

Page 1

SE873 Family
Product User Gui de
1VV0301216 Rev. 4
2018-08-24
Page 2

SE873 Family Product User Guide Notices
SPECIFICATIONS ARE SUBJECT TO CHANGE WITHOUT NOTICE
NOTICES
While reasonable efforts have been made to assure the accu racy of this document, Telit assumes
no liability resulting from any inaccuracies or omissions in this document, or from use of the
information obtained herein. The information in this document has been carefully checked and is
believed to be reliable. However, no responsibility is assumed for inaccuracies or omissions. Telit
reserves the right to make changes to any products described herein and reserves the right to
revise this document and to make changes from time to time in content hereof with no obligation
to notify any person of revisions or changes. Telit does not assume any liability arising out of the
application or use of any product, software, or circuit described herein; neither does it convey
license under its patent rights or the rights of others.
It is possible that this publication may contain references to, or information about Telit products
(machines and programs), programming, or services that are not announced in your country.
Such references or information must not be construed to mean that Telit intends to announce
such Telit products, programming, or services in your country.
COPYRIGHTS
This manual and the Telit products described in it may be, include or describe copyrighted Telit
material, such as computer programs stored in semiconductor me mories or other media. Laws in
Italy and other countries preserve for Telit and its licensors cer tain exclusive rights for copyrighted
material, including the exclusive right to copy, reproduce in any form, distribute, and make
derivative works of the copyrighted material. Accordingly, any copyrighted material of Telit and its
licensors contained herein or in the Telit products described in this manual may not be copied,
reproduced, distributed, merged, or modified in any manner without the express written
permission of Telit. Furthermore, the purchase of Telit products shall not be deemed to grant
either directly or by implication, estoppel, or otherwise, any license under the copyrights, patents,
or patent applications of Telit, as arises by operation of law in the sale of a product.
COMPUTER SOFTWARE COPYRIGHTS
The Telit and 3rd Party supplied Software (SW) products described in this manual may include
copyrighted Telit and other 3rd Party supplied computer programs stored in semiconductor
memories or other media. Laws in Italy and other countries preserve for Telit and other 3rd Party
supplied SW certain exclusive rights for copyrighted computer programs, including the exclusive
right to copy or reproduce in any form the copyrighted computer program. Accordingly, any
copyrighted Telit or other 3rd Party supplied SW computer programs contained in the Telit
products described in this instruction manual may not be copied (reverse engineered) or
reproduced in any manner without the express written permission of Telit or the 3rd Pa rty SW
supplier. Furthermore, the purchase of Telit products shall not be deemed to grant either directly
or by implication, estoppel, or otherwise, any license under the copyrights, patents, or patent
applications of Telit or other 3rd Party supplied SW, except for the normal non-exclusive, royalty
free license to use that arises by operation of law in the sale of a product.
1VV0301216 Rev.4 Page 2 of 69 2018-08-24
Page 3
SE873 Family Product User Guide Notices
Usage and Disclosure Re str ic t ions
I. License Agreements
The software described in this document is the property of Telit and its licensors. It is furnished
by express license agreement only and may be used only in accordance with the terms of such
an agreement.
II. Copyrighted Materials
Software and documentation are copyrighted materials. Making unautho rized copies is prohibited
by law. No part of the software or documentation may be reproduced, transmitted, transcribed,
stored in a retrieval system, or translated into any language or computer language, in any form or
by any means, without prior written permission of Telit
III. High Risk Materials
Components, units, or third-party products used in the product described herein are NOT faulttolerant and are NOT designed, manufactured, or intended for use as on-line control equipment
in the following hazardous environments requiring fail-safe controls: the operation of Nuclear
Facilities, Aircraft Navigation or Aircraft Communication Systems, Air Traffic Control, Life Support,
or Weapons Systems (High Risk Activities"). Telit and its supplier(s) specifically disclaim any
expressed or implied warranty of fitness for such High-Risk Activities.
IV. Trademarks
TELIT and the Stylized T Logo are registered in Trademark Office. All other product or service
names are the property of their respective owners.
V. Third Party Right s
The software may include Third Party Right software. In this case you agree to comply with all
terms and conditions imposed on you in respect of such separate software. In addition to Third
Party Terms, the disclaimer of warranty and limitation of liability provisions in this License shall
apply to the Third-Party Right software.
TELIT HEREBY DISCLAIMS ANY AND ALL WARRANTIES EXPRESS OR IMPLIED FROM ANY
THIRD PARTIES REGARDING ANY SEPARATE FILES, ANY THIRD PARTY MATERIALS
INCLUDED IN THE SOFTWARE, ANY THIRD PARTY MATERIALS FROM WHICH THE
SOFTWARE IS DERIVED (COLLECTIVELY “OTHER CODE”), AND THE USE OF ANY OR ALL
THE OTHER CODE IN CONNECTION WITH THE SOFTWARE, INCLUDING (WITHOUT
LIMITATION) ANY WARRANTIES OF SATISFACTORY QUALITY OR FITNESS FOR A
PARTICULAR PURPOSE.
NO THIRD PARTY LICENSORS OF OTHER CODE SHALL HAVE ANY LIABILITY FOR ANY
DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
DAMAGES (INCLUDING WITHOUT LIMITATIO N LOST PROFIT S), HOWEVER CAUSED AND
WHETHER MADE UNDER CONTRACT, TORT OR OTHER LEGAL THEORY, ARISING IN ANY
WAY OUT OF THE USE OR DISTRIBUTION OF T HE OTHER CODE OR T HE EXERCISE OF
ANY RIGHTS GRANTED UNDER EITHER OR BOTH THIS LICENSE AND THE LEGAL TERMS
APPLICABLE TO ANY SEPARATE FILES, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH
DAMAGES.
1VV0301216 Rev.4 Page 3 of 69 2018-08-24
Page 4
SE873 Family Product User Guide Product Applicability Table
PRODUCT
SE873
SE873Q5
PRODUCT APPLICABILITY TABLE
Table 0-1 Product Applicability Table
1VV0301216 Rev.4 Page 4 of 69 2018-08-24
Page 5
SE873 Family Product User Guide Contents
CONTENTS
NOTICES .................................................................................................................................... 2
PRODUCT APPLICABILITY TABLE .......................................................................................... 4
CONTENTS ................................................................................................................................ 5
1. INTRODUCTION ............................................................................................................. 11
Purpose ...................................................................................................................... 11
Contact and Support Information ................................................................................. 11
Related Documents and Downloads ........................................................................... 11
Related Documents Requiring a Non-Disclosure Agreement 11
Text Conventions ........................................................................................................ 12
2. PRODUCT DESCRIPTION .............................................................................................. 13
Product Overview ........................................................................................................ 13
Product Variants.......................................................................................................... 13
Block Diagram ............................................................................................................. 14
SE873 Modules Photos ............................................................................................... 15
3. SE873 EVALUATON KIT (EVK) ..................................................................................... 16
SE873 Evaluation Unit ................................................................................................ 17
4. PRODUCT FEATURES ................................................................................................... 18
Multi-Constellation Navigation ..................................................................................... 18
Quasi-Zenith Satellite System (QZSS) support ........................................................... 18
Satellite Based Augmentation System (SBAS) ............................................................ 18
SBAS Corrections 18
SBAS Ranging 18
Assisted GPS (AGPS) - SiRFInstantFix™ ................................................................... 18
Client-generated Extended Ephemeris (CGEE) 19
Server-generated Extended Ephemeris (SGEE) 19
2-D Positioning ............................................................................................................ 19
Static Navigation ......................................................................................................... 19
Velocity Dead-Reckoning ............................................................................................ 19
Jamming Rejection – Continuous Wave (CW) Jamming Mitigation ............................. 20
Elevation Mask Angle .................................................................................................. 20
5 Hz and 10 Hz Navigation .......................................................................................... 20
1PPS ........................................................................................................................... 20
Internal LNA ................................................................................................................ 21
Passive antenna: 21
Active antenna (or External LNA) with High Gain firmware: 21
Active antenna (or External LNA) with Low Gain firmware: 21
1VV0301216 Rev.4 Page 5 of 69 2018-08-24
Page 6
SE873 Family Product User Guide Contents
Serial I/O Ports ............................................................................................................ 21
Power Management .................................................................................................... 22
Full Power Mode (default) 22
SmartGNSS 22
Trickle Power 23
Push-to-Fix 23
SiRFaware 23
Hibernate 23
5. PRODUCT PERFORMANCE .......................................................................................... 24
Horizontal Position Accuracy ....................................................................................... 24
Time to First Fix .......................................................................................................... 24
Sensitivity .................................................................................................................... 25
6. MESSAGE INTERFACE ................................................................................................. 26
NMEA Output Messages ............................................................................................. 26
Standard Messages 26
Proprietary Messages 27
NMEA Input Commands .............................................................................................. 27
Change output sentences and their rates 27
Change data rate 27
Switch to OSP protocol 27
OSP Output Messages................................................................................................ 28
OSP Input Commands ................................................................................................ 28
Change output messages 28
Change data rate 28
Switch to NMEA protocol and data rate 28
7. FLASH UPGRADABILITY .............................................................................................. 29
8. ELECTRICAL INTERFACE ............................................................................................. 30
Module Pin-out ............................................................................................................ 30
DC Characteristics 32
Absolute Maximum Ratings 32
Power Supply .............................................................................................................. 33
1.8 V Supply Voltage 33
DC Power Requirements 33
Power Supply Capacitance 33
DC Power Consumption 34
Control (input) SIgnals................................................................................................. 36
ON-OFF (input) and SYSTEM-ON (output) 36
nReset 36
Boot Select 37
Status (output) Signals ................................................................................................ 37
SYSTEM-ON 37
GNSS_ON (GPIO8) 37
1PPS 37
Serial I/O Ports - Configuration and Operation ............................................................ 38
1VV0301216 Rev.4 Page 6 of 69 2018-08-24
Page 7
SE873 Family Product User Guide Contents
Primary Serial Port Configuration 38
Secondary Serial Port Configuration 38
UART Operation 39
I2C Operation 40
SPI Operation 40
RF Interface ................................................................................................................ 41
RF Input 41
External Active Antenna Voltage 41
Burnout Protection 41
Jamming Rejection 41
Frequency Plan 41
Local Oscillator Leakage 41
9. RF SIGNALS ................................................................................................................... 42
RF Input ...................................................................................................................... 42
GNSS Antenna Polarization ........................................................................................ 43
Active versus Passive Antenna ................................................................................... 43
GNSS Antenna Gain ................................................................................................... 43
System Noise Floor ..................................................................................................... 44
PCB stack and Trace Impedance ................................................................................ 44
RF Trace Losses ......................................................................................................... 45
Implications of the Pre-Select SAW Filter .................................................................... 45
RF Interference ........................................................................................................... 45
Shielding ..................................................................................................................... 46
Powering an External LNA .......................................................................................... 46
10. REFERENCE DESIGNS .................................................................................................. 47
11. MECHANICAL DRAWING .............................................................................................. 50
12. PCB FOOTPRINT ........................................................................................................... 51
13. PRODUCT PACKAGING AND HANDLING .................................................................... 52
Product Marking and Serialization ............................................................................... 52
Product Label – SE873 Family 52
Product Packaging and Delivery ................................................................................. 53
Moisture Sensitivity ..................................................................................................... 55
ESD Sensitivity ........................................................................................................... 57
Reflow ......................................................................................................................... 57
Assembly Considerations ............................................................................................ 57
Washing Considerations ............................................................................................. 57
Safety .......................................................................................................................... 57
Disposal ...................................................................................................................... 57
14. ENVIRONMENTAL REQUIREMENTS ............................................................................ 58
Operating Environmental Limits .................................................................................. 58
1VV0301216 Rev.4 Page 7 of 69 2018-08-24
Page 8
SE873 Family Product User Guide Contents
Storage Environmental Limits ...................................................................................... 58
15. COMPLIANCES .............................................................................................................. 59
EU RED Certification ................................................................................................... 59
eCall Compliance ........................................................................................................ 59
GOST R-55534 Certification ....................................................................................... 59
EU RED Declarations of Conformity ............................................................................ 60
16. GLOSSARY AND ACRONYMS ...................................................................................... 62
17. SAFETY RECOMMENDATIONS..................................................................................... 66
READ CAREFULLY .................................................................................................... 66
Electrical and Fire Safety ............................................................................................ 67
18. DOCUMENT HISTORY ................................................................................................... 68
1VV0301216 Rev.4 Page 8 of 69 2018-08-24
Page 9
SE873 Family Product User Guide Contents
FIGURES
Figure 2-1 SE873 Block Diagram ..............................................................................................14
Figure 2-2 SE873 module photo ...............................................................................................15
Figure 2-3 SE873Q5 module photo ...........................................................................................15
Figure 3-1 Evaluation Kit (EVK) contents ..................................................................................16
Figure 3-2 SE873 Evaluation unit ..............................................................................................17
Figure 8-1 SE873 Pin-out Diagram ...........................................................................................30
Figure 9-1 RF Trace Examples .................................................................................................45
Figure 10-1 SE873 Reference Design – Passive Antenna ........................................................47
Figure 10-2 SE873 Reference Design – Active Antenna ...........................................................48
Figure 11-1 SE873 Family Mechanical Drawing ........................................................................50
Figure 12-1 SE873 Family PCB Footprint .................................................................................51
Figure 13-1 SE873Q5 Product Label ........................................................................................52
Figure 13-2 Product Packaging - Tape and Reel 1500 pcs .......................................................53
Figure 13-3 Product Packaging - Tape and Reel 450 pcs .........................................................54
Figure 13-4 Moisture Sensitive Device Label ............................................................................56
Figure 15-1 EU RED Declaration of Conformity – SE873 ..........................................................60
Figure 15-2 EU RED Declaration of Conformity – SE873Q5 .....................................................61
1VV0301216 Rev.4 Page 9 of 69 2018-08-24
Page 10
SE873 Family Product User Guide Contents
TABLES
Table 0-1 Product Applicability Table ......................................................................................... 4
Table 4-1 Internal gain value and external gain range ...............................................................21
Table 4-2 Power Management Modes ......................................................................................22
Table 5-1 SE873 Family - Horizontal Position Accuracy ............................................................24
Table 5-2 SE873 Family - Time to First Fix ..............................................................................24
Table 5-3 SE873 Family - Sensitivity ........................................................................................25
Table 6-1 Default NMEA Output Messages ...............................................................................26
Table 6-2 Available NMEA Output Messages ...........................................................................26
Table 6-3 NMEA Talker IDs ......................................................................................................27
Table 8-1 SE873 Pin-out Function Table...................................................................................31
Table 8-2 DC Characteristics ....................................................................................................32
Table 8-3 Absolute Maximum Ratings .......................................................................................32
Table 8-4 DC Supply Voltage ....................................................................................................33
Table 8-5 Power Consumption – SE873 ...................................................................................34
Table 8-6 Power Consumption – SE873 Low Power modes .....................................................34
Table 8-7 Power Consumption – SE873Q5 ...............................................................................35
Table 8-8 Power Consumption – SE873Q5 Low Power modes .................................................35
Table 8-9 Primary Serial Port Configuration ..............................................................................38
Table 8-10 UART Pin Assignments ...........................................................................................39
Table 8-11 I2C Pin Assignments ...............................................................................................40
Table 8-12 SPI Mode Pin Assignments .....................................................................................40
Table 8-13 Frequency Plan .......................................................................................................41
Table 8-14 LO Leakage ............................................................................................................41
Table 9-1 Inductor Loss ............................................................................................................46
Table 13-1 SE873Q5 Product Label Description .......................................................................52
Table 14-1 Operating Environmental Limits ..............................................................................58
Table 14-2 Storage Environmental Limits ..................................................................................58
1VV0301216 Rev.4 Page 10 of 69 2018-08-24
Page 11
SE873 Family Product User Guide Introduction
1. INTRODUCTION
Purpose
The purpose of this document is to provide information regarding the function, features, and usage
of the Telit products listed in Table 0-1 Product Applicability Table.
Please refer to section 2 Product Description for details of the members of the product family.
Contact and Support Information
For general contact, technical support services, technical questions and report documentation errors
contact Telit Technical Support at:
• TS-EMEA@telit.com
• TS-AMERICAS@telit.com
• TS-APAC@telit.com
For detailed information about where you can buy the Telit modules or for recommendations on
accessories and components visit:
http://www.telit.com
Our aim is to make this guide as helpful as possible. Keep us informed of your comments and
suggestions for improvements.
Telit appreciates feedback from the users of our information.
Related Docum ents and Downloads
Please refer to http://www.telit.com/gnss/ for current documentation and downloads
• SE873 Data Sheet
• SE873 Evaluation Kit User Guide (1VV0301214)
Related Documents Requiring a Non-Disclosure Agreement
• SiRFstar V B02 Designer’s Guid e (CS -319281-AN-2)
• SiRFstar V B02 Software User's Guide (CS-314345-UG-2)
• NMEA Reference Guide (CS-129435-MA8)
• SiRFstar V One Socket Protocol Interface Control Document (CS-129291-DCP15)
• SiRFstar V OSP Extensions (CS-303979-7)
• Product firmware
1VV0301216 Rev.4 Page 11 of 69 2018-08-24
Page 12
SE873 Family Product User Guide Introduction
Symbol
Description
Text Conventions
Dates are in ISO 8601 format, i.e. YYYY-MM-DD.
Danger – This in formation MUST be followed or catastrophic equipment
failure and/or bodily injury may occur.
Caution or Warning – This is an important point about integrating the
product into a system. If this information is disregarded, the product or
system may malfunction or fail.
Tip – This is advice or suggestion that may be useful when integrating
the product.
1VV0301216 Rev.4 Page 12 of 69 2018-08-24
Page 13
SE873 Family Product User Guide Product Description
2. PROD UCT DES CRIPTI ON
The SE873 modules are complete multi-constellation position, velocity, and time (PVT) engines
featuring high performance, high sensitivity, and low power consumption, w hich are based on the
SiRFstar 5e (B02) flash GNSS chip. These modules are capable of excellent performance in
harsh environments. The inclusion of the GLONASS and BeiDou constellations yields better
coverage, greater accuracy, and improved availability.
Special Features
Very small form factor: 7 x 7 x 1.85 mm
Product Overvi ew
• Com plete GNSS receiver module including memory, LNA, TCXO, and RTC
• Based on the SiRFstar 5e (B02) flash GNSS chip
• Constellations: GPS, Galileo, QZSS, and either Glonass or BeiDou
• SBAS c ap able (WAAS, EGNOS, MSAS, GAGAN), including ranging
• AG PS support for extended ephemeris using local or server-based solutions:
o Client-Generated Extended Ephemeris (CGEE)
o Server-Generated Extended Ephemeris (SGEE)
• Jam ming Rejection
• Multipath mitigation
• Supports passive or active antenna
• 1PPS output
• Power management modes for extended battery life
o SiRFSmartGNSS I, SiRFSmartGNSS II
o Push-to-Fix, Trickle Power, SiRFaware
• Fix reporting at 1 H z, 5 Hz, or 10 Hz
• Command input and data output
o NMEA-0183
o OSP (binary)
• Two serial ports
o Primary serial port: configurable for UART, I
o Secondary serial port: configurable for UART or I
• 16 Megabit built-in flash memory
• Less t han 70 mW total power consumption (SE873Q5 Full Power mode - typical)
• Suppor t ed by evaluation kits
• -40°C to +85°C industrial temperature range
• 7. 0 x 7.0 x 1.85 mm (nominal) 20-pad QFN package
• Surface mountable by standard SMT equipment
• eCall and ERA/GLONASS compliant
• RoHS and RED compliant design
2
C, or SPI interface
2
C interface
Product Variants
The SE873 family has the following members:
• SE873: Linear power supply
• SE873Q5: Switching mode power supply
1VV0301216 Rev.4 Page 13 of 69 2018-08-24
Page 14
SE873 Family Product User Guide Product Description
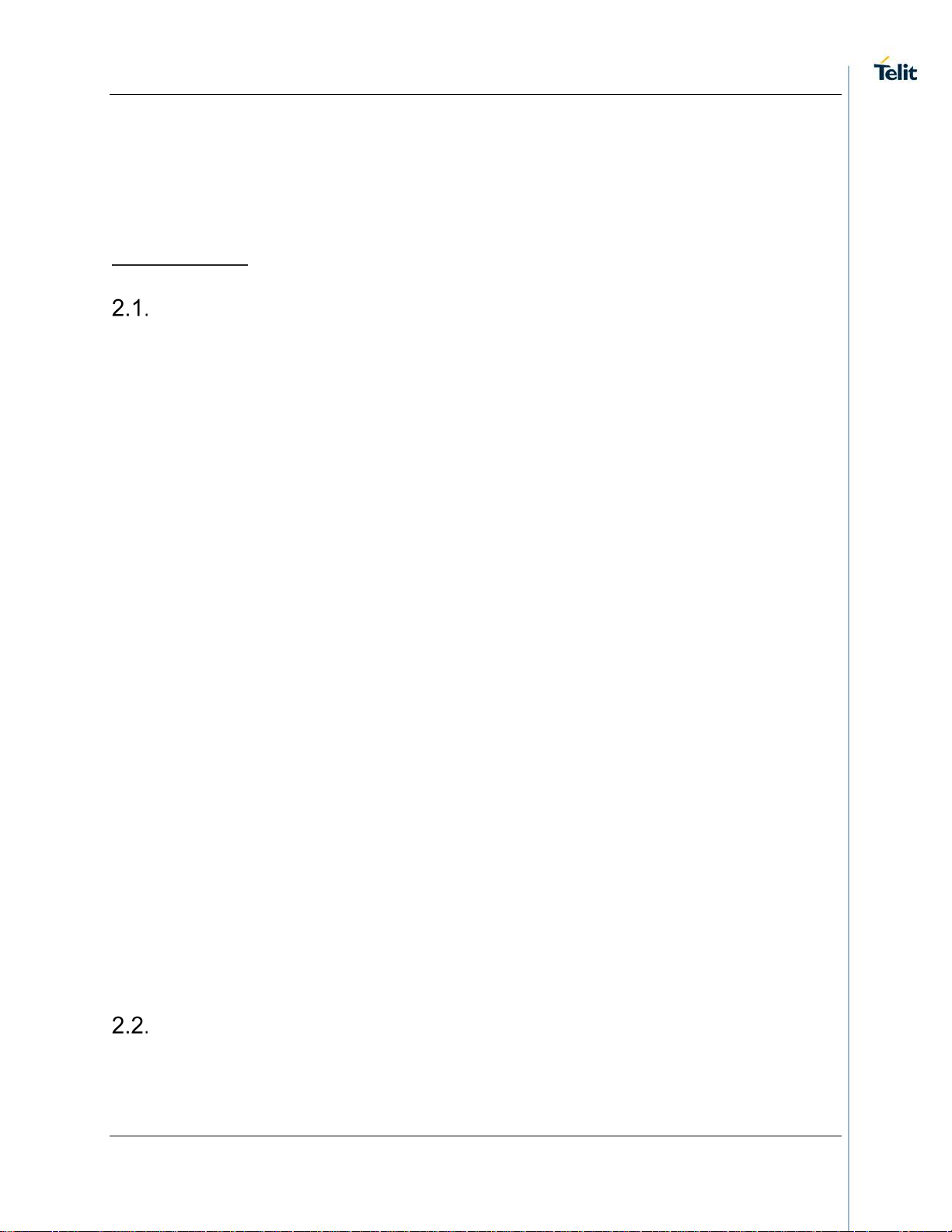
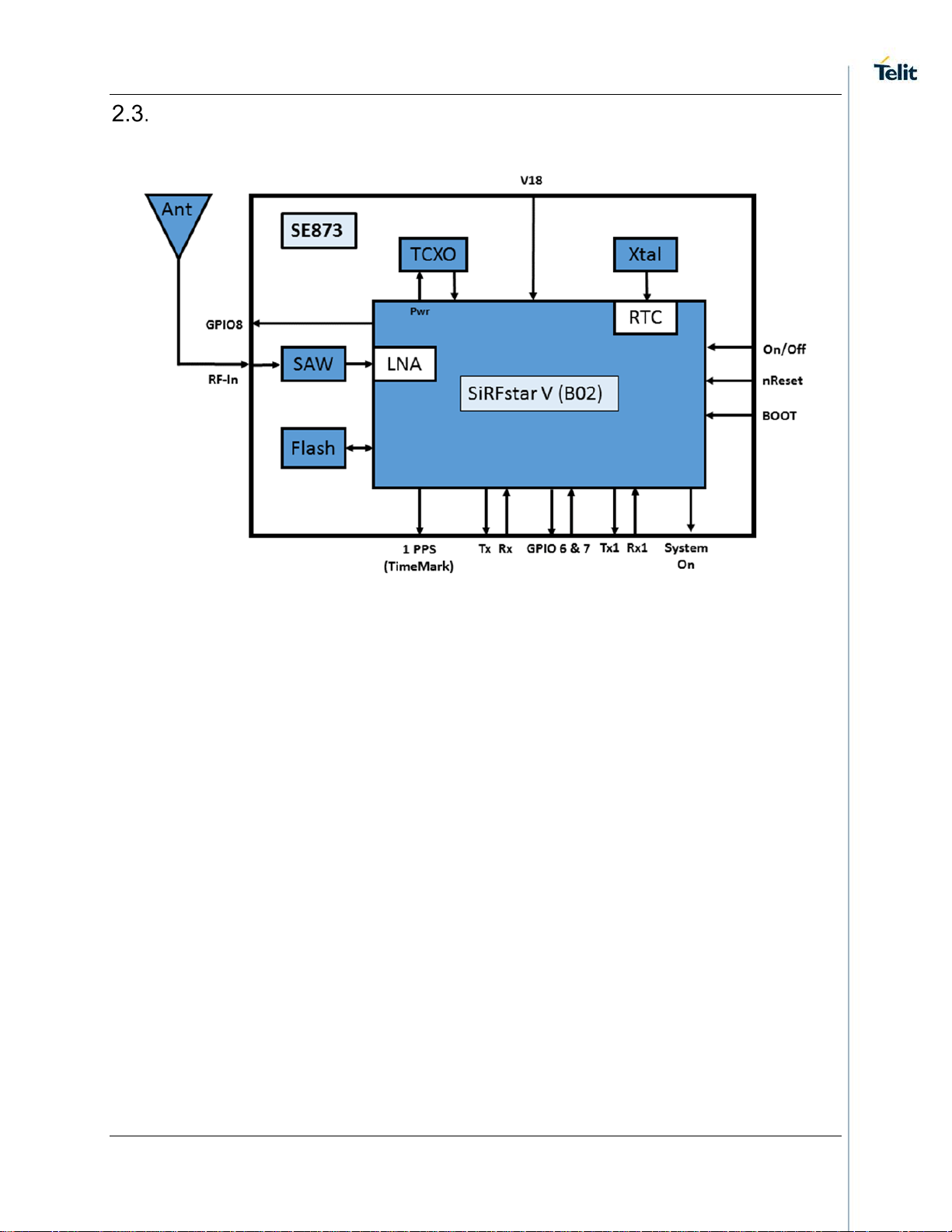
Block Diagram
Figure 2-1 SE873 Block Diagram
1VV0301216 Rev.4 Page 14 of 69 2018-08-24
Page 15

SE873 Family Product User Guide Product Description
SE873 Modules Photos
Figure 2-2 SE873 module photo
Figure 2-3 SE873Q5 module photo
1VV0301216 Rev.4 Page 15 of 69 2018-08-24
Page 16

SE873 Family Product User Guide SE873 Evaluaton Kit (EVK)
3. SE873 EVALUATON KIT (EVK)
Figure 3-1 Evaluation Kit (EVK) contents
1VV0301216 Rev.4 Page 16 of 69 2018-08-24
Page 17
SE873 Family Product User Guide SE873 Evaluaton Kit (EVK)
SE873 Evaluation Unit
Figure 3-2 SE873 Evaluation unit
1VV0301216 Rev.4 Page 17 of 69 2018-08-24
Page 18
SE873 Family Product User Guide Product Features
4. PROD UCT FE ATURES
Multi-Constellation Navigat ion
GPS and GLONASS constellations are enabled by default. GLONASS and BeiDou cannot both
be enabled at the same time. GPS, Galileo, GLONASS, and/or BDS constellations are
enable/disabled via OSP command MID 222,16..
Quasi-Zenith Satellite System (QZSS) support
The satellites of the Japanese regional system are in a highly inclined, elliptical geosynchronous
orbit, allowing continuous high-elevation coverage over Japan and other countries using only
three satellites plus one geostationary satellite. They provide additional ranging signals to
augment the GNSS systems along with a corrections data stream.
QZSS ranging is enabled by default, but can be disabled via OSP command MID 222,16.
Satellite Based Augmentation System (SBAS)
The receiver is capable of using SBAS satellites both as a source of differential corrections and
satellite ranging measurements. These systems (WAAS, EGNOS, GAGAN and MSAS) use
geostationary satellites to transmit regional corrections via a GNSS-compatible signal.
SBAS Corrections
The SBAS satellites transmit a set of differential corrections to their respective regions. The use
of SBAS corrections can improve positioning accuracy. However, the nav solution cannot use
mixed corrected and uncorrected satellites.
SBAS corrections are disabled by default but can be enabled via OSP MIDs 133, 138, and 170
commands. Thereafter, the receiver will demodulate and use corrections data from the SBAS
signal for satellites over 36 dB-Hz.signal level.
SBAS Ranging
The use of SBAS satellites can augment the number of measurements available for the navigation
solution, thus improving availability and accuracy.
SBAS satellite ranging is disabled by default but can be enabled via a NMEA $PSRF103
command or OSP Mode Control command MID 136 .
Assisted GPS (AGPS) - SiRFInstantFix™
A GNSS receiver requires ephemeris data to calculate the precise position in space of each
satellite to be used in the navigation solution. Since the satellites move at a speed of 3874 km/s
along their orbits and are subject to gravitational perturbations from all masses in the solar system,
this data must be both current and accurate. Each GPS satellite transmits a complete set of its
ephemeris coefficients (called the broadcast ephemeris or BE) every 30 seconds. This is
therefore the minimum time required for a cold start Time to First Fix (TTFF). The BE data is
usually refreshed every 2 hours.
The minimum cold start TTFF can be reduced from 30 seconds to just a few seconds by
implementing AGPS, which can provide Extended Ephemeris (EE) data by two methods -
1. Locally-generated (CGEE): The receiver includes software to project the future positions of the
satellites. This data may be calculated out to 14 days or even longer, depending on the
resources available in the receiver, e.g. computation ability and memory.
1VV0301216 Rev.4 Page 18 of 69 2018-08-24
Page 19
SE873 Family Product User Guide Product Features
2. Server-generated (SGEE): A server calculates the future position projections and ma kes them
available to a receiver, typically over the internet. This data may be good for 30 days,
depending on available resources, e.g. communication links and storage.
Both CGEE and SGEE are available for GPS and GLONASS satellites.
Client-generated Extended Ephemeris (CGEE)
Extended ephemeris is computed in the receiver and then stored locally in the flash memory.
Whenever the module receives ephemeris data for a satellite, it checks if it has computed CGEE
for that satellite recently. If it has not, it computes EE for that satellite (for the nex t 3 days for GPS
and 1 day for GLONASS) and stores it in flash memory. The next time the module turns on and
broadcast ephemeris is not available for a visible satellite, the stored CGEE data is s earc hed t o
see if it is still valid and can be used. If EE data is av ailable for enough satellites, the receiver can
obtain a first fix in a few seconds rather than the usual 30+ seconds without EE data. CGEE is
enabled by default.
Server-generated Extended Ephemeris (SGEE)
Extended ephemeris is computed at the server and saved in a file which can then be downloaded
to the receiver’s flash memory. The server file contains 1, 3, 7, and 14, days of ephemerides. To
use SGEE data, a file must be transferred using NMEA or OSP commands. Please contact Telit
support for subscription details.
2-D Positioning
By default, the module will compute a 2-D solution if possible when performing initial acquisition.
In a 2-D solution, the receiver assumes a value for altitude and uses it to estimate the nav solution.
Under warm and hot start conditions, the receiver uses the last known value of altitude, which is
a good assumption in most situations. However, under cold start conditions, the last position is
unknown, and the receiver assumes a value of 0. In situations where the true altitude is
significantly higher than that, the horizontal position estimate will be noticeably impacted. 2_D
positioning is controlled by OSP MID 136.
Static Navigation
Static Navigation is an operating mode in which the receiver will freeze the position fix when the
speed falls below a set threshold (indicating that the receiver is stationary). The course is also
frozen, and the speed is reported as 0. The navigation solution is unfrozen when the speed
increases above a threshold or when the computed position exceeds a set distance from the
frozen position (indicating that the receiver is again in motion). These thresholds cannot be
changed by the user.
This feature is useful for applications in which very low dynamics are not expected, the classic
example being an automotive application.
Static Navigation is disabled by default, but can be enabled by OSP command MID 143.
Velocity Dead-Reckoning
Velocity dead-reckoning is the use of the last known velocity to propagate the navigation solution
when there are insufficient measurements to calculate an updated solution. It serves to mitigate
the effects of blocked satellite signals by continuing to provide a position output. Note: The
receiver outputs status information which indicates that a solution is being maintained using deadreckoning.
This feature is disabled by default but can be enabl ed using the M ode C ontrol message MID 136.
Valid timeout values are in a range from zero (which disables dead-reckoning) to two minutes.
1VV0301216 Rev.4 Page 19 of 69 2018-08-24
Page 20
SE873 Family Product User Guide Product Features
Jamming Rejec ti on – Continuous Wave (CW) Jamming
Mitigation
Continuous Wave (CW) jamming mitigation improves performance in a system that is affected by
these predictable jamming signals:
• St able j amming signals generated by your system implementation, such as harmonics of
digital clocks and logic switch ing
• Predictable jamming signals in the RF environment (e.g. from collocated transmitters)
When this feature is activated, the process for jamming mitigation is:
1. Detect jamming signals above the noise floor.
2. Isolate and filter frequencies containing jamming signals.
The GNSS signal is constantly monitored for CW jammers and up to eight are detected and
cancelled in each band without any operator intervention.
GPS, GLONASS, and BDS band cancellers are activated and reported using OSP MID 92. T h i s
feature is useful both in the design stage and during the production stage for uncovering issues
related to unexpected jamming. Use OSP MID 220,1 to configure this feature.
Elevation Mask Angle
The default elevation mask angle is 5° which can be changed using OSP MID 139.
5 Hz and 10 Hz Navigation
When this feature is enabled, the receiver starts in 1 Hz mode and continues until it achieves an
over-determined fix with 5 or more satellites. It then computes and outputs solutions 5 or 10 times
per second. Each computation uses fewer, but more frequent satellite observations. In most
situations this gives a better response to vehicle velocity and course changes but might cause
slightly more erratic performance in stationary or low-dynamic situations.
The receiver also attempts to send out 5 or 10 times as many messages per second. The data
rate may need to be increased or the set of schedu led messages be reduced to avoid overloading
the available bandwidth.
For NMEA protocol, with default messages set on (GGA, GSA and RMC output once per cycle
and GSV output once every 5 cycles) output is nearly 1300 characters per second at 5 Hz.
Including start and stop bits, at least 19200 bps is required to avoid running out of bandwidth.
For multi-constellation output, one GNGNS and one GNGSA would be added to each report cycle,
and three GNGSV sentences every 5
Hz. For OSP protocol, CSR recommends a minimum data rate of 115,200 bps.
To enable 5 or 10 Hz Navigation, use a $PSRF103 command or an OSP MID 136 command with
bit 2 of the pos_mode_enable field set to 1.
th
c ycle, requiring a minimum of 38,400 bps data rate at 5
1PPS
The module provides a 1PPS timing pulse. See section 8.4.3 1PPS
1VV0301216 Rev.4 Page 20 of 69 2018-08-24
Page 21
SE873 Family Product User Guide Product Features
Internal LNA
The GNSS engin e has an adjustable gain internal LNA which allows the receiver to compensate
for the use of various external antennas. The default gain (low or high) is determined by the
version of firmware installed in the module. The chart below shows the internal gain modes and
the allowable external gain.
Use the OSP command MID 178,70 to change the gain of the internal LNA.
Passive antenna:
For passive antenna operations, the internal LNA should be in high gain mode. GPIO8 should
normally be left unconnected or connected to monitor the receiver status.
Active antenna (or External LNA) with High Gain firmware:
If an external LNA is used with the internal LNA in high gain mode, total RF gain should not
exceed the recommend limit of 30dB.
When GPIO8 is high, the external LNA should be enabled. When low, it should be disabled.
Active antenna (or External LNA) with Low Gain firmware:
If an external LNA is used with the internal LNA in low gain mode, total RF gain should not
exceed the recommend limit of 30dB.
When GPIO8 is high, the external LNA should be enabled. When low, it should be disabled.
Gain Internal LN A gain Internal LNA NF External Gain Range
High 16 dB 2 dB (typical) 0 to 14 dB
Low 6 dB 6.5 dB (typical) 14 to 24 dB
Table 4-1 Internal gain value and external gain range
Serial I/O Ports
The primary port (TX / RX) can be configured to communicate using UART, I2C, or SPI interface.
It is used for command input and message output.
The secondary port (TX1 / RX1) can be c onfigured to communica te using UA RT or I
These pins are named GPIO 0 and 1.
See section 8.5 Serial I/O Ports - Configuration and Operation for details
2
C interface.
1VV0301216 Rev.4 Page 21 of 69 2018-08-24
Page 22

SE873 Family Product User Guide Product Features
Continuous operation in reporting
SmartGNSS modes save power based
Power Management
The receiver features several operating modes that provide reduced power consumption.
Availability of GNSS signals in the operational environment will be a factor in choosing power
management modes. The designer can choose a mode that provides the best trade-off of
navigation performance versus power consumption.
Each of the power management modes can be commanded using the Power Mode Request
Message MID218,6. Please refer to the SiRFstarV OSP Extensions manual (CS-303979) for
details.
Power Mode Name Description
Full Power
Continuous
SiRFSmartGNSS 1
Fixes
SiRFSmartGNSS 2
Trickle Power Power cycling: RUN - STANDBY
Periodic
Fixes
Push To Fix Power cycling: RUN - HIBERNATE
SiRFAware Periodic data collection & updating
No Fixes Hibernate
Table 4-2 Power Management Modes
position fixes optimized for the best allaround performance.
on satellite signal strength.
Only RTC and BBRAM ar e powered up
for maximum power saving.
Full Power Mode (default)
This mode has the highest average power consumption, but it is the most accurate navigation
mode and supports the most dynamic motion scenarios. Full Power is required during initial
satellite acquisition, tracking, & navigation and while receiving SGEE assistance data.
SmartGNSS
SmartGNSS modes are power saving alternatives for GNSS operation while maintaining
complete functionality of the device, similar to the full power mode. T he module uses full power
during the initial acquisition of the first fix, and will continue tracking in SmartGNSS if enabled.
Therefore, all first fix metrics for SmartGNSS are equivalent to full power.
1VV0301216 Rev.4 Page 22 of 69 2018-08-24
Page 23

SE873 Family Product User Guide Product Features
4.14.2.1. SmartGNSS I
SmartGNSS I autonomously manages GNSS system usage to save power based on signal
conditions.
The adaptive mechanism uses fewer system resources during strong signal conditions and uses
more resources during weak signal conditions in order to maintain navigation performance. Full
constellation tracking is maintained while in this mode. 1PPS is available.
4.14.2.2. SmartGNSS II
SmartGNSS II includes the benefits of SmartGNSS I and achieves further power reduction by
minimizing the usage of the secondary GNSS constellation. The adaptive mechanism adjusts
constellation usage based on signal conditions to maintain performance while minimizing power
consumption. 1PPS is available.
Trickle Power
This mode cycles between FULL POWER and STANDBY states. It provides GPS-only navigation
updates at a fixed rate of 1 to 10 seconds, and retains good accuracy and dynamic motion
response, but at a lower average power consumption than Full Power. The receiver will go to
FULL POWER if signals are weak or the fix is lost. 1PPS is not available. TricklePower mode
yields significant power savings in strong signal conditions.
Push-to-Fix
This mode cycles between FULL POWER and HIBERNATE states. It provides for even lower
power consumption than TricklePower and is intended for applications that require relatively
infrequent position reports. The position is reported periodically (once every 6, 12, 18, 24 seconds
or 30 to 86400 seconds in 30 s increments) and also when requested by toggling the On-Off pin.
Push-to-FixII allows vehicle velocity to be taken into account for PTF period, and QoS checks to
be enabled or disabled.
SiRFaware
This mode switches between FULL POWER and HIBERNATE states. It is a power-saving mode
that maintains GPS data by waking up at intervals (e.g. every 30 minutes) t o collect si gnals. Time
and position estimates are updated (e.g. every 10 minutes). Extended Ephemeris will be used if
available.
Hibernate
The receiver can be commanded into the HIBERNATE state, which is the lowest power mode
available. Only the RTC and BBRAM domains are powered up. Use the NMEA $PSRF117,16 or
OSP MID 205 command to transition to this s tate. The module will also transition to HIBERNATE
when the ON-OFF pin is brought low.
1VV0301216 Rev.4 Page 23 of 69 2018-08-24
Page 24

SE873 Family Product User Guide Product Performance
Constellation
CEP (m)
GPS
1.5
BeiDou
N/A
GPS + Glonass
1.5
GPS + BeiDou
2.5
Hot
1.1
Warm - Assisted
7.5
Warm
23
Cold
31
Hot
1.1
Warm
23
Cold
27
Hot
1.1
Warm
30
Cold
32
5. PRODUCT PERFORMANCE
Horizontal P osi tion Accuracy
Test Conditions: 24-hr Static, -130 dBm, Full Power mode
Table 5-1 SE873 Family - Horizontal Position Accuracy
Time to First Fix
Constellations(s) Start Type Max TTFF (s)
GPS
GPS + GLO
GPS + BeiDou
Test Conditions: Static scenario, -130 dBm, Full Power mode
Table 5-2 SE873 Family - Time t o First Fix
1VV0301216 Rev.4 Page 24 of 69 2018-08-24
Page 25

SE873 Family Product User Guide Product Performance
SE873
SE873Q5
Acquisition
-146
-147
Navigation
-161
-160
Tracking
-165
-164
Acquisition
-146
-146
Navigation
-161
-161
Tracking
-165
-167
Acquisition
-146
-146
Navigation
-161
-160
Tracking
-165
-167
Sensitivity
Minimum Signal Level (dBm)
Constellation(s) State
GPS
GPS + GLO
GPS + BeiDou
Test conditions: Static scenario, Full Power mode
Table 5-3 SE873 Family - Sensitivity
1VV0301216 Rev.4 Page 25 of 69 2018-08-24
Page 26

SE873 Family Product User Guide Message Interface
Message ID
Description
Frequency
RMC
GNSS Recommended minimum navigation data
1
GGA
GNSS position fix data
1
GSA
GNSS Dilution o f Pr ecision (DOP) and ac ti ve satellites
1
GSV
GNSS satellites in view.
1 / 5
Message ID
Description
GNS
GNSS Fix Data
6. MESSAGE INTERFACE
The primary serial I/O port ( UART, I2C, or SPI) supports full duplex communication between the
receiver and the user.
The default configuration is: NMEA, 9600 bps, 8 data bits, no parity, 1 stop bit.
Two protocols are available for command input and data output:
• NMEA-0183
• SiRF One Socket Protocol (OSP)
See section 6.2 NMEA Input Commands for information on controlling the output messages.
NMEA Output Messa ges
1 Hz fix rate 5 Hz or 10 Hz may be selected.
Standard Messages
These messages are sent by default.
Note: Multiple GSA and GSV messages may be output per cycle.
Table 6-1 Default NMEA Output Messages
The following messages can be enabled by command:
GLL Geographic Position – Latitude & Longitude
VTG Course Over Ground & Ground Speed
ZDA Time and Date
Table 6-2 Available NMEA Output Messages
1VV0301216 Rev.4 Page 26 of 69 2018-08-24
Page 27

SE873 Family Product User Guide Message Interface
Talker ID
Constellation
GL
GLONASS
GP
GPS
The following Talker IDs are used:
GA Galileo
GB BeiDou
GN Solutions using multiple constellations
Table 6-3 NMEA Talker IDs
Proprietary Messages
The receiver can issue several proprietary NMEA output messages ($PSRF) which report
additional receiver data and status information.
Some of these messages exceed the 80-character limitation of the NMEA-0183 standard.
NMEA Input Commands
The receiver uses NMEA proprietary messages for commands and command responses. This
interface provides configuration and control over selected firmware features and operational
properties of the module.
The format of a command i s:
$<command-ID>[,<parameters>]*<cr><lf>
Commands are NMEA proprietary format and begin with “$PSRF”.
Parameters, if present, are comma-delimited as specified in the NMEA protocol.
Change output sentences and their rates
Use the Query/Rate Control $PSRF103 command to enable and disable output NMEA messages
and set their output rates.
Change data rate
Use the Set Serial Port $PSRF100 command to change the port data rate.
Switch to OSP protocol
Use the Set Serial Port $PSRF100 command to switch to the OSP protocol. It may be necessary
to change the data rate since OSP can generate a much larger volume of output per reporting
cycle.
1VV0301216 Rev.4 Page 27 of 69 2018-08-24
Page 28

SE873 Family Product User Guide Message Interface
OSP Output Messages
Please refer to SiRF OSP documentation.
OSP Input Commands
Change output messages
Use OSP MID 166 to change the output messages.
Change data rate
Use OSP MID 134 to change the baud rate
Switch to NMEA protocol and data rate
Use the OSP MID 129 command to switch to the NMEA protocol and change the port data rate.
1VV0301216 Rev.4 Page 28 of 69 2018-08-24
Page 29

SE873 Family Product User Guide Flash Upgradability
7. FLASH UPGRAD ABILITY
The firmware stored in the internal Flash memory of the SE873 may be upgraded via the serial
port TX/RX pads.
Please refer to the SE873 Evaluation Kit User Guide to update the firmware
1VV0301216 Rev.4 Page 29 of 69 2018-08-24
Page 30

SE873 Family Product User Guide Electrical Interface
8. ELECTRICAL INTERFACE
Module Pin-out
Figure 8-1 SE873 Pin-out Diagram
1VV0301216 Rev.4 Page 30 of 69 2018-08-24
Page 31

SE873 Family Product User Guide Electrical Interface
Pin
Name
Type
Function
Power
3, 19
V18
P
Connect all pins to 1.8 V supply . See section 8.2 Power Supply.
Ground
2, 10,
20
GND
G
Connect all pins to ground.
RF Input
1
RF_IN
I Control Input
6
ON-OFF
I
On/Off. See section 8.3.1 ON-OFF (input) and SYST EM-ON (output)
8
NRESET
I
Reset (active low). See section 8.3.2 nReset.
This signal is not necessary for normal operation and may be brought
out to a test point or left uncon nect ed.
9
SEL
I
Low during normal operation. BOOT-SEL may be pulled high to force
SEL is read prior to the
select lines (GPIO 6 & 7). This pin s hou ld be le ft floati ng or brou ght
See section 7 Flash Upgradability.
13
GPIO6
I
GPIOs 6 & 7 are read to configure the primary serial port. only at powerAfter configuration, they may be used for UART or SPI signal lines
See section 8.5 Serial I/O Ports - Configuration and Operation
12
GPIO7
I
Output
7
SYSTEMON
O
Indicates the power state of the module. Also called Wakeup.
See 8.3.1 ON-OFF (input) and SYSTEM-ON (output)
5
GPIO8
O
External LNA control. High when the receiver is ope r at ing, and low
See section 4.12 Internal LNA
11
TM O 1PPS time mark. See section 8.4.3 1PPS
Primary Port I/O See section 8.5 Serial I/O Ports - Configuration and O pe r at ion
15
TX
O
Primary Serial Port Outp ut. UART: TX, I2C: CLK, or SPI: Data Out
(MISO).
14
RX
I
Primary Serial Port Inpu t. UART: RX, I2C: DIO, or SPI: D ata In
(MOSI).
13
GPIO6
I/O
After configuration, may be used for UART: CTS or SPI: CL K.
12
GPIO7
I/O
After configuration, may be used for U ART: RTS or SPI: nCS.
Secondary Port I/O See section 8.5 Serial I/O Ports - Configuration and O per ati on
17
GPIO1
I/O
Secondary Serial Port I/O. UART: Receive (RX1), I2C: Clock (SCL)
18
GPIO0
I/O
Secondary Serial Port I/O. UART: Transmit(TX1), I2C: Data (SDA)
Reserved
4
Reserved
R
Reserved - Do not connec t to any external circuit.
16
Reserved
R
Reserved - Do not connec t to any external circuit.
the module into the progra mm able st ate. BO O Tport
BOOT-
out to a test point. Max: 1.8 V.
up and reset
depending on the firmware options enabled.
when in a low-power state. Also ca lled GNSS_ON.
Table 8-1 SE873 Pin-out Function Table
1VV0301216 Rev.4 Page 31 of 69 2018-08-24
Page 32

SE873 Family Product User Guide Electrical Interface
ESD Voltage CDM
JESD22-C101E
ESD Voltage HDM
JEDEC JS-001-2012
I/O Pin Voltage
(except BOOT_SEL)
DC Characteristics
Signal Description Min Typ Max
VOL Low level output voltage, IOL 2mA - - 0.4 V
VOH High level output voltage, IOH 2mA 0.75 * VDD - - V
VIL Low level input voltage -0.3 - 0.45 V
VIH High level input voltage, IIH 2mA 0.7 * VDD - 3.6 V
RPU Internal pull-up resistor equivalent 50 86 157 kΩ
RPD Internal pull-down resistor equivalent 51 91 180 kΩ
LI Input leakage at VI = 1.8 V or 0 V -10 - 10 µA
LO Tristate output leakage at VO = 1.8 V or 0 V -10 - 10 µA
CI Input capacitance, digital output - 8 - pF
Table 8-2 DC Characteristics
Unit
s
Absolute Maximum Ratings
Parameter Pins Absolute Max Rating Units
RF Input Voltage All RF inputs 1.5 V
RF Input Power All RF in pu ts 10 dBm
All Pins +/- 1100 V
All Pins +/-500 V
1.8 V Supply Voltage VDD_18 2.2 V
BOOT_SEL pin
Table 8-3 Absolute Maximum Ratings
BOOT_SEL 1.8 V
Digital inputs 3.60 V
1VV0301216 Rev.4 Page 32 of 69 2018-08-24
Page 33

SE873 Family Product User Guide Electrical Interface
Name
Min
Typ
Max
Units
V18
1.71
1.8
1.89
V
Max ripple: 54 mV (0 to 3 MHz), 15 mV (> 3 MHz)
Power Supply
1.8 V Supply Voltage
Unlike previous GNSS receiver modules, the SE873 requires a single always-on 1.8 V supply.
Rather than having a “split” power supply design of main and backup, the module manages all of
its power modes internally. The module will power up into the state determined by the ON-OFF
pin (High: RUN; Low: HIBERNATE) .
The power state of the SE873 can be determined by monitoring the “SYSTEM-ON” signal. A logic
low indicates the module is in OFF, RESET, HIBERNATE, or STANDBY; whereas logic high
indicates the module is in RUN state.
If the 1.8 volt DC supply is removed from the module (re gardless of power state) it w ill lose current
RTC time and the contents of the internal SRAM. To execute an orderly shutdown, place the
module into the HIBERNATE state, then remove power. To prevent improper startup, keep the
power removed for approximately 10 seconds to reliably clear the SRAM contents.
The module monitors the 1.8 volt supply and issues an internal hardw are reset if the supply drops
below 1.7 volts. This reset protects the memory from accidental writes during a power down
condition. This reset forces the module into a low power stand-by state.
To prevent the reset, the 1.8 volt supply must be regulated to be within ±50 mV of nominal vol tage
(including load regulation and power supply noise and ripple). Noise and ripple outside of these
limits can affect GNSS sensitivity and also risk tripping the internal voltage supervisors, thereby
shutting down the module unexpectedly. Regulators with very good load regulation are strongly
recommended along with adequate power supply filtering to prevent power supply glitches as the
module transitions between power states.
The power supply voltage, including noise and ripple must be as speci fied below in Table 8-4 DC
Supply Voltage for all frequencies. To help meet these requirements, a separate LDO for the
module is suggested.
DC Power Requirements
Table 8-4 DC Supply Voltage
Power Supply Capacitance
Aluminum electrolytic capacitors are not recommended at the input to the module due to their
high ESR. Tantalum capacitors are recommended with a minimum value of 10uF in parallel with
a 0.1uF ceramic capacitor. Ceramic capacitors alone can be used, but ensure that the LDO is
stable with such capacitors tied to the output.
1VV0301216 Rev.4 Page 33 of 69 2018-08-24
Page 34

SE873 Family Product User Guide Electrical Interface
Acquisition
GPS only
72
98
84
111
mW
GPS and Glonass
92
117
101
125
mW
GPS and BeiDou
94
122
100
130
mW
Navigation/Tracking
GPS Only
51
83
63
91
mW
GPS and Glonass
62
92
94
124
mW
GPS and BeiDou
71
111
93
135
mW
Low Power Modes
State & Constellation
Typ
Units
Trickle Power
GPS only
32
mW
GPS and Glonass
42
mW
GPS and BeiDou
44
mW
Push To Fix
GPS only
27
mW
GPS and Glonass
34
mW
GPS and BeiDou
35
mW
Battery Backup (Hibernate)
62
uW
Trickle Power mode: On 100 ms, Max Off 30 s
Push To Fix mode: Max Search: 6 s, Max Off: 120 s
DC Power Consumption
Power Mode -> Smart 1 Full Power
State & Constellation Typ Max Typ Max Units
Table 8-5 Power Consumption – SE873
Table 8-6 Power Consumption – SE873 Low Power modes
1VV0301216 Rev.4 Page 34 of 69 2018-08-24
Page 35

SE873 Family Product User Guide Electrical Interface
Low Gain
Full Power
State & Constellation
Typ
Max
Typ
Max
Typ
Max
Units
Acquisition
GPS only
59
80
75
104
mW
GPS and Glonass
76
99
77
100
96
106
mW
GPS and BeiDou
78
101
94
105
mW
Navigation/Tracking
GPS Only
44
67
61
83
mW
GPS and Glonass
44
70
52
81
77
101
mW
GPS and BeiDou
55
87
83
95
mW
Operating temperature: 25°C.
Supply voltage: 1.8 VDC nominal
Low Power Modes
State & Constellation
Typ
Units
Trickle Power
GPS only
16
mW
GPS and Glonass
17
mW
GPS and BeiDou
18
mW
Push To Fix
GPS only
18
mW
GPS and Glonass
20
mW
GPS and BeiDou
20
mW
Trickle Power mode: On 100 ms, Max Off 30 s
Push To Fix mode: Max Search: 6 s, Max Off: 120 s
Power Mode ->
Smart 2
Table 8-7 Power Consumption – SE873Q5
Smart 1
Hign Gain
Table 8-8 Power Consumption – SE873Q5 Low Power modes
1VV0301216 Rev.4 Page 35 of 69 2018-08-24
Page 36

SE873 Family Product User Guide Electrical Interface
Control (input) SIgnals
ON-OFF (input) and SYSTEM-ON (output)
The SE873 module has three power states: OFF, RESET, and ON.
The OFF state is when power is removed from the module.
Upon initial application of power, the module enters the RESET state until the internal reset
process is completed. It then transitions to the ON state.
In the ON state, the module will transition to either the RUN or HIBERNATE substate depending
on the ON-OFF pin status.
• If the ON-OFF pin is high, the module will transition to the RUN substate.
• If the ON-OFF pin is low, the module will transition to the HIBERNATE substate.
The ON state is indicated by a logic high output on the SYSTEM-ON signal.
Note: The ON_OFF pin must not be tied to V18 because it must be brought low, then high
to transition out of a commanded hibernate state.
The module will transition to the RESET state when external reset (nRESET) is pulled low, or
upon internal reset (e.g. supply voltage out of spec). The external nRESET signal takes
precedence over the state of the ON-OFF signal. SYSTEM-ON will be logic low.
While in the ON state, there are three substates, depending upon commands or selected power
management modes. The three substates ar e: HIBERNA TE, STANDBY, and RUN.
The module transitions between RUN and STANDBY via TricklePower modes; and between RUN
and HIBERNATE via PushToFixII and SiRFaware modes. It can also transition from RUN to
HIBERNATE by de-asserting the ON-OFF signal. The firmware is configured to transition fr om
HIBERNATE to RUN when data is received on the RX pin.
In HIBERNATE and STANDBY, the SYSTEM-ON signal will be logic low; in RUN, it will be logic
high.
To execute an orderly shutdown, place the module in the HI BERNATE substate, then remove
power.
Also, see the next section 8.3.2 nReset.
nReset
The module will generate an internal reset as appropriate. Therefore, no external signal is
required for the module to operate properly and this pin may be left unconnected.
If an external reset is desired, the signal must be either open collector or open drain without any
form of pull up. Do not pull this line high with either a pull up or a driven logic one. When this line
is pulled low, the module will immediately transition into reset mode.
When the external reset is released, the module will go through its normal power up sequence provided the V18 supply is within specifications. See section 8.3 Control (input) SIgnals
ON-OFF (input) and SYSTEM-ON (output)
Pulling nRESET low at any time forces the module into the reset state regardless of the ON-OFF
signal. In the reset state, the SYSTEM-ON signal is low.
Once the nRESET signal is released the module will transition to the HIBERNATE state or to the
ON state as determined by the ON-OFF signal input.
1VV0301216 Rev.4 Page 36 of 69 2018-08-24
Page 37

SE873 Family Product User Guide Electrical Interface
Boot Select
It is not necessary to use the Boot Select pin to re-flash the receiver since SiRFlive can use
commands to perform this task. This pin should be left floating or may be brought out to a test
point.
Max volta ge is 1.8 V .
Status (output ) Signals
SYSTEM-ON
See section 8.3.1 ON-OFF (input) and SYSTEM-ON (output).
GNSS_ON (GPIO8)
See section 4.12 Internal LNA for details.
1PPS
1PPS is a one pulse per second signal which is enabled after the receiver has achieved a 5satellite Kalman filter position fix. It is disabled 5 seconds after the position fix becomes invalid.
The time mark is within 1 μs of the GPS epoch and normally within 100 ns.
Pulse width is 250 ms.
1VV0301216 Rev.4 Page 37 of 69 2018-08-24
Page 38

SE873 Family Product User Guide Electrical Interface
Serial I/O Ports - Configurat ion and Operation
The receiver module includes two full-duplex serial ports which are configurable for the desired
interface.
Primary Serial Port Configuration
The primary port is configured for UART, I2C or SPI interface via reading GPIO6 and GPIO7 pins
at startup or reset (only).
Pin Pullup /
Pulldown
GPIO6 Weak
internal
pulldown
GPIO7
Table 8-9 Primary Serial Port Configuration
Note: GPIO6 and GPIO7 are read for configuration purposes only at power up or reset.
Afterwards, they may be used for UART or SPI signal lines depending on firmware options.
Weak
internal
pullup
(may become CTS)
(may become RTS)
UART I2C
(MULTI-MASTER)
Pullup
10 kΩ to +1.8 V
Float
10 kΩ to ground
Float
Pulldown
SPI
(slave)
Float
(becomes SCLK)
Float
(becomes SPI_CS)
Secondary Serial Port Configuration
The secondary port is configured by the firmware build. It is disabled by default.
Note: SPI is not available because it requires 4 pins.
1VV0301216 Rev.4 Page 38 of 69 2018-08-24
Page 39

SE873 Family Product User Guide Electrical Interface
TX
Transmit Data (TX)
RX
Receive Data (RX)
GPIO6
CTS (if enabled)
GPIO7
RTS (if enabled)
Secondary Port
TX1
Trans mit Dat a ( TX1)
RX1
Receive Data (RX1)
UART Operation
See section 8.5.1 Primary Serial Port Configuration to specify UART interface for t he pr i m a r y
port..
The secondary port is configured by loading the appropriate FW.
Default: NMEA at 9600 bps, 8-bit, No parity, and 1 stop bit.
Upon power up, the module will communicate using a standard asynchronous 8 bit protocol with
output messages appearing on the TX line and input commands and data being received on the
RX line. The UART can operate at baud rates from 4800 bps to 1.2288 Mbps, however speeds
above 115,200 bps have not been fully tested and verified.
If the module is operated in TricklePower mode, a baud rate of at least 38,400 is recommended.
This reduces the time required to empty the output buffer and allows the receiver to drop into the
low power state for a longer period of time.
The minimum recommended baud rate for OSP is 38400, or 115200 if debug data messages are
enabled.
Use the Query/Rate Control PSRF103 command to enable and disable output NMEA messages
and set their output rates.
Flow control is disabled by default.
Use the OSP MID 178,70 command to enable/disable flow control on primary first port.
After configuration, the pins are defined below:
Pin Name UART Function
Primary Port
Table 8-10 UART Pin Assignments
1VV0301216 Rev.4 Page 39 of 69 2018-08-24
Page 40

SE873 Family Product User Guide Electrical Interface
Pin Name
I2C Function
Primary Port
TX
I2C Clock (SCL)
RX
I2C Data (SDA)
GPIO6
Not used
GPIO7
Not used
Secondary Port
TX
I2C Data (SDA)
RX
I2C Clock (SCL)
Primary Port
TX
SPI Data Out (MISO)
RX
SPI Data In (MOSI)
GPIO6
SPI Clock (SCLK)
GPIO7
SPI Chip Select (CS#)
Secondary Port
Not Available
I2C Operation
See section 8.5.1 Primary Serial Port Configuration to specify I2C interface for the primary
port..
The secondary port is configured by loading the appropriate FW.
Upon power up, the module acts as a master transmitter and a slave receiver (multi-master
mode).
Clock rates of 100 and 400 kbps are supported.
Default addresses – Transmit: 0x60, Receive: 0x62.
After configuration, the pins are defined below:
When used in I2C mode, pull-ups in the range of
1K to 2.2K to a 1.8V to 3.6V power supply are
required on the clock and data lines.
Table 8-11 I2C Pin Assignments
SPI Operation
See section 8.5.1 Primary Serial Port Configuration to specify SPI interface f or the primary
port..
nd
The 2
SPI is supported in the slave mode. The MicroWire format is not supported.
Maximum speed is 6.8 MHz.
After configuration, the pins are defined below:
Pin Name SPI Function
port cannot be configured for SPI interface since there are only two pins available.
Table 8-12 SPI Mode Pin Assignments
1VV0301216 Rev.4 Page 40 of 69 2018-08-24
Page 41

SE873 Family Product User Guide Electrical Interface
Signal
Frequency (MHz)
TCXO Frequency
26.000
LO Frequency
1588.6
Signal
Level
LO Leakage
-70 dBm (typical)
RF Interface
RF Input
The RF input (RF-IN) pin accepts GNSS signals in the range of 1561 M Hz to 1606 M Hz at a level
between -125 dBm and -165 dBm into 50 Ohm impedance.
A maximum of 3 V DC can be applied to the RF input.
The RF-IN pin is ESD sensitive.
The SE873 contains an integrated LNA and pre-select SA W filter. This allow s the module to wor k
well with a passive GNSS antenna. If the antenna cannot be located near the module, then an
active antenna (that is, an antenna with a built in low noise amplifier) should be used.
Antenna Characteristics:
• Passive antenna: isotropic gain of greater than -6 dBi.
• Act ive antenna: noise figure of less than 1.0 dB will offer the best performance.
See section 4.12 Internal LNA for recommendations and maximum ratings for active antenna (or
external LNA) gain.
External Active Antenna Voltage
If an active antenna (or external LNA) is used, an external bias-T is required to provide voltage to
it. A DC blocking capacitor is also required to prevent DC v oltage from bein g applied to RF-IN pin.
Burnout Protection
The receiver accepts without risk of damage a signal of +10 dBm from 0 to 2 GHz carrier
frequency, except in band 1560 to 1610 MHz where the maximum level is –10 dBm.
Jamming Rejection
Jamming Rejection can be used for solving narrow band (CW) EMI problems in the customer’s
system. It is effective against narrow band clock harmonics. Jamming Rejection is not effective
against wide band noise, e.g. from a host CPU memory bus or switching power supply because
these sources typically cannot be distinguished from thermal noise. A wide band jamming signal
effectively increases the noise floor and reduces GNSS signal levels. Please refer to section 4.8
Jamming Rejection – Continuous Wave (CW) Jamming Mitigation for further details.
Frequency Plan
Table 8-13 Frequency Plan
Local Oscillator Leakage
Table 8-14 LO Leakage
1VV0301216 Rev.4 Page 41 of 69 2018-08-24
Page 42

SE873 Family Product User Guide RF Signals
9. RF SIGNALS
RF Input
The receiver can achieve Cold Start acquisition with a signal level above the specified minimum
at its input. This means that it can acquire and track visible satellites, download the necessary
ephemeris data and compute the location within a 5 minute period. In the G NSS signal acquisition
process, decoding the navigation message data is the most difficult task, which is why Cold Start
acquisition requires a higher signal level than navigation or tracking. For the purposes of this
discussion, autonomous operation is assumed, which makes the Cold Start acquisition level the
dominant design constraint. If assistance data in the form of time or ephemeris aiding is available,
lower signal levels can be used for acquisition.
The GPS signal is defined by IS-GPS-200. This document states that the signal level received by
a linearly polarized antenna having 3 dBi gain will be a minimum of -130 dBm when the antenna
is in the worst-case orientation and the satellite is 5 degrees or more above the horizon.
In actual practice, the GPS satellites transmit slightly more power than specified by
IS-GPS-200, and the signal level typically increases if a satellite has higher elevation angles.
The GLONASS signal is defined by GLONASS ICD 2008 Version 5.1. This document states that
the power level of the received RF signal from GLONASS satellite at the output of a 3 dBi linearly
polarized antenna is not less than -131dBm for L1 sub-band provided that the satellite is observed
at an angle 5 of degrees or more above the horizon.
The receiver will display a reported C/No of 40 dB-Hz for a GPS signal level of -130 dBm at the
RF input. This assumes a SEN (system equivalent noise) of the receiver of 4dB. System
Equivalent Noise includes the Noise Figure of the receiver plus signal processing or digital noise.
For an equivalent GLONASS signal level the GLONASS signal will report a C/No of approximately
39 dB-Hz. This is due to the receiver’s higher losses (NF) for GLONASS signals and a higher
signal processing noise for GLONASS signals.
Each GNSS satellite presents its own signal to the receiver, and best performance is obtained
when the signal levels are between -130 dBm and -125 dBm. These received signal levels are
determined by:
• GNSS satellite transmit power
• G NSS sat ellite elevation angle
• Fr ee spac e path loss
• Extraneous pat h loss (such as rain)
• Par t ial or total path blockage (such as foliage or buildings)
• Multipath interference (caused by signal reflection)
• G NSS antenna characteristics
• Sig nal pat h after the GNSS antenna
The satellite transmit power is specified in each constellation’s reference documentation, readily
available online.
The GNSS signal is relatively immune t o attenuation from rainfall.
However, the GNSS signal is heavily influenced by attenuation due to foliage (such as tree
canopies, etc.) as well as outright blockage caused by buildings, terrain or other items near the
line of sight to the specific GNSS satellite. This variable attenuation is highly dependent upon
satellite location. If enough satellites are blocked, say at a lower elevation, or all in one general
direction, the geometry of the remaining satellites will result is a lower position accuracy. The
receiver reports this geometry effect in the form of PDOP, HDOP and VDOP numbers.
1VV0301216 Rev.4 Page 42 of 69 2018-08-24
Page 43

SE873 Family Product User Guide RF Signals
For example, in a vehicular application, the GNSS antenna may be placed on the dashboard or
rear package tray of an automobile. The metal roof of the vehicle will cause significant blockage,
plus any thermal coating applied to the vehicle glass can attenuate the GNSS signal by as much
as 15 dB. Again, both of these factors will affect the performance of the receiver.
Multipath interference is a phenomenon where the signal from a particular satellite is reflected
and is received by the GNSS antenna in addition to or in place of the line of sight signal. The
reflected signal has a path length that is longer than the line of sight path and can ei ther attenuate
the original signal, or, if received in place of the original signal, can add error in determining a
solution because the distance to the particular satellite is actually shorter than measured. It is this
phenomenon that makes GNSS navigation in urban canyons (narrow roads surrounded by high
rise buildings) so challenging. In general, the reflection of a GNSS signal causes the polarization
to reverse. The implications of this are covered in the next section.
GNSS Antenna Polarization
The GPS broadcast signal is Right Hand Circularly Polarized (RHCP).
An RHCP antenna will have 3 dB gain compared to a linearly-polarized antenna (assuming the
same antenna gain specified in dBic and dBi respectively).
An RHCP antenna is better at rejecting multipath interference than a linearly polarized antenna
because the reflected signal changes polarization to LHCP. This signal would be rejected by the
RHCP antenna, typically by 20 dB or greater.
If the multipath signal is attenuating the line of sight signal, then the RHCP antenna would show
a higher signal level than a linearly polarized antenna because the interfering signal is rejected.
However, in the case where the multipath signal is replacing the line of sight signal, such as in an
urban canyon environment, then the number of satellites in view could drop below the minimum
needed to determine a 3D position. This is a case where a bad signal may be better than no
signal. The system designer needs to understand trade-offs in their application to determine the
better choice.
Active versus Passive Antenna
If the GNSS antenna is placed near the receiver and the RF trace losses are not excessive
(nominally 1 dB), then a passive antenna may be used. This would often be the lowest cost option
and most of the time the simplest to use. However, if the antenna needs to be located away from
the receiver, then an active antenna may be required to obtain the best system performance. An
active antenna includes a built- in low noise amplifier (LNA) to overcome RF trace and cable
losses. Also, many active antennas have a pre-select filter, a post-select filter, or both.
Important specifications for an active antenna LNA are gain and noise figure.
GNSS Antenna Gain
Antenna gain is defined as the amplified signal power from the antenna compared to a theoretical
isotropic antenna (equally sensitive in all directions).
Optimum performance is realized only if the firmware build and hardware c onfiguration match the
type of antenna used (active or passive). The firmware must set the internal LNA gain to
correspond to the installed antenna.
For example, a 25 mm by 25 mm square patch antenna on a reference ground plane (usually 70
mm by 70 mm) may give an antenna gain at zenith of 5 dBic. A smaller 18 mm by 18 mm square
patch on a reference ground plane (usually 50 mm by 50 m m) may give an antenna gain at zenith
of 2 dBic.
1VV0301216 Rev.4 Page 43 of 69 2018-08-24
Page 44

SE873 Family Product User Guide RF Signals
An antenna vendor should specify a nominal antenna gain (usually at zenith, or directly overhead)
and antenna pattern curves specifying gain as a function of elevation, and gain at a fixed elevation
as a function of azimuth. Pay careful attention to the requirement to meet the required design,
such as ground plane size and any external matching components. Failure to follow these
requirements could result in very poor antenna performance.
It is important to note that GNSS antenna gain is not the same as external LN A gain. Most antenna
vendors will specify these numbers separately, but some combine them into a single number.
Both numbers are significant when designing the front end of a GNSS receiver.
For example, antenna X has an antenna gain of 5 dBic at azimuth and an LNA gain of
20 dB for a combined total of 25 dB. Antenna Y has an antenna gain of -5 dBic at azimuth and an
LNA gain of 30 dB for a combined total of 25 dB. However, in the system, antenna X will
outperform antenna Y by about 10 dB (Refer to section 4.12 Internal LNA for more details on
external LNA gain).
An antenna with higher gain will generally outperform an antenna wi th lower gain. How ever, once
the signals are above about -130 dBm for a particular satellite, no improvement in performance
would be realized. But for those satellites with a signal level below about -135 dBm, a hi gher gain
antenna would amplify the signal and improve the performance of the GNSS receiver. In the case
of really weak signals, a good antenna could mean the difference between being able to use a
particular satellite signal or not.
System Noise Floor
The receiver will display a reported C/No of 40 dB-Hz for an input signal level of -130 dBm. The
C/No number means the carrier (or signal) is 40 dB greater than the noise floor measured in a
one Hz bandwidth. This is a standard method of measuring GNSS receiver performance.
The simplified formula is:
C/No = GNSS Signal level – Thermal Noise – System NF
Equation 9-1Carrier to Noise Ratio
Thermal noise is -174 dBm/Hz at 290K.
We can estimate a system noise figure of 4 dB for the module, consisting of the pre-select SAW
filter loss, the LNA noise figure, and implementation losses within the digital signal processing
unit. The DSP noise is typically 1.0 to 1.5 dB.
However, if a good quality external LNA is used, the noise figure of that LN A (typically better than
1dB) could reduce the overall system noise figure from 4 dB to approximately 2 dB.
PCB stack and Trace Impedance
It is important to maintain a 50 Ω impedance on the RF path trace. Design software for calculating
trace impedance can be found from multiple sources on the internet. The best method is to contact
your PCB supplier and request a stackup for a 50 Ω controlled impedance board. They will give
you a suggested trace width along with PCB stackup needed to create the 50 Ω impedance.
It is also important to consider the effects of component pads that are in the path o f the 50 Ω trace.
If the traces are shorter than a 1/16th wavelength, transmission line effects will be minimized, but
stray capacitance from large component pads can induce additional RF losses. It may be
necessary to ask the PCB vendor to generate a new PCB stackup and suggested trace w idth that
is closer to the component pads, or modify the component pads themselves.
1VV0301216 Rev.4 Page 44 of 69 2018-08-24
Page 45

SE873 Family Product User Guide RF Signals
RF Trace Losses
RF Trace losses on a PCB are difficult to estimate without having appropriate tables or RF
simulation software. A good rule of thumb would be to keep the RF traces as short as possible,
make sure they are 50 ohm impedance, and don’t contain any sharp bends.
Figure 9-1 RF Trace Examples
Implications of the Pre-Select SAW Filter
The SE873 modules include a pre-select SAW filter in front of the internal LNA. Thus, the RF
input of the module is connected directly to the SAW filter. Any circuit connected to the RF input
pin would see a complex impedance presented by the SAW filter (especially out of band), rather
than the relatively broad and flat return loss presented by an LNA. Filter dev ices pass the desired
in-band signal, resulting in low reflected energy (good return loss), and reject the out-of-band
signals by reflecting it back to the input, resulting in bad return loss.
If an external amplifier is to be used with the receiver, the overall design should be checked for
RF stability to prevent the external amplifier from oscillating. Amplifiers that are unconditionally
stable at their output will function correctly.
If an external filter is to be connected directly to the module, care needs to be used in making
sure the external filter or the internal SAW filter performance is not compromised. These
components are typically specified to operate into 50 Ω impedance, which is generally true inband, but would not be true out of band. If there is extra gain associated with the external filter,
then a 6 dB Pi or T resistive attenuator is suggested to improve the impedance match between
the two components.
RF Interfer e nc e
RF interference into the GNSS receiver tends to be the biggest problem when determining why
the system performance is not meeting expectations. As men tioned earlier, the GNSS signals are
at -130 dBm and lower. If signals higher than this are presented to the receiver, the RF front end
can be overdriven. The receiver can reject CW jamming signals in each band (GPS, GLONASS,
and BeiDou), but would still be affected by non-CW signals.
1VV0301216 Rev.4 Page 45 of 69 2018-08-24
Page 46

SE873 Family Product User Guide RF Signals
The most common source of interference is digital noise, often created by the fast rise and fall
times and high clock speeds of modern di gital circuitry. For ex ample, a popul ar netbook computer
uses an Atom processor clocked at 1.6 GHz. This is only 25 MHz away from the GNSS signal,
and depending upon temperature of the SAW filter, can be within its passband. Because of the
nature of the address and data lines, this would be broadband digital noise at a relatively high
level.
Such devices are required to adhere to a regulatory standard for emissions such as FCC Part 15
Subpart J Class B or CISPR 22. However, these regulatory emission levels are far higher than
the GNSS signal.
Shielding
Shielding the RF circuitry generally is ineffective because the interference is received by the
GNSS antenna itself, the most sensitive portion of the RF path. The antenna cannot be shielded
because it could not then receive the GNSS signals.
There are two solutions, one is to move the antenna away from the source of interference, and
the other is to shield the digital interference source to prevent it from getting to the antenna.
Powering an External LNA
An external LNA requires a source of power. Many active antennas accept a 3 V or
5 V DC voltage that is impressed upon the RF signal line.
Two approaches can be used:
1. Use an inductor to tie directly to the RF trace. This inductor should be at self-resonant at L1
(1.57542 GHz) and should have good Q for low loss. The higher the inductor Q, the lower
the loss will be. The side of the inductor connecting to the antenna supply vol tage should be
bypassed to ground with a good quality RF capacitor, again with self-resonance at the L1
frequency.
2. Use a quarter wave stub in place of the inductor. The length of the stub is designed to be
exactly ¼ wavelength at L1, which has the effect of making an RF short at one end of the
stub to appear as an RF open at the other end. The RF short is created by a high quality RF
capacitor operating at self-resonance.
The choice between the two would be determined by:
• RF pat h loss introduced by either the inductor or quarter wave stub.
• Cost of the inductor.
• Space availability f or the quarter wave stub.
Simulations done by Telit show the following losses:
Inductor Additional signal loss
Murata LQG15HS27NJ02 0.65
Quarter wave stub on FR4 0.59
Coilcraft B09TJLC (used in ref. design) 0.37
Table 9-1 Inductor Loss
Since this additional loss occurs after the LNA, it is generally not significant unless the circuit is
being designed to work with both active and passive antennas.
1VV0301216 Rev.4 Page 46 of 69 2018-08-24
Page 47

SE873 Family Product User Guide Reference Designs
10. REFERENCE DESIGNS
Note: XC6221 is the DC voltage supply regulator
Figure 10-1 SE873 Reference Design – Passive Antenna
1VV0301216 Rev.4 Page 47 of 69 2018-08-24
Page 48

SE873 Family Product User Guide Reference Designs
Note: XC6221 is the DC voltage supply regulator
Figure 10-2 SE873 Reference Design – Active Antenna
See notes on the next page.
1VV0301216 Rev.4 Page 48 of 69 2018-08-24
Page 49

SE873 Family Product User Guide Reference Designs
Along with power and ground, the minimum signals required to operate the module properly are:
one RF input and four digital lines.
The RF input can be connected directly to a passive GNSS antenna.
C5 is used to block DC voltage from entering the module. The active-antenna reference design
shows a DC power feed for its LNA. The inductor L1 is chosen to be self-resonant at the GPS L1
frequency (1.57542 GHz) to minimize loading on the RF trace. Capacitor C6 is also chosen to be
self-resonant at the GPS L1 frequency such that it is close to an RF short at that frequency.
V_ANT is the supply voltage for the external active antenna.
TX is a standard serial output - usually a UART with a default bit rate of 9600 bps, 8 data bits, 1
stop bit, and no parity. As is the case with all UART data, the idle state is logic one. This is a 1.8
volt logic level signal. Note that it can be configured for I
2
C or SPI interface.
RX is a standard serial input - usually a UART with a default bit rate of 9600 bps, 8 data bits, 1
stop bit and no parity. As is the case with all UART data, the idle state is logic one. This is a 1.8
volt logic level sig nal, but is tole rant to 3.6 volt s. Note that it c an be configur ed for I
2
C or SPI
interface.
SYSTEM-ON is an output indicating the power state of the module. If the module is in the RUN
state, the logic level will be high, otherwise the logic level will be low. This is a 1.8 volt signal.
ON-OFF is an input to co ntrol the power state of th e module. After power-up, the module will enter
the RUN state if it is high, or the HIBERNATE state if it is low. SYSTEM- ON will then indicate
the system’s state.
Note: ON-OFF must not be tied to V18 or the module will not be able to exit a commanded
HIBERNATE state.
Resistor R1 as shown pulls GPIO6 high, which specifies the serial port configuration to be serial
UART. See section 8.5 Serial I/O Ports - Configuration and Operation.
The power supply shown is a minimal design for power requirements. The power supply must
have tight voltage regulation under varying line and load conditions to prevent falsely tripping the
internal voltage supervisor within the module.
1VV0301216 Rev.4 Page 49 of 69 2018-08-24
Page 50

SE873 Family Product User Guide Mechanical Drawing
11. MECH ANICAL DRAWING
Figure 11-1 SE873 Family Mechanical Drawing
1VV0301216 Rev.4 Page 50 of 69 2018-08-24
Page 51

SE873 Family Product User Guide PCB Footprint
12. PCB FOOTPRINT
Figure 12-1 SE873 Family PCB Footprint
1VV0301216 Rev.4 Page 51 of 69 2018-08-24
Page 52

SE873 Family Product User Guide Product Packaging and Handling
13. PRODUCT PACKAGING AND HANDLING
Product Marking and Seriali za t ion
The SE873 module label has a 2D Barcode with the module serial number.
Contact a Telit representative for information on specific module serial numbers.
Product Label – SE873 Family
Figure 13-1 SE873Q5 Product Label
Key Description
0 Pin 1 location
1 Tel it Logo
2 Module Name
3 Product Variant (if any)
Barcode type 2D Datamatrix and text of Telit Serial Number
4
11 digit (base 36 - 0 to 9 followed by A to Z)
Table 13-1 SE873Q5 Product Label Description
1VV0301216 Rev.4 Page 52 of 69 2018-08-24
Page 53

SE873 Family Product User Guide Product Packaging and Handling
Product Packaging and Delivery
SE873 modules are available in Tape and Reel packaging of 450 pcs or 1500 pcs.
Each reel is ‘dry’ packaged and vacuum sealed in a Moisture Barrier Bag (MBB) with two silica
gel packs and placed in a carton. All packaging is ESD protective lined.
Figure 13-2 Product Packaging - Tape and Reel 1500 pcs
1VV0301216 Rev.4 Page 53 of 69 2018-08-24
Page 54

SE873 Family Product User Guide Product Packaging and Handling
Figure 13-3 Product Packaging - Tape and Reel 450 pcs
1VV0301216 Rev.4 Page 54 of 69 2018-08-24
Page 55

SE873 Family Product User Guide Product Packaging and Handling
Moisture Sensitivity
Precautionary measures are required in handling, storing and using these devices to avoid
damage from moisture absorption. If localized heating is required to rework or repair the device,
precautionary methods are required to avoid exposure to solder reflow temperatures that can
result in performance degradation.
The SE873 module has a moisture sensitivity level rating of 3 as defined by IPC/JEDEC J-STD-
020. This rating is assigned due to some of the components used within the module.
The SE873 packaging is hermetically sealed with desiccant and humidity indicator card. The
SE873 parts must be placed and reflowed within 168 hours of first opening the hermetic seal
provided the factory conditions are less than 30°C and less than 60% and the humidity indicator
card indicates less than 10% relative humidity.
If the package has been opened or the humidity indicator card indicates above 10%, then the
parts must be baked prior to reflow. The parts may be baked at +125°C ± 5°C for 48 hours.
However, the tape and reel cannot withstand that temperature. Lower temperature baking is
feasible if the humidity level is low and time is available. Please see IPC/JEDEC J-STD-033 for
additional information.
Additional information can be found on the MSL tag affixed to the outside of the hermetically
sealed bag.
JEDEC standards are available free of charge from the JEDEC website http://www.jedec.org.
1VV0301216 Rev.4 Page 55 of 69 2018-08-24
Page 56

SE873 Family Product User Guide Product Packaging and Handling
Figure 13-4 Moisture Sensitive Device Label
1VV0301216 Rev.4 Page 56 of 69 2018-08-24
Page 57

SE873 Family Product User Guide Product Packaging and Handling
ESD Sensitivity
The SE873 module contains class 1 devices and is classified as Electro-Static Discharge
Sensitive (ESDS).
Telit recommends the two basic principles of protecting ESD devices from damage:
• Handle sensitive components only in an ESD Protected Area (EPA) under protected and
controlled conditions;
• Protect sensitive devices outside the EPA using ESD protective packaging.
All personnel handling ESDS devices have the responsibility to be aware of the ESD threat to the
reliability of electronic products.
Further information can be obtained from the JEDEC standard JESD625-A Requirements for
Handling Electrostatic Discharge Sensitive (ESDS) Devices.
Reflow
The modules are compatible with lead free soldering processes as defined in IPC/JEDEC J-STD-
020. The reflow profile must not exceed the profile given IPC/JEDEC J-STD-020 Table 5-2,
“Classification Reflow Profiles”. Although IPC/JEDEC J-STD-020 allows for three reflows, the
assembly process for the module uses one of those profiles, therefore the module is limited to
two reflows.
When re-flowing a dual-sided SMT board, it is important to reflow the side containing the module
last. This prevents heavier components within the module from becoming dislodged if the solder
reaches liquidus temperature while the module is inverted.
Note: JEDEC standards are available for free from the JEDEC website http://www.jedec.org
.
Assembly Considerations
During board assembly and singulation process steps, pay careful attention to unwanted
vibrations, resonances and mechanical shocks introduced by the board router.
Washing Considerations
The module can be washed using standard PCB cleaning procedures after assembly. The shield
does not provide a water seal to the internal components of the module, so it is important that the
module be thoroughly dried prior to use by blowing excess water and then baking the module to
drive residual moisture out. Depending upon the board cleaning equipment, the drying cycle may
not be sufficient to thoroughly dry the module, so additional steps may need to be taken. Exact
process details will need to be determined by the type of washing equipment as well as other
components on the board to which the module is attached. The module itself can withstand
standard JEDEC baking procedures.
Safety
Improper handling and use of this module can cause permanent damage to it. There is also the
possible risk of personal injury from mechanical trauma or choking hazard.
See section 17 Safety Recommendations for safety information.
Disposal
We recommend that this product should not be treated as household waste. For more detailed
information about recycling this product, please contact your local waste management authority
or the reseller from whom you purchased the product.
1VV0301216 Rev.4 Page 57 of 69 2018-08-24
Page 58

SE873 Family Product User Guide Environmental Requirements
Environmental Limits - Operating
Temperature
-40°C to +85°C
Temperature
Rate of Change
±1°C / minute maximum
Up to 95% non-condensing or wet bulb temperature of +35°C,
whichever is less
Altitude
-1500 m to 100,000 m
Maximum Vehicle
Dynamics
600 m/s (acquisition and navigation)
2 G acceleration
Environmental Limits - Storage
Temperature
-40°C to +85°C
Up to 95% non-condensing or wet bulb te mperature of +35°C,
whichever is less
Shock
18G peak, 5 millisecond duration
Shock
(in shipping container)
10 drops from 75 cm onto concrete floor
14. ENVIRONMENTAL REQUIREMENTS
Operating Environmental Limits
Humidity
Table 14-1 Operating Environmental Limits
Storage Environmental Lim it s
Humidity
Table 14-2 Storage Environmental Limits
1VV0301216 Rev.4 Page 58 of 69 2018-08-24
Page 59

SE873 Family Product User Guide Compliances
15. COMPLIANCES
The module complies with the following:
• Directive 2011/65/EU art. 16 on the restriction of the use of certain hazardous
substances in electrical and electronic equipment (RoHS)
• Manufactur ed in an ISO 9000: 2008 accredited facility
• Manufactur ed to TS 16949 2009 requirement (upon request)
EU RED Certification
The Telit SL873 modules are certified compliant with the EU RED Directives.
eCall Compliance
The modules comply with eCall requirements.
GOST R-55534 Certification
For this certification, the 1 Hz update rate must be used.
1VV0301216 Rev.4 Page 59 of 69 2018-08-24
Page 60

SE873 Family Product User Guide Compliances
EU RED Declarations of Conformity
Figure 15-1 EU RED Declaration of Conformity – SE873
1VV0301216 Rev.4 Page 60 of 69 2018-08-24
Page 61

SE873 Family Product User Guide Compliances
Figure 15-2 EU RED Declaration of Conformity – SE873Q5
1VV0301216 Rev.4 Page 61 of 69 2018-08-24
Page 62

SE873 Family Product User Guide Glossary and Acronyms
generated or
precision set of orbital parameters for the entire GPS
almanac is updated weekly by the Master Control Station. See
start occurs when a receiver begins operation with unknown
position, time, and ephemeris data, typically when it is powered up
after a period on inactivity. Almanac information may be used to
The lowest signal level at which a GNSS receiver is able to reliably
satellite position and velocity. The satellite position is then
used to calculate the navigation solution. Ephemeris data is updated
Large, momentary, unwanted electrical currents that can cause
16. GLO SS ARY AND ACR O NYMS
AGPS Assisted (or Aided) GPS
AGPS provides ephemeris data to the receiver to allow faster cold start
times than would be possible using only broadcast data.
This extended ephemeris data could be either serverlocally-generated.
See Local Ephemeris prediction data and Server-based Ephemeris
prediction data
Almanac A reduced-
constellation that allows calculation of approximate satellite positions
and velocities. The almanac may be used by a receiver to determine
satellite visibility as an aid during acquisition of satellite signals. The
Ephemeris.
BeiDou (BDS)
formerly COMPASS
Cold Start A cold
Cold Start Acquisition
Sensitivity
EGNOS European Geostationary Navigation Overlay Service
Ephemeris
(plural ephemerides)
The Chinese GNSS, currently being expanded towards full operational
capability.
identify previously visible satellites and their approximate positions.
See Restart.
acquire satellite signals and calculate a navigation solution from a Cold
Start. Cold start acquisition sensitivity is limited by the dat a decoding
threshold of the satellite messages.
The European SBAS system.
A set of precise orbital parameters that is used by a GNSS receiver to
calculate
frequently (normally every 2 hours for GPS) to maintain the accuracy
of the position calculation. See Almanac.
ESD: Electro-Static Disch arg e
damage to electronic equipment.
GAGAN The Indian SBAS system.
1VV0301216 Rev.4 Page 62 of 69 2018-08-24
Page 63

SE873 Family Product User Guide Glossary and Acronyms
A factor used to describe the effect of satellite geometry on the
The Russian GNSS, which is operated by the Russian Aerospace
based navigation system with global
that provides
position, and ephemeris data, typically after being sent a restart
A module design without pins. In place of the pins are pads of bare
Extended Ephemeris (i.e. predicted) data, calculated by the receiver
from broadcast data received from satellites, which is stored in
Galileo The European GNSS currently being built by the European Union (EU)
and European Space Agency (ESA).
GDOP Geometric Dilution of P rec is io n
accuracy of the time and position solution of a GN SS receiver. A low er
value of GDOP indicates a smaller error in the solution. Related factors
include PDOP, HDOP, VDOP and TDOP.
GLONASS ГЛОбальная НАвигационная Спутниковая Система
GLObal'naya NAvigatsionnaya Sputnikovaya Sistema
(Global Navigation Satellite System)
Defense Forces
GNSS Global Navigation Satellite System
Generic term for a satellitecoverage. The current or planned systems are: GPS, GLONASS, BDS,
and Galileo.
GPS Global Positioning System
The U.S. GNSS, a satellite-based positioning system
accurate position, velocity, and time data. GPS is operated by the US
Department of Defense.
Hot Start A hot start occurs when a receiver begins operation with known time,
command. See Restart.
LCC Leadless Chip Carrier
gold-plated copper that are soldered to the printed circuit board.
LNA Low Noise Amplifier
An electronic amplifier used for very weak signals which is especially
designed to add very little noise to the amplified signal.
Local Ephemeris
prediction data
memory. It is usually useful for up to three days. See AGPS.
MSAS MTSAT Satellite Augmentation System
The Japanese SBAS system.
MSD Moisture sensitive device.
1VV0301216 Rev.4 Page 63 of 69 2018-08-24
Page 64

SE873 Family Product User Guide Glossary and Acronyms
The lowest signal level at which a GNSS receiver is able to reliably
A receiver beginning operation after being sent a restart command,
) that maintains time continuously while
uses a network of ground stations and geostationary
corrections are transmitted on the same frequency as navigation
MTSAT Multifunctional Transport Satellites
The Japanese system of geosynchronous satellites used for weather
and aviation control.
Navigation Sensitivity
maintain navigation after the satellite signals have been acquired.
NMEA National Marine Electronics Association
QZSS Quasi-Zenith Satellite System
The Japanese Regional Navigation Satellite System.
Reacquisition A receiver, while in normal operation, loses RF signal (perhaps due to
the antenna cable being disconnected or a vehicle entering a tunnel),
and re-establishes a valid fix after the signal is restored. Contrast with
Reset and Restart.
Restart
generally used for testing rather than normal operation. A restart can
also result from a power-up. See Cold Start, Warm Start, and Hot Start.
Contrast with Reset and Reacquisition.
Reset A receiver beginning operation after a (hardware) reset signal on a pin,
generally used for testing rather than normal operation. Contrast with
Restart and Reacquisition.
RoHS The Restriction of Hazardous Substances
Directive on the restriction of the use of certain hazardous substances
in electrical and electronic equipment, was adopted in February 2003
by the European Union.
RTC Re a l Time Clock
An electronic device (chip
powered up.
SAW Surface Acoustic Wave filter
Electromechanical device used in radio frequency applications. SAW
filters are useful at frequencies up to 3 GHz.
SBAS Satellite Based Augmentation System
A system that
satellites to provide differential corrections to GNSS receivers. These
signals, so the receiver can use the same front-end design to process
them. Current examples are WAAS, EGNOS, MSAS, and GAGAN.
1VV0301216 Rev.4 Page 64 of 69 2018-08-24
Page 65

SE873 Family Product User Guide Glossary and Acronyms
provided to the receiver over a network. It is usually useful for up to 14
The lowest signal level at which a GNSS receiver is able to maintain
d by a receiver to achieve a valid position
An integrated circuit (or part thereof) which provides a serial
Server-based
Ephemeris prediction
data
TCXO Temperature-Compensated Crystal Oscillator
Tracking Sensitivity
TTFF Time to First Fix
UART Universal Asynchronous Receiver/Transmitter
WAAS Wide Area Augmentation System
Extended Ephemeris (i.e. predicted) data, calculated by a server and
days. See AGPS.
tracking of a satellite signal after acquisition is complete.
The elapsed time require
solution from a specified starting condition. This value will vary with the
operating state of the receiver, the length o f time since the l ast position
fix, the location of the last fix, and the specific receiver design.
A standard reference level of -130 dBm is used for testing.
communication port for a computer or peripheral device.
The North American SBAS system developed by the US FAA (Federal
Aviation Administration).
Warm Start A warm start occurs when a receiver begins operation with known (at
least approximately) time and position, but unknown ephemeris data,
typically after being sent a restart command. See Restart.
1VV0301216 Rev.4 Page 65 of 69 2018-08-24
Page 66

SE873 Family Product User Guide Safety Recommendations
17. SAFETY RECOMMENDATIONS
READ CAREFULLY
Be sure that the use of this product is allowed in the country and in the environment
required. The use of this product may be dangerous and must be avoi ded in the following
areas:
• Where it can interfere with other electronic devices in environments such as hospitals,
airports, aircraft, etc.
• Where there is risk of explosion such as gasoline stations, oil refineries, etc. It is the
responsibility of the user to enforce the country regulations and specific environmental
regulations.
Do not disassemble the product. Evidence of tampering will invalidate the warranty.
Telit recommends following the instructions in product user guides for correct installation of the
product. The product must be supplied with a stabilized voltage source and all wiring must
conform to security and fire prevention regulations. The product must be handled with care,
avoiding any contact with the pins because electrostatic discharges may damage the product
itself.
The system integrator is responsible for the functioning of the final product; therefore, care must
be taken with components external to the module, as well as for any project or installation issue.
Should there be any doubt, please refer to the technical documentation and the regulations in
force. Non-antenna modules must be equipped with a proper antenna with specific
characteristics.
The European Community provides directives for electronic equipment introduced in the market.
Relevant information is available on the European Community website:
http://ec.europa.eu/enterprise/sectors/rtte/documents/
The text of the Directive 99/05 regarding telecommunication equipment is available, while the
applicable Directives (Low Voltage and EMC) are available at:
http://ec.europa.eu/enterprise/sectors/electrical/
The power supply used shall comply the clause 2.5 (Limited power sources) of the standard
EN 60950-1 and shall be mounted on a PCB which complies with V-0 flammability class.
Since the module must be built-in to a system, it is intended only for installation in a RES TRICTED
ACCESS LOCATION. Therefore, the system integrator mus t provide an en closure which protects
against fire, electrical shock, and mechanical shock in accordance with relevant standards.
http://ec.europa.eu/enterprise/sectors/electrical/
1VV0301216 Rev.4 Page 66 of 69 2018-08-24
Page 67

SE873 Family Product User Guide Safety Recommendations
Electrical and Fire Safety
This device is intended for built-in designs and must be installed by users that have taken
adequate precautions and have sufficient knowledge to avoid electrical, mechanical and fire
hazards.
The module shall be mounted on a PCB which complies with V-0 flammability class.
The device must be supplied with a limited power source that meets clause 2.5 of the EN 60950-
1 standard. These requirements are:
• For power supplies without overcurrent protection device:
Short circuit current < 8 A. Apparent power < 100 VA
•
• For power supplies with overcurrent protection device (rated current of overcurrent
device shall be < 5A):
Short circuit current < 333 A. Apparent power < 250 VA.
•
• Fur t herm ore, the device must be installed within an enclosure that meets HB class or
pass the 550º glowing fire test of EN 60695-2-11 and mounted on a V1 flammability
class material or better.
1VV0301216 Rev.4 Page 67 of 69 2018-08-24
Page 68

SE873 Family Product User Guide Document History
Text updates
Minor text corrections and revisions
Minor text revisions
18. DOCUMENT HISTORY
Revision Date Changes
0 2015-07-13 First issue
1 2015-09-05
2 2016-09-23
3 2018-08-10
Reorganized the text
Changed module photo
Changed default for Velocity DR to disabled
Added NMEA and OSP command information
Revised Table 7-1 Default NMEA Output Messages.
Revised Table 7-2 NMEA Output Messages.
Clarified BOOT pin should be left floating
Added Internal LNA information
Added Table 4-1 Internal gain / external gain range.
Changed description of GPI08
Corrected SYSTEM_ON to ON_OFF in 9.4.4
Corrected active antenna reference design
Corrected LNA Noise Figure example
Added package description in 2.1
Updated glossary
Clarified GLONASS glossary entry
Added product: SE873Q5
Updated photo and product label information
Added Galileo support
Changed QZSS default to enabled.
Added 10 Hz reporting
Changed default to Full Power mode.
Changed V18 range to 1.71 - 1.89 V
Changed MID to control LNA gain from 178,71 to 178,70
Added default I
Added eCall and ERA/GLONASS compliance
Added EU RED Declarations of Conformance
2
C addresses
4 2018-08-24
1VV0301216 Rev.4 Page 68 of 69 2018-08-24
Minor text revisions
Page 69

 Loading...
Loading...