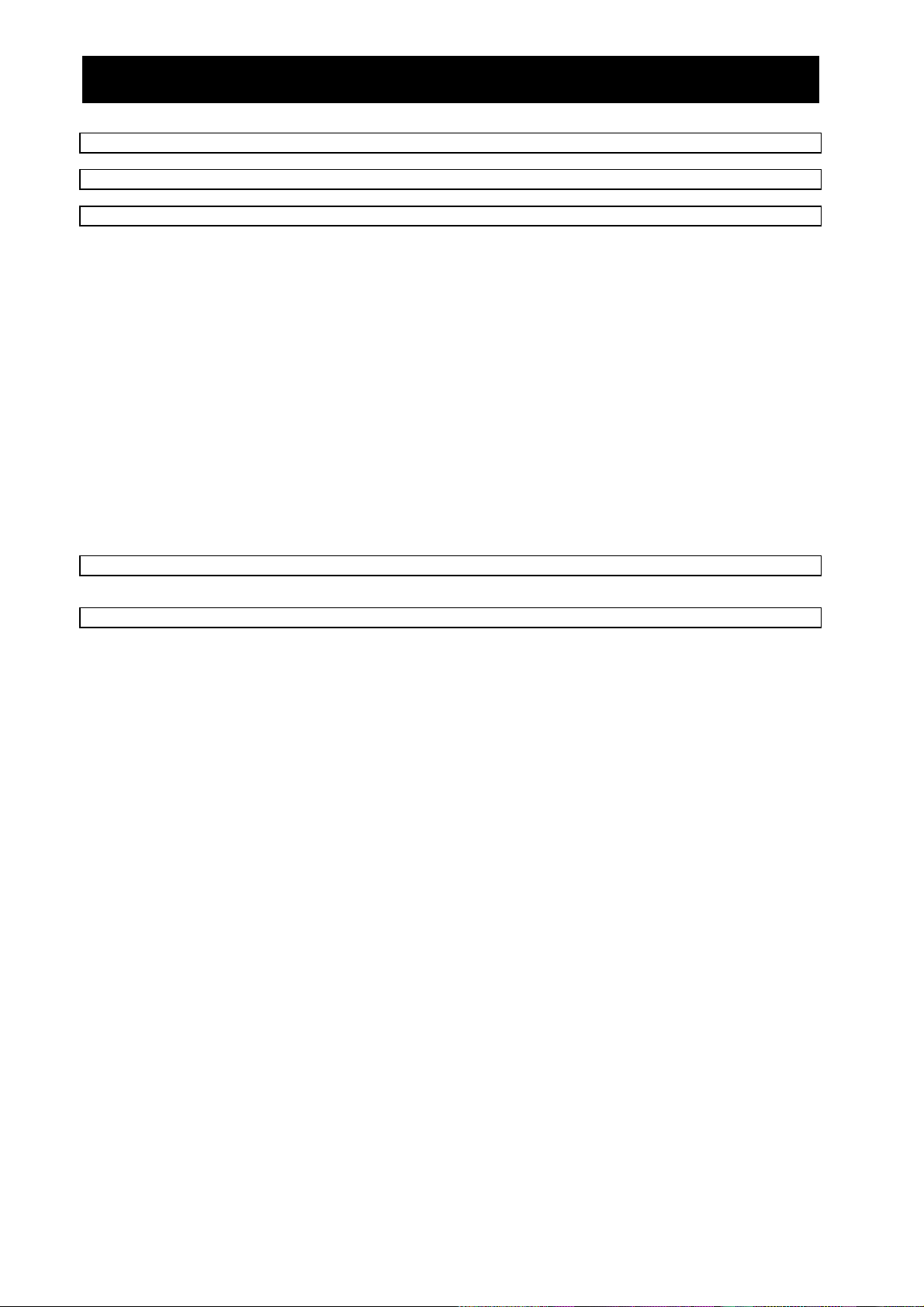
Programmeringskommandon
Command 0 Rensar och återställer systemet {0}
Rensar allt. Återställer startstandardvärdena vid påslagning. Kanal 11 väljs automatiskt.
Command 1 Rensar kanal {1,0}
Rensar kanal
Command 1 Kanal {1,11,
operation
REALTIME=NO
0(
REALTIME=NO
1(
REALTIME=NO
2(
REALTIME=NO
3(
operation
REALTIME=YES
0(
REALTIME=YES
1(
REALTIME=YES
2(
REALTIME=YES
3(
REALTIME=YES
4(
REALTIME=YES
5(
REALTIME=YES
6(
REALTIME=YES
7(
post_processing
0 (standardvärde) Inget
1(
2(
temperature_conversion
0 (standardvärde) Avaktiverar temperaturkompensation.
1 Aktiverar temperaturkompensation.
REALTIME=NO
REALTIME=NO
) Rensar allt. Återställer startvärden.
) Meter
) Meter
) Fot
) Rensar allt. Återställer startvärden.
) Meter,
) Meter,
) Fot,
) Meter,
) Fot,
) Meter,
) Fot,
)dàdt (första ordningens derivata)
)d
Command 2 Datatyp {2,
data_type
1 (standardvärde) Lista
Command 3 Insamling/Triggning {3,
sample_time
0.005–1500 (0.1) Tid i sekunder mellan varje insamling.
0.0001–0.005 Avrundat till 0.005.
1500<x<16000 Avrundat till 1500.
sample#
L1 Väljer datainsamlingsläge
REALTIME=NO
1–512 (
trigger
0 Påbörjar insamlingen utan triggning.
1 (standardvärde) Påbörjar insamlingen med ¤.
7 10 sekunders fördröjning innan insamlingen påbörjas.
record_time
0 (standardvärde) Inget.
REALTIME=NO
1(
REALTIME=NO
2(
filter
(se "command 1", fältet "operation")
0 (standardvärde) Ingen filtrering.
REALTIME=NO
1 (
REALTIME=NO
2 (
REALTIME=NO
3 (
REALTIME=NO
4 (
REALTIME=NO
5 (
REALTIME=NO
6 (
REALTIME=YES
7 (
REALTIME=YES
8 (
REALTIME=YES
9 (
) Utför från 1 till 512 insamlingar.
) Absolut tid (startar vid tiden 0 och justerar sedan insamlingstiden).
) Relativ tid (startar vid tiden 0 och justerar sedan insamlingstiden).
) 5-punkters Savitzsky-Golay-utjämning.
) 9-punkters Savitzsky-Golay-utjämning.
) 17-punkters Savitzsky-Golay-utjämning.
) 29-punkters Savitzsky-Golay-utjämning.
) 3-punkters mediantrimningsfilter.
) 5-punkters mediantrimningsfilter.
) Lätt
) Medium
) Kraftigt
Resultat
Resultat
Resultat
2
Resultat
data_type
Resultat
sample_time,sample#,trigger
Resultat
Resultat
Resultat
Resultat
Resultat
operation,post_processing
CBR
returnerar {
CBR
returnerar {
CBR
returnerar {
CBR
returnerar {
CBR
returnerar {
CBR
returnerar {
CBR
returnerar {
àdt2 (andra ordningens derivata)
avstånd,@tid
avstånd,@tid
avstånd,@tid
avstånd,hastighet,@tid
avstånd,hastighet,@tid
avstånd,hastighet,acceleration,@tid
avstånd,hastighet,acceleration,@tid
,0,0,0,0,0,0,0}
REALTIME=YES
REALTIME=YES
REALTIME=YES
REALTIME=YES
spårningsfilter.
spårningsfilter.
spårningsfilter.
temperature_conversion
,0,
}
}
}
}
}
,0,0,0,0,
record_time,filter
.
}
}
}
}
40
KOMMA IGÅNG MED
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI

Programmeringskommandon
(forts)
Command 4 Temperaturkompensation {4,
equation#
equation_type
temperature
units
Command 5 (
first_channel
data_select
data_begin
data_end
0 (standardvärde) Rensar alla ekvationer.
4 Väljer ekvation 4.
0 (standardvärde) Rensar ekvationen.
13 Väljer temperaturkompensation.
Tal med flytande komma Ställer in aktuell temperatur.
0 (standardvärde) Inget (ignoreras av
1 Sätter enhet till Fahrenheit.
2 Sätter enhet till Celsius.
3 Sätter enhet till Kelvin.
4 Sätter enhet till Rankin där R = F + 459.7.
REALTIME=NO
0 (standardvärde) Väljer lägsta aktiva kanal.
1, 2, 3, 11, 21 Anger ljudkanal.
M1 Registrerar tidslista.
0 Filtredata {avstånd}
1 Filtredata dàdt {hastighet}
2 Filtredata d
3 Rådata {avstånd}
4 Rådata dàdt {hastighet}
5 Rådata d
1–512 Första dataelement för GET
0–512 Sista dataelement för GET (0 = sista insamlingen)
) Datainställningar {5,
Resultat
Resultat
Resultat
Resultat
Resultat
Resultat
Resultat
Resultat
Command 6 Systemalternativ {6,
system_command
0 Stoppar insamling (för CBL-kompatabilitet).
2 (standardvärde) Stoppar insamling.
3 Stänger av ljudet (ljudet på vid påslagning).
4 Sätter på ljudet (ljudet på vid påslagning).
5 Ställer in ID-nummer (
6 Tillämpar nytt filter på tidigare data (
operation
Tal med flytande komma ID-nummer på formen
0–6 Nytt filter för tidigare insamlade data (
Resultat
Resultat
Command 7 Statusbegäran {7}
Returnerar en lista med:
10.rrrr Enhetskod.ROM-version.
0–99 Senaste felkod (0 = inget fel).
0–2 Batteristatus (0 = OK; 1 = lågt under insamling; 2 = lågt hela tiden).
11 Ljudkanalsidentifierare.
sample_time Aktuellt insamlingsintervall i sekunder.
trigger_condition Aktuellt triggalternativ.
function Aktuell kanalfunktion (1–9).
post_processing Aktuellt efterbearbetningsalternativ (0–2).
filter Aktuell filtreringsnivå (0–9).
samples Antal tillgängliga insamlingar; 0–512
recorded_time Alternativ för registrerad tid (0–2).
temperature Temperatur används (¡C)
piezo_flag 0 = ljud av; 1 = ljud på
system_state 1 = ej inställd; 2 = aktiverad; 3 = triggad/samlar in; 4 = klar
window_start 0 = ännu inget "command 5"; 1–512
window_end 0 = använd elementantal; 1–512
id_number 6-siffrigt ID (standard 0.00000) sätts med command 6
equation#,equation_type,temperature,units
CBR
). Sätter T-grader till Celsius.
first_channel,data_select,data_begin,data_end
2
àdt2 {acceleration}
2
àdt2 {acceleration}
system_command[,operation]
operation
n.nnnnn
}
krävs).
operation
system_command
(
system_command
krävs).
REALTIME=NO
system_command
= 5)
}
}
= 5)
= 6)
REALTIME=YES
; M1
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
41

Batterier
Batterityp
är konstruerad för att användas med fyra alkaliska batterier av typen AA. Utan
CBR
batterier kan
Batteriinstallation
endast användas om den samtidigt är ansluten till en
CBR
CBL
.
Håll
uppochner och skjut batteriluckan mot baksidan av
CBR
med tummen. Stoppa i
CBR
batterierna i enlighet med figuren som finns i batterifacket. Två av batterierna ska
placeras med den positiva änden upp mot markeringen +. De två andra batterierna
placeras tvärt om med den negativa änden upp mot markeringen -. Sätt tillbaka locket.
är nu klar för att användas.
CBR
Varning för låg batterispänning
har två funktioner som båda indikerar att batterispänningen är låg:
CBR
0
RANGER
-programmet visar ett varningsmeddelande i graffönstret under
mätvärdesinsamlingen.
0
Den röda lampan blinkar periodiskt under mätvärdesinsamlingen.
Batteristatus
Batterispänningen kan kontrolleras innan en mätvärdesinsamling påbörjas. Välj
från
MAIN MENU
Viktig batteriinformation
0
Ersätt alltid alla fyra batterierna samtidigt. Blanda inte batterier från olika tillverkare.
och sedan
CBR STATUS
. Batteristatus OK eller
REPLACE
visas.
TOOLS
Blanda inte olika batterityper från samma tillverkare.
0
Installera alltid batterierna enligt figuren i batterifacket.
0
Släng de gamla batterierna direkt och på lämpligaste sätt. Lämna dem inte inom
räckhåll för barn.
0
Undvik att upphetta, bränna eller göra hål på batterierna. Batterierna innehåller giftiga
ämnen som kan explodera eller börja läcka.
0
Blanda inte uppladdningsbara batterier med sådan som inte kan laddas om.
0
Placera inte batterier som inte kan laddas om i en batteriladdare.
42
KOMMA IGÅNG MED
CBR
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI

Om du får problem
g
g
gg
g
gg
g
g
j
g
y
g
g
g
g
Om du får följande problem: Försök med:
Svårigheter vid överföring av
RANGER
-programmet eller
datainsamling.
CBR
börjar samla in data av si
själv.
Kontrollera att anslutnin
en räknare-
båda ändar helt och hållet.
Kontrollera att batterierna är laddade (se sidan 42).
Om du lä
däri
er CBR med knappen
enom aktivera insamlingen. Tryck på
CBR
¤
insamlingen.
CBR
ska du avsluta
CBR
- eller
en räknare-
CBL
-program som eventuellt körs.
CBR
CBR
Meddelandet:
LINK ERROR
Innan du lä
Detta gäller även andra
. Anslut
Kontrollera att anslutnin
er undan
CBR
till räknaren med räknare-
båda ändar helt och hållet.
Om du inte vill (eller inte kan) ansluta
CBR
att avbryta programmet och väljer sedan
Otillräckligt med minne. Det måste finnas tillräckligt med minne för
datalistorna. Pro
rammet och listorna kräver cirka 17 500 byte. Ta bort
program och/eller data som inte behövs.
Räknaren motsvarar inte
övningarnas anvisningar.
Värdena ser felaktiga ut:
0
Punkter ligger utanför kurvan.
0
Hackiga grafer.
0
Plana grafer.
0
Brutna grafer.
Den här handboken gäller för alla TI-räknare som kan användas med
vilket betyder att vissa menynamn, bilder eller knappar inte heter samma sak
som på din räknare. Väl
säger ”Välj
DISTANCE MATCH
det som ligger närmast. Om en instruktion t ex
” ska du på en TI-83 välja ”
Upprepa insamlingen och kontrollera att CBR är riktad rakt mot föremålet.
Läs sidorna 6–12 om hur du förbättrar datainsamlingen.
Kontrollera att det fria området inte störs av elever, bord eller andra föremål.
När två
CBR
-enheter används samtidigt i ett rum ska en insamlingen avslutas
innan nästa påbörjas.
Kontrollera att anslutnin
en räknare-
CBR
båda ändar helt och hållet.
Kontrollera att batterierna är laddade (se sidan 42).
Kontrollera att utjämningen inte är för kraftig eller svag.
CBR
fungerar inte med en TI-85. Kontrollera att det står “
CBL
” efter serienumret på räknarens undersida.
Detta indikerar att den kan användas med
TI
-
85 saknar funktioner för punktdiagram vilket betyder att vissa funktioner
på plottade värden) inte kan användas med TI-85.
Kabeln räknare-CBR har
förlorats.
(t ex att använda
Det går att använda räknare-räknare kabeln som följer med räknaren.
(Eftersom räknare-räknare kabeln är m
beställa en ny räknare-CBR kabel.)
Ofta låg batterispänning. Innan du lägger undan
Detta gäller även andra
även koppla loss
Ingenting händer när du
försöker köra
RANGER
-
programmet.
Felmeddelande: ”Variable is
locked or protected” (
-
endast TI
92)
äller
Om du redi
minuter för räknaren att förbereda pro
du startar det. Detta är normalt.
Du måste frigöra variablerna L1, L2, L3, L4 och L5. Se i räknarens handbok.
erar eller visar
CBR
CBR
CBR
från räknaren.
ska du avsluta
CBL
- eller
RANGER
-program som eventuellt körs. Du ska
-programmet kan det ta upp till två
är korrekt. Tryck alltid in kabelns
nedåt kan den tryckas in och
¤
igen för att stoppa
RANGER
-programmet (med
QUIT).
kabeln.
är korrekt. Tryck alltid in kabelns
till räknaren trycker du på
QUIT
.
RANGER
-programmet och
DIST MATCH”
½
CBR
.
är korrekt. Tryck alltid in kabelns
CBL
och
CBR
.
cket kortare kan det vara bra att
RANGER
-programmet (med
QUIT).
rammet för körningen nästa gån
för
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
43

Service och garanti för TI-produkter
TI-produkter och service
Mer information om TI-produkter och service kan du få via E-post eller genom att besöka hemsidan för TIräknare på internet.
e-post:ti-cares@ti.com
internetadress:http://www.ti.com/calc
Service och garanti
Information om garantitid och garantivillkor eller om produktservice finns i garantibeviset som medföljer
denna produkt. Du kan också kontakta din lokala återförsäljare/distributör för Texas Instruments.
44
KOMMA IGÅNG MED
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
CBR
TI
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
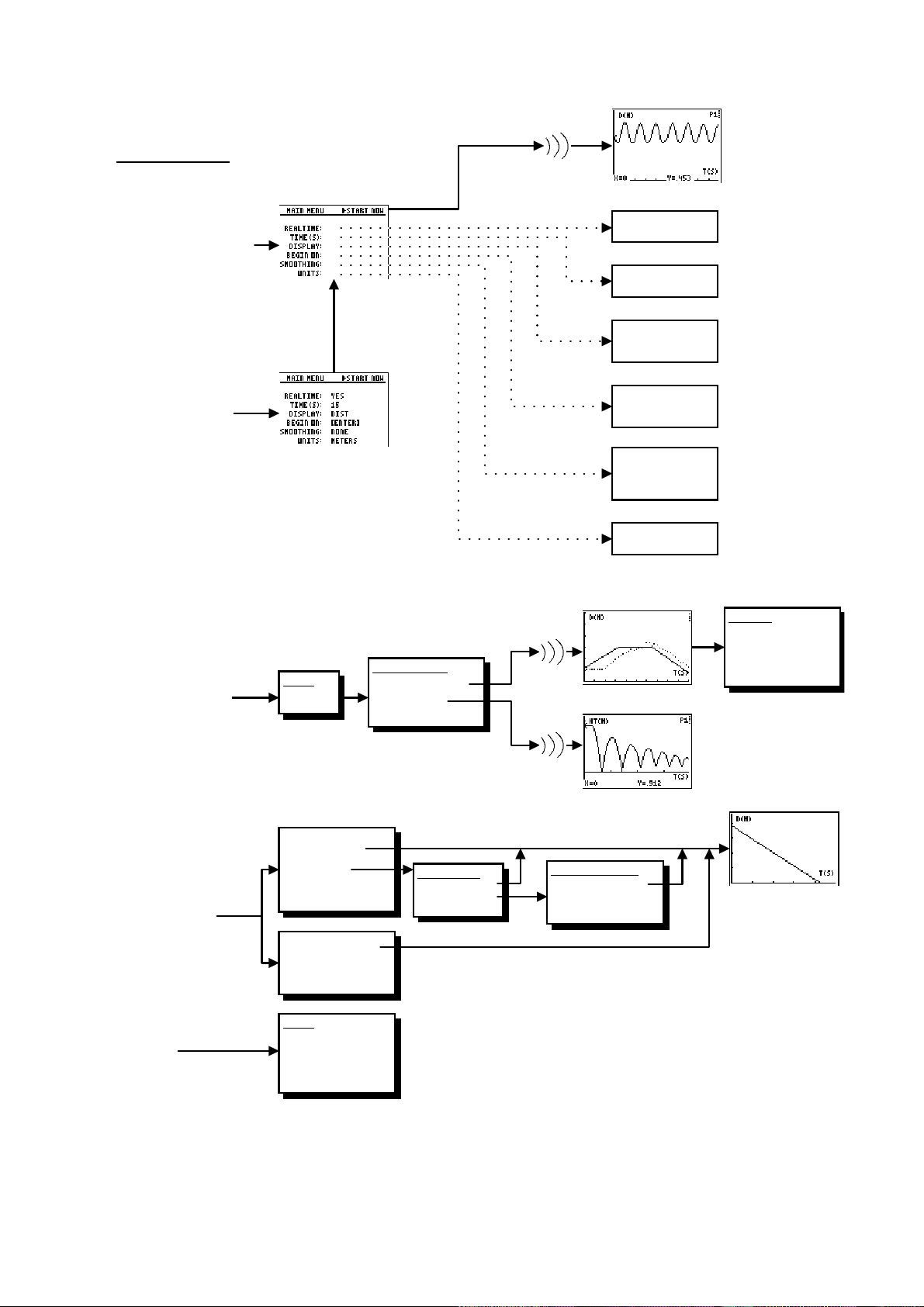
RANGE
R
MAIN MENU
SETUP / SAMPLE
SET DEFAULTS
NO
YES
1-99
(REALTIME=NO)
DISTANCE
VELOCITY
ACCELERATION
[ENTER]
[TRIGGER]
DELAY
NONE
LIGHT
MEDIUM
HEAVY
METERS
FEET
APPLICATIONS
REALTIME=NO
PLOT MENU
REALTIME=YES
TOOLS
QUIT
APPLICATIONS
UNITS
METERS
FEET
DISTANCE-TIME
VELOCITY-TIME
ACCELERATION-TIME
PLOT TOOLS
REPEAT SAMPLE
MAIN MENU
QUIT
SHOW PLOT
SELECT DOMAIN
REPEAT SAMPLE
MAIN MENU
QUIT
TOOLS
GET CBR DATA
GET CALC DATA
CBR STATUS
STOP/CLEAR CBR
MAIN MENU
DISTANCE MATCH
VELOCITY MATCH
BALL BOUNCE
MAIN MENU
PLOT TOOLS
SELECT DOMAIN
SMOOTH DATA
PLOT MENU
DATA SMOOTHING
LIGHT
MEDIUM
HEAVY
NONE
OPTIONS
SAME MATCH
NEW MATCH
APPLICATIONS
MAIN MENU
QUIT
ENNA SIDA KAN KOPIERAS FÖRUTSATT ATT COPYRIGHT-MEDDELANDET FRÅN
D
EXAS INSTRUMENTS INCORPORATED
© 1997 T
FINNS MED PÅ KOPIAN
TI
KOMMA IGÅNG MED
CBR
 Loading...
Loading...