

Page 1
Visionary Solutions for Industry®Since 1972 — ISO 9001 Certified
4.00"
6.75"
1
4
5
2
3
7
6
20A-FAST
1
A-FAST
®
®
Temperature Contro llers & Sen sors ◆ Heating E lements ◆ Proc ess Heating Systems
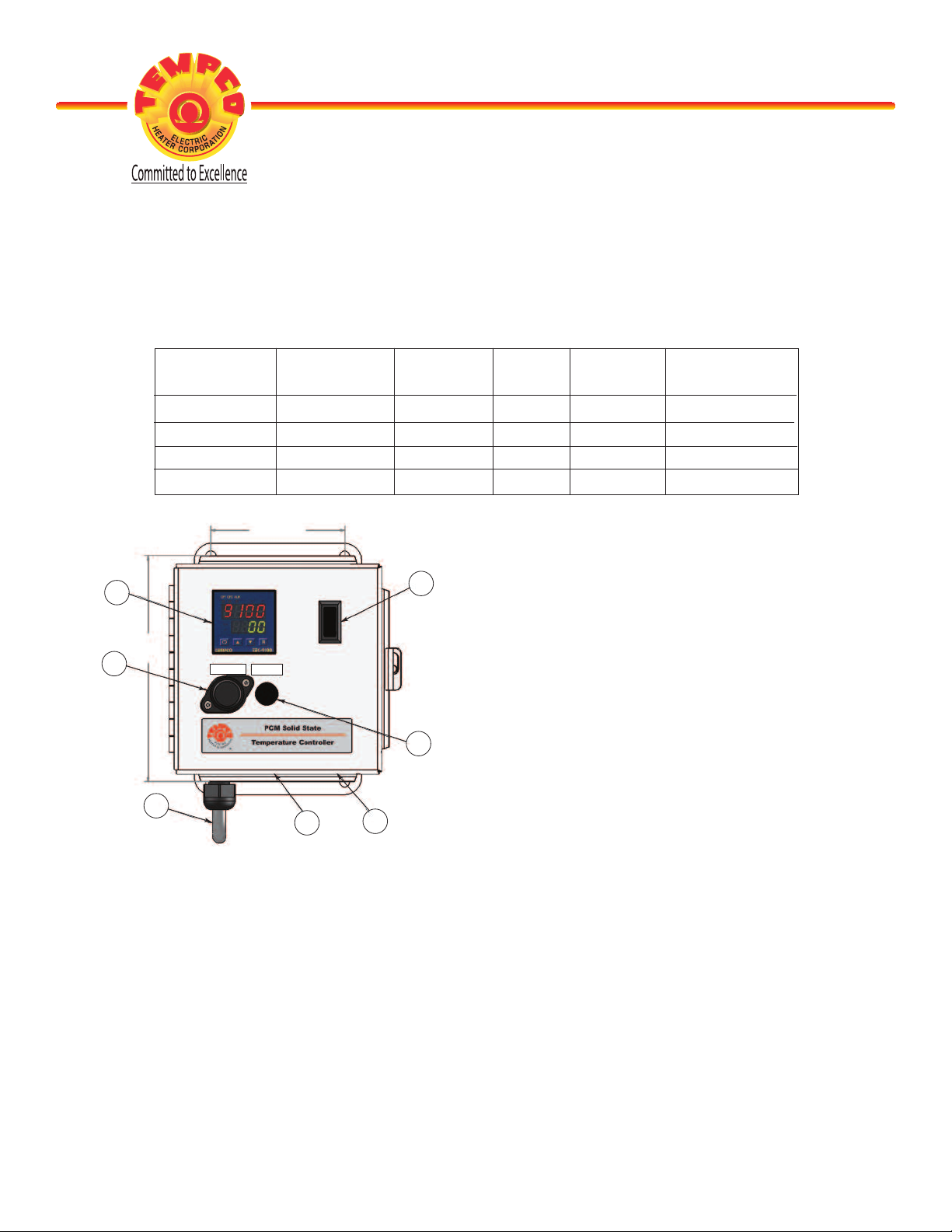
Instructions for Tempco Control Enclosure PCM10001 through PCM10004
Temperature Controller: Model TEC-9100, 1/16 DIN, Dual Display with PID Auto-tuning
Main Power Switch: Located on Front Panel
Part Number Input Voltage Max. Heater Maximum Thermocouple
(50/60 Hz) Amperage Fusing Wattage Sensor Input
PCM10001 120VAC 16 20amps 1920 Type J
PCM10002 240VAC 16 20amps 3840 Type J
PCM10003 120VAC 16 20amps 1920 Type K
PCM10004 240VAC 16 20amps 3840 Type K
1: TEC-9100 Controller
2: On-Off Switch
3: 1 Amp Control Fuse
4: 20 Amp Main Fuse (240V model has 2)
5: 120V or 240V Power Cord (20A)
6: 120V or 240V Heater Receptacle (20A)
7: Type J or K Thermocouple Jack
WARNINGS
1. Dangerous voltage capable of causing injury or death is present within this enclosure. Power to all
equipment must be disconnected before installation or beginning any troubleshooting procedures.
All wiring and component replacement must be made by qualified personnel only.
2. To minimize the possibility of fire or shock, do not expose this console to rain or excessive moisture.
3. Do not use this enclosure in areas where hazardous conditions exist such as excessive shock, vibration,
dirt, corrosive gases, oil or where explosive gases or vapors are present.
© 2016 Tempco Electric Heater Corporation (Revision 6/15/2016)
TEMPCO Electric Heater Corporation
607 N. Central Avenue
◆ Wood Dale, IL 60191-1452 USA ◆ 630.350.2252 ◆ Fax: 630.350.0232
E-mail: info@tempco.com
◆ Web: www.tempco.com
Page 1 of 10
Page 2

WIRING (for safety, unplug unit prior to making any heater or sensor connections)
1. Attach the leads from your thermocouple to the provided standard thermocouple jack of the
same thermocouple type. Note the correct polarity: For type “J” and “K thermocouples, the
RED lead is (-) negative.
2. The heater output current is sourced directly thru the line cord. The bottom console output receptacle provides live controlled power for direct connection to your heater(s).
OPERATION
1. Verify the power switch is in the off position. Plug your heater into the straight-blade enclosure
connector. Plug the provided line cord from the console into a standard outlet. Switch on the
enclosure.
2. Using the up & down pushbuttons on the TEC-9100 controller, start out with the temperature
set low to test your system. If the setpoint temperature is being maintained, set your desired
temperature setpoint.
Note: The signal of the output circuit is wired through output 2 of the TEC-9100 which can
be used as a cut-out in the event of an over-setpoint temperature condition. This is
a deviation contact set to 30º F above the setpoint.
In the event of an over-setpoint temperature condition, output 2 will open, cutting
the control signal to the output relay.
This deviation setpoint can be changed by accessing “SP2” in the TEC-9100 (note
page 3 for user menu selection). This is not meant to be a redundant safety controller.
Refer to our TEC-910 for a safety controller.
3. Auto-tuning is recommended for initial set-up. Refer to page 7 of the attached manual for autotuning procedures.
SPARE/REPLACEMENT PARTS
Part Number Description
EHD-124-245 (1 or 2) Main fuse(s) rated 20 amps, 250V, Class CC, fast acting,
LittelFuse KLKR020 or equivalent.
EHD-124-276 Control fuse (1) rated 1 amp, 250V, 1/4 x 1¼", fast acting,
Bussmann ABC-1-R or equivalent.
EHD-102-218 Output plug — 20A 125V, 2-pole, 3-wire grounding,
NEMA 5-20R (PCM10001, PCM10003)
EHD-102-187 Output plug — 20A 250V, 2-pole, 3-wire grounding,
NEMA 6-20P (PCM10002, PCM10004)
TCA-101-101 Thermocouple plug, Type “J” (if PCM10001, PCM10002)
TCA-101-102 Thermocouple plug, Type “K” (if PCM10003, PCM10004)
Page 2 of 10
Page 3
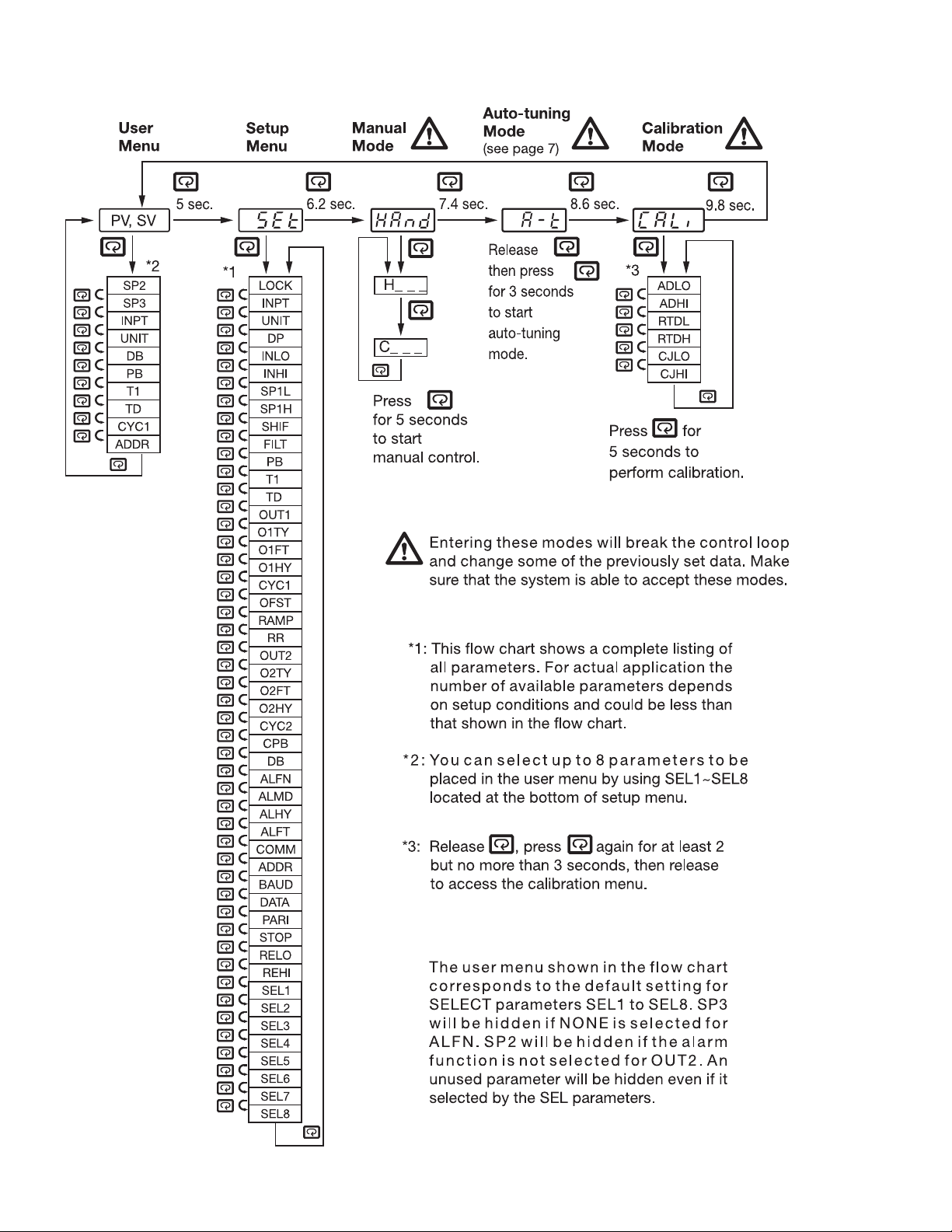
1–5 Menu Overview
Page 3 of 10
Page 4

Parameter Descriptions (TEC-9100 Temperature Controller)
Page 4 of 10
Controller Parameter Descriptions that are not applicable are not shown in the above table.
Page 5

Control Outputs
Heat only ON-OFF control: Select REVR for OUT1. Set PB
proportional band) to 0. O1HY is used to adjust dead band for
(
ON-OFF control. The output 1 hysteresis (O1HY) is enabled
in case PB=0. The heat only on-off control function is shown
in the following diagram:
The ON-OFF control may introduce excessive process oscillation
even if hysteresis is minimized. If ON-OFF control is set (i.e.,
PB=0), TI, TD, CYC1, OFST, CYC2, CPB, and DB will be hidden
and have no function in the system. The auto-tuning and bumpless
transfer functions will be disabled as well.
Heat only P (or PD) control: Select REVR for OUT1, set TI to
0. OFST is used to adjust the control offset (manual reset).
O1HY is hidden if PB is not equal to 0.
OFST function: OFST is measured by % with a range of 0–
00.0%. In the steady state (i.e., process has been stabilized), if
1
the process value is lower than the set point by a definite value,
say 5°C, while 20°C is used for PB, that is lower by 25%, then
increase OFST 25%, and vice-versa. After adjusting OFST
value, the process value will be varied and eventually coincide
ith set point.
w
Refer to section 3-12 “manual tuning” for the adjustment of PB
and TD. Manual reset (adjust OFST) is not practical because the
load may change from time to time and OFST may need to be
adjusted repeatedly. PID control can avoid this situation.
Heat only PID control: If REVR is selected for OUT1, PB and
TI should not be zero. Perform auto-tuning for the new process,
or set PB, TI, and TD with historical values. See section 3-11
for auto-tuning operation. If the control result is still unsatisfactory, then use manual tuning to improve control. See section 312 for manual tuning. The unit contains a very advanced PID
and Fuzzy Logic algorithm to create a very small overshoot and
very quick response to the process if it is properly tuned.
Cool only control: ON-OFF control, P (PD) control, and PID
control can be used for cool control. Set OUT1 to DIRT (direct
action). The other functions for cool only ON-OFF control, cool
only P (PD) control, and cool only PID control are the same as
for heat only control except that the output variable (and action)
for cool control is inverse to heat control.
NOTE: ON-OFF control may result in excessive overshoot and
undershoot problems in the process. P (or PD) control will result
in a deviation of process value from the set point. It is recommended to use PID control for heat-cool control to produce a stable
and zero offset process value.
Ramp
The ramping function is performed during power up as well as any
time the set point is changed. If MINR or HRR is chosen for
RAMP, the unit will perform the ramping function. The ramp rate
is programmed by adjusting RR. The ramping function is disabled
as soon as failure mode, manual control mode, auto-tuning mode
or calibration mode is entered.
Example without dwell timer
Select MINR for RAMP, select °C for UNIT, select 1-DP for DP,
set RR=10.0. SV is set to 200°C initially, and changed to 100°C
30 minutes after power-up. The starting temperature is 30°C. After
power-up, the process runs like the curve shown below:
Figure 3.5 RAMP Function
Note: When the ramp function is used, the lower display will show
the current ramping value. The ramping value is an artificially determined setpoint created and updated by the control to match the
ramp rate set by the user. However, it will revert to show the set
point value as soon as the up or down key is touched for adjustment. The ramping value is initiated to process value either on
power-up or when RR and/or the set point are changed. Setting
RR to zero means no ramp function.
Page 5 of 10
Page 6

PV Shift
R
In certain applications it is desirable to shift the controller display value (PV) from its actual value. This
can easily be accomplished by using the PV shift
unction.
f
The SHIF function will alter PV only.
Example: A process is equipped with a heater, a sensor, and a subject to be warmed up. Due to the design
and position of the components in the system, the sensor could not be placed any closer to the part. Thermal
gradient (differing temperatures) is common and necessary to an extent in any thermal system for heat to
be transferred from one point to another. If the difference between the sensor and the subject is 35°C, and
the desired temperature at the subject to be heated is
200°C, the temperature at the sensor should be 235°C.
You should enter -35°C to subtract 35°C from the actual process display. This in turn will cause the controller to energize the load and bring the process
display up to the set point value.
Failure Transfer
The controller will enter failure mode if one
of the following conditions occurs:
1. SBER occurs due to input sensor break
or input current below 1mA if 4–20 mA
is selected or input voltage below 0.25V
if 1–5V is selected.
2. ADER occurs due to the A-D converter
of the controller failing.
Output 1 and output 2 will perform the failure transfer function as the controller enters
failure mode.
Output 1 failure transfer, if activated, will
perform:
1. If output 1 is configured as proportional
control (PB≠ 0), and BPLS is selected
for O1FT, then output 1 will perform
bumpless transfer. Thereafter, the previous averaging value of MV1 will be
used for controlling output 1.
2. If output 1 is configured as proportional
control (PB≠ 0), and a value of 0 to
100.0% is set for O1FT, then output 1
will perform failure transfer. Thereafter,
the value of O1FT will be used for controlling output 1.
Figure 3.7 PV Shift Application
3. If output 1 is configured as ON-OFF
control (PB=0), then output 1 will be
driven OFF if OFF is set for O1FT and
will be driven ON if ON is set for O1FT.
Manual Control
Operation
To enable manual control, the LOCK parameter should be set
to NONE, then press for 6.2 seconds;
(hand control) will appear on the display. Press for 5 seconds, then the MAN indicator will begin to flash and the lower
display will show . The controller is now in manual
control mode. indicates output control variable for output 1, and indicates control variable for output 2. Now
you can use the up and down keys to adjust the percentage
values for the heating or cooling output.
The controller performs open loop control as long as it stays
in manual control mode.
Exit Manual Control
Pressing the key will cause the controller to revert to its
normal display mode.
Page 6 of 10
Page 7

Auto-tuning
The auto-tuning process is performed near the set point.
The process will oscillate around the set point during
the tuning process. Set the set point at a lower value if overshooting beyond the normal process value is likely to cause
amage.
d
Auto-tuning is applied in cases of:
• Initial setup for a new process
• The set point is changed substantially from the previous
auto-tuning value
• The control result is unsatisfactory
Operation:
1. The system has been installed normally.
2. Set the correct values for the setup menu of the unit, but
don’t set a zero value for PB and TI, or the auto-tuning program will be disabled. The LOCK parameter should be set
at NONE.
3. Set the set point to a normal operating value, or a lower value
if overshooting beyond the normal process value is likely to
cause damage.
4. Press and hold until appears on the display.
5. Then press
will begin to flash and the auto-tuning procedure begins.
NOTE: The ramping function, if used, will be disabled when
auto-tuning is taking place.
Auto-tuning mode is disabled as soon as either failure mode or
manual control mode is entered.
Procedures:
Auto-tuning can be applied either as the process is warming
up (cold start), or when the process has been in a steady state
(warm start). After the auto-tuning procedures are completed,
the AT indicator will cease to flash and the unit will revert to
PID control using its new PID values. The PID values obtained are stored in the nonvolatile memory.
Auto-Tuning Error
If auto-tuning fails an ATER message will appear on the upper
display in the following cases:
• If PB exceeds 9000 (9000 PU, 900.0°F or 500.0°C),
• if TI exceeds 1000 seconds,
• if the set point is changed during the auto-tuning procedure.
Solutions to
1. Try auto-tuning once again.
2. Don’t change the set point value during the auto-tuning pro-
cedure.
3. Don’t set a zero value for PB and TI.
4. Use manual tuning instead of auto-tuning (see section 3-12).
5. Touch RESET key to reset message.
again
for at least 5 seconds. The AT indicator
Table 3.2 PID Adjustment Guide
Manual Tuning
In certain applications auto-tuning may be inadequate for the
control requirements. You can try manual tuning for these applications.
If the control performance using auto-tuning is still unsatisfactory, the following rules can be applied for further adjustment of PID values:
Figure 3.9 Effects of PID Adjustment
Figure 3.9 shows the effects of PID
adjustment on process response.
Page 7 of 10
Page 8

Table A.1 Error Codes and Corrective Actions
Page 8 of 10
Page 9

WARRANTY
Tempco Electric Heater Corporation is pleased to offer suggestions on the use of its products. However, Tempco makes no warranties or representations of any sort regarding the fitness for use,
r the application of its products by the Purchaser. The selection,
o
application, or use of Tempco products is the Purchaser's responsibility. No claims will be allowed for any damages or losses,
whether direct, indirect, incidental, special, or consequential.
Specifications are subject to change without notice. In addition,
Tempco reserves the right to make changes–without notification
to the Purchaser–to materials or processing that do not affect compliance with any applicable specification. TEC Temperature Controllers are warranted to be free from defects in material and
workmanship for two (2) years after delivery to the first purchaser
for use. Tempco's sole responsibility under this warranty, at Tempco's option, is limited to replacement or repair, free of charge, or
refund of purchase price within the warranty period specified.
This warranty does not apply to damage resulting from transportation, alteration, misuse, or abuse.
Common Causes of Failures
RETURNS
No product returns can be accepted without a completed Return
Material Authorization (RMA) form.
TECHNICAL SUPPORT
echnical questions and troubleshooting help is available from
T
Tempco. When calling or writing please give as much background
information on the application or process as possible.
E-mail: techsupport@tempco.com
Phone: 630-350-2252
800-323-6859
• Incorrect parameters entered in menu (most common)
• Excessive electrical interference
• Line wires are improperly connected
• No voltage between line terminals
• Incorrect voltage between line terminals
• Connections to terminals are open, missing or loose
• Thermocouple (or RTD) is open at tip
• Thermocouple (or RTD) is broken
• Shorted thermocouple (or RTD) leads
If the points listed above have been checked and the controller does not function, it is suggested
that the instrument be returned for inspection.
Please request an RMA (Return Material Authorization) number for return instructions.
• Short across terminals
• Open or shorted heater circuit
• Open coil in external contactor
• Burned out line fuses
• Defective solid-state relays
• Defective line switches
• Burned out contactor
• Defective circuit breakers
Page 9 of 10
Page 10

Complete Your Thermal Loop System
With Over 100,000 Various Items
Available from Stock
• Electric Heating Elements
• Thermocouples and RTD Assemblies
• SCR Power Controls
• Solid State Relays
• Mechanical Relays
• Videographic Data Recorders
• Temperature Measurement
• Current Indicators
• Thermocouple and Power Lead Wire
• Wiring Accessories
TEMPCO’s Visionary Solutions
The Electric Heating Element, Temperature Controls and
Temperature Sensors Handbook
REQUEST YOUR FREE 960 PAGE COPY TODAY!
Call (800-323-6859) or E-mail (info@tempco.com)
™
Experience the Advantages of our Diverse and Innovative Products
Page 10 of 10
Specify Print Edition, CD-ROM or Both
Serving Industry Since 1972
TEMPCO Electric Heater Corporation
607 N. Central Avenue • Wood Dale, IL 60191-1452 USA
Tel: 630-350-2252 • Toll Free: 800-323-6859
Fax: 630-350-0232 • E-mail: info@tempco.com
Web: www.tempco.com
© Copyright 2015. All Rights Reserved.
 Loading...
Loading...