

TERIDIAN Semiconductor 71M6533, 71M6533H User Manual

71M6533/71M6533H Demo Board User’s Manual
71M6533/71M6533H Demo Board
USER’S MANUAL
Page: 1 of 83
5/9/2008 3:13 PM
V1-2
TERIDIAN Semiconductor Corporation
6440 Oak Canyon Rd., Suite 100
Irvine, CA 92618-5201
Phone: (714) 508-8800 ▪ Fax: (714) 508-8878
http://www.teridian.com/
meter.support@teridian.com
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2

71M6533/71M6533H Demo Board User’s Manual
TERIDIAN Semiconductor Corporation makes no warranty for the use of its products, other than expressly contained in the Company’s
warranty detailed in the TERIDIAN Semiconductor Corporation standard Terms and Conditions. The company assumes no responsibility
for any errors which may appear in this document, reserves the right to change devices or specifications detailed herein at any time
without notice and does not make any commitment to update the information contained herein.
Page: 2 of 83
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2

71M6533/71M6533H Demo Board User’s Manual
71M6533/71M6533H
3-Phase Energy Meter IC
DEMO BOARD
USER’S MANUAL
Page: 3 of 83
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2

71M6533/71M6533H Demo Board User’s Manual
Table of Contents
1 GETTING STARTED ................................................................................................................................................ 7
1.1 General .................................................................................................................................................................... 7
1.2 Safety and ESD Notes ............................................................................................................................................ 7
1.3 Demo Kit Contents ................................................................................................................................................. 8
1.4 Demo Board Versions ............................................................................................................................................ 8
1.5 Compatibility ........................................................................................................................................................... 8
1.6 Suggested Equipment not Included ..................................................................................................................... 8
1.7 Demo Board Test Setup ......................................................................................................................................... 9
1.7.1 Power Supply Setup ........................................................................................................................................ 11
1.7.2 Cable for Serial Connection (Debug Board) .................................................................................................... 11
1.7.3 Checking Operation ......................................................................................................................................... 11
1.7.4 Serial Connection Setup .................................................................................................................................. 13
1.8 Using the Demo Board ......................................................................................................................................... 14
1.8.1 Serial Command Language ............................................................................................................................. 15
1.8.2 Using the Demo Board for Energy Measurements .......................................................................................... 23
1.8.3 Adjusting the Kh Factor for the Demo Board ................................................................................................... 23
1.8.4 Adjusting the Demo Boards to Different Current Transformers ....................................................................... 24
1.8.5 Adjusting the Demo Boards to Different Voltage Dividers ............................................................................... 24
1.9 Calibration Parameters ........................................................................................................................................ 25
1.9.1 General Calibration Procedure ........................................................................................................................ 25
1.9.2 Calibration Macro File ..................................................................................................................................... 26
1.9.3 Updating the Demo Code (hex file) ................................................................................................................. 26
1.9.4 Updating Calibration Data in Flash or EEPROM without Using the ICE or the TFP-2 ..................................... 26
1.9.5 Automatic Gains Calibration ............................................................................................................................ 27
1.9.6 Loading the Code for the 6533 into the Demo Board ...................................................................................... 27
1.9.7 The Programming Interface of the 71M6533/6533H ....................................................................................... 29
1.10 Demo Code ........................................................................................................................................................ 30
1.10.1 Demo Code Description ............................................................................................................................... 30
1.10.2 Important Demo Code MPU Parameters ..................................................................................................... 31
1.10.3 Useful CLI Commands Involving the MPU and CE ...................................................................................... 38
2 APPLICATION INFORMATION ............................................................................................................................. 39
2.1 Calibration Theory ................................................................................................................................................ 39
2.1.1 Calibration with Three Measurements ............................................................................................................. 39
2.1.2 Calibration with Five Measurements................................................................................................................ 41
2.2 Calibration Procedures ........................................................................................................................................ 42
2.2.1 Calibration Procedure with Three Measurements ........................................................................................... 43
2.2.2 Calibration Procedure with Five Measurements .............................................................................................. 44
2.2.3 Calibration Procedure for Rogowski Coil Sensors ........................................................................................... 44
2.2.4 Calibration Spreadsheets ................................................................................................................................ 45
2.2.5 Compensating for Non-Linearities ................................................................................................................... 49
2.3 Power Saving Measures ...................................................................................................................................... 50
2.4 Schematic Information ......................................................................................................................................... 51
2.4.1 Components for the V1 Pin ............................................................................................................................. 51
2.4.2 Reset Circuit .................................................................................................................................................... 51
2.4.3 Oscillator ......................................................................................................................................................... 52
2.4.4 EEPROM ......................................................................................................................................................... 52
2.4.5 LCD ................................................................................................................................................................. 53
2.4.6 Optical Interface .............................................................................................................................................. 53
Page: 4 of 83
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
2.5
Testing the Demo Board ...................................................................................................................................... 54
2.5.1 Functional Meter Test ...................................................................................................................................... 54
2.5.2 EEPROM ......................................................................................................................................................... 56
2.5.3 RTC ................................................................................................................................................................. 56
2.5.4 Hardware Watchdog Timer .............................................................................................................................. 56
2.5.5 LCD ................................................................................................................................................................. 56
2.6 TERIDIAN Application Notes ............................................................................................................................... 58
3 HARDWARE DESCRIPTION ................................................................................................................................. 59
3.1 D6533T14A3 Board Description: Jumpers, Switches and Test Points ............................................................ 59
3.2 Board Hardware Specifications .......................................................................................................................... 62
4 APPENDIX ............................................................................................................................................................. 63
4.1 71M6533 Demo Board Electrical Schematic ...................................................................................................... 64
4.2 71M6533 Demo Board Bill of Material ................................................................................................................. 67
4.3 71M6533 Demo Board PCB Layout ..................................................................................................................... 68
4.4 Debug Board Bill of Material ............................................................................................................................... 74
4.5 Debug Board Schematics .................................................................................................................................... 75
4.6 Debug Board PCB Layout .................................................................................................................................... 76
4.7 TERIDIAN 71M6533 Pin-Out Information ............................................................................................................ 79
4.8 Revision History ................................................................................................................................................... 83
List of Figures
Figure 1-1: TERIDIAN D6533T14A3 Demo Board with Debug Board: Basic Connections ................................................. 9
Figure 1-2: Block diagram for the TERIDIAN D6533T14A3 Demo Board with Debug Board ............................................ 10
Figure 1-3: Hyperterminal Sample Window with Disconnect Button (Arrow) ..................................................................... 13
Figure 1-4: Port Speed and Handshake Setup (left) and Port Bit setup (right) .................................................................. 14
Figure 1-5: Command Line Help Display ........................................................................................................................... 15
Figure 1-6: Typical Calibration Macro File ......................................................................................................................... 26
Figure 1-7: Emulator Window Showing Reset and Erase Buttons (see Arrows) ............................................................... 28
Figure 1-8: Emulator Window Showing Erased Flash Memory and File Load Menu ......................................................... 28
Figure 2-1: Watt Meter with Gain and Phase Errors. ......................................................................................................... 39
Figure 2-2: Phase Angle Definitions .................................................................................................................................. 43
Figure 2-3: Calibration Spreadsheet for Three Measurements ......................................................................................... 47
Figure 2-4: Calibration Spreadsheet for Five Measurements ............................................................................................ 47
Figure 2-5: Calibration Spreadsheet for Rogowski coil ...................................................................................................... 48
Figure 2-6: Non-Linearity Caused by Quantification Noise ................................................................................................ 49
Figure 2-7: Voltage Divider for V1 ..................................................................................................................................... 51
Figure 2-8: External Components for RESETZ ................................................................................................................. 51
Figure 2-9: Oscillator Circuit .............................................................................................................................................. 52
Figure 2-10: EEPROM Circuit ........................................................................................................................................... 52
Figure 2-11: LCD Connections .......................................................................................................................................... 53
Figure 2-12: Optical Interface Block Diagram .................................................................................................................... 53
Figure 2-13: Meter with Calibration System ...................................................................................................................... 54
Figure 2-14: Calibration System Screen ............................................................................................................................ 55
Figure 2-15: Load Line in Differential Mode at Room Temperature................................................................................... 55
Figure 3-1: D6533T14A3 Demo Board - Board Description .............................................................................................. 61
Figure 4-1: TERIDIAN D6533T14A3 Demo Board: Electrical Schematic 1/3 .................................................................... 64
Figure 4-2: TERIDIAN D6533T14A3 Demo Board: Electrical Schematic 2/3 .................................................................... 65
Figure 4-3: TERIDIAN D6533T14A3 Demo Board: Electrical Schematic 3/3 .................................................................... 66
Figure 4-4: TERIDIAN D6533T14A3 Demo Board: Top View ........................................................................................... 68
Figure 4-5: TERIDIAN D6533T14A3 Demo Board: Top Copper ....................................................................................... 69
Figure 4-6: TERIDIAN D6533T14A3 Demo Board: Middle Layer 1 (Ground Plane) ......................................................... 70
Page: 5 of 83
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
Figure 4-7: TERIDIAN D6533T14A3 Demo Board: Middle Layer 2 (Supply Plane) .......................................................... 71
Figure 4-7: TERIDIAN D6533T14A3 Demo Board: Bottom Copper .................................................................................. 72
Figure 4-9: TERIDIAN D6533T14A3 Demo Board: Bottom View ...................................................................................... 73
Figure 4-9: Debug Board: Electrical Schematic ................................................................................................................. 75
Figure 4-10: Debug Board: Top View ................................................................................................................................ 76
Figure 4-11: Debug Board: Bottom View ........................................................................................................................... 76
Figure 4-12: Debug Board: Top Signal Layer .................................................................................................................... 77
Figure 4-13: Debug Board: Middle Layer 1 (Ground Plane) .............................................................................................. 77
Figure 4-14: Debug Board: Middle Layer 2 (Supply Plane) ............................................................................................... 78
Figure 4-15: Debug Board: Bottom Trace Layer ............................................................................................................... 78
Figure 4-16: TERIDIAN 71M6533/71M6533H epLQFP100: Pinout (top view) .................................................................. 82
List of Tables
Table 1-1: Jumper settings on Debug Board ..................................................................................................................... 11
Table 1-2: Straight cable connections ............................................................................................................................... 11
Table 1-3: Null-modem cable connections ........................................................................................................................ 11
Table 1-4: CE RAM Locations for Calibration Constants ................................................................................................... 25
Table 1-5: Flash Programming Interface Signals .............................................................................................................. 29
Table 1-6: MPU Input Parameters for Metering ................................................................................................................. 32
Table 1-7: Selectable Pulse Sources ................................................................................................................................ 33
Table 1-8: MPU Instantaneous Output Variables .............................................................................................................. 34
Table 1-9: MPU Status Word Bit Assignment.................................................................................................................... 36
Table 1-10: MPU Accumulation Output Variables ............................................................................................................. 37
Table 1-11: CLI Commands for Data Memory ................................................................................................................... 38
Table 2-1: Power Saving Measures .................................................................................................................................. 50
Table 3-1: D6533T14A3 Demo Board Description ............................................................................................................ 59
Table 3-2: D6533T14A3 Demo Board Description ............................................................................................................ 61
Table 4-1: D6533T14A3 Demo Board: Bill of Material ...................................................................................................... 67
Table 4-2: Debug Board: Bill of Material............................................................................................................................ 74
Table 4-3: 71M6533/71M6533H Pin Description Table 1/3 ............................................................................................... 79
Table 4-4: 71M6533/71M6533H Pin Description Table 2/3 ............................................................................................... 79
Table 4-5: 71M6533/71M6533H Pin Description Table 3/3 ............................................................................................... 81
Page: 6 of 83
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
1
1 GETTING STARTED
1.1 GENERAL
The TERIDIAN Semiconductor Corporation (TSC) D6533T14A3 Demo Board is a demonstration board for
evaluating the 71M6533/71M6533H device for 3-phase electronic power metering applications. It incorporates a
71M6533 or 71M6533H integrated circuit, peripheral circuitry such as a serial EEPROM, emulator port, and onboard power supply as well as a companion Debug Board that allows a connection to a PC through a RS232
port. The Demo Board allows the evaluation of the 71M6533 or 71M6533H energy meter chip for measurement
accuracy and overall system use.
The board is pre-programmed with a Demo Program in the FLASH memory of the 71M6533/6533H IC. This embedded application is developed to exercise all low-level function calls to directly manage the peripherals, flash
programming, and CPU (clock, timing, power savings, etc.).
The 71M6533/6533H IC on the Demo Board is pre-programmed with default calibration factors. Since current
sensors are not part of the Demo Kit, the Demo Board is tested but not calibrated at the factory.
1.2 SAFETY AND ESD NOTES
Connecting live voltages to the demo board system will result in potentially hazardous voltages on the demo
board.
THE DEMO SYSTEM IS ESD SENSITIVE! ESD PRECAUTIONS SHOULD BE TAKEN
WHEN HANDLING THE DEMO BOARD!
EXTREME CAUTION SHOULD BE TAKEN WHEN HANDLING THE DEMO BOARD
ONCE IT IS CONNECTED TO LIVE VOLTAGES!
Page: 7 of 83
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
1.3 DEMO KIT CONTENTS
• Demo Board D6533T14A3 with 71M6533/71M6533H IC and pre-loaded demo program:
• Debug Board
• Two 5VDC/1,000mA universal wall transformers with 2.5mm plug (Switchcraft 712A compatible)
• Serial cable, DB9, Male/Female, 2m length (Digi-Key AE1020-ND)
• CD-ROM containing documentation (data sheet, board schematics, BOM, layout), Demo Code (sources
and executable), and utilities
The CD-ROM contains a file named readme.txt that specifies all files found on the media and their
purpose.
1.4 DEMO BOARD VERSIONS
Currently, only the following version of the Demo Board is available:
• Demo Board D6533T14A3 (standard)
1.5 COMPATIBILITY
This manual applies to the following hardware and software revisions:
• 71M6533 or 71M6533H chip revision A03
• Demo Kit firmware revision 4.p6b or later
• Demo Board D6533T14A3
1.6 SUGGESTED EQUIPMENT NOT INCLUDED
For functional demonstration:
• PC w/ MS-Windows® versions XP, ME, or 2000, equipped with RS232 port (COM port) via DB9 connector
For software development (MPU code):
• Signum ICE (In Circuit Emulator): ADM-51
http://www.signum.com
• Keil 8051 “C” Compiler kit: CA51
http://www.keil.com/c51/ca51kit.htm
, http://www.keil.com/product/sales.htm
Page: 8 of 83
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
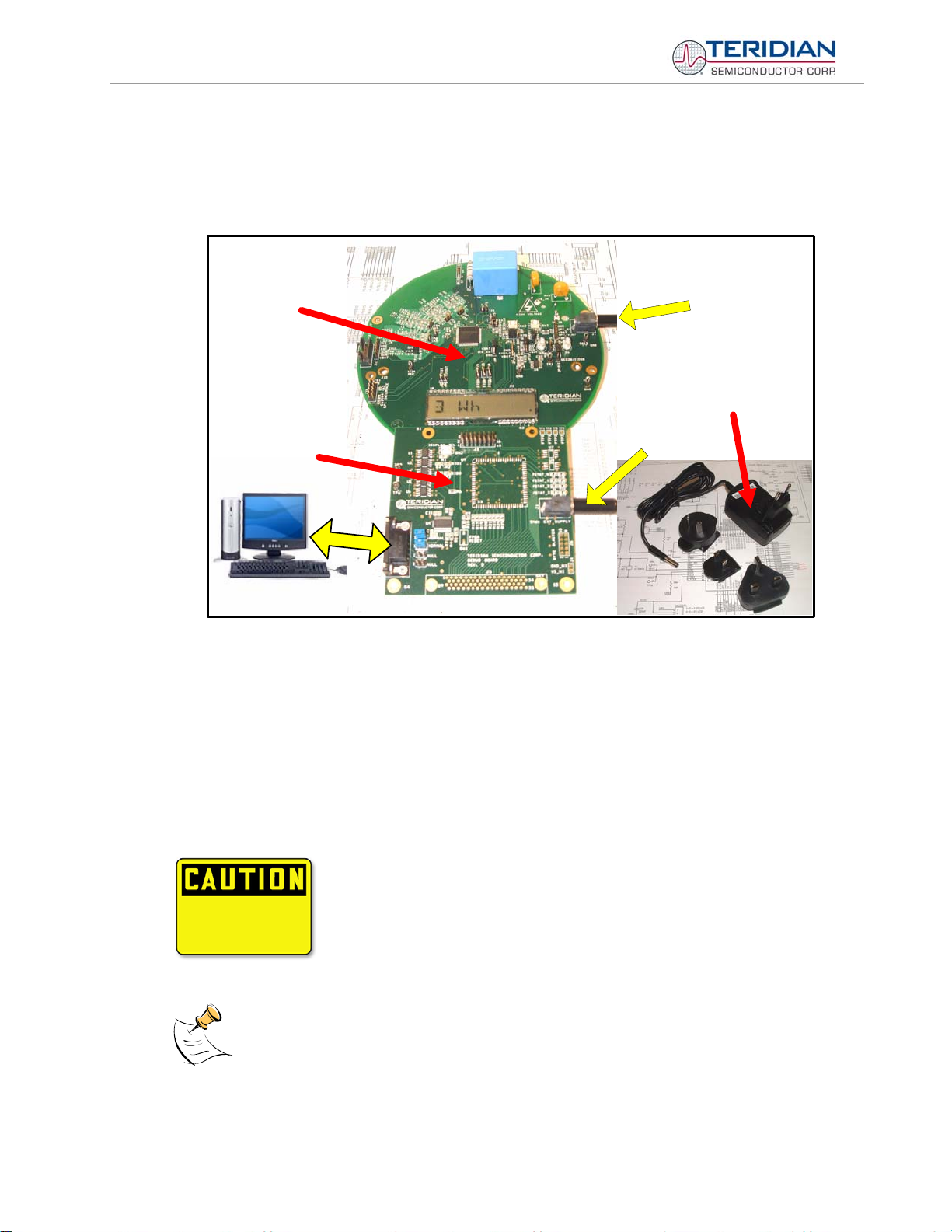
1.7 DEMO BOARD TEST SETUP
Figure 1-1 shows the basic connections of the Demo Board plus Debug Board with the external equipment for
desktop testing, i.e. without live power applied. For desktop testing, both the Demo and Debug board may be
powered with just the 5VDC power supplies.
Demo
Board
Two Power Supplies
(100VAC to 240VAC,
Power
(5VDC)
5V/1ADC Output)
Debug
Power 5VDC
Board
Host PC
Figure 1-1: TERIDIAN D6533T14A3 Demo Board with Debug Board: Basic Connections
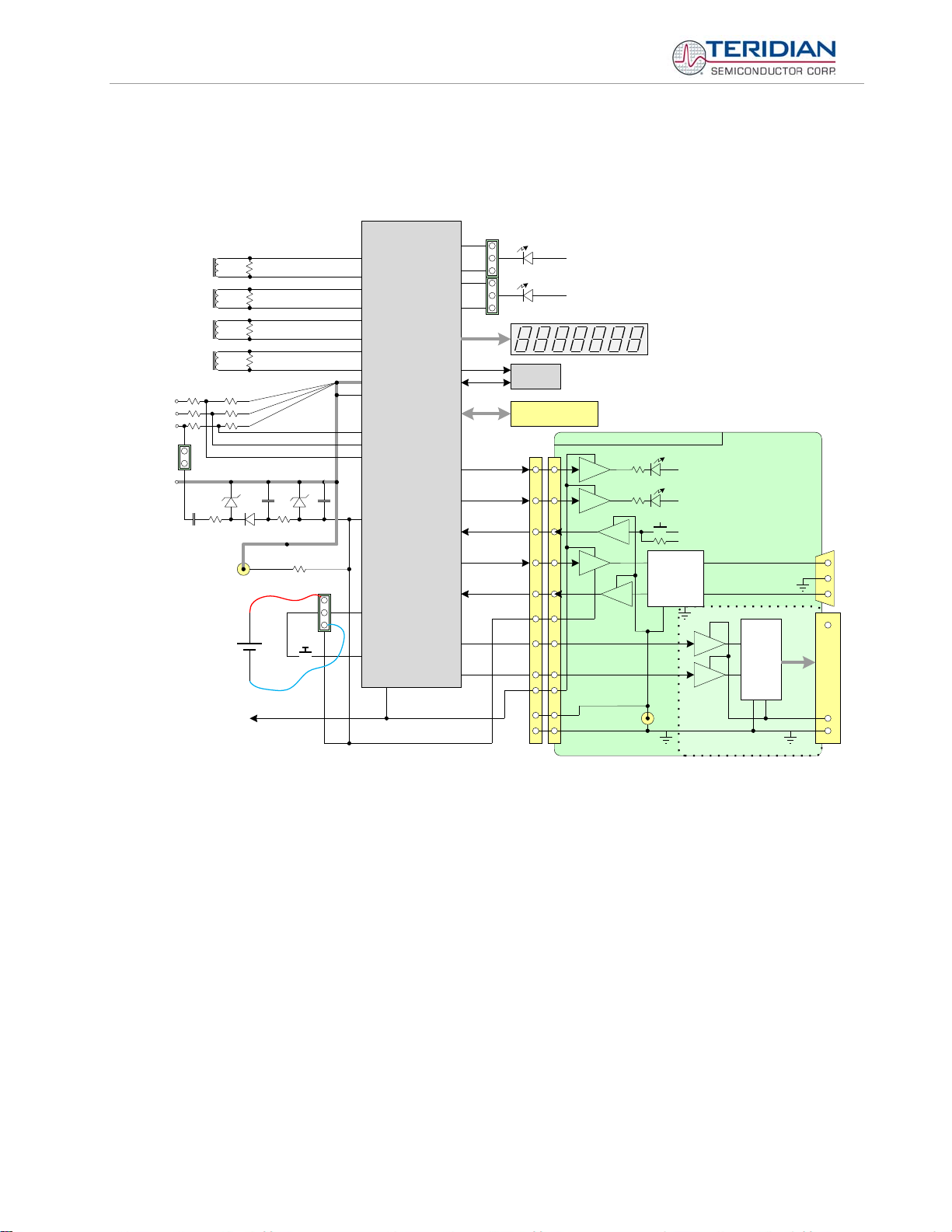
The D6533T14A3 Demo Board block diagram is shown in Figure 1-2. The configuration consists of a standalone (round) meter Demo Board and an optional Debug Board. The Demo Board contains all circuits
necessary for operation as a meter, including display, calibration LEDs, and internal power supply. The Debug
Board, uses a separate power supply, and is optically isolated from the Demo Board. It interfaces to a PC
through a 9 pin serial port connector. For serial communication between the PC and the TERIDIAN
71M6533/71M6533H, the Debug Board needs to be plugged with its connector J3 into connector J2 of the
Demo Board.
Connections to the external signals to be measured, i.e. scaled AC voltages and current signals derived from
shunt resistors or current transformers, are provided on the rear side of the demo board.
Caution: It is recommended to set up the demo board with no live AC voltage
connected, and to connect live AC voltages only after the user is familiar with
the demo system.
Page: 9 of 83
All input signals are referenced to the V3P3A (3.3V power supply to the chip).
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
DEMONSTRATION METER
External Current
Transformers
INEUTRAL
VC
VB
VA
JP1
NEUTRAL
IA
IB
IC
V3P3
5V DC
battery
(optional)
On-board
components
powered by
V3P3D
PB
3.3v
JP8
GND
IDP
IDN
IAP
IAN
IBP
IBN
ICP
ICN
V3P3A
V3P3SYS
Single Chip
VA
Meter
VB
VC
GND
VBAT
PB
V3P3D
DIO6/WPULSE
DIO8/XPULSE
DIO7/RPULSE
DIO9/YPULSE
DIO4
DIO5
6533
DIO56
DIO57
DIO58
TMUXOUT
CKTEST
PULSE OUTPUTS
TX
RX
GND
Wh
VARh
EEPROM
ICE Connector
1
2
3
10
12
5, 7,
9, 11
8
6
4
15, 16
N/C
13, 14
N/C
J2
V3P3SYS
V3P3SYS
3.3V LCD
DEBUG BOARD (OPTIONAL)
MPU HEARTBEAT (5Hz)
OPTO
OPTO
OPTO
OPTO
OPTO
6
V5_DBG
V5_DBG
CE HEARTBEAT (1Hz)
V5_DBG
GND_DBG
V5_DBG
RS-232
INTERFACE
OPTO
OPTO
5V DC
GND_DBG
JP21
DB9
to PC
COM Port
RTM INTERFACE
FPGA
J5
68 Pin Connector
to NI PCI-6534
DIO Board
V5_NI
04/25/2008
Page: 10 of 83
Figure 1-2: Block diagram for the TERIDIAN D6533T14A3 Demo Board with Debug Board
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
1.7.1 POWER SUPPLY SETUP
There are several choices for the meter power supply:
• Internal (using phase A of the AC line voltage). The internal power supply is only suitable when the phase A
voltage exceeds 220V RMS. A jumper needs to be installed across JP1 on the bottom of the board.
• External 5VDC connector (J1) on the Demo Board.
• External 5VDC connector (J1) on the Debug Board.
1.7.2 CABLE FOR SERIAL CONNECTION (DEBUG BOARD)
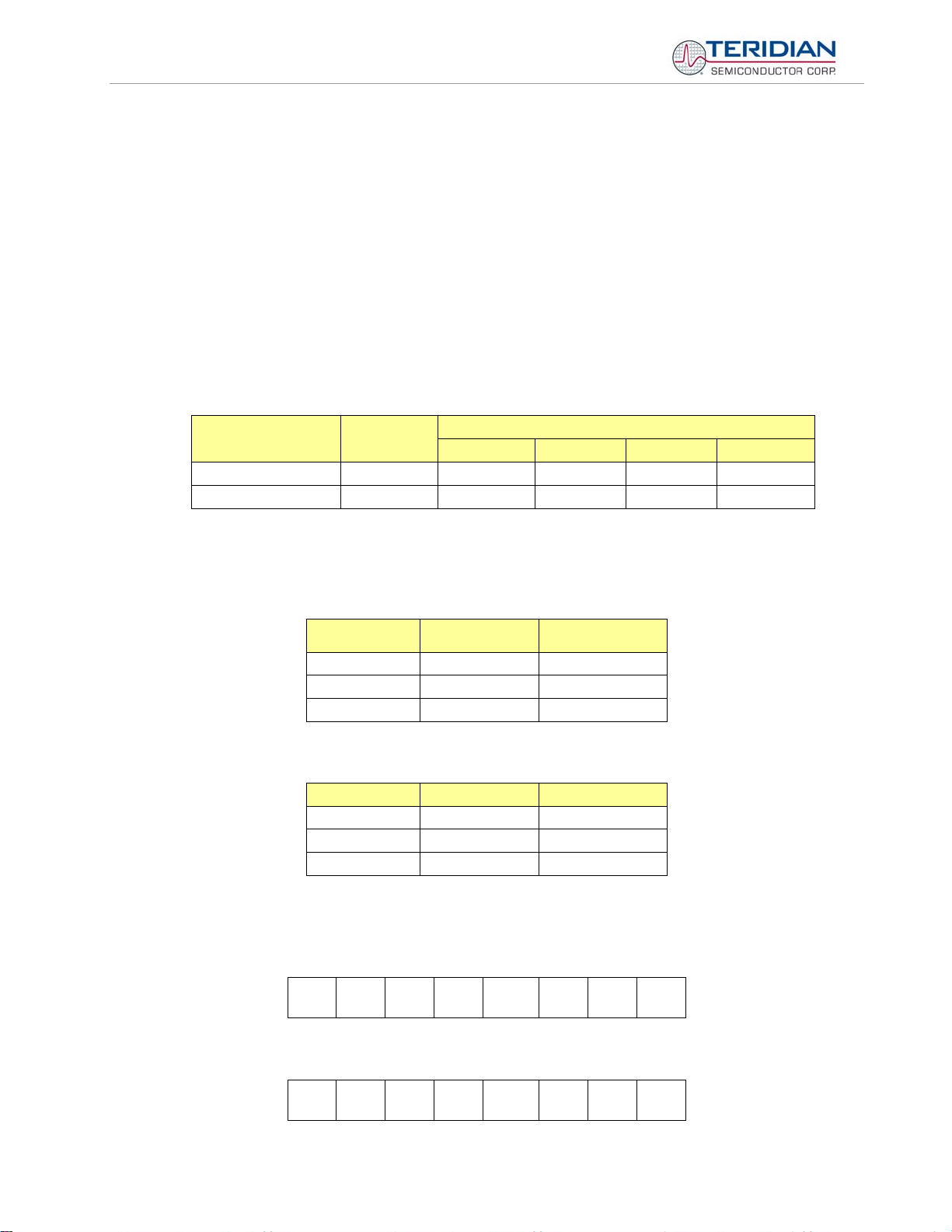
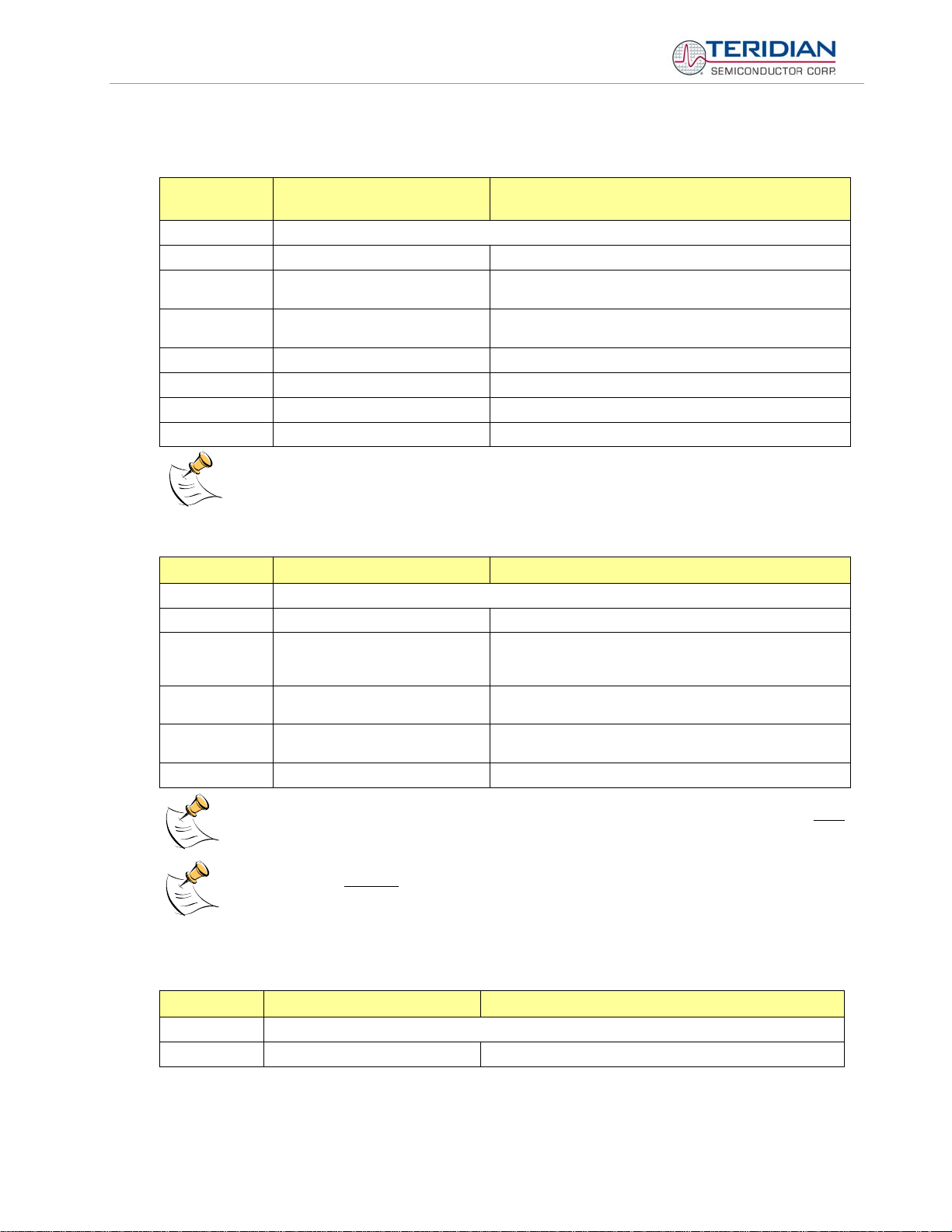
For connection of the DB9 serial port to a PC, either a straight or a so-called “null-modem” cable may be used.
JP1 and JP2 are plugged in for the straight cable, and JP3/JP4 are empty. The jumper configuration is reversed
for the null-modem cable, as shown in Table 1-1.
Cable
Configuration
Straight Cable
Null-Modem Cable Alternative -- -- Installed Installed
JP1 through JP4 can also be used to alter the connection when the PC is not configured as a DCE device.
Table 1-2 shows the connections necessary for the straight DB9 cable and the pin definitions.
Table 1-3 shows the connections necessary for the null-modem DB9 cable and the pin definitions.
Mode
Default
Table 1-1: Jumper Settings on Debug Board
PC Pin Function Demo Board Pin
2 TX 2
3 RX 3
5 Signal Ground 5
Table 1-2: Straight Cable Connections
PC Pin Function Demo Board Pin
2 TX 3
3 RX 2
5 Signal Ground 5
JP1 JP2 JP3 JP4
Installed Installed -- --
Jumpers on Debug Board
Table 1-3: Null-modem Cable Connections
1.7.3 CHECKING OPERATION
A few seconds after power up, the LCD display on the Demo Board should display this brief greeting:
H E L L 0
The “HELLO” message should be followed by the display of accumulated energy:
3. 0. 0 0 1
The Wh display should be followed by the text “Wh”, as shown below:
Page: 11 of 83
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2

71M6533/71M6533H Demo Board User’s Manual
3. W h
The decimal dot in the rightmost segment will be blinking, indicating activity of the MPU inside the
71M6533/6533H.
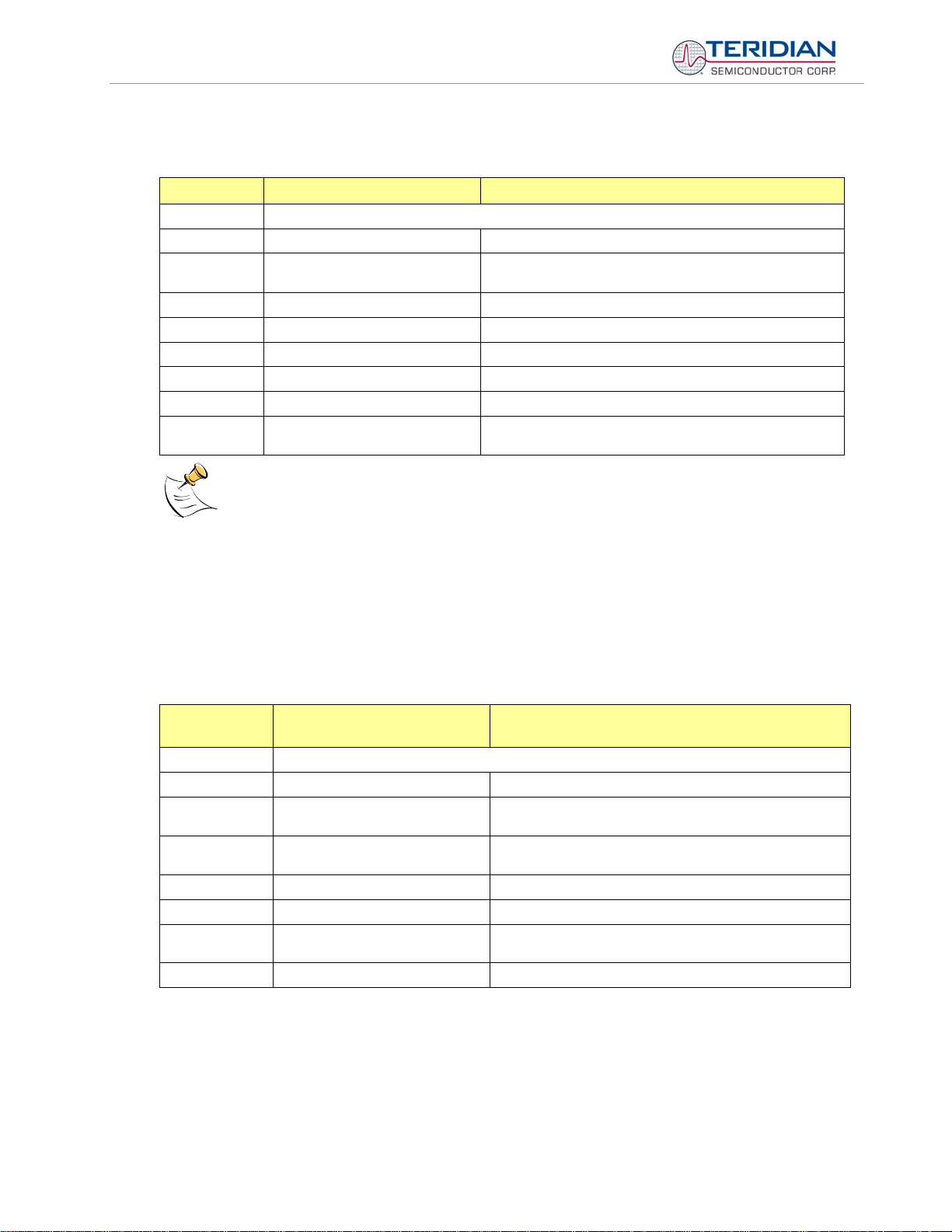
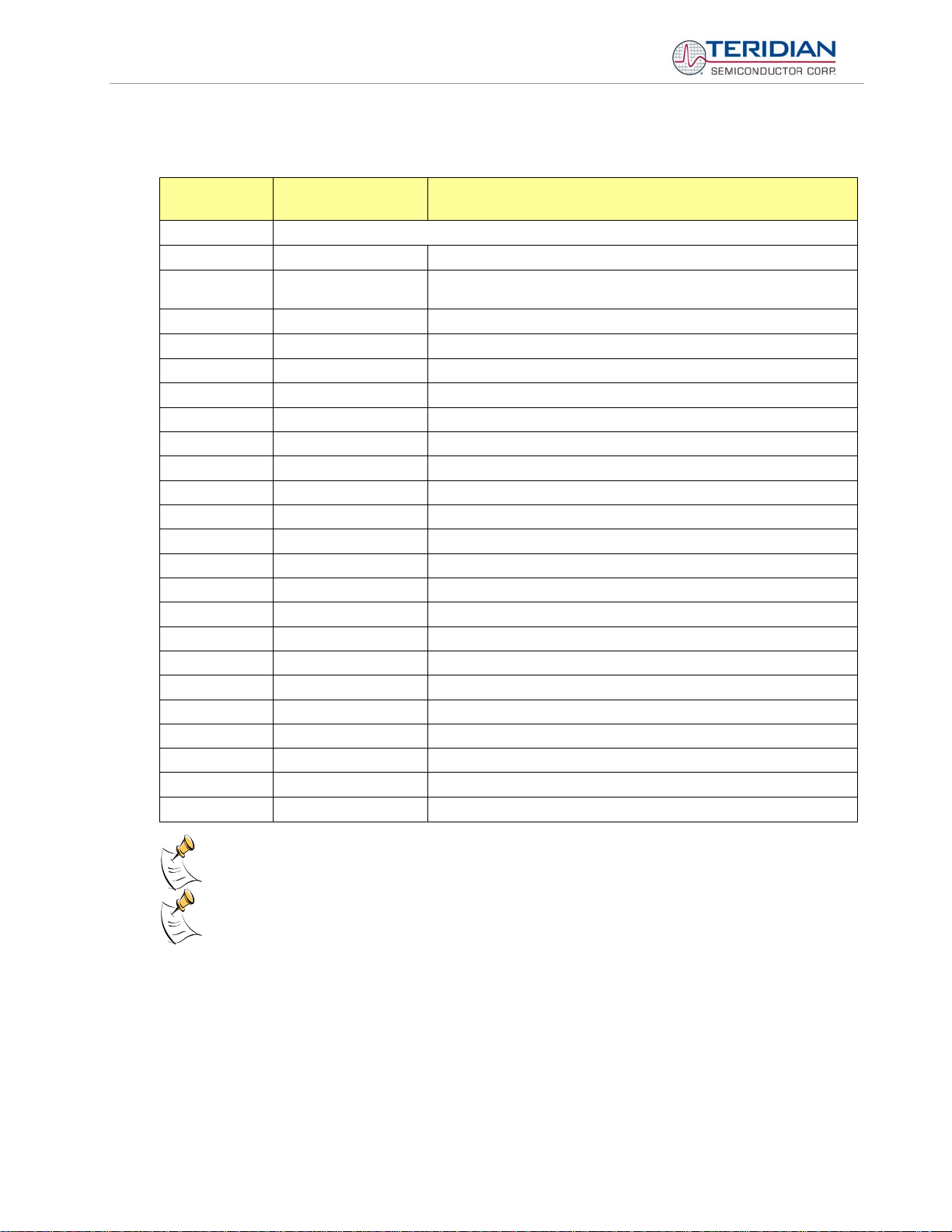
The Demo Code allows cycling of the display using the PB button. By briefly pressing this button, the next
available parameter from Table 1-4 is selected. This makes it easy to navigate various displays for Demo
Boards without having to use the command line interface (CLI).
Step Display in
left-most
digit(s)
1
2
3
4
5
6
7
8
9
10
11
1 Delt C
2 HZ
3 Wh
4 Wh
5 VARh
6 VARh
7 VAh
8 HOURS
9 TIME
-- DATE
11 PF
Text
display
Correspon-
ding CLI
command
M1
M2
M3
M4
M5
M6
M7
M8
M9
M10
M11
Displayed Parameter
Temperature difference from calibration temperature.
Displayed in 0.1°C
Frequency at the VA_IN input [Hz]
Accumulated real energy [Wh]. The default display setting
after power-up or reset.
Accumulated exported real energy [Wh].
Accumulated reactive energy [VARh].
Accumulated exported reactive energy [VARh].
Accumulated apparent energy [VAh].
Elapsed time
Time of day (hh.mm.ss)
Date (yyyy.mm.dd)
Power factor
12
13
14
15
16
17
Page: 12 of 83
12 --
13 EDGES
14 PULSES
15 A
16 V
17 BAT V
Table 1-4: Selectable Display Options
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
M12
M13
M14
M15
M16
M17
V/V phase angle [degrees]
Zero crossings of the mains voltage
Pulse counter
RMS current
RMS voltage
Battery voltage
71M6533/71M6533H Demo Board User’s Manual
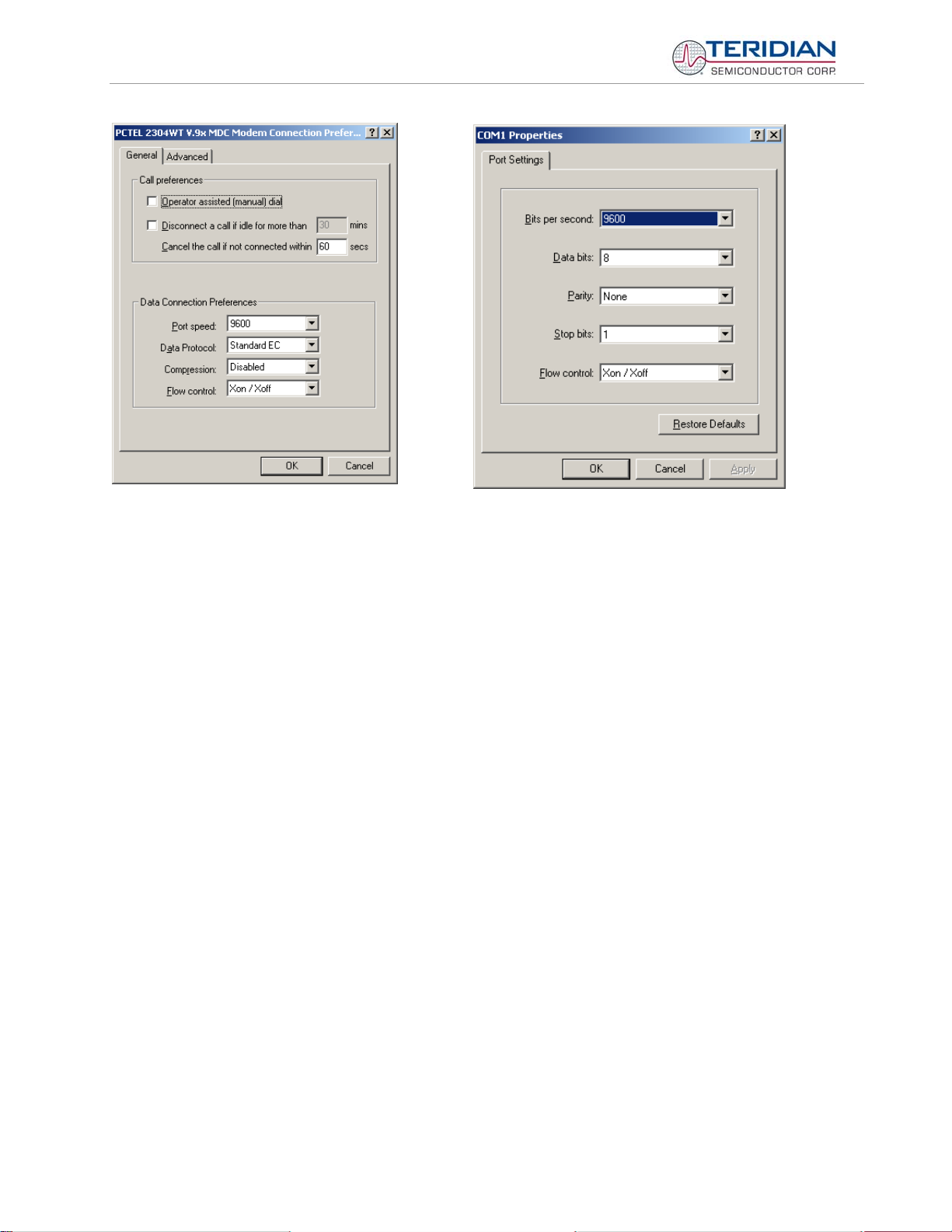
1.7.4 SERIAL CONNECTION SETUP
After connecting the DB9 serial port to a PC, start the HyperTerminal application and create a session using the
following parameters:
Port Speed: 9600 bd or 300bd (see below)
Data Bits: 8
Parity: None
Stop Bits: 1
Flow Control: XON/XOFF
See section 3.1 for proper selection of the operation mode when main power is removed:
• A jumper across pins 2-3 (VBAT-GND) of JP16 indicates that no external battery is available. The IC
will stay in brownout mode when the system power is down and it will communicate at 9600bd.
• A jumper across pins 1-2 (BATMODE-VBAT) indicates that an external battery is available. The IC will
be able to transition from brownout mode to sleep and LCD modes when the system power is down
and it will communicate at 300bd.
HyperTerminal can be found by selecting Programs ÆAccessories Æ Communications from the Windows
menu. The connection parameters are configured by selecting File Æ Properties and then by pressing the
Configure button. Port speed and flow control are configured under the General tab (Figure 1-4, left), bit settings
are configured by pressing the Configure button (Figure 1-4, right), as shown below. A setup file (file name
“Demo Board Connection.ht”) for HyperTerminal that can be loaded with File Æ Open is also provided with the
tools and utilities.
©
start
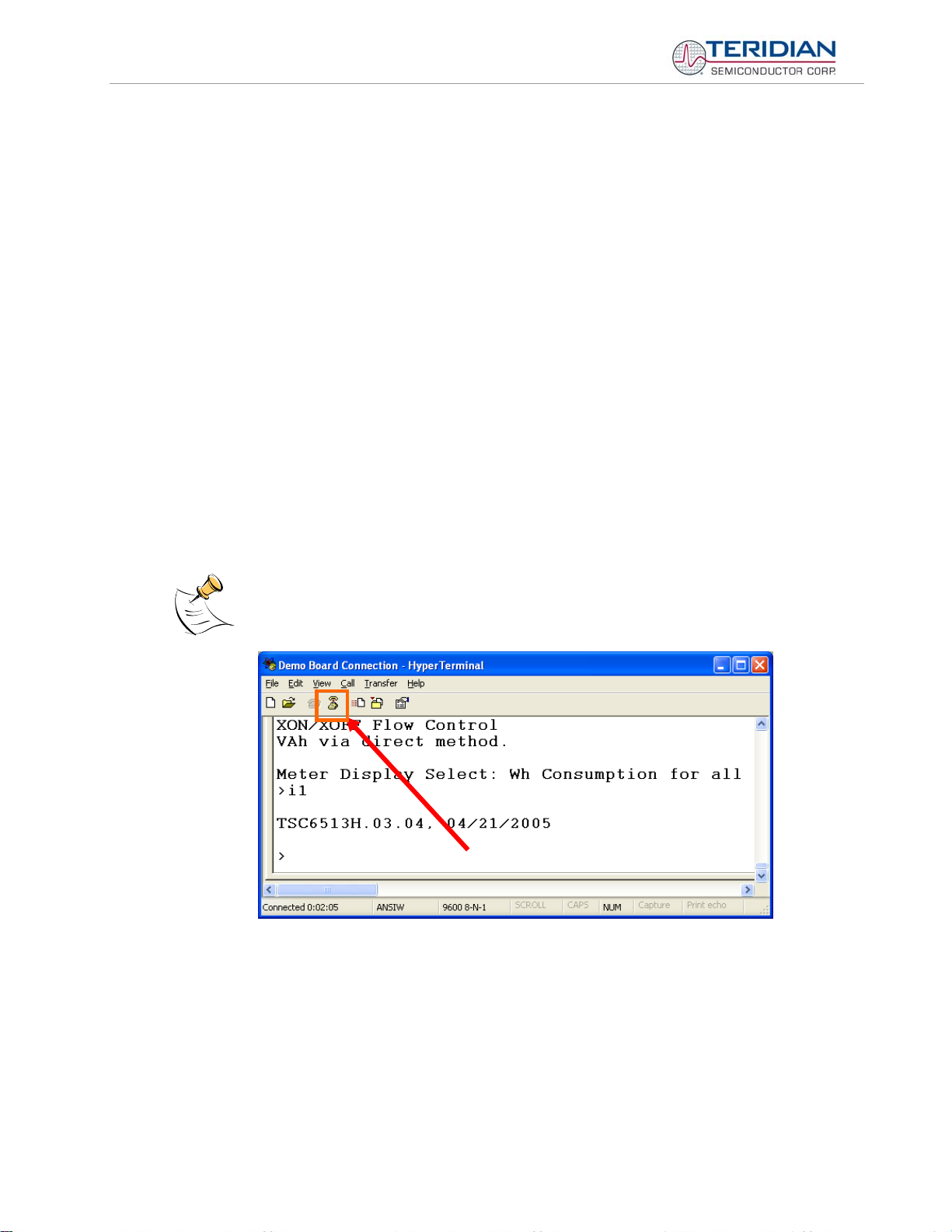
Port parameters can only be adjusted when the connection is not active. The disconnect
button, as shown in Figure 1-3 must be clicked in order to disconnect the port.
Figure 1-3: Hyperterminal Sample Window with Disconnect Button (Arrow)
Page: 13 of 83
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
Figure 1-4: Port Speed and Handshake Setup (left) and Port Bit setup (right)
Once, the connection to the demo board is established, press <CR> and the command prompt,
appear. Type >? to see the Demo Code help menu. Type >i to verify the demo code revision.
1.8 USING THE DEMO BOARD
The 71M6533/6533H Demo Board is a ready-to-use meter prepared for use with external current transformers
(CTs).
Using the Demo Board involves communicating with the Demo Code via the command line interface (CLI). The
CLI allows all sorts of manipulations to the metering parameters, access to the EEPROM, initiation of auto-cal
sequences, selection of the displayed parameters, changing calibration factors and many more operations.
Before evaluating the 71M6533/6533H on the Demo Board, users should get familiar with the commands and
responses of the CLI. A complete description of the CLI is provided in section 1.8.1.
>, should
Page: 14 of 83
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
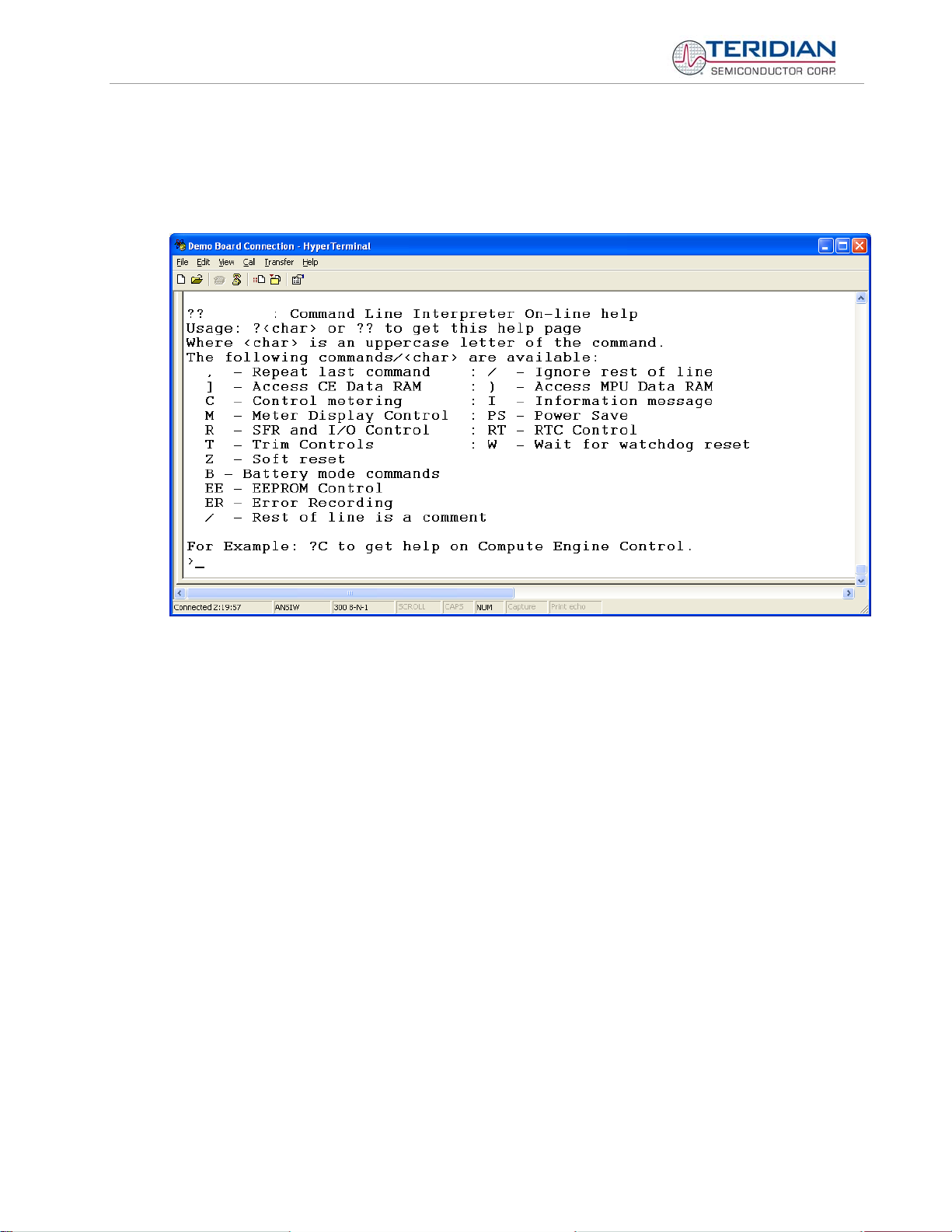
1.8.1 SERIAL COMMAND LANGUAGE
The Demo Code residing in the flash memory of the 71M6533/6533H provides a convenient way of examining
and modifying key meter parameters. Once the Demo Board is connected to a PC or terminal per the
instructions given in Section 1.7.2 and 1.7.4, typing ‘
?’ will bring up the list of commands shown in Figure 1-5.
Figure 1-5: Command Line Help Display
The tables in this chapter describe the commands in detail.
Page: 15 of 83
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
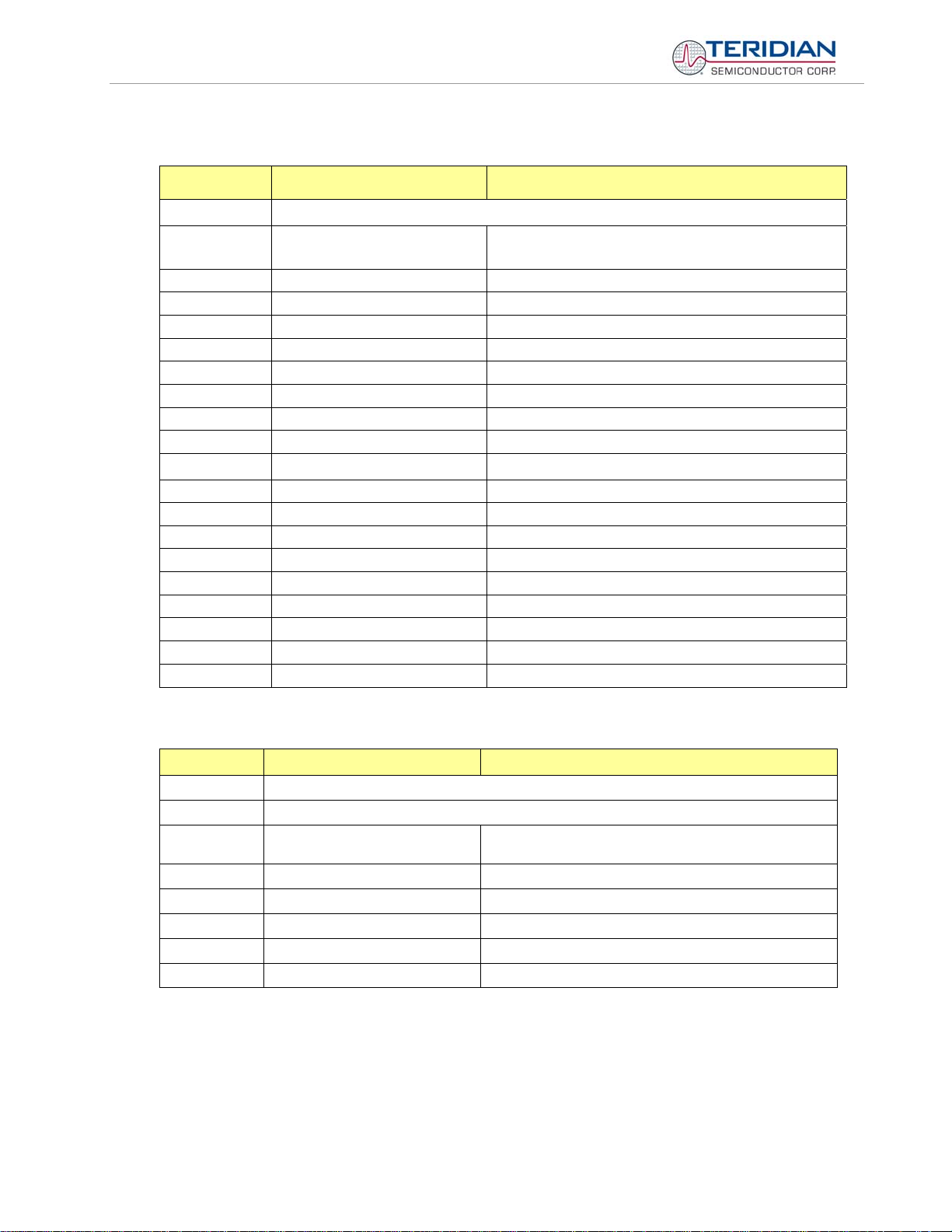
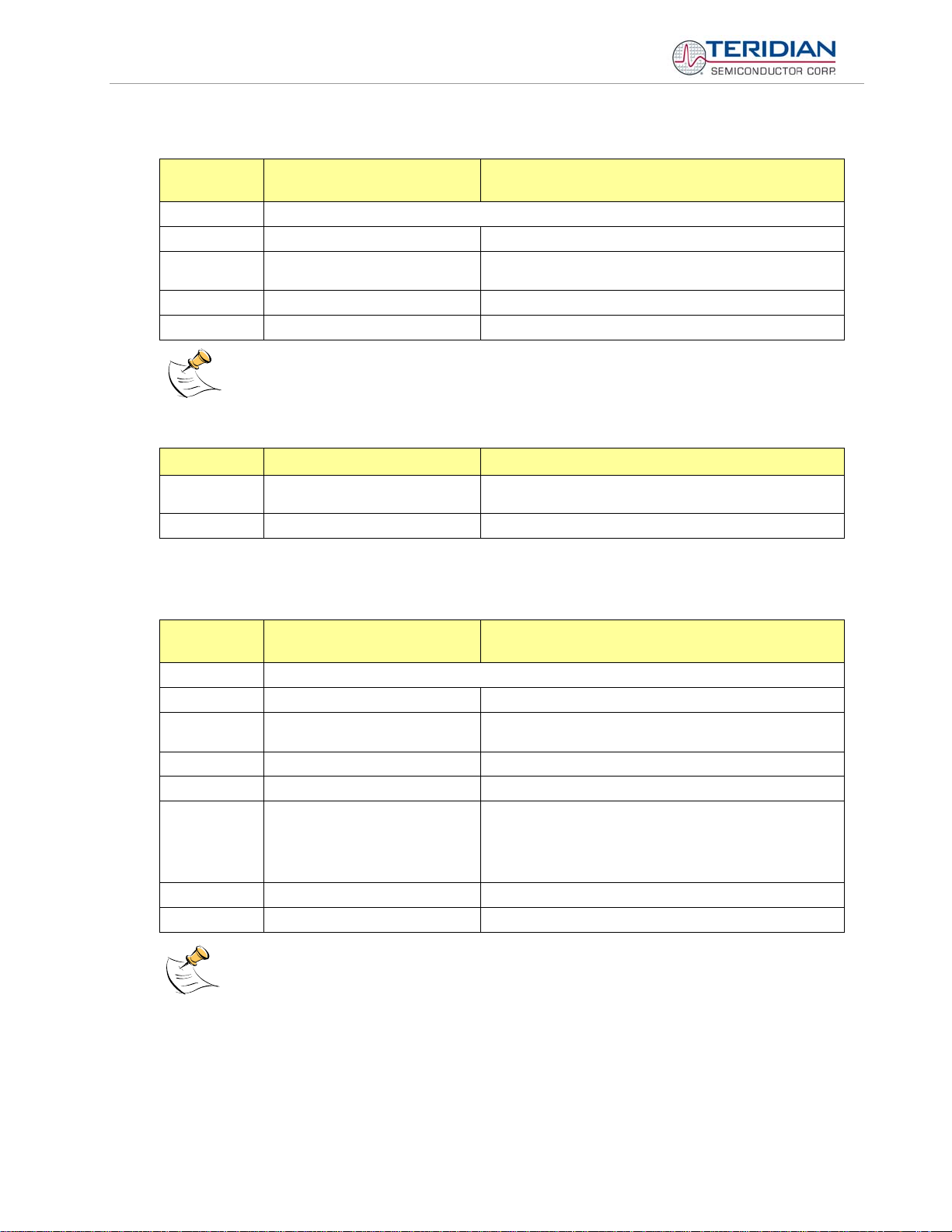
Commands to Display Help on the CLI Commands:
? HELP
Description:
Command
combinations:
Command help available for each of the options below.
? Command line interpreter help menu.
Comment
?] Display help on access CE data RAM
?) Display help on access MPU RAM
?, Display help on repeat last command
?/ Display help on ignore rest of line
?C Display help on compute engine control.
?CL Display help on calibration.
?EE Display help on EEPROM control
?ER Display help on error recording
?I Display help on information message
?M Display help on meter display control
?MR Display help on meter RMS display control
?R Display help on SFR control
?RT Display help on RTC control
?T Display help on trim control
?W Display help on the wait/reset command
?Z Display help on reset
Examples:
?? Display the command line interpreter help menu.
?C Displays compute engine control help.
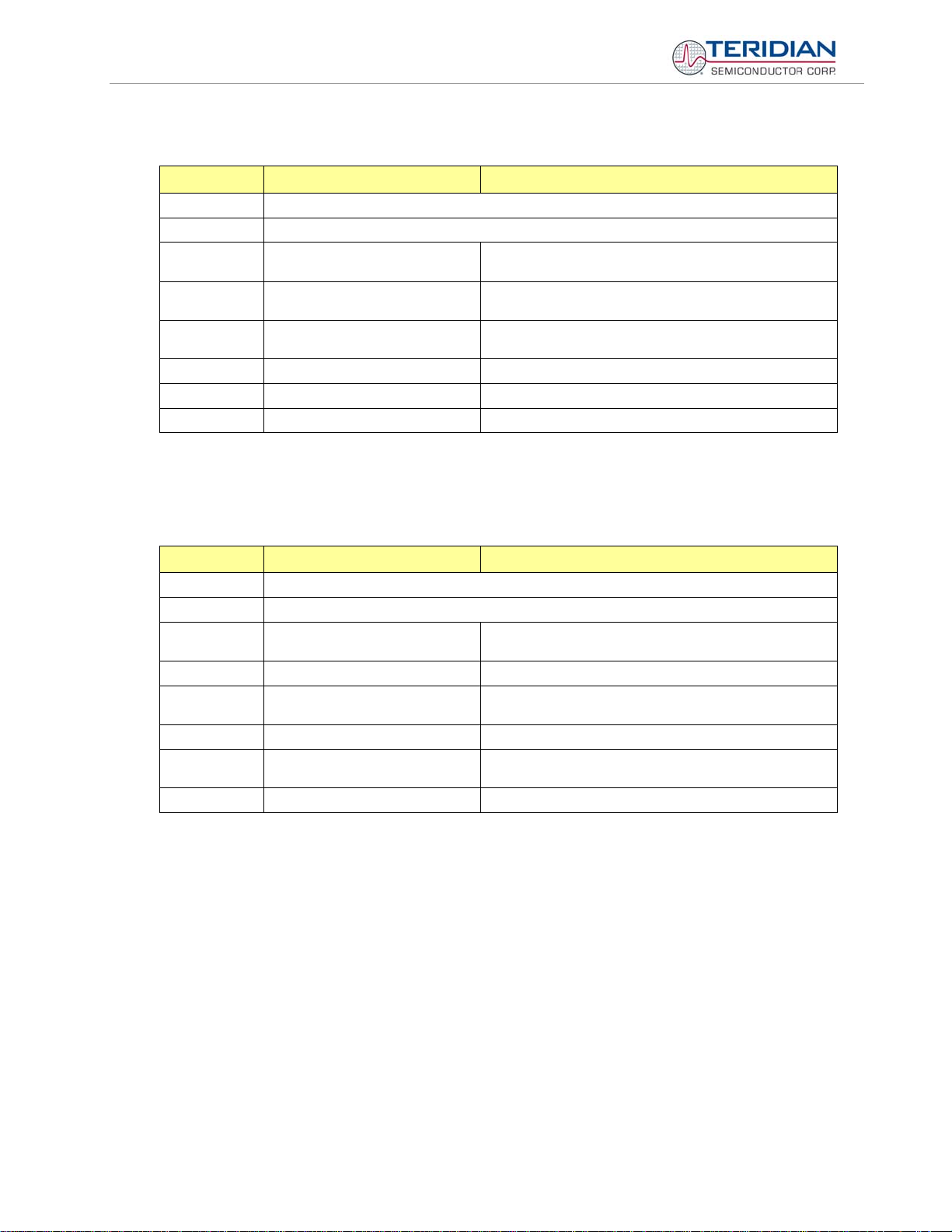
Commands for CE Data Access:
] CE DATA ACCESS Comment
Description:
Usage:
Command
combinations:
Example:
]7E=12345678=9876ABCD Writes two words starting @ 0x7E
Allows user to read from and write to CE data space.
] [Starting CE Data Address] [option]…[option]
]A??? Read consecutive 16-bit words in Decimal, starting at
address A
]A$$$ Read consecutive 16-bit words in Hex, starting at address A
]A=n=n Write consecutive memory values, starting at address A
]U Update default version of CE Data in flash memory
]40$$$ Reads CE data words 0x40, 0x41 and 0x42.
All CE data words are in 4-byte (32-bit) format. Typing ]A? will access the 32-bit word located at the byte
address 0x1000 + 4 * A = 0x1028.
Page: 16 of 83
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
Commands for MPU/XDATA Access:
) MPU DATA ACCESS Comment
Description:
Usage:
Command
combinations:
Example:
)04=12345678=9876ABCD Writes two words starting @ 0x04
MPU or XDATA space is the address range for the MPU XRAM (0x0000 to 0xFFF). All MPU data words are in 4-byte (32-bit)
format. Typing ]A? will access the 32-bit word located at the byte address 4 * A = 0x28. The energy accumulation registers of
the Demo Code can be accessed by typing two Dollar signs (“$$”), typing question marks will display negative decimal values
if the most significant bit is set.
Allows user to read from and write to MPU data space.
) [Starting MPU Data Address] [option]…[option]
)A??? Read three consecutive 32-bit words in Decimal, starting at
address A
)A$$$ Read three consecutive 32-bit words in Hex, starting at
address A
)A=n=m Write the values n and m to two consecutive addresses
starting at address A
?) Display useful RAM addresses.
)08$$$$ Reads data words 0x08, 0x0C, 0x10, 0x14
Commands for DIO RAM (Configuration RAM) and SFR Control:
R DIO AND SFR CONTROL Comment
Description:
Usage:
Command
combinations:
Example:
DIO or Configuration RAM space is the address range 0x2000 to 0x20FF. This RAM contains registers used for configuring
basic hardware and functional properties of the 71M6533/6533H and is organized in bytes (8 bits). The 0x2000 offset is
automatically added when the command RI is typed.
The SFRs (special function registers) are located in internal RAM of the 80515 core, starting at address 0x80.
Allows the user to read from and write to DIO RAM and special function registers (SFRs).
R [option] [register] … [option]
RIx… Select I/O RAM location x (0x2000 offset is automatically
added)
Rx… Select internal SFR at address x
Ra???... Read consecutive SFR registers in Decimal, starting at
address a
Ra$$$... Read consecutive registers in Hex, starting at address a
Ra=n=m… Set values of consecutive registers to n and m starting at
address a
RI2$$$ Read DIO RAM registers 2, 3, and 4 in Hex.
Page: 17 of 83
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
Commands for EEPROM Control:
EE EEPROM CONTROL Comment
Description:
Usage:
Command
combinations:
Example:
Allows user to enable read and write to EEPROM.
EE [option] [arguments]
EECn EEPROM Access (1 Æ Enable, 0 Æ Disable)
EERa.b Read EEPROM at address 'a' for 'b' bytes.
EESabc..xyz Write characters to buffer (sets Write length)
EETa Transmit buffer to EEPROM at address 'a'.
EEWa.b...z Write values to buffer
CLS Saves calibration to EEPROM
EEShello
EET$0210
Due to buffer size restrictions, the maximum number of bytes handled by the EEPROM command is 0x40.
Writes 'hello' to buffer, then transmits buffer to EEPROM
starting at address 0x210.
Auxiliary Commands:
Typing a comma (“,”) repeats the command issued from the previous command line. This is very helpful when
examining the value at a certain address over time, such as the CE DRAM address for the temperature (0x40).
The slash (“/”) is useful to separate comments from commands when sending macro text files via the serial
interface. All characters in a line after the slash are ignored.
Commands controlling the CE, TMUX and the RTM:
C COMPUTE ENGINE
Comment
CONTROL
Description:
Usage:
Command
combinations:
Example:
Allows the user to enable and configure the compute engine.
C [option] [argument]
CEn Compute Engine Enable (1 Æ Enable,
0 Æ Disable)
CTn Select input n for TMUX output pin. n is interpreted as a
decimal number.
CREn RTM output control (1 Æ Enable, 0 Æ Disable)
CRSa.b.c.d Selects CE addresses for RTM output
CE0 Disables CE, followed by “CE OFF” display on LCD. The
Demo Code will reset if the WD timer is enabled.
CT3 Selects the VBIAS signal for the TMUX output pin
Page: 18 of 83
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
Commands controlling the Auto-Calibration Function:
CL AUTO-CALIBRATION
Comment
CONTROL
Description:
Usage:
Command
combinations:
Example:
Allows the user to initiate auto-calibration and to store calibration values.
CL [option]
CLB Begin auto-calibration. Prior to auto-calibration, the calibration
coefficients are automatically restored from flash memory.
CLS Save calibration coefficients to EEPROM starting at address
0x0004
CLC Use machine-readable calibration protocol
CLR Restore calibration coefficients from EEPROM
CLD Restore coefficients from flash memory
CLB Starts auto-calibration and saves data automatically.
Before starting the auto-calibration process, target values for voltage, duration and current must be entered in
MPU RAM (see section 1.9.5) and the target voltage and current must be applied constantly during calibration.
Calibration factors can be saved to EEPROM using the CLS command.
Commands controlling the Pulse Counter Function
CP PULSE-COUNT CONTROL Comment
Description:
Usage:
Command
combinations:
Example:
Allows the user to control the pulse count functions.
CP [option]
CPA Start pulse counting for time period defined with the CPD
command. Pulse counts will display with commands M15.2,
M16.2
CPC Clear the absolute pulse count displays (shown with
commands M15.1, M16.1)
CPDn Set time window for pulse counters to n seconds, n is inter-
preted as a decimal number.
CPD60 Set time window to 60 seconds.
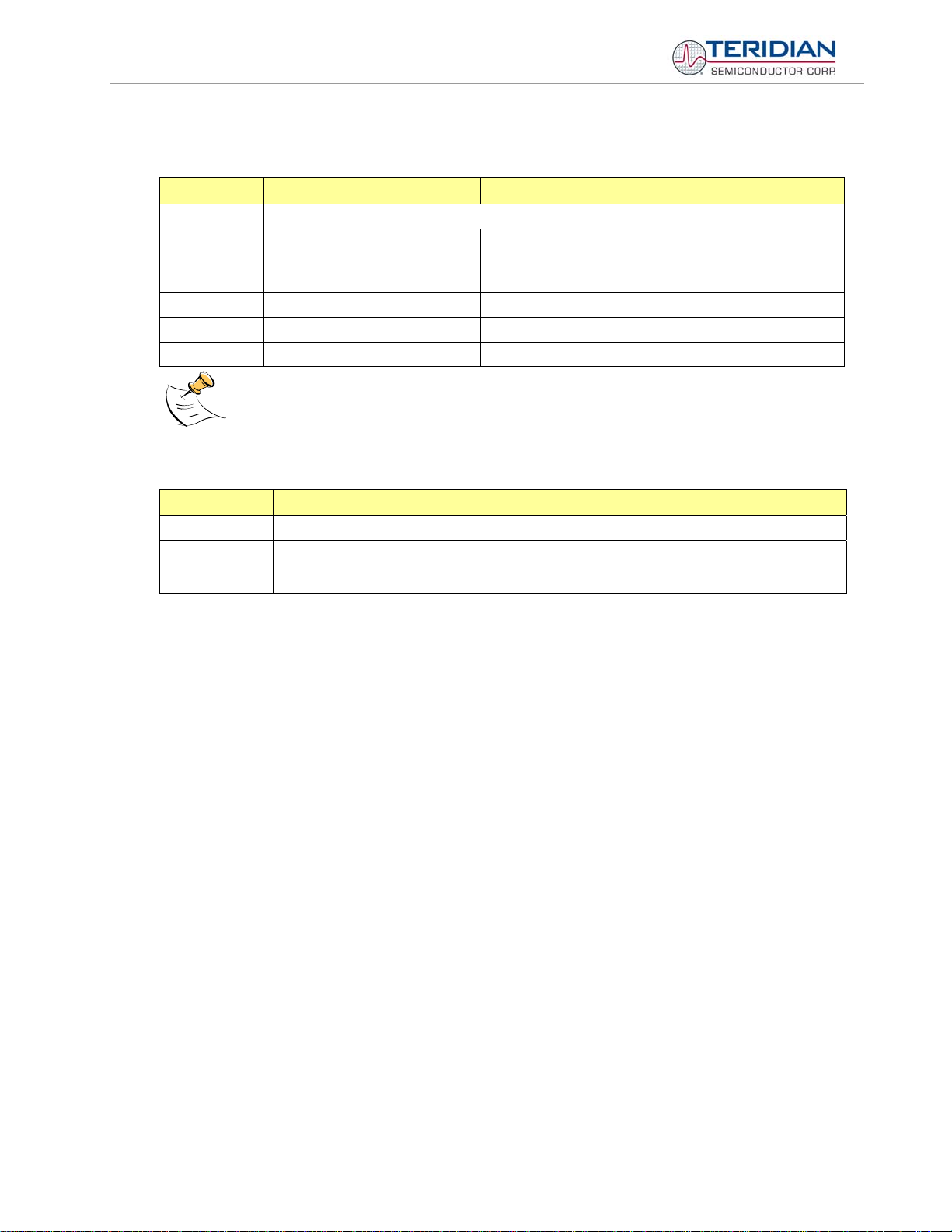
Commands for Identification and Information:
I INFORMATION MESSAGES Comment
Description:
Usage:
The I command is mainly used to identify the revisions of Demo Code and the contained CE code.
Page: 19 of 83
Pulse counts accumulated over a time window defined by the CPD command will be displayed by M14 after the
defined time has expired.
M14 will display the absolute
CPC command (or the XRAM write )1=2).
Allows user to read information messages.
I Displays complete version information
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
pulse count for the W and VAR outputs. These displays are reset to zero with the
71M6533/71M6533H Demo Board User’s Manual
Commands for Controlling the RMS Values Shown on the LCD Display:
MR METER RMS DISPLAY
Comment
CONTROL (LCD)
Description:
Usage:
Command
combinations:
MR2. [phase] Displays instantaneous RMS voltage
Example:
No error message is issued when an invalid parameter is entered, e.g. MR1.8.
Allows user to select meter RMS display for voltage or current.
MR [option]. [option]
MR1. [phase] Displays instantaneous RMS current
MR1.3 Displays phase C RMS current.
Phase 4 is the measured neutral current.
Commands for Controlling the MPU Power Save Mode:
PS POWER SAVE MODE Comment
Description:
Usage:
Return to normal mode is achieved by resetting the MPU (Z command).
Enters power save mode Disables CE, ADC, CKOUT, ECK, RTM, SSI, TMUX VREF,
and serial port, sets MPU clock to 38.4KHz.
PS
Commands for Controlling the RTC:
RT REAL TIME CLOCK
CONTROL
Description:
Usage:
Command
combinations:
Example:
Allows the user to read and set the real time clock.
RT [option] [value] … [value]
RTDy.m.d.w: Day of week (year, month, day, weekday [1 = Sunday]). If the weekday is
RTR Read Real Time Clock.
RTTh.m.s Time of day: (hr, min, sec).
RTAs.t Real Time Adjust: (start, trim). Allows trimming of the RTC.
RTD05.03.17.5 Programs the RTC to Thursday, 3/17/2005
RTA1.+1234 Speeds up the RTC by 1234 PPB.
The “Military Time Format” is used for the RTC, i.e. 15:00 is 3:00 PM.
Comment
omitted it is set automatically.
If s > 0, the speed of the clock will be adjusted by ‘t’ parts per
billion (PPB). If the CE is on, the value entered with 't' will be
changing with temperature, based on Y_CAL, Y_CALC and
Y_CALC2.
Page: 20 of 83
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
Commands for Accessing the Trim Control Registers:
T TRIM CONTROL Comment
Description:
Usage:
Command
combinations:
Example:
Allows user to read trim and fuse values.
T [option]
T4 Read fuse 4 (TRIMM).
T5 Read fuse 5 (TRIMBGA)
T6 Read fuse 6 (TRIMBGB).
T4 Reads the TRIMM fuse.
These commands are only accessible for the 71M6533H (0.1%) parts. When used on a 71M6533 (0.5%) part,
the results will be displayed as zero.
Reset Commands:
W RESET Comment
Description:
Usage:
Watchdog control
W Halts the Demo Code program, thus suppressing the trigger-
ing of the hardware watchdog timer. This will cause a reset, if
the watchdog timer is enabled.
Page: 21 of 83
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
Commands for Controlling the Metering Values Shown on the LCD Display:
M METER DISPLAY
Comment
CONTROL (LCD)
Description:
Usage:
Command
combinations:
M2 Frequency (Hz)
M3. [phase] Wh Total Consumption (display wraps around at 999.999)
M4. [phase] Wh Total Inverse Consumption (display wraps around at 999.999)
M5. [phase] VARh Total Consumption (display wraps around at 999.999)
M6. [phase] VARh Total Inverse Consumption (display wraps around at 999.999)
M7. [phase] VAh Total (display wraps around at 999.999)
M8 Operating Time (in hours)
M9 Real Time Clock
M10 Calendar Date
M11. [phase] Power factor
M13 Mains edge count for the last accumulation interval
M13.1 Main edge count (accumulated) – zero transitions of the input signal
M13.2 Main edge count for the last accumulation interval
M14.1 Absolute count for Wh pulses. Reset with CPC command.
M14.2 Absolute count for VARh pulses. Reset with CPC command.
M15.[phase] I RMS display
M16.[phase] V RMS display
Example:
Allows user to select internal variables to be displayed.
M [option]. [option]
M Wh Total Consumption (display wraps around at 999.999)
M0 Wh Total Consumption (display wraps around at 999.999)
M1 Temperature (C° delta from nominal)
M3.3 Displays Wh total consumption of phase C.
M5.0 Displays VARh total consumption for all phases.
Page: 22 of 83
Displays for total consumption wrap around at 999.999Wh (or VARh, VAh) due to the limited number of
available display digits. Internal registers (counters) of the Demo Code are 64 bits wide and do not wrap
around.
When entering the phase parameter, use 1 for phase A, 2 for phase B, 3 for phase C, and 0 or blank for all
phases.
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
1.8.2 USING THE DEMO BOARD FOR ENERGY MEASUREMENTS
The 71M6533/6533H Demo Board was designed for use with current transformers (CT).
The Demo Board may immediately be used with current transformers having 2,000:1 winding ratio and is
programmed for a Kh factor of 3.2 and (see Section 1.8.4 for adjusting the Demo Board for transformers with
different turns ratio).
Once, voltage is applied and load current is flowing, the red LED D5 will flash each time an energy sum of 3.2
Wh is collected. The LCD display will show the accumulated energy in Wh when set to display mode 3
(command
>M3 via the serial interface).
Similarly, the red LED D6 will flash each time an energy sum of 3.2 VARh is collected. The LCD display will
show the accumulated energy in VARh when set to display mode 5 (command
>M5 via the serial interface).
1.8.3 ADJUSTING THE KH FACTOR FOR THE DEMO BOARD
The 71M6533/6533H Demo Board is shipped with a pre-programmed scaling factor Kh of 3.2, i.e. 3.2Wh per
pulse. In order to be used with a calibrated load or a meter calibration system, the board should be connected to
the AC power source using the spade terminals on the bottom of the board. The current transformers should be
connected to the dual-pin headers on the bottom of the board.
The Kh value can be derived by reading the values for IMAX and VMAX (i.e. the RMS current and voltage
values that correspond to the 250mV maximum input signal to the IC), and inserting them in the following
equation for Kh:
Kh = IMAX * VMAX * 66.1782 / (In_8 * WRATE * N
* X) = 3.19902 Wh/pulse.
ACC
The small deviation between the adjusted Kh of 3.19902 and the ideal Kh of 3.2 is covered by calibration. The
default values used for the 71M6533/6533H Demo Board are:
WRATE: 683
IMAX: 208
VMAX: 600
In_8: 1 (controlled by IA_SHUNT = -15)
N
: 2520
ACC
X: 1.5
Explanation of factors used in the Kh calculation:
WRATE: The factor input by the user to determine Kh
IMAX: The current input scaling factor, i.e. the input current generating 177mVrms at the IA/IB/IC
input pins of the 71M6533. 177mV rms is equivalent to 250mV peak.
VMAX: The voltage input scaling factor, i.e. the voltage generating 177mVrms at the VA/VB/VC input
pins of the 71M6533
In_8: The setting for the additional ADC gain (8 or 1) determined by the CE register IA_SHUNT
N
: The number of samples per accumulation interval, i.e. PRE_SAMPS *SUM_CYCLES
ACC
X: The pulse rate control factor determined by the CE registers PULSE_SLOW and
PULSE_FAST
Almost any desired Kh factor can be selected for the Demo Board by resolving the formula for WRATE:
WRATE = (IMAX * VMAX * 66.1782) / (Kh * In_8 * N
ACC
* X)
For the Kh of 3.2Wh, the value 683 (decimal) should be entered for WRATE at location 2D (using the CLI
command
>]2D=+683).
Page: 23 of 83
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
1.8.4 ADJUSTING THE DEMO BOARDS TO DIFFERENT CURRENT TRANSFORMERS
The Demo Board is prepared for use with 2000:1 current transformers (CTs). This means that for the
unmodified Demo Board, 208A on the primary side at 2000:1 ratio result in 104mA on the secondary side,
causing 177mV at the 1.7Ω resistor pairs R24/R25, R36/R37, R56/R57 (2 x 3.4Ω in parallel).
In general, when IMAX is applied to the primary side of the CT, the voltage V
at the IA, IB, or IC input of the
in
71M6533 IC is determined by the following formula:
V
= R * I = R * IMAX/N
in
where N = transformer winding ratio, R = resistor on the secondary side
If, for example, IMAX = 208A are applied to a CT with a 2500:1 ratio, only 83.2mA will be generated on the se-
condary side, causing only 141mV. The steps required to adapt a 71M6533 Demo Board to a transformer with a
winding ratio of 2500:1 are outlined below:
1) The formula R
= 177mV/(IMAX/N) is applied to calculate the new resistor Rx. We calculate Rx to 2.115Ω
x
2) Changing the resistors R24/R25, R106/R107 to a combined resistance of 2.115Ω (for each pair) will
cause the desired voltage drop of 177mV appearing at the IA, IB, or IC inputs of the 71M6533 IC.
3) WRATE should be adjusted to achieve the desired Kh factor, as described in 1.8.3.
Simply scaling IMAX is not recommended, since peak voltages at the 71M6533 inputs should always be in the
range of 0 through ±250mV (equivalent to 177mV rms). If a CT with a much lower winding ratio than 1:2,000 is
used, higher secondary currents will result, causing excessive voltages at the 71M6533 inputs. Conversely, CTs
with much higher ratio will tend to decrease the useable signal voltage range at the 71M6533 inputs and may
thus decrease resolution.
1.8.5 ADJUSTING THE DEMO BOARDS TO DIFFERENT VOLTAGE DIVIDERS
The 71M6533 Demo Board comes equipped with its own network of resistor dividers for voltage measurement
mounted on the PCB. The resistor values (for the D6533T14A3 Demo Board) are 2.5477MΩ (R15-R21, R26-
R31 combined) and 750Ω (R32), resulting in a ratio of 1:3,393.933. This means that VMAX equals
176.78mV*3,393.933 = 600V. A large value for VMAX has been selected in order to have headroom for
overvoltages. This choice need not be of concern, since the ADC in the 71M6533 has enough resolution, even
when operating at 120Vrms or 240Vrms.
If a different set of voltage dividers or an external voltage transformer (potential transformer) is to be used,
scaling techniques similar to those applied for the current transformer should be used.
In the following example we assume that the line voltage is not applied to the resistor divider for VA formed by
R15-R21, R26-R31, and R32, but to a voltage transformer with a ratio N of 20:1, followed by a simple resistor
divider. We also assume that we want to maintain the value for VMAX at 600V to provide headroom for large
voltage excursions.
When applying VMAX at the primary side of the transformer, the secondary voltage V
Vs is scaled by the resistor divider ratio RR. When the input voltage to the voltage channel of the 71M6533 is the
desired 177mV, V
Resolving for R
This divider ratio can be implemented, for example, with a combination of one 16.95kΩ and one 100Ω resistor.
Page: 24 of 83
is:
s
Vs = VMAX / N
is then given by:
s
Vs = RR * 177mV
, we get:
R
= (VMAX / N) / 177mV = (600V / 30) / 177mV = 170.45
R
R
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
71M6533/71M6533H Demo Board User’s Manual
If potential transformers (PTs) are used instead of resistor dividers, phase shifts will be introduced that will require negative phase angle compensation. TERIDIAN can supply Demo Code that accepts negative calibration
factors for phase.
1.9 CALIBRATION PARAMETERS
1.9.1 GENERAL CALIBRATION PROCEDURE
Any calibration method can be used with the 71M6533/6533H chips. This Demo Board User’s Manual presents
calibration methods with three or five measurements as recommended methods, because they work with most
manual calibration systems based on counting "pulses" (emitted by LEDs on the meter).
Naturally, a meter in mass production will be equipped with special calibration code offering capabilities beyond
those of the Demo Code. It is basically possible to calibrate using voltage and current readings, with or without
pulses involved. For this purpose, the MPU Demo Code can be modified to display averaged voltage and
current values (as opposed to momentary values). Also, automated calibration equipment can communicate
with the Demo Boards via the serial interface and extract voltage and current readings. This is possible even
with the unmodified Demo Code.
Complete calibration procedures are given in section 2.2 of this manual.
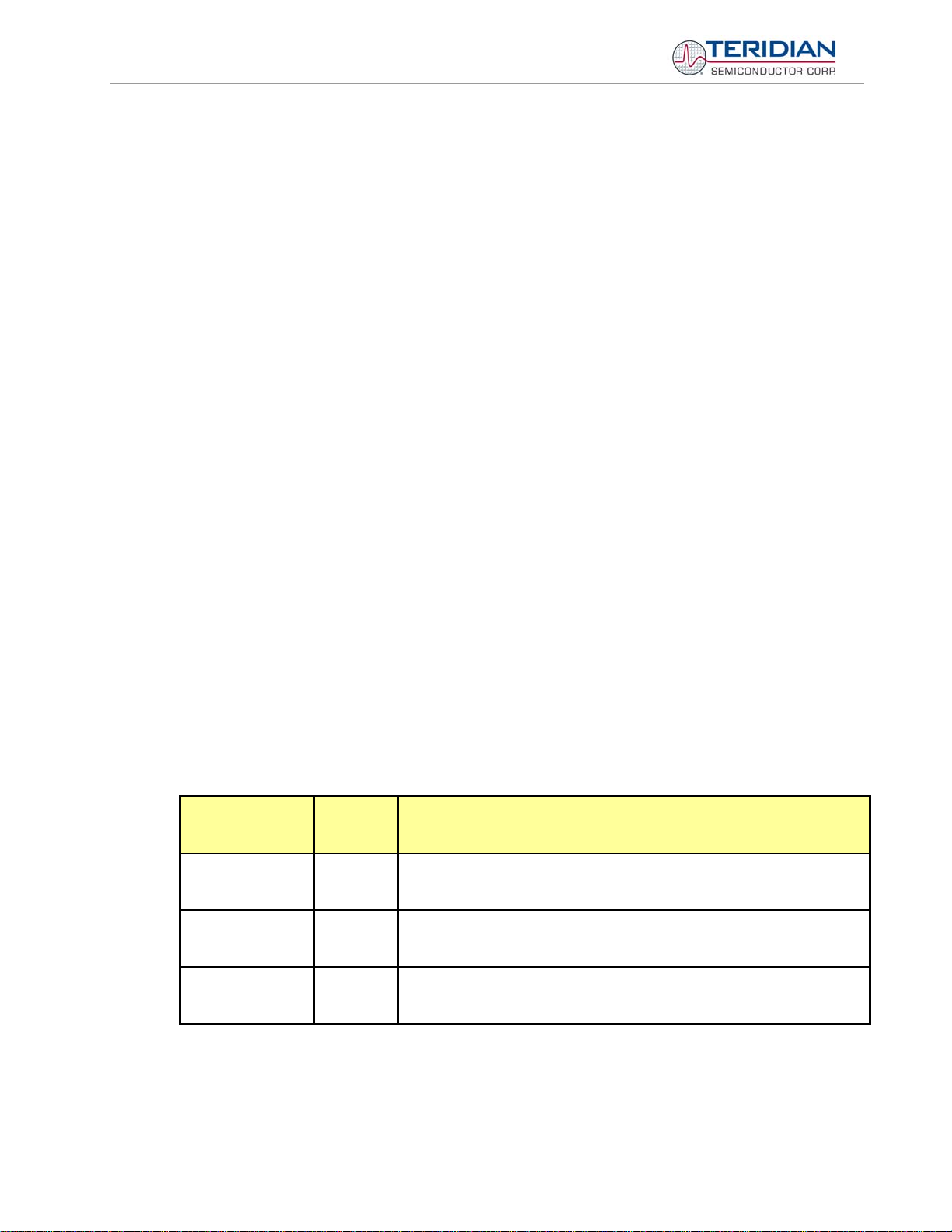
Regardless of the calibration procedure used, parameters (calibration factors) will result that will have to be
applied to the 71M6533/6533H chip in order to make the chip apply the modified gains and phase shifts
necessary for accurate operation. Table 1-5 shows the names of the calibration factors, their function, and their
location in the CE RAM.
Again, the command line interface can be used to store the calibration factors in their respective CE RAM
addresses. For example, the command
>]10=+16302
stores the decimal value 16302 in the CE RAM location controlling the gain of the current channel (CAL_IA) for
phase A.
The command
>]11=4005
stores the hexadecimal value 0x4005 (decimal 16389) in the CE RAM location controlling the gain of the voltage
channel for phase A (
Constant
CAL_VA
CAL_VB
CAL_VC
CAL_IA
CAL_IB
CAL_IC
PHADJ_A
PHADJ_B
PHADJ_C
CAL_VA).
CE
Address
(hex)
0x11
0x13
0x15
0x10
0x12
0x14
0x18
0x19
0x1A
Description
Adjusts the gain of the voltage channels. +16384 is the typical value. The
gain is directly proportional to the CAL parameter. Allowed range is 0 to
32767. If the gain is 1% slow, CAL should be increased by 1%.
Adjusts the gain of the current channels. +16384 is the typical value. The
gain is directly proportional to the CAL parameter. Allowed range is 0 to
32767. If the gain is 1% slow, CAL should be increased by 1%.
This constant controls the CT phase compensation. No compensation
occurs when PHADJ=0. As PHADJ is increased, more compensation is
introduced.
Page: 25 of 83
Table 1-5: CE RAM Locations for Calibration Constants
© 2005-2008 TERIDIAN Semiconductor Corporation V1-2
 Loading...
Loading...